INDICATORI DI PERFORMANCE MOTORIA PER L’ARTO SUPERIORE: INTEGRAZIONE DI UN ROBOT PLANARE CON UN...
23
INDICATORI DI PERFORMANCE MOTORIA PER L’ARTO SUPERIORE: INTEGRAZIONE DI UN ROBOT PLANARE CON UN SISTEMA OPTOELETTRONICO FACOLTÀ DI INGEGNERIA TESI DI LAUREA MAGISTRALE IN INGEGNERIA BIOMEDICA Relatore Prof. Paolo CAPPA Candidata Annachiara SEPIACCI Correlatore Ing. Marco GERMANOTTA Anno accademico 2011/2012
-
Upload
annachiarasepiacci -
Category
Documents
-
view
447 -
download
0
Transcript of INDICATORI DI PERFORMANCE MOTORIA PER L’ARTO SUPERIORE: INTEGRAZIONE DI UN ROBOT PLANARE CON UN...

INDICATORI DI PERFORMANCE MOTORIA PER L’ARTO SUPERIORE: INTEGRAZIONE DI UN
ROBOT PLANARE CON UN SISTEMA OPTOELETTRONICO
FACOLTÀ DI INGEGNERIATESI DI LAUREA MAGISTRALE IN INGEGNERIA BIOMEDICA
RelatoreProf. Paolo CAPPA
CandidataAnnachiara SEPIACCI
CorrelatoreIng. Marco GERMANOTTA
Anno accademico 2011/2012

SCOPO DELLA TESI
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri
Valutare l’efficacia clinica e scientifica dell’integrazione di un robot planare per la riabilitazione dell’arto superiore con un sistema optoelettronico per l’analisi del movimento.
Analizzare la capacità di adattamento dei soggetti pediatrici sani a differenti campi di forza generati dal robot riabilitativo.

CONTESTO
I dispositivi robotici per la neuroriabilitazione permettono di:
svolgere un certo movimento in modo standardizzato, per un numero elevato di volte e senza bisogno di una costante supervisione da parte del fisioterapista;
somministrare trattamenti di elevata intensità, modulata in relazione alle capacità dei singoli soggetti ed ai progressi effettuati;
valutare le performance motorie dei soggetti mediante sensori che forniscono dati oggettivi e ripetibili relativi al movimento effettuato.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

STATO DELL’ARTE
Le scale cliniche convenzionali hanno limiti di affidabilità, soggettività e dispendio di tempo.
Elaborando i dati ottenuti dai robot si ottengono indicatori di performance motoria che sintetizzano numericamente il grado di disabilità del paziente.
La varietà degli indicatori proposti in letteratura è dovuta ai differenti aspetti riabilitativi che ciascun autore ha voluto porre in risalto e ai diversi set-up adoperati.
Non sempre gli indicatori utilizzati hanno mostrato valori significativamente diversi tra soggetti sani e patologici e non sempre sono risultati correlati con le scale cliniche.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

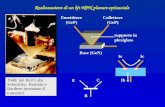
MATERIALI E METODISet-up sperimentale – InMotion Arm Robot
È un modulo planare a 2DoF attivi per la riabilitazione della spalla e del gomito.
È capace di rilevare la componente volontaria del movimento effettuato dal soggetto e di adattare il feedback dinamico fornito.
MECCANISMO SCARA
MANIPOLOMONITOR
SOGGETTO
PC
MOTORI BRUSHLESS
UNITÀ DI CONTROLLO
Il cuore del dispositivo è un meccanismo SCARA azionato da 2 motori brushless e collegato ad un manipolo.
2 encoder misurano la posizione angolare di ciascun motore.
2 tachimetri misurano la velocità di ciascun motore.
2 sensori di coppia misurano la coppia di ciascun motore.
1 cella di carico a sei componenti misura la forza e il momento di interazione tra soggetto e manipolo.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

MATERIALI E METODISet-up sperimentale – Vicon 512
Sistema optoelettronico per l’analisi del movimento che mediante 6 telecamere a raggi rossi ed algoritmi di stereofotogrammetria consente di riprodurre il movimento di zone del corpo segnate da appositi marker passivi retroriflettenti.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

MATERIALI E METODIProtocollo sperimentale – Applicazione dei marker e modello biomeccanico
A ciascun soggetto sono stati applicati 13 marker (D=14 mm) ciascuno dei quali contrassegna un punto di repere anatomico (ripetibilità intra e inter soggettuale delle prove).
La scelta dei punti di repere è legata all’individuazione dei sistemi di riferimento locali per la rappresentazione dei distretti anatomici di tronco, omero avambraccio e mano.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

MATERIALI E METODIProtocollo sperimentale – Task motorio
3 soggetti pediatrici sani hanno eseguito 9 prove point-to-point integrando il robot e il sistema optoelettronico.
Sono state alternate prove senza e prove con campo di forza generato dal robot.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

MATERIALI E METODIProtocollo sperimentale – Task motorioLe prove con campo di forza utilizzate sono: Adaptive Therapy: prova in cui alla direzione corretta lungo cui muoversi corrisponde
un corridoio a bassa impedenza meccanica. Al di fuori di tale corridoio, invece, l’impedenza è molto elevata.
Curl Therapy: prova in cui la forza esercitata dal robot ha direzione ortogonale a quella del movimento e intensità proporzionale alla velocità.
Unstable Therapy: prova in cui se il soggetto devia dalla traiettoria corretta il robot amplifica l’errore di posizione con una forza proporzionale all’errore stesso e ortogonale alla direzione del movimento.
Mix Therapy: prova mista, costituita dall’esecuzione in sequenza di tutte e tre le prove precedenti.
La sequenza delle prove è stata variata da soggetto a soggetto al fine di escludere l’influenza dell’effetto di apprendimento sui risultati ottenuti.Per una corretta valutazione del “dopo effetto” è stato descritto al paziente l’esercizio da eseguire, ma non è stato specificato il tipo di ambiente che si sarebbe trovato ad esplorare.Scopo della tesi Contesto Stato dell’arte Materiali e
metodiRisultati Conclusioni Sviluppi futuri

MATERIALI E METODI Elaborazione dei dati – Indicatori di perfomance
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri
traiettoriaangoli
forza
INDICATORI SINTETICI

MATERIALI E METODIElaborazione dei dati – Indicatori di perfomance
INDICATORI CINEMATICI
Normalized Jerk (NJ) (*)
Peaks Metric (**) Numero di picchi del profilo di velocità con il segno meno.
Speed Metric (SM) (**)
Mean Arrest Period Ratio (MAPR) (**) Percentuale di tempo in cui la velocità di movimento supera il 10% della velocità di picco.
Length Ratio (***)
Rapporto tra la lunghezza della curva realmente effettuata dal paziente e la lunghezza della linea
retta che congiunge il punto d’inizio del movimento e il punto di target.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri
(*) Teulings, H. L. et al. Jul 1997, (**) Rohrer, B. et al. Sep 2002, (***) Zollo, L. et al. 2011

MATERIALI E METODI Elaborazione dei dati – Indicatori di perfomance
INDICATORI DINAMICIPeak Force: componente x (*)
Peak Force: componente y (*)
Peak Force: componente z (*)
INDICATORI DI SINERGIA
Joint Angle Correlation (JAC) (**)
Pearson’s Correlation Coefficient of Extension (rE) (***)
Integration of Absolute Deviation of Torque (IADT) (***)
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri
(*) Zollo, L. et al. 2011, (**) Dipietro, L. et al. Aug 2007, (***) Kung, P. C. et al. 2010

RISULTATI
Sono stati confrontati i valori medi di ciascun indicatore relativi alle prove senza campo di forza precedenti e seguenti ogni tipo di prova con campo di forza (ANOVA per misure ripetute ad una e a due vie).
Per ogni soggetto è stato analizzato l’andamento di ciascun indicatore durante tutto il ciclo di prove.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

RISULTATIAnalisi dei valori medi – Indicatori cinematici
Dopo l’applicazione dei campi di forza i
soggetti riescono a recuperare la normale
cinematica di movimento.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

RISULTATIAnalisi per singolo soggetto– Indicatori cinematici
SOGGETTO 3 SOGGETTO 3
SOGGETTO 3 SOGGETTO 3
Coerenza tra gli indicatori di fluidità.Scopo della tesi Contesto Stato dell’arte Materiali e
metodiRisultati Conclusioni Sviluppi futuri

RISULTATIAnalisi dei valori medi – Indicatori dinamici
Dopo le prove Adaptive Therapy e Mix Therapy i soggetti non riescono a recuperare la normale
dinamica di movimento.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

RISULTATIAnalisi per singolo soggetto – Indicatori dinamici
La componente z della forza che il soggetto esercita
sull’end-effector del robot diminuisce dopo la prova
Adaptive Therapy e aumenta dopo la prova Mix Therapy .
SOGGETTO 1 SOGGETTO 2
SOGGETTO 3
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

RISULTATIAnalisi dei valori medi – Indicatori di sinergia
Dopo l’applicazione dei campi di forza i soggetti riescono a recuperare la normale sinergia di movimento.I soggetti adottano strategie di sinergia differenti a seconda della direzione del movimento.L’indicatore IADT sembra il più adatto ad evidenziare le differenti scelte di coordinamento tra angoli e momenti anatomici.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

RISULTATIAnalisi per singolo soggetto– Indicatori di sinergia
SOGGETTO 2SOGGETTO 2
SOGGETTO 2
Coerenza tra gli indicatori di sinergia.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

CONCLUSIONI
L’integrazione dell’InMotion Arm Robot con il sistema optoelettronico Vicon 512 ha permesso, utilizzando un modello biomeccanico appositamente sviluppato, di misurare in modo del tutto originale la cinematica e la dinamica dell’intero arto superiore.
Le performance motorie dei soggetti sono state quantificate mediante indicatori cinematici, dinamici e di sinergia.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

CONCLUSIONI
I soggetti pediatrici sani che eseguono in sequenza una prova senza campo, una prova con campo e un’altra prova senza campo recuperano la normale cinematica e sinergia di movimento.
I soggetti pediatrici sani che eseguono in sequenza una prova senza campo, una prova con campo e un’altra prova senza campo non recuperano la normale dinamica di movimento.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
Risultati Conclusioni Sviluppi futuri

SVILUPPI FUTURI
Estensione ad un numero maggiore di soggetti sani e confronto con soggetti patologici.
Capire se e come utilizzare il processo di adattamento a differenti situazioni dinamiche per favorire il recupero delle funzioni motorie compromesse di soggetti emiplegici.
Scopo della tesi Contesto Stato dell’arte Materiali e metodi
ConclusioniRisultati Sviluppi futuri

Grazie dell’attenzione!