
RELAZIONE TECNICA - risknet-alcotra.org · La realizzazione di rilievi fotogrammetrici a supporto...
34
GEODIGITAL Solutions S.r.l. (Spin-off dell’Università degli Studi di Parma) Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto RiskNat - Anno 2011/2012 Rilievo fotogrammetrico del bacino del torrente Regoud RELAZIONE TECNICA Committente: Fondazione Montagna Sicura Località Villard de La Palud, 1 11013 Courmayeur (AO) Elaborato: Relazione Tecnica Data: 27 Febbraio 2012 Revisione: Finale Riferimento: FMS1201_RelazioneTecnica.pdf
Transcript of RELAZIONE TECNICA - risknet-alcotra.org · La realizzazione di rilievi fotogrammetrici a supporto...
GEODIGITAL Solutions S.r.l.(Spin-off dell’Università degli Studi di Parma)
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto RiskNat - Anno 2011/2012
Rilievo fotogrammetrico del bacino del torrente Regoud
RELAZIONE TECNICA
Committente: Fondazione Montagna Sicura Località Villard de La Palud, 1 11013 Courmayeur (AO)
Elaborato: Relazione TecnicaData: 27 Febbraio 2012Revisione: FinaleRiferimento: FMS1201_RelazioneTecnica.pdf


i RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
RILIEVO DEL REGOUD . . . . . . . . . . . . . . . . . . . . . . . 1
INTRODUZIONE . . . . . . . . . . . . . . . . . . . . . . . . . . 1Descrizione generale dell'intervento 1Individuazione delle opere e struttura del documento 2
1. PROGETTO DEL RILIEVO . . . . . . . . . . . . . . . . . . . . . 5Specifiche del rilievo e precisioni 5Tecniche fotoGPS 6
2. ACQUISIZIONE DEI DATI . . . . . . . . . . . . . . . . . . . . . 9Sistema di riferimento 9Rete di inquadramento 9Rilievo dei punti di appoggio 10
3. RILIEVO FOTOGRAMMETRICO . . . . . . . . . . . . . . . . . . 13Orientamento del blocco fotogrammetrico 13Prima blocco fotogrammetrico (agosto) 14Secondo blocco fotogrammetrico (ottobre) 16Compensazione PhotoGPS 18Generazione dei DSM 25
4. PRODOTTI RESTITUITI . . . . . . . . . . . . . . . . . . . . . . 27Nuvole di punti e DSM 27
CONCLUSIONI . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
INDICE

1 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Descrizione generale dell'intervento
La realizzazione di rilievi fotogrammetrici a supporto delle indagini geomeccaniche relative al sito del Regoud, in Val di Rhemes (AO), è consistita in una serie di interventi mirati al raccoglimento delle informazioni morfologiche e tematiche necessari all’applicazione delle metodologie di analisi innovative.L’analisi di stabilità di pareti rocciose può essere affrontata con due approcci differenti: tra-mite lo studio statistico delle giaciture di piani di frattura o di discontinuità oppure trami-te la modellazione meccanica dell’ammasso (ovvero tramite uno studio deterministico). In entrambi i casi occorre determinare le caratteristiche geometrico-morfologiche della parete ed in particolare mettere in evidenza la posizione e l’orientamento dei diversi piani di di-scontinuità che compongono l’ammasso. Attualmente il rilievo di tali caratteristiche avviene per via diretta: uno scalatore professionista, munito di bussola geotecnica e nastro metrico, calandosi lungo la parete rocciosa, va ad individuare le informazioni ritenute caratterizzanti per l’ammasso. Il metodo risulta però, oltre che estremamente laborioso e costoso, anche poco efficiente e indubbiamente non adeguato dal punto di vista della sicurezza. In molti casi (fra cui quello del sito in oggetto) l’accessibilità diretta alla parete è difficoltosa, e in alcune circostanze la possibilità di avere distacco di materiale mette a repentaglio l’incolumità degli addetti al rilievo. Analoghe considerazioni possono essere fatte per il caso di analisi e model-lazione di fenomeni di caduta massi.In particolare il sito in esame presenta caratteristiche tali che difficilmente sarebbe possibile operare come appena descritto: l’estensione dell’ammasso e il fatto che le zone che manifesta-no instabilità si trovano ad alta quota e sono difficilmente accessibili rendono estremamente poco efficiente l’approccio diretto; al tempo stesso avere una chiara comprensione di tutte le dinamiche che possono avere luogo su un corpo così ampio diventa estremamente improba-bile se il problema viene affrontato con metodi come quelli appena descritti.La soluzione proposta consiste nel rilevare la superficie dell’ammasso con metodi indiretti (fotogrammetria o laser scanner terrestre), realizzare un modello digitale della parete e, con opportuni strumenti software, effettuare le misurazioni richieste sul modello digitale stesso. La metodologia permette di risolvere tutti i problemi connessi all’accessibilità della parete e risulta adeguata dal punto di vista della sicurezza; fornisce la possibilità al professionista di avere una descrizione completa della morfologia della parete, interrogabile in qualsiasi momento in tempi estremamente brevi e senza la necessità di integrare il rilievo con ulteriori misure. Al tempo stesso, dal punto di vista economico, risulta una soluzione oltre che più
RILIEVO DEL REGOUDINTRODUZIONE
2
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
rapida anche molto meno dispendiosa. Studi recenti al riguardo1 mostrano come su una gamma di lavori piuttosto comuni in questo ambito si possano avere costi del 20÷25% infe-riori con questo tipo di tecniche.La necessità di fornire una soluzione che possa essere accessibile al più ampio gruppo possi-bile di utilizzatori ci ha portato a sviluppare un prodotto software/hardware estremamente flessibile, scalabile e che possa fornire una reale alternativa ai metodi di rilievo tradizionali, tanto su piccola scala e in condizioni di accessibilità ottimali, che su grande scala e con pro-blemi di inaccessibilità della parete.Il processo di rilievo e analisi può essere schematizzato in tre successivi passaggi:
1. Acquisizione delle informazioni tridimensionali della parete (nuvola di punti): il processo può essere compiuto mediante laser a scansione o mediante un blocco foto-grammetrico. Nel primo caso, se vengono effettuate più scansioni dell’oggetto, occorre co-registrare (ovvero riferire allo stesso sistema di riferimento) le diverse scansioni. Nel secondo caso sono stati sviluppati algoritmi automatici per far svolgere completamente al calcolatore tutte le operazioni fotogrammetriche (orientamento del blocco, indivi-duazione di punti corrispondenti sui vari fotogrammi e triangolazione dei punti della nuvola). Al termine della procedura, indipendentemente dal tipo di tecnica utilizzata, il prodotto ottenuto è una nuvola di punti (centinaia di migliaia fino ad alcuni milioni di punti tridimensionali) che descrive la morfologia della parete.2. Estrazione delle informazioni dalla nuvola di punti: mediante un software appo-sitamente sviluppato, andando a misurare le grandezze di interesse direttamente sulla nuvola di punti o su un’immagine orientata della parete, l’utilizzatore può determinare la posizione dei diversi piani di discontinuità, il loro orientamento, la loro estensione, può misurare distanze fra elementi di interesse della parete, analizzare sezioni dell’am-masso, etc.3. Analisi e modellazione della parete rocciosa: Le tecniche messe a punto si possono facilmente interfacciare con le numerose soluzioni già presenti sul mercato per l’analisi di stabilità. Inoltre sono già allo studio soluzioni che dai dati del punto 2 derivino au-tomaticamente una modellazione preliminare dell’ammasso, riducendo anche i tempi di analisi dei dati.
Individuazione delle opere e struttura del documento
A seguito di diversi incontri con la stazione appaltante e le persone incaricate dello svol-gimento delle analisi geomeccaniche relative alle problematiche di stabilità e di distacco e caduta massi che interessano il sito in questione si è giunti ad individuare le zone da rilevare come di seguito indicate:
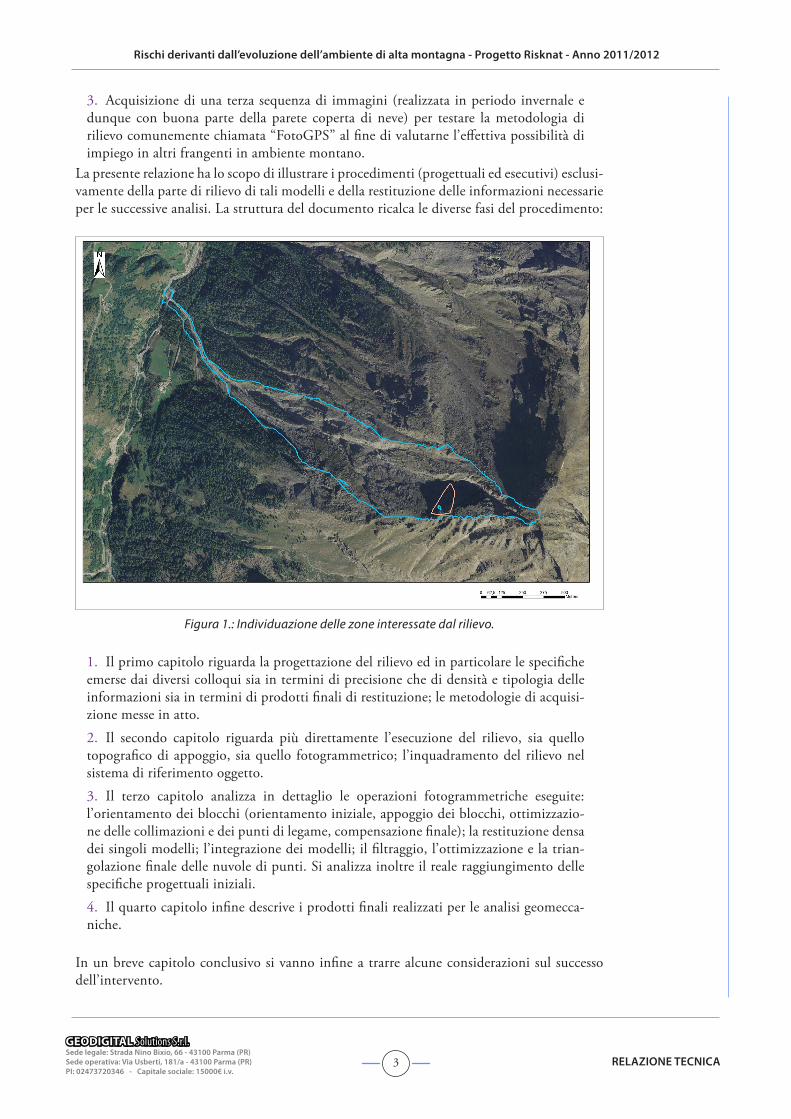
1. Acquisizione completa di fotogrammi a medio dettaglio di tutta la parete interessata dai distacchi fino ad una quota indicativa di circa 1800-2000 m (ovvero a poche centi-naia di metri sopra il livello stradale) della parete con sviluppo in planimetria variabile da circa 200 m fino a circa 350 m (si veda figura 1); per tutto il bacino così individuato realizzazione di un modello digitale del terreno a medio dettaglio.2. Acquisizione di una seconda serie di fotogrammi di dettaglio della sola zona di dettaglio (indicata in rosa in figura 1) di sviluppo approssimativo pari a 200x100 m; in tale zona l’incarico non prevede la restituzione di un DTM di dettaglio in quanto, con buona probabilità, le informazioni desumibili dal modello di cui al punto 1 sono già sufficienti a fornire le informazioni richieste.
1 SivedaadesempioS.Slobetal.,2005.A method for automated discontinuity analysis of rock slopes with 3D laser scanning.InTransportationResearchRecord1913(2005)1,pp.187-208.
3 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
3. Acquisizione di una terza sequenza di immagini (realizzata in periodo invernale e dunque con buona parte della parete coperta di neve) per testare la metodologia di rilievo comunemente chiamata “FotoGPS” al fine di valutarne l’effettiva possibilità di impiego in altri frangenti in ambiente montano.
La presente relazione ha lo scopo di illustrare i procedimenti (progettuali ed esecutivi) esclusi-vamente della parte di rilievo di tali modelli e della restituzione delle informazioni necessarie per le successive analisi. La struttura del documento ricalca le diverse fasi del procedimento:
Figura 1.: Individuazione delle zone interessate dal rilievo.
1. Il primo capitolo riguarda la progettazione del rilievo ed in particolare le specifiche emerse dai diversi colloqui sia in termini di precisione che di densità e tipologia delle informazioni sia in termini di prodotti finali di restituzione; le metodologie di acquisi-zione messe in atto.2. Il secondo capitolo riguarda più direttamente l’esecuzione del rilievo, sia quello topografico di appoggio, sia quello fotogrammetrico; l’inquadramento del rilievo nel sistema di riferimento oggetto.3. Il terzo capitolo analizza in dettaglio le operazioni fotogrammetriche eseguite: l’orientamento dei blocchi (orientamento iniziale, appoggio dei blocchi, ottimizzazio-ne delle collimazioni e dei punti di legame, compensazione finale); la restituzione densa dei singoli modelli; l’integrazione dei modelli; il filtraggio, l’ottimizzazione e la trian-golazione finale delle nuvole di punti. Si analizza inoltre il reale raggiungimento delle specifiche progettuali iniziali.4. Il quarto capitolo infine descrive i prodotti finali realizzati per le analisi geomecca-niche.
In un breve capitolo conclusivo si vanno infine a trarre alcune considerazioni sul successo dell’intervento.
4
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
5 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Obiettivo del rilievo era la produzione di un modello digitale del terreno nelle aree da restituire. Le informazioni raccolte sono funzionali, fra l’altro, all’analisi di stabilità (ma eventualmente anche di caduta massi) della parte sommitale del corpo roccioso. I dati rac-colti dovevano pertanto permettere l’individuazione delle diverse discontinuità superficiali dell’ammasso. L’acquisizione datie la restituzione doveva essere estesa a tutto il bacino anche se, in una fase iniziale, si era stabilito di limitare gli interventi solo ad una zona campione ritenuta significativa nella parte sommitale della parete.Dalle necessità emerse, si è ritenuto come più consono (sia in termini operativi che economi-ci) un approccio fotogrammetrico: grazie ad esso è possibile infatti produrre modelli digitali dell’intero ammasso sufficientemente dettagliati, con il grado di precisione richiesto (vedi prossimo paragrafo) in un’unico intervento. Per la corretta georeferenziazione dei blocchi/modelli fotogrammetrici è stato necessario prevedere un rilievo topografico ausiliario che permettesse di ottenere un sufficiente numero di punti d’appoggio. Il sito è stato ritenuto particolarmente adatto per valutare le possibilità offerta dalle tecniche fotoGPS (utilizzando un sistema integrato che affianca alla camera fotogrammetrica un ricevitore GPS, permet-tendo di evitare l’appoggio del blocco per mezzo di punti sull’oggetto), il rilievo topografico aveva comunque lo scopo di irrobustire la soluzione di orientamento. In realtà, non essendo stato possibile avere a disposizione immagini del bacino adatte alla ricostruzione del DTM (in particolare senza copertura nevosa) che disponessero contemporaneamente dei dati di na-vigazione GPS, si è deciso di realizzare un secondo volo ed una seconda campagna di acqui-sizione e restituzione al solo scopo di valutare le effetive prestazioni del sistema fotoGPS. Per la prima sequenza di immagini si è quindi deciso di georiferire i blocchi/modelli utilizzando punti d’appoggio opportunamente rilevati.Di seguito verranno analizzate le specifiche richieste per la realizzazione dei modelli digitali dell’ammasso, la progettazione della rete topografica d’appoggio, del blocco fotogrammetri-co, e verranno descritte le prime fasi di ricognizione e sopralluogo e di verifica della possibi-lità di utilizzo delle tecniche fotoGPS.
Specifiche del rilievo e precisioni
Le riprese fotogrammetriche erano finalizzate ad ottenere un modello digitale complessivo della parete rocciosa e del terreno avente spaziatura media tra i punti di circa 20 cm, con precisione stimata in circa 15÷20 cm.Per ottenere il grado di precisione richiesta si è deciso di utilizzare un obbiettivo grandango-lare Nikon da 35 mm montato su una fotocamera digitale Nikon D3X (focale equivalente
1. PROGETTO DEL RILIEVO

6
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
35 mm) con risoluzione 6048x4032 pixel.Si è deciso di utilizzare uno schema di blocco simile a quelli utilizzati in un tradizionale volo aerofotogrammetrico per fini cartografici: una serie di strisciate orizzontali a distanza circa costante dalla parete. Ammettendo un ricoprimento longitudinale dei fotogrammi pari al 60%, le precisioni richieste per il modello globale dell’ammasso impongono che la distanza di presa dal fronte sia all’incirca di 200 m. La conduzione del volo, in termini di mante-nimento e impostazione di rotta, quota e velocità, è stata affidata al pilota dell’elicottero utilizzato per acquisire le informazioni, non essendovi possibilità di controllo da parte del fotografo. Date le caratteristiche della parete, la ristrettezza della fascia di terreno utile per collimazioni da terra con teodolite e conseguentemente le visuali fortemente inclinate sui punti nella fascia superiore della parete, è stato necessario cercare di ridurre la determinazione dei punti di appoggio allo stretto necessario. Le caratteristiche del luogo, e la necessità di garantire una buona distribuzione su tutta la superficie dell’ammasso dei punti d’appoggio, ha vincolato decisamente la progettazione del rilievo topografico terrestre. Ciononostante, la non trascu-rabile altezza della parete ha reso la fase di collimazione decisamente laboriosa. Per rendere più robusta la rete topografica e per georiferire il modello finale, ciascun punto di stazione è stato determinato anche per mezzo di osservazioni GPS.
Tecniche fotoGPS
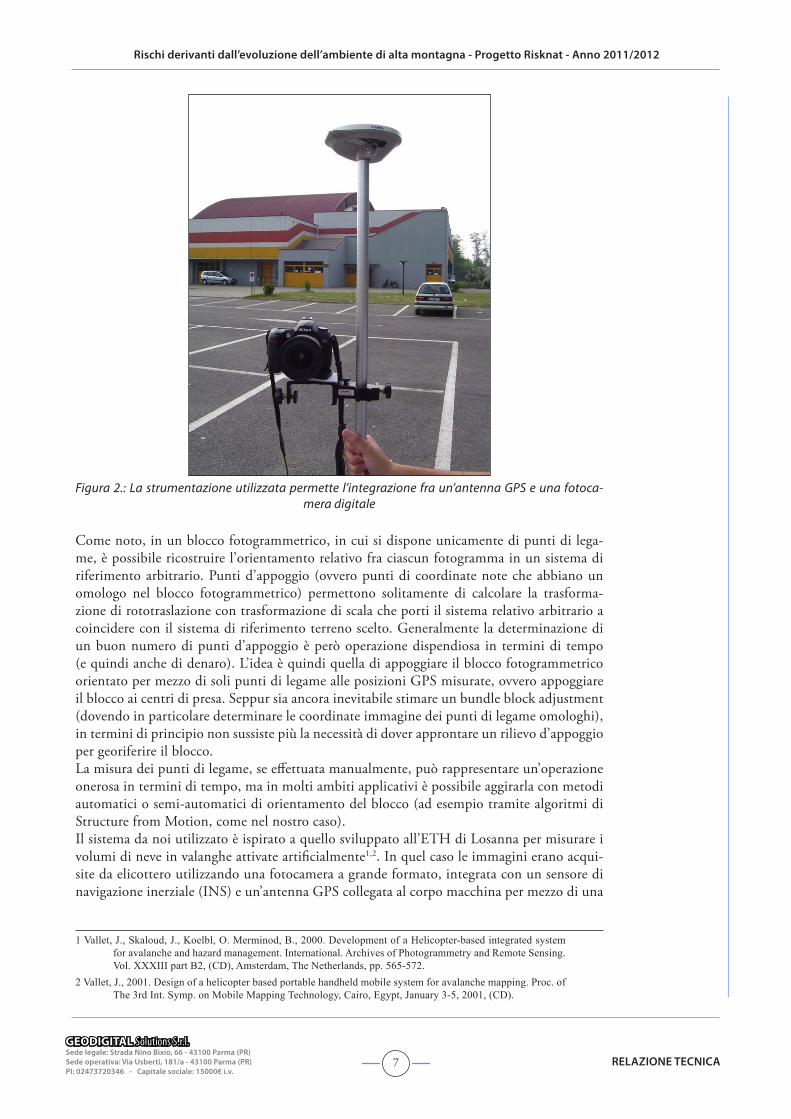
Ci sembra utile, per una miglior comprensione dei risultati emersi dalla sperimentazione, illustrare brevemente i principi di funzionamento delle tecniche fotoGPS in quanto potreb-bero rappresentare, in un futuro, un sostanziale superamento della necessità di disporre di un rilievo topografico d’appoggio, riducendo sensibilmente i tempi di esecuzione di un rilievo analogo a quello in oggetto e conseguentemente i costi ad esso connesso.Per integrare efficacemente le due tecniche (fotogrammetria e GPS), l’idea è quella di uti-lizzare uno strumento di misura ibrido composto da un ricevitore GPS accoppiato ad una camera fotogrammetrica (si veda figura 2.). Il GPS fornisce, tenuto conto dell’eccentricità fra centro di fase dell’antenna e centro di proiezione della camera, i parametri di orientamento esterno di ciascun fotogramma. Per far si che ciò avvenga è necessario calcolare in maniera indiretta le posizioni dei centri di presa e gli angoli di assetto della camera per ciascun foto-gramma integrando le osservazioni con alcuni punti di legame.
7 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Figura 2.: La strumentazione utilizzata permette l’integrazione fra un’antenna GPS e una fotoca-mera digitale
Come noto, in un blocco fotogrammetrico, in cui si dispone unicamente di punti di lega-me, è possibile ricostruire l’orientamento relativo fra ciascun fotogramma in un sistema di riferimento arbitrario. Punti d’appoggio (ovvero punti di coordinate note che abbiano un omologo nel blocco fotogrammetrico) permettono solitamente di calcolare la trasforma-zione di rototraslazione con trasformazione di scala che porti il sistema relativo arbitrario a coincidere con il sistema di riferimento terreno scelto. Generalmente la determinazione di un buon numero di punti d’appoggio è però operazione dispendiosa in termini di tempo (e quindi anche di denaro). L’idea è quindi quella di appoggiare il blocco fotogrammetrico orientato per mezzo di soli punti di legame alle posizioni GPS misurate, ovvero appoggiare il blocco ai centri di presa. Seppur sia ancora inevitabile stimare un bundle block adjustment (dovendo in particolare determinare le coordinate immagine dei punti di legame omologhi), in termini di principio non sussiste più la necessità di dover approntare un rilievo d’appoggio per georiferire il blocco.La misura dei punti di legame, se effettuata manualmente, può rappresentare un’operazione onerosa in termini di tempo, ma in molti ambiti applicativi è possibile aggirarla con metodi automatici o semi-automatici di orientamento del blocco (ad esempio tramite algoritmi di Structure from Motion, come nel nostro caso). Il sistema da noi utilizzato è ispirato a quello sviluppato all’ETH di Losanna per misurare i volumi di neve in valanghe attivate artificialmente1,2. In quel caso le immagini erano acqui-site da elicottero utilizzando una fotocamera a grande formato, integrata con un sensore di navigazione inerziale (INS) e un’antenna GPS collegata al corpo macchina per mezzo di una
1Vallet,J.,Skaloud,J.,Koelbl,O.Merminod,B.,2000.DevelopmentofaHelicopter-basedintegratedsystemforavalancheandhazardmanagement.International.ArchivesofPhotogrammetryandRemoteSensing.Vol.XXXIIIpartB2,(CD),Amsterdam,TheNetherlands,pp.565-572.
2Vallet,J.,2001.Designofahelicopterbasedportablehandheldmobilesystemforavalanchemapping.Proc.ofThe3rdInt.Symp.onMobileMappingTechnology,Cairo,Egypt,January3-5,2001,(CD).
8
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
palina. La presenza del sistema inerziale rende superflua l’individuazione dei punti di legame e il successivo bundle block adjustment, in quanto gli angoli d’assetto di ciascun fotogramma possono essere calcolati direttamente.

9 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
La prima acquisizione delle immagini dell’intero bacino, secondo le indicazioni di progetto illustrate nel precedente capitolo, è stata effettuata in data 20 agosto 2011, mentre il rilievo dei punti d’appoggio e stato eseguito in data 20 e 21 agosto 2011.La seconda acquisizione delle immagini, stavolta accoppiate a misure GPS è stata effettuata in data 29 ottobre 2011.
Sistema di riferimento
Le misure fotogrammetriche sono state compensate in un sistema di riferimento cartesiano locale, con origine sul punto di coordinate geografiche WGS84 (f = 45° 36’ 59.67297”; l = 7° 9’ 24.72716”; h=0.0 m) corrispondenti a coordinate UTM-WGS84 (N=5053100.000 m; E=356300.000 m; h= 0.000 m). Il sistema adottato ha il piano xy orizzontale e l’asse y diretto verso il Nord cartografico (Nord rete). La scelta di un sistema cartesiano locale è stata fatta per poter lavorare in una geometria corretta per la compensazione del blocco, essendo le equazioni di collinearità espresse in un sistema cartesiano e non cartografico. Essendo la georeferenziazione effettuata con GPS, le quote sono ellissoidiche; quelle nel sistema di riferimento locale sono ovviamente convenzionali (riferite al piano orizzontale); non è stata pertanto calcolata l’ondulazione del geoide.
Rete di inquadramento
La funzione della rete di inquadramento è quella di fornire punti di coordinate note con elevata precisione, con due finalità: predisporre la stazione master GPS a terra da impiegare nel volo di ripresa con GPS e fornire una serie di punti ben disposti rispetto alla parete per il rilievo con total station dei punti di appoggio del blocco fotogrammetrico.Una ricognizione preliminare ha escluso la possibilità di rilievo dei punti di appoggio da singola stazione, dati i dislivelli e le distanze in gioco, superiori alla portata di qualunque distanziometro no-prism in produzione. Dovendo quindi impiegare un rilievo di tipo solo angolare per intersezione, sono stati individuati 2 punti di stazione, situati su versanti op-posti della valle in posizione tale da avere una visuale non troppo differente (il che favorisce la riconoscibilità dei punti) pur mantenendo una base sufficientemente elevata in rapporto alla distanza dalla parete. La scelta non è ideale in termini di omogeneità dell’ellisse d’errore, ma i vincoli costituiti dalla morfologia dei versanti, dalla vegetazione d’alto fusto, dall’inter-visibilità tra le stazioni e dalla visibilità della costellazione satellitare hanno oggettivamente impedito soluzioni diverse. I vertici sono stati materializzati impiegando picchetti oppor-tunamente colorati per essere più facilmente individuati: tuttavia, essendo quelle zone di passaggio per il bestiame al pascolo non si può escludere che nel tempo i picchetti vengano
2. ACQUISIZIONE DEI DATI

10
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
spostati o addirittura rimossi.Nel corso delle misure effettuate nel luglio 2011 si è proceduto a rilevare con GPS una se-rie di punti utili sia per la georeferenziazione del volo di ripresa sia per la determinazione di punti d’appoggio e/o di verifica sulla parete. In particolare sono state determinate con GPS 4 stazioni, poi collegate con una poligonale planoaltimetrica per controllo, dalle quali orientare le osservazioni angolari con teodolite verso la parete; tale schema di misura, più impegnativo di quello adottato nel caso del Pellaud, si è reso necessario per l’impossibilità di trovare posizioni accessibili ed intervisibili che fossero ben collocate rispetto alla parete. Per determinare i 4 punti sono state effettuate due distinte sessioni di misure GPS, ciascuna con due ricevitori. Due delle sessioni, processate rispetto alla stazione permanente di Morgex del-la rete INGV, distante circa 24 km, hanno avuto sdurara di 4h e 40’ e 5h 50’ rispettivamente. Determinate le coordinate di queste due stazioni, i rimanenti punti sono stati rilevati rispet-to a queste ultime con sessioni più corte, (39’ e 1h) essendo la distanza in gioco ben inferiore al km. Come già ricordato per rilievi precedenti (Pellaud) non è stato possibile individuare in quale SdR sono date le coordinate di Morgex; si tratta molto probabilmente di una rea-lizzazione ETRF (2000 o 2005); non sono pertanto disponibili parametri di trasformazione accurati verso i sistemi nazionali. Tuttavia, per un impiego di tipo cartografico, si può ragio-nevolmente assumere che le eventuali conversioni in ED50 e quote ortometriche possano essere effettuate impiegando Verto2k e ipotizzando per i dati la realizzazione ETRF2000.La precisione delle componenti delle baselines stimata dall’elaborazione dati, come accade normalmente con misure GPS, è sempre inferiore al mm: ovviamente tale valore è di almeno di un ordine di grandezza ottimista rispetto alla realtà, anche e soprattutto perché non tiene conto degli errori sistematici non totalmente eliminati dal procedimento di differenziazione rispetto alla master. Una valutazione empirica della accuratezza delle coordinate (e al tempo stesso una verifica di compatibilità tra misure GPS e topografiche), è stata ottenuta calco-lando gli errori di chiusura della poligonale topografica con la quale sono stati collegati i 4 punti GPS; l’errore planimetrico è risultato di 1 cm in Est e 1 cm in Nord mentre quello di orientamento di 70cc, ovvero 0.007 gon, valori che mostrano un ottimo accordo tra le due serie di misure.
Rilievo dei punti di appoggio
Le zone dove disporre i punti di appoggio sono state dapprima individuate approssimativa-mente localizzandoli sul contorno dell’area di interesse sulla base di foto aeree riprese duran-te una ricognizione precedente. Successivamente, in stazione col teodolite, i punti sono stati individuati in via definitiva, collimati e registrati sulle monografie digitali del total station in modo da poterli ritrovare e collimare sui fotogrammi. Tutti i punti sono stati collimati per intersezione angolare semplice in avanti: questa in-tersezione è non ridondante in planimetria e ridondante in quota. Pertanto, nel caso la collimazione dai due vertici fosse non accurata (ad esempio per la difficoltà ad identificare il particolare, data la differente prospettiva) si avrebbe un residuo significativo nelle sole misure zenitali. Complessivamente sono stati determinati circa una cinquantina di punti, di cui una quindicina eliminati dopo la compensazione altimetrica a causa di parallassi eccessive. La compensazione è stata effettuata separatamente per planimetria e altimetria. Dapprima sono state calcolate le coordinate cartografiche dei punti per intersezione angolare in avanti a partire dalle posizioni delle stazioni di teodolite determinate con GPS.Successivamente, a partire dalle coordinate cartografiche, sono state calcolate le distanze el-lissoidiche tra ogni punto rilevato e ciascuna stazione. Infine sono state compensate le misure zenitali determinando le quote ellissoidiche dei punti con livellazione trigonometrica.I punti così determinati in ENh sono poi stati trasformati nel SdR locale con origine nella stazione di teodolite, utilizzando le coordinate GPS per calcolare i parametri di trasforma-zione.
11 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
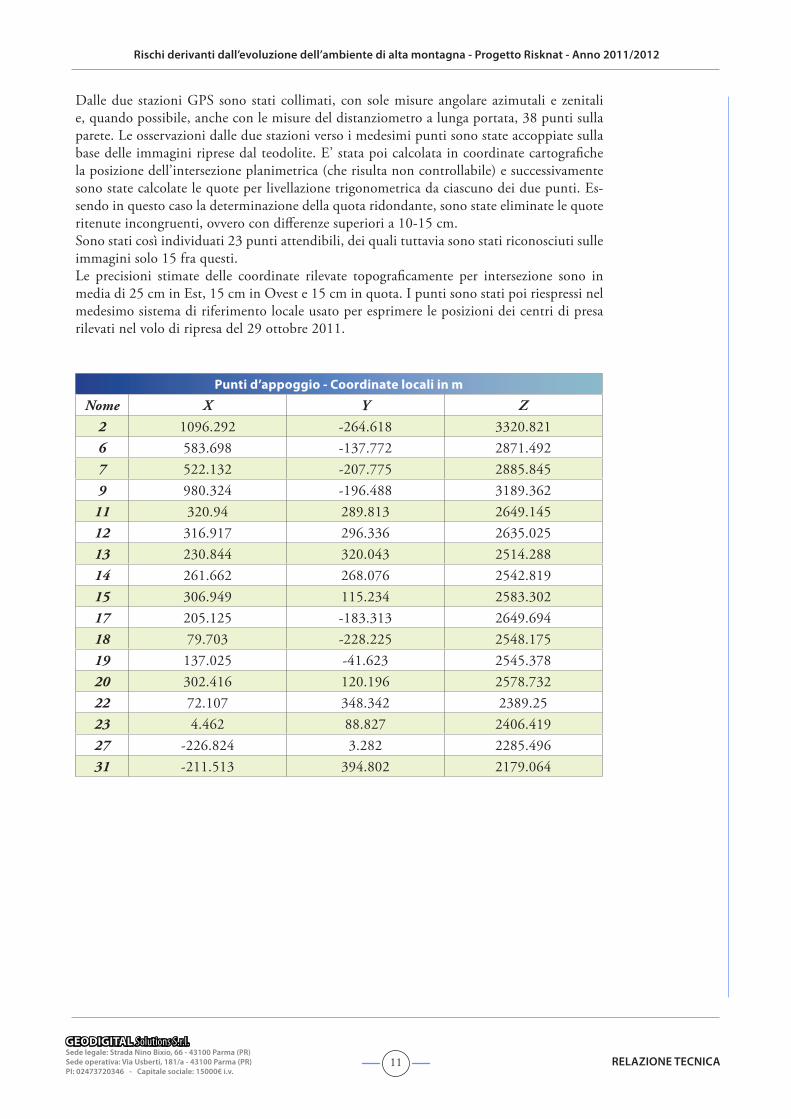
Dalle due stazioni GPS sono stati collimati, con sole misure angolare azimutali e zenitali e, quando possibile, anche con le misure del distanziometro a lunga portata, 38 punti sulla parete. Le osservazioni dalle due stazioni verso i medesimi punti sono state accoppiate sulla base delle immagini riprese dal teodolite. E’ stata poi calcolata in coordinate cartografiche la posizione dell’intersezione planimetrica (che risulta non controllabile) e successivamente sono state calcolate le quote per livellazione trigonometrica da ciascuno dei due punti. Es-sendo in questo caso la determinazione della quota ridondante, sono state eliminate le quote ritenute incongruenti, ovvero con differenze superiori a 10-15 cm.Sono stati così individuati 23 punti attendibili, dei quali tuttavia sono stati riconosciuti sulle immagini solo 15 fra questi. Le precisioni stimate delle coordinate rilevate topograficamente per intersezione sono in media di 25 cm in Est, 15 cm in Ovest e 15 cm in quota. I punti sono stati poi riespressi nel medesimo sistema di riferimento locale usato per esprimere le posizioni dei centri di presa rilevati nel volo di ripresa del 29 ottobre 2011.
Punti d’appoggio - Coordinate locali in m
Nome X Y Z2 1096.292 -264.618 3320.8216 583.698 -137.772 2871.4927 522.132 -207.775 2885.8459 980.324 -196.488 3189.36211 320.94 289.813 2649.14512 316.917 296.336 2635.02513 230.844 320.043 2514.28814 261.662 268.076 2542.81915 306.949 115.234 2583.30217 205.125 -183.313 2649.69418 79.703 -228.225 2548.17519 137.025 -41.623 2545.37820 302.416 120.196 2578.73222 72.107 348.342 2389.2523 4.462 88.827 2406.41927 -226.824 3.282 2285.49631 -211.513 394.802 2179.064
12
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA

13 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Orientamento del blocco fotogrammetrico
Come già anticipato, per la restituzione del DSM, si è deciso in fase di progettazione di utilizzare una fotocamera digitale Nikon D3X (risoluzione 6048x4032 pixel) con obbiettivo Nikor da 35 mm (equivalente sul formato 36mm ad un’ottica da 35 mm). I parametri di orientamento interno della camera e i parametri di distorsione dell’ottica sono stati prece-dentemente determinati mediante calibrazione analitica.Per eseguire l’orientamento del blocco fotogrammetrico si è deciso di utilizzare algoritmi automatici di structure from motion. Normalmente l’orientamento dei blocchi fotogram-metrici viene eseguito manualmente determinando nelle zone di sovrapposizione dei singoli modelli e delle diverse strisciate punti di legame ben riconoscibili. L’operazione può tutta-via risultare onerosa in termini di tempo soprattutto quando il numero di fotogrammi che compone il blocco è grande (per il primo blocco si dovevano orientare almeno duecento im-magini) e le caratteristiche superficiali dell’oggetto rendono difficoltoso il riconoscimento di punti omologhi: mentre in fotogrammetria aerea è generalmente facile individuare elementi caratteristici nella scena, le caratteristiche di una parete rocciosa rendono ardua la determi-nazione di punti omologhi.Sotto il nome di structure from motion ricadono diverse metodologie e algoritmi che, in sostanza, sono finalizzati a ricostruire automaticamente i parametri di orientamento e le ca-ratteristiche geometriche dell’oggetto partendo da una sequenza di immagini. Per facilitare l’individuazione e il riconoscimento di punti omologhi sulle diverse immagini è opportuno che fotogrammi adiacenti nella sequenza non siano troppo differenti in termini prospettici: in altre parole la base di presa fra un fotogramma e il successivo deve essere limitata entro certi limiti per rendere più affidabile ed efficiente l’estrazione dei punti di legame da parte del programma. Gli algoritmi utilizzati lavorano su sequenze di immagini: l’ordine dei fotogrammi deve dunque seguire un certo ordine geometrico. Dal momento che tutte le strisciate sono state eseguite mantenendo la stessa direzione, i fotogrammi sono stati suddivisi ed orientati in sequenze indipendenti. La conformazione del bacino, inoltre, crea notevoli problemi in fase di orientamento con-giunto delle varie strisciate: l’elicottero, infatti, in entrambi i voli ha seguito, per ovvie ra-gioni, traiettorie orizzontali approssimativamente rettilinee e parallele alla direzione media della parete; tuttavia in molti casi la distanza fra punto di presa e parete varia modificando in maniera la scala fotogramma.Se nel secondo volo (quello fotoGPS) tale problema è risultato tutto sommato trascura-bile essendo comunque la distanza dal fronte piuttosto elevata, nel primo al contrario la
3. RILIEVO FOTOGRAMMETRICO

14
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
scala fotogramma è variata in maniere per nulla trascurabile: conseguentemente sia l’area di abbracciamento di ogni singolo fotogramma, così come la percentuale di ricoprimento trasversale (cioè fra le strisciate), risultano fortemente variabili. Nel caso del ricoprimento, in particolare, si assiste a zone (in cui il punto di vista è più distante dalla parete) in cui tale ricoprimento raggiunge valori molto elevati (superiori anche al 50 %) mentre in altri sfiora pericolosamente lo 0%.Mentre nel secondo blocco, dunque, è stato possibile orientare automaticamente tutta l’in-tera sequenza di immagini, aumentando considerevolmente il numero di punti di legame fra strisciate adiacenti riproiettando le coordinate terreno dei punti sui fotogrammi e indivi-duando le corrispondenze per mezzo di tecniche automatizzate di correlazione di immagine, nel primo è stato necessario procedere manualmente al riconoscimento ed alla collimazione dei punti omologhi.
Prima blocco fotogrammetrico (agosto)
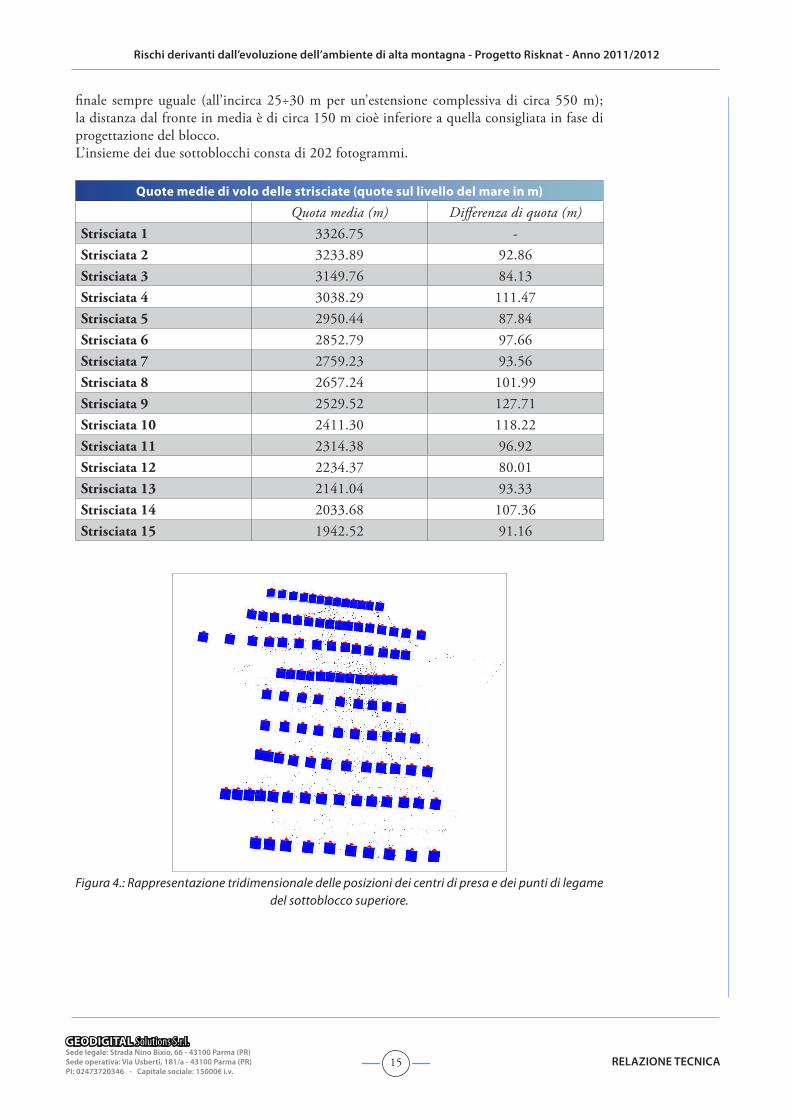
In alcuni casi alcuni fotogrammi sono stati esclusi dal processamento in quanto inquadranti zone non di interesse per il presente lavoro. Complessivamente sono state ordinate sedici se-quenze; mediamente ciascuna sequenza è composta da circa 15 immagini. Vista la mole non trascurabile di dati da elaborare si è preferito, non solo per motivi di onere computazionale ma anche di efficienza nella verifica qualitativa del blocco, di suddividere l’orientamento dello stesso in due sottoblocchi: il primo riguardante la parte superiore del volo e costituito da sette strisciate; il secondo riguardante la parte inferiore e costituito dalle rimanenti stri-sciate. In realtà le ultime due strisciate (quelle cioè a quota più bassa) sono risultate slegate fra loro e con il resto del blocco a causa di un non corretto mantenimento del piano di volo concordato da parte del pilota; riguardando tuttavia zone ormai fuori dall’area di interesse concordata con la committenza si è semplicemente deciso di non utilizzarle nelle successive elaborazioni. Il secondo sottoblocco risulta pertanto costituito anch’esso da sette strisciate. Al termine dell’elaborazione automatica tramite structure from motion le singole strisciate sono state unite: sono stati collimati manualmente i punti di legame e d’appoggio deter-minati durante il rilievo topografico e si è eseguita una compensazione a minimi quadrati dei singoli blocchi utilizzando un approccio a stelle proiettive. A causa della metodologia utilizzata, analizzando il blocco lungo la sequenza di immagini, la structure from motion ha ottenuto un buon legame fra fotogrammi consecutivi (ovvero in senso longitudinale); il lega-me realizzato in questa fase fra strisciate adiacenti è tuttavia pressoché inesistente, portando l’intero blocco a presentare un certo grado di labilità. Per cercare di ridurre il lavoro manuale di individuazione dei punti di legame fra strisciate adiacenti si è cercato di migliorare il risul-tato andando a rianalizzare la sequenza di fotogrammi per mezzo di algoritmi di matching automatico, proiettando tutti i punti terreno determinati su tutti i fotogrammi del blocco. Tuttavia, a causa delle problematiche connesse al piano di volo (in particolare la notevole variazione della scala fotogramma) il tentativo non ha sortito gli effetti sperati, fornendo po-chissimi punti effettivamente corrispondenti: si è dunque reso necessario un lungo processo di collimazione manuale per raggiungere il grado di legame ottimale. Una compensazione a stelle proiettive finale ha permesso di determinare i parametri di orientamento e le coordi-nate terreno dei punti di legame dei due blocchi. La posizione dei centri di presa delle varie strisciate è indicata nella seguente tabella mentre una rappresentazione grafica dei due bloc-chi e dei punti terreno è illustrata rispettivamente in figura 4 per il sotto-blocco superiore e in figura 5 per quello inferiore.Dall’analisi dei dati è possibile notare che il piano di volo previsto in fase di progettazione è stato complessivamente rispettato; in particolare l’interdistanza di circa 100 m fra le stri-sciate.Osservando la figura 4 e 5 è possibile osservare come tutte le strisciate sono piuttosto re-golari: si sviluppano in linea retta con basi di presa fra fotogrammi consecutivi nella parte
15 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
finale sempre uguale (all’incirca 25÷30 m per un’estensione complessiva di circa 550 m); la distanza dal fronte in media è di circa 150 m cioè inferiore a quella consigliata in fase di progettazione del blocco.L’insieme dei due sottoblocchi consta di 202 fotogrammi.
Quote medie di volo delle strisciate (quote sul livello del mare in m)
Quota media (m) Differenza di quota (m)Strisciata 1 3326.75 -Strisciata 2 3233.89 92.86Strisciata 3 3149.76 84.13Strisciata 4 3038.29 111.47Strisciata 5 2950.44 87.84Strisciata 6 2852.79 97.66Strisciata 7 2759.23 93.56Strisciata 8 2657.24 101.99Strisciata 9 2529.52 127.71Strisciata 10 2411.30 118.22Strisciata 11 2314.38 96.92Strisciata 12 2234.37 80.01Strisciata 13 2141.04 93.33Strisciata 14 2033.68 107.36Strisciata 15 1942.52 91.16
Figura 4.: Rappresentazione tridimensionale delle posizioni dei centri di presa e dei punti di legame del sottoblocco superiore.
16
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
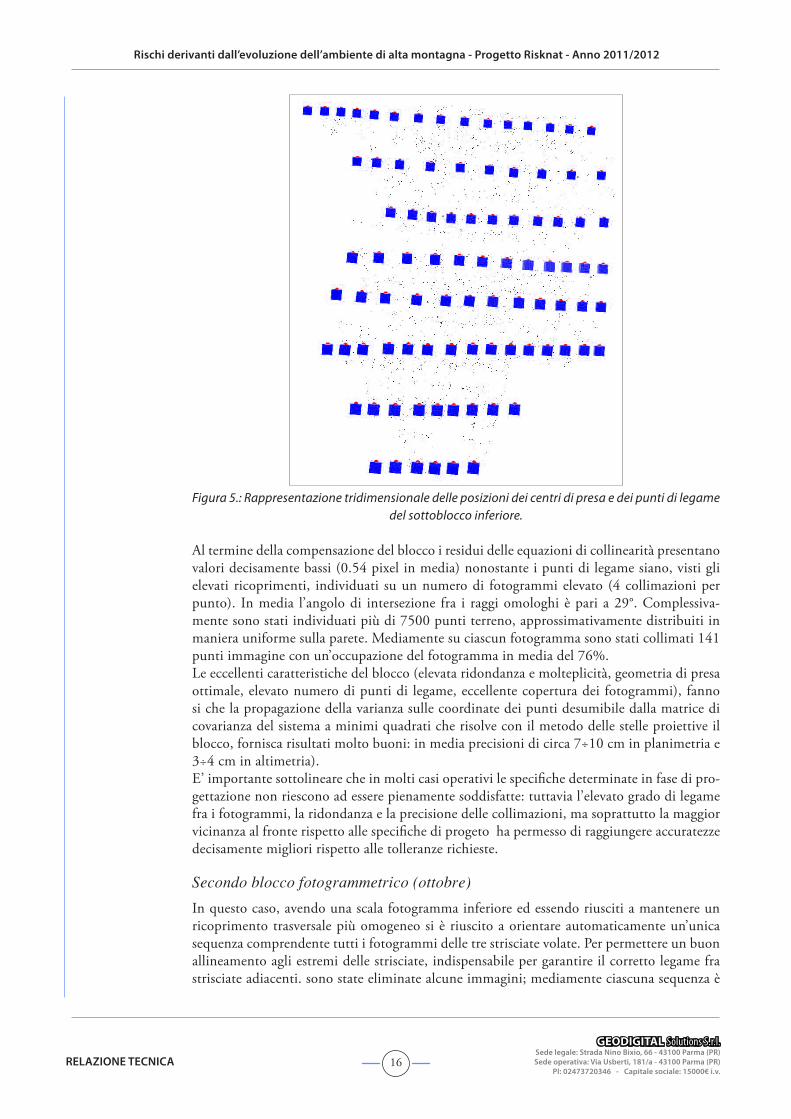
Figura 5.: Rappresentazione tridimensionale delle posizioni dei centri di presa e dei punti di legame del sottoblocco inferiore.
Al termine della compensazione del blocco i residui delle equazioni di collinearità presentano valori decisamente bassi (0.54 pixel in media) nonostante i punti di legame siano, visti gli elevati ricoprimenti, individuati su un numero di fotogrammi elevato (4 collimazioni per punto). In media l’angolo di intersezione fra i raggi omologhi è pari a 29°. Complessiva-mente sono stati individuati più di 7500 punti terreno, approssimativamente distribuiti in maniera uniforme sulla parete. Mediamente su ciascun fotogramma sono stati collimati 141 punti immagine con un’occupazione del fotogramma in media del 76%.Le eccellenti caratteristiche del blocco (elevata ridondanza e molteplicità, geometria di presa ottimale, elevato numero di punti di legame, eccellente copertura dei fotogrammi), fanno si che la propagazione della varianza sulle coordinate dei punti desumibile dalla matrice di covarianza del sistema a minimi quadrati che risolve con il metodo delle stelle proiettive il blocco, fornisca risultati molto buoni: in media precisioni di circa 7÷10 cm in planimetria e 3÷4 cm in altimetria).E’ importante sottolineare che in molti casi operativi le specifiche determinate in fase di pro-gettazione non riescono ad essere pienamente soddisfatte: tuttavia l’elevato grado di legame fra i fotogrammi, la ridondanza e la precisione delle collimazioni, ma soprattutto la maggior vicinanza al fronte rispetto alle specifiche di progeto ha permesso di raggiungere accuratezze decisamente migliori rispetto alle tolleranze richieste.
Secondo blocco fotogrammetrico (ottobre)
In questo caso, avendo una scala fotogramma inferiore ed essendo riusciti a mantenere un ricoprimento trasversale più omogeneo si è riuscito a orientare automaticamente un’unica sequenza comprendente tutti i fotogrammi delle tre strisciate volate. Per permettere un buon allineamento agli estremi delle strisciate, indispensabile per garantire il corretto legame fra strisciate adiacenti. sono state eliminate alcune immagini; mediamente ciascuna sequenza è
17 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
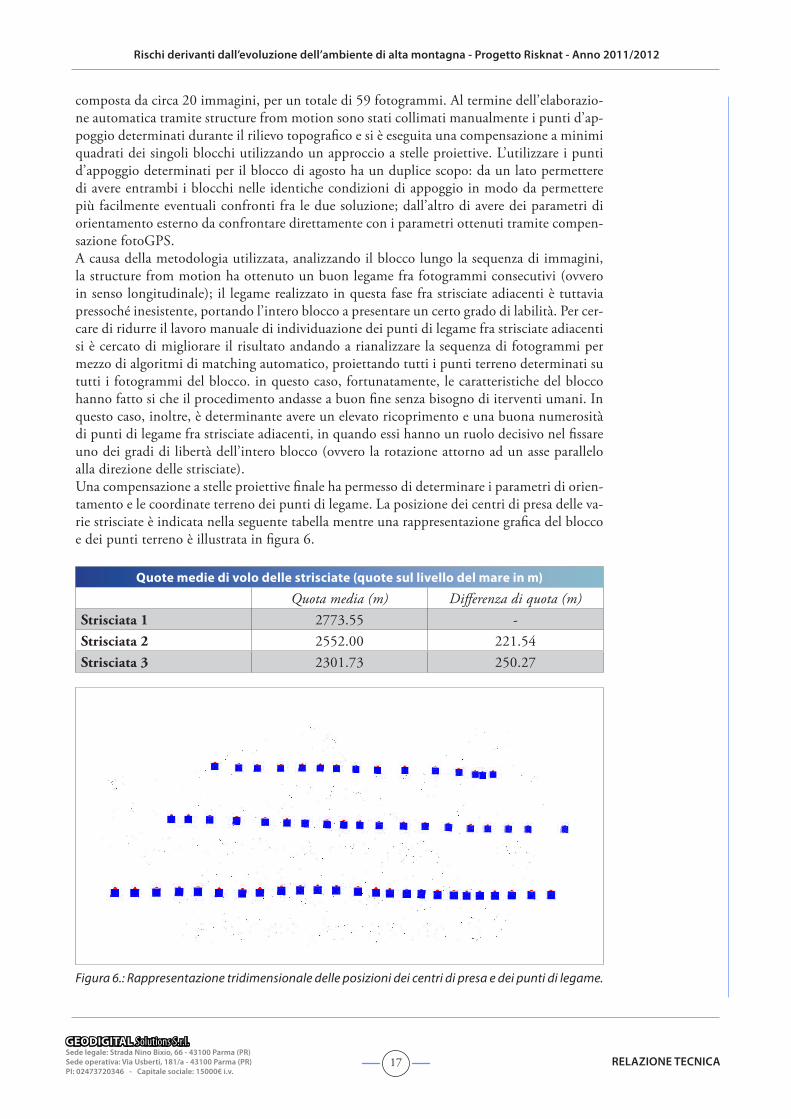
composta da circa 20 immagini, per un totale di 59 fotogrammi. Al termine dell’elaborazio-ne automatica tramite structure from motion sono stati collimati manualmente i punti d’ap-poggio determinati durante il rilievo topografico e si è eseguita una compensazione a minimi quadrati dei singoli blocchi utilizzando un approccio a stelle proiettive. L’utilizzare i punti d’appoggio determinati per il blocco di agosto ha un duplice scopo: da un lato permettere di avere entrambi i blocchi nelle identiche condizioni di appoggio in modo da permettere più facilmente eventuali confronti fra le due soluzione; dall’altro di avere dei parametri di orientamento esterno da confrontare direttamente con i parametri ottenuti tramite compen-sazione fotoGPS. A causa della metodologia utilizzata, analizzando il blocco lungo la sequenza di immagini, la structure from motion ha ottenuto un buon legame fra fotogrammi consecutivi (ovvero in senso longitudinale); il legame realizzato in questa fase fra strisciate adiacenti è tuttavia pressoché inesistente, portando l’intero blocco a presentare un certo grado di labilità. Per cer-care di ridurre il lavoro manuale di individuazione dei punti di legame fra strisciate adiacenti si è cercato di migliorare il risultato andando a rianalizzare la sequenza di fotogrammi per mezzo di algoritmi di matching automatico, proiettando tutti i punti terreno determinati su tutti i fotogrammi del blocco. in questo caso, fortunatamente, le caratteristiche del blocco hanno fatto si che il procedimento andasse a buon fine senza bisogno di iterventi umani. In questo caso, inoltre, è determinante avere un elevato ricoprimento e una buona numerosità di punti di legame fra strisciate adiacenti, in quando essi hanno un ruolo decisivo nel fissare uno dei gradi di libertà dell’intero blocco (ovvero la rotazione attorno ad un asse parallelo alla direzione delle strisciate).Una compensazione a stelle proiettive finale ha permesso di determinare i parametri di orien-tamento e le coordinate terreno dei punti di legame. La posizione dei centri di presa delle va-rie strisciate è indicata nella seguente tabella mentre una rappresentazione grafica del blocco e dei punti terreno è illustrata in figura 6.
Quote medie di volo delle strisciate (quote sul livello del mare in m)
Quota media (m) Differenza di quota (m)Strisciata 1 2773.55 -Strisciata 2 2552.00 221.54Strisciata 3 2301.73 250.27
Figura 6.: Rappresentazione tridimensionale delle posizioni dei centri di presa e dei punti di legame.
18
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
Osservando la figura 6 è possibile osservare come tutte le strisciate sono piuttosto regolari: si sviluppano in linea retta con basi di presa fra fotogrammi consecutivi nella parte finale sem-pre uguale (all’incirca 70÷80 m per un’estensione complessiva di circa 1500 m); la distanza dal fronte in media è di circa 250 m.Al termine della compensazione del blocco i residui delle equazioni di collinearità presenta-no valori decisamente bassi (0.61 pixel in media) nonostante i punti di legame siano, visti gli elevati ricoprimenti, individuati su un numero di fotogrammi elevato (20 collimazioni per punto). In media l’angolo di intersezione fra i raggi omologhi è pari a 38°. Complessi-vamente sono stati individuati più di 650 punti terreno, approssimativamente distribuiti in maniera uniforme sulla parete. Mediamente su ciascun fotogramma sono stati collimati 218 punti immagine con un’occupazione del fotogramma in media del 86%.Le caratteristiche del blocco (elevata ridondanza e molteplicità, geometria di presa ottimale, elevato numero di punti di legame, eccellente copertura dei fotogrammi), fanno si che la propagazione della varianza sulle coordinate dei punti desumibile dalla matrice di covarian-za del sistema a minimi quadrati che risolve con il metodo delle stelle proiettive il blocco, fornisca risultati molto buoni: in media precisioni di circa 7÷10 cm in planimetria e 3÷4 cm in altimetria).
Compensazione PhotoGPS
IntroduzioneLa georeferenziazione e l’appoggio dei blocchi fotogrammetrici sono normalmente affidati ai cosiddetti punti d’appoggio, da rilevare tramite metodi topografici (incluso il GPS) lungo il contorno ed all’interno del blocco. Le peculiari difficoltà nell’effettuare tale operazione per blocchi che riprendono pareti di montagna suggeriscono di fare ricorso, quando possibile, a tecniche alternative. In particolare si possono misurare direttamente i parametri di orienta-mento esterno dei fotogrammi usando sistemi di navigazione inerziale (INS) assistiti da GPS; tali sistemi sono disponibili per varie fascie di precisione e di costo e sono correntemente impiegati nella scansione laser aviotrasportata e nei rilievi fotogrammetrici per produzione cartografica o di ortofoto. Il loro utilizzo non elimina tuttavia la fase di triangolazione aerea, ovvero la necessità di misurare punti di legame, che resta necessaria nelle applicazioni di pre-cisione per migliorare la qualità dei parametri dell’orientamento esterno. In generale infatti, nella restituzione di coppie di fotogrammi orientate tramite sistemi INS/GPS, si ha presenza di parallassi residue significative. Un potenziale vantaggio dei sistemi INS/GPS nei voli di ripresa su versanti rocciosi è la minor vulnerabilità a perdite temporanee (da una ventina di secondi a oltre 1’, a seconda delle prestazioni dell’INS) della copertura satellitare GPS; per brevi periodi infatti il sistema inerziale è in grado di ricostruire la traiettoria e l’assetto del velivolo con accuratezza sufficiente, poi gli errori sistematici a cui è soggetto si accumulano progressivamente facendo derivare la soluzione. Solo dopo aver ripreso contatto coi satelliti, il dato GPS introdotto nel filtro di Kalman consente di riottenere dati accurati. Il dato GPS è quindi l’elemento fondamentale per l’operatività del sistema. In considerazione dei costi ancora rilevanti dei sistemi INS/GPS, che si giustificano quindi per impieghi di tipo conti-nuo (ogni installazione-disinstallazione del sistema sul velivolo richiede una calibrazione), si ritiene vi sia ancora spazio, nel contesto dei rilievi su versanti, per un metodo di orientamen-to dei fotogrammi in cui si impiega il GPS per rilevare indirettamente la sola posizione dei centri di presa. Il blocco foto¬grammetrico viene cioè “appeso” alle posizioni delle antenne GPS (e quindi ai centri di presa) invece che “appoggiato” ai punti d’appoggio. Durante la ripresa la camera fotogrammetrica deve, a questo scopo, essere mantenuta fissa (in posizione ed orientamento) rispetto all’antenna GPS perché occorre conoscere il vettore tra centro camera e centro di fase dell’antenna, che deve restare quindi inalterato in modulo e compo-nenti. Ciò può essere ottenuto, come nei rilievi da terra, montando la camera tramite un ap-

19 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
posito elemento di bloccaggio sulla palina che porta l’antenna GPS. In alternativa, la camera e l’antenna possono essere fissate ad elementi distinti del velivolo utilizzato per la ripresa. Misurati preventivamente i parametri di eccentricità fra centro di fase dell’antenna e centro di proiezione della camera (ricavabili tramite calibrazione), è possibile appoggiare il blocco fotogrammetrico (noto grazie ai punti di legame in un sistema arbitrario) alle posizioni GPS interpolate in corrispondenza degli istanti di scatto, ottenendone la georeferenziazione.L’interpolazione della posizione dell’antenna all’istante di scatto della camera è necessaria nel caso di rilievi cinematici; infatti in questi casi pur impostando il ricevitore su rate di misura elevati (10-20 Hz), date le velocità in gioco non è accettabile associare al centro di presa la posizione temporalmente più vicina all’istante di scatto. E’ quindi necessario un dispositivo di registrazione dell’istante di scatto, coerente con la scala dei tempi GPS. In molti ricevitori attualmente sul mercato è possibile registrate eventi temporali direttamente nel¬la memoria del ricevitore GPS interfacciando il ricevitore stesso con un generatore di impulsi (che, con le opportune modifiche, può essere rappresentato semplicemente dal segnale elettrico rilevabile ai contatti del flash della camera utilizzata per il rilievo).
Il modello matematicoIl modello matematico che lega il centro di fase dell’antenna con il centro di proiezione è il medesimo utilizzato nella triangolazione aerea [Forlani, Pinto, 1994] con blocchi nadirali, in cui vengono presi in considerazione, oltre all’eccentricità camera-antenna, anche i cosiddetti parametri di deriva. Tali parametri hanno il compito di descrivere le differenze fra la soluzio-ne GPS e quella fotogrammetrica, per assorbire differenze di natura sistematica fra strisciate adiacenti che possono nascere dal fatto che, a causa delle perdite di collegamento col segnale GPS (loss of lock dell’antenna), il ricevitore deve ricalcolare l’ambiguità intera. Questo suc-cede assai spesso nelle fasi di virata e riallineamento tra una strisciata e l’altra oltre che, con configurazioni satellitari critiche, anche lungo la strisciata stessa. Date le condizioni di dina-mica ben superiori a quelle di un rilievo da terra, la determinazione corretta dell’ambiguità è oggettivamente più difficile; un errore nel fissaggio del valore intero provoca differenze si-stematiche che possono essere assorbite per la gran parte con un modello lineare, espresso ad esempio in funzione del tempo lungo la strisciata, almeno per strisciate non troppo lunghe. Qualora ad ogni strisciata venga associato un insieme di parametri di deriva, nascono delle singolarità (è ad esempio evidente la correlazione tra termini di traslaszione e centri di presa) per cui occorrerebbe impeigare dei punti d’appoggio per eliminarle. In alternativa, si sceglie una strisciata come riferimento la strisciata più affidabile in termini di elaborazione dei dati GPS (ovvero non le si associano parametri di deriva) e si modellano le incongruenze delle altre rispetto a questa.Il modello matematico risulta pertanto:
Xa = X0 + RcG e + S + D t dove:Xa = Coordinate oggetto del centro di fase dell’antenna X0 = Coordinate oggetto del centro di proiezione della camera RcG = Matrice di rotazione da spazio immagine a spazio oggetto e = Vettore eccentricità (nello spazio immagine) da centro di presa a centro di fase dell’an-tennaS = Vettore dei termini di traslazione della derivaB = Vettore dei coefficienti del termine lineare della deriva t = tempo dall’inizio della strisciata
Esso viene inserito nella stima a minimi quadrati sotto forma di equazione di pseudo-osser-vazione.Se la soluzione GPS viene ottenuta in un sistema di riferimento cartografico si possono avere lievi discrepanze fra le due tipologie di osservazione: mentre la rete fotogrammetrica è
20
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
intrinsecamente tridimensionale, quella GPS, in quel caso, fa distizione fra planimetria (in cui in misura più o meno marcata interviene il coefficiente di contrazione) e altimetria; i due sistemi, dunque non sono strettamente compatibili. Si preferisce pertanto determinare le coordinate dei centri di fase in un sistema di riferimento cartesiano locale tridimensionale, coerente con la tradizionale scrittura delle equazioni di collinearità; noti origine e orienta-mento del sistema è poi sempre possibile riportare i punti in un sistema cartografico.Un punto d’appoggio tradizionale (un punto cioè visibile su uno o più fotogrammi e di coor-dinate note) ha generalmente ha precisioni nettamente superiori a quelle ottenibili dal rilievo fotogrammetrico e pertanto può essere considerato, in prima approssimazione, non affetto da errore. Viceversa una posizione GPS, soprattutto se derivante da un rilievo cinematico, può avere lo stesso grado di precisione (e in certi casi anche peggiore) rispetto alla fotogram-metria. Un approccio più corretto è quindi considerare tali posizioni affette da un errore, che può essere stimato in fase di processamento della rete GPS o che può essere stimato conside-rando rilievi in cui le caratteristiche dello stumento e le condizioni geometriche e di misura siano ap¬prossimativamente analoghe. A differenza di un punto d’appoggio tradizionale le posizioni dei centri di fase vengono dunque viste come informazioni aggiuntive affette da errore, il che conferisce una certa elasticità alle posizioni dei centri di presa. Rispetto a bloc-chi appoggiati a terra, il calcolo delle coordinate terreno (dei punti di legame della TA e di conseguenza dei punti restituiti) diventa allora più simile ad una estrapolazione, ovvero le deformazioni del blocco sono contrastate assai meno efficacemente, essendo i punti di le-game più liberi di spostarsi. Gli errori eventuali nell’OI (ad esempio un valore errato della distanza principale) si scaricano però ora sulle coordinate dei punti a terra, non potendo i punti di presa spostarsi più della precisione di determinazione del GPS. L’interconnessione tra immagini adiacenti, data dai punti di legame, permette ancora un controllo indiretto del-le posizioni GPS (ovvero fa nascere residui sulle equazioni di pseudo-osservazione dei centri di presa), per quanto di limitata affidabilità. Viceversa, se la struttura del blocco non è suf-ficientemente rigida, la presenza dei centri di presa pseudo-osservati può controllare defor-mazioni del blocco dovute in ultima analisi a errori nelle misure delle coordinate immagine.
Problemi di condizionamento e configurazione di bloccoL’utilizzo delle equazioni di pseudo-osservazione ha lo scopo di rimuovere la deficienza di rango nel bundle block adjustment, dal momento che si dispone esclusivamente di punti di legame. Tuttavia esistono circostan¬ze in cui, a causa di una non opportuna disposizione spaziale dei punti GPS, il sistema risulta comunque mal condizionato, il che può condurre ad una soluzione instabile. Per esempio se il blocco fotogrammettrico è costituito da una sin-gola strisciata in cui le posizioni dei centri di presa risultano approssimativamente allineate, un angolo di rotazione (se ad esempio la strisciata si sviluppa lungo la direzione X, l’angolo w) viene stimato con grande incertezza; in altre parole la soluzione finale è mal condizionata in quanto la strisciata è praticamente libera di ruotare attorno al proprio asse. Per risolvere il problema in generale sia le simulazioni effettuate sia l’esperienza sul campo suggeriscono due possibili linee di condotta:• modificare la configurazione del blocco in modo da accentuare la distribuzione spaziale
di centri di proiezione - posizioni GPS;• utilizzare caratteristiche geometriche note dell’oggetto (ad esempio la verticalità di al-
cuni elementi) per vincolare il blocco con ulteriori equazioni di pseudo-osservazione. Questa seconda opzione è difficilmente applicabile nei rilievi di versanti.
Come criterio generale, per una buona georeferenziazione del blocco, l’inviluppo dei punti corrispondenti ai centri di presa (le posizioni GPS) non deve presentarsi eccessivamente allungato in una particolare direzione ma deve, al contrario, avere una forma piuttosto com-patta e se possibile di dimensioni paragonabili a quelle dell’oggetto da rilevare. L’ideale sareb-be avere posizioni tutto intorno all’oggetto, ovvero fare in modo che la scena da rilevare sia interamente contenuta nell’inviluppo. Nel caso di un versante montuoso si ha l’opzione tra:
21 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
• acquisire due o più strisciate a quote sufficientemente differenti;• acquisire due strisciate a distanze diverse dall’oggetto (utilizzando enventualmente anche
focali differenti). La prima soluzione è largamente preferibile in quanto origina un blocco più stabile. E’ importante infine notare che dal punto di vista della georeferenziazione del blocco non è necessario che ad ogni punto di presa venga corrispondentemente acquisita una posizione GPS: sebbene ciò sia preferibile dal momento che le pseudo-osservazioni GPS hanno anche il compito di irrobustire il blocco fotogrammetrico, sono sufficienti tre punti GPS non alli-neati per eliminare la deficienza di rango nel bundle block adjustment.
Calibrazione del fotoGPSNell’equazione di pseudo-osservazione il vettore eccentricità, che rappresenta la posizione relativa fra centro di fase dell’antenna GPS e centro di proiezione della camera, espressa nel sistema di riferimento immagine, è considerato noto e deve pertanto essere determinato ap-positamente. A tale scopo, un primo metodo consiste nel preparare un test-field con un buon numero di target (almeno una quindicina) ben distribuiti spazialmente le cui coordinate, determinate da un rilievo topografico, siano espresse in WGS84. Acquisendo contempo-ranemente una o più immagini del test field e le relative posizioni GPS dei centri di presa, l’orientamento di ogni fotogramma per mezzo di una resezione spaziale fornisce il vettore eccentricità calcolato come differenza fra le due posizioni: quella stimata del centro di presa e quella misurata del centro di fase dell’antenna. Invertendo l’equazione di pseudo-osser-vazione, priva ovviamente dei termini di deriva, si ricava il vettore e. Con questo metodo solitamente è possibile ottenere precisioni nella stima dell’eccentricità comprese fra 1 e 2 cm.Un altro metodo di calibrazione grazie al quale si possono raggiungere precisioni superiori consiste nel materializzare un test-field, misurando le coordinate dei target in un sistema lo-cale per mezzo di un teodolite. Al posto dell’antenna GPS si monta sul sistema di supporto, reso verticale, un prisma retroriflettente misurabile per mezzo del teodolite. La posizione del centro di presa viene sempre determinata per resezione; la posizione (virtuale) del centro di fase dell’antenna viene invece ricavata dalla posizione misurata del prisma retroriflettente, nota la differenza di altezza fra il prisma stesso e l’antenna GPS. In questo caso le precisioni dipendono direttamente dalla precisione del teodolite utlizzato, dalla correttezza nella stima della differenza fra antenna e prisma e dalla stabilità della palina al momento dello scatto e della misura del prisma. Utilizzando un bipede per tenere in posizione verticale la palina si possono ottenere precisioni dell’ordine di 3÷5 mm. Qualora antenna e fotocamera siano invece posizionate indipendentemente l’una dall’altra sulla struttura dell’elicottero o dell’a-reo, è giocoforza adoperare un’unica immagine, essendo complesso manovare il velivolo a terra per variare la posizione di presa. In linea di principio è opportuno posizionare camera ed antenna alla minima distanza possi-bile, per non creare un braccio di leva rilevante: simulazioni mostrano infatti che la rigidezza del blocco “appeso alle antenne GPS” diminuisce con l’aumento del braccio; l’errore di determinazione dell’assetto del fotogramma usato nella calibrazione si traduce in un errore sulle componenti proporzionale alla componente stessa.
Strumentazione ed installazione del sistema sul velivoloCome accennato in precedenza, per conoscere la posizione dell’antenna all’istante di scatto alcuni ricevitori sono forniti di una porta che accetta segnali in ingresso, ne memorizza il tempo di arrivo e ne calcola la posizione interpolandola tra i due rilevamenti precedente e successivo. Entrambi i ricevitori Leica a disposizione di GeoDigital Solutions (modello SR530 e 1230) sono dotati di tale porta; il ricevitore SR530 è stato in passato impiegato in applicazioni cinematiche per le quali tale dispositivo è stato adoperato con successo; il ricevitore 1230, dotato di un’antenna con prestazioni assai migliorate e di un sistema di trac-ciamento del segnale molto più sofisticato, è stato impiegato nel volo sul Pellaud del luglio

22
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
2010. Dal momento che l’elaborazione dei dati GPS in questo caso ha prodotto una traietto-ria incongruente con la posizione dei centri di presa calcolati con l’appoggio topografico del blocco, si è proceduto ad un sistematico controllo del dispositivo nel ricevitore 1230. L’ope-razione ha richiesto la ripresa da autovettura e l’orientamento di due blocchi fotogrammetri-ci, impiegando in successione i due differenti ricevitori. L’esito delle eleborazioni ha mostrato che la soluzione col 530 è attendibile mentre quella con il 1230 presenta incongruenze con la posizione dei centri di presa calcolati con appoggio topografico. Sono stati presi contatti con Leica per trovare una spiegazione ma al momento, dato anche la limitata esperienza dei tecnici con tale problematica, non si è ancora trovata una soluzione. Pertanto si è deciso di adoperare nel secondo volo sul Regoud il ricevitore 530, pur nella consapevolezza che le sue prestazioni in condizioni cinematiche sono inferiori. Per quanto riguarda l’installazione dell’antenna sul velivolo, era stato ipotizzato di fissarla al traliccio di sostegno dello specchietto di atterraggio; l’effetto di schermatura, volando in direzione nord-sud, sarebbe probabilmente stato accettabile. Il pilota ha comunque escluso tale scelta, accettando invece la soluzione già adottata nel volo Pellaud di impiegare camera ed antenna fissate alla palina, vincolando opportunamente la stessa alla struttura dell’elicot-tero sopra il portellone. In questa condizione vi è comunque una riduzione della tracciabilità dei satelliti sia in senso azimutale sia in senso zenitale, per la sagomatura della fusoliera nella zona del rotore.
Acquisizione ed elaborazione dei dati GPSA questa limitazione si è cercato di porre rimedio con la condotta di volo, per la quale il pilota si è dimostrato di grande disponibilità. Una volta giunti in posto e accertato fossero in vista un sufficiente numero di satelliti, il pilota ha poi mantenuto il medesimo assetto (ovve-ro non ha effettuato virate) per evitare perdite di segnale, effettuando le tre strisciate sempre nel medesimo senso, retrocedendo ed abbassandosi di quota per ripartire con la successiva ripresa; ha inoltre condotto il volo a velocità molto ridotta, evitando accelerazioni e altre manovre che potessero ostacolare il tracciamento del segnale satellitare. Nonostante questo, probabilmente a seguito delle variazioni di quota (le strisciate sono state volate a quote di circa 2300, 2550 e 2750 m) si sono avute variazioni anche molto forti di PDOP e perdita di collegamento (loss of lock) con i satelliti. Nei rilievi GPS cinematici la traiettoria viene ricostruita elaborando le osservazioni del rice-vitore in movimento (rover) rispetto ad una (o più) stazioni fisse (master) o ancora rispetto ad una rete di stazioni permanenti. Nel caso specifico, disponendo di un punto GPS rilevato rispetto alla stazione permanente INVG di Morgex nel luglio 2011 per i rilievi topografici sul versante, situato in prossimità della zona di sorvolo, lo si è utilizzato come master. Il volo è stato elaborato con il sw Leica LGO dapprima nella versione 4.2 e successivamente nella versione 8.2. Per raggiungere precisioni sub-decimetriche in un rilievo cinematico oc-corre che sia fissata la cosiddetta ambiguità intera di fase, incognita che deve essere ricalcolata quando vi siano perdite di collegamento coi satelliti. A questo scopo i software di elaborazio-ne impiegano algoritmi di tipo statistico, con assegnati livelli di probabilità di fissaggio del valore corretto; la probabilità che venga calcolata una soluzione non corretta dipende anche dalla copertura satellitare (PDOP) e dall’intervallo di tempo in cui si ha ricezione stabile del segnale. Nel corso delle strisciate alta e bassa il PDOP è variato tra 5.2 e 6.1, ovvero oltre i limiti consentiti normalmente per un rilievo statico (e quindi a maggior ragione per uno cinematico con precisioni centimetriche); nella strisciata centrale invece il PDOP è stato sempre superiore a 10, con punte oltre 30, ovvero con valori inaccettabili per una soluzione accurata. Come accennato nell’introduzione al modello matematico del fotoGPS, qualora vi sia un bias nel calcolo dell’ambiguità, la traiettoria accumula errori sistematici crescen-ti. L’elaborazione con la versione 4.2 ha fissato l’ambiguità intera solo sulla terza strisciata (quella a quota più bassa); quella con la versione 8.2 ha fissato invece l’ambiguità in tutte le strisciate. Le due soluzioni coincidono nella terza strisciata; nelle altre le differenze sono
23 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
notevoli (fino a quasi 2 m) specie in Est e quota.
Compensazione del blocco con tecnica fotoGPSLa compensazione del blocco con le pseudo-osservazioni GPS è stata effettuata in un sistema di riferimento (SdR) locale, con origine in un punto di coordinate (E=356300; N=5053100; h=0) nella proiezione UTM associata al SdR della rete INGV, assi x,y paralleli a quelli del sistema cartografico ed asse z lungo la normale ellissoidica; il punto origine è approssimativa-mente baricentrico alla zona da rilevare. Le coordinate GPS delle posizioni dell’antenna sono state quindi trasformate in tale sistema. Per quanto riguarda i parametri di orientamento esterno approssimati e le coordinate approssimate dei punti di legame del blocco, compensa-to inizialmente in un sistema arbitrario, essi sono stati trasformati nel sistema locale tramite una rototraslazione con variazione di scala calcolata tra i centri di presa e le antenne, consi-derati omologhi ai fini di questa operazione.I due gruppi di osservazioni (le coordinate immagine dei punti di legame e le coordinate delle antenne GPS) sono state compensate congiuntamente con la tecnica fotoGPS per ot-tenere un nuovo orientamento del blocco georeferenziato e correttamente messo in scala. A tale fine, le discrepanze tra le posizioni dei centri di presa implicitamente definite delle po-sizioni GPS delle antenne e le posizioni dei medesimi centri di presa dettate dalla minimiz-zazione dei residui delle equazioni di collinearità devono essere minimizzate. I due gruppi di osservazioni agiscono sulla base dei rispettivi pesi, ovvero delle precisioni di misura delle coordinate immagine e delle posizioni GPS; come noto, queste ultime sono sempre stimate ottimisticamente dall’elaborazione dei dati grezzi GPS. Nello specifico sono state effettuate elaborazioni sia attribuendo precisioni costanti (di 5 cm e per le posizioni X,Y e 10 cm per le Z) sia precisioni derivate dai risultati del processamento GPS. Valutando l’entità dei residui delle equazioni di pseudo-osservazione e l’incremento dei residui delle equazioni di colli-nearità nei due casi si è optato per assegnare le precisioni costanti sopra indicate. Qualora nei dati GPS siano rimasti errori (dovuti ad esempio ad un errato fissaggio dell’ambiguità) questi provocano una deformazione del blocco e quindi residui più elevati delle equazioni di collinearità ed errori (sistematici) di restituzione del terreno; la presenza di tali errori può essere messa in luce dai residui delle equazioni di pseudo-osservazione. Nello specifico, non è stato possibile accettare come corrette tutte le posizioni GPS delle strisciate, data l’entità dei residui. Si è quindi partiti dal presupposto che la strisciata più affidabile fosse quella in cui entrambe le versioni del sw di elaborazione avevano fissato concordemente l’ambiguità intera, ovvero la strisciata più bassa. Non essendo questa sufficiente ad assicurare una stabile georeferenziazione del blocco (come ricordato a proposito di situazioni di quasi singolarità) si è proceduto introducendo parametri di deriva nelle altre due strisciate, nell’ipotesi che potessero assorbire le incongruenze col GPS e nel medesimo tempo stabilizzare il blocco. Al termine della fase di reiezione degli errori sulla base dei residui standardizzati le posizioni GPS della strisciata centrale sono state comunque rimosse dal calcolo, essendosi dimostrate non compatibili con le altre, pur con l’ulteriore grado di libertà dei parametri di deriva; sono state inoltre eliminate alcune posizioni sulle altre due strisciate, in particolare agli estremi delle strisciate. Complessivamente, sono state quindi usate nel calcolo finale 40 posizioni GPS sulle 59 disponibili. I valori delle traslazioni stimate per i parametri di deriva sono in-torno a 50 cm in planimetria e 75 in altimetria; le velocità di deriva stimate variano tra 3 e 7 mm/s, equivalenti a circa 40 cm e 1 m sui 2’ di tempo di volo della strisciata.Gli orientamenti esterni dei fotogrammi e le posizioni dei punti di legame ottenute dalla compensazione sono state poi impiegate per la generazione del modello digitale del terreno.
Verifica sulla precisione di georeferenziazionePer verificare la qualità della georeferenziazione del blocco sono stati collimati e restituiti 15 punti, scelti tra quelli rilevati topograficamente nel luglio 2011, che è stato possibile identi-ficare e riconoscere sui fotogrammi, date le condizioni di innevamento della parete. La preci-
24
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
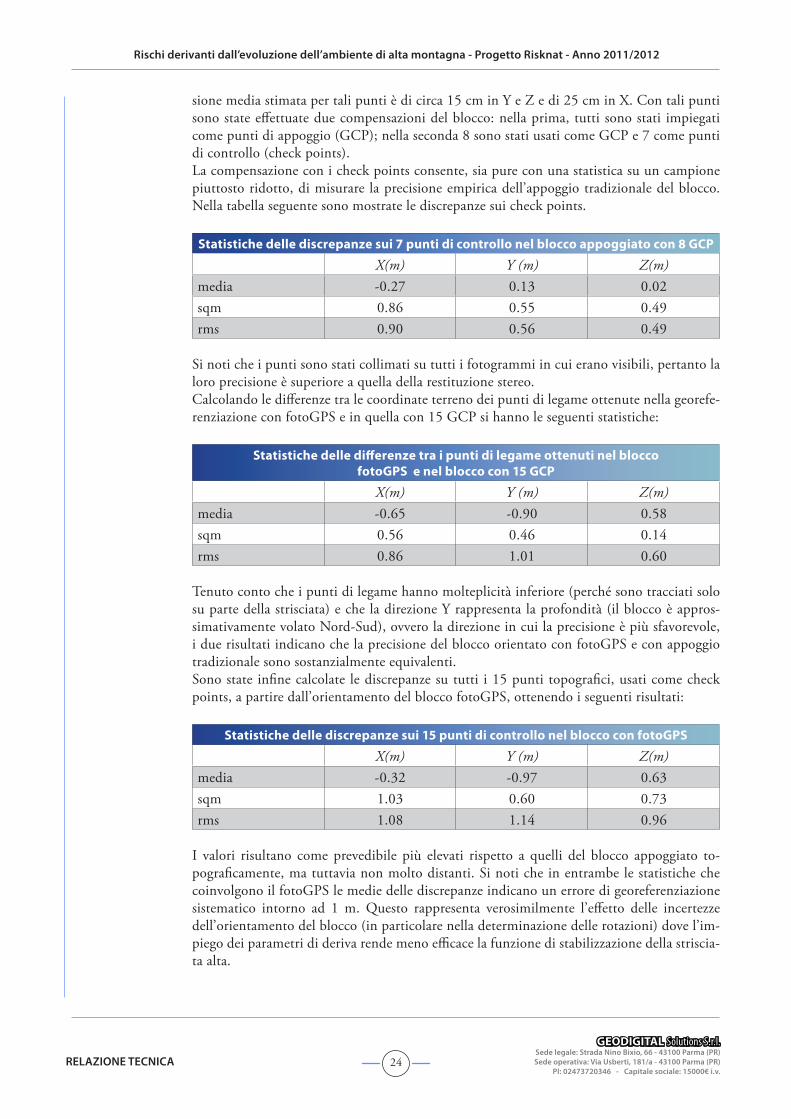
sione media stimata per tali punti è di circa 15 cm in Y e Z e di 25 cm in X. Con tali punti sono state effettuate due compensazioni del blocco: nella prima, tutti sono stati impiegati come punti di appoggio (GCP); nella seconda 8 sono stati usati come GCP e 7 come punti di controllo (check points). La compensazione con i check points consente, sia pure con una statistica su un campione piuttosto ridotto, di misurare la precisione empirica dell’appoggio tradizionale del blocco. Nella tabella seguente sono mostrate le discrepanze sui check points.
Statistiche delle discrepanze sui 7 punti di controllo nel blocco appoggiato con 8 GCP
X(m) Y (m) Z(m)media -0.27 0.13 0.02sqm 0.86 0.55 0.49rms 0.90 0.56 0.49
Si noti che i punti sono stati collimati su tutti i fotogrammi in cui erano visibili, pertanto la loro precisione è superiore a quella della restituzione stereo.Calcolando le differenze tra le coordinate terreno dei punti di legame ottenute nella georefe-renziazione con fotoGPS e in quella con 15 GCP si hanno le seguenti statistiche:
Statistiche delle differenze tra i punti di legame ottenuti nel bloccofotoGPS e nel blocco con 15 GCP
X(m) Y (m) Z(m)media -0.65 -0.90 0.58sqm 0.56 0.46 0.14rms 0.86 1.01 0.60
Tenuto conto che i punti di legame hanno molteplicità inferiore (perché sono tracciati solo su parte della strisciata) e che la direzione Y rappresenta la profondità (il blocco è appros-simativamente volato Nord-Sud), ovvero la direzione in cui la precisione è più sfavorevole, i due risultati indicano che la precisione del blocco orientato con fotoGPS e con appoggio tradizionale sono sostanzialmente equivalenti. Sono state infine calcolate le discrepanze su tutti i 15 punti topografici, usati come check points, a partire dall’orientamento del blocco fotoGPS, ottenendo i seguenti risultati:
Statistiche delle discrepanze sui 15 punti di controllo nel blocco con fotoGPS
X(m) Y (m) Z(m)media -0.32 -0.97 0.63sqm 1.03 0.60 0.73rms 1.08 1.14 0.96
I valori risultano come prevedibile più elevati rispetto a quelli del blocco appoggiato to-pograficamente, ma tuttavia non molto distanti. Si noti che in entrambe le statistiche che coinvolgono il fotoGPS le medie delle discrepanze indicano un errore di georeferenziazione sistematico intorno ad 1 m. Questo rappresenta verosimilmente l’effetto delle incertezze dell’orientamento del blocco (in particolare nella determinazione delle rotazioni) dove l’im-piego dei parametri di deriva rende meno efficace la funzione di stabilizzazione della striscia-ta alta.

25 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Generazione dei DSM
Al termine delle operazioni di orientamento del blocco si è proceduto alla ricostruzione del modello digitale di superficie (DSM) del corpo roccioso. Allo scopo si è utilizzato un sof-tware di matching sviluppato proprietariamente. I dati di orientamento sono stati importati nel programma unitamente ai punti terreno stimati. Tali punti risultano di fondamentale importanza per inizializzare l’operazione di matching fornendo al codice di calcolo una de-scrizione approssimata della morfologia dell’oggetto: per il fronte si disponeva, come già detto, di circa 7500 punti.Il codice utilizza algoritmi di correlazione di immagine a minimi quadrati (Least Squares Matching o LSM) per determinare corrispondenze fra le immagini che compongono il bloc-co. Utilizzando un approccio a multi risoluzione (piramidi di immagini) dalla descrizione approssimata della superficie da analizzare vengono predette le posizioni dei punti omologhi che vengono poi ottimizzate dall’algoritmo di matching passando dalle immagini della pira-mide a più bassa risoluzione fino a quelle a massimo dettaglio. I punti da correlare vengono individuati automaticamente dal software in corrispondenza dei nodi di una maglia regolare a passo di 2÷4 pixel su una delle due immagini. Complessivamente sono state analizzate per il primo blocco 90 coppie di immagini (per un totale di più di 59 milioni di punti); per il secondo blocco sono state analizzate 11 coppie di immagini (per un totale di circa 13.7 milioni di punti). Si è cercato di mantenere una sovrapposizione di almeno il 40% fra modelli adiacenti in modo da avere una descrizio-ne ridondante della geometria della parete, che permettesse fra l’altro l’individuazione di eventuali errori grossolani, la corretta descrizione di quelle zone dell’ammasso che potevano essere maggiormente interessate da problemi di occlusione sui fotogrammi.Al termine delle operazioni di unione e filtraggio dei dati si è deciso di imporre una densità di punti non troppo elevata per permettere una più semplice gestione dei dati: per il primo blocco fotogrammetrico si è imposta una risoluzione sull’oggetto pari a circa 1 punto ogni 30÷40 cm) mentre per il secondo, che inquadra una zona più ampia in senso orizzontale, si è imposta una risoluzione sull’oggetto pari a 1 punto ogni 50 cm. Le due nuvole di punti finali risultano composte rispettivamente da circa 2.4 milioni di punti la prima e da circa 4.9 milioni di punti la seconda.
26
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
27 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Nuvole di punti e DSM
I dati ottenuti dalla restituzione fotogrammetrica sono stati opportunamente trattati per poter essere utilizzati nelle successive fasi di analisi. In particolare, il software RockScan, impiegato per determinare la giacitura e la distribuzione spaziale delle principali famiglie di discontinuità, utilizza un set di fotogrammi orientati della zona da investigare proiettando su di essi le nuvole di punti determinati; non è quindi richiesta una strutturazione della point cloud (ad esempio tramite triangolazione) ed è possibile utilizzare fonti di dati costituite anche da diverse decine di milioni di punti.Sono dunque stati consegnati:
1. Per quanto riguarda il prodotto derivante dal blocco di agosto: una nuvola di punti (in formato XYZ - 2.4 milioni di punti circa), mesh triangolata in formato Stereolitho (.stl) e relativi fotogrammi orientati (202 immagini);2. Per quanto riguarda il prodotto derivante dal blocco di ottobre: una nuvola di punti (in formato XYZ - 4.9 milioni di punti circa), mesh triangolata in formato Stereolitho (.stl) e relativi fotogrammi orientati (59 immagini);
Di seguito, in figura 7 e 8, viene presentata una vista tridimensionale rispettivamente del modello finale triangolato del blocco di agosto e del blocco si ottobre.In figura 9, infine, viene presentato il confronto fra i due modelli in cui, a falsi colori, vengo-no illustrate le distanze fra le due superfici. E’ possibile osservare come le differenze risultino decisamente contenute; bisogna inoltre precisare che in parte le discrepanze visibili sono anche dovute al differente livello di dettaglio delle due superfici ed al fatto che nel blocco di ottobre in alcune zone è presente in maniera non trascurabile la copertura nevosa che in quello di agosto è ovviamente assente.
4. PRODOTTI RESTITUITI
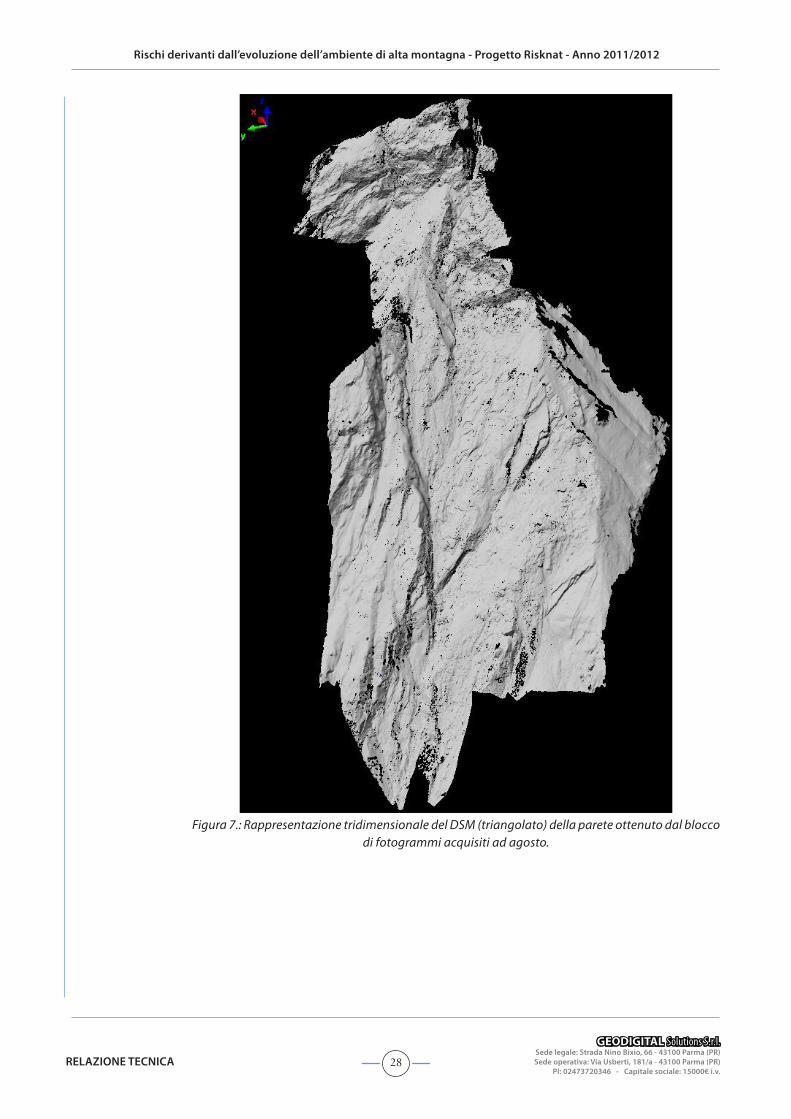
28
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
Figura 7.: Rappresentazione tridimensionale del DSM (triangolato) della parete ottenuto dal blocco di fotogrammi acquisiti ad agosto.
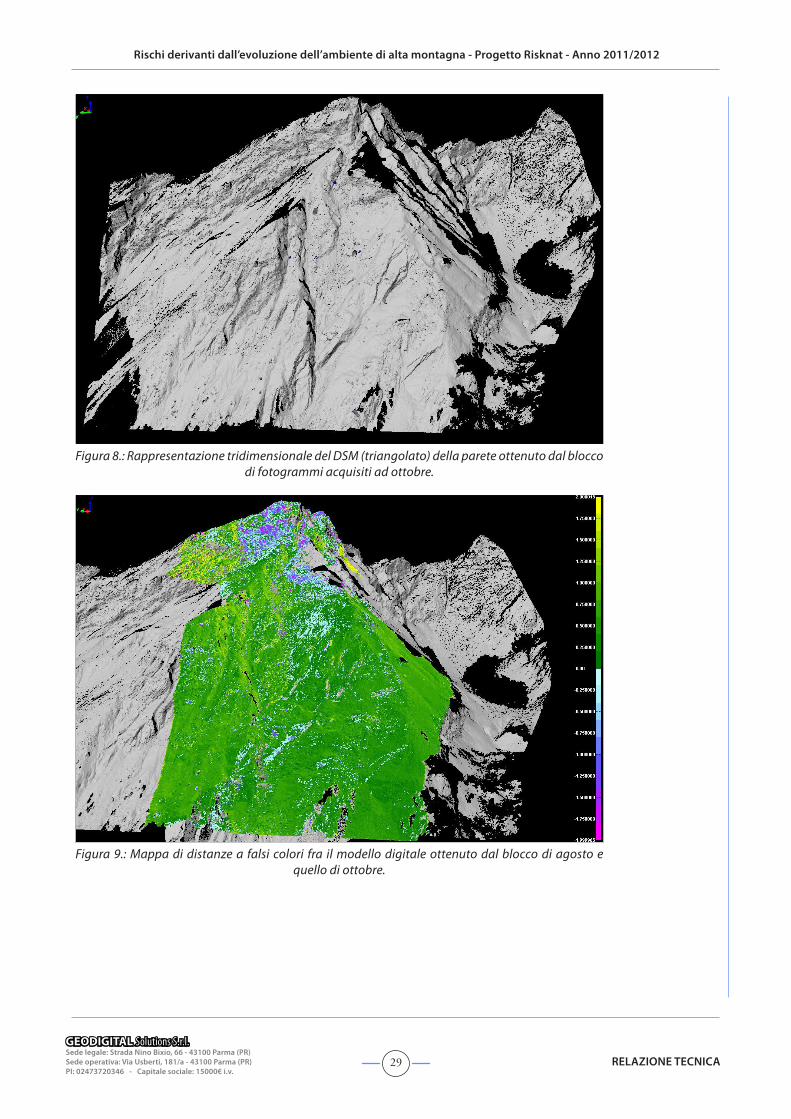
29 RELAZIONE TECNICA
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)PI: 02473720346 - Capitale sociale: 15000€ i.v.
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
Figura 8.: Rappresentazione tridimensionale del DSM (triangolato) della parete ottenuto dal blocco di fotogrammi acquisiti ad ottobre.
Figura 9.: Mappa di distanze a falsi colori fra il modello digitale ottenuto dal blocco di agosto e quello di ottobre.

30
Rischi derivanti dall’evoluzione dell’ambiente di alta montagna - Progetto Risknat - Anno 2011/2012
GEODIGITAL Solutions S.r.l.Sede legale: Strada Nino Bixio, 66 - 43100 Parma (PR)Sede operativa: Via Usberti, 181/a - 43100 Parma (PR)
PI: 02473720346 - Capitale sociale: 15000€ i.v.RELAZIONE TECNICA
Il rilievo fotogrammetrico a scopo geomeccanico della parete del Regoud ha rappresentato un’interessante sfida: le dimensioni dell’oggetto, la richiesta di avere una descrizione estre-mamente minuziosa della morfologia della parete, i tempi di intervento ed elaborazione piuttosto ristretti per permettere di avere più tempo a disposizione per le fasi di analisi han-no richiesto l’applicazione delle metodologie di rilievo attualmente più efficienti e accurate presenti sul mercato. I risultati ottenuti sono stati eccellenti con miglioramenti notevoli rispetto a quelli ad esempio ottenuti anche solo nei rilievi del precedente anno: ciò è dovuto soprattutto all’ottimizzazione messa in atto nei diversi codici di calcolo che riescono, sfrut-tando anche la più elevata qualità del dato di partenza, a raggiungere livelli prestazionali fino all’anno scorso impensabili.I risultati finali presentano le caratteristiche di completezza, correttezza ed accuratezza richie-ste; le possibilità offerte da un processo conoscitivo dell’intero ammasso roccioso al grado di dettaglio realizzato non solo permettono una successiva fase di analisi e progettazione decisa-mente più accurata e meno soggettiva, ma offrono una base documentale del corpo roccioso che potrebbe dimostrarsi utile anche in altre fasi dell’intervento.
CONCLUSIONI








