Matematica Computazionale(6cfu) Ottimizzazione · 2016. 5. 13. · Matematica Computazionale,...
45
1 Corso di Laurea in Infomatica Corso di Laurea in Matematica Matematica Computazionale(6cfu) Ottimizzazione(8cfu) (a.a. 2015-16, lez.13) Docente: Marco Gaviano (e-mail:[email protected])
Transcript of Matematica Computazionale(6cfu) Ottimizzazione · 2016. 5. 13. · Matematica Computazionale,...

1
Corso di Laurea in Infomatica
Corso di Laurea in Matematica
Matematica Computazionale(6cfu)
Ottimizzazione(8cfu)
(a.a. 2015-16, lez.13)
Docente: Marco Gaviano
(e-mail:[email protected])

2
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Minimizzazione unidimensionale
Un problema di minimizzazione in una variabile si può formulare come
minimizzare f() R (1)
E' importante poter disporre di buoni algoritmi che risolvono (1)
efficientemente . Ciò perché la risoluzione in due o più dimensioni si
baserà su minimizzazioni unidimensionali.
Ipotesi 1: f() abbia derivata prime e seconde nell'intervallo [a,b]; sia
inoltre strettamente convessa, ovvero f =f"()>0.
Esempio di funzione
strettamente convessa,

3
Matematica Computazionale, Ottimizzazione , a.a. 2015-16, Lezione, n.13
Si danno ora alcuni algoritmi per la sua risoluzione.
Algoritmo della sezione aurea (golden section)
Si parte da un intervallo [ai.bi] in cui esiste un punto di minimo ed in esso
si scelgono i punti v e w.
Se f(v)f(w), allora il minimo si trova nell’intervallo [ai+1,bi+1] [ai w]; se
f(v)>f(w), allora il minimo si trova nell’intervallo [ai+1,bi+1] [v bi] (La
figura illustra il procedimento).
Si ripete la procedura a partire da [ai+1 bi+1] e si ottiene [ai+2 bi+2].
Si ripete l’iterazione finché la misura dell’intervallo è sufficientemente
piccola.

4
Matematica Computazionale, Ottimizzazione , a.a. 2015-16, Lezione, n.13
bi v w ai
v w ai+1 bi+1
caso f(v) > f(w)
w bi+1 v
v w ai bi
ai+1
caso f(v)f(w),

5
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo 1 (sezione aurea) >0. F1 =(3-51/2)/2, F2 =(51/2 -1)/2,
Sia [a,b]= [a0 ,b0 ], i=0,
v= ai+F1(bi -ai ), w= ai+F2(bi -ai )
fv=f(v), fw=f(w),
while |(bi -ai )|>
if fv fw
ai+1 = ai ,bi+1 =w,
w=v, v= ai+1+ F1 (bi+1 –ai+1), fw=fv, fv=f(v) ,
else
ai+1 = vi ,bi+1 =bi,
v=w, w= ai+1+ F2 (bi+1 –ai+1), fv=fw, fw=f(w)
end
i=i+1
end
= (ai + bi)/2, (approssimaziome punto di minimo)

6
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Convergenza
Nel caso si ponga =0 allora l’algoritmo della sezione aurea genera una
successione infinita {[ai ,bi ]}. Può allora dimostrarsi la seguente,
Proposizione
L'ipotesi 1 sia valida. Allora
con =(51/2 -1)/2=0.6180,
ia)θ(b2
15a)(bab
i
ii

7
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo dell’interpolazione parabolica
Si costruisce una successione i . Si parte
dal valore della f() nei punti i e i-1 e dal
valore della sua derivata nel punto i-1. Si
costruisce la parabola (polinomio di 2° grado)
che nei punti i e i-1 ha lo stesso valore di
f() ed inoltre in i-1 ha la stessa derivata. Il
minimo della parabola è utilizzato per
costruire il nuovo punto i+1.
i i-1 i+1
parabola
f()
minimo parabola

8
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo 2 (interpolazione parabolica) >0. f '(0 =0)<0, 1 >0,
Poni i=1,
while |f (i)|> ,
end
=i+1 (approssimaziome punto di minimo)
))f(λ)(f(λ)(λ' )fλ(λ
)λ)(λ(λ' fλ
2
1λ
i1ii1ii
2
1ii1i1i1i

9
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Convergenza
Come nel caso dell’algoritmo della sezione aurea, l’algoritmo
dell’interpolazione parabolica genera una successione infinita {i}.
Può allora dimostrarsi la seguente
Proposizione
L'ipotesi 1 sia valida. Allora la successione {i } converge al punto di
minimo * di f(), inoltre ,
con = 20.5 e (0,1) ed opportune costanti.
iγ
i ωθ |λ*λ|

10
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo dell’interpolazione cubica
Si costruisce una successione i . Si parte
dal valore della f() e della sua derivata nei
punti i e i-1 . Si costruisce la cubica
(polinomio di 3° grado) che nei punti i e i-1
ha lo stesso valore di f () ed della sua
derivata. Il minimo della cubica è utilizzato
per costruire il nuovo punto i+1.
i i-1 i+1
cubica
f()
minimo cubica

11
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo 3 (interpolazione cubica) >0. f '(0 =0)<0, 1 >0,
Poni i=1,
while |f '(i)|>
end
=i+1 (approssimaziome punto di minimo)
0.5
1ii
2
11ii2
i1-i1iii1i1
21ii
21i1iii1i
))(λ' )f(λ' f)(uλsgn(λu
)λ))/(λλ3(λ-)(λ' f)(λ' fu
con
u)(λ' f)(λ' f
)uu)(λ')(fλ(λλλ

12
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Convergenza
L’algoritmo dell’interpolazione parabolica genera una successione
infinita {i}. Può allora dimostrarsi la seguente
Proposizione
L'ipotesi 1 sia valida. Allora la successione {i } converge al punto di
minimo * di f(), inoltre
con = 2 e (0,1) ed opportune costanti.
iγ
i ωθ|λ*λ|

13
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Minimizzazione in n dimensioni,
Come avviene spesso nell'Analisi Numerica si cerca di raggruppare gli
algoritmi che risolvono un certo problema in classi o famiglie.Vengono
quindi studiate le proprietà (convergenza, tasso di convergenza, ...) della
classe. La maggior parte degli algoritmi di minimizzazione per il
problema
min f(x) xRn (2)
possono inquadrarsi nel seguente schema generale o modello di
algoritmo. Da notare che gli algoritmi sono iterativi e la soluzione
viene trovata come punto limite di una successione {xk}

14
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo 4 (schema,n-dimensional minimization). >0
Scegli x0 Rn, x0 starting point; k=0;
while ||f(xk)|| >
calcola pkRn , pk la direzione di ricerca tale che
-(pk)Tf(xk ) > 0(direzione di discesa);
calcola un numero positivo k, (la lunghezza del passo),
(step length), tale che,
f(xk +kpk ) < f(xk );
calcola il nuovo punto
xk+1=xk+kpk
k=k+1
end
x*=xk, (approssimaziome punto di minimo).

15
L'algoritmo 4 è abbastanza generale e comprende la maggior parte degli
algoritmi di minimizzazione. Il suo comportamento è illustrato nella
seguente figura.
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
-f(xk) xk pk
pkdirezione di ricerca
f(xk)=gradiente di f(x)
partendo da xk si procede
lungo pk scegliendo un
passo k, e xk+1= xk+ k pk
e f(xk+1) f(xk). xk+1

16
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Sostanzialmente da un punto xk si procede lungo una direzione di
discesa per la f(x). Lungo pk si sceglie un passo opportuno. Si calcola
xk+1 e si ripete la procedura fino a che il criterio di stop è soddisfatto.
Ciò che distingue i vari algoritmi è la scelta e della direzione di ricerca
pk e quella del passo k. Il criterio di stop usato nella struttura while è,
|f(xk )| (3)
con un numero positivo prefissato; ma può usarsi un altro criterio di
stop.

17
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
La scelta di k
Il valore ottimale k è quello per cui vale la seguente relazione,
f(xk +kpk) = min f(xk +pk), 0. (4)
Si parla allora di ricerca lineare esatta. Chiaramente questa scelta
assicura il massimo decremento della funzione lungo pk. Per il calcolo di
k si potrebbe dunque pensare di utilizzare l’algoritmo della sezione
aurea o dell’interpolazione parabolica o cubica. In tal caso la funzione
unidimensionale cambia ad ogni iterazione, precisamente si ha
f k() = f(xk +pk),
La scelta di un 'piccolo' negli algoritmi unidimensionali garantisce
che (4) è soddisfatta con una buona approssimazione.

18
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Questa scelta, benché corretta, è inefficiente nel senso che essa richiede
un numero molto alto di valutazioni di funzione (Un criterio di
valutazione della bontà di un algoritmo è il numero di valutazioni di
funzione che la sua applicazione richiede; nel Calcolo Numerico questo
criterio è usato spesso). Insistere sulla ricerca lineare in modo da
ottenere grande accuratezza porta ad un risultato disastroso.
Gli algoritmi 1,2 e 3, pertanto, vengono utilizzati con criteri di stop
basati sul principio di Goldstein-Armijo. Vale a dire si sceglie un k tra
tutti gli che soddisfano la seguente relazione,
0< -1(pk)Tf(xk) f(xk) - f(xk +pk) -2(pk)
Tf(xk) (5),
con 1 e 2 numeri positivi tali che 0<1 2<1,

19
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
La figura illustra il significato di (5).
2(pk)Tf(xk) f(xk +pk)- f(xk) 1(pk)
Tf(xk)
1(pk)Tf(xk)
f(xk +pk)- f(xk)) 2(pk)
Tf(xk)
Il principio di Goldstein-Armijo

20
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Il caso 1 = 2= 0.5 equivale come costo computazionale ad effettuare
la ricerca lineare esatta ossia a calcolare k secondo (4).
Un altro criterio è il seguente, si sceglie k in modo da soddisfare, la
relazione,
|(pk)Tf(xk +pk)|(pk)
Tf(xk) (6)
con 01. Questa è giustificata dal fatto che nel punto di minimo
lungo pk
(pk)T f(xk +pk)=0
Dunque si rende meno stringente la condizione di convergenza sul passo.

21
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
La scelta della direzione di ricerca pk
Per la scelta della direzione di ricerca pk nell’algoritmo 4 sono stati
proposti centinaia di algoritmi che possono raggrupparsi in classi. Si
considererà il metodo del gradiente, il metodo di Newton, i metodi quasi-
Newton ed il metodo del gradiente coniugato. La proprietà che si
richiede a pk è che sia di discesa; vale a dire,- (pk)T f(xk)>0. Questa
proprietà è abbastanza debole e da sola, anche con una scelta ottimale del
passo, non può garantire la convergenza dell’algoritmo 4. La condizione
che quindi spesso si richiede è
-(pk)T f(xk )>||pk|| || f(xk )|| (7)
con (0,1). Questa assicura che l'angolo tra il gradiente negativo e pk
non tenda a /2 (vedi figura).

22
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
-f(xk) xk
pk
pkdirezione di ricerca
f(xk)=gradiente di f(x)
questo angolo non
deve tendere a /2

23
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Il metodo del gradiente o di più ripida discesa
La (pk)Tf(xk ) con ||pk||=1 dà la derivata prima di f(xk+pk ) (vista
come funzione di ) per =0. E' dunque naturale scegliere come
direzione di ricerca quella direzione che rende minima pTf(xk)/||p|| .
Si consideri il problema
in cui la norma è quella Euclidea, (||x||=(x1 ,x2 ,...,xn)0.5 ), allora la
soluzione di g(p)=0 è
p=-f(xk )
La scelta pk=-f(xk ) nell’algoritmo 4 dà quindi origine al metodo di più
ripida discesa.
)f(xp
pg(p) k
T
Rpmin
n

24
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Vale la seguente proposizione
Proposizione
f(x) sia una funzione con derivate prime e seconde continue. Il metodo
del gradiente con una opportuna scelta del passo (utilizzo teoricamente
del passo ottimale o più realisticamente degli algoritmi 1, 2, e 3) generi
una successione convergente a x* . Allora f(x*)=0 ovvero x* è un
punto di stazionarietà.
Se vale la condizione di uniforme convessità
m||x||2xTH (x)x M||x||2, xRn
con m ed M, mM, numeri reali positivi e H(x), l’hessiano di f(x) calcolato in x, si ha convergenza lineare,
||xk-x*||ck
per k=1,2,... , c un opportuno numero reale positivo e (1-m/M)0.5.

25
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
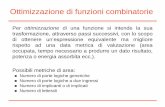
Il metodo di più ripida discesa per una funzione di due variabili,
nel caso il punto di stazionarietà sia minimo locale
-f(•)
xk
xk+1

26
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
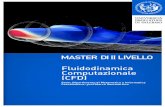
Comportamento del metodo del gradiente per m<<M e mM.
Nel secondo caso il problema può dirsi malcondizionato e risulta
evidente l'inefficienza del metodo del gradiente.
mM
m<<M

27
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Il metodo di Newton
Il metodo di Newton per problemi di minimo è derivato dallo stesso
metodo per la risoluzione di sistemi di equazioni nonlineari. Esso nel
caso sia applicabile e convergente ha un tasso di convergenza quadratico.
Pertanto in poche iterazioni permette di avere una buona
approssimazione della soluzione. Ma essendo computazionalmente
costoso esso non viene applicato spesso, è comunque diventato il
modello per altri metodi che hanno un tasso di convergenza comparabile
ma che richiedono ad ogni iterazione una mole di calcolo notevolmente
inferiore. La giustificazione del metodo è la seguente.
Si consideri il seguente sviluppo di Taylor di f(x)
f(xk +p)= f(xk )+p Tf(xk ) +½pTHkp+...
con Hk=H(xk), H(x) l'Hessiano di f(x) calcolato in x .

28
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Si approssimi ora la f(x) con la somma dei primi tre termini e si
minimizzi rispetto a p. Si trova che p deve soddisfare la relazione
Hkp = -f(xk ).
Questa suggerisce di calcolare pk nell’algoritmo 4 secondo la formula,
pk = -(Hk)-1f(xk ) (8)
Il metodo che ne deriva è chiamato metodo di Newton. La scelta di p
tiene conto di informazioni sulla derivata seconda di f(x).
La scelta pk = -f(xk ) nel metodo del gradiente era basata solo su
informazioni del primo ordine. Dunque con la scelta (8) è naturale avere
risultati migliori per ciò che riguarda il tasso di convergenza.

29
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Si possono fare le seguenti osservazioni.
• Nel caso di funzioni quadratiche con k =1 una sola iterazione è
sufficiente ad individuare il minimo.
• Il costo numerico per iterazione è molto alto in quanto si richiede
e il calcolo dell'hessiano e il calcolo della sua inversa.
• La direzione p k è di discesa solo se la matrice H k è definita
positiva per ogni k.
• La condizione (7) risulta soddisfatta solo se H k per k, non
tende a diventare semidefinita positiva ovvero vale la condizione
di uniforme convessità.
m||p||2pTH k p M||p||2, pRn
per k=1,2,... e con m ed M, mM, numeri reali positivi.

30
Per l'algoritmo 4 con la direzione di ricerca data da (8) si ha la seguente
proposizione.
Proposizione
f(x) sia una funzione con derivate prime e seconde continue ed inoltre
m||x||2xTH(x) x M||x||2 xRn
con m ed M, mM,numeri reali positivi, allora il metodo di Newton con
una scelta opportuna del passo (utilizzo del passo ottimale o più
realisticamente degli algoritmi 1, 2 e 3) genera una successione
convergente al minimo x* . Si ha inoltre convergenza quadratica,
k=1,2,..., e c un opportuno numero reale positivo e (0,1).
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
k
cxxk
2*

31
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Si noti che nel metodo di Newton il passo ottimale (4) k tende a 1 al tendere di xk alla soluzione.
La proposizione mette in evidenza le restrizioni che devono valere per
l'applicazione del metodo di Newton. In realtà le ipotesi fatte possono
restringersi ad un intorno di un punto di minimo locale, la convergenza è
comunque dimostrabile solo partendo da un punto in tale intorno.
Nel caso di funzioni generali in cui o l'hessiano è definito negativo o la
matrice H(x) è singolare, allora chiaramente (8) o non è applicabile o
genera un direzione non di discesa. In tal caso sono stati proposti nella
letteratura numerosi metodi chiamati di Newton modificato, nei quali la
pk è sempre di discesa. Generalmente se si è lontani dalla soluzione si
applica Newton modificato (eventualmente si può utilizzare la direzione
del gradiente negativo), nelle vicinanze della soluzione si passa alla (8).

32
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Un esempio di calcolo della direzione di ricerca è dato da
if f(xk )T (Hk)
-1f(xk ) ||f(xk )|| ||(Hk)-1f(xk )|| oppure
l’hessiano è non-singolare e definito positivo allora,
pk =-(Hk)-1f(xk )
else
pk =- f(xk )
end.
con (0,1).

33
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Metodi quasi Newton
I metodi quasi Newton, o a metrica variabile come anche vengono
chiamati, sono stati proposti per ovviare agli inconvenienti del metodo di
Newton già citati, ovvero il calcolo dell'hessiano e della sua inversa. In
questi metodi non si vuole utilizzare l'hessiano ma solo i valori della
funzione f(x) e i valori del gradiente f(xk) già calcolati. Man mano che
si procede con le iterazioni si cercherà di approssimare mediante una
matrice Bk l’inverso dell'hessiano H(xk). Vale a dire si cerca di
soddisfare il limite
limk Bk=H(x*)-1.
dove con x* si indica il minimo a cui la successione {xk} tende. La
direzione di ricerca si calcola quindi secondo una formula uguale alla (8)
ovvero
pk =-Bkf(xk )

34
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Come può costruirsi la matrice B?
Nel caso f(x) sia una funzione quadratica
f(x) = dTx+(xTHx)/2 (9)
con H matrice nn simmetrica definita positiva e d un vettore in Rn allora vale la seguente relazione
Hsk=f(xk+sk)- f(xk)
ovvero
sk= H-1(f(xk+sk)- f(xk)). (10)
Per una funzione non quadratica la (10) non vale. Ma se si è in un
intorno sufficiente piccolo di un punto di minimo locale con hessiano
definito positivo si ha
sk H(xk )-1(f(xk+sk)- f(xk)).
dove si può porre sk=xk+i-xk.

35
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
La (10) è dunque utilizzata per la costruzione della successione delle
matrici Bk. Si costruisce la Bk+1 a partire dalla Bk, mediante la formula
Bk+1 =Bk+Uk.
La correzione Uk è aggiunta a Bk in modo che valga la (10) ossia,
(Bk+Uk) –1(xk+1-xk)=(Bk+1)
-1 (xk+1-xk)= f(xk+1)- f(xk).
Esistono numerose espressioni per Uk. Un esempio è la seguente,
con sk = (xk+1 -xk) e yk = f(xk+1)- f(xk) e v un qualsiasi vettore tale che
vTyk0.
k
T
T
kkkk1k
yv
)vyB(sBB

36
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Se si impone la simmetria su Uk allora si ha la formula di Broyden di
rango 1
Se si pone
con v e z vettori arbitrari ma tali che vTyk0, zTyk0, si ha un'altra
famiglia di formule per le quali (10) è valida. La scelta in (11) di v = sk e
z = Bk yk dà
chiamata formula di Davidon-Fletcher-Powell che è una formula
simmetrica. Inizialmente si pone B0 =I, con I la matrice identità .
(Broyden). y)yB(s
)yB)(syB(sBB
k
T
kkk
T
kkkkkkk1k
)(11 yz
zyB
yv
vsBB
k
T
T
kk
k
T
T
kkk1k
Powell)Fletcher(Davidon yBy
)y(ByB
ys
ssBB
kk
T
k
T
kkkk
k
T
T
kkk1k

37
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Per questa formula si hanno i seguenti risultati.
Proposizione
L'algoritmo 4 applicato alla funzione quadratica (9) con =0 e pk
calcolato mediante
pk =-Bkf(xk ),
Bk mediante la formula di Davidon-Fletcher-Powell ed k ottimale,
converge al punto di minimo in un numero finito di passi minore od
uguale ad n.
Per funzioni non quadratiche si ha

38
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Proposizione
Sia f(x) una funzione avente derivate prime e seconde continue; inoltre
per xC(x0) (di misura finita)
C(x0)= {x | f(x)f(x0) }
e per ogni yRn sia
m||y||2yTH(x)y M||y||2
con m, M costanti positive, allora l'algoritmo 4 con pk =-Bkf(xk ), Bk
dato dalla formula di Davidon-Fletcher-Powell, k ottimale e =0
partendo da x0 o si ferma dopo un numero finito di iterazioni trovando il
punto di minimo o genera una successione convergente al punto x* che
minimizza f(x) su C(x0).

39
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
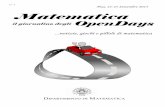
Convergenza del metodo quasi-Newton con la formula Davidon-
Fletcher-Powell
punto di partenza x0
punto limite x*
(minimo locale)

40
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Per il tasso di convergenza si ha
Proposizione
Siano valide tutte le ipotesi della proposizione precedente allora la
successione {xk} converge superlinearmente al punto di minimo x*,
ovvero,
0*
*lim
1
xx
xx
k
k
k

41
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Metodo del gradiente coniugato
I metodi del gradiente coniugato furono introdotti da Fletcher e Reeves
con lo scopo di ridurre il numero di operazioni aritmetiche richiesti dai
metodi quasi-Newton. Nei primi metodi introdotti nella letteratura la
direzione di ricerca è calcolata secondo la formula
pk=-f(xk)+kpk-1 (12)
Vale a dire pk è ottenuto come combinazione lineare del gradiente
negativo e della direzione di ricerca precedente. Il parametro è scelto in
diversi modi. Si hanno le formula di Fletcher-Reeves e Polak-Ribiere
per
(13) Reeves)-(Fletcher )f(x)f(x
)f(x)f(xγ
1k
T
1k
k
T
kk
(14) Ribiere)-(Polak )f(x)f(x
)f(x))f(x)f(x(γ
1k
T
1k
k
T
1kkk

42
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Vediamo ora la motivazione del metodo. Ciò giustificherà anche il nome
'gradiente coniugato'. Consideriamo la definizione di direzioni coniugate.
Definizione
Sia data una matrice nn H simmetrica e definita positiva, m vettori pi ,
i=1,2,...,m, si dicono coniugati rispetto ad H se vale la relazione,
La scelta di k in (13) e (14) è stata fatta in modo che nel caso si debba
minimizzare la funzione quadratica (9) con la scelta ottimale del passo k
allora le prime n direzioni di ricerca risultano coniugate rispetto ad H.
Può dimostrarsi
Proposizione
L'algoritmo 4 con pk calcolato secondo (12) e k dato da (13) o (14),
con scelta ottimale del passo e =0, qualora applicato ad una funzione
quadratica converge al minimo in un numero di iterazioni mn.
.1,2,...mi j,iper 0,Hpp j
T
i

43
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Per l'applicazione ad una funzione non quadratica si ha
Proposizione
Sia f(x) una funzione avente derivate prime e seconde continue; inoltre
per xC(x0), con
C(x0)= {x | f(x)f(x0)}
e per ogni yRn sia,
m||y||2yTH(x)y M||y||2
con m, M costanti positive, allora l'algoritmo 4 con pk calcolato secondo
(12) e k dato da (13) o (14) e =0, partendo da xo o si ferma dopo un
numero finito di iterazioni trovando il punto di minimo o genera una
successione convergente al punto x* che minimizza f(x) su C(xo)

44
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
I metodi del gradiente coniugato sono usualmente applicati
riinizializzando dopo n o 2n,…, iterazioni la direzione di ricerca.
Usualmente si pone all'inizio di ogni ciclo pk=-(xk).
La riinizializzazione è motivata dal fatto che si può dimostrare che n
iterazioni di un metodo del gradiente coniugato equivalgono ad una
iterazione del metodo di Newton. I metodi del gradiente coniugato hanno
tasso di convergenza inferiore a quello dei metodi Quasi-Newton. Ma
sono semplici da applicare e non richiedono la memorizzazione di una
matrice (Quelli proposti più recentemente richiedono la memorizzazione
di più vettori), pertanto in problemi di grandi dimensione sono i metodi
più efficienti.
L'algoritmo che ne consegue è il seguente

45
Matematica Computazionale, Ottimizzazione, a.a. 2015-16, Lezione, n.13
Algoritmo (Polak-Ribiere , gradiente coniugato con restart). >0.
Scegli x0Rn, (starting point); k=0; p-1=(0,…,0);
while |f(xk)|>
pk=-f(xk)+kpk-1
calcola k tale che f(xk +kpk) = min f(xk +pk), 0
xk+1=xk+kpk
k=k+1,
end
x*=xk, (approssimaziome punto di minimo).
altrimenti)f(x)f(x
)f(x))f(x)f(x(
n di multiploun èk se 0
γ
1k
T
1k
k
T
1kkk