Problema 1.1 Sistema di assiematura con robot e agv Sia dato il sistema in figura.
7
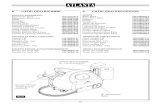
Problema 1.1 Sistema di assiematura con robot e agv Sia dato il sistema in figura. Inizialmente sull' AGV libero viene caricato un semilavorato dal magazzino M1, l' AGV porta questo in pos. 1 per il grasp (la presa) del robot 1. Questo si porta nella posizione di assemblaggio ove arriva il robot 2 per montare sul semilavorato un componente prelevato dal magazzino planare M2 (attenzione: il robot 2 deve arrivare in posizione di assemblaggio sempre dopo il robot 1; l'assemblaggio avviene con entrambi i robots in grasp). Al termine di questa operazione, mentre il robot 2, effettuato il release (il rilascio), torna in posizione 2 per prelevare il successivo componente, il robot 1 carica sull' AGV il pezzo assemblato; l'AGV dunque torna al magazzino M1 ove, dopo l' operazione di scarico, viene caricato un nuovo semilavorato. Modellare il sistema con una rete di Petri marcata, rappresentando le attività con una sola transizione , cioè ignorando le condizioni “attività in corso” (quindi i relativi R1 R2 AGV AGV AGV AGV POS1 M2 ASSIEMATURA M1 POS2
description
Problema 1.1 Sistema di assiematura con robot e agv Sia dato il sistema in figura. ASSIEMATURA. POS2. POS1. M1. AGV. AGV. AGV. AGV. R1. R2. M2. - PowerPoint PPT Presentation
Transcript of Problema 1.1 Sistema di assiematura con robot e agv Sia dato il sistema in figura.

Problema 1.1Sistema di assiematura con robot e agvSia dato il sistema in figura.
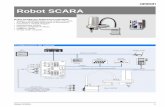
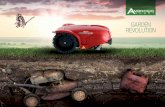
Inizialmente sull' AGV libero viene caricato un semilavorato dal magazzino M1, l' AGV porta questo in pos. 1 per il grasp (la presa) del robot 1. Questo si porta nella posizione di assemblaggio ove arriva il robot 2 per montare sul semilavorato un componente prelevato dal magazzino planare M2 (attenzione: il robot 2 deve arrivare in posizione di assemblaggio sempre dopo il robot 1; l'assemblaggio avviene con entrambi i robots in grasp). Al termine di questa operazione, mentre il robot 2, effettuato il release (il rilascio), torna in posizione 2 per prelevare il successivo componente, il robot 1 carica sull' AGV il pezzo assemblato; l'AGV dunque torna al magazzino M1 ove, dopo l' operazione di scarico, viene caricato un nuovo semilavorato. Modellare il sistema con una rete di Petri marcata, rappresentando le attività con una sola transizione, cioè ignorando le condizioni “attività in corso” (quindi i relativi stati), e dettagliando le operazioni di grasp e release per i robots, con le relative precedenze
R1 R2AGVAGVAGVAGV
POS1
M2
ASSIEMATURA
M1
POS2

AGV liberoin M1
semilavorato in M1
R1 in pos. 1
R2 inpos. 2
componente in M2
R1 R2AGVAGVAGVAGV
POS1
M2
ASSIEMATURA
M1
POS2

AGV liberoin M1
semilavorato in M1
AGV consemilavorato in pos.1
R1 in pos. 1
R1 con semilavorato in pos. 1
grasp di R1 (ATTIVITA’)
viaggio da M1 a pos. 1 (ATTIVITA’)
componente in M2R1 si sposta in ASS(ATTIVITA’)
AGV in pos1In attesa dellavorato
R1 R2AGVAGVAGVAGV
POS1
M2
ASS
M1
POS2
R2 inpos. 2

AGV liberoin M1
semilavorato in M1
AGV consemilavorato in pos.1 R1 in pos. 1
R1 con semilavorato in pos. 1
grasp di R1
viaggio da M1 a pos. 1
componente in M2
R1 si sposta in ASS
R1 con semilav.in ASS
chiamataper R2
grasp di R2
R2 con comp. in pos. 2
R2 si sposta in ASS (ATTIVITA’)
R2 con comp.in ASS
(ATTIVITA’) lavoroASSIEMATURA
AGV in pos1In attesa dellavorato
R1 R2AGVAGVAGVAGV
POS1
M2
ASS
M1
POS2
R2 inpos. 2

AGV liberoin M1
semilavorato in M1
AGV consemilavorato in pos.1
R1 in pos. 1
R1 con semilavorato in pos. 1
grasp di R1
viaggio da M1 a pos. 1
componente in M2R1 si sposta in ASS
R1 con semilav.in ASS
chiamataper R2
grasp di R2
R2 con comp. in pos. 2
R2 si sposta in ASS
R2 con comp.in ASS
lavoro
lavoratoin ASS
release di R2 R2 si sposta in posiz. 2
R1 con lavorato ASS
R1 si spostain pos. 1
R2 in ASS
AGV in pos1In attesa dellavorato
R2 inpos. 2
R1 R2AGVAGVAGVAGV
POS1
M2
ASS
M1
POS2

AGV liberoin M1
semilavorato in M1
AGV consemilavorato in pos.1
R1 in pos. 1
R1 con semilavorato in pos. 1
grasp di R1
viaggio da M1 a pos. 1
componente in M2R1 si sposta in ASS
R1 con semilav.in ASS
chiamataper R2
grasp di R2
R2 con comp. in pos. 2
R2 si sposta in ASS
R2 con comp.in ASS
lavoro
lavoratoin ASS
release di R2 R2 si sposta in posiz. 2
R1 con lavorato ASS
R1 si spostain pos. 1
R2 in ASS
R1 con lav.in pos. 1
release di R1
AGV in pos1In attesa dellavorato
R1 R2AGVAGVAGVAGV
POS1
M2
ASS
M1
POS2

AGV liberoin M1
semilavorato in M1
AGV consemilavorato in pos.1
R1 in pos. 1
R1 con semilavorato in pos. 1
grasp di R1
viaggio da M1 a pos. 1
R1 si sposta in ASS
R1 con semilav.in ASS
chiamataper R2
R2 inpos. 2
grasp di R2
R2 con comp. in pos. 2
R2 si sposta in ASS
R2 con comp.in ASS
lavoro
lavoratoin ASS
release di R2 R2 si sposwta in posiz. 2
R2 in ASS
R1 con lavorato ASS
R1 si spostain pos. 1
R1 con lav.in pos. 1
release di R1
AGV con lav.in pos. 1
AGV si spostain M1
AGV in M1
scarico
componente in M2
AGV in pos1In attesa dellavorato
R1 R2AGVAGVAGVAGV
POS1
M2
ASS
M1
POS2