Prof. Alessandro Astolfi (Room A407, phone...
28
1
Transcript of Prof. Alessandro Astolfi (Room A407, phone...

1

2
Prof. Alessandro Astolfi (Room A407, phone 7426)
PhD. Daniele Carnevale (Room A404, phone 7428)
PhD. Sergio Galeani (Room A406, phone 7428)
Prof. Osvaldo M. Grasselli (Room A404, phone 7430)
Prof. Francesco Martinelli (Room A405, phone 7429)
Prof. Laura Menini (Room A402, phone 7432)
Prof. Salvatore Nicosia (Room A408, phone 7433)
PhD. Mario Sassano (Room A102, phone 7336)
Prof. Antonio Tornambé (Room A401, phone 7431)

3
Ing. Luca Boncagni (ENEA) Ing. Giuseppe Ferrò (Room A101, phone 7337) Ing. Antonio Gabrielli (Room A101, phone 7337) Ing. Mateusz Gospodarczyk (Room A101, phone 7337) Ing. Corrado Possieri (Room A101, phone 7337)

Know-‐how: Nonlinear Control Robo3cs Es3ma3on Modeling and Iden3fica3on Supply chain Vision and localiza3on Saturated actuators Observers Op3mal Control Periodic Systems
Adap3ve Control Hybrid Systems Robust Control Smart actuators Network Controlled Systems Systems with Impacts Digital Control UAV -‐ UGV Biological systems
4
Collaborations: • University of California, Santa Barbara • University of New Mexico, Albuquerque • University of Illinois, Urbana-‐Champaign • Ohio State University, Columbus • Boston University • Imperial College, London • University of Leicester • Johannes Kepler University, Linz • LAAS-‐CNRS, Toulouse • University of Melbourne • LAAS-‐CNRS, Toulouse • École Polytechnique de Montréal • INRIA Rhone Alpes, Grenoble • Universitade Technica de Lisboa • Chulam Science Center, JET-‐MAST • ENEA /EURATOM • CNR • INFN

elettronica

q Il termine Automazione, coniato nell'industria automobilistica nell'immediato dopoguerra, indica una sostituzione del lavoro e dell'intelligenza umana con azioni di tipo informatico, elettronico e meccanico.
q L'Ingegneria dell'Automazione ha come scopo lo studio ed il controllo dei sistemi dinamici.
q Materia interdisciplinare, l'ingegneria dell'automazione si avvale delle conoscenze acquisite nelle varie discipline e dello sviluppo della tecnologia per realizzare procedure e strumenti di controllo in ambiti nuovi e con crescente efficienza.
q L'automazione accresce la qualità e la sicurezza in tutte le attività umane e sostituisce l'uomo nei compiti più gravosi, pericolosi e dannosi, arrivando là dove un operatore umano non è in grado di arrivare.
L’Ingegneria dell’Automazione

q Automazione dei processi industriali
q Robotica in ambito industriale, medico, domestico e spaziale
q Realizzazione di dispositivi di controllo in diversi settori come quello automobilistico e aerospaziale
q Sistemi di controllo e sicurezza industriali e domestici
q Controllo per la produzione di energia
q Monitoraggio e controllo di sistemi di traffico, di reti di calcolo e telecomunicazioni
q Modellistica e controllo di sistemi ecologici e socio-economici.
L’Ingegneria dell’Automazione - Applicazioni

L’Ingegneria dell’Automazione – Sbocchi professionali q Ingegnere progettista ed analista di sistemi di controllo in:
Ø enti di ricerca e industrie dei settori spaziale, nucleare e della difesa; Ø aziende impegnate nella produzione industriale (automobilistica, aerea, manifatturiera, farmaceutica); Ø impianti di produzione, trasformazione e distribuzione dell'energia; Ø impianti petrolchimici e farmaceutici.
q L'ingegnere dell'automazione può trovare impiego in tutte le industrie, aziende ed enti nei quali i sistemi di predizione, diagnosi, controllo e supporto alle decisioni sono tecnologicamente rilevanti.
q Il 100% dei laureati in Ing. dell'Automazione trova impiego entro 6 mesi dalla data di laurea con un primo contratto di valore superiore al 30% della media per Ingegneria.
q Grado di internazionalizzazione (erasmus) pari a 3 volte la media per Ingegneria

STUDENTS WORKING AT: A3R, ABB, ACT SOLUTIONS, AGC AUTOMOTIVE EUROPE, ALENIA, ALTRAN, ALSTOM POWER, AUTOMATE, AVANADE, BIOSENSORS, BIOSYS, BOEING, BOSCH, CCFE, CENTRO RICERCHE FIAT, COMAU, DAIKIN APPLIED EUROPE, EASY AUTOMATION, EXPERT SYSTEM, ENEL, ELV, EUROLINK SYSTEMS, ENEA, FUSION FOR ENERGY, GENERAL ELECTRIC, HAUPT PHARMA, INDESIT, INFOSOLUTION, INMARSAT, ITALIANA ROBOT, KIMBERLY CLARK, LABOR, MAGNETI MARELLI, MEDIA MOTIVE, MES, METAPACK ENGINEERING, MC LARENS, NECS, NPO CONSULTING, POSTE ITALIANE, PROGESI, SCHALCON, SELEX, SIGMA CONSULTING, SAS, ST-‐MICROELECTRONICS, TECNOMARE, TELECOM, TECNO AUTOMAZIONE, TETRA PAK, THALES, VANDELANDE INDUSTRIES, BORBANDIER ITALIA, VITROCISET, YARRA VALLEY WATER ...

Satellite stabilization (reaction wheel)
10
Path tracker Attitude control
Airspeed control
Flight control
Cruise control and vibration analysis

Electrical and combustion engines power control
11
Magnetorheological suspensions
Modeling of vibration effects on human spine

Nuclear Fusion: plasma confinement in Tokamaks
12
Extremum seeking techniques for on-line optimization of solar trackers
Distributed optimization for smart buildings

Approximated (dynamically) optimal control for nonlinear bioreactors
13
Modeling and control of diabetes
Distributed sensors and data mining for crop monitoring and control of fermentation process

14
Ground autonomous vehicles (cleaning, transport, harvesting)
Aerial autonomous vehicles (video surveillance, gaming)
Rehabilitation robotics, systems for gesture recognition
15
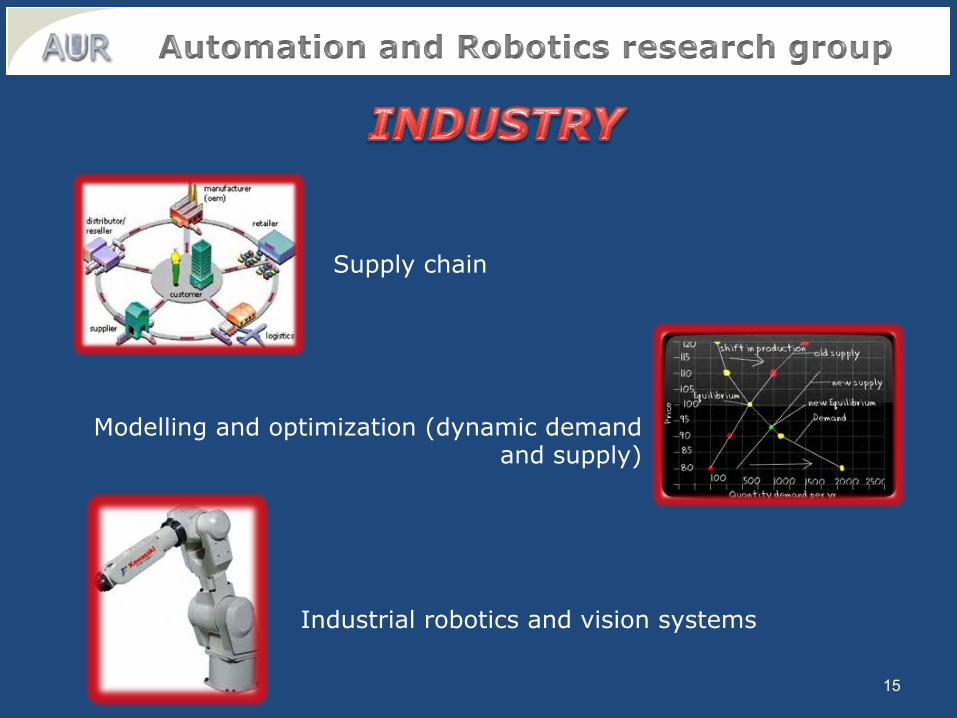
Modelling and optimization (dynamic demand and supply)
Supply chain
Industrial robotics and vision systems


L’Università di Tor Vergata • Nata nel 1982
• Occupa un'estensione territoriale di circa 600 ettari
• 114 corsi di laurea
• 40.000 studenti
• 1441 docenti
• 6 Facoltà (Economia, Giurisprudenza, Ingegneria, Lettere, Medicina, Scienze MMFFNN)
• 300 premi di studio annuali "Raeli" da 5000 euro ciascuno
• 554 borse di studio Erasmus erogate ogni anno
• CampusX

Ingegneria dell’Informazione, 4th floor, office A4-06/03
Classrooms Bus stop “Viale Cambridge”, Engineering and Economy buildings(Bus 20 Express to/from Anagnina-Torbellamonaca)
http://maps.google.it/?ie=UTF8&hq=&hnear=Roma,+Lazio&ll=41.855174,12.623758&spn=0.002753,0.006539&t=h&z=18
Tor Bella Monaca
Anagnina

I possibili percorsi didattici
MAGISTRALE Triennale

q Laurea di Primo Livello (triennale).
Ø Laurea in Ing. Informatica indirizzo Robotica e Automazione.
Ø 180 crediti (1 cfu = 10 ore lezione, 25 ore complessive di lavoro): moduli didattici + tirocinio + prova finale
Ø Nel primo anno vengono impartiti insegnamenti di base (Analisi Matematica, Geometria, Fisica Generale I, Fondamenti di Informatica, Laboratorio di Automatica, Lingua straniera).
Ø Nel secondo anno vengono forniti approfondimenti delle materie di base, e si cominciano corsi più specifici (Calcolatori Elettronici, Elettrotecnica, Fisica Generale II, Ingegneria degli Algoritmi, Fondamenti di Controlli, Fondamenti di Elettronica, Sistemi operativi).
Ø Il terzo anno comprende altri moduli di approfondimento soprattutto in relazione agli argomenti specifici del corso di studi (Controlli Automatici, Ricerca Operativa, Automazione e Robotica con Laboratorio, Basi di dati e Conoscenza o Ingegneria di Internet e Web o Ingegneria del Software e Progettazione Web, Teoria dei Sistemi, Fondamenti di Telecomunicazioni).
Ø Concludono il terzo anno attività di tirocinio, effettuabili anche in azienda, e una prova finale che consiste in una tesi.

q Laurea Magistrale (biennale).
Ø Laurea magistrale in Ing. dell’Automazione
Ø 120 crediti: moduli didattici + tesi finale
Ø I moduli costituiscono un approfondimento dei contenuti della laurea triennale soprattutto in relazione al corso di studi (Ingegneria di Internet e Web, Ottimizzazione, Robotica Industriale, Controllo robusto di sistemi a più variabili, Meccanica applicata alle macchine, Ottimizzazione nei sistemi di controllo, Analisi e sintesi di sistemi non lineari, Sistemi embedded e Real-time, Sicurezza Informatica e Internet).
Ø Lo studente ha la possibilità di personalizzare il proprio piano di studi, previa autorizzazione del Consiglio di Corso di Studi.
Ø Prova finale: tesi su argomenti tra cui: Allocazione di attuatori ridondanti; Architetture di controllo real-time Linux-based; Controllo di fusione termonucleare; Controllo di sistemi di produzione; Controllo ottimo; Controllo predittivo; Controllo robusto; Localizzazione e navigazione di robot mobili; Modelli virtuali di robot articolati per la simulazione in tempo reale; Modellistica e controllo di robot articolati; Modellistica e controllo di sistemi con impatto; Simulazione e realizzazione di sistemi di controllo basati su micro-controllore; Sistemi di controllo nonlineari in presenza di saturazioni.

Test d’ingresso q Consultare il sito di Ingegneria: http://www.ing.uniroma2.it alla voce Immatricolazioni
q Per prepararsi al test: http://www.cisiaonline.it/

MAKER FAIRE – ROMA 2014

ARDUINO DAY – ROMA 2014

SPACE APPS (NASA) – ROMA 2014
CASAIDEA – ROMA 2013
TG2 Costume e Società: http://www.rai.tv/dl/RaiTV/programmi/media/ContentItem-58f53592-cd1a-436d-93e0-ddfbe8a622e1-tg2.html#p=

ROMECUP – ROMA 2013
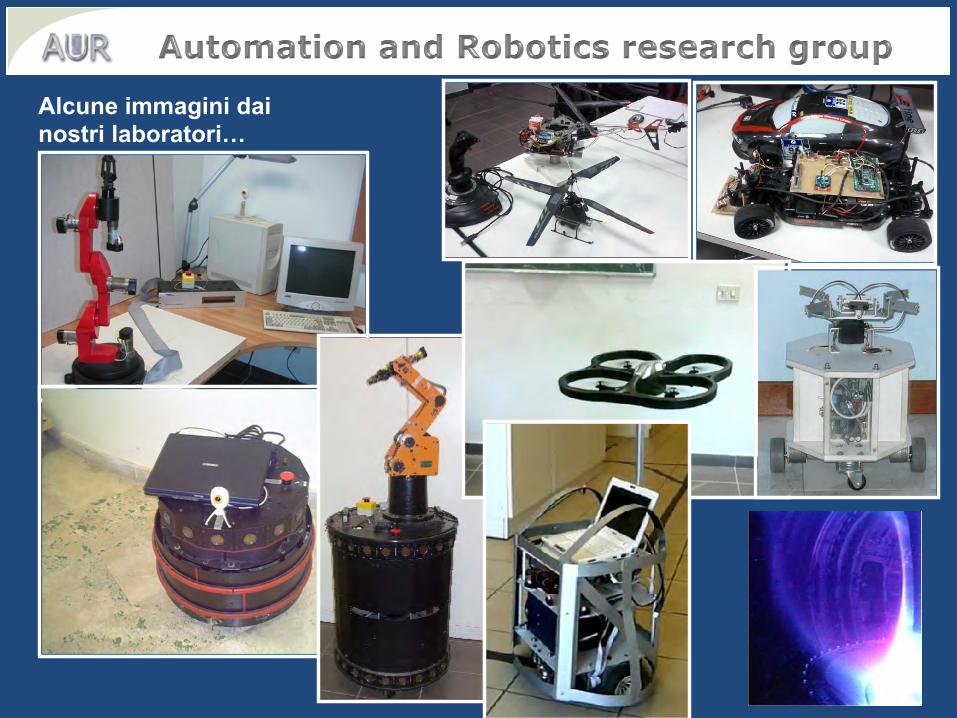
Alcune immagini dai nostri laboratori…