
Poligoni, Poliedrie( Volumi( - unibg.it · QuickTHull(algorithm(3.9 Computing Convex Hulls 67...
30
Poligoni, Poliedri e Volumi
Transcript of Poligoni, Poliedrie( Volumi( - unibg.it · QuickTHull(algorithm(3.9 Computing Convex Hulls 67...
Poligoni, Poliedri e Volumi
Poligoni
• Un poligono è una figura con n la5, definita da un insieme ordinato di almeno 3 pun5 nel piano, nel quale ogni punto è collegato al successivo (e l’ul5mo al primo) con un segmento di re>a.
• Due ver5ci si dicono adiacen5 se sono uni5 da un lato
• Un poligono è semplice se ogni coppia di la5 non consecu5vi non ha pun5 in comune
• Un poligono semplice divide il piano in due par5: l’area interna al poligono e quella esterna
Poligoni
Poligoni
• Un ver5ce di un poligono è convesso se l’angolo interiore è minore di 180°
• Se l’angolo è maggiore, il ver5ce si dice concavo • Un poligono è convesso se per ogni coppia di pun5 interni al poligono, la congiungente è interna al poligono
• Un poligono che non è convesso è concavo • Un poligono con uno o più ver5ci concavi è concavo, ma un poligono con solo ver5ci convessi non è necessariamente convesso
• Il triangolo è l’unico poligono sempre convesso
Poligoni
• I poligoni convessi possono essere vis5 come un so>oinsieme dell’conce>o di insieme dei pun* convessi nel piano
• Un insieme di pun5 convessi è un insieme di pun5 in cui qualsiasi linea tra due pun5 è cos5tuita da pun5 dell’insieme
• Dato un insieme di pun5 S, il guscio convesso (convex hull) di S, denotato con CH(S) è il più piccolo insieme di pun5 convessi che con5ene S
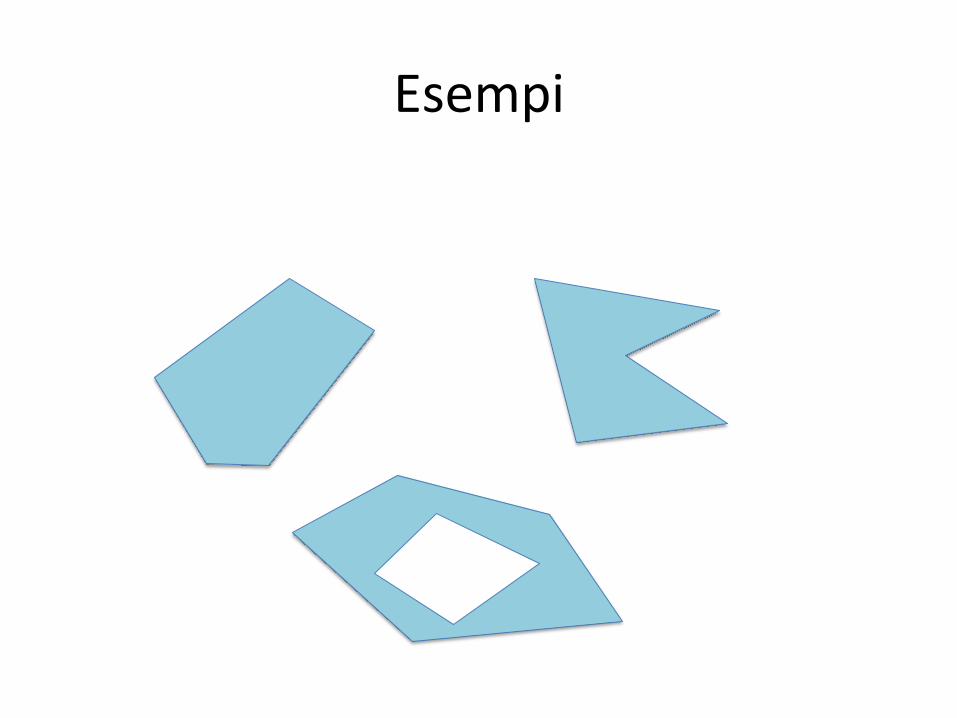
Esempi
Test di Convessità su Quadrilateri
• Spesso, oltre ai triangoli, all’interno di una mesh vi sono anche quadrilateri.
• Il test di convessità su un quadrilatero può essere fa>o in maniera semplice rispe>o ad un test di un poligono ad n la5
• Assumendo che i ver5ci del quadrilatero ABCD siano co-‐planari, occorre testare che le due diagonali giacciano nell’interno del quadrilatero
• Tale test è equivalente al fa>o che le due diagonali si intersechino
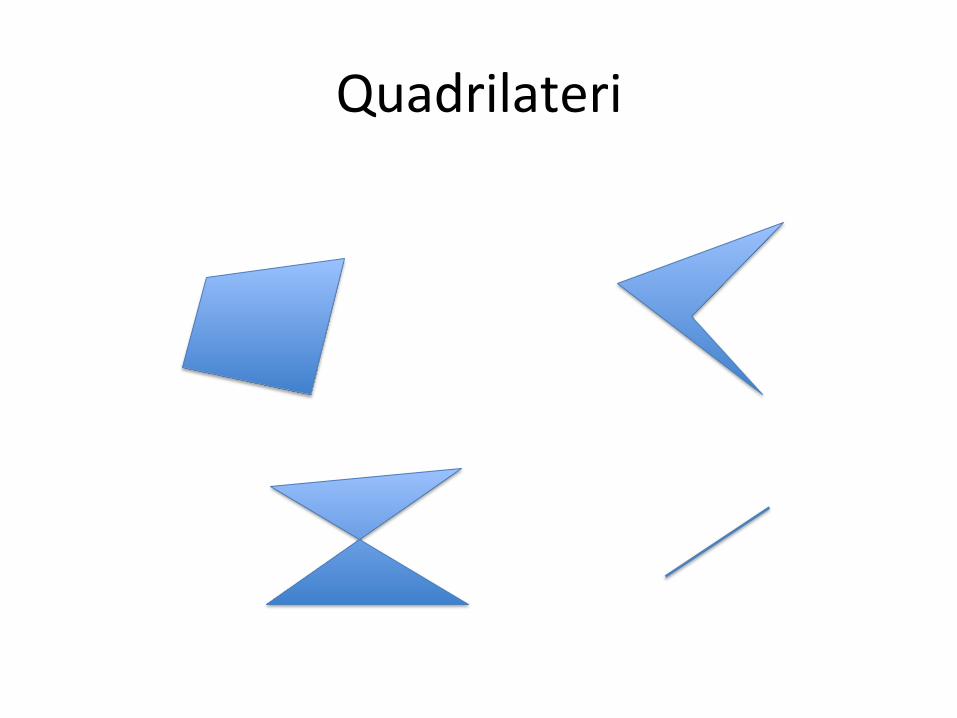
Quadrilateri
Test di convessità su quadrilateri
• Mediante considerazioni geometriche, si dimostra che un test equivalente a quelli precedentemente elenca5, consiste nel verificare che l’avvolgimento dei due triangoli ABD e BDC sia opposto, ovvero – (BD x BA) (BD x BC) < 0 – (AC x AD) (AC x AB) < 0
Test di convessità su poligoni
• Per poligoni con numero di ver5ci maggiore di 4 occorre controllare che per ogni lato del poligono, gli altri ver5ci giacciano tuZ da una parte rispe>o al lato.
• La complessità di tale algoritmo è O(n^2) • Altri test sono più veloci ma possono dare risulta5 erra5 – zig-‐zag – angoli interni < 180°
Poliedri
• Un poliedro è la controparte di un poligono in 3 dimensioni
• E’ una regione di spazio connessa e limitata • Ha la forma di un solido con più facce • I poliedri dividono lo spazio in due regioni, interna ed esterna
Politopi
• Un poliedro convesso è definito anche un politopo.
• Come un poligono, i politopi possono essere defini5 come l’intersezione di un numero finito di semispazi
Simplesso
• Un d-‐simplesso è il guscio convesso di d+1 pun5 in uno spazio d-‐dimensionale – Uno 0-‐simplesso è un punto – Un 1-‐simplesso è una re>a – Un 2-‐Simplesso è un triangolo – Un 3-‐simplesso un tetraedro
• la proprietà di un simplesso è che la rimozione di un singolo punto riduce la dimensione del simplesso
Computazione dei gusci convessi
• I gusci convessi possono essere u5lizza5 come volumi per geometrie di collisione
• Diversi algoritmi per la computazione di ques5 sono sta5 propos5
Andrew’s Algorithm
• Uno dei più robus5 e facili da implementare • Nella prima passata, occorre ordinare tuZ i pun5 da sinistra a destra
• Nelle seguen5 seconda e terza passata, le catene dei la5 da sinistra a destra, corrisponden5 rispeZvamente alla catena superiore ed inferiore del guscio
• Il guscio si oZene conne>endo le due catene
Andrew’s Algorithm 3.9 Computing Convex Hulls 65
A
B
C D
EF
G
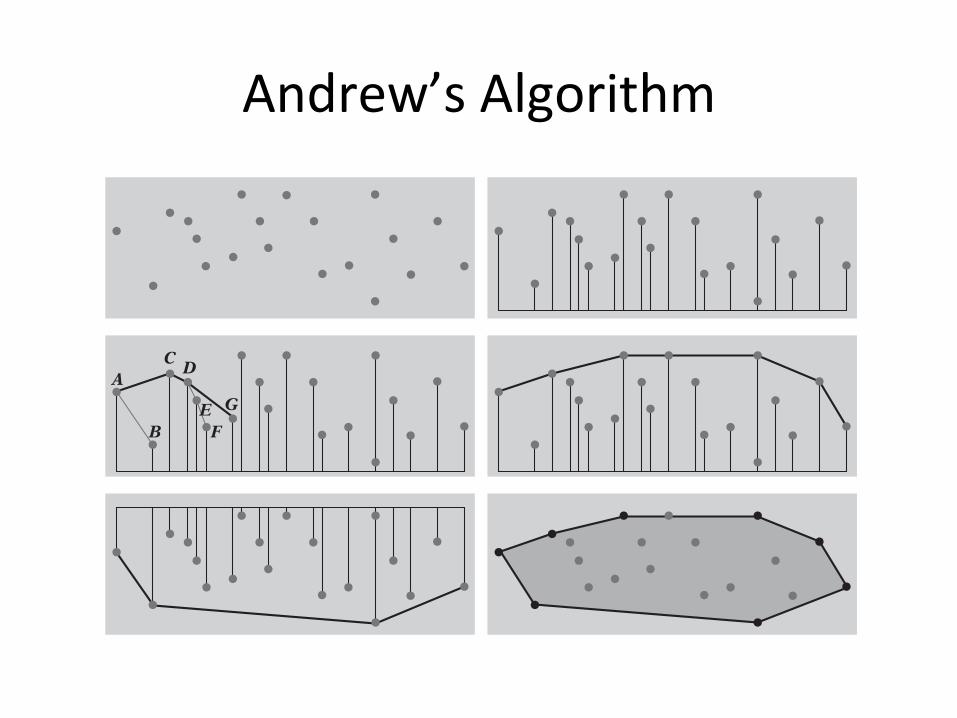
Figure 3.22 Andrew’s algorithm. Top left: the point set. Top right: the points sorted (lexi-cographically) from left to right. Middle left: during construction of the upper chain. Middleright: the completed upper chain. Lower left: the lower chain. Lower right: the two chainstogether forming the convex hull.
Two of them are briefly described in the next two sections: Andrew’s algorithm andthe Quickhull algorithm.
3.9.1 Andrew’s Algorithm
One of the most robust and easy to implement 2D convex hull algorithms is Andrew’salgorithm [Andrew79]. In its first pass, it starts by sorting all points in the given pointset from left to right. In subsequent second and third passes, chains of edges fromthe leftmost to the rightmost point are formed, corresponding to the upper and lowerhalf of the convex hull, respectively. With the chains created, the hull is obtained bysimply connecting the two chains end to end. The process is illustrated in Figure 3.22.The main step lies in the creation of the chains of hull edges. To see how one of thechains is formed, consider the partially constructed upper chain of points, as shownin the middle left-hand illustration. To simplify the presentation, it is assumed thereare not multiple points of the same x coordinate (this assumption is lifted further on).
Initially, the two leftmost points, A and B, are taken to form the first edge of thechain. The remaining points are now processed in order, considered one by one foraddition to the hull chain. If the next point for consideration lies to the right of the
Quick Hull Algorithm • Funziona bene sia in due che in tre dimensioni 1. Nel primo step viene iden5ficata una Bounding Box
dell’insieme di pun5 2. I pun5 che cos5tuiscono la BB saranno anche ver5ci
del guscio convesso – Ogni punto interno non farà parte del guscio convesso
3. Per ogni lato del guscio convesso occorre trovare il punto più lontano, che cos5tuirà un triangolo assieme ai due estremi del lato – Ogni punto appartenente a questo triangolo non può
essere un ver5ce del guscio convesso 4. La procedura del punto 3 si ripete ricorsivamente
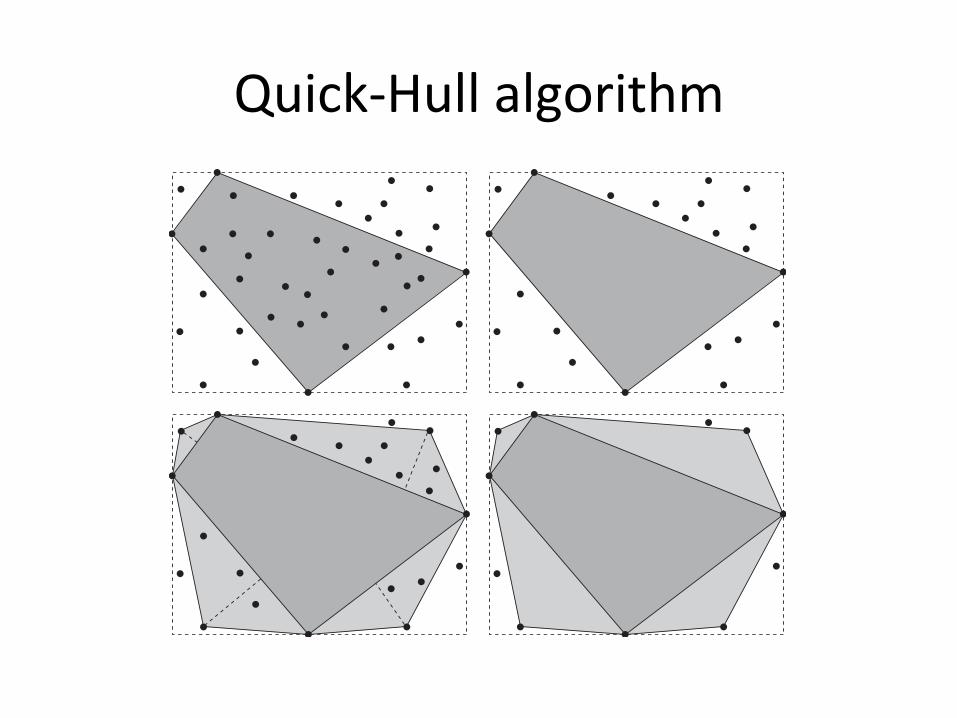
Quick-‐Hull algorithm 3.9 Computing Convex Hulls 67
Figure 3.23 First steps of the Quickhull algorithm. Top left: the four extreme points (on thebounding box of the point set) are located. Top right: all points inside the region formed bythose points are deleted, as they cannot be on the hull. Bottom left: for each edge of theregion, the point farthest away from the edge is located. Bottom right: all points inside thetriangular regions so formed are deleted, and at this point the algorithm proceeds recursivelyby locating the points farthest from the edges of these triangle regions, and so on.
endpoints of the edge, these new points form a triangular region. Just as before, anypoints located inside this region cannot be on the hull and can be discarded (Figure3.23, bottom right). The procedure now recursively repeats the same procedure foreach new edge that was added to the hull, terminating the recursion when no pointslie outside the edges.
Although the preceding paragraph completes the overall algorithm description,two minor complications must be addressed in a robust implementation. The firstcomplication is that the initial hull approximation may not always be a quadrilateral.If an extreme point lies, say, in the bottom left-hand corner, the initial shape mayinstead be a triangle. If another extreme point lies in the top right-hand corner,it may be a degenerate hull, consisting of only two points. To avoid problems, animplementation must be written to handle an initial hull approximation of a variablenumber of edges. The second complication is that there might not be a single unique
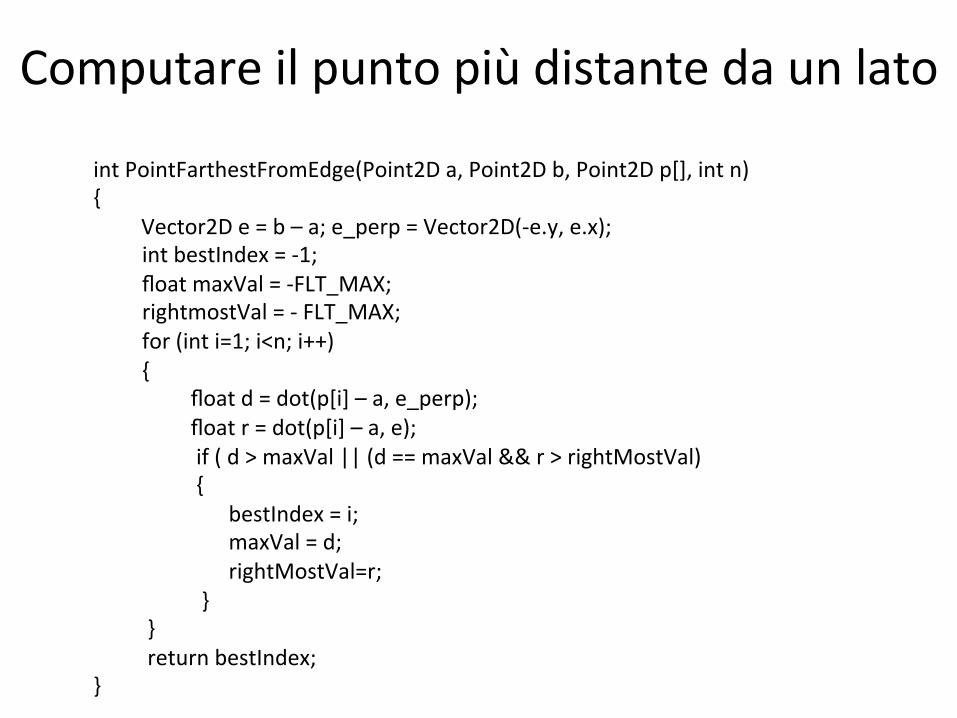
Computare il punto più distante da un lato
int PointFarthestFromEdge(Point2D a, Point2D b, Point2D p[], int n) {
Vector2D e = b – a; e_perp = Vector2D(-‐e.y, e.x); int bestIndex = -‐1; float maxVal = -‐FLT_MAX; rightmostVal = -‐ FLT_MAX; for (int i=1; i<n; i++) { float d = dot(p[i] – a, e_perp); float r = dot(p[i] – a, e); if ( d > maxVal || (d == maxVal && r > rightMostVal) { bestIndex = i; maxVal = d; rightMostVal=r; } } return bestIndex; }
Bounding Volumes
• Un Bounding Volume è un volume che incapsula uno o più oggeZ di natura più complessa.
• L’idea è quella di u5lizzare tali volumi più semplici, come sfere o parallelepipedi, per compiere dei test di sovrapposizione.
• Usandoli, è possibile computare velocemente una mancata sovrapposizione
Cara>eris5che Desiderabili
• test di intersezione poco costoso in termini computazionali
• Aderenza stre>a con la geometria • Semplice da calcolare • Poca memoria richiesta
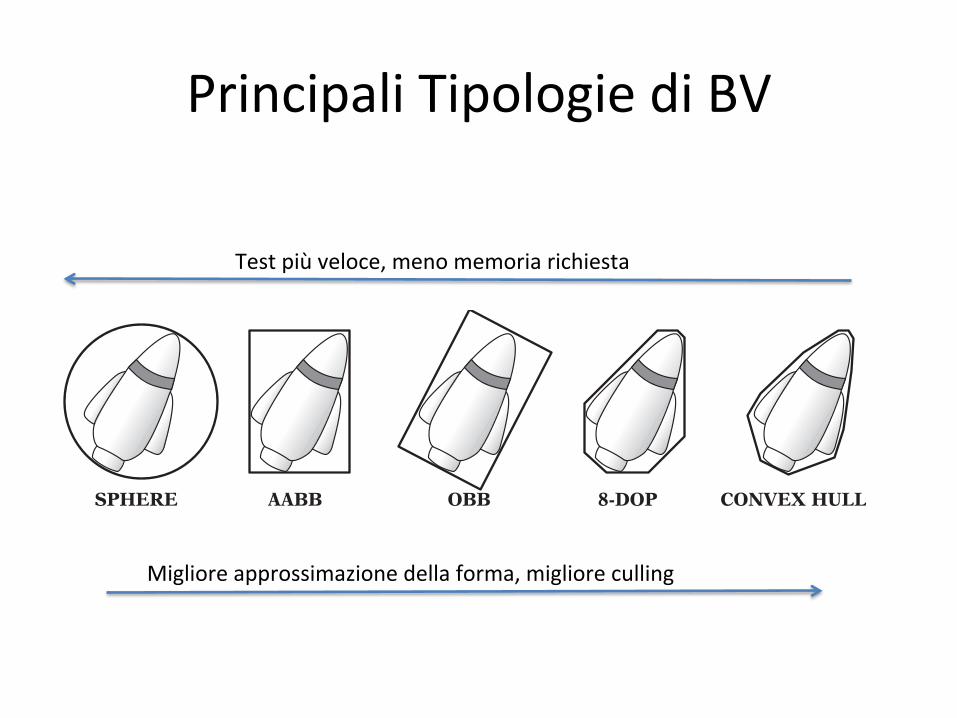
Principali Tipologie di BV 4.2 Axis-aligned Bounding Boxes (AABBs) 77
BETTER BOUND, BETTER CULLING
FASTER TEST, LESS MEMORY
SPHERE AABB OBB 8-DOP CONVEX HULL
Figure 4.2 Types of bounding volumes: sphere, axis-aligned bounding box (AABB), orientedbounding box (OBB), eight-direction discrete orientation polytope (8-DOP), and convex hull.
point inclusion, ray intersection with the volume, and intersection with planes andpolygons.
Bounding volumes are typically computed in a preprocessing step rather than atruntime. Even so, it is important that their construction does not negatively affectresource build times. Some bounding volumes, however, must be realigned at runtimewhen their contained objects move. For these, if the bounding volume is expensiveto compute realigning the bounding volume is preferable (cheaper) to recomputingit from scratch.
Because bounding volumes are stored in addition to the geometry, they shouldideally add little extra memory to the geometry. Simpler geometric shapes require lessmemory space. As many of the desired properties are largely mutually exclusive, nospecific bounding volume is the best choice for all situations. Instead, the best optionis to test a few different bounding volumes to determine the one most appropriatefor a given application. Figure 4.2 illustrates some of the trade-offs among five ofthe most common bounding volume types. The given ordering with respect to betterbounds, better culling, faster tests, and less memory should be seen as a rough, ratherthan an absolute, guide. The first of the bounding volumes covered in this chapter isthe axis-aligned bounding box, described in the next section.
4.2 Axis-aligned Bounding Boxes (AABBs)
The axis-aligned bounding box (AABB) is one of the most common bounding volumes.It is a rectangular six-sided box (in 3D, four-sided in 2D) categorized by having itsfaces oriented in such a way that its face normals are at all times parallel with theaxes of the given coordinate system. The best feature of the AABB is its fast overlapcheck, which simply involves direct comparison of individual coordinate values.
Migliore approssimazione della forma, migliore culling
Test più veloce, meno memoria richiesta
Axis Aligned Bounding Box
• Un parallelepipedo orientato in maniera tale da avere le facce orientate normali agli assi del sistema di riferimento
• La sua cara>eris5ca è la rapidità con cui si può computare un test di sovrapposizione
• Il test coinvolge semplicemente la comparazione di valori di coordinate
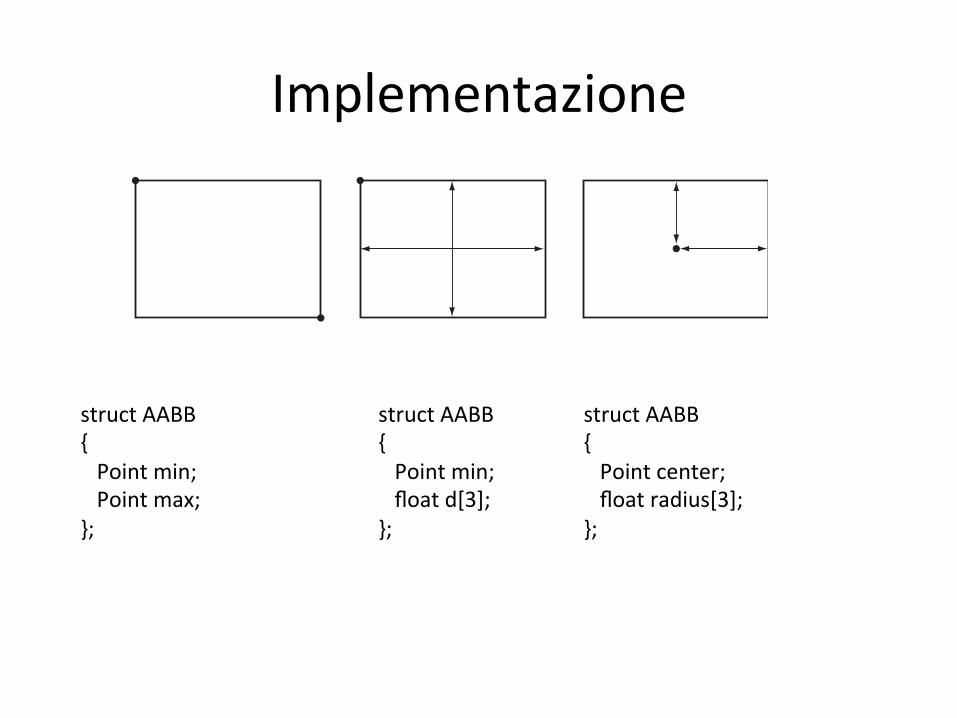
Implementazione 78 Chapter 4 Bounding Volumes
(a) (b) (c)
Figure 4.3 The three common AABB representations: (a) min-max, (b) min-widths, and(c) center-radius.
There are three common representations for AABBs (Figure 4.3). One is by theminimum and maximum coordinate values along each axis:
// region R = {(x, y, z) | min.x<=x<=max.x, min.y<=y<=max.y, min.z<=z<=max.z }struct AABB {
Point min;Point max;
};
This representation specifies the BV region of space as that between the two oppos-ing corner points: min and max. Another representation is as the minimum cornerpoint min and the width or diameter extents dx, dy, and dz from this corner:
// region R = {(x, y, z) | min.x<=x<=min.x+dx, min.y<=y<=min.y+dy, min.z<=z<=min.z+dz}struct AABB {
Point min;float d[3]; // diameter or width extents (dx, dy, dz)
};
The last representation specifies the AABB as a center point C and halfwidthextents or radii rx, ry, and rz along its axes:
// region R = {(x, y, z) | |c.x-x|<=rx, |c.y-y|<=ry, |c.z-z|<=rz }struct AABB {
Point c; // center point of AABBfloat r[3]; // radius or halfwidth extents (rx, ry, rz)
};
struct AABB { Point min; Point max; };
struct AABB { Point min; float d[3]; };
struct AABB { Point center; float radius[3]; };
Intersezione AABB-‐AABB
• Il test è abbastanza immediato, indipendentemente dalla rappresentazione
int testAABB(AABB a, AABB b) { if( a.max[0] < b.min[0] || a.min[0] > b.max[0]) return 0; if( a.max[1] < b.min[1] || a.min[1] > b.max[1]) return 0; if( a.max[2] < b.min[2] || a.min[2] > b.max[2]) return 0; return 1; }
• Nel caso di rappresentazione min-‐max l’implementazione può essere la seguente:
Computare ed aggiornare le AABB
• Per il test di overlap è necessario che le due AABB siano nello stesso sistema di riferimento
• Può essere quello di tenere entrambe le AABB in world space oppure di trasformare una AABB nello spazio locale dell’altra
• Efficienza ed accuratezza
Sfere
• Altro bounding volume molto comune • Sono anche invarian5 alle rotazioni • Dal punto di vista della memoria, è il bounding volume meno costoso
struct Sphere {
Point c; float radius; }
Computare una Bounding Sphere
• Una tecnica semplice ed approssima5va può essere computare prima l’AABB dei pun5.
• Il centro di tale AABB sarà il centro della sfera • Il raggio è dato dal punto più lontano dal centro
• Ci sono altre tecniche per creare sfere che si ada>ano meglio
Test Sfera-‐Sfera
int testSphereSphere (Sphere a, Sphere b) { Vector d = a.c – b.c; float dist2 = dot(d,d); float radiusSum = a.r + b.r; return dist2 <= radiusSum*radiusSum; }
Oriented Bounding Box (OBB) • E’ un parallelepipedo orientato in maniera arbitraria • Può essere rappresentato in diverse maniere – 8 ver5ci – 6 piani – un ver5ce e 3 ve>ori ortogonali – un centro, una matrice di orientamento e 3 semi-‐lunghezze
• Onerosa in termini di risorse computazionali
struct OBB { Point c; Vector u[3]; Vector e; }


















