Presentazione standard di...
12
1 1 i CM N i A i A N i i mr r m = = = Sistema di riferimento del centro di massa - l’origine e’ istante per istante collocata nel → si assume - gli assi mantengono sempre lo stesso 3 m 2 m n m 5 m 1 m O’ 4 m z’ y’ x’ centro di massa del sistema di punti materiali orientamento rispetto agli assi fissi che abbia assi sempre paralleli agli assi fissi CM A r z cm y cm x cm O c.m. poiche’ il centro di massa e’ un punto rappresentativo lo utilizzeremo per definire un nuovo sistema di riferimento S’ → sistema di riferimento inerziale fisso . . CM O CM 0 CM A = → dell’ intero sistema di punti materiali in altri termini il sistema di riferimento del centro di massa non e’ in rotazione rispetto al sistema di riferimento inerziale fisso
Transcript of Presentazione standard di...
1
1
i
CM
N
i A
iA N
i
i
m r
r
m
=
=
=
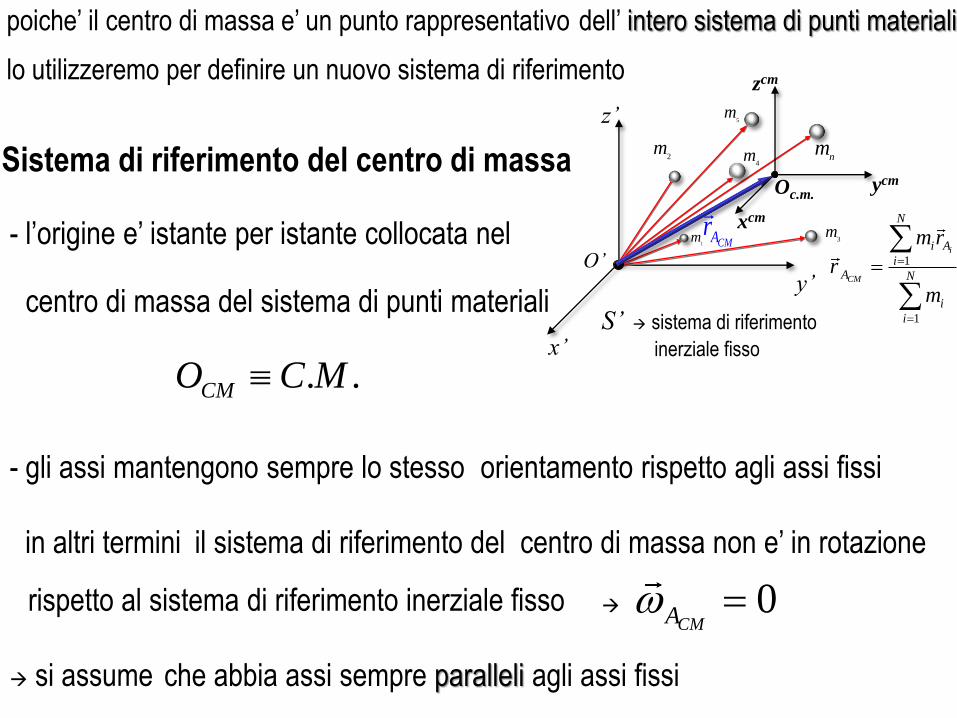
Sistema di riferimento del centro di massa
- l’origine e’ istante per istante collocata nel
→ si assume
- gli assi mantengono sempre lo stesso
3m
2m
nm
5m
1m
O’
4m
z’
y’
x’
centro di massa del sistema di punti materiali
orientamento rispetto agli assi fissi
che abbia assi sempre paralleli agli assi fissi
CMAr
zcm
ycm
xcm
Oc.m.
poiche’ il centro di massa e’ un punto rappresentativo
lo utilizzeremo per definire un nuovo sistema di riferimento
S’ → sistema di riferimento
inerziale fisso
. .CMO C M
0CMA =→
dell’ intero sistema di punti materiali
in altri termini il sistema di riferimento del centro di massa non e’ in rotazione
rispetto al sistema di riferimento inerziale fisso

( )P P OT R R Aa r r a = + +
2 vPC Ra =
P PA R T Ca a a a= + +
v v vP PA R T= +
v vO PT A Rr= + dove
dove
e
➢
➢
PAr PRr= OAr+
PArPRr
oAr➢
Ptrasformazione della velocita’ e
dell’ accelerazione
v v v P CM CMP
scm scm
A A A Pr= + +
→ tutte le grandezze riferite
saranno indicate con l’apice scm
del C.M.
P CMP
scm
A Aa a a= +
Nota Bene:
un sistema inerziale
0CMAa → il sistema del centro di massain generale
invece che con il pedice R
v v v P P O PA R A A Rr= + +
0 CMA =
2 v 0A PCM
C Ra = =
( ) 0CM CM PA A Rr =
→
→
→
0CMA =se
v v vP CMP
scm
A A= +
non e’
al sistema
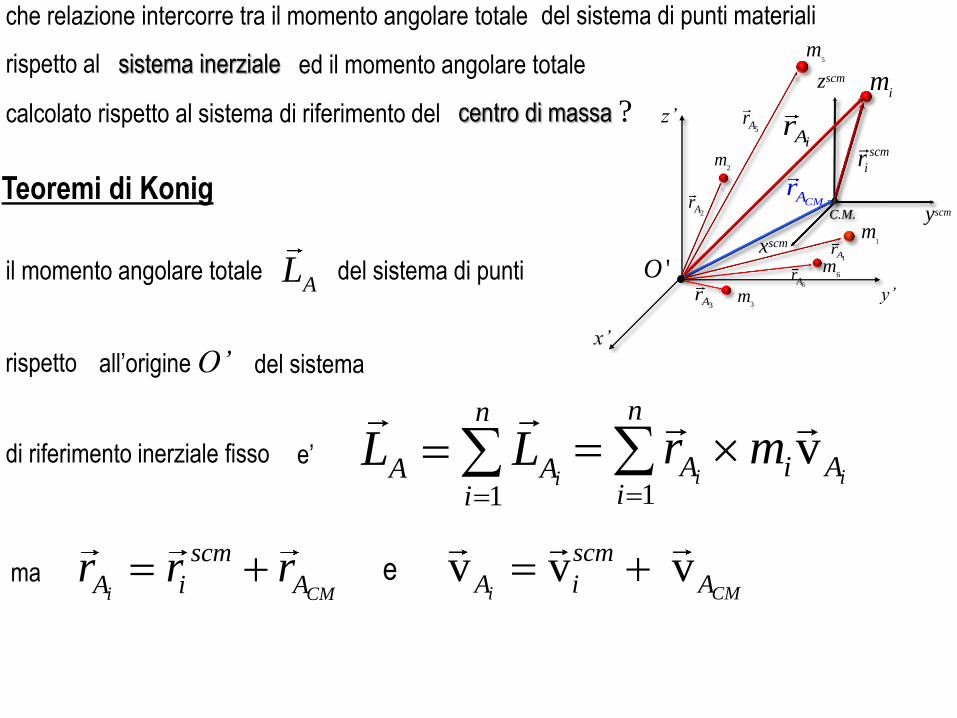
Teoremi di Konig
1i
n
A Ai
L L=
=
il momento angolare totale
di riferimento inerziale fisso e’
che relazione intercorre tra il momento angolare totale
rispetto al
calcolato rispetto al sistema di riferimento del
ed il momento angolare totale
del sistema
AL
rispetto
del sistema di punti
all’origine O’
1
vi i
n
A i Ai
r m=
=
i CM
scm
A i Ar r r= + v v vi CM
scm
A i A= +
C.M.
zscm
yscm
xscm
2m
im
5m
1m
z’
y’
x’
6m
3m
2Ar
6Ar
5Ar
1Ar
scm
ir
3Ar
iAr
CMAr
'O
ma e
del sistema di punti materiali
sistema inerziale
centro di massa ?
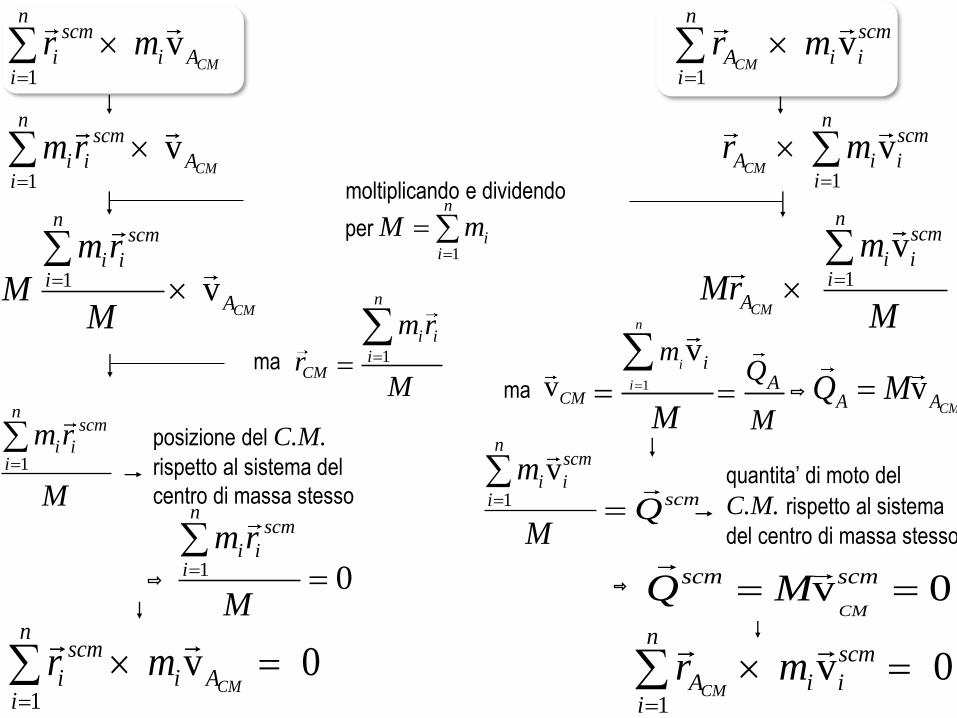
1
( ) (v v )CM CM
nscm scm
A i A i i Ai
L r r m=
= + +
1
vn
scm scm
i i ii
r m=
+1
vCM
nscm
i i Ai
r m=
+1
vCM
nscm
A i ii
r m=
+1
vCM CM
n
A i Ai
r m=
1
vi i
n
A A i Ai
L r m=
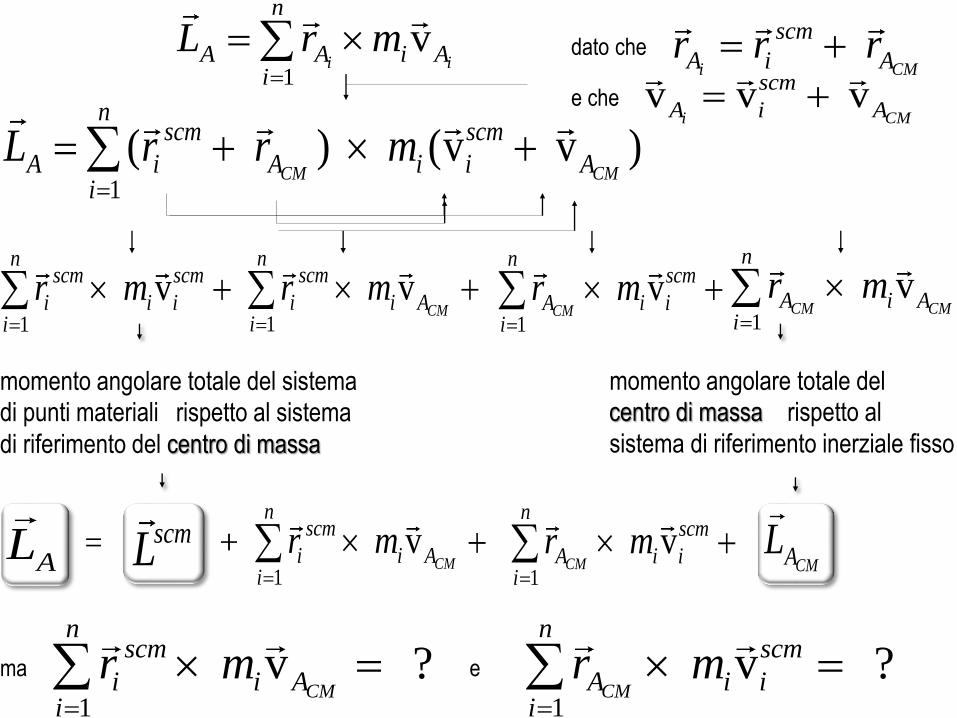
= dato che
e che
i CM
scm
A i Ar r r= +
v v vi CM
scm
A i A= +
momento angolare totale del sistema momento angolare totale del
CMALscmL
di punti materiali
di riferimento del centro di massa
rispetto alrispetto al sistema centro di massa
ma
1
v ?CM
nscm
A i ii
r m=
=1
v ?CM
nscm
i i Ai
r m=
= e
AL = +
1
vCM
nscm
i i Ai
r m=
+1
vCM
nscm
A i ii
r m=
+
sistema di riferimento inerziale fisso
1
vCM
nscm
i i Ai
m r=
1
vCM
nscm
A i ii
r m=
1
vCM
nscm
i i Ai
r m=
moltiplicando e dividendo
1
n
ii
M m=
=per
1 vCM
nscm
i ii
A
m r
MM
=
CMr 1
n
i i
i
m r
M
==
ma
1
nscm
i ii
m r
M
=
posizione del C.M.rispetto al sistema del
centro di massa stesso
1 0
nscm
i ii
m r
M
= =
1
v 0CM
nscm
i i Ai
r m=
=
1
vCM
nscm
A i ii
r m=
1
v
CM
nscm
i ii
A
m
MrM
=
AQ
M=1
vn
i
i
im
M
==
vCMma
1
vn
scm
i ii
m
M
=
quantita’ di moto del
C.M. rispetto al sistema
del centro di massa stesso
vCMA AQ M=
v 0CM
scm scmQ M= =
scmQ=
1
v 0CM
nscm
A i ii
r m=
=
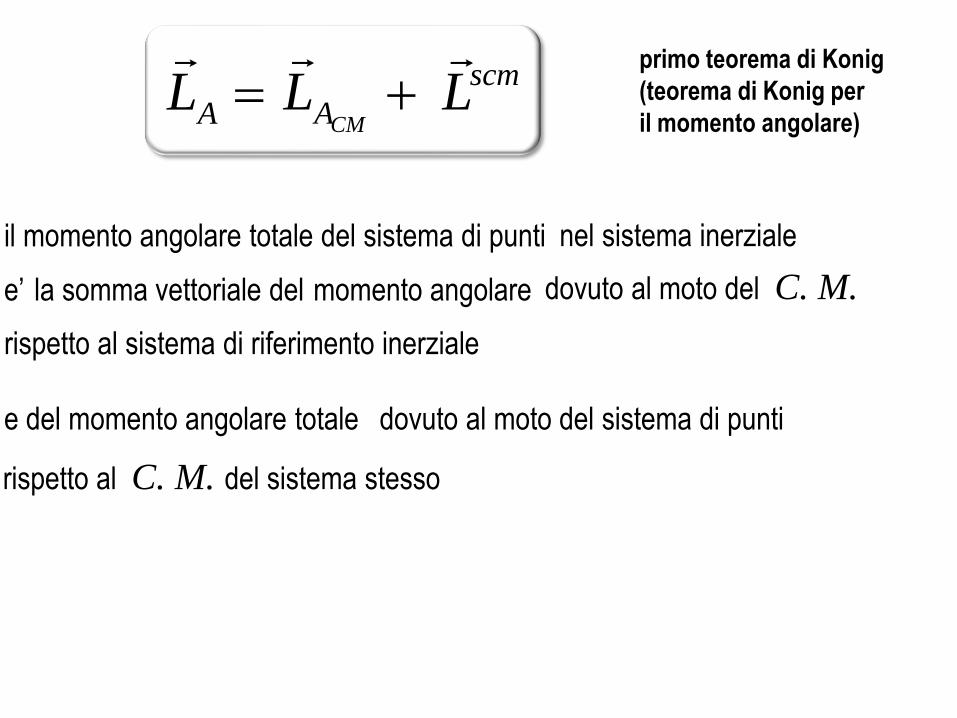
primo teorema di Konig
(teorema di Konig per
il momento angolare)
CM
scm
AL L+AL =
il momento angolare totale del sistema di punti
dovuto al moto del C. M.
e del momento angolare totale
momento angolarela somma vettoriale del
rispetto al sistema di riferimento inerziale
rispetto al C. M. del sistema stesso
nel sistema inerziale
e’
dovuto al moto del sistema di punti
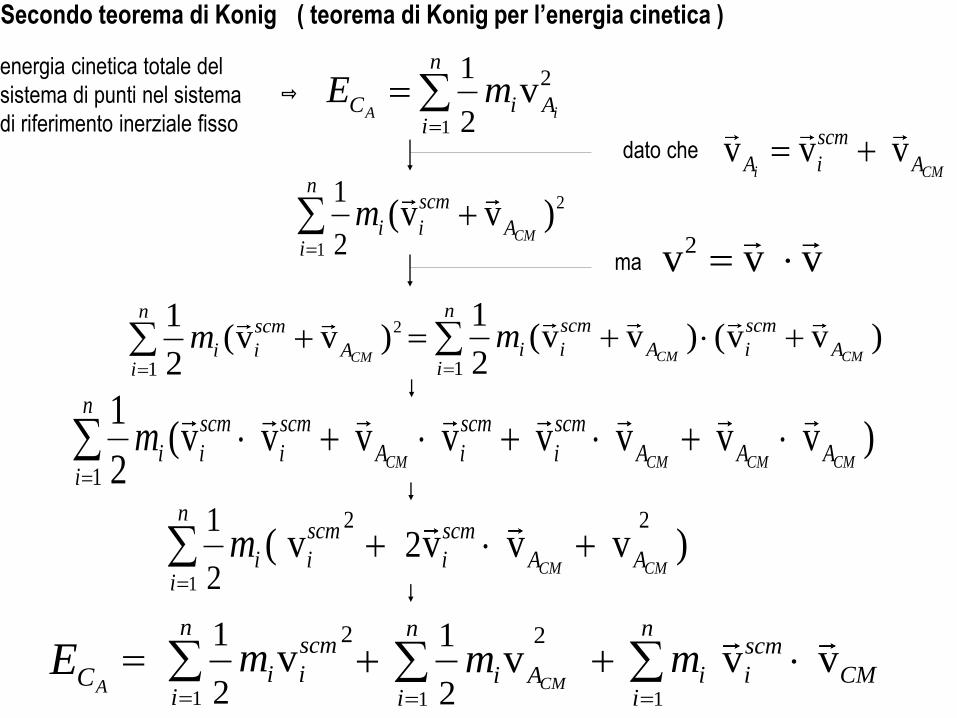
Secondo teorema di Konig
energia cinetica totale del
sistema di punti nel sistema
di riferimento inerziale fisso 1
21
2v
A i
n
C i Ai
E m=
=
2
1
1
2(v v )
CM
nscm
i i Ai
m=
+
1
2 2 1
22( v v v v )
CM CM
nscm scm
i i i A Ai
m=
+ +
ma
1
21
2 v
nscm
i ii
m=
= 1
2 1
2 v
CM
n
i Ai
m=
+ 1
v vn
scm
i i CMi
m=
+
2v v v=
1
1(v v v v v v v v )
2 CM CM CM CM
nscm scm scm scm
i i i A i i A A Ai
m=
+ + +
2
1
1(v v )
2 CM
nscm
i i Ai
m=
+1
1(v v ) (v v )
2 CM CM
nscm scm
i i A i Ai
m=
= + +
dato che v v vi CM
scm
A i A= +
ACE
( teorema di Konig per l’energia cinetica )

1
21
2v
nscm
i ii
m=
1
2 1
2v
CM
n
i Ai
m=
1
v vACM
nscm
i ii
m=
1
v ( v )CM
nscm
A i ii
m=
v CM
scm
A Q
energia cinetica
totale del sistema
di punti rispetto al
sistema del centro
di massa
energia cinetica di un punto
0scmQ =
e’quantita’ di moto totale
del C.M. rispetto a se stesso
massa totale
del centro di massa
→ energia cinetica del C.M.rispetto al sistema inerziale
1
2 1
2v
CM
n
A ii
m=
2 1
2v
CMAM
scmQ
1
v v 0ACM
nscm
i ii
m=
=
che si muova’
materiale di massa pari alla
2 vCMA
rispetto al sistema inerziale
con la stesssa velocita
M del sistema
di punti
ma
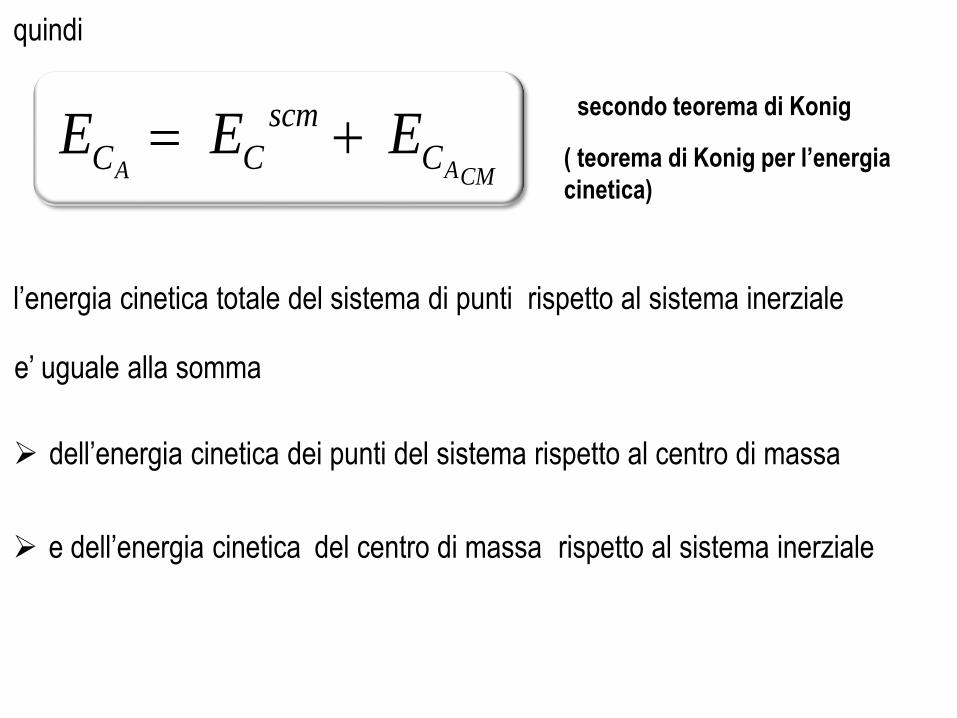
quindi
l’energia cinetica totale del sistema di punti rispetto al sistema inerziale
ACE = ACM
scm
C CE E+
➢ dell’energia cinetica dei punti del sistema rispetto al centro di massa
del centro di massa
secondo teorema di Konig
➢ e dell’energia cinetica
e’ uguale alla somma
rispetto al sistema inerziale
( teorema di Konig per l’energia
cinetica)

sia concentrata tutta la massa delle forze esterne
ma
e’ un punto rappresentativo
e su cui si applica la risultante
del sistema di punti
il centro di massa di un sistema di punti materiali
nel quale si puo’ pensare
per il momento angolare totale
sufficiente conoscere la quantita’ di moto
tenere anche conto del moto del sistema di punti
ossia il moto del centro di massa
rispetto al centro di massa
ma bisogna
e la risultante delle forze esterne,
rispetto al sistema inerziale,
e l’energia cinetica totale
non e’
riassumendo:
del sistema di punti

iAr
viA
iAa
vi iA i Aq m=
vi i iA A i AL r m=
2 1
2v
iAii AC mE =
im
( rispetto all’origine o rispetto
al polo fisso prescelto )
le grandezze
di un sistemaper ogni punto Pi
di massa mi ciascuno
1
n
i
i
mM=
=
1i
n
iAQ q
=
=
2
1
1
2v
i
n
i A
i
C mE=
=
1
n
i
i
LL=
=
di tutti i puntirelativamente all’insieme
si introducono
di punti materiali il sistema di punti materiali
1i
n
i A
i
m r
M
==
CMr
CMdr
dt=vCM
CMa =vCMd
dt
espresse in funzione di
CMr vCMe
iAdr
dt=
viAd
dt=
le grandezzesi introducono
costituenti
3m
2m
nm
5m
1m
O’
4m
z’
y’
x’
cmr
eE
iF I
jiFe
1
nE E
i
i
R F=
=IR
1 1
n nI I
ji ij
j ij i i j
F F= =
= +
?'Q =
?'L =
' ?CE =
vCMMQ =
S’ → sistema di riferimento
inerziale fisso
scmCML L+L =
CE = CMC
scmCE E+

Backup Slides