Riassunto Propagazione LS (aggiornato)
105
Propagazione e Pianificazione nei Sistemi d’Area Riccardo Crociani, Ing. Pazzo 11 luglio 2009
-
Upload
ingegnere-pazzo -
Category
Documents
-
view
863 -
download
5
description
La versione revisionata del riassunto di Propagazione LS
Transcript of Riassunto Propagazione LS (aggiornato)

Propagazione e Pianificazione nei Sistemi d’Area
Riccardo Crociani, Ing. Pazzo
11 luglio 2009

2
Si consiglia di affiancare il materiale presente in questo riassunto agli appunti presi a lezione. Que-sto perché (ovviamente!) non si vuole avere alcuna presunzione di esaustività, né di assoluta corret-tezza: nonostante le revisioni fin’ora effettuate, potrebbero infatti essere ancora presenti molti errori eimprecisioni.
2

Indice
1 Introduzione 51.1 Attenuazione in spazio libero e non . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Propagazione in mezzi lentamente variabili 72.1 Effetti dei gas atmosferici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Attenuazione supplementare da pioggia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Effetto della ionosfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4 Ottica Geometrica classica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.1 Esempio: atmosfera omogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.2 Esempio: mezzo a stratificazione sferica . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.3 Esempio: mezzo a stratificazione piana . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.5 Il principio di Fermat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.6 La propagazione troposferica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.7 Il raggio terrestre equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.8 Effetto di Condotto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Propagazione in presenza di discontinuità 173.1 Coefficienti di riflessione e rifrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Ricerca dei coefficienti di Fresnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3 Effetti del terreno sulla propagazione: la riflessione . . . . . . . . . . . . . . . . . . . . . . . . 213.4 Il principio di Huygens-Fresnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.5 Il teorema di Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.6 Diffrazione da Knife-Edge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.7 Zone di Fresnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Modelli empirico-statistici 354.1 Tipologie di modelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2 Il fading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3 I modelli Hata-like . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.4 Il modello di Epstein-Peterson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.5 Il modello di Berg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.6 Il modello multi-wall indoor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424.7 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5 Teoria Geometrica della Propagazione 455.1 Richiami: onda sferica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2 Il fattore di divergenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.3 Principi Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.4 Diffrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.5 Esempio Riflessione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.6 Esempio Diffrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.7 Esempio Doppia Interazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.8 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3

4 INDICE
6 Modelli deterministici a raggi 556.1 Ray Tracing method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.2 Ray Tracing semplificato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.3 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7 Il Canale Radiomobile 637.1 Caso statico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 647.2 Caso dinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 667.3 Le 4 funzioni del canale radiomobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 687.4 Parametri di dispersione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 687.5 Caratterizzazione multidimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 707.6 Tecniche di diversità e MIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 717.7 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
8 Tecniche di trasmissione Spread Spectrum 778.1 Direct-Sequence Spread-Spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 778.2 Frequency-Hopping Spread Spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 808.3 Spreading e Scrambling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 808.4 Power control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8.4.1 Controllo di potenza ad anello aperto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 828.4.2 Controllo di potenza ad anello chiuso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8.5 Rake receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 838.6 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9 Sistemi d’area cellulari 879.1 Reticoli simmetrici, relazioni geometriche e settorizzazione . . . . . . . . . . . . . . . . . . . 889.2 Accesso multiplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 899.3 Miglioramenti nei sistemi CDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
9.3.1 Soft handover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 919.3.2 Macrodiversità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
9.4 Parametri di bontà di un sistema d’area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 929.5 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
10 Pianificazione di sistemi radiomobili 9510.1 Pianificazione in base alla copertura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9510.2 Pianificazione in base al C/I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.3 Efficienza spettrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9810.4 Pianificazione assistita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9910.5 In sintesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4

Capitolo 1
Introduzione
1.1 Attenuazione in spazio libero e non
Consideriamo un mezzo omogeneo e assolutamente ideale, e ipotizziamo di essere in condizionedi spazio libero: in questo caso la potenza ricevuta a distanza R è descritta dalla formula di Friis (neriportiamo qui la versione incoerente, cioè che tralascia problematiche di fase e polarizzazione):
Pr = Pt · Gt · Gr
(λ
4πR
)α
= PR(R0) ·(
R0
R
)α
Nella relazione soprascritta R0 è una distanza di riferimento, Pt è la potenza trasmessa, Gt il guadagnodel trasmettitore, Gr il guadagno del ricevitore e quello tra parentesi il termine di attenuazione1 doveα = 2 è l’esponente con cui decade la potenza all’aumentare della distanza. La scelta α = 2 non è causale:per la conservazione dell’energia, la potenza trasportata dall’onda deve essere sempre costante mentre lasfera che rappresenta il fronte d’onda2 aumenta la sua superficie quadraticamente con la distanza. Questosignifica che, perché il bilancio rimanga invariato, la densità di potenza deve decadere col quadrato delladistanza. Si può inoltre definire l’attenuazione L come il rapporto
L(R) =Pt
Pr= L(R0) ·
(RR0
)α
con R0 distanza di riferimento (1.1)
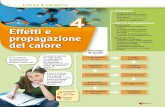
Esprimendo tutto in dB e graficando l’attenuazione in un grafico log-log risulta quindi una retta dipendenza α = 2 (figura 1.1):
LdB = LdB(R0)− 10 · αlogR0 + 10 · αlogR
Per descrivere la propagazione in ambiente reale, si può utilizzare un modello semplificato (empirico estatistico) che non fa altro che assumere un coefficiente α 6= 2; per misurare questo coefficiente in unasituazione un minimo più attinente al reale il metodo usato è quello di effettuare molte prove sul campoe di traccia la cosiddetta linea di regressione (figura 1.2) una volta riportati i valori su un grafico. Cosìfacendo si scopre che α, solitamente, sta tra 2 e 4: ciò significa che, nella realtà, il segnale decade molto piùvelocemente rispetto che nel caso ideale. Questo è dovuto a fenomeni come il multicammino (multipath),la riflessione e rifrazione di ostacoli.
Il parametro α dà quindi l’attenuazione media e gli scostamenti da questa sono dovuti al fading (lentoo rapido) (vedi par. 4.2), che può essere descritto statisticamente.
In molti casi non cambia solo il parametro α ma l’intera dipendenza dei parametri in gioco; un esempioè riportato in figura 1.3: essa rappresenta l’andamento della potenza per una generica onda che attraversapiù muri in un ambiente indoor.
Risulta inoltre necessario dotarsi di modelli che tengano conto non solo della potenza, ma che sianocoerenti (cioè che tengano conto anche della polarizzazione e dell’adattamento in potenza) e che prendanoin considerazione tutte le interazione con tutti gli ostacoli che possono essere presenti, sia statisticamente,sia in maniera deterministica (Multidimensional Propagation Prediction).
1Sottile distinzione fra l’attenuazione qui riportata e il termine L che compare nella formula 1.1: mentre il primo è un termineche ha le dimensioni di un guadagno < 1 (e solo in questo senso è un’attenuazione), il secondo è un’attenuazione tout-court ed ètanto più grande quanto minore è la potenza ricevuta in rapporto a quella trasmessa.
2In spazio libero e in un mezzo del genere l’onda è da considerarsi sferica.
5

6 CAPITOLO 1. INTRODUZIONE
Figura 1.1: In spazio libero la potenza decade con α = 2
Figura 1.2: Differenza tra propagazione in spazio libero e in ambiente reale
Figura 1.3: In questo caso non solo α varia.
1.2 In sintesi
In spazio libero e in condizioni ideali vale la formula di Friis:
Pr = Pt · Gt · Gr
(λ
4πR
)α
= PR(R0) ·(
R0
R
)α
L'esponente α è tuttavia pari a 2 solamente in condizioni assolutamente ideali: tale parametro, nella realtà, è
infatti maggiore di 2 e può assumere valori che comportano un'attenuazione ben più consistente di quella in spazio
libero! Per la sua misurazione si fa ricorso a prove sperimentali, interpolando i dati raccolti mediante linea di
regressione su gra�co log-log, oppure ci si appella a particolari modelli ad-hoc.
6

Capitolo 2
Propagazione in mezzi lentamentevariabili
2.1 Effetti dei gas atmosferici
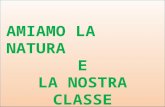
Alcuni gas che compongono l’atmosfera (vapore acqueo H2O, ossigeno O2, etc...) provocano attenua-zione in quanto le loro molecole, non bilanciate elettricamente, risuonano a certe frequenze disperdendoenergia in calore; com’è prevedibile, questa attenuazione dipende dalla concentrazione di tali gas1. Infigura 2.1 si possono notare, per alcuni gas nell’atmosfera standard, le righe di assorbimento situate in pros-simità delle frequenze alle quali le molecole risuonano; si noti, in particolare, che non si hanno effettirilevanti sotto i 10 GHz.
L’attenuazione dipende anche dalla quota del collegamento in quanto le concentrazioni dei gas varianoal variare di essa.
Figura 2.1: Righe di assorbimento al variare della frequenza
Date le attenuazioni specifiche dovute all’ossigeno (α0) e al vapore d’acqua (αw), entrambe espresse in
1La concentrazione di H2O, in particolare, è molto variabile.
7

8 CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI
[dB/Km], per un collegamento tra quote h e hmax, con angolo di elevazione θ (piccolo), si ha:
Ls =h max∫
h
α0(H) + αw(H)sin(ϕ)
dH
ϕ = arccos(
(d + h) · n(h) · cos θ
(d + H) · n(H)
)Quando però il collegamento è praticamente parallelo al terreno si può semplificare la formula comeriportato di seguito:
Ls = [α0 + αw] · d
Questa attenuazione andrà poi sommata a quella di spazio libero.
2.2 Attenuazione supplementare da pioggia
La diffusione e l’assorbimento dell’onda da parte delle gocce d’acqua è un’altra causa di attenuazione:l’entità di quest’ultima dipenderà dalla loro forma e dalla loro distribuzione, nonché dall’intensità di pre-cipitazione. In apposite tabelle è possibile trovare l’attenuazione specifica αr in funzione della frequenza,ma ai fini pratici si può far uso di una relazione del tipo:
αr = K · Ra
dove K e a dipendono da frequenza, polarizzazione e angolo di elevazione, mentre R è l’intensità diprecipitazione (variabile aleatoria di cui sono note le statistiche). Se Ps è la probabilità di servizio, si puòcalcolare il Ps-esimo percentile Rx e quindi l’attenuazione supplementare totale Asx:
Asx = KRaxD
2.3 Effetto della ionosfera
La ionosfera è lo strato di atmosfera che sta tra 50 e 400 Km di quota; lì le radiazioni solari ionizzanole molecole e i gas si separano in ioni ed elettroni liberi generando un plasma con densità di ionizzazioneNp [elettroni/m3].
In questo caso ciò che accade dipende dall’entità della cosiddetta pulsazione di taglio ωp, ricavabiletramite le equazioni di Maxwell2; se ω < ωp allora la costante di fase risulterà immaginaria: in un mezzosenza perdite questo significa che l’onda viene riflessa al suolo (mentre oltre la ionosfera si propaga soloun’onda evanescente, la quale decade quasi immediatamente). Con i valori in gioco si trova che subiscono
2Se u è la velocità dell’elettrone ed e la sua carica si ha:
Jt = eNpu(t)
Deve sempre valere le legge della meccanica F = ma, che si scrive:
mdu(t)
dt= eE in regime armonico mjωu = eE
Sostituendo quest’ultima nella prima equazione di Maxwell si ottiene:
∇×H = jωε0E + J = jωε0
(1−
e2 Np
mε0ω2
)E
Otteniamo così una nuova permittività elettrica reale (non ci sono perdite) pari a:
εp = ε0
(1−
e2 Np
mε0ω2
)con ωp =
√e2 Np
mε0pulsazione di plasma
La nuova costante di fase dell’onda sarà ora:
β = ωnp√
µ0ε0 =ω
c
√1−
(ωp
ω
)2
8

CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI 9
questa riflessione le onde aventi frequenza ≤ a 10 MHz: le onde lunghe, quindi, possono sfruttare lariflessione nella ionosfera per raggiungere zone anche molto distanti nel globo terrestre.
A frequenze molto maggiori (GHz) le disomogeneità della troposfera possono invece causare retrodif-fusione di un onda incidente in tutte le direzioni (troposcatter).
2.4 Ottica Geometrica classica
Nella troposfera3, l’indice di rifrazione diminuisce lentamente con la quota. La propagazione avvienequindi in un mezzo con indice di rifrazione lentamente variabile e ciò fa sì che la traiettoria del segnalenon sia rettilinea: per prevedere l’esatto percorso del segnale si deve perciò ricorrere alla teoria dell’otticageometrica classica.
In assenza di ostacoli, in un mezzo non omogeneo con indice di rifrazione lentamente variabile si puòipotizzare una soluzione simile ad un’onda sferica, ma con ampiezza e fase variabili con la posizione:
E(r) = E0(r) · e−jβ0Ψ(r) con Ψ(r): funzione iconale
Questa è una soluzione ammissibile delle equazioni di Maxwell (in figura 2.2 sono riportati i calcoli).Arriviamo così alle equazioni fondamentali dell’ottica geometrica:L’EQUAZIONE DELL’ICONALE:
|∇Ψ|2 = n2
L’EQUAZIONE DEL TRASPORTO:
E0∇2Ψ + 2∇Ψ [E0 · ∇ ln (n)] + 2 (∇Ψ · ∇) E0 = 0
Risolvendo l’equazione dell’iconale si può calcolare ψ(r); le superfici per cui ψ(r) = costante sono ifronti d’onda, i quali definiscono la traiettoria del segnale in quanto permettono di individuare i raggi: sidefinisce infatti raggio ottico ogni linea dello spazio perpendicolare in ogni punto alla superficie d’onda.Detto inoltre s il versore che individua la direzione di propagazione del raggio si ha4:
s =∇Ψ|∇Ψ| =
∇Ψn
s =dr(s)
dsdove r(s) è la parametrizzazione del raggio
Semplicemente sostituendo otteniamo l’equazione dei raggi:
ndr(s)
ds= ∇Ψ
Questa si può nuovamente derivare rispetto ad s per ottenere così l’equazione differenziale dei raggi cheha il grande vantaggio di poter descrivere la traiettoria dei raggi sapendo solo l’andamento di n(r).
dds
(n
dr (s)ds
)=
dds
(∇ψ) = ∇(
dds
ψ
)= ∇ (∇ψ · s) = ∇ (n · s · s) = ∇n
dds
(n
drds
)= ∇n
Ora si possono definire il vettore5 di curvatura c e il raggio di curvatura R (si veda la figura 2.3):
c =dsds
c =1R
c
Dall’equazione differenziale dei raggi, e dalle definizioni date di s e di c otteniamo:
∇n =dds
(n
drds
)=
dds
(ns) =dnds
s +dsds
n =dnds
s + cn
3La troposfera è la fascia dell’atmosfera a diretto contatto con la superficie terrestre.4La coordinata s è di tipo curvilineo.5Attenzione: la derivata di un versore è un vettore!
9

10 CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI
Moltiplicando scalarmente per c si ha6:
∇nc =dnds
s · c + nc · c = n |c|
|c| = 1R
=∇nn· c
Figura 2.3: Raggio di curvatura
Poiché il primo membro è positivo, per forza l’an-golo tra c e ∇n dev’essere sempre minore di π
2 :il raggio tende sempre a curvare verso la regionead indice di rifrazione più alto7 e quindi, nel casoterrestre, i raggi ’curvano’ verso il suolo.
2.4.1 Esempio: atmosfera omogenea
Se l’atmosfera è omogenea n(r) è costante, percui:
dds
(n
drds
)= ∇n = 0
d2rds2 = 0 ⇒ r = as + b
1R
=∇nn
c ⇒ R→ ∞
La traiettoria è perciò rettilinea.
2.4.2 Esempio: mezzo a stratificazionesferica
Si veda anche la figura 2.4. L’andamento del-l’indice di rifrazione è funzione del solo raggio(simmetria sferica):
∇n = ndndr
r dipende solo da r
Applicando l’equazione differenziale dei raggi e moltiplicando vettorialmente per r si ha
dds
ns = ∇n
dds
(r× ns) = r×∇n = r× dndr
r = 0
Questo significa che r× ns è costante e che quindi è costante anche l’angolo compreso fra essi.
2.4.3 Esempio: mezzo a stratificazione piana
In tal caso i raggi si mantengono su dei piani (omettiamo la dimostrazione).
6Si ricordi che i versori s e hatc sono ortogonali e il loro prodotto scalare è nullo.7Nel caso discreto l’equivalente è la legge di Snell.
10

CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI 11
(a) .
(b) .
(c) .
Figura 2.2: Calcoli per le equazioni fondamentali dell’ottica geometrica
11

12 CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI
2.5 Il principio di Fermat
Il principio di Fermat afferma che il cammino ottico8 è stazionario per raggi effettivi. Ne consegue chela traiettoria del raggio minimizza il cammino ottico9.
Per dirlo in parole non povere, bensì poverissime:
• a parità di lunghezza ’fisica’ maggiore è n e maggiore sarà il cammino ottico;
• il raggio, molto pigramente, cerca di prendere il cammino ottico più breve e prediligendo la perma-nenza nelle zone a n basso.
Questo non significa che il raggio non finirà mai nelle zone a n maggiore: semplicemente, sapendo cheil raggio andrà dal punto P1 al punto P2, l’integrale
L =P2∫
P1
n(s)ds
calcolato lungo il cammino del raggio risulterà essere sempre quello a risultato (cioè a cammino ottico)minore rispetto a tutte le traiettorie possibili.
2.6 La propagazione troposferica
Nella troposfera l’indice di rifrazione cala esponenzialmente con la quota, quindi il segnale subiscedeviazioni prevedibili grazie all’ottica geometrica classica.
L’insieme Terra + atmosfera può essere considerato un mezzo non omogeneo a simmetria quasi-sfericacon:
• n = n(r);
• r = R0 + h;
• R0 = 6370 Km, raggio terrestre;
• h = quota.
In figura 2.4 è riportata la legge di Snell nel caso di simmetria sferica. Quindi nel caso in esame deveessere
n(r) · r · sin Ψ = k
n(h) · (R0 + h) · sin Ψ = k
n(h) ·(
1 +R0
h
)· sin Ψ =
kR0
= K(n(h) +
hR0
)sin Ψ = K dato che
hR0
è molto piccolo
Queste relazioni sono il punto di partenza per risolvere il problema di stratificazione piana per via nu-merica. Dato che però ci interessa soprattutto conoscere curvatura del percorso del segnale, si fa usodell’equazione
|c| = 1R
=∇nn
c =1n
dndr
r · c (2.1)
dopodiché si introduce il gradente verticale di rifrattività
G =dN(h)
dh8Dati due punti P1 e P2 ed un percorso che li colleghi, si definisce cammino ottico
L =P2∫
P1
n(s)ds
9Infatti se n(s) è costante il raggio risulta essere la retta congiungente.
12

CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI 13
Figura 2.4: Legge di Snell per simmetria sferica
tale che si abbiadndr
= 10−6 dN (h)dh
= 10−6G
In questo modo, sostituendo in 2.1, si ha
|c| = 1n
G · r · c =1n
G · (− sin ψ)
e, per collegamenti terrestri10,1R
= −10−6G
Nel caso di atmosfera standard e per quote basse esso vale:
Gst = −40 N/Km
Inserendo nell’equazione precedente tale parametro otteniamo il raggio standard (che è circa quattro voltequello terrestre):
Rs = 25.500 Km
Non sempre però ci si trova a lavorare in atmosfera standard, si fa allora riferimento all’indicetroposferico definito come:
K =R
R− R0=
157157 + G
Kst =43
Si possono allora distinguere 3 zone di lavoro (figura 2.7), l’atmosfera può essere :
• G > −40, K < Ks substandard;
• G = −40, K = Ks standard;
• G < −40, K > Ks superstandard;
• G = 0, K = 1 omogenea.
Se fra i due terminali non c’è ostruzione si dice che esiste visibilità radio: essa è solitamente maggioredi quella geometrica in quanto le situazioni più probabili sono quelle vicino ai valori standard.
Accade a volte che rapide variazioni di pressione e temperatura portino a forti variazioni di n(h), sipuò allora avere il fenomeno della super-rifrazione con ritorno a terra di un raggio: si generano così camminimultipli con conseguenti attenuazione e distorsione (vedi fig. 2.6).
10Quindi con ψ = π2
13

14 CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI
Figura 2.5: Andamento di K in funzione di G
Figura 2.6: Cammini multipli e atmosfera
Figura 2.7: Tipi di atmosfera
2.7 Il raggio terrestre equivalente
In un collegamento radio si devono considerare due curvature: quella del raggio e quella terrestre(figura 2.8.a). Risulta tuttavia utile eliminare una delle due curvature e ricondursi ad una sola: quellaterra-equivalente o quella raggio-equivalente (figura 2.8.b). In entrambi i casi comunque quello che conta è ladifferenza E(x), fra il profilo del raggio e il profilo della Terra
E(x) = yc(x)− yt(x) = profilo dei raggi - profilo terrestre
la quale deve sempre essere maggiore dell’altezza degli ostacoli. Quest’ultima può essere ricavata in formagrafica (figura 2.8.c):
Sia quindi:
• h1: altezza dell’antenna trasmittente;
• h2: altezza dell’antenna ricevente;
14

CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI 15
• d: distanza di collegamento;
• yc: funzione del raggio;
• yt: funzione profilo terrestre.
(a) .
(b) .
(c) .
Figura 2.8
La curvatura delle due funzioni si può approssimare con la derivata seconda11
y′′c = − 1
Ry′′t = − 1
R0
per poi risalire alle funzioni integrando due volte. Sapendo che per yc le condizioni iniziali sono yc(0) = h1e yc(d) = h2 si ha:
yc(x) = h1 +h2 − h1
dx− 1
2Rx(x− d) (2.2)
11Con segno negativo perché rivolte verso l’alto.
15

16 CAPITOLO 2. PROPAGAZIONE IN MEZZI LENTAMENTE VARIABILI
Per yt, invece, le condizioni iniziali sono yt(0) = 0 e yt(d) = 0, quindi:
yt(x) = − x2R0
(x− d) (2.3)
Quindi E(x) = yc(x)− yt(x) risulta essere:
E(x) = h1 +h2 − h1
dx− x(x− d)
2
[1R− 1
R0
](2.4)
Osservando tale equazione e confrontandola con la 2.2 si può considerare il raggio piatto attribuendo alleterra la curvatura 1/Req. Si definisce allora il raggio equivalente:
1Req
=1
R0− 1
R=
R− R0
R · R0=
1K · R0
Req = K · R0 (2.5)
Supponendo che h1 = h2 = h, si può calcolare l’orizzonte radio (figura 2.9) dor ponendo E( dor2 ) = 0, e
ricavando:dor = 2
√2hKR0
Figura 2.9: Rispetto al caso K = 1 l’orizzonte radio è maggiore
2.8 Effetto di Condotto
Se si hanno strati di aria con differenti temperature, si può avere una forte variazione di dn/dh e quindidi G rispetto al valore standard, si possono allora verificare due fenomeni:
• effetto di condotto al suolo: quando G < −157. Si hanno multiple riflessioni al suolo di un camminocon curvatura maggiore della terra;
• effetto di condotto in quota: quando si ha un’inversione di G, un raggio rimane intrappolato in unasorta di guida planare.
16

Capitolo 3
Propagazione in presenza didiscontinuità
3.1 Coefficienti di riflessione e rifrazione
Le ipotesi su cui si basa l’ottica geometrica cadono in difetto quando si è in presenza di superfici incui le caratteristiche dei due mezzi variano bruscamente (discontinuità di prima specie): è questo il casodella presenza di ostacoli o pareti che si frappongono tra il trasmettitore ed il ricevitore. Per semplificarela trattazione di queste situazioni si fa la seguente ipotesi: si ammette che ciascun raggio incidente abbiain tutti i punti un comportamento analogo a quello di un onda piana TEM1:
• ~Ei(r) = ~Ei0e−σir
• ~Hi(r) = ~Hi0e−σir
• σi = (αi + jβi)si con si direzione di incidenza
Si dimostra che ogni raggio incidente dà luogo ad un raggio trasmesso ed uno riflesso.Il mezzo in cui si propaga l’onda è descritto dai parametri µ, ε, σ. In alternativa si possono definire i
parametri ’composti’:
• εc = ε + σjω permettività complessa
• n =√
µεcµ0 ε0
indice di rifrazione
• η =√
µεc
impedenza intrinseca
Nel caso di mezzo privo di perdite (µ = µ0) e inoltre definita η0 (impedenza intrinseca di spazio libero):
n =√
εr η =η0
nη0 =
õ0
ε0
In un radiocollegamento2, in assenza di ostacoli e senza tener conto degli effetti dell’atmosfera, sihanno due contributi principali: il raggio diretto e quello riflesso (vedi fig. 3.1). In uno scenario più com-plesso come quello urbano, invece, l’onda subisce diverse interazioni (riflessione, trasmissione, diffrazionee scattering) (vedi fig. 3.2).
Vediamo ora come poter calcolare l’onda riflessa e trasmessa nel caso ideale, ovvero quando l’ondaincidente è (localmente) piana e la superficie di separazione è un piano illimitato3. Nostro scopo è ricava-re4 il coefficiente di riflessione Γ e il coefficiente di trasmissione τ, indicanti rispettivamente ’quanta parte
1Qualunque onda a grande distanza può essere approssimata come onda piana.2Per essere in campo lontano bisogna che siano verificate: d >> λ, d >> D, d >> 2D2
λ . In queste condizioni ciascun camminocorrisponde ad un onda piana uniforme.
3Le sue dimensioni molto piccole rispetto a λ.4La teoria che si svilupperà nel seguito sarebbe valida, a rigore, solo per mezzi puramente dielettrici, tuttavia la si può estendere
anche a mezzi debolmente conduttori a patto di tener conto delle perdite tramite l’uso di una permittività elettrica complessa.
17

18 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
Figura 3.1: Ci sono due contributi principali, il cammino diretto e il raggio riflesso dal terreno.
Figura 3.2: In uno scenario complesso ci sono diverse interazioni.
dell’onda’ (e con quale segno) subisce riflessione e quanta invece viene trasmessa; imponiamo la conti-nuità delle componenti tangenti dei campi (elettrico e magnetico) incidente, riflesso e trasmesso (si facciariferimento alla figura 3.3), supponendo che non vi siano correnti superficiali né impresse né indotte.
~Eτt = ~Eτ
i + ~Eτr ; ~Hτ
t∼= ~Hτ
i + ~Hτr
Figura 3.3: Riferimenti scelti per la trattazione dell’onda incidente.
Ricordando che i tre vettori (si, sr, st) sono complanari e appartenenti al piano di equazione z = ky, sigiunge alle leggi della riflessione e della rifrazione5:
• θi = θr Legge di Snell della Riflessone
• n1 sin θi = n2 sin θt Legge di Snell della Rifrazione
5Queste due leggi sono in realtà una sola: facile è infatti convincersi che la legge della riflessione non è che un caso particolaredella legge della rifrazione in cui n1 = n2.
18

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 19
Dalla seconda equazione si può notare che, se n1 > n2, aumentando θi si può arrivare ad avere θt = π2
(la direzione del raggio rifratto coincide con l’asse in figura 3.3): si ha in questo caso il fenomeno dellariflessione totale. L’angolo di incidenza θc per cui avviene questo fenomeno è detto angolo critico6.
3.2 Ricerca dei coefficienti di Fresnel
Imponiamo nuovamente l’uguaglianza delle componenti tangenti:
~Eτt0 = ~Eτ
i0 + ~Eτr0 ; ~Hτ
t0 = ~Hτi0 + ~Hτ
r0
e scomponiamo i campi rispetto a tre nuovi sistemi di riferimento, ognuno avente un asse solidale conla direzione del raggio come mostrato in figura 3.4. I campi ~E ed ~H si scompongono lungo le due
Figura 3.4: Scomponiamo i campi in tre nuovi sistemi di riferimento.
componenti7 ~ξ e~iy, descrivendo due soluzioni indipendenti tra loro e mutuamente esclusive ma sufficienti,una volta composte, a descrivere un campo qualsiasi.
Risulta comunque sempre possibile scomporre il campo in due polarizzazioni lineari e ortogonali:
• per ~Ei//~iy si ha polarizzazione TE (o polarizzazione perpendicolare8;
• per ~Ei//~ξ si ha polarizzazione TM (o polarizzazione parallela).
Dopo svariati calcoli, che qui ometteremo, giungiamo così ai coefficienti di Fresnel:
ΓTE =Er0y
Ei0y=
Componente del campo elettrico (onda riflessa)Componente del campo elettrico (onda incidente)
=n1 cos θi − n2 cos θt
n1 cos θi + n2 cos θt
τTE =Et0y
Ei0y=
Componente del campo elettrico (onda trasmessa)Componente del campo elettrico (onda incidente)
=2n1 cos θi
n1 cos θi + n2 cos θt
per i quali vale la seguente proprietà9:
τTE = 1 + ΓTE
6In realtà anche in questo caso è presente, nel mezzo 2, una certa componente di campo elettromagnetico in quanto l’onda sipropaga sulla superficie (asse z), mentre si attenua in maniera esponenziale nella direzione normale (onda evanescente lungo la partenegativa dell’asse x).
7Campo elettrico, magnetico e direzione di propagazione dell’onda formano una terna cartesiana ortogonale: i campi elettrico emagnetico oscilleranno quindi fra loro perpendicolarmente nonché su piani ortogonali alle direzioni si , st, sr .
8Rispetto al piano di incidenza.9Conservazione dell’energia.
19

20 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
Applicando la legge si Snell10 ed esprimendo il tutto utilizzando l’angolo di radenza (θ = π2 − θi), spesso
usato in radiotecnica, otteniamo i coefficienti di riflessione Γ e i coefficienti di trasmissione τ:POLARIZZAZIONE TE
ΓTE =sin θ −
√(n2n1
)2− cos2 θ
sin θ +√(
n2n1
)2− cos2 θ
τTE =2 sin θ
sin θ +√(
n2n1
)2− cos2 θ
POLARIZZAZIONE TM
ΓTM =
(n2n1
)2sin θ −
√(n2n1
)2− cos2 θ(
n2n1
)2sin θ +
√(n2n1
)2− cos2 θ
τTM =2 n2
n1sin θ(
n2n1
)2sin θ +
√(n2n1
)2− cos2 θ
Imponendo la condizione ΓTE = 0 (riflessione nulla), tutta la potenza passa dal mezzo 1 al mezzo 2; lalegge di Snell deve tuttavia essere ancora valida e si deve cioè avere:
n2 cos θi = n1 cos θt ⇒n2
n1=
cos θt
cos θi=
sin θt
sin θi(3.1)
L’ultima uguaglianza è verificata solo se:
θi + θt =π
2Ne consegue che:
cos θt = cos(π
2− θi
)= sin θi
Sostituendo quest’ultima uguaglianza nella 3.1 si ricava l’angolo di Brewster (o angolo di rifrazione totale):
tan θi =n2
n1
Riassumendo (vedere figure 3.611 e 3.7) possiamo catalogare i punti principali:
• ~si,~sr,~st complanari;
• θi = θr (legge della riflessione);
• n1 sin θi = n2 sin θr (legge della rifrazione);
• Er = ΓEi;
• Et = τEi.
10Andiamo a sostituire:
sin θt =n1
n2sin θi ⇒ cosθt =
√1−
(n1
n2sin θi
)2
=n1
n2
√(n2
n1
)2
− sin2 θi
11Ad un primo esame si potrebbe rimanere ’stupiti’ dalla presenza di un termine s′ al numeratore. Per convincersi si tengapresente che:
E (QR) = E0e−jβs′
s′
E′ (s) = E0e−jβ(s+s′)
s + s′e−jβs′
s′s′
e−jβs′= E0
e−jβs′
s′︸ ︷︷ ︸E(QR)
e−jβ(s+s′)
s + s′s′
e−jβs′= E (QR)
s′
s + s′e−jβs
20

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 21
Figura 3.5: Andamento dei coefficienti di riflessione e di rifrazione. Angolo di Brewster.
Figura 3.6: Onda incidente, riflessa e rifratta.
3.3 Effetti del terreno sulla propagazione: la riflessione
Vediamo ora l’effetto della riflessione al suolo di un’onda trasmessa. Riprendiamo le espressioniriportate nel paragrafo 3.1 e manipoliamo facendo le seguenti ipotesi:
• µ = µ0 (come nel vuoto), che implica n =√
µεc
µ0ε0=√
εr;
• mezzo 1 privo di perdite, quindi con permittività reale;
• il mezzo 1 solitamente è l’aria: εr1 = 1.
21

22 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
Figura 3.7: Polarizzazione TE e TM.
Otteniamo allora altre due espressioni per i coefficienti di riflessione:
ΓTE =cos θi −
√εr2 − sin2 θi
cos θi +√
εr2 − sin2 θi
ΓTM =cos θi
√εr2 −
√1− 1
εr2sin2 θi
cos θi√
εr2 +√
1− 1εr2
sin2 θi
ora si possono notare, con semplici limiti matematici che se:
• θi = π2 → ΓTE, ΓTM = −1 incidenza radente;
• il mezzo su cui incide l’onda è conduttore elettrico perfetto (σ2, εr2 → ∞)→ ΓTE = −1, ΓTM = 1.
In molti casi pratici l’onda incidente è sferica e la superficie piana: questo permette di dire che anchel’onda riflessa sarà sferica e con uguale raggio di curvatura (è come avere un’antenna ’immagine’ nelmezzo 2)12.
~Er(s) = Γ~E0
rr1 + rr2e−jβ(rr1+rr2)
La riflessione di un’onda sul terreno può essere schematizzata come in figura 3.8. Ricordando che l’ondaincide nel punto esatto in cui transiterebbe l’onda generata da un’ipotetica antenna (immagine) trasmet-
12Per arrivare alla formula: Er (s) = Γ~Ei (Qr)
rr1
rr2 + rr1e−jβrr2
~Ei (Qr) =~E0
rr1e−jβrr1
⇒ ~Er(s) = Γ~E0
rr1 + rr2e−jβ(rr1+rr2)
22

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 23
tente posta nel mezzo 2 con stesse caratteristiche, è facile calcolare13 il percorso del raggio diretto (rd) e diquello riflesso (rr):
rd =√
d2 + (hTX − hRX)2 ; rr =√
d2 + (hTX + hRX)2
Detta ∆r la differenza tra i due cammini ottici, essa vale:
Figura 3.8: Schema di riferimento per la riflessione al suolo
∆r = rr − rd =√
d2 + (hTX + hRX)2 −√
d2 + (hTX − hRX)2 =
= d
√1 +
(hTX + hRX)2
d2 − d
√1 +
(hTX − hRX)2
d2
Sotto l’ipotesi (1) che d >> hTX , hRX (distanza del collegamento molto maggiore rispetto all’altezzadelle antenne dal suolo) si può sviluppare in serie14 e scrivere semplicemente:
∆r = d +(hTX + hRX)2
2d−(
d +(hTX − hRX)2
2d
)= 4
hTXhRX2d
= 2hTXhRX
d
(Rimane soltanto il doppio prodotto)
(3.2)
Al ricevitore giungono quindi due contributi di campo, uno diretto ed uno riflesso15:
• Ed =E0d
(θd , φd
)rd
· e−jβrd
• Er = Γ · E0r(θr ,φr)rr
· e−jβrr = Γ · E0r (θr, φr)rd + ∆r
· e−jβ(rd+∆r)
Aggiungiamo ora l’ipotesi 2: antenne omnidirezionali nel piano verticale (il campo emesso ha stessaampiezza in ogni direzione del piano verticale). Grazie all’ipotesi 1 possiamo anche dire che rd
∼= rr ∼= d(attenzione: ciò è vero solo per le ampiezze, non per le fasi: per le seconde, infatti, piccole differenze dipercorso possono comportare grandi scostamenti16). Come già più volte sottolineato, il campo totale saràla somma del campo elettrico del cammino diretto (Ed) e di quello del cammino riflesso (Er):
E = Ed + Er =E0
d· e−jβr ·
(1 + Γ · e−jβ∆r
)(3.3)
13Basta utilizzare il teorema di Pitagora: il primo triangolo, quello utile al calcolo di rd, è facile da trovare; per il secondo triangolobisogna invece prolungare rr1 fino alla retta perpendicolare al terreno e passante per l’antenna ricevente: si ottiene un triangolorettangolo con rr1 + rr2 come diagonale e altezza pari alla somma dell’altezza delle antenne.
14Si ha:√
1 + x2 ≈ 1 + 12 x2 per x → 0.
15E0d (ϑd, ϑd) è il campo emesso nella direzione del cammino diretto, E0r (ϑr , ϑr) è il campo emesso nella direzione del camminoriflesso.
16β può essere molto grande!
23

24 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
L’effetto del terreno viene quindi usualmente quantificato tramite il rapporto:
|E||Ed|
= |1 + Γ · e−jβ∆r |
posto Γ = |Γ| · e−j arg(Γ), ricordando la 3.2 e che β = 2πλ , lo si può riscrivere come segue:
|E||Ed|
=
√1 + |Γ|2 + 2 · |Γ| · cos
(4π
λ
hTXhRXd
− arg (Γ))
(3.4)
Nelle ipotesi fatte, indicato con gRV il guadagno dell’antenna ricevente nel piano verticale e supponendoperfetto adattamento in ricezione, la potenza ricevuta è, secondo la formula di Friis
Pr =(
λ2
4π· gRV
)· |E|
2
2η(3.5)
nella quale si può sostituire il modulo del campo totale ricavandolo dall’equazione 3.4. Spesso è comodoesprimere il tutto17 tramite il Path Gain PG (inverso dell’attenuazione di tratta):
PG =PRPA
= (gRV · gTV) ·(
λ
4πd
)2·(
1 + |Γ|2 + 2 · |Γ| · cos(
4π
λ
hTXhRXd
− arg (Γ)))
(3.6)
In figura 3.9 è rappresentato l’andamento del Path Gain per un terreno approssimato come conduttoreelettrico perfetto (Γ = −1) e polarizzazione TE18. In figura si noti come per distanze superiori ad un certovalore, detto distanza di break-point (dBP), la potenza smetta di oscillare e cali più velocemente. Oltre ilbreak-point, infatti, la potenza decade come19 1
d4 , e quindi molto più rapidamente di come accade in spaziolibero (vedere 1.1): dunque la presenza del terreno è sufficiente ad alterare, in maniera anche significativa,le condizioni di propagazione rispetto al caso ideale (i contributi interferiscono sempre distruttivamente).Al contrario, prima di questo valore si hanno grandi oscillazioni della potenza per piccole variazioni delladistanza: esse sono dovute all’interferenza tra i due contributi che a volte si sommano costruttivamente(in alcuni punti si ha un comportamento migliore che in spazio libero, visto che si ’supera’ la retta α = 2)e a volte distruttivamente.
In figura 3.10 è mostrato un altro modello detto modello a 6 raggi, utilizzato in particolare nelle situazionidi canyon urbano: in esso non si prendono in considerazione solamente due raggi bensì sei (3 riflessioni20)contemporaneamente.
17Per arrivare a tale formulazione è necessario che sia PR che PA siano entrambe espresse nella forma prevista dalla formula diFriis, in modo che si possano semplificare molti termini.
18In tal caso sfruttando la trigonometria e il fatto che l’argomento di Γ vale −π, in quanto Γ quantità negativa, è possibile arrivarea scrivere:
|E||Ed|
= 2∣∣∣∣sin
(2π
λ
hTXhRX
d
)∣∣∣∣ ⇒ PG = gRV gTV
(λ
4πd
)2 (4 sin2
(2π
λ
hTXhRX
d
))19Lo si può dimostrare effettuando lunghe e noiose sostituzioni (che non riportiamo) e notando che l’argomento del seno può
essere confuso con il seno stesso per distanze superiori a quella di break-point.20Una contro gli edifici a destra, una contro gli edifici a sinistra e una con il manto stradale.
24

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 25
Figura 3.9: Esempio del PG per un terreno con Γ = −1.
Figura 3.10: Modello a 6 raggi.
Figura 3.11: Andamento del path gain con la distanza
25

26 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
3.4 Il principio di Huygens-Fresnel
Lo spazio libero rappresenta l’ambiente propagativo21 ideale e viene descritto semplicemente dallaformula di Friis
PR = PA · gT · gR ·(
λ
4πR
)2· τ · ρT
ma nella quasi totalità dei collegamenti reali TX e RX sono circondati da ostacoli che rendono lo scenariopropagativo assai diverso (figura 3.12).
Figura 3.12: Quando al ricevitore giungono differenti cammini generati dall’interazione dell’onda con gli oggetti sidice che la propagazione avviene per Cammini Multipli (Multipath).
Il fenomeno della diffrazione può essere descritto a partire dal principio di Huygens (o delle sorgentisecondarie): esso afferma che, noto il fronte d’onda F all’istante t, è possibile ricostruire il successivo fronted’onda F′ all’istante t + dt supponendo che gli elementi di superficie dΣ di F siano eccitati ad emetterecontemporaneamente onde sferiche con velocità v dell’onda; l’inviluppo di tali onde secondarie all’istantet + dt costituisce il fronte d’onda F′ allo stesso istante (vedi figura 3.13). Detta dΨ(R) la componente
Figura 3.13: Principio di Huygens-Fresnel e sorgenti secondarie
21Quando cariche elettriche vengono sollecitate a muoversi di moto accelerato si genera un’onda EM che si propaga nello spaziocircostante. Nella cosiddetta regione di campo lontano dalla sorgente, il campo elettrico e il campo magnetico sono in ogni puntoperpendicolari sia tra loro che rispetto alla direzione di propagazione.
26

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 27
Figura 3.14
infinitesima del campo nel punto R (cioè ’al destinatario’) generata dall’infinitesima parte di superficiedΣ del fronte d’onda (cioè generata da una sorgente secondaria infinitesima, vedi fig. 3.14), possiamoscrivere:
dΨ(R) = K(χ) · A · e−jβ0r0
r0· e−jβ0s
s· dΣ
ed esprimere quindi il campo come somma infinita (integrale22) di tali componenti:
Ψ(R) =∫
Sfera
K(χ) · A · e−jβ0r0
r0· e−jβ0s
s· dΣ
Per ora non viene specificato il parametro K(χ) (ci penserà Kirchhoff), ma si dice solo che esso dipendedalla posizione del punto R rispetto alla porzione del fronte d’onda dΣ.
3.5 Il teorema di Kirchhoff
Rispetto ad Huygens-Fresnel (paragrafo 3.4), Kirchhoff fornisce una definizione più rigorosa del campogenerato, specificando meglio le caratteristiche del parametro K(χ). Prima di tutto si fanno le seguentiipotesi:
• ipotesi 1: limr→∞
r · |Ψ| = limr→∞
r · | ∂Ψ∂n | = 0 (il campo va a 0 prima di 1
r );
• ipotesi 2: funzione di Green di spazio libero sia G(ρ) = − 14π
e−σρ
ρ ;
• ipotesi 3: ρ >> λ, ovvero la distanza tra sorgente e sorgente secondaria è molto maggiore dellalunghezza d’onda;
• ipotesi 4: d >> λ, ovvero la distanza tra sorgente secondaria e punto potenziato è molto maggioredella lunghezza d’onda;
• ipotesi 5: mezzo senza perdite.
Con riferimento alla figura 3.15, partiamo dall’equazione di Helmoltz
∇Ψ2 − σ2Ψ = 0 con σ2 = −ω2µεc
che ha soluzione
Ψ(P) = −∫
S+Sinf
Ψ∂G∂n− G
∂Ψ∂n
ds (Metodo di Green)
22L’integrale serve a considerare gli effetti di tutte le infinitamente non numerabili sorgenti secondarie.
27

28 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
Figura 3.15: Riferimenti per la dimostrazione del teorema di Kirchhoff.
e che necessita, come condizioni al contorno, dei valori di Ψ sul bordo. Grazie all’ipotesi 1 si puòtrascurare il contributo su Sin f
23 e ridurre l’integrale alla sola superficie S:
Ψ(P) =∫S
G∂Ψ∂n−Ψ
∂G∂n
ds (3.7)
Data l’ipotesi 2 possiamo sviluppare il termine ∂G∂n come segue:
∂G∂n
= ∇G · n =∂G∂ρ
(−ρ) · n =
= − 14π
(−σe−σρ
ρ− e−σρ
ρ2
)(−1) cos (χ) =
= − 14π
e−σρ
ρ
(σ +
1ρ
)cos (χ)
Introduciamo ora l’ipotesi 3, che ci permette di scrivere(
σ + 1ρ
)= j 2π
λ e ottenere:
∂G∂n' − jβ
4π
e−σρ
ρcos χ (3.8)
Sostituiamo ora la 3.8 nella 3.7. Si ha:
Ψ(P) =∫S
− 14π
e−σρ
ρ
∂Ψ∂n−Ψ
(− jβ
4π
e−σρ
ρcos χ
)ds
Ψ(P) =1
4π
∫S
e−σρ
ρ
(jβΨ(Q) cos χ− ∂Ψ
∂n
)ds (3.9)
L’onda nel punto Q è ancora un’onda sferica ed è quindi possibile descriverla come segue (introducendoF(θ′, φ′) che tiene conto della direttività):
Ψ(Q) =e−σd
dF(θ′, ϕ′)
Come fatto in precedenza sviluppiamo ora il termine ∂Ψ∂n :
∂Ψ∂n
=∂Ψ∂d
= F
(e−σd
d− e−σd
d2
)= −F
e−σd
d
(σ +
1d
)Ora grazie all’ipotesi 4 si può scrivere
(σ + 1
d
)=(
j 2πλ + 1
d
)= j 2π
λ e riscrivere la formula precedente:
∂Ψ∂n' −F(θ′, ϕ′) · jβ e−σd
d(3.10)
23Che è una superficie all’infinito.
28

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 29
Ora non resta che inserire la 3.10 nella 3.9 per ottenere l’espressione finale:
Ψ(P) =jβ4π
∫S
e−σρ
ρF
e−σd
d(1 + cos χ) ds
Se ora confrontiamo quest’ultima espressione con quella di Huygens-Fresnel, possiamo facilmentericavare il valore del parametro K(χ):
K(χ) =jβ4π
(1 + cosχ)
Il teorema di Kirchhoff è assai utile quando si vuole calcolare il campo ricevuto in presenza di ostacoli.L’integrale deve però essere limitato alla porzione di fronte d’onda non intercettato come mostrato infigura 3.16.
Figura 3.16: L’integrale deve essere limitato alla porzione di fronte d’onda non intercettato
3.6 Diffrazione da Knife-Edge
Il termine Diffrazione indica una particolare categoria di fenomeni propagativi generati dalla presenzadi ostacoli sul cammino. La figura 3.17 mostra due tipi differenti di diffrazione: quella da apertura e quellada Knife-Edge. La diffrazione provoca due effetti principali:
Figura 3.17: Esempi di diffrazione.
• la presenza di campo anche in zone non direttamente illuminate dalla sorgente;
• valori di campo diversi da quelli in spazio libero nelle zone direttamente illuminate.
La diffrazione è tanto più rilevante quanto più sono piccole, rispetto a λ, le dimensioni in gioco (a fre-quenze molto alte fenomeni del genere tendono a scomparire). Teoricamente, per ottenere l’espressionedel campo, occorrerebbe volta per volta determinare la superficie SA per applicare il teorema di Kirchhoff(paragrafo 3.5). Vediamo ora di studiare il caso della diffrazione da Knife-Edge (’lama di coltello’). Questasituazione è rappresentata in figura 3.18: abbiamo un semipiano (posto fino alla quota h) che si frapponetra TX e RX, posti alla stessa altezza. Applicando Kirchhoff, il contributo infinitesimo del campo dE(R)
29

30 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
Figura 3.18: Esempio di diffrazione da KE
dovuto alla superficie infinitesima dΣ si esprime come:
dE(R) =jβ4π· F · e−σρ
ρ· e−σd
d· (1 + cos χ) dΣ
Come sempre, per semplificare la trattazione, facciamo uso di (non troppo limitanti) ipotesi semplificative:
• ipotesi 1: sorgente tanto lontana da poter approssimare il fronte d’onda col piano XY;
• ipotesi 2: h� a e h� b;
• ipotesi 3: le sorgenti secondarie dΣ che danno contributo rilevante sono quelle raccolte attorno alladirezione di collegamento24, quelle ovvero per le quali si ha x << ρ, d y << ρ, d
Le ipotesi 2 e 3 ci permettono di assumere:
F(Θ, Φ) = A = costante; χ ' 0; d ' a; ρ ' b
Il campo totale nel punto R al di là dell’ostacolo risulta perciò essere (si notino gli estremi degli integrali):
E(R) =jβ2π·A · e−jβ(a+b)
ab
+∞∫−∞
+∞∫h
e−jβ a+b2ab (x2+y2)dxdy
Ciò che però più ci interessa non è tanto il campo effettivo al di là dell’ostacolo, ma l’attenuazionesupplementare che l’ostacolo provoca. Detto E(R0) il campo che si avrebbe senza il Knife-Edge
E(R0) =jβ4π·A · e−jβ(a+b)
ab
+∞∫−∞
+∞∫−∞
e−jβ a+b2ab (x2+y2)dxdy
si definisce attenuazione supplementare AS il rapporto:
AS =E0
E=
2 ·+∞∫0
e−jβ a+b2ab x2
dx
+∞∫h
e−jβ a+b2ab x2
dx
posto ora
ν = x
√2λ
a + bab
24Scopriremo poi che appartengono alla prima zona di Fresnel.
30

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 31
e
ν0 = ν(h) = h
√2λ
a + bab
Parametro di Fresnel
si ottiene l’espressione definitiva dell’attenuazione supplementare da Knife-Edge:
AS =E0
E=
1
1+j2
+∞∫ν0
e−j π2 ν2 dν
In figura 3.19 viene riportato l’andamento dell’attenuazione supplementare25 in funzione del parametro ν0:per ν0 < −
√2 l’attenuazione AS è inferiore ad 1 dB, dunque l’ostacolo risulta praticamente trascurabile.
Si noti che la condizione ν0 < −√
2 corrisponde alla condizione h < −ρ1, ovvero alla condizione di nonintersezione tra l’ostacolo ed il primo ellissoide di Fresnel.
Figura 3.19: Andamento dell’attenuazione supplementare in funzione del parametro ν0.
Una volta che si ha a disposizione il parametro di Fresnel, è possibile calcolare l’attenuazione L(ν)attraverso formule semplificate che permettono di aggirare il (non facile) integrale di Fresnel26 (formuledi Lee):
L (ν) =
per − 0, 8 < ν < 0 ⇒ − 20 log (0, 5− 0, 62ν)
per 0 < ν < 1 ⇒ − 20 log[0, 5e−0,95ν
]per 1 < ν < 2, 4 ⇒ 20 log
[0, 4−
{0, 1184− (0, 38− 0, 1ν)2
}0,5]
per ν > 2, 4 ⇒ − 20 log(
0, 225ν
)25Si faccia attenzione a come sono orientati gli assi.26Ovvero:
+∞∫0
e−j
π
2ν2
dν
31

32 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
3.7 Zone di Fresnel
In alcuni casi è possibile valutare gli effetti della diffrazione senza fare ricorso al teorema di Kirchhoff(l’integrale da risolvere può essere anche molto complicato) bensì valutando le cosiddette zone di Fresnel:esse sono porzioni di fronte d’onda delimitate dall’intersezione fra il medesimo e le superfici sferiche diraggio rk (figura 3.20). Per definizione si deve avere che
rk = R2 + k · λ
2
dove R2 è la distanza fra il ricevitore e il punto in cui si erge l’ostacolo. Da considerazioni geometriche
Figura 3.20: Zone di Fresnel.
e supponendo che R1, R2 >> ρk, si può scoprire che il punto Pk si trova in posizione tale che la sommadelle distanze da tale punto a R e T è costante. Il punto Pk appartiene quindi ad un’ellisse27 di fuochi T eR. Ciò significa che al variare di R1, la circonferenza di raggio ρk si sposta, ma appartiene sempre ad unellissoide di fuochi T e R detto kmo ellissoide di Fresnel (figura 3.21).
Figura 3.21: Esempio di un ellissoide di Fresnel.
Visto il modo col quale abbiamo definito gli ellissoidi (i raggi rk sono sfasati di mezze lunghezzed’onda), e facendo l’ipotesi di prendere in considerazione aperture circolari, si ha che i contributi portatidalla (k + 1)ma zona sono sfasati esattamente di π rispetto a quelli portati dalla kma; quindi se la primazona di Fresnel passa attraverso l’apertura allora verranno annullati (cioè bilanciati) i contributi della
27L’ellisse è definita come il luogo dei punti, in un piano, la cui somma delle distanze da due punti fissi dati (detti fuochi) ècostante.
32

CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ 33
seconda. Generalizzando possiamo dire che, se passano un numero pari di zone di Fresnel, si avrà unminimo del campo, mentre si avrà un massimo se questo numero è dispari (vedi fig. 3.22).
Figura 3.22: Diffrazione da apertura circolare e zone di Fresnel.
33

34 CAPITOLO 3. PROPAGAZIONE IN PRESENZA DI DISCONTINUITÀ
34

Capitolo 4
Modelli empirico-statistici
4.1 Tipologie di modelli
I modelli che vengono usati per il calcolo del campo dipendono fortemente dall’ambiente in cui sivogliono fare le misure e dall’accuratezza che si vuole ottenere. Modelli deterministici (come quello diRay Tracing, che vedremo successivamente) comportano una notevole complessità di calcolo e un numeromolto elevato di informazioni necessarie a priori. Per contro, modelli statistici potrebbero non adattar-si perfettamente all’ambiente e restituire espressioni non molto precise, col vantaggio - però - di unacomplessità molto minore.
Possiamo dividere gli ambienti in due fondamentali categorie:
• ambiente rurale caratterizzato da:
– propagazione in spazio libero (capitolo 1.1);
– riflessione al suolo (capitolo 3.3);
– diffrazione da knife-edge (capitolo 3.6);
• ambiente urbano che può essere esaminato con diversi modelli:
– Over-Roof-Top Propagation ORT (sopra gli edifici);
– Lateral Propagation (ai lati degli edifici);
– Indoor Propagation (all’interno degli edifici);
Quando la stazione radio base si trova al di sopra delle costruzioni (Over-Roof-Top) la maggior partedella propagazione avviene in spazio libero, e le interazioni avvengono solo nell’ultimo tratto di percorso(figura 4.1.a: si tenga presente che collegamento può essere di diversi Km). Per semplificare la trattazionesi possono omettere gran parte delle discontinuità e considerare solamente l’attenuazione principale piùil fading: questa procedura caratterizza i modelli di tipo Hata-like con 2 < α < 4.
Se al contrario la stazione base si trova ad un’altezza inferiore all’altezza degli edifici circostanti (fi-gura 4.1.b), la propagazione avviene tra questi ultimi (Lateral Propagation). In questo caso non si puòutilizzare un modello puramente statistico, ma serve ora una componente deterministica che prenda inconsiderazione tutte le interazioni (riflessione, rifrazione, diffrazione e lo scattering).
Quando i terminali si trovano all’interno di edifici (figura 4.1.c), la propagazione dipende fortementedalla struttura dell’edificio (Indoor Propagation) ma sorprendentemente si avvicina più al modello in spa-zio libero che alla propagazione laterale. Comunque per una rigorosa valutazione è ancora necessarioprendere in considerazione tutti i possibili fenomeni dovuti alla presenza di ostacoli.
I vari modelli di possono essere definiti come:
• euristici: se hanno bisogno di misure per essere validati (prima si fanno i calcoli col modello, poi sele misure lo smentiscono allora significa che c’è qualcosa da aggiustare);
• empirici: se hanno bisogno di misure per essere derivati (prima si fanno le misure, dopodiché irisultati vengono manipolati per estrarre il modello);
35

36 CAPITOLO 4. MODELLI EMPIRICO-STATISTICI
(a) Over-Roof-Top Propagation.
(b) Lateral Propagation.
(c) Indoor Propagation.
Figura 4.1: Tipi di propagazione.
• fisici: se derivano da leggi fisiche.
Inoltre, possono essere classificati come:
• statistici: se i parametri principali sono forniti statisticamente per un generico ambiente;
• deterministici: se i parametri principali sono forniti specificatamente (in maniera precisa e oggettiva)per un determinato ambiente.
Spesso i modelli empirici sono anche statistici e prendono perciò il nome di modelli empirico-statistici1
(ES): tali modelli sono generalmente più semplici e veloci degli altri e vengono utilizzati soprattutto infase di progettazione. La differenza principale tra i modelli ES e quelli ORT è che questi ultimi sonomaggiormente deterministici in quanto necessitano di un profilo del radio collegamento come mostrato infigura 4.2. Da sottolineare che entrambi questi modelli sono incoerenti, cioè forniscono solo informazionisulla potenza media, mentre le deviazioni rispetto a questa media costituiscono il fading (descrivibile solostatisticamente).
4.2 Il fading
Come noto, in ambiente reale l’andamento della potenza si discosta significativamente da quelloprevisto dalla formula di Friis. Si possono individuare 3 componenti principali (mostrati in figura 4.3):
1Il connubio empirici + statistici è abbastanza naturale: le misure vengono generalmente fatte in un unico ambiente (in posizionie istanti diversi) ma poi, per poter utilizzare i risultati anche in altre situazioni o in altri momenti, è necessario introdurre una certacomponente statistica.
36

CAPITOLO 4. MODELLI EMPIRICO-STATISTICI 37
Figura 4.2: il modello ORT necessita di un profilo del radio collegamento.
• termine dominante, funzione della distanza;
• fading lento (oscillazioni lente);
• fading rapido (oscillazioni rapide).
Figura 4.3: Andamento della potenza in ambiente reale.
Il termine dominante è funzione della distanza, e si può rappresentare come
PR = P(R0)(
R0
R
)α
dove α è la pendenza della retta di figura 4.4.a ed è un parametro compreso tra 2 e 4.Gli ostacoli presenti sul cammino di propagazione (ad esempio le montagne) causano perdite per
diffrazione in quanto sono la causa dello shadowing (ovvero dello slow fading) mostrato in figura 4.4.b.Tale fenomeno può essere descritto tramite un andamento lognormale del tipo
f (l) =1√
2πσl· e−
(ln l−µ)2
2σ2
Di conseguenza LdB avrà un andamento gaussiano il cui valore medio sarà il termine dominante.Abbiamo infine il fast fading, dovuto ai vari cammini multipli generati dall’interazione del segnale con
i vari ostacoli presenti: tali cammini giungono al ricevitore dopo aver percorso distanze differenti e quindicon fasi differenti (a seconda delle quali possono comportare un contributo positivo, cioè costruttivo, onegativo, cioè distruttivo). Le oscillazioni rapide possono essere descritte tramite una variabile di Rayleigh:
fr(r) =2rl2 · e
− r2
l2 con l2 = Er2
Solitamente, data L la componente dominante (e F(L) la sua cumulativa) e Ps la probabilità di servizio,si vuole calcolare il Pimo
s percentile:LF tale che F(LF) = Ps
37

38 CAPITOLO 4. MODELLI EMPIRICO-STATISTICI
(a) Termine dominante dell’attenuazione.
(b) Fading lento.
Figura 4.4: Componenti dell’attenuazione in ambiente reale.
In presenza di fading si deve infatti tenere conto di una maggiore attenuazione LF (figura 4.5): per questomotivo si decide di fissare un certo margine (margine di fading MF) in grado di includere nelle nostreformule l’effetto peggiorativo di tutti gli effetti sopra descritti. Si ha:
MF = LF − L
Figura 4.5: Margine di fading
In definitiva possiamo riscrivere la formula di Friis modificata, introducendo ulteriori le perdite Lc esupponendo di desiderare una determinata probabilità di servizio:
PR = PT + GT + GR − LTOT
LTOT = L(modello) + MF + LC
38

CAPITOLO 4. MODELLI EMPIRICO-STATISTICI 39
4.3 I modelli Hata-like
I modelli Hata-like sono modelli statistici, derivati dalla formula originale di Hata del 1980 (che è stataricavata sulla base delle misure di Okumura a Tokyo nel 1968):
L = 69.55 + 26.16 log f − 13.82 log hBS − a(hBS) + (44.9− 6.55 log hBS) log Rn
Essa è applicabile solo se:R > 1Km hBS > 30m
Le formule derivate da questa sono tutte del tipo
L = K + 10α log(d)
e misurano l’attenuazione media in funzione della distanza. In un grafico log-log come in figura 4.6 sipuò notare che l’attenuazione cresce linearmente con la distanza, con α inclinazione della retta2. Questi
Figura 4.6: Esempio di modello Hata.
modelli risultano particolarmente semplici e veloci ma presentano diversi svantaggi:
• forniscono solo l’attenuazione;
• sono validi solo per macro-celle;
• sono validi solo a grandi distanze (Km);
• hanno bassa accuratezza;
• per ogni nuovo ambiente serve una nuova caratterizzazione;
• servono descrizioni statistiche del fading.
4.4 Il modello di Epstein-Peterson
I modelli ORT sono modelli ibridi perché necessitano di informazioni deterministiche dell’ambienteovvero necessitano del link profile, rappresentazione semplificata dello scenario reale in cui avviene lapropagazione. Ogni edificio interposto tra trasmettitore e ricevitore è in questo caso schematizzato comeun knife-edge dell’altezza corrispondente; un esempio è riportato in figura 4.7.
2In un grafico log-lineare si avrebbe una dipendenza esponenziale.
39

40 CAPITOLO 4. MODELLI EMPIRICO-STATISTICI
Figura 4.7: Esempio di caratterizzazione tramite knife-edge
Come calcolare esattamente l’attenuazione supplementare3 da knife-edge viene descritto nel paragrafo3.6. Qui vedremo invece un veloce esempio di calcolo per un singolo knife-edge (figura 4.8) riportandounicamente le formule principali4:
ν =
√2λ
a + bab
EE0
=1 + j
2
∞∫ν
e−j(π\2)x2dx
Figura 4.8: Esempio di un solo knife-edge
Benché per un solo knife-edge sia possibile ricondursi ad una formulazione in forma chiusa, ciò non èpossibile per knife-edge multipli, per cui si sono sviluppati metodi euristici che si basano su considerazionigeometriche e su molteplici calcoli di singoli knife-edge.
Il modello di Epstein-Peterson5 o della corda tesa, consiste nell’immaginare una corda tesa che collegatrasmettitore e ricevitore, tale per cui solo i knife-edge toccati da tale corda saranno presi in considerazione,mentre gli altri verranno scartati (figura 4.9). Questa tecnica non risulta essere molto accurata se il numerodi knife-edge supera i 4 o 5. Il modello si basa sulla scomposizione del cammino di propagazione insottocammini parziali aventi due ostacoli come estremi. L’attenuazione supplementare totale è valutatacome prodotto delle singole attenuazioni sui cammini parziali (figura 4.10).
3Da sommare poi a quella di spazio libero.4Per il calcolo dell’attenuazione supplementare esistono anche diverse formule semplificate che approssimano quelle esatte.5Che, per le ragioni descritte in seguito, potremmo definire euristico-deterministico.
40

CAPITOLO 4. MODELLI EMPIRICO-STATISTICI 41
Figura 4.9: Esempio modello di Epstein-Peterson.
Figura 4.10: L’attenuazione supplementare totale è valutata come prodotto delle singole attenuazioni sui camminiparziali.
4.5 Il modello di Berg
Il modello di Berg, a differenza del modello Epstein-Peterson che esamina la propagazione sul pianoverticale, prende in considerazione la propagazione laterale (LP). Anche questo metodo è parzialmentedeterministico in quanto è necessario fornire una caratterizzazione dell’ambiente con le strade e gli incrocifra esse. In figura 4.11 viene mostrato un esempio di ambiente in cui gli incroci sono rappresentati danodi, e in cui:
• sj è la distanza fisica del percorso j-esimo;
• dj è la distanza effettiva del percorso j-esimo;
• qj è il fattore di attenuazione.
Figura 4.11: Esempio di modello di Berg.
41

42 CAPITOLO 4. MODELLI EMPIRICO-STATISTICI
L’attenuazione totale può allora essere calcolata come segue
L(n)dB = 20 · log
(4πdn
λ
)
dove i parametri sono così calcolabili (ricorsivamente):{k j = k j−1 + dj−1 · qj−1
dj = k j · sj−1 + dj−1
con
k1 = 1, d0 = 0
I parametri qj devono essere caratterizzati per i diversi ambienti, infatti l’attenuazione per un incrocio ètanto maggiore quanto è maggiore θj: in particolare, se θj = 0 allora non c’è angolo e (ovviamente) nonc’è perdita. Una semplice formula euristica per tali parametri è
qi(θj) =(
θj ·q90
90
)ν
dove
q90 = 0.5 ν = 1.5
Anche per questo modello, vista la sua semplicità, ci si devono aspettare diverse limitazioni:
• considera solo l’attenuazione;
• considera solo il piano laterale;
• è valido per piccole distanze;
• necessita della caratterizzazione dell’ambiente.
4.6 Il modello multi-wall indoor
Il modello multi-wall si basa sul fatto che esiste sempre un cammino dominante (vedi fig. 4.12): l’at-tenuazione lungo tale cammino è calcolabile sommando le attenuazione dei cammini multipli a quella dispazio libero
LdB = 20 log(
4πRλ
)+ Lc +
Ntype
∑i=1
Nwi · Lwi + N f · L f
dove
• Lc = perdita costante;
• Nwi = numero di muri di tipo i attraversati;
• Lwi = attenuazione del muro di tipo i;
• N f = numero di soffitti attraversati;
• L f = attenuazione del soffitto;
• Ntype = numero di tipi di muro attraversati.
42

CAPITOLO 4. MODELLI EMPIRICO-STATISTICI 43
Figura 4.12: Esempio modello Multi-Wall.
4.7 In sintesi
I modelli empirico statistici non saranno precisi e puntuali come quelli deterministici, ma sono più semplici
e immediati. In ambiente rurale viene considerata la propagazione in spazio libero, la di�razione da knife-edge
e la ri�essione del suolo; in un ambiente urbano, costellato da edi�ci, si usano invece i modelli over roof-top
(trasmettitori in alto rispetto alle costruzioni: la propagazione avviene per gran parte del tempo in spazio libero,
poi le interazioni avvengono presso gli edi�ci fra i quali si trova ricevitore), di propagazione laterale (trasmettitore
al livello degli edi�ci: questi algoritmi hanno anche una componente deterministica) o indoor all'interno degli
edi�ci.
I modelli possono essere:
• euristici : devono essere validati dalle misure;
• empirici : devono essere ricavati dalle misure;
• �sici : derivano da leggi �siche;
• statistici : i parametri principali sono forniti statisticamente;
• deterministici : i parametri sono forniti speci�catamente.
La distinzione è tuttavia sempre molto sfumata.
In ambiente reale tre sono i contributi principali all'attenuazione di cui tenere conto:
• il termine dominante, ovvero quello che compare anche nella formula di Friis, con un esponente α che
dipenderà dalle caratteristiche complessive dell'ambiente e sarà generalmente compreso fra 2 e 4;
• un termine di slow fading (shadowing) dovuto alla presenza di ostacoli e statisticamente descritto mediante
andamento log-normale;
• un termine di fast fading dovuto al multipath, descritto mediante variabile di Rayleigh.
Per considerare tutti questi contributi si aggiunge alla formula di Friis un termine di attenuazione chiamato
margine di fading : esso consiste semplicemente un'attenuazione aggiuntiva (calcolata in termini di probabilità di
servizio) in grado di rendere la stima su�cientemente peggiorativa da considerare tutte le eventualità di cui sopra.
Alcuni modelli:
• Hata-like: sono i più marcatamente empirici. Derivano dalla formula di Hokomura-Hata e descrivono
l'attenuazione come
L = K + 10α log d
Sono validi solo per macrocelle, per grandi distanze e forniscono solamente l'attenuazione. Poco accurati.
• Epstein-Peterson: per il calcolo di di�razione da multipli knife-edge. Si immagina di tendere una corda
fra ricevitore e trasmettitore, in modo da individuare quali kinfe-edge eliminare (ovvero quelli che non
lambiscono la corda). Dopodiché si calcola l'attenuazione di ogni percorso parziale, cioè generata da ogni
di�razione.
43

44 CAPITOLO 4. MODELLI EMPIRICO-STATISTICI
• Berg : ottimi per la lateral-propagation. Si fa uso della planimetria della rete viaria e si speci�cano le
distanze fra ogni nodo (incrocio) oltre alla distanza e�ettiva (in linea d'aria) e agli 'angoli' fra le strade.
Questi parametri vengono calcolati ricorsivamente e forniscono la distanza 'virtuale' da inserire nella formula
d'attenuazione in spazio libero (tale distanza sarà chiaramente molto più grande di quella e�ettiva fra RX
e TX).
• Multi-wall indoor : si usa all'interno degli edi�ci. Si considera un'attenuazione speci�ca per muri e so�tti.
44

Capitolo 5
Teoria Geometrica della Propagazione
Figura 5.1: Le teorie in gioco.
Questa teoria viene utilizzata quando la propagazione avviene in regioni con elevata concentrazionedi ostacoli come muri piani e spigoli rettilinei. La teoria geometrica della propagazione, in particolare, èun’estensione dell’ottica geometrica (capitolo 2.4) ma non si assume più che λ→ 0 cosicché ∆n→ 0 su λ.Ciò non toglie tuttavia che si debba comunque avere che λ << delle grandezze in gioco (gli ostacoli).Si noti che l’ottica geometrica (GO) non prendeva in considerazione la diffrazione che ora viene inveceinserita tramite la teoria geometrica della diffrazione (GDT).
5.1 Richiami: onda sferica
Il campo elettrico prodotto da una sorgente puntiforme si propaga nello spazio libero come ondasferica, ed in ogni punto può essere calcolato sia usando un sistema di riferimento centrato sulla sorgentesia facendo uso di una distanza di riferimento (figura 5.2). Se il campo alla distanza di riferimento R0 è
E(R0) = E0e−jβR0
R0(5.1)
ad una generica distanza R risulta essere
E(R) = E′0
e−jβR
R(5.2)
Dato che E0 = E′0 = kp si può riscrivere la 5.2 in relazione alla 5.1 e ottenere che
E(R) = E0 ·(
R0
R
)e−jβ(R−R0) = E ·
(R0
s + R0
)· e−jβs (5.3)
45

46 CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE
Nella 5.3 si può definireR0
s + R0fattore di divergenza
Figura 5.2
5.2 Il fattore di divergenza
In generale le onde, a grande distanza dal trasmettitore, si possono considerare, almeno localmente,piane. Mentre il fattore di divergenza di tale onda non cambia se esse vanno in contro a riflessione, incaso di diffrazione la forma dell’onda si modifica e con essa anche il fattore di divergenza. In figura 5.3è riportata un’onda cosiddetta astigmatica per cui il generico fattore di divergenza, in mezzo omogeneo,vale:
A(ρ1, ρ2, s) =√
ρ1 · ρ2
(ρ1 + s) (ρ2 + s)=
√dA0
dA(5.4)
Per come viene definito, tale parametro:
• è intrinsecamente legato al principio di conservazione della potenza1;
• sarà sempre compreso fra 0 e 1;
• tanto più si avvicina ad 1 e minore sarà la divergenza del tubo di flusso;
• viceversa, tanto più si avvicina a 0 e maggiore sarà l’’apertura’ suscitata della divergenza.
Si noti che l’onda astigmatica rappresenta un caso largamente generale che ’contiene’ tutti gli altri:
• ρ1 = ρ2 = ρ0: onda sferica→ A = ρ0ρ0+s
• ρ1 = ∞, ρ2 = ρ0: onda cilindrica→ A =√
ρ0ρ0+s
• ρ1 = ρ2 = ∞: onda piana→ A = 1
Il fattore di divergenza fornisce la legge di attenuazione del campo (e quindi anche della potenza) lungoil raggio; a distanza s per una generica onda in spazio libero si può infatti scrivere:
E(s) = E(0) ·√
ρ1ρ2
(ρ1 + s) (ρ2 + s)· e−jβs (5.5)
1Infatti:
A =
√dA0
dA=
√√√√ |E|2|E0|2
=
√1L
Dove L è il termine d’attenuazione.
46

CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE 47
Figura 5.3: Onda astigmatica generica.
Dato che il campo elettrico è un campo vettoriale si deve tenere presente anche il vettore di polarizzazionep: esso è un versore avente la stessa polarizzazione del campo, ed è definito come
p ,E(s)|E(s)| · e
jχ
5.3 Principi Base
La teoria geometrica della propagazione trattata di seguito si basa sui seguenti principi:
• il principio del campo locale
– l’onda può essere assunta localmente piana (per il coefficiente di interazione);
– la parete si può localmente considerare infinita (il campo dipende solo dal raggio incidente edalle caratteristiche elettromagnetiche e geometriche dell’ostacolo);
• il principio di Fermat
– la traiettoria del raggio è tale da minimizzare il cammino ottico.
Quindi la seguente teoria non è più valida se ci si trova vicino al trasmettitore (le condizioni di campolontano non sono rispettate), o se la parete ha dimensioni paragonabili alla lunghezza d’onda.
5.4 Diffrazione
L’estensione al caso della diffrazione nella GO fu introdotta da Keller nel 1961 e si basa sulle dueseguenti assunzioni:
• un raggio diffratto si genera quando un raggio incide su uno spigolo (o su un vertice);
• per ogni raggio diffratto vale il principio di Fermat.
La legge della diffrazione afferma che l’angolo tra raggio incidente/rifratto e spigolo2 soddisfa la leggedi Snell. Quindi con riferimento alla figura 5.4 deve valere:
ni · sin θi = nd · sin θd
2In ambiente urbano solo gli spigoli rettilinei sono di interesse.
47

48 CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE
Se si considerano raggi nello stesso materiale (ni = nd) la legge si riduce semplicemente a:
θi = θd
Tutti i raggi diffratti devono perciò appartenere al cosiddetto cono di Keller (vedi figura 5.4). L’onda
Figura 5.4: Tutti i raggi difratti appartengono al cono di Keller
diffratta è tale che una delle due caustiche coincide con lo spigolo, quindi il fattore di divergenza ditale onda sarà differente da quello dell’onda incidente. Il campo elettrico diffratto può essere calcolatorisolvendo le equazioni di Maxwell, sottraendo in qualche modo il campo incidente e il campo riflesso, einfine sviluppando in serie di Luneberg-Kline; troncando al primo ordine tale serie si ricava il coefficientedi diffrazione.
Come detto il campo deve rispettare la legge 5.5, ma sappiamo che una caustica coincide con lo spigolo.Con riferimento alla figura 5.5 è quindi utile scegliere come punto di riferimento (O
′) proprio il punto di
incidenza (QD): si ottiene cosìρd
2 = 0
Figura 5.5
Introducendo D, matrice di diffrazione che contiene i coefficienti di diffrazione, possiamo scrivere:
Ed(s) = Ei(QD) ·D · A(ρd, s) · e−jβs
48

CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE 49
Come per i coefficienti di riflessione, anche in questo caso possiamo scindere il campo in due polarizza-zioni (hard, TE, e soft, TM); così facendo la matrice D diventa una 2× 2 (figura 5.6)
Figura 5.6
Assunto che ρd2 = 0, l’espressione generale del fattore di divergenza per un onda sferica incidente risulta
essere, dopo l’interazione:
A(ρd, s) =
√ρd
s · (ρd + s)
Il calcolo dei coefficienti di diffrazione (matrice D) può risultare spesso molto complesso e di seguitonon si tratterà tale sviluppo: diremo unicamente che in caso di diffrazione lo spazio si può dividere in 3differenti regioni, divise da discontinuità (vedi figura 5.7).
Figura 5.7
49

50 CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE
5.5 Esempio Riflessione
Utilizzando la GTP rivediamo ora come è possibile ricalcolare il campo dopo una riflessione di un’on-da sferica, ricordando che in caso di riflessione non si modifica il fattore di divergenza (paragrafo 5.2).Introduciamo inoltre il diadico dei coefficienti di riflessione R: esso è una matrice che, se moltiplicataper il campo incidente, lo scompone nelle sue polarizzazioni e moltiplica ognuna di esse per il rispettivocoefficiente di riflessione. Con riferimento alla figura 5.8, il campo ad una qualunque distanza s risultaessere:
Er(s) = E0 · R ·e−jβ(s+s
′)
s + s′
Esso equivale dunque a:
Er(s) =(
ΓTE 00 ΓTM
)·(
E0TM
E0TE
)· e−jβs
′
s′
√√√√ (s′)2(s + s′
)2 ·e−jβs
Figura 5.8: Esempio di riflessione di un’onda sferica.
5.6 Esempio Diffrazione
Quando invece che une riflessione abbiamo una diffrazione il fattore di divergenza si modifica comevisto in precedenza. Con riferimento alla figura 5.9 e introducendo questa volta il dadico dei coefficientidi diffrazione D, si ottiene:
Ed = E0 ·D ·1√
s · s′ · (s′ + s)· e−jβ(s+s
′)
Sviluppando l’espressione del diadico possiamo scrivere:
Ed(s) =(
Ds 00 Dh
)·(
E0β0
E0ϕ0
)· 1√
s · s′ · (s′ + s)· e−jβ(s+s
′)
50

CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE 51
Figura 5.9
5.7 Esempio Doppia Interazione
Combinando i due casi precedenti possiamo ora calcolare il campo dopo due interazioni, una riflessio-ne e una diffrazione come in figura 5.10.
Figura 5.10: Doppia interazione.
51

52 CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE
Il campo nel primo punto di interazione è ovviamente ancora un’onda sferica:
E(QR) = E0e−jβs
′′
s′′
La prima interazione è una riflessione che quindi non modifica il fattore di divergenza (l’onda risulta essereancora sferica):
E(QD) = E0e−jβs
′′
s′′· R ·
√(s′′)2
(s′ + s′′)2 · e−jβs
′= E0 ·R ·
e−jβ(s′+s′′)
s′ + s′′
La seconda interazione è invece una diffrazione di un’onda sferica: il fattore di divergenza, dunque, simodifica3 e quindi l’onda non è più sferica:
E(Rx) = E(QD) ·D ·√
(s′′ + s′)s[s + (s′′ + s′)
] · e−jβs
Inserendo ora, nell’ultima espressione, lo sviluppo del campo nel punto D trovato precedentemente siottiene:
E(Rx) = E0 · R ·D ·1
s′′ + s′·√
(s′′ + s′)s[s + (s′′ + s′)
] · e−jβ(s+s′+s′′) =
= E0 · R ·D ·1√
s(s′ + s′′)(s + s′ + s′′)· e−jβ(s+s
′+s′′)
Come previsto, il risultato non rappresenta un’onda sferica.
5.8 In sintesi
Se uniamo l'ottica geometrica (alte frequenze, mezzi lentamente variabili) con la teoria geometrica della
di�razione (considera la di�razione e brusche variazioni dell'indice di rifrazione) otteniamo la teoria geometrica
della propagazione (che unisce le peculiarità e permette lo studio dei raggi).
Ogni onda è dotata di un suo proprio fattore di divergenza: quello più generico di tutti appartiene all'onda
astigmatica (de�nita da due caustiche e da due raggi di curvatura ρ1 e ρ2) e ha forma:
A (ρ1, ρ2, s) =√
ρ1ρ2
(ρ1 + s) (ρ2 + s)=
√dA0
dA
Il fattore di divergenza non si modi�ca nelle ri�essioni, ma sbarella nelle di�razioni!
La teoria geometrica della propagazione si regge su due principi: quello del campo locale (onda considerata
localmente piana e la parete contro la quale incide è considerata in�nitamente estesa) e quello di Fermat (i raggi
minimizzano il cammino ottico). In particolare, quando un raggio incide su un vertice o su uno spigolo:
• la legge di Fermat dice che ogni raggio di�ratto minimizza il cammino ottico;
• la legge di Snell suggerisce che l'angolo di�ratto dovrà avere inclinazione rispetto allo spigolo di incidenza
pari a quella del raggio incidente.
Soddisfano questi requisiti tutti i raggi posizionati sul cono di Keller (che ha l'asse coincidente con lo spigolo).
Chiaramente il fattore di divergenza dell'onda di�ratta sarà diverso da quello dell'onda incidente: in particolare,
una delle due caustiche dell'onda di�ratta sarà locata sullo spigolo. Se D è la matrice contenente i coe�cienti di
di�razione si avrà:
Ed (s) = Ei (QD) ·D · A(
ρd, s)
e−jβs
dove A è il fattore di divergenza e sarà pari a:
A(
ρd, 0, s)
=
√ρd(
ρd + s)
s
3Il fattore di divergenza diventa A(s′, s) =√
s′s·(s′+s)
52

CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE 53
Il ρ2 presente nella formula data precedentemente è pari a zero ma il fattore di divergenza è diverso da zero
perché si presuppone il campo elettrico in�nito nel punto di incidenza. Eventualmente possiamo scindere il campo
elettrico nelle sue polarizzazioni (lineari e ortogonali) TE e TM; in�ne, si dimostra che esistono tre zone attorno
allo spigolo: quella in cui vi è solo il raggio di�ratto, quella in cui vi è il raggio di�ratto più quello diretto e
un'ultima in cui sono presenti il raggio di�ratto, diretto e ri�esso.
Volendo possiamo utilizzare i diadici, ovvero particolari matrici che - se moltiplicate per il campo incidente -
scompongono quest'ultimo nelle sue polarizzazioni e moltiplicano ognuna di esse per il rispettivo coe�ciente di
ri�essione; si cita anche il fatto che i diadici possono essere ricavati anche per la ri�essione. In�ne, è possibile tenere
conto di interazioni multiple con la moltiplicazione successiva di più matrici (o diadici) di di�razione/ri�essione.
53

54 CAPITOLO 5. TEORIA GEOMETRICA DELLA PROPAGAZIONE
54

Capitolo 6
Modelli deterministici a raggi
I modelli deterministici a raggi sono simulazioni numeriche della propagazione multi-cammino in ac-cordo alla Teoria Geometrica della Propagazione (GTP). Essi comportano il calcolo i raggi che collegano idue terminali attraverso lo spazio libero e attraverso le interazioni con l’ambiente; a tal proposito, riflessio-ne, rifrazione e scattering vengono anche detti eventi: solitamente si fissa un certo numero Nev (predictionorder) di eventi da considerare. Questi modelli esistono sia in 3D che in 2D e possono fornire il campoal ricevitore oppure, se i parametri del ricevitore vengono inclusi nel modello, il segnale in uscita. Slowfading e fast fading vengono inclusi.
I modelli a raggi possono fare riferimento ai rays o ai beams1: si parla allora rispettivamente di RayTracing (RT) o Ray Launching2 (RL). In ogni caso si rende comunque necessario un environment database,cioè una mappa ambientale. I vantaggi di questi modelli sono, prevedibilmente:
• grande accuratezza;
• grande versatilità.
Per contro gli svantaggi sono:
• la necessità di un grande database;
• l’alto costo computazionale3.
Con riferimento alla figura 6.1 si può filtrare il fast fading ricorrendo ad una sorta di media spaziale; sidefiniscono dunque l’errore medio e la deviazione standard dell’errore:
e =1N
N
∑i=1
ei
std(e) =
√√√√ 1N
N
∑i=1
(ei − e)2
Un grande problema di questi modelli è la necessità, come detto, di avere grandi database, costosi,difficili da maneggiare e spesso non molto accurati. Non essendo fattibile il prendere in considerazionetutte le caratteristiche elettromagnetiche di ogni superficie, si utilizzano valori standard4. Questi databasevengono creati in vari modi: tramite rilevazioni aeree, basandosi su mappe catastali o mappe cittadine.
6.1 Ray Tracing method
Per prima cosa si devono considerare tutte le possibili riflessioni e rifrazioni. La regione di visibilitàdopo una o più riflessioni è costruita tramite un processo iterativo che sfrutta le immagini virtuali deiterminali; in figura 6.2, ad esempio, Tx è il trasmettitore reale, Tx′ è la sua immagine rispetto al muro 1mentre Tx′′ è l’immagine di Tx′ rispetto al muro 2.
1A differenza dei primi questi hanno una sezione trasversale non nulla perché si adotta una discretizzazione spaziale.2Non tiene conto della diffrazione.3Il tempo di simulazione cresce più che linearmente con Nev, per cui solitamente si fissa Nev = 3− 4.4Per i muri, e a 2 GHz, in Europa si utilizzano εr = 5 e σ = 10−2.
55

56 CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI
Figura 6.1
Figura 6.2: Esempio di costruzione delle regioni di visibilità per due riflessioni.
Per le diffrazioni invece la regione di visibilità è tutto il piano esterno allo spigolo in accordo col conodi Keller (vedere capitolo 5). Ora si deve costruire il cosiddetto view tree, ovvero un albero che racchiudetutti i possibili percorsi tra trasmettitore e ricevitore considerando Nev eventi; a tal proposito due punti sidicono in visibilità se esiste un cammino che li collega. La figura 6.3 mostra un esempio di albero: si partedal trasmettitore e lo si collega con gli ostacoli (i nodi) in vista; da ogni nodo si continua poi allo stessomodo finché non si raggiunge il ricevitore, considerando al massimo Nev + 1 livelli.
La compilazione dell’albero è la parte dell’algoritmo computazionalmente più pesante in quanto, seNV è il numero medio di ostacoli, l’albero sarà composto da ben M rami, con M uguale a:
M ≈ N(Nev+1)V
Con il procedimento appena illustrato sorgono diversi problemi:
• i punti di diffrazione sullo spigolo in 3D possono essere determinati esattamente solo dopo lavisibilità;
• se il raggio considerato subisce diffrazione, allora anche il punto di riflessione può essere calcolatosolamente dopo la visibilità;
• le informazioni contenute nell’albero non sono ancora quelle ’geometriche’ per il calcolo del campo(field computation).
56

CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI 57
Figura 6.3: Esempio di view tree.
Si rende necessaria quindi un’ulteriore fase, detta di backtracking: si parte dal ricevitore e si procede aritroso fino al trasmettitore per scoprire, con un metodo geometrico, tali punti di interazione. Per lediffrazioni ad esempio, come mostrato in figura 6.4, il punto P di interazione può essere determinatodispiegando il piano di incisione e quello di diffrazione in un singolo piano verticale. Una volta che tuttii piani vengono ricondotti sullo stesso piano si può quindi tracciare un diagramma come quello di figura6.5 tramite il quale si scopre se alcuni spigoli sono da non considerare (nell’esempio in figura si nota chelo spigolo centrale non viene in realtà colpito dal raggio, come invece si poteva dedurre dal view tree: ilraggio prodotto da quella diffrazione dovrà quindi essere scartato).
Figura 6.4: Per determinare P si devono dispiegare i due piani.
Eseguito anche il backtracking giunge infine il momento di calcolare il campo effettivo al ricevitore:per fare questo ricordiamo prima l’espressione del campo emesso in un generico punto P(r, θ, φ) da
57

58 CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI
Figura 6.5: Esempio di backtracking.
un’antenna in perfetto adattamento di impedenza5:
ET(r, θT , ϕT) = IT
√ZT · η · gT(θT , ϕT)
16π· e−jβr
r· pT(θT , ϕT) = ET0(r, θT , ϕT)
e−jβr
r(6.1)
Per il k-esimo raggio dobbiamo considerare tutte le interazioni subite nel suo percorso; a tal proposito,una formula generale può essere la seguente
EkT = Ak(sk
l ) ·
Nkev
∏l=min{1,Nk
ev}Dl
· EkT0(θk
T , ϕkT) · e−jβsk
(6.2)
dove Nkev è il numero di rimbalzi del k-esimo raggio, Ak il fattore di divergenza complessivo, sk
l lalunghezza dell’l-esimo segmento e sk la lunghezza totale del percorso dispiegato.Una volta calcolato il campo per ogni raggio, si devono prendere in considerazione le caratteristiche del-l’antenna ricevente: ogni raggio darà infatti il suo contributo (costruttivo o distruttivo) al segnale ricevutoimprimendo sull’antenna RX una certa corrente. Dato in figura 6.6 il circuito equivalente dell’antennaricevente il k-esimo raggio sarà foriero di un contributo pari a:
Ik = −jλ
√Re{YR} · gR(θR, ϕR)
πη· { pR(θR, ϕR) · Ek
T} (6.3)
Se si suppone perfetto adattamento in potenza anche in ricezione6 si può scrivere (formulazione coerente)
Figura 6.6: Circuito equivalente d’antenna.
la potenza come contributo di tutti i raggi:
PR =
∣∣∣∣∣∣ N∑
k=1
−jλ
√Re{YR} · gR(θk
R, φkR)
πη· { pR(θk
R, φkR) · Ek
T}
∣∣∣∣∣∣2
8 · Re{YR}(6.4)
5Quindi PT = ZT I2T
8 .6Quindi PR = |ITOT
R |28·Re{YR}
.
58

CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI 59
Sviluppando quest’ultima e assumendo perfetto adattamento di polarizzazione, giungiamo alla seguenteespressione della potenza (formulazione non coerente):
PR =λ2
8πη·
N
∑k=1
gR(θkR, ϕk
R) · |EkT |2 (6.5)
Si noti che riscrivendo quest’ultima espressione nel caso di un solo raggio si riottiene esattamente laformula di Friis.
Diamo ora uno sguardo all’indoor ray tracing riportandone di seguito le principali caratteristiche:
• è necessario un approccio 3D (quindi complicato);
• è necessario considerare trasmissioni multiple;
• è richiesta una mappa molto dettagliata dell’edificio;
• il mobilio può avere un impatto rilevante me non è descritto nella mappa, quindi potrebbe esserviun non prevedibile scattering;
• possono esserci anche cammini esterni all’edificio.
Per questi ed altri motivi, il ray tracing va modificato per poter essere utilizzato indoor: nella sua formu-lazione standard, infatti, esso risulta essere meno conveniente di un più semplice schema multiwall, chepermette il calcolo dell’attenuazione una volta che si ha a disposizione il numero di muri, il numero disoffitti e un’attenuazione specifica per ciascuno di essi.
In figura 6.7 si vede che aumentare a dismisura il numero di eventi considerati non produce migliora-menti rilevanti: è quindi inutile assumere un Nev esageratamente alto.
Figura 6.7: Dopo qualche interazione l’errore medio si stabilizza.
6.2 Ray Tracing semplificato
I modelli a raggi semplificati derivano concettualmente dal modello a raggi deterministico, con la dif-ferenza che l’insieme dei percorsi viene semplificato, prendendo in considerazione solo i raggi principali,per alleggerire il carico computazionale. Solitamente il modello viene ’sfrondato’ determinando i piani incui la maggior parte dei raggi giace, ed utilizzando per tali piani un modello 2D (computazionalmentemolto più leggero di uno 3D); tale approccio non è tuttavia molto rigoroso in quanto la propagazioneavviene sempre in 3 dimensioni. Le scelte spesso utilizzate prendono perciò in considerazione:
• modello 2D + 2D;
• modello quasi-3D (VPL).
59

60 CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI
In figura 6.8 è mostrato un esempio di utilizzo del modello 2D+2D; la propagazione viene scompostain due piani: quello verticale (VP) e quello laterale7 (LP). Per ognuno di essi si utilizza poi il modelloappropriato di propagazione (vedere paragrafo 4.1).
Figura 6.8: Esempio di uso del modello 2D+2D
Per concludere diciamo che, se in un modello a raggi coerente si vuole considerare anche lo scatteringdiffuso, si deve allora ricorrere ad un modello ibrido8: i raggi coerenti (quelli che non hanno subito inte-razioni diverse dalla semplice riflessione) vengono trattati con le formule che tengono in considerazionela polarizzazione; i raggi che invece hanno subito almeno un’interazione di scattering vengono trattati inmaniera non coerente.
6.3 In sintesi
I modelli deterministici sono il non-plus-ultra dell'accuratezza e della versatilità (considerano persino lo slow
fading e abbiamo pure modo di �ltrare il fast fading) ma a che prezzo! Computazionalmente sono un disastro:
servono dettagliati database per fornire i dati al calcolatore, grandi memorie per conservare i risultati e il tempo
di calcolo cresce più che linearmente col numero di eventi e di ostacoli considerati. Siccome non abbiamo tutto
questo tempo, si limita il numero di iterazioni (eventi) e si cerca di sempli�care dov'è possibile.
Il metodo denominato ray tracing cerca di ricostruire l'albero di visibilità (view tree), ovvero la sequenza
'strutturata' (e in qualche modo cronologica) di oggetti visti dai raggi, sfruttando il teorema delle immagini
e fermandosi a un numero di eventi prede�nito. Purtroppo i punti di di�razione sullo spigolo possono essere
determinati solamente solo dopo la visibilità e non conosciamo precisamente il punto di incidenza dei vari raggi
(addirittura alcuni eventi potrebbero essere da scartare perché l'interazione non è mai geometricamente avvenuta!),
cosicché si necessita di una fase di backtracking per individuare i punti precisi e scartare eventuali rami prima di
7La propagazione sul piano laterale avrebbe rigorosamente luogo solo se i terminali avessero stessa altezza dal suolo.8In generale, tutti i modelli in cui sono presenti sia elementi statistici che deterministici sono chiamati modelli ibridi.
60

CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI 61
e�ettuare la vera e propria �eld computation. Possiamo scrivere, per il k-simo raggio:
ET(r, θT , ϕT) = IT
√ZT · η · gT(θT , ϕT)
16π· e−jβr
r· pT(θT , ϕT) = ET0(r, θT , ϕT)
e−jβr
r
La produttoria fa sì che si moltiplichi per una matrice di di�razione/ri�essione ad ogni evento. Supponendo
perfetto adattamento in polarizzazione e in potenza, all'antenna ricevente arriverà:
PR =λ2
8πη·
N
∑k=1
gR(θkR, ϕk
R) · |EkT |2
In ambiente indoor il ray tracing è comunque possibile, ma è richiesta una mappa molto dettagliata dell'edi�cio,
è necessario considerare trasmissioni multiple e considerare anche cammini esterni, quindi il gioco probabilmente
non vale la candela ed è meglio ripiegare per un metodo empirico-statistico (multiwall, ad esempio).
Per sempli�care il ray tracing è possibile utilizzare modelli 2D+2D (piano orizzontale + piano verticale) oppure
3D sempli�cati (prima facciamo i calcoli sul piano orizzontale e poi immaginiamo di trasformare i raggi in piani e
di passare il 3D). Se si vuole considerare anche lo scattering, invece, servirà un modello ibrido.
Alternativamente esiste anche il ray launching, che è come il ray tracing solo che lo spazio viene discretizzato
e ad ogni parte viene associato un singolo raggio. Il ray launching è pertanto meno preciso del ray tracing e non
tiene conto della di�razione.
61

62 CAPITOLO 6. MODELLI DETERMINISTICI A RAGGI
62

Capitolo 7
Il Canale Radiomobile
Abbiamo visto, nei capitoli precedenti, quanto la presenza di ostacoli lungo il cammino tra trasmettito-re e ricevitore possa influire sulla reale propagazione: in generale, visto che la propagazione difficilmenteavviene in condizioni assimilabili a quelle ideali, si avranno sempre fenomeni quali cammini multipli,riflessioni, rifrazioni e scattering. Vogliamo in questo capitolo dare una descrizione della funzione di tra-sferimento del canale radiomobile: com’è naturale aspettarsi, essa sarà in funzione di due parametri (piùle loro trasformate) ovvero il tempo e la frequenza. Questo significa che il canale non si comporterà sempreallo stesso modo per due diverse frequenze (a parità di istante temporale) o nel tempo (prendendo inconsiderazione una singola frequenza). Quando siamo in presenza di cammini multipli, infatti, il segnalegiunge al ricevitore attraverso percorsi diversi e quindi con ritardi differenti: questo fenomeno aggravanelle trasmissioni numeriche l’interferenza intersimbolica (ISI), ovvero il processo tale per cui - al ricevitore- i vari simboli si sovrappongono1 in quanto arrivano con ritardi diversi. Il ricevitore e/o il trasmettitore,inoltre, potrebbero muoversi durante la trasmissione e in tal caso la velocità dei loro spostamenti sarà datenere in considerazione. Questi due aspetti congiunti danno una funzione di trasferimento come quelladi figura 7.1 in cui si ha selettività in frequenza e selettività nel tempo.
Figura 7.1: Funzione di trasferimento del canale radiomobile.
Se immaginiamo di sezionare la funzione con un piano a t = costante vediamo che l’ampiezza dellafunzione varia al variare della frequenza: si dice allora che il canale è affetto da fading in frequenza; vice-versa, se sezioniamo la funzione con un piano a f = costante si nota che, per la stessa frequenza, si hannodifferenti valori: si parla allora di fading nel tempo. Da sottolineare il fatto che, se si considera una piccola
1Sia all’interno dello stesso simbolo, sia tra simboli adiacenti. Che disastro!
63

64 CAPITOLO 7. IL CANALE RADIOMOBILE
area della superficie, la funzione di trasferimento si può approssimativamente considerare costante sia neltempo sia in frequenza.
Nel capitolo 6 abbiamo visto che il fasore della corrente complessiva impressa sull’antenna riceventesi può scrivere come:
IiR = |Ii
R| · ejArg(IiR) = ρi · ejθi (7.1)
Possiamo tuttavia scrivere tale fasore complessivo come contributo di tutti gli Nr cammini:
IR =Nr
∑i=1
ρi · ejθi (7.2)
dove ρi e θi sono ampiezza e fase dell’i-esimo cammino. Nel dominio del tempo ciò significa che abbiamouna sovrapposizione di Nr sinusoidi.
7.1 Caso statico
Quanto detto fino ad ora è valido solo nel caso in cui si trasmettano sinusoidi pure, con frequenzacostante e ampiezza periodica; ma sappiamo bene che con tali segnali non si trasporta alcuna informa-zione e che, invece, i segnali reali hanno sempre un’ampiezza ed una frequenza che variano nel tempo(modulazione di ampiezza o di frequenza). Per poter lavorare coi fasori dobbiamo allora fare riferimentoall’equivalente passa basso (figura 7.2) e agli inviluppi complessi rappresentativi2.
Figura 7.2: Equivalente passa basso.
Immaginando di inviare un unico segnale attraverso un’antenna trasmittente dislocata in modo che siabbia propagazione multicammino, il segnale y(t) all’uscita dal canale sarà quindi una somma di replichedello stesso segnale (una per cammino):
• ritardate di ti,
• moltiplicate per ρi (e quindi attenuate, perché salvo fenomeni particolari di interferenza costruttivaρi è sempre� 1),
• sfasate di θi. Possiamo quindi buttare giù tutto quanto in formule:
y(t) = x(t) ∗ h(t) =Nr
∑i=1
Re{ρi · u (t− ti) · ej{2π f0(t−ti)+θi}} (7.3)
Anche se ora sembra un’operazione superflua, scriviamo y(t) come anti-trasformata di Steinmetz delsuo equivalente passa-basso v(t) (fare riferimento allo schema 7.2):
y(t) = Re{v(t) · ej2π f0t} (7.4)
2Sono fasori con ampiezza e frequenza varianti nel tempo del tipo u(t) = A(t) · ejα(t) tali che x(t) = Re{u(t) · ej2π f0t}
64

CAPITOLO 7. IL CANALE RADIOMOBILE 65
In quanto uscita di un sistema definito dalla risposta impulsiva h0(t) (versione passa-basso della rispostaimpulsiva originaria h(t)), v(t), equivalente passa basso di y(t), può essere scritto come la convoluzionetra u(t) e h0(t):
y(t) = Re{
∞∫−∞
h0(ε) · u(t− ε)dε
· ej2π f0t} (7.5)
Dunque h0(t), equivalente passa basso della risposta impulsiva, sarà quella funzione che, se inseritanella 7.5, darà la 7.3. Coma fare a trovarla? Osserviamo la 7.3 e la 7.5: in comune hanno il termineesponenziale ej2π f0t e la funzione u(t) (equivalente passa-basso di x(t)), calcolata da una parte in t− ti edell’altra in t− ε: per fare sì che la 7.3 e la 7.5 coincidano, quindi:
• dobbiamo sfruttare la proprietà di vaglio della Delta di Dirac3 in modo che u(t) sia calcolata nel puntogiusto;
• dobbiamo includere in h0(t) i rimanenti termini esponenziali: ej(−2π f0ti+θi) e il termine di ampiezzaρi.
Otteniamo dunque:
h0(t) =Nr
∑i=1
ρi · δ [t− ti] · ej{−2π f0ti+θi}
Ora che abbiamo la risposta impulsiva nella sua versione passa-basso, possiamo trasformare secondoFourier per ottenere l’equivalente passa basso della funzione di trasferimento:
H( f ) =Nr
∑i=1
ρi · ej{−2π( f + f0)ti+θi}
Facendo riferimento ai moduli dei segnali, l’uscita si può rappresentare come in figura 7.3; i ritardi deicammini possono provocare interferenza inter-simbolo: perché essa non sia presente il tempo di simboloTS (cioè quanto tempo intercorre fra la trasmissione di due simboli) deve essere sufficientemente maggioredei ritardi con cui arrivano le copie di ogni simbolo (cosicché esse non si sovrappongano alle copie delsimbolo successivo):
Ts >> tmaxi − tmin
i = ∆t (7.6)
Il segnale in ingresso non deve cioè variare troppo velocemente rispetto al ritardo massimo.
Figura 7.3: Risposta impulsiva del canale.
Quanto detto comporta distorsione in frequenza: ovvero la H( f ) non ha modulo costante in frequenza(vedi fig. 7.4).
Per non avere tale fenomeno è necessario che il segnale abbia una banda B sufficientemente piccolarispetto alla banda di coerenza Bc in maniera tale da non percepire le variazioni in frequenza dellafunzione di trasferimento. Se B << Bc allora si ha perciò fading piatto; in caso contrario si ha fadingselettivo in frequenza (figura 7.5). La banda di coerenza è quindi quella frazione di banda entro la
3δ(t− ti) ∗ x(t) =∞∫−∞
δ(ε− ti) · x(t− ε)dε = x(t− ti)
65

66 CAPITOLO 7. IL CANALE RADIOMOBILE
Figura 7.4: Propagazione multicammino: la H( f ) non ha modulo costante in frequenza
quale possiamo considerare la funzione di trasferimento (approssimativamente) invariante. In primaapprossimazione si può dire che:
Bc ≈1
∆t=
1tmaxi − tmin
i(7.7)
Quindi le due condizioni di distorsione, nel tempo e nella frequenza, coincidono.
Figura 7.5: Fading piatto e selettivo.
7.2 Caso dinamico
Vediamo ora cosa succede se il ricevitore si muove4: in tal caso si ha effetto Doppler5, dunque dovremoconsiderare, per il nostro segnale, una frequenza Doppler; la questione, quindi, si complica dato che oraampiezze e ritardi sono dipendenti dal tempo. Si assume un tempo ξ dei segnali detto tempo relativo (otempo in eccesso), differente dal tempo di canale t: il tempo t è quello in cui cambia il canale (cioè la suafunzione di trasferimento), mentre ξ è una piccola variazione intorno a t entro la quale varia il segnale.L’uscita ha ora un’espressione del tipo:
y(t, ξ) =Nr
∑i=1
Re{ρi(t) · u (ξ − ti(t)) · ej{2π f0[ξ−ti(t)]+θi(t)}} (7.8)
Come si nota, ora tutte le grandezze dipendono anche dal tempo (di canale). Con riferimento alla figura7.6 associamo ad ogni cammino una frequenza Doppler pari a
fi =− f0
cv · ki =
− f0
cv cos(α)
in cui versore ki punta nella direzione di propagazione del cammino, f0 è la frequenza di centro-bandadel nostro segnale, c è la velocità della luce e v la velocità del ricevitore. Dalla formula si nota che se
4Per semplicità, nei seguenti esempi considereremo il trasmettitore immobile.5L’effetto Doppler è un cambiamento apparente della frequenza o della lunghezza d’onda di un’onda percepita da un osservatore
che si trova in movimento rispetto alla sorgente delle onde. Per quelle onde che si trasmettono in un mezzo, come le onde sonore, lavelocità dell’osservatore e dell’emettitore vanno considerate in relazione a quella del mezzo in cui sono trasmesse le onde. L’effettoDoppler totale può quindi derivare dal moto di entrambi, ed ognuno di essi è analizzato separatamente.
66

CAPITOLO 7. IL CANALE RADIOMOBILE 67
il ricevitore si sta allontanando dalla sorgente allora il coseno di α (che avrà valori fra −π/2eπ/2) ècompreso tra 0 e 1 e dunque la frequenza Doppler associata a quel cammino è inferiore a quella delsegnale originario. Viceversa se l’angolo α è compreso fra π/2e3π/2 significherà che il ricevitore si staavvicinando alla sorgente quindi la frequenza Doppler sarà maggiore a quella originaria6. Facendo le
Figura 7.6: Mobilità del terminale ricevente.
seguenti approssimazioni:
• ρi e θi lentamente varianti (trascuriamo la dipendenza dal tempo),
• inviluppo complesso del segnale con durata limitata,
• dipendenza dei ritardi dal tempo linearizzabile7,
possiamo riscrivere la 7.8 come:
y(t, ξ) =Nr
∑i=1
Re{ρi · u [ξ − ti] · ej{2π f0ξ+2π fit−2π f0ti+θi}} (7.9)
Effettuando un procedimento analogo al caso statico (paragrafo 7.1) si ottengono le espressioni per larisposta impulsiva e la funzione di trasferimento (notiamo ora che ora entrambe sono funzioni di duevariabili, tra cui il tempo!):
h0(t, ξ) =Nr
∑i=1
ρi · δ [ξ − ti] · ej{2π fit−2π f0ti+θi}
H(t, f ) =Nr
∑i=1
ρi · ej{2π fit−2π( f0+ f )ti+θi}
La frequenza f nella seconda equazione la trasformata di Fourier8 del tempo in eccesso (ξ) nella prima.Si ha quindi una simmetria: a causa dei ritardi (temporali) dei cammini si ha una selettività in frequenza,mentre a causa dell’effetto Doppler (in frequenza) si ha una selettività nel tempo. Analogamente a primasi ha fading piatto nel tempo se:
Td << Tc (7.10)
dove Td è la durata del segnale, e Tc il cosiddetto tempo di coerenza del canale (analogo alla banda dicoerenza, ma nel caso duale). Questo significa che il segnale deve essere contenuto all’interno di quella
6In questo caso è come se il ricevitore ’andasse incontro’ ai fronti d’onda, recependoli più velocemente rispetto ad un analogocaso statico (da qui l’aumento di frequenza dovuto all’effetto Doppler).
7Si ha:
ti ∼= ti −fi
f0= ti −
− f0
cv cos α
f0= ti +
v cos α
c
8X(t, λ) = F(s) [x(t, s)] =∞∫−∞
x(t, s) · e−j2πsλdλ
67

68 CAPITOLO 7. IL CANALE RADIOMOBILE
fascia temporale (il tempo di coerenza) durante la quale il canale può essere considerato invariante rispettoalle variazioni dovute all’effetto Doppler. In maniera sempre approssimativa si può dire che:
Tc ≈1
∆v=
1| fi|max
(7.11)
Spesso, invece che ricorrere a formule approssimate come quelle illustrate per Tc e Bc, si utilizzano iparametri di dispersione nel tempo e nelle frequenze Doppler: Delay Spread e Doppler Spread (vedereparagrafo 7.4) che tengono conto anche dei profili di potenza.
7.3 Le 4 funzioni del canale radiomobile
Abbiamo visto nei paragrafi precedenti che la funzione di trasferimento del canale radiomobile (H( f ))dipende fondamentalmente dal tempo t e dalla frequenza f , ma possiamo per ognuna di esse calcolarela trasformata di Fourier e trovare così altri due parametri: ξ (tempo in eccesso) e ν (frequenza Doppler).Quindi abbiamo in totale 4 funzioni che descrivono il canale (vedi figura 7.7).
Figura 7.7: Le 4 funzioni del canale radiomobile
Le 4 variabili si possono dividere in tue tipologie, quelle ’di tipo δ’ e quelle ’di tipo e’: le prime sonofunzioni a impulsi, mentre le seconde sono funzioni continue. Abbiamo perciò:
• ξ: tempo in eccesso di tipo δ;
• t: tempo assoluto di tipo e;
• ν: frequenza Doppler di tipo δ;
• f : frequenza assoluta di tipo e.
7.4 Parametri di dispersione
Se consideriamo un determinato istante di sondaggio t = 0 si ha che
h(t, ξ) = h(0, ξ) = h(ξ)
Dunque la risposta impulsiva del canale è funzione del solo tempo in eccesso. L’idea, ora, potrebbeessere quella di trovare un legame9 tra la risposta impulsiva del canale e la ricezione, lato destinatario,della potenza del segnale trasmesso. L’assunto che si fa è il seguente; una certa antenna trasmittenteinvia un segnale e, quindi, invia una certa potenza: tale potenza si frammenterà in molti cammini egiungerà al ricevitore ’alla spicciolata’. L’attitudine multipath del canale è d’altronde facilmente rilevabilenell’espressione della sua risposta impulsiva, che è un pettine di impulsi di Dirac posizionati, sull’asse
9In realtà, per come lo troveremo, sembrerà più che altro una forzatura. . .
68

CAPITOLO 7. IL CANALE RADIOMOBILE 69
temporale, ai generici ti (= ritardo del cammino i-esimo e quindi della potenza associata al cammino i-esimo). Immaginando di prendere la nostra risposta impulsiva al quadrato e di normalizzarla (di dividerlacioè per
∫|h (ξ)|2 dξ) otterremo una quantità il cui integrale è esattamente 1, proprio come si avrebbe per
una densità di probabilità. In essa sarà graficato il ’ritardo della potenza’ (power delay) ovvero il suo’ordine di arrivo’ al ricevitore: integrare tale parametro (normalizzato!) fino a un certo tempo (in eccesso)ξ equivarrà a calcolare la percentuale di potenza appartenente al segnale originario giunta al ricevitoredal primissimo istante di arrivo (0) fino a ξ. Si definisce però il power-delay profile normalizzato10:
p(ξ) =|h(ξ)|2∫|h(ξ)|2dξ
(7.12)
Dualmente, se ci fissiamo ad una determinata frequenza f = 0, utilizzando la funzione F(ν) si definisceil power-Doppler profile normalizzato:
pν(ν) =|Fν)|2∫|F(ν)|2dν
(7.13)
I power-profile vengono definiti solo per quei domini di tipo δ (cioè ad energia limitata), quindi sola-mente per ξ e ν.
Possiamo infine interpretare p e pν come densità di probabilità e calcolarne come la deviazione stan-dard (possiamo farlo in quanto abbiamo normalizzato la funzione, la quale avrà perciò tutte le caratteristi-che di una probability density function); in questo modo arriviamo alla formulazione dei cosiddetti parametridi dispersione:
• delay spread:DS =√∫
p(ξ)(ξ − TM0)2dξ TM0 =∫
ξ· (ξ)dξ
• Doppler spread: W =√∫
pν(ν)(ν−W0)2dν W0 =∫
ν · p(ν)dν
Ora possiamo fornire una più accurata espressione per la banda di coerenza ed il tempo di coerenza11:
Bc =1
DSTc =
1W
Nel caso discreto12 possiamo riscrivere tali espressioni semplificate per il power-deley profile e il delay-spread:
p(ξ) =
N∑
i=1ρ2
i δ(ξ − ti)
N∑
i=1ρ2
i
TM0 =N
∑i=1
ξi pi
DS =
√√√√ N
∑i=1
(ξi − TM0)2 · pi
E per power-Doppler profile e Doppler spread:
pν(ν) =
N∑
i=1ρ2
i δ(ν− fi)
N∑
i=1ρ2
i
10Tale che∫
p(ξ)dξ = 111Per questo motivo sono stati ’inventati’ i parametri di dispersione.12Quantità numerabile di raggi.
69

70 CAPITOLO 7. IL CANALE RADIOMOBILE
W0 =N
∑i=1
fi pi
DS =
√√√√ N
∑i=1
( fi −W0)2 · pi
Dove:
pi =ρ2
iρTOT
=ρ2
iN∑
i=1ρ2
i
(7.14)
7.5 Caratterizzazione multidimensionale
Per il canale radiomobile esistono diverse caratterizzazioni a seconda delle funzioni prese in esame:
• narrowband characterization: si esamina la potenza ricevuta, il guadagno di tratta, la copertura,etc. . .
• wideband characterization: si esaminano delay-spread, Doppler-spread, DS, W, Tc, Bc, etc. . .
• multidimensional characterization: si prendono in considerazione tutti i parametri visti ma anchei parametri spaziali come l’angolo di arrivo, il power-angle profile, l’angle spread, etc. . . In pratica sitratta della caratterizzazione del canale rispetto a tutte le dimensioni in gioco: ampiezza, tempo,frequenza, frequenza Doppler e spazio. Questa trattazione porta alla nascita dei sistemi MIMO(Multiple Input Multiple Output).
Prendiamo brevemente in considerazione l’estensione al dominio angolare: ogni raggio che arriva avràun suo angolo (discreto) chiamato azimut13 φi quindi la h(t, ξ) diventa ora:
h0(t, ξ, φ) =Nr
∑i=1
ρi · δ [ξ − ti] · δ [φ− φi] · ej{2π fit−2π f0ti+θi} (7.15)
Esattamente come fatto in precedenza si può definire un power-azimuth profile:
pφ(φ) =|H(φ)|2∫|H(φ)|2dφ
(7.16)
Nel caso ideale questo diventa semplicemente:
pφ(φ) =N
∑i=1
piδ(φ− φi) (7.17)
L’angolo medio di arrivo è dato da14
φ =2π∫0
φ · pφ(φ)dφ (7.18)
Infine, in maniera conforme a DS e W l’angle spread nel caso discreto è dato da:
AS =
√√√√ N
∑i=1
pi(φi − φ)2 (7.19)
Come ξ e ν, anche φ è un dominio di ’tipo δ’, ed ha come trasformata di Fourier la dipendenza spazialer (che invece è un dominio di ’tipo e’15): se si guarda l’andamento della funzione di trasferimento rispettoad r, nel caso ci siano diversi cammini, si ritroverà il tipico andamento alla Rayleigh del fast-fading.
13Per capirci, un angolo su un piano parallelo al terreno.14Anche questa formulazione viene ereditata dalla teoria della probabilità e, precisamente, dalla definizione di valore medio
statistico.15La trasformata di una variabile di tipo δ è sempre una variabile di tipo e e viceversa.
70

CAPITOLO 7. IL CANALE RADIOMOBILE 71
7.6 Tecniche di diversità e MIMO
Il canale radiomobile è sempre soggetto quindi a fading nel tempo, nelle frequenze e nello spazio:questi fenomeni distorcono il segnale ricevuto, diminuendo così la capacità di canale, ovvero la massimabit-rate ammissibile ad una determinata BER16. Quando il fading è piatto si può aumentare la potenza perdiminuire la BER, ma quando il fading è selettivo la distorsione del segnale è ineludibile.
Nei sistemi moderni non c’è più una chiara distinzione fra il fading piatto e quello selettivo, semmai sicerca di considerare il fading e la propagazione multicammino non più come un problema bensì come unarisorsa. Per cercare di diminuire i problemi dovuti al multipath si utilizzano diverse tecniche:
• Coding;
• Diversity;
• Equalization;
tutte queste tecniche sono implementate nei sistemi MIMO (Multiple Input, Multiple Output).Le tecniche di diversità puntano in particolare sulla trasmissione di copie del segnale nel tempo, nella
frequenza e nello spazio. Sfruttando la bassa correlazione del canale radio dopo una certa distanza sicerca di ricomporre tutte la copie dello stesso segnale per ottenere un cosiddetto diversity gain (più omeno alla stregua di quanto accadeva con il rake receiver). Esistono tre principali tipi di diversità sui tredomini di ’tipo e’:
• time diversity: si cerca di replicare il segnale nel tempo con tecniche di interleaving; se il tempo traun simbolo e la sua copia (inviata successivamente) sarà maggiore del tempo di coerenza del canaleallora avremo una copia del segnale quasi indipendente dall’originale17;
• frequency diversity: si replica il segnale su diverse portanti tali che la loro differenza sia maggioredella banda di coerenza del canale;
• space diversity (o antenna diversity): è la tecnica più comune e consiste nel replicare il segnale tramitel’uso di più antenne collocate ad una distanza superiore della distanza di coerenza. Esistono duesottocategorie di diversità di spazio:
– diversità d’angolo: l’antenna ricevente è formata da più antenne puntate in direzioni differenti,in modo da ricevere copie scorrelate del segnale;
– diversità di polarizzazione: segnali che hanno polarizzazioni ortogonali vengono trasmessi dapiù antenne con polarizzazioni differenti e vengono ricevuti separatamente, e con le rispettivepolarizzazioni, dai più antenne riceventi. Sfruttato soprattutto in ambiente urbano questo modusoperandi garantisce una bassa correlazione tra i vari segnali.
Nel seguito assumiamo fading piatto in frequenza, cosicché tutti i ritardi t1 . . . tN possano essere rim-piazzati da un ritardo medio t0
18. Il generico segnale in arrivo al ricevitore da un determinato raggio, unavolta sommato il rumore n, si può esprimere come:
ν(t, ξ, r) = u(ξ − t) · r(r) · ejθ(r) + n(ξ, r) (7.20)
Per ottenere il segnale trasmesso si ricombinano linearmente i vari segnali ricevuti come mostrato in figura7.8.
Ogni ramo viene moltiplicato per un fasore αi tale da annullare la fase del segnale su quel ramo:
αi = aie−jθi (7.21)
Il segnale finale risulta quindi essere semplicemente la somma di tutti i segnali rifasati e pesati secondoun certo criterio:
aΣ =M
∑i=1
ai · ri (7.22)
Le tecniche di combinazione di questi segnali possono essere molteplici:16Bit Error Rate, ovvero probabilità d’errore per bit.17Dobbiamo cioè tempo al canale di ’scordarsi’ il segnale inviato. Si noti che comunque il tempo di trasmissione del singolo
simbolo deve invece essere minore del tempo di coerenza!18B << Bc, ovvero Ts >> ∆t e possiamo prendere un ritardo medio per tutti i raggi.
71

72 CAPITOLO 7. IL CANALE RADIOMOBILE
Figura 7.8: Combinazione lineare dei segnali ricevuti. Si noti che la formula in fondo alla figura è un rapportosegnale-rumore.
• Selection Combining: si seleziona solo il ramo che presenta il maggiore SNR e si scartano gli altri;
• Equal Gain Combining: ogni segnale viene rifasato e pesato con lo stesso peso αi = e−jθi ; in tal casosi ottiene un SNR pari a
γΣ =1
N0M
(M
∑i=1
ri
)2
(7.23)
• Maximum Ratio Combining: si pesa ogni ramo in proporzione all’SNR che presenta. Maggioresarà l’SNR (e, quindi, più pulito sarà il segnale) e maggiore sarà il peso. Impostando ai = ri/
√N0 si
ottiene un SNR equivalente alla somma di tutti gli SNR:
γΣ =
M∑
i=1r2
i
N0=
M
∑i=1
γi (7.24)
La figura 7.9 mostra tutte le possibili degenerazioni del concetto di Multiple Input Multiple Output19
Come mostra la figura 7.10 per studiare tali sistemi viene naturale passare attraverso l’uso delle matrici,infatti si possono definire:
• il vettore u(ξ) di NT elementi (segnali trasmessi);
19Si noti che anche un classico collegamento ad un trasmettitore e ad un ricevitore si può comunque vedere come caso particolaredi sistema MIMO.
72

CAPITOLO 7. IL CANALE RADIOMOBILE 73
Figura 7.9: Esempi si sistemi MIMO.
• il vettore ν(t, ξ, r) di NR elementi (segnali ricevuti);
• il vettore n(ξ, r) di NR elementi (rumore);
• la matrice di canale H(t, ξ, r) di NT × NR elementi.
Figura 7.10: Schematizzazione a matrice del canale MIMO.
u(ξ) =
u1(ξ)...
uNT (ξ)
v(t, ξ, r) =
v1(t, ξ, r)...
vNR(t, ξ, r)
73

74 CAPITOLO 7. IL CANALE RADIOMOBILE
n(ξ, r) =
n1(ξ, r)...
nNR(ξ, r)
H(t, ξ, r) =
h(t, ξ, r11) . . . h(t, ξ, r1NT )...
. . ....
h(t, ξ, rNR1) . . . h(t, ξ, rNR NT )
In questo modo è possibile formulare una relazione generica del canale MIMO:
ν(t, ξ) = H(t, ξ) ∗ u(ξ) + n(ξ) ,∫τ
H(t, τ) · u(ξ − τ)dτ + n(ξ)
Se il canale è tempo-invariante e piatto in frequenza possiamo dimenticarci la dipendenza dal tempo ineccesso ξ: la relazione si riduce a
ν(t) ∼= H(t) · u(t) + n(t) (7.25)
Concludiamo elencando i principali vantaggi dei sistemi MIMO:
• array gain: gli array di antenne presentano un guadagno maggiore delle singole antenne in quantopossono sfruttare la diversità per ’raggranellare’ maggiori quantità di potenza;
• diversity gain: si migliora l’SNR (magari facendo uso di una tecnica di combinazione Maximum RatioCombining);
• multiplexing gain: possibilità di multiplare più segnali e quindi di aumentare la capacità del canale.
7.7 In sintesi
La funzione di trasferimento del canale radiomobile varia col tempo e nelle frequenze: si parla infatti di
selettività (o fading) nel tempo, dovuto allo spostamento del terminale mobile, e di selettività (o fading) in
frequenza, dovuto all'interferenza intersimbolica generata dal fenomeno del multicammino.
Poniamoci nel caso statico: il trasmettitore e il ricevitore sono in due punti �ssi. Sia:
• x(t) (e il suo equivalente passa-basso u(t)) il segnale in ingresso;
• h(t) (e il suo equivalente passa-basso h0(t)) la risposta impulsiva del sistema, la cui trasformata è la funzione
di trasferimento H( f );
• y(t) (e il suo equivalente passa-basso v(t)) il segnale in uscita.
Possiamo scrivere l'uscita come somma di segnali attenuati, ritardati e sfasati (ognuno in base al cammino
percorso),
y(t) = x(t) ∗ h(t) =Nr
∑i=1
Re{
ρi.u (t− ti) e−j(2π f0(t−ti)+ϑi)}
e come antitrasformata di Steinmetz del segnale passa-basso equivalente:
y(t) = Re{
v (t) ej2π f0t}
Sfruttando la convoluzione
y(t) = Re
∞∫−∞
h0 (ε) u (t− ε) dε·ej2π f0t
e confrontando con l'espressione originaria otteniamo:
h0 (t) =Nr
∑i=1
ρiδ (t− ti) ej(−2π f0ti+ϑi) ⇒ H ( f ) =Nr
∑i=1
ρiej(−2π( f0+ f )ti+ϑi)
74

CAPITOLO 7. IL CANALE RADIOMOBILE 75
Tale funzione di trasferimento non è costante in sequenza, per cui il fenomeno del multicammino determina
selettività in frequenza. Se la banda del segnale è tuttavia su�cientemente piccola, ovvero minore della banda di
coerenza, il fading può essere considerato piatto perché signi�ca che la distanza temporale fra i simboli è maggiore
del cammino con ritardo massimo.
Mettiamoci nel caso dinamico: in questo caso si ha e�etto Doppler, ovvero una variazione apparente della
frequenza pari a
fi = − f0
cv · ki = − f0
cv cos α
Ampiezze, sfasamenti, ritardi: nel caso dinamico tutto dipenderebbe dal tempo, ma noi sceglieremo di immaginare
ρi e ϑi lentamente varianti.
y(t, ξ) =Nr
∑i=1
Re{ρi · u [ξ − ti] · ej{2π f0ξ+2π fit−2π f0ti+θi}} (7.26)
Applicando un procedimento analogo a quello precedente otteniamo:
h0(t, ξ) =Nr
∑i=1
ρi · δ [ξ − ti] · ej{2π fit−2π f0ti+θi}
L'e�etto Doppler provoca selettività in tempo: se tuttavia il segnale ha durata minore del tempo di coerenza, il
relativo fading potrà anche questa volta essere considerato piatto.
Possiamo sfruttare l'espressione della risposta impulsiva in funzione del tempo in eccesso ξ (tempo di variazione
del segnale) e l'espressione della funzione di trasferimento in funzione della frequenza Doppler per de�nire due
parametri importanti, i quali hanno le caratteristiche di una densità di probabilità e permettono di determinare
in maniera più accurata la banda di coerenza e il tempo di coerenza. Considerando l'azimut (angolo rispetto al
piano parallelo al terreno) come variabile aleatoria rispetto alla quale rappresentare la funzione di trasferimento
possiamo, analogamente a quanto fatto nei casi precedenti, de�nire un power-azimut pro�le.
Le tecniche di diversità sono un modo astuto per sfruttare:
• il fatto che un unico segnale in trasmissione genera propagazione multicammino ed arrivi a destinazione in
tante copie fra loro sfasate;
• la replicazione del segnale su più portanti a diverse frequenze;
• la presenza repliche di un segnale, giunte da antenne dislocate in punti diversi o aventi polarizzazione diversa.
Si parla quindi di diversità in tempo, in frequenza, in spazio, angolo e polarizzazione. Supponendo di non
considerare selettivo il fading, i segnali giunti al ricevitore possono essere adeguatamente ricombinati per migliorare
la qualità complessiva di ricezione. Fra le varie tecniche di combinazione:
• selection combining : ci si a�da al ramo di ricezione che percepisce il cammino a maggiore SNR;
• equal gain: caso duale al precedente, si dà lo stesso peso a tutti i rami;
• maximum ratio combining : si combinano le copie in modo ottimo, sfruttando un opportuno algoritmo e
pesando maggiormente i segnali a SNR maggiore.
Le tecniche di diversità sono alla base dei sistemi MIMO (Multiple Input Multiple Output).
75

76 CAPITOLO 7. IL CANALE RADIOMOBILE
76

Capitolo 8
Tecniche di trasmissione SpreadSpectrum
Le tecniche Spread Spectrum (SS) sono diffuse in moltissimi sistemi (cellulari CDMA, UMTS, Wi-Fi,GPS, etc. . . ) e, al costo di una relativamente alta complessità e occupazione di banda, permettono di:
• diminuire l’interferenza verso altri sistemi esistenti (in virtù della bassa densità spettrale di potenza);
• fornire una protezione anti-jamming e anti-multipath per la soppressione di tutti i segnali indeside-rati (compresi i cammini multipli), nonché anti-intercettazione per l’intrinseca codifica del segnaletramite un codice solo noto al destinatario;
• effettuare accesso multiplo a divisione di codice (CDMA).
Il principio che sta alla base di queste tecniche prevede che la banda B del segnale venga allargata artifi-cialmente imprimendo al segnale utile un codice pseudo-noise ad elevata velocità di cifra. In ricezione, notoil codice di spreading, esso viene eliminato e il segnale risultante filtrato per ricostruire il segnale originalea banda stretta.
8.1 Direct-Sequence Spread-Spectrum
Figura 8.1: Schema generale della codifica spread spectrum
Si parla di sequenza diretta in quanto la sequenza pseudo-noise (PN) viene direttamente moltiplicata1
al segnale da trasmettere: siccome si presuppone che la sequenza PN abbia un’elevata velocità di cifrarispetto al segnale, l’effetto netto di tale moltiplicazione sarà quello di aver allargato la banda del segnaleda B a B′, con B′ � B. Chiameremo:
1Si presuppone che l’operazione di moltiplicazione sia involutoria: se così non fosse, sarebbe impossibile per il destinatarioeffettuare il de-spreading e ottenere l’informazione utile.
77

78 CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM
• tempo di chip TC la durata di un bit della sequenza PN;
• tempo di simbolo TS la durata di un simbolo della sequenza utile da trasmettere (per ipotesi si deveavere che TS � TC, visto che la frequenza della sequenza PN è molto elevata);
• guadagno di processo la quantità
Gp =B′
B=
TSTC� 1
Detto anche spreading factor, tale parametro indica il numero di chip con cui viene rappresentato ognibit di informazione2;
• a(t) il segnale dati;
• s(t) il segnale allargato in virtù della moltiplicazione con la sequenza PN;
• p(t) la sequenza PN (nota sia dal ricevitore che dal trasmettitore).
Figura 8.2: Lo spreading nel caso antipodale
Al trasmettitore il segnale dati a(t) viene moltiplicato per la sequenza p(n): il risultato è il segnale s(t)allargato con banda B′ � B. Al ricevitore il segnale a(t) viene recuperato sfruttando l’involutorietà dellamoltiplicazione: una volta effettuata l’operazione di sincronizzazione per poter agganciare la sequenzaricevuta alla copia locale della sequenza PN, il segnale ricevuto viene moltiplicato per p(t) e come risultatosi ottiene la sequenza utile a(t).
Il problema della sincronizzazione è molto delicato, non solo perché la sequenza PN è ad elevatissimafrequenza di cifra, ma anche perché è assolutamente fondamentale che la sequenza p(t) per la quale vienemoltiplicato il segnale sia molto poco (o per nulla) sfasata rispetto al segnale, pena l’attenuazione dellostesso e la sua definitiva perdita.
Per una corretta sincronizzazione viene sfruttata la misura dell’autocorrelazione fra il segnale ricevutoe la sequenza PN localmente memorizzata nel ricevitore.
Autocorrelazione del segnale p(t)⇒ R (τ) = 〈p (t)⊗ p (t + τ)〉 =1
NTC
TC∫0
p (t)⊗ p (t + τ) dt
Proprietà delle sequenze PN è infatti quella di restituire un’autocorrelazione3:
2Al fine di ottenere la stessa chip rate del segnale in aria indipendentemente dalla bit rate di sorgente occorre utilizzare unafamiglia di codici a spreading factor variabile.
3In particolare, ogni codice deve avere funzione di autocorrelazione con bassi picchi secondari, per questioni di aggancio delsincronismo e per garantire buona auto-immunità all’interferenza da multipath.
78

CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM 79
Figura 8.3: Il despreading
• elevata (prossima a 1) nel caso τ (cioè lo sfasamento della sequenza) tenda a 0. Ciò significa chepossiamo imputare un’elevata autocorrelazione R(τ) ad una buona sincronizzazione;
• assolutamente trascurabile (−1/N, con N enorme) nelle zone lontane da τ → 0. Una sequenza PNe la stessa sequenza sfasata sono quindi molto incorrelate.
Figura 8.4: Funzione di autocorrelazione della sequenza PN
Per i motivi testé illustrati il ricevitore possiede un filtro di de-spreading in grado di effettuare il calcolodell’autocorrelazione R(τ): se scopre che essa è molto vicina ad 1 allora avrà modo di agganciare cor-rettamente il segnale ricevuto alla sequenza PN (e quindi di ’decodificare’); in caso contrario il risultatopotrebbe essere anche catastrofico (segnale completamente bagattato e irriconoscibile). Correlando infattiil segnale ricevuto e la sequenza otteniamo:
〈s (t)⊗ p (t + τ)〉 = 〈[a (t)⊗ p (t)]⊗ p (t + τ)〉 =
= a (t)1
NTC
TC∫0
p (t)⊗ p (t + τ) dt = a (t) R (τ)
Come si nota, si ottiene il segnale utile a(t) solo quando τ = 0, altrimenti si ha un segnale tanto piùattenuato quanto è consistente lo sfasamento. L’effetto collaterale benefico di tutto ciò è che pure altrisegnali non correlati (compresi quelli interferenti) vengono attenutati.
Dopo aver illustrato il principio, ecco come viene fatta - in pratica - la sincronizzazione; il processo perottenerla è diviso in due fasi principali:
• coarse synchronization: il segnale ricevuto viene correlato con un certo numero di versioni sfasatedella nostra sequenza4: fra queste viene scelta quella col valore di correlazione maggiore, ovveroquella più vicina alla sincronizzazione;
4Scegliendo un passo pari ad α = TC/2 esistono NTCα possibili sfasamenti da provare.
79

80 CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM
• fine synchronization: la sincronizzazione trovata all’acquisizione viene raffinata per mezzo di uncircuito ad anello ad aggancio di fase (Delay-Locked Loop).
Ma non è finita! Osserviamo la figura 8.5: come si nota, la densità spettrale di potenza del segnaleoriginario, inizialmente raccolta tra −B e B, viene grazie allo spreading ben ben spalmata in una fasciadecisamente più vasta di frequenze (tra −B′ e B′). Se a questo punto un jammer tentasse di disturbarci,magari sparando una grande quantità di potenza intorno alla banda originaria B, rimarrebbe a boccaasciutta in quanto il despreading avrebbe l’effetto congiunto di ’ricompattare’ il segnale utile nella bandaoriginaria e di ’disperdere’ in frequenza il segnale interferente (che verrebbe riconosciuto come incorrelatodal filtro di despreading del ricevitore). A quel punto sarebbe sufficiente filtrare il tutto per ritagliare ilsegnale che ci interessa ed eliminare tutto il rumore.
Figura 8.5: Effetto dello spreading e del de-spreading
8.2 Frequency-Hopping Spread Spectrum
Con questa tecnica alternativa il codice, invece che essere impresso direttamente sul segnale (ad esem-pio tramite una moltiplicazione), va a pilotare l’oscillatore della portante, facendo saltare quest’ultima(hopping) ad una frequenza diversa ad ogni TC (tempo di chip). Anche nel FH-SS il segnale può essererappresentato a prodotto e il de-spreading come correlazione: in tutto e per tutto, infatti, le proprietà sonosimili al caso DS-SS.
8.3 Spreading e Scrambling
Per permettere l’accesso multiplo al canale di trasmissione, ogni comunicazione viene distinta dallealtre tramite l’assegnazione di un codice (tecniche CDMA). Oltre a produrre l’allargamento di banda(spreading) i codici devono quindi permettere di distinguere tra loro:
• le differenti sorgenti trasmissive (stazioni base nella tratta di downlink e terminali mobili nella trattadi uplink)→ scrambling;
• le differenti trasmissioni di una singola sorgente (differenti canali di una stessa stazione base nellatratta di downlink, differenti canali di uno stesso terminale mobile nella tratta di uplink)→ spreading.
Tutto questo è ottenibile tramite la moltiplicazione del segnale di sorgente non con un solo codice(come visto fino ad ora) ma con 2 codici:
80

CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM 81
Figura 8.6: Spreading e scrambling
• i codici di scrambling distinguono tra loro le differenti sorgenti. Ovviamente, a causa dei differentiritardi di propagazione (le sorgenti sono dislocate in differenti luoghi), fra i segnali ricevuti da dif-ferenti sorgenti non ci può essere sincronismo, quindi possiamo sfruttare le proprietà di tali codiciper distinguere, fra tutte le possibili sorgenti, quella sincronizzata. I codici di scrambling sono rap-presentabili tramite un diagramma ad albero in cui ogni parola è associata ad un ramo. Essi noncambiano la banda del segnale ma servono soltanto a distinguere sorgenti tra loro non sincrone percui non si usa una famiglia di codici ortogonali;
• codici di spreading, già visti. Essi separano i segnali di una singola sorgente e allargano lo spettro delsegnale. Fortunatamente i segnali ricevuti dalla stessa sorgente subiscono lo stesso ritardo, quindi icodici di scrambling possono agire in maniera ’indipendente’ rispetto a quelli di spreading.
Figura 8.7: Codici di spreading e scrambling
8.4 Power control
Il guadagno di processo (vedi par. 8.1) protegge la comunicazione utile, poiché solo una frazione 1/Gpdella potenza trasmessa da un utente interferente risulta effettivamente tale. Tuttavia può accadere chel’utente ’utile’ si trovi in condizioni di propagazione molto più penalizzanti rispetto all’utente interfe-rente; in tal caso, nonostante il process gain, la potenza interferente può risultare eccessivamente alta ascapito della buona qualità del collegamento (problema del near-far). Tale problematica deve essere op-portunamente arginata per mezzo di opportune politiche di controllo di potenza (i trasmettitori aggiustanola potenza irradiata al variare delle condizioni di propagazione). Il controllo di potenza:
• aumenta la capacità del sistema;
• evita che qualcuno ’urli’5;
5AAAAAAAAAAAAAHHHH!!!
81

82 CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM
• elimina l’effetto near-far in uplink (in downlink invece tutti i segnali arrivano al mobile percorrendo lostesso cammino).
Chiaramente, il terminale mobile deve essere in grado di modificare la potenza trasmessa in modo damantenere il rapporto segnale/rumore ricevuto dalla stazione base pari ad una soglia assegnata.
Il principio generale cui si deve ispirare qualunque algoritmo di Power Control è alquanto semplice:chi si trova più vicino alla stazione radio base deve trasmettere con potenze inferiori rispetto a chi sitrova più lontano. Il criterio più semplice (tratta di up-link6) corrisponde ad ipotizzare che tutti i terminalitrasmettano potenze tali da essere tutti ricevuti con la stessa potenza: in tal caso, è semplice valutare lacapacità del sistema, cioè il numero massimo di utenti contemporaneamente attivi in un settore isolato enel caso di singolo servizio.
Indichiamo con:
• PV la potenza del segnale utile;
• R la banda del segnale utile prima dello spreading;
• PI la potenza del segnale interferente;
• W la banda del segnale utile dopo lo spreading;
• Gp il guadagno di processo;
• Eb l’energia per bit;
• N0 la densità spettrale del rumore;
• NS il numero di utenti contemporaneamente attivi all’interno di uno stesso settore isolato.
Si ha:PII
=IWIR
=WR
=Tbit
Tchip= Gp
CI
=EbN0
RW
=EbN0
1Gp
Ma ancheCI
=C
(NS − 1) C
in quanto, su un totale di NS utenti, NS − 1 sono potenziali disturbatori. Mettendo a sistema otteniamo:
Gp
(EbN0
)=
1(NS − 1)
⇒ NS = 1 +GpEbN0
Tenendo conto del fatto che l’interferenza e in realtà minore visto che gli interferenti trasmettono inmaniera discontinua (Activity Factor A f < 1) e che l’interferenza dovuta alle celle adiacenti riduce di unfattore F < 1 il numero di utenti servibili, il numero N di utenti per cella può essere stimato come:
N =3FA f
NS =3FA f
1 +GpEbN0
' 3FA f
GpEbN0
8.4.1 Controllo di potenza ad anello aperto
Il controllo di potenza ad anello aperto viene utilizzato in uplink in fase di messa in piedi della chiama-ta: la stazione base trasmette un segnale predefinito tramite cui il mobile effettua una stima dell’attenua-zione in downlink e, in base a questa stima, viene determinato il valore della potenza con cui trasmettere.Così facendo, si suppone l’attenuazione in uplink uguale a quella in downlink: in realtà ciò non è esattoperché la distanza in frequenza tra le bande usate per le 2 tratte è tale da rendere poco correlati i fenomenidi propagazione in uplink e in downlink.
6Considereremo tratta di up-link quella da terminale mobile a BS e tratta di down-link quella da BS a terminale mobile.
82

CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM 83
8.4.2 Controllo di potenza ad anello chiuso
La comunicazione viene ricevuta in uplink dalla stazione base con un certo rapporto segnale rumore.Tale valore viene messo a confronto con una soglia (inner loop):
• se è minore della soglia, si invia un segnale di comando per dire al terminale mobile di aumentarela potenza;
• se è maggiore della soglia, si invia un segnale di comando per dire al terminale mobile di diminuirela potenza;
• altrimenti, la potenza non viene modificata.
Il mobile, in base al comando ricevuto, modificherà la sua potenza in trasmissione. Periodicamente (outerloop) si verifica che il valore della soglia che si sta utilizzando per il confronto garantisca la qualità delservizio fissata in termini di Bit Error Rate: se questo non è più attuale è necessario determinare un nuovovalore con cui fare il confronto.
8.5 Rake receiver
La trasmissione SS permette di realizzare uno schema di equalizzatore che non solo rende la trasmis-sione insensibile ai cammini multipli, ma addirittura permette di sfruttarli. Il rake receiver (ricevitore ’arastrello’), utilizzato nel sistema UMTS, è proprio uno di questi: lo schema di realizzazione viene illustratoin figura 8.8.
Figura 8.8: Il rake receiver
Condizione per la quale il rake receiver funziona è che sia stato impresso un certo codice al segnale:vengono infatti utilizzate tecniche simili a quelle viste nei paragrafi 8.1 e 8.2, le quali presuppongonol’utilizzazione di un certo codice (che in quel caso era una sequenza PN). Al ricevitore sono in arrivo Nrepliche ritardate: il rake receiver si aggancia al cammino più forte (presumibilmente il primo), dopodichéeffettua il de-spreading e fa partire il secondo correlatore, il quale effettua operazioni simili e fa partire ilterzo correlatore, etc. . . Ogni correlatore si aggancia quindi ad un solo cammino, sfruttando la presenzadi un codice per poter effettuare il calcolo di correlazione. Una volta delineatisi gli N cammini, essivengono messi in fase e sommati: in questo modo abbiamo sfruttato la presenza di cammini multipli per’rastrellare’ da essi potenza e compattare quest’ultima in un unico segnale!
Il rake receiver implementa implicitamente una tecnica di diversità: volendo possiamo infatti sfruttarequanto detto nel paragrafo 7.6 e affidare un certo peso ai cammini.
8.6 In sintesi
Le tecniche di trasmissione spread-spectrum hanno l'utilità di:
83

84 CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM
• fornire una protezione anti-jamming e anti-multipath;
• aiutano a diminuire l'interferenza prodotta da altri utenti trasmittenti nelle vicinanze;
• sono lo strumento con il quale implementare sistemi ad accesso multiplo.
Abbiamo due principali tecniche di spread-spectrum:
• Direct sequence: il segnale (tempo di simbolo TS) viene moltiplicato per una sequenza pseudo-noise PN
(tempo di chip TC � TS). Questo fa sì che il segnale utile si 'spalmi nelle frequenze' andando ad occupare
una banda Gp =TSTC
volte maggiore di quella originaria (Gp = guadagno di processo o spreading factor). Il
codice PN quasi-ortogonale col quale è stato moltiplicato il segnale ha l'importante proprietà di possedere
un'autocorrelazione massima in caso di perfetta sincronia e estremamente bassa per sfasamenti sostenuti;
al ricevitore il segnale viene confrontato con tante copie sfasate della sequenza PN, una delle quali sarà
sicuramente più correlata di altre in virtù del maggiore sincronismo: dopo aver a�nato il rifasamento, questa
sequenza verrà passata a un �ltro di de-spreading che sfrutterà l'involutorietà della moltiplicazione per la
sequenza al �ne di riottenere il segnale originale. Ogni altra copia sfasata o ogni altro segnale risulterà
completamente scorrelato e verrà invece attenuato. Inoltre, un eventuale interferente (jammer) che avesse
provato a emettere una certa potenza di disturbo P vedrebbe quest'ultima abbattuta di un fattore pari a
GP. Il DS-SS sfrutta implicitamente una tecnica di diversità.
• Frequency Hopping : il codice PN pilota la frequenza della portante. Saltelliamo in frequenza!
In realtà esistono due fondamentali sequenze (ad alta frequenza di cifra rispetto al segnale utile) in grado di
garantire la condivisione del canale ovvero il corretto accesso multiplo:
• Codici di spreading : sono codici ortogonali e sono i primi ad essere moltiplicati per il dato. Lo spalmano in
frequenza e in virtù delle proprietà dell'autocorrelazione permettono di distinguere i diversi tipi di tra�co
emessi da un unico terminale (stesso terminale mobile→ stesso ritardo di propagazione→ i codici ortogonali
vanno benissimo perché il sincronismo è garantito).
• Codici di scrambling : sono codici PN (pseudo-noise) in grado di permettere la separazione del tra�co dei
di�erenti terminali mobili. Non alterano la banda del segnale perché a quello ci hanno già pensato quelli di
spreading.
Altro escamotage astuto è quello del power-control ; il principio è semplice: chi trasmette lontano dalla stazione
base deve trasmettere 'più forte', chi è più vicino invece non deve urlare. Questo perché:
• chi è più vicino può risparmiare in batteria ed evitare di disturbare altri;
• chi è lontano deve sopperire alla maggiore distanza e a un numero spesso maggiore di interferenti.
Supponendo di avere un certo parametro Eb/N0, un guadagno di processo pari a Gp e un numero di utenti attivi
NS all'interno di un settore isolato possiamo scrivereCI
=EbN0
1Gp
CI
=C
(NS − 1) C
⇒ NS = 1 +Gp
Eb/N0
in quanto se uno è il terminale 'utile' avremo NS − 1 terminali interferenti. Si noti che si è fatta l'ipotesi che alla
stazione base arrivino potenze tutte uguali da tutti i trasmettitori, ovunque essi siano (l'algoritmo è precisissimo
e tara la potenza di ciascun mobile a�nché alla stazione base arrivino segnali tutti ugualmente intensi e con
potenza pari a C).L'algoritmo e�ettua continuamente tre fasi:
• Controllo di potenza ad anello aperto: avviene quando parte la comunicazione. La stazione base trasmette
ad una potenza prede�nita e il mobile capisce quant'è l'attenuazione in downlink (ovvero nel percorso:
stazione base - ricevitore mobile).
• Controllo di potenza ad anello chiuso, inner loop: in uplink (ovvero nel percorso: ricevitore mobile - stazione
base) la BS confronta la potenza ricevuta con una soglia e poi suggerisce al mobile cosa deve fare.
84

CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM 85
• Controllo di potenza ad anello chiuso, outer loop: periodicamente si veri�ca che la soglia rispetti la voluta
BER.
In�ne, abbiamo il rake reciever, prodigio della scienza e della tecnica: esso appro�tta della propagazione
multicammino (che a rigore è solo una seccatura) e delle tecniche di spread-spectrum per sfruttare le solite
proprietà dell'autocorrelazione e poter agganciare ogni cammino (sfasato) di uno stesso segnale con la sua fase
corretta. Questo permetterà di sommare ogni contributo in maniera costruttiva con tutti gli altri, rastrellando
(rake = rastrello) tutta la potenza da tutti i paths.
85

86 CAPITOLO 8. TECNICHE DI TRASMISSIONE SPREAD SPECTRUM
86

Capitolo 9
Sistemi d’area cellulari
I sistemi d’area si prefiggono di realizzare collegamenti tra terminali di cui (almeno) uno posizionatoarbitrariamente all’interno dell’area di servizio.
A causa dell’attenuazione, ad una certa distanza fra le antenne il rapporto segnale/rumore C/N (carrierto noise power ratio) scende al di sotto della soglia minima per un’accettabile qualità di collegamento. L’areadi servizio deve pertanto essere divisa in celle di raggio1 R, ciascuna dotata di stazione base. In ogni cellasi utilizzano determinati canali (risorse) per la comunicazione, ma deve poter essere possibile, senza che visia interruzione del servizio, il passaggio di un terminale mobile da una cella all’altra (handover). Essendoi canali limitati, occorre riutilizzarli a una certa distanza (riuso spaziale) sfruttando l’attenuazione delsegnale (filtraggio spaziale) per minimizzare l’interferenza.
Figura 9.1: Problematiche interferenziali e filtraggio spaziale
Collegamenti differenti che utilizzano contemporaneamente lo stesso canale/risorsa interferiscono fraloro, a discapito della qualità del collegamento. Per evitare che il rapporto segnale-rumore scenda al disotto della soglia minima di qualità occorre operare in modo che celle che utilizzano le stesse risorse sianoopportunamente distanziate (distanza di riuso D). Nei sistemi a più canali ortogonali, questi devonoessere distribuiti sul territorio in maniera opportuna, in modo da realizzare un sistema ad interferenzacontrollata.
Esaminiamo la figura 9.1: in essa viene graficata la potenza emessa da due stazioni radio-base e messain evidenza una zona, detta area di perturbazione, in cui le potenze emesse sono paragonabili e quindi fraloro interferenti (diventa difficile distinguere fra un segnale e l’altro2). Viene inoltre chiamata distanza utile
1Nei sistemi bidirezionali occorre dimensionare le celle anche in base al traffico offerto. Chiaramente a Manhattan sarannonecessarie celle molto piccole, vista la densità di utenti, mentre in mezzo al deserto potremo prendere celle grandi e utilizzare unnumero molto minore di stazioni radio-base.
2Quando si è nella vicinanza dell’area di perturbazione, possono esservi oscillazioni della potenza tali da rendere molto difficil-mente distinguibile il segnale ’più potente’ rispetto all’altro (o agli altri): sarebbe tuttavia da stupidi cercare di agganciarsi ad esso,in quanto saremmo costretti (viste le oscillazioni) ad effettuare l’handover un gran numero di volte nell’unità di tempo. Per evitare
87

88 CAPITOLO 9. SISTEMI D’AREA CELLULARI
la distanza entro la quale una stazione radio-base riesce a trasmettere senza che vi sia interferenza daparte di segnali delle stazioni vicine.
Se i canali sono virtualmente illimitati si tratta semplicemente di distribuirli in numero sufficientein ciascuna cella per far fronte alle necessità. Si definisce perciò cluster un gruppo di celle all’internodelle quali sono stati distribuiti tutti i canali disponibili. A parità di canali e all’aumentare del cluster-size(aumentando quindi il numero di celle), diminuiscono le risorse a disposizione di ogni singola cella (lecelle sono di più mentre i canali, cioè le risorse, sono sempre quelli!), ma si allontanano gli interferenti inquanto uno stesso canale viene utilizzato in celle fra loro più distanti rispetto al caso precedente.
Figura 9.2: Un cluster
9.1 Reticoli simmetrici, relazioni geometriche e settorizzazione
Consideriamo un reticolo simmetrico a ricoprimento continuo (senza ’buchi’): si dimostra che èpossibile ottenere tale strutturazione solo con un numero m di celle pari a
m = i2 + j2 + ij
con i e j numeri interi entrambi non nulli3.Le grandezze che descrivono la suddivisione cellulare del territorio (D = distanza di riuso4, R = raggio
delle celle, m = cluster size) sono evidentemente legate da relazioni di reciproca dipendenza5.Possiamo esprimere la distanza di riuso nel seguente modo:
D =√
m · R√
3 Oppure D =√
m in unità R√
3
Da qui si deriva immediatamente che:DR
=√
3m
Possiamo verificare questa relazione calcolando il cluster size; facendo riferimento alla figura e tenendopresente che l’area del cluster è uguale a quella del parallelogramma6:
AreaclusterAreacella
=U1U2 sin
π
312
R2︸︷︷︸
base
·(
R2
√3
2
)︸ ︷︷ ︸
altezza (apotema)
·12
U1=U2=D=
(√3mR · D
)2√
32
32
R2√
3= m
tali ’palleggiamenti’ si adottano quindi alcuni dB di isteresi, cioè di tolleranza, prima di decidere di cambiare stazione radio-base diriferimento.
3Ad essere precisi, il soddisfacimento di tale relazione è il requisito per il solo ricoprimento continuo: la simmetria è cosa a sé.4Celle isocanale sono distribuite in una circonferenza di raggio D.5Se R è il raggio della cella, R
√3
2 è l’apotema dell’esagono scelto per il ricoprimento. Una scelta può essere quella di utilizzare ildoppio di tale apotema come unità di misura, visto che essa è la distanza tra i centri di due esagoni adiacenti.
6. . . e che l’area del parallelogramma può essere trovata tramite un prodotto vettoriale.
88

CAPITOLO 9. SISTEMI D’AREA CELLULARI 89
Spesso, anziché montare le stazioni a centro cella si usa spesso montarle in un angolo (cioè nelleintersezioni fra più celle) e dotare la stazione di tre antenne direttive, puntanti ciascuna nella propria areadi servizio: in questo modo si servono 3 celle con un solo sito al modesto prezzo di una minore uniformitàdi copertura. In tal caso si parla di settorizzazione (vedi figura 9.3).
Figura 9.3: La settorizzazione
In questo modo possiamo godere del maggiore guadagno garantito dalle antenne direttive (loboprincipale di circa 120◦) e riduciamo di circa un terzo l’interferenza fra celle isocanale.
9.2 Accesso multiplo
All’interno di ogni cluster vengono utilizzate tutte le risorse assegnate al servizio, opportunamentesuddivise fra le celle. Tali risorse possono in generale essere descritte come un set di funzioni ortonormali7
ψ1 (t) , ψ2 (t) , . . . , ψNc (t).Ogni volta si attiva un canale di comunicazione, una (o più) fra le Nc funzioni ortonormali viene
assegnata in maniera esclusiva alla comunicazione. Le forme d’onda trasmesse dall’i-mo trasmettitoresono quindi del tipo
si (t) = ui (t)⊗ ψi (t)
7A tal proposito ricordiamo che un insieme funzioni si dice ortonormale se
⟨ψi (t) , ψj (t)
⟩=
∞∫−∞
ψi (t) ψ∗j (t) dt =
{1 se i = j
0 se i 6= j
89

90 CAPITOLO 9. SISTEMI D’AREA CELLULARI
dove u(t) è la forma d’onda con la quale sono stati ’codificati’ i simboli trasmessi. Poiché il canale ra-dio è per sua natura condiviso, il ricevitore i-mo riceve tutti i segnali trasmessi; tuttavia, per recuperarel’informazione desiderata, sarà necessario (previa sincronizzazione!) eseguire la correlazione del segnalecomplessivo ricevuto con tutte le funzioni ortonormali assegnate al canale utile. Solo alcune fra questefunzioni, tuttavia, restituiranno in seguito alla moltiplicazione del segnale ricevuto per loro stesse (ope-razione che supponiamo a priori essere involutoria) il segnale originario (vedi fig. 9.4): tutte le altre, invirtù dell’ortogonalità, non riconosceranno alcuna correlazione nel segnale ricevuto (ed è giusto che siacosì, perché quelle funzioni saranno state associate ad altri!). Il ricevitore riuscirà perciò capire quale frale componenti del segnale è destinata a lui, ma non subirà interferenze dagli altri canali. Come si vede,
Figura 9.4: Funzioni ortonormali e correlazione in sede di ricezione
questa operazione è simile in tutto e per tutto a quella vista per le tecniche di spread-spectrum (vedi par.8.1 per maggiori delucidazioni).
In base alla natura del set di funzioni ψ1 (t) , ψ2 (t) , . . . , ψNc (t) si distingue fra:
• Frequency Division Multiple Access (FDMA): si hanno funzioni ortogonali in frequenza, ovvero dilunghezza temporale pari all’intero periodo T e con bande praticamente disgiunte; la separazionedei canali può essere quindi ottenuta mediante filtri passa-banda. Saranno tuttavia necessarie ’bandedi guardia’ per limitare l’interferenza da canali adiacenti;
• Time Division Multiple Access (TDMA): si hanno funzioni ortogonali in tempo, ovvero non nulle suintervalli temporali disgiunti ed aventi banda pari a tutta la banda disponibile; la separazione deicanali può essere quindi ottenuta mediante opportuna divisione temporale in slot. Saranno necessari’tempi di guardia’ per limitare l’interferenza da canale adiacente;
• una scelta ibrida fra le due precedenti (usata nel GSM);
• Code Division Multiple Access (CDMA): ogni utente ha assegnato un codice il quale, per costruire ilsegnale trasmesso, può essere utilizzato in 2 modi diversi:
– CDMA-DS (Direct Sequence): il codice va a moltiplicare il segnale informativo secondo l’oppor-tuno operatore (involutorio);
– CDMA-FH (Frequency Hopping): il codice determina i salti in frequenza della portante di mo-dulazione.
Il caso CDMA è vantaggioso perché i codici non sono limitati come la banda. Di conseguenza nonc’è motivo di dividere la copertura cellulare in cluster: si fissa quindi m = 1, il che significa che tuttele celle sono uguali (dispongono delle stesse risorse) e che l’interferenza può venire sia dalla cellacorrente (interferenza intra-cella) sia dalle altre (interferenza inter-cella).
90

CAPITOLO 9. SISTEMI D’AREA CELLULARI 91
9.3 Miglioramenti nei sistemi CDMA
In un sistema CDMA tutte le celle operano sulla stessa portante (riuso frequenziale = 1) per cui ilterminale mobile può essere connesso in parallelo a più stazioni base contemporaneamente. Questopermette di implementare due strategie migliorative quali il soft handover (per ottenere il minimo rischiodi interruzione della chiamata nel passaggio da una cella ad un’altra) e la macrodiversità, per migliorare laqualità della chiamata.
9.3.1 Soft handover
Figura 9.5: Soft handover vs. hard handover
Il terminale mobile può coinvolgere nella chiamata tutte le stazioni base da cui riceve un segnaledi riferimento (pilota) sufficientemente buono. Si individuano quindi zone differenti (vedi fig. 9.6): seaddirittura il terminale è connesso a 2 settori della stessa stazione base (copertura settoriale) si parla disofter handover.
Figura 9.6: Active sets
9.3.2 Macrodiversità
Figura 9.7: Macrodiversità
91

92 CAPITOLO 9. SISTEMI D’AREA CELLULARI
Se il numero di active set è maggiore di 1, allora si dice che stiamo operando in macrodiversità. In talcaso:
• downlink: il terminale mobile riceve la stessa informazione utile da più di una stazione base contem-poraneamente. In più, ogni link verso una delle stazioni base dell’active set utilizza una differentecoppia di codici (spreading + scrambling). Il terminale può quindi migliorare la qualità della comuni-cazione combinando i segnali che riceve dalle stazioni base a cui è contemporaneamente connesso(rake receiver).
• uplink: il segnale trasmesso dal mobile viene decodificato da tutte le stazioni base appartenentiall’active set. I segnali decodificati dalle differenti stazioni base dell’active set vengono ricombinatidalla rete a livello superiore. L’effetto netto è quello di ottenere un miglioramento della qualità dellacomunicazione.
9.4 Parametri di bontà di un sistema d’area
I parametri che indicano la bontà di un sistema d’area sono:
• l’estensione dell’area di servizio;
• il numero di utenti serviti detto anche capacita del sistema;
• la bit-rate a disposizione di ciascun utente/collegamento;
• la probabilità di blocking al set-up della comunicazione;
• la probabilità di dropping durante la comunicazione;
• l’occupazione spettrale del sistema;
• il costo degli apparati e dell’installazione (deployment).
La qualità del collegamento aumenta al crescere di m, cioè del cluster size (le celle interferenti si al-lontanano). Tuttavia, se il traffico e elevato, conviene m non troppo elevato, affinché ogni cella abbia adisposizione un numero di risorse sufficiente per far fronte alle richieste di accesso al sistema, mante-nendo la probabilità di blocco (blocking) entro la specifica assegnata; il valore di m deve perciò esserericercato nel compromesso (trade-off ) fra tali esigenze. In alternativa, le esigenze di traffico possono esseresoddisfatte riducendo, a parità di m, la dimensione delle celle (non troppo, per non rendere critica la ge-stione dell’handover), diminuendo le potenze in trasmissione o, più usualmente, aumentando il filtraggiospaziale, ovvero portando le base stations sotto il livello dei tetti.
Dato il traffico offerto da ciascun utente e [Erlang], il numero di utenti nu, il traffico offerto totaleA = e · nu, il numero di canali disponibili nc, e assumendo di avere code di lunghezza nulla, si puòottenere la probabilità di blocco tramite la formula di Erlang:
B (nc, A) =
Anc
nc!nc∑
i=0
Ai
i!
9.5 In sintesi
I sistemi ad area cellulari nascono per via del fatto che risulta impossibile servire aree grandi con un'unica
stazione radio-base: oltre ad essere poco pratico (dovremmo usare potenze enormi e non è che possiamo arrostire
tutti i volatili che passano vicino all'antenna!) dobbiamo fare i conti con risorse limitate (ad es. in frequenza).
Per questo si sceglie di dividere il territorio in cluster, ognuno dei quali contiene m celle: ogni cella userà quindi
una quantità di risorse pari a quella totale riservata al cluster diviso m. Per evitare che il rapporto segnale-rumore
scenda al di sotto della soglia minima di qualità occorre operare in modo che le celle che utilizzano le stesse risorse
(potenzialmente interferenti) stiano ad un opportuna distanza D. Detto R il raggio delle celle, si ha che:
DR
=√
3m
92

CAPITOLO 9. SISTEMI D’AREA CELLULARI 93
Inoltre si può dimostrare che si ha riempimento continuo solo se ogni cluster contiene
m = i2 + ij + j2
celle, dove i e j sono numeri interi non entrambi nulli.
Spesso, anziché montare le stazioni base (questi giganteschi e antiestetici pali) al centro delle celle, si agisce con
più furbizia e si paga il prezzo di una copertura meno uniforme scegliendo di piazzare tre antenne nel medesimo
sito (settorizzazione), ognuna facente riferimento ad uno 'spicchio' di piano avente angolo pari 120◦ (queste
antenne saranno chiaramente direttive nel loro spazio e molto poco trasmittenti altrove). Quel che otteniamo è
un maggiore guadagno e una robusta riduzione dell'interferenza iso-canale.
Le risorse di cui parlavamo poco sopra possono essere schematizzate come un set di funzioni ortonormali:
l'ortonormalità sarà:
• in frequenza, nei sistemi FDMA;
• nel tempo, nei sistemi TDMA;
• nel codice, per i sistemi CDMA: possiamo qui distinguere, come nello SS, fra direct sequence e frequency
hopping. Si noti che il CDMA è vantaggioso in quanto abbiamo un numero esorbitante di possibili codici:
non ha quindi senso parlare di cluster e si �ssa m = 1. I sistemi CDMA possono essere poi migliorati
implementando il soft handover (che minimizza la probabilità di caduta di linea nell'handover) e la ma-
crodiversità, che consiste nel collegare simultaneamente un unico terminale mobile a più stazioni base per
sfruttare al meglio la diversità.
A distinguere fra i vari segnali (e a permettere quindi l'accesso multiplo) ci penserà quindi il ricevitore, che sarà
dotato di un opportuno numero di �ltri in grado di calcolare la correlazione e �ltrare (cioè attenuare) tutti i segnali
ortogonali a quello utile.
La bontà dei sistemi ad area si misura valutando:
• l'estensione dell'area di servizio;
• il numero di utenti serviti (detto anche capacita del sistema) e l'occupazione spettrale del sistema;
• la bit-rate a disposizione di ciascun utente/collegamento;
• la probabilità di blocking e dropping, valutate tramite opportune formule statistiche (v. Erlang);
• i costi.
93

94 CAPITOLO 9. SISTEMI D’AREA CELLULARI
94

Capitolo 10
Pianificazione di sistemi radiomobili
Generalmente la pianificazione di sistemi radiomobili a canali limitati (FDMA, TDMA e ibridi) inun’area omogenea consiste in due fasi:
1. pianificazione in base alla copertura (C/N);
2. pianificazione in base al C/I (segnale utile / interferente).
Di seguito supporremo l’ambiente omogeneo e ideale, con propagazione che segue una legge Hata-likecon fattore α.
10.1 Pianificazione in base alla copertura
In base alla tecnologia degli apparati Tx/Rx esiste una soglia di sensibilità del ricevitore (Psens) consi-stente nella minima potenza ricevuta compatibile con una sufficiente qualità in termini di Bit Error Rate.Generalmente, essendo la potenza trasmessa maggiore presso la base station, il collegamento più critico equello fra terminale mobile e base (uplink): per questo bisognerà considerare un consistente margine difading M f entro il quale includere tutti i possibili inconvenienti (fenomeni di multicammino, scattering,canale radiomobile selettivo, etc. . . ). In tal caso la potenza ricevuta presenta un andamento aleatoriosecondo statistiche note1.
Di solito si considera il solo fading lento log-normale perché il fading rapido viene parzialmente arginatodalla diversità e dalle tecniche di codifica (di esso si tiene conto tramite un margine fisso pari a circa 2-3dB). A bordo cella (r = R, dove R è il raggio della cella) si avrà dunque:
• potenza ricevuta2: PR = Psens = PT + GT + GR − LTOT ;
• attenuazione LTOT = L + MF (più, eventualmente, le perdite LC dovute ai cavi). In questa relazioneMF è il margine di fading;
• termine di attenuazione di tratta L = L(R) = L0 + 10α log R (calcolata con Okumura-Hata, mapotevamo utilizzare un qualsiasi modello empirico).
L è una variabile aleatoria gaussiana con valor medio L e deviazione standard σ: avremo quindi laseguente (classica!) funzione di densità di probabilità
pL (L) =1√
2πσ2e−
(L− L)2
2σ2
Mentre la cumulativa sarà:
FL (L) =12
+12
erf(
L− L√2σ
)1La copertura radio di una cella viene ad essere definita in termini probabilistici.2Porremo la potenza ricevuta pari alla soglia di sensibilità del ricevitore non tanto perché vogliamo essere taccagni e sparagnini
fino all’osso, bensì per evitare interferenze alle altre celle.
95

96 CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI
Se ora calcoliamo la cumulativa in LF, ovvero nel PC-esimo percentile della variabile aleatoria L (PC è laprobabilità di copertura/servizio richiesta a distanza R), si ha:
FL (LF) =12
+12
erf(
LF − L√2σ
)=
12
+12
erf(
MF√2σ
)In quanto il margine di fading è definito come MF = LF − L. Quest’ultima probabilità di copertura,formulata una volta fissata la distanza, viene chiamata location probability (LP).
Il calcolo effettuato corrisponde al caso peggiore. Infatti se si ha probabilità di copertura PC a bor-do cella, su tutta la cella si avrà una probabilità di copertura maggiore essendo minore l’attenuazione.Integrando la location probability (cioè calcolando la probabilità in ogni punto della cella3 e mediando) èpossibile ottenere la probabilità di copertura su tutta la cella:
PC =1
Acella
∫Acella
LP (r) ds =1
πR2
2π∫0
R∫0
LP (r) rdrdφ =2π
πR2
R∫0
LP (r) rdr =
=2
R2
R∫0
(12
+12
erf
(L f − L (r)√
2σ
))rdr
Sostituiamo ora l’espressione LF = L + MF:
PC =2
R2
R∫0
12
+12
erf
LF︷ ︸︸ ︷
L (R) + MF −L (r)√2σ
rdr =
2R2
R∫0
12
+12
erf
10α log( r
R
)+ MF
√2σ
rdr
Si noti che nell’ultimo passaggio si è usata la relazione L = L(R) = L0 + 10α log R. Osserviamo poi, atitolo d’esempio, che per MF = 0 dB si ottiene LP = 0, 5; ciò significa che il 50% delle locazioni a bordocella si trova sotto soglia per il 50% del tempo.
Figura 10.1: Andamento di PC in funzione di σ/α
3Questo è il senso del ds nella formulazione dell’integrale.
96

CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI 97
10.2 Pianificazione in base al C/I
Si tratta di determinare il cluster size che garantisce il C/I per una corretta ricezione4, cioè per una BERsufficientemente bassa. Siccome la relazione tra m e D/R in una copertura a reticolo esagonale uniforme ègià stata ricavata (vedi paragrafo 9.1) occorre mettere ora in relazione D/R e C/I; sia C che I sono variabilialeatorie: tuttavia, per la legge dei grandi numeri, se gli interferenti sono molti si potrebbe approssimareI con il suo valor medio5. L’unico parametro ancora da trovare rimarrebbe quindi C.
Facciamo ora qualche ipotesi di lavoro (vedi fig. 10.2):
• mobile utile a bordo cella (distanza utile = R): in questo modo consideriamo il caso peggiore;
• consideriamo solo gli interferenti della prima cerchia (cioè locati nelle sei celle interferenti più vicinea quella in cui ci troviamo6): distanza degli interferenti da noi = D;
• ogni mobile trasmette la stessa potenza PMS;
• territorio con legge di attenuazione con la distanza Hata-like.
Figura 10.2: Il caso in esame
In questo caso, l’attenuazione sarà semplicemente:
L (r) = L (r0)(
rr0
)α
La potenza del segnale utile (trasmessa dall’unico terminale mobile utile) sarà pari a:
C = PU =PMS
L (R)=
PMSL (r0)
( r0
R
)α
I sei interferenti invece romperanno le scatole con:
I = PI =6PMSL (D)
=6PMSL (r0)
( r0
D
)α
Calcolando il rapporto C/I si ha quindi:
CI
=PUPI
=PMS
L (r0)
( r0
R
)α· L (r0)
6PMS
(Dr0
)α
=16
(DR
)α
Ricordando ora che si ha:DR
=√
3m
Otteniamo:CI
=16
(3m)0,5α
4Tale parametro è detto anche SIRth. Si ricorda inoltre che C/I è un rapporto segnale-rumore.5Nel seguito, per semplicità, considereremo valori medi e si trascureremo il fading.6Il ricoprimento è stato effettuato con celle esagonali.
97

98 CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI
Figura 10.3: Relazione fra C/I, m e α
10.3 Efficienza spettrale
L’efficienza spettrale è un rapporto fra costi (gli operatori sborsano fior fior di quattrini per comprarsile frequenze, quindi bisogna spremerle all’osso!) e benefici (cioè bit-rate) di un sistema radiomobile. Nelcaso ideale e disponendo di numero Nc di canali si può fare la seguente formulazione:
η ,MBr
B
M = numero di utenti
Br = bit - rate per utente
B = banda totale allocata al sistema
Si può inoltre definire la banda equivalente per canale:
B0 =B
NC
Data una certa probabilità di blocco, con Nc canali si possono servire (formula Erlang-B per code alunghezza nulla, vedi paragrafo 9.4) M0 utenti all’interno di uno stesso cluster.
Si possono allora definire 3 efficienze spettrali parziali:
• efficienza nel tempo:
ηt ,M0
NC=
Numero di utenti per clusterNumero di canali
Tale efficienza è maggiore quando il traffico offerto da ciascun utente e basso (gli utenti usano ilservizio in una bassa percentuale di tempo): per sfruttare meglio il canale, che altrimenti sarebbesottoutilizzato, si possono perciò multiplexare più utenti sugli stessi canali;
• efficienza in frequenza:
η f ,Br
B0=
Bit-rate per utenteBanda per canale
Si tratta della la classica efficienza frequenziale e dipende dal codice utilizzato, nonché dalla tecnicadi modulazione, demodulazione. Tecniche ad alta efficienza richiedono un alto SIRth (cioè di un altoC/I per una corretta ricezione).
• efficienza nello spazio:
ηs ,MM0
=Numero di utenti
Utenti in un cluster= Ncluster
Indica il grado di riuso spaziale dei canali.
98

CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI 99
Moltiplicando queste tre definizioni otteniamo l’efficienza propriamente detta:
ηtη f ηs =M0
NC
Br
B0
MM0
=MNC
Br
B0=
MBr
B= η
Ricordando tuttavia che m è il cluster size, possiamo anche scrivere:
η = η fM0
NC︸︷︷︸ηt
Ncluster︸ ︷︷ ︸ηs
= η fM0
NC
Ncellem
Si vede che l’efficienza spettrale dipende dal numero di celle. Se si desidera una figura di merito indipen-dente da questo parametro, e quindi più indicativo della bontà del progetto, si può utilizzare l’efficienzaspettrale per cella:
ηc =η
Ncelle= η f
M0
NC
1m
I primi due fattori (η f eM0
NC) dipendono da tecniche di modulazione e da problematiche di traffico7: il
terzo termine, m è invece dipendente dal rapporto C/I. A prima vista si potrebbe pensare di aumentarel’efficienza aumentando η f , ma modulazioni efficienti in banda richiedono anche un C/I maggiore equindi un m maggiore.
Proviamo ora a sostituire i risultati ottenuti in precedenza, ovvero
CI
=16
(3m)0,5α ⇒ 13
(6CI
)2/α
= m
per vedere che forma assuma l’espressione della potenza:
ηc = η fM0
NC︸︷︷︸costante
1m
= η f k1
m(
CI
) = η f k1
13
(6CI
)2/α=
13
η f k(
6CI
)−2/α
Applicando il logaritmo:
log ηc = log
[13
η f k(
6CI
)−2/α]
= log13
+ log k− 2α
log 6︸ ︷︷ ︸k′
+ log η f + log(
CI
)−2/α
=
= k′ + log η f −2α
log(
CI
)= k′ + log η f −
210α
10 log(
CI
)︸ ︷︷ ︸(C
I
)dB
= k′ + log η f −1
5α
(CI
)dB
Quindi si ha: (CI
)dB
= −5α log ηc + 5α log η f + 5αk′︸︷︷︸k′′
= −5α log ηc + 5α log η f + k′′
Quindi in un diagramma logaritmico C/I in funzione di log η f è una retta di coefficiente angolare pro-porzionale ad α e intercetta che cala con ηc. Sullo stesso diagramma, assimilando l’interferenza a rumoreAWGN si potrebbe rappresentare la curva del teorema di Shannon e vedere come il sistema si comportarispetto al caso ideale (vedi fig. 10.4).
10.4 Pianificazione assistita
Per la pianificazione di sistemi in ambiente urbano in cui la propagazione interagisce fortemente congli ostacoli, possiamo farci aiutare dal computer e sfruttare così opportuni modelli di propagazione. Si
7In particolare,M0
NCtende ad essere una costante nei sistemi con molti canali.
99

100 CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI
Figura 10.4: Analisi dell’efficienza spettrale per cella
tratterebbe questa di una pianificazione deterministica8 in cui è possibile anche la scelta e la pianificazionedei siti (attività dalla quale spesso si parte in quanto la disponibilità di siti è esigua e occorre quindi metteresubito l’accento su tale aspetto). Dopo una pianificazione di massima fatta con i metodi visti, sulla basedel database urbano e della localizzazione dei siti viene effettuata la verifica di copertura e di interferenzaal computer. Se la verifica non è soddisfacente si modificano i parametri o la localizzazione delle BS inmaniera mirata e si ripete la verifica fino ad esito positivo. Alla fine della procedura si può effettuare unasimulazione di sistema per verificare la qualità complessiva del servizio.
Per l’assegnazione delle frequenze si tiene conto solitamente di un salto di due frequenze (per cellenon isocanale appartenenti allo stesso settore) o di una frequenza (se le celle sono di settori diversi):l’algoritmo può essere molto complesso e dipende dalle strategie dell’operatore.
Figura 10.5: Pianificazione assistita al calcolatore
8Non è necessario il calcolo di margini di fading (fatta eccezione per il fading rapido) se si usano modelli di propagazionedeterministici, in cui tali aspetti sono già tenuti in conto.
100

CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI 101
10.5 In sintesi
Sono possibili due tipi di piani�cazioni:
• In base alla copertura (C/N): si �ssa la sensibilità del ricevitore e si cerca di fare in modo che la potenza
ricevuta sia sempre maggiore di tale soglia. Per farlo si tiene in conto non solo l'attenuazione di spazio
libero, ma anche varie attenuazioni aggiuntive e un margine di fading MF calcolato statisticamente mediante
distribuzione lognormale:
pL (L) =1√2πσ
e−
M2f
2σ2 ⇒ cumulativa: FL (L) =12
+12erf
(M2
f√2σ
)
Una stima del genere è già fatta tenendo conto del caso peggiore: se vogliamo fare un calcolo più preciso
possiamo integrare la cumulativa su tutta l'area della cella, assegnando ad ogni punto l'attenuazione precisa
dipendente dalla sua posizione. In ogni caso, quel che otteniamo è una probabilità di copertura detta
location probability.
• In base all'interferenza (C/I): si �ssa il cluster size m in grado di garantire una corretta ricezione. Suppo-
nendo di avere celle esagonali (considereremo i sei interferenti appartenenti alle più vicine celle isocanale,
tutti distanti D), distanza dell'utile dalla BS pari a R (= raggio celle), potenza trasmessa dai terminali pari
a PMS e attenuazione Hata-like si ha:C =
PMSL (R)
( r0
R
)α
I =6PMSL (D)
( r0
D
)α⇒ C
I=
16
(DR
)α D/R=√
3m⇒ C
I=
16
(3m)0,5α
L'e�cienza spettrale è un rapporto costi-bene�ci riferito a un certo sistema radiomobile:
η =Numero utenti · Bit-rate per utente
Banda totale allocata=
NBr
B
Se dividiamo η per NC (numero di canali) otteniamo la banda equivalente per canale. Possiamo tuttavia de�nire
altri tre tipi di e�cienze:
• e�cienza nel tempo:
ηt ,M0
NC=
Utenti in un cluster
Numero di canali
• e�cienza in frequenza:
η f ,Br
B0=
Bit-rate per utente
Banda per canale
• e�cienza nello spazio:
ηs ,MM0
=Numero di utenti
Utenti in un cluster= Ncluster
Moltiplicando tutte queste particolari espressioni di e�cienza otteniamo la η vera e propria.
Ehi! La piani�cazione è dura da fare a mano: serve il calcolatore!
101

102 CAPITOLO 10. PIANIFICAZIONE DI SISTEMI RADIOMOBILI
102

Elenco delle figure
1.1 In spazio libero la potenza decade con α = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2 Differenza tra propagazione in spazio libero e in ambiente reale . . . . . . . . . . . . . . . . . 61.3 In questo caso non solo α varia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1 Righe di assorbimento al variare della frequenza . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Raggio di curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Calcoli per le equazioni fondamentali dell’ottica geometrica . . . . . . . . . . . . . . . . . . . 112.4 Legge di Snell per simmetria sferica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5 Andamento di K in funzione di G . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.6 Cammini multipli e atmosfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.7 Tipi di atmosfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.9 Rispetto al caso K = 1 l’orizzonte radio è maggiore . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Ci sono due contributi principali, il cammino diretto e il raggio riflesso dal terreno. . . . . . 183.2 In uno scenario complesso ci sono diverse interazioni. . . . . . . . . . . . . . . . . . . . . . . 183.3 Riferimenti scelti per la trattazione dell’onda incidente. . . . . . . . . . . . . . . . . . . . . . . 183.4 Scomponiamo i campi in tre nuovi sistemi di riferimento. . . . . . . . . . . . . . . . . . . . . 193.5 Andamento dei coefficienti di riflessione e di rifrazione. Angolo di Brewster. . . . . . . . . . 213.6 Onda incidente, riflessa e rifratta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.7 Polarizzazione TE e TM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.8 Schema di riferimento per la riflessione al suolo . . . . . . . . . . . . . . . . . . . . . . . . . . 233.9 Esempio del PG per un terreno con Γ = −1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.10 Modello a 6 raggi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.11 Andamento del path gain con la distanza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.12 Quando al ricevitore giungono differenti cammini generati dall’interazione dell’onda con
gli oggetti si dice che la propagazione avviene per Cammini Multipli (Multipath). . . . . . . . 263.13 Principio di Huygens-Fresnel e sorgenti secondarie . . . . . . . . . . . . . . . . . . . . . . . . 263.14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.15 Riferimenti per la dimostrazione del teorema di Kirchhoff. . . . . . . . . . . . . . . . . . . . . 283.16 L’integrale deve essere limitato alla porzione di fronte d’onda non intercettato . . . . . . . . 293.17 Esempi di diffrazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.18 Esempio di diffrazione da KE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.19 Andamento dell’attenuazione supplementare in funzione del parametro ν0. . . . . . . . . . . 313.20 Zone di Fresnel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.21 Esempio di un ellissoide di Fresnel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.22 Diffrazione da apertura circolare e zone di Fresnel. . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1 Tipi di propagazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2 il modello ORT necessita di un profilo del radio collegamento. . . . . . . . . . . . . . . . . . 374.3 Andamento della potenza in ambiente reale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.4 Componenti dell’attenuazione in ambiente reale. . . . . . . . . . . . . . . . . . . . . . . . . . 384.5 Margine di fading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.6 Esempio di modello Hata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.7 Esempio di caratterizzazione tramite knife-edge . . . . . . . . . . . . . . . . . . . . . . . . . . 40
103

104 ELENCO DELLE FIGURE
4.8 Esempio di un solo knife-edge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.9 Esempio modello di Epstein-Peterson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.10 L’attenuazione supplementare totale è valutata come prodotto delle singole attenuazioni sui
cammini parziali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.11 Esempio di modello di Berg. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.12 Esempio modello Multi-Wall. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.1 Le teorie in gioco. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.3 Onda astigmatica generica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.4 Tutti i raggi difratti appartengono al cono di Keller . . . . . . . . . . . . . . . . . . . . . . . . 485.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.8 Esempio di riflessione di un’onda sferica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.10 Doppia interazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.2 Esempio di costruzione delle regioni di visibilità per due riflessioni. . . . . . . . . . . . . . . 566.3 Esempio di view tree. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.4 Per determinare P si devono dispiegare i due piani. . . . . . . . . . . . . . . . . . . . . . . . . 576.5 Esempio di backtracking. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586.6 Circuito equivalente d’antenna. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586.7 Dopo qualche interazione l’errore medio si stabilizza. . . . . . . . . . . . . . . . . . . . . . . . 596.8 Esempio di uso del modello 2D+2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7.1 Funzione di trasferimento del canale radiomobile. . . . . . . . . . . . . . . . . . . . . . . . . . 637.2 Equivalente passa basso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 647.3 Risposta impulsiva del canale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 657.4 Propagazione multicammino: la H( f ) non ha modulo costante in frequenza . . . . . . . . . 667.5 Fading piatto e selettivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 667.6 Mobilità del terminale ricevente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 677.7 Le 4 funzioni del canale radiomobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 687.8 Combinazione lineare dei segnali ricevuti. Si noti che la formula in fondo alla figura è un
rapporto segnale-rumore. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727.9 Esempi si sistemi MIMO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.10 Schematizzazione a matrice del canale MIMO. . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
8.1 Schema generale della codifica spread spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . 778.2 Lo spreading nel caso antipodale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 788.3 Il despreading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798.4 Funzione di autocorrelazione della sequenza PN . . . . . . . . . . . . . . . . . . . . . . . . . . 798.5 Effetto dello spreading e del de-spreading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 808.6 Spreading e scrambling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 818.7 Codici di spreading e scrambling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 818.8 Il rake receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.1 Problematiche interferenziali e filtraggio spaziale . . . . . . . . . . . . . . . . . . . . . . . . . 879.2 Un cluster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 889.3 La settorizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 899.4 Funzioni ortonormali e correlazione in sede di ricezione . . . . . . . . . . . . . . . . . . . . . 909.5 Soft handover vs. hard handover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 919.6 Active sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 919.7 Macrodiversità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
10.1 Andamento di PC in funzione di σ/α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
104

ELENCO DELLE FIGURE 105
10.2 Il caso in esame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.3 Relazione fra C/I, m e α . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9810.4 Analisi dell’efficienza spettrale per cella . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10010.5 Pianificazione assistita al calcolatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
105