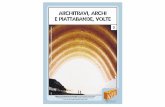
Movimentazione e stoccaggio silos orizzontali Horizontal ... · - Limitare l’utilizzo di mezzi...
24
since 1948 Horizontal silos handling and stocking Movimentazione e stoccaggio silos orizzontali Leader europeo nella costruzione di macchine per la movimentazione dei cereali Grain handling machines manufacture european leader
Transcript of Movimentazione e stoccaggio silos orizzontali Horizontal ... · - Limitare l’utilizzo di mezzi...
since1948
Horizontal silos handling and stocking
Movimentazione e stoccaggiosilos orizzontali
Leader europeo nella costruzione di macchineper la movimentazione dei cereali
Grain handling machines manufacture european leader

Robot
2
ROBOT DI CARICO E SCARICO MAGAZZINIWAREHOUSE LOADING AND UNLOADING ROBOT
Presentazione PresentationIl “ROBOT” è una macchina innovativa idonea per eseguireil carico e lo scarico in automatico dei cereali stoccatiall’interno di magazzini piani aventi luce massima di 50.000mm, altezza e lunghezza illimitata.
Tale sistema consente elevate velocità operative oltre chèoffrire all’utilizzatore i seguenti vantaggi:
- Limitare la presenza dell’uomo all’interno del magazzinodurante le operazioni di carico e scarico (l’intervento dell’uomo è in funzione del grado di automazione sceltoricordando che la presenza uomo pùo essere anche nonnecessaria con l’automazione più spinta).
- Limitare l’utilizzo di mezzi meccanici per compiere leoperazioni di carico e scarico riducendo drasticamente l’inquinamento dei prodotti stoccati.
- Riduzione dei costi di scarico dei magazzini in quantolo stesso viene usato sia per estrarre e convogliare il prodotto verso il sistema di evacuazione che per il caricamento che avviene in modo puntuale e ben distribuito con possibilita di creare box (tramite l’utilizzodi paratoie in cemento armato) all’interno dello stesso magazzino .
- Ottimizzazione dei volumi disponibili con sensibile riduzione del costo per tonnellata stoccata.
- Riduzione dei costi di ventilazione di mantenimento del cereale dovuto alla uniformità della massa stoccata.
- Fruizione dei magazzini adibiti allo stoccaggio per altrouso in contemporanea in quanto quando la macchina sitrova in condizioni di riposo (posizione stabilita dal cliente)si trova in posizione sospesa quindi si ha la possibilita di usare il pavimento per altre operazioni.
- Il controllo in automatico dei movimenti della macchina,siano essi quelli verticali che orizzontali, possono esseregestiti integralmente da un controllore programmabile (PLC) che assicura la massima affidabilità, sicurezza epossibilità di variarne le funzioni di utilizzo in qualsiasi istante. Questa operazione si rende possibile a secondadel grado di automazione scelto in fase di ordine in quantoil Robot può essere ordinato nella versione MANUALE,SEMIAUTOMATICA, AUTOMATICA.
Il “Robot” viene normalmente utilizzato per livellare escaricare prodotti quali cereali, mangimi, zucchero e prodottisfusi sfarinati o granulari in genere.
Warehouse loading and unloading robot Illustrative technicaldescription The “ ROBOT “ is an innovating machine ableto allow the automatic unloading of stocked products insideflat warehouses having a high light of 50.000mm, unlimitedheight and length.
Such system allows operative high speeds apart frommaking sure customer of the following functions:
- Limit man presence inside warehouse during loadingand unloading operations (his intervention is acting as theautomation degree you choose remembering that hispresence can be not necessary using a more pushedautomation)- Limit mechanical equipment to carry out loading andunloading operations reducing drastically stocked productpollution- Reduce warehouse unloading costs as this robot isused whether extracting and conveying product towardsevacuation system or good distributed and prompt loadingcreating boxes (by means of reinforced concrete gates)inside the same warehouse.- Volume optimization at disposition reducing sensiblythe cost per stocked ton.- Reduce ventilation costs of grain conservation due tostocked mass uniformity.- Warehouse use, considering that when the machine isat rest (position established by customer), it is overhang,so there is the possibility to use differently floor from stockinguse.- Control automatically machine movements, horizontallyor vertically, by a programmable controller (PLC), whichguarantees the maximum reliance, safety and possibilityto vary always its utilization functions. This operation ispossible in accordance to automation degree you chooseduring order as the “Robot” can be ordered in MANUAL,SEMIAUTOMATIC, AUTOMATIC version.
The “ Robot “ is normally used to level and unload productssuch as: grains, feeds, sugar and bulk milling or granularproducts in general.
3
RobotROBOT DI CARICO E SCARICO MAGAZZINIWAREHOUSE LOADING AND UNLOADING ROBOT
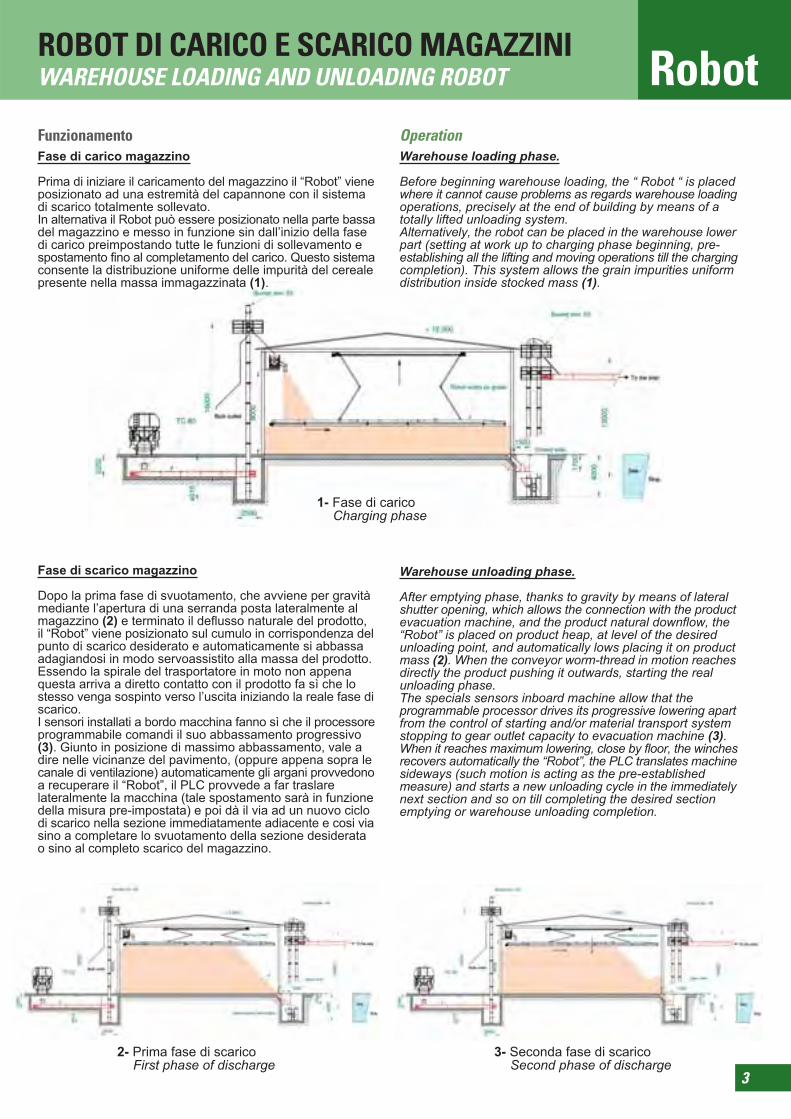
Fase di carico magazzino
Prima di iniziare il caricamento del magazzino il “Robot” vieneposizionato ad una estremità del capannone con il sistemadi scarico totalmente sollevato.In alternativa il Robot può essere posizionato nella parte bassadel magazzino e messo in funzione sin dall’inizio della fasedi carico preimpostando tutte le funzioni di sollevamento espostamento fino al completamento del carico. Questo sistemaconsente la distribuzione uniforme delle impurità del cerealepresente nella massa immagazzinata (1).
Warehouse loading phase.
Before beginning warehouse loading, the “ Robot “ is placedwhere it cannot cause problems as regards warehouse loadingoperations, precisely at the end of building by means of atotally lifted unloading system.Alternatively, the robot can be placed in the warehouse lowerpart (setting at work up to charging phase beginning, pre-establishing all the lifting and moving operations till the chargingcompletion). This system allows the grain impurities uniformdistribution inside stocked mass (1).
Funzionamento Operation
Fase di scarico magazzino
Dopo la prima fase di svuotamento, che avviene per gravitàmediante l’apertura di una serranda posta lateralmente almagazzino (2) e terminato il deflusso naturale del prodotto,il “Robot” viene posizionato sul cumulo in corrispondenza delpunto di scarico desiderato e automaticamente si abbassaadagiandosi in modo servoassistito alla massa del prodotto.Essendo la spirale del trasportatore in moto non appenaquesta arriva a diretto contatto con il prodotto fa sì che lostesso venga sospinto verso l’uscita iniziando la reale fase discarico.I sensori installati a bordo macchina fanno sì che il processoreprogrammabile comandi il suo abbassamento progressivo(3). Giunto in posizione di massimo abbassamento, vale adire nelle vicinanze del pavimento, (oppure appena sopra lecanale di ventilazione) automaticamente gli argani provvedonoa recuperare il “Robot”, il PLC provvede a far traslarelateralmente la macchina (tale spostamento sarà in funzionedella misura pre-impostata) e poi dà il via ad un nuovo ciclodi scarico nella sezione immediatamente adiacente e cosi viasino a completare lo svuotamento della sezione desideratao sino al completo scarico del magazzino.
Warehouse unloading phase.
After emptying phase, thanks to gravity by means of lateralshutter opening, which allows the connection with the productevacuation machine, and the product natural downflow, the“Robot” is placed on product heap, at level of the desiredunloading point, and automatically lows placing it on productmass (2). When the conveyor worm-thread in motion reachesdirectly the product pushing it outwards, starting the realunloading phase.The specials sensors inboard machine allow that theprogrammable processor drives its progressive lowering apartfrom the control of starting and/or material transport systemstopping to gear outlet capacity to evacuation machine (3).When it reaches maximum lowering, close by floor, the winchesrecovers automatically the “Robot”, the PLC translates machinesideways (such motion is acting as the pre-establishedmeasure) and starts a new unloading cycle in the immediatelynext section and so on till completing the desired sectionemptying or warehouse unloading completion.
1- Fase di caricoCharging phase
2- Prima fase di scaricoFirst phase of discharge
3- Seconda fase di scaricoSecond phase of discharge
4
RobotROBOT DI CARICO E SCARICO MAGAZZINIWAREHOUSE LOADING AND UNLOADING ROBOT
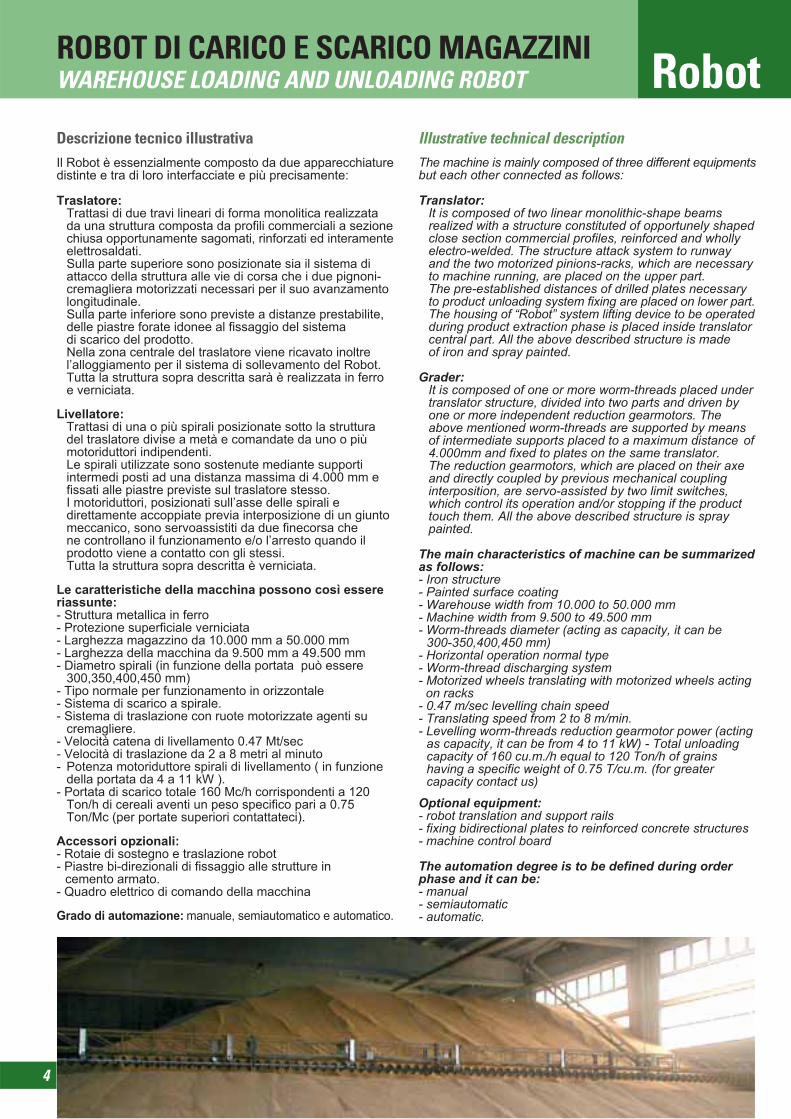
Il Robot è essenzialmente composto da due apparecchiaturedistinte e tra di loro interfacciate e più precisamente:
Traslatore:Trattasi di due travi lineari di forma monolitica realizzata da una struttura composta da profili commerciali a sezionechiusa opportunamente sagomati, rinforzati ed interamenteelettrosaldati.Sulla parte superiore sono posizionate sia il sistema di attacco della struttura alle vie di corsa che i due pignoni-cremagliera motorizzati necessari per il suo avanzamento longitudinale.Sulla parte inferiore sono previste a distanze prestabilite, delle piastre forate idonee al fissaggio del sistema di scarico del prodotto.Nella zona centrale del traslatore viene ricavato inoltre l’alloggiamento per il sistema di sollevamento del Robot. Tutta la struttura sopra descritta sarà è realizzata in ferro e verniciata.
Livellatore:Trattasi di una o più spirali posizionate sotto la struttura del traslatore divise a metà e comandate da uno o più motoriduttori indipendenti.Le spirali utilizzate sono sostenute mediante supporti intermedi posti ad una distanza massima di 4.000 mm e fissati alle piastre previste sul traslatore stesso.I motoriduttori, posizionati sull’asse delle spirali e direttamente accoppiate previa interposizione di un giunto meccanico, sono servoassistiti da due finecorsa che ne controllano il funzionamento e/o l’arresto quando il prodotto viene a contatto con gli stessi.Tutta la struttura sopra descritta è verniciata.
Le caratteristiche della macchina possono così essereriassunte:- Struttura metallica in ferro- Protezione superficiale verniciata- Larghezza magazzino da 10.000 mm a 50.000 mm- Larghezza della macchina da 9.500 mm a 49.500 mm- Diametro spirali (in funzione della portata può essere
300,350,400,450 mm)- Tipo normale per funzionamento in orizzontale- Sistema di scarico a spirale.- Sistema di traslazione con ruote motorizzate agenti su
cremagliere.- Velocità catena di livellamento 0.47 Mt/sec- Velocità di traslazione da 2 a 8 metri al minuto- Potenza motoriduttore spirali di livellamento ( in funzione
della portata da 4 a 11 kW ).- Portata di scarico totale 160 Mc/h corrispondenti a 120
Ton/h di cereali aventi un peso specifico pari a 0.75 Ton/Mc (per portate superiori contattateci).
Accessori opzionali:- Rotaie di sostegno e traslazione robot- Piastre bi-direzionali di fissaggio alle strutture in
cemento armato.- Quadro elettrico di comando della macchina
Grado di automazione: manuale, semiautomatico e automatico.
The machine is mainly composed of three different equipmentsbut each other connected as follows:
Translator:It is composed of two linear monolithic-shape beams realized with a structure constituted of opportunely shapedclose section commercial profiles, reinforced and wholly electro-welded. The structure attack system to runway and the two motorized pinions-racks, which are necessaryto machine running, are placed on the upper part.The pre-established distances of drilled plates necessary to product unloading system fixing are placed on lower part.The housing of “Robot” system lifting device to be operatedduring product extraction phase is placed inside translatorcentral part. All the above described structure is made of iron and spray painted.
Grader:It is composed of one or more worm-threads placed undertranslator structure, divided into two parts and driven by one or more independent reduction gearmotors. The above mentioned worm-threads are supported by means of intermediate supports placed to a maximum distance of4.000mm and fixed to plates on the same translator. The reduction gearmotors, which are placed on their axe and directly coupled by previous mechanical coupling interposition, are servo-assisted by two limit switches, which control its operation and/or stopping if the product touch them. All the above described structure is spray painted.
The main characteristics of machine can be summarizedas follows:- Iron structure- Painted surface coating- Warehouse width from 10.000 to 50.000 mm- Machine width from 9.500 to 49.500 mm- Worm-threads diameter (acting as capacity, it can be
300-350,400,450 mm)- Horizontal operation normal type- Worm-thread discharging system- Motorized wheels translating with motorized wheels acting
on racks- 0.47 m/sec levelling chain speed- Translating speed from 2 to 8 m/min.- Levelling worm-threads reduction gearmotor power (acting
as capacity, it can be from 4 to 11 kW) - Total unloading capacity of 160 cu.m./h equal to 120 Ton/h of grains having a specific weight of 0.75 T/cu.m. (for greater capacity contact us)
Optional equipment:- robot translation and support rails- fixing bidirectional plates to reinforced concrete structures- machine control board
The automation degree is to be defined during orderphase and it can be:- manual- semiautomatic- automatic.
Descrizione tecnico illustrativa Illustrative technical description

5
Robot
L’automazione del Robot di carico e scarico magazzinipuò essere eseguita in tre versioni:
Manuale (con PLC e tastiera TOUCH):Automazione ad operatore presente tramite pulsantieramanuale o wireless.Il sistema prevede la gestione delle sicurezze ed assorbimentodella macchina sia in fase di carico che in quella di scarico,con spostamento trasversale tramite operatore ad ogni fineoperazione. Per integrazione sono possibili degli spostamentia step.Lo spostamento riguarda anche il carrello sul nastro, mentrecon la pulsantiera, oltre alle operazioni tipiche di spostamentolivellatore e carrello, si può avviare o spegnere la sequenzadi carico capannone o cella interessata.
Semiautomatico (con PLC e tastiera TOUCH):Automazione a parziale presenza operatore.Il sistema prevede, oltre alla gestione delle sicurezze edell'assorbimento della macchina, anche quella della posizionetrasversale del livellatore e del carrello su nastro, tramiteencoders. E' prevista comunque una pulsantiera manualeo wireless, per operatore presente.Lo spostamento e l'allineamento con il carrello su nastrosono eseguiti automaticamente durante la fase di carico oscarico, compreso l'avviamento e lo spegnimento dellarelativa sequenza.
Automatico (con PLC, PC e GRAINSTING):Automazione a totale assenza operatore.Il sistema prevede la gestione totale del livellatore con ilcarrello su nastro, tramite encoders sulla traslazione deglistessi e sui paranchi salita-discesa. Si possono eseguirecarichi o scarichi a quote preimpostate.Con il sistema GRAINSTING è inoltre possibile rilevareautomaticamente la temperatura e l'umidità del prodotto inwireless sempre a quote preimpostate integrandosi con glispostamenti del livellatore stesso.E' prevista comunque una pulsantiera manuale o wireless,per eventuali operazioni ad operatore presente.
Warehouse loading and unloading robot can be carriedout in three versions:
Manual (with PLC and TOUCH keyboard) :Automation at user’s presence by means of manual orwireless push-button panel.The system controls safeties and machine absorption duringloading and unloading phases, with transversal motion bymeans user at all operation ends. For integration it is possiblea step motion. The motion includes also the carriage on belt,while it is possible to start or stop the sequence of warehouseor interested cell loading by means of the push-button panel,apart from grader and carriage motion typical operations.
Semiautomatic (with PLC and TOUCH keyboard) :Automation at user’s partial presence.The system controls carriage and grader transversal positionon belt, by means of encoders, apart from safeties andmachine absorption control. However, the present user canuse the manual or wireless push-button panel. The motionand the alignment with the carriage on belt are automaticallyexecuted during loading and unloading phases, includingthe start and stop relative sequence.
Automatic (with PLC, PC and GRAINSTING) :Automation at user’s total absence.The system controls totally the grader with the carriage onbelt, by means of encoders on their translation and on rise-descent hoists. It is possible to carry out loadings andunloadings at pre-established levels. Thanks to GRAINSTINGsystem is possible also to take automatically wireless theproduct temperature and the humidity at pre-establishedlevels self-integrating with the same grader motion. However,it is possible to use a manual or wireless push-button, forfurther operations, at present user.
Automazione Automation
AUTOMAZIONE ROBOT DI CARICO E SCARICO MAGAZZINI
WAREHOUSE LOADING AND UNLOADING ROBOT

6
1 2
TEMPERATURA E UMIDITA’TEMPERATURE AND HUMIDITY
GrainstingRilevamento automatico temperatura e umidità delcereale stoccato nel magazzino
GrainstingStocked grain temperature and humidity automaticsurvey inside warehouse
1- Grainsting MASTER con misura in immersione da 0 a6 mt. in associazione ad automazione livellatore.
Sistema di rilevamento a pistone pneumatico telescopico,con sonda wireless installata in punta stelo, per il rilevamentoautomatico a quote preimpostate della temperatura edell’umidità del prodotto.
2- Sistema Grainsting ROLL con misura ad immersioneda 0 a 10 mt. in associazione ad automazione livellatore.
Sistema di livellamento ad aspo avvolgisvolgi motorizzato,con sonda in acciaio inox diam. 7 con installata in puntauna testina PT100, per il rilevamento automatico a quotepreimpostate della temperatura del prodotto.
1- Grainsting MASTER system with immersion measurefrom 0 to 6 m jointed to grader automation.
Telescopic pneumatic piston survey system, with wirelessprobe installed on rod point, to take automatically, accordingto pre-established heights, product temperature andhumidity.
2- Grainsting ROLL system with immersion measure from0 to 6 m jointed to grader automation.
Motorized winding-unwinding reel survey, with steel probe,dia. 7, on which point it is installed a PT100 head, to takeautomatically, according to pre-established heights, producttemperature.
7
T10/CT
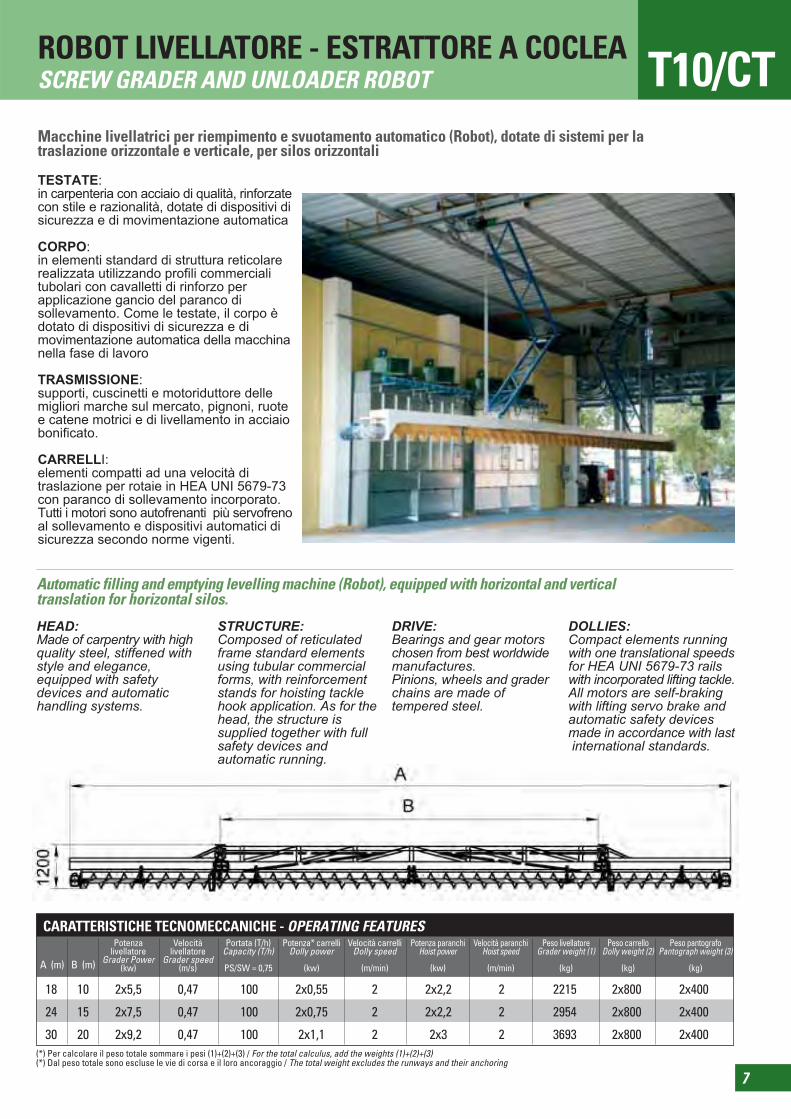
18
24
30
10
15
20
2x5,5
2x7,5
2x9,2
0,47
0,47
0,47
100
100
100
2x0,55
2x0,75
2x1,1
2
2
2
2x2,2
2x2,2
2x3
2
2
2
2215
2954
3693
2x800
2x800
2x800
2x400
2x400
2x400
ROBOT LIVELLATORE - ESTRATTORE A COCLEASCREW GRADER AND UNLOADER ROBOT
Macchine livellatrici per riempimento e svuotamento automatico (Robot), dotate di sistemi per latraslazione orizzontale e verticale, per silos orizzontali
Automatic filling and emptying levelling machine (Robot), equipped with horizontal and verticaltranslation for horizontal silos.
HEAD:Made of carpentry with highquality steel, stiffened withstyle and elegance,equipped with safetydevices and automatichandling systems.
TESTATE:in carpenteria con acciaio di qualità, rinforzatecon stile e razionalità, dotate di dispositivi disicurezza e di movimentazione automatica
CORPO:in elementi standard di struttura reticolarerealizzata utilizzando profili commercialitubolari con cavalletti di rinforzo perapplicazione gancio del paranco disollevamento. Come le testate, il corpo èdotato di dispositivi di sicurezza e dimovimentazione automatica della macchinanella fase di lavoro
TRASMISSIONE:supporti, cuscinetti e motoriduttore dellemigliori marche sul mercato, pignoni, ruotee catene motrici e di livellamento in acciaiobonificato.
CARRELLI:elementi compatti ad una velocità ditraslazione per rotaie in HEA UNI 5679-73con paranco di sollevamento incorporato.Tutti i motori sono autofrenanti più servofrenoal sollevamento e dispositivi automatici disicurezza secondo norme vigenti.
STRUCTURE:Composed of reticulatedframe standard elementsusing tubular commercialforms, with reinforcementstands for hoisting tacklehook application. As for thehead, the structure issupplied together with fullsafety devices andautomatic running.
DRIVE:Bearings and gear motorschosen from best worldwidemanufactures.Pinions, wheels and graderchains are made oftempered steel.
DOLLIES:Compact elements runningwith one translational speedsfor HEA UNI 5679-73 railswith incorporated lifting tackle.All motors are self-brakingwith lifting servo brake andautomatic safety devicesmade in accordance with last international standards.
CARATTERISTICHE TECNOMECCANICHE - OPERATING FEATURES
A (m) B (m)
Potenzalivellatore
Grader Power(kw)
Velocitàlivellatore
Grader speed(m/s)
Portata (T/h)Capacity (T/h)
PS/SW = 0,75
Potenza* carrelliDolly power
(kw)
Velocità carrelliDolly speed
(m/min)
Potenza paranchiHoist power
(kw)
Velocità paranchiHoist speed
(m/min)
Peso livellatoreGrader weight (1)
(kg)
Peso carrelloDolly weight (2)
(kg)
Peso pantografoPantograph weight (3)
(kg)
(*) Per calcolare il peso totale sommare i pesi (1)+(2)+(3) / For the total calculus, add the weights (1)+(2)+(3)(*) Dal peso totale sono escluse le vie di corsa e il loro ancoraggio / The total weight excludes the runways and their anchoring
8
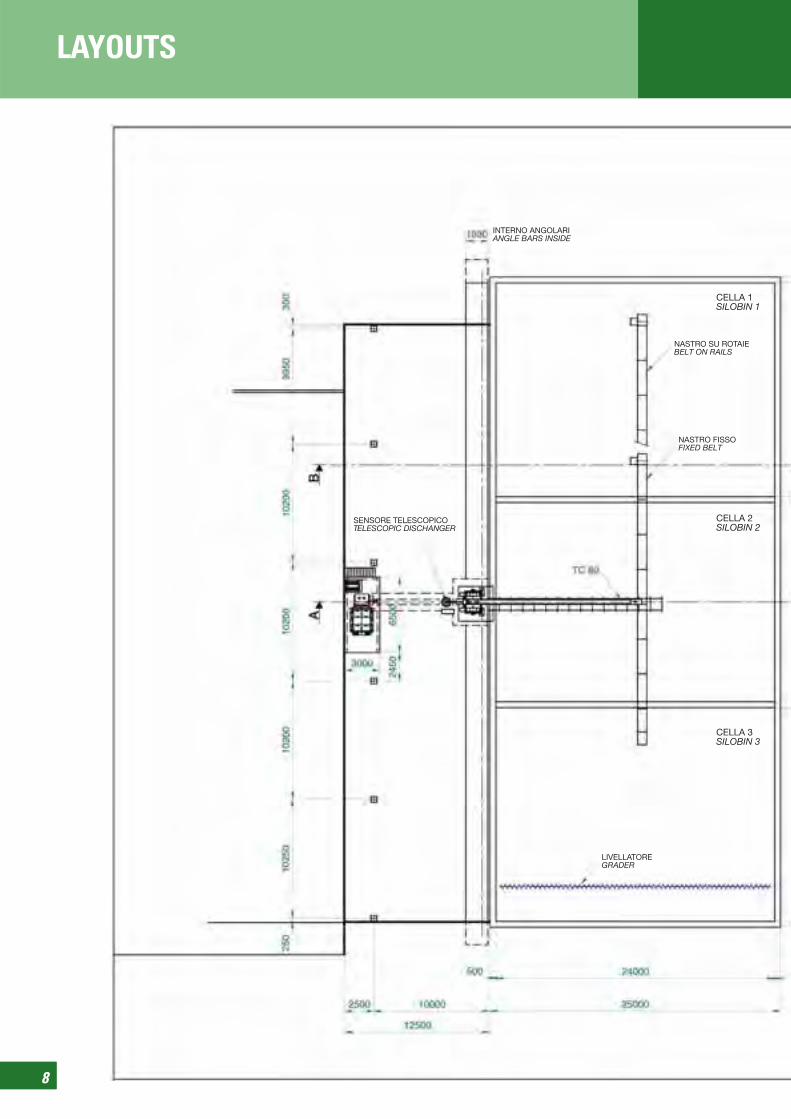
LAYOUTS
INTERNO ANGOLARIANGLE BARS INSIDE
SENSORE TELESCOPICOTELESCOPIC DISCHANGER
LIVELLATOREGRADER
CELLA 3SILOBIN 3
CELLA 2SILOBIN 2
CELLA 1SILOBIN 1
NASTRO SU ROTAIEBELT ON RAILS
NASTRO FISSOFIXED BELT
9
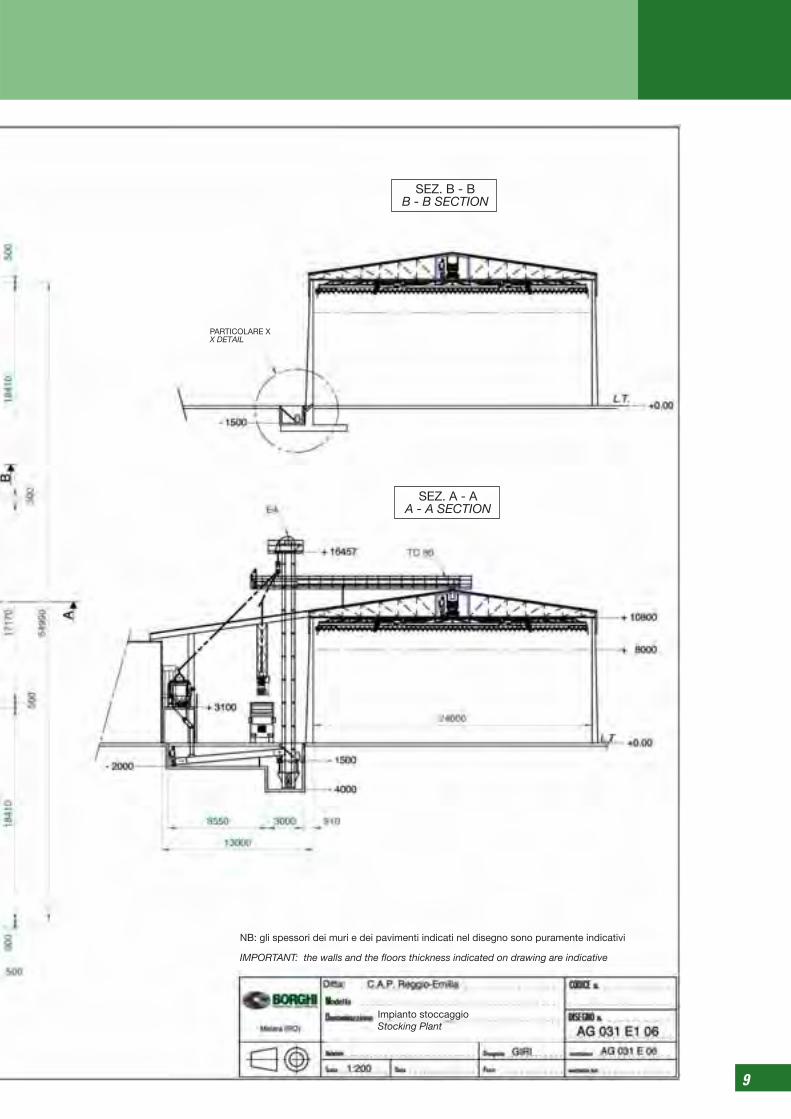
PARTICOLARE XX DETAIL
SEZ. B - BB - B SECTION
SEZ. A - AA - A SECTION
NB: gli spessori dei muri e dei pavimenti indicati nel disegno sono puramente indicativi
IMPORTANT: the walls and the floors thickness indicated on drawing are indicative
Impianto stoccaggioStocking Plant
10
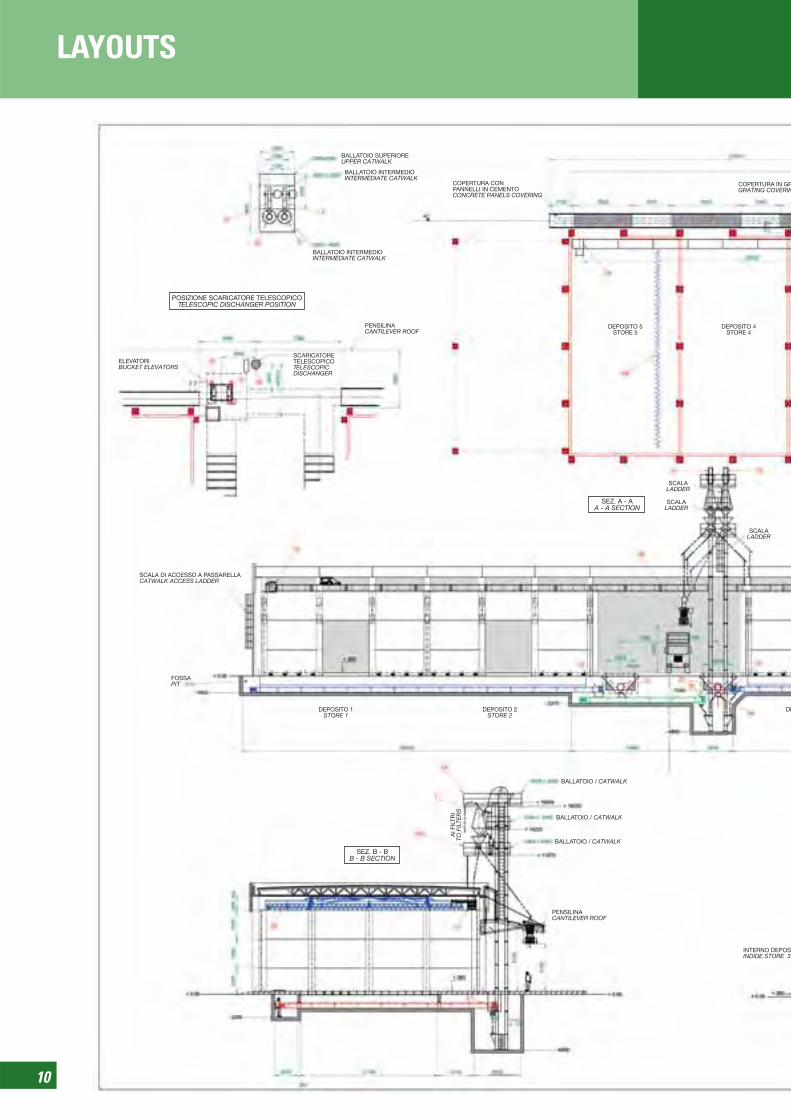
LAYOUTS
BALLATOIO SUPERIOREUPPER CATWALK
BALLATOIO INTERMEDIOINTERMEDIATE CATWALK
BALLATOIO INTERMEDIOINTERMEDIATE CATWALK
POSIZIONE SCARICATORE TELESCOPICOTELESCOPIC DISCHANGER POSITION
ELEVATORIBUCKET ELEVATORS
PENSILINACANTILEVER ROOF
SCARICATORETELESCOPICOTELESCOPICDISCHANGER
COPERTURA CONPANNELLI IN CEMENTOCONCRETE PANELS COVERING
DEPOSITO 5STORE 5
DEPOSITO 4STORE 4
COPERTURA IN GRGRATING COVERIN
SCALA DI ACCESSO A PASSARELLACATWALK ACCESS LADDER
FOSSAPIT
DEPOSITO 1STORE 1
DEPOSITO 2STORE 2
SCALALADDER
SCALALADDER
SCALALADDER
DES
PENSILINACANTILEVER ROOF
BALLATOIO / CATWALK
BALLATOIO / CATWALK
BALLATOIO / CATWALK
SEZ. A - AA - A SECTION
SEZ. B - BB - B SECTION
INTERNO DEPOSIINDIDE STORE 3
AI F
ILTR
ITO
FIL
TER
S

11
DEPOSITO 3STORE 3
RIGLIATONG
COPERTURA CONPANNELLI IN CEMENTOCONCRETE PANELSCOVERING
COPERTURA IN GRIGLIATOGRATING COVERING
DEPOSITO 2STORE 2
DEPOSITO 1STORE 1
COPERTURACON PANNELLIIN CEMENTOCONCRETEPANELSCOVERING
FOSSA 2PIT 2
FOSSA 1PIT 1
EPOSITO 3STORE 3
DEPOSITO 4STORE 4
DEPOSITO 5STORE 5
FOSSAPIT
SEZ. H - HH - H SECTION
ITO 3
CHIUSURA CON TENDAA STRISCE IN PLASTICACLOSING WITHPLASTIC STRIP TENT
INTERNODEPOSITO 2INDIDESTORE 2 ATTENZIONE: gli spessori dei muri rappresentati che non sono quotati,
sono puramente indicativi
ATTENTION: the no dimensioned walls thickness represented are indicative
TETTOIACANTILEVER ROOF
Plan A-A ; B-B ; H-H+ Sectionswith equipment
Pianta + Sezioni A-A; B-B; H-Hcon apparecchiature
12
PORTE A SPINTATHRUST DOORS
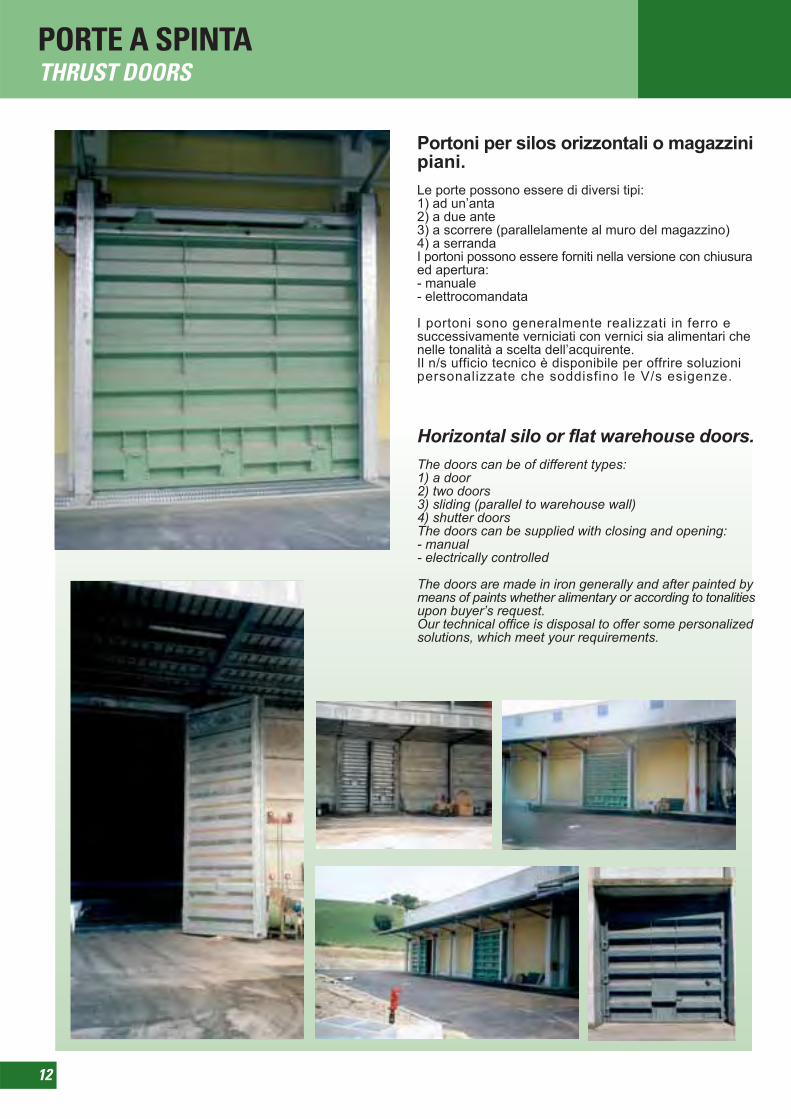
Portoni per silos orizzontali o magazzinipiani.Le porte possono essere di diversi tipi:1) ad un’anta2) a due ante3) a scorrere (parallelamente al muro del magazzino)4) a serrandaI portoni possono essere forniti nella versione con chiusuraed apertura:- manuale- elettrocomandata
I portoni sono generalmente realizzati in ferro esuccessivamente verniciati con vernici sia alimentari chenelle tonalità a scelta dell’acquirente.Il n/s ufficio tecnico è disponibile per offrire soluzionipersonalizzate che soddisfino le V/s esigenze.
Horizontal silo or flat warehouse doors.The doors can be of different types:1) a door2) two doors3) sliding (parallel to warehouse wall)4) shutter doorsThe doors can be supplied with closing and opening:- manual- electrically controlled
The doors are made in iron generally and after painted bymeans of paints whether alimentary or according to tonalitiesupon buyer’s request.Our technical office is disposal to offer some personalizedsolutions, which meet your requirements.

13
PORTE RAPIDEQUICK DOOR
Il sistema della porta ad avvolgimento rapido è uninnovazione da poco presente sul mercato.Essa rappresenta il più semplice quanto funzionale sistemadi chiusura veloce adatto a qualsiasi esigenza di logisticaindustriale.Concepito per uso intensivo, non necessita di particolarimanutenzioni.
VELO PACK Impacchettamento rapido Quick packing VELO PACK
The quick winding door system is a market recent innovation.It represents the simplest as much as the most functionalquick locking system suitable to any industrial logisticrequirement.It is realized for an intensive use, but it needs no particularmaintenance.
• Chiusura di semplice installazione affidabile e robusta, adatta a risolverei problemi di transiti veloci e continui.• Sistema di trascinamento del telo ad impacchettamento tramite cinghie.• Non necessita di alcuna installazione a pavimento e si adegua a qualsiasitipo di ambiente e fabbricato.• Costruita secondo la norma EN 13659 garantisce un assoluta affidabilitàper ogni utilizzo.• Il manto realizzato in PVC ad alta resistenza può essere dotato di unao più file di oblò trasparenti per favorire il passaggio della luce o pergarantire maggiore visibilità oltre la porta
• Strong and safe simple installation suitable to solve continuous and fastpassage problems.• Packing cloth dragging system by belts.• It needs no floor installation and it is suitable to any type of place andbuilding.• Realized in compliance with EN 13659 rule guarantying an absolutesafety for any use.• The PVC high strength covering can be equipped with one or more rowsof transparent windows to facilitate light passage or to guarantee a greatervisibility beyond the door.
VELO ROLL Arrotolamento rapidoLe porte VELO Roll, di concezione ancora più innovativa rispetto a quellead impacchettamento, hanno un sistema di arrotolamento del telodirettamente sul tubo avvolgente anziché utilizzare cinghie di trascinamento.Costruite a norma CE - EN 13659.Grazie alla ridotta dimensione dei montanti di sostegno, le porte VELORoll garantiscono una perfetta sistemazione su vani in luce, riducendonotevolmente lo spazio d’ingombro.Il movimento a rotazione permette manovre di apertura/chiusura fino a0,75 mt/sec e silenziosità di funzionamento.
Quick rolling VELO ROLLVELO Roll doors, of more innovative conception in regard to quick packing,have a cloth rolling system directly on a winding pipe, rather than usingdragging by belts.Realized in compliance with CE - EN 13659 rule.Thanks to supporting stiffeners reduced dimension, VELO Roll doorsguarantee a perfect settlement on light openings, reducing remarkableoverall space.The rotation motion allows opening/closing move up to 0,75 mt/sec andoperation silentness.
LM-CM
14
1
2
3
4
5
6
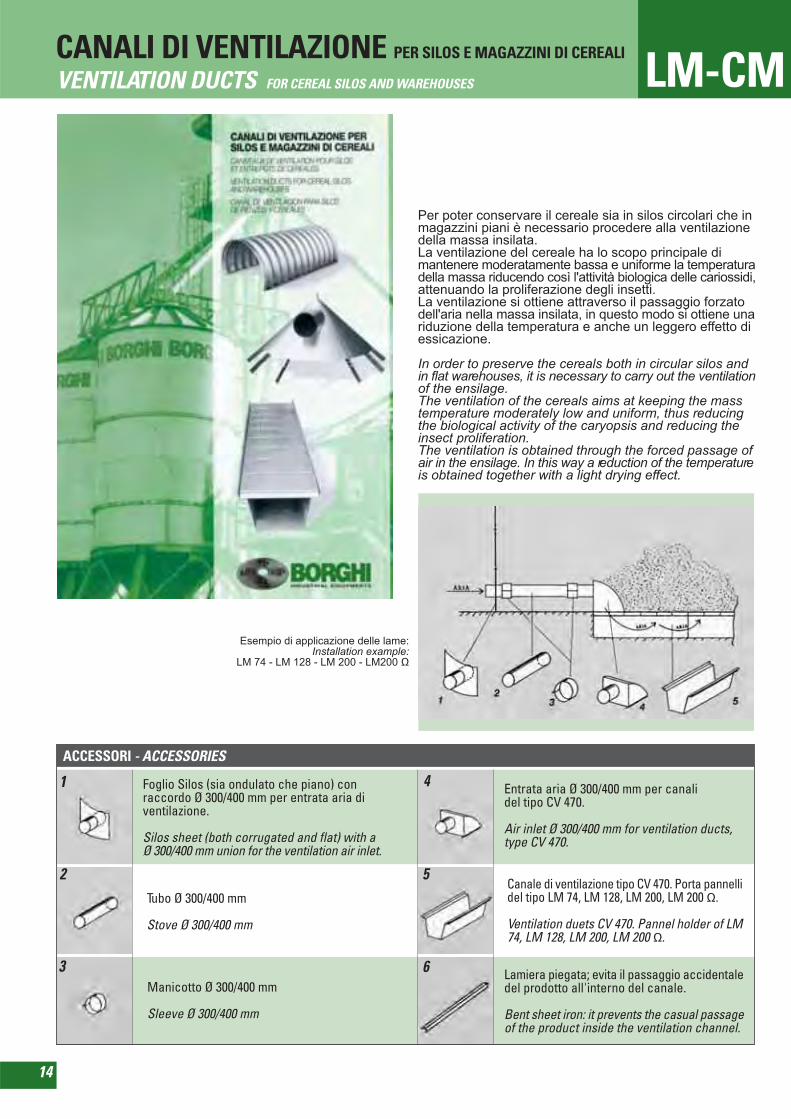
CANALI DI VENTILAZIONE PER SILOS E MAGAZZINI DI CEREALI
VENTILATION DUCTS FOR CEREAL SILOS AND WAREHOUSES
Per poter conservare il cereale sia in silos circolari che inmagazzini piani è necessario procedere alla ventilazionedella massa insilata.La ventilazione del cereale ha lo scopo principale dimantenere moderatamente bassa e uniforme la temperaturadella massa riducendo così l'attività biologica delle cariossidi,attenuando la proliferazione degli insetti.La ventilazione si ottiene attraverso il passaggio forzatodell'aria nella massa insilata, in questo modo si ottiene unariduzione della temperatura e anche un leggero effetto diessicazione.
In order to preserve the cereals both in circular silos andin flat warehouses, it is necessary to carry out the ventilationof the ensilage.The ventilation of the cereals aims at keeping the masstemperature moderately low and uniform, thus reducingthe biological activity of the caryopsis and reducing theinsect proliferation.The ventilation is obtained through the forced passage ofair in the ensilage. In this way a reduction of the temperatureis obtained together with a light drying effect.
Esempio di applicazione delle lame:Installation example:
LM 74 - LM 128 - LM 200 - LM200 Ω
ACCESSORI - ACCESSORIES
Foglio Silos (sia ondulato che piano) conraccordo Ø 300/400 mm per entrata aria diventilazione.
Silos sheet (both corrugated and flat) with aØ 300/400 mm union for the ventilation air inlet.
Tubo Ø 300/400 mm
Stove Ø 300/400 mm
Manicotto Ø 300/400 mm
Sleeve Ø 300/400 mm
Entrata aria Ø 300/400 mm per canalidel tipo CV 470.
Air inlet Ø 300/400 mm for ventilation ducts,type CV 470.
Canale di ventilazione tipo CV 470. Porta pannellidel tipo LM 74, LM 128, LM 200, LM 200 Ω.
Ventilation duets CV 470. Pannel holder of LM74, LM 128, LM 200, LM 200 Ω.
Lamiera piegata; evita il passaggio accidentaledel prodotto all'interno del canale.
Bent sheet iron: it prevents the casual passageof the product inside the ventilation channel.
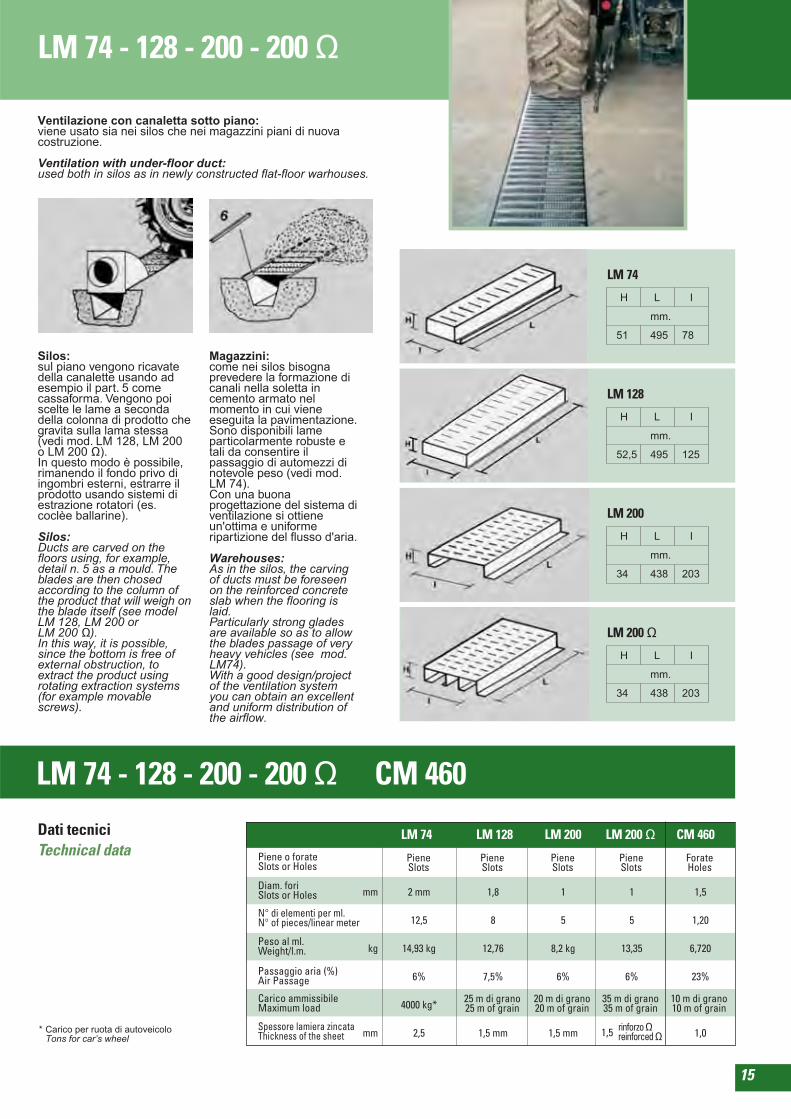
LM 74 - 128 - 200 - 200 Ω
LM 74 - 128 - 200 - 200 Ω
H L I
mm.
34 438 203
LM 200 Ω
H L I
mm.
34 438 203
LM 200
H L I
mm.
52,5 495 125
LM 128
H L I
mm.
51 495 78
LM 74
15
LM 200LM 128LM 74 LM 200 Ω CM 460
CM 460
Ventilazione con canaletta sotto piano:viene usato sia nei silos che nei magazzini piani di nuovacostruzione.
Ventilation with under-floor duct:used both in silos as in newly constructed flat-floor warhouses.
Silos:sul piano vengono ricavatedella canalette usando adesempio il part. 5 comecassaforma. Vengono poiscelte le lame a secondadella colonna di prodotto chegravita sulla lama stessa(vedi mod. LM 128, LM 200o LM 200 Ω).In questo modo è possibile,rimanendo il fondo privo diingombri esterni, estrarre ilprodotto usando sistemi diestrazione rotatori (es.coclèe ballarine).
Silos:Ducts are carved on thefloors using, for example,detail n. 5 as a mould. Theblades are then chosedaccording to the column ofthe product that will weigh onthe blade itself (see modelLM 128, LM 200 orLM 200 Ω).In this way, it is possible,since the bottom is free ofexternal obstruction, toextract the product usingrotating extraction systems(for example movablescrews).
Magazzini:come nei silos bisognaprevedere la formazione dicanali nella soletta incemento armato nelmomento in cui vieneeseguita la pavimentazione.Sono disponibili lameparticolarmente robuste etali da consentire ilpassaggio di automezzi dinotevole peso (vedi mod.LM 74).Con una buonaprogettazione del sistema diventilazione si ottieneun'ottima e uniformeripartizione del flusso d'aria.
Warehouses:As in the silos, the carvingof ducts must be foreseenon the reinforced concreteslab when the flooring islaid.Particularly strong gladesare available so as to allowthe blades passage of veryheavy vehicles (see mod.LM74).With a good design/projectof the ventilation systemyou can obtain an excellentand uniform distribution ofthe airflow.
* Carico per ruota di autoveicoloTons for car’s wheel
Dati tecniciTechnical data Piene o forate
Slots or Holes
Diam. foriSlots or Holes
N° di elementi per ml.N° of pieces/linear meter
Peso al ml.Weight/l.m.
Passaggio aria (%)Air Passage
Carico ammissibileMaximum load
Spessore lamiera zincataThickness of the sheet
PieneSlots
PieneSlots
PieneSlots
PieneSlots
ForateHoles
2 mm
12,5
14,93 kg
6%
4000 kg*
2,5
1,8
8
12,76
7,5%
1,5 mm
1
5
8,2 kg
6%
1,5 mm
1
5
13,35
6%
1,5
1,20
6,720
23%
1,0
10 m di grano10 m of grain
35 m di grano35 m of grain
rinforzo Ωreinforced Ω1,5
mm
kg
mm
20 m di grano20 m of grain
25 m di grano25 m of grain
3200
3873
4518
5809
6445
7746
8392
9683
1800
1800
1800
2500
2500
4400
4400
4400
75
75
75
125
125
338
338
338
3200
3873
4518
5809
6445
7746
8392
9683
1200
1200
1200
1500
1500
2250
2250
2250
68
68
75
97
104
186
193
200
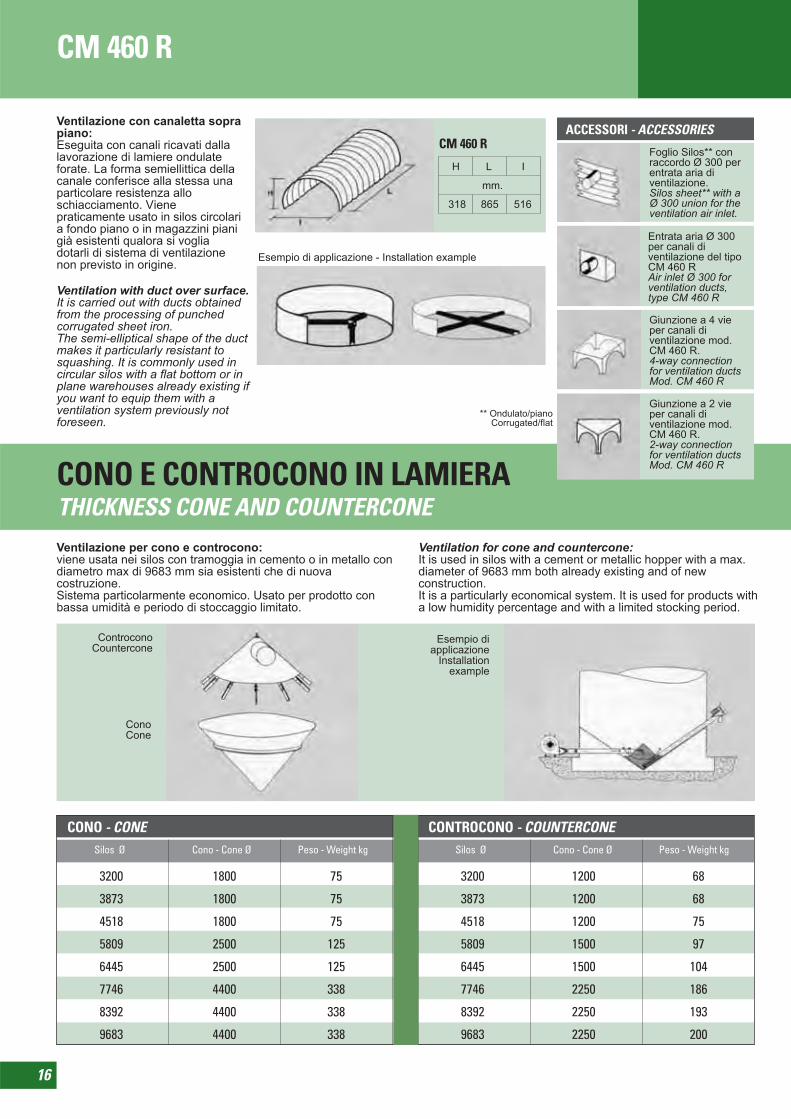
CM 460 R
16
H L I
mm.
318 865 516
CM 460 R
Ventilazione con canaletta soprapiano:Eseguita con canali ricavati dallalavorazione di lamiere ondulateforate. La forma semiellittica dellacanale conferisce alla stessa unaparticolare resistenza alloschiacciamento. Vienepraticamente usato in silos circolaria fondo piano o in magazzini pianigià esistenti qualora si vogliadotarli di sistema di ventilazionenon previsto in origine.
Ventilation with duct over surface.It is carried out with ducts obtainedfrom the processing of punchedcorrugated sheet iron.The semi-elliptical shape of the ductmakes it particularly resistant tosquashing. It is commonly used incircular silos with a flat bottom or inplane warehouses already existing ifyou want to equip them with aventilation system previously notforeseen.
ACCESSORI - ACCESSORIES
** Ondulato/piano Corrugated/flat
Esempio di applicazione - Installation example
Foglio Silos** conraccordo Ø 300 perentrata aria diventilazione.Silos sheet** with aØ 300 union for theventilation air inlet.
Entrata aria Ø 300per canali diventilazione del tipoCM 460 RAir inlet Ø 300 forventilation ducts,type CM 460 R
Giunzione a 4 vieper canali diventilazione mod.CM 460 R.4-way connectionfor ventilation ductsMod. CM 460 R
Giunzione a 2 vieper canali diventilazione mod.CM 460 R.2-way connectionfor ventilation ductsMod. CM 460 RCONO E CONTROCONO IN LAMIERA
THICKNESS CONE AND COUNTERCONEVentilazione per cono e controcono:viene usata nei silos con tramoggia in cemento o in metallo condiametro max di 9683 mm sia esistenti che di nuovacostruzione.Sistema particolarmente economico. Usato per prodotto conbassa umidità e periodo di stoccaggio limitato.
Ventilation for cone and countercone:It is used in silos with a cement or metallic hopper with a max.diameter of 9683 mm both already existing and of newconstruction.It is a particularly economical system. It is used for products witha low humidity percentage and with a limited stocking period.
ControconoCountercone
ConoCone
Esempio diapplicazione
Installationexample
CONO - CONESilos Ø Cono - Cone Ø Peso - Weight kg Silos Ø Cono - Cone Ø Peso - Weight kg
CONTROCONO - COUNTERCONE
1 2 3 4 5 6 7 8 9
VC 7
VC 7
VC 7
VC 10
VC 10
VC 15
VC 5
88
73
59
46
36
26
18
12
6,5
(m2)
VC 5
VC 7
VC 10
VC 15
112 M2
132 SA2
132 SB2
160 MR2
5,5
7,5
10
15
4,0
5,5
7,5
11
21090
23070
270130300100
5616063
20080
22590
280
630
670
670
830
655
735
735
832
815
915
915
1000
322
361
361
288
229
256
256
404
402
441
441
-368
309
336
336
484
285
320
320
360
332
366
366
405
365
400
400
440
mm H20 m3/min
17
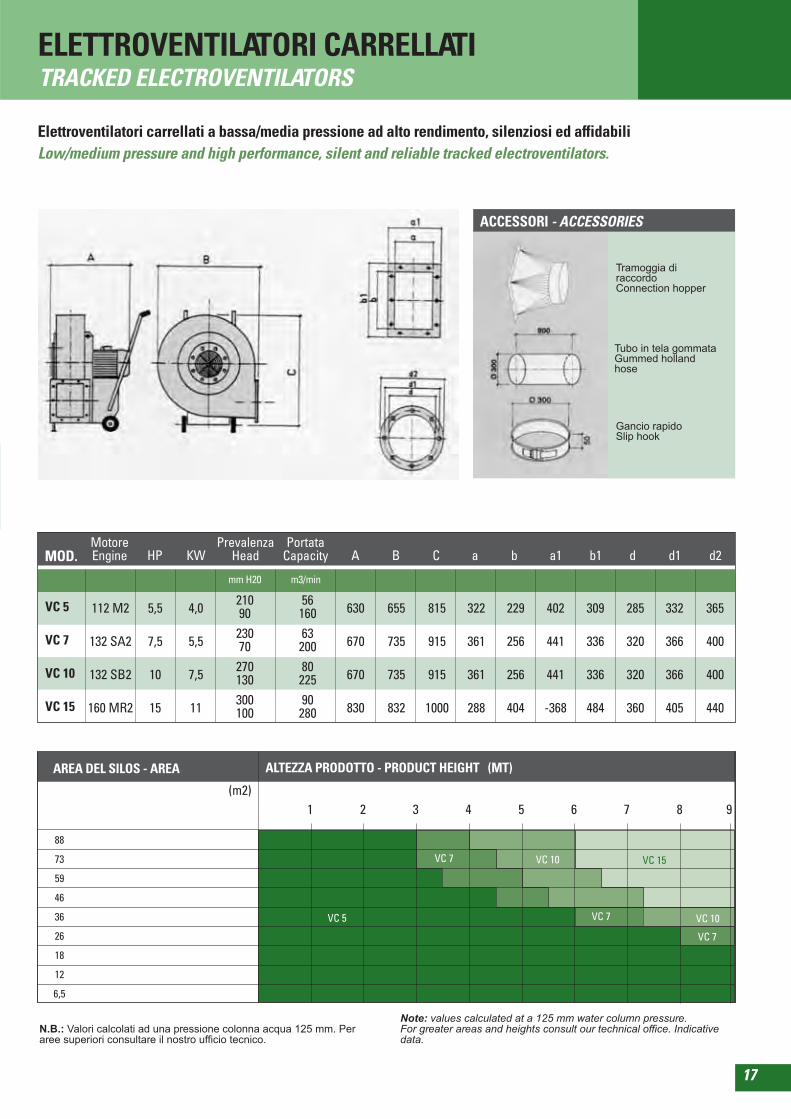
ELETTROVENTILATORI CARRELLATITRACKED ELECTROVENTILATORS
Elettroventilatori carrellati a bassa/media pressione ad alto rendimento, silenziosi ed affidabiliLow/medium pressure and high performance, silent and reliable tracked electroventilators.
ACCESSORI - ACCESSORIES
Tramoggia diraccordoConnection hopper
Tubo in tela gommataGummed hollandhose
Gancio rapidoSlip hook
MotoreEngineMOD. HP KW
PrevalenzaHead
PortataCapacity A B C a b a1 b1 d d1 d2
AREA DEL SILOS - AREA ALTEZZA PRODOTTO - PRODUCT HEIGHT (MT)
N.B.: Valori calcolati ad una pressione colonna acqua 125 mm. Peraree superiori consultare il nostro ufficio tecnico.
Note: values calculated at a 125 mm water column pressure.For greater areas and heights consult our technical office. Indicativedata.

FREDDY
18
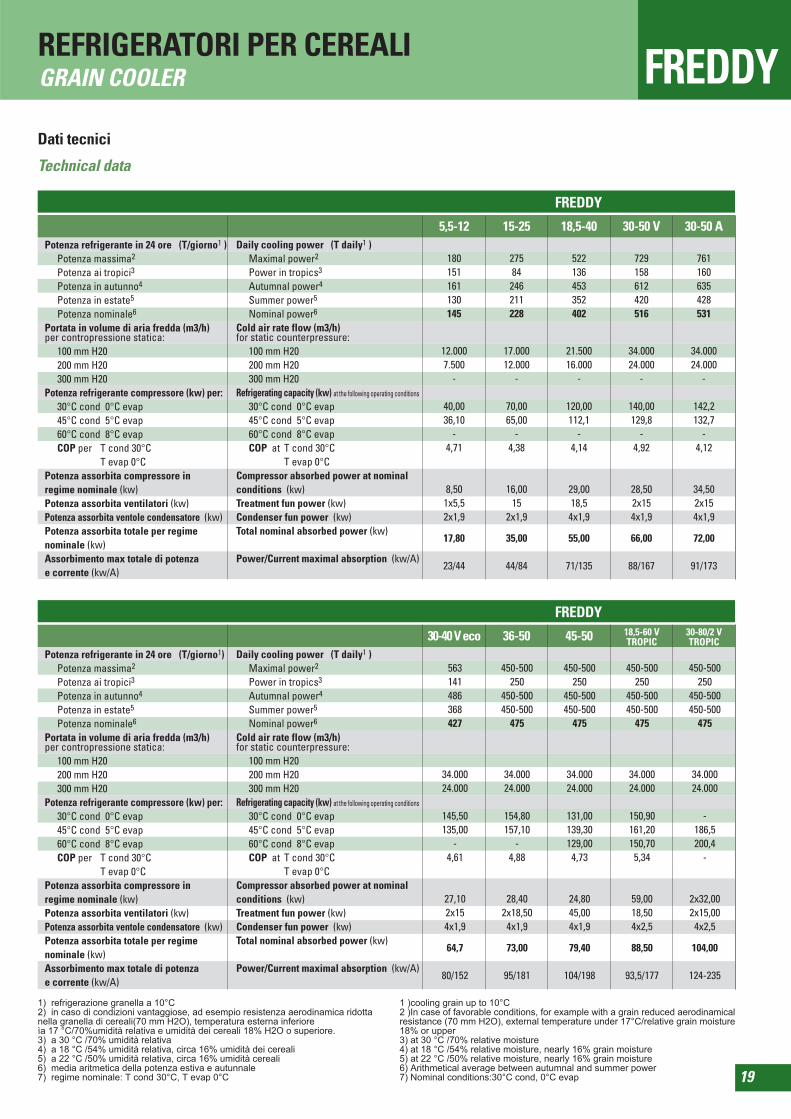
REFRIGERATORI PER CEREALIGRAIN COOLER
Freddy grain cooler represents the most natural and thecheapest way to preserve grain different type.It is the result of Borghi’s research and improvement yearsin order to manufacture an efficient machine from athermodynamic and thermal standpoint, easy to use butwith moderate consumption, making it economicallyconvenient.
Find here below the advantages rising from its use:- Reduce grain metabolism, so a lesser loss of weight due
to grain respiration- Avoid loss of weigh and quality owing to insects: when
temperature is low, insects are in retirement and do notreproduceany longer.
- Allow a biological preservation, that is without chemical disinsectization treatment.
- Prevent generation mycetos and their relative mycotoxins,which are toxic for man and animal, apart from an important financial prejudice
- Save drying costs since every cooling produces a furtherdrying effect. Cycle. It reduces grain humidity of a subsequent 0.5-1.5% each 20°C temperature reductionof stocked goods.
- Avoid grain breaking due to displacing: in traditional stocking without cooling it is often necessary to removegrains and every displacing implies minimum a loss equalto 0.3% of total qualities.
- Obtain a cool grain for a long time thanks to an isolatingeffect of air inside grain interstices. For a grain with a taxof humidity of 14.5%, a temperature reduction from 24°Cto 10°C stocks five times better than the usual one.
I refrigeratori per cereali Freddy rappresentano il modopiù naturale ed economico per la conservazione di vari tipidi cereali.Essi sono il frutto di anni di ricerca e di miglioramentiintrapresi dalla Borghi con lo scopo di costruire una macchinaefficiente dal punto di vista termodinamico e termico, facileda usare ma che abbia anche dei consumi moderati equindi renderla conveniente economicamente.
I vantaggi derivanti dall’uso di un refrigeratore Freddysono i seguenti:- Diminuire il metabolismo del grano, quindi una minore
perdita di peso dovuta alla respirazione del cereale.- Evitare le perdite di peso e di qualità causate da insetti:
a temperature basse, gli insetti vanno in uno stato di quiescenza e non si riproducono più.
- Permettere una conservazione biologica e cioè senza trattamenti di disinfestazione chimica.
- Impedire lo sviluppo di miceti e delle rispettive micotossineche sono tossiche per l’uomo e per l’animale oltre al rilevante pregiudizio finanziario.
- Risparmiare nei costi di essiccazione dal momento in cuiogni ciclo di refrigerazione produce un ulteriore effetto diessiccamento. Ciò riduce l’umidità dei cereali di un ulteriore0.5-1.5% per ogni 20°C di abbassamento della temperatura delle merci stoccate.
- Evitare la rottura dei grani dovuta allo spostamento: nellostoccaggio tradizionale senza raffreddamenti è spesso necessario lo spostamento dei cereali e ogni spostamentocomporta al minimo una perdita pari allo 0.3% della quantità totale.
- Avere un grano freddo per lungo tempo grazie all’effettoisolante dell’aria negli interstizi del grano. Per un cerealecon tasso di umidità del 14.5%, una diminuzione della temperatura da 24°C a 10°C rende possibile un periododi stoccaggio circa cinque volte superiore.
180151161130145
12.0007.500
-
40,0036,10
-4,71
8,501x5,52x1,9
17,80
23/44
30-50 A
FREDDY
5,5-12 15-25 18,5-40 30-50 V
27584
246211228
17.00012.000
-
70,0065,00
-4,38
16,0015
2x1,9
35,00
44/84
522136453352402
21.50016.000
-
120,00112,1
-4,14
29,0018,5
4x1,9
55,00
71/135
729158612420516
34.00024.000
-
140,00129,8
-4,92
28,502x154x1,9
66,00
88/167
761160635428531
34.00024.000
-
142,2132,7
-4,12
34,502x154x1,9
72,00
91/173
563141486368427
34.00024.000
145,50135,00
-4,61
27,102x154x1,9
64,7
80/152
FREDDY
30-40 V eco 36-50 45-50 18,5-60 VTROPIC
450-500250
450-500450-500
475
34.00024.000
154,80157,10
-4,88
28,402x18,50
4x1,9
73,00
95/181
450-500250
450-500450-500
475
34.00024.000
131,00139,30129,00
4,73
24,8045,004x1,9
79,40
104/198
450-500250
450-500450-500
475
34.00024.000
150,90161,20150,70
5,34
59,0018,504x2,5
88,50
93,5/177
450-500250
450-500450-500
475
34.00024.000
-186,5200,4
-
2x32,002x15,00
4x2,5
104,00
124-235
30-80/2 VTROPIC
19
FREDDYREFRIGERATORI PER CEREALIGRAIN COOLER
Dati tecnici
Technical data
Potenza refrigerante in 24 ore (T/giorno1 )Potenza massima2
Potenza ai tropici3
Potenza in autunno4
Potenza in estate5
Potenza nominale6
Portata in volume di aria fredda (m3/h)per contropressione statica:
100 mm H20200 mm H20300 mm H20
Potenza refrigerante compressore (kw) per:30°C cond 0°C evap45°C cond 5°C evap60°C cond 8°C evapCOP per T cond 30°C
T evap 0°CPotenza assorbita compressore inregime nominale (kw)Potenza assorbita ventilatori (kw)Potenza assorbita ventole condensatore (kw)Potenza assorbita totale per regimenominale (kw)Assorbimento max totale di potenzae corrente (kw/A)
Daily cooling power (T daily1 )Maximal power2
Power in tropics3
Autumnal power4
Summer power5
Nominal power6
Cold air rate flow (m3/h)for static counterpressure:
100 mm H20200 mm H20300 mm H20
Refrigerating capacity (kw) at the following operating conditions
30°C cond 0°C evap45°C cond 5°C evap60°C cond 8°C evapCOP at T cond 30°C
T evap 0°CCompressor absorbed power at nominalconditions (kw)Treatment fun power (kw)Condenser fun power (kw)Total nominal absorbed power (kw)
Power/Current maximal absorption (kw/A)
Potenza refrigerante in 24 ore (T/giorno1)Potenza massima2
Potenza ai tropici3
Potenza in autunno4
Potenza in estate5
Potenza nominale6
Portata in volume di aria fredda (m3/h)per contropressione statica:
100 mm H20200 mm H20300 mm H20
Potenza refrigerante compressore (kw) per:30°C cond 0°C evap45°C cond 5°C evap60°C cond 8°C evapCOP per T cond 30°C
T evap 0°CPotenza assorbita compressore inregime nominale (kw)Potenza assorbita ventilatori (kw)Potenza assorbita ventole condensatore (kw)Potenza assorbita totale per regimenominale (kw)Assorbimento max totale di potenzae corrente (kw/A)
Daily cooling power (T daily1 )Maximal power2
Power in tropics3
Autumnal power4
Summer power5
Nominal power6
Cold air rate flow (m3/h)for static counterpressure:
100 mm H20200 mm H20300 mm H20
Refrigerating capacity (kw) at the following operating conditions
30°C cond 0°C evap45°C cond 5°C evap60°C cond 8°C evapCOP at T cond 30°C
T evap 0°CCompressor absorbed power at nominalconditions (kw)Treatment fun power (kw)Condenser fun power (kw)Total nominal absorbed power (kw)
Power/Current maximal absorption (kw/A)
1) refrigerazione granella a 10°C2) in caso di condizioni vantaggiose, ad esempio resistenza aerodinamica ridottanella granella di cereali(70 mm H2O), temperatura esterna inferioreìa 17 °C/70%umidità relativa e umidità dei cereali 18% H2O o superiore.3) a 30 °C /70% umidità relativa4) a 18 °C /54% umidità relativa, circa 16% umidità dei cereali5) a 22 °C /50% umidità relativa, circa 16% umidità cereali6) media aritmetica della potenza estiva e autunnale7) regime nominale: T cond 30°C, T evap 0°C
1 )cooling grain up to 10°C2 )In case of favorable conditions, for example with a grain reduced aerodinamicalresistance (70 mm H2O), external temperature under 17°C/relative grain moisture18% or upper3) at 30 °C /70% relative moisture4) at 18 °C /54% relative moisture, nearly 16% grain moisture5) at 22 °C /50% relative moisture, nearly 16% grain moisture6) Arithmetical average between autumnal and summer power7) Nominal conditions:30°C cond, 0°C evap
20
FFB
FFB 8-48,00
444.400
1724,319224422400
FFB 10-510,00
555.500
2154,3240305
27,5500
FFB 12-612,00
666.600
2584,328836633600
FFB 14-714,00
777.700
3024,2336427
38,5697
FFB 16-816,00
888.800
3454,238448844800
FFB 18-918,00
999.900
3884,2432549
49,5909
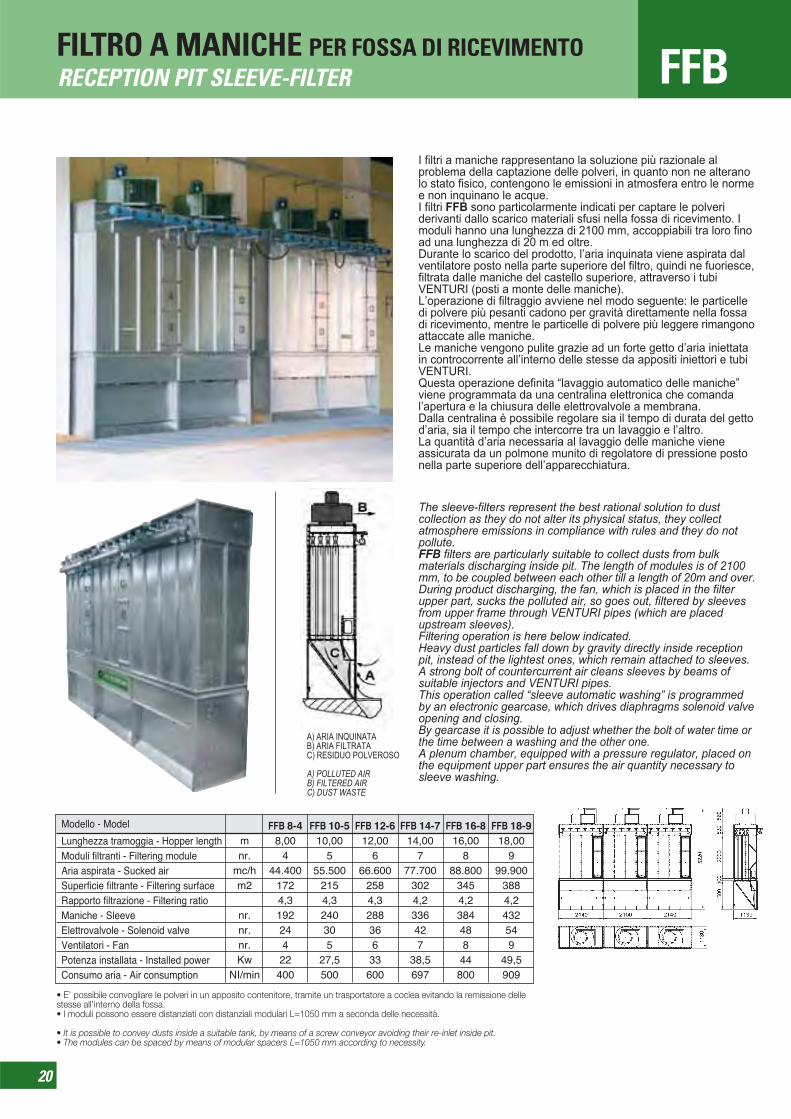
FILTRO A MANICHE PER FOSSA DI RICEVIMENTORECEPTION PIT SLEEVE-FILTER
I filtri a maniche rappresentano la soluzione più razionale alproblema della captazione delle polveri, in quanto non ne alteranolo stato fisico, contengono le emissioni in atmosfera entro le normee non inquinano le acque.I filtri FFB sono particolarmente indicati per captare le polveriderivanti dallo scarico materiali sfusi nella fossa di ricevimento. Imoduli hanno una lunghezza di 2100 mm, accoppiabili tra loro finoad una lunghezza di 20 m ed oltre.Durante lo scarico del prodotto, l’aria inquinata viene aspirata dalventilatore posto nella parte superiore del filtro, quindi ne fuoriesce,filtrata dalle maniche del castello superiore, attraverso i tubiVENTURI (posti a monte delle maniche).L’operazione di filtraggio avviene nel modo seguente: le particelledi polvere più pesanti cadono per gravità direttamente nella fossadi ricevimento, mentre le particelle di polvere più leggere rimangonoattaccate alle maniche.Le maniche vengono pulite grazie ad un forte getto d’aria iniettatain controcorrente all’interno delle stesse da appositi iniettori e tubiVENTURI.Questa operazione definita “lavaggio automatico delle maniche”viene programmata da una centralina elettronica che comandal’apertura e la chiusura delle elettrovalvole a membrana.Dalla centralina è possibile regolare sia il tempo di durata del gettod’aria, sia il tempo che intercorre tra un lavaggio e l’altro.La quantità d’aria necessaria al lavaggio delle maniche vieneassicurata da un polmone munito di regolatore di pressione postonella parte superiore dell’apparecchiatura.
The sleeve-filters represent the best rational solution to dustcollection as they do not alter its physical status, they collectatmosphere emissions in compliance with rules and they do notpollute.FFB filters are particularly suitable to collect dusts from bulkmaterials discharging inside pit. The length of modules is of 2100mm, to be coupled between each other till a length of 20m and over.During product discharging, the fan, which is placed in the filterupper part, sucks the polluted air, so goes out, filtered by sleevesfrom upper frame through VENTURI pipes (which are placedupstream sleeves).Filtering operation is here below indicated.Heavy dust particles fall down by gravity directly inside receptionpit, instead of the lightest ones, which remain attached to sleeves.A strong bolt of countercurrent air cleans sleeves by beams ofsuitable injectors and VENTURI pipes.This operation called “sleeve automatic washing” is programmedby an electronic gearcase, which drives diaphragms solenoid valveopening and closing.By gearcase it is possible to adjust whether the bolt of water time orthe time between a washing and the other one.A plenum chamber, equipped with a pressure regulator, placed onthe equipment upper part ensures the air quantity necessary tosleeve washing.
• E’ possibile convogliare le polveri in un apposito contenitore, tramite un trasportatore a coclea evitando la remissione dellestesse all’interno della fossa.• I moduli possono essere distanziati con distanziali modulari L=1050 mm a seconda delle necessità.
• It is possible to convey dusts inside a suitable tank, by means of a screw conveyor avoiding their re-inlet inside pit.• The modules can be spaced by means of modular spacers L=1050 mm according to necessity.
mnr.
mc/hm2
nr.nr.nr.Kw
NI/min
Modello - Model
Lunghezza tramoggia - Hopper lengthModuli filtranti - Filtering moduleAria aspirata - Sucked airSuperficie filtrante - Filtering surfaceRapporto filtrazione - Filtering ratioManiche - SleeveElettrovalvole - Solenoid valveVentilatori - FanPotenza installata - Installed powerConsumo aria - Air consumption
A) ARIA INQUINATAB) ARIA FILTRATAC) RESIDUO POLVEROSO
A) POLLUTED AIRB) FILTERED AIRC) DUST WASTE

21
SP
NOPNEUMATIC
SONDA PRELEVACAMPIONISAMPLING PROBE
La sonda preleva campioni è uno strumento essenzialeper ogni centro di stoccaggio ed essiccazione cereali.Permette infatti in modo tempestivo di testare il prodottoin entrata prelevando un campione omogeneo di cerealee di effettuare rapide operazioni di controllo sui campioniprelevati senza alterarne le caratteristiche .Il campione viene prelevato con un sistema meccanico(coclea) per poi essere trasferito nel laboratorio in modopneumatico.E’ possibile dotare il sistema di videocamera a circuitochiuso facilitando le operazioni di prelievo e permettendodi scegliere il punto di prelievo.
The sampling probe is an essential instrument for all grainstocking and drying centre.In fact, It allows to test inlet product in time drawing ahomogeneous grain sample and carrying out control quickoperations on samples without altering their characteristics.A mechanical system (screw) draws sample and transferit pneumatically in laboratory.It is possible to equip the system with a closed circuit video-camera facilitating drawing and allowing to choose thesampling point.
Il preleva campioni è costituito da:
1) sonda preleva campioni2) pistone braccio3) colonna sostegno sonda con
centralina idraulica4) tubo trasporto campione5) aspiratore per trasporto campione6) ciclone arrivo campione7) quadro elettrico di comando
The sampler is composed of:
1) sampling probe2) piston arm3) sample support column with hydraulic
control unit4) sample conveying pipe5) sample suction conveyor6) sample delivery cyclone7) electrical control board
up to 5m
fino a 5m

22
MS
STOCK
22
MS 39
MS 53
MS 67
MS 81
MS 97
MS116
MS135
MS154
Ø AxB C F
39/31
53/42
67/54
81/65
97/76
116/89
135/105
154/120
3873
3873
3873
3873
4518
4518
4518
4518
3900
x
3900
2492
3688
4884
6080
5000
6193
7386
8579
1900
1900
1900
1900
2330
2330
2330
2330
G
1000
1000
1000
1000
1150
1150
1150
1150
H
9742
10938
12134
13330
12860
14053
15246
16439
4500
x
4500
G
Ø
C43
80
H
A x B
Ø 500
F
SILOS DI CARICO RAPIDOLOADING BINS
Silos di carico rapido• Gamma completa da 39 a 154 mc• Esecuzione zincata• Disponibili con tramogge a 45 o 60 gradi• Possibilità di applicare diversi sistemi di scarico
e/o estrazione prodotto.• Tetto di forma tronco-conica, inclinazione a 30° realizzato
con lamiera zincata e/o preverniciata.• A richiesta: tetto a tenuta o tetto a tenuta con carico
pneumatico.• Fasciame esterno realizzato con lamiera zincata• Tramoggia di forma tronco-conica a 45 o 60° eseguita
con lamiera zincata.• Bulloneria ad alta resistenza con rivestimento antiossidante
DACROMET.• Piedi in tubolare Ø 250 o 300 mm. a seconda del modello,
zincati a caldo.Accessori• Ballatoio di ispezione scarico• Ballatoio di ispezione carico• Scala di accesso al tetto, ai ballatoi.• Passo d'uomo sul fasciame• Elettrolivello a elica o a funi• Serranda di scarico (manuale-pneumatica-elettrica)
Loading Bins• Complete range from 39 to 154 mc• Galvanized version• Available with 45 or 60 degrees hopper• Possible application of various unload and/or
product extraction mechanisms.• 30° inclination truncated cone-shaped roof made of
galvanized and/or pre-varnished sheet metal• Upon request: tight roof or tight roof with pneumatic
charging• Galvanized sheet metal outside plating• Hopper truncated cone-shaped at 45 or 60° made of
galvanized sheet metal• High strength bolts and nuts with DACROMET
anti-oxidant coating• Tubolar feet Ø 250 or 300 mm according to the version,
galvanized coating
Accesories• Unload inspection cat-walk• Load inspection cat-walk• Access ladder to the roof, to the cat-walks.• Manhole on the plating• Propeller or ropes electro-level• Unload rolling shutter (manual-pneumatic-electric).
* Quantità riferita a mais pulito ed umidità del 16%. Peso specifico 0,78 kg/dmcAmount of clean material with a 16% humidity. Specific weight of 0,78 kg/dmc
ModelloModel
Capacità*Capacity*
mctons
www.borghigroup.it
23
VIDEO “HORIZONTAL SILOS”VIDEO “HORIZONTAL SILOS”
Richiedi il CD a:[email protected]
CD on demand:[email protected]
Per ulteriori informazioni visita il sito:For additional information watch at:

cam
pb
ella
dv.
com
783
7
BORGHI s.r.l.Via Paradello, 7 - 45037 Melara (Rovigo) ItalyTel. +39-0425.89689 (4 linee r.a.)Fax +39-0425.89636E-mail: [email protected]
BORGHI-SOFRAM SarlZ.I. de Carouge 73250 St. Pierre D’Albigny (France)Tel. (0033) 04.79.28.01.39Fax (0033) 04.79.28.00.29E-mail: [email protected] - www.borghi-sofram.fr
www.borghigroup.it
Programma di produzioneProduction range
Elevatori a tazzeBucket elevators
Tazze per elevatoriBuckets for elevators
Trasportatori a catenaChain conveyors
Catene raschiantiScraping chains
Trasportatori a palettaFlight conveyors
Trasportatori a nastroBelt conveyors
Coclee tubolari eda cassaTubular and boxedscrews
Filtri abbattimentopolveriDust demolition filters
PrepulitoriCleaners
Pulitori rotantiRotary cleaners
Pulitori a tamburoDrum cleaners
Distributori rotantiRotary distributors
MelassatriciMolasses mixers
MiscelatoriMixers
Molini a martelliHammer mills
Tubazione di condottasmaltata, zincata e inoxStainless steel, paintedand galvanized piping
Mangimifici aziendaliFeed Mill plants
Sonde prelevacampioniSampling probes
Refrigeratori per cerealiGrain coolers
Porte a spinta permagazzini pianiFlat warehouse thrustdoors
Impianti agro-industrialiAgro-industrial plants
Silos metallici in lamieraondulataCorrugated metal sheetsilos
Silos in lamiera pianaFlat metal sheet silos
Silos metallici quadratiSquare metallic silos
Silos di carico rapidoLoading bins
Meccanizzazione e automazionesilos orizzontali (Magazzini)Horizontal silos automationand mechanization (Warehouses)
Canali di ventilazioneVentilation ducts
Filtri per fossa diricevimentoReception pit filters
Porte rapideQuick doors
Separatori elicoidaliHelicoidal separators
Consulenza tecnica per la bonifica e messa in conformità degli impianti esistenti secondo la normativa ATEX.We offer technical consultation for your plant setting at conformity in compliance with Atex rules.
I dat
i son
o in
dica
tivi e
non
impe
gnat
ivi -
Dat
a ar
e in
dica
tive
and
not b
indi
ng