POLITECNICO DI MILANO - politesi.polimi.it · saldamente al suo supporto che è avvitato al banco...
54
POLITECNICO DI MILANO Facoltà di Ingegneria Industriale e dell'informazione Corso di Laurea Magistrale in Ingegneria Elettronica PROGETTO DI UN SISTEMA ELETTRONICO PER L’ATTENUAZIONE ATTIVA DI VIBRAZIONI MECCANICHE Relatore: Prof. Michele NORGIA Tesi di Laurea Magistrale di: ANDREA BARCHIELLI Matricola 804067 Anno Accademico 2014-2015
Transcript of POLITECNICO DI MILANO - politesi.polimi.it · saldamente al suo supporto che è avvitato al banco...
POLITECNICO DI MILANO
Facoltà di Ingegneria Industriale e dell'informazione
Corso di Laurea Magistrale in
Ingegneria Elettronica
PROGETTO DI UN SISTEMA ELETTRONICO PER
L’ATTENUAZIONE ATTIVA DI VIBRAZIONI MECCANICHE
Relatore: Prof. Michele NORGIA
Tesi di Laurea Magistrale di:
ANDREA BARCHIELLI
Matricola 804067
Anno Accademico 2014-2015

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
2
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
3
INDICE GENERALE
Indice delle figure…………………………………………………………………………………………………………………………..4
Sommario……………………………………………………………………………………………………………………………………….7
INTRODUZIONE………………………………………………………………………………………………………………………………8
1. DESCRIZIONE DEL SISTEMA………………………………………………………………………………………………………..9
1.1. Lamina, altoparlante, piezoelettrico……………………………………………………………………………………9
1.2. Accelerometro…………………………………………………………………………………………………………………..13
1.3. Microcontrollore……………………………………………………………………………………………………………….16
1.4. Amplificatore…………………………………………………………………………………………………………………….19
1.5. Amplificatore audio e scheda di acquisizione dati……………………………………………………………..25
2. Analisi del sistema……………………………………………………………………………………………………………………28
2.1. Acquisizione dati……………………………………………………………………………………………………………….28
2.2. Rielaborazione dati……………………………………………………………………………………………………………34
3. Progetto del regolatore…………………………………………………………………………………………………………….43
3.1. Algoritmo di controllo delle vibrazioni..……………………………………………………………………………..43
3.2. Ottimizzazione dell’algoritmo…………………………………………………………………………………………….46
CONCLUSIONI……………………………………………………………………………………………………………………………….48
APPENDICE…………………………………………………………………………………………………………………………………..50
Bibliografia……………………………………………………………………………………………………………………………………52
Ringraziamenti……………………………………………………………………………………………………………………………..54
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
4
Indice delle figure
Figura 1.1. Prototipo per l’attenuazione attiva delle vibrazioni meccaniche___________________________________8
Figura 1.2. Setup del sistema visto dall’alto__________________________________________________________11
Figura 1.3. Setup del sistema visto di fronte__________________________________________________________11
Figura 1.4. Attuatore piezoelettrico AE1010D16_______________________________________________________12
Figura 1.5. Accelerometro ADXL350_________________________________________________________________14
Figura 1.6. Configurazione dell’accelerometro ADXL350_________________________________________________15
Figura 1.7. Protocollo di scrittura dell’SPI per l’ADXL350_________________________________________________16
Figura 1.8. Protocollo di lettura dell’SPI per l’ADXL350___________________________________________________16
Figura 1.9. Kit Discovery con STM32F4_______________________________________________________________17
Figura 1.10. Configurazione ed abilitazione del DAC1 e del DAC2 e dei loro pin d’uscita________________________18
Figura 1.11. Routine dell’interrupt___________________________________________________________________18
Figura 1.12. Lettura dell’accelerometro ed attivazione del LED verde_______________________________________19
Figura 1.13. Cicli while annidati ed attivazione del LED blu_______________________________________________19
Figura 1.14. Amplificatore_________________________________________________________________________20
Figura 1.15. Schema elettrico dell’amplificatore________________________________________________________21
Figura 1.16. Jumper (J1)___________________________________________________________________________23
Figura 1.17. Circuito di alimentazione dell’amplificatore_________________________________________________24
Figura 1.18. Massa e alimentazione dello stadio d’uscita_________________________________________________25
Figura 1.19. Messa a terra della massa dell’amplificatore________________________________________________25
Figura 1.20. Amplificatore audio____________________________________________________________________26
Figura 1.21. Circuito applicativo del TDA2030__________________________________________________________27
Figura 1.22. NI 6251______________________________________________________________________________28
Figura 2.1. Front Panel____________________________________________________________________________29
Figura 2.2. Sezione del Block Diagram________________________________________________________________30
Figura 2.3. 1a frame della Flat Sequence Structure (Block Diagram)_________________________________________31
Figura 2.4. 2a frame della Flat Sequence Structure (Block Diagram)_________________________________________32
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
5
Figura 2.5. 3a frame della Flat Sequence Structure (Block Diagram)_________________________________________33
Figura 2.6. Condizione di uscita dal ciclo while (Block Diagram)____________________________________________33
Figura 2.7. Programma eseguito dal microcontrollore__________________________________________________34
Figura 2.8. Front Panel___________________________________________________________________________35
Figura 2.9. 1a frame della Flat Sequence Structure (Block Diagram)________________________________________36
Figura 2.10. Lettura dei files (2a frame della Flat Sequence Structure)______________________________________36
Figura 2.11. Ricostruzione della forma d’onda (2a frame della Flat Sequence Structure)________________________37
Figura 2.12. FFT, calcolo del modulo e della fase della funzione di trasferimento, salvataggio dati (2a
frame)_______37
Figura 2.13. Report di Tp(f)________________________________________________________________________38
Figura 2.14. Diagramma del modulo di Tp(f)___________________________________________________________39
Figura 2.15 Diagramma della fase di Tp(f)_____________________________________________________________39
Figura 2.16. Diagramma del modulo di Tp(f), (2a misura)_________________________________________________40
Figura 2.17. Diagramma della fase di Tp(f), (2a misura)__________________________________________________40
Figura 2.18. Report di Tp(f), (2a misura)_______________________________________________________________41
Figura 2.19. Diagramma del modulo di Ta(f)___________________________________________________________42
Figura 2.20. Diagramma della fase di Ta(f)_____________________________________________________________42
Figura 2.21. Report di Ta(f)_________________________________________________________________________43
Figura 3.1. Algoritmo eseguito dal microcontrollore____________________________________________________44
Figura 3.2. Segnale dell’accelerometro, in giallo, e ingresso dell’amplificatore, in verde, col sistema di controllo
spento________________________________________________________________________________________44
Figura 3.3. Segnale dell’accelerometro, in giallo, ingresso dell’amplificatore, in verde, e comando del piezoelettrico, in
blu, col sistema di controllo attivo_________________________________________________________________45
Figura 3.4. Schema funzionale del sistema____________________________________________________________46

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
6
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
7
Sommario
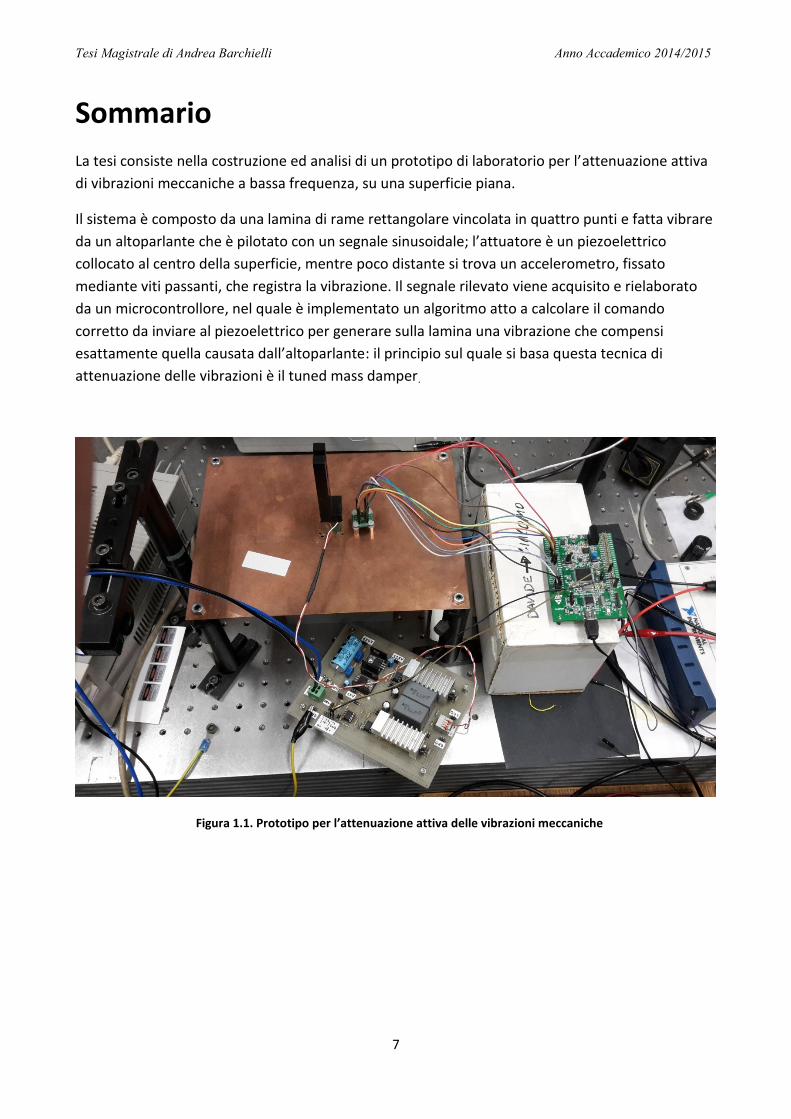
La tesi consiste nella costruzione ed analisi di un prototipo di laboratorio per l’attenuazione attiva
di vibrazioni meccaniche a bassa frequenza, su una superficie piana.
Il sistema è composto da una lamina di rame rettangolare vincolata in quattro punti e fatta vibrare
da un altoparlante che è pilotato con un segnale sinusoidale; l’attuatore è un piezoelettrico
collocato al centro della superficie, mentre poco distante si trova un accelerometro, fissato
mediante viti passanti, che registra la vibrazione. Il segnale rilevato viene acquisito e rielaborato
da un microcontrollore, nel quale è implementato un algoritmo atto a calcolare il comando
corretto da inviare al piezoelettrico per generare sulla lamina una vibrazione che compensi
esattamente quella causata dall’altoparlante: il principio sul quale si basa questa tecnica di
attenuazione delle vibrazioni è il tuned mass damper.
Figura 1.1. Prototipo per l’attenuazione attiva delle vibrazioni meccaniche
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
8
INTRODUZIONE
Il sistema è stato ideato ispirandosi al principio del tuned mass damper che è un metodo che viene
utilizzato in vari ambiti: per esempio per ridurre le oscillazioni degli edifici provocate da terremoti,
oppure per smorzare le vibrazioni dell’abitacolo di un’automobile, o ancora per isolare il vascello
di grandi navi dalle vibrazioni causate dal motore. Una sua applicazione caratteristica si trova nei
grattacieli che possono ondeggiare pericolosamente a causa dei forti venti presenti ad alta quota:
per ridurre l’oscillazione viene agganciato al soffitto un pesante pendolo che, quando la struttura
viene spinta dal vento, agisce da contrappeso limitandone lo spostamento. In quest’ultimo
esempio il tuned mass damper è il pendolo che agisce in modo passivo, però esistono anche tuned
mass damper attivi che non si limitano a smorzare le oscillazioni, ma generano delle vibrazioni
opposte a quelle da eliminare in modo che sommandosi ad esse si annullino a vicenda. Uno studio
quantitativo più approfondito di questo metodo si trova nei seguenti articoli: “Semi-active Tuned
Mass Damper control strategy for wind-excited structures [1]”, “Semi-Active versus Passive or Active
Tuned Mass Dampers for Structural Control [2]”.
Il prototipo oggetto di questa tesi implementa un tuned mass damper attivo che è composto da un
piezoelettrico e dal suo sistema di pilotaggio (amplificatore, microcontrollore, accelerometro): il
piezoelettrico è un parallelepipedo di materiale rigido, il quale se viene posta ai suoi capi una
differenza di potenziale positiva aumenta la sua lunghezza; quindi se gli viene fornito un
potenziale variabile nel tempo, quest’ultimo varia la sua dimensione seguendo l’andamento del
segnale di comando e, dato che è fissato saldamente su una lamina di rame, che rappresenta la
superficie da controllare, ed è sormontato da un pesetto che lo tiene premuto contro di essa,
genera una vibrazione meccanica sulla lamina. Lo scopo della tesi è quello di fare in modo che
questa vibrazione sommandosi a quella generata dallo spostamento d’aria dovuto ad un
altoparlante, che si trova sotto la lamina e che rappresenta il disturbo, la annulli e la superficie da
controllare resti ferma.
Nei capitoli seguenti verrà prima analizzata nel dettaglio ogni parte del sistema, poi ne sarà
presentata la caratterizzazione realizzata tramite labview, con l’ausilio di una scheda di
acquisizione dati, infine verrà mostrato l’ algoritmo di controllo delle vibrazioni e ne sarà proposta
un’ottimizzazione da sviluppare in futuro.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
9
1. DESCRIZIONE DEL SISTEMA
1.1. Lamina, altoparlante, piezoelettrico
La superficie da controllare è stata ottenuta ritagliando un rettangolo di dimensioni 20x26cm a
partire da una lamina di rame di spessore 0.5mm; successivamente sono stati praticati dei fori in
corrispondenza dei quattro angoli che ne permettono l’inserimento sulla sommità di quattro
colonnine, che terminano con una vite filettata: mediante dei dadi la lamina è stata fissata
saldamente al suo supporto che è avvitato al banco ottico, il quale è provvisto di fori filettati ed è
messo a terra tramite un filo elettrico, collegato ad una presa del laboratorio.
Sotto la lamina, in centro, è stato posizionato uno spessore alto 5.5cm, sopra cui è collocato
l’altoparlante che arriva così a trovarsi a circa 1.5cm dalla superficie. Quest’ultimo ha un cono a
sezione circolare di diametro 9cm e la resistenza tra i morsetti di 4Ω; durante gli esperimenti viene
pilotato da un generatore di funzioni che gli invia un’onda sinusoidale: l’accoppiamento con lo
strumento che ha un’impedenza d’uscita di 50Ω è diretto, ed è effettuato mediante un cavo
BNC-coccodrillo; questo comporta il fatto che il trasferimento di potenza non sia ottimizzato ed in
particolare la tensione che cade sull’altoparlante è
Vg ∗4
50 + 4 = Vg ∗ 0.074
dove Vg è la tensione in uscita dal generatore di funzioni, e quindi sull’altoparlante arriva solo il
7.4% della tensione erogata dallo strumento. In queste condizioni la vibrazione prodotta sulla
lamina è piccola e permette di testare il sistema a fronte di piccoli disturbi, mentre per poter
analizzare il comportamento del sistema quando è soggetto a disturbi di maggiore intensità è stato
necessario costruire un amplificatore audio che amplifica il segnale del generatore e lo manda
all’altoparlante con una resistenza d’uscita piccolissima, idealmente nulla; l’amplificatore audio
verrà descritto nel capitolo 1.5. Infine è importante sottolineare che l’altoparlante è stato
posizionato in corrispondenza del centro della lamina per far sì che quest’ultima venga investita
dalle vibrazioni nella zona centrale, in quanto è la parte più mobile, poiché è più distante dai punti
di fissaggio alle colonnine; invece per quanto riguarda la distanza tra l’altoparlante e la lamina, è
stata scelta di modo tale che, anche quando l’altoparlante è collegato direttamente al generatore
di funzioni, la potenza trasmessa alla superficie sia sufficiente per produrre una vibrazione
apprezzabile. Nelle figure 1.2 e 1.3 si può osservare il setup del sistema.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
10
Figura 1.2. Setup del sistema visto dall’alto
Figura 1.3. Setup del sistema visto di fronte
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
11
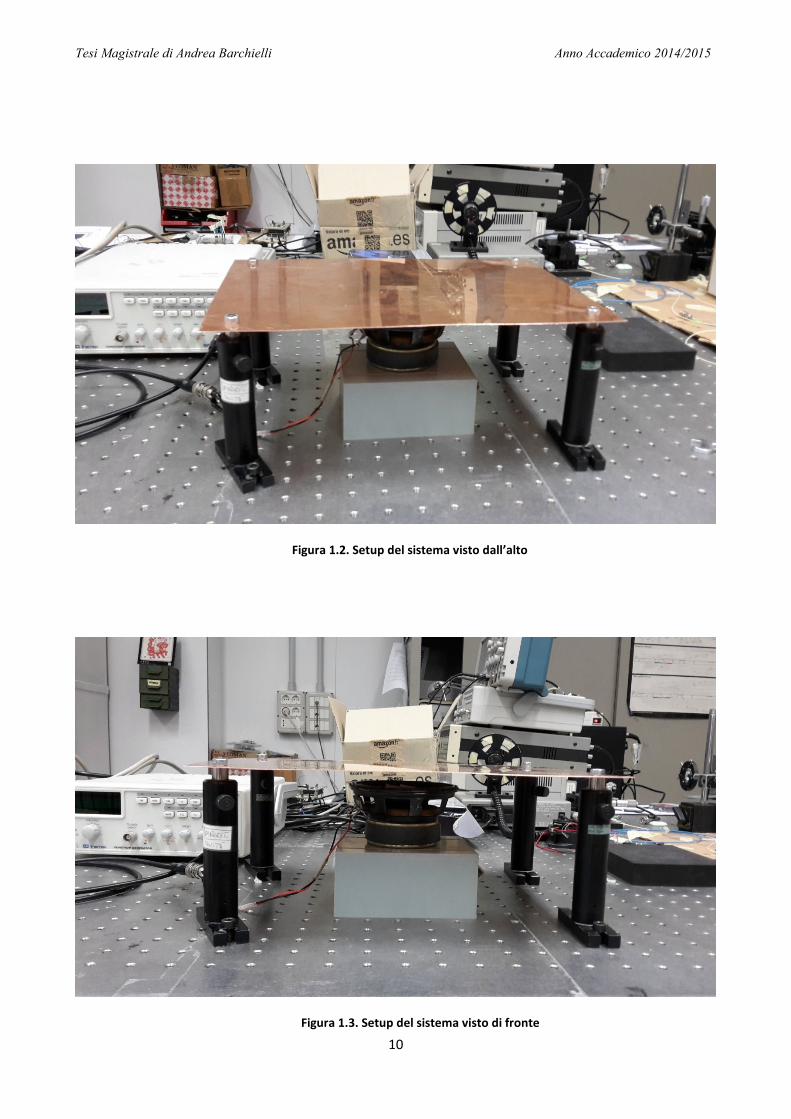
Come attuatore piezoelettrico, figura 4, è stato preso il modello disponibile in laboratorio,
AE1010D16 [3], che ha la forma di un parallelepipedo con dimensioni 10x10x20mm, e che soggetto
a tensioni positive, al massimo 150V, modifica la lunghezza della sua dimensione maggiore fino ad
un delta positivo di 18.4µm.
Figura 1.4. Attuatore piezoelettrico AE1010D16
Elettricamente presenta ai morsetti una capacità equivalente di 5.8µF e per poterlo pilotare è
stato costruito un amplificatore lineare che può farlo funzionare fino quasi alla tensione massima
sopportabile; è stato posto al centro della parte superiore della lamina di rame ed è stato incollato
in un primo tempo con la colla a caldo, ma successivamente con l’attak per avere un fissaggio più
sicuro e preciso: infatti la colla a caldo formava uno strato di circa un millimetro di spessore tra la
lamina e il piezoelettrico, facendo sì che le vibrazioni prodotte venissero smorzate per via delle
proprietà elastiche del collante, in più dopo alcune ore di funzionamento il piezoelettrico si
staccava. Una volta costruito l’amplificatore, la cui struttura verrà descritta nel capitolo 1.4,
l’attuatore è stato testato, verificando sperimentalmente che riesce a produrre sulla lamina una
vibrazione di intensità maggiore rispetto a quella generata dall’altoparlante e quindi dimostrando
che ha la potenza necessaria per poter, se opportunamente comandato, annullare l’oscillazione
che rappresenta il disturbo. Sopra al piezoelettrico è stato incollato un pesetto di massa pari a 58g
che contribuisce insieme all’attak e alla forza di gravità che agisce sul dispositivo, a impedire che
quest’ultimo saltelli sulla superficie, invece di dirigere tutto il suo allungamento sulla lamina,
ottimizzando il trasferimento della vibrazione. La massa del pesetto è stata scelta in base alla
disponibilità del laboratorio ed è stato verificato che fosse sufficiente per lo scopo previsto; è
importante evidenziare anche che posizionando dei corpi sulla superficie da controllare se ne

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
12
modifica la massa e di conseguenza anche la frequenza di risonanza: i picchi di risonanza, che si
possono trovare pilotando l’altoparlante con un segnale sinusoidale ad ampiezza costante mentre
si varia lentamente la frequenza, si spostano a frequenze inferiori. Infatti le frequenze di risonanza
di un sistema dipendono da vari fattori, in particolare dalla dimensione, dalla massa, dalla
geometria del sistema, dalla struttura dell’ambiente circostante, dalla direzione di provenienza
della perturbazione periodica: in generale all’aumentare delle dimensioni e della massa di un
sistema, i suoi picchi di risonanza tendono a scendere a frequenze più basse. Tuttavia, una volta
definito il sistema e la struttura circostante, i picchi di risonanza sono fissi e possono essere
considerati come una caratteristica propria del sistema stesso: nel caso in esame il picco di
risonanza che si cercherà di annullare con il tuned mass damper è centrato intorno a 235Hz.

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
13
1.2. Accelerometro
L’accelerometro ADXL350 [4], in figura 1.5, è stato fissato alla superficie mediante viti passanti
vicino al piezoelettrico, per poter verificare che nella zona d’azione dell’attuatore, la lamina stia
ferma; inizialmente il materiale di fissaggio, viti, distanziali, dadi, era di metallo, ma, dato che
l’accelerometro ha il piano di massa, quest’ultimo tramite la lamina di rame e le torrette, che
nonostante siano verniciate risultano leggermente conduttive, era cortocircuitato col banco ottico
e quindi messo a terra. Questo faceva sì che l’accelerometro ricevesse la massa sia dalla terra di
una presa del laboratorio che dal microcontrollore, che a sua volta prendeva la massa dal
computer e la forniva anche all’amplificatore, il quale era collegato ad un altro alimentatore,
attaccato ad un’altra presa del laboratorio: in questa situazione ogni volta che c’era uno
sbilanciamento tra le masse, per esempio durante i transitori di accensione e spegnimento degli
strumenti, in particolare dell’amplificatore, che dispone di un interruttore indipendente che
interrompe entrambe le alimentazioni, scorreva corrente verso la terra, attraversando
l’accelerometro e danneggiandolo irreparabilmente. Il problema, una volta compreso, è stato
risolto ancorando il sensore alla superficie con elementi in plastica, collegando tutti gli strumenti
utilizzati, computer, alimentatori, oscilloscopio, scheda di acquisizione dati, alla stessa presa di
corrente attraverso una ciabatta, e cortocircuitando la massa dell’amplificatore con il banco ottico,
di modo che abbia sempre un riferimento di massa fisso. Riguardo inece al funzionamento interno,
l’accelerometro converte con un ADC il segnale misurato ed alza un flag ogni volta che campiona
un nuovo valore, in modo che il microcontrollore sappia quando deve leggerlo; la comunicazione
avviene tramite SPI a quattro fili e all’accensione il microcontrollore sceglie la modalità di
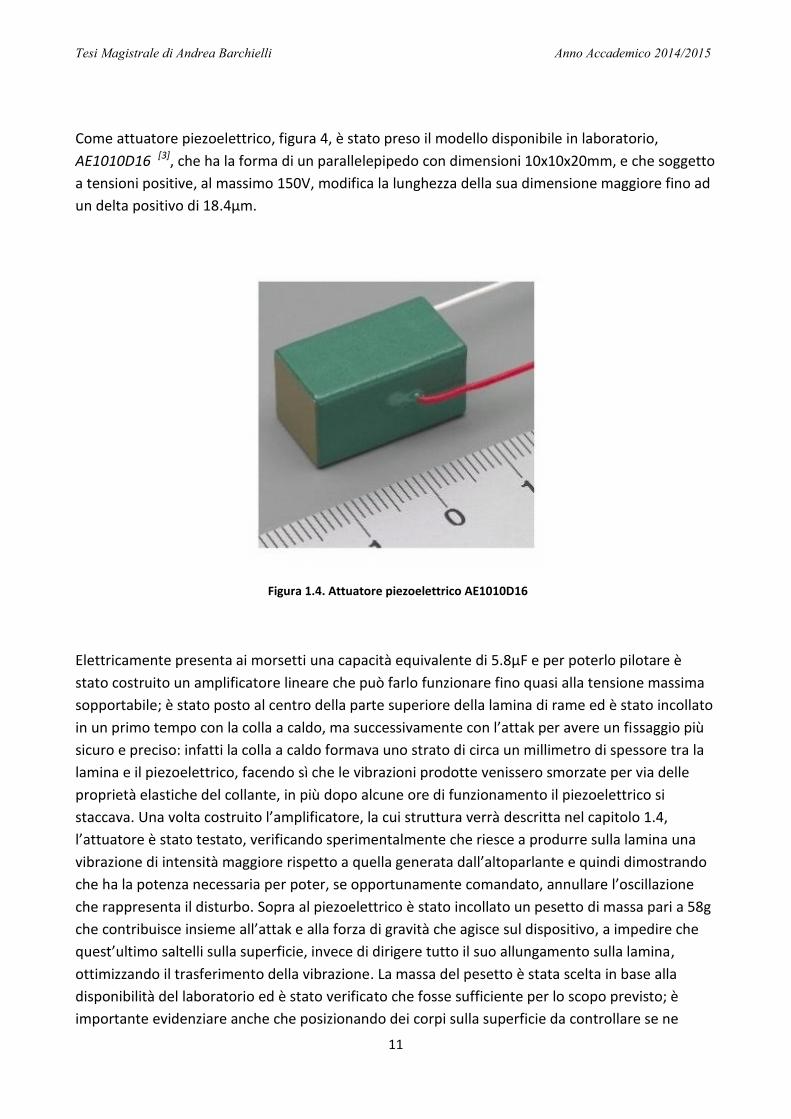
funzionamento, scrivendo i registri di configurazione del sensore: come si evince dalla figura 1.6 è
abilitata la full resolution mode, il range di misura è compreso tra ±2g, le interrupt sono mappate
sul pin INT1 e la frequenza di campionamento è 3.2kHz.
Figura 1.5. Accelerometro ADXL350
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
14
Figura 1.6. Configurazione dell’accelerometro ADXL350
Inizialmente era stato utilizzato un altro accelerometro, l’ ADXL362 [5], che non era fissato
direttamente sulla lamina di rame, ma era connesso ad una braedboard che faceva da supporto e
che lo isolava dalla superficie e perciò non era soggetto al problema descritto sopra, però aveva
una frequenza di campionamento massima di 400Hz, che per rilevare il picco scelto era appena
sufficiente (in principio si era deciso di operare a frequenze più basse, tra 100Hz e 170Hz, e per il
teorema di Nyquist la massima frequenza campionabile è pari a metà della frequenza di
campionamento), con un conseguente errore di quantizzazione elevato. Per poter utilizzare
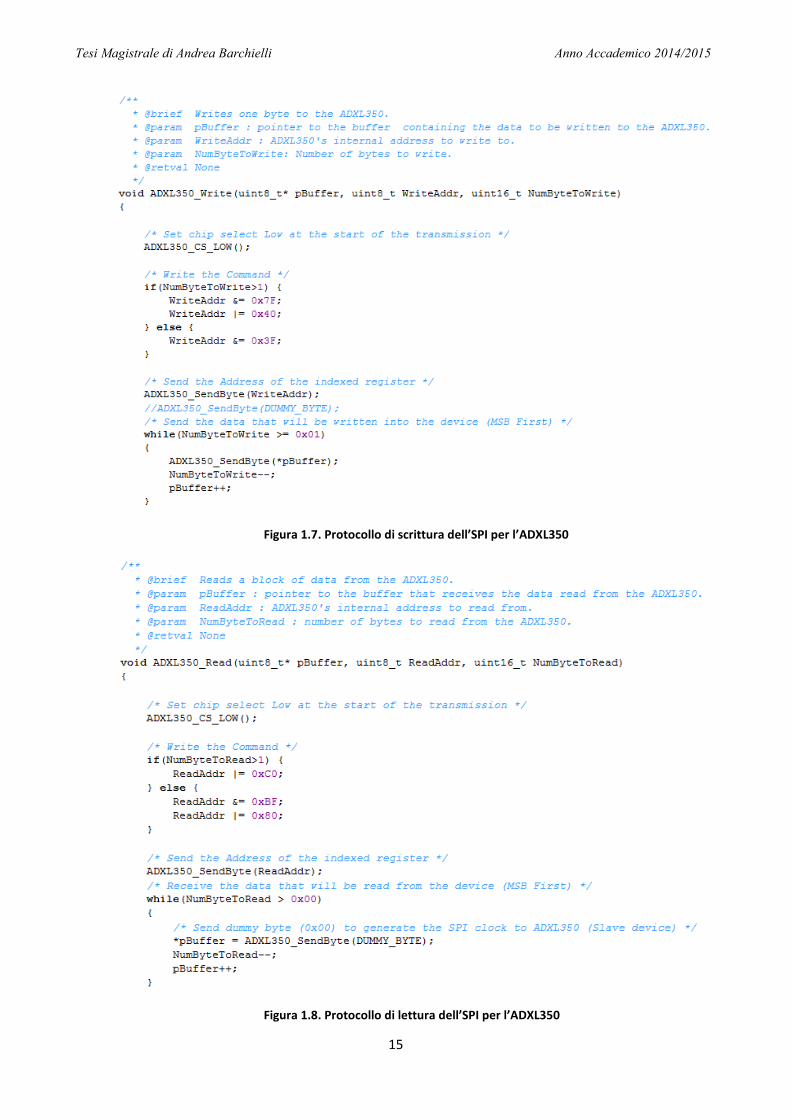
l’ADXL350 si è dovuto modificare il protocollo SPI: infatti il primo sensore utilizzava 8 bit di
istruzione + 8 bit di indirizzo + 8 bit di dato, mentre il secondo necessita solo di due frame, 2 bit di
istruzione inviati insieme a 6 bit di indirizzo + 8 bit di dato. Nelle figure 1.7 e 1.8 è mostrato il
codice che riguarda rispettivamente la scrittura (1° bit di istruzione = 0) e la lettura (1° bit di
istruzione = 1); il 2° bit di istruzione se posto a 1, indica che c’è più di una parola da leggere o
scrivere. Infine è stato necessario anche porre i parametri CPOL e CPHA a 1, come prevede il
datasheet dell’ADXL350, diversamente dall’altro sensore per il quale dovevano essere messi a
zero: CPOL indica il primo valore che deve assumere il clock dell’SPI quando viene abilitata la
comunicazione, mentre CPHA indica su quale fronte del clock vengono campionati i bit.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
15
Figura 1.7. Protocollo di scrittura dell’SPI per l’ADXL350
Figura 1.8. Protocollo di lettura dell’SPI per l’ADXL350
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
16
1.2. Microcontrollore
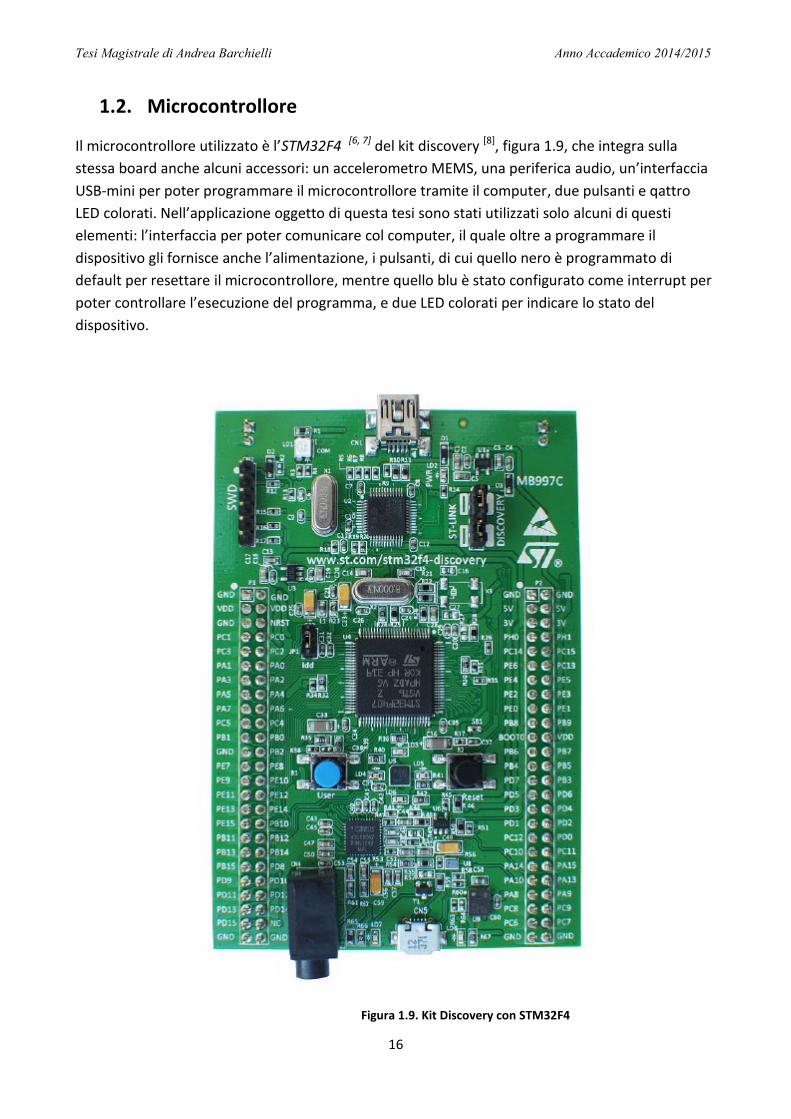
Il microcontrollore utilizzato è l’STM32F4 [6, 7] del kit discovery [8], figura 1.9, che integra sulla
stessa board anche alcuni accessori: un accelerometro MEMS, una periferica audio, un’interfaccia
USB-mini per poter programmare il microcontrollore tramite il computer, due pulsanti e qattro
LED colorati. Nell’applicazione oggetto di questa tesi sono stati utilizzati solo alcuni di questi
elementi: l’interfaccia per poter comunicare col computer, il quale oltre a programmare il
dispositivo gli fornisce anche l’alimentazione, i pulsanti, di cui quello nero è programmato di
default per resettare il microcontrollore, mentre quello blu è stato configurato come interrupt per
poter controllare l’esecuzione del programma, e due LED colorati per indicare lo stato del
dispositivo.
Figura 1.9. Kit Discovery con STM32F4
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
17
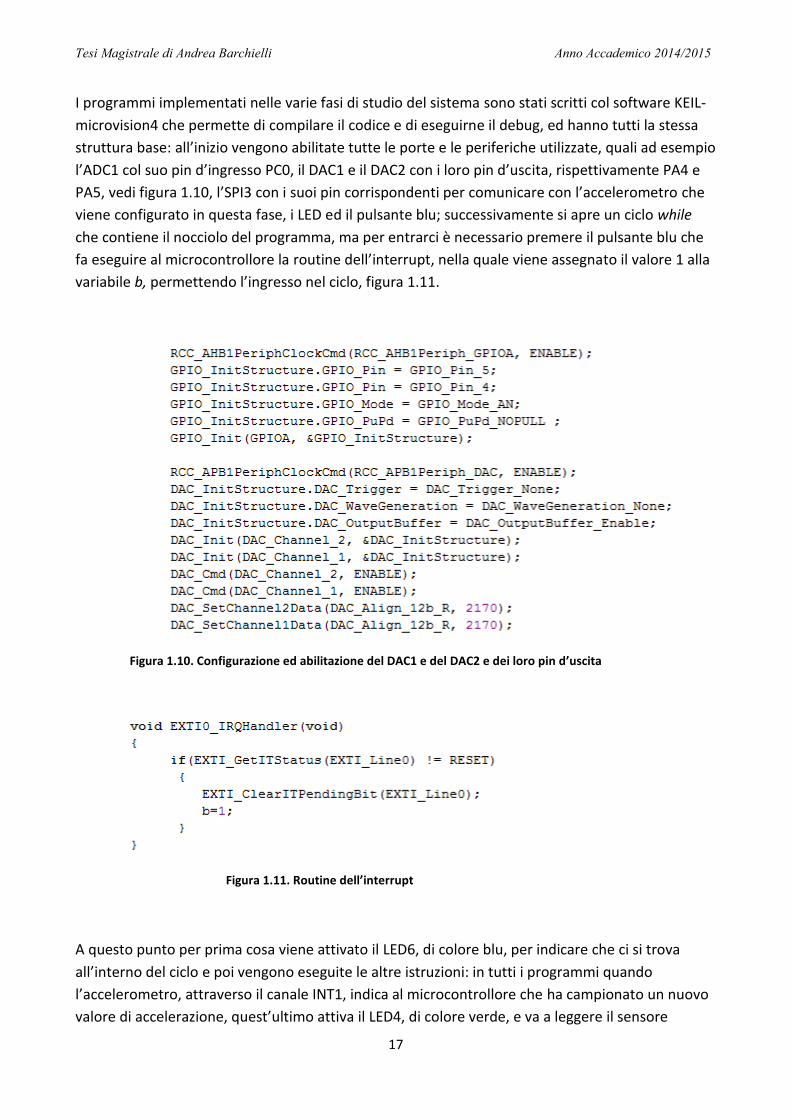
I programmi implementati nelle varie fasi di studio del sistema sono stati scritti col software KEIL-
microvision4 che permette di compilare il codice e di eseguirne il debug, ed hanno tutti la stessa
struttura base: all’inizio vengono abilitate tutte le porte e le periferiche utilizzate, quali ad esempio
l’ADC1 col suo pin d’ingresso PC0, il DAC1 e il DAC2 con i loro pin d’uscita, rispettivamente PA4 e
PA5, vedi figura 1.10, l’SPI3 con i suoi pin corrispondenti per comunicare con l’accelerometro che
viene configurato in questa fase, i LED ed il pulsante blu; successivamente si apre un ciclo while
che contiene il nocciolo del programma, ma per entrarci è necessario premere il pulsante blu che
fa eseguire al microcontrollore la routine dell’interrupt, nella quale viene assegnato il valore 1 alla
variabile b, permettendo l’ingresso nel ciclo, figura 1.11.
Figura 1.10. Configurazione ed abilitazione del DAC1 e del DAC2 e dei loro pin d’uscita
Figura 1.11. Routine dell’interrupt
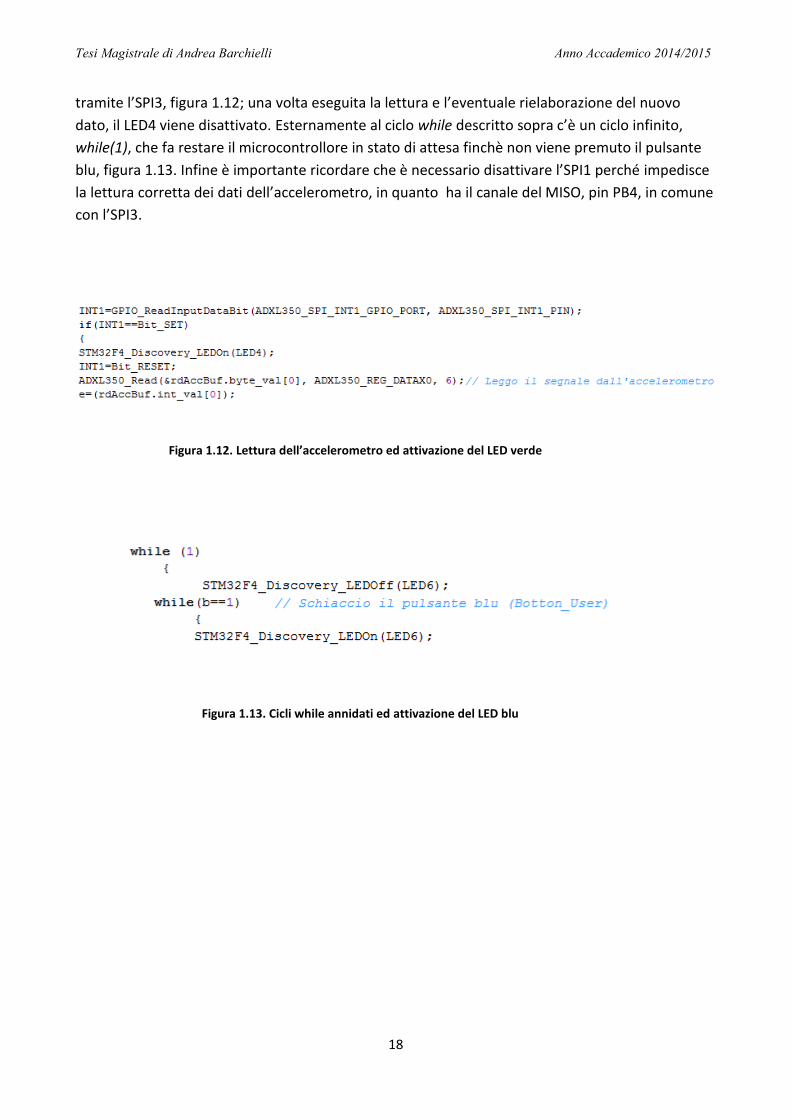
A questo punto per prima cosa viene attivato il LED6, di colore blu, per indicare che ci si trova
all’interno del ciclo e poi vengono eseguite le altre istruzioni: in tutti i programmi quando
l’accelerometro, attraverso il canale INT1, indica al microcontrollore che ha campionato un nuovo
valore di accelerazione, quest’ultimo attiva il LED4, di colore verde, e va a leggere il sensore
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
18
tramite l’SPI3, figura 1.12; una volta eseguita la lettura e l’eventuale rielaborazione del nuovo
dato, il LED4 viene disattivato. Esternamente al ciclo while descritto sopra c’è un ciclo infinito,
while(1), che fa restare il microcontrollore in stato di attesa finchè non viene premuto il pulsante
blu, figura 1.13. Infine è importante ricordare che è necessario disattivare l’SPI1 perché impedisce
la lettura corretta dei dati dell’accelerometro, in quanto ha il canale del MISO, pin PB4, in comune
con l’SPI3.
Figura 1.12. Lettura dell’accelerometro ed attivazione del LED verde
Figura 1.13. Cicli while annidati ed attivazione del LED blu
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
19
1.3. Amplificatore
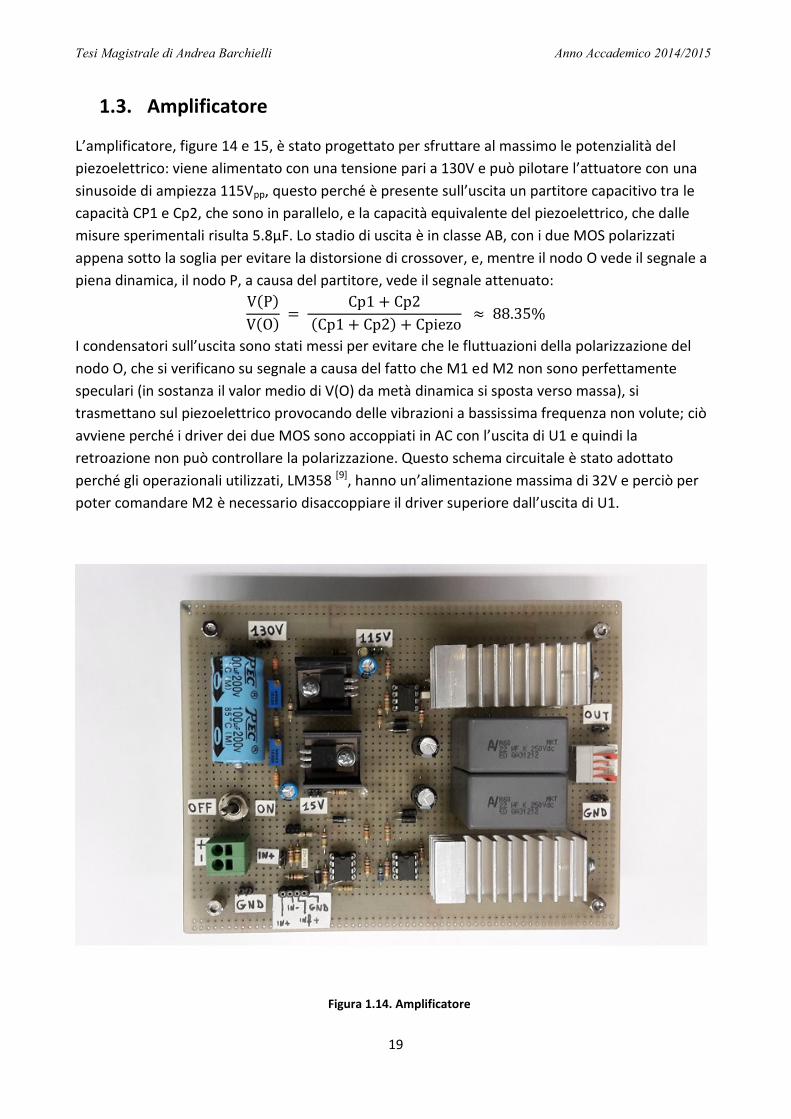
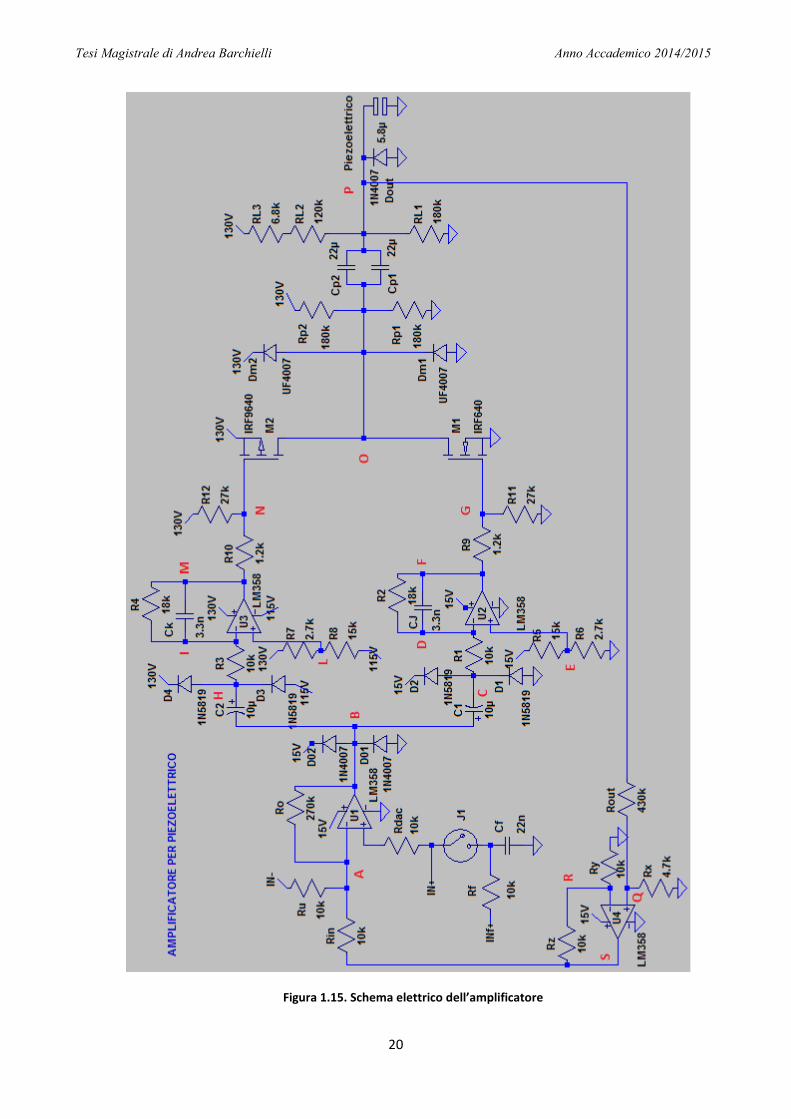
L’amplificatore, figure 14 e 15, è stato progettato per sfruttare al massimo le potenzialità del
piezoelettrico: viene alimentato con una tensione pari a 130V e può pilotare l’attuatore con una
sinusoide di ampiezza 115Vpp, questo perché è presente sull’uscita un partitore capacitivo tra le
capacità CP1 e Cp2, che sono in parallelo, e la capacità equivalente del piezoelettrico, che dalle
misure sperimentali risulta 5.8µF. Lo stadio di uscita è in classe AB, con i due MOS polarizzati
appena sotto la soglia per evitare la distorsione di crossover, e, mentre il nodo O vede il segnale a
piena dinamica, il nodo P, a causa del partitore, vede il segnale attenuato:
V(P)
V(O) =
Cp1 + Cp2
(Cp1 + Cp2) + Cpiezo ≈ 88.35%
I condensatori sull’uscita sono stati messi per evitare che le fluttuazioni della polarizzazione del
nodo O, che si verificano su segnale a causa del fatto che M1 ed M2 non sono perfettamente
speculari (in sostanza il valor medio di V(O) da metà dinamica si sposta verso massa), si
trasmettano sul piezoelettrico provocando delle vibrazioni a bassissima frequenza non volute; ciò
avviene perché i driver dei due MOS sono accoppiati in AC con l’uscita di U1 e quindi la
retroazione non può controllare la polarizzazione. Questo schema circuitale è stato adottato
perché gli operazionali utilizzati, LM358 [9], hanno un’alimentazione massima di 32V e perciò per
poter comandare M2 è necessario disaccoppiare il driver superiore dall’uscita di U1.
Figura 1.14. Amplificatore
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
20
Figura 1.15. Schema elettrico dell’amplificatore

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
21
Il polo dominante è dato da R2 e da Cj (da R4 e da Ck sull’altro ramo del circuito) e sta alla
frequenza
Fp = 1
2π ∗ R2 ∗ Cj ≈ 2.68kHz
che è circa dieci volte maggiore rispetto al picco di risonanza della lamina, che si si trova intorno a
235Hz. Il guadagno ideale è
Gid = (1 +Rout
Rx) / (1 +
Rz
Ry) ≈ 46.24
però, dato che i MOS lavorano vicino alla soglia, la loro transconduttanza è molto minore rispetto
a quella indicata dai datasheets [10, 11] e soprattutto non è costante: se il segnale in ingresso, su IN+
o su INf+, è minore o uguale a 200mV allora il guadagno reale, Greal, risulta pari a 40, chiaramente
minore del guadagno ideale, il che significa che il guadagno d’anello, Gloop, è molto piccolo. Infatti
𝐺𝑟𝑒𝑎𝑙 =𝐺𝑖𝑑
1 −1
𝐺𝑙𝑜𝑜𝑝
cioè Gloop ≈ −6.41, mentre per segnali in ingresso maggiori di 600mV Greal ≈ Gid e perciò il
modulo del Gloop aumenta; in effetti il Gloop dipende dalla transconduttanza dei MOS e a media
frequenza si calcola con la seguente formula:
𝐺𝑙𝑜𝑜𝑝𝑀𝐹 = −𝑅0
𝑅𝑖𝑛∗
𝑅2
𝑅1∗
𝑅11
𝑅9 + 𝑅11∗ 𝑔𝑚 ∗ 𝑅𝑢𝑠 ∗
𝑅𝑥
𝑅𝑜𝑢𝑡 + 𝑅𝑥∗ (1 +
𝑅𝑧
𝑅𝑦)
dove Rus è la resistenza vista sul drain dei due MOS e vale:
𝑅𝑢𝑠 = 𝑅𝑝1//𝑅𝑝2//𝑅𝑙1//(𝑅𝑙2 + 𝑅𝑙3)//(𝑅𝑜𝑢𝑡 + 𝑅𝑥) ≈ 37.24𝑘Ω
Il circuito comunque risulta stabile in tutti i casi e in frequenza il Gloop presenta due zeri
nell’origine dati da C1 (da C2 nel ramo superiore del circuito) e da Cp1+Cp2, due poli a bassa
frequenza, Fpl1 ≈ 2.3Hz e Fpl2 ≈ 75.4Hz, dati da Cp1+Cp2 e dalla capacità equivalente del
piezoelettrico, che sono stati calcolati con il metodo delle costanti di tempo mostrato
nell’appendice 1, il polo dominante citato sopra, e un polo ad alta frequenza dato dalla capacità di
gate dei MOS che sta a
𝐹𝑝ℎ = (1 − 𝐺𝑙𝑜𝑜𝑝𝑀𝐹) / (2𝜋 ∗ 𝐶𝑖𝑠𝑠 ∗ (𝑅9//𝑅11) ) ≈ (1 − 𝐺𝑙𝑜𝑜𝑝𝑀𝐹) ∗ 119.41𝐻𝑧
dove Ciss è la capacità di gate dell’n-MOS che sul datasheet vale 1.16nF (ovviamente lo stesso polo
è presente anche sull’altro ramo del circuito). Dalle considerazioni espresse sopra si evince che il
diagramma del modulo del Gloop è piatto da Fpl2 fino al polo dominante e che, poichè Fph, anche
per Gloop = −1, sta ad una frequenza almeno 80 volte maggiore di Fp, taglia l’asse a 0dB con una
pendenza di −20𝑑𝐵
𝑑𝑒𝑐 , quindi è stabile per il criterio di Bode.
L’amplificatore è stato progettato per ricevere il segnale di ingresso sia sul morsetto negativo, IN-,
che su quello positivo, IN+, dell’operazionale U1, vedi figura 15; in più per tagliare le repliche in
frequenza del segnale in uscita dal DAC del microcontrollore e per ridurne l’errore di
quantizzazione è stato creato l’ingresso INf+ che integra un filtro passa basso a
Fµ =1
2π ∗ Rf ∗ Cf ≈ 723.43𝐻𝑧
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
22
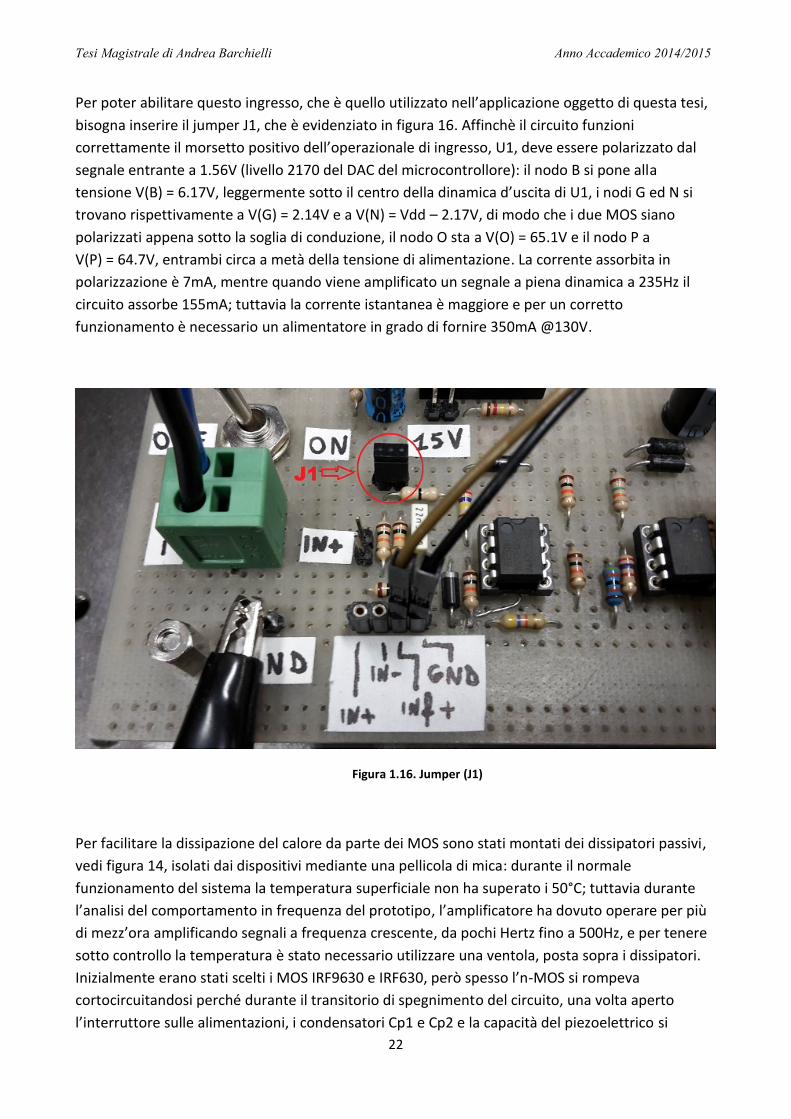
Per poter abilitare questo ingresso, che è quello utilizzato nell’applicazione oggetto di questa tesi,
bisogna inserire il jumper J1, che è evidenziato in figura 16. Affinchè il circuito funzioni
correttamente il morsetto positivo dell’operazionale di ingresso, U1, deve essere polarizzato dal
segnale entrante a 1.56V (livello 2170 del DAC del microcontrollore): il nodo B si pone alla
tensione V(B) = 6.17V, leggermente sotto il centro della dinamica d’uscita di U1, i nodi G ed N si
trovano rispettivamente a V(G) = 2.14V e a V(N) = Vdd – 2.17V, di modo che i due MOS siano
polarizzati appena sotto la soglia di conduzione, il nodo O sta a V(O) = 65.1V e il nodo P a
V(P) = 64.7V, entrambi circa a metà della tensione di alimentazione. La corrente assorbita in
polarizzazione è 7mA, mentre quando viene amplificato un segnale a piena dinamica a 235Hz il
circuito assorbe 155mA; tuttavia la corrente istantanea è maggiore e per un corretto
funzionamento è necessario un alimentatore in grado di fornire 350mA @130V.
Figura 1.16. Jumper (J1)
Per facilitare la dissipazione del calore da parte dei MOS sono stati montati dei dissipatori passivi,
vedi figura 14, isolati dai dispositivi mediante una pellicola di mica: durante il normale
funzionamento del sistema la temperatura superficiale non ha superato i 50°C; tuttavia durante
l’analisi del comportamento in frequenza del prototipo, l’amplificatore ha dovuto operare per più
di mezz’ora amplificando segnali a frequenza crescente, da pochi Hertz fino a 500Hz, e per tenere
sotto controllo la temperatura è stato necessario utilizzare una ventola, posta sopra i dissipatori.
Inizialmente erano stati scelti i MOS IRF9630 e IRF630, però spesso l’n-MOS si rompeva
cortocircuitandosi perché durante il transitorio di spegnimento del circuito, una volta aperto
l’interruttore sulle alimentazioni, i condensatori Cp1 e Cp2 e la capacità del piezoelettrico si
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
23
scaricano sollecitando molto i nodi del circuito ai quali sono collegati: in particolare l’IRF630 entra
in breakdown ed è soggetto ad un’energia superiore a quella massima che può sopportare in
questo stato (dal datasheet [12] 𝐸𝐴𝑆 = 94𝑚𝐽); il problema è stato risolto sostituendo l’IRF630 con
l’IRF640 (𝐸𝐴𝑆 = 247𝑚𝐽), e per non perdere il matching tra i MOS, che è indispensabile per il
corretto funzionamento dello stadio di uscita in classe AB, si è dovuto sostituire anche il p-MOS[13].
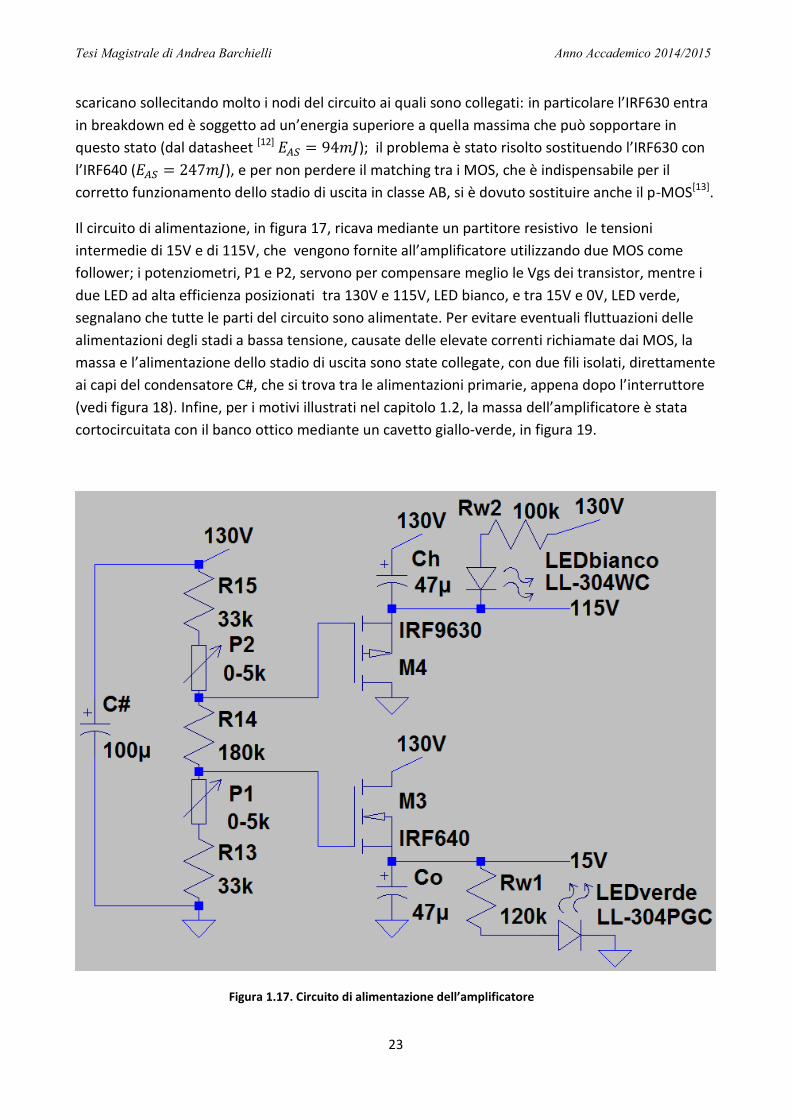
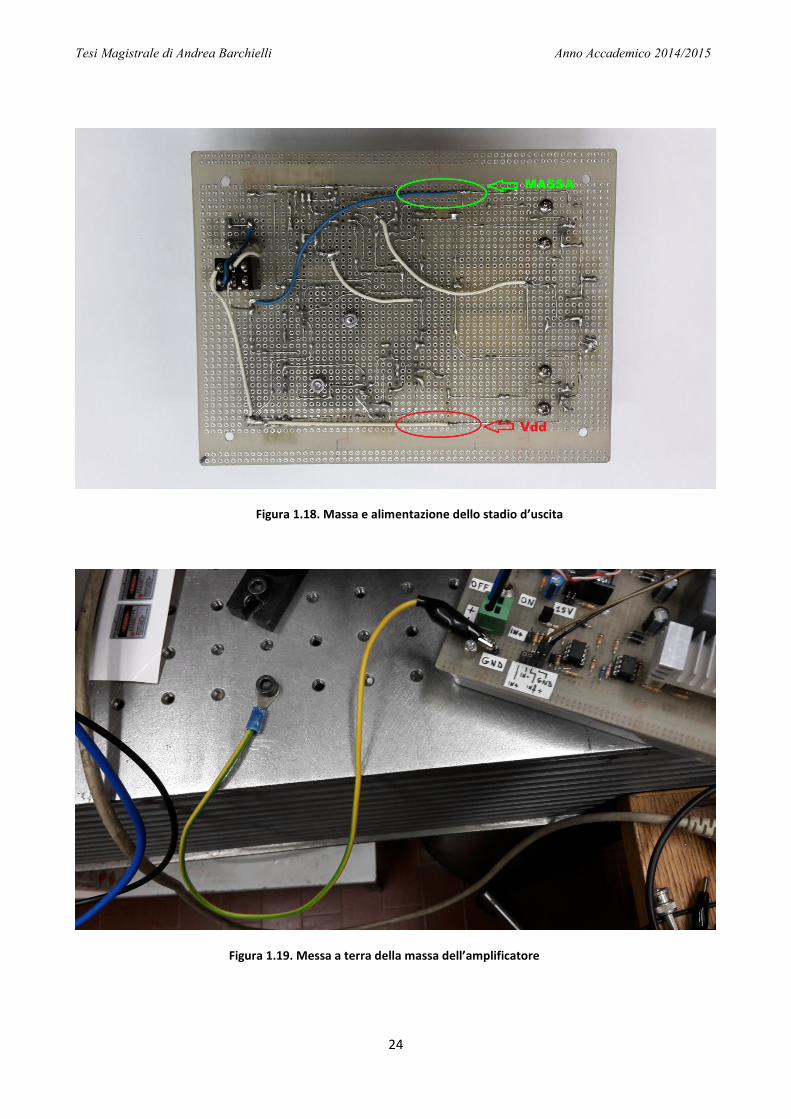
Il circuito di alimentazione, in figura 17, ricava mediante un partitore resistivo le tensioni
intermedie di 15V e di 115V, che vengono fornite all’amplificatore utilizzando due MOS come
follower; i potenziometri, P1 e P2, servono per compensare meglio le Vgs dei transistor, mentre i
due LED ad alta efficienza posizionati tra 130V e 115V, LED bianco, e tra 15V e 0V, LED verde,
segnalano che tutte le parti del circuito sono alimentate. Per evitare eventuali fluttuazioni delle
alimentazioni degli stadi a bassa tensione, causate delle elevate correnti richiamate dai MOS, la
massa e l’alimentazione dello stadio di uscita sono state collegate, con due fili isolati, direttamente
ai capi del condensatore C#, che si trova tra le alimentazioni primarie, appena dopo l’interruttore
(vedi figura 18). Infine, per i motivi illustrati nel capitolo 1.2, la massa dell’amplificatore è stata
cortocircuitata con il banco ottico mediante un cavetto giallo-verde, in figura 19.
Figura 1.17. Circuito di alimentazione dell’amplificatore
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
24
Figura 1.18. Massa e alimentazione dello stadio d’uscita
Figura 1.19. Messa a terra della massa dell’amplificatore

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
25
1.4. Amplificatore audio e scheda di acquisizione dati
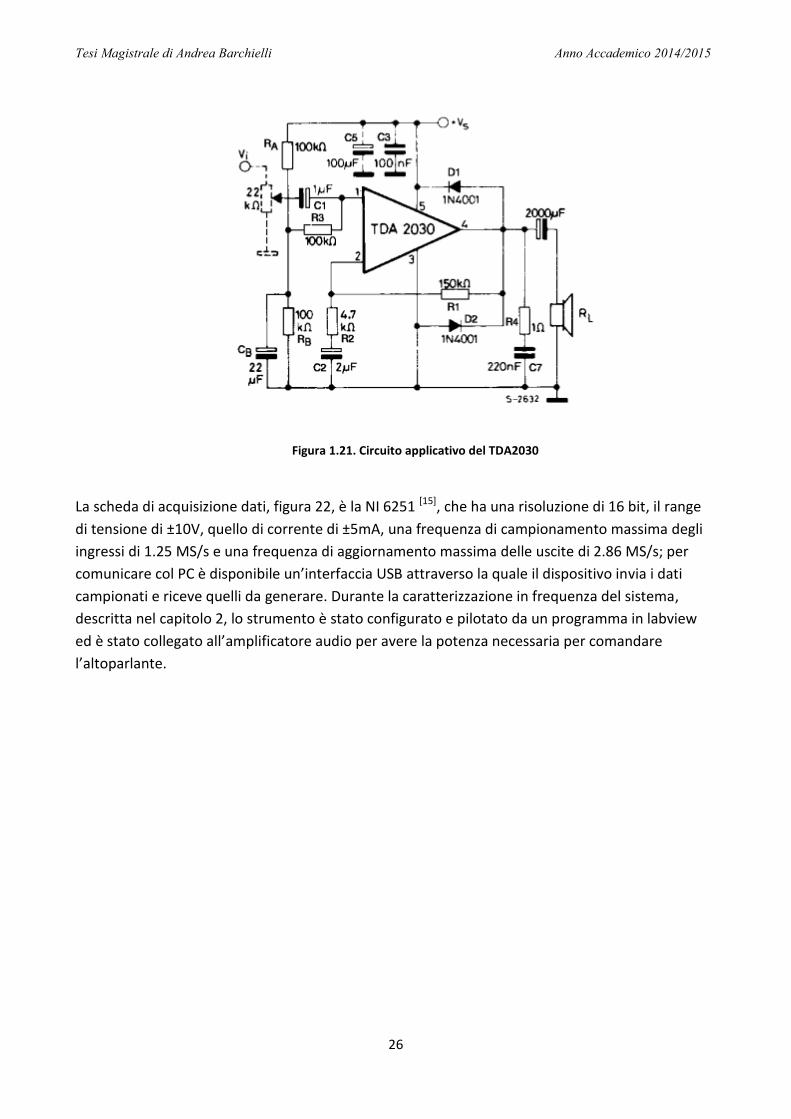
L’amplificatore audio, figura 20, è stato costruito a partire da un circuito applicativo del datasheet
del TDA2030 [14], in figura 21, al quale è stato aggiunto un interruttore sulle alimentazioni, un LED
verde ad alta efficienza, LL-304PGC, con in serie una resistenza da 150kΩ, che segnala che il
circuito è alimentato, ed un potenziometro da 10kΩ con in serie una resistenza da 47Ω, in
sostituzione di quello da 22kΩ, di modo che l’ingresso possa sia essere configurato come alta
impedenza rispetto al generatore di funzioni, che ha come resistenza d’uscita 50Ω, sia essere
adattato allo strumento, azzerando il potenziometro. Il dissipatore è stato selezionato
considerando che il dispositivo debba funzionare ininterrottamente per più di mezz’ora, ed è stato
testato imponendo sull’uscita un segnale sinusoidale di ampiezza 10Vpp con un’alimentazione di
20V, e verificando che dopo circa 20 minuti la temperatura superficiale non aumenta più, ma si
stabilizza a 53°C. L’operazionale è in una configurazione non invertente con un guadagno a media
frequenza pari a
𝐺𝑀𝐹 = 1 +𝑅1
𝑅2≈ 33
Figura 1.20. Amplificatore audio
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
26
Figura 1.21. Circuito applicativo del TDA2030
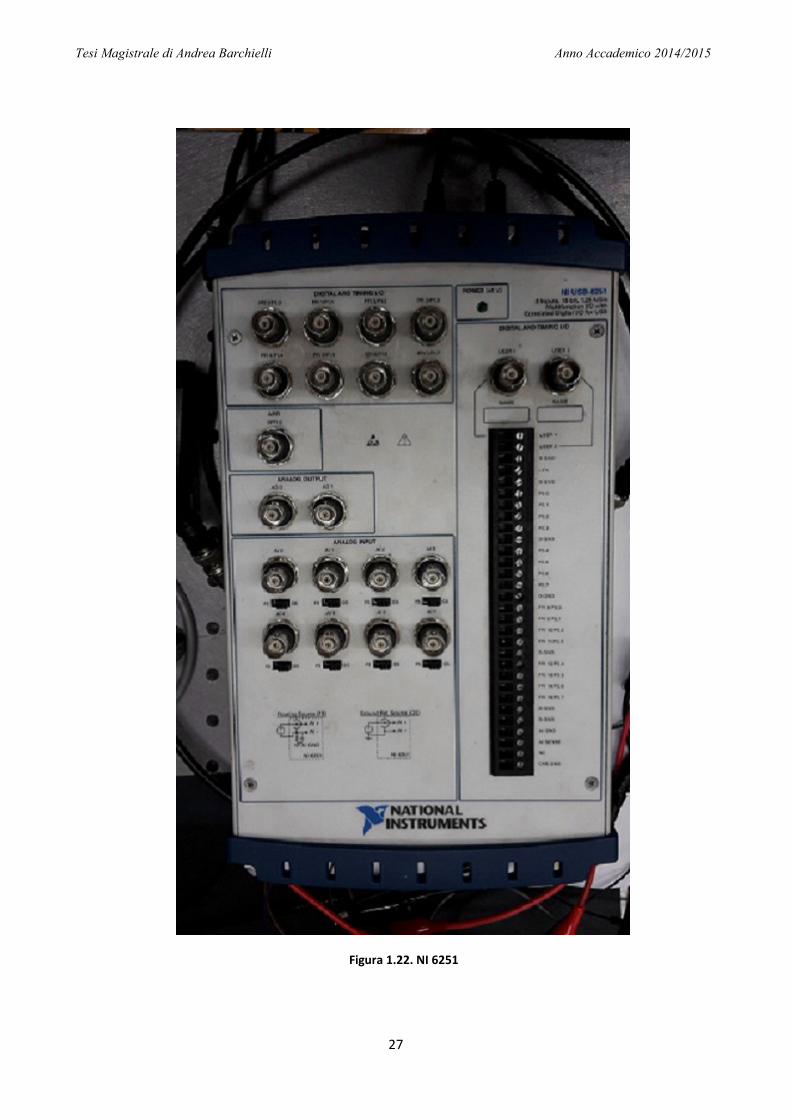
La scheda di acquisizione dati, figura 22, è la NI 6251 [15], che ha una risoluzione di 16 bit, il range
di tensione di ±10V, quello di corrente di ±5mA, una frequenza di campionamento massima degli
ingressi di 1.25 MS/s e una frequenza di aggiornamento massima delle uscite di 2.86 MS/s; per
comunicare col PC è disponibile un’interfaccia USB attraverso la quale il dispositivo invia i dati
campionati e riceve quelli da generare. Durante la caratterizzazione in frequenza del sistema,
descritta nel capitolo 2, lo strumento è stato configurato e pilotato da un programma in labview
ed è stato collegato all’amplificatore audio per avere la potenza necessaria per comandare
l’altoparlante.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
27
Figura 1.22. NI 6251
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
28
2. ANALISI DEL SISTEMA 2.1. Acquisizione dati
L’analisi del sistema, descritto nel capitolo 1, è stata eseguita per comprenderne il comportamento
in frequenza, al fine di progettare un regolatore da implementare nel microcontrollore che riesca,
in base al segnale che riceve dall’accelerometro, a calcolare il giusto comando da dare al
piezoelettrico per annullare la vibrazione; l’obbiettivo è quindi quello di registrare come risponde
l’accelerometro quando il microcontrollore invia all’amplificatore, e di conseguenza al
piezoelettrico, un segnale sinusoidale ad ampiezza fissa e frequenza che varia da pochi Hertz, fino
ad un valore molto maggiore del picco di risonanza che si è scelto di eliminare, il tutto tenendo
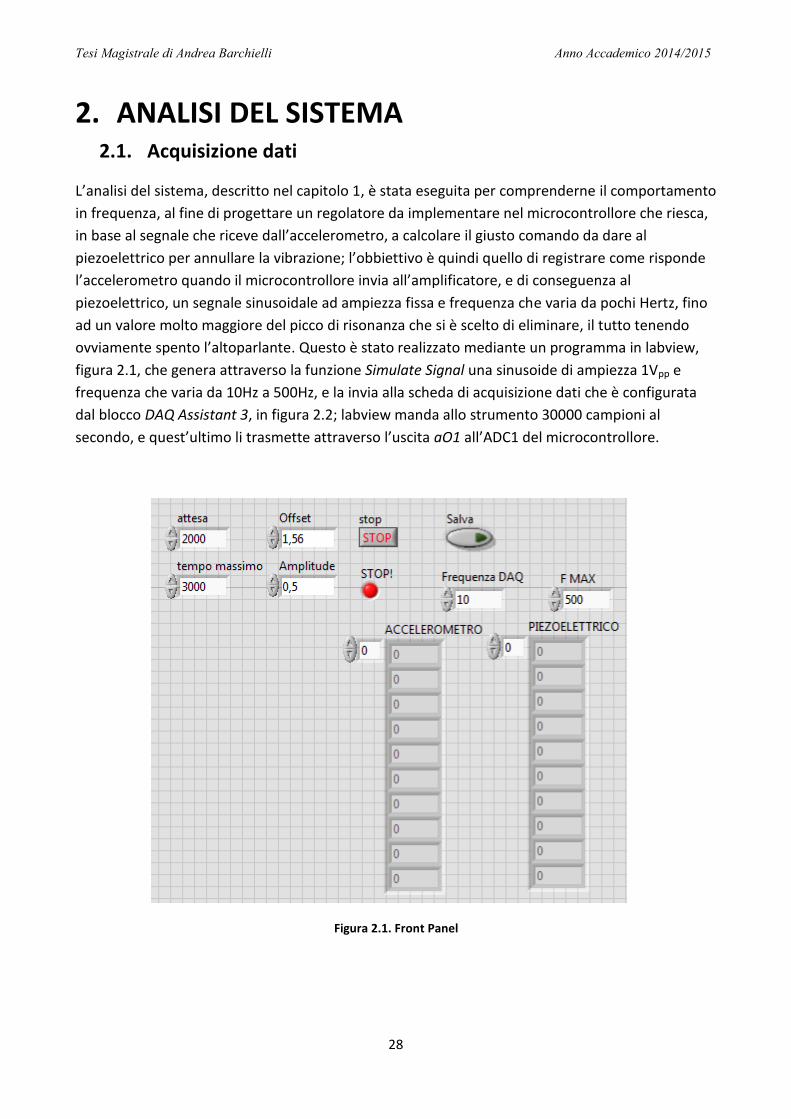
ovviamente spento l’altoparlante. Questo è stato realizzato mediante un programma in labview,
figura 2.1, che genera attraverso la funzione Simulate Signal una sinusoide di ampiezza 1Vpp e
frequenza che varia da 10Hz a 500Hz, e la invia alla scheda di acquisizione dati che è configurata
dal blocco DAQ Assistant 3, in figura 2.2; labview manda allo strumento 30000 campioni al
secondo, e quest’ultimo li trasmette attraverso l’uscita aO1 all’ADC1 del microcontrollore.
Figura 2.1. Front Panel
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
29
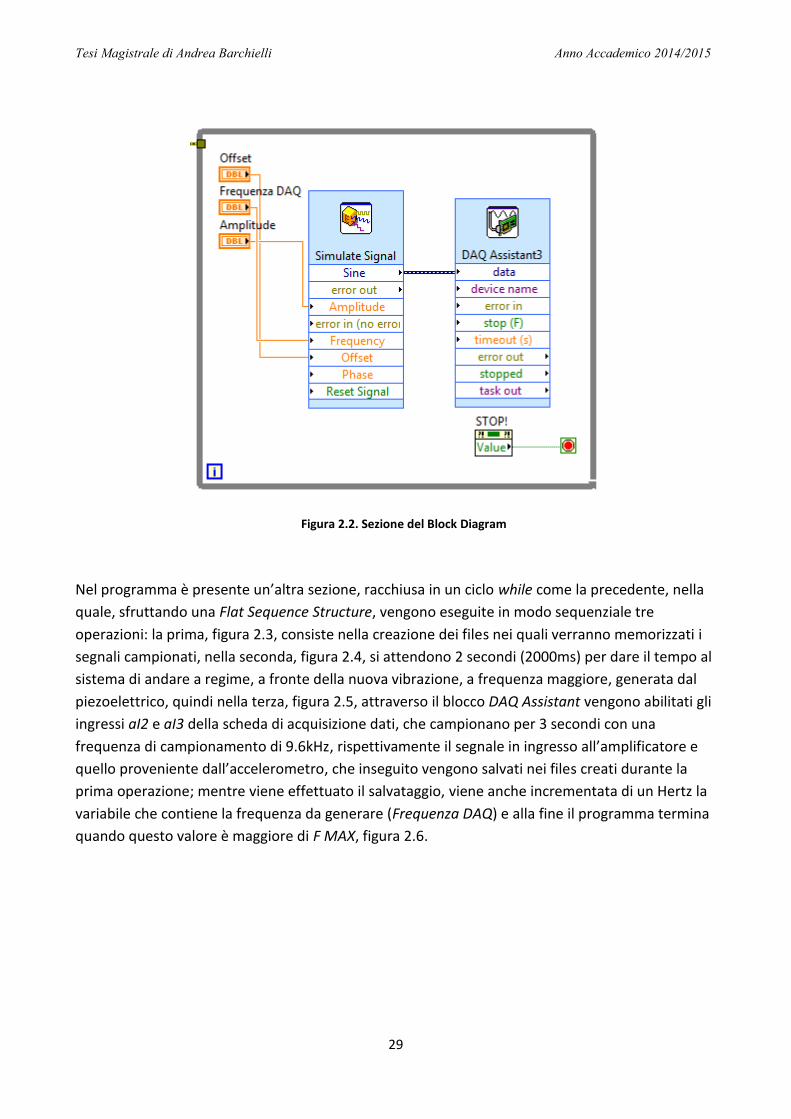
Figura 2.2. Sezione del Block Diagram
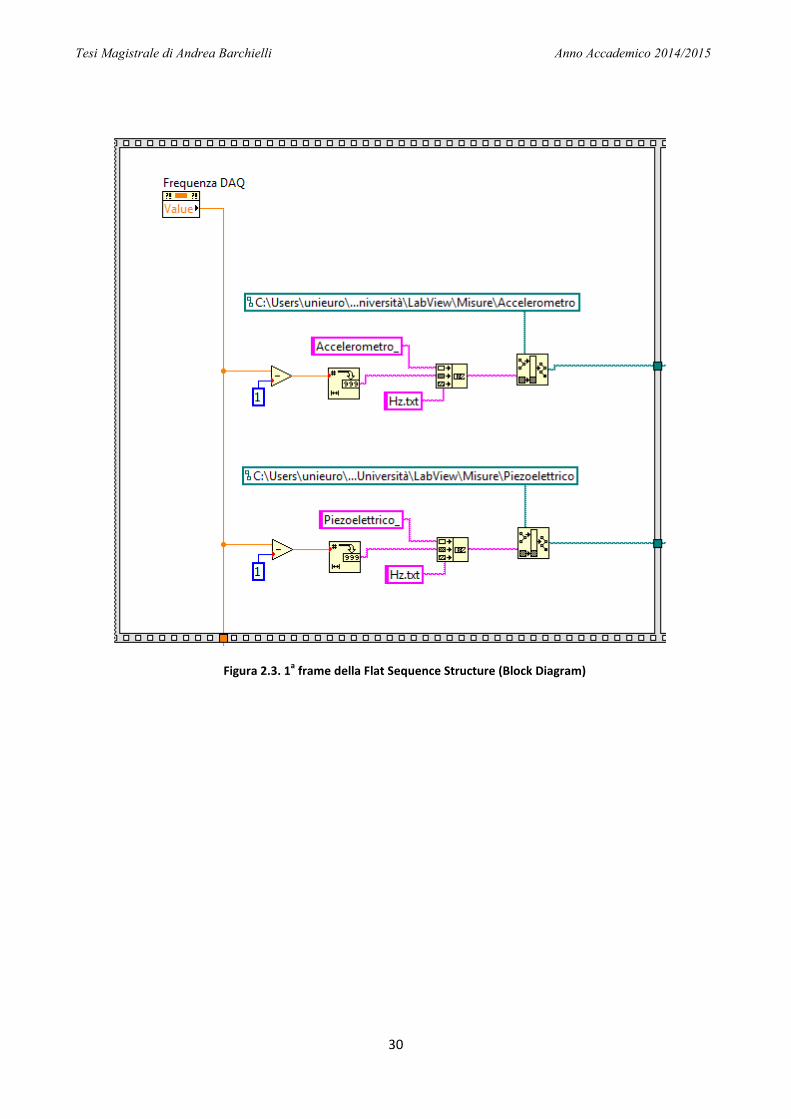
Nel programma è presente un’altra sezione, racchiusa in un ciclo while come la precedente, nella
quale, sfruttando una Flat Sequence Structure, vengono eseguite in modo sequenziale tre
operazioni: la prima, figura 2.3, consiste nella creazione dei files nei quali verranno memorizzati i
segnali campionati, nella seconda, figura 2.4, si attendono 2 secondi (2000ms) per dare il tempo al
sistema di andare a regime, a fronte della nuova vibrazione, a frequenza maggiore, generata dal
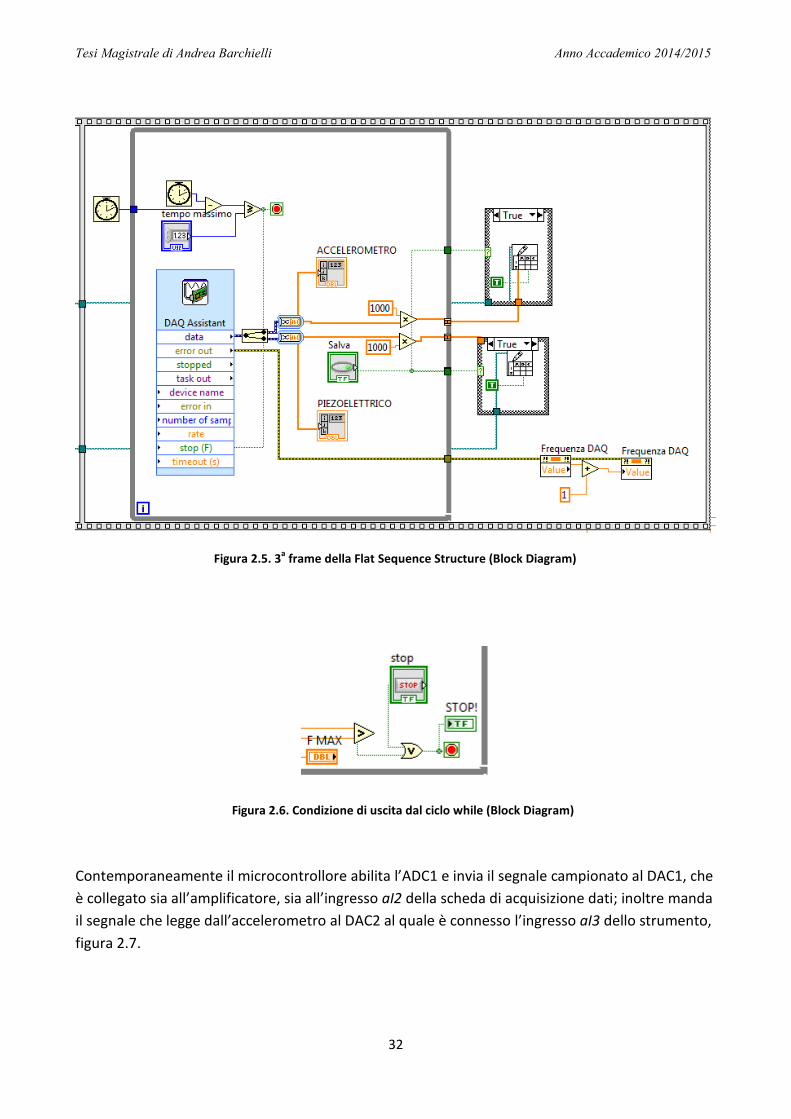
piezoelettrico, quindi nella terza, figura 2.5, attraverso il blocco DAQ Assistant vengono abilitati gli
ingressi aI2 e aI3 della scheda di acquisizione dati, che campionano per 3 secondi con una
frequenza di campionamento di 9.6kHz, rispettivamente il segnale in ingresso all’amplificatore e
quello proveniente dall’accelerometro, che inseguito vengono salvati nei files creati durante la
prima operazione; mentre viene effettuato il salvataggio, viene anche incrementata di un Hertz la
variabile che contiene la frequenza da generare (Frequenza DAQ) e alla fine il programma termina
quando questo valore è maggiore di F MAX, figura 2.6.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
30
Figura 2.3. 1a frame della Flat Sequence Structure (Block Diagram)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
31
Figura 2.4. 2a frame della Flat Sequence Structure (Block Diagram)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
32
Figura 2.5. 3a frame della Flat Sequence Structure (Block Diagram)
Figura 2.6. Condizione di uscita dal ciclo while (Block Diagram)
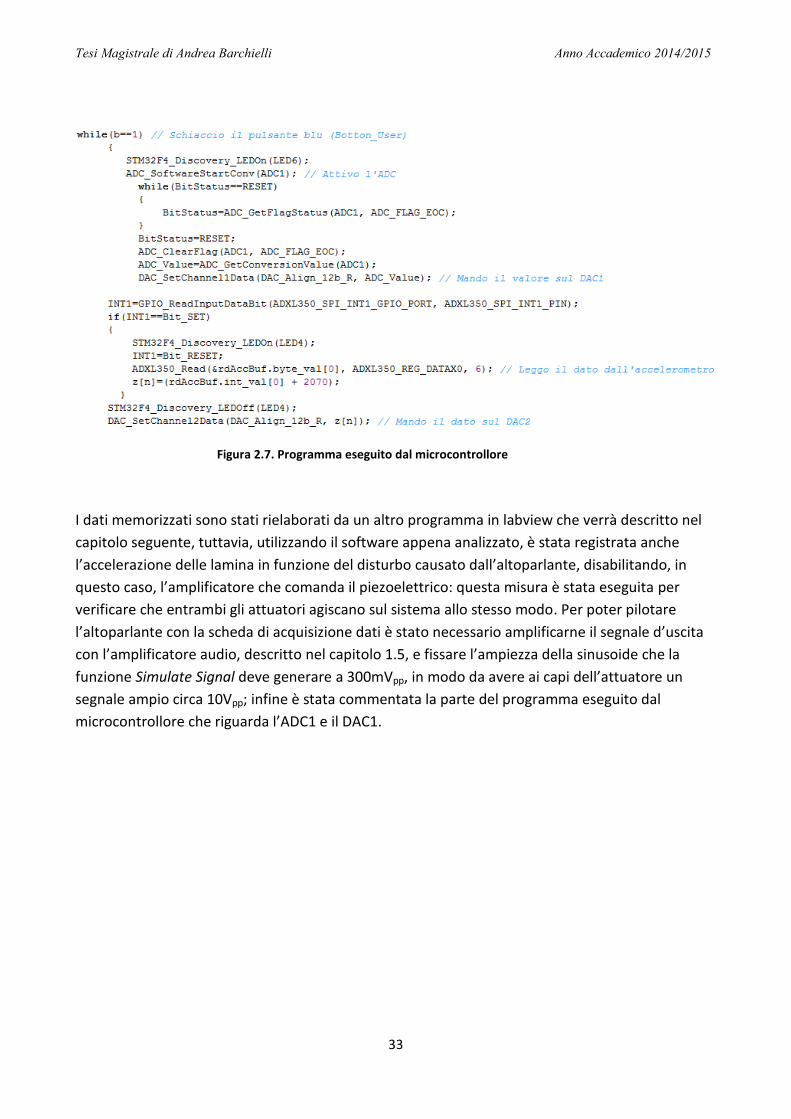
Contemporaneamente il microcontrollore abilita l’ADC1 e invia il segnale campionato al DAC1, che
è collegato sia all’amplificatore, sia all’ingresso aI2 della scheda di acquisizione dati; inoltre manda
il segnale che legge dall’accelerometro al DAC2 al quale è connesso l’ingresso aI3 dello strumento,
figura 2.7.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
33
Figura 2.7. Programma eseguito dal microcontrollore
I dati memorizzati sono stati rielaborati da un altro programma in labview che verrà descritto nel
capitolo seguente, tuttavia, utilizzando il software appena analizzato, è stata registrata anche
l’accelerazione delle lamina in funzione del disturbo causato dall’altoparlante, disabilitando, in
questo caso, l’amplificatore che comanda il piezoelettrico: questa misura è stata eseguita per
verificare che entrambi gli attuatori agiscano sul sistema allo stesso modo. Per poter pilotare
l’altoparlante con la scheda di acquisizione dati è stato necessario amplificarne il segnale d’uscita
con l’amplificatore audio, descritto nel capitolo 1.5, e fissare l’ampiezza della sinusoide che la
funzione Simulate Signal deve generare a 300mVpp, in modo da avere ai capi dell’attuatore un
segnale ampio circa 10Vpp; infine è stata commentata la parte del programma eseguito dal
microcontrollore che riguarda l’ADC1 e il DAC1.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
34
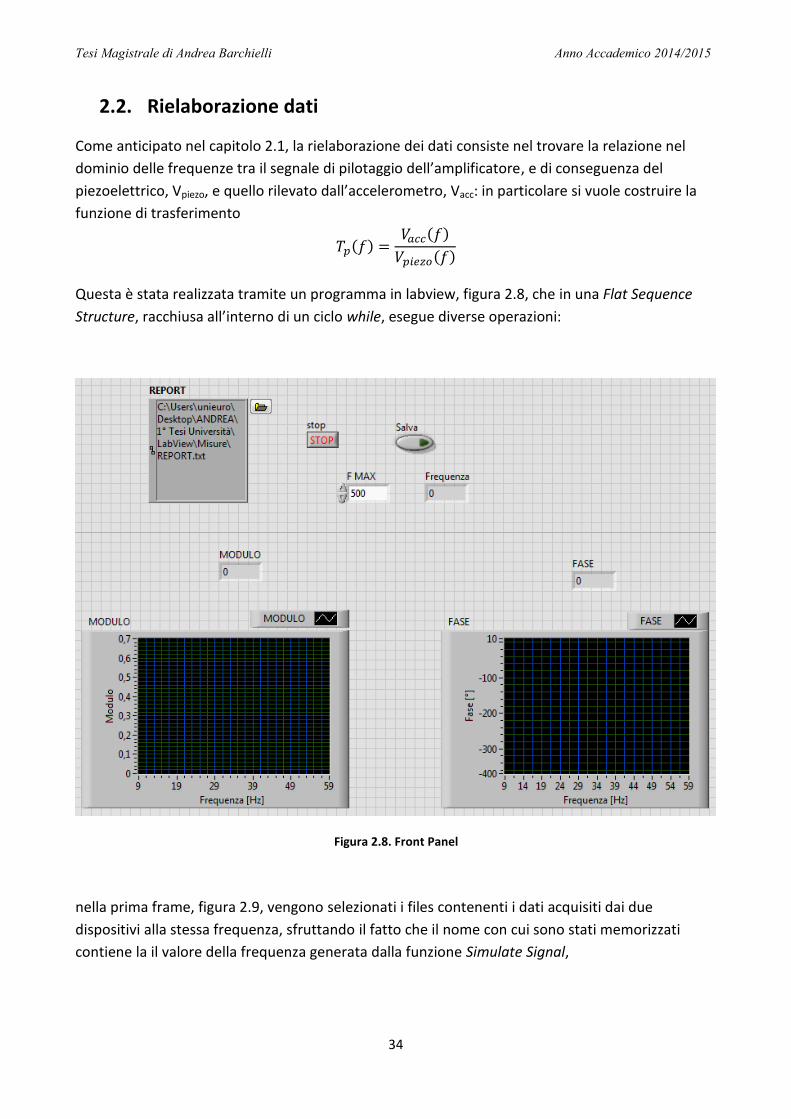
2.2. Rielaborazione dati
Come anticipato nel capitolo 2.1, la rielaborazione dei dati consiste nel trovare la relazione nel
dominio delle frequenze tra il segnale di pilotaggio dell’amplificatore, e di conseguenza del
piezoelettrico, Vpiezo, e quello rilevato dall’accelerometro, Vacc: in particolare si vuole costruire la
funzione di trasferimento
𝑇𝑝(𝑓) =𝑉𝑎𝑐𝑐(𝑓)
𝑉𝑝𝑖𝑒𝑧𝑜(𝑓)
Questa è stata realizzata tramite un programma in labview, figura 2.8, che in una Flat Sequence
Structure, racchiusa all’interno di un ciclo while, esegue diverse operazioni:
Figura 2.8. Front Panel
nella prima frame, figura 2.9, vengono selezionati i files contenenti i dati acquisiti dai due
dispositivi alla stessa frequenza, sfruttando il fatto che il nome con cui sono stati memorizzati
contiene la il valore della frequenza generata dalla funzione Simulate Signal,

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
35
Figura 2.9. 1a frame della Flat Sequence Structure (Block Diagram)
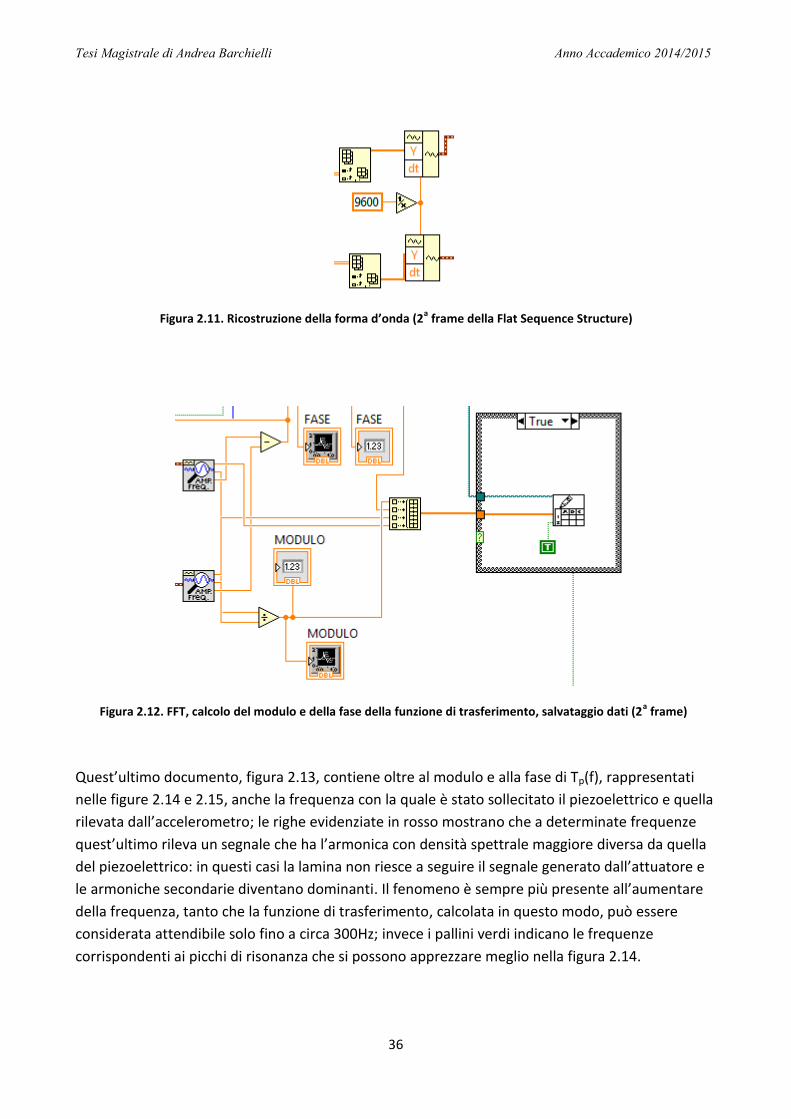
mentre nellla seconda frame, attraverso le funzioni fornite dal tool, vengono compiute varie azioni
che consistono nella lettura dei files, figura 2.10, nella ricostruzione della forma d’onda, che
avviene moltiplicando i campioni per il tempo di campionamento, figura 2.11, nell’applicazione
dell’FFT per estrarne l’armonica con densità spettrale maggiore e calcolarne il modulo e la fase,
figura 2.12, nell’esecuzione del rapporto tra i moduli dei due segnali e della differenza tra le loro
fasi, ed infine nel salvataggio dei risultati, che viene effettuato nel file indicato nel Front Panel nel
box denominato REPORT, figure 2.8 e 2.12.
Figura 2.10. Lettura dei files (2a frame della Flat Sequence Structure)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
36
Figura 2.11. Ricostruzione della forma d’onda (2a frame della Flat Sequence Structure)
Figura 2.12. FFT, calcolo del modulo e della fase della funzione di trasferimento, salvataggio dati (2a frame)
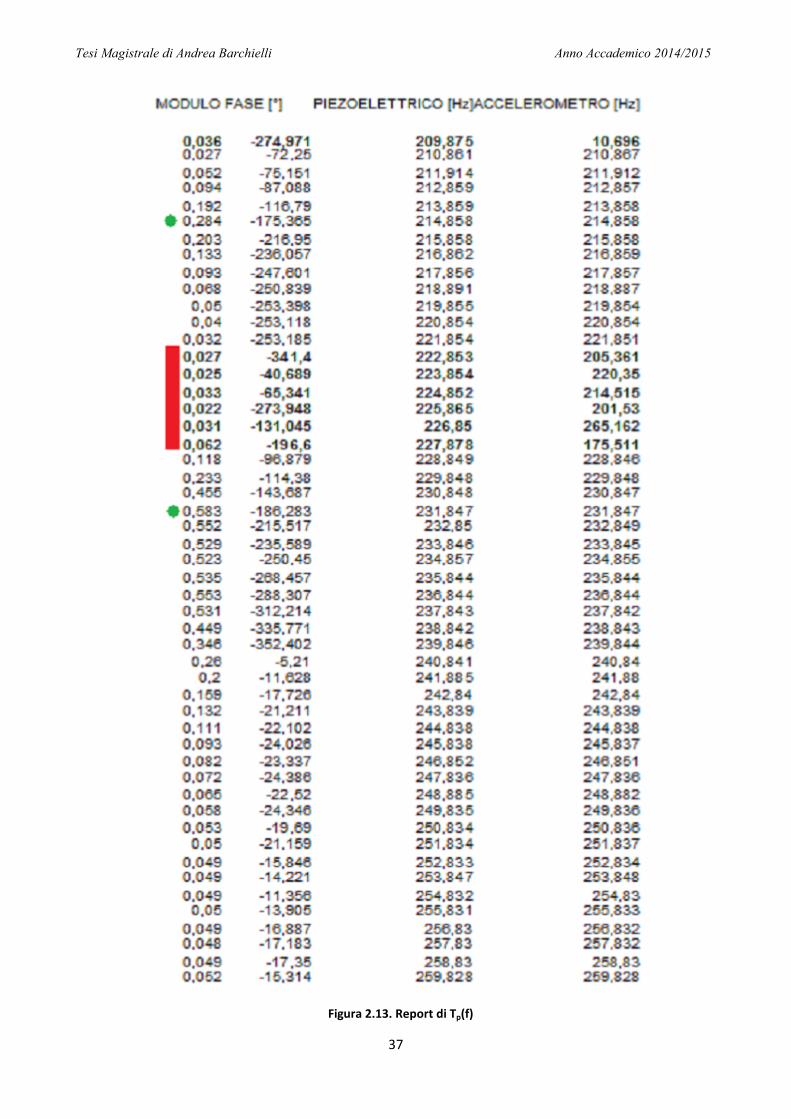
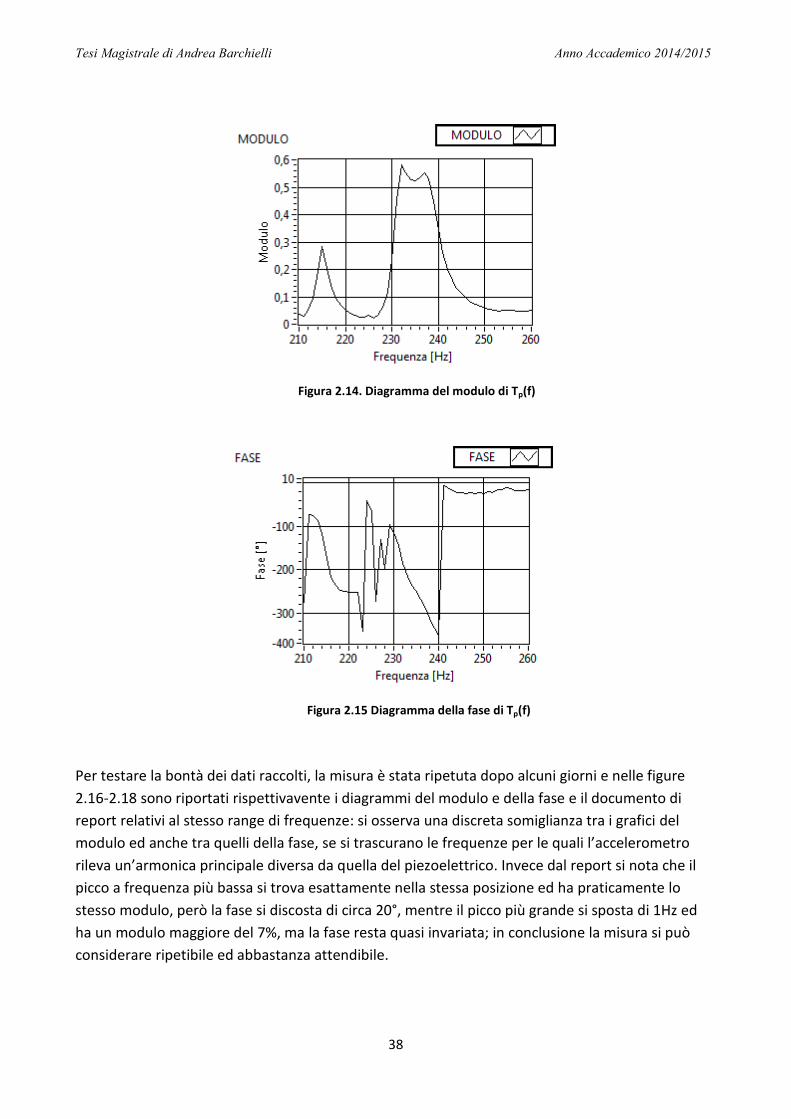
Quest’ultimo documento, figura 2.13, contiene oltre al modulo e alla fase di Tp(f), rappresentati
nelle figure 2.14 e 2.15, anche la frequenza con la quale è stato sollecitato il piezoelettrico e quella
rilevata dall’accelerometro; le righe evidenziate in rosso mostrano che a determinate frequenze
quest’ultimo rileva un segnale che ha l’armonica con densità spettrale maggiore diversa da quella
del piezoelettrico: in questi casi la lamina non riesce a seguire il segnale generato dall’attuatore e
le armoniche secondarie diventano dominanti. Il fenomeno è sempre più presente all’aumentare
della frequenza, tanto che la funzione di trasferimento, calcolata in questo modo, può essere
considerata attendibile solo fino a circa 300Hz; invece i pallini verdi indicano le frequenze
corrispondenti ai picchi di risonanza che si possono apprezzare meglio nella figura 2.14.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
37
Figura 2.13. Report di Tp(f)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
38
Figura 2.14. Diagramma del modulo di Tp(f)
Figura 2.15 Diagramma della fase di Tp(f)
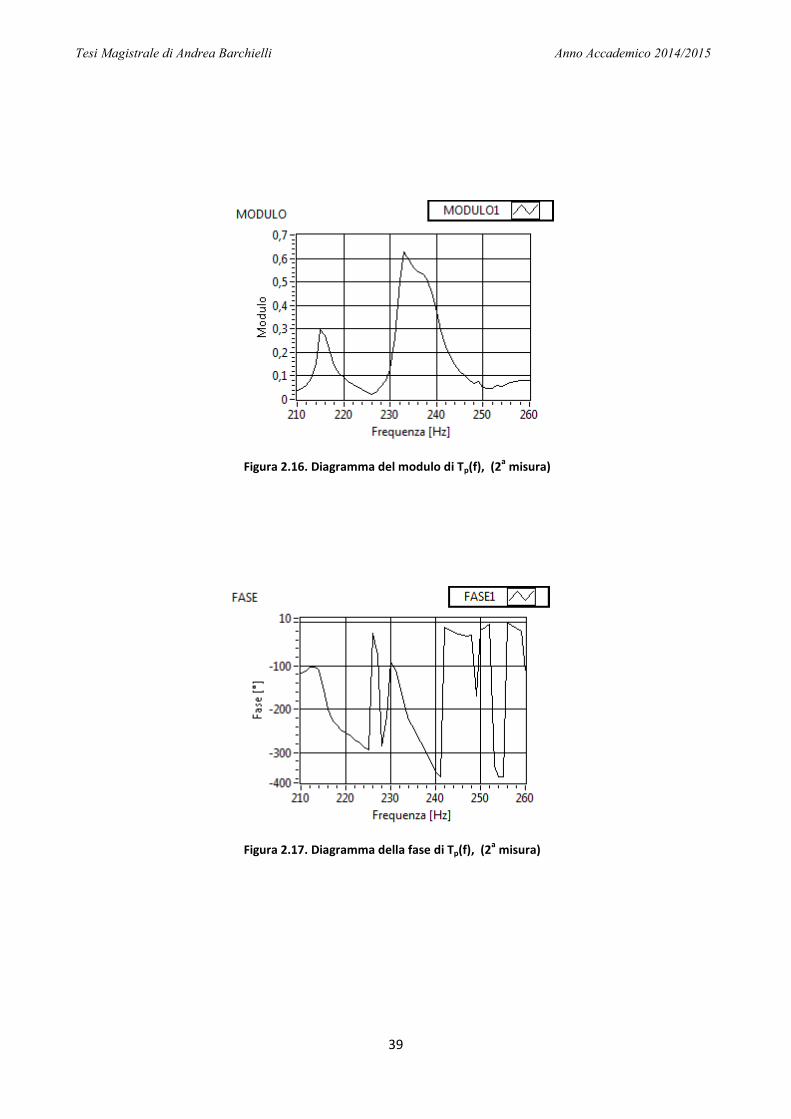
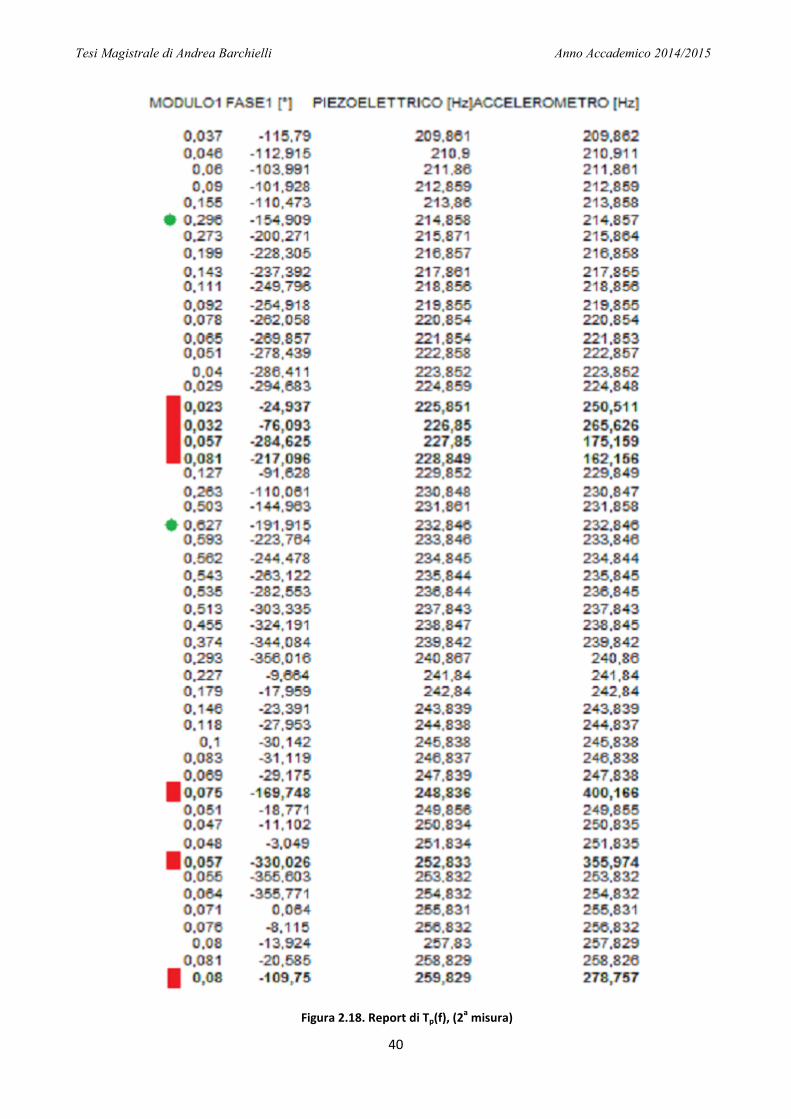
Per testare la bontà dei dati raccolti, la misura è stata ripetuta dopo alcuni giorni e nelle figure
2.16-2.18 sono riportati rispettivavente i diagrammi del modulo e della fase e il documento di
report relativi al stesso range di frequenze: si osserva una discreta somiglianza tra i grafici del
modulo ed anche tra quelli della fase, se si trascurano le frequenze per le quali l’accelerometro
rileva un’armonica principale diversa da quella del piezoelettrico. Invece dal report si nota che il
picco a frequenza più bassa si trova esattamente nella stessa posizione ed ha praticamente lo
stesso modulo, però la fase si discosta di circa 20°, mentre il picco più grande si sposta di 1Hz ed
ha un modulo maggiore del 7%, ma la fase resta quasi invariata; in conclusione la misura si può
considerare ripetibile ed abbastanza attendibile.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
39
Figura 2.16. Diagramma del modulo di Tp(f), (2a misura)
Figura 2.17. Diagramma della fase di Tp(f), (2a misura)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
40
Figura 2.18. Report di Tp(f), (2a misura)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
41
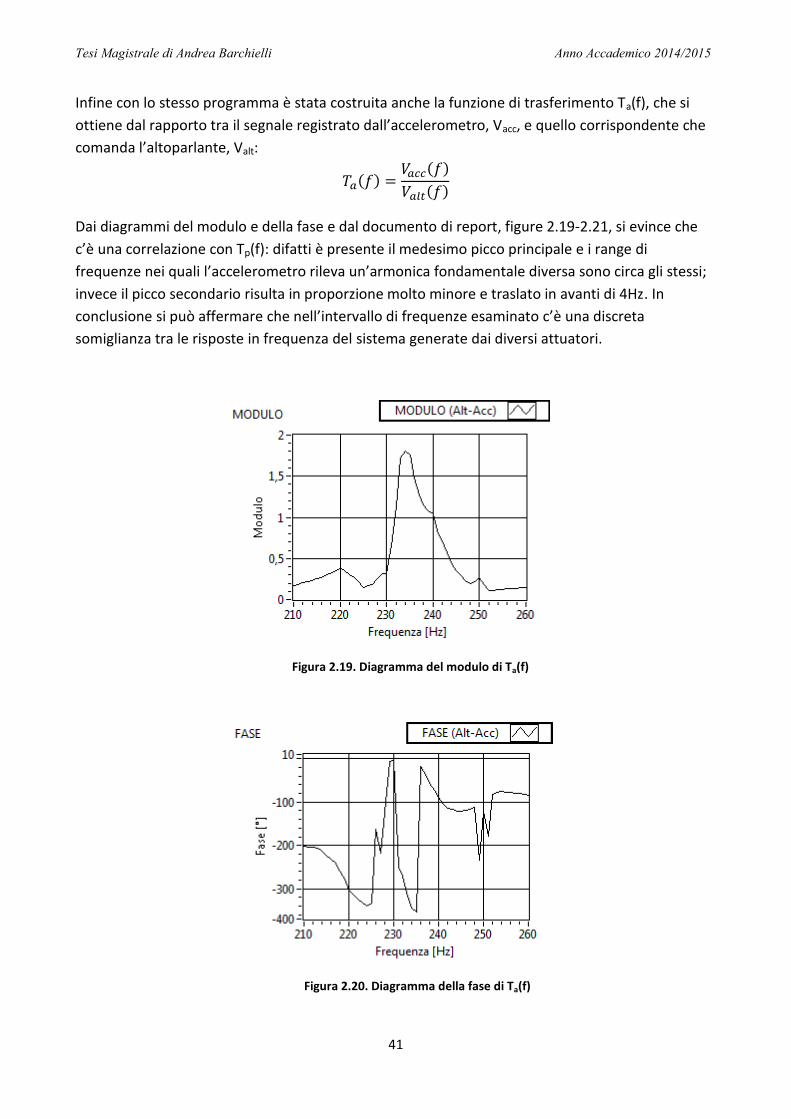
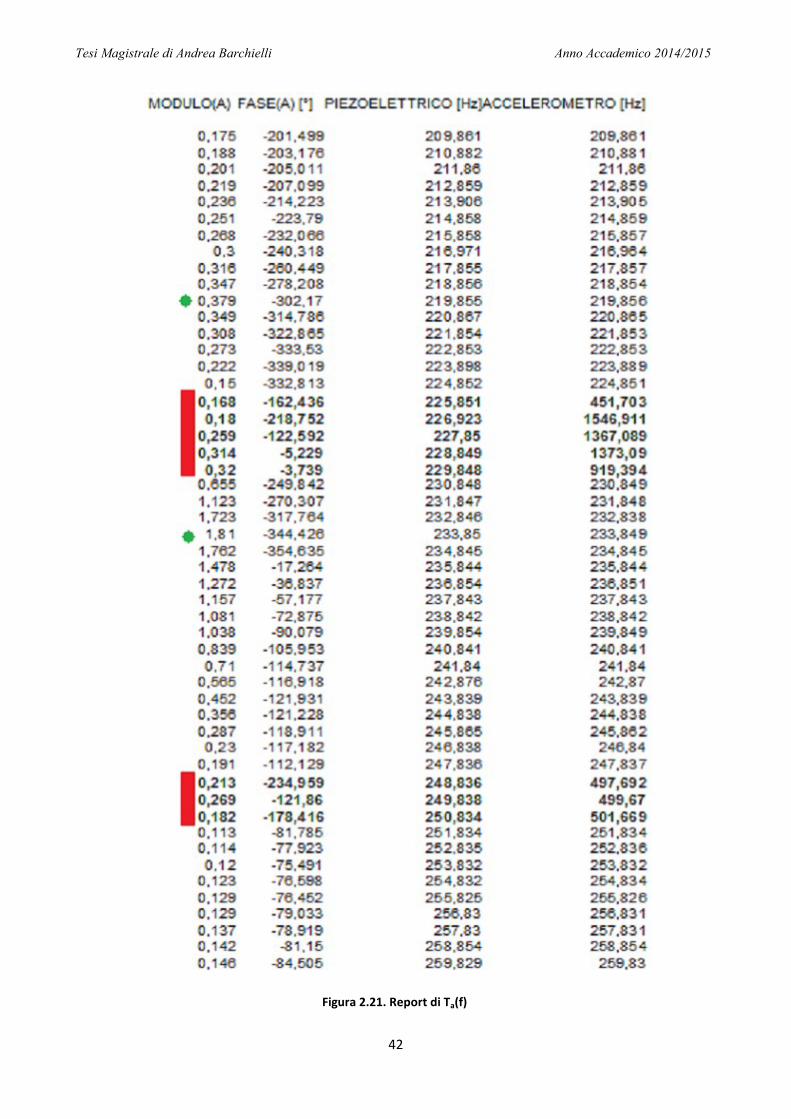
Infine con lo stesso programma è stata costruita anche la funzione di trasferimento Ta(f), che si
ottiene dal rapporto tra il segnale registrato dall’accelerometro, Vacc, e quello corrispondente che
comanda l’altoparlante, Valt:
𝑇𝑎(𝑓) =𝑉𝑎𝑐𝑐(𝑓)
𝑉𝑎𝑙𝑡(𝑓)
Dai diagrammi del modulo e della fase e dal documento di report, figure 2.19-2.21, si evince che
c’è una correlazione con Tp(f): difatti è presente il medesimo picco principale e i range di
frequenze nei quali l’accelerometro rileva un’armonica fondamentale diversa sono circa gli stessi;
invece il picco secondario risulta in proporzione molto minore e traslato in avanti di 4Hz. In
conclusione si può affermare che nell’intervallo di frequenze esaminato c’è una discreta
somiglianza tra le risposte in frequenza del sistema generate dai diversi attuatori.
Figura 2.19. Diagramma del modulo di Ta(f)
Figura 2.20. Diagramma della fase di Ta(f)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
42
Figura 2.21. Report di Ta(f)

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
43
3. PROGETTO DEL REGOLATORE 3.1. Algoritmo di controllo delle vibrazioni
Il primo algoritmo che è stato implementato nel microcontrollore per attenuare la vibrazione è un
regolatore proporzionale: il segnale letto dall’accelerometro viene moltiplicato per un peso
calcolato sperimentalmente, ‘𝑓’ = −0.5, e inviato al piezoelettrico attraverso l’amplificatore. Il
segno meno è dovuto alla struttura fisica del sistema, difatti l’altoparlante, essendo pilotato con
un segnale sinusoidale, induce sulla lamina uno spostamento ‘x’ anch’esso sinusoidale, che
rappresenta il disturbo; quindi l’accelerazione misurata, ‘a’, risulta:
𝑎 =𝑑2𝑥(𝑡)
𝑑𝑡2=
𝑑2(𝐶𝑠𝑖𝑛(𝜔𝑡))
𝑑𝑡2= −𝐶𝜔2 sin(𝜔𝑡)
che, per via del segno, è sfasata di 180° rispetto allo spostamento ‘x’. Tuttavia anche il
piezoelettrico introduce uno sfasamento di pari entità che riporterebbe il segnale in fase,
amplificando il disturbo, come risulta dagli esperimenti: questo avviene perché l’attuatore a fronte
di un segnale positivo aumenta la sua lunghezza ed, essendo incollato sulla lamina e sormontato
da un pesetto, tende a spingere quest’ultima verso il basso. In sostanza dato che l’accelerometro è
montato con l’asse z rivolto verso l’alto, il piezoelettrico quando viene sollecitato dalla semionda
positiva genera uno spostamento negativo, e viceversa. Dalle prove sperimentali il disturbo risulta
attenuato del 15.7%, però bisogna tener presente che tra la rilevazione della vibrazione e
l’effettivo movimento del piezoelettrico intercorre del tempo, che introduce un ulteriore
sfasamento; inoltre, come si può notare dall’analisi eseguita nel capitolo 2.2, c’è uno sfasamento
anche tra il comando dell’attuatore e il segnale registrato dall’accelerometro, dovuto al tempo di
propagazione della vibrazione sulla lamina. Per compensare questi fenomeni è stato ritardato di
alcuni campioni il segnale di pilotaggio del piezoelettrico in modo che le due onde di vibrazioni
risultino in controfase: ciò risulta possibile perché il disturbo è un segnale periodico e quindi
l’azione dell’attuatore può essere calibrata anche su uno o più periodi successivi del segnale da
attenuare. Ovviamente lo sfasamento introdotto è quantizzato poiché l’accelerometro invia al
microcontrollore una sequenza di valori discreti, separati dal tempo di campionamento: dalle
misure effettuate si è trovato che il ritardo ottimale è di 6 campioni, con un leggero miglioramento
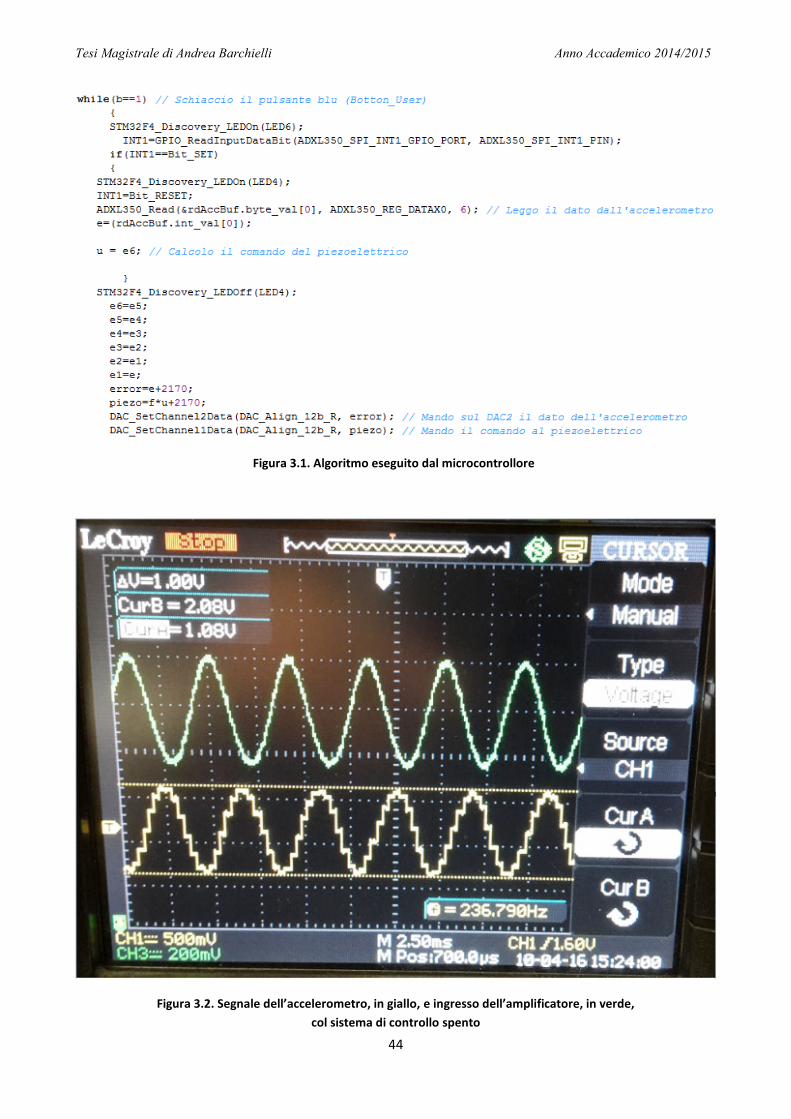
dell’attenuazione che arriva al 20%. In figura 3.1 è mostrato il codice eseguito dal
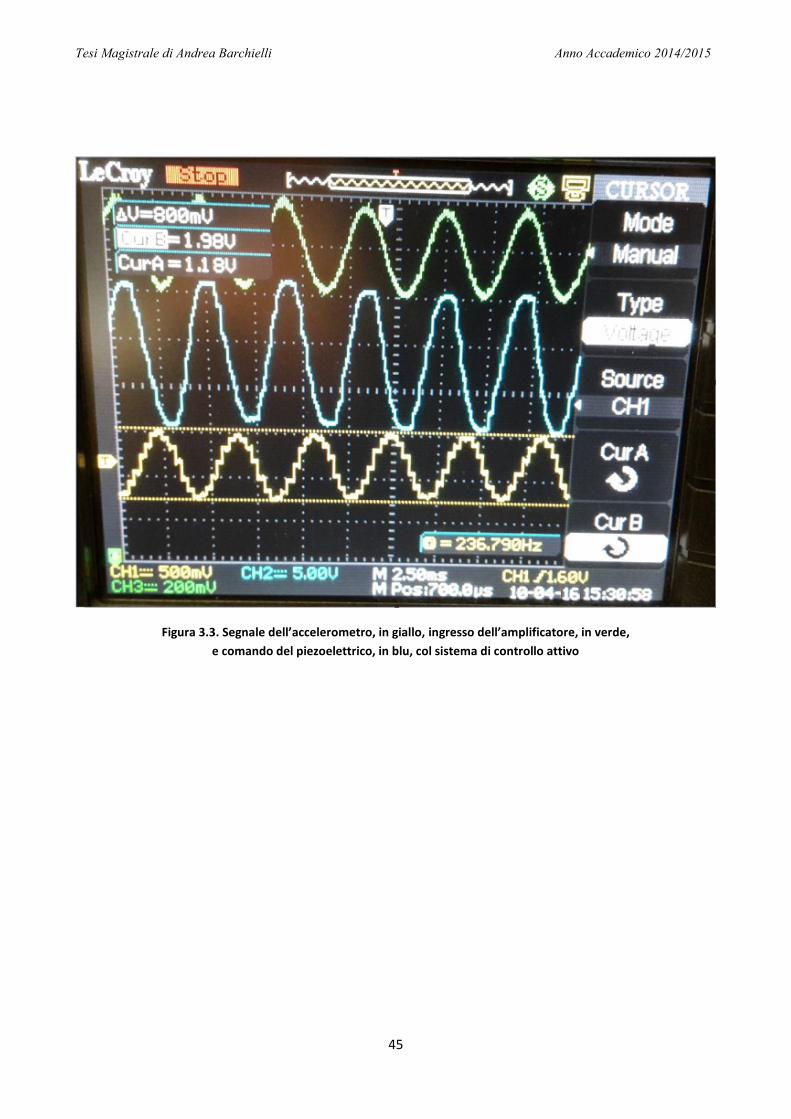
microcontrollore, mentre nelle figure 3.2 e 3.3 ci sono due foto dell’oscilloscopio mentre rileva il
segnale dell’accelerometro dal DAC2, linea gialla, rispettivamente senza l’azione del piezoelettrico,
il cui comando è la linea blu, e con il sistema di controllo attivo. (la linea verde è il segnale
d’ingresso dell’amplificatore dopo il filtro passa basso, vedi capitolo 1.4)
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
44
Figura 3.1. Algoritmo eseguito dal microcontrollore
Figura 3.2. Segnale dell’accelerometro, in giallo, e ingresso dell’amplificatore, in verde,
col sistema di controllo spento
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
45
Figura 3.3. Segnale dell’accelerometro, in giallo, ingresso dell’amplificatore, in verde,
e comando del piezoelettrico, in blu, col sistema di controllo attivo
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
46
3.2. Ottimizzazione dell’algoritmo
Una possibile ottimizzazione dell’algoritmo di controllo delle vibrazioni consiste nel progettare un
regolatore che si basi direttamente sui dati raccolti durante la caratterizzazione del sistema. Come
primo passo bisognerebbe costruire un modello matematico che rappresenti il comportamento in
frequenza del sistema ad anello aperto, cioè una funzione nel dominio di Laplace che rispecchi
quella calcolata per punti nel capitolo 2.2, Tp(s); dopodichè, mediante varie simulazioni eseguite
con un software in grado di calcolare i diagrammi di bode e la posizione dei poli e degli zeri nel
piano complesso, ad esempio matlab, si dovrebbe progettare il regolatore di modo che il sistema
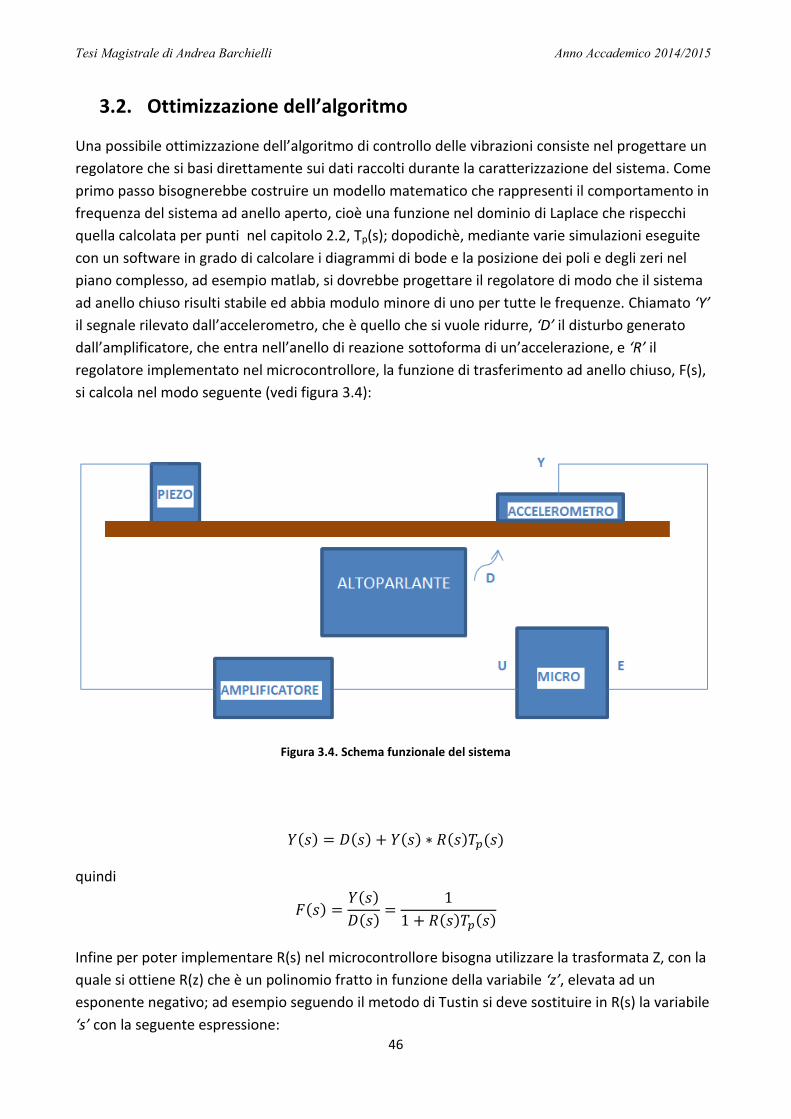
ad anello chiuso risulti stabile ed abbia modulo minore di uno per tutte le frequenze. Chiamato ‘Y’
il segnale rilevato dall’accelerometro, che è quello che si vuole ridurre, ‘D’ il disturbo generato
dall’amplificatore, che entra nell’anello di reazione sottoforma di un’accelerazione, e ‘R’ il
regolatore implementato nel microcontrollore, la funzione di trasferimento ad anello chiuso, F(s),
si calcola nel modo seguente (vedi figura 3.4):
Figura 3.4. Schema funzionale del sistema
𝑌(𝑠) = 𝐷(𝑠) + 𝑌(𝑠) ∗ 𝑅(𝑠)𝑇𝑝(𝑠)
quindi
𝐹(𝑠) =𝑌(𝑠)
𝐷(𝑠)=
1
1 + 𝑅(𝑠)𝑇𝑝(𝑠)
Infine per poter implementare R(s) nel microcontrollore bisogna utilizzare la trasformata Z, con la
quale si ottiene R(z) che è un polinomio fratto in funzione della variabile ‘z’, elevata ad un
esponente negativo; ad esempio seguendo il metodo di Tustin si deve sostituire in R(s) la variabile
‘s’ con la seguente espressione:

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
47
𝑠 =2
𝑇𝑠∗
1 − 𝑧−1
1 + 𝑧−1
dove Ts è il tempo di campionamento impostato nell’accelerometro e quindi è la distanza
temporale tra i campioni, e poi riscrivere tutto come un’unica frazione, Pn(z)/Pd(z). In conclusione
si ottiene (vedi ancora la figura 3.4):
𝑅(𝑧) =𝑃𝑛(𝑧)
𝑃𝑑(𝑧)=
𝑈(𝑧)
𝐸(𝑧)
e di conseguenza
𝑈(𝑧)𝑃𝑑(𝑧) = 𝐸(𝑧)𝑃𝑛(𝑧)
in cui la parte a sinistra dell’uguale riguarda i campioni inviati al piezoelettrico, mentre la parte a
destra quelli letti dall’accelerometro. In questa formulazione il modulo dell’esponente della
variabile ‘z’ è il ritardo in campioni rispetto al valore presente, invece il coefficiente è il peso per
cui il campione deve essere moltiplicato prima di essere sommato agli altri, per calcolare il
comando attuale da mandare al piezoelettrico.
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
48
CONCLUSIONI
Il prototipo attenua del 20% la vibrazione alla frequenza di risonanza della lamina, che è circa
235Hz: questa riduzione del disturbo è limitata dal fatto che c’è uno sfasamento tra il segnale
rilevato dall’accelerometro e la vibrazione generata dal piezoelettrico, che può essere solo in parte
compensato ritardando di alcuni campioni il segnale di comando dell’attuatore, come mostrato
nel capitolo 3.1. Tuttavia è possibile ottenere risultati migliori se si sviluppa un algoritmo partendo
dai dati raccolti durante la caratterizzazione del sistema, che potrebbe essere approfondita
analizzando nel dettaglio anche la potenza delle armoniche secondarie, per comprendere meglio
come si comporta il sistema quando l’accelerometro rileva una frequenza diversa da quella del
piezoelettrico (vedi il capitolo 2.1). Dalle considerazioni fatte nel capitolo 3.2 si evince che per
poter ottimizzare il sistema occorre costruirne un modello matematico accurato che consideri un
range di frequenze che parta dalla continua e arrivi fino alla massima frequenza che può esserci
nell’anello di reazione, per esempio fino a metà della frequenza di campionamento
dell’accelerometro. In conclusione il sistema costruito ed analizzato in laboratorio ha dimostrato
un corretto funzionamento, ma ha dei buoni margini di miglioramento che potranno essere
raggiunti in futuro partendo dalle analisi presentate in questo elaborato.

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
49
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
50
APPENDICE
Metodo delle costanti di tempo
Gloop = -99, si considera il caso di Gloop elevato che è il peggiore per la stabilità nel caso di poli a
frequenza inferiore a Fp
Cpiezo = 5.8µF
Ceq = Cp1+Cp2 = 44µF
Rus = 37.24kΩ
𝜏0 =𝐶𝑒𝑞
1−𝐺𝑙𝑜𝑜𝑝∗ (𝑅𝑙1//(𝑅𝑙2 + 𝑅𝑙3)//(𝑅𝑜𝑢𝑡 + 𝑅𝑥) + 𝑅𝑝1//𝑅𝑝2) +
𝐶𝑝𝑖𝑒𝑧𝑜
1−𝐺𝑙𝑜𝑜𝑝∗ (𝑅𝑙1//(𝑅𝑙2 + 𝑅𝑙3)//(𝑅𝑜𝑢𝑡 + 𝑅𝑥)) = 0.0676 + 0.0037 = 0.0713 [𝑠] = 𝑏
1
𝜏∞= (1 − 𝐺𝑙𝑜𝑜𝑝)/(𝐶𝑒𝑞 ∗ (𝑅𝑝1//𝑅𝑝2)) +
1−𝐺𝑙𝑜𝑜𝑝
𝐶𝑝𝑖𝑒𝑧𝑜∗𝑅𝑢𝑠= 25.253 + 462.98 = 488.233 [𝑠−1]
𝑎 =𝑏1
𝜏∞
= 0.000146 [𝑠2]
I poli sono le radici della seguente equazione:
𝑎𝑠2 + 𝑏𝑠 + 1 = 0
S1 = -14.453 [𝑟𝑎𝑑
𝑠] → 𝐹𝑝𝑙1 = |
𝑆1
2𝜋| = 2.3 [𝐻𝑧]
S2 = -473.903 [𝑟𝑎𝑑
𝑠] → 𝐹𝑝𝑙2 = |
𝑆2
2𝜋| = 75.42 [𝐻𝑧]
Se il Gloop fosse più piccolo, i poli si sposterebbero a frequenze più basse.

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
51
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
52
Bibliografia
[1] Francesco Ricciardelli, Antonio Occhiuzzi, Paolo Clemente – Semi-active Tuned Mass Damper
aaacontrol strategy for wind-excited structures, 18 maggio 2000, Journal of Wind Engineering and
aaaIndustrial Aerodynamics 88 (2000) 57-74
[2] Davorin Hrovat, Pinhas Barak, Michael Rabins, – Semi-Active versus Passive or Active Tuned
aaaMass Dampers for Structural Control, giugno 1983, Journal of Engineering Mechanics 109 (3)
aaa691-705
[3] Business Destination s.r.l. – Attuatore piezoelettrico - AE1010D16
[4] Analog Devices – Datasheet ADXL350, 2012
[5] Analog Devices – Preliminary Technical Data ADXL362, 2012
[6] STMicroelectronics – Datasheet STM32F405xx STM32F407xx, giugno 2013
[7] STMicroelectronics – Reference manual RM0090, settembre 2013
[8] STMicroelectronics – User Manual UM1472, gennaio 2014
[9] Texas Instrument – Datasheet LM358, settembre 2004, Dallas
[10] International Rectifier – Datasheet IRF640, luglio 2010
[11] International Rectifier – Datasheet IRF9640
[12] International Rectifier – Datasheet IRF630, ottobre 2004
[13] International Rectifier – Datasheet IRF9630
[14] STMicroelectronics – Datasheet TDA2030, giugno 2011
[15] National Instruments – Device Specification NI 6251, settembre 2015

Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
53
Tesi Magistrale di Andrea Barchielli Anno Accademico 2014/2015
54
Ringraziamenti
Ringrazio tutti coloro che hanno contribuito allo sviluppo di questo elaborato a partire dal mio
relatore che ne ha permesso la nascita proponendo l’argomento, al professor Piroddi che mi ha
fornito i documenti riguardanti il tuned mass damper, ai miei compagni di laboratorio, in
particolare Federico e Giorgio che mi hanno aiutato a sviluppare i software, e a tutti i miei
famigliari che mi hanno sempre sostenuto, soprattutto mio padre che mi ha dedicato molto tempo
e mi ha affiancato nella progettazione degli amplificatori, trasmettendomi tutte le conoscenze
tecniche e pratiche con le quali sono riuscito a costruirli fisicamente.