Modellistica e simulazione di un’autovettura con cambio...
151
Universit`a degli studi di Modena e Reggio Emilia Facolt`a di Ingegneria - Sede di Modena Dipartimento di Ingegneria dell’Informazione Corso di Laurea in Ingegneria Elettronica Modellistica e simulazione di un’autovettura con cambio automatico e interfacciamento con l’unit`a di controllo Relatore: Tesi di Laurea di: Prof. Roberto Zanasi Matteo Gibellini Correlatori: Ing. Germano Sandoni Ing. Davide Montosi Ing. Francesco Farachi Ing. Riccardo Morselli Anno Accademico 2001-2002
Transcript of Modellistica e simulazione di un’autovettura con cambio...

Universita degli studi di Modena e Reggio Emilia
Facolta di Ingegneria - Sede di ModenaDipartimento di Ingegneria dell’Informazione
Corso di Laurea in Ingegneria Elettronica
Modellistica e simulazione
di un’autovettura con cambio automatico
e interfacciamento con l’unita di controllo
Relatore: Tesi di Laurea di:Prof. Roberto Zanasi Matteo Gibellini
Correlatori:Ing. Germano SandoniIng. Davide MontosiIng. Francesco FarachiIng. Riccardo Morselli
Anno Accademico 2001-2002

Chi casca in tera al cul pates,
chi al nas caioun mai pio guares.
- Mia Nonna -
5 parole chiave:
Modellistica,Controlli,Autovettura,Attuatori,Cambio.

ii

Indice
1 Cambio automatico Magneti Marelli 11.1 Accumulatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Motore e Pompa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Elettrovalvole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Valvola Proporzionale in Portata . . . . . . . . . . . . . . . . . . . 61.3.2 Valvola Proporzionale in Pressione . . . . . . . . . . . . . . . . . . 91.3.3 Parte Idraulica delle Elettrovalvole . . . . . . . . . . . . . . . . . . 11
1.4 Attuatori del Cambio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.4.1 Attuatore Innesto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.4.2 Attuatore di Selezione . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.5 Attuatore Frizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.5.1 Modellizzazione dell’Attuatore Frizione . . . . . . . . . . . . . . . . 24
1.6 Semplificazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.6.1 Semplificazione della Parte Idraulica . . . . . . . . . . . . . . . . . 261.6.2 Modello Semplificato dell’Attuatore di Innesto . . . . . . . . . . . . 261.6.3 Modello Semplificato dell’Attuatore Selezione . . . . . . . . . . . . 27
2 Sistema di trasmissione 292.1 Motore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.2 Frizione e Parastrappi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.1 Modellazione dell’Attrito Coulombiano . . . . . . . . . . . . . . . . 352.2.2 Modello della Frizione con Parastrappi . . . . . . . . . . . . . . . . 39
2.3 Cambio e Sincronizzatori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.3.1 Modello del Cambio . . . . . . . . . . . . . . . . . . . . . . . . . . 442.3.2 Modello dei sincronizzatori . . . . . . . . . . . . . . . . . . . . . . . 482.3.3 Considerazioni sul modello . . . . . . . . . . . . . . . . . . . . . . . 49
2.4 Differenziale, Semiassi e Ruote . . . . . . . . . . . . . . . . . . . . . . . . . 492.4.1 Differenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492.4.2 Semiassi e Ruote . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.5 Dinamica del Veicolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3 Centralina Marelli 533.1 ECU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.2 Pilota . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.3 Veicolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.3.1 Sottosistema Cambio . . . . . . . . . . . . . . . . . . . . . . . . . . 603.3.2 Sottosistema Driveline . . . . . . . . . . . . . . . . . . . . . . . . . 60
iii

iv INDICE
4 Analisi dei dati e risultati simulativi 634.1 Analisi dei dati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.2 Simulazione e confronto con i dati . . . . . . . . . . . . . . . . . . . . . . . 684.3 “Polipo” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5 Implementazioni Simlink 835.1 Enable Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835.2 Blocco di Attrito Coulombiano . . . . . . . . . . . . . . . . . . . . . . . . . 855.3 Finecorsa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865.4 Gioco Selezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
A Sfunction 93A.1 Come Lavora al Suo Interno il Programma Simulink . . . . . . . . . . . . . 93
A.1.1 Zero Crossing e Loops Algebrici . . . . . . . . . . . . . . . . . . . . 95A.2 S–Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
A.2.1 Concetti Fondamentali . . . . . . . . . . . . . . . . . . . . . . . . . 98A.3 Scrittura di una S–Function . . . . . . . . . . . . . . . . . . . . . . . . . . 100
A.3.1 Esempio di S–Function: integratore limitato . . . . . . . . . . . . . 100
B Modellazione di linee idrauliche 103B.1 Funzioni Caratteristiche della Linea . . . . . . . . . . . . . . . . . . . . . . 103B.2 Modelli della Linea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
B.2.1 Modello 1: Senza Perdite . . . . . . . . . . . . . . . . . . . . . . . . 104B.2.2 Modello 2: Perdite Lineari . . . . . . . . . . . . . . . . . . . . . . . 105B.2.3 Modello 3: Modello Dissipativo . . . . . . . . . . . . . . . . . . . . 106
B.3 Validita dei Modelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107B.4 Rappresentazioni della Linea per Analisi . . . . . . . . . . . . . . . . . . . 108B.5 Tecniche di Approssimazione dei Modelli . . . . . . . . . . . . . . . . . . . 111
B.5.1 Approssimazione Modale . . . . . . . . . . . . . . . . . . . . . . . . 111B.5.2 Approssimazione del Linear Friction Model . . . . . . . . . . . . . . 112B.5.3 Effetti dipendenti dalla frequenza . . . . . . . . . . . . . . . . . . . 113B.5.4 Correzione Stato Stazionario . . . . . . . . . . . . . . . . . . . . . . 115
C Il Can Bus 117C.1 I Bus di Campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
C.1.1 Il Modello di Riferimento ISO/OSI 7498 . . . . . . . . . . . . . . . 118C.2 Il Protocollo Can . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
C.2.1 Il Livello Fisico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119C.2.2 Il Livello Data Link . . . . . . . . . . . . . . . . . . . . . . . . . . . 126C.2.3 Il Livello Applicazione . . . . . . . . . . . . . . . . . . . . . . . . . 132
C.3 Time Triggered Can . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132C.3.1 TTCAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
D Tecnica di modellazione P.O.G. 133D.0.2 Esempio: Massa - Molla - Smorzatore . . . . . . . . . . . . . . . . . 134
Conclusioni 137

INDICE v
Ringraziamenti 139
Bibliografia 140

vi INDICE

Introduzione
L’evoluzione tecnologica, avuta negli anni recenti, ha portato l’elettronica ad essere ora-mai presente in ogni aspetto della vita quotidiana.Anche nelle autovetture si e assistito all’esplosione del numero delle centraline elettron-iche, che ne controllano la stabilita, la frenata, il cambio marcia ecc., per migliorare ilcomfort e la sicurezza dei passeggeri.Fra i vari sistemi, che si celano sotto acronimi quali ABS, ESP, TCS, ACC, e presentel’AMT (Automatic Manual Transmission). Esso permette di rendere semi-automatica l’-operazione di cambio marcia, consentendo al pilota di scegliere se gestire autonomamentel’istante della cambiata e la marcia da inserire, o delegare il tutto alla centralina elettron-ica che controlla il sistema.Il sistema AMT considerato e quello sviluppato da Magneti Marelli S.p.A per conto diFerrari S.p.A. Esso e composto da tre attuatori elettro idraulici che si sostituiscono alpedale della frizione e alla leva del cambio e agiscono simulando l’azione del piede sinistroe della mano destra del guidatore in un cambio tradizionale. Rispetto ad un cambio to-talmente automatico questo sistema ha il vantaggio di non apportare modifiche al bloccocambio e pertanto risulta meno ingombrante e costoso pur fornendo prestazioni analoghe.In collaborazione con Magneti Marelli S.p.A e Ferrari S.p.A e stato messo a nostra dispo-sizione il modello Matlab del software implementato all’interno della centralina elettronicache controlla il sistema. Lo scopo di questa attivita di ricerca e quello di poter simularecambi marcia realistici in modo da correggere eventuali errori presenti nel software edeventualmente migliorarne le strategie di controllo.Per poter far cio e necessario avere modelli accurati sia degli attuatori idraulici, sia delladinamica dell’autovettura nel suo complesso. Tali modelli sono stati sviluppati nel corsodi diverse tesi effettuate all’interno dell’Universita.Lo scopo della tesi e di connettere i vari modelli in modo da ottenere un modello comp-lessivo capace di simulare correttamente i cambi marcia e di interfacciarsi con il modellofornito della centralina Magneti Marelli. A causa della complessita del sistema finale,risulta di particolare importanza la velocita di simulazione e la stabilita delle singole par-ti, intesa come capacita di non rallentare o bloccare la simulazione. Tali esigenze hannospinto a migliorare gli schemi simulativi esistenti e sono state sviluppate nuove soluzioniimplementative.Nel primo capitolo di questa tesi, e descritto il sistema di cambio automatico sviluppatoda Magneti Marelli.Nel secondo capitolo viene descritto e modellato il comportamento dinamico dell’autovet-tura considerata ovvero la Maserati Spider (M138).Nel terzo capitolo vengono descritte le funzionalita e i segnali relativi alla centralina Marel-li, necessari al suo interfacciamento con il resto del veicolo.
vii

viii INTRODUZIONE
Nel quarto capitolo vengono presentati i risultati simulativi ottenuti e confrontati con leacquisizioni effettuate in vettura.Nel quinto capitolo vengono spiegate alcune tecniche di modellazione utilizzate nella re-alizzazione Simulink dei modelli.In appendice sono presenti informazioni di complemento per comprendere e approfondiregli argomenti trattati nella tesi. In appendice A viene spiegato il funzionamento di Simu-link e viene descritto il funzionamento delle S–Function. In appendice B viene trattatala modellizzazione delle linee idrauliche. In appendice C viene descritto il protocollo ditrasmissione del Can Bus con il quale la centralina Marelli comunica con le altre unita dicontrollo presenti nell’autovettura. Infine in appendice D viene descritta la tecnica graficadi modellizzazione detta Power Oriented Graphs (POG) utilizzata in questa tesi.

Capitolo 1
Descrizione e modellazione delsistema di cambio automaticoMagneti Marelli
La centralina Marelli gestisce il sistema di cambio automatico montato su Ferrari eMaserati.Il sistema considerato e tale da sollevare il guidatore dalle operazioni necessarie ad es-eguire il cambio marcia. Esso riproduce, tramite attuatori idraulici, i movimenti dellamano destra e del piede sinistro del guidatore, inoltre controlla la generazione della cop-pia motrice prendendo il controllo della centralina motore durante la cambiata. Graziea tale sistema non si necessita di modificare la struttura del blocco cambio che rimaneuguale a quella di un tradizionale cambio manuale.Il sistema e schematizzabile come in Fig. 1.1.
Pompa aingranaggi
Serbatoio
Attuatorefrizione
Attuatoreselezione
Attuatoreinnesto
Elettrovalvole
Accumulatore
Alimentazione
Scarico
Motoreelettrico
Cambio
Frizione
Figura 1.1: Schema del cambio automatico Magneti Marelli.
1

2 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Esso si compone delle seguenti parti:
• Accumulatore: ha la funzione di accumulare il volume di liquido (olio) necessarioall’attuazione della cambiata mantenendo la pressione di alimentazione entro valoriprestabiliti;
• Serbatoio: e la riserva di liquido, in bassa pressione, necessaria al rifornimento delsistema. Viene riempita con il liquido di ritorno espulso dalle valvole;
• Motore elettrico e pompa: quando la pressione nell’accumulatore scende sotto unvalore di soglia prestabilito, la centralina comanda l’accensione del motore che,agendo sulla pompa ad ingranaggi, ricarica l’accumulatore;
• Elettrovalvole: forniscono agli attuatori la pressione o la portata necessarie;
• Attuatori Cambio: gestiscono l’inserimento e il disinnesto delle marce sostituendosialla mano destra del guidatore in un sistema di cambio tradizionale;
• Attuatore Frizione: gestisce l’apertura e la chiusura della frizione, sostituendo ilpiede sinistro del guidatore, in un sistema di cambio tradizionale.
1.1 Accumulatore
L’accumulatore e assimilabile, in campo elettrico, ad un condensatore. Esso accumulaun certo volume di liquido per ridarlo quando richiesto. E formato da un contenitoreavente due camere separate da una membrana elastica. Una camera contiene un gascompresso, in genere azoto (N2), l’altra viene riempita con il liquido che dovra alimentareil circuito idraulico. In Fig. 1.2 viene mostrato lo schema di un accumulatore in vari stadidi riempimento.
P0 V0P1 V1
P1 V1
P2 V2
P2 V2
Vl
Caso A Caso CCaso B
Figura 1.2: Schema dell’accumulatore in varie situazioni.
Considerando il gas perfetto si ha che, in ogni condizione vale la legge:
PgVgn = Pg0Vg0
n = K0 = cost. (1.1)

1.1. ACCUMULATORE 3
ove:
– n e il coefficiente politropico del gas che varia, a seconda del gas e dalle condizionidi utilizzo, da 1 a 1.4;
– Pg0 e la pressione di gonfiaggio del gas;
– Vg0 e il volume del gas alla pressione di gonfiaggio;
– Vg e Pg sono il volume e la pressione del gas.
Per calcolare la pressione fornita al sistema, facciamo l’ipotesi che durante il riempi-mento dell’accumulatore vengano assunti infiniti stati di equilibrio, ovvero per ogni istantedel processo valga l’equazione:
Pg = Pl (1.2)
Cioe in ogni istante la pressione del liquido e quella del gas si equivalgano; moltipli-cando entrambi membri per Vg
n si ha:
PgVgn = PlVg
n (1.3)
ma PgVgn = K0 mentre Vg = V0 − Vl pertanto:
K0 = Pl(V0 − Vl)n (1.4)
da cui:
Pl =K0
(V0 − Vl)n(1.5)
Se si considera il liquido incomprimibile si ha che:
Vl =
∫
Ql dt (1.6)
ove Ql e la portata di liquido entrante (quando positiva) nell’accumulatore, ovveroe la differenza fra la portata fornita dalla pompa (Qp) e quella assorbita dagli attuatori(Qass).Il modello POG dell’ accumulatore e mostrato in Fig. 1.3.
In Fig. 1.4 viene graficata la pressione fornita dall’accumulatore in funzione del volumedi liquido presente, per diversi valori di K0.
Le equazioni ricavate sono valide sotto l’ipotesi di liquido incomprimibile. In caso taleipotesi non sia valida si necessita di considerare anche la capacita idraulica del liquido.Essa vale:
Cl =Vl
Bulk
(1.7)
ove Bulk e il modulo di comprimibilita del liquido. Pertanto la pressione del liquidovale:
Pl =
∫1
Cl
Qdt =
∫Bulk
Vl
Qdt (1.8)

4 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Pl
Qp
-
6
1s
6
V0
6
6
K0
(·)n
-
Vl
Pl
Qass
Figura 1.3: Modello POG dell’accumulatore idraulico.
0 50 100 150 2000
10
20
30
40
50
60
70
80
90
100
P0=12
P0=17
P0=22
P0=27
P0=32
P0=37
Vl [cc]
Pl [b
ar]
Andamento pressione−volumeSoglie controllo
Figura 1.4: Andamento pressione nell’accumulatore per diversi valori della pressione digonfiaggio. In rosso la curva utilizzata.

1.2. MOTORE E POMPA 5
Mentre dall Eq. 1.5 si ricava:
Vl = V0 −
(K0
Pl
) 1n
(1.9)
sostituendo tale espressione nell’equazione precedente e risolvendola e possibile calco-lare la pressione fornita in ogni istante.
1.2 Motore e Pompa
Lo scopo del motore elettrico e relativa pompa e di ricaricare l’accumulatore quando lapressione di alimentazione scende sotto un determinato valore. Dato che il motore esolidale alla pompa, si possono considerare le inerzie relative come una sola. Le equazioniche caratterizzano il sistema sono:
Va − E = RmIa + Lm Ia
Cp = Jpωp + bvpωp + bcp sgn(ωp)
ove:
– Va e Ia rappresentano la tensione di alimentazione e la corrente assorbita dal motore;
– Rm Lm sono la resistenza e l’induttanza degli avvolgimenti del motore elettrico;
– Jp e l’inerzia del blocco motore elettrico-pompa;
– ωp e la velocita angolare;
– bvp bcp sono gli attriti viscoso e coulombiano agenti sul sistema;
– E = Km ωp e la forza contro-elettromotrice;
– Cp = Km Ia e la coppia motrice;
– Km e il fattore di conversione corrente - coppia.
Si ha dunque la schematizzazione POG illustrata in Fig. 1.5.
La pompa ad ingranaggi genera una portata proporzionale alla velocita angolare delmotore attraverso un coefficiente di proporzionalita Kp. Tuttavia la portata fornita all’ac-cumulatore risulta minore di quella erogata dalla pompa a causa della presenza di trafila-menti nelle valvole i quali sono funzione della differenza fra la pressione di alimentazionee quella di scarico. Pertanto la portata di ricarica dell’accumulatore risulta:
Qacc = Kp ωp − α(Palim − Pscarico) (1.10)
ove α(·) e la portata persa per trafilamenti.

6 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Ia
Va
-
1
Lm s + Rm
6
6
- Km
E
- Km-
Cm-
1
Jp s + bvp
?
?
ωp
-
bcp sgn(ωp)
6
6
-
Figura 1.5: Modello POG del sistema motore elettrico - pompa.
1.3 Elettrovalvole
Sono sistemi elettromeccanici a due ingressi ed una uscita che, variando la posizione diuna spoletta, mettono in collegamento uno dei due ingressi con l’uscita. I tipi di valvoleutilizzate sono due, e si differiscono in base alla variabile idraulica controllabile dallecorrenti di eccitazione delle stesse:
• Valvole Proporzionali in Portata;
• Valvole Proporzionali in Pressione.
Gli ingressi sono collegati uno all’alimentazione idraulica (nel nostro caso l’accumula-tore), e l’altro allo scarico (il serbatoio). L’uscita dell’elettrovalvola, invece, viene collegataattraverso un “tubo”, alla camera dell’attuatore a cui fa capo.
1.3.1 Valvola Proporzionale in Portata
E cosı detta perche attraverso la corrente di eccitazione (Iecc) si controlla la portataerogabile dalla valvola (Qout). Viene dunque utilizzata quando si vuole avere il controllosulla velocita del pistone idraulico che alimenta. Lo schema fisico di una valvola di questotipo e mostrato in Fig. 1.6.
E costituita da una “spoletta” che sotto la forza generata dall’elettromagnete si muovein modo da collegare uno dei due ingressi all’uscita. Nel caso in cui la corrente di ecci-tazione sia zero, le molle di richiamo portano la spoletta a collegare l’uscita alla pressionepiu bassa (pressione di scarico). L’ equazione dinamica che ne descrive il moto e:
Fsp − Ksp(xsp − xsp0) = Mspxsp + bvspxsp + bcsp sgn(xsp) (1.11)
ove:

1.3. ELETTROVALVOLE 7
Pscarico Qscarico Palim Qalim
PoutQout
Iecc
Spoletta
Figura 1.6: Schema fisico di una valvola proporzionale in portata.
– Fsp = KFIIecc e la forza esercitata dal solenoide: viene considerata proporzionalealla corrente di eccitazione attraverso il coefficiente KFI ;
– Msp e la massa della spoletta;
– bvsp e l’attrito viscoso della spoletta;
– bcsp e l’attrito statico della spoletta;
– Ksp e la rigidita della molla;
– xsp e xsp0 sono le posizioni attuali e di riposo della spoletta.
lo schema POG che rappresenta la dinamica della spoletta e mostrato in Fig. 1.7L’attrito viscoso e funzione non lineare della velocita della spoletta e varia con la
temperatura. L’andamento della forza di attrito per varie temperature e mostrato inFig. 1.8.
Durante il suo moto la spoletta ostruisce o lascia libero parte dei fori collegati agliingressi. La portata erogabile dalla valvola e dunque proporzionale all’area del foro lasciatalibera. Considerando il caso di un foro di raggio Rf parzialmente occluso (come mostratoin Fig 1.9), si ha che l’area visibile risulta essere :
A = 0 , xsp < 0
A = 2
∫ xsp
0
√
Rf2 − (x − Rf )2dx , 0 ≤ xsp ≤ 2Rf
A = πRf2 , xsp > 2Rf
ove l’integrale che compare vale:

8 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Fsp
xsp
-
1
Msp
1s
?
?
?
xsp
-
6
bcsp sgn(·)
6
- -
6
-6
xsp
bvsp
6
- - - -6
1s
6
-6
xsp
FK
6
xsp
0
xsp
Figura 1.7: Modello POG della dinamica della spoletta della valvola.
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−50
−40
−30
−20
−10
0
10
20
30
40
50
m/s
N
20C
30C
40C
50C
60C
Figura 1.8: Attrito viscoso della spoletta (bvsp) per varie temperature.

1.3. ELETTROVALVOLE 9
RfMRf
-
0 xsp
^
A
+
Pistone
Figura 1.9: Area foro.
A = 2
∫ xsp
0
√
Rf2 − (x − Rf )2dx = Rf
2 arccos(Rf − xsp
Rf
)+(xsp−Rf )√
Rf2 − (xsp − Rf )2
(1.12)L’andamento delle aree dei fori di alimentazione e di scarico in funzione della posizione
della spoletta e mostrato in FIG. 1.10Come si vede dal grafico delle aree, vi e una posizione della spoletta in cui entrambi i
fori sono completamente ostruiti e la camera dell’attuatore non puo ricevere ne espellereliquido. In tale situazione la pressione sull’attuatore rimane costante, a meno dei trafila-menti.Dalle aree di apertura dei fori e possibile dunque calcolare le portate che attraversano glistessi. Le relazione che si ottengono sono del tipo:
Qalim = KQ Aalim (xsp)
√
|Palim − Pout| sgn (Palim − Pout)
Qscarico = KQ Ascarico (xsp)√
|Pscarico − Pout| sgn (Pscarico − Pout)(1.13)
Pertanto la portata erogabile dalla valvola risulta dipendente, attraverso la posizionedella spoletta, dalla corrente di eccitazione.
1.3.2 Valvola Proporzionale in Pressione
Nelle valvole proporzionali in pressione, la corrente di eccitazione controlla la pressioneerogabile dalla valvola. Viene dunque utilizzata quando si vuole avere il controllo sullaforza esercitata dal pistone idraulico che alimenta. Lo schema fisico di una valvola diquesto tipo e mostrato in Fig. 1.11.
Come si nota, lo schema e analogo a quello della valvola proporzionale in portata tranneper il fatto che in questo caso la dinamica della spoletta e influenzata dalla pressione inuscita (Pout).L’equazione che ne descrive il moto e:
KFIIecc − PoutAsp = Mspxsp + bvspxsp + bcsp sgn(xsp) + Ksp(xsp − xsp0) (1.14)

10 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
−2 −1 0 1 2 3 40
0.5
1
1.5
2
2.5
3
3.5
4
Area di alimentazione Area di scarico
Rf = 1mm
xsp − xsp0 [mm]
Are
e[m
m2]
Figura 1.10: Aree fori funzione della posizione della spoletta.

1.3. ELETTROVALVOLE 11
Pscarico Qscarico Palim Qalim
PoutQout
Iecc
Spoletta
Figura 1.11: Schema fisico di una valvola proporzionale in pressione.
In cui Asp e l’area laterale della spoletta su cui agisce la pressione di uscita. Incondizioni stazionarie, ovvero xsp = cost, si ha:
KFIIecc − PoutAsp = Ksp(xsp − xsp0) ⇒ Iecc =PoutAsp + Ksp(xsp − xsp0)
KFI
(1.15)
Pertanto, in regime stazionario, la pressione d’uscita e legata alla corrente di ecci-tazione attraverso una relazione lineare.
Lo schema POG che rappresenta la dinamica della spoletta e mostrato in Fig. 1.12
1.3.3 Parte Idraulica delle Elettrovalvole
Per completare la parte idraulica del sistema bisogna aggiungere il modello del tubo, checollega la valvola alla camera di attuazione, e la capacita’ idraulica del liquido presentenella stessa. Lo schema POG completo della parte idraulica che fa capo all’elettrovalvolae mostrato in Fig. 1.13.
Ove:
– G11 G12 G21 G22 sono le funzioni di trasferimento che caratterizzano la dinamica deltubo come descritto nell’appendice B;
– Pout Qout sono la pressione e la portata che escono dalla valvola;
– Patt e la pressione all’interno della camera dell’attuatore a cui la valvola e connessa;
– Qatt e la portata assorbita dall’attuatore;

12 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Fsp
xsp
-
1
Msp
1s
?
?
?
xsp
-
6
bcsp sgn(·)
6
- -
6
-6
xsp
bvsp
6
- - - -6
1s
6
-6
xsp
FK
6
xsp
- Asp-
Asp Pout
Qsp
Figura 1.12: Modello POG della dinamica della spoletta in una valvola proporzionale inpressione.
[Palim
Pscar
]
[Qalim
Qscar
]
-
Q(xsp,·)
?
?
-
[1
1
]
[1 1
]- -
6
G11(s)
6
- -- G12(s) -
G21(s)
- -
?
G22(s)
?
-
1Colio
1s
6
6
6
-
Patt
QattQout
Pout
Figura 1.13: Modello POG della parte idraulica della valvola.

1.3. ELETTROVALVOLE 13
– Q(xsp, ·) e la matrice di funzioni seguente:
Q(xsp, ·) =
(Qalim 0
0 Qscarico
)
le funzioni Qalim e Qscarico sono state definite nell’Eq. 1.13 ovvero:
Qalim = KQ Aalim (xsp)
√
|Palim − Pout| sgn (Palim − Pout)
Qscarico = KQ Ascarico (xsp)√
|Pscarico − Pout| sgn (Pscarico − Pout)(1.16)
– Colio e la capacita idraulica dovuta alla non assoluta incomprimibilita dell’oliopresente nella camera dell’attuatore. Tale capacita e pari a:
Colio =Vatt(xatt)
Bulk
(1.17)
in cui Vatt = Aatt(xatt − xatt0) e il volume della camera dell’attuatore, funzione dellaposizione dello stesso (xatt), e Bulk e il modulo di comprimibilita dell’olio.

14 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
1.4 Attuatori del Cambio
Come detto, questi attuatori agiscono in modo da simulare il comportamento della manodestra del guidatore, la quale puo restare in presa sul volante. La richiesta di cambiataavviene attraverso apposite levette a bilanciere posizionate dietro al volante.
P3sel P1sel P2sel
2 4 6
31
0
0
xsel
yinn
5
RM Pinn2
Pinn1
Attuatore Selezione
Attuatore Innesto
? ? ?
6
-
Figura 1.14: Schema di principio del sistema di cambio automatico Marelli.
Come mostrato in Fig. 1.14, il sistema di cambio automatico e composto da dueattuatori.
• l’Innesto: ha il compito di disinnestare la marcia attuale e di innestare la marciainferiore o superiore, operazione che nei cambi tradizionali si effettua spostando laleva del cambio in senso verticale;
• la Selezione: ha il compito di selezionare il sincronizzatore desiderato, operazioneche nei cambi tradizionali si effettua spostando la leva del cambio in senso orizzon-tale.
Il tipo di cambio in esame presenta sei rapporti piu la retromarcia, cio comporta lapresenza di quattro sincronizzatori e altrettante posizioni di equilibrio per l’attuatore diselezione; per quello di innesto invece ne sono previste tre.I movimenti dei due attuatori sono condizionati alla geometria del cambio. Ovvero prima

1.4. ATTUATORI DEL CAMBIO 15
che la selezione possa muoversi, l’innesto deve disingranare la marcia inserita e portarsi inposizione centrale. A questo punto la selezione deve spostarsi il piu velocemente possibileverso il nuovo rango (RM, 1-2, 3-4, 5-6), ovvero la posizione realativa al sincronizzatoredella marcia da inserire, per permettere all’innesto di ingranare la nuova marcia.
1.4.1 Attuatore Innesto
L’attuatore di innesto viene schematizzato meccanicamente come mostrato in Fig. 1.15.
Pinn1
Pinn2
Bicchierini
Pistone
Anelli di tenuta
(O-Rings)
yinn
0
6
s
z
y
Figura 1.15: Schema meccanico dell’attuatore di innesto.
Il dispositivo e formato da un pistone, e da due bicchierini mobili.Le camere di attuazione vengono alimentate da due elettrovalvole proporzionali in pres-sione. Tale scelta e motivata dal fatto che si vuole controllare la forza esercitata dall’at-tuatore sui sincronizzatori.Come mostrato in Fig.1.16, nel suo moto il pistone intercetta i bicchierini e li trascina conse. Cosı facendo, l’area su cui agiscono le pressioni, all’interno delle due camere, divienefunzione della posizione dell’innesto. In pratica quando il pistone non si trova in posizionecentrale l’area su cui agisce la pressione di una delle due camere diviene la somma di quel-la del pistone piu quella dei bicchierini, mentre l’altra resta uguale a quella del pistone.

16 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Grazie a cio e possibile effettuare il centraggio del pistone, da qualunque punto si trovi,semplicemente alimentando entrambe le camere con la stessa pressione. Inoltre una voltacentrato, per spostare il pistone in una delle due direzioni, basta aumentare la pressionein una camera e diminuirla nell’altra. Nella direzione positiva, si ha l’ingranamento dellemarce pari, dispari nell’altra direzione.La soluzione meccanica adottata permette di non dover dipendere, nella fase di centrag-gio, da un controllo esterno di posizione che porterebbe, inevitabilmente, ad un calonell’affidabilita complessiva del sistema.
Pinn2
Pinn1 Pinn1
Pinn2 Pinn2
Pinn1
-
-
Figura 1.16: Attuatore innesto nelle tre posizioni di equilibrio: centraggio, innesto marcepari e innesto marce dispari.
Modello dell’Attuatore di Innesto
L’attuatore viene modellato attraverso tre masse mobili, soggette alle forze di pressione,agli attriti e alle reazioni vincolari. Tali masse interagiscono attraverso forze elastichequando vengono a contatto. Le masse sono quella del pistone e quelle dei due bicchierinii quali vengono considerati identici.Le equazioni che descrivono il moto delle masse prese in esame sono:
Fpist = mpist ypist + bvpist ypist + bcpist sgn(ypist) + Kpist(ypist, ybic1, ybic2) + Fsnc(ypist)Fbic1 = mbic ybic1 + bvbic ybic1 + bcbic sgn(ybic1) + Kbic1(ybic1, ypist)Fbic2 = mbic ybic2 + bvbic ybic2 + bcbic sgn(ybic2) + Kbic2(ybic2, ypist)Fpist = Pinn1 Apist − Pinn2 Apist
Fbic1 = Pinn1 Abic
Fbic2 = −Pinn2 Abic
(1.18)In cui :

1.4. ATTUATORI DEL CAMBIO 17
– Apist Abic sono le aree del pistone, e dei bicchierini, su cui agisce la pressione;
– Pinn1 Pinn2 sono le pressioni all’interno delle camere dell’attuatore;
– mpist mbic sono le masse del pistone e dei bicchierini;
– bvpist bvbic sono gli attriti viscosi;
– bcpist bcbic sono gli attriti coulombiani;
– Fpist Fbic1 Fbic2 sono le forze che agiscono sul pistone e sui bicchierini;
– Kpist Kbic1 Kbic2 sono funzioni che rappresentano le reazioni vincolari;
– Fsnc e la forza esercitata dai sincronizzatori sull’innesto.
Definendo le matrici:
Pinn =
[P1
P2
]
, Qinn =
[Q1
Q2
]
, vinn =
vpist
vbic1
vbic2
,
yinn =
ypist
ybic1
ybic2
, Finn =
Fpist
Fbic1
Fbic2
, Fsnc =
Fsnc
00
,
ATinn =
Apist −Apist
Abic 00 −Abic
, M-1inn =
m-1pist 0 0
0 m-1bic 0
0 0 m-1bic
,
Bvinn =
bvpist 0 00 bvbic 00 0 bvbic
, Bcinn =
bcpist 0 00 bcbic 00 0 bcbic
.
E possibile rappresentare le equazioni in forma matriciale:
Finn = Minn · yinn + Bvinn · yinn + Bcinn sgn(yinn) + Kinn(yinn) + FSNC
Finn = ATinn · Pinn
(1.19)
Da cui si ottiene lo schema POG mostrato in Fig.1.17.
La matrice di funzioni Kinn(yinn) rappresenta l’azione delle reazioni vincolari sullemasse e delle interazioni fra le stesse quando vengono a contatto. Tali sono megliorappresentate nello schema di Fig. 1.18 oppure dall’espressione matriciale:
Kinn(yinn) = K1(yinn) + TT
inn · K2(Tinn · yinn)
ove:

18 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Pinn
Qinn
ATinn
- -
Ainn
-
M-1inn
1s
?
?
?
yinn
-
6
Bv
6
- -
6
Bc sgn()
6
- - - -6
1s
6
Kinn(·)
6
FSNC
Figura 1.17: Modello POG dell’attuatore di innesto.
K1(·) =
0 0 0
0 -6 0
0 0 -6
, K2(·) =
-6 0
0 -6
,
Tinn =
[1 −1 01 0 −1
]
, Tinn · yinn =
[ypist − ybic1
ypist − ybic2
]
.
Kinn(yinn)
yinn
6
K1(·)
6
- - - Tinn-
TTinn
K2(·)
6
6
-
Figura 1.18: Rappresentazione delle reazioni vincolari.
Le reazioni vincolari sono modellate come molle di elevata rigidita, le quali agisconosolo quando la posizione della massa, soggetta a vincolo, supera quella del finecorsa. Intale caso forniscono una forza che si oppone all’ulteriore avanzamento nella direzioneproibita. Analogamente le forze di interazione sono modellate con molle che agiscono infunzione della posizione relativa delle masse interagenti.La forza Fsnc e la forza esercitata dai sincronizzatori sull’attuatore d’innesto. Nel caso

1.4. ATTUATORI DEL CAMBIO 19
il cambio marcia venga effettuato a macchina ferma, tale forza e dovuta all’azione di unnottolino che fornisce una forza per mantenere la marcia ingranata o in posizione centrale .Nel caso di cambio marcia in movimento il sincronizzatore fornisce una forza che impedisceal pistone di avanzare finche le inerzie da ingranare non acquisiscono la stessa velocitaangolare (vedi Cap. 2.3 ).
1.4.2 Attuatore di Selezione
In Fig. 1.19 e mostrato uno schema meccanico di principio dell’attuatore di selezione.
Psel3 Psel1 Psel2
Bicchierini
Separatore
Pistone? ? ?
o
Figura 1.19: Schema meccanico dell’attuatore di selezione.
Come si vede la struttura e analoga a quella dell’attuatore di innesto tranne per la pre-senza di una terza camera di attuazione e di un separatore. Le valvole sono proporzionaliin portata e sono eccitate con segnali booleani ovvero aperto/chiuso. Tale scelta deri-va dalla necessita di portare la selezione il piu velocemente possibile nella posizione dilavoro richiesta, in modo da poter proseguire con la fase seguente del cambio marcia,ovvero l’innesto del nuovo rapporto. Durante la selezione di una delle marce di avan-zamento (1-6), la terza valvola viene sempre alimentata, pertanto il separatore rimanenella posizione in Fig. 1.20.C, facendo da finecorsa per il pistone e impedendo che questiselezioni la retromarcia. Le posizioni di lavoro sono mostrate in Fig. 1.20. Esse vengonoraggiunte, qualunque sia la posizione iniziale del pistone, con le configurazioni dei segnalidi eccitazione delle valvole mostrate in Tab. 1.4.2.
Modello dell’Attuatore di Selezione
L’attuatore viene modellato attraverso quattro masse mobili, soggette alle forze di pres-sione, agli attriti e alle reazioni vincolari. Tali masse interagiscono quando vengono acontatto. Le masse sono quella del pistone, quelle dei due bicchierini che vengono con-siderati identici, e quella del separatore.Le equazioni, che descrivono il moto delle masse, sono:

20 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
Psel3 Psel1 Psel2
Psel3 Psel1 Psel2 RM
RM1
2
3
4
5
6
1
2
3
4
5
6
? ? ?
6? ?
Psel2
Psel3 Psel1 Psel2
Psel3 Psel1
RM
1
2
3
4
5
6
1
2
3
4
5
6RM
? ?6
6?
6
Figura 1.20: Posizioni di lavoro dell’attuatore di selezione.
Isel1 Isel2 Isel3 Rango1 0 1 1-21 1 1 3-40 1 1 5-60 1 0 RM
Figura 1.21: Tabella delle configurazioni correnti di eccitazione delle valvole di selezioneper selezionare il rango di lavoro.

1.4. ATTUATORI DEL CAMBIO 21
Fpist = mpist xpist + bvpist xpist + bcpist sgn(xpist) + Kpist(xpist, xbic1, xbic2) + Finn(ypist)Fbic1 = mbic xbic1 + bvbic xbic1 + bcbic sgn(xbic1) + Kbic1(xbic1, xpist, xsep)Fbic2 = mbic xbic2 + bvbic xbic2 + bcbic sgn(xbic2) + Kbic2(xbic2, xpist)Fsep = msep xsep + bvsep xsep + bcsep sgn(xsep) + Ksep(xsep, xbic1)Fpist = Psel1 Apist − Psel2 Apist
Fbic1 = Psel1 Abic
Fbic2 = −Psel2 Abic
Fsep = Psel3 Asep3 − Psel2 Asep2
(1.20)
In cui :
– Fpist Fbic1 Fbic2 Fsep sono le forze che agiscono sul pistone, sui bicchierini e sulseparatore;
– Apist Abic sono le aree del pistone, e dei bicchierini, su cui agisce la pressione;
– Asep2 Asep3 sono le aree del separatore, su cui agisce la pressione della camera 2 e 3rispettivamente;
– Psel1 Psel2 e Psel3 sono le pressioni all’interno delle camere dell’attuatore;
– mpist mbic msep sono le masse del pistone, dei bicchierini e del separatore;
– bvpist bvbic bvsep sono gli attriti viscosi;
– bcpist bcbic bcsep sono gli attriti coulombiani;
– Kpist Kbic1 Kbic2 Ksep(xsep) sono funzioni che rappresentano le reazioni vincolari;
– Finn(ypist) e la forza esercitata dall’innesto sulla selezione.
Definendo le matrici:
Psel =
Psel1
Psel2
Psel3
, Qsel =
Qsel1
Qsel2
Qsel3
, vsel =
vpist
vbic1
vbic2
vsep
,
xsel =
xpist
xbic1
xbic2
xbic2
, Fsel =
Fpist
Fbic1
Fbic2
Fbic2
, Finn =
Finn
00
,

22 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
ATsel =
Apist −Apist 0Abic 0 0
0 −Abic 00 −Asep2 −Asep3
, M-1sel =
m-1pist 0 0 00 m-1
bic 0 00 0 m-1
bic 00 0 0 m-1
sel
,
Bvsel =
bvpist 0 0 00 bvbic 0 00 0 bvbic 00 0 0 bvsep
, Bcsel =
bcpist 0 0 00 bcbic 0 00 0 bcbic 00 0 0 bcsep
.
E possibile rappresentare le equazioni in forma compatta:
Fsel = Msel · xsel + Bvsel · xsel + Bcsel sgn(xsel) + Ksel(xsel) + Finn
Fsel = ATsel · Psel
(1.21)
Di cui lo schema POG mostrato in Fig. 1.22.
Psel
Qsel
ATsel
- -
Asel
-
M-1sel
1s
?
?
?
xsel
-
6
Bvsel
6
- -
6
Bcsel sgn()
6
- - - -6
1s
6
Ksel(·)
6
Finn
Figura 1.22: Modello POG dell’attuatore di selezione.
La matrice di funzioni Ksel(xsel) rappresenta l’azione delle reazioni vincolari sullemasse e delle interazioni fra le stesse quando vengono a contatto. Tali sono megliorappresentate nello schema di Fig. 1.23 oppure dall’ espressione matriciale:
Ksel(xsel) = K1sel(xsel) + TT
sel · K2sel(Tsel · xsel)
ove
K1sel(·) =
0 0 0 0
0 -6 0 0
0 0 -6 0
0 0 0 -6
K2sel(·) =
-6 0 0
0 -6 0
0 0 -6
Tsel =
1 −1 0 01 0 −1 0
−1 0 0 1
Tsel · xsel =
xpist − xbic1
xpist − xbic2
xsep − xbic1

1.4. ATTUATORI DEL CAMBIO 23
Ksel(xsel)
xsel
6
K1sel(·)
6
- - - Tsel-
TTsel
K2sel(·)
6
6
-
Figura 1.23: Rappresentazione delle reazioni vincolari.
La forza Finn e tale da permettere alla selezione di muoversi solamente quando l’innestosi trova in posizione centrale. Tale forza e stata per semplicita implementata aumentan-do il coefficiente di attrito statico del pistone di selezione in funzione della posizionedell’attuatore di innesto come definito di seguito:
bcpist = bcpist se |ypist| ≤ ycentr
bcpist = ∞ altrimenti(1.22)
ove:
– ypist e la posizione del pistone di innesto;
– ycentr e il valore della posizione dell’innesto entro il quale la selezione puo muoversi;

24 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
1.5 Attuatore Frizione
In un sistema automatico di cambio marcia, l’attuatore della frizione svolge il compitoche, in un autovettura con cambio manuale, e gestito dal conducente attraverso l’azion-amento del pedale analogo. Esso varia l’apertura dei dischi della frizione modulandol’attrito statico fra essi e dunque la coppia massima trasmissibile dal motore al resto dellatrasmissione. L’attuatore tuttavia non agisce direttamente sui dischi ma bensı sulla mollache li tiene compressi che viene comunemente detta molla a tazza per la sua forma carat-teristica. Il pistone incrementando la sua posizione, riduce la forza esercitata da questa,e di conseguenza l’attrito statico fra i dischi. L’andamento dell’attrito statico, fra i dischidella frizione, in funzione della posizione dell’attuatore viene detta curva di trasmissibilita(vedi Cap. 2.2). La giusta modulazione della coppia trasmessa risulta fondamentale allospunto (avvio del moto), e in fase di ripresa dopo un cambio marcia, in modo da evitarelo spegnimento del motore, oscillazioni o bruschi contraccolpi.A causa della delicatezza di tale operazione la centralina Marelli esegue un controllo sullaposizione dell’attuatore in modo da inseguire un riferimento da essa generato funzionedella differenza fra la velocita angolare del motore e una velocita obbiettivo. La valvolae stata dunque scelta del tipo proporzionale in portata cosı da avere il controllo sullavelocita del pistone e dunque sulla sua posizione.
1.5.1 Modellizzazione dell’Attuatore Frizione
Lo schema fisico del sistema di attuazione della frizione e mostrato in Fig. 1.24.
Contr.Ifr
Valvola
Kmt
P R
xfr
F
Figura 1.24: Schema di principio del sistema fisico dell’attuatore della frizione.
Si tratta di un sistema tipo massa-molla descritto dall’equazione dinamica:

1.5. ATTUATORE FRIZIONE 25
Ffr = Mfr xfr + bvfr xfr + bcfr sgn(xfr) + Kmr(xfr − xfr0) + Kmt(xfr)Ffr = Afr Pfr
(1.23)
Ove:
– Mfr e la massa del pistone della frizione;
– Ffr e la forza che agisce sul pistone;
– Pfr e la pressione nella camera dell’attuatore;
– Afr e l’area su cui agisce la pressione;
– bvfr e l’attrito viscoso;
– bcfr e l’attrito coulombiano;
– Kmt e la forza resistente della molla a tazza;
– Kmr e la forza della molla di ritenzione;
– xfr e xfr0 sono le posizioni attuale e di riposo del pistone.
L’andamento della forza esercitata dalla molla a tazza sul pistone (Kmt(xfr)) dipendedal livello di usura (U) della stessa, espresso in mm.
Lo schema POG dell’attuatore frizione e mostrato in Fig. 1.25.
Ffr-
1
Mfr
1s
?
?
?
vfr
-
6
bvfr
6
- -
6
bcfrsgn()
6
- - - -6
1s
6
Kmr
6
- -6
1s
6
Kmt(·)
6
0
vfr
xfr xfr
Figura 1.25: Modello POG dell’attuatore frizione.

26 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI
1.6 Semplificazioni dei Modelli presentati
I modelli presentati sono i piu completi tuttavia nelle simulazioni e risultato necessario oconveniente semplificarli in alcune loro parti.
1.6.1 Semplificazione della Parte Idraulica
Per migliorare l’efficenza delle simulazioni si e reso necessario eliminare il modello del tubo.Si e considerata la sola capacita idraulica del liquido presente nei condotti, trascurandogli effetti induttivi e resistivi nonche geometrici degli stessi, sommandola a quella giapresente negli attuatori. Anche il modulo di comprimibilita Bulk e stato diminuito pertenere conto dell’elasticita dei tubi. L’aumento complessivo della capacita idraulica hareso trascurabile la variazione della stessa dovuta al moto degli attuatori ed e quindi statapresa di valore costante. Pertanto la parte idraulica si e ridotta al mostrato nello schemaPOG di Fig. 1.26
[Palim
Pscar
]
[Qalim
Qscar
]
-
Q(xsp,·)
?
?
-
[1
1
]
[1 1
]- -
-
1Colio
1s
6
6
6
-
Patt
Qatt
Qout
Pout
Figura 1.26: Modello POG della parte idraulica semplificata.
1.6.2 Modello Semplificato dell’Attuatore di Innesto
Durante il moto del pistone, uno dei due bicchierini rimane solidale ad esso mentre l’altroresta fermo in posizione centrale, come si puo dedurre in Fig 1.16.B e Fig 1.16.C. Pertantosi e deciso di modellare il sistema con una sola massa, pari alla somma del pistone e diun bicchierino, le cui aree variano in funzione della posizione della stessa. Le equazioniche descrivono il moto della massa considerata sono:
Finn = minn yinn + bvinn yinn + bcinn sgn(yinn) + Kinn(yinn) + Fsnc(yinn)Finn = Pinn1 Ainn1(yinn) − Pinn2 Ainn2(yinn)
(1.24)

1.6. SEMPLIFICAZIONI 27
Ove le aree relative alle due camere, Ainn1 e Ainn2 sono funzioni della posizionedell’innesto attraverso le seguenti relazioni:
Ainn1 =
Apist + Abic per yinn < 0Apist per yinn ≥ 0
Ainn2 =
Apist + Abic per yinn > 0Apist per yinn ≤ 0
(1.25)
Lo schema POG dell’attuatore di innesto semplificato viene mostrato in Fig. 1.27.
Pinn
Qinn
ATinn
- -
Ainn
-
m-1inn
1s
?
?
?
yinn
-
6
bvinn
6
- -
6
bcinn sgn()
6
- - - -6
1s
6
Kinn(·)
6
Fsnc
Figura 1.27: Modello POG dell’attuatore di innesto semplificato.
1.6.3 Modello Semplificato dell’Attuatore Selezione
Per lo stesso motivo dell’ innesto si e deciso di modellare la selezione con due sole massemobili una data dalla somma di quella del pistone e di un bicchierino, e l’altra il separatore.Le equazioni che ne descrivono il moto sono:
Fsel = msel xsel + bvsel xsel + bcsel sgn(xsel) + Ksel(xsel) + Finn(yinn)Fsep = msep xsep + bvsep xsep + bcsep sgn(xsep) + Ksep(xsep)Fsel = Psel1 Asel1(xsel) − Psel2 Asel2(xsel)Fsep = Psel3 Asep3 − Psel2 Asep2
(1.26)
Ove le aree relative alle due camere, Asel1 e Asel2 sono funzioni della posizione dellaselezione attraverso le seguenti relazioni:
Asel1 =
Apist + Abic per xsel < 0Apist per xsel ≥ 0
Asel2 =
Apist + Abic per xsel > 0Apist per xsel ≤ 0
(1.27)

28 CAPITOLO 1. CAMBIO AUTOMATICO MAGNETI MARELLI

Capitolo 2
Descrizione e Modellazione delSistema di Trasmissione di unAutovettura
Il sistema di trasmissione di un autovettura e composta dai seguenti elementi:
• motore;
• frizione con parastrappi;
• cambio e differenziale;
• semiassi e pneumatici;
• dinamica veicolo.
Lo schema a blocchi del sistema di trasmissione che viene considerato e mostrato inFig. 2.1.
Engineq Clutch
Torsional-Dumper
GearboxDifferential
AxlesWheels
VehicleC1 C3C3
C4ω1 ω3
ω4
Fm
vv
Figura 2.1: Schema a blocchi della trasmissione di una autovettura.
Ove:
– θ e la posizione della valvola a farfalla dell’aspirazione;
– C1 e la coppia utile fornita dal motore;
– ω1 e la velocita angolare del motore;
– C3 e la coppia all’albero primario del cambio;
– ω3 e la velocita angolare albero primario del cambio;
29

30 CAPITOLO 2. SISTEMA DI TRASMISSIONE
– C4 e la coppia ai semiassi;
– ω4 e la velocita angolare dei semiassi;
– vv e la velocita del veicolo;
– Fm e la forza motrice scaricata a terra.
Nei paragrafi successivi i vari componenti verranno descritti e modellati nel dettaglio.
2.1 Motore
Il modello del motore viene fornito assieme a quello della centralina Marelli. Esso ricevei segnali di controllo della stessa, fra i quali anticipo e posizione della valvola a farfalla, egenera la coppia utile applicata all’albero motore ovvero C1.
2.2 Frizione e Parastrappi
Lo scopo della frizione e di controllare e modulare la coppia trasmessa dal motore al restodella trasmissione, attraverso l’attrito generato dal contatto dei dischi omonimi. Un discoe solidale all’albero motore, mentre l’altro e solidale all’albero primario del cambio. I dischivengono tenuti compressi da una molla a tazza. Come si mostra in Fig. 2.2 e Fig. 2.3,l’attuatore frizione si oppone alla forza generata dalla molla diminuendo il carico gravantesui dischi che si staccano. L’attrito statico (k12) fra l’albero motore e l’albero primario delcambio, e pertanto funzione della posizione dell’attuatore frizione; tale funzione e dettacurva di trasmissibilita della frizione. Un andamento ideale di tale curva e mostrato inFig. 2.5. Il parastrappi e un elemento elastico, in genere una molla a torsione, inseritofra il disco di frizione e l’albero primario del cambio al fine di ottenere lo smorzamentodei picchi di coppia generati dal motore, o riportati su di esso dalla trasmissione. Lacaratteristica elastica tipica delle molle a torsione viene riportata in Fig. 2.4 . Quando laposizione angolare del disco della frizione rispetto a quella dell’albero primario del cambio,θd = θ2 − θ3, e piccola la caratteristica φ(θd) e praticamente lineare; quando invece θd
e maggiore di un determinato valore (o minore di un valore minimo) la caratteristicadiventa praticamente verticale, a causa della lunghezza finita della molla.

2.2. FRIZIONE E PARASTRAPPI 31
Figura 2.2: Sezione di una frizione innestata.
Figura 2.3: Sezione di una frizione disinnestata.

32 CAPITOLO 2. SISTEMA DI TRASMISSIONE
φe(Nm)
Coppia elastica
∆θd(gradi)0
Figura 2.4: Rappresentazione della caratteristica elastica di una molla a torsione.
Posizione frizione [mm]
Attr
ito [N
m]
00 1 2-1-2 3 4
1
2
3
4
5
6
7
8
9
Figura 2.5: Curva di trasmissibilita di una frizione ideale.

2.2. FRIZIONE E PARASTRAPPI 33
Fn Fn
C1 C3ω1
ω2
ω3
b1
b2
b3
J1 J2 J3
τ12
τ21
τ23
τ32
Figura 2.6: Rappresentazione schematica di una frizione con parastrappi.

34 CAPITOLO 2. SISTEMA DI TRASMISSIONE
Una rappresentazione schematica della frizione con parastrappi e mostrata in Fig. 2.6.Essa viene rappresentata mediante tre inerzie J1, J2 e J3; le prime due si scambianocoppia attraverso l’attrito statico (k12(xfr)) generato dai dischi frizione, funzione dellaposizione dell’attuatore omonimo, mentre la coppia scambiata dalla seconda e dalla terzae principalmente dovuta alla torsione del parastrappi. Tuttavia in parallelo a quest’ultimoagisce un attrito coulombiano (k23) di valore costante appositamente inserito con lo scopodi smorzare le oscillazione della molla stessa. E proprio a causa della presenza di dueattriti coulombiani in serie che l’elemento considerato risulta complesso da simulare.

2.2. FRIZIONE E PARASTRAPPI 35
2.2.1 Modellazione dell’Attrito Coulombiano
Per modellare la frizione e dunque necessario poter simulare in maniera corretta l’attritocoulombiano. Tale attrito fornisce una forza resistente al moto costante (k12), e dunqueindipendente dalla velocita relativa delle inerzie (o masse se nel campo translazionale) chesono a contatto. Tuttavia se la velocita relativa va a zero i due elementi divengono unosolo e rimangono attaccati fin tanto che la coppia (o forza) scambiata dai due non supera ilvalore definito dal coefficiente di primo distacco (k12pd). Pertanto tale coefficiente definiscela coppia massima trasmissibile fra due inerzie a contatto. Per meglio comprendere ilproblema consideriamo il caso in Fig. 2.7.
6 6 6
?w1C1 w2 C2
Figura 2.7: Rappresentazione schematica di due inerzie a contatto.
Le equazioni che descrivono il sistema sono:
J1 ω1 = C1 − b1 ω1 − k12 sgn(ω1 − ω2)J2 ω2 = −C2 − b2 ω2 + k12 sgn(ω1 − ω2)
(2.1)
posto:
Cb1 = C1 − b1 ω1
Cb2 = −C2 − b2 ω2(2.2)
si ha: J1 ω1 = Cb1 − k12 sgn(ω1 − ω2)J2 ω2 = Cb2 + k12 sgn(ω1 − ω2)
(2.3)
Lo schema POG relativo e mostrato in Fig. 2.8.Tuttavia tali equazioni sono valide soltanto se ω1−ω2 6= 0. Nel caso in cui ω1−ω2 = 0
e la coppia trasmessa e minore del coefficiente di primo distacco k12pd, il sistema divienedescritto dall’equazione:
(J1 + J2) ω12 = Cb1 + Cb2 (2.4)
di cui lo schema POG di Fig. 2.9.

36 CAPITOLO 2. SISTEMA DI TRASMISSIONE
Cb1-
1
J1
1s
?
?
?
ω1
-
-
k12 sgn()
6
6
-
-
1
J2
1s
?
?
?
ω2
-
Cb2
Figura 2.8: Inerzie non in sliding.
Cb1-
1J1+J2
1s
?
?
?
ω12
-
Cb2
Figura 2.9: Inerzie in sliding.

2.2. FRIZIONE E PARASTRAPPI 37
Pertanto nel caso in cui la coppia scambiata sia minore di k12pd le due inerzie sicomportano come se fossero una sola e l’ordine delle equazioni che descrivono il sistemadiminuisce di una unita. In tale condizione si dice che le inerzie sono in sliding.Bisogna dunque creare un algoritmo capace di simulare adeguatamente il comportamentodel sistema. Note, all’istante di simulazione attuale, le velocita angolari delle due inerzie(ω1 e ω2) e le coppie fornite alle stesse (Cb1 e Cb2), l’algoritmo deve fornire, agli integratoripresenti nello schema SIMULINK, le accelerazioni angolari ω1 e ω2 appropriate.Si possono presentare due casi:
1. ω1 − ω2 6= 0 in questo caso le inerzie sicuramente non sono in sliding pertanto leaccelerazioni si ricavano dall’Eq. (2.3), ovvero:
ω1 =Cb1 − k12 sgn(ω1 − ω2)
J1
ω2 =Cb2 + k12 sgn(ω1 − ω2)
J2
(2.5)
2. ω1 − ω2 = 0 in questo caso nell’istante di simulazione corrente le inerzie sono insliding ma bisogna vedere se la condizione si mantiene anche nell’istante successivo.Per far cio bisogna calcolare la coppia che le due inerzie si trasmettono (o meglio chesi trasmetterebbero se l’attrito fosse sufficiente a mantenerle unite) e confrontarlacon il coefficiente di primo distacco k12pd. Tale coppia, che definiamo come τ12, siricava risolvendo le equazioni:
ω1 =Cb1 − τ12
J1
ω2 =Cb2 + τ12
J2
ω1 = ω2
(2.6)
da cui
τ12 =J2Cb1 − J1Cb2
J1 + J2
(2.7)
Ora se:
|τ12| ≤ k12pd allora l’attrito e abbastanza elevato da permettere alle inerzie di restareunite. Pertanto agli integratori verra fornito lo stesso valore di accelerazionepari a:
ω1 = ω2 =Cb1 + Cb2
J1 + J2
(2.8)
|τ12| > k12pd nell’ istante successivo di simulazione le due inerzie si staccano. Il segnodella forza di attrito risulta lo stesso di τ12, pertanto:
ω1 =Cb1 − k12 sgn(τ12)
J1
ω2 =Cb2 + k12 sgn(τ12)
J2
(2.9)

38 CAPITOLO 2. SISTEMA DI TRASMISSIONE
Din.Comune
1∆ s
?
?z1
-- T1-
TT1
CbT1
-
ω
?
-?
Cb
T2
- TT2
-CbT2
Dinamiche Relative
-
1J1 J2
1s
?
?
?
z2
-
k12 sgn(z2)
6
6
-
Figura 2.10: Schema POG del sistema trasformato.
Strade alternative: la trasformazione
Una via alternativa alla risoluzione del problema e quella di utilizzare una matrice ditrasformazione in modo da esplicitare, nello spazio trasformato, una variabile che rappre-senti la differenza delle velocita angolari.
Le equazioni possono essere riscritte in forma matriciale come segue:
ω = J-1(Cb − DTk12 sgn(D · ω)) (2.10)
ove:
ω =
[ω1
ω2
]
, Cb =
[Cb1
Cb2
]
, DT =
[1
−1
]
, J =
[J1 00 J2
]
.
Si utilizza una trasformazione di congruenza ove la matrice di trasformazione e:
T =
[1 J2
∆
1 −J1
∆
]
, T-1 =
[J1
∆J2
∆
1 −1
]
, TT =
[1 1
J2
∆−J1
∆
]
.
con ∆ = J1 + J2.Pertanto il sistema trasformato diviene:
z = J-1
T (CbT − (DT)T k12 sgn(DTz)) (2.11)
ove:
z = T-1ω =
[J1ω1+J2ω2
∆
ω1 − ω2
]
, CbT = TTCb =
[Cb1 + Cb2
J2Cb1 − J1Cb2
∆
]
, (DT)T =
[01
]
,
JT = TTJT =
[∆ 00 J1J2
]
, J-1T =
[1∆
00 1
J1J2
]
.
lo schema POG del sistema trasformato e presentato in Fig. 2.10. Esso si compone didue sottosistemi:

2.2. FRIZIONE E PARASTRAPPI 39
– Dinamica comune: e il sottosistema relativo alla variabile trasformata z1 = J1ω1+J2ω2
∆
che rappresenta la velocita media ponderata dai momenti di inerzia. L’equazioneche lo governa e:
z1 =CbT1
∆(2.12)
pertanto la dinamica comune non e influenzata dall’attrito coulombiano.
– Dinamica relativa: e il sottosistema inerente alla variabile trasformata z2 = ω1 −ω2
che rappresenta la velocita relativa delle inerzie. L’equazione che lo governa e:
z2 =CbT2 − k12 sgn(z2)
J1J2
(2.13)
ovviamente l’equazione vale se le inerzie non sono in sliding, in caso contrario, percherimangano in tale stato bisogna verificare che |CbT2| sia minore di k12pd. Infatti CbT2
rappresenta la coppia che si scambierebbero le inerzie se restassero in sliding, comesi puo facilmente verificare confrontando la sua espressione con quella di τ12 calco-lata in precedenza. La differenza di velocita angolare e dunque influenzata dalladifferenza fra la coppia scambiata in condizione di sliding e quella effettiva.
Sebbene tale trasformazione sia formalmente corretta essa puo provocare problemi infase di simulazione. Infatti per riconvertire il vettore trasformato z nella forma di partenzaω si necessita di un operazione di prodotto matriciale con la matrice T.
ω = T · z (2.14)
Le variabili ω1 e ω2 vengono dunque calcolate dalla velocita media e da quella relativa.Nel calcolo tuttavia, a causa della rappresentazione finita dei numeri sul calcolatore, siintroducono degli errori di approssimazione.Per esempio a causa di tali errori non viene rispettata l’uguaglianza fra le velocita angolari,anche nel caso sia z2 = 0. Inoltre non vengono rispettate le condizioni iniziali nulle sullevelocita anche se le coppie applicate lo sono. Tutto cio puo comportare problemi simulativise in serie alle inerzie vi sono elementi con rigidita elevata.
2.2.2 Modello della Frizione con Parastrappi
La presenza del parastrappi complica il problema a causa dell’attrito statico presente sullostesso. Considerando lo schema in Fig. 2.6 le equazioni che descrivono il sistema, quandole inerzie non sono in sliding, sono:
J1 ω1 = C1 − b1 ω1 − k12 sgn(ω1 − ω2)J2 ω2 = −b2 ω2 + k12 sgn(ω1 − ω2) − k23 sgn(ω2 − ω3) − φe(∆θd)J3 ω3 = −C3 − b3 ω3 + k23 sgn(ω2 − ω3) + φe(∆θd)
˙∆θd = ω2 − ω3
(2.15)
dove compaiono le seguenti variabili:

40 CAPITOLO 2. SISTEMA DI TRASMISSIONE
– J1, J2, J3 rispettivamente momento d’inerzia dell’albero motore compreso il volano, del discodi frizione compreso il parastrappi e dell’albero primario del cambio;
– C1, C3 coppia utile sull’albero motore e coppia resistente sull’albero primario del cambio;
– ω1, ω2, ω3 rispettivamente velocita angolare del motore, del parastrappi e dell’albero primariodel cambio;
– b1, b2, b3 attrito lineare sull’albero motore, sul parastrappi e sull’albero primario del cambio;
– k12, k23 termini di attrito coulombiano sul disco di frizione e sul parastrappi;
– φe = φe(∆θd) coppia elastica generata dal parastrappi come funzione della posizionerelativa ∆θd = θ2 − θ3.
Il sistema puo essere riscritto in forma matriciale nel seguente modo:
J ω = C − Bω − DT φe(
∆θd︷︸︸︷
D θ )︸ ︷︷ ︸
CB
−DT K sgn(
w︷︸︸︷
Dω)︸ ︷︷ ︸
E
↔ J ω = CB − E (2.16)
In cui:
C =
C1
0−C3
, θ =
θ1
θ2
θ3
, ω =
ω1
ω2
ω3
=
θ1
θ2
θ3
, ∆θd =
[θ1 − θ2
θ2 − θ3
]
J =
J1 0 00 J2 00 0 J3
, B =
b1 0 00 b2 00 0 b3
, D =
[1−1 00 1 −1
]
, K =
[k12(xfriz) 0
0 k23
]
, φe =
[0 00 φe()
]
w =
[ω1 − ω2
ω2 − ω3
]
, CB =
CB1
CB2
CB3
, E =
k12 sgn(ω1 − ω2)−k12 sgn(ω1 − ω2) + k23 sgn(ω2 − ω3)
−k23 sgn(ω2 − ω3)
Il sistema viene rappresentato nello schema POG di Fig. 2.11.La parte di interesse e quella relativa agli attriti statici che e governata dalle seguenti
equazioni:
ω1 = J -11 (Cb1 − k12 sgn(ω1 − ω2))
ω2 = J -12 (Cb2 + k12 sgn(ω1 − ω2) − k23 sgn(ω2 − ω3))
ω3 = J -13 (Cb3 + k23 sgn(ω2 − ω3))
(2.17)
Come nel caso precedente si deve costruire un algoritmo per tenere conto degli attritistatici e fornire le giuste accelerazioni agli integratori. Per semplicita supponiamo che ilcoefficiente di primo distacco risulti uguale all’attrito stesso (K12pd = K12 e K23pd = K23).In funzione della differenza fra le velocita angolari dei vari elementi, si possono presentarequattro casi che di seguito andremo ad analizzare:
1. ω1 − ω2 6= 0 e ω2 − ω3 6= 0 in questo caso le inerzie sicuramente non sono in slidingpertanto le accelerazioni sono le stesse dell’Eq. (2.17).

2.2. FRIZIONE E PARASTRAPPI 41
φe
0
-
6
1s
6
φe()
6
-
∆θd
CB
D
-DT- ?C
- -
6
B
6
-
J-1
1s
?
?
?
ω -- D -
w
DTE
K sgn()
6
6
-
6xfriz
Figura 2.11: Schema POG della frizione con parastrappi.
2. ω1 − ω2 6= 0 e ω2 − ω3 = 0 in questo caso la coppia scambiata fra J1 e J2 valek12(xfriz) sgn(ω1 − ω2) e si ricade nel caso di due inerzie in sliding (J2 e J3)
3. ω1 − ω2 = 0 e ω2 − ω3 6= 0 in questo caso la coppia scambiata fra J2 e J3 valek23 sgn(ω2 − ω3) e si ricade nel caso di due inerzie in sliding (J1 e J2)
4. ω1−ω2 = 0 e ω2−ω3 = 0 nell’istante di simulazione corrente le inerzie sono tutte e trein sliding ma bisogna vedere se la condizione si mantiene anche nell’istante successivooppure se qualcuna o tutte escono da tale condizione. Calcoliamo gli attriti necessariaffinche la condizione attuale si mantenga, ovvero le coppie scambiate dalle inerziese restassero in sliding. Tali coppie dette τ12 e τ23 si ottengono risolvendo il sistema:
ω1 =Cb1 − τ12
J1
ω2 =Cb2 + τ12 − τ23
J2
ω3 =Cb3 + τ23
J3
ω1 = ω2
ω2 = ω3
(2.18)
da cui si ricavano le espressioni
τ12 =(J2 + J3)Cb1 − J1Cb2 − J1Cb3
∆
τ23 =J3Cb1 + J3Cb2 − (J1 + J2)Cb3
∆
(2.19)
Ora se valgono le condizioni: |τ12| ≤ k12pd e |τ23| ≤ k23pd allora gli attriti sono ab-bastanza elevati da permettere alle inerzie di restare unite. Pertanto agli integratoriverra fornito lo stesso valore di accelerazione pari a:
ω1 = ω2 = ω3 =Cb1 + Cb2 + Cb3
J1 + J2 + J3
(2.20)
in caso contrario una coppia di inerzie si stacca. Per capire quale bisogna e consid-erare le varie ipotesi e verificarene la validia.

42 CAPITOLO 2. SISTEMA DI TRASMISSIONE
• Supponiamo che all’istante successivo si stacchino le inerzie J1 e J2. pertantosi avra:
ω1 6= ω2
ω2 = ω3(2.21)
Per ricavare la coppia scambiata da J2 e J3 si deve dunque risolvere il sistema:
ω2 =Cb2 + k12sgn(ω1 − ω2) − τ23
J2
ω3 =Cb3 + τ23
J3
ω2 = ω3
(2.22)
da cui si ottiene:
τ23 =J3Cb2 − J2Cb3
J2 + J3
+J3
J2 + J3
k12 sgn(ω1 − ω2) (2.23)
Ora se:|τ23(ω1 > ω2)| ≤ K23pd (2.24)
allora la condizione e verificata e le inerzie si staccano con ω1 > ω2. Invece sese:
|τ23(ω1 < ω2)| ≤ K23pd (2.25)
allora la condizione e verificata e le inerzie si staccano con ω1 < ω2.ovviamente se nessuna delle condizioni sopra risulta verificata si deve ipotizzareun altro caso.
• Supponiamo che all’istante successivo si stacchino le inerzie J2 e J3. Questocaso e analogo a quello sopra considerato.
• Se nessuna delle ipotesi sovraesposte vengono verificate allora vuol dire che,nell’istante successivo tutte le inerzie si staccano contemporaneamente. Vi sonodunque quattro sottocasi in funzione del segno delle velocita relative assuntedalle inerzie. Ovvero:
ω1 > ω2
ω2 > ω3,
ω1 > ω2
ω2 < ω3,
ω1 < ω2
ω2 < ω3,
ω1 < ω2
ω2 > ω3(2.26)
Il primo caso implica siano verificate le disequazioni:
Cb1 − k12
J1
>Cb2 + k12 − k23
J2Cb2 + k12 − k23
J2
>Cb3 + k23
J3
(2.27)
Se non lo sono verificate bisogna considerare uno degli altri casi.
E verificato che il sistema evolve senza ambiguita verso uno solo dei casi presen-tati, pertanto l’ordine con cui vengono testate le ipotesi influenza solamente la velocitadell’algoritmo e non la sua esattezza.

2.2. FRIZIONE E PARASTRAPPI 43
Metodi alternativi
Per diminuire la complessita del sistema e possibile trascurare l’effetto di uno dei dueattriti statici. La scelta ricade su k23 in quanto rimane costante e la sua unica funzione equella di smorzare le oscillazioni del parastrappi. L’approssimazione consiste nel sostituirela funzione segno che moltiplica il coefficiente con una funzione similare ma continua nell’origine; ad esempio puo essere essere utilizzata la funzione tangente iperbolica mostratain Fig. 2.12. Le equazioni che descrivono il sistema divengono:
ω1 = J -11 (Cb1 − k12 sgn(ω1 − ω2))
ω2 = J -12 (Cb2 + k12 sgn(ω1 − ω2) − k23 tanh(β(ω2 − ω3)))
ω3 = J -13 (Cb3 + k23 tanh(β(ω2 − ω3)))
(2.28)
Ove col parametro β > 0 si modifica la pendenza della funzione, nell’origine. A questopunto l’algoritmo di risoluzione considera possibile la condizione di sliding fra le sole in-erzie J1 e J2.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
∆ω
tanh(β
∆ω)
10
20
100
Figura 2.12: Tangente iperbolica per diversi valori di β.

44 CAPITOLO 2. SISTEMA DI TRASMISSIONE
2.3 Cambio e Sincronizzatori
Mediante il cambio e possibile modificare l’accoppiamento fra l’albero primario , connessoal motore tramite la frizione e il secondario connesso alle ruote tramite il differenziale.Il suo scopo e di variare il rapporto fra velocita angolare e coppia mantenendo il loroprodotto, ovvero la potenza, costante a meno delle perdite. Il cambio considerato e a seirapporti, piu la retromarcia, indiretto e ad ingranamento costante. Cio significa che visono quattordici ruote, a due a due accoppiate e sempre ingranate, montate su due assidetti primario e secondario cambio. Ogni coppia presenta una ruota, montata fissa su unalbero e l’altra (detta ruota folle), libera di ruotare sull’altro albero. L’accoppiamento frauna ruota folle e l’albero su cui e montata avviene tramite l’utilizzo di un elemento dettosincronizzatore visibile in Fig. 2.13.
Figura 2.13: Schema meccanico di un sincronizzatore.
Tali dispositivi sono posizionati in mezzo a due ruote folli e dunque ne sono presentiquattro, nel cambio considerato (uno serve esclusivamente la retromarcia). Il sincroniz-zatore dunque permette di rendere solidali la ruota folle desiderata e l’albero su cui emontata creando l’accoppiamento fra l’albero primario e il secondario.
2.3.1 Modello del Cambio
La rappresentazione schematica del cambio che andremo a modellare e disegnata inFig. 2.14. Nel modello e stato omessa la retromarcia in quanto la sua simulazione non edi interesse. Come si vede dallo schema sono presenti ruote folli su entrambi gli alberidel cambio. In particolare le ruote folli di prima e seconda sono montate sul secondariomentre le altre sul primario.In Tab. 2.1 vengono descritte le variabili utilizzate.

2.3. CAMBIO E SINCRONIZZATORI 45
Js
Jp
Jr1Jr2
Jr3Jr4 Jr5Jr6
rp1
rs1
ωp
ωs
Cs
Cp
bp
bs
K1K2
K3K4 K5K6
bv1
bv2
bv3bv4 bv5bv6
ωr1ωr2
ωr3ωr4 ωr5ωr6
gr1, hr1
12
34 5
6
Figura 2.14: Rappresentazione schematica del cambio in esame.
Jp = momento inerzia albero primario del cambio con le ruote calettate fisse;Js = momento inerzia albero secondario con le ruote fisse ma senza ruote folli;Jri = momento inerzia della i-esima ruota dentata folle sul primario o sul
secondario;Cp = coppia motrice all’albero primario;Cs = coppia resistente all’albero secondario;ωp = velocita angolare albero primario;ωs = velocita angolare albero secondario;ωri = velocita angolare della i-esima ruota dentata folle montata sull’albero
primario o secondario;∆θi = posizioni angolari relative tra le ruote ingranate della marcia i esima;rpi = raggio della ruota i esima sul primario (fissa o folle);rsi = raggio della ruota i esima sul secondario (fissa o folle);τri = rapporto di trasmissione della marcia i esima;bp = coefficiente di attrito viscoso sul primario;bs = coefficiente di attrito viscoso sul secondario;bvi = coeff. di attrito viscoso tra le ruote del rapporto i esimo;Ki = coeff. di attrito coulombiano rotazionale tra ruota folle i esima e albero
primario o secondario sulla quale e montata;gri = giochi angolari tra i denti delle ruote ingranate della marcia i esima;hri = rigidezza angolare delle ruota dentata i esima;N = rapporto di marcia inserito.
Tabella 2.1: Tabella riassuntiva delle variabili utilizzate (ove i ∈ 1, 2, 3, 4, 5, 6).

46 CAPITOLO 2. SISTEMA DI TRASMISSIONE
Le equazioni che descrivono il sistema cambio sono :
Jp ωp = Cp −∑
6
i=3Ki sgn(ωp − ωri) − hr1 gr1(∆θ1) − hr2 gr2(∆θ2) − bp ωp
Jr1 ωr1 = τr1 hr1 gr1(∆θ1) − K1 sgn(ωr1 − ωs) − bv1 ωr1
Jr2 ωr2 = τr2 hr2 gr2(∆θ2) − K2 sgn(ωrs2 − ωs) − bv2 ωr2
Jr3 ωr3 = −hr3 gr3(∆θ3) + K3 sgn(ωp − ωr3) − bv3 ωr3
Jr4 ωr4 = −hr4 gr4(∆θ4) + K4 sgn(ωp − ωr4) − bv4 ωr4
Jr5 ωr1 = −hr5 gr5(∆θ5) − K5 sgn(ωp − ωr5) − bv5 ωr5
Jr6 ωr6 = −hr6 gr6(∆θ6) − K6 sgn(ωp − ωr6) − bv6 ωr6
Js ωs = −Cs +∑
2
i=1Ki sgn(ωri − ωs) +
∑6
i=3τri hri gri(∆θi) − bs ωs
∆θ1 = ωp − τr1 ωr1
∆θ2 = ωp − τr2 ωr2
∆θ3 = ωr3 − τr3 ωs
∆θ4 = ωr4 − τr4 ωs
∆θ5 = ωr5 − τr5 ωs
∆θ6 = ωr6 − τr6 ωs
(2.29)
Definendo le seguenti matrici:
J =
Jp 0 0 0 0 0 0 00 Jr1 0 0 0 0 0 00 0 Jr2 0 0 0 0 00 0 0 Jr3 0 0 0 00 0 0 0 Jr4 0 0 00 0 0 0 0 Jr5 0 00 0 0 0 0 0 Jr6 00 0 0 0 0 0 0 Js
, G =
-6gr1
hr10 0 0 0 0
0 -6gr2
hr20 0 0 0
0 0 -6gr3
hr30 0 0
0 0 0 -6gr4
hr4 0 0
0 0 0 0 -6gr5
hr5 0
0 0 0 0 0 -6gr6
hr6
,
D =
0 1 0 0 0 0 0 −10 0 1 0 0 0 0 −11 0 0 −1 0 0 0 01 0 0 0 −1 0 0 01 0 0 0 0 −1 0 01 0 0 0 0 0 −1 0
, K =
K1 0 0 0 0 00 K2 0 0 0 00 0 K3 0 0 00 0 0 K4 0 00 0 0 0 K5 00 0 0 0 0 K6
,
w = Dω =
ωr1 − ωs
ωr2 − ωs
ωp − ωr3
ωp − ωr4
ωp − ωr5
ωp − ωr6
, DT K=
0 0 K3 K4 K5 K6
K1 0 0 0 0 00 K2 0 0 0 00 0 −K3 0 0 00 0 0 −K4 0 00 0 0 0 −K5 00 0 0 0 0 −K6
−K1−K2 0 0 0 0
,

2.3. CAMBIO E SINCRONIZZATORI 47
Υ =
1−τr1 0 0 0 0 0 01 0 −τr20 0 0 0 00 0 0 1 0 0 0 −τr3
0 0 0 0 1 0 0 −τr4
0 0 0 0 0 1 0 −τr5
0 0 0 0 0 0 1 −τr6
, B =
bp 0 0 0 0 0 0 00 bv1 0 0 0 0 0 00 0 bv2 0 0 0 0 00 0 0 bv3 0 0 0 00 0 0 0 bv4 0 0 00 0 0 0 0 bv5 0 00 0 0 0 0 0 bv6 00 0 0 0 0 0 0 bs
,
C =
Cp
000000
−Cs
, ∆θ =
∆θ1
∆θ2
∆θ3
∆θ4
∆θ5
∆θ6
, ω =
ωp
ωr1
ωr2
ωr3
ωr4
ωr5
ωr6
ωs
,Υω =
ωp − τr1 ωr1
ωp − τr2 ωr2
ωr3 − τr3 ωs
ωr4 − τr4 ωs
ωr5 − τr5 ωs
ωr6 − τr6 ωs
Il sistema (2.29) puo essere riscritto in forma matriciale nel seguente modo:
J ω = C − Bω − ΥT G(∆θ) − DT K sgn(w)
∆θ = Υω(2.30)
da cui la rappresentazione POG di Fig. 2.15.
[00
]
-
6
1s
6
G
6
-
∆θ
Υ
- ΥT - ?C
- -
6
B
6
-
J-1
1s
?
?
?
ω -- D -
w
DT
K sgn()
6
6
-
6
N
Figura 2.15: Schema POG multi dimensionale del cambio a sei marce.
Come si vede dallo schema, vi sono sei attriti coulombiani i quali agiscono fra le ruotefolli e gli alberi su cui sono montate. Questo complicherebbe notevolmente il problemadella loro simulazione, se si dovessero prendere in esame tutti i casi. Se tuttavia si con-sidera che l’accoppiamento fra i due elementi avviene attraverso dei cuscinetti e che tuttoil cambio e immerso nell’olio di lubrificazione ci si rende conto che gli attriti presi inconsiderazione sono minimi. Cio vuol dire che la coppia massima trasferita dal primarioal secondario a causa di tali attriti risulta irrilevante se confrontata con le altre coppie ingioco e con gli attriti presenti sugli assi. Sotto la luce di queste considerazioni si e deciso,senza colpo ferire, di porre tutti gli attriti a zero tranne uno ovvero quello relativo alla

48 CAPITOLO 2. SISTEMA DI TRASMISSIONE
ruota ingranata. L’algoritmo di simulazione degli attriti deve quindi prendere in consid-erazione lo sliding di due sole inerzie per volta, ovvero quella della ruota folle ingranatae quella dell’albero relativo. L’andamento degli attriti durante la fase di innesto dellamarcia e demandato al blocco dei sincronizzatori.
2.3.2 Modello dei sincronizzatori
Sono gli elementi che permettono di rendere solidale la ruota folle selezionata e l’albero sucui e normalmente libera di ruotare, consentendo il trasferimento di potenza dal primarioal secondario. Il loro nome deriva dal fatto che durante l’inserimento di una nuova marciail sincronizzatore genera una coppia di attrito fra ruota folle e albero relativo in mododa sincronizzarne le due velocita angolari. Inoltre, grazie ad un dispositivo detto “anellodi arresto”, la nuova marcia non puo venir inserita finche tali velocita non divengonouguali. Pertanto il sincronizzatore agisce, e fa interagire, due elementi del sistema ovveroil cambio e l’attuatore di innesto.Del blocco cambio, controlla il valore l’attrito statico fra la ruota folle da inserire e l’alberorelativo e questo in funzione della posizione dell’attuatore di innesto (yinn). L’andamentodell’attrito viene definito dalla seguente relazione:
Ki = 0 se yinn < yinsinc
Ki = Csinc yinn se yendsinc < yinn < yendsinc
Ki = ∞ se yinn > yendsinc
(2.31)
ove:
– Csinc e il fattore di proporzionalita fra posizione innesto e coppia di sincronizzazione;
– yinsinc e la posizione dell’innesto per cui inizia la fase di sincronizzazione;
– yendsinc e la posizione dell’innesto per cui finisce la fase di sincronizzazione.
Sull’innesto invece agisce l’azione dell’anello di arresto che durante la fase di sincroniz-zazione genera una forza Fsinc che impedisce al pistone di avanzare finche la velocita rela-tiva tra ruota e asse non diviene nulla. La forza che si oppone all’avanzamento dell’innestoe definita da:
Fsinc = Ksinc yinn se yinn > yinsinc e ωri 6= ωasse
Fsinc = 0 altrimenti(2.32)
L’indice i ∈ 1, 2, 3, 4, 5, 6, l’indice della marcia da inserire, e dunque del coefficientedi attrito da aumentare, viene calcolato in base al “rango” (ovvero la posizione di riposoin cui si trova l’attuatore di selezione) e dal segno dell’innesto, quando questi abbandonala posizione centrale. La posizione della selezione decide su quale sincronizzatore si andraad agire, mentre l’innesto porta lo stesso a inserire marce pari (se yinn > 0) o dispari (seyinn < 0). Il tutto viene riassunto in Tab. 2.2.

2.4. DIFFERENZIALE, SEMIASSI E RUOTE 49
xsel Rango Rango Rango1 − 2 3 − 4 5 − 6
yinn > 0 2 4 6yinn < 0 1 3 5
Tabella 2.2: Marcia da inserire (i ∈ 1, 2, 3, 4, 5, 6).
2.3.3 Considerazioni sul modello
Il fatto di bloccare, una volta sincronizzate, ruota folle e asse, tramite l’incremento del-l’attrito statico ad un valore infinito, deriva da esigenze puramente pratiche. Nella realtal’accoppiamento avviene attraverso la rigidita dei denti del sincronizzatore, con relativogioco. Una piu accurata modellizzazione del sistema viene mostrata nello schema POGdi Fig. 2.16.
-
6
1s
6
G
6
-
∆θ
Υ
-ΥT- ?C
- -6
B
6
-
J-1
1s
?
?
?
ω -- D -
w
DT 6
K sgn()
6
- -
-
6
1s
6
H
6
- 0
6N
6N
Figura 2.16: Schema POG del cambio modificato.
Ove la matrice H introduce la rigidezza dei denti del sincronizzatore considerato e,una volta che questi risulta ingranato, si sostituisce all’effetto dell’attrito che, in questocaso, deve andare a 0.Sebbene tale soluzione sia piu realistica, presenta maggiori problemi in fase di realizzazioneSimulink pertanto si e optato per la soluzione precedente.
2.4 Differenziale, Semiassi e Ruote
2.4.1 Differenziale
Il differenziale e assunto come un blocco ideale di trasformazione fra la velocita angolaredell’albero secondario del cambio ωsec e la velocita di ingresso del semiasse ω4 (Dc ≥ 1):
Dc =ωsec
ω4
2.4.2 Semiassi e Ruote
La presenza di elevate coppie e basse velocita angolari permette di considerare i semiassie le ruote come degli elementi elastici. La deformazione di tali elementi viene considerataattraverso le rigidezze angolari h45 e h56, mentre lo smorzamento delle oscillazioni, indotteda queste deformazioni, viene ottenuto attraverso i termini di attrito b45, b56. La forza Fm

50 CAPITOLO 2. SISTEMA DI TRASMISSIONE
e quella scaricata a terra, che di conseguenza agisce fra ruote e terreno. Con vv si indicala velocita lineare delle ruote, che corrisponde in questo modello alla velocita del veicolo,con Rp il raggio della ruota, mentre J5 bv5 e bc5 sono i termini globali relativi al momentod’inerzia all’attrito lineare e a quello coulombiano del gruppo semiassi-ruote. Lo schemaPOG complessivo del sistema viene mostrato in Fig. 2.17.
Cs
ωs - 1
Dc
-ω4
1
Dc
C4
- 6
6
b45
1s
6
h45
6
6 - -
1
J5 s+bv5
?
?
ω5
-
6
bc5 sgn()
6
- -
C5
- 6
6
b56
1s
6
h56
6
6 -
1
Rp
ω6
-1
Rp
- Fm
vw
∆γ ∆ι
– C4 coppia sui semiassi;
– C5 coppia sulle ruote;
– ω4 velocita angolare in uscita dal differenziale;
– ω5 velocita angolare del mozzo delle ruote;
– ω6 velocita angolare delle ruote;
– Fm forza motrice alla ruote;
– vv velocita lineare delle ruote;
– h45 rigidezza dei semiassi;
– h56 rigidezza delle ruote;
– b45 attrito sulla differenza di velocita fra le estremita dei semiassi;
– b56 attrito sulla differenza di velocita fra mozzo e estermita ruota;
– bv5 attrito lineare sui semiassi e sulle ruote;
– bc5 attrito coulombiano sui semiassi e sulle ruote;
– J5 momento d’inerzia dei semiassi e delle ruote;
– Rp raggio del pneumatico o di rotolamento.
Figura 2.17: Schema POG dei semiassi e delle ruote.

2.5. DINAMICA DEL VEICOLO 51
2.5 Dinamica del Veicolo
Le principali forze che influenzano la dinamica translazionale del veicolo sono di seguitoriportate:
• la forza motrice Fm;
• la componente della forza peso legata all’inclinazione del terreno, che risulta esseredata da:
Fg = Mv g sin(α) (2.33)
• la forza legata alla resistenza aerodinamica, che risulta essere funzione quadraticadella velocita del mezzo:
Fa =ρa Cx S v2
v
2(2.34)
• La resistenza dovuta all’attrito volvente e legata alla deformazione locale delle ruotein prossimita del punto di contatto ed e tale da opporsi costantemente al rotolamentodella ruota. Viene modellata con un attrito statico il cui coefficiente varia in funzionedella velocita del veicolo, nel modo mostrato in Fig. 2.18.
0 10 20 30 40 50 60 70 80 90 100150
200
250
300
350
400
450
500
550
kv
[N]
vv [m/s]
Figura 2.18: Attrito volvente funzione della velocita del veicolo.
Lo schema POG della dinamica del veicolo viene mostrato in Fig. 2.19.

52 CAPITOLO 2. SISTEMA DI TRASMISSIONE
Fm
vv
-
1
Mv s+bv
?
?
-
?
Mv g sin(α)
- -
kv sgnvv
6
6
ρa Cx S v2v
2
6
6
-
Fa
– Fm forza motrice;
– vv velocita del veicolo;
– kv forza di attrito volvente;
– Mv la massa complessiva del veicolo;
– bv attrito lineare del veicolo;
– g accelerazione di gravita;
– ρa densita dell’aria;
– Cx coefficiente di penetrazione aerodinamica;
– S sezione frontale del veicolo;
– α pendenza del terreno.
Figura 2.19: Schema POG della dinamica del veicolo.

Capitolo 3
Descrizione e funzionalita dellacentralina Magneti Marelli
L’unita di controllo elettronica (ECU), che gestisce il funzionamento del sistema di cambiomarcia automatico, deve generare le correnti di comando delle valvole degli attuatori edel motore elettrico connesso alla pompa di ricarica dell’accumulatore idraulico. Inoltreprende il controllo del motore nella fase di spunto e di cambio marcia. Per testare il suofunzionamento, e stato fornito il software implementato nella centralina, attraverso una“C MEX S–Function” MATLAB (vedi App. A) compilata in una DLL (Dynamic LinkLibrary). In aggiunta e stato fornito il modello del motore della maserati M138.In Fig. 3.1 e mostrato lo schema generale del sistema. Esso si compone delle seguentiparti:
• ECU (Azzurro): contiene il codice che simula il comportamento della centralinaMarelli;
• Controllo motore (Verde): contiene il modello del motore e il controllo ad essoapplicato;
• Pilota (Arancione): contiene le variabili che il pilota puo influenzare;
• Altri segnali CAN (Magenta): contiene i segnali provenienti, attraverso il BUSCAN (vedi App. C), dalle altre centraline elettroniche presenti nell’autovettura e diinteresse per la centralina Marelli;
• VEICOLO (Verde): contiene i modelli del veicolo e degli attuatori cambio, mostratinei CAP. 1 e CAP. 2.
53

54C
AP
ITO
LO
3.
CE
NT
RA
LIN
AM
AR
ELLI
Coppia Netta
ANALOGIC INPUT
ANALOGIC OUTPUT
VEICOLO
MMI
PILOTA
MMI
ANALOGIC INPUT
CAN SIGNALS
OTHER CAN SIGNALS
OTHER CAN SIGNAL
MMI
ANALOGIC INPUT
DIGITAL INPUT FROM MOTRONIC
CAN KUP
ECU ANALOGIC OUTPUT
ECU
MMI
OTHER CAN SIGNALS
CAN KUP
ANALOGIC INPUT
DIGITAL OTPUT
Coppia netta
CONTROLLO MOTORE
<>
Fig
ura
3.1:
Sch
ema
gener
ale
disi
mula
zion
edel
laM
aser
atiM
138.

3.1. ECU 55
3.1 ECU
Questo blocco contiene la S–Function che simula le funzionalita della centralina elettron-ica Marelli, che controlla il cambio marcia. I segnali entranti ed uscenti da questo bloccovengono opportunamente modificati per essere compatibili con il software, in particolaredevono essere convertiti in digitale i segnali analogici provenienti dal modello del veicolo.Infatti l’algoritmo implementato lavora come se si trovasse all’interno del microcontrol-lore presente nell’unita di controllo. Pertanto i segnali entranti nella S–Function devonorispecchiare i dati presenti nella memoria centrale della centralina e dunque venir conver-titi nello stesso modo operato dai sistemi di acquisizione presenti sulla stessa. In Fig. 3.2e mostrato l’interno del blocco. Esso si compone di:
• ECU S–Function (Azzurro): contiene la S–Function;
• SENSORI (Giallo): converte i segnali provenienti dal modello del veicolo nel modorichieso dal software;
• CAN PACK (Arancione): prende i segnali non direttamente acquisiti dalla centrali-na, ma che le provengono attraverso il CAN BUS dalle altre unita di controllo, eli impacchetta in modo da essere compatibili con il software. In particolare agiscesimulando l’azione del controllore CAN, presente nella centralina. Ovvero aggiornai buffer di memoria predisposti, con i nuovi valori che gli provengono dalle altrecentraline.
• CAN UNPACK (Verde): scompatta il segnale che rappresenta il contenuto delbuffer di memoria in uscita dalla centralina attraverso il CAN BUS, nei segnalinecessari a comandare il blocco motore.

56C
AP
ITO
LO
3.
CE
NT
RA
LIN
AM
AR
ELLI
2
ECU ANALOGIC OUTPUT
1
CAN KUP
POTENZ_INN1
POTENZ_SEL1
POTENZ_FRIZ1
pressione
pi
ps
pfriz
press_fil
SENSORI
ECU S−function (DLL)
CAN_STAND_KUP
OBD_STATUS_KUP
GANG_KUP
B_ANF_KUP
B_MDRED_KUP
B_N_SOLL_KUP
B_MDZUN_KUP
B_MOT_AUS
MD_IND_KUP
N_SOLL_KUP
MD_IND_KU2
DISPLAY_KUP
S_CLUTCH_KUP
RTVPB_KUP
MSGCNT_KUP
DIAG_KUP
PB
CAN_UNPACK
CAN_SIGNAL
DIGITAL INPUT
Can_in
CAN_PACK
4
DIGITAL INPUT FROM MOTRONIC
3
ANALOGIC INPUT
2
MMI
1
OTHER CAN SIGNAL
ECU CAN INPUT
<giri ingresso>
ECU CAN OUTPUT
<gsl1>
<gsl2>
<gsl3>
<keypower>
<crank request>
<switch freno>
<switch porta>
<switch Auto>
<switch Ice>
<PI>
<PS>
<PFRIZ>
<pressione>
<gsl0>
<giri motore>
Fig
ura
3.2:
Sch
ema
inte
rno
del
laE
lect
ronic
Con
trol
Unit
.

3.2. PILOTA 57
3.2 Pilota
Contiene tutte le variabili influenzabili dal pilota ovvero l’Interfaccia Uomo MacchinaMMI (Machine Man Interface). In particolare fornisce le seguenti informazioni:
– Pedale Acc: stato del pedale dell’acceleratore;
– S BRAKE: stato pedale freno;
– switch sport: opzione sport inserita/disinserita;
– T EXT: temperatura esterna (C);
– GSL0,GSL1,GSL2,GSL3: stato delle leve per la richiesta di cambio marcia;
– key pwr: chiave inserita;
– Crankrq: richiesta di accensione motore;
– Crsbrk: controllo elettronico della frenata attivo/spento;
– Doorsw: porta aperta/chiusa;
– Autogmrd: cambio automatico acceso/spento;
– BassaAder: pulsante di bassa aderenza;
Per simulare l’azione delle mani del guidatore sulle leve di richiesta cambiata e presenteun automa (Fig. 3.3), realizzato tramite stateflow di Simulink, che fornisce i valori correttidelle variabili GSL0,GSL1,GSL2 e GSL3 per ogni tipo di richiesta, ovvero cambiata (UP),scalata (DOWN), scalata doppia (KICK DOWN), folle (N) e retromarcia (RM).

58C
AP
ITO
LO
3.
CE
NT
RA
LIN
AM
AR
ELLIPrinted 23−Nov−2002 11:39:02
S5entry:out=5;during:count++;
S0entry:count=0;out=1;
S1entry:out=2;during:count++;
S3entry:out=3;during:count++;
S2entry:out=1;count=0;
S4entry:out=4;during:count++;
[(dw_signal==0)&&(up_signal==0)&&(n_signal==0)&&(rm_signal==1)]
[(count==20)&&(dw_signal==0)&&(up_signal==0)&&(n_signal==0)]
[(count==20)&&((dw_signal==1)||(up_signal==1)||(n_signal==1)||(rm_signal==1))][(count==20)&&((dw_signal==1)||(up_signal==1)||(n_signal==1)||(rm_signal==1))]
[(count==20)&&(dw_signal==0)&&(up_signal==0)&&(n_signal==0)&&(rm_signal==0)] [(dw_signal==0)&&(up_signal==0)&&(n_signal==1)&&(rm_signal==0)]
[(count==20)&&(dw_signal==0)&&(up_signal==0)&&(n_signal==0)&&(rm_signal==0)]
[(count==20)&&(dw_signal==0)&&(up_signal==0)&&(n_signal==0)&&(rm_signal==0)]
[(dw_signal==1)&&(up_signal==0)&&(rm_signal==0)&&(n_signal==0)]
[(up_signal==0)&&(dw_signal==0)&&(n_signal==0)&&(rm_signal==0)]
[(up_signal==1)&&(dw_signal==0)]
[(count==20)&&((dw_signal==1)||(up_signal==1)||(n_signal==1)||(rm_signal==1))][(count==20)&&((dw_signal==1)||(up_signal==1)||(n_signal==1)||(rm_signal==1))]
Figu
ra3.3:
Autom
adisim
ulazion
edelle
levedel
cambio
alvolan
te.

3.3. VEICOLO 59
3.3 Veicolo
1
ANALOGIC OUTPUT
iecfriz
iec1
iec2
isel1
isel2
isel3
HydPmp
Coppia Motore Netta
ps
pi
posiz friz
pressione
giri ingresso
giri motore
giri ruote anteriori
giri ruote posteriori
VEICOLO
2
ANALOGIC INPUT
1
Coppia Netta
<HydPmp>
<Shift3>
<Shift2>
<Shift1>
<Gear2>
<Gear1>
<Clutch>
Figura 3.4: Veicolo.

60 CAPITOLO 3. CENTRALINA MARELLI
La parte contenente il modello del veicolo e degli attuatori e mostrato in Fig. 3.4.Il sistema riceve in ingresso le correnti di eccitazione di valvole e pompa generate dallacentralina e la coppia netta generata dal modello del motore. Da questi ingressi devegenerare:
– ps: posizione dell’attuatore di selezione;
– pi: posizione dell’attuatore di innesto;
– posiz friz: posizione dell’attuatore della frizione;
– pressione: pressione nell’accumulatore;
– giri ingresso: velocita angolare all’ingresso del primario cambio;
– giri motore: velocita angolare dell’albero motore;
– giri ruote anteriori: velocita angolare delle ruote anteriori;
– giri ruote posteriori: velocita angolare delle ruote posteriori;
Il blocco si compone di due sottosistemi:
1. Cambio;
2. Driveline.
3.3.1 Sottosistema Cambio
Questo blocco contiene i modelli che simulano gli attuatori del cambio automatico Marelli.Come visibile in Fig. 3.5 e formato dai seguenti elementi:
• Power unit (Azzurro): simula l’accumulatore idraulico e la relativa pompa;
• Frizione (Rosso): simula l’attuatore frizione;
• Innesto (Giallo): simula l’attuatore di innesto;
• Selezione (Magenta): simula l’attuatore di selezione;
• Sincronizzatori (Verde): simula l’effetto dei sincronizzatori.
3.3.2 Sottosistema Driveline
Questo blocco contiene i modelli che simulano il comportamento dell’autovettura. Comevisibile in Fig. 3.6 e formato dai seguenti elementi:
• Frizione con Parastrappi (Rosso);
• Cambio e differenziale (Verde);
• Semiassi e ruote (Giallo);
• Dinamica Veicolo (Azzurro).

3.3
.V
EIC
OLO
61
6
Ngear
5Kcambio
4
posizfriz
3
pressione
2
ps
1
pi
comando accensione elettropompa
portata totale assorbita
pressione di alimentazione circuito
power unit
CORRENTI INNESTO
CORRENTI SELEZIONE
Fermacambio
pos innesto
KCAMBIO
Ngear
Reazione Sincro
SINCRONIZZATORI
UEvSel
pressione_alimentazione
Pos. Inn.
Portata selezione
Posizione selezione
SELEZIONE
pressione_alimentazione
Correnti Innesto
Reazioni Sincronizz
Posizione Innesto
Portata innesto
INNESTO
Ifriz
Press alim
POS FRIZ
Portata
FRIZIONE
8
Fermacambio
7
HydPmp
6
isel3
5
isel2
4
isel1
3
iec2
2
iec1
1
iecfriz
Fig
ura
3.5:
CA
MB
IO.

62C
AP
ITO
LO
3.
CE
NT
RA
LIN
AM
AR
ELLI
4 W63 W32 W1
1 Fermacambio
W5
Vv
C5
W6
Fv
SemiassiRuote
C1 K
C3
W1
W3
FRIZIONE −PARASTRAPPI Dinamica
Veicolo
???
Curva di trasmis.frizione
VEIC_Kfriz23
Coeff. attritoparastrappi
Wp
C5
C3
W5
Cambio e Differenziale
4COPPIA MOTORE
NETTA
3Ngear 2 Kcambio
1
POS FRIZ
Fv
Vv
Fig
ura
3.6:
DR
IVE
LIN
E.

Capitolo 4
Analisi dei dati e risultati simulativi
In questo capitolo andremo ad analizzare i dati fornitici e confrontarli con i risultatiottenuti dalle simulazioni. Cio e stato fatto applicando al modello le correnti di ecci-tazione delle valvole e la coppia netta fornita dal motore (vedi Fig. 4.1). Questi datisono stati acquisiti da una centralina Marelli di prova la quale permette di campionare ilBUS di sistema, in tempo reale, durante il moto del veicolo. Sono dunque presenti datiche la centralina campiona o elabora, ma che non fornisce direttamente in uscita. Talidati non entrano direttamente nel modello ma sono utili per il confronto e per capire ilfunzionamento interno della unita di controllo.
Controllo Frizione
PRESS
x_sel
y_inn
SIM_Hp
SIM_W6
SIM_W3
SIM_W1
x_fr
[t1,UEvSel3B]
[t1,UEvSel2B]
iecfriz
iec1
iec2
isel1
isel2
isel3
HydPmp
Coppia motore
pi
ps
posiz friz
pressione
Giri Motore rad/sec
Giri Ingresso rad/sec
Giri Ruota rad/sec
Veicolo
[t1,X_RIF]
[t1,UEvSel1B]
[t1, coppia_fil]
POS. FRIZ
RIFERIMENTOCORRENTE
PRESSIONEHydPmp
Attivazione pompa
[t1,Ec2]
[t1,Ec1]
Figura 4.1: Schema simulink dei dati di ingresso e d’uscita al modello dell’autoveicolo.
63

64 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
4.1 Analisi dei dati
I dati considerati sono quelli presenti nel file A50 2.mat e corrispondono alle seguentivariabili:
– gmot fil: velocita angolare motore [rpm];
– ging fil: velocita angolare primario cambio [rpm];
– gusc fil: velocita angolare ruote [rpm];
– ngear : valore della marcia richiesta;
– xm pfriz: posizione attuatore frizione [bit];
– xm friz rif: riferimento posizione frizione [bit];
– PI CLR: posizione attuatore innesto [bit];
– PS CLR: posizione attuatore selezione [bit];
– Ec1: corrente eccitazione valvola di innesto 1 [bit];
– Ec2: corrente eccitazione valvola di innesto 2 [bit];
– coppia fil: coppia motrice netta [Nm];
– coppia persa: coppia persa all’interno del motore (stima) [Nm];
– UEvSel1B: corrente eccitazione valvola di selezione 1 [bit];
– UEvSel2B: corrente eccitazione valvola di selezione 2 [bit];
– UEvSel3B: corrente eccitazione valvola di selezione 3 [bit].
Essendo campionati all’interno della centralina, alcuni dati necessitano di essere con-vertiti nelle unita di misura utilizzate nel modello. In particolare si hanno le seguenticonversioni:
xfr =−xm pfriz + 1000
1000
144
28.17[mm]
xrif =−xm friz rif + 1000
1000
144
28.17[mm]
xsel = (PS CLR−356) 5.5160 − 5.5 [mm]
yinn = −(PI CLR−260) 18573 + 9 [mm]
Le velocita angolari non necessitano di conversione essendo espresse in giri al minuto[rpm]. Essendo lineare, la conversione delle correnti di eccitazione delle valvole, se netenuto conto attraverso il coefficiente di proporzionalita forza-corrente della valvola (Kfi).Per capire il funzionamento del sistema, prendiamo come esempio un cambio marcia 2-3.

4.1. ANALISI DEI DATI 65
6 6.5 7 7.5 8 8.5 9 9.5 10−0.2
0
0.2
0.4
0.6
0.8
1
2°
3°
C1
tempo [s]
[Nm
]
ngear
Figura 4.2: Andamento temporale della coppia motore C1.
6 6.5 7 7.5 8 8.5 9 9.5 10
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
PIS
2°
3°
tempo [s]
[mm
]
xfr
xrif
ngear
Figura 4.3: Andamento temporale della posizione dell’attuatore frizione (blu) e riferimento(verde).

66 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
6 6.5 7 7.5 8 8.5 9 9.5 10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
2°
3°
tempo [s]
[bit
]
Iinn1
Iinn2
Figura 4.4: Correnti di eccitazione delle valvole dell’attuatore di innesto Iinn1 (rosso) eIinn2 (verde).
6 6.5 7 7.5 8 8.5 9 9.5 10
0
0.5
1
6 6.5 7 7.5 8 8.5 9 9.5 10
0
0.5
1
6 6.5 7 7.5 8 8.5 9 9.5 10
0
0.5
1
6 6.5 7 7.5 8 8.5 9 9.5 100
2
4
2°3°
Isel1
Isel2
Isel3
[Bit
][B
it]
[Bit
][0
-6]
tempo [s]
ngear
Figura 4.5: Correnti di eccitazione delle valvole dell’attuatore di selezione Isel1 (rosso)Isel2 (verde) e Isel3 (blu).

4.1. ANALISI DEI DATI 67
6 6.5 7 7.5 8 8.5 9 9.5 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
2°3°
tempo [s]
[mm
]
yinn
xsel
Figura 4.6: Posizione attuatori innesto e selezione.
All’inizio e ingranata la seconda, le correnti di eccitazione delle valvole sono nulle ela frizione e completamente chiusa. A un certo punto il guidatore, agendo sulle levetteposte sul retro del volante, richiede l’inserimento della marcia superiore. La richiesta vienesegnalata tramite la variazione del segnale ngear, segnale interno alla centralina, che neigrafici viene riportato in azzurro. A questo punto inizia la operazione di cambio marciache si articola in varie fasi:
• Apertura frizione: viene incrementato il riferimento della posizione dell’attuatorefrizione e viene calata la coppia motrice (vedi Fig. 4.2 e Fig. 4.3). Contempo-raneamente le correnti di eccitazione delle valvole dell’attuatore di innesto (vediFig. 4.4) assumono un valore di precarico. Tale valore di corrente corrisponde aduna pressione nelle camere (le valvole di innesto sono proporzionali in pressione),non sufficiente a disinnestare la marcia ingranata, ma che permette alle valvole diessere piu pronte nella fase successiva.
• Disinnesto: la frizione continua ad aprirsi finche arriva al valore definito dal PIS(Punto Incipiente di Slittamento). Esso e un valore convenzionale, della posizionedell’attuatore frizione, per il quale si assume che la coppia massima trasferibile dallafrizione sia sufficientemente bassa da non impedire il disinnesto del sincronizzatore.Pertanto si procede con la fase di disinnesto, aumentando entrambe le correnti dieccitazione delle valvole di innesto fino a che la posizione dello stesso non arriva adun valore nullo (vedi Fig. 4.4 e Fig. 4.6).
• Selezione: le valvole dell’attuatore di selezione vengono eccitate con una configu-razione che permette di “selezionare” il sincronizzatore della marcia da ingranare.Nel caso in esame si eccitano contemporaneamente tutte e tre le valvole in modo da

68 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
portare la selezione in posizione centrale (vedi Fig. 4.5 e Fig. 4.6). Durante questafase le correnti di eccitazione dell’innesto calano e si portano ad un valore di “ri-poso” cosı da diminuire la pressione nelle camere e dunque rendere meno brusca lafase successiva.
• Ingranamento: a questo punto e possibile ingranare la nuova marcia. Per far ciouna delle due correnti di eccitazione delle valvole di innesto viene portata a zeromentre l’altra viene gradualmente incrementata. L’innesto dunque si muove nelladirezione voluta fino ad incontrare il sincronizzatore. Questi impedisce all’attuatoredi avanzare ulteriormente, contemporaneamente genera attrito fra la ruota folle daingranare e l’albero relativo. Tale attrito riduce la differenza di velocia angolare deidue elementi fino ad annullarla. E da notare che e sempre il primario del cambio, ola ruota folle ad esso solidale, che si sincronizza con il secondario essendo quest’ulti-mo attaccato al resto della driveline mentre il primario agisce sulla sola frizione cherisulta aperta in questa fase. A sincronizzazione avvenuta l’innesto e libero di avan-zare fino ad andare in battuta contro il suo finecorsa, mentre le correnti si portanoad un valore di sicuro ingranamento fino ad operazione di cambio completata.
• chiusura frizione: il riferimento della posizione dell’attuatore frizione torna a ze-ro e contemporaneamente viene incrementata la coppia fornita dal motore fino ariportarsi nella situazione iniziale.
4.2 Simulazione e confronto con i dati
Per poter eseguire le simulazioni correttamente si e dovuto ricreare il controllo frizionepresente all’interno della centralina. Essa genera internamente un riferimento di posizioneper l’attuatore frizione (xrif ) e, attraverso una azione di tipo proporzionale, ricava lacorrente di eccitazione della valvola dell’attuatore frizione (Ifriz). Graficando la correntedi eccitazione in funzione dell’errore di posizione si ottiene la curva di Fig. 4.7.

4.2. SIMULAZIONE E CONFRONTO CON I DATI 69
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
I friz
[Am
p]
xfr − xrif [mm]
Figura 4.7: Controllo Frizione.

70 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
A tale curva viene aggiunto il valore di offset della corrente ad errore nullo che deveessere tale da mantenere l’uscita della valvola non connessa ne all’alimentazione ne alloscarico.Oltre al controllo della frizione si e ricreato il comando dell’accensione della pompa diricarica dell’accumulatore idraulico. Esso non e altro che un rele con isteresi che attiva lapompa quando la pressione scende sotto al valore di soglia inferiore e la spegne quandoraggiunge il valore di soglia superiore.Di seguito vengono graficati i risultati simulativi ottenuti:
0 2 4 6 8 10 12 14 16 18−0.2
0
0.2
0.4
0.6
0.8
1
1°
2°
3°
4°
5°
tempo [s]
[Nm
]
C1
C3
Figura 4.8: Andamento temporale della coppia motore C1(rosso) e della coppia resistentedella trasmissione simulata C3(verde).

4.2. SIMULAZIONE E CONFRONTO CON I DATI 71
0 2 4 6 8 10 12 14 16 18
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
PIS
1°
2°
3°
4°
5°
tempo [s]
[mm
]
Figura 4.9: Andamento temporale della posizione frizione reale (blu) simulata(rosso) eriferimento (verde).
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1°
2°
3°
4°
5°
tempo [s]
[rpm
]
w1
w1sim
w3sim
w3
Figura 4.10: Dinamica delle velocia angolari del motore w1 e della frizione w3.

72 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
0 2 4 6 8 10 12 14 16 18
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1°
2°
3°
4°
5°
tempo [s]
[bit
]
Figura 4.11: Correnti di eccitazione delle valvole dell’attuatore di innesto Iinn1 (rosso) eIinn2 (verde).
0 2 4 6 8 10 12 14 16 18
0
0.5
1
Isel1
0 2 4 6 8 10 12 14 16 18
0
0.5
1
Isel2
0 2 4 6 8 10 12 14 16 18
0
0.5
1
Isel3
0 2 4 6 8 10 12 14 16 180
2
4
6
1°2°
3°4°
5°
Figura 4.12: Correnti di eccitazione delle valvole dell’attuatore di selezione Isel1 (rosso)Isel2 (verde) e Isel3 (blu).

4.2. SIMULAZIONE E CONFRONTO CON I DATI 73
0 2 4 6 8 10 12 14 16 180.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18−1
−0.5
0
0.5
1
1.5
2Duty Cycle Pompa=29 %
tempo [s]
tempo [s]
[Bar
]
Psup
Pinf
[0-1
]
Figura 4.13: Andamento temporale della pressione nel circuito idraulico di alimentazionedegli attuatori e durata di intervento della pompa di ricarica.
0 2 4 6 8 10 12 14 16 18−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1°2°
3°4°
5°
tempo [s]
[mm
]
yinnsim
yinn
xsel
xselsim
Figura 4.14: Posizione innesto (yinn) e selezione (xsel) simulata e sperimentale.

74 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
0 2 4 6 8 10 12 14 16 180
500
1000
0 2 4 6 8 10 12 14 16 180
500
1000
0 2 4 6 8 10 12 14 16 180
500
1000
0 2 4 6 8 10 12 14 16 180
500
1000
0 2 4 6 8 10 12 14 16 180
500
1000
0 2 4 6 8 10 12 14 16 180
500
1000
tempo [s]
K1
K2
K3
K4
K5
K6
Figura 4.15: Andamento dei coefficienti di attrito di inserimento marce azionati dalmovimento dell’innesto e della selezione.
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1°2°
3°4°
5°
tempo [s]
[rpm
]
wr2
wr1
Figura 4.16: Dinamica delle velocia angolari del secondario cambio e ruote folli relative.

4.2. SIMULAZIONE E CONFRONTO CON I DATI 75
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1°2°
3°4°
5°
tempo [s]
[rpm
]
wpwr3
wr4wr5
Figura 4.17: Dinamica delle velocia angolari del primario cambio e delle ruote folli relative.
0 2 4 6 8 10 12 14 16 180
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1°
2°
3°
4°
5°
tempo [s]
[rpm
]
w5
w6simw6
Figura 4.18: Dinamica delle velocia angolari di semiassi simulata (blu) e delle delle ruotesperimentale (verde) e simulata (rosso).

76 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
Come si puo osservare dalle figure mostrate, le simulazioni riproducono abbastan-za bene il comportamento dell’ autovettura. Come e possibile notare dalle Fig. 4.10 eFig. 4.18 la macchina simulata “spunta” prima di quella presa in esame mentre soffremaggiormente dell’attrito ad alte velocita. Anche il comportamento simulato degli attua-tori, mostrato in Fig. 4.9 e Fig. 4.14, non e perfettamente uguale a quello reale soprattuttoin fase di distacco. Tuttavia lo scopo delle simulazioni era quello di riuscire a riprodurreun comportamento realistico di un’autovettura, durante i cambi marcia, avendo in ingres-so le stesse variabili di un mezzo reale. Riguardando sotto quest’ottica le figure si notache, sebbene i grafici non siano sovrapposti, gli andamenti e le tempistiche di cambiatasono congruenti con quelle reali.

4.3. “POLIPO” 77
4.3 “Polipo”
Per problemi di compatibilita fra le versioni di MATLAB, non si e potuto provare uncambio marcia effettuato sotto il controllo del modello che simula la centralina Marelli.Tuttavia e stato possibile simulare l’operazione che, in gergo, viene detta polipo. Con talenome si intende l’autotaratura dei sensori relativi agli attuatori del cambio.Le posizioni degli attuatori di innesto, selezione e frizione vengono rilevate dalla centralinaattraverso la “lettura” di potenziometri ad essi collegati. Prima che il sistema possafunzionare la centralina deve memorizzare i valori letti dai potenziometri nelle posizionidi riposo degli attuatori. Pertanto, a motore spento, l’unita di controllo inserisce insuccessione le varie marce e determina la griglia del cambio (vedi Fig. 4.19).
Gioco
31 5
2 4 6RM
Figura 4.19: Griglia della leva del cambio.
Come si nota dalla figura, quando la marcia e ingranata e permesso un certo giocoorrizzontale, che determina anche i valori limiti della posizione della selezione entro i qualil’innesto puo ingranare con sicurezza. Per simulare tale comportamento e stato introdottonel modello della selezione un blocco simulink appropriato descritto nel Cap. 5. I risultatidella simulazione del polipo sono mostrati nelle figure seguenti.

78 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tempo [s]
I fr
[Am
p]
Figura 4.20: Corrente di eccitazione della frizione.
0 5 10 15 20 25 30 35−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
tempo [s]
xfr
[mm
]
Figura 4.21: Andamento temporale della posizione frizione.

4.3. “POLIPO” 79
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
tempo [s]
I inn
[Bit
]
Figura 4.22: Corrente di eccitazione delle valvole di innesto.
0 5 10 15 20 25 30 35−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
tempo [s]
y inn
[mm
]
Figura 4.23: Posizione innesto.

80 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI
0 5 10 15 20 25 30 35 400
0.5
1
0 5 10 15 20 25 30 35 400
0.5
1
0 5 10 15 20 25 30 35 400
0.5
1
tempo [s]
I sel1
[Bit
]I s
el2
[Bit
]I s
el3
[Bit
]
Figura 4.24: Corrente di eccitazione delle valvole di selezione.
0 5 10 15 20 25 30 35−1
−0.5
0
0.5
tempo [s]
xsel[m
m]
Figura 4.25: Posizione selezione.

4.3. “POLIPO” 81
−1 −0.5 0 0.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
xsel [mm]
y inn
[mm
]
Figura 4.26: Griglia ottenuta.

82 CAPITOLO 4. ANALISI DEI DATI E RISULTATI SIMULATIVI

Capitolo 5
Implementazioni Simlink
In questo capitolo verranno descritte alcune soluzioni adottate nelle realizzazioni Simulinkdei modelli, al fine di renderli piu performanti e stabili.
5.1 Enable Subsystem
Un metodo per aumentare la velocita di simulazione, consiste nell’utilizzo, ogni volta siapossibile, del blocco di Enable. Tale blocco, messo all’interno di un subsystem, permette dicreare un enabled subsystem. Esso presenta un ingresso di enable con il quale e possibiledisabilitarlo con un segnale esterno. Per tutto il tempo nel quale l’enabled subsystemresta disabilitato, il suo stato e le sue uscite rimangono costanti, pertanto Simulink evitadi effettuare i calcoli relativi ad essi, con guadagno in velocita di simulazione. E dunqueconsigliabile utilizzare tale blocco ogni volta che sia possibile determinare una condizioneper cui si e certi che lo stato di un subsystem non cambi.Ad esempio il blocco di Enable e stato utilizzato all’interno del subsystem “Attivazionepompa” visibile in Fig. 4.1. Esso non e altro che un rele con isteresi che si attiva quandola pressione scende sotto il valore inferiore (Pinf) e si disattiva quando raggiunge il valoresuperiore (Psup). L’interno del blocco e visibile in Fig. 5.1 e Fig. 5.2.
Quando la pressione scende sotto il valore Pinf, l’Enabled Subsystem viene attivato.Al suo interno (Fig. 5.2) viene verificato che la pressione sia minore di Psup. Fintanto chequesta condizione rimane vera l’uscita del Subsystem e a uno. Cio produce sia l’attivazionedella pompa che ricarica l’accumulatore, sia il mantenimento del Subsystem nello statodi attivazione finche il valore della pressione non raggiunge il valore Psup. Il blocco diMemory serve ad evitare Loop algebrici e con esso puo essere settata la condizione inizialedel rele.
83

84 CAPITOLO 5. IMPLEMENTAZIONI SIMLINK
Memory
Costante
Enabled Subsystem
1
HydPmp
PRESSHydPmp
<
OR
Pinf
1
PRESSIONE
Figura 5.1: Interno del blocco “Attivazione pompa”.
Costante
1
HydPmp
<
Psup
Enable
1
PRESS
Figura 5.2: Interno del blocco “Enabled Subsystem”.

5.2. BLOCCO DI ATTRITO COULOMBIANO 85
5.2 Blocco di Attrito Coulombiano
Risulta utile poter simulare, in maniera corretta, l’attrito Coulombiano fra una massamobile e una superfice ferma, ovvero solidale al sistema di riferimento considerato. Ilproblema e stato affrontato nel CAP. 2.2.1 nel caso di due inerzie (o masse se nel campotranslazionale) a contatto. Il caso in esame risulta tuttavia piu semplice da trattare inquanto una delle due masse ha sempre velocita nulla. In questo caso la forza scambiatain condizione di sliding e uguale alla forza applicata alla massa mobile. Questo puo esserericavato, dal caso trattato precedentemente, facendo tendere ad infinito una delle dueinerzie.Pertanto, se la forza applicata alla massa mobile, risulta minore al coefficiente di primodistacco, essa rimane solidale alla superfice, ovvero ferma, in caso contrario si stacca e,alla forza applicata, viene sottratto il valore dell’attrito coulombiano. Lo schema Simulinkutilizzato viene mostrato in Fig. 5.3.
Integratore
Prodotto
1
Velocita’ SwitchSegno
Saturazione
s
1
Hit Crossing
1/M
1
Forzaapplicata
+Kpd
−Kpd
K
Figura 5.3: Blocco Attrito Coulombiano.
Quando la velocita e nulla, ovvero siamo in condizione di sliding, l’uscita dell bloccoHit Crossing e uno. Alla forza agente sulla massa viene sottratto il proprio valore saturatodal coefficiente di primo distacco (Kpd). Pertanto se la forza e minore in modulo di Kpd,all’ingresso dell’integratore verra fornito un valore nullo e la condizione di sliding permarraanche nel successivo istante di simulazione. In caso contrario all’ingresso dell’integratoreviene applicato un valore non nullo e dunque la massa iniziera a muoversi nella direzionedella forza applicata. A questo punto lo switch commutera sottraendo alla forza applicataun valore costante pari all’attrito coulombiano (K).A volte risulta utile poter far variare il coefficiente di primo distacco durante la simu-lazione. e dunque necessario un blocco saturatore con i limiti variabili. Un modo diimplementare tale blocco e mostrato in Fig. 5.4.
In uscita si ha il valore minimo tra il modulo della forza applicata in ingresso e ilcoefficiente di primo distacco, il tutto moltiplicato per il segno della forza. Si ottiene cosıla forza saturata con limiti di saturazione variabili.

86 CAPITOLO 5. IMPLEMENTAZIONI SIMLINK
1
Forza Saturata
Segno
|u|
Modulo
min
2
1
Forzaapplicata
Kpd
Figura 5.4: Saturazione con limiti variabili.
5.3 Finecorsa
Come descritto nel CAP. 1 i finecorsa degli attuatori sono modellati attraverso dellemolle di elevata rigidita che agiscono solo quando la posizione della massa, soggetta avincolo, supera quella del finecorsa. Tuttavia tale soluzione presenta alcuni problemisimulativi derivanti dall’introduzione di un sistema massa-molla che provoca oscillazioniattorno alla posizione di riposo e non rispetta la posizione del finecorsa. Un esempio diimplementazione dei finecorsa in questo modo viene mostrato in Fig. 5.5 la cui simulazionee vedi visibile in Fig. 5.6. Tali oscillazioni riducono la velocita di simulazione e, se adinteragire sono piu masse contemporaneamente, possono anche provocarne il blocco.
Velocita’
Finecorsa
POS
Posizione
s
1s
1100
1000
1/100
20
Figura 5.5: Schema dei finecorsa implementato come una molla.
Un metodo alternativo e quello di resettare l’integratore di velocita una volta che laposizione della massa ha raggiunto quella di finecorsa e, contemporaneamente, annullare

5.3. FINECORSA 87
4 5 6 7 8 9 10 11 12 13 140.6
0.7
0.8
0.9
1
1.1
1.2
Tempo
Pos
izio
ne
Figura 5.6: Simulazione di finecorsa implementato come una molla.
4 5 6 7 8 9 10 11 12 13 140.6
0.7
0.8
0.9
1
1.1
1.2
Tempo
Pos
izio
ne
Figura 5.7: Simulazione di finecorsa alternativo.

88 CAPITOLO 5. IMPLEMENTAZIONI SIMLINK
le forze che spingono la massa nella direzione proibita, ovvero le forze positive se la massaha raggiunto la sua posizione massima e negative se ha raggiunto la sua posizione minima.Una implementazione di quanto detto e mostrata in Fig. 5.8 e Fig. 5.9 e la sua simulazionein Fig. 5.7.Per realizzare il tutto, e stato limitato l’integratore di posizione ai valori di finecorsa (vediFig. 5.8). Utilizzando il segnale proveniente dalla porta di saturazione dello stesso, siresetta l’integratore di velocita e contemporaneamente si annulla la forza entrante nellamassa se il suo segno risulta uguale a quello del segnale di saturazione (vedi Fig. 5.9).Questo segnale infatti e uguale a uno se la posizione ha raggiunto il valore massimo, menouno se ha raggiunto il valore minimo e zero se e compresa fra i due.Questa soluzione puo sembrare scorretta, da un punto di vista fisico, in quanto annullala velocita della massa (e dunque la sua energia cinetica) istantaneamente. Tuttavia puoessere utilizzata senza problemi, quando si e sicuri che, nel sistema che si sta modellando,l’impatto della massa col finecorsa non provoca oscillazioni rilevanti e che dunque nonnecessitano di essere simulate. La soluzione adottata infatti risulta essere molto perfor-mante in termini di velocita di simulazione, in quanto elimina le oscillazioni, e dunque icalcoli necessari a simularle, e rispetta il valore dei finecorsa, come visibile in Fig. 5.7.

5.3. FINECORSA 89
Velocita’
Saturazione
Attrito
POS
Posizione
s
1
s
1
Satu
razi
one
Forz
a Ap
plic
ata
Acce
lera
zion
e
Res
et
Finecorsa
100
20
Figura 5.8: Schema dei finecorsa alternativo.
1/MASSA
2 Reset1 Accelerazione
Sign
~=
1/100
2 Forza Applicata 1 Saturazione
Figura 5.9: Subsystem FINECORSA.

90 CAPITOLO 5. IMPLEMENTAZIONI SIMLINK
5.4 Gioco Orizzontale della Selezione a Marcia In-
granata
Per poter simulare correttamente il “polipo” e stato necessario implementare il giocodella selezione a marcia ingranata (vedi Fig. 4.19 nel CAP. 4). Lo schema utilizzatoallo scopo e visibile in Fig. 5.10 e Fig. 5.11. Il metodo utilizzato e lo stesso usato perimplementare i finecorsa, anche se in questo caso il segnale di reset viene generato dalblocco GIOCO attraverso la posizione degli attuatori di innesto e selezione. Il subsystemin questione viene mostrato in Fig. 5.11. Quando la posizione dell’innesto e, in modulo,minore del valore che definisce i limiti centrali entro i quali nessuna marcia e ingranata,lo switch ha come uscita la posizione attuale della selezione. Questa si sottrae a sestessa e dunque l’uscita RESET e sempre zero e non viene applicato nessun finecorsa allaselezione. Quando la posizione dell’innesto supera i limiti centrali, lo switch commuta,memorizzando il valore attuale della selezione, che si ipotizza essere arrivata nella suaposizione di lavoro. Ora, se la posizione della selezione resta uguale a quella memorizzataa meno di DELTA allora il segnale di reset resta a zero, in caso contrario diviene uno omeno uno, impedendo alla selezione di avanzare ulteriormente nella direzione proibita.
1/MASSA
2 Reset1 Accelerazione
~=
PO
SIZ
ION
E IN
NE
STO
PO
SIZ
ION
E S
ELE
ZIO
NE
RE
SE
T
GIOCO
1/M_SEL
3POSIZIONE INNESTO2 Forza Applicata 1 POSIZIONE SELEZIONE
Figura 5.10: Schema del gioco selezione.

5.4. GIOCO SELEZIONE 91
MEMORY
SWITCH
1 RESET
Sign
>=
|u|
|u|
Abs
DELTA
2
POSIZIONESELEZIONE
1
POSIZIONEINNESTO
Figura 5.11: Subsystem GIOCO.

92 CAPITOLO 5. IMPLEMENTAZIONI SIMLINK

Appendice A
Sfunction
Le S–Function sono un potente strumento per estendere le capacita di Simulink. Essepermettono di aggiungere propri algoritmi ai modelli gia esistenti seguendo semplici re-gole (vedere [1], [2]).Le S–Function possono essere scritte usando sia il linguaggio MATLAB che C. In quest’ul-timo caso prima di essere utilizzate devono venir compilate come MEX–file usando il co-mando mex di MATLAB.Le S–Function usano una speciale sintassi di chiamata che permette loro di interagire conl’algoritmo di risoluzione delle equazioni di Simulink (ODE), nello stesso modo operatodai blocchi precompilati.Nei seguenti paragrafi si descrivera come funziona Simulink e si illustreranno alcuniconcetti base sulle S–Function per poi passare alla loro scrittura.
A.1 Come Lavora al Suo Interno il Programma Si-
mulink
Per ogni generico blocco all’interno di uno schema Simulink, vengono mantenuti in memo-ria i seguenti vettori ad esso associati (come mostrato in Fig. A.1):
• un vettore degli ingressi u
• un vettore delle uscite y
• un vettore degli stati x
Figura A.1: Vettori associati al generico blocco Simulink.
Il vettore degli stati puo contenere stati continui xc, discreti xd o entrambi, nel qualcaso il sistema si dice ibrido.
93

94 APPENDICE A. SFUNCTION
Le equazioni che legano tali vettori sono definite dal sistema di equazioni differenziali edalle differenze:
y = f0(t,x,u) (output)
xc = fc(t,x,u) (derivative)
xdk+1= fd(t,x,u) (update)
ove: x =
[xc
xdk
]
La simulazione si sviluppa in due fasi: Inizializzazione e Loop di Simulazione.Durante la fase di Inizializzazione vengono eseguite le seguenti operazioni:
• Le espressioni usate nei parametri dei blocchi sono passati a MATLAB per la lorovalutazione e sostituite con i valori numerici calcolati;
• La gerarchia del modello viene appiattita, ovvero ogni Subsistem viene sostituitocon i blocchi che lo compongono;
• I blocchi vengono ordinati in base a come devono essere eseguiti. L’algoritmo diordinamento costruisce una lista e ogni blocco con direct feedthrough non vieneaggiornato finche non lo sono i blocchi che lo guidano. E in questa fase che vengonoindividuati i loop algebrici ;
• Vengono verificate le connessioni tra i blocchi e individuate eventuali disomogeneitafra le lunghezze dei vettori di uscita e ingresso.
A questo punto la simulazione e pronta per partire. Un modello viene simulato ri-solvendo le equazioni che lo descrivono attraverso l’integrazione numerica. L’efficacia diognuno dei metodi di integrazione forniti dipende dalla capacita di ogni blocco di fornirele derivate dei suoi stati continui.Il calcolo delle derivate e un processo a due fasi:
1. Viene calcolata l’uscita di ogni blocco nell’ordine determinato precedentemente;
2. Ogni blocco con stati continui calcola le sue derivate in base a:
• il tempo corrente
• lo stato attuale
• i suoi ingressi
attraverso la funzione:
xc = fc(t,x,u) (derivative)
Il vettore risultante viene ritornato al risolvitore il quale lo usa per calcolare il prossimotempo di campionamento e il nuovo stato di ognuno dei blocchi del modello.

A.1. COME LAVORA AL SUO INTERNO IL PROGRAMMA SIMULINK 95
A.1.1 Zero Crossing e Loops Algebrici
Per capire appieno il funzionamento di Simulink e necessario conoscere questi due concetti.
Zero Crossing
Lo Zero Crossing serve per determinare l’istante esatto, a meno della precisione impostata,in cui avviene il passaggio di una uscita per lo zero, o per un valore specificato. Se il passodi integrazione e troppo largo la transizione puo essere saltata come mostrato in Fig. A.2.
Figura A.2: Zero Crossing detection.
Se lo Zero Crossing viene individuato Simulink torna al passo precedente e rifa i calcolicon un tempo di campionamento minore e procede cosı fino alla determinazione dell’istanteesatto in cui lo Zero Crossing e avvenuto.L’utilizzo degli Zero Crossing gioca un ruolo fondamentale nei seguenti ambiti:
• Gestione degli “State Events” :un sistema sperimenta uno state event quando il cambiamento del valore di uno statoprovoca il cambiamento delle equazioni che descrivono il sistema stesso. Per unasimulazione corretta l’istante in cui si verifica lo state event deve essere determinatoaccuratamente e per far cio si usa appunto lo Zero Crossing;
• Accurata integrazione dei segnali discontinui :le routines di integrazione numerica sono basate sull’ipotesi che i segnali da integraresiano regolari. Se una discontinuita viene rilevata durante uno step di integrazioneSimulink usa lo Zero Crossing per determinare l’istante in cui si e verificata.A questo punto viene considerato l’istante di integrazione sull margine sinistro delladiscontinuita e viene preso un passo in modo da saltarla e iniziare l’integrazionenella successiva parte continua del segnale.
In Tab. A.1 vengono elencati i blocchi Simulink aventi all’interno Zero Crossing.Lo zero Crossing puo causare rallentamenti nella simulazione, se usato su segnali cheattraversano la discontinuita con frequenza elevata. E possibile in questi casi disabilitaregli Zero Crossing presenti nei blocchi Simulink attraverso l’opzione Disable zero crossingdetection.
Loops Algebrici
Alcuni blocchi Simulink hanno porte di ingresso con direct feedthrough cio significa chel’uscita di questi blocchi non puo essere calcolata senza conoscere tutti i segnali chearrivano alle suddette porte.

96 APPENDICE A. SFUNCTION
Nome blocco Descrizione dello Zero CrossingAbs per determinare quando il segnale di ingresso attraversa lo zero
nelle due direzioniBackslash uno per determinare quando abilitare il valore di soglia superiore
e l’altro quello inferioreDead one uno per determinare quando il segnale di ingresso entra
nella Dead Zone e l’altro quando ne esceHit Crossing per determinare quando il segnale di ingresso attraversa il valore
impostato (non viene disabilitato dall’opzione Disable zero crossing )Integrator se e presente la porta di reset o l’integratore viene limitatoMinMax per determinare il nuovo minimo o massimo fra i segnali di ingressoRelay per determinare l’istante di switchRelational operator per determinare quando cambiano i segnali di ingressoSaturation uno per determinare quando abilitare il valore di soglia superiore
e l’altro quello inferioreSign per determinare l’istante in cui l’ingresso cambia segnoStep per determinare l’istante dello stepSubsistem se e presente la porta di Enable o TriggerSwitch sulla condizione di switch
Tabella A.1: Blocchi con Zero Crossing.
Un Loop algebrico si verifica in genere quando un ingresso con direct feedthrough e guidatodall uscita dello stesso blocco, o direttamente, o attraverso una retroazione di altri blocchicon direct feedthrough. Un semplice esempio e mostrato in Fig. A.3.
Figura A.3: Esempio di loop algebrico con blocco sommatore.
Con riferimento all’esempio in Fig. A.3, l’uscita del blocco sommatore e data da z =z − u , pertanto si ha che z = u
2. Sebbene la soluzione di questo loop si semplice, essa
non puo essere risolta immediatamente da Simulink. Quando un modello presenta loopalgebrici Simulink chiama, ad ogni passo, una routine di risoluzione del loop algebricoche cerca di trovare la soluzione del problema attraverso un algoritmo iterativo. Ciocomporta un rallentamento generale della simulazione e pertanto e sempre meglio evitaredi introdurre loop algebrici all’interno dei propri modelli.

A.2. S–FUNCTION 97
A.2 S–Function
Una S–Function e come un qualsiasi altro blocco Simulink. Durante la simulazione, Simu-link effettua ripetute chiamate al codice delle routine presenti nei blocchi che compongonolo schema. In Fig. A.4 e mostrato in modo piu approfondito quali sono le fasi di unasimulazione.
Figura A.4: Flow chart delle diverse fasi di una simulazione.
Ad ogni passo della simulazione Simulink puo interrogare la S–Function e richiederledi eseguire una delle routine in essa implementata.Le fasi della simulazione sono:
• Inizializzazione: prima di iniziare il loop di simulazione, Simulink inizializza la S–Function. Durante questa fase si ha:

98 APPENDICE A. SFUNCTION
– Inizializzazione di SimStruct, una struttura di simulazione che contiene infor-mazioni riguardanti la S–Function;
– Settaggio del numero e dimensione delle porte di ingresso e uscita;
– Settaggio del tempo (o tempi se piu di uno) di campionamento dei blocchi;
– Allocazione delle aree di memoria e dell’array sizes.
• Calcolo dell’istante di campionamento successivo: se si e scelti una routine di inte-grazione a passo variabile, questa fase calcola l’istante successivo ovvero il prossimoistante temporale.
• Calcolo delle uscite: al termine di questa chiamata le uscite sono disponibili per ilpasso di integrazione corrente.
• Aggiornamento degli stati discreti: tutti i blocchi che devono effettuare una solaattivita per passo temporale vengono chiamati. Ad esempio come aggiornare glistati discreti;
• Integrazione: questa fase si applica ai modelli con stati continui o aventi ZeroCrossing.
– Per modelli con stati continui Simulink fornisce al blocco i valori degli ingressi,degli stati e dell’istante di simulazione attuale e chiama le routine della S–Function che calcolano le uscite e le derivate. Poi utilizza tali informazioniper poter calcolare lo stato successivo. Tali operazioni possono venir ripetutecon un minor passo temporale fino a raggiungere le precisioni imposte dallasimulazione;
– Per modelli con Zero Crossing Simulink chiama la porzione di codice relativacon un minor passo temporale fino a localizzare l’istante esatto di crossing.
Come detto a ogni passo della simulazione Simulink puo richiamare una delle routinepresenti nella S–Function e sono dunque esse che devono essere scritte per definire lapropria S–Function. La Tab. A.2 mostra il nome delle routine e il flag passato da Simulinkper richiamarle.
Nel caso di S–Function scritte in linguaggio MATLAB (M–file S–Function) si deveprevedere un codice che in base al valere di flag chiami la routine corrispondente.Nel caso di S–Function scritte in linguaggio C (C–MEX S–Function), Simulink chiamadirettamente la routine e dunque bisogna utilizzare i nomi sopra specificati.
A.2.1 Concetti Fondamentali
Per riuscire a costruire correttamente una S–Function e necessario comprendere alcuniconcetti chiave:
• Direct Feedthrough;
• Dimensionamento dinamico degli ingressi;
• Settaggio del tempo di campionamento e di offset.

A.2. S–FUNCTION 99
Stage di simulazione S–Function routine Flag
Inizializzazione mdlInitializeSizes flag = 0
Calcolo dell’istante di campionamento mdlGetTimeOfNextVarHit flag = 4successivo(opzionale)
Calcolo delle uscite mdlOutputs flag = 3
Aggiornamento stati discreti mdlUpdate flag = 2
Calcolo delle derivate mdlDerivatives flag = 1
Fine della simulazione mdlTerminate flag = 9
Tabella A.2: Routine che compongono una S–Function.
Direct Feedthrough
Direct Feedthrough significa che l’uscita o il tempo di campionamento sono controllatedirettamente dal valore di un ingresso. Si puo dire che un ingresso di una S–Function haDirect Feedthrough se:
• La funzione d’uscita (mdlOutputs o flag=3) e funzione diretta dell’ingresso u;
• La funzione che calcola il prossimo istante di campionamento per la S–Function(mdlGetTimeOfNextVarHit o flag=4) e funzione dell’ingresso u.
Dimensionamento Dinamico degli Ingressi
Una S–Function puo essere scritta in modo da accettare ampiezze degli ingressi variabili.In tale caso l’ampiezza deve essere determinata all’inizio della simulazione durante la fasedi inizializzazione.Per conoscere il numero di ingressi che attualmente guidano il blocco basta usare il co-mando length(u); da tale informazione e possibile poi determinare il numero degli statixe delle uscite y.
Settaggio del Tempo di Campionamento e di Offset
Le S–Function permettono un elevato grado di flessibilita nello specificare quando lafunzione deve essere valutata (ovvero il tempo di campionamento T ). Si hanno le seguentiopzioni per specificare il tempo di campionamento:
• tempo di campionamento continuo: per S–Function che hanno stati continui o fannouso di zero crossing;
• tempo di campionamento continuo ma che non cambia durante l’integrazione: perS–Function che necessitano di essere valutate ad ogni passo ma che non varianodurante la fase di integrazione;

100 APPENDICE A. SFUNCTION
• tempo di campionamento discreto: se la S–Function e una funzione discreta deltempo, ovvero stati e uscite devono essere aggiornate solo a intervalli prestabiliti.E possibile definire anche un offset che deve essere comunque minore del periodo dicampionamento;
• tempo di campionamento variabile: e come un tempo di campionamento discretoma con il periodo che varia ad esempio in funzione di un ingresso;
• tempo di campionamento ereditato: eredita il proprio tempo di campionamento dail blocco che lo guida a monte, il blocco a valle o il blocco del sistema che ha tempodi campionamento minore.
Una S–Function puo avere diversi tempi di campionamento uno per ogni elemento delvettore di stato.
A.3 Scrittura di una S–Function
Come gia accennato vi sono due possibilita per scrivere una S–Function: o come un M–file(file MATLAB) o come C MEX–file (MATLAB EXecutable file), che necessita, prima dipoter essere utilizzato, di compilazione in dll, operazione effettuabile con il comando mexdi MATLAB.Sebbene il primo metodo sia piu semplice, il codice implementato deve essere interpretatoda MATLAB e dunque risulta meno prestazionale in simulazione. Inoltre una C MEXS–Function offre la possibilita di definire zero crossing e di resettare il valore correntedello stato, cose non fruibili attraverso una M–file S–Function.Per quanto riguarda la scrittura delle S–Function, MATLAB offre due template che rispec-chiano la struttura del file finale e a cui basta inserire le funzioni costruite, dove indicato.Questi file sono:
• sfuntmpl.m situato nella sottocartella MATLAB /toolbox/simulink/blocks, che riguar-da le M–file S–Function.
• sfuntmpl.doc situato nella sottocartella MATLAB /simulink/scr, che riguarda le CMEX S–Function.
Nelle stesse cartelle sono presenti una serie di esempi ampiamente commentati.
A.3.1 Esempio di S–Function: integratore limitato
Di seguito viene riportato un esempio di M–file S–Function, che implementa un integra-tore limitato ai valori lb (lower bound) e ub (upper bound).
function [sys,x0,str,ts]=limint(t,x,u,flag,lb,ub,xi)
switch flag
%%%%%%%%%%%%%%%%%%%%

A.3. SCRITTURA DI UNA S–FUNCTION 101
% Inizializzazione %
%%%%%%%%%%%%%%%%%%%%
case 0
[sys,x0,str,ts] = mdlInitializeSizes(lb,ub,xi);
%%%%%%%%%%%%%%%
% Derivatives %
%%%%%%%%%%%%%%%
case 1
sys = mdlDerivatives(t,x,u,lb,ub);
%%%%%%%%%%%%%%%%%%%%%%%%
% Update and Terminate %
%%%%%%%%%%%%%%%%%%%%%%%%
case 2,9
sys = []; % do nothing
%%%%%%%%%%
% Output %
%%%%%%%%%%
case 3
sys = mdlOutputs(t,x,u);
otherwise
error([’unhandled flag = ’,num2str(flag)]);
end
%
% =====================================================================
% mdlInitializeSizes
% Ritorna la struttura \emphsizes, le condizioni iniziali e
% i tempi di campionamento della S-Function.
%======================================================================
%
function [sys,x0,str,ts] = mdlInitializeSizes(lb,ub,xi)
sizes = simsizes; sizes.NumContStates = 1;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
str = [];
x0 = xi;

102 APPENDICE A. SFUNCTION
ts = [0 0]; % sample time: [period, offset]
% end mdlInitializeSizes
%
%======================================================================
% mdlDerivatives
% Computa le derivate degli stati continui.
%======================================================================
%
function sys = mdlDerivatives(t,x,u,lb,ub)
if (x <= lb & u < 0) | (x>= ub & u>0 )
sys = 0;
else
sys = u;
end
% end mdlDerivatives
%
%======================================================================
% mdlOutputs
% Ritorna il vettore di uscita.
%======================================================================
%
function sys = mdlOutputs(t,x,u)
sys = x;
% end mdlOutputs

Appendice B
Modellazione di linee idrauliche
Il problema della determinazione della dinamica di una linea idraulica o tubo, e di interessein svariate applicazione fra le quali il controllo di sistemi idraulici ([3],[4]). Il modello delprimo ordine per una linea idraulica e rappresentato da un ritardo puro dovuto allavelocita finita di propagazione del fluido. Le difficolta si incontrano quando vengonoconsiderati effetti del secondo ordine quali dissipazioni, condizione al contorno complesse,effetti di riflessione, e comportamenti non lineari.Nel seguente si descriveranno le tecniche di modellizzazione utilizzate in questa tesi.
B.1 Funzioni Caratteristiche della Linea
I vari modelli differiscono fra di loro per la complessita delle equazioni che vengono utiliz-zate per descriverli. Per tutti i modelli le soluzioni, di tali equazioni, sono caratterizzatedalle seguenti due funzioni:
• Γ(s): detta operatore di propagazione;
• Z(s): detta impedenza caratteristica.
ove s e la variabile di Laplace.
Sebbene tali funzioni caratterizzino la risposta della linea in un caso generale, la lorointerpretazione fisica e illustrata efficacemente nel caso di una linea semi–infinita (vediFig B.1).
In questo caso la trasformata di Laplace della pressione presente in x1 e legata a quellain x2 dall equazione:
P (x2, s) = P (x1, s) e−[Γ(s)x2−x1
l ] (B.1)
ove l e una lunghezza di normalizzazione.Inoltre in ogni sezione del tubo la trasformata di Laplace della portata e legata a quelladella pressione dell’ equazione:
P (x, s) = Z(s)Q(x, s) (B.2)
La natura delle funzioni scelte a rappresentare Γ(s) e Z(s) nel modello matematico,caratterizzano la risposta di tale modello.
103

104 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE
- -
x1 x2
Q(x1, s) Q(x2, s)
l
P (x1, s) P (x2, s)
Figura B.1: Rappresentazione schematica di una linea idraulica.
B.2 Modelli della Linea
I modelli utilizzati possono essere riassunti nei seguenti tre:
1. Modello senza perdite (Lossless Fluid Line Model): in cui non sono inclusi effettidissipativi o di trasmissione del calore;
2. Modello con attrito lineare (Linear Friction Model): in cui gli effetti dissipativi sonoassunti proporzionali alla velocita media del fluido;
3. Modello dissipativo (Dissipative Model): che include la viscosita e trasferimento dicalore.
B.2.1 Modello 1: Senza Perdite
Le equazioni relative a tale modello sono:
ρ0∂u
∂t+
∂p
∂x= 0 (Momento)
∂ρ
∂t+ ρ0
∂u
∂x= 0 (Continuita)
dρ
ρ0
=dp
KB
(Stato)
ove:
– ρ(x, t) e la densita del fluido nella sezione x;
– ρ0(x, t) e la densita media del fluido;
– u(r, x, t) e la velocita assiale del fluido, ove r e la coordinata radiale;

B.2. MODELLI DELLA LINEA 105
– p(x, t) e la pressione;
– KB e il modulo di comprimibilita del liquido (bulk).
queste equazioni combinate tra loro danno la seguente equazione delle onde:
∂2p
∂2t= c0
2 ∂2p
∂2x(B.3)
in cui c0 e la velocita del suono nel fluido ed e data da:
c0 =
√
KB
ρ0
(B.4)
Per questo modello l’operatore di propagazione e l’impedenza caratteristica sono dateda:
Γ(s) = lc0
s
Z(s) =ρ0c0
πr02
Ovvero in tale modello, Γ(s) produce un ritardo temporale puro mentre Z(s) risultaessere una impedenza costante.
B.2.2 Modello 2: Perdite Lineari
In questo caso l’equazione di momento si trasforma nella seguente:
ρ0
[∂u
∂t+ Fu
]
+∂p
∂x= 0 (Momento) (B.5)
ove F e il coefficiente di attrito, che dalla teoria del flusso di Hagen–Poiseuille risultaessere:
F =8ν0
ro2
(B.6)
con ν0 viscosita cinematica media.Per questo modello l’operatore di propagazione e l’impedenza caratteristica sono date da:
Γ(s) =ls
c0
√
1 +F
s
Z(s) =ρ0c0
πr02
√
1 +F
s
In questo modello oltre al ritardo, Γ(s) produce anche una attenuazione dovuta altermine di attrito F . Inoltre la portata e legata alla pressione da un’impedenza complessa,Z(s) che introduce un ritardo di fase.

106 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE
B.2.3 Modello 3: Modello Dissipativo
In questo caso le equazioni descrittive risultano essere:
ρ0∂u
∂t+
∂p
∂x= µ0
[∂2u
∂r2 +1
r
∂u
∂r
]
(Momento)
∂ρ
∂t+ ρ0
[∂u
∂x+
∂v
∂r+
v
r
]
= 0 (Continuita)
θ0(γ − 1)∂ρ
∂t+
∂θ
∂t= α0
[∂2θ
∂r2 +1
r
∂θ
∂r
]
(Energia)
dρ
ρ0
=dp
KB
(Stato)
ove:
– µ0 e la viscosita dinamica media che risulta essere data da µ0 = ρ0ν0;
– v(r, x, t) e la velocita radiale;
– θ e la temperatura del fluido;
– γ e il rapporto dei calori specifici;
– α0 e il coefficiente di diffusione.
In questo caso l’operatore di propagazione e l’impedenza caratteristica sono date daespressioni del tipo:
Γ(s) =ls
c0
1√
N(r0
√
s/ν0)
√
1 + (γ − 1)(1 − N(r0
√
s/α0))
Z(s) =ρ0c0
πr02
1√
N(r0
√
s/ν0)
1√
1 + (γ − 1)(1 − N(r0
√
s/α0))
in cui la funzione N(·) = I2(·)I0(·)
e data dal rapporto delle funzioni di Bessel modificate
I2(·) e I0(·).Nel caso in cui γ = 1, ovvero gli elementi che si scambiano calore hanno uguali calorispecifici, gli operatori si riducono a:
Γ(s) =ls
c0
1√
N(r0
√
s/ν0)
Z(s) =ρ0c0
πr02
1√
N(r0
√
s/ν0)
In questo modello, dunque, l’attenuazione e il ritardo di fase risultano dipendenti dallafrequenza attraverso la funzione N(·).

B.3. VALIDITA DEI MODELLI 107
B.3 Validita dei Modelli
Le restrizioni necessarie alla derivazione delle equazioni che si riferiscono ai modelli so-praesposti, sono essenzialmente la presenza di un flusso laminare in un tubo rigido adiametro costante in cui la velocita media del fluido risulta molto minore della velocitadel suono nello stesso.In termine dei parametri che descrivono la linea, queste restrizioni implicano le seguenticostrizioni:
• Il numero di Reynolds (Re = u02r0/ν0) minore di 2000 (limite di turbolenza delflusso);
• Il numero di Mach (M = u0/c0) molto minore dell’unita;
• Il rapporto fra lunghezza e diametro del tubo molto maggiore dell’unita;
• Variazione normalizzata della densita (ρ/ρ0) molto minore dell’unita.
Tuttavia i risultati sperimentali, confrontati con quelli teorici, hanno permesso distabilire le condizioni di validita dei modelli e di rilassare alcune delle restrizioni sopraindicate. In particolare si ha che:
(a) I modelli sono applicabili per condizioni al contorno arbitrarie ai terminali dellalinea;
(b) Il modello puo essere utilizzato al di sopra del limite di turbolenza del flusso;
(c) I risultati si mantengono inalterati per variazioni ragionevoli del rapporto fra i calorispecifici (γ);
(d) I risultati si mantengono per linee non rettilinee, rigidamente montate, in cui ilraggio di curvatura massimo e maggiore del raggio del tubo;
(e) La velocita del suono puo essere modificata per includere gli effetti di linee flessibili.Si ricava, da prove sperimentali, la nuova velocita:
c =1
√
1 +2r0c0
2ρ0
Ef
(B.7)
ove:
– E e l’elasticita del tubo;
– f e lo spessore del tubo.
La risposta dinamica completa della linea, viene caratterizzata attraverso quattronumeri adimensionali, che sono:

108 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE
1. Dissipation number :
Dn =lν0
c0r02
(B.8)
Il cui valore e indicativo dell’attenuazione e della distorsione lungo la linea. E ilrapporto fra il tempo di attraversamento della linea (l/c0) e un termine indicativodel decadimento transitorio (r0
2/ν0 ).
2. Prandtl number :
Pr =ν0
α0
(B.9)
Indica l’importanza relativa della viscosita rispetto al trasferimento di calore. e ilrapporto della viscosita cinematica sul coefficiente di diffusione.
3. Rapporto fra i calori specifici γ:come visto nel modello 3, per γ = 1, Γ(s) e Z(s) vengono notevolmente semplificate.
4. Propagation number :
Pn =2ωl
πc0
(B.10)
ove ω e la frequenza (in rad/sec), di un ingresso sinusoidale. E il rapporto fra iltempo di attraversamento dell onda (l/c0) e un quarto del periodo (π/2ω). Valoriinteri del numero di Pn indicano le pulsazioni naturali (di risonanza) di una lineasenza perdite (modello 1) ovvero:
ωr = Pn
πc0
2l(B.11)
in cui:
Pn = 1, 3, 5, . . . (Linea bloccata)Pn = 2, 4, 6, . . . (Linea aperta)
Tali pulsazioni possono essere riscritte come:
ωni = (2i − 1)πc0
2l(Linea bloccata)
i = 1, 2, 3, . . .
ωsi = 2iπc0
2l(Linea aperta)
Per il modello con dissipazione le frequenze di risonanza risultano minori rispetto aquelle calcolate in assenza di perdite.
B.4 Rappresentazioni della Linea per Analisi
Date Γ(s) e Z(s) vi sono tecniche che possono essere utilizzate per modellare una linea concondizioni al contorno arbitrarie. Tali tecniche si basano su reti a due porte in cui entranoed escono le variabili di potenza P (s) e Q(s). Vi sono vari tipi di possibili rappresentazioni;

B.4. RAPPRESENTAZIONI DELLA LINEA PER ANALISI 109
quella utilizzata e la rappresentazione a funzioni di trasferimento. Come si evince dallaFig. B.2 si ha che:
Ya(s)
Yb(s)
=
G11(s) G12(s)
G21(s) G22(s)
Xa(s)
Xb(s)
Vi possono essere quattro forme fisicamente realizzabili in funzione di quali variabilientrano e di quali escono, come mostrato in Tab. B.1.
Xa(s)
Ya(s)
- -
?
G11(s)
? G12(s)
- G21(s) - - -
6
G22(s)
6
Yb(s)
Xb(s)
Figura B.2: Rappresentazione della linea attraverso matrici di trasferimento.
Xa = Qa Ya = Pa Xa = Qa Ya = Pa Xa = Pa Ya = Qa Xa = Pa Ya = Qa
Xb = Qb Yb = Pb Xb = Pb Yb = Qb Xa = Qb Ya = Pb Xa = Pb Ya = Qb
G11Z(s) cosh Γ(s)
sinh Γ(s)
Z(s) sinh Γ(s)
cosh Γ(s)
sinh Γ(s)
Z(s) cosh Γ(s)
cosh Γ(s)
Z(s) sinh Γ(s)
G12 −Z(s)
sinh Γ(s)
1
cosh Γ(s)
1
cosh Γ(s)−
1
Z(s) sinh Γ(s)
G21Z(s)
sinh Γ(s)
1
cosh Γ(s)
1
cosh Γ(s)
1
Z(s) sinh Γ(s)
G22 −Z(s) cosh Γ(s)
sinh Γ(s)−
sinh Γ(s)
Z(s) cosh Γ(s)−
Z(s) sinh Γ(s)
cosh Γ(s)−
cosh Γ(s)
Z(s) sinh Γ(s)
Tabella B.1: Forme realizzabili della rappresentazione con matrici di trasferimento.
Come si vede le funzioni di trasferimento risultano essere espresse in termini di fun-zioni iperboliche.Una rappresentazione equivalente e quella mostrata in Tab. B.2. Essa diviene utile utiliz-zando il modello 1, in tal caso infatti l’operatore di propagazione exp−Γ(s) risulta essere

110 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE
un semplice ritardo puro, mentre l’impedenza Z(s) e costante.
Qa
Pa
- Z -
-
-
e−Γ(s)
-e−Γ(s) -
-
-
Z
- Pb
Qb
Qa
Pa
- Z -
-
-
e−Γ(s)
-e−Γ(s) -
-
- - 1Z
-
Qb
Pb
Pa
Qa
- 1Z
-
-
-
e−Γ(s)
-e−Γ(s) -
-
- - Z -
Pb
Qb
Pa
Qa
- 1Z
-
-
-
e−Γ(s)
-e−Γ(s) -
-
-
1Z
- Qb
Pb
Tabella B.2: Forme realizzabili della rappresentazione con operatori di propagazione.

B.5. TECNICHE DI APPROSSIMAZIONE DEI MODELLI 111
B.5 Tecniche di Approssimazione dei Modelli
Mentre con il modello 1, l’effetto di Γ(s) si riduce ad un ritardo puro e Z(s) e costante(ovvero impedenza reale), nei modelli 2 e 3 il calcolo delle funzioni di trasferimento presen-ta dei problemi a causa della complessita di tali operatori. In questo paragrafo si presentauna tecnica di approssimazione, per il linear friction model (modello 2), che permette ilcalcolo delle relative funzioni di trasferimento.In seguito si procedera alla modifica di tali approssimazioni in modo da includere queglieffetti, dipendenti dalla frequenza, propri del modello 3.
B.5.1 Approssimazione Modale
Consideriamo uno dei quattro casi che si possono presentare (gli altri sono trattabili inmodo analogo). Come mostrato in Fig. B.3, consideriamo come ingresso le variabili Pb(s)e Qa(s) e dunque come uscite le variabili Pa(s) e Qb(s).
Qa(s)
Pa(s)
- -
?
G11(s)
? G12(s)
- G21(s) - - -
6
G22(s)
6
Qb(s)
Pb(s)
Figura B.3: Schema a matrici di trasferimento considerato.
La rappresentazione matriciale relativa risulta:
Pa(s)
Qb(s)
=
G12(s) G11(s)
G22(s) G21(s)
Pb(s)
Qa(s)
=
1cosh Γ(s)
Z(s) sinh Γ(s)cosh Γ(s)
− sinh Γ(s)Z(s) cosh Γ(s)
1cosh Γ(s)
Pb(s)
Qa(s)
In questa rappresentazione vi sono dunque tre distinte funzioni di trasferimento,1/cosh Γ(s), Z(s) sinh Γ(s)/cosh Γ(s) e sinh Γ(s)/Z(s) cosh Γ(s). Lo scopo della tecni-ca di approssimazione modale e di rappresentare tale funzioni come somma infinita difunzioni di trasferimento del secondo ordine. Le soluzioni ottenute, che risultano anchesoluzioni delle equazioni di partenza, vengono dette modi. L’approssimazione consiste nelconsiderare, per la soluzione generale, la somma dei soli primi n modi.L’equazione matriciale sopra viene dunque riscritta come:
Pa(s)
Qb(s)
=n∑
i=1
Pai(s)
Qbi(s)
=n∑
i=1
acis + bci
s2 + cis + di
azis + bzi
s2 + cis + di
−asis − bsi
s2 + cis + di
acis + bci
s2 + cis + di
Pb(s)
Qa(s)

112 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE
dove aci, bci, azi, bzi, asi, bsi, ci e di sono i coefficienti che devono essere determinati en e il numero di modi considerato ovvero l’indice dell’approssimazione.
B.5.2 Approssimazione del Linear Friction Model
Riprendiamo gli operatori caratteristici per il modello 2:
Γ(s) =ls
c0
√
1 +8ωc
scon ωc =
ν0
r02
(pulsazione di attrito)
Z(s) = Z0
√
1 +8ωc
scon Z0 =
ρ0c0
πr02
(impedenza caratteristica)
Definendo l’operatore Laplaciano normalizzato s = s/ωc e ricordando che il Dissipationnumber e dato da Dn = l
c0ωc, tali espressioni possono venire riscritte come:
Γ(s) = Dns√
1 + 8s
Z(s) = Z0
√
1 + 8s
Per approssimare le funzioni iperboliche cosh Γ(s) e sinh Γ(s) viene utilizzata unaproduttoria infinita al posto dello sviluppo in serie delle stesse. Tale metodo ha il vantaggiodi preservare gli zeri estratti della funzione, ovvero gli zeri della produttoria troncata sonozeri anche della funzione di partenza. Le espressioni che si ricavano sono dunque:
cosh Γ(s) =∞∏
i=1
[
1 +
(Γ(s)
(2i − 1) π/2
)2]
=∞∏
i=1
[
1 +
(Γ(s)
Dnλci
)2]
sinh Γ(s) = Γ(s)∞∏
i=1
[
1 +
(Γ(s)
(2i)π/2
)2]
= Γ(s)∞∏
i=1
[
1 +
(Γ(s)
Dnλsi
)2]
ove :
λci = (2i − 1)π
2
c0
lωc
=ωni
ωc
λsi = (2i)π
2
c0
lωc
=ωsi
ωc
E da notare che λci e λsi sono le pulsazioni naturali del Lossless Model, rispettivamentenel caso di linea bloccata e linea aperta (ωni e ωsi), le quali vengono normalizzate daltermine ωc = ν0/r0
2 che riassume l’effetto della viscosita del sistema (ν0 e la viscositacinematica).Sostituendo le formule cosı ricavate e possibile ricavarsi le funzioni di trasferimento cercateovvero:

B.5. TECNICHE DI APPROSSIMAZIONE DEI MODELLI 113
1
cosh Γ(s)=
∞∑
i=1
(−1)i+1(2/Dn)λci
s2 + 8s + λci2 =
∞∑
i=1
(−1)i+1(2i − 1)π(c0/l)2
s2 + 8ωcs + ωni2
Z(s) sinh Γ(s)
cosh Γ(s)=
∞∑
i=1
(2Z0/Dn)(s + 8)
s2 + 8s + λci2 =
∞∑
i=1
2Z0(c0/l)(s + 8ωc)
s2 + 8ωcs + ωni2
sinh Γ(s)
Z(s) cosh Γ(s)=
∞∑
i=1
(2/Z0Dn)s
s2 + 8s + λci2 =
∞∑
i=1
(2/Z0)(c0/l)s
s2 + 8ωcs + ωni2
Pertanto l’i–esimo modo assume la forma:
Pai(s)
Qbi(s)
=
(−1)i+1(2i − 1)π(c0/l)2
s2 + 8ωcs + ωni2
2Z0(c0/l)(s + 8ωc)
s2 + 8ωcs + ωni2
−(2/Z0)(c0/l)s
s2 + 8ωcs + ωni2
(−1)i+1(2i − 1)π(c0/l)2
s2 + 8ωcs + ωni2
Pb(s)
Qa(s)
E da notare che i poli delle tre funzioni di trasferimento sono equivalenti, e, come cisi aspettava dall’aver adottato il modello con attrito lineare, il fattore di smorzamentodi tutti i modi e lo stesso, essendo pari a 8ωc; cio e dovuto dall’assunzione che gli effettiviscosi sono indipendenti dalla frequenza.
B.5.3 Effetti dipendenti dalla frequenza
Il calcolo dei coefficienti presenta problemi di complessita quando si deve considerare ildissipative model. Per ovviare a tali difficolta vengono introdotti dei coefficienti correttivi,funzione della pulsazione naturale del modo.Pertanto gli operatori caratteristici vengono modificati come segue:
Γ(s) =ls
c0
√
α2 +8αβωc
s
Z(s) = Z0
√
8αβωc
s
dove:
– α e il fattore di modificazione della frequenza naturale;
– β e il fattore di modificazione dello smorzamento.
Le curve che rappresentano α e β, in funzione della frequenza naturale normalizzata,sono mostrati in Fig. B.4 e Fig. B.5.
Pertanto le funzioni di trasferimento vengono modificate come segue:

114 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE
10−3
10−2
10−1
100
101
102
103
1
1.02
1.04
1.06
1.08
1.1
1.12
1.14
1.16
1.18
ωni/πωc
α
Figura B.4: Fattore di modificazione della frequenza naturale (α).
10−2
10−1
100
101
102
103
0
1
2
3
4
5
6
7
8
ωni/πωc
β
Figura B.5: Fattore di modificazione dello smorzamento (β).

B.5. TECNICHE DI APPROSSIMAZIONE DEI MODELLI 115
1
cosh Γ(s)=
∞∑
i=1
(−1)i+1(2i − 1)π(c0/l)2
αs2 + 8αβωcs + ωni2
Z(s) sinh Γ(s)
cosh Γ(s)=
∞∑
i=1
2Z0(c0/l)(α2s + 8αβωc)
αs2 + 8αβωcs + ωni2
sinh Γ(s)
Z(s) cosh Γ(s)=
∞∑
i=1
(2/Z0)(c0/l)s
αs2 + 8αβωcs + ωni2
B.5.4 Correzione Stato Stazionario
L’approssimazione calcolata preserva gli autovalori dominanti del sistema, indipendente-mente dal numero di modi considerato. Tuttavia non vengono rispettati i guadagni staticidelle funzioni di trasferimento originali, e si necessita quindi di una correzione. Si ha che:
1
cosh Γ(s)
∣∣∣∣s=0
= 1
Z(s) sinh Γ(s)
cosh Γ(s)
∣∣∣∣s=0
= 8Z0Dn
sinh Γ(s)Z(s) cosh Γ(s)
∣∣∣s=0
= 0
Pertanto dopo aver calcolato le relative approssimazioni bisogna imporre che i guadag-ni statici coincidano con quelli sopra.

116 APPENDICE B. MODELLAZIONE DI LINEE IDRAULICHE

Appendice C
Il Can Bus
Nell’ambito industriale, e in particolar modo nei sistemi di locomozione, sta diventandosempre piu importante l’esigenza di poter trattare in tempo reale una crescente quantitadi informazioni digitali.Inoltre, l’aumento di unita intelligenti (quali centraline elettroniche nonche di sensori edattuatori) all’interno degli autoveicoli impone che vi sia un sistema di comunicazioneaperto, cioe in grado di collegare tra loro piu dispositivi prodotti da costruttori diversi,affidabile ed economico.La risposta a queste problematiche e arrivata, da una decina d’anni a questa parte, conla comparsa nel mercato dei “Bus di campo”.
C.1 I Bus di Campo
“BUS DI CAMPO” e un’espressione generica che descrive una forma di comunicazionedigitale la quale, ha sostituito nell’industria la tecnologia analogica.Il BUS rappresenta il mezzo fisico utilizzato per trasportare i dati. Tipicamente si trattadi un fascio di fili conduttori comune a piu dispositivi che permettere loro di comunicarescambiandosi dati.Contrariamente ad una connessione punto a punto, dove solo due circuiti si scambianoinformazioni, un bus conta generalmente un numero di utenti superiore. Mentre una co-municazione punto a punto e limitata a due circuiti collegati ai due estremi del cavo, nelcaso di un bus la flessibilita di estensione aumenta. In effetti, l’aggiunta di un nuovocircuito da collegare al bus esistente costituisce raramente un problema.Rispetto a connessioni tra soli due nodi, il modo di scambiare dati attraverso un canaledi comunicazione comune a piu utilizzatori richiede regole severe di convivenza, le qualivengono comunemente chiamate PROTOCOLLO. Infatti bisogna regolamentare l’acces-so contemporaneo al mezzo da parte di piu dispositivi in modo da prevenire errori nellatrasmissione dei dati e rendere la comunicazione rapida ed affidabile.Il Modello al quale viene fatto riferimento da tutti i principali protocolli presenti nel mer-cato e il modello di riferimento ISO/OSI 7498.
117

118 APPENDICE C. IL CAN BUS
C.1.1 Il Modello di Riferimento ISO/OSI 7498
Introdotto dalla International Standard Organization (ISO), il modello di riferimento ISOper l’interconnessione di sistemi aperti (OSI, Open Sistem Interconnection) e stato con-cepito per consentire la comunicazione tra processi applicativi in esecuzione su calcolatoriche utilizzino uno standard comune, indipendentemente dal loro produttore.A tal fine e stata pensata un’architettura a sette strati. Ciascuno strato esegue una fun-zione ben definita nel proprio ambito operando in base ad una serie di regole.Esso e in grado di scambiare oggetti con lo strato immediatamente precedente e/o suc-cessivo, secondo un’interfaccia stabilita, e di colloquiare con il rispettivo strato presentesu un sistema remoto tramite lo scambio di messaggi. Inoltre, ogni livello e in grado difornire servizi allo strato superiore e utilizza dei servizi forniti dal livello immediatamenteinferiore.In Tab. C.1 viene riepilogata la struttura a livelli del modello di riferimento.
Livello 7: lo strato di applicazione Trasferimento di file, gestione dei processi.
Livello 6: lo strato di presentazione Negoziazione del formato di trasferimento.
Livello 5: lo strato di sessione Gestione del controllo del dialogo,sincronizzazione tra processi.
Livello 4: lo strato di trasporto Gestione della connessione,controllo degli errori e di flusso.
Livello 3: lo strato di rete Instradamento dei pacchetti,creazione e terminazione della chiamata.
Livello 2: lo strato di data link Riconoscimento degli errori,ritrasmissione dei messaggi.
Livello 1: lo strato fisico Specifiche elettriche e fisiche dell’interfaccia di rete.
Tabella C.1: I setti livelli del modello di riferimento ISO/OSI.

C.2. IL PROTOCOLLO CAN 119
C.2 Il Protocollo Can
Il CAN (Controller Area Network) e un protocollo standardizzato a livello internazionaleper la comunicazione multi-master via seriale, sviluppato per la prima volta dalla RobertBosch Gmbh in collaborazione con la Intel.Progettato per garantire un’elaborazione real-time delle informazioni provenienti da sen-sori e attuatori in ambito automobilistico, CAN e ora utilizzato anche nel settore indus-triale e dell’automazione dove le sue caratteristiche di basso costo, alta velocita (fino ad1 Mbit/s) ed estrema robustezza lo rendono adatto a questo tipo di mercato.CAN e un sistema di comunicazione normalizzato e, secondo il modello di riferimentoa 7 livelli ISO/OSI, copre solo i livelli 1 e 2 (fisico e data link). Per il livello 7 (appli-cazione) esistono diverse alternative, molte proprietarie, non ancora standardizzate; traqueste le piu note sono CANopen/CAL , CAN Kingdom e DeviceNet (vedi Fig. C.1). Inparticolare, vi sono tre norme che coprono le varie parti di questo protocollo:
• ISO 11519-1 Generalita e definizioni di CAN
• ISO 11519-2 CAN a bassa velocita ( fino a 125 Kbit/s)
• ISO 11898 CAN ad alta velocita (da 125 Kbit/s fino a 1 Mbit/s)
APPLICAZIONE
DATA LINKFISICO
Soluzioni non standard
ISO 11519–1ISO 11519–2 , ISO 11898
Figura C.1: I livelli definiti nel protocollo CAN.
Oltre a queste norme esistono due specifiche che si distinguono, in particolare, perla diversa lunghezza dell’intestazione dei messaggi: nella specifica 2.0A (Standard CAN)l’identificatore della trama e lungo 11 Bit, mentre nella specifica 2.0B (Extended CAN)l’intestazione e lunga 29 Bit.Tra le caratteristiche salienti di CAN si annovera il basso costo, l’assenza dell’indirizzodi destinazione, la ritrasmissione automatica in caso di errori sui dati, la disconnessioneautomatica del nodo che presenta un sospetto guasto fisico e la semplicita di cablaggio.
C.2.1 Il Livello Fisico
Questo strato del protocollo si preoccupa di tutti gli aspetti fisici inerenti la trasmissionedei dati tra i diversi nodi della rete. A livello di Data Link il protocollo CAN prevedeun arbitraggio non distruttivo dei Bit garantendo che solo il messaggio a priorita piu altavenga trasmesso pertanto il livello fisico deve prevedere la rappresentazione di uno stato

120 APPENDICE C. IL CAN BUS
DOMINANTE(0 logico) e uno stato RECESSIVO(1 logico).E importante garantire che un Bit dominante vada a sovrascrivere un contemporaneo Bitrecessivo o lo stato di bus idle (sempre recessivo).A questo scopo si distinguono 3 parti che compongono il physical layer:
1. PLS (PhysicaL Signaling), responsabile della codifica/decodifica dei Bit, della lorotemporizzazione, nonche della sincronizzazione.
2. PMA (Physical Medium Attachment),contenente la descrizione delle caratteristichedei transceiver (Transmitter\Receiver).
3. MDI (Medium Dependent Interface) specifica le proprieta dei cavi e dei connettori.
PLS (PhysicaL Signaling)
Questo substrato si occupa della gestione, della temporizzazione e della sincronizzazionedei segnali e dei messaggi trasmessi. Utilizza una codifica dei Bit NRZ(No Return toZero), ovvero per tutto il tempo di Bit il livello generato rimane costante o al livelloDOMINANTE o a quello RECESSIVO (vedi Fig. C.2).
Figura C.2: Codifica NRZ.
• Codifica NRZ e Bit Stuffing :La codifica NRZ ha il vantaggio di avere larghezza di banda inferiore ad altre, manon permette di estrarre il segnale di CLOCK e rende difficile la sincronizzazione incaso di lunghe sequenze con la stessa polarita.Per ovviare al problema si utilizza la tecnica del Bit Stuffing. Questa regola imponeche durante la trasmissione di un qualsiasi messaggio non sia possibile inviare piudi cinque Bit consecutivi uguali.La Fig. C.3 illustra un esempio nel quale la stringa da trasmettere presenta unaprima sequenza di 6 Bit allo stato recessivo ed una seconda di 5 Bit allo stato dom-inante. Il Bit-stuffing procede quindi all’inserimento di due Bit di stuff (di polaritainversa a quella della sequenza) subito dopo la presenza di 5 Bit identici. In ricezioneil Bit di stuff, prima di essere scartato, sara utilizzato per la sincronizzazione.
• Tempo di Bit :Il Tempo di Vit e specificato da quattro distinti segmenti (vedi Fig. C.4).

C.2. IL PROTOCOLLO CAN 121
Figura C.3: Codifica NRZ con tecnica del Bit-stuffing.
Ogni segmento dura un numero intero di unita temporali chiamate Time Quan-tum(TQ); la loro durata, nonche il numero di Time Quantum costituenti ogni sin-golo segmento, viene programmata a livello del controllore CAN in funzione del BitRate, ovvero della velocita di trasmissione, che si vuole raggiungere.In ogni caso la durata minima di ogni Bit non puo essere inferiore ad 8 TQ, men-tre la durata massima non puo superare i 25 TQ. Dal tempo di Bit si deriva im-mediatamente il Bit Rate, definito come inverso del Bit Time (Bit Rate=1/BitTime).
Figura C.4: Suddivisione del Tempo di Bit nei segmenti costituenti.
• SYNC SEG(Synchronization Segment): e la parte di Tempo di Bit usata persincronizzare i vari nodi. La sua durata e di 1 TQ;
• PROP SEG(Propagation Time Segment): viene usato per compensare i ritardidella rete. La sua durata e programmabile da 1 a 8 TQ e deve essere maggioredel doppio della somma dei ritardi di propagazione generati dai controllori, daitransceiver, nonche dalla linea di trasmissione;
• PHASE SEG(1 e 2)(Phase Buffer Segment(1 e 2)): servono a compensare even-tuali errori di sincronizzazione. La loro durata e programmabile da 1 a 8 TQma puo venire allungata o accorciata durante la fase di sincronizzazione;
• Sample Point: e l’istante temporale nel quale viene letto il livello logico delbus.

122 APPENDICE C. IL CAN BUS
• Sincronizzazione :Una rete CAN e composta da piu nodi, ognuno dei quali e temporizzato da unproprio oscillatore. A causa di cio, variazioni di fase si possono creare tra nodi dif-ferenti. Il protocollo CAN prevede due tipi di sincronizzazione definiti nella specifica2.0B come HARD SYNCHRONIZATION e RESYNCHRONIZATION. Queste dueforme di sincronizzazione sono soggette alle seguenti regole:
1. E ammessa una sola sincronizzazione per ogni Bit Time.
2. Un fronte viene usato per effettuare la Risincronizzazione solo se il valorerilevato nel punto di campionamento precedente differisce dal valore del busimmediatamente dopo il fronte.
3. La hard synchronization viene eseguita solo quando avviene un passaggio re-cessivo - dominante durante la fase in cui il bus e inattivo (bus idle).
La hard synchronization forza, nel nodo ricevente, l’inizio del segmento di sincroniz-zazione (SYNC SEG) con la rilevazione del fronte. Essa avviene all’inizio di unatrasmissione di un frame.La Risincronizzazione invece puo avvenire su un fronte all’interno di un frame. In-fatti il nodo CAN ricevente e in grado di restringere il PHASE SEG2 o di allungareil PHASE SEG1 per adattarsi a trasmettitori piu rapidi o piu lenti. In caso di untrasmettitore piu lento il fronte, previsto nel segmento di sincronizzazione, vienerilevato nel segmento successivo. Il ricevitore e in grado, in questo caso, di allun-gare il tratto PHASE SEG1 di un numero preprogrammato di time quantum, dettoResynchronization Jump Width. In Fig. C.5 e illustrato con un esempio questocaso. Se il trasmettitore, al contrario del precedente, risulta essere troppo veloce, il
Figura C.5: Esempio di sincronizzazione con trasmettitore piu lento.
fronte viene rilevato nel tratto successivo al punto di campionamento nominale. Ilricevitore, quindi, reagira accorciando il tratto PHASE SEG 2, un esempio e ripor-tato in Fig. C.6. Il numero di time quantum utilizzabili per accorciare tale segmentoe sempre definito in RJW.
• Bit Rate :Il Bit Rate non e altro che l’inverso del Bit Time. Pertanto per poter avere rate

C.2. IL PROTOCOLLO CAN 123
Figura C.6: Esempio di sincronizzazione con trasmettitore piu veloce.
elevati bisogna avere bassi tempi di propagazione (cosı da accorciare il PROP SEG)e dispositivi con oscillatori affidabili.
PMA (Physical Medium Attachment)
Lo standard ISO 11898 assume che la rete sia strutturata ad una singola linea (come inFig. C.7) per minimizzare ogni possibile effetto dovuto alle onde riflesse. Ad entrambe leterminazioni e previsto l’inserimento di un resistore del valore nominale di 120 Ohm.
Figura C.7: Struttura base di una rete CAN.
Come mostrato in Fig. C.8 ogni nodo e costituito da tre parti fondamentali:
• il microcontrollore: gestisce le operazioni che deve svolgere il nodo;

124 APPENDICE C. IL CAN BUS
• il controllore CAN: Si occupa degli aspetti della trasmissione e ricezione di piu altolivello;
• il transceiver: interfaccia il Controllore CAN con il BUS e ne rileva lo stato.
Figura C.8: Struttura Nodo CAN.
In particolare viene rilevata la presenza di uno stato recessivo quando la differenza ditensione tra le linee CAN H e CAN L non e superiore ai 0.5V, mentre se tale differenzasupera i 0.9V, per un tempo superiore ad 1µsec ,allora viene rilevato uno stato domi-nante(Fig. C.9). I valori nominali di tensione delle due linee nello stato dominante sonodi 3.5V per CAN H e 1.5V per CAN L, mentre nello stato recessivo sono entrambe a2.5V.
Grazie alla natura della trasmissione differenziale il segnale CAN risulta insensibilealle interferenze elettromagnetiche, infatti il disturbo va ad influire su entrambe le lineelasciando, come mostrato in Fig. C.10, costante il valore differenziale (Vdiff=cost).
MDI (Medium Dependent Interface)
Lo standard ISO 11898 non specifica nulla per quanto riguarda il connettore da utilizzare.Ogni consorzio raccomanda un proprio connettore per collegare i nodi della rete al busCAN.La linea di trasmissione deve essere adattata con un’impedenza di 120 Ohm nominali. Inogni caso tale valore non puo essere inferiore a 108 Ohm e superiore a 132 Ohm. Il ritardodella linea e fissato a 5 ns/m. La terminazione della linea va eseguita con resistori a 120Ohm. Il rapporto resistenza-lunghezza del cavo e posto a 70mΩ/m.

C.2. IL PROTOCOLLO CAN 125
Figura C.9: Livelli nominali del BUS.
Figura C.10: Influsso dei disturbi Elettromagnetici sul BUS CAN.

126 APPENDICE C. IL CAN BUS
C.2.2 Il Livello Data Link
Lo strato di data link standardizzato dall’ISO 11898 prevede la suddivisione dello stessoin due sottolivelli:
• Logical Link Control (LLC): gestisce il filtraggio dei segnali, l’eventuale sovraccaricodel bus e il recupero dei dati;
• Medium Access Control (MAC): invece, inserisce i dati nei messaggi, codifica i frame,gestisce l’accesso al bus, gli errori e gli acknowledgement.
La comunicazione e ti tipo broadcast; questo significa che ogni pacchetto spedito dauna stazione raggiunge ogni altro nodo della rete. E compito di ognuno di questi nodi, unavolta ricevuto il pacchetto, valutare se esso e di interesse o meno attraverso un’operazionedi filtraggio mostrato in Fig. C.11.
Figura C.11: Invio di un frame in broadcast sul CAN BUS e filtraggio.
Il trasferimento dati su bus CAN e controllato da 4 tipi diversi di frame:
1. DATA FRAME: serve per trasferire i dati;
2. REMOTE FRAME: serve per inviare la richiesta di trasmissione di un data framecon lo stesso identificatore;
3. ERROR FRAME: viene trasmesso da un qualsiasi nodo che rileva un errore;
4. OVERLOAD FRAME: e utilizzato per inserire un ritardo aggiuntivo tra 2 data oremote frame successivi.
DATA FRAME e REMOTE FRAME sono disponibili sia in formato standard (CAN2.0 A) che in formato esteso (CAN 2.0 B).

C.2. IL PROTOCOLLO CAN 127
Data FRAME
Un data frame e prodotto da un nodo CAN per inviare dati. Ogni singolo frame puotrasportare al massimo 8 Byte di dati. Nella Fig. C.12 e riportata la struttura di unsingolo frame.
Figura C.12: Struttura del DATA FRAME
I vari campi del frame sono:
• SOF – (Start Of Frame) :Indica l’inizio di un frame. E lungo 1Bit ed e sempre a livello DOMINANTE, incaso di bus idle (Livello RECESSIVO) garantisce un fronte su cui i ricevitori sisincronizzano (Hard Synchronization).
• AF – (Arbitration Field) :E lungo 12 o 32 Bit a seconda che la trama sia rispettivamente in formato stan-dard o esteso e serve per identificare il contenuto e la priorita del messaggio. Nelformato standard si ha un campo identificatore di 11 Bit, piu un Bit di RemoteTransmission Request (RTR). Nel formato esteso l’identificatore e lungo 29 Bit di-viso in due sezioni: Base ID di 11 Bit ed extended ID di 18 Bit. In mezzo a questedue sezioni sono stati introdotti due Bit: SRR (Substitute Remote Request) e IDEBit. Quest’ultimo Bit identificatore di estensione (IDentifier Extension) permettedi riconoscere se la trama e di tipo standard (IDE=0) o di tipo esteso (IDE=1).
Figura C.13: Struttura della trama standard 2.0A ed estesa 2.0B.
In linea di principio su una rete CAN possono circolare successivamente ed in modomescolato sia messaggi standard che estesi. In caso di trasmissione simultanea, i

128 APPENDICE C. IL CAN BUS
primi 11 Bit degli identificatori permettono una prima valutazione della priorita edell’interesse della trama. Se i primi 11 Bit sono identici, allora il Bit successivo(RTR nel formato standard, SRR in quello esteso) definira che la priorita e delmessaggio standard; infatti il Bit sostitutivo della richiesta remota (SRR) e semprea livello recessivo per le trame estese, mentre RTR e a livello dominante per le tramestandard di dati. Se quest’ultimo fosse anch’esso a livello recessivo, e cioe se fossimonel caso di una richiesta di trasmissione remota, il Bit di identificatore di estensionedarebbe la precedenza proprio alla trama con IDE=0: quella standard.
• CF – (Control Field) :E lungo 6 Bit: 2 (R0 e R1) riservati per sviluppi futuri del protocollo e 4 (DLC:Data Length Code) per indicare il numero di Byte di dati che compone per quelmessaggio il Data Field.
• DF – (Data Field) :E lungo da 0 a 8 Byte. Contiene i dati che il messaggio trasporta.
• CRC – (Cyclic Redundancy Check) :E lungo 16 Bit, 15 di CRC code e 1 delimit. Serve per la rivelazione di eventualierrori di trasmissione.
• ACKF – (Acknowledgment Field) :E lungo 2 Bit: ACK Slot e ACK Delimiter. Sono inviati entrambi come recessivi, maACK Slot viene sovrascritto come dominante da ogni nodo che riceve il messaggio inmaniera corretta. In questo modo il TX sa che almeno un nodo nella rete ha ricevutoil messaggio corretto, ma non significa che sia arrivato a chi ne ha effettivamentebisogno.
• EOF – (End Of Frame) :E una sequenza di 7 Bit recessivi con la doppia funzione di terminare il frame eoffrire una finestra in cui mandare un eventuale frame di errore senza sovrascrivereil frame successivo.
Remote Frame
Ha la stessa struttura e la stessa composizione del Data Frame, uniche differenze sono:
• Assenza del Data Field.
• Il Bit RTR nell’ Arbitration Field e allo stato RECESSIVO.
E usato da un nodo per richiedere alla stazione che lo possiede il DATA FRAME neces-sario. Esso viene specificato direttamente nel campo IDENTIFIER dell’ARBITRATIONFIELD.
Error Frame
Lungo il bus vi possono essere diverse cause per le quali si verifica un errore di trasmissioneo di ricezione. Le tre principali sono:

C.2. IL PROTOCOLLO CAN 129
1. Ogni nodo puo avere un diverso punto di campionamento e quindi a causa di undisturbo puo verificarsi che due nodi leggano due livelli logici diversi;
2. Due diversi nodi possono avere soglie diverse di riconoscimento dei livelli logici;
3. Il segnale lungo la linea si attenua e quindi si puo avere una degradazione eccessivadel dato.
Per garantire la CONSISTENZA della RETE gli errori locali devono essere resi notia tutti e questo e possibile grazie alla violazione della regola di Bit stuffing. Inviandoun frame con 6 Bit di stessa polarita tutti i nodi in ascolto rileveranno e notificherannol’errore. In questo modo il messaggio corrotto in corso viene tempestivamente annullatoe ne viene disposta la ritrasmissione automatica.L’error frame e composto da due campi:
1. Error Flag: e composto da 6 Bit della stessa polarita, che identifica se il framed’errore e attivo (Bit DOMINANTI) o passivo (Bit RECESSIVI), nel qual caso ilframe in corso non viene sovrascritto;
2. Error Delimiter Field: 8 Bit recessivi che delimitano il frame.
Nella trama d’errore ci puo essere una sovrapposizione di diversi error flags dovuta alfatto che nodi diversi si possono accorgere in ritardo dell’errore. La sovrapposizione puoessere al max di 6 Bit e dunque l’ERROR FRAME assume, in generale, la struttura diFig. C.14.
Figura C.14: Struttura della trama di errore.
Overload Frame
Serve per richiedere al nodo trasmittente di ritardare l’invio del prossimo messaggio. Vienegenerato in uno dei seguenti casi:
• Per cause interne un nodo non e pronto a ricevere il messaggio successivo.

130 APPENDICE C. IL CAN BUS
• Viene persa la sincronizzazione durante l’ultimo Bit di EOF.
• Vengono rilevati due Bit dominanti durante una intermissione.
Ha lo stesso formato dell’error frame, compresa la sovrapposizione.
Interframe Space
Serve per separare un data frame o un remote frame dal frame precedente. Contiene icampi
• INTERMISSION: (3 Bit recessivi).
• SUSPEND TRANSMISSION: (opzionale, nel caso di stazione che ha trasmesso unerrore passivo) 8 Bit recessivi.
• BUS IDLE: di lunghezza arbitraria.
Arbitraggio
Il protocollo di accesso al mezzo utilizzato da CAN e una variante del CSMA/CD Car-rier Sense Medium Access/ Collision Detection) denominato CSMA/CA (Carrier SenseMedium Access/ Collision Avoiding).Questo meccanismo permette ad ogni nodo di accedere liberamente al bus quando e liberoe, in caso di accesso simultaneo di piu nodi, fa sı che il messaggio con priorita maggiorecontinui, mentre quello con priorita inferiore si interrompa, venendo ritrasmesso solo inun secondo tempo. Se due o piu nodi iniziano la trasmissione nel medesimo istante ditempo dopo aver trovato il bus libero, cioe nello stato di Idle, la collisione dei messag-gi viene evitata facendo procedere solo la trasmissione della trama con l’identificatore apriorita maggiore. Infatti, ogni nodo, dopo l’invio di ogni Bit del campo identificatore,monitorizza il livello del bus. Fino a quando i Bit trasmessi da ogni stazione sono identicinon accade nulla. Appena la sequenza si differenzia sara solo il messaggio con prioritamaggiore a procedere, cioe quello con il Bit dominante.Per capire meglio analizziamo il seguente esempio, illustrato nella Fig. C.15:
Viene ipotizzata la trasmissione simultanea di tre nodi e, come si evince dalla Fig. C.15,il messaggio 3 ha la priorita piu alta. Fino alla trasmissione del Bit 6 del campo identifi-catore ogni nodo e convinto di essere l’unico a trasmettere, in quanto il valore monitoratoe lo stesso di quello da lui inviato. Al Bit successivo il nodo due trasmette un ‘1’ cheha carattere recessivo rispetto al Bit ‘0’ inviato dalle altre due stazioni. A questo puntorilevando un valore diverso del bus, che si e portato a ‘0’ (valore dominante), il nodo duesi mette in ascolto interrompendo la sua trasmissione.Con lo stesso criterio il nodo uno lascera il bus in presenza di un valore dominante inatte-so. In questo modo il nodo con il valore binario piu basso (priorita maggiore) nel campoidentificatore vince l’arbitraggio del canale.Il vantaggio maggiore di questo protocollo, rispetto al CSMA/CD, e che il nodo chevince la contesa per l’accesso al bus, non incorre a perdite di tempo conseguenti ad unaritrasmissione della trama.

C.2. IL PROTOCOLLO CAN 131
Figura C.15: Arbitraggio del bus per una trama standard.
Gestione degli errori
Gli errori che ogni nodo CAN e in grado di gestire sono:
• Bit error: se il Bit e rilevato con un livello logico diverso da quello che ci si aspettavache fosse;
• Bit stuffing error: quando viene violata la regola del Bit stuffing;
• CRC error: generato in caso di ricezione di un valore di CRC diverso da quellocalcolato;
• Format error: questo errore appare quando e stata rilevata una violazione nelformato della trama;
• ACK error: in caso di mancata conferma di corretta ricezione da almeno un nodo.
Uno qualsiasi degli errori indicati causa automaticamente, nel nodo nel quale e statorilevato, l’invio della trama di errore al fine di mettere al corrente tutti gli altri di questaanomalia (in particolar modo la stazione trasmittente). Per distinguere i guasti o malfun-zionamenti temporanei da quelli permanenti, ogni controllore CAN mantiene aggiornatidue contatori degli errori:
1. TEC(Transmit Error Counter): per i messaggi trasmessi.
2. REC(Receive Error Counter) : per quelli ricevuti.
I contatori vengono incrementati ogni volta che viene rilevato un errore, mentre vengonodecrementati in caso di transizione corretta. A seconda dei valori assunti da questi due

132 APPENDICE C. IL CAN BUS
contatori lo stato in cui si trova il nodo puo variare.Lo stato iniziale di ogni nodo e fissato ad error active e cio significa che il controllore eabilitato a trasmettere trame di errore attivo. Gli altri stati sono error passive e bus off.Quest’ultimo stato interviene in caso di presenza di un numero molto elevato di errori epone il controllore in uno stato di alta impedenza, disconnettendolo, di fatto, dal bus.
C.2.3 Il Livello Applicazione
A livello applicazione vengono gestite le problematiche di:
• Distribuzione degli identificatori dei messaggi tra i diversi nodi della rete.
• Avvio del sistema.
• Ottenimento di rapporti sullo stato del sistema.
Tuttavia per i livelli piu alti dello standard ISO/OSI, non esistono ancora specifichestandardizzate, ma solo soluzioni riconosciute dal consorzio europeo CiA (CAN in Au-tomation).Le piu usate sono CANopen, CAN Kingdom, Device Net e SDS. Tali implementazionipero non possono coesistere sulla stessa rete a causa della diversa concezione con cui sonorealizzate.
C.3 Time Triggered Can
Il protocollo CAN e un protocollo Event Triggered, in cui un nodo comunica con gli altrisolo quando accade un determinato evento, inoltre il meccanismo di arbitraggio favoriscei messaggio ad alta priorita. In questo modo non e garantito che ogni messaggio vengaascoltato in tempi utili.Questo e un grosso svantaggio per applicazioni di tipo Hard Real Time o Safety Criticalcome sono quelle in ambiente automotive che riguardano tipicamente i sistemi che vannosotto la denominazione X-by-Wire, dove e richiesto che la rete abbia un comportamentodeterministico. Per ovviare a questo si stanno studiando nuovi protocolli di comunicazionenon piu Event Triggered ma Time Triggered. Tra questi si ricordano Flex-Ray, Byteflight,TTP e TTCAN.
C.3.1 TTCAN
TTCAN in particolare, sviluppato da BOSCH (che ha sviluppato anche CAN), e unprotocollo Time Triggered che si colloca ad un livello superiore rispetto ai due livelliimplementati da CAN. E’ una estensione del tradizionale CAN e questo porta il grossovantaggio che una rete con moduli TTCAN supporta anche nodi implementati con CAN2.0 (A o B).TTCAN, come tutti i protocolli Time Triggered, fornisce un clock globale per tutto ilsistema. In questo modo i nodi sono tutti sincronizzati e quindi ogni messaggio puovenire trasmesso in un determinato SLOT TEMPORALE senza dover piu competere congli altri per l’accesso al bus. Diventa predicibile il tempo di latenza con cui un messaggio diun nodo viene servito. Il comportamento della rete, quindi, diventa DETERMINISTICO.

Appendice D
Tecnica di modellazione P.O.G.
I Power-Oriented Graphs (POG) [9], [10], [12], [11] rappresentano una tecnica graficae matematica adatta a modellare sistemi reali nei diversi domini energetici (meccanico,idraulico, elettrico ecc.). Questa tecnica si basa sulla stessa idea dei Bond Graph diutilizzare le “interazioni di potenza” tra i sotto-sistemi come concetto di base per lamodellazione. Rispetto ai Bond Graphs, i POG utilizzano una notazione grafica differente,inoltre sono piu orientati ad una descrizione matematica. Gli schemi a blocchi ottenuticon i POG sono semplici, modulari e facili da utilizzare.
Un POG e sostanzialmente basato su due tipi di blocchi: un “blocco di elaborazione”,che immagazzina e/o dissipa energia, e un “blocco di connessione” che puo solamente“trasformare” l’energia, cioe, trasforma le variabili del sistema da un tipo di campo en-ergetico ad un altro. In Fig. D.1 sono illustrati i simboli grafici utilizzati negli schemi
x1
y
-
G(s)
?
?
-
x2
y
12yTMy
yTRy
xT1y xT
2y
x1
y1
- K -
KT
x2
y2
0
0
xT1y1 xT
2y2
G-1(s) = M s + R
Energia immagazzinata (K):
Potenza dissipata (Pd) :
Potenza entrante e uscente (Pf) :
Figura D.1: Simboli grafici utilizzati nei POG per indicare i blocchi di “elaborazione” edi “connessione”.
POG per indicare i blocchi di “elaborazione” e di “connessione”. Solitamente, quan-do si considerando sistemi MIMO (Multi Input Multi Output) di tipo lineare, si haG-1(s) = M s + R. In questo caso, la potenza dissipata (Pd = yTRy) e l’energia im-magazzinata dal sistema(Es = 1
2yTMy) sono entrambe forme quadratiche del vettore di
stato y.
Le caratteristiche fondamentali dei POG sono:
133

134 APPENDICE D. TECNICA DI MODELLAZIONE P.O.G.
• una corrispondenza diretta tra i blocchi del POG e le parti reali del sistema damodellare;
• sono adatti per rappresentare sia sistemi scalari che vettoriali;
• gli schemi POG possono essere trasformati facilmente, sia graficamente che matem-aticamente;
• il modello matematico nello spazio degli stati di un sistema puo essere ottenuto“direttamente” dalla rappresentazione POG corrispondente;
• quando alcuni parametri dinamici del sistema tendono a zero (o ad infinito), si puousare una “trasformazione congruente” per ottenere il modello POG “ridotto”.
Si consideri, ad esempio, il sistema seguente:
Lx = Ax + Buy = BTx
L = LT > 0 (D.1)
dove x ∈ Rn rappresenta lo stato, u ∈ Rm l’ingresso y ∈ Rm l’uscita, e dove L e unamatrice simmetrica e definita positiva. In Fig. D.2 e mostrata una rappresentazione graficadel sistema (D.1).
u
y BT
- B - -
L-1
1s
?
?
?
x -
A
6
6
-
Figura D.2: Power-Oriented Graph di un sistema dinamico generico.
Se, nella (D.1), ogni variabile di ingresso ui e “accoppiata” con la corrispondentevariabile di uscita yi “coniugata in potenza ”, (il prodotto uiyi rappresenta la “potenza”che scorre attraverso la i-esima “porta” del sistema), allora la matrice L definisce l’energiaimmagazzinata nel sistema K = 1
2xTLx, la parte simmetrica As = 1
2(A + AT) della
matrice A definisce la potenza dissipativa (Pd = 12xTAs x), e la parte anti-simmetrica
Aw = 12(A − AT) della matrice A definisce le “connessioni interne” del sistema. Alla
matrice Aw: xTAw x = 0 non e associata nessuna dissipazione di energia.
D.0.2 Esempio: Massa - Molla - Smorzatore
Prendiamo in esame l’esempio di un generico sistema del secondo ordine composto damassa, molla e smorzatore. Le equazioni che descrivono il sistema sono:
mx = F − bvx − Kx (D.2)
di cui lo schema POG di Fig. D.3.

135
F
v
-
1
m
1s
?
?
?
-
6
bv
6
- - - -6
1s
6
K
6
0
x
Figura D.3: Modello POG Massa-Molla-Smorzatore.
L’EQ. D.2 puo essere riscritta attraverso il sistema:
mv = F − bvv − Kxx = v
(D.3)
Moltiplicando la seconda equazione per K e possibile riportare il sistema nella formadi Fig. D.2 ove le matrici sono definite come di seguito:
L =
[m 00 K
]
, A =
[−bv −KK 0
]
, B =
[10
]
, x =
[vx
]
In questo caso il sistema e SISO (m = 1n = 2) con u = F e y = v.L’energia immagazzinata dal sistema risulta dunque essere:
Es =1
2xTLx =
1
2mv2 +
1
2Kx2 (D.4)
La potenza dissipata risulta:
Pd =1
2xTAs x = −
1
2bvv
2 (D.5)
essendo:
As =
[−bv 00 0
]
Infine la parte antisimmetrica della matrice A, che definisce le “connessioni interne”,ovvero i legami fra le variabili di stato del sistema, e data da:
Aw =
[0 −KK 0
]

136 APPENDICE D. TECNICA DI MODELLAZIONE P.O.G.

Conclusioni
L’obiettivo della tesi e stato quello di migliorare i modelli sviluppati nel corso di prece-denti tesi e integrarli in modo da ottenere un modello completo capace di simulare, conla dovuta precisione, i cambi marcia.In particolare sono stati migliorati i modelli degli attuatori relativi al cambio AMT svilup-pato da Magneti Marelli. E stata introdotta una piu accurata descrizione delle valvoleelettroidrauliche e della parte idraulica del sistema, nonche degli attuatori, modellandola terza valvola dell’attuatore di selezione, migliorando la descrizione dell’effetto dellamolla a tazza sull’attuatore della frizione e aumentando la velocita di simulazione delsistema attraverso una migliore implementazione dei finecorsa. Sono stati modellati i seisincronizzatori relativi alle ruote del cambio e l’inserimento e il disinnesto delle marce. Ilcambio e stato semplificato eliminando la simualzione degli attriti statici non rilevanti.Tale semplificazione ha portato grandi vantaggi in termini di velocita di simulazione sen-za influire sulla correttezza dei risultati. Infine e stato migliorato anche il modello dellafrizione eliminando i problemi relativi all’introduzione della trasformazione di congruenza.I modelli cosı ottenuti sono stati integrati in un unico modello il quale e stato simulatoavendo come ingressi soltanto quelli provenienti dalla centralina e la coppia motore. Pereffettuare la simulazione e stato necessario ricreare il controllo frizione presente nella stes-sa e il controllo della pompa di ricarica dell’accumulatore. Dal confronto fra le simulazioneeffettuate e i dati acquisiti dalla vettura su strada, si evince che il modello implementatoriproduce correttamente la dinamica del veicolo durante i cambi marcia.Infine si e proceduto alla connessione con il modello della centralina Magneti Marelli. Perproblemi legati alla compatibilita con le versioni MATLAB non e stato possibile provareil sistema in “moto” tuttavia e stata portata a termine con successo, da parte della cen-tralina, l’autotaratura dei sensori relativi agli attuatori.Per il futuro il modello puo essere migliorato introducendo una piu accurata descrizionedel blocco differenziale e del contatto ruota terreno nonche della dinamica del veicolo.
137

138 CONCLUSIONI

Ringraziamenti
In questa mia ultima, desidero ringraziare tutti coloro che hanno contribuito alla realiz-zazione di questa tesi.In particolare ringrazio il Prof. Roberto Zanasi per la disponibilita e la Prof-essionalitamostrata. Ringrazio i correlatori che mi hanno assistito in questi mesi ovvero l’Ing. FrancescoFarachi l’Ing. Riccardo Morselli e l’Ing. Davide Montosi (detto “Furia”), che purtroppoha lasciato, prematuramente, questa desolata terra di motori e che, sicuramente, si trovain un posto migliore.Infine debbo (anche se controvoglia) ringraziare la persona (se cosı e possibile definirla)che in questi mesi, piu di altri mi ha sfrutt. . . , cioe mi ha aiutato nella realizzazionedi questa tesi. Sto parlando, niente popo di meno che, del Dott. Ing. Astron. Farab-but. Gran Minchion. Germano Sandoni, noto ai piu come Gekigaki (e in certi ambientifelsinei neo-social-nazionalisti come “il Crukko” ). Ad egli (o meglio ad esso) Mando ilmio piu Caloroso ringraziamento (e lui sa dove deve andare a Prenderselo).Per ultimi, ma non tali, desidero ringraziare gli Ing. S. Zucchini e Ing. A. Pagani (noticome “I BOLOGNESI”) per la loro collaborazione, anche se indiretta, alla realizzazionedella tesi.Infine, dato che ci sono, Saluto (per la prima e ultima volta) tutti i residenti del laboratorioElecom, con l’invito a non lavorare troppo: “basta il solito”.
139

140 RINGRAZIAMENTI

Bibliografia
[1] “Using Simulink ”,1990 - 1999 by The MathWorks, Inc.
[2] “Writing S-Functions ”, 1990 - 1999 by The MathWorks, Inc.
[3] R. E. Goodson, R. G. Leonard, “A survey of modeling techniques for fluid line
transients”, transaction of the ASME, journal of Basic Engineering, 94: 474–482,June 1972.
[4] W. c. Yang, W. E. Tobler, “Dissipative modal approximation of fluid transmission
line using linear friction model”, ASME, journal of Dynamic Sistems, Measurementand Control, 113: pp.
[5] G. Sandoni, “Modellistica dinamica e controllo di una frizione per F1 ”, Tesi diLaurea A.A. 1998-1999 Univerista degli studi di Modena e Reggio Emilia.
[6] C. Corsini, “Modellistica del sistema idraulico di un’ autovettura e controllo del
cambio marcia”, Tesi di Laurea A.A. 2001-2002 Univerista degli studi di Modena eReggio Emilia.
[7] L. Bertoli, “Modellistica dinamica e controllo del sistema di trasmissione di un’au-
tovettura”, Tesi di Laurea A.A. 2000-2001 Univerista degli studi di Modena e ReggioEmilia.
[8] G. Pollini, “Implementazione e gestione di un’interfaccia CAN”, Tesi di LaureaA.A. 1998-1999 Univerista degli studi di Brescia.
[9] R. Zanasi, “Power Oriented Modelling of Dynamical System for Simulation”, IMACSSymp. on Modelling and Control of Technological System, Lille, France, May 1991.
[10] R. Zanasi, “Power Oriented Graphs for Modelling Robotic Systems”, invited paperfor the Second Int. Symposium MIM-S2 ’93, Special Session on “Intelligent Modelsin Robotics”, Brussels, Belgium, April 1993.
[11] R. Zanasi, “Dynamics of a n-link Manipulator by Using Power Oriented Graphs”,SYROCO ’94, Capri, September 1994.
[12] R. Zanasi, “Power Oriented Graphs : Basic Propeties”, Technical Report n. DEIS-LAR-17-96, University of Bologna, May 1996.
[13] S. Zucchini, “Configurazione “tubo lungo”: modellazione e controllo ”, Report n.1A.2002.
141

142 BIBLIOGRAFIA
[14] S. Zucchini, A. Pagani, “Modellazione dell’attuatore del cambio”, Report n.13A.2002.
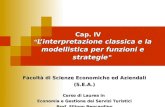


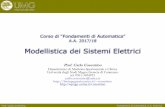


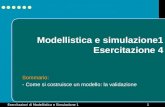







![Modellistica Dei Combustori - [D. Lentini]](https://static.fdocumenti.com/doc/165x107/5695d2191a28ab9b029918a3/modellistica-dei-combustori-d-lentini.jpg)