PROGETTO DELL’ELICA Giorgio Trincas - unina.stidue.netunina.stidue.net/Universita' di...
250
PROGETTO DELL’ELICA Giorgio Trincas Dipartimento di Ingegneria Navale, del Mare e per l’Ambiente —————— Facolt` a di Ingegneria Universit` a degli Studi di Trieste Anno Accademico 2009–10
Transcript of PROGETTO DELL’ELICA Giorgio Trincas - unina.stidue.netunina.stidue.net/Universita' di...
PROGETTO DELL’ELICA
Giorgio Trincas
Dipartimento di Ingegneria Navale,
del Mare e per l’Ambiente——————
Facolta di Ingegneria
Universita degli Studi di Trieste
Anno Accademico 2009–10
II

Indice
1 Progetto Concettuale 11.1 Stima approssimata del sistema propulsivo . . . . . . . . . . . . . . . . . . . . . 11.2 Punto operativo dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Elica a passo fisso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.2 Eliche a passo variabile . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Accoppiamento elica–motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.1 Condizioni di equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3.2 Metodi convenzionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.3.3 Metodo integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4 Scelta del punto progettuale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.5 Scelta dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.5.1 Ottimizzazione del diametro . . . . . . . . . . . . . . . . . . . . . . . . . 231.5.2 Ottimizzazione del numero di giri . . . . . . . . . . . . . . . . . . . . . . 261.5.3 Diagrammi di progetto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.6 Il problema progettuale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.6.1 Variabili progettuali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.6.2 Parametri progettuali . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291.6.3 Obiettivi e vincoli progettuali . . . . . . . . . . . . . . . . . . . . . . . . 301.6.4 Tipi di problemi progettuali . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.7 Previsione della potenza in servizio . . . . . . . . . . . . . . . . . . . . . . . . . 341.8 Rugosita e potenza nave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.8.1 Effetti della rugosita di carena sulle prestazioni della nave . . . . . . . . 351.8.2 Effetto dell’invecchiamento della carena e dell’elica . . . . . . . . . . . . 391.8.3 Incremento di potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511.8.4 Costruzione delle curve combinate passo-giri . . . . . . . . . . . . . . . . 52
2 Progetto Preliminare 552.1 Informazioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.2 Aspetti progettuali preliminari . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.3 Scelta delle caratteristiche principali dell’elica . . . . . . . . . . . . . . . . . . . 58
2.3.1 Margine sul numero di giri . . . . . . . . . . . . . . . . . . . . . . . . . 592.3.2 Diametro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622.3.3 Numero di pale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
III

2.3.4 Rapporto di area espansa . . . . . . . . . . . . . . . . . . . . . . . . . . 652.3.5 Geometria dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 672.3.6 Direzione di rotazione per navi bieliche . . . . . . . . . . . . . . . . . . . 70
2.4 Cavitazione e vibrazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 712.5 Riduzione della cavitazione per vortice d’apice . . . . . . . . . . . . . . . . . . 74
2.5.1 Eliche con apici moderatamente caricati . . . . . . . . . . . . . . . . . . 742.5.2 Eliche con apici completamente scaricati . . . . . . . . . . . . . . . . . . 75
2.6 Indici di difficolta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 762.7 Passo virtuale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 792.8 Registri di classifica e robustezza . . . . . . . . . . . . . . . . . . . . . . . . . . 812.9 Analisi parametriche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3 Fondamenti della teoria vorticale 873.1 Modelli matematici dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 883.2 Sistemi vorticosi su un’ala o su una pala isolata . . . . . . . . . . . . . . . . . . 903.3 Circolazione e vorticita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 923.4 Teoria dei profili portanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
3.4.1 Teorema di Biot–Savart . . . . . . . . . . . . . . . . . . . . . . . . . . . 953.4.2 Teorema di Kutta–Zoukovsky . . . . . . . . . . . . . . . . . . . . . . . . 97
3.5 Teoria della linea portante di un’ala isolata . . . . . . . . . . . . . . . . . . . . 1003.6 Proprieta delle velocita indotte . . . . . . . . . . . . . . . . . . . . . . . . . . . 1053.7 Modelli di funzionamento dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . 108
3.7.1 Linea portante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1093.7.2 Superficie portante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1113.7.3 Griglie di vortici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1123.7.4 Metodi a pannelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1143.7.5 Metodi RANS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3.8 Teoria della linea portante di un’elica . . . . . . . . . . . . . . . . . . . . . . . 1163.9 Metodo dei fattori di induzione . . . . . . . . . . . . . . . . . . . . . . . . . . . 1273.10 Distribuzione del carico prodotto dai vortici liberi . . . . . . . . . . . . . . . . . 1393.11 Fattori di correzione per superficie portante . . . . . . . . . . . . . . . . . . . . 1453.12 Condizione ottimale dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
3.12.1 Formulazione del problema . . . . . . . . . . . . . . . . . . . . . . . . . 1513.12.2 Condizione ottimale generalizzata . . . . . . . . . . . . . . . . . . . . . 154
4 Metodo di Eckhardt–Morgan 1634.1 Generalita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1644.2 Considerazioni base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1664.3 Procedura progettuale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
4.3.1 Caratteristiche dell’elica . . . . . . . . . . . . . . . . . . . . . . . . . . . 1734.3.2 Procedura di calcolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
4.4 Applicazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
IV

5 Progetto dell’elica subcavitante 2035.1 Influenza della scia e carico dell’elica . . . . . . . . . . . . . . . . . . . . . . . . 2055.2 Metodo della linea portante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2065.3 Progetto idrodinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2095.4 Progetto geometrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
5.4.1 Controllo della cavitazione . . . . . . . . . . . . . . . . . . . . . . . . . . 2195.4.2 Effetti prodotti dalla curvatura del flusso . . . . . . . . . . . . . . . . . 2255.4.3 Dettagli geometrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2265.4.4 Rendimento, effetti viscosi e correzione del passo . . . . . . . . . . . . . 2285.4.5 Ottimizzazione dei profili alari . . . . . . . . . . . . . . . . . . . . . . . 2315.4.6 Modifiche geometriche dell’elica . . . . . . . . . . . . . . . . . . . . . . . 236
Bibliografia 239

II
Introduzione
Il progetto dell’elica e un processo decisionale in seguito al quale ne vengono stabilite le ca-ratteristiche geometriche e cinematiche primarie e ne viene sviluppato il disegno costruttivo. Irequisiti principali di un’elica navale sono:
• elevato rendimento idrodinamico,
• rischio minimo di erosione per cavitazione,
• buone capacita di frenata,
• favorevole interazione con il timone, per migliorare sia il rendimento propulsivo che lamanovrabilita,
• minima vulnerabilita,
• bassi costi iniziali e di manutenzione.
Molti di questi requisiti sono soddisfatti se sono assicurate simultaneamente la robustezza dipala ed una bassa attivita vibratoria dovuta ai carichi eccitanti prodotti dall’elica sulla carenaattraverso la linea d’assi ed il fluido e se si riesce ad evitare lo sviluppo della cavitazione neidiversi modi operativi. Dal momento che soddisfare questi requisiti e massimizzare il rendimen-to propulsivo sono obiettivi contradditori, durante il progetto dell’elica e necessario utilizzaremetodi iterativi e giungere ad una soluzione di compromesso.
Il processo progettuale dell’elica si sviluppa attraverso numerose fasi, descrivibili come sequenzadi un insieme di attivita riportate nel diagramma di flusso riportato piu avanti. Inizialmenteviene effettuata la cosiddetta scelta ottimale delle caratteristiche geometriche fondamentali(diametro, passo medio, numero di pale, area espansa) sulla base di calcoli di previsione cheutilizzano dati storici e statistici per la resistenza nave e per i coefficienti propulsivi descrit-tori dell’interazione elica-carena, nonche i diagrammi (oggi matematizzati) di funzionamentodell’elica isolata disponibili da prove sperimentali di serie sistematiche. Il progetto concettualee realizzato con l’obiettivo primario di raggiungere la velocita di servizio della nave, come daspecifica armatoriale, con il minimo consumo di combustibile e la minima potenza richiesta almotore principale.
Affinche tutti i requisiti progettuali possano essere rispettati completamente nella secondafase, durante il progetto preliminare si effettua l’ottimizzazione delle caratteristiche principalidell’elica tenendo conto degli effetti del carico idrodinamico dell’elica sui coefficeinti propulsivi.
1
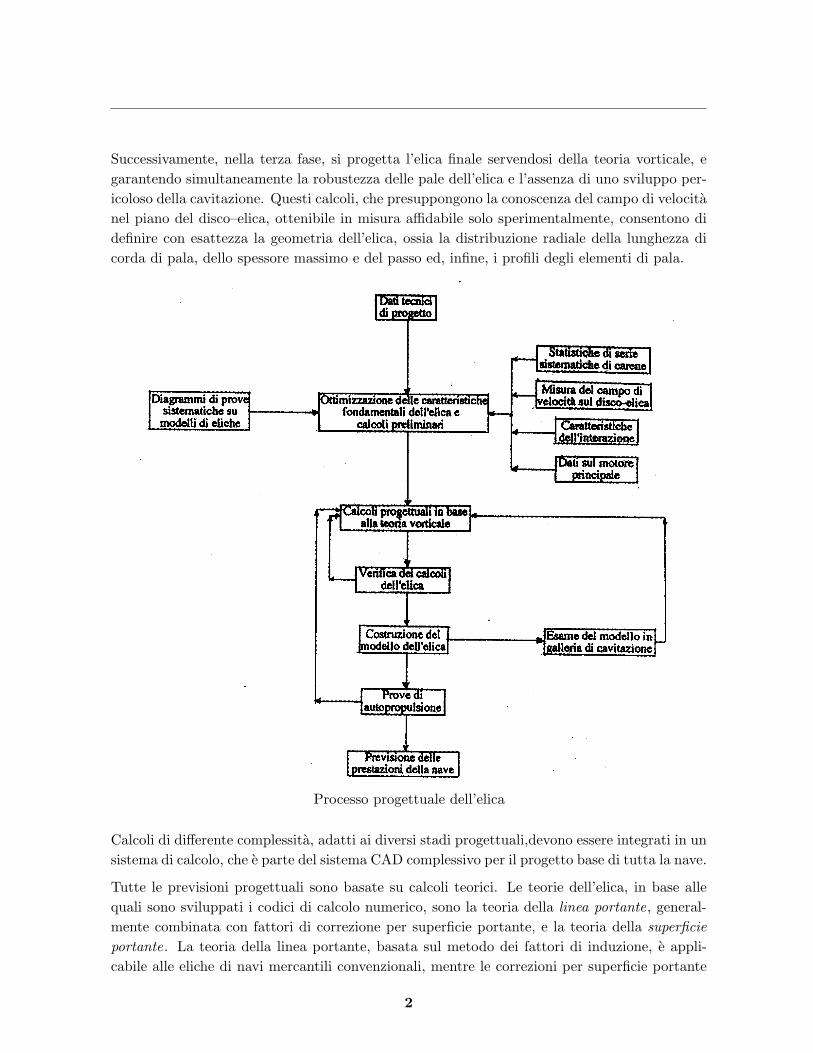
Successivamente, nella terza fase, si progetta l’elica finale servendosi della teoria vorticale, egarantendo simultaneamente la robustezza delle pale dell’elica e l’assenza di uno sviluppo per-icoloso della cavitazione. Questi calcoli, che presuppongono la conoscenza del campo di velocitanel piano del disco–elica, ottenibile in misura affidabile solo sperimentalmente, consentono didefinire con esattezza la geometria dell’elica, ossia la distribuzione radiale della lunghezza dicorda di pala, dello spessore massimo e del passo ed, infine, i profili degli elementi di pala.
Processo progettuale dell’elica
Calcoli di differente complessita, adatti ai diversi stadi progettuali,devono essere integrati in unsistema di calcolo, che e parte del sistema CAD complessivo per il progetto base di tutta la nave.
Tutte le previsioni progettuali sono basate su calcoli teorici. Le teorie dell’elica, in base allequali sono sviluppati i codici di calcolo numerico, sono la teoria della linea portante, general-mente combinata con fattori di correzione per superficie portante, e la teoria della superficieportante. La teoria della linea portante, basata sul metodo dei fattori di induzione, e appli-cabile alle eliche di navi mercantili convenzionali, mentre le correzioni per superficie portante
2
sono introdotte per le eliche di navi mercantili con un rapporto d’area espansa relativamentegrande. L’utilizzo di codici numerici basati sulla teoria della superficie portante e raccomndatoper eliche di navi speciali e navi militari, nonche per le eliche di navi mercantili convenzionali,quando i problemi indotti dalla cavitazione sono di assoluta importanza funzionale e contrat-tuale
Il problema diretto (analisi) include l’analisi dei calcoli statici e dinamici di robustezza, dellecaratteristiche di cavitazione, dell’attivita vibratoria dell’elica, ecc. Qualora qualche requisi-to non sia soddisfatto, il processo progettuale viene reiterato variando qualche caratteristicadell’elica.
Nella fase finale del progetto dell’elica vengono determinate le sue curve caratteristiche difunzionamento, che consentono di prevedere le prestazioni della nave al vero e di preparare ladocumentazione per la produzione dell’elica. Al termine del progetto e consigliabile produrreun modello dell’elica le cui caratteristiche di funzionamento sono derivate mediante prove ingalleria di cavitazione. Sia l’esame finale della corrispondenza tra i parametri progettuali equelli operativi, sia la stima delle qualita propulsive della nave, vengono effettuati al verodurante le prove in mare.
3
Capitolo 1
Progetto Concettuale
Fu impressionante constatare (Kanerva, 1996) che le previsioni di potenza sulla stessa nave,effettuate da tredici cantieri navali, rivelavano differenze relative fino al 30%. Molto probabil-mente, da allora non e cambiato molto; il che significa che l’affidabilita della progettazione delsistema propulsivo continua ad essere un problema non risolto definitivamente.
Il progetto dell’elica deve soddisfare diversi requisiti, molti dei quali tra loro conflittuali: devegarantirne il massimo rendimento propulsivo per produrre, alla velocita desiderata, la spin-ta richiesta assorbendo la potenza disponibile ad un assegnato numero di giri, garantendocontemporaneamente una robustezza adeguata delle pale, la riduzione/eliminazione della ca-vitazione per avere un livello accettabile di vibrazioni indotte in un assegnato campo di scianon–uniforme, una certa semplicita costruttiva, ecc.
Per tutte queste ragioni, lo sviluppo di un progetto soddisfacente non puo essere realizzatoin un unico calcolo, per quanto complicato esso sia. Il progetto e sviluppato piuttosto comesequenza di approssimazioni, nel quale le procedure analitiche interagiscono con l’esperienzadel progettista fino ad ottenere un’elica finale soddisfacente.
1.1 Stima approssimata del sistema propulsivo
La potenza motore necessaria a fornire all’elica la spinta sufficiente a fare avanzare la nave allavelocita di progetto deve essere stimata fin dalla fase concettuale del progetto. Allo scopo, sononecessari e sufficienti programmi di previsione conglobanti serie sistematiche e/o formulazioniempirico-statistiche, in modo da scegliere un motore di potenza adeguata, e trovare per l’elicala migliore combinazione tra diametro, numero di giri e passo medio.
1
1 – Progetto Concettuale
Contestualmente, occorre valutare le condizioni di ‘trade–off’, ossia quelle a velocita differentidalla velocita di progetto e/o quelle derivanti da condizioni di carico diverse da quella di pienocarico, da situazioni meteo–marine piu gravose, dal degrado idraulico della carena e dell’elica,nonche quelle caratterizzate dall’aumento di resistenza in bassi fondali. Occorre risolvere, inol-tre, i problemi relativi all’applicazione del riduttore ed alla scelta del rapporto di riduzione.Occorre valutare, infine, i consumi complessivi.
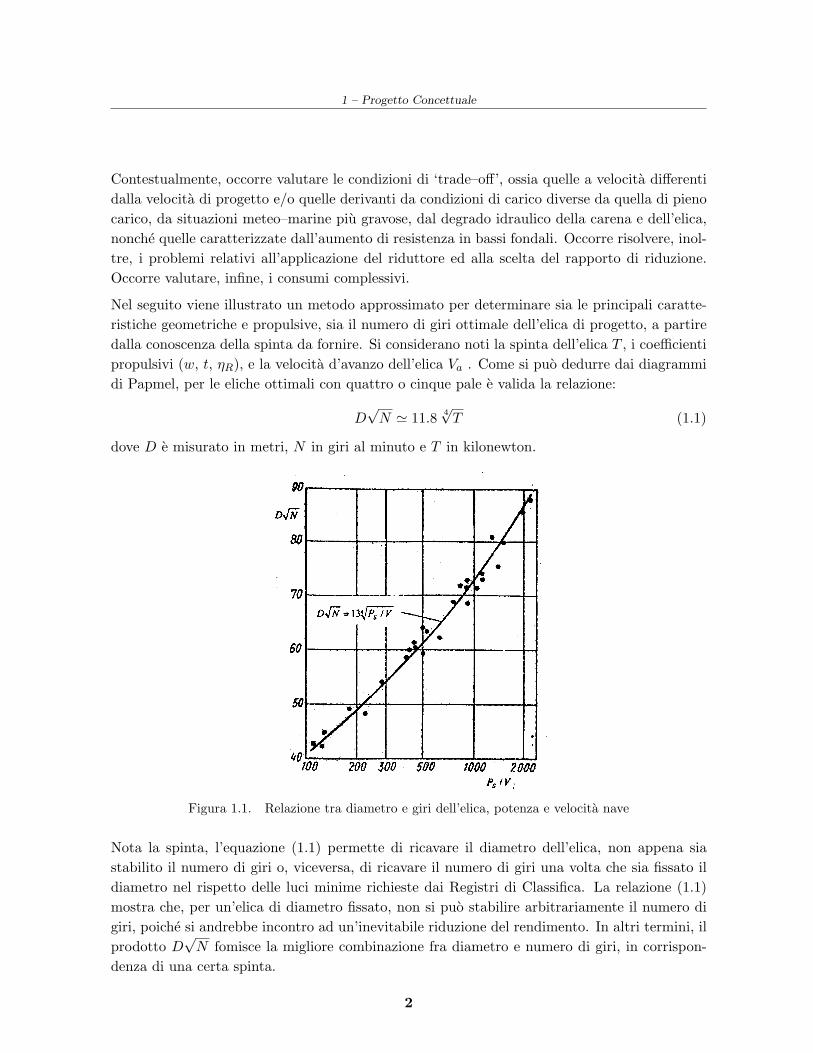
Nel seguito viene illustrato un metodo approssimato per determinare sia le principali caratte-ristiche geometriche e propulsive, sia il numero di giri ottimale dell’elica di progetto, a partiredalla conoscenza della spinta da fornire. Si considerano noti la spinta dell’elica T , i coefficientipropulsivi (w, t, ηR), e la velocita d’avanzo dell’elica Va . Come si puo dedurre dai diagrammidi Papmel, per le eliche ottimali con quattro o cinque pale e valida la relazione:
D√
N ' 11.8 4√
T (1.1)
dove D e misurato in metri, N in giri al minuto e T in kilonewton.
Figura 1.1. Relazione tra diametro e giri dell’elica, potenza e velocita nave
Nota la spinta, l’equazione (1.1) permette di ricavare il diametro dell’elica, non appena siastabilito il numero di giri o, viceversa, di ricavare il numero di giri una volta che sia fissato ildiametro nel rispetto delle luci minime richieste dai Registri di Classifica. La relazione (1.1)mostra che, per un’elica di diametro fissato, non si puo stabilire arbitrariamente il numero digiri, poiche si andrebbe incontro ad un’inevitabile riduzione del rendimento. In altri termini, ilprodotto D
√N fomisce la migliore combinazione fra diametro e numero di giri, in corrispon-
denza di una certa spinta.
2

1.1 – Stima approssimata del sistema propulsivo
Se si considera la relazione tra resistenza nave e potenza asse
PS =RT ·VηD ·ηS
(1.2)
per un valore medio del coefficiente quasi–propulsivo di una nave bielica, ipotizzabile pari aηD = 0.66, e per un rendimento della linea d’assi pari a ηS = 0.98, si puo scrivere la formulaapprossimata
D√
N ' 13.0 4
√PS/V (1.3)
I punti riportati in Figura 1.1 rappresentano, per diverse navi, i valori progettuali del prodottoD√
N in funzione dei valori corrispondenti del rapporto PS/V . La relazione (1.3) e rappresen-tata dalla curva di regressione tracciata nella stessa figura. Come si puo facilmente verificare,le relazioni (1.1) e (1.3) sono conformi alle situazioni medie delle moderne navi mercantili.
La formula (1.1) e relativa al cosiddetto ‘approccio del carenista’, poiche per calcolare il prodot-to D
√N occorre conoscere la spinta, che dipende linearmente dalla resistenza nave. Viceversa,
la formula (1.3) e relativa al cosiddetto ‘approccio del motorista’, in quanto per la sua appli-cazione occorre partire dalla conoscenza della potenza motore.
Per una stima iniziale del rendimento dell’elica isolata si puo utilizzare la formula
η0 = 1.876− 1.235C0.1T (1.4)
dove CT e il coefficiente di carico di spinta, mentre la stima del rapporto di passo medioprogettuale puo essere effettuata mediante la relazione
P
D=
a√CE
+ b + 0.4 t (1.5)
nella quale si tiene conto in maniera approssimata dell’influenza del fattore di deduzione dispinta sul passo dell’elica adattata alla scia in quanto e
CE = CT (1− t)
I coefficienti a e b nella relazione (1.5) dipendono dal numero di pale (Tab. 1.1), cui e associatoil valore minimo del rapporto di area espansa.
Z (AE/A0)min a b
3 0.50 0.564 0.2034 0.55 0.545 0.3045 0.60 0.581 0.3296 0.80 0.608 0.387
Tabella 1.1. Coefficienti per il calcolo del passo medio
3

1 – Progetto Concettuale
Si puo raccomandare la seguente sequenza nei calcoli. Per eliche in presa diretta con il motore,essendo obbligatoriamente fissati i giri dell’elica, in base alla relazione (1.1) si puo ricavare ildiametro ottimale. Viceversa, per un sistema propulsivo con riduttore, fissato il diametro si puoeffettuare una stima iniziale del numero di giri. Successivamente, determinato il coefficiente dicarico, si puo calcolare, in base alla formula (1.2), il rendimento dell’elica isolata e, quindi, ilrendimento quasi–propulsivo
ηD = η0 · 1− t
1− wT· 1iQ
= η0 ·ηH ·ηR (1.6)
e, infine, la potenza richiesta. Nella formula (1.6) iQ e il coefficiente d’influenza per momentotorcente, che e l’inverso del rendimento relativo rotativo ηR, mentre ηH e il cosiddetto rendi-mento di carena.
il passo medio puo essere ricavato, grazie all’equazione (1.5), in funzione del numero di pale,che inizialmente puo essere scelto in base all’esperienza o, meglio, effettuando un controllo chegarantisca la non contiguita tra la frequenza naturale del modo di vibrazione fondamentalelongitudinale della trave nave e la frequenza di pala. il rapporto di area espansa, necessarioper evitare lo sviluppo della cavitazione, puo essere ricavato mediante la formula di Keller oaltri criteri di cavitazione.
I risultati dei calcoli possono essere illustrati graficamente in funzione del numero di giri dell’eli-ca. Definiti i limiti delle dimensioni primarie dell’elica, in base al rispetto delle luci minimesecondo semplici formule imposte dai Registri di Classifica, e possibile risolvere al meglio il pro-blema della scelta del motore principale e del corrispondente numero di giri dell’elica, tenendoconto del loro legame.
In Tabella 1.2 sono riportati i valori medi del numero di giri espresso in funzione della potenzamotore per navi monoelica a presa diretta con motori diesel a due tempi. Bassi numeri di girisono tipici per navi lente con eliche assai caricate, mentre giri piu elevati sono propri di navidislocanti relativamente veloci.
PB [kW] 1000 2500 5000 10000 20000 30000 ≥ 40000
N [rpm] 250÷300 180÷210 125÷160 100÷125 100÷120 80÷110 65÷100
Tabella 1.2. Campo di variazione della frequenza di rotazione delle eliche
1.2 Punto operativo dell’elica
La caratteristica di carico di una nave in termini di resistenza e di velocita e data generalmentein forma quadratica, come R = a·V 2
s (Fig. 1.2). Cio vale solamente per velocita relativamentebasse (Fn = 0.10 ÷ 0.20), mentre per velocita piu elevate la curva si impenna fino a poteredivenire una polinomiale di grado compreso tra il terzo ed il quarto ordine.
4
1.2 – Punto operativo dell’elica
Figura 1.2. Andamento di curve di resistenza
1.2.1 Elica a passo fisso
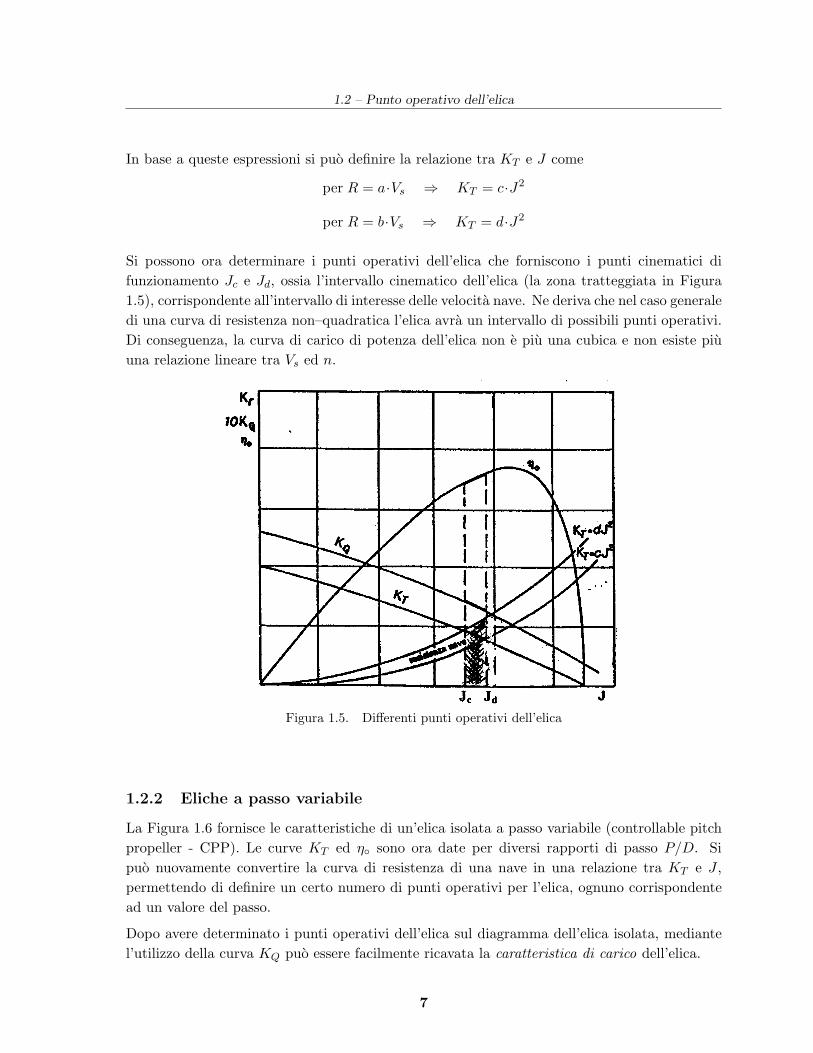
Il diagramma di funzionamento dell’elica isolata, ossia dell’elica senza tenere conto dell’influen-za della carena sul flusso che la investe, fornisce in forma adimensionale i coefficienti di spinta,KT , di momento torcente, KQ, e di rendimento, η◦, espressi in funzione di una grandezza ci-nematica, J , detta coefficiente d’avanzo. La Figura 1.3 fornisce tale diagramma per un’elicaa passo fisso (fixed pitch propeller - FPP). Il piano di rappresentazione del funzionamentodell’elica isolata, una volta che questa sia stata scelta tra quelle disponibili (spesso un’elica diserie sistematica) o progettata per la specifica carena, puo essere utilizzato per ‘trasformare’ lacaratteristica di resistenza della nave in caratteristica di carico dell’elica.
Figura 1.3. Identificazione del punto operativo
5

1 – Progetto Concettuale
A tale scopo, si assume in prima approssimazione una curva di resistenza quadratica, che puoessere trasformata come segue
RT = a·V 2s ⇒ T (1− t) = a
(Va
1− w
)2
→ T =a
(1− t)(1− w)2V 2
a ⇒
KT ·ρn2D4 =a
(1− t)(1− w)2V 2
a ⇒ KT =a
(1− t)(1− w)2ρD2
(Va
nD
)2
Se si assumono costanti D, t e w, tale relazione consente di formulare la caratteristica di caricodell’elica come
KT = c·J2 con c = cost.
Tracciando la parabole corrispondente sul diagramma dell’elica isolata, l’intersezione con lacurva KT dell’elica fornisce il punto operativo J∗ dell’elica (Fig. 1.3). Si puo, quindi, determi-nare il coefficiente del momento torcente ed il rendimento dell’elica isolata.
E evidente che per una curva di resistenza quadratica l’elica avra un unico punto operativo,indipendente dalla velocita nave; cio significa ipotizzare che:
• J , KT e KQ rimangono costanti;
• Q e funzione del quadrato della velocita di rotazione dell’elica;
• PD dipende dal cubo della velocita di rotazione dell’elica;
• D, Va ed n sono legate da relazioni lineari, essendo J = cost.
Figura 1.4. Andamento locale della resistenza
Quando la curva della resistenza non e quadratica, le relazioni suddette non sono piu valide.In tal caso (Fig. 1.4), si possono determinare i diversi punti operativi dell’elica a differentivelocita nave, Vs, assumendo localmente una legge quadratica per la resistenza. Ad una certavelocita si avra una relazione del tipo R = aV 2
s ; ad un’altra velocita si assumera R = b V 2s .
6
1.2 – Punto operativo dell’elica
In base a queste espressioni si puo definire la relazione tra KT e J come
per R = a·Vs ⇒ KT = c·J2
per R = b·Vs ⇒ KT = d·J2
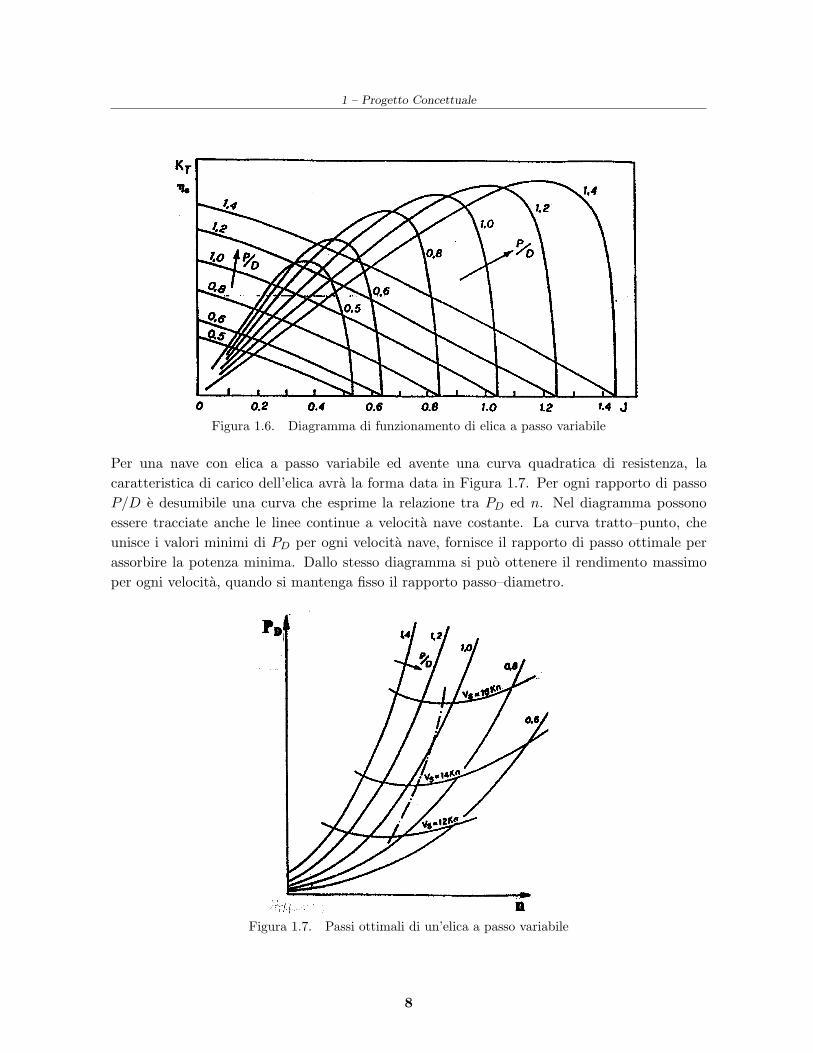
Si possono ora determinare i punti operativi dell’elica che forniscono i punti cinematici difunzionamento Jc e Jd, ossia l’intervallo cinematico dell’elica (la zona tratteggiata in Figura1.5), corrispondente all’intervallo di interesse delle velocita nave. Ne deriva che nel caso generaledi una curva di resistenza non–quadratica l’elica avra un intervallo di possibili punti operativi.Di conseguenza, la curva di carico di potenza dell’elica non e piu una cubica e non esiste piuuna relazione lineare tra Vs ed n.
Figura 1.5. Differenti punti operativi dell’elica
1.2.2 Eliche a passo variabile
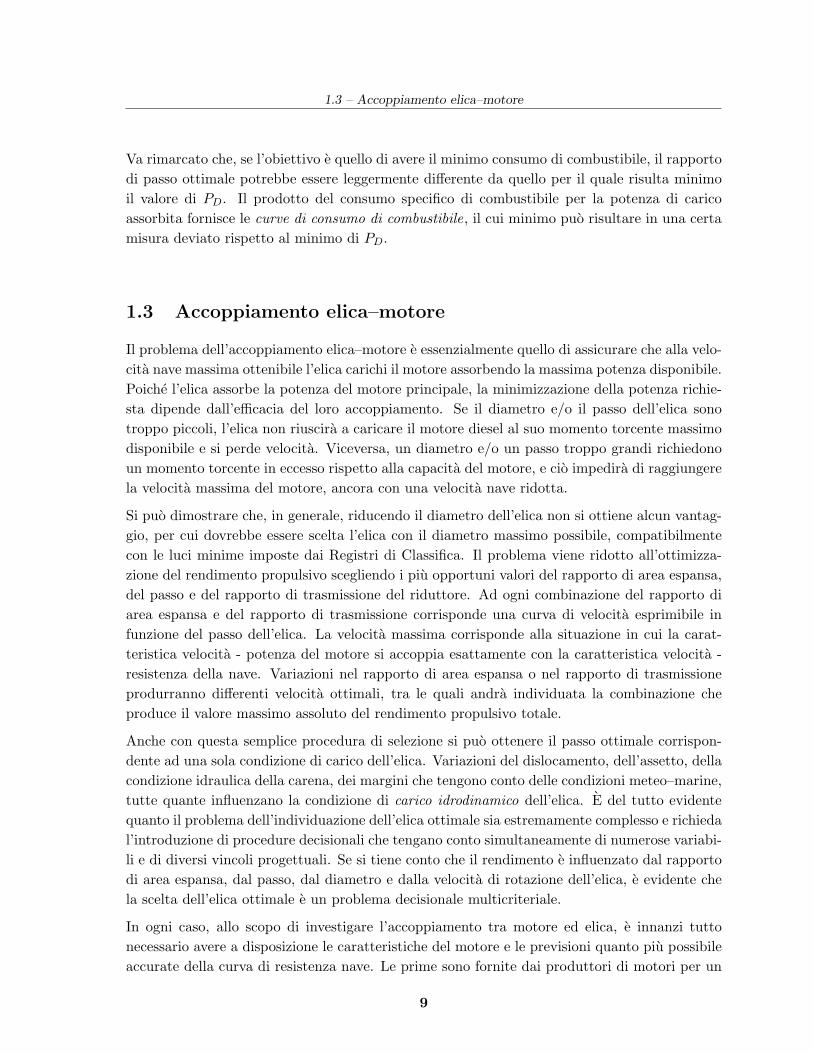
La Figura 1.6 fornisce le caratteristiche di un’elica isolata a passo variabile (controllable pitchpropeller - CPP). Le curve KT ed η◦ sono ora date per diversi rapporti di passo P/D. Sipuo nuovamente convertire la curva di resistenza di una nave in una relazione tra KT e J ,permettendo di definire un certo numero di punti operativi per l’elica, ognuno corrispondentead un valore del passo.
Dopo avere determinato i punti operativi dell’elica sul diagramma dell’elica isolata, mediantel’utilizzo della curva KQ puo essere facilmente ricavata la caratteristica di carico dell’elica.
7
1 – Progetto Concettuale
Figura 1.6. Diagramma di funzionamento di elica a passo variabile
Per una nave con elica a passo variabile ed avente una curva quadratica di resistenza, lacaratteristica di carico dell’elica avra la forma data in Figura 1.7. Per ogni rapporto di passoP/D e desumibile una curva che esprime la relazione tra PD ed n. Nel diagramma possonoessere tracciate anche le linee continue a velocita nave costante. La curva tratto–punto, cheunisce i valori minimi di PD per ogni velocita nave, fornisce il rapporto di passo ottimale perassorbire la potenza minima. Dallo stesso diagramma si puo ottenere il rendimento massimoper ogni velocita, quando si mantenga fisso il rapporto passo–diametro.
Figura 1.7. Passi ottimali di un’elica a passo variabile
8
1.3 – Accoppiamento elica–motore
Va rimarcato che, se l’obiettivo e quello di avere il minimo consumo di combustibile, il rapportodi passo ottimale potrebbe essere leggermente differente da quello per il quale risulta minimoil valore di PD. Il prodotto del consumo specifico di combustibile per la potenza di caricoassorbita fornisce le curve di consumo di combustibile, il cui minimo puo risultare in una certamisura deviato rispetto al minimo di PD.
1.3 Accoppiamento elica–motore
Il problema dell’accoppiamento elica–motore e essenzialmente quello di assicurare che alla velo-cita nave massima ottenibile l’elica carichi il motore assorbendo la massima potenza disponibile.Poiche l’elica assorbe la potenza del motore principale, la minimizzazione della potenza richie-sta dipende dall’efficacia del loro accoppiamento. Se il diametro e/o il passo dell’elica sonotroppo piccoli, l’elica non riuscira a caricare il motore diesel al suo momento torcente massimodisponibile e si perde velocita. Viceversa, un diametro e/o un passo troppo grandi richiedonoun momento torcente in eccesso rispetto alla capacita del motore, e cio impedira di raggiungerela velocita massima del motore, ancora con una velocita nave ridotta.
Si puo dimostrare che, in generale, riducendo il diametro dell’elica non si ottiene alcun vantag-gio, per cui dovrebbe essere scelta l’elica con il diametro massimo possibile, compatibilmentecon le luci minime imposte dai Registri di Classifica. Il problema viene ridotto all’ottimizza-zione del rendimento propulsivo scegliendo i piu opportuni valori del rapporto di area espansa,del passo e del rapporto di trasmissione del riduttore. Ad ogni combinazione del rapporto diarea espansa e del rapporto di trasmissione corrisponde una curva di velocita esprimibile infunzione del passo dell’elica. La velocita massima corrisponde alla situazione in cui la carat-teristica velocita - potenza del motore si accoppia esattamente con la caratteristica velocita -resistenza della nave. Variazioni nel rapporto di area espansa o nel rapporto di trasmissioneprodurranno differenti velocita ottimali, tra le quali andra individuata la combinazione cheproduce il valore massimo assoluto del rendimento propulsivo totale.
Anche con questa semplice procedura di selezione si puo ottenere il passo ottimale corrispon-dente ad una sola condizione di carico dell’elica. Variazioni del dislocamento, dell’assetto, dellacondizione idraulica della carena, dei margini che tengono conto delle condizioni meteo–marine,tutte quante influenzano la condizione di carico idrodinamico dell’elica. E del tutto evidentequanto il problema dell’individuazione dell’elica ottimale sia estremamente complesso e richiedal’introduzione di procedure decisionali che tengano conto simultaneamente di numerose variabi-li e di diversi vincoli progettuali. Se si tiene conto che il rendimento e influenzato dal rapportodi area espansa, dal passo, dal diametro e dalla velocita di rotazione dell’elica, e evidente chela scelta dell’elica ottimale e un problema decisionale multicriteriale.
In ogni caso, allo scopo di investigare l’accoppiamento tra motore ed elica, e innanzi tuttonecessario avere a disposizione le caratteristiche del motore e le previsioni quanto piu possibileaccurate della curva di resistenza nave. Le prime sono fornite dai produttori di motori per un
9

1 – Progetto Concettuale
intervallo di combinazioni tra potenze e velocita di rotazione; sono normalmente specificati ilimiti operativi del motore. Le seconde sono ottenute da previsioni empirico–statistiche, daprove su modelli in scala della nave e da dati di prove al vero, quando disponibili, se la naveappartiene ad una classe gia costruita. Questi dati sono spesso riducibili alle caratteristicheche legano il rapporto tra resistenza e dislocamento R/∆ alla velocita nave relativa V/
√gL,
per il tipo di forme di carena in esame.
Considerati separatamente, i metodi di previsione della resistenza nave, cosı come le stimedella spinta e della potenza sono da ritenere affidabili al livello del progetto concettuale. Leraccomandazioni dell’ITTC per il loro calcolo sono state validate a sufficienza. Lo stesso valeper i risultati raggiunti nella teoria e nella pratica di utilizzo dei motori navali.
Perche allora esistono tante discrepanze tra cantiere e cantiere nella previsione di potenza perla stessa nave al vero? Perche spesso il sistema propulsivo, sebbene composto di eccellentiunita singole, risulta inadeguato, almeno in parte, ad ottimizzare le prestazioni in potenzae velocita della nave? Per tentare di dare risposta a queste questioni, occorre analizzare leprocedure esistenti per la scelta dell’accoppiamento elica–motore, per poi proporre un metodoalternativo, il cosiddetto metodo integrale, quale base per la sua ottimizzazione.
1.3.1 Condizioni di equilibrio
Nel caso di trasmissione diretta della potenza al mozzo dell’elica, l’interazione tra elica e mo-tore e determinata dall’eguaglianza del numero di giri dell’elica e dell’albero motore, e dallaconseguente eguaglianza dei loro momenti torcenti, fatte salve, in ogni caso, le perdite d’attritolungo la linea d’assi.
Il momento torcente assorbito dall’elica dietro carena e dato da
QB = KQ ·ρn2D5 (1.7)
dove KQ e sostanzialmente funzione del coefficiente d’avanzo e del rapporto di passo
KQ = KQ (J, P/D)
Nelle reali condizioni operative, in prima approssimazione la velocita nave dipende linearmentedal numero di giri dell’elica (V = cost.×n), cosı che si puo assumere che il coefficiente d’avanzoe, quindi, il coefficiente di momento torcente varino di poco. La potenza assorbita dall’elica e,quindi, proporzionale al cubo del numero di giri; la relativa relazione e detta curva caratteristicadell’elica, espressa come
PD = 2πnQB = 2πKQ ·ρn3D5 = cost.× n3
Il momento torcente fornito dal motore, in analogia con la relazione (1.7), puo essere scrittonella forma
QE = K′Q ·ρn2D5 (1.8)
10

1.3 – Accoppiamento elica–motore
dove il coefficiente K′Q e funzione solamente della velocita di rotazione del motore stesso, ossia
K′Q = K
′Q (n)
La condizione QB = QE porta all’eguaglianza KQ = K′Q, il che puo essere assicurato adattan-
do il passo dell’elica. Tuttavia, definito P/D, poiche per l’elica e KQ = KQ (J), mentre per ilmotore e K
′Q = K
′Q (n), quando la resistenza nave varia, se si mantiene costante il numero di
giri, viene rotta la condizione di eguaglianza dei coefficienti del momento torcente, con conse-guente malfunzionamento nell’interazione elica–motore.
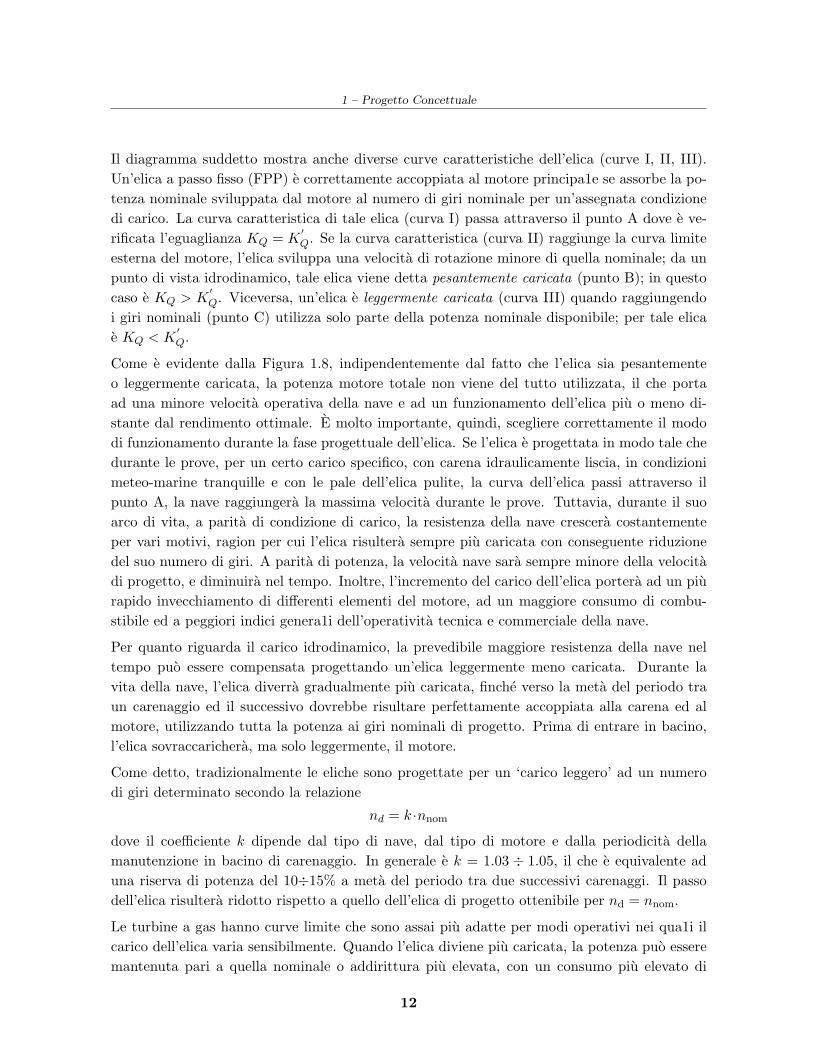
Allo scopo di svolgere un’analisi dettagliata di questo problema, si considerino le caratteristichedi velocita degli usuali motori diesel navali. La Figura 1.8 mostra le caratteristiche fondamen-tali del motore (potenza e numero di giri normalizzati rispetto ai loro valori nominali), le qualideterminano la sua zona operativa stabile, ossia:
• caratteristica nominale esterna del motore, ossia relazione tra potenza e velocita di rota-zione per la massima erogazione di combustibile (curva 1);
• caratteristica limitativa del momento torcente per il carico meccanico (curva 2), corris-pondente alla condizione Q = cost. e PB = 2πn QB/ηS ;
• caratteristica relativa al numero di giri minimo del motore (curva 3);
• caratteristica di regolazione limitativa del numero di giri massimo del motore (curva 4),alla quale scatta il regolatore di frequenza limite in caso di improvvisa caduta del carico;questo regolatore impedisce a1 motore di funzionare ad un numero di giri maggiore del3÷5% di quello nominale.
Figura 1.8. Corrispondenza nel campo di funzionamento tra elica e motore diesel
Durante il funzionamento normale, al motore non e permesso di operare al di fuori delle curvelimite. Il punto A del diagramma indica la potenza nominale del motore alla velocita nominaledi rotazione, quando il motore operi senza sovraccarico.
11
1 – Progetto Concettuale
Il diagramma suddetto mostra anche diverse curve caratteristiche dell’elica (curve I, II, III).Un’elica a passo fisso (FPP) e correttamente accoppiata al motore principa1e se assorbe la po-tenza nominale sviluppata dal motore al numero di giri nominale per un’assegnata condizionedi carico. La curva caratteristica di tale elica (curva I) passa attraverso il punto A dove e ve-rificata l’eguaglianza KQ = K
′Q. Se la curva caratteristica (curva II) raggiunge la curva limite
esterna del motore, l’elica sviluppa una velocita di rotazione minore di quella nominale; da unpunto di vista idrodinamico, tale elica viene detta pesantemente caricata (punto B); in questocaso e KQ > K
′Q. Viceversa, un’elica e leggermente caricata (curva III) quando raggiungendo
i giri nominali (punto C) utilizza solo parte della potenza nominale disponibile; per tale elicae KQ < K
′Q.
Come e evidente dalla Figura 1.8, indipendentemente dal fatto che l’elica sia pesantementeo leggermente caricata, la potenza motore totale non viene del tutto utilizzata, il che portaad una minore velocita operativa della nave e ad un funzionamento dell’elica piu o meno di-stante dal rendimento ottimale. E molto importante, quindi, scegliere correttamente il mododi funzionamento durante la fase progettuale dell’elica. Se l’elica e progettata in modo tale chedurante le prove, per un certo carico specifico, con carena idraulicamente liscia, in condizionimeteo-marine tranquille e con le pale dell’elica pulite, la curva dell’elica passi attraverso ilpunto A, la nave raggiungera la massima velocita durante le prove. Tuttavia, durante il suoarco di vita, a parita di condizione di carico, la resistenza della nave crescera costantementeper vari motivi, ragion per cui l’elica risultera sempre piu caricata con conseguente riduzionedel suo numero di giri. A parita di potenza, la velocita nave sara sempre minore della velocitadi progetto, e diminuira nel tempo. Inoltre, l’incremento del carico dell’elica portera ad un piurapido invecchiamento di differenti elementi del motore, ad un maggiore consumo di combu-stibile ed a peggiori indici genera1i dell’operativita tecnica e commerciale della nave.
Per quanto riguarda il carico idrodinamico, la prevedibile maggiore resistenza della nave neltempo puo essere compensata progettando un’elica leggermente meno caricata. Durante lavita della nave, l’elica diverra gradualmente piu caricata, finche verso la meta del periodo traun carenaggio ed il successivo dovrebbe risultare perfettamente accoppiata alla carena ed almotore, utilizzando tutta la potenza ai giri nominali di progetto. Prima di entrare in bacino,l’elica sovraccarichera, ma solo leggermente, il motore.
Come detto, tradizionalmente le eliche sono progettate per un ‘carico leggero’ ad un numerodi giri determinato secondo la relazione
nd = k ·nnom
dove il coefficiente k dipende dal tipo di nave, dal tipo di motore e dalla periodicita dellamanutenzione in bacino di carenaggio. In generale e k = 1.03 ÷ 1.05, il che e equivalente aduna riserva di potenza del 10÷15% a meta del periodo tra due successivi carenaggi. Il passodell’elica risultera ridotto rispetto a quello dell’elica di progetto ottenibile per nd = nnom.
Le turbine a gas hanno curve limite che sono assai piu adatte per modi operativi nei qua1i ilcarico dell’elica varia sensibilmente. Quando l’elica diviene piu caricata, la potenza puo esseremantenuta pari a quella nominale o addirittura piu elevata, con un consumo piu elevato di
12
1.3 – Accoppiamento elica–motore
combustibile ed una riduzione insignificante dei giri dell’elica. Il carico termico della turbinanon varia, mentre aumenta leggermente il carico del riduttore, che va percio progettato consufficiente riserva di robustezza. Di conseguenza, le eliche delle navi motorizzate con turbine agas non vengono mai progettate per ‘carico leggero’. Si raccomanda che il passo medio dell’elicasia scelto per la condizione delle prove di velocita al vero, ossia per potenza e numero di girinominali.
1.3.2 Metodi convenzionali
Durante la vita operativa della nave, come risultato della variazione della resistenza di care-na dovuta alla flora marina, alle onde, al vento, ai bassi fondali, nonche della variazione diimmersione per differenti casi di caricazione, le condizioni dell’interazione elica–motore nonrimangono fisse, il che porta ad una variazione dei giri dell’elica, della potenza richiesta e dellavelocita nave.
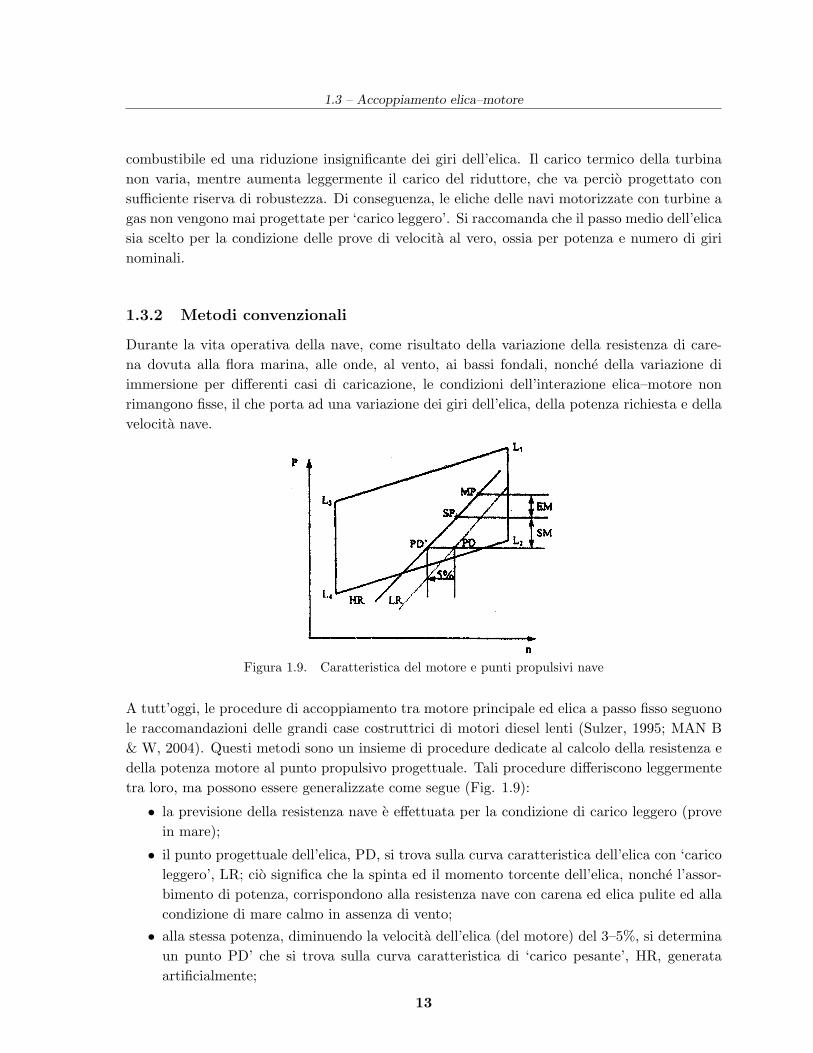
Figura 1.9. Caratteristica del motore e punti propulsivi nave
A tutt’oggi, le procedure di accoppiamento tra motore principale ed elica a passo fisso seguonole raccomandazioni delle grandi case costruttrici di motori diesel lenti (Sulzer, 1995; MAN B& W, 2004). Questi metodi sono un insieme di procedure dedicate al calcolo della resistenza edella potenza motore al punto propulsivo progettuale. Tali procedure differiscono leggermentetra loro, ma possono essere generalizzate come segue (Fig. 1.9):
• la previsione della resistenza nave e effettuata per la condizione di carico leggero (provein mare);
• il punto progettuale dell’elica, PD, si trova sulla curva caratteristica dell’elica con ‘caricoleggero’, LR; cio significa che la spinta ed il momento torcente dell’elica, nonche l’assor-bimento di potenza, corrispondono alla resistenza nave con carena ed elica pulite ed allacondizione di mare calmo in assenza di vento;
• alla stessa potenza, diminuendo la velocita dell’elica (del motore) del 3–5%, si determinaun punto PD’ che si trova sulla curva caratteristica di ‘carico pesante’, HR, generataartificialmente;
13
1 – Progetto Concettuale
• si determina il punto di servizio SP sulla curva HR aumentando la potenza mediantel’imposizione del ‘margine per il mare’ (SM ≈ 15%) per superare la resistenza aggiuntadella carena causata da un peggioramento delle condizioni meteo–marine e/o del ‘fouling’progressivo; aggiungendo il ‘ margine del motore’ (EM = 10-15%) si individua il puntoMP, che rappresenta la potenza e la velocita nominali del motore principale.
Nonostante la sua estesa applicazione nella pratica progettuale navale, questo metodo e infi-ciato da alcune debolezze concettuali. Tra l’altro, non e difficile dimostrare che la sua logicamira a preservare sostanzialmente l’interesse dei produttori di motori diesel.
La potenza in eccesso raccomandata protegge l’apparato motore dai sovraccarichi termici emeccanici che si manifestano nell’intervallo tra le curve caratteristiche dell’elica LR e HR. Gra-zie alla imposta ridondanza, il motore principale puo mantenere la sua velocita nominale intale intervallo senza risultare sovraccaricato. Ma per fruire di tale opportunita l’armatore puotrovarsi a pagare una notevole extra–potenza; ossia, a dovere scegliere un motore con uno o duecilindri in piu. Questi costi aggiuntivi non garantiscono che il sistema propulsivo sia capacedi mantenere la velocita di progetto in condizioni di servizio piu pesanti e di deterioramentodi alcune sue componenti. Infatti, non appena la curva della resistenza diviene piu pesante,la velocita della nave diminuisce, indipendentemente dal fatto che si mantengano costanti levelocita dell’elica e del motore. L’unico impatto positivo dell’eccesso di potenza sulla velocitanave e la capacita di impedire un’eccessiva riduzione di velocita del motore stesso allo scopo diimpedirne il funzionamento oltre le curve limite.
Tuttavia, in alcune situazioni, indipendentemente dalla fornita riserva di potenza del motoreprincipale, l’operativita della nave in condizioni meteo–marine assai severe e con ‘fouling’ piusevero (di solito alla fine del periodo tra due carenaggi) si potrebbe trovare di fronte ad uninattesa e notevole riduzione dei giri del motore principale e, di conseguenza, della velocitanave. Il motore si trova a funzionare in condizioni tecniche ed economiche sfavorevoli.
I progettisti si trovano dunque di fronte ad un nuovo problema quando devono progettare ilsistema propulsivo: i parametri del sistema carena–elica–motore devono essere scelti in mododa garantire una corretta operativita della nave, ossia che i giri del motore e la velocita navevarino entro un intervallo predefinito di limiti accettabili .
La determinazione dei parametri tecnici del sistema propulsivo della nave e effettuata da tecnicii quali, ancorche specializzati, prendono spesso decisioni indipendentemente gli uni dagli altri.Cio porta ad un accumulo di margini quando si considerano tutte le unita del sistema, ilche comporta il rischio di sovradimensionare il motore principale. La velocita nave fissatacontrattualmente viene spesso considerata dall’armatore come velocita nominale di servizio,mentre il cantiere navale la considera come velocita di progetto; comunque, per entrambi espesso, anche se ambiguamente, la velocita alle prove in mare. L’assenza di una definizioneesatta di queste velocita comporta problemi tecnici e legali, nonche discussioni infinite tracantieri ed armatori.
14
1.3 – Accoppiamento elica–motore
Per tutte queste ragioni, nessuno e in grado di spiegare a quale livello di rugosita della carena edell’elica, ed a quale stato di mare e di intensita del vento, presi separatamente o complessiva-mente, corrisponde l’abusato valore di ‘margine per il mare’ (sea margin) pari frequentementea SM = 15%.
Pur accettando come regola i metodi standard per l’accoppiamento tra elica e motore, moltiricercatori hanno provato a migliorarli correggendone gli errori suddetti. Le loro ricerche sonostate dirette soprattutto a determinare relazioni quantitative tra i parametri di prestazionedegli elementi del sistema propulsivo della nave (resistenza, spinta, momento torcente e poten-za, perdita di velocita) e la variazione dei fattori che li determinano (rugosita della carena edell’elica, onde, vento, ecc.). Il lavoro di Kresic e Haskell (1983) e un’ottima sintesi del modo diaffrontare tali problematiche. Tuttavia, nonostante il significativo contributo fornito a singoliaspetti del problema complessivo, nessuno e riuscito ad ovviare completamente alle debolezzesuddette. Il che accade perche, pur cercando di applicare valori corretti del ‘margine per ilmare’ in condizioni meteo–marine probabili e con incrementi attesi della rugosita dell’elica edella carena, l’elica ha continuato ad essere progettata ‘leggermente caricata’.
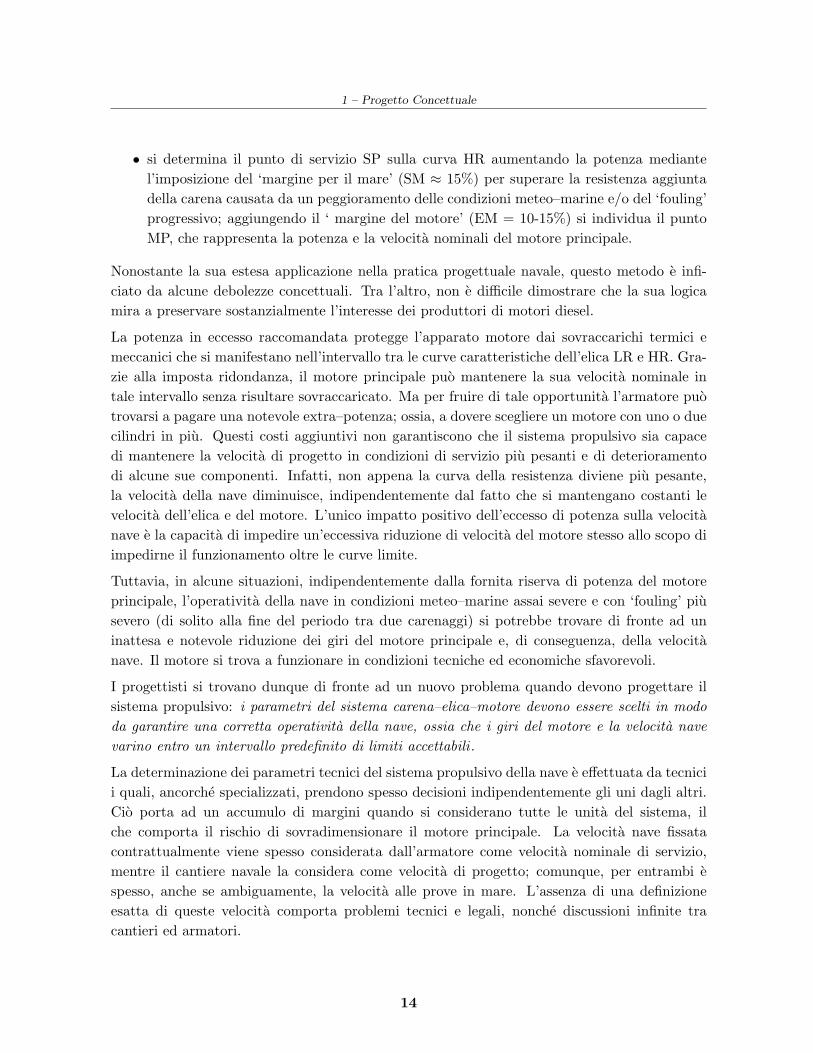
Figura 1.10. Variazione nel tempo del diagramma di carico del motore
Va messa in discussione anche la pratica di definire il punto MP aggiungendo sulla curva ca-ratteristica dell’elica HR il ‘margine del motore’ EM. Questo margine e stato introdotto percompensare la diminuzione di potenza del motore principale causata dal deterioramento dellesue condizioni tecniche. Cio significa che il diagramma di carico del motore non rimane co-stante, ma varia nel tempo (Fig. 1.10).
La potenza massima sviluppata dal motore diminuira ed il punto MP si muovera verticalmenteverso il basso fino al punto MP’, ma senza scivolare sulla curva di carico pesante fino al puntoSP. Anche le curve limite si muoveranno verso il basso. In tal modo, il numero di giri nL delmotore principale corrispondera al punto d’intersezione L della curva limite effettiva e dellacurva di carico pesante. Il valore nL sara sempre inferiore al numero di giri nSP relativi al pun-to SP. Cio non accadrebbe se il punto MP fosse ricavato aggiungendo il margine EM relativo
15
1 – Progetto Concettuale
alla potenza corrispondente ai giri costanti nSP. Il nuovo punto contrattuale C, costruito ver-ticalmente da SP introducendo il ‘margine del motore’, si trova sulla curva di carico HR’, chee ancora piu pesante. Il vantaggio consiste nella possibilita per tutta o per la restante quantitadi EM di essere utilizzata per il mantenimento del numero di giri nominale del motore, quandola nave opera in condizioni idrodinamiche piu onerose.
Le osservazioni critiche sulle procedure standard per l’accoppiamento elica–motore sono cosıriassumibili:
• la procedura raccomandata per la definizione del punto contrattuale MP mediante i mar-gini SM e EM assicura l’operativita del motore principale, senza sovraccarico, fino allecondizioni di servizio corrispondenti alla curva HR; ma non garantisce che la velocita diprogetto della nave sia mantenuta in queste condizioni;
• la mancanza di una relazione quantitativa tra la riduzione raccomandata della velocitaprogettuale dell’elica, pari a 2.5–5.0% per la definizione della curva HR, ed i fattori chegenerano e determinano la sua posizione esatta, implica che non vi sia una chiara defini-zione degli obiettivi propulsivi;
• la determinazione aprioristica del ’margine per il mare’ e del ’margine del motore’, im-ponendo valori prefissati, comporta l’abbandono della relazione logica causa–effetto nelprocesso progettuale; ne risulta che tali margini sono scorrelati dalle cause fisiche che negenerano la necessita.
1.3.3 Metodo integrale
Quando un armatore ordina una nuova nave, ha un’idea abbastanza precisa circa la velocitaeconomica ottimale alle condizioni di carico ed operative previste. Per l’armatore la ‘velocitacontrattuale’ significa ‘velocita operativa’ ottimale, da mantenere il piu a lungo possibile nellecondizioni di servizio assunte come quelle relativamente peggiori. Tale aspettativa e connessaovviamente ai margini fissati per le singole componenti del sistema propulsivo.
Per il team progettuale la ‘velocita contrattuale’ equivale a ‘velocita di progetto’ con un signi-ficato pressoche onnicomprensivo. Infatti, non e solamente una variabile determinante per lapotenza motore da installare a bordo, ma lo e anche per l’ottimizzazione delle forme di carena,per i parametri di calcolo della robustezza nave, ed anche per la determinazione dei marginisulla nave.
Come e del tutto evidente, esiste una forte divaricazione tra questi due approcci. Superare ledebolezze delle procedure standard richiede la definizione di un metodo integrale per il progettodel sistema propulsivo, che risponda agli interessi degli armatori, anziche a quelli dei produttoridi motori marini. Un tale approccio puo essere formulato fissando l’obiettivo di mantenere lavelocita di servizio della nave fino a valori predeterminati di deterioramento delle condizionitecniche della carena e delle pale dell’elica, nonche di peggioramento delle condizioni meteo–marine, senza causare sovraccarico ne termico ne meccanico del motore principale.
16

1.3 – Accoppiamento elica–motore
Raggiungere tale obiettivo porta a sostanziali vantaggi per la nave e per l’armatore. Crea lapossibilita di trasformare in incremento di spinta la potenza in eccesso del motore principalerispetto alla potenza assorbita dall’elica nella condizione progettuale di carico leggero. La po-tenza in eccesso puo essere utilizzata compiutamente per mantenere la velocita di progetto,evitando cosı di perdere velocita finche le caratteristiche di funzionamento dell’elica non supe-rino i livelli massimi di carico idrodinamico assunti per le reali condizioni operative.
La perdita di velocita causa all’armatore sostanziali costi aggiuntivi, soprattutto nei ‘contrattidi nolo a tempo’ (time–charter contracts), che spesso danno luogo a contenziosi legali derivantidal cosiddetto ‘reclamo per la velocita’ (time–claim). Gran parte di questi problemi derivada aspettative impossibili circa la possibilita di mantenere la velocita di servizio. Quando cioaccade, l’armatore deve pagare al noleggiatore una ‘penale per reclamo di velocita’ (SCP -speed claim penalty), dovuta a ‘ritardo temporale’ (TD - time delay), ad ogni toccata duranteil periodo del nolo. Tale penale e proporzionale al ‘nolo a tempo’ (TCH - time charter hire),secondo la seguente relazione
SCP = TCH ·TD
essendo
TD =k∑
i=1
Li
24Vc· ∆Vi
Vc −∆Vi
dove i e il numero di toccate previste durante il contratto, Li rappresenta la lunghezza dellatratta i–ma, Vc e la velocita contrattuale, mentre ∆Vi denota la perdita di velocita lungo latratta i–ma.
E importante sottolineare che, se non diversamente precisato, la velocita contrattuale nelcontratto di nolo a tempo deve essere mantenuta fino alle condizioni meteo corrispondentia Beaufort 4. La perdita di velocita causa all’armatore perdite finanziarie, anche quando ope-ra la nave alle condizioni di ‘noleggio a viaggio’ (voyage charter). Nella teoria economicadell’industria marittima e consuetudine trasformare il tasso di nolo in un TCH equivalente,consentendo cosı di valutare le perdite finanziarie causate dalla perdita di velocita.
Progettare il sistema propulsivo con un altro approccio deve consentire all’armatore di recu-perare l’investimento addizionale dovuto all’installazione di un motore principale di maggiorepotenza, allo scopo di mantenere la velocita di servizio, grazie ad una sensibile riduzione dellaSCP fino al suo annullamento.
Per determinare le prestazioni della nave in diversi modi operativi, e utile calcolare e disegnareil cosiddetto diagramma passaporto, detto anche caratteristica di prestazione (o di velocita)della nave. Tale diagramma consente di determinare rapidamente la velocita della nave ed imodi di funzionamento dell’elica e del motore in qualsiasi condizione operativa. Il diagram-ma passaporto e la rappresentazione sintetica del sistema di caratteristiche interagenti dellacarena, del motore e dell’elica, tutte espresse in funzione della velocita nave e del numero di giri.
I punti chiave della nuova metodologia proposta sono illustrati in Figura 1.11. Ogni quadrantecontiene almeno tre curve, relative alla resistenza di carena, RT , o per la potenza motore, PB,
17
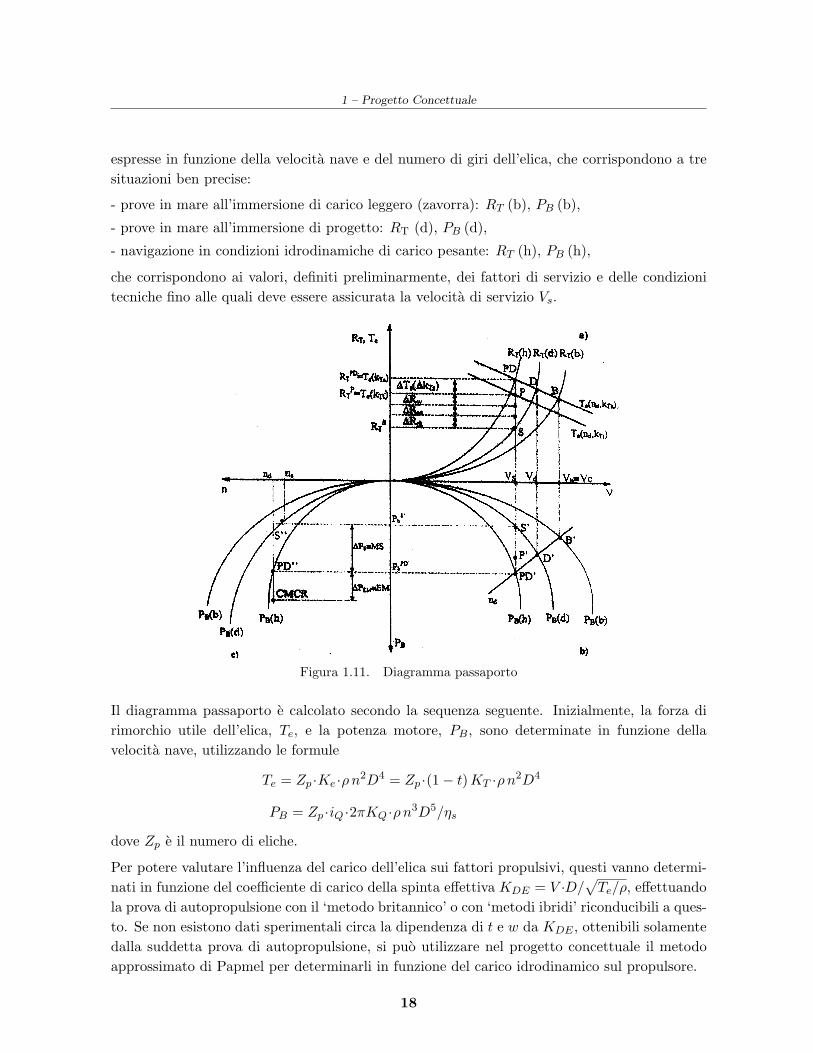
1 – Progetto Concettuale
espresse in funzione della velocita nave e del numero di giri dell’elica, che corrispondono a tresituazioni ben precise:
- prove in mare all’immersione di carico leggero (zavorra): RT (b), PB (b),
- prove in mare all’immersione di progetto: RT (d), PB (d),
- navigazione in condizioni idrodinamiche di carico pesante: RT (h), PB (h),
che corrispondono ai valori, definiti preliminarmente, dei fattori di servizio e delle condizionitecniche fino alle quali deve essere assicurata la velocita di servizio Vs.
Figura 1.11. Diagramma passaporto
Il diagramma passaporto e calcolato secondo la sequenza seguente. Inizialmente, la forza dirimorchio utile dell’elica, Te, e la potenza motore, PB, sono determinate in funzione dellavelocita nave, utilizzando le formule
Te = Zp ·Ke ·ρn2D4 = Zp ·(1− t) KT ·ρn2D4
PB = Zp ·iQ ·2πKQ ·ρn3D5/ηs
dove Zp e il numero di eliche.
Per potere valutare l’influenza del carico dell’elica sui fattori propulsivi, questi vanno determi-nati in funzione del coefficiente di carico della spinta effettiva KDE = V ·D/
√Te/ρ, effettuando
la prova di autopropulsione con il ‘metodo britannico’ o con ‘metodi ibridi’ riconducibili a ques-to. Se non esistono dati sperimentali circa la dipendenza di t e w da KDE , ottenibili solamentedalla suddetta prova di autopropulsione, si puo utilizzare nel progetto concettuale il metodoapprossimato di Papmel per determinarli in funzione del carico idrodinamico sul propulsore.
18
1.3 – Accoppiamento elica–motore
La resistenza in mare calmo, all’immersione di progetto ed alla velocita di servizio, e RST e
corrisponde al punto S (Fig. 1.11a). Per i valori assegnati di rugosita di carena, di forza delvento e di stato di mare fino ai quali deve essere mantenuta la velocita Vs, possono esserecalcolate le quote addizionali della resistenza; ossia:
- ∆Rrh, in funzione della rugosita di carena;
- ∆Raa, in funzione della forza del vento, secondo la scala di Beaufort;
- ∆Rw , in funzione dell’altezza d’onda significativa, secondo lo stato di mare.
In prima approssimazione, l’elica e progettata nel punto P indicativo della resistenza totalealla velocita Vs. La spinta progettuale Te = RP
T , il numero di giri nd, la velocita nave Vs ela frazione di scia w corrispondono alla rugosita iniziale delle pale. L’aumento della rugositadi pala fa diminuire la spinta dell’elica, per cui deve essere fornita una riserva di spinta ag-giuntiva. Tale riserva di spinta ∆Te (∆KTs), necessaria a compensare le suddetta resistenzaaggiunta, dipende dal valore assoluto della riduzione del coefficiente di spinta ∆KTs, causatadall’inevitabile aumento della rugosita delle pale passando dalla condizione ideale alle prove inmare ad una qualunque condizione di servizio.
Una volta raggiunto il punto PD, che determina la posizione della curva RT (h) alla velocitadi servizio, si effettua la seconda approssimazione del progetto dell’elica, che deve produrrela spinta Te (KTs), agli stessi valori di Vs e nd. In maniera similare si ricava l’incremento dimomento torcente ∆KQs causato dall’accresciuta rugosita delle pale, determinando il corris-pondente momento torcente e, quindi, la potenza assorbita.
Effettuata la seconda approssimazione, si ricava il punto PD’ (Fig. 1.11b), insieme alla curvadella potenza assorbita PB(h) alla quale sara mantenuta la velocita di servizio Vs. La potenzaPPD′
B nel punto PD’ e maggiore della potenza P S′B al punto S’, corrispondente alla potenza
assorbita nelle condizioni ideali di servizio, con un incremento (margine) pari a ∆PB = MS.Questo incremento assomiglia al ben noto ‘margine per il mare’ (SM). Ambedue i marginiesprimono la ridondanza in potenza dell’apparato motore, ma sono sostanzialmente diversi nelloro significato.
La differenza tra SM ed MS e concettualmente esprimibile come segue:
• Nella pratica progettuale storica, SM e fissato a priori, senza una correlazione chiara edesatta con i fattori della sua genesi. Viceversa, MS e determinato a posteriori, in ognisituazione particolare, come risultato quantitativo a partire dai valori limite assegnati siaai fattori tecnici, sia alle condizioni meteo–marine.
• Il ‘margine per il mare’ SM non consente al sistema propulsivo di mantenere la desideratavelocita di servizio Vs, indipendentemente da quanto elevata sia la potenza in eccessoche risulta necessaria. Viceversa, il ‘margine in mare’ MS realizza questo obiettivo conun’esatta corrispondenza tra il suo valore ed il grado di aggravamento delle condizionitecniche e di servizio.
19
1 – Progetto Concettuale
• Ambedue i margini proteggono il motore principale contro il sovraccarico fino ai suoi girinominali, ma a fronte di diverse curve di carico dell’elica. Utilizzando l’approccio tradi-zionale, la curva HR e fissata arbitrariamente a priori, mentre l’andamento della curvaPB(h) deriva dai valori assunti per tenere conto del deterioramento dei fattori relativialle condizioni di servizio e del peggioramento delle condizioni meteo–marine.
• I due metodi danno luogo a modi differenti di controllo del motore principale. Per ilsistema propulsivo progettato con i metodi tradizionali, la velocita di progetto Vd puoessere raggiunta alla velocita nominale del motore principale, lungo la curva caratteris-tica dell’elica LR e con il motore parzialmente caricato. Il fattore SM e assorbito allavelocita nominale del motore, quando la curva di carico dell’elica si sposta da LR a HR(vedi Fig. 1.9). La velocita nave diminuisce continuamente, ma il motore principale none sovraccaricato. Il modo con il quale e assorbito il margine MS e concettualmente diffe-rente. Alla curva di carico dell’elica PB(d), relativa alla condizione di carico progettuale,la velocita Vs puo essere mantenuta ad un valore di velocita inferiore, ns, del motore prin-cipale. Quando la curva caratteristica dell’elica si sposta da PB(d) a PB(h), la velocitanave e assicurata incrementando i giri del motore fino a nd, assorbendo il margine MScompletamente (Fig. 1.11c). Si puo affermare che SM e un margine di potenza ‘passivo’,mentre MS e un margine ‘attivo’ dal punto di vista del mantenimento della velocita Vs.
Per quanto riguarda il ‘margine del motore’, questo deve essere valutato in connessione con idati reali relativi alla diminuzione di potenza del motore principale a seguito del deterioramentodelle sue condizioni tecniche. Il margine del motore deve essere aggiunto in corrispondenza delnumero di giri nd, ma non sulla curva di carico dell’elica PB(h) (Fig. 1.11c)
L’applicazione del ‘metodo integrale’ garantisce una certa riserva di velocita. A parita di giri,nella condizione contrattuale (carico leggero o zavorra), la velocita raggiungibile e Vb = Vc,mentre nella condizione progettuale e Vd (Fig. 1.11a). Ambedue sono maggiori di Vs. Leloro differenze rispetto a Vs rappresentano una riserva di velocita per il sistema propulsivo.Normalizzando queste velocita rispetto alla velocita Vs, si possono formulare rispettivamente icoefficienti di riserva di spinta kvc e kvd. In termini numerici, questi coefficienti sono espressi inproporzione inversa alla perdita di velocita relativa. Se i dati concernenti la perdita di velocitasono affidabili, possono essere trasformati nei necessari coefficienti di riserva di velocita, cosıche i margini di spinta e di potenza possono essere determinati per approssimazioni successive(Alexiev e Kostova, 1993).
Il ‘metodo integrale’ fornisce all’armatore la possibilita di aumentare le garanzie contrattualiper quanto concerne il valore della velocita di servizio Vs. Quando l’armatore specifica talevelocita insieme al tasso di deterioramento e di peggioramento delle condizioni fino alle quallquesta velocita deve essere mantenuta, si puo determinare facilmente ed affidabilmente la ve-locita alle prove in mare da formalizzare contrattualmente.
La velocita Vc va fissata nel contratto sulla base della condizione di carico contrattuale alleprove; si puo avere, quindi, Vc = Vb, o Vc = Vd. In tal modo si evitano le incomprensioni chespesso si generano quando la velocita di progetto Vd e fissata come velocita contrattuale, mentre
20

1.4 – Scelta del punto progettuale
le prove sono effettuate all’immersione di carico leggero o di zavorra, e non all’immersione diprogetto. Il che comporta un successivo ricalcolo previsionale per convincere l’armatore che lavelocita misurata durante le prove in mare garantisce la velocita contrattuale Vd all’immersionedi progetto. Gli esperti sanno bene che tale operazione e scorretta e suscettibile di speculazioni.Il problema della velocita contrattuale assume, quindi, una complessita notevole.
1.4 Scelta del punto progettuale
Variare il punto progettuale di un’elica puo comportare vantaggi significativi nel consumo dicombustibile. Ovviamente, la scelta del punto progettuale e condizionata dall’intervallo di ca-rico disponibile per il motore.
E noto che per un motore diesel a due tempi un aumento del numero di giri a parita di potenzaporta ad un minore consumo specifico, come riscontrabile in Figura 1.12. Per questo motivo,quando si desideri ridurre i consumi, e conveniente progettare a valori quanto piu possibileelevati del numero di giri, in quanto l’elica lavorera con un maggiore margine di carico leggero.Va da se che esistono due limitazioni al riguardo. Innanzi tutto, il numero di giri nel puntoprogettuale non puo superare il limite del fuori-giri del motore. Inoltre, l’elica non potrebbepiu assorbire la potenza massima in condizioni di ‘pulizia’ del motore.
Figura 1.12. Curve di consumo del combustibile in motori diesel lenti a 2 tempi
Varra la pena investigare, in ogni caso, diverse definizioni del punto progettuale, per asseverare,fra l’altro, quali economie sui costi operativi possano essere realizzate.
21

1 – Progetto Concettuale
1.5 Scelta dell’elica
Quando si tratta del progetto dell’elica finale, ci si puo servire di calcoli puramente teorici,supportati anche da prove sperimentali. Nella fase concettuale del progetto si utilizzano lecurve di funzionamento di modelli di eliche di serie sistematiche, In questo caso si deve parlaredi scelta dell’elica, o meglio della determinazione dei suoi parametri fondamentali (diametro enumero di giri), piuttosto che di progetto dell’elica.
Il progetto concettuale dell’elica deve determinare le caratteristiche propulsive fondamentalicon un’accuratezza ingegneristicamente accettabile e deve rispondere a questi quesiti:
• e ottimale il diametro dell’elica?• e stato scelto correttamente il numero di pale, oppure e possibile migliorare il rendimento
dell’elica e/o ridurre le vibrazioni indotte variando il numero di pale?• e il punto progettuale dell’elica ottimale rispetto alle caratteristiche del motore? si e sicu-
ri che un’altra scelta del rapporto tra potenza e numero di giri non ridurrebbe il consumodi combustibile?
• potrebbe l’applicazione di un mantello o di altri dispositivi per il risparmio energeticoprodurre miglioramenti complessivi, per quanto attiene consumi, vibrazioni, ecc.
Nel passato, sono state sviluppate numerose serie sistematiche di eliche e per molte di questesono state pubblicate equazioni di regressione che permettono di calcolarne con accuratezza lecurve caratteristiche di funzionamento. La loro importanza e, e restera ancora vitale, nella faseconcettuale e negli stadi iniziali del progetto base di una nave.
Nella scelta iniziale delle caratteristiche geometriche e cinematiche fondamentali dell’elica, qual-siasi sia la serie sistematica o l’elica di stock utilizzata, sono sempre disponibili i coefficienti dispinta KT e di momento torcente KQ. Sei sono le incognite base: T (o RT ), Va (o V ), P , D, n
e Q. Percio, purche si conoscano quattro delle sei incognite, il problema della scelta dell’elicatrova soluzione. Ad esempio, si supponga di conoscere la resistenza nave RT alla richiestavelocita di progetto V e di avere scelto il motore principale: sono allora noti il numero di girin ed il momento torcente Q. Fissato il diametro dell’elica D, si voglia ricavare il passo P ela potenza sviluppata all’elica PD. Allo scopo, si devono stimare, innanzi tutto, i coefficientipropulsivi w, t, ηR. Conoscendo, quindi, T , Va, n e D, si ricavano KT e J , individuando ilpunto propulsivo sul diagramma KT -J . La curva P/D, che passa per questo punto, consentedi determinare il valore del passo P , mentre il valore corrispondente di KQ fornisce il momentotorcente Q dell’elica. La potenza sviluppata al mozzo dell’elica e calcolabile come
PD =2πn Q
ηR
Se invece di quattro, sono noti solamente tre dei quattro parametri suddetti, e se e derivabileuna relazione che leghi due dei parametri incogniti rimanenti - ad esempio, R e PE espressi infunzione di V - si deve parlare della risoluzione di un problema di ottimizzazione. Il criterioguida dell’ottimizzazione e normalmente la massimizzazione del rendimento dell’elica isolata.
22
1.5 – Scelta dell’elica
Nella fase concettuale del progetto, si possono individuare due classi principali per tale proble-ma, ovvero:
• ottimizzazione del diametro,
• ottimizzazione del numero di giri.
Nel determinare la loro combinazione ottimale, non e indifferente in quale sequenza vienesvolto il processo di ottimizzazione. Se si ottimizza rispetto al rendimento, il suo valore risultadifferente se si fissa il numero di giri o se si fissa il diametro. Ambedue sono subottimizzazionie generano eliche diverse. Ne deriva l’opportunita di ricorrere a tecniche di ottimizzazionemultiobiettivo, che consentano di ottimizzare D ed N simultaneamente (Chisari, 2008).
1.5.1 Ottimizzazione del diametro
In generale, ma non sempre, quanto maggiore e il diametro dell’elica, nel rispetto dei limiti delleluci poppiere, tanto maggiore sara il rendimento quasi–propulsivo. Nel caso di bulk carriers edi tankers, che spesso si trovano a navigare in condizione di zavorra, cosı come per le navi por-tacontenitori e per le ro-ro in condizioni di carico leggero, bisogna garantire progettualmenteche l’elica sia completamente immersa, con ovvie limitazioni sulle dimensioni del propulsore.Le formule seguenti possono essere assunte come linee guida di prima approssimazione:
• per bulk carriers e tankers D < 0.65T
• per ro-ro e portacontainers D < 0.74T
Tra eliche convenzionali, quella piu grande fornisce sempre il migliore rendimento di elicaisolata, purche la velocita di rotazione possa essere scelta liberamente. Per eliche leggermentecaricate, l’incremento del rendimento al crescere dell’elica fino a diametri eccezionalmente gran-di risulta, comunque, marginale. Una scia ridotta, nonche caratteristiche di resistenza menofavorevoli per navi con forme poppiere estreme, impongono sempre una limitazione del diame-tro. Anche l’immersione minima poppiera in zavorra e le luci richieste tra apice dell’elica evolta di poppa contribuiscono a limitare il diametro.
La procedura per determinare le caratteristiche principali di un’elica di diametro ottimale, unavolta fissato un apparato motore di potenza e numero di giri predefiniti, si sviluppa secondo lefasi seguenti:
• Il motore determina la potenza PD disponibile al mozzo dell’elica, che e derivata dallapotenza asse PS , assumendo un certo rendimento meccanico che congloba le perditenell’astuccio e nei cuscinetti della linea d’assi. In assenza di dati precisi da parte delcostruttore, il rendimento meccanico viene assunto pari a ηS = 0.98 nella condizione diMCR. A un MCR inferiore il rendimento meccanico dovrebbe diminuire. La velocita dirotazione nominale, alla quale e fornita la potenza motore, viene maggiorata generalmentedel 2–5%.
23
1 – Progetto Concettuale
• La frazione di scia e la velocita nave sono stimate mediante metodi empirico–statistici.Si possono calcolare ed utilizzare nei diagrammi corrispondenti parametri di carico idro-dinamico, quali B
′P di Taylor–Troost o KDE di Papmel. La stima della velocita nave
consente una prima valutazione della spinta, del rendimento dell’elica isolata e del rendi-mento propulsivo.
• Viene scelto il numero di pale Z, che influenza sostanzialmente il livello delle forze non–stazionarie sull’elica. Il numero di pale va messo a confronto anche con il numero dicilindri del motore. Numeri di cilindri multipli del numero di pale potrebbero causareproblemi vibratori. Eliche con tre pale sono utilizzate solamente su piccole navi ed imbar-cazioni veloci con linee d’alberi libere. Va combattutto il vecchio dogma navale secondoil quale il rendimento propulsivo cresce sempre al diminuire del numero di pale. Quandoe possibile aumentare il diametro, si verifica spesso un incremento del rendimento pro-pulsivo al crescere di Z.
• A questo punto si deve stimare il rapporto minimo di area espansa AE/A0, ritenuto suf-ficiente ad evitare cavitazione media sul disco–elica, in base ad un criterio di cavitazione.Il rapporto di area espansa minimo possibile fornisce il rendimento piu elevato per elichenormalmente caricate; cio non e sempre vero per rapporti d’area espansa molto piccoli.Ne deriva che e buona pratica imporre un limite inferiore per tale rapporto: deve esseresempre AE/A0 > Z/10.
• Si interpola, infine, sui diagrammi, o si utilizzano le equazioni di regressione, ricavandoi valori ottimali del coefficiente d’avanzo, del rapporto passo–diametro e del rendimentodi elica isolata.
Al termine del processo, si deve confrontare il rendimento totale rispetto a quello assunto inprima istanza per la stima della velocita nave. Se esiste una differenza sensibile, il processo vareiterato a partire da un’altra velocita di progetto.
La procedura suddetta puo essere migliorata tenendo conto che:
• Non si e tenuto conto che il rendimento dell’elica isolata, derivato da prove su modelli,e valido esattamente per Rn = 2 × 106, almeno per le eliche della Serie–B, mentre ilnumero di Reynolds dell’elica al vero e sempre maggiore. Al vero le perdite viscose, cheavvengono fondamentalmente sulle sezioni di pala piu esterne, sono inferiori. Ne derivache il diametro ottimale dell’elica della nave deve essere maggiore di quello determinatoin base a dati sperimentali (eliche di serie o di stock).
• Non sono stati considerati gli effetti della rugosita di pala, che comporterebbe una ridu-zione del diametro ottimale al vero.
• Si potrebbe ipotizzare che il diametro ottimale determinato per l’elica isolata, ossia influsso assiale uniforme, sia identico al diametro ottimale dell’elica dietro carena. Questonon e vero, anche perche e stato finora trascurato l’effetto del timone posizionato dietrol’elica.
24
1.5 – Scelta dell’elica
• La scelta del diametro ottimale e stata effettuata ignorando gli effetti del diametro sullafrazione di scia. Utilizzando un’ottimizzazione mono–obiettivo si ipotizza implicitamenteche tutte le eliche candidate abbiano la stessa scia, il che non e assolutamente vero, so-prattutto per le navi monoelica dove esiste un notevole gradiente radiale di scia e dovela scia media assiale diminuisce al crescere del diametro.
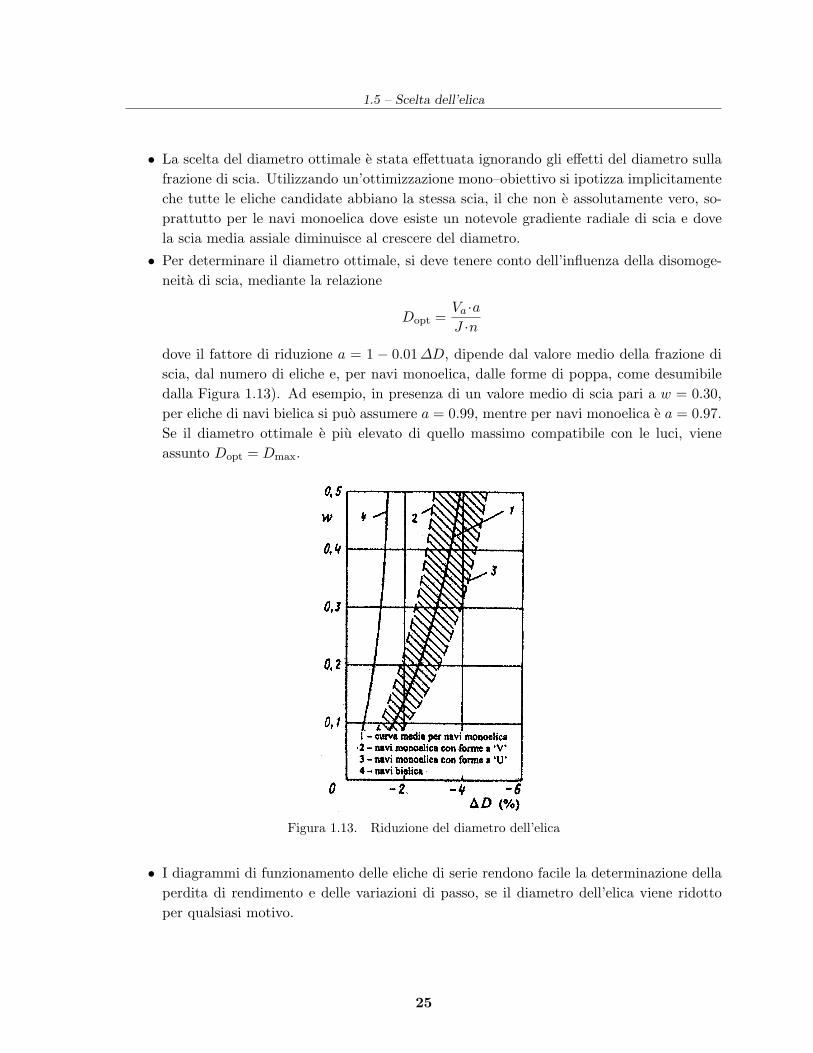
• Per determinare il diametro ottimale, si deve tenere conto dell’influenza della disomoge-neita di scia, mediante la relazione
Dopt =Va ·aJ ·n
dove il fattore di riduzione a = 1 − 0.01∆D, dipende dal valore medio della frazione discia, dal numero di eliche e, per navi monoelica, dalle forme di poppa, come desumibiledalla Figura 1.13). Ad esempio, in presenza di un valore medio di scia pari a w = 0.30,per eliche di navi bielica si puo assumere a = 0.99, mentre per navi monoelica e a = 0.97.Se il diametro ottimale e piu elevato di quello massimo compatibile con le luci, vieneassunto Dopt = Dmax.
Figura 1.13. Riduzione del diametro dell’elica
• I diagrammi di funzionamento delle eliche di serie rendono facile la determinazione dellaperdita di rendimento e delle variazioni di passo, se il diametro dell’elica viene ridottoper qualsiasi motivo.
25
1 – Progetto Concettuale
1.5.2 Ottimizzazione del numero di giri
Per determinare il numero di giri ottimale di un’elica si adotta un approccio differente. Fissatoil diametro, ed assegnata la potenza motore insieme alla velocita d’avanzo, il numero di giriottimale ed altre caratteristiche principali dell’elica possono essere determinati dai diagrammidi Taylor o da quelli di Papmel.
La procedura per determinare le caratteristiche dell’elica e la seguente:
• Il diametro massimo ammissibile e stabilito dalla configurazione all’estrema poppa e daaltri criteri progettuali, tra i quali le limitazioni raccomandate per le luci tra elica e carena.
• Si determina la potenza sviluppata all’elica dopo avere tenuto conto delle perdite delriduttore e delle perdite d’attrito sulla linea d’assi. Le perdite dovute al riduttore sonospesso assunte pari al 2–3% della potenza asse. Si osservi che a potenze inferiori, parti-colarmente quando si impiegano eliche a passo variabile in posizioni di passo ridotto, leperdite meccaniche possono essere superiori alla percentuale suddetta.
• La velocita nave e la frazione di scia sono stimate a partire da una previsione iniziale delrendimento totale, della resistenza e della spinta.
• Circa l’area espansa, valgono le stesse considerazioni svolte rispetto alla scelta del dia-metro ottimale. Si ricordi la limitazione relativa al rapporto di area espansa per eliche apasso variabile.
• Il rapporto di area espansa ed il numero di pale indicano quale diagramma utilizzare. Siricavano, quindi, il numero di giri ottimale ed il rapporto passo–diametro.
• Se il rendimento di elica isolata e diverso da quello stimato inizialmente, si ripete la pro-cedura con una nuova velocita nave.
La procedura appena descritta per la scelta del numero di giri dell’elica necessita di alcuneprecisazioni:
• Anche in questo caso non sono stati considerati ne gli effetti del numero di Reynoldsdell’elica al vero, ne gli effetti della rugosita di pala.
• E stato ipotizzato che la velocita di rotazione ottimale dell’elica isolata sia identico aquella dell’elica dietro carena, il che non e vero quasi mai.
• Si e trascurato l’effetto del timone, che di solito e posizionato dietro l’asse dell’elica. Varicordato che la velocita di rotazione ottimale di un’elica di diametro fissato fornisce unequilibrio tra perdite d’attrito e perdite rotazionali. Le perdite d’attrito si manifestanoprevalentemente ai raggi piu esterni e crescono con una maggiore velocita periferica seviene ridotto il passo. Le perdite rotazionali, associate alla variazione della quantita dimoto impartita in direzione circonferenziale nel flusso dietro l’elica, sono presenti soprat-tutto sui raggi piu interni. Esse crescono rapidamente al crescere del passo. Il timonedietro l’elica lavora come uno statore e recupera almeno meta delle perdite rotazionali,quando e posizionato in asse dietro eliche con passo elevato. Ne consegue che, se vieneinstallato un timone in asse con l’elica, per raggiungere il massimo rendimento totaledovrebbero essere applicati rapporti di passo piu elevati e velocita di rotazione inferiori.
26
1.5 – Scelta dell’elica
• Ulteriori studi parametrici hanno mostrato che le eliche progettate per un numero di giriottimale presentano una differente combinazione di diametro e numero di giri rispetto aquella delle eliche progettate per avere diametro ottimale. A tale proposito, si tengano amente le due linee guida seguenti, che sono confermate da tutti i diagrammi di progetto,anche se quelli di Papmel sono di piu agevole utilizzo:
– un’elica di diametro ottimale, con combinazione prefissata di potenza motore e nu-mero di giri, ruota piu velocemente di un’elica con lo stesso diametro e numero digiri libero;
– se si ottimizza il numero di giri di un’elica di diametro prefissato, qualora si vogliadeterminarne successivamente il diametro ottimale, si ricava un diametro ottimalemaggiore del diametro iniziale.
• Mediante i diagrammi progettuali si puo effettuare una stima grossolana delle caratteris-tiche delle eliche a passo variabile in condizioni diverse dal punto progettuale (off–design).Naturalmente cio vale solamente per gli effetti prodotti da piccole variazioni del passo.Quando le variazioni di passo sono maggiori, non sono piu trascurabili ne l’effetto dellavariazione della distribuzione radiale del carico, ne gli effetti prodotti dalla distorsionedei profili delle sezioni di pala, ne soprattutto gli effetti prodotti dallo scarico degli apicidi pala che e responsabile di una perdita addizionale del rendimento propulsivo dell’elica.
1.5.3 Diagrammi di progetto
L’utilizzo di diagrammi progettuali dell’elica, del tipo di quelli di Papmel, e imprescindibilenella fase concettuale del progetto per quanto attiene la scelta finale del diametro ottimale e/odel numero di giri ottimale, nonche del rapporto medio di passo. Per risolvere questo problemaa partire dalla curva di resistenza al moto della carena, occorre avere a disposizione i datirelativi al motore principale, ossia tipo, potenza e numero di giri dello stesso.
La procedura base consiste nel calcolare il valore del coefficiente d’avanzo, il valore del coeffi-ciente KT ed il valore del coefficiente KQ, e derivare il rendimento dalle polinomiali (diagrammi)di serie sistematiche. Comunque, non sono in generale disponibili i dati per calcolare questiparametri. Si stimano percio statisticamente i dati incogniti e si attiva una procedura iterativache porti alla massimizzazione del rendimento propulsivo. Un esempio spiega meglio comeprocedere.
Si ipotizzi che sia nota la velocita di progetto e che sia imposto il numero di giri dell’elica. Lavelocita d’avanzo e derivata dalla velocita di progetto utilizzando la frazione di scia nominale.Nel caso di elica pesantemente caricata e meglio utilizzare la scia effettiva. Sono note, quindi,due variabili del coefficiente d’avanzo, ossia Va ed n, mentre e incognito il diametro D. Si sce-glie un diametro arbitrario, il che consente di calcolare il coefficiente d’avanzo J . Dopo averescelto il numero di pale ed il rapporto d;area espansa, si determina il rendimento corrispondentedell’elica per tutti i rapporti di passo disponibili per la serie utilizzata. Si sceglie il rapporto
27

1 – Progetto Concettuale
di passo cui corrisponde il massimo rendimento. Si varia il diametro fino a ricavare il massimorendimento.
Questa tecnica iterativa puo essere applicata anche quando e incognita piu di una variabile. Intal caso, devono essere variati tutti i parametri disponibili e deve essere calcolata una matricedelle variazioni. Questo e, ad esempio, il caso quando siano entrambi incogniti il diametro edil numero di giri. In questo caso, si inizia l’iterazione scegliendo adeguatamente il diametroiniziale ed il numero di giri iniziale. E fissato, quindi, il coefficiente d’avanzo e si puo calcolare ilrendimento. Si varia per primo il numero di giri, mantenendo fisso il diametro, fino a ricavarneil valore ottimale. Si sceglie, quindi, un secondo diametro e si ripete tutta la procedura. Siosservi che l’ottimizzazione del rendimento con un numero di giri fissato produce un valoreottimale diverso da quello derivato con un diametro prefissato. Ambedue i valori sono subot-timali e generano una diversa classe di eliche.
Nell’approccio del carenista, i calcoli sono effettuati per un certo numero di velocita nell’intornodel valore della velocita di progetto, con un passo non superiore a 0.5 nodi. I coefficienti propul-sivi sono determinati grazie a formule di regressione derivate dall’analisi statistica dei risultatidell’analisi delle prove di autopropulsione, auspicabilmente tenendo conto del coefficiente dicarico dell’elica, definito in funzione della spinta effettiva TE = RT /Zp come
KDE = VaD
√ρ
TE
e sperabilmente sintetizzati in formule approssimate per il tipo specifico di nave. Avvalendosidei diagrammi di Papmel, il coefficiente d’avanzo relativo J viene determinato in funzione delcoefficiente
KNT =Va√n
4
√ρ
T
Dopo avere determinato J e KT secondo le relazioni
J =Va
n·Dopt; KT =
T
ρn2 D4opt
in base ai diagrammi di Papmel, si ricavano P/D = f(J,KT ) ed η0 = f(J,KT ) e, quindi, ilrendimento quasi–propulsivo ηD e la potenza motore PB.
I risultati dei calcoli vengono presentati in forma grafica come relazioni delle variabili ca1colatePD, Dopt, P/D, η0 ed ηD in funzione della velocita nave. Il punto di intersezione tra la curvadella potenza richiesta ed il valore della potenza motore disponibile determina la massimavelocita di progetto della nave e le corrispondenti caratteristiche dell’elica.
1.6 Il problema progettuale
L’elica navale puo essere considerata come una macchina trasformatrice che converte la potenzarotazionale trasmessa attraverso l’asse in una potenza di traslazione che fa muovere la nave. Il
28

1.6 – Il problema progettuale
prodotto della spinta T e della velocita d’avanzo Va e la potenza in uscita, mentre il prodottodel momento torcente assorbito Q e della velocita angolare ω e la potenza d’ingresso.
1.6.1 Variabili progettuali
E didascalico considerare l’elica come un sistema, il cui schema e mostrato in Figura 1.14, chegenera due variabili, T e Q, per valori specifici della variabili Va e ω. Poiche la velocita dellalinea d’assi n = ω/(2π) e impiegata piu comunemente di ω, sara utilizzata di qui in avanti.Adottando la terminologia della teoria dei sistemi, T e Q sono le variabili dipendenti , mentreVa ed n sono le variabili indipendenti .
Figura 1.14. Schema del sistema elica
Se si utilizza una terminologia piu ingegneristica, il quartetto di variabili T , Q, Va ed n sonole variabili progettuali nel problema di definizione dell’elica, proprio perche i valori di questequattro variabili possono variare quando l’elica opera in condizioni differenti. Si puo osservaredi passata che per un’elica a passo variabile il passo nominale (P0.7R) andrebbe consideratocome un’ulteriore variabile progettuale, poiche il suo valore puo variare per diverse richiestedel sistema di controllo.
I valori delle variabili progettuali specificano lo stato dell’elica nella condizione progettuale.Qualunque altro insoeme di valori di T , Q, Va ed n specificano le condizioni operative ‘off–design’ dell’elica. A seconda della natura del problema progettuale, i valori delle variabiliprogettuali possono essere specificati come risultato dei requisiti progettuali o sono ricavaticome soluzioni del problema progettuale.
1.6.2 Parametri progettuali
In termini quanto piu semplici possibile, progettare un’elica a pale fisse significa determinarela sua geometria e le sue caratteristiche meccaniche, definite come parametri progettuali . Sonoquantita che non variano una volta che l’elica sis stata progettata.
Il numero e la natura dei parametri progettuali dipendono da numerosi fattori: il metodoutilizzato nel progettare l’elica, se sono parametri di input o di output, il livello di dettaglio alquale e sviluppato il progetto, etc. La Tabella 1.3 fornisce una lista dei parametri progettualicatalogati sotto il titolo di parametri geometrici e meccanici.
29

1 – Progetto Concettuale
Parametri geometrici Parametri meccanici
Numero di pale Distribuzione dello ‘skew’ θ(r) Tipo di materiale
Diametro Distribuzione del ‘rake’ ψ(r) Peso specifico del materiale
Distribuzione del passo P (r) Tipo di sezione di pala Tipo di materiale
Distribuzione della corda c(r) Diametro medio esterno del mozzo Modulo di elasticita
Distribuzione della curvatura f(r) Diametro medio interno del mozzo Tensione massima ammissibile
Distribuzione dello spessore t(r) Lunghezza del mozzo
Tabella 1.3. Parametri progettuali fondamentali per eliche convenzionali
Come nel caso delle variabili progettuali, alcuni dei parametri progettuali sono fissati a priori,mentre altri sono variati sistematicamente. Il progetto sara del tutto automatico solamentequando tutti i parametri progettuali potranno essere determinati come risultato del processoprogettuale, un obiettivo raggiungibile solo con una complessa procedura multicriteriale.
1.6.3 Obiettivi e vincoli progettuali
Prima di iniziare il progetto di un’elica, e necessario comprendere chiaramente cio che si deveottenere e quali implicazioni devono essere considerate. Il modo migliore per descrivere il pro-blema progettuale e di contestualizzarlo entro la teoria dell’ottimizzazione, parlando, quindi,di funzione obiettivo e di vincoli . Un tale approccio non solo fornisce una base razionale percomprendere il problema progettuale, ma apre la strada verso l’adozione di precise procedureanalitiche per sviluppare un progetto.
Si deve capire anche che in un progetto ottimale, i valori ottimali delle variabili e dei parametriprogettuali non solo dovrebbero produrre il rendimento propulsivo piu elevato, ma dovrebberorispettare anche un insieme di vincoli. Una lista dei vincoli progettuali piu comuni comprende:caratteristiche di cavitazione accettabili, deboli forze vibratorie sulla carena, caratteristiche dirumore soddisfacenti, adeguata robustezza, limitazioni geometriche e di peso, costi di acqui-sizione e di manutenzione ragionevoli, buone qualita di frenata, accettabile comportamento‘off–design, affidabilita. Il progettista potrebbe far crescere questa lista con vincoli ulteriori aseconda della natura dello specifico problema e/o della sua esperienza pregressa.
E raro che si possano esprimere i vincoli in funzione delle variabili e dei parametri progettualimediante relazioni semplici. Si consideri, ad esempio, il problema di riprogettare l’elica di unanave esistente, per la quale l’armatore richieda che il peso delle pale dell’elica non superi unvalore assegnato, ad esempio 450 kN. La forma analitica del vincolo di peso appropriato nelproblema dell’ottimizzazione del progetto potrebbe assumere la forma (Schonherr, 1963)
0.248t◦D
AE
A0γD2 ≤ 450
Anche per il vincolo piu semplice, quale quello appena descritto, la forma nella quale appaio-no alcune variabili ed alcuni parametri e nonlineare; ossia, la maggior parte dei vincoli, senon tutti, sono altamente nonlineari, ed e nonlineare anche la funzione obiettivo. Il problema
30

1.6 – Il problema progettuale
dell’ottimizzazione nonlineare e complesso, ma oggi risolvibile. In ogni caso, discuterne e utileda molti punti di vista.
In primo luogo, si possono introdurre alcuni vincoli elementari; ad esempio, e relativamentesemplice includere il requisito che la lunghezza minima del mozzo sia almeno pari alla lunghezzaproiettata della corda alla radice; quale esempio alternativo, e relativamente semplice investi-gare l’effetto prodotto dall’incremento del ‘fattore di sicurezza’ sul numero di cavitazione locale.Va sottolineato che il concetto di vincolo progettuale consente al progettista di comprenderemeglio perche piu soluzioni sono possibili in specifiche applicazioni progettuali. Ad esempio, seil problema non e vincolato rigidamente, ossia se esistono pochi vincoli o se gli stessi non sonostringenti, puo essere analizzato sistematicamente un gran numero di eliche candidate, primadi proporre il ‘progetto migliore possibile’. Se, d’altra parte, il problema progettuale e ‘com-pletamente vincolato’, esistera una sola soluzione possibile che soddisfa i requisiti progettuali,ossia la funzione obiettivo ed i vincoli.
1.6.4 Tipi di problemi progettuali
Poiche e impossibile sintetizzare il processo progettuale dell’elica in un unico passo, si utilizzaun processo di analisi nel quale si ipotizza che certe grandezze siano note, mentre le altre sa-ranno determinate come rislutato dell’analisi.
I problemi progettuali dell’elica sono meglio decifrabilii se si considerano proritariamente lequattro variabili progettuali T , Q, Va ed n (Fig. 1.14). Queste variabili, prese due alla volta,dividono il problema progettuale in due classi principali, coem segue:
• problemi dei quali sono note la velocita d’avanzo Va e la spinta T , mentre Q ed n sonoincogniti;
• problemi dei quali sono noti il momento torcente Q e la velocita della linea d’assi n,mentre Va e T sono incognite.
La prima classe di problemi e risolta di solito mediante il cosiddetto ‘approccio del carenis-ta’ (naval architect approach), mentre la seconda classe utilizza il cosiddetto ‘approccio dellapotenza’ (marine engineer approach). Queste due classi di problemi e le loro varianti conglo-bano la quasi totalita dei problemi progettuali risolvibili fin dalla fase concettuale, e che sonosintetizzati in Tabella 1.4.
Approccio del carenista
Nella prima classe del problema progettuale, la spinta dell’elica, T , e la velocita d’avanzo, Va,sono variabili note. Piu precisamente, la velocita di progetto della nave, Vs, e specificata o as-sunta come valore desiderabile, e la velocita Va e calcolata utilizzando valori empirico/statisticio sperimentali di scia media. Analogamente, la spinta dell’elica e derivata dalla conoscenzadella resistenza nave alla velocita di progetto (o dalla potenza effettiva alla stessa velocita) edel fattore di deduzione di spinta t.
31

1 – Progetto Concettuale
Caso Dati Incognite Target
Approccio del carenista
1 D, Va, T N , P/D T/(ρV 2a D2)
2 D, Va, T , P/D N , PD T/(ρV 2a D2)
3 N , D, Va, T D, P/D T ·n2/(ρV 4a )
4 D, Va, PE N , P/D KT , η◦5 N , Va, PE D, P/D KT , η◦
Approccio del motorista
6 D, Va, PD N , P/D PD/(2πρ V 3a D2)
7 D, Va, PD, P/D N , T PD/(2πρ V 3a D2)
8 N , Va, PD D, P/D PD ·n2/(2πρ V 5a )
9 D, Va, Q, P/D N , T , PD Q/(ρV 2a D3)
10 N , Va, Q, P/D D, T , PD Q·n3/(ρV 5a )
Analisi
11 N , D, PE P/D KT , η◦12 N , D, Va, PD P/D, T PD ·n2/(2πρ n3D5)13 N , D, P/D, PD Va, T PD ·n2/(2πρ n3D5)14 N , D, P/D, T Va, PD KT , η◦15 N , D, P/D, Va T , PD KT , η◦16 N , D, Va P/D KT , η◦17 N , D, Va, T P/D, PD T ·n2/(ρV 2
a )
Tabella 1.4. Sintesi dei casi progettuali
L’obiettivo di questo approccio e la determinazione, sulla base di qualche funzione obiettivo, deivalori appropriati delle variabili progettuali Q ed n, cosı come degli altri parametri progettuali.
L’approccio del carenista e, in generale, quello seguito negli stadi iniziali del progetto dellanave (e dell’elica) purche, naturalmente, le caratteristiche del motore principale non siano talida imporre vincoli stringenti su Q ed n. Oggi e concettualmente piu razionale ‘adattare l’elicaalla nave’, per cui questo approccio e favorito da molti progettisti.
Se si fa riferimento ai diagrammi progettuali, l’approccio del carenista e quello seguito quando siutilizzano i coefficienti KTD di Papmel, i coefficienti BU di Taylor, o i diagrammi che prevedonol’utilizzo del coefficiente
KT
J2=
T
ρn2D4·n
2D2
V 2a
=T
ρD2V 2a
dove il diametro D e ipotizzato noto oppure e variato sistematicamente, nel qual caso il numerodi giri n (e Q) e calcolato in base alle restanti grandezze note.
32

1.6 – Il problema progettuale
Una leggera variante dell’approccio base del carenista consiste nel ‘fissare’ un valore per n enel determinare D, utilizzando coefficienti o diagrammi che consentono di eliminare il diametromediante il rapporto
KT
J4=
T
ρn2D4·n
4D4
V 2a
=Tn2
ρV 4a
L’applicazione combinata di queste due varianti dell’approccio del carenista permette di deter-minare una finestra di soluzioni, combinazioni accettabili di D ed n.
Approccio del macchinista
Una situazione frequente e quella nella quale il motore e scelto in partenza, per cui sono notila potenza disponibile al mozzo PD ed il numero di giri al quale questa potenza e sviluppata.
Se si assumono come variabili assegnate il momento torcente Q assorbito dall’elica e la velocitadi rotazione della linea d’assi n, il progetto dell’elica e effettuato utilizzando l’approccio delmacchinista. Poiche la potenza sviluppata all’elica e PD = 2πnQ, tale approccio e detto anche‘approccio della potenza’ o ‘approccio del momento torcente’.
Piu esplicitamente, l’approccio del macchinista assume che siano specificate a priori la potenzacontinua massima disponibile del motore principale e la velocita alla quale questa potenza etrasmessa, dalle quali possono essere calcolate la potenza sviluppata al mozzo e la velocita dirotazione dell’elica, una volta che siano note il rendimento meccanico della trasmissione ed ilrapporto di riduzione.
L’obiettivo corrispondente in questo approccio e quello di determinare, in base a qualche cri-terio, la velocita nave attesa Vs, oppure, piu precisamente, la velocita d’avanzo dell’elica Va, ela spinta associata T che possono essere sviluppate, insieme ai rimanenti parametri progettuali.
L’utilizzo dell’approccio del macchinista e associato con i coefficienti KQE di Papmel, i coeffi-cienti BP di Taylor, e con i diagrammi che includono il rapporto
KQ
J5=
Q
ρn2 D5·n
5D5
V 5a
=Qn3
ρ V 5a
=PD n2
2πρ V 5a
Con questo approccio base del macchinista, la velocita d’avanzo Va viene assunta o variatasistematicamente, e viene ricercato il diametro dell’elica ottimale come risultato della soluzioneprogettuale. Una variante di questo approccio consiste nel fissare un valore per D e nel de-terminare la velocita di rotazione n. In quest’ultimo caso, i diagrammi progettuali appropriatisono quelli basati sui coefficienti KDQ di Papmel, sui coefficienti B
′P di Taylor, o sui diagrammi
che includono il rapporto
KQ
J3=
Q
ρn2D5·n
3D3
V 3a
=Q
ρnD3 V 5a
=PD
2πρD2 V 3a
eliminando cosı il numero di giri.
33
1 – Progetto Concettuale
In ogni caso, l’obiettivo e lo stesso, ossia la determinazione dei valori attesi di T e Va (o Vs),insieme ai piu appropriati parametri progettuali. A differenza dell’approccio del carenista,l’approccio del macchinista consiste nell’accoppiare l’elica con il motore.
1.7 Previsione della potenza in servizio
L’obiettivo di una realistica progettazione del sistema propulsivo deve essere quello di calcolarela potenza motore, e di ottimizzare sia il rapporto di passo che il numero di giri dell’elica, consi-derando il maggior numero possibile di reali situazioni operative, che tengano conto dell’effettodell’invecchiamento della carena e dell’elica sulle prestazioni propulsive, dello stato di mare e/odel basso fondale.
La metodologia proposta, definita in precedenza metodo integrale, e ben diversa da quella clas-sica, che prevede la semplice assunzione di margini di potenza aprioristici, senza valutare ilpeso delle effettive condizioni in servizio della nave. Il risultato finale della nuova metodologiadi analisi e la costruzione, nel caso di eliche a passo variabile, delle curve combinate passo–girigarantendo il funzionamento sicuro, lontano dal sovraccarico, dell’apparato motore. L’analisiprogettuale deve permettere di valutare attentamente le prestazioni propulsive in infinite condi-zioni operative: in cio risiede la differenza fondamentale con l’approccio classico, che assicurale prestazioni della nave solamente finche la potenza richiesta nella reale situazione operativanon superi i margini prestabiliti euristicamente.
1.8 Rugosita e potenza nave
Per implementare un approccio corretto alla determinazione delle prestazioni in potenza di unanave, e importante sapere come le prestazioni di carena si combinano con l’utilizzo dell’energiaa bordo. Oltre alle prestazioni della carena, esistono vari aspetti da considerare nell’utilizzo ditale energia, fra i quali le prestazioni dei macchinari, il rendimento del propulsore, ed i legamifunzionali tra questi aspetti. Qui il problema specifico e identificare come ridurre il dispendiodi energia associato con le prestazioni della carena, ed in particolare il legame tra energia spesae rugosita. Isolando la carena dal sistema complessivo, la stessa viene qui correlata alle com-ponenti della rugosita, suggerendo cosa fare per controllare o modificare la rugosita in terminidi tecniche di gestione della superficie di carena.
La Figura 1.15 fornisce uno schema semplificato dell’utilizzo dell’energia a bordo di una nave.In questo caso, la funzione primaria e la conversione dell’energia in velocita nave, come si evincemuovendo da sinistra a destra nel diagramma. L’utilizzo dell’energia e descritto dai legami inverticale tra spese energetiche e velocita nave. Sono sostanzialmente i parametri della terzafase che devono essere considerati nella previsione delle prestazioni in velocita di una nave. In
34
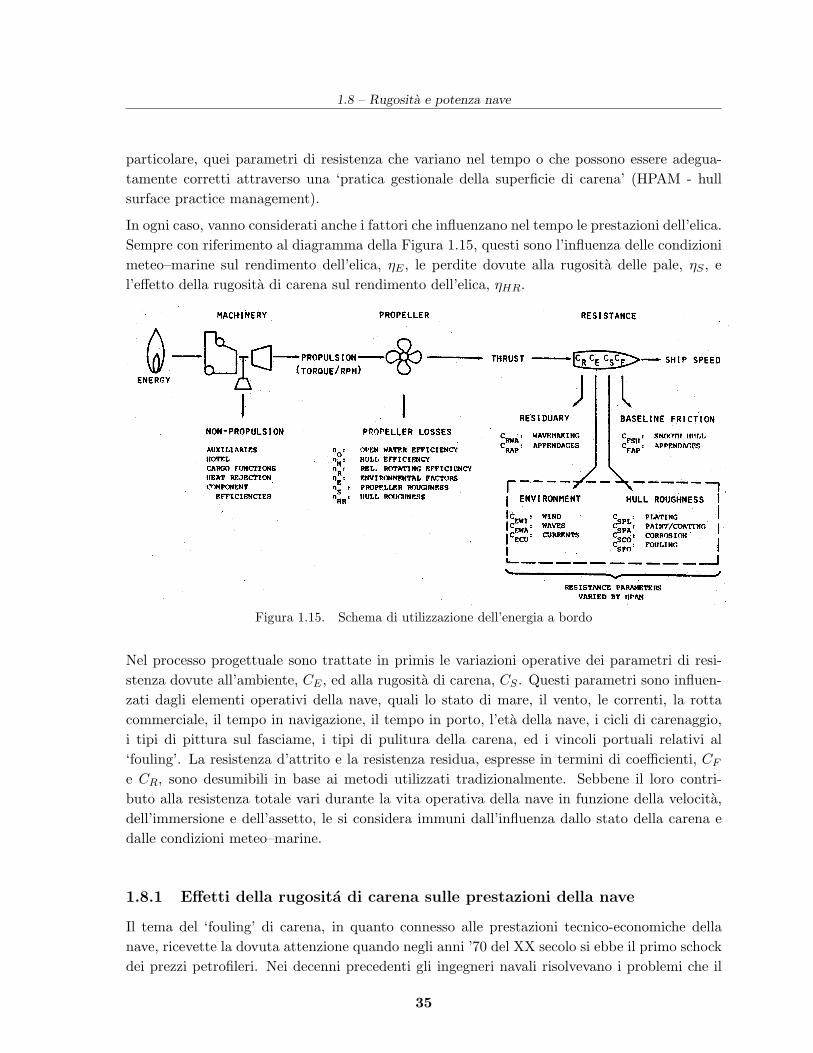
1.8 – Rugosita e potenza nave
particolare, quei parametri di resistenza che variano nel tempo o che possono essere adegua-tamente corretti attraverso una ‘pratica gestionale della superficie di carena’ (HPAM - hullsurface practice management).
In ogni caso, vanno considerati anche i fattori che influenzano nel tempo le prestazioni dell’elica.Sempre con riferimento al diagramma della Figura 1.15, questi sono l’influenza delle condizionimeteo–marine sul rendimento dell’elica, ηE , le perdite dovute alla rugosita delle pale, ηS , el’effetto della rugosita di carena sul rendimento dell’elica, ηHR.
Figura 1.15. Schema di utilizzazione dell’energia a bordo
Nel processo progettuale sono trattate in primis le variazioni operative dei parametri di resi-stenza dovute all’ambiente, CE , ed alla rugosita di carena, CS . Questi parametri sono influen-zati dagli elementi operativi della nave, quali lo stato di mare, il vento, le correnti, la rottacommerciale, il tempo in navigazione, il tempo in porto, l’eta della nave, i cicli di carenaggio,i tipi di pittura sul fasciame, i tipi di pulitura della carena, ed i vincoli portuali relativi al‘fouling’. La resistenza d’attrito e la resistenza residua, espresse in termini di coefficienti, CF
e CR, sono desumibili in base ai metodi utilizzati tradizionalmente. Sebbene il loro contri-buto alla resistenza totale vari durante la vita operativa della nave in funzione della velocita,dell’immersione e dell’assetto, le si considera immuni dall’influenza dallo stato della carena edalle condizioni meteo–marine.
1.8.1 Effetti della rugosita di carena sulle prestazioni della nave
Il tema del ‘fouling’ di carena, in quanto connesso alle prestazioni tecnico-economiche dellanave, ricevette la dovuta attenzione quando negli anni ’70 del XX secolo si ebbe il primo schockdei prezzi petrofileri. Nei decenni precedenti gli ingegneri navali risolvevano i problemi che il
35

1 – Progetto Concettuale
‘fouling’ poteva produrre in termini di penali, introducendo un margine di potenza sufficientea raggiungere o superare la velocita di progetto in ogni condizione di ‘fouling’ della carena traregolari andate in bacino di carenaggio per la pulitura e la ripitturazione dello scafo. Tuttavia,oggi tale approccio risulta inadeguato in quanto e difficilmente accettabile la determinazionedei consumi reali e, quindi, dei costi operativi sulla base di pure relazioni empiriche e di datistorici. E percio necessario sviluppare un approccio analitico per la determinazione degli effettidel ‘fouling’, espressi in funzione di pertinenti variabili indipendenti, che siano significative nelprocesso progettuale, nella gestione operativa della nave, e nel conto economico a lungo termine.
Poiche si tratta di un problema multidimensionale, e stante la scarsa disponibilita di misure alvero, occorre accettare in partenza certe ipotesi di compromesso per costruire un primo mo-dello analitico che consenta di valutare gli effetti del ‘fouling’ sulle prestazioni e sull’economiadella nave. Lo sviluppo di un tale modello e fondamentale, comunque, per un’analisi compara-tiva degli effetti della rugosita e di differenti pratiche di manutenzione della carena al variaredei parametri progettuali, operativi ef economici. Per consentire aggiornamenti permanentiallo scopo di affinarne l’accuratezza previsionale, il modello analitico deve essere strutturatoin maniera modulare facilitando il miglioramento e la sostituzione di formulazioni incerte edimprecise.
In generale, la rugosita media di carena aumenta con l’eta della nave, ma non esiste una rela-zione semplice tra eta e rugosita che potrebbe essere derivata considerando:
• i sistemi di pitturazione utilizzati e le loro prestazioni;
• l’eventuale protezione catodica;
• il numero di carenaggi e la qualita del lavoro svolto.
Componenti della rugosita di carena
Per pianificare la gestione della superficie di carena devono essere isolati i contributi alla re-sistenza totale dati dai parametri della rugosita di carena, CS , da quelli dell’ambiente meteo–marino, CE , dalla resistenza residua, CR, e dalla resistenza d’attrito, CF . Il contributo di CE ,che consiste della resistenza aggiunta dovuta a onde, vento e correnti, e valutato separatamentemediante procedure consolidate che fruiscano dei dati ambientali relativi alle rotte di interesse.
Una volta isolato il contributo alla resistenza nave dovuto alla rugosita, si deve procedere aduna descrizione piu dettagliata delle componenti della rugosita di carena. La rugosita dellacarena di una nave (mean average amplitude - MAA) comprende i termini seguenti:
MAA = MAAlamiere + MAApittura + MAAcorrosione + MAAfouling
La rugosita cumulativa della carena di una nave, in qualsiasi periodo della sua vita operativa edescritta nel modello di previsione di potenza da un’ampiezza media apparente (MAA - meanapparent amplitude). Questa misura rappresenta la distanza media verticale cresta–cavo inuna data zona della superficie di carena. Sebbene esistano metodi piu complessi per misurare
36

1.8 – Rugosita e potenza nave
la rugosita, il metodo MAA e stato scelto dagli ingegneri navali per la sua semplicita e per lamole di dati disponibili che correlano la rugosita alla effettiva resistenza nave. Le MAA dovutealle lamiere, alle pitture ed alla corrosione, sono direttamente misurabili, mentre la rugositaper ‘fouling’ non lo e, per cui le si puo solamente assegnare una MAA equivalente basata sulsuo tasso di crescita in funzione del tempo. Per rappresentare la rugosita totale di carena sisomma la MAA per ogni componente di rugosita.
La MAA totale e utilizzata per stimare l’effetto della rugosita di carena sulla resistenza. Larelazione base tra la rugosita di carena e l’incremento di potenza asse richiesta per muovere lanave ad una certa velocita e dislocamento lega l’ampiezza media apparente della rugosita dellacarena al valore CS , mediante la relazione proposta da Schorsch et al. (1978), e
CS ·103 = 105(
MAA
12000LPP
)1/3
− 0.64 (1.9)
derivata empiricamente in base ad una serie di misure al vero su diverse navi.
Poiche il ‘fouling’ marino si accumula a differenti velocita sulle murate e sul fondo della nave,la superficie bagnata della nave e suddivisa in superficie del fondo e superficie delle murate. Larugosita totale della carena e assunta come rugosita media pesata delle murate e del fondo.
Come mostrato in Figura 1.15, la rugosita di carena puo essere espressa come la somma di quat-tro componenti adimensionali, dovute alle lamiere, CSPL, alle pitture/rivestimenti, CSPA, allacorrosione CSCO, ed al ‘fouling’, CSFO. Il coefficiente CSPL rappresenta la rugosita iniziale delmetallo nudo utilizzato per le lamiere del fasciame, mentre il coefficiente CSPA rappresenta larugosita addizionale derivante dall’applicazione di varie pitture e rivestimenti anticorrosione edantifouling. L’entita di CSPA dipende notevolmente dal tipo di rivestimento, dalla tecnica ap-plicativa e dalla qualita della lavorazione durante l’applicazione. La resistenza d’attrito totaledi una nave nuova andrebbe rappresentata in forma adimensionale dalla somma di CF , CSPL
e CSPA. Le variabili che influenzano CSPL e CSPA sono utilizzate nella determinazione dellavariazioni nel tempo della rugosita di carena, che dipendono dalla qualita nella manutenzionee nella pitturazione delle lamiere. La valutazione separata del coefficiente CSPA e particolar-mente utile quando si effettuino operazioni di sabbiatura e ripitturazione durante il carenaggio.Il coefficiente di rugosita per corrosione, CSCO, rappresenta l’incremento di rugosita di carenacausato da butterature e fenditure delle lamiere in zone dove non hanno funzionato le misureanticorrosione. Il coefficiente per ‘fouling’, CSFO, rappresenta le crescite di organismi marinisulla superficie di carena dove i rivestimenti antifouling non funzionano o hanno superato laloro durata effettiva.
Sono diversi i parametri che influenzano l’entita della rugosita prodotta da ogni componentedella rugosita di carena. La rugosita di una lamiera e funzione della qualita costruttiva e nonvaria durante la vita della nave a meno che la lamiera non sia riparata o sostituita. La rugo-sita iniziale della pittura o del rivestimento e funzione del tipo, della tecnica e della qualitadell’applicazione. La rugosita iniziale varia, quindi, in funzione del tempo e della percentualedel danno subito dalla pittura. Nel caso di tipi di rivestimenti avanzati, quali pitture autole-viganti, si puo prevedere il decremento di rugosita nel tempo successivo all’applicazione. Ogni
37

1 – Progetto Concettuale
volta che si sostituiscono le lamiere della carena, inizia un nuovo ciclo di vita della pittura edella rugosita. Successivamente va applicato uno stimato tasso di rugosita delle superfici dicarena esposte per prevedere l’effetto globale di rugosita per corrosione. Di nuovo, il carenag-gio e la rigenerazione della superficie di carena danno luogo ad un nuovo ciclo di vita per lemisure anticorrosione. Comunque, numerose misure al vero hanno indicato che i bassi livellidi rugosita della nave nuova non vengono piu raggiunti, per cui una certa rugosita diviene unacaratteristica permanente della superficie di carena.
La rugosita per ‘fouling’ sulla carena e stimata utilizzando i parametri della durata effettivadei rivestimenti antifouling, del tempo speso dalla nave nei porti e dei vincoli imposti dai porticirca il ‘fouling’. In genere, si ipotizza che non si produca ‘fouling’ quando la nave si muove aduna velocita superiore ai 3 nodi, anche se cio non e mai vero per le grandi navi cisterna lente.La bassa velocita e le forme piene di carena delle navi cisterna fanno sı che le velocita locali delflusso siano sempre minori di 3 nodi su certe zone della carena. La rugosita dovuta al ‘fouling’puo essere rimossa in diversa misura mediante differenti procedure di pulizia.
Figura 1.16. Componenti della rugosita di carena
Il valore di MAA incluso nell’equazione (1.9) rappresenta l’ampiezza media apparente pesatasull’insiene della carena. Questa equazione non considera la posizione sulla carena delle diversequantita di rugosita, ma ipotizza piuttosto una distribuzione uniforme di rugosita. L’equazione(1.9) rappresenta una semplificazione della resistenza aggiunta indotta dalla rugosita, ma e ilmetodo piu accurato ancora oggi ingegneristicamente disponibile.
38
1.8 – Rugosita e potenza nave
L’entita dei singoli contributi alla rugosita di carena da parte delle quattro componenti variaa seconda del profilo operativo e della pratica gestionale della superficie di carena. Una tipicasuddivisione della rugosita di carena in funzione della vita della nave e mostrata in Figura 1.16.Come si puo osservare, il contributo relativo delle varie componenti e alquanto diverso a secondadel momento e del tipo di intervento.
1.8.2 Effetto dell’invecchiamento della carena e dell’elica
L’invecchiamento del fasciame di scafo causa la continua modifica di alcuni fattori che influi-scono marcatamente sulle caratteristiche propulsive della nave.
In primo luogo, l’aumento nel tempo della rugosita della superficie di carena determina l’incre-mento della resistenzad’attrito della nave con conseguente aumento della potenza effettiva e,quindi, della potenza motore. Parallelamente, l’aumento della rugosita sullo scafo modifica lecondizioni del flusso nella zona del disco–elica: la scia media assiale aumenta nel tempo. Anchel’elica risente dell’invecchiamento, in quanto l’aumento di rugosita sulla superficie delle palecausa un peggioramento del funzionamento del propulsore. Risulta evidente come la nave, dopoun certo periodo di tempo, operi in condizioni del tutto diverse rispetto a quelle corrispondentialle prove in mare con la nave appena consegnata.
Una previsione accurata della prestazioni propulsive dovrebbe considerare i fattori suddetti,nonostante non sia facile stabilire con esattezza quale sia la reale influenza dell’invecchiamentosulle prestazioni della nave. Allo stato attuale non esiste una consolidata metodologia di calcolodegli effetti dell’invecchiamento, data la difficolta di previsione e la scarsita di pubblicazionisull’argomento. Pertanto, l’unico modo di procedere e quello di affidarsi agli studi in materiadisponibili in letteratura, valutando diverse situazioni possibili, e costruendo, laddove possibile,un intervallo di incertezza per le variabili studiate.
Nel prosieguo saranno considerati separatamente gli effetti dell’invecchiamento sulla resistenzad’attrito (dunque, sulla potenza effettiva), sui coefficienti propulsivi e sul rendimento dell’elicaisolata. Piu avanti, sara presentata una previsione dell’aumento di potenza, dovuto all’in-vecchiamento di una nave ro-ro.
Per rendere piu agevoli i calcoli ed ottenere un continuo controllo dei risultati, una correttaprocedura di calcolo deve prevedere le seguenti operazioni:
• calcolo dell’incremento della rugosita di carena e del corrispondente aumento di potenzaeffettiva secondo diverse metodologie, considerando diverse qualita della pitturazione;
• calcolo della variazione dei coefficienti propulsivi in funzione dell’aumento di rugositadella carena e, quindi, anche del tipo di pittura utilizzata;
• calcolo dell’incremento della rugosita della superficie delle pale dell’elica e valutazione delsuo effetto sull’incremento di potenza.
39

1 – Progetto Concettuale
Le previsioni devono potere essere svolte a qualsiasi velocita nave e per qualsiasi periodo divita della nave stessa. Le previsioni sono piu precise quanto minore e il lasso di tempo passatodal varo della nave; oltre gli 8-10 anni di vita della nave le previsioni sono poco affidabili.
Effetto della rugosita di carena sulla resistenza
La rugosita delle lamiere dello scafo di una nave nuova dipende dalla qualita delle lamiered’acciaio, dalla qualita tecnologica del cantiere costruttore e dal tipo di pittura di rivestimento.La rugosita nel tempo dovuta alla pitturazione e influenzata dal tipo di materiale utilizzato edai metodi di applicazione, e puo variare notevolmente. La corrosione delle lamiere di acciaio,che produce un danno permanente, varia in funzione di molti fattori ambientali e della suaposizione sulla carena. La rugosita dovuta al ‘fouling’ e influenzata dal tipo di pittura anti-vegetativa, dal metodo di applicazione, dalla posizione sulla carena, dai fattori ambientali esoprattutto dal tempo di sosta in porto.
L’ITTC 1978 ha proposto un valore standard di rugosita iniziale della carena pari a 150µm:tale valore e stato ed e ancora largamente utilizzato nell’estrapolazione al vero delle previsionidi potenza ottenute in vasca. Grazie ai continui miglioramenti delle qualita delle lamiere e delletecnologie di costruzione, il valore della rugosita iniziale dello scafo si e ridotto negli anni: unvalore ragionevole oscilla nell’intervallo 90− 125 µ m.
L’aumento di rugosita nel tempo e dovuto al deterioramento della carena durante il servizio(corrosione delle lamiere, danni meccanici alle lamiere causati dalla navigazione con ghiaccio,dalle operazioni di ancoraggio, dagli eventuali incagli, ecc.), al trattamento che lo scafo ricevein bacino di carenaggio, nonche all’effetto del ‘fouling’.
Fra tutte le cause dell’aumento di rugosita, il ‘fouling’ e il fattore di piu difficile previsione,essendo un fenomeno biologico il cui controllo risulta ancora complicato: il grado di influenzadel ‘fouling’ sull’aumento di rugosita dipende, infatti, da molteplici fattori fra i quali i piuimportanti sono la velocita media di crociera della nave, il tempo medio delle soste in porto, ela qualita della pittura di rivestimento utilizzata. I risultati di molte ricerche hanno indicatoche il problema del ‘fouling’ ha un peso relativo che va diminuendo grazie all’enorme migliora-mento della qualita delle pitture. Sembra, infatti, che pitture del tipo TBT-SPC o foul releaseriducano di molto l’entita del problema.
Negli studi compiuti da Kresic e Haskell (1983), la formula per calcolare l’incremento delcoefficiente di resistenza d’attrito, dovuto alla rugosita, e quella proposta da Bowden e Davison(1974) ed adottata dall’ITTC 1978 per l’estrapolazione al vero della resistenza; si ha
∆CF ·103 = 105·(
MAA
LWL
)1/3
− 0.64 (1.10)
La formula (1.10) deriva dall’analisi di misure di spinta effettuate durante le prove in mare didieci navi monoelica. Tuttavia, secondo le indicazioni dell’ITTC 2005, la formula di Bowden e
40

1.8 – Rugosita e potenza nave
Davison (1974) non e accurata per la previsione dell’aumento di resistenza dovuto all’incremen-to di rugosita in servizio: infatti, non include solo l’effetto della rugosita, ma anche quello dellecomponenti residue di resistenza necessarie per l’estrapolazione al vero. Il ‘Powering Perfor-mance Committee’ dell’ITTC 1990 raccomanda di utilizzare, laddove siano disponibili misuredi rugosita, la formula suggerita da Townsin et al. (1980)
∆CF ·103 = 44·(
MAA
LWL
)1/3
− 10·(Rn)−1/3 + 0.125 (1.11)
che consente di calcolare l’aumento di resistenza tenendo conto anche dell’effetto della velocitanave.
Metodo Kresic–Haskell con pittura convenzionale
Per costruire il loro metodo, Kresic e Haskell (1983) hanno ipotizzato che fossero primerizzatele lamiere di acciaio utilizzate per costruire la nave sulla quale furono effettuate le misurazionie che gli operai del cantiere fossero qualificati. La nave fu dipinta con due strati di pitturaanticorrosiva e con due strati di pittura antifouling convenzionale prima delle prove in mare.La stima della rugosita totale di superficie di una nave nuova all’inizio del servizio, espressain funzione di una ampiezza media apparente (MAA) su una lunghezza del campione di 50mm, era di circa 150 micron. Tale valore della rugosita e la stessa adotta dall’ITTC 1978 comerugosita standard di una nave nuova, da utilizzare nelle previsioni al vero. La variazione diMAA in servizio fu ipotizzata pari ad un incremento di 2.8 micron al mese, come risultato diun deterioramento delle lamiere.
Secondo questo approccio la variazione di rugosita viene scomposta in tre componenti fonda-mentali: incremento dovuto al servizio della nave, variazione dovuta agli interventi in bacino,incremento dovuto al ‘fouling’.
Gli interventi in bacino determinano una variazione della rugosita che dipende dalla tipologia edalla qualita delle operazioni svolte. Townsin et al. (1980) hanno verificato che nel 68% dei casi,all’uscita dal bacino la carena presenta un certo aumento di rugosita, dovuto all’appoggio delloscafo sulle taccate che ne alterano la superficie del fondo. Gli stessi autori valutano l’aumentodi rugosita dovuto al servizio pari a 2.8 µm al mese; ossia
MAAS = 2.8 MS [µm]
dove MAAS e la rugosita media, mentre MS indica i mesi di servizio della nave.
Si ipotizza che le navi siano fermate in bacino ogni due anni, come richiesto dai Registri diClassifica per la certificazione. L’aumento della rugosita media di carena come risultato delleprocedure di pulizia di carena e valutato essere 14 micron.
Secondo le rilevazioni di Kresic e Haskell (1983), l’aumento medio di rugosita dovuto alleoperazioni di manutenzione dello scafo in bacino e pari a
MAAD = 14 [µm]
41

1 – Progetto Concettuale
per ogni carenaggio. Comunque, all’uscita dal bacino, il nuovo strato di pittura riacquisiscetutte le proprieta antifouling iniziali.
Per quanto riguarda il calcolo dell’aumento di rugosita dovuto al ‘fouling’, sono necessarie al-cune ipotesi iniziali. Si e stabilito, sulla base delle indicazioni date da Kresic e Haskell (1983),che la durata del potere antifouling della pittura sia di un anno a partire dall’ultima applica-zione avvenuta in bacino. Inoltre, e necessario valutare il numero di giorni all’anno in cui lanave si trovera ferma in porto: quest’ultima variabile e di particolare importanza, in quanto lacrescita degli organismi marini sulla superficie di carena avviene in gran parte quando la navee ferma, oppure quando avanza con una velocita inferiore ai tre nodi.
Il calcolo dell’accumulo della rugosita media dovuta al ‘fouling’ sulle murate (MMAFS) e sulfondo (MMAFB), dovuta alle fermate in porto, e effettuato mediante le formule
MAAFS = HRF ·PT ·CEFF
MAAFB = 0.75·HRF ·PT · CEFF
dove MAAF e la rugosita media (µm), HRF e il fattore di rugosita della carena per ‘fouling’(µm/giorno), PT e il numero di giorni in porto, mentre CEFF e il fattore di efficacia dellapittura antifouling. Alla formula di calcolo della rugosita sul fondo e applicato il fattore cor-rettivo 0.75, poiche il fouling sul fondo della nave non si sviluppa cosı rapidamente come sullemurate immerse a causa dell’acqua piu profonda e, quindi, piu fredda. L’assunzione del fattoreHRF , per ciascuna delle severita qualitative del ‘fouling’, e fatta in accordo con la Tabella 1.5(Malone, 1980). Seguendo le indicazioni di Kresic e Haskell (1983), in genere si assume HRF
= 0.5755, corrispondente ad un fenomeno con severita da moderata a intensa.
Scala qualitativa di HRFseverita Severita del fouling (µm/giorno)
del fouling
0.0 assente 0.02.0 presenza di residui 5.334·10−4
4.0 da presenza di residui a leggero 7.849·10−3
6.0 leggero 3.828·10−2
8.0 da leggero a moderato 0.117810.0 moderato 0.282212.0 da moderato a intenso 0.575514.0 intenso 1.0520
Tabella 1.5. Scala del fattore di rugosita per ‘fouling’
Il calcolo del fattore di efficienza della pittura antifouling utilizza la formula (Dick et al., 1976)
CEFF = 1.0−[2.72eZ
− 0.240·(Z − 1.0)0.263]
dove 0 < CEFF < 1, mentre Z e il rapporto fra il tempo trascorso dall’ultima applicazionedella pittura antifouling e la durata effettiva delle proprieta della pittura.
42

1.8 – Rugosita e potenza nave
Il valore di CEFF sara uguale a zero durante il periodo in cui la pittura conserva le sue pro-prieta, mentre crescera esponenzialmente verso il valore unitario durante il periodo di decadi-mento delle proprieta, il che indica che la pittura non impedisce piu la crescita del ‘fouling’,fino al nuovo ingresso della nave in bacino.
A questo punto, e possibile calcolare la rugosita totale MAA risultante dalla somma di tuttele componenti
MAA = MAAS + MAAD + MAAFB + 2 MAAFS
Per calcolare l’incremento di resistenza, ovvero quello di potenza effettiva, si calcola il coeffi-ciente di resistenza dovuto alla rugosita in servizio CS come
CS = ∆CFservizio −∆CFprove (1.12)
dove gli incrementi del coefficiente di resistenza d’attrito ∆CF vengono calcolati con la formula(1.10), ossia come differenza tra la rugosita in servizio e la rugosita alle prove (150µm).
E ora possibile calcolare l’aumento di potenza effettiva e dovuto alla rugosita come
∆PE = 0.5 ρCS S V 3s (1.13)
dove ρ e la densita dell’acqua di mare (t/m3), S e la superficie bagnata di carena (m2), Vs lavelocita della nave (m/s).
Metodo di Townsin e pittura TBT–SPC
Utilizzando una pittura antivegetativa TBT–SPC , Townsin et al. (1980, 1986) hanno stimatoche l’aumento medio di rugosita sia pari a 20 µm all’anno. D’altra parte, va segnalato che,a causa della tossicita della componente TBT a base di stagno, tali pitture sono state com-pletamente bandite a partire dal 1◦ gennaio 2008 (provvedimento del comitato IMO-MEPC,novembre 1998). Dunque, nei calcoli dell’accoppiamento elica–motore si dovra considerare unapittura con proprieta antivegetative intermedie tra quelle dei due tipi di pittura considerati.
Seguendo questo approccio, l’aumento di rugosita della carena non viene scomposto nelle trecomponenti, ma viene semplicemente fornito un suo valore medio complessivo. I calcoli dell’in-cremento del coefficiente di resistenza d’attrito ∆CF , del coefficiente di resistenza dovuto allarugosita in servizio CS e dell’aumento di potenza effettiva ∆PE sono effettuati rispettivamentemediante le formule (1.11), (1.9), (1.13).
Seguono alcuni grafici che riassumono i risultati di alcuni calcoli effettuati per una nave ro–ro.In Figura 1.17 viene illustrato l’andamento della rugosita di carena in funzione degli anni divita della nave, considerando le due tipologie di pittura. Nel caso della pittura convenzionalesono evidenti i picchi di aumento di rugosita, dovuti alla perdita delle qualita antifouling. Dopoun anno dall’applicazione dell’ultimo strato di pittura; all’uscita dal bacino la nave presentauna rugosita ridotta grazie alla rimozione della sporcizia e all’applicazione del nuovo strato.Nel caso della pittura TBT-SPC l’andamento dell’aumento di rugosita e lineare, in accordocon l’approccio di Townsin et al. (1980, 1986).
43
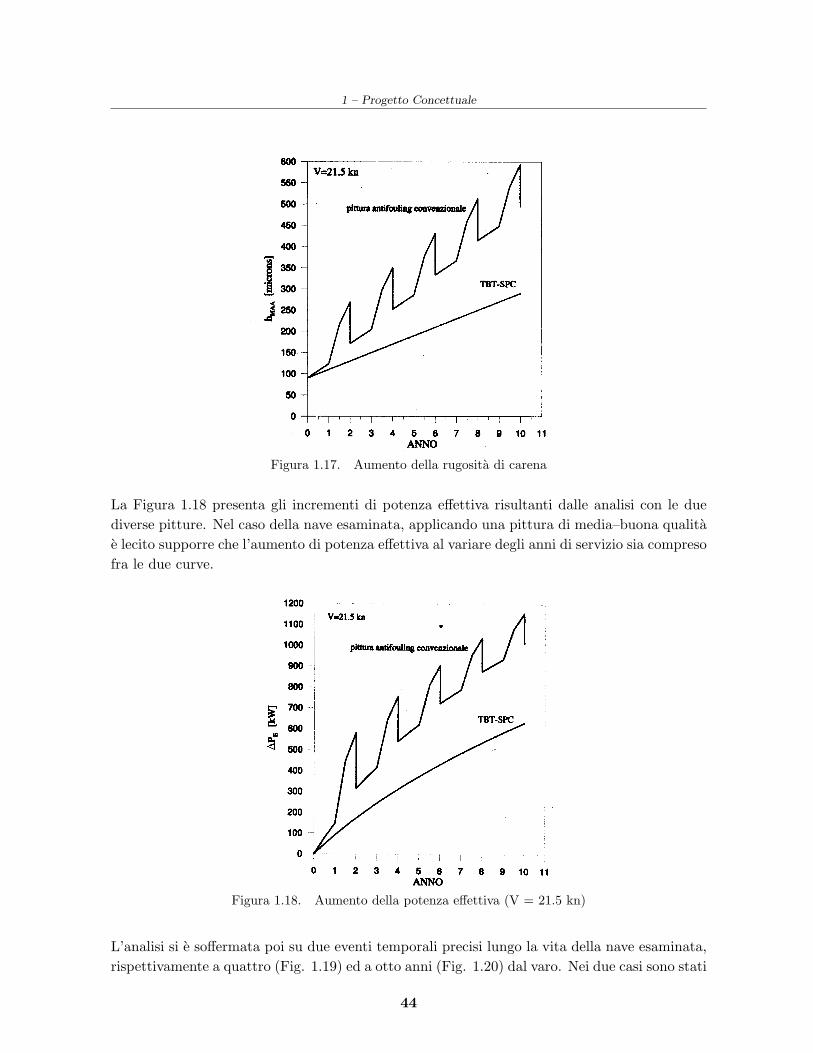
1 – Progetto Concettuale
Figura 1.17. Aumento della rugosita di carena
La Figura 1.18 presenta gli incrementi di potenza effettiva risultanti dalle analisi con le duediverse pitture. Nel caso della nave esaminata, applicando una pittura di media–buona qualitae lecito supporre che l’aumento di potenza effettiva al variare degli anni di servizio sia compresofra le due curve.
Figura 1.18. Aumento della potenza effettiva (V = 21.5 kn)
L’analisi si e soffermata poi su due eventi temporali precisi lungo la vita della nave esaminata,rispettivamente a quattro (Fig. 1.19) ed a otto anni (Fig. 1.20) dal varo. Nei due casi sono stati
44
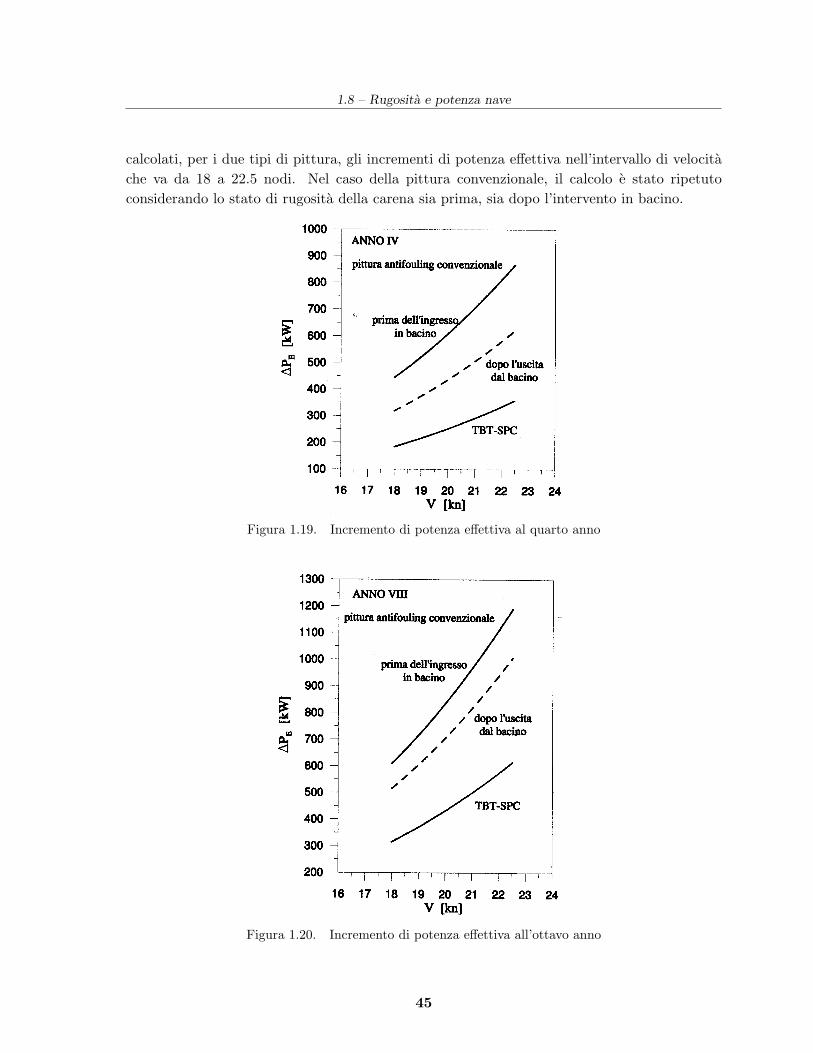
1.8 – Rugosita e potenza nave
calcolati, per i due tipi di pittura, gli incrementi di potenza effettiva nell’intervallo di velocitache va da 18 a 22.5 nodi. Nel caso della pittura convenzionale, il calcolo e stato ripetutoconsiderando lo stato di rugosita della carena sia prima, sia dopo l’intervento in bacino.
Figura 1.19. Incremento di potenza effettiva al quarto anno
Figura 1.20. Incremento di potenza effettiva all’ottavo anno
45

1 – Progetto Concettuale
Variazione dei coefficienti propulsivi per effetto della rugosita
Il passo successivo nella modellazione delle condizioni in servizio della nave e la stima dellavariazione dei coefficienti propulsivi; ossia della frazione di scia w, del fattore di deduzione dispinta t e del rendimento relativo rotativo ηR.
La variazione della frazione di scia e funzione della modifica delle condizioni del flusso sulle paledell’elica; il deterioramento della superficie di carena ed il ‘fouling’ alterano continuamente lecondizioni dello strato limite e, conseguentemente, quelle del flusso che investe l’elica.
Purtroppo non esistono misure sulla variazione della frazione di scia effettiva fra due successiviinterventi in bacino di carenaggio. Tuttavia, le prove su una nave di 20 metri di lunghezza(Kan et al., 1958) hanno illustrato l’evoluzione della scia nominale in funzione del tempo tradue carenaggi successivi: la frazione di scia media nominale cresce quasi linearmente dal giornosuccessivo all’ultima applicazione dello strato di pittura fino alll’intervento successivo.
Il metodo proposto da Kresic e Haskell (1983) prevede un comportamento del tutto simileanche per la frazione di scia in servizio, ws. La relazione da loro proposta per quantificare lamodifica della frazione di scia effettiva e
ws = t + (wt − t)[1 +
CS
(1 + k)·CFt
](1.14)
dove t e il fattore di deduzione di spinta, wt e la frazione di scia derivata dalle prove in mare,CS e il coefficiente di resistenza dovuto alla rugosita in servizio (formula (1.9)), k e il fattoredi forma della nave, mentre CFt e il coefficiente di resistenza d’attrito calcolato per le prove inmare secondo la linea di correlazione ITTC 1957. La relazione (1.14) e ottenuta dalla modi-fica della relazione proposta dall’ITTC 1978 per il trasferimento al vero della frazione di sciamodello: non vi compare il coefficiente correttivo che modifica il valore della frazione di sciaper la presenza del timone, in quanto la sua influenza e conglobata nel calcolo della frazione discia derivata dalle prove in mare (wt). Quanto al fattore di forma k, si suggerisce di calcolarloin base alla formula proposta da Holtrop e Mennen (1982).
Per la nave ro-ro esaminta, il valore della frazione di scia alle prove wt e minore del fattoredi deduzione di spinta t; tale circostanza, che puo verificarsi anche per altre tipologie di navibielica, impedisce l’utilizzo della formula (1.14). In questi casi, per valutare la variazione dellafrazione di scia effettiva ∆w, si puo ricorrere alla relazione lineare, scaturita dall’analisi svoltada Kresic e Haskell (1983), espressa come
∆w = 70.0 CS (1.15)
Le critiche mosse alla metodologia di Kresic e Haskell sostengono che la previsione della varia-zione della frazione di scia non considera l’effettiva distribuzione della rugosita sulla superficiebagnata di carena: la modellazione dello strato limite e, dunque, la conseguente previsionedella variazione della scia sono inesatte. Resta, tuttavia, la consapevolezza che l’aumento dellafrazione di scia, dovuto all’incremento di rugosita, sia un fenomeno che accade realmente e
46
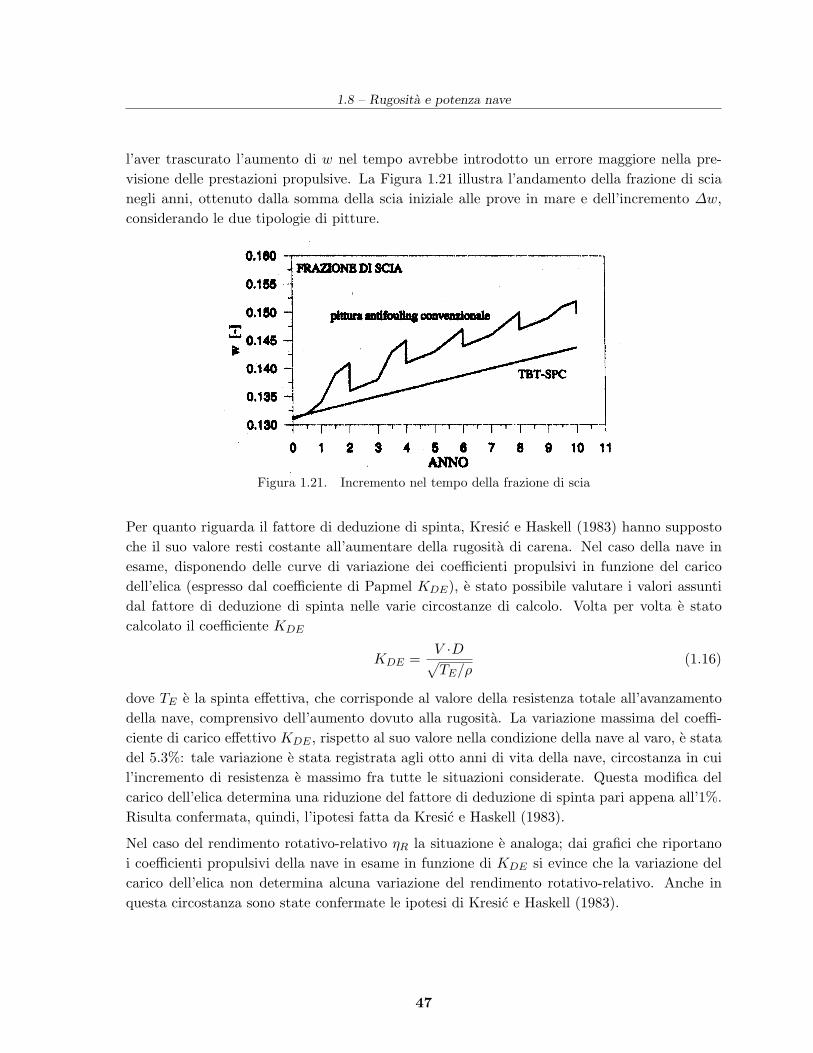
1.8 – Rugosita e potenza nave
l’aver trascurato l’aumento di w nel tempo avrebbe introdotto un errore maggiore nella pre-visione delle prestazioni propulsive. La Figura 1.21 illustra l’andamento della frazione di scianegli anni, ottenuto dalla somma della scia iniziale alle prove in mare e dell’incremento ∆w,considerando le due tipologie di pitture.
Figura 1.21. Incremento nel tempo della frazione di scia
Per quanto riguarda il fattore di deduzione di spinta, Kresic e Haskell (1983) hanno suppostoche il suo valore resti costante all’aumentare della rugosita di carena. Nel caso della nave inesame, disponendo delle curve di variazione dei coefficienti propulsivi in funzione del caricodell’elica (espresso dal coefficiente di Papmel KDE), e stato possibile valutare i valori assuntidal fattore di deduzione di spinta nelle varie circostanze di calcolo. Volta per volta e statocalcolato il coefficiente KDE
KDE =V ·D√TE/ρ
(1.16)
dove TE e la spinta effettiva, che corrisponde al valore della resistenza totale all’avanzamentodella nave, comprensivo dell’aumento dovuto alla rugosita. La variazione massima del coeffi-ciente di carico effettivo KDE , rispetto al suo valore nella condizione della nave al varo, e statadel 5.3%: tale variazione e stata registrata agli otto anni di vita della nave, circostanza in cuil’incremento di resistenza e massimo fra tutte le situazioni considerate. Questa modifica delcarico dell’elica determina una riduzione del fattore di deduzione di spinta pari appena all’1%.Risulta confermata, quindi, l’ipotesi fatta da Kresic e Haskell (1983).
Nel caso del rendimento rotativo-relativo ηR la situazione e analoga; dai grafici che riportanoi coefficienti propulsivi della nave in esame in funzione di KDE si evince che la variazione delcarico dell’elica non determina alcuna variazione del rendimento rotativo-relativo. Anche inquesta circostanza sono state confermate le ipotesi di Kresic e Haskell (1983).
47

1 – Progetto Concettuale
Effetto della rugosita sul rendimento dell’elica isolata
La perdita di rendimento dell’elica in servizio puo avvenire molto rapidamente ed e funzione delperiodo di navigazione, del carico dell’elica, del tempo in porto e delle condizioni ambientaliquali la temperatura e la salinita dell’acqua. E possibile mantenere il rendimento originaledell’elica mediante un programma di regolare manutenzione.
Come e risultato da numerosi esperimenti (Townsin et al., 1986), la rugosita della superficie dellepale dell’elica influenza il rendimento del propulsore in due modi. In primo luogo, l’aumento dirugosita delle pale incrementa l’attrito delle stesse, aumentando cosı il coefficiente di resistenzaCD e, quindi, il coefficiente di momento torcente KQ. In secondo luogo, la rugosita dellepale riduce la circolazione, causando la diminuzione del coefficiente di portanza CL e, quindi,quella del coefficiente di spinta KT . Si puo stimare la variazione dei coefficienti di spinta e delmomento torcente come funzione della rugosita media delle pale. Per determinare l’evoluzionenel tempo delle caratteristiche di funzionamento dell’elica si segue la metodologia propostada Kresic e Haskell (1983), che e un’applicazione della teoria del profilo equivalente di Lerbs(1952); si ha
KTs = KTt −∆KTD −∆KTL
KQs = KQt −∆KQD −∆KQL
dove ∆KTDe ∆KQD
sono le variazioni dei coefficienti risultanti dall’aumento di resistenza,mentre ∆KTL
e ∆KQLsono le variazioni dei coefficienti dovute alla riduzione della portanza.
Le variazioni dei coefficienti di spinta e del momento torcente al vero possono essere valutatemediante le seguenti relazioni
∆KTD= −∆CD · 0.3
P
D· cZ
D
∆KQD= ∆CD · 0.25
cZ
D
∆KTL=
0.733 + 0.132 J2
√1 + 0.180 (P/D)2
·Z ·(
c
D
)
0.75·∆CL
∆KQL=
0.117 + 0.021J2
√1 + 0.180 (P/D)2
·Z ·(
c
D
)
0.75·∆CL
dove ∆CD e ∆CL sono le differenze fra i coefficienti di resistenza e portanza corrispondenti allecondizioni della nave durante le prove in mare ed in quelle in servizio.
Il coefficiente di resistenza ∆CD puo essere calcolato, sia per la condizione di servizio, sia nellaprova in mare, mediante la seguente relazione (ITTC 1978)
CD = 2(
1 + 2t
c
)·(
1.89 + 1.62 logc
kP
)−2.5
dove t e lo spessore massimo di pala alla sezione 0.75R, kP (equivalente a HMAA) e l’ampiezzamedia della rugosita di pala.
48
1.8 – Rugosita e potenza nave
Una volta calcolata la variazione del coefficiente di resistenza, la variazione del coefficiente diportanza e data da
∆CL = −1.1∆CD
Tutte le formule precedenti relazioni sono state raccomandate dall’ITTC 1978 e sono basatesui lavori di Lerbs (1952), di Aucher (1973) e di Lindgren e Bjarne (1975).
Per poter proseguire nell’analisi bisogna stabilire la metodologia di calcolo della rugosita dellepale. Quest’ultima e dovuta principalmente a tre fattori: l’incremento della rugosita dovutoal servizio della nave, il fenomeno del ‘fouling’ e l’eventuale urto delle pale con corpi esterniche ne danneggerebbero la superficie. Fra tutte le cause di aumento della rugosita, il ‘fouling’e sicuramente quella piu importante (le pale non sono protette da pitture che impedisconoil fenomeno) e al tempo stesso quella piu difficile da prevedere: la rotazione dell’elica, infatti,permette la rimozione di una parte degli organismi che si depositano sulle pale, ed e impossibilecalcolare esattamente la quantita residua che determina l’incremento di rugosita.
Per il calcolo della rugosita sulle eliche della nave in esame sono state seguite le indicazioni diKresic e Haskell (1983). Si e assunto che la superficie delle eliche nuove presenti una rugositainiziale di 20 µm; al momento delle prove in mare si e supposto che la rugosita raggiunga i30 µm: durante l’allestimento della nave in bacino accade frequentemente che la qualita dellasuperficie delle pale peggiori a causa del gocciolamento della pittura dallo scafo. L’aumentodi rugosita in servizio viene considerato pari a 20 µm per anno di servizio della nave. Si eassunto, infine, che la quota di rugosita dovuta al ‘fouling’ aumenti linearmente dal valore zero,immediatamente dopo l’ultimo intervento in bacino, al valore HMAA/3, immediatamente primadell’ingresso in bacino.
Durante i trattamenti convenzionali (rimozione della sporcizia con getti d’acqua ad alta pres-sione) si e fissato che la rugosita venga ridotta di 10 µm per ogni intervento in bacino. Seguendole indicazioni di Kresic e Haskell (1983), si considera che all’ottavo anno di vita della nave ven-gano eseguiti interventi radicali di manutenzione sulla superficie delle pale: la rugosita vieneriportata al valore di 40 µm.
Il grafico in Figura 1.22 illustra l’incremento nel tempo della rugosita delle pale, calcolato se-condo le ipotesi precedenti.
Nel caso della nave esaminata, e stato mantenuto costante il numero di giri (RPM nominalidelle eliche, corrispondenti alla condizione di pieno carico) e sono stati ricalcolati tutti i valoridel rapporto di passo ottimale e del rendimento dell’elica isolata. Seguono i risultati ottenutinei due casi: nel primo utilizzando la pittura anti–fouling convenzionale (approccio di Kresice Haskell 1983), nel secondo utilizzando la pittura del tipo TBT-SPC in base all’approccio diTownsin et al. (1980, 1986).
Le Tabelle 1.6 e 1.7 riassumono i risultati ottenuti, al quarto ed all’ottavo anno nel caso diutilizzo della pittura convenzionale. I calcoli sono stati effettuati considerando sia le condizioni
49
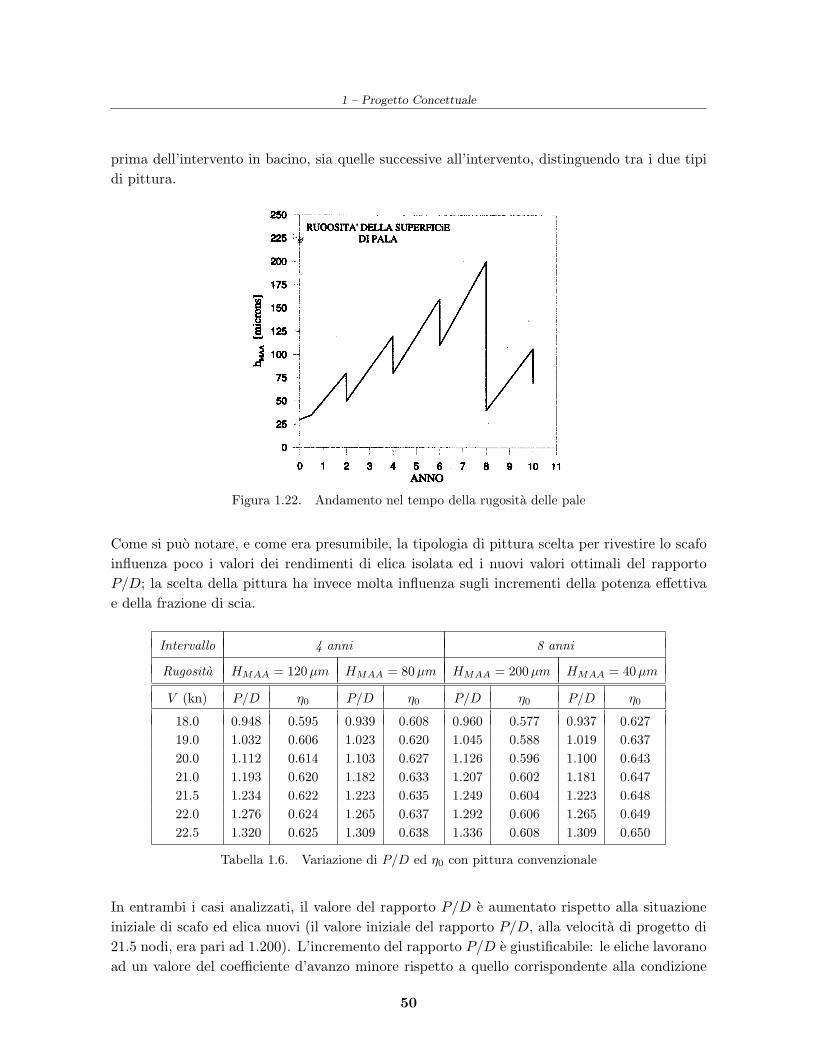
1 – Progetto Concettuale
prima dell’intervento in bacino, sia quelle successive all’intervento, distinguendo tra i due tipidi pittura.
Figura 1.22. Andamento nel tempo della rugosita delle pale
Come si puo notare, e come era presumibile, la tipologia di pittura scelta per rivestire lo scafoinfluenza poco i valori dei rendimenti di elica isolata ed i nuovi valori ottimali del rapportoP/D; la scelta della pittura ha invece molta influenza sugli incrementi della potenza effettivae della frazione di scia.
Intervallo 4 anni 8 anni
Rugosita HMAA = 120 µm HMAA = 80 µm HMAA = 200 µm HMAA = 40 µm
V (kn) P/D η0 P/D η0 P/D η0 P/D η0
18.0 0.948 0.595 0.939 0.608 0.960 0.577 0.937 0.62719.0 1.032 0.606 1.023 0.620 1.045 0.588 1.019 0.63720.0 1.112 0.614 1.103 0.627 1.126 0.596 1.100 0.64321.0 1.193 0.620 1.182 0.633 1.207 0.602 1.181 0.64721.5 1.234 0.622 1.223 0.635 1.249 0.604 1.223 0.64822.0 1.276 0.624 1.265 0.637 1.292 0.606 1.265 0.64922.5 1.320 0.625 1.309 0.638 1.336 0.608 1.309 0.650
Tabella 1.6. Variazione di P/D ed η0 con pittura convenzionale
In entrambi i casi analizzati, il valore del rapporto P/D e aumentato rispetto alla situazioneiniziale di scafo ed elica nuovi (il valore iniziale del rapporto P/D, alla velocita di progetto di21.5 nodi, era pari ad 1.200). L’incremento del rapporto P/D e giustificabile: le eliche lavoranoad un valore del coefficiente d’avanzo minore rispetto a quello corrispondente alla condizione
50
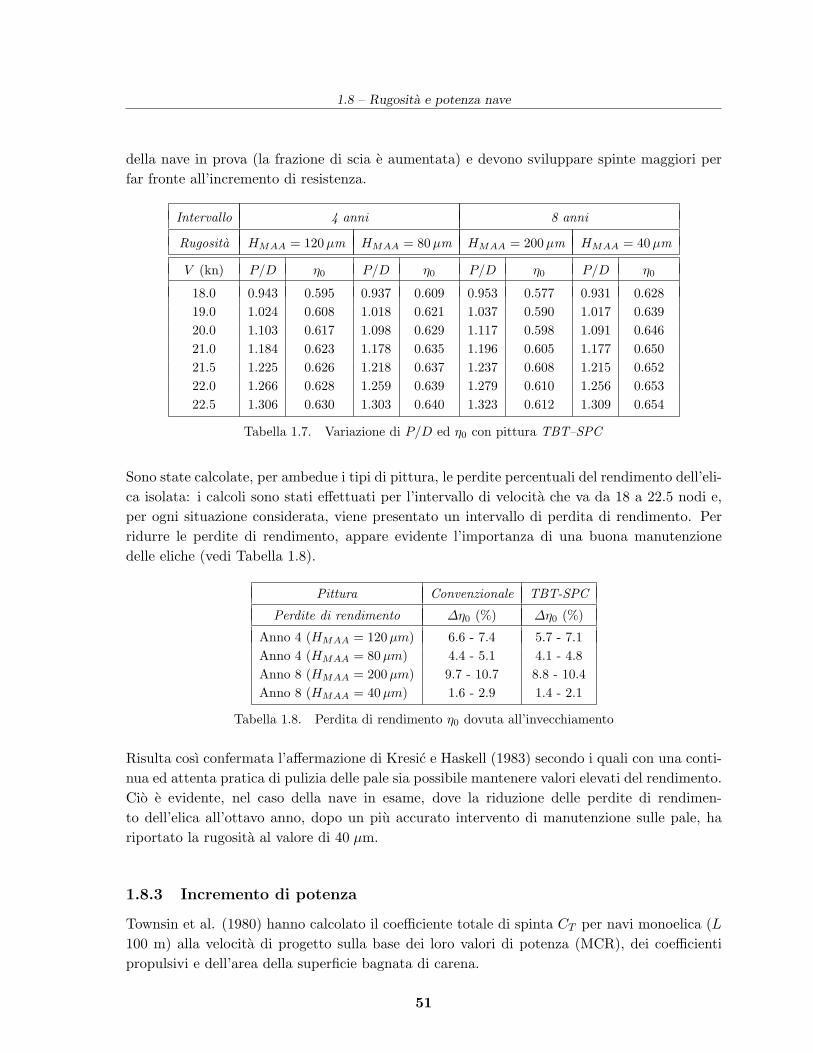
1.8 – Rugosita e potenza nave
della nave in prova (la frazione di scia e aumentata) e devono sviluppare spinte maggiori perfar fronte all’incremento di resistenza.
Intervallo 4 anni 8 anni
Rugosita HMAA = 120 µm HMAA = 80 µm HMAA = 200 µm HMAA = 40 µm
V (kn) P/D η0 P/D η0 P/D η0 P/D η0
18.0 0.943 0.595 0.937 0.609 0.953 0.577 0.931 0.62819.0 1.024 0.608 1.018 0.621 1.037 0.590 1.017 0.63920.0 1.103 0.617 1.098 0.629 1.117 0.598 1.091 0.64621.0 1.184 0.623 1.178 0.635 1.196 0.605 1.177 0.65021.5 1.225 0.626 1.218 0.637 1.237 0.608 1.215 0.65222.0 1.266 0.628 1.259 0.639 1.279 0.610 1.256 0.65322.5 1.306 0.630 1.303 0.640 1.323 0.612 1.309 0.654
Tabella 1.7. Variazione di P/D ed η0 con pittura TBT–SPC
Sono state calcolate, per ambedue i tipi di pittura, le perdite percentuali del rendimento dell’eli-ca isolata: i calcoli sono stati effettuati per l’intervallo di velocita che va da 18 a 22.5 nodi e,per ogni situazione considerata, viene presentato un intervallo di perdita di rendimento. Perridurre le perdite di rendimento, appare evidente l’importanza di una buona manutenzionedelle eliche (vedi Tabella 1.8).
Pittura Convenzionale TBT-SPC
Perdite di rendimento ∆η0 (%) ∆η0 (%)
Anno 4 (HMAA = 120 µm) 6.6 - 7.4 5.7 - 7.1Anno 4 (HMAA = 80 µm) 4.4 - 5.1 4.1 - 4.8Anno 8 (HMAA = 200 µm) 9.7 - 10.7 8.8 - 10.4Anno 8 (HMAA = 40 µm) 1.6 - 2.9 1.4 - 2.1
Tabella 1.8. Perdita di rendimento η0 dovuta all’invecchiamento
Risulta cosı confermata l’affermazione di Kresic e Haskell (1983) secondo i quali con una conti-nua ed attenta pratica di pulizia delle pale sia possibile mantenere valori elevati del rendimento.Cio e evidente, nel caso della nave in esame, dove la riduzione delle perdite di rendimen-to dell’elica all’ottavo anno, dopo un piu accurato intervento di manutenzione sulle pale, hariportato la rugosita al valore di 40 µm.
1.8.3 Incremento di potenza
Townsin et al. (1980) hanno calcolato il coefficiente totale di spinta CT per navi monoelica (L100 m) alla velocita di progetto sulla base dei loro valori di potenza (MCR), dei coefficientipropulsivi e dell’area della superficie bagnata di carena.
51

1 – Progetto Concettuale
Dalla relazione
∆P
P× 100% =
∆CF
CT× 100% =
1.0510CT
·[100
(k
L
)1/3
− 0.6095
](1.17)
furono calcolati per il campione i valori di 0.105/CT . Le navi container veloci, le grandi bulkcarriers ed i grandi tankers produssero una banda stretta di valori intorno ad una media di 40,mentre le altre navi, che erano piu piccole, mostrarono una dispersione maggiore intorno ad unvalore medio di 30.
Esprimendo il rapporto 0.105/CT rispetto alla lunghezza L mediante la curva
∆P
P× 100% = 5.8L1/3
l’incremento di potenza assorbita alla velocita di progetto, normalizzata rispetto alla potenzamassima comntinuativa, puo essere approssimato mediante la formula
∆P
P× 100% = 5.8L1/3
[100
(k
L
)1/3
− 0.6
](1.18)
Se la rugosita varia da k1 a k2 µm MAA, la variazione percentuale di potenza e
∆P1 −∆P2
P× 100% = 5.8 [k1/3
1 − k1/32 ] (1.19)
Questa formula indica che si ha 1% di incremento di potenza per un aumento della rugosita del10 µm per un suo valore minimo di 80 µm ed un incremento di potenza pari allo 0.5% sempreper un aumento della rugosita del 10 µm per un tipico valore in servizio di 230 µm.
1.8.4 Costruzione delle curve combinate passo-giri
La caratteristica comune dei motori diesel a quattro tempi e la maggiore sensibilita al sovrac-carico rispetto ai motori a due tempi. Le eliche a passo variabile accoppiate ai motori, tramiteriduttori, devono garantire il funzionamento continuativo del motore lontano da eventuali stresstermo–meccanici. Questo e, infatti, il primo scopo che va perseguito durante la realizzazionedelle curve combinate passo–giri , Una volta individuata la zona di funzionamento dell’elica equella del motore distante dalla zona di sovraccarico, vanno ricercate le combinazioni dei valoridel passo e del numero di giri che presentano il maggiore rendimento.
Occorre disporre del diagramma del campo di funzionamento, layout , del motore (Fig. 1.23),dove sono tracciate due rette verticali che delimitano l’intervallo del numero di giri per il fun-zionamento continuativo (normalmente fra il 70% ed il 100% dei giri nominali del motore). Laretta inclinata alla destra del diagramma rappresenta il limite massimo del numero di giri. Lacurva TL e la curva limite del momento torcente: quando il motore raggiunge questo limiteviene automaticamente bloccato l’afflusso di nafta agli iniettori per un breve intervallo di tempo.
52

1.8 – Rugosita e potenza nave
Successivamente occorre calcolare la curva nominale dell’elica NP , relativa al valore massi-mo del passo dell’elica, che deve raggiungere il 100% dell’MCR in corrispondenza del 100%del numero di giri nominali del motore. La curva calcolata va sovrapposta al diagramma difunzionamento. Quindi, si individuano due zone all’interno del layout del motore; la zona A
destinata al funzionamento continuativo e la zona ombreggiata B di sovraccarico, al cui in-terno il motore puo operare solamente per un breve lasso di tempo. I punti della curva NP
costituiscono i valori di riferimento per il sistema di controllo automatico del sovraccarico, cheviene programmato in modo tale che, quando durante il funzionamento ci si avvicina alla curva,venga automaticamente ridotto il rapporto di passo delle eliche.
Figura 1.23. Diagramma di accoppiamento elica–motore
La curva combinata va costruita all’interno della zona A calcolando un certo numero di curvedell’elica a passo costante ed un certo numero di curve di isovelocita. Sovrapponendo tutte lecurve al diagramma del motore, si ottiene un reticolo che permette la scelta dei punti dellacombinata: le tacche devono essere scelte in corrispondenza dei minimi delle curve di isovelo-cita, verificando al tempo stesso di essere lontani dalla zona B di sovraccarico. La tacca 9 dellacurva combinata, visibile nei prossimi diagrammi, e quella corrispondente al punto di serviziodella nave, al 100% del numero di giri ed ad un valore della potenza compreso fra l’85% ed il90% dell’MCR. Nella costruzione delle curve combinate si e scelto di far arrivare la curva allatacca 9 , facendo funzionare le eliche a passo fisso a partire approssimativamente dalla taccacorrispondente al 50–58% dell’MCR ed all’80-85% del numero di giri. Cio consente un funzio-namento nella zona ad elevato rendimento, corrispondente al minimo delle curve isovelocita.
53

1 – Progetto Concettuale
La tacca 10 viene raggiunta con l’ultimo incremento di passo delle eliche ed il motore funzio-nante al 100% dei giri: la potenza che si sviluppa e superiore al limite rappresentato dal 90%MCR e per questo motivo la tacca 10 va utilizzata per breve tempo e solamente in condizionidi estrema emergenza. Durante le prove in mare la tacca 10 viene utilizzata per dimostrareil conseguimento dell’MCR, qualora la specifica contrattuale lo preveda. Resta l’incertezzadi quale sia la massima percentuale dell’MCR utilizzabile durante le situazioni di emergenza,evitando la compromissione del motore. Dall’analisi delle tabelle corrispondenti ai casi studiatie possibile ottenere delle informazioni sulle velocita raggiungibili e sui relativi rapporti P/D
che si ottengono operando al massimo dei giri nella zona limite al di sopra del 90% dell’MCR;nei calcoli si e scelto di non superare il valore corrispondente al 98.5% dell’MCR.
Le tacche ai bassi regimi sono quelle destinate ai transitori della nave in accelerazione. Perquesti casi non e stata svolta l’analisi dell’accoppiamento elica-motore, essendo lo scopo dellaricerca quello di prevedere e ottimizzare l’accoppiamento nelle condizioni di servizio. Inoltre,non conoscendo i valori dei coefficienti propulsivi ai bassi regimi, non e possibile fornire unaprevisione accurata dell’accoppiamento. Va ricordato che il settaggio definitivo dei punti dellacombinata avviene generalmente durante le prove della nave. Prima della consegna; per questomotivo, sulle curve combinate non verranno segnati i punti corrispondenti alle tacche, ma verrapresentato l’andamento della combinata, accompagnato da tabelle che ne riassumono i valorirelativi.
54
Capitolo 2
Progetto Preliminare
Scopo del progetto preliminare di un’elica navale e stabilire i suoi parametri progettuali fon-damentali (diametro D, numero di pale Z, passo medio P , rapporto d’area espansa AE/A0),curando nel contempo gli aspetti principali connessi alla cavitazione ed alle vibrazioni per ot-tenere le prestazioni attese. Deve fornire la base per il progetto della geometria dell’elica conla teoria vorticale in una fase piu avanzata del processo progettuale. Per ottenere un progettocorretto, e necessario che il cantiere, o l’armatore, oppure il costruttore dell’elica, siano in gradodi specificare alcuni criteri progettuali e costruttivi. I risultati delle prove di autopropulsionesu modello, nelle quali si utilizza un’elica di stock, costituiscono una base solida per il progettopreliminare. L’elemento piu importante di queste prove sperimentali e la previsione correttadella velocita di rotazione dell’elica.
2.1 Informazioni generali
Per svuluppare al meglio il progetto di un’elica, e necessario disporre di una serie di dati inizia-li affidabili. Alcune carenze informative, tipiche ed accettabili nella fase concettuale, possonoessere sostituite da dati empirico–statistici e da conoscenze di carattere generale. In sintesi,occorre disporre dei seguenti elementi:
• Caratteristiche della nave e dei motori
– tipo e dimensioni principali della nave, immersioni operative e dislocamenti corri-spondenti, direzione di rotazione dell’elica, posizione dell’elica;
– resistenza totale della nave in differenti condizioni operative;
– disegno della linea d’assi e dei timoni;
– tipo di motore, sua potenza massima e corrispondente velocita nominale; diagram-ma di funzionamento del motore;
55
2 – Progetto Preliminare
– tipo di trasmissione; perdite del riduttore e della linea d’assi; eventuale presenza diun generatore asse e relativa potenza assorbita.
• Caratteristiche dell’interazione elica–carena– frazione di scia effettiva, fattore di deduzione di spinta, rendimento relativo rotativo;– luci, diametro massimo dell’elica.
• Punto progettuale dell’elica e profilo operativo della nave
La scelta del punto progettuale dell’elica, ossia della combinazione tra potenza e giri delmotore, e spesso una scelta soggettiva tra varie condizioni di servizio, il che implica uncompromesso. Quando l’elica e progettata per condizioni meteo–marine ideali, con carenaed eliche pulite, ossia per le prove in mare, risulta essenziale introdurre un certo margineper il numero di giri. Se l’elica deve servire al meglio piu di una condizione progettuale,occorre specificare le condizioni relative.
• Esperimenti su modello e/o al vero
La conoscenza della frazione di scia e del fattore di deduzione di spinta sono di impor-tanza primaria. E opportuno conoscere gia in questa fase progettuale la distribuzionetridimensionale della scia nel piano del disco–elica. Sono molto utili anche informazionida prove al vero su navi similari.
• Informazioni realizzative– registro di classifica;– costruttore dell’elica e tolleranze costruttive (classe ISO);– irrobustimento per (eventuale) navigazione in ghiaccio;– tipo di elica (libera, intubata, a passo fisso, a passo variabile, ecc.);– numero di pale, diametro massimo, massa massima, GD2 massimo;– dimensioni e disegno del mozzo;– materiale dell’elica.
• Presentazione del progetto
Nei progetti standard si e soliti sviluppare due disegni contenenti informazioni sufficientiper costruire l’elica. Il piano sagomatore fornisce i profili di pala nelle varie viste, i profilidi alcune sezioni, la distribuzione del passo, il profilo del mozzo, alcuni dettagli e la tabelladegli offsets delle sezioni. L’altro disegno comprende i dettagli, in scala 1:1, dei bordid’ingresso delle sezioni di pala. Inoltre, un report breve dovrebbe delineare il processoprogettuale e le decisioni assunte.
Prima di fornire i dati per il progetto dell’elica, vanno effettuate le scelte fondamentali circa iltipo di elica, le caratteristiche principali dell’apparato propulsivo, il profilo operativo della navee vari aspetti che hanno poco o niente a che fare con le prestazioni idrodinamiche dell’elica.Nel seguito sono trattati alcuni di questi elementi, che influenzano la scelta del tipo di elica.
56

2.2 – Aspetti progettuali preliminari
2.2 Aspetti progettuali preliminari
La progettazione preliminare dell’elica coinvolge sia il team progettuale della nave che il pro-gettista (specialista) dell’elica.
A volte non e facilmente ed immediatamente evidente se convenga optare per una nave mono-elica o bielica. L’impatto di questa decisione puo essere devastante quando si considerino gliaspetti fondamentali, spesso conflittuali del progetto, quali il costo iniziale ed i costi operatividella nave, i problemi cavitativi e le vibrazioni indotte dall’elica.
I costi di acquisizione sono ovviamente piu elevati per una nave bielica (mediamente del 20%).I costi operativi dipendono sostanzialmente dal consumo di combustibile e, di conseguenza,dal rendimento propulsivo globale. Il rapporto del rendimento propulsivo globale di una navebielica rispetto a quello di una nave monoelica puo essere formulato come
ηOA2
ηOA1
=η02
η01
· ηH2
ηH1
· ηR2
ηR1
·RT1
RT2
· ηE2
ηE1
(2.1)
dove
ηOA - rendimento propulsivo totaleη0 - rendimento elica isolataηH - rendimento di carenaηR - rendimento relativo rotativoηE - rendimento del motore, che comprende il consumo specifico,
il rendimento del riduttore e quello della linea d’assiRT - resistenza della nave
e dove gli indici 1 e 2 sono riferiti rispettivamente alla nave monoelica e bielica.
L’influenza degli ultimi due fattori e marginale, cosı che si puo assumere che sia RT1/RT2 ' 1e ηE2/ηE1 ' 1. Il rendimento di carena combinato con il rendimento relativo rotativo e piuelevato per una nave monoelica e deve essere quantificato sperimentalmente.
Per determinare la differenza tra i rendimenti di elica isolata, si puo utilizzare la semplice teoriaimpulsiva assiale, in quanto tale differenza ha origine quasi completamente dalle perdite assiali.Il rendimento ideale di elica isolata e
ηi0 =2
1 +√
1 + CT
(2.2)
dove CT e il coefficiente di carico di spinta dell’elica.
Per una certa velocita nave, trasformando la spinta di ogni nave in resistenza, il rapporto trai coefficienti di carico di spinta delle due navi puo essere espresso come
CT2
CT1
=RT2
RT1· 1− t11− t2
·(
1− w1
1− w2
)2
·(
D1
D2
)2
(2.3)
ed il rapporto tra i rendimenti propulsivi globali, introducendo le rispettive relazioni (2.2) nellarelazione (2.3) diviene
57

2 – Progetto Preliminare
ηOA2
ηOA1
=1 +
√1 + CT1
1 +√
1 + CT2
· ηH2
ηH1
· ηR2
ηR1
·RT1
RT2
· ηE2
ηE1
(2.4)
Sono stati analizzati vari tipi di navi, monoelica e bielica, lente e veloci, per determinarne ilrendimento propulsivo totale ideale ηi. I risultati forniti in Tabella 2.1 mostrano che nell’inter-vallo dei carichi considerati (CT ' 1) il rendimento propulsivo di una nave monoelica e intornoal 7% migliore di quello di una configurazione bielica equivalente. Comunque, va tenuto contoche forme poppiere ben progettate di navi bielica tendono a ridurre il vantaggio delle navi mo-noeliche. Inoltre, severe limitazioni all’immersione possono portare su una nave monoelica acarichi sull’elica talmente elevati (CT ' 3) che una configurazione bielica puo risultare miglioredal punto di vista propulsivo.
Nave VS D/T CB CT ηi◦ ηH ηR ηi
Navi mercantili monoelica
1 20.0 0.710 0.574 1.053 0.822 1.055 1.050 0.9772 23.5 0.790 0.553 1.012 0.827 1.101 1.032 0.9403 20.0 0.652 0.572 1.244 0.801 1.275 0.961 0.9814 20.5 0.719 0.632 1.215 0.804 1.183 0.970 0.9235 19.5 0.673 0.628 1.123 0.814 1.167 1.013 0.9626 23.0 0.700 0.612 1.166 0.809 1.145 1.014 0.9397 26.0 0.676 0.531 0.971 0.832 0.968 1.133 0.912
Navi mercantili bielica
8 26.5 0.621 0.524 0.475 0.903 1.016 0.943 0.8039 33.0 0.721 0.514 0.468 0.906 1.024 0.913 0.84710 28.5 0.592 0.580 0.510 0.897 0.970 1.026 0.893
Tabella 2.1. Fattori propulsivi di navi monoelica e bielica
La ridondanza e le superiori qualita in manovra di una configurazione bielica potrebbero avereun effetto favorevole sui costi assicurativi. Tuttavia, si puo affermare con certezza che sia icosti iniziali, sia i costi operativi delle navi bielica sono superiori a quelli delle navi monoelicaequivalenti. Pertanto, la configurazione bielica dovrebbe essere scelta solamente se i problemicavitativi e vibratori non possono essere evitati su una nave monoelica, se si presentano serielimitazioni dell’immersione, e se non si puo fare a meno di frazionare la potenza.
2.3 Scelta delle caratteristiche principali dell’elica
Prima di procedere al progetto preliminare dell’elica occorre effettuare una valutazione oppor-tuna dei margini da incorporare al punto progettuale dell’elica. Si deve osservare che in pratica
58
2.3 – Scelta delle caratteristiche principali dell’elica
sono utilizzati almeno due differenti punti progettuali: uno per il progetto idrodinamico ed unoper il progetto strutturale. Per le eliche a passo variabile, il progetto dell’elica richiede chetutti i requisiti siano soddisfatti in tutto il campo di variazione del passo. A seconda del tipodi nave e di elica, e bene considerare anche un certo numero di condizioni off–design diverse daquella relativa al punto propulsivo.
Il tipo e la potenza del motore, i giri di funzionamento dell’elica ed i suoi elementi base geo-metrici e strutturali vanno determinati in modo da garantirne il massimo rendimento con uncerto utilizzo (percentuale del MCR) della potenza del motore principa1e, contestualmente alrispetto di un certo numero di requisiti che assicurino una bassa attivita vibratoria, assenza disviluppo di cavitazione, ecc. Vengono di seguito illustrate alcune linee guida per la scelta diquegli elementi geometrici dell’elica che dipendono fondamentalmene dai requisiti di robustezzae di vibrazione, cosi come da altre considerazioni progettua1i di carattere genera1e.
2.3.1 Margine sul numero di giri
E abitudine consolidata progettare l’elica per le prove in mare oppure per una assegnata condi-zione di servizio. I dati progettuali storici riflettono tradizionalmente la prima condizione. Mal’esperienza operativa insegna che a causa dell’aumento della rugosita di pala e della maggiorerugosita della carena nelle condizioni di servizio, l’attrito di pala aumenta mentre la velocitad’avanzo diminuisce. Ne risulta una riduzione graduale del numero di giri del 2–4% rispettoalla condizione iniziale di nave nuova con elica pulita. Inoltre, vanno considerate le variazionidel carico dell’elica dovute al vento, allo stato del mare, alle variazioni d’immersione, ecc.
Da un punto di vista teorico, l’utilizzo di una frazione della potenza installata come margine disicurezza, da utilizzare per tenere conto delle condizioni ambientali della nave, e stato criticatoa piu riprese.
Il progettista dell’elica deve essere cosciente, che, a causa di effetti variabili e sistematici, ilnumero di giri puo scostarsi di una certa quantita in ambedue le direzioni. E stato osservatoche, a seconda del tipo di nave e della condizione progettuale adottata, lo scostamento delnumero di giri dal valore progettuale puo risultare di una certa consistenza. In particolare, vaprestata molta attenzione per le eliche a passo fisso mosse da motori diesel. I motori sono criticirispetto alla velocita di rotazione alla quale puo essere fornito un certo momento torcente. Eper questo che occorre garantire che durante la vita operativa l’elica lavori alla combinazioneprevista di potenza e numero di giri.
Le prestazioni del motore sono espresse nel diagramma delle prestazioni (Fig. 2.1), che mostrala potenza sviluppata e/o la pressione media effettiva espresse in funzione della velocita dirotazione del motore. Per il progettista dell’elica e di particolare importanza l’angolo in alto adestra del diagramma, in quanto a quel punto corrispondono la potenza massima ed il numerodi giri massimo del motore. Questo punto e denotato di solito come il punto MCR. Il motorediesel dovrebbe essere in grado, sia termicamente che meccanicamente, di operare in questacondizione per un considerevole periodo di tempo.
59
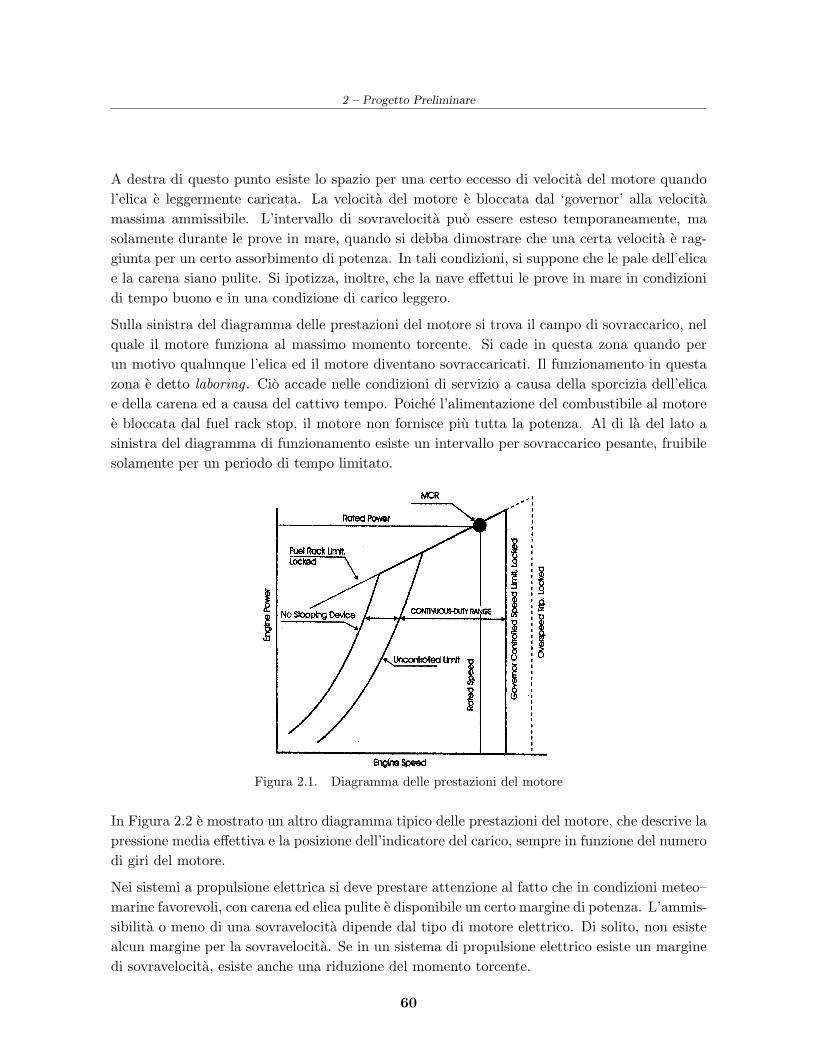
2 – Progetto Preliminare
A destra di questo punto esiste lo spazio per una certo eccesso di velocita del motore quandol’elica e leggermente caricata. La velocita del motore e bloccata dal ‘governor’ alla velocitamassima ammissibile. L’intervallo di sovravelocita puo essere esteso temporaneamente, masolamente durante le prove in mare, quando si debba dimostrare che una certa velocita e rag-giunta per un certo assorbimento di potenza. In tali condizioni, si suppone che le pale dell’elicae la carena siano pulite. Si ipotizza, inoltre, che la nave effettui le prove in mare in condizionidi tempo buono e in una condizione di carico leggero.
Sulla sinistra del diagramma delle prestazioni del motore si trova il campo di sovraccarico, nelquale il motore funziona al massimo momento torcente. Si cade in questa zona quando perun motivo qualunque l’elica ed il motore diventano sovraccaricati. Il funzionamento in questazona e detto laboring . Cio accade nelle condizioni di servizio a causa della sporcizia dell’elicae della carena ed a causa del cattivo tempo. Poiche l’alimentazione del combustibile al motoree bloccata dal fuel rack stop, il motore non fornisce piu tutta la potenza. Al di la del lato asinistra del diagramma di funzionamento esiste un intervallo per sovraccarico pesante, fruibilesolamente per un periodo di tempo limitato.
Figura 2.1. Diagramma delle prestazioni del motore
In Figura 2.2 e mostrato un altro diagramma tipico delle prestazioni del motore, che descrive lapressione media effettiva e la posizione dell’indicatore del carico, sempre in funzione del numerodi giri del motore.
Nei sistemi a propulsione elettrica si deve prestare attenzione al fatto che in condizioni meteo–marine favorevoli, con carena ed elica pulite e disponibile un certo margine di potenza. L’ammis-sibilita o meno di una sovravelocita dipende dal tipo di motore elettrico. Di solito, non esistealcun margine per la sovravelocita. Se in un sistema di propulsione elettrico esiste un marginedi sovravelocita, esiste anche una riduzione del momento torcente.
60

2.3 – Scelta delle caratteristiche principali dell’elica
Il punto progettuale idrodinamico dell’elica e scelto di solito come frazione della potenza (adesempio, 85% MCR) in combinazione con la massima velocita di rotazione del motore (100%).Un tale punto progettuale comporta automaticamente che durante il servizio l’elica lavoraall’angolo in alto a destra del campo di funzionamento del motore, oppure nel margine tempo-raneo di sovravelocita durante le prove in mare. Esistono alcune ragioni per esaminare meglioil margine della velocita di rotazione. Come noto, lo scarto del punto propulsivo tra prove inmare ed effettive condizioni di servizio dipende da vari fattori.
Figura 2.2. Pressione media effettiva ed indicatore del carico
In alcuni tipi di navi, lo scarto va invariabilmente verso un’unica direzione (i giri diminuiscono).Negli yachts, nelle navi militari ed in alcuni tipi di navi mercantili da carico secco, lo scostamen-to e costante con una tendenza a divenire gradualmente maggiore. Un incremento stazionariodella rugosita della carena e delle pale dell’elica, in combinazione con gli effetti del vento e delmare, causeranno una ulteriore diminuzione della velocita di rotazione in servizio. Per questenavi, e inconcepibile un aumento della velocita di rotazione rispetto a quella in condizioni ideali.
Solamente in alcuni tipi di moderne navi mercantili (navi portacontainers e ro–ro), quandonavighino ad immersione minore di quella progettuale, si puo verificare un leggero aumentodella velocita di rotazione in alcune condizioni specifiche. Tuttavia, solo un calcolo adeguatodelle variazioni di carico previste in diverse condizioni di servizio puo contribuire a formularecorrettamente il margine per il numero di giri progettuale.
Il margine da considerare per il numero di giri e particolarmente delicato per le navi veloci. Inparticolare, negli scafi plananti relativamente corti, il picco principale di resistenza puo avereun’entita tale che la richiesta di momento torcente, seppure alla ridotta potenza relativa, puodivenire critica rispetto al massimo torcente del motore.
61

2 – Progetto Preliminare
L’effetto dell’estremo sovraccarico dei motori diesel semiveloci, che prevedono un momentotorcente inferiore alle velocita piu basse del motore, deve essere considerato con attenzione, inquanto potrebbero risultare necessari margini addizionali per la velocita di rotazione. Lo stessovale per le eliche progettate per imbarcazioni speciali quali gli aliscafi, le cui eliche dovrebberoessere in grado di sviluppare una spinta sufficiente a basse velocita di rotazione nelle condizionidi decollo.
In base a quanto detto, la specifica tradizionale per cui l’elica va progettata ad una potenzapari all’85% della potenza nominale ed al 100% della velocita di rotazione nominale dovrebbeessere riconsiderata sostanzialmente.
La capacita da parte dell’elica di potere fruire della potenza totale disponibile in condizionimeteo–marine avverse e la richiesta emergente di un migliore comportamento nelle condizionidi servizio vanno divenendo obiettivi piu importanti rispetto alla capacita di sviluppare la pienapotenza per la nave nuova, con elica pulita ed in condizioni ambientali favorevoli. Va osservatoche un’elica con un passo leggermente ridondante ha un rendimento piu elevato di un’elica conpasso inferiore, come si puo desumere dai diagrammi progettuali. La differenza di rendimentoe comunque piuttosto piccola e di solito inferiore allo 0.5%. Ne consegue che, in generale,l’armatore o l’operatore dovrebbero preferire un’elica con passo ridotto ad un’elica con passomaggiorato.
2.3.2 Diametro
Le caratteristiche principali dell’elica sono determinate di solito mediante l’utilizzo dei dia-grammi di funzionamento di eliche da serie sistematiche. La serie piu utilizzata e la Serie–Bdi Wageningen, soprattutto per le eliche subcavitanti a passo fisso. Altre serie sono disponi-bili per eliche subcavitanti, transcavitanti e supercavitanti. In particolare, la Serie di Gawn atre pale e adatta per scafi semidislocanti dove i rapporti passo–diametro sono assai elevati, inquanto arrivano fino a P/D = 2 per il fatto che il carico idrodinamico (RT /∆) e assai basso.Per le eliche intubate e disponibile la Serie–Ka con vari tipi di mantelli, dal 19–A al 37. Pertutte queste eliche sono disponibili equazioni di regressione per esprimere le caratteristiche difunzionamento.
Il primo parametro geometrico da stabilire e il diametro dell’elica. Per una combinazione as-segnata di potenza e numero di giri, condizione che si presenta rigidamente per i motori diesellenti in presa diretta, esiste sempre un unico diametro ottimale. Quando si tratta di sceglieretra piu motori alternativi, si devono calcolare il diametro ottimale e le componenti del rendi-mento per ogni soluzione alternativa, tenendo conto dei vincoli imposti dalle luci disponibili,dalle eccitazioni vibratorie indotte, ecc. Generalmente, per le eliche subcavitanti di navi mo-noelica dalle forme piene si sceglie un diametro finale che puo essere fino al 5% minore deldiametro ottimale ricavato dalla serie sistematica utilizzata. Questa strategia non e validaper gli scafi ad alta velocita dove gli effetti cavitativi sulla propulsione dovrebbero portare a
62

2.3 – Scelta delle caratteristiche principali dell’elica
scegliere diametri leggermente maggiori per evitare eccessive riduzioni del rendimento, qualorasi adottino rapporti inferiori di area espansa. Queste ultime considerazioni confermano che ebuona pratica progettuale includere gli effetti dell’influenza della cavitazione sulle prestazionipropulsive fin dalla fase preliminare del progetto.
L’eventuale riduzione del diametro dipende sostanzialmente dalla distribuzione radiale dellascia assiale. Cio e particolarmente importante per le navi mercantili monoelica, nelle quali ladistribuzione radiale della scia e alquanto disuniforme. Per le navi che presentano una debolevariazione della scia radiale, il diametro ottimale dell’elica isolata puo essere scelto come de-finitivo senza incorrere in errori significativi. Questo vale, ad esempio, per le navi mercantilibieliche con linee d’assi esposte, purche gli effetti cavitativi non siano rilevanti.
Un’attenzione speciale va prestata alle eliche concepite per essere utilizzate in condizioni ditiro a punto fisso (bollard pull). Maggiore e il diametro, maggiore e la forza di tiro prodottadall’elica a parita di potenza, anche se cio e vero solamente se si puo scegliere liberamente lavelocita di rotazione dell’elica. Le seguenti formule approssimate valgono per la determinazioneiniziale della forza di tiro TBP a velocita nulla
TBP = 0.84 (D·PD)2/3 per eliche libere
TBP = 1.22 (D·PD)2/3 per eliche intubate
Non e del tutto chiaro come il rapporto tra diametro del mozzo e diametro dell’elica, insiemealla distribuzione radiale del carico idrodinamico (spinta), influenzi il valore della scelta del dia-metro ottimale. Probabilmente, il diametro ottimale di un’elica con apice di pala scaricato ein qualche misura maggiore del diametro ottimale determinato mediante una serie sistematica.Parimenti, poco si sa circa l’influenza sul diametro ottimale da parte della forma geometricadelle pale (curvatura delle sezioni, ‘skew’ e ‘rake’).
Se il numero di giri puo essere scelto liberamente, in generale non c’e nulla che osti all’applica-zione del diametro massimo possibile, associato ad un minore numero di giri, compatibilmentecon la forma di carena a poppa e la luce tra apice di pala e volta di poppa, in quanto quasisempre si ottiene un rendimento piu elevato. Si osservi che cio non vale automaticamente perle eliche intubate. Infatti, nei sistemi propulsivi con eliche intubate un aumento del diametrocausa una riduzione del contributo alla spinta da parte del mantello a causa del minore caricoe dell’aumento delle perdite per viscosita prodotto dall’accresciuta superficie bagnata del man-tello.
Per la scelta del diametro finale alcuni parametri adimensionali possono aiutare a capire se lascelta del diametro dell’elica e corretta o meno. Il parametro piu importante e il coefficiente dicarico di spinta CT , che e un indice della contrazione del flusso attraverso il disco–elica. Essoconsente di valutare il rendimento potenzialmente raggiungibile da parte dell’elica isolata, inquanto e strettamente correlato al cosiddetto rendimento ideale
ηi =2
1 +√
1 + CT
63

2 – Progetto Preliminare
dove
CT =T
12ρ[V (1− w)]2πD2/4
=8π·KT
J2
Va da se che il rendimento ideale non puo essere superiore a quello calcolato, ad esempio, coni diagrammi di Kramer.
Un altro parametro pratico per giudicare le caratteristiche del progetto dell’elica e il coefficientedi spinta KT . Valori tipici sono:
KT = 0.08− 0.12 per navi bieliche veloci;
KT = 0.14− 0.18 per navi mercantili monoeliche;
KT = 0.04− 0.08 per navi monoeliche con forme piene.
Esiste una relazione diretta tra il coefficiente di spinta KT ed il coefficiente di portanza CL deiprofili delle sezioni di pala
CL0.7R≈ 0.725
KT
AE/A0
Poiche la curvatura del profilo e correlata al coefficiente di portanza (CL = 4πf/c per una se-zione piana con linea mediana parabolica ed angolo d’incidenza nullo), il coefficiente di spintaindica se occorre adottare per il profilo della sezione una curvatura piu o meno accentuata. Ingenerale, devono essere evitati coefficienti di spinta troppo elevati, poiche le eliche risultantiavrebbero profili delle sezioni con elevata curvatura, che sono piu sensibili allo stallo e ad alcunitipi di cavitazione indesiderata.
Prima di potere utilizzare diagrammi o polinomiali delle caratteristiche di funzionamento dieliche da serie sistematiche, occorre definire i parametri che influenzano soprattutto caratteri-stiche diverse dal rendimento. Questi parametri sono il numero di pale Z ed il rapporto d’areaespansa AE/A0.
2.3.3 Numero di pale
Statisticamente le eliche leggermente o moderatamente caricate di navi mercantili hanno quat-tro o cinque pale, mentre un numero maggiore e impiegato qualche volta su navi militari. Leeliche di scafi veloci hanno in genere tre pale, qualche volta cinque. All’aumentare del numerodi pale, diminuiscono il diametro ottimale ed il rendimento dell’elica isolata.
Comunque, la scelta del numero di pale e significativamente influenzata da considerazioni ri-guardanti le vibrazioni dovute all’azione dell’elica in una scia non–uniforme ed al tipo di motore.Ad esempio, un motore ad otto cilindri ed un’elica a quattro pale possono entrare in risonanzaperche la frequenza del motore e la frequenza dell’elica hanno armoniche comuni; in questocaso, le vibrazioni diverranno eccessive e pericolose.
64

2.3 – Scelta delle caratteristiche principali dell’elica
Dal numero di pale dipendono le frequenze ed i livelli delle forze e dei momenti periodici ge-nerati dall’elica sia sullo scafo poppiero che sulla linea d’assi. Queste frequenze non devonoentrare in risonanza l’una con l’altra se si vogliono mantenere rumore e vibrazioni a livelli ac-cettabili. Al crescere del numero di pale, aumenta la frequenza di tali forze, mentre diminuiscel’ampiezza delle loro armoniche. Prima della scelta definitiva del numero di pale, occorre effet-tuare, quindi, i calcoli delle frequenze natura1i di vibrazione della carena, della linea d’assi edel motore principale per i modi operativi fondamentali della nave. Il numero di pale e assuntotale da evitare la coincidenza della frequenza di pala f = nZ, e del suo valore doppio, con lefrequenze naturali dei primi tre modi di vibrazione della struttura della nave, della linea d’assie del motore. Quando si sceglie il numero di pale, si dovrebbe tenere conto che, al cresceredel loro numero, diminuisce il valore del diametro ottimale ed aumenta il rapporto AE/A0,il che riduce il rischio di cavitazione. Al crescere di Z, anche il rendimento dell’elica risultaridotto, come conseguenza dell’aumento dello spessore relativo di pala teso a bilanciare la ridu-zione delle lunghezze di corda; aumentando le pale da 4 a 6, il rendimento diminuisce del 2÷3%.
Per la scelta del numero di pale e importante anche la struttura della scia. Quando la scia haarmoniche di ampiezza elevata eguali al numero di pale, le fluttuazioni della spinta possonodivenire notevoli. Le forze fluttuanti orizzontali e verticali sono generate dalle armoniche dellascia di ordine (Z−1) e (Z +1). La frequenza dell’armonica di pala e, quindi, nZ e le armonichedi ordine piu elevato sono multiple di questa frequenza.
Le forze vibratorie indotte dall’elica sono di tre tipi:
• componenti periodiche delle forze e dei momenti della linea d’assi (bearing forces);
• fluttuazioni delle forze di pressione sulla carena (surface forces);
• forze vibratorie indotte dal timone.
Di solito, le fluttuazioni delle forze di pressione sono le piu rilevanti e, quindi, le piu importantitra queste tre. Le forze non–stazionarie del timone non sono considerate come critiche nellamaggior parte dei progetti. L’eccitazione vibratoria prodotta dalle forze non–stazionarie dellalinea d’assi e generalmente limitata; le soluzioni vanno trovate localmente nella struttura enelle linea d’assi. Quando si adotta un elevato numero di pale, le forze fluttuanti generate dallepale dell’elica, che sono trasferite dal mozzo alla linea d’assi ed ai suoi cuscinetti, si traduconoin una inferiore forza di eccitazione totale. Anche le ampiezze delle fluttuazioni delle forze dipressione sulla carena sono inferiori, se l’elica e progettata con un grande numero di pale.
Per le navi militari si sceglie spesso il numero di pale piu elevato possibile per ridurre lacavitazione di vortice all’apice, sebbene sia dubbio che questa sia la scelta piu corretta.
2.3.4 Rapporto di area espansa
Il valore del rapporto di area espansa influenza notevolmente la cavitazione dell’elica, la suarobustezza ed il suo rendimento. Gli esperimenti hanno dimostrato che, a parita di condizioni,l’aumento di AE/A0 porta ad un incremento dei coefficienti di spinta e momento torcente,
65
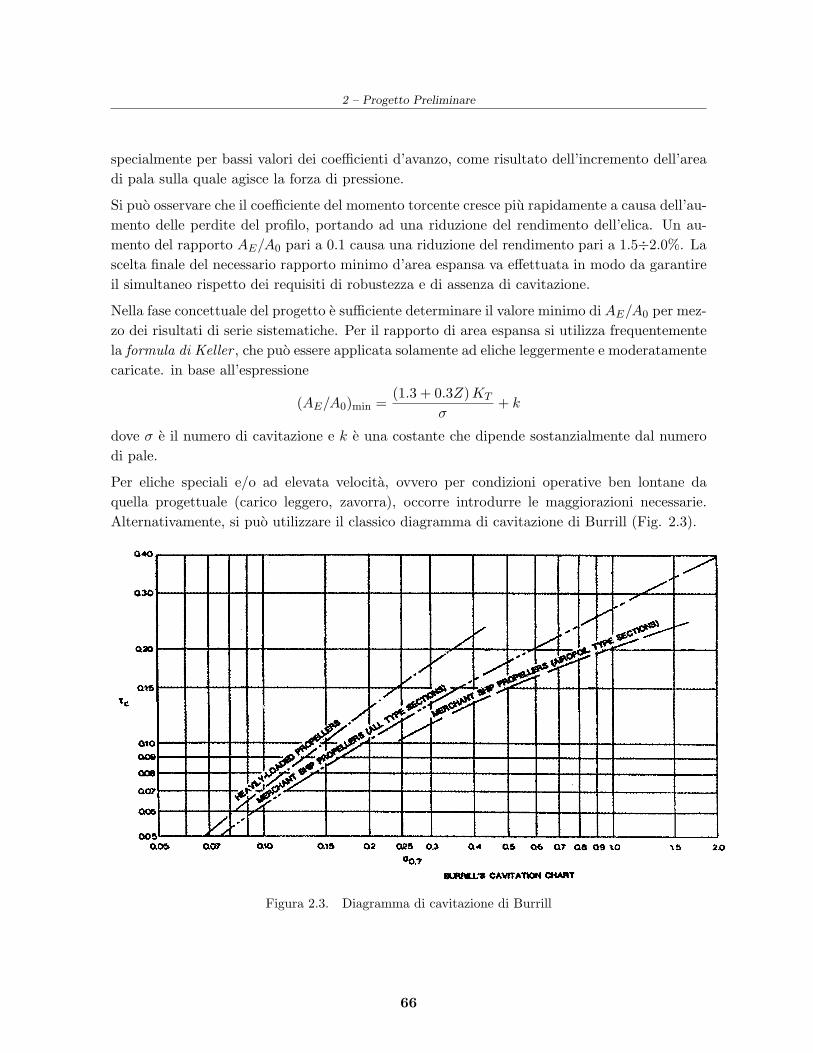
2 – Progetto Preliminare
specialmente per bassi valori dei coefficienti d’avanzo, come risultato dell’incremento dell’areadi pala sulla quale agisce la forza di pressione.
Si puo osservare che il coefficiente del momento torcente cresce piu rapidamente a causa dell’au-mento delle perdite del profilo, portando ad una riduzione del rendimento dell’elica. Un au-mento del rapporto AE/A0 pari a 0.1 causa una riduzione del rendimento pari a 1.5÷2.0%. Lascelta finale del necessario rapporto minimo d’area espansa va effettuata in modo da garantireil simultaneo rispetto dei requisiti di robustezza e di assenza di cavitazione.
Nella fase concettuale del progetto e sufficiente determinare il valore minimo di AE/A0 per mez-zo dei risultati di serie sistematiche. Per il rapporto di area espansa si utilizza frequentementela formula di Keller , che puo essere applicata solamente ad eliche leggermente e moderatamentecaricate. in base all’espressione
(AE/A0)min =(1.3 + 0.3Z)KT
σ+ k
dove σ e il numero di cavitazione e k e una costante che dipende sostanzialmente dal numerodi pale.
Per eliche speciali e/o ad elevata velocita, ovvero per condizioni operative ben lontane daquella progettuale (carico leggero, zavorra), occorre introdurre le maggiorazioni necessarie.Alternativamente, si puo utilizzare il classico diagramma di cavitazione di Burrill (Fig. 2.3).
Figura 2.3. Diagramma di cavitazione di Burrill
66

2.3 – Scelta delle caratteristiche principali dell’elica
Nel diagramma di Burrill si utilizza il coefficiente
τc =T
12ρV 2
0.7R ·AP
dove AP e l’area proiettata di pala, legata all’area espansa dell’elica, che e oggi usata piufrequentemente, dalla seguente relazione
AP = (1.067− 0.229P/D)·AE
mentre la velocita al raggio 0.7R, V0.7R, e definita come
V0.7R =√
V 2a + (0.7πnD)2
Si osservi che per navi veloci e
τc =8π· KT
AE/A0 (J2T + 4.8361)
dove JT e il coefficiente d’avanzo basato sull’identita di spinta e derivato dalla prova diautopropulsione, mentre l’indice di cavitazione e basato sulla velocita a 0.7R e formulato come
σ0.7R =p◦ + ρgh− pv
12ρV 2
A
[J2
T
J2T + 4.84
]2
2.3.5 Geometria dell’elica
Minimizzare la potenza asse alla velocita di progetto e soddisfare contemporaneamente i criteridi robustezza, vibrazione e rumore, richiede l’ottimizzazione della geometria dell’elica, dellaquale si discutono qui gli elementi fondamentali.
In una procedura di ottimizzazione della geometria dell’elica, la scelta delle variabili decisionalinon e guidata solamente da considerazioni idrodinamiche, in quanto il progetto di un’elica eintrinsecamente un problema multicriteriale dove l’esperienza del progettista gioca un ruolofondamentale nello scegliere una geometria accettabile per l’elica finale. In questo contesto,alcune variabili progettuali sono libere e possono variare quasi arbitrariamente entro il lorocampo di definizione; altre sono, invece, limitate da vincoli di eguaglianza e diseguaglianza.
Rake
L’applicazione di eliche con ‘skew–back’ elevato porta ad un abbattimento (‘rake’) della pala,il che consente, a parita di diametro, di arretrare la posizione delle pale su navi monoelica, e diporle piu distanti dai bracci per navi bieliche, garantendo luci sufficienti tra pale e carena senzadovere allungare l’albero. Cio riduce spesso la forza di deduzione di spinta e le ampiezze dellapressione pulsante sulla carena, con conseguente riduzione delle vibrazioni. Prove sperimentalihanno dimostrato, comunque, che con un ‘rake’ intorno al 10%, le caratteristiche idrodinamichedell’elica ed il suo rendimento praticamente non variano.
67

2 – Progetto Preliminare
Profilo di pala
La forma del profilo di pala e definita in base alla distribuzione radiale della corda ed allaposizione delle sezioni cilindriche lungo l’asse di pala. Applicando profili di pala con ‘skew’distributo asimmetricamente rispetto all’asse di pala, e possibile ridurre il carico periodicosull’elica durante la sua azione in un campo di velocita non–uniforme. Le eliche della Serie’B’ di Wageningen hanno uno ‘skew–back’ appena accennato. A partire dalla meta degli anni’70 sono state progettate sempre piu spesso eliche con ‘skew–back’ elevato, che permettono diridurre di almeno due–tre volte le ampiezze dei carichi periodici rispetto alle eliche tradizionali.Gli esperimenti hanno dimostrato che l’influenza dello ‘skew’ sul rendimento dell’elica e sullesue caratteristiche idrodinamiche e molto debole. Comunque, le pale molto svirgolate hannorobustezza inferiore a parita di spessori, e sono meno efficienti, specialmente in marcia indietro,rispetto a quelle della Serie–B.
Forma delle sezioni
La forma delle sezioni di pala e caratterizzata dalla curvatura della linea mediana, dalla qualedipende il valore del passo ad ogni raggio, dall’angolo di portanza nulla e dalla distribuzionedi pressione lungo il profilo alare, che influenza fortemente il rendimento dell’elica. Per elichesubcavitanti sono ampiamente applicati i profili NACA o loro modifiche. I profili di questo tipo,a causa di una distribuzione uniforme di pressione sulla maggior parte del dorso della sezionedi pala, sono utili per rafforzare la laminarita del flusso entro lo strato limite, con conseguentemiglioramento del loro rendimento. L’applicazione di tali profili consente di migliorare il ren-dimento dell’elica del 5÷6% rispetto alle vecchie sezioni ogivali.
La curvatura influenza soprattutto le caratteristiche idrodinamiche dell’elica. All’aumentare dif/c crescono sia il coefficiente CD che i coefficienti di spinta e momento torcente. In alcuni casi,specialmente per le eliche della Serie–B, le sezioni di pala piu estreme sono segmenti simmetricicon il massimo spessore a meta corda. Questi profili garantiscono la riduzione del picco didepressione, rinviando in tal modo l’innesco della cavitazione rispetto ai profili aerodinamiciNACA originali. In tal modo viene ridotto, comunque, il coefficiente ε di questi profili. L’ap-plicazione di profili aerodinamici sul resto della pala assicura un elevato rendimento globaledell’elica.
Va osservato che per navi rompighiaccio e per navi che debbano navigare in mari ghiacciati, sonoutilizzate eliche con sezioni di pala aventi spessore maggiorato; esse garantiscono un elevatorendimento dell’elica a velocita nulla o pressoche nulla per modi operativi inversi.
Spessore di pala
Lo spessore della sezione di pala ad ogni raggio viene determinato tenendo conto della robu-stezza necessaria e della pressione minima che riduca il rischio di innesco della cavitazione.Dal momento che tali requisiti sono conflittuali, viene data priorita al rapporto tra spessore
68
2.3 – Scelta delle caratteristiche principali dell’elica
e robustezza, il quale dipende dal materiale dell’elica, dal tipo di nave e dalle sue condizionioperative. Gli esperimenti hanno dimostrato che l’aumento dello spessore adimensionale dellasezione di pala porta ad un aumento della curvatura e, quindi, ad un aumento dei coefficienti dispinta e di momento torcente con una diminuzione del rendimento dovuto all’incremento delleperdite del profilo. L’innesco della cavitazione viene anticipato. E per questo che si e portatia scegliere lo spessore di pala minimo possibile.
La distribuzione radiale dello spessore e caratterizzata dallo spessore relativo t◦/c sull’assedell’elica, mentre lo spessore dell’apice di pala viene derivato in base alla legge di distribuzione,pressoche rettilinea, dei massimi spessori. Normalmente il valore di t◦ e pari al 3÷4% deldiametro dell’elica. Lo spessore relativo alla radice di pala non dovrebbe superare il valoret◦/c = 0.22.
Rapporto passo-diametro
Questo rapporto e una caratteristica geometrica fondamentale, in quanto da essa dipendono lequalita idrodinamiche dell’elica. Come e noto, all’aumentare del rapporto P/D crescono anchei coefficienti di spinta e di momento torcente in tutto il campo di variazione dell’avanzo relativo,per cui crescono anche la portanza e la resistenza del profilo. Il rendimento cambia in manieranon univoca. Nella zona dei bassi coefficienti di avanzo, a causa dell’aumento della spinta, ilcoefficiente di carico CT aumenta, il che causa una riduzione del rendimento induttivo, conconseguente riduzione del rendimento globale. Per coefficienti d’avanzo eccessivamente elevati,gli elementi di pala lavorano ad angoli di attacco molto bassi e non–ottimali. Comunque, l’in-cremento del passo porta mediamente ad un aumento della qualita idrodinamica degli elementidi pala e del rendimento globale dell’elica. Contemporaneamente, crescono anche il valoremassimo del rendimento ed il rapporto di passo a spinta nulla.
Skew
Un’elica con ‘skew–back’ puo presentare un rendimento piu elevato. Lo ‘skew’ consente diridurre l’area di pala, di accettare una certa cavitazione sulla faccia, di ridurre le forze di pres-sione indotte sulla carena, di diminuire il rischio di erosione di pala e di indurre minori livelli dirumore. Si presenta cavitazione per vortice d’apice che sostituisce l’eventuale cavitazione a nu-vola assai frequente sulle eliche senza ‘skew–back’, il che consente di mantenere la distribuzioneottimale di circolazione senza dovere modificare la curvatura delle sezioni. Se si combina lo‘skew’ con un aumento del carico idrodinamico sull’apice di pala si puo ottenere un rendimentopiu elevato purche non si superino livelli accettabili delle fluttuazioni delle pressioni indotte.
L’applicazione di eliche con ‘skew–back’ moderato (θs < 40◦) riduce significativamente i livellidelle vibrazioni indotte dall’elica a bordo delle navi. Rispetto al progetto di un’elica conven-zionale il rendimento propulsivo puo essere aumentato senza superare il vincolo dei livelli divibrazione in quanto:
• si puo accettare un’area di pala minore;
69
2 – Progetto Preliminare
• si puo applicare un carico sull’apice di pala leggermente maggiore oppure, quanto meno,una distribuzione ottimale di circolazione in senso radiale;
• sono consentiti un diametro maggiore ed un numero di giri minore in quanto possonoessere accettate ‘luci’ piu piccole.
Si deve fare attenzione, comunque, al fatto che un’eccessiva riduzione dell’area di pala puoportare a cavitazione a bolle, ad erosione di pala, a problemi di robustezza ed a riduzione delrendimento prodotto dalla cavitazione.
In generale, l’aumento di rendimento ottenibile applicando un’elica con ‘skew–back’ e conun’area minore di pala dipendera dal campo di scia. La riduzione della pressione indotta sullacarena dipende dalla differenza tra il massimo picco di scia e la scia media effettiva.
Posizionamento dell’elica dietro carena
Come gia detto, la posizione reciproca tra elica e carena e quella tra elica ed appendici (timoni,alette, bracci, mantelli) influenzano significativamente le prestazioni della nave, l’attivita vi-bratoria dell’elica e l’intensita della sua cavitazione. Quando si studia l’interazione tra timoneed apparato propulsivo, si devono ricercare il massimo valore del rendimento di carena e la mi-nima disomogeneita della scia nel piano del disco–elica. Va soddisfatto anche un certo numerodi requisiti operativi, quali l’assenza di ventilazione dell’elica, la protezione dell’elica rispettoa rotture accidentali, ecc.
Alcuni dati, ottenuti dalla pratica operativa, per la scelta dei parametri principali che carat-terizzano la posizione dell’elica dietro la carena, con lo scopo di massimizzare il rendimentopropulsivo e minimizzare il livello di attivita vibratoria, indicano che al crescere della lucelongitudinale elica–carena b/D, si riducono in diversa misura la frazione di scia ed il fat-tore di deduzione di spinta, cosı che cresce il rendimento propulsivo. Si raccomanda che siab/D > 0.45.
2.3.6 Direzione di rotazione per navi bieliche
In generale, le eliche di navi bielica che ruotano verso l’interno richiedono 3–4% di potenzain meno rispetto a quelle che ruotano verso l’esterno. Il livello di incremento del rendimentodell’elica dipende dal valore medio della componente tangenziale della scia nel piano del disco–elica. Ad esempio, se la componente tangenziale adimensionale, Vt/V◦, presenta un valoreintorno a 0.04 a tutti i raggi, e evidente che esiste una certa quantita di rotazione della scia nelpiano del disco–elica che ruota verso l’esterno. Per le navi bielica veloci con bassi coefficientidi finezza, questa proprieta e abbastanza comune, sebbene possa essere meno rilevante quanti-tativamente. Va ribadito che la certezza di ottenere un incremento del rendimento propulsivorichiede sempre la misura sperimentale della scia tangenziale.
70
2.4 – Cavitazione e vibrazioni
La direzione di rotazione dell’elica, dal punto di vista del rendimento propulsivo, dovrebbeavere verso opposto a quello della rotazione naturale della scia. L’incremento di rendimentodell’elica e approssimativamente pari all’1% per un’asimmetria nel valore risultante di Vt/V◦sul disco–elica pari a 0.010 a 0.015.
Quando la cavitazione a lamina o per vortice d’apice costituisce un problema, le eliche do-vrebbero ruotare nella direzione per la quale il rendimento dell’elica e piu elevato, ossia nelladirezione alla quale le fluttuazioni dell’angolo d’incidenza sull’apice di pala sono minori. Quan-do si ha cavitazione alla radice di pala, il che accade spesso sulle eliche a passo variabile a causadei maggiori rapporti spessore–corda alla radice, le eliche dovrebbero ruotare nella direzioneper la quale il rendimento dell’elica e minimo.
La scelta della direzione di rotazione dell’elica dipende, quindi, fondamentalmente dall’entitadella componente tangenziale della scia, ossia dal possibile incremento del rendimento, e dalfatto che sia considerata piu pericolosa la cavitazione sull’apice di pala oppure alla radice dipala. Nelle eliche a passo variabile, prima di decidere sulla direzione di rotazione, deve esserepesato il rischio di cavitazione per vortice d’apice rispetto al rischio di cavitazione alla radice.Probabilmente, la possibilita di ottenere un incremento del rendimento con eliche che ruotanoverso l’interno fa propendere per una rotazione verso l’interno nel caso di eliche a passo variabilecon quattro pale. Per CPP a cinque o piu pale, nelle quali la cavitazione alla radice di palapuo essere severa, e possibile che la scelta sia in favore di eliche che ruotano verso l’esterno. Leeliche a passo fisso dovrebbero ruotare sempre verso l’interno, a meno che il valore medio dellacomponente tangenziale di scia sul disco–elica sia tale da presentere una rotazione del flussoverso l’interno.
2.4 Cavitazione e vibrazioni
E noto che la cavitazione sulle eliche puo aumentare considerevolmente le forze di pressioneimpulsive sullo scafo poppiero. La relazione tra cavitazione dell’elica e vibrazioni di scafo econfermata dall’esperienza, particolarmente per navi piccole e piuttosto rigide, anche se le fre-quenze di eccitazione sono ben lontane dalla zona di risonanza. Il problema diviene quantomai delicato per gli scafi plananti e per gli aliscafi, che hanno eliche molto veloci. Per questeimbarcazioni e stato verificato che l’ampiezza delle pressioni fluttuanti cresce al diminuire delnumero di cavitazione e del carico sull’elica. L’effetto del carico ridotto puo essere spiegatodalla distribuzione della cavitazione associata sulla pala, la quale ha mostrato che l’aumentodell’ampiezza di pressione coincide con lo sviluppo di cavitazione sulla faccia.
Le linee guida concernenti i limiti imposti dalla cavitazione dell’elica sulla potenza e sulla ve-locita della nave sono fornite piu avanti, dove sono state prese in considerazione le principalidifferenze tra configurazioni monoelica e bielica (il carico e pressoche doppio per le navi monoeli-ca, che presentano anche una maggiore disuniformita di scia). I requisiti fondamentali sono che:
• la cavitazione sulla faccia deve essere evitata in tutte le condizioni;
71

2 – Progetto Preliminare
• la cavitazione sul dorso e consentita purche sia di estensione e tipo (cavitazione a lamina)tale da non produrre erosione ed eccessivi fenomeni indotti.
I limiti di cavitazione in un flusso bidimensionale sono presentati di solito mediante i cosiddettibuckets di cavitazione. Il ‘bucket’ indica l’intervallo di carico che ad un certo numero di cavi-tazione puo essere sopportato dalla sezione senza che si sviluppi cavitazione. In particolare, lalarghezza del ‘bucket’ rappresenta la capacita della sezione di accettare valori variabili dell’an-golo d’incidenza senza cavitare.
Poiche la sezione r = 0.7 puo essere considerata approssimativamente determinante per tuttal’elica (Lerbs, 1952), si tratta di trasformare il coefficiente di portanza della sezione, (CLi)r, nelcoefficiente di carico di spinta CT , ed il numero di cavitazione della sezione σr in un indice dicavitazione basato sulla velocita di rotazione, σn, o sulla velocita d’avanzo, σ◦. Dal diagrammadi velocita al raggio rappresentativo r si puo derivare la relazione
CT = k1 ·Z ·(
c
D
)
r·(CLi)r ·
√1 +
(πr
J
)2
J(2.5)
dove il fattore k1 varia tra 0.55 e 0.95, mentre CLi r esprime il coefficiente di portanza proget-tuale che, per angolo d’incidenza ideale, e identico al coefficiente di portanza ideale.
Il numero di cavitazione σr della sezione e legato direttamente a σ◦ ed indirettamente a σn invirtu delle equazioni
σr =1
1 +(
πr
J
)2 ·(
σ◦ − g rD
V 2A
)(2.6)
σn = σ◦ ·J2 (2.7)
A causa delle variazioni della scia circonferenziale il coefficiente di portanza varia durante ognigiro di pala. In un’analisi quasi-stazionaria, si puo assumere che sia
KT +dKT
dJ·∆J = k2 ·CLr (2.8)
dove
k2 =KT
(CLi)r
Le equazioni (2.5)÷(2.8) ed il ‘bucket’ di cavitazione bidimensionale della sezione al raggio r
consentono il calcolo dell’indice di innesco della cavitazione ad ogni punto progettuale (CT , J)e ad ogni variazione di scia deducibile dall’oscillazione ∆J .
I risultati di calcoli sistematici di innesco della cavitazione sono presentati in Figura 2.4, dove eriportato un certo numero di eliche delle quali e stata misurata la cavitazione. I casi riguardanti
72
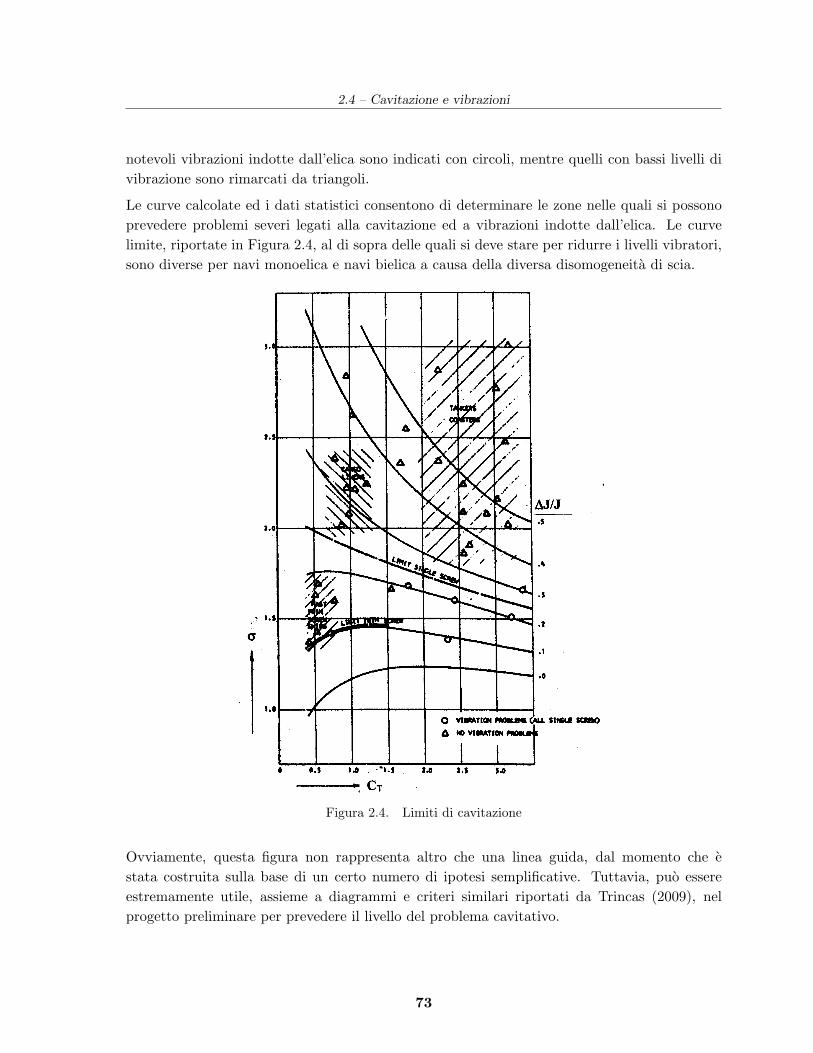
2.4 – Cavitazione e vibrazioni
notevoli vibrazioni indotte dall’elica sono indicati con circoli, mentre quelli con bassi livelli divibrazione sono rimarcati da triangoli.
Le curve calcolate ed i dati statistici consentono di determinare le zone nelle quali si possonoprevedere problemi severi legati alla cavitazione ed a vibrazioni indotte dall’elica. Le curvelimite, riportate in Figura 2.4, al di sopra delle quali si deve stare per ridurre i livelli vibratori,sono diverse per navi monoelica e navi bielica a causa della diversa disomogeneita di scia.
Figura 2.4. Limiti di cavitazione
Ovviamente, questa figura non rappresenta altro che una linea guida, dal momento che estata costruita sulla base di un certo numero di ipotesi semplificative. Tuttavia, puo essereestremamente utile, assieme a diagrammi e criteri similari riportati da Trincas (2009), nelprogetto preliminare per prevedere il livello del problema cavitativo.
73
2 – Progetto Preliminare
2.5 Riduzione della cavitazione per vortice d’apice
Per alcuni tipi di nave, quali le navi militari e le navi ocenografiche, e assolutamente necessariogarantire bassi livelli di rumore subacqueo irradiato dai propulsori. Le eliche sono una sorgenteimportante di rumore, particolarmente quando si ha presenza di cavitazione. Se si vuole che leeliche irradino poco rumore, si deve ritardare l’innesco della cavitazione, in quanto il rumoreprodotto da un’elica cavitante ha un livello molto piu elevato di quello prodotto da eliche non–cavitanti.
Poiche di solito la prima forma di cavitazione che si instaura su un’elica navale e la cavitazioneper vortice d’apice sul dorso, si deve cercare di ritardare l’innesco di questo tipo di cavitazione,adottando appropriate misure nel progetto delle pale dell’elica. D’altra parte, queste misureimplicano sempre una certa perdita di rendimento propulsivo. Il problema e, quindi, quello didecidere quanto rendimento deve essere sacrificato per ridurre l’entita del fenomeno.
Il modo piu efficiente per ritardare l’innesco della cavitazione per vortice d’apice e quello discaricare gli apici di pala in misura tale che si ottenga una pari suscettibilita all’innesco dellacavitazione per vortice d’apice sulla faccia e sul dorso. Per mantenere un rendimento ancorasoddisfacente, si puo applicare un carico moderato sull’apice, il che configura una situazionealquanto differente da quelle nelle quali gli apici delle pale siano scaricate completamente.
2.5.1 Eliche con apici moderatamente caricati
Nelle eliche per le quali si voglia ritardare la cavitazione per vortice d’apice senza sacrificaretroppo il rendimento (gli apici di pala non possono essere scaricati completamente) convieneapplicare un elevato numero di pale. L’intensita del vortice d’apice delle eliche e legata alla cir-colazione (vortice concatenato) della pala (spinta per pala). Durante il passaggio della sezionedi pala nel picco di scia cresce la circolazione concatenata. Nel picco di scia la circolazioneconcatenata e costituita dalla sua media circonferenziale e da una parte non–stazionaria pro-dotta dal carico ulteriore derivante dal deficit di velocita del picco di scia.
La media circonferenziale della circolazione concatenata puo essere ridotta dal progettistadell’elica scegliendo un basso carico specifico di pala, il che spinge verso l’adozione di un’elicadi diametro relativamente grande e con un elevato numero di pale. Se gli apici di pala so-no scaricati solo parzialmente, il numero di pale influenza l’intensita dei vortici d’apice liberi.Quando una pala attraversa il picco di scia, la variazione dell’angolo d’incidenza puo essere ri-dotta scegliendo per la pala una larghezza maggiore della larghezza del picco di scia. Tuttavia,l’utilizzo di pale larghe comporta una perdita di rendimento, che cresce sensibilmente quandoil rapporto d’area espansa si avvicina all’unita.
Poiche, a meno della massa specifica del fluido, in base alla legge di Kutta–Zoukovsky il pro-dotto tra la velocita del flusso e la circolazione concatenata e uguale alla portanza prodotta,per le eliche con apici moderatamente caricati e importante raggiungere una velocita circon-ferenziale relativamente elevata. Purtroppo la maggiore velocita circonferenziale causa anche
74

2.5 – Riduzione della cavitazione per vortice d’apice
una riduzione del numero di cavitazione ed un aumento del numero di Reynolds. Ambeduegli effetti, particolarmente il primo, aumenta la predisposizione all’innesco della cavitazioneper vortice d’apice, cancellando in grande misura l’effetto positivo dell’aumento dell’intensitadella circolazione. Tuttavia, la maggiore velocita circonferenziale, volta a ridurre l’intensita deivortici concatenati, suggerisce di scegliere un diametro leggermente superiore a quello ottimale,oppure un passo minore dell’ottimale.
2.5.2 Eliche con apici completamente scaricati
Nelle eliche i cui apici di pala sono completamente scaricati, al di fuori del picco di scia nonesiste alcuna relazione tra il livello della media circonferenziale della circolazione concatenatae l’intensita del vortice d’apice. Nel picco di scia, per effetto del carico addizionale, si gene-rano vortici liberi e concatenati anche nella zona d’apice delle pale. In queste eliche, il caricospecifico medio su una pala non ha piu rilevanza, per cui la maggior attenzione va dedicata afacilitare il passaggio della singola pala attraverso il picco di scia.
In questo caso, e preferibile progettare eliche con un minore numero di pale, ma piu larghe.La distribuzione radiale della circolazione (carico) e in questo caso un fattore essenziale. Vaevitato un suo forte gradiente sulle sezioni di pala piu interne, che potrebbe divenire un fattorerestrittivo nel progetto dell’elica, se la generazione di vortici sul bordo d’ingresso, al variare delcarico di pala, e stimolata da uno ‘skew’ elevato.
Per otimizzare l’innesco della cavitazione per vortice d’apice, il rapporto passo–diametro sull’apice,(P/D)1.0R, puo essere ridotto a valori variabili da 0.80J a 0.95J per navi con eliche a bassaemissione di rumore. In base a numerosi esperimenti sull’innesco della cavitazione per vorticed’apice, e stata derivata una regola semplice, in base alla quale un valore bilanciato del rap-porto di passo sull’apice, che offre eguale suscettibilita all’innesco della cavitazione per vorticid’apice sia sul dorso che sulla faccia, puo essere ricavato come
(P
D
)
1.0R=
0.576 J
1− 0.2993J
La riduzione del carico sull’apice implica una certa perdita di rendimento, che puo essererilevante per eliche pesantamente caricate. E forse superfluo ricordare che una certa uniformitadi scia, che influenza le variazioni della circolazione durante la rotazione della pala, e un fattoreessenziale per ritardare con successo l’innesco della cavitazione per vortice d’apice. Alcunivalori tipici della perdita di rendimento ∆η, prodotta da uno scarico eccessivo dell’apice, sonoriportati in Tabella 2.2.
P1.0R/P0.7R 1.00 0.60 0.40 0.30 0.25
∆η (%) 0 1-4 3-8 8-11 9-14
Tabella 2.2. Perdita di rendimento per scarico dell’apice
75

2 – Progetto Preliminare
I valori sono basati su calcoli con linea portante, tarati grazie a dati sperimentali ricavati dapochi casi estremi. I valori piu elevati sono relativi a carichi di spinta piu elevati. Sembra chele eliche leggermente caricate subiscano riduzioni minori del rendimento a causa di uno scaricoestremo dell’apice.
2.6 Indici di difficolta
E importante controllare le eccitazioni vibratorie generate da un’elica cavitante, sia che si mani-festino attraverso la linea d’assi, sia che siano prodotte dalle fluttuazioni della pressione indottasulla carena attraverso il fluido. Nella fase preliminare del progetto dell’elica non e possibileutilizzare alcun metodo teorico per determinare con accuratezza il rischio di vibrazioni. Tutta-via, esistono alcune semplici regole mediante le quali si puo stimare la difficolta del progetto.Non e una sorpresa riconoscere che, in ogni caso, la disuniformita di scia e la sorgente primariadi molti problemi vibratori.
Per valutare inizialmente il rischio di vibrazioni indotte dall’elica cavitante, sono riportati al-cuni indici di difficolta, espressi in termini di criteri . Si potrebbe obiettare che alcuni di questicriteri sono fin troppo semplicistici per potere fornire risposte definitive circa il rischio di vi-brazioni indotte, anche perche in molti criteri non sono incorporati neppure i parametri di sciae le luci dell’elica. Tuttavia, sono indicatori utili ad individuare il livello del problema.
Velocita periferica all’apice di pala
In generale vale il criterio
πnD < 40÷ 45 m/s
Per eliche intubate
πnD < 32÷ 40 m/s
Per grandi eliche in semitunnel poppiero
πnD < 11÷ 22 m/s
Cantiere Kawasaki
(PS N2)0.4 < 3500, dove PS e espresso in HP
PS
πD2/4< 600 , per i casi normali, dove PS in kW e D in metri
PS
πD2/4< 1000 , per campi di scia alquanto omogenei ed eliche ottimali
76

2.6 – Indici di difficolta
Formula di Keller
T + D3VsN(wp − wm)(h + 10) D2
< 600÷ 700
dove T in kg, VS in nodi, h in metri sull’apice di pala in posizione verticale, mentre wp e wm
sono rispettivamente la scia di picco e la scia media assiale.
Formula di Vossnack
Vale la formula
π TN2 ·∆w·SRF
900Z ·AE/A0 ·√
C/D·√D< 700
dove C e, in metri, la luce verticale tra apice di pala e carena, T e la spinta in tonnellate, ∆w
e l’ampiezza del picco di scia, da calcolare come
∆w = (Vmax − Vmin)/V per navi monoelica
∆w = (1− Vmin)/V per navi bielica
Il fattore di riduzione dello skew e pari a SRF = 1 quando non siano adottate misure specialiper ridurre le fluttuazioni di pressione sulla carena mediante lo ‘skew’ e/o lo scarico dell’apicedi pala. Per uno ‘skew–back’ estremo con gli apici scarichi si assume SRF = 0.7. Nei casiintermedi e SRF = 0.85.
Formula del MARIN
In base a numerosi e sistematici esperimenti condotti al MARIN su forme di carena monoelica,tipiche di grandi navi portacontainers, dal criterio di Vossnack e stata derivata la formula
π T N2 ·∆w·SRF
2700Z ·AE/A0 ·√
C/D·√D< 7
nella quale e stata incorporata un’influenza assai maggiore dell’ampiezza del picco di scia.Tutti i parametri della formula sono definiti come nella regola di Vossnack. Progetti dedicatipotrebbero produrre valori di SRF leggermente inferiori, intorno a 0.9. Il limite superiore di7 e legato al livello di eccitazione massima ammissibile prodotta dalle pressioni fluttuanti sullacarena di navi monoelica. Utilizzando questo indice di difficolta, e possibile definire fin dallafase iniziale del progetto parametri quali la luce elica–carena, l’ampiezza ammissibile del piccodi scia ed alcune delle dimensioni principali dell’elica.
77

2 – Progetto Preliminare
Navi militari
Per le navi militari si possono prevedere problemi seri se la relazione tra potenza, velocitamassima della nave e diametro viola la seguente regola empirica
PS
D2 ·V < 25
dove PS e la potenza asse [kW], D e il diametro [m] e V e la velocita massima della nave [kn].
Scafi veloci
Per scafi veloci Blount ha suggerito la regola
τc < 0.494 (σ0.7R)0.88
dove i parametri della formula hanno lo stesso significato di quelli del diagramma di cavitazionedi Burrill.
Traghetti e navi da crociera
Per traghetti e navi da crociera bielica con linee d’alberi esposte, e disponibile la formula se-guente da utilizzare nelle fasi iniziali del progetto, che consente una prima valutazione dellaluce elica–carena necessaria a smorzare gli effetti delle pressioni indotte
∆p = 0.555 (0.001PS/C2)0.8 [kPa]
dove ∆p e l’ampiezza della pressione indotta sulla carena, sopra l’elica, alla frequenza di pala,PS e la potenza asse in kilowatt, e C e la luce verticale elica–carena in metri.
Eliche leggermente caricate
Per eliche non–cavitanti o per eliche leggermente caricate, indipendentemente dal campo discia e dalla loro geometria, purche abbiano forme tranquille e spessori normali sugli apici dipala, vale la formula
∆p = 0.00116 ρn2D4/C2 [kPa]
dove per le grandezze in gioco valgono le notazioni delle formule precedenti.
Eliche azimutali
Per eliche azimutali con elica traente deve essere:
πnD < 35 [m/s]
PD
πD2/4< 400 [kW/m2]
78

2.7 – Passo virtuale
Cavitazione PHV
Andrebbe fornito anche un criterio di tentativo per l’innesco della cavitazione di vortice traelica e carena (PHV). Questa forma pericolosa di cavitazione puo presentarsi quando in unazona d’acqua morta, ad esempio dietro la poppa di una carena dalle forme molto piene, oppurenelle condizioni di tiro a punto fisso di navi dalle forme fini, il carico dell’elica e relativamenteelevato e la pressione nel cuore di un vortice nel flusso incidente l’elica cade al di sotto dellapressione di vapore. La cavitazione di vortice tra elica e carena deve essere evitata perche causarumore, vibrazioni e danneggiamenti possibili sul fasciame di carena. I tentativi effettuati finoradi derivare un criterio per la cavitazione PHV sulla base di un numero (limitato) di esperimentisu modelli sono risultati vani a causa della grande dispersione dei dati sperimentali.
2.7 Passo virtuale
Una delle grandezze geometriche fondamentali dell’elica e il passo, in quanto e il fattore pri-mario che determina la relazione tra velocita e potenza. Poiche il rapporto passo-diametro eun elemento critico nel progetto della maggior parte delle eliche, particolarmente per quelle apasso fisso, il passo medio va scelto con buona accuratezza, in modo che il rapporto desideratotra potenza e numero di giri sia raggiunto effettivamente.
Allo scopo, il MARIN utilizza il concetto di passo virtuale. Per definizione, il passo virtualee il ‘passo medio di portanza nulla’ di una pala. Questo concetto richiede che sia noto il va-lore dell’angolo di portanza nulla per ogni profilo di pala. Per le linee mediane parabolichee α◦ = 2f/c in radianti, se si trascurano gli effetti della viscosita e dello spessore. Per lamaggior parte dei profili alari, tale valore teorico non e molto differente dal valore effettivo,che e leggermente minore a causa della viscosita. In ogni caso, l’angolo di portanza nulla eapprossimativamente pari a α◦ = 100 f/c , in gradi. La direzione di portanza nulla definisce,ad ogni raggio, il passo di portanza nulla Pv, la cui media radiale determina il passo virtualePvg della pala dell’elica.
Sono disponibili tre modalita per determinare il passo virtuale dell’elica in progetto:
• dai risultati sperimentali utilizzando un modello di elica di stock;
• dalle caratteristiche della Serie–B;
• dai calcoli di progetto dell’elica mediante la teoria della linea portante.
Il passo virtuale e considerato una base corretta per confrontare i risultati dell’elica di stock edelle caratteristiche dell’elica in progetto. Il passo virtuale e un parametro che, qualora fossecostante, produrrebbe lo stesso rapporto tra velocita di rotazione e potenza assorbita da diverseeliche, che abbiano lo stesso diametro. Calcolando le prestazioni di un’elica della Serie–B, ilsuo passo virtuale dovrebbe corrispondere al passo virtuale di altre eliche con lo stesso diametro.
79

2 – Progetto Preliminare
Il passo virtuale Pvg e definito come il passo medio volumetrico della pala dell’elica, quando ilpiano di portanza nulla delle sezioni del profilo e assunto come piano di riferimento. Il passovirtuale Pv di una particolare sezione di pala al raggio adimensionale r ed il passo virtuale ditutta l’elica Pvg sono definiti come
Pv =
∫ 1
rh
pv ·c·r dr
∫ 1
rh
c·r dr
, Pvg =
∫ 1
rh
pv ·c·r2 dr
∫ 1
rh
c·r2 dr
dove il passo geometrico virtuale per la generica sezione r di pala e pv = πrD tan(ϕ + α◦).
Tuttavia, e preferibile considerare il passo virtuale di tutta l’elica, in quanto e meno sensibilealle variazioni della distribuzione del carico radiale, quando si confrontino eliche che abbianolo stesso diametro, lo stesso numero di pale, lo stesso rapporto di area espansa e lo stessoassorbimento di potenza. Per eliche la cui distribuzione di carico non sia estrema, la differenzadi passo vituale tra le due definizioni e trascurabile. Al MARIN il passo virtuale e calcolatomediante la seconda definizione, incorporando la correzione per flusso viscoso in base al metododi Burrill e Glauert, che consente di determinare l’angolo di portanza nulla.
Per tutti i tipi di linee mediane l’angolo di portanza nulla puo essere determinato con buonaaccuratezza in base alla teoria dei profili alari sottili, utilizzando il metodo di Glauert, dopoavere proiettato la linea mediana sulla lunghezza di corda. E consuetudine incorporare unacorrezione del primo ordine all’angolo di portanza nulla cosı determinato, che tenga conto deglieffetti di viscosita secondo il fattore di correzione di Burrill. Un’espressione polinomiale diquesto fattore di correzione, che moltiplica il valore teorico di un profilo bidimensionale, efornito da van Oossanen (1973) come
k(α◦) = 0.972− 0.169 t/c− 2.78 (t/c)2 + 21 f/c (t/c)2 − (f/c)2[0.32 + 278 (t/c)3]−(f/c)3 [28.7 (t/c)2 − 335 (t/c)3]
dove f e il valore della freccia della linea mediana nella posizione del punto di massimo spessore.misurata dal bordo d’ingresso.
Nel passato numerosi autori hanno sostenuto che il rapporto di passo virtuale Pvg/D di un’eli-ca fosse uguale al valore di J al quale il coefficiente di spinta diviene nullo nel diagramma dielica isolata. Il valore di J al quale il coefficiente KT si annulla e definito ‘rapporto di passoeffettivo’. Glauert definı questo passo come ‘passo medio sperimentale’. Ma la somiglianza trail ‘rapporto di passo virtuale’ e il ‘rapporto di passo effettivo’ apparve essere realistica con unacerta approssimazione solamente per una classe limitata di eliche. Un’analisi delle eliche dellaSerie–B mostro che lo scarto tra il rapporto di passo virtuale Pvg/D, calcolato dalla geometria dipala, ed il rapporto di passo effettivo J(KT =0), aumenta progressivamente con il numero di pale.
A partire dalle eliche della Serie–B, e stata costruita la seguente relazione tra il rapporto dipasso virtuale ed il rapporto di passo effettivo
Pvg/D = 0.960764J(KT =0) − 0.131308/Z + 0.0234954J(KT =0)/(AE/A0) +
0.161443 (AE/A0)− 0.0334549Z (AE/A0) + 0.00304012Z2
80

2.8 – Registri di classifica e robustezza
Il passo effettivo ed il passo virtuale sono differenti per varie ragioni:• effetti dello spessore di pala,• effetti persiana,• effetti viscosi,• effetti della presenza del mozzo.
Il rapporto di passo virtuale delle eliche della Serie–B puo essere approssimato mediantel’equazione di regressione
Pvg/D = 1.02847P/D − 0.16499 (P/D)/Z2 + 0.0331838P/D/(AE/A0) +
0.0541019 /(AE/A0)− 0.0663506 /[Z ·(AE/A0))
Si raccomanda di utilizzare queste formule di regressione solamente per eliche le cui combina-zioni tra i parametri geometrici siano entro il campo di definizione delle eliche della Serie–B:
2 ≤ Z ≤ 7
0.5 ≤ P/D ≤ 1.4
0.2 + Z/20 < AE/A0 < Z (0.6− 0.06Z)− 0.42
Per le eliche a quattro pale della Serie–B, il passo virtuale Pvg calcolato mediante questa for-mula, deve essere ridotto dell’1.3% per tenere conto della riduzione del passo verso il mozzodi queste eliche. Per le eliche a tre ed a cinque pale della Serie–B va aggiunto lo 0.3% pereliminare sistematiche deviazioni standard.
Come detto in precedenza, a parita di diametro, eliche con lo stesso rapporto di passo virtualepresentano lo stesso rapporto tra numero di giri e potenza propulsiva. Poiche il passo virtualeriflette solamente la distribuzione radiale del passo e della curvatura, quando si confrontanodue eliche, devono essere identici altri parametri, che potrebbero influenzare lo stesso rapporto.A tale proposito, dovrebbero essere uguali lo ‘skew’, il ‘rake’, il numero di pale, ed il rapportodi area espansa. Se questi parametri secondari si differenziano in una certa misura, la Serie–Boffre un mezzo facile per calcolare gli effetti prodotti da alcuni di questi parametri.
Si puo osservare che quando sono messe a confronto due eliche geometricamente identiche,tranne che per lo ‘skew’, l’elica con lo ‘skew’ ruota poco piu lentamente, a parita di assorbimentodi potenza e di velocita d’avanzo. Di regola, una differenza dell’1% nel numero di giri ad un certoassorbimento di potenza corrisponde ad una correzione dell’1.5% del passo virtuale. Un’altraregola afferma che per mantenere il rapporto tra potenza assorbita e numero di giri, la sommadel diametro e del passo virtuale dovrebbe essere costante.
2.8 Registri di classifica e robustezza
L’elica da progettare deve soddisfare non soltanto i requisiti idrodinamici, ma anche quellistrutturali, rispettando in primis le regole di uno specifico Registro di Classifica. Nei calcoli di
81
2 – Progetto Preliminare
robustezza, si deve esaminare la condizione di massimo assorbimento di potenza al numero digiri nominale. Per quanto riguarda le tensioni ammissibili, il criterio guida e di solito legato aiseguenti tre tipi di carico dell’elica:
1. Nella condizione normale di marcia avanti la potenza massima assorbita dall’elica do-vrebbe determinare la condizione nella quale considerare un criterio di robustezza a fatica.Le tensioni medie e fluttuanti sono parametri importanti nel calcolo dello spessore di pala.I Registri di Classifica utilizzano regole semplificate. Per eliche a pale fisse i regolamenticonsiderano il raggio a 0.25R, mentre per le eliche a passo variabile considerano il rag-gio a 0.35R; inoltre, richiedono il controllo dello spessore a 0.6R, ed eventualmente a 0.9R.
2. Per i carichi sull’elica a marcia indietro e in ‘crash–stop’ deve essere applicato un criterioper il picco di carico, che consenta di sopportare una tensione massima maggiore di quellarelativa alla normale condizione di marcia avanti. In marcia indietro, di solito si richiedeuna velocita di rotazione del 70-80% del numero di giri in marcia avanti. Esistono indica-zioni che per eliche propulse da motori elettrici si deve specificare per la marcia indietrouna velocita di rotazione pari solamente al 60% di quella in marcia avanti alla velocita diprova. In alternativa, potrebbe essere specificato un momento torcente in marcia indietropari al 75% o all’85% del massimo momento torcente in marcia avanti. Queste normativevalgono per le eliche a pale fisse, in quanto il numero di giri delle eliche a passo variabilenon subira inversione nelle operazioni di frenata e di marcia indietro. Alcuni laboratorinavali adottano lo standard che prevede lo 0.15% del limite di snervamento come limite ditensione ammissibile per i picchi di carico; il che corrisponde, ad esempio, a 183 MPa perla lega di nickel–alluminio–bronzo. Questo criterio viene applicato ai risultati dei calcoliFEM nella condizione di velocita nulla, che e ritenuta rappresentativa della manovra difrenata. Va rilevato che, al riguardo, altri enti sono piu conservativi ed utilizzano il valoredi 150 MPa come limite superiore.
3. Per le eliche progettate per operazioni in ghiaccio, si devono considerare due tipi di re-gole: (i) incrementi di spessore determinati dal carico idrodinamico nel quale si utilizzaun criterio di tensione a fatica; oppure (ii) mediante un carico specifico prodotto dal mo-mento torcente dovuto al ghiaccio al quale si applica un criterio di tensione per il piccodi carico. La maggior parte dei Registri di Classifica forniscono linee guida complete eregole per eliche della classe ghiaccio.
I Registri di Classifica hanno formulato regole e criteri di tensione per tutte queste condizioni.Inoltre, specificano lo spessore necessario in posizioni dove non e la tensione ma e la vulne-rabilita dell’elica ad essere un fattore critico. Cio riguarda la zona dell’apice di pala, nonche ibordi d’ingresso e d’uscita. Inoltre, nella maggior parte dei regolamenti sono formulati requisitiper i raggi dei raccordi.
Le regole richiamate finora sono tutti modelli semplici di trave incastrata, che rispondono consufficiente accuratezza per eliche di forma normale e con debole ‘skew’. Molti Registri di Classi-fica considerano come limite un angolo di ‘skew’ pari a 25 gradi. Sotto questo limite, un calcolocon il metodo della trave incastrata, quale e conglobato nelle regole, e considerato sufficiente; al
82
2.8 – Registri di classifica e robustezza
contrario, per angoli di ‘skew’ maggiori deve essere prodotto un calcolo separato di robustezza,di solito mediante calcoli agli elementi finiti.
La robustezza di eliche con ‘skew’ elevato e spesso critica in marcia avanti, quando le tensioniraggiungono di solito i massimi valori vicino al bordo d’uscita a meta distanza tra il mozzo el’apice. Nel modo di marcia indietro, importante solamente per le eliche a passo fisso, la ten-sione massima nella zona dell’apice e spesso critica. Un problema ben noto nella condizione difrenata delle eliche a passo fisso e la determinazione del carico idrodinamico piu critico, poiche estato osservato in prove sperimentali, sia su modelli che al vero, che il carico idrodinamico sullepale e assai fluttuante. Inoltre, nei calcoli sono ignorati del tutto gli effetti della separazione diflusso intermittente e della cavitazione.
Al MARIN, per il normale modo operativo in marcia avanti si utilizza di solito il metodo diRomson. Gli effetti del ‘rake’ sul carico centrifugo sono incorporati in questa variante del me-todo della trave incastrata. Comunque, gli effetti dello ‘skew’, della larghezza delle pale e dialtre caratteristiche non sono tenute in conto. Il MARIN ha sempre applicato un decimo dellaresistenza estrema alla trazione come criterio di fatica nel metodo di Romson, per la velocitamassima in marcia avanti alla potenza massima. Le regole della maggior parte dei Registri diClassifica indicano uno spessore minimo che oggi e dello stesso ordine di grandezza di quellocalcolato mediante il metodo di Romson. Gli elevati fattori di sicurezza utilizzati tengono contodelle semplificazioni delle procedure e dei ‘fattori di ignoranza’ insiti nella progettazione dellepale dell’elica nelle fasi iniziali.
Le tensioni di pala variano quando la pala ruota attraversando la scia. Quando si effettuano icalcoli agli elementi finiti, nella condizione di massima potenza in marcia avanti, si consideranodi solito quelle posizioni angolari di pala nelle quali la spinta raggiunge il valore massimo, ilvalore minimo ed il valore medio. Quale criterio di tensione massima ammissibile di una legadi nickel-alluminio-bronzo, di resistenza massima a trazione di 600 MPa, MARIN applica comelimite 85 MPa per la condizione di tensione massima a trazione sulla superficie della faccia e65 MPa per la condizione di carico medio ai risultati dei calcoli agli elementi finiti per il modoin marcia avanti. Questi criteri sono applicati alle tensioni di von Mises.
Si deve osservare che il livello delle tensioni ammissibili dovrebbe dipendere non solamentedal carico idrodinamico, ma anche dal carico a fatica e dal picco di carico. Inoltre, dovrebberoessere tenute in conto le tensioni residue prodotte nella fusione, nonche la qualita e le dimensionidella stessa. I vari modi di vibrazione delle pale potrebbero produrre effetti ulteriori, ma questeinfluenze sono difficili da determinare globalmente. Le stesse considerazioni valgono per glieffetti prodotti dalla navigazione in mare mosso. Gli effetti delle vibrazioni delle pale e delmare confuso sono considerati, quindi, introducendo opportuni fattori di sicurezza.
83
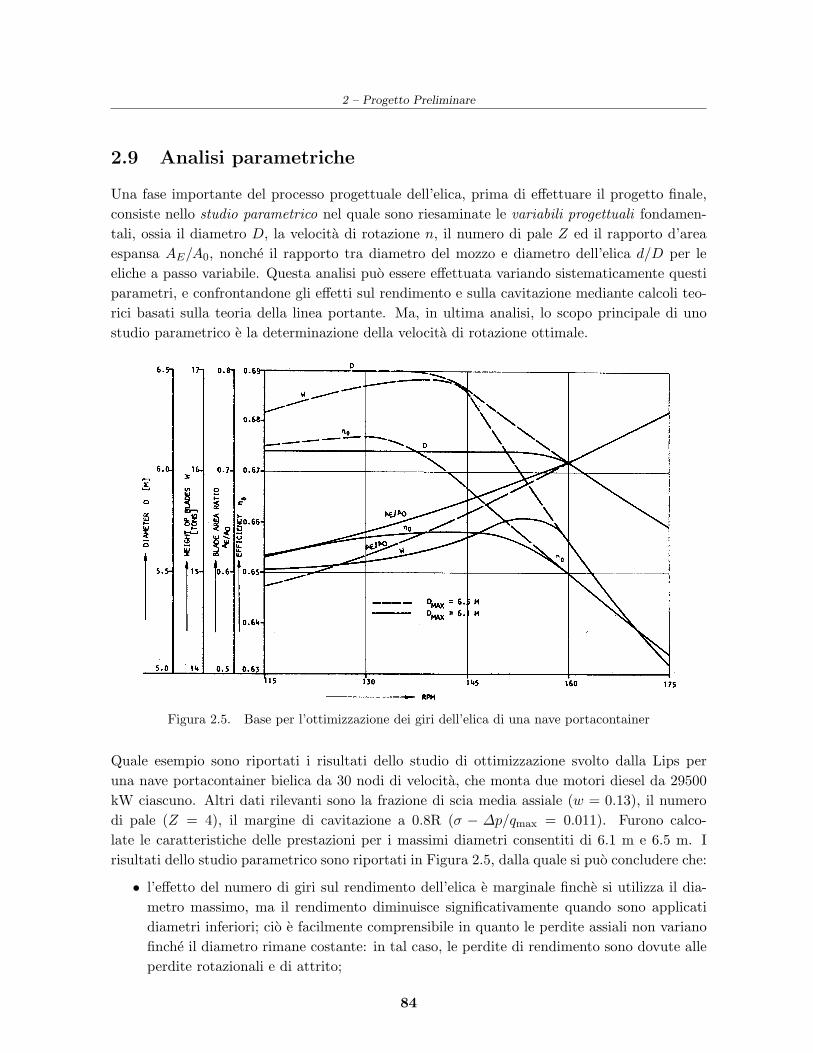
2 – Progetto Preliminare
2.9 Analisi parametriche
Una fase importante del processo progettuale dell’elica, prima di effettuare il progetto finale,consiste nello studio parametrico nel quale sono riesaminate le variabili progettuali fondamen-tali, ossia il diametro D, la velocita di rotazione n, il numero di pale Z ed il rapporto d’areaespansa AE/A0, nonche il rapporto tra diametro del mozzo e diametro dell’elica d/D per leeliche a passo variabile. Questa analisi puo essere effettuata variando sistematicamente questiparametri, e confrontandone gli effetti sul rendimento e sulla cavitazione mediante calcoli teo-rici basati sulla teoria della linea portante. Ma, in ultima analisi, lo scopo principale di unostudio parametrico e la determinazione della velocita di rotazione ottimale.
Figura 2.5. Base per l’ottimizzazione dei giri dell’elica di una nave portacontainer
Quale esempio sono riportati i risultati dello studio di ottimizzazione svolto dalla Lips peruna nave portacontainer bielica da 30 nodi di velocita, che monta due motori diesel da 29500kW ciascuno. Altri dati rilevanti sono la frazione di scia media assiale (w = 0.13), il numerodi pale (Z = 4), il margine di cavitazione a 0.8R (σ − ∆p/qmax = 0.011). Furono calco-late le caratteristiche delle prestazioni per i massimi diametri consentiti di 6.1 m e 6.5 m. Irisultati dello studio parametrico sono riportati in Figura 2.5, dalla quale si puo concludere che:
• l’effetto del numero di giri sul rendimento dell’elica e marginale finche si utilizza il dia-metro massimo, ma il rendimento diminuisce significativamente quando sono applicatidiametri inferiori; cio e facilmente comprensibile in quanto le perdite assiali non varianofinche il diametro rimane costante: in tal caso, le perdite di rendimento sono dovute alleperdite rotazionali e di attrito;
84
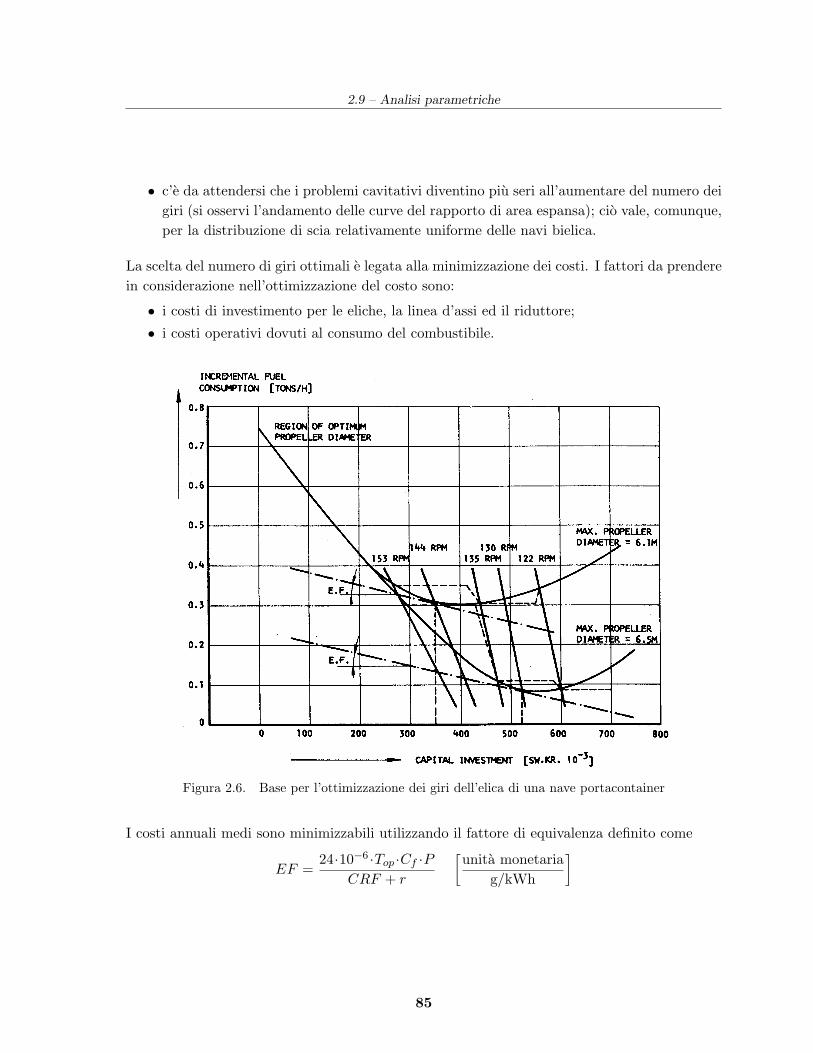
2.9 – Analisi parametriche
• c’e da attendersi che i problemi cavitativi diventino piu seri all’aumentare del numero deigiri (si osservi l’andamento delle curve del rapporto di area espansa); cio vale, comunque,per la distribuzione di scia relativamente uniforme delle navi bielica.
La scelta del numero di giri ottimali e legata alla minimizzazione dei costi. I fattori da prenderein considerazione nell’ottimizzazione del costo sono:
• i costi di investimento per le eliche, la linea d’assi ed il riduttore;
• i costi operativi dovuti al consumo del combustibile.
Figura 2.6. Base per l’ottimizzazione dei giri dell’elica di una nave portacontainer
I costi annuali medi sono minimizzabili utilizzando il fattore di equivalenza definito come
EF =24·10−6 ·Top ·Cf ·P
CRF + r
[unita monetaria
g/kWh
]
85
2 – Progetto Preliminare
dove
Top - tempo operativo (giorni/anno)Cf - costo del combustibile (unita monetaria)P - potenza [kW]CRF - fattore di recupero del capitaler - altri costi del capitale
La curva investimento-prestazioni e presentata in Figura 2.6, che indica le velocita ‘tecnico-economiche’ di 144 e 130 rpm rispettivamente ai massimi diametri ammissibili di 6.1 m e 6.5m. Come risultato del progetto di un riduttore standard, le curve di costo sono discontinue(linee tratteggiate in Figura 2.6).
Tenendo conto dei progetti standard e del rischio di cavitazione, fu scelta, infine, la velocita dirotazione di 135 rpm.
86
Capitolo 3
Fondamenti della teoria vorticale
Lo sviluppo originario della teoria dell’azione dell’elica e derivata sia dalla teoria impulsivaassiale, sia dalla teoria dell’elemento di pala. Queste due teorie, fatti salvi i loro meriti, nonrisolsero del tutto la mancanza di comprensione degli effetti del numero di pale e della sceltadei valori appropriati di portanza e di resistenza per gli elementi di pala. La teoria impulsiva,a causa delle note limitazioni, non consente di considerare l’influenza sul campo di velocita dielementi importanti di un’elica reale, quali il numero di pale, il rapporto d’area espansa, laforma delle sezioni di pala. Inoltre, tale teoria non permette di determinare la distribuzionedelle pressioni sulla superficie di pala, il che e necessario per la valutazione delle caratteristichedi cavitazione delle eliche navali. Tali problemi iniziarono ad essere risolti con l’avvento dellateoria vorticale dell’ala, sviluppata inizialmente da Lanchester (1907), e che nel tempo ha datoluogo ad un sistema di diversi modelli matematici complessi, i quali oggi consentono di risolverei problemi suddetti ed assicurano un progetto razionale dell’elica navale.
Essenziale e la determinazione della portanza prodotta dai profili delle sezioni di pala. E al-trettanto essenziale conoscere le caratteristiche del flusso locale per definire correttamente ilposizionamento delle sezioni di pala dell’elica rispetto all’asse di pala. Tali caratteristiche sa-rebbero determinabili esattamente in ogni posizione del disco–elica se non esistessero le velocitaindotte. In realta, le pale dell’elica determinano per induzione una variazione del campo diflusso, generato dal sistema di vortici liberi che si staccano dalle pale e si diffondono a valledell’elica.
Se si vuole scegliere la geometria ed il posizionamento corretto dei profili delle sezioni di pala,occorre conoscere l’entita e la direzione del flusso indotto in parecchi punti dell’elica. Poiche lepale dell’elica possono essere progettate tenendo conto delle condizioni medie del flusso in ungiro, e sufficiente progettare le pale tenendo conto della scia media circonferenziale ed utiliz-zando solamente le componenti di scia assiale e tangenziale, quanto meno per le eliche di navimercantili.
Intorno ad un’elica il campo di flusso indotto e molto piu complesso rispetto al sistema vorticosodi un profilo alare isolato. Ogni pala dell’elica genera il proprio campo di flusso indotto, ed
87
3 – Fondamenti della teoria vorticale
inoltre, a causa della variazione circonferenziale del flusso incidente, descritta dalla distribuzionedi scia, questo campo di flusso indotto varia durante la rotazione delle pale. Ne consegue cheil campo di flusso indotto varia sia radialmente che circonferenzialmente.
3.1 Modelli matematici dell’elica
Il problema fondamentale della teoria vorticale di un’elica navale consiste nel determinare unmodello matematico che tenga conto della geometria dell’elica, delle sue caratteristiche di fun-zionamento, ed anche delle forze e momenti ad essa associati. Il modello deve essere funzionalea condurre due attivita primarie:
1. progetto (problema inverso): il modello matematico deve permettere di calcolare la geo-metria dell’elica in base alle prestazioni richieste progettualmente, una volta assegnate lecondizioni al contorno (T , V , N);
2. analisi (problema diretto): assegnate le condizioni al contorno (T , V , N) e la geometriadell’elica, il modello matematico calcola le forze che si generano nel funzionamento, invalore medio ed in ampiezza massima di oscillazione, nonche la cavitazione ed il campodi pressioni indotte.
I primi modelli matematici furono sviluppati all’inizio del XX secolo da Prandtl e successiva-mente da molti altri scienziati ed ingegneri tra le due guerre mondiali. Una teoria che consentivala modellazione dell’elica fu sviluppata gia a quell’epoca, ma mancavano gli strumenti mate-matici (hardware e software) che ne consentissero adeguate applicazioni ingegneristiche. Gliingegneri navali furono costretti ad adoperare modellazioni approssimate, che presentavano li-miti di accuratezza a causa delle semplificazioni introdotte, a partire da quella di trascurare glieffetti viscosi sulle pale.
Tali semplificazioni dei modelli matematici dell’elica sono ancora accettabili in certe situazioniprogettuali (quando si tratta di determinare la spinta di eliche leggermente o moderatamentecaricate), ma sono del tutto inaccettabili quando si tratta di analizzare la cavitazione ed il cam-po di pressione indotto da un’elica subcavitante e/o cavitante, in quanto la viscosita influenzanotevolmente questi fenomeni.
Allo stato attuale dello sviluppo delle conoscenze idrodinamiche, i modelli matematici esistentie, quindi, i codici di calcolo numerico sono adeguati per quanto attiene la determinazione dellecaratteristiche propulsive in sede progettuale, mentre devono essere necessariamente combinaticon una sperimentazione sofisticata per quanto riguarda l’analisi della cavitazione e delle pres-sioni indotte.
Tutti i modelli matematici dell’elica sono basati sulla teoria vorticale. L’essenza della teoriavorticale e la seguente: l’interazione effettiva tra l’elica ed il fluido puo essere sostituita, nell’am-bito del modello matematico dell’elica ideale, dall’interazione del sistema vorticoso equivalente,costituito da vortici liberi (free vortices) e vortici concatenati (bound vortices), con il fluido
88
3.1 – Modelli matematici dell’elica
non–viscoso. La presenza di vortici liberi nella scia dietro le pale dell’elica non fu chiarita finche,in base a rilievi fotografici, Zoukovsky (1906) non stabilı che questo era il fenomeno fisico piuimportante dell’interazione elica–fluido, evidenziato dalle bolle d’aria che si formano nella zonain depressione, ossia lungo l’asse dei vortici. I vortici che abbandonano l’apice delle pale sonodenominati vortici di estremita (tip vortices). Essi si formano come risultato del moto del flui-do dalla faccia della pala (lato in sovrapressione) verso il dorso della stessa (lato in depressione).
Il vortice rettilineo, che abbandona il mozzo, e detto vortice del mozzo (hub vortex ). La di-rezione della velocita tangenziale da esso indotta coincide con quella di rotazione dell’elica.Questo vortice si forma come conseguenza del moto del fluido in direzione tangenziale dallasuperficie in pressione a quella in depressione di pale adiacenti, poiche la presenza del mozzonon consente al fluido di fluire in direzione radiale.
Il sistema vorticoso dell’elica reale e molto piu complicato. Oltre i vortici liberi ed i vortici delmozzo, ci sono altri vortici liberi che si distaccano da ogni singolo punto del bordo di uscitadella pala (trailing vortices). Questi vortici formano la cosiddetta lamina vorticale libera (freevortex sheet) che e instabile, come mostrano gli esperimenti. Fluendo all’indietro, si mescolanocon i vortici del mozzo e degli apici di pala. La bassa pressione su questa lamina e insufficienteper la formazione di bolle d’aria di dimensioni visibili.
Il sistema vorticoso reale cosı descritto risulta differente dalla sua modellazione teorica, chetende a semplificare la teoria vorticale dell’elica utilizzando diversi modelli matematici. Alloscopo di classificarli e tenendo presente la suddetta similitudine tra i sistemi vorticali di alidi apertura finita (foils) e le eliche navali, vanno considerati in parallelo un certo numero dischemi differenti.
In base a quanto e noto dal metodo idromeccanico delle singolarita idrodinamiche, e semprepossibile selezionare un certo sistema equivalente di singolarita, per esempio dei vortici, cheindurranno un campo di velocita corrispondente al moto del corpo studiato. In tal modo, unprofilo alare (o la pala dell’elica) puo essere sostituito da un sistema vorticoso equivalente,costituito da vortici liberi e da vortici concatenati. I vortici concatenati si muovono nel fluidosecondo la predefinita legge di moto del corpo, ossia quella delle pale che essi rappresentano. Ilfluido agisce su questi vortici con forze corrispondenti alle forze di pressione che si avrebberosu corpi solidi equivalenti. Allo scopo di avere un equilibrio tra queste forze, la teoria vorticaleaccetta la presenza di forze di massa esterne non–potenziali che tengono in equilibrio i vorticiconcatenati.
Se ogni pala, ovvero ogni ala di allungamento finito, e schematizzata da un solo vortice conca-tenato, il modello matematico corrispondente e rappresentativo della teoria della linea portante(lifting line theory - LLT). Se i vortici concatenati sono sistemati discretamente sulla cosiddettasuperficie di riferimento, che rappresenta schematicamente la pala o il profilo alare considerato,il modello matematico e rappresentativo della teoria della superficie portante (lifting surfacetheory - LST). In questo caso, lo spessore di pala puo essere rappresentato dalla distribuzionecorrispondente del semplice strato, ossia da uno strato con sorgenti su quella superficie.
89

3 – Fondamenti della teoria vorticale
Nella teoria della superficie portante non–lineare (nonlinear lifting surface theory - NLLST), ivortici concatenati sono distribuiti sulla faccia e sul dorso della pala, il che permette di conside-rare lo spessore. I vortici liberi sono sistemati all’esterno delle pale, per cui la legge di moto, laforma e l’intensita di questi vortici non sono noti in anticipo, ma dovranno essere determinatidurante il processo di soluzione del problema. In tal modo, l’assenza d’interazione tra le forzedi questi vortici ed il fluido e assunta come condizione principale, derivante dall’assenza di pos-sibilita fisica che appaiano forze che non siano quelle agenti sulle pale. La presenza di questacondizione conduce all’assunzione che la velocita di spostamento, relativa al fluido di qualsiasielemento del vortice libero, e nulla. Nel caso di moto stazionario, si ha quindi coincidenza tralinee vorticose e linee di flusso corrispondenti. Quando si considera il moto non–stazionario,oltre i suddetti vortici liberi, esistono i vortici liberi non–stazionari (slipping free vortices). Nelprosieguo saranno considerati solamente i vortici stazionari.
3.2 Sistemi vorticosi su un’ala o su una pala isolata
La Figura 3.1 mostra alcuni dei piu usuali schemi vorticosi che modellano un’ala di allunga-mento finito. In Figura 3.1a e illustrato lo schema piu semplice, che consiste di un vortice aforma di ferro di cavallo (un vortice concatenato e due vortici liberi), l’intensita del quale, inbase al teorema di Helmholtz, e costante lungo tutta l’ala. La Figura 3.1b mostra uno schemadi linea portante, consistente di un vortice concatenato che trascina dietro di se una superficievorticosa libera e continua. Questo schema puo essere reso piu complesso considerando uncerto numero di vortici a forma di ferro di cavallo di diverso allungamento (Fig. 3.1c).
Figura 3.1. Schemi di vortici liberi di un’ala di allungamento finito
I diversi modi di rappresentare la forma reale dei vortici liberi prevedono la loro modellazionee la determinazione della loro direzione, includendovi le velocita da questi indotte. Si possonoottenere cosı diversi schemi lineari e nonlineari della scia, quale lo schema della Figura 3.2a,dove i vortici liberi formano un angolo αz con il piano del moto. La distribuzione discreta deivortici lungo l’intera superficie di riferimento, la quale rappresenta schematicamente il profiloalare, corrisponde al modello di superficie portante. Anche in questo caso, il modello di scialineare rappresenta i vortici liberi nel piano di moto del profilo alare (Fig. 3.2b).
In base alla suddetta similitudine tra un profilo alare ed una pala di elica i modelli matematicisviluppati nella teoria dei profili alari trovano gli analoghi corrispondenti nella teoria dell’elicanavale. Cosi, per esempio, la Figura 3.3 mostra lo schema vorticoso nonlineare di un’elica aquattro pale, simile al vortice a forma di ferro di cavallo di un’ala (Fig. 3.1a), con vortici diintensita costante. Si puo osservare che questo schema consiste di quattro vortici concatenati
90
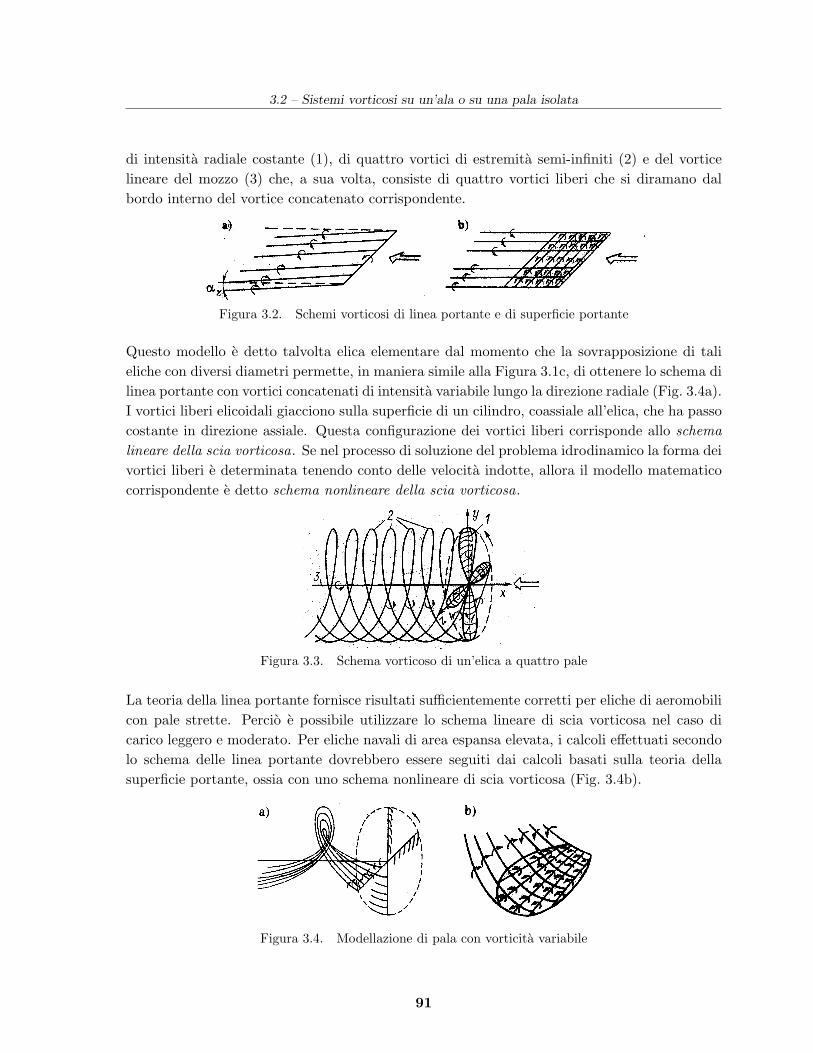
3.2 – Sistemi vorticosi su un’ala o su una pala isolata
di intensita radiale costante (1), di quattro vortici di estremita semi-infiniti (2) e del vorticelineare del mozzo (3) che, a sua volta, consiste di quattro vortici liberi che si diramano dalbordo interno del vortice concatenato corrispondente.
Figura 3.2. Schemi vorticosi di linea portante e di superficie portante
Questo modello e detto talvolta elica elementare dal momento che la sovrapposizione di talieliche con diversi diametri permette, in maniera simile alla Figura 3.1c, di ottenere lo schema dilinea portante con vortici concatenati di intensita variabile lungo la direzione radiale (Fig. 3.4a).I vortici liberi elicoidali giacciono sulla superficie di un cilindro, coassiale all’elica, che ha passocostante in direzione assiale. Questa configurazione dei vortici liberi corrisponde allo schemalineare della scia vorticosa. Se nel processo di soluzione del problema idrodinamico la forma deivortici liberi e determinata tenendo conto delle velocita indotte, allora il modello matematicocorrispondente e detto schema nonlineare della scia vorticosa.
Figura 3.3. Schema vorticoso di un’elica a quattro pale
La teoria della linea portante fornisce risultati sufficientemente corretti per eliche di aeromobilicon pale strette. Percio e possibile utilizzare lo schema lineare di scia vorticosa nel caso dicarico leggero e moderato. Per eliche navali di area espansa elevata, i calcoli effettuati secondolo schema delle linea portante dovrebbero essere seguiti dai calcoli basati sulla teoria dellasuperficie portante, ossia con uno schema nonlineare di scia vorticosa (Fig. 3.4b).
Figura 3.4. Modellazione di pala con vorticita variabile
91

3 – Fondamenti della teoria vorticale
3.3 Circolazione e vorticita
Nell’idrodinamica classica il progetto di una superficie portante, sia che si tratti di un’ala iso-lata in flusso uniforme, sia che riguardi la pala di un’elica, e trattabile con due approcci:
• studio del campo di flusso intorno ad un profilo bidimensionale;• studio del campo di flusso intorno ad un’ala tridimensionale e delle forze generate dall’in-
terazione con il fluido, ignorando la geometria dei suoi profili trasversali.
Prima di discutere la modellazione delle pale di un’elica mediante la teoria della linea portanteo la teoria della superficie portante, e opportuno discutere il piu semplice modello di lineaportante per un’ala o una pala isolata, in quanto ne evidenzia le caratteristiche essenziali.
L’ala di un aeromobile e la pala di un’elica possono essere schematizzate sostituendole con unalinea che e l’asse di un vortice con circolazione costante (modello di linea portante di Prandtl)o radialmente variabile; ossia, in ogni sezione di pala (punto della linea portante) esiste unvortice di circolazione Γ = Γ (r). Tale linea e detta linea portante. Il contorno fisico dell’ala odella pala e del tutto trascurato.
Questa modellazione da luogo alla teoria della linea portante, il cui sviluppo matematico eestremamente complesso. La soluzione del sistema di equazioni che descrivono l’interazione trafluido e linea portante richiede l’uso del computer, anche nel caso di semplificazione dei calcoliidrodinamici con i cosiddetti metodi approssimati (Hill, 1949; Eckardt–Morgan, 1955; ecc.). Lateoria vorticale dell’ala o dell’elica ha come scopo primario il calcolo delle velocita indotte daloro prodotte nella mutua interazione con il fluido.
Figura 3.5. Triangolo di velocita e vortice elementare
Per la legge di conservazione dell’energia del vortice, l’asse del vortice si chiude su se stesso otermina su una superficie di separazione. Nel tratto dr dell’asse vorticale si ha un incrementodi circolazione dΓ (Fig. 3.5). La variazione di Γ comporta che una linea vorticosa libera sistacchi dalla linea portante tra le sezioni r e r + dr. Si puo pensare che nel punto (r + dr) ilvortice Γ (r + dr) sia composto da due vortici aventi assi distinti, tale da risultare
Γ (r + dr) = Γ (r) + dΓ
A sua volta, l’asse del vortice di circolazione dΓ dovrebbe chiudersi da qualche parte; ma poicheal punto di raggio r non esiste, si genera un vortice che viene trascinato dal flusso che investel’ala o la pala con velocita ~VR.
92

3.4 – Teoria dei profili portanti
Se si rappresenta questo fenomeno sul triangolo delle velocita (Fig. 3.6), si ha, per unita dilinea portante, il vortice elementare dΓ/dr che si allontana lungo l’asse coincidente con ~VR.Si hanno cosı due sistemi vorticosi: il primo ha come asse la linea portante ed e il sistema divortici concatenati , responsabile della generazione di portanza; il secondo e il sistema di vorticiliberi che ha come asse la velocita incidente ~VR inclinato di βw rispetto alla linea portante.
Figura 3.6. Modello di linea portante
Da ogni sezione della superficie portante (ala o pala), ossia da ogni vortice concatenato, sistacca un vortice libero. Ora la velocita ~VR e in realta una linea elicoidale di passo βi = βw,per cui l’asse del vortice libero e proprio quella linea elicoidale che abbandona la superficieportante seguendo tale elicoide. A valle della linea portante si genera percio una superficieelicoidale costituita dalle linee elicoidali, che sono gli assi dei vortici liberi. Tale superficie edetta superficie dei vortici liberi .
3.4 Teoria dei profili portanti
Per costruire il modello matematico del flusso del fluido viscoso intorno ad un’elica si parte dalflusso del fluido ideale ed incompressibile intorno ad un sistema di singolarita idrodinamicheequivalente all’elica, e che forma una scia vorticosa a valle di questa. I vortici sono ipotizzaticome singolarita idrodinamiche. La zona di fluido esterna al campo vorticoso e consideratacome un campo a potenziale, ossia senza vortici, il che significa che nel suo dominio e nulla lacircolazione totale
Γ =∮
`◦~u ~d` = 0 (3.1)
indipendentemente dalla forma del contorno chiuso `◦ lungo il quale viene effettuata l’integra-zione. Come noto, in base al teorema di Stokes, il valore della circolazione e legato all’intensitadei vortici che circondano quel contorno chiuso lungo il quale viene effettuata l’integrazione dellacircolazione. Ad esempio, il modello piu semplice di un vortice reale puo essere presentato comeuna linea vorticosa di intensita finita (vortice discreto) senza dimensioni trasversali. La sua
93

3 – Fondamenti della teoria vorticale
intensita viene determinata dalla circolazione della velocita lungo il contorno chiuso intornoalla linea vorticosa. Se la linea vorticosa infinita e rettilinea coincide con l’asse x∗ del sistemadi coordinate cilindriche E∗ (O,x∗, r, t) e se la sua intensita e Γ , la circolazione lungo il contornoattraversato dall’asse x∗. sara Γ . Prendendo come contorni chiusi cerchi concentrici di raggio r,situati su un piano perpendicolare alla linea vorticosa, e tenendo conto della simmetria assialee del fatto che il campo di velocita e indipendente da x∗, si ottiene
Γ = 2πrut (3.2)
il che permette di ricavare il campo di velocita indotta corrispondente nel sistema di coordinatecilindriche descritto dalle componenti
ux = 0 ; ut =Γ
2πr; ur = 0 (3.3)
L’asse x∗, sul quale e situata la linea vorticosa, e la linea di separazione del campo di velocita.All’esterno di tale linea il campo di velocita e continuo e potenziale, dal momento che la circo-lazione e nulla lungo il contorno chiuso che puo essere ridotto ad un punto senza attraversarex∗, ossia lungo un contorno che non racchiuda questo asse. Rispetto ad un tubo vorticoso cheha dimensioni trasversali e che modella un campo di velocita continuo lungo x∗, per la lineavorticosa, in base alla fonnula (3.3), la componente tangenziale della velocita indotta tendeall’infinito quando il punto di osservazione si avvicina all’asse. Cio e una conseguenza del fattoche vengono trascurate le dimensioni trasversali del tubo vorticoso. Ne derivano difficolta nelcalcolo delle velocita indotte da un sistema di linee vorticose.
Oltre le linee vorticose, la teoria vorticale usa frequentemente la superficie vorticosa che puoessere considerata come un sistema di linee vorticose di intensita elementare dΓ . La densita disuperficie dei vortici in un punto A della superficie vorticosa considerata (Fig. 3.7) e un vettore~γ legato alla circolazione Γ lungo un qualsiasi contorno chiuso l◦, che attraversi la superficievorticosa solamente nel punto A, dall’equazione
~γ = (gradΓ )× ~n (3.4)
Si supponga di utilizzare un sistema di coordinate destrorso (Fig. 3.7). Nella formula (3.4) ~n
indica il versore della superficie vorticosa in un punto A, orientato nello stesso verso dell’ele-mento ~d` del contorno chiuso nell’equazione (3.1); coincide, quindi, con la direzione positivadel percorso lungo il contorno utilizzato nella determinazione di Γ . A questo punto, se si os-serva dalla coda del vettore ~γ, che e diretto tangenzialmente alla linea vorticosa elementare nelpunto A, la direzione della velocita nei punti piu vicini al punto A corrispondera alla rotazioneantioraria intorno al vettore ~γ. Sulla superficie vorticosa esiste un salto del vettore di velocitaindotta (~ut+ − ~ut−), detta velocita di perturbazione, che e legato a ~γ dalla relazione
~γ = (~ut+ − ~ut−)× ~n (3.5)
dove ~ut± e il vettore della velocita, in prossimita del punto considerato, lungo la normale~n, rispettivamente sopra e sotto la superficie portante. Come lato inferiore, marcato con ilpedice ‘-’, viene assunto quel lato della superficie vorticosa che si vede dal terminale del versore
94
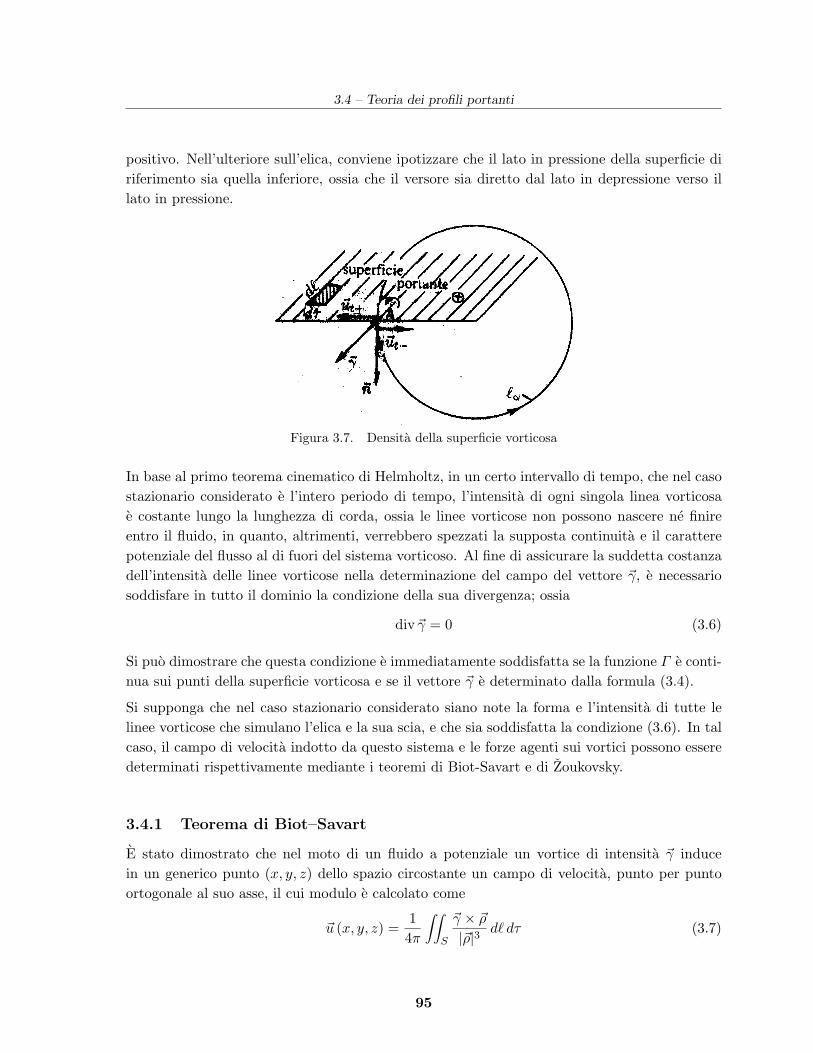
3.4 – Teoria dei profili portanti
positivo. Nell’ulteriore sull’elica, conviene ipotizzare che il lato in pressione della superficie diriferimento sia quella inferiore, ossia che il versore sia diretto dal lato in depressione verso illato in pressione.
Figura 3.7. Densita della superficie vorticosa
In base al primo teorema cinematico di Helmholtz, in un certo intervallo di tempo, che nel casostazionario considerato e l’intero periodo di tempo, l’intensita di ogni singola linea vorticosae costante lungo la lunghezza di corda, ossia le linee vorticose non possono nascere ne finireentro il fluido, in quanto, altrimenti, verrebbero spezzati la supposta continuita e il caratterepotenziale del flusso al di fuori del sistema vorticoso. Al fine di assicurare la suddetta costanzadell’intensita delle linee vorticose nella determinazione del campo del vettore ~γ, e necessariosoddisfare in tutto il dominio la condizione della sua divergenza; ossia
div~γ = 0 (3.6)
Si puo dimostrare che questa condizione e immediatamente soddisfatta se la funzione Γ e conti-nua sui punti della superficie vorticosa e se il vettore ~γ e determinato dalla formula (3.4).
Si supponga che nel caso stazionario considerato siano note la forma e l’intensita di tutte lelinee vorticose che simulano l’elica e la sua scia, e che sia soddisfatta la condizione (3.6). In talcaso, il campo di velocita indotto da questo sistema e le forze agenti sui vortici possono esseredeterminati rispettivamente mediante i teoremi di Biot-Savart e di Zoukovsky.
3.4.1 Teorema di Biot–Savart
E stato dimostrato che nel moto di un fluido a potenziale un vortice di intensita ~γ inducein un generico punto (x, y, z) dello spazio circostante un campo di velocita, punto per puntoortogonale al suo asse, il cui modulo e calcolato come
~u (x, y, z) =14π
∫∫
S
~γ × ~ρ
|~ρ|3 d` dτ (3.7)
95

3 – Fondamenti della teoria vorticale
dove
~γ - vettore che denota la densita superficiale dei vortici liberi e che caratterizzala direzione del filamento vorticoso elementare di intensita |~γ | dτ
~ρ - raggio vettore che unisce il centro dell’elemento della superficie vorticosa d`·dτcon il punto di controllo (x, y, z) nel quale si calcola la velocita indotta;
~d` - elemento differenziale del filamento vorticoso (Fig. 3.7)d`, dτ - elementi tra loro perpendicolari della superficie vorticosaS - rappresenta tutte le superfici costituenti il sistema vorticoso
Per il filamento vorticoso di intensita finita Γ , costante lungo la linea stessa, nell’equazione(3.7) si ipotizza che sia ~γ dτ d` = Γ ~d`, per cui la stessa si trasforma nella formula
~u (x, y, z) =Γ
4π
∮
L
~d`× ~ρ
|~ρ |3 dl (3.8)
dove l’integrazione viene effettuata lungo tutta la linea vorticosa L che non puo che essere chiu-sa, oppure iniziare e terminare all’infinito. L’equazione (3.8) e detta legge di Biot–Savart dalnome dei due scienziati francesi che nel XVIII secolo la derivarono studiando i campi elettricie magnetici. Il prodotto vettoriale ~d`× ~ρ, come noto, e un vettore pari a |~ρ|·|~d`|·sinα (dove α
e l’angolo tra ~d` e ~ρ), diretto perpendicolarmente al piano sul quale giacciono il punto (x, y, z)e l’elemento ~d`. Per questa ragione, la via piu breve dall’elemento ~d` a ~ρ e quella antioraria.
Quale applicazione della legge di Biot–Savart si consideri il campo di velocita prodotto da unfilamento vorticoso rettilineo ed infinitamente lungo. Poiche e α = 0, applicando la formula(3.8) si ricava direttamente
|~ρ | = r
sinα; x = −r cotα ; dx = |~d` | = r dα
sin2 α
ut =Γ
4π
∫ π
◦|~ρ | |~d` | sinα
|~ρ |3 dα =Γ
4πr
∫ π
◦sinα dα =
Γ
2πr
(3.9)
che e il risultato corretto per un vortice bidimensionale. Per un vortice semi–infinito che siestende da x = 0 all’infinito, la velocita indotta e meta di quella di un vortice infinito, che epari a ut = Γ/4πr. Questo risultato e utile nella teoria della linea portante.
Se il punto di controllo, nel quale si calcola la velocita indotta, giace sulla superficie vorti-cosa considerata, l’integrando nella formula (3.7) per |~ρ | → 0 rappresenta una funzione nonintegrabile. Di conseguenza, per calcolare i valori corrispondenti e necessario utilizzare la notageneralizzazione del termine integrale e considerare la formula (3.7) come un integrale singolare.
Quando si applica il metodo dei vortici discreti, le suddette difficolta vengono superate utiliz-zando un raggio fittizio r◦. Ad esempio, se il punto di osservazione si trova ad una distanzar dall’asse della linea vorticosa rettilinea ed infinita, con r < r◦, invece della relazione (3.9) siaccetta un valore provvisorio di ut pari a
96

3.4 – Teoria dei profili portanti
ut =Γ r
2πr2◦per r < r◦ (3.10)
il cui valore non corrisponde esattamente a quello dato dalla legge di Biot–Savart.
Se si considera un filamento vorticoso rettilineo, oppure un tubo vorticoso, di lunghezza finita,al suo esterno la velocita indotta e esattamente nulla. Se ci si avvicina all’asse, per un piccolovalore di r e possibile ottenere la velocita indotta secondo la formula asintotica
ut =Γ ·r8π
·[
1e2− 1
(a− e)2
]per r << 1 e e > a (3.11)
dove
a - lunghezza del tubo che giace sull’asse x∗
e - distanza, lungo l’asse del tubo, dalla sua estremita al punto di osservazione
Questa formula e ottenuta dall’espressione generale ricavata secondo il teorema di Biot–Savart,ed e analoga alla relazione (3.9)
ut =Γ
4πr(cosα + cos β) (3.12)
dove α e β sono gli angoli, interni al tubo, del triangolo formato dal tubo vorticoso e da duesegmenti che connettono il suo terminale con il punto di osservazione.
3.4.2 Teorema di Kutta–Zoukovsky
La circolazione intorno ad una superficie portante va vista come una differenza di velocita trai due lati della superficie, piuttosto che come un flusso intorno ad una sezione della superficiein quanto non esistono nel fluido particelle che vi ruotino intorno.
Il vettore delle forze elementari prodotte dal fluido di densita ρ su un elemento d` ·dτ dellasuperficie vorticosa e dato da
d~F = ρ ~VR × ~γ dτ ·d` (3.13)
dove ~VR = (~V +R + ~V −
R )/2 e il vettore della velocita relativa sul punto medio di un elementodella superficie vorticosa.
Il campo di velocita suddetto e considerato stazionario nel sistema mobile di coordinate, solidalecon l’elica rotante. Come e stato descritto in precedenza, esiste un legame tra la velocita indotta~u e la velocita ~VE
~u = ~VE + ~VR (3.14)
che permette di determinare la velocita relativa ~VR a partire dalla velocita di trasporto di massa~VE = V (1− wf∞), dove wf∞ e la frazione di scia media viscosa all’infinito.
97

3 – Fondamenti della teoria vorticale
In base alla formula (3.13), per d~F 6= 0, si verifica una caduta di pressione sulla superficievorticosa considerata, pari alla proiezione normale della forza agente sulla superficie unitaria,che vale
∆p = p+ − p− =d~F ·~nd`·dτ
= ρ ~VRτ |~γ | (3.15)
dove |~γ | e il modulo del vettore ~γ, mentre ~VRτ rappresenta la proiezione del vettore ~VR indirezione τ , che coincide con la direzione del vettore ~γ, se quest’ultimo viene ruotato, intornoalla normale alla superficie vorticosa nel punto dato, di 90◦ in senso antiorario guardando nelverso positivo del versore; ossia, guardando dal lato in depressione della pala dell’elica, ’+’verso il lato in pressione, ’-’.
Nel caso di un filamento vorticoso di intensita finita Γ costante, dall’equazione (3.13) si ricavala formula
d~F = ρ ~Γ ~VR × ~d` (3.16)
Nel caso particolare di un vortice costituito da un filamento vorticoso rettilineo, infinito edisolato, poiche, in base alla formula (3.10), sui punti del filamento stesso e ~u = 0, dalle equazioni(3.14) e (3.16) si ottiene
d~F = −ρ Γ ~VE × ~d` (3.17)
Se si sostituisce il moto di trasporto regolare e rettilineo in un piano perpendicolare all’assedel vortice rettilineo considerato, il quale simula la superficie portante, e si integra l’equazione(3.17) lungo questo vortice di lunghezza unitaria, si ottiene la relazione tra la portanza el’intensita del vortice, espressa dalla circolazione Γ , come
L = ρΓ |~VE | (3.18)
Questa formula e detta teorema di Kutta–Zoukovsky per la forza di portanza, dove L e lacosiddetta forza di portanza agente sull’elemento di lunghezza unitaria del vortice infinito erettilineo che si muove con velocita costante |~VE |. La proiezione del vettore della forza L econsiderata positiva se, nel determinare la circolazione Γ , la direzione del vettore ~F coincidecon la direzione del moto di trasporto del vortice, che ruota su se stesso di 90◦ in direzionepositiva quando attraversa il contorno.
Come discusso in precedenza, sono detti vortici liberi quelle sezioni della linea o della super-ficie vorticosa che non risentono della forza prodotta dal flusso; ossia, nel caso stazionarioconsiderato, quelle sezioni sulle quali viene soddisfatta la condizione
d~F = 0 (3.19)
Per determinare la forma e l’intensita dei vortici liberi, sono fondamentali i seguenti teoremi.
98
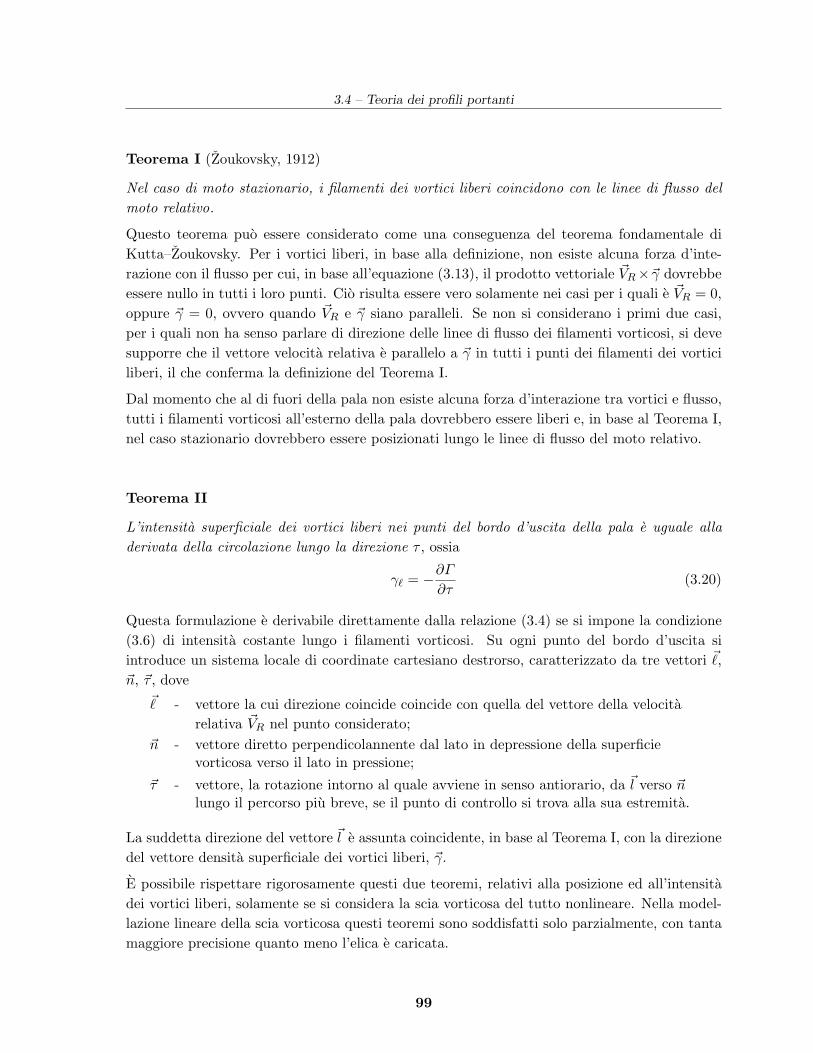
3.4 – Teoria dei profili portanti
Teorema I (Zoukovsky, 1912)
Nel caso di moto stazionario, i filamenti dei vortici liberi coincidono con le linee di flusso delmoto relativo.
Questo teorema puo essere considerato come una conseguenza del teorema fondamentale diKutta–Zoukovsky. Per i vortici liberi, in base alla definizione, non esiste alcuna forza d’inte-razione con il flusso per cui, in base all’equazione (3.13), il prodotto vettoriale ~VR×~γ dovrebbeessere nullo in tutti i loro punti. Cio risulta essere vero solamente nei casi per i quali e ~VR = 0,oppure ~γ = 0, ovvero quando ~VR e ~γ siano paralleli. Se non si considerano i primi due casi,per i quali non ha senso parlare di direzione delle linee di flusso dei filamenti vorticosi, si devesupporre che il vettore velocita relativa e parallelo a ~γ in tutti i punti dei filamenti dei vorticiliberi, il che conferma la definizione del Teorema I.
Dal momento che al di fuori della pala non esiste alcuna forza d’interazione tra vortici e flusso,tutti i filamenti vorticosi all’esterno della pala dovrebbero essere liberi e, in base al Teorema I,nel caso stazionario dovrebbero essere posizionati lungo le linee di flusso del moto relativo.
Teorema II
L’intensita superficiale dei vortici liberi nei punti del bordo d’uscita della pala e uguale alladerivata della circolazione lungo la direzione τ , ossia
γ` = −∂Γ
∂τ(3.20)
Questa formulazione e derivabile direttamente dalla relazione (3.4) se si impone la condizione(3.6) di intensita costante lungo i filamenti vorticosi. Su ogni punto del bordo d’uscita siintroduce un sistema locale di coordinate cartesiano destrorso, caratterizzato da tre vettori ~,~n, ~τ , dove
~ - vettore la cui direzione coincide coincide con quella del vettore della velocitarelativa ~VR nel punto considerato;
~n - vettore diretto perpendicolannente dal lato in depressione della superficievorticosa verso il lato in pressione;
~τ - vettore, la rotazione intorno al quale avviene in senso antiorario, da ~l verso ~nlungo il percorso piu breve, se il punto di controllo si trova alla sua estremita.
La suddetta direzione del vettore ~l e assunta coincidente, in base al Teorema I, con la direzionedel vettore densita superficiale dei vortici liberi, ~γ.
E possibile rispettare rigorosamente questi due teoremi, relativi alla posizione ed all’intensitadei vortici liberi, solamente se si considera la scia vorticosa del tutto nonlineare. Nella model-lazione lineare della scia vorticosa questi teoremi sono soddisfatti solo parzialmente, con tantamaggiore precisione quanto meno l’elica e caricata.
99
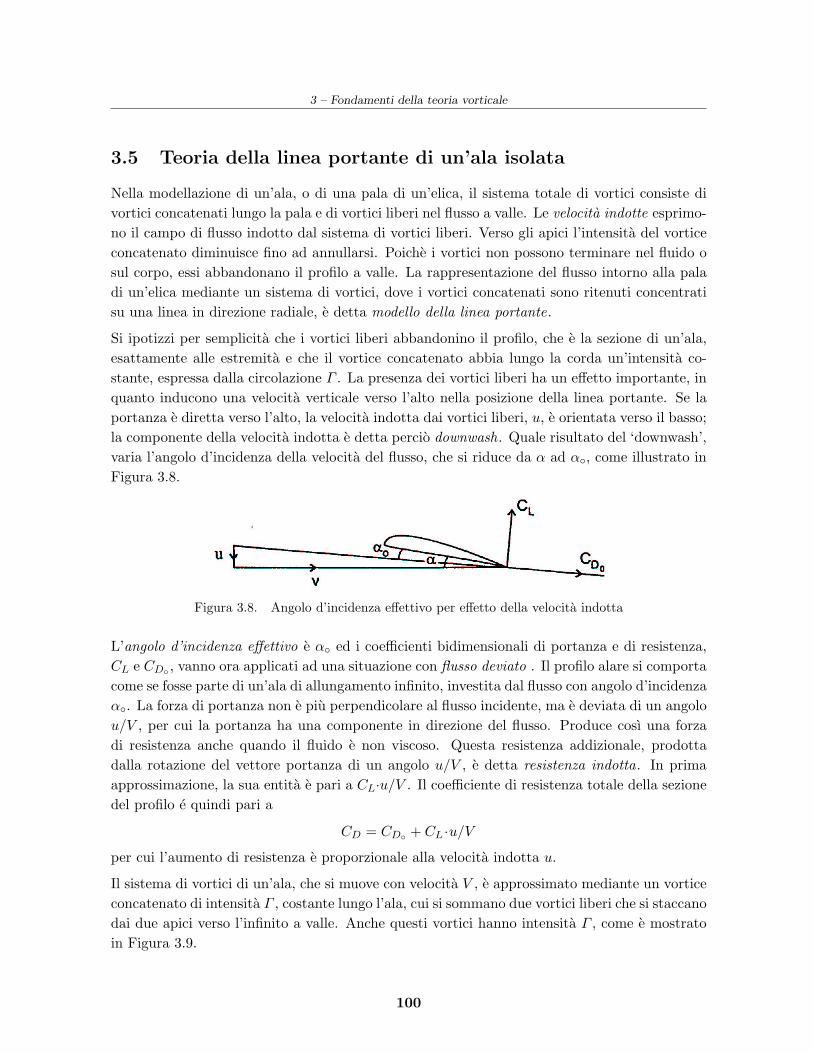
3 – Fondamenti della teoria vorticale
3.5 Teoria della linea portante di un’ala isolata
Nella modellazione di un’ala, o di una pala di un’elica, il sistema totale di vortici consiste divortici concatenati lungo la pala e di vortici liberi nel flusso a valle. Le velocita indotte esprimo-no il campo di flusso indotto dal sistema di vortici liberi. Verso gli apici l’intensita del vorticeconcatenato diminuisce fino ad annullarsi. Poiche i vortici non possono terminare nel fluido osul corpo, essi abbandonano il profilo a valle. La rappresentazione del flusso intorno alla paladi un’elica mediante un sistema di vortici, dove i vortici concatenati sono ritenuti concentratisu una linea in direzione radiale, e detta modello della linea portante.
Si ipotizzi per semplicita che i vortici liberi abbandonino il profilo, che e la sezione di un’ala,esattamente alle estremita e che il vortice concatenato abbia lungo la corda un’intensita co-stante, espressa dalla circolazione Γ . La presenza dei vortici liberi ha un effetto importante, inquanto inducono una velocita verticale verso l’alto nella posizione della linea portante. Se laportanza e diretta verso l’alto, la velocita indotta dai vortici liberi, u, e orientata verso il basso;la componente della velocita indotta e detta percio downwash. Quale risultato del ‘downwash’,varia l’angolo d’incidenza della velocita del flusso, che si riduce da α ad α◦, come illustrato inFigura 3.8.
Figura 3.8. Angolo d’incidenza effettivo per effetto della velocita indotta
L’angolo d’incidenza effettivo e α◦ ed i coefficienti bidimensionali di portanza e di resistenza,CL e CD◦ , vanno ora applicati ad una situazione con flusso deviato . Il profilo alare si comportacome se fosse parte di un’ala di allungamento infinito, investita dal flusso con angolo d’incidenzaα◦. La forza di portanza non e piu perpendicolare al flusso incidente, ma e deviata di un angolou/V , per cui la portanza ha una componente in direzione del flusso. Produce cosı una forzadi resistenza anche quando il fluido e non viscoso. Questa resistenza addizionale, prodottadalla rotazione del vettore portanza di un angolo u/V , e detta resistenza indotta. In primaapprossimazione, la sua entita e pari a CL·u/V . Il coefficiente di resistenza totale della sezionedel profilo e quindi pari a
CD = CD◦ + CL ·u/V
per cui l’aumento di resistenza e proporzionale alla velocita indotta u.
Il sistema di vortici di un’ala, che si muove con velocita V , e approssimato mediante un vorticeconcatenato di intensita Γ , costante lungo l’ala, cui si sommano due vortici liberi che si staccanodai due apici verso l’infinito a valle. Anche questi vortici hanno intensita Γ , come e mostratoin Figura 3.9.
100

3.5 – Teoria della linea portante di un’ala isolata
Se l’allungamento del profilo alare e 2b, la velocita indotta ux◦ , prodotta dai vortici liberi suun generico punto x◦ della linea portante, puo essere calcolata come
ux◦ =Γ
4π (b− x◦)+
Γ
4π (b + x◦)=
Γ
2π· b
b2 − x2◦(3.21)
L’espressione (3.21) della velocita indotta su un punto della linea portante mostra, comunque,che la velocita indotta diverrebbe nulla se l’allungamento fosse infinito. Se x◦ fosse uguale a± b (punto di singolarita idrodinamica), la velocita diverrebbe infinitamente grande.
Figura 3.9. Linea portante di un’ala di allungamento finito
Il legame tra portanza e circolazione, in base alla definizione di portanza ed in base alla leggedi Kutta–Zoukovsky, e dato da
L =12ρ V 2 ·CL ·c·2b = ρ V Γ ·2b ⇒ Γ =
12
CL ·c·V (3.22)
che consente di dedurre che la circolazione e indipendente dall’allungamento dell’ala.
Sebbene questo modello semplice permetta di identificare chiaramente i vortici d’apice concen-trati, la presenza di velocita infinite e del tutto teorica: si puo affermare, quindi, che la rappre-sentazione dell’azione idrodinamica dell’ala mediante un singolo vortice d’intensita costante ealquanto grossolana. In realta, i vortici liberi non sono solamente quelli diffusi alle estremitadell’ala. Si deve parlare piuttosto di uno strato di vortici liberi che abbandona l’ala nei puntidove l’intensita del vortice concatenato varia in direzione dell’allungamento, come mostrato inFigura 3.10.
In termini matematici, la velocita indotta in un punto x◦ dell’ala dal sistema di vortici liberi,prodotto dai vortici concatenati di circolazione variabile e fornita dalla legge di Biot–Savart
ux◦ =∫ +b
−b
dΓ/dx
4π (x− x◦)dx (3.23)
Si tratta ora di dimostrare come la circolazione incognita possa essere determinata a partiredalle relazioni tra le caratteristiche del profilo bidimensionale, la portanza e la velocita indotta.
Il coefficiente di portanza di un profilo alare in un flusso potenziale bidimensionale e pari aCL = 2πα (1 + 0.77 t/c), dove l’angolo d’incidenza α, espresso in radianti, e misurato dalla
101
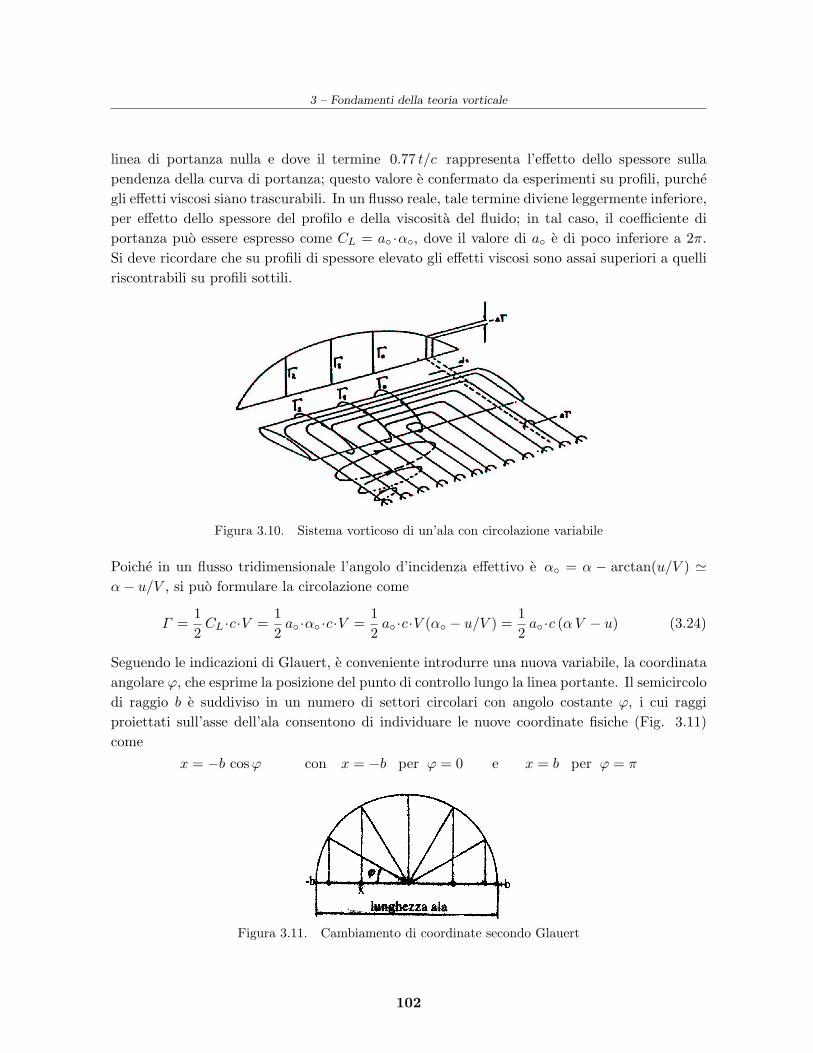
3 – Fondamenti della teoria vorticale
linea di portanza nulla e dove il termine 0.77 t/c rappresenta l’effetto dello spessore sullapendenza della curva di portanza; questo valore e confermato da esperimenti su profili, purchegli effetti viscosi siano trascurabili. In un flusso reale, tale termine diviene leggermente inferiore,per effetto dello spessore del profilo e della viscosita del fluido; in tal caso, il coefficiente diportanza puo essere espresso come CL = a◦ ·α◦, dove il valore di a◦ e di poco inferiore a 2π.Si deve ricordare che su profili di spessore elevato gli effetti viscosi sono assai superiori a quelliriscontrabili su profili sottili.
Figura 3.10. Sistema vorticoso di un’ala con circolazione variabile
Poiche in un flusso tridimensionale l’angolo d’incidenza effettivo e α◦ = α − arctan(u/V ) 'α− u/V , si puo formulare la circolazione come
Γ =12
CL ·c·V =12
a◦ ·α◦ ·c·V =12
a◦ ·c·V (α◦ − u/V ) =12
a◦ ·c (α V − u) (3.24)
Seguendo le indicazioni di Glauert, e conveniente introdurre una nuova variabile, la coordinataangolare ϕ, che esprime la posizione del punto di controllo lungo la linea portante. Il semicircolodi raggio b e suddiviso in un numero di settori circolari con angolo costante ϕ, i cui raggiproiettati sull’asse dell’ala consentono di individuare le nuove coordinate fisiche (Fig. 3.11)come
x = −b cosϕ con x = −b per ϕ = 0 e x = b per ϕ = π
Figura 3.11. Cambiamento di coordinate secondo Glauert
102

3.5 – Teoria della linea portante di un’ala isolata
Se si esprime la circolazione come sviluppo in serie di Fourier della variabile ϕ, utilizzando lafunzione seno, si ottiene
Γ (ϕ) = 4 b V∞∑
n=1
an sin (nϕ) (3.25)
che ha la proprieta di essere nulla alle estremita dell’ala per tutti i valori dei coefficienti an.Si osservi che i contributi derivanti dai coefficienti pari a2, a4, . . . , porterebbero a distribuzio-ni asimmetriche della circolazione, per cui vanno considerati nulli nel caso di un’ala simmetrica.
Se si sostituisce la serie di Fourier nell’espressione integrale (3.23) che lega la velocita indotta,u(ϕ◦), da un punto ϕ sulla linea portante alla circolazione in un punto sulla stessa lineaportante, definito dalla variabile ϕ◦, si puo ricavare la velocita indotta u(ϕ◦) come
u(ϕ◦) =V
π
∫ π
◦a1 cosϕ
cos ϕ◦ − cos ϕdϕ +
V
π
∫ π
◦2a2 cos 2ϕ
cos ϕ◦ − cos ϕdϕ +
V
π
∫ π
◦3a3 cos 3ϕ
cos ϕ◦ − cos ϕdϕ +
V
π
∫ π
◦4a4 cos 4ϕ
cos ϕ◦ − cos ϕdϕ + . . .
Questi integrali sono di tipo speciale, in quanto per ϕ = ϕ◦ il denominatore diviene nullo.Fortunatamente possono essere risolti a partire dal valore principale di Cauchy, dando luogo aicosiddetti integrali di Glauert (1947) la cui soluzione generale e
∫ π
◦cos (nϕ◦)
cos ϕ◦ − cos ϕdϕ◦ = π
sin (nϕ◦)sinϕ◦
per cui la velocita indotta diviene
u(ϕ◦) = Va1 sinϕ◦sin ϕ◦
+ V2a2 sin 2ϕ◦
sin ϕ◦+ V
3a3 sin 3ϕ◦sin ϕ◦
+ ...... =V
sinϕ◦
∞∑
n=1
nan sin (nϕ◦)
Associando l’equazione (3.25) alla formulazione (3.24), che lega la circolazione alla velocitaindotta, e sostituendo in quest’ultima la soluzione generale per la velocita indotta, si ricava
Γ = 4 b V∞∑
n=1
an sin (nϕ) =12a◦c
{αV − V
sinϕ
∞∑
n=1
nan sin (nϕ)
}
da cui
4 b V∞∑
n=1
an sinϕ sin(nϕ) =12a◦ c α V sinϕ− 1
2a◦ c V
∞∑
n=1
nan sin (nϕ)
ovvero∞∑
n=1
an sin ϕ sin (nϕ) +a◦c8b
∞∑
n=1
nan sin (nϕ) =a◦c8b
α sin ϕ
ed infine∞∑
n=1
[an sin (nϕ)
(n
a◦c8b
+ sin ϕ
)]=
a◦c8b
α sin ϕ (3.26)
103

3 – Fondamenti della teoria vorticale
Quest’ultima e l’equazione fondamentale della teoria della linea portante da soddisfare in tuttii punti lungo l’ala. I coefficienti a della serie di Fourier sono ottenibili risolvendo il sistema diequazioni lineari per un certo numero di punti. Per effetto della simmetria, basta consideraresolamente l’intervallo (0 , π/2), osservando che le condizioni alle estremita dell’ala non fornis-cono alcuna informazione, poiche in questi punti la circolazione e nulla per definizione.
La forza totale di portanza dell’ala e desunta dalla legge di Kutta–Zoukovsky integrando lacircolazione lungo la sua lunghezza come
L =∫ +b
−bρ V Γ dx = 4 b2ρ V 2
∫ π
◦
∞∑
n=1
an sin (nϕ) sin ϕdϕ = 2π b2ρ V 2 ·a1 (3.27)
Si osservi che nell’integrazione svaniscono i termini con n > 1, per cui il contributo alla por-tanza e determinato solamente dal coefficiente a1.
La resistenza dell’ala consiste di due parti: la resistenza della sezione in moto bidimensionaleD◦ e la resistenza indotta Di. Quest’ultima e ricavata dalla relazione
Di =∫ +b
−bρ u Γ dx =
∫ π
◦4b2ρ V 2
[ ∞∑
n=1
nan sin (nϕ)
][ ∞∑
n=1
an sin (nϕ)
]dϕ =
2π b2ρ V 2∞∑
n=1
n a2n
Si osservi che nell’integrazione il contributo dei termini misti della serie svanisce. La resistenzaindotta e determinata dalla somma dei quadrati dei coefficienti della serie di Fourier. Per unaportanza assegnata la resistenza minima si verifica, quindi, quando tutti i coefficienti sono nul-li, tranne a1 che e richiesto per la portanza. La distribuzione della circolazione, che determinaquesta condizione, e una funzione sinusoidale della variabile ϕ.
Nota la distribuzione della circolazione, si puo calcolare la velocita indotta in ogni punto delfluido. L’ala puo essere progettata a partire da questi parametri del flusso. Grazie a questicalcoli si ricava l’intensita del campo di flusso indotto, che determina non solo la variazionedell’angolo d’incidenza su ogni sezione lungo l’ala, ma anche la variazione nella curvatura delflusso incidente, come illustrato in Figura 3.12.
Figura 3.12. Curvatura del flusso incidente
Questo effetto di curvatura e irrilevante per ali leggermente caricate di grande allungamento.Per eliche con pale larghe, quali sono le eliche navali, questi effetti di curvatura non possono
104

3.6 – Proprieta delle velocita indotte
essere ignorati. Si dimostrera piu avanti che questi effetti di curvatura possono essere introdottipraticamente come correzione della curvatura delle sezioni dei profili.
In alternativa, il flusso intorno ad una sezione di pala puo essere calcolato come un flussoincurvato. Anche quando l’ala e modellata da un singolo vortice, la curvatura del primo ordinedel flusso lungo la corda puo essere calcolata a partire dalle velocita indotte del sistema divortici liberi con un’accuratezza sorprendente. Naturalmente, quando l’ala e rappresentata dauna serie di vortici concatenati lungo la sua lunghezza, gli effetti della curvatura lungo la cordapossono essere determinati con un’accuratezza ancora superiore.
3.6 Proprieta delle velocita indotte
Come e stato discusso in precedenza, a tutt’oggi lo schema della linea portante e quello ap-plicato piu diffusamente nella pratica progettuale. Secondo tale modello le pale dell’elica sonosostituite con vortici concatenati rettilinei posti simmetricamente e perpendicolarmente all’assedell’elica, o con linee portanti di intensita variabile in direzione radiale. I filamenti vorticosiliberi di intensita elementare sono considerati come linee elicoidali semi-inifinite, che formanouna superficie elicoidale di vortici liberi a valle di ogni linea portante. Per un sistema vorti-coso di forma cosı semplice, la determinazione delle velocita indotte puo risultare semplificatarispetto all’applicazione diretta del teorema di Biot-Savart, grazie all’utilizzo delle proprietadescritte qui di seguito. La trattazione relativa e svolta nel sistema di coordinate cilindricheE∗(O, x∗, r) solidale con l’elica rotante, nell’ipotesi che l’asse x∗ sia diretto lungo l’asse dell’elicanel verso della scia.
Proprieta 1
La velocita indotta dai filamenti vorticosi concatenati sistemati in maniera simmetrica e nullasui punti sistemati all’infinito dietro l’elica e sui punti della linea portante. Tale proprietapuo essere dimostrata grazie al teorema di Biot–Savart. Nella successiva derivazione della for-mula per i fattori di induzione sara utilizzato l’effetto diretto di questa proprieta, ossia per ipunti che giacciono sulla linea portante e per quelli che si trovano all’infinito dietro l’elica levelocita indotte sono prodotte solamente dall’induzione prodotta dalle superfici dei vortici liberi .
Proprieta 2
In un’elica isolata la componente tangenziale media ut della velocita indotta lungo un circolodi raggio assegnato e ovunque nulla all’esterno del cilindro semi-infinito che racchiude la sciavorticosa. mentre entro il cilindro e determinata in base alla formula
ut =Z ·Γ (r)
2πr(3.28)
che e valida per x∗ > 0 e 0 < r ≤ R.
105

3 – Fondamenti della teoria vorticale
Questa proprieta puo essere dimostrata in base alla relazione (3.1), scegliendo un contornocircolare chiuso di raggio r che ha centro sull’asse x∗ ed e perpendicolare a questo asse. Ognivolta che viene attraversata la superficie dei vortici liberi, la circolazione aumenta di Γ (r). Ladirezione positiva di attraversamento ed il valore positivo ~ut sono considerati coincidenti conla direzione di rotazione dell’elica.
Questa seconda proprieta mostra che al di fuori del cilindro considerato, ossia davanti all’elica,non esiste alcuna velocita media tangenziale, ma che essa e presente entro la scia. Questofatto e stato verificato sperimentalmente. Secondo tale proprieta la velocita media tangenzialeaumenta in modo discontinuo quando si attraversa il disco–elica, dal valore nullo ad un valoreche si conserva fino all’infinito a valle. Sul disco–elica, ossia nel piano delle linee portanti, siconsidera in prima approssimazione che la componente tangenziale media della velocita indotta,utd , e pari alla meta del salto di discontinuita, per cui si ipotizza che sia
utd =Z ·Γ (r)
4πr(3.29)
Il valore considerato della velocita tangenziale e quello ottenuto dalla media lungo un circolodi raggio equivalente, per cui generalmente tale valore non coincide con il valore utd di questacomponente nel punto considerato della linea portante. Il rapporto tra utd e utd , calcolatoper l’elica con distribuzione ottimale della circolazione secondo Prandtl, e detto correzione pernumero finito di pale o fattore di Goldstein
κ =utd
utd
(3.30)
Il termine correzione indica che al crescere del numero di pale Z il fattore di Goldstein tendeall’unita, e che per la cosiddetta elica ideale con un numero infinito di pale e uguale ad uno. Vaosservato che utd non e necessariamente il valore massimo della componente trasversale della ve-locita indotta per i punti del circolo di raggio assegnato, per cui non e sempre vero che sia κ ≤ 1.
Una conseguenza della formula (3.29) e la riduzione della circolazione Γ (r) vicino all’assedell’elica quando non esista il mozzo, ossia
Γ (r) = 0 ;dΓ
dr= 0 per r = 0 (3.31)
il che garantisce che utd tende a zero vicino all’asse dell’elica in base ad una legge lineare deltipo Ar, dove A e la costante di riduzione.
Proprieta 3
Ad ogni raggio le componenti assiale e tangenziale della velocita indotta sui punti della li-nea portante e sui punti della superficie libera vorticosa all’infinito dietro l’elica sono legaterispettivamente dalle relazioni
ux∞(r) = 2uxd(r) (3.32)
ut∞(r) = 2utd(r) (3.33)
106

3.6 – Proprieta delle velocita indotte
Queste ultime espressioni sono simili a quelle del teorema di Froude–Finsterwalder derivato informa differenziale per l’elica ideale leggermente caricata. Questa proprieta puo essere dimo-strata confrontando il campo di velocita prodotto da filamenti vorticosi elicoidali regolari liberiall’infinito con quello generato da filamenti vorticosi elicoidali regolari semi-infiniti. E possibileutilizzare le formule del metodo dei fattori di induzione nello schema lineare della scia vorticosa,quando si determinino le velocita indotte non solo sui punti della linea portante ma su tutti ipunti della superficie dei vortici liberi posti all’infinito dietro l’elica.
Proprieta 4
La componente radiale della velocita indotta e nulla per i punti della superficie dei vortici liberiall’infinito dietro l’elica. Quando questa superficie viene attraversata in direzione normale, lacomponente radiale presenta un salto il cui valore e pari alla semisomma del valore superioree di quello inferiore.
Proprieta 5
Il potenziale Φ del campo di velocita indotto dalla superficie dei vortici liberi sotto forma diun elicoide infinito lungo l’asse x∗, definito per i punti che giacciono su questa superficie, efunzione solamente del raggio quando si attraversi la superficie dall’alto verso il basso. Cio eevidente se si considera che due superfici vorticose libere ed eguali possono coincidere dopouno spostamento lungo x∗, variando il segno di una di esse e ruotandola intorno all’asse x∗.Di conseguenza, ed a causa della loro mutua compensazione, si ottiene un valore nullo delpotenziale in tutto il dominio. E ancora, la componente tangenziale della velocita indotta enulla all’infinito per i punti situati sulle superfici dei vortici liberi.
Proprieta 6.
Il vettore della velocita indotta per i punti delle superfici vorticose libere all’infinito dietrol’elica, trascurando la componente radiale sui punti della linea portante, e perpendicolare allasuperficie dei vortici liberi , ossia
ut∞ux∞
=utd
uxd= tanβw (3.34)
dove βw e l’angolo di passo della superficie libera vorticosa. Questa proprieta e conseguenzadella precedente e per i punti della linea portante anche della proprieta 3. Va osservato chenonostante il fatto che il potenziale Φ stesso abbia una discontinuita sui punti che giaccionosulla superficie dei vortici liberi, la sua derivata normale e, quindi, anche la componente normaledella velocita indotta, e continua e non presenta discontinuita.
107
3 – Fondamenti della teoria vorticale
3.7 Modelli di funzionamento dell’elica
Gli sviluppi dei metodi teorici per il calcolo delle caratteristiche idrodinamiche di un’elica na-vale, basati sui modelli matematici dell’elica, hanno progredito e continuano a progredire, grazieai continui potenziamenti dell’hardware ed all’affinamento delle tecniche numeriche. Conte-stualmente sono stati proposti diversi modelli matematici, sempre piu complessi ed accurati,per descrivere e determinare il funzionamento dell’elica.
I modelli matematici utilizzati per la previsione numerica delle prestazioni di un’elica - metodidella linea e della superficie portante, metodi a griglie di vortici, metodi a pannelli, risolutoriRANS - non sono fra loro alternativi ma complementari. I metodi della linea e della superficieportante sono fondamentalmente strumenti progettuali , in quanto il loro punto forte consistenella determinazione della geometria piu idonea a produrre le forze richieste. Gli altri metodivengono utilizzati come strumenti di analisi, specialmente per quanto riguarda il controllo dellacavitazione: consentono di prevedere la distribuzione di pressione sulle pale e possono servireanche per affinare la geometria di pala.
In generale, i modelli che descrivono il funzionamento delle eliche navali affrontano il problemainverso, ossia il progetto, basandosi sulla determinazione del flusso potenziale ed introducendosuccessivamente le correzioni per viscosita. Viceversa, nel problema diretto, che e quello relativoall’analisi delle prestazioni, la geometria dell’elica e definita: l’obiettivo primario e il calcolodel carico risultante e delle condizioni cavitative.
Il problema diretto viene formulato ipotizzando che l’elica operi in un fluido incompressibileed illimitato, e che il flusso rappresenti il campo fluido effettivo nell’interazione elica–carena.Tale campo viene definito rispetto ad un sistema di riferimento cartesiano fisso, mentre l’elica,il cui asse coincide con uno degli assi del riferimento fisso, viene definita rispetto ad un sistemadi riferimento in rotazione. Si ipotizza che l’elica abbia un certo numero di pale identiche traloro e calettate simmetricamente intorno al mozzo, e che ruoti a velocita costante. Il mozzoviene idealizzato come un corpo assial–simmetrico, oppure viene ignorato come avvenne spessoper molti dei primi modelli teorici.
La soluzione del problema idrodinamico relativo alla definizione del potenziale di velocita sullasuperficie di pala puo essere espresso, analogamente ad ogni altro problema relativo ad un fluidoincompressibile intorno ad un corpo portante, mediante un integrale di superficie che utilizzila formula di identita di Green. Nell’analisi, questa formulazione generalizzata del problemadell’elica puo essere tradotta in una distribuzione di vorticita e di sorgenti sulle pale, in combi-nazione con una distribuzione di vortici liberi nella scia dell’elica, i quali individuano gli strativorticosi emananti dalle pale. Tale distribuzione, definita in base alla geometria della superficiedi pala, rappresenta idrodinamicamente la condizione al contorno del flusso. In alcune formu-lazioni, la distribuzione di vorticita viene sostituita da una distribuzione equivalente di dipolinormali in modo tale che la circolazione dei vortici sia equivalente alla derivata dell’intensitadei dipoli. La definizione del problema diretto viene completata imponendo la condizione diKutta sul bordo di uscita, ossia definendo precisamente la posizione nello spazio degli strati
108

3.7 – Modelli di funzionamento dell’elica
vorticosi, ed introducendo, infine, le correzioni approssimate per viscosita sulla base della teoriadello strato limite.
Mentre il problema progettuale puo essere trattato, in prima istanza, per una condizione me-dia del flusso incidente, il problema dell’analisi dell’elica richiede una formulazione matematicacomplessa, la cui soluzione e stata affrontata solo in tempi relativamente recenti grazie alleaccresciute capacita computazionali ed allo sviluppo di tecniche numeriche. Tuttavia, esistonoesempi lontani di soluzioni, quale l’approccio analitico di Streseletzky, che ottenne risultati ac-curati utilizzando un esercito di assistenti tecnici armati di calcolatori manuali. Come discussoin precedenza, la soluzione del problema dell’elica e essenzialmente simile a quella di qualsiasialtro problema di flusso incompressibile intorno ad un corpo tridimensionale; in particolare,esiste una stretta correlazione tra l’ala subsonica delle aeromobili e la dinamica dell’elica navale,cosı che quest’ultima deve molti suoi sviluppi alla teoria aerodinamica. Tuttavia, nonostante lesomiglianze, esistono differenze significative, tra le quali le principali sono dovute alla naturaelicoidale del flusso dell’elica navale ed al rapporto di allungamento alquanto ridotto delle suepale.
Nel prosieguo sono descritti sommariamente i fondamenti di alcune teorie dell’elica, i cui mo-delli di azione sono riconducibili ad uno dei tre gruppi seguenti:
1. modelli che utilizzano la teoria della linea portante;
2. modelli che utilizzano la teoria della superficie portante;
3. modelli a pannelli ed altri metodi numerici.
3.7.1 Linea portante
La teoria della linea portante fornisce probabilmente il modello matematico piu semplice perdescrivere il funzionamento dell’elica, in quanto ipotizza che ogni pala sia rappresentata daun’unica linea vorticosa, la cui intensita puo variare da sezione a sezione, trascurando cosı l’es-tensione della pala lungo la direzione della corda. La linea continua in direzione radiale, sullaquale agiscono i vortici, e detta linea portante; normalmente si suppone che passi attraversoi centri aerodinamici delle sezioni, anche se spesso, soprattutto nel passato, veniva collocatasulla generatrice di pala.
Nel caso piu semplice si puo sostituire l’azione esercitata da ogni sezione di pala sul flusso dicorrente con un vortice concatenato. Nell’ipotesi che in tutte le sezioni si produca una identicaforza di portanza, la circolazione del vortice concatenato sara invariabile lungo tutta la pala.Agli apici di pala i vortici concatenati si trasformano in due vortici di estremita che hannola stessa intensita di circolazione del vortice concatenato e che si allontanano all’infinito. Siottiene cosı, per l’ala di allungamento finito, uno schema vorticoso semplice che ha la forma diun vortice seminfinito ad ‘U’ (horse–shoe vortex ) con circolazione costante lungo tutta la sualunghezza (Fig. 3.13a).
109

3 – Fondamenti della teoria vorticale
Tuttavia, e piu rispondente alla realta supporre che le diverse sezioni di pala creino una forza diportanza variabile lungo il raggio. In base al teorema di Zoukovsky, cio significa che l’intensitadi circolazione del vortice concatenato varia da una sezione all’altra, per cui e Γ = Γ (r). Indefinitiva, data una pala che presenti una variazione continua della circolazione in direzioneradiale, si forma uno strato vorticoso costituito da vortici liberi elementari. Lo schema vorticosodi pala composto da un vortice concatenato di intensita radialmente variabile e di uno stratoseminfinito di vortici liberi costituisce il vero modello di linea portante (Fig. 3.13b).
Figura 3.13. Modelli di linea portante
Poiche l’intensita dei vortici concatenati varia in direzione radiale, per soddisfare il teorema diHelmholtz i vortici liberi vengono diffusi nella corrente a valle, a forma di ferro di cavallo, daivortici concatenati lungo la linea portante con circolazione elementare
dΓf =∂Γb
∂rdr (3.35)
dove Γf e l’intensita del vortice libero e Γb e l’intensita del vortice concatenato alla posizioneradiale r.
Il concetto di linea portante e del tutto adeguato per le eliche delle aeromobili e per le pale delrotore degli elicotteri grazie al loro elevato rapporto di allungamento. Ma per le eliche navali,che hanno bassi rapporti di allungamento e, quindi, forti effetti tridimensionali sulle loro palelarghe, questo approccio, per quanto semplice, presenta imprecisioni rilevanti soprattutto nelcaso di eliche svirgolate, a meno di non introdurre le cosiddette correzioni per superficie por-tante.
Tale modello matematico dell’elica viene correntemente applicato nel progetto preliminare dieliche subcavitanti leggermente caricate. E in grado di tenere conto sia delle perdite rotazionaliche di quelle viscose, utilizzando per queste ultime formule empiriche di correzione. Nelle elichemoderatamente caricate l’entita delle velocita indotte risultano non trascurabili rispetto allavelocita del flusso indisturbato, per cui e necessario introdurre alcune approssimazioni per ri-solvere il problema della combinazione del vettore del flusso indisturbato con la velocita indottadallo stesso sistema di vortici che si distaccano.
Betz (1929) aveva ricavato che per un’elica di rendimento ottimale gli strati di vortici liberiformano vere superfici elicoidali, tutte di passo costante, per le quali la risultante delle velo-cita indotte e sempre normale al vettore della velocita risultante. Tutte le teorie sviluppatesuccessivamente utilizzano queste ipotesi per il calcolo delle velocita indotte anche quando ladistribuzione radiale del carico non sia quella ottimale (Eckhardt & Morgan, 1955). Viceversa,
110

3.7 – Modelli di funzionamento dell’elica
nel suo metodo di calcolo Lerbs (1952) aveva ipotizzato piu semplicemente che gli strati dei vor-tici liberi fossero composti da linee vorticali cilindriche ciascuna con angolo di passo costante,consentendo quindi di considerare flussi variabili radialmente e distribuzione di circolazionenon ottimali. In questo modo, il metodo dei fattori di induzione, da lui introdotto, consente dicalcolare direttamente le velocita indotte assiali e tangenziali, e di tenere conto dell’effetto delmozzo.
3.7.2 Superficie portante
Il semplice schema della linea portante consente di determinare l’inclinazione del flusso sulvortice concatenato nel punto in cui la portanza agisce sulla sezione. Ma poiche le velocitaindotte e quindi l’inclinazione del flusso variano lungo la corda di una sezione, il flusso tra lepale, oltre che inclinato, risulta essere anche incurvato. Ne consegue che, per determinare lecaratteristiche idrodinamiche di un’elica, non e sufficiente considerare la sola inclinazione sulpunto di calcolo della portanza, ma anche la curvatura del flusso a valle dell’elica. Questacondizione impone che la pala sia sostituita da strati di vortici concatenati.
Ne e derivata una rappresentazione piu adeguata del funzionamento idrodinamico della pala,descritta mediante il modello della superficie portante, nel quale, in prima istanza, si ipotizzache le pale dell’elica siano molto sottili. Questo metodo venne sviluppato per applicare la teoriavorticale alle eliche pesantemente caricate e con pale molto larghe, allo scopo di minimizzarei problemi di cavitazione e di vibrazioni tipici dei propulsori che assorbono potenze elevatee di quelli che operano a bassi indici di cavitazione. Anziche modellare la sezione portantecon un singolo vortice concatenato, come nel caso della linea portante, ogni profilo alare vienesostituito da uno strato vorticoso concatenato, mediante il quale si possono derivare le suecaratteristiche di portanza in maniera analoga a quanto illustrato nella teoria dei profili alarisottili. La distribuzione di circolazione sulla superficie portante e arbitraria sia in direzioneradiale che lungo le corde delle singole sezioni di pala. L’intensita dei vortici viene determinatarisolvendo l’equazione integrale di Fredholm del primo tipo, imponendo sia la condizione cine-matica che quella dinamica sulla superficie di pala, nonche la condizione di Kutta sul bordo diuscita delle singole sezioni.
La teoria della superficie portante linearizzata fu applicata inizialmente alle pale ‘quasi pia-ne’ con piccola curvatura, investite da un flusso uniforme con piccoli angoli d’incidenza (Pien,1961; Tsakonas et al., 1973). Successivamente la teoria della superficie portante fu estesa pertenere conto sia dello ‘skew’ e del ‘rake’, sia del flusso stazionario non–uniforme ad un angolod’incidenza arbitrario (Greely & Kerwin, 1982). Nelle modellazioni piu recenti, la distribuzionedi vorticita viene collocata intorno al contorno del profilo alare per tenere conto degli effettidello spessore della sezione.
E stato dimostrato che l’azione di un profilo alare sottile in flusso uniforme puo essere model-lata mediante uno strato vorticoso di vortici concatenati, disposti lungo la sua linea medianacon gli assi diretti lungo la direzione radiale di pala. Nel caso di una pala di allungamento
111
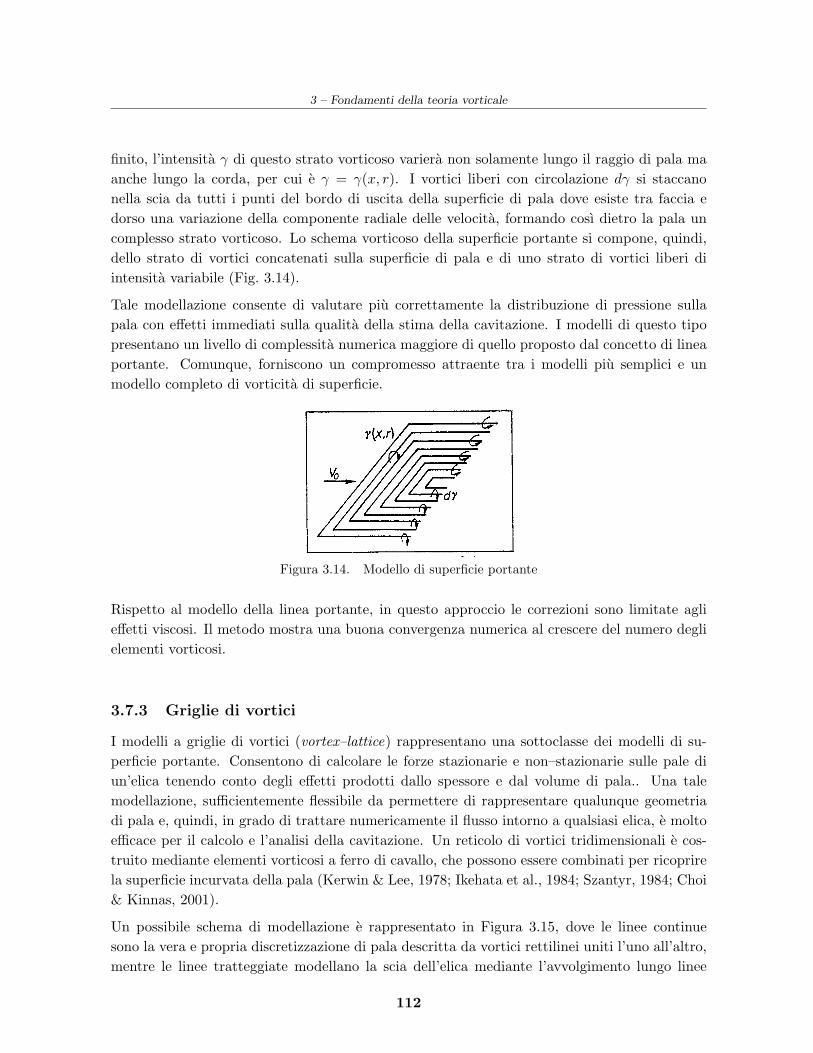
3 – Fondamenti della teoria vorticale
finito, l’intensita γ di questo strato vorticoso variera non solamente lungo il raggio di pala maanche lungo la corda, per cui e γ = γ(x, r). I vortici liberi con circolazione dγ si staccanonella scia da tutti i punti del bordo di uscita della superficie di pala dove esiste tra faccia edorso una variazione della componente radiale delle velocita, formando cosı dietro la pala uncomplesso strato vorticoso. Lo schema vorticoso della superficie portante si compone, quindi,dello strato di vortici concatenati sulla superficie di pala e di uno strato di vortici liberi diintensita variabile (Fig. 3.14).
Tale modellazione consente di valutare piu correttamente la distribuzione di pressione sullapala con effetti immediati sulla qualita della stima della cavitazione. I modelli di questo tipopresentano un livello di complessita numerica maggiore di quello proposto dal concetto di lineaportante. Comunque, forniscono un compromesso attraente tra i modelli piu semplici e unmodello completo di vorticita di superficie.
Figura 3.14. Modello di superficie portante
Rispetto al modello della linea portante, in questo approccio le correzioni sono limitate aglieffetti viscosi. Il metodo mostra una buona convergenza numerica al crescere del numero deglielementi vorticosi.
3.7.3 Griglie di vortici
I modelli a griglie di vortici (vortex–lattice) rappresentano una sottoclasse dei modelli di su-perficie portante. Consentono di calcolare le forze stazionarie e non–stazionarie sulle pale diun’elica tenendo conto degli effetti prodotti dallo spessore e dal volume di pala.. Una talemodellazione, sufficientemente flessibile da permettere di rappresentare qualunque geometriadi pala e, quindi, in grado di trattare numericamente il flusso intorno a qualsiasi elica, e moltoefficace per il calcolo e l’analisi della cavitazione. Un reticolo di vortici tridimensionali e cos-truito mediante elementi vorticosi a ferro di cavallo, che possono essere combinati per ricoprirela superficie incurvata della pala (Kerwin & Lee, 1978; Ikehata et al., 1984; Szantyr, 1984; Choi& Kinnas, 2001).
Un possibile schema di modellazione e rappresentato in Figura 3.15, dove le linee continuesono la vera e propria discretizzazione di pala descritta da vortici rettilinei uniti l’uno all’altro,mentre le linee tratteggiate modellano la scia dell’elica mediante l’avvolgimento lungo linee
112
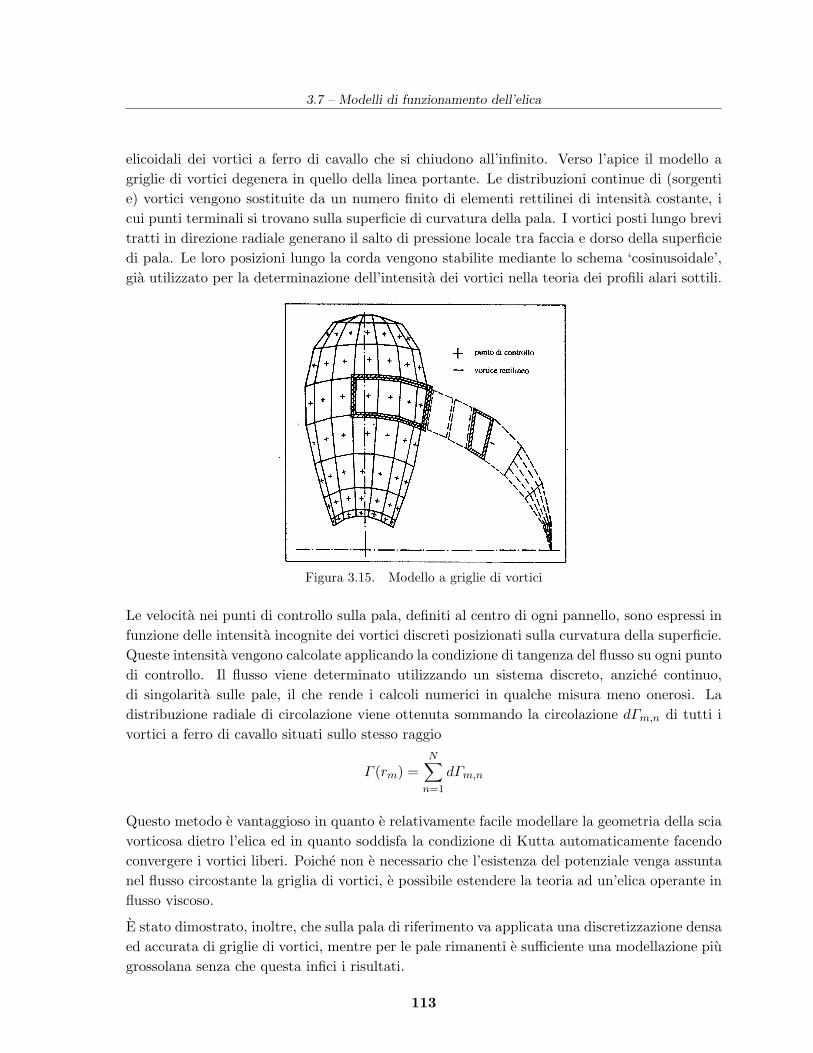
3.7 – Modelli di funzionamento dell’elica
elicoidali dei vortici a ferro di cavallo che si chiudono all’infinito. Verso l’apice il modello agriglie di vortici degenera in quello della linea portante. Le distribuzioni continue di (sorgentie) vortici vengono sostituite da un numero finito di elementi rettilinei di intensita costante, icui punti terminali si trovano sulla superficie di curvatura della pala. I vortici posti lungo brevitratti in direzione radiale generano il salto di pressione locale tra faccia e dorso della superficiedi pala. Le loro posizioni lungo la corda vengono stabilite mediante lo schema ‘cosinusoidale’,gia utilizzato per la determinazione dell’intensita dei vortici nella teoria dei profili alari sottili.
Figura 3.15. Modello a griglie di vortici
Le velocita nei punti di controllo sulla pala, definiti al centro di ogni pannello, sono espressi infunzione delle intensita incognite dei vortici discreti posizionati sulla curvatura della superficie.Queste intensita vengono calcolate applicando la condizione di tangenza del flusso su ogni puntodi controllo. Il flusso viene determinato utilizzando un sistema discreto, anziche continuo,di singolarita sulle pale, il che rende i calcoli numerici in qualche misura meno onerosi. Ladistribuzione radiale di circolazione viene ottenuta sommando la circolazione dΓm,n di tutti ivortici a ferro di cavallo situati sullo stesso raggio
Γ (rm) =N∑
n=1
dΓm,n
Questo metodo e vantaggioso in quanto e relativamente facile modellare la geometria della sciavorticosa dietro l’elica ed in quanto soddisfa la condizione di Kutta automaticamente facendoconvergere i vortici liberi. Poiche non e necessario che l’esistenza del potenziale venga assuntanel flusso circostante la griglia di vortici, e possibile estendere la teoria ad un’elica operante influsso viscoso.
E stato dimostrato, inoltre, che sulla pala di riferimento va applicata una discretizzazione densaed accurata di griglie di vortici, mentre per le pale rimanenti e sufficiente una modellazione piugrossolana senza che questa infici i risultati.
113

3 – Fondamenti della teoria vorticale
3.7.4 Metodi a pannelli
La teoria della superficie portante e le sue varianti, quale e il metodo delle griglie di vortici,costituiscono attualmente gli approcci piu utilizzati per l’analisi delle eliche navali. Tuttavia,queste teorie sono adeguate solamente per una pala sottile, ossia per una superficie sempli-cemente incurvata, ma richiedono approssimazioni complicate per tenere conto correttamentedell’effetto di uno spessore non trascurabile.
Per superare questa limitazione e per giungere al concetto di vorticita completa di superficiesono stati sviluppati metodi a pannelli, miranti a fornire uno strumento di soluzione sia alprogetto dell’elica che all’analisi delle sue prestazioni. Il problema principale da risolvere el’adozione di un adeguato schema di discretizzazione della distribuzione del potenziale sullasuperficie di pala e nella scia a valle (Kerwin et al., 1987).
Va precisato che rispetto ai metodi della superficie portante, i metodi a pannelli riducono glierrori e le inaccuratezze in prossimita del bordo di ingresso e del mozzo. Hanno avuto originenell’industria aerospaziale e sono stati introdotti per la prima volta nell’analisi idrodinamicadelle eliche operanti in flusso stazionario da Hoshino (1989), che ha modellato le pale ed ilmozzo con un numero limitato di pannelli quadrilateri aventi distribuzionim costanti di sorgentie vortici, nonche lo strato vorticoso nella scia dell’elica con pannelli simili aventi distribuzionicostanti di doppiette (Fig. 3.16).
Figura 3.16. Sketch di una discretizzazione a pannelli
In questi metodi la superficie di pala viene discretizzata mediante un numero finito di pannellivorticosi , distribuiti sia sulla faccia che sul dorso, sui quali vengono distribuite le singolaritaidrodinamiche e sui quali viene applicata la condizione al contorno cinematica (Fig. 3.17). Suogni pannello la densita di circolazione varia linearmente tra le sue due estremita. Sul bordo diuscita viene imposta la condizione di Kutta, che risulta essere generalmente stabile tranne chesui profili alari con bordi di uscita a cuspide e/o quando si discretizzi con un eccessivo numerodi pannelli.
I punti di calcolo ed i punti di controllo sono collocati sulla superficie del profilo. Sui punti dicontrollo, posti a meta lunghezza del pannello, viene imposta la condizione di impermeabilita.
114

3.7 – Modelli di funzionamento dell’elica
Utilizzando questo approccio, per un sistema di m pannelli vorticosi, il potenziale di velocitasull’imo punto di controllo (xi,yi) e dato da
φ(xi,yi) = V◦(xi cosα + yi sinα)−m∑
j=1
∫γ(sj)2π
tan−1
(yi − yj
xi − xj
)dsj
dove l’intensita vorticosa alla posizione sj del generico pannello di lunghezza Sj viene ricavatocome
γ(sj) = γj + (γj+1 − γj)sj
Sj
Il numero di pannelli utilizzati per la modellazione dipende dal rapporto di spessore, e va sceltocon l’obiettivo di stabilizzare la soluzione numerica.
Figura 3.17. Modello a pannelli
Utilizzando i metodi a pannelli, le previsioni delle prestazioni delle eliche sono generalmente inbuon accordo con i risultati sperimentali, in quanto la distribuzione di pressione viene deter-minata alquanto correttamente. In maniera simile ai metodi classici bidimensionali, i metodia pannelli vorticosi possono essere estesi a problemi tridimensionali, sebbene siano molto piuonerosi dal punto di vista computazionale.
3.7.5 Metodi RANS
Negli anni ’80 si ebbe uno sviluppo notevole nell’applicazione di risolutori delle cosiddetteequazioni di Reynolds Averaged Navier Stokes (RANS) per il calcolo del campo di flusso vis-coso e turbolento intorno ai propulsori navali. Furono introdotti metodi basati su tecniche alledifferenze finite per la risoluzione delle equazioni RANS per flussi incompressibili e stazionari(Tzabiras et al., 1986). Lo stesso approccio fu utilizzato per calcolare il flusso assialsimmetricointorno ad eliche libere ed intubate, da combinare con la parte fluttuante del flusso ottenutocon un metodo basato su griglie di vortici (Kerwin et al., 1987).
L’applicazione di metodi RANS riguarda la determinazione della spinta e del momento tor-cente dell’elica, nonche del flusso tridimensionale intorno al propulsore. Il completamento delsistema di equazioni risultanti viene ottenuto introducendo adeguati modelli di turbolenza chelegano le velocita fluttuanti del fluido con le velocita medie nel tempo. Esistono tuttavia pa-recchi problemi non risolti, dipendenti fondamentalmente dai modelli di turbolenza utilizzabili
115
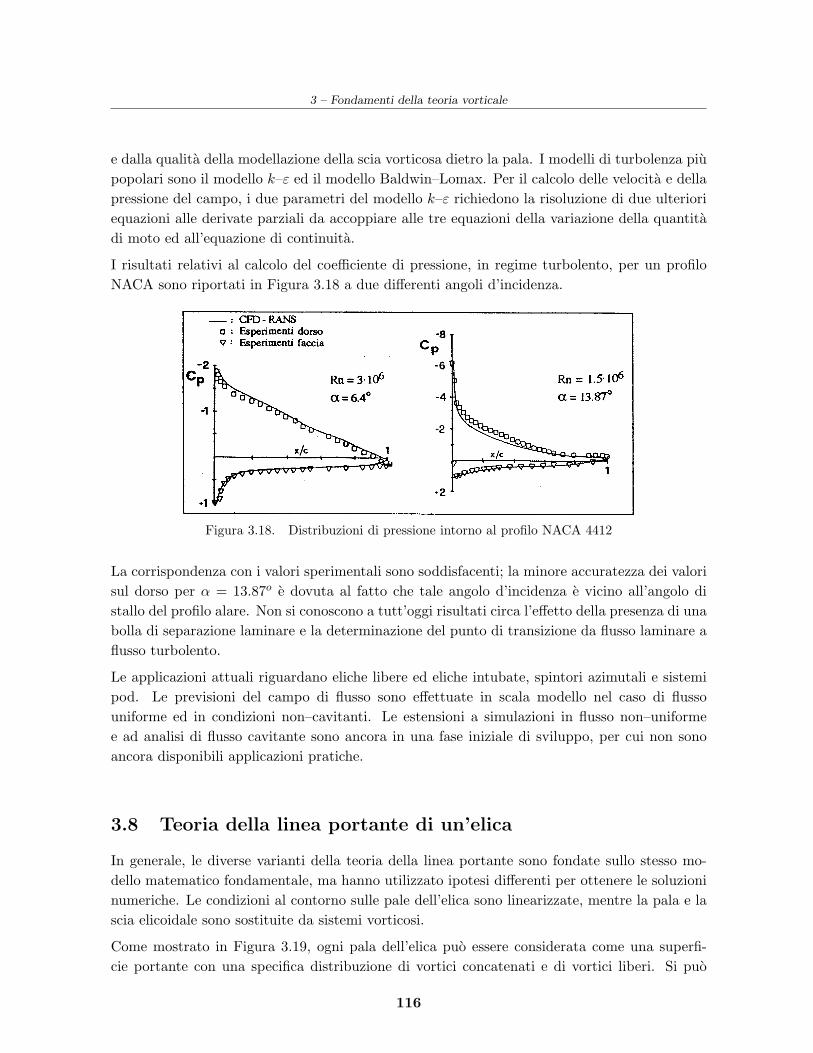
3 – Fondamenti della teoria vorticale
e dalla qualita della modellazione della scia vorticosa dietro la pala. I modelli di turbolenza piupopolari sono il modello k–ε ed il modello Baldwin–Lomax. Per il calcolo delle velocita e dellapressione del campo, i due parametri del modello k–ε richiedono la risoluzione di due ulterioriequazioni alle derivate parziali da accoppiare alle tre equazioni della variazione della quantitadi moto ed all’equazione di continuita.
I risultati relativi al calcolo del coefficiente di pressione, in regime turbolento, per un profiloNACA sono riportati in Figura 3.18 a due differenti angoli d’incidenza.
Figura 3.18. Distribuzioni di pressione intorno al profilo NACA 4412
La corrispondenza con i valori sperimentali sono soddisfacenti; la minore accuratezza dei valorisul dorso per α = 13.87o e dovuta al fatto che tale angolo d’incidenza e vicino all’angolo distallo del profilo alare. Non si conoscono a tutt’oggi risultati circa l’effetto della presenza di unabolla di separazione laminare e la determinazione del punto di transizione da flusso laminare aflusso turbolento.
Le applicazioni attuali riguardano eliche libere ed eliche intubate, spintori azimutali e sistemipod. Le previsioni del campo di flusso sono effettuate in scala modello nel caso di flussouniforme ed in condizioni non–cavitanti. Le estensioni a simulazioni in flusso non–uniformee ad analisi di flusso cavitante sono ancora in una fase iniziale di sviluppo, per cui non sonoancora disponibili applicazioni pratiche.
3.8 Teoria della linea portante di un’elica
In generale, le diverse varianti della teoria della linea portante sono fondate sullo stesso mo-dello matematico fondamentale, ma hanno utilizzato ipotesi differenti per ottenere le soluzioninumeriche. Le condizioni al contorno sulle pale dell’elica sono linearizzate, mentre la pala e lascia elicoidale sono sostituite da sistemi vorticosi.
Come mostrato in Figura 3.19, ogni pala dell’elica puo essere considerata come una superfi-cie portante con una specifica distribuzione di vortici concatenati e di vortici liberi. Si puo
116
3.8 – Teoria della linea portante di un’elica
esaminare, quindi, il caso limite nel quale la corda si estingue, rappresentato sul lato destrodella figura. Come nel caso di un’ala piana, lo strato di vortici concatenati si riduce ad unsingolo vortice concatenati di circolazione Γ (r) su ogni pala. Poiche tutte le pale hanno lastessa distribuzione di circolazione in un flusso circonferenzialmente uniforme, si puo scegliereuna pala, o una linea portante, come pala di riferimento (‘key blade’).
La vasta applicazione della teoria della linea portante e legata alla sua semplicita ed allaprecisione sufficientemente alta, ottenibile se si utilizzano opportune correzioni che tenganoconto della viscosita del fluido e della geometria delle sezioni di pala.
Figura 3.19. Illustrazione del concetto di linea portante
Nella teoria della linea portante si introducono tre gruppi di ipotesi: due di carattere generaleed uno concernente i vortici liberi e quelli concatenati. Le ipotesi generali sono state illustratein precedenza. Va sottolineato solamente che il moto del fluido viene considerato stazionarionel sistema di coordinate cilindriche E∗ solidale all’elica.
Per quanto riguarda i vortici concatenati, si suppone che ogni pala sia modellata medianteuna sezione rettilinea del nucleo vorticoso posta in direzione radiale, detta linea portante, diintensita Γ (r) variabile lungo il raggio. L’equazione della kma linea portante per un’elica di Z
pale nel sistema di coordinate cilindriche ha la forma
x∗ = 0 ; rh ≤ r ≤ R ; θk = 2πk/Z (k = 0, 1, . . . , Z − 1) (3.36)
dove rh ed R sono rispettivamente i raggi del mozzo e dell’elica, k e il numero della lineaportante e della pala corrispondente, mentre θk e la coordinata angolare corrispondente ad unpunto della kma pala.
Ad ogni raggio l’intensita del nucleo vorticoso concatenato dovrebbe essere uguale alla cir-colazione della velocita che si manifesta intorno alla sezione di pala, modellata dall’elementodel nucleo vorticoso considerato. Circa l’intensita Γ (r), si ipotizza che essa sia una funzionesufficientemente avviata del raggio, tendendo a zero verso l’apice, ossia Γ (R) = 0.
117

3 – Fondamenti della teoria vorticale
Per quanto riguarda i vortici liberi, si suppone quanto segue. Innanzi tutto, poiche un vorticelibero non e soggetto ad alcuna forza, la sua direzione coincide, in base ad una legge fonda-mentale della teoria di un’ala, con quella del moto risultante relativo al sistema portante, percui, nel caso di un’elica, una linea vorticosa libera ha generalmente forma elicoidale. Si ipo-tizza, quindi che tutti i filamenti vorticosi liberi che si staccano dalla linea portante forminouna superficie vorticosa seminfinita (superficie dei vortici liberi) con una densita superficiale~γ dei vortici. Si suppone pure che tra i vortici liberi non esistano nuclei vorticosi di intensitafinita, e che, qualora esistano, ne esista uno solo, di intensita Γ (rh) per ogni pala giacente sullasuperficie del mozzo cilindrico seminfinito.
In secondo luogo, si suppone che ogni filamento vorticoso elementare libero, che puo essereestratto dalla superficie suddetta, abbia la forma di un elicoide regolare seminfinito di passocostante lungo l’asse e che giaccia completamente sulla superficie di un cilindro di raggio co-stante. Nel sistema E∗ di coordinate cilindriche, l’equazione di tale elicoide per un filamentovorticoso che inizi in un punto di coordinate x∗ = 0, r = r◦, θ = 0 della linea portante zero, hala forma
x∗ = −h θ◦2π
; r = r◦ ; 0 ≤ θ ≤ ∞ (3.37)
dove h e il passo dell’elicoide.
L’ipotesi suddetta equivale a dire che sui punti della superficie vorticosa il vettore ~γ e direttolungo gli elicoidi tangenti mantenendovi costante il modulo. Entro questo schema, il flussodell’elica e concepito come ‘indotto’ dalle linee portanti e dagli strati di vortici liberi, la cuiinduzione e determinabile mediante la legge di Biot–Savart oppure, piu generalmente, mediantel’equazione di Laplace. Pertanto il calcolo dell’intensita e della direzione del flusso sulla lineaportante non puo essere immediato poiche e necessario combinare il vettore del flusso indistur-bato con la velocita indotta dallo stesso sistema di vortici che si distaccano.
In terzo luogo, per tenere conto del campo di velocita non-uniforme presente a poppavia dellacarena, si introduce un campo di velocita esterno, ossia il campo di velocita della scia ~Vw
prodotta dalla carena e dalle sue appendici. Tenendo conto del campo di velocita di scia, laformula (3.14) diviene
~u + ~Vw = ~VE + ~VR (3.38)
~VE = −V ~ix + ωr~it (3.39)
dove le componenti del vettore velocita di scia sono Vwx = V ·wx, Vwt = V ·wt, mentre ~ix e ~itsono i versori nel punto considerato del sistema E∗ di coordinate cilindriche.
Nell’ipotesi di assenza della componente radiale della velocita indotta, la Figura 3.20 mostrail diagramma delle velocita, che rappresenta geometricamente le relazioni (3.38) e (3.39), eche fotografa la situazione del flusso al raggio r per la linea portante. Per semplicita, d’orain avanti non viene piu utilizzato il segno di asterisco per l’asse x∗, mentre il pedice d conti-nua a significare che il punto di controllo sulla linea portante e situato nel piano del disco–elica.
118

3.8 – Teoria della linea portante di un’elica
A questo punto, per rimuovere la possibile contraddizione tra quanto detto circa il presuntoregime stazionario ed il potenziale all’esterno del sistema vorticoso, si introducono i concettidi flusso quasi–stazionario e di flusso quasi–potenziale. Quest’ultimo concetto consente l’ap-plicazione di relazioni valide per un flusso potenziale al di fuori del sistema vorticoso. Cio evalido per un flusso di bassa vorticita a causa dell’irregolarita del campo di velocita Vw. Se siconsidera il problema inverso (progetto dell’elica), la scia viene mediata circonferenzialmente,giacche in questo caso e impossibile considerare la disomogeneita circonferenziale.
In quarto luogo, viene assunto radialmente costante il passo dei filamenti vorticosi liberi semi–infiniti che, in base alle relazioni (3.32), sono elicoidi regolari; tale passo e pari a
hw
2R= πλw (3.40)
dove λw e il valore assegnato, indipendente dal raggio, del passo della scia vorticosa elicoidale,ossia il passo dei vortici liberi .
Figura 3.20. Diagramma vettoriale delle velocita
Questa ipotesi corrisponde allo schema lineare generalizzato per il quale, in generale, non esoddisfatta la condizione formulata in precedenza (Teorema l) circa la disposizione dei vorticiliberi lungo le linee di corrente del moto relativo. Comunque, nel caso di carico idrodinamicoleggero, quando le velocita indotte e le velocita di scia sono piccole rispetto a |~VE | ed il valoredel rapporto (λtv − λw)/λtv e piccolo rispetto all’unita, il Teorema 1 e soddisfatto in primaapprossimazione. Infatti, in questo caso e possibile trascurare nella relazione (3.38) ~u e ~Vw
ottenendo ~VR = ~VE ; ossia, in prima approssimazione, i vortici liberi devono coincidere o, peressere piu precisi, essere vicini alla traiettoria del moto dei punti della linea portante. Ma cioe vero solamente se λw coincide o e pressoche identico a λtv, dove λtv e il coefficiente d’avanzoridotto dipendente dalla velocita nave
λtv =V
ωR=
Jv
π(3.41)
Nel caso di carico moderato, per un’elica ottimale nel senso di Prandtl, viene assunta l’identita
λw = λi (3.42)
119

3 – Fondamenti della teoria vorticale
dove λi e il coefficiente d’avanzo induttivo che per un’elica ottimale nel senso di Prandtl ecostante in direzione radiale.
In tal modo, quando si voglia determinare λw sono possibili i tre casi
λw =
λtv
λ◦wλi
(3.43)
dove λtv e derivabile mediante la formula (3.41), mentre λ◦w e λi sono assegnati a priori.
Indipendentemente dallo schema assunto per la scia vorticosa, nel calcolo delle caratteristicheidrodinamiche dell’elica, e sufficiente conoscere la distribuzione della forza portante elementaredL/dr lungo la linea portante e l’angolo di passo idrodinamico βi. Le equazioni che leganoqueste due funzioni rappresentano il sistema di equazioni della teoria della linea portante.
In forma vettoriale, questo sistema include quattro equazioni desumibili da:
1. Teorema di Zoukovsky [equazione (3.18)], applicato al vortice concatenato, ossia ai puntidella linea portante: in base a questo teorema, dopo avere effettuato il prodotto vettoriale,produce la formula della portanza elementare
dL = ρ VR Γ dr (3.44)
2. Teorema di Biot–Savart [equazione (3.7)], dove il dominio di integrazione e l’intera su-perficie dei vortici liberi. Il punto di controllo sul quale sono determinate le velocitaindotte, si trova sulla linea portante; si suppone che le velocita indotte dal sistema divortici concatenati siano nulle (Proprieta 1).
3. Teorema II [equazione (3.20)], che nel caso considerato1 fornisce il legame tra l’intensitadel vortice concatenato Γ (r◦) in un punto di raggio r◦, e l’intensita γd dr del filamentovorticoso libero elementare e seminfinito, che inizia in quel punto. Di fatto, questo eun legame tra la circolazione intorno ad un contorno chiuso arbitrario che attraversa lasuperficie dei vortici liberi solamente in un punto al raggio r e la densita superficiale delfilamento vorticoso libero che si stacca al raggio r◦; lo si esprime come
γ` (r◦) = −∂Γ
∂τ= − dΓ
dr◦(3.45)
Se si considera dΓ/dr◦ una funzione continua e si integra la formula (3.45) lungo il raggioentro i limiti della linea portante, si puo ricavare
∫ R
rh
dΓ
dr◦dr◦ = Γ (R)− Γ (rh) = −Γ (rh) (3.46)
essendo Γ (R) = 0.
1Grazie alle ipotesi adottate, la direzione del vettore ~ coincide con quella del vettore ~VE , mentre il versoreτ coincide con il versore ~iR
120
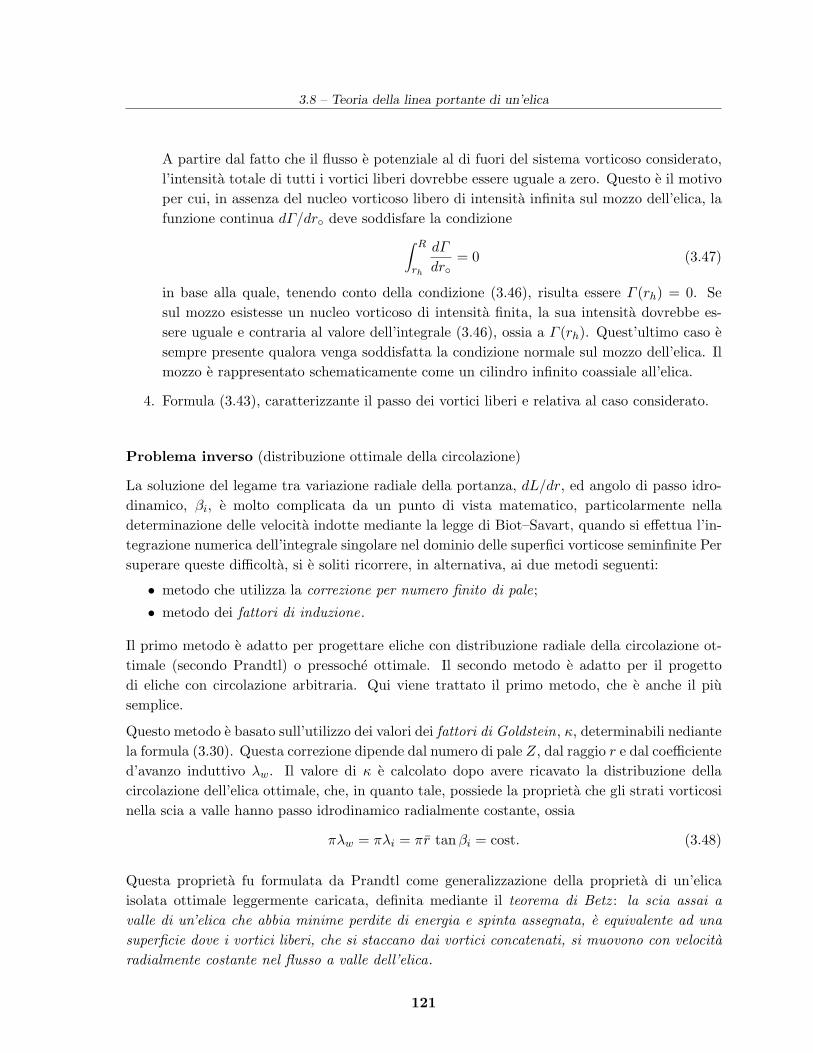
3.8 – Teoria della linea portante di un’elica
A partire dal fatto che il flusso e potenziale al di fuori del sistema vorticoso considerato,l’intensita totale di tutti i vortici liberi dovrebbe essere uguale a zero. Questo e il motivoper cui, in assenza del nucleo vorticoso libero di intensita infinita sul mozzo dell’elica, lafunzione continua dΓ/dr◦ deve soddisfare la condizione
∫ R
rh
dΓ
dr◦= 0 (3.47)
in base alla quale, tenendo conto della condizione (3.46), risulta essere Γ (rh) = 0. Sesul mozzo esistesse un nucleo vorticoso di intensita finita, la sua intensita dovrebbe es-sere uguale e contraria al valore dell’integrale (3.46), ossia a Γ (rh). Quest’ultimo caso esempre presente qualora venga soddisfatta la condizione normale sul mozzo dell’elica. Ilmozzo e rappresentato schematicamente come un cilindro infinito coassiale all’elica.
4. Formula (3.43), caratterizzante il passo dei vortici liberi e relativa al caso considerato.
Problema inverso (distribuzione ottimale della circolazione)
La soluzione del legame tra variazione radiale della portanza, dL/dr, ed angolo di passo idro-dinamico, βi, e molto complicata da un punto di vista matematico, particolarmente nelladeterminazione delle velocita indotte mediante la legge di Biot–Savart, quando si effettua l’in-tegrazione numerica dell’integrale singolare nel dominio delle superfici vorticose seminfinite Persuperare queste difficolta, si e soliti ricorrere, in alternativa, ai due metodi seguenti:
• metodo che utilizza la correzione per numero finito di pale;
• metodo dei fattori di induzione.
Il primo metodo e adatto per progettare eliche con distribuzione radiale della circolazione ot-timale (secondo Prandtl) o pressoche ottimale. Il secondo metodo e adatto per il progettodi eliche con circolazione arbitraria. Qui viene trattato il primo metodo, che e anche il piusemplice.
Questo metodo e basato sull’utilizzo dei valori dei fattori di Goldstein, κ, determinabili nediantela formula (3.30). Questa correzione dipende dal numero di pale Z, dal raggio r e dal coefficiented’avanzo induttivo λw. Il valore di κ e calcolato dopo avere ricavato la distribuzione dellacircolazione dell’elica ottimale, che, in quanto tale, possiede la proprieta che gli strati vorticosinella scia a valle hanno passo idrodinamico radialmente costante, ossia
πλw = πλi = πr tanβi = cost. (3.48)
Questa proprieta fu formulata da Prandtl come generalizzazione della proprieta di un’elicaisolata ottimale leggermente caricata, definita mediante il teorema di Betz : la scia assai avalle di un’elica che abbia minime perdite di energia e spinta assegnata, e equivalente ad unasuperficie dove i vortici liberi, che si staccano dai vortici concatenati, si muovono con velocitaradialmente costante nel flusso a valle dell’elica.
121
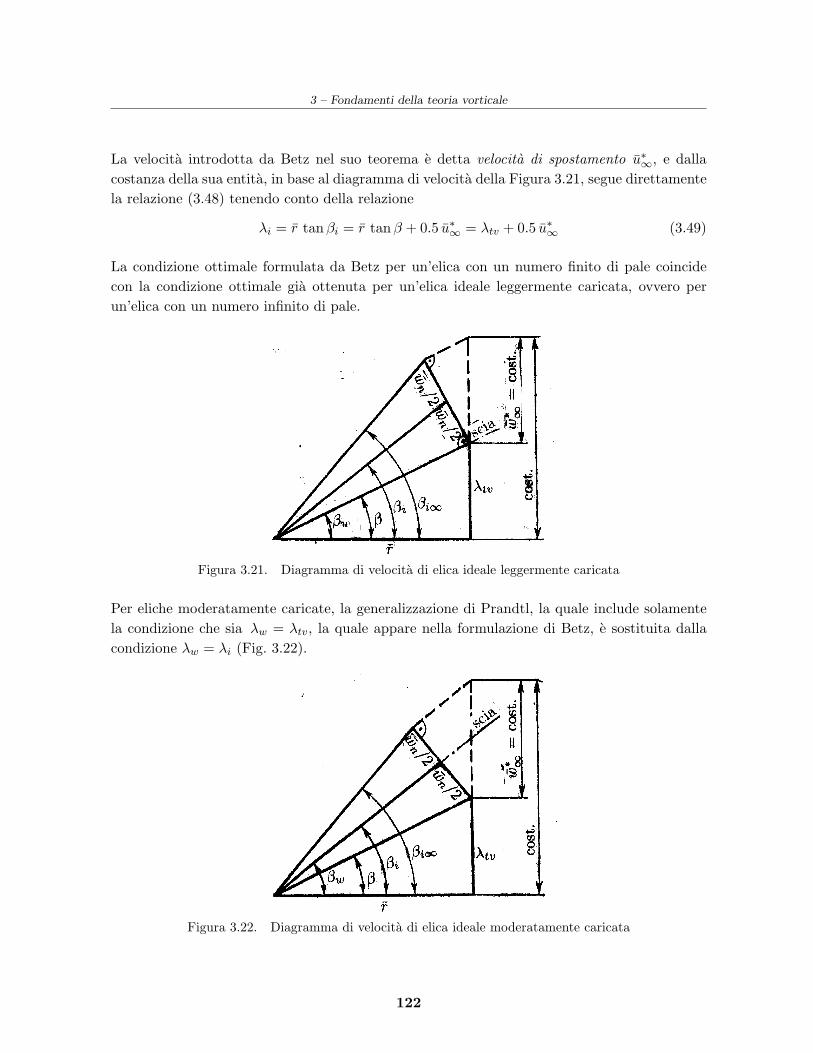
3 – Fondamenti della teoria vorticale
La velocita introdotta da Betz nel suo teorema e detta velocita di spostamento u∗∞, e dallacostanza della sua entita, in base al diagramma di velocita della Figura 3.21, segue direttamentela relazione (3.48) tenendo conto della relazione
λi = r tanβi = r tanβ + 0.5 u∗∞ = λtv + 0.5 u∗∞ (3.49)
La condizione ottimale formulata da Betz per un’elica con un numero finito di pale coincidecon la condizione ottimale gia ottenuta per un’elica ideale leggermente caricata, ovvero perun’elica con un numero infinito di pale.
Figura 3.21. Diagramma di velocita di elica ideale leggermente caricata
Per eliche moderatamente caricate, la generalizzazione di Prandtl, la quale include solamentela condizione che sia λw = λtv, la quale appare nella formulazione di Betz, e sostituita dallacondizione λw = λi (Fig. 3.22).
Figura 3.22. Diagramma di velocita di elica ideale moderatamente caricata
122

3.8 – Teoria della linea portante di un’elica
Per determinare i valori κ delle correzioni di Golstein per numero finito di pale, si deve risol-vere il problema del flusso potenziale intorno alle superfici regolari elicoidali che si muovono dimoto traslatorio con velocita u∗∞. Fin dal 1919 Prandtl propose un metodo appropriato perla determinazione di queste correzioni. Successivamente Goldstein (1929) sviluppo i fattori dicorrezione, calcolati assumendo un flusso omogeneo ed imponendo la condizione di Betz per laminima perdite di energia (Tachmindj e Milan, 1957).
Dopo avere effettuato una serie di calcoli comparativi tra il metodo che utilizza i fattori di cor-rezione di Goldstein ed il metodo dei fattori di induzione di Lerbs, Eckhardt e Morgan (1955)giunsero alla conclusione che il metodo approssimato che utilizza i fattori di Goldstein per ilprogetto pratico di un’elica porta a risultati sufficientemente accurati. La grande quantita dicalcoli necessari nel progetto di un’elica con l’ausilio dei fattori di induzione fu il motivo percui i progettisti continuarono per lungo tempo a preferire il metodo approssimato.
Una volta ottenuti i valori dei fattori di Goldstein, introducendoli nelle formule (3.29) e (3.30),non e difficile derivare un legame tra la circolazione Γ (r) intorno ad una sezione di pala adun certo raggio ed il valore della componente tangenziale della velocita indotta nel puntocorrispondente della linea portante: si puo ottenere la re1azione
Γ (r) =4πrκutd
Z(3.50)
dove la correzione κ per numero finito di pale e considerata una funzione nota
κ = κ (Z, r, λw) (3.51)
Come dimostra la usuale pratica progettuale, questa relazione e del tutto corretta per un’elicanavale ottimale nel senso di Prandtl, ma mantiene una precisione accettabile anche in certi casidi importanza pratica, sebbene l’accuratezza diminuisca man mano che le proprieta dell’elicain progetto si allontanano da quelle dell’elica ottimale.
Se si utilizzano la relazione (3.50) e la condizione di ortogonalita (3.34) per le componentiassiale e tangenziale della velocita indotta si ricavano le formule
utd =Z ·Γ4πrκ
(3.52)
uxd =Z ·Γ
4πrκ tanβw(3.53)
che dipende dal numero di pale, dal raggio adimensionale e dal passo della scia vorticosa eli-coidale.
Combinando le relazioni (3.44), (3.51), (3.52), insieme alle tre relazioni puramente geometricheche introducono gli angoli β e βi, dalla Figura 3.23 e possibile ottenere con il metodo consideratoil seguente sistema di equazioni per la teoria della linea portante:
123
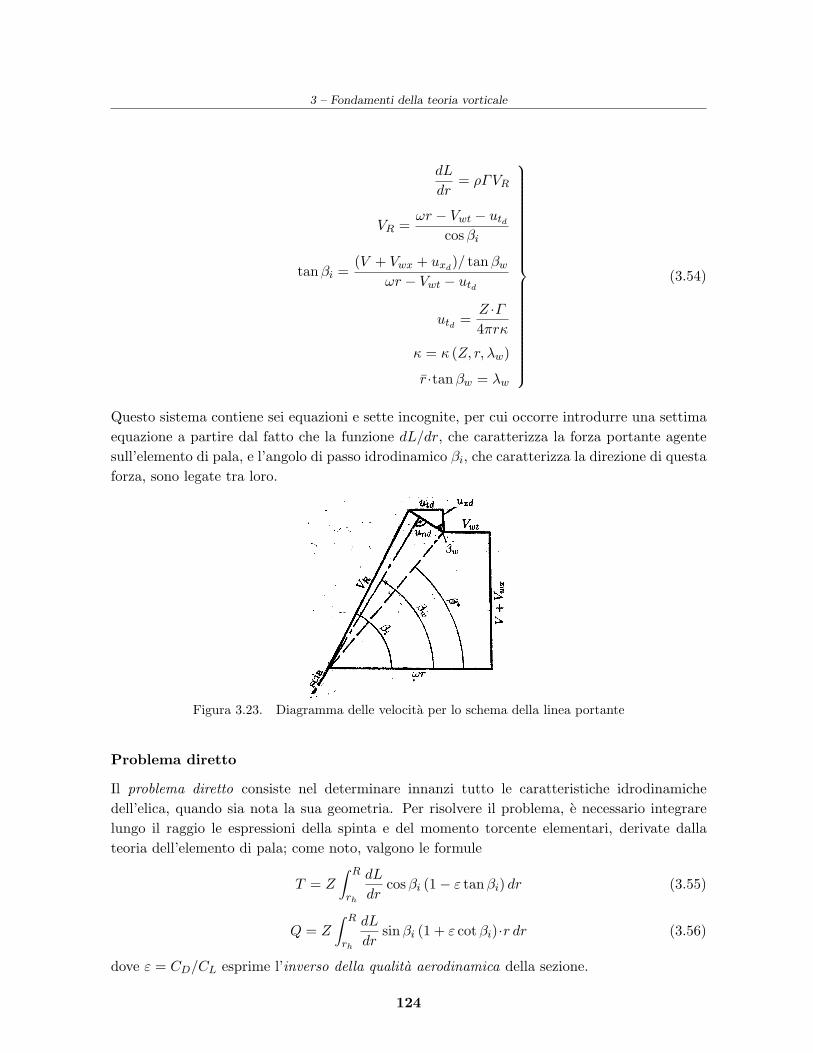
3 – Fondamenti della teoria vorticale
dL
dr= ρΓVR
VR =ωr − Vwt − utd
cosβi
tanβi =(V + Vwx + uxd
)/ tanβw
ωr − Vwt − utd
utd =Z ·Γ4πrκ
κ = κ (Z, r, λw)
r·tanβw = λw
(3.54)
Questo sistema contiene sei equazioni e sette incognite, per cui occorre introdurre una settimaequazione a partire dal fatto che la funzione dL/dr, che caratterizza la forza portante agentesull’elemento di pala, e l’angolo di passo idrodinamico βi, che caratterizza la direzione di questaforza, sono legate tra loro.
Figura 3.23. Diagramma delle velocita per lo schema della linea portante
Problema diretto
Il problema diretto consiste nel determinare innanzi tutto le caratteristiche idrodinamichedell’elica, quando sia nota la sua geometria. Per risolvere il problema, e necessario integrarelungo il raggio le espressioni della spinta e del momento torcente elementari, derivate dallateoria dell’elemento di pala; come noto, valgono le formule
T = Z
∫ R
rh
dL
drcosβi (1− ε tanβi) dr (3.55)
Q = Z
∫ R
rh
dL
drsinβi (1 + ε cotβi)·r dr (3.56)
dove ε = CD/CL esprime l’inverso della qualita aerodinamica della sezione.
124

3.8 – Teoria della linea portante di un’elica
Per il momento si suppone che sia assegnata la funzione ε(r), per cui le uniche funzioni in-cognite sono dL/dr e βi. Tra queste due funzioni, come gia osservato, esiste una relazioneche nell’ambito della teoria della linea portante fornisce l’equazione mancante e risolutiva delsistema di equazioni (3.54).
Allo scopo si introduce la relazione tra la forza portante elementare, che agisce sull’elementodi pala con angolo d’incidenza α = ϕ−βi e la freccia relativa f/c del profilo di questa sezione.Poiche si e sempre nell’ambito della teoria della linea portante, si utilizzera l’ipotesi che lesezioni siano piane, per cui la relazione suddetta per l’elemento della sezione di pala puo essereconsiderata approssimativamente la stessa che si aveva per una sezione libera di allungamentoinfinito. In base alle formule derivate nello studio delle caratteristiche aerodinamiche dell’elica,si puo introdurre la formula
dL =12ρ V 2
R CL ·c dr (3.57)
essendo in fluido reale
CL = 2πµ (ϕ− βi + 2χ·f/c) (3.58)
dove µ e χ sono i fattori correttivi che tengono conto dell’influenza dello spessore del profiloe della viscosita del fluido rispettivamente sul gradiente di portanza (dCL/dα) e sull’angolod’incidenza nullo α◦, e che valgono rispettivamente (Miskevic, 1974)
µ = (1 + 0.87 t/c)·e−0.0691+12.46 t/c−0.1855 ln Rns
χ = 1.013[1 +
t/c (t/c− 0.05)(0.04664 lnRns − 0.4378)2
]
Si assume che siano noti i valori della lunghezza di corda di pala c, dell’angolo di passo ϕ e dellafreccia adimensionale f/c al raggio considerato. Nelle relazioni suddette sono presenti quattrofunzioni incognite, dL/dr, CL, VR e βi, per cui rispetto al sistema considerato di equazioniesiste una funzione incognita in piu, ossia CL. Ma combinando le equazioni (3.57) e (3.58) conil sistema di equazioni (3.54) si ottiene un sistema chiuso di equazioni per il problema diretto,sulla base del quale e possibile ricavare le incognite dL/dr e βi.
Se si esclude dL/dr, mettendo a sistema l’equazione (3.57) con la prima delle equazioni (3.54),si ricava la relazione
Γ =12
VR CL ·c (3.59)
dalla quale, introducendo per il coefficiente di portanza la relazione (3.58), si ottiene
Γ = πVR ·c·µ (ϕ− βi + 2χ·f/c) (3.60)
125

3 – Fondamenti della teoria vorticale
Legame tra circolazione ed angolo di passo idrodinamico
Si vuole ora esprimere βi in funzione di Γ . Allo scopo si noti, innanzi tutto, che dal diagrammadi velocita (Fig. 3.23) si ricava direttamente la relazione
tanβi =V + Vwx + uxd
+ utd tanβi
ωr − Vwt= tanβ∗ +
uxd+ utd tanβi
ωr − Vwt(3.61)
dove e
tanβ∗ =V + Vwx
ωr − Vwt(3.62)
essendo β∗ l’angolo d’avanzo alla velocita nave V , che tiene conto del campo di velocita pre-sente sul disco–elica.
In secondo luogo, in base alla semplice relazione trigonometrica
tan βi − tanβ∗ =sin (βi − β∗)cosβi ·cosβ∗
(3.63)
e facile ottenere
βi − β∗ = cosβi ·cosβ∗ (tanβi − tanβ∗)− [sin(βi − β∗)− (βi − β∗)] (3.64)
ossia, utilizzando la formula (3.61), si ricava il passo idrodinamico come
βi = β∗ + cosβi ·cosβ∗ ·uxd+ utd tanβi
ωr − Vwt− [sin(βi − β∗)− (βi − β∗)] (3.65)
dove l’ultimo termine sul lato destro dell’equazione (3.65) puo essere trascurato di qui in avanti,in quanto e molto piccolo.
In terzo luogo, utilizzando le formule (3.52) e (3.53) e facile ricavare la relazione
u∗d = uxd+ utd tanβi =
Z ·Γ4πrκ
(1
tanλw+ tanβi
)(3.66)
Unendo poi le relazioni suddette e sostituendole nell’equazione (3.60) si ricava per rh < r <R
Γ
[1 + Z cµ VR cosβi cosβ∗
1/ tanλw + tanβi
4 r κ (ωr − Vwt)
]= πVR ·c·µ [ϕ + 2χ·f/c− β∗] (3.67)
Sebbene non sia difficile ottenere la soluzione del sistema di equazioni (3.54), combinato conl’equazione (3.67), mediante una serie di iterazioni successive, proprio grazie alla forma appros-simata del metodo e possibile semplificare ulteriormente la relazione (3.67). Si assume che levelocita indotte presentino piccoli valori e si impongono le seguenti approssimazioni
VR ' ωr − Vwt
cosβ∗
βi ' βw
(3.68)
126

3.9 – Metodo dei fattori di induzione
l’equazione (3.67) puo essere risolta rispetto alla circolazione come
Γ (r) = 4π c µ r κ sinβw(ϕ + 2χ·f/c− β∗) (ωr − Vwt)
(Z cµ + 4rκ sinβw) cos β∗(3.69)
Quest’ultima equazione consente di trovare la distribuzione di circolazione radiale, non appenasiano noti la corda di pala c(r), l’angolo di passo ϕ(r), la curvatura massima relativa f/c,l’angolo d’avanzo β(r) grazie alla relazione (3.62), ed infine il parametro λw che carattetizzail passo della superficie libera vorticosa. Nel problema diretto questo passo puo essere assuntopari al passo della sezione di pala a r = 0.7 dell’elica considerata, ossia
λw = λ∗w = 0.7 tanϕ|r=0.7 =1π
(P
D
)
r=0.7(3.70)
Dopo avere determinato Γ (r) in base alla relazione (3.69), utilizzando il sistema di equazioni(3.54) e possibile ricavare le funzioni incognite dL/dr e βi. Sostituendole nelle relazioni (3.55)e (3.56), si possono ricavare la spinta ed il momento torcente locali dell’elica considerata. Aquesto punto e possibile determinare per ogni sezione l’inverso della qualita idrodinamica ε,che finora era stata considerata costante, secondo le formula di Miskievic (1974)
ε =0.05808 (1 + 2.3 t/c)
CL ·Rn0.1458s
3.9 Metodo dei fattori di induzione
Il modello della linea portante derivato per un’ala simmetrica puo essere adattato facilmentead un modello di linea portante che ruota. Purtroppo l’espressione (3.23) per il calcolo dellavelocita indotta tende all’infinito se il punto di controllo si avvicina al raggio della linea vor-ticosa, ossia se r → r◦ (x → x◦). Per evitare questa difficolta, che fa crollare l’accuratezzanumerica in prossimita di x◦, Kawada (1933) introdusse il concetto di fattore di induzione.
Il metodo dei fattori di induzione consente di calcolare il prodotto, CL ·c , del coefficiente diportanza per la lunghezza di corda senza le approssimazioni insite nell’applicazione dei fattoridi Goldstein.
I fattori di induzione non sono altro che quantita adimensionali delle componenti delle velo-cita indotte. Mettono in relazione il complicato sistema di vortici liberi che si instaura dietroun’elica ruotante con il sistema vorticoso libero di un singolo profilo. Scegliendo come velocitadi riferimento Γ /[4π (r − r◦)] , ossia la velocita indotta su r da un vortice potenziale rettilineofittizio, situato sul punto r◦ e parallelo all’asse, ambedue le componenti della velocita indottae la velocita di riferimento divengono infinite nello stesso ordine se r → r◦, in quanto le loroproprieta all’infinito sono le stesse sia per il vortice elicoidale che per il vortice rettilineo. Per-tanto i fattori di induzione rimangono finiti se r 6= r◦.
127

3 – Fondamenti della teoria vorticale
I fattori di induzione costituiscono la base per il metodo sviluppato da Lerbs (1952) per ilcalcolo di eliche leggermente e moderatamente caricate con una distribuzione arbitraria dicircolazione. Il fattore di induzione ~i rappresenta il rapporto di due velocita indotte da vorticiliberi semi–infiniti della stessa intensita; ossia
~i =velocita indotta da Z vortici elicoidalivelocita indotta da un vortice rettilineo
=d~uz
d~us
La prima velocita e indotta al raggio r della linea portante da Z vortici liberi elicoidali che sistaccano al raggio adimensionale r◦ da Z linee portanti equispaziate. Questa velocita indotta esuddivisa in una componente assiale ed in una componente tangenziale, ognuna da considerareseparatamente, ed include l’effetto del mozzo. I fattori di induzione sono riferiti, quindi, allacomponente assiale, ia, ed alla componente tangenziale, it. La seconda velocita, quella al deno-minatore, e la velocita indotta da un singolo vortice rettilineo che ha origine dalla linea portante,ancora al raggio r◦, e che si estende infinitamente a valle in direzione parallela all’asse dell’elica.
Poiche la velocita indotta dal singolo vortice rettilineo e
dus =∫ π/2
◦dΓ
4π· (r − r◦)(r − r◦)2
·sin θ dθ =dΓ
4π (r − r◦)(3.71)
il fattore di induzione risulta essere
~i =d~uz
dΓ/[4π (r − r◦)](3.72)
Ne deriva che la velocita indotta da un singolo vortice elicoidale e
d~u =~idΓ
4π (r − r◦)=~i
dΓ
dr◦dr◦
4π (r − r◦)(3.73)
La velocita indotta da tutti i vortici liberi elicoidali che si staccano da una linea portante alraggio r sara allora
~u =∫ R
rh
~idΓ
dr◦· 14π (r − r◦)
dr◦ (3.74)
Se si introducono le quantita adimensionali
G =Γ
πD Va; x =
r
R; x◦ =
r◦R
,
la velocita indotta ~u da tutti i vortici elicoidali al raggio xr puo essere scomposta in unacomponente assiale ua ed in una tangenziale ut, calcolate in base alla legge di Biot–Savartcome
ua
Va=
12
∫ 1
xh
iadG
dx◦· 1x− x◦
dx◦
ut
Va=
12
∫ 1
xh
itdG
dx◦· 1x− x◦
dx◦
(3.75)
128
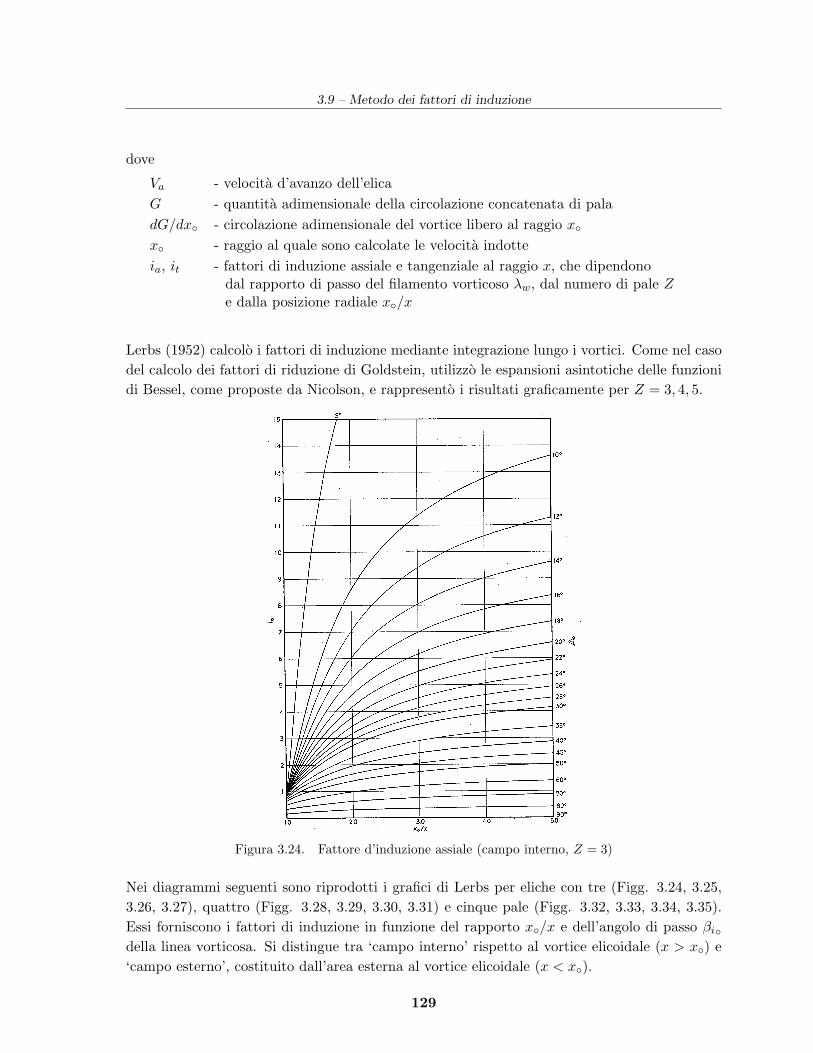
3.9 – Metodo dei fattori di induzione
dove
Va - velocita d’avanzo dell’elicaG - quantita adimensionale della circolazione concatenata di paladG/dx◦ - circolazione adimensionale del vortice libero al raggio x◦x◦ - raggio al quale sono calcolate le velocita indotteia, it - fattori di induzione assiale e tangenziale al raggio x, che dipendono
dal rapporto di passo del filamento vorticoso λw, dal numero di pale Ze dalla posizione radiale x◦/x
Lerbs (1952) calcolo i fattori di induzione mediante integrazione lungo i vortici. Come nel casodel calcolo dei fattori di riduzione di Goldstein, utilizzo le espansioni asintotiche delle funzionidi Bessel, come proposte da Nicolson, e rappresento i risultati graficamente per Z = 3, 4, 5.
Figura 3.24. Fattore d’induzione assiale (campo interno, Z = 3)
Nei diagrammi seguenti sono riprodotti i grafici di Lerbs per eliche con tre (Figg. 3.24, 3.25,3.26, 3.27), quattro (Figg. 3.28, 3.29, 3.30, 3.31) e cinque pale (Figg. 3.32, 3.33, 3.34, 3.35).Essi forniscono i fattori di induzione in funzione del rapporto x◦/x e dell’angolo di passo βi◦della linea vorticosa. Si distingue tra ‘campo interno’ rispetto al vortice elicoidale (x > x◦) e‘campo esterno’, costituito dall’area esterna al vortice elicoidale (x < x◦).
129

3 – Fondamenti della teoria vorticale
Si ricordi che x e x◦ sono punti sulla linea portante. I vortici elicoidali si staccano dalla pala alraggio x◦, mentre il punto relativo al calcolo della velocita indotta e x. Si osservi, inoltre, chele curve rappresentative dei fattori di induzione assiale tendono ad incontrarsi per x◦/x = 1. Ifattori di induzione nel campo interno sono notevolmente maggiori rispetto a quelli nel campoesterno, il che illustra l’effetto amplificante delle velocita indotte entro il sistema vorticoso,particolarmente per piccoli angoli del passo idrodinamico βi.
I valori limite delle componenti dei fattori di induzione sono desumibili per alcuni valori par-ticolari del rapporto x◦/x (vedi Tabella 3.1). Va osservato che questi fattori non dipendonodalla circolazione ma solo da grandezze geometriche; piu precisamente, dalla posizione relativadel punto di riferimento x rispetto al punto x◦ dal quale si stacca il vortice libero e dall’angolodi passo βi◦ = βi.
x◦/x ia it
0 (punto di calcolo molto distante dal vortice elicoidale) 0 Z
1 (punto di calcolo sul vortice elicoidale) cosβi sin βi
∞ (punto di calcolo sull’asse dell’elica) Z/ tan βi 0
Tabella 3.1. Valori limite dei fattori di induzione
Una descrizione dei fattori di induzione, piu conveniente di quella di Lerbs, e quella algebricasviluppata da Wrench per un numero arbitrario di pale Z.
Figura 3.25. Fattore d’induzione assiale (campo esterno, Z = 3)
130
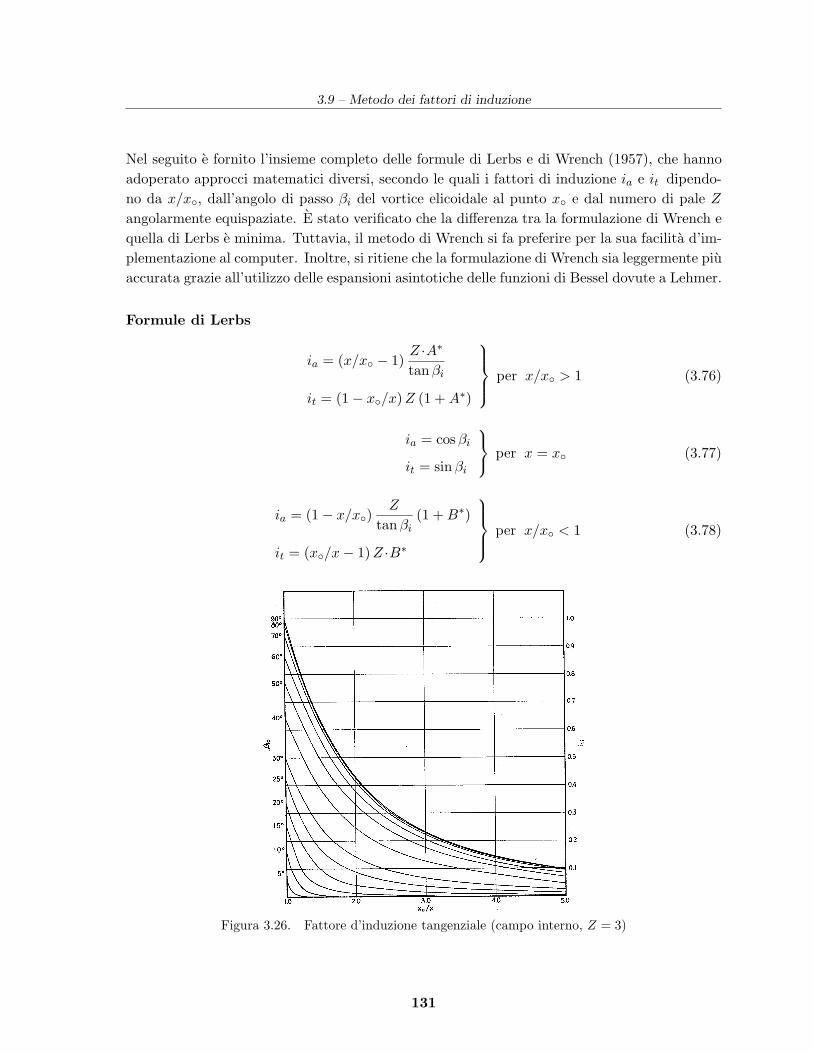
3.9 – Metodo dei fattori di induzione
Nel seguito e fornito l’insieme completo delle formule di Lerbs e di Wrench (1957), che hannoadoperato approcci matematici diversi, secondo le quali i fattori di induzione ia e it dipendo-no da x/x◦, dall’angolo di passo βi del vortice elicoidale al punto x◦ e dal numero di pale Z
angolarmente equispaziate. E stato verificato che la differenza tra la formulazione di Wrench equella di Lerbs e minima. Tuttavia, il metodo di Wrench si fa preferire per la sua facilita d’im-plementazione al computer. Inoltre, si ritiene che la formulazione di Wrench sia leggermente piuaccurata grazie all’utilizzo delle espansioni asintotiche delle funzioni di Bessel dovute a Lehmer.
Formule di Lerbs
ia = (x/x◦ − 1)Z ·A∗tanβi
it = (1− x◦/x) Z (1 + A∗)
per x/x◦ > 1 (3.76)
ia = cosβi
it = sin βi
per x = x◦ (3.77)
ia = (1− x/x◦)Z
tanβi(1 + B∗)
it = (x◦/x− 1)Z ·B∗
per x/x◦ < 1 (3.78)
Figura 3.26. Fattore d’induzione tangenziale (campo interno, Z = 3)
131
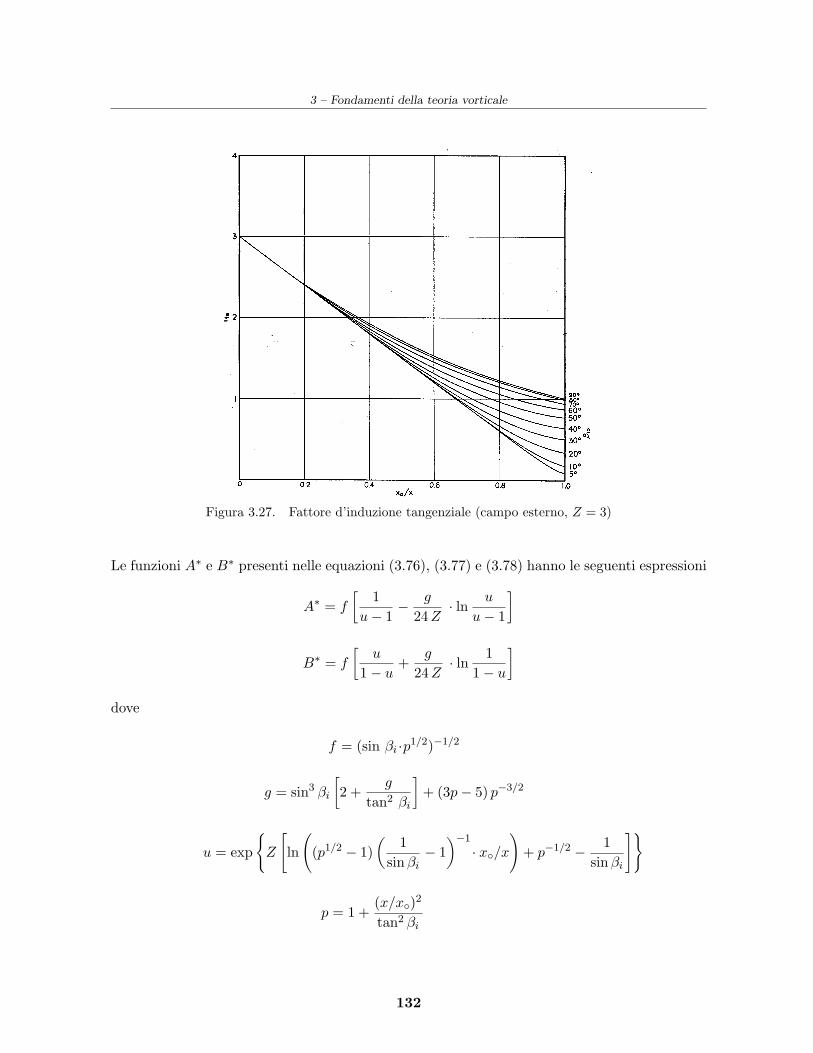
3 – Fondamenti della teoria vorticale
Figura 3.27. Fattore d’induzione tangenziale (campo esterno, Z = 3)
Le funzioni A∗ e B∗ presenti nelle equazioni (3.76), (3.77) e (3.78) hanno le seguenti espressioni
A∗ = f
[1
u− 1− g
24 Z· ln u
u− 1
]
B∗ = f
[u
1− u+
g
24 Z· ln 1
1− u
]
dove
f = (sin βi ·p1/2)−1/2
g = sin3 βi
[2 +
g
tan2 βi
]+ (3p− 5) p−3/2
u = exp
{Z
[ln
((p1/2 − 1)
(1
sinβi− 1
)−1
· x◦/x
)+ p−1/2 − 1
sinβi
]}
p = 1 +(x/x◦)2
tan2 βi
132
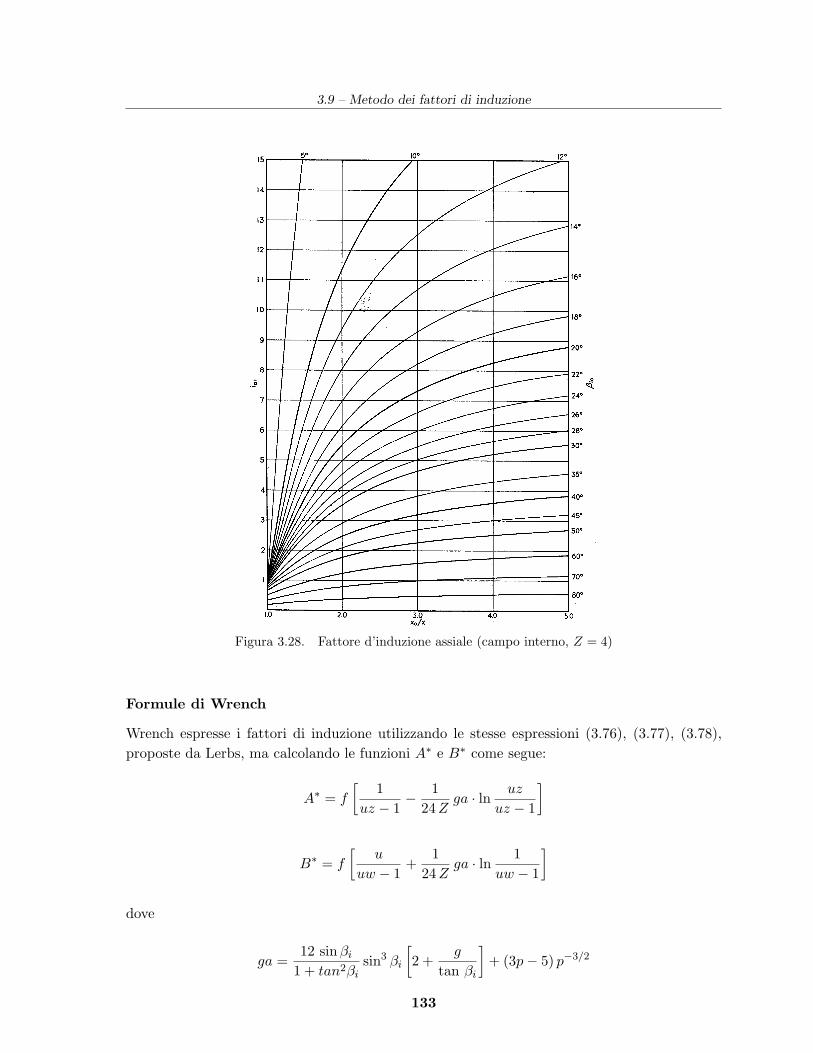
3.9 – Metodo dei fattori di induzione
Figura 3.28. Fattore d’induzione assiale (campo interno, Z = 4)
Formule di Wrench
Wrench espresse i fattori di induzione utilizzando le stesse espressioni (3.76), (3.77), (3.78),proposte da Lerbs, ma calcolando le funzioni A∗ e B∗ come segue:
A∗ = f
[1
uz − 1− 1
24Zga · ln uz
uz − 1
]
B∗ = f
[u
uw − 1+
124Z
ga · ln 1uw − 1
]
dove
ga =12 sinβi
1 + tan2βisin3 βi
[2 +
g
tan βi
]+ (3p− 5) p−3/2
133
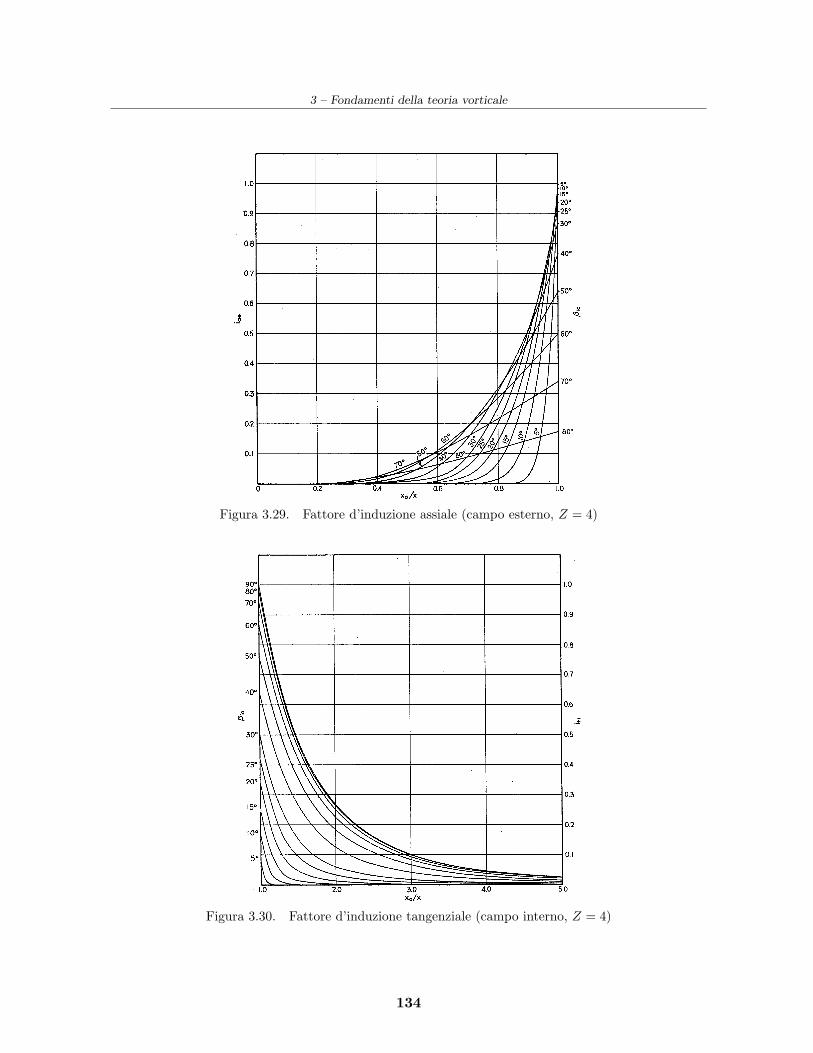
3 – Fondamenti della teoria vorticale
Figura 3.29. Fattore d’induzione assiale (campo esterno, Z = 4)
Figura 3.30. Fattore d’induzione tangenziale (campo interno, Z = 4)
134
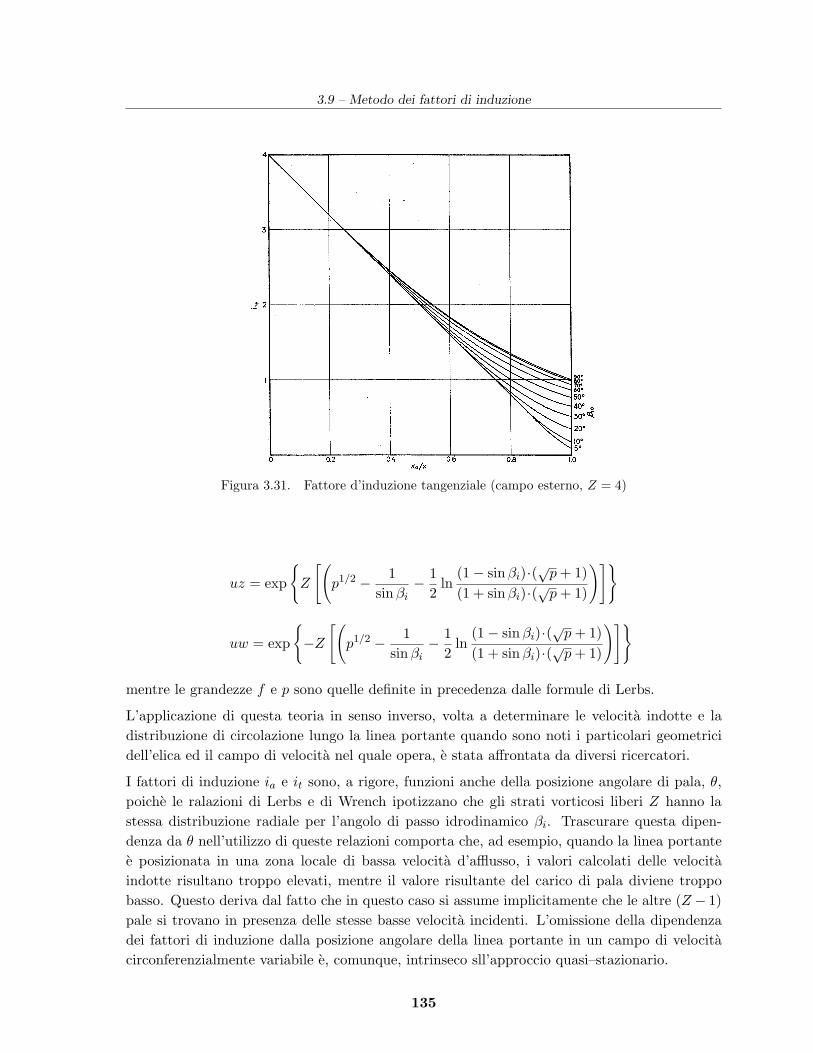
3.9 – Metodo dei fattori di induzione
Figura 3.31. Fattore d’induzione tangenziale (campo esterno, Z = 4)
uz = exp
{Z
[(p1/2 − 1
sinβi− 1
2ln
(1− sinβi)·(√p + 1)(1 + sinβi)·(√p + 1)
)]}
uw = exp
{−Z
[(p1/2 − 1
sinβi− 1
2ln
(1− sinβi)·(√p + 1)(1 + sinβi)·(√p + 1)
)]}
mentre le grandezze f e p sono quelle definite in precedenza dalle formule di Lerbs.
L’applicazione di questa teoria in senso inverso, volta a determinare le velocita indotte e ladistribuzione di circolazione lungo la linea portante quando sono noti i particolari geometricidell’elica ed il campo di velocita nel quale opera, e stata affrontata da diversi ricercatori.
I fattori di induzione ia e it sono, a rigore, funzioni anche della posizione angolare di pala, θ,poiche le ralazioni di Lerbs e di Wrench ipotizzano che gli strati vorticosi liberi Z hanno lastessa distribuzione radiale per l’angolo di passo idrodinamico βi. Trascurare questa dipen-denza da θ nell’utilizzo di queste relazioni comporta che, ad esempio, quando la linea portantee posizionata in una zona locale di bassa velocita d’afflusso, i valori calcolati delle velocitaindotte risultano troppo elevati, mentre il valore risultante del carico di pala diviene troppobasso. Questo deriva dal fatto che in questo caso si assume implicitamente che le altre (Z − 1)pale si trovano in presenza delle stesse basse velocita incidenti. L’omissione della dipendenzadei fattori di induzione dalla posizione angolare della linea portante in un campo di velocitacirconferenzialmente variabile e, comunque, intrinseco sll’approccio quasi–stazionario.
135
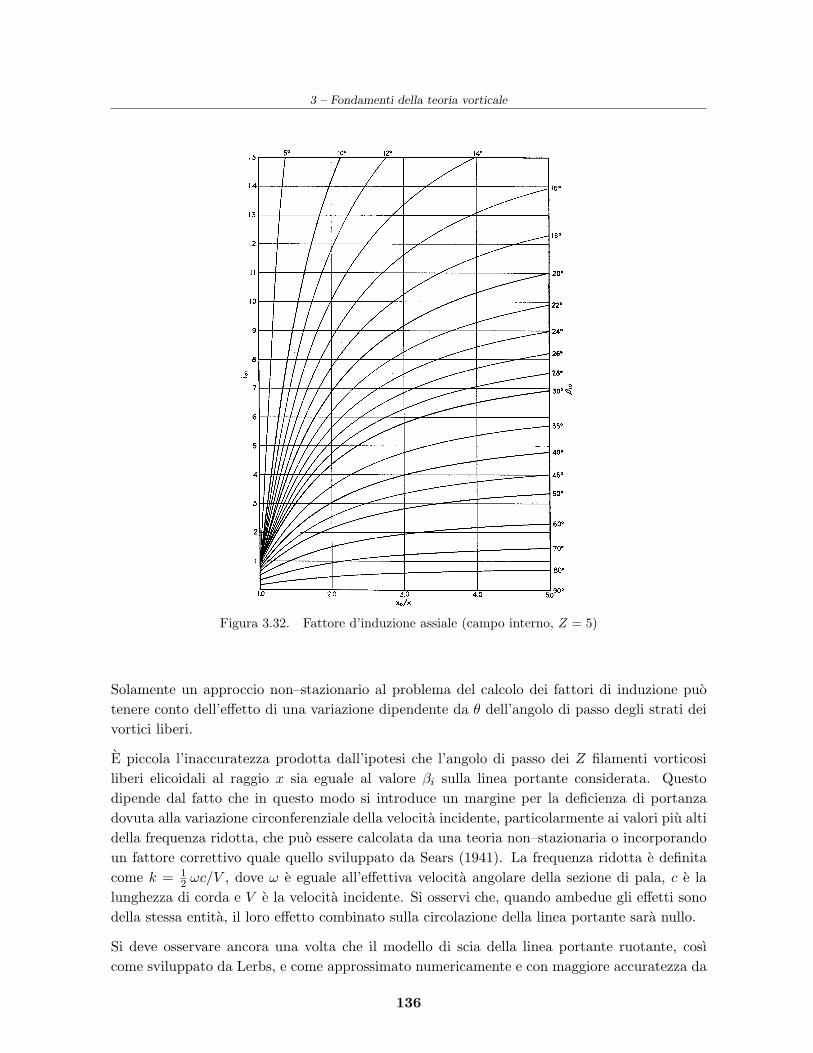
3 – Fondamenti della teoria vorticale
Figura 3.32. Fattore d’induzione assiale (campo interno, Z = 5)
Solamente un approccio non–stazionario al problema del calcolo dei fattori di induzione puotenere conto dell’effetto di una variazione dipendente da θ dell’angolo di passo degli strati deivortici liberi.
E piccola l’inaccuratezza prodotta dall’ipotesi che l’angolo di passo dei Z filamenti vorticosiliberi elicoidali al raggio x sia eguale al valore βi sulla linea portante considerata. Questodipende dal fatto che in questo modo si introduce un margine per la deficienza di portanzadovuta alla variazione circonferenziale della velocita incidente, particolarmente ai valori piu altidella frequenza ridotta, che puo essere calcolata da una teoria non–stazionaria o incorporandoun fattore correttivo quale quello sviluppato da Sears (1941). La frequenza ridotta e definitacome k = 1
2 ωc/V , dove ω e eguale all’effettiva velocita angolare della sezione di pala, c e lalunghezza di corda e V e la velocita incidente. Si osservi che, quando ambedue gli effetti sonodella stessa entita, il loro effetto combinato sulla circolazione della linea portante sara nullo.
Si deve osservare ancora una volta che il modello di scia della linea portante ruotante, cosıcome sviluppato da Lerbs, e come approssimato numericamente e con maggiore accuratezza da
136
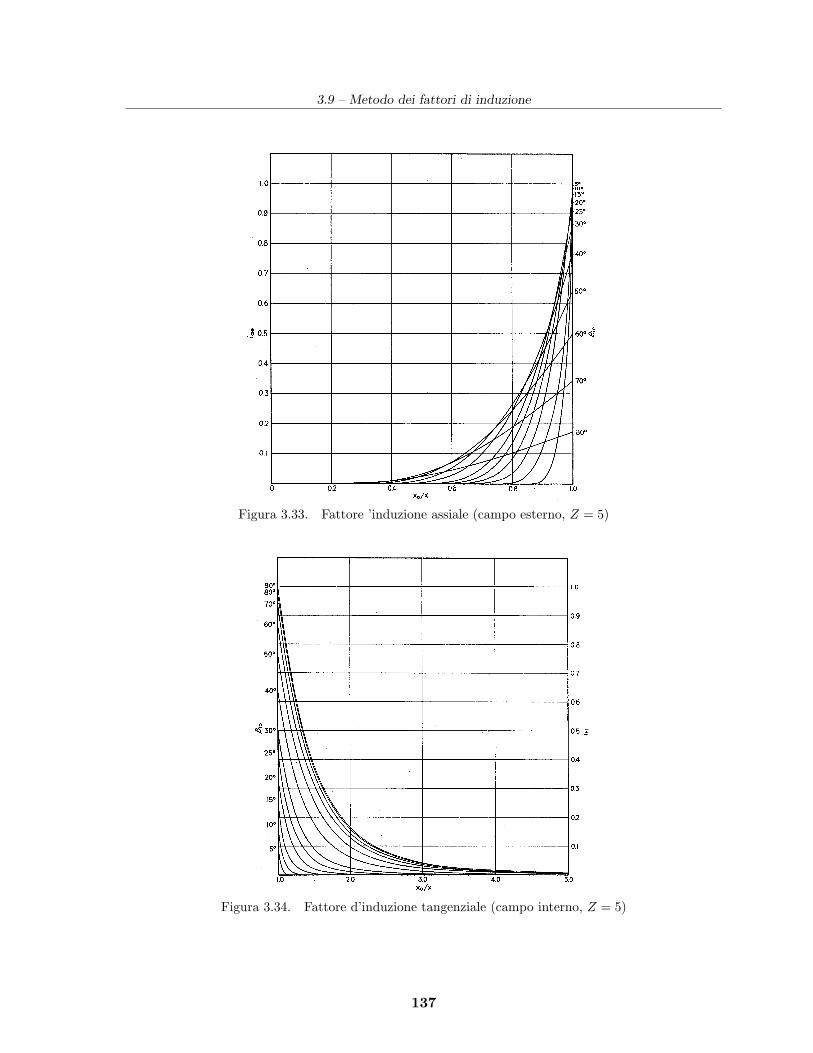
3.9 – Metodo dei fattori di induzione
Figura 3.33. Fattore ’induzione assiale (campo esterno, Z = 5)
Figura 3.34. Fattore d’induzione tangenziale (campo interno, Z = 5)
137

3 – Fondamenti della teoria vorticale
Figura 3.35. Fattore d’induzione tangenziale (campo esterno, Z = 5)
Wrench, implica una semplificazione grossolana della scia effettiva dell’elica. Il loro modellonon ignora solamente la contrazione del tubo di flusso a valle dell’elica, ma non e in grado diconglobare gli effetti del ‘rake’ e dello ‘skew’. Inoltre, gli strati vorticosi liberi divengono insta-bili e per effetto dell’arrotolamento la vorticita che si stacca da ogni pala nella parte esterna,diviene concentrata in singoli vortici d’apice. In maniera simile, per effetto dell’avvolgimentoe presente generalmente un vortice separato sul mozzo.
La contrazione del flusso a valle dell’elica e una caratteristica che deve essere tenuta presentequando l’elica produce la spinta. Tale aspetto puo essere considerato introducendo il modellodel disco attuatore e rispettando la legge di continuita. Comunque, tale contrazione cosı comela contrazione del sistema vorticoso libero e trascurata nella maggior parte dei modelli di sciadi linea portante comunemente utilizzati. Anche nei modelli vorticosi piu complessi, i vorticiliberi si muovono a valle su una superficie elicoidale, perfettamente cilindrica, di passo costante,violando cosı la legge elementare della continuita.
I vortici abbandonano la linea portante sotto forma di una superficie elicoidale il cui passo e ilpasso idrodinamico. I fattori di induzione dipendono dall’angolo di passo dei vortici elicoidaliliberi. Ne deriva che prima di calcolare i fattori di induzione, sia in direzione assiale che inquella tangenziale, occorre calcolare il passo idrodinamico, la cui direzione radiale puo essereanalizzata opportunamente mediante il modello di linea portante descritto in precedenza.
138
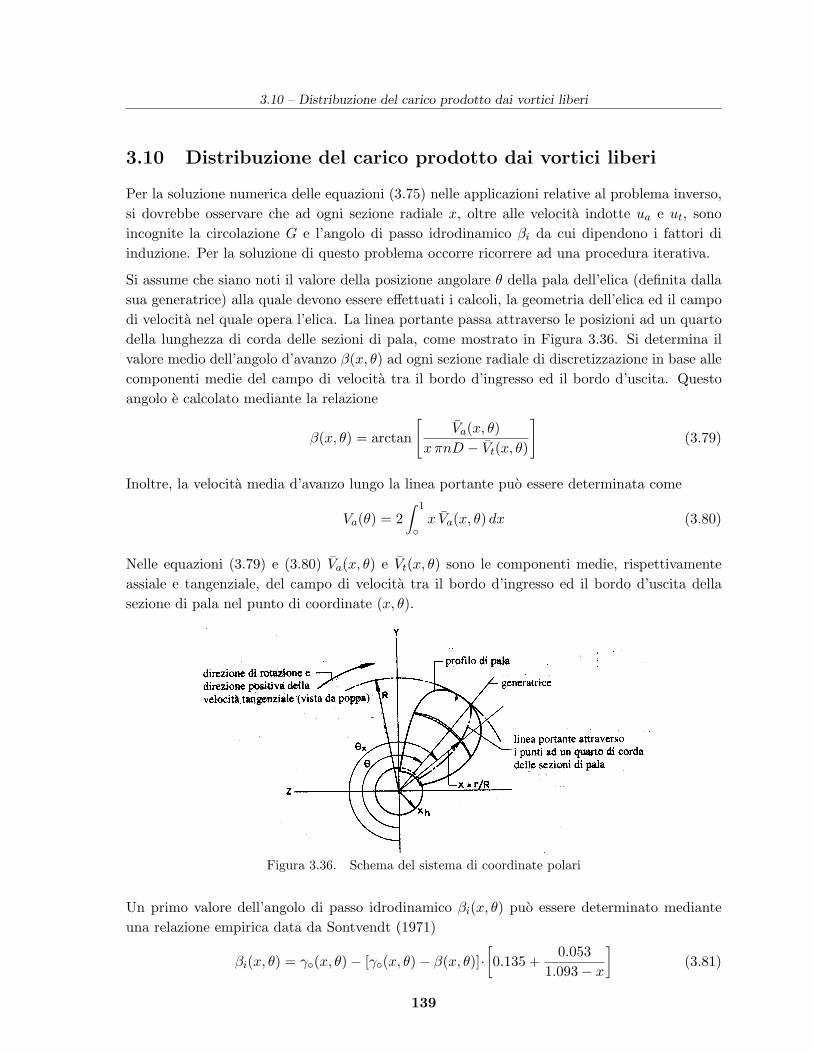
3.10 – Distribuzione del carico prodotto dai vortici liberi
3.10 Distribuzione del carico prodotto dai vortici liberi
Per la soluzione numerica delle equazioni (3.75) nelle applicazioni relative al problema inverso,si dovrebbe osservare che ad ogni sezione radiale x, oltre alle velocita indotte ua e ut, sonoincognite la circolazione G e l’angolo di passo idrodinamico βi da cui dipendono i fattori diinduzione. Per la soluzione di questo problema occorre ricorrere ad una procedura iterativa.
Si assume che siano noti il valore della posizione angolare θ della pala dell’elica (definita dallasua generatrice) alla quale devono essere effettuati i calcoli, la geometria dell’elica ed il campodi velocita nel quale opera l’elica. La linea portante passa attraverso le posizioni ad un quartodella lunghezza di corda delle sezioni di pala, come mostrato in Figura 3.36. Si determina ilvalore medio dell’angolo d’avanzo β(x, θ) ad ogni sezione radiale di discretizzazione in base allecomponenti medie del campo di velocita tra il bordo d’ingresso ed il bordo d’uscita. Questoangolo e calcolato mediante la relazione
β(x, θ) = arctan
[Va(x, θ)
xπnD − Vt(x, θ)
](3.79)
Inoltre, la velocita media d’avanzo lungo la linea portante puo essere determinata come
Va(θ) = 2∫ 1
◦x Va(x, θ) dx (3.80)
Nelle equazioni (3.79) e (3.80) Va(x, θ) e Vt(x, θ) sono le componenti medie, rispettivamenteassiale e tangenziale, del campo di velocita tra il bordo d’ingresso ed il bordo d’uscita dellasezione di pala nel punto di coordinate (x, θ).
Figura 3.36. Schema del sistema di coordinate polari
Un primo valore dell’angolo di passo idrodinamico βi(x, θ) puo essere determinato medianteuna relazione empirica data da Sontvendt (1971)
βi(x, θ) = γ◦(x, θ)− [γ◦(x, θ)− β(x, θ)]·[0.135 +
0.0531.093− x
](3.81)
139

3 – Fondamenti della teoria vorticale
Dalla Figura 3.37 si puo osservare che e
γ◦(x, θ) = atan[P (x)xπD
]+ αnt(x)− α◦(x, θ) (3.82)
dove
αnt(x) - angolo, in radianti, tra la linea di corda e la retta del passo alla sezionedi pala al raggio x,
α◦(x, θ) - angolo, in radianti, tridimensionale di portanza nulla rispetto alla lineadi corda in flusso reale.
Figura 3.37. Definizione degli angoli che correlano le entita geometriche
Con questo valore iniziale di βi, fornendo un primo valore dei fattori di induzione ia e it, siricavano la distribuzione di circolazione G(x, θ) e le velocita indotte ua(x, θ) e ut(x, θ) introdu-cendo, in accordo con Lerbs (1952), le coordinate angolari ϕ e ϕ◦ per x e x◦ in maniera che siaϕ = 0 per x = xh e ϕ = π per x = 1, cosı che i generici raggi x e x◦ sono espressi come
x = xh +(
1− xh
2
)(1− cosϕ)
x◦ = xh +(
1− xh
2
)(1− cosϕ◦)
(3.83)
Si puo allora espandere la circolazione concatenata G(x, θ) in serie di Fourier, purche se neconoscano i valori al contorno, tenendo conto che sia all’apice (ϕ = π) che al mozzo (ϕ = 0) siha eguale pressione sul dorso e sulla faccia; ossia imponendo i vincoli G(xh) = G(1) = 0. Trail mozzo e l’apice la circolazione di un’elica convenzionale e continua, per cui si puo scrivere
G(ϕ, θ) =∞∑
m=1
Gm(θ) sin (mϕ◦) (3.84)
dove Gm(θ) e i coefficientie di Fourier della distribuzione radiale della circolazione concatentaadimensionale, i cui valori sono incogniti.
140

3.10 – Distribuzione del carico prodotto dai vortici liberi
Grazie alla continuita di G, non si possono presentare singoli vortici di intensita finita e la seriedi Fourier che esprime G(ϕ, θ), quando introdotta nelle espressioni (3.75), fornisce le compo-nenti complete delle velocita indotte.
I fattori di induzione dipendono sia da ϕ che da ϕ◦, e non dal numero di pale e dal passo deifilamenti vorticosi. Anche essi sono risolti in una serie pari di Fourier rispetto a ϕ◦, e poichesono diversi da zero sia sul mozzo che sugli apici di pala, si puo utilizzare la funzione cosenoottenendo
ia(ϕ,ϕ◦) =∞∑
n=0
ian(ϕ) cos (nϕ◦)
it(ϕ,ϕ◦) =∞∑
n=0
itn(ϕ) cos (nϕ◦)
(3.85)
I valori dei coefficienti di Fourier ian(ϕ) e itn(ϕ) alle n sezioni radiali di discretizzazione sonoottenuti invertendo la matrice formata dai coefficienti nelle n equazioni lineari risultanti.
Si possono calcolare, a questo punto, per ogni sezione le espressioni integrali per le velocitaindotte assiali, ua, e tangenziali, ut. Sostituendo le equazioni (3.85) nelle equazioni (3.75), siricava
ua(ϕ, θ)Va(θ)
=1
1− xh
∞∑
m=1
mGm(θ)∫ π
0
ia(ϕ, ϕ◦) cos (mϕ◦)cosϕ◦ − cosϕ
dϕ◦
ut(ϕ, θ)Va(θ)
=1
1− xh
∞∑
m=1
mGm(θ)∫ π
0
it(ϕ, ϕ◦) cos (mϕ◦)cosϕ◦ − cosϕ
dϕ◦
(3.86)
Gli integrali di queste espressioni possono essere semplificati come segue. Se si introducono leposizioni
ham(ϕ) =
∫ π
0
cos (mϕ◦)cosϕ◦ − cosϕ
ia(ϕ,ϕ◦) dϕ◦
htm(ϕ) =
∫ π
0
cos (mϕ◦)cosϕ◦ − cosϕ
it(ϕ,ϕ◦) dϕ◦
e possibile calcolare gli integrali (3.86) sostituendovi le serie di Fourier dei fattori di induzione(3.85), riducendo cosı l’integrale improprio che rappresenta le velocita indotte alla somma didue integrali impropri dello stesso tipo
ham(ϕ) =
12
∞∑
n=0
ian(ϕ)[∫ π
0
cos [(m + n) ϕ◦]cosϕ◦ − cosϕ
dϕ◦ +∫ π
0
cos [(m− n) ϕ◦]cosϕ◦ − cosϕ
dϕ◦]
htm(ϕ) =
12
∞∑
n=0
itn(ϕ)[∫ π
0
cos [(m + n) ϕ◦]cosϕ◦ − cosϕ
dϕ◦ +∫ π
0
cos [(m− n) ϕ◦]cosϕ◦ − cosϕ
dϕ◦]
(3.87)
141

3 – Fondamenti della teoria vorticale
Il valore principale di questi integrali e noto da Glauert come∫ π
0
cos (mϕ◦)cosϕ◦ − cosϕ
dϕ◦ = πsin(mϕ)
sinϕ
In questo modo, gli integrali ham(ϕ) e ht
m(ϕ) divengono
ham(ϕ) =
π
sin ϕ
sin (mϕ)
m∑
n=0
ian(ϕ) cos (nϕ) + cos (mϕ)∞∑
n=m+1
ian(ϕ) sin (nϕ)
htm(ϕ) =
π
sin ϕ
sin (mϕ)
m∑
n=0
itn(ϕ) cos (nϕ) + cos (mϕ)∞∑
n=m+1
itn(ϕ) sin (nϕ)
(3.88)
L’esperienza ha insegnato che vicino all’apice di pala ed al mozzo le soluzioni diventano menostabili che nella zona centrale della pala. In questi punti le soluzioni per la linea portantepossono essere ricavate ricorrendo alla regola dell’Hospital. Si e dimostrato che e piu praticodeterminare i valori sull’apice e sul mozzo mediante estrapolazione in senso radiale come
ham(0) = π
m
m∑
n=0
ian(0) +∞∑
n=m+1
ian(0)
htm(π) = −π cos (mπ)
m
m∑
n=0
ian cos (nπ) +∞∑
n=m+1
ian(0) cos (nπ)
(3.89)
ed analogamente per ham(π) e ht
m(0).
E stato dimostrato, inoltre, che si possono ottenere risultati ragionevolmente accurati gia conun piccolo numero di termini nella serie armonica (ad esempio, cinque o sei), che rappresenta-no le distribuzioni radiali della circolazione ed i fattori di induzione. D’altra parte, risolvere icoefficienti di Fourier di una serie armonica che abbia piu di tredici termini e risultato essereprogressivamente instabile.
Queste equazioni consentono di legare le componenti della velocita indotta alla distribuzionedi circolazione ed ai fattori di induzione. Poiche questi ultimi sono noti (Figg. 3.24÷3.35), leequazioni (3.86) consentono di calcolare le componenti della velocita indotta per ogni assegnatadistribuzione di circolazione che puo essere rappresentata dall’equazione (3.84).
Per soddisfare l’ultima condizione, in base alla quale gli strati vorticosi coincidono con le lineedi corrente relative su una linea portante, sono necessarie approssimazioni successive poichei fattori di induzione dipendono dalla direzione degli strati e, quindi, dalle componenti dellavelocita indotta. Questi risultati possono essere sostituiti nelle equazioni delle velocita indottenon appena si conoscano i coefficienti di Fourier della circolazione adimensionale G.
142

3.10 – Distribuzione del carico prodotto dai vortici liberi
Infatti, sostituendo le equazioni (3.88) nelle espressioni delle velocita indotte si ottiene
ua(ϕ, θ)Va(θ)
=1
1− xh
∞∑
m=1
m Gm(θ) ham(ϕ)
ut(ϕ, θ)Va(θ)
=1
1− xh
∞∑
m=1
m Gm(θ) htm(ϕ)
(3.90)
Dalla relazione tra le velocita indotte e la circolazione, che deve essere applicata a tutte lesezioni radiali, si puo derivare un sistema di equazioni lineari dal quale ottenere i coefficientiincogniti Gm di Fourier.
Dallo schema delle velocita locali intorno al profilo di una sezione di pala al raggio r, comemostrato in Figura 3.38, si puo vedere come le velocita indotte ua e ut sono legate all’angolodi passo idrodinamico βi. Si puo osservare che qui il passo geometrico, di solito indicato conϕ, coincide con l’angolo βi. Cio avviene in una condizione molto speciale, quella di ‘shock–freeentry’, e non corrisponde, quindi, ad una condizione generale.
Figura 3.38. Diagramma delle velocita in una posizione radiale della linea portante
Nelle equazioni (3.90) i valori ua(ϕ, θ), ut(ϕ, θ) e Gm(ϕ) sono incogniti cosı che e necessariointrodurre un’equazione ulteriore. Questa puo essere ottenuta direttamente dal diagramma inFigura 3.38 come
ωr tanβi = ωr tanβ + ua − ut tanβi (3.91)
che puo essere riscritta come
ua
VS− ut
VStanβi =
ωr
VS(tanβi − tanβ) (3.92)
ma poiche Va/ωr = tanβ si puo eliminare ωr ed ottenere la formulazione finale
ua
VS− ut
VStanβi =
Va
VS
(tanβi
tan β− 1
)(3.93)
143

3 – Fondamenti della teoria vorticale
Si osservi che la resistenza delle sezioni e nulla nei modelli a flusso potenziale, anche se e pre-sente, comunque, la resistenza indotta per effetto delle velocita indotte. La resistenza viscosadelle varie sezioni deve essere calcolata in ogni caso. La portanza e la resistenza delle varie se-zioni sono decomposte in direzione assiale e tangenziale per potere calcolare, infine, la spinta edil momento torcente di pala secondo le formule della teoria dell’elemento di pala (Trincas, 2008).
A questo punto e stata determinata l’intensita del sistema vorticoso dell’elica. I vortici liberidi questo sistema producono le velocita indotte, che devono essere sempre considerate se sivogliono collegare gli angoli del flusso alle caratteristiche del profilo. Inoltre, si e ipotizzatoche si sia in grado di calcolare i fattori di induzione, il che presuppone che sia effettivamentenoto il passo dei vortici liberi, dal momento che i fattori di induzione dipendono dall’angolo dipasso idrodinamico, per cui occorre introdurre un’ipotesi iniziale circa la distribuzione radialedel passo.
Dopo avere risolto il problema delle velocita indotte, si determina la spinta in base all’inten-sita della circolazione e si calcola la resistenza dei profili. Successivamente si aggiusta il passoidrodinamico iterativamente e si confronta la spinta ottenuta con quella richiesta. Si dovrebbecomprendere che in linea di principio esiste un numero infinito di soluzioni poiche la distribu-zione del passo idrodinamico non e ancora fissata. Nel progetto e pratica consueta imporre iltipo della sua distribuzione radiale e studiare gli effetti delle sue variazioni, risolvendo il model-lo della linea portante per ogni caso particolare. Si osservi che gli effetti della variazione delladistribuzione radiale del passo idrodinamico non si riflettono sempre sul rendimento dell’elicase si utilizza il modello di linea portante che e stato presentato.
Con un approccio piu flessibile, il flusso indotto puo essere calcolato numericamente in manieradiretta dalla legge di Biot–Savart. In tal caso, i fattori di induzione possono essere derivatimediante integrazione numerica per qualunque forma dello strato vorticoso e per qualunqueforma della linea portante. Con questo approccio, nella procedura di calcolo del campo di flussoindotto possono essere incorporati anche gli effetti del ‘rake’ e dello ‘skew’ della pala, noncheil flusso indotto causato dalla curvatura dei vortici concatenati.
Esaurito questo processo, si possono determinare il passo idrodinamico, le velocita indotte e lacircolazione ai vari raggi di discretizzazione.
Infine, si possono calcolare i coefficienti di spinta e di momento torcente di ogni sezione di pala,rispettivamente come
KT
dx=
c·CLD ·[πx
J − ut]2 ·J2
(1− CL
CDtanβi
)
4 cos βi(3.94)
KQ
dx=
x· c·CLD ·[1 + ua]
2 ·J2(1− CL
CDtanβi
)
8 sin βi(3.95)
dove
c·CL
D=
2πG sinβi
1 + ua(3.96)
144

3.11 – Fattori di correzione per superficie portante
Il coefficiente di resistenza di ogni sezione di pala puo essere calcolato in funzione dello spessoredi pala e della lunghezza di corda come segue
CD = 2(
1 + 2t
c
) [1.89 + 1.62log
(c
30·10−6
)]−2.5
(3.97)
3.11 Fattori di correzione per superficie portante
I calcoli hanno mostrato che, come era prevedibile, i risultati ottenuti dalla teoria della lineaportante peggiorano al crescere del rapporto di area espansa, ossia al crescere della lunghezzadi corda della pala. Questo e il motivo per cui, quando si progetta con la LLT un’elica dallepale ampie, e obbligatorio introdurre correzioni alla lunghezza di corda. In generale, e possi-bile considerare correttamente ed interamente la corda di pala solamente con la teoria dellasuperficie portante, dove ogni pala e simulata non mediante un vortice discreto, come nellaLLT, ma da un intero sistema vorticoso collocato su una superficie all’interno delle proiezionidel contorno di pala su questa superficie. I calcoli con la LST mostrano che le velocita indottelungo la corda non sono costanti ed eguali ai valori che hanno sui punti della linea portante,ma che variano in modo significativo come risultato dell’influenza del sistema vorticoso spazialecon il quale si modella la pala dell’elica.
La suddetta irregolarita del campo di velocita produce generalmente una riduzione della curva-tura e dell’angolo d’incidenza effettivi della sezione considerata rispetto ai valori ottenuti dallateoria della linea portante. Allo scopo di valutare, seppure in misura approssimata, l’influenzadella corda di pala quando si usa la LLT, e necessario applicare correzioni che tengano contorispettivamente dell’angolo d’incidenza, del passo e della curvatura della sezione durante ilcalcolo di progetto (problema inverso). Nel caso del problema diretto, e necessario introdurrecorrezioni similari per determinare piu accuratamente il coefficiente di portanza della sezione.Ad esempio, se si utilizza il sistema di correzioni per la corda di pala sviluppato da Morgan etal. (1955), la formula (3.58) per la determinazione del coefficiente di portanza puo essere mo-dificata, tenendo conto dei valori corretti della curvatura e dell’angolo d’incidenza, per essereriscritta come
CL = 2πµ
[ϕ− βi − (t◦/c) kt
kα+
2χ·f/c
kc
](3.98)
dove kc, kα e kt sono i fattori di correzione, ottenuti utilizzando la teoria della superficie por-tante, rispettivamente per curvatura, angolo d’incidenza e spessore della sezione di pala, e dovet◦/D e lo spessore adimensionale massimo sull’asse dell’elica. L’influenza dello spessore di palasi riduce al diminuire della lunghezza di corda adimensionale di pala, c0.7R/D, ovvero del pa-rametro (AE/A0)/Z. Quando sia (AE/A0) < 0.05 Z, questa influenza puo essere trascurata.
Come e noto, la curvatura, la sua distribuzione radiale e l’angolo d’incidenza ideale sono diversiin flusso bidimensionale ed in flusso tridimensionale. La teoria della linea portante e in gradodi trattare gli effetti tridimensionali sulla pala di un’elica solamente in direzione radiale. Di
145
3 – Fondamenti della teoria vorticale
conseguenza, l’affidabilita nell’utilizzo della teoria della linea portante per il progetto e l’analisidelle prestazioni di eliche con pale larghe dipende in grande misura dall’accuratezza del metodoadottato per prevedere gli effetti tridimensionali della lunghezza di corda. Nella formulazionedei diversi modelli matematici LLT sono effettuate ipotesi diverse circa la distribuzione di ca-rico radiale e lungo le sezioni di pala. Ne deriva un complicato integrale singolare dal qualecalcolare la conseguente distorsione della pala per ottenere il carico richiesto. Oltre a determi-nare gli effetti del carico, Kerwin e Leopold (1964) hanno considerato l’effetto dello spessore dipala ed hanno trovato che contribuisce significativamente alla necessaria distorsione di pala.
Per un’elica senza ‘skew’, l’effetto del carico sulla forma di pala comporta una curvatura edun angolo d’incidenza ideale maggiori di quelli richiesti in flusso bidimensionale per produrrela stessa portanza. L’effetto principale dello spessore e di distorcere il flusso in maniera taleche occorre aumentare l’angolo d’incidenza per garantire il carico desiderato. Analogamente,l’effetto principale dello ‘skew’ e una variazione dell’angolo d’incidenza con un’ulteriore piccolavariazione della curvatura dei profili.
Quando si progetta un’elica, molto spesso si utilizzano le caratteristiche bidimensionali dei pro-fili alari e si introducono fattori di correzione derivati dalla teoria della superficie portante perottenere la geometria dell’elica che fornisca la distribuzione del carico voluta per la condizioneassegnata.
Poiche i fattori di correzione per superficie portante possono essere derivati indipendentementedall’entita del carico e dello spessore dell’elica, e stato possibile calcolare una serie sistematicadi questi fattori di correzione, che possono essere utilizzati nel progetto dell’elica per ottenereil passo e la curvatura di pala senza dovere ricorrere ad aggiustamenti empirici.
In virtu delle condizioni al contorno linearizzate, le correzioni per la curvatura e per l’angolod’incidenza ideale, che sono indipendenti dall’entita del carico dell’elica, possono essere derivateconsiderando rispettivamente il rapporto della curvatura e dell’angolo d’incidenza ideale tridi-mensionale rispetto alla curvatura ed all’angolo d’incidenza ideale bidimensionale. I fattori dicorrezione sono ovviamente dipendenti dalla distribuzione radiale del carico (o del passo), dalnumero di pale, nonche dall’area di pala e dalla sua forma. Analogamente si puo derivare unfattore di correzione per lo spessore, che non dipende dall’entita dello spessore, ma che dipendedalle distribuzioni dello spessore radialmente e lungo la corda.
A cavallo tra gli anni ’60 e ’70 Morgan et al. (1968), Minsaas e Slaattelid (1971), e Cumminget al. (1972) pubblicarono un’ampia gamma di fattori correttivi derivati da codici di calcolobasati sulla teoria della superficie portante: utilizzarono il programma di calcolo sviluppato daKerwin e Leopold (1964) per tenere conto degli effetti dello spessore e quello implementato daCheng (1964, 1965) per tenere conto degli effetti del carico. L’insieme dei fattori correttivi residisponibili da questi autori coprono un vasto campo di variazione della geometria dell’elica.Il numero di pale considerate e Z = 3, 4, 5, 6. I valori del rapporto AE/A0 sono 0.35, 0.55,0.75, 0.95, 1.15. I valori esaminati del coefficiente d’avanzo induttivo sono λi = 0.4/π, 0.8/π,1.2/π, 1.6/π e 2.0/π. L’angolo di ‘skew’ ha valori agli apici di pala pari a θs = 0◦, 7◦, 14◦, 21◦,180◦/Z, 360◦/Z. Le sezioni radiali sono r = 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9.
146

3.11 – Fattori di correzione per superficie portante
Conseguenze tridimensionali importanti di questi fattori di correzione sulla sezione di palasono gli effetti prodotti dal carico idrodinamico e dallo spessore sulla curvatura della linea me-diana e sull’angolo d’incidenza ideale. Altri effetti 3D sono risultati relativamente insignificanti.
In flusso bidimensionale, per una linea mediana NACA a=0.8, se la curvatura massima e fmax,la lunghezza di corda c necessaria per ottenere il coefficiente di portanza CL della sezione e
fmax
c= 0.06790·CL
e l’angolo d’incidenza ideale, espresso in gradi, vale
αi = 1.54CL
mentre in flusso tridimensionale si ha rispettivamente
fmax
c= 0.06790 kc ·CL e αi = 1.54 kα ·CL
Il fattore di correzione della curvatura, kc, dovuto al carico, e definito come il rapporto dell’or-dinata massima della curvatura richiesta per avere uno specifico coefficiente di portanza in unflusso tridimensionale rispetto alla ordinata massima che genera lo stesso coefficiente di por-tanza in un flusso bidimensionale. Questo fattore e quasi sempre maggiore dell’unita a causadella curvatura del flusso indotto lungo la sezione di pala, la quale riduce in effetti la curvaturageometrica.
Il fattore di correzione dell’angolo d’incidenza ideale, kα, dovuto al carico, e definito come ilrapporto tra l’angolo d’incidenza ideale in un flusso tridimensionale ed il valore bidimensionaleper un coefficiente di portanza eguale all’unita. Questo comporta che per un assegnato coef-ficiente di portanza, l’angolo d’incidenza ideale tridimensionale e maggiore del corrispondentevalore bidimensionale.
Il fattore di correzione dell’angolo d’incidenza ideale, kt, dovuto allo spessore e definito comeil rapporto tra l’angolo d’incidenza tridimensionale indotto dallo spessore di pala e lo spessoreadimensionale di pala sull’asse dell’elica. Il coefficiente kt fornisce il valore dell’angolo αt chedeve essere aggiunto all’angolo (βi + αi), e che puo essere calcolato in radianti come
αt = kt · t◦D
I valori di questo fattore di correzione sono per la maggior parte positivi, il che indica chel’effetto dello spessore richiede un angolo d’incidenza positivo addizionale per ottenere il valoreatteso del coefficiente di portanza.
Le eliche per le quali furono effettuati i calcoli mediante la teoria della superficie portanteavevano un raggio del mozzo pari a rh = 0.2, con distribuzione di spessore NACA 66∗ e lineamediana NACA a=0.8 a tutti i raggi.
147

3 – Fondamenti della teoria vorticale
Lungo il raggio di pala di queste eliche la distribuzione di spessore e data da
tmax(r)D
=(
t◦D− 0.003
)·(1− r) + 0.003
dove tmax e lo spessore massimo al raggio r.
La lunghezza di corda e data dalla formula
c(r)D
=k(r)Z
·AE
A0
dove k(r) = 1.6338, 1.8082, 1.9648, 2.0967, 2.1926, 2.2320, 2.1719, 1.8931, 1.5362, 0, rispetti-vamente ai raggi r = 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 0.95, 1.0.
E considerata ammissibile l’applicazione di questi fattori di correzione ad eliche che presentanodistribuzioni di curvatura e di spessore delle sezioni non troppo diverse, differenti profili di palae diverse distribuzioni di carico radiale.
La distribuzione radiale dello ‘skew’ fu scelta in modo che la curva luogo dei punti a metalunghezza di corda fosse un arco circolare nel piano dell’area espansa, calcolata mediantel’equazione
skewR
= Rs −√
R2s − (r − 0.2)2 (3.99)
dove
Rs =0.32
skewtip+
skewtip
2e skewtip =
θs
cosβi
essendo θs l’angolo di ‘skew’.
La rappresentazione polinomiale di questi fattori di correzione offre molti vantaggi. Si evitano,tra l’altro, complicate procedure d’interpolazione per il caso frequente nel quale siano richiestii fattori di correzione per valori intermedi delle quattro variabili indipendenti che sono Z, θsr ,AE/A0 e λi. Per i valori calcolati da Morgan et al. (1968) e da Minsaas e Slaattelid (1972),van Oossanen (1974) ricavo le polinomiali che forniscono i fattori di correzione per superficieportanta mediante un metodo di regressione multipla; tali fattori sono formulati come
kc, kα, kt =∑
i
ci ·Zsi ·(tan θsr)ti ·
(AE
A0
)ui
·(λi)vi (3.100)
dove θsr e l’angolo di ‘skew’ locale.
I coefficienti ci e gli esponenti si, ti, ui e vi sono forniti da van Oossanen (1974) per le ventisettepolinomiali ai nove raggi suddetti, valide per i seguenti campi di definizione delle variabili
3 ≤ Z ≤ 7
0 ≤ tan θsr ≤ 1.02556−√
1.05177− (r − 0.2)2
0.35 ≤ AE/A0 ≤ 1.15
0.4/π ≤ λi ≤ 2/π
148

3.11 – Fattori di correzione per superficie portante
L’angolo di ‘skew’ locale, mostrato in Figura 3.39, e definito come l’angolo tra la linea radialeche passa attraverso la curva di ‘skew’ effettivo della pala dell’elica al raggio considerato e laretta radiale tangente a questa curva di ‘skew’ al raggio dove lo ‘skew’ e minimo, ossia al rag-gio dove la coordinata polare angolare e massima nel verso di rotazione. E stato ricavato chetutte le curve, quando sia stata eliminata la dipendenza dal numero di pale, mostrano tendenzeregolari che hanno consentito l’estrapolazione da Z = 6 a Z = 7. Le polinomiali per r = 0.2e r = 1.0 sono state ottenute per estrapolazione e dovrebbero essere utilizzate per avviare legrandezze varianti radialmente vicino al mozzo ed all’apice.
Le polinomiali della formula (3.100) sono valide solamente per uno ‘skew’ moderato, ossia 0◦
per r = 0.2, 0.3◦ per r = 0.3, 1.2◦ per r = 0.4, 2.6◦ per r = 0.5, 4.7◦ per r = 0.6, 7.5◦ perr = 0.7, 11.2◦ per r = 0.8, 16◦ per r = 0.9 e 21◦ per r = 1.0. Per ‘skew–back’ elevati, sipossono utilizzare i dati pubblicati da Cumming et al. (1972). Questi valori, comunque, sonoforniti solamente per il valore AE/A0 = 0.75 e solamente per due valori del coefficiente d’avanzoinduttivo, ossia λi = 0.8/π e λi = 1.2/π.
Figura 3.39. Definizione dello skew effettivo e degli angoli di skew locale
Utilizzando ancora il metodo di regressione multipla, van Oossanen (1974) ha derivato perquesti valori le polinomiali
kc, kα, kt =∑
i
ci ·rai ·Zbi ·(θsr)di (3.101)
dove θsr e l’angolo di ‘skew’ locale espresso in radianti. E fornito un insieme di polinomiali perAE/A0 = 0.75 e λi = 0.8/π, ed un insieme per AE/A0 = 0.75 e λi = 1.2/π.
I valori approssimati di questi fattori di correzione per superficie portante per valori diversidell’area espansa e dei coefficienti d’avanzo possono essere determinati da queste polinomialideterminando il differenziale totale
k = k◦[Z◦, θsr ,
(AE
A0
)
◦, (λi)◦
]+
(∂k
∂Z
)
◦∆Z +
(∂k
∂(AE/A◦)
)
◦∆
(AE
A0
)+
(∂k
∂λi
)
◦∆λi (3.102)
dove (AE/A◦)◦ = 0.75, (λi)◦ = 0.8/π o 1.2/π e Z◦ = 4,5 o 6.
149
3 – Fondamenti della teoria vorticale
Nella formula (3.102) le derivate di k devono essere determinate rispetto al rapporto d’areaespansa, al coefficiente d’avanzo induttivo ed al numero di pale. Le espressioni approssimatedi queste derivate possono essere ottenute differenziando le polinomiali (3.100) ottenute per‘skew’ moderato.Finche non fu implementata 1a teoria della superficie portante, furono sviluppati parecchi si-stemi di correzione alla lunghezza della corda di pala. Ne vengono elencati alcuni.
Papmel (1936) ipotizzo che la componente tangenziale della velocita indotta aumenti linear-mente kungo la corda di pala da zero al suo valore nella scia all’infinito a valle, ed ottenne unacorrezione per curvatura umediante la semplice formula
∆ (f/c) = 0.25 sin2βi ·tan(βi − β∗) (3.103)
dove ∆ (f/c) e la variazione di curvatura che, nel caso del problema diretto, deve essere sottrat-ta al valore della curvatura reale della sezione di pala considerata, mentre nel caso del problemainverso deve essere aggiunta al valore ottenuto con la teoria della linea portante. Se nel progettodell’elica (problema inverso) per la sezione di pala a 0.7R si utilizza la correzione di Papmelinvece di quella ottenuta con la LST, la curvatura della sezione di pala viene ridotta dell’11%.Comunque, la correzione di Papmel non considera un certo numero di condizioni importanti,quali il carattere della distribuzione di carico lungo la corda o la forma del contorno di pala.
Diffusa applicazione incontrarono anche le correzioni della larghezza di pala ottenute mediantel’utilizzo della teoria del flusso attorno ad una cascata idrodinamica infinita piana. Questo ap-proccio e basato sul fatto che il moto del fluido intorno all’elica avviene approssimativamentelungo una superficie cilindrica. Infatti, svolgendo questo cilindro su una superficie piana, epossibile osservare la somiglianza tra il flusso attorno al profilo immerso in una cascata e quellointorno alla sezione cilindrica, il che consente di considerare in modo approssimato la presenzadelle pale contigue. Correzioni di questo tipo sono usate anche per la curvatura e per l’angolod’incidenza. I loro valori dipendono dal passo della cascata relativa 2πr/(Z ·c) e dall’angolodi passo ϕ dell’elemento di pala considerato. Uno svantaggio notevole delle correzioni di taletipo e dovuto al fatto che non considerano il flusso tridimensionale. Le pressioni molto a monteed a valle della cascata in un flusso piano sono differenti, mentre in un flusso tridimensionalesono considerati eguali se le forze centrifughe sono piccole. Per superare questo inconveniente,Gutsche (1938) propose un sistema di correzioni per la corda di pala ottenuto utilizzando irisultati di prove con cascata di apertura finita in una galleria aerodinamica.
Il confronto dei risultati ottenuti da calcoli effettuati con metodi differenti per tenere conto dellacorda di pala, mostrano che, per quanto riguarda le caratteristiche globali delle eliche di geo-metria semplice, quei risultati sono ben correlati tra loro ed anche con gli esperimenti. Quandosi calcolano le caratteristiche di distribuzione, ossia il carico e la pressione lungo la corda, equando si vuole risolvere il problema inverso (progetto), tali differenze possono raggiungerevalori significativi. Di conseguenza, in tali casi i calcoli dovrebbero essere effettuati mediantel’applicazione della teoria della superficie portante sotto forma di correzioni corrispondenti,oppure con l’applicazione di codici numerici sviluppati allo scopo.
150

3.12 – Condizione ottimale dell’elica
3.12 Condizione ottimale dell’elica
Nel progetto finale l’elica ottimale dovrebbe spingere la nave alla velocita definita contrattual-mente, massimizzando cosı la spinta, mentre assorbe una potenza predefinita ad un precisonumero di giri. In alternativa, si puo volere minimizzare il momento torcente per una spintaprescritta. Ovviamente, la soluzione di questo problema richiede un’ottimizzazione multicrite-riale, che introduce come variabili e parametri le diverse caratteristiche geometriche dell’elica.Questa definizione del problema parte dall’assunto che ad un certo stadio del progetto dell’elicasono stati gia scelti il motore principale ed il riduttore, per cui sono noti la potenza da assorbireed il numero di giri dell’elica. Ovviamente, il rendimento quasi–propulsivo e massimizzato perla massima velocita nave. In questa sede, il problema dell’ottimizzazione dell’elica viene ridottoalla determinazione della distribuzione ottimale del passo geometrico, ossia della distribuzioneottimale della circolazione.
3.12.1 Formulazione del problema
Il problema da risolvere nel processo di ottimizzazione e il seguente: essendo assegnati la po-tenza sviluppata al mozzo, PD, ed il numero di giri dell’elica n, ed avendo determinato la spintarichiesta, Tr = Tr(Vs), e la distribuzione di scia effettiva, w = w(r, Vs), si devono ricavare la ve-locita nave massima possibile, Vs, la spinta dell’elica, Tp, ed il rendimento quasi–propulsivo, ηD.
La soluzione di questo problema non e determinabile in un passo in quanto Vs e incognita; sideve ricorrere, quindi, ad una procedura iterativa. Si assume una velocita nave Vs, e con gliassegnati valori di PD ed n si massimizza la spinta dell’elica Tp. Se questa spinta e minore(maggiore) della corrispondente Tr, si diminuisce (aumenta) Vs e si ripete la procedura finchee Tp = Tr.
Questo problema, sebbene non sia ovvio, ha come soluzione una distribuzione del passo idro-dinamico identica a quella del problema dell’ottimizzazione piu tradizionale dell’elica, dove sivuole minimizzare la potenza assorbita PD per gli assegnati valori di VS , T , w e n.
L’equivalenza dei due problemi puo essere dedotta facilmente se si segue la procedura di Yim(1976), ma con il coefficiente di spinta CT da massimizzare (piuttosto che CP da minimizzare),con un predeterminato coefficiente di potenza CP (piuttosto che il coefficiente di spinta CT ).In questo modo, i criteri tradizionali di ottimizzazione possono essere applicati anche a questadefinizione del problema.
Mentre altre considerazioni, quali l’innesco della cavitazione per vortice d’apice, possono co-stringere ad allontanarsi dalla condizione ottimale, questo e un logico punto di partenza nelprocesso progettuale. Il problema dell’ottimizzazione dell’elica puo essere risolto utilizzandoil metodo del calcolo variazionale. Ma le equazioni risultanti, sebbene possano essere risolterapidamente al computer, sono nonlineari e complicate, ma soprattutto sono di poco aiuto allacomprensione fisica del problema.
151

3 – Fondamenti della teoria vorticale
D’altra parte, l’approccio iniziale sviluppato da Betz (1919) per un’elica in flusso uniformecon velocita VS , ed esteso successivamente da Lerbs (1952) per un’elica adattata alla scia, erelativamente semplice da derivare ed e intuitivo dal punto di vista fisico. Si supponga di avereuna distribuzione ottimale di circolazione e che questa generi la spinta desiderata, e si ipotizzidi perturbare questa circolazione aggiungendovi un incremento δΓ al reggio arbitrario r. Ciocomporta una variazione incrementale δT della spinta e δQ del momento torcente. Il risultatodi questo processo e il rapporto tra potenza in uscita e potenza in ingresso
η∗ =δT ·VS
δQ·ωr(3.104)
Se la distribuzione Γ (r) e veramente ottimale, η∗ deve essere indipendente dal raggio; altrimen-ti, la circolazione dovrebbe essere diminuita ad un raggio dove η∗ e basso ed incrementato diuna quantita corrispondente ad un raggio dove η∗ e elevato. Il risultato sarebbe una riduzionedel momento torcente per una spinta assegnata, contraddicendo cosı l’asserzione che Γ (r) siaottimale. In ogni caso, questa e fondamentalmente una formulazione fisicamente consistentedel principio variazionale.
Comunque, se si cercasse di esprimere l’equazione (3.104) in funzione della circolazione e deifattori di induzione della velocita indotta, le espressioni risultanti non sarebbero affatto sempli-ci. Questo accade in quanto l’incremento della circolazione introdotto ad un raggio particolare,r, non solo fa variare la forza localmente, ma altera la forza su tutto il raggio per effetto dellaconseguente variazione della distribuzione della velocita indotta. Betz supero questa difficoltaimpiegando un principio sviluppato da Munk, il quale afferma che la forza totale su una su-perficie portante rimane invariata se un elemento della circolazione concatenata e spostato indirezione di una linea di corrente. Il teorema di Munk deriva dal principio che la forza su unasuperficie portante puo essere ottenuta solamente da un’analisi della variazione della quantitadi moto nel campo di flusso lontano dalla superficie portante ed assumendo che il flusso in que-sto campo dipenda solamente dall’intensita dei vortici liberi, che a sua volta non e influenzatada uno spostamento lungo una linea di corrente della vorticita concatenata.
Betz aggiunse percio l’incremento della vorticita concatenata alquanto a valle dell’elica, cosıda non avere alcuna interazione tra l’incremento della circolazione ed il flusso sulla linea por-tante dell’elica. D’altra parte, la forza locale agente sull’elemento aggiunto della circolazioneconcatenata deve includere l’effetto del raddoppio delle velocita indotte
δFx(r) = ρ [ωr + 2ut(r)] δΓ
δFt(r) = ρ [VS + 2ua(r)] δΓ
Se si assume che siano ut(r) << ωr e ua(r) << VS , si possono effettuare alcune manipolazionialgebriche grazie alle quali si ottiene
δT ·VS
δQ·ω ·ωr
VS≈ VS + 2ua(r) + u2
a/VS
ωr + 2ut(r) + u2t /VS
=VS
ωr
[(ωr)2 + 2ωrut + u2
t
V 2S + 2VSua + u2
a
]=
VS
ωr
[ωr + ut
VS + ua
]2
(3.105)
152

3.12 – Condizione ottimale dell’elica
Se si combinano le equazioni (3.105) e (3.61), il rendimento diviene
η =δT ·VS
δQ·ω =[ωr + ut(r)VS + ua(r)
]2 [VS
ωr
]2
=[
tan β(r)tanβi(r)
]2
(3.106)
Per un’elica con una distribuzione ottimale del carico radiale l’equazione (3.106) deve essereindipendente dal raggio; altrimenti una redistribuzione della circolazione potrebbe variare ilrendimento globale. Si ha percio il risultato
tanβ(r)tanβi(r)
= cost. (3.107)
che e noto come condizione di Betz .
In base a questa condizione, il flusso indotto sulla linea portante deve formare una superficieelicoidale a passo costante. La condizione di Betz e il corretto risultato lineare nel caso di flussoideale ed omogeneo. La costante incognita nell’equazione (3.107) e funzione della spinta desi-derata, il cui valore puo essere determinato solamente dopo avere calcolato le velocita indotte.La prima soluzione per la distribuzione della circolazione che soddisfa la condizione di Betz fusviluppata da Prandtl che utilizzo un metodo approssimato per ottenere la velocita indotta.Questo metodo fu seguito da una soluzione esatta dovuta a Goldstein (1929).
Ragionamenti simili sono applicabili nel caso di un flusso assiale non–uniforme o di un’elicaadattata alla scia. In questo caso si puo ottenere la condizione di Lerbs formulata come
tanβ(r)tanβi(r)
= ε√
1− wx(r) (3.108)
dove ε e una costante incognita.
Yim (1976) ha derivato la maggior parte dei criteri di ottimizzazione del passo, estendendoliper tenere conto della resistenza d’attrito di pala e della resistenza delle cavita. Nel caso dieliche convenzionali subcavitanti, Yim sostiene che possono essere trattate mediante teorie apotenziale e che percio il criterio di Betz, secondo il quale il passo idrodinamico e costante,puo essere applicato ad eliche operanti in flusso omogeneo, mentre il criterio di Lerbs, secondoil quale la distribuzione del passo idrodinamico dovrebbe essere
Pi = 2πλi = 2πr tanβi = c√
1− w(r)
puo essere utilizzato per ottimizzare le eliche adattate alla scia. Tutti questi criteri sono statiderivati utilizzando diverse ipotesi semplificative.
L’ipotesi fondamentale per la scia delle eliche navali e che sia modellata mediante linee elicoi-dali di raggio ed angolo d’avanzo costanti. Ma questo modello di scia viola il teorema base deiflussi vorticosi secondo il quale la scia dovrebbe muoversi con il fluido e viola anche la legge dicontinuita in quanto non prevede la contrazione della scia. La causa di queste inconsistenze eche le velocita indotte dalla scia nell’infinito a valle, che non sono piccole per le eliche navali,sono doppie delle velocita indotte sul disco–elica, e che dietro il disco–elica esistono le compo-nenti radiali delle velocita.
153

3 – Fondamenti della teoria vorticale
La scia effettiva delle eliche marine non corrisponde affatto a questo modello matematico. Gliesperimenti su modelli hanno dimostrato che i vortici liberi, dopo una piccola zona di transi-zione, si avvolgono in un vortice elicoidale d’apice ed in un nucleo vorticoso rettilineo che sistacca dal mozzo.
Anche se le ipotesi suddette relative al modello matematico della scia sembrano giustificate dalpunto di vista ingegneristico, questo modello non puo essere assolutamente utilizzato in proce-dure di ottimizzazione senza effettuare verifiche sperimentali. Inoltre, anche quando si utilizzail modello approssimato di scia, la trattazione matematica della procedura di ottimizzazionenecessita di un’ulteriore ipotesi base, ossia che la scia sia ‘congelata’ durante la variazione delladistribuzione della circolazione, mentre si ricerca la distribuzione ottimale della circolazione ela corrispondente distribuzione del passo.
3.12.2 Condizione ottimale generalizzata
In base alle formule (3.55) ed alla (3.56), sostituendovi la (3.54) e la condizione che sia
T =TE
1− t(3.109)
e possibile esprimere le caratteristiche dinamiche dell’elica come
T = ρZ
∫ R
rh
Γ VR (cosβi − ε sinβi) dr (3.110)
Q = ρZ
∫ R
rh
Γ VR (sinβi + ε cosβi)·r dr (3.111)
Si consideri il sistema elica–carena. La formula che esprime le perdite di potenza in questosistema e del tipo
∆PD = Qω − TEV (3.112)
Il rapporto tra potenza utile e potenza sviluppata, che rappresenta il rendimento quasi–propulsivo del sistema, e
ηD =T (1− t)·V
T (1− t)·V + ∆PD(3.113)
Le caratteristiche di un qualsiasi sistema elica–carena sono del tutto definite da Z, rh, R, ρ,V , ω, t, ε(r), Γ (r), βi(r). Se si assume, inoltre, che siano noti il parametro λw ed il campo divelocita dei vortici liberi ~Vw sul disco-elica, utilizzando le formule (3.7), (3.43), (3.44) e (3.45),e possibile ricavare VR(r) e βi(r) per un’assegnata distribuzione di circolazione Γ (r) .
154

3.12 – Condizione ottimale dell’elica
In questo modo, la ricerca dell’elica ottimale operante nel sistema elica–carena puo essere vistacome la ricerca della legge della distribuzione radiale di circolazione Γ (r) che assicuri il mas-simo rendimento quasi–propulsivo ηD, non appena siano determinati la forza di rimorchio TE
ed i parametri Z, rh, R, ρ, V e ε(r), Vwx(r), Vwt(r) e λw.
Naturalmente, invece della legge ottimale per la distribuzione di circolazione, si potrebbe rica-vare la condizione ottimale dalla quale derivare questa distribuzione. Questo problema non estato ancora risolto del tutto. Comunque, e stata trovata una soluzione per un certo numero dicasi. Ad esempio, per un’elica leggermente caricata la condizione ottimale fu ricavata da Betz.La condizione ottimale generalizzata puo essere scritta nella forma
~u∗∞ =~u∗n∞
cosβ◦w=
2~u∗nd
cosβ◦w= c− λtv(t− wx)− λ2
tvwt
r− ε
r
(r2 + λ2
tv
)(3.114)
dove ~u∗∞ e ~u∗n∞ sono adimensionalizzate rispetto a ωR, e rappresentano rispettivamente la ve-locita di spostamento e la componente normale della velocita indotta sui punti corrispondentidella superficie libera vorticosa all’infinito a valle dell’elica; β◦w e l’angolo di passo della superfi-cie libera vorticosa pari, secondo l’ultima delle relazioni (3.54), a tan−1 (λw/r) e corrispondentead un passo predeterminato radialmente costante; c e una costante il cui valore e determinatodall’equazione e che assicura la forza di rimorchio data (spinta); λtv = V/ωR e il coefficiented’avanzo alla velocita nave; wx = −Vwx/V e wt = −Vwt/V sono rispettivamente il coefficientedella componente media circonferenziale del campo di velocita sul disco–elica; t e il fattoredi deduzione di spinta, indipendente dal raggio; ε e una funzione caratterizzante la distribu-zione radiale della qualita inversa delle sezioni di pala dell’elica. Questa formulazione fornisce lacondizione ottimale richiesta nell’ambito dello schema lineare ed e valida entro i limiti seguenti:
1. i valori di t, wx(r), wt(r), ε(r), λw, λtv, u∗∞ sono piccole quantita del primo ordine, mentrei parametri rh e λw non sono piccoli; si rientra percio nel caso di carico leggero con l’unicadifferenza, rispetto alle ipotesi di Betz, che nel caso generale il passo dei filamenti vortico-si liberi non e uguale al passo della traiettoria dei punti corrispondenti della linea portante;
2. il campo esterno di velocita, caratterizzato dalle funzioni wx(r) e wt(r), e consideratofisso e non dipendente dalla distribuzione radiale della circolazione;
3. il fattore di deduzione di spinta t e considerato noto ed anch’esso non dipendente dalladistribuzione radiale di circolazione; comunque, se si ipotizza noto il campo di velocitanominale nella scia assai a poppavia della carena, e se e descritto dalle funzioni wx∞(r)e wt∞(r), e possibile evitare di dovere fare ipotesi circa t dal momento che il suo valorenon e compreso nelle espressioni considerate;
4. viene utilizzata l’ipotesi di stazionarieta, per cui il campo esterno di velocita e assuntoassial–simmetrico e coassiale con l’elica, dopo avere calcolato la media circonferenzialedel campo di velocita reale;
5. si suppone, infine, che la disuniformita del campo esterno di velocita sia piccola, per cuisi puo applicare l’approccio quasi–potenziale; di conseguenza, nella determinazione delleforze e delle velocita indotte si possono utilizzare le relazioni della teoria della linea por-tante che sono del tutto valide solo per flussi potenziali.
155

3 – Fondamenti della teoria vorticale
La correttezza della suddetta condizione ottimale generalizzata puo essere dimostrata in basealla relazione che lega le perdite di potenza tra una condizione qualsiasi e quella ottimale
∆PD −∆P ◦D = ρZ ω
∫ R
rh
(Γ − Γ ◦)un∞ − u◦n∞
2 cos β◦wr dr (3.115)
dove l’apice ‘◦’ indica i valori dei parametri quando sia soddisfatta la condizione ottimale(3.114). L’esattezza di questa relazione viene dimostrata, a sua volta, mediante alcune tra-sformazioni, nel corso delle quali e importante considerare l’eguaglianza delle spinte al raggioconsiderato e della distribuzione ottimale della circolazione. Analogamente va considerata lacorrettezza dell’equazione
∫ R
rh
Γu◦n∞
cosβ◦wr dr =
∫ R
rh
Γ ◦un∞
cosβ◦wr dr (3.116)
ottenuta da Polyahov (1948) mediante l’utilizzo della seconda formula di Green per il flussopotenziale costituito da elicoidi regolari ed esterno alla superficie dei vortici liberi. Se a taleflusso si applica la prima formula di Green, e possibile provare la correttezza della disequazione
∫ R
rh
Γun∞
cosβ◦wr dr > 0 (3.117)
per ogni funzione Γ (r) diversa da zero e sufficientemente avviata. Se si accetta che sia Γ 6= Γ ◦,dalle relazioni (3.115) e (3.117) deriva direttamente che e ∆PD − ∆P ◦
D > 0, ossia che nelleipotesi suddette le perdite di potenza del sistema elica–carena, di assegnata forza di rimorchioe di distribuzione casuale di circolazione non–ottimale, sono sempre piu elevate delle perditedello stesso sistema con la stessa forza di rimorchio ma con distribuzione di circolazione otti-male, data dalla formula (3.114).
La condizione ottimale generalizzata cosı ottenuta, in base alle osservazioni suddette, e esatta-mente valida solo per eliche leggermente caricate, ossia quando t, wx, wt, ε, u∗∞ e (λw − λtv)tendono a zero. Il carattere asintotico della condizione ottenuta consente di effettuarne le tra-sformazioni, che sono corrette solamente tenendo conto di questa caratteristica; ad esempio, perwx → 0 asintoticamente, trascurando i piccoli termini del secondo ordine, e pressoche correttala seguente identita
1
1− wx
2
≈ 1 +wx
2≈ √
1 + wx
In base a quanto detto e tenendo conto dell’equazione (3.61), mediante trasformazioni alge-briche e possibile provare che le seguenti formule per la condizione ottimale generalizzata sonoequivalenti alla (3.114), poiche le differenze nei risultati sono marginali per effetto dei piccolitermini del secondo ordine che erano stati trascurati nel ricavare la condizione (3.114).
156

3.12 – Condizione ottimale dell’elica
2und
ωR cosβi
2und
ωR cosβ◦w
2und
ωR cosβ
2und
ωR cosβ∗
≈ c− λtv(t− wx)− λ2tv wt
r− ε
r(r2 + λ2
tv) (3.118)
tanβi
tanβ∗≈
1 +c
2λtv− t
2+
wx
2− λ2
tv wt
2r− ε
2r· r
2 + λ2tv
2λtv
√(1− t) (1− λtv wt/r) (1 + c/λtv − ε r/λtv)
(1− wx) (1 + ε λtv/r)
(3.119)
r tanβi
λtv≈
1 +c
2λtv− t
2− wx
2+
λ2tv wt
2r− ε
2r
r2 + λ2tv
2λtv
√(1− t)(1− wx)(1 + c/λtv − ε r/λtv)
(1− wt λtv/r)(1 + ελtv/r)
(3.120)
r tanβi∞λtv
≈ (1− t)(1 + c/λtv − ε·r/λtv)1 + ελtv/r
(3.121)
dove conformemente alle ipotesi suddette sono
r tanβ = λtv = cost.
r tanβw = λw = cost.
r tanβ∗ = λtv1− wx
1− λtvwt/r
r tanβi = r tanβ∗ +und
/(ωR cosβ◦w)1− λtvwt/r
r tanβi∞ = r tan β∗ +2und
/(ωR cosβ◦w)1− λtvwt/r
Si deve osservare che applicando praticamente queste formule, relative alla condizione ottimalegeneralizzata, le differenze tra i risultati da loro prodotte potrebbero essere significative. Maentro i limiti della presentazione qui sviluppata non occorre dimostrare quale delle formuleottimali generali dovrebbe essere preferita.
157

3 – Fondamenti della teoria vorticale
Dalla condizione ottimale generalizzata e possibile ricavare molte delle condizioni ottimali co-nosciute. Si considerano qui le piu importanti.
Caso 1. Se si trascurano le perdite viscose durante il moto delle particelle fluide dal disco–elicaall’infinito dietro la carena, qualora si conosca il campo di velocita nominale assai a valle nellascia, caratterizzato dalle funzioni wx∞ e wt∞ (con wx∞ = wf∞, che e la frazione di scia d’attritomolto a valle della carena), la condizione ottimale generalizzata (3.114) assume la forma
u∗∞ = c + λtvwx∞ −λ2
tvwt∞r
− ε
r(r2 + λ2
tv) (3.122)
Questa condizione corrisponde alla perdita minima, ossia al massimo rendimento propulsivoper una data forza di rimorchio, e non per la spinta assegnata, poiche in questo caso non esistealcuna limitazione per il fattore di deduzione di spinta.
La suddetta condizione e ottenibile dalla condizione (3.114) in base a quanto segue. Innanzitutto, e evidente che per un’elica installata molto a poppavia della carena risulta t = 0, ewx = wx∞ , wt = wt∞ ; ossia, e facile ottenere la formula (3.122) dalla condizione (3.114). Insecondo luogo, in base alla legge della conservazione della quantita di moto, il sistema elica–carena e del tutto determinato dal campo di velocita all’infinito dietro la carena. Questo eil motivo per cui due eliche leggermente caricate, una posizionata vicino alla carena, mentrel’altra e alquanto a valle della carena, svilupperanno un’identica forza di rimorchio se sonoeguali le distribuzioni radiali di circolazione, e quindi le velocita indotte all’infinito a valle.Percio il campo di velocita esterno non dipende dalla posizione dell’elica, in quanto e conside-rato nominale, ossia indipendente dall’azione dell’elica. In terzo luogo, in base all’equazionedel bilancio d’energia espressa in forma integrale, e possibile affermare che nel caso di elicaleggermente caricata le perdite di potenza dei due sistemi considerati sono uguali poiche le lorovelocita indotte all’infinito nella scia sono uguali. Si puo concludere, quindi, che la formula(3.122) fornisce la condizione ottimale richiesta per un’elica leggermente caricata, qualunquesia la sua posizione rispetto alla carena. Per w∞= 0 e ε = 0, questa condizione coincide conquella derivata per il sistema carena - elica ideale.
Caso 2. Se non si considerano le perdite viscose del profilo, ossia per ε = 0, il passo idrodina-mico all’infinito, definito mediante la relazione (3.121), e ottimale lungo il raggio (Fig. 3.40);ossia
πr tanβi∞ = λtv(1− t)(
1 +c
λtv
)= cost, (3.123)
Questa formula rende evidente che per un’elica isolata, quando e t = 0, il passo idrodinamico euguale a (λtv +c). In questo caso si puo dimostrare che se si ipotizza che il passo della superficiedei vortici liberi sia eguale a questo valore, ossia che si abbia λw = λtv+c, la condizione ottimale(3.123) sarebbe corretta non solo per carico leggero, ma per un carico qualunque.
158

3.12 – Condizione ottimale dell’elica
Figura 3.40. Diagramma delle velocita dell’elica ottimale leggermente caricata
Questa conseguenza, a rigore, non e corretta nel caso 1 in quanto e
r tanβi∞λtv
= 1 +c
λtv− (wx − wx∞)
mentre (wx − wx∞) non e costante lungo il raggio, sebbene nel caso di carico leggero, in basealla (3.66), sia costante in direzione radiale poiche e (wx − wx∞) ' t = cost.
Caso 3. Il rendimento propulsivo della sezione di pala senza considerare le perdite del profiloe pari a
η(r) =TE ·Va
ω dQ=
tanβ
tanβi(1− t) =
λtv(1− t)r tan βi
(3.124)
che generalmente, in base all’equazione (3.120), non e costante lungo il raggio.
Caso 4. Se si assume che siano λw = λtv = λt, t = 0, wx = wt = 0 e ε = 0, si puo ottenere lacondizione ottimale di Betz per un’elica isolata leggermente caricata. In questo caso le relazioni(3.118) si trasformano nella condizione
u∗∞ =2und
ωR cosβ= c (3.125)
che coincide appunto con la condizione di Betz, da lui formulata come teorema. L’elica chesoddisfa la condizione ottimale di Betz e detta elica ottimale nel senso di Betz . Il diagrammadi velocita di tale elica e stato fornito in Figura 3.21. Per tale elica di devono considerarequattro proprieta importanti:
1. Poiche e βw = β, la superficie dei vortici liberi e elicoidale e coincidente con la traiettoriadei punti della linea portante. In base all’equazione (3.125) il campo delle velocita in-dotte all’infinito dietro l’elica ottimale nel senso di Betz coincide con il campo di velocitaindotte da un moto traslatorio di Z elicoidi nel fluido ideale con velocita ux∞ nel flusso avalle lungo l’asse dell’elica.
159

3 – Fondamenti della teoria vorticale
2. In base all’equazione (3.120), il passo idrodinamico πr tanβi e costante lungo il raggio.Se si utilizza la costante λi invece di r tanβi, λi e λtv definiscono del tutto la velocitadell’elica ottimale di Betz. Di conseguenza, la velocita di spostamento ux∞ e la costantec sono legate dalla relazione
c
2=
u∗∞2ωR
= λi − λt (3.126)
3. Il rendimento induttivo dell’elemento di pala e costante lungo il raggio. Infatti, in basealla relazione (3.120) valgono le relazioni
ηi(r) =Va dT
ω dQ=
tanβ
tanβi=
λ
r tanβi≈ 1 +
c
2λt= cost. (3.127)
Percio il rendimento induttivo dell’elica ηi e uguale alla costante suddetta, il che permettedi scrivere
ηi = ηi(r) =tanβ
tanβi=
λt
λi(3.128)
4. Secondo la formula (3.121) il passo delle linee di flusso all’infinito dietro l’elica, e costantelungo il raggio (πr tanβi∞). Questa proprieta non contraddice la proprieta 2, poicheambedue posseggono un carattere asintotico e sono del tutto soddisfatte solamente percarico tendente a zero, ossia per u∗∞ → 0.
Caso 5. Se si ipotizza che siano t = 0, wx = ut = 0, ε = 0, rh = 0, e che sia
λw = λi +c
2(3.129)
e facile ricavare la condizione ottimale per un’elica isolata e moderatamente caricata, propostada Prandtl come generalizzazione del teorema di Betz. In questo caso, la condizione ottimalegenerale, espressa mediante la formula (3.118) assume la forma
u∗∞ =2und
ωR cosβi= c (3.130)
che puo essere definita come condizione di Prandtl . I1 diagramma delle velocita di un’elica ot-timale nel senso di Prandtl e illustrato in Figura 3.22. Il risultato riportato e valido per un’elicamoderatamente caricata. Come e stato verificato mediante numerosi calcoli, la condizione diPrandtl non e corretta quando l’elica e pesantemente caricata. Comunque, la differenza neivalori progettuali del rendimento di ambedue le eliche - quella ottimale e quella che soddisfa lacondizione di Prandtl - e intorno all’1%, anche per carichi maggiori. Questo e il motivo per cuinei calcoli ingegneristici e del tutto plausibile utilizzare la condizione (3.130) per il progetto diun’elica moderatamente caricata.
Tutte le proprieta suddette per un’elica ottimale nel senso di Betz sono corrette anche inquesto caso, con la sola differenza che il passo della superficie dei vortici liberi dovrebbe essere
160

3.12 – Condizione ottimale dell’elica
variata di conseguenza (si vedano le Figure 3.21 e 3.22). Tale proprieta permise a Goldstein,risolvendo il problema del flusso intorno ad un elicoide solido che si muove di moto traslatorioin un fluido ideale, di trovare il campo di velocita all’infinito, e di determinare in tal modo lalegge corrispondente della distribuzione di circolazione radiale ed i valori delle correzioni, κ,per un numero finito di pale.
161

3 – Fondamenti della teoria vorticale
162
Capitolo 4
Metodo di Eckhardt–Morgan
Esiste una terza via tra il progetto concettuale di un’elica, basato sui classici diagrammi diprogetto, ed il progetto finale, basato su teorie vorticali piu o meno e sofisticate?
Seppure fondamentali nelle fasi iniziali del progetto, i metodi di progettazione di eliche basatisui diagrammi di progetto e/o su equazioni di regressione da serie sistematiche presentano al-cune gravi limitazioni, tra le quali le principali sono:
• il massimo rendimento ottenibile dipende dal tipo di elica standard assunta come elicabase per il progetto;
• la previsione di cavitazione, nel caso di un’elica di serie standard, e effettuata mediantediagrammi empirico–statistici, i quali, al di la della loro imprecisione, forniscono sola-mente una valutazione media, e non le necessarie indicazioni sezione per sezione.
Mediante la teoria vorticale, che fornisce, tra l’altro, la relazione tra le forze agenti sugli ele-menti di pala e le variazioni di velocita che si manifestano nel fluido circostante, e possibile:
• progettare l’elica avente il massimo rendimento possibile, ossia la minima perdita di ener-gia;
• effettuare una previsione accurata della cavitazione per ogni sezione di pala.
Via via che negli ultimi decenni le velocita e le potenze asse sono andate crescendo, il problemadella cavitazione e costantemente cresciuto d’importanza. Cosı, non e sorprendente che il pro-getto dell’elica sviluppato con codici numerici basati sulla teoria vorticale sia divenuto semprepiu imprescindibile.
Nel caso ideale, il campo di velocita dietro la carena ed in prossimita dell’elica e consideratoirrotazionale ed omogeneo, per cui la velocita d’afflusso dell’acqua all’elica e la stessa su tutti ipunti dell’area del disco–elica ed e perpendicolare a questo piano. In questa condizione idealel’elica puo essere progettata con l’ausilio della teoria vorticale in un campo omogeneo di ve-locita. Con buona approssimazione, questa modalita di calcolo puo venire utilizzata per navibielica.
163

4 – Metodo di Eckhardt–Morgan
Soprattutto nel caso di navi monoelica, con i loro campi di velocita non uniformi in prossimitadell’elica, la teoria vorticale, sviluppata per un campo uniforme di velocita, viene estesa allateoria dell’elica adattata alla scia.
Esistono diverse teorie vorticali, quali quelle della linea portante e della superficie portante, chesolo negli ultimi decenni hanno trovato applicazione diretta grazie allo sviluppo dei computerse delle tecniche numeriche. Non va dimenticato, comunque, che per alcuni decenni i metodiapprossimati basati sulla teoria vorticale hanno permesso di migliorare i progetti delle eliche edi facilitare le applicazioni della teoria della linea portante con correzioni per superficie portante.
Tra i molti metodi sviluppati a suo tempo, si esamina il metodo approssimato di Eckhardt–Morgan (1955). Questo metodo, sviluppato sulla base della teoria della linea portante, includeuna correzione del passo che integra la teoria della linea portante con la teoria della superficieportante. Sebbene il metodo di Eckhardt–Morgan non sia fondato su una base teorica deltutto consistente, e stato riscontrato che i suoi risultati sono del tutto soddisfacenti dal puntodi vista propulsivo, per eliche leggermente caricate ed anche per eliche moderatamente caricate.
Vengono illustrate le ipotesi fondamentali e vengono fornite le equazioni necessarie per l’applica-zione pratica del metodo. Sono descritti due esempi: il primo relativo ad un’elica non–ottimalein flusso uniforme; il secondo per progettare un’elica adattata alla scia. Il confronto con ilmetodo rigoroso di Lerbs, basato sul metodo dei fattori d’induzione, ha mostrato che il metododi Eckhardt–Morgan e abbastanza accurato, tranne che per eliche pesantemente caricate.
4.1 Generalita
Diversamente dalla maggior parte delle macchine idrauliche, l’elica navale opera in condizionidifficilmente prevedibili e continuamente variabili. Ne consegue che la complessita del flusso cheinveste l’elica e l’interazione tra le pale, nonche tra campo fluido e pale, richiedono la soluzionedi un complesso problema teorico.
Come noto, per la fase concettuale del progetto, tutti gli approcci fin qui sviluppati si fondanosull’utilizzo dei risultati di prove sperimentali da serie sistematiche. Essi forniscono risultatisoddisfacenti circa la determinazione del rendimento propulsivo e, quindi, della relazione trapotenza motore, numero di giri dell’elica e velocita nave. Tuttavia, il progetto dell’elica deve af-frontare altri problemi, quali la cavitazione, le vibrazioni indotte ed il rumore, che non possonoessere affrontati adeguatamente se ci si limita all’utilizzo di eliche derivate da serie sistematiche.
Fino al 1907 non si ebbe a disposizione una base per sviluppare una moderna teoria dell’elica,che consentisse, tra l’altro, di analizzare il flusso incidente ad ogni raggio di pala. In quell’annoLanchester, un ingegnere meccanico inglese, formulo la teoria vorticale in un trattato intitolato‘Volo Aereo’. Pochi anni dopo, Prandtl formulo i fondamenti matematici di questa teoria.In seguito, Helmbold, Goldstein ed altri scienziati svilupparono ulteriormente i concetti basedella teoria vorticale per poterla trasferire alle applicazioni progettuali. Purtroppo, negli annisuccessivi si ebbe modo di riscontrare l’esistenza di un certo numero di discrepanze tra teoria
164
4.1 – Generalita
e sperimentazione. Ad esempio, la teoria della linea portante non era in grado di calcolare ladistribuzione del passo e dell’angolo d’incidenza per le eliche navali a pale larghe. Hill (1949)sviluppo curve empiriche per la determinazione dell’angolo d’incidenza. Altri, tra i quali Lud-wieg, Ginzel e Lerbs, affrontarono il problema progettuale su basi teoriche rigorose.
Lo sviluppo teorico della teoria della linea portante subı un’accelerazione negli anni ’50, quandosi cristallizzarono due approcci al problema progettuale: (i) metodi approssimati , tra i qualiebbe maggiore successo quello di Eckhardt–Morgan; (ii) metodi rigorosi , quale quello di Lerbsbasato sul calcolo dei fattori di induzione. Quest’ultimo metodo costituı un grande passo inavanti nella determinazione accurata delle velocita indotte in ogni sezione di pala; combina-to con altre acquisizioni teoriche, rese possibile sviluppare una teoria progettuale basata suprincipi idrodinamici. Tuttavia, richiedendo una notevole e complessa mole di calcoli, risultoall’epoca di difficile applicazione pratica da parte dei progettisti, i quali, come sempre, si scon-travano con le rigidita delle scadenze contrattuali.
Il metodo dei fattori di induzione di Lerbs sara qui utilizzato solamente come base di confrontoper la validazione dei risultati del metodo approssimato di Eckhardt–Morgan. Ovviamente, imetodi rigorosi forniscono una soluzione piu precisa al problema progettuale dell’elica rispettoai metodi approssimati. Ambedue utilizzano, tra l’altro, i fattori di riduzione di Goldstein nelcalcolo del coefficiente di portanza-spessore-corda per tenere conto dell’effetto di un numerofinito di pale. L’unica e sostanziale differenza tra i due metodi consiste nella procedura cheporta alla determinazione dei coefficienti di portanza, delle componenti assiali e tangenzialidelle velocita indotte, e della distribuzione della circolazione. Una volta ottenuti i risultatiidrodinamici base, i due metodi sono identici.
I risultati di un approccio approssimato, che pure e notevolmente semplificativo, sono in accor-do soddisfacente con quelli prodotti da un metodo rigoroso. Il metodo approssimato presentaalcuni vantaggi specifici: (i) richiede poca esperienza, conoscenza ed intuizione da parte dell’eli-cista; (ii) e basato quasi completamente su principi idrodinamici; (iii) e applicabile non soload eliche in flusso uniforme, ma anche ad eliche adattate alla scia; (iv) le correzioni del passoe della curvatura della linea mediana hanno un fondamento teorico, tranne che per l’effettoprodotto dalla viscosita; (v) prove e confronti con altri metodi indicano che i risultati di questoapproccio sono molto accurati.
Nella presentazione del metodo, verranno inizialmente illustrate le approssimazioni e le ipotesida applicare. La teoria e la sua descrizione matematica non verranno discusse, sebbene sianoriportati vari riferimenti alla letteratura sul tema. Verra illustrato, quindi, il metodo proget-tuale. Seguira una discussione dei risultati dei due esempi forniti in Appendice, relativi adun’elica in flusso omogeneo e ad un’elica dietro carena (adattata alla scia). Infine, sarannomessi a confronto anche i risultati ottenuti con altri metodi.
165
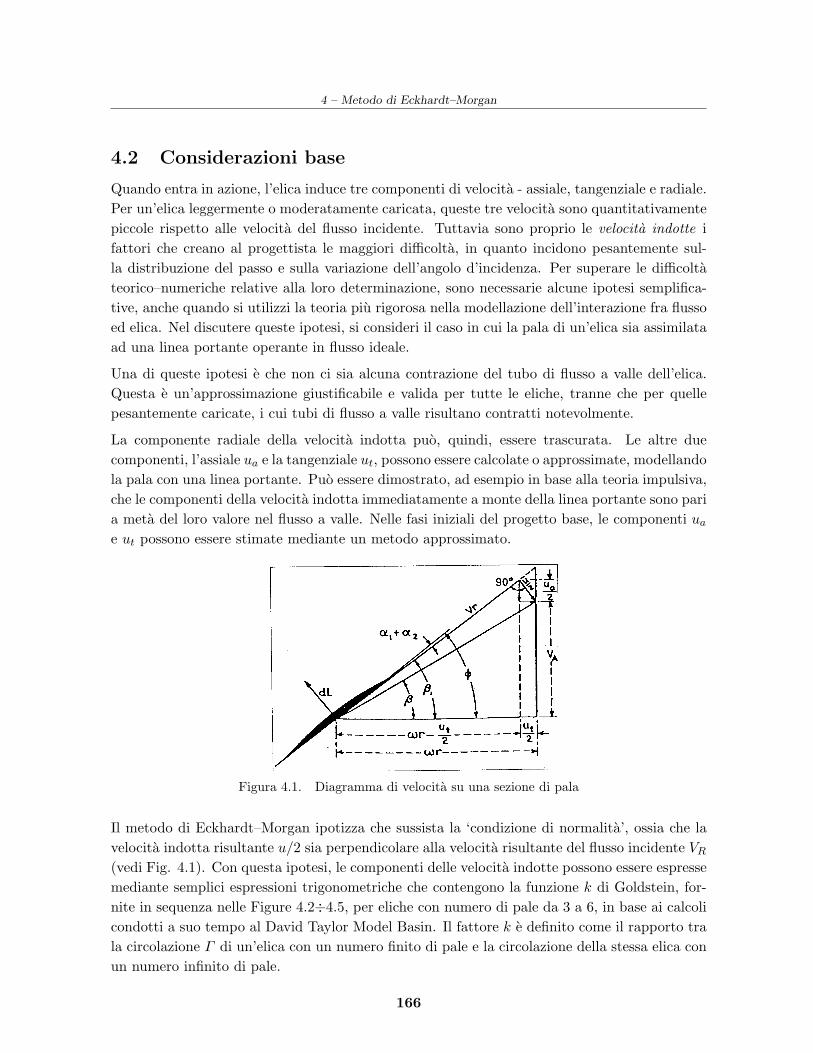
4 – Metodo di Eckhardt–Morgan
4.2 Considerazioni base
Quando entra in azione, l’elica induce tre componenti di velocita - assiale, tangenziale e radiale.Per un’elica leggermente o moderatamente caricata, queste tre velocita sono quantitativamentepiccole rispetto alle velocita del flusso incidente. Tuttavia sono proprio le velocita indotte ifattori che creano al progettista le maggiori difficolta, in quanto incidono pesantemente sul-la distribuzione del passo e sulla variazione dell’angolo d’incidenza. Per superare le difficoltateorico–numeriche relative alla loro determinazione, sono necessarie alcune ipotesi semplifica-tive, anche quando si utilizzi la teoria piu rigorosa nella modellazione dell’interazione fra flussoed elica. Nel discutere queste ipotesi, si consideri il caso in cui la pala di un’elica sia assimilataad una linea portante operante in flusso ideale.
Una di queste ipotesi e che non ci sia alcuna contrazione del tubo di flusso a valle dell’elica.Questa e un’approssimazione giustificabile e valida per tutte le eliche, tranne che per quellepesantemente caricate, i cui tubi di flusso a valle risultano contratti notevolmente.
La componente radiale della velocita indotta puo, quindi, essere trascurata. Le altre duecomponenti, l’assiale ua e la tangenziale ut, possono essere calcolate o approssimate, modellandola pala con una linea portante. Puo essere dimostrato, ad esempio in base alla teoria impulsiva,che le componenti della velocita indotta immediatamente a monte della linea portante sono paria meta del loro valore nel flusso a valle. Nelle fasi iniziali del progetto base, le componenti ua
e ut possono essere stimate mediante un metodo approssimato.
Figura 4.1. Diagramma di velocita su una sezione di pala
Il metodo di Eckhardt–Morgan ipotizza che sussista la ‘condizione di normalita’, ossia che lavelocita indotta risultante u/2 sia perpendicolare alla velocita risultante del flusso incidente VR
(vedi Fig. 4.1). Con questa ipotesi, le componenti delle velocita indotte possono essere espressemediante semplici espressioni trigonometriche che contengono la funzione k di Goldstein, for-nite in sequenza nelle Figure 4.2÷4.5, per eliche con numero di pale da 3 a 6, in base ai calcolicondotti a suo tempo al David Taylor Model Basin. Il fattore k e definito come il rapporto trala circolazione Γ di un’elica con un numero finito di pale e la circolazione della stessa elica conun numero infinito di pale.
166
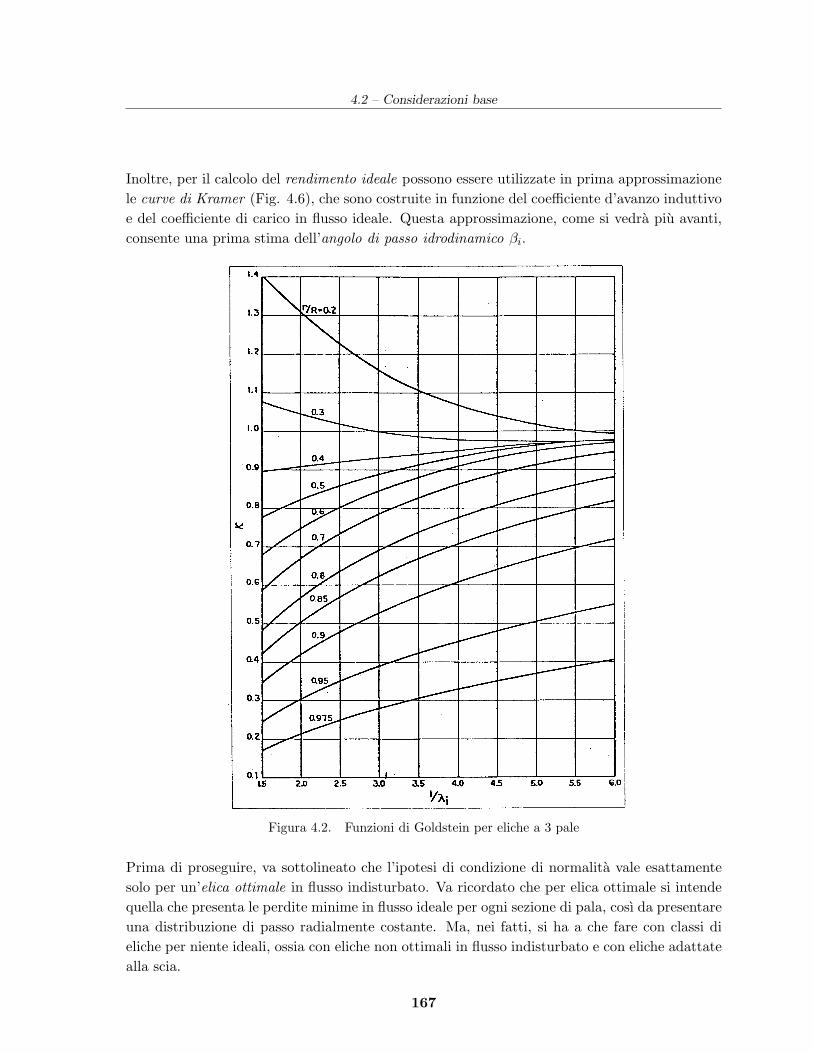
4.2 – Considerazioni base
Inoltre, per il calcolo del rendimento ideale possono essere utilizzate in prima approssimazionele curve di Kramer (Fig. 4.6), che sono costruite in funzione del coefficiente d’avanzo induttivoe del coefficiente di carico in flusso ideale. Questa approssimazione, come si vedra piu avanti,consente una prima stima dell’angolo di passo idrodinamico βi.
Figura 4.2. Funzioni di Goldstein per eliche a 3 pale
Prima di proseguire, va sottolineato che l’ipotesi di condizione di normalita vale esattamentesolo per un’elica ottimale in flusso indisturbato. Va ricordato che per elica ottimale si intendequella che presenta le perdite minime in flusso ideale per ogni sezione di pala, cosı da presentareuna distribuzione di passo radialmente costante. Ma, nei fatti, si ha a che fare con classi dieliche per niente ideali, ossia con eliche non ottimali in flusso indisturbato e con eliche adattatealla scia.
167
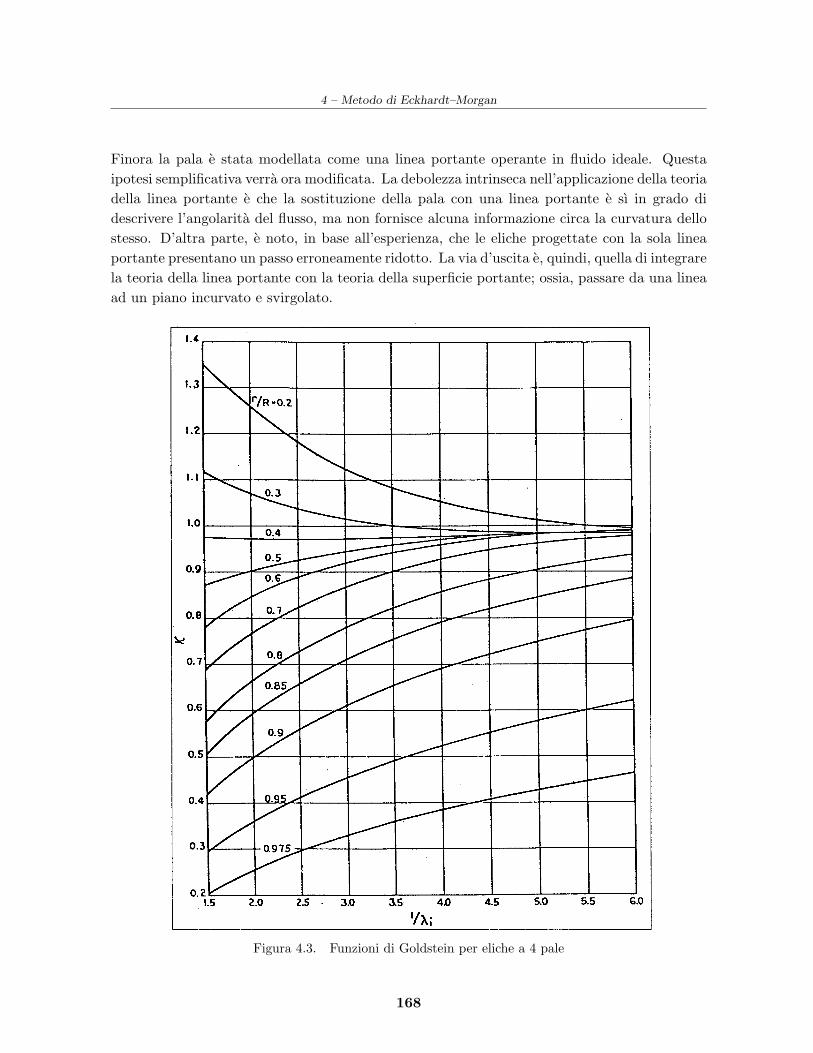
4 – Metodo di Eckhardt–Morgan
Finora la pala e stata modellata come una linea portante operante in fluido ideale. Questaipotesi semplificativa verra ora modificata. La debolezza intrinseca nell’applicazione della teoriadella linea portante e che la sostituzione della pala con una linea portante e sı in grado didescrivere l’angolarita del flusso, ma non fornisce alcuna informazione circa la curvatura dellostesso. D’altra parte, e noto, in base all’esperienza, che le eliche progettate con la sola lineaportante presentano un passo erroneamente ridotto. La via d’uscita e, quindi, quella di integrarela teoria della linea portante con la teoria della superficie portante; ossia, passare da una lineaad un piano incurvato e svirgolato.
Figura 4.3. Funzioni di Goldstein per eliche a 4 pale
168
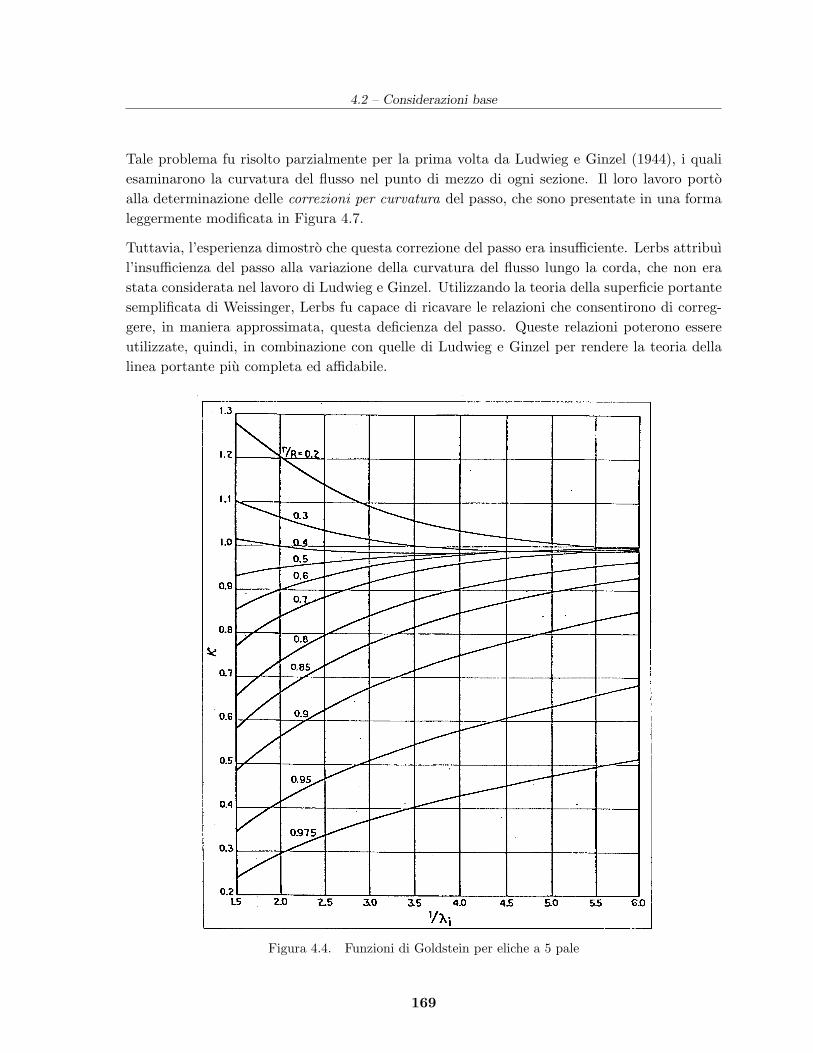
4.2 – Considerazioni base
Tale problema fu risolto parzialmente per la prima volta da Ludwieg e Ginzel (1944), i qualiesaminarono la curvatura del flusso nel punto di mezzo di ogni sezione. Il loro lavoro portoalla determinazione delle correzioni per curvatura del passo, che sono presentate in una formaleggermente modificata in Figura 4.7.
Tuttavia, l’esperienza dimostro che questa correzione del passo era insufficiente. Lerbs attribuıl’insufficienza del passo alla variazione della curvatura del flusso lungo la corda, che non erastata considerata nel lavoro di Ludwieg e Ginzel. Utilizzando la teoria della superficie portantesemplificata di Weissinger, Lerbs fu capace di ricavare le relazioni che consentirono di correg-gere, in maniera approssimata, questa deficienza del passo. Queste relazioni poterono essereutilizzate, quindi, in combinazione con quelle di Ludwieg e Ginzel per rendere la teoria dellalinea portante piu completa ed affidabile.
Figura 4.4. Funzioni di Goldstein per eliche a 5 pale
169
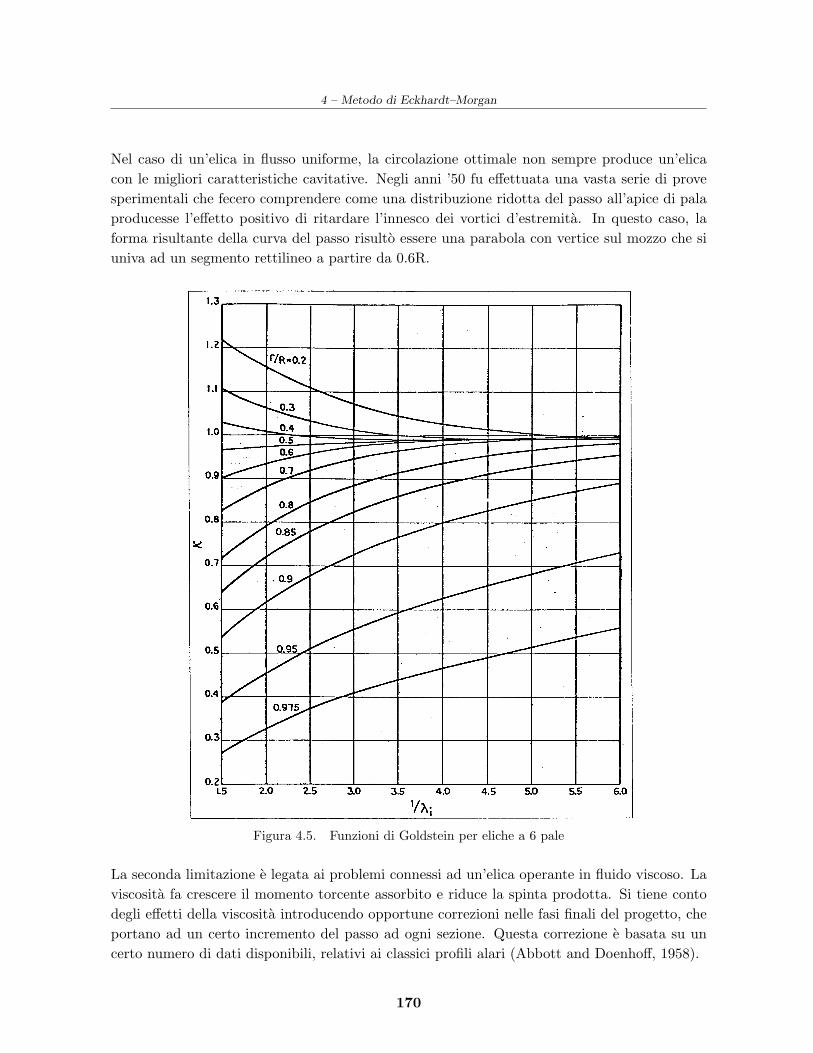
4 – Metodo di Eckhardt–Morgan
Nel caso di un’elica in flusso uniforme, la circolazione ottimale non sempre produce un’elicacon le migliori caratteristiche cavitative. Negli anni ’50 fu effettuata una vasta serie di provesperimentali che fecero comprendere come una distribuzione ridotta del passo all’apice di palaproducesse l’effetto positivo di ritardare l’innesco dei vortici d’estremita. In questo caso, laforma risultante della curva del passo risulto essere una parabola con vertice sul mozzo che siuniva ad un segmento rettilineo a partire da 0.6R.
Figura 4.5. Funzioni di Goldstein per eliche a 6 pale
La seconda limitazione e legata ai problemi connessi ad un’elica operante in fluido viscoso. Laviscosita fa crescere il momento torcente assorbito e riduce la spinta prodotta. Si tiene contodegli effetti della viscosita introducendo opportune correzioni nelle fasi finali del progetto, cheportano ad un certo incremento del passo ad ogni sezione. Questa correzione e basata su uncerto numero di dati disponibili, relativi ai classici profili alari (Abbott and Doenhoff, 1958).
170
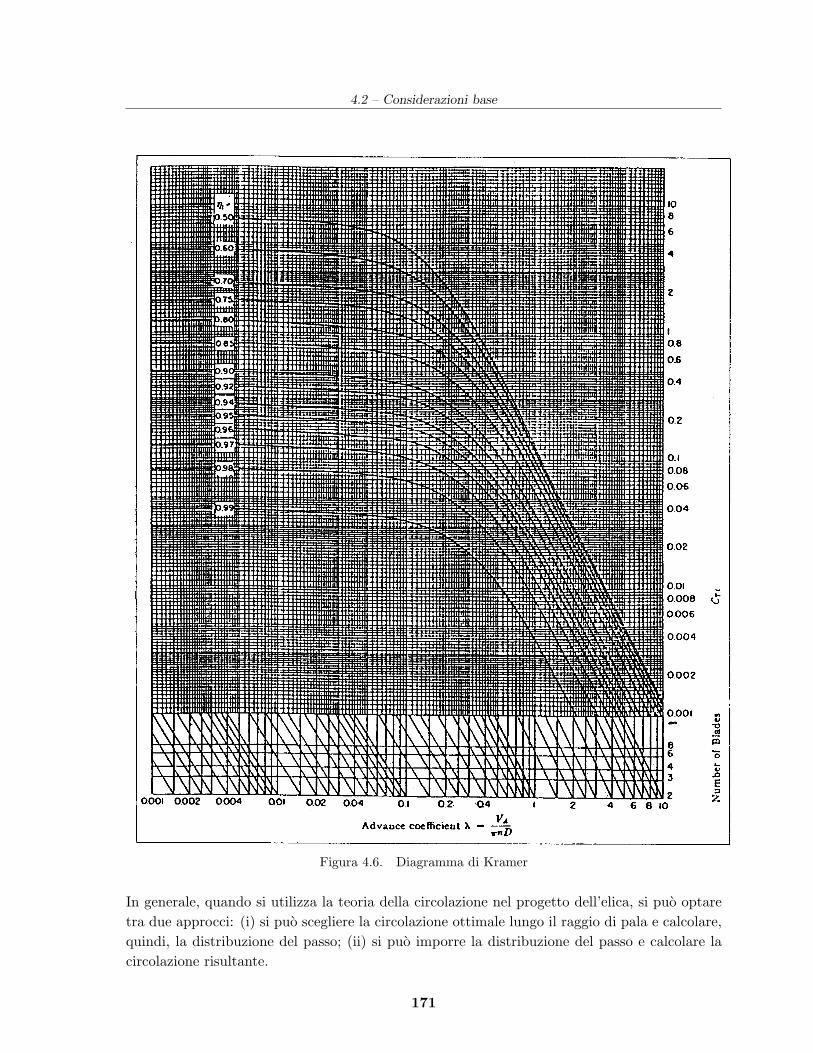
4.2 – Considerazioni base
Figura 4.6. Diagramma di Kramer
In generale, quando si utilizza la teoria della circolazione nel progetto dell’elica, si puo optaretra due approcci: (i) si puo scegliere la circolazione ottimale lungo il raggio di pala e calcolare,quindi, la distribuzione del passo; (ii) si puo imporre la distribuzione del passo e calcolare lacircolazione risultante.
171
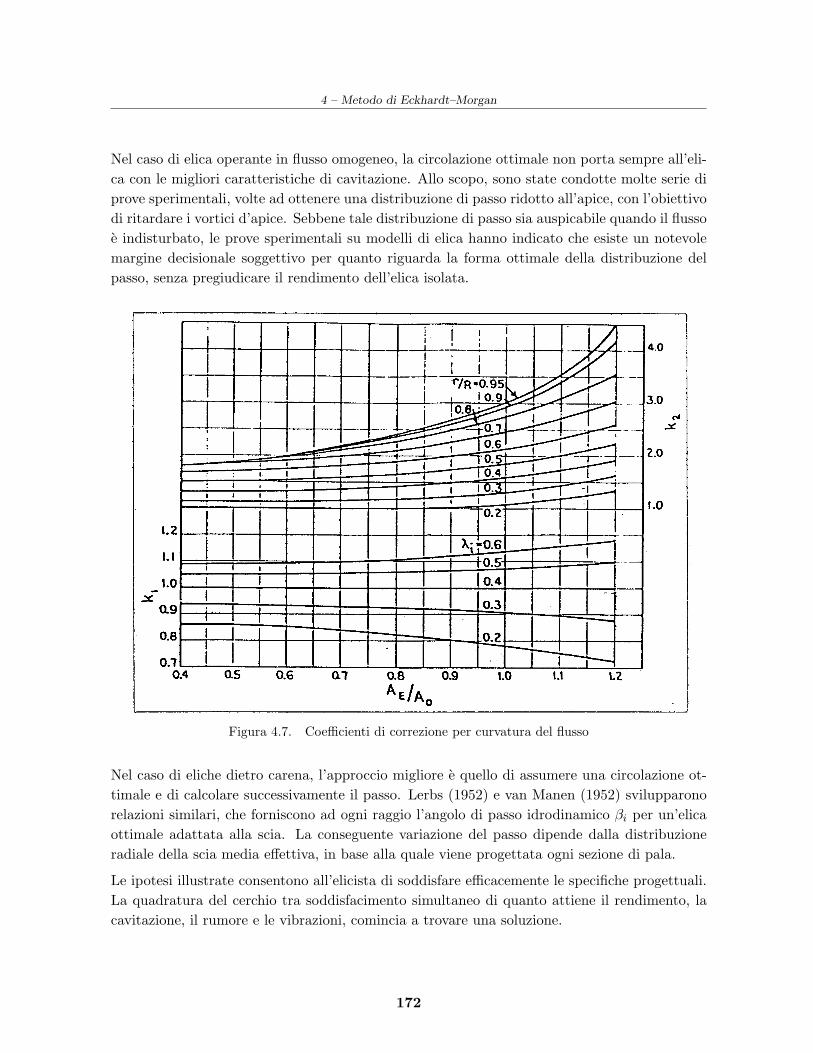
4 – Metodo di Eckhardt–Morgan
Nel caso di elica operante in flusso omogeneo, la circolazione ottimale non porta sempre all’eli-ca con le migliori caratteristiche di cavitazione. Allo scopo, sono state condotte molte serie diprove sperimentali, volte ad ottenere una distribuzione di passo ridotto all’apice, con l’obiettivodi ritardare i vortici d’apice. Sebbene tale distribuzione di passo sia auspicabile quando il flussoe indisturbato, le prove sperimentali su modelli di elica hanno indicato che esiste un notevolemargine decisionale soggettivo per quanto riguarda la forma ottimale della distribuzione delpasso, senza pregiudicare il rendimento dell’elica isolata.
Figura 4.7. Coefficienti di correzione per curvatura del flusso
Nel caso di eliche dietro carena, l’approccio migliore e quello di assumere una circolazione ot-timale e di calcolare successivamente il passo. Lerbs (1952) e van Manen (1952) svilupparonorelazioni similari, che forniscono ad ogni raggio l’angolo di passo idrodinamico βi per un’elicaottimale adattata alla scia. La conseguente variazione del passo dipende dalla distribuzioneradiale della scia media effettiva, in base alla quale viene progettata ogni sezione di pala.
Le ipotesi illustrate consentono all’elicista di soddisfare efficacemente le specifiche progettuali.La quadratura del cerchio tra soddisfacimento simultaneo di quanto attiene il rendimento, lacavitazione, il rumore e le vibrazioni, comincia a trovare una soluzione.
172
4.3 – Procedura progettuale
4.3 Procedura progettuale
Fornita la sintesi dei fondamenti teorici che stanno alla base del metodo approssimato diEckhardt–Morgan, si puo illustrare l’applicazione di questo metodo utilizzando le formule illus-trate ed i diagrammi necessari.
I passi principali della procedura progettuale sono sintetizzabili come segue:
1. raccolta dei dati progettuali necessari;
2. determinazione dell’angolo di passo idrodinamico corretto;
3. determinazione del coefficiente di portanza, della lunghezza di corda, dei rapporti di spes-sore e dei rapporti di curvatura delle sezioni di pala, in base al controllo della cavitazionesezione per sezione;
4. correzione della curvatura della linea mediana in base alla teoria della superficie portante;
5. correzione del passo secondo la teoria della superficie portante, a partire dalla linea me-diana in flusso ideale, per poi tenere conto degli effetti della viscosita;
6. analisi della robustezza;
7. controllo della produzione di spinta;
8. determinazione della potenza asse.
Il primo punto e particolarmente delicato se non sono disponibili i risultati di prove sperimen-tali. Si deve ipotizzare, quindi, che prove di resistenza e di autopropulsione vengano sempreeffettuate preliminarmente al progetto dell’elica finale. I dati necessari sono ricavabili appuntodalle prove sperimentali e dalle specifiche progettuali. Per progettare l’elica occorre conoscerela potenza asse ad un assegnato numero di giri, la resistenza nave, la frazione di scia, il fattoredi deduzione di spinta, il diametro dell’elica e la velocita nave di progetto.
4.3.1 Caratteristiche dell’elica
In molte situazioni, quando si progetta una nuova elica per una nave esistente, i dati modellodi resistenza ed autopropulsione non sono disponibili. In tali casi si puo effettuare una stimadella resistenza nave in base ad algoritmi basati su equazioni di regressione sviluppate da di-versi laboratori idrodinamici su basi di dati. Si possono determinare statisticamente la frazionedi scia ed il fattore di deduzione di spinta. Successivamente si puo calcolare, l’angolo di passoidrodinamico in base alla potenza disponibile (approccio meccanico). Tuttavia, i calcoli proget-tuali andrebbero effettuati preferibilmente a partire dalla conoscenza della spinta (approccioidrodinamico).
Esistono, quindi, due approcci progettuali, uno basato sulla spinta e l’altro basato sul momentotorcente reso disponibile al mozzo dell’elica. E preferibile il calcolo sulla base della spinta, inquanto la variazione della spinta passando da fluido ideale a fluido viscoso oscilla tra 2% e 6%,mentre tale variazione e maggiore se si parte della potenza (momento torcente).
173
4 – Metodo di Eckhardt–Morgan
Il primo e fondamentale problema da considerare e quello della scelta ottimale della combina-zione tra diametro e numero di giri dell’elica. Inizialmente andrebbe scelto un diametro chegarantisca luci verticali/orizzontali pari al 20÷25% del diametro. Puo essere calcolato, quin-di, il numero di giri ottimale, in base al quale scegliere il motore principale con una specificapotenza ed un preciso numero di giri. Per una nave esistente il diametro ottimale andrebbecalcolato a partire dalla potenza e dal numero di giri del motore. Il calcolo del diametro e/odel numero di giri ottimale puo essere effettuato in base ai diagrammi di funzionamento ed adiagrammi progettuali di serie sistematiche.
Di importanza pari a quella del diametro e la scelta del numero di pale. Sulle navi mercantilivengono applicate eliche da 2 a 7 pale. Prima della scelta definitiva del numero di pale, vannoeffettuati i calcoli delle frequenze naturali dei modi di vibrazione di carena, delle frequenzenaturali della linea d’assi e del motore principale, nonche occorre conoscere le fluttuazioni per-iodiche del campo di scia. Infatti, al crescere del numero di pale aumenta anche la frequenzadelle forze di pala, mentre diminuisce l’ampiezza delle loro armoniche. Se si ipotizza che tuttequeste grandezze siano note con ragionevole accuratezza, si puo scegliere il numero di pale inmodo tale da evitare la risonanza alla frequenza di pala f = nZ ed alla sua frequenza dop-pia con le frequenze naturali dei primi tre modi di vibrazione dello scafo, delle sue struttureprincipali, della linea d’assi e del motore, a qualsiasi velocita. Purtroppo e alquanto difficiledeterminare queste quantita, anche perche variano al variare del carico dell’elica e della velocitanave. In ogni caso, le vibrazioni sono il fattore dominante nella scelta del numero di pale.
Infine, va fissato il diametro del mozzo. La sua dimensione dipende dal diametro della linead’assi e puo dipendere anche dal numero di pale. Il mozzo, che dovrebbe essere il piu piccolopossibile per aumentare il rendimento dell’elica, di solito varia tra il 15% ed il 25% del diametrodell’elica. Nel caso di serie sistematiche, i mozzi hanno diametri definiti rigidamente.
Un altro aspetto da considerare nel progetto dell’elica e la desiderabilita di avere ‘rake’ dellepale, anche per aumentare le luci. Quando si hanno elevate velocita di rotazione, occorre preoc-cuparsi delle tensioni addizionali prodotte dal momento flettente derivante dall’eccentricita delbaricentro di pala quando la pala presenta ‘skew–back’ e/o ‘rake’. Per le eliche lente, tipichedelle grandi navi mercantili, dove queste tensioni sono basse, e auspicabile che il ‘rake’ sia taleche a tutti i raggi il bordo d’ingresso di pala sia a distanza costante dal profilo di poppa. E sta-to dimostrato che la luce longitudinale e molto importante, talvolta anche piu della luce radiale.
Per quanto riguarda lo ‘skew’ delle pale, e stato piu volte verificato che ha poca influenza sulrendimento dell’elica. Invece, e del tutto probabile che un’elica con ‘skew–back’ ecciti menovibrazioni di un’elica con generatrice rettilinea, in particolar modo per navi monoelica. Laragione e che nelle navi monoelica il bordo d’ingresso di una pala con ‘skew–back’ non attraversaistantaneamente (simultaneamente per tutte le sezioni) la zona di scia elevata. In manierafisicamente non corretta, ma tuttavia efficace, si puo affermare che un’elica non svirgolataentrerebbe nelle zone di flusso disomogeneo con un impatto maggiore, producendo cosı forzedi vibrazione piu elevate. Eliche con elevato ‘skew–back’ consentono di ridurre le ampiezze deicarichi periodici anche di due o tre volte rispetto alle eliche pressoche simmetriche.
174

4.3 – Procedura progettuale
4.3.2 Procedura di calcolo
Per progettare un’elica con la teoria vorticale, devono essere disponibili i seguenti dati iniziali:
• la potenza al mozzo PD che deve essere assorbita dall’elica, ossia la potenza motore ri-dotta per le perdite meccaniche sulla linea d’assi, oppure la spinta T che l’elica devesviluppare;
• la velocita nave V per la condizione di prova o di servizio, e la corrispondente velocitad’afflusso VA del fluido all’elica;
• il numero di giri n dell’elica nella condizione di carico progettuale;• il diametro D dell’elica ed il numero di pale Z: la teoria vorticale non fornisce alcuna
indicazione per quanto concerne il diametro ottimale, che deve essere determinato me-diante diagrammi progettuali di eliche di serie sistematiche.
• la pressione statica sull’asse dell’elica, inclusiva dell’effetto dell’ampiezza d’onda: cio servea calcolare il numero di cavitazione; se l’ampiezza d’onda e sconosciuta, puo essere as-sunta pari a 1/200 della lunghezza nave.
Una volta organizzati i dati d’ingresso, si calcola l’angolo di passo idrodinamico βi per ognisezione di discretizzazione. La procedura qui illustrata segue l’approccio dell’ingegnere navale,in quanto si parte dall’assunto che sia piu conveniente partire dalla spinta, anziche dalla potenzamotore. Inizialmente sono calcolate le seguenti grandezze
VA = V (1− w) → velocita d’avanzo [m/s] (4.1)
λ =VA
πnD=
VA
ωR→ coefficiente d’avanzo ridotto (4.2)
CT =T
12ρ V 2
A ·(πD2/4)→ coefficiente di carico di spinta (4.3)
T =RT
(1− t) cos ψ→ spinta dell’elica [kN] (4.4)
CP =2πnQ
12ρ V 2
A ·(πD2/4)→ coefficiente di carico di potenza (4.5)
dove
V : velocita nave [m/s]w : frazione media di sciaQ : momento torcente [kN ·m]n : numero di giri al secondo [rps]D : diametro dell’elica [m]t : fattore di deduzione di spintaψ : angolo d’inclinazione della linea d’assi [deg]RT : resistenza della nave [kN]
175

4 – Metodo di Eckhardt–Morgan
Per potere utilizzare il diagramma di Kramer (Fig. 4.6) allo scopo di ottenere il rendimentoideale, deve essere stimato preventivamente il coefficiente di spinta ideale, legato al coefficientedi spinta effettivo CT dalla relazione
CT i =CT
1− 2 ελi' (1.02÷ 1.06)CT (4.6)
dove
λi = x tanβi : coefficiente d’avanzo induttivo, che include l’influenza delle velocita indottex = r/R : raggio adimensionaleε = CD/CL : rapporto resistenza/portanza per un profilo alare di allungamento infinitoβi : angolo di passo idrodinamico
Nella fase iniziale del progetto dell’elica, viene utilizzata per CT i l’approssimazione fornitadall’equazione (4.6), in quanto inizialmente ε e λi sono incogniti. Comunque, il fattore diapprossimazione andrebbe ritarato dopo avere calcolato ε e βi.
La teoria dell’elica ideale ha portato alla conclusione che per un’elica operante in flusso uni-forme, che abbia un numero infinito di pale e che soddisfi la condizione di Betz, di minimaperdita di energia, risulta essere
CT i = f(λ, ηi)
Una volta noti CT i, λ ed il numero di pale, il rendimento ideale ηi viene dedotto da queste curve.
Tutti i metodi esistenti utilizzano, ai vari raggi x = r/R dell’elica, una relazione tra l’angolod’avanzo β, non corretto dalle velocita indotte, e l’angolo di passo idrodinamico βi, correttoper effetto delle velocita indotte (Fig. 4.1). Poiche i valori di tanβi lungo il raggio di palaforniscono direttamente la distribuzione del passo dell’elica in base alla relazione
(P/D)i = πx tanβi (4.7)
e relativamente facile determinare tale distribuzione in quanto, in base al teorema di Betz perla perdita minima d’energia, e
tanβi =tanβ
ηi(4.8)
mentre i singoli valori di
tanβ =VA
πnxD=
λ
x
sono ricavabili rapidamente in base ai dati progettuali di input.
Nelle relazioni precedenti:
- (P/D)i : rapporto di passo ideale (non corretto)- ηi = λ/λi : condizione di Betz di perdita minima di energia in un campo di velocita
uniforme
176

4.3 – Procedura progettuale
In tal modo, si puo determinare facilmente il passo non corretto per un’elica ottimale in flussoomogeneo. Quando l’elica e progettata per la condizione d’incidenza ideale (shock–free entry),l’equazione (4.7) porta ad un’elica a passo radialmente costante. Comunque, occorre modifi-care, in generale, la distribuzione del passo per diminuire il rischio di cavitazione, riducendoil passo all’apice per ridurre i vortici d’estremita ed il passo al mozzo per ridurre i vortici sulmozzo ed alla radice di pala.
Verifica del coefficiente di spinta
Quando l’elica e non–ottimale, oppure quando e adattata alla scia, le curve di Kramer non sonopiu applicabili, in prima istanza, sono ancora utili. Per l’elica non–ottimale in flusso omogeneo,si introduce l’approssimazione che il valore tan βi, calcolato grazie alle curve di Kramer, siaeguale al valore di tan βi al raggio 0.7R. La distribuzione arbitraria del passo e costruita,quindi, a partire dal suo valore a 0.7R.
Si calcola, quindi, il coefficiente di carico di spinta
CT i = 8∫ 1
xh
k xut
2VA
(x
λ− ut
2VA
)dx (4.9)
dove k e il fattore di corrwzione di Goldstein fornita in dipendenza del coefficiente d’avanzoinduttivo λi, per un’elica non-ottimale in flusso omogeneo, dove il raggio e il parametro (Figg.4.2÷4.5). Nell’equazione 4.10, xh e il raggio adimensionale del mozzo, mentre la componentetangenziale normalizzata della velocita indotta ut e derivabile dalla formula
ut
2VA=
sin βi · sin (βi − β)sin β
(4.10)
In pratica, la formula (4.10) e calcolata a partire dai valori elementari dCT i, relativi ad unnumero discreto di raggi, che sono poi integrati numericamente dal mozzo all’apice di pala.Se il valore ottenuto per CT i non corrisponde a quello derivato dall’equazione (4.3), il valoredi tan βi va corretto ed il calcolo va ripetuto iterativamente. La formula seguente, applicataal raggio 0.7R, fornisce una buona approssimazione per il nuovo valore corretto dell’angolo dipasso idrodinamico
(tan βi)m ' (tan βi)m−1
[1 +
(CT i)r − (CT i)c
6 (CT i)r
](4.11)
dove i pedici hanno il seguente significato: m indica il passo di calcolo, r indica il valore ri-chiesto, mentre c denota il valore calcolato.
Per un’elica adattata alla scia, del metodo fin qui illustrato valgono solamente i principigenerali, in quanto la scia varia con il raggio.
177

4 – Metodo di Eckhardt–Morgan
Lerbs ha sviluppato le seguenti formule per elica adattata alla scia:
• per l’angolo d’avanzo:
tan β =λs
x(1− wx) (4.12)
dove wx e la scia media circonferenziale ad ogni sezione di pala e λs e il coefficiented’avanzo basato sulla velocita nave
λs =V
πnD(4.13)
• per il coefficiente di spinta basato sulla velocita nave, dato da:
CT s =T
12ρ V 2 ·πD2
4
(4.14)
Per elica in flusso omogeneo queste relazioni divengono
tan βi =tan β
ηi·√
1− w
1− wx=
λs
√(1− w) (1− wx)
x ηi(4.15)
CT si = (1.02÷ 1.06) CT s (4.16)
dove w e la scia media assiale sul disco–elica, ottenuta integrando radialmente le scie mediecirconferenziali.
Le curve di Kramer sono utilizzate per una prima stima del rendimento ideale ηi, che comparenell’equazione (4.15). Il coefficiente di spinta viene calcolato, quindi, per integrazione mediantela formula seguente
CT si = 8∫ 1
xh
k xut
2V
(x
λs− ut
2V
)dx (4.17)
dove la velocita indotta tangenziale vale
ut
2V=
(1− wx) sin βi · sin (βi − β)sin β
(4.18)
La procedura per determinare il valore corretto dell’angolo di passo idrodinamico (tan βi) e,quindi, la stessa illustrata per l’elica non–ottimale in flusso omogeneo.
Caratteristiche geometriche
Una volta calcolato il valore corretto di tan βi ad ogni raggio di discretizzazione di pala, epossibile ricavare il coefficiente di portanza CL e la lunghezza di corda c. Ad ogni raggio, perdeterminare il coefficiente di portanza, occorre risolvere una delle formule seguenti, che fornis-cono la cosiddetta caratteristica aerodinamica:
178

4.3 – Procedura progettuale
• per eliche in flusso uniforme
CL ·cD
=4π
Z(k ·x)
ut
2VAx
λ− ut
2VA
cos βi (4.19)
• per eliche adattate alla scia
CL ·cD
=4π
Z(k ·x)
ut
2Vx
λs− ut
2V
cos βi (4.20)
La scelta della lunghezza di corda di ogni elemento di pala deve essere determinata tenendoconto dei vincoli seguenti:
• rischio di cavitazione;
• robustezza della sezione.
Di norma, il valore di c deve essere tale da evitare la presenza di cavitazione, mentre la robustez-za del profilo va ridotta al minimo mediante la scelta della forma piu opportuna. Per prevederela cavitazione sugli elementi di pala, sono state utilizzate misure di pressione su diversi profi-li. Sono stati cosı costruiti diagrammi d’innesco della cavitazione per flussi bidimensionali. Idiagrammi riportati nelle Figure 4.8, 4.9, 4.10, sono relativi ad un angolo d’incidenza ideale,in base all’ipotesi che tutta la portanza della sezione di pala sia sviluppata dalla sola lineamediana. I diagrammi d’innesco della cavitazione hanno in ascissa il numero di cavitazioneminimo σ della sezione ed in ordinata il coefficiente portanza–lunghezza-spessore (CL · c/tm).Quando siano note queste grandezze, si possono ricavare sia il rapporto di curvatura della lineamediana, sia il rapporto di spessore massimo. Poiche il flusso puo essere non–uniforme circon-ferenzialmente, potrebbe essere consigliabile ridurre il numero di cavitazione di una quantitaarbitraria (al massimo fino al 20%), a seconda della disomogeneita della scia.
L’indice di cavitazione di ogni sezione di pala, in posizione verticale, viene calcolato medianteuna delle formule seguenti:
• per eliche in flusso uniforme
σ =1
12ρV 2
A
[(pa + ρgh) sin2 β
cos2 (βi − β)
](4.21)
• per eliche adattate alla scia
σ =1
12ρV 2
[(pa + ρgh) sin2 β
(1− wx)2 cos2 (βi − β)
](4.22)
dove pa e la pressione atmosferica ed h e il battente sull’asse dell’elica.
179
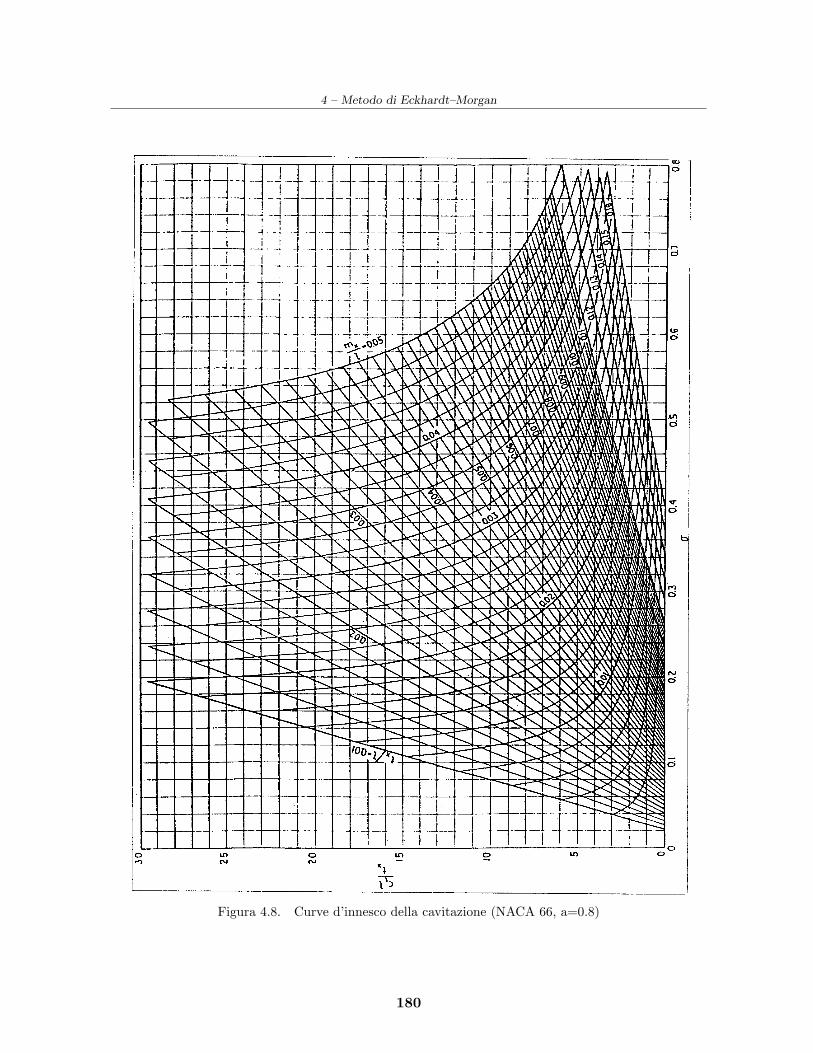
4 – Metodo di Eckhardt–Morgan
Figura 4.8. Curve d’innesco della cavitazione (NACA 66, a=0.8)
180
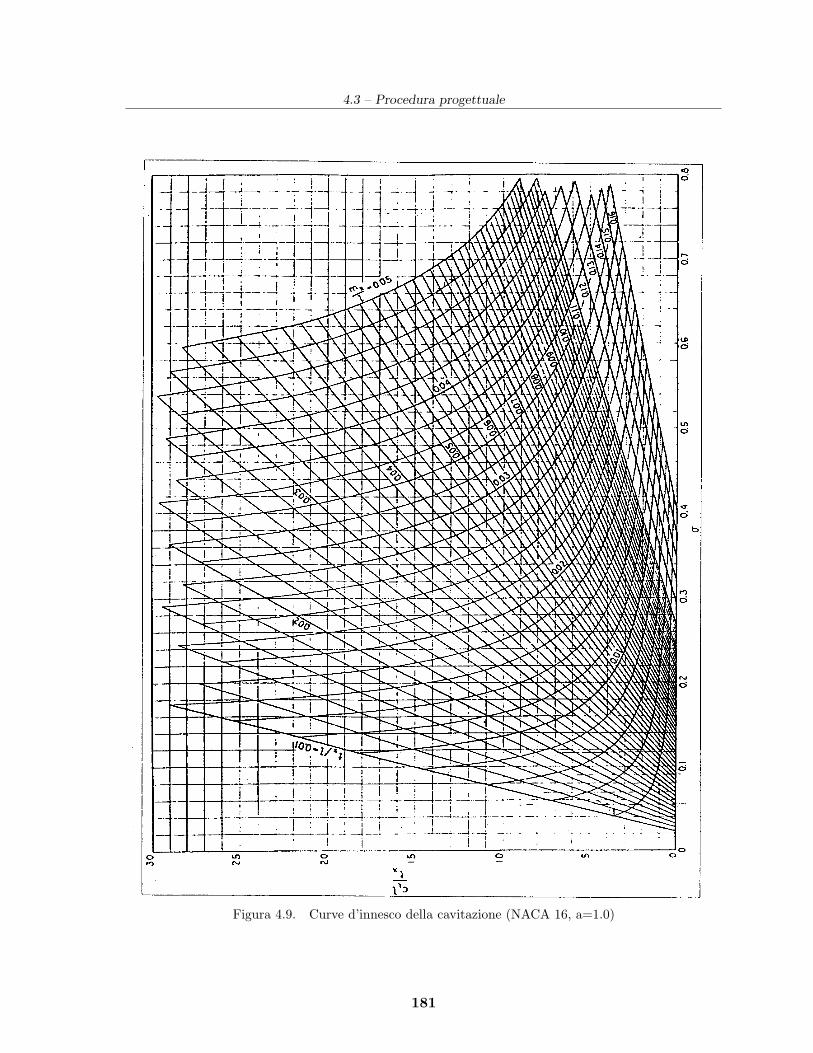
4.3 – Procedura progettuale
Figura 4.9. Curve d’innesco della cavitazione (NACA 16, a=1.0)
181
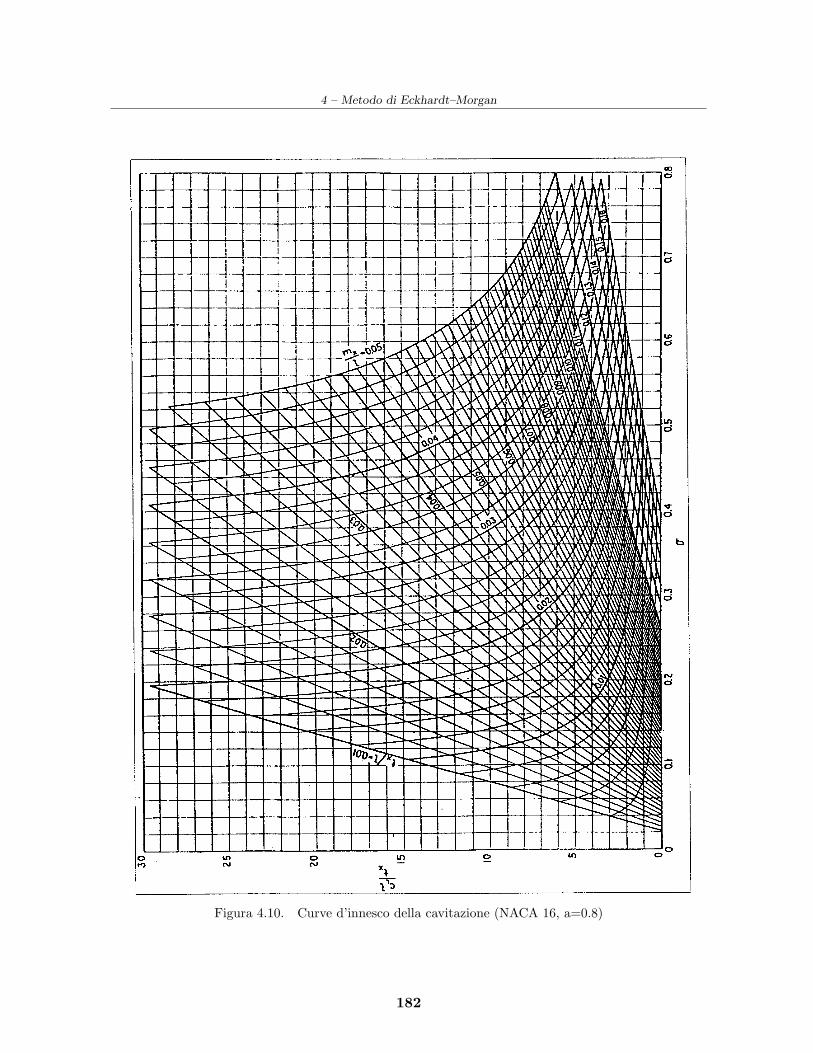
4 – Metodo di Eckhardt–Morgan
Figura 4.10. Curve d’innesco della cavitazione (NACA 16, a=0.8)
182

4.3 – Procedura progettuale
A questo punto va calcolato il coefficiente di portanza–corda–spessore CL · c/tm. Lo spessoremassimo tm di ogni sezione deve essere fissato in base a calcoli di robustezza. Una stima dellospessore virtuale di pala puo essere ottenuta in base alla formula di Taylor come
toD
=1D
3
√Cl ·PD
n·σc(4.23)
dove
to/D : spessore adimensionale sull’asse dell’elicaCl : coefficiente derivato in Figura 4.11PD : potenza al mozzo per pala [kW]σc : tensione massima ammissibile [psi]
La distribuzione radiale di spessore massimo puo essere calcolata, a partire dalla frazione dispessore di pala, mediante la formula di Van Manen e Troost
txD
=ttD
+ f
[toD− tt
D
](4.24)
dove tt/D e e lo spessore adimensionale dell’apice di pala (puo essere assunto pari a 0.003) edf e un coefficiente desumibile in Tabella 4.1.
x 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 0.95
f 0.788 0.665 0.551 0.443 0.344 0.251 0.162 0.079 0.039
Tabella 4.1. Coefficiente per la distribuzione radiale di spessore massimo
Utilizzando i dati forniti da Romson, van Lammeren e van Manen hanno fornito un metodopiu accurato per la stima dello spessore massimo. L’approccio di questo metodo consiste nelcalcolare lo spessore di pala ai raggi x = 0.2 e x = 0.6, adattando poi la distribuzione radialedi spessore ai valori in questi due punti ed allo spessore fissato all’apice.
Quando sia stata ricavata la distribuzione radiale di spessore, ad ogni sezione si calcola il pro-dotto CL ·c . La curvatura della linea mediana ed i rapporti di spessore sono derivaboli dallecurve d’innesco della cavitazione. Ovviamente, vanno scelti preliminarmente il tipo di sezionee di linea mediana, tra i profili NACA 16 e NACA 66, e le linee mediane NACA a = 0.8 eNACA a = 1.0.
Vengono letti, quindi, i rapporti di curvatura massima (fm/c) e di spessore massimo (tm/c)dalle curve d’innesco della cavitazione corrispondenti alla sezione ed alla linea mediana scelte.Le lunghezze di corda sono calcolate in funzione dei rapporti di spessore, cosı da costruireil profilo di pala espansa. E del tutto possibile che, per rispettare il criterio di cavitazione,le sezioni di pala siano troppo corte dal punto di vista della robustezza, specialmente vicinoal mozzo. L’esame del rapporto resistenza/portanza di profili di pala con spessore variabileha indicato che e meglio limitare il rapporto di spessore tra 0.18 e 0.22. Se la pala divienetroppo sottile, deve essere scelto un profilo di pala arbitrario. Un profilo suggeribile nelle fasiprogettuali iniziali e quello delle Series–B del MARIN.
183

4 – Metodo di Eckhardt–Morgan
Figura 4.11. Coefficiente per la stima dello spessore di pala
Quando il profilo di pala viene scelto arbitrariamente, la curvatura della linea mediana vienederivata dopo avere determinato il coefficiente di portanza CL. Il coefficiente di portanza vieneottenuto dal coefficiente CL·c/D, essendo noto a questo punto, sezione per sezione, il rapportoc/D. Un esempio su come ottenere fm, ovvero il rapporto di curvatura fm/c, e quello che laNACA ha derivato per la linea mediana a = 0.8, dove risulta essere
CL = 1.0 perfm
c= 0.0679
per cui, ad esempio, per CL = 0.5 dovra essere
fm
c= 0.0679CL = 0.03395
Correzione per curvatura del flusso
La curvatura della linea mediana, indipendentemente dal fatto che sia letta dai diagrammi dicavitazione o che sia calcolata direttamente, deve essere corretta, come richiamato in precedenzanelle considerazioni teoriche, per effetto della curvatura del flusso lungo la corda della sezione.I fattori correttivi k1 e k2 vengono letti in Figura 4.7 ed applicati per ottenere la curvaturaadimensionale massima corretta come
(fm
c
)
c= k1 k2
fm
c(4.25)
L’ascissa nel diagramma in Figura 4.7 e il rapporto d’area espansa AE/A0. Tale diagramma e ilrisultato della raccolta di tanti risultati numerici reperibili in letteratura, relativi alla curvaturadel flusso sull’elica.
184

4.3 – Procedura progettuale
Correzione del passo
Come detto in precedenza, va corretto anche il passo perche risulta in genere insufficiente, conconseguente incapacita da parte dell’elica di produrre la spinta attesa. La causa di tale deficien-za del passo e attribuibile al fatto che il flusso risulta scorrettamente incurvato lungo la cordadi ogni profilo, cosı come al fatto che la pressione e insufficiente nel disco dell’elica ruotantea causa della presenza di forze centrifughe. Allo scopo, vanno introdotte due correzioni checomportano due angoli d’incidenza addizionali , ossia la correzione per viscosita e la correzioneper superficie portante.
Correzione per viscosita
Si tiene conto della correzione per viscosita introducendo l’angolo d’incidenza addizionale α1.Esso dipende dalla curvatura della linea mediana, ed e funzione lineare del coefficiente di por-tanza. Tale correzione, introdotta per la prima volta da Ludwig e Ginzel (1944), va effettuataad ogni raggio di discretizzazione della pala. L’angolo d’incidenza addizionale puo avere valoridifferenti; precisamente:
- per una linea mediana ad arco circolare
α1 = 2.86CL [deg] (4.26)
- per una linea mediana NACA a = 1.0
α1 = 2.35CL [deg] (4.27)
- per una linea mediana NACA a = 0.8
α1 = 1.15CL [deg] (4.28)
Correzione per superficie portante
E quella necessaria per tenere conto degli effetti prodotti sull’angolo di passo idrodinamico daivortici liberi e dai vortici concatenati. Ne deriva un angolo d’incidenza addizionale, sommaalgebrica di diversi contributi, pari a
α2 = αb + αf − (αi + αo)
Il primo addendo della correzione e relativo ai vortici concatenati delle singole pale e vienecalcolato come
αb =sin βi
2
Z∑
i=1
[(c
Dsinµ− 0.7 cos βi cosµ
) ∫ 1
xh
Γ
(P/R)3dx
](4.29)
dove µ e la posizione angolare di pala, fissata in dipendenza del numero di pale, mentre Γ e lacircolazione adimensionale di pala, definibile rispettivamente
185

4 – Metodo di Eckhardt–Morgan
- per un’elica in flusso uniforme
Γ =2k ·xZ
· ut
2VA
- per un’elica adattata alla scia
Γ =2k ·xZ
· ut
2V· 11− wx
e dove e, infine
(P/R)3 =
[x2 +
(c
D
)2
+ 0.49− 2(
c
Dcosµ cosβi + 0.7 sin µ
)x
]1.5
(4.30)
I calcoli sono effettuati per la pala di riferimento, posizionata a µ = 90o, mentre l’effetto dellealtre pale e determinato sul vortice concatenato di questa pala di riferimento. Cosı, ad esempio,per un’elica a quattro pale, i calcoli sono svolti per µ = 90o per la prima pala, e per 180o, 270o
e 360o rispettivamente per la seconda, terza e quarta pala. Per un’elica a cinque pale gli angoliµ di calcolo sono in sequenza µ = 90o, 162o, 234o, 306o, 18o. L’angolo d’incidenza aggiuntivoαb e pari alla somma algebrica degli effetti da ogni pala nella sua specifica posizione.
Figura 4.12. Coefficiente di correzione del passo
Il secondo contributo e dato dalla correzione che da conto dell’effetto dei vortici liberi
αf = αi2
1 + cos2 βi
(2h− 1
) (4.31)
dove
αi = βi − β [rad]
186

4.3 – Procedura progettuale
Il coefficiente h di correzione del passo idrodinamico nella formula (4.31) e derivabile in Figura4.12, dove l’angolo θ in ascissa e dato da
θ = tan−1(
0.7sin βi
·Dc
)(4.32)
Ne consegue, infine, che complessivamente l’angolo d’incidenza addizionale per effetto di su-perficie portante e dato da
α2 =180π
αb + αi
2
1 + cos2 βi
(2h− 1
) − 1
− αo
[deg] (4.33)
dove αo e l’angolo di portanza nulla della linea mediana che vale:
- per una linea mediana ad arco circolare
αo = 0.130CL [rad]
- per la linea mediana NACA a = 1.0
αo = 0.120CL [rad]
- per la linea mediana NACA a = 0.8
αo = 0.139CL [rad]
Utilizzando il risultato dell’equazione (4.33), la correzione del passo per superficie portante
1 +∆P/D
P/D=
tan(βi + α2)0.7R
(tan βi)0.7R
viene effettuata al raggio x = 0.7; la stessa variazione percentuale viene applicata agli altriraggi.
Infine, si puo ricavare il rapporto passo–diametro finale come:
P
D= πx tan (βi + α1)·
(1 +
∆P/D
P/D
)(4.34)
Verifica della spinta e della potenza
Prima di potere affermare che il progetto dell’elica e completato, occorre effettuare alcunicontrolli. Inizialmente e stato ipotizzato che il coefficiente CT i fosse dal 2% al 6% maggioredi CT per un’elica in flusso uniforme. Questa assunzione puo essere verificata mediante larelazione esatta
CT i 'CT
1− 2ελi(4.35)
187

4 – Metodo di Eckhardt–Morgan
dove approssimativamentee
ε =0.008CL
Una verifica piu accurata viene effettuata integrando numericamente la seguente equazione
CT = 8∫ 1
xh
k ·x ut
2VA
(x
λ− ut
2VA
)(1− ε tanβi) dx =
∫ 1
xh
(1− ε tanβi)dCT i
dxdx (4.36)
Il coefficiente CT cosı ottenuto dovrebbe differire non piu dell’1÷2% dal valore di CT derivatodirettamente dalla spinta richiesta.
Un controllo va effettuato anche sui requisiti di potenza e sul rendimento dell’elica. Il coeffi-ciente di potenza CP puo essere calcolato per un’elica in flusso uniforme mediante la seguenteequazione
CP = 8∫ 1
xh
k ·xtanβ
· ut
2VA
(1 +
ua
2VA
)·(
1 +ε
tanβi
)dx '
∫ 1
xh
tanβi + ε
tanβ· dCT i
dxdx (4.37)
La potenza assorbita dall’elica e calcolabile, quindi, come
PD =12ρV 2
A ·πD2
4·CP (4.38)
Una volta noti i coefficienti CT e CP , si puo facilmente calcolare il rendimento dell’elica come
η =CT
CP(4.39)
Per le eliche adattate alla scia viene introdotta una leggera modifica alle equazioni che calcolanoi coefficienti di spinta e di potenza ottenendo
CTs = 8∫ 1
xh
k ·x ut
2V
(x
λs− ut
2V
)(1− ε tanβi) dx =
∫ 1
xh
(1− ε tanβi)dCT si
dxdx (4.40)
CPs =8λs
∫ 1
xh
k x2 ut
2V
[(1− wx) +
ua
2V
](1 +
ε
tanβi
)dx =
1λs
∫ 1
xh
x (tanβi + ε)dCT si
dxdx (4.41)
PD =12ρV 2
A ·πD2
4·CP s (4.42)
Nel corso dei passi progettuali precedenti e stata utilizzata una formula semplificata per ottenerelo spessore delle sezioni di pala. Tale formula non ha considerato ne la forma delle sezioni ne laforza centrifuga. Un approccio piu rigoroso all’analisi della robustezza e fornito in Appendice 3.
Talvolta, per ovviare al rischio di cavitazione, le sezioni di pala possono divenire estremamentelarghe con sovrapposizione parziale delle pale. Puo accadere, allora, che calcoli di robustezza piu
188
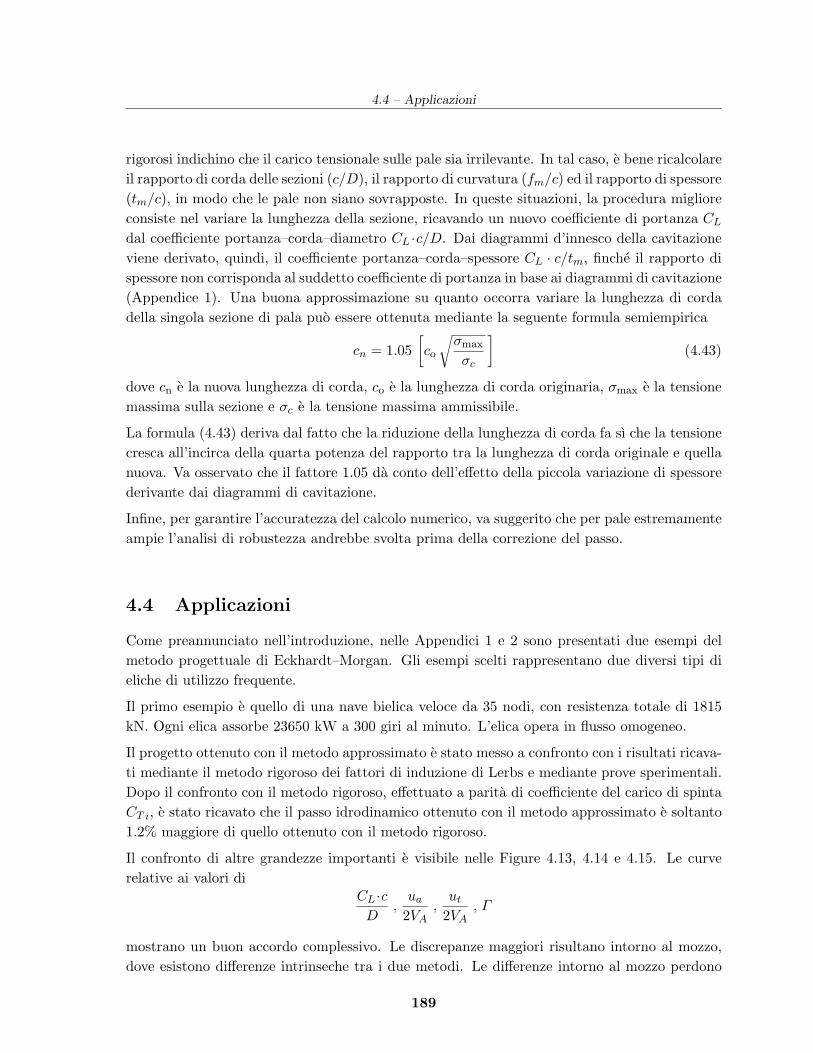
4.4 – Applicazioni
rigorosi indichino che il carico tensionale sulle pale sia irrilevante. In tal caso, e bene ricalcolareil rapporto di corda delle sezioni (c/D), il rapporto di curvatura (fm/c) ed il rapporto di spessore(tm/c), in modo che le pale non siano sovrapposte. In queste situazioni, la procedura miglioreconsiste nel variare la lunghezza della sezione, ricavando un nuovo coefficiente di portanza CL
dal coefficiente portanza–corda–diametro CL ·c/D. Dai diagrammi d’innesco della cavitazioneviene derivato, quindi, il coefficiente portanza–corda–spessore CL · c/tm, finche il rapporto dispessore non corrisponda al suddetto coefficiente di portanza in base ai diagrammi di cavitazione(Appendice 1). Una buona approssimazione su quanto occorra variare la lunghezza di cordadella singola sezione di pala puo essere ottenuta mediante la seguente formula semiempirica
cn = 1.05[co
√σmax
σc
](4.43)
dove cn e la nuova lunghezza di corda, co e la lunghezza di corda originaria, σmax e la tensionemassima sulla sezione e σc e la tensione massima ammissibile.
La formula (4.43) deriva dal fatto che la riduzione della lunghezza di corda fa sı che la tensionecresca all’incirca della quarta potenza del rapporto tra la lunghezza di corda originale e quellanuova. Va osservato che il fattore 1.05 da conto dell’effetto della piccola variazione di spessorederivante dai diagrammi di cavitazione.
Infine, per garantire l’accuratezza del calcolo numerico, va suggerito che per pale estremamenteampie l’analisi di robustezza andrebbe svolta prima della correzione del passo.
4.4 Applicazioni
Come preannunciato nell’introduzione, nelle Appendici 1 e 2 sono presentati due esempi delmetodo progettuale di Eckhardt–Morgan. Gli esempi scelti rappresentano due diversi tipi dieliche di utilizzo frequente.
Il primo esempio e quello di una nave bielica veloce da 35 nodi, con resistenza totale di 1815kN. Ogni elica assorbe 23650 kW a 300 giri al minuto. L’elica opera in flusso omogeneo.
Il progetto ottenuto con il metodo approssimato e stato messo a confronto con i risultati ricava-ti mediante il metodo rigoroso dei fattori di induzione di Lerbs e mediante prove sperimentali.Dopo il confronto con il metodo rigoroso, effettuato a parita di coefficiente del carico di spintaCT i, e stato ricavato che il passo idrodinamico ottenuto con il metodo approssimato e soltanto1.2% maggiore di quello ottenuto con il metodo rigoroso.
Il confronto di altre grandezze importanti e visibile nelle Figure 4.13, 4.14 e 4.15. Le curverelative ai valori di
CL ·cD
,ua
2VA,
ut
2VA, Γ
mostrano un buon accordo complessivo. Le discrepanze maggiori risultano intorno al mozzo,dove esistono differenze intrinseche tra i due metodi. Le differenze intorno al mozzo perdono
189
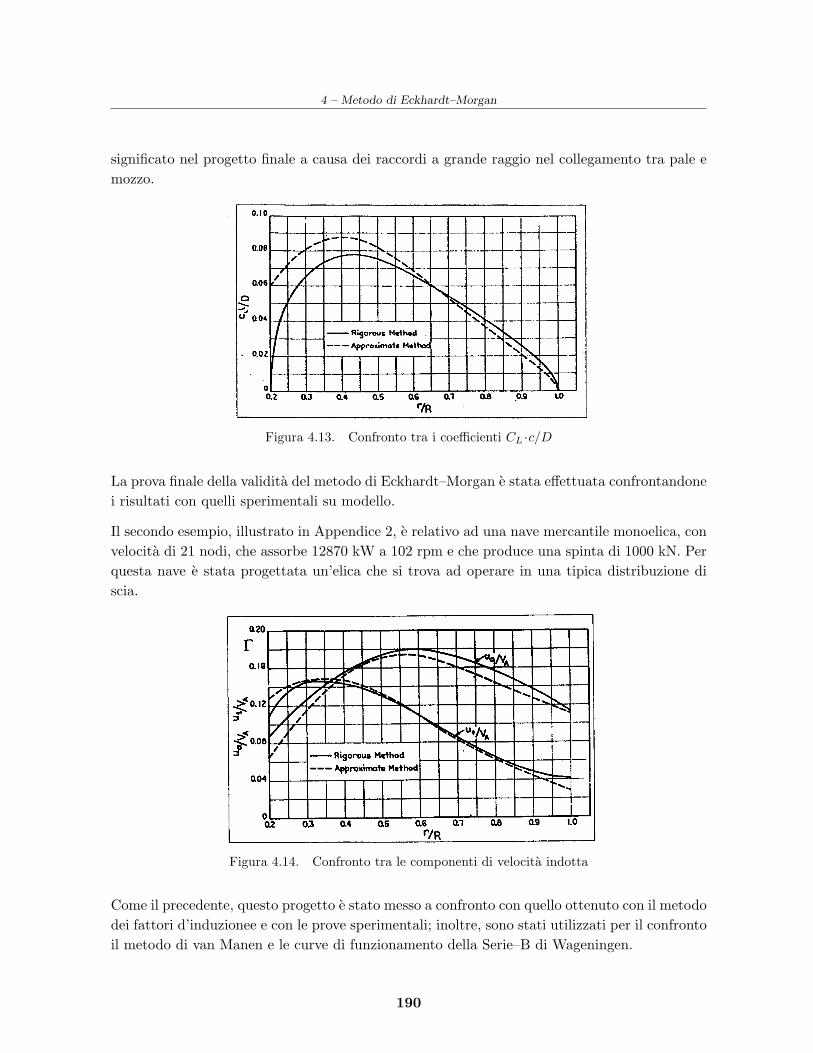
4 – Metodo di Eckhardt–Morgan
significato nel progetto finale a causa dei raccordi a grande raggio nel collegamento tra pale emozzo.
Figura 4.13. Confronto tra i coefficienti CL ·c/D
La prova finale della validita del metodo di Eckhardt–Morgan e stata effettuata confrontandonei risultati con quelli sperimentali su modello.
Il secondo esempio, illustrato in Appendice 2, e relativo ad una nave mercantile monoelica, convelocita di 21 nodi, che assorbe 12870 kW a 102 rpm e che produce una spinta di 1000 kN. Perquesta nave e stata progettata un’elica che si trova ad operare in una tipica distribuzione discia.
Figura 4.14. Confronto tra le componenti di velocita indotta
Come il precedente, questo progetto e stato messo a confronto con quello ottenuto con il metododei fattori d’induzionee e con le prove sperimentali; inoltre, sono stati utilizzati per il confrontoil metodo di van Manen e le curve di funzionamento della Serie–B di Wageningen.
190
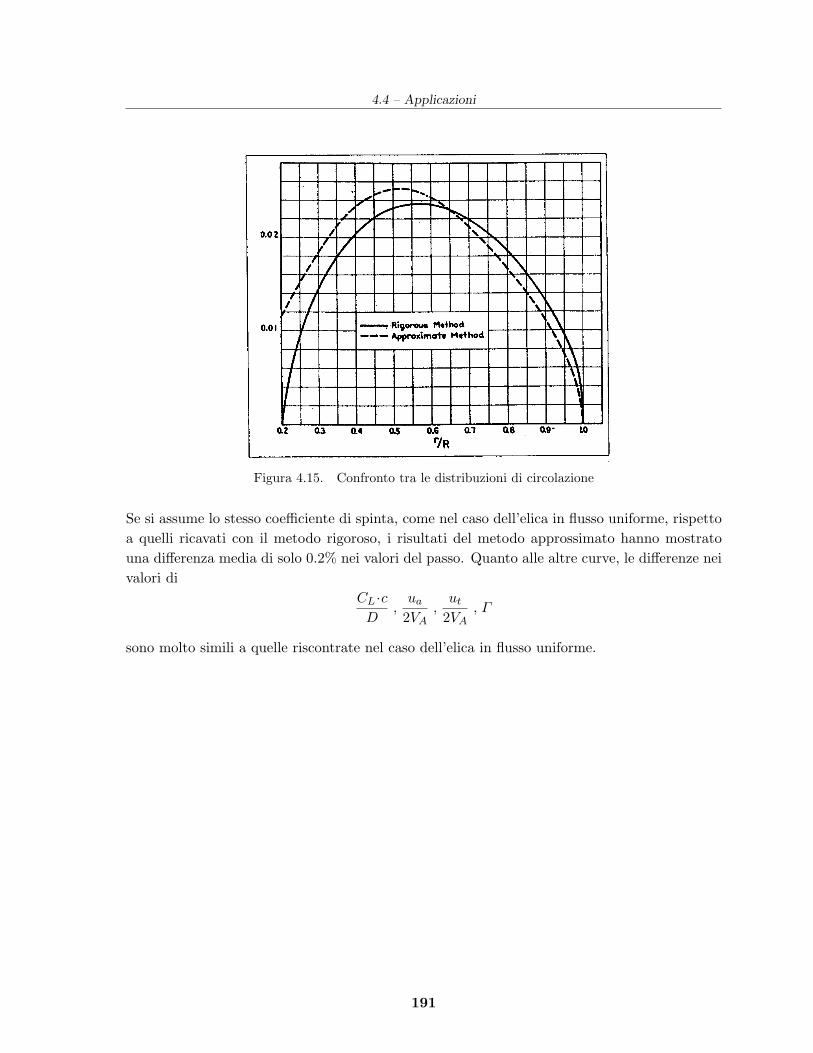
4.4 – Applicazioni
Figura 4.15. Confronto tra le distribuzioni di circolazione
Se si assume lo stesso coefficiente di spinta, come nel caso dell’elica in flusso uniforme, rispettoa quelli ricavati con il metodo rigoroso, i risultati del metodo approssimato hanno mostratouna differenza media di solo 0.2% nei valori del passo. Quanto alle altre curve, le differenze neivalori di
CL ·cD
,ua
2VA,
ut
2VA, Γ
sono molto simili a quelle riscontrate nel caso dell’elica in flusso uniforme.
191

4 – Metodo di Eckhardt–Morgan
Appendice 1
Progetto di un’elica non–ottimale in flusso uniforme per una nave bielica
Passo 1. Dalle prove sperimentali condotte sul modello di una nave militare bielica si rilevanoi seguenti dati iniziali
V = 35 [kn]N = 300 [rpm]D = 3.80 [m]Dh = 0.76 [m]PD = 47300 [kW]RT = 1815 [kN]w = 0t = 0.05Z = 5Nsh = 2
Passo 2. Coefficienti base di progetto, assumendo che la temperatura dell’acqua di mare sia di15o, per cui e ρ = 1.0258
λ =Va
πnD= 0.301
T =RT
(1− t) Nsh= 955.3 [kN] per asse
CT =T
12ρ
πD2
4·V 2
a
= 0.504 ⇒ CTi = 1.04CT = 0.524
Dal diagramma di Kramer (si entra con λ e CTi) si ricava
ηi = 0.830
Passo 3. Velocita indotta tangenziale ut e verifica del coefficiente di spinta, imponendo che ilcoefficiente di carico calcolato (CT )c sia pressoche uguale a quello richiesto (CT )r.
Al raggio 0.7R e
λi =λ
ηi= 0.363
tan βi =λi
x= 0.518
192

4.4 – Applicazioni
Poiche la distribuzione di passo dell’elica e parabolica dal mozzo fino al raggio 0.6R e, quindi,rettilinea fino all’apice, dove con riferimento a quello relativo al raggio r/R = 0.7
(P/D)i = π x tan βi = 1.139
il passo ai vari raggi e calcolabile utilizzando i fattori dati nella seguente tabella
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
f 1.0872 1.0837 1.0724 1.0549 1.0288 1.0000 0.9712 0.9424 0.9136
E possibile derivare, quindi, la distribuzione dell’angolo di passo idrodinamico ad ogni raggio.
Essendo noti i valori degli angoli di passo β e βi, mediante le loro funzioni trigonometriche epossibile determinare il rapporto ut/Va.
Si calcola, quindi, il fattore di Goldstein k ai vari raggi in funzione del numero di pale. Aquesto punto, integrando con la regola di Simpson, si determina il coefficiente di carico dispinta, che risulta essere pari a (CT )c = 0.5195. Se si impone che lo scarto massimo ammissibilenormalizzato rispetto a (CT )r tra (CT )c e (CT )r sia pari a ε = 0.001, e probabile che occorradar luogo ad una procedura iterativa che porti dai primi valori stimati a quelli corretti. Inquesto caso, essendo
|(CT )r − (CT )c|(CT )r
> 0.001
occorre procedere ad una seconda approssimazione, che porta a (CT )c = 0.5196.
Passo 4. Coefficiente portanza-corda-diametro
In base alle grandezze idrodinamiche calcolate in precedenza, si determina la circolazione Γ suogni profilo di pala. E immediato, quindi, calcolare il coefficiente (CL ·c)/D, che costituiscela base per la determinazione della lunghezza di corda c, dopo avere effettuato le opportune enecessarie verifiche di robustezza e cavitazione.
Passo 5. Robustezza preliminare
Viene stimato lo spessore massimo virtuale sull’asse dell’elica to/D ed il coefficiente portanza–corda–spessore CL·c/t, che serve in ingresso per l’utilizzo delle ‘carte di cavitazione’ della NACA.
Determinato lo spessore massimo, assumendo che lo spessore all’apice sia pari a 3 mm, lospessore ad ogni raggio segue la legge lineare
t = 0.003 + f(to/D − 0.003)
193

4 – Metodo di Eckhardt–Morgan
Passo 6. Portanza e caratteristiche geometriche fondamentali
L’utilizzo dei diagrammi d’innesco della cavitazione per la determinazione dei rapporti di cur-vatura e di spessore, sezione per sezione, richiede la determinazione preliminare dell’indice dicavitazione locale σ, calcolato in base alla relazione (4.21). Come si potra verificare, i valoriradiali di f/c e di t/c, che si ottengono in questa fase, producono una pala molto larga, comeconseguenza della scelta di calcolare preventivamente la robustezza.
Sono utilizzate le carte d’innesco della cavitazione relative ai profili alari costruiti con unadistribuzione di spessore NACA 66 ed una linea mediana a = 0.8. E cosı possibile determinareil rapporto di spessore massimo t/c e quello di curvatura massima f/c in funzione dell’indicedi cavitazione σ e del coefficiente CL ·c/t.
Una volta derivato il rapporto t/c, utilizzando il coefficiente portanza–corda–spessore si defi-niscono le lunghezze di corda c ad ogni raggio. Si puo cosı calcolare il rapporto AE/AO.
Infine, si correggono i rapporti di curvatura f/c introducendo i fattori correttivi k1 e k2
dipendenti dal rapporto d’area espansa e dal coefficiente d’avanzo induttivo λ.
Passo 7. Robustezza finale
A questo punto possono essere completati i calcoli di robustezza forniti in Appendice 3. I valoriottenuti di lunghezza di corda, curvatura e spessore massimi ad ogni raggio, vanno riavviati.
Passo 8. Correzione del passo
Prima di completare il progetto dell’elica, vanno effettuate le due correzioni del passo. Sonoeffettuate per prime le correzioni per viscosita mediante un angolo d’incidenza addizionale ris-petto a quello ideale, secondo una delle equazioni (4.26)–(4.28).
La seconda correzione tiene conto dell’effetto per superficie portante, relativamente ai vorticiconcatenati - equazione (4.29) - ed ai vortici liberi che si staccano da ogni pala - equazione(4.31).
Si ricava cosı il rapporto passo-diametro finale secondo l’equazione (4.34).
Passo 9. Rendimento dell’elica e potenza assorbita
Viene verificato che il coefficiente di spinta, ottenuto integrando l’equazione (4.40), sia soddisfa-cente. Si calcola, quindi, il coefficiente di potenza mediante integrazione dell’equazione (4.41),determinando cosı il rendimento dell’elica isolata come rapporto tra coefficiente di spinta ecoefficiente di potenza. Si calcola, infine, la potenza assorbita mediante l’equazione (4.42).
194

4.4 – Applicazioni
Appendice 2
Progetto di un’elica adattata alla scia su una nave monoelica
Dalle prove sperimentali di resistenza e di autopropulsione, condotte sul modello di una naveda carico monoelica, sono disponibili i seguenti dati iniziali:
V = 21 [kn]PE = 9600 [kW]w = 0.20t = 0.15
nonche la seguente distribuzione radiale di scia assiale
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
wx 0.424 0.344 0.288 0.249 0.221 0.200 0.185 0.174 0.161
Le specifiche progettuali richiedono che sia
PD = 12500 kW(PD)max = 21000 kW a 109 RPM
Sono state scelte quattro pale (Z = 4) in base a valutazioni sulle vibrazioni. Per avere una luceverticale pari al 20% del diametro dell’elica, il diametro e limitato ad essere D = 4. Tale valoree incrementato del 5% per potere calcolate il numero di giri ottimale. Un’analisi preliminarecon l’approccio di Papmel suggerisce un numero di giri ottimale N = 102 RPM. Le pale hannoun ‘rake’ di 7.5 gradi per aumentare le luci.
Passo 1. Coefficienti base di progetto
Per ottenere in prima approssimazione l’angolo di passo idrodinamico sono necessari i coeffi-cienti base di progetto .
Va = V (1− w) = 16.8 [kN]
λ =Va
πnD= 0.253
T =PE
V (1− t)= 1055.5 [kN]
CT =T
12ρ
πD2
4·V 2
a
= 0.856 ⇒ CTi = 1.03CT = 0.882
195

4 – Metodo di Eckhardt–Morgan
Dal diagramma di Kramer (si entra con λ e CTi) si ricava
ηi = 0.760
Passo 2. Coefficienti base di progetto
Per un’elica adattata alla scia i coefficienti idrodinamici progettuali sono basati sulla velocitanave e sulla scia ad ogni sezione di pala. Si ricava
λs =V
πnD= 0.316
CTs =T
12ρ
πD2
4·V 2
= 0.548 ⇒ CTsi = 1.03 CTs = 0.565
tanβ =λs
x(1− wx) = 0.316
(1− wx)x
tanβi =λs
x
√1− w
√1− wx
ηi= 0.372
√1− wx
x
λi = x tanβi
Passo 3. Velocita indotte e verifica del coefficiente di spinta
E possibile derivare, quindi, la distribuzione dell’angolo di passo idrodinamico ad ogni raggio.
Essendo noti i valori degli angoli di passo β e βi, mediante le loro funzioni trigonometriche epossibile determinare ad ogni angolo le velocita indotte tangenziali ut/Va.
Si calcola, quindi, il fattore di Goldstein k ai vari raggi in funzione del numero di pale. Sidetermina successivamante il coefficiente di carico di spinta, che al primo passo risulta esserepari a (CT )c = 0.555. Dopo avere corretto i valori di tan′ ,βi, e rispettando il criterio.
|(CTsi)r − (CTsi)c|(CTsi)r
> 0.001
l’iterazione finale fornisce (CTsi = 0.567.
Passo 4. Coefficiente portanza-corda-diametro
In base alle grandezze idrodinamiche calcolate in precedenza, si determina la circolazione Γ suogni profilo di pala. Si calcola, quindi, il coefficiente (CL·c)/D, che consente di determinare lalunghezza di corda c, dopo avere effettuato le opportune e necessarie verifiche di robustezza ecavitazione.
196

4.4 – Applicazioni
I valori ricavati sono ai diversi raggi di pala
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
wx 0.124 0.126 0.118 0.107 0.095 0.081 0.067 0.048 0.000
Passo 5. Robustezza finale
La verifica di robustezza e effettuata con il metodo iluustrato in Appendice 3, assumenso unatensione massima ammissibile σmax = 86,200kPa. Si calcolano anche le tensioni prodotte dallaforza centrifuga dovuta al ‘rake’ ed allo ‘skew’. Risulta che l’elica ha un basso livello tensionale,per cui la distribuzione radiale dello spessore di pala puo essere ridotta in modo da avere unospessore adimensionale a mozzo pari a t/c = 0.19.
Passo 6. Geometria finale
I valori finali avviati della geometria di pala sono i seguenti
x 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
P/D 0.980 1.041 1.082 1.111 1.129 1.143 1.154 1.162 1.170c/D 0.220 0.249 0.271 0.284 0.289 0.284 0.260 0.209 0.000t/c 0.190 0.144 0.110 0.087 0.069 0.054 0.044 0.033 —–f/c 0.035 0.036 0.037 0.037 0.036 0.034 0.032 0.029 —–
Passo 7. Potenza assorbita
Si puo controllare se e soddisfatta l’ipotesi iniziale CTsi = 1.03CTs . In base alla relazione
CTsi 'CT
1− 20.008CL
λi
dove CL e λi sono caloclat al raggio x = 0.7, si verifica essere CTsi = 1.03CTs .
Una verifica della potenza richiesta dalle equazioni (4.37) e (4.38) fornisce PD = 12875 kW.
197

4 – Metodo di Eckhardt–Morgan
Appendice 3
Analisi di Robustezza
L’analisi di robustezza delle pale dell’elica e sviluppata in base alla semplice teoria della traveincastrata. Il metodo e concepito in modo tale da minimizzare il lavoro richiesto nel calcolodelle proprieta geometriche della sezione di pala. Vengono fornite solamente le formule neces-sarie ad implementare questo metodo al computer.
Poiche, di solito, le tensioni causate dalla forza centrifuga sono piccole, vengono consideratesolamente le tensioni prodotte dai momenti flettenti generati dalla spinta e dal momento tor-cente. Questi momenti sono scomposti in due componenti: Mxo intorno ad un asse paralleloalla linea di corda della sezione, ed Myo perpendicolare a questo asse. Ambedue gli assi, xo eyo, passano attraverso il centroide della sezione di pala (Fig. 4.16).
Figura 4.16. Proprieta geometriche di una sezione di pala
Quando siano noti l’angolo di passo ϕ, ed i momenti dovuti alla spinta ed al momento torcente,e semplice ricavare i momenti flettenti intorno agli assi xo ed yo come segue
Mxo = MTbcosϕ + MQb
sinϕ (4.44)
Myo = MTbsinϕ−MQb
cosϕ (4.45)
I momenti MT b e MQb, relativi alla pala di riferimento, sono ottenuti dalle distribuzioni dellaspinta e del momento torcente, ricavate mediante la teoria vorticale. Le formule per questimomenti sono quindi
MTb=
ρ
2·πR3
Z·V 2
A
∫ 1
xh
(x− xo)·(1− ε tanβi)· dCT i
dxdx (4.46)
MQb=
ρ
2·πR3
Z·V 2
A
∫ 1
xh
(x− xo)·(tanβi + ε)· dCT i
dxdx (4.47)
dove xo e il raggio adimensionale della sezione della quale si esamina la robustezza.
198

4.4 – Applicazioni
Per eliche adattate alla scia, nelle equazioni (4.46) e (4.47), anziche la velocita d’avanzo VA edil coefficiente dCT i, vanno utilizzati la velocita nave V ed il coefficiente di spinta basato sullavelocita nave dCT si.
Se Ixo e Iyo sono i momenti d’inerzia rispetto agli assi baricentrici xo e yo, le tensioni su ognisezione di pala sono date dalle seguenti relazioni:
- tensione sul bordo d’ingresso
σle = −y1 ·Mxo
Ixo
− x1Myo
Iyo
(4.48)
- tensione sul bordo d’uscita
σte = −y2 ·Mxo
Ixo
− x2Myo
Iyo
(4.49)
- tensione sul dorso nel punto di massimo spessore
σbtm = −y3 ·Mxo
Ixo
− x3Myo
Iyo
(4.50)
Per convenzione, una tensione positiva denota trazione, mentre una tensione negativa denotacompressione. Come mostrato in Figura 4.16, x1, x2 e x3 sono rispettivamente le ascisse delbordo d’ingresso, del bordo d’uscita e del punto di massimo spessore, mentre y1, y2 e y3 rap-presentano le ordinate degli stessi punti.
Le equazioni che forniscono le proprieta geometriche di un profilo alare sono state considerateper le due distribuzioni di spessore NACA 16 e NACA 66. Le formule che seguono sono appli-cabili a tutti i profili alari costruiti con linee mediane NACA a = 0.8 oppure NACA a = 1.0.
Per la sezione NACA 16 le equazioni che forniscono le proprieta geometriche sono:
A = 0.986 (k1 ·tm/c)·c2
x1 = (0.4838− 0.026fm/c)·cx2 = x1 − c
x3 = x1 − 0.5 c
y1 = −(0.113 tm/c + 0.782)·(fm/c)·cy2 = y1
y3 = y1 + (0.5 tm/c + fm/c)·cIxo = 0.9925 [k2 (fm/c)2 + 0.04487 (tm/c)3]·c4
Iyo = 0.946 (k3 ·tm/c)·c4
Per la sezione NACA 66 le equazioni sono:
A = 0.963 (k1 ·tm/c)·c2
x1 = (0.473− 0.026fm/c)·c
199
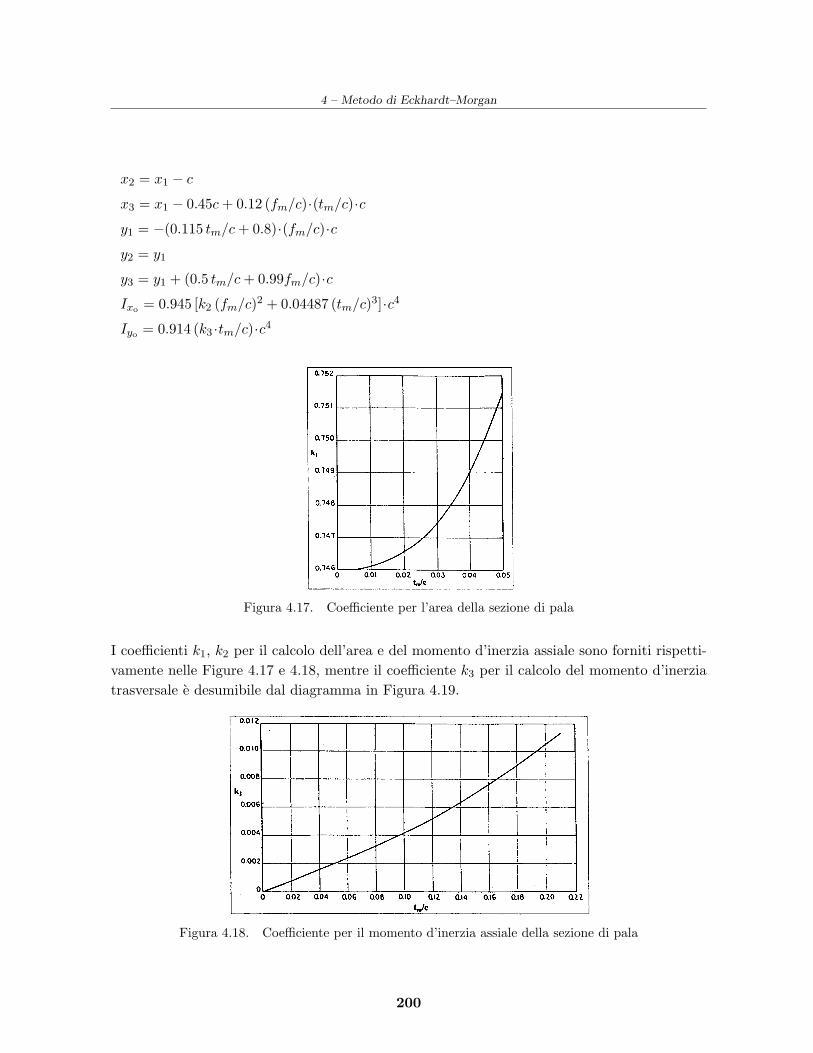
4 – Metodo di Eckhardt–Morgan
x2 = x1 − c
x3 = x1 − 0.45c + 0.12 (fm/c)·(tm/c)·cy1 = −(0.115 tm/c + 0.8)·(fm/c)·cy2 = y1
y3 = y1 + (0.5 tm/c + 0.99fm/c)·cIxo = 0.945 [k2 (fm/c)2 + 0.04487 (tm/c)3]·c4
Iyo = 0.914 (k3 ·tm/c)·c4
Figura 4.17. Coefficiente per l’area della sezione di pala
I coefficienti k1, k2 per il calcolo dell’area e del momento d’inerzia assiale sono forniti rispetti-vamente nelle Figure 4.17 e 4.18, mentre il coefficiente k3 per il calcolo del momento d’inerziatrasversale e desumibile dal diagramma in Figura 4.19.
Figura 4.18. Coefficiente per il momento d’inerzia assiale della sezione di pala
200
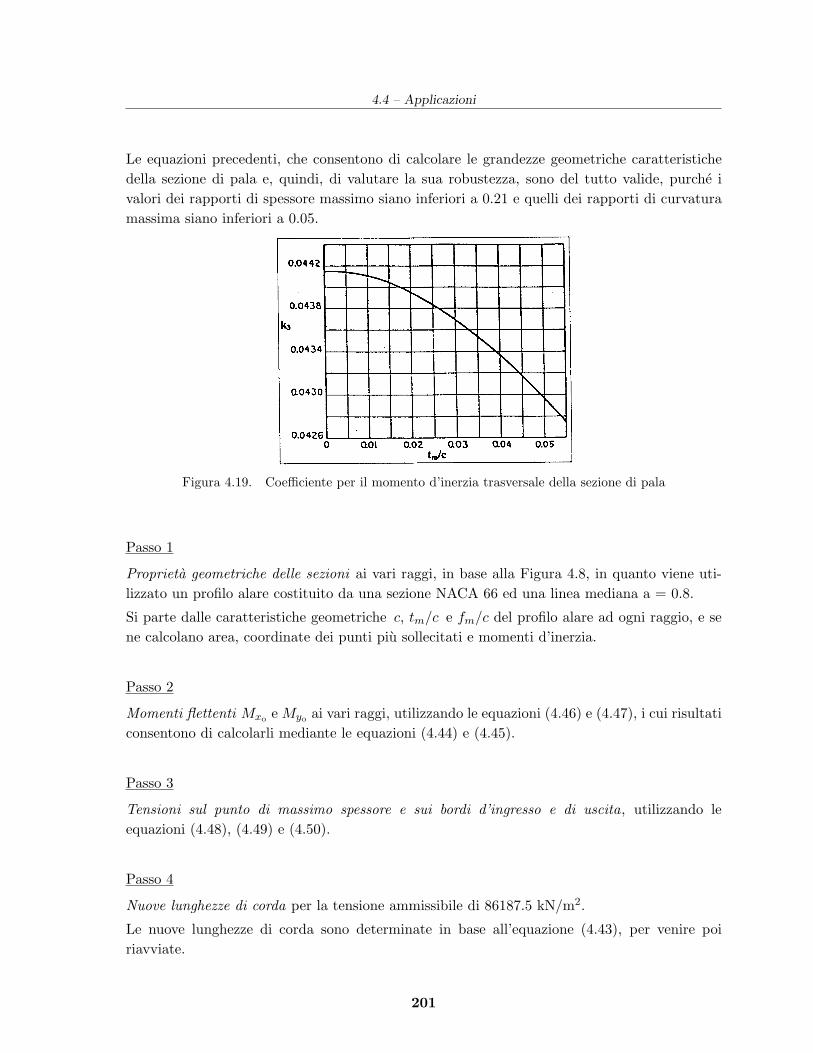
4.4 – Applicazioni
Le equazioni precedenti, che consentono di calcolare le grandezze geometriche caratteristichedella sezione di pala e, quindi, di valutare la sua robustezza, sono del tutto valide, purche ivalori dei rapporti di spessore massimo siano inferiori a 0.21 e quelli dei rapporti di curvaturamassima siano inferiori a 0.05.
Figura 4.19. Coefficiente per il momento d’inerzia trasversale della sezione di pala
Passo 1
Proprieta geometriche delle sezioni ai vari raggi, in base alla Figura 4.8, in quanto viene uti-lizzato un profilo alare costituito da una sezione NACA 66 ed una linea mediana a = 0.8.
Si parte dalle caratteristiche geometriche c, tm/c e fm/c del profilo alare ad ogni raggio, e sene calcolano area, coordinate dei punti piu sollecitati e momenti d’inerzia.
Passo 2
Momenti flettenti Mxo e Myo ai vari raggi, utilizzando le equazioni (4.46) e (4.47), i cui risultaticonsentono di calcolarli mediante le equazioni (4.44) e (4.45).
Passo 3
Tensioni sul punto di massimo spessore e sui bordi d’ingresso e di uscita, utilizzando leequazioni (4.48), (4.49) e (4.50).
Passo 4
Nuove lunghezze di corda per la tensione ammissibile di 86187.5 kN/m2.
Le nuove lunghezze di corda sono determinate in base all’equazione (4.43), per venire poiriavviate.
201

4 – Metodo di Eckhardt–Morgan
Passo 5
Nuovi rapporti di corda e di curvatura corrispondenti alle nuove lunghezze di corda.
La procedura che consente di ricavare i rapporti tm/c e fm/c ad ogni raggio e la seguente:
1. Si entra nel diagramma d’innesco di cavitazione con il valore dell’indice di cavitazionelocale σ.
2. Si determina per primo il valore di tm/c.
3. Si ricava, quindi, il valore di fm/c.
4. Il valore del rapporto di curvatura viene corretto, infine, mediante i fattori k1 e k2.
Passo 6
Nuovo controllo della robustezza.
Utilizzando i nuovi valori di c, tm/c e fm/c, viene ripetuto il calcolo della robustezza di pala,verificando che le tensioni massime finali siano vicine, ma inferiori a quella massima ammissibile.
202
Capitolo 5
Progetto dell’elica subcavitante
Il progetto finale dell’elica deve soddisfare diversi requisiti tra loro conflittuali: deve garantireil rendimento propulsivo massimo possibile con l’obiettivo di produrre, alla velocita desiderata,la spinta richiesta assorbendo la potenza disponibile ad una assegnata velocita angolare. Allostesso tempo deve garantire contemporaneamente una robustezza di pala adeguata e la ridu-zione/eliminazione della cavitazione per avere un livello accettabile di vibrazioni indotte in unassegnato campo di scia non–uniforme.
Scopo dei calcoli progettuali di un’elica subcavitante, i cui algoritmi sono basati sulla teoriavorticale, e la determinazione della distribuzione radiale del passo, nonche delle curvature, de-gli spessori e delle lunghezze di corda delle sezioni di pala, a partire dal calcolo delle velocitaindotte.
Dal punto di vista idrodinamico, il problema progettuale dell’elica puo essere affrontato me-diante la teoria della linea portante oppure mediante la teoria della superficie portante.
Nel processo finale della definizione della forma di pala, i calcoli basati sulla teoria della lineaportante servono fondamentalmente per ricavare un’appropriata distribuzione del carico radialee l’associata distribuzione del carico idrodunamico. Per navi ed imbarcazioni lente il rendimen-to e il parametro da ottimizzare, mentre per le navi veloci e/o molto caricate la cavitazione ela voce progettuale primaria.
Il progetto di nuovi profili per le sezioni di pala e generalmente limitato ad eliche speciali,quali sono quelle per navi militari, alle eliche intubate, alle eliche supercavitanti e ventilate,alle eliche per navigazione in ghiaccio, oppure ad altre eliche per le quali sono imposti requisitispeciali per quanto riguarda l’innesco della cavitazione o la portanza massima. Per le elicheconvenzionali di navi mercantili, le sezioni sono scelte di solito tra i tipi standard (NACA,
203

5 – Progetto dell’elica subcavitante
MAU, Walckner, ecc.). I profili standard sono determinati dalle distribuzioni dello spessore edella linea mediana,per cui lo spessore massimo e la freccia massima determinano completa-mente i particolari geometrici della sezione.
Un tipo di sezione ampiamente utilizzato per le eliche navali e la combinazione della distribu-zione di spessore NACA 66 con la linea mediana NACA a=0.8. Tra le proprieta di questi profilialari e importante la relazione tra angolo d’incidenza, coefficiente di portanza e caratteristiched’innesco della cavitazione. Il coefficiente di portanza e determinabile in funzione dello spessoremassimo e dell’angolo d’incidenza, espresso in gradi, mediante le relazioni fornite in Tabella5.1.
f/c CL
0.00 CL = 0.11 (1− 0.83 t/c)α
0.02 CL = 0.11 (1− 0.83 t/c) (α + 2.35)0.04 CL = 0.11 (1− 0.83 t/c) (α + 4.70)
Tabella 5.1. Coefficienti di portanza (profilo NACA 66 - linea mediana a=0.8)
Talvolta sono utilizzati altri profili standard, in particolare i NACA 16. In molte vasche idro-dinamiche sono applicati profili alari differenti, sebbene le loro caratteristiche d’innesco dellacavitazione siano piuttosto simili a quelle dei profili standard. Per profili di superfici portantiquali timoni, braccioli, ecc., si applicano spesso distribuzioni di spessore NACA 00xx.
Nel progetto dell’elica finale con la teoria vorticale si assume che gli elementi fondamentalidell’elica (diametro e numero di giri) sianno stati determinati preventivamente, grazie all’utiliz-zo dei diagrammi progettuali computerizzati derivati da serie sistematiche, Il punto di partenzae la valutazione di un’elica ottimale (in termini del criterio di Lerbs) adattata alla scia al puntoprogettuale. Il progettista e libero di introdurre ogni tipo di modifiche alla geometria dell’elicaed alle caratteristiche del suo punto progettuale. Queste modifiche possono includere:
• distribuzione radiale del passo;• distribuzione radiale della curvatura massima della linea mediana delle sezioni di pala;• distribuzione radiale delle lunghezze di corda delle sezioni di pala;• distribuzione radiale degli spessori massimi delle sezioni di pala;• distribuzione radiale delle ordinate dello ‘skew–back’;• distribuzione radiale delle ordinate del ‘rake’;• il punto progettuale dell’elica, descritto dalla velocita nave, dal numero di giri della linea
d’assi e dalla spinta sviluppata dall’elica.
Ad ogni passo del calcolo progettuale si effettua una sola modifica, che da luogo ad un nuo-vo calcolo allo scopo di raggiungere il punto progettuale specificato. Il codice di calcolo devefornire informazioni complete sull’elica modificata, che comprendano la sua geometria, le carat-teristiche idrodinamiche locali e totali, insieme ai margini di sicurezza rispetto alla cavitazionea bolle ed a lamina. Queste informazioni costituiscono la base per le decisioni da prendere nellemodifiche successive.
204
5.1 – Influenza della scia e carico dell’elica
5.1 Influenza della scia e carico dell’elica
Il progetto dell’elica adattata alla scia della carena, necessita di informazioni circa la distri-buzione del campo di velocita sul disco–elica. E auspicabile avere informazioni circa la sciaeffettiva, ossia circa il campo di velocita con l’elica operante. Tali informazioni sono costruitedall’analisi dei risultati delle misure del campo di velocita durante le prove su modelli autopro-pulsi in una vasca di rimorchio.
Le navi di nuovo tipo producono una varieta di distribuzioni di scia dovute alle grandi dif-ferenze delle forme di carena, i cui effetti influenzano le prestazioni dell’elica. Oggi le elichenon possono essere progettate utilizzando solamente il valore di scia effettivo o la media delledistribuzioni di scia.
Le sezioni, il contorno, lo spessore e lo ‘skew’ di pala devono essere determinate per adattarele loro caratteistiche alla particolare distribuzione di scia. Tutte le analisi vanno realizzateutlizzando la teoria verticale. Gli esperimenti su modello sono effettuati solamente per cattu-rare il legame tra teoria e realta, ovvero per confermare le caratteristiche dell’elica calcolateteoricamente.
Una difficolta insita in questa concezione nasce dal fatto che la forma degli strati di vorticiliberi e le entita delle componenti della velocita indotta sono mutuamente dipendenti, il cherende necessarie certe approssimazioni. Nel caso di elica leggermente caricata, si ipotizza che laforma di uno strato vorticoso sia determinato dalla velocita d’avanzo e dalla velocita perifericadell’elica. Non viene considerata, quindi, l’influenza delle velocita indotte sulla forma stessa inquanto queste ultime sono trascurabili rispetto alla velocita del flusso indisturbato. Lo stratovorticoso risulta essere percio una vera superficie elicoidale.
Nel caso di elica moderatamente caricata, il che si verifica per la maggior parte delle elichenavali tranne che in condizioni di tiro, questa semplificazione non e piu accettabile, per cui sirende necessario introdurre alcune approssimazioni per risolvere il problema. Si tiene contodell’influenza delle velocita indotte sulla forma dello strato di vortici liberi, ma si trascuranogli effetti della contrazione e delle forze centrifughe sulla scia a valle dell’elica. In questo caso,la formazione degli strati vorticosi differisce, in generale, da effettive superfici elicoidali. Se,infine, si tiene conto di questi effetti sulla forma degli strati vorticosi, si parla di elica pesante-mente caricata.
Per eliche moderatamente e pesantemente caricate, la legge di Betz stabilisce che gli strativorticosi liberi formano vere superfici elicoidali, per cui la risultante delle velocita indotte enormale al vettore velocita risultante, purche la circolazione lungo la linea portante sia taleche l’energia cinetica nella scia a valle dell’elica presenti un valore minimo per valori assegna-ti del coefficiente d’avanzo e del coefficiente di carico. Questo vale fondamentalmente per lascia alquanto a valle del disco–elica, ma e applicabile anche agli strati vorticosi sul piano deldisco–elica stesso quale approssimazione nel caso di carico moderato,. Legata a questa ipotesie un’ulteriore approssimazione, in base alla quale puo essere trascurata ogni deformazione deglistrati vorticosi in direzione assiale ed in virtu della quale diviene determinabile la distribuzione
205

5 – Progetto dell’elica subcavitante
ottimale della circolazione lungo una linea portante. Tutte le teorie sviluppate successivamenteutilizzano questa premessa per il calcolo delle velocita indotte, anche quando la distribuzioneradiale del carico idrodinamico non e piu quella ottimale (Eckhardt & Morgan, 1955).
Le teorie dell’elica moderatamente caricata, basate su queste ipotesi, sono state validate danumerosi riscontri sperimentali. Tuttavia, sulla base di esperimenti con eliche ottimali, Lerbs(1952) ha ritenuto giustificabile trascurare, entro certi limiti, la deformazione degli strati vorti-cosi in direzione assiale anche quando la distribuzione della circolazione di un’elica moderata-mente caricata non sia ottimale. Di conseguenza, si ipotizza che gli strati vorticosi siano costi-tuiti da linee vorticose cilindriche con diametro ed angolo di passo costanti in direzione assiale,consentendo quindi di considerare flussi variabili radialmente e distribuzione di circolazione nonottimali.
5.2 Metodo della linea portante
E stato dimostrato (Tanybayashi (1973) che l’utilizzo corretto di un’adeguata teoria della lineaportante, applicata in modo quasi–stazionario, puo produrre risultati affidabili per il calcolodella spinta e del momento torcente di un’elica adattata alla scia per valori non troppo elevatidel rapporto d’area espansa. La validita della teoria quasi–stazionaria della linea portante pervalori elevari del rapporto dell’area di pala cresce notevolmente quando si considera il fenome-no della variazione dell’angolo d’incidenza del flusso indisturbato lungo la sezione di pala, checambia la curvatura effettiva delle sezioni di pala. Questi fatti, insieme alla conoscenza che icodici basati sulla teoria della linea portante sono estremamente versatili, particolarmente seincorporano gli effetti viscosi e gli effetti delle variazioni della geometria delle sezioni di pala,hanno portato ad accettare l’utilizzo della teoria quasi–stazionaria della linea portante per ilcalcolo della distribuzione delle circolazione lungo la linea portante e dell’angolo d’incidenzadel flusso incidente risultante alle varie posizioni angolari di pala.
Il metodo piu rigoroso e piu completo di applicazione della teoria della linea portante per elicheleggermente e moderatamente caricate e il metodo dei fattori di induzione. Nello sviluppo diquesto metodo, Lerbs (1952) ha ipotizzato che gli strati di vortici liberi siano costituiti da fila-menti vorticosi cilindrici, ognuno dei quali con angolo di passo costante, il che consente di avereun flusso non–uniforme variabile radialmente ed una distribuzione di circolazione non ottimale.Questo metodo permette di calcolare le velocita indotte assiali e tangenziali indipendentementele une dalle altre ed include l’effetto del mozzo dell’elica. Le linee portanti sono consideraterettilinee, ossia senza ‘skew’ e senza ‘rake’.
Dal diagramma del triangolo delle velocita locali, relativo alla generica sezione di pala al raggiox (Fig. 5.1), si puo rilevare come le velocita indotte ua e ut siano legate all’angolo di passoidrodinamico βi. Si osservi che qui l’angolo di passo geometrico, di solito indicato con ϕ, coin-cide con l’angolo di passo idrodinamico βi: questa e una condizione molto particolare, ossiaquella di ‘shock–free entry’, e, quindi, non rappresenta una condizione generale.
206
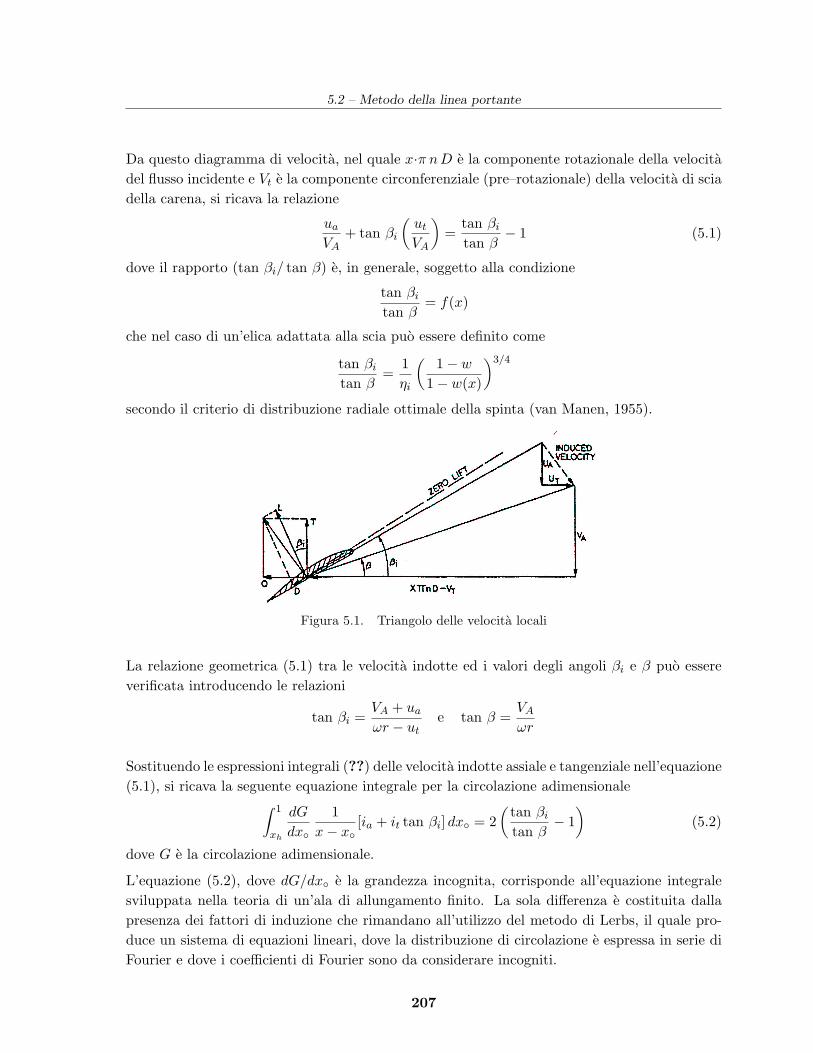
5.2 – Metodo della linea portante
Da questo diagramma di velocita, nel quale x·π n D e la componente rotazionale della velocitadel flusso incidente e Vt e la componente circonferenziale (pre–rotazionale) della velocita di sciadella carena, si ricava la relazione
ua
VA+ tan βi
(ut
VA
)=
tan βi
tan β− 1 (5.1)
dove il rapporto (tan βi/ tan β) e, in generale, soggetto alla condizione
tan βi
tan β= f(x)
che nel caso di un’elica adattata alla scia puo essere definito come
tan βi
tan β=
1ηi
(1− w
1− w(x)
)3/4
secondo il criterio di distribuzione radiale ottimale della spinta (van Manen, 1955).
Figura 5.1. Triangolo delle velocita locali
La relazione geometrica (5.1) tra le velocita indotte ed i valori degli angoli βi e β puo essereverificata introducendo le relazioni
tan βi =VA + ua
ωr − ute tan β =
VA
ωr
Sostituendo le espressioni integrali (??) delle velocita indotte assiale e tangenziale nell’equazione(5.1), si ricava la seguente equazione integrale per la circolazione adimensionale
∫ 1
xh
dG
dx◦1
x− x◦[ia + it tan βi] dx◦ = 2
(tan βi
tan β− 1
)(5.2)
dove G e la circolazione adimensionale.
L’equazione (5.2), dove dG/dx◦ e la grandezza incognita, corrisponde all’equazione integralesviluppata nella teoria di un’ala di allungamento finito. La sola differenza e costituita dallapresenza dei fattori di induzione che rimandano all’utilizzo del metodo di Lerbs, il quale pro-duce un sistema di equazioni lineari, dove la distribuzione di circolazione e espressa in serie diFourier e dove i coefficienti di Fourier sono da considerare incogniti.
207

5 – Progetto dell’elica subcavitante
Questa equazione integrale e applicabile universalmente ad ogni tipo di elica, con campo divelocita omogeneo e radialmente non–uniforme, e con distribuzione di passo arbitraria. Unmetodo per determinare il valore principale di questo integrale e stato fornito da Schubert(1954) come estensione della soluzione di Glauert. Si ricava la seguente espressione per lacircolazione adimensionale
11− xh
∞∑
m=1
mGm[ham(ϕ) + tanβi(ϕ) ht
m(ϕ)] =tanβi
tanβ− 1
Se si impone che questa relazione sia soddisfatta per un certo numero di punti sulla lineaportante, si ricava un sistema di equazioni lineari dal quale si puo ottenere il vettore dei co-efficienti di Fourier G che esprimono la circolazione adimensionale. Si puo calcolare, quindi,la velocita indotta mediante sostituzione nella serie di Fourier, determinando infine la portanza.
Si osservi che la resistenza delle sezioni e nulla nei modelli a flusso potenziale, mentre la re-sistenza indotta e presente in ogni caso per effetto della generazione delle velocita indotte. Laresistenza della sezione deve essere percio determinata mediante il calcolo della resistenza visco-sa. La portanza e la resistenza alle varie sezioni di pala sono scomposte, quindi, in senso assialee tangenziale; la loro integrazione consente di determinare la spinta ed il momento torcente dipala secondo le formule fornite dalla teoria delle sezioni di pala.
La teoria vorticale consente di determinare l’intensita del sistema vorticoso dell’elica. I vorticiliberi di questo sistema producono le velocita indotte, che devono essere considerate se si vo-gliono legare gli angoli d’incidenza del flusso alle caratteristiche dei singoli profili. Inoltre, si ein grado di calcolare i fattori di induzione con relativa semplicita. Di conseguenza, si potrebbeipotizzare che il passo dei vortici liberi sia conosciuto, dal momento che i fattori di induzionedipendono dall’angolo di passo idrodinamico. Di norma, questo non e vero, per cui occorrescegliere inizialmente la distribuzione radiale del passo.
L’esperienza ha insegnato, inoltre, che vicino al mozzo ed all’apice di pala le soluzioni numerichediventano meno stabili rispetto alla zona centrale di pala. Infatti, per ϕ = 0 e per ϕ = π, lefunzioni hm divengono indefinite. Le soluzioni per la linea portante in questi punti di estremitapossono essere ricavate mediante la regola dell’Hospital come
ham(0) = π
m
m∑
n=0
ian(0) +n∑
n=m+1
ian(0)
(5.3)
htm(π) = −π cos (mπ)
m
m∑
n=0
ian cos (nπ) +n∑
n=m+1
ian(0) cos (nπ)
(5.4)
Tuttavia, e stato verificato che e piu pratico determinare i valori della circolazione sul mozzo esugli apici mediante estrapolazione in senso radiale.
208
5.3 – Progetto idrodinamico
Inoltre, e risultato evidente che basta un piccolo numero di termini nella serie armonica, cinqueo sei, che rappresentano le distribuzioni radiali della circolazione ed i fattori di induzione perottenere risultati ragionevolmente accurati. L’esperienza ha anche insegnato che, per avere ri-sultati stabili rispetto alla distribuzione di circolazione, occorre introdurre un numero minimodi sette termini nella serie armonica di Fourier. D’altra parte, la risoluzione del sistema chefornisce i coefficienti di Fourier di una serie armonica con piu di tredici termini e risultata essereprogressivamente instabile.
Dopo avere risolto il problema delle velocita indotte, si determina la spinta in base all’intensitadella circolazione e si calcola, infine, la resistenza. Successivamente, si corregge iterativamenteil passo idrodinamico, finche la spinta corrisponde al valore desiderato. In linea di principio,si dovrebbe tenere presente che esiste un numero infinito di soluzioni, almeno fino a quandonon sia fissata la distribuzione radiale del passo. Nello sviluppo del progetto dell’elica e pra-tica comune fissare il tipo di distribuzione radiale e studiare gli effetti delle variazioni delladistribuzione risolvendo il modello della linea portante per ogni caso particolare. Si osservi chegli effetti della variazione della distribuzione radiale del passo idrodinamico non si riflettonosempre correttamente nel rendimento dell’elica cosı come e derivata dal modello di linea por-tante descritto in precedenza.
In base al processo progettuale suddetto, si determinano i valori finali del passo idrodinamico,delle velocita indotte e della circolazione ai diversi raggi della discretizzazione di pala.
5.3 Progetto idrodinamico
Il processo progettuale dell’elica in base alla teoria vorticale puo essere schematicamente divisoin tre fasi interdipendenti:
1. determinazione delle principali caratteristiche cinematiche ed idrodinamiche delle sezionidi pala a partire da un’assegnata distribuzione di circolazione o per soddisfare la condi-zione ottimale generalizzata della linea portante;
2. scelta dei valori ottimali della portanza, della lunghezza e dello spessore di corda dellasezione di pala, con la simultanea verifica dei requisiti di robustezza e del contemporaneocontrollo della cavitazione;
3. determinazione del passo e della curvatura della sezione in base alla teoria della superficieportante, oppure utilizzando le correzioni per superficie portante da apportare al passoed alla curvatura definiti in base alla teoria della linea portante.
Fase 1. Soluzione del sistema di equazioni per la linea portante di un’elica moderatamentecaricata mediante il metodo dei fattori di induzione, senza ottimizzare alcun parametro.
Nei metodi approssimati della teoria vorticale si applicano correzioni per il numero finito di paledell’elica (fattori di Goldstein). Questi metodi applicati diffusamente dopo la seconda guerramondiale, sono cosı semplici da avere consentito il calcolo progettuale di un’elica adattata alla
209

5 – Progetto dell’elica subcavitante
scia in modalita quasi manuale. E importante osservare che la precisione di questi metodi none inferiore a quella garantita dal metodo dei fattori di induzione nel caso del progetto di elicaottimale isolata nel senso dell’elica di Prandtl, secondo il quale il passo idrodinamico πr tanβi
e costante in direzione radiale.
Piu avanti e illustrato l’algoritmo per i calcoli progettuali di un’elica adattata alla scia mediantel’utilizzo dei fattori di Goldstein e della condizione ottimale generalizzata (3.120). Successiva-mente viene applicato lo schema generale lineare della scia vorticosa insieme al calcolo dellecomponenti assiale e tangenziale del campo di velocita assialsimmetrico in termini di mediacirconferenziale.
I parametri prefissati sono: il numero di pale Z, il raggio adimensionale de mozzo rh, il dia-metro D = 2R, il numero di giri dell’elica n, il coefficiente di spinta nella condizione di elicadietro carena KTB
, il coefficiente d’avanzo Jv, il fattore di deduzione di spinta t, il campo discia descritto dalle componenti assiale wx(r) e tangenziale wt(r), l’inverso della qualita aerodi-namica della sezione di pala ε.
La funzione ε(r) e di solito incognita all’inizio dei calcoli. Il valore di questa funzione puo es-sere determinato solamente dopo il secondo stadio del processo progettuale; per questo motivoinizialmente si assume ε(r) = 0. Inizialmente il valore di KTB
e sostituito con KTi , correttomediante il coefficiente d’influenza iv della viscosita sulla spinta. Scelto iv, dopo avere determi-nato i valori reali di ε(r) ed i corrispondenti valori di K∗
TB, e possibile precisare iv in base alla
formula iv = KTI/KTB
e ripetere i calcoli per un altro valore di iv, assumendo ancora che siaε(r) = 0. Se il nuovo valore di iv differisce leggermente da quello assunto inizialmente, e pos-sibile proseguire i calcoli con la funzione ε(r) calcolata al passo precedente. Questa procedurapuo essere applicata affidabilmente se puo essere trascurata l’influenza di ε(r) sulla distribu-zione radiale ottimale della circolazione, ossia per coefficienti d’avanzo moderati (Jv ≤ 1.0).
I calcoli della prima fase hanno inizio con la determinazione di un certo numero di funzionibase, quali la spinta TB = ρn2D4KTB
, la velocita nave V = nDJv, il coefficiente d’avanzoapparente λtv = Jv/π ed il coefficiente di scia media assiale
w =2
1− r2h
∫ R
rh
wx ·r dr
e proseguono sviluppando sequenzialmente i seguenti algoritmi:
1. Si fissa il coefficiente di influenza viscosa iv che per le eliche al vero puo essere assuntopari a 1.02÷1.05.
2. Si determinano le caratteristiche cinematiche e dinamiche dell’elica isolata equivalente,operante in un flusso omogeneo e cilindrico
K∗Ti
=iv ·KTB
[1− λtv ·wt(r)/r]2(5.5)
λ∗t =λtv (1− w)
[1− λtv ·wt(r)/r]2](5.6)
210

5.3 – Progetto idrodinamico
Le condizioni di equivalenza sono assunte in maniera tale che, quando sono wt(r) = A·rcon A = cost. e ux = u, per l’elica equivalente i valori dimensionali delle forze, delle velo-cita e della circolazione sono uguali a quelli dell’elica iniziale. Le formule (5.5) e (5.6) sonoderivate nell’ipotesi che il valore di A e determinato in base alla condizione w∗t (r) = wt(r).
3. Si calcola il coefficiente d’avanzo induttivo λi per l’elica equivalente mediante le formule
λ◦i = 0.26 (λ∗t )2 + [1.2 (K∗
T )2 − 0.5K∗T + 0.897]λ∗t−
0.15 (K∗T )2 + 0.5K∗
T + 0.0131 per Z = 3 (5.7)
λ◦i = 0.26 (λ∗t )2 + 0.812λ∗t + 0.0276 + 0.38K∗
T per Z = 4 (5.8)
λ◦i = 0.26 (λ∗t )2 + 0.812λ∗t + 0.0321 + 0.35K∗
T per Z = 5 (5.9)
λ◦i = 0.26 (λ∗t )2 + 0.812λ∗t + 0.0306 + 0.34K∗
T per Z = 6 (5.10)
che approssimano il diagramma progettuale di Lavrentiev per eliche isolate, ottimali emoderatamente caricate, dove e K∗
T = K∗Ti
se e ε(r) = 0.
4. Si calcola il parametro che caratterizza il passo radialmente costante dei vortici libericome
λw = λ◦i (5.11)
5. Si calcola la costante c della condizione ottimale generalizzata mediante la formula
c = 2 (λw − λtv) + λtv(w + t)− λ2tv ·wt(r)
r+
ε(r)r
(r2 + λ2tv) (5.12)
Questa formula e ricavata dalla condizione di ottimalita purche sia πr tanβi = πλw nelcaso particolare nel quale πr tanβi sia radialmente costante. E questa condizione deveessere soddisfatta in quanto per un’elica isolata, ottimale per l’elica di Prandtl, l’algoritmodeve fornire una soluzione esatta.
6. Si determina un parametro secondario S necessario per calcolare la correzione di Goldsteinper numero finito di pale
S =Z
√1 + λ2
w
2λw(5.13)
7. Dopo avere discretizzato la pala ad un certo numero di raggi r, si calcolano le seguenticaratteristiche idrodinamiche:
• il rapporto di passo idrodinamico in base alla condizione di ottimalita data dall’equa-zione (3.114)
πr tanβi = πλtv
[1 +
c
2λtv− wx(r)
2− t
2+
λtvwt(r)2r
− ε
r
r2 + λ2tv
2λtv
](5.14)
211

5 – Progetto dell’elica subcavitante
• l’avanzo induttivo
λi = r tanβi (5.15)
• l’angolo di passo idrodinamico
βi = tan−1 λi
r(5.16)
• l’angolo di passo della superficie dei vortici liberi
βw = tan−1 λw
r(5.17)
• la normale della proiezione della velocita indotta sulla superficie dei vortici liberi neipunti della linea portante
und =(r − λtvwt) sin βi − λtv(1− wx) cos βi
cos (βi − βw)(5.18)
• il modulo della velocita relativa, normalizzata rispetto a ωR
VR =λtv(1− wx) + wnd cosβw
sinβi(5.19)
• il fattore di Goldstein κ(r, S) per numero finito di pale, ricordando che per r = 1 eκ = 0
• la circolazione adimensionale
G =Γ
ωR2=
4πr κ und sinβw
Z(5.20)
• il termine definito da Lavrentiev caratteristica idrodinamica
H =CL ·cD
=G
VR(5.21)
• la funzione
dK∗TB
dr=
π2
4Z G VR cosβi (1− ε tanβi) (5.22)
8. Si puo ricavare, mediante integrazione della funzione dK∗TB
/dr da rh ad 1, il valore K∗Ti
per ε(r) = 0, oppure il valore K∗TB
se ε(r) e derivato dalla seconda fase dei calcoli.
9. Si confronta il valore ricavato di K∗TB
con il valore richiesto di KTB, e se non si e rag-
giunta la necessaria precisione, ossia se la loro differenza e superiore al 2%, si procedeulteriormente dal passo 10. per determinare λw. Altrimenti, si considera terminata laprima fase e si procede con la seconda. Se si accetta inizialmente che sia ε(r) ≡ 0 e se sistima trascurabile l’influenza di ε(r) su Γ (r), il valore ricavato di K∗
TBviene fissato pari
212

5.3 – Progetto idrodinamico
a K∗Ti
ed andrebbe confrontato con il valore di iv ·KTB. In questo caso, dopo avere svolto
la seconda fase dei calcoli ed avere determinato ε(r), si dovrebbe ricalcolare dK∗TB
/dr
secondo la formula (5.22). Se la precisione e insufficiente, dopo avere fissato un nuovovalore di iv = KTi/KTB
, si devono ripetere i calcoli a partire dal passo 2.
10. Si ricava il nuovo valore di λw con l’ausilio dei valori ricavati in precedenza di λ∗w = λw eK∗
TB, in base alla relazione
λw = λ∗w + 0.3 (KTB−K∗
TB) (5.23)
11. Si ripetono tutti i calcoli a partire dal punto 5.
Fase 2. Scelta dei valori ottimali della lunghezza di corda, dello spessore e del coefficiente diportanza.
Sono possibili due varianti in dipendenza del fatto che:1. la lunghezza di corda c(r) e assegnata per ogni sezione, una volta scelto il tipo di profilo;2. la lunghezza di corda non e assegnata, ovvero e arbitraria.
Il sistema di equazioni e disequazioni, necessario alla scelta dei valori suddetti
CL ·cD
= H (5.24)
(t/c)2/3 ·cD
≥ Ad (5.25)
(1 + a1 ·t/c + a2 ·CL)2 − 1 ≤ kσ σ (5.26)
ε = 0.05808[
ν
VR H ·πnD2
]0.1458 (1 + 2.3
t
c
)C−0.8542
L (5.27)
0 < t/c ≤ 0.2 (5.28)
0 < CL ≤ 0.3 (5.29)
e costruito imponendo tre condizioni, relative rispettivamente all’idrodinamica (5.24), alla ro-bustezza (5.25) ed al controllo della cavitazione per la sezione cilindrica considerata (5.26),insieme all’espressione analitica di Miskevic relativa all’inverso dell’efficienza aerodinamica delprofilo portante, insieme ai vincoli per cui questa espressione e valida.
Lunghezza di corda arbitraria
Quando la lunghezza di corda e arbitraria, i termini incogniti in questo sistema sono il coef-ficiente di portanza CL, la lunghezza di corda normalizzata c/D, lo spessore massimo norma-lizzato della sezione t/c e l’inverso dell’efficienza idrodinamica ε. Si assume che siano noti gli
213

5 – Progetto dell’elica subcavitante
altri termini, ossia: la caratteristica di robustezza Ac1; i parametri a1 e a2 che caratterizzano il
coefficiente di pressione minima sulla superficie del profilo di pala durante il suo modo operati-vo ‘shock–free-entry’ (per il profilo NACA–66, a1 = 1.28 e a2 = 0.278; per il profilo NACA–66modificato, a1 = 1.25 e a2 = 0.263; il coefficiente del margine per l’innesco della cavitazione kσ
sul dorso del profilo, determinato secondo le raccomandazioni di Voitkunsky (1985) in rapportoal livello di disuniformita circonferenziale di scia, al rapporto tra modo operativo progettuale emodo operativo piu pericoloso dal punto di vista della cavitazione. Il coefficiente kσ puo esseredeterminato dalla condizione che assicura l’intervallo massimo di angoli d’incidenza senza ca-vitazione. Per profili con distribuzione di spessore ellittica o similare e kσ = 2/3. I valori dellafunzione H(r) e di VR sono scelti in accordo con i risultati ottenuti nei primi passi dei calcoliprogettuali descritti in precedenza, rispettivamente in base alle equazioni (5.19) e (5.21).
r 0.2 0.3 0.4 0.5 0.6 0.7 0.8
kt 244 211 169 122 80 46 20
kc 320 274 225 164 111 65 30
Tabella 5.2. Coefficienti per il calcolo dell’area delle sezioni di pala
Lunghezza di corda ottimale
Come e facile capire, il sistema ottenuto di equazioni e disequazioni non determina univoca-mente i tre termini incogniti CL, c e t/c per ogni sezione considerata. Questa e la ragione percui, aggiungendo al sistema suddetto la condizione di minimizzazione di ε, occorre utilizzare laprogrammazione matematica (mathematical programming) per la scelta ottimale di quei terminiche assicurino la minimizzazione delle perdite da parte del profilo. E possibile dimostrare che,entro l’intervallo di variazioni ammissibili di CL e t/c, le derivate parziali ∂ε/∂CL e ∂ε/∂(t/c)sono diverse da zero, per cui il minimo incognito deve trovarsi sul limite di quell’intervallo.Se utilizzando la relazione (5.24) si esclude dalla disequazione (5.25) il termine c/D, la zonaconsiderata sara determinata nel piano cartesiano di coordinate t/c − CL nel modo seguente(Fig. 5.2)
√(CL · Ad
H3
)3
≤ t/c ≤√
1 + kσσ − 1− a2 CL
a1(5.30)
dove il limite superiore corrisponde alla condizione di assenza di cavitazione, mentre quelloinferiore e relativo alla condizione di robustezza per la sezione in esame. Al crescere di CL questilimiti si avvicinano e si intersecano in un punto, che corrisponde al massimo del coefficiente di
1Secondo Lavrentiev le robustezza di pala e caratterizzata dalla diseguaglianza c/D ≥ Ad/(t/c)2/3, dove lacaratteristica dimensionale di robustezza di pala richiesta Ad e uguale alla maggiore tra le grandezze
At = 0.01√
kt m T/Z D2σt e Ac = 0.01√
kc m T/Z D2σc
dove σt e σc sono rispettivamente le tensioni ammissibili di trazione e compressione. Il coefficiente m dipendedalle condizioni di funzionamento e varia da 1.15 per le navi mercantili convenzionali a 2.0 per le navi in classeghiaccio. I coefficienti kt e kc sono forniti in Tabella 5.2.
214

5.3 – Progetto idrodinamico
portanza. Sostituendo nell’equazione (5.27) i valori di t/c corrispondenti al limite superiore edinferiore, si puo vedere che il minimo richiesto di ε si trova in quel punto d’intersezione se sonorispettati i vincoli descritti dalle disequazioni (5.28) e (5.29), che restringono l’applicabilitadell’equazione (5.27) per il calcolo di ε.
Figura 5.2. Individuazione del punto ottimale
In questo modo si puo ottenere la soluzione della programmazione lineare nel caso generale,corrispondente alla variante 1, nella forma analitica
√(CLmax ·
Ad
H
)3
=√
1 + kσσ − 1− a2CL
a1(5.31)
t
c=
√(CLmax ·
Ad
H
)3
CLopt =
CLmax per CLmax ≤ 0.3 e t/c ≤ 0.2
0.3 per CLmax > 0.3 e√
(0.3Ad/B)3 ≤ 0.2
3√
0.22 per CLmax > 0.3 e√
(0.3Ad/B)3 > 0.2
(5.32)
(t
c
)
opt=
√(CLopt ·
Ad
H
)3
(5.33)
c
2R=
H
CLopt(5.34)
L’equazione di terzo grado (5.31), dovuta a Lavrentiev, e risolta numericamente rispetto a√CLmax . L’analisi progettuale ha dimostrato che l’aumento del rapporto di area espansa, ov-
vero della lunghezza di corda, produce una diminuzione del rendimento dell’elica. Questo e il
215

5 – Progetto dell’elica subcavitante
motivo per cui si sceglie il rapporto d’area espansa minimo possibile, che corrisponde al sud-detto massimo di CL per la sezione considerata.
La variante 1 della seconda fase dei calcoli progettuali condotti in base alla teoria vorticaledifferisce dalla variante 2 per il fatto che la lunghezza di corda normalizzata, c/D, e prestabilitae, quindi, in base all’equazione (5.24), CL e noto per ogni sezione. In questo caso si ottimizzasolamente lo spessore relativo. Dall’equazione (5.27) deriva immediatamente che minore e lospessore per un assegnato valore di CL, minore e ε e, quindi, minori sono anche le perdite delprofilo. Ne deriva che la soluzione cercata si triva sul limite inferiore dell zaona considerata (vediFigura 10.12); ossia, in base alle equazioni (5.24) e (5.25), la soluzione nel caso di lunghezza dicorda prefissata ha la forma
(t
c
)
opt=
(CL ·Ad/H)3/2 per (t/c)opt < 0.20
non esiste soluzione che soddisfi per (CLAd/B)3/2 > 0.20le condizioni assegnate
(5.35)
essendo CL =H
c/D
Fase 3. Determinazione del passo e della curvatura della sezione di pala .
Questa fase del processo progettuale e dedicata alla ricerca della distribuzione del passo P (r),ovvero dell’angolo di passo geometrico ϕ(r), e della distribuzione radiale della curvatura mas-sima della linea mediana del profilo f(r). Quest’ultima variabile dovrebbe essere scelta inmaniera da garantire il mantenimento dei valori del coefficiente di portanza CL ricavato nellaseconda fase e dell’angolo d’incidenza ‘shock free’ del profilo su tutte le sezioni di pala.
In questa fase si dovrebbe assumere inizialmente quale distribuzione di carico lungo la cordaquella derivata nella prima e nella seconda fase, per effettuare successivamente i calcoli me-diante la teoria della superficie portante, i quali consentono di precisare la forma delle lineedi corrente del flusso vicino alle pale e di ricavare in questo modo la desiderata distribuzionedel passo e della curvatura del profilo con sufficiente precisione. Tuttavia, di solito si assumeuna legge di distribuzione del carico pressoche uniforme lungo la corda, quale quella data dallalinea mediana NACA a = 0.8, in quanto assicura le migliori caratteristiche di cavitazione. Sela pala e molto sottile, la distribuzione del passo e della curvatura possono essere derivate sottoquesta ipotesi, il che semplifica notevolmente il compito. Purtroppo le eliche navali non hannopale strette, per cui i calcoli con la teoria della linea portante sono seguiti sempre dai calcolibasati sulla teoria della superficie portante, oppure dalle correzioni per superficie portante.
Introducendo queste correzioni al profilo con linea mediana NACA - a= 0.8, si ricava la soluzioneal problema progettuale secondo lo schema della linea portante in base alle formule seguenti
f
c= 0.0679 kc CL (5.36)
∆αf = 5.364CL Rn−0.4249s (5.37)
216

5.3 – Progetto idrodinamico
ϕ = βi + 0.0269 kα CL + (t◦/D)kt + ∆αf (5.38)
P/D = πr tanϕ (5.39)
Rns =VR ·(c/D)·πnD2
ν(5.40)
Nelle equazioni (5.36)÷(5.40) ν e la viscosita cinematica, βi e CL sono i valori determinati nellaprima e nella seconda fase del progetto; t◦/D e lo spessore relativo di pala sull’asse dell’elica,ottenuto per estrapolazione della distribuzione radiale dello spessore massimo di pala ottenutonella seconda fase del progetto; kc, kα, kt sono le correzioni derivate dalla teoria della superficieportante, mentre ∆αf e la correzione dell’angolo d’incidenza per viscosita del fluido.
La correzione per curvatura kc considera la curvatura delle linee di corrente intorno al pro-filo della sezione in esame ed e sempre maggiore di 1. Le correzioni kα e kt tengono contodell’influenza della distribuzione asimmetrica del carico lungo la corda e dello spessore di palasull’angolo d’incidenza, relative alla condizione ‘shock–free–entry’. Se si suppone che il cari-co sia simmetrico lungo la corda e se si trascurano lo spessore e la viscosita, dalle formuleprecedenti deriva che il passo della sezione coincide con il passo idrodinamico (ϕ = βi), percui, in questo caso, le forza di portanza e interamente dovuta alla curvatura della linea mediana.
Un esempio di progetto di elica secondo la teoria vorticale e fornito in Tabella 5.3. Per sempli-cita, si progetta un’elica isolata ottimale senza considerare l’influenza di ε sulla distribuzioneottimale della circolazione. In questo caso, la condizione ottimale generalizzata coincide conquella di Prandtl ed e espressa dal passo idrodinamico πr tanβi costante in direzione radiale,che corrisponde ad un’elica ottimale moderatamente caricata, per la quale si introducono lecorrezioni per numero finito di pale. Questa e la ragione per cui, in questo caso, il metodonon e peggiore del metodo dei fattori di induzione. Se il valore di K∗
Tiottenuto nella prima
fase corrisponde al valore assegnato di iv ·KTB, la seconda fase e conclusa immediatamente. In
questa fase del progetto si assume che la distribuzione radiale di c/D sia quella del prototipoed e facile verificare che corrisponde ad AE/A0 = 0.748. Alla fine della seconda fase, i valoridi dK∗
TBe K∗
TBsono calcolati precisamente tenendo conto di ε(r). Poiche il valore ottenuto di
KTBcorrisponde bene al valore cercato (0.208 ' 0.207), non occorrono ulteriori iterazioni e puo
iniziare la terza fase. Per l’integrazione e stata utilizzata una semplice formula di quadraturacon i coefficienti Ai. Nella terza fase, l’angolo di ‘skew’ e stato fissato a 7◦ e lo spessore relativodi pala sull’asse e stato calcolato mediante estrapolazione lineare come
t◦D
= 1.4 tr=0.2 − 0.4 tr=0.7 (5.41)
Le correzioni della corda di pala per superficie portante sono state derivate in base ai diagrammiper πλi =1.2, anche se in realta e πλi =1.15. Non esistono valori disponibili ai raggi 0.2 e 0.95,per cui le colonne corrispondenti sono state lasciate vuote.
217
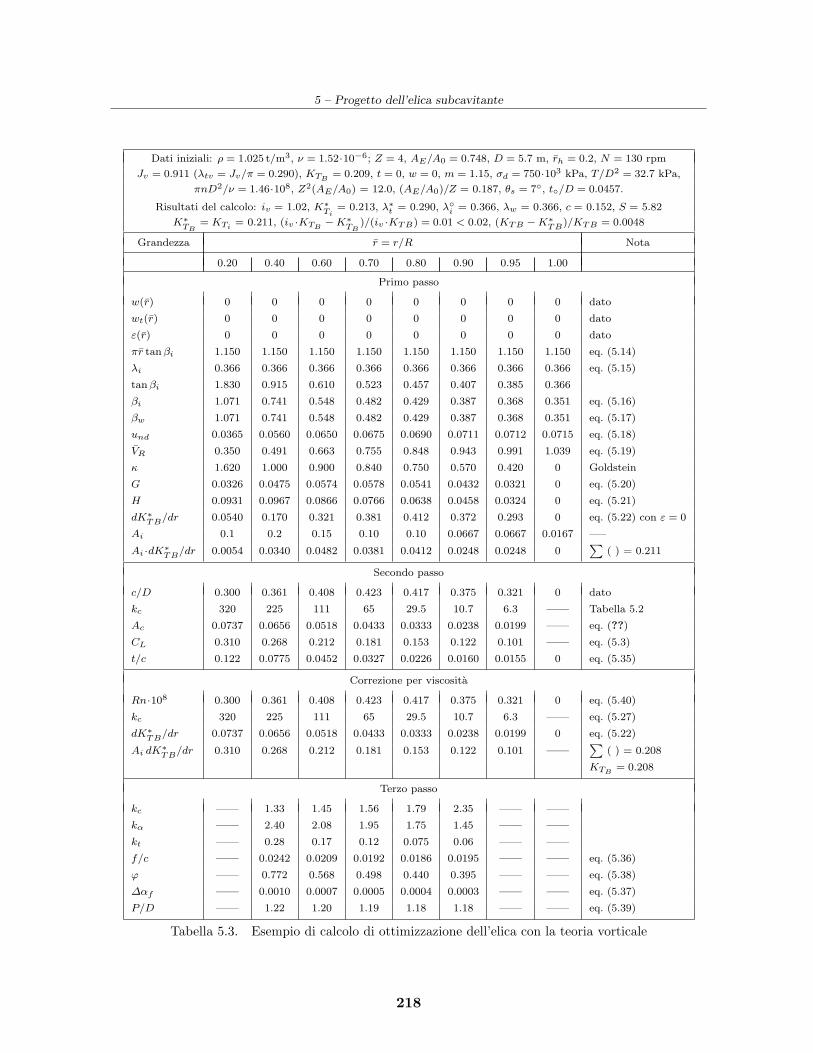
5 – Progetto dell’elica subcavitante
Dati iniziali: ρ = 1.025 t/m3, ν = 1.52·10−6; Z = 4, AE/A0 = 0.748, D = 5.7 m, rh = 0.2, N = 130 rpm
Jv = 0.911 (λtv = Jv/π = 0.290), KTB= 0.209, t = 0, w = 0, m = 1.15, σd = 750·103 kPa, T/D2 = 32.7 kPa,
πnD2/ν = 1.46·108, Z2(AE/A0) = 12.0, (AE/A0)/Z = 0.187, θs = 7◦, t◦/D = 0.0457.
Risultati del calcolo: iv = 1.02, K∗Ti
= 0.213, λ∗t = 0.290, λ◦i = 0.366, λw = 0.366, c = 0.152, S = 5.82
K∗TB
= KTi= 0.211, (iv ·KTB
−K∗TB
)/(iv ·KTB) = 0.01 < 0.02, (KTB −K∗TB)/KTB = 0.0048
Grandezza r = r/R Nota
0.20 0.40 0.60 0.70 0.80 0.90 0.95 1.00
Primo passo
w(r) 0 0 0 0 0 0 0 0 dato
wt(r) 0 0 0 0 0 0 0 0 dato
ε(r) 0 0 0 0 0 0 0 0 dato
πr tan βi 1.150 1.150 1.150 1.150 1.150 1.150 1.150 1.150 eq. (5.14)
λi 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 eq. (5.15)
tan βi 1.830 0.915 0.610 0.523 0.457 0.407 0.385 0.366
βi 1.071 0.741 0.548 0.482 0.429 0.387 0.368 0.351 eq. (5.16)
βw 1.071 0.741 0.548 0.482 0.429 0.387 0.368 0.351 eq. (5.17)
und 0.0365 0.0560 0.0650 0.0675 0.0690 0.0711 0.0712 0.0715 eq. (5.18)
VR 0.350 0.491 0.663 0.755 0.848 0.943 0.991 1.039 eq. (5.19)
κ 1.620 1.000 0.900 0.840 0.750 0.570 0.420 0 Goldstein
G 0.0326 0.0475 0.0574 0.0578 0.0541 0.0432 0.0321 0 eq. (5.20)
H 0.0931 0.0967 0.0866 0.0766 0.0638 0.0458 0.0324 0 eq. (5.21)
dK∗TB/dr 0.0540 0.170 0.321 0.381 0.412 0.372 0.293 0 eq. (5.22) con ε = 0
Ai 0.1 0.2 0.15 0.10 0.10 0.0667 0.0667 0.0167 —–
Ai ·dK∗TB/dr 0.0054 0.0340 0.0482 0.0381 0.0412 0.0248 0.0248 0
∑( ) = 0.211
Secondo passo
c/D 0.300 0.361 0.408 0.423 0.417 0.375 0.321 0 dato
kc 320 225 111 65 29.5 10.7 6.3 —— Tabella 5.2
Ac 0.0737 0.0656 0.0518 0.0433 0.0333 0.0238 0.0199 —— eq. (??)
CL 0.310 0.268 0.212 0.181 0.153 0.122 0.101 —— eq. (5.3)
t/c 0.122 0.0775 0.0452 0.0327 0.0226 0.0160 0.0155 0 eq. (5.35)
Correzione per viscosita
Rn·108 0.300 0.361 0.408 0.423 0.417 0.375 0.321 0 eq. (5.40)
kc 320 225 111 65 29.5 10.7 6.3 —— eq. (5.27)
dK∗TB/dr 0.0737 0.0656 0.0518 0.0433 0.0333 0.0238 0.0199 0 eq. (5.22)
Ai dK∗TB/dr 0.310 0.268 0.212 0.181 0.153 0.122 0.101 ——
∑( ) = 0.208
KTB= 0.208
Terzo passo
kc —— 1.33 1.45 1.56 1.79 2.35 —— ——
kα —— 2.40 2.08 1.95 1.75 1.45 —— ——
kt —— 0.28 0.17 0.12 0.075 0.06 —— ——
f/c —— 0.0242 0.0209 0.0192 0.0186 0.0195 —— —— eq. (5.36)
ϕ —— 0.772 0.568 0.498 0.440 0.395 —— —— eq. (5.38)
∆αf —— 0.0010 0.0007 0.0005 0.0004 0.0003 —— —— eq. (5.37)
P/D —— 1.22 1.20 1.19 1.18 1.18 —— —— eq. (5.39)
Tabella 5.3. Esempio di calcolo di ottimizzazione dell’elica con la teoria vorticale
218
5.4 – Progetto geometrico
5.4 Progetto geometrico
Dopo avere risolto il progetto idrodinamico, ad ogni sezione di pala sono noti il passo idrodi-namico, il prodotto della lunghezza di corda per il coefficiente di portanza come risultato dellalegge di Kutta–Zoukowsky, la circolazione, le velocita indotte e, di conseguenza, l’entita e ladirezione della velocita risultante.
A questo punto, ogni profilo di pala sara considerato sostanzialmente come sezione di un’ala diallungamento infinito e per ognuno si potra scegliere una combinazione di curvatura, lunghezzadi corda e passo tali da soddisfare i dati prodotti dal modello della linea portante dell’elica.Una prima soluzione dovrebbe consentire di scegliere sequenzialmente:
• il passo P del profilo portante in base al passo idrodinamico per ottenere la condizionedi ‘shock free entry’, che corrisponde a quella con angolo d’incidenza nullo per numerositipi di profilo;
• la lunghezza di corda c che soddisfi un adeguato criterio di cavitazione ed un profilo dellasezione sufficientemente sottile;
• la curvatura massima f dalla relazione CL = 4πf/c, valida per sezioni ogivali, linee me-diane paraboliche, angoli d’incidenza nulli, flusso rettilineo;
• lo spessore massimo t in base ad un accettabile criterio di robustezza.
Naturalmente, lo spessore e la lunghezza di corda sono ambedue parametri che influenzanocontemporaneamente le prestazioni idrodinamiche e la robustezza, per la cui soluzione occorreattivare una procedura iterativa. Ricavare la soluzione per la geometria della sezione equivalealla risoluzione di un sistema di quattro equazioni in quattro incognite (P , c, f , t).
Comunque, esistono alcuni criteri piu stringenti da rispettare nella progettazione, prima discegliere definitivamente i parametri che determinano il profilo della sezione; si tratta di
• evitare i tipi piu pericolosi di cavitazione;
• tenere conto degli effetti prodotti dalla curvatura del flusso.
5.4.1 Controllo della cavitazione
Nel processo di previsione del rendimento dell’elica si deve tenere sempre conto della cavita-zione, in quanto questo fenomeno ne deteriora le caratteristiche di funzionamento, a partiredal rendimento. Come e noto dalla teoria della cavitazione delle eliche navali, devono essereevitati assolutamente quei tipi di cavitazione che possono produrre erosione e devono essereminimizzati quelli che contribuiscono maggiormente all’insorgere del rumore e delle vibrazioniindotte dall’elica. La cavitazione a lamina fluttuante sul dorso che degenera in bolle a nu-vole sul lato posteriore delle lamine, la cavitazione a bolle a meta corda e la cavitazione anuvole sono considerate tipologie pericolose, mentre la cavitazione stazionaria a lamina suldorso, particolarmente quando si accoppia alla cavitazione per vortice sull’apice, e la stessa
219
5 – Progetto dell’elica subcavitante
cavitazione per vortice d’apice non comportano grossi rischi di erosione. Probabilmente anchela cavitazione a bolle a meta corda, purche di entita modesta, non e cosı pericolosa come si teme.
Un’eccezione pericolosa e costituita dalla cosiddetta cavitazione di vortice tra elica e carena(cavitazione PHV), che puo danneggiare severamente il fasciame dello scafo. Questo tipo dicavitazione e causato dall’azione combinata dell’elica e di un’area di flusso stagnante sulla vol-ta di poppa, che inizia a ruotare per effetto della depressione creata dall’elica. La geometriadell’elica non ha alcuna influenza sull’intensita del vortice tra elica e carena. La cavitazioneper vortice d’apice diffuso dall’elica puo produrre erosione sul timone.
Quando la cavitazione e nulla o debole, le vibrazioni prodotte dall’elica sono in misura pre-dominante quelle prodotte dalle forze e dai momenti fluttuanti trasferiti dalla linea d’assi allefondazioni dei motori ed alle strutture di scafo. Le forze fluttuanti che si trasmettono lungo lalinea d’assi non sono molto influenzate dalla cavitazione sulle pale. Tuttavia, le forze fluttuantidi pressione sul fasciame di carena al di sopra dell’elica mostrano un brusco incremento quandola cavitazione si sviluppa ulteriormente. Il campo di pressione varia periodicamente in forma,posizione e grandezza, quando le pale ruotando attrraversano il picco di scia. Il comportamen-to dinamico della cavitazione sull’elica amplifica considerevolmente il campo di pressione. Ingenerale, le variazioni temporali del volume della cavitazione a lamina forniscono il contributomaggiore alle fluttuazioni della pressione sulla carena. In pratica, tali fluttuazioni costituisconospesso un fattore limite nel progetto di molte eliche. In linea di principio:
• si dovrebbe evitare la cavitazione sulla faccia in tutte le condizioni operative;
• e consentita la cavitazione sul dorso purche sia di estensione e tipo (cavitazione a lamine)tale da non produrre erosione.
Va osservato che la cavitazione sul dorso puo innescarsi piu facilmente sulle pale delle eliche apasso variabile quando viene ridotto il passo, perche cio comporta un aumento della velocitadi rotazione con conseguente diminuzione dell’indice di cavitazione locale, particolarmente airaggi piu esterni.
Gli strumenti piu efficaci per controllare le fluttuazioni delle forze di pressione sono innanzitutto la riduzione della cavitazione in estensione e volume e, quindi, l’applicazione dello ‘skew–back’ che rende piu graduale la crescita ed il collasso delle cavita a lamina, e/o rende piuuniforme la distribuzione nel tempo della dinamica della cavitazione ai vari raggi.
L’attuale pratica progettuale mira a minimizzare la cavitazione a lamina sul dorso. Tale formadi cavitazione e riscontrabile in condizioni di nave leggermente caricata (nave in zavorra, beltempo, carena pulita, ecc.). Scegliendo i parametri del profilo della sezione in maniera tale chequesto tipo di cavitazione sia prevenuta proprio in queste condizioni di carico piu leggero, lacavitazione sul dorso e minimizzata automaticamente. Con questa procedura risultano mini-mizzate le fluttuazioni di pressione sulla carena. I parametri del profilo sono scelti in manieratale da evitare anche la cavitazione a bolle a meta corda.
Il comportamento cavitativo di un’elica nella fase progettuale puo essere controllato utilizzandoi buckets di cavitazione ai vari raggi. Un bucket puo essere costituito da un insieme di curve
220
5.4 – Progetto geometrico
che forniscono le relazioni tra il coefficiente adimensionale di portanza CL ed il valore minimodel coefficiente di pressione −CP che si trova in un certo punto del profilo.
Se si traccia il valore piu alto del coefficiente di pressione negativa, −CP , in un diagramma (ilcosiddetto bucket di cavitazione) che incorpori il numero di cavitazione specifico, σ, del profilodella sezione (Fig. 5.3), si puo valutare se avviene o meno l’innesco della cavitazione. L’areadi questo diagramma, racchiusa dai due rami, indica l’intervallo di carico sopportabile da unospecifico profilo portante ad un certo indice di cavitazione senza sviluppo di cavitazione. Inparticolare, la larghezza del bucket rappresenta la capacita della sezione di pala di sopportarele variazioni dell’angolo di incidenza senza cavitare.
Il bucket illustra le condizioni di innesco dei vari tipi di cavitazione. Nella parte centrale ilprofilo della sezione lavora nelle condizioni di ‘shock–free entry’. Se un profilo opera sul fondodel bucket non esiste alcuna cavitazione a lamina, poiche non esistono picchi di depressione sulbordo d’ingresso. Infatti, la bassa pressione si trova nella parte centrale del profilo ed i valoridi CP e σ indicano la eventuale presenza di cavitazione a bolle a meta corda. A causa dellacurvatura, la suscettibilita a cavitazione a bolle sul dorso e maggiore che sulla faccia.
Va ribadito che la cavitazione inizia, solo teoricamente, quando la pressione locale eguaglia lapressione del vapore saturo. In effetti, la cavitazione inizia quando la pressione locale e minoredella pressione di vapore. Tale differenza e spesso definita come ‘effetto scala sulla cavitazione’,ma in realta cio che causa questo effetto scala non e il fattore scala stesso ma la carenza dinuclei di innesco e la diversita dei flussi locali (differenze dei numeri di Reynolds).
La curva a sinistra del bucket (Fig. 5.3) rappresenta il picco di pressione sulla faccia del profilo,mentre la curva a destra riflette il picco di depressione sul dorso. La parte piatta tra le duecurve, ossia il fondo del bucket, si riferisce alla pressione minima sul dorso quando non esistonopicchi di depressione sul bordo d’ingresso. La pressione minima si presenta allora piu a vallelungo la sezione. Questa bassa pressione, che si trova spesso intorno a meta lunghezza di corda,e responsabile della cavitazione a bolle proprio a meta corda. La linea tratteggiata al di sottodel fondo del bucket rappresenta la pressione minima che si registra a valle del bordo d’ingressosulla faccia. Sui profili piu incurvati la curva di pressione minima sul dorso a meta corda e piucritica di quella sulla faccia.
La curva operativa, disegnata nel diagramma come un percorso chiuso, rappresenta, per uncerto profilo, la relazione tra l’indice di cavitazione locale σ ed il carico CL mentre l’elicaruota. Questa curva operativa va mostrata in combinazione con il bucket di cavitazione. Siipotizza che l’innesco della cavitazione avvenga quando l’indice di cavitazione locale σ e ugualea −CPmin . La difficolta consiste nel determinare il carico di una particolare sezione in vari puntinel campo di scia. Allo scopo, occorre fare alcune ipotesi per quanto riguarda l’entita dellevelocita indotte nelle condizioni diverse dalla media per la quale sono stati effettuati finorai calcoli idrodinamici della linea portante. Va sottolineato che la teoria della linea portantebasata sui fattori di induzione non fornisce le relative informazioni necessarie.
221
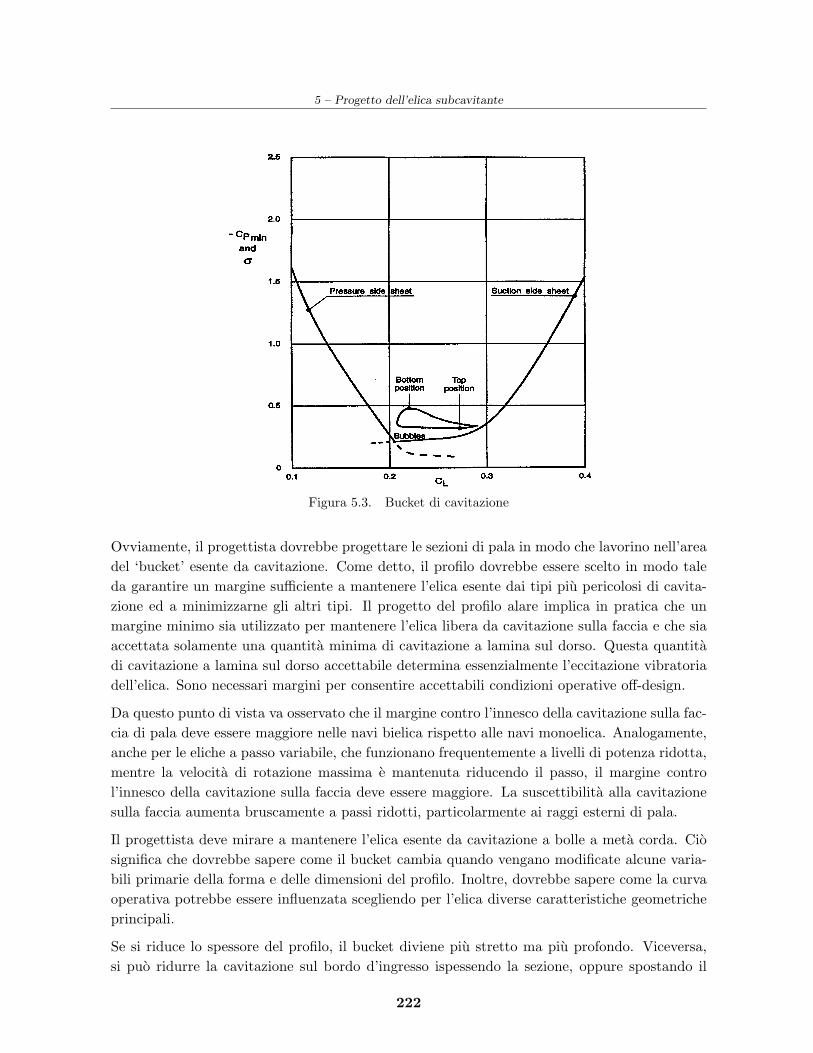
5 – Progetto dell’elica subcavitante
Figura 5.3. Bucket di cavitazione
Ovviamente, il progettista dovrebbe progettare le sezioni di pala in modo che lavorino nell’areadel ‘bucket’ esente da cavitazione. Come detto, il profilo dovrebbe essere scelto in modo taleda garantire un margine sufficiente a mantenere l’elica esente dai tipi piu pericolosi di cavita-zione ed a minimizzarne gli altri tipi. Il progetto del profilo alare implica in pratica che unmargine minimo sia utilizzato per mantenere l’elica libera da cavitazione sulla faccia e che siaaccettata solamente una quantita minima di cavitazione a lamina sul dorso. Questa quantitadi cavitazione a lamina sul dorso accettabile determina essenzialmente l’eccitazione vibratoriadell’elica. Sono necessari margini per consentire accettabili condizioni operative off-design.
Da questo punto di vista va osservato che il margine contro l’innesco della cavitazione sulla fac-cia di pala deve essere maggiore nelle navi bielica rispetto alle navi monoelica. Analogamente,anche per le eliche a passo variabile, che funzionano frequentemente a livelli di potenza ridotta,mentre la velocita di rotazione massima e mantenuta riducendo il passo, il margine control’innesco della cavitazione sulla faccia deve essere maggiore. La suscettibilita alla cavitazionesulla faccia aumenta bruscamente a passi ridotti, particolarmente ai raggi esterni di pala.
Il progettista deve mirare a mantenere l’elica esente da cavitazione a bolle a meta corda. Ciosignifica che dovrebbe sapere come il bucket cambia quando vengano modificate alcune varia-bili primarie della forma e delle dimensioni del profilo. Inoltre, dovrebbe sapere come la curvaoperativa potrebbe essere influenzata scegliendo per l’elica diverse caratteristiche geometricheprincipali.
Se si riduce lo spessore del profilo, il bucket diviene piu stretto ma piu profondo. Viceversa,si puo ridurre la cavitazione sul bordo d’ingresso ispessendo la sezione, oppure spostando il
222

5.4 – Progetto geometrico
punto di massimo spessore verso il bordo d’ingresso. Cio non puo essere effettuato in manieraeccessiva poiche il rischio di cavitazione a bolle aumenta e la zona del bordo d’ingresso puodiventare troppo sottile.
Anche la curvatura e la sua distribuzione sono fattori fondamentali che influenzano il compor-tamento cavitativo di ogni sezione di pala. Un aumento della curvatura allarga il bucket, il checomporta un maggiore coefficiente di portanza nelle condizioni di ‘shock–free entry’. Purtrop-po, a causa della maggiore curvatura del dorso, il bucket si spostera verso l’alto.
Una distribuzione parabolica di pressione fa sı che la portanza sia distribuita a mo’ di ellisse,il cui punto piu alto, ossia la pressione a meta corda, decadra ad un valore inferiore rispetto aquando si abbia una distribuzione di pressione piu piatta. Le linee mediane con curvatura piuaccentuata sul bordo d’ingresso distribuiscono piu uniformemente il carico sulla corda, almenosulla parte iniziale, Occorre fare attenzione a non applicare una forma troppo incurvata dellalinea mediana verso il bordo d’uscita. La maggiore curvatura sul dorso puo condurre ad effettiviscosi piu pronunciati e ad una maggiore resistenza del profilo. Inoltre, gli effetti viscosi ri-ducono la portanza ed i guadagni preventivati saranno ridotti di molto. Infine, lo stallo, ossiala separazione del flusso a grandi angoli d’incidenza, nelle condizioni off–design e facilitato, ingenerale, aumentando la curvatura.
La cavitazione a bolle a meta corda dipende fondamentalmente dal rapporto di spessore e dalnumero di cavitazione locale. Di conseguenza, il rapporto di spessore t/c della sezione nonpuo non dipendere dall’indice di cavitazione. Poiche lo spessore e determinato dai requisitidi robustezza, la lunghezza minima di corda deriva dalla necessita di evitare la cavitazione abolle a meta corda. Si puo seguire la procedura che utilizza il coefficiente di pressione minima,valido per un profilo ogivale (profilo di Karman–Trefftz), che, per un angolo d’incidenza nullo,e pressoche pari a
σ = −CPmin =CL + 4 t/c
1.5
Alternativamente si puo utilizzare la relazione di Chang et al. (1980)
σ = −CPmin = 0.556CL + 2.36 t/c
Quest’ultima formula e applicabile, per angoli d’incidenza nulli, a profili alari composti da unadistribuzione di spessore NACA 16 e linea meduana NACA a=0.8. In tal modo, a partire dauna distribuzione assegnata di spessore in funzione del raggio x = r/R, si puo determinare lalunghezza di corda c, se si suppongono noti CL e CPmin . Il prodotto della lunghezza di cordae del coefficiente di portanza c ·CL e derivato dalla legge di Kutta–Zoukovsky. Per −CPmin
si assume il numero di cavitazione ridotto di un certo margine. Quale standard per le elichenavali, al MARIN si utilizzano le percentuali relative ai valori di −CPmin dei profili ogivali datein Tabella 5.4.
223

5 – Progetto dell’elica subcavitante
Va osservato che con questi margini si vogliono implicitamente ridurre:
• il rischio di cavitazione sulla faccia;
• la presenza di un picco di scia;
• gli effetti prodotti dal fatto che l’elica dovra operare nelle piu varie condizioni di carico(dal leggero al sovraccarico.
Mediante un processo iterativo, che implichi calcoli di robustezza nei quali le tensioni sianorapportate ad un criterio di robustezza, si determinano lo spessore e la lunghezza minima dicorda.
r 0.6 0.7 0.8 0.9 0.95
Percentuale 29% 31% 33% 35% 36%
Tabella 5.4. Valori percentuali di CPmin
Per il profilo NACA 16 modificato e linea mediana a = 0.8, in base ai risultati di Brockett(1966) l’indice di cavitazione puo essere espresso come
σ = −CPmin = 26.67(
f
c
)2
+ 8.09f
c+ 10
f ·tc2
+ 3.03t
c
Va osservato che finora non e stata prestata alcuna attenzione ai modi necessari per evitarecavitazione sulla faccia. Impedire questo tipo di cavitazione e realizzato implicitamente assu-mendo i margini suddetti ed il concetto di ‘shock–free entry’. Minimizzare la cavitazione suldorso progettando l’elica al limite dell’innesco della cavitazione sulla faccia significa semplice-mente adattare la curvatura dei profili che la costituiscono.
Come regola base, un margine sulla faccia pari all’1% del coefficiente di spinta KT , stabilito inuna galleria di cavitazione o in una vasca di rimorchio depressurizzata ad un indice di cavita-zione costante, consente di incrementare la curvatura massima dell’1%. Grazie a questa regolaun’elica puo essere modificata dopo avere stabilito sperimentalmente che il margine contro lacavitazione sulla faccia non e ne troppo elevato (si lascia spazio alla minimizzazione della ca-vitazione sul dorso), ne insufficiente (necessita di evitare cavitazione sulla faccia).
Per le eliche di navi militari e importante ritardare l’innesco della cavitazione per vortice d’apicepoiche questa e di solito la prima forma di cavitazione ad apparire quando crescono la velocitanave e/o il carico dell’elica. Anche dopo avere fissato le dimensioni principali e la geometriadell’elica, esistono altri modi di ritardare l’innesco della cavitazione per vortice d’apice.
Risulta molto efficiente una diminuzione graduale dell’intensita del vortice d’estremita, ottenutascaricando l’apice di pala. Sembra che elevati angoli di ‘skew’ aumentino l’intensita del vorticed’apice per effetto dell’interazione con il cosiddetto vortice del bordo d’ingresso. Vortici sulbordo d’ingresso si presentano sul dorsi delle ali a delta. Si ritiene che apici di pala spessicontribuiscano a ritardare l’innesco della cavitazione per vortice d’apice.
224
5.4 – Progetto geometrico
5.4.2 Effetti prodotti dalla curvatura del flusso
Se il flusso fosse rettilineo e diretto lungo la retta che unisce il bordo d’ingresso al bordo d’us-cita, si avrebbe la condizione di ‘shock–free entry’, per cui la portanza sarebbe prodotta deltutto dalla curvatura delle sezioni di pala.
Ma in realta il flusso e incurvato lungo la sezione. In maniera similare al modello del discoattuatore, le velocita indotte assiali aumentano gradualmente quando attraversano il piano deldisco–elica. Anche nel modello di linea portante, le velocita indotte, sia assiali che tangenziali,aumentano da un valore nullo al valore finale dietro le pale dell’elica. Ne consegue che sullacorda della sezione esiste un incremento stazionario delle velocita indotte dovute ad ambeduei fattori che causano la curvatura del flusso. Poiche una lamina piana posizionata in un flus-so incurvato mostrera lo stesso effetto di una lamina incurvata in un flusso rettilineo, si puocorreggere la linea mediana per adattare la curvatura, pur mantenendo la portanza desideratadella sezione di pala. La curvatura del profilo portante deve essere corretta, quindi, per effet-to della curvatura del flusso. Queste correzioni sono particolarmente importanti ai raggi piuesterni, dove la curvatura del flusso porta ad un incremento considerevole della curvatura daapplicare rispetto alla curvatura derivata in flusso rettilineo.
Le correzioni per curvatura sono applicate di solito introducendo le cosiddette correzioni persuperficie portante, quali quelle determinate da Morgan et al. (1967), valide solamente pereliche con una distribuzione ottimale del carico radiale. Quanto agli effetti dello ‘skew’ sullecorrezioni per curvatura del flusso, se ne puo tenere conto purche l’angolo di ‘skew’ sia limitato.
Molti autori hanno sostenuto che questi effetti per curvatura, prodotti dal campo di flussoindotto, non possano essere determinati dalla teoria della linea portante. Ora, e pur vero che ladistribuzione dettagliata lungo la corda del campo di flusso indotto non puo essere determinataaccuratamente servendosi di una semplice modellazione della pala mediante una linea portante,in quanto tale modellazione non consente di conoscere la distribuzione di carico lungo la cor-da. Tuttavia, la correzione per curvatura del primo ordine puo essere determinata con buonaapprossimazione a partire dal sistema semplificato di vortici liberi utilizzato nel metodo dellalinea portante. In questo modo, la variazione della direzione del flusso e calcolata, utilizzandola legge di Biot–Savart, a partire dal sistema di vortici liberi in prossimita del disco–elica. Aquesto punto possono essere introdotti gli effetti dello ‘skew’ e del ‘rake’, che spesso risultanoessere alquanto sostanziali.
Infine, andrebbe applicata una correzione minima al passo delle singole sezioni per tenereconto di tutti i tipi di imprecisione fin qui menzionati. Si tratta di introdurre una correzioneempirica la quale assicuri che le eliche in progetto operino alla velocita di rotazione corretta.Ovviamente, questa correzione finale e volta a bilanciare tutti i tipi di limiti insiti nei metodiutilizzati finora, recuperando gli effetti viscosi che sono considerati solamente in alcune partidel processo progettuale.
225

5 – Progetto dell’elica subcavitante
5.4.3 Dettagli geometrici
A questo punto sono state determinate le lunghezze di corda alle varie stazioni radiali chesoddisfano i requisiti di cavitazione e di robustezza. Ai raggi inferiori, la classica proceduraprogettuale porta spesso a profili di pala corti e spessi che facilitano la separazione del flusso.Per scafi veloci le lunghezze di corda ai raggi inferiori sono spesso elevate a causa della necessitadi evitare la cavitazione a bolle a meta corda.
Profili di pala
Si tratta ora di approssimare una curva avviata tra i punti calcolati del profilo ai raggi esternie di ottenere una lunghezza adeguata delle sezioni vicine al mozzo. La lunghezza di corda almozzo e sempre il risultato di un compromesso. Una certa forma del mozzo potrebbe talvoltalasciare spazio insufficiente per le pale, per cui potrebbe rendersi necessario un adattamentolocale del passo o, in ultima analisi, un diverso numero di pale.
Problemi piu seri potrebbero presentarsi nel progetto del profilo di pala delle eliche a passovariabile, dove il diametro del palmare e fisso e dove le pale devono sovrapporsi l’una all’altraquando il passo viene invertito. Tra l’altro, il palmare dovrebbe offrire spazio sufficiente per iraccordi ed i fori di fissaggio delle pale. Inoltre, vanno effettuate opportune verifiche rispetto almontaggio ed allo sfilamento dei fissaggi, il che comporta il rispetto di ulteriori requisiti circala variazione del passo ai raggi piu interni, nonche circa la curvatura e la forma del ‘rake’ nellazona centrale dell’elica. I problemi di natura geometrica del profilo di pala di un’elica a passovariabile sono spesso identificabili osservando l’aumento della dimensione del mozzo. In ognicaso, si paga un prezzo in termini di costi piu elevati e di rendimento inferiore.
La forma del profilo, o meglio la distribuzione dello ‘skew’, e importante anche per controllareil momento torcente sull’asse di pala. Di solito si sceglie uno ‘skew’ verso il flusso incidente airaggi inferiori ed uno skew che segue il flusso ai raggi esterni (tale combinazione e spesso defi-nita ‘skew bilanciato’), allo scopo di mantenere il momento torcente sull’asse di pala (spindletorque) al di sotto di un certo livello.
Il passo progettuale successivo, dopo avere fissato il profilo di pala ed avere scelto i profili alaridelle sue sezioni, e la verifica della robustezza delle pale. Si suggerisce allo scopo di utilizzare ilmetodo di Romson, che e una variante del metodo della trave incastrata. Si deve presupporrela conoscenza della distribuzione radiale di spinta e si devono conglobare gli effetti prodottidalla forza centrifuga. Tuttavia il metodo di Romson e alquanto approssimato; gli effetti dello‘skew’, del ‘rake’, delle variazioni di forma delle sezioni e delle concentrazioni delle tensionilocali non sono considerati da questo metodo. Per queste ragioni le eliche con ‘skew’ elevatoed altri propulsori speciali necessitano, per l’approvazione da parte dei Registri di Classifica,di calcoli agli elementi finiti in alcune tipiche condizioni di carico.
Per lo spessore all’apice di pala delle eliche navali e stato applicato di solito il valore tt = 0.003D,anche se nel tempo e divenuta pratica corrente applicare sezioni leggermente piu spesse. Nella
226
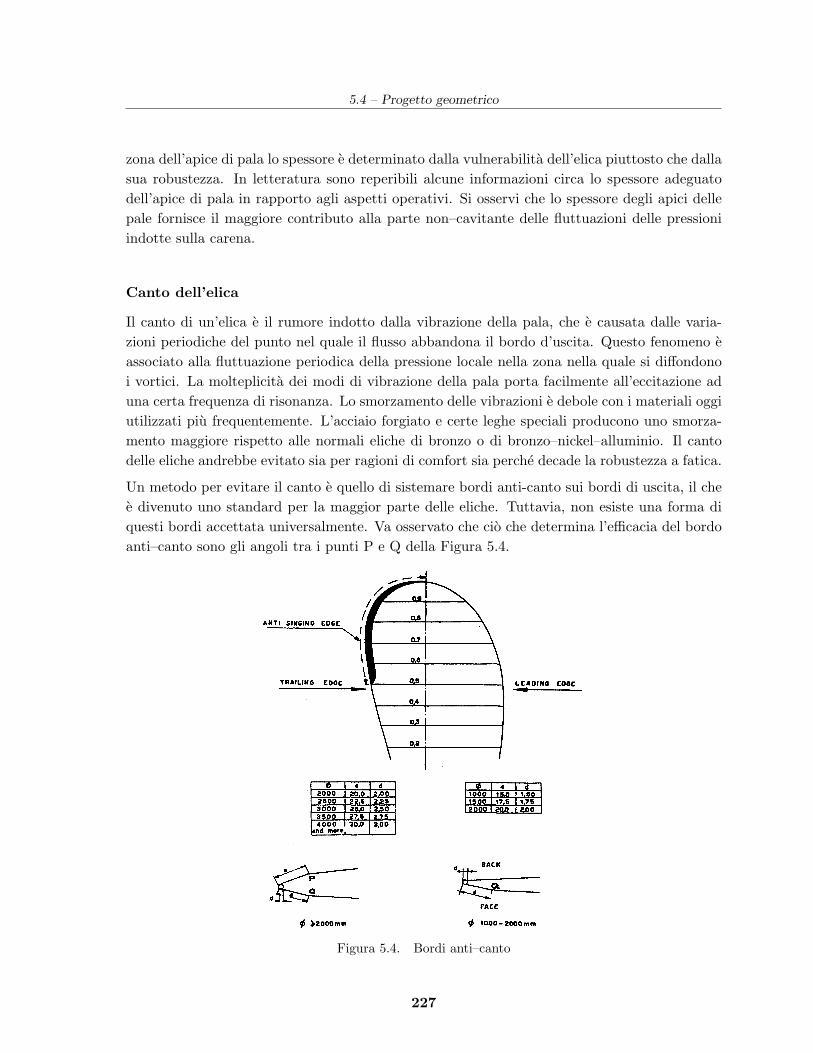
5.4 – Progetto geometrico
zona dell’apice di pala lo spessore e determinato dalla vulnerabilita dell’elica piuttosto che dallasua robustezza. In letteratura sono reperibili alcune informazioni circa lo spessore adeguatodell’apice di pala in rapporto agli aspetti operativi. Si osservi che lo spessore degli apici dellepale fornisce il maggiore contributo alla parte non–cavitante delle fluttuazioni delle pressioniindotte sulla carena.
Canto dell’elica
Il canto di un’elica e il rumore indotto dalla vibrazione della pala, che e causata dalle varia-zioni periodiche del punto nel quale il flusso abbandona il bordo d’uscita. Questo fenomeno eassociato alla fluttuazione periodica della pressione locale nella zona nella quale si diffondonoi vortici. La molteplicita dei modi di vibrazione della pala porta facilmente all’eccitazione aduna certa frequenza di risonanza. Lo smorzamento delle vibrazioni e debole con i materiali oggiutilizzati piu frequentemente. L’acciaio forgiato e certe leghe speciali producono uno smorza-mento maggiore rispetto alle normali eliche di bronzo o di bronzo–nickel–alluminio. Il cantodelle eliche andrebbe evitato sia per ragioni di comfort sia perche decade la robustezza a fatica.
Un metodo per evitare il canto e quello di sistemare bordi anti-canto sui bordi di uscita, il chee divenuto uno standard per la maggior parte delle eliche. Tuttavia, non esiste una forma diquesti bordi accettata universalmente. Va osservato che cio che determina l’efficacia del bordoanti–canto sono gli angoli tra i punti P e Q della Figura 5.4.
Figura 5.4. Bordi anti–canto
227
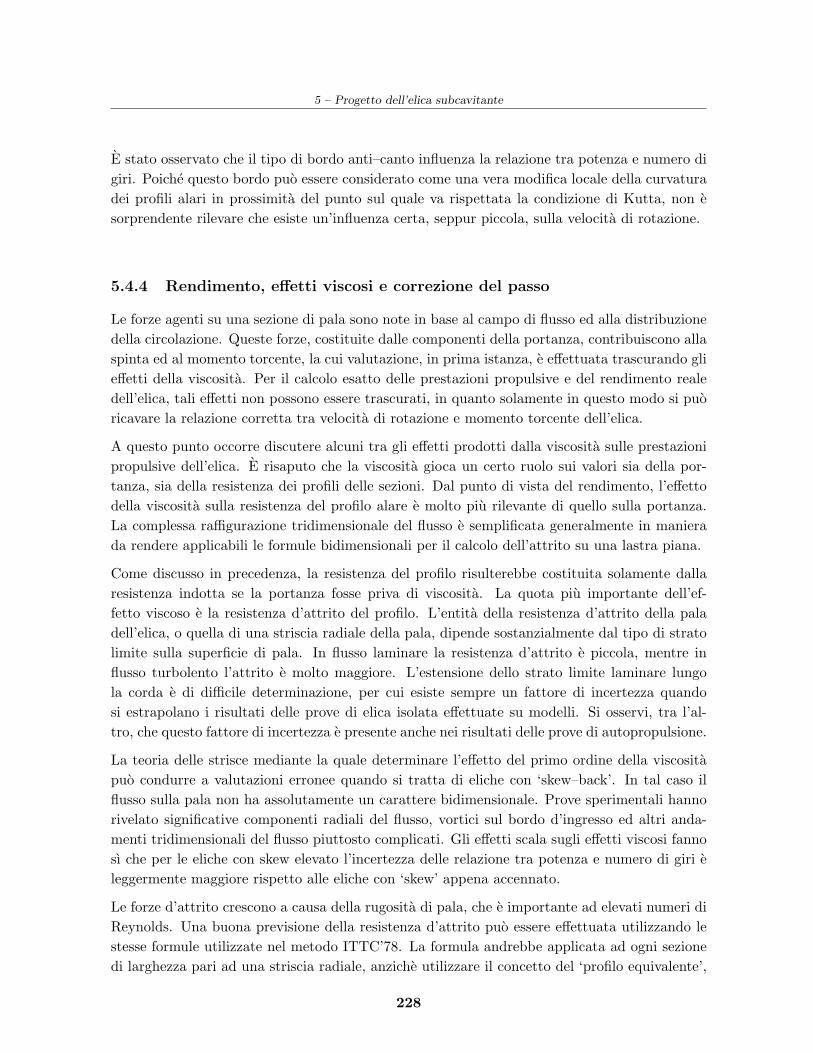
5 – Progetto dell’elica subcavitante
E stato osservato che il tipo di bordo anti–canto influenza la relazione tra potenza e numero digiri. Poiche questo bordo puo essere considerato come una vera modifica locale della curvaturadei profili alari in prossimita del punto sul quale va rispettata la condizione di Kutta, non esorprendente rilevare che esiste un’influenza certa, seppur piccola, sulla velocita di rotazione.
5.4.4 Rendimento, effetti viscosi e correzione del passo
Le forze agenti su una sezione di pala sono note in base al campo di flusso ed alla distribuzionedella circolazione. Queste forze, costituite dalle componenti della portanza, contribuiscono allaspinta ed al momento torcente, la cui valutazione, in prima istanza, e effettuata trascurando glieffetti della viscosita. Per il calcolo esatto delle prestazioni propulsive e del rendimento realedell’elica, tali effetti non possono essere trascurati, in quanto solamente in questo modo si puoricavare la relazione corretta tra velocita di rotazione e momento torcente dell’elica.
A questo punto occorre discutere alcuni tra gli effetti prodotti dalla viscosita sulle prestazionipropulsive dell’elica. E risaputo che la viscosita gioca un certo ruolo sui valori sia della por-tanza, sia della resistenza dei profili delle sezioni. Dal punto di vista del rendimento, l’effettodella viscosita sulla resistenza del profilo alare e molto piu rilevante di quello sulla portanza.La complessa raffigurazione tridimensionale del flusso e semplificata generalmente in manierada rendere applicabili le formule bidimensionali per il calcolo dell’attrito su una lastra piana.
Come discusso in precedenza, la resistenza del profilo risulterebbe costituita solamente dallaresistenza indotta se la portanza fosse priva di viscosita. La quota piu importante dell’ef-fetto viscoso e la resistenza d’attrito del profilo. L’entita della resistenza d’attrito della paladell’elica, o quella di una striscia radiale della pala, dipende sostanzialmente dal tipo di stratolimite sulla superficie di pala. In flusso laminare la resistenza d’attrito e piccola, mentre influsso turbolento l’attrito e molto maggiore. L’estensione dello strato limite laminare lungola corda e di difficile determinazione, per cui esiste sempre un fattore di incertezza quandosi estrapolano i risultati delle prove di elica isolata effettuate su modelli. Si osservi, tra l’al-tro, che questo fattore di incertezza e presente anche nei risultati delle prove di autopropulsione.
La teoria delle strisce mediante la quale determinare l’effetto del primo ordine della viscositapuo condurre a valutazioni erronee quando si tratta di eliche con ‘skew–back’. In tal caso ilflusso sulla pala non ha assolutamente un carattere bidimensionale. Prove sperimentali hannorivelato significative componenti radiali del flusso, vortici sul bordo d’ingresso ed altri anda-menti tridimensionali del flusso piuttosto complicati. Gli effetti scala sugli effetti viscosi fannosı che per le eliche con skew elevato l’incertezza delle relazione tra potenza e numero di giri eleggermente maggiore rispetto alle eliche con ‘skew’ appena accennato.
Le forze d’attrito crescono a causa della rugosita di pala, che e importante ad elevati numeri diReynolds. Una buona previsione della resistenza d’attrito puo essere effettuata utilizzando lestesse formule utilizzate nel metodo ITTC’78. La formula andrebbe applicata ad ogni sezionedi larghezza pari ad una striscia radiale, anziche utilizzare il concetto del ‘profilo equivalente’,
228

5.4 – Progetto geometrico
che vuole rappresentare tutta l’elica nell’estrapolazione dei risultati sperimentali su modellomediante il metodo ITTC’78.
Formule per il calcolo della resistenza viscosa sulle pale dell’elica
Nelle formule seguenti il numero di Reynolds e Rn = VR ·c/ν, dove c e la lunghezza di corda,ν e la viscosita cinematica e VR e la velocita risultante, che include le velocita indotte.
Ai bassi numeri di Reynolds il flusso e laminare, per cui la resistenza d’attrito e determinabilemediante la formula di Blasius
CF = 1.32/√
Rn (5.42)
Per flussi del tutto turbolenti si puo applicare la regola di Von Karman
CF = 0.455/(Log Rn)2.58 (5.43)
Si osservi che spesso nell’estrapolazione di prove su modelli si utilizza la curva di transizionedi Aucher
CF = 0.044/Rn1/6 − 5/Rn2/3 (5.44)
Il coefficiente 5 presente nella formula (5.44), va osservato che questo valore fu consideratocome rappresentativo del campo di flusso che si instaurava sulle eliche modello parecchi decen-ni orsono. Minore e questo coefficiente, maggiore e l’estensione dello strato limite turbolento.Nelle estrapolazioni dei risultati sperimentali su eliche moderne questo coefficiente e stato ri-dotto da 5 a 2, per migliorare la correlazione tra velocita di rotazione misurate e previste per leeliche al vero. Oltre a questa ragione pratica, si deve tenure conto anche che gli effetti viscosisi manifestano soprattutto sui raggi esterni, dove lo strato limite e quasi sempre turbolento,particolarmente sui modelli di elica nella condizione di marcia indietro. Questa formula con ilsuo valore originale di 5 e stata incorporata nella procedura ITTC–78 per calcolare gli effettiscala sulle prestazioni dell’elica.
Per il coefficiente d’attrito di una superficie di pala con estesa rugosita, si utilizza spesso laformula di Prandtl–Schlichting
CF = [1.89 + 1.62Log (c/kp)]−2.5 (5.45)
purche sia Rn·kp > 100.
La formula (5.45) e basata sugli esperimenti condotti da Nikuradse sui tubi la cui superficie fuirrugosita con granuli di sabbia di dimensione nota. La formula fu sviluppata per essere appli-cata a lastre piane. Questo e il motivo per cui nei calcoli idrodinamici la rugosita delle paledi un’elica e espressa come dimensione di un granulo equivalente. Comunque, oggi la rugositadi un’elica e espressa e misurata mediante altri parametri. E ancora aperta lka questione sulmodo in cui nuovi parametri di rugosita possono essere trasferiti in dimensione di un granulo
229

5 – Progetto dell’elica subcavitante
equivalente, da utilizzare nei calcoli idrodinamici.
Per le eliche nuove kp e assunto di solito pari a 30 µm, anche se molti case costruttrici di elichesostengono di produrre una finitura delle loro pale con valori ancora inferiori. Al MARIN, peril calcolo dell’effetto scala sulla viscosita di pala e stata adottata una dimensione di granulodi sabbia equivalente pari a kp = 20 µm, per migliorare la correlazione tra giri misurati e giriprevisti al vero.
A tutti questi coefficienti d’attrito delle lastre piane si aggiunge di solito un certo effetto diforma per tenere conto dell’effetto dello spessore di pala sulla resistenza viscosa del profilo;ossia;
CF = CF2D(1 + 2 t/c) (5.46)
Il termine (1 + 2 t/c) e analogo al fattore di forma (1 + k) utilizzato nell’estrapolazione dellaresistenza nave; tiene conto dell’incremento sia dell’attrito prodotto dall’incremento di velocitadovuto dallo spessore, sia della resistenza di pressione che si crea verso il bordo d’uscita dellasezione a causa dell’ispessimento dello strato limite. Si puo rilevare facilmente che questi effettidi forma giocano un ruolo insignificante nelle eliche navali convenzionali.
La resistenza base, ossia la componente di resistenza viscosa causata da una zona di acquamorta dietro una sezione tronca, non e inclusa nelle formule suddette. Questa componente an-drebbe considerata separatamente; anche se e relativamente modesta per le sezioni esterne chesono sottili. Questa componente di resistenza e presente anche nelle eliche con spessore finitosul bordo d’uscita, che sia una frazione sostanziale dello spessore massimo, per cui si avrannoperdite di rendimento non trascurabili. Le varie formulazioni relative agli effetti dell’attrito edella rugosita di pala sono riportate in Figura 5.5.
Oltre agli effetti viscosi sulla resistenza delle pale, esiste un effetto separato sulle caratteristichedi portanza dei profili alari. Questo effetto si manifesta in due modi: attraverso una riduzionedella pendenza della curva del coefficiente di portanza rispetto all’angolo d’incidenza, ed attra-verso una riduzione dell’angolo di portanza nulla α◦.
La pendenza della portanza dCL/dα, pari a 2π(1 + 0.77 t/c) in flusso potenziale, per i profilinormali e ridotta a valori pari a 5.8 ÷ 6.1. Come regola pratica, per la curva della pendenzadella portanza van Oossanen ha approssimato la correzione per viscosita di Burrill mediante laformula
dCL/dα = 2π [0.947− 9.76 (t/c)3] (5.47)
230
5.4 – Progetto geometrico
Figura 5.5. Effetti dell’attrito e della rugosita di pala
Si hanno pochi riscontri circa l’utilizzo di questa formula. D’altra parte e ben noto che talerelazione dovrebbe essere piu complicata, in quanto non include ne le distribuzioni dello spes-sore e della curvatura, ne il numero di Reynolds. Per ali isolate sono state costruite regole piusofisticate, nelle quali sono stati incorporati il numero di Reynolds ed alcuni dettagli geome-trici delle sezioni. Tuttavia, le applicazioni alle eliche navali non hanno ancora prodotto unacorrezione per effetto scala che migliori realmente la correlazione tra le previsioni sperimentalisu modelli ed i risultati ottenuti da prove al vero.
Una volta effettuato il calcolo della resistenza viscosa, si calcolano la potenza propulsiva ed ilrendimento. Infine, si effettua un adattamento del passo per adeguarlo alla velocita di rotazionerelativa alla potenza motore. E auspicabile che questo adattamento sia in linea con il confrontodel passo virtuale dell’elica in progetto e quello di un’elica di stock o quello delle eliche dellaSerie–B.
5.4.5 Ottimizzazione dei profili alari
Esistono altri approcci grazie ai quali ad ogni raggio e possibile ottimizzare la forma dellasezione per ritardare il piu possibile l’innesco della cavitazione. Cio viene realizzato scegliendoi parametri geometrici della sezione in maniera tale che per lo specifico indice di cavitazione
231

5 – Progetto dell’elica subcavitante
σ la larghezza del bucket sia allargato al massimo, raggiungendo cosı la massima latitudineche sia in grado di ovviare alla variazione dell’angolo d’incidenza. Nelle procedure progettualiclassiche che adottano i profili NACA, la variazione del passo e della curvatura della sezione dipala viene determinata in modo che la maggior parte del carico derivi dalla curvatura.
232
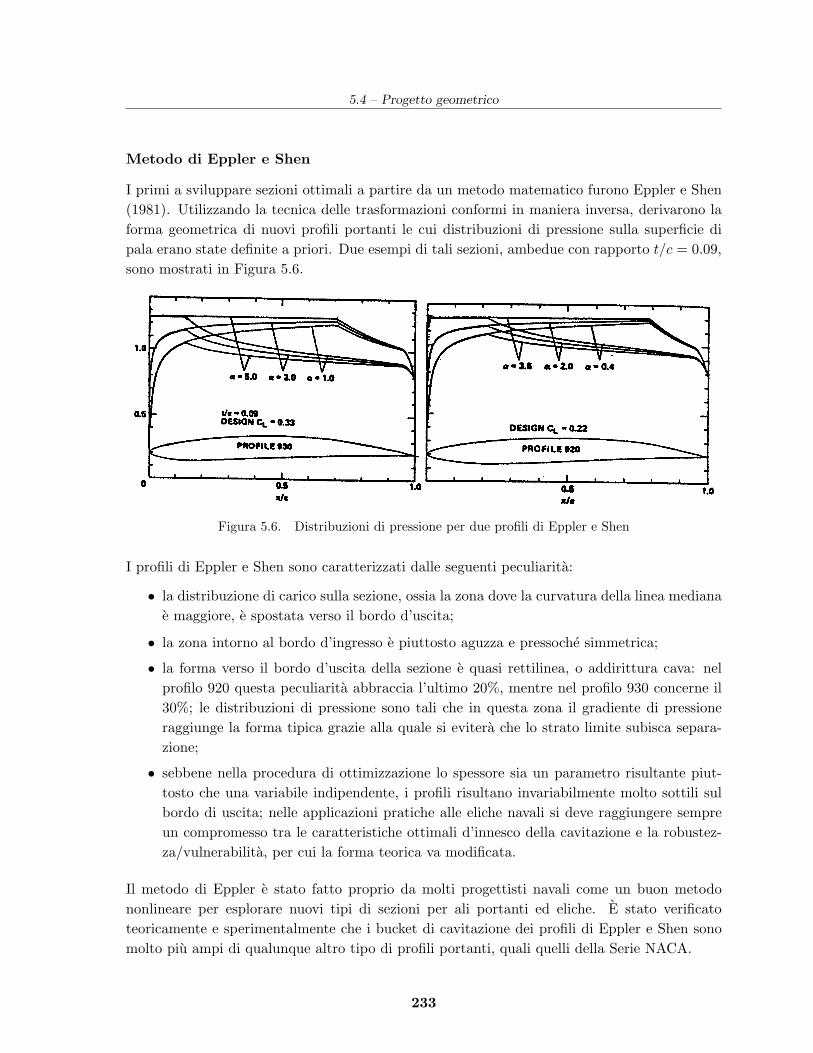
5.4 – Progetto geometrico
Metodo di Eppler e Shen
I primi a sviluppare sezioni ottimali a partire da un metodo matematico furono Eppler e Shen(1981). Utilizzando la tecnica delle trasformazioni conformi in maniera inversa, derivarono laforma geometrica di nuovi profili portanti le cui distribuzioni di pressione sulla superficie dipala erano state definite a priori. Due esempi di tali sezioni, ambedue con rapporto t/c = 0.09,sono mostrati in Figura 5.6.
Figura 5.6. Distribuzioni di pressione per due profili di Eppler e Shen
I profili di Eppler e Shen sono caratterizzati dalle seguenti peculiarita:
• la distribuzione di carico sulla sezione, ossia la zona dove la curvatura della linea medianae maggiore, e spostata verso il bordo d’uscita;
• la zona intorno al bordo d’ingresso e piuttosto aguzza e pressoche simmetrica;
• la forma verso il bordo d’uscita della sezione e quasi rettilinea, o addirittura cava: nelprofilo 920 questa peculiarita abbraccia l’ultimo 20%, mentre nel profilo 930 concerne il30%; le distribuzioni di pressione sono tali che in questa zona il gradiente di pressioneraggiunge la forma tipica grazie alla quale si evitera che lo strato limite subisca separa-zione;
• sebbene nella procedura di ottimizzazione lo spessore sia un parametro risultante piut-tosto che una variabile indipendente, i profili risultano invariabilmente molto sottili sulbordo di uscita; nelle applicazioni pratiche alle eliche navali si deve raggiungere sempreun compromesso tra le caratteristiche ottimali d’innesco della cavitazione e la robustez-za/vulnerabilita, per cui la forma teorica va modificata.
Il metodo di Eppler e stato fatto proprio da molti progettisti navali come un buon metodononlineare per esplorare nuovi tipi di sezioni per ali portanti ed eliche. E stato verificatoteoricamente e sperimentalmente che i bucket di cavitazione dei profili di Eppler e Shen sonomolto piu ampi di qualunque altro tipo di profili portanti, quali quelli della Serie NACA.
233
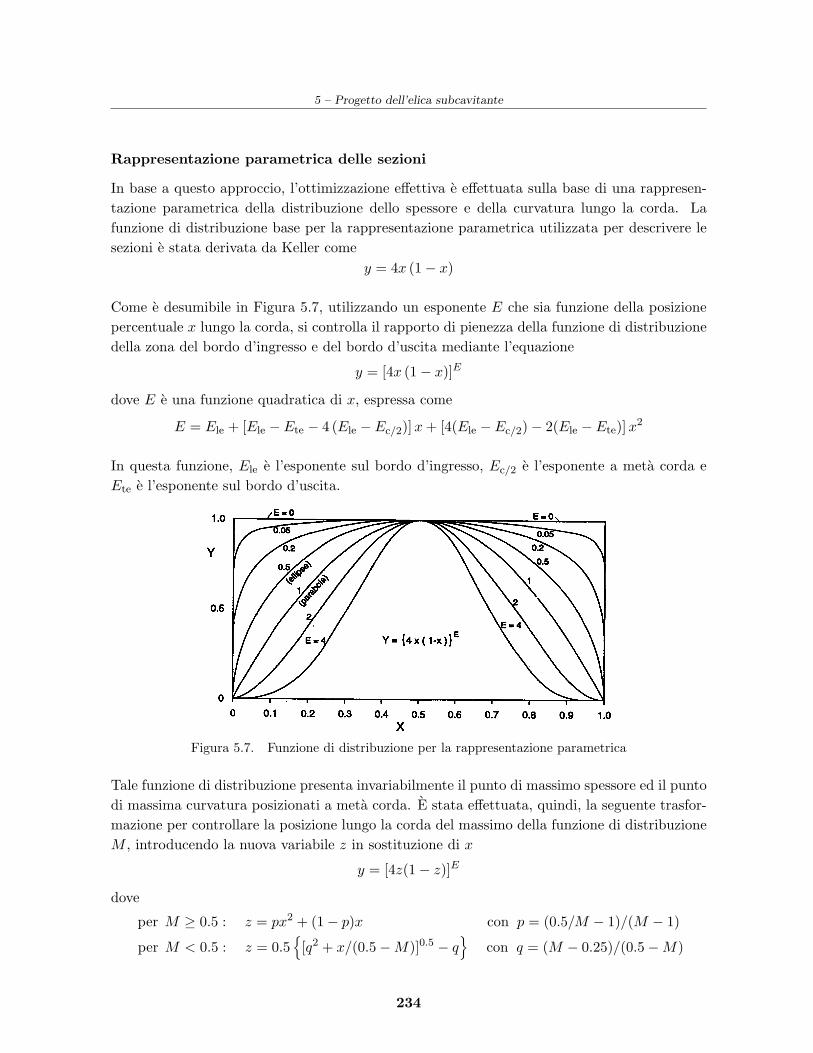
5 – Progetto dell’elica subcavitante
Rappresentazione parametrica delle sezioni
In base a questo approccio, l’ottimizzazione effettiva e effettuata sulla base di una rappresen-tazione parametrica della distribuzione dello spessore e della curvatura lungo la corda. Lafunzione di distribuzione base per la rappresentazione parametrica utilizzata per descrivere lesezioni e stata derivata da Keller come
y = 4x (1− x)
Come e desumibile in Figura 5.7, utilizzando un esponente E che sia funzione della posizionepercentuale x lungo la corda, si controlla il rapporto di pienezza della funzione di distribuzionedella zona del bordo d’ingresso e del bordo d’uscita mediante l’equazione
y = [4x (1− x)]E
dove E e una funzione quadratica di x, espressa come
E = Ele + [Ele − Ete − 4 (Ele − Ec/2)]x + [4(Ele −Ec/2)− 2(Ele − Ete)]x2
In questa funzione, Ele e l’esponente sul bordo d’ingresso, Ec/2 e l’esponente a meta corda eEte e l’esponente sul bordo d’uscita.
Figura 5.7. Funzione di distribuzione per la rappresentazione parametrica
Tale funzione di distribuzione presenta invariabilmente il punto di massimo spessore ed il puntodi massima curvatura posizionati a meta corda. E stata effettuata, quindi, la seguente trasfor-mazione per controllare la posizione lungo la corda del massimo della funzione di distribuzioneM , introducendo la nuova variabile z in sostituzione di x
y = [4z(1− z)]E
dove
per M ≥ 0.5 : z = px2 + (1− p)x con p = (0.5/M − 1)/(M − 1)
per M < 0.5 : z = 0.5{[q2 + x/(0.5−M)]0.5 − q
}con q = (M − 0.25)/(0.5−M)
234
5.4 – Progetto geometrico
In pratica e risultato che la funzione suddetta e adeguata per rappresentare le distribuzionidella curvatura, mentre per le distribuzioni di spessore e emersala necessita di ispessire le zoneintorno ad ambedue le estremita delle sezioni, per cui le distribuzioni adimensionali di spessoresono maggiorate come riportato dalla relazione
t/c = (tmax/c)[y − (y − 1)A] con A = [4x (1− x)]Ule+x(Ute−Ule) ·[Rle + x (Rte −Rle)]
dove x e la posizione adimensionale di corda, mentre Rle e Rte sono rispettivamente le frazioniadimensionali dello spessore massimo sul bordo d’ingresso e sul bordo d’uscita; inoltre, Ule eUte sono rispettivamente gli esponenti sul bordo d’ingresso e sul bordo d’uscita.
L’esperienza ha insegnato che con questa rappresentazione parametrica le sezioni descrittehanno una forma dolce e ben definita, tranne nella zona alquanto vicina al bordo d;ingresso(x < 0.002 c). Il numero di parametri utilizzato e sufficiente per coprire tutte le forme concepibi-li di profili applicabili alle eliche navali. Utilizzando la rappresentazione parametrica del profilonello schema di ottimizzazione, i parametri di spessore, di curvatura e di estremita, possonoessere scelti dal punto di vista dell’innesco della cavitazione, insieme al rapporto spessore–cordat/c ed al rapporto freccia–corda f/c.
L’esperienza ha confermato che ottime caratteristiche di ritardo dell’innesco della cavitazione siottengono per quei profili che siano ottimizzati per offrire un intervallo dell’angolo d’incidenzaesente da cavitazione quanto piu ampio possibile. D’altra parte, nello schema di ottimizzazionedovrebbere essere inclusi requisiti di spessore supplementare, particolarmente sul bordo d’us-cita, per ottenere soluzioni pratiche con il rendimento globale migliore possibile.
Va osservato che ottimizzare i profili delle sezioni di pala in un flusso 2D non e del tutto cor-retto poiche il flusso reale intorno alla pala e tridimensionale, specie sui raggi esterni delleeliche con ‘skew’ elevato. Per il flusso incidente si tiene conto dell’effetto del primo ordinedella curvatura del flusso dovuto al carico dell’elica, mentre sono ignorate tutte le componentiradiali. Poiche parecchi effetti non sono considerati adeguatamente, se si ritiene che l’elicain progetto non si comporti adeguatamente, si puo effettuare una correzione finale della cur-vatura della sezione in base alla teoria della superficie portante oppure a esperimenti su modelli.
Spesso e stato riscontrato un comportamento instabile della cavitazione sui profili ottimizzatiper ritardare l’innesco della cavitazione. Si evidenzia che, una volta che esista un’estensiva ca-vitazione a lamina sul dorso, si presenta spesso la tendenza verso una cavitazione meno stabile.Probabilmente questa e una conseguenza della distribuzione uniforme di pressione sul dorso.Tali distribuzioni di pressione sono la conseguenza naturale dell’ottimizzazione della forma delprofilo. Quando la cavitazione e sviluppata completamente, e non esiste incidenza ideale, lapressione verso il bordo d’uscita sul dorso risulta essere inferiore rispetto a quella su profili piuconvenzionali.
Va osservato che lo schema di ottimizzazione per il progetto di profili portanti delle sezioni dipala puo essere applicato con successo anche per generare profili per i braccioli portaelica, peri rettificatori di flusso, per i cavalletti, ecc.
235
5 – Progetto dell’elica subcavitante
5.4.6 Modifiche geometriche dell’elica
Talvolta, come risultato di esperimenti su modelli, oppure in base a prove al vero, si puo giun-gere alla conclusione che la geometria dell’elica dovrebbe essere modificata. Sono qui elencatealcune ragioni plausibili che portano a rettificare la geometria dell’elica e sono discussi alcunirimedi possibili:
• l’elica ruota piu velocemente del previsto alla specifica potenza assorbita: l’elica e cari-cata troppo leggermente;
• l’elica ruota troppo lentamente alla specifica potenza assorbita: l’elica e troppo caricata;
• esiste cavitazione sulla faccia;
• il margine contro la cavitazione sulla faccia e piuttosto elevato;
• esiste cavitazione alla radice di pala;
• esiste cavitazione a bolle a meta corda;
• l’elica canta.
Le prime due situazioni sono rilevanti solamente per le eliche a passo fisso. Nelle eliche a passovariabile una certa imprecisione del valore del passo non e critica, a meno che la corsa del passonon sia esaurita. Per prevedere esattamente la velocita di rotazione per un certo assorbimentodi potenza, in genere sara sufficiente una minima correzione del passo in fase progettuale. Comeregola generale, a parita di potenza, un aumento dell’1% del numero di giri corrisponde ad unariduzione del passo pari a 1.5%.
Una variazione del diametro puo essere valutata in base alla regola empirica che vuole che lasomma del passo e del diametro dovrebbe essere costante per mantenere la stessa relazione trapotenza e numero di giri.
Per le eliche gia installate su una nave la situazione diviene molto piu complicata se si desi-dera un adattamento della loro geometria. Ovviamente, sono limitate le possibilita di ridurregli effetti prodotti da imprecisioni progettuali. L’applicazione di una correzione del passo adun’elica esistente mediante la forza bruta e limitata alle piccole eliche. Anche in questo ca-so, il limite superiore corrisponde ad una variazione del 10% del passo. Il rischio di rovinarela situazione cavitativa o di ridurre la robustezza delle pale e insito in questo metodo grossolano.
Oltre gli adattamenti del passo da parte del costruttore, sono disponibili le misure seguenti perrendere un’elica meno caricata:
• riduzione del diametro (Fig. 5.8), il che non e raccomandabile in quanto produce unaperdita di rendimento; si deve prestare attenzione al fatto che la riduzione del momentod’inerzia polare di massa, la quale puo essere considerevole quando il diametro e ridotto,non produca risonanza per vibrazioni torsionali;
• troncamento del bordo d’uscita, che costituisce una misura efficace per modificare la geo-metria della coda delle sezioni, influenzando cosı la condizione di Kutta e rendendo l’elicameno caricata; il grande scarto tra i dati disponibili, come si evince da diagramma inFigura 5.9, indica che non e facile prevedere questo effetto;
236

5.4 – Progetto geometrico
• variazione del bordo d’ingresso dei profili, i cui effetti sono estremamente ridotti; va pres-tata attenzione a non facilitare l’innesco della cavitazione;
• affilatura di un bordo asimmetrico anti-canto sulla faccia; i suoi effetti sono piuttostomarginali in quanto cio costituisce una forma ridotta di troncamento del bordo d’uscita,ma su scala molto ridotta.
Figura 5.8. Effetto della riduzione del diametro sul numero di giri
Rendere piu pesantemente caricata un’elica esistente, o ridurre la velocita di rotazione, none cosı facile quanto rendere un’elica meno caricata. Modifiche del bordo d’uscita sono rara-mente efficaci a causa della forma naturale dei profili con curvatura. D’altra parte, esiste unavariazione naturale delle prestazioni nel tempo, in quanto la rugosita della carena e delle paledell’elica aumenta negli anni. Ambedue questi effetti causano una riduzione della velocita in-cidente. Inoltre, la rugosita delle pale fa crescere il momento torcente. Ambedue questi effettifanno diminuire gradualmente il numero di giri.
La cavitazione sulla faccia puo essere evitata arrotondando il bordo d’ingresso sulla faccia esollevandolo verso il dorso, oppure riducendo la curvatura del profilo. Viceversa, se il marginecontro la cavitazione sulla faccia e eccessivo, si puo aumentarne la curvatura. In tal modo,risultera ridotta l’estensione della cavitazione a lamina sul dorso di pala. Queste sono modi-fiche che vengono applicate normalmente ai modelli delle eliche durante lo svolgimento di unprogramma sperimentale.
La cavitazione alla radice di pala e la cavitazione a bolle a meta corda devono essere evitatea causa del loro potenziale rischio di erosione. Poiche non esiste un metodo per correggere leeliche gia costruite, l’unico modo di impedire la presenza di queste forme di cavitazione, chesono spesso di natura erosiva se la cavitazione e bene sviluppata, e una riduzione della potenza
237
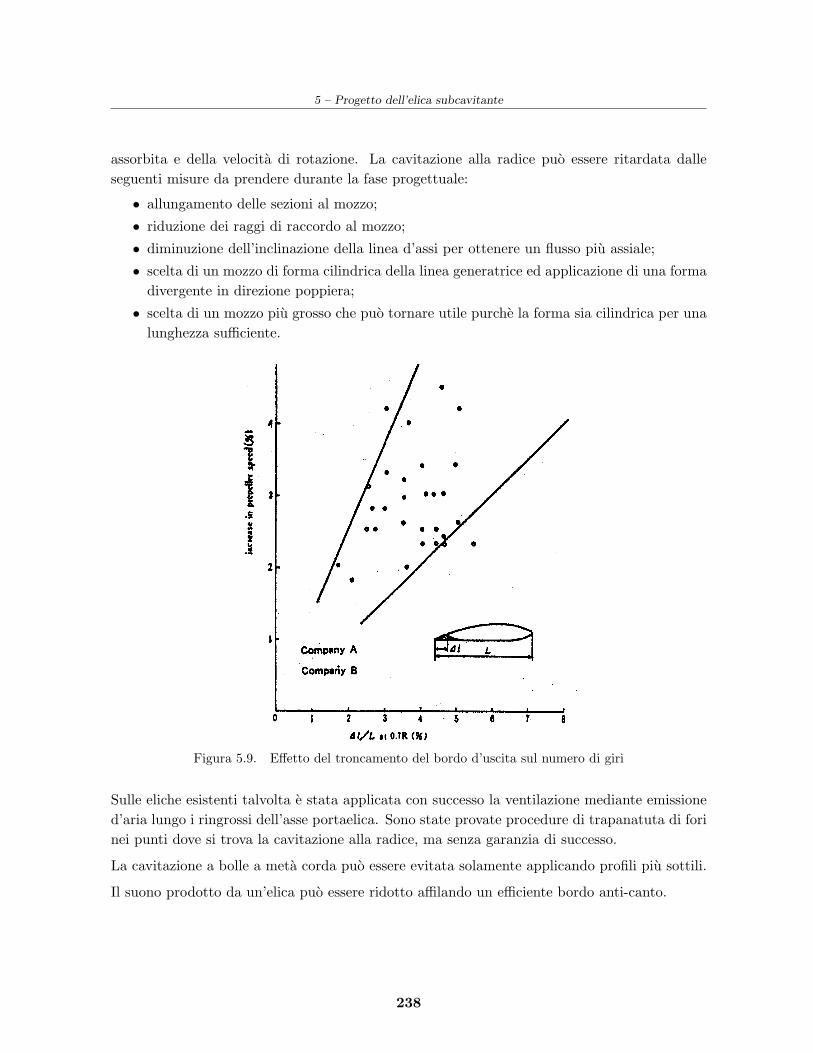
5 – Progetto dell’elica subcavitante
assorbita e della velocita di rotazione. La cavitazione alla radice puo essere ritardata dalleseguenti misure da prendere durante la fase progettuale:
• allungamento delle sezioni al mozzo;
• riduzione dei raggi di raccordo al mozzo;
• diminuzione dell’inclinazione della linea d’assi per ottenere un flusso piu assiale;
• scelta di un mozzo di forma cilindrica della linea generatrice ed applicazione di una formadivergente in direzione poppiera;
• scelta di un mozzo piu grosso che puo tornare utile purche la forma sia cilindrica per unalunghezza sufficiente.
Figura 5.9. Effetto del troncamento del bordo d’uscita sul numero di giri
Sulle eliche esistenti talvolta e stata applicata con successo la ventilazione mediante emissioned’aria lungo i ringrossi dell’asse portaelica. Sono state provate procedure di trapanatuta di forinei punti dove si trova la cavitazione alla radice, ma senza garanzia di successo.
La cavitazione a bolle a meta corda puo essere evitata solamente applicando profili piu sottili.
Il suono prodotto da un’elica puo essere ridotto affilando un efficiente bordo anti-canto.
238
Bibliografia
[1] Bowden, B.S. and Davison, N.J.: Resistance Increments due to Hull Roughness Associated withForm Factor Extrapolation Methods, NMI, Ship TM 380, 1974.
[2] Brockett, T.: Minimum Pressure Envelopes for Modified NACA–66 Sections with NACA a=0.8Camber and Buships Type I and Type II Sections, David Taylor Model Basin, Report no. 1780,1966.
[3] Burrill, L.C.: Calculation of Marine Propeller Performance Characteristics, Transactions of theNorth East Coast Institution of Engineers and Shipbuilders, Vol. 60, 1944.
[4] Cheng, H.M.: Hydrodynamic Aspect of Propeller Design Based on Lifting Surface Theory : Part I- Uniform Chordwise Load Distribution, David Taylor Model Basin Report 1802, 1964.
[5] Cheng, H.M.: Hydrodynamic Aspect of Propeller Design Based on Lifting Surface Theory : PartII - Arbitrary Chordwise Load Distribution, David Taylor Model Basin Report 1803, 1965.
[6] Chisari, C.: Ottimizzazione vincolata per la previsione di potenza nel progetto di un’elica navale,Tesi di Laurea, DINMA, Universita di Trieste, 2008.
[7] Choi, J.K. and Kinnas, S.: Prediction of Non–Axisymmetric Effective Wake b a Three–DimensionalEuler Solver , Journal of Ship Research, Vol. 45, no. 1,, 2001.
[8] Cumming, R.A., Morgan, W.B. and Boswell, R.J.: Highly Skewed Propellers, TransactionsSNAME, Vol. 80, 1972, pp. 98–135.
[9] Eckhardt, M.K. and Morgan, W.B.: A Propeller Design Method , Transactions SNAME, Vol. 57,1955, pp. 325–374.
[10] Glauert, H.: The Elements of the Aerofoil and Airscrew Theory , Cambridge, University Press,1947.
[11] Goldstein : On the Vortex Theory of Screw Propellers, Proceedings, Royal Society, London (A),Vol. 123, 1929, pp. 440–465.
[12] Greeley, D.S. and Kerwin, J.E.: Numerical Methods for Propeller Design and Analysis in SteadyFlow , Transactions SNAME, Vol. 90, 1982.
[13] Ikehata, M., Ando, M. and Maruo, H.: The Analysis of Unsteady Characteristics of MarinePropeller in Harmonic Wake by Vortex Lattice Lifting–Surface Model , Chalmers University ofTechnology, Department of Ship Hydromechanics, Report no. 68, Goteborg, 1984.
[14] Hill, J.G.: The Design of Propellers, Transactions SNAME, Vol. 57, 1949, pp. 143–192.
[15] Hoshino, T.: Hydrodynamic Analysis of Propellers in Steady–Flow Using a Surface Panel Method ,Journal of The Society of Naval Architects of Japan, 1989, pp. 79–92.
[16] Isherwood, R.M.: Wind Resistance of Merchant Ships, Transactions RINA, Voi. 115, 1973.
[17] Kawada, S.: On the Induced Velocity and Characteristics of a Propeller , Journal of the Faculty ofEngineering, Tokyo, Imperial University, Vol. 20, 1933.
239

Bibliografia
[18] Kawada, S.: Induced Velocity by Helical Vortices, Journal of the Aeronautical Sciences, Vol. 3, 1936.
[19] Kerwin, J.E. and Leopold, R.: A Design Theory for Subcavitating Propellers, TransactionsSNAME, Vol. 72, 1964, pp. 294–335.
[20] Kerwin, J.E. and Lee, C.S.: Prediction of Steady and Unsteady Marine Propeller Performance byNumerical Lifting-Surface Theory , Transactions SNAME, Vol. 86, 1978, pp. 218–253.
[21] Kerwin, J.E., Kinnas, S.A., Lee, J.J. and Shih, W.Z.: A Surface Panel Method for the Hydrody-namic Analysis of Ducted Propellers, Transactions SNAME, Vol. 95, 1987.
[22] Kramer: Induced Efficiencies of Optimum Airscrews with a Finite Number of Blades, Luftfahrt-forschung, Vol. XV, 1938.
[23] Lanchester, F.W.: Aerodynamics, Constable Company, London, 1907.
[24] Lavrentiev, V.M.: Teoria Generale dei Propulsori Navali (in russo), Morflota Magazine, Lenin-grad, Vol. 35, 1961, pp. 3–39.
[25] Lerbs, H.W.: Moderately Loaded Propellers with a Finite Number of Blades and an ArbitraryDistribution of Circulation, Transactions SNAME, Vol. 60, 1952, pp. 73–117.
[26] Manen, J.D. van: The Design of Ship Screws of Optimum Diameter for an Unequal Velocity Field ,Transactions SNAME, Vol. 60, 1952, pp. 442–468.
[27] Manen, J.D. van: Thrust Deduction and a Proposed Formula for Its Radial Distribution,International Shipbuilding Progress, Vol. 2, no. 8, 1955, pp. 153–166.
[28] Minsaas, K. and Slattelid, O.H.: Lifting Surface Corrections for 3 Bladed Optimum Propellers,International Shipbuilding Progress, Vol. 18, no. 208, 1971, pp. 437–452.
[29] Miskevic, V.G.: Elaborazione Numerica dei Risultati dell’Esame su Modelli di Serie Sistematichedi Eliche Isolate (in russo), Proceedings, in memoriam of A.N. Krylov, Leningrad, Paper no. 296,1979, pp. 61–68.
[30] Morgan, W.B., Silovic V. and Denny, S.B.: Propeller Lifting Surface Corrections, TransactionsSNAME, Vol. 76, 1968, pp. 309–347.
[31] Oossanen, P. van: Calculation of Performance and Cavitation Characteristics of PropellersIncluding Effects of Non–Uniform Flow and Viscosity , Netherlands Ship Model Basin, Publicationno. 457, 1974.
[32] Papmel, E.E.: Practical Calculations of Propellers (in russo), Leningrad, 1936.
[33] Pien, P.C.: The Calculation of Marine Propellers Based on Lifting–Surface Theory , Journal ofShip Research, Vol. 5, no. 1,, 1961, pp. 1–14.
[34] Polyahov, N:N. Fondamenti Teorici del Metodo di Calcolo di Eliche Cavitanti (in russo),Proceedings, III Congresso in memoriam of A.N. Krylov, Leningrad, no. 34, 1948, pp. 20–29.
[35] Sears, W. R.: Some Aspects of Non–Stationary Airfoil Theory and its Practical Application,Journal of the Aeronautical Sciences, Vol. 8, no. 3, 1941.
[36] Sontvedt, T.: Theoretical Calculations of Hydrodynamic Loading on the Marine Propeller, Part I,Open–Water Performance, Det norske Veritas, Report no. 71-64-M, 1971.
[37] Szantyr, J.A.: A New Method for the Analysis of Unsteady Propeller Cavitation and Hull SurfacePressure, Transactions RINA, Vol. 126, 1984, pp. 153–167.
[38] Tanibayashi, H.: Practical Approach to Unsteady Problems of Propellers, International Shipbuil-ding Progress, Vol. 20, no. 226, 1973, pp. 211–222.
[39] Townsin, R.L., Byrne, D., Milne, A. and Svensen, T. E.: Speed, Power and Roughness: TheEconomics of Outer Bottom Maintenance, Transactions RINA, Vol. 122, 1980, pp. 459–482.
[40] Trincas, G.: Fondamenti di Propulsione Navale, DINMA, Universita di Trieste, 2008.
240

Bibliografia
[41] Tsakonas, S., Jacobs, W.R. and Ali, M.R.: An Exact Linear Lifting–Surface Theory for a marinePropeller in a Nonuniform Flow , Journal of Ship Research, Vol. 17, no. 4,, 1973, pp. 196–207.
[42] Tzabiras, G., Dimas, A. and Loukakis, T.: A Numerical Method for the Calculation of Incompres-sible, Steady, Separated Flows around Aerofoils, International Journal for Numerical Methods inFluids, Vol. 6, 1986, pp. 789–809.
[43] Wrench, J.W.: The Calculation of Propeller Induction Factors, David Taylor Model Basin, Reportno. 1116, 1957.
[44] Yim, B.: Optimum Propellers with Cavity–Drag and Frictional–Drag Effects, Journal of ShipResearch, Vol. 20, no. 2,, 1976, pp. 118–123.
241