r(s) y(s) K F(s) - Politecnico di...
26
Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi ©2007 Politecnico di Torino 1 Esercizio 1 Sia dato il sistema LTI descritto dalla seguente funzione di trasferimento: 3 2 200(s 10) F(s) s 45s 250s + = + − controllato mediante un controllore statico di guadagno K c (da definire), chiuso in un anello di retroazione negativa unitaria, secondo lo schema riportato in figura: a) Determinare, con l’ausilio di Matlab, le singolarità della funzione F(s), evidenziandone parte reale e parte immaginaria, nonché pulsazione naturale e fattore di smorzamento per eventuali singolarità complesse coniugate. b) Dopo aver tracciato qualitativamente a mano i diagrammi di Bode di F(jω), determinarne l’andamento esatto con l’ausilio di Matlab. c) Tracciare qualitativamente il diagramma di Nyquist di F(jω) e quotarne i principali punti di interesse (ovvero gli attraversamenti dell’asse reale) con l'ausilio di Matlab. d) Studiare la stabilità del sistema ad anello chiuso al variare di K c mediante applicazione del criterio di Nyquist, verificandone in particolare la stabilità per K c = 10 anche mediante calcolo diretto dei poli della funzione di trasferimento ad anello chiuso. e) Determinare i margini di stabilità di guadagno e di fase per K c = 10. Svolgimento completo dell’esercizio 1 a) La funzione F(s) possiede uno zero in -10, un polo nell’origine, uno in +5 ed uno in -50. Per il loro calcolo, si ricordano i comandi Matlab: zero(F), pole(F), damp(F). b) Nella seguente figura sono riportati i diagrammi di Bode di F(jω) ottenuti con il comando bode(F): r(s) K c + y(s) F(s)
Transcript of r(s) y(s) K F(s) - Politecnico di...

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
1
Esercizio 1 Sia dato il sistema LTI descritto dalla seguente funzione di trasferimento:
3 2
200(s 10)F(s)s 45s 250s
+=
+ −
controllato mediante un controllore statico di guadagno Kc (da definire), chiuso in un anello di retroazione negativa unitaria, secondo lo schema riportato in figura:
a) Determinare, con l’ausilio di Matlab, le singolarità della funzione F(s), evidenziandone parte reale e parte immaginaria, nonché pulsazione naturale e fattore di smorzamento per eventuali singolarità complesse coniugate.
b) Dopo aver tracciato qualitativamente a mano i diagrammi di Bode di F(jω), determinarne l’andamento esatto con l’ausilio di Matlab.
c) Tracciare qualitativamente il diagramma di Nyquist di F(jω) e quotarne i principali punti di interesse (ovvero gli attraversamenti dell’asse reale) con l'ausilio di Matlab.
d) Studiare la stabilità del sistema ad anello chiuso al variare di Kc mediante applicazione del criterio di Nyquist, verificandone in particolare la stabilità per Kc = 10 anche mediante calcolo diretto dei poli della funzione di trasferimento ad anello chiuso.
e) Determinare i margini di stabilità di guadagno e di fase per Kc = 10. Svolgimento completo dell’esercizio 1
a) La funzione F(s) possiede uno zero in -10, un polo nell’origine, uno in +5 ed uno in -50. Per il loro calcolo, si ricordano i comandi Matlab: zero(F), pole(F), damp(F).
b) Nella seguente figura sono riportati i diagrammi di Bode di F(jω) ottenuti con il comando bode(F):
r(s) Kc+
y(s) F(s)

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
2
c) Nella seguente figura è riportato il diagramma di Nyquist di F(jω) ottenuto con il comando
nyquist(F), completato manualmente dal semicerchio di raggio infinito. Direttamente dalla corrispondente finestra grafica di Matlab, è possibile leggere l’ascissa del punto di attraversamento del diagramma con il semiasse reale negativo, pari a -0.62.
d) Si osserva che F(s) presenta un polo a parte reale positiva e quindi nia = 1. Al variare di Kc,
il punto critico ( )c1/ K ,0− si sposta lungo l’asse reale; indicato con N il numero di giri compiuti in senso orario da F(jω) attorno al punto critico variabile, si individuano 3 regioni di interesse per l’analisi di stabilità:
i. c c1/ K 0.62, con K 0− < − > , corrispondente a c0 K 1.613< < , per cui si ha N = 1 e quindi nic = 2 (il sistema ad anello chiuso presenta due poli instabili)
ii. c1/ K 0.62,− > − corrispondente a cK 1.613> , per cui si ha N = -1 e quindi nic = 0 (il sistema ad anello chiuso è asintoticamente stabile)
iii. c1/ K 0,− > corrispondente a cK 0< , per cui si ha N = 0 e quindi nic = 1 (il sistema ad anello chiuso presenta un polo instabile)
In particolare, il valore Kc = 10 appartiene alla seconda regione, per cui il sistema ad anello chiuso risulta asintoticamente stabile. È possibile verificare con Matlab tale risultato,

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
3
determinando la funzione di trasferimento ad anello chiuso W(s) per tale valore di Kc e calcolandone esplicitamente i poli con i seguenti comandi: Kc=10; W=feedback(Kc*F,1); pole(W)
I poli risultanti sono in: -14.77 + 32.79i, -14.77 - 32.79i, -15.465. Essendo tutti a parte reale negativa, è confermata l’effettiva stabilità del sistema.
e) Con il comando margin(Kc*F) si ottengono i margini di stabilità, pari a mG = -15.9 dB (margine di massima attenuazione del guadagno) e mϕ = 31o (margine di massima perdita di fase).

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
4
Esercizio 2 Sia dato il sistema LTI descritto dalla seguente funzione di trasferimento:
2
3 2 2
31250(s 4)F(s)(s s )(s 50)
+=
+ +
controllato mediante un controllore statico di guadagno Kc (da definire), chiuso in un anello di retroazione negativa unitaria, secondo lo schema riportato in figura:
a) Determinare, con l’ausilio di Matlab, le singolarità della funzione F(s), evidenziandone parte reale e parte immaginaria, nonché pulsazione naturale e fattore di smorzamento per eventuali singolarità complesse coniugate.
b) Dopo aver tracciato qualitativamente a mano i diagrammi di Bode di F(jω), determinarne l’andamento esatto con l’ausilio di Matlab.
c) Tracciare qualitativamente il diagramma di Nyquist di F(jω) e quotarne i principali punti di interesse (ovvero gli attraversamenti dell’asse reale) con l'ausilio di Matlab.
d) Studiare la stabilità del sistema ad anello chiuso al variare di Kc mediante applicazione del criterio di Nyquist, verificandone in particolare la stabilità per Kc = 2 anche mediante calcolo diretto dei poli della funzione di trasferimento ad anello chiuso.
e) Determinare i margini di stabilità di guadagno e di fase per Kc = 2. Traccia dello svolgimento dell’esercizio 2 Per la risoluzione dei punti a) e b), si faccia riferimento ai comandi Matlab utilizzati per i medesimi punti dell’esercizio precedente. Nel tracciamento del diagramma di Nyquist, è necessario prestare attenzione alla presenza di due punti di attraversamento del diagramma con il semiasse reale negativo (corrispondenti alle due pulsazioni alle quali la fase di F(jω) vale -180o, come risulta dal corrispondente diagramma di Bode). Tali punti di attraversamento sono rilevabili in Matlab soltanto ingrandendo opportunamente l’ultima porzione del diagramma, come riportato nella figura sottostante.
r(s) Kc+
y(s) F(s)

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
5
Data la presenza di due poli nell’origine fra le singolarità di F(jω), il diagramma deve essere completato da due semicerchi di raggio infinito (equivalenti ad una rotazione completa) percorsi in senso orario dal punto corrispondente a 0−ω→ a quello corrispondente a 0+ω→ . Dall’applicazione del criterio di Nyquist, osservando che nia = 0, risulta che:
i. Per 0 < Kc < 0.125 e per Kc > 5.747 il sistema ad anello chiuso presenta due poli instabili
ii. Per 0.125 < Kc < 5.747 il sistema ad anello chiuso è asintoticamente stabile iii. Per Kc < 0 il sistema ad anello chiuso presenta un polo instabile.
Per il calcolo diretto dei poli del sistema ad anello chiuso per Kc = 2 e per la determinazione dei corrispondenti margini di stabilità è sufficiente applicare gli stessi comandi Matlab considerati nell’esercizio precedente.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
6
Esercizio 3 È dato il sistema descritto dalla funzione di trasferimento:
2
2 2
10(s 1)F(s)s (s 4)
+=
+
Tale sistema viene chiuso in retroazione negativa unitaria, con l’inserimento di un blocco di guadagno variabile Kc. Discutere la stabilità del sistema in catena chiusa al variare di Kc, mediante applicazione del criterio di Nyquist. Determinare il valore di Kc per cui il margine di fase è massimo (specificando tale valore massimo). Soluzione dell’esercizio 3 Dall’applicazione del criterio di Nyquist, il sistema ad anello chiuso risulta asintoticamente stabile per qualunque valore positivo di Kc; presenta un polo instabile per qualunque valore negativo di Kc. Si ottiene il massimo margine di fase scegliendo Kc in modo che ωc risulti pari a 2 rad/s, pulsazione alla quale la fase di F(jω) raggiunge il valore massimo (come si rileva dal corrispondente diagramma di Bode). In particolare, per Kc = 1.6 si ottiene mϕ = 73.7o.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
7
Esercizio 4 È dato il sistema descritto dalla funzione di trasferimento:
2
2
5(s 10)F(s)s(s 50)
+=
−
Tale sistema viene chiuso in retroazione negativa unitaria, con l’inserimento di un blocco di guadagno variabile Kc. Discutere la stabilità del sistema in catena chiusa al variare di K (determinando in particolare l’intervallo di valori di Kc per cui si ha asintotica stabilità), mediante applicazione del criterio di Nyquist; in caso di instabilità del sistema, specificare il numero di poli instabili per ciascun intervallo di valori di Kc. Soluzione dell’esercizio 4 Dall’applicazione del criterio di Nyquist, osservando che F(s) presenta due poli a parte reale positiva, risulta che:
i. Per 0 < Kc < 20.833 il sistema ad anello chiuso presenta due poli instabili ii. Per Kc > 20.833 il sistema ad anello chiuso è asintoticamente stabile
iii. Per Kc < -25 il sistema ad anello chiuso presenta un polo instabile iv. Per -25 < Kc < 0 il sistema ad anello chiuso presenta tre poli instabili.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
8
Esercizio 5 È dato il sistema descritto dalla funzione di trasferimento:
1125(s 2)(s 4)F(s)(s 1)(s 30)(s 50)
+ +=
− + +
Tale sistema viene chiuso in retroazione negativa unitaria, con l’inserimento di un blocco di guadagno variabile Kc. Discutere la stabilità del sistema in catena chiusa al variare di K (determinando in particolare l’intervallo di valori di Kc per cui si ha asintotica stabilità), mediante applicazione del criterio di Nyquist; in caso di instabilità del sistema, specificare il numero di poli instabili per ciascun intervallo di valori di Kc. Soluzione dell’esercizio 5 Dall’applicazione del criterio di Nyquist, osservando che F(s) presenta un polo a parte reale positiva, risulta che:
v. Per -0.072 < Kc < 0.1667 e per Kc < -0.2 il sistema ad anello chiuso presenta un polo instabile (N.B.: per Kc = 0 il sistema diventa in catena aperta)
vi. Per Kc > 0.1667 il sistema ad anello chiuso è asintoticamente stabile vii. Per -0.2 < Kc < -0.072 il sistema ad anello chiuso presenta tre poli instabili.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
9
Esercizio 6 Sia dato un sistema dinamico del secondo ordine il cui modello approssimato è caratterizzato dalla fdt G(s):
2nn
2
2n
s2s)s(u)s(y)s(G
ω+ζω+ω
== , con 10 <ζ< (sistema stabile)
Si ipotizzi di partire da condizioni iniziali nulle ( )0)0t(y,0)0t(y ==== e di applicare un ingresso u sinusoidale di ampiezza unitaria e pulsazione ωo:
2o
2o
o
s)s(u
)tsin()t(u
ω+ω
=
ω=
Calcolare l’espressione dei modi propri e dei modi forzati dell’uscita y del sistema. Svolgimento completo dell’esercizio 6 È conveniente partire dall’espressione di y(s) e dalla sua rappresentazione in frazioni parziali
2o
22nn
22o
2o
2nn
2
2n
ss
s2sbas
ss2s)s(u)s(G)s(y
ω+β+α
+ω+ζω+
+=
ω+ω
⋅ω+ζω+
ω==
con a, b, α, β da determinare uguagliando gli ultimi due membri ⇒ ⇒ ( )( ) ( )( ) o
2n
2nn
22o
2 s2sssbas ωω=ω+ζω+β+α+ω++
da cui,
o2n
2n
2o
n2n
2o
n
b
02a
02b0a
ωω=βω+ω
=βζω+αω+ω
=αζω+β+=α+
→ ( )( )
( ) ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−Ωω−Ωζ−
−Ω+ζωΩζ
⋅−Ω+ζΩ
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
βα
12
142
141b
a
2o
22o
2222 dove
n
o
ωω
=Ω
A questo punto, calcolati a, b, α, β, con l’ausilio delle tabelle delle trasformate, si può riscrivere l’espressione di y:

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
10
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
( )
( )( )2
2222
2
22
22222
.forz
o
.prop
xt
.forz
oo
o
.prop
xt
x
nx
t
2nx
.forz
o2o
2o
2o
2
.prop
2x
2n
x
x
n2x
2n
n
.forz
2o
2
.prop
2nn
2
1,2atan2
14
1K
112,2atan2
141H
con
tsinKtsinHe
tsintcostsineabtcosae)t(y
1con ss
ss
abs
sa
ss
s2sbas)s(y
n
nn
Ω−Ωζ−=ϕ
−Ω+ζΩ=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ζ−
−Ω+ζζ=θ
−Ω+ζΩ⋅ζ−
Ω=
ϕ+ω+θ+ω=
=ωωβ
+ωα+ωω
ωζ−+ω=
↓
ζ−ω=ωωβ
⋅ω+
ω+
ω+⋅α+
ω+ζω+ω
⋅ω
ωζ−+
ω+ζω+ζω+
⋅=
=ω+β+α
+ω+ζω+
+=
ζω−
ζω−ζω−
Verifica sui modi propri: 1. è naturale che ampiezza e sfasamento dipendano anche da ωo; 2. la pulsazione di oscillazione ωx coincide con la parte immaginaria dei poli complessi coniugati
x
2nn 1j
ω
ζ−ω±ζω−=λ
3. l’evoluzione dei modi propri tende asintoticamente a zero in quanto il sistema è asintoticamente stabile (la parte reale dei poli, nζω− , è negativa in quanto ωn è positiva per definizione e ζ è positivo per ipotesi);
4. a motivo del punto 3. si ha che in condizioni stazionarie
∞→t ovvero ⎭⎬⎫
⎩⎨⎧
ωπ
ωπ
ζω>>
oxn
2,2,1maxt
l’uscita coincide con l’evoluzione forzata; 5. IMPORTANTE: si ricordi che l’ampiezza e lo sfasamento dei modi forzati (della risposta
forzata) a un ingresso sinusoidale (di ampiezza unitaria, di sfasamento nullo e pulsazione ωo) coincidono rispettivamente con il modulo e la fase della fdt in ω = ωo, )js(G oω= .
ricorrendo alle tavole delle trasformate:

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
11
Verifica sui modi forzati (in questo caso coincidenti con la risposta in regime stazionario): 1. in BF, ovvero per 0no →Ω⇒ω<<ω , si hanno i seguenti risultati: ;0,1K =ϕ= questi
risultati si possono ritrovare dai DdB della G(s) in BF; 2. in AF, ovvero per ∞→Ω⇒ω>>ω no , si hanno i seguenti risultati:
2
1 come 0KΩ
→ (pendenza di −40 dB/dec),
( ) ( ) ( ) ( )180radΩ,ζ2atan2ΩΩ,ζ2atan2Ω1Ω,ζ2atan2 22 −π−=−−=−−≅−−=ϕ ; questi risultati si possono ritrovare dai DdB della G(s) in AF;
3. per 1no =Ω⇒ω=ω , si hanno i seguenti risultati:
ζ=
21K ;
( ) ( ) ( )90rad2
0,ζ2atan2Ω1Ω,ζ2atan2 2 −π
−=−=−−=ϕ
questi risultati si possono ritrovare dai DdB della G(s) in 1=Ω ;
Note finali 1. Le soluzioni fornite sono valide anche per ζ < 0 (sistema instabile). 2. Per il caso limite ζ = 0 le soluzioni fornite sono ancora valide, tranne che per il caso Ω = 1. 3. Per il caso ζ > 0 (due poli reali) è valida solo la soluzione dei modi forzati.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
12
4. Lo studente può effettuare esperimenti numerici sul presente esercizio utilizzando lo script
Matlab “Modi_2o_seno.m”. 5. Per facilitare lo svolgimento è stato utilizzato un programma di calcolo simbolico.
% % I parametri liberi sono evidenziati da: <<<<<<<<<<<<<<<<<<< % close all clear all wn=10; % <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< z=0.05; % <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< wo=23; % <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< tfin=41; % <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< s=tf('s'); wx=wn*sqrt(1-z^2); Om=wo/wn; Gs=wn^2/(s^2+2*z*wn*s+wn^2); us=wo/(s^2+wo^2); t=0:0.0001:tfin; ut=sin(wo*t); ys=Gs*us; yt=(lsim(Gs,ut,t))'; H=Om/sqrt(4*Om^2*z^2+(Om^2-1)^2)/sqrt(1-z^2); tet=atan2((2*z),((2*z^2+Om^2-1)/sqrt(1-z^2))); K= 1/sqrt(4*Om^2*z^2+(Om^2-1)^2); fi=atan2((-2*z*Om),(1-Om^2)); ytlib=H*exp(-z*wn*t).*sin(wx*t+tet); ytforz=K*sin(wo*t+fi); figure plot(t,yt,'b','linewidth',2) title('y(t) e y_p_r_o_p_r(t)+y_f_o_r_z(t)') hold on grid on plot(t,ytlib+ytforz,'r--') % figure % plot(t,-yt+(ytlib+ytforz),'g'), grid on % title('differenza') figure plot(t,[ytlib' ytforz'],'linewidth',2), grid on title('y_p_r_o_p_r (in blu) e y_f_o_r_z (in verde)')

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
13
Esercizio 7 Sia dato un sistema dinamico del secondo ordine il cui modello approssimato è caratterizzato dalla fdt G(s):
2nn
2
2n
s2s)s(u)s(y)s(G
ω+ζω+ω
== , con 10 <ζ< (sistema stabile)
Si ipotizzi di partire da condizioni iniziali nulle e di applicare un ingresso u sinusoidale di ampiezza unitaria:
2o
2o
o
s)s(u
)tsin()t(u
ω+ω
=
ω=
Calcolare l’uscita in condizioni stazionarie. Impostazione dell’esercizio 7 Il sistema dato è quello dell’esercizio precedente; l’uscita in condizioni stazionarie coincide perciò con l’evoluzione dei modi forzati già calcolati. Adottando il medesimo formalismo:
( )
( )( )2
2222
o
1,2atan2
14
1K
contsinK)t(y
Ω−Ωζ−=ϕ
−Ω+ζΩ=
ϕ+ω=
Impostazione di un metodo alternativo In questo caso il calcolo dei modi propri può essere evitato. Dall’espressione della fdt G(s) si può derivare il seguente modello nel dominio del tempo:
)t(u)t(y)t(y2)t(y 2n
2nn ω=ω+ζω+
Essendo il sistema lineare e stabile, la risposta alla sinusoide in ingresso, )tsin()t(u oω= , sarà ancora una sinusoide alla stessa frequenza, ma con ampiezza K e sfasamento ϕ da calcolare:
( )ϕ+ω= tsinK)t(y o
con K positivo. Per calcolare K e ϕ è sufficiente: 1. sostituire le espressioni di u(t) e di y(t) nell’equazione del modello in t; 2. eguagliare i coefficienti delle funzioni ( )tsin oω e ( )tcos oω ;
3. risolvere il sistema risultante (di due equazioni) nelle due incognite K e ϕ. Consiglio: Ai fini di un più rapido svolgimento è conviente utilizzare un qualunque programma di calcolo simbolico.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
14
Esercizio 8 Sia dato un sistema dinamico del secondo ordine il cui modello approssimato è caratterizzato dalla fdt G(s):
2nn
2
2n
s2s)s(u)s(y)s(G
ω+ζω+ω
== , con 0=ζ
Si ipotizzi di partire da condizioni iniziali nulle e di applicare un ingresso u sinusoidale di ampiezza unitaria:
2o
2o
noo
s)s(u
con)tsin()t(u
ω+ω
=
ω=ωω=
Calcolare l’espressione dell’uscita y(t). Impostazione dell’esercizio 8 In questo caso la trasformata di Laplace dell’uscita è:
( )22n
2
3n
s)s(u)s(G)s(y
ω+
ω==
I modi propri e i modi forzati sono indistinguibili. Dall’espressione della fdt G(s) è immediato derivare il seguente modello nel dominio del tempo:
)t(u)t(y)t(y 2n
2n ω=ω+
In casi come questo l’Analisi Matematica prevede che la soluzione sia la somma tra una sinusoide di pulsazione ωn e un’altra sinusoide di pari frequenza inviluppata in una rampa:
( ) ( )ϕ+ω+θ+ω= tsinBtsinA)t(y nn
con A e B positivi. Per calcolare A, B, θ e ϕ è sufficiente: 1. sostituire le espressioni di u(t) e di y(t) nell’equazione del modello; 2. eguagliare i coefficienti delle funzioni ( )tsin oω e ( )tcos oω (si noti che si riescono a calcolare
solamente ϕ e B); 3. calcolare θ e A imponendo che le condizioni iniziali )0t(ye)0t(y == siano nulle;
4. calcolati ϕ e B, si noti che anche nel caso generale θ e A dipendono solo dalle condizioni iniziali.
Risultati (in ordine di calcolo):
5.0A,0,2
B,2
==θω
=π
−=ϕ
Consiglio: Ai fini di un più rapido svolgimento è conviente utilizzare un qualunque programma di calcolo simbolico.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
15
Esercizio 9 Con riferimento alla soluzione dell’esercizio 6, verificare che le condizioni iniziali
)0t(ye)0t(y == siano nulle.

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
16
Esercizio 10 Sia dato il sistema dinamico del secondo ordine di cui all’esercizio 6
2nn
2
2n
s2s)s(u)s(y)s(G
ω+ζω+ω
== , con 10,05.0 n =ω=ζ rad/s (sistema stabile)
Si ipotizzi di partire da condizioni iniziali nulle ( )0)0t(y,0)0t(y ==== e di applicare un ingresso u sinusoidale di ampiezza unitaria e pulsazione ωo:
23cons
)s(u
)tsin()t(u
o2o
2o
o
=ω⎪⎩
⎪⎨
⎧
ω+ω
=
ω= rad/s
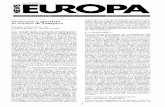
Verificare, con l’ausilio del DdB della fdt G(s), l’esattezza della soluzione relativa alla risposta in regime stazionario calcolata nell’esercizio 6. Svolgimento completo dell’esercizio 10 Viene richiamata qui di seguito la soluzione della risposta nelle condizioni date:
( )
( )( ) )9.176(rad3.08801,2atan2
)dB66.12(2328.014
1K
1023con
tsinK)t(y
o2
2222
o
−−=Ω−Ωζ−=ϕ
−=−Ω+ζΩ
=
=Ω
ϕ+ω=
Verifica sulla risposta in frequenza a 23 rad/s:
-40
-30
-20
-10
0
10
20
30
Mag
nitu
de (d
B) System: g Frequency (rad/sec): 23 Magnitude (dB): -12.7
100 101 102-180
-135
-90
-45
0
Phas
e (d
eg)
System: g Frequency (rad/sec): 23 Phase (deg): -177
Bode Diagram
Frequency (rad/sec)

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
17
Ulteriori verifiche:
100 101 102-180
-135
-90
-45
0
System: g Frequency (rad/sec): 1 Phase (deg): -0.579
System: g Frequency (rad/sec): 100
Phase (deg): -179
System: g Frequency (rad/sec): 10 Phase (deg): -90.1
Phas
e (d
eg)
-40
-30
-20
-10
0
10
20
30
System: g Frequency (rad/sec): 1 Magnitude (dB): 0.0869
System: g Frequency (rad/sec): 10 Magnitude (dB): 20
System: g Frequency (rad/sec): 100
Magnitude (dB): -39.9
Mag
nitu
de (d
B)
Frequency (rad/sec)
1. in BF, ovvero per 0no →Ω⇒ω<<ω , si hanno i seguenti risultati: ;0,1K =ϕ= questi
risultati, a meno delle naturali approssimazioni numeriche, si ritrovano anche nei DdB sopra riportati;
2. in AF, ovvero per ∞→Ω⇒ω>>ω no , si hanno i seguenti risultati:
2
1 come 0KΩ
→ (pendenza di −40 dB/dec),
( ) ( ) ( ) ( )180radΩ,ζ2atan2ΩΩ,ζ2atan2Ω1Ω,ζ2atan2 22 −π−=−−=−−≅−−=ϕ ; questi risultati, a meno delle naturali approssimazioni numeriche, si ritrovano anche nei DdB sopra riportati;;
3. per 1no =Ω⇒ω=ω , si hanno i seguenti risultati:
1021K =ζ
= (20 dB);
( ) ( ) ( )90rad2
0,ζ2atan2Ω1Ω,ζ2atan2 2 −π
−=−=−−=ϕ ;
questi risultati, a meno delle naturali approssimazioni numeriche, si ritrovano anche nei DdB sopra riportati;
4. il rapporto fra le ampiezze di uscita e di ingresso e il loro sfasamento possono essere messi in evidenza anche mediante simulazioni in ambiente Simulink:

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
18
Esercizio 11 Sia data la fdt d’anello Ga(s)
( )( )( )100s2s1s
50ssK)s(G2a
+++
+=
Per K = 1: tracciare i DdB, DdN e DdNic di Ga e mettere in evidenza i punti corrispondenti a pari valori della pulsazione. Per K = 1 verificare la risposta in frequenza con le approssimazioni in BF e in AF.
Per K ≠ 1: analizzare la stabilità della fdt in catena chiusa a
a
G1G)s(W+
= al variare di K.
Svolgimento completo dell’esercizio 11 Per K=1, con l’ausilio di Matlab si tracciano i tre tipi di diagrammi. Questi i punti notevoli riportati nelle tre figure: A: BF; B: fase di 0°; il modulo è circa unitario (0 dB); C: modulo massimo; la fase è di circa –67°; D: modulo unitario (0 dB); la fase è di circa –135°; E: fase minima; F: AF. Per K=1, le fdt approssimanti in BF e in AF sono le seguenti:
2sG
BFa = (DdB con asintoto a +20 dB/dec che interseca l’asse ω in 2 rad/s)
s1G
AFa = (DdB con asintoto a −20 dB/dec che interseca l’asse ω in 1 rad/s)

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
19
-60
-50
-40
-30
-20
-10
0
10M
agni
tude
(dB)
10-1 100 101 102 103-180
-135
-90
-45
0
45
90
Phas
e (d
eg)
Bode Diagram
Frequency (rad/sec)
A B
CD
EF

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
20
-2 -1 0 1 2 3-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
AB
C
D
E ,F

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
21
-180 -135 -90 -45 0 45 90-60
-50
-40
-30
-20
-10
0
10Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB)
per K≠1, con riferimento al formalismo e alle definizioni utilizzate nel corso delle lezioni:
Nnn a,ic,i +=
Nel presente esercizio 0n a,i = in quanto Ga non possiede poli a parte reale positiva, per cui Nn c,i = . A questo punto il problema dato si trasforma nel seguente: determinare N al variare di K.
Per risolvere quest’ultimo problema è utile fare riferimento al DdN tracciato per K=1 e considerare
come “punto critico” non più il punto 0j1s +−= , ma il punto 0jK1s +−= . In tal modo è facile
verificare che per +∞<< K0 la fdt W della catena chiusa è stabile (il punto critico è esterno al DdN). Per K negativi si hanno due situazioni: una quando il suddetto punto critico cade sul segmento del semiasse reale positivo tra A e B; l’altra quando cade a destra di detto segmento. Nella prima situazione, 2N,026.1K0 =−>> quindi la catena chiusa è instabile, con due poli instabili sui tre complessivi. Nella seconda situazione , 0N,026.1K =−< quindi la catena chiusa è stabile.
NB: il valore di – 1.026 è ottenuto da 975.0K1
−= dove 0.975 è il modulo in corrispondenza del
punto B (in cui la fase è di 0°).
A
B
C
D
E
F

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
22
Ulteriori osservazioni Dalla zoomata del DdNic riportata qui di seguito si può rilevare che la fdt W presenta una risonanza; si può infatti stimare che il cerchio M tangente al DdNic è quello da circa +2 dB in 12 rad/s circa. Tale risonanza può essere verificata tracciando il DdB di |W| (da cui risulterà più precisamente Mr= +2.08 dB in 12.0 rad/s). Si noti che nel presente caso il guadagno stazionario della fdt W è nullo; ciò a motivo della presenza di uno zero nell’origine, ovvero di un derivatore puro (si ricordi che con la struttura di controllo utilizzata gli zeri della catena aperta sono anche zeri della catena chiusa).
-180 -135 -90 -45-10
-5
0
5
10 3 dB
-12 dB
6 dB
-6 dB
-3 dB
System: g Gain (dB): 0.303 Phase (deg): -133 Frequency (rad/sec): 12
Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB)
2 dB

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
23
Esercizio 12 Sia data la fdt d’anello Ga(s)
( )( )( )100s1s
50ssK)s(G2a++
+=
Per K = 1: tracciare i DdB, DdN e DdNic di Ga e mettere in evidenza i punti corrispondenti a pari valori della pulsazione.
Per K ≠ 1: analizzare la stabilità della fdt in catena chiusa a
a
G1G)s(W+
= al variare di K.
Impostazione dell’esercizio 12 Seguire l’impostazione dell’esercizio 11. Si noti che la fdt del presente esercizio è identica a quella dell’esercizio 11 tranne che per il valore del fattore di smorzamento dei poli complessi coniugati che qui è nullo. In questo caso i poli complessi sono in 10j± ; per 10±=ω il modulo della fdt sarà perciò ∞. Nel DdN è quindi prevista una semicirconferenza oraria di raggio ∞ che unisce gli asintoti da −=ω 10 a +=ω 10 (e, naturalmente, per simmetria, da −−=ω 10 a +−=ω 10 .

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
24
Esercizio 13 Sia data la fdt d’anello Ga(s)
( )( )50s1ss
100sK)s(G2
a++
+=
Per K = 1: tracciare i DdB, DdN e DdNic di Ga e mettere in evidenza i punti corrispondenti a pari valori della pulsazione.
Per K ≠ 1: analizzare la stabilità della fdt in catena chiusa a
a
G1G)s(W+
= al variare di K.
Impostazione dell’esercizio 13 Seguire l’impostazione dell’esercizio 11. Si noti la presenza di due zeri immaginari coniugati (complessi a smorzamento nullo) in 10j± . Ciò implica un asintoto verticale nel DdB del modulo e nel DdNic in 10=ω e quindi un passaggio per
l’origine da parte del DdN. Quest’ultimo, a motivo del fattore s1 , presenterà due rami a ∞ per
−=ω 0 e per +=ω 0 (attenzione quindi alla “chiusura” con semicirconferenze orarie di raggio ∞).

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
25
Esercizio 14 Sia data la fdt d’anello Ga(s)
( )( )( )50s10ss1100s2sK20)s(G
2
a ++−++
−=
Per K = 1: tracciare i DdB, DdN e DdNic di Ga e mettere in evidenza i punti corrispondenti a pari valori della pulsazione.
Per K ≠ 1: analizzare la stabilità della fdt in catena chiusa a
a
G1G)s(W+
= al variare di K.
Impostazione dell’esercizio 14 Seguire l’impostazione dell’esercizio 11. Si noti che in questo caso, a motivo della presenza di un polo instabile, 1n a,i = .

Controlli automatici Stabilità dei sistemi di controllo in retroazione - Esercizi
©2007 Politecnico di Torino
26
Esercizio 15 Sia data la fdt d’anello Ga(s)
( )( )( )50s10ss1100s2sK20)s(G
2
a ++−++
−=
Per K = 1 e per K = 10, posto che a
a
G1GW+
= sia stabile, calcolare i margini di fase mϕ, i margini di
guadagno mG e i picchi di risonanza Mr mettendo in evidenza le differenze fra i due casi. Impostazione dell’esercizio 15 a – verificare (con il criterio di Nyquist) che la catena chiusa sia stabile; b – nel caso di stabilità della catena chiusa mϕ e mG possono essere calcolati con l’ausilio dei DdB e/o dei DdN; c – nel caso di stabilità della catena chiusa Mr può essere rilevato con l’ausilio dei cerchi M sui DdN e/o sui DdNic oppure con il DdB del modulo della fdt W.