Modellistica e Simulazione: il sistema di Rossler a.a. …mocenni/Rossler.pdfModellistica e...
20
Modellistica e Simulazione: il sistema di Rossler a.a. 2007-2008 Chiara Mocenni Il sistema di Rossler è il più semplice sistema di terzo ordine capace di manifestare comportamenti di tipo caotico. ( ) x y z y x ay z b zx c =− − = + = + − Questo sistema presenta un solo termine non lineare, il prodotto tra z e x nella terza equazione, il quale è parte fondamentale del processo di stretching and folding tipico dei sistemi caotici. Consideriamo le prime due equazioni e supponiamo che z sia abbastanza piccolo da essere trascurato. Pertanto il sottosistema x y y x a = − = + y (1) può essere trasformato nell’oscillatore lineare del secondo ordine ( ) 2 2 1,2 0 4 2 x ax x a a λ − + = ± − =
Transcript of Modellistica e Simulazione: il sistema di Rossler a.a. …mocenni/Rossler.pdfModellistica e...

Modellistica e Simulazione: il sistema di Rosslera.a. 2007-2008 Chiara Mocenni
Il sistema di Rossler è il più semplice sistema di terzo ordine capace
di manifestare comportamenti di tipo caotico.
( )
x y zy x ayz b z x c
= − −= += + −
Questo sistema presenta un solo termine non lineare, il prodotto tra z
e x nella terza equazione, il quale è parte fondamentale del processo di
stretching and folding tipico dei sistemi caotici.
Consideriamo le prime due equazioni e supponiamo che z sia
abbastanza piccolo da essere trascurato. Pertanto il sottosistema
x yy x a= −= + y
(1)
può essere trasformato nell’oscillatore lineare del secondo ordine
( )22
1,2
0
4
2
x ax x
a aλ
− + =
± −=
mio
Nota
MigrationConfirmed impostata da mio
mio
Nota
Accepted impostata da mio
mio
Nota
Accepted impostata da mio
Con il parametro a positivo questo oscillatore ha uno smorzamento
negativo, in più se a è compreso tra 0 e 2 l’origine è una spirale instabile.
Vedendo il tutto in tre dimensioni questo significa che traiettorie vicine al
piano (x,y) saranno respinte in maniera spiraliforme dall’origine. Questo
genera il dispiegamento delle traiettorie adiacenti, il quale è il primo
ingrediente del caos
Tutto ciò è generato solo da termini lineari, ma questo non basta per
ottenere un comportamento caotico perché, se l’intero sistema fosse
lineare, l’effetto di stretching continuerebbe fino a far divergere le
traiettorie all’infinito. Per confinare l’azione di allontanamento all’interno
di una regione di spazio limitata, il termine non lineare è necessario.
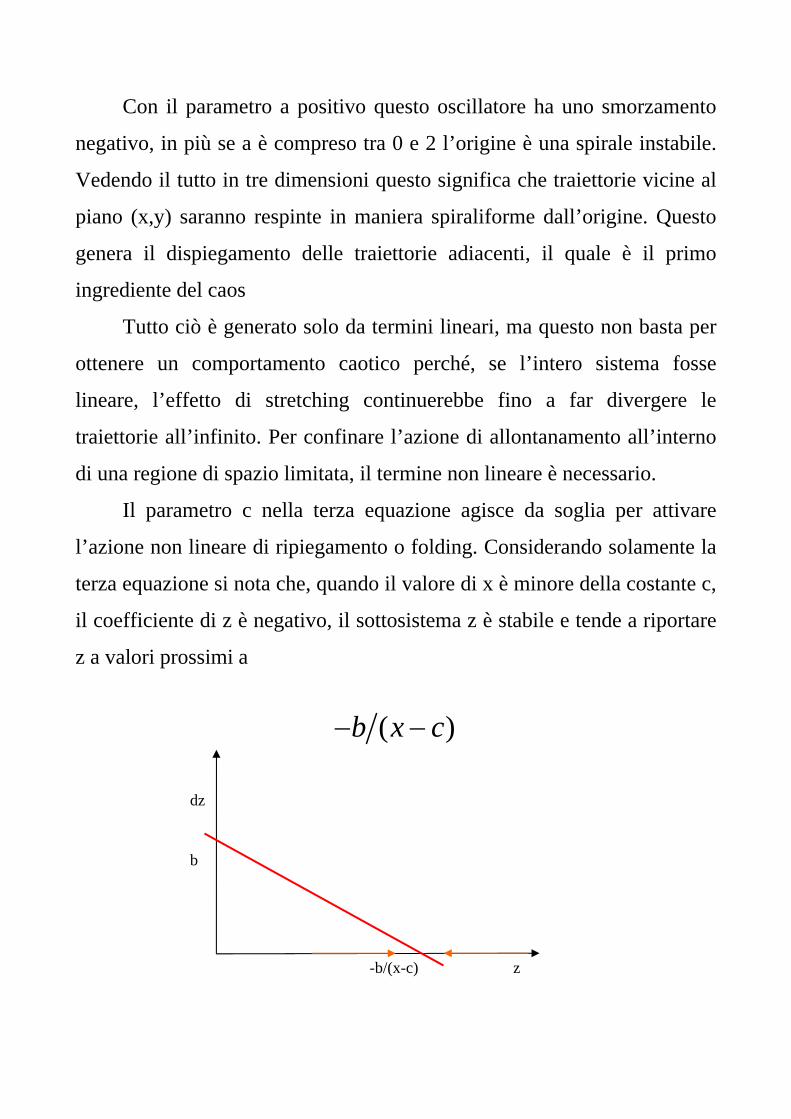
Il parametro c nella terza equazione agisce da soglia per attivare
l’azione non lineare di ripiegamento o folding. Considerando solamente la
terza equazione si nota che, quando il valore di x è minore della costante c,
il coefficiente di z è negativo, il sottosistema z è stabile e tende a riportare
z a valori prossimi a
( )b x c− −
-b/(x-c)
dz
z
b
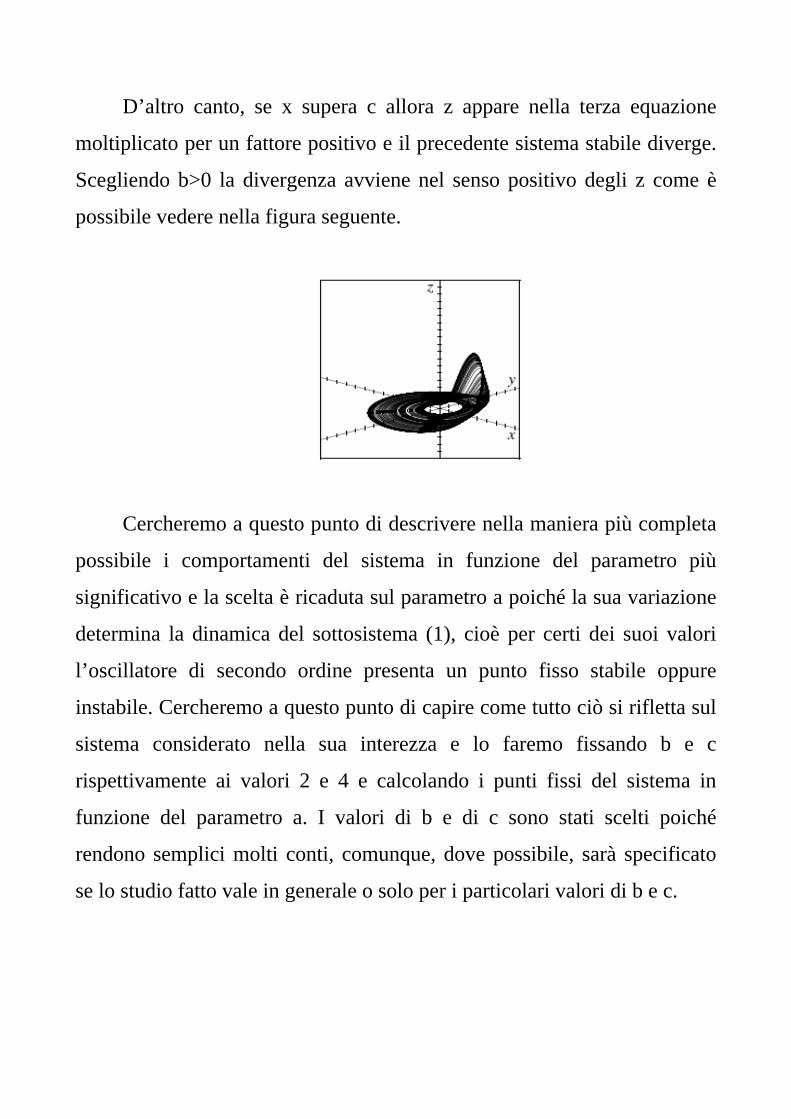
D’altro canto, se x supera c allora z appare nella terza equazione
moltiplicato per un fattore positivo e il precedente sistema stabile diverge.
Scegliendo b>0 la divergenza avviene nel senso positivo degli z come è
possibile vedere nella figura seguente.
Cercheremo a questo punto di descrivere nella maniera più completa
possibile i comportamenti del sistema in funzione del parametro più
significativo e la scelta è ricaduta sul parametro a poiché la sua variazione
determina la dinamica del sottosistema (1), cioè per certi dei suoi valori
l’oscillatore di secondo ordine presenta un punto fisso stabile oppure
instabile. Cercheremo a questo punto di capire come tutto ciò si rifletta sul
sistema considerato nella sua interezza e lo faremo fissando b e c
rispettivamente ai valori 2 e 4 e calcolando i punti fissi del sistema in
funzione del parametro a. I valori di b e di c sono stati scelti poiché
rendono semplici molti conti, comunque, dove possibile, sarà specificato
se lo studio fatto vale in generale o solo per i particolari valori di b e c.
( )( )
( )
21,2
21,2
21,2
1 42
1 42
1 42
x c c ab
y c c aba
z c c aba
= ± −
= − ± −
= ± −
Per b e c positivi, il sistema presenta due punti fissi fintanto che a
è diverso da zero e minore di c2/(4b).
E’ utile quindi concentrasi inizialmente su valori di a negativi, vedere poi
cosa succede se a=0 per poi spostarsi sull’intervallo 0<a< c2/(4b).
Per fare ciò è necessario calcolare la matrice A del sistema
linearizzato che risulta uguale a:

0 1 11 0
0A a
z x
− −
c
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥−⎣ ⎦
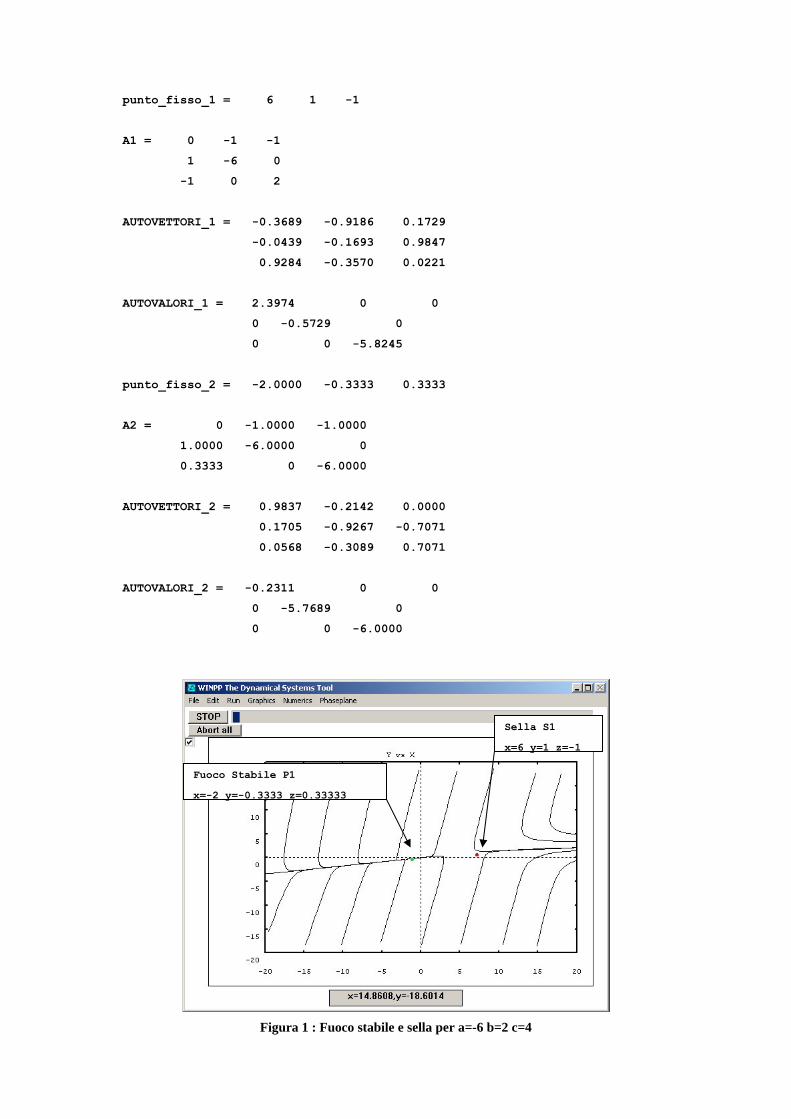
Fissato un particolare valore di a negativo, ad esempio -6, e
utilizzando un piccolo script su MATLAB, sono stati calcolate le
coordinate dei punti, gli autovalori della matrice del sistema linearizzato A
e gli autovettori associati. Dai risultati ottenuti si nota che uno dei due
punti fissi è un fuoco stabile mentre l’altro una sella come si può vedere
dai dati e dalla figura seguenti. Da ora in poi chiameremo la sella S1ed il
punto fisso P2, tanto che abbia un comportamento stabile che instabile.
a=-6
b=2
c=4
z1=(0.5/a)*(c+sqrt(c^2-4*a*b));
z2=(0.5/a)*(c-sqrt(c^2-4*a*b));
y1=-z1;
y2=-z2;
x1=a*z1;
x2=a*z2;
punto_fisso_1=[x1 y1 z1]
A1=[0 -1 -1;1 a 0;z1 0 x1-c]
[AUTOVETTORI_1,DELTA_1]=eig(A1)
punto_fisso_2=[x2 y2 z2]
A2=[0 -1 -1;1 a 0;z2 0 x2-c]
[AUTOVETTORI_2,DELTA_2]=eig(A2)
punto_fisso_1 = 6 1 -1
A1 = 0 -1 -1
1 -6 0
-1 0 2
AUTOVETTORI_1 = -0.3689 -0.9186 0.1729
-0.0439 -0.1693 0.9847
0.9284 -0.3570 0.0221
AUTOVALORI_1 = 2.3974 0 0
0 -0.5729 0
0 0 -5.8245
punto_fisso_2 = -2.0000 -0.3333 0.3333
A2 = 0 -1.0000 -1.0000
1.0000 -6.0000 0
0.3333 0 -6.0000
AUTOVETTORI_2 = 0.9837 -0.2142 0.0000
0.1705 -0.9267 -0.7071
0.0568 -0.3089 0.7071
AUTOVALORI_2 = -0.2311 0 0
0 -5.7689 0
0 0 -6.0000
Sella S1
x=6 y=1 z=-1
Fuoco Stabile P1
x=-2 y=-0.3333 z=0.33333
Figura 1 : Fuoco stabile e sella per a=-6 b=2 c=4

Successivamente i valori dei due punti sono stati inseriti in
MATCONT con il quale è stato fatto lo studio di biforcazione per valori di
a minori di zero. Per a che tende a meno infinito non sono state riscontrate
variazioni nel comportamento qualitativo dei due punti, l’unico tipo di
differenza si nota nella dislocazione spaziale di S1 e P2 poiché in entrambi
si ha convergenza a zero lungo gli assi y, z e una divergenza verso infinito
lungo l’asse x. Il punto H riportato da MATCONT sulla traiettoria di
biforcazione del punto di sella rappresenta una ‘neutral saddle’, cioè S1
per a=-2.69929 presenta due autovalori reali uguali in modulo ma di segno
opposto.
Sella neutra 2 autovalori uguali ma di segno opposto
Sella S1
Fuoco Stabile P2
Entrambi i punti divergono verso infinito lungo x
Figura 2 : Diagramma di biforcazione per a minore di zero (x contro a)
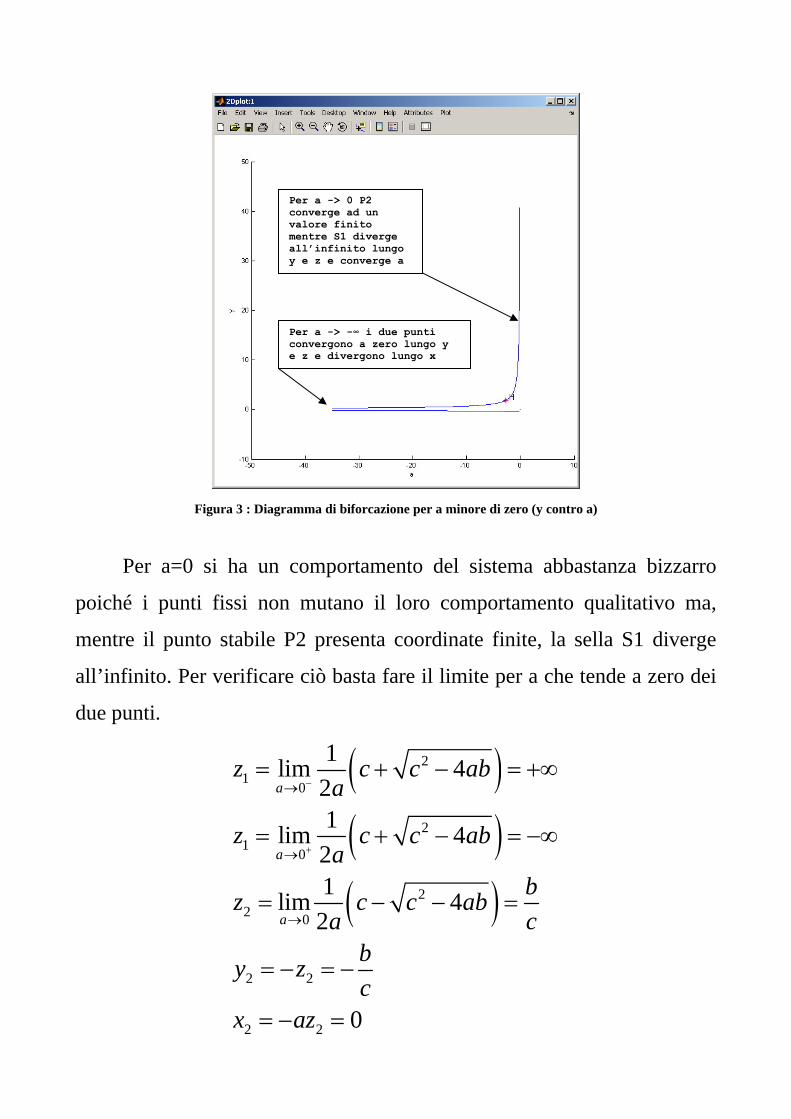
Figura 3 : Diag
Per a=0 si ha un
poiché i punti fissi non
mentre il punto stabile
all’infinito. Per verificar
due punti.
1
1
2
2
2
l
l
l
a
a
z
z
z
y
x
=
=
=
=
= −
Per a -> 0 P2 converge ad un valore finito mentre S1 diverge all’infinito lungo y e z e converge a
Per a -> -∞ i due punti convergono a zero lungo y e z e divergono lungo x
ramma di biforcazione per a minore di zero (y contro a)
comportamento del sistema abbastanza bizzarro
mutano il loro comportamento qualitativo ma,
P2 presenta coordinate finite, la sella S1 diverge
e ciò basta fare il limite per a che tende a zero dei
( )( )( )
2
0
2
0
2
0
2
2
1im 421im 4
21im 4
2
0
a
c c aba
c c aba
bc c aba c
bzc
az
−
+
→
→
→
+ − =
+ − =
− − =
− = −
=
+∞
−∞
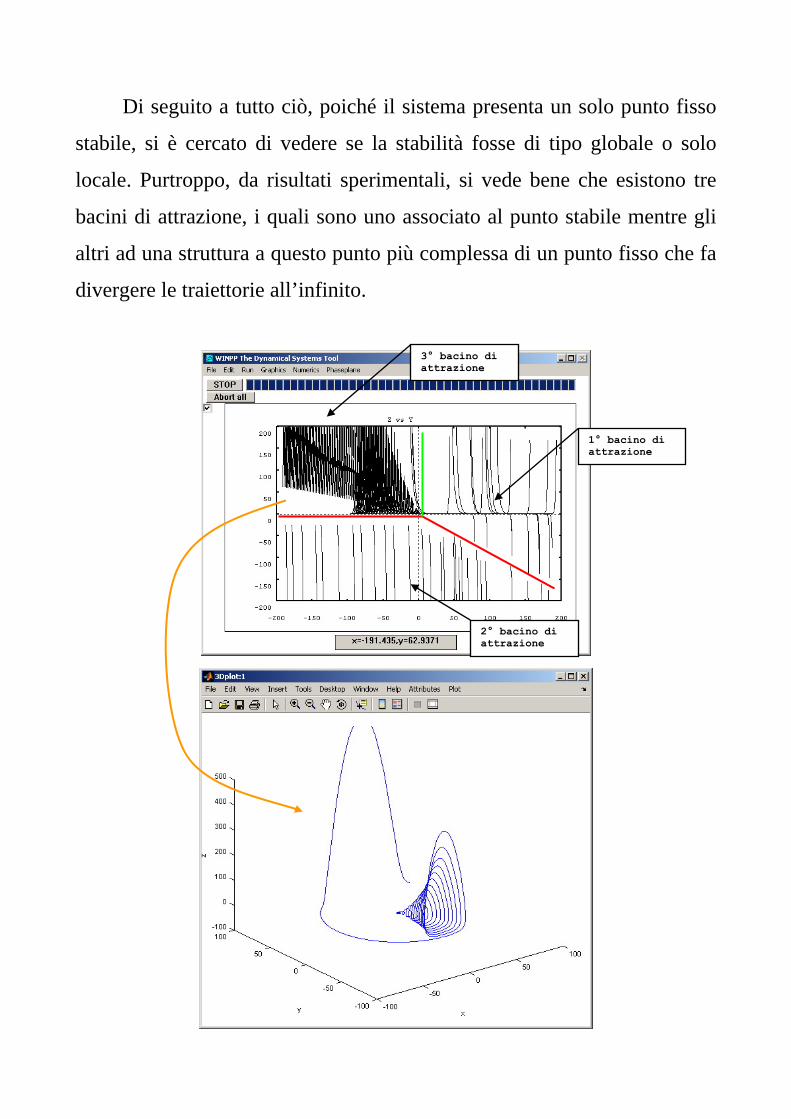
Di seguito a tutto ciò, poiché il sistema presenta un solo punto fisso
stabile, si è cercato di vedere se la stabilità fosse di tipo globale o solo
locale. Purtroppo, da risultati sperimentali, si vede bene che esistono tre
bacini di attrazione, i quali sono uno associato al punto stabile mentre gli
altri ad una struttura a questo punto più complessa di un punto fisso che fa
divergere le traiettorie all’infinito.
3° bacino di attrazione
2° bacino di attrazione
1° bacino di attrazione
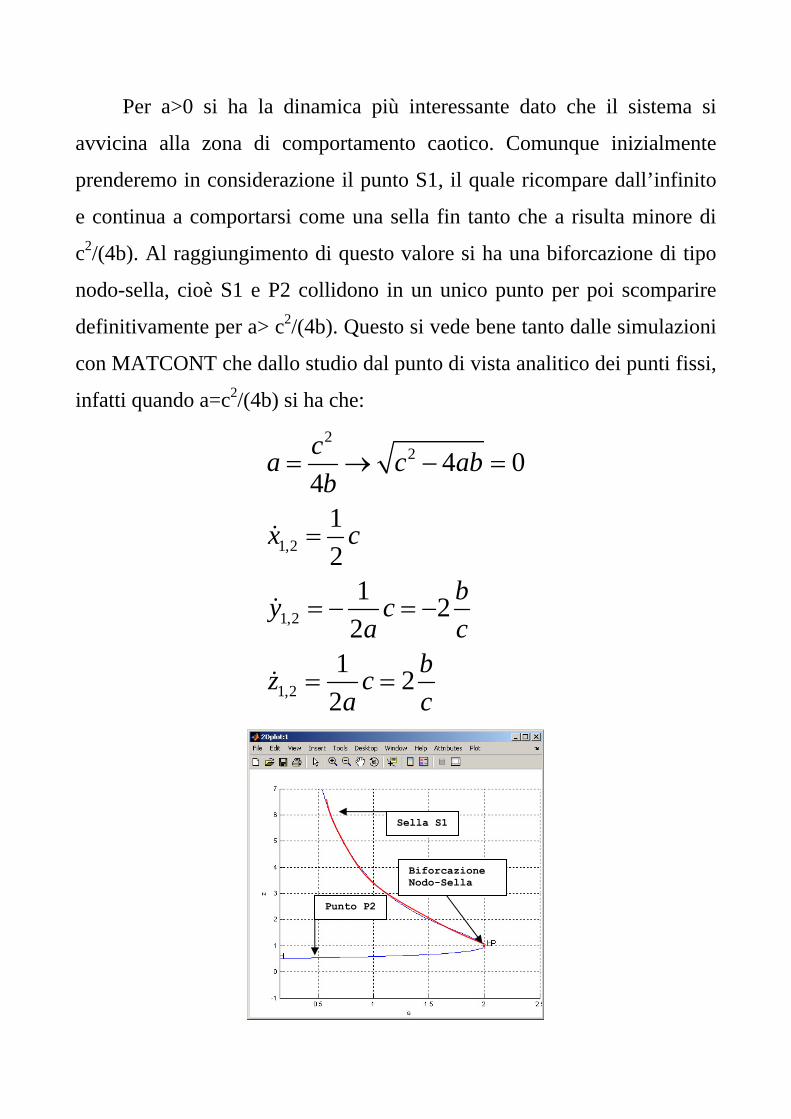
Per a>0 si ha la dinamica più interessante dato che il sistema si
avvicina alla zona di comportamento caotico. Comunque inizialmente
prenderemo in considerazione il punto S1, il quale ricompare dall’infinito
e continua a comportarsi come una sella fin tanto che a risulta minore di
c2/(4b). Al raggiungimento di questo valore si ha una biforcazione di tipo
nodo-sella, cioè S1 e P2 collidono in un unico punto per poi scomparire
definitivamente per a> c2/(4b). Questo si vede bene tanto dalle simulazioni
con MATCONT che dallo studio dal punto di vista analitico dei punti fissi,
infatti quando a=c2/(4b) si ha che:
22
1,2
1,2
1,2
4 04
12
1 22
1 22
ca c abb
x c
by ca c
bz ca c
= → − =
=
= − = −
= =
Punto P2
Sella S1
Biforcazione Nodo-Sella

Nella figura precedente si può notare come MATCONT segnali il
punto di collisione con la sigla LP (Limit Point) per indicare che, superato
quel valore particolare di a, il punto fisso in esame scompare. Sovrapposto
al all’indicatore LP è presente l’ulteriore marker H, il quale indica che il
punto fisso, risultante dalla fusione di S1 e P1 in a= c2/(4b), è una “sella
neutra” (‘Neutral Saddle’), cioè ha due autovalori uguali in modulo ma di
segno opposto.
A questo punto è necessario concentrarsi sulle biforcazioni cui va in
contro il punto P2 per a compreso nell’intervallo [0,c2/4b] nel caso
particolare di b=2 e c=4. Dallo studio fatto con MATCONT si è visto che
il punto presenta una biforcazione di Hopf supercritica quando
a=0.12496748. Conseguentemente P2 diviene una spirale instabile (due
autovalori complessi e coniugati attraversano lo zero divenendo a parte
reale positiva mentre il terzo autovalori è reale negativo) circondata un
ciclo limite stabile.

Fuoco Stabile
Biforcazione di Hopf
Spirale Stabile
Figura 4 : Biforcazione do Hop
Dopo la biforcazione di Hopf, il p
precedenza, è divenuto una spirale insta
biforcazione nodo-sella.
A questo punto le coordinate del punt
MATCONT il quale ci ha permesso di trov
ciclo, il suo periodo e di provarne effettivam
Sella
Biforcazione Nodo-Sella
Spirale Instabile
f (x contro a)
unto P2, come gia detto in
bile e così rimane sino alla
o di Hopf sono state inserite in
are la collocazione spaziale del
ente la stabilità.
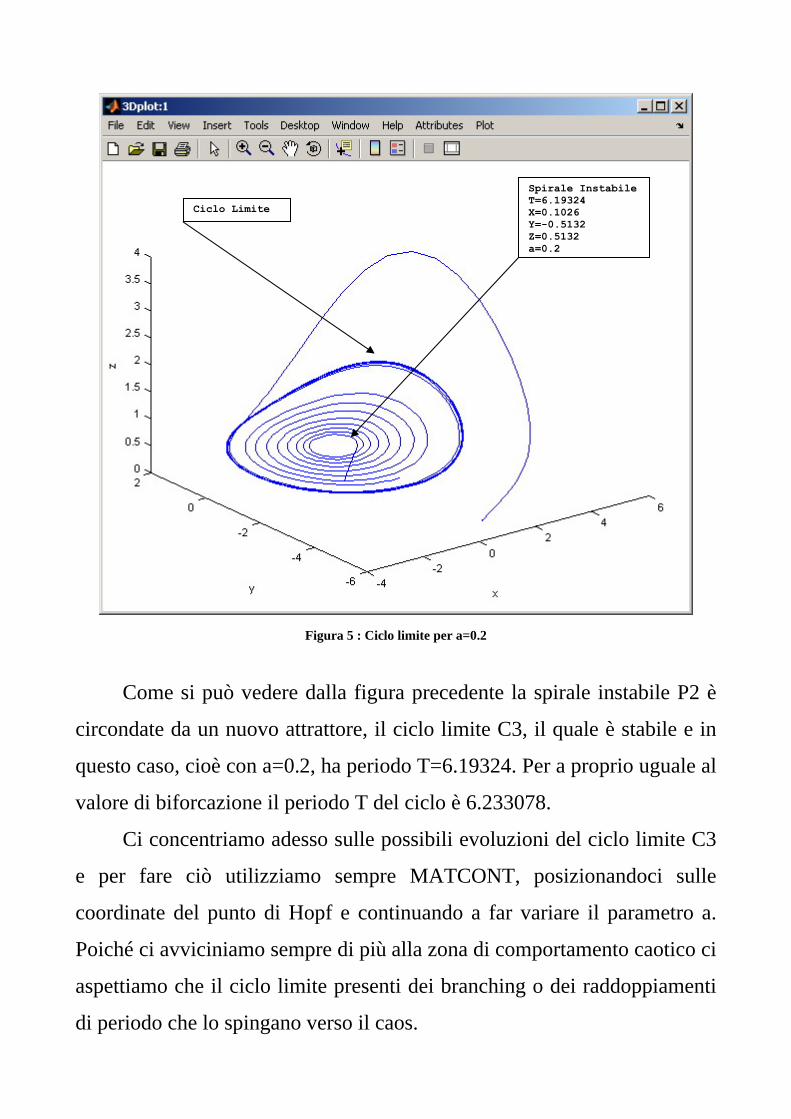
Spirale Instabile T=6.19324 X=0.1026 Y=-0.5132 Z=0.5132 a=0.2
Ciclo Limite
Figura 5 : Ciclo limite per a=0.2
Come si può vedere dalla figura precedente la spirale instabile P2 è
circondate da un nuovo attrattore, il ciclo limite C3, il quale è stabile e in
questo caso, cioè con a=0.2, ha periodo T=6.19324. Per a proprio uguale al
valore di biforcazione il periodo T del ciclo è 6.233078.
Ci concentriamo adesso sulle possibili evoluzioni del ciclo limite C3
e per fare ciò utilizziamo sempre MATCONT, posizionandoci sulle
coordinate del punto di Hopf e continuando a far variare il parametro a.
Poiché ci avviciniamo sempre di più alla zona di comportamento caotico ci
aspettiamo che il ciclo limite presenti dei branching o dei raddoppiamenti
di periodo che lo spingano verso il caos.
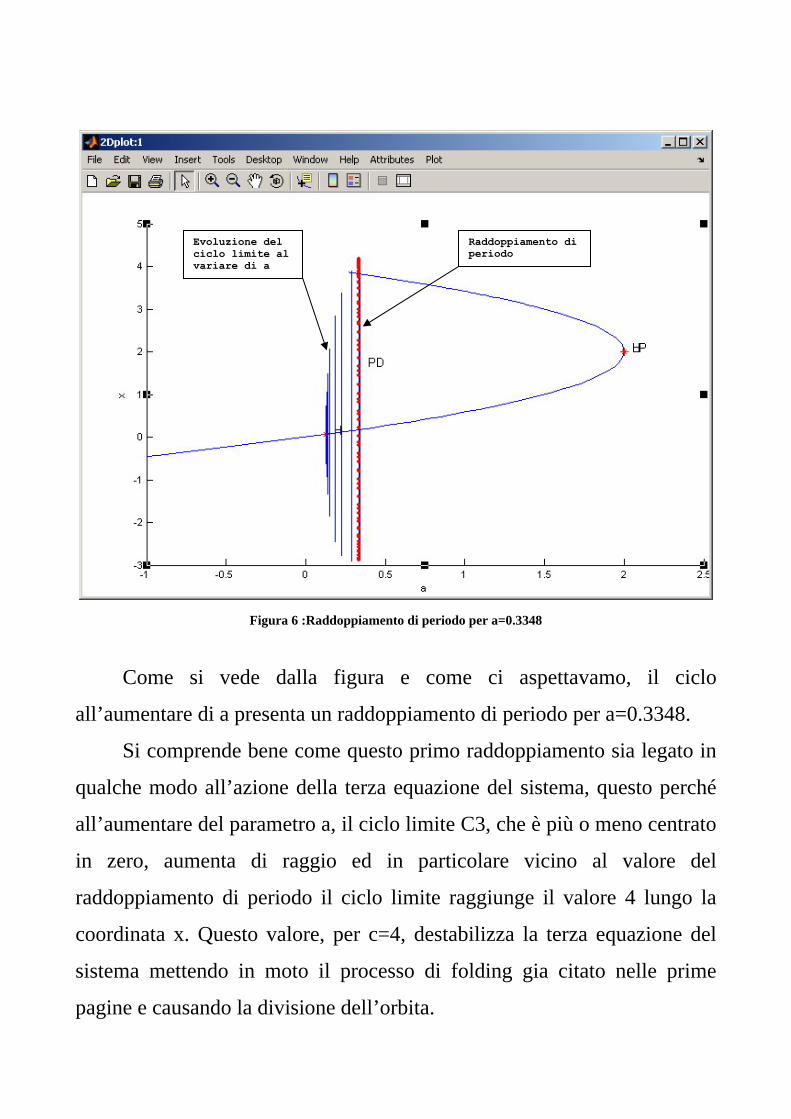
Evoluzione del ciclo limite al variare di a
Raddoppiamento di periodo
Figura 6 :Raddoppiamento di periodo per a=0.3348
Come si vede dalla figura e come ci aspettavamo, il ciclo
all’aumentare di a presenta un raddoppiamento di periodo per a=0.3348.
Si comprende bene come questo primo raddoppiamento sia legato in
qualche modo all’azione della terza equazione del sistema, questo perché
all’aumentare del parametro a, il ciclo limite C3, che è più o meno centrato
in zero, aumenta di raggio ed in particolare vicino al valore del
raddoppiamento di periodo il ciclo limite raggiunge il valore 4 lungo la
coordinata x. Questo valore, per c=4, destabilizza la terza equazione del
sistema mettendo in moto il processo di folding gia citato nelle prime
pagine e causando la divisione dell’orbita.
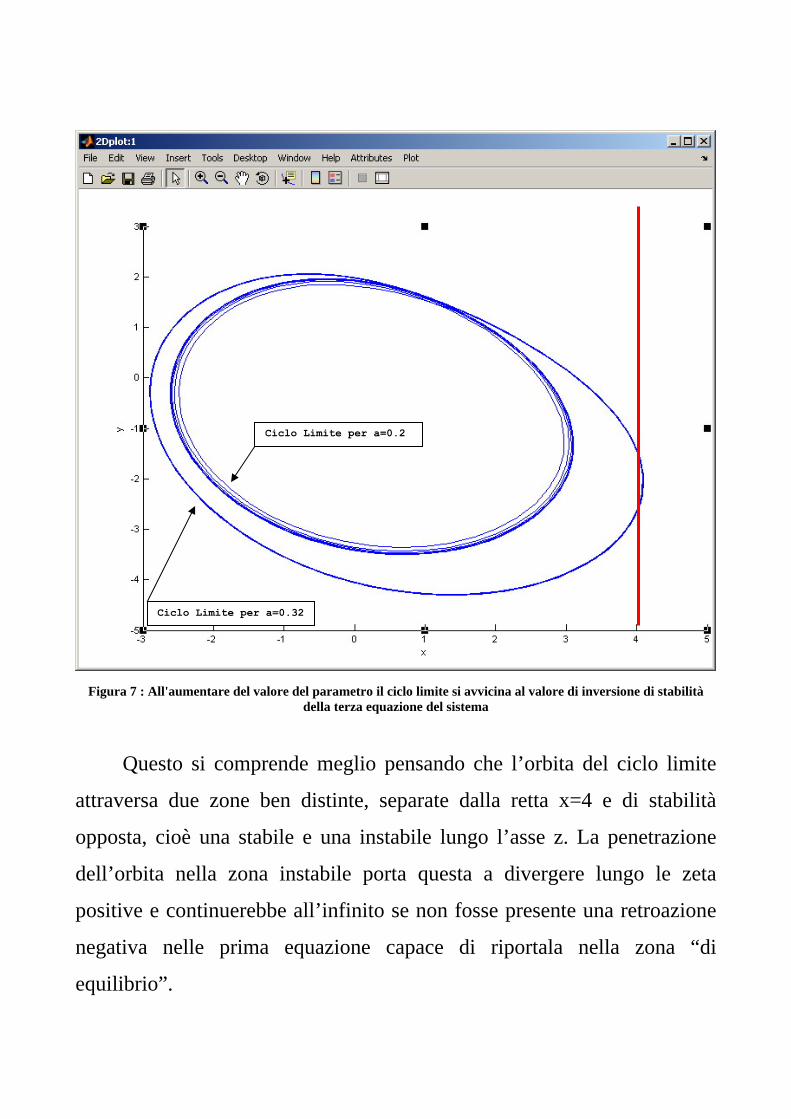
Ciclo Limite per a=0.2
Ciclo Limite per a=0.32
Figura 7 : All'aumentare del valore del parametro il ciclo limite si avvicina al valore di inversione di stabilità della terza equazione del sistema
Questo si comprende meglio pensando che l’orbita del ciclo limite
attraversa due zone ben distinte, separate dalla retta x=4 e di stabilità
opposta, cioè una stabile e una instabile lungo l’asse z. La penetrazione
dell’orbita nella zona instabile porta questa a divergere lungo le zeta
positive e continuerebbe all’infinito se non fosse presente una retroazione
negativa nelle prima equazione capace di riportala nella zona “di
equilibrio”.
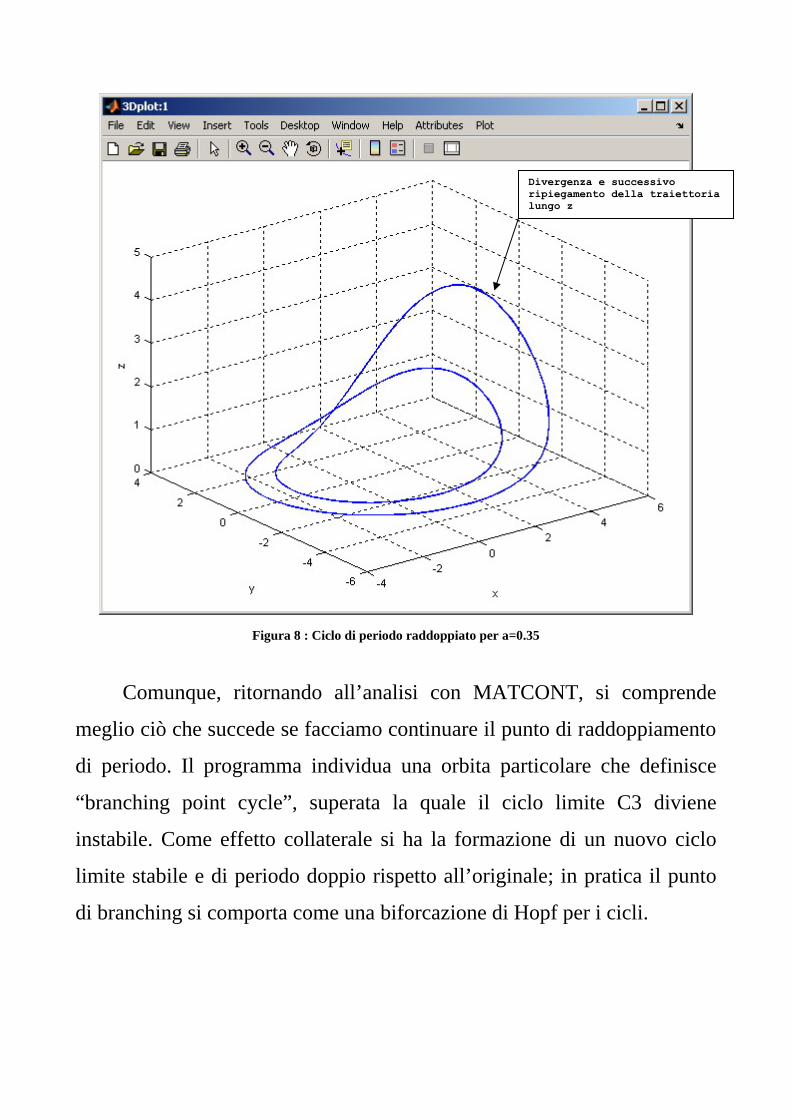
Divergenza e successivo ripiegamento della traiettoria lungo z
Figura 8 : Ciclo di periodo raddoppiato per a=0.35
Comunque, ritornando all’analisi con MATCONT, si comprende
meglio ciò che succede se facciamo continuare il punto di raddoppiamento
di periodo. Il programma individua una orbita particolare che definisce
“branching point cycle”, superata la quale il ciclo limite C3 diviene
instabile. Come effetto collaterale si ha la formazione di un nuovo ciclo
limite stabile e di periodo doppio rispetto all’originale; in pratica il punto
di branching si comporta come una biforcazione di Hopf per i cicli.
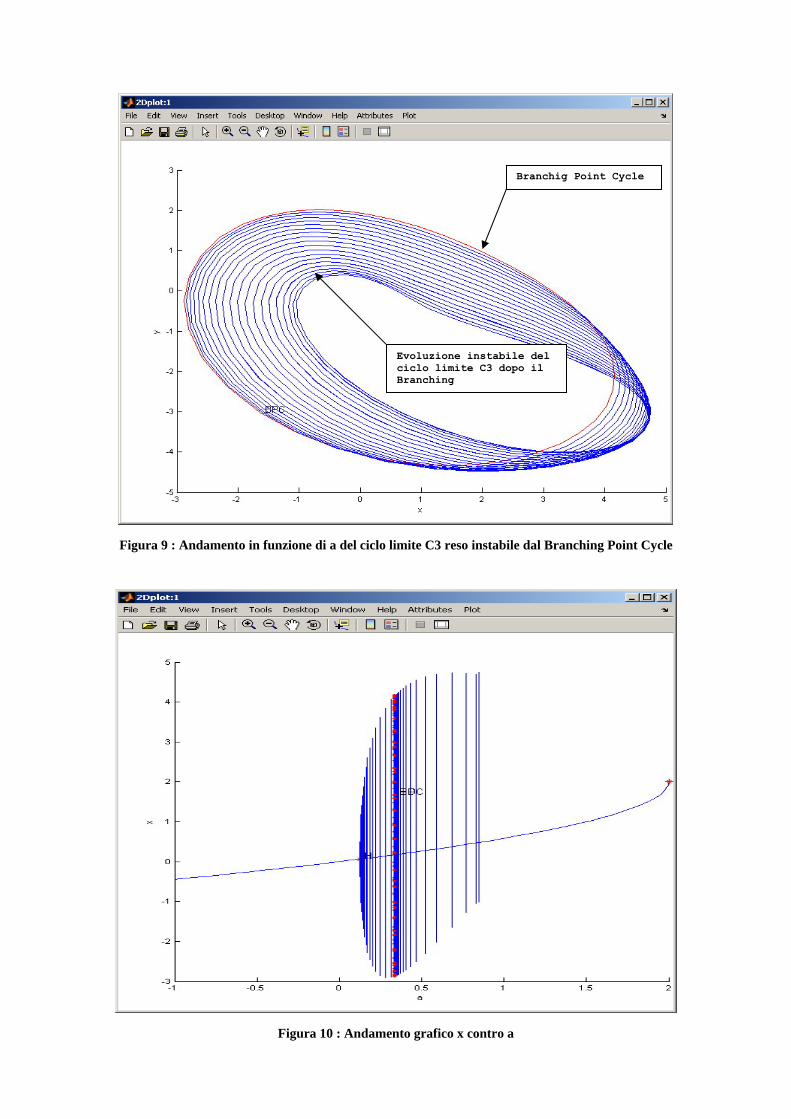
Branchig Point Cycle
Evoluzione instabile del ciclo limite C3 dopo il Branching
Figura 9 : Andamento in funzione di a del ciclo limite C3 reso instabile dal Branching Point Cycle
Figura 10 : Andamento grafico x contro a

Branchig Point Cycle
Ciclo limite stabile di periodo doppio
Figura 11 : Evoluzione del ciclo limite di periodo doppio dopo il BPC
Ciclo limite instabile
Ciclo stabile di periodo doppio
Figura 12 : Coesistenza del ciclo limite instabile C3 e del suo raddoppiamento di periodo

Le figure precedenti mostrano l’andamento nel tempo del sistema nel
caso di stato iniziale prossimo al ciclo limite C3 e per un valore del
parametro a pari a 0.35. Si vede bene come la traiettoria inizialmente
rimane sul ciclo limite instabile per poi allontanarsi ed essere attratta verso
quello stabile e di periodo doppio. Questo comportamento mette in luce
nuovamente l’effetto di stretching e folding presente nel sistema, poiché
l’evoluzione stabile del ciclo C3 non è altro che un suo stiramento e
ripiegamento nello spazio.
Purtroppo dopo il primo raddoppiamento di periodo MATCONT non
ha più la sensibilità necessaria per detectare raddoppiamenti di periodo
successivi, pertanto da questo punto in poi l’analisi sarà portata avanti
basandosi solamente sui dati ottenuti dall’integrazione numerica.
Comunque, estrapolando il comportamento del sistema dai dati ottenuti
sino ad ora, ci aspettiamo una dinamica a cascata attraverso
raddoppiamenti di periodo successivi e sempre più frequenti al variare di a
e la conseguente generazione di cicli limite instabili. Pertanto esisterà un
valore di accumulazione per a, tale che, una volta sorpassato, il sistema
subentra nella zona di comportamento caotico.
Per individuare questo valore e circoscrivere la zona caotica, le
simulazioni sono state portate avanti in maniera ricorsiva, cioè attraverso
aggiustamenti successivi del parametro e conseguenti simulazioni. Il
grafico sottostante mostra i comportamenti del sistema relativi a vari
intervalli del parametro a.
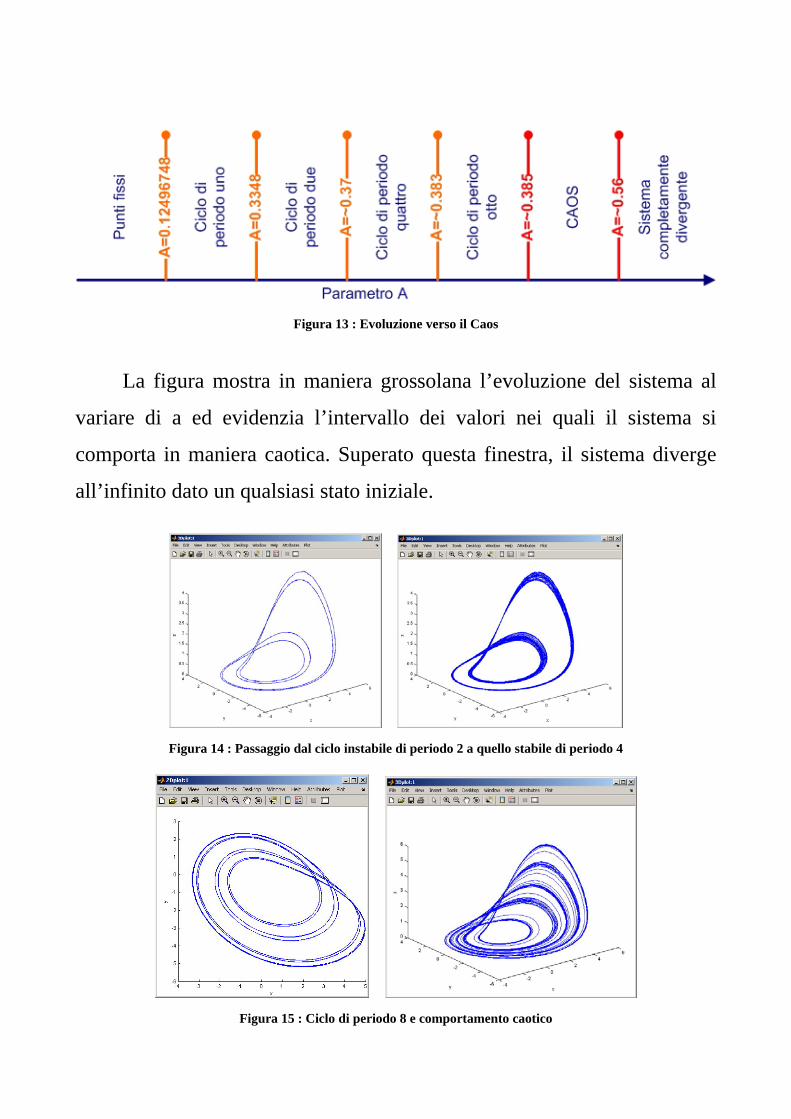
Figura 13 : Evoluzione verso il Caos
La figura mostra in maniera grossolana l’evoluzione del sistema al
variare di a ed evidenzia l’intervallo dei valori nei quali il sistema si
comporta in maniera caotica. Superato questa finestra, il sistema diverge
all’infinito dato un qualsiasi stato iniziale.
Figura 14 : Passaggio dal ciclo instabile di periodo 2 a quello stabile di periodo 4
Figura 15 : Ciclo di periodo 8 e comportamento caotico