Progettazione di un Sistema Per l'Evoluzione Intrinseca di...
103
POLITECNICO DI MILANO FACOLT ` A DI I NGEGNERIA CORSO DI LAUREA IN I NGEGNERIA I NFORMATICA DIPARTIMENTO DI ELETTRONICA E I NFORMAZIONE PROGETTAZIONE DI UN SISTEMA PER L’EVOLUZIONE INTRINSECA DI CIRCUITI SU FPGA Relatore: Prof.ssa Donatella S CIUTO Correlatore: Ing. Fabio C ANCAR ´ E Tesi di Laurea di Primo Livello di: Davide Basilio BARTOLINI Matricola n. 701665 Matteo C ARMINATI Matricola n. 700313 ANNO ACCADEMICO 2008-2009
Transcript of Progettazione di un Sistema Per l'Evoluzione Intrinseca di...
POLITECNICO DI MILANO
FACOLTA DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA INFORMATICA
DIPARTIMENTO DI ELETTRONICA E INFORMAZIONE
PROGETTAZIONE DI UN SISTEMA PERL’EVOLUZIONE INTRINSECA DI CIRCUITI SU
FPGA
Relatore: Prof.ssa Donatella SCIUTO
Correlatore: Ing. Fabio CANCARE
Tesi di Laurea di Primo Livello di:
Davide Basilio BARTOLINI
Matricola n. 701665
Matteo CARMINATI
Matricola n. 700313
ANNO ACCADEMICO 2008-2009


Alle nostre famiglie.

Ringraziamenti
I ringraziamenti, in queste occasioni, finiscono quasi sempre per essere banali e
piuttosto melensi; d’altro canto e giusto e doveroso, oltre che piacevole, ringra-
ziare le persone da cui si e ricevuto qualcosa. Anche se, per indole, sono piuttosto
avaro in quanto a moine e smancerie, so apprezzare l’affetto delle persone che
mi sono vicine. Ci tengo, quindi, a ringraziare qui Giuseppe, mio padre, per il
supporto e la fiducia; Silvana, mia madre, per l’affetto e la pazienza; Giulia, mia
sorella, per essersi prestata (seppur brevemente, ma come biasimarla) alla corre-
zione grammaticale di questo elaborato. Un ringraziamento particolare va a Mat-
teo, che si e provato un vero amico nel sopportarmi durante la collaborazione per
questa tesi. Un grazie per l’affetto va anche agli amici di vecchia data (in partico-
lare a Elisa e Michele) che, occupato nel terminare questo lavoro, ho ultimamente
un po’ trascurato.
Davide
Il primo e il piu sentito grazie va ai miei genitori, Patrizia e Gianmario, che in
ogni istante hanno creduto in me e in ogni momento di difficolta hanno saputo
aiutarmi e spronarmi. Grazie anche a tutto il resto della mia famiglia che mi e sta-
ta vicina nonostante la mia poca disponibilita e reperibilita, soprattutto in questi
ultimi mesi. Un ringraziamento speciale va a Valeria, che e riuscita a sopportar-
mi e supportarmi in tutti questi giorni: la sua comprensione e il suo sorriso mi
hanno permesso di affrontare ogni momento importante con tranquillita e con la
necessaria leggerezza. Un ringraziamento all’amico, compagno di studi e di te-
si, Davide, per la costante simpatia e disponibilita. Grazie anche ai “ragazzi” di
Progetti e ai titolari, che mi offrono una grande occasione di crescita e sono stati
iii

comprensivi in questo periodo piuttosto concitato. Grazie a tutti gli amici (quelli
della ex Quinta B, Dany, gli ex colleghi e colleghe) e a tutte quelle persone che
a modo loro hanno contribuito, anche minimamente, a farmi vivere serenamente
questi primi tre anni universitari.
Matteo
Infine, alcuni ringraziamenti comuni. Per prima cosa un sentito grazie va al Re-
latore, Prof.ssa Donatella Sciuto, e all’Ing. Fabio Cancare, Correlatore e amico,
per la disponibilita, la pazienza e i preziosi consigli e correzioni; ringraziamo an-
che Marco Castagna e Matteo Renesto, che hanno lavorato prima di noi a questo
progetto. Grazie anche a Irene, nonna di Davide, per la simpatia e l’ottimo cibo
offertoci durante la scrittura di questa tesi. Come ultima cosa, ma non per im-
portanza, vorremmo ringraziare i nostri compagni di corso (tra cui, soprattutto,
Davide, per la sua indole ingegneristica; Marco, per la sua indole ben poco inge-
gneristica; Stefania, per essersi sobbarcata la quota di ansia di tutti; Andrea, per
gli spunti origamo-culinar-danzanti), per la simpatia e il divertimento (talvolta alle
loro spalle) che ci hanno offerto in questi tre anni.
Milano, 22 Luglio 2009

Indice
Indice v
1 Introduzione 11.1 Introduzione all’evolvable hardware . . . . . . . . . . . . . . . . 2
1.2 Algoritmi Genetici . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Dispositivi riconfigurabili . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Struttura della tesi . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Strumenti 112.1 Field Programmable Gate Array . . . . . . . . . . . . . . . . . . 11
2.1.1 Cenni generali sulla struttura . . . . . . . . . . . . . . . . 11
2.1.2 FPGA utilizzata . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Architettura utilizzata . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Struttura generale . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 HwIcap . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.3 Controller EHW . . . . . . . . . . . . . . . . . . . . . . 21
2.3 Strumenti software per lo sviluppo . . . . . . . . . . . . . . . . . 24
2.3.1 EDK . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.2 Altri strumenti software . . . . . . . . . . . . . . . . . . 26
3 Stato dell’arte 293.1 Primi esperimenti con FPGA . . . . . . . . . . . . . . . . . . . . 29
3.2 Evoluzione Hardware su FPGA Virtex-2 e Virtex-2 PRO . . . . . 33
3.2.1 Circuiti Virtuali Riconfigurabili . . . . . . . . . . . . . . 34
v

3.2.2 Manipolazione del bitstream . . . . . . . . . . . . . . . . 37
3.3 Evoluzione hardware su FPGA Virtex-4 . . . . . . . . . . . . . . 43
3.3.1 Analisi del bitstream . . . . . . . . . . . . . . . . . . . . 43
3.3.2 Architettura proposta . . . . . . . . . . . . . . . . . . . . 49
3.3.3 Ulteriori tentativi . . . . . . . . . . . . . . . . . . . . . . 55
4 Sistema Evolutivo 57
4.1 Rappresentazione e strutture dati . . . . . . . . . . . . . . . . . . 57
4.1.1 Popolazioni e individui . . . . . . . . . . . . . . . . . . . 58
4.1.2 Rappresentazione delle celle . . . . . . . . . . . . . . . . 58
4.1.3 Altri tipi di dato . . . . . . . . . . . . . . . . . . . . . . . 60
4.2 Evoluzione ed operatori genetici . . . . . . . . . . . . . . . . . . 60
4.2.1 Popolazione e individui . . . . . . . . . . . . . . . . . . . 60
4.2.2 Elitismo . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2.3 Mutazione . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2.4 Crossover . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3 Controller EHW . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3.1 Utilizzo dell’area riconfigurabile . . . . . . . . . . . . . . 65
4.3.2 Valutazione degli individui . . . . . . . . . . . . . . . . . 66
4.4 Interfaccia HwIcap . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4.1 Calcolo degli indirizzi . . . . . . . . . . . . . . . . . . . 68
4.4.2 Generazione del bitstream parziale . . . . . . . . . . . . . 68
4.4.3 Riconfigurazione degli individui . . . . . . . . . . . . . . 69
4.4.4 Validazione dei dati . . . . . . . . . . . . . . . . . . . . . 70
5 Risultati Sperimentali 71
5.1 Sintesi dell’architettura . . . . . . . . . . . . . . . . . . . . . . . 71
5.2 Modalita di svolgimento degli esperimenti . . . . . . . . . . . . . 74
5.3 Analisi temporale del ciclo . . . . . . . . . . . . . . . . . . . . . 75
5.4 Evoluzione di un generatore di parita . . . . . . . . . . . . . . . . 76

6 Conclusioni 796.1 Sviluppi futuri . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Elenco delle Figure 83
Elenco delle Tabelle 85
Bibliografia 87

Capitolo 1
Introduzione
In questo lavoro di tesi si propone un sistema hardware e software basato su FPGA
capace di realizzare l’evoluzione di circuiti in base ad una specifica comportamen-
tale. Il sistema, realizzato su una FPGA Xilinx Virtex-4, e in grado di operare in
modo autonomo direttamente sul dispositivo embedded, senza necessita di con-
trollo da parte di una workstation esterna durante l’evoluzione. Questa caratteri-
stica e la principale novita introdotta da questa tesi rispetto alle architetture basate
sullo stesso chip presenti in letteratura e apre la strada allo sviluppo di dispositivi
in grado di auto-ripararsi in caso di guasti e di adattarsi in modo autonomo a va-
riazioni dell’ambiente di lavoro.
In questo Capitolo introduttivo vengono proposte alcune nozioni riguardo al filone
di ricerca dello evolvable hardware (Sezione 1.1), all’interno del quale si pone il
lavoro svolto; in seguito, la Sezione 1.2 fornisce una breve introduzione per quan-
to riguarda gli algoritmi genetici e la Sezione 1.3 presenta una visione d’insieme
dei dispositivi riconfigurabili maggiormente utilizzati per la realizzazione di siste-
mi di evoluzione hardware.
Viene proposto, infine, un riassunto per temi principali dei Capitoli che compon-
gono questa tesi (Sezione 1.4).
1

CAPITOLO 1. INTRODUZIONE
1.1 Introduzione all’evolvable hardware
Non e facile definire con precisione il concetto di Hardware Evolvibile. Molti
ricercatori hanno provato a dare delle definizioni piu o meno formali, ma spes-
so contrastanti. In letteratura si possono trovare definizioni piuttosto generiche:
“Per hardware evolvibile si intende uno schema, ispirato dal modello di evoluzio-
ne naturale, per il design automatico di sistemi hardware” [1] ed altre piu precise
e categoriche che distinguono tra hardware evoluto e hardware evolvibile: “Con
il termine hardware evolvibile ci si riferisce ad hardware in grado di cambiare
la propria architettura e il proprio comportamento dinamicamente e in maniera
autonoma interagendo con l’ambiente. Idealmente questo processo di interazione
e cambiamenti dovrebbe essere continuo e durare per tutto il periodo di funzio-
namento del sistema.” [2] e “Il termine hardware evoluto indica un dispositivo
hardware la cui configurazione e stata ottenuta attraverso un processo evoluti-
vo terminato una volta identificata una soluzione ritenuta soddisfacente.” [2].
Se non e fondamentale dare una definizione generica di hardware evolvibile, e
invece importante comprendere le caratteristiche principali che distinguono i va-
ri approcci, in particolare la classificazione del tipo di evoluzione intrinseca ed
estrinseca. La differenza risiede fondamentalmente nel procedimento di valuta-
zione degli individui: nel primo caso le configurazioni candidate vengono valutate
in hardware (implementandole direttamente sul dispositivo a cui sono destinate),
nel secondo invece le configurazioni candidate vengono valutate simulandole tra-
mite strumenti software. La scelta di un’evoluzione di tipo intrinseco permette di
ottenere una valutazione piu accurata che tiene conto anche delle caratteristiche
fisiche del dispositivo utilizzato, cosa che non e possibile fare nel caso di valuta-
zione estrinseca poiche una simulazione dettagliata richiederebbe la costruzione
di un modello computazionalmente troppo complesso. D’altro canto l’evoluzione
intrinseca comporta una notevole perdita di tempo dovuta alla continua necessita
di riconfigurare il dispositivo ed alla difficolta del processo stesso. Con l’evoluzio-
ne estrinseca e necessario riconfigurare il chip solo al termine del ciclo evolutivo
(la valutazione avviene per mezzo di una simulazione esterna, con un notevole ri-
sparmio di tempo), tuttavia e possibile che, a causa delle approssimazioni imposte
2

CAPITOLO 1. INTRODUZIONE
dalla simulazione, si ottengano dei circuiti che presentano un comportamento non
esattamente coincidente con quello voluto una volta implementati su dispositivi
reali.
Piu intuitivamente si puo pensare all’evoluzione hardware come al naturale pun-
to di incontro tra algoritmi evolutivi e dispositivi riconfigurabili. Gli algoritmi
evolutivi possono essere infatti sfruttati per generare una configurazione ottimale
(rispetto ad un certo compito) di un dispositivo hardware. La Figura 1.1 fornisce
Figura 1.1: Visione ad alto livello di un sistema hardware evolvibile.
uno schema di un generico sistema hardware evolvibile. Tipicamente il processo
evolutivo inizia con la generazione casuale una popolazione di possibili soluzio-
ni, cioe di possibili configurazioni del dispositivo utilizzato. Ognuna di queste
soluzioni, detta individuo, viene processata attraverso una funzione di fitness: ne
viene cioe valutata l’aderenza rispetto ad uno specifico comportamento. E proprio
questa misura di bonta che guida il processo evolutivo attraverso l’applicazione
dei classici operatori genetici, in un processo ciclico che ha come scopo la sele-
zione della soluzione piu aderente possibile alla specifica fornita. La creazione
delle generazioni successive avviene tramite l’utilizzo di una serie di operatori il
3

CAPITOLO 1. INTRODUZIONE
cui compito fondamentale e quello di rimescolare e mutare il materiale geneti-
co delle soluzioni “genitori”, scelte in modo casuale con probabilita direttamente
proporzionale al loro fitness; viene cosı creata una nuova popolazione che vie-
ne a sua volta sottoposta al ciclo di valutazione. Si puo decidere di arrestare il
processo evolutivo una volta ottenuta una soluzione che soddisfa certi requisiti
(Hardware Evoluto), oppure farlo continuare anche durante il funzionamento del
sistema (Hardware Evolvibile). Nel caso si voglia realizzare un sistema in grado
di proseguire la sua evoluzione anche durante il funzionamento (ad esempio per
recuperare funzionalita in seguito a guasti o per adattarsi a variazioni dell’ambien-
te di lavoro) e necessario adottare un modello di evoluzione intrinseco (rendendo
in una certa misura il dispositivo capace di evolvere in maniera autonoma). Nel
caso di realizzazione di circuiti evoluti si puo invece ricorrere ad un modello evo-
lutivo estrinseco, che non e limitato dalle risorse presenti sul dispositivo utilizzato,
che in genere non e in grado di offrire grande potenza di calcolo.
Una caratteristica molto importante dell’uso di algoritmi evolutivi nell’evoluzione
hardware e che questi sono tipicamente indipendenti dal dispositivo che si intende
far evolvere e non sono in possesso di alcuna informazione sul suo funzionamen-
to (fatto salvo il riscontro fornito dalla funzione di fitness). Quello che viene
fatto evolvere e quindi il comportamento del circuito e non direttamente la sua
struttura. Diventa allora fondamentale la definizione di una funzione di fitness
in grado di promuovere il comportamento migliore al fine di dirigere il processo
evolutivo verso soluzioni ottimali. Ottimali e non ottime proprio perche la con-
figurazione finale non e generalmente la migliore possibile, ma rappresenta un
buon compromesso tra tempo di ricerca e qualita. Inoltre, nel caso particolare
di evoluzione on-line (cioe in cui il processo evolutivo continua anche durante il
funzionamento del sistema) vengono garantite proprieta di resistenza ai guasti e
di adattamento ai cambiamenti dell’ambiente, caratteristiche che sono raramente
presenti in architetture sviluppate con tecniche classiche. Appurati i vantaggi, si
deve considerare anche una caratteristica negativa di questo approccio: il risultato
del processo evolutivo risulta spesso di difficile interpretazione e analisi, proprio
perche l’evoluzione sfrutta particolarita trascurate durante la fase di modellazione
4

CAPITOLO 1. INTRODUZIONE
dell’architettura. Nonostante il campo degli algoritmi evolutivi sia piuttosto am-
pio, ci si sofferma ora sulla descrizione della terminologia e della teoria alla base
degli algoritmi genetici, di cui si e fatto uso nello sviluppo di questo sistema.
1.2 Algoritmi Genetici
John Holland [3] fu il primo ad introdurre il concetto di Algoritmo Genetico (AG),
prendendo spunto per la terminologia e per i meccanismi evolutivi dal mondo de-
gli esseri viventi. Da un punto di vista biologico, le caratteristiche peculiari di
ogni essere vivente sono contenute nel suo DNA, raggruppato in cromosomi il cui
contenuto varia da individuo a individuo. L’insieme di tutti i cromosomi, cioe di
tutto il materiale genetico di un individuo, e detto genoma. Il genoma di un indi-
viduo, cioe il suo profilo genetico, caratterizza il genotipo dell’individuo stesso.
A suo volta il genotipo, manifestandosi fisicamente, da origine al fenotipo, ovvero
alle caratteristiche fisiche e comportamentali dell’individuo. Durante la creazio-
ne di un nuovo individuo (ad esempio nella riproduzione sessuata negli uomini),
il figlio si presenta come una ricombinazione del materiale genetico dei genitori:
questo meccanismo prende il nome di crossing over (o crossover). Inoltre i nuovi
individui vanno talvolta incontro ad un processo di mutazione durante il quale i
mattoncini elementari del DNA vengono modificati rispetto a quelli originari dei
genitori. Tali cambiamenti sono spesso frutto di errori di copia, ma possono dare
origine a dei vantaggi per l’individuo che li subisce: sara la selezione naturale
(che viene rappresentata dalla valutazione del fitness) a valutare la bonta di queste
modifiche in relazione all’ambiente in cui l’individuo vive (al compito che deve
svolgere).
In ambito informatico, gli algoritmi genetici sono delle tecniche di ottimizzazio-
ne stocastica che si basano sul concetto di popolazione, in cui il ruolo del DNA
viene svolto dalla codifica scelta per le soluzioni candidate per un certo problema.
Allo stesso modo il crossover non e altro che la creazione di un nuovo individuo
utilizzando delle parti del codice binario che rappresenta il genotipo dei genitori,
mentre la mutazione consiste semplicemente nell’inversione di uno o piu bit del-
5

CAPITOLO 1. INTRODUZIONE
l’individuo.
L’ Algoritmo 1, di seguito rappresentato, ricalca in pseudocodice la struttura di
un algoritmo genetico standard. Tipicamente viene mantenuta in memoria l’at-
Algoritmo 1 Algoritmo Genetico Standard1: t← 0
2: InizializzazioneCasuale(P(t))
3: Valutazione(P(t))
4: while not Terminazione(P(t)) do5: t← t +1
6: P(t)← Selezione(P(t−1))
7: Crossover(P(t))
8: Mutazione(P(t))
9: Valutazione(P(t))
10: end while11: return P(t)
tuale popolazione di individui (soluzioni candidate) e ad ogni iterazione del ciclo
viene creata una nuova generazione, originata dall’evoluzione della popolazione
precedente (negli algoritmi genetici standard la cardinalita delle popolazioni e co-
stante). In particolare, durante ciascuna iterazione, ogni individuo della nuova
popolazione viene generato a partire dagli individui della generazione precedente
tramite l’uso degli operatori gia accennati (mutazione e crossover) e quindi valu-
tato. L’operatore di crossing over e utilizzato, in concomitanza con gli altri due,
per realizzare la fusione del materiale genetico: ricevuti in ingresso i genotipi dei
due individui vengono prodotti in uscita due figli, ottenuti ricombinando il ma-
teriale genetico dei genitori. Per questo operatore l’implementazione tipica, ma
non l’unica possibile, e quella chiamata a punto singolo: viene scelto casualmen-
te un punto che individua il punto di taglio dei cromosomi genitori. L’operatore
di crossover viene applicato con una certa probabilita p: cio significa che con
probabilita (1− p) i figli saranno identici ai genitori. L’operatore di mutazione
si limita invece a inserire delle modifiche casuali all’interno degli individui della
6

CAPITOLO 1. INTRODUZIONE
nuova generazione, a partire da individui scelti casualmente tra quelli della ge-
nerazione precedente; anch’esso si applica con una certa probabilita p ad ogni
bit. La probabilita di riproduzione dell’individuo cosı generato dipende dal suo
fitness e da quello degli individui della sua generazione: gli individui con fitness
piu alto avranno probabilita piu elevata di riprodursi. E inoltre possibile utilizzare
un operatore di elitismo, che permette di trasportare, senza alcuna modifica, nella
nuova generazione una certa percentuale dei candidati migliori della generazione
precedente. Questi meccanismi assicurano la proliferazione di soluzioni ottimali
e l’aumento del fitness medio tra gli individui.
Gli algoritmi genetici si sono dimostrati particolarmente adatti alla risoluzione di
problemi caratterizzati da un grande numero di parametri e con funzioni obiettivo
che presentano molti punti di minimo (o massimo) locali. Esempio di tali fun-
zioni sono proprio le funzioni di fitness per la valutazione del comportamento dei
circuiti da evolvere. Queste caratteristiche hanno fatto sı che in molti esperimenti
svolti nel campo dello hardware evolvibile ci si sia basati proprio sugli algoritmi
genetici.
1.3 Dispositivi riconfigurabili
La gamma di dispositivi hardware riconfigurabili presenti in commercio e piut-
tosto ampia. Affinche essi siano adatti ad ospitare un processo evolutivo e pero
necessario che godano di alcune fondamentali proprieta: flessibilita e rapidita di
riconfigurazione (soprattutto se si intende implementare un processo di evoluzio-
ne intrinseca, come descritto nella Sezione 1.1), riconfigurabilita parziale (per
limitare ulteriormente i tempi di riconfigurazione) e auto-riconfigurazione (carat-
teristica necessaria nel caso si voglia realizzare un System-On-Chip in grado di
implementare autonomamente il processo evolutivo).
Una prima grossa distinzione tra i dispositivi sfruttati per evoluzione hardware e
quella tra dispositivi digitali (in primis Field Programmable Gate Array, o FPGA),
analogici (ad esempio Field Programable Analogue Array, o FPAA), dispositivi
misti analogico/digitali (come FIPSOC [4] o l’Evolvable Motherboard [5]) e altri
7

CAPITOLO 1. INTRODUZIONE
dispositivi “non convenzionali”, utilizzati per l’evoluzione In Materio [6, 7, 8].
I primi esperimenti effettuati nel campo dello hardware evolvibile (Sezione 3.1)
sono stati svolti utilizzando come supporto delle FPGA e la maggior parte degli
studi in quest’ambito continuano a sfruttare prevalentemente questa categoria di
dispositivi. I motivi di questo vasto utilizzo di sistemi digitali va ricercato nella
loro facile reperibilita sul mercato (si tratta di dispositivi commerciali), nella loro
vasta dotazione di risorse riconfigurabili a bordo e nella loro architettura general
purpose. Tuttavia, secondo molti ricercatori, questa grande flessibilita limiterebbe
le performance ottenibili con questi dispositivi: sono quindi stati proposti anche
approcci alternativi non realizzabili utilizzando FPGA convenzionali.
Tenuti in considerazione tutti gli svantaggi (che nel caso specifico non sembra-
no essere particolarmente rilevanti e soprattutto non sembrano inficiare il lavoro
svolto) e i vantaggi appena esposti, si e deciso di sviluppare questo lavoro di te-
si utilizzando come supporto hardware un dispositivo digitale, in particolare una
FPGA della famiglia delle Virtex-4 [9].
1.4 Struttura della tesi
Nel Capitolo 2, dedicato agli Strumenti, vengono elencati e descritti tutti i dispo-
sitivi hardware e software che sono stati utilizzati nel corso del lavoro qui esposto.
Vengono dapprima introdotte le caratteristiche generali del dispositivo hardware
su cui e stato svolto il progetto (la FPGA) e gli specifici componenti dell’archi-
tettura alla base del sistema evolutivo (interfaccia HwIcap e Controller EHW).
Vengono infine presentati gli strumenti software utilizzati per lo sviluppo, l’im-
plementazione e i test (EDK [10], iMPACT [11], FPGA Editor [12]).
Segue il Capitolo 3, dedicato allo stato dei lavori di ricerca fin qui svolti nel cam-
po dell’hardware evolvibile. L’area di ricerca incentrata sull’hardware evolvibile
e un settore ancora relativamente giovane, ma esistono gia in letteratura numero-
si articoli scientifici ad essa dedicati (ad esempio, per una introduzione pratica,
si veda [2]). Si e quindi cercato di esporre in modo piuttosto sintetico, ma al-
lo stesso tempo completo, gli approcci sin qui documentati, a partire dai primi
8

CAPITOLO 1. INTRODUZIONE
esperimenti di Thompson basati su FPGA Xilinx XC6200, passando per i sistemi
che utilizzano FPGA Virtex-2 e Virtex-2 PRO (Circuiti Virtuali Riconfigurabili e
manipolazione diretta del bitstream), fino agli ultimi esperimenti con le Virtex-4.
Tra questi, a conclusione del Capitolo, viene introdotto il lavoro esposto in [13]
nell’ambito della riconfigurazione dinamica su Virtex-4: in particolare l’analisi
del formato del bitstream (non documentato da Xilinx, societa produttrice della
scheda) e lo sviluppo di un’architettura adatta all’implementazione di un sistema
evolutivo.
Il Capitolo 4, e dedicato piu dettagliatamente alla descrizione del sistema svilup-
pato per far evolvere circuiti logici su FPGA. Innanzitutto viene esposto l’algo-
ritmo genetico, in particolare le strutture dati scelte e gli operatori utilizzati nel
corso del ciclo evolutivo. Viene poi fornita una descrizione di come e stato possi-
bile interfacciarsi con l’HwIcap, per la riconfigurazione parziale del dispositivo, e
con il Controller EHW, per l’interazione con gli individui allocati sulla FPGA.
Alcuni esperimenti svolti sul sistema descritto nei Capitoli precedenti sono esposti
nel Capitolo 5, in cui vengono presentati nei dettagli i risultati ottenuti effettuan-
do alcuni cicli di test sulla FPGA su cui e stata istanziata l’architettura sviluppata.
Viene anche proposto un confronto con i risultati ottenuti da una architettura simi-
le, basata pero su evoluzione estrinseca (ovvero simulata); e cosı possibile valutare
i reali vantaggi ottenibili grazie alle caratteristiche innovative del sistema proget-
tato.
Il documento si conclude con il Capitolo 6, in cui si sintetizzano i punti notevoli
dei Capitoli precedenti. La ricerca nel campo dell’hardware evolvibile e ancora
agli inizi e rimangono molti aspetti da analizzare e molte direzioni in cui spin-
gere la ricerca; al termine vengono quindi proposti dei possibili sviluppi futuri e
accennati degli spunti di ulteriore approfondimento sull’argomento.
9

CAPITOLO 1. INTRODUZIONE
10
Capitolo 2
Strumenti
In questo capitolo vengono presentate le caratteristiche generali degli strumenti
hardware e software utilizzati. In particolare, nella Sezione 2.1, vengono presen-
tate la struttura generale di una FPGA e alcune caratteristiche tecniche del partico-
lare chip utilizzato. Nella Sezione 2.2 viene esposta l’architettura utilizzata per il
sistema evolutivo, presentando le caratteristiche dei vari componenti. Infine, nella
Sezione 2.3 si tratta degli strumenti software usati per lo sviluppo, in particolare
EDK (Sottosezione 2.3.1).
2.1 Field Programmable Gate Array
2.1.1 Cenni generali sulla struttura
Una FPGA (o Field Programmable Gate Array) e un dispositivo elettronico ca-
ratterizzato dalla presenza al suo interno di componenti logici e connessioni pro-
grammabili. In particolare i circuiti interni possono essere riprogrammati, tramite
una opportuna stringa di bit (o bitstream) di configurazione, in modo da imple-
mentare i principali dispositivi logici noti, sia combinatori (porte logiche AND,
OR e anche funzione piu complesse) che sequenziali (flip-flop o altri circuiti piu
complessi). Anche le connessioni tra i vari blocchi possono essere programma-
te, in modo da ottenere il routing desiderato per i segnali. La struttura interna di
una FPGA (Figura 2.1) e tipicamente composta da una matrice regolare di blocchi
11

CAPITOLO 2. STRUMENTI
Figura 2.1: Organizzazione interna di una FPGA.
riconfigurabili, o CLB (Configurable Logic Blocks), dei quali quelli sul contor-
no della matrice si occupano anche di gestire i segnali di Input/Output. I CLB
costituiscono l’unita base configurabile e sono collegati tra loro tramite una re-
te anch’essa configurabile secondo le necessita dell’utente; ogni CLB puo essere
programmato in modo da implementare uno qualsiasi tra i circuiti (combinatori
o sequenziali) supportati dalla FPGA. Internamente ogni CLB e formato da (tipi-
camente 4) slice e ogni slice puo contenere a sua volta diversi componenti logici
(come multiplexer, bistabili o altro) a seconda del modello di FPGA considerato.
Tipicamente all’interno delle slice sono present delle LUT (Look Up Tables); una
LUT opera come una funzione logica che, avendo N bit in ingresso, permette di
assegnare un valore all’unica uscita binaria per ciascuna delle 2N possibili confi-
gurazioni degli ingressi. Una rappresentazione fedele di una LUT e una tabella
con 2N righe e N + 1 colonne (N per gli ingressi e una per l’uscita).
2.1.2 FPGA utilizzata
Lo sviluppo del sistema evolutivo proposto si e basato sul design architetturale
proposto da Marco Castagna in [13], progettato per una FPGA Xilinx Virtex-4.
12

CAPITOLO 2. STRUMENTI
In particolare la board utilizzata e una Evaluation Platform della Xilinx, modello
ML403, equipaggiata con un chip XC4VFX12-FF668-10.
Evaluation board
La scheda utilizzata per l’implementazione dell’architettura e lo svolgimento dei
test di evoluzione e della famiglia ML40x Evaluation Board, presente nel labo-
ratorio di microarchitetture. Come si puo leggere nella guida per l’utente della
Xilinx [14], pur non essendo una board di alto livello, la ML403 offre, oltre alla
logica di controllo per il chip della FPGA, svariate possibilita di connessione; tra
queste quelle maggiormente sfruttate durante questo lavoro sono:
• La porta seriale RS-232, utilizzata per la visualizzazione dell’output su
terminale seriale con Baud-Rate di 9600Bps.
• La porta di configurazione JTAG, utilizzata con l’apposito cavo USB per
configurare il chip con l’architettura utilizzata, per caricare in memoria il
software da eseguire e per controllare l’avvio e l’interruzione dell’esecuzio-
ne da parte del processore.
Caratteristiche tecniche del chip
Il chip di cui dispone la scheda utilizzata offre tutti i vantaggi introdotti dalla fa-
miglia Virtex-4 ed e costruito con un processo produttivo a 90nm.
Alcuni esempi delle potenzialita del chip sono la disponibilita di BRAM con fre-
quenza di funzionamento di 500MHz, l’integrazione di un processore PowerPC
405 con frequenza di clock massima di 300MHz e il ridotto consumo di potenza
rispetto alle generazioni precedenti. Il chip supporta inoltre una grande quantita
di interfacce di I/O (Ethernet, RGB, audio, . . . ), solo alcune delle quali (elencate
poco sopra) sono state realmente utilizzate ai fini della creazione del framework
evolutivo.
Da un punto di vista architetturale, il chip si presenta come una classica matrice
di CLB di dimensioni 64X24, ogni CLB contiene 4 slice e ogni slice e compo-
sta di due LUT (dette LUTF e LUTG) e di alcuni altri componenti logici, come
13

CAPITOLO 2. STRUMENTI
bistabili e multiplexer; la Tabella 2.1 elenca le risorse configurabili presenti sulla
Virtex-4 utilizzata. Le quattro slice di ogni CLB sono raggruppate in due colonne
Tabella 2.1: Risorse disponibili sulla FPGA XC4VFX12-FF668-10.
Matrice di CLB slice LUT
64X24 5472 10944
e vengono distinte in SLICEM (quelle appartenenti alla colonna sinistra di ogni
CLB) e SLICEL (appartenenti alla colonna di destra); le differenze tra i due tipi
di slice non sono interessanti ai fini dell’architettura evolutiva, che utilizza com-
ponenti presenti in entrambi. Uno schema della struttura di un CLB presente sul
chip e visibile in Figura 2.3. Ogni CLB e connesso a quelli adiacenti per mezzo
di interconnessioni locali e puo accedere alle risorse globali della FPGA tramite
il collegamento ad una switch matrix; sono inoltre presenti dei data path inter-
ni ai blocchi che permettono, utilizzando dei multiplexer disponibili all’interno
delle slice, di combinare fino a 16 LUT (appartenenti a due CLB) per realizzare
funzioni a 8 ingressi.
Indirizzamento delle risorse
Per l’identificazione delle risorse la Xilinx propone nei suoi tool uno spazio di
indirizzamento per ogni tipologia di componente (CLB, slice, . . . ). Per ogni com-
ponente che appartiene ad uno schema di numerazione vengono definite due coor-
dinate (X, Y) che ne indicano la posizione all’interno della matrice; in particolare
(come si puo vedere in Figura 2.2) il componente con coordinate (X, Y) = (0, 0) si
trova in basso a sinistra. La Figura 2.3 mostra la struttura interna (descritta poco
sopra) riferita al CLB con coordinate (0, 0); si possono notare le quattro slice,
divise per colonne e le connessioni locali e verso la switch matrix. Una cosa da
tener presente e, che per quanto riguarda la riconfigurazione, viene utilizzato uno
spazio di indirizzamento diverso da quello basato su (X, Y) e appena esposto. Esi-
ste chiaramente un isomorfismo tra i diversi spazi di indirizzamento e la biiezione
tra i due e nota grazie al lavoro di analisi svolto in [13], che verra esposto nella
Sezione 3.3.
14

CAPITOLO 2. STRUMENTI
Figura 2.2: Collocazione delle risorse di un certo spazio di indirizzamento in dipendenza
dalle coordinate (X, Y).
Configurazione e riconfigurazione
Tutte le risorse della FPGA programmabili da parte dell’utente vengono configu-
rate per mezzo di una memoria volatile che viene scritta all’accensione del dispo-
sitivo o quando si procede ad una riconfigurazione. Questa memoria di configu-
razione e costituita da celle che definiscono le funzioni implementate dalle LUT,
il routing dei segnali (ovvero la topologia delle connessioni) e ogni altro aspetto
del design creato dall’utente. Per la scrittura della memoria di configurazione si
fa uso di una serie di comandi e istruzioni che, insieme ai dati da scrivere in me-
moria, costituiscono il bitstream di configurazione della FPGA. Diverse interfacce
(JTAG, SelectMAP o Slave/Master Serial) possono essere utilizzate per inviare il
bitstream alla scheda; in particolare, durante questo lavoro, e stata utilizzata l’in-
terfaccia JTAG con l’apposito cavo USB. Per la riconfigurazione e stata invece
utilizzata l’interfaccia HwIcap, che opera da controllore per la porta denominata
ICAP (ovvero Internal Configuration Access Port). La struttura del bitstream di
15

CAPITOLO 2. STRUMENTI
Figura 2.3: Struttura interna del CLB con coordinate (X, Y) = (0, 0) delle FPGA della
famiglia Xilinx Virtex-4.
configurazione per la Virtex-4, studiata sempre in [13], e esposta nella Sezione 3.3,
a cui si rimanda per maggior dettaglio.
2.2 Architettura utilizzata
2.2.1 Struttura generale
L’architettura su cui ci si e basati (sviluppata all’interno del gruppo di ricerca
HERA, ovvero Hardware Evolution over Reconfigurable Architecture) cerca di
coniugare le prime prove effettuate da Marco Castagna [13] con il lavoro di ri-
cerca svolto successivamente da Matteo Renesto [15]. I componenti fondamentali
che caratterizzano il sistema proposto sono gli stessi utilizzati nell’architettura
originaria. Gli individui soggetti al processo evolutivo sono ubicati in una regio-
ne riconfigurabile e la loro riconfigurazione avviene per mezzo dell’interfaccia
HwIcap (si rimanda alla Sottosezione 2.2.2 per ulteriori dettagli). L’interfaccia
16

CAPITOLO 2. STRUMENTI
tra l’applicazione (che viene eseguita sul PowerPC presente sulla scheda) e l’area
evolvibile e fornita dal Controller EHW (Evolvable HardWare). La comunica-
zione tra i vari componenti e garantita dalla presenza di un bus PLB al quale
i componenti stessi sono opportunamente connessi. In Figura 2.4 si puo vede-
re una rappresentazione grafica dell’architettura qui presentata. Se l’architettura
Figura 2.4: Schema a blocchi dell’architettura HERA.
proposta in [13] permetteva di far evolvere solo un individuo per volta, quella qui
presentata garantisce la possibilita di mantenere fino a 16 (utilizzando FPGA piu
capienti anche fino a 32) individui contemporaneamente sulla scheda e permette
quindi di riconfigurare un individuo mentre si valutano gli altri. Cio rappresenta
un notevole vantaggio dal punto di vista del tempo necessario per la convergenza
dell’algoritmo evolutivo (il tempo di riconfigurazione e un serio collo di bottiglia
alle prestazioni in termini di velocita) e garantisce il conseguimento di un risultato
ottimale in tempi piu brevi. Tale miglioramento e stato possibile grazie all’utilizzo
della versione 4.0 del Controller EHW, la cui struttura e proposta in [15].
Sono proprio questi due componenti, l’interfaccia HwIcap e il Controller EHW,
17

CAPITOLO 2. STRUMENTI
a caratterizzare l’architettura utilizzata e la loro trattazione verra quindi ulterior-
mente approfondita.
2.2.2 HwIcap
Il controller HwIcap e un componente disponibile sulla Virtex-4 ed e istanziabi-
le sulla FPGA come un IP-CORE disponibile nelle librerie messe a disposizione
dalla Xilinx nella categoria FPGA Reconfiguration. Esso infatti permette al pro-
cessore presente sulla scheda di leggere e scrivere la memoria di configurazione
della FPGA a run-time attraverso la porta di accesso alla configurazione interna
(Internal Configuration Access Port o ICAP); l’utente puo quindi scrivere pro-
grammi che modificano la struttura e le funzionalita della logica implementata
mentre questa e in funzione. L’HwIcap offre l’interfaccia necessaria a trasferire
bitstream alla e dalla porta ICAP e un insieme di funzioni per il controllo dello
stato della configurazione delle risorse sulla FPGA.
Piu nei dettagli l’interfaccia si compone di una memoria di scrittura FIFO, nella
quale sono memorizzate le configurazioni e dalla quale il processore legge per tra-
sferire i dati all’ICAP, e da una memoria di lettura (sempre FIFO), dove vengono
salvate le configurazioni lette dalla scheda tramite l’ICAP. Dei dieci registri inter-
ni che costituiscono il componente e opportuno citare, oltre al Write FIFO (WF)
e al Read FIFO (RF) i seguenti:
• Size Register (SR): contiene il numero di parole da 32 bit che devono essere
trasferite dall’ICAP alla memoria di lettura.
• Control Register (CR): determina la direzione del flusso di dati attraverso
due bit che, se scritti, attivano rispettivamente il processo di scrittura e let-
tura dalla scheda. Permette inoltre, attraverso altri due bit, di fare un clear
delle memorie FIFO e di resettare tutti i registri del componente.
• Status Register (SR): controlla lo stato del processo di lettura/scrittura, evi-
denziando eventuali errori di configurazione o disallineamento di dati. Al
suo interno e presente un bit, denominato bit Done, che viene portato a 1
18

CAPITOLO 2. STRUMENTI
ogni volta che la configurazione o la lettura sono stati portati a termine con
successo.
La Figura 2.5 schematizza quanto appena appuntato, fornendo una rappresenta-
zione schematica della struttura del modulo HwIcap. Il controllo dell’HwIcap a
Figura 2.5: Diagramma a blocchi della struttura del modulo HwIcap (fonte: [16])
livello software puo avvenire in due modi sostanzialmente differenti. Il primo
metodo, piu semplice e effettivamente utilizzato nel lavoro di implementazione
(Sezione 4.4), sfrutta le funzioni di lettura e scrittura messe a disposizione dalle
librerie Xilinx. A basso livello esso si compone di tre semplici passi:
• Selezione dell’azione da eseguire tramite scrittura nel registro di controllo:
– Scrivendo 0x00000001 nel CR si da inizio alla scrittura.
– Scrivendo 0x00000000 nel CR si fa partire la lettura.
• Scrittura del bitstream di configurazione nel registro Write FIFO o lettura
del bitstream dal registro Read FIFO.
• Controllo dello stato della lettura o della configurazione tramite lo Status
Register.
19

CAPITOLO 2. STRUMENTI
Nelle Figure 2.6 e 2.7 si puo vedere l’andamento temporale dei vari segnali du-
rante le operazioni di lettura e scrittura tramite la porta ICAP.
Figura 2.6: Grafico temporale dei segnali durante un ciclo di lettura (fonte: [16])
Figura 2.7: Grafico temporale dei segnali durante un ciclo di scrittura (fonte: [16])
Il secondo metodo, piu complesso, permette una gestione migliore e piu ot-
timizzata delle operazioni sfruttando gli interrupt. I segnali di interrupt generati
dall’HwIcap sono gestiti dall’ISC (Interrupt Service Controller), che offre anche
la maggior parte delle piu comuni funzionalita per la gestione degli stessi. L’abi-
litazione o meno del servizio di interrupt e affidata al primo bit del registro GIE
(Global Interrupt Enable Register). L’HwIcap e in grado di generare diversi se-
gnali di interrupt da inviare alla CPU a seconda dei bit abilitati nell’IP Interrupt
Status Register (IPISR). I tipi di interrupt possibili sono quattro e possono essere
generati nei seguenti casi:
• Se la memoria di lettura FIFO e piena.
• Se la memoria di scrittura FIFO e vuota.
• Se la dimensione della parte occupata di memoria Read FIFO e maggiore
della meta delle dimensioni della memoria stessa.
20

CAPITOLO 2. STRUMENTI
• Se la dimensione della parte occupata di memoria Write FIFO e maggiore
della meta delle dimensioni della memoria stessa.
Un terzo registro, IP Interrupt Enable Register (IPIER), permette di specificare,
tipo per tipo, quali interrupt si vogliono abilitare e quali si vuole restino disabili-
tati.
2.2.3 Controller EHW
Oltre all’interfaccia HwIcap l’altro modulo di rilievo dell’architettura e costitui-
to dal Controller EHW. Questo componente si occupa di gestire l’area riconfi-
gurabile dedicata agli individui in evoluzione fornendo la logica di controllo e i
collegamenti al PowerPC tramite bus PLB. La versione di riferimento per questa
trattazione e la 4.0, che rappresenta uno sviluppo (realizzato da Matteo Renesto
[15]) del componente originalmente sviluppato da Marco Castagna [13].
Area riconfigurabile
Nell’architettura HERA l’area della FPGA e divisa in due Sezioni: una parte sta-
tica che contiene il PowerPC, la BRAM e parte della logica di controllo (colonne
di sinistra della matrice) e una zona riconfigurabile, che viene gestita dal Con-
troller EHW e contiene le soluzioni candidate dell’algoritmo genetico (colonne di
destra). Nelle prime versioni (in particolare nel Controller EHW proposto in [13])
l’area riconfigurabile offre spazio per istanziare, in un dato istante, un solo indivi-
duo, che occupa una colonna di 32 slice (indifferentemente SLICEM o SLICEL)
ed e definito da una Hard Macro; la descrizione dettagliata della struttura dell’in-
dividuo si puo trovare nel Capitolo 3. La struttura degli individui e stata mantenuta
nei successivi sviluppi ed e la medesima che viene utilizzata dal sistema evolutivo
sviluppato in questo lavoro di tesi. La possibilita di allocare individui nell’area
riconfigurabile, invece, si e notevolmente ampliata nelle successive versioni del
componente (Figura 2.8), permettendo di allocare, nella versione 4.0, un massi-
mo di 32 individui contemporaneamente nell’area riconfigurabile. Per avere la
possibilita di istanziare piu di un individuo nell’area riconfigurabile e stato inse-
21

CAPITOLO 2. STRUMENTI
Figura 2.8: Confronto tra la vecchia (sinistra) e la nuova (destra) area riconfigurabile con
Management Logic.
rito un layer di controllo, denominato Management Logic, che redireziona i dati
in ingresso verso l’individuo selezionato e raccoglie i dati di output rendendoli
disponibili al PowerPC sul bus PLB.
Management Logic
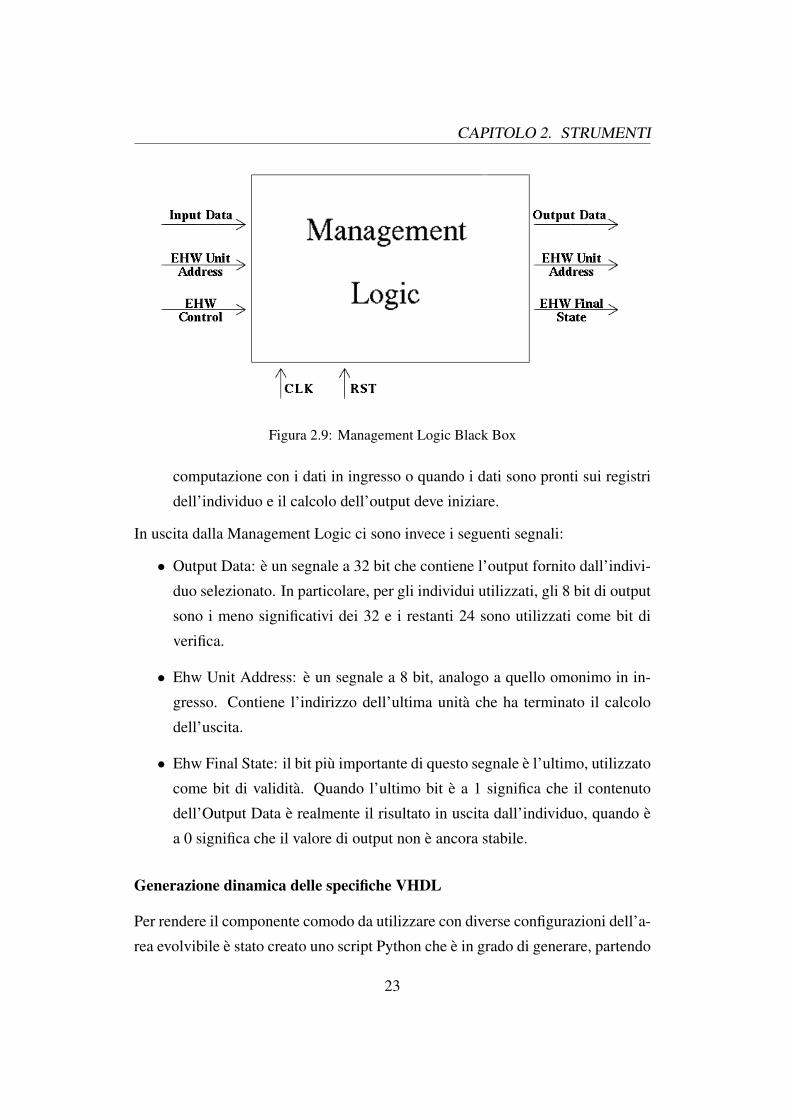
Osservando il modulo della Management Logic da un punto di vista esterno (ov-
vero come una scatola nera, come illustrato in Figura 2.9) si hanno i seguenti
segnali in ingresso:
• Input Data: e un segnale di 32 bit che viene trasportato in ingresso all’indivi-
duo selezionato. Utilizzando gli individui definiti dalla Hard Macro sopra-
citata solo gli ultimi 8 bit sono realmente utilizzati ponendoli sul datapath
in ingresso all’individuo.
• Ehw Unit Address: e un segnale di 8 bit che serve per selezionare uno
specifico individuo. Vista la dimensione del segnale, il numero massimo
teorico di individui indirizzabili e pari a 28 = 256.
• Ehw Control: e un segnale di controllo utilizzato per notificare quando l’ap-
plicazione seleziona un nuovo individuo e sara quindi necessario avviare la
22
CAPITOLO 2. STRUMENTI
Figura 2.9: Management Logic Black Box
computazione con i dati in ingresso o quando i dati sono pronti sui registri
dell’individuo e il calcolo dell’output deve iniziare.
In uscita dalla Management Logic ci sono invece i seguenti segnali:
• Output Data: e un segnale a 32 bit che contiene l’output fornito dall’indivi-
duo selezionato. In particolare, per gli individui utilizzati, gli 8 bit di output
sono i meno significativi dei 32 e i restanti 24 sono utilizzati come bit di
verifica.
• Ehw Unit Address: e un segnale a 8 bit, analogo a quello omonimo in in-
gresso. Contiene l’indirizzo dell’ultima unita che ha terminato il calcolo
dell’uscita.
• Ehw Final State: il bit piu importante di questo segnale e l’ultimo, utilizzato
come bit di validita. Quando l’ultimo bit e a 1 significa che il contenuto
dell’Output Data e realmente il risultato in uscita dall’individuo, quando e
a 0 significa che il valore di output non e ancora stabile.
Generazione dinamica delle specifiche VHDL
Per rendere il componente comodo da utilizzare con diverse configurazioni dell’a-
rea evolvibile e stato creato uno script Python che e in grado di generare, partendo
23

CAPITOLO 2. STRUMENTI
da dei file VHDL di base, tutte le specifiche necessarie per implementare l’IP-
CORE utilizzando un tool come EDK. Lo script funziona leggendo le informazio-
ni di base da alcuni file VHDL predefiniti e chiedendo all’utente quanti individui
intende istanziare nell’area riconfigurabile. L’output fornito dallo script e costi-
tuito da dei file VHDL che contengono la specifica per tutta la Management Logic
e da un file UCF che contiene i vincoli di area, specifici per questo componente,
da applicare all’architettura in fase di sintesi con EDK.
2.3 Strumenti software per lo sviluppo
2.3.1 EDK
L’ambiente di sviluppo scelto e EDK [10]. EDK, acronimo di Embedded Develo-
pement Kit, e stato utilizzato sia per implementare, sintetizzare, e caricare su sche-
da l’architettura hardware, che per progettare e sviluppare l’algoritmo genetico e
la comunicazione con la board. Questo strumento integra, infatti, un’interfaccia
per la creazione del design hardware e un editor per la scrittura di applicazioni da
far girare sul processore. EDK presenta una perfetta compatibilita con la scheda
utilizzata: il software e infatti fornito da Xilinx, societa produttrice della Virtex-4.
La versione utilizzata e la 9.2 (opportunamente aggiornata con l’ultimo service-
pack e la patch per l’abilitazione della riconfigurazione dinamica).
Il Base System Builder wizard, che viene presentato appena lanciato il software,
permette di creare una semplice architettura di base. Innanzitutto e necessario
selezionare una evaluation board equipaggiata con una FPGA Xilinx, il proces-
sore da utilizzare (PowerPC o MicroBlaze), le dimensioni e i tipi di memoria di
cui si vuole fare uso (Sdram, bram) e, se necessario, ogni altro componente uti-
le di cui la scheda e dotata; e possibile connettere, in un momento successivo,
ulteriori componenti al processore attraverso i bus di comunicazione presenti nel-
l’architettura. I componenti possono essere scelti tra una vasta libreria proposta
da Xilinx (l’HwIcap, utilizzato per la riconfigurazione parziale, ne rappresenta un
esempio), oppure creati ad hoc e quindi importati nel sistema (cosa che e stata fat-
24

CAPITOLO 2. STRUMENTI
ta per il Controller EHW). Di seguito si elencano in breve i comandi da eseguire
per provvedere, dopo aver dato le specifiche per l’architettura da sintetizzare, alla
creazione e al caricamento del file di configurazione per la FPGA.
• Libgen: a partire dal file MSS (Microprocessor Software Specification)
genera e configura in automatico le librerie ed i driver dei dispositivi per
l’architettura.
• Generate Netlist: crea una rete logica di porte e interconnessioni (la netlist),
mediante l’utilizzo dello strumento di sintesi Xst. Il risultato e un file NGD
(Native Generic Database) che contiene tutte le informazioni sul progetto e
sui suoi componenti.
• Generate Bitstream: genera il file di configurazione da caricare sulla FPGA.
• Compile Sources: si occupa della compilazione dei file che contengono il
codice che dovra essere eseguito dal processore.
• Update Bitstream: si occupa dell’inizializzazione della memoria delle istru-
zioni sulla FPGA.
• Download: carica il design prodotto sulla FPGA.
Tutti questi passi vengono eseguiti in maniera automatica dall’ambiente di svi-
luppo e portano alla configurazione del chip con un file binario prodotto a partire
dalle specifiche del design fornite a EDK.
Come accennato in precedenza, EDK offre anche un ambiente di sviluppo per
applicazioni software da far girare sul processore della FPGA. Due applicazioni
in linguaggio C vengono automaticamente create una volta completata la sinte-
si dello hardware: una per il test dell’architettura appena generata e una per il
test della memoria, entrambe personalizzabili a piacere. Ulteriori applicazioni
possono ovviamente essere create successivamente direttamente nell’ambiente di
sviluppo principale (Xps [10]) o utilizzando una versione modificata di Eclipse
(xps sdk [10]), orientata piu specificatamente alla programmazione (in linguag-
gio C) di software per il processore incluso nel chip della FPGA. La compilazione
25
CAPITOLO 2. STRUMENTI
dei sorgenti porta alla generazione di un file eseguibile dal processore (*.elf ). Una
sola delle applicazioni presenti puo essere contrassegnata per essere inizializzata
sulla bram. Nel caso le dimensioni del file .elf siano eccessive e tale file non pos-
sa essere contenuto nella bram, l’eseguibile deve essere scaricato manualmente in
una memoria piu capiente, tramite una console XMD. Per svolgere tale operazione
e sufficiente digitare alcuni semplici comandi in una shell XMD:
• Connect ppc hw: permette di connettersi al processore (un PowerPC nel
nostro caso).
• Dow elfName.elf: effettua il download dell’eseguibile nella DDRram.
• Run/stop: rispettivamente per lanciare e fermare l’esecuzione del program-
ma.
Ambienti operativi utilizzati
Vista la disponibilita dei software sviluppati dalla Xilinx sia per ambiente Win-
dows che per ambiente *nix, e stato possibile utilizzare EDK anche su Linux (in
particolare su una distribuzione Gentoo installata su un portatile con architettura
x86 64). Questa versatilita ha permesso (senza dover acquistare ulteriore soft-
ware proprietario) di utilizzare due macchine diverse per la programmazione (il
portatile appena citato) e la verifica (una workstation del laboratorio di microar-
chitetture con ambiente Windows) tramite terminale seriale dell’output da scheda.
Sempre l’utilizzo di due macchine con i tool della Xilinx ha permesso, quando
questo si e rivelato utile, di effettuare sintesi parallele di architetture simili con
piccole varianti, in modo da velocizzare i tempi di test per l’individuazione della
disposizione ottimale dei componenti.
2.3.2 Altri strumenti software
Vari altri software sono stati utilizzati nel corso di questo lavoro di tesi, anche
se meno intensivamente di EDK. iMPACT [11], tool sviluppato dalla stessa Xili-
nx, e stato talvolta sfruttato per caricare il file di configurazione dell’architettura
26

CAPITOLO 2. STRUMENTI
(download.bit) sulla scheda (operazione che puo comunque essere eseguita all’in-
terno di EDK). Per avere un’idea della struttura reale dell’area riconfigurabile e
stato invece utilizzato FPGA Editor [12], anch’esso sviluppato da Xilinx. FPGA
Editor permette, come detto, di rappresentare graficamente il sistema interessato,
ma anche di eseguire una serie di funzioni piu o meno complesse su di esso (dal
semplice esame dello stato dei segnali, al Place&Route di componenti critici del
sistema, alla completa progettazione di una architettura con un controllo a basso
livello). Nel nostro caso, FPGA Editor e stato unicamente utilizzato per verifica-
re la corretta disposizione dei diversi componenti, per sincerarsi del rispetto dei
vincoli imposti nel file .ucf e verificare quindi che non ci fossero dannose sovrap-
posizioni tra i vari componenti. Infine vale la pena citare alcuni semplici software
per la comunicazione tramite seriale, quali HyperTerminal e uCon, che hanno
permesso, utilizzando una connessione attraverso la porta seriale, di visualizzare
l’output del software in esecuzione sulla scheda.
27

CAPITOLO 2. STRUMENTI
28

Capitolo 3
Stato dell’arte
Il capitolo seguente riassume le principali attivita di ricerca note nell’area del-
l’hardware evoluto ed evolvibile su FPGA. L’esplorazione di questo campo e co-
minciata piuttosto di recente, verso la fine del secolo scorso, ma ha gia portato alla
luce dei risultati interessanti che incentivano ulteriori lavori di ricerca. Qui si da
una panoramica degli studi documentati fino ad oggi in letteratura: dai primi espe-
rimenti riguardanti l’evoluzione intrinseca svolti da Thompson (Sezione 3.1), pas-
sando per le successive sperimentazioni su Virtex-2 e Virtex-2 PRO (Sezione 3.2),
fino a trattare (nella Sezione 3.3) dei recenti approfondimenti sulla manipolazione
del bitstream delle Virtex-4 documentati in [13].
3.1 Primi esperimenti con FPGA
Come accennato nell’introduzione, fu Adrian Thompson [17, 18, 19], durante la
seconda meta degli anni ’90, ad interessarsi per primo a temi riguardanti l’evolu-
zione hardware su dispositivi riconfigurabili quali le FPGA. Il dispositivo scelto
da Thompson per i suoi esperimenti [18] fu una FPGA della famiglia XC6200,
prodotta dalla Xilinx (Figura 3.1). Thompson scelse questa scheda come base
evolutiva per una serie di ragioni, tra cui la sua facile reperibilita commerciale e la
presenza di alcune caratteristiche decisamente interessanti per l’evoluzione di cir-
cuiti hardware: un’ottima interfaccia di accesso alla memoria di configurazione,
29

CAPITOLO 3. STATO DELL’ARTE
la possibilita di riconfigurabilita parziale, l’elevata velocita di riconfigurazione, il
formato del bitstream completamente aperto e l’assenza di configurazioni di rou-
ting illegali. Quest’ultima caratteristica e particolarmente importante per l’esperi-
Figura 3.1: Struttura della FPGA Xilinx XC6200.
mento condotto da Thompson, che ebbe la possibilita di lasciare che l’evoluzione
esplorasse la massima ampiezza dello spazio delle soluzioni, senza preoccuparsi
di eventuali sequenze dannose per il chip all’interno del bitstream di configura-
zione.
Per il suo primo esperimento Thompson decise di lavorare sul bitstream corrispon-
dente ad un area di 10x10 blocchi riconfigurabili (Configurable Logic Block), con-
figurando le altre celle per produrre un valore costante, e sottoporlo direttamente
30

CAPITOLO 3. STATO DELL’ARTE
al processo evolutivo facendo uso di un algoritmo genetico standard. Il caso di
studio a cui applico la sua idea fu l’evoluzione di un discriminatore di tono in
grado di fornire in uscita un valore alto (+5V) nel caso in cui all’ingresso fosse
presente un’onda quadra ad alta frequenza (10KHz) e un valore basso (0V) nel
caso in cui fosse posta in ingresso un’onda quadra a bassa frequenza (1KHz). Il
circuito a cui si voleva giungere sarebbe dovuto essere in grado di discriminare
correttamente l’ingresso senza far uso di alcuna fonte esterna di clock.
L’obiettivo di Thompson, come detto, era quello di lasciare la massima liberta al
processo evolutivo per riuscire a sfruttare le caratteristiche peculiari del substrato
di silicio su cui era implementata la scheda; per ottenere questo la scelta ovvia e
stata quella di basare il processo evolutivo su un modello intrinseco. L’evoluzio-
ne avveniva quindi caricando sulla FPGA ogni individuo (attraverso l’inserimento
nella memoria di configurazione del bitstream corrispondente) e valutandone il
comportamento rispetto agli ingressi forniti. Il segnale di ingresso veniva appli-
cato su un piedino del chip predefinito ed era composto da 10 intervalli di durata
500ms, scelti con una distribuzione casuale, ma in modo che 5 fossero l’onda qua-
dra a 10KHz e gli altri 5 l’onda a 1KHz. Durante la fase di valutazione l’uscita
veniva valutata su un altro piedino predefinito e il suo valore veniva digitalizzato e
inviato ad un calcolatore per poterne valutare l’andamento. La funzione di fitness
implementata e quella proposta nella Equazione 3.1, dove con S1 e S10 sono indi-
cati gli intervalli in cui l’ingresso era rispettivamente a 1KHz e a 10KHz, mentre
it corrisponde al valore dell’integratore alla fine dell’intervallo t.
f =1
10
∣∣(k1 ∑t∈S1 it)−(k2 ∑t∈S10 it
)∣∣ con
{k1 = 1/30730.746
k2 = 1/30527.973(3.1)
La funzione scelta per valutare gli individui non specifica quale sia il valore de-
siderato in uscita per le due onde in ingresso, ma valuta la differenza tra i valori
medi delle uscite nei momenti in cui si presentano in ingresso i due segnali cam-
pione. Questa scelta e in linea con l’idea di Thompson di un percorso evolutivo
composto da piccoli passi incrementali, il meno possibile vincolato, in modo da
sfruttare al massimo tutte le caratteristiche del dispositivo utilizzato [17].
Le caratteristiche scelte per l’evoluzione furono:
31

CAPITOLO 3. STATO DELL’ARTE
• Cardinalita della popolazione pari a 50 individui.
• Probabilita di crossover del 70%.
• Probabilita di mutazione per ogni bit tale che il numero di mutazioni per
genotipo fosse in media 2.7.
• Elitismo per il miglior individuo di ogni generazione.
L’algoritmo e stato lasciato evolvere per 5000 generazioni e, ad evoluzione com-
pletata, il circuito corrispondente al miglior individuo e stato testato per un tempo
superiore rispetto a quello usato nell’evoluzione in modo da eliminare il contri-
buto dei disturbi e determinare esattamente quali CLB influissero effettivamente
sull’uscita. Alla fine del processo di generazione e testing, Thompson e perve-
nuto ad una soluzione funzionante utilizzando un numero decisamente limitato di
risorse rispetto a quelle disponibili. Il piu grande vantaggio ottenuto con l’utiliz-
zo di un algoritmo genetico e stato quello di astrarre dal comportamento tipico
della scheda presa in esame, utilizzando in modo differente i transistor (usati dal-
la soluzione selezionata non soltanto in zona di saturazione, come sarebbe tipico
per il dispositivo digitale sottostante). D’altro canto e inevitabile che il circuito
cosı ottenuto dipenda fortemente dalle caratteristiche dell’area di silicio utilizzata
e dalle sue proprieta fisiche, soprattutto dalla temperatura. In merito a cio e stato
verificato un decadimento di circa il 7% delle prestazioni implementando lo stes-
so circuito su di un’area differente della medesima FPGA. Lo stesso Thompson,
con il collega Lyzell, ha svolto ulteriori studi per tentare di limitare questa ecces-
siva specializzazione delle soluzioni rispetto alle specifiche condizioni fisiche di
evoluzione e alla specifica area di silicio utilizzata. L’evoluzione delle soluzioni
candidate e stata realizzata introducendo delle variabilita nelle condizioni al con-
torno (temperature d’esercizio variabili, diverse aree di silicio e varie condizioni
di alimentazione elettrica) e definendo un sistema di evoluzione definito Evolva-
tron [20]. Le conclusioni a cui sono giunti [21] dimostrano che e possibile far
evolvere individui che, arrivando comunque a risolvere il problema del caso di
test, sviluppano delle buone caratteristiche di resistenza a questo tipo di disturbi.
32

CAPITOLO 3. STATO DELL’ARTE
3.2 Evoluzione Hardware su FPGA Virtex-2 e Virtex-
2 PRO
Un lavoro analogo a quello svolto da Thompson non e piu realizzabile con i dispo-
sitivi moderni, infatti la Xilinx ha deciso di abbandonare la produzione di schede
riconfigurabili della famiglia XC6200 e le nuove FPGA in commercio non pre-
sentano alcune delle caratteristiche sfruttate in questi primi esperimenti. Come e
ovvio per un’azienda presente sul mercato, la Xilinx ha seguito, nello sviluppo
dei propri chip, criteri di decisione basati sull’opportunita commerciale e questi le
hanno imposto di togliere dalle nuove generazioni di FPGA proprio alcune delle
caratteristiche che le rendevano uno strumento cosı adatto all’implementazione
di circuiti hardware evolvibili. In particolare le nuove schede in commercio non
offrono piu un formato del bitstream aperto, che consentiva una facile manipola-
zione anche a basso livello dei componenti logici implementati. Nel 1998 e nato
il progetto Virtex, che ha portato alla produzione di chip tecnologicamente piu
avanzati, ma con alcune caratteristiche che ne rendono piu difficoltoso l’utilizzo
per l’evoluzione hardware. In primo luogo, come si accennava in precedenza,
il formato del bitstream e chiuso, ovvero non e noto come siano codificate le
informazioni relative ai circuiti implementati sul chip. Questa mancanza di in-
formazione rende necessario, nel caso in cui si voglia operare un’evoluzione gate
level (a basso livello), un pesante lavoro di ingegneria inversa per arrivare alla
decodifica del formato del bitstream. In secondo luogo l’introduzione del routing
multi-direzionale, che permette una maggiore flessibilita nel processo di riconfi-
gurazione, comporta pero la possibilita di caricare su scheda configurazioni illega-
li, che possono dare luogo al cortocircuito degli ingressi, danneggiando in modo
permanente il chip della FPGA. Per poter sfruttare le nuove possibilita introdotte
dalla famiglia Virtex si e dovuto cercare di ovviare a questi ostacoli e a questo
scopo i ricercatori hanno intrapreso due strade differenti. Da una parte la crea-
zione di Circuiti Virtuali Riconfigurabili (Virtual Reconfigurable Circuit o VRC),
realizzati con una struttura programmabile che utilizza le risorse della FPGA ma
si pone a piu alto livello, introducendo un layer di sicurezza e astrazione tra il
33

CAPITOLO 3. STATO DELL’ARTE
dispositivo logico riprogrammabile e il chip; dall’altra la manipolazione, diretta o
tramite API, del bitstream.
3.2.1 Circuiti Virtuali Riconfigurabili
La tecnica dei Circuiti Virtuali Riconfigurabili, proposta da Sekanina nel 1999
[22], propone di implementare un secondo layer riconfigurabile sulla FPGA, il
cui comportamento puo essere definito modificando il contenuto di una memoria
di configurazione; questo permette al progettista di scegliere a proprio piacimento
la relazione tra i singoli bit della memoria di configurazione e il comportamento
del circuito. L’approccio sopra descritto trova le sue basi in una particolare tecni-
ca chiamata Cartesian Genetic Programming (CGP) e si basa su una sua versione
semplificata, sviluppata da Miller [23] e altri. Un circuito hardware, che possiamo
anche chiamare “programma”, e visto come un insieme di nodi (o celle) disposti in
righe e colonne per formare un rettangolo di dimensioni note. Ogni nodo realizza
una particolare funzione logica. In questo modo e possibile realizzare il circuito
virtuale programmando direttamente il genotipo, senza bisogno di trasformarlo
nel bitstream di riconfigurazione della FPGA per poterlo implementare.
L’idea e quindi quella di sviluppare un circuito in modo che sia composto da
una serie di elementi programmabili, una rete di connessioni anch’esse program-
mabili, una memoria di configurazione e una porta di accesso a tale memoria.
Circuiti cosı organizzati permettono un’evoluzione di tipo funzionale: sebbene
questo approccio non abbia le potenzialita di “esplorazione” dello spazio delle
configurazioni tipiche dell’evoluzione a livello delle porte logiche, ha il vantaggio
di permettere un’evoluzione in tempi ridotti e un’elevata adattabilita e rapidita nel
processo di riconfigurazione. Una interessante caratteristica dei Circuiti Virtuali
Riconfigurabili, che li ha resi molto utilizzati tra i ricercatori, e quella di essere
implementati utilizzando un linguaggio di descrizione harware (HDL) o addirittu-
ra in C. Questo rende la definizione di VRC molto flessibile e portabile su diversi
dispositivi. Il processo di definizione di tale circuito puo essere sintetizzato in
quattro passi principali:
34
CAPITOLO 3. STATO DELL’ARTE
• Definizione della singola cella: in particolare occorre soffermarsi sui pro-
blemi di definizione dell’unita logica (quindi della funzione svolta dalla cel-
la) e dell’unita di controllo del routing, responsabile dell’instradamento dei
segnali.
• Creazione di una gerarchia di cella: questo passo e utile per creare un singo-
lo schema complessivo composto da diverse celle elementari; questi schemi
saranno successivamente composti per creare schemi di dimensioni ancora
maggiori.
• Sintesi logica: il codice HDL scritto nei due punti precedenti viene ora
sintetizzato al fine di produrre una rappresentazione a livello delle porte
logiche (dipendente dall’architettura della FPGA scelta).
• Place and route: il circuito virtuale viene infine collocato sulla scheda e ne
viene eseguito il routing.
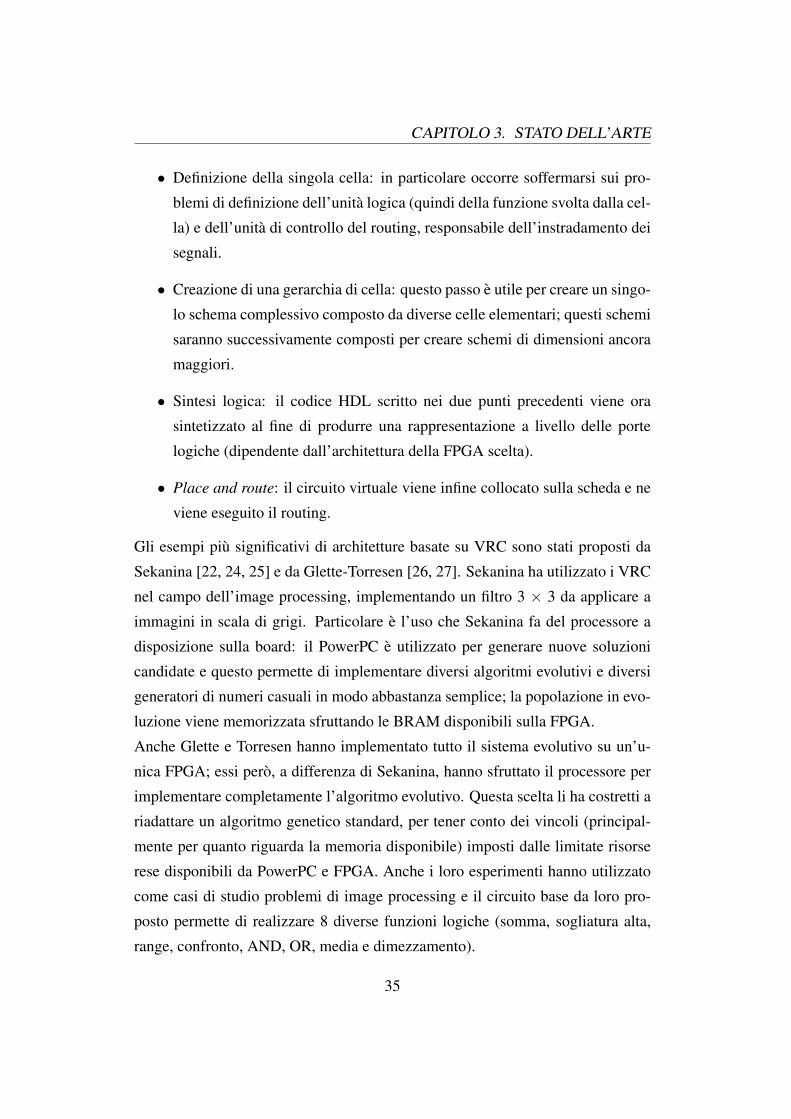
Gli esempi piu significativi di architetture basate su VRC sono stati proposti da
Sekanina [22, 24, 25] e da Glette-Torresen [26, 27]. Sekanina ha utilizzato i VRC
nel campo dell’image processing, implementando un filtro 3 × 3 da applicare a
immagini in scala di grigi. Particolare e l’uso che Sekanina fa del processore a
disposizione sulla board: il PowerPC e utilizzato per generare nuove soluzioni
candidate e questo permette di implementare diversi algoritmi evolutivi e diversi
generatori di numeri casuali in modo abbastanza semplice; la popolazione in evo-
luzione viene memorizzata sfruttando le BRAM disponibili sulla FPGA.
Anche Glette e Torresen hanno implementato tutto il sistema evolutivo su un’u-
nica FPGA; essi pero, a differenza di Sekanina, hanno sfruttato il processore per
implementare completamente l’algoritmo evolutivo. Questa scelta li ha costretti a
riadattare un algoritmo genetico standard, per tener conto dei vincoli (principal-
mente per quanto riguarda la memoria disponibile) imposti dalle limitate risorse
rese disponibili da PowerPC e FPGA. Anche i loro esperimenti hanno utilizzato
come casi di studio problemi di image processing e il circuito base da loro pro-
posto permette di realizzare 8 diverse funzioni logiche (somma, sogliatura alta,
range, confronto, AND, OR, media e dimezzamento).
35

CAPITOLO 3. STATO DELL’ARTE
I vantaggi principali dei Circuiti Virtuali Riconfigurabili risiedono nella loro adat-
tabilita e nella rapidita di riconfigurazione. I sostenitori dei VRC ritengono, infatti,
che i sistemi di riconfigurazione parziale (come l’Internal Configuration Access
Port, offerta dalla Xilinx), necessari per un’evoluzione con manipolazione del bi-
tstream, non offrano prestazioni accettabili. D’altro canto, gli svantaggi dei VRC
sono riassumibili con la maggiore richiesta di area (dovuta all’utilizzo di un li-
vello di astrazione sulle risorse della FPGA), la limitata esplorazione delle risorse
fisiche e la minore resistenza ai guasti.
In Figura 3.2 si puo vedere la struttura tipica di un VRC, in particolare quello pro-
posto da Sekanina. Si puo notare come questo offra un livello di astrazione sulle
risorse della FPGA.
Figura 3.2: Struttura del VRC proposto da Sekanina [28].
36

CAPITOLO 3. STATO DELL’ARTE
3.2.2 Manipolazione del bitstream
Un approccio alternativo a quello dei VRC di fronte alla chiusura del formato
del bitstream e stato quello di proseguire con la manipolazione della stringa di
configurazione. La scelta di operare in questo modo comporta ovviamente del
lavoro aggiuntivo a causa della mancanza di informazione riguardo alla codifica
del bitstream. Sono stati sviluppati due approcci alla manipolazione del bitstream
di cui uno si pone ancora ad un livello di astrazione superiore, utilizzando come
strumento di riconfigurazione un set di API Java denominato JBits, mentre l’altro
si propone di trattare direttamente il bitstream della FPGA.
JBits: API Java per la manipolazione del bitstream
JBits e una libreria, scritta in linguaggio Java, che offre una utile interfaccia di
configurazione per la manipolazione del bitstream delle schede appartenenti al-
la famiglia Virtex. La versatilita offerta da questo strumento rappresenta il suo
maggior vantaggio: le classi Java sono infatti in grado di operare sia su bitstream
generati utilizzando i tools della Xilinx, sia su quelli letti direttamente da un dispo-
sitivo, permettendo la modifica dinamica della configurazione della FPGA. JBits
offre un modello di programmazione rappresentabile tramite un array bidimensio-
nale di CLB, ognuno dei quali e indirizzato da un numero di riga e da un numero
di colonna. Occorre notare, tuttavia, che questa soluzione non impedisce, in gene-
rale, di creare configurazioni illegali. Per evitare di danneggiare il dispositivo un
possibile modo di operare e modificare solo le risorse di interesse (tipicamente le
funzioni logiche che definiscono i vari componenti di base) dopo averle corretta-
mente riconosciute all’interno del bitstream (questo puo essere fatto modificando
un bitstream valido di partenza dopo aver compreso la posizione e la struttura del-
le sezioni di interesse). Una volta generata una configurazione valida e possibile
inviarla alla FPGA facendo uso di una apposita interfaccia, denominata XHWIF,
fornita direttamente da Xilinx. La stessa interfaccia puo essere utilizza anche per
recuperare il bitstream di una configurazione presente sulla scheda.
Tra i primi ricercatori che utilizzarono l’API appena descritta per l’evoluzione
hardware si possono trovare Levi e Guccione. Gli studi dei due si concentraro-
37

CAPITOLO 3. STATO DELL’ARTE
no nello sviluppo di un intero framework dedicato a tale scopo, noto con il no-
me di GeneticFPGA [29]. In Figura 3.3 e data una rappresentazione del flusso
evolutivo implementato da questo framework. Il flusso evolutivo proposto e cosı
Figura 3.3: Rappresentazione del flusso evolutivo proposto in [29].
sintetizzabile:
• Generazione del bitstream che rappresenta la soluzione candidata su cui si
vuole operare.
• Caricamento su scheda ed evoluzione dell’individuo con operatori genetici.
• Lettura del nuovo genotipo evoluto e sua analisi con gli strumenti offerti da
JBits.
Il primo punto e necessario per generare il genotipo (bitstream) che codifica il
fenotipo dell’individuo da evolvere. La generazione viene attuata utilizzando del-
le classi offerte da JBits, che permettono anche di inserire delle strutture statiche
prima di scaricare la configurazione sulla scheda. Una volta caricato l’individuo
sulla scheda e realizzata l’evoluzione, la configurazione viene estratta e analizzata
facendo uso della API JBits. In tal modo e possibile dare un punteggio all’indivi-
duo e continuare la valutazione della popolazione.
38

CAPITOLO 3. STATO DELL’ARTE
Altri ricercatori hanno cercato di ovviare alla particolare lentezza che ha mostrato
l’implementazione proposta da Levi-Guccione. Tra questi il lavoro piu interessan-
te e quello dovuto agli studi di Tyrrell nel campo della robotica autonoma [30].
L’architettura proposta da Tyrrell presenta un tempo di riconfigurazione sensi-
bilmente inferiore a quella utilizzata da Levi e Guccione, poiche e in grado di
sfruttare la riconfigurazione parziale. Infatti essa richiede di modificare (con l’uso
di JBits) soltanto il contenuto delle tabelle di definizione delle funzioni logiche
(Look Up Tables o LUT) e non tutto il bitstream. Tale architettura non e, pero,
priva di difetti, riscontrabili in una struttura di interconnessioni tra le LUT troppo
semplificata e nell’assenza di elementi di memoria.
Nonostante il largo uso che i ricercatori hanno fatto della libreria JBits, essa pre-
senta delle notevoli limitazioni [31]: l’impossibilita di effettuare evoluzione on
chip (poiche le piattaforme embedded non sono supportate), l’incompatibilita con
altri linguaggi di descrizione hardware, il supporto ridotto ad un numero piuttosto
limitato di chip e board e un supporto limitato da parte della stessa Xilinx.
Manipolazione diretta del bitstream
Per le ragioni appena esposte alcuni ricercatori hanno deciso di adottare altre solu-
zioni per la manipolazione del bitstream a partire dalle FPGA della serie Virtex-2.
Di particolare interesse sono le tre tecniche sfruttate da Upegui e Sanchez [31].
La prima tecnica si basa sulla riconfigurazione Module Based [32]: tale approccio
impone di effettuare un design altamente modularizzato, in cui l’unita minima di
riconfigurazione e rappresentata dai singoli moduli (permettendo una evoluzione
a grana grossa adatta a strutture modulari, quali le reti neurali). I vincoli imposti
dalla struttura basata su moduli sono numerosi e fissano a priori molte caratteri-
stiche delle soluzioni (ad esempio, per l’evoluzione di una rete neurale, bisogna
rispettare il numero degli strati che la compongono, fissato a priori, e sono fissati
anche i segnali di connessione tra gli strati e quelli di ingresso/uscita). In que-
sto ambito un algoritmo evolutivo puo quindi al massimo effettuare una sorta di
esplorazione architetturale alla ricerca della miglior disposizione dei moduli. La
scelta dei moduli avviene, solitamente, all’interno di una libreria di moduli gia
39

CAPITOLO 3. STATO DELL’ARTE
sintetizzati, poiche sarebbe impraticabile lasciare che l’algoritmo modifichi libe-
ramente la descrizione in HDL di ogni modulo.
La seconda tecnica si basa sul flusso di riconfigurazione Difference Based [33]
e permette un’evoluzione piu fine. Essa consente infatti di modificare porzioni
ridotte del design, come la configurazione di una singola CLB o addirittura di
una sola LUT all’interno di questa. Requisito indispensabile per eseguire questa
tecnica e fornire una descrizioni in linguaggio HDL del sistema, includendo delle
hard macro che definiscano la porzione del dispositivo che si intende riconfigura-
re. L’idea proposta dai due ricercatori prevede che l’algoritmo evolutivo generi il
contenuto delle LUT da riconfigurare e quindi venga invocato uno script capace
di generare il bistream parziale da caricare sulla FPGA.
Bisogna notare che i due approcci citati si basano sui flussi di riconfigurazione
parziale proposti dalla Xilinx (Module Based e Difference Based) [34] e sfruttano
dei tool appositamente prodotti per questi flussi.
L’ultima tecnica proposta e anche la piu interessante ai fini di questo lavoro di tesi.
Essa consiste infatti nella manipolazione diretta del bitstream, ottenuta evolvendo
unicamente il contenuto delle LUT, dopo aver definito a priori uno schema di inter-
connessione (hard macro), senza utilizzare alcuno strumento intermedio. Poiche,
come detto, la struttura del bitstream della Virtex-2 utilizzata da Upegui e San-
chez era sconosciuta, l’ostacolo principale e rappresentato dall’identificazione del
contenuto delle LUT all’interno del bitstream stesso. Nella documentazione della
Xilinx si trovano indicazioni solo sul fatto che il bitstream sia diviso in una serie
di colonne, ognuna delle quali e suddivisa in un certo numero di frame (che sono
l’unita minima di riconfigurazione). Gran parte degli sforzi di Upegui e Sanchez
si sono quindi concentrati nel lavoro di ingegneria inversa della stringa di confi-
gurazione, effettuato operando dei confronti tra bitstream ottenuti sintetizzando
circuiti differenziati da piccole modifiche nella configurazione delle sole LUT. Il
lavoro di reverse engineering ha permesso di individuare all’interno del bitstream
le sezioni che codificano le LUT presenti nei CLB della Virtex-2, consentendo
quindi di effettuare, dopo aver definito una struttura base di interconnessione, una
evoluzione mirata con la modifica incrementale delle sole sezioni di interesse.
40

CAPITOLO 3. STATO DELL’ARTE
In merito alla definizione dell’architettura di base per la manipolazione diretta del
bitstream si puo inoltre notare, tra le varie proposte presenti in letteratura, una
certa analogia con le strutture dei Circuiti Virtuali Riconfigurabili; ad esempio
Tufte e Haddow [35, 36] hanno proposto una struttura cellulare per Virtex-E (la
cui struttura e visibile nella Figura 3.4). Al contrario dei VRC, in cui le singo-
le celle vengono progettate astraendo rispetto alla tecnologia implementativa, in
questo secondo caso la struttura e l’ubicazione delle celle dipende strettamente
dalle proprieta della specifica FPGA. Questa differenza e affatto non trascurabi-
Figura 3.4: Rappresentazione della struttura cellulare proposta in [35, 36]
le, dal momento che permette di sfruttare la riconfigurazione parziale, una volta
nota la posizione della risorsa da manipolare all’interno del genotipo (ovvero del
bitstream parziale di configurazione).
Sono noti diversi test effettuati implementando la stessa struttura tramite Circuiti
Virtuali Riconfigurabili e tramite manipolazione diretta del bitstream: il risultato
e stato che in media la prima soluzione occupa 5 volte lo spazio occupato dalla
seconda. In particolare alcuni test sono stati condotti, ancora da Upegui [37], im-
plementando una struttura simile a quella cellulare proposta da Tufte. La struttura
proposta si compone di celle, connesse a quelle adiacenti, che offrono in uscita
sui quattro lati uno tra i quattro ingressi o lo stato interno della cella, definito in
termini dei segnali di ingresso e del valore di un Flip-Flop interno. Utilizzando
un approccio di manipolazione diretta ogni cella richiede 4 slices di una Virtex-2
per l’implementazione e puo quindi essere mappata in un solo CLB. La stessa cel-
la, implementata secondo il paradigma dei VRC in seguito alla creazione di una
opportuna descrizione HDL, e risultata richiedere 18 slices, ovvero 5 CLB della
41

CAPITOLO 3. STATO DELL’ARTE
Virtex-2. Ulteriori test svolti su questa struttura sono consistiti nell’assemblare
una griglia di 5×6 celle del tipo descritto e nell’utilizzo dell’interfaccia di ricon-
figurazione Icap. La riconfigurazione parziale richiede, in questo caso, la modifica
di 24 frame (4 per ogni colonna dell’array) per la parte relativa alle connessioni
e di 6 frame (un frame per colonna) per cambiare il contenuto della regola della
cella. L’evoluzione e resa possibile dall’utilizzo di un processore MicroBlaze (im-
plementato sulla FPGA), dallo sfruttamento della memoria BRAM interna per il
codice dell’algoritmo evolutivo e di una SRAM esterna per la memorizzazione dei
genotipi. Per permettere l’accesso allo stato delle celle da parte del processore,
infine, sono state implementate delle interfacce ad-hoc.
Una simile tecnica di manipolazione diretta del bitstream porta i suoi migliori
vantaggi se applicata ai bitstream delle FPGA della serie Virtex-4 e successive;
su questi chip e infatti possibile sfruttare la possibilita di riconfigurazione 2D che
essi offrono. Come si vede dalla Figura 3.5, la riconfigurazione 2D permette di
modificare solo alcune parti di una colonna, dando la possibilita di allocare diver-
si individui all’interno della stessa colonna di CLB. Con le vecchi Virtex, invece,
volendo riconfigurare una certa porzione di una colonna si era comunque obbli-
gati a riprogrammarla tutta. Gli esperimenti fin qui menzionati utilizzano FPGA
Figura 3.5: Possibile allocazione degli individui con (a destra) e senza (a sinistra)
possibilita di configurazione 2D.
42

CAPITOLO 3. STATO DELL’ARTE
che permettono solo una riconfigurazione monodimensionale, ovvero e necessario
riconfigurare un’intera colonna di CLB per volta. La riconfigurazione bidimen-
sionale invece offre la possibilita di riconfigurare anche una sola cella senza dover
riconfigurare l’intera colonna di CLB. I vantaggi apportati dalla riconfigurazio-
ne bidimensionale sono sostanzialmente due: bitstream di dimensioni ridotte e
migliore sfruttamento dell’area della FPGA. Questo secondo punto in particolare
puo consentire di implementare simultaneamente piu individui sulla scheda, ef-
fettuando una valutazione parallela delle soluzioni candidate con una riduzione
notevole dei tempi di evoluzione. Queste possibilita sono ampiamente esposte in
[13] e riassunte nella prossima Sezione 3.3.
3.3 Evoluzione hardware su FPGA Virtex-4
La piu importante fonte di ispirazione e di informazioni per lo sviluppo di questo
lavoro di tesi (e la base architetturale su cui e stato sviluppato l’algoritmo geneti-
co) e il lavoro documentato in [13]. Gli studi di quest’ultimo si sono concentrati
sulla comprensione, seppur parziale, della struttura del bitstream di configurazio-
ne della FPGA scelta (Virtex-4, XC4VFX12) attraverso un’opera di analisi. E
stata quindi proposta una possibile architettura per il sistema evolutivo in grado di
sfruttare la riconfigurazione bidimensionale offerta dal dispositivo scelto.
3.3.1 Analisi del bitstream
Come noto l’unita minima di riconfigurazione per le Virtex (e quindi anche per la
Virtex-4) e costituita dal frame: la memoria di configurazione del chip XC4VFX12
utilizzato si compone di 3.848 frame, ognuno dei quali e composto da 41 parole
da 32 bit. Oltre che da questi frame un bitstream completo incorpora alcuni co-
mandi necessari per controllare la logica di configurazione, che e costituita da un
processore di pacchetti (che controlla il flusso di dati provenienti dall’interfaccia
di configurazione e lo dirige verso i vari registri di configurazione), un set di regi-
stri (che controllano il processo di configurazione e riconfigurazione) e una serie
43
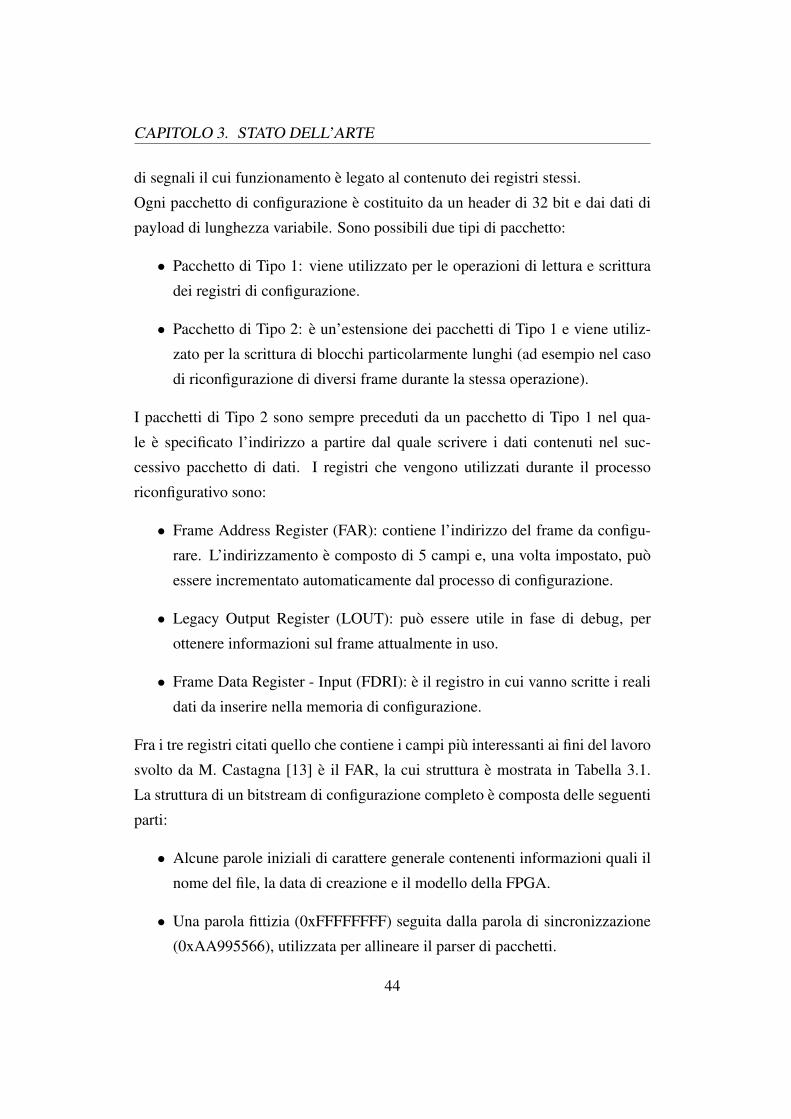
CAPITOLO 3. STATO DELL’ARTE
di segnali il cui funzionamento e legato al contenuto dei registri stessi.
Ogni pacchetto di configurazione e costituito da un header di 32 bit e dai dati di
payload di lunghezza variabile. Sono possibili due tipi di pacchetto:
• Pacchetto di Tipo 1: viene utilizzato per le operazioni di lettura e scrittura
dei registri di configurazione.
• Pacchetto di Tipo 2: e un’estensione dei pacchetti di Tipo 1 e viene utiliz-
zato per la scrittura di blocchi particolarmente lunghi (ad esempio nel caso
di riconfigurazione di diversi frame durante la stessa operazione).
I pacchetti di Tipo 2 sono sempre preceduti da un pacchetto di Tipo 1 nel qua-
le e specificato l’indirizzo a partire dal quale scrivere i dati contenuti nel suc-
cessivo pacchetto di dati. I registri che vengono utilizzati durante il processo
riconfigurativo sono:
• Frame Address Register (FAR): contiene l’indirizzo del frame da configu-
rare. L’indirizzamento e composto di 5 campi e, una volta impostato, puo
essere incrementato automaticamente dal processo di configurazione.
• Legacy Output Register (LOUT): puo essere utile in fase di debug, per
ottenere informazioni sul frame attualmente in uso.
• Frame Data Register - Input (FDRI): e il registro in cui vanno scritte i reali
dati da inserire nella memoria di configurazione.
Fra i tre registri citati quello che contiene i campi piu interessanti ai fini del lavoro
svolto da M. Castagna [13] e il FAR, la cui struttura e mostrata in Tabella 3.1.
La struttura di un bitstream di configurazione completo e composta delle seguenti
parti:
• Alcune parole iniziali di carattere generale contenenti informazioni quali il
nome del file, la data di creazione e il modello della FPGA.
• Una parola fittizia (0xFFFFFFFF) seguita dalla parola di sincronizzazione
(0xAA995566), utilizzata per allineare il parser di pacchetti.
44

CAPITOLO 3. STATO DELL’ARTE
Tabella 3.1: Struttura del registro FAR.
Campo Bit Descrizione
Top/Bottom 22Seleziona i frame appartenenti alla meta
superiore o inferiore del dispositivo.
Tipo di Blocco 21:19
I tipi disponibili sono: CLB/IO/CLK (000),
block RAM Interconnect (001), block
RAM content (010), CFG CLB (011) e
CFB BRAM (100).
Row Address 18:14
Seleziona una riga di frame. Tale indi-
rizzo aumenta allontanandosi dal centro del
dispositivo.
Major Address 13:6
Seleziona una colonna di risorse. La colon-
na piu a sinistra ha indirizzo pari a 0 e viene
incrementato andando verso destra.
Minor Address 5:0Seleziona un particolare frame all’interno di
una colonna.
• Una prima serie di pacchetti, costituenti il preambolo, usati per effettuare
l’inizializzazione del processo di configurazione.
• La codifica dell’area da da configurare (indirizzato al registro FDRI), che e
il contenuto vero e proprio della memoria di configurazione.
• Una serie finale di pacchetti per le operazioni di finalizzazione del processo
di configurazione e avvio del normale funzionamento del dispositivo.
Per quanto riguarda le operazioni di riconfigurazione parziale la struttura del bi-
tstream si presenta in modo leggermente differente rispetto ad una configurazione
completa, poiche viene interessata solo una parte del dispositivo e non viene in-
terrotto il funzionamento della parte restante.
La parte piu interessante del lavoro di analisi qui presentato e quella riguardante
la ricerca, a basso livello, della codifica del contenuto delle LUT all’interno della
memoria di configurazione (questa informazione non e infatti documentata dalla
45

CAPITOLO 3. STATO DELL’ARTE
Xilinx). L’approccio con il quale si e tentato di raggiungere questo obiettivo e
stato quello di generare dei design molto semplici a cui apportare piccole modifi-
che: il loro confronto ha permesso di dedurre un ridotto numero di regole per la
costruzione di tali bitstream a partire dal contenuto desiderato per le LUT. Ovvia-
mente nel corso di tale confronto non sono state prese in considerazione tutte le
differenze, ma solo quelle relative all’effettivo contenuto della memoria di confi-
gurazione. Le relazioni che legano l’indirizzo della slice (in termini di coordinate
X e Y) e il contenuto del frame sono mostrate dalle equazioni seguenti.
Ma jor = Ma jor(X) =⌊x
2
⌋+Ad j(X) (3.2)
Ad j(X) =
1 se 0≤ X ≤ 23
3 se 24≤ X ≤ 31
4 se 32≤ X ≤ 47
(3.3)
Minor = Minor(X) =
{21 se X e pari
19 se X e dispari(3.4)
Row = Row(Y ) =
1 se 0≤ Y ≤ 31
0 se 32≤ Y ≤ 95
1 se 96≤ Y ≤ 127
(3.5)
Top/Bottom = Top/Bottom(Y ) =
{1 se 0≤ Y ≤ 63
0 se 64≤ Y ≤ 127(3.6)
Questa analisi ha permesso di identificare il frame che configura una slice di coor-
dinate note. Il passo successivo e stato quello di capire quali fossero gli effettivi
byte di codifica delle LUT all’interno del frame che contiene la slice di apparte-
nenza. Si e scoperto che la posizione dei byte di interesse all’interno del frame e
funzione della sola coordinata Y e che l’andamento del valore del valore del byte
del frame all’interno del quale inizia il byte ricercato (ByteStart) presenta una forte
regolarita. Per le slice appartenenti alla parte superiore della FPGA (Top/Bottom
= 0) e per lo stesso tipo di LUT tale valore cresce ad intervalli regolari di 5 byte e
questo schema resta valido fino ad arrivare alla LUT con coordinata Y tale che Y
% 32 = 15. Dalla LUT successiva si ripete ancora la sequenza ma con un offset di
una parola di 32 bit. Per quanto riguarda i due frame appartenenti alla meta infe-
46

CAPITOLO 3. STATO DELL’ARTE
riore del dispositivo e possibile osservare lo stesso schema, ma in ordine inverso.
In definitiva il mattone costitutivo del bitstream e rappresentato da un blocco di 5
byte, all’interno del quale si trovano i contenuti della LUTF e della corrispondente
LUTG (che occupano in totale 4 byte), mentre gli 8 bit rimanenti si trovano prima
della LUTF, dopo la LUTG o tra esse a seconda dei risultati ottenuti applicando
queste formule:
TopByteStart(Y,LUT ) = 5 · (Y %32)+Ad jLUT (LUT )+Ad jY (Y ) (3.7)
Ad jLUT (LUT ) =
{0 se LUT == FLUT
2 se LUT == GLUT(3.8)
Ad jY (Y ) =
{4 se Y %32 > 15
0 se Y %32≤ 15(3.9)
ByteStart(Y,LUT ) =
TopByteStart(Y,LUT ) se Y ≥ 64
162−TopByteStart(Y,LUT )
−Ad jG(LUT ) se Y ≤ 63
(3.10)
Ad jG(LUT ) =
{0 se LUT == FLUT
1 se LUT == GLUT(3.11)
In particolare le formule precedenti permettono di calcolare il ByteStart (Equa-
zione 3.10), ovvero il byte del frame di configurazione entro cui inizia la codifica
della LUT che si vuole localizzare.
Se si e interessati a conoscere non solo il byte, ma anche il primo bit di contenuto
della LUT si possono usare le seguenti equazioni per calcolare BitStart, ovvero il
bit di inizio della codifica della LUT all’interno del frame che la contiene.
Ad jBit(Y,LUT ) =
7 se LUT == GLUT & Y ≥ 64
1 se LUT == GLUT & Y ≤ 63
0 altrimenti
(3.12)
BitStart(Y,LUT ) = 8 ·ByteStart(Y,LUT )+Ad jBit(Y,LUT ) (3.13)
In Figura 3.6 si puo vedere una rappresentazione grafica della struttura del bi-
tstream di configurazione per un frame della meta superiore del chip. Risultati
sperimentali hanno infine permesso di affermare che i bit di configurazione delle
47

CAPITOLO 3. STATO DELL’ARTE
Figura 3.6: Rappresentazione della struttura di un frame della meta superiore di una
Virtex-4 (Top/Bottom = 0) secondo l’analisi presentata in [13].
slice della parte inferiore del dispositivo hanno ordine invertito rispetto a quelli
della meta superiore.
Un discorso a se merita la parola centrale (ovvero la ventesima) di ogni frame.
Essa viene ricalcolata ogni qual volta vengano apportate delle modifiche al frame
di configurazione e funziona da parola di controllo. Il formato binario di questa
checkword dipende dal contenuto delle LUT del frame e viene calcolato in modo
incrementale per ogni bit posto a 1. In particolare e stato appurato che il calcolo
viene effettuato come XOR bit a bit di un certo numero di checkword “locali’ che
possono essere calcolate per ogni bit posto a 1 all’interno delle LUT del frame.
Per riuscire a calcolare la parola centrale e quindi sufficiente comprendere come
avviene il calcolo delle parole di controllo per i singoli bit. Dopo svariati test sono
stati raggiunti i seguenti risultati:
• I primi 11 bit della checkword locale funzionano da indice per la coordinata
Y della slice contenente la LUT che contiene il bit in questione. L’indice
ha un valore di partenza di 704, che corrisponde al bit 0 del frame, e viene
incrementato come descritto nelle formule dalle Equazioni dalla 3.14 alla
3.16.
• Il dodicesimo bit e un controllo di parita dispari sui precedenti 11.
Il calcolo delle checkword locali puo procedere quindi riutilizzando la formula
per il calcolo del BitStart e la posizione del bit di interesse all’interno della LUT
48

CAPITOLO 3. STATO DELL’ARTE
che lo contiene (BitPos):
CheckWordBase = 704+ calcolaBitStart(Y,LUT )+BitPos (3.14)
CheckWordAd j = 32 se y%32 > 7 (3.15)
CheckWord = CheckWordBase +CheckWordAd j (3.16)
Una volta note tutte le checkword per i bit alti del frame si puo procedere allo
XOR bit a bit per il calcolo dei primi 11 bit della parola centrale e al controllo di
parita per l’impostazione del dodicesimo bit (posto a 1 in caso di parita dispari dei
valori alti nei primi 11 bit); i rimanenti 20 bit della parola rimangono a 0.
Bisogna notare che i risultati esposti sono validi per frame che appartengono alla
meta superiore del dispositivo (Top/Bottom = 0). I calcoli sono comunque analo-
ghi, con piccole modifiche di simmetria, per quanto riguarda la meta inferiore del
dispositivo.
3.3.2 Architettura proposta
Gli ottimi risultati ottenuti nell’analisi del bitstream, che hanno portato ad indi-
viduare la codifica delle LUT all’interno dei frame di configurazione, possono
essere sfruttati in un processo evolutivo. Il lavoro di ricerca documentato in [13] e
concentrato soprattutto sulla definizione della struttura hardware dell’area ricon-
figurabile e dei meccanismi che consentono di poterla manipolare, piuttosto che
nell’implementazione dell’algoritmo evolutivo e dei dettagli ad esso legati (atti-
vita che e alla base di questo lavoro di tesi). L’architettura ivi proposta e composta
da:
• Un PowerPC: il processore si occupa dell’esecuzione dell’algoritmo evolu-
tivo, della creazione delle informazioni necessarie per la riconfigurazione
della porzione evolvibile del sistema e della valutazione degli individui.
• L’interfaccia HwIcap: componente sviluppato dalla Xilinx per l’interfac-
ciamento con la logica di configurazione della FPGA, fornita dalla Internal
Configuration Access Port.
49

CAPITOLO 3. STATO DELL’ARTE
• Il Controller EHW: interfaccia per l’I/O degli individui implementati nel-
l’area riconfigurabile.
Per il sistema esposto in [13] si e deciso di realizzare una soluzione basata sulla
manipolazione del bitstream piuttosto che sfruttare i Circuiti Virtuali Riconfigu-
rabili. Questa scelta e dovuta al fatto che l’uso dei VRC richiede un maggior
numero di risorse e garantisce una minore resistenza ai guasti, pur offrendo una
maggiore rapidita di configurazione. Si possono notare notevoli analogie tra que-
sta architettura e quella implementata da Upegui e Sanchez [31] (in particolare
ci si riferisce al terzo metodo, basato su una manipolazione piu a basso livello
del bitstream); la principale differenza risiede nel diverso dispositivo utilizzato:
una Virtex-4 in questo caso, una Virtex-2 PRO nel caso analizzato in precedenza.
Per quanto riguarda l’architettura qui esposta non sono stati utilizzati i tool della
Xilinx, ma l’implementazione e avvenuta direttamente su scheda. Per evitare di
danneggiare la FPGA caricando delle configurazioni illegali e per semplificare il
processo di analisi, la strategia e stata quella di modificare solo il contenuto delle
LUT, mantenendo una struttura prefissata di collegamento tra le celle (definita con
una Hard Macro). La scelta di quali connessioni utilizzare e stata fatta a priori al
momento del design della porzione evolvibile del sistema e il routing dei segnali
risulta quindi statico durante l’evoluzione. La capacita di modificare la funzione
calcolata dalle LUT operando direttamente sul bitstream e stata acquisita grazie al
lavoro di analisi del formato di configurazione esposto in precedenza.
L’architettura proposta e stata progettata tenendo conto della tipologia e della di-
sposizione delle risorse disponibili sulla FPGA, delle caratteristiche principali del-
l’algoritmo evolutivo (pur provvisorio e limitato all’evoluzione estrinseca) che si
e utilizzato e del tipo di applicazione per la quale ci si proponeva di utilizzare il
circuito da realizzare. Il sistema evolvibile e stato progettato anche e soprattutto
per poter sfruttare una caratteristica molto importante della Virtex-4 gia accennata
in precedenza: la riconfigurabilita bidimensionale; questo progetto risulta essere
il primo presente in letteratura a sfruttare questa funzionalita offerta dalle nuove
schede della famiglia Virtex. Per poter sfruttare tutte le possibilita offerte del pro-
cesso evolutivo sono stati pensati tre livelli gerarchici: un livello basso, nel quale
50

CAPITOLO 3. STATO DELL’ARTE
vengono modificatii singoli bit delle LUT, un livello medio, nel quale vengono
modificati contemporaneamente tutti i bit di una LUT, un livello alto, che permet-
te di aggregare piu LUT in strutture complesse.
Analizzando un po’ piu nei dettagli l’architettura proposta in [13] si puo notare
come, ad alto livello, la struttura e un array bidimensionale di celle, ognuna con
quattro ingressi e una uscita da un bit, connesse tra di loro e organizzate in quattro
righe e n colonne. Tutte le colonne condividono lo stesso segnale di clock. Una
struttura simile era gia presente in letteratura: la novita di quella proposta consiste
nel fatto che le singole celle non sono piu connesse alle altre quattro adiacenti
lungo le direzioni cardinali, ma l’architettura e organizzata in colonne e ogni cella
appartenente alla colonna x e connessa alle uscite delle quattro celle appartenen-
ti alla colonna x − 1 (o direttamente agli ingressi per le celle appartenenti alla
colonna 0). Ogni cella si configura come una funzione logica a cinque ingressi:
quattro sono i segnali in ingresso alla cella, il quinto e rappresentato dallo stato
interno della cella, memorizzato sfruttando uno dei flip-flop presenti nelle slices
della FPGA. Per realizzare il generatore di funzioni a cinque ingressi e necessario
collegare due LUT (una LUTF e una LUTG) a quattro degli ingressi (quelli pro-
venienti dall’esterno) mediante un multiplexer controllato dal quinto ingresso (lo
stato proveniente dal flip-flop). Sia le due LUT sia il multiplexer a cinque ingressi
sono disponibili in una singola slice (Figura 3.7) e questo permette (come limite
teorico, senza considerare i problemi di routing dei segnali) di allocare quattro
celle per ogni CLB. Per definire il comportamento di una singola cella sono ne-
cessari 32 bit: 16 per la codifica della funzione implementata dalla LUTF e 16 per
quella che comanda la LUTG. Quanto esposto porta ad avere una cella di dimen-
sioni 4 volte piu piccole rispetto a quelle proposte in letteratura. Le singole celle
costituiscono il livello piu basso della gerarchia. Il livello superiore e rappresen-
tato da una colonna di celle: ogni colonna puo essere a sua volta vista come una
cella con quattro segnali di ingresso, quattro segnali di uscita e uno stato interno
di quattro bit.
Altra interessante caratteristica di questa architettura e l’allocazione fisica di tutte
le celle di primo livello sulla stessa colonna di slice. In questo modo, e possibile
51

CAPITOLO 3. STATO DELL’ARTE
Figura 3.7: Rappresentazione della struttura di una cella dell’architettura proposta in [13].
riconfigurare un’intera colonna o addirittura un intero individuo modificando un
unico frame della FPGA. L’architettura esposta poco sopra conta pero su un input
molto ridotto di soli 4 bit. Per aumentare il numero di bit in ingresso e stata pro-
posta un’architettura modificata che presenta colonne composte da 8 celle, la cui
struttura interna non e stata modificata rispetto a quanto esposto in precedenza.
Le soluzioni proposte per il collegamento delle colonne sono svariate, in Figu-
ra 3.8 sono riportati i due esempi piu interessanti. Lo schema ad alto livello scelto
per implementare il design con datapath da 8 bit collega le celle con coordinata
Y pari ai 4 bit meno significativi in uscita dalla colonna precedente (o dell’in-
gresso nel caso delle celle della colonna 0) e quelle con coordinata Y dispari ai
4 bit piu significativi. Questa soluzione consente di avere uno schema di collega-
mento identico per ogni colonna di celle, il che permette di poter scambiare due
colonne indipendentemente dalla loro posizione all’interno dell’individuo senza
necessita di modificare i collegamenti. Inoltre, anche in questo caso, e sufficiente
riscrivere un unico frame per riconfigurare un’intera colonna (vengono utilizzate
8 slice, cioe una per ogni cella, delle 32 contenute in un frame). Nella Figura 3.9
si puo vedere una rappresentazione della struttura dell’individuo; sono evidenziati
52

CAPITOLO 3. STATO DELL’ARTE
Figura 3.8: Esempi di possibili collegamenti tra le colonne.
i collegamenti tra le celle delle diverse colonne. Sono state testate diverse alloca-
zioni degli individui sopra definiti sulla scheda. Tra le disposizioni sperimentate
ne sono emerse due in particolare: una prima allocazione orizzontale consiste nel
posizionare le colonne di celle su colonne di slice adiacenti. In questo modo ogni
colonna che compone l’individuo appartiene ad un frame differente dalle altre e
puo essere riconfigurata indipendentemente da esse. Sulla scheda utilizzata e con
la suddetta disposizione, e possibile impilare fino a quattro colonne di altrettanti
individui per ogni frame e per riconfigurare un individuo allocato usando questa
soluzione e necessario scrivere n frame, dove n e il numero di colonne che lo com-
pongono. Il vantaggio e che, manipolando un solo frame, e possibile riconfigurare
fino a quattro individui (ovvero una colonna di ognuno di quelli impilati all’inter-
no del frame riconfigurato); se si alloca un numero ridotto di individui, tuttavia, si
perde buona parte del vantaggio ottenibile andando a riconfigurare piu soluzioni
candidate in parallelo. Il secondo schema di allocazione proposto e verticale, cioe
tutte le colonne di un individuo sono allocate sulla stessa colonna di slice. Se si
53

CAPITOLO 3. STATO DELL’ARTE
Figura 3.9: Struttura dell’individuo con datapath a 8 bit.
sceglie un individuo formato da quattro colonne, questa configurazione ha il van-
taggio di contenere tutto l’individuo in un solo frame, quindi solo questo frame
dovra essere riscritto nel caso l’individuo voglia essere riconfigurato. In generale,
per riconfigurare un individuo composto da n colonne, sara necessario riscrivere
n/4 frame.
L’ultima parte di [13] tratta della progettazione di un componente che funga da
interfaccia in grado di gestire i segnali di controllo necessari per il funzionamento
del design proposto, di sottoporre il dato di ingresso al circuito e recuperare il dato
54

CAPITOLO 3. STATO DELL’ARTE
in uscita e di inviare e ricevere i dati di ingresso e uscita verso il PowerPC. Tale
componente, denominato Controller EHW, e un IP-core in grado di interfacciarsi
con il PowerPC tramite il bus PLB. Il funzionamento del componente e piuttosto
semplice: letto un segnale di ingresso di 8 bit il componente lo instrada verso l’in-
dividuo allocato sulla board; dopo 4 cicli di clock il segnale di uscita (anch’esso
di 8 bit) avra un valore stabile, pari a cio che e stato computato dall’individuo.
3.3.3 Ulteriori tentativi
In letteratura e davvero ridotto il numero di lavori relativi all’evoluzione a grana
fine su Virtex-4 o successive (che permettono di sfruttare la riconfgurabilita bidi-
mensionale). In [38] Rafla descrive un framework evolutivo basato su Virtex-4 e
progettato per la Computer Vision, in particolare per l’image processing. Tuttavia
nel documento non sono spiegati i dettagli implementativi del sistema; oltretut-
to l’autore afferma, erroneamente, che con la FPGA utilizzata non e possibile
effettuare riconfigurazione interna. Altro lavoro interessante per gli argomenti
qui trattati e [39]. In esso vengono presentate tre diverse soluzioni al problema
dell’evoluzione intrinseca su FPGA:
• un sistema basato su riconfigurazione a basso livello run-time;
• un sistema che utilizza la libreria JBits;
• un sistema che si caratterizza per l’utilizzo di piu schede (Multi-Board).
I primi due sistemi proposti effettuano una evoluzione gate-level, mentre il terzo
propone una evoluzione a livello funzionale. Per i nostri scopi il sistema piu in-
teressante risulta essere il primo; sfortunatamente pero esso viene solo accennato
nel documento, poiche la non conoscenza del formato del bitstream non ne ha
permesso l’implementazione. Gli altri due sistemi sono stati infatti studiati come
soluzione ai problemi scaturiti dal primo tentativo.
Come gia accennato, il lavoro in [13] (il cui contenuto e stato riassunto in questo
Capitolo) risulta quindi essere il piu importante finora in questo ambito e merita
quindi di essere preso come base di partenza per questo lavoro di ricerca.
55

CAPITOLO 3. STATO DELL’ARTE
56
Capitolo 4
Sistema Evolutivo
La trattazione presentata in questo capitolo riguarda il cuore del lavoro svolto per
questa tesi: viene infatti esposto quanto e stato fatto per la progettazione e l’ef-
fettiva implementazione del sistema evolutivo. Nella Sezione 4.1 vengono trattate
le strutture dati utilizzate per la rappresentazione delle popolazioni di soluzioni
candidate da far evolvere; successivamente (Sezione 4.2) si passa a presentare
l’implementazione dell’algoritmo evolutivo utilizzato. Infine le Sezioni 4.3 e 4.4
trattano, rispettivamente, dell’utilizzo del Controller EHW e dell’interfaccia di
riconfigurazione HwIcap.
4.1 Rappresentazione e strutture dati
Per realizzare un software che potesse essere il piu possibile flessibile e parametri-
co si e scelto di modellare gli individui in memoria a un livello logico piu leggibile
e strutturato rispetto al bitstream che li rappresenta su scheda.
Sono stati quindi creati degli opportuni tipi e strutture di dati che rappresentano
le generazioni a vari livelli (dalla popolazione ai bit di codifica delle Look Up Ta-
bles) e si e scelto di effettuare le operazioni genetiche su questi oggetti strutturati,
in modo da avere un controllo ad alto livello sul processo di evoluzione.
57
CAPITOLO 4. SISTEMA EVOLUTIVO
4.1.1 Popolazioni e individui
Una popolazione e rappresentata come una struttura dati che permette di specifi-
care il numero progressivo della generazione corrispondente durante l’evoluzione
e contiene un vettore di individui. La rappresentazione degli individui ha richiesto
qualche decisione sulla loro struttura, valutata anche in base alle possibilita offerte
dallo hardware utilizzato. In particolare ogni individuo e formato da una matrice
di celle contenenti ognuna due Look Up Tables (LUT), che codificano i circuiti
che costituiscono fisicamente l’individuo su scheda (per una spiegazione piu esau-
stiva in merito si veda la Sottosezione 2.1.2). La matrice di celle e suddivisa in
moduli (un modulo corrisponde ad una colonna della matrice) e la sua dimensione
e del tutto parametrica ed esprimibile in dimensione (DIM MODULO) e numero
(DIM INDIVIDUO) dei moduli (Figura 4.1). La struttura dati di ogni individuo
permette inoltre di memorizzare il fitness calcolato durante l’evoluzione.
4.1.2 Rappresentazione delle celle
Data la struttura dell’individuo, e stato necessario trovare una rappresentazione ef-
ficace per le due LUT presenti in ogni cella. Vista l’assenza in C di un tipo di dato
binario o booleano si e scelto di rappresentare le LUT di ogni cella accorpandole
in un’unica stringa di 32 bit, rappresentata con un intero senza segno (denominato
int32), utilizzando i bit piu significativi per le LUTF e i bit meno significativi per
le LUTG (Figura 4.2). La scelta di definire un tipo apposito e stata dettata dalla
iniziale necessita di sviluppare il codice su una architettura (x86 64) diversa da
quella della fpga (powerpc) in modo che, in caso di diversita nella dimensione
dei tipi primitivi, sarebbe bastato modificare la definizione dell’int32, senza altre
conseguenze sul codice.
Per la manipolazione diretta dei singoli bit delle LUT (necessaria, ad esempio,
per estrarre un certo bit da una LUT o per operare mutazioni a basso livello) sono
state definite delle opportune funzioni che sfruttano gli operatori bitwise del C.
In particolare sono state implementate funzioni che permettono di leggere, impo-
stare a 1 o a 0 o invertire un certo bit di una LUT. In questo modo la gestione
58

CAPITOLO 4. SISTEMA EVOLUTIVO
Figura 4.1: Rappresentazione gerarchica di un individuo.
Figura 4.2: Rappresentazione di una cella su di un int32.
di qualsiasi operazione sulle celle puo essere fatta operando a piu livelli: a basso
livello, direttamente sui singoli bit di codifica, oppure ad alto livello, modificando
direttamente tutta una LUT o addirittura entrambe le LUT di una cella.
59

CAPITOLO 4. SISTEMA EVOLUTIVO
4.1.3 Altri tipi di dato
Durante l’implementazione del codice, sempre nel tentativo di limitare le riper-
cussioni in caso di diverse rappresentazioni con il cambio di architettura, e stato
ritenuto opportuno definire altri due tipi di dato per codificare una stringa di 16 bit
(int16) e un singolo byte.
4.2 Evoluzione ed operatori genetici
L’evoluzione delle soluzioni candidate avviene all’interno di un ciclo che si ripete
fino al raggiungimento di una delle condizioni di terminazione (raggiungimen-
to del numero massimo di generazioni, presenza di un individuo con fitness pari
o superiore ad una certa soglia o individui troppo simili tra loro, ovvero varianza
troppo bassa all’interno della popolazione), valutate rispetto a valori di soglia defi-
niti a seconda del contesto evolutivo. Il seguente Algoritmo 2 e una trascrizione in
pseudocodice dell’algoritmo genetico implementato in linguaggio C per il sistema
evolutivo, che viene trattato piu nel dettaglio nella prossima Sottosezione 4.2.1.
4.2.1 Popolazione e individui
Oltre alla dimensione degli individui e possibile specificare la cardinalita delle
popolazioni, che si mantiene costante durante l’evoluzione.
Da un punto di vista dell’algoritmo genetico l’evoluzione comincia con la crea-
zione di una prima popolazione, le cui celle vengono inizializzate in modo casuale
(eventualmente si puo scegliere di inizializzarle a partire da un set predefinito di
configurazioni), e con il calcolo del fitness degli individui cosı generati. Dopo
questa fase di inizializzazione puo cominciare il ciclo di evoluzione, che prevede
l’utilizzo dei classici operatori genetici di elitismo, mutazione e crossover.
Da un punto di vista implementativo si e cercato, per quanto possibile, di otti-
mizzare l’esecuzione, evitando inutili copie di dati durante l’evoluzione. Questa
ricerca si e scontrata con il problematico supporto da parte del processore della
FPGA per l’allocazione dinamica della memoria. La soluzione che e stata per-
60

CAPITOLO 4. SISTEMA EVOLUTIVO
Algoritmo 2 Pseudo-codice del ciclo evolutivo utilizzato.1: pop← newPopolazione()
2: nextPop← newPopolazione()
3: InizializzazioneHwIcap()
4: InizializzazioneCasuale(pop)
5: Valutazione(pop)
6: while (numGenerazione() < nMaxGenerazioni &&
bestFitness(pop) < maxFitness &&
varianza(pop) > minVarianza) do7: Elitismo(pop,nextPop)
8: Crossover(pop,nextPop)
9: Mutazione(pop,nextPop)
10: Valutazione(nextPop)
11: pop← nextPop
12: end while13: return pop
61
CAPITOLO 4. SISTEMA EVOLUTIVO
corsa e di istanziare in modo separato le strutture dati e dei puntatori ad esse,
in modo da poter eseguire dei semplici reindirizzamenti dei puntatori piuttosto
che delle dispendiose copie. In fase di inizializzazione vengono quindi dichiarate
due popolazioni, delle quali una e la reale prima generazione e l’altra e utilizzata
per compilare la generazione successiva durante l’evoluzione. Al termine di ogni
iterazione del ciclo evolutivo i puntatori alle due strutture vengono scambiati, in
modo che la nuova popolazione attuale punti alla struttura appena generata e la
struttura dati della vecchia popolazione venga utilizzata per essere riempita con
gli individui della generazione ancora successiva. Allo stesso modo anche all’in-
terno di una popolazione gli individui sono istanziati come puntatori a strutture
dichiarate separatamente, in modo da facilitare il riordino della popolazione stes-
sa in base al fitness degli individui, utile per lo sfruttamento dell’elitismo.
Ad ogni ciclo evolutivo gli individui della generazione attuale evolvono in quella
successiva utilizzando le classiche operazioni genetiche di elitismo, mutazione e
crossover. Inizialmente alcuni individui vengono copiati per elitismo, mentre per
tutti gli altri possono avvenire sia la mutazione che (a coppie) il crossover.
4.2.2 Elitismo
Il supporto all’elitismo e implementato in modo molto semplice nel ciclo evolu-
tivo. Ad ogni iterazione la prima cosa che viene fatta e copiare gli N migliori
individui della vecchia popolazione in quella nuova. Il numero Nelite degli indivi-
dui scelti per elitismo dipende dalla costante PERC ELITISMO, che indica la di-
mensione dell’elite di individui che sopravvivono, in percentuale sulla cardinalita
della popolazione; in particolare si ha:
Nelite = |Popolazione| ∗PERC ELIT ISMO (4.1)
4.2.3 Mutazione
Grazie alla struttura modulare della rappresentazione degli individui l’implemen-
tazione del classico operatore genetico di mutazione permette di operare, a se-
conda delle necessita, a diversi livelli. Assegnando alla costante LIVELLO MUT
62

CAPITOLO 4. SISTEMA EVOLUTIVO
uno tra gli opportuni valori predefiniti e possibile scegliere fra cinque granularita
di mutazione; in particolare (in ordine crescente di finezza):
• livello modulo (costante LIVELLO MODULO):
La mutazione dell’individuo avviene reinizializzando in modo casuale uno
tra i moduli dell’individuo.
• livello cella (costante LIVELLO CELLA):
L’individuo viene mutato con una nuova inizializzazione casuale di una sua
cella (ovvero di due sue LUT adiacenti).
• livello bit:
Questo livello permette la mutazione a granularita piu fine, invertendo i bit
delle LUT dell’individuo; sono possibili tre diverse scelte:
– un singolo bit (costante LIVELLO BIT):
L’individuo mutato presenta un unico bit invertito rispetto all’indivi-
duo mutante.
– un bit per modulo (costante LIVELLO MODULO BIT):
Viene invertito un singolo bit per ogni modulo dell’individuo.
– un bit per cella (costante LIVELLO CELLA BIT):
La mutazione inverte un bit all’interno di ogni cella dell’individuo.
Le diverse scelte che vengono operate a seconda del livello scelto (ovvero la scel-
ta della sezione o del bit da modificare) sono fatte in maniera casuale, sfruttando
la funzione pseudo-random offerta dal linguaggio C rand(). Vista l’assenza sulla
board utilizzata di un orologio di sistema, non e stato possibile utilizzare (co-
me viene in genere fatto) la funzione time() per l’inizializzazione della rand();
si e quindi scelto di utilizzare una combinazione lineare di indirizzi di variabili
precedentemente istanziate in modo da ottenere, tra le diverse esecuzioni, valori
ragionevolmente casuali.
Come richiesto da qualsiasi algoritmo genetico e possibile anche definire la proba-
bilita con cui, individuo per individuo, avviene la mutazione; questa impostazio-
63

CAPITOLO 4. SISTEMA EVOLUTIVO
ne viene fatta assegnando alla costante PROB MUTAZIONE un valore decimale
compreso tra 0 (nessuna mutazione) e 1 (mutazione certa per ogni individuo).
4.2.4 Crossover
Il crossover avviene per coppie di individui della popolazione; due individui fanno
da genitori e vengono sezionati lungo una certa linea. L’operazione, se avviene,
genera due figli, ottenuti affiancando in modo alternato le quattro porzioni otte-
nute dal taglio degli individui genitori. Anche in questo caso, come per la muta-
zione, e possibile operare su piu livelli, che permettono di scegliere la modalita di
sezionamento degli individui genitori:
• livello modulo (costante LIVELLO MODULO):
Il taglio avviene lungo un modulo; quindi gli individui figli sono costituiti
da una giustapposizione dei moduli degli individui genitori.
• livello cella (costante LIVELLO CELLA):
La linea di sezione puo attraversare un modulo all’altezza di una qualsiasi
delle sue celle.
In Figura 4.3 sono rappresentati graficamente i due diversi tipi di tracciato della
linea di taglio per il crossover. Sempre in modo analogo alla mutazione, anche per
il crossover c’e una costante a cui assegnare uno tra i valori sopracitati per la scelta
della granularita (LIVELLO CROSS) e una costante (PROB CROSSOVER) in
cui indicare la probabilita di esecuzione del crossover per ogni coppia di individui;
nel caso in cui il crossover non venga eseguito i due figli, nella nuova generazione,
coincidono con gli individui genitori della vecchia generazione.
4.3 Controller EHW
Perche l’algoritmo evolutivo, implementato come descritto nella Sezione prece-
dente, possa funzionare correttamente e necessario valutare il funzionamento dei
64

CAPITOLO 4. SISTEMA EVOLUTIVO
Figura 4.3: Modalita di esecuzione del taglio degli individui genitori a seconda della
granularita scelta.
circuiti che costituiscono il fenotipo delle soluzioni candidate (ovvero degli indi-
vidui in evoluzione); per fare cio e stata utilizzata l’interfaccia fornita dal Con-
troller EHW. Questo componente (il cui funzionamento e descritto nella Sottose-
zione 2.2.3) offre una interfaccia di Input/Output verso e dagli individui presenti
sulla FPGA.
4.3.1 Utilizzo dell’area riconfigurabile
L’algoritmo genetico implementato non sfrutta per ora le possibilita offerte dal
Controller EHW in merito alla riconfigurazione e valutazione concorrente di in-
dividui diversi. Si e comunque deciso, in vista di sviluppi futuri, di sfruttare la
65
CAPITOLO 4. SISTEMA EVOLUTIVO
possibilita di avere piu di un individuo caricato sulla FPGA. Sono stati dunque
attuati i seguenti accorgimenti:
• Sono stati istanziati due array contenenti le coordinate X e Y delle posizioni
del CLB contenente la prima slice del frame entro cui vanno codificati gli
individui nella zona riconfigurabile.
• A partire dal primo individuo valutato durante il processo evolutivo si uti-
lizzano in sequenza i frame indicati nei due array di coordinate.
Questo modo di operare consente, se si utilizza un numero di individui al piu pari
al numero di individui gestibili tramite il Controller EHW, di avere contempo-
raneamente sulla scheda tutte le soluzioni candidate della popolazione che viene
processata in quel momento. Per ora non ci sono evidenti vantaggi da questo
punto di vista, ma il framework e gia pronto a supportare sviluppi in termini di
parallelizzazione delle operazioni di valutazione e riconfigurazione.
4.3.2 Valutazione degli individui
Chiaramente la valutazione delle performance dei singoli individui viene fatta se-
condo una certa funzione di fitness, che e pero del tutto dipendente dall’appli-
cazione per cui si mette in atto il processo evolutivo e va quindi riprogettata a
seconda di cio che si desidera ottenere. In particolare questa consiste tipicamente
in una valutazione del valore dato in uscita dalla soluzione candidata in dipenden-
za da cio che le viene fornito in ingresso.
Da un punto di vista generale e invece interessante l’utilizzo fatto delle funzioni C
offerte dal driver del Controller EHW per gestire le operazioni di ingresso e uscita
degli individui. A questo scopo sono state scritte due apposite funzioni che effet-
tuano le operazioni di basso livello richieste dal componente, esponendo al ciclo
evolutivo un’interfaccia di alto livello verso le operazioni di comunicazione con
le soluzioni candidate presenti sulla scheda. La funzione di invio dell’ingresso ad
un certo individuo opera come segue:
• Viene azzerato il registro di controllo (EHW Control) della Management
Logic per iniziare una nuova operazione.
66

CAPITOLO 4. SISTEMA EVOLUTIVO
• Si pone in EHW Unit Address l’indirizzo (numero progressivo da 0 a N−1,
dove N e il numero di individui supportati) dell’individui a cui inviare i dati.
• Sul registro Input Data viene scritto l’input desiderato.
• Si pone a 1 il valore dell’ultimo bit del registro EHW Control, avvisando
la Management Logic che il dato in ingresso e pronto e deve essere inviato
all’individuo precedentemente indirizzato.
Gli individui utilizzati richiedono 4 cicli di clock per la stabilizzazione dell’uscita,
una volta fornito loro il dato in ingresso; dopo questo tempo il software si occupa
di leggere l’output dato dall’individuo al momento analizzato in questo modo:
• Si attende la certezza della validita dell’output verificando che il bit numero
8 del registro Final State sia a 1.
• L’uscita fornita dall’individuo viene letta dal registro Output Data.
Per come si opera non e necessario verificare che l’output letto sia effettivamente
stato prodotto dall’individuo che si vuole considerare; questa verifica potrebbe
rendersi necessaria in futuro nel caso di valutazione parallela delle soluzioni.
La parte che rimarra fissa tra le varie implementazioni della funzione di fitness
dovra quindi utilizzare le funzioni di I/O sopra esposte fornendo agli individui un
ingresso di interesse e valutando secondo i criteri evolutivi scelti l’uscita fornita.
4.4 Interfaccia HwIcap
Una volta definita la struttura degli individui (sia da un punto di vista logico che
da un punto di vista circuitale) e necessario, per il funzionamento dell’algoritmo
genetico, che sia possibile riprogrammare la FPGA con gli individui che vengono
via via generati, in modo che l’evoluzione possa realmente avvenire. Per fare que-
sto e stata utilizzata l’interfaccia di riconfigurazione HwIcap offerta dalla Xilinx
per la Virtex-4, che permette la riconfigurazione parziale di uno o piu frame. La
struttura scelta per gli individui si accorda perfettamente con questa possibilita e
permette di riconfigurare esattamente ogni individuo posto sulla scheda.
67
CAPITOLO 4. SISTEMA EVOLUTIVO
4.4.1 Calcolo degli indirizzi
Prima di passare all’HwIcap il bitstream vero e proprio, contenente la configu-
razione desiderata, e necessario calcolare la parola di configurazione del registro
FAR in funzione delle coordinate X e Y del frame che si desidera riconfigurare.
Le regole che permettono di eseguire il calcolo correttamente vengono analizza-
te in [13] e sono riportate all’interno della Sottosezione 3.3.1. Nella parte soft-
ware e stata quindi implementata una funzione che calcola il valore degli indirizzi
Top/Bottom, Row, Major e Minor in base alla posizione (X, Y) della prima slice
del frame da riconfigurare. Una volta calcolate, tutte queste variabili vengono uti-
lizzate come input per la funzione di scrittura dei frame, fornita dalla Xilinx con
la libreria del componente HwIcap.
4.4.2 Generazione del bitstream parziale
Alla funzione di libreria per la riconfigurazione va (ovviamente) fornito in input
anche il bitstream che controlla la configurazione del frame. Visto che si ha la
necessita di riconfigurare un solo frame il bitsream che viene generato e un bi-
tstream parziale. Anche in questo caso la conoscenza della struttura del bistream
con il posizionamento delle varie LUT e della parola centrale e documentata in
[13] ed e stato necessario implementare del codice che generasse effettivamente
questa struttura a partire dalla rappresentazione di alto livello del contenuto delle
celle degli individui. Questa fase ha richiesto un certo impegno per riuscire a com-
prendere con precisione la codifica delle informazioni utilizzata all’interno delle
parole del bitstream parziale e a realizzare una effettiva traduzione del genotipo
dell’individuo.
Un primo problema incontrato durante l’implementazione e stato quello della di-
versa organizzazione in blocchi tra la rappresentazione di una singola cella (co-
stituita dalla sua coppia di LUT) e il bitstream finale usato per la riconfigurazione
parziale. Il mattone elementare del bitstream e un blocco di 5 bytes, mentre le
LUT sono salvate in un’unica parola di 4 byte: ci saranno quindi degli spazi tra il
contenuto di una LUTG e quello di una LUTF. La posizione del contenuto delle
68

CAPITOLO 4. SISTEMA EVOLUTIVO
LUT all’interno dei 5 byte e dato dalle formule esposte nella Sottosezione 3.3.1.
E’ stato quindi necessario scrivere una funzione che calcolasse il bitStart (fun-
zione solo della coordinata y e del tipo di LUT). Inoltre prima di poter generare
il bitstream parziale si deve calcolare la parola centrale del frame in funzione
del contenuto di tutte le LUT: ogni volta che il frame viene modificato la parola
centrale viene ricalcolata facendo lo XOR degli effetti relativi al valore di ogni
singolo bit. Per effettuare tutto cio e stato necessario implementare una serie di
funzioni che fanno un pesante utilizzo degli operatori bitwise del C. Una volta
calcolate tutte le informazioni necessarie si puo procedere alla generazione del
bistream parziale e alla sua scrittura su scheda.
4.4.3 Riconfigurazione degli individui
La funzione che scrive sulla board la stringa di configurazione si articola in tre
fasi:
• Il bitstream viene calcolato secondo i dettagli prima esposti.
• Viene letto il frame attualmente sulla scheda nella posizione in cui si vuole
andare a riconfigurare.
• Il frame letto viene modificato inserendo il frame appena calcolato e quindi
riscritto sulla scheda.
E’ stato scelto di operare in questo modo per mantenere un approccio conservati-
vo, infatti si e notato che la lettura di un frame restituisce un array di dimensioni
doppie rispetto a quelle che ci si aspetta. Analizzando il contenuto del buffer di
lettura si vede che il frame che si trova realmente sulla scheda e ubicato nella se-
conda meta dell’array, mentre nella prima meta si trova un certo numero di parole
corrispondente alla dimensione di un altro frame. Non e stato verificato se queste
parole aggiuntive siano solo un riempitivo per necessita interne ai tool della Xili-
nx o se il loro contenuto codifichi qualche informazione relativa al frame letto; e
stato quindi deciso, come detto, di effettuare una lettura preventiva e di riutilizzare
69

CAPITOLO 4. SISTEMA EVOLUTIVO
lo stesso buffer per la scrittura, lasciando invariata la parte iniziale e sostituendo
solo il contenuto della seconda parte, che contiene il frame da scrivere.
4.4.4 Validazione dei dati
Per essere certi che cio che viene scritto sulla scheda sia esattamente cio che viene
calcolato dall’applicazione, e stata implementata una funzione di verifica e valida-
zione dei dati. Questa funzione non fa altro che confrontare il bitstream calcolato
logicamente con quello presente fisicamente sulla scheda. Viene quindi riletta di-
rettamente dalla scheda la stringa di configurazione appena scritta e la si confronta
bit a bit con quella generata a partire dal contenuto delle LUT presente in memo-
ria. In molte delle prove effettuate durante il periodo di sviluppo dell’algoritmo e
stato attivato questo meccanismo di validazione e si e constatato che talvolta alcu-
ni bit risultano differenti da come ci si aspetta. Ulteriori approfondimenti hanno
appurato che i bit differenti sono posizionati anche all’interno del contenuto delle
LUT e vanno quindi a modificare la configurazione effettiva del dispositivo. Si e
inoltre notato che le anomalie rilevate variano con il variare degli individui con-
figurati e dipendono quindi dal bitstream scritto. Un’altra dipendenza emersa e
rispetto alla specifica architettura caricata sulla scheda; diverse sintesi di archi-
tetture equivalenti (o con piccole variazioni) hanno infatti dato risultati diversi in
termini di affidabilita della scrittura (talvolta presentando gli errori detti e talvolta
non presentandone affatto). A causa di questa variabilita del fenomeno non e stato
possibile effettuare ulteriori test per appurarne le reali cause e si e deciso di tra-
scurarlo (visto il ridotto impatto generato), utilizzando per la configurazione della
scheda un’architettura che si sia provata affidabile (ovvero sia esente da errori di
riconfigurazione).
70

Capitolo 5
Risultati Sperimentali
In questo Capitolo vengono presentate alcune analisi sperimentali svolte sul si-
stema evolutivo. Viene dapprima proposta una sintesi delle operazioni di adatta-
mento dell’architettura gia proposta all’interno del gruppo HERA che si sono rese
necessarie per ottenere un sistema funzionante (Sezione 5.1); in seguito si defi-
nisce la specifica architettura utilizzata per i successivi test (Sezione 5.2). Infine
vengono proposti alcuni dati sperimentali relativi al funzionamento del sistema
evolutivo tra cui, per prima cosa, viene esposta una semplice analisi temporale
(Sezione 5.3), utile per valutare le attuali prestazioni del sistema. Come ulterio-
re punto di validazione e stata realizzata l’evoluzione intrinseca di un generatore
di parita pari, in modo analogo a quanto fatto nell’esperimento proposto in [13],
basato pero su evoluzione estrinseca realizzata con un simulatore software; que-
st’analogia permette di effettuare un confronto tra i rispettivi risultati e di trarre
qualche conclusione sul lavoro svolto.
5.1 Sintesi dell’architettura
Durante la sintesi dell’architettura per i test (effettuata con EDK, vedere la Sotto-
sezione 2.3.1) si sono riscontrati alcuni problemi legati ad alcune scelte progettuali
effettuate nei lavori precedenti. In particolare ci sono state difficolta in merito alla
definizione dei vincoli di area per i vari componenti, necessari per fare in modo
71

CAPITOLO 5. RISULTATI SPERIMENTALI
che nessuna parte di logica fosse implementata nell’area riconfigurabile. I vincoli
proposti in [13] per la sintesi della medesima architettura (ma senza il controllore
HwIcap e con un solo individuo nell’area riconfigurabile) non si sono rivelati ade-
guati. La sintesi del controllore HwIcap richiede infatti una grande porzione di
area del chip e si e dunque stati costretti ad allargare l’area dedicata alla logica di
controllo, pur dovendo stavolta mantenere l’area riconfigurabile abbastanza gran-
de per contenere 16 individui. Questo rilassamento dei vincoli ha pero portato
ulteriori problemi in merito alla modalita di espressione dei vincoli stessi.
In [13] si propone infatti di porre i vincoli (espressi nel file system.ucf di EDK)
come segue:
INST "/*" AREA_GROUP=All;
AREA_GROUP "All" RANGE=SLICE_X0Y0:SLICE_X23Y127;
In questo modo viene creato un AREA GROUP denominato All per tutta la lo-
gica e si indica al programma di mantenere l’area da esso occupata tra la slice
con (X ,Y ) = (0,0) e la slice con (X ,Y ) = (23,127); nel seguito dello stesso file
si procede ad istanziare l’individuo riconfigurabile nell’area lasciata libera dalla
logica. Come accennato sopra, anche allargando l’area adibita alla logica si sono
presentati problemi di funzionamento dell’interfaccia HwIcap dovuti a problema-
tiche legate alla sintesi architetturale. Facendo riferimento alla guida della Xilinx
sull’utilizzo dei vincoli di area ([40]) si e definita una nuova formulazione degli
stessi, definendo un AREA GROUP per la zona riconfigurabile e imponendo che
in questa zona non fossero poste parti di altri circuiti. I vincoli sono stati quindi
cosı espressi nel file system.ucf :
INST ".../Inst_ehw_core_logic_0/..."
AREA_GROUP="ehw_area";
INST ".../Inst_ehw_core_logic_1/..."
AREA_GROUP="ehw_area";
...
72

CAPITOLO 5. RISULTATI SPERIMENTALI
INST ".../Inst_ehw_core_logic_14/..."
AREA_GROUP="ehw_area";
INST ".../Inst_ehw_core_logic_15/..."
AREA_GROUP="ehw_area";
AREA_GROUP "ehw_area"
RANGE="SLICE_X40Y0:SLICE_X46Y127";
AREA_GROUP "ehw_area" PLACE=CLOSED;
AREA_GROUP "ehw_area" MODE=RECONFIG;
Come si vede dal codice l’area riconfigurabile e assegnata all’AREA GROUP de-
nominato ehw area, che viene limitato tra la slice con (X ,Y ) = (40,0) e la slice
con (X ,Y ) = (46,127). viene inoltre imposto (con il vincolo PLACE=CLOSED)
che l’area riconfigurabile non possa essere usata per istanziare parti diverse da
quelle appartenenti al gruppo e che l’area stessa e utilizzata per la riconfigurazio-
ne (MODE=RECONFIG).
Una volta imposti i vincoli vengono istanziare le hard-macro degli individui al-
l’interno delle slice appartententi alla ehw area:
INST ".../Inst_ehw_core_logic_0/..."
LOC = "SLICE_X40Y96:SLICE_X40Y127";
INST ".../Inst_ehw_core_logic_1/..."
LOC = "SLICE_X40Y64:SLICE_X40Y95";
INST ".../Inst_ehw_core_logic_2/..."
LOC = "SLICE_X40Y32:SLICE_X40Y63";
INST ".../Inst_ehw_core_logic_3/..."
LOC = "SLICE_X40Y0:SLICE_X40Y31";
...
INST ".../Inst_ehw_core_logic_12/..."
LOC = "SLICE_X46Y96:SLICE_X46Y127";
INST ".../Inst_ehw_core_logic_13/..."
LOC = "SLICE_X46Y64:SLICE_X46Y95";
73

CAPITOLO 5. RISULTATI SPERIMENTALI
INST ".../Inst_ehw_core_logic_14/..."
LOC = "SLICE_X46Y32:SLICE_X46Y63";
INST ".../Inst_ehw_core_logic_15/..."
LOC = "SLICE_X46Y0:SLICE_X46Y31";
Grazie alla revisione dei vincoli di area e stato possibile sintetizzare una architettu-
ra funzionante, la quale presenta le caratteristiche di occupazione di area elencate
nella Tabella 5.1.
Tabella 5.1: Occupazione di area sulla FPGA da parte dell’intero sistema evolutivo.
Risorsa Occupati/e Liberi/e % Occupata
Slice 4372 5472 79%
Flip-Flop 3818 10944 44%
LUT 7672 10944 70%
5.2 Modalita di svolgimento degli esperimenti
Il sistema evolutivo utilizzato per i test e esattamente quello esposto nel Capito-
lo 4, che fa uso dell’interfaccia HwIcap per la riconfigurazione, del Controller
EHW per la gestione di Ingresso/Uscita degli individui e dell’algoritmo genetico
esposto per il controllo del processo evolutivo. In particolare sono stati utilizzati
individui formati da 4 moduli di 8 celle l’uno. Si e scelto di utilizzare un nume-
ro di individui per popolazione pari al numero di individui istanziabili nell’area
riconfigurabile, ovvero 16 (in questo modo tutti e soli gli individui di una popola-
zione sono presenti ad un certo istante sul chip).
Per ogni esperimento e stata implementata una opportuna funzione di valutazio-
ne che si occupa di presentare in ingresso agli individui una sequenza di input
considerata significativa per la loro evoluzione e valutare, per ogni ingresso, la
vicinanza del risultato ottenuto in uscita rispetto al valore desiderato. Nel caso
di evoluzione di un circuito sequenziale i dati in input vengono presentati agli in-
dividui sempre nello stesso ordine, mentre nel caso di evoluzione di un circuito
74

CAPITOLO 5. RISULTATI SPERIMENTALI
combinatorio si procede alla valutazione modificando ogni volta in modo casuale
l’ordine di presentazione dei valori, per evitare che il circuito faccia uso di in-
formazioni legate all’ordine di presentazione degli input. I parametri utilizzati
per l’evoluzione (ottenuti dopo alcune sperimentazioni ma probabilmente ancora
migliorabili) sono riassunti nella Tabella 5.2 (per il significato delle costanti di
granularita vedere le Sezioni 4.2.3 e 4.2.4). Si fa notare che le prestazioni non so-
no l’oggetto di maggior interesse in questi test (in futuro queste potranno di certo
essere notevolmente migliorate, ad esempio ottimizzando il codice e tarando al
meglio l’algoritmo genetico); qui si vogliono solo proporre alcuni dati riguardo
all’effettivo funzionamento del sistema di evoluzione intrinseca su Virtex-4.
Tabella 5.2: Parametri utilizzati per l’algoritmo genetico durante gli esperimenti
Parametro Valore
Numero individui 16
Perc. Elitismo 10%
Granularita Mutazione LIVELLO MODULO BIT
Prob. Mutazione 0,6
Granularita Crossover LIVELLO CELLA
Prob. Crossover 0,7
5.3 Analisi temporale del ciclo
Prima di passare ad un reale esperimento di evoluzione, e stata svolta (utilizzando
una apposita libreria C) una analisi temporale del sistema di cui vengono breve-
mente riportati i risultati in Tabella 5.3. L’inizializzazione della popolazione e
dell’interfaccia HwIcap vengono operate solo una volta all’inizio del ciclo, quindi
con un numero abbastanza grande di generazioni questi tempi sono trascurabili e
il tempo totale e dato (asintoticamente) dalle sole operazioni di riconfigurazione e
valutazione ripetute durante il ciclo evolutivo. Il tempo di riconfigurazione ripor-
tato in tabella dipende solo dal numero di frame da riconfigurare (in questo caso
ci si riferisce a individui di 8× 4 celle, che occupano un solo frame). Il tempo
75
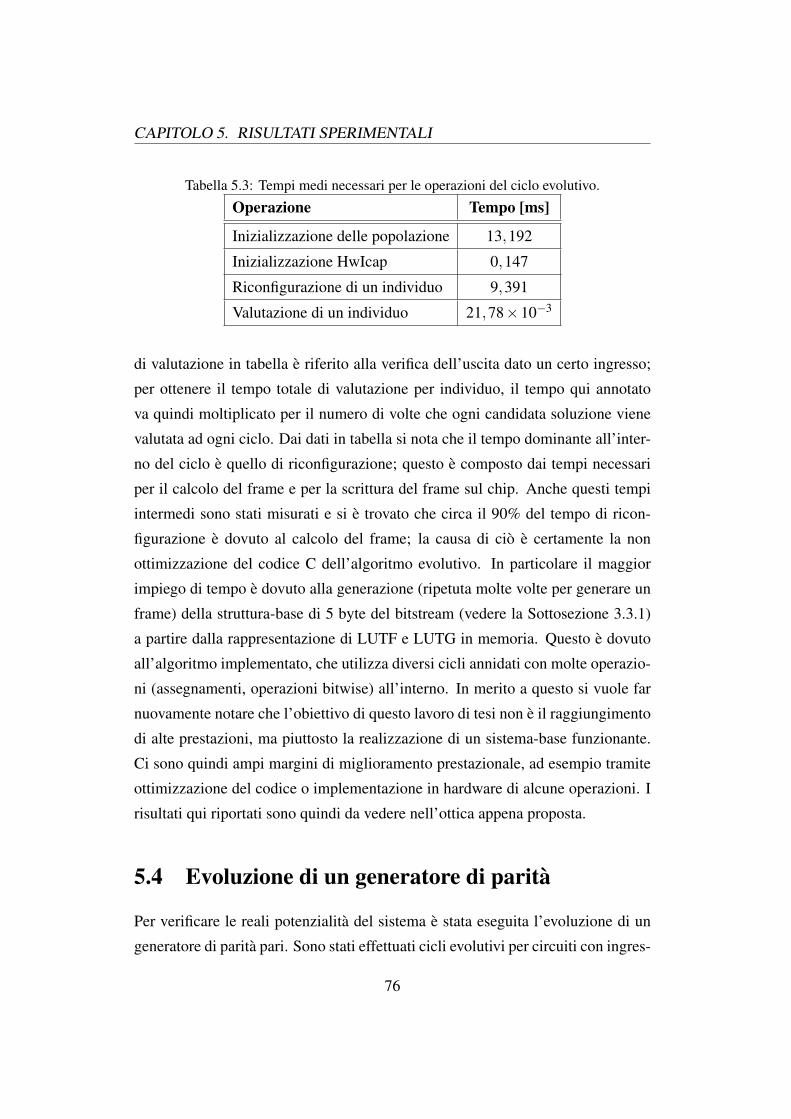
CAPITOLO 5. RISULTATI SPERIMENTALI
Tabella 5.3: Tempi medi necessari per le operazioni del ciclo evolutivo.
Operazione Tempo [ms]
Inizializzazione delle popolazione 13,192
Inizializzazione HwIcap 0,147
Riconfigurazione di un individuo 9,391
Valutazione di un individuo 21,78×10−3
di valutazione in tabella e riferito alla verifica dell’uscita dato un certo ingresso;
per ottenere il tempo totale di valutazione per individuo, il tempo qui annotato
va quindi moltiplicato per il numero di volte che ogni candidata soluzione viene
valutata ad ogni ciclo. Dai dati in tabella si nota che il tempo dominante all’inter-
no del ciclo e quello di riconfigurazione; questo e composto dai tempi necessari
per il calcolo del frame e per la scrittura del frame sul chip. Anche questi tempi
intermedi sono stati misurati e si e trovato che circa il 90% del tempo di ricon-
figurazione e dovuto al calcolo del frame; la causa di cio e certamente la non
ottimizzazione del codice C dell’algoritmo evolutivo. In particolare il maggior
impiego di tempo e dovuto alla generazione (ripetuta molte volte per generare un
frame) della struttura-base di 5 byte del bitstream (vedere la Sottosezione 3.3.1)
a partire dalla rappresentazione di LUTF e LUTG in memoria. Questo e dovuto
all’algoritmo implementato, che utilizza diversi cicli annidati con molte operazio-
ni (assegnamenti, operazioni bitwise) all’interno. In merito a questo si vuole far
nuovamente notare che l’obiettivo di questo lavoro di tesi non e il raggiungimento
di alte prestazioni, ma piuttosto la realizzazione di un sistema-base funzionante.
Ci sono quindi ampi margini di miglioramento prestazionale, ad esempio tramite
ottimizzazione del codice o implementazione in hardware di alcune operazioni. I
risultati qui riportati sono quindi da vedere nell’ottica appena proposta.
5.4 Evoluzione di un generatore di parita
Per verificare le reali potenzialita del sistema e stata eseguita l’evoluzione di un
generatore di parita pari. Sono stati effettuati cicli evolutivi per circuiti con ingres-
76

CAPITOLO 5. RISULTATI SPERIMENTALI
si di dimensione crescente: prima si e evoluto un generatore di parita pari sensibile
a solo 5 degli 8 bit di ingresso, poi un altro sensibile a 6 bit in ingresso e cosı via
fino a considerare tutti e 8 i bit in ingresso. Per questo esperimento la funzione
di valutazione presenta agli individui una sequenza di 8 diversi ingressi in cui gli
eventuali bit non considerati sono invariabilmente uguali a 0, mentre i bit di inte-
resse variano. L’uscita viene valutata sull’ultimo bit dell’output dell’individuo e
il valore desiderato e 1 se sulla stringa di ingresso sono presenti un numero pari di
bit a 1, 0 altrimenti. In linea con quanto fatto nell’analogo esperimenti proposto
in [13] si e valutato ogni individuo proponendo la sequenza di ingresso (riordinata
ogni volta in modo casuale) per 15 volte, in modo da cercare di generare soluzioni
con comportamento combinatorio.
In Tabella 5.4 sono riportati (per i generatori di parita a 5, 6, 7, 8 bit) i dati me-
di ottenuti da 30 ripetizioni dell’esperimento; in particolare e riportato il numero
di generazioni necessario per ottenere una soluzione corretta al 100% (obiettivo
raggiunto in ognuna delle 30 ripetizioni del ciclo evolutivo) e il rispettivo tempo
di evoluzione. Vengono inoltre riportati, per un confronto, i dati riportati in [13]
(qui corredati anche dei tempi di evoluzione, la cui fonte e interna al gruppo HE-
RA) per il medesimo esperimento con l’uso di evoluzione estrinseca tramite un
framework di simulazione.
Si puo notare come sia il numero di generazioni necessarie che i tempi speri-
Tabella 5.4: Risultati degli esperimenti sull’evoluzione del generatore di parita (valori
medi su 30 ripetizioni) e confronto con i dati di evoluzione estrinseca.
Dati sperimentali Dati Simulazione [13]
N Bit5
6
7
8
N Gen Tempo [s]1245,7 242,9
1452,2 283,2
1491,3 290,8
1524,8 297,3
N Gen Tempo [s]198,5 7,9
231,7 18,3
238 37,6
243,3 76,8
mentali siano notevolmente piu alti rispetto a quelli ottenuti mediante evoluzio-
ne estrinseca e riportati in [13]. Per quanto riguarda la piu lenta convergenza
77

CAPITOLO 5. RISULTATI SPERIMENTALI
dell’algoritmo genetico in termini di numero di generazioni necessarie, la causa
principale della discrepanza con i dati di confronto e la grande differenza nelle
cardinalita delle popolazioni utilizzate (16 individui in questo lavoro, mentre 100
nell’esperimento di confronto). Per quanto riguarda i tempi, invece, il valore piu
elevato e dovuto (oltre che al maggior numero di generazioni necessarie) alla non
ottimizzazione del codice dell’algoritmo genetico e alla scarsa potenza di calcolo
del PowerPC di cui e dotata la Virtex-4 rispetto alle workstation usate durante la
valutazione estrinseca (una analisi temporale del ciclo evolutivo qui utilizzato e
proposta nella Sezione 5.3).
Un’altra osservazione che si puo fare sui dati e che il divario tra i risultati dell’evo-
luzione intrinseca rispetto a quelli dell’evoluzione estrinseca si riduce al crescere
del numero di bit considerati per il calcolo della parita. Questo e dovuto al fatto
che, con evoluzione estrinseca, e richiesto un tempo via via maggiore per la valu-
tazione di un certo individuo con un numero crescente di bit in ingresso; cio non e
invece vero se si opera con i circuiti delle soluzioni candidate realmente istanziati
sulla FPGA.
78
Capitolo 6
Conclusioni
In questo elaborato sono stati presentati i dettagli relativi alla progettazione e alla
sviluppo di un sistema per l’evoluzione intrinseca basato su FPGA. Per poter por-
tare a termine questo studio e stato necessario utilizzare le informazioni, presenti
in letteratura, relative all’analisi del bitstream della FPGA Virtex-4 utilizzata, il
cui formato non e documentato dalla casa produttrice. Il sistema realizzato sfrutta
(attraverso l’interfaccia HwIcap, fornita da Xilinx) la porta ICAP per effettuare la
riconfigurazione dinamica degli individui presenti sulla scheda (l’area riconfigu-
rabile ne puo contenere fino a un massimo di 32 per volta) e il Controller EHW
(IP-CORE realizzato appositamente all’interno del gruppo di ricerca HERA) per
implementare la comunicazione da e verso gli individui stessi. L’utilizzo di queste
risorse ha permesso di introdurre notevoli novita rispetto alle architetture finora
presentate in letteratura. In primo luogo e stato possibile sfruttare la possibilita
di riconfigurazione parziale 2D offerta dal chip Virtex-4 (pratica che permette un
notevole risparmio temporale rispetto alla riconfigurazione monodimensionale di-
sponibile sulle FPGA Xilinx fino alla Virtex 2-PRO); inoltre il sistema evolutivo
e in grado di operare l’evoluzione intrinseca delle popolazioni, cioe tutto il ciclo
evolutivo avviene autonomamente sul dispositivo embedded, senza necessita di
simulazioni esterne. La combinazione di questi due fattori rappresenta una novita
nel campo dell’evoluzione hardware e pone le basi per svariate possibilita di ulte-
riore ricerca.
79

CAPITOLO 6. CONCLUSIONI
Per il raggiungimento dei risultati esposti sono state riscontrate (e superate) diver-
se problematiche: in particolare ha richiesto un certo impegno la piena compren-
sione della rappresentazione delle LUT all’interno del bitstream parziale, neces-
saria per poter realizzare un’adeguata rappresentazione in memoria delle stesse
e, successivamente, la traduzione che permette di creare la stringa di riconfigura-
zione degli individui. Ulteriori intoppi sono stati causati dall’uso dell’HwIcap: le
specifiche di funzionamento fornite dalla guida per l’utente sono infatti in parte in-
complete ed e stato necessario analizzare con attenzione il codice C delle funzioni
di esempio proposte per la riconfigurazione prima di essere in grado di far operare
correttamente il componente. Neanche l’integrazione del Controller EHW e stata
banale: in questo caso si sono rese necessarie alcune revisioni del codice VHDL
del componente a causa di un suo malfunzionamento non emerso in precedenza.
Il sistema presentato e il primo del suo genere e di certo presenta alcune limitazio-
ni. Da un punto di vista fisico, il chip a disposizione (Xilinx Virtex-4 XC4VFX12-
FF668-10) non e molto capiente in termini di numero di blocchi configurabili:
questo fatto, unito alla necessita di istanziare l’interfaccia l’HwIcap (che e piutto-
sto pesante in termini di occupazione di area per la sintesi), ha richiesto la riformu-
lazione dei vincoli di area per i componenti e l’imposizione di un limite superiore
alla capienza dell’area riconfigurabile (32 individui al massimo). Certamente se
fosse stato possibile utilizzare un chip piu capiente si sarebbero potuti ottenere
risultati migliori con sforzo minore. Un altro fronte di possibili (e auspicabili)
miglioramenti e quello dei tempi di esecuzione dell’algoritmo (misurati e tabula-
ti nel Capitolo 5), che risultano piuttosto elevati soprattutto per quanto riguarda
il calcolo del frame di riconfigurazione; questo accade poiche non si e puntato
all’ottimizzazione del codice scritto, ma piuttosto alla produzione di un sistema
funzionante e robusto.
6.1 Sviluppi futuri
Come accennato poco sopra, lo sviluppo del sistema presentato in questo elabora-
to offre svariati spunti per lavori e sviluppi, sia nell’immediato futuro che a lungo
80

CAPITOLO 6. CONCLUSIONI
termine. Quelli considerati i piu importanti sono elencati di seguito:
• Provvedere all’ottimizzazione del codice dell’algoritmo genetico per ren-
dere piu rapida l’evoluzione. La maggior parte del tempo necessario a far
girare l’algoritmo e infatti speso per effettuare operazioni algebriche sui da-
ti in memoria e non per interagire coi componenti dell’architettura (a causa
della necessita di tradurre tra diverse rappresentazioni del genotipo). Una
revisione del codice di manipolazione delle stringhe di bit, con una con-
seguente riduzione della complessita computazionale, puo portare notevoli
vantaggi dal punto di vista temporale.
• Implementare la parallelizzazione del calcolo. La versione del Controller
EHW utilizzata permette di interagire con un massimo di 32 individui con-
temporaneamente sul chip; cio potrebbe essere sfruttato, per esempio, per
effettuare la valutazione di meta degli individui mentre l’altra meta viene
riconfigurata (la riconfigurazione 2D non influenza il funzionamento delle
celle non interessate dalla stessa). L’effetto sarebbe un ulteriore risparmio
di tempo nel ciclo evolutivo. Questo sviluppo non dovrebbe richiedere ec-
cessivi sforzi, in quanto il codice e l’architettura proposti in questo lavoro di
tesi sono gia stati predisposti per l’implementazione di questa funzionalita.
• Implementare in hardware alcune funzioni software. Si potrebbe pensare
di implementare direttamente in hardware pian piano tutte le funzioni del-
l’algoritmo evolutivo. Un primo passo potrebbe essere quello di integrare
nella logica la valutazione degli individui, quindi gli operatori genetici e in-
fine anche la generazione del bitstream parziale, arrivando a non sfruttare
(o a sfruttare solo marginalmente) il processore general purpose incluso sul
chip.
• Studiare piu approfonditamente l’utilizzo di sistemi analoghi a quello pro-
posto nell’ambito della fault tolerance e dell’adattamento a variazioni delle
caratteristiche ambientali. L’uso di algoritmi evolutivi, infatti, ben si presta
a reagire ai cambiamenti dell’ambiente di lavoro e a modificare la struttu-
81

CAPITOLO 6. CONCLUSIONI
ra interna del circuito per recuperare piena funzionalita in caso di guasti o
malfunzionamenti.
82

Elenco delle figure
1.1 Visione ad alto livello di un sistema hardware evolvibile. . . . . . 3
2.1 Organizzazione interna di una FPGA. . . . . . . . . . . . . . . . 12
2.2 Collocazione delle risorse di un certo spazio di indirizzamento in
dipendenza dalle coordinate (X, Y). . . . . . . . . . . . . . . . . 15
2.3 Struttura interna del CLB con coordinate (X, Y) = (0, 0) delle
FPGA della famiglia Xilinx Virtex-4. . . . . . . . . . . . . . . . . 16
2.4 Schema a blocchi dell’architettura HERA. . . . . . . . . . . . . . 17
2.5 Diagramma a blocchi della struttura del modulo HwIcap (fonte:
[16]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6 Grafico temporale dei segnali durante un ciclo di lettura (fonte: [16]) 20
2.7 Grafico temporale dei segnali durante un ciclo di scrittura (fonte:
[16]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.8 Confronto tra la vecchia (sinistra) e la nuova (destra) area riconfi-
gurabile con Management Logic. . . . . . . . . . . . . . . . . . . 22
2.9 Management Logic Black Box . . . . . . . . . . . . . . . . . . . 23
3.1 Struttura della FPGA Xilinx XC6200. . . . . . . . . . . . . . . . 30
3.2 Struttura del VRC proposto da Sekanina [28]. . . . . . . . . . . . 36
3.3 Rappresentazione del flusso evolutivo proposto in [29]. . . . . . . 38
3.4 Rappresentazione della struttura cellulare proposta in [35, 36] . . 41
3.5 Possibile allocazione degli individui con (a destra) e senza (a si-
nistra) possibilita di configurazione 2D. . . . . . . . . . . . . . . 42
83

ELENCO DELLE FIGURE
3.6 Rappresentazione della struttura di un frame della meta superiore
di una Virtex-4 (Top/Bottom = 0) secondo l’analisi presentata in
[13]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.7 Rappresentazione della struttura di una cella dell’architettura pro-
posta in [13]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.8 Esempi di possibili collegamenti tra le colonne. . . . . . . . . . . 53
3.9 Struttura dell’individuo con datapath a 8 bit. . . . . . . . . . . . . 54
4.1 Rappresentazione gerarchica di un individuo. . . . . . . . . . . . 59
4.2 Rappresentazione di una cella su di un int32. . . . . . . . . . . . . 59
4.3 Modalita di esecuzione del taglio degli individui genitori a secon-
da della granularita scelta. . . . . . . . . . . . . . . . . . . . . . 65
84
Elenco delle tabelle
2.1 Risorse disponibili sulla FPGA XC4VFX12-FF668-10. . . . . . . 14
3.1 Struttura del registro FAR. . . . . . . . . . . . . . . . . . . . . . 45
5.1 Occupazione di area sulla FPGA da parte dell’intero sistema evo-
lutivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2 Parametri utilizzati per l’algoritmo genetico durante gli esperimenti 75
5.3 Tempi medi necessari per le operazioni del ciclo evolutivo. . . . . 76
5.4 Risultati degli esperimenti sull’evoluzione del generatore di parita
(valori medi su 30 ripetizioni) e confronto con i dati di evoluzione
estrinseca. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
85

ELENCO DELLE TABELLE
86
Bibliografia
[1] Jim Torresen. An evolvable hardware tutorial. In Jurgen Becker, Marco
Platzner, and Serge Vernalde, editors, FPL, volume 3203 of Lecture Notes in
Computer Science, pages 821–830. Springer, 2004. (Citato a Pagina 2).
[2] Garrison W. Greenwood and Andrew M. Tyrrell. Introduction to Evolvable
Hardware: A Practical Guide for Designing Self-Adaptive Systems (IEEE
Press Series on Computational Intelligence). Wiley-IEEE Press, 2006.
(Citato alle Pagine 2 e 8).
[3] John H. Holland. Adaptation in Natural and Artificial Systems: An In-
troductory Analysis with Applications to Biology, Control, and Artificial
Intelligence. The MIT Press, April 1992. (Citato a Pagina 5).
[4] Julio Faura, Chris Horton, Phuoc Van Duong, Jordi Madrenas, and Mi-
guel Angel Aguirre. A novel mixed signal programmable device with onchip
microprocessor. In in Proc. 19th IEEE Custom Integrated Circuits Conf.
(CICC, pages 103–106. IEEE Press, 1997. (Citato a Pagina 7).
[5] Paul Layzell. The ’evolvable motherboard’. a test platform for the research
of intrinsic hardware evolution. Cognitive Science Research Paper, 479,
1998. (Citato a Pagina 7).
[6] Simon Harding and Julian F. Miller. Evolution in materio : A real-time
robot controller in liquid crystal. In Jason Lohn, David Gwaltney, Gregory
Hornby, Ricardo Zebulum, Didier Keymeulen, and Adrian Stoica, editors,
Proceedings of the 2005 NASA/DoD Conference on Evolvable Hardware,
87
BIBLIOGRAFIA
pages 229–238, Washington, DC, USA, 29 June-1 July 2005. IEEE Press.
(Citato a Pagina 8).
[7] Simon Harding and Julian Francis Miller. Evolution in materio: Initial ex-
periments with liquid crystal. In Evolvable Hardware, pages 298–. IEEE
Computer Society, 2004. (Citato a Pagina 8).
[8] Julian F. Miller and Keith L. Downing. Evolution in materio: Looking
beyond the silicon box. In Evolvable Hardware, pages 167–176. IEEE
Computer Society, 2002. (Citato a Pagina 8).
[9] Xilinx Inc. Virtex-4 FPGA Configuration User Guide, 2008. (Citato a
Pagina 8).
[10] EDK User Guide, http://www.xilinx.com/ise/embedded/edk docs.htm. (Ci-
tato alle Pagine 8, 24 e 25).
[11] iMPACT User Guide, http://www.xilinx.com/itp/xilinx4/data/docs/pac/pac.html.
(Citato alle Pagine 8 e 26).
[12] Xilinx Inc. FPGA Editor Guide, 2000. (Citato alle Pagine 8 e 27).
[13] Marco Castagna. Progettazione di un sistema evolutivo hardware basato su
virtex-4. Master’s thesis, Politecnico di Milano, 2009. (Citato alle Pagine 9,
12, 14, 16, 17, 21, 29, 43, 44, 48, 49, 50, 51, 52, 54, 55, 68, 71, 72, 77 e 84).
[14] Xilinx Inc. ML401/ML402/ML403 Evaluation Platform User Guide, 2006.
(Citato a Pagina 13).
[15] Matteo Renesto. A new ip-core to manage fpgas evolvable regions, July
2009. (Citato alle Pagine 16, 17 e 21).
[16] Xilinx Inc. XPS HWICAP (v1.00.a) User Guide, 2007. (Citato alle Pagine
19, 20 e 83).
[17] A. Thompson, I. Harvey, and P. Husbands. Unconstrained evolution and hard
consequences. In E. Sanchez and M. Tomassini, editors, Towards Evolvable
88
BIBLIOGRAFIA
Hardware: The evolutionary engineering approach, volume 1062 of LNCS,
pages 136–165. Springer-Verlag, 1996. (Citato alle Pagine 29 e 31).
[18] Adrian Thompson. An evolved circuit, intrinsic in silicon, entwined wi-
th physics. In Tetsuya Higuchi, Masaya Iwata, and Weixin Liu, editors,
ICES, volume 1259 of Lecture Notes in Computer Science, pages 390–405.
Springer, 1996. (Citato a Pagina 29).
[19] A. Thompson, P. Layzell, and R. S. Zebulum. Explorations in design space:
Unconventional electronics design through artificial evolution. IEEE Trans.
Evol. Comp., 3(3):167–196, 1999. (Citato a Pagina 29).
[20] Adrian Thompson. On the automatic design of robust electronics throu-
gh artificial evolution. In ICES ’98: Proceedings of the Second Interna-
tional Conference on Evolvable Systems, pages 13–24, London, UK, 1998.
Springer-Verlag. (Citato a Pagina 32).
[21] Adrian Thompson and Paul J. Layzell. Evolution of robustness in an electro-
nics design. In Julian F. Miller, Adrian Thompson, Peter Thomson, and Te-
rence C. Fogarty, editors, ICES, volume 1801 of Lecture Notes in Computer
Science, pages 218–228. Springer, 2000. (Citato a Pagina 32).
[22] L. Sekanina. Modeling of evolvable hardware. Master’s thesis, Brno
University of Technology, 1999. (Citato alle Pagine 34 e 35).
[23] Julian F. Miller, Dominic Job, and Vesselin K. Vassilev. Principles in the
evolutionary design of digital circuits - part II. Genetic Programming and
Evolvable Machines, 1(3):259–288, 2000. (Citato a Pagina 34).
[24] Zdenek Vasicek and Lukas Sekanina. Evaluation of a new platform for image
filter evolution. In AHS, pages 577–586. IEEE Computer Society, 2007.
(Citato a Pagina 35).
[25] Lukas Sekanina. Evolutionary functional recovery in virtual reconfigurable
circuits. JETC, 3(2), 2007. (Citato a Pagina 35).
89

BIBLIOGRAFIA
[26] Kyrre Glette and Jim Torresen. A flexible on-chip evolution system im-
plemented on a xilinx virtex-ii pro device. In Juan Manuel Moreno, Jordi
Madrenas, and Jordi Cosp, editors, ICES, volume 3637 of Lecture Notes in
Computer Science, pages 66–75. Springer, 2005. (Citato a Pagina 35).
[27] Kyrre Glette, Jim Torresen, Moritoshi Yasunaga, and Yoshiki Yamaguchi.
On-chip evolution using a soft processor core applied to image recognition.
In AHS ’06: Proceedings of the first NASA/ESA conference on Adaptive
Hardware and Systems, pages 373–380, Washington, DC, USA, 2006. IEEE
Computer Society. (Citato a Pagina 35).
[28] Friedl S Sekanina L. On routine implementation of virtual evolvable devices
using combo6. In Proc. of the 2004 NASA/DoD Conference on Evolvable
Hardware, pages 63–70, 2004. (Citato alle Pagine 36 e 83).
[29] Delon Levi and Steve Guccione. GeneticFPGA: Evolving stable circuits
on mainstream FPGA devices. In Evolvable Hardware, pages 12–17. IEEE
Computer Society, 1999. (Citato alle Pagine 38 e 83).
[30] A.M. Tyrrell, R.A. Krohling, and Y. Zhou. Evolutionary algorithm for the
promotion of evolvable hardware. Computers and Digital Techniques, IEE
Proceedings -, 151(4):267–275, July 2004. (Citato a Pagina 39).
[31] Andres Upegui and Eduardo Sanchez. Evolving hardware by dynamical-
ly reconfiguring xilinx fpgas. In Juan Manuel Moreno, Jordi Madrenas,
and Jordi Cosp, editors, ICES, volume 3637 of Lecture Notes in Computer
Science, pages 56–65. Springer, 2005. (Citato alle Pagine 39 e 50).
[32] Xilinx. Two Flows for Partial Reconfiguration: Module Based or Small Bit
Manipulations. (Citato a Pagina 39).
[33] Xilinx. Difference-Based Partial Reconfiguration. (Citato a Pagina 40).
[34] Xilinx Inc., www.xilinx.com. XAPP 290: Two flows for Partial Reconfi-
guration: Module Based or Difference Based, September 2004. (Citato a
Pagina 40).
90
BIBLIOGRAFIA
[35] Pauline C. Haddow and Gunnar Tufte. Bridging the genotype-phenotype
mapping for digital fpgas. In Evolvable Hardware, pages 109–115. IEEE
Computer Society, 2001. (Citato alle Pagine 41 e 83).
[36] Gunnar Tufte and Pauline C. Haddow. Biologically-inspired: A rule-based
self-reconfiguration of a virtex chip. In Marian Bubak, G. Dick van Albada,
Peter M. A. Sloot, and Jack Dongarra, editors, International Conference on
Computational Science, volume 3038 of Lecture Notes in Computer Science,
pages 1249–1256. Springer, 2004. (Citato alle Pagine 41 e 83).
[37] Andres Upegui and Eduardo Sanchez. Evolving hardware with self-
reconfigurable connectivity in xilinx fpgas. In AHS ’06: Proceedings of
the first NASA/ESA conference on Adaptive Hardware and Systems, pages
153–162, Washington, DC, USA, 2006. IEEE Computer Society. (Citato a
Pagina 41).
[38] N. I. Rafla. Evolvable reconfigurable hardare framework for edge detection.
In Circuits and System MWSCAS07, 50th Midwest Symposium on,, pages
65–68, Coimbra, Portugal, August 2007. (Citato a Pagina 55).
[39] T. Kalganova C. Lambert and E. Stomeo. Fpga-based systems for evolva-
ble hardware. transactions on engineering. Computing and Technology, 12,
2006. (Citato a Pagina 55).
[40] Xilinx Inc. Constraints Guide. (Citato a Pagina 72).
91

BIBLIOGRAFIA
92

Documento generato con LATEX il 23 luglio 2009
93