Manuale di messa in servizio - DDS (Distributor Data Solutions) · 2019-06-29 · SINAMICS S120 -...
326
Manuale di messa in servizio Edizione 06/2005 sinamics SINAMICS S120
Transcript of Manuale di messa in servizio - DDS (Distributor Data Solutions) · 2019-06-29 · SINAMICS S120 -...
Manuale di messa in servizio Edizione 06/2005
sinamics
SINAMICS S120

Valido per
Azionamento Versione firmwareSINAMICS S120 2.3
Edizione 06/2005
Manuale di messain servizio
SINAMICS S120
Documentazione per il costruttore /per il service
Panoramica del sistema 1
Preparativiper la messa in servizio 2
Messa in servizio 3
Comunicazione 4
SINAMICSSafety Integrated Booksize 5
Diagnostica 6
Principi del sistemadi azionamento 7
Indice delle abbreviazioni
Bibliografia
Glossario
Indice
Documentazione SINAMICS®
Codice delle edizioni
Prima della presente sono state pubblicate le edizionisottoriportate.
Una lettera nella colonna “Annotazioni” distingue lo stato delle edizioni sin qui pubblicate.
Identificazione dello stato nella colonna “Annotazioni”:
A Nuova documentazioneB Ristampa invariata con nuovo numero di ordinazioneC Edizione rielaborata con nuovo numero di versione
Se il contenuto tecnico di una pagina è stato modificato rispetto alla precedente versione,questo viene evidenziato con la variazione della versione nell’intestazione della pagina relativa.
Edizione N. di ordinazione Note03.03 6SL3097--0AF00--0CP0 A04.04 6SL3097--2AF00--0CP0 C10.04 6SL3097--2AF00--0CP1 C12.04 6SL3097--2AF00--0CP2 C06.05 6SL3097--2AF00--0CP3 C
I marchiSINAMICSr, SIMOTIONr, SIMATICr, SIMATIC HMIr, SIMATIC NETr, SIROTECr, SINUMERIKr eSIMODRIVEr sono marchi registrati di Siemens AG. Gli altri nomi contenuti in questa documentazionepossono essere marchi il cui utilizzo da parte di terzi per propri scopi può ledere i diritti dei legittimiproprietari.
Ulteriori informazioni sono reperibili in Internet all’indirizzo:http://www.siemens.com/motioncontrolPer informazioni su SINAMICS S120 consultare:http://www.siemens.com/sinamics
Questa documentazione è stata realizzata con Interleaf V 7
© Siemens AG, 2005. All rights reserved
Il controllo può contenere altre funzioni oltre a quelle descritte inquesto manuale. Non sussiste tuttavia l’obbligo di implementare talifunzioni in fase di fornitura o assistenza tecnica.
In questa documentazione abbiamo verificato che il contenuto tecnicocorrisponda realmente all’hardware e al software descritti. Eventualidiscordanze non possono tuttavia essere escluse. Le indicazionicontenute in questa pubblicazione vengono verificate periodicamente.Le modifiche che si renderanno eventualmente necessarie sarannocontenute nella successiva edizione aggiornata. Vi saremo grati perqualsiasi proposta di miglioramento.
Con riserva di modifiche tecniche.
Siemens AktiengesellschaftN. di ordinazione 6SL3 097--2AF00--0CP3Stampato nella Repubblica Federale Tedesca
v© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Prefazione
Informazioni sulla documentazione per SINAMICS S120
La documentazione per i SINAMICS S120 è strutturata nel seguente modo:
S Documentazione generale / cataloghi
S Documentazione per il costruttore / per il service
S Documentazione elettronica
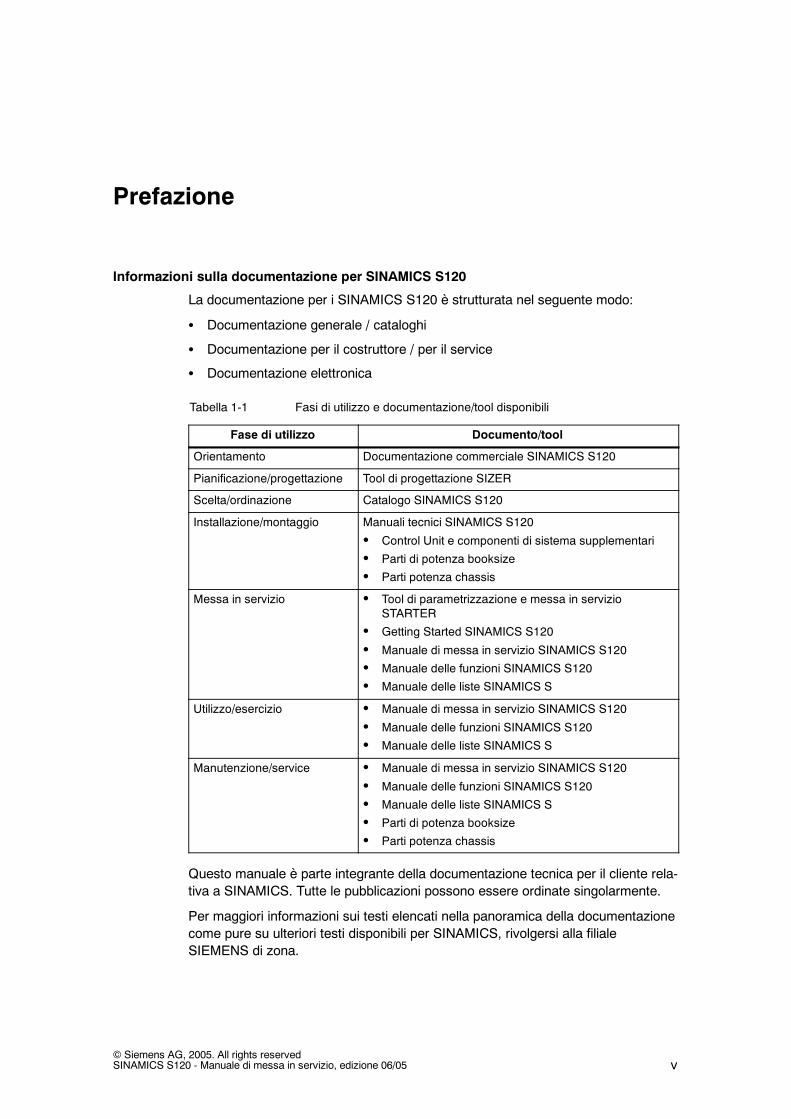
Tabella 1-1 Fasi di utilizzo e documentazione/tool disponibili
Fase di utilizzo Documento/tool
Orientamento Documentazione commerciale SINAMICS S120
Pianificazione/progettazione Tool di progettazione SIZER
Scelta/ordinazione Catalogo SINAMICS S120
Installazione/montaggio Manuali tecnici SINAMICS S120
S Control Unit e componenti di sistema supplementari
S Parti di potenza booksize
S Parti potenza chassis
Messa in servizio S Tool di parametrizzazione e messa in servizioSTARTER
S Getting Started SINAMICS S120
S Manuale di messa in servizio SINAMICS S120
S Manuale delle funzioni SINAMICS S120
S Manuale delle liste SINAMICS S
Utilizzo/esercizio S Manuale di messa in servizio SINAMICS S120
S Manuale delle funzioni SINAMICS S120
S Manuale delle liste SINAMICS S
Manutenzione/service S Manuale di messa in servizio SINAMICS S120
S Manuale delle funzioni SINAMICS S120
S Manuale delle liste SINAMICS S
S Parti di potenza booksize
S Parti potenza chassis
Questo manuale è parte integrante della documentazione tecnica per il cliente rela-tiva a SINAMICS. Tutte le pubblicazioni possono essere ordinate singolarmente.
Per maggiori informazioni sui testi elencati nella panoramica della documentazionecome pure su ulteriori testi disponibili per SINAMICS, rivolgersi alla filialeSIEMENS di zona.
Prefazione
vi© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Per motivi di chiarezza questo manuale non riporta tutte le informazioni dettagliaterelative alle varie esecuzioni del prodotto e non può nemmeno prendere in consi-derazione e trattare ogni possibile caso di montaggio, funzionamento e manuten-zione.
Il contenuto di questa documentazione non è parte integrante né va a modificarequalsiasi accordo, accettazione passata o rapporto giuridico presente o intercorsonel passato. Tutti gli obblighi della Siemens si ricavano dal corrispondente con-tratto di vendita che contiene anche tutte e le uniche regole di garanzia valide.Queste norme di garanzia contrattuale non vengono né limitate né ampliate daquesta documentazione.
Destinatari
La presente documentazione si rivolge al costruttore di macchine, agli addetti allamessa in servizio e al personale del servizio di assistenza che utilizzano il sistemadi azionamento SINAMICS S.
Finalità
Oltre a fornire le informazioni necessarie per la messa in servizio e il service delSINAMICS S120, il manuale di messa in servizio ne descrive le procedure e leoperazioni di comando.
Il manuale di messa in servizio è così articolato:Capitolo 1 Panoramica del sistemaCapitolo 2 Preparativi per la messa in servizioCapitolo 3 Messa in servizioCapitolo 4 Comunicazione PROFIBUSCapitolo 5 SINAMICS Safety IntegratedCapitolo 6 DiagnosticaCapitolo 7 Principi del sistema di azionamento
Raccomandazione per gli utenti poco esperti:leggere per primi i capitoli 1 e 7, quindi i capitoli che interessano.
Insieme al manuale di messa in servizio sono necessari il manuale delle liste e ilmanuale delle funzioni.
Supporti per la ricerca
Per un migliore orientamento, oltre all’indice, nell’appendice vengono offerti anche iseguenti supporti:
1. Indice delle abbreviazioni
2. Bibliografia
3. Indice analitico
Prefazione
vii© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
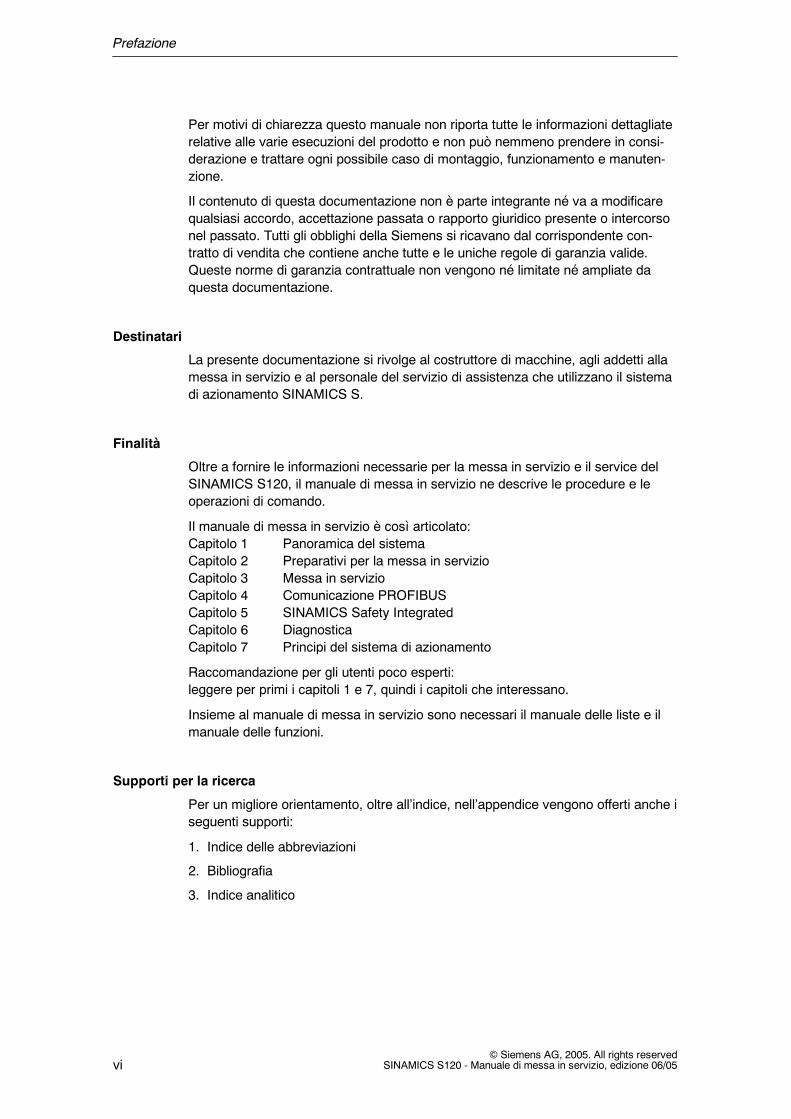
Segnali di pericolo e avvertenze -- Spiegazione dei simboli utilizzati
In questa documentazione vengono utilizzati i seguenti simboli per i segnali dipericolo e le avvertenze di sicurezza:
!Pericolo di morte
Significa che la non osservanza delle relative misure di sicurezza provoca lamorte, gravi lesioni alle persone e ingenti danni materiali.
!Pericolo
Significa che la non osservanza delle relative misure di sicurezza può causare lamorte, gravi lesioni alle persone e ingenti danni materiali.
!Avvertenza
Significa che la non osservanza delle relative misure di sicurezza può causareleggere lesioni alle persone o lievi danni materiali.
Avvertenza
Questo avviso di pericolo (senza triangolo di avvertimento) significa che la nonosservanza delle relative misure di sicurezza può causare, lievi danni materiali.
Attenzione
Questo avviso di pericolo significa che la non osservanza delle relative misure disicurezza può causare un risultato o uno stato indesiderato.
Nota
Questo simbolo viene riportato nella documentazione tutte le volte che vienefornita un’ulteriore indicazione.

Prefazione
viii© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Definizione: Cosa si intende per personale qualificato?
Il personale qualificato al quale si rivolgono la presente documentazione e gli avvisidi pericolo riportati sul prodotto è rappresentato da persone che hanno dimesti-chezza con l’installazione, il montaggio, la messa in servizio e il funzionamento delprodotto e che dispongono delle relative qualifiche professionali, come ad es.:
S ha seguito corsi di istruzione o formazione oppure è autorizzato a inserire e di-sinserire dalla rete, mettere a terra o contrassegnare circuiti ed apparecchiaturein base alle vigenti norme di sicurezza.
S ha seguito corsi di istruzione o formazione conformi alle normative standarddella tecnica di sicurezza, relativi alla manutenzione e all’utilizzo degli equipag-giamenti di sicurezza necessari.
S ha frequentato un corso di pronto soccorso.

Prefazione
ix© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Avvertenze tecniche
Technical Support
Per eventuali chiarimenti si prega di contattare la seguente hotline:
A&D Technical Supports Tel.: +49 (0) 180 5050 -- 222Fax: +49 (0) 180 5050 -- 223http://www.siemens.com/automation/support-request
Per domande relative alla documentazione (suggerimenti, correzioni) inviare un faxo una e-mail al seguente indirizzo:Fax: +49 (0) 9131 98 -- 2176Modulo fax: Vedere il foglio delle correzioni al termine della
documentazioneE-mail: [email protected]
Indirizzo Internet
Informazioni sempre aggiornate sui nostri prodotti sono reperibili in Internet alseguente indirizzo:
http://www.siemens.com/motioncontrol
Informazioni su SINAMICS si possono trovare in Internet all’indirizzo seguente:
http://www.siemens.com/sinamics
Stile
Nella presente documentazione sono state adottate le seguenti abbreviazioni econvenzioni stilistiche:
Convenzioni stilistiche dei parametri (esempi):
S p0918 Parametro di impostazione 918
S r1024 Parametro di supervisione 1024
S p1070[1] Parametro di impostazione 1070 indice 1
S p2098[1].3 Parametro di impostazione 2098 indice 1 bit 3
S p0099[0...3] Parametro di impostazione 99 indice 0 ... 3
S r0945[2](3) Parametro di supervisione 945 indice 2 dell’oggetto diazionamento 3
S p0795.4 Parametro di impostazione 795 bit 4
Convenzioni stilistiche per anomalie e avvisi (esempi):
S F12345 Anomalia 12345 (inglese: Fault)
S A67890 Avviso 67890 (inglese: Alarm)
Convenzioni stilistiche generali:
S Il simbolo “≐” significa “corrisponde a”
Prefazione
x© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Avvertenze ESD
!Avvertenza
Electrostatic Sensitive Devices (ESD) sono componenti singoli, circuiti integrati oschede che possono essere danneggiati da campi o scariche elettrostatiche.
Norme comportamentali per l’uso di componenti a rischio di ESD:S Lavorando con componenti elettronici è indispensabile provvedere ad una
buona messa a terra della persona, della stazione di lavoro e dell’imballaggio!S I componenti elettronici possono essere toccati dall’operatore solo in ambienti
ESD con pavimenti conduttivi e solo se la persona-- indossa l’apposito bracciale ESD previsto per la messa a terra e se-- calza scarpe ESD adeguate o scarpe dotate di fascetta per la messa a
terra.S Il contatto con componenti elettronici va comunque evitato se non strettamente
indispensabile. È consentito afferrare solo il pannello frontale o il bordo dellapiastra madre.
S I componenti elettronici non devono venire a contatto con elementi in plastica eindumenti con parti in plastica.
S I componenti elettronici possono essere appoggiati solo su supporti conduttivi(tavoli con rivestimento ESD, materiale espanso ESD conduttivo, sacchetti perimballaggio ESD, contenitori di trasporto ESD).
S Le unità elettroniche non devono venire a trovarsi in prossimità divideoterminali, monitor o televisori (distanza minima dallo schermo > 10 cm).
S Le misure su schede elettroniche possono essere effettuate solo se-- lo strumento di misura è stato collegato a terra (ad es. mediante conduttore
di protezione) oppure se-- prima di procedere alla misura con strumento di misura a separazione
galvanica la testina viene scaricata per un tempo breve (ad es. toccando ilmetallo scoperto del telaio del controllo numerico).
Prefazione
xi© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Note tecniche di sicurezza
!Pericolo di morteS La messa in servizio è interdetta fino a quando viene stabilito che la macchina
nella quale devono essere montati i componenti descritti nel presente manualeè conforme alle prescrizioni definite nella direttiva 98/37/CE.
S La messa in servizio delle apparecchiature SINAMICS e dei motori trifase puòessere eseguita solo da personale adeguatamente qualificato.
S Questo personale deve tener presente la documentazione tecnica relativa alprodotto ed inoltre conoscere a fondo e rispettare i pericoli e le avvertenzeindicate.
S Durante il funzionamento di apparecchiature e motori elettrici, i circuiti elettriciche si trovano sotto tensione costituiscono una fonte di pericolo.
S Durante il funzionamento dell’impianto sono possibili movimenti pericolosi degliassi.
S Tutti i lavori sull’impianto elettrico devono avvenire in assenza di tensione.S Il collegamento di apparecchiature SINAMICS con motori in corrente trifase alla
rete di alimentazione tramite dispositivi di protezione per le dispersioni dicorrente a commutazione selettiva è ammesso solo se la compatibilitàdell’apparecchiatura SINAMICS con il dispositivo di sicurezza FI è comprovatasecondo la norma EN 50178, cap. 5.2.11.2.
!PericoloS Per un funzionamento ottimale e sicuro di queste apparecchiature e dei relativi
motori è essenziale che il trasporto, l’immagazzinaggio, l’installazione e ilmontaggio siano stati eseguiti con la cura necessaria.
S Per l’esecuzione di varianti speciali per le apparecchiature e i motori ènecessario fare riferimento alle indicazioni riportate nei cataloghi e nelle offerte.
S Oltre alle avvertenze e agli avvisi di pericolo contenuti nella documentazionetecnica fornita, vanno tenute presenti anche le normative nazionali, locali e leprescrizioni relative all’impianto.
S A tutti i collegamenti e i morsetti da 0 V a 48 V possono essere collegate solobassissime tensioni di protezione (PELV = Protective Extra Low Voltage)secondo EN60204--1.

Prefazione
xii© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
!AvvertenzaS La temperatura sulla superficie esterna dei motori può superare i +80 _C.S Per questo motivo componenti termosensibili quali ad es. cavi o componenti
elettronici non devono trovarsi nelle immediate vicinanze del motore o esserefissati allo stesso.
S Nel montaggio è necessario fare attenzione affinché i cavi:-- non vengano danneggiati-- non siano sottoposti a trazione e-- non restino impigliati in parti in rotazione.
AvvertenzaS Le apparecchiature SINAMICS con motori trifase vengono sottoposti, durante
la fase di verifica costruttiva, a una prova sotto tensione secondo quantoprevisto dalla norma EN 50178. Durante la prova sotto tensione degliequipaggiamenti elettrici di macchine industriali secondo la norma EN 60204--1,paragrafo 19.4, è necessario scollegare/disconnettere tutti i collegamenti delleapparecchiature SINAMICS per evitare di danneggiarle.
S Il collegamento dei motori va eseguito sulla base dello schema circuitalefornito. La mancata osservanza può comportare la distruzione dei motori.
NotaS Le apparecchiature SINAMICS con motori a corrente alternata in condizioni di
esercizio adeguate e in ambienti operativi asciutti soddisfano la direttiva per labassa tensione 73/23/CEE.
J

xiii© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Contenuto
1 Panoramica del sistema 1-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Campo d’impiego 1-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Esecuzioni 1-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Piattaforma e Totally Integrated Automation 1-19. . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Panoramica 1-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Componenti SINAMICS S120 1-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Confronto Servo <--> Vector 1-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Preparativi per la messa in servizio 2-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Requisiti per la messa in servizio 2-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Componenti PROFIBUS 2-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Regole per l’esecuzione del cablaggio con DRIVE-CLiQ 2-33. . . . . . . . . . . . . .2.3.1 Regole generali 2-33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.3.2 Regole per le varie versioni del firmware 2-35. . . . . . . . . . . . . . . . . . . . . . . . . . . .2.3.3 Cablaggio di esempio di azionamenti Vector 2-38. . . . . . . . . . . . . . . . . . . . . . . .2.3.4 Cablaggio di esempio di azionamenti Vector collegati in parallelo 2-40. . . . . .2.3.5 Modifica della topologia offline in STARTER 2-41. . . . . . . . . . . . . . . . . . . . . . . . .
3 Messa in servizio 3-43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Procedura generale della messa in servizio 3-44. . . . . . . . . . . . . . . . . . . . . . . . .3.1.1 Avvertenze tecniche di sicurezza 3-44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Tool di messa in servizio STARTER 3-46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.2.1 Funzioni principali di STARTER 3-46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.2.2 Attivazione del funzionamento online: STARTER tramite
PROFIBUS 3-48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Creazione di un progetto in STARTER 3-50. . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3.1 Assemblaggio offline di un progetto 3-50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3.2 Ricerca online di un apparecchio di azionamento 3-52. . . . . . . . . . . . . . . . . . . .
3.4 Esempio di prima messa in servizio di un Servo Booksize 3-55. . . . . . . . . . . . .3.4.1 Impostazione del task 3-56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.4.2 Cablaggio dei componenti (esempio) 3-57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.4.3 Flusso di segnali dall’esempio di prima messa in servizio 3-58. . . . . . . . . . . . .3.4.4 Messa in servizio con STARTER (esempio) 3-59. . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Esempio di prima messa in servizio di un Vector Booksize 3-62. . . . . . . . . . . .3.5.1 Impostazione del task 3-62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.5.2 Cablaggio dei componenti (esempio) 3-63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.5.3 Flusso di segnali dall’esempio di prima messa in servizio 3-64. . . . . . . . . . . . .3.5.4 Messa in servizio con STARTER (esempio) 3-65. . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Esempio di prima messa in servizio di un Vector Chassis 3-69. . . . . . . . . . . . .3.6.1 Impostazione del task 3-70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Contenuto
xiv© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.6.2 Cablaggio dei componenti (esempio) 3-71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.6.3 Flusso di segnali dall’esempio di prima messa in servizio 3-72. . . . . . . . . . . . .3.6.4 Messa in servizio con STARTER (esempio) 3-73. . . . . . . . . . . . . . . . . . . . . . . . .
3.7 Avvertenze per la messa in servizio dei motori lineari (Servo) 3-78. . . . . . . . . .3.7.1 Informazioni per la messa in servizio dei motori lineari 3-78. . . . . . . . . . . . . . . .3.7.2 Messa in servizio: motore lineare con una parte primaria 3-80. . . . . . . . . . . . .3.7.3 Messa in servizio: motori lineari con più parti primarie uguali 3-84. . . . . . . . . .3.7.4 Protezione termica del motore 3-85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.7.5 Sistema di misura esterno 3-87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.7.6 Verifica delle misure tecniche dei motori lineari 3-89. . . . . . . . . . . . . . . . . . . . . .
4 Comunicazione tramite PROFIBUS 4-93. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Generalità su PROFIBUS 4-94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.1 Informazioni generali su PROFIBUS in SINAMICS 4-94. . . . . . . . . . . . . . . . . . .4.1.2 Esempio: Struttura dei telegrammi per trasmissione di dati ciclica 4-98. . . . . .
4.2 Messa in servizio di PROFIBUS 4-101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.1 Informazioni generali 4-101. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.2 Esecuzione della messa in servizio 4-105. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.3 Possibilità diagnostiche 4-106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.4 Indirizzamento dell’interfaccia HMI SIMATIC 4-106. . . . . . . . . . . . . . . . . . . . . . . .
4.3 Comunicazione ciclica 4-108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.3.1 Telegrammi e dati di processo 4-108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.3.2 Sorveglianza anomalia telegramma 4-114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.3.3 Descrizione di parole di comando e valori di riferimento 4-115. . . . . . . . . . . . . . .4.3.4 Descrizione di parole di stato e valori reali 4-123. . . . . . . . . . . . . . . . . . . . . . . . . .4.3.5 Parole di comando e di stato per encoder 4-134. . . . . . . . . . . . . . . . . . . . . . . . . . .4.3.6 Parole di comando e di stato centrali 4-146. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Comunicazione aciclica 4-152. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.4.1 Informazioni generali sulla comunicazione aciclica 4-152. . . . . . . . . . . . . . . . . . .4.4.2 Job e risposte secondo DPV1 4-153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.4.3 Calcolo dei numeri di oggetti di azionamento 4-159. . . . . . . . . . . . . . . . . . . . . . . .4.4.4 Esempio 1: Lettura di parametri 4-160. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.4.5 Esempio 2: Lettura di parametri (job multiparametro) 4-163. . . . . . . . . . . . . . . . .
4.5 Motion Control con PROFIBUS 4-167. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 SINAMICS Safety Integrated (Booksize) 5-175. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Informazioni generali su SINAMICS Safety Integrated 5-176. . . . . . . . . . . . . . . .5.1.1 Spiegazioni, norme e concetti 5-176. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.1.2 Parametri, checksum, versione, password 5-180. . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Arresto sicuro (SH) 5-182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Comando di frenatura sicuro (SBC) 5-187. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Messa in servizio delle funzioni “SH” e “SBC” 5-190. . . . . . . . . . . . . . . . . . . . . . .5.4.1 Informazioni generali sulla messa in servizio delle funzioni Safety 5-190. . . . . .5.4.2 Procedura per la messa in servizio di “SH” e “SBC” 5-192. . . . . . . . . . . . . . . . . .5.4.3 Anomalie Safety 5-196. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Panoramica dei parametri e degli schemi logici 5-198. . . . . . . . . . . . . . . . . . . . . .
5.6 Esempi di applicazione 5-200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contenuto
xv© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.6.1 Arresto sicuro con porta di protezione bloccata, disattivazionearresto di emergenza 5-200. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Test e protocollo di collaudo 5-205. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.7.1 Informazioni generali sul collaudo 5-205. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.7.2 Documentazione 5-207. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.7.3 Test funzionale 5-210. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.7.4 Conclusione del protocollo 5-215. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Diagnostica 6-217. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Diagnostica tramite LED 6-218. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.1 Control Unit 320 (CU320) 6-219. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.2 Active Line Module 6-222. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.3 Basic Line Module 6-223. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.4 Smart Line Module 5 kW e 10 kW 6-224. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.5 Smart Line Module 16 kW e 36 kW 6-225. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.6 Single Motor Module / Double Motor Module 6-226. . . . . . . . . . . . . . . . . . . . . . . .6.1.7 Braking Module Booksize 6-227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.8 Control Supply Module 6-227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.9 Sensor Module Cabinet 10 / 20 (SMC10 / SMC20) 6-228. . . . . . . . . . . . . . . . . . .6.1.10 Sensor Module Cabinet 30 (SMC30) 6-229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.1.11 Terminal Module 31 (TM31) 6-230. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Diagnostica tramite STARTER 6-231. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.2.1 Generatore di funzioni 6-232. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.2.2 Funzione Trace 6-236. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.2.3 Funzione di misura (Servo) 6-237. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.2.4 Prese di misura 6-240. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Messaggi: anomalie e avvisi 6-245. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.3.1 Informazioni generali sugli errori e gli avvisi 6-245. . . . . . . . . . . . . . . . . . . . . . . . .6.3.2 Buffer per anomalie e avvisi 6-247. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.3.3 Progettazione di messaggi (anomalie e avvisi) 6-250. . . . . . . . . . . . . . . . . . . . . .6.3.4 Parametri e schemi logici per anomalie e avvisi 6-252. . . . . . . . . . . . . . . . . . . . . .
7 Principi del sistema di azionamento 7-253. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Parametri 7-254. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Record di dati 7-257. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Oggetti di azionamento (Drive Objects) 7-264. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4 Tecnica BICO: interconnessione di segnali 7-267. . . . . . . . . . . . . . . . . . . . . . . . . .
7.5 Moduli funzionali 7-275. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.6 Note sulla topologia DRIVE-CLiQ 7-276. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.6.1 Combinazioni possibili di Line Module e Motor Module 7-279. . . . . . . . . . . . . . . .7.6.2 Esempi di sostituzione di componenti 7-280. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7 Tempi di campionamento di sistema 7-283. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.7.1 Caratteristiche 7-283. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.7.2 Descrizione 7-283. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.7.3 Procedura della messa in servizio 7-284. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.7.4 Integrazione 7-285. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.8 Ingressi/uscite 7-286. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.8.1 Panoramica ingressi/uscite 7-286. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contenuto
xvi© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.8.2 Ingressi/uscite digitali 7-287. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.8.3 Ingressi analogici 7-290. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.8.4 Uscite analogiche 7-291. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.9 Funzioni di sorveglianza e di protezione 7-293. . . . . . . . . . . . . . . . . . . . . . . . . . . .7.9.1 Protezione della parte di potenza generale 7-293. . . . . . . . . . . . . . . . . . . . . . . . . .7.9.2 Sorveglianze termiche e reazioni ai sovraccarichi 7-294. . . . . . . . . . . . . . . . . . . .7.9.3 Protezione del blocco 7-296. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.9.4 Protezione contro lo stallo 7-297. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.9.5 Protezione termica del motore 7-297. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.10 Aggiornamento del firmware 7-300. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.10.1 Aggiornamento del firmware e del progetto in STARTER 7-300. . . . . . . . . . . . . .
7.11 Licenze 7-301. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice delle abbreviazioni A-305. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bibliografia B-313. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice I-319. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
J
1-17© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica del sistema
1.1 Campo d’impiego
SINAMICS è la nuova famiglia di azionamenti della Siemens per la costruzione dimacchinari e impianti industriali. SINAMICS offre la soluzione ideale per tutti icompiti di azionamento:
S Semplici applicazioni con pompe e ventilatori nell’industria di processo
S Complessi azionamenti singoli in centrifughe, presse, estrusori, ascensori,impianti di trasporto
S Gruppi di azionamenti nelle macchine tessili, nelle macchine per la produzionedi plastica e carta o nei laminatoi
S Servoazionamenti altamente dinamici per macchine utensili, confezionatrici emacchine da stampa.
Fig. 1-1 Campi applicativi di SINAMICS
1

Panoramica del sistema
Esecuzioni
1-18© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
1.2 Esecuzioni
A seconda del campo d’impiego, la famiglia SINAMICS mette a disposizioneun’esecuzione adattata in modo ottimale ad ogni compito di azionamento.
S SINAMICS G è concepito per le applicazioni standard con motori asincroni. Perqueste applicazioni sono richiesti bassi requisiti di dinamica e di precisione dellavelocità del motore.
S SINAMICS S risolve i compiti di azionamento più complessi con motori sincronie asincroni e soddisfa requisiti elevati per quanto riguarda
-- la dinamica e la precisione,
-- l’integrazione di ampie funzioni tecnologiche nella regolazione dell’aziona-mento.
Panoramica del sistema
Piattaforma e Totally Integrated Automation
1-19© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
1.3 Piattaforma e Totally Integrated Automation
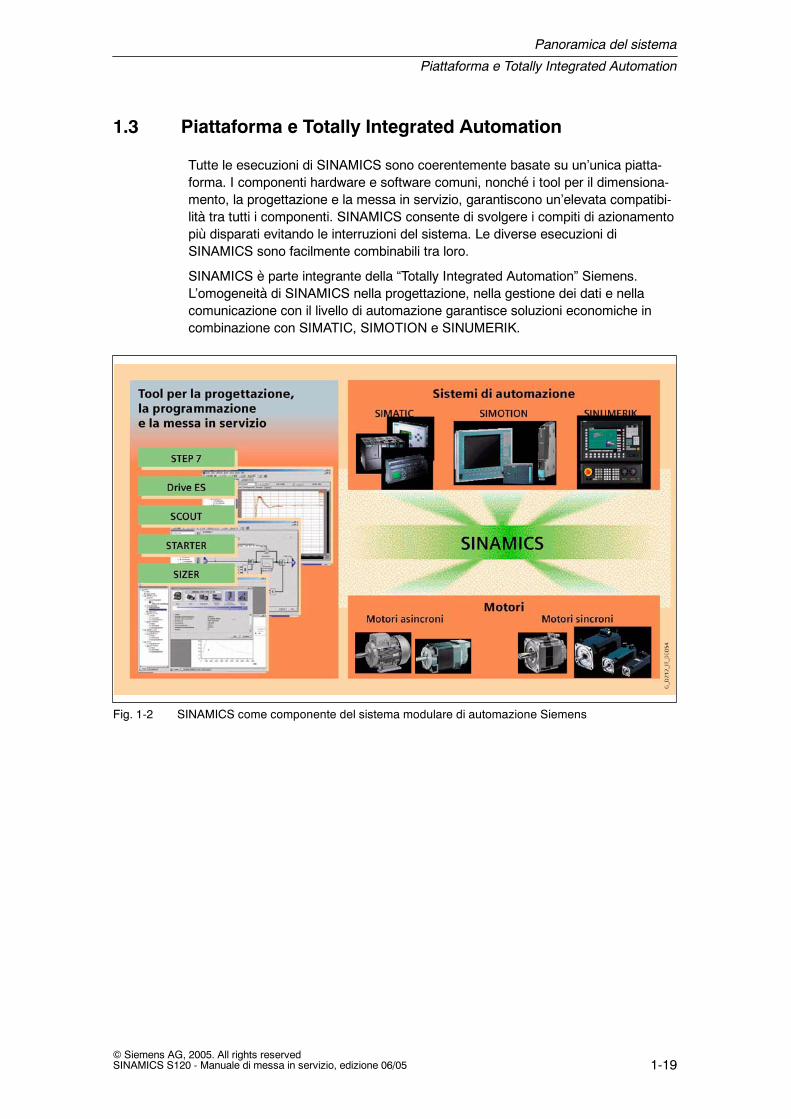
Tutte le esecuzioni di SINAMICS sono coerentemente basate su un’unica piatta-forma. I componenti hardware e software comuni, nonché i tool per il dimensiona-mento, la progettazione e la messa in servizio, garantiscono un’elevata compatibi-lità tra tutti i componenti. SINAMICS consente di svolgere i compiti di azionamentopiù disparati evitando le interruzioni del sistema. Le diverse esecuzioni diSINAMICS sono facilmente combinabili tra loro.
SINAMICS è parte integrante della “Totally Integrated Automation” Siemens.L’omogeneità di SINAMICS nella progettazione, nella gestione dei dati e nellacomunicazione con il livello di automazione garantisce soluzioni economiche incombinazione con SIMATIC, SIMOTION e SINUMERIK.
Fig. 1-2 SINAMICS come componente del sistema modulare di automazione Siemens

Panoramica del sistema
Panoramica
1-20© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
1.4 Panoramica
Il sistema modulare per compiti di automazione complessi
SINAMICS S120 è in grado di svolgere compiti di automazione complessi inun’ampia gamma di applicazioni industriali e di conseguenza è stato concepitocome sistema modulare. Partendo da molteplici componenti e funzioni compatibilitra loro, l’utente può costruire la combinazione più adatta per le proprie esigenze. Ilpotente tool di dimensionamento SIZER facilita la scelta e aiuta a individuare laconfigurazione di azionamento ottimale. L’offerta di SINAMICS S120 viene comple-tata da un’ampia gamma di motori. SINAMICS S120 supporta in modo ottimaleogni tipo di motore, sia sincrono che asincrono.
Panoramica del sistema
Panoramica
1-21© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
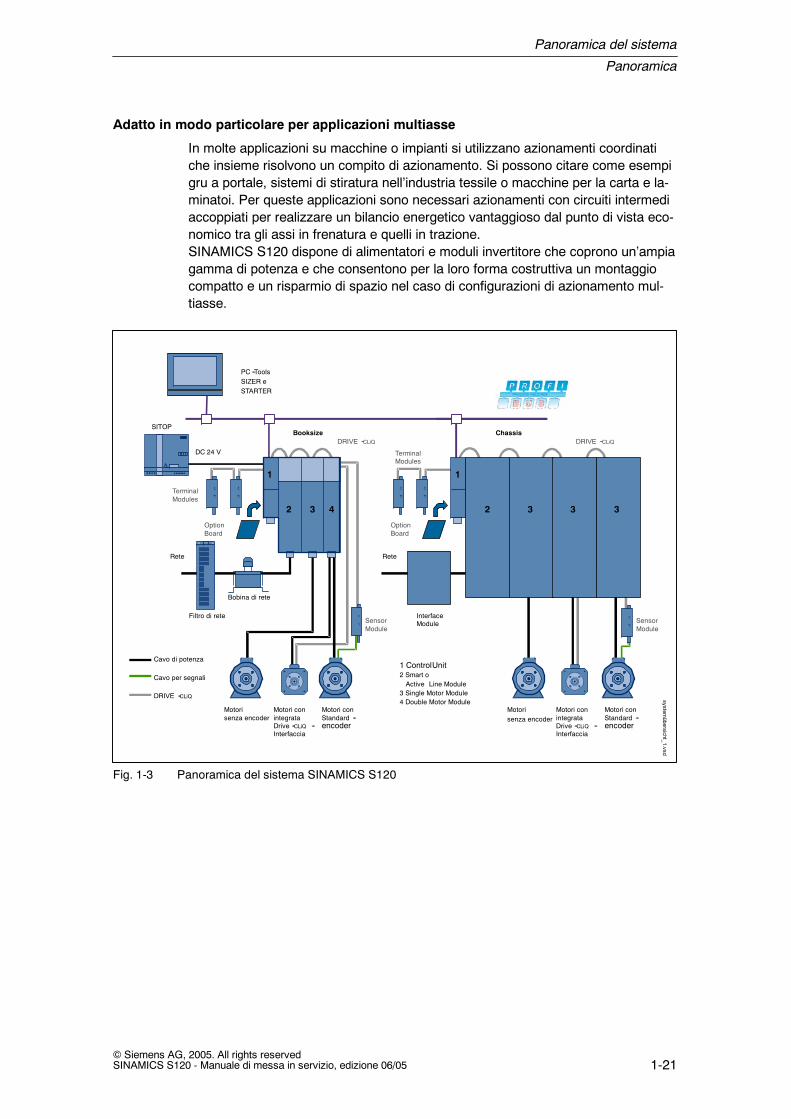
Adatto in modo particolare per applicazioni multiasse
In molte applicazioni su macchine o impianti si utilizzano azionamenti coordinatiche insieme risolvono un compito di azionamento. Si possono citare come esempigru a portale, sistemi di stiratura nell’industria tessile o macchine per la carta e la-minatoi. Per queste applicazioni sono necessari azionamenti con circuiti intermediaccoppiati per realizzare un bilancio energetico vantaggioso dal punto di vista eco-nomico tra gli assi in frenatura e quelli in trazione.SINAMICS S120 dispone di alimentatori e moduli invertitore che coprono un’ampiagamma di potenza e che consentono per la loro forma costruttiva un montaggiocompatto e un risparmio di spazio nel caso di configurazioni di azionamento mul-tiasse.
Rete
DRIVE --CLiQ
Bobina di rete
Filtro di rete
DC 24 V
SITOP
Motori conintegrataDrive --CLiQ --Interfaccia
Motorisenza encoder
Motori conStandard --encoder
SensorModule
TerminalModules
Rete
DRIVE --CLiQ
InterfaceModule
Motori conintegrataDrive --CLiQ --Interfaccia
Motorisenza encoder
Motori conStandard --encoder
1 ControlUnit2 Smart oActive Line Module
3 Single Motor Module4 Double Motor Module
1
2 3 4
1
2 3 3 3
SensorModule
PC --ToolsSIZER eSTARTER
OptionBoard
TerminalModules
OptionBoard
Cavo di potenza
Cavo per segnali
DRIVE --CLiQ
Booksize Chassis
systemübersicht_1.vsd
Fig. 1-3 Panoramica del sistema SINAMICS S120
Panoramica del sistema
Panoramica
1-22© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nuova architettura di sistema con unità di regolazione centrale
I singoli azionamenti coordinati elettronicamente svolgono insieme il proprio com-pito di azionamento. I controlli sovraordinati comandano gli azionamenti in mododa creare il movimento coordinato desiderato. A questo scopo è necessario unoscambio ciclico dei dati tra il controllo e tutti gli azionamenti. Finora questo scam-bio doveva essere realizzato tramite un bus di campo, con un conseguente au-mento del tempo e dei costi necessari per il montaggio e la progettazione. Ma SI-NAMICS S120 percorre una nuova via: un modulo di regolazione centralizzato sioccupa della regolazione degli azionamenti per tutti gli assi collegati e realizza inol-tre le connessioni tecnologiche tra gli azionamenti o tra gli assi stessi. Dal mo-mento che tutte le informazioni necessarie sono presenti nell’unità di regolazionecentrale, non sono necessari complessi trasferimenti dei dati. All’interno di un’unitàè possibile realizzare accoppiamenti a livello degli assi e progettarli con un sem-plice clic del mouse nel tool di messa in servizio STARTER.L’unità di regolazione di SINAMICS S120 è in grado di svolgere autonomamentesemplici attività tecnologiche. Per compiti tecnologici più complessi essa viene so-stituita da unità programmabili liberamente appartenenti alla gamma di prodotti diSIMOTION D.
DRIVE-CLiQ -- l’interfaccia digitale tra tutti i componenti
Tutti i componenti di SINAMICS S120, inclusi i motori asincroni compatti e gli en-coder, sono collegati tra loro mediante l’interfaccia seriale comune DRIVE-CLiQ.L’esecuzione uniforme della tecnica di cablaggio e di connessione permette di ri-durre il numero dei componenti e i costi di immagazzinamento.Per i motori senza interfaccia DRIVE-CliQ integrata sono disponibili dei convertitori(Sensor Modules) che trasformano i segnali tradizionali in segnali DRIVE-CLiQ.
Targhetta elettronica in tutti i componentiTutti i componenti di SINAMICS S120 dispongono di una targhetta dati elettronica.Questa targhetta contiene tutti i dati tecnici rilevanti del singolo componente. Per imotori asincroni compatti con interfaccia DRIVE-CLiQ questi dati sono, ad esem-pio, i parametri del circuito equivalente e dell’encoder motore integrato. Questi dativengono rilevati automaticamente dall’unità di regolazione tramite DRIVE-CLiQ enon devono essere inseriti durante la messa in servizio o la sostituzione.
Panoramica del sistema
Panoramica
1-23© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
systemübersicht_2.vsd
Rete
DRIVE --CLiQ
Bobina di rete
Filtro di rete
DC 24 V
SITOP
Motori conintegrata
Drive --CLiQ --Interfaccia
Motorisenza encoder
Motori conStandard --encoder
SensorModule
TerminalModule
Rete
DRIVE --CLiQ
Interface
Module
Motori conintegrata
Drive --CLiQ --Interfaccia
Motori
senza encoder
Motori conStandard --encoder
1 Control Unit2 Smart o
Active Line Module
3 Single Motor Module
4 Double Motor Module
1
2 3 4
1
2 3 3 3
SensorModule
PC --ToolsSIZER e
STARTER
OptionBoard
TerminalModule
OptionBoard
Cavo di potenza
Cavo per segnali
DRIVE --CLiQ
Booksize Chassis
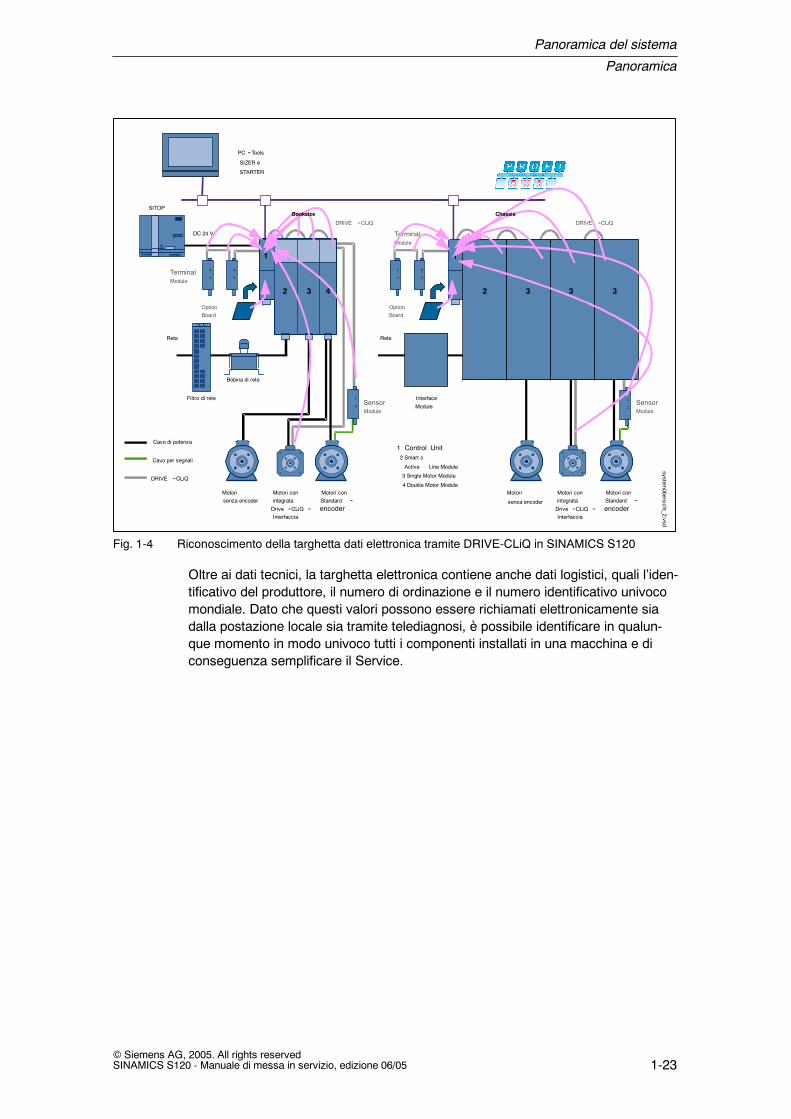
Fig. 1-4 Riconoscimento della targhetta dati elettronica tramite DRIVE-CLiQ in SINAMICS S120
Oltre ai dati tecnici, la targhetta elettronica contiene anche dati logistici, quali l’iden-tificativo del produttore, il numero di ordinazione e il numero identificativo univocomondiale. Dato che questi valori possono essere richiamati elettronicamente siadalla postazione locale sia tramite telediagnosi, è possibile identificare in qualun-que momento in modo univoco tutti i componenti installati in una macchina e diconseguenza semplificare il Service.
Panoramica del sistema
Componenti SINAMICS S120
1-24© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
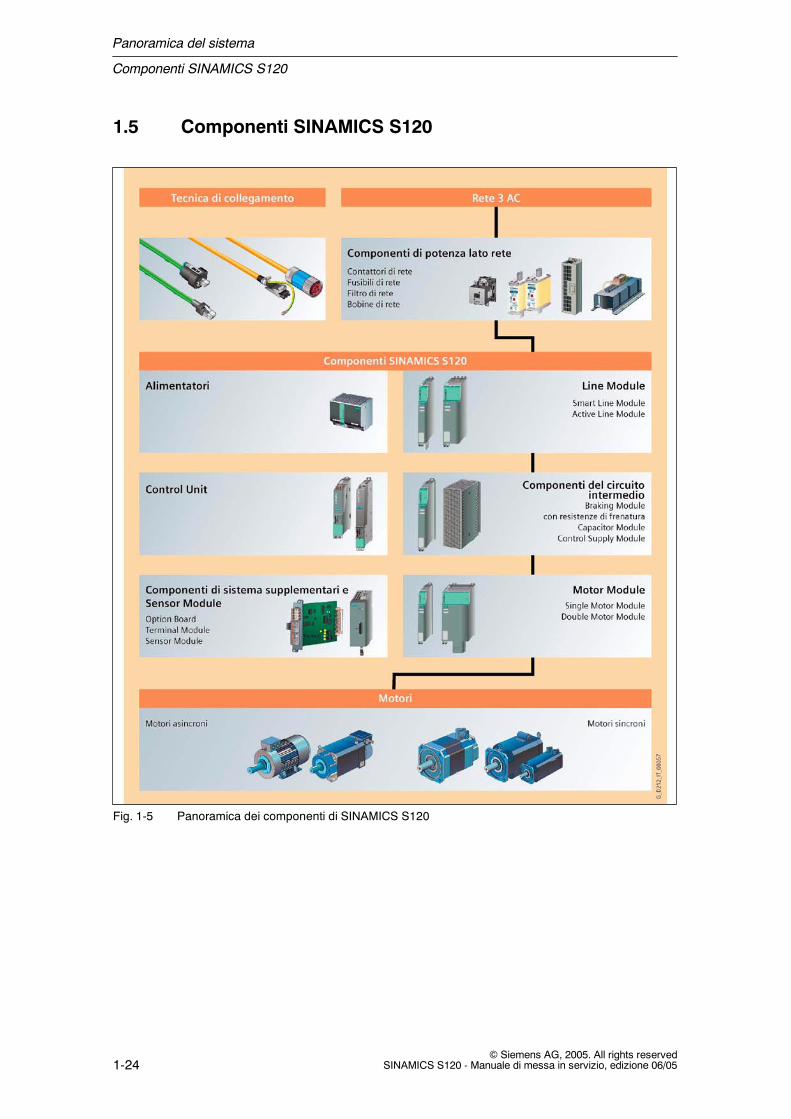
1.5 Componenti SINAMICS S120
Fig. 1-5 Panoramica dei componenti di SINAMICS S120

Panoramica del sistema
Confronto Servo <--> Vector
1-25© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
1.6 Confronto Servo <--> Vector
Tabella 1-1 Confronto Servo-Vector
Servo Vector
Tipici utilizzi Azionamenti con movimento gui-dato altamente dinamici. Sincroni-smo angolare con PROFIBUS consincronizzazione di clock. Impiegonelle macchine utensili e di produ-zione con sincronizzazione di clock
Azionamenti regolati in velocitàe regolati in coppia con elevata pre-cisione di velocità e di coppia inparticolare negli azionamenti senzaencoder.
Numero massimo diazionamenti chepossono essere re-golati da una ControlUnit
1 Active Line Module +6 Motor Module(con percentuale di campionamentoregolatore di corrente 125 µs / re-golatore del numero di giri 125 µs)
1 Active Line Module +2 Motor Module(con percentuale di campionamentoregolatore di corrente 62,5 µs / re-golatore del numero di giri 62,5 µs)
1 Active Line Module +2 Motor Module(con tempo di campionamento re-golatore di corrente 250 µs / regola-tore del numero di giri 1 ms)1 Active Line Module +4 Motor Module(con tempo di campionamento re-golatore di corrente 400 µs / regola-tore del numero di giri 1,6 ms)1 Active Line Module +10 Motor Module(con tempo di campionamento re-golatore di corrente 500 µs / regola-tore del numero di giri 2 ms)
Dinamica alta media
Tempo di campiona-mento regolatore dicorrente/regolatore del nu-mero di giri/frequenza impulsi
Booksize:
125 µs / 125 µs /≥ 4 kHz
Booksize:250 µs / 1000 µs /≥ 2 kHz(impostazione predefinita 4 kHz)400 µs / 1600 µs /≥ 1,25 kHz(impostazione predefinita 2,5 kHz)Chassis:≤ 250kW: 250 µs / 1000 µs /≥ 2 kHz> 250 kW: 400 µs / 1600 µs /≥ 1,25 kHz690 V: 400 µs / 1600 µs /≥ 1,25 kHz
Motori collegabili Servomotori sincroniMotori asincroni
Motori a riluttanzaMotori torqueMotori asincroni
Nota:
nessun motore sincrono della serie1FT6, 1FK6 e 1FK7
Interfaccia di posi-zione tramitePROFIBUS per con-trollo MotionControlsovraordinato
sì no
Regolazione numerodi giri senza enco-der
sì (dal 10 % del numero di giri delmotore)
sì (da fermo o dal 2 % del numerodi giri del motore)
Panoramica del sistema
Confronto Servo <--> Vector
1-26© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
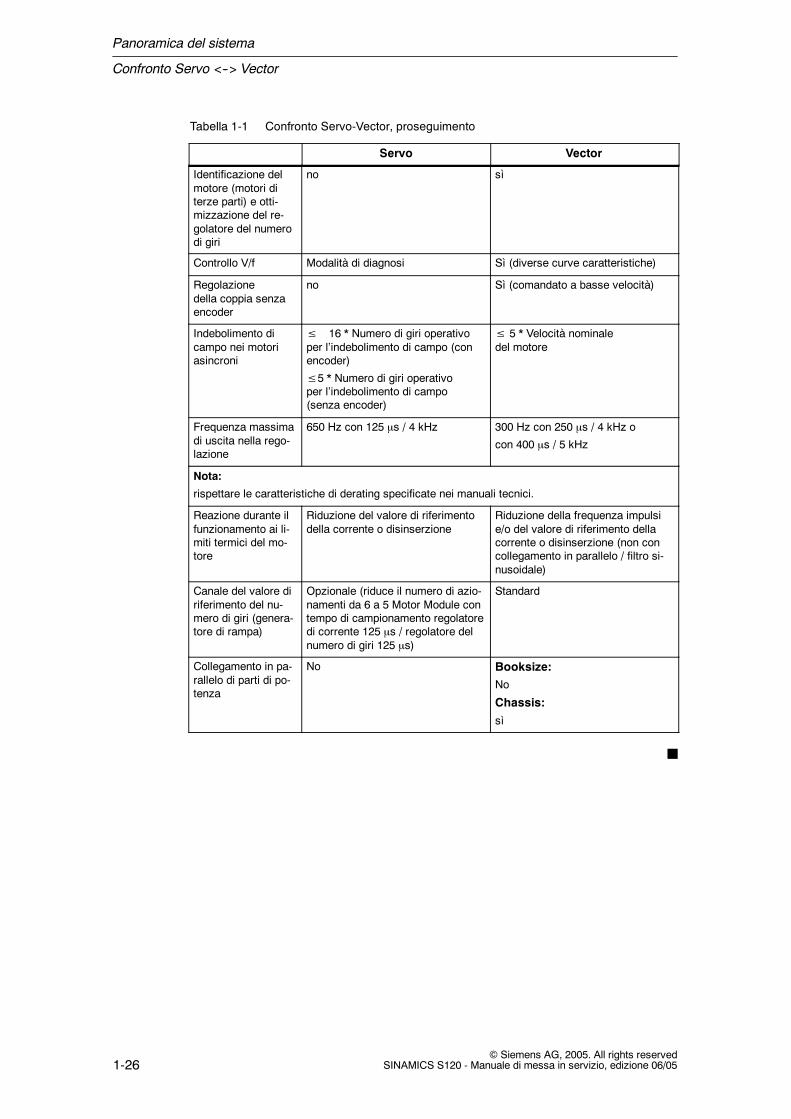
Tabella 1-1 Confronto Servo-Vector, proseguimento
VectorServo
Identificazione delmotore (motori diterze parti) e otti-mizzazione del re-golatore del numerodi giri
no sì
Controllo V/f Modalità di diagnosi Sì (diverse curve caratteristiche)
Regolazionedella coppia senzaencoder
no Sì (comandato a basse velocità)
Indebolimento dicampo nei motoriasincroni
≤ 16 * Numero di giri operativoper l’indebolimento di campo (conencoder)
≤5 * Numero di giri operativoper l’indebolimento di campo(senza encoder)
≤ 5 * Velocità nominaledel motore
Frequenza massimadi uscita nella rego-lazione
650 Hz con 125 µs / 4 kHz 300 Hz con 250 µs / 4 kHz o
con 400 µs / 5 kHz
Nota:
rispettare le caratteristiche di derating specificate nei manuali tecnici.
Reazione durante ilfunzionamento ai li-miti termici del mo-tore
Riduzione del valore di riferimentodella corrente o disinserzione
Riduzione della frequenza impulsie/o del valore di riferimento dellacorrente o disinserzione (non concollegamento in parallelo / filtro si-nusoidale)
Canale del valore diriferimento del nu-mero di giri (genera-tore di rampa)
Opzionale (riduce il numero di azio-namenti da 6 a 5 Motor Module contempo di campionamento regolatoredi corrente 125 µs / regolatore delnumero di giri 125 µs)
Standard
Collegamento in pa-rallelo di parti di po-tenza
No Booksize:No
Chassis:
sì
J

2-27© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Preparativi per la messa in servizio
Prima di iniziare la messa in servizio, descritta nel capitolo 3, eseguire le opera-zioni preliminari elencate nel presente capitolo:
S Requisiti per la messa in servizio
S Componenti PROFIBUS
S Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2
Preparativi per la messa in servizio
Requisiti per la messa in servizio
2-28© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
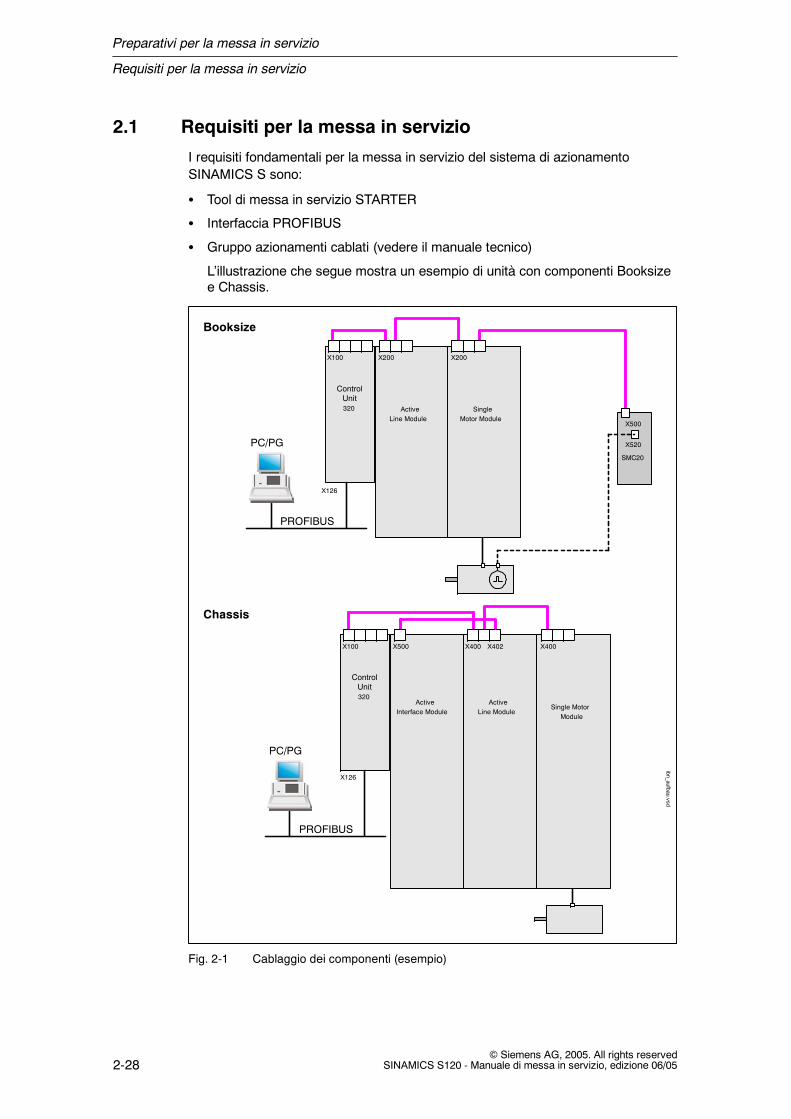
2.1 Requisiti per la messa in servizio
I requisiti fondamentali per la messa in servizio del sistema di azionamentoSINAMICS S sono:
S Tool di messa in servizio STARTER
S Interfaccia PROFIBUS
S Gruppo azionamenti cablati (vedere il manuale tecnico)
L’illustrazione che segue mostra un esempio di unità con componenti Booksizee Chassis.
ibn_aufbau.vsd
X100
ControlUnit320
SMC20
X500
X520
ActiveLine Module
X200
SingleMotor Module
X200
X100
ControlUnit320
ActiveInterface Module
X500
Single MotorModule
X400
ActiveLine Module
X400 X402
PROFIBUS
X126
PC/PG
PROFIBUS
X126
PC/PG
Booksize
Chassis
Fig. 2-1 Cablaggio dei componenti (esempio)

Preparativi per la messa in servizio
Requisiti per la messa in servizio
2-29© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Lista di controllo per la messa in servizio di parti di potenza Booksize
Tenere presente la seguente lista di controllo. Prima di iniziare, leggere attenta-mente le avvertenze di sicurezza specificate nei manuali tecnici.
Tabella 2-1 Lista di controllo per la messa in servizio Booksize
Elemento da verificare O. K.n
Le condizioni ambientali devono essere accettabili. Vedere il manualetecnico.
I componenti devono essere montati correttamente sui punti di fissaggioappositamente previsti.
L’aria di raffreddamento può circolare liberamente.
Rispettare gli spazi di ventilazione tra i componenti.
La CompactFlash Card deve essere inserita nella Control Unit.
Tutti i componenti necessari del gruppo azionamenti progettato devono es-sere a disposizione e montati.
Rispettare le regole di topologia DRIVE-CLiQ.
Regole per il cablaggio DRIVE-CLiQ: vedere il capitolo 2.3.
I cavi di potenza collegati alla rete e al motore vanno dimensionati e posatiin base alle condizioni ambientali e di posa. Rispettare la lunghezza mas-sima ammessa tra convertitore e motore in funzione dei cavi utilizzati.
Collegare i cavi ai morsetti del componente con la coppia corretta. Anche icavi e l’impianto a bassa tensione vanno collegati al motore con le coppienecessarie.
Le operazioni di cablaggio sono state portate a termine?
I connettori sono stati tutti inseriti e avvitati correttamente?
Tutte le viti sono serrate alla coppia di serraggio prescritta?
Tutte le coperture per il circuito intermedio sono chiuse e scattate inposizione?
I collegamenti dello schermo sono stati eseguiti correttamente?

Preparativi per la messa in servizio
Requisiti per la messa in servizio
2-30© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Lista di controllo per la messa in servizio di parti di potenza Chassis
Tenere presente la seguente lista di controllo. Prima di iniziare, leggere attenta-mente le avvertenze di sicurezza specificate nei manuali tecnici.
Tabella 2-2 Lista di controllo per la messa in servizio Chassis
Operazione O. K.n
Le condizioni ambientali devono essere accettabili. Vedere il manuale tec-nico.
I componenti devono essere montati correttamente nel quadro di comando.
Deve essere garantito il flusso dell’aria del modulo a raffreddamento forzato.Garantire spazi di ventilazione adeguati tra i componenti. Garantire il flussodell’aria indicato nei dati tecnici. A causa della struttura a incasso, tra l’in-gresso e l’uscita dell’aria dello chassis non deve esserci un passaggio di-retto dell’aria.
Rispettare gli spazi di ventilazione tra i componenti.
La CompactFlash Card deve essere inserita nella Control Unit.
Tutti i componenti necessari del gruppo azionamenti progettato devono es-sere a disposizione e montati.
Rispettare le regole di topologia DRIVE-CLiQ.
Regole per il cablaggio DRIVE-CLiQ: vedere il capitolo 2.3.
I cavi di potenza collegati alla rete e al motore vanno dimensionati e posatiin base alle condizioni ambientali e di posa. Rispettare la lunghezza mas-sima ammessa tra convertitore e motore in funzione dei cavi utilizzati.
La messa a terra del motore deve essere collegata direttamente alla messaa terra dei Motor Module (distanza più breve).
Collegare i cavi ai morsetti del componente con la coppia corretta. Anche icavi e l’impianto a bassa tensione vanno collegati al motore con le coppienecessarie.
Il sistema di sbarre e il sistema di cablaggio del collegamento DC tra l’ali-mentazione e i Motor Module è da verificare in funzione del carico e dellecondizioni di impiego. Per le applicazioni plurimotore, verificare la correnteglobale del collegamento DC.
I cavi tra l’impianto a bassa tensione e la parte di potenza devono essereprotetti con dei fusibili di rete secondo quanto prescritto dalla normativa sullaprotezione dei conduttori (VDE 636, parte 10). Si raccomanda l’impiego difusibili combinati per la protezione dei conduttori e dei semiconduttori (VDE636, parte 40 / EN 60269-4). I fusibili adeguati possono essere individuatinel catalogo.
Garantire lo scarico del tiro.
Preparativi per la messa in servizio
Requisiti per la messa in servizio
2-31© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
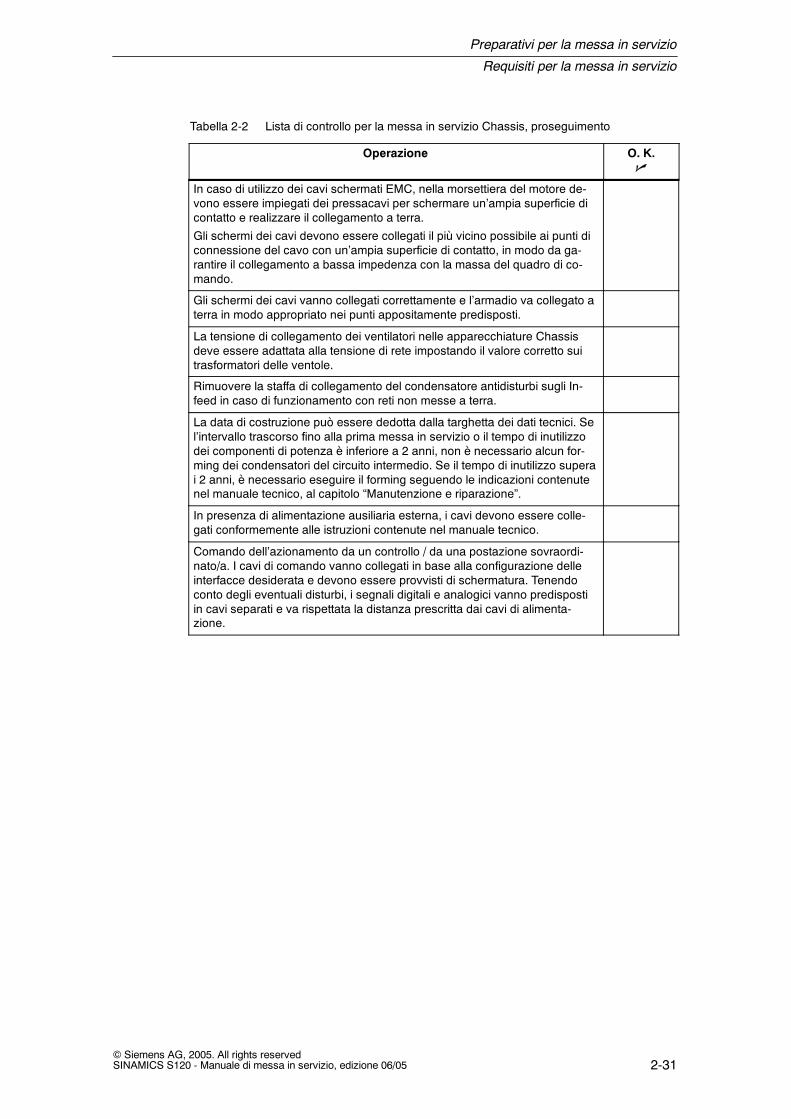
Tabella 2-2 Lista di controllo per la messa in servizio Chassis, proseguimento
Operazione O. K.n
In caso di utilizzo dei cavi schermati EMC, nella morsettiera del motore de-vono essere impiegati dei pressacavi per schermare un’ampia superficie dicontatto e realizzare il collegamento a terra.
Gli schermi dei cavi devono essere collegati il più vicino possibile ai punti diconnessione del cavo con un’ampia superficie di contatto, in modo da ga-rantire il collegamento a bassa impedenza con la massa del quadro di co-mando.
Gli schermi dei cavi vanno collegati correttamente e l’armadio va collegato aterra in modo appropriato nei punti appositamente predisposti.
La tensione di collegamento dei ventilatori nelle apparecchiature Chassisdeve essere adattata alla tensione di rete impostando il valore corretto suitrasformatori delle ventole.
Rimuovere la staffa di collegamento del condensatore antidisturbi sugli In-feed in caso di funzionamento con reti non messe a terra.
La data di costruzione può essere dedotta dalla targhetta dei dati tecnici. Sel’intervallo trascorso fino alla prima messa in servizio o il tempo di inutilizzodei componenti di potenza è inferiore a 2 anni, non è necessario alcun for-ming dei condensatori del circuito intermedio. Se il tempo di inutilizzo superai 2 anni, è necessario eseguire il forming seguendo le indicazioni contenutenel manuale tecnico, al capitolo “Manutenzione e riparazione”.
In presenza di alimentazione ausiliaria esterna, i cavi devono essere colle-gati conformemente alle istruzioni contenute nel manuale tecnico.
Comando dell’azionamento da un controllo / da una postazione sovraordi-nato/a. I cavi di comando vanno collegati in base alla configurazione delleinterfacce desiderata e devono essere provvisti di schermatura. Tenendoconto degli eventuali disturbi, i segnali digitali e analogici vanno predispostiin cavi separati e va rispettata la distanza prescritta dai cavi di alimenta-zione.
Preparativi per la messa in servizio
Componenti PROFIBUS
2-32© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
2.2 Componenti PROFIBUS
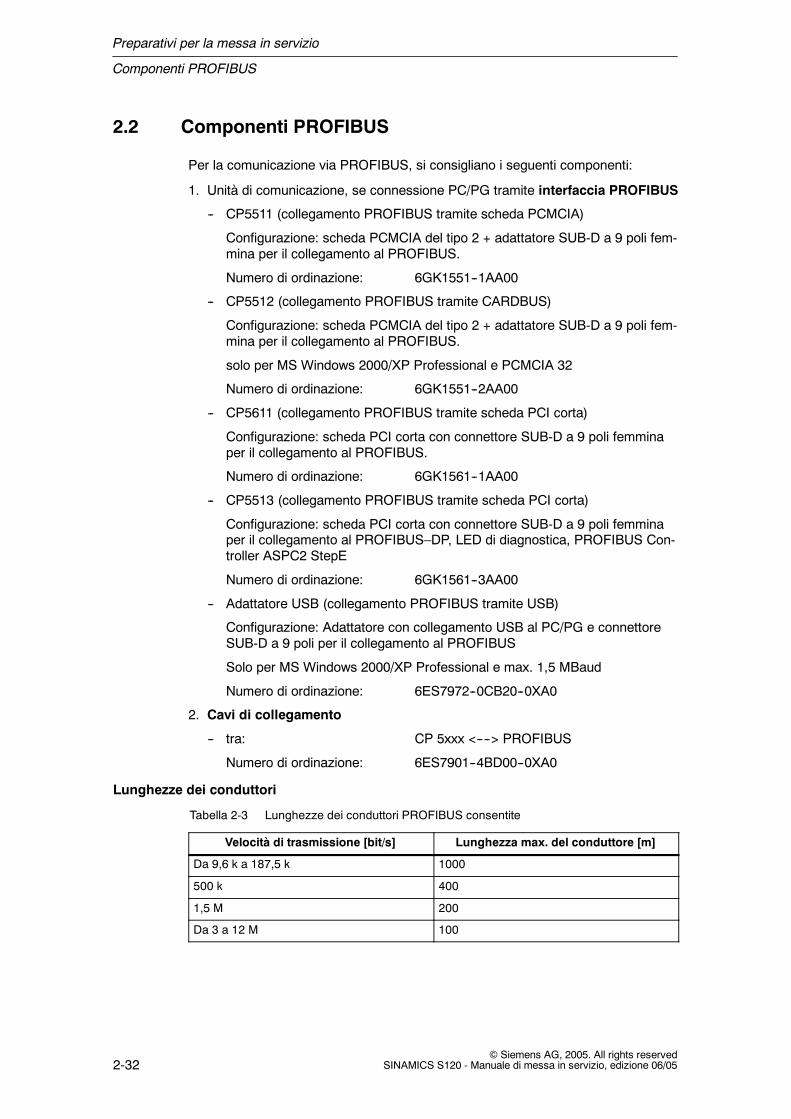
Per la comunicazione via PROFIBUS, si consigliano i seguenti componenti:
1. Unità di comunicazione, se connessione PC/PG tramite interfaccia PROFIBUS
-- CP5511 (collegamento PROFIBUS tramite scheda PCMCIA)
Configurazione: scheda PCMCIA del tipo 2 + adattatore SUB-D a 9 poli fem-mina per il collegamento al PROFIBUS.
Numero di ordinazione: 6GK1551--1AA00
-- CP5512 (collegamento PROFIBUS tramite CARDBUS)
Configurazione: scheda PCMCIA del tipo 2 + adattatore SUB-D a 9 poli fem-mina per il collegamento al PROFIBUS.
solo per MS Windows 2000/XP Professional e PCMCIA 32
Numero di ordinazione: 6GK1551--2AA00
-- CP5611 (collegamento PROFIBUS tramite scheda PCI corta)
Configurazione: scheda PCI corta con connettore SUB-D a 9 poli femminaper il collegamento al PROFIBUS.
Numero di ordinazione: 6GK1561--1AA00
-- CP5513 (collegamento PROFIBUS tramite scheda PCI corta)
Configurazione: scheda PCI corta con connettore SUB-D a 9 poli femminaper il collegamento al PROFIBUS–DP, LED di diagnostica, PROFIBUS Con-troller ASPC2 StepE
Numero di ordinazione: 6GK1561--3AA00
-- Adattatore USB (collegamento PROFIBUS tramite USB)
Configurazione: Adattatore con collegamento USB al PC/PG e connettoreSUB-D a 9 poli per il collegamento al PROFIBUS
Solo per MS Windows 2000/XP Professional e max. 1,5 MBaud
Numero di ordinazione: 6ES7972--0CB20--0XA0
2. Cavi di collegamento
-- tra: CP 5xxx <----> PROFIBUS
Numero di ordinazione: 6ES7901--4BD00--0XA0
Lunghezze dei conduttori
Tabella 2-3 Lunghezze dei conduttori PROFIBUS consentite
Velocità di trasmissione [bit/s] Lunghezza max. del conduttore [m]
Da 9,6 k a 187,5 k 1000
500 k 400
1,5 M 200
Da 3 a 12 M 100
Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-33© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
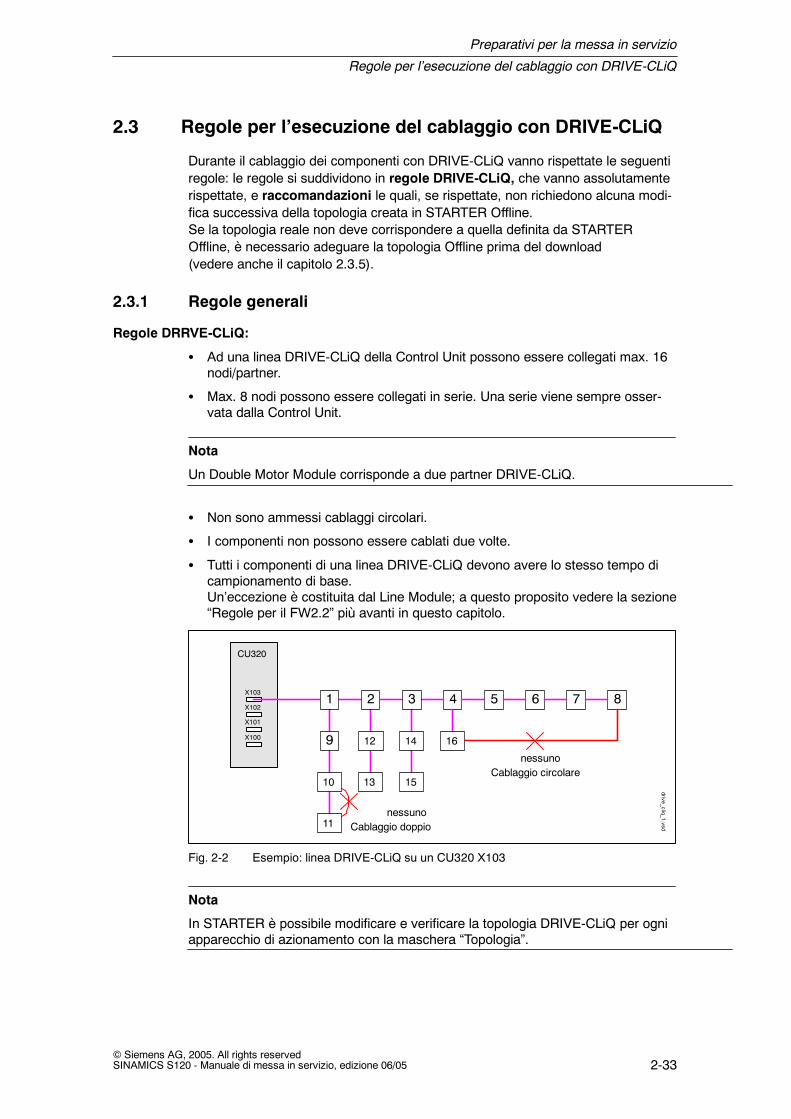
2.3 Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
Durante il cablaggio dei componenti con DRIVE-CLiQ vanno rispettate le seguentiregole: le regole si suddividono in regole DRIVE-CLiQ, che vanno assolutamenterispettate, e raccomandazioni le quali, se rispettate, non richiedono alcuna modi-fica successiva della topologia creata in STARTER Offline.Se la topologia reale non deve corrispondere a quella definita da STARTEROffline, è necessario adeguare la topologia Offline prima del download(vedere anche il capitolo 2.3.5).
2.3.1 Regole generali
Regole DRRVE-CLiQ:
S Ad una linea DRIVE-CLiQ della Control Unit possono essere collegati max. 16nodi/partner.
S Max. 8 nodi possono essere collegati in serie. Una serie viene sempre osser-vata dalla Control Unit.
Nota
Un Double Motor Module corrisponde a due partner DRIVE-CLiQ.
S Non sono ammessi cablaggi circolari.
S I componenti non possono essere cablati due volte.
S Tutti i componenti di una linea DRIVE-CLiQ devono avere lo stesso tempo dicampionamento di base.Un’eccezione è costituita dal Line Module; a questo proposito vedere la sezione“Regole per il FW2.2” più avanti in questo capitolo.
drive_cliq_1.vsd
CU320
X100
X101
X102
X1034 5 6 7 8
nessunoCablaggio doppio
nessunoCablaggio circolare
1
9
10
11
12
13
2 3
15
14 16
Fig. 2-2 Esempio: linea DRIVE-CLiQ su un CU320 X103
Nota
In STARTER è possibile modificare e verificare la topologia DRIVE-CLiQ per ogniapparecchio di azionamento con la maschera “Topologia”.

Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-34© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Raccomandazioni:
S Il cavo DRIVE-CLiQ dalla Control Unit deve essere collegato all’X200 dellaprima parte di potenza Booksize o all’X400 della prima parte di potenza Chas-sis.
S I collegamenti DRIVE-CLiQ tra le parti di potenza devono essere collegati ri-spettivamente dall’interfaccia X201 a X200 o dall’interfaccia X401 a X400 delcomponente successivo.
topologie_1.vsd
CU320
X100
X101
X102
X103
SingleMotorModule
X202/X402
X201/X401
X200/X400
DoubleMotorModule
SingleMotorModule
X202/X402
X201/X401
X200/X400
X202
X201
X200
X203
Fig. 2-3 Esempio di linea DRIVE-CLiQ
S L’encoder motore deve essere collegato al Motor Module corrispondente.
Tabella 2-4 Collegamento encoder motore
Componente Collegamento encoder motore
Single Motor Module Booksize X202
Double Motor Module Booksize S Collegamento motore X1: encoderall’X202
S Collegamento motore X2: encoderall’X203
Single Motor Module Chassis X402
Nota
Se a un Motor Module viene collegato un encoder supplementare, esso vieneautomaticamente assegnato a questo azionamento come encoder 2.
S Il Voltage Sensing Module (modulo per il rilevamento della tensione di rete)deve essere collegato all’Active Line Module corrispondente. Il Voltage SensingModule è un componente integrato nell’Active Interface Module Chassis.
Tabella 2-5 Collegamento VSM
Componente Collegamento VSM
Active Line Module Chassis X402
Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-35© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
2.3.2 Regole per le varie versioni del firmware
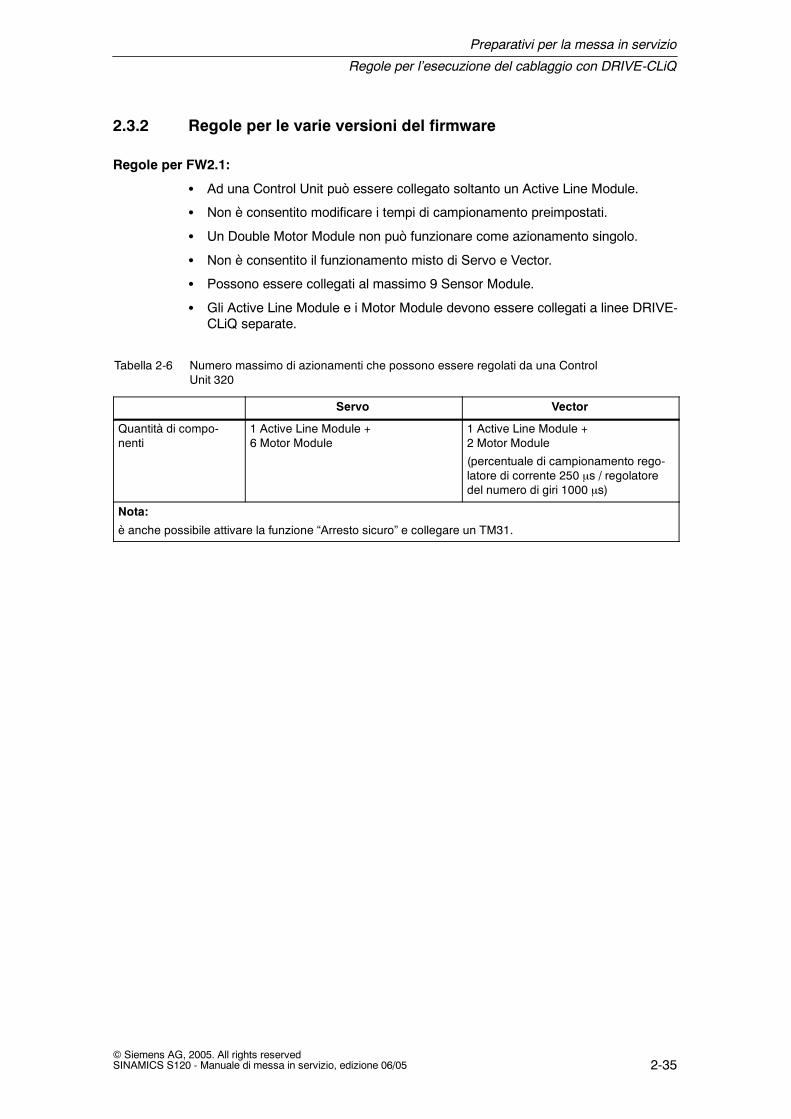
Regole per FW2.1:
S Ad una Control Unit può essere collegato soltanto un Active Line Module.
S Non è consentito modificare i tempi di campionamento preimpostati.
S Un Double Motor Module non può funzionare come azionamento singolo.
S Non è consentito il funzionamento misto di Servo e Vector.
S Possono essere collegati al massimo 9 Sensor Module.
S Gli Active Line Module e i Motor Module devono essere collegati a linee DRIVE-CLiQ separate.
Tabella 2-6 Numero massimo di azionamenti che possono essere regolati da una ControlUnit 320
Servo Vector
Quantità di compo-nenti
1 Active Line Module +6 Motor Module
1 Active Line Module +2 Motor Module
(percentuale di campionamento rego-latore di corrente 250 µs / regolatoredel numero di giri 1000 µs)
Nota:
è anche possibile attivare la funzione “Arresto sicuro” e collegare un TM31.

Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-36© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Regole per FW2.2:
S Ad una Control Unit può essere collegato al massimo un Active Line Module.
S Non è consentito modificare i tempi di campionamento preimpostati.
S Un Double Motor Module non può funzionare come azionamento singolo.
S È consentito il funzionamento misto di Servo con V/f Vector.
S Possono essere collegati al massimo 9 Sensor Module.
S L’Active Line Module Booksize e i Motor Module Booksize
-- in modo operativo Servo possono essere collegati a una sola linea DRIVE-CLiQ.
-- In modo operativo Vector devono essere collegati a linee DRIVE-CLiQ se-parate.
S Nel caso di funzionamento misto con Servo e V/f Vector devono essere utiliz-zate linee DRIVE-CLiQ separate.
S L’Active Line Module Chassis e i Motor Module Chassis devono essere collegatia linee DRIVE-CLiQ separate.
S I Motor Module Chassis con frequenze impulsi diverse devono essere collegatea linee DRIVE-CLiQ separate.
Tabella 2-7 Numero massimo di azionamenti che possono essere regolati da unaControl Unit 320
Servo V/f Vector (=Vector senzamodulo funzionale regola-
zione numero di giri)
Vector
Quantità dicomponenti
1 Active Line Module +6 Motor Module
1 Active Line Module +4 Motor Module(tempo di campionamento re-golatore di corrente 250 µs)
1 Active Line Module +6 Motor Module(tempo di campionamento re-golatore di corrente 400 µs)
1 Active Line Module +2 Motor Module(con tempo di campiona-mento regolatore di corrente250 µs / regolatore del nu-mero di giri 1000 µs)
1 Active Line Module +4 Motor Module( t di i
Servo e V/f Vector:
1 Active Line Module + 5 Motor Module(Servo: Regolatore di corrente 125 µs / regolatore delnumero di giri 125 µsV/f Vector:tempo di campionamento regolatore di corrente 250 µsper 2 azionamenti V/f max.tempo di campionamento regolatore di corrente 400 µsper più di 2 azionamenti V/f)
(con tempo di campiona-mento regolatore di corrente400 µs / regolatore del nu-mero di giri 1600 µs)
Note sul numero massimo di azionamenti regolabili tramite una CU320:
S è anche possibile attivare la funzione “Arresto sicuro” e collegare un TM31.
S Non deve esservi alcun modulo funzionale attivato.

Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-37© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Regole per FW2.3:
S Ad una Control Unit può essere collegato al massimo un Active Line Module (incaso di collegamento in parallelo anche di più).
S Non è consentito modificare i tempi di campionamento preimpostati.
S Un Double Motor Module non può funzionare come azionamento singolo.
S È consentito il funzionamento misto di Servo con V/f Vector.
S Possono essere collegati al massimo 9 Sensor Module.
S L’Active Line Module Booksize e i Motor Module Booksize
-- in modo operativo Servo possono essere collegati a una sola lineaDRIVE-CLiQ.
-- in modo operativo Vector devono essere collegati a linee DRIVE-CLiQ se-parate.
S Nel caso di funzionamento misto con Servo e V/f Vector devono essere utiliz-zate linee DRIVE-CLiQ separate.
S L’Active Line Module Chassis e i Motor Module Chassis devono essere collegatia linee DRIVE-CLiQ separate.
S I Motor Module Chassis con frequenze impulsi diverse devono essere collegatea linee DRIVE-CLiQ separate.
Tabella 2-8 Numero massimo di azionamenti che possono essere regolati da unaControl Unit 320
Servo V/f Vector (=Vector senza mo-dulo funzionale regolazione
numero di giri)
Vector
Quantità dicomponenti
1 Active Line Module +6 Motor Module
1 Active Line Module +4 Motor Module(tempo di campionamento regola-tore di corrente 250 µs)
1 Active Line Module +6 Motor Module(tempo di campionamento regola-tore di corrente 400 µs)
1 Active Line Module +10 Motor Module(tempo di campionamento regola-tore di corrente 500 µs)
1 Active Line Module +2 Motor Module(con tempo di campionamentoregolatore di corrente 250 µs /regolatore del numero di giri1000 µs)
1 Active Line Module +4 Motor Module(con tempo di campionamentoregolatore di corrente 400 µs /regolatore del numero di giri 1600 µs)
Servo e V/f Vector:
1 Active Line Module + 5 Motor Module(Servo: Regolatore di corrente 125 µs / regolatore del numerodi giri 125 µsV/f Vector:tempo di campionamento regolatore di corrente 250 µs per 2azionamenti V/f max.tempo di campionamento regolatore di corrente 400 µs perpiù di 2 azionamenti V/f)
Note sul numero massimo di azionamenti regolabili tramite una CU320:
è anche possibile attivare la funzione “Arresto sicuro” e collegare un TM31.
Non deve esservi alcun modulo funzionale attivato.
Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-38© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
2.3.3 Cablaggio di esempio di azionamenti Vector
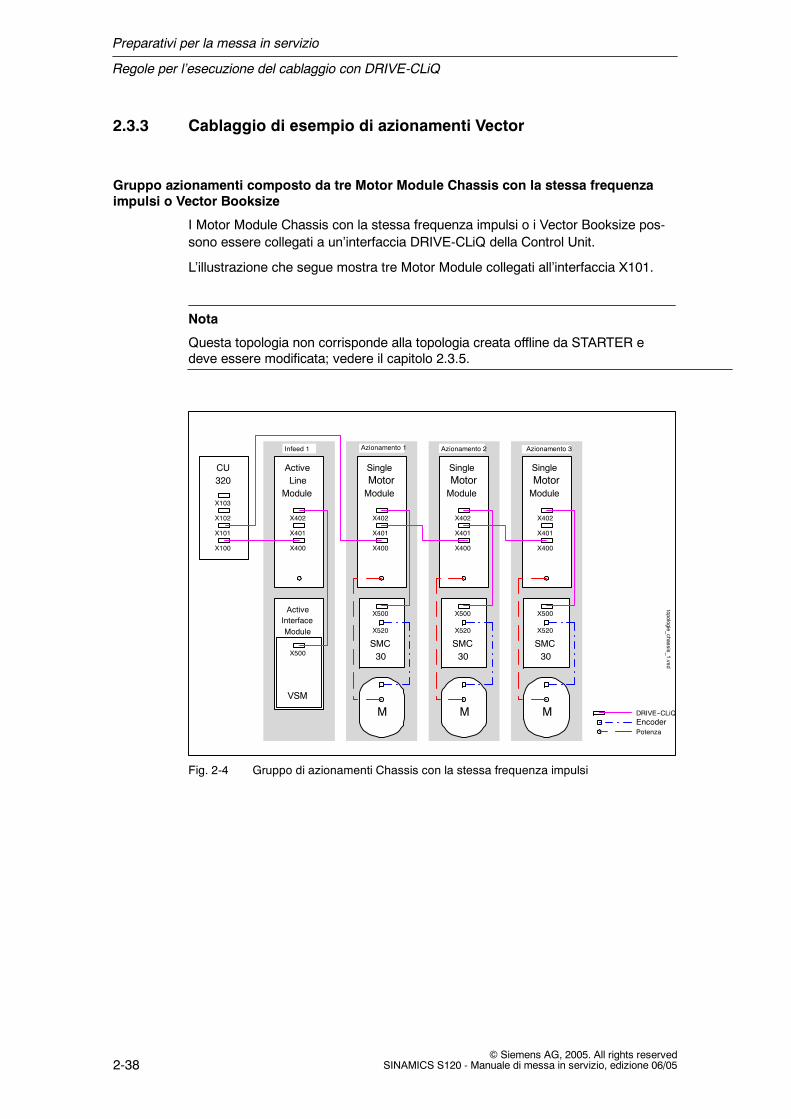
Gruppo azionamenti composto da tre Motor Module Chassis con la stessa frequenzaimpulsi o Vector Booksize
I Motor Module Chassis con la stessa frequenza impulsi o i Vector Booksize pos-sono essere collegati a un’interfaccia DRIVE-CLiQ della Control Unit.
L’illustrazione che segue mostra tre Motor Module collegati all’interfaccia X101.
Nota
Questa topologia non corrisponde alla topologia creata offline da STARTER edeve essere modificata; vedere il capitolo 2.3.5.
topologie_chassis_1.vsd
ActiveLine
Module
X400
X401
X402
DRIVE--CLiQEncoderPotenza
CU320
X100
X101
X102
X103
Infeed 1
ActiveInterfaceModule
VSM
X500
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 1
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 2
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 3
Fig. 2-4 Gruppo di azionamenti Chassis con la stessa frequenza impulsi
Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-39© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
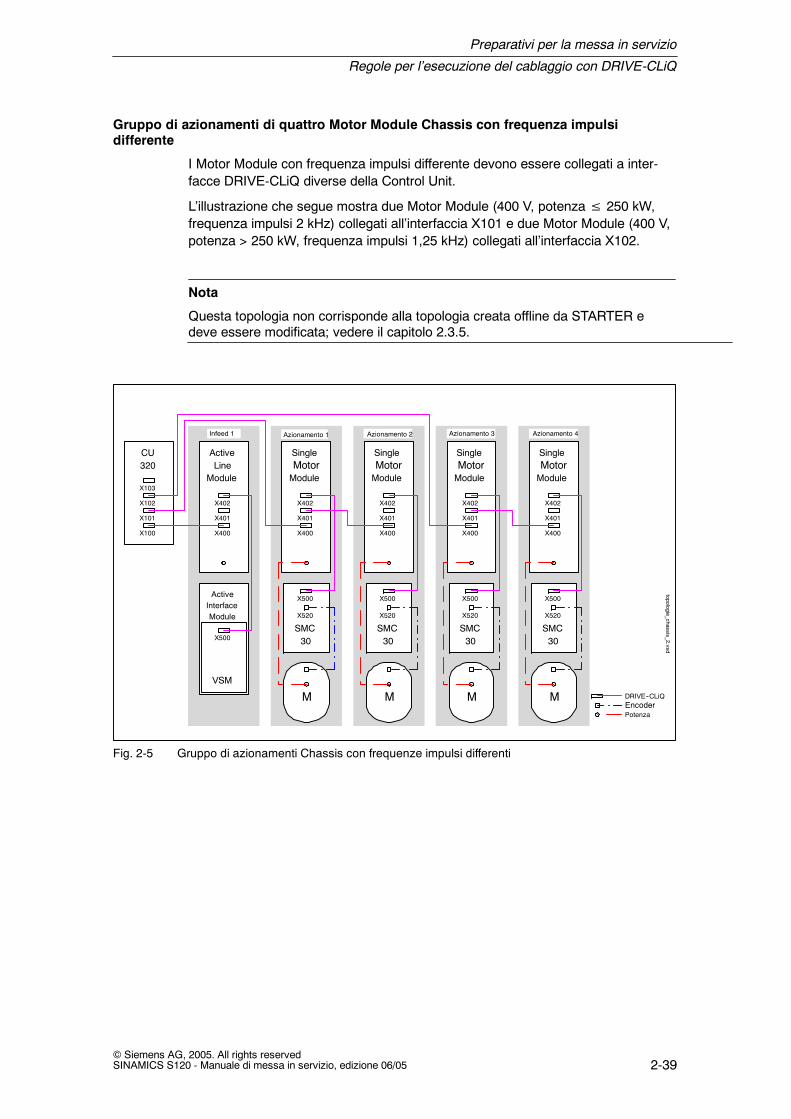
Gruppo di azionamenti di quattro Motor Module Chassis con frequenza impulsidifferente
I Motor Module con frequenza impulsi differente devono essere collegati a inter-facce DRIVE-CLiQ diverse della Control Unit.
L’illustrazione che segue mostra due Motor Module (400 V, potenza≤ 250 kW,frequenza impulsi 2 kHz) collegati all’interfaccia X101 e due Motor Module (400 V,potenza > 250 kW, frequenza impulsi 1,25 kHz) collegati all’interfaccia X102.
Nota
Questa topologia non corrisponde alla topologia creata offline da STARTER edeve essere modificata; vedere il capitolo 2.3.5.
topologie_chassis_2.vsd
ActiveLine
Module
X400
X401
X402
DRIVE--CLiQEncoderPotenza
CU320
X100
X101
X102
X103
Infeed 1
ActiveInterfaceModule
VSM
X500
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 1
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 2
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 3
M
SingleMotorModule
X400
X401
X402
SMC30
X500
X520
Azionamento 4
Fig. 2-5 Gruppo di azionamenti Chassis con frequenze impulsi differenti

Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-40© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
2.3.4 Cablaggio di esempio di azionamenti Vector collegati inparallelo
Gruppo azionamenti composto da due Line Module e Motor Module Chassis collegati inparallelo con lo stesso tipo
I Line Module Chassis e Motor Module Chassis dello stesso tipo collegati in paral-lelo si possono entrambi collegare a un’interfaccia DRIVE-CLiQ della Control Unit.
L’illustrazione che segue mostra Active Line Module e due Motor Module collegatirispettivamente all’interfaccia X101 e X101.
Per ulteriori informazioni sul collegamento in parallelo, vedere il manualedelle funzioni.
Nota
Questa topologia non corrisponde alla topologia creata offline da STARTER edeve essere modificata; vedere il capitolo 2.3.5.
Azionamento 1
EncoderPotenza
Fig. 2-6 Gruppo di azionamenti di parti potenza chassis collegate in parallelo
Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-41© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
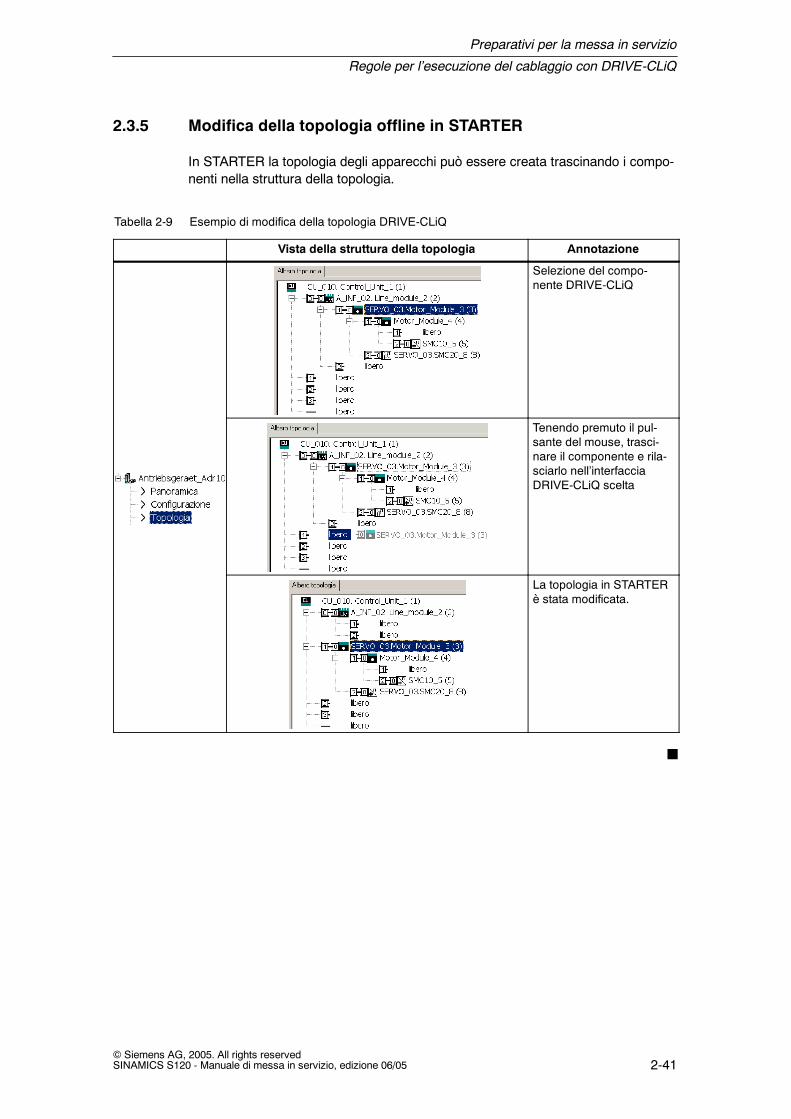
2.3.5 Modifica della topologia offline in STARTER
In STARTER la topologia degli apparecchi può essere creata trascinando i compo-nenti nella struttura della topologia.
Tabella 2-9 Esempio di modifica della topologia DRIVE-CLiQ
Vista della struttura della topologia Annotazione
Selezione del compo-nente DRIVE-CLiQ
Tenendo premuto il pul-sante del mouse, trasci-nare il componente e rila-sciarlo nell’interfacciaDRIVE-CLiQ scelta
La topologia in STARTERè stata modificata.
J
Preparativi per la messa in servizio
Regole per l’esecuzione del cablaggio con DRIVE-CLiQ
2-42© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Spazio per appunti

Messa in servizio
3-43© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Messa in servizio
Questo capitolo descrive i seguenti argomenti:
S Procedura generale della messa in servizio
S Tool di messa in servizio STARTER
S Creazione di un progetto in STARTER
S Esempio di prima messa in servizio di un Servo Booksize
S Esempio di prima messa in servizio di un Vector Booksize
S Esempio di prima messa in servizio di un Vector Chassis
S Avvertenze per la messa in servizio dei motori lineari (Servo)
3

Messa in servizio
Procedura generale della messa in servizio
3-44© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.1 Procedura generale della messa in servizio
Una volta soddisfatti i requisiti di base (vedere il capitolo 2), procedere come segueper la messa in servizio:
Tabella 3-1 Procedura della messa in servizio
Opera-zione
Esecuzione Capi-tolo
1 Creazione del progetto con STARTER 3.3
2 Configurazione dell’apparecchio di azionamento in STARTER 3.4.4,3.5.4,3.6.4
3 Salvataggio del progetto in STARTER 3.4.4,3.5.4,3.6.4
4 Passaggio online in STARTER con l’apparecchio di destina-zione
3.2.2
5 Caricamento del progetto nell’apparecchio di destinazione 3.4.4,3.5.4,3.6.4
6 Avviamento del motore 3.4.4,3.5.4,3.6.4
3.1.1 Avvertenze tecniche di sicurezza
!Pericolo di morte
Dopo la disinserzione di tutte le tensioni, per circa 5 minuti in tutti i componenti èancora presente una tensione pericolosa.
Rispettare le avvertenze indicate sul componente.
!Avvertenza
Per motivi di sicurezza, la messa in servizio di Safety Integrated deve avvenireonline con il tool di messa in servizio STARTER.
Causa:
il tool di messa in servizio STARTER può salvare nel progetto solo i parametriSafety di un canale di sorveglianza. Per questo motivo, il download di un progettocon Safety Integrated abilitato provoca delle anomalie Safety.
Messa in servizio
Procedura generale della messa in servizio
3-45© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Prima di attivare l’apparecchio di azionamento per la prima volta occorre verificareche le viti delle sbarre del circuito intermedio siano serrate con la coppia diserraggio corretta (vedere la documentazione SINAMICS S120, Manuale tecnico).
Rischio residuo
Grazie all’analisi degli errori, il costruttore della macchina è in grado di determinareil rischio residuo sulla propria macchina per quanto riguarda l’apparecchio di azio-namento. Sono noti i seguentirischi residui:
S Spostamento imprevisto dell’azionamento dalla posizione di fermo:
Questo problema può verificarsi, ad esempio, a causa di un errore durante l’in-stallazione o l’uso, o di disfunzionamenti del controllo sovraordinato, del regola-tore dell’azionamento, della valutazione encoder o dell’encoder.
Il rischio residuo può essere ridotto considerevolmente grazie alla funzione Ar-resto sicuro. (Vedere il capitolo 5, Safety Integrated)
S Cambiamento imprevisto del numero di giri/della velocità durante il funziona-mento:
A causa, ad es., di condizioni anomale del controllo sovraordinato, del regola-tore dell’azionamento o dell’encoder.

Messa in servizio
Tool di messa in servizio STARTER
3-46© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.2 Tool di messa in servizio STARTER
Descrizione sintetica
STARTER serve per la messa in servizio di apparecchi di azionamento della fami-glia di prodotti MICROMASTER e SINAMICS.
Con STARTER si possono eseguire le seguenti operazioni:
S Messa in servizio
S Test
S Diagnostica
Requisiti di sistema
I requisiti di sistema per STARTER sono indicati nel file Leggimi, nella directory diinstallazione di STARTER.
3.2.1 Funzioni principali di STARTER
Descrizione
STARTER offre i seguenti strumenti per la gestione del progetto:
S Copia da RAM a ROM
S Carica nell’apparecchio di destinazione
S Carica in PG
S Crea impostazioni di fabbrica
S Wizard per la messa in servizio
S Visualizzazione delle barre degli strumenti
Copia da RAM a ROM
Questa funzione permette di salvare i dati volatili della Control Unit nella memorianon volatile della scheda CompactFlash. In questo modo i dati saranno conservatidopo un’eventuale interruzione dell’alimentazione 24 V della Control Unit.
Questa funzione può essere attivata nei modi seguenti:
S Strumenti --> Impostazioni --> Download --> attivazione di “Copia da RAM aROM”. In questo modo, ad ogni caricamento nel sistema di destinazione tramiteil pulsante “Carica progetto nel sistema di destinazione” i dati vengono salvatinella memoria non volatile.
S Clic con il tasto destro del mouse sull’apparecchio di azionamento --> Apparec-chio di destinazione --> Copia da RAM a ROM
S Apparecchio di azionamento con sfondo grigio --> Pulsante “Copia da RAM aROM”

Messa in servizio
Funzioni principali di STARTER
3-47© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Carica nell’apparecchio di destinazione
Questa funzione carica il progetto corrente di STARTER nella Control Unit. I dativengono caricati nella memoria di lavoro della Control Unit, quindi viene eseguitoun reset.
Tranne che per il pulsante “Carica progetto nel sistema di destinazione” e avendoattivato “Copia da RAM a ROM”, i dati devono quindi essere memorizzati nella me-moria non volatile tramite la funzione “Copia da RAM a ROM”.
Questa funzione può essere attivata nei modi seguenti:
S Facendo clic con il pulsante destro del mouse sull’apparecchio di azionamento--> Apparecchio di destinazione --> Carica nell’apparecchio di destinazione
S Apparecchio di azionamento con sfondo grigio --> Pulsante “Carica nell’appa-recchio di destinazione”
S Progetto in tutti gli apparecchi di azionamento contemporaneamente:Pulsante “Carica progetto nel sistema di destinazione”
Carica in PG
Questa funzione carica il progetto corrente della Control Unit in STARTER.
Questa funzione può essere attivata nei modi seguenti:
S Clic con il pulsante destro del mouse sull’apparecchio di azionamento --> Appa-recchio di destinazione --> Carica in PG
S Apparecchio di azionamento con sfondo grigio --> Pulsante “Carica in PG”
Ripristino impostazioni di fabbrica
Questa funzione imposta tutti i parametri della memoria di lavoro della Control Unitalle impostazioni di fabbrica. Per reimpostare anche i dati della scheda Compact-Flash ai valori di fabbrica, è necessario eseguire l’azione “Copia da RAM a ROM”.
Per ulteriori avvertenze relative a STARTER, consultare il manuale Getting Started
Visualizzazione delle barre degli strumenti
Le barre degli strumenti si possono attivare con un segno di spunta da Visualizza--> Barre degli strumenti.

Messa in servizio
Funzioni principali di STARTER
3-48© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.2.2 Attivazione del funzionamento online: STARTER tramitePROFIBUS
Descrizione
Per il funzionamento online tramite PROFIBUS vi sono le seguenti possibilità:
S Funzionamento online tramite adattatore PROFIBUS.
STARTER tramite PROFIBUS (esempio con 3 Control Unit)
MPI
PROFIBUS
ad es.
CPU: S7--315--2--DP
Indirizzo8
STARTER
PG/PCSIMATIC S7
InterfacciaPROFIBUS
Indirizzo9
Indirizzo10
20 21 22 23 24 25 26
PROFIBUSAdattatorePROFIBUS
Fig. 3-1 STARTER tramite PROFIBUS (esempio con 3 Control Unit)
Messa in servizio
Funzioni principali di STARTER
3-49© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Impostazioni in STARTER, se online direttamente tramite PROFIBUS
In STARTER la comunicazione tramite PROFIBUS deve essere impostata comesegue:
S Strumenti -- Imposta interfaccia PG/PC...
Eseguire l’aggiunta/rimozione di interfacce
S Strumenti -- Imposta interfaccia PG/PC... -- Proprietà
Attivare o disattivare la casella “PG/PC-- unico master sul bus”
NotaS Velocità di trasmissione
Attivazione di STARTER su un PROFIBUS funzionante:La velocità di trasmissione utilizzata da SINAMICS per PROFIBUS vienericonosciuta automaticamente da STARTER.Attivazione di STARTER per la messa in servizio:La velocità di trasmissione impostata in STARTER viene riconosciutaautomaticamente dalla Control Unit.
S Indirizzi PROFIBUSGli indirizzi PROFIBUS per i singoli apparecchi di azionamento devono esserespecificati nel progetto e corrispondere agli indirizzi impostati negli apparecchi.

Messa in servizio
Creazione di un progetto in STARTER
3-50© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.3 Creazione di un progetto in STARTER
3.3.1 Assemblaggio offline di un progetto
Per l’assemblaggio offline sono necessari l’indirizzo PROFIBUS, il tipo di apparec-chio (ad es. SINAMICS S120) e la versione dell’apparecchio (ad es. FW 2.2).
Tabella 3-2 Sequenza di assemblaggio con STARTER (esempio)
Cosa? Come? Note
1. Creazione diun nuovoprogetto
Operazione da eseguire:
Menu “Progetto”----> Nuovo ...
Progetti utente:progetti già disponibilinella directory di destinazione
Nome: Progetto_1 (selezionabileliberamente)
Tipo: Progetto
Percorso: preimpostato (impostabile liberamente)
Il progetto viene creato offlinee caricato nel sistema di de-stinazione al termine dellaprogettazione.
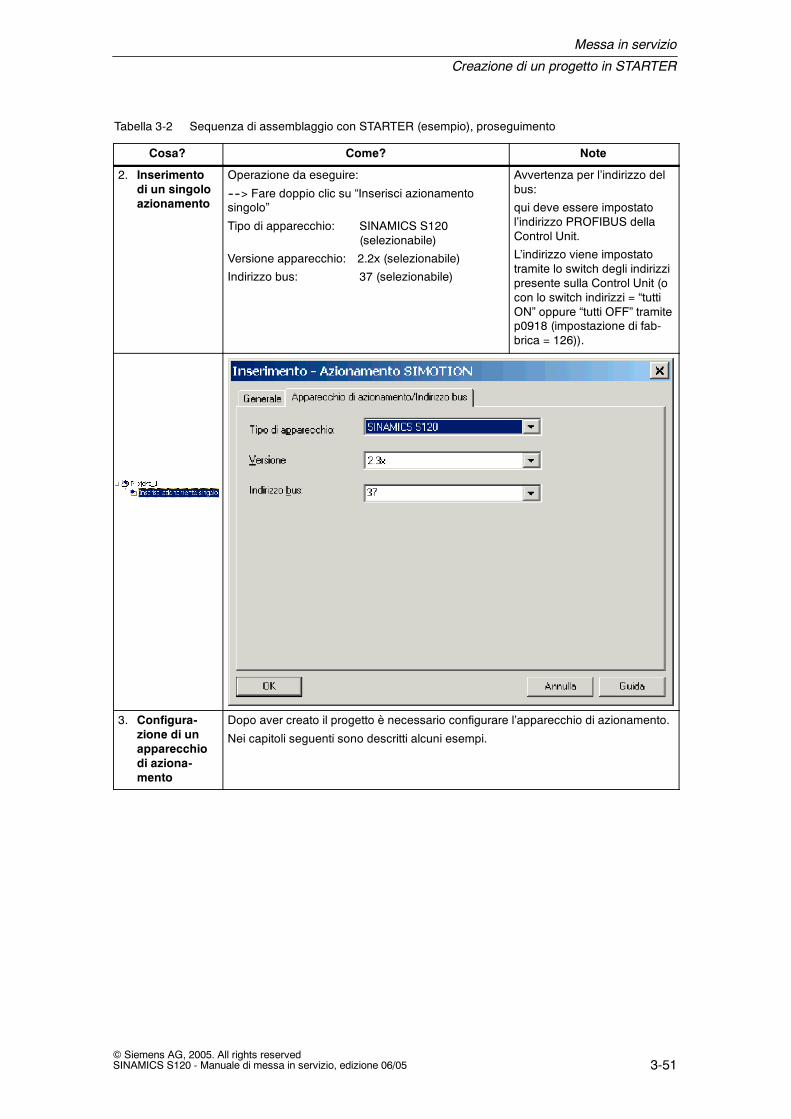
Messa in servizio
Creazione di un progetto in STARTER
3-51© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-2 Sequenza di assemblaggio con STARTER (esempio), proseguimento
Cosa? NoteCome?
2. Inserimentodi un singoloazionamento
Operazione da eseguire:
----> Fare doppio clic su “Inserisci azionamentosingolo”
Tipo di apparecchio: SINAMICS S120(selezionabile)
Versione apparecchio: 2.2x (selezionabile)
Indirizzo bus: 37 (selezionabile)
Avvertenza per l’indirizzo delbus:
qui deve essere impostatol’indirizzo PROFIBUS dellaControl Unit.
L’indirizzo viene impostatotramite lo switch degli indirizzipresente sulla Control Unit (ocon lo switch indirizzi = “tuttiON” oppure “tutti OFF” tramitep0918 (impostazione di fab-brica = 126)).
3. Configura-zione di unapparecchiodi aziona-mento
Dopo aver creato il progetto è necessario configurare l’apparecchio di azionamento.
Nei capitoli seguenti sono descritti alcuni esempi.
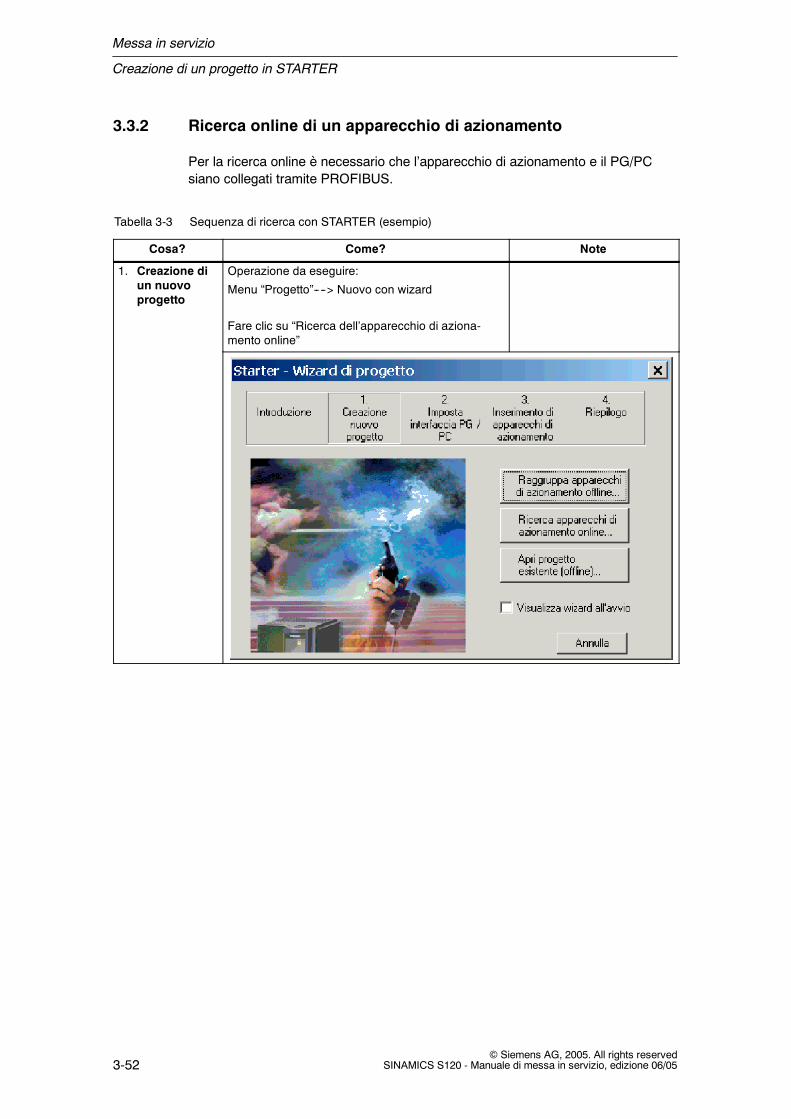
Messa in servizio
Creazione di un progetto in STARTER
3-52© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.3.2 Ricerca online di un apparecchio di azionamento
Per la ricerca online è necessario che l’apparecchio di azionamento e il PG/PCsiano collegati tramite PROFIBUS.
Tabella 3-3 Sequenza di ricerca con STARTER (esempio)
Cosa? Come? Note
1. Creazione diun nuovoprogetto
Operazione da eseguire:
Menu “Progetto”----> Nuovo con wizard
Fare clic su “Ricerca dell’apparecchio di aziona-mento online”
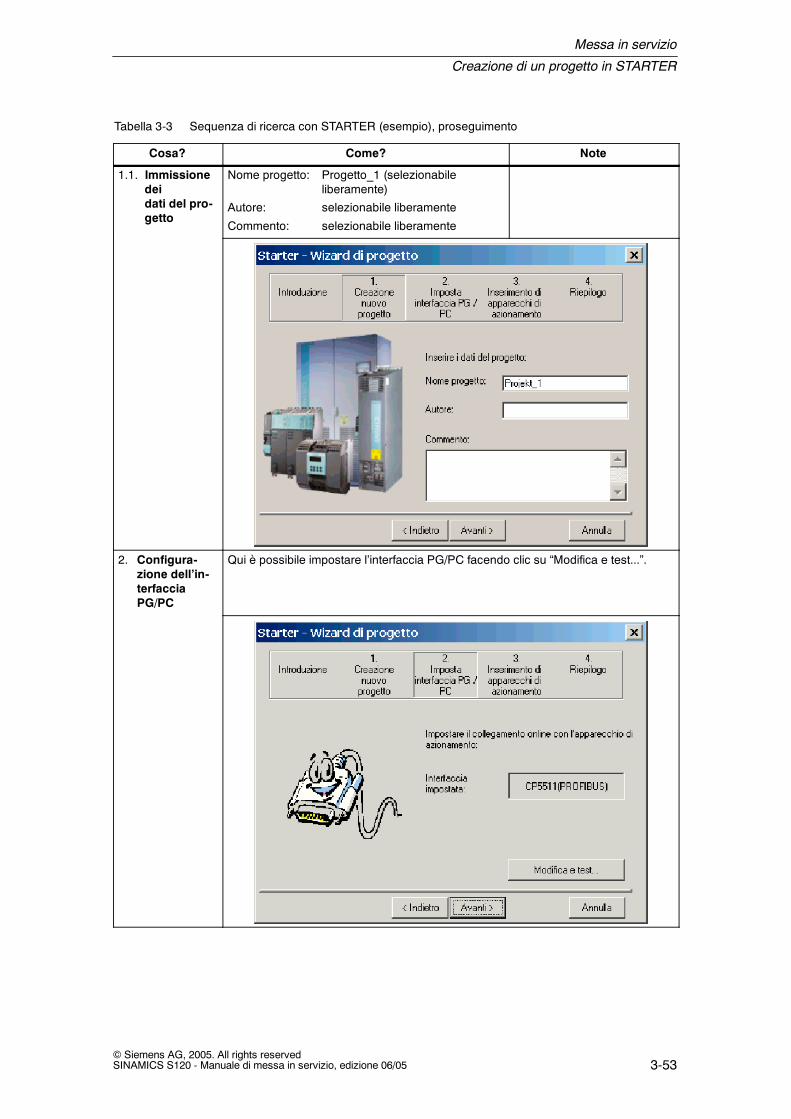
Messa in servizio
Creazione di un progetto in STARTER
3-53© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-3 Sequenza di ricerca con STARTER (esempio), proseguimento
Cosa? NoteCome?
1.1. Immissionedeidati del pro-getto
Nome progetto: Progetto_1 (selezionabileliberamente)
Autore: selezionabile liberamente
Commento: selezionabile liberamente
2. Configura-zione dell’in-terfacciaPG/PC
Qui è possibile impostare l’interfaccia PG/PC facendo clic su “Modifica e test...”.
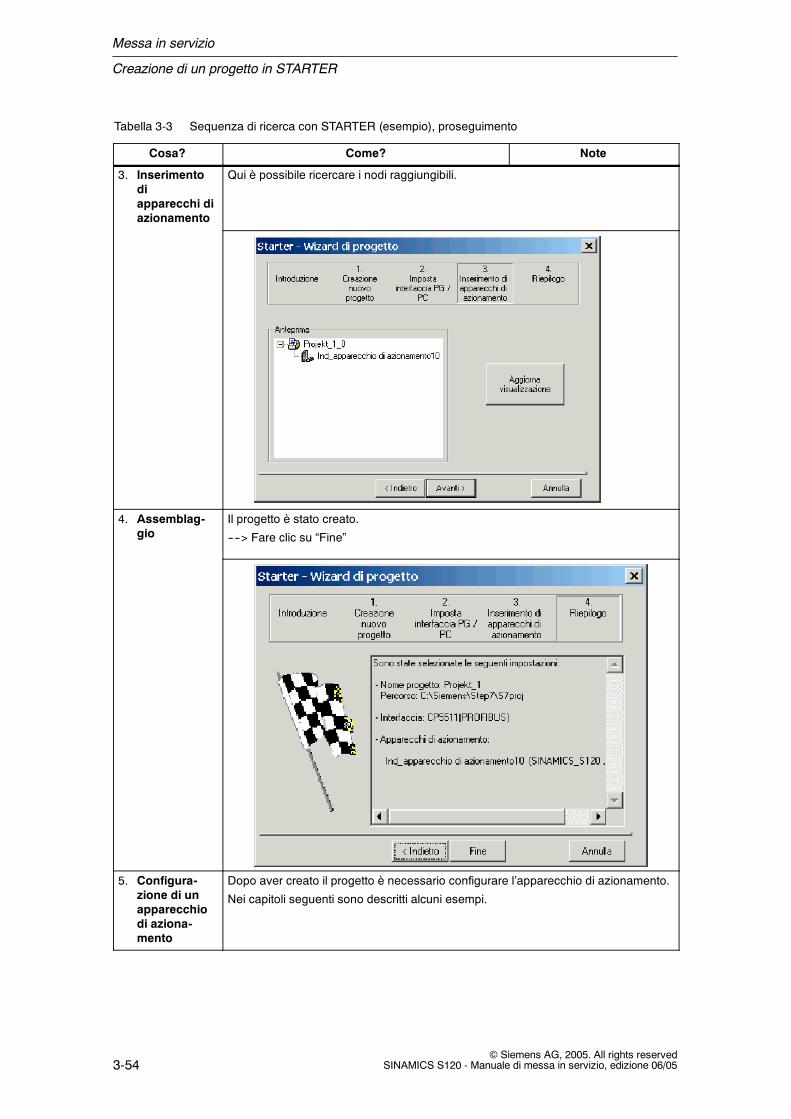
Messa in servizio
Creazione di un progetto in STARTER
3-54© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-3 Sequenza di ricerca con STARTER (esempio), proseguimento
Cosa? NoteCome?
3. Inserimentodiapparecchi diazionamento
Qui è possibile ricercare i nodi raggiungibili.
4. Assemblag-gio
Il progetto è stato creato.
----> Fare clic su “Fine”
5. Configura-zione di unapparecchiodi aziona-mento
Dopo aver creato il progetto è necessario configurare l’apparecchio di azionamento.
Nei capitoli seguenti sono descritti alcuni esempi.
Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-55© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.4 Esempio di prima messa in servizio di un ServoBooksize
La prima messa in servizio descritta in questo capitolo contiene in un esempio spe-cifico di tutte le configurazioni, le impostazioni dei parametri e i test necessari. Lamessa in servizio viene eseguita con il tool per la messa in servizio STARTER.
Requisiti per la messa in servizio
1. I requisiti per la messa in servizio sono soddisfatti
----> Vedere il capitolo 2
2. La lista di controllo per la messa in servizio è stata compilata e tutti i punti sonoOK.
----> Vedere il capitolo 2
3. STARTER è installato e pronto per il funzionamento
----> Vedere il file “Leggimi” sul CD di installazione di STARTER
4. L’alimentazione dell’elettronica (DC24 V) è inserita

Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-56© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.4.1 Impostazione del task
1. Si deve eseguire la messa in servizio di un apparecchio di azionamento con iseguenti componenti:
Tabella 3-4 Panoramica dei componenti
Denominazione Componente N. di ordinazione
Regolazione e alimentazione
Control Unit 1 Control Unit 320 6SL3040--0MA00--0AAx
Active Line Module 1 Active Line Module 16 kW 6SL3130--7TE21--6AAx
Pacchetto filtro di rete16 kW
Filtri e reattanze di rete 6SL3000--0FE21--6AAx
Azionamento 1
Motor Module 1 Single Motor Module 9 A 6SL3120--1TE21--0AAx
Sensor Module 1.1 SMC20 6SL3055--0AA00--5BAx
Motore 1 Motore sincrono 1FK7061--7AF7x--xxxx
Encoder motore 1 Encoder incrementale sin/cosC/D 1Vpp 2048 p/r
1FK7xxx--xxxxx--xAxx
SensorModule 1.2 SMC20 6SL3055--0AA00--5BAx
Encoder esterno Encoder incrementali
sin/cos 1Vpp 4096 p/r
--
Azionamento 2
Motor Module 2 Single Motor Module 18 A 6SL3120--1TE21--8AAx
Motore 2 Motore asincrono 1PH7103--xNGxx--xLxx
Sensor Module 2 SMC20 6SL3055--0AA00--5BAx
Encoder motore 2 Encoder incrementale sin/cos1Vpp 2048 p/r
1PH7xxx--xMxxx--xxxx
2. Le abilitazioni per l’alimentatore ed entrambi gli azionamenti devono avveniretramite PROFIBUS.
-- Telegramma per Active Line Module
Telegramma 370: alimentatore, 1 parola
-- Telegramma per l’azionamento 1
Telegramma standard 4: Regolazione di velocità, 2 encoder di posizione
-- Abilitazioni per l’azionamento 2
Telegramma standard 3: Regolazione di velocità, 1 encoder di posizione
Nota
Per ulteriori avvertenze relative ai tipi di telegramma, consultare il capitolo“Comunicazione tramite PROFIBUS” o il Manuale delle liste SINAMICS S120.

Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-57© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.4.2 Cablaggio dei componenti (esempio)
La seguente illustrazione mostra un possibile montaggio dei componenti e il rela-tivo cablaggio. Il cablaggio DRIVE-CLiQ è evidenziato in grassetto.
ibn_servo_verdrahtung.vsd
DRIVE--CLiQ
2 1SH
2 1SH
Filtro di rete
Bobina di rete
DO
X124
X100
ControlUnit320
SMC20
X500
X520
DC24 Vesterno
Contattore di rete
L1L2L3
ActiveLine Module
X200
SingleMotor Module
X200
SingleMotor Module
X2003 4EP
DICU
est.24V
4 4
Cavo motoreConduttoreencoder
SMC20
X500
X520
SMC20
X500
X520
Fig. 3-2 Cablaggio dei componenti (esempio)
Per ulteriori avvertenze relative al cablaggio, consultare il manuale dell’apparec-chio

Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-58© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.4.3 Flusso di segnali dall’esempio di prima messa in servizio
r0863.1 p0738 = 0863.1
ACTIVE INFEED CONTROL
L1
L2L3
p0723.9p0860 = 0723.9
DI/DO 8
X122.7
DI/DO 9X122.8
come uscitap728.8 = 1[8934]
Contattore principale ON
Contattore principaleRisposta
[2130]
[2447]
Ricezione dati di processoPar.comando11
Parola di stato 11[2459]
Invio dei dati di processo
IBN_Servo_bico1.vsd
Active Line Module
Interfacce di rete
24 V
DCP/DCN
Alimentatore pronto
r0863.0[8932]
1
Fig. 3-3 Flusso di segnali dall’esempio di prima messa in servizio Servo, parte 1
SERVO CONTROL 1
M~
Motor Module 1
p0864 = 0863.0Alimentatore prontor0863.0
[2610][8932]
SERVO CONTROL 2
M~
Motor Module 2
p0864 = 0863.0Alimentatore prontor0863.0
[2610][8932]
DCP/DCN
Invio dei dati di processo
[2440]
Ricezione dei dati di processo
Par.comando1
Par. comando 2
NRIF_B
G1_STW
G2_STW
123456
Parola di stato 1
Par. stato 2
NIST_B
G1_ZSW
G2_ZSW
123456
G1_XIST178
G1_XIST2910
G2_XIST111
12
G2_XIST213
14[2450]
[2440]
Ricezione dei dati di processo
Par.comando1
Par. comando 2
NRIF_B
G1_STW
12345
Parola di stato 1
Par. stato 2
NIST_B
G1_ZSW
123456
G1_XIST178
G1_XIST29
[2450]
Invio dei dati di processo
Regolatore di ve--corrente
p1140p1142p1055
[2440]p2060[1]NRIF_B
0
1
0
1
Regolatore di ve--corrente
p1140p1142
p1055
Canale del valore di riferimento [3080]
[2440]p2060[1]NRIF_B
0
1
0
1
Canale del valore di riferimento [3080]
IBN_Servo_bico2.vsd
Fig. 3-4 Flusso di segnali dall’esempio di prima messa in servizio Servo, parte 2

Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-59© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.4.4 Messa in servizio con STARTER (esempio)
Nella seguente tabella sono descritti i passi per la messa in servizio degli esempicon STARTER.
Tabella 3-5 Sequenza di messa in servizio con STARTER (esempio)
Cosa? Come? Note
1. Configura-zione auto-matica
Operazione da eseguire:
----> “Progetto” ----> “Collega al sistema di destinazione”
----> Fare doppio clic su “Configurazione automatica”
----> Seguire le istruzioni fornite dal wizard
2. Configura-zione dell’ali-mentazione
Configurare l’alimentazione.
Nome dell’alimentatore ----> doppio clic su “Configu-razione” ----> doppio clic su “Configura DDS”
2.1. Wizarddell’alimenta-zione
Nel wizard vengono visualizzati i dati della targhettaelettronica trasmessi elettronicamente.
È possibile impostare l’identificazione della rete edel circuito intermedio.
È necessario impostare la tensione di allacciamentodegli apparecchi e la frequenza nominale.
L’opzione “Filtro di rete presente” deve essere at-tiva.
Deve essere selezionato il tipo di telegramma PRO-FIBUS 370.
A questo punto la configurazione dell’alimentazioneè conclusa.
Se l’ambiente di rete o i com-ponenti del circuito intermediocambiano, si deve ripeterel’ identificazione.
3. Configura-zione aziona-mento
Gli azionamenti devono essere configurati singolar-mente.
----> “Azionamento” ----> Nome azionamento ---->doppio clic su “Configurazione” ----> doppio clic su“Configura DDS”
3.1. Strutturadi regola-zione
È possibile attivare i moduli funzionali.
È possibile selezionare il tipo di regolazione.
3.2. Parte di po-tenza
Nel wizard vengono visualizzati i dati della targhettaelettronica trasmessi elettronicamente.
3.3. Motor È possibile immettere il nome del motore (ad es.contrassegno dell’apparecchiatura).
Selezionare il motore standard dalla lista: sì
Selezionare il tipo di motore (vedere targhetta dati)
È possibile selezionare unmotore standard dalla lista oimmettere i dati del motore.Quindi si può selezionare iltipo di motore.
3.4. Freno motore Il freno motore può essere attivato e configurato.
3.5. Scambiodati diprocesso
Deve essere selezionato il tipo di telegramma PRO-FIBUS 4 (azionamento 1) o 3 (azionamento 2).

Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-60© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-5 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
3.6. Dati del mo-tore
Qui si immettono i dati del motore indicati sulla tar-ghetta di identificazione.
Motori asincroni (rotatori):
Se sono noti, si possono immettere i dati meccanicidel motore e della linea di azionamenti.
Motori sincroni (rotatori, eccitati in modo perma-nente):
Se sono noti, si possono immettere i dati di un man-drino PE.
Se non vengono immessi datimeccanici, essi vengono sti-mati sulla base dei dati ripor-tati sulla targhetta.
Anche i dati del circuito equi-valente vengono stimati inbase ai dati riportati sulla tar-ghetta di identificazione o tra-mite l’identificazione automa-tica dei dati del motore.
3.7. Frenimotore
Qui è possibile configurare il freno e attivare il mo-dulo funzionale “Comando di frenatura esteso”.
Per ulteriori informazioni: ve-dere il manuale delle funzioni.
3.8. Encoder Encoder motore (encoder 1):
Selezionare un encoder standard dall’elenco: sì
Selezionare “2048, 1Vpp, A/B C/D R”
Encoder esterno (encoder 2):
rotatorio: sì
Sistema di misura: “seno/coseno incrementale”
Risoluzione: “4096”
Tacca di zero: “nessuna tacca di zero”
Se si utilizza un tipo di enco-der non incluso nell’elenco, èpossibile anche immettere idati relativi.
3.9. Funzionidell’aziona-mento
Qui è possibile selezionare l’applicazione. La scelta dell’applicazione in-fluenza il calcolo dei parame-tri di controllo e di regola-zione.
3.10.Assemblag-gio
I dati dell’azionamento possono essere copiati, perla documentazione dell’impianto, nella memoriaintermedia e successivamente inseriti, ad esempio,in un programma di testo.
4. Contattore direte
Contattore di rete
p0728.8 = 1 impostare DI/DO come uscita
p0738 =863.1 Contattore di rete On
p0860 = 723.9 risposta di confermacontattore di rete
Il contattore di rete deve es-sere comandato tramite l’og-getto di azionamento Alimen-tatore_1.
Vedere lo schema logico[8934]
Nella maschera Funzione----> Comando contattore direte è possibile verificare l’in-terconnessione.

Messa in servizio
Esempio di prima messa in servizio di un Servo Booksize
3-61© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-5 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
5. Memorizzare iparametrinell’apparec-chio
S Collegamento con il sistema di destinazione(passaggio online)
S Sistema di destinazione --> Carica in apparec-chio di destinazione
S Sistema di destinazione --> Copia da RAM aROM (salvataggio dei dati sulla scheda CF)
Fare clic con il pulsante destrodel mouse sull’apparecchio diazionamento (SINAMICSS120).
6. Avviamentodel motore
Gli azionamenti sono stati avviati tramite il pannellodi comando in STARTER.
S Quest’azione viene eseguita dopo aver eseguitol’abilitazione impulsi dell’alimentatore e dopoaver attivato l’identificazione della rete e del cir-cuito intermedio, dopodiché l’alimentatore passaallo stato di funzionamento.
Per ulteriori informazioni sulpannello di comando, consul-tare il manuale Getting Star-ted.
Per ulteriori informazionisull’identificazione della rete edel circuito intermedio, con-sultare il manuale delle fun-zioni.
Possibilità di diagnostica in STARTER
Sotto “Componente” --> Diagnostica --> Parole di comando/stato
S Parole di comando/stato
S Parametri di stato
S Abilitazioni mancanti

Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-62© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.5 Esempio di prima messa in servizio di un VectorBooksize
L’esempio di prima messa in servizio presentato in questo capitolo descrive tutte leconfigurazioni, le impostazioni dei parametri e i test necessari. La messa in servi-zio viene eseguita con il tool per la messa in servizio STARTER.
Requisiti per la messa in servizio
1. I requisiti per la messa in servizio sono soddisfatti
----> Vedere il capitolo 2
2. La lista di controllo per la messa in servizio è stata compilata e tutti i punti sonoOK.
----> Vedere il capitolo 2
3. STARTER è installato e pronto per il funzionamento
----> Vedere il file “Leggimi” sul CD di installazione di STARTER
4. L’alimentazione dell’elettronica (DC24 V) è inserita
3.5.1 Impostazione del task
1. Si deve eseguire la messa in servizio di un apparecchio di azionamento con iseguenti componenti:
Tabella 3-6 Panoramica dei componenti
Denominazione Componente N. di ordinazione
Regolazione e alimentazione
Control Unit Control Unit 320 6SL3040--0MA00--0AAx
Smart Line Module Smart Line Module 10 kW 6SL3130--6AE21--0AAx
Pacchetto filtro di rete10 kW
Filtri e reattanze di rete 6SL3130--0GE21--0AAx
Azionamento 1
Motor Module Single Motor Module 5 A 6SL3120--1TE15--0AAx
Motor Motore asincrono 1LA
Azionamento 2
Motor Module Single Motor Module 5 A 6SL3120--1TE15--0AAx
Motor Motore asincrono 1LA
2. Le abilitazioni per l’alimentatore ed entrambi gli azionamenti devono avveniretramite morsetti.
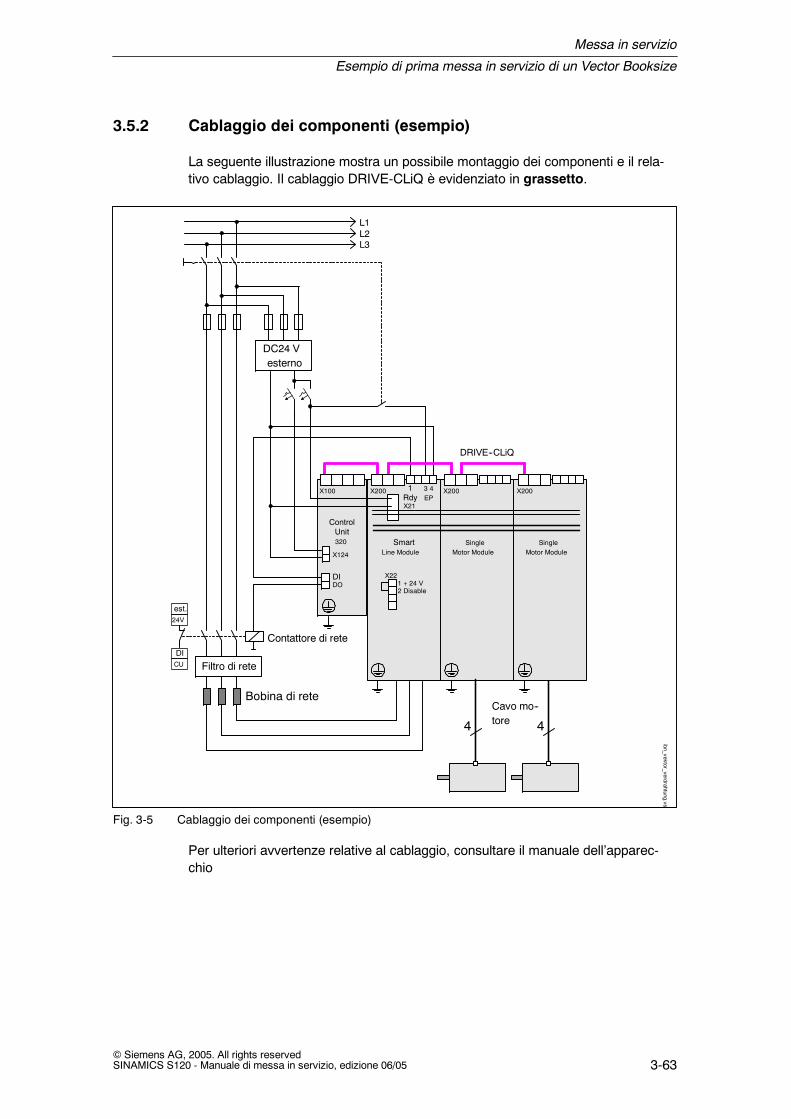
Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-63© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.5.2 Cablaggio dei componenti (esempio)
La seguente illustrazione mostra un possibile montaggio dei componenti e il rela-tivo cablaggio. Il cablaggio DRIVE-CLiQ è evidenziato in grassetto.
ibn_vektor_verdrahtung.vsd
DRIVE--CLiQ
Filtro di rete
Bobina di rete
DO
X124
X100
ControlUnit320
DC24 Vesterno
Contattore di rete
L1L2L3
SmartLine Module
X200 3 4EP
DICU
est.24V
SingleMotor Module
X200
4
Cavo mo--tore
2 1SH
SingleMotor Module
X200
4
DI
1Rdy
X22
X21
1 + 24 V2 Disable
Fig. 3-5 Cablaggio dei componenti (esempio)
Per ulteriori avvertenze relative al cablaggio, consultare il manuale dell’apparec-chio
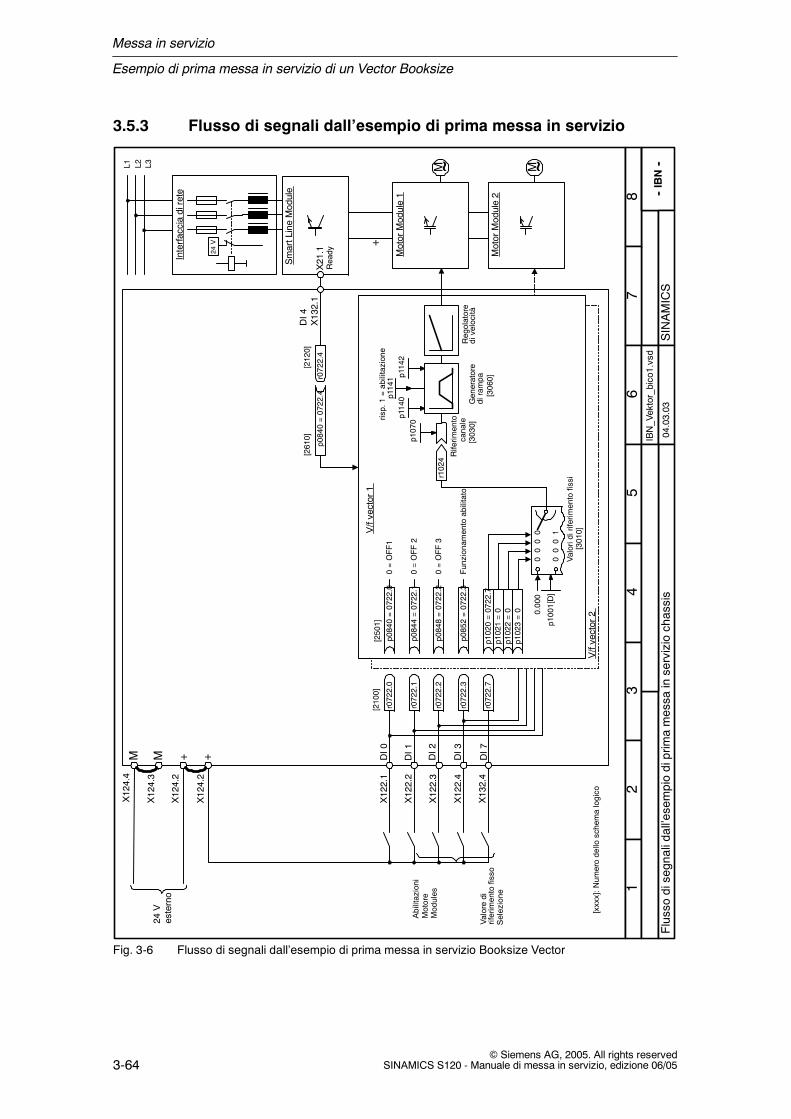
Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-64© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.5.3 Flusso di segnali dall’esempio di prima messa in servizio
MotorModule2 --IBN--
87
65
43
21
IBN_Vektor_bico1.vsd
SINAMICS
04.03.03
Flussodisegnalidall’esempiodiprimamessa
inserviziochassis
++M M
X124.4
X124.3
24V
esterno
DI0
DI1
DI2
DI3
Abilitazioni
Motore
Modules
X124.2
X124.2
DI4
X132.1
X122.1
X122.2
X122.3
X122.4
p0852=0722.3
p0848=0722.2
p0844=0722.1
p0840=0722.0
r0722.4
r0722.0
r0722.1
r0722.2
r0722.3
0=OFF
3
Funzionamentoabilitato
0=OFF
2
0=OFF
1
V/fvector1
M ~Regolatore
divelocità
Generatore
p1140
p1142
p1141
risp.1=abilitazione
p0840=0722.4
+
L1 L2 L3
[2120]
[3060]
[2501]
[2610]
[2100]
[xxxx]:N
umerodello
schemalogico
p1070
Riferim
ento
canale
[3030]
MotorModule1
SmartLineModule
r1024
p1001[D]
0.000
0000
0001
p1020=0722.7
r0722.7
p1021=0
p1022=0
p1023=0
Valoridiriferimentofissi
[3010]
Valoredi
Selezione
DI7
X132.4
V/fvector2
M ~
Interfacciadirete
24V
X21.1
Ready
dirampa
riferimentofisso
Fig. 3-6 Flusso di segnali dall’esempio di prima messa in servizio Booksize Vector
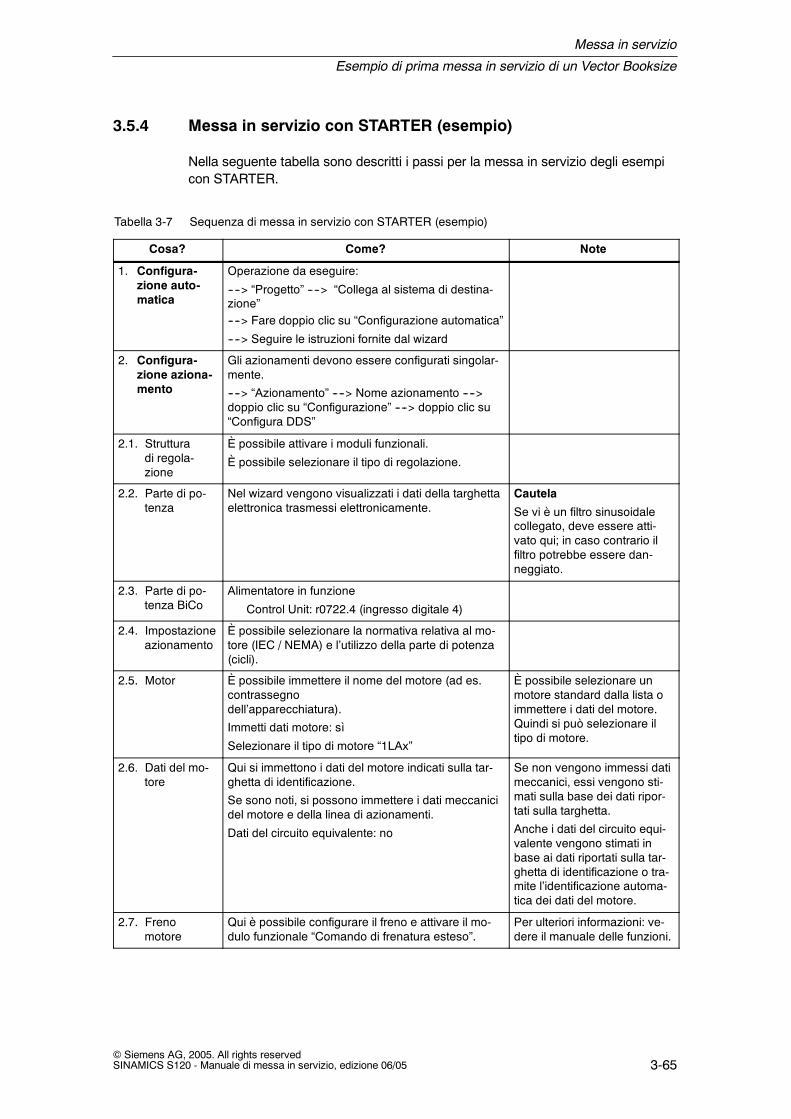
Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-65© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.5.4 Messa in servizio con STARTER (esempio)
Nella seguente tabella sono descritti i passi per la messa in servizio degli esempicon STARTER.
Tabella 3-7 Sequenza di messa in servizio con STARTER (esempio)
Cosa? Come? Note
1. Configura-zione auto-matica
Operazione da eseguire:
----> “Progetto” ----> “Collega al sistema di destina-zione”----> Fare doppio clic su “Configurazione automatica”
----> Seguire le istruzioni fornite dal wizard
2. Configura-zione aziona-mento
Gli azionamenti devono essere configurati singolar-mente.
----> “Azionamento” ----> Nome azionamento ---->doppio clic su “Configurazione” ----> doppio clic su“Configura DDS”
2.1. Strutturadi regola-zione
È possibile attivare i moduli funzionali.
È possibile selezionare il tipo di regolazione.
2.2. Parte di po-tenza
Nel wizard vengono visualizzati i dati della targhettaelettronica trasmessi elettronicamente.
Cautela
Se vi è un filtro sinusoidalecollegato, deve essere atti-vato qui; in caso contrario ilfiltro potrebbe essere dan-neggiato.
2.3. Parte di po-tenza BiCo
Alimentatore in funzione
Control Unit: r0722.4 (ingresso digitale 4)
2.4. Impostazioneazionamento
È possibile selezionare la normativa relativa al mo-tore (IEC / NEMA) e l’utilizzo della parte di potenza(cicli).
2.5. Motor È possibile immettere il nome del motore (ad es.contrassegnodell’apparecchiatura).
Immetti dati motore: sì
Selezionare il tipo di motore “1LAx”
È possibile selezionare unmotore standard dalla lista oimmettere i dati del motore.Quindi si può selezionare iltipo di motore.
2.6. Dati del mo-tore
Qui si immettono i dati del motore indicati sulla tar-ghetta di identificazione.
Se sono noti, si possono immettere i dati meccanicidel motore e della linea di azionamenti.
Dati del circuito equivalente: no
Se non vengono immessi datimeccanici, essi vengono sti-mati sulla base dei dati ripor-tati sulla targhetta.
Anche i dati del circuito equi-valente vengono stimati inbase ai dati riportati sulla tar-ghetta di identificazione o tra-mite l’identificazione automa-tica dei dati del motore.
2.7. Frenomotore
Qui è possibile configurare il freno e attivare il mo-dulo funzionale “Comando di frenatura esteso”.
Per ulteriori informazioni: ve-dere il manuale delle funzioni.
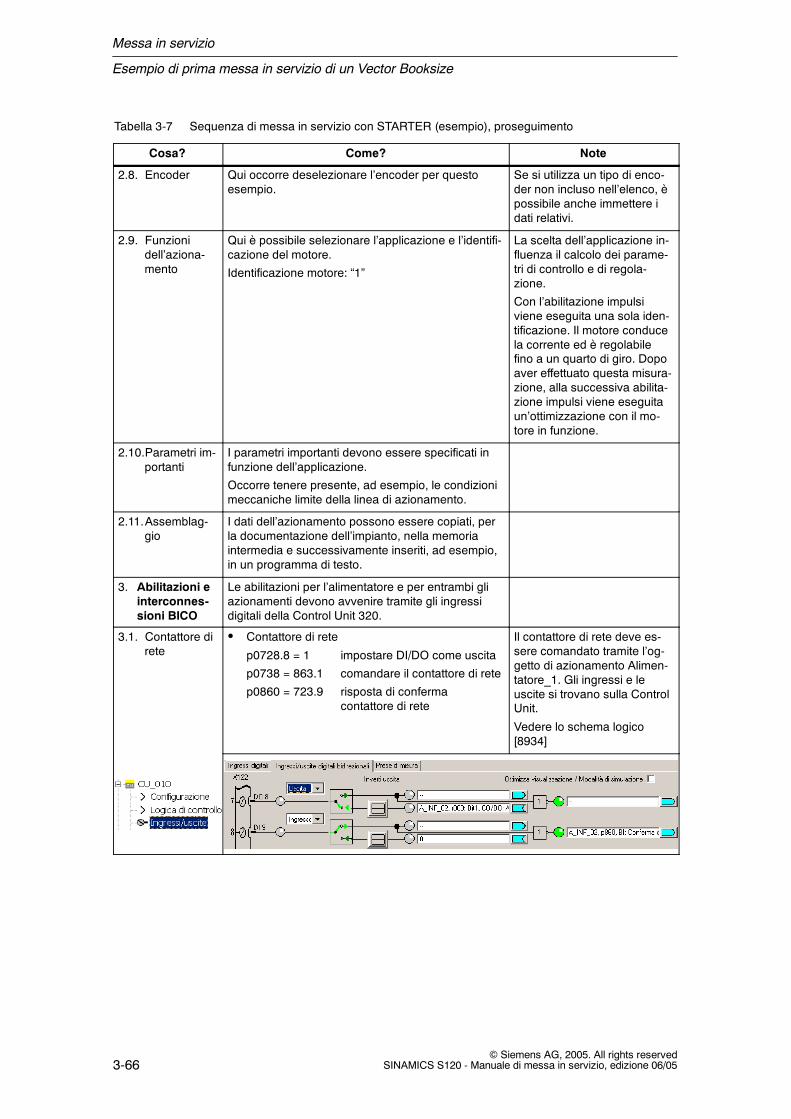
Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-66© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-7 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
2.8. Encoder Qui occorre deselezionare l’encoder per questoesempio.
Se si utilizza un tipo di enco-der non incluso nell’elenco, èpossibile anche immettere idati relativi.
2.9. Funzionidell’aziona-mento
Qui è possibile selezionare l’applicazione e l’identifi-cazione del motore.
Identificazione motore: “1”
La scelta dell’applicazione in-fluenza il calcolo dei parame-tri di controllo e di regola-zione.
Con l’abilitazione impulsiviene eseguita una sola iden-tificazione. Il motore conducela corrente ed è regolabilefino a un quarto di giro. Dopoaver effettuato questa misura-zione, alla successiva abilita-zione impulsi viene eseguitaun’ottimizzazione con il mo-tore in funzione.
2.10.Parametri im-portanti
I parametri importanti devono essere specificati infunzione dell’applicazione.
Occorre tenere presente, ad esempio, le condizionimeccaniche limite della linea di azionamento.
2.11.Assemblag-gio
I dati dell’azionamento possono essere copiati, perla documentazione dell’impianto, nella memoriaintermedia e successivamente inseriti, ad esempio,in un programma di testo.
3. Abilitazioni einterconnes-sioni BICO
Le abilitazioni per l’alimentatore e per entrambi gliazionamenti devono avvenire tramite gli ingressidigitali della Control Unit 320.
3.1. Contattore direte
S Contattore di rete
p0728.8 = 1 impostare DI/DO come uscita
p0738 = 863.1 comandare il contattore di rete
p0860 = 723.9 risposta di confermacontattore di rete
Il contattore di rete deve es-sere comandato tramite l’og-getto di azionamento Alimen-tatore_1. Gli ingressi e leuscite si trovano sulla ControlUnit.
Vedere lo schema logico[8934]

Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-67© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-7 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
3.2. AbilitazioneMotor Mo-dule
S Abilitazioni per il Motor Module (Azionamento_1)
p0840 = 722.0 ON/OFF1
p0844 = 722.1 1. OFF2
p0845 = 1 2. OFF2
p0848 = 722.2 1. OFF3
p0849 = 1 2. OFF3
p0852 = 722.3 abilitare l’azionamento
Vedere lo schema logico[2501]
3.3. Generatoredi rampa
Generatore di rampa
p1140 = 1 abilitazione generatore dirampa
p1141 = 1 generatore di rampa Start
p1142 = 1 abilitazione valore diriferimento
Vedere lo schema logico[3060]
3.4. Valore di rife-rimento
Impostare il valore di riferimento
p1001 = 40 valore di riferimento fisso 1
Vedere lo schema logico[3010]

Messa in servizio
Esempio di prima messa in servizio di un Vector Booksize
3-68© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-7 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
4. Memorizzare iparametrinell’apparec-chio
S Collegamento con il sistema di destinazione(passaggio online)
S Apparecchio di destinazione --> Carica nell’ap-parecchio di destinazione
S Apparecchio di destinazione -->Copia da RAM aROM
Fare clic con il pulsante de-stro del mouse sull’apparec-chio di azionamento(SINAMICS S120).
5. Avviamentodel motore
Gli azionamenti sono stati avviati tramite il pannellodi comando in STARTER.
S Quest’azione viene eseguita dopo aver eseguitol’abilitazione impulsi dell’alimentatore e dopoaver attivato l’identificazione della rete e del cir-cuito intermedio, dopodiché l’alimentatore passaallo stato di funzionamento.
S Dopo l’abilitazione impulsi viene eseguita unavolta l’identificazione dei dati del motore (se atti-vata).
S Dopo un’ulteriore abilitazione impulsi, viene ese-guita un’ottimizzazione con il motore in funzione(se attivata).
Per ulteriori informazioni sulpannello di comando, consul-tare il manuale Getting Star-ted.
Durante l’identificazione delmotore, il motore conduce lacorrente ed è regolabile fino aun quarto di giro.
Per ulteriori informazionisull’identificazione della rete,del circuito intermedio e delmotore, vedere il manualedelle funzioni.
Possibilità di diagnostica in STARTER
Sotto “Componente” --> Diagnostica --> Parole di comando/stato
S Parole di comando/stato
S Parametri di stato
S Abilitazioni mancanti

Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-69© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.6 Esempio di prima messa in servizio di un Vector Chassis
L’esempio di prima messa in servizio presentato in questo capitolo descrive tutte leconfigurazioni, le impostazioni dei parametri e i test necessari. La messa in servi-zio viene eseguita con il tool per la messa in servizio STARTER.
Requisiti per la messa in servizio
1. I requisiti per la messa in servizio sono soddisfatti
----> Vedere il capitolo 2.1
2. La lista di controllo per la messa in servizio è stata compilata e tutti i punti sonoOK.
----> Vedere il capitolo 2.2
3. STARTER è installato e pronto per il funzionamento
----> Vedere il file “Leggimi” sul CD di installazione di STARTER
4. L’alimentazione dell’elettronica (DC24 V) è inserita
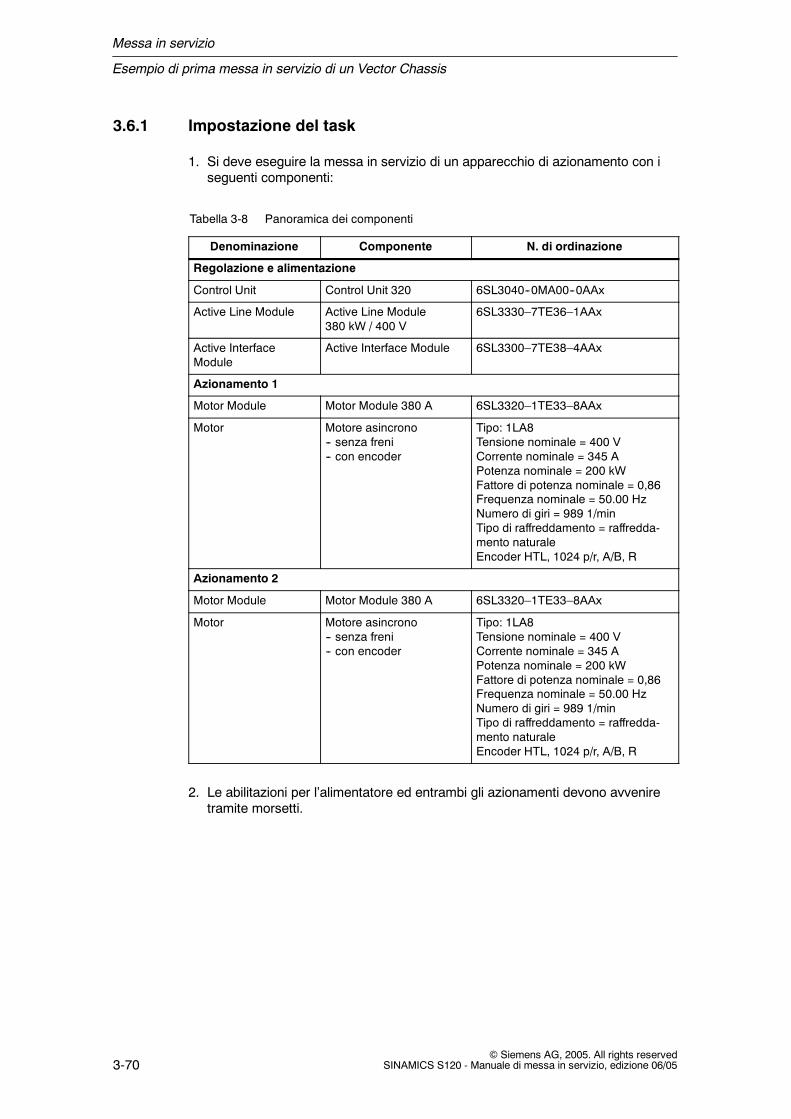
Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-70© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.6.1 Impostazione del task
1. Si deve eseguire la messa in servizio di un apparecchio di azionamento con iseguenti componenti:
Tabella 3-8 Panoramica dei componenti
Denominazione Componente N. di ordinazione
Regolazione e alimentazione
Control Unit Control Unit 320 6SL3040--0MA00--0AAx
Active Line Module Active Line Module380 kW / 400 V
6SL3330–7TE36–1AAx
Active InterfaceModule
Active Interface Module 6SL3300–7TE38–4AAx
Azionamento 1
Motor Module Motor Module 380 A 6SL3320–1TE33–8AAx
Motor Motore asincrono-- senza freni-- con encoder
Tipo: 1LA8Tensione nominale = 400 VCorrente nominale = 345 APotenza nominale = 200 kWFattore di potenza nominale = 0,86Frequenza nominale = 50.00 HzNumero di giri = 989 1/minTipo di raffreddamento = raffredda-mento naturaleEncoder HTL, 1024 p/r, A/B, R
Azionamento 2
Motor Module Motor Module 380 A 6SL3320–1TE33–8AAx
Motor Motore asincrono-- senza freni-- con encoder
Tipo: 1LA8Tensione nominale = 400 VCorrente nominale = 345 APotenza nominale = 200 kWFattore di potenza nominale = 0,86Frequenza nominale = 50.00 HzNumero di giri = 989 1/minTipo di raffreddamento = raffredda-mento naturaleEncoder HTL, 1024 p/r, A/B, R
2. Le abilitazioni per l’alimentatore ed entrambi gli azionamenti devono avveniretramite morsetti.
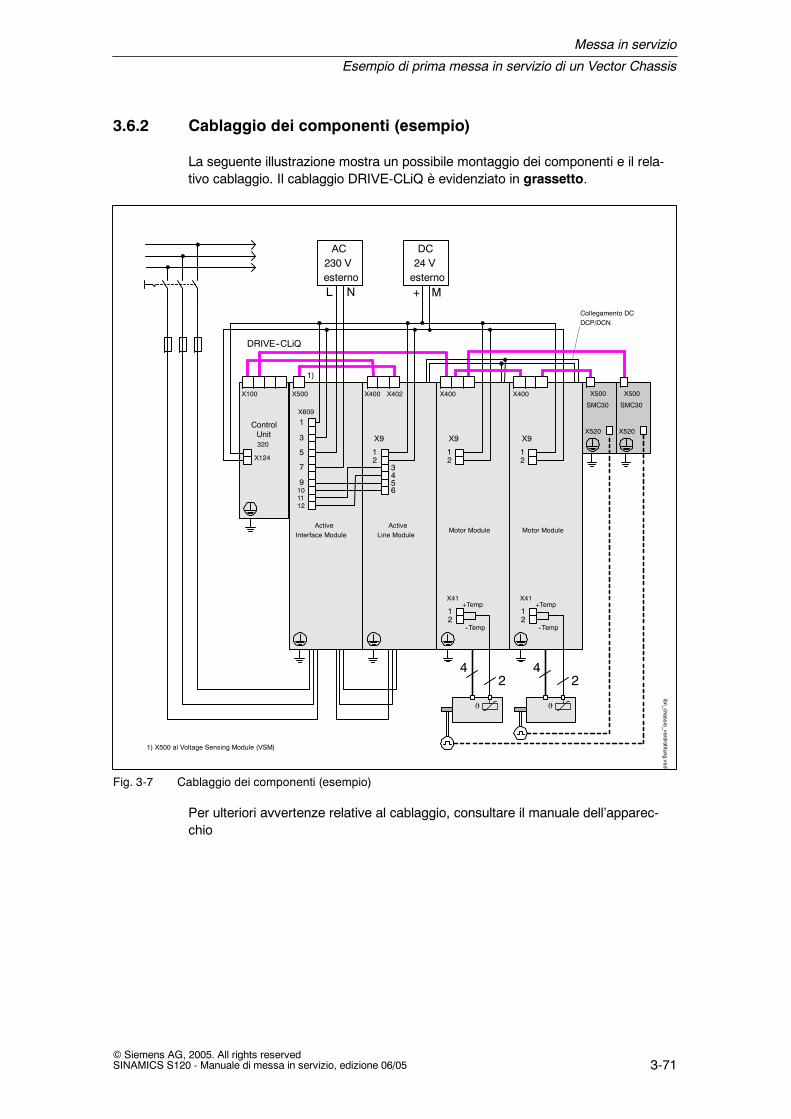
Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-71© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.6.2 Cablaggio dei componenti (esempio)
La seguente illustrazione mostra un possibile montaggio dei componenti e il rela-tivo cablaggio. Il cablaggio DRIVE-CLiQ è evidenziato in grassetto.
DRIVE--CLiQ
2 1SH
X124
X100
ControlUnit320
ActiveInterface Module
X500
Motor Module
X400
ActiveLine Module
X400
X609
1
3 X9
5
7
9101112
AC230 Vesterno
6543
21
X9
21
DC24 Vesterno
X402
Collegamento DCDCP/DCN
+ M
ibn_chassis_verdrahtung.vsd
L N
X41
21
+Temp
--Temp
1)
1) X500 al Voltage Sensing Module (VSM)
2 1SH
Motor Module
X400
X9
21
X41
21
+Temp
--Temp
ϑ ϑ
42
42
SMC30
X500
X520
SMC30
X500
X520
Fig. 3-7 Cablaggio dei componenti (esempio)
Per ulteriori avvertenze relative al cablaggio, consultare il manuale dell’apparec-chio
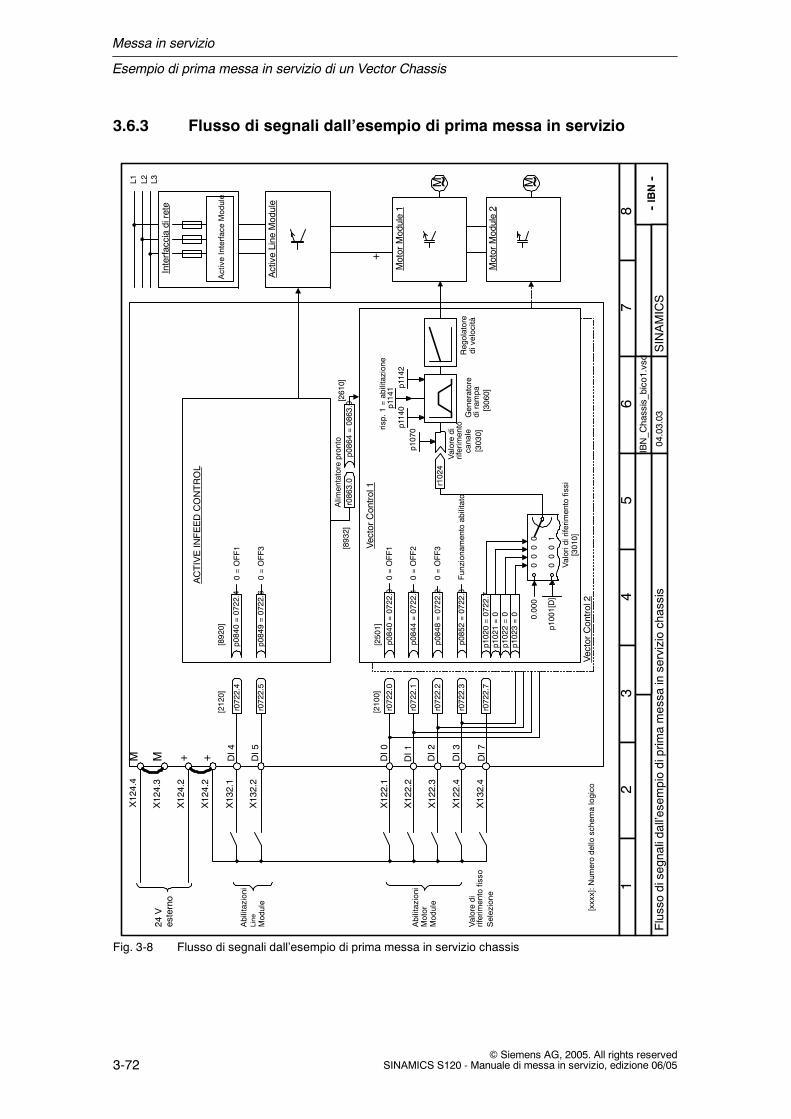
Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-72© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.6.3 Flusso di segnali dall’esempio di prima messa in servizio
MotorModule2 --IBN--
87
65
43
21
IBN_C
hassis_bico1.vsd
SINAMICS
04.03.03
Flussodisegnalidall’esempiodiprimamessa
inserviziochassis
++M M
X124.4
X124.3
24V
esterno
DI5
DI0
DI1
DI2
DI3
DI4
Abilitazioni
Motor
Module
Abilitazioni
Line
Module
X124.2
X124.2
X132.1
X132.2
X122.1
X122.2
X122.3
X122.4
p0852=0722.3
p0848=0722.2
p0844=0722.1
p0840=0722.0
p0849=0722.6
p0840=0722.4
r0722.4
r0722.5
r0722.0
r0722.1
r0722.2
r0722.3
0=OFF
3
Funzionamentoabilitato
0=OFF
2
0=OFF
1
0=OFF
1
0=OFF
3
ACTIVEINFEEDCONTROL
VectorControl1
M ~Regolatore
Generatore
p1140
p1142
p1141
risp.1=abilitazione
p0864=0863.0
Alim
entatorepronto
r0863.0
+
L1 L2 L3Interfacciadirete
[8920]
[2120]
[3060]
[2501]
[2610]
[8932]
[2100]
[xxxx]:N
umerodello
schemalogico
p1070
Valoredi
canale
[3030]
MotorModule1
ActiveLine
Module
r1024
p1001[D]
0.000
0000
0001
p1020=0722.7
r0722.7
p1021=0
p1022=0
p1023=0
Valoridiriferimentofissi
[3010]
Valoredi
Selezione
DI7
X132.4
ActiveInterface
Module
VectorControl2
M ~
dirampa
divelocità
riferimentofisso
riferimento
Fig. 3-8 Flusso di segnali dall’esempio di prima messa in servizio chassis
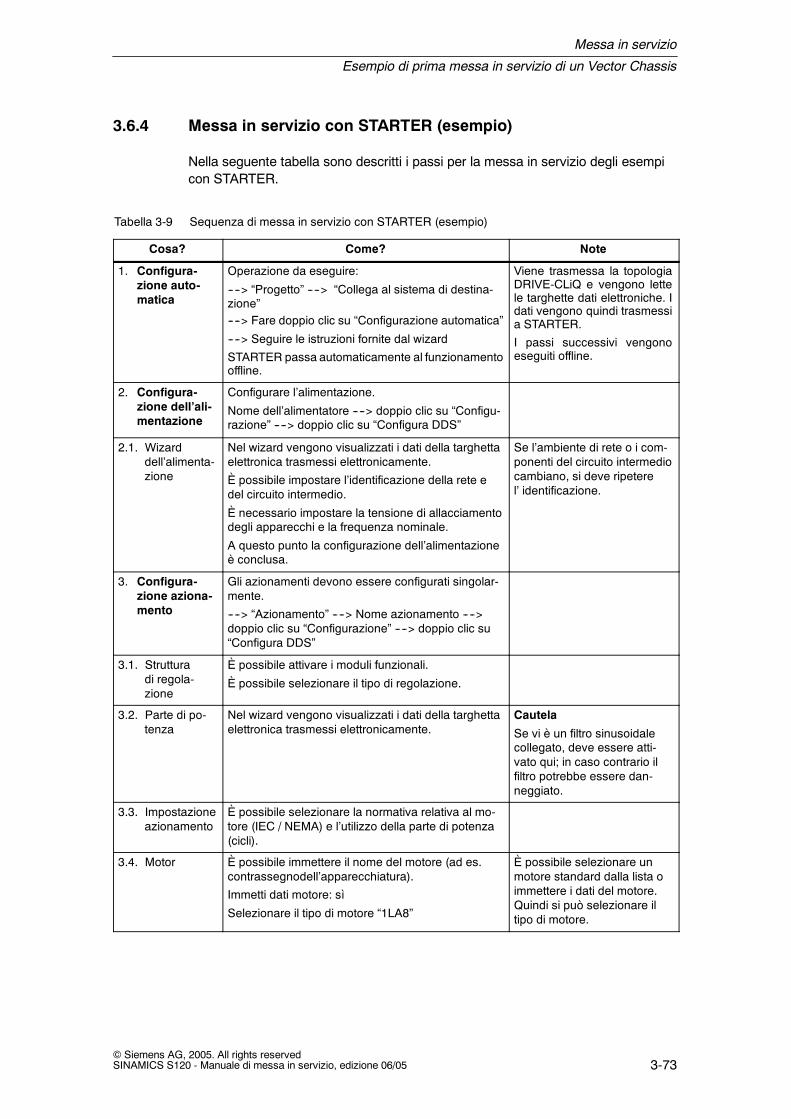
Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-73© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.6.4 Messa in servizio con STARTER (esempio)
Nella seguente tabella sono descritti i passi per la messa in servizio degli esempicon STARTER.
Tabella 3-9 Sequenza di messa in servizio con STARTER (esempio)
Cosa? Come? Note
1. Configura-zione auto-matica
Operazione da eseguire:
----> “Progetto” ----> “Collega al sistema di destina-zione”----> Fare doppio clic su “Configurazione automatica”
----> Seguire le istruzioni fornite dal wizard
STARTER passa automaticamente al funzionamentooffline.
Viene trasmessa la topologiaDRIVE-CLiQ e vengono lettele targhette dati elettroniche. Idati vengono quindi trasmessia STARTER.
I passi successivi vengonoeseguiti offline.
2. Configura-zione dell’ali-mentazione
Configurare l’alimentazione.
Nome dell’alimentatore ----> doppio clic su “Configu-razione” ----> doppio clic su “Configura DDS”
2.1. Wizarddell’alimenta-zione
Nel wizard vengono visualizzati i dati della targhettaelettronica trasmessi elettronicamente.
È possibile impostare l’identificazione della rete edel circuito intermedio.
È necessario impostare la tensione di allacciamentodegli apparecchi e la frequenza nominale.
A questo punto la configurazione dell’alimentazioneè conclusa.
Se l’ambiente di rete o i com-ponenti del circuito intermediocambiano, si deve ripeterel’ identificazione.
3. Configura-zione aziona-mento
Gli azionamenti devono essere configurati singolar-mente.
----> “Azionamento” ----> Nome azionamento ---->doppio clic su “Configurazione” ----> doppio clic su“Configura DDS”
3.1. Strutturadi regola-zione
È possibile attivare i moduli funzionali.
È possibile selezionare il tipo di regolazione.
3.2. Parte di po-tenza
Nel wizard vengono visualizzati i dati della targhettaelettronica trasmessi elettronicamente.
Cautela
Se vi è un filtro sinusoidalecollegato, deve essere atti-vato qui; in caso contrario ilfiltro potrebbe essere dan-neggiato.
3.3. Impostazioneazionamento
È possibile selezionare la normativa relativa al mo-tore (IEC / NEMA) e l’utilizzo della parte di potenza(cicli).
3.4. Motor È possibile immettere il nome del motore (ad es.contrassegnodell’apparecchiatura).
Immetti dati motore: sì
Selezionare il tipo di motore “1LA8”
È possibile selezionare unmotore standard dalla lista oimmettere i dati del motore.Quindi si può selezionare iltipo di motore.

Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-74© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-9 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
3.5. Dati del mo-tore
Qui si immettono i dati del motore indicati sulla tar-ghetta di identificazione.
Se sono noti, si possono immettere i dati meccanicidel motore e della linea di azionamenti.
Dati del circuito equivalente: no
Se non vengono immessi datimeccanici, essi vengono sti-mati sulla base dei dati ripor-tati sulla targhetta.
Anche i dati del circuito equi-valente vengono stimati inbase ai dati riportati sulla tar-ghetta di identificazione o tra-mite l’identificazione automa-tica dei dati del motore.
3.6. Frenomotore
Qui è possibile configurare il freno e attivare il mo-dulo funzionale “Comando di frenatura esteso”.
Per ulteriori informazioni: ve-dere il manuale delle funzioni.
3.7. Encoder Selezionare un encoder standard dall’elenco: sì
Selezionare “1024 HTL A/B R an X521/X531”
Se si utilizza un tipo di enco-der non incluso nell’elenco, èpossibile anche immettere idati relativi.
3.8. Funzionidell’aziona-mento
Qui è possibile selezionare l’applicazione e l’identifi-cazione del motore.
Identificazione motore: “1”
La scelta dell’applicazione in-fluenza il calcolo dei parame-tri di controllo e di regola-zione.
Con l’abilitazione impulsiviene eseguita una sola iden-tificazione. Il motore conducela corrente ed è regolabilefino a un quarto di giro. Dopoaver effettuato questa misura-zione, alla successiva abilita-zione impulsi viene eseguitaun’ottimizzazione con il mo-tore in funzione.
3.9. Parametri im-portanti
I parametri importanti devono essere specificati infunzione dell’applicazione.
Occorre tenere presente, ad esempio, le condizionimeccaniche limite della linea di azionamento.
3.10.Assemblag-gio
I dati dell’azionamento possono essere copiati, perla documentazione dell’impianto, nella memoriaintermedia e successivamente inseriti, ad esempio,in un programma di testo.
4. Abilitazioni einterconnes-sioniBICO
Le abilitazioni per l’alimentatore e per entrambi gliazionamenti devono avvenire tramite gli ingressidigitali della Control Unit 320.
Nota:
se è presente un Active LineModule, non utilizzare lastessa sorgente del segnaleper l’abilitazione dell’alimenta-tore e degli azionamenti.
Vedere anche: Fig. 3-8
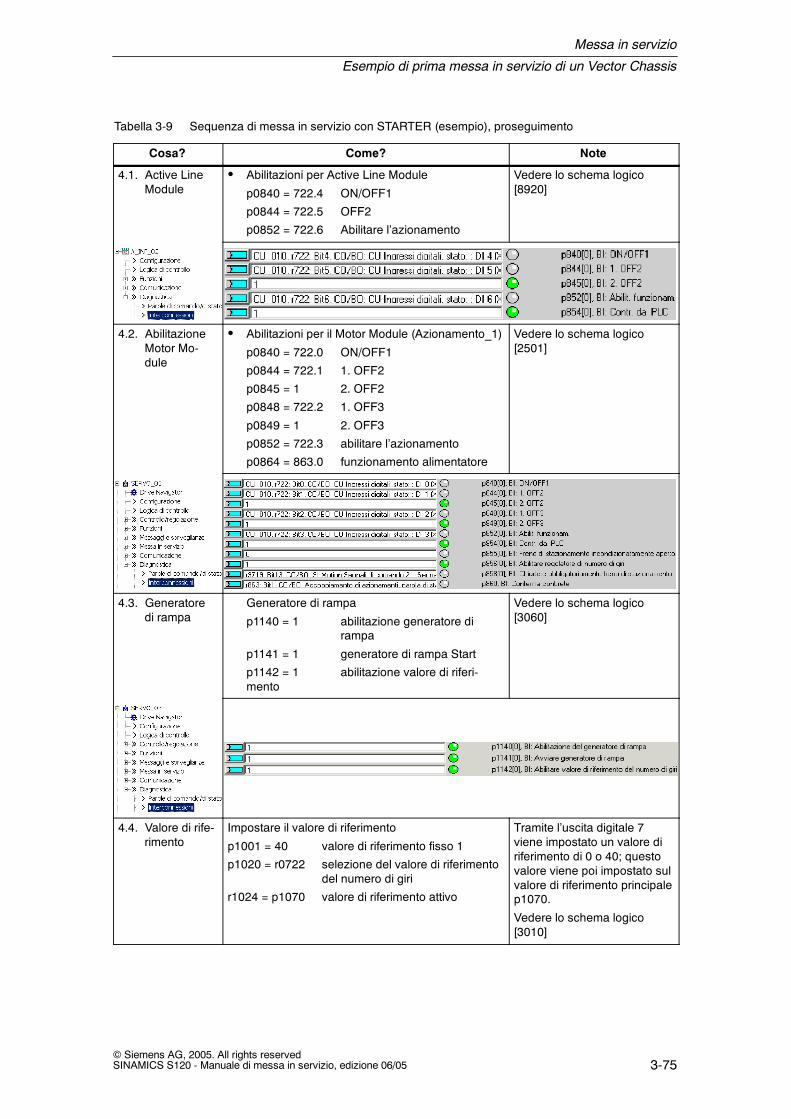
Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-75© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-9 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
4.1. Active LineModule
S Abilitazioni per Active Line Module
p0840 = 722.4 ON/OFF1
p0844 = 722.5 OFF2
p0852 = 722.6 Abilitare l’azionamento
Vedere lo schema logico[8920]
4.2. AbilitazioneMotor Mo-dule
S Abilitazioni per il Motor Module (Azionamento_1)
p0840 = 722.0 ON/OFF1
p0844 = 722.1 1. OFF2
p0845 = 1 2. OFF2
p0848 = 722.2 1. OFF3
p0849 = 1 2. OFF3
p0852 = 722.3 abilitare l’azionamento
p0864 = 863.0 funzionamento alimentatore
Vedere lo schema logico[2501]
4.3. Generatoredi rampa
Generatore di rampa
p1140 = 1 abilitazione generatore dirampa
p1141 = 1 generatore di rampa Start
p1142 = 1 abilitazione valore di riferi-mento
Vedere lo schema logico[3060]
4.4. Valore di rife-rimento
Impostare il valore di riferimento
p1001 = 40 valore di riferimento fisso 1
p1020 = r0722 selezione del valore di riferimentodel numero di giri
r1024 = p1070 valore di riferimento attivo
Tramite l’uscita digitale 7viene impostato un valore diriferimento di 0 o 40; questovalore viene poi impostato sulvalore di riferimento principalep1070.
Vedere lo schema logico[3010]

Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-76© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-9 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
4.5. Temperaturadel motore
Selezione del sensore di temperatura: tramite MotorModule (11)
Tipo di sensore di temperatura: KTY84 (2)
Reazione in caso di sovratemperatura: avviso eanomalia (nessuna riduzione di Imax)
Segnalazione di anomalia in caso di un guasto delsensore: ON
Tempo di ritardo: 0,100 s
Soglia di avviso: 120,0 °C
Soglia di anomalia: 155,0 °C
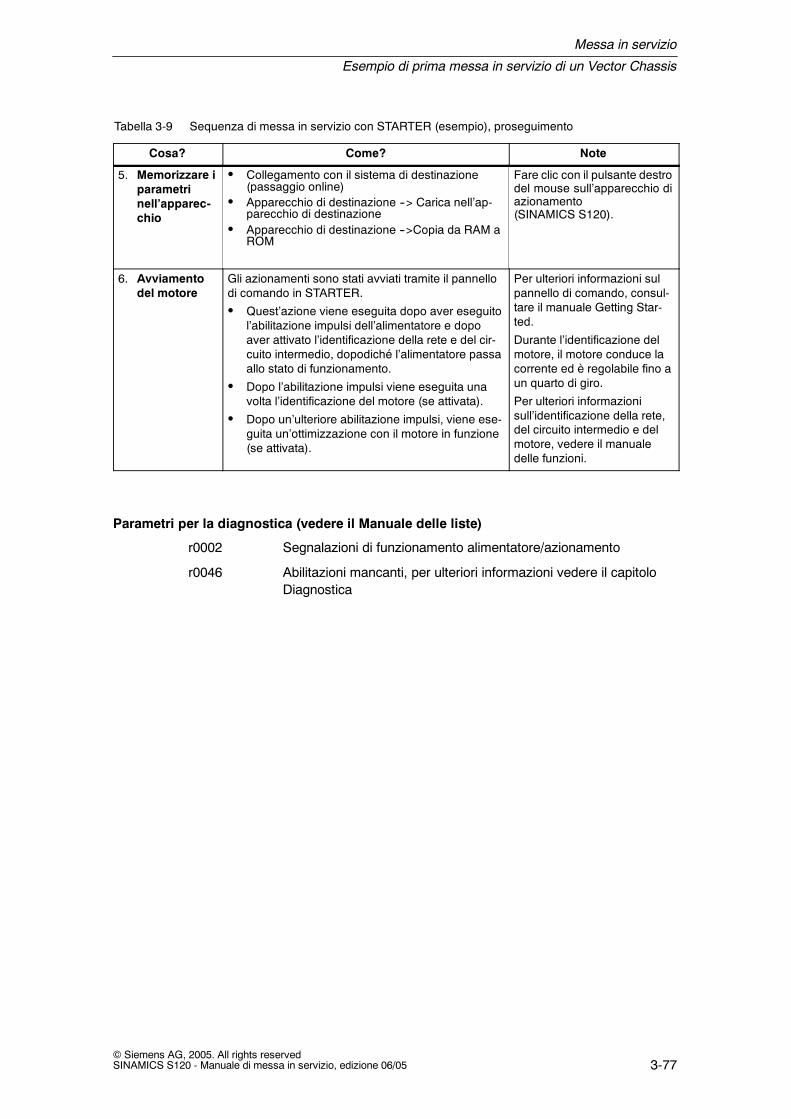
Messa in servizio
Esempio di prima messa in servizio di un Vector Chassis
3-77© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 3-9 Sequenza di messa in servizio con STARTER (esempio), proseguimento
Cosa? NoteCome?
5. Memorizzare iparametrinell’apparec-chio
S Collegamento con il sistema di destinazione(passaggio online)
S Apparecchio di destinazione --> Carica nell’ap-parecchio di destinazione
S Apparecchio di destinazione -->Copia da RAM aROM
Fare clic con il pulsante destrodel mouse sull’apparecchio diazionamento(SINAMICS S120).
6. Avviamentodel motore
Gli azionamenti sono stati avviati tramite il pannellodi comando in STARTER.
S Quest’azione viene eseguita dopo aver eseguitol’abilitazione impulsi dell’alimentatore e dopoaver attivato l’identificazione della rete e del cir-cuito intermedio, dopodiché l’alimentatore passaallo stato di funzionamento.
S Dopo l’abilitazione impulsi viene eseguita unavolta l’identificazione del motore (se attivata).
S Dopo un’ulteriore abilitazione impulsi, viene ese-guita un’ottimizzazione con il motore in funzione(se attivata).
Per ulteriori informazioni sulpannello di comando, consul-tare il manuale Getting Star-ted.
Durante l’identificazione delmotore, il motore conduce lacorrente ed è regolabile fino aun quarto di giro.
Per ulteriori informazionisull’identificazione della rete,del circuito intermedio e delmotore, vedere il manualedelle funzioni.
Parametri per la diagnostica (vedere il Manuale delle liste)
r0002 Segnalazioni di funzionamento alimentatore/azionamento
r0046 Abilitazioni mancanti, per ulteriori informazioni vedere il capitoloDiagnostica
Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-78© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.7 Avvertenze per la messa in servizio dei motori lineari(Servo)
3.7.1 Informazioni per la messa in servizio dei motori lineari
Prima della messa in servizio dei motori, rispondere alle seguenti domande:
S Sono stati rispettati i requisiti per la messa in servizio e sono stati controllati ipunti della lista di controllo per la messa in servizio (vedere il capitolo 2)?
Per informazioni dettagliate sui motori lineari, sui collegamenti degli encoder edella potenza, sulla progettazione e sul montaggio consultare la:
/PJLM/ Manuale di progettazione Motori lineari 1FN1, 1FN3
Confronto dei concetti relativi agli azionamenti rotatori e lineari
Tabella 3-10 Confronto
concetti relativi agli azionamenti rotatori concetti relativi agli azionamenti lineari
numero di giri velocità
coppia forza
statore Parte primaria
rotore parte secondaria
rotore parte secondaria
senso di rotazione direzione
tacca passo del reticolo
gira si sposta
Verifiche in condizione di assenza di corrente
Possono essere eseguite le seguenti verifiche:
1. Motore lineare
-- Quale motore lineare viene utilizzato?
1FN _ _ _ _ -- _ _ _ _ _ -- _ _ _ _
-- Il motore è montato e pronto all’inserzione?
-- Il circuito di raffreddamento eventualmente presente è funzionante?
2. Meccanica
-- L’asse è libero di spostarsi in tutto il campo di movimento?
-- Il traferro tra la parte primaria e la secondaria o le dimensioni di montaggiocorrispondono ai dati del costruttore del motore?

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-79© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
-- Asse appeso:è presente ed attivo un eventuale bilanciamento dell’asse?
-- Freno:viene comandato correttamente il freno eventualmente presente (vedere ilmanuale delle funzioni)?
-- Limitazione del campo di movimento:sono presenti e correttamente fissati i finecorsa di battuta meccanici ad en-trambe le estremità del percorso?
-- I cavi mobili sono posati correttamente nella catena portacavi?
3. supplementare
-- Quale sistema di misura è disponibile?
_ _ _ _ _ _ _ _ _ _ _ _
assoluto o incrementale ass j incr j
passo del reticolo_ _ _ _ _ _ _ _ _ _ µm
tacche di zero (numero e posizione)_ _ _ _ _ _ _ _ _ _ _ _
-- Qual è la direzione positiva dell’azionamento?Qual è la direzione di conteggio del sistema di misura?
Eseguire l’inversione (p0410)? sì j no j
4. Cablaggio
-- Parte di potenza (collegamento UVW, sequenza fasi, campo rotante de-strorso)
-- Collegato il cavo di terra?
-- È stata fissata la schermatura?
-- Circuito sorveglianza temperatura:I conduttori sono collegati alla morsettiera di collegamento degli schermi?
----> Sonda di temperatura (Temp-F):Con la sonda di temperatura (Temp-F) può essere misuratain modo assoluto la temperatura media degli avvolgimenti.
----> Interruttore di sovratemperatura (Temp-S)Il circuito di disinserzione per sovratemperatura (Temp-S) consenteuna sorveglianza digitale della sovratemperatura di ogni singola fasedel motore.

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-80© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
!Pericolo di morte
I circuiti di corrente di Temp-F e Temp-S non sono certificati per una “separazioneelettrica sicura” secondo VDE 0160/EN 50178 né l’uno rispetto all’altro né rispettoai circuiti di potenza.
Quindi essi non possono essere considerati come anello di corrente SELV/PELV enemmeno possono essere collegati a questi circuiti.
A questo proposito vedere anche il /PJLM/Manuale di progettazione Motori lineari1FN1, 1FN3
-- Rilevamento sensore di temperatura
5. Collegamento sistema encoderIl sistema encoder è collegato correttamente a SINAMICS?
3.7.2 Messa in servizio: motore lineare con una parte primaria
Procedimento per la messa in servizio con STARTER
!Pericolo di morte
I motori lineari possono raggiungere accelerazioni e velocità sensibilmentesuperiori rispetto ai motori convenzionali.
Per evitare pericoli per le persone e per le macchine, il campo di movimento deveessere sempre lasciato libero.

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-81© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Messa in servizio del motore con STARTER
1. Scelta del tipo di motore
È possibile selezionare un motore standard dalla lista o immettere i dati se sitratta di un motore di altro fornitore.È necessario immettere il numero di parti primarie parallele (p0306).
Fig. 3-9 Maschera Motore di STARTER
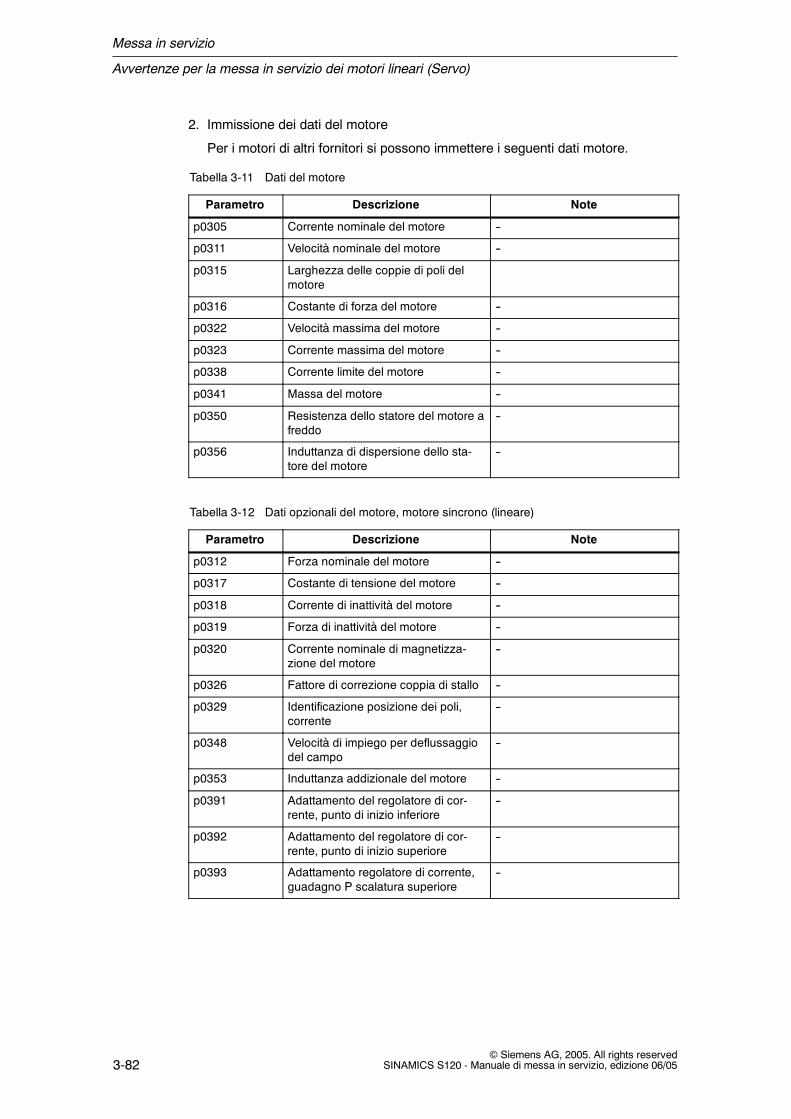
Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-82© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
2. Immissione dei dati del motore
Per i motori di altri fornitori si possono immettere i seguenti dati motore.
Tabella 3-11 Dati del motore
Parametro Descrizione Note
p0305 Corrente nominale del motore --
p0311 Velocità nominale del motore --
p0315 Larghezza delle coppie di poli delmotore
p0316 Costante di forza del motore --
p0322 Velocità massima del motore --
p0323 Corrente massima del motore --
p0338 Corrente limite del motore --
p0341 Massa del motore --
p0350 Resistenza dello statore del motore afreddo
--
p0356 Induttanza di dispersione dello sta-tore del motore
--
Tabella 3-12 Dati opzionali del motore, motore sincrono (lineare)
Parametro Descrizione Note
p0312 Forza nominale del motore --
p0317 Costante di tensione del motore --
p0318 Corrente di inattività del motore --
p0319 Forza di inattività del motore --
p0320 Corrente nominale di magnetizza-zione del motore
--
p0326 Fattore di correzione coppia di stallo --
p0329 Identificazione posizione dei poli,corrente
--
p0348 Velocità di impiego per deflussaggiodel campo
--
p0353 Induttanza addizionale del motore --
p0391 Adattamento del regolatore di cor-rente, punto di inizio inferiore
--
p0392 Adattamento del regolatore di cor-rente, punto di inizio superiore
--
p0393 Adattamento regolatore di corrente,guadagno P scalatura superiore
--
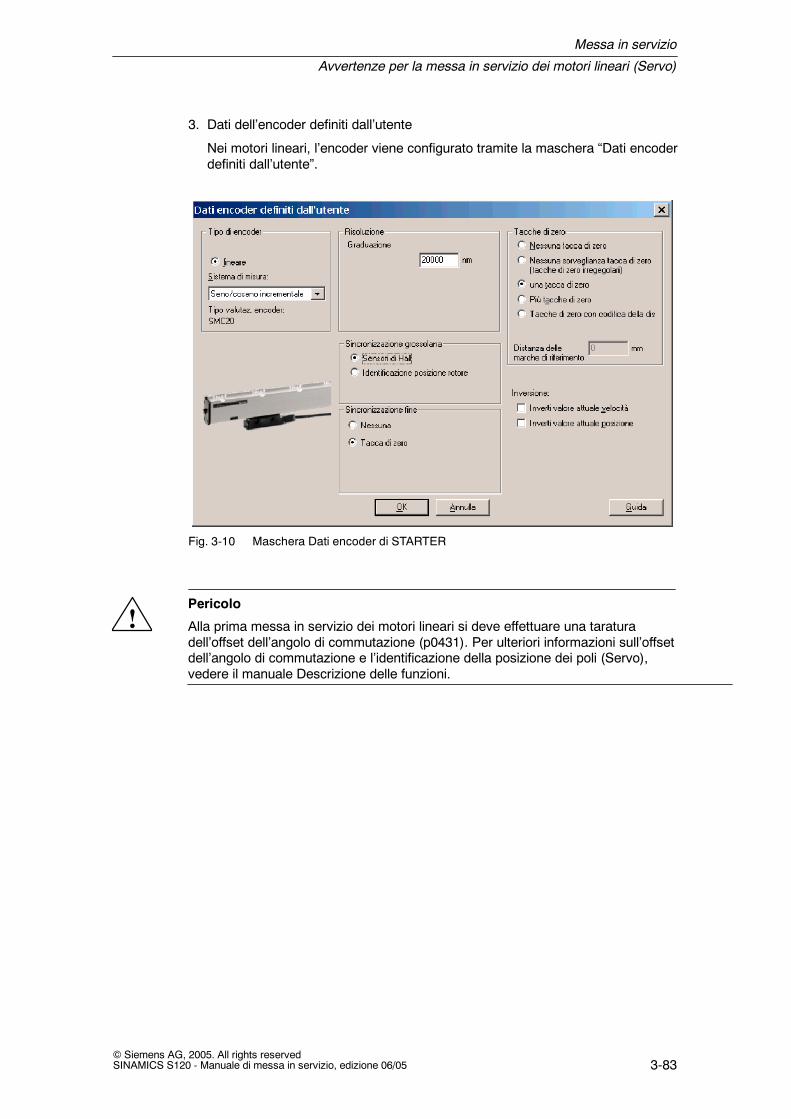
Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-83© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3. Dati dell’encoder definiti dall’utente
Nei motori lineari, l’encoder viene configurato tramite la maschera “Dati encoderdefiniti dall’utente”.
Fig. 3-10 Maschera Dati encoder di STARTER
!Pericolo
Alla prima messa in servizio dei motori lineari si deve effettuare una taraturadell’offset dell’angolo di commutazione (p0431). Per ulteriori informazioni sull’offsetdell’angolo di commutazione e l’identificazione della posizione dei poli (Servo),vedere il manuale Descrizione delle funzioni.

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-84© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.7.3 Messa in servizio: motori lineari con piùparti primarie uguali
Informazioni generali
Se si è certi che la FEM di più motori abbia la stessa posizione di fase, i cavi dicollegamento, collegati in parallelo, possono funzionare su un unico azionamento.
La messa in servizio dei motori lineari in parallelo si basa fondamentalmente sullamessa in servizio di un motore lineare singolo. Il numero di parti primarie collegatein parallelo viene immesso nella maschera “Motore” di STARTER durante la confi-gurazione dell’azionamento (p0306).
Dapprima viene collegato all’azionamento solo un motore lineare (motore 1) emesso in servizio come motore singolo (1FNx...). In questo contesto viene rilevatoe annotato automaticamente l’offset dell’angolo di commutazione.
Quindi vengono collegati e messi in servizio, al posto del motore 1, i motori suc-cessivi come singoli motori. Anche in questo caso viene rilevato e annotato l’offsetdell’angolo di commutazione automaticamente.
Se la differenza tra l’offset dell’angolo di commutazione del motore 1 e del motoresuccessivo è più piccola di 10 gradi elettrici, entrambi i motori possono essere col-legati in parallelo all’azionamento e messi in servizio per il funzionamento conil collegamento in parallelo di n motori lineari (ad es. 2 S 1FN1xxx).
Nota
Si possono collegare in parallelo solo motori lineari identici (stessa forza, tipo diavvolgimento, tipo di parti secondarie e traferro). (La sigla d’ordinazione dellaparte primaria inserita in parallelo deve essere identica per quanto concerne ilsenso d’avvolgimento e/o lunghezza della parte primaria.)
Se i motori lineari sono collegati in parallelo su un asse, la posizione delle partiprimarie tra di loro e rispetto alle parti secondarie deve presentare un reticolodefinito per raggiungere una posizione delle fasi elettricamente concordante.
Per ulteriori informazioni consultare il: /PJLM/ Manuale di progettazione Motorilineari 1FN1, 1FN3

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-85© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Sensore di temperatura e cablaggio elettrico
I sensori di temperatura possono essere valutati ad es. come descritto di seguito:
S Sensore di temperatura
-- Motore 1: valutazione con l’azionamento
-- Motore n: non collegato(messo in corto circuito e collegato con il PE)
S Interruttore di temperatura
-- Motore da 1 a n: valutazione con PLC
Vedere anche: /PJLM/ Manuale di progettazione Motori lineari 1FN1, 1FN3.
!Pericolo
In fase di inserzione del circuito di sorveglianza della temperatura, si osservino leprescrizioni per la separazione elettrica in sicurezza in conformità a quantoprevisto dalla DIN EN 50178.
Vedere anche: /PJLM/ Manuale di progettazione Motori lineari 1FN1, 1FN3.
3.7.4 Protezione termica del motore
Descrizione
Per proteggere il motore termicamente sono disponibili, nelle parti primarie dei mo-tori 1FN1, 1FN3, due circuiti di sorveglianza indipendenti.
Con la pastiglia termica (Temp-F), composta da un sensore di temperatura(KTY 84), può essere misurata la temperatura media dell’avvolgimento in modoassoluto.
Il circuito di disinserzione per temperatura (Temp-S) permette una sorveglianzadigitale della temperatura di ogni singola fase dell’avvolgimento motore.
I due circuiti di temperatura indipendenti Temp-F e Temp-S possono essere utiliz-zati singolarmente o insieme per la protezione del motore. Per proteggere dallasovratemperatura il motore, deve essere utilizzato per lo meno il circuito Temp-S.
La tecnica di commutazione e di collegamento di Temp-F e Temp-S è descritta det-tagliatamente nel: /PJLM/ Manuale di progettazione Motori lineari 1FN1, 1FN3.
!Pericolo di morte
I circuiti di corrente per Temp-F e Temp-S non sono certificati per una“separazione elettrica sicura” secondo VDE 0160/EN 50178 né l’uno rispettoall’altro né rispetto ai circuiti di potenza.

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-86© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
!Pericolo di morte
Per proteggere termicamente il motore, deve venire collegato il Temp-S; unmancato collegamento del Temp-S non è ammesso!
Temp-F può venire collegato opzionalmente ad un’apparecchiatura di misura infase di messa in servizio o a scopo di test.
Nel funzionamento normale, i conduttori del Temp-F vanno cortocircuitati ecollegato al punto PE.
Nota
Il sensore di temperatura (Temp-F) rileva solo la temperatura dell’avvolgimento diuna fase della parte primaria. Tuttavia, le fasi nel motore sincrono vengonocaricate differentemente, cosicché -- nel caso più sfavorevole -- le fasi che nonvengono misurate presentano temperature più elevate.
Nota
Con la separazione elettrica in sicurezza non è ammesso un collegamento delTemp-F a un Sensor Module del sistema di azionamento SINAMICS se non siutilizza un modulo di protezione idoneo.
Per la gestione ed il cablaggio del sensore Temp-F si deve presumere che, conl’azionamento inserito, sui morsetti lato motore e sui collegamenti del sensorestesso possano essere presenti tensioni pericolose -- l’azionamento deve esserequindi sempre disinserito e non essere sotto tensione.
Nota
Con la separazione elettrica sicura non è ammesso un collegamento del Temp S alPLC o a un Sensor Module del sistema di azionamento SINAMICS se non siutilizza una protezione motore a termistore 3RN1013--1BW10 o un modulo diprotezione idoneo.
Per la gestione ed il cablaggio del sensore Temp-S si deve presumere che, conazionamento inserito, sui morsetti lato motore e sui collegamenti del sensorestesso possano essere presenti tensioni pericolose; l’azionamento deve esserequindi sempre disinserito e senza tensione.
Avvertenze sul rilevamento dei sensori di temperatura
Vedere in proposito: /PJLM/ Manuale di progettazione Motori lineari 1FN1, 1FN3.

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-87© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3.7.5 Sistema di misura esterno
Rilevamento del senso di regolazione
Il senso di regolazione di un asse è corretto se la direzione positiva dell’aziona-mento (= campo rotante destrorso U, V, W) concorda con la direzione di conteggiopositiva del sistema di misura.
Nota
I dati per la determinazione della direzione del motore valgono solo per i motoriSiemens (motori 1FNx).Se la direzione positiva dell’azionamento e la direzione positiva di conteggio delsistema di misura non concordano, bisogna invertire il valore attuale del numerodi giri (p0410.0) durante la messa in servizio.Il senso di regolazione può anche essere verificato parametrizzando dapprimal’azionamento, quindi spostandolo manualmente con le abilitazioni disattivate.Se l’asse viene spostato in direzione positiva, anche il valore attuale di velocitàdeve contare in senso positivo.
Rilevamento della direzione dell’azionamento
La direzione del motore è positiva se la parte primaria si muove, rispetto alla partesecondaria, in senso contrario alla direzione di uscita del cavo.
Parte secondaria (magneti)
+
Parte secondaria (magneti) +
Parte primaria Direzione di uscita del cavo
Parte primaria Direzione di uscita del cavo
N -- polo nord
N -- polo nord
Fig. 3-11 Determinazione della direzione positiva del motore
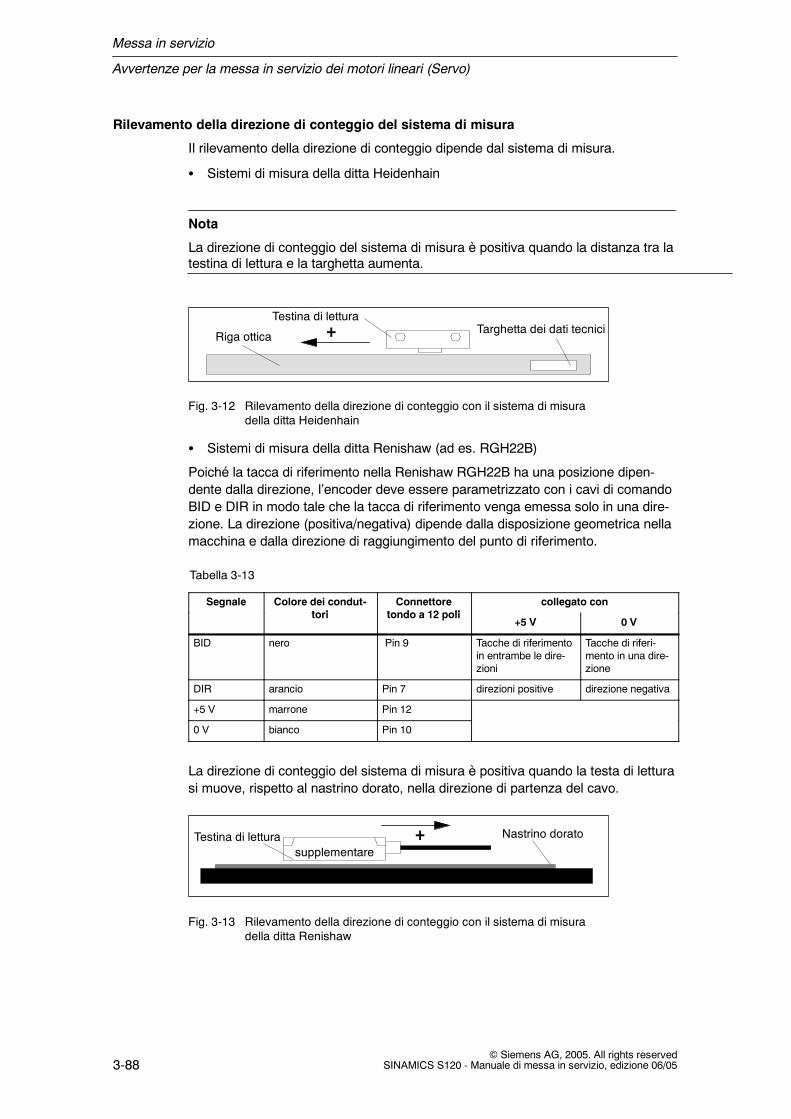
Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-88© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Rilevamento della direzione di conteggio del sistema di misura
Il rilevamento della direzione di conteggio dipende dal sistema di misura.
S Sistemi di misura della ditta Heidenhain
Nota
La direzione di conteggio del sistema di misura è positiva quando la distanza tra latestina di lettura e la targhetta aumenta.
Testina di letturaTarghetta dei dati tecnici
Riga ottica +
Fig. 3-12 Rilevamento della direzione di conteggio con il sistema di misuradella ditta Heidenhain
S Sistemi di misura della ditta Renishaw (ad es. RGH22B)
Poiché la tacca di riferimento nella Renishaw RGH22B ha una posizione dipen-dente dalla direzione, l’encoder deve essere parametrizzato con i cavi di comandoBID e DIR in modo tale che la tacca di riferimento venga emessa solo in una dire-zione. La direzione (positiva/negativa) dipende dalla disposizione geometrica nellamacchina e dalla direzione di raggiungimento del punto di riferimento.
Tabella 3-13
Segnale Colore dei condut-tori
Connettoreto do a 12 poli
collegato contori tondo a 12 poli
+5 V 0 V
BID nero Pin 9 Tacche di riferimentoin entrambe le dire-zioni
Tacche di riferi-mento in una dire-zione
DIR arancio Pin 7 direzioni positive direzione negativa
+5 V marrone Pin 12
0 V bianco Pin 10
La direzione di conteggio del sistema di misura è positiva quando la testa di letturasi muove, rispetto al nastrino dorato, nella direzione di partenza del cavo.
Nastrino doratoTestina di letturasupplementare
+
Fig. 3-13 Rilevamento della direzione di conteggio con il sistema di misuradella ditta Renishaw

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-89© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Se la testina di lettura è collegata meccanicamente con la parte primaria, ladirezione di uscita del cavo deve essere differente. Altrimenti invertire il valoreattuale!
3.7.6 Verifica delle misure tecniche dei motori lineari
Perché misurare?
Se il motore lineare è stato messo in servizio secondo le istruzioni e si riscontranotuttavia messaggi d’errore inspiegabili, tutti i segnali devono essere verificati conl’aiuto di un oscilloscopio.
Verificare la sequenza delle fasi U-V-W
Con le parti primarie collegate in parallelo, la FEM_U del motore 1 deve essere infase con la FEM_U del motore 2. La stessa cosa vale per la FEM_V la FEM_W.A questo scopo, eseguire una verifica metrologica.
Procedura per la verifica delle misure:
S Disinserire dalla rete il gruppo di azionamenti.
S Attenzione: attendere il tempo di scarica del circuito intermedio!
S Fissare i cavi di potenza sull’azionamento.Separare un eventuale collegamento in parallelo delle parti primarie
S Formare il centro stella virtuale con resistenze da 1 kOhm.
UV
W
1 kΩ
Motorelineare
FEM_U1 kΩ 1 kΩ
FEM_W FEM_V
Fig. 3-14 Disposizione per la verifica delle misure tecniche

Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-90© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Con direzione di spostamento positiva, la sequenza delle fasi deve essere U-V-W.La direzione del motore è quindi positiva quando la parte primaria si muove, ri-spetto alla parte secondaria, in senso contrario alla direzione di partenza dei cavi.
Parte secondaria (magneti)
+
Parte secondaria (magneti)
+
Parte primaria Direzione di uscita del cavo
Parte primaria Direzione di uscita del cavo
N -- polo nord
N -- polo nord
Fig. 3-15 Determinazione della direzione positiva del motore (campo rotantedestrorso)
Determinazione dell’angolo di commutazione mediante oscilloscopio
Dopo aver collegato l’oscilloscopio occorre che l’azionamento passi sopra la taccadi zero per consentirne la sincronizzazione fine.
L’offset dell’angolo di commutazione può essere ricavato dalla misura della forzaelettromotrice e dall’angolo elettrico normalizzato della posizione dei poli tramitel’uscita analogica.
Ch1 Ch2 Ch3
Ch4
Fig. 3-16 Oscillogramma
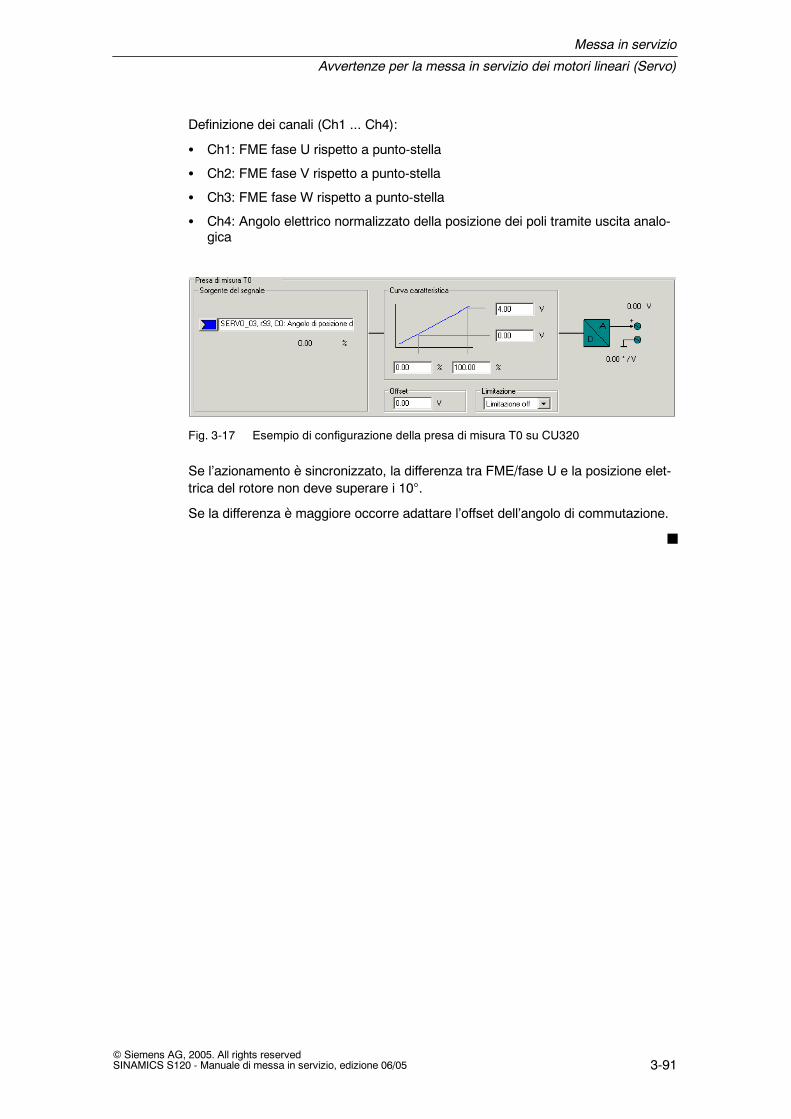
Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-91© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Definizione dei canali (Ch1 ... Ch4):
S Ch1: FME fase U rispetto a punto-stella
S Ch2: FME fase V rispetto a punto-stella
S Ch3: FME fase W rispetto a punto-stella
S Ch4: Angolo elettrico normalizzato della posizione dei poli tramite uscita analo-gica
Fig. 3-17 Esempio di configurazione della presa di misura T0 su CU320
Se l’azionamento è sincronizzato, la differenza tra FME/fase U e la posizione elet-trica del rotore non deve superare i 10°.
Se la differenza è maggiore occorre adattare l’offset dell’angolo di commutazione.
J
Messa in servizio
Avvertenze per la messa in servizio dei motori lineari (Servo)
3-92© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Spazio per appunti
4-93© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Comunicazione tramite PROFIBUS
Questo capitolo descrive i seguenti argomenti relativi alla comunicazione tramitePROFIBUS:
S Generalità su PROFIBUS
S Messa in servizio di PROFIBUS
S Comunicazione ciclica
S Comunicazione aciclica
S Motion Control con PROFIBUS
4

Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-94© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.1 Generalità su PROFIBUS
4.1.1 Informazioni generali su PROFIBUS in SINAMICS
Generalità
PROFIBUS è un bus di campo standard aperto internazionale con un vasto campodi applicazione nell’automazione della lavorazione e del processo.
L’indipendenza dai costruttori e l’apertura sono garantite dalle seguenti norme:
S Norma internazionale EN 50170
S Norma internazionale IEC 61158
PROFIBUS è ottimizzato per il trasferimento veloce di dati al livello di campo.
Nota
PROFIBUS per la tecnica di azionamento è standardizzato e definito nelladocumentazione seguente:
Bibliografia: /P5/ PROFIdrive Profile Drive Technology
Avvertenza
Durante la prima sincronizzazione, l’alimentatore e tutti gli azionamenti di unapparecchio di azionamento passano al blocco impulsi (ca. 1s) in caso disincronizzazione su PROFIBUS a sincronismo di clock, dopodiché si verifica unritorno improvviso degli impulsi. Questo vale per tutti gli apparecchi diazionamento, con o senza sincronismo di clock. Attualmente negli azionamentinon a sincronismo di clock non viene segnalato alcun avviso o anomalia. In casodi perdita del clock PROFIBUS, dopo l’avvenuta sincronizzazione tutti gliazionamenti dell’apparecchio vengono arrestati tramite F01911. L’alimentatorecontinua a funzionare finché non riceve i dati di processo tramite PROFIBUS.
Possono verificarsi i seguenti effetti:
-- Sovracorrente al ritorno degli impulsi
-- Gli azionamenti che devono obbligatoriamente continuare a funzionare (come ades. le pompe dei filatoi) potrebbero arrestarsi.
!Avvertenza
L’inserimento errato del connettore CAN sul connettore PROFIBUS distrugge ilmaster CAN.

Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-95© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Master e slave
S Proprietà di master e slave
Tabella 4-1 Proprietà di master e slave
Proprietà Master Slave
Come nodo del bus Attivo Passivo
Invio di messaggi Consentito senza richiestaesterna
Possibile solo su richiesta delmaster
Ricezione di messaggi Possibile senza limitazioni Consentite solo ricezione econferma
S Master
I master si dividono i due classi:
-- Master classe 1 (DPMC1):
Stazioni di automazione centrali che scambiano dati in modo ciclico e aci-clico con gli slave. È possibile anche una comunicazione tra i master.
Esempi: SIMATIC S5, SIMATIC S7
-- Master classe 2 (DPMC2):
Apparecchiature per la configurazione, la messa in servizio, l’uso e la super-visione del bus in funzione. Apparecchi che scambiano dati con gli slave e imaster solo in modo aciclico.
Esempi: dispositivi di programmazione, apparecchiature di servizio e super-visione
S Slave
L’apparecchio di azionamento SINAMICS è un slave rispetto a PROFIBUS.
Metodo di accesso al bus
PROFIBUS funziona in base al metodo Token Passing, ovvero le stazioni attive(master) ricevono l’autorizzazione all’invio in un anello logico per un intervallo ditempo determinato.
Nell’ambito di questo intervallo di tempo il master con autorizzazione all’invio puòcomunicare con gli slave assegnati in una relazione master-slave e/o con altrimaster.

Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-96© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Telegramma PROFIBUS per trasmissione di dati ciclica e servizi aciclici
Per ogni apparecchio di azionamento con scambio ciclico di dati di processo esisteun telegramma per l’invio e la ricezione di tutti i dati di processo. Per l’esecuzionedi tutti i servizi aciclici (lettura e scrittura di parametri) a un indirizzo PROFIBUSviene inviato un proprio telegramma. La trasmissione dei dati aciclici avviene conpriorità inferiore dopo la trasmissione di dati ciclici.
La lunghezza totale del telegramma aumenta con il numero di oggetti di aziona-mento coinvolti nello scambio dei dati di processo.
Sequenza degli oggetti di azionamento nel telegramma
La sequenza degli oggetti di azionamento nel telegramma sul lato dell’azionamentoviene visualizzata con una lista in p0978[0...15] e può anche essere modificata.
Con il tool di messa in servizio STARTER è possibile visualizzare la sequenza de-gli oggetti di azionamento di un sistema di azionamento messo in servizio nel fun-zionamento online selezionando ----> “Apparecchio di azionamento” ----> “Configu-razione”.
Nella creazione della configurazione sul lato master (ad es. Config HW) gli oggettidi azionamento previsti dall’applicazione per lo scambio di dati di processo ven-gono inseriti nel telegramma in questa sequenza.
I seguenti oggetti di azionamento possono scambiare dati di processo:
Oggetto di azionamento
S Active Infeed (A_INF)
S Basic Infeed (B_INF)
S Smart Infeed (S_INF)
S SERVO
S VECTOR
S Terminal Module 15 (TM15DI/DO)
S Terminal Module 31 (TM31)
S Terminal Board 30 (TB30)
S Control Unit (CU)

Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-97© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
La sequenza degli oggetti di azionamento nella configurazione deve coinciderecon la sequenza nel sistema di azionamento.
La struttura dei telegrammi dipende dagli oggetti di azionamento previsti nella con-figurazione. Sono consentite le configurazioni che non prevedono tutti gli oggetti diazionamento presenti nel sistema di azionamento.
Esempio:
Ipotesi: la struttura hardware è descritta nel capitolo 4.1.2.
Sono possibili ad es. le seguenti comunicazioni:
----> Configurazione con SERVO, SERVO, SERVO
----> Configurazione con A_INF, SERVO, SERVO, SERVO, TB30
----> e altre
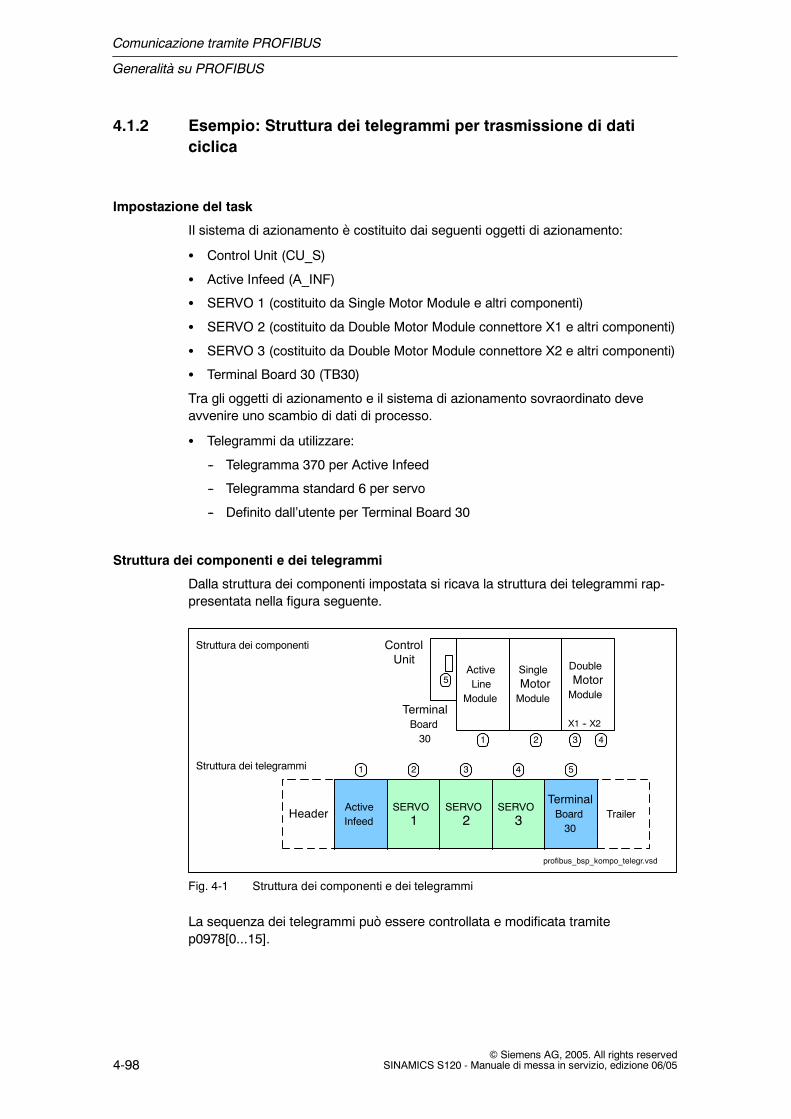
Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-98© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.1.2 Esempio: Struttura dei telegrammi per trasmissione di daticiclica
Impostazione del task
Il sistema di azionamento è costituito dai seguenti oggetti di azionamento:
S Control Unit (CU_S)
S Active Infeed (A_INF)
S SERVO 1 (costituito da Single Motor Module e altri componenti)
S SERVO 2 (costituito da Double Motor Module connettore X1 e altri componenti)
S SERVO 3 (costituito da Double Motor Module connettore X2 e altri componenti)
S Terminal Board 30 (TB30)
Tra gli oggetti di azionamento e il sistema di azionamento sovraordinato deveavvenire uno scambio di dati di processo.
S Telegrammi da utilizzare:
-- Telegramma 370 per Active Infeed
-- Telegramma standard 6 per servo
-- Definito dall’utente per Terminal Board 30
Struttura dei componenti e dei telegrammi
Dalla struttura dei componenti impostata si ricava la struttura dei telegrammi rap-presentata nella figura seguente.
profibus_bsp_kompo_telegr.vsd
Struttura dei telegrammi
Header ActiveInfeed
SERVO1
SERVO2 Trailer
SERVO3
TerminalBoard30
Struttura dei componenti
ActiveLine
Module
SingleMotorModule
DoubleMotorModule
X1 -- X2
ControlUnit
TerminalBoard30
1 2 3 4 5
4321
5
Fig. 4-1 Struttura dei componenti e dei telegrammi
La sequenza dei telegrammi può essere controllata e modificata tramitep0978[0...15].
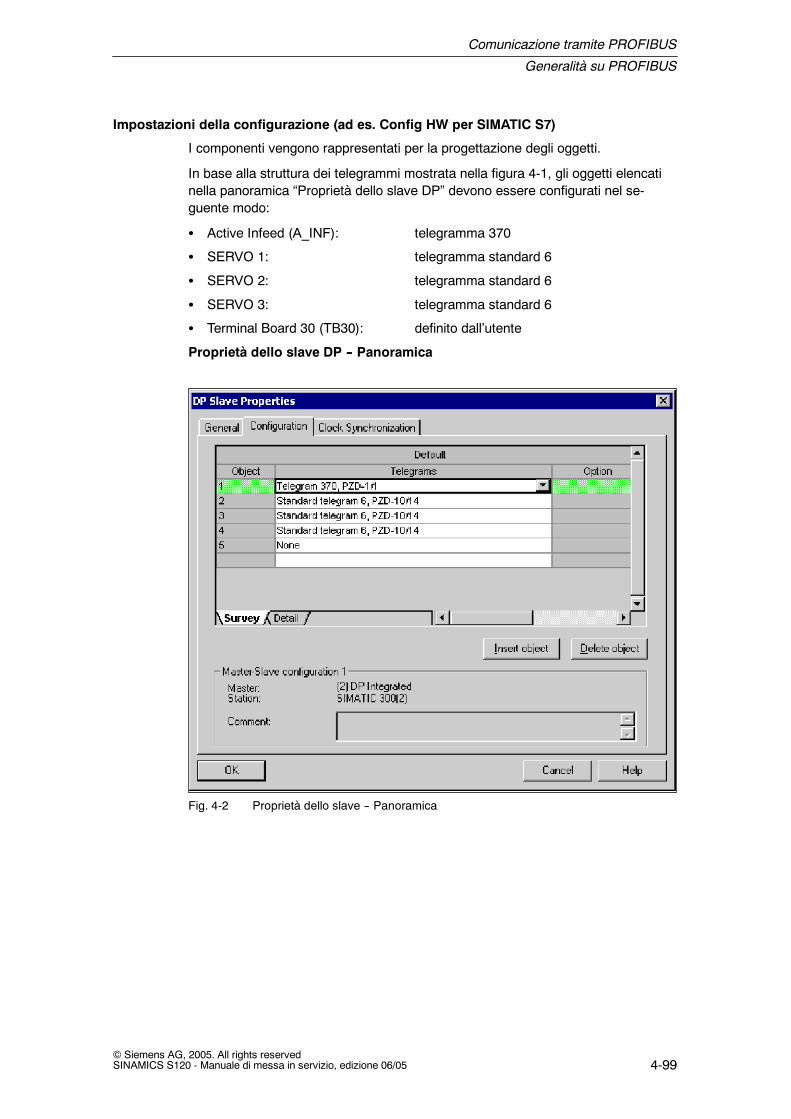
Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-99© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Impostazioni della configurazione (ad es. Config HW per SIMATIC S7)
I componenti vengono rappresentati per la progettazione degli oggetti.
In base alla struttura dei telegrammi mostrata nella figura 4-1, gli oggetti elencatinella panoramica “Proprietà dello slave DP” devono essere configurati nel se-guente modo:
S Active Infeed (A_INF): telegramma 370
S SERVO 1: telegramma standard 6
S SERVO 2: telegramma standard 6
S SERVO 3: telegramma standard 6
S Terminal Board 30 (TB30): definito dall’utente
Proprietà dello slave DP -- Panoramica
Fig. 4-2 Proprietà dello slave -- Panoramica
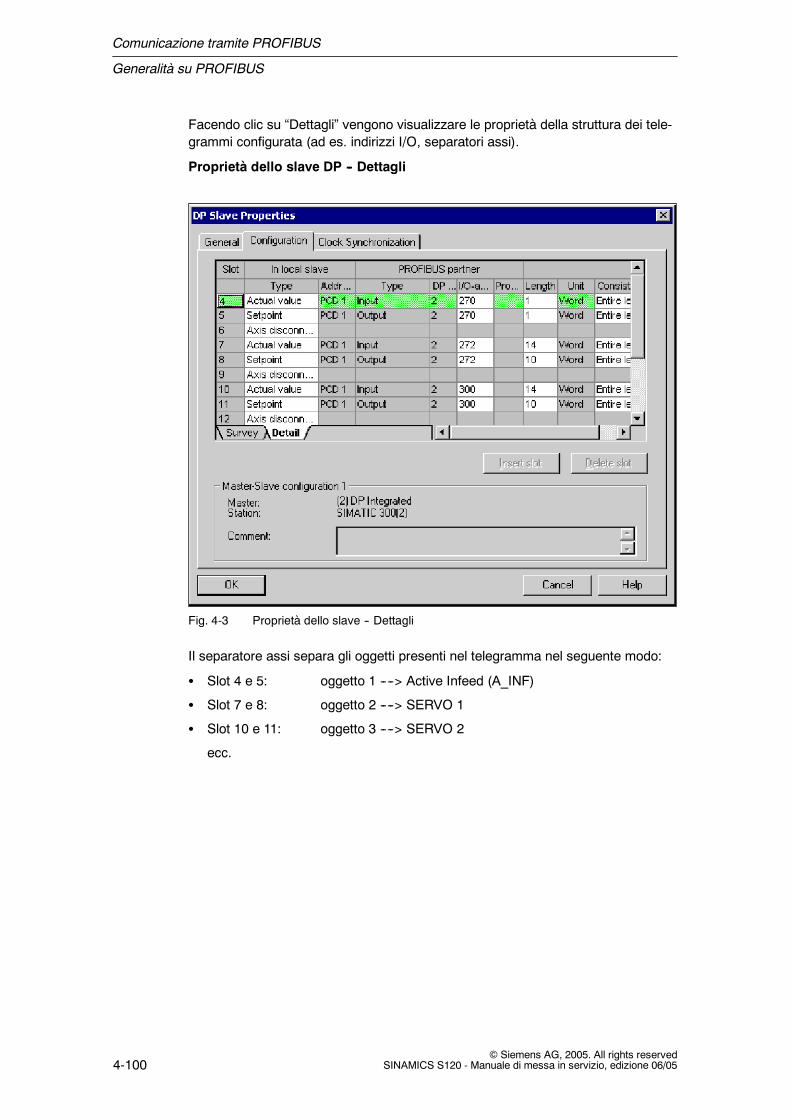
Comunicazione tramite PROFIBUS
Generalità su PROFIBUS
4-100© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Facendo clic su “Dettagli” vengono visualizzare le proprietà della struttura dei tele-grammi configurata (ad es. indirizzi I/O, separatori assi).
Proprietà dello slave DP -- Dettagli
Fig. 4-3 Proprietà dello slave -- Dettagli
Il separatore assi separa gli oggetti presenti nel telegramma nel seguente modo:
S Slot 4 e 5: oggetto 1 ----> Active Infeed (A_INF)
S Slot 7 e 8: oggetto 2 ----> SERVO 1
S Slot 10 e 11: oggetto 3 ----> SERVO 2
ecc.

Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-101© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.2 Messa in servizio di PROFIBUS
4.2.1 Informazioni generali
Interfacce e LED di diagnostica
Un’interfaccia PROFIBUS con LED e switch degli indirizzi è sempre presente sullaControl Unit.
PROFIBUS
Interfaccia
PROFIBUS
Switch degli indirizzi
Control Unit
PROFIBUS
LED di diagnostica “DP1”
Fig. 4-4 Interfacce e LED di diagnostica
S Interfaccia PROFIBUS
L’interfaccia PROFIBUS è rappresentata nella bibliografia seguente:
Bibliografia: /GH1/ Manuale SINAMICS S120Control Unit e componenti di sistema integrativi
S LED di diagnostica PROFIBUS
Per la descrizione dei LED di diagnostica ----> vedere il capitolo 6.1.1.
Nota
All’interfaccia PROFIBUS (X126) è possibile collegare un adattatore di teleserviceper la diagnostica remota.

Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-102© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Impostazione dell’indirizzo PROFIBUS
L’impostazione degli indirizzi PROFIBUS può avvenire in due modi:
1. Tramite switch degli indirizzi PROFIBUS sulla Control Unit
-- p0918 è quindi di sola lettura e mostra l’indirizzo impostato.
-- La modifica diventa attiva solo dopo un POWER ON.
2. Tramite p0918
-- Solo se tra i DIP switch tutti gli interruttori da S1 a S7 sono impostati su ONo OFF.
-- Una variazione di indirizzo tramite parametri deve essere salvata in modonon volatile con la funzione “Copia da RAM a ROM”.
-- La modifica diventa attiva solo dopo un POWER ON.
Esempio:
Impostazione dell’indirizzo PROFIBUS tramite switch degli indirizzi PROFIBUSsulla Control Unit.
profibus_adresse.vsd
Valenza
ON
OFF
20
1
S1
Esempio
1
ON
OFF
21
222
423
824
1625
3226
64
S7...
+ 4 + 32 = 37
Fig. 4-5 Esempio: Indirizzo PROFIBUS tramite interruttore PROFIBUS sulla Control Unit
Nota
L’impostazione predefinita è “ON” o “OFF” per tutti i switch. Con queste dueimpostazioni è possibile configurare l’indirizzo PROFIBUS tramite i parametri.
Il parametro p0918 è specifico della CU (presente sulla Control Unit) el’impostazione predefinita è 126.
L’indirizzo 126 è previsto per la messa in servizio. Gli indirizzi PROFIBUSconsentiti sono compresi tra 1 e 126.
Se si collegano più Cu su un ramo PROFIBUS occorre impostare gli indirizzi inmodo diverso rispetto all’impostazione predefinita, tenendo presente che ogniindirizzo può essere assegnato una sola volta a un ramo PROFIBUS. Ciò si puòfare anche tramite lo switch degli indirizzi o con un’impostazione selettiva delparametro p0918. L’impostazione selettiva può avvenire anche attivando passodopo passo l’alimentazione a 24 V e riparametrizzando p0918.
L’indirizzo impostato sullo switch viene visualizzato in r2057.
Ogni modifica dell’indirizzo di bus diventa attiva solo dopo un POWER ON.

Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-103© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
File base dell’apparecchiatura
Un file base dell’apparecchiatura descrive in maniera univoca e precisa le caratteri-stiche di uno slave PROFIBUS. I file base dell’apparecchiatura (GSD) sono fileASCII con un formato definito precisamente.
Esistono i seguenti file base dell’apparecchiatura (file GSD) per SINAMICS S120:
S si0280e5.gse Inglese
S si0280e5.gsf Francese
S si0280e5.gsg Tedesco
S si0280e5.gsi Italiano
S si0280e5.gss Spagnolo
I file GSD corrispondono alle direttive GSD dopo la revisione 4 e permettono diconfigurare il funzionamento a sincronismo di clock tramite un GSD.Per l’impiego in ambiente SIMATIC è richiesta l’applicazione STEP7 a partiredalla versione V5.1 SP3.
I file GSD si trovano:
S In Internet all’indirizzo: http://www4.ad.siemens.de/WW/view/de/113204
S Sul CD del tool di messa in servizio STARTERN. di ordinazione 6SL3072--0AA00--0AGx
S Sulla scheda CompactFlash nella directory\\SIEMENS\SINAMICS\DATA\CFG\
Avvertenza relativa alla messa in servizio per VIK-NAMUR
Per poter mettere in servizio un azionamento SINAMICS come azionamento VIK-NAMUR, è necessario impostare il telegramma standard 20 e attivare l’Ident Num-ber di VIK-NAMUR tramite p2042 =1. In questo caso si può usare solo il file GSDNAMUR.
Identificazione dell’apparecchio
Per una panoramica e la diagnostica di tutti i nodi su PROFIBUS viene eseguitaun’identificazione dei singoli slave.
Le informazioni relative ad ogni slave si trovano nel parametro seguente specificodella CU:
r0964[0...6] Identificazione dell’apparecchio
Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-104© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Resistenza terminale di chiusura bus e schermatura
La trasmissione dei dati affidabile tramite PROFIBUS dipende, tra l’altro, dall’impo-stazione delle resistenze terminali di chiusura bus e dalla schermatura dei caviPROFIBUS.
S Resistenza terminale di chiusura bus
Le resistenze terminali di chiusura bus presenti nel connettore PROFIBUS de-vono essere impostate nel seguente modo:
-- Primo e ultimo nodo nel ramo: attivare la resistenza terminale
-- Altri nodi nel ramo: disattivare la resistenza terminale
S Schermatura dei cavi PROFIBUS
Lo schermo del cavo deve essere inserito nel connettore con un’ampia superfi-cie di contatto su entrambi i lati.
Bibliografia: /GH1/ Manuale SINAMICS S120Control Unit e componenti di sistema integrativi
Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-105© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.2.2 Esecuzione della messa in servizio
Requisiti e presupposti per la messa in servizio
Slave PROFIBUS
S L’indirizzo PROFIBUS da impostare per l’applicazione è noto.
S Il tipo di telegramma di ogni oggetto di azionamento è noto in base all’applica-zione.
Master PROFIBUS
S Le proprietà dello slave SINAMICS S120 per quanto riguarda la comunicazionedevono essere presenti nel master (file GSD o Drive ES Slave-OM).
Fasi della messa in servizio (esempio con SIMATIC S7)
1. Impostare l’indirizzo PROFIBUS sullo slave.
Vedere il capitolo 4.2.1
2. Impostare il tipo di telegramma sullo slave.
Vedere il capitolo 4.3.1
3. Eseguire le seguenti operazioni in Config HW:
-- Collegare l’apparecchio di azionamento a PROFIBUS e assegnare l’indi-rizzo.
-- Impostare il tipo di telegramma.
Per ogni oggetto di azionamento con scambio di dati di processo tramitePROFIBUS occorre impostare lo stesso tipo di telegramma dello slave.
Per un nodo o un oggetto è anche possibile impostare “senza PZD” (ad es.l’alimentatore viene controllato tramite morsetti).
4. Gli indirizzi I/O devono essere assegnati in base al programma utente.
Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-106© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.2.3 Possibilità diagnostiche
Diagnostica tramite parametri (vedere Manuale delle liste)
S r2050 CO: PROFIBUS PZD ricevuto formato parola
S r2053 PROFIBUS Diagnostica Invio PZD formato parola
S r2054 PROFIBUS Stato (CU_S)
S r2055 PROFIBUS Diagnostica standard (CU_S)
S r2060 CO: PROFIBUS PZD ricevuto formato parola doppia
S r2063 PROFIBUS Diagnostica Invio PZD formato parola doppia
S r2064 PROFIBUS Diagnostica sincronismo di clock (CU_S)
S r2065 PROFIBUS Diagnostica, funzionalità vitale master
S r2075 PROFIBUS Offset telegramma PZD ricevuto
S r2075 PROFIBUS Offset telegramma PZD inviato
S r2090 BO: PROFIBUS PZD1 ricevuto bit per bit
Diagnostica tramite LED DP1 (vedere capitolo 6.1)
4.2.4 Indirizzamento dell’interfaccia HMI SIMATIC
Con un’interfaccia HMI SIMATIC come master PROFIBUS (master classe 2) èpossibile accedere direttamente a un SINAMICS. Un SINAMICS si comporta comeun SIMATIC S7 rispetto a un’interfaccia HMI SIMATIC. Per gli accessi ai parametridi azionamento valgono le semplici regole seguenti:
S Numero di parametro = Numero di blocco dati
S Sottoindice di parametri = Bit 0 -- 9 dell’offset del blocco dati
S Numero di oggetto di azionamento = Bit 10 -- 15 dell’offset del blocco dati
Pro Tool e WinCC flexible
L’interfaccia SIMATIC HMI si può progettare con “Pro Tool” o con “WinCC flexible”.
Nella progettazione con Pro Tool o WinCC flexible occorre tenere conto delleseguenti impostazioni specifiche per gli azionamenti.
Controlli: protocollo sempre “SIMATIC S7 -- 300/400”
Tabella 4-2 Altri parametri
Campo Valore
Profilo dei parametri di rete DP
Baudrate dei parametri di rete liberamente selezionabile
Indirizzo dei partner di comunicazione Indirizzo PROFIBUS dell’apparecchio di azio-namento
Posto connettore/telaio di montaggio delpartner di comunicazione
don’t care, 0

Comunicazione tramite PROFIBUS
Messa in servizio di PROFIBUS
4-107© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-3 Variabili: Scheda “Generale”
Campo Valore
Nome liberamente selezionabile
Controllo liberamente selezionabile
Tipo A seconda del valore del parametro indirizzato,ad es.:INT: Per Integer 16DINT: Per Integer 32WORD: Per Unsigned 16REAL: Per Float
Campo DB
DB(numero di blocco dati)
Numero di parametro1 ... 65535
DBB, DBW, DBD(offset del blocco dati)
N. oggetto di azionamento e sottoindiceBit 15 -- 10: N. oggetto di azionamento 0 ... 63Bit 9 -- 0: Sottoindice 0 ... 1023
oppure:DBW = 1024 * n. oggetto di azionamento + sot-toindice
L Non attivato
Ciclo di acquisizione liberamente selezionabile
Numero di elementi 1
Cifre dopo la virgola liberamente selezionabile
NotaS Un’interfaccia HMI SIMATIC può funzionare con un apparecchio di azionamento
indipendentemente dal controllo presente.È possibile un semplice collegamento punto-punto con due soli nodi.
S Per gli apparecchi di azionamento possono essere usate le funzioni HMI “Variable”. Altrefunzioni non sono utilizzabili (ad es. “Messaggi” o “Ricette”).
S Sono possibili gli accessi a singoli valori di parametri. Non sono possibili gli accessi ainteri array, descrizioni o testi.

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-108© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.3 Comunicazione ciclica
Con la comunicazione ciclica vengono scambiati dati di processo critici dal punto divista dei tempi.
4.3.1 Telegrammi e dati di processo
Generalità
Selezionando un telegramma tramite p0922 si determinano sul lato dell’apparec-chio di azionamento i dati di processo che vengono scambiati tra master e slave.
Dal punto di vista dello slave i dati di processo ricevuti rappresentano le parole diricezione e i dati di processo da inviare le parole di invio.
Le parole di ricezione e di invio sono costituite dai seguenti elementi :
S Parole di ricezione: parole di comando o valori di riferimento
S Parole di invio: parole di stato o valori attuali
Quali telegrammi sono disponibili?
1. Telegrammi standard
I telegrammi standard sono strutturati conformemente al PROFIdrive Profile.L’interconnessione interna dei dati di processo avviene automaticamente inbase al numero di telegramma impostato.
Tramite il parametro p0922 possono essere impostati i seguenti telegrammistandard:
-- 1 Regolazione di velocità, 2 parole
-- 2 Regolazione di velocità, 4 parole
-- 3 Regolazione di velocità, 1 encoder di posizione
-- 4 Regolazione di velocità, 2 encoder di posizione
-- 5 DSC, 1 encoder di posizione
-- 6 DSC, 2 encoder di posizione
-- 20 Regolazione di velocità, VIK-NAMUR

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-109© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
2. Telegrammi specifici del costruttore
I telegrammi specifici del costruttore sono strutturati secondo quanto stabilitoall’interno della ditta. L’interconnessione interna dei dati di processo avvieneautomaticamente in base al numero di telegramma impostato.
Tramite il parametro p0922 possono essere impostati i seguenti telegrammistandard:
-- 102 Regolazione di velocità con riduzione della coppia, 1 encoder diposizione
-- 103 Regolazione di velocità con riduzione della coppia, 2 encoder diposizione
-- 105 DSC con riduzione della coppia, 1 encoder di posizione
-- 106 DSC con riduzione della coppia, 2 encoder di posizione
-- 116 DSC con riduzione della coppia, 2 encoder di posizione
-- 352 Regolazione di velocità, PCS7
-- 370 Telegramma per alimentazione
-- 390 Telegramma per Control Unit (oggetto di azionamento 1, DO1), I/Odigitali
-- 391 Telegramma per Control Unit (oggetto di azionamento 1, DO1), I/Odigitali e tastatore di misura
3. Telegrammi liberi (p0922 = 999)
Il telegramma di ricezione e invio può essere progettato liberamente con l’inter-connessione di dati di processo di ricezione e invio tramite la tecnica BICO.
Tabella 4-4 Dati di processo di ricezione e di invio
SERVO, VECTOR: CU_S A_INF, B_INF,S_INF, CU_S,TB30, TM31,TM15DI/DO
Dati di processo di ricezione
Uscita connettore DWORD r2060[0 ... 14] --
Uscita connettore WORD r2050[0 ... 15] r2050[0 ... 4]
Uscita binettore r2090.0 ... 15r2091.0 ... 15r2092.0 ... 15r2093.0 ... 15
r2090.0 ... 15r2091.0 ... 15
Trasformatori liberi binettore-connettore
p2080[0 ... 15], p2081[0 ... 15], p2082[0 ... 15],p2083[0 ... 15] / r2089[0 ... 3]
Dati di processo di invio
Ingresso connettore DWORD p2061[0 ... 14] --
Ingresso connettore WORD p2051[0 ... 18] p2051[0 ... 6] p2051[0 ... 4]
Convertitori liberi connettore-binettore
p2099[0 ... 1] / r2094.0 ... 15, r2095.0 ... 15

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-110© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Avvertenze relative alle interconnessioni dei telegrammi
Modificando p0922 = 999 (impostazione di fabbrica) in p0922¸ 999l’interconnessione dei telegrammi viene eseguita automaticamente e bloccata.
Nota
Fanno eccezione i telegrammi 20, 352, in cui è possibile interconnettereliberamente nel telegramma di invio il dato di processo PZD06 o nel telegramma diricezione i dati di processo da PZD03 a PZD06.
Modificando p0922¸ 999 in p0922 = 999 l’interconnessione dei telegrammiprecedente viene mantenuta e può essere modificata.
Modificando p0922 = 999 e p2079¸ 999, l’interconnessione dei telegrammiparametrizzata con p2079 viene eseguita e bloccata automaticamente, iltelegramma può comunque essere ampliato in direzione di invio.
Entrambi i casi possono essere usati per creare comodamente interconnessioni ditelegrammi libere sulla base di telegrammi esistenti.
Avvertenze relative alla struttura dei telegrammi
Con p0978 è possibile cambiare l’ordinamento e inserire uno zero per caratteriz-zare quegli oggetti di azionamento che partecipano allo scambio dei dati di pro-cesso e per determinare la sequenza nello scambio stesso. Gli oggetti di aziona-mento elencati dopo il primo zero sono esclusi dallo scambio dati di processo.
Con p0978 è possibile inserire più volte il valore 255. P0978[n] = 255 emula unoggetto di azionamento vuoto visibile senza un effettivo scambio di dati di pro-cesso. Ciò permette la comunicazione ciclica di un master PROFIBUS con proget-tazione invariata verso apparecchi di azionamento con numero variabile di oggettidi azionamento.
NotaS Per mantenere il profilo PROFIdrive occorre:
-- interconnettere la parola di ricezione PZD 1 come parola di comando 1(STW1)
-- interconnettere la parola di ricezione PZD 1 come parola di stato 1 (ZSW 1)Per PZD1 deve essere usato il formato WORD.
S Un PZD corrisponde a una parola.Solo uno dei parametri di interconnessione p2051 o p2061 può avere un valore¸ 0 per una parola PZD.
S Le grandezze fisiche di parola e parola doppia vengono inserite nel telegrammacome grandezze riferite.Come grandezze di riferimento sono determinanti i valori p200x (contenuto deltelegramma = 4000 hex o 4000 0000 hex per parole doppie se la grandezzad’ingresso ha il valore p200x).

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-111© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Struttura dei telegrammi
Fig. 4-6 Struttura dei telegrammi

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-112© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
A seconda dell’oggetto di azionamento è possibile usare solo determinati tele-grammi:
Oggetto di azionamento Telegrammi
S A_INF p0922 = 370, 999
S B_INF p0922 = 370, 999
S S_INF P0922 = 370, 999
S SERVO p0922 = 2, 3, 4, 5, 6, 102, 103, 105, 106, 116, 999
S VECTOR p0922 = 1, 20, 352, 999
S TM15DI/DO Nessuna impostazione di telegramma definita
S TM31 Nessuna impostazione di telegramma definita
S TB30 Nessuna impostazione di telegramma definita
S CU p0922 = 390, 391
A seconda dell’oggetto di azionamento, in caso di struttura dei telegrammi definitadall’utente è possibile trasmettere il seguente numero massimo di dati di processo:
Oggetto di azionamento Numero massimo di PZD per invio e ricezione
S A_INF 5
S B_INF 5
S S_INF 5
S SERVO invio 19, ricezione 16
S VECTOR invio 19, ricezione 16
S TM15DI/DO 5
S TM31 5
S TB30 5
S CU invio 7, ricezione 5
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-113© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Interface Mode
L’Interface Mode serve ad adattare l’assegnazione delle parole di comando e distato ad altri sistemi di azionamento e ad altre interfacce standardizzate.
L’Interface Mode può essere impostato nel seguente modo:
Valore Interface Mode
S p2038 = 0 SINAMICS (impostazione di fabbrica)
S p2038 = 1 SIMODRIVE 611 universal
S p2038 = 2 VIK-NAMUR
Procedura:
1. Impostare p0922 ¸ 999
2. Impostare p2038 = Interface Mode desiderato
Se si imposta un telegramma compreso tra 100 e 199, l’Interface Mode viene im-postato in modo fisso (p2038 = 1) e non può essere modificato.
L’impostazione del telegramma standard 20 imposta l’Interface Mode in modo fisso(p2038 = 2 impostato). L’assegnazione non può più essere modificata.
Se si modifica un telegramma che è già assegnato in modo fisso all’Interface Mode(ad es. p0922 = 102) in un altro telegramma (ad es. p0922 = 3), viene mantenutal’impostazione in p2038.
Panoramica degli schemi logici (vedere il manuale contenente le liste di riferimento)
S 2410 Indirizzo PROFIBUS, Diagnostica
S ...
S 2483 Interconnessione libera telegramma di invio via BICO(p0922 = 999)

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-114© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.3.2 Sorveglianza anomalia telegramma
Descrizione
In caso di anomalia di un telegramma e dopo che è trascorso il tempo di sorve-glianza (t_An), il bit r2043.0 viene impostato a “1” e viene emesso l’avviso A01920.L’uscita binettore r2043.0 può essere usata ad es. per un arresto rapido.Dopo che è trascorso il tempo di ritardo p2044 viene emessa l’anomalia F01910.L’anomalia F01910 provoca in caso di alimentazione una reazione anomala OFF2(blocco impulsi) e in caso di SERVO/VECTOR una reazione anomala OFF3 (arre-sto rapido). Se non deve essere emessa alcuna reazione di OFF, si può riparame-trizzare la reazione anomala.L’anomalia F01910 può essere tacitata immediatamente. L’azionamento può fun-zionare anche senza PROFIBUS.
pb_ueberw.vsd
F01910
A01920
S Q
R Q
T 0
p2044
r2043.0CicliciTelegrammidal master
t
t>t_An
Fig. 4-7 Sorveglianza anomalia telegramma
Esempio di arresto rapido in caso di anomalia del telegramma
Ipotesi:
Un apparecchio di azionamento con un Active Line Module e un Single Motor Mo-dule.
Il modo operativo VECTOR è attivato.
L’azionamento si trova nello stato di fermo dopo un tempo di decelerazione(p1135) di due secondi.
Impostazioni:
S A_INF p2044 = 2
S VECTOR p2044 = 0
Sequenza:
Dopo l’anomalia del telegramma (t > t_An) l’uscita binettore r2043.0 dell’oggetto diazionamento CU passa a “1”. Contemporaneamente vengono emessi per gli og-getti di azionamento A_INF l’avviso A01920 e per VECTOR l’avviso A01920 el’anomalia F01910. L’anomalia F01910 provoca un OFF3 dell’azionamento. Dopo iltempo di ritardo (p2044) di due secondi si verifica l’anomalia F01910 sull’alimenta-tore provocando un OFF2.
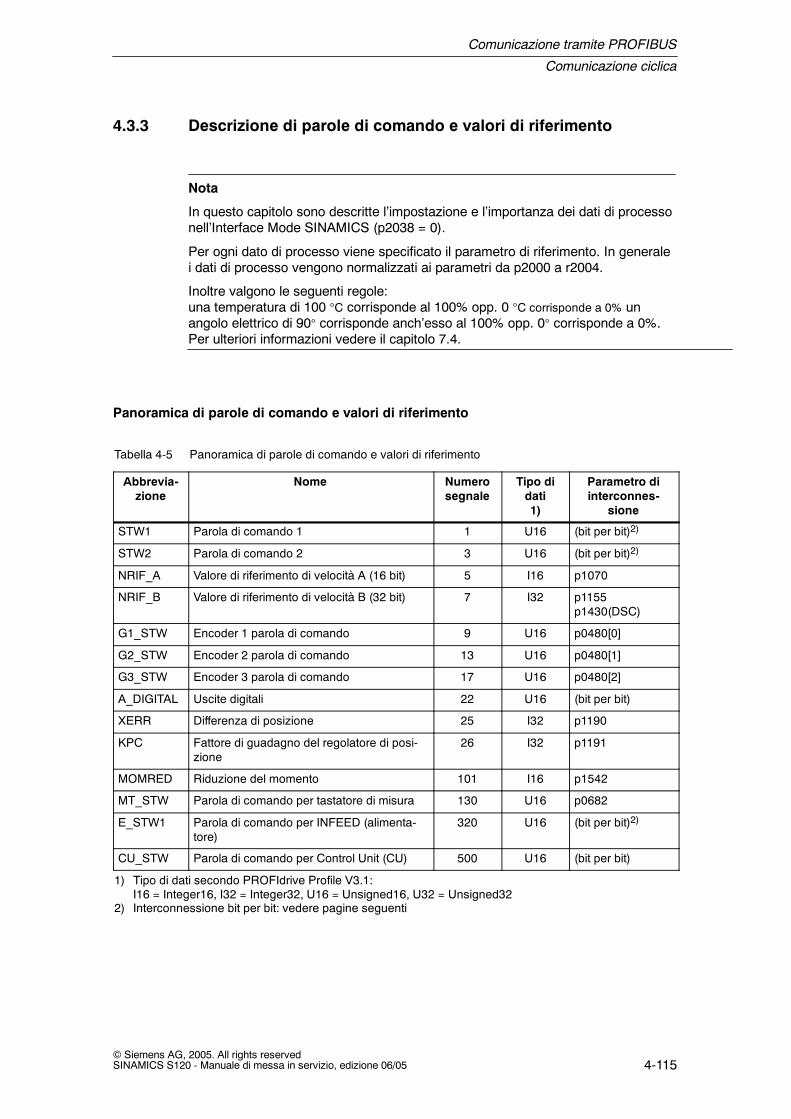
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-115© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.3.3 Descrizione di parole di comando e valori di riferimento
Nota
In questo capitolo sono descritte l’impostazione e l’importanza dei dati di processonell’Interface Mode SINAMICS (p2038 = 0).
Per ogni dato di processo viene specificato il parametro di riferimento. In generalei dati di processo vengono normalizzati ai parametri da p2000 a r2004.
Inoltre valgono le seguenti regole:una temperatura di 100 °C corrisponde al 100% opp. 0 °C corrisponde a 0% unangolo elettrico di 90° corrisponde anch’esso al 100% opp. 0° corrisponde a 0%.Per ulteriori informazioni vedere il capitolo 7.4.
Panoramica di parole di comando e valori di riferimento
Tabella 4-5 Panoramica di parole di comando e valori di riferimento
Abbrevia-zione
Nome Numerosegnale
Tipo didati1)
Parametro diinterconnes-
sione
STW1 Parola di comando 1 1 U16 (bit per bit)2)
STW2 Parola di comando 2 3 U16 (bit per bit)2)
NRIF_A Valore di riferimento di velocità A (16 bit) 5 I16 p1070
NRIF_B Valore di riferimento di velocità B (32 bit) 7 I32 p1155p1430(DSC)
G1_STW Encoder 1 parola di comando 9 U16 p0480[0]
G2_STW Encoder 2 parola di comando 13 U16 p0480[1]
G3_STW Encoder 3 parola di comando 17 U16 p0480[2]
A_DIGITAL Uscite digitali 22 U16 (bit per bit)
XERR Differenza di posizione 25 I32 p1190
KPC Fattore di guadagno del regolatore di posi-zione
26 I32 p1191
MOMRED Riduzione del momento 101 I16 p1542
MT_STW Parola di comando per tastatore di misura 130 U16 p0682
E_STW1 Parola di comando per INFEED (alimenta-tore)
320 U16 (bit per bit)2)
CU_STW Parola di comando per Control Unit (CU) 500 U16 (bit per bit)
1) Tipo di dati secondo PROFIdrive Profile V3.1:I16 = Integer16, I32 = Integer32, U16 = Unsigned16, U32 = Unsigned32
2) Interconnessione bit per bit: vedere pagine seguenti
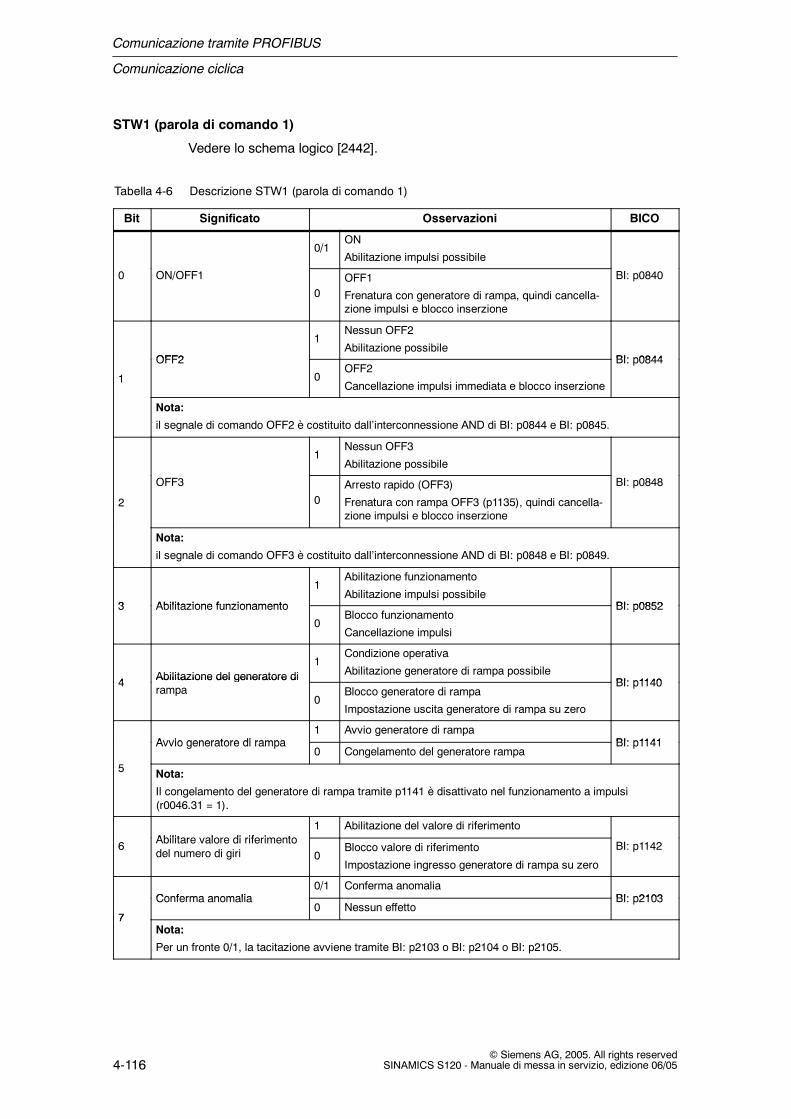
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-116© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
STW1 (parola di comando 1)
Vedere lo schema logico [2442].
Tabella 4-6 Descrizione STW1 (parola di comando 1)
Bit Significato Osservazioni BICO
0/1ON
Abilitazione impulsi possibile
0 ON/OFF1
0OFF1
Frenatura con generatore di rampa, quindi cancella-zione impulsi e blocco inserzione
BI: p0840
OFF2
1Nessun OFF2
Abilitazione possibileBI: p0844
1
OFF2
0OFF2
Cancellazione impulsi immediata e blocco inserzione
BI: p0844
Nota:
il segnale di comando OFF2 è costituito dall’interconnessione AND di BI: p0844 e BI: p0845.
1Nessun OFF3
Abilitazione possibile
2
OFF3
0Arresto rapido (OFF3)
Frenatura con rampa OFF3 (p1135), quindi cancella-zione impulsi e blocco inserzione
BI: p0848
Nota:
il segnale di comando OFF3 è costituito dall’interconnessione AND di BI: p0848 e BI: p0849.
3 Abilitazione funzionamento
1Abilitazione funzionamento
Abilitazione impulsi possibileBI: p08523 Abilitazione funzionamento
0Blocco funzionamento
Cancellazione impulsi
BI: p0852
4 Abilitazione del generatore di1
Condizione operativa
Abilitazione generatore di rampa possibileBI: p11404 Abilitazione del generatore di
rampa0
Blocco generatore di rampa
Impostazione uscita generatore di rampa su zero
BI: p1140
Avvio generatore di rampa1 Avvio generatore di rampa
BI: p1141Avvio generatore di rampa0 Congelamento del generatore rampa
BI: p1141
5 Nota:
Il congelamento del generatore di rampa tramite p1141 è disattivato nel funzionamento a impulsi(r0046.31 = 1).
Abilit l di if i t1 Abilitazione del valore di riferimento
6 Abilitare valore di riferimentodel numero di giri 0
Blocco valore di riferimento
Impostazione ingresso generatore di rampa su zero
BI: p1142
Conferma anomalia0/1 Conferma anomalia
BI: p2103
7
Conferma anomalia0 Nessun effetto
BI: p2103
7Nota:
Per un fronte 0/1, la tacitazione avviene tramite BI: p2103 o BI: p2104 o BI: p2105.
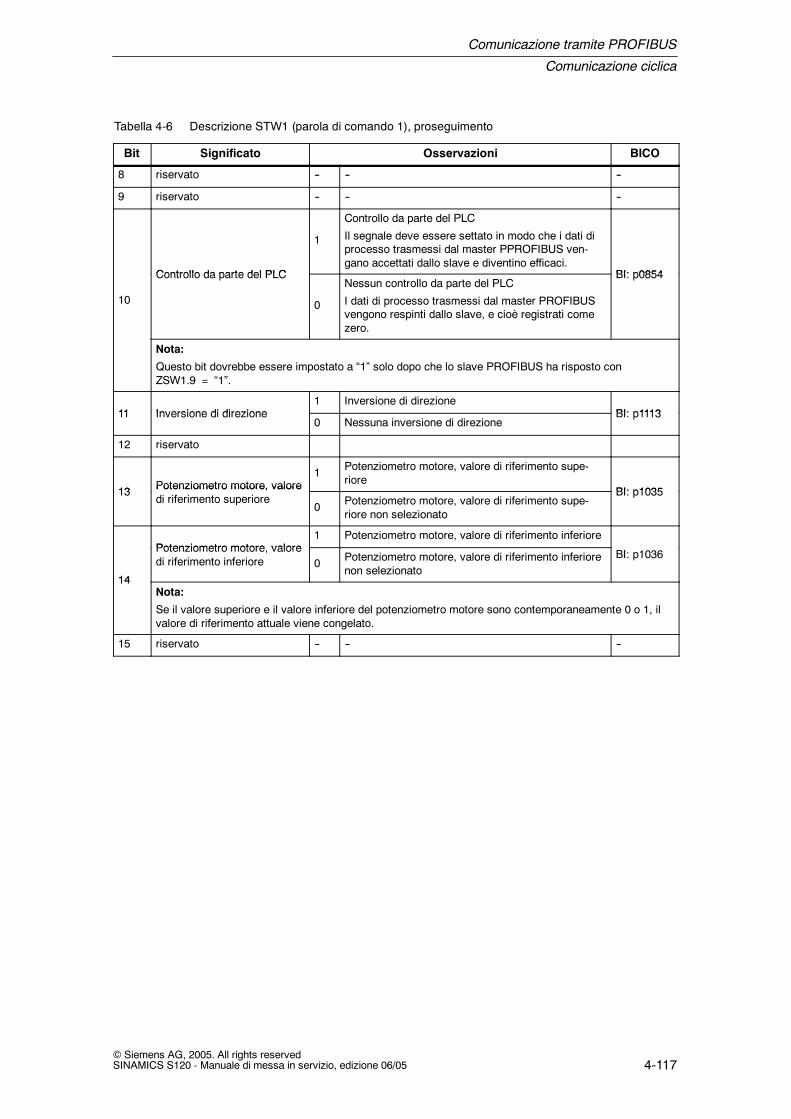
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-117© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-6 Descrizione STW1 (parola di comando 1), proseguimento
Bit BICOOsservazioniSignificato
8 riservato -- -- --
9 riservato -- -- --
Controllo da parte del PLC
1
Controllo da parte del PLC
Il segnale deve essere settato in modo che i dati diprocesso trasmessi dal master PPROFIBUS ven-gano accettati dallo slave e diventino efficaci.
BI: p0854
10
Controllo da parte del PLC
0
Nessun controllo da parte del PLC
I dati di processo trasmessi dal master PROFIBUSvengono respinti dallo slave, e cioè registrati comezero.
BI: p0854
Nota:
Questo bit dovrebbe essere impostato a “1” solo dopo che lo slave PROFIBUS ha risposto conZSW1.9 = “1”.
11 Inversione di direzione1 Inversione di direzione
BI: p111311 Inversione di direzione0 Nessuna inversione di direzione
BI: p1113
12 riservato
13 Potenziometro motore, valore1 Potenziometro motore, valore di riferimento supe-
rioreBI: p103513 Potenziometro motore, valore
di riferimento superiore0 Potenziometro motore, valore di riferimento supe-
riore non selezionato
BI: p1035
Potenziometro motore valore1 Potenziometro motore, valore di riferimento inferiore
14
Potenziometro motore, valoredi riferimento inferiore 0 Potenziometro motore, valore di riferimento inferiore
non selezionatoBI: p1036
14Nota:
Se il valore superiore e il valore inferiore del potenziometro motore sono contemporaneamente 0 o 1, ilvalore di riferimento attuale viene congelato.
15 riservato -- -- --
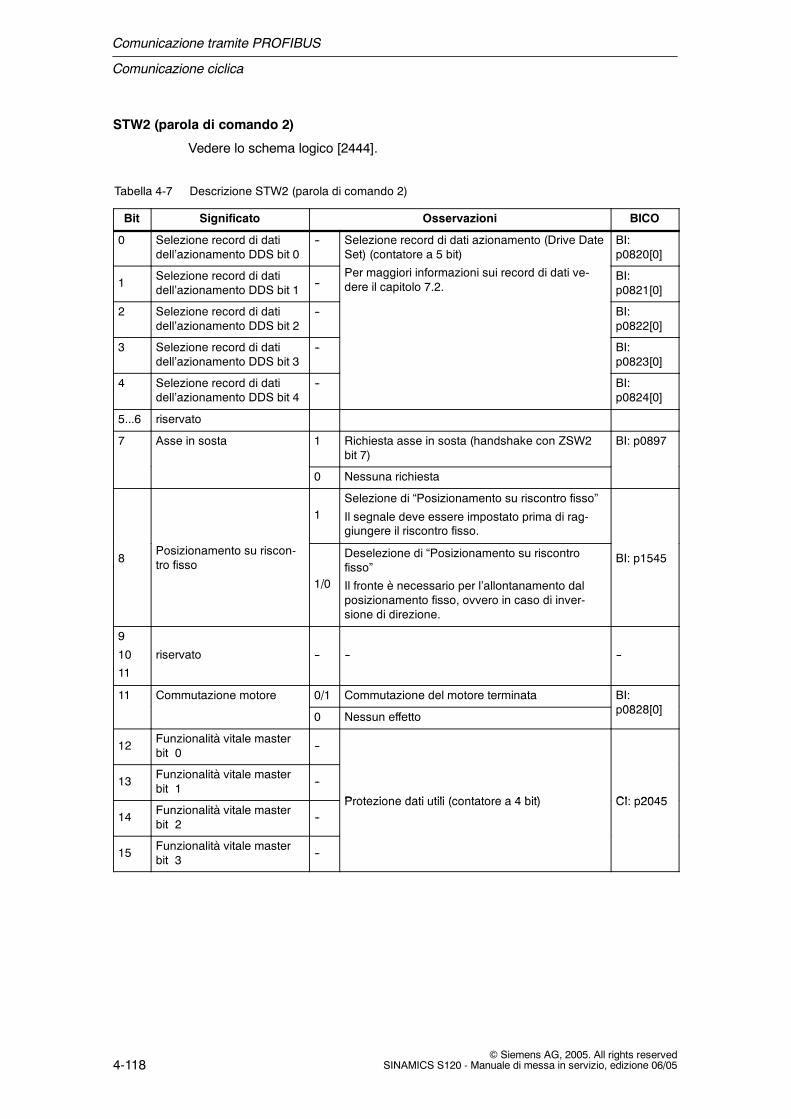
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-118© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
STW2 (parola di comando 2)
Vedere lo schema logico [2444].
Tabella 4-7 Descrizione STW2 (parola di comando 2)
Bit Significato Osservazioni BICO
0 Selezione record di datidell’azionamento DDS bit 0
-- Selezione record di dati azionamento (Drive DateSet) (contatore a 5 bit)
BI:p0820[0]
1 Selezione record di datidell’azionamento DDS bit 1
--Per maggiori informazioni sui record di dati ve-dere il capitolo 7.2.
BI:p0821[0]
2 Selezione record di datidell’azionamento DDS bit 2
-- BI:p0822[0]
3 Selezione record di datidell’azionamento DDS bit 3
-- BI:p0823[0]
4 Selezione record di datidell’azionamento DDS bit 4
-- BI:p0824[0]
5...6 riservato
7 Asse in sosta 1 Richiesta asse in sosta (handshake con ZSW2bit 7)
BI: p0897
0 Nessuna richiesta
1Selezione di “Posizionamento su riscontro fisso”
Il segnale deve essere impostato prima di rag-giungere il riscontro fisso.
8Posizionamento su riscon-tro fisso
1/0
Deselezione di “Posizionamento su riscontrofisso”
Il fronte è necessario per l’allontanamento dalposizionamento fisso, ovvero in caso di inver-sione di direzione.
BI: p1545
9
10
11
riservato -- -- --
11 Commutazione motore 0/1 Commutazione del motore terminata BI:0828[0]
0 Nessun effettop0828[0]
12 Funzionalità vitale masterbit 0
--
13 Funzionalità vitale masterbit 1
--
Protezione dati utili (contatore a 4 bit) CI: p204514 Funzionalità vitale master
bit 2--
Protezione dati utili (contatore a 4 bit) CI: p2045
15 Funzionalità vitale masterbit 3
--
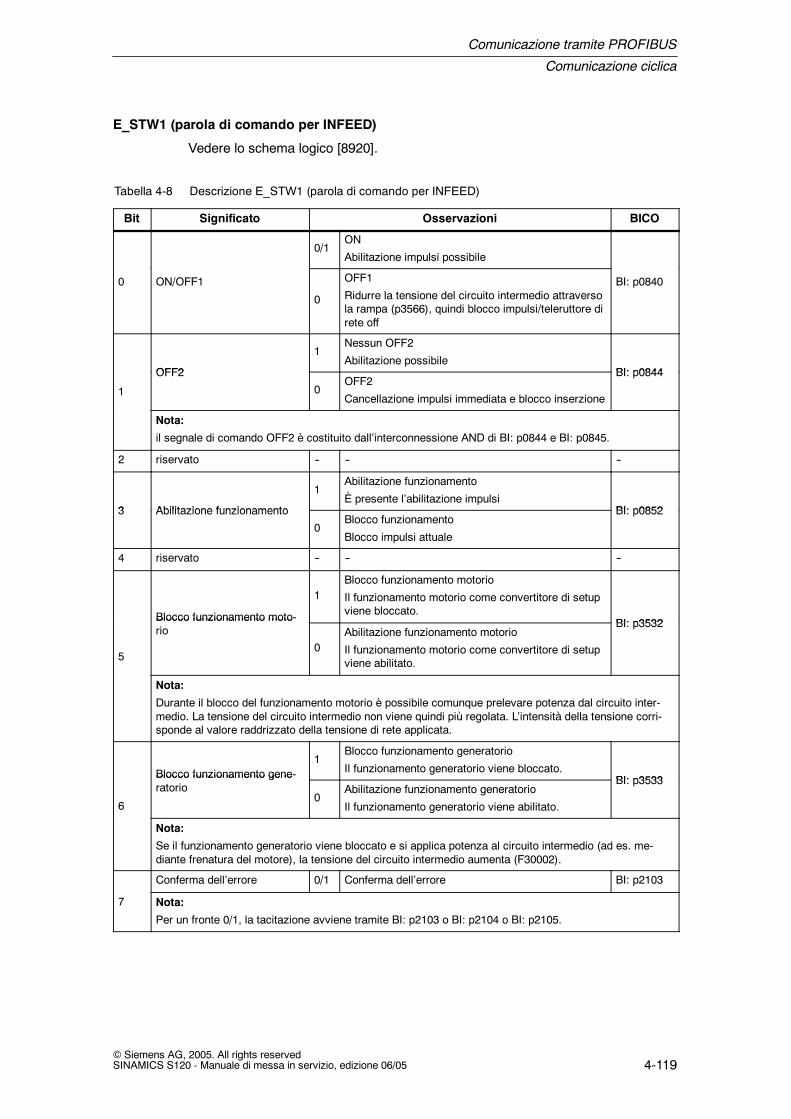
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-119© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
E_STW1 (parola di comando per INFEED)
Vedere lo schema logico [8920].
Tabella 4-8 Descrizione E_STW1 (parola di comando per INFEED)
Bit Significato Osservazioni BICO
0/1ON
Abilitazione impulsi possibile
0 ON/OFF1
0
OFF1
Ridurre la tensione del circuito intermedio attraversola rampa (p3566), quindi blocco impulsi/teleruttore direte off
BI: p0840
OFF2
1Nessun OFF2
Abilitazione possibileBI: p0844
1
OFF2
0OFF2
Cancellazione impulsi immediata e blocco inserzione
BI: p0844
Nota:
il segnale di comando OFF2 è costituito dall’interconnessione AND di BI: p0844 e BI: p0845.
2 riservato -- -- --
3 Abilitazione funzionamento
1Abilitazione funzionamento
È presente l’abilitazione impulsiBI: p08523 Abilitazione funzionamento
0Blocco funzionamento
Blocco impulsi attuale
BI: p0852
4 riservato -- -- --
Blocco funzionamento moto-
1Blocco funzionamento motorio
Il funzionamento motorio come convertitore di setupviene bloccato.
BI: p3532
5
Blocco funzionamento moto-rio
0Abilitazione funzionamento motorio
Il funzionamento motorio come convertitore di setupviene abilitato.
BI: p3532
Nota:
Durante il blocco del funzionamento motorio è possibile comunque prelevare potenza dal circuito inter-medio. La tensione del circuito intermedio non viene quindi più regolata. L’intensità della tensione corri-sponde al valore raddrizzato della tensione di rete applicata.
Blocco funzionamento gene-1
Blocco funzionamento generatorio
Il funzionamento generatorio viene bloccato.BI: p3533
6
Blocco funzionamento gene-ratorio
0Abilitazione funzionamento generatorio
Il funzionamento generatorio viene abilitato.
BI: p3533
Nota:
Se il funzionamento generatorio viene bloccato e si applica potenza al circuito intermedio (ad es. me-diante frenatura del motore), la tensione del circuito intermedio aumenta (F30002).
Conferma dell’errore 0/1 Conferma dell’errore BI: p2103
7 Nota:
Per un fronte 0/1, la tacitazione avviene tramite BI: p2103 o BI: p2104 o BI: p2105.

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-120© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-8 Descrizione E_STW1 (parola di comando per INFEED), proseguimento
Bit BICOOsservazioniSignificato
8
9riservato -- -- --
Controllo da parte del PLC
1
Controllo da parte del PLC
Il segnale deve essere settato in modo che i dati diprocesso trasmessi dal master PPROFIBUS ven-gano accettati dallo slave e diventino efficaci.
BI: p0854
10
Controllo da parte del PLC
0
Nessun controllo da parte del PLC
I dati di processo trasmessi dal master PROFIBUSvengono respinti dallo slave, e cioè registrati comezero.
BI: p0854
Nota:
Questo bit dovrebbe essere impostato a “1” solo dopo che lo slave PROFIBUS ha risposto conZSW1.9 = “1”.
11
12
13
14
15
riservato -- -- --
NRIF_A Valore di riferimento di velocità A (16 bit)
S Valore di riferimento di velocità con una risoluzione di 16 bit incluso bit del se-gno.
S Il bit 15 determina il segno del valore di riferimento:
-- Bit = 0 ----> valore di riferimento positivo
-- Bit = 1 ----> valore di riferimento negativo
S Il numero di giri viene normalizzato tramite p2000.
NRIF_A = 4000 hex o 16384 dec≐ Numero di giri in p2000

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-121© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
NRIF_B Valore di riferimento di velocità B (32 bit)
S Valore di riferimento di velocità con una risoluzione di 32 bit incluso bit delsegno.
S Il bit 31 determina il segno del valore di riferimento:
-- Bit = 0 ----> valore di riferimento positivo
-- Bit = 1 ----> valore di riferimento negativo
S Il numero di giri viene normalizzato tramite p2000.
NRIF_B = 4000 hex o 1 073 741 824 dec≐ Numero di giri in p2000
n
p2000
NRIF_ANRIF_B
4000 hex4000 0000 hex
Fig. 4-8 Normalizzazione della velocità
Gn_STW (encoder n parola di comando)
Questi dati di processo fanno parte dell’interfaccia dell’encoder e sono descritti nelcapitolo 4.3.5.
XERR (errore di posizione)
Tramite questo valore di riferimento l’errore di posizione viene trasmesso per ilDynamic Servo Control (DSC).
Il formato di XERR è identico al formato di G1_XIST1 (vedere il capitolo 4.3.5)
KPC (Fattore di guadagno del regolatore di posizione)
Tramite questo valore di riferimento viene trasmesso il fattore di guadagno del re-golatore di posizione per il Dynamic Servo Control (DSC).
Formato di trasmissione: Il KPC viene trasmesso in unità 0,001 1/s
Campo valori: da 0 fino a 4000.0
Eccezione: Con KPC = 0 la funzione “DSC” viene disattivata.
Esempio:
A2C2A hex≐ 666666 dec≐ KPC = 666,666 1/s≐ KPC = 40 1000/min

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-122© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
MOMRED (riduzione della coppia)
Con questo valore di riferimento può essere ridotto l’attuale limite di coppia validonell’azionamento.
Se si utilizzano telegrammi PROFIBUS specifici del costruttore con la parola dicomando MOMRED, il flusso di segnali viene interconnesso immediatamente finoalla scalatura del limite di coppia.
profibus_momred.vsd
(1543)p1528
(1520)p1522
p1520M_lim_1p1520
(1543)p1529
(1521)p1523
p1521M_lim_2p1521
p2050[4]
3
2
1
6
MOMRED
4
...
p1543(2050[4])p1542
1 -- (p1544 * x)
p1544
p1543(2050[4])p1542
1 -- (p1544 * x)
p1544
Fattore di scala
Fattore di scala
ad es.di 10 %
10 % sul 90 %
----> 100 % == 4000 Hex
10 % sul 90 %
----> 100 % == 4000 Hex
Fig. 4-9 Valore di riferimento MOMRED
Con MOMRED si indica la percentuale di riduzione della limite di coppia. Interna-mente questo valore viene convertito a quanto si riduce il limite di coppia e vienenormalizzato con p1544.
MT_STWCU_STWA_DIGITAL
Questi dati di processo fanno parte dei dati di processo centrali e sono descritti nelcapitolo 4.3.6.
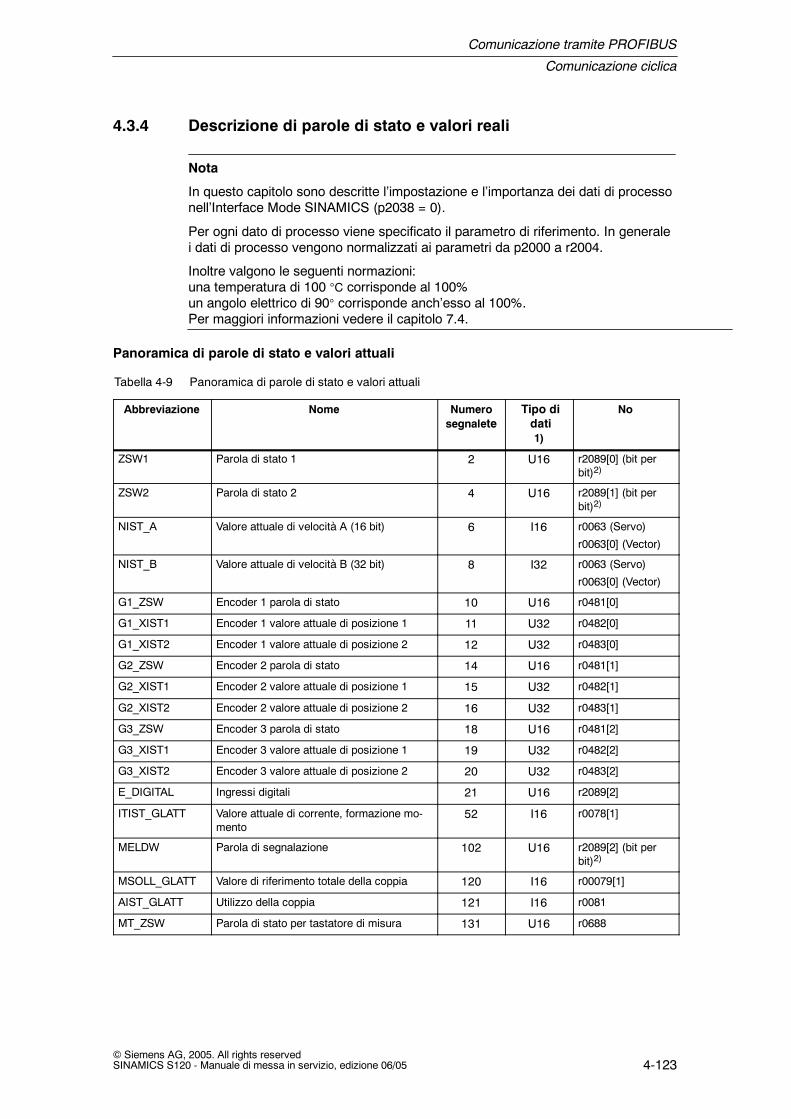
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-123© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.3.4 Descrizione di parole di stato e valori reali
Nota
In questo capitolo sono descritte l’impostazione e l’importanza dei dati di processonell’Interface Mode SINAMICS (p2038 = 0).
Per ogni dato di processo viene specificato il parametro di riferimento. In generalei dati di processo vengono normalizzati ai parametri da p2000 a r2004.
Inoltre valgono le seguenti normazioni:una temperatura di 100 °C corrisponde al 100%un angolo elettrico di 90° corrisponde anch’esso al 100%.Per maggiori informazioni vedere il capitolo 7.4.
Panoramica di parole di stato e valori attuali
Tabella 4-9 Panoramica di parole di stato e valori attuali
Abbreviazione Nome Numerosegnalete
Tipo didati1)
No
ZSW1 Parola di stato 1 2 U16 r2089[0] (bit perbit)2)
ZSW2 Parola di stato 2 4 U16 r2089[1] (bit perbit)2)
NIST_A Valore attuale di velocità A (16 bit) 6 I16 r0063 (Servo)
r0063[0] (Vector)
NIST_B Valore attuale di velocità B (32 bit) 8 I32 r0063 (Servo)
r0063[0] (Vector)
G1_ZSW Encoder 1 parola di stato 10 U16 r0481[0]
G1_XIST1 Encoder 1 valore attuale di posizione 1 11 U32 r0482[0]
G1_XIST2 Encoder 1 valore attuale di posizione 2 12 U32 r0483[0]
G2_ZSW Encoder 2 parola di stato 14 U16 r0481[1]
G2_XIST1 Encoder 2 valore attuale di posizione 1 15 U32 r0482[1]
G2_XIST2 Encoder 2 valore attuale di posizione 2 16 U32 r0483[1]
G3_ZSW Encoder 3 parola di stato 18 U16 r0481[2]
G3_XIST1 Encoder 3 valore attuale di posizione 1 19 U32 r0482[2]
G3_XIST2 Encoder 3 valore attuale di posizione 2 20 U32 r0483[2]
E_DIGITAL Ingressi digitali 21 U16 r2089[2]
ITIST_GLATT Valore attuale di corrente, formazione mo-mento
52 I16 r0078[1]
MELDW Parola di segnalazione 102 U16 r2089[2] (bit perbit)2)
MSOLL_GLATT Valore di riferimento totale della coppia 120 I16 r00079[1]
AIST_GLATT Utilizzo della coppia 121 I16 r0081
MT_ZSW Parola di stato per tastatore di misura 131 U16 r0688
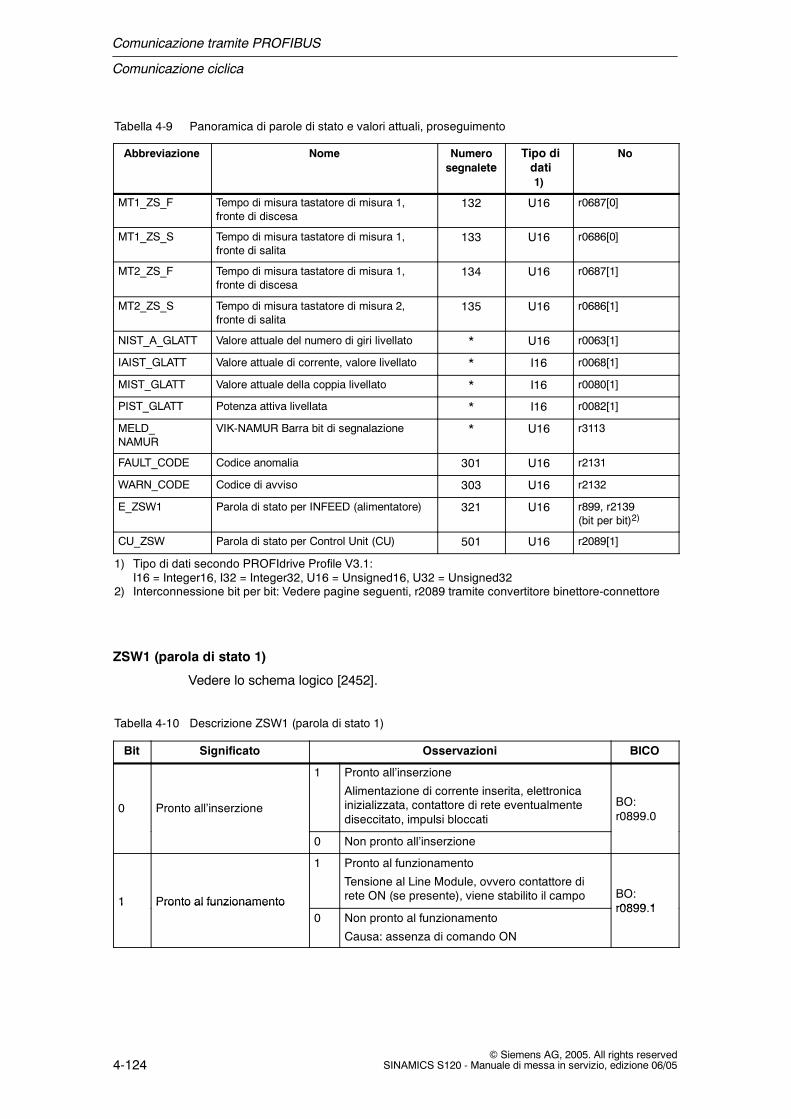
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-124© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-9 Panoramica di parole di stato e valori attuali, proseguimento
Abbreviazione NoTipo didati1)
Numerosegnalete
Nome
MT1_ZS_F Tempo di misura tastatore di misura 1,fronte di discesa
132 U16 r0687[0]
MT1_ZS_S Tempo di misura tastatore di misura 1,fronte di salita
133 U16 r0686[0]
MT2_ZS_F Tempo di misura tastatore di misura 1,fronte di discesa
134 U16 r0687[1]
MT2_ZS_S Tempo di misura tastatore di misura 2,fronte di salita
135 U16 r0686[1]
NIST_A_GLATT Valore attuale del numero di giri livellato * U16 r0063[1]
IAIST_GLATT Valore attuale di corrente, valore livellato * I16 r0068[1]
MIST_GLATT Valore attuale della coppia livellato * I16 r0080[1]
PIST_GLATT Potenza attiva livellata * I16 r0082[1]
MELD_NAMUR
VIK-NAMUR Barra bit di segnalazione * U16 r3113
FAULT_CODE Codice anomalia 301 U16 r2131
WARN_CODE Codice di avviso 303 U16 r2132
E_ZSW1 Parola di stato per INFEED (alimentatore) 321 U16 r899, r2139(bit per bit)2)
CU_ZSW Parola di stato per Control Unit (CU) 501 U16 r2089[1]
1) Tipo di dati secondo PROFIdrive Profile V3.1:I16 = Integer16, I32 = Integer32, U16 = Unsigned16, U32 = Unsigned32
2) Interconnessione bit per bit: Vedere pagine seguenti, r2089 tramite convertitore binettore-connettore
ZSW1 (parola di stato 1)
Vedere lo schema logico [2452].
Tabella 4-10 Descrizione ZSW1 (parola di stato 1)
Bit Significato Osservazioni BICO
0 Pronto all’inserzione
1 Pronto all’inserzione
Alimentazione di corrente inserita, elettronicainizializzata, contattore di rete eventualmentediseccitato, impulsi bloccati
BO:r0899.0
0 Non pronto all’inserzione
1 Pronto al funzionamento
1 Pronto al funzionamento
Tensione al Line Module, ovvero contattore direte ON (se presente), viene stabilito il campo BO:
r0899 11 Pronto al funzionamento0 Non pronto al funzionamento
Causa: assenza di comando ON
r0899.1

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-125© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-10 Descrizione ZSW1 (parola di stato 1), proseguimento
Bit BICOOsservazioniSignificato
2 Funzionamento abilitato
1 Funzionamento abilitato
Abilitazione di elettronica e impulsi, quindi acce-lerazione fino al valore di riferimento impostato
BO:r0899.2
0 Funzionamento inibito
3 Anomalia attiva
1 Anomalia attiva
L’azionamento è guasto ed è fuori servizio. Dopola tacitazione e l’eliminazione della causa, l’azio-namento va in blocco di inserzione.
Le anomalie presenti si trovano nel buffer delleanomalie.
BO:r2193.3
0 Nessun’anomalia attiva
Nessun’anomalia nel buffer delle anomalie.
A t i i tti1 Nessun OFF2 attivo
BO4
Arresto per inerzia attivo(OFF2) 0 Arresto per inerzia attivo (OFF2)
È applicato un comando OFF2.
BO:r0899.4
1 Nessun OFF3 attivoBO
5 Arresto rapido attivo (OFF3) 0 Arresto rapido attivo (OFF3)
È applicato un comando OFF3.
BO:r0899.5
6 Blocco all’inserzione
1 Blocco inserzione
La riaccensione è possibile solo con OFF1 equindi ON. BO:
r0899 66 Blocco all inserzione0 Nessun blocco inserzione
L’inserzione è possibile.
r0899.6
7 Avviso attivo
1 Avviso attivo
L’azionamento rimane in funzione. Non è neces-saria la tacitazione.
Gli avvisi attivi si trovano nel buffer degli avvisi.BO:r2139.7
0 Nessun avviso attivo
Nessun avviso nel buffer degli avvisi.
8
Scostamento tra valore diriferimento evalore attuale di velocitànella fascia di tolleranza
1 Sorveglianza dello scostamento tra valore di rife-rimento e valore attuale nella fascia di tolleranza
Valore attuale nella fascia di tolleranza, supera-mento o non raggiungimento dinamico consen-tito per t < tmax , ad es.
n = nrif+
f = frif+, ecc.,
tmax è parametrizzabile
BO:r2197.7
0 Sorveglianza dello scostamento tra valore di rife-rimento e valore attuale non nella fascia di tolle-ranza

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-126© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-10 Descrizione ZSW1 (parola di stato 1), proseguimento
Bit BICOOsservazioniSignificato
9 Gestione richiesta dal PLC
1 Gestione richiesta
Il sistema di automazione viene invitato ad assu-mere il controllo. Condizione in caso di applica-zioni con sincronismo di clock: Azionamento sin-crono al sistema di automazione.
BO:r0899.9
0 Funzionamento in locale
Gestione possibile solo sull’apparecchio
Valore di confronto f o n 1 Valore di confronto f o n raggiunto o superato BO:Valore di confronto f o nraggiunto o superato 0 Valore di confronto f o n non raggiunto
BO:r2199.1
10Nota:
Il messaggio viene parametrizzato come segue:
p2141 Valore di soglia
p2142 Isteresi
11Limite I, M o P raggiunto o 1 Limite I, M o P non raggiunto BO:
11Limite I, M o P raggiunto osuperato 0 Limite I, M o P raggiunto o superato
BO:r1407.7
12Freno di stazionamento 1 Freno di stazionamento attivato BO:
12Freno di stazionamentochiuso 0 Freno di stazionamento non attivato
BO:r0899.12
13Avviso surriscaldamento 1 Avviso surriscaldamento motore attivo BO:
13Avviso surriscaldamentomotore 0 Avviso surriscaldamento motore non attivo
BO:r2135.14
14 n att > 01 Valore attuale di velocità> = 0 BO:
14 n_att >= 00 Valore attuale di velocità< 0
BO:r2197.3
1 Nessun avviso attivo
15Avviso sovraccarico termicoconvertitore
0 Avviso sovraccarico termico convertitore
L’avviso per sovraccarico termico del convertitoreè attivo.
BO:r2135.15

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-127© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
ZSW2 (parola di stato 2)
Vedere lo schema logico [2454].
Tabella 4-11 Descrizione ZSW2 (parola di stato 2)
Bit Significato Osservazioni BICO
0 Record dati azionamentoDDS attivo bit 0
-- Drive Data Set attivo (contatore a 5 bit)
Per maggiori informazioni sui record di dati ve-
BO:r0051.0
1 Record dati azionamentoDDS attivo bit 1
--Per maggiori informazioni sui record di dati vedere il capitolo 7.2. BO:
r0051.1
2 Record dati azionamentoDDS attivo bit 2
-- BO:r0051.2
3 Record dati azionamentoDDS attivo bit 3
-- BO:r0051.3
4 Record dati azionamentoDDS attivo bit 4
-- BO:r0051.4
5...7 riservato -- -- --
7 Asse in sosta 1 Sosta dell’asse attiva BO:0896 0
0 Sosta dell’asse non attivar0896.0
8Posizionamento su riscon- 1 Posizionamento su riscontro fisso BO:
8Posizionamento su riscontro fisso 0 Nessun posizionamento su riscontro fisso
BO:r1406.8
9
10riservato -- -- --
11 Commutazione del recorddi d ti
1 Commutazione record di dati attiva BO:0835 0di dati
0 Nessuna commutazione record di dati attivar0835.0
12 Funzionalità vitale slavebit 0
--
13 Funzionalità vitale slavebit 1
--
Protezione dati utili (contatore a 4 bit)
Intercon-nesso
14 Funzionalità vitale slavebit 2
--Protezione dati utili (contatore a 4 bit)
nessoimplicita-mente
15 Funzionalità vitale slavebit 3
--
NIST_A (valore attuale di velocità A (16 Bit))
S Valore attuale di velocità con una risoluzione di 16 bit
S Il valore attuale di velocità è normalizzato come il valore di riferimento (vedereNRIF_A).
NIST_B (valore attuale di velocità B (32 bit))
S Valore attuale di velocità con una risoluzione di 32 bit
S Il valore attuale di velocità è normalizzato come il valore di riferimento (vedereNRIF_B).
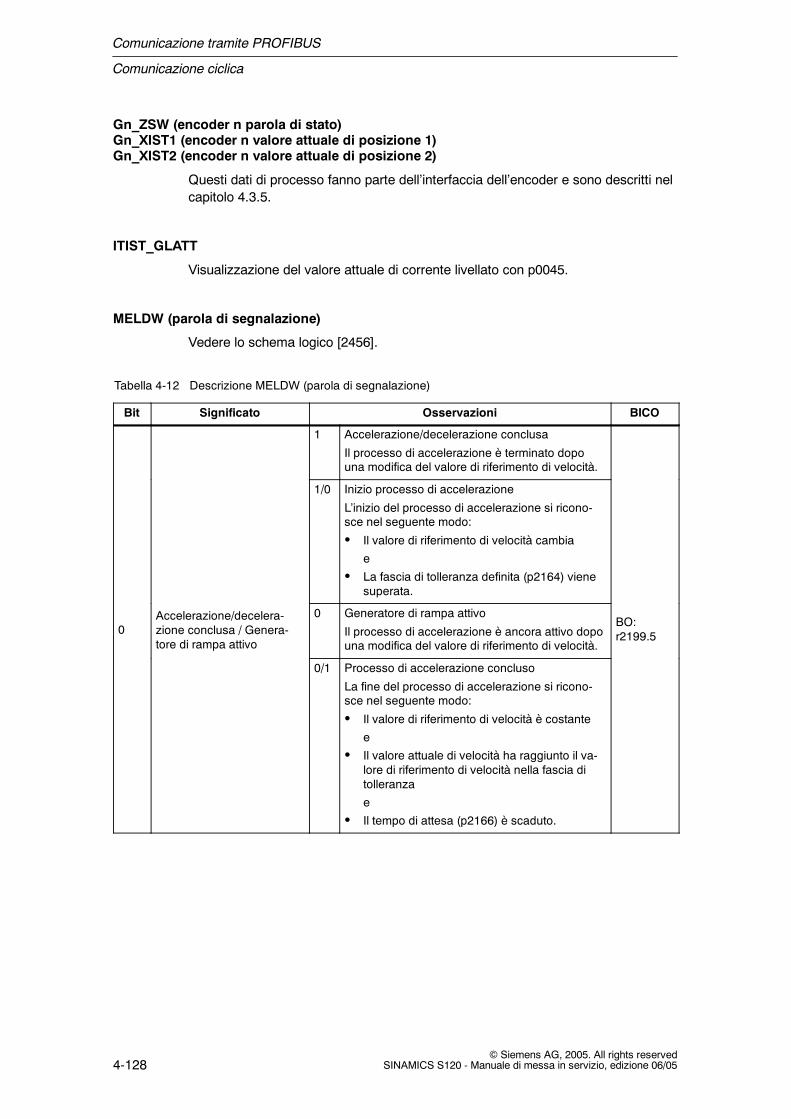
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-128© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Gn_ZSW (encoder n parola di stato)Gn_XIST1 (encoder n valore attuale di posizione 1)Gn_XIST2 (encoder n valore attuale di posizione 2)
Questi dati di processo fanno parte dell’interfaccia dell’encoder e sono descritti nelcapitolo 4.3.5.
ITIST_GLATT
Visualizzazione del valore attuale di corrente livellato con p0045.
MELDW (parola di segnalazione)
Vedere lo schema logico [2456].
Tabella 4-12 Descrizione MELDW (parola di segnalazione)
Bit Significato Osservazioni BICO
1 Accelerazione/decelerazione conclusa
Il processo di accelerazione è terminato dopouna modifica del valore di riferimento di velocità.
1/0 Inizio processo di accelerazione
L’inizio del processo di accelerazione si ricono-sce nel seguente modo:
S Il valore di riferimento di velocità cambia
e
S La fascia di tolleranza definita (p2164) vienesuperata.
0Accelerazione/decelera-zione conclusa / Genera-tore di rampa attivo
0 Generatore di rampa attivo
Il processo di accelerazione è ancora attivo dopouna modifica del valore di riferimento di velocità.
BO:r2199.5
0/1 Processo di accelerazione concluso
La fine del processo di accelerazione si ricono-sce nel seguente modo:
S Il valore di riferimento di velocità è costante
e
S Il valore attuale di velocità ha raggiunto il va-lore di riferimento di velocità nella fascia ditolleranza
e
S Il tempo di attesa (p2166) è scaduto.
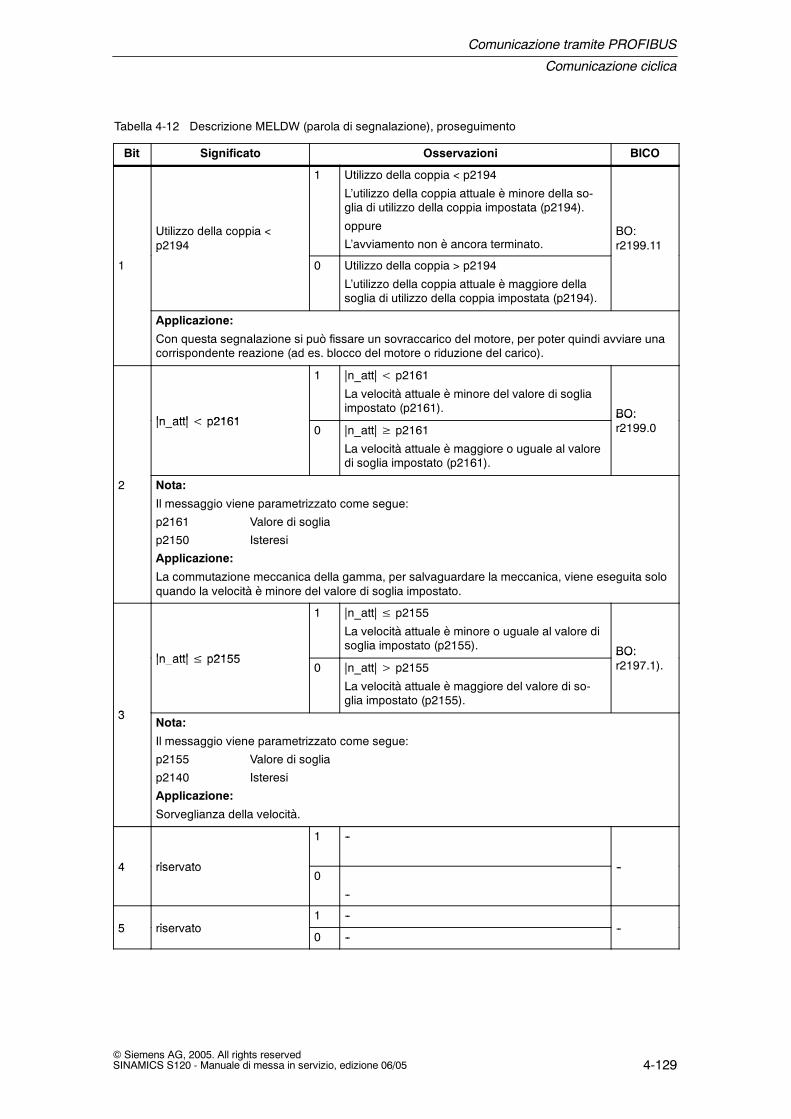
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-129© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-12 Descrizione MELDW (parola di segnalazione), proseguimento
Bit BICOOsservazioniSignificato
Utilizzo della coppia <p2194
1 Utilizzo della coppia < p2194
L’utilizzo della coppia attuale è minore della so-glia di utilizzo della coppia impostata (p2194).
oppure
L’avviamento non è ancora terminato.BO:r2199.11
1
p
0 Utilizzo della coppia > p2194
L’utilizzo della coppia attuale è maggiore dellasoglia di utilizzo della coppia impostata (p2194).
Applicazione:
Con questa segnalazione si può fissare un sovraccarico del motore, per poter quindi avviare unacorrispondente reazione (ad es. blocco del motore o riduzione del carico).
|n att|< p2161
1 |n_att|< p2161
La velocità attuale è minore del valore di sogliaimpostato (p2161). BO:
|n_att|< p21610 |n_att|≥ p2161
La velocità attuale è maggiore o uguale al valoredi soglia impostato (p2161).
BO:r2199.0
2 Nota:
Il messaggio viene parametrizzato come segue:
p2161 Valore di soglia
p2150 Isteresi
Applicazione:
La commutazione meccanica della gamma, per salvaguardare la meccanica, viene eseguita soloquando la velocità è minore del valore di soglia impostato.
|n att|≤ p2155
1 |n_att|≤ p2155
La velocità attuale è minore o uguale al valore disoglia impostato (p2155). BO:
3
|n_att|≤ p21550 |n_att|> p2155
La velocità attuale è maggiore del valore di so-glia impostato (p2155).
BO:r2197.1).
3Nota:
Il messaggio viene parametrizzato come segue:
p2155 Valore di soglia
p2140 Isteresi
Applicazione:
Sorveglianza della velocità.
4 riservato
1 --
4 riservato0
--
--
5 riservato1 --
5 riservato0 --
--
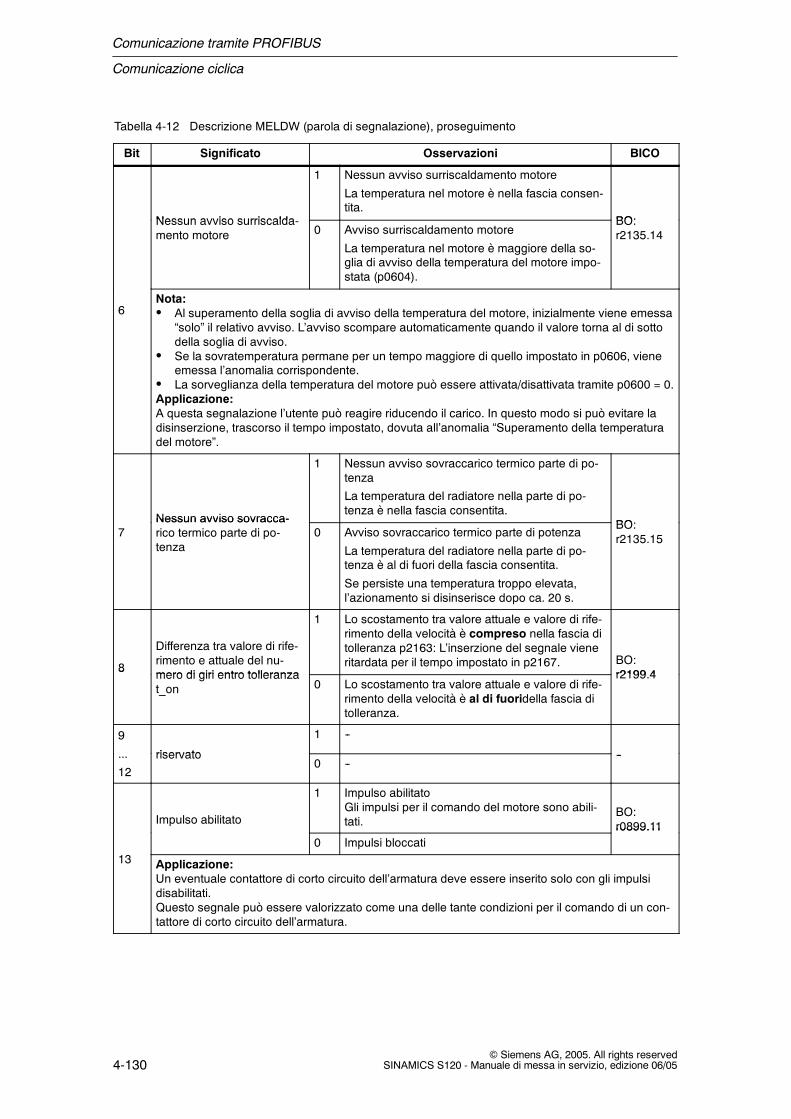
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-130© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-12 Descrizione MELDW (parola di segnalazione), proseguimento
Bit BICOOsservazioniSignificato
Nessun avviso surriscalda
1 Nessun avviso surriscaldamento motore
La temperatura nel motore è nella fascia consen-tita.
BO:Nessun avviso surriscalda-mento motore 0 Avviso surriscaldamento motore
La temperatura nel motore è maggiore della so-glia di avviso della temperatura del motore impo-stata (p0604).
BO:r2135.14
6Nota:S Al superamento della soglia di avviso della temperatura del motore, inizialmente viene emessa
“solo” il relativo avviso. L’avviso scompare automaticamente quando il valore torna al di sottodella soglia di avviso.
S Se la sovratemperatura permane per un tempo maggiore di quello impostato in p0606, vieneemessa l’anomalia corrispondente.
S La sorveglianza della temperatura del motore può essere attivata/disattivata tramite p0600 = 0.Applicazione:A questa segnalazione l’utente può reagire riducendo il carico. In questo modo si può evitare ladisinserzione, trascorso il tempo impostato, dovuta all’anomalia “Superamento della temperaturadel motore”.
Nessun avviso sovracca-
1 Nessun avviso sovraccarico termico parte di po-tenza
La temperatura del radiatore nella parte di po-tenza è nella fascia consentita.
BO7
Nessun avviso sovracca-rico termico parte di po-tenza
0 Avviso sovraccarico termico parte di potenza
La temperatura del radiatore nella parte di po-tenza è al di fuori della fascia consentita.
Se persiste una temperatura troppo elevata,l’azionamento si disinserisce dopo ca. 20 s.
BO:r2135.15
8
Differenza tra valore di rife-rimento e attuale del nu-mero di giri entro tolleranza
1 Lo scostamento tra valore attuale e valore di rife-rimento della velocità è compreso nella fascia ditolleranza p2163: L’inserzione del segnale vieneritardata per il tempo impostato in p2167. BO:
r2199 48 mero di giri entro tolleranzat_on 0 Lo scostamento tra valore attuale e valore di rife-
rimento della velocità è al di fuoridella fascia ditolleranza.
r2199.4
9
riservato
1 --
...
12riservato
0 ----
Impulso abilitato
1 Impulso abilitatoGli impulsi per il comando del motore sono abili-tati.
BO:r0899.11
0 Impulsi bloccatir0899.11
13 Applicazione:Un eventuale contattore di corto circuito dell’armatura deve essere inserito solo con gli impulsidisabilitati.Questo segnale può essere valorizzato come una delle tante condizioni per il comando di un con-tattore di corto circuito dell’armatura.
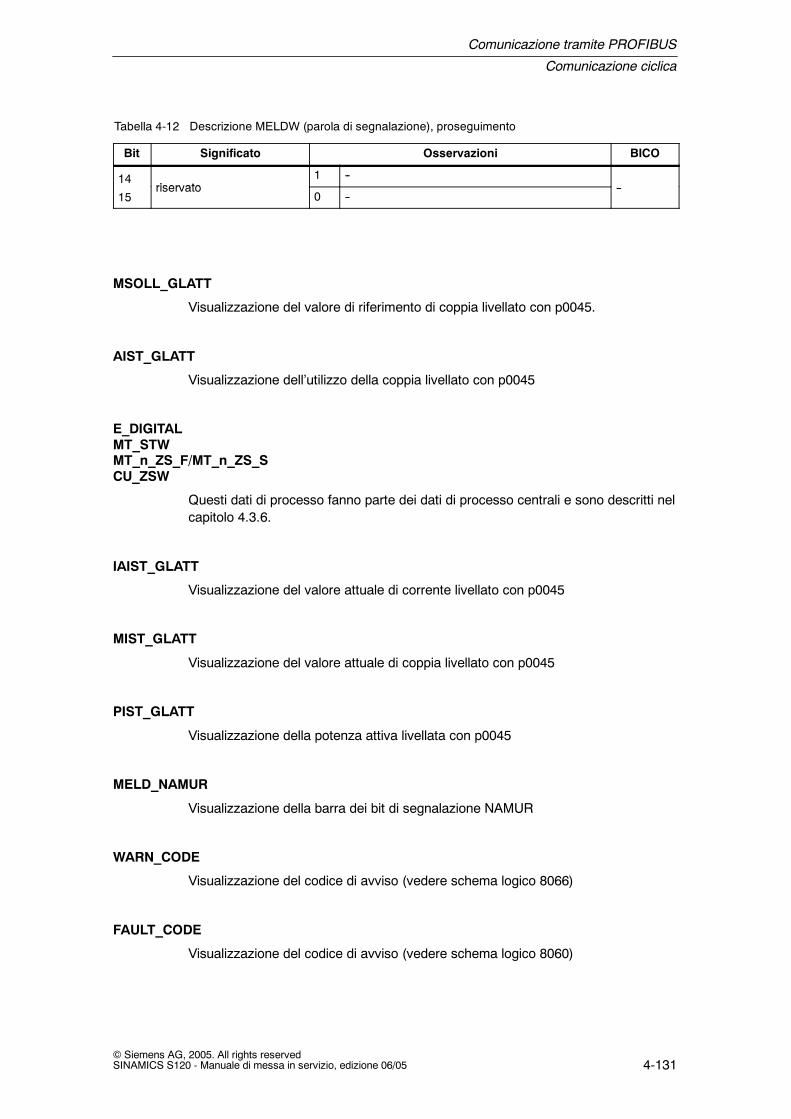
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-131© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-12 Descrizione MELDW (parola di segnalazione), proseguimento
Bit BICOOsservazioniSignificato
14riservato
1 --14
15riservato
0 ----
MSOLL_GLATT
Visualizzazione del valore di riferimento di coppia livellato con p0045.
AIST_GLATT
Visualizzazione dell’utilizzo della coppia livellato con p0045
E_DIGITALMT_STWMT_n_ZS_F/MT_n_ZS_SCU_ZSW
Questi dati di processo fanno parte dei dati di processo centrali e sono descritti nelcapitolo 4.3.6.
IAIST_GLATT
Visualizzazione del valore attuale di corrente livellato con p0045
MIST_GLATT
Visualizzazione del valore attuale di coppia livellato con p0045
PIST_GLATT
Visualizzazione della potenza attiva livellata con p0045
MELD_NAMUR
Visualizzazione della barra dei bit di segnalazione NAMUR
WARN_CODE
Visualizzazione del codice di avviso (vedere schema logico 8066)
FAULT_CODE
Visualizzazione del codice di avviso (vedere schema logico 8060)

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-132© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
E_ZSW1 (parola di stato per INFEED)
Vedere lo schema logico [8926].
Tabella 4-13 Descrizione E_ZSW1 (parola di stato per E_INF)
Bit Significato Osservazioni BICO
0 Pronto all’inserzione1 Pronto all’inserzione
BO: r0899 00 Pronto all’inserzione0 Non pronto all’inserzione
BO: r0899.0
1 Pronto al funzionamento1
Pronto al funzionamento
Circuito intermedio precaricato, impulsi bloc-cati BO: r0899.1
0 Non pronto al funzionamento
2 Funzionamento abilitato1
Funzionamento abilitato
Vdc = Vdc_soll BO: r0899.22 Funzionamento abilitato
0 Funzionamento inibito
BO: r0899.2
3 Anomalia attiva1 Anomalia attiva
BO: r2139 33 Anomalia attiva0 Nessun’anomalia presente
BO: r2139.3
4 Nessun OFF2 attivo1 Nessun OFF2 attivo
BO: r0899 44 Nessun OFF2 attivo0 OFF2 Attivo
BO: r0899.4
5 riservato -- -- --
6 Blocco inserzione1
Blocco inserzione
Anomalia attiva BO: r0899.66 Blocco inserzione
0 Nessun blocco inserzione presente
BO: r0899.6
7 Avviso attivo1 Avviso attivo
BO: r2139 77 Avviso attivo0 Nessun avviso presente
BO: r2139.7
8 riservato -- -- --
9 Gestione richiesta dal PLC
1
Gestione richiesta
Il sistema di automazione viene invitato adassumere il controllo. Condizione in caso diapplicazioni con sincronismo di clock: Aziona-mento sincrono al sistema di automazione.
BO: r0899.9
0Funzionamento in locale
Gestione possibile solo sull’apparecchio
10 riservato -- -- --
11 Esclusione comandata
1
Esclusione comandata
La precarica è terminata e il relè di ponticella-mento per le resistenze di precarica è coman-dato. BO: r0899.11
0Ponticellamento non comandato
La precarica non è terminata.
12Contattore di rete coman- 1 Contattore di rete comandato
BO: r0899 1212Contattore di rete comandato 0 Contattore di rete non comandato
BO: r0899.12
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-133© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-13 Descrizione E_ZSW1 (parola di stato per E_INF), proseguimento
Bit BICOOsservazioniSignificato
13
14
15
riservato -- -- --
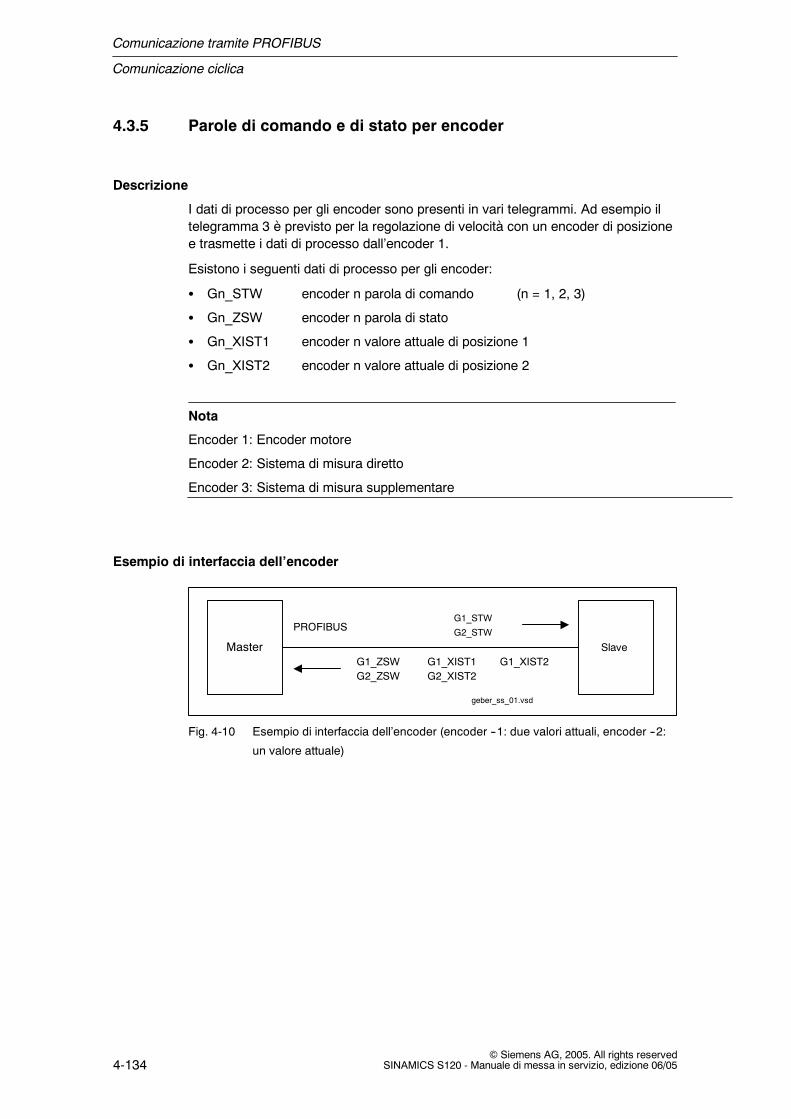
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-134© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.3.5 Parole di comando e di stato per encoder
Descrizione
I dati di processo per gli encoder sono presenti in vari telegrammi. Ad esempio iltelegramma 3 è previsto per la regolazione di velocità con un encoder di posizionee trasmette i dati di processo dall’encoder 1.
Esistono i seguenti dati di processo per gli encoder:
S Gn_STW encoder n parola di comando (n = 1, 2, 3)
S Gn_ZSW encoder n parola di stato
S Gn_XIST1 encoder n valore attuale di posizione 1
S Gn_XIST2 encoder n valore attuale di posizione 2
Nota
Encoder 1: Encoder motore
Encoder 2: Sistema di misura diretto
Encoder 3: Sistema di misura supplementare
Esempio di interfaccia dell’encoder
geber_ss_01.vsd
PROFIBUS
Master Slave
G1_STW
G2_STW
G1_ZSWG2_ZSW
G1_XIST1G2_XIST2
G1_XIST2
Fig. 4-10 Esempio di interfaccia dell’encoder (encoder --1: due valori attuali, encoder --2:
un valore attuale)

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-135© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Parola di comando encoder n (Gn_STW, n = 1, 2, 3)
La parola di comando dell’encoder controlla le funzioni dell’encoder.
Tabella 4-14 Descrizione dei singoli segnali in Gn_STW
Bit Nome Stato del segnale, descrizione
0
Se il bit 7 = 0, viene attivata la richiesta della ricerca della tacca di riferi-mento:
Bit Significato
0 Funzione 1 tacca di riferimento 1
1 Funzione 2 tacca di riferimento 2
2 Funzione 3 tacca di riferimento 3
3 Funzione 4 tacca di riferimento 4
1
Fun-
3 Funzione 4 tacca di riferimento 4
Se il bit 7 = 1, viene attivata la richiesta della misura al volo:
Bit Significato
0 Funzione 1 tastatore di misura 1 fronte di salita
1 Funzione 2 tastatore di misura 1 fronte di discesa
2 Funzione 3 tastatore di misura 2 fronte di salita
3 Funzione 4 tastatore di misura 2 fronte di discesa
2
Ricercadella taccadi riferi-mento
oppure
Misura al
Funzioni
3 Funzione 4 tastatore di misura 2 fronte di discesa
Nota:
S Bit x = 1 Richiedere la funzioneBit x = 0 Non richiedere la funzione
S Se viene attivata più di 1 funzione, vale:
I valori di tutte le funzioni possono essere letti solo se tutte le funzioniattivate sono terminate e se vi è stata la conferma mediante il relativobit di stato (ZSW.0/.1/.2/.3 di nuovo segnale “0”).
3
Misura alvolo
bit di stato (ZSW.0/.1/.2/.3 di nuovo segnale 0 ).
S Ricerca della tacca di riferimento
È possibile cercare una tacca di riferimento.
S Tacca di zero ausiliaria
S Misura al volo
Possono essere attivati contemporaneamente i fronti di salita e di di-scesa.
4Bit 6, 5, 4 Significato
000 --
5 Co-mando
001 Attivare la funzione x
010 Leggere il valore x
6011 Interrompere la funzione x
(x: funzione selezionata tramite bit 0 -- 4)
7Moda- 1 Misura al volo (risoluzione fine tramite p0418)
7Modalità 0 Ricerca tacca di riferimento (risoluzione fine tramite p0418)
8
...
12
riservato --

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-136© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-14 Descrizione dei singoli segnali in Gn_STW, proseguimento
Bit Stato del segnale, descrizioneNome
13Richiesta trasmis-sione ciclica valoreassoluto
1 Richiesta di trasmissione ciclica del valore attuale di posizione inGn_XIST2.
Utilizzo (ad es.):
S Sorveglianza aggiuntiva sistema di misura
S Sincronizzazione nell’avviamento
0 Nessuna richiesta
14 Encoder in sosta1 Richiesta encoder in sosta (handshake con Gn_ZSW bit 14)
14 Encoder in sosta0 Nessuna richiesta
0/1 Richiesta di reset di errori encoder.
15Conferma errore en-coder
1
0
Gn_ZSW.15
Erroreencoder
1
0
1
0
Gn_STW.15
Conferma erroreencoder
Gn_ZSW.11
Conferma erroreencoder attivo
Cancellare l’errore
1)
1) Il segnale deve essere resettato dall’utente
0 Nessuna richiesta

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-137© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio 1: Ricerca della tacca di riferimento
Presupposti per l’esempio:
S Ricerca del punto di riferimento con codifica della distanza
S Due tacche di riferimento (funzione 1 / funzione 2)
S Regolazione di posizione con encoder 1
Modalità
G1_STW.7 = 0
Funzione 1
G1_STW.0 = 1
Comando
G1_STW.4 = 1(attivare la funzione)
G1_STW.5 = 1(leggere il valore)
Funzione 1 attiva
G1_ZSW.0 = 1
Valore 1/2 disponibile
G1_ZSW.4 /.5 = 1
Gx_XIST2
Tacca di riferimento 1/2
Accettazione del valore attuale1
0
1
0
1
0
1
0
1
0
1
0Ricerca della tacca di riferimento
Tacca di riferimento 1
Attivare la funzione 1/2
Funzione 1 attiva
Valore 1disponibile
Funzione 2
G1_STW.1= 11
0
Funzione 2 attiva
G1_ZSW.1 = 11
0
Funzione 2 attiva
Tacca di riferimento 2
Valore 2disponibile
Valore attuale di posizionesulla tacca di riferimento 1
Valore attuale di posizionesulla tacca di riferimento 2
Tacca di riferimento 1
Tacca di riferimento 2
1 2
1)
1) Il segnale deve essere resettato dall’utente
1
0
Leggere ilvalore 1
Leggere ilvalore 2
1)
Fig. 4-11 Diagramma di flusso per la funzione “Ricerca della tacca di riferimento”

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-138© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio 2: Misura al volo
Presupposti per l’esempio:
S Tastatore di misura con fronte di salita (funzione 1)
S Regolazione di posizione con encoder 1
Modalità
G1_STW.7 = 1
Funzione 1
G1_STW.0 = 1
Comando
G1_STW.4 = 1(attivare la funzione)
G1_STW.5 = 1(leggere il valore)
Funzione attiva
G1_ZSW.0 = 1
Valore disponibile
G1_ZSW.4 = 1
Tastatore di misura flesso
G1_ZSW.8
Tastatore di misura fronte
Accettazione del valore attuale1
0
1
0
1
0
1
0
1
0
1
0
1
0Misura al volo
Tastatore di misura, fronte di salita
Attivare la funzione 1
Funzione 1 attiva
Valore 1 disponibile
1)
1) Il segnale deve essere resettato dall’utente
1
0
Leggere il valore 1
Fig. 4-12 Diagramma sequenziale con la funzione “Misura al volo”

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-139© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Encoder 2 parola di comando (G2_STW)
S vedere G1_STW (tabelle 4-14)
Encoder 3 parola di comando (G3_STW)
S vedere G1_STW (tabelle 4-14)
Parola di stato encoder n (Gn_STW, n = 1, 2, 3)
La parola di stato dell’encoder serve a visualizzare stati, errori e tacitazioni.
Tabella 4-15 Descrizione dei singoli segnali in Gn_ZSW
Bit Nome Stato del segnale, descrizione
0Vale per la ricerca della tacca di riferimento e le misure al volo
Bit Significato
0 Funzione 1 Tacca di riferimento 1
1 Stato:
Funzione
Tastatore di misura 1 fronte di salita
1 Funzione 2 Tacca di riferimento 2Tastatore di misura 1 fronte di discesa
2 Funzione 3 Tacca di riferimento 3
2
Funzioneattiva1 -- 4
2 Funzione 3 Tacca di riferimento 3Tastatore di misura 2 fronte di salita
3 Funzione 4 Tacca di riferimento 4Tastatore di misura 2 fronte di discesa
3
Ricerca
Nota:
S Bit x = 1 Funzione attivaBit x = 0 Funzione non attiva
4
Ricercadella taccadi riferi-mento
oppure
Vale per la ricerca della tacca di riferimento e le misure al volo
Bit Significato
4 Valore 1 Tacca di riferimento 1Tastatore di misura 1 fronte di salita
5
oppure
Misura alvolo Stato:
Valore
Tastatore di misura 1 fronte di salita
5 Valore 2 Tastatore di misura 1 fronte di discesa
6 Valore 3 Tastatore di misura 2 fronte di salita
7 Valore 4 Tastatore di misura 2 fronte di discesa
6
1 -- 4disponi-bile
Nota:
S Bit x = 1 Valore disponibileBit x = 0 Valore non esistente
S Può essere letto sempre solo un singolo valore.
7
p g
Causa: È disponibile solo una parola di stato comune Gn_XIST2 perleggere i valori.
S Il tastatore di misura deve essere progettato su un “ingresso veloce”DI/DO della Control Unit.
8Tastatoredi misura
1 Tastatore di misura flesso (segnale high)8 di misura
1 flesso 0 Tastatore di misura non flesso (segnale low)
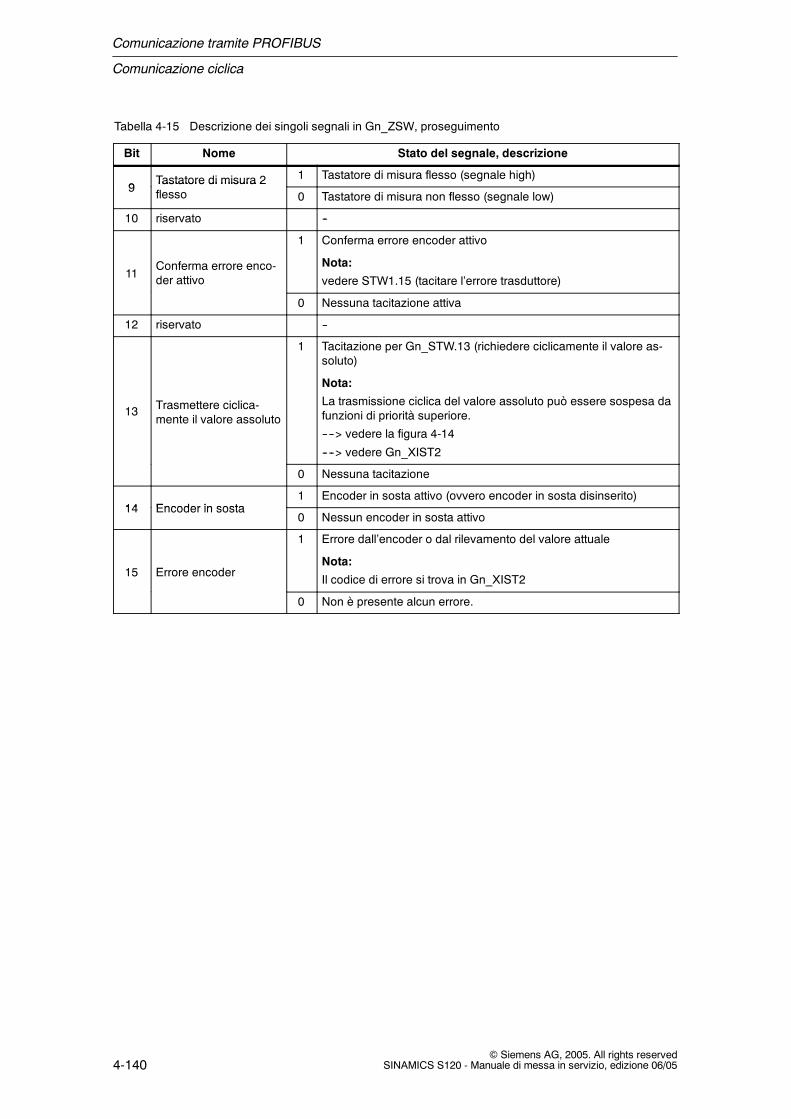
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-140© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-15 Descrizione dei singoli segnali in Gn_ZSW, proseguimento
Bit Stato del segnale, descrizioneNome
9Tastatore di misura 2 1 Tastatore di misura flesso (segnale high)
9Tastatore di misura 2flesso 0 Tastatore di misura non flesso (segnale low)
10 riservato --
11Conferma errore enco-der attivo
1 Conferma errore encoder attivo
Nota:
vedere STW1.15 (tacitare l’errore trasduttore)
0 Nessuna tacitazione attiva
12 riservato --
13 Trasmettere ciclica-mente il valore assoluto
1 Tacitazione per Gn_STW.13 (richiedere ciclicamente il valore as-soluto)
Nota:
La trasmissione ciclica del valore assoluto può essere sospesa dafunzioni di priorità superiore.
----> vedere la figura 4-14
----> vedere Gn_XIST2
0 Nessuna tacitazione
14 Encoder in sosta1 Encoder in sosta attivo (ovvero encoder in sosta disinserito)
14 Encoder in sosta0 Nessun encoder in sosta attivo
15 Errore encoder
1 Errore dall’encoder o dal rilevamento del valore attuale
Nota:
Il codice di errore si trova in Gn_XIST2
0 Non è presente alcun errore.
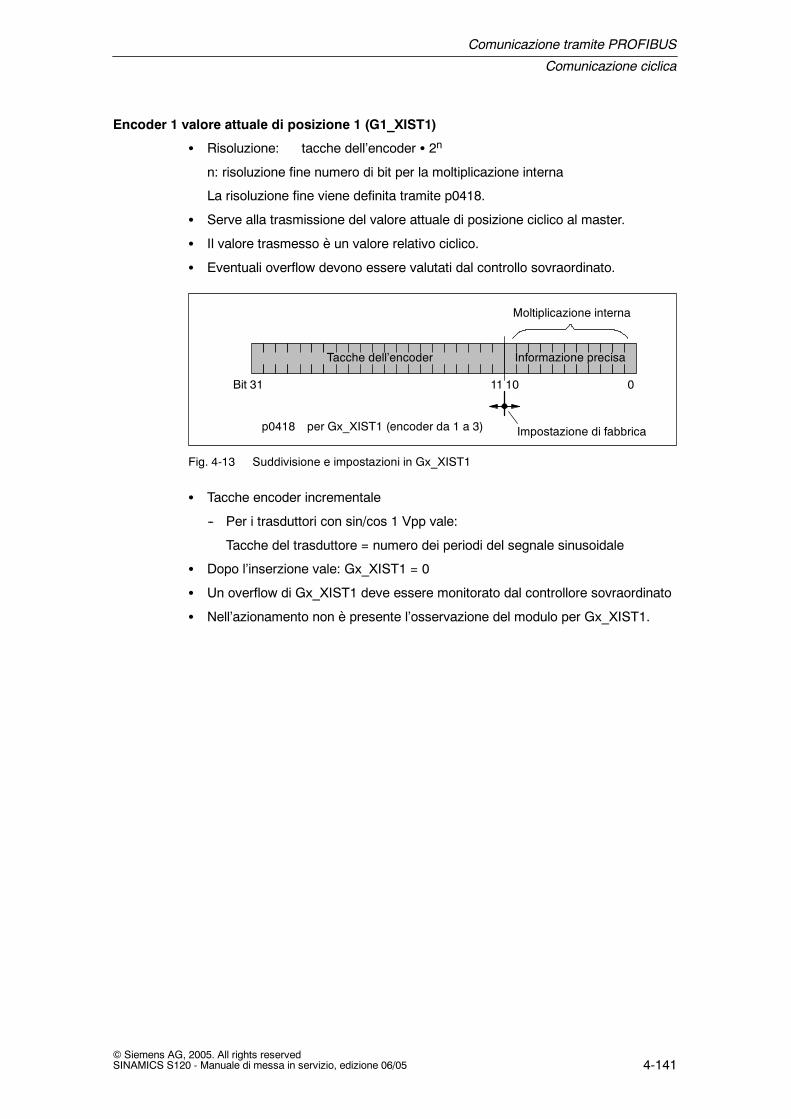
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-141© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Encoder 1 valore attuale di posizione 1 (G1_XIST1)
S Risoluzione: tacche dell’encoder S 2n
n: risoluzione fine numero di bit per la moltiplicazione interna
La risoluzione fine viene definita tramite p0418.
S Serve alla trasmissione del valore attuale di posizione ciclico al master.
S Il valore trasmesso è un valore relativo ciclico.
S Eventuali overflow devono essere valutati dal controllo sovraordinato.
Bit 31
Tacche dell’encoder Informazione precisa
11 10 0
Moltiplicazione interna
p0418 per Gx_XIST1 (encoder da 1 a 3) Impostazione di fabbrica
Fig. 4-13 Suddivisione e impostazioni in Gx_XIST1
S Tacche encoder incrementale
-- Per i trasduttori con sin/cos 1 Vpp vale:
Tacche del trasduttore = numero dei periodi del segnale sinusoidale
S Dopo l’inserzione vale: Gx_XIST1 = 0
S Un overflow di Gx_XIST1 deve essere monitorato dal controllore sovraordinato
S Nell’azionamento non è presente l’osservazione del modulo per Gx_XIST1.

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-142© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Encoder 1 valore attuale di posizione 2 (G1_XIST2)
A seconda delle singole funzioni vengono registrati in Gx_XIST2 valori differenti(vedere la figura 4-14).
S Priorità per Gx_XIST2
Per i valori nel Gx_XIST2 vanno osservate le seguenti priorità:
Gx_ZSW.14 = 1?
Gx_XIST2= codice di errore
(vedere tabella 4-16)
Gx_XIST2= valore richiesto
(p0418)
sì
no
sì
no
sì
no
sì
no
Gx_XIST2 = 0
Gx_ZSW.13 = 1
Gx_ZSW.4 = 1oppure .5 = 1oppure .6 = 1oppure .7 = 1
Gx_ZSW.15 = 1?
Trasduttore inparcheggio?
Erroreencoder?
Ricerca tacca diriferimento o misura alvoloselezionata?
Trasmettereciclicamente il valoreassoluto?
Gx_XIST2= valore assoluto
(p0419)
Fig. 4-14 Priorità per le funzioni e Gx_XIST2
S Risoluzione: tacche dell’encoder S 2n
n: risoluzione fine numero di bit per la moltiplicazione interna
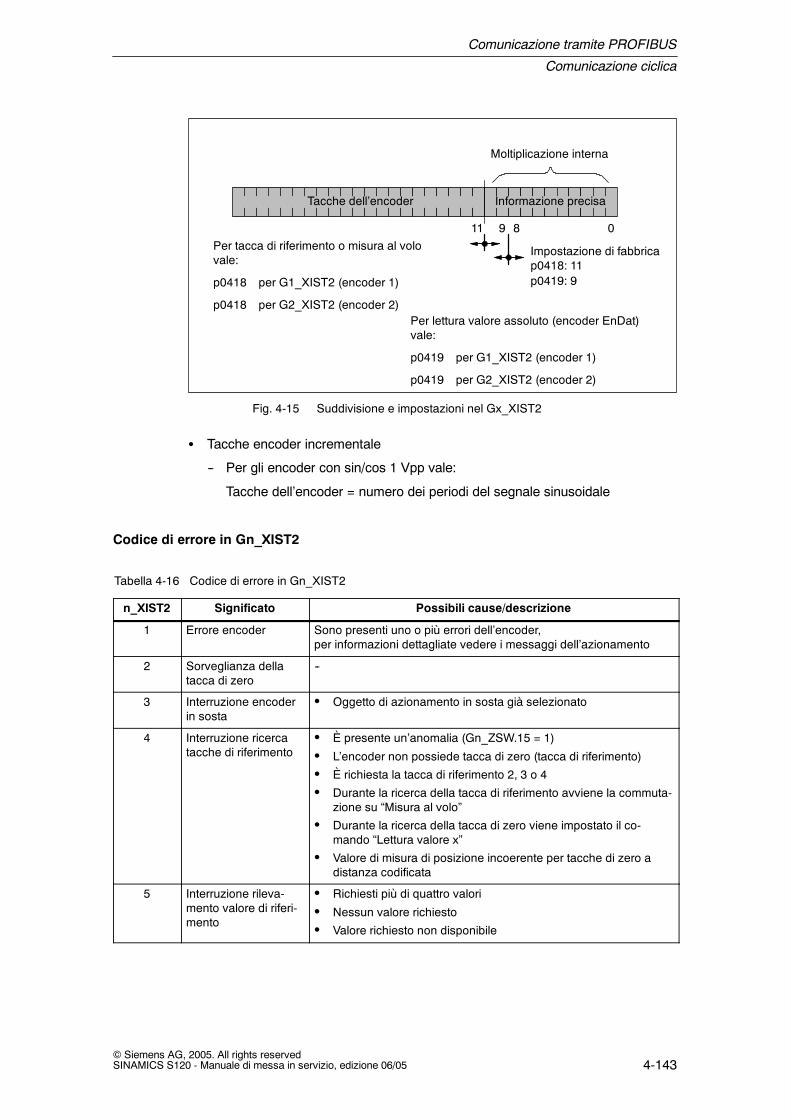
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-143© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tacche dell’encoder Informazione precisa
11 0Per tacca di riferimento o misura al volovale:
p0418 per G1_XIST2 (encoder 1)
p0418 per G2_XIST2 (encoder 2)Per lettura valore assoluto (encoder EnDat)vale:
p0419 per G1_XIST2 (encoder 1)
p0419 per G2_XIST2 (encoder 2)
Impostazione di fabbrica
Moltiplicazione interna
89
p0418: 11p0419: 9
Fig. 4-15 Suddivisione e impostazioni nel Gx_XIST2
S Tacche encoder incrementale
-- Per gli encoder con sin/cos 1 Vpp vale:
Tacche dell’encoder = numero dei periodi del segnale sinusoidale
Codice di errore in Gn_XIST2
Tabella 4-16 Codice di errore in Gn_XIST2
n_XIST2 Significato Possibili cause/descrizione
1 Errore encoder Sono presenti uno o più errori dell’encoder,per informazioni dettagliate vedere i messaggi dell’azionamento
2 Sorveglianza dellatacca di zero
--
3 Interruzione encoderin sosta
S Oggetto di azionamento in sosta già selezionato
4 Interruzione ricercatacche di riferimento
S È presente un’anomalia (Gn_ZSW.15 = 1)
S L’encoder non possiede tacca di zero (tacca di riferimento)
S È richiesta la tacca di riferimento 2, 3 o 4
S Durante la ricerca della tacca di riferimento avviene la commuta-zione su “Misura al volo”
S Durante la ricerca della tacca di zero viene impostato il co-mando “Lettura valore x”
S Valore di misura di posizione incoerente per tacche di zero adistanza codificata
5 Interruzione rileva-mento valore di riferi-mento
S Richiesti più di quattro valori
S Nessun valore richiesto
S Valore richiesto non disponibile
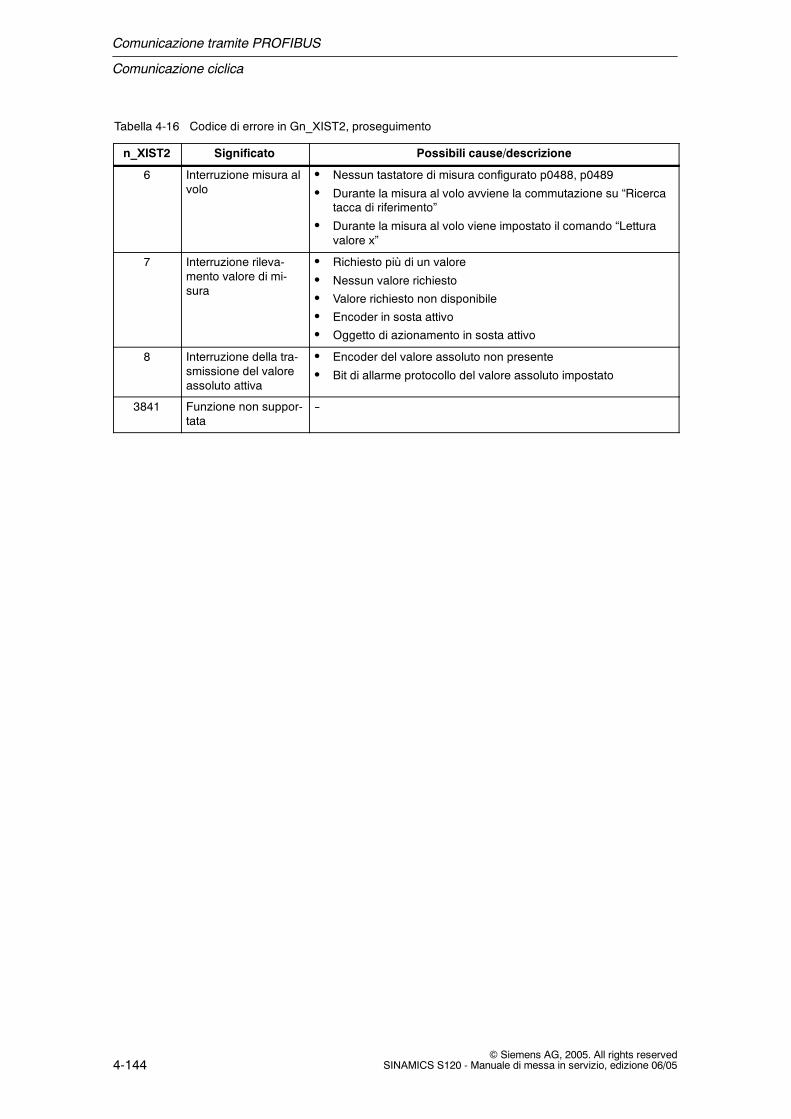
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-144© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-16 Codice di errore in Gn_XIST2, proseguimento
n_XIST2 Possibili cause/descrizioneSignificato
6 Interruzione misura alvolo
S Nessun tastatore di misura configurato p0488, p0489
S Durante la misura al volo avviene la commutazione su “Ricercatacca di riferimento”
S Durante la misura al volo viene impostato il comando “Letturavalore x”
7 Interruzione rileva-mento valore di mi-sura
S Richiesto più di un valore
S Nessun valore richiesto
S Valore richiesto non disponibile
S Encoder in sosta attivo
S Oggetto di azionamento in sosta attivo
8 Interruzione della tra-smissione del valoreassoluto attiva
S Encoder del valore assoluto non presente
S Bit di allarme protocollo del valore assoluto impostato
3841 Funzione non suppor-tata
--
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-145© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Encoder 2 parola di stato (G2_ZSW)
S Vedere G1_ZSW (tabella 4-15)
Encoder 2 valore attuale di posizione 1 (G2_XIST1)
S Vedere G1_XIST1
Encoder 2 valore attuale di posizione 2 (G2_XIST2)
S Vedere G1_XIST2
Encoder 3 parola di stato (G3_ZSW)
S Vedere G1_ZSW (tabella 4-15)
Encoder 3 valore attuale di posizione 1 (G3_XIST1)
S Vedere G1_XIST1
Encoder 3 valore attuale di posizione 2 (G3_XIST2)
S Vedere G1_XIST2
Panoramica dello schema logico (vedere il manuale delle liste)
S 4720 Interfaccia utente, segnali di ricezione per encoder n
S 4730 Interfaccia utente, segnali di invio per encoder n
S 4735 Ricerca tacca di riferimento con tacca di zero ausiliaria encoder n
S 4740 Valutazione tastatore di misura, memoria per valori di misura perencoder n
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-146© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica dei parametri (vedere il manuale delle liste)
Parametri di impostazione azionamento, parametro CU_S contrassegnato
S p0418[0...15] Risoluzione fine Gx_XIST1
S p0419[0...15] Risoluzione fine Gx_XIST2
S p0480[0...2] CI: Sorgente del segnale per parola di comando encoderGn_STW
S p0488[0...2] Morsetto tastatore di misura 1 ingresso
S p0489[0...2] Morsetto tastatore di misura 2 ingresso
S p0490 Inversione tastatore di misura (CU_S)
Parametri di supervisione azionamento
S r0481[0...2] CO: Parola di stato encoder Gn_ZSW
S r0482[0...2] CO: Valore attuale di posizione encoder Gn_XIST1
S r0483[0...2] CO: Valore attuale di posizione encoder Gn_XIST2
S r0487[0...2] CO: Diagnostica, parola di comando encoder Gn_STW
4.3.6 Parole di comando e di stato centrali
Descrizione
I dati centrali di processo sono presenti in diversi telegrammi. Ad esempio è previ-sto il telegramma 391 per la trasmissione dei tempi di misura, degli ingressi digitalie delle uscite digitali.
Esistono i seguenti dati centrali di processo:
Segnali di ricezione:
S CU_STW Parola di comando della Control Unit
S A_DIGITAL Uscite digitali
S MT_STW Parola di comando del tastatore di misura
Segnali di invio:
S CU_ZSW Parola di stato della Control Unit
S E_DIGITAL Ingressi digitali
S MT_ZSW Parola di stato del tastatore di misura
S MTn_ZS_F Tempo di misura tastatore di misura n, fronte di discesa(n = 1, 2)
S MTn_ZS_S Tempo di misura tastatore di misura n, fronte di salita(n = 1, 2)
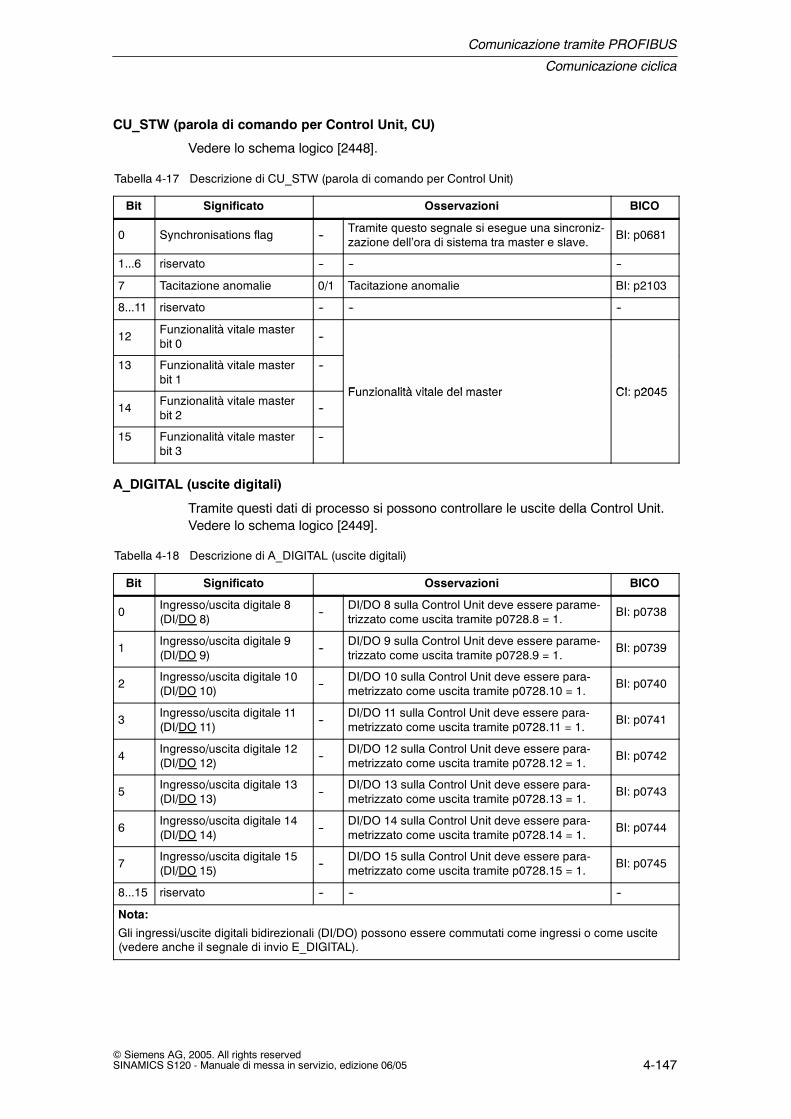
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-147© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
CU_STW (parola di comando per Control Unit, CU)
Vedere lo schema logico [2448].
Tabella 4-17 Descrizione di CU_STW (parola di comando per Control Unit)
Bit Significato Osservazioni BICO
0 Synchronisations flag -- Tramite questo segnale si esegue una sincroniz-zazione dell’ora di sistema tra master e slave.
BI: p0681
1...6 riservato -- -- --
7 Tacitazione anomalie 0/1 Tacitazione anomalie BI: p2103
8...11 riservato -- -- --
12 Funzionalità vitale masterbit 0
--
13 Funzionalità vitale masterbit 1
--
Funzionalità vitale del master CI: p204514 Funzionalità vitale master
bit 2--
Funzionalità vitale del master CI: p2045
15 Funzionalità vitale masterbit 3
--
A_DIGITAL (uscite digitali)
Tramite questi dati di processo si possono controllare le uscite della Control Unit.Vedere lo schema logico [2449].
Tabella 4-18 Descrizione di A_DIGITAL (uscite digitali)
Bit Significato Osservazioni BICO
0 Ingresso/uscita digitale 8(DI/DO 8)
-- DI/DO 8 sulla Control Unit deve essere parame-trizzato come uscita tramite p0728.8 = 1.
BI: p0738
1 Ingresso/uscita digitale 9(DI/DO 9)
-- DI/DO 9 sulla Control Unit deve essere parame-trizzato come uscita tramite p0728.9 = 1.
BI: p0739
2 Ingresso/uscita digitale 10(DI/DO 10)
-- DI/DO 10 sulla Control Unit deve essere para-metrizzato come uscita tramite p0728.10 = 1.
BI: p0740
3 Ingresso/uscita digitale 11(DI/DO 11)
-- DI/DO 11 sulla Control Unit deve essere para-metrizzato come uscita tramite p0728.11 = 1.
BI: p0741
4 Ingresso/uscita digitale 12(DI/DO 12)
-- DI/DO 12 sulla Control Unit deve essere para-metrizzato come uscita tramite p0728.12 = 1.
BI: p0742
5 Ingresso/uscita digitale 13(DI/DO 13)
-- DI/DO 13 sulla Control Unit deve essere para-metrizzato come uscita tramite p0728.13 = 1.
BI: p0743
6 Ingresso/uscita digitale 14(DI/DO 14)
-- DI/DO 14 sulla Control Unit deve essere para-metrizzato come uscita tramite p0728.14 = 1.
BI: p0744
7 Ingresso/uscita digitale 15(DI/DO 15)
-- DI/DO 15 sulla Control Unit deve essere para-metrizzato come uscita tramite p0728.15 = 1.
BI: p0745
8...15 riservato -- -- --
Nota:
Gli ingressi/uscite digitali bidirezionali (DI/DO) possono essere commutati come ingressi o come uscite(vedere anche il segnale di invio E_DIGITAL).
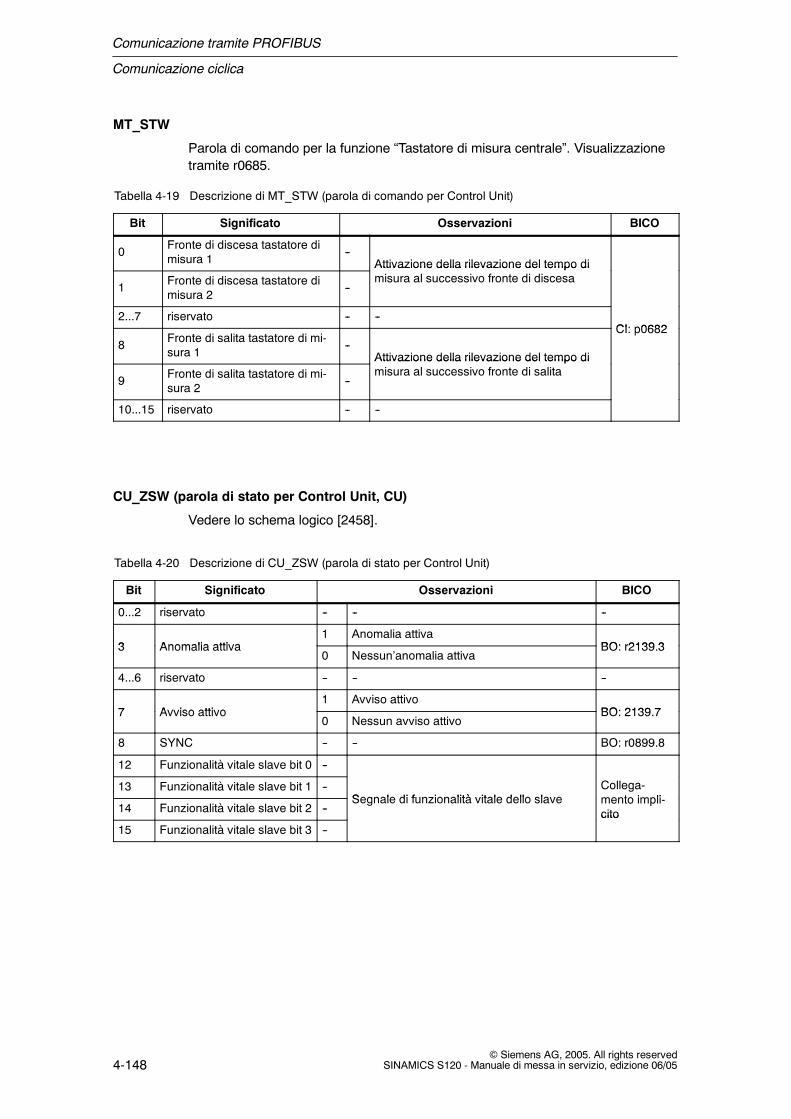
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-148© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
MT_STW
Parola di comando per la funzione “Tastatore di misura centrale”. Visualizzazionetramite r0685.
Tabella 4-19 Descrizione di MT_STW (parola di comando per Control Unit)
Bit Significato Osservazioni BICO
0 Fronte di discesa tastatore dimisura 1
--Attivazione della rilevazione del tempo di
1 Fronte di discesa tastatore dimisura 2
--
Attivazione della rilevazione del tempo dimisura al successivo fronte di discesa
2...7 riservato -- --CI: p0682
8 Fronte di salita tastatore di mi-sura 1
--Attivazione della rilevazione del tempo di
CI: p0682
9 Fronte di salita tastatore di mi-sura 2
--
Attivazione della rilevazione del tempo dimisura al successivo fronte di salita
10...15 riservato -- --
CU_ZSW (parola di stato per Control Unit, CU)
Vedere lo schema logico [2458].
Tabella 4-20 Descrizione di CU_ZSW (parola di stato per Control Unit)
Bit Significato Osservazioni BICO
0...2 riservato -- -- --
3 Anomalia attiva1 Anomalia attiva
BO: r2139 33 Anomalia attiva0 Nessun’anomalia attiva
BO: r2139.3
4...6 riservato -- -- --
7 Avviso attivo1 Avviso attivo
BO: 2139 77 Avviso attivo0 Nessun avviso attivo
BO: 2139.7
8 SYNC -- -- BO: r0899.8
12 Funzionalità vitale slave bit 0 --
13 Funzionalità vitale slave bit 1 --Segnale di funzionalità vitale dello slave
Collega-mento impli
14 Funzionalità vitale slave bit 2 --Segnale di funzionalità vitale dello slave mento impli-
cito15 Funzionalità vitale slave bit 3 --
cito

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-149© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
E_DIGITAL (ingressi digitali)
Vedere lo schema logico [2459].
Tabella 4-21 Descrizione di E_DIGITAL (ingressi digitali)
Bit Significato Osservazioni BICO
0 Ingresso/uscita digitale 8(DI/DO = 8)
-- DI/DO 8 sulla Control Unit deve essere para-metrizzato come ingresso tramite p0728.8 = 0.
BO: p0722.8
1 Ingresso/uscita digitale 9(DI/DO = 9)
--DI/DO 9 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.9 = 0.
BO: p0722.9
2 Ingresso/uscita digitale 10(DI/DO = 10)
--DI/DO 10 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.10 = 0.
BO: p0722.10
3 Ingresso/uscita digitale 11(DI/DO = 11)
--DI/DO 11 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.11 = 0.
BO: p0722.11
4 Ingresso/uscita digitale 12(DI/DO = 12)
--DI/DO 12 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.12 = 0.
BO: p0722.12
5 Ingresso/uscita digitale 13(DI/DO = 13)
--DI/DO 13 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.13 = 0.
BO: p0722.13
6 Ingresso/uscita digitale 14(DI/DO = 14)
--DI/DO 14 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.14 = 0.
BO: p0722.14
7 Ingresso/uscita digitale 15(DI/DO = 15)
--DI/DO 15 sulla Control Unit deve essere para-metrizzato come ingresso tramitep0728.15 = 0.
BO: p0722.15
8 Ingresso digitale 0 (DI 0) -- Ingresso digitale DI 0 sulla Contol Unit BO: r0722.0
9 Ingresso digitale 1 (DI 1) -- Ingresso digitale DI 1 sulla Contol Unit BO: r0722.1
10 Ingresso digitale 2 (DI 2) -- Ingresso digitale DI 2 sulla Contol Unit BO: r0722.2
11 Ingresso digitale 3 (DI 3) -- Ingresso digitale DI 3 sulla Contol Unit BO: r0722.3
12 Ingresso digitale 4 (DI 4) -- Ingresso digitale DI 4 sulla Contol Unit BO: r0722.4
13 Ingresso digitale 5 (DI 5) -- Ingresso digitale DI 5 sulla Contol Unit BO: r0722.5
14 Ingresso digitale 6 (DI 6) -- Ingresso digitale DI 6 sulla Contol Unit BO: r0722.6
15 Ingresso digitale 7 (DI 7) -- Ingresso digitale DI 7 sulla Contol Unit BO: r0722.7
Nota:
Gli ingressi/uscite digitali bidirezionali (DI/DO) possono essere commutati come ingressi o come uscite(vedere anche il segnale di ricezione A_DIGITAL).

Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-150© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
MT_ZSW
Parola di stato per la funzione “Tastatore di misura centrale”.
Tabella 4-22 Descrizione di MT_ZSW (parola di stato per la funzione tastatore di misuracentrale)
Bit Significato Osservazioni BICO
0 Ingresso digitale tastatore dimisura 1
--
Visualizzazione degli ingressi digitali1 Ingresso digitale tastatore di
misura 2--
Visualizzazione degli ingressi digitali
2...7 riservato -- --CO: r0688
8 Sottocampionamento tastatoredi misura 1
--
Non ancora implementato
CO: r0688
9 Sottocampionamento tastatoredi misura 2
--Non ancora implementato.
10...15 riservato -- --
MTn_ZS_F e MTn_ZS_S
Visualizzazione del tempo di misura calcolatoIl tempo di misura viene indicato come valore a 16 bit con risoluzione di 0.25 µs.
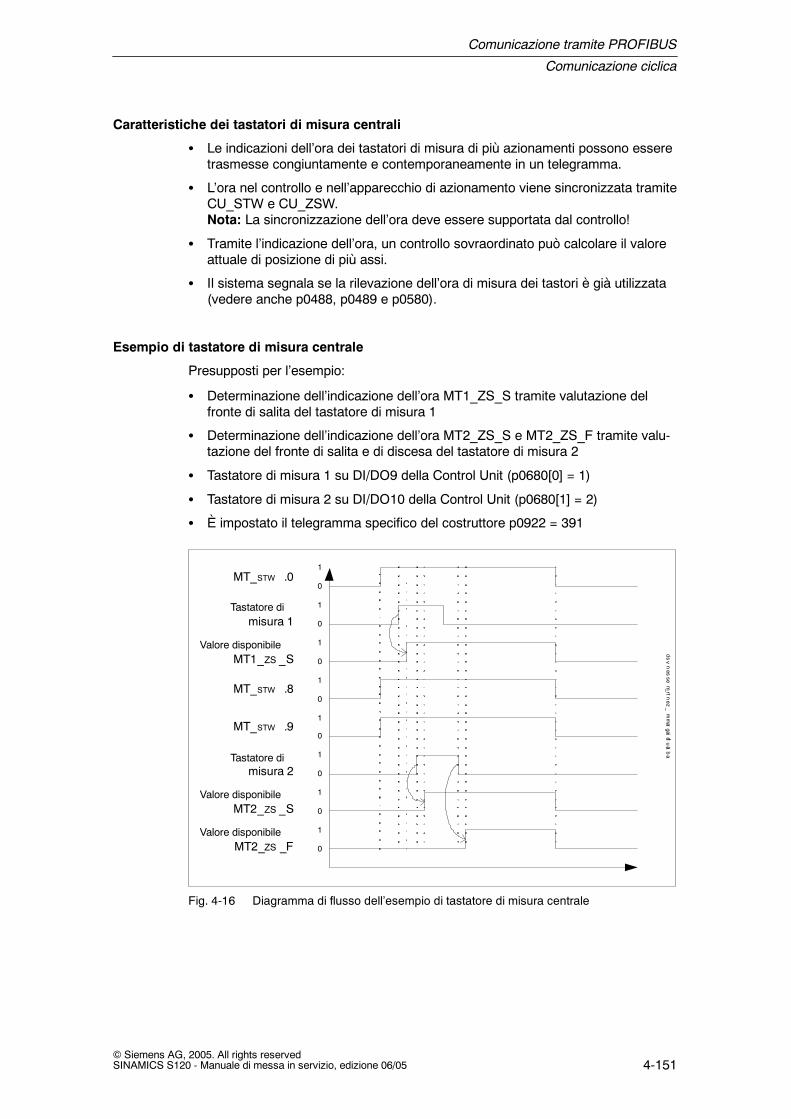
Comunicazione tramite PROFIBUS
Comunicazione ciclica
4-151© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Caratteristiche dei tastatori di misura centrali
S Le indicazioni dell’ora dei tastatori di misura di più azionamenti possono esseretrasmesse congiuntamente e contemporaneamente in un telegramma.
S L’ora nel controllo e nell’apparecchio di azionamento viene sincronizzata tramiteCU_STW e CU_ZSW.Nota: La sincronizzazione dell’ora deve essere supportata dal controllo!
S Tramite l’indicazione dell’ora, un controllo sovraordinato può calcolare il valoreattuale di posizione di più assi.
S Il sistema segnala se la rilevazione dell’ora di misura dei tastori è già utilizzata(vedere anche p0488, p0489 e p0580).
Esempio di tastatore di misura centrale
Presupposti per l’esempio:
S Determinazione dell’indicazione dell’ora MT1_ZS_S tramite valutazione delfronte di salita del tastatore di misura 1
S Determinazione dell’indicazione dell’ora MT2_ZS_S e MT2_ZS_F tramite valu-tazione del fronte di salita e di discesa del tastatore di misura 2
S Tastatore di misura 1 su DI/DO9 della Control Unit (p0680[0] = 1)
S Tastatore di misura 2 su DI/DO10 della Control Unit (p0680[1] = 2)
S È impostato il telegramma specifico del costruttore p0922 = 391
ab
lau
fdia
gra
mm
_ze
ntr_
mes
sen
.vsd
1
0MT_STW .0
1
0
Valore disponibileMT2_ZS _F
1
0
Tastatore dimisura 1
1
0
Tastatore dimisura 2
1
0
1
0
MT_STW .8
MT_STW .9
Valore disponibileMT1_ZS _S
1
0
1
0
Valore disponibileMT2_ZS _S
Fig. 4-16 Diagramma di flusso dell’esempio di tastatore di misura centrale
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-152© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.4 Comunicazione aciclica
4.4.1 Informazioni generali sulla comunicazione aciclica
Descrizione
Contrariamente a quanto avviene nella comunicazione ciclica, la trasmissione deidati nella comunicazione aciclica avviene solo previa richiesta corrispondente (ades. di lettura e scrittura di parametri).
Per la comunicazione aciclica sono disponibili i servizi DPV1 (lettura/scrittura re-cord di dati).
Nota
Per una descrizione dettagliata della comunicazione ciclica tramite DPV1consultare la bibliografia seguente:
Bibliografia: /P5/ PROFIdrive Profile Drive Technology
Per la lettura e la scrittura di parametri esistono le seguenti possibilità:
S Protocollo S7
Questo protocollo usa ad es. il tool di messa in servizio STARTER nel funziona-mento online tramite PROFIBUS.
S Canale parametri PROFIdrive (DPV1) con record di dati 47
I servizi DPV1 sono disponibili per i master classe 1 e classe 2.
Caratteristiche del canale parametri DPV1
S Indirizzo a 16 bit per ogni numero di parametro e sottoindice.
S Accesso simultaneo attraverso altri master PROFIBUS (master classe 2, ad es.tool di messa in servizio).
S Trasmissione di vari parametri in un accesso (job multiparametro).
S Trasmissione possibile di interi array o di un settore di un array.
S È sempre in corso l’elaborazione di un solo job parametri (nessun pipelining).
S Un job/una risposta parametri deve entrare in un record di dati (max. 240 byte).
S L’header del job/della risposta fa parte dei dati utili.
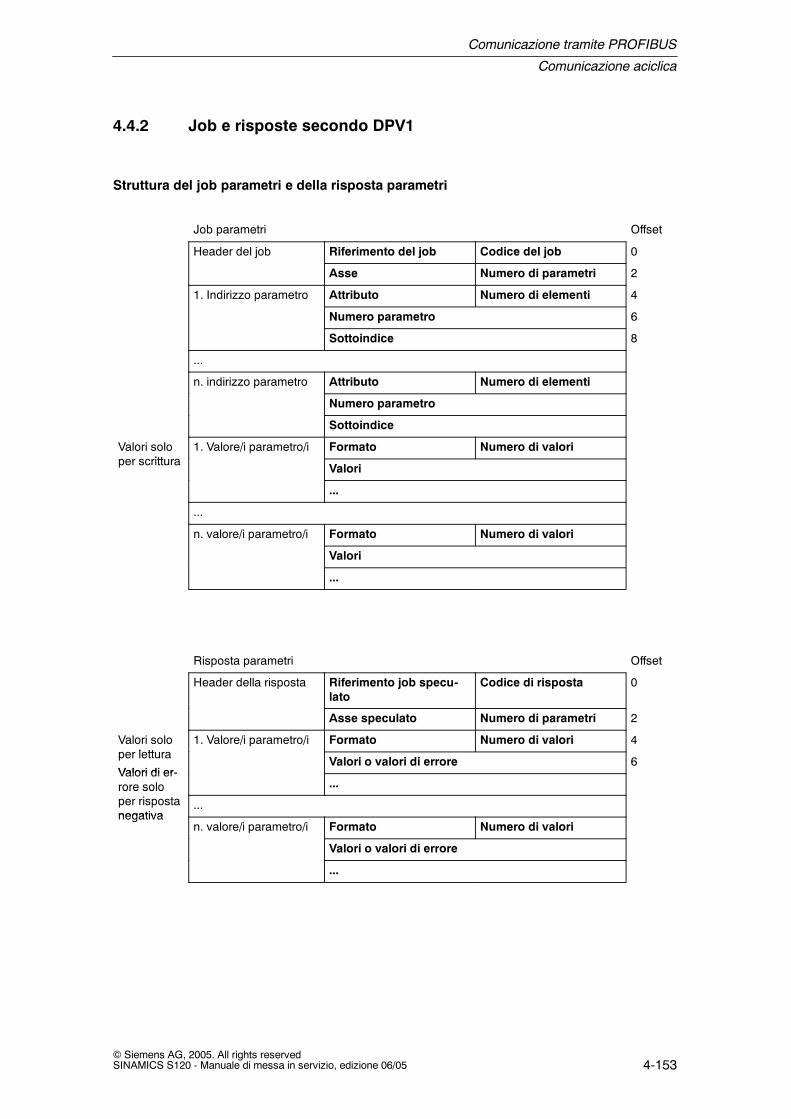
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-153© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.4.2 Job e risposte secondo DPV1
Struttura del job parametri e della risposta parametri
Job parametri Offset
Header del job Riferimento del job Codice del job 0
Asse Numero di parametri 2
1. Indirizzo parametro Attributo Numero di elementi 4
Numero parametro 6
Sottoindice 8
...
n. indirizzo parametro Attributo Numero di elementi
Numero parametro
Sottoindice
Valori soloitt
1. Valore/i parametro/i Formato Numero di valoriper scrittura
Valori
...
...
n. valore/i parametro/i Formato Numero di valori
Valori
...
Risposta parametri Offset
Header della risposta Riferimento job specu-lato
Codice di risposta 0
Asse speculato Numero di parametri 2
Valori solol tt
1. Valore/i parametro/i Formato Numero di valori 4per lettura
Valori di er-Valori o valori di errore 6
Valori di er-rore solo ...rore soloper rispostanegativa
...negativa
n. valore/i parametro/i Formato Numero di valori
Valori o valori di errore
...
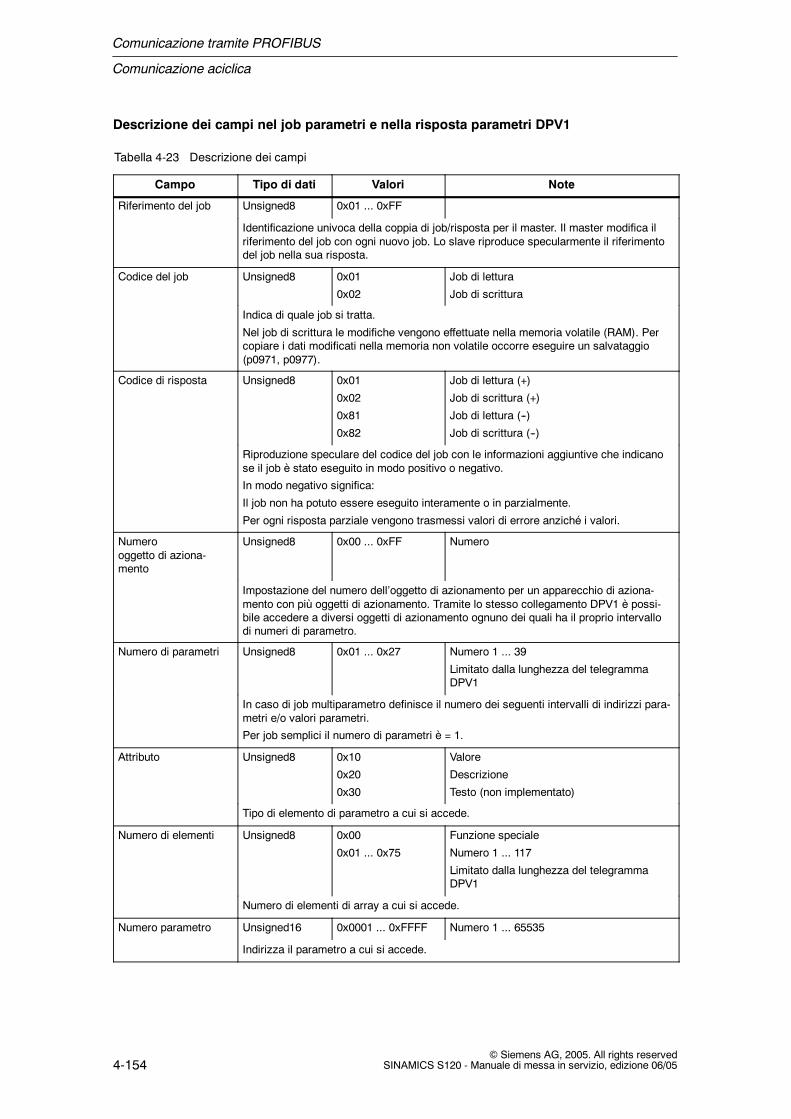
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-154© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Descrizione dei campi nel job parametri e nella risposta parametri DPV1
Tabella 4-23 Descrizione dei campi
Campo Tipo di dati Valori Note
Riferimento del job Unsigned8 0x01 ... 0xFF
Identificazione univoca della coppia di job/risposta per il master. Il master modifica ilriferimento del job con ogni nuovo job. Lo slave riproduce specularmente il riferimentodel job nella sua risposta.
Codice del job Unsigned8 0x01
0x02
Job di lettura
Job di scrittura
Indica di quale job si tratta.
Nel job di scrittura le modifiche vengono effettuate nella memoria volatile (RAM). Percopiare i dati modificati nella memoria non volatile occorre eseguire un salvataggio(p0971, p0977).
Codice di risposta Unsigned8 0x01
0x02
0x81
0x82
Job di lettura (+)
Job di scrittura (+)
Job di lettura (--)
Job di scrittura (--)
Riproduzione speculare del codice del job con le informazioni aggiuntive che indicanose il job è stato eseguito in modo positivo o negativo.
In modo negativo significa:
Il job non ha potuto essere eseguito interamente o in parzialmente.
Per ogni risposta parziale vengono trasmessi valori di errore anziché i valori.
Numerooggetto di aziona-mento
Unsigned8 0x00 ... 0xFF Numero
Impostazione del numero dell’oggetto di azionamento per un apparecchio di aziona-mento con più oggetti di azionamento. Tramite lo stesso collegamento DPV1 è possi-bile accedere a diversi oggetti di azionamento ognuno dei quali ha il proprio intervallodi numeri di parametro.
Numero di parametri Unsigned8 0x01 ... 0x27 Numero 1 ... 39
Limitato dalla lunghezza del telegrammaDPV1
In caso di job multiparametro definisce il numero dei seguenti intervalli di indirizzi para-metri e/o valori parametri.
Per job semplici il numero di parametri è = 1.
Attributo Unsigned8 0x10
0x20
0x30
Valore
Descrizione
Testo (non implementato)
Tipo di elemento di parametro a cui si accede.
Numero di elementi Unsigned8 0x00
0x01 ... 0x75
Funzione speciale
Numero 1 ... 117
Limitato dalla lunghezza del telegrammaDPV1
Numero di elementi di array a cui si accede.
Numero parametro Unsigned16 0x0001 ... 0xFFFF Numero 1 ... 65535
Indirizza il parametro a cui si accede.

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-155© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-23 Descrizione dei campi, proseguimento
Campo NoteValoriTipo di dati
Sottoindice Unsigned16 0x0000 ... 0xFFFF Numero 0 ... 65535
Indirizza il primo elemento di array del parametro a cui si accede.
Formato Unsigned8 0x02
0x03
0x04
0x05
0x06
0x07
0x08
Altri valori
Tipo di dati Integer8
Tipo di dati Integer18
Tipo di dati Integer32
Tipo di dati Unsigned8
Tipo di dati Unsigned16
Tipo di dati Unsigned32
Tipo di dati FloatingPoint
Vedere PROFIdrive Profile V3.1
0x40
0x41
0x42
0x43
0x44
Zero (senza valori come risposta parzialepositiva di un job di scrittura)
Byte
Word
Double word
Error
Formato e numero specificano il posto occupato da valori nel telegramma.
Nel processo di scrittura è preferibile indicare tipi di dati conformi a PROFIdrive Profile.In alternativa sono possibili anche byte, parola e parola doppia.
Numero di valori Unsigned8 0x00 ... 0xEA Numero 0 ... 234
Limitato dalla lunghezza del telegrammaDPV1
Indica il numero dei valori seguenti.
Valori di errore Unsigned16
0x0000 ... 0x00FF Significato dei valori di errore----> vedere tabella4-24
I valori di errore in caso di risposta negativa.
Se i valori sono costituiti da un numero dispari di byte, viene aggiunto un byte zero. Inquesto modo viene garantita la struttura della parola del telegramma.
Valori Unsigned16
0x0000 ... 0x00FF
I valori del parametro in caso di lettura o scrittura.
Se i valori sono costituiti da un numero dispari di byte, viene aggiunto un byte zero. Inquesto modo viene garantita la struttura della parola del telegramma.
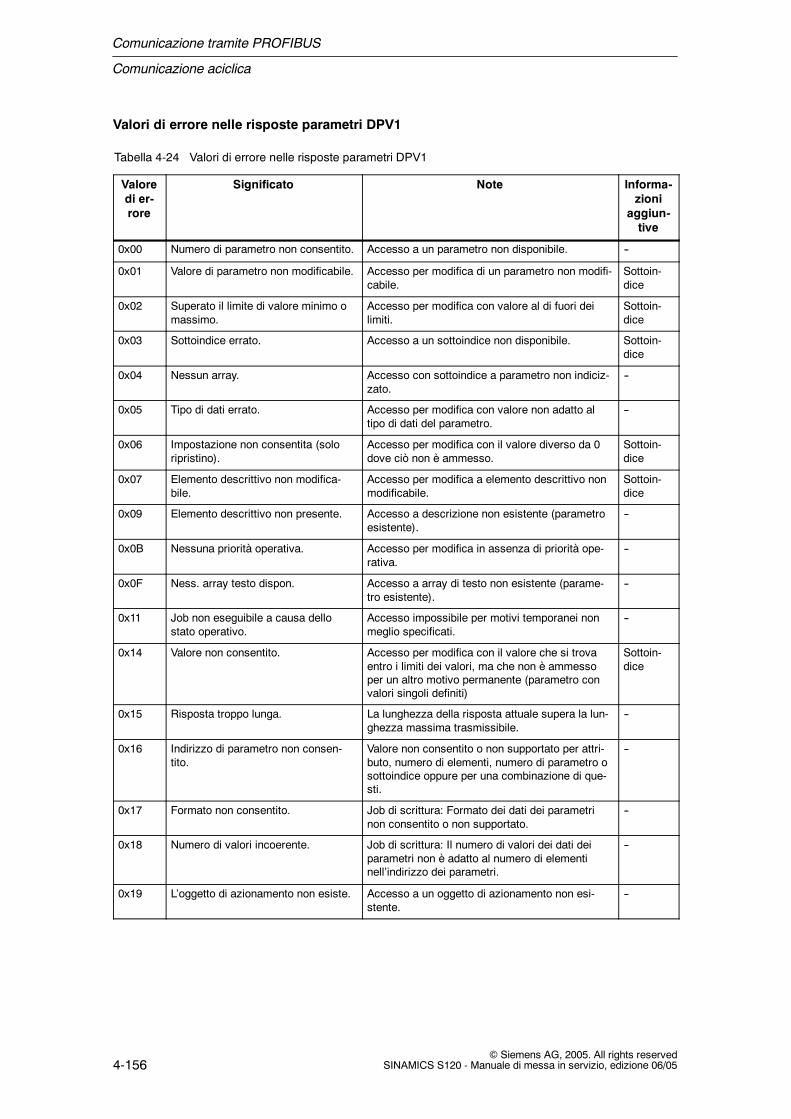
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-156© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Valori di errore nelle risposte parametri DPV1
Tabella 4-24 Valori di errore nelle risposte parametri DPV1
Valoredi er-rore
Significato Note Informa-zioni
aggiun-tive
0x00 Numero di parametro non consentito. Accesso a un parametro non disponibile. --
0x01 Valore di parametro non modificabile. Accesso per modifica di un parametro non modifi-cabile.
Sottoin-dice
0x02 Superato il limite di valore minimo omassimo.
Accesso per modifica con valore al di fuori deilimiti.
Sottoin-dice
0x03 Sottoindice errato. Accesso a un sottoindice non disponibile. Sottoin-dice
0x04 Nessun array. Accesso con sottoindice a parametro non indiciz-zato.
--
0x05 Tipo di dati errato. Accesso per modifica con valore non adatto altipo di dati del parametro.
--
0x06 Impostazione non consentita (soloripristino).
Accesso per modifica con il valore diverso da 0dove ciò non è ammesso.
Sottoin-dice
0x07 Elemento descrittivo non modifica-bile.
Accesso per modifica a elemento descrittivo nonmodificabile.
Sottoin-dice
0x09 Elemento descrittivo non presente. Accesso a descrizione non esistente (parametroesistente).
--
0x0B Nessuna priorità operativa. Accesso per modifica in assenza di priorità ope-rativa.
--
0x0F Ness. array testo dispon. Accesso a array di testo non esistente (parame-tro esistente).
--
0x11 Job non eseguibile a causa dellostato operativo.
Accesso impossibile per motivi temporanei nonmeglio specificati.
--
0x14 Valore non consentito. Accesso per modifica con il valore che si trovaentro i limiti dei valori, ma che non è ammessoper un altro motivo permanente (parametro convalori singoli definiti)
Sottoin-dice
0x15 Risposta troppo lunga. La lunghezza della risposta attuale supera la lun-ghezza massima trasmissibile.
--
0x16 Indirizzo di parametro non consen-tito.
Valore non consentito o non supportato per attri-buto, numero di elementi, numero di parametro osottoindice oppure per una combinazione di que-sti.
--
0x17 Formato non consentito. Job di scrittura: Formato dei dati dei parametrinon consentito o non supportato.
--
0x18 Numero di valori incoerente. Job di scrittura: Il numero di valori dei dati deiparametri non è adatto al numero di elementinell’indirizzo dei parametri.
--
0x19 L’oggetto di azionamento non esiste. Accesso a un oggetto di azionamento non esi-stente.
--

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-157© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-24 Valori di errore nelle risposte parametri DPV1, proseguimento
Valoredi er-rore
Informa-zioni
aggiun-tive
NoteSignificato
0x65 Parametro temporaneamente disatti-vato.
Accesso a un parametro che è presente ma chenon svolge alcuna funzione al momento dell’ac-cesso (ad es. regolazione n impostata e accessoa parametro del controllo V/f).
--
0x6B Parametro %s [%s]: Nessun accessoin scrittura con regolatore abilitato.
-- --
0x6C Parametro %s [%s]: Unità scono-sciuta.
-- --
0x6D Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio encoder (p0010 = 4).
-- --
0x6E Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio motore (p0010 = 3).
-- --
0x6F Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio parte di potenza (p001 = 2).
-- --
0x70 Parametro %s [%s]: Accesso in scrit-tura solo nella messa in servizio ra-pida (p0010 = 1).
-- --
0x71 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di pronto(p0010 = 0).
-- --
0x72 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio reset parametri (p0010 = 30).
-- --
0x73 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio encoder (p0010 = 95).
-- --
0x74 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio applicazione tecnica/unità(p0010 = 5).
-- --
0x75 Parametro %s [%s]: Accesso in scrit-tura solo nella messa in servizio(p0010 diverso da 0).
-- --
0x76 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio download (p0010 = 29).
-- --
0x77 Il parametro %s [%s] non può esserescritto nel download
-- --
0x78 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio configurazione dell’azionamento(apparecchio: p0009 = 3).
-- --
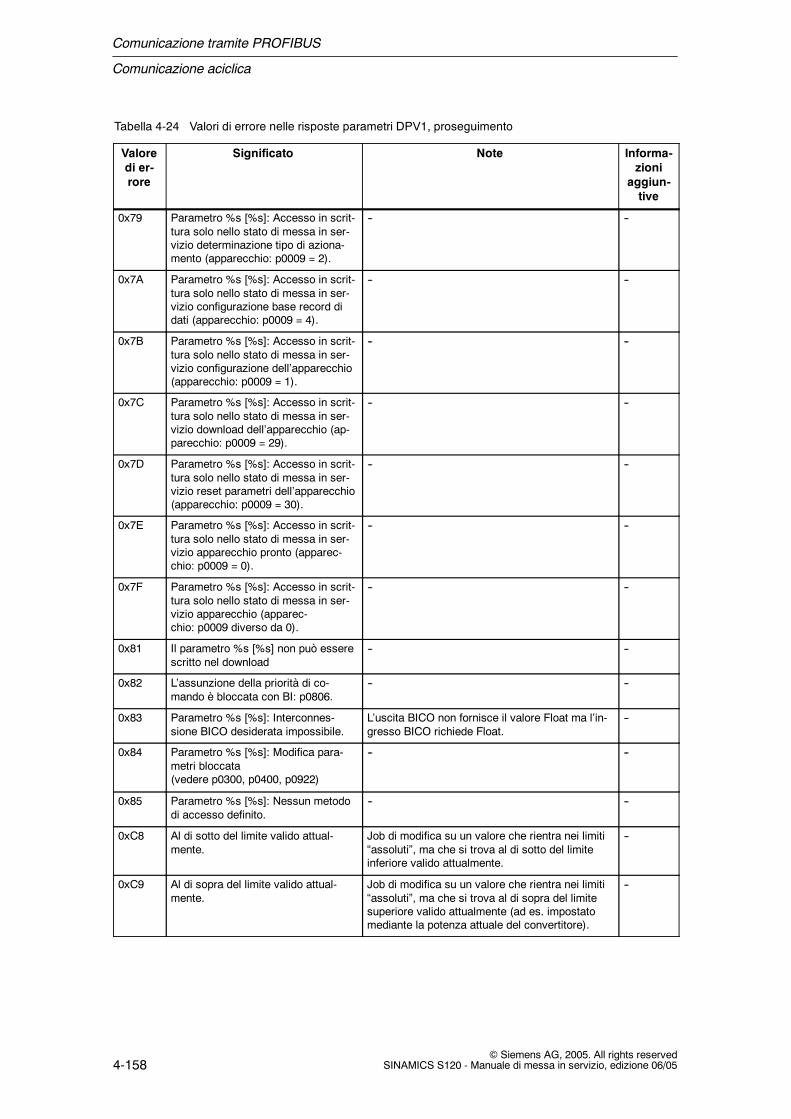
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-158© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-24 Valori di errore nelle risposte parametri DPV1, proseguimento
Valoredi er-rore
Informa-zioni
aggiun-tive
NoteSignificato
0x79 Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio determinazione tipo di aziona-mento (apparecchio: p0009 = 2).
-- --
0x7A Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio configurazione base record didati (apparecchio: p0009 = 4).
-- --
0x7B Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio configurazione dell’apparecchio(apparecchio: p0009 = 1).
-- --
0x7C Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio download dell’apparecchio (ap-parecchio: p0009 = 29).
-- --
0x7D Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio reset parametri dell’apparecchio(apparecchio: p0009 = 30).
-- --
0x7E Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio apparecchio pronto (apparec-chio: p0009 = 0).
-- --
0x7F Parametro %s [%s]: Accesso in scrit-tura solo nello stato di messa in ser-vizio apparecchio (apparec-chio: p0009 diverso da 0).
-- --
0x81 Il parametro %s [%s] non può esserescritto nel download
-- --
0x82 L’assunzione della priorità di co-mando è bloccata con BI: p0806.
-- --
0x83 Parametro %s [%s]: Interconnes-sione BICO desiderata impossibile.
L’uscita BICO non fornisce il valore Float ma l’in-gresso BICO richiede Float.
--
0x84 Parametro %s [%s]: Modifica para-metri bloccata(vedere p0300, p0400, p0922)
-- --
0x85 Parametro %s [%s]: Nessun metododi accesso definito.
-- --
0xC8 Al di sotto del limite valido attual-mente.
Job di modifica su un valore che rientra nei limiti“assoluti”, ma che si trova al di sotto del limiteinferiore valido attualmente.
--
0xC9 Al di sopra del limite valido attual-mente.
Job di modifica su un valore che rientra nei limiti“assoluti”, ma che si trova al di sopra del limitesuperiore valido attualmente (ad es. impostatomediante la potenza attuale del convertitore).
--
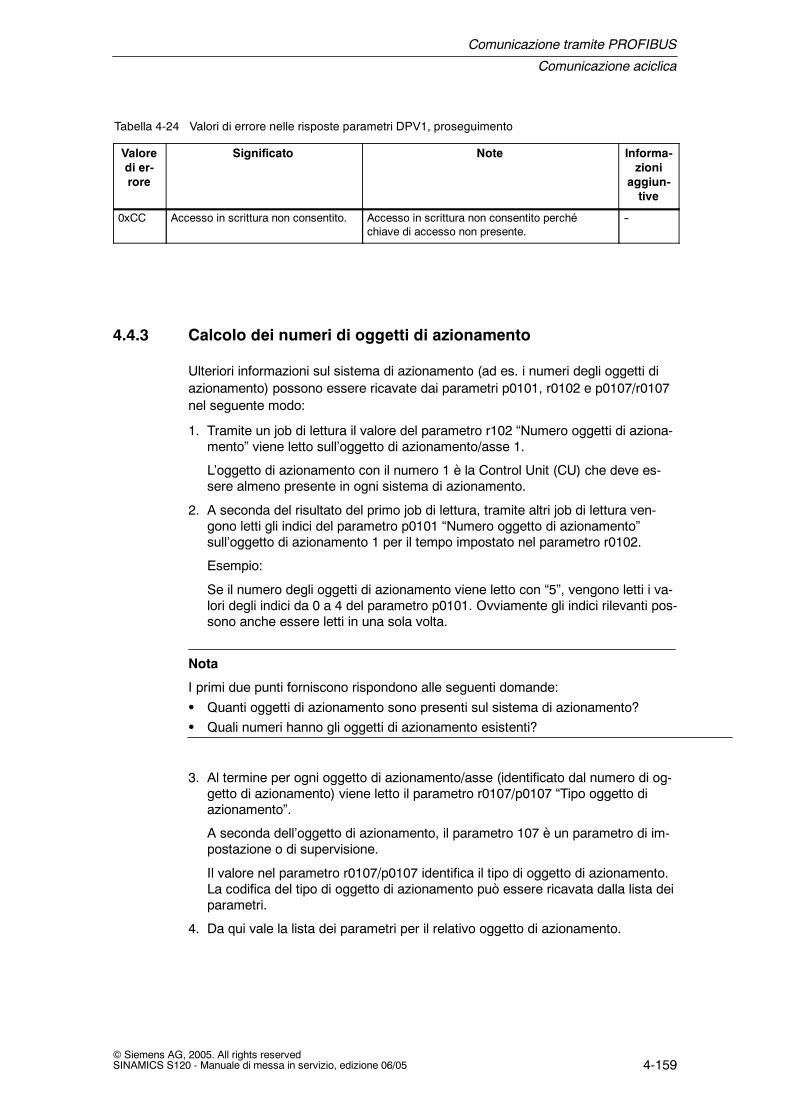
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-159© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-24 Valori di errore nelle risposte parametri DPV1, proseguimento
Valoredi er-rore
Informa-zioni
aggiun-tive
NoteSignificato
0xCC Accesso in scrittura non consentito. Accesso in scrittura non consentito perchéchiave di accesso non presente.
--
4.4.3 Calcolo dei numeri di oggetti di azionamento
Ulteriori informazioni sul sistema di azionamento (ad es. i numeri degli oggetti diazionamento) possono essere ricavate dai parametri p0101, r0102 e p0107/r0107nel seguente modo:
1. Tramite un job di lettura il valore del parametro r102 “Numero oggetti di aziona-mento” viene letto sull’oggetto di azionamento/asse 1.
L’oggetto di azionamento con il numero 1 è la Control Unit (CU) che deve es-sere almeno presente in ogni sistema di azionamento.
2. A seconda del risultato del primo job di lettura, tramite altri job di lettura ven-gono letti gli indici del parametro p0101 “Numero oggetto di azionamento”sull’oggetto di azionamento 1 per il tempo impostato nel parametro r0102.
Esempio:
Se il numero degli oggetti di azionamento viene letto con “5”, vengono letti i va-lori degli indici da 0 a 4 del parametro p0101. Ovviamente gli indici rilevanti pos-sono anche essere letti in una sola volta.
Nota
I primi due punti forniscono rispondono alle seguenti domande:S Quanti oggetti di azionamento sono presenti sul sistema di azionamento?S Quali numeri hanno gli oggetti di azionamento esistenti?
3. Al termine per ogni oggetto di azionamento/asse (identificato dal numero di og-getto di azionamento) viene letto il parametro r0107/p0107 “Tipo oggetto diazionamento”.
A seconda dell’oggetto di azionamento, il parametro 107 è un parametro di im-postazione o di supervisione.
Il valore nel parametro r0107/p0107 identifica il tipo di oggetto di azionamento.La codifica del tipo di oggetto di azionamento può essere ricavata dalla lista deiparametri.
4. Da qui vale la lista dei parametri per il relativo oggetto di azionamento.
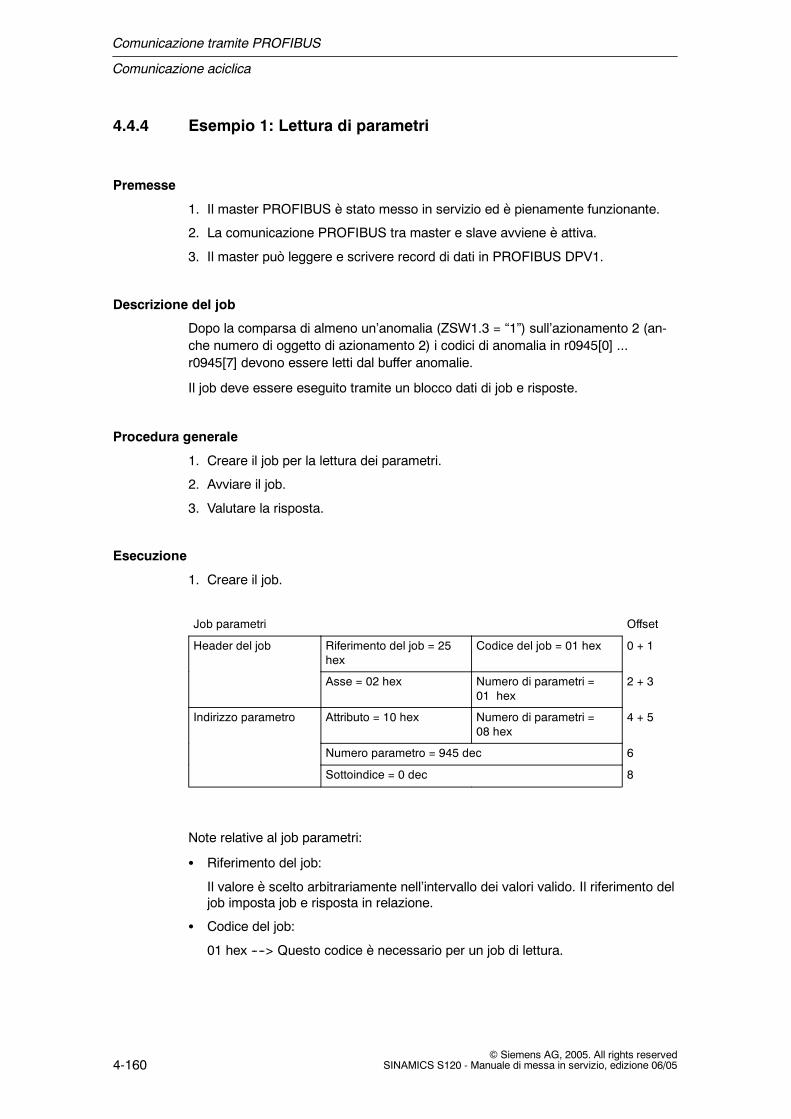
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-160© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.4.4 Esempio 1: Lettura di parametri
Premesse
1. Il master PROFIBUS è stato messo in servizio ed è pienamente funzionante.
2. La comunicazione PROFIBUS tra master e slave avviene è attiva.
3. Il master può leggere e scrivere record di dati in PROFIBUS DPV1.
Descrizione del job
Dopo la comparsa di almeno un’anomalia (ZSW1.3 = “1”) sull’azionamento 2 (an-che numero di oggetto di azionamento 2) i codici di anomalia in r0945[0] ...r0945[7] devono essere letti dal buffer anomalie.
Il job deve essere eseguito tramite un blocco dati di job e risposte.
Procedura generale
1. Creare il job per la lettura dei parametri.
2. Avviare il job.
3. Valutare la risposta.
Esecuzione
1. Creare il job.
Job parametri Offset
Header del job Riferimento del job = 25hex
Codice del job = 01 hex 0 + 1
Asse = 02 hex Numero di parametri =01 hex
2 + 3
Indirizzo parametro Attributo = 10 hex Numero di parametri =08 hex
4 + 5
Numero parametro = 945 dec 6
Sottoindice = 0 dec 8
Note relative al job parametri:
S Riferimento del job:
Il valore è scelto arbitrariamente nell’intervallo dei valori valido. Il riferimento deljob imposta job e risposta in relazione.
S Codice del job:
01 hex ----> Questo codice è necessario per un job di lettura.

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-161© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
S Asse:
02 hex ----> Azionamento 2, buffer anomalie con anomalie specifiche dell’azio-namento e dell’apparecchio
S Numero di parametri:
01 hex ----> Viene letto un parametro.
S Attributo:
10 hex ----> Vengono letti i valori del parametro.
S Numero di elementi:
08 hex ----> Deve essere letto il caso di anomalia attuale con 8 anomalie.
S Numero parametro:
945 dec ----> Viene letto p0945 (codice anomalia).
S Sottoindice:
0 dec ----> Viene letto a partire dall’indice 0.
2. Avviare il job parametri
Quando ZSW1.3 = “1” ----> avviare il job parametri
3. Valutare la risposta parametri
Risposta parametri Offset
Header della risposta Riferimento del job specu-lato = 25 hex
Codice della risposta = 01hex
0 + 1
Asse speculato = 02 hex Numero di parametri =01 hex
2 + 3
Valore parametro Formato = 06 hex Numero di valori = 08 hex 4 + 5
1. Valore = 1355 dec 6
2. Valore = 0 dec 8
... ...
8. Valore = 0 dec 20
Note relative alla risposta parametri:
S Riferimento job speculato:
Questa risposta fa parte del job con riferimento del job 25.
S Codice di risposta:
01 hex ----> Job di lettura positivo, i valori si trovano dal 1 valore
S Asse speculato, numero di parametri:
I valori corrispondono ai valori del job.
S Formato:
06 hex ----> I valori del parametro sono nel formato Unsigned16.

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-162© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
S Numero di valori:
08 hex ----> Esistono 8 valori di parametri.
S 1. valore ... 8. valore
Nel buffer anomalie dell’azionamento 2 è registrata un’anomalia solo nel primovalore.

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-163© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.4.5 Esempio 2: Lettura di parametri (job multiparametro)
Premesse
1. Il master PROFIBUS è stato messo in servizio ed è pienamente funzionante.
2. La comunicazione PROFIBUS tra master e slave avviene è attiva.
3. Il master può leggere e scrivere record di dati in PROFIBUS DPV1.
Presupposto specifico per questo esempio:
4. Tipo di regolazione: VECTOR
Descrizione del job
Deve essere impostato il funzionamento a impulsi 1 e 2 mediante morsetti di in-gresso della Control Unit per l’azionamento 2 (anche numero di oggetto di aziona-mento 2). A questo scopo i parametri corrispondenti devono essere scritti nel se-guente modo tramite un job parametri:
S BI: p1055 = r0722.4 Funzionamento a impulsi bit 0
S BI: p1056 = r0722.5 Funzionamento a impulsi bit 1
S p1058 = 300 1/min Funzionamento a impulsi 1 valore di riferimento divelocità
S p1059 = 600 1/min Funzionamento a impulsi 2 valore di riferimento divelocità
Il job deve essere eseguito tramite un blocco dati di job e risposte.
profibus_para_schreiben.vsd
X132.1
X132.2
r0722.4
r0722.5DI 5
DI 4
0 0
0 1
1 0
1 1
n_soll_1
Valore di riferimento del funzionamento a impulsi 1p1058
Valore di riferimento del
p1059
Salvataggio valore di riferimento
p1055 [C]
p1056 [C]+24 V
Valore di riferimento principale
722 41
31 ... 16 15 ... 10 9 ... 0
Numero parametro
Oggetto0: Apparecchio1: CU32063: cablaggio su se stesso
Numero indice
= 02D2 0404Hex
722 51 = 02D2 0405Hex
Immissione in BI: p1055 e BI: p1056
funzionamento a impulsi 2
Fig. 4-17 Impostazione del task per job multiparametro (esempio)
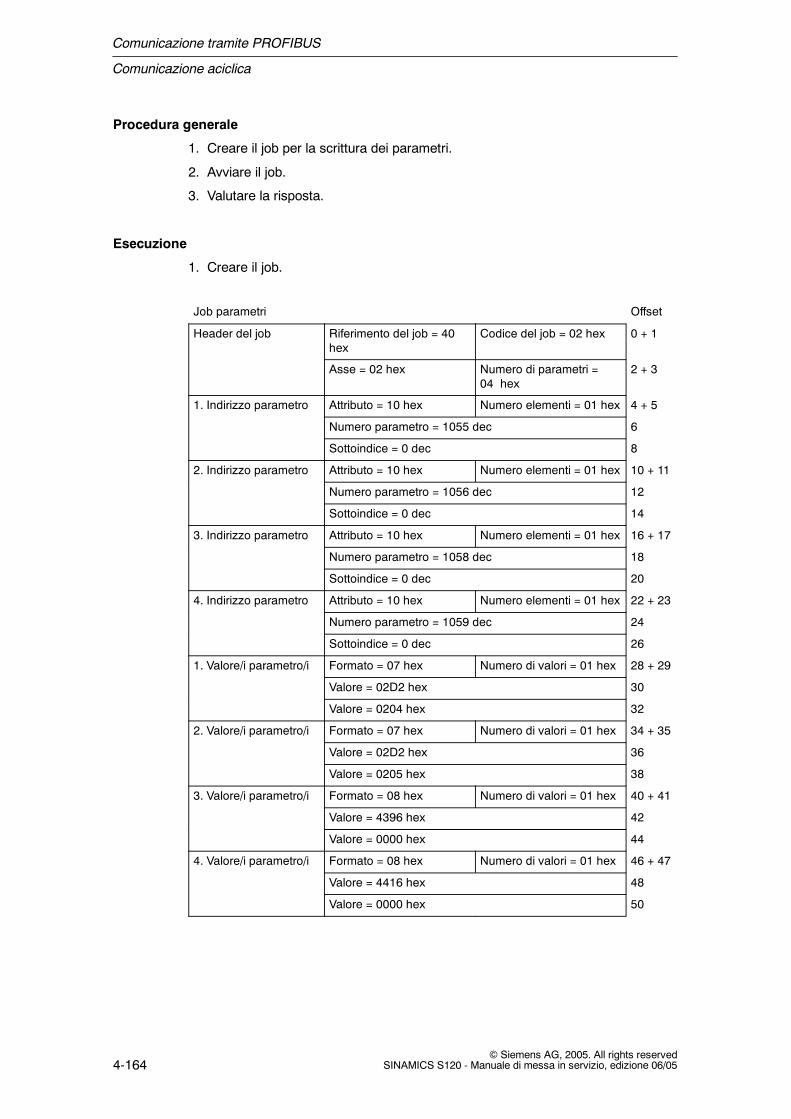
Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-164© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Procedura generale
1. Creare il job per la scrittura dei parametri.
2. Avviare il job.
3. Valutare la risposta.
Esecuzione
1. Creare il job.
Job parametri Offset
Header del job Riferimento del job = 40hex
Codice del job = 02 hex 0 + 1
Asse = 02 hex Numero di parametri =04 hex
2 + 3
1. Indirizzo parametro Attributo = 10 hex Numero elementi = 01 hex 4 + 5
Numero parametro = 1055 dec 6
Sottoindice = 0 dec 8
2. Indirizzo parametro Attributo = 10 hex Numero elementi = 01 hex 10 + 11
Numero parametro = 1056 dec 12
Sottoindice = 0 dec 14
3. Indirizzo parametro Attributo = 10 hex Numero elementi = 01 hex 16 + 17
Numero parametro = 1058 dec 18
Sottoindice = 0 dec 20
4. Indirizzo parametro Attributo = 10 hex Numero elementi = 01 hex 22 + 23
Numero parametro = 1059 dec 24
Sottoindice = 0 dec 26
1. Valore/i parametro/i Formato = 07 hex Numero di valori = 01 hex 28 + 29
Valore = 02D2 hex 30
Valore = 0204 hex 32
2. Valore/i parametro/i Formato = 07 hex Numero di valori = 01 hex 34 + 35
Valore = 02D2 hex 36
Valore = 0205 hex 38
3. Valore/i parametro/i Formato = 08 hex Numero di valori = 01 hex 40 + 41
Valore = 4396 hex 42
Valore = 0000 hex 44
4. Valore/i parametro/i Formato = 08 hex Numero di valori = 01 hex 46 + 47
Valore = 4416 hex 48
Valore = 0000 hex 50

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-165© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Note relative al job parametri:
S Riferimento del job:
Il valore è scelto arbitrariamente nell’intervallo dei valori valido. Il riferimento deljob imposta job e risposta in relazione.
S Codice del job:
02 hex ----> Questo codice è necessario per un job di scrittura.
S Asse:
02 hex ----> I parametri vengono scritti nell’azionamento 2.
S Numero di parametri
04 hex ----> Il job multiparametro comprende 4 singoli job parametri.
1. indirizzo parametro ... 4. indirizzo parametro
S Attributo:
10 hex ----> Vengono scritti i valori del parametro.
S Numero di elementi
01 hex ----> Viene letto un elemento dell’array.
S Numero parametro
Indicazione del numero del parametro da descrivere (p1055, p1056, p1058,p1059).
S Sottoindice:
0 dec ----> Identificazione del primo elemento dell’array.
1. valore parametro ... 4. valore parametro
S Formato:
07 hex ----> Tipo di dati Unsigned32
08 hex ----> Tipo di dati FloatingPoint
S Numero di valori:
01 hex ----> Ogni parametro viene scritto con un valore nel formato specificato.
S Valore:
Parametri di ingresso BICO: immettere la sorgente del segnale (vedere lafigura 4-17)
Parametri di impostazione: immettere il valore
2. Avviare il job parametri

Comunicazione tramite PROFIBUS
Comunicazione aciclica
4-166© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
3. Valutare la risposta parametri
Risposta parametri Offset
Header della risposta Riferimento del job specu-lato = 40 hex
Codice di risposta = 02hex
0
Asse speculato = 02 hex Numero di parametri =04 hex
2
Note relative alla risposta parametri:
S Riferimento job speculato:
Questa risposta fa parte del job con riferimento del job 40.
S Codice di risposta:
02 hex ----> Job di scrittura positivo
S Asse speculato:
02 hex ----> Il valore corrisponde al valore del job.
S Numero di parametri:
04 hex ----> Il valore corrisponde al valore del job.
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-167© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
4.5 Motion Control con PROFIBUS
Descrizione
Con la funzione “Motion Control con PROFIBUS” può essere realizzato unaccoppiamento a ciclo sincrono tra un master e uno o più slave con il bus dicampo PROFIBUS.
Nota
L’accoppiamento isocrono di azionamento è definito nella seguente bibliografia:
Bibliografia: /P5/ PROFIdrive Profile Drive Technology
Caratteristiche
S Per attivare questa funzione non è necessaria alcuna immissione di parametriaggiuntiva oltre alla progettazione del bus. Master e slave devono essere impo-stati solo per questa funzione.
S L’impostazione sul lato master viene eseguita tramite la configurazione har-dware, ad es. Config HW di SIMATIC S7. L’impostazione sul lato slave vieneeseguita tramite il telegramma di parametrizzazione durante l’avviamento delbus.
S Tempi di campionamento fissi per l’intera trasmissione dati.
S Prima dell’inizio di un ciclo viene inviata l’informazione clock Global Control(GC).
S La lunghezza del tempo di ciclo dipende dalla configurazione del bus. Il tool diconfigurazione del bus (ad es. Config HW) supporta nella scelta del tempo diciclo:
-- Numero elevato di azionamenti per ogni slave/apparecchio di azionamento--> ciclo più lungo
-- Numero elevato di slave/apparecchi di azionamento --> clock più lungo
S Le anomalie della trasmissione dati utili o del clock vengono sorvegliate dalcontatore di funzionalità vitale.
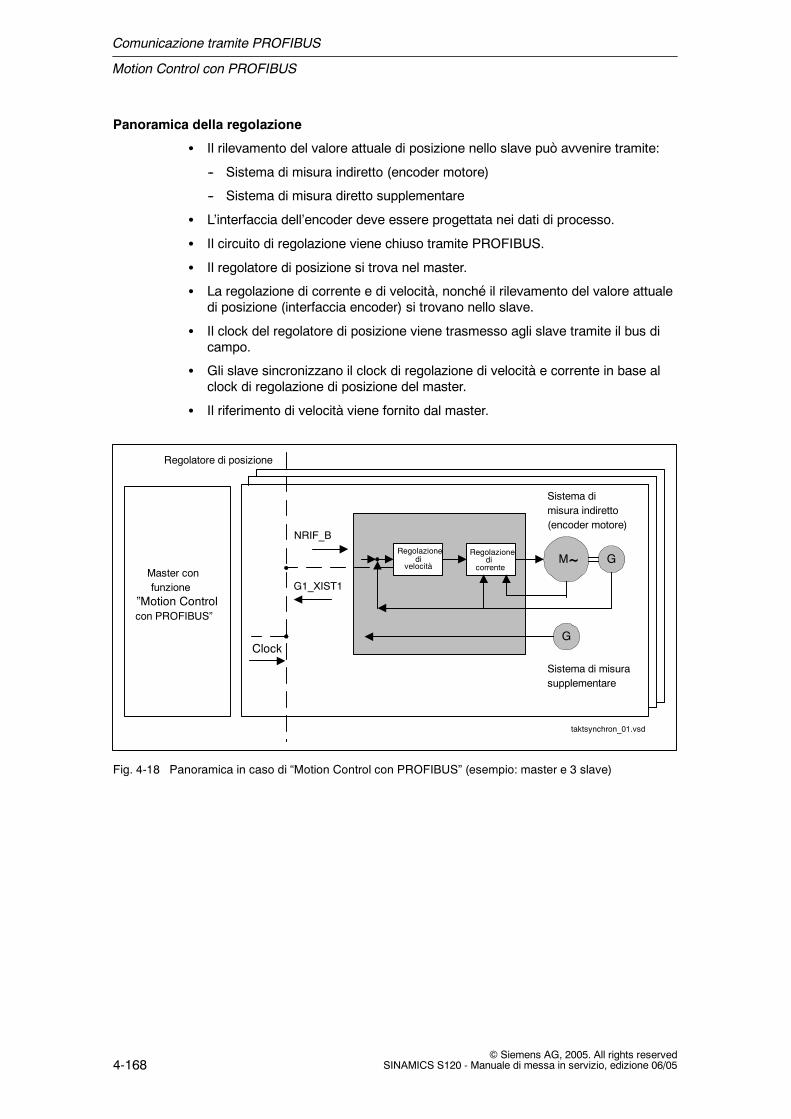
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-168© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica della regolazione
S Il rilevamento del valore attuale di posizione nello slave può avvenire tramite:
-- Sistema di misura indiretto (encoder motore)
-- Sistema di misura diretto supplementare
S L’interfaccia dell’encoder deve essere progettata nei dati di processo.
S Il circuito di regolazione viene chiuso tramite PROFIBUS.
S Il regolatore di posizione si trova nel master.
S La regolazione di corrente e di velocità, nonché il rilevamento del valore attualedi posizione (interfaccia encoder) si trovano nello slave.
S Il clock del regolatore di posizione viene trasmesso agli slave tramite il bus dicampo.
S Gli slave sincronizzano il clock di regolazione di velocità e corrente in base alclock di regolazione di posizione del master.
S Il riferimento di velocità viene fornito dal master.
Regolatore di posizione
Sistema dimisura diretto(encoder motore)
Master confunzione
”Motion Controlcon PROFIBUS”
taktsynchron_01.vsd
Regolazione
velocità
Regolazione
corrente
G
G
Sistema di misurasupplementare
M
NRIF_B
G1_XIST1
Clock
~
Sistema dimisura indiretto(encoder motore)
didi
Fig. 4-18 Panoramica in caso di “Motion Control con PROFIBUS” (esempio: master e 3 slave)

Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-169© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Struttura del ciclo di dati
Il ciclo di dati è composto dagli elementi seguenti:
1. Telegramma Global Control
2. Parte ciclica
-- Valori di riferimento e attuali
3. Parte aciclica
-- Parametri e dati di diagnostica.
4. Riserva
-- Inoltro del token (TTH).
-- Per la ricerca di nuovi nodi nel gruppo azionamenti (GAP).
-- Tempo di attesa prima dell’inizio del ciclo successivo.
R
DxDxDxGCMSG RES MSG DxDxDx MSG DxDxDx MSG
RR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRR RRRRRR RRR
Tempo ciclo delregolatore divelocità
Slaveda 1 a 3
Master(regolatore diposizione)
R1 R2 R3
Clock del regolatoredi posizione
TI
TM
TO
TMAPC = 2 S TDP
TM
TDP
TI
RES GC RES GC
TI
R1 R2TDX
Fig. 4-19 Esempio: Ciclo ottimizzato con TMAPC = 2 S TDP
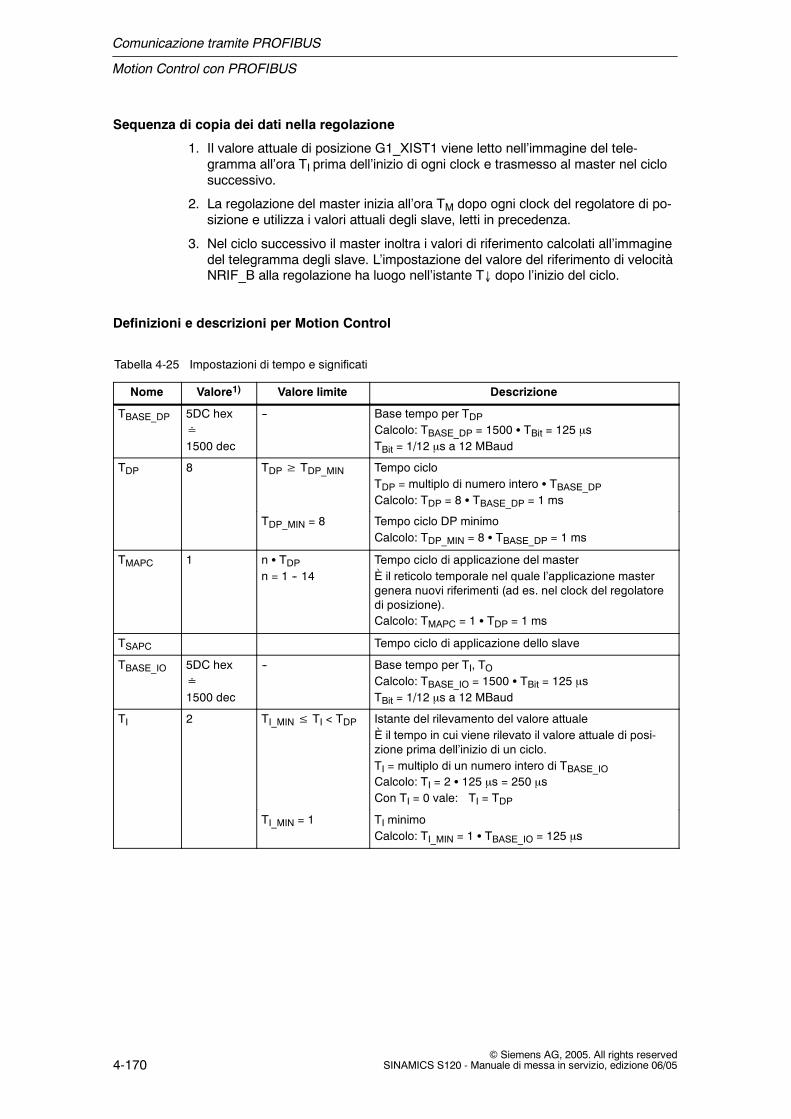
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-170© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Sequenza di copia dei dati nella regolazione
1. Il valore attuale di posizione G1_XIST1 viene letto nell’immagine del tele-gramma all’ora TI prima dell’inizio di ogni clock e trasmesso al master nel ciclosuccessivo.
2. La regolazione del master inizia all’ora TM dopo ogni clock del regolatore di po-sizione e utilizza i valori attuali degli slave, letti in precedenza.
3. Nel ciclo successivo il master inoltra i valori di riferimento calcolati all’immaginedel telegramma degli slave. L’impostazione del valore del riferimento di velocitàNRIF_B alla regolazione ha luogo nell’istante T↓ dopo l’inizio del ciclo.
Definizioni e descrizioni per Motion Control
Tabella 4-25 Impostazioni di tempo e significati
Nome Valore1) Valore limite Descrizione
TBASE_DP 5DC hex≐1500 dec
-- Base tempo per TDPCalcolo: TBASE_DP = 1500 S TBit = 125 µsTBit = 1/12 µs a 12 MBaud
TDP 8 TDP≥ TDP_MIN Tempo cicloTDP = multiplo di numero intero S TBASE_DPCalcolo: TDP = 8 S TBASE_DP = 1 ms
TDP_MIN = 8 Tempo ciclo DP minimoCalcolo: TDP_MIN = 8 S TBASE_DP = 1 ms
TMAPC 1 n S TDPn = 1 -- 14
Tempo ciclo di applicazione del masterÈ il reticolo temporale nel quale l’applicazione mastergenera nuovi riferimenti (ad es. nel clock del regolatoredi posizione).Calcolo: TMAPC = 1 S TDP = 1 ms
TSAPC Tempo ciclo di applicazione dello slave
TBASE_IO 5DC hex≐1500 dec
-- Base tempo per TI, TOCalcolo: TBASE_IO = 1500 S TBit = 125 µsTBit = 1/12 µs a 12 MBaud
TI 2 TI_MIN≤ TI < TDP Istante del rilevamento del valore attualeÈ il tempo in cui viene rilevato il valore attuale di posi-zione prima dell’inizio di un ciclo.TI = multiplo di un numero intero di TBASE_IOCalcolo: TI = 2 S 125 µs = 250 µsCon TI = 0 vale: TI = TDP
TI_MIN = 1 TI minimoCalcolo: TI_MIN = 1 S TBASE_IO = 125 µs
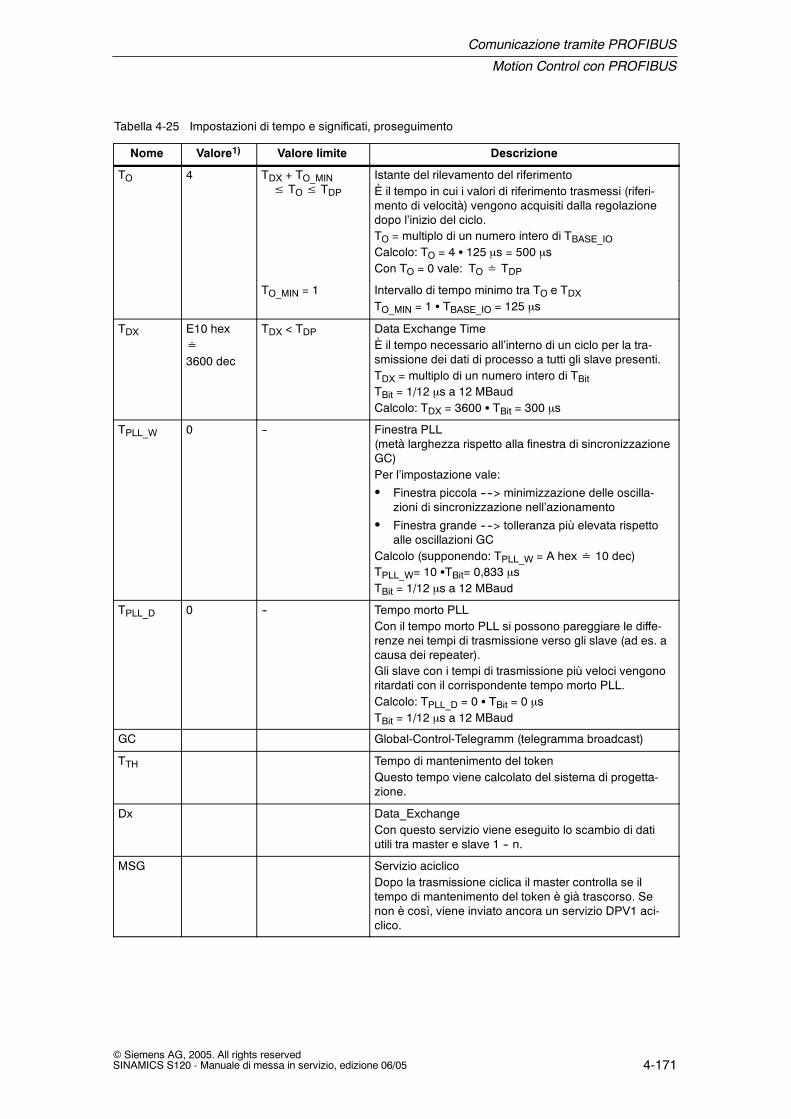
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-171© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-25 Impostazioni di tempo e significati, proseguimento
Nome DescrizioneValore limiteValore1)
TO 4 TDX + TO_MIN≤ TO≤ TDP
Istante del rilevamento del riferimentoÈ il tempo in cui i valori di riferimento trasmessi (riferi-mento di velocità) vengono acquisiti dalla regolazionedopo l’inizio del ciclo.TO = multiplo di un numero intero di TBASE_IOCalcolo: TO = 4 S 125 µs = 500 µsCon TO = 0 vale: TO≐ TDP
TO_MIN = 1 Intervallo di tempo minimo tra TO e TDXTO_MIN = 1 S TBASE_IO = 125 µs
TDX E10 hex≐3600 dec
TDX < TDP Data Exchange TimeÈ il tempo necessario all’interno di un ciclo per la tra-smissione dei dati di processo a tutti gli slave presenti.TDX = multiplo di un numero intero di TBitTBit = 1/12 µs a 12 MBaudCalcolo: TDX = 3600 S TBit = 300 µs
TPLL_W 0 -- Finestra PLL(metà larghezza rispetto alla finestra di sincronizzazioneGC)Per l’impostazione vale:
S Finestra piccola ----> minimizzazione delle oscilla-zioni di sincronizzazione nell’azionamento
S Finestra grande ----> tolleranza più elevata rispettoalle oscillazioni GC
Calcolo (supponendo: TPLL_W = A hex≐ 10 dec)TPLL_W= 10 STBit= 0,833 µsTBit = 1/12 µs a 12 MBaud
TPLL_D 0 -- Tempo morto PLLCon il tempo morto PLL si possono pareggiare le diffe-renze nei tempi di trasmissione verso gli slave (ad es. acausa dei repeater).Gli slave con i tempi di trasmissione più veloci vengonoritardati con il corrispondente tempo morto PLL.Calcolo: TPLL_D = 0 S TBit = 0 µsTBit = 1/12 µs a 12 MBaud
GC Global-Control-Telegramm (telegramma broadcast)
TTH Tempo di mantenimento del tokenQuesto tempo viene calcolato del sistema di progetta-zione.
Dx Data_ExchangeCon questo servizio viene eseguito lo scambio di datiutili tra master e slave 1 -- n.
MSG Servizio aciclicoDopo la trasmissione ciclica il master controlla se iltempo di mantenimento del token è già trascorso. Senon è così, viene inviato ancora un servizio DPV1 aci-clico.
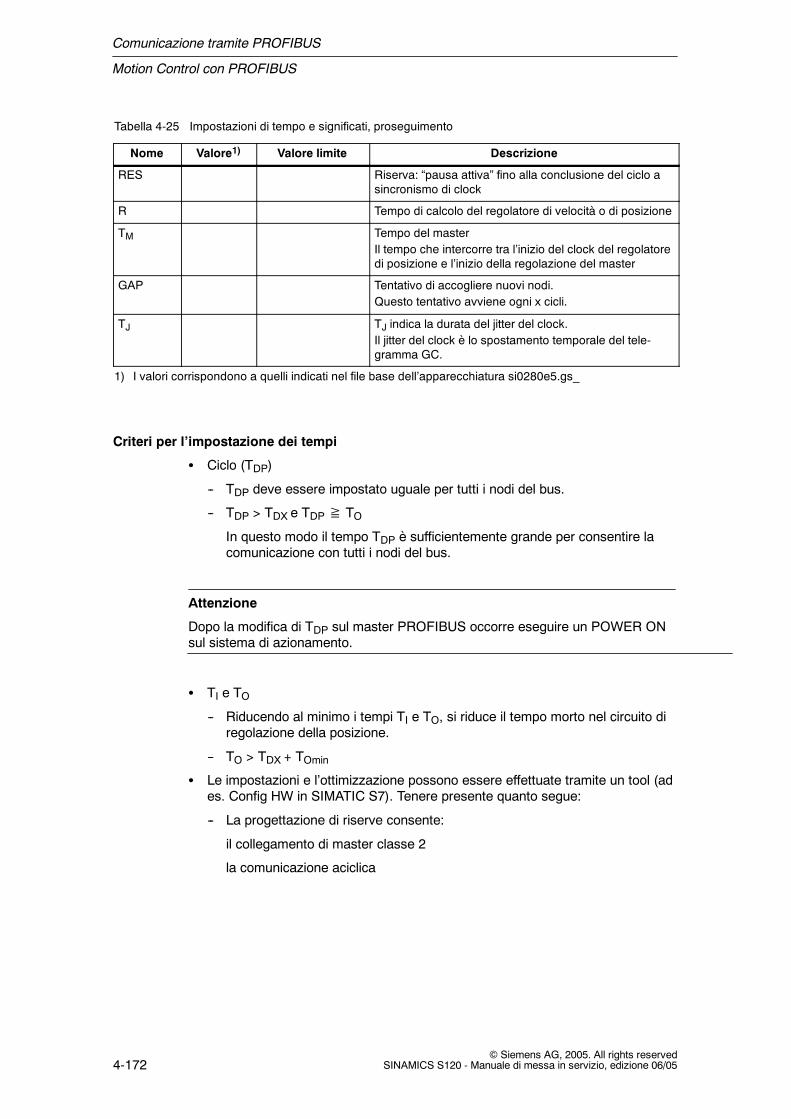
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-172© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 4-25 Impostazioni di tempo e significati, proseguimento
Nome DescrizioneValore limiteValore1)
RES Riserva: “pausa attiva” fino alla conclusione del ciclo asincronismo di clock
R Tempo di calcolo del regolatore di velocità o di posizione
TM Tempo del masterIl tempo che intercorre tra l’inizio del clock del regolatoredi posizione e l’inizio della regolazione del master
GAP Tentativo di accogliere nuovi nodi.Questo tentativo avviene ogni x cicli.
TJ TJ indica la durata del jitter del clock.Il jitter del clock è lo spostamento temporale del tele-gramma GC.
1) I valori corrispondono a quelli indicati nel file base dell’apparecchiatura si0280e5.gs_
Criteri per l’impostazione dei tempi
S Ciclo (TDP)
-- TDP deve essere impostato uguale per tutti i nodi del bus.
-- TDP > TDX e TDP≧ TO
In questo modo il tempo TDP è sufficientemente grande per consentire lacomunicazione con tutti i nodi del bus.
Attenzione
Dopo la modifica di TDP sul master PROFIBUS occorre eseguire un POWER ONsul sistema di azionamento.
S TI e TO
-- Riducendo al minimo i tempi TI e TO, si riduce il tempo morto nel circuito diregolazione della posizione.
-- TO > TDX + TOmin
S Le impostazioni e l’ottimizzazione possono essere effettuate tramite un tool (ades. Config HW in SIMATIC S7). Tenere presente quanto segue:
-- La progettazione di riserve consente:
il collegamento di master classe 2
la comunicazione aciclica
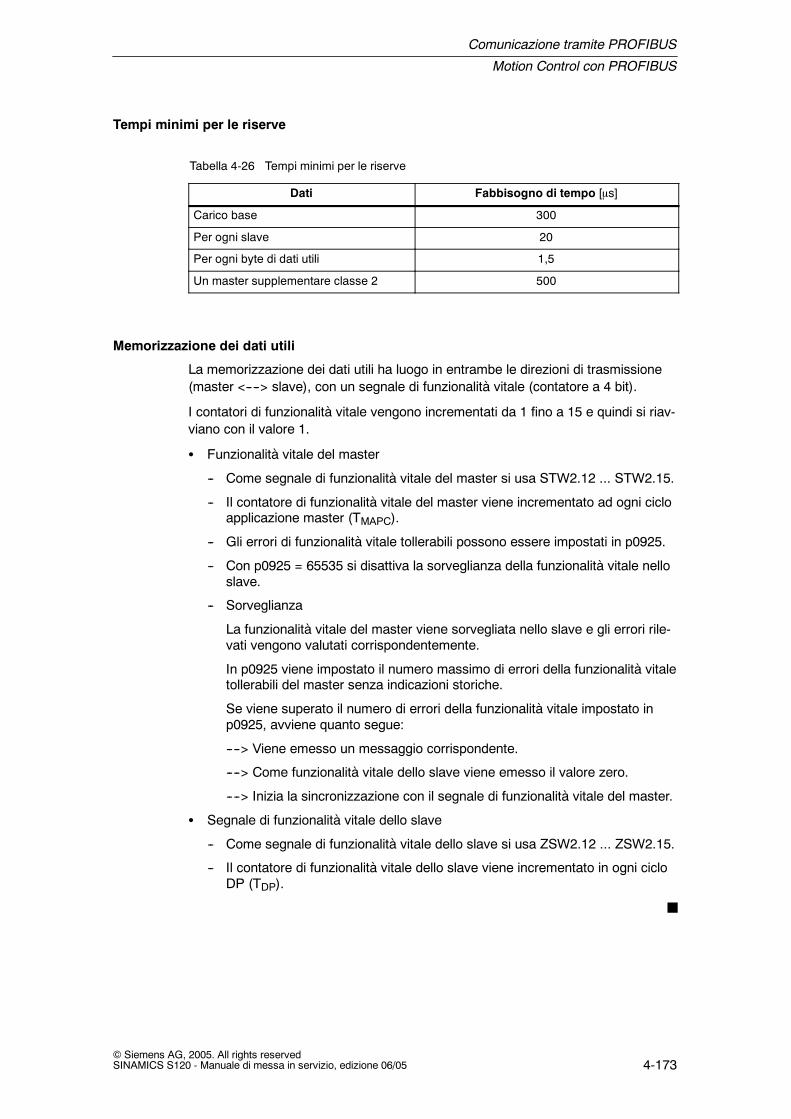
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-173© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tempi minimi per le riserve
Tabella 4-26 Tempi minimi per le riserve
Dati Fabbisogno di tempo [ms]
Carico base 300
Per ogni slave 20
Per ogni byte di dati utili 1,5
Un master supplementare classe 2 500
Memorizzazione dei dati utili
La memorizzazione dei dati utili ha luogo in entrambe le direzioni di trasmissione(master <----> slave), con un segnale di funzionalità vitale (contatore a 4 bit).
I contatori di funzionalità vitale vengono incrementati da 1 fino a 15 e quindi si riav-viano con il valore 1.
S Funzionalità vitale del master
-- Come segnale di funzionalità vitale del master si usa STW2.12 ... STW2.15.
-- Il contatore di funzionalità vitale del master viene incrementato ad ogni cicloapplicazione master (TMAPC).
-- Gli errori di funzionalità vitale tollerabili possono essere impostati in p0925.
-- Con p0925 = 65535 si disattiva la sorveglianza della funzionalità vitale nelloslave.
-- Sorveglianza
La funzionalità vitale del master viene sorvegliata nello slave e gli errori rile-vati vengono valutati corrispondentemente.
In p0925 viene impostato il numero massimo di errori della funzionalità vitaletollerabili del master senza indicazioni storiche.
Se viene superato il numero di errori della funzionalità vitale impostato inp0925, avviene quanto segue:
----> Viene emesso un messaggio corrispondente.
----> Come funzionalità vitale dello slave viene emesso il valore zero.
----> Inizia la sincronizzazione con il segnale di funzionalità vitale del master.
S Segnale di funzionalità vitale dello slave
-- Come segnale di funzionalità vitale dello slave si usa ZSW2.12 ... ZSW2.15.
-- Il contatore di funzionalità vitale dello slave viene incrementato in ogni cicloDP (TDP).
J
Comunicazione tramite PROFIBUS
Motion Control con PROFIBUS
4-174© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Spazio per appunti

5-175© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
SINAMICS Safety Integrated (Booksize)
Questo capitolo descrive i seguenti argomenti relativi a SINAMICS SafetyIntegrated:
S Informazioni generali su SINAMICS Safety Integrated
S Arresto sicuro (SH)
S Comando di frenatura sicuro (SBC)
S Messa in servizio delle funzioni Arresto sicuro (SH) e Comando di frenaturasicuro (SBC)
S Panoramica dei parametri e degli schemi logici
S Esempi di applicazione
S Test e protocollo di collaudo
5

SINAMICS Safety Integrated (Booksize)
Informazioni generali su SINAMICS Safety Integrated
5-176© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.1 Informazioni generali su SINAMICS Safety Integrated
5.1.1 Spiegazioni, norme e concetti
Safety Integrated
Le collaudate funzioni di sicurezza di “Safety Integrated” permettono di realizzareun efficiente sistema di protezione di persone e macchine facilmente applicabilealla pratica.
Questa innovativa tecnica di sicurezza consente di ottenere i seguenti risultati:
S maggior sicurezza
S maggior profitto
S maggiore flessibilità
S maggiore disponibilità degli impianti
Safety Integrated dispone delle seguenti funzioni (funzioni SI):
S Arresto sicuro (SH) Safe Standstill (SH)
L’“Arresto sicuro” (SH) è un dispositivo atto ad evitare l’avviamento non previ-sto, secondo EN 60204 --1, punto 5.4.
S Comando di frenatura sicuro (SBC) Safe Brake Control (SBC)
Nota
Queste funzioni sono indipendenti dagli azionamenti, ossia non necessitano di uncontrollore sovraordinato.

SINAMICS Safety Integrated (Booksize)
Informazioni generali su SINAMICS Safety Integrated
5-177© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Norme e direttive
La tecnica di sicurezza prevede che vengano rispettate diverse norme e direttive.
Le direttive sono vincolanti tanto per il produttore delle macchine quanto per chi leusa.
Le norme rispecchiano in generale lo stato della tecnica e servono da guidanell’applicazione pratica dei criteri di sicurezza ma, al contrario delle direttive, nonsono vincolanti.
Il seguente elenco riporta una selezione di norme e direttive riguardanti la tecnicadi sicurezza.
S Direttiva europea in materia di macchine 98/37/CEQuesta direttiva definisce le finalità principali della protezione nella tecnica disicurezza.
S EN 292--1Definizioni di base e direttive generali di realizzazione.
S EN 954--1Parti dei sistemi di comando soggette alle disposizioni di sicurezza.
S EN 1050Valutazione dei rischi.
S IEC 61508Sicurezza funzionale dei sistemi elettrici ed elettronici.Questa norma definisce i cosiddetti livelli di integrità di sicurezza (SafetyIntegrity Levels, SIL), che descrivono sia un determinato livello di integritàdel software orientato alla sicurezza sia gli intervalli di probabilità di erroredell’hardware quantitativamente determinati.
Nota
Le funzioni di sicurezza del sistema di azionamento SINAMICS S120 soddisfano iseguenti requisiti per quanto riguarda i componenti certificati:S Categoria 3 secondo EN 954--1.S Grado di integrità della sicurezza 2 (SIL 2) secondo IEC 61508.
Per una lista dei componenti certificati rivolgersi alla filiale Siemens di zona.
Aspettative
Le sorveglianze in ognuno dei relativi canali si basano sul principio secondo cuiprima di un’azione deve vigere uno stato definito e dopo l’azione deve avvenireuna determinata retroazione.
Se queste aspettative non vengono soddisfatte in un canale di sorveglianza, l’azio-namento si arresta mediante due canali e viene emesso un messaggio corrispon-dente.
SINAMICS Safety Integrated (Booksize)
Informazioni generali su SINAMICS Safety Integrated
5-178© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tracciati di arresto
Vi sono due tracciati di arresto indipendenti l’uno dall’altro. Tutti i tracciati di arrestosono attivi in modo low. Viene così garantito che, in caso di guasto di un compo-nente o al momento della rottura di un cavo, il sistema passi sempre allo statosicuro.
Per scoprire gli errori nei tracciati di arresto viene attivata la funzione “Arrestosicuro” e bloccata la reinserzione.
Struttura di sorveglianza a due canali
Tutte le funzioni hardware e software importanti ai fini di Safety Integrated sonorealizzate in due canali di sorveglianza reciprocamente indipendenti (ad es. trac-ciati di arresto, mantenimento dati, confronto dati).
I due canali di sorveglianza di un azionamento sono realizzati tramite i seguenticomponenti:
S la Control Unit
S il Motor Module appartenente a un azionamento.
Dinamizzazione forzata o test dei tracciati di arresto
La dinamizzazione forzata dei tracciati di arresto serve a scoprire tempestivamentegli errori nel software e nell’hardware dei due canali di sorveglianza e viene ese-guita automaticamente tramite la selezione/deselezione della funzione “Arrestosicuro”.
Per soddisfare i requisiti previsti dalla norma EN 954 --1 dopo il tempestivo rileva-mento degli errori, occorre verificare almeno una volta il corretto funzionamento dientrambi i tracciati di arresto entro un determinato intervallo di tempo. L’utentedeve provvedervi attivando manualmente o automaticamente la dinamizzazioneforzata.
L’esecuzione tempestiva della dinamizzazione forzata viene sorvegliata da untimer.
S p9659 Safety Integrated, timer per dinamizzazione forzata
Entro il periodo di tempo impostato in questo parametro è necessario eseguirealmeno una volta una dinamizzazione forzata dei tracciati di arresto.
Trascorso questo intervallo di tempo, viene emesso un relativo avviso che per-mane fino all’esecuzione della dinamizzazione forzata.
Ad ogni deselezione della funzione SH, il timer viene riportato al valore impostato.
Quando una macchina è in funzionamento, si possono escludere i rischi di lesionipersonali prevedendo dei dispositivi di sicurezza adeguati (ad es. porte di prote-zione). Perciò l’utente viene informato solo attraverso un avviso della dinamizza-zione forzata da eseguire a breve, e con ciò invitato ad effettuarla all’occasionesuccessiva. Questo avviso non pregiudica il funzionamento della macchina.

SINAMICS Safety Integrated (Booksize)
Informazioni generali su SINAMICS Safety Integrated
5-179© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
In funzione della propria applicazione, l’utente deve impostare da 0,00 a 9000,00ore l’intervallo di tempo per l’esecuzione della dinamizzazione forzata (imposta-zione di fabbrica: 8,00 ore).
Esempi di esecuzione della dinamizzazione forzata:
S Con gli azionamenti in stato di arresto dopo l’attivazione dell’impianto.
S All’apertura della porta di protezione.
S A intervalli di tempo prefissati (ad es. otto ore).
S Nel funzionamento automatico, in funzione del tempo e dell’evento.
Segnali di ingresso sicuri (SGE)
I segnali di ingresso sicuri costituiscono l’interfaccia verso il processo. Questi se-gnali digitali vengono trasmessi lungo due canali al sistema e servono a selezio-nare e deselezionare le funzioni di sicurezza.
Esempio: Selezione/deselezione della funzione Arresto sicuro (SH)
Confronto incrociato dei dati
Per i dati di sicurezza di entrambi i canali di sorveglianza viene eseguito ciclica-mente un confronto incrociato.
In caso di incoerenza dei dati avviene quanto segue:
1. Viene emessa l’anomalia F01611 o F30611 (STOP F) e viene avviato il tempoin p9658 o in p9858.
2. Una volta trascorso questo tempo, viene emessa un’altra anomalia F01600 oF30600 (STOP A) ed eseguita la cancellazione sicura degli impulsi.
La reazione anomala viene trasferita all’altro canale di sorveglianza, in modo che siverifichi l’arresto mediante due canali.
Clock di sorveglianza
Le funzioni degli azionamenti orientate alla sicurezza vengono eseguite ciclica-mente nel clock di sorveglianza.
Il clock di sorveglianza Safety è di 4 ms minimo. Aumentando il tempo di campio-namento di base DRIVE--CLiQ (p0110) aumenta anche il clock di sorveglianzaSafety.
Panoramica dei parametri (vedere il manuale delle liste)
S r9780 Safety Integrated, clock di sorveglianza (Control Unit)
S r9880 Safety Integrated, clock di sorveglianza (Motor Module)

SINAMICS Safety Integrated (Booksize)
Informazioni generali su SINAMICS Safety Integrated
5-180© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.1.2 Parametri, checksum, versione, password
Proprietà dei parametri per Safety Integrated
I parametri per Safety Integrated hanno le seguenti caratteristiche:
S Vengono conservati separatamente per ciascun canale di sorveglianza.
S Vengono protetti con una password da modifiche accidentali o non autorizzate.
S All’avvio viene creata e verificata una checksum (Cyclic Redundancy Check,CRC) tramite i parametri Safety sottoposti a controllo della checksum.
S Gestione dati
-- Parametri Safety per la Control Unit
Questi parametri vengono memorizzati in modo non volatile nella schedaCompactFlash.
-- Parametri Safety per il Motor Module
Questi parametri vengono salvati in modo non volatile sulla scheda Com-pactFlash in un formato proprietario.
S Creazione delle impostazioni di fabbrica per i parametri Safety
La reimpostazione specifica per l’azionamento dei parametri Safety ai valori difabbrica con p0970 o p3900 è possibile soltanto se le funzioni Safety non sonoabilitate (p9601 = p9801 = 0).
La reimpostazione globale di tutti i parametri ai valori di fabbrica (p0976 = 1 ep0009 = 1 sulla Control Unit) è possibile anche con le funzioni Safety abilitate(p9601 = p9801 = 1).
Verifica della checksum
All’interno dei parametri Safety vi è per ogni canale di sorveglianza un parametroper la checksum attuale tramite i parametri Safety sottoposti a controllo dellachecksum.
Alla messa in servizio, la checksum attuale deve essere trasferita nel corrispon-dente parametro della checksum di riferimento.
S r9798 Safety Integrated, checksum attuale parametri SI (Control Unit)
S p9799 Safety Integrated, checksum di riferimento parametri SI(Control Unit)
S r9898 Safety Integrated, checksum attuale parametri SI (MotorModule)
S p9899 Safety Integrated, checksum di riferimento parametri SI (MotorModule)
Ad ogni avvio, la checksum attuale viene calcolata attraverso i parametri Safety,quindi confrontata con la checksum di riferimento.
Se la checksum attuale e di riferimento sono differenti, viene emessa l’anomaliaF01650 o F30650 e richiesto un test di collaudo.
SINAMICS Safety Integrated (Booksize)
Informazioni generali su SINAMICS Safety Integrated
5-181© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Versioni di Safety Integrated
Il software Safety della Control Unit e del Motor Module hanno una versione pro-pria.
S r9770[0...2] Versione Safety Integrated (Control Unit)
S r9870[0...2] Versione Safety Integrated (Motor Module)
Password
La password Safety consente di proteggere i parametri Safety dagli accessi inscrittura non autorizzati.
Nella modalità di messa in servizio per Safety Integrated (p0010 = 95) la modificadei parametri Safety è possibile solo dopo l’immissione della password Safety va-lida in p9761.
S Durante la prima messa in servizio di Safety Integrated è valido quanto segue:
-- password Safety = 0
-- preimpostazione di p9761 = 0
Questo significa che:
durante la prima messa in servizio non è necessario impostare la passwordSafety.
S Modifica password
-- p0010 = 95 modi di messa in servizio (vedere il capitolo 5.4)
-- p9761 = immettere la “Vecchia password Safety”
-- p9762 = immettere la “Nuova password”
-- p9763 = confermare la “Nuova password”
-- Da questo momento è valida la nuova password Safety confermata.
Se occorre modificare i parametri Safety e la relativa password è sconosciuta, pro-cedere come segue:
1. Ripristinare le impostazioni di fabbrica dell’intero apparecchio di azionamento(Control Unit con tutti gli azionamenti/componenti collegati) (vedere il capitolo3.2.1)
2. Eseguire una nuova messa in servizio dell’apparecchio di azionamento e degliazionamenti
3. Eseguire una nuova messa in servizio di Safety Integrated
Panoramica dei parametri (vedere il manuale delle liste)
S p9761 immissione della password Safety Integrated
S p9762 nuova password Safety Integrated
S p9763 conferma della password Safety Integrated
SINAMICS Safety Integrated (Booksize)
Arresto sicuro (SH)
5-182© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.2 Arresto sicuro (SH)
Descrizione generale
La funzione “Arresto sicuro (SH)” serve, in caso di guasto o in relazione ad unafunzione di macchina, per disconnettere in modo sicuro l’alimentazione dell’energiache genera la coppia del motore.
Dopo la selezione della funzione, il dispositivo di azionamento si trova in “stato si-curo”. La reinserzione è interdetta da un blocco di inserzione.
Questa funzione si basa sulla cancellazione degli impulsi, integrata nei Motor Mo-dule.
Caratteristiche funzionali di “Arresto sicuro”
S Questa funzione è indipendente dagli azionamenti, ossia non necessita di uncontrollore sovraordinato.
S La funzione è specifica per l’azionamento, ossia è presente per ciascun aziona-mento e va messa singolarmente in servizio.
S Abilitazione della funzione obbligatoriamente tramite i parametri.
S È possibile raggruppare i morsetti per la funzione “Arresto sicuro”.
S Selezionando la funzione “Arresto sicuro” vale quanto segue:
-- Non è possibile l’avviamento accidentale del motore.
-- Tramite la cancellazione sicura degli impulsi viene interrotta l’alimentazionedell’energia che genera la coppia del motore.
-- Non si verifica una separazione galvanica tra Motor Module e motore.
!Avvertenza
È necessario assumere delle misure idonee a prevenire i movimenti dopo ladisinserzione dell’alimentazione del motore (arresto per inerzia); in caso di assesospeso, ad esempio, abilitando la funzione “Comando di frenatura sicuro”.
!Avvertenza
Il breakdown contemporaneo di due transistori di potenza (di cui uno nel pontesuperiore dell’invertitore e uno sfalsato in quello inferiore) nel Motor Module puòprovocare un limitato movimento di breve durata.
Il movimento massimo può essere:
Motori sincroni rotativi: movimento max. = 180 _ / numero di coppie di poli
Motori sincroni lineari: movimento max. = ampiezza del polo
S Lo stato della funzione “Arresto sicuro” è indicato dal parametro.
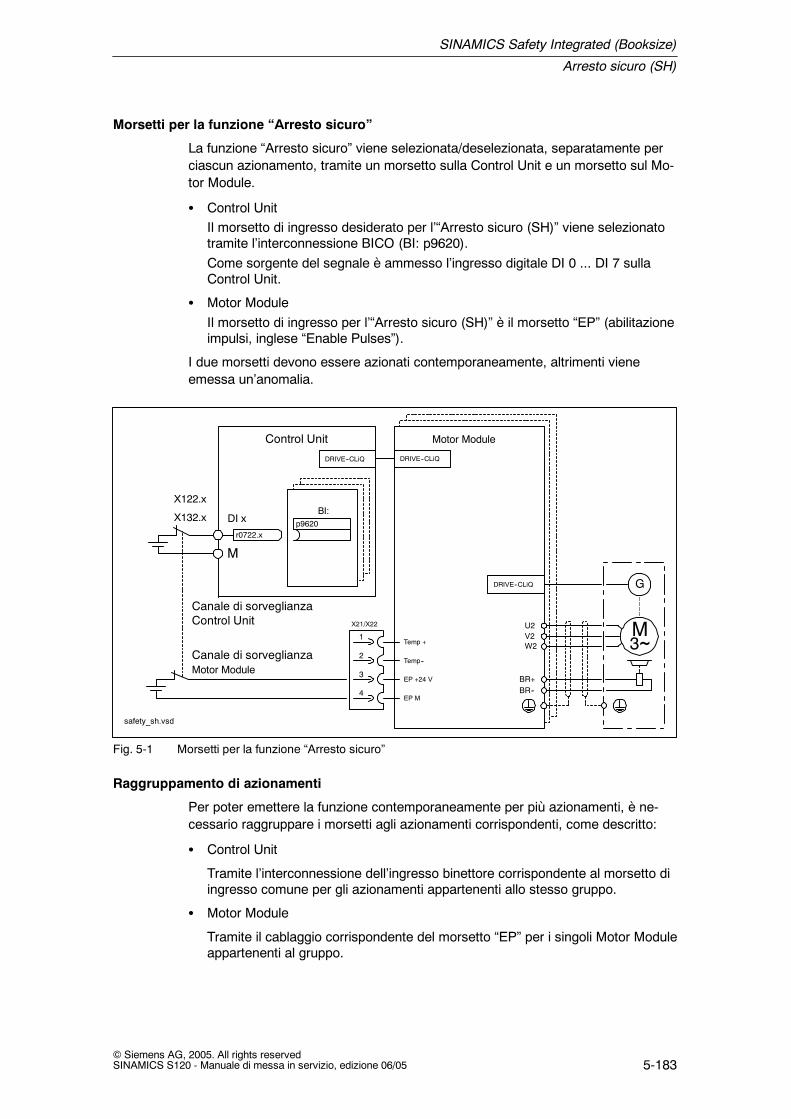
SINAMICS Safety Integrated (Booksize)
Arresto sicuro (SH)
5-183© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Morsetti per la funzione “Arresto sicuro”
La funzione “Arresto sicuro” viene selezionata/deselezionata, separatamente perciascun azionamento, tramite un morsetto sulla Control Unit e un morsetto sul Mo-tor Module.
S Control UnitIl morsetto di ingresso desiderato per l’“Arresto sicuro (SH)” viene selezionatotramite l’interconnessione BICO (BI: p9620).Come sorgente del segnale è ammesso l’ingresso digitale DI 0 ... DI 7 sullaControl Unit.
S Motor ModuleIl morsetto di ingresso per l’“Arresto sicuro (SH)” è il morsetto “EP” (abilitazioneimpulsi, inglese “Enable Pulses”).
I due morsetti devono essere azionati contemporaneamente, altrimenti vieneemessa un’anomalia.
safety_sh.vsd
r0722.x
Control Unit
DRIVE--CLiQ
Temp +
X21/X22
Temp--
EP M
EP +24 V
U2V2
BR+
W2
BR--
DI x
M
BI:p9620
Motor Module
DRIVE--CLiQ DRIVE--CLiQ
X132.x
Canale di sorveglianzaMotor Module
~M3
G
X122.x
Canale di sorveglianzaControl Unit
4
3
2
1
Fig. 5-1 Morsetti per la funzione “Arresto sicuro”
Raggruppamento di azionamenti
Per poter emettere la funzione contemporaneamente per più azionamenti, è ne-cessario raggruppare i morsetti agli azionamenti corrispondenti, come descritto:
S Control Unit
Tramite l’interconnessione dell’ingresso binettore corrispondente al morsetto diingresso comune per gli azionamenti appartenenti allo stesso gruppo.
S Motor Module
Tramite il cablaggio corrispondente del morsetto “EP” per i singoli Motor Moduleappartenenti al gruppo.
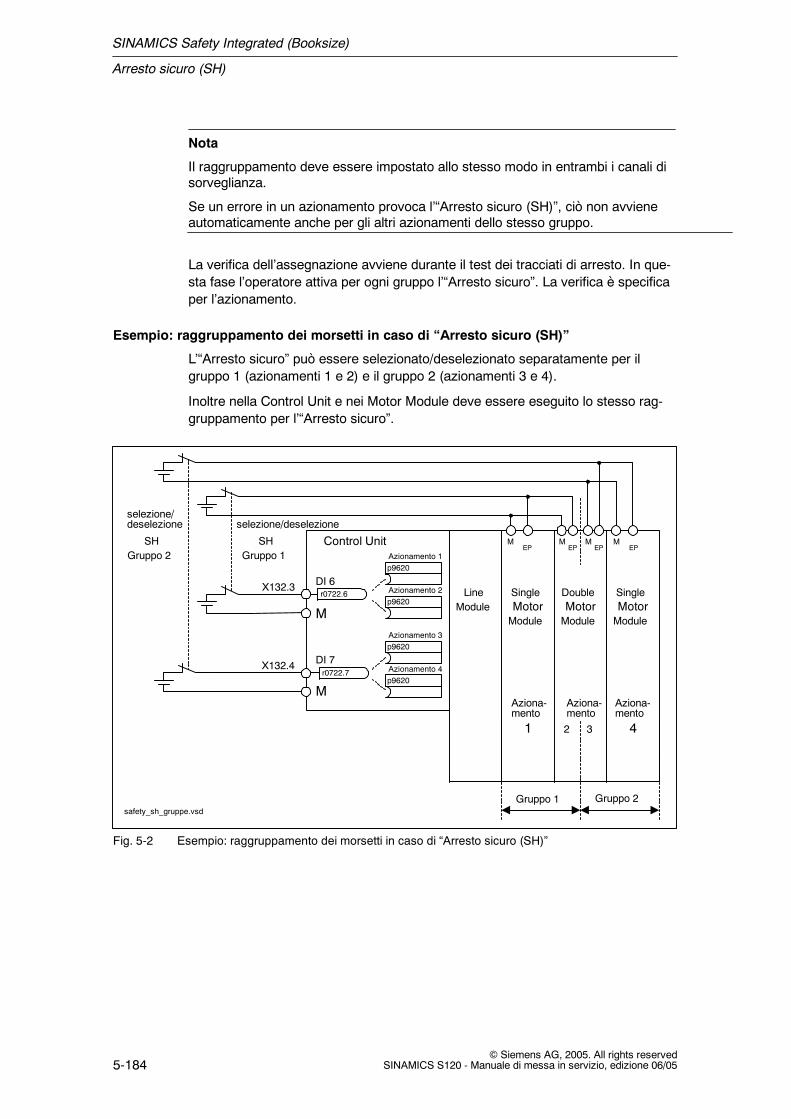
SINAMICS Safety Integrated (Booksize)
Arresto sicuro (SH)
5-184© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Il raggruppamento deve essere impostato allo stesso modo in entrambi i canali disorveglianza.
Se un errore in un azionamento provoca l’“Arresto sicuro (SH)”, ciò non avvieneautomaticamente anche per gli altri azionamenti dello stesso gruppo.
La verifica dell’assegnazione avviene durante il test dei tracciati di arresto. In que-sta fase l’operatore attiva per ogni gruppo l’“Arresto sicuro”. La verifica è specificaper l’azionamento.
Esempio: raggruppamento dei morsetti in caso di “Arresto sicuro (SH)”
L’“Arresto sicuro” può essere selezionato/deselezionato separatamente per ilgruppo 1 (azionamenti 1 e 2) e il gruppo 2 (azionamenti 3 e 4).
Inoltre nella Control Unit e nei Motor Module deve essere eseguito lo stesso rag-gruppamento per l’“Arresto sicuro”.
safety_sh_gruppe.vsd
r0722.6
Control UnitEP
DI 6
M
SingleMotorModule
DoubleMotorModule
SingleMotorModule
Gruppo 1 Gruppo 2
EP EP EP
selezione/deselezione
SHGruppo 1
selezione/
SHGruppo 2
r0722.7
DI 7
M
Azionamento 1p9620
Azionamento 2p9620
Azionamento 3p9620
Azionamento 4p9620
M M M
1 2 3 4
M
LineModule
X132.3
X132.4
Aziona-
deselezione
mentoAziona-mento
Aziona-mento
Fig. 5-2 Esempio: raggruppamento dei morsetti in caso di “Arresto sicuro (SH)”

SINAMICS Safety Integrated (Booksize)
Arresto sicuro (SH)
5-185© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abilitazione della funzione “Arresto sicuro (SH)”
La funzione “Arresto sicuro” viene abilitata con i seguenti parametri:
S p9601.0 SH tramite morsetti (Control Unit)
S p9801.0 SH tramite morsetti (Motor Module)
Selezione/deselezione della funzione “Arresto sicuro”
La funzione “Arresto sicuro” deve essere selezionata/deselezionata “contempora-neamente” nei due canali di sorveglianza attraverso i morsetti di ingresso e agiscesolo sull’azionamento interessato.
Segnale 1: deselezione della funzione
Segnale 0: selezione della funzione
“Contemporaneamente” significa che:
la commutazione deve concludersi nei due canali di sorveglianza entro il tempo disorveglianza parametrizzato.
S p9650 Safety Integrated, tempo di tolleranza commutazione SGE(Control Unit)
S p9850 Safety Integrated, tempo di tolleranza commutazione SGE(Motor Module)
Se l’“Arresto sicuro” non viene selezionato/deselezionato entro il tempo di sorve-glianza, il confronto incrociato rileva questo fatto ed emette l’anomalia F01611 oF30611 (STOP F). In questo caso gli impulsi vengono già cancellati dalla selezionedell’“arresto sicuro” su un solo canale.
Selezionando “Arresto sicuro” avviene quanto segue:
S Ogni canale di sorveglianza effettua, tramite il suo tracciato di arresto, la can-cellazione sicura degli impulsi.
S Viene azionato un freno di stazionamento motore (se collegato e configurato).
Deselezionando “Arresto sicuro” avviene quanto segue:
S Ogni canale di sorveglianza annulla, tramite il suo tracciato di arresto, la cancel-lazione sicura degli impulsi.
S Il requisito Safety “Chiusura freno motore” viene rimosso.S Eventuali comandi STOP F o STOP A presenti vengono annullati (vedere
r9772 / r9872).
Nota
Se entrambi i segnali di ingresso per la selezione/deselezione di “Arresto sicuro”differiscono per un periodo di tempo breve, compreso entro i limiti del tempo ditolleranza indicato in p9650/p9850, gli impulsi dell’azionamento vengono cancellatima non viene emesso alcun messaggio.
Per far sì che in questo caso venga visualizzato un messaggio, N01620/N30620deve essere riprogettato mediante p2118 e p2119 in un’avviso o in un’anomalia.
SINAMICS Safety Integrated (Booksize)
Arresto sicuro (SH)
5-186© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Riavvio dopo la selezione della funzione “Arresto sicuro”
1. Selezionare la funzione in ogni canale di sorveglianza tramite i morsetti di in-gresso.
2. Immettere le abilitazioni per l’azionamento.
3. Rimuovere il blocco all’inserzione e riavviare.
-- Fronte 1/0 sul segnale di ingresso “ON/OFF1” (rimozione del blocco all’in-serzione)
-- Fronte 0/1 sul segnale di ingresso “ON/OFF1” (avvio dell’azionamento)
4. Comandare nuovamente gli azionamenti.
Stato della funzione “Arresto sicuro”
Lo stato della funzione “Arresto sicuro” (SH) è indicato dai seguenti parametri:
Panoramica dei parametri (vedere il manuale delle liste)
S r9772 CO/BO: stato di Safety Integrated (Control Unit)
S r9872 CO/BO: stato di Safety Integrated (Motor Module)
S r9773 CO/BO: stato di Safety Integrated (Control Unit + MotorModule)
S r9774 CO/BO: stato di Safety Integrated (gruppo arresto sicuro)
Tempo di reazione per la funzione “Arresto sicuro”
Per i tempi di reazione per la selezione/deselezione della funzione tramite imorsetti di ingresso possono essere indicati i seguenti valori:
S Tempo di reazione tipico
2 x clock di sorveglianza Safety CU (r9780) + tempo di campionamentoingressi/uscite (p0799)
S Tempo di reazione massimo in caso di guasto
4 x clock di sorveglianza Safety CU (r9780) + tempo di campionamentoingressi/uscite (p0799)
Esempi:
Ipotesi:clock di sorveglianza Safety CU (r9780) = 4 ms etempo di campionamento ingressi/uscite (r0799) = 4 ms
tR_tip = 2 x r9780 (4 ms) + r0799 (4 ms) = 12 ms
tR_max = 4 x r9780 (4 ms) + r0799 (4 ms) = 20 ms
Panoramica dei parametri (vedere il manuale delle liste)
S p0799 CU Tempo di campionamento ingressi/uscite
S r9780 Safety Integrated, clock di sorveglianza (Control Unit)
S r9880 Safety Integrated, clock di sorveglianza (Motor Module)
SINAMICS Safety Integrated (Booksize)
Comando di frenatura sicuro (SBC)
5-187© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.3 Comando di frenatura sicuro (SBC)
Descrizione
Il comando di frenatura sicuro serve al comando dei freni di stazionamento chefunzionano secondo il principio della corrente di riposo (ad es. i freni di staziona-mento motore).
Il comando per l’apertura e la chiusura del freno viene trasmesso al Motor Moduletramite DRIVE-CLiQ. Il Motor Module esegue quindi l’azione e comanda di conse-guenza le uscite per il freno.
Il comando del freno tramite il collegamento del freno al Motor Module è eseguitocon la tecnica di sicurezza a due canali.
!Pericolo
Il “Comando di frenatura sicuro” non riconosce i guasti del freno stesso, adesempio il corto circuito nell’avvolgimento del freno, un freno usurato ecc.
Una rottura del cavo viene riconosciuta dal “Comando di frenatura sicuro” solo incaso di un cambiamento di stato, ovvero all’apertura o alla chiusura del freno.
Caratteristiche funzionali del “Comando di frenatura sicuro (SBC)”
S La funzione “SBC” viene eseguita tramite la selezione di “Arresto sicuro” e larisposta delle sorveglianze Safety con la cancellazione impulsi sicura.
S A differenza della gestione del comando di frenatura convenzionale, la funzione“SBC” viene eseguita tramite p1215 su due canali.
S “SBC” viene eseguito indipendentemente dal modo operativo del comando di frena-tura sicuro impostato in p1215. “SBC” non ha tuttavia senso se 1215 = 0 o 3.
S L’abilitazione della funzione deve avvenire obbligatoriamente tramite i parame-tri.
S Ad ogni selezione di “Arresto sicuro” il freno di stazionamento viene subitochiuso e viene forzata la dinamizzazione.
Abilitazione della funzione “Comando di frenatura sicuro (SBC)”
La funzione “Comando di frenatura sicuro” viene abilitata con i seguenti parametri:
S p9602 Safety Integrated, abilitazione comando di frenatura sicuro(Control Unit)
S p9802 Safety Integrated, abilitazione comando di frenatura sicuro (Mo-tor Module)
La funzione “Comando di frenatura sicuro” è attiva solo quando è abilitata almenouna funzione di sorveglianza Safety (cioè p9601 = p9801≠ 0).

SINAMICS Safety Integrated (Booksize)
Comando di frenatura sicuro (SBC)
5-188© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Comando di frenatura sicuro a due canali
In linea di principio il freno viene comandato dalla Control Unit. Vi sono due per-corsi di segnale per la chiusura del freno.
Motor Module
safety_sbc.vsd
Control Unit
TB+
TB--
P24
Motor
Freno a corrente
Diagnostica dei freni
MMBR2
DRIVE--CLiQ
BR1
BR+
BR--
X132
EP (Enable Pulses)
di riposo
Fig. 5-3 Comando di frenatura sicuro a due canali
Per il “Comando di frenatura sicuro” il Motor Module assume una funzione di con-trollo e garantisce che in caso di guasto o di comportamento anomalo della ControlUnit venga interrotta la corrente di frenatura e quindi venga chiuso il freno.
Tramite la diagnostica dei freni, una disfunzione su uno dei due interruttori (TB+,TB--) viene riconosciuta solo al cambiamento di stato, ovvero all’apertura e allachiusura del freno.
Quando il Motor Module o la Control Unit riconosce un errore, la corrente di frena-tura viene disinserita e viene raggiunto lo stato sicuro.
SINAMICS Safety Integrated (Booksize)
Comando di frenatura sicuro (SBC)
5-189© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tempo di reazione per la funzione “Comando di frenatura sicuro”
Per i tempi di reazione per la selezione/deselezione della funzione tramite morsettidi ingresso possono essere indicati i seguenti valori:
S Tempo di reazione tipico
4 x clock di sorveglianza Safety CU (r9780) + tempo di campionamentoingressi/uscite (p0799)
S Tempo di reazione massimo in caso di guasto
8 x clock di sorveglianza Safety CU (r9780) + tempo di campionamentoingressi/uscite (p0799)
Esempi:
Ipotesi:clock di sorveglianza Safety CU (r9780) = 4 ms etempo di campionamento ingressi/uscite (r0799) = 4 ms
tR_tip = 4 x r9780 (4 ms) + r0799 (4 ms) = 20 ms
tR_max = 8 x r9780 (4 ms) + r0799 (4 ms) = 36 ms
Panoramica dei parametri (vedere il manuale delle liste)
S p0799 CU Tempo di campionamento ingressi/uscite
S r9780 Safety Integrated, clock di sorveglianza (Control Unit)
S r9880 Safety Integrated, clock di sorveglianza (Motor Module)

SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-190© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.4 Messa in servizio delle funzioni “SH” e “SBC”
5.4.1 Informazioni generali sulla messa in servizio delle funzioniSafety
Avvertenze per la messa in servizio
Attenzione
Per ragioni tecniche di sicurezza non si può effettuare una messa in servizio offlinedelle funzioni Safety con il tool di messa in servizio STARTER (o SCOUT).
NotaS Le funzioni “SH” e “SBC” sono specifiche per l’azionamento; ciò significa che la
messa in servizio delle funzioni va eseguita una volta per ogni azionamento.S Per il supporto delle funzioni “SH” e “SBC” è necessaria almeno la seguente
versione Safety:Control Unit: V02.01.01 (r9770[0...2])Motor Module: V02.01.01 (r9870[0...2])
S Se nel Motor Module è disponibile una versione non compatibile, la Control Unitreagisce passando al modo di messa in servizio Safety (p0010 = 95) comedescritto di seguito:-- Viene emessa l’anomalia F01655 (Safety Integrated Control Unit:
compensazione delle funzioni di sorveglianza). L’anomalia provoca lareazione di stop OFF2.L’anomalia può essere tacitata solo una volta usciti dal modo di messa inservizio (p0010≠ 95).
-- La Control Unit genera una cancellazione degli impulsi sicura tramite ilproprio tracciato di arresto Safety.
-- Se il parametro è stato impostato (p1215), il freno di stazionamento motoreviene chiuso.
-- Non è ammessa nessuna abilitazione delle funzioni Safety (p9601/p9801 ep9602/p9802).
SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-191© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Presupposti per la messa in servizio delle funzioni di sicurezza
1. La messa in servizio dell’azionamento deve essere conclusa.
2. La cancellazione impulsi non sicura deve essere presente.
ad es. tramite OFF1 = “0” o OFF2 = “0”
Con un freno di stazionamento motore collegato e parametrizzato il freno distazionamento è chiuso.
3. I morsetti per l’“Arresto sicuro” devono essere cablati.
-- Control Unit: ingresso digitale DI 0 ... DI 7
-- Motor Module: morsetto “EP”
4. Durante il funzionamento con SBC vale quanto segue:
Un motore con il freno di stazionamento deve essere collegato alla connessionecorrispondente del Motor Module.
Messa in servizio di serie delle funzioni di sicurezza
1. Un progetto messo in servizio e caricato in STARTER può essere trasferito suun altro apparecchio di azionamento mantenendo la parametrizzazione Safety.
2. Se sull’apparecchio sorgente e su quello di destinazione vi sono versioni soft-ware differenti, può rendersi necessario un adeguamento delle checksum diriferimento (p9799, p9899). Ciò viene segnalato mediante le anomalie F01650(valore di anomalia: 1000) e F30650 (valore di anomalia: 1000).
3. Dopo il download del progetto nell’apparecchio di destinazione occorre effet-tuare un breve test di collaudo (vedere la tabella 5-8). Ciò viene segnalatodall’anomalia F01650 (valore di anomalia 2004).
Attenzione
Dopo il download di un progetto, lo stesso deve essere salvato in maniera nonvolatile sulla scheda CompactFlash (copia da RAM a ROM).
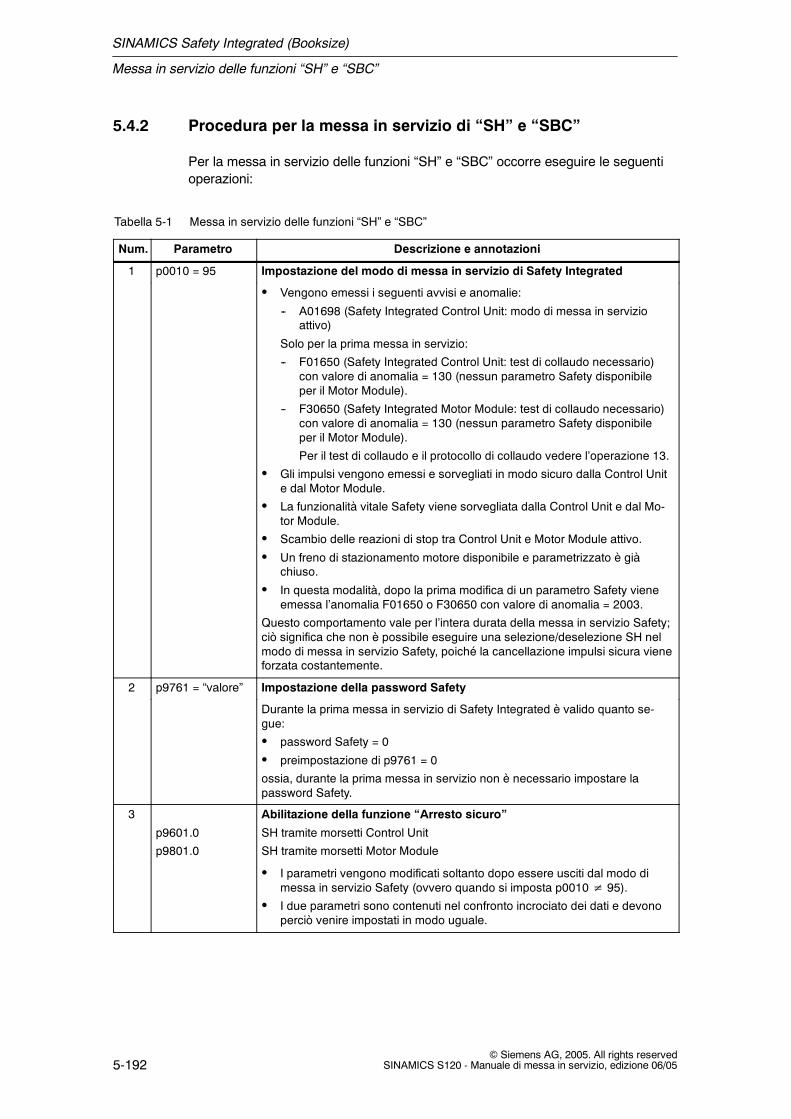
SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-192© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.4.2 Procedura per la messa in servizio di “SH” e “SBC”
Per la messa in servizio delle funzioni “SH” e “SBC” occorre eseguire le seguentioperazioni:
Tabella 5-1 Messa in servizio delle funzioni “SH” e “SBC”
Num. Parametro Descrizione e annotazioni
1 p0010 = 95 Impostazione del modo di messa in servizio di Safety Integrated
S Vengono emessi i seguenti avvisi e anomalie:
-- A01698 (Safety Integrated Control Unit: modo di messa in servizioattivo)
Solo per la prima messa in servizio:
-- F01650 (Safety Integrated Control Unit: test di collaudo necessario)con valore di anomalia = 130 (nessun parametro Safety disponibileper il Motor Module).
-- F30650 (Safety Integrated Motor Module: test di collaudo necessario)con valore di anomalia = 130 (nessun parametro Safety disponibileper il Motor Module).
Per il test di collaudo e il protocollo di collaudo vedere l’operazione 13.
S Gli impulsi vengono emessi e sorvegliati in modo sicuro dalla Control Unite dal Motor Module.
S La funzionalità vitale Safety viene sorvegliata dalla Control Unit e dal Mo-tor Module.
S Scambio delle reazioni di stop tra Control Unit e Motor Module attivo.
S Un freno di stazionamento motore disponibile e parametrizzato è giàchiuso.
S In questa modalità, dopo la prima modifica di un parametro Safety vieneemessa l’anomalia F01650 o F30650 con valore di anomalia = 2003.
Questo comportamento vale per l’intera durata della messa in servizio Safety;ciò significa che non è possibile eseguire una selezione/deselezione SH nelmodo di messa in servizio Safety, poiché la cancellazione impulsi sicura vieneforzata costantemente.
2 p9761 = “valore” Impostazione della password Safety
Durante la prima messa in servizio di Safety Integrated è valido quanto se-gue:
S password Safety = 0
S preimpostazione di p9761 = 0
ossia, durante la prima messa in servizio non è necessario impostare lapassword Safety.
3
p9601.0
p9801.0
Abilitazione della funzione “Arresto sicuro”
SH tramite morsetti Control Unit
SH tramite morsetti Motor Module
S I parametri vengono modificati soltanto dopo essere usciti dal modo dimessa in servizio Safety (ovvero quando si imposta p0010≠ 95).
S I due parametri sono contenuti nel confronto incrociato dei dati e devonoperciò venire impostati in modo uguale.

SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-193© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-1 Messa in servizio delle funzioni “SH” e “SBC”, proseguimento
Num. Descrizione e annotazioniParametro
4
p9602 = 1
p9802 = 1
Abilitazione della funzione “Comando di frenatura sicuro”
Abilitazione “SBC” sulla Control Unit
Abilitazione “SBC” sul Motor Module
S I parametri vengono modificati soltanto dopo essere usciti dal modo dimessa in servizio Safety (ovvero quando si imposta p0010≠ 95).
S I due parametri sono contenuti nel confronto incrociato dei dati e devonoperciò venire impostati in modo uguale.
S La funzione “Comando di frenatura sicuro” è attiva solo quando è abilitataalmeno una funzione di sorveglianza Safety(cioè p9601 = p9801≠ 0).
5
p9620 = “valore”
morsetto “EP”
Impostazione dei morsetti per “Arresto sicuro”
Impostazione della sorgente del segnale per l’arresto sicuro sulla Control Unit
Cablaggio del morsetto “EP” (Enable Pulses) sul Motor Module
S Canale di sorveglianza Control Unit:
Tramite l’interconnessione corretta di BI: p9620 nei singoli azionamentinon sono possibili le seguenti azioni:
-- Selezione/deselezione della funzione Arresto sicuro
-- Raggruppamento dei morsetti per l’arresto sicuro
Come sorgente del segnale è ammesso l’ingresso digitale DI 0 ... DI 7sulla Control Unit.
S Canale di sorveglianza Motor Module:
Tramite il cablaggio del morsetto “EP” sul singolo Motor Module sono pos-sibili le seguenti azioni:
-- Selezione/deselezione della funzione Arresto sicuro
-- Raggruppamento dei morsetti per l’arresto sicuro
Nota:
il raggruppamento dei morsetti per l’“Arresto sicuro” deve essere eseguito allostesso modo in entrambi i canali di sorveglianza.
6
p9650 = “valore”
p9850 = “valore”
Impostazione del tempo di tolleranza commutazione SGE
Tempo di tolleranza commutazione SGE sulla Control Unit
Tempo di tolleranza commutazione SGE sul Motor Module
S I parametri vengono modificati soltanto dopo essere usciti dal modo dimessa in servizio Safety (ovvero quando si imposta p0010≠ 95).
S A causa dei diversi tempi di esecuzione nei due canali di sorveglianza, lacommutazione SGE (ad es. selezione/deselezione SH) non si attiva con-temporaneamente. Dopo una commutazione SGE, durante questo tempodi tolleranza non vengono effettuati confronti incrociati di dati dinamici.
S I due parametri sono contenuti nel confronto incrociato dei dati e devonoperciò venire impostati in modo “uguale”. È tollerata una differenza diclock di sorveglianza per i valori.
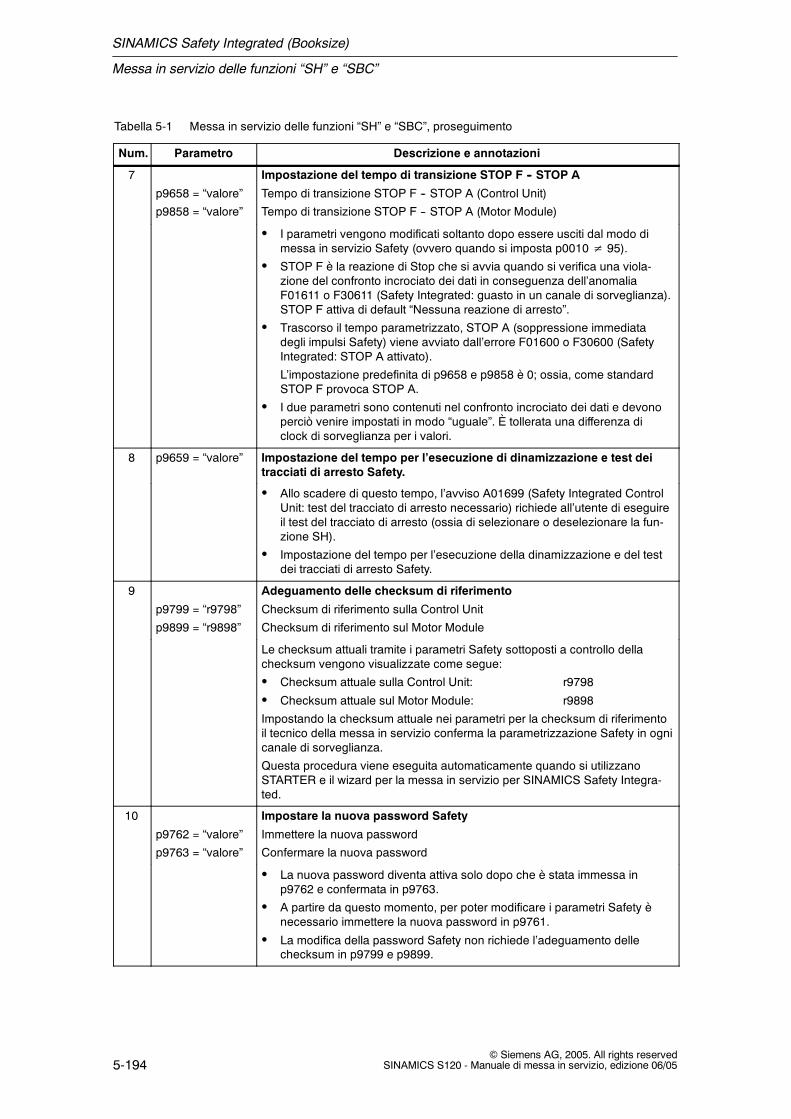
SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-194© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-1 Messa in servizio delle funzioni “SH” e “SBC”, proseguimento
Num. Descrizione e annotazioniParametro
7
p9658 = “valore”
p9858 = “valore”
Impostazione del tempo di transizione STOP F -- STOP A
Tempo di transizione STOP F -- STOP A (Control Unit)
Tempo di transizione STOP F -- STOP A (Motor Module)
S I parametri vengono modificati soltanto dopo essere usciti dal modo dimessa in servizio Safety (ovvero quando si imposta p0010≠ 95).
S STOP F è la reazione di Stop che si avvia quando si verifica una viola-zione del confronto incrociato dei dati in conseguenza dell’anomaliaF01611 o F30611 (Safety Integrated: guasto in un canale di sorveglianza).STOP F attiva di default “Nessuna reazione di arresto”.
S Trascorso il tempo parametrizzato, STOP A (soppressione immediatadegli impulsi Safety) viene avviato dall’errore F01600 o F30600 (SafetyIntegrated: STOP A attivato).
L’impostazione predefinita di p9658 e p9858 è 0; ossia, come standardSTOP F provoca STOP A.
S I due parametri sono contenuti nel confronto incrociato dei dati e devonoperciò venire impostati in modo “uguale”. È tollerata una differenza diclock di sorveglianza per i valori.
8 p9659 = “valore” Impostazione del tempo per l’esecuzione di dinamizzazione e test deitracciati di arresto Safety.
S Allo scadere di questo tempo, l’avviso A01699 (Safety Integrated ControlUnit: test del tracciato di arresto necessario) richiede all’utente di eseguireil test del tracciato di arresto (ossia di selezionare o deselezionare la fun-zione SH).
S Impostazione del tempo per l’esecuzione della dinamizzazione e del testdei tracciati di arresto Safety.
9
p9799 = “r9798”
p9899 = “r9898”
Adeguamento delle checksum di riferimento
Checksum di riferimento sulla Control Unit
Checksum di riferimento sul Motor Module
Le checksum attuali tramite i parametri Safety sottoposti a controllo dellachecksum vengono visualizzate come segue:
S Checksum attuale sulla Control Unit: r9798
S Checksum attuale sul Motor Module: r9898
Impostando la checksum attuale nei parametri per la checksum di riferimentoil tecnico della messa in servizio conferma la parametrizzazione Safety in ognicanale di sorveglianza.
Questa procedura viene eseguita automaticamente quando si utilizzanoSTARTER e il wizard per la messa in servizio per SINAMICS Safety Integra-ted.
10
p9762 = “valore”
p9763 = “valore”
Impostare la nuova password Safety
Immettere la nuova password
Confermare la nuova password
S La nuova password diventa attiva solo dopo che è stata immessa inp9762 e confermata in p9763.
S A partire da questo momento, per poter modificare i parametri Safety ènecessario immettere la nuova password in p9761.
S La modifica della password Safety non richiede l’adeguamento dellechecksum in p9799 e p9899.
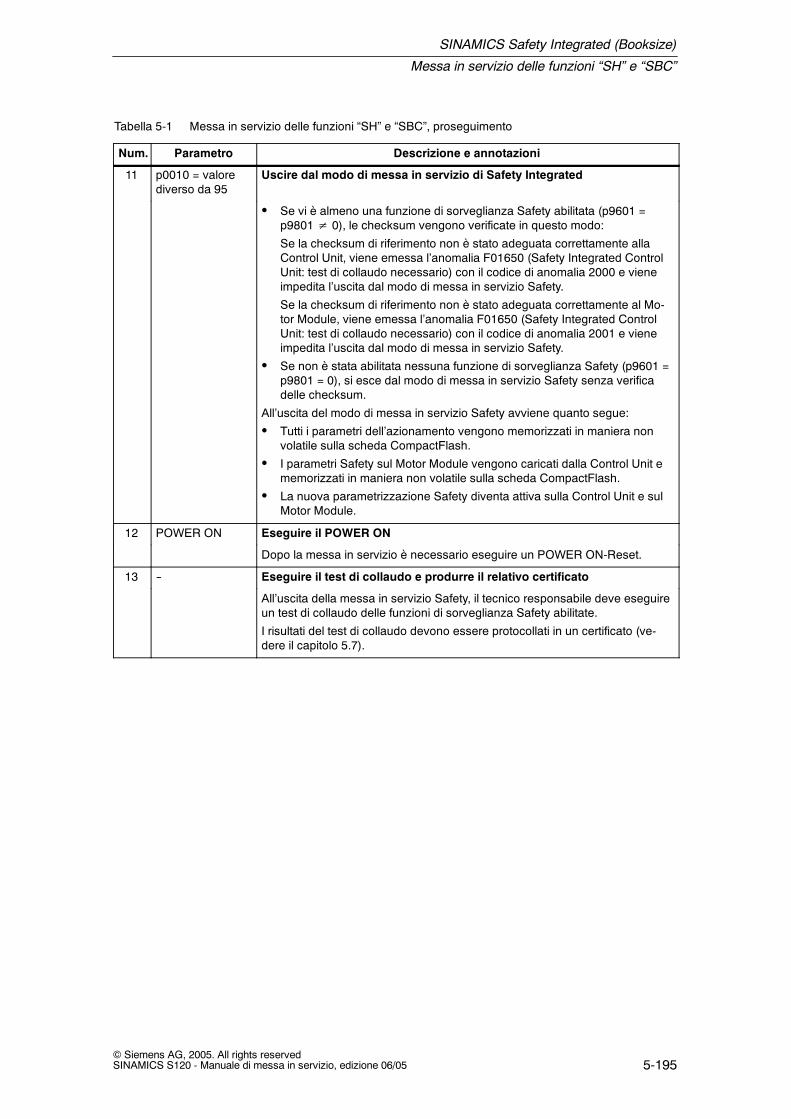
SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-195© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-1 Messa in servizio delle funzioni “SH” e “SBC”, proseguimento
Num. Descrizione e annotazioniParametro
11 p0010 = valorediverso da 95
Uscire dal modo di messa in servizio di Safety Integrated
S Se vi è almeno una funzione di sorveglianza Safety abilitata (p9601 =p9801≠ 0), le checksum vengono verificate in questo modo:
Se la checksum di riferimento non è stato adeguata correttamente allaControl Unit, viene emessa l’anomalia F01650 (Safety Integrated ControlUnit: test di collaudo necessario) con il codice di anomalia 2000 e vieneimpedita l’uscita dal modo di messa in servizio Safety.
Se la checksum di riferimento non è stato adeguata correttamente al Mo-tor Module, viene emessa l’anomalia F01650 (Safety Integrated ControlUnit: test di collaudo necessario) con il codice di anomalia 2001 e vieneimpedita l’uscita dal modo di messa in servizio Safety.
S Se non è stata abilitata nessuna funzione di sorveglianza Safety (p9601 =p9801 = 0), si esce dal modo di messa in servizio Safety senza verificadelle checksum.
All’uscita del modo di messa in servizio Safety avviene quanto segue:
S Tutti i parametri dell’azionamento vengono memorizzati in maniera nonvolatile sulla scheda CompactFlash.
S I parametri Safety sul Motor Module vengono caricati dalla Control Unit ememorizzati in maniera non volatile sulla scheda CompactFlash.
S La nuova parametrizzazione Safety diventa attiva sulla Control Unit e sulMotor Module.
12 POWER ON Eseguire il POWER ON
Dopo la messa in servizio è necessario eseguire un POWER ON-Reset.
13 -- Eseguire il test di collaudo e produrre il relativo certificato
All’uscita della messa in servizio Safety, il tecnico responsabile deve eseguireun test di collaudo delle funzioni di sorveglianza Safety abilitate.
I risultati del test di collaudo devono essere protocollati in un certificato (ve-dere il capitolo 5.7).

SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-196© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.4.3 Anomalie Safety
Reazioni di stop
In caso di anomalie Safety Integrated possono essere emesse le seguenti reazionidi stop:
Tabella 5-2 Reazioni di stop in Safety Integrated
Reazionedi stop
Azione Effetto Viene emessa
STOP A
non tacita-bile
Emette la cancellazione de-gli impulsi sicura tramite iltracciato di arresto del rela-
Il motore ral-lenta fino afermarsi e
In tutte le anomalie Safety nontacitabili con cancellazione degliimpulsi.
STOP A
tracciato di arresto del rela-tivo canale di sorveglianza.
Nel funzionamento conSBC: chiudere il freno distazionamento motore.
fermarsi eviene frenatotramite ilfreno di sta-zionamento.
In tutte le anomalie Safety nontacitabili con cancellazione degliimpulsi.
Come reazione conseguente aSTOP F.
STOP A corrisponde alla categoria Stop 0 secondo EN 60204--1.
Con STOP A il motore viene commutato direttamente allo stato senza coppiatramite la funzione “Arresto sicuro (SH)”.
Un motore che si trova in condizione di fermo non può essere avviato involon-tariamente.
Un motore in movimento rallenta fino a fermarsi. Questo può essere evitatoimpiegando meccanismi di frenatura esterni come un cortocircuito dell’indotto,un freno di stazionamento o un freno operativo.
Con STOP A attivo è attiva la funzione “Arresto sicuro (SH)”.
STOP F Passaggio a STOP A. Nessuno. 1) In caso di errore durante il con-fronto incrociato dei dati.
STOP F assegnato fisso al confronto incrociato dei dati (KDV). In questomodo vengono rilevati errori nei canali di sorveglianza.
Dopo STOP F viene attivato STOP A.
Con STOP A attivo è attiva la funzione “Arresto sicuro (SH)”.
1) Se STOP F viene emesso in seguito al confronto incrociato dei due segnali d’ingresso perla selezione della funzione “Arresto sicuro”, gli impulsi vengono già cancellati dallaselezione dell’“arresto sicuro” su un solo canale.
!Pericolo
Con asse sospeso o carico in trazione vi è il pericolo, all’attivazione di STOP A/F,di un movimento incontrollato degli assi. Questo movimento può essere impeditoutilizzando il “Comando di frenatura sicuro (SBC)” e un freno di stazionamento conforza frenante sufficiente (non sicuro).
SINAMICS Safety Integrated (Booksize)
Messa in servizio delle funzioni “SH” e “SBC”
5-197© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tacitazione delle anomalie Safety
Le anomalie in Safety Integrated devono essere tacitate come segue:
1. Rimuovere la causa dell’anomalia.
2. Deselezionare la funzione “Arresto sicuro (SH)”.
3. Tacitare l’anomalia.
Se si esce dal modo di messa in servizio Safety con le funzioni Safety disattivate(p0010 = valore diverso da 95 con p9601 = p9801 = 0), è possibile tacitare tutte leanomalie Safety.
Impostando nuovamente il modo di messa in servizio Safety (p0010 = 95) com-paiono di nuovo tutte le anomalie visualizzate precedentemente.
Attenzione
La tacitazione delle anomalie Safety, così come di tutte le altre anomalie, puòanche essere effettuata spegnendo e riaccendendo l’apparecchio di azionamento(Power On).
Se non viene rimossa la causa dell’anomalia, l’anomalia ricompare subito dopol’avvio.
Descrizione delle anomalie e degli avvisi
Nota
Le anomalie e gli avvisi relativi a SINAMICS Safety Integrated sono descritte nellaseguente documentazione:
Documentazione: /LH1/ SINAMICS S Manuale delle liste -- Capitolo 3.2

SINAMICS Safety Integrated (Booksize)
Panoramica dei parametri e degli schemi logici
5-198© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.5 Panoramica dei parametri e degli schemi logici
Panoramica dei parametri (vedere il manuale delle liste)
Tabella 5-3 Parametri per Safety Integrated
Num. Num. Nome modificabile
ControlUnit(CU)
Motor Mo-dule(MM)
in
p9601 p9801 Abilitazione funzioni sicure
p9602 p9802 Abilitazione del comando di frenatura sicuro
p9620 -- Sorgente del segnale per l’arresto sicuro alla messa in serviziodi Safety Integrated
p9650 p9850 Commutazione SGE tempo di tolleranzadi Safety Integrated(p0010 = 95)
p9658 p9858 Tempo di transizione da STOP F a STOP A(p0010 = 95)
p9659 -- Timer per la dinamizzazione forzata
p9761 -- Immissione password In ogni stato di funzio-namento
p9762 -- Nuova password alla messa in serviziodi Safety Integrated
p9763 -- Conferma passworddi Safety Integrated(p0010 = 95)
r9770[0...2] r9870[0...2] Versione --
r9771 r9871 Funzioni comuni --
r9772 r9872 Stato --
r9773 -- Stato (Control Unit + Motor Module) --
r9774 -- Stato (gruppo arresto sicuro) --
r9780 r9880 Clock di sorveglianza --
r9794 r9894 Lista riferimenti incrociati --
r9795 r9895 Diagnosi per STOP F --
r9798 r9898 Checksum attuale dei parametri SI --
p9799 p9899 Checksum di riferimento dei parametri SI alla messa in serviziodi Safety Integrated(p0010 = 95)

SINAMICS Safety Integrated (Booksize)
Panoramica dei parametri e degli schemi logici
5-199© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Descrizione dei parametri
Nota
I parametri per SINAMICS Safety Integrated sono descritti nella seguentedocumentazione:
Bibliografia: /LH1/ SINAMICS S Manuale delle liste -- Capitolo 1.2
Panoramica degli schemi logici (vedere il manuale delle liste)
S 2800 Gestore parametri
S 2802 Sorveglianze e anomalie/avvisi
S 2804 Parole di stato
S 2810 Arresto sicuro (SH)
S 2814 Comando di frenatura sicuro (SBC)

SINAMICS Safety Integrated (Booksize)
Esempi di applicazione
5-200© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.6 Esempi di applicazione
5.6.1 Arresto sicuro con porta di protezione bloccata, disattivazionearresto di emergenza
Fig. 5-4 Esempio di applicazione
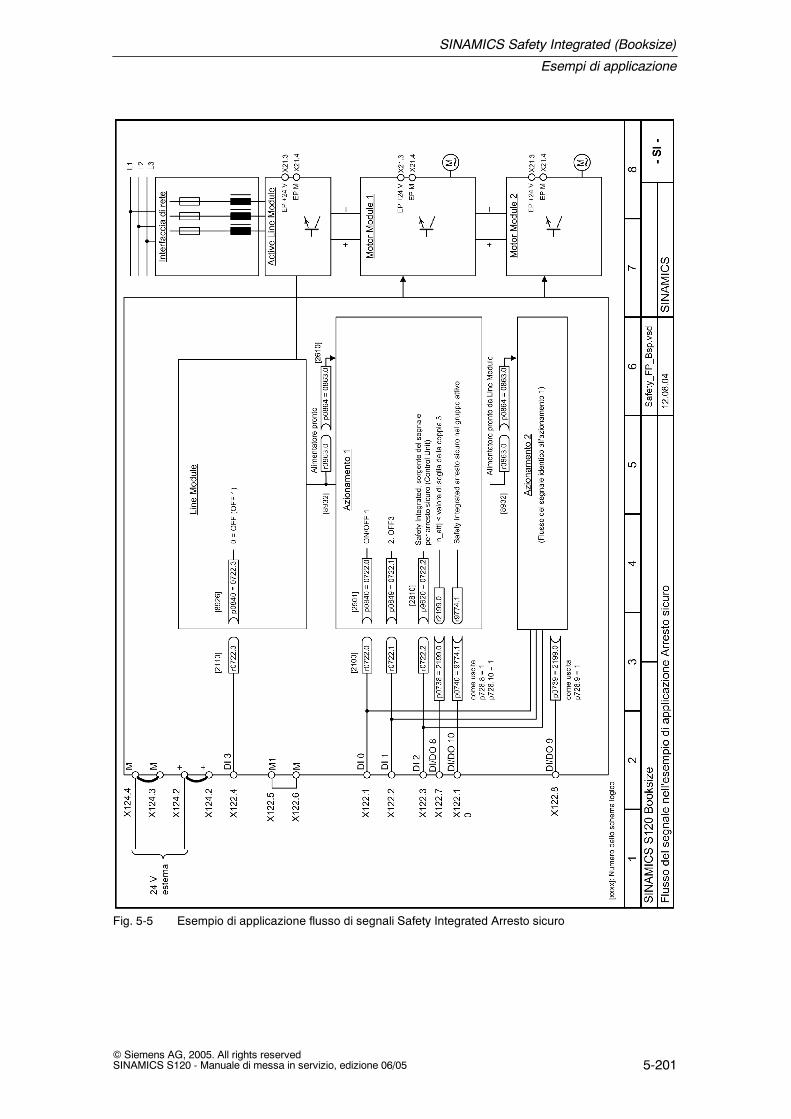
SINAMICS Safety Integrated (Booksize)
Esempi di applicazione
5-201© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Fig. 5-5 Esempio di applicazione flusso di segnali Safety Integrated Arresto sicuro
SINAMICS Safety Integrated (Booksize)
Esempi di applicazione
5-202© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Attenzione
Questo esempio mostra le possibilità di realizzazione. La soluzione necessaria perla macchina deve essere adeguata alla funzione macchina. Di conseguenzaoccorre parametrizzare o inviare comandi di controllo individuali.
Attenzione
Le reazioni di errore e la funzione delle uscite (ad es. l’inversione o la simulazione)non possono essere modificate né attivate rispetto alle impostazioni di fabbrica.
Descrizione della funzione
Con due combinazioni di sicurezza SIGUARD per l’arresto di emergenza e la portadi protezione e un PLC standard è possibile realizzare una struttura conforme aEN 954--1 categoria 3 e EN1037. L’arresto dell’azionamento avviene secondo loStop Categoria 1 secondo EN 60204--1.
S La funzione di sicurezza integrata nell’azionamento “Arresto sicuro” corrispondealla categoria 3 secondo EN 954--1 o SIL 2 secondo IEC 61508. È sufficienteuna conferma non sicura “Arresto sicuro attivo”.
S Le combinazioni di sicurezza per l’arresto di emergenza e la sorveglianza dellaporta di protezione corrispondono alla categoria 4 (circuito di abilitazione nonritardato) o alla categoria 3 (circuito di abilitazione ritardato).
S I circuiti di abilitazione per l’arresto di emergenza e la sorveglianza della porta diprotezione sono sorvegliati su due canali querschlusssicher.
S Gli interruttori S4, S5 e S6 sono interruttori di posizione ad apertura forzata,conformi alla norma EN 1088.
S Se l’esecuzione della funzione avviene come circuito sovraordinato basato sucontatti, la funzione “Arresto sicuro” è garantita anche in caso di guasto o dicomportamento anomalo del PLC.
S La comunicazione EA tramite l’interfaccia digitale tra l’azionamento e il PLC puòanche essere sostituita da una comunicazione standard non sicura (ad es.PROFIBUS).
S Per la funzione Arresto di emergenza non è indispensabile una separazionegalvanica e non è necessario un contattore di rete sovraordinato. Nei lavori sulmotore o sul convertitore l’abilitazione della tensione avviene tramite un interrut-tore principale (chiudibile).
SINAMICS Safety Integrated (Booksize)
Esempi di applicazione
5-203© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Comportamento in caso di arresto di emergenza
L’arresto di emergenza viene emesso dal tasto S3 (“Arresto di emergenza”). Inizial’arresto degli azionamenti secondo la categoria di stop 1 secondo EN 60204--1.
S Tramite i contatti di abilitazione non ritardati della combinazione di sicurezzaA1, sul morsetto X122.2 (DI 1: 2. AUS3) dell’azionamento viene impostato ilsegnale 0, gli azionamenti vengono frenati immediatamente con la rampa divelocità (p1135) e gli impulsi cancellati.
S I contatti di abilitazione ritardati sicuri della combinazione di sicurezza A1 siaprono allo scadere del tempo di ritardo impostato; in questo modo viene atti-vata la funzione “Arresto sicuro” degli azionamenti su due canali tramite il mor-setto X122.3 (DI 2) della Control Unit e i morsetti X21.3 (EP +24 V) e X21.4(EP M) del Motor Module. Quando tutti gli azionamenti raggruppati hanno atti-vato la funzione “Arresto sicuro”, questo viene segnalato tramite il morsettoX122.10 (DO 10: SH Gruppo attivo).
S Le risposte di conferma della combinazione di sicurezza e dell’azionamentovengono sottoposte nel PLC alla sorveglianza di plausibilità.
Comportamento all’apertura della porta di protezione
L’apertura della porta di protezione viene attivata tramite il tasto S2 (“OFF”). Inizial’arresto dell’azionamento secondo la categoria di stop 1 secondo EN 60204--1.
S Ripristinando l’uscita del PLC DO3, sul morsetto X122.2(DI 1: 2. OFF3) dell’azionamento viene impostato il segnale 0, gli azionamentivengono frenati immediatamente con la rampa di velocità (p1135) e gli impulsicancellati.
S Se gli azionamenti sono fermi (DO 8 e DO 9: |n|<p2161), tramite il ripristinodell’uscita DO 2 del PLC viene attivata la funzione “Arresto sicuro” dell’aziona-mento su due canali e tramite morsetti X122.10 (DO 10: SH attivo) viene se-gnalato lo stato al PLC (DI 8).
S Se il PLC riconosce la selezione della funzione “Arresto sicuro” (PLC DI 8 “SHattivo”), tramite il comando della bobina Y1 (uscita PLC DO 4) viene aperto ilblocco della porta di protezione. L’apertura della porta di protezione interrompeil circuito di sicurezza e la combinazione di sicurezza A2 apre i suoi circuiti disicurezza.
Nota
La posizione del blocco porta è sorvegliata da S6! Se a causa di una disfunzionedel PLC il blocco della porta di sicurezza dovesse aprirsi prima che gli azionamentisiano frenati fino a raggiungere il numero di giri = 0, tramite S6 sul morsettoX122.2 (DI 1: 2. OFF3) della Control Unit viene impostato il segnale 0sull’azionamento tramite interconnessione BICO. Gli azionamenti vengono frenatiimmediatamente con la rampa di velocità (p1135) e gli impulsi cancellati. Aprendole porte di protezione si seleziona la funzione “Arresto sicuro”. Si deve garantireche i movimenti pericolosi siano giunti allo stato di fermo prima del lororaggiungimento!

SINAMICS Safety Integrated (Booksize)
Esempi di applicazione
5-204© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Attivazione degli azionamenti
Per poter attivare gli azionamenti è necessario che la porta di protezione sia chiusae il tasto S3 di arresto di emergenza sia sbloccato. Il Line Module deve essere atti-vato tramite l’uscita DO5 del PLC tramite un fronte da “0” a “1”.
S Dopo l’azionamento del tasto S1 (“ON”) la combinazione di sicurezza A1 passaa “Pronto per il funzionamento”. Se si ripristina l’uscita DO 4 del PLC, la bobinadel meccanismo di ritenuta Y1 non è più comandata e la porta di protezione èbloccata. Anche la combinazione di sicurezza A2 è pronta per il funzionamento.
S Impostando contemporaneamente le uscite DO 2 e DO 3 del PLC viene desele-zionata la funzione di sicurezza “Arresto sicuro” su due canali tramite il mor-setto X122.3 della Control Unit e i morsetti X21.3 (EP +24 V) e X21.4 (EP M)del Motor Module così come l’arresto rapido sul morsetto X122.2 (DI 1: 2.OFF3).
S Tramite il fronte di salita dell’uscita DO1 del PLC gli azionamenti, tramite il mor-setto X122.1 (DI 0: OFF1), passano nuovamente allo stato Funzionamento.
SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-205© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.7 Test e protocollo di collaudo
5.7.1 Informazioni generali sul collaudo
Test di collaudo
Il costruttore della macchina deve eseguire sulla macchina un test di collaudo dellefunzioni di Safety Integrated attivate (funzioni SI).
Il test di collaudo deve provocare il superamento di tutti i valori limite impostati perle funzioni SI abilitate, in modo da poterne verificare e testare il funzionamento cor-retto.
Attenzione
Il test di collaudo può avvenire solo dopo che è terminata la messa in servizio dellefunzioni Safety e il successivo POWER-ON-Reset.
Persona autorizzata, protocollo di collaudo
Il test di ogni funzione SI deve essere eseguito da una persona autorizzata a que-sto fine, protocollato nel documento di collaudo e firmato. Il protocollo di collaudodeve essere inserito nel registro della macchina.
Autorizzata nel senso suddetto è una persona scelta dal costruttore della mac-china la quale, grazie alla propria formazione tecnica e alla conoscenza delle fun-zioni di sicurezza, è in grado di eseguire il collaudo in modo adeguato.
NotaS Rispettare le avvertenze e le descrizioni per la messa in servizio indicate nel
capitolo 5, sezioni da 5.1 a 5.5, di questo manuale per la messa in servizio.S Se i parametri delle funzioni SI vengono modificati, occorre eseguire un nuovo
test di collaudo e registrarlo nel protocollo di collaudo.S Modello del protocollo di collaudo
La forma stampata raccomandata utilizzabile come esempio è disponibile inquesto capitolo del manuale per la messa in servizio.

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-206© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Contenuto di un test di collaudo completo
Documentazione (vedere il capitolo 5.7.2)
Documentazione della macchina incluse le funzioni SI.
1. Descrizione della macchina e illustrazione ricapitolativa (vedere le tabelle 5-4 e5-5)
2. Funzioni SI per ogni azionamento (vedere la tabella 5-6)
3. Descrizione dei dispositivi di sicurezza (vedere la tabella 5-7)
Test funzionale (vedere il capitolo 5.7.3)
Verifica delle singole funzioni SI utilizzate.
4. Funzione “Arresto sicuro”, Parte 1 (vedere la tabella 5-8)
5. Funzione “Arresto sicuro”, Parte 2 (vedere la tabella 5-9)
6. Funzione “Comando di frenatura sicuro” (vedere la tabella 5-10)
Conclusione del protocollo (vedere il capitolo 5.7.4)
Stesura del protocollo della messa in servizio e controfirma.
7. Controllo dei parametri Safety
8. Protocollo dei checksum
9. Certificazione del salvataggio dei dati
10.Controfirme
Appendice
Registrazioni delle misurazioni per il test funzionale, parte 1 e 2.
S Protocolli di allarme
S Registrazioni Trace
SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-207© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.7.2 Documentazione
Tabella 5-4 Descrizione della macchina e tabella riassuntiva
Denominazione
Tipo
Numero di serie
Costruttore
Cliente finale
Assi elettrici
Altri assi
Mandrini
Tabella riassuntiva dellamacchina

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-208© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-5 Valori dai dati macchina rilevanti
Parametro Versione FW --Parametro
Control Unit r0018 = --
Numeroazionamento
Versione FW Versione SI
r0018 = r9770 =
r0128 = r9870 =
Parametro
M t M d lr0128 = r9870 =
Motor Module r0128 = r9870 =
r0128 = r9870 =
r0128 = r9870 =
r0128 = r9870 =
Numeroazionamento
Clock di sorveglianza SI
Control Unit
Clock di sorveglianza SI
Motor Module
r9780 = r9880 =
r9780 = r9880 =
Parametro r9780 = r9880 =Parametro
Motor Module r9780 = r9880 =
r9780 = r9880 =
r9780 = r9880 =
Tabella 5-6 Funzioni SI per azionamento
Numero azionamento Funzione SI
SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-209© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-7 Descrizione dei dispositivi di sicurezza
Esempi:
Cablaggio dei morsetti SH (porta di protezione, OFF di emergenza), raggruppamento dei morsetti SH,freno di stazionamento per asse sospeso ecc.

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-210© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.7.3 Test funzionale
Il test funzionale deve essere eseguito separatamente per ogni singolo aziona-mento (se la macchina lo consente).
Esecuzione della prova
Prima messa in servizio
Messa in servizio di serie
Barrare la casella corrispondente
Funzione “Arresto sicuro” (SH), parte 1
Questo test è costituito dai seguenti passi:
Tabella 5-8 Funzione “Arresto sicuro” (SH), parte 1
Num. Descrizione Stato
1. Stato iniziale
S Azionamento nello stato “pronto al funzionamento” (p0010 = 0)
S Funzione SH abilitata (p9601.0 = 1, p9801.0 = 1)
S Nessuna anomalia né avviso Safety (r0945, r2122, r2132)
S r9772.0 = r9772.1 = 0 (SH deselezionata e inattiva – CU)
S r9872.0 = r9872.1 = 0 (SH deselezionata e inattiva – MM)
S r9773.0 = r9773.1 = 0 (SH deselezionata e inattiva – azionamento)
S Per il raggruppamento dei morsetti per la funzione “Arresto sicuro”:
r9774.0 = r9774.1 = 0 (SH deselezionata e inattiva -- gruppo)
2. Comandare l’azionamento
3. Verificare che si muova l’azionamento previsto
4. Selezionare SH durante il comando di movimento
5. Controllare quanto segue:
S L’azionamento rallenta fino a fermarsi o viene frenato e arrestato dalfreno meccanico se il freno è disponibile e parametrizzato (p1215,p9602, p9802)
S Nessuna anomalia né avviso Safety (r0945, r2122, r2132)
S r9772.0 = r9772.1 = 1 (SH selezionata e attiva – CU)
S r9872.0 = r9872.1 = 1 (SH selezionata e attiva – MM)
S r9773.0 = r9773.1 = 1 (SH selezionata e attiva – azionamento)
S Per il raggruppamento dei morsetti per la funzione “Arresto sicuro”:
r9774.0 = r9774.1 = 1 (SH selezionata e attiva -- gruppo)
6. Deselezionare SH

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-211© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-8 Funzione “Arresto sicuro” (SH), parte 1, proseguimento
Num. StatoDescrizione
7. Controllare quanto segue:
S Nessuna anomalia né avviso Safety (r0945, r2122, r2132)
S r9772.0 = r9772.1 = 0 (SH deselezionata e inattiva – CU)
S r9872.0 = r9872.1 = 0 (SH deselezionata e inattiva – MM)
S r9773.0 = r9773.1 = 0 (SH deselezionata e inattiva – azionamento)
S Per il raggruppamento dei morsetti per la funzione “Arresto sicuro”:
r9774.0 = r9774.1 = 0 (SH deselezionata e inattiva -- gruppo)
S r0046.0 = 1 (azionamento nello stato “blocco inserzione”)
8. Tacitare il blocco inserzione e comandare l’azionamento
9. Verificare che si muova l’azionamento previsto
Si effettuano i seguenti test:
S Corretto cablaggio DRIVE-CLiQ tra la Control Unit e i Motor Module
S Corretta assegnazione numero azionamento – Motor Module – motore
S Corretta funzionalità hardware
S Corretto cablaggio dei percorsi di disinserzione
S Corretta assegnazione dei morsetti SH sulla Control Unit
S Corretta formazione dei gruppi SH (se presenti)
S Corretta parametrizzazione della funzione SH
S Routine della dinamizzazione forzata dei percorsi di disinserzione
Funzione “Arresto sicuro” (SH), parte 2
Questo test è costituito dai seguenti passi:
Tabella 5-9 Funzione “Arresto sicuro” (SH), parte 2
Num. Descrizione Stato
1. Stato iniziale
S Un canale per la selezione di SH viene collegato fisso ai morsetti consegnale HIGH
(Qui come esempio: cablaggio SH Motor Module)
S Azionamento nello stato “pronto al funzionamento” (p0010 = 0)
S Funzione SH abilitata (p9601.0 = 1, p9801.0 = 1)
S Nessuna anomalia né avviso Safety (r0945, r2122, r2132)
S r9772.0 = r9772.1 = 0 (SH deselezionata e inattiva – CU)
S r9872.0 = r9872.1 = 0 (SH deselezionata e inattiva – MM)
S r9773.0 = r9773.1 = 0 (SH deselezionata e inattiva – azionamento)
2. Comandare l’azionamento
3. Verificare che si muova l’azionamento previsto
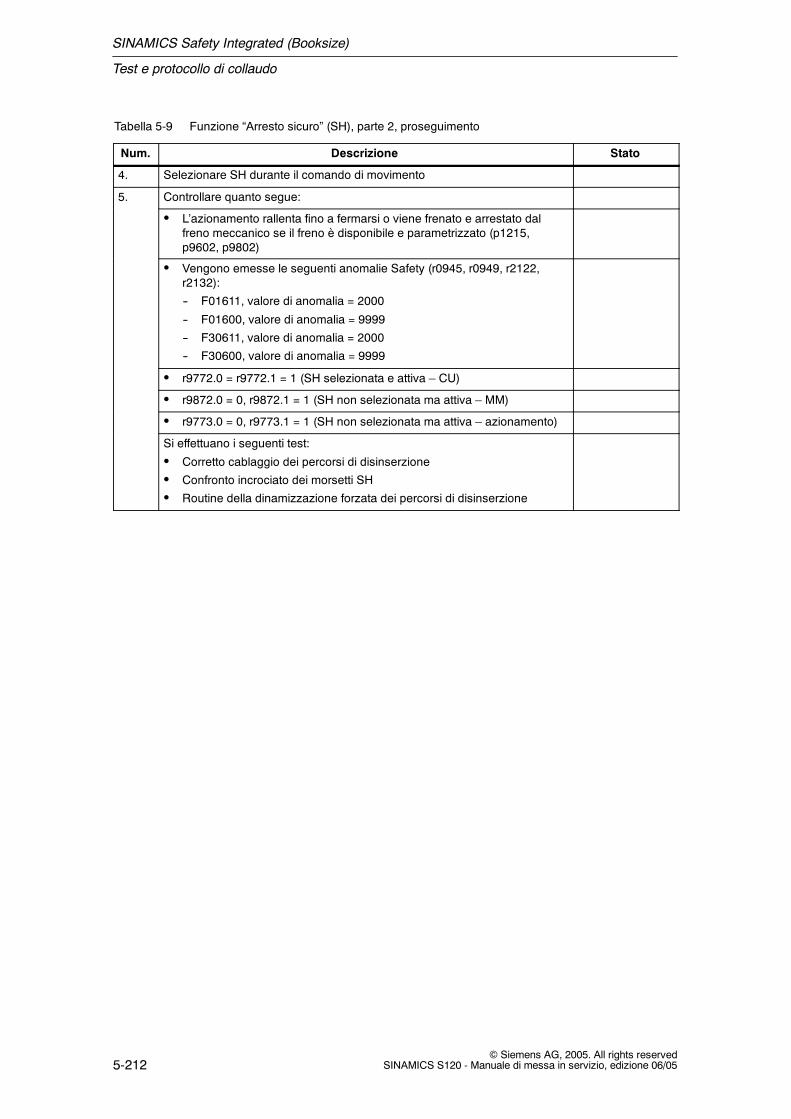
SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-212© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-9 Funzione “Arresto sicuro” (SH), parte 2, proseguimento
Num. StatoDescrizione
4. Selezionare SH durante il comando di movimento
5. Controllare quanto segue:
S L’azionamento rallenta fino a fermarsi o viene frenato e arrestato dalfreno meccanico se il freno è disponibile e parametrizzato (p1215,p9602, p9802)
S Vengono emesse le seguenti anomalie Safety (r0945, r0949, r2122,r2132):
-- F01611, valore di anomalia = 2000
-- F01600, valore di anomalia = 9999
-- F30611, valore di anomalia = 2000
-- F30600, valore di anomalia = 9999
S r9772.0 = r9772.1 = 1 (SH selezionata e attiva – CU)
S r9872.0 = 0, r9872.1 = 1 (SH non selezionata ma attiva – MM)
S r9773.0 = 0, r9773.1 = 1 (SH non selezionata ma attiva – azionamento)
Si effettuano i seguenti test:
S Corretto cablaggio dei percorsi di disinserzione
S Confronto incrociato dei morsetti SH
S Routine della dinamizzazione forzata dei percorsi di disinserzione
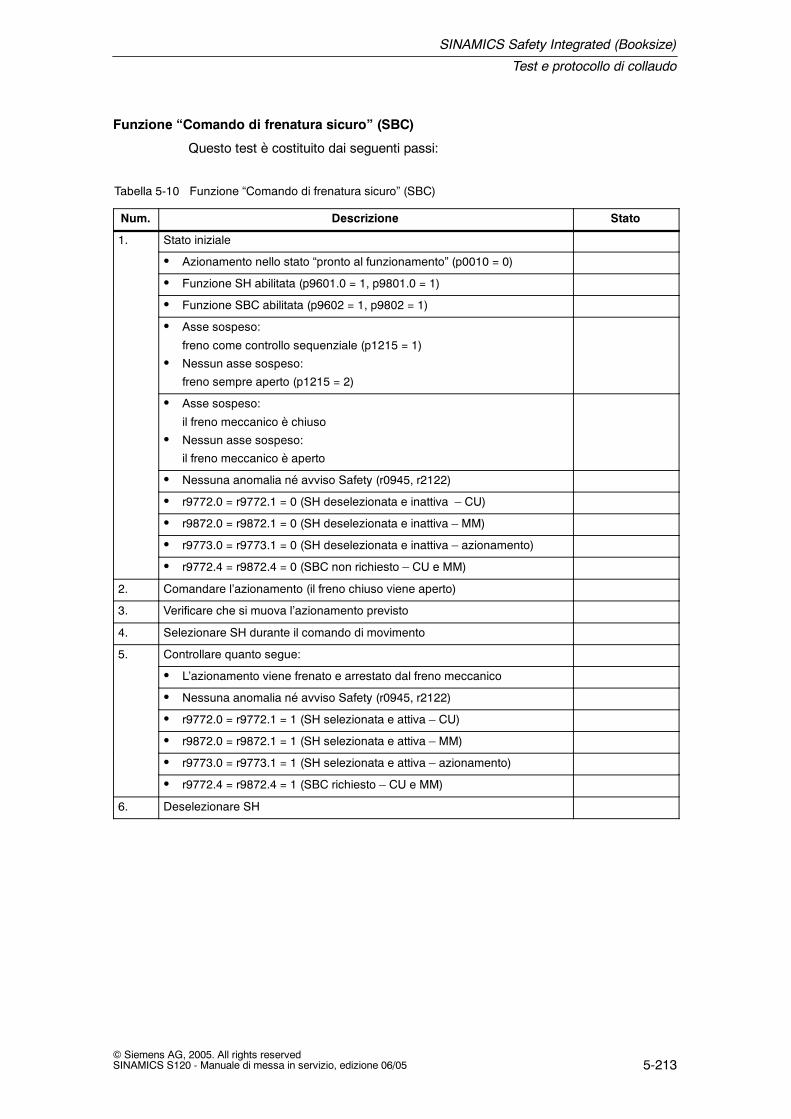
SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-213© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Funzione “Comando di frenatura sicuro” (SBC)
Questo test è costituito dai seguenti passi:
Tabella 5-10 Funzione “Comando di frenatura sicuro” (SBC)
Num. Descrizione Stato
1. Stato iniziale
S Azionamento nello stato “pronto al funzionamento” (p0010 = 0)
S Funzione SH abilitata (p9601.0 = 1, p9801.0 = 1)
S Funzione SBC abilitata (p9602 = 1, p9802 = 1)
S Asse sospeso:
freno come controllo sequenziale (p1215 = 1)
S Nessun asse sospeso:
freno sempre aperto (p1215 = 2)
S Asse sospeso:
il freno meccanico è chiuso
S Nessun asse sospeso:
il freno meccanico è aperto
S Nessuna anomalia né avviso Safety (r0945, r2122)
S r9772.0 = r9772.1 = 0 (SH deselezionata e inattiva – CU)
S r9872.0 = r9872.1 = 0 (SH deselezionata e inattiva – MM)
S r9773.0 = r9773.1 = 0 (SH deselezionata e inattiva – azionamento)
S r9772.4 = r9872.4 = 0 (SBC non richiesto – CU e MM)
2. Comandare l’azionamento (il freno chiuso viene aperto)
3. Verificare che si muova l’azionamento previsto
4. Selezionare SH durante il comando di movimento
5. Controllare quanto segue:
S L’azionamento viene frenato e arrestato dal freno meccanico
S Nessuna anomalia né avviso Safety (r0945, r2122)
S r9772.0 = r9772.1 = 1 (SH selezionata e attiva – CU)
S r9872.0 = r9872.1 = 1 (SH selezionata e attiva – MM)
S r9773.0 = r9773.1 = 1 (SH selezionata e attiva – azionamento)
S r9772.4 = r9872.4 = 1 (SBC richiesto – CU e MM)
6. Deselezionare SH

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-214© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 5-10 Funzione “Comando di frenatura sicuro” (SBC), proseguimento
Num. StatoDescrizione
7. Controllare quanto segue:
S Asse sospeso:
il freno meccanico resta chiuso
S Nessun asse sospeso:
il freno meccanico viene aperto
S Nessuna anomalia né avviso Safety (r0945, r2122)
S r9772.0 = r9772.1 = 0 (SH deselezionata e inattiva – CU)
S r9872.0 = r9872.1 = 0 (SH deselezionata e inattiva – MM)
S r9773.0 = r9773.1 = 0 (SH deselezionata e inattiva – azionamento)
S r9772.4 = r9872.4 = 0 (SBC non richiesto – CU e MM)
S r0046.0 = 1 (azionamento nello stato “blocco inserzione”)
8. Tacitare il blocco inserzione e comandare l’azionamento
(asse sospeso: il freno meccanico viene aperto)
9. Verificare che si muova l’azionamento previsto
Si effettuano i seguenti test:
S Collegamento corretto del freno
S Corretta funzionalità hardware
S Corretta parametrizzazione della funzione SBC
S Routine della dinamizzazione forzata del comando di frenatura

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-215© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
5.7.4 Conclusione del protocollo
Parametri SI
Sono stati controllati i valori preimpostati?
Sì No
Control Unit
Motor Module
Checksum
asse/mandrino Checksum (8 hex)
Nome Numero azionamento Control Unit Motor Module
Salvataggio dei dati
Supporto di memoria Percorso di archi-viazione
Tipo Denominazione Data
Parametro
Programma PLC
Schemi elettrici

SINAMICS Safety Integrated (Booksize)
Test e protocollo di collaudo
5-216© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Controfirme
Addetto alla messa in servizio
Viene confermata la corretta esecuzione dei test e dei controlli suddetti.
Data Nome Ditta / reparto Firma
Costruttore della macchina
Viene confermata la correttezza della suddetta parametrizzazione protocollata.
Data Nome Ditta / reparto Firma
J
6-217© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Diagnostica
Questo capitolo descrive le seguenti possibilità di diagnostica per il sistema diazionamento SINAMICS S120:
S Diagnostica tramite LED
S Diagnostica tramite STARTER
S Messaggi: anomalie e avvisi
6
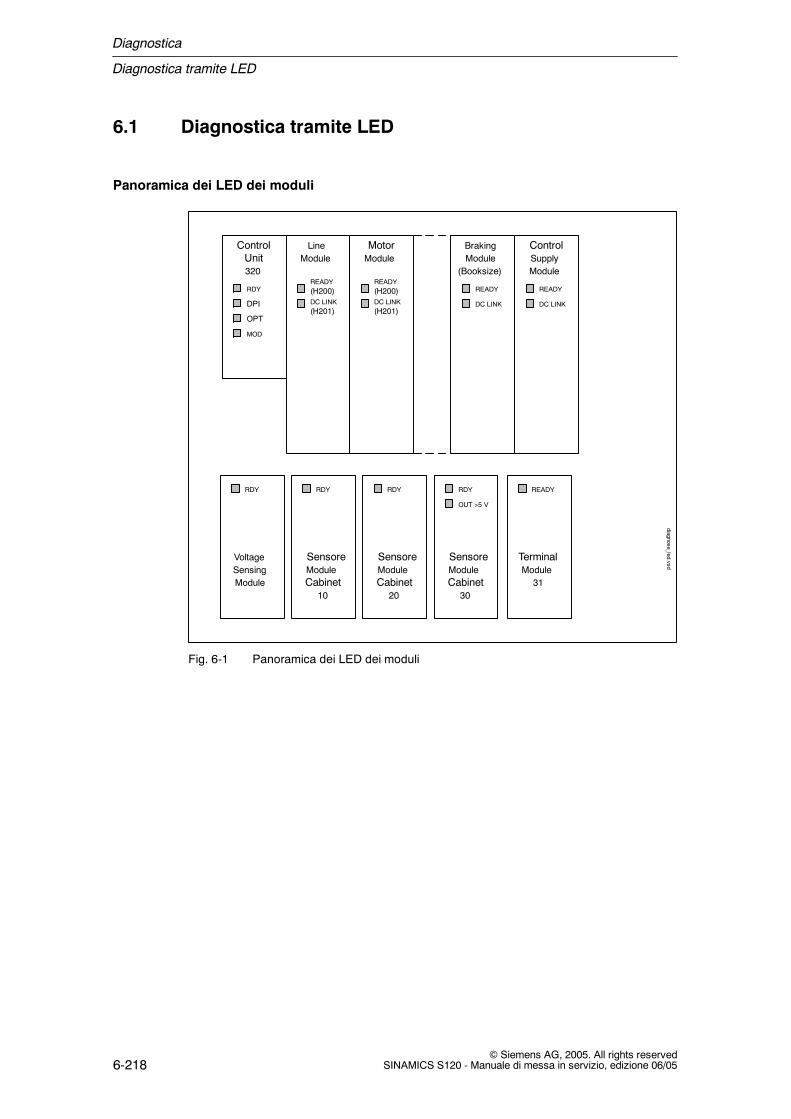
Diagnostica
Diagnostica tramite LED
6-218© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1 Diagnostica tramite LED
Panoramica dei LED dei moduli
diagnose_led.vsd
RDY
DPI
OPT
MOD
ControlUnit320
READY(H200)DC LINK(H201)
LineModule
READY(H200)DC LINK(H201)
MotorModule
READY
DC LINK
BrakingModule
(Booksize)
ControlSupplyModule
READY
DC LINK
RDY
OUT >5 V
SensoreModuleCabinet
30
READY
TerminalModule
31
RDY
SensoreModuleCabinet
20
RDY
SensoreModuleCabinet
10
RDY
VoltageSensingModule
Fig. 6-1 Panoramica dei LED dei moduli

Diagnostica
Diagnostica tramite LED
6-219© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.1 Control Unit 320 (CU320)
LED durante l’avviamento della Control Unit
I singoli stati dell’avviamento vengono segnalati dai LED della Control Unit.
S La durata degli stati è variabile.
S In caso di errore, l’avviamento si interrompe e la causa viene segnalata dagliopportuni LED.
S Quando l’avviamento termina regolarmente, tutti i LED si spengono breve-mente.
S Dopo l’avviamento i LED vengono comandati dal software caricato.
Vedere la descrizione dei LED dopo l’avviamento (tabella 6-2).
Tabella 6-1 Control Unit 320 -- Descrizione dei LED durante l’avviamento
Software 1 Software 2 Firmware
LED Reset error loaded running errorfile
errorcrc
FWloaded
initiali-zing
running
RDY RossoRosso
2 HzOFF OFF OFF OFF OFF OFF
DP1 Rosso Rosso Rosso Aran-cione
Rosso
2 Hz
Rosso
0,5 HzOFF OFF
Vederela tab
OPT Rosso Rosso Rosso Rosso Rosso Rosso Rosso OFF
la tab.6-2
MOD OFF OFF OFF OFF OFF OFF OFF OFF
Cause possibili:
S CompactFlash Card non presente.
S Software 2 sulla scheda CompactFlash non presente o errato.
S Software sulla scheda CompactFlashCard incompleto o errato.
S CRC errato.
Rimedio:
Inserire la scheda CompactFlash adatta all’impianto con il software e laparametrizzazione corretti.
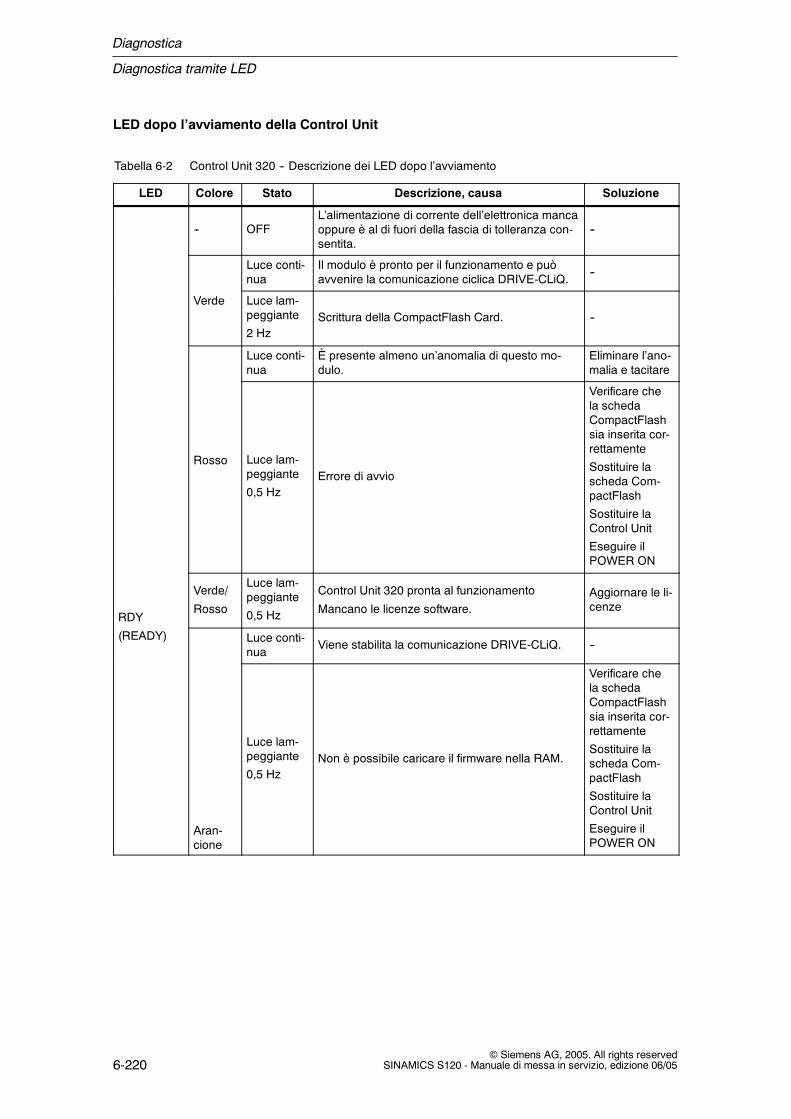
Diagnostica
Diagnostica tramite LED
6-220© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
LED dopo l’avviamento della Control Unit
Tabella 6-2 Control Unit 320 -- Descrizione dei LED dopo l’avviamento
LED Colore Stato Descrizione, causa Soluzione
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
Luce conti-nua
Il modulo è pronto per il funzionamento e puòavvenire la comunicazione ciclica DRIVE-CLiQ.
--
Verde Luce lam-peggiante
2 HzScrittura della CompactFlash Card. --
Luce conti-nua
È presente almeno un’anomalia di questo mo-dulo.
Eliminare l’ano-malia e tacitare
Rosso Luce lam-peggiante
0,5 HzErrore di avvio
Verificare chela schedaCompactFlashsia inserita cor-rettamente
Sostituire lascheda Com-pactFlash
Sostituire laControl Unit
Eseguire ilPOWER ON
RDY
Verde/
Rosso
Luce lam-peggiante
0,5 Hz
Control Unit 320 pronta al funzionamento
Mancano le licenze software.Aggiornare le li-cenze
(READY) Luce conti-nua
Viene stabilita la comunicazione DRIVE-CLiQ. --
Aran-cione
Luce lam-peggiante
0,5 HzNon è possibile caricare il firmware nella RAM.
Verificare chela schedaCompactFlashsia inserita cor-rettamente
Sostituire lascheda Com-pactFlash
Sostituire laControl Unit
Eseguire ilPOWER ON
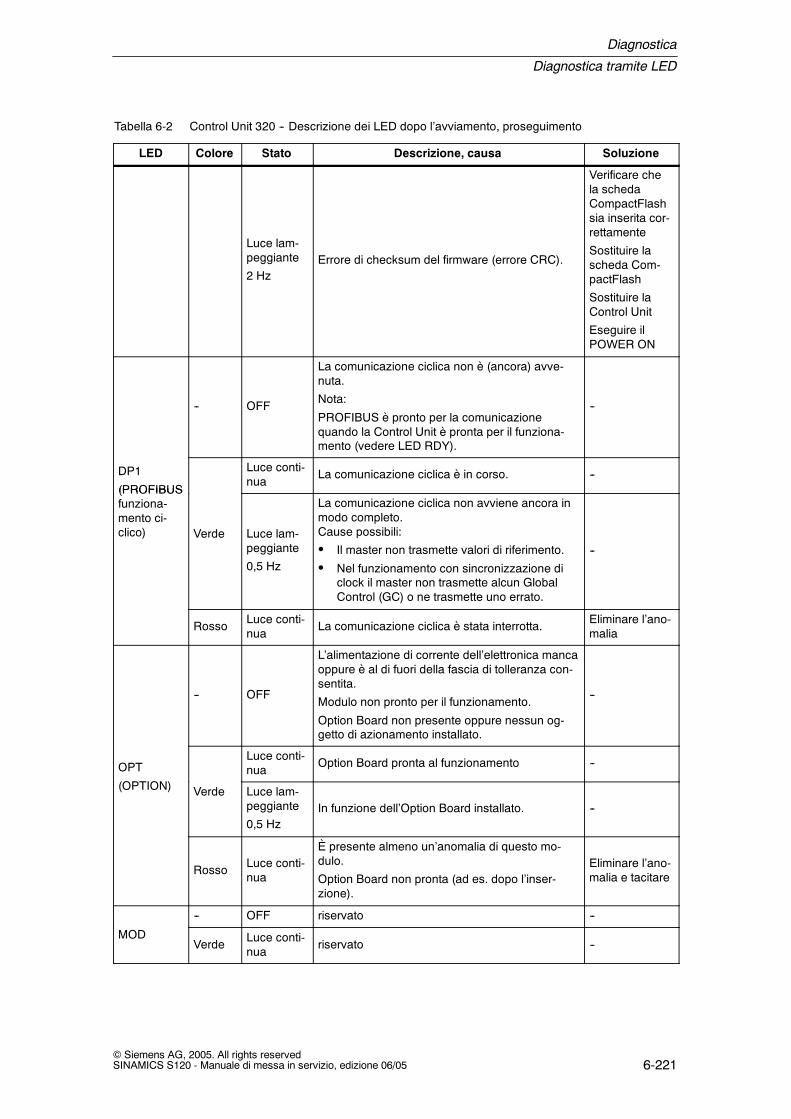
Diagnostica
Diagnostica tramite LED
6-221© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 6-2 Control Unit 320 -- Descrizione dei LED dopo l’avviamento, proseguimento
LED SoluzioneDescrizione, causaStatoColore
Luce lam-peggiante
2 HzErrore di checksum del firmware (errore CRC).
Verificare chela schedaCompactFlashsia inserita cor-rettamente
Sostituire lascheda Com-pactFlash
Sostituire laControl Unit
Eseguire ilPOWER ON
-- OFF
La comunicazione ciclica non è (ancora) avve-nuta.
Nota:
PROFIBUS è pronto per la comunicazionequando la Control Unit è pronta per il funziona-mento (vedere LED RDY).
--
DP1
(PROFIBUS
Luce conti-nua
La comunicazione ciclica è in corso. --(PROFIBUSfunziona-mento ci-clico) Verde Luce lam-
peggiante
0,5 Hz
La comunicazione ciclica non avviene ancora inmodo completo.Cause possibili:
S Il master non trasmette valori di riferimento.
S Nel funzionamento con sincronizzazione diclock il master non trasmette alcun GlobalControl (GC) o ne trasmette uno errato.
--
Rosso Luce conti-nua
La comunicazione ciclica è stata interrotta. Eliminare l’ano-malia
-- OFF
L’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
Modulo non pronto per il funzionamento.
Option Board non presente oppure nessun og-getto di azionamento installato.
--
OPT
O O
Luce conti-nua
Option Board pronta al funzionamento --
(OPTION) Verde Luce lam-peggiante
0,5 HzIn funzione dell’Option Board installato. --
Rosso Luce conti-nua
È presente almeno un’anomalia di questo mo-dulo.
Option Board non pronta (ad es. dopo l’inser-zione).
Eliminare l’ano-malia e tacitare
-- OFF riservato --
MODVerde Luce conti-
nuariservato --
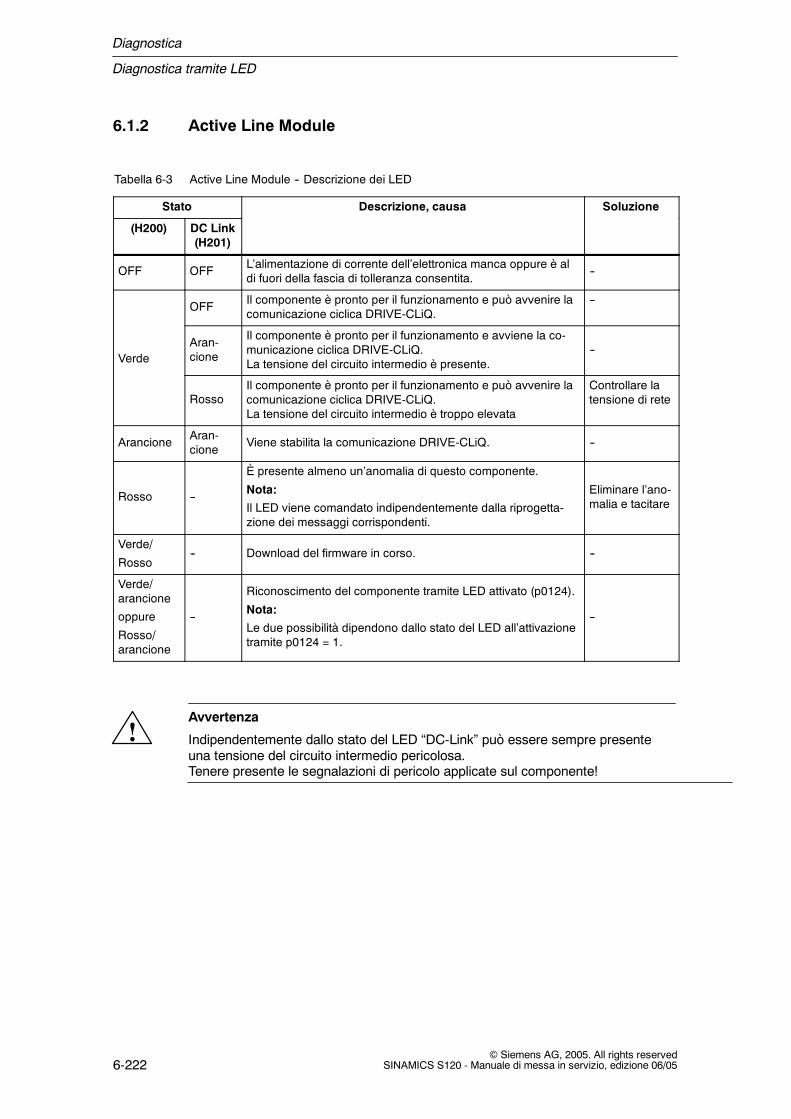
Diagnostica
Diagnostica tramite LED
6-222© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.2 Active Line Module
Tabella 6-3 Active Line Module -- Descrizione dei LED
Stato Descrizione, causa Soluzione
(H200) DC Link(H201)
OFF OFF L’alimentazione di corrente dell’elettronica manca oppure è aldi fuori della fascia di tolleranza consentita.
--
OFF Il componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.
--
VerdeAran-cione
Il componente è pronto per il funzionamento e avviene la co-municazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è presente.
--
RossoIl componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è troppo elevata
Controllare latensione di rete
Arancione Aran-cione
Viene stabilita la comunicazione DRIVE-CLiQ. --
Rosso --
È presente almeno un’anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogetta-zione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
Rosso-- Download del firmware in corso. --
Verde/arancione
oppure
Rosso/arancione
--
Riconoscimento del componente tramite LED attivato (p0124).
Nota:
Le due possibilità dipendono dallo stato del LED all’attivazionetramite p0124 = 1.
--
!Avvertenza
Indipendentemente dallo stato del LED “DC-Link” può essere sempre presenteuna tensione del circuito intermedio pericolosa.Tenere presente le segnalazioni di pericolo applicate sul componente!

Diagnostica
Diagnostica tramite LED
6-223© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.3 Basic Line Module
Tabella 6-4 Basic Line Module -- Descrizione dei LED
Stato Descrizione, causa Soluzione
(H200) DC Link(H201)
OFF OFF L’alimentazione di corrente dell’elettronica manca oppure è aldi fuori della fascia di tolleranza consentita.
--
OFF Il componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.
--
VerdeAran-cione
Il componente è pronto per il funzionamento e avviene la co-municazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è presente.
--
RossoIl componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è troppo elevata
Controllare latensione di rete
Arancione Aran-cione
Viene stabilita la comunicazione DRIVE-CLiQ. --
Rosso --
È presente almeno un’anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogetta-zione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
Rosso-- Download del firmware in corso. --
Verde/arancione
oppure
Rosso/arancione
--
Riconoscimento del componente tramite LED attivato (p0124).
Nota:
Le due possibilità dipendono dallo stato del LED all’attivazionetramite p0124 = 1.
--
!Avvertenza
Indipendentemente dallo stato del LED “DC-Link” può essere sempre presenteuna tensione del circuito intermedio pericolosa.Tenere presente le segnalazioni di pericolo applicate sul componente!

Diagnostica
Diagnostica tramite LED
6-224© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.4 Smart Line Module 5 kW e 10 kW
Tabella 6-5 Smart Line Module 5 kW e 10 kW -- Descrizione dei LED
LED Colore Stato Descrizione, causa Soluzione
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
Verde Luce conti-nua
Componente pronto per il funzionamento. --
READY
Rosso Luce conti-nua
Surriscaldamento.
Disinserzione per sovracorrente.
Diagnosticarel’anomalia (tra-mite morsetti diuscita) e taci-tare (tramitemorsetti diingresso)
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
DC LINK Giallo Luce conti-nua
Tensione del circuito intermedio nel campo ditolleranza consentito.
--
Rosso Luce conti-nua
Tensione del circuito intermedio al di fuori delcampo di tolleranza consentito
Errore di rete.
Controllare latensione di rete
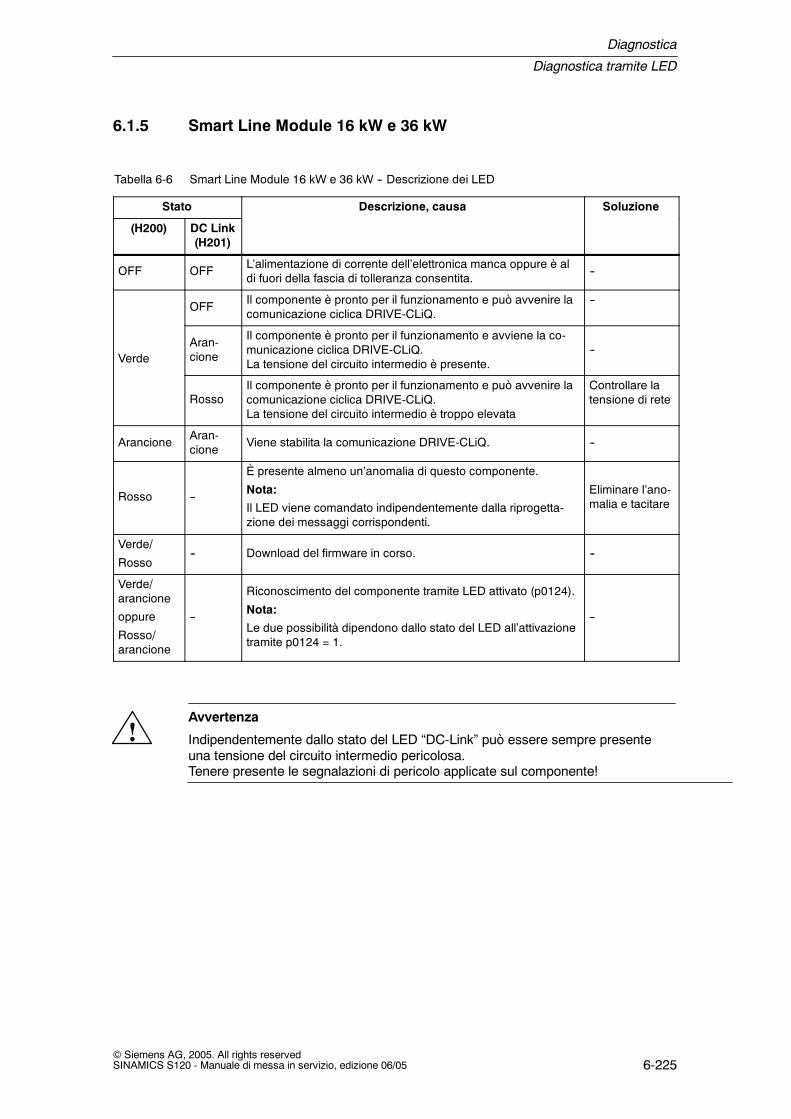
Diagnostica
Diagnostica tramite LED
6-225© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.5 Smart Line Module 16 kW e 36 kW
Tabella 6-6 Smart Line Module 16 kW e 36 kW -- Descrizione dei LED
Stato Descrizione, causa Soluzione
(H200) DC Link(H201)
OFF OFF L’alimentazione di corrente dell’elettronica manca oppure è aldi fuori della fascia di tolleranza consentita.
--
OFF Il componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.
--
VerdeAran-cione
Il componente è pronto per il funzionamento e avviene la co-municazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è presente.
--
RossoIl componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è troppo elevata
Controllare latensione di rete
Arancione Aran-cione
Viene stabilita la comunicazione DRIVE-CLiQ. --
Rosso --
È presente almeno un’anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogetta-zione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
Rosso-- Download del firmware in corso. --
Verde/arancione
oppure
Rosso/arancione
--
Riconoscimento del componente tramite LED attivato (p0124).
Nota:
Le due possibilità dipendono dallo stato del LED all’attivazionetramite p0124 = 1.
--
!Avvertenza
Indipendentemente dallo stato del LED “DC-Link” può essere sempre presenteuna tensione del circuito intermedio pericolosa.Tenere presente le segnalazioni di pericolo applicate sul componente!

Diagnostica
Diagnostica tramite LED
6-226© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.6 Single Motor Module / Double Motor Module
Tabella 6-7 Motor Module -- Descrizione dei LED
Stato Descrizione, causa Soluzione
(H200) DC Link(H201)
OFF OFF L’alimentazione di corrente dell’elettronica manca oppure è aldi fuori della fascia di tolleranza consentita.
--
OFF Il componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.
--
VerdeAran-cione
Il componente è pronto per il funzionamento e avviene lacomunicazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è presente.
--
RossoIl componente è pronto per il funzionamento e può avvenire lacomunicazione ciclica DRIVE-CLiQ.La tensione del circuito intermedio è troppo elevata
Controllare latensione di rete
Arancione Aran-cione
Viene stabilita la comunicazione DRIVE-CLiQ. --
Rosso --
È presente almeno un’anomalia di questo componente.
Nota:
Il LED viene comandato indipendentemente dalla riprogetta-zione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
Rosso-- Download del firmware in corso. --
Verde/arancione
oppure
Rosso/arancione
--
Riconoscimento del componente tramite LED attivato (p0124).
Nota:
Le due possibilità dipendono dallo stato del LED all’attivazionetramite p0124 = 1.
--
!Avvertenza
Indipendentemente dallo stato del LED “DC-Link” può essere sempre presenteuna tensione del circuito intermedio pericolosa.Tenere presente le segnalazioni di pericolo applicate sul componente!
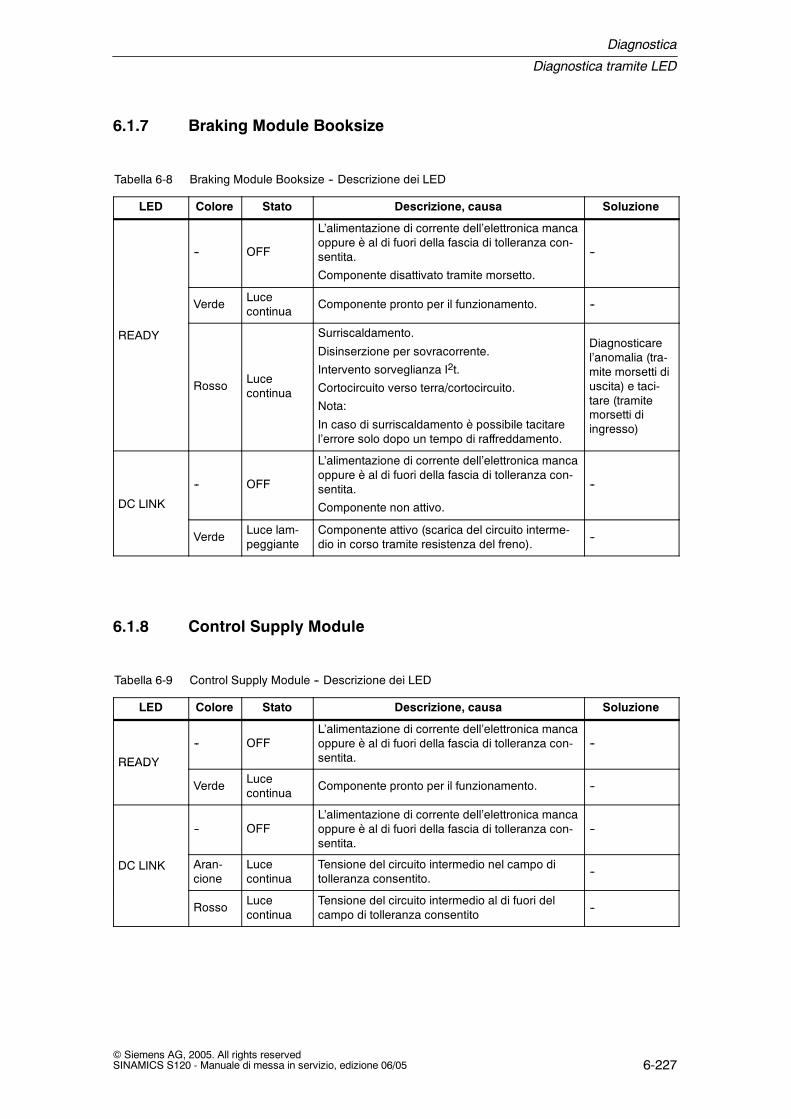
Diagnostica
Diagnostica tramite LED
6-227© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.7 Braking Module Booksize
Tabella 6-8 Braking Module Booksize -- Descrizione dei LED
LED Colore Stato Descrizione, causa Soluzione
-- OFF
L’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
Componente disattivato tramite morsetto.
--
Verde Lucecontinua
Componente pronto per il funzionamento. --
READY
Rosso Lucecontinua
Surriscaldamento.
Disinserzione per sovracorrente.
Intervento sorveglianza I2t.
Cortocircuito verso terra/cortocircuito.
Nota:
In caso di surriscaldamento è possibile tacitarel’errore solo dopo un tempo di raffreddamento.
Diagnosticarel’anomalia (tra-mite morsetti diuscita) e taci-tare (tramitemorsetti diingresso)
DC LINK
-- OFF
L’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
Componente non attivo.
--
Verde Luce lam-peggiante
Componente attivo (scarica del circuito interme-dio in corso tramite resistenza del freno).
--
6.1.8 Control Supply Module
Tabella 6-9 Control Supply Module -- Descrizione dei LED
LED Colore Stato Descrizione, causa Soluzione
READY
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
READY
Verde Lucecontinua
Componente pronto per il funzionamento. --
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
DC LINK Aran-cione
Lucecontinua
Tensione del circuito intermedio nel campo ditolleranza consentito.
--
Rosso Lucecontinua
Tensione del circuito intermedio al di fuori delcampo di tolleranza consentito
--

Diagnostica
Diagnostica tramite LED
6-228© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.9 Sensor Module Cabinet 10 / 20 (SMC10 / SMC20)
Tabella 6-10 Sensor Module Cabinet 10 / 20 -- Descrizione dei LED
LED Colore Stato Descrizione, causa Soluzione
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
Verde Lucecontinua
Il componente è pronto per il funzionamento epuò avvenire la comunicazione ciclica DRIVE-CLiQ.
--
Aran-cione
Lucecontinua
Viene stabilita la comunicazione DRIVE-CLiQ. --
RDY
READY
Rosso Lucecontinua
È presente almeno un’anomalia di questo com-ponente.
Nota:
Il LED viene comandato indipendentemente dallariprogettazione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
RossoLuce lam-peggiante
Download del firmware in corso. --
Verde/aran-cione
oppure
Rosso/aran-cione
Luce lam-peggiante
Riconoscimento del componente tramite LEDattivato (p0144).
Nota:
Le due possibilità dipendono dallo stato del LEDall’attivazione tramite p0144 = 1.
--
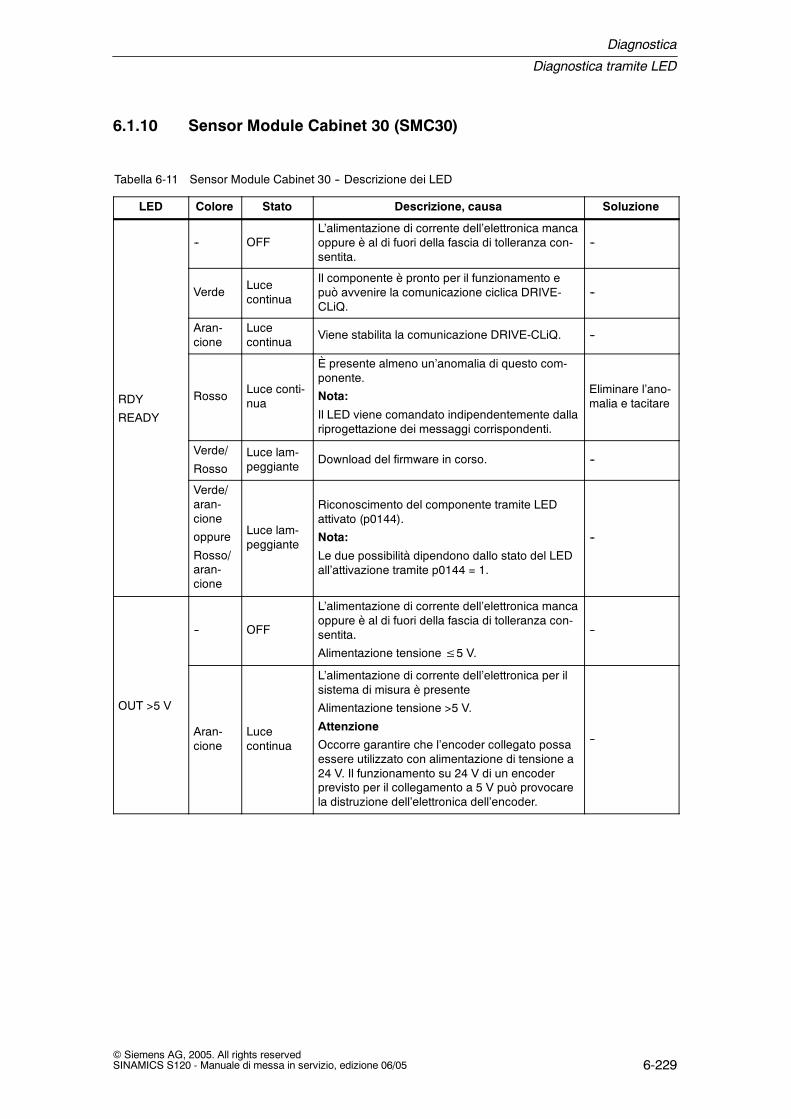
Diagnostica
Diagnostica tramite LED
6-229© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.10 Sensor Module Cabinet 30 (SMC30)
Tabella 6-11 Sensor Module Cabinet 30 -- Descrizione dei LED
LED Colore Stato Descrizione, causa Soluzione
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
Verde Lucecontinua
Il componente è pronto per il funzionamento epuò avvenire la comunicazione ciclica DRIVE-CLiQ.
--
Aran-cione
Lucecontinua
Viene stabilita la comunicazione DRIVE-CLiQ. --
RDY
READY
Rosso Luce conti-nua
È presente almeno un’anomalia di questo com-ponente.
Nota:
Il LED viene comandato indipendentemente dallariprogettazione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
RossoLuce lam-peggiante
Download del firmware in corso. --
Verde/aran-cione
oppure
Rosso/aran-cione
Luce lam-peggiante
Riconoscimento del componente tramite LEDattivato (p0144).
Nota:
Le due possibilità dipendono dallo stato del LEDall’attivazione tramite p0144 = 1.
--
-- OFF
L’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
Alimentazione tensione≤5 V.
--
OUT >5 V
Aran-cione
Lucecontinua
L’alimentazione di corrente dell’elettronica per ilsistema di misura è presente
Alimentazione tensione >5 V.
Attenzione
Occorre garantire che l’encoder collegato possaessere utilizzato con alimentazione di tensione a24 V. Il funzionamento su 24 V di un encoderprevisto per il collegamento a 5 V può provocarela distruzione dell’elettronica dell’encoder.
--

Diagnostica
Diagnostica tramite LED
6-230© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.1.11 Terminal Module 31 (TM31)
Tabella 6-12 Terminal Module 31 -- Descrizione dei LED
LED Colore Stato Descrizione, causa Soluzione
-- OFFL’alimentazione di corrente dell’elettronica mancaoppure è al di fuori della fascia di tolleranza con-sentita.
--
Verde Lucecontinua
Il componente è pronto per il funzionamento epuò avvenire la comunicazione ciclica DRIVE-CLiQ.
--
Aran-cione
Lucecontinua
Viene stabilita la comunicazione DRIVE-CLiQ. --
READYRosso Luce
continua
È presente almeno un’anomalia di questo com-ponente.
Nota:
Il LED viene comandato indipendentemente dallariprogettazione dei messaggi corrispondenti.
Eliminare l’ano-malia e tacitare
Verde/
RossoLuce lam-peggiante
Download del firmware in corso. --
Verde/aran-cione
oppure
Rosso/aran-cione
Luce lam-peggiante
Il riconoscimento del componente tramite LED èattivato (p0154).
Nota:
Le due possibilità dipendono dallo stato del LEDall’attivazione tramite p0154 = 1.
--
Diagnostica
Diagnostica tramite STARTER
6-231© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.2 Diagnostica tramite STARTER
Descrizione
Le funzioni di diagnostica supportano il personale di messa in servizio e assistenzanella messa in servizio, ricerca degli errori, diagnostica e assistenza.
Informazioni generali
Presupposto: Funzionamento online di STARTER.
In STARTER sono disponibili le seguenti funzioni di diagnostica:
S Impostazione di segnali con il generatore di funzioni
Vedere il capitolo 6.2.1
S Registrazione di segnali con la funzione Trace
Vedere il capitolo 6.2.2
S Analisi del comportamento di regolazione con la funzione di misura
Vedere il capitolo 6.2.3
S Emissione di segnali di tensione per apparecchi di misura esterni tramite presedi misura
Vedere il capitolo 6.2.4

Diagnostica
Diagnostica tramite STARTER
6-232© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.2.1 Generatore di funzioni
Descrizione
Questo generatore di funzioni può essere utilizzato ad es. per i seguenti compiti:
S per la misura e l’ottimizzazione di circuiti di regolazione,
S per il confronto della dinamica in caso di azionamenti accoppiati,
S per l’impostazione di un profilo di movimento semplice senza programma dicorsa.
Con il generatore di funzioni possono essere create diverse forme di segnali.
Il segnale di uscita può essere immesso nel circuito di regolazione nel modo ope-rativo uscita connettore tramite interconnessione BICO.
Nel funzionamento Servo questo valore di riferimento può essere inoltre immessonella struttura di regolazione a seconda del modo operativo impostato, ad es.come valore di riferimento di corrente, coppia anomala o valore di riferimento divelocità. L’influenza di circuiti di regolazione sovraordinati viene disattivata automa-ticamente.
Parametrizzazione e comando del generatore di funzioni
La parametrizzazione e il comando del generatore di funzioni vengono effettuatetramite il tool di parametrizzazione e messa in servizio STARTER.
Fig. 6-2 Pagina base “Generatore di funzioni”

Diagnostica
Diagnostica tramite STARTER
6-233© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Per maggiori informazioni sulla parametrizzazione e il comando, consultare laguida in linea.
Proprietà
S Possibilità di attivazione contemporanea su più azionamenti.
S Possibilità di impostare le seguenti forme di segnali a parametrizzazione libera:-- Rettangolo-- Scala-- Triangolo-- PRBS (pseudo random binary signal, rumore bianco)-- Seno
S Possibilità di offset per ogni segnale. L’avviamento per l’offset è parametrizza-bile. La generazione di segnali inizia dopo l’avviamento per l’offset.
S Possibilità di impostazione della limitazione del segnale di uscita al valore mi-nimo e massimo.
S Modi operativi del generatore di funzioni per Servo e Vector
-- Uscita connettore
S Modi operativi del generatore di funzioni solo per Servo
-- Valore di riferimento di corrente a valle del filtro (filtro del valore di riferi-mento di corrente)
-- Coppia anomala (a valle del filtro del valore di riferimento di corrente)
-- Valore di riferimento della velocità a valle del filtro (filtro del valore di riferi-mento di corrente)
-- Valore di riferimento di corrente a monte del filtro (filtro del valore di riferi-mento di corrente)
-- Valore di riferimento della velocità a monte del filtro (filtro del valore di riferi-mento di corrente)
Punti di inserzione per il generatore di funzioni
funk_gen_ueber.vsd
da
interpolatore
Filtro del Regolatore di Filtro delvalore di
Regolatore
correntePercorso
Valore di riferimento
a monte del filtro
Valore di riferimento
a valle del filtro
Coppia anomala
Valore di riferimento
a monte del filtro
Valore di riferimento
a valle del filtro
----riferimento
della velocità della velocità di corrente di corrente
vecorrente di
Fig. 6-3 Punti di inserzione per il generatore di funzioni
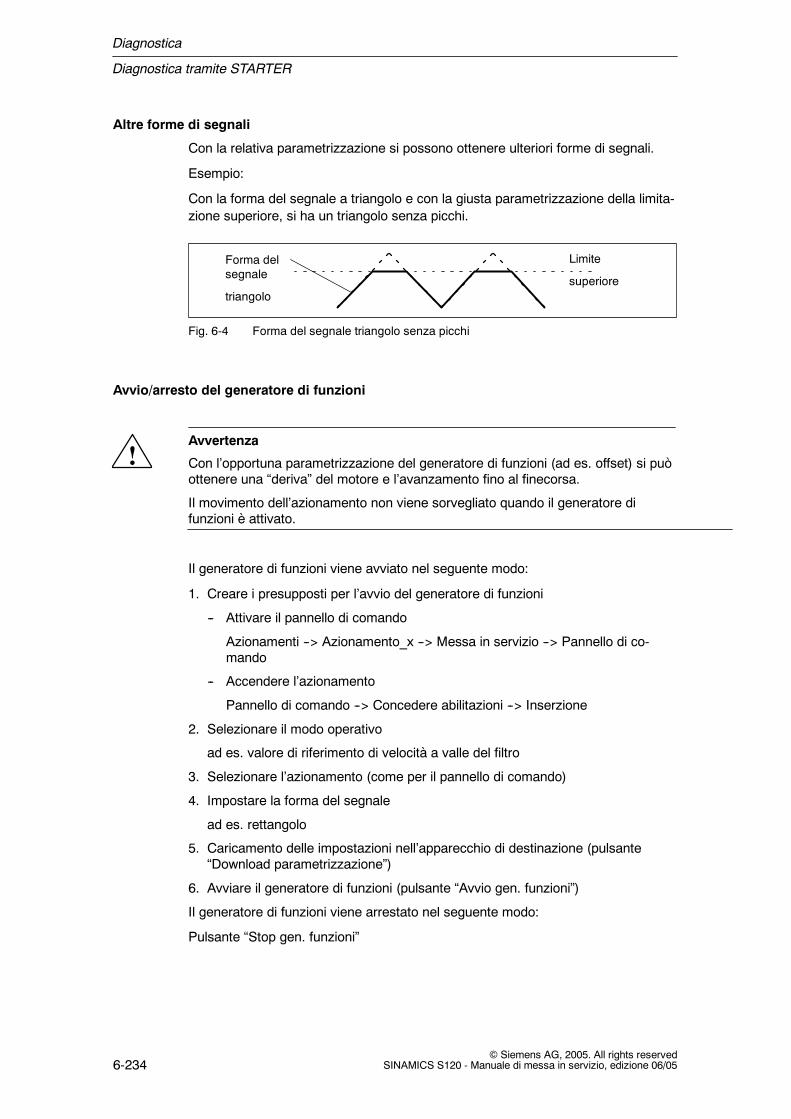
Diagnostica
Diagnostica tramite STARTER
6-234© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Altre forme di segnali
Con la relativa parametrizzazione si possono ottenere ulteriori forme di segnali.
Esempio:
Con la forma del segnale a triangolo e con la giusta parametrizzazione della limita-zione superiore, si ha un triangolo senza picchi.
Limite
superiore
Forma delsegnale
triangolo
Fig. 6-4 Forma del segnale triangolo senza picchi
Avvio/arresto del generatore di funzioni
!Avvertenza
Con l’opportuna parametrizzazione del generatore di funzioni (ad es. offset) si puòottenere una “deriva” del motore e l’avanzamento fino al finecorsa.
Il movimento dell’azionamento non viene sorvegliato quando il generatore difunzioni è attivato.
Il generatore di funzioni viene avviato nel seguente modo:
1. Creare i presupposti per l’avvio del generatore di funzioni
-- Attivare il pannello di comando
Azionamenti --> Azionamento_x --> Messa in servizio --> Pannello di co-mando
-- Accendere l’azionamento
Pannello di comando --> Concedere abilitazioni --> Inserzione
2. Selezionare il modo operativo
ad es. valore di riferimento di velocità a valle del filtro
3. Selezionare l’azionamento (come per il pannello di comando)
4. Impostare la forma del segnale
ad es. rettangolo
5. Caricamento delle impostazioni nell’apparecchio di destinazione (pulsante“Download parametrizzazione”)
6. Avviare il generatore di funzioni (pulsante “Avvio gen. funzioni”)
Il generatore di funzioni viene arrestato nel seguente modo:
Pulsante “Stop gen. funzioni”

Diagnostica
Diagnostica tramite STARTER
6-235© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Parametrizzazione
Nel tool di messa in servizio STARTER viene selezionata la maschera di parame-trizzazione “Generatore di funzioni” nella barra degli strumenti con l’icona se-guente.
Fig. 6-5 Icona di STARTER “Trace/Generatore di funzioni”

Diagnostica
Diagnostica tramite STARTER
6-236© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.2.2 Funzione Trace
Descrizione
La funzione Trace consente di rilevare i valori di misura a seconda delle funzioni ditrigger per un intervallo di tempo predefinito.
Parametrizzazione e comando della funzione Trace
La parametrizzazione e il comando della funzione Trace vengono effettuate tramiteil tool di parametrizzazione e messa in servizio STARTER.
Fig. 6-6 Pagina base “Funzione Trace”
Nota
Per maggiori informazioni sulla parametrizzazione e il comando, consultare laguida in linea.
Diagnostica
Diagnostica tramite STARTER
6-237© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Caratteristiche
S Quattro canali di registrazione per ogni recorder
S Due Trace recorder per ogni Control Unit
S Trigger
-- Senza trigger (registrazione subito dopo l’avvio)
-- Trigger sul segnale con fronte o su livello
-- Possibilità di trigger delay e pretrigger
S Tool di parametrizzazione e messa in servizio STARTER
-- Scala automatica o impostabile degli assi di visualizzazione
-- Misura del segnale con il cursore
S Clock Trace impostabile: numeri interi del tempo di campionamento di base
(vedere anche capitolo 7.7)
Parametrizzazione
Nel tool di messa in servizio STARTER viene selezionata la maschera di parame-trizzazione “Funzione Trace” nella barra degli strumenti con l’icona seguente.
Fig. 6-7 Icona di STARTER “Trace/Generatore di funzioni”
6.2.3 Funzione di misura (Servo)
Descrizione
La funzione di misura serve per l’ottimizzazione dei regolatori dell’azionamento. Lafunzione di misura consente di disattivare in modo mirato l’influenza di circuiti diregolazione sovraordinati e analizzare la dinamica dei singoli azionamenti me-diante una semplice parametrizzazione. A questo scopo il generatore di funzione eil Trace vengono accoppiati tra loro. Il circuito di regolazione viene sollecitato in undeterminato punto (ad es. valore di riferimento della velocità) con il segnale delgeneratore di funzioni, in un altro punto (ad es. valore attuale della velocità) av-viene la registrazione di Trace. Con la parametrizzazione di una funzione di misuraviene parametrizzata automaticamente anche la funzione Trace. Trace dispone dimodi operativi predefiniti che vengono utilizzati a questo scopo.

Diagnostica
Diagnostica tramite STARTER
6-238© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Parametrizzazione e comando della funzione di misura
La parametrizzazione e il comando della funzione di misura vengono effettuatetramite il tool di parametrizzazione e messa in servizio STARTER.
Fig. 6-8 Pagina base “Funzione di misura”
Nota
Per maggiori informazioni sulla parametrizzazione e il comando, consultare laguida in linea.
CaratteristicheS Funzioni di misura
-- Salto valore di riferimento regolatore di corrente (a valle del filtro valore diriferimento di corrente)
-- Uscita frequenza guida regolatore di corrente (a valle del filtro valore di riferi-mento di corrente)
-- Salto valore di riferimento regolatore di velocità (a valle del filtro valore diriferimento di velocità)
-- Salto grandezza di disturbo regolatore di velocità (anomalia a valle filtro delvalore di riferimento di corrente)
-- Uscita frequenza guida regolatore di velocità (a valle del filtro valore di riferi-mento di velocità)
-- Uscita frequenza guida regolatore di velocità (a monte del filtro valore di rife-rimento di velocità)
-- Andamento frequenza di disturbo regolatore di velocità (anomalia a valle delfiltro valore di riferimento di corrente)
-- Tratto regolatore di velocità (attivazione a valle del filtro valore di riferimentodi corrente)
Diagnostica
Diagnostica tramite STARTER
6-239© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Avvio/arresto della funzione di misura
!Avvertenza
Con l’opportuna parametrizzazione della funzione di misura (ad es. offset) si puòottenere una “deriva” del motore e l’avanzamento fino al finecorsa.
Il movimento dell’azionamento non viene sorvegliato quando la funzione di misuraè attivata.
La funzione di misura viene avviata nel seguente modo:
1. Creare i presupposti per l’avvio della funzione di misura
-- Attivare il pannello di comando
Azionamenti --> Azionamento_x --> Messa in servizio --> Pannello dicomando
-- Accendere l’azionamento
Pannello di comando --> Concedere abilitazioni --> Inserzione
2. Selezionare l’azionamento (come per il pannello di comando)
3. Impostare la funzione di misura
z. B. salto valore di riferimento regolatore di corrente
4. Caricamento delle impostazioni nell’apparecchio di destinazione (pulsante“Download parametrizzazione”)
5. Avviare il generatore di funzioni (pulsante “Avvio funzione di misura”)
La funzione di misura viene arrestata nel seguente modo:
Pulsante “Stop funzione di misura”
Parametrizzazione
Nel tool di messa in servizio STARTER viene selezionata la maschera di parame-trizzazione “Funzione di misura” nella barra degli strumenti con l’icona seguente.
Fig. 6-9 Icona di STARTER “Funzione di misura”
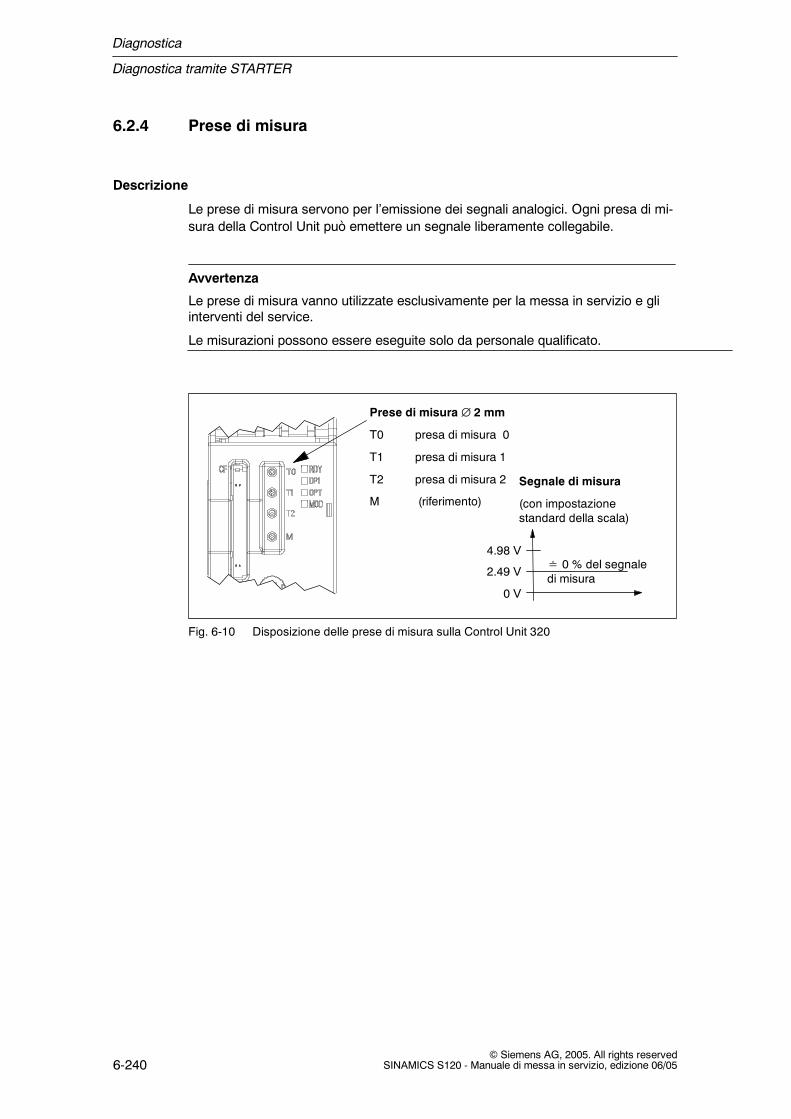
Diagnostica
Diagnostica tramite STARTER
6-240© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.2.4 Prese di misura
Descrizione
Le prese di misura servono per l’emissione dei segnali analogici. Ogni presa di mi-sura della Control Unit può emettere un segnale liberamente collegabile.
Avvertenza
Le prese di misura vanno utilizzate esclusivamente per la messa in servizio e gliinterventi del service.
Le misurazioni possono essere eseguite solo da personale qualificato.
Prese di misura ∅ 2 mm
T0 presa di misura 0
T1 presa di misura 1
T2 presa di misura 2
M (riferimento)
4.98 V
2.49 V≐ 0 % del segnaledi misura
0 V
Segnale di misura
(con impostazionestandard della scala)
Fig. 6-10 Disposizione delle prese di misura sulla Control Unit 320
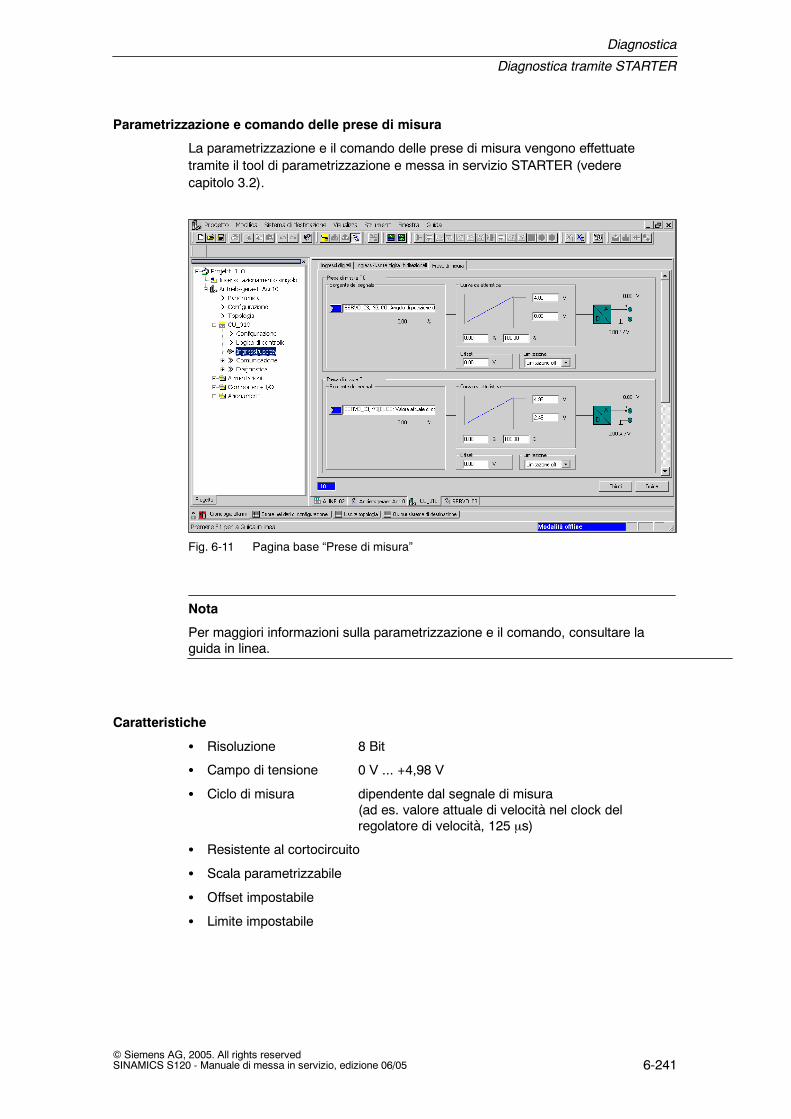
Diagnostica
Diagnostica tramite STARTER
6-241© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Parametrizzazione e comando delle prese di misura
La parametrizzazione e il comando delle prese di misura vengono effettuatetramite il tool di parametrizzazione e messa in servizio STARTER (vederecapitolo 3.2).
Fig. 6-11 Pagina base “Prese di misura”
Nota
Per maggiori informazioni sulla parametrizzazione e il comando, consultare laguida in linea.
Caratteristiche
S Risoluzione 8 Bit
S Campo di tensione 0 V ... +4,98 V
S Ciclo di misura dipendente dal segnale di misura(ad es. valore attuale di velocità nel clock delregolatore di velocità, 125 µs)
S Resistente al cortocircuito
S Scala parametrizzabile
S Offset impostabile
S Limite impostabile
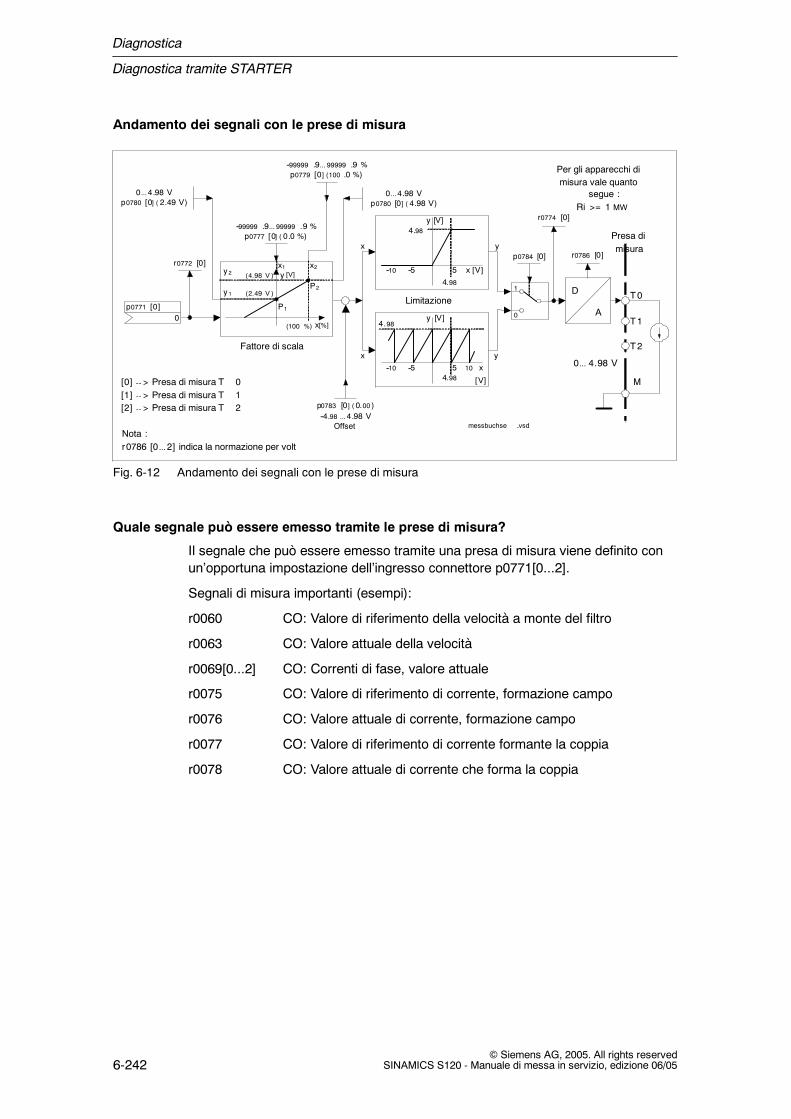
Diagnostica
Diagnostica tramite STARTER
6-242© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Andamento dei segnali con le prese di misura
messbuchse .vsd
Fattore di scala
p0783 [0] ( 0.00 )--4.98 ... 4.98 V
Offset
--99999 .9... 99999 .9 %p0779 [0] (100 .0 %)
--99999 .9... 99999 .9 %p0777 [0] ( 0.0 %)
0... 4.98 Vp0780 [0] ( 4.98 V)
0... 4.98 Vp0780 [0] ( 2.49 V)
T0
T1
T2
M
D
A
r0774 [0]
p0784 [0]
Presa dimisura
Limitazione
[0] ---- > Presa di misura T 0[1] ---- > Presa di misura T 1[2] ---- > Presa di misura T 2
Per gli apparecchi dimisura vale quanto
segue :Ri >= 1 MW
1
0
r0772 [0]
0p0771 [0]
r0786 [0]
0... 4.98 V
x
y
y 1
y 2x2
[%](100 %)
[V](4.98 V )
(2.49 V )
x1
P2
P1
x10
4.98
5
[V]
[V]
--10 --54.98
y
5--10 --5
4.98
4.98y [V]
x [V]
Nota :r0786 [0... 2] indica la normazione per volt
x
x
y
y
Fig. 6-12 Andamento dei segnali con le prese di misura
Quale segnale può essere emesso tramite le prese di misura?
Il segnale che può essere emesso tramite una presa di misura viene definito conun’opportuna impostazione dell’ingresso connettore p0771[0...2].
Segnali di misura importanti (esempi):
r0060 CO: Valore di riferimento della velocità a monte del filtro
r0063 CO: Valore attuale della velocità
r0069[0...2] CO: Correnti di fase, valore attuale
r0075 CO: Valore di riferimento di corrente, formazione campo
r0076 CO: Valore attuale di corrente, formazione campo
r0077 CO: Valore di riferimento di corrente formante la coppia
r0078 CO: Valore attuale di corrente che forma la coppia
Diagnostica
Diagnostica tramite STARTER
6-243© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Fattore di scala
Con il fattore di scala si stabilisce l’elaborazione del segnale di misura. A questoscopo occorre definire una retta con 2 punti.
Esempio:
x1 / y1 = 0,0 % / 2,49 V x2 / y2 = 100,0 % / 4,98 V (impostazione standard)
----> 0,0 % corrisponde a 2,49 V
----> 100,0 % corrisponde a 4,98 V
----> --100,0 % corrisponde a 0,00 V
Offset
L’offset agisce in modo additivo sul segnale da emettere. Il segnale da emetterepuò così essere visualizzato nell’ambito del campo di misura.
Limitazione
S Limitazione on
L’uscita di segnali al di fuori del campo di misura consentito provoca la limita-zione del segnale a 4,98 V o a 0 V.
S Limitazione off
L’uscita di segnali al di fuori del campo di misura consentito provoca l’overflowdel segnale. In caso di overflow il segnale passa da 0 V a 4,98 V o da 4,98 V a0 V.
Esempio di misura
Ipotesi:
In un azionamento il valore attuale di velocità (r0063) deve essere emesso tramitela presa di misura T1.
Come procedere?
1. Collegare e impostare l’apparecchio di misura.
2. Interconnettere il segnale (ad es. con STARTER).
Interconnettere l’ingresso connettore (CI) appartenente alla presa di misura conl’uscita connettore (CO) desiderata.
CI: p0771[1] = CO: r0063
3. Parametrizzare il tracciato del segnale (scala, offset, limitazione).
Diagnostica
Diagnostica tramite STARTER
6-244© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Con r0786[1] viene visualizzata la normazione per volt.
Una modifica della tensione di uscita di 1 Volt corrisponde al valore in questoparametro. L’unità deve essere ricavata dal segnale di misura interconnesso.
Esempio:
r0786 = 1500.0 e il segnale di misura è r0063 (CO: Valore attuale di velocità).
La variazione di 1 Volt all’uscita della presa di misura corrisponde a 1500.0 1/min.
Panoramica dei parametri (vedere il manuale delle liste)
Parametri di impostazione
S p0771[0...2] CI: Prese di misura, sorgente del segnale
S p0777[0...2] Valore x1 curva caratteristica prese di misura
S p0778[0...2] Valore y1 curva caratteristica prese di misura
S p0779[0...2] Valore x2 curva caratteristica prese di misura
S p0780[0...2] Valore y2 curva caratteristica prese di misura
S p0783[0...2] Offset prese di misura
S p0784[0...2] Limitazione on/off prese di misura
Parametri di supervisione
S p0772[0...2] Segnale da emettere prese di misura
S p0774[0...2] Tensione di uscita prese di misura
S r0786[0...2] Normazione per volt prese di misura
Panoramica dello schema logico (vedere il manuale delle liste)
S 8134 Prese di misura
Diagnostica
Messaggi: anomalie e avvisi
6-245© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.3 Messaggi: anomalie e avvisi
6.3.1 Informazioni generali sugli errori e gli avvisi
Descrizione
Gli errori e gli stati rilevati dai singoli componenti dell’apparecchio di azionamentovengono segnalati tramite messaggi.
I messaggi si dividono in anomalie e avvisi.
Nota
Le anomalie e gli avvisi sono descritti dettagliatamente in.
Bibliografia: /LH1/ SINAMICS S Manuale delle liste
Caratteristiche delle anomalie e degli avvisi
S Anomalie
-- Vengono contrassegnate con Fxxxxx.
-- Possono provocare una reazione anomala.
-- Devono essere tacitate dopo l’eliminazione della causa dell’errore.
-- Stato tramite Control Unit e LED RDY.
-- Stato tramite segnale di stato PROFIBUS ZSW1.3 (anomalia attiva).
-- Registrazione nel buffer anomalie (vedere capitolo 6.3.2).
S Avvisi (identificativo A56789)
-- Vengono contrassegnati con Axxxxx.
-- Non hanno alcun effetto sull’apparecchio di azionamento.
-- Gli avvisi si resettano automaticamente dopo l’eliminazione della causadell’errore. La tacitazione non è necessaria.
-- Stato tramite segnale di stato PROFIBUS ZSW1.7 (avviso attivo).
-- Registrazione nel buffer avvisi (vedere capitolo 6.3.2).
S Caratteristiche generali di anomalie e avvisi
-- Possono essere progettati (ad es. modifica di anomalia in avviso, reazione alguasto).
-- Possibilità di trigger su determinate messaggi.
-- Possibilità di emissione di messaggi tramite un segnale esterno.

Diagnostica
Messaggi: anomalie e avvisi
6-246© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tacitazione di anomalie
Nella lista delle anomalie e degli avvisi viene indicato per ogni anomalia il modo incui essa deve essere tacitata una volta eliminata la causa.
1. Tacitare le anomalie con POWER ON
-- Eseguire uno spegnimento/riaccensione dell’apparecchio di azionamento(POWER ON)
-- Premere il tasto RESET sulla Control Unit
2. Tacitare le anomalie con “IMMEDIATAMENTE”
-- Tramite il segnale di comando PROFIBUS
STW1.7 (reset memoria anomalie): Fronte 0/1
STW1.0 (ON/OFF1) = impostare “0” e “1”
-- Tramite segnale di ingresso esterno
Ingresso binettore e interconnessione su un ingresso digitale
p2103[0...n] = “Sorgente del segnale desiderata”
p2104[0...n] = “Sorgente del segnale desiderata”
p2105[0...n] = “Sorgente del segnale desiderata”
Nota
Solo dopo la tacitazione di tutte le anomalie presenti, l’azionamento puònuovamente riprendere il funzionamento.

Diagnostica
Messaggi: anomalie e avvisi
6-247© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.3.2 Buffer per anomalie e avvisi
Nota
Per ogni azionamento esiste un buffer delle anomalie e uno degli avvisi.
In questo buffer vengono registrati i messaggi specifici dell’azionamento edell’apparecchio.
Il buffer anomalie viene memorizzato nella memoria non volatile alla disinserzionedella Control Unit 320 (CU320), ovvero la cronologia del buffer anomalie è ancorapresente dopo l’inserzione.
Attenzione
L’immissione nel buffer anomalie/avvisi avviene in modo ritardato. Il bufferanomalie/avvisi va quindi letto solo se dopo un messaggio “Anomaliaattiva”/“Avviso attivo” è stata rilevata anche una modifica nel buffer (r0944, r2121).

Diagnostica
Messaggi: anomalie e avvisi
6-248© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Buffer anomalie
Le anomalie apparse vengono registrate nel buffer anomalie come descritto di se-guito:
<1>
Caso dianomaliaattuale
Anomalia 1
Anomalia 2
Anomalia 8
7. Caso dianomaliatacitato
[più vecchio ]
1. Casto dianomaliatacitato
<1> Questa anomalia vienesovrascritto dalleanomalie ”più recenti ”(tranne che per le”anomalie Safety ”).
Codiceanomalia
Anomalia 1
Anomalia 2
Anomalia 8r0949 [63 ] [ I32 ]r2133 [63 ] [Float ]
Anomalia 1
Anomalia 2
Anomalia 8
r0945 [0]
r0945 [1]
r0945 [7]
r0945 [56 ]
r0945 [57 ]
r0945 [63 ]
r0945 [8]
r0945 [9]
r0945 [15 ]
Valoreanomalia
r0949 [0] [I32 ]r2133 [0] [Float ]
r0949 [1] [I32 ]r2133 [1] [ Float ]
r0949 [7] [I32 ]r2133 [7] [ Float ]
r0949 [56 ] [ I32 ]r2133 [56 ] [Float ]
r0949 [57 ] [ I32 ]r2133 [57 ] [Float ]
r0949 [8] [I32 ]r2133 [8] [ Float ]
r0949 [9] [I32 ]r2133 [9] [ Float ]
r0949 [15 ] [ I32 ]r2133 [15 ] [Float ]
Ora in cui si èpresentata l ’anomalia
r0948 [0] [ms ]r2130 [0] [d]
r0948 [1] [ms ]r2130 [1] [d]
r0948 [7] [ms ]r2130 [7] [d]
r0948 [56 ] [ms]r2130 [56 ] [d]
r0948 [57 ] [ms]r2130 [57 ] [d]
r0948 [63 ] [ms]r2130 [63 ] [d]
r0948 [8] [ms ]r2130 [8] [d]
r0948 [9] [ms ]r2130 [9] [d]
r0948 [15 ] [ms]r2130 [15 ] [d]
Ora in cui è stataeliminata l ’anomalia
r2109 [0] [ms]r2136 [0] [d]
r2109 [1] [ms]r2136 [1] [d]
r2109 [7] [ms]r2136 [7] [d]
r2109 [56 ] [ms]r2136 [56 ] [d]
r2109 [57 ] [ms]r2136 [57 ] [d]
r2109 [63 ] [ms]r2136 [63 ] [d]
r2109 [8] [ms]r2136 [8] [d]
r2109 [9] [ms]r2136 [9] [d]
r2109 [15 ] [ms]r2136 [15 ] [d]
stö
rpu
ffer.
vsd
Fig. 6-13 Struttura del buffer anomalie
Caratteristiche del buffer anomalie:
S Un nuovo caso di anomalia consiste in una o più anomalie e viene registrata nel“caso di anomalia attuale”.
S La registrazione nel buffer avviene nell’ordine di comparsa.
S Quando si verifica un nuovo caso di anomalia, il buffer anomalie viene riorga-nizzato. La cronologia viene registrata nel “caso di anomalia tacitato” da 1 a 7.
S Se la causa viene eliminata e tacitata per almeno un’anomalia nel “caso di ano-malia attuale”, il buffer anomalie viene riorganizzato. Le anomalie non eliminatevengono mantenute nel “caso di anomalia attuale”.
S Se nel “caso di anomalia attuale” sono contenute 8 anomalie e si verifica unanuova anomalia, l’anomalia nei parametri nell’indice 7 viene sovrascritta con lanuova anomalia.
S Ad ogni variazione del buffer anomalie r0944 viene incrementato.

Diagnostica
Messaggi: anomalie e avvisi
6-249© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
S Per un’anomalia è possibile eventualmente emettere un valore di anomalia(r0949). Il valore di anomalia permette di effettuare una diagnostica più precisadell’anomalia. Il significato deve essere ricavato dalla descrizione dell’anomalia.
Cancellazione del buffer anomalie:
S Il buffer anomalie viene azzerato nel seguente modo: p0952 = 0
Buffer avvisi
Gli avvisi apparsi vengono registrati nel buffer avvisi come descritto di seguito:
wa
rnp
uffe
r.vs
d
<1> Questo avviso viene sovrascritto dagli avvisi ”più recenti ” (tranne che per gli ”avvisi Safety ”).
<1>
Valoreavviso
Ora in cui si èpresentato l ’avviso
Ora in cui è statoeliminato l ’avviso
Codice diavviso
RESET
r2122 [0]
r2122 [1]
r2122 [7]
r2124 [0] [I32 ]r2134 [0] [Float ]
r2124 [1] [I32 ]r2134 [1] [Float ]
r2124 [7] [I32 ]r2134 [7] [Float ]
r2123 [0] [ms ]r2145 [0] [d]
r2123 [1] [ms ]r2145 [1] [d]
r2123 [7] [ms ]r2145 [7] [d]
r2125 [0] [ms ]r2146 [0] [d]
r2125 [1] [ms ]r2146 [1] [d]
r2125 [7] [ms ]r2146 [7] [d]
Avviso 1(più vecchio )
Avviso 2
Avviso 8(più recente )
Fig. 6-14 Struttura del buffer avvisi
Vengono visualizzati max. 8 avvisi. Se sono presenti più di 8 avvisi, la visualizza-zione è la seguente:
Indice 0 .. 6 Visualizzazione degli ultimi 7 avvisi
Indice 7 Visualizzazione dell’avviso più recente
Caratteristiche del buffer avvisi:
S La registrazione nel buffer avviene nell’ordine di comparsa.
S Se nel buffer avvisi sono contenuti 8 avvisi e si verifica un nuovo avviso, l’av-viso nei parametri nell’indice 7 viene sovrascritto con il nuovo avviso.
S Ad ogni variazione del buffer avvisi r2121 viene incrementato.
S Per un avviso è possibile eventualmente emettere un valore di avviso (r0949). Ilvalore di avviso permette di effettuare una diagnostica più precisa dell’avviso. Ilsignificato deve essere ricavato dalla descrizione dell’avviso.
Cancellazione del buffer avvisi:
S Il buffer avvisi viene azzerato nel seguente modo: p2111 = 0
Diagnostica
Messaggi: anomalie e avvisi
6-250© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
6.3.3 Progettazione di messaggi (anomalie e avvisi)
Le caratteristiche delle anomalie e degli avvisi sono predefinite nel sistema di azio-namento.
Per alcuni messaggi sono possibili le seguenti progettazioni nell’ambito di un mo-dello predefinito dal sistema di azionamento:
S Modifica del tipo di messaggio (esempio)
Selezione del messaggio Impostazione del tipo di messaggio
p2118[5] = 1001 p2119[5] = 1: Anomalia (F, Fault)
= 2: avviso (A, Alarm)
= 3: nessun messaggio (N, NoReport)
S Modifica del tipo di messaggio (esempio)
Selezione del messaggio Impostazione della reazione anomala
p2100[3] = 1002 p2101[3] = 0: Nessuno
= 1: OFF1
= 2: OFF2
= 3: OFF3
= 4: STOP1 (in prep.)
= 5: STOP2
= 6: FRENODC (in prep.)
= 7: ENCODER (p0491)
S Modifica della tacitazione (esempio)
Selezione del messaggio Impostazione della tacitazione
p2126[4] = 1003 p2127[4] = 1: POWER ON
= 2: IMMEDIATAMENTE
NotaS Se tra gli oggetti di azionamento sono presenti interconnessioni BICO, la
progettazione deve essere eseguita su tutti gli oggetti interconnessi.Esempio:TM31 ha interconnessioni BICO con l’azionamento 1 e 2 e F35207 deveessere riprogettato per l’avviso.----> p2118[n] = 35207 und p2119[n] = 2----> L’impostazione deve essere questa per TM31, azionamento 1 eazionamento 2.
Diagnostica
Messaggi: anomalie e avvisi
6-251© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Vengono modificati a piacere solo i messaggi elencati anche nei corrispondentiparametri indicizzati. Tutte le altre impostazioni dei messaggi vengono lasciate oriportate ai valori predefiniti.
Esempi:S Per i messaggi elencati in p2128[0...19] è possibile modificare il tipo di
messaggio. Per tutti gli altri messaggi viene impostato il valore predefinito.S La reazione anomala dell’anomalia F12345 è stata modificata con p2100[n].
Occorre ripristinare l’impostazione di fabbrica.----> p2100[n] = 0
Trigger su messaggi (esempio)
Selezione del messaggio Segnale di trigger
p2128[0] = 1001 BO: r2129.0
oppure
p2128[1] = 1002 BO: r2129.1
Nota
Il valore di CO: r2129 può essere usato come trigger collettivo.
CO: r2129 = 0 Nessuno dei messaggi selezionati è comparso.
CO: r2129 > 0 trigger collettivo.Almeno 1 messaggio selezionato è comparso.Le singole uscite binettore BO: r2129 devono essere esaminate.

Diagnostica
Messaggi: anomalie e avvisi
6-252© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Attivazione di messaggi dall’esterno
Se l’ingresso binettore corrispondente viene interconnesso con un segnale di in-gresso, è possibile attivare l’anomalia 1, 2 o 3 oppure l’avviso 1, 2 o 3 mediante unsegnale di ingresso esterno.
Dopo l’attivazione di un’anomalia esterna da 1 a 3 sul Drive Object Control Unit,questo errore è presente anche per tutti i relativi Drive Object. Se una di questeanomalie esterne viene attivata su un altro Drive Object, è presente solo perquell’oggetto.
BI: p2106 ----> Anomalia esterna 1 ----> F07860(A)
BI: p2107 ----> Anomalia esterna 2 ----> F07861(A)
BI: p2108 ----> Anomalia esterna 3 ----> F07862(A)
BI: p2112 ----> Avviso esterno 1 ----> A07850(F)
BI: p2116 ----> Avviso esterno 2 ----> A07851(F)
BI: p2117 ----> Avviso esterno 3 ----> A07852(F)
Nota
Un’anomalia esterna o un avviso esterno è attivato con un segnale 1/0.
Generalmente un’anomalia esterna o un avviso esterno non è un messaggiointerno all’azionamento. Pertanto la causa di un’anomalia esterna o di un avvisoesterno va ricercata al di fuori dell’apparecchio di azionamento.
6.3.4 Parametri e schemi logici per anomalie e avvisi
Panoramica dei parametri (vedere il manuale delle liste)
S r0944 Contatore modifiche buffer anomalie
...
S p0952 Contatore casi di anomalia
S p2100[0...19] Selezione codice di anomalia per reazione anomala
...
S r2139 Parola di stato anomalie
Panoramica degli schemi logici (vedere il manuale delle liste)
S 1710 Schema generale -- Sorveglianze, anomalie, avvisi
S 8060 Anomalie e avvisi -- Buffer anomalie
S 8065 Anomalie e avvisi -- Buffer avvisi
S 8070 Anomalie e avvisi -- Parola di trigger anomalie/avvisi r2129
S 8075 Anomalie e avvisi -- Configurazione anomalie/avvisi
J

7-253© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Principi del sistema di azionamento
Contenuto del capitolo Principi del sistema di azionamento
7.1 Parametri
7.2 Record di dati
7.3 Oggetti di azionamento (Drive Objects)
7.4 Tecnica BICO: interconnessione di segnali
7.5 Moduli funzionali
7.6 Note sulla topologia DRIVE-CLiQ7.6.1 Combinazioni possibili di Line Module e Motor Module7.6.2 Esempi di sostituzione di componenti
7.7 Tempi di campionamento di sistema7.7.1 Caratteristiche7.7.2 Descrizione7.7.3 Procedura della messa in servizio7.7.4 Integrazione
7.8 Ingressi/uscite7.8.1 Panoramica ingressi/uscite7.8.2 Ingressi/uscite digitali7.8.3 Ingressi analogici7.8.4 Uscite analogiche
7.9 Funzioni di sorveglianza e di protezione7.9.1 Protezione della parte di potenza generale7.9.2 Sorveglianze termiche e reazioni ai sovraccarichi7.9.3 Protezione del blocco7.9.4 Protezione contro lo stallo7.9.5 Protezione termica del motore
7.10 Aggiornamento del firmware
7.11 Licenze
7

Principi del sistema di azionamento
Parametri
7-254© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.1 Parametri
Tipi di parametri
Esistono parametri di impostazione e parametri di supervisione:
S Parametri di impostazione (leggibili e scrivibili)
Questi parametri influenzano direttamente il comportamento di una funzione.
Esempio: tempo di accelerazione e decelerazione del generatore di rampa
S Parametri di supervisione (solo lettura)
Questi parametri permettono di visualizzare grandezze interne.
Esempio: corrente attuale del motore
para_arten.vsd
Parametri
lettura (r ...) scrittura/lettura (p ...)
Uscita BICO ”normali”parametri di lettura
Ingresso BICO ”normali”parametri di scrittura/lettura
Fig. 7-1 Tipi di parametri
Tutti questi parametri dell’azionamento possono essere letti e modificati tramitePROFIBUS con i meccanismi definiti nel profilo PROFIdrive.
Suddivisione dei parametri
I parametri dei singoli oggetti di azionamento (vedere il capitolo 7.2) vengono sud-divisi in record di dati (vedere il capitolo 7.2) nel seguente modo:
S Parametri indipendenti da record di dati
Questi parametri sono presenti una sola volta per ogni oggetto di azionamento.
S Parametri dipendenti da record di dati
Questi parametri possono essere presenti più volte per ogni oggetto di aziona-mento e possono essere indirizzati tramite l’indice dei parametri per lettura escrittura. Si distinguono vari tipi di record di dati:
-- CDS: Command Data Set (vedere il capitolo 7.2)
Tramite opportuna parametrizzazione di più record di dati dei comandi ecommutazione dei record di dati, è possibile far funzionare l’azionamentocon diverse sorgenti di segnale preconfigurate.
-- DDS: Drive Data Set
Nel Drive Data Set sono raggruppati i parametri per la commutazione dellaparametrizzazione della regolazione dell’azionamento.
I record di dati CDS e DDS possono essere commutati durante il funziona-mento. Esistono inoltre altri tipi di record di dati che però possono essere atti-vati solo indirettamente tramite una commutazione del DDS.
S EDS Encoder Data Set -- record di dati dell’encoder
S MDS Motor Data Set -- record di dati del motore
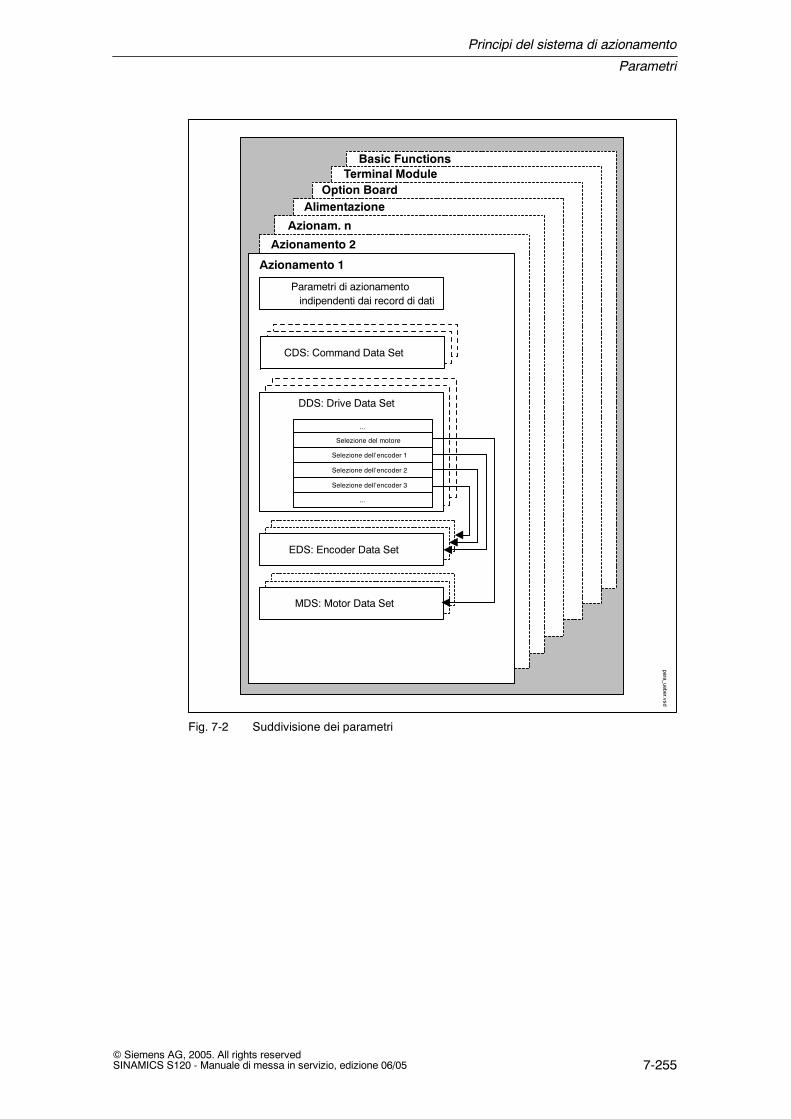
Principi del sistema di azionamento
Parametri
7-255© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Basic FunctionsTerminal Module
Option BoardAlimentazione
para_ueber.vsd
Parametri di azionamentoindipendenti dai record di dati
EDS: Encoder Data Set
MDS: Motor Data Set
Azionamento 1
Azionamento 2
Azionam. n
CDS: Command Data Set
DDS: Drive Data Set
...
Selezione del motore
Selezione dell’encoder 1
Selezione dell’encoder 2
Selezione dell’encoder 3
...
Fig. 7-2 Suddivisione dei parametri

Principi del sistema di azionamento
Parametri
7-256© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Salvataggio dei parametri nella memoria non volatile
I valori modificati dei parametri vengono conservati in modo volatile nella memoriadi lavoro. Spegnendo il sistema di azionamento questi dati vanno perduti.
Affinché le modifiche restino disponibili alla successiva accensione, è necessariomemorizzare i dati in modo non volatile sulla scheda CompactFlash, come de-scritto.
S Salvataggio parametri -- Apparecchio e tutti gli azionamenti
p0977 = 1 Viene azzerato automaticamente
S Salvataggio parametri con STARTER
Vedere la funzione “Copia RAM in ROM”
Ripristino dei parametri
Il parametri possono venire ripristinati come segue secondo le impostazioni di fab-brica:
S Ripristino parametri -- Oggetto corrente di azionamento
p0970 = 1 Viene azzerato automaticamente
S Ripristino parametri -- Tutti i parametri oggetto di azionamento “Control Unit”
p0009 = 30 Reset parametri
p0976 = 1 Viene azzerato automaticamente
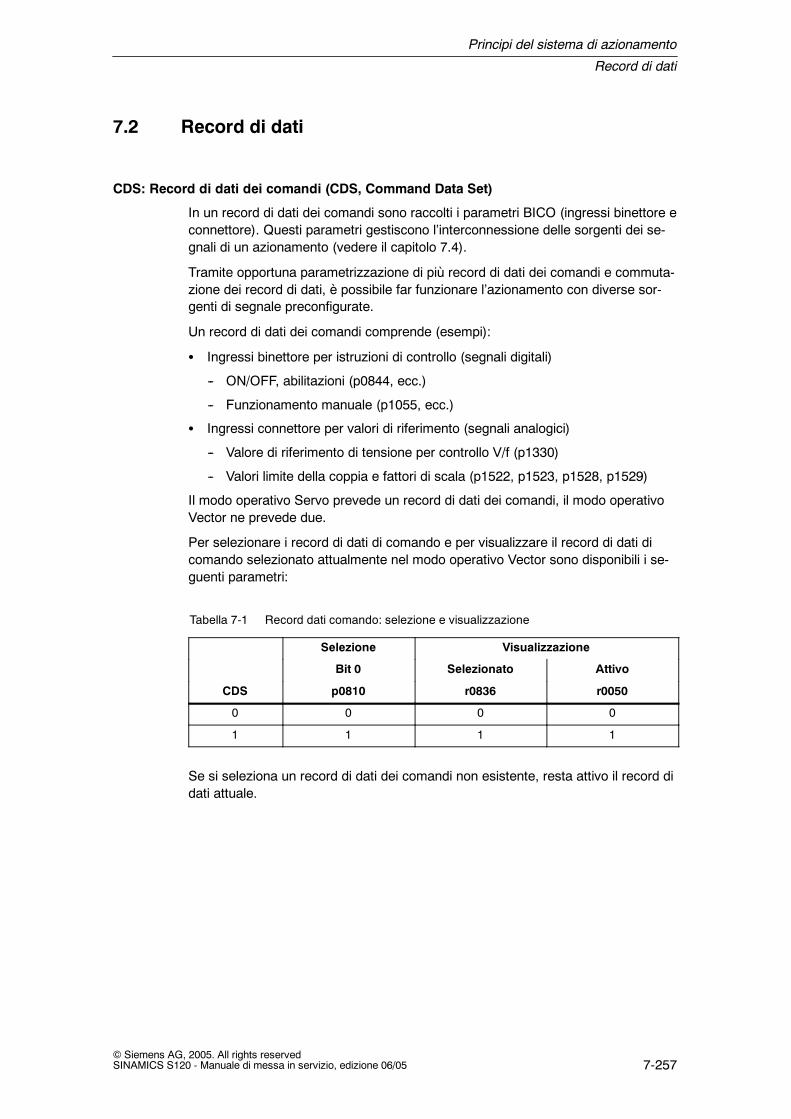
Principi del sistema di azionamento
Record di dati
7-257© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.2 Record di dati
CDS: Record di dati dei comandi (CDS, Command Data Set)
In un record di dati dei comandi sono raccolti i parametri BICO (ingressi binettore econnettore). Questi parametri gestiscono l’interconnessione delle sorgenti dei se-gnali di un azionamento (vedere il capitolo 7.4).
Tramite opportuna parametrizzazione di più record di dati dei comandi e commuta-zione dei record di dati, è possibile far funzionare l’azionamento con diverse sor-genti di segnale preconfigurate.
Un record di dati dei comandi comprende (esempi):
S Ingressi binettore per istruzioni di controllo (segnali digitali)
-- ON/OFF, abilitazioni (p0844, ecc.)
-- Funzionamento manuale (p1055, ecc.)
S Ingressi connettore per valori di riferimento (segnali analogici)
-- Valore di riferimento di tensione per controllo V/f (p1330)
-- Valori limite della coppia e fattori di scala (p1522, p1523, p1528, p1529)
Il modo operativo Servo prevede un record di dati dei comandi, il modo operativoVector ne prevede due.
Per selezionare i record di dati di comando e per visualizzare il record di dati dicomando selezionato attualmente nel modo operativo Vector sono disponibili i se-guenti parametri:
Tabella 7-1 Record dati comando: selezione e visualizzazione
Selezione Visualizzazione
Bit 0 Selezionato Attivo
CDS p0810 r0836 r0050
0 0 0 0
1 1 1 1
Se si seleziona un record di dati dei comandi non esistente, resta attivo il record didati attuale.

Principi del sistema di azionamento
Record di dati
7-258© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio: commutazione tra il record di dati dei comandi 0 e 1
cds_1.vsd
t
1
2
t
Tempo di commutazione
r0050 = 0
p0810 (0)
0
0
1
1
r0050 = 1
CDS
CDS attivo
r0836 = 0 r0836 = 1 CDS selezionato
Fig. 7-3 Commutazione di set di dati comando (esempio)
DDS: Record di dati dell’azionamento (Drive Data Set)
Un record di dati dell’azionamento contiene vari parametri di impostazione rilevantiper la regolazione e il comando di un azionamento:
S Numeri dei record di dati motore e encoder assegnati:
-- p0186: record di dati del motore (MDS)
-- Da p0187 a p0189: fino a 3 record di dati encoder assegnati (EDS)
S Vari parametri di regolazione, come ad es.:
-- Valori di riferimento fissi per numeri di giri (da p1001 a p1015)
-- Limiti di numero di giri min./max. (p1080, p1082)
-- Dati caratteristici del generatore di rampa (p1120 e segg.)
-- Dati caratteristici del regolatore (p1120 e segg.)
-- ...
I parametri raccolti in un record di dati dell’azionamento sono identificati nella listaparametri SINAMICS con “Record di dati DDS” e sono provvisti dell’indice [0..n].
E’ possibile la parametrizzazione di più record di dati dell’azionamento. Risulta cosìpiù semplice la commutazione tra diverse configurazioni dell’azionamento (tipo diregolazione, motore, encoder) grazie alla selezione del corrispondente record didati dell’azionamento.

Principi del sistema di azionamento
Record di dati
7-259© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Un oggetto di azionamento può gestire al massimo 32 record di dati dell’aziona-mento. La selezione dei record di dati dell’azionamento viene configurata conp0180.
Per selezionare un record di dati dell’azionamento si usano gli ingressi binettore dap0820 a p0824. Questi formano il numero del record di dati dell’azionamento (da 0a 31) in formato binario (con p0824 come bit più significativo).
S p0820 BI: Selezione record di dati dell’azionamento DDS bit 0
S p0821 BI: Selezione record di dati dell’azionamento DDS bit 1
S p0822 BI: Selezione record di dati dell’azionamento DDS bit 2
S p0823 BI: Selezione record di dati dell’azionamento DDS bit 3
S p0824 BI: Selezione record di dati dell’azionamento DDS bit 4
Condizioni marginali e raccomandazioni
S Raccomandazione per il numero di DDS di un azionamento
Il numero di DDS di un azionamento deve corrispondere alle possibilità di com-mutazione. Deve pertanto valere:
p0180 (DDS)≥ max. (p0120 (PDS), p0130 (MDS))
S Numero massimo di DDS per un oggetto di azionamento = 32 DDS
EDS: Record di dati dell’encoder (Encoder Data Set)
Un record di dati dell’encoder contiene vari parametri di impostazione dell’encodercollegato che sono rilevanti per la configurazione dell’azionamento.
S Parametri di impostazione, ad es.:
-- Numero di componente interfaccia encoder (p0141)
-- Numero di componente encoder (p0142)
-- Selezione tipo di encoder (p0400)I parametri raccolti in un record di dati dell’encoder sono identificati nella lista para-metri SINAMICS con “Record di dati EDS” e provvisti dell’indice [0..n].
Per ogni encoder gestito dalla Control Unit è necessario un proprio record di dati.Ad un record di dati dell’azionamento vengono assegnati fino a 3 record di datidell’encoder tramite i parametri p0187, p0188 e p0189.
Un oggetto di azionamento può gestire al massimo 3 record di dati dell’encoder. Ilnumero dei record di dati dell’encoder configurati è indicato in p0140.
Selezionando un record di dati dell’azionamento si selezionano anche i record didati dell’encoder assegnati.
Nota
A tutti i record di dati azionamento di un oggetto azionamento possono essereassegnati solo gli stessi record di dati encoder. La commutazione tra record di datiencoder differenti non è possibile.

Principi del sistema di azionamento
Record di dati
7-260© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
MDS: Record dati del motore (Motor Data Set)
Un record di dati del motore contiene vari parametri di impostazione del motorecollegato che sono rilevanti per la configurazione dell’azionamento. Inoltre contienealcuni parametri di supervisione con dati calcolati.
S Parametri di impostazione, ad es.:
-- Numero di componente motore (p0131)
-- Selezione tipo di motore (p0300)
-- Dati nominali motore (p0304 e segg.)
-- ...
S Parametri di supervisione, ad es.:
-- Dati nominali calcolati (r0330 e segg.)
-- ...
I parametri raccolti in un record di dati del motore sono identificati nella listaparametri SINAMICS con “Record di dati MDS” e sono provvisti dell’indice [0..n].
Per ogni motore comandato dalla Control Unit tramite un Motor Module è necessa-rio un proprio record di dati del motore. Il record di dati del motore viene assegnatoa un record di dati dell’azionamento mediante il parametro p0186.
Una commutazione del record di dati può avvenire solo tramite una commutazioneDDS.Ad esempio, la commutazione del record di dati del motore viene utilizzata nei casiseguenti:
S commutazione di vari motori
S commutazione di diversi avvolgimenti in un motore (ad es. commutazione stel-la-triangolo)
S adattamento dei dati motore
Se più motori vengono fatti funzionare alternativamente con uno stesso Motor Mo-dule, è necessario creare un numero corrispondente di record di dati dell’aziona-mento. Per altre informazioni sulla commutazione del motore vedere il capitolo“Commutazione motore” nel manuale delle funzioni.
Attenzione
Solo un motore per Motor Module può disporre di un encoder, tutti gli altri motoridevono funzionare senza encoder.
Un oggetto di azionamento può gestire al massimo 16 record di dati del motore. Ilnumero dei record di dati del motore in p0130 non può eccedere quello dei recorddi dati dell’azionamento in p0180.
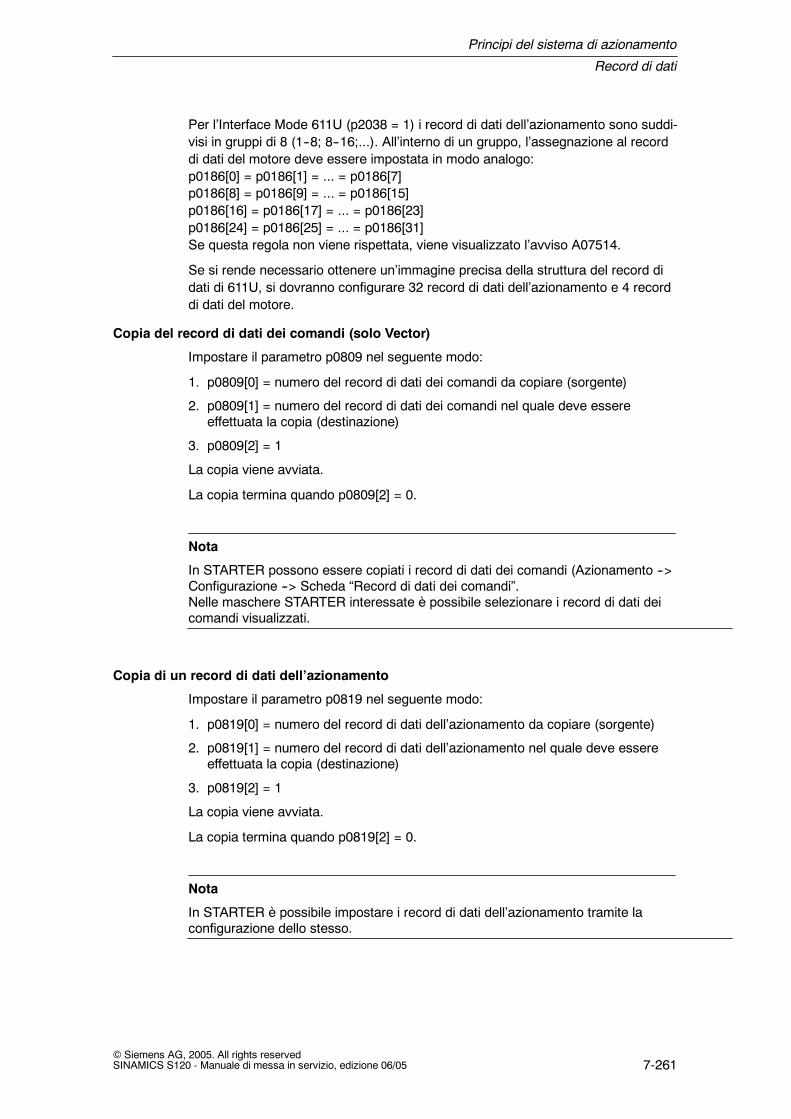
Principi del sistema di azionamento
Record di dati
7-261© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Per l’Interface Mode 611U (p2038 = 1) i record di dati dell’azionamento sono suddi-visi in gruppi di 8 (1--8; 8--16;...). All’interno di un gruppo, l’assegnazione al recorddi dati del motore deve essere impostata in modo analogo:p0186[0] = p0186[1] = ... = p0186[7]p0186[8] = p0186[9] = ... = p0186[15]p0186[16] = p0186[17] = ... = p0186[23]p0186[24] = p0186[25] = ... = p0186[31]Se questa regola non viene rispettata, viene visualizzato l’avviso A07514.
Se si rende necessario ottenere un’immagine precisa della struttura del record didati di 611U, si dovranno configurare 32 record di dati dell’azionamento e 4 recorddi dati del motore.
Copia del record di dati dei comandi (solo Vector)
Impostare il parametro p0809 nel seguente modo:
1. p0809[0] = numero del record di dati dei comandi da copiare (sorgente)
2. p0809[1] = numero del record di dati dei comandi nel quale deve essereeffettuata la copia (destinazione)
3. p0809[2] = 1
La copia viene avviata.
La copia termina quando p0809[2] = 0.
Nota
In STARTER possono essere copiati i record di dati dei comandi (Azionamento -->Configurazione --> Scheda “Record di dati dei comandi”.Nelle maschere STARTER interessate è possibile selezionare i record di dati deicomandi visualizzati.
Copia di un record di dati dell’azionamento
Impostare il parametro p0819 nel seguente modo:
1. p0819[0] = numero del record di dati dell’azionamento da copiare (sorgente)
2. p0819[1] = numero del record di dati dell’azionamento nel quale deve essereeffettuata la copia (destinazione)
3. p0819[2] = 1
La copia viene avviata.
La copia termina quando p0819[2] = 0.
Nota
In STARTER è possibile impostare i record di dati dell’azionamento tramite laconfigurazione dello stesso.
Principi del sistema di azionamento
Record di dati
7-262© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Copia del record di dati motore
Impostare il parametro p0139 nel seguente modo:
1. p0139[0] = numero del record di dati dell’azionamento da copiare (sorgente)
2. p0139[1] = numero del record di dati dell’azionamento nel quale deve essereeffettuata la copia (destinazione)
3. p0139[2] = 1
La copia viene avviata.
La copia termina quando p0139[2] = 0.
Nota
In STARTER è possibile impostare i record di dati dell’azionamento tramite laconfigurazione dello stesso.
Panoramica dello schema logico (vedere il manuale delle liste)
S 8560 Record di dati dei comandi (Command Data Set, CDS)
S 8565 Record di dati dell’azionamento (Drive Data Set, DDS)
S 8570 Record di dati dell’encoder (Encoder Data Set, EDS)
S 8575 Record dati del motore (Motor Data Set, MDS)
Principi del sistema di azionamento
Record di dati
7-263© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica dei parametri (vedere il manuale delle liste)
Parametri di impostazione
S p0120 Quantità di record di dati della parte di potenza (PDS)
S p0130 Quantità di record di dati motore (MDS)
S p0139 Copia del record di dati motore
S p0140 Quantità di record di dati dell’encoder (EDS)
S p0170 Quantità di record di dati dei comandi (CDS)
S p0180 Quantità di record di dati dell’azionamento (DDS)
S p0809 Copiare record di dati dei comandi CDS
S p0810 BI: record di dati dei comandi CDS bit 0
S p0811 BI: record di dati dei comandi CDS bit 1
S p0812 BI: record di dati dei comandi CDS bit 2
S p0813 BI: record di dati dei comandi CDS bit 3
S p0819[0...2] Copia DDS record di dati dell’azionamento
S p0820 BI: Selezione record di dati dell’azionamento DDS bit 0
S p0821 BI: Selezione record di dati dell’azionamento DDS bit 1
S p0822 BI: Selezione record di dati dell’azionamento DDS bit 2
S p0823 BI: Selezione record di dati dell’azionamento DDS bit 3
S p0824 BI: Selezione record di dati dell’azionamento DDS bit 4

Principi del sistema di azionamento
Oggetti di azionamento (Drive Objects)
7-264© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.3 Oggetti di azionamento (Drive Objects)
Un oggetto di azionamento è una funzionalità software indipendente che ha i propriparametri ed eventualmente anche le proprie anomalie e i propri avvisi. Gli oggettidi azionamento possono essere presenti per impostazione predefinita (ad es. rile-vazione ingressi/uscite), si possono creare una sola volta (ad es. Terminal Board)o anche più volte (ad es. regolazione azionamento).
Fig. 7-4 Oggetti di azionamento -- Drive Objects
Panoramica degli oggetti di azionamento
S Regolazione azionamento
La regolazione azionamento esegue la regolazione del motore. Alla regolazioneazionamento sono assegnati 1 Motor Module, almeno 1 motore e al massimo 3encoder.
Possono essere configurati vari tipi di dati regolazioni di azionamenti (ad es.Servo, Vector, ecc.).
A seconda della capacità funzionale della Control Unit e dei requisiti posti allaregolazione dell’azionamento, è possibile configurare più regolazioni dell’azio-namento.
S Control Unit, ingressi/uscite
Gli ingressi e le uscite presenti sulla Control Unit vengono analizzati nell’ambitodi un oggetto di azionamento. Oltre agli ingressi e alle uscite digitali bidirezio-nali, qui vengono elaborati anche ingressi rapidi per tastatori di misura.
Principi del sistema di azionamento
Oggetti di azionamento (Drive Objects)
7-265© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
S Proprietà di un oggetto di azionamento
-- propria area parametri
-- propria finestra in STARTER
-- Proprio sistema di anomalie/avvisi (per VECTOR, SERVO, INFEED)
-- Proprio telegramma PROFIBUS per dati di processo (per VECTOR,SERVO, INFEED)
S Alimentatore: Regolazione dell’alimentazione Line Module con interfacciaDRIVE-CLiQ
Se in un sistema di azionamento viene usato per l’alimentazione un Line Mo-dule con interfaccia DRIVE-CLiQ, il controllo o la regolazione dell’alimentazioneavviene nell’ambito di un corrispondente oggetto di azionamento sulla ControlUnit.
S Alimentatore: Controllo dell’alimentazione Line Module senza interfacciaDRIVE-CLiQ
Se in un sistema di azionamento viene usato per l’alimentazione un Line Mo-dule senza interfaccia DRIVE-CLiQ, la Control Unit deve provvedere al controlloe alla valutazione dei segnali relativi (RESET, READY).
S Rilevamento Option Board
Un oggetto di azionamento esegue il rilevamento di una Option Board eventual-mente inserita. Il funzionamento specifico dipende dal tipo di Option Board.
S Rilevamento Terminal Module
Un oggetto di azionamento esegue il rilevamento del Terminal Module collega-bile in opzione.
Configurazione di oggetti di azionamento
Gli “oggetti di azionamento” elaborati via software nella Control Unit vengono impo-stati in STARTER alla prima messa in servizio mediante dei parametri di configura-zione. In una Control Unit si possono creare diversi oggetti di azionamento (DriveObjects).
Gli oggetti di azionamento sono blocchi funzionali configurabili con i quali si pos-sono eseguire determinate funzioni di azionamento.
Se dopo la prima messa in servizio vengono configurati ulteriori oggetti di aziona-mento, ciò deve avvenire attraverso la modalità di configurazione del sistema diazionamento.
Ai parametri di un oggetto di azionamento si può accedere solo dopo aver configu-rato l’oggetto stesso ed essere entrati in modalità parametri.

Principi del sistema di azionamento
Oggetti di azionamento (Drive Objects)
7-266© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Ad ogni oggetto di azionamento presente (Drive Object) viene assegnato allaprima messa in servizio un numero da 0 a 63 per la sua identificazione.
Panoramica dei parametri (vedere il manuale delle liste)
Parametri di impostazione
S p0101 numeri degli oggetti di azionamento
S p0107 tipo oggetti di azionamento
S p0108 configurazione oggetti di azionamento
Parametri di supervisione
S r0102 numero di oggetti di azionamento
Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-267© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.4 Tecnica BICO: interconnessione di segnali
Descrizione
In ogni apparecchio di azionamento esistono molteplici grandezze di ingresso e diuscita nonché varie grandezze di regolazione interne.
Con la tecnica BICO (acronimo inglese per Binector Connector Technology) è pos-sibile adattare l’apparecchio di azionamento alle più disparate esigenze.
I segnali digitali e analogici che possono essere interconnessi liberamente tramiteparametri BICO sono identificati nei nomi dei parametri con le lettere iniziali BI,BO, CI o CO. Questi parametri sono opportunamente contrassegnati anche nellalista parametri o negli schemi logici.
Nota
Per impiegare la tecnica BICO si consiglia di usare il tool di parametrizzazione emessa in servizio STARTER.
Binettori, BI: ingresso binettore, BO: uscita binettore
Un binettore è un segnale digitale (binario) senza unità che può assumere il va-lore 0 o 1.
I binettori vengono suddivisi in ingressi binettore (ricevitore del segnale) e uscitebinettore (sorgente del segnale).
Tabella 7-2 Binettori
Abbrevia-zione e sim-
bolo
Nome Descrizione
BIIngresso binettore
Binector Input
(ricevitore del segnale)
Può essere interconnesso con un’uscitabinettore come sorgente.
Il numero dell’uscita binettore deve essereimmesso come valore del parametro.
BOUscita binettore
Binector Output
(sorgente del segnale)
Può essere usata come sorgente per uningresso binettore.
Connettori, CI: ingresso connettore, CO: uscita connettore
Un connettore è un segnale analogico. I connettori vengono suddivisi in ingressiconnettore (ricevitore del segnale) e uscite connettore (sorgente del segnale).
Per motivi legati alle prestazioni, le possibilità di interconnessione dei connettorisono limitate.
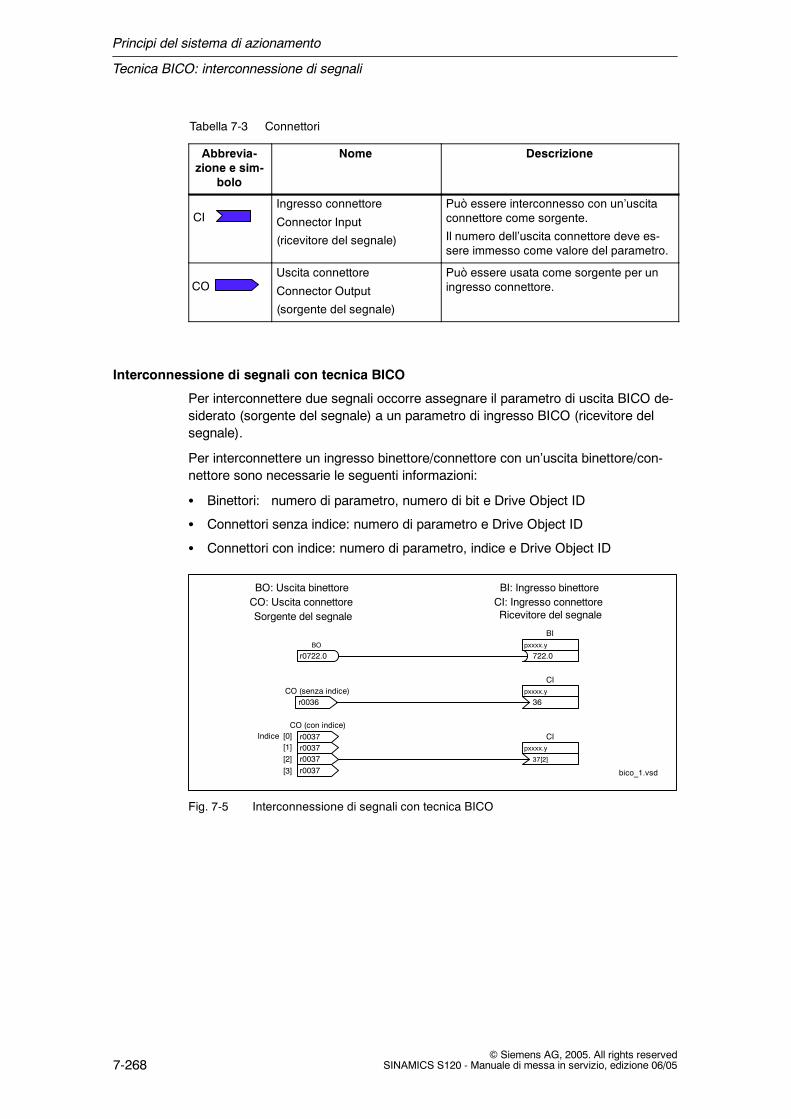
Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-268© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Tabella 7-3 Connettori
Abbrevia-zione e sim-
bolo
Nome Descrizione
CIIngresso connettore
Connector Input
(ricevitore del segnale)
Può essere interconnesso con un’uscitaconnettore come sorgente.
Il numero dell’uscita connettore deve es-sere immesso come valore del parametro.
COUscita connettore
Connector Output
(sorgente del segnale)
Può essere usata come sorgente per uningresso connettore.
Interconnessione di segnali con tecnica BICO
Per interconnettere due segnali occorre assegnare il parametro di uscita BICO de-siderato (sorgente del segnale) a un parametro di ingresso BICO (ricevitore delsegnale).
Per interconnettere un ingresso binettore/connettore con un’uscita binettore/con-nettore sono necessarie le seguenti informazioni:
S Binettori: numero di parametro, numero di bit e Drive Object ID
S Connettori senza indice: numero di parametro e Drive Object ID
S Connettori con indice: numero di parametro, indice e Drive Object ID
bico_1.vsd
BO: Uscita binettoreCO: Uscita connettoreSorgente del segnale
BI: Ingresso binettoreCI: Ingresso connettoreRicevitore del segnale
pxxxx.y
722.0
BI
r0722.0BO
r0037CO (con indice)
pxxxx.y
37[2]
CIIndice [0]r0037r0037
[1][2]
r0037[3]
r0036CO (senza indice) pxxxx.y
36
CI
Fig. 7-5 Interconnessione di segnali con tecnica BICO
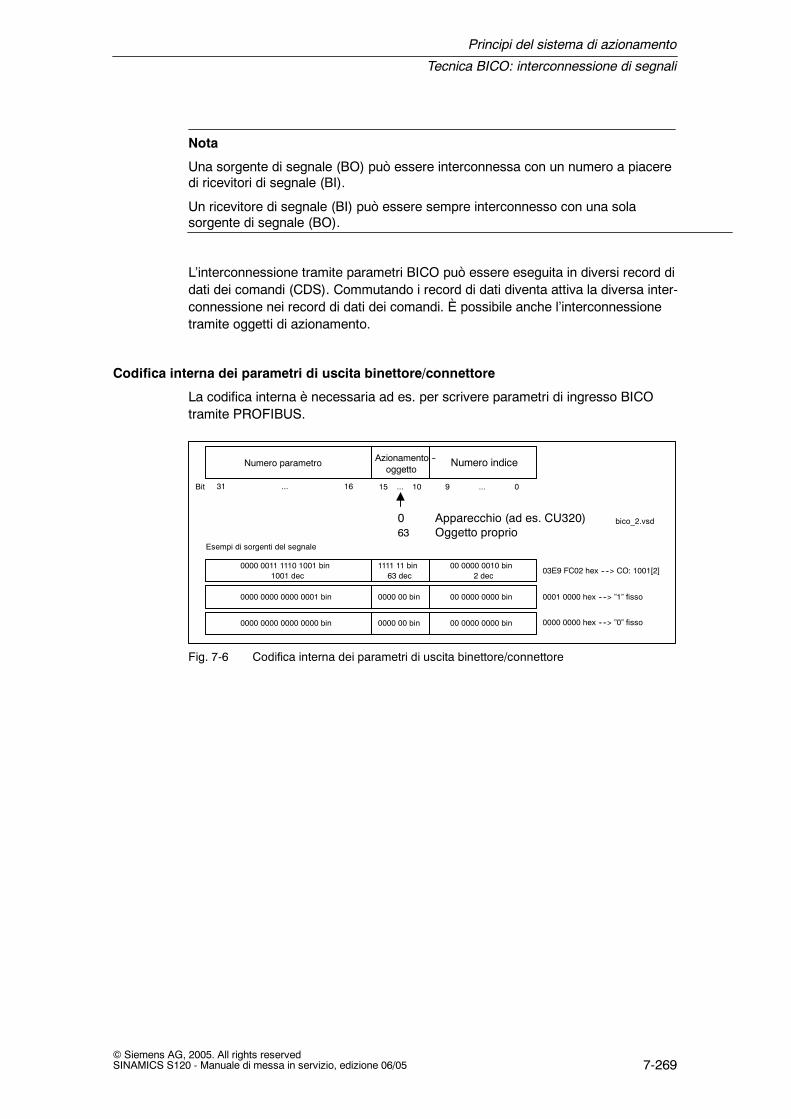
Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-269© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Una sorgente di segnale (BO) può essere interconnessa con un numero a piaceredi ricevitori di segnale (BI).
Un ricevitore di segnale (BI) può essere sempre interconnesso con una solasorgente di segnale (BO).
L’interconnessione tramite parametri BICO può essere eseguita in diversi record didati dei comandi (CDS). Commutando i record di dati diventa attiva la diversa inter-connessione nei record di dati dei comandi. È possibile anche l’interconnessionetramite oggetti di azionamento.
Codifica interna dei parametri di uscita binettore/connettore
La codifica interna è necessaria ad es. per scrivere parametri di ingresso BICOtramite PROFIBUS.
bico_2.vsd
15 ... 1031 ... 16
0 Apparecchio (ad es. CU320)63 Oggetto proprio
9 ... 0Bit
Numero parametro Numero indiceAzionamento --oggetto
0000 0000 0000 0001 bin 00 0000 0000 bin0000 00 bin
0000 0000 0000 0000 bin 00 0000 0000 bin0000 00 bin
Esempi di sorgenti del segnale
0000 0000 hex ----> ”0” fisso
0001 0000 hex ----> ”1” fisso
03E9 FC02 hex ----> CO: 1001[2]0000 0011 1110 1001 bin
1001 dec00 0000 0010 bin
2 dec1111 11 bin63 dec
Fig. 7-6 Codifica interna dei parametri di uscita binettore/connettore
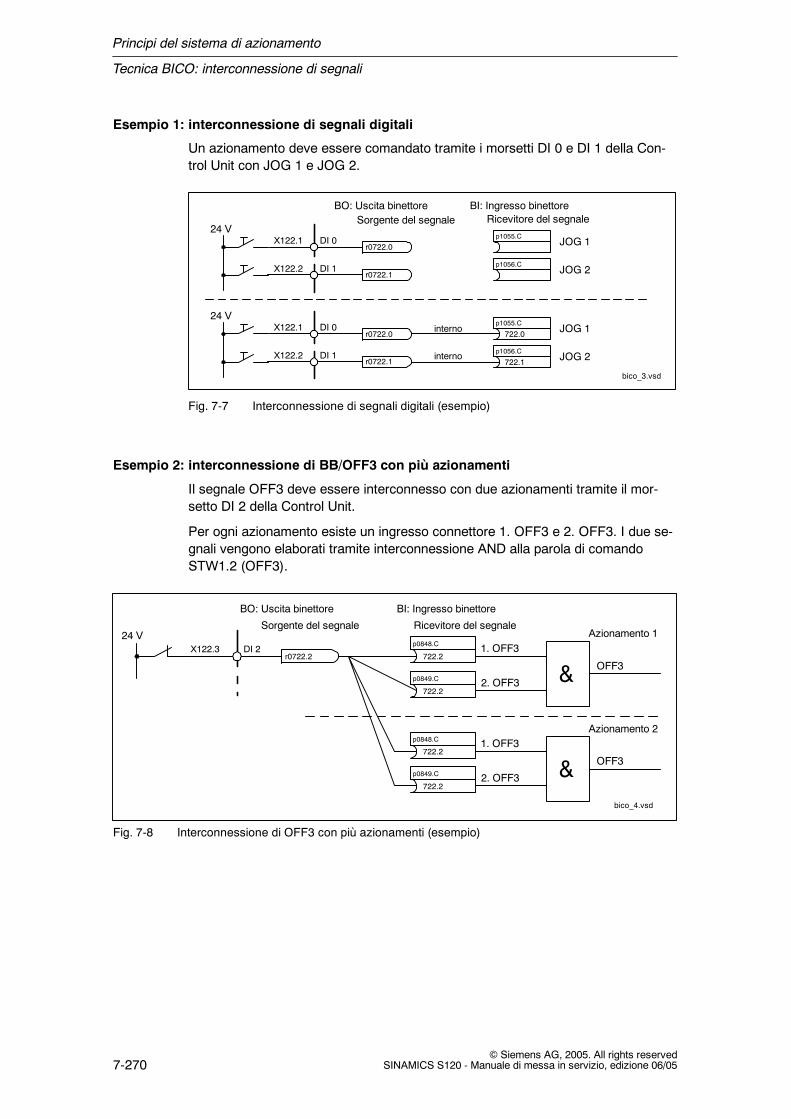
Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-270© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio 1: interconnessione di segnali digitali
Un azionamento deve essere comandato tramite i morsetti DI 0 e DI 1 della Con-trol Unit con JOG 1 e JOG 2.
bico_3.vsd
BO: Uscita binettoreSorgente del segnale
BI: Ingresso binettoreRicevitore del segnale
r0722.0
r0722.1DI 1X122.2
DI 0X122.1 p1055.C
p1056.C
JOG 1
JOG 2
24 V
r0722.0
r0722.1DI 1X122.2
DI 0X122.1 p1055.C
722.0
p1056.C
722.1
JOG 1
JOG 2
24 Vinterno
interno
Fig. 7-7 Interconnessione di segnali digitali (esempio)
Esempio 2: interconnessione di BB/OFF3 con più azionamenti
Il segnale OFF3 deve essere interconnesso con due azionamenti tramite il mor-setto DI 2 della Control Unit.
Per ogni azionamento esiste un ingresso connettore 1. OFF3 e 2. OFF3. I due se-gnali vengono elaborati tramite interconnessione AND alla parola di comandoSTW1.2 (OFF3).
bico_4.vsd
BO: Uscita binettore
Sorgente del segnale
BI: Ingresso binettore
Ricevitore del segnale
r0722.2DI 2X122.3
24 Vp0848.C
722.2
p0849.C
722.2
1. OFF3
&2. OFF3
OFF3
Azionamento 1
p0848.C
722.2
p0849.C
722.2
1. OFF3
&2. OFF3
OFF3
Azionamento 2
Fig. 7-8 Interconnessione di OFF3 con più azionamenti (esempio)

Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-271© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Interconnessioni BICO con altri azionamenti
Per le interconnessioni BICO di un azionamento con altri azionamenti esistono iseguenti parametri:
S r9490 Numero di interconnessioni BICO con altri azionamenti
S r9491[0...15] BI/CI delle interconnessioni BICO con altri azionamenti
S r9492[0...15] BO/CO delle interconnessioni BICO con altri azionamenti
S p9493[0...15] Reimpostazione delle interconnessioni BICO con altri aziona-menti
Copia di azionamenti
Nella copia di un azionamento viene copiata anche l’interconnessione.
Binettore-connettore-trasformatore e connettore-binettore-trasformatore
Binettore-connettore-trasformatore
S Più segnali digitali vengono convertiti in una parola doppia Integer a 32 bit o inuna parola Integer a 16 bit.
S p2080[0...15] BI: PROFIBUS Invio PZD bit per bit
Connettore-binettore-trasformatore
S Una parola doppia Integer a 32 bit o una parola Integer a 16 bit vengono con-vertite in segnali digitali singoli.
S p2099[0...1] CI: PROFIBUS Selezione PZD ricevuta bit per bit
Valori fissi per l’interconnessione tramite tecnica BICO
Per l’interconnessione di valori fissi impostabili liberamente esistono le seguentiuscite connettore:
S p2900[0...n] CO: Val.fisso _%_1
S p2901[0...n] CO: Val.fisso _%_2
S p2930[0...n] CO: Val.fisso _M_1
Esempio:
Questi parametri possono essere usati per interconnettere il fattore di scala per ilvalore di riferimento principale o per interconnettere una coppia supplementare.

Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-272© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Segnali per le uscite analogiche
Tabella 7-4 Lista di alcuni segnali per le uscite analogiche
Segnale Parametri Unità Normazione(100% = ...)
Valore di riferimento delnumero di giri a montedel filtro del valore di ri-ferimento
r0060 giri/min p2000
Valore attuale numero digiri, encoder motore
r0061 giri/min p2000
Valore attuale dellavelocità
r0063 giri/min p2000
Azionamento, frequenzadi uscita
r0066 Hz Frequenza di riferimento
Valore attuale dicorrente
r0068 Aeff p2002
Valore attuale tensionedel circuito intermedio
r0070 V p2001
Valore di riferimento to-tale della coppia
r0079 Nm p2003
Valore attuale dellapotenza attiva
r0082 kW r2004
Deviazionedi regolazione
r0064 giri/min p2000
Grado controllo r0074 % Fattore di comando diriferimento
Valore di riferimento dicorrente, formazionemomento
r0077 A p2002
Valore attuale dicorrente, formazionemomento
r0078 A p2002
Valore di riferimento delflusso
r0083 % Flusso di riferimento
Val.att.flusso r0084 % Flusso di riferimento
Regolatore di numero digiri, uscita coppia PI
r1480 Nm p2003
Regolatore di numero digiri, uscita coppia I
r1482 Nm p2003

Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-273© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Normalizzazione per l’oggetto Vector
Tabella 7-5 Normalizzazione per l’oggetto Vector
Grandezza Parametro di normalizzazione Preimpostazione alla prima messain servizio
N. giri di riferimento 100 % = p2000 p2000 = n. di giri massimo (p1082)
Tensione di riferimento 100 % = p2001 p2001 = 1000 V
Corrente di riferimento 100 % = p2002 p2002 = limite di corrente (p0640)
Coppia di riferimento 100 % = p2003 p2003 = 2 * coppia nominale motore(p0333)
Potenza di riferimento 100 % = r2004 r2004 = p2003 * p2000 * 2π / 60
Frequenza di riferimento 100 % = p2000/60 --
Fattore di comando diriferimento
100 % = massima tensione di uscitasenza sovracomando
--
Flusso di riferimento 100 % = flusso nominale del motore --
Temperatura di riferimento 100 % = 100°C --
Riferimento angoloelettrico
100 % = 90° --
Normalizzazione per l’oggetto Servo
Tabella 7-6 Normalizzazione per l’oggetto Servo
Grandezza Parametro di normalizzazione Preimpostazione alla prima messa inservizio
N. giri di riferimento 100 % = p2000 Motore asincronop2000 = velocità max. motore (p0322)
Motore sincronop2000 = n. di giri nominale motore(p0311)
Tensione di riferimento 100 % = p2001 p2001 = 1000 V
Corrente di riferimento 100 % = p2002 p2002 = corrente limite del motore(p0338); se p0338 = “0”, allora2 * corrente nominale del motore(p0305)
Coppia di riferimento 100 % = p2003 p2003 = p0338 * p0334; se “0”, allora 2 *coppia nominale del motore (p0333)
Potenza di riferimento 100 % = r2004 r2004 = p2003 * p2000 * π / 30
Frequenza di riferimento 100 % = p2000/60 --
Fattore di comando diriferimento
100 % = massima tensione diuscita senza sovracomando
--
Flusso di riferimento 100 % = flusso nominale del mo-tore
--
Temperatura di riferimento 100 % = 100°C --
Riferimento angoloelettrico
100 % = 90° --

Principi del sistema di azionamento
Tecnica BICO: interconnessione di segnali
7-274© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Normalizzazione per l’oggetto A_Inf
Tabella 7-7 Normalizzazione per l’oggetto A_Inf
Grandezza Parametro di normalizzazione Preimpostazione alla primamessa in servizio
Frequenza di riferimento 100 % = p2000 p2000 = p0211
Tensione di riferimento 100 % = p2001 p2001 = r0206/r0207
Corrente di riferimento 100 % = p2002 p2002 = p0207
Potenza di riferimento 100 % = r2004 r2004 = p0206
Fattore di comando di riferimento 100 % = massima tensione diuscita senza sovracomando
--
Temperatura di riferimento 100 % = 100°C --
Riferimento angolo elettrico 100 % = 90° --
Normalizzazione per l’oggetto B_Inf
Tabella 7-8 Normalizzazione per l’oggetto B_Inf
Grandezza Parametro di normalizzazione Preimpostazione alla primamessa in servizio
Frequenza di riferimento 100 % = p2000 p2000 = 50
Tensione di riferimento 100 % = p2001 p2001 = r0206/r0207
Corrente di riferimento 100 % = p2002 p2002 = p0207
Potenza di riferimento 100 % = r2004 r2004 = p0206
Temperatura di riferimento 100 % = 100°C --
Riferimento angolo elettrico 100 % = 90° --

Principi del sistema di azionamento
Moduli funzionali
7-275© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.5 Moduli funzionali
Un modulo funzionale è un ampliamento funzionale di un oggetto di azionamentoche può essere attivato alla messa in servizio.Esempi di moduli funzionali:
S Regolatore tecnologico
S Canale del valore di riferimento nell’oggetto di azionamento SERVO
S Circuito parallelo di Motor Module o Line Module
S Controllo di frenatura esteso
S Motore lineare
Un modulo funzionale ha in genere i propri parametri ed eventualmente anchele proprie anomalie e i propri avvisi. Questi parametri e messaggi sonovisibili solo quando il modulo funzionale è attivato. Un modulo funzionale attivatosignifica in genere anche tempo di calcolo aggiuntivo. Tenere presente questo fattoin fase di progettazione.

Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-276© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.6 Note sulla topologia DRIVE-CLiQ
Introduzione
Con topologia si intende in SINAMICS una struttura di cablaggio ad albero dei caviDRIVE-CLiQ. Nella fase di avvio, a ciascun componente viene assegnato un nu-mero.
DRIVE-CLiQ (DRIVE Component Link con IQ) è un sistema di comunicazione percollegare i diversi componenti in SINAMICS, quali ad es. Control Unit, Line Mo-dule, Motor Module, motori ed encoder.
DRIVE-CLiQ possiede le seguenti caratteristiche:
S Rilevamento automatico dei componenti da parte della Control Unit
S Interfacce unitarie per tutti i componenti
S Diagnostica omogenea anche all’interno dei componenti
S Omogeneità del service anche all’interno dei componenti
Targhetta elettronica dei dati
Questa targhetta contiene i seguenti dati:
S Tipo di componente (ad es. SMC20)
S Numero di ordinazione (ad es. 6SL3055--0AA0--5BA0)
S Produttore (ad es. SIEMENS)
S Versione hardware (ad es. A)
S Numero di serie (ad es. T--PD3005049)
S Dati tecnici (ad es. corrente nominale)
Topologia attuale
La topologia attuale è la struttura di cablaggio ad albero effettiva di DRIVE-CLiQ.
All’avvio dei componenti del sistema di azionamento, la topologia attuale viene au-tomaticamente rilevata tramite DRIVE-CLiQ.
Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-277© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Topologia di riferimento
La topologia di riferimento è memorizzata nella Control Unit sulla scheda Compact-Flash e viene confrontata con la topologia attuale all’avvio della Control Unit.
La topologia di riferimento può essere impostata e salvata sulla scheda Compact-Flash in due modi:
S in STARTERcreando la configurazione e caricandola nell’apparecchio di azionamento
S tramite la messa in servizio rapida (configurazione automatica)
Lettura della topologia attuale e scrittura della topologia di riferimento sullascheda CompactFlash

Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-278© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Monitoraggio delle topologie all’inserzione
Il confronto della topologia impedisce errori di controllo/analisi di un componente(ad es. azionamento 1 e 2).
All’avvio del sistema di azionamento, la Control Unit confronta la topologia attualerilevata e le targhette elettroniche dei dati con la topologia di riferimento memoriz-zata sulla scheda CompactFlash.
Il tipo di confronto delle targhette elettroniche dei dati può essere impostato su unaControl Unit tramite p9906 per tutti i componenti. È possibile modificare successi-vamente il confronto per ciascun componente tramite p9908 o in STARTER, nellavisualizzazione della topologia, facendo clic con il pulsante destro del mouse. Perimpostazione predefinita vengono confrontati tutti i dati della targhetta elettronica.
In funzione di p9906/9908 vengono confrontati i seguenti dati nella topologia di rife-rimento e attuale:
S p9906/9908 = 0 Tipo di componente, numero di ordinazione, produttore,numero di serie
S p9906/9908 = 1 Tipo di componente, numero di ordinazione
S p9906/9908 = 2 Tipo di componente
S p9906/9908 = 3 Classe di componente (ad es. Sensor Module o Motor Module)
Fig. 7-9 Visualizzazione della topologia in STARTER
Attenzione
La Control Unit e la Option Board non vengono sorvegliate. La sostituzione deicomponenti viene accettata automaticamente e non visualizzata.
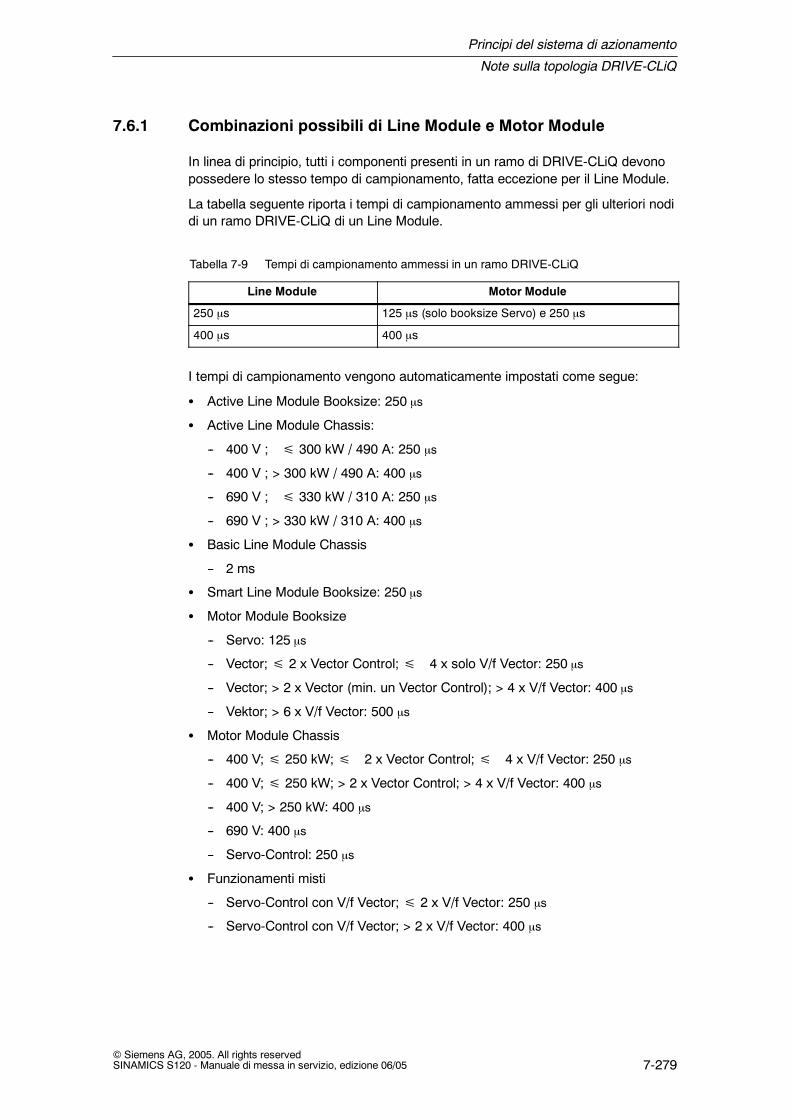
Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-279© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.6.1 Combinazioni possibili di Line Module e Motor Module
In linea di principio, tutti i componenti presenti in un ramo di DRIVE-CLiQ devonopossedere lo stesso tempo di campionamento, fatta eccezione per il Line Module.
La tabella seguente riporta i tempi di campionamento ammessi per gli ulteriori nodidi un ramo DRIVE-CLiQ di un Line Module.
Tabella 7-9 Tempi di campionamento ammessi in un ramo DRIVE-CLiQ
Line Module Motor Module
250 µs 125 µs (solo booksize Servo) e 250 µs
400 µs 400 µs
I tempi di campionamento vengono automaticamente impostati come segue:
S Active Line Module Booksize: 250 µs
S Active Line Module Chassis:
-- 400 V ; 300 kW / 490 A: 250 µs
-- 400 V ; > 300 kW / 490 A: 400 µs
-- 690 V ; 330 kW / 310 A: 250 µs
-- 690 V ; > 330 kW / 310 A: 400 µs
S Basic Line Module Chassis
-- 2 ms
S Smart Line Module Booksize: 250 µs
S Motor Module Booksize
-- Servo: 125 µs
-- Vector; 2 x Vector Control; 4 x solo V/f Vector: 250 µs
-- Vector; > 2 x Vector (min. un Vector Control); > 4 x V/f Vector: 400 µs
-- Vektor; > 6 x V/f Vector: 500 µs
S Motor Module Chassis
-- 400 V; 250 kW; 2 x Vector Control; 4 x V/f Vector: 250 µs
-- 400 V; 250 kW; > 2 x Vector Control; > 4 x V/f Vector: 400 µs
-- 400 V; > 250 kW: 400 µs
-- 690 V: 400 µs
-- Servo-Control: 250 µs
S Funzionamenti misti
-- Servo-Control con V/f Vector; 2 x V/f Vector: 250 µs
-- Servo-Control con V/f Vector; > 2 x V/f Vector: 400 µs
Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-280© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.6.2 Esempi di sostituzione di componenti
Nota
Affinché vengano utilizzate tutte le funzionalità di una versione firmware, siraccomanda che tutti i componenti di un gruppo di azionamenti abbiano lo stessoaggiornamento firmware.
Descrizione
Se il tipo di confronto è al livello più elevato, valgono gli esempi seguenti.
Si distinguono i casi seguenti:
S Componenti con numero di ordinazione identico
-- Confronto topologia, sostituzione componenti attiva (p9909 = 1)
-- Confronto topologia, sostituzione componenti non attiva (p9909 = 0)
S Un componente con numero di ordinazione diverso
Esempio di sostituzione di componenti guasti con numero di ordinazione identico(p9909 = 1)
Presupposto:
S Il componente sostituito ha un numero di ordinazione identico
S Il numero di serie del componente sostituito non deve essere contenuto nellatopologia di riferimento della Control Unit.
S Confronto topologia, sostituzione componenti attiva (p9909 = 1)
I componenti che non sono contenuti nella topologia di riferimento della ControlUnit e presentano un numero di ordinazione identico, vengono automaticamenteapplicati nella topologia di riferimento e memorizzati in modo non volatile.
Nota
La sostituzione del componente deve avvenire prima del POWER ON permemorizzare nella memoria non volatile le modifiche apportate alla topologiaattuale.

Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-281© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio di sostituzione di un componente guasto con numero di ordinazione identico(p9909 = 0)
Presupposto:
S Il componente sostituito ha un numero di ordinazione identico
S Confronto topologia, sostituzione componenti non attiva (p9909 = 0)
Tabella 7-10 Esempio: Sostituzione di un Motor Module
Operazione Reazione Note
S Disinserire l’alimentazione
S Sostituire il componente gua-sto effettuando la connes-sione corretta
S Ripristinare l’alimentazione Avviso F1425
S Impostare p9905 su “1” S L’avviso scompare
S Il numero di serie viene appli-cato nella topologia di riferi-mento
Il numero di serie ènella memoria dilavoro della Con-trol Unit e deve an-cora essere sal-vato, con p0971 op0977, nella me-moria non volatile.
La sostituzione del componente è conclusa

Principi del sistema di azionamento
Note sulla topologia DRIVE-CLiQ
7-282© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio di sostituzione di un componente con numero di ordinazione diverso
Presupposto:
S Il componente sostituito ha un numero di ordinazione diverso
Tabella 7-11 Esempio di sostituzione di componenti con numero di ordinazione diverso
Operazione Reazione Note
S Disinserire l’alimenta-zione
S Sostituire i componentiguasti effettuando laconnessione corretta
S Ripristinare l’alimenta-zione
Avviso F1420
S Caricamento del pro-getto dalla Control Unit aSTARTER (PG)
S Riconfigurazionedell’azionamento sosti-tuito con selezione delcomponente corrente.
S Caricamento del pro-getto nella Control Unit(apparecchio di destina-zione)
S L’avviso scompare Il nuovo numero di ordina-zione è nella memoria di la-voro della Control Unit edeve ancora essere salvato,con p0971 o p0977, nellamemoria non volatile.
La sostituzione del componente è conclusa

Principi del sistema di azionamento
Tempi di campionamento di sistema
7-283© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.7 Tempi di campionamento di sistema
7.7.1 Caratteristiche
Le funzioni software presenti nel sistema vengono elaborate ciclicamente in diversitempi di campionamento (p0115).
Questi tempi di campionamento (p0115) degli azionamenti sono sempre multipliinteri di un tempo base di campionamento (p0110) della Control Unit.
Tanto questo tempo base di campionamento quanto i tempi di campionamentodelle funzioni vengono automaticamente impostati durante la configurazionedell’apparecchio di azionamento.
Queste impostazioni variano a seconda del modo operativo selezionato (Vector/Servo), il numero dei componenti connessi e le funzioni attivate.
Tutti i componenti connessi tramite una presa DRIVE-CLiQ della Control Unit(ramo DRIVE-CLiQ) devono essere impostati sullo stesso tempo di campiona-mento di base (vedere p0111).L’unica eccezione è il Line Module. I tempi di campionamento di altri componentipresenti sullo stesso ramo DRIVE-CLiQ devono stare in rapporto numerico interorispetto al tempo di campionamento di base dell’Active Line Module. Il rapportominimo è la metà del tempo di campionamento dell’Active Line Module.
7.7.2 Descrizione
Se i tempi di campionamento del sistema vanno modificati (ad es. per l’adatta-mento della dinamica), il tempo base di campionamento e quello del regolatore dicorrente (tempo più breve di campionamento del regolatore di corrente) devonoessere sempre impostati in modo uguale.
La frequenza degli impulsi viene immessa in p1800 e deve stare in rapporto nume-rico intero rispetto alla frequenza di campionamento del regolatore di corrente. Lafrequenza minima degli impulsi che si può immettere è la metà della frequenza dicampionamento del regolatore di corrente.
La frequenza base di campionamento di un TMxx (p0111) viene automaticamenteimpostata sul tempo base di campionamento del ramo DRIVE-CLiQ utilizzato. Itempi di campionamento di I/O vengono impostati in p4099 e devono essere unmultiplo del tempo base di campionamento (p0111).
Nota
Nel PROFIBUS DP sincrono al clock, il clock PROFIBUS DP deve essere unmultiplo intero dei tre tempi di campionamento di base (p0110[0..2]).
Principi del sistema di azionamento
Tempi di campionamento di sistema
7-284© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.7.3 Procedura della messa in servizio
Con il parametro p0110 vengono impostati i clock di base nell’apparecchio di azio-namento; tutti i componenti connessi si basano su questo tempo base di campio-namento. Questo parametro è modificabile solo nello stato p0009=1.
Tutti i componenti connessi e presenti su un ramo DRIVE-CLiQ della Control Unitdevono essere impostati sullo stesso tempo base di campionamento (p0111 nellostato p0009 = 3).
I tempi di campionamento per:
S regolatore di corrente
S regolatore di velocità
S regolatore di flusso
S canale del valore di riferimento
vengono impostati per la rispettiva configurazione della regolazione selezionandoliin p0112 e applicati in p0115 in base ai requisiti di prestazione. I livelli diprestazione vanno da xLow a xHigh. I clock devono essere un multiplo intero delclock di base.
Impostazione predefinita dei tempi base di campionamento
I clock di campionamento di base (p0110[0..2]) vengono preimpostati come seguedopo il download nella Control Unit:
S Se i tempi di campionamento del regolatore di corrente (p0115[0]) degli aziona-menti sono identici, in base a questi vengono impostati i tempi base di campio-namento (p0110[0..2]).
S Se i tempi di campionamento del regolatore di corrente sono diversi:
-- p0110[0] viene impostato sul tempo minimo di campionamento del regola-tore di corrente; nel modo operativo Vector, sul tempo massimo di campio-namento del regolatore di corrente
-- p0110[1] viene impostato su 250 µs, se p0110[2] ² 250 µs, altrimenti sup0110[2]
-- p0110[2] viene impostato sul tempo massimo di campionamento del regola-tore di corrente
Attenzione
Fa eccezione l’impostazione predefinita del tempo di campionamento di base(p0110[2]) nel modo operativo Vector. Se il numero degli azionamenti è maggioredi 2 come regolazione vettoriale o maggiore di 4--6 come V/f Vector, p110[2] vieneimpostato a 400 µs. Se il numero degli azionamenti è maggiore di 6 come V/fVector, p110[2] viene impostato a 500 µs.
Principi del sistema di azionamento
Tempi di campionamento di sistema
7-285© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.7.4 Integrazione
I tempi di campionamento del sistema sono integrati come segue nel sistemastesso.
Panoramica dei parametri (vedere il manuale delle liste)
Parametri di impostazione
S p0110 [0..2] tempi di campionamento di base DRIVE-CLiQ
S p0111 selezione tempo di campionamento di base DRIVE-CLiQ
S p0112 preimpostazione tempi di campionamento p0115
S p0115[0..6] tempi di campionamento per circuiti di regolazione interni
S p0118 tempo morto di calcolo del regolatore di corrente
S p1800 frequenza impulsi
S p0799 CU tempo di campionamento ingressi/uscite
S p4099 tempo di campionamento ingressi/uscite
S r9780 Safety Integrated, clock di sorveglianza (Control Unit)
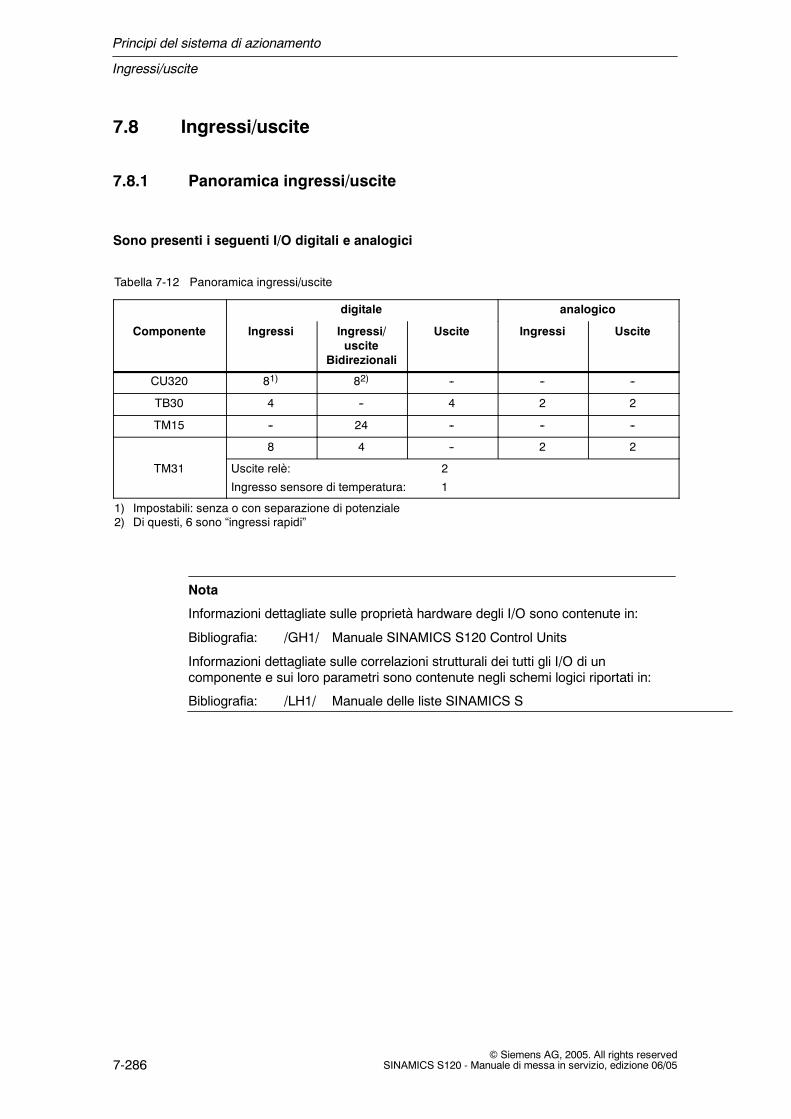
Principi del sistema di azionamento
Ingressi/uscite
7-286© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.8 Ingressi/uscite
7.8.1 Panoramica ingressi/uscite
Sono presenti i seguenti I/O digitali e analogici
Tabella 7-12 Panoramica ingressi/uscite
digitale analogico
Componente Ingressi Ingressi/uscite
Bidirezionali
Uscite Ingressi Uscite
CU320 81) 82) -- -- --
TB30 4 -- 4 2 2
TM15 -- 24 -- -- --
8 4 -- 2 2
TM31 Uscite relè: 2
Ingresso sensore di temperatura: 1
1) Impostabili: senza o con separazione di potenziale2) Di questi, 6 sono “ingressi rapidi”
Nota
Informazioni dettagliate sulle proprietà hardware degli I/O sono contenute in:
Bibliografia: /GH1/ Manuale SINAMICS S120 Control Units
Informazioni dettagliate sulle correlazioni strutturali dei tutti gli I/O di uncomponente e sui loro parametri sono contenute negli schemi logici riportati in:
Bibliografia: /LH1/ Manuale delle liste SINAMICS S
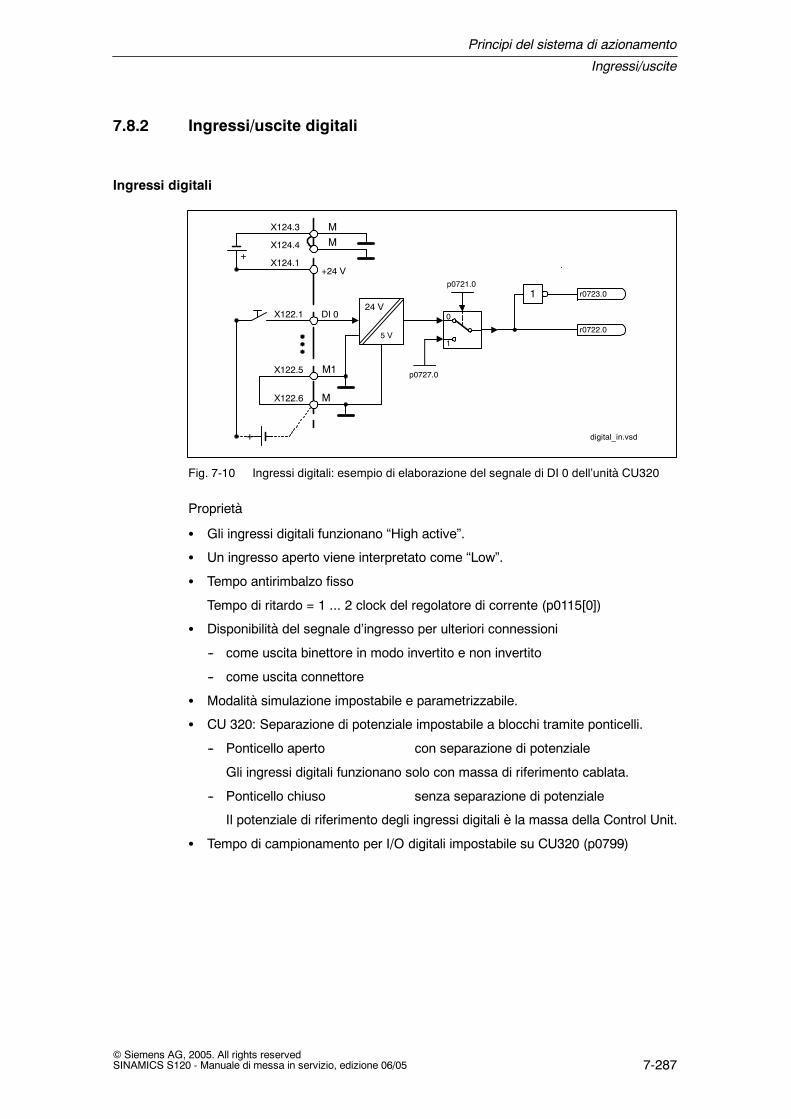
Principi del sistema di azionamento
Ingressi/uscite
7-287© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.8.2 Ingressi/uscite digitali
Ingressi digitali
digital_in.vsd
+24 V
X124.3
X124.1
DI 0X122.1
p0727.0
p0721.0
0
1
1 r0723.0
r0722.0
+
X122.5
X122.6
M1
M
M
X124.4 M+
24 V
5 V
Fig. 7-10 Ingressi digitali: esempio di elaborazione del segnale di DI 0 dell’unità CU320
Proprietà
S Gli ingressi digitali funzionano “High active”.
S Un ingresso aperto viene interpretato come “Low”.
S Tempo antirimbalzo fisso
Tempo di ritardo = 1 ... 2 clock del regolatore di corrente (p0115[0])
S Disponibilità del segnale d’ingresso per ulteriori connessioni
-- come uscita binettore in modo invertito e non invertito
-- come uscita connettore
S Modalità simulazione impostabile e parametrizzabile.
S CU 320: Separazione di potenziale impostabile a blocchi tramite ponticelli.
-- Ponticello aperto con separazione di potenziale
Gli ingressi digitali funzionano solo con massa di riferimento cablata.
-- Ponticello chiuso senza separazione di potenziale
Il potenziale di riferimento degli ingressi digitali è la massa della Control Unit.
S Tempo di campionamento per I/O digitali impostabile su CU320 (p0799)
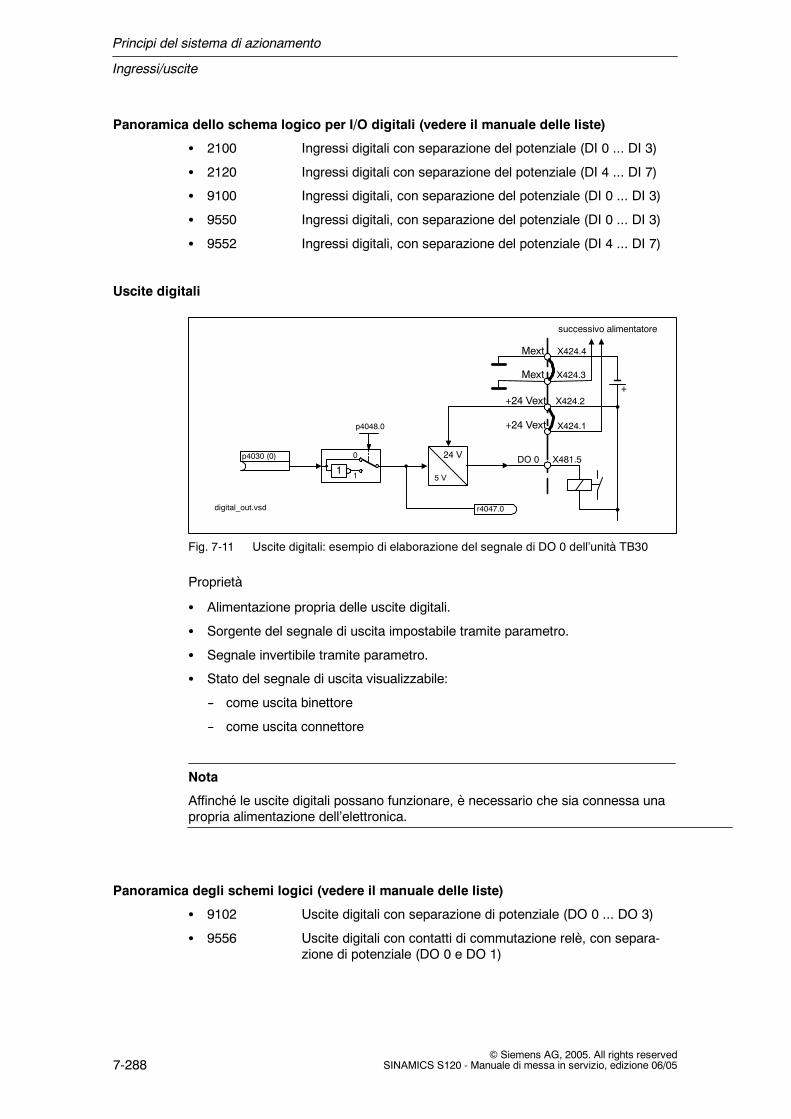
Principi del sistema di azionamento
Ingressi/uscite
7-288© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica dello schema logico per I/O digitali (vedere il manuale delle liste)
S 2100 Ingressi digitali con separazione del potenziale (DI 0 ... DI 3)
S 2120 Ingressi digitali con separazione del potenziale (DI 4 ... DI 7)
S 9100 Ingressi digitali, con separazione del potenziale (DI 0 ... DI 3)
S 9550 Ingressi digitali, con separazione del potenziale (DI 0 ... DI 3)
S 9552 Ingressi digitali, con separazione del potenziale (DI 4 ... DI 7)
Uscite digitali
digital_out.vsd
DO 0
r4047.0
p4030 (0)
p4048.0
1
0
1
24 V
5 V
X481.5
X424.4
X424.2+
X424.3
successivo alimentatore
X424.1+24 Vext
+24 Vext
Mext
Mext
Fig. 7-11 Uscite digitali: esempio di elaborazione del segnale di DO 0 dell’unità TB30
Proprietà
S Alimentazione propria delle uscite digitali.
S Sorgente del segnale di uscita impostabile tramite parametro.
S Segnale invertibile tramite parametro.
S Stato del segnale di uscita visualizzabile:
-- come uscita binettore
-- come uscita connettore
Nota
Affinché le uscite digitali possano funzionare, è necessario che sia connessa unapropria alimentazione dell’elettronica.
Panoramica degli schemi logici (vedere il manuale delle liste)
S 9102 Uscite digitali con separazione di potenziale (DO 0 ... DO 3)
S 9556 Uscite digitali con contatti di commutazione relè, con separa-zione di potenziale (DO 0 e DO 1)
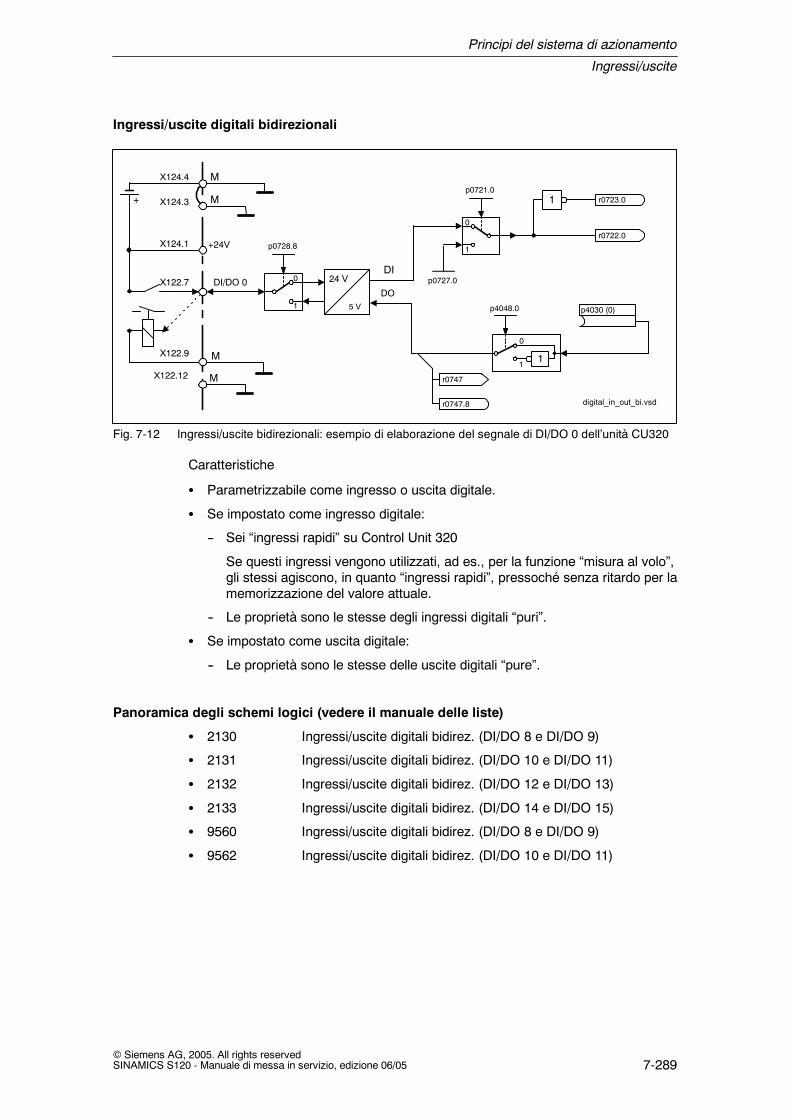
Principi del sistema di azionamento
Ingressi/uscite
7-289© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Ingressi/uscite digitali bidirezionali
+
digital_in_out_bi.vsd
DI
DO
+24VX124.1
DI/DO 0X122.7 0
1
p0728.8
X122.12
X122.9 M
M
5 V
24 V
r0747.8
r0747
X124.4 M
X124.3 M
p0727.0
p0721.0
0
1
1 r0723.0
r0722.0
p4030 (0)p4048.0
1
0
1
Fig. 7-12 Ingressi/uscite bidirezionali: esempio di elaborazione del segnale di DI/DO 0 dell’unità CU320
Caratteristiche
S Parametrizzabile come ingresso o uscita digitale.
S Se impostato come ingresso digitale:
-- Sei “ingressi rapidi” su Control Unit 320
Se questi ingressi vengono utilizzati, ad es., per la funzione “misura al volo”,gli stessi agiscono, in quanto “ingressi rapidi”, pressoché senza ritardo per lamemorizzazione del valore attuale.
-- Le proprietà sono le stesse degli ingressi digitali “puri”.
S Se impostato come uscita digitale:
-- Le proprietà sono le stesse delle uscite digitali “pure”.
Panoramica degli schemi logici (vedere il manuale delle liste)
S 2130 Ingressi/uscite digitali bidirez. (DI/DO 8 e DI/DO 9)
S 2131 Ingressi/uscite digitali bidirez. (DI/DO 10 e DI/DO 11)
S 2132 Ingressi/uscite digitali bidirez. (DI/DO 12 e DI/DO 13)
S 2133 Ingressi/uscite digitali bidirez. (DI/DO 14 e DI/DO 15)
S 9560 Ingressi/uscite digitali bidirez. (DI/DO 8 e DI/DO 9)
S 9562 Ingressi/uscite digitali bidirez. (DI/DO 10 e DI/DO 11)

Principi del sistema di azionamento
Ingressi/uscite
7-290© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.8.3 Ingressi analogicia
nalo
g_
in.v
sd
AI
Spianamento hardware Offsetp4063 [0]
[V]r4052 [0]
0
1
p4097.0
p4098 [0]Simulazione
+
--
[%]
Fattore di scala
p4057 [0] p4059 [0]
p4060 [0]
p4058 [0]
x
y
x 1
y2
x2
y1
--1
0
1
p4066 [0]p4067 [0]
0
1
r 4055 [0]
p4069 [0]
Abilitazione
y = x se|y --x | > p4068altrimenti y =y(precedente)
y0
1
0 %
Finestra
x
Livellamento
3
≠320 mA T 0
p4062 [0]
Soglia perrilevamento rottura conduttore
p4061 [0]
Tipo di ingressi analogicip4056 [0]
F03505” rotturaconduttore ”
A
D4,5
3
0,2
4mA
S5.1V /I
inoltre per ingresso di corrente (ad es TM31)
100 µs
p4053 [0] p4068 [0]
Fig. 7-13 Ingressi analogici: esempio di elaborazione del segnale con TB30/TM31
Proprietà
S Filtro d’ingresso hardware, impostazione fissa
S Modalità simulazione parametrizzabile
S Offset impostabile
S Segnale invertibile tramite ingresso binettore
S Generazione del valore impostabile
S Soppressione di rumore (p4068)
S Abilitazione degli ingressi tramite ingresso binettore
S Segnale di uscita disponibile tramite uscita connettore
S Fattore di scala
S Livellamento

Principi del sistema di azionamento
Ingressi/uscite
7-291© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Attenzione
I parametri da p4057 a p4060 della scala non limitano i valori della tensione.
Panoramica degli schemi logici (vedere il manuale delle liste)
S 9104 Ingressi analogici (AI 0 e AI 1)
S 9566 Ingresso analogico 0 (AI 0)
S 9568 Ingresso analogico 1 (AI 1)
7.8.4 Uscite analogiche
analog_out.vsd
AO
Fattore di scala
p4083[0]Offset
p4079 [0]p4077 [0]
D
A
r4074 [0]
x
y
x1
y2
x2
y1
p4080 [0]
p4078 [0]
--1
0
1
p4082 [0]
Livellamento
p4075 [0]
r4072 [0]
[%]p4073 [0] (0.0)
0
1
p4071[0]
[V]
[%]4,5
3
0,2
4mA
p4076 [0]
supplementare peruscita di corrente(ad es. TM31)
Fig. 7-14 Uscite analogiche: esempio di elaborazione del segnale di AO 0 con TB30/TM31
Proprietà
S Generazione del valore impostabile
S Inversione tramite ingresso binettore
S Livellamento impostabile
S Caratteristica di trasferimento impostabile
S Segnale di uscita visualizzabile tramite parametro di supervisione

Principi del sistema di azionamento
Ingressi/uscite
7-292© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Attenzione
I parametri da p4077 a p4080 della scala non limitano i valori della tensione.
Panoramica degli schemi logici (vedere il manuale delle liste)
S 9106 Uscite analogiche (AO 0 e AO 1)
S 9572 Uscite analogiche (AO 0 e AO 1)
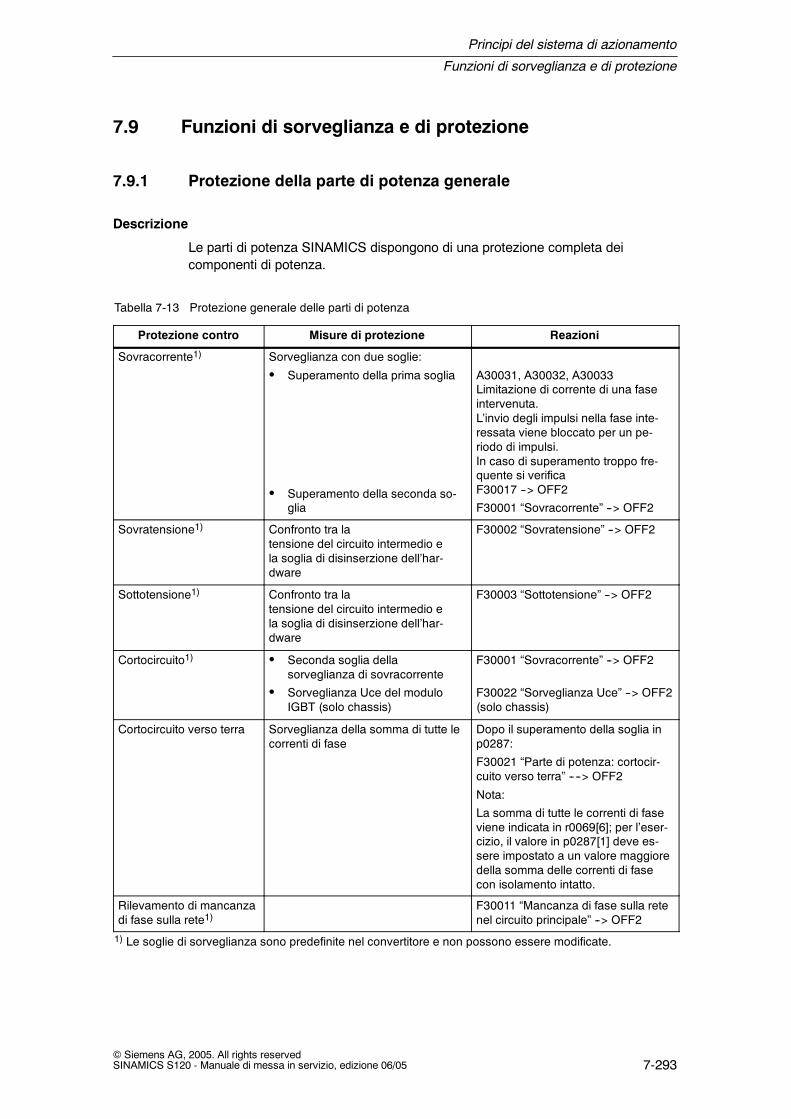
Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-293© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.9 Funzioni di sorveglianza e di protezione
7.9.1 Protezione della parte di potenza generale
Descrizione
Le parti di potenza SINAMICS dispongono di una protezione completa deicomponenti di potenza.
Tabella 7-13 Protezione generale delle parti di potenza
Protezione contro Misure di protezione Reazioni
Sovracorrente1) Sorveglianza con due soglie:
S Superamento della prima soglia
S Superamento della seconda so-glia
A30031, A30032, A30033Limitazione di corrente di una faseintervenuta.L’invio degli impulsi nella fase inte-ressata viene bloccato per un pe-riodo di impulsi.In caso di superamento troppo fre-quente si verificaF30017 --> OFF2
F30001 “Sovracorrente” --> OFF2
Sovratensione1) Confronto tra latensione del circuito intermedio ela soglia di disinserzione dell’har-dware
F30002 “Sovratensione” --> OFF2
Sottotensione1) Confronto tra latensione del circuito intermedio ela soglia di disinserzione dell’har-dware
F30003 “Sottotensione” --> OFF2
Cortocircuito1) S Seconda soglia dellasorveglianza di sovracorrente
S Sorveglianza Uce del moduloIGBT (solo chassis)
F30001 “Sovracorrente” --> OFF2
F30022 “Sorveglianza Uce” --> OFF2(solo chassis)
Cortocircuito verso terra Sorveglianza della somma di tutte lecorrenti di fase
Dopo il superamento della soglia inp0287:
F30021 “Parte di potenza: cortocir-cuito verso terra” ----> OFF2
Nota:
La somma di tutte le correnti di faseviene indicata in r0069[6]; per l’eser-cizio, il valore in p0287[1] deve es-sere impostato a un valore maggioredella somma delle correnti di fasecon isolamento intatto.
Rilevamento di mancanzadi fase sulla rete1)
F30011 “Mancanza di fase sulla retenel circuito principale” --> OFF2
1) Le soglie di sorveglianza sono predefinite nel convertitore e non possono essere modificate.

Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-294© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.9.2 Sorveglianze termiche e reazioni ai sovraccarichi
Descrizione
Il presupposto fondamentale della sorveglianza termica della parte di potenzaè il riconoscimento degli stati critici. Dopo il superamento delle soglie di avvisosono disponibili reazioni sotto forma di opzioni parametrizzabili che consentono diproseguire il funzionamento (ad es. a potenza ridotta) impedendo una disinser-zione immediata. Le opzioni di parametrizzazione sono tuttavia semplici intervential di sotto delle soglie di disinserzione, che non possono essere modificati.
Sono disponibili le seguenti sorveglianze termiche:
S I2t -- Sorveglianza -- A07805 -- F30005La sorveglianza I2t protegge quei componenti che presentano una costantetermica di tempo cospicua in rapporto ai semiconduttori. Un sovraccarico rela-tivo a I2t si verifica quando il sovraccarico del convertitore r0036 mostra un va-lore superiore al 100% (sovraccarico percentuale riferito al funzionamento no-minale).
S Temperatura del dissipatore di calore -- A05000 -- F30004La sorveglianza della temperatura del dissipatore di calore r0037 del semicon-duttore di potenza (IGBT).
S Temperatura del chip -- A05001 -- F30025Tra la giunzione dell’IGBT e il dissipatore di calore possono verificarsi notevolidifferenze di temperatura. Queste differenze vengono analizzate e sorvegliatetramite la temperatura del chip r0037.
In caso di sovraccarico relativo a una di queste sorveglianze viene visualizzatoun avviso. Le soglie di avviso p0294 (sorveglianza I2t) o p0292 (sorveglianza dellatemperatura del dissipatore di calore o del chip) sono parametrizzabili in funzionedei valori di disinserzione.

Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-295© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Esempio
La soglia di avviso per la sorveglianza della temperatura del chip è impostata infabbrica a 15 °C, quella per la sorveglianza della temperatura del dissipatore dicalore e dell’aria in entrata a 5 °C. Questo significa che al di sotto della soglia didisinserzione di 15 °C o 5 °C viene emesso l’avviso “Sovratemperatura, sovracca-rico”.
L’introduzione delle reazioni parametrizzabili tramite p0290 avviene contempora-neamente alla visualizzazione dell’avviso. Le reazioni possibili sono:
S Riduzione della frequenza degli impulsi (p0290 = 2, 3)Questo è un metodo molto efficace per ridurre le perdite nella parte di potenza,poiché le perdite di commutazione rappresentano una parte molto consistentedelle perdite totali. In molte applicazioni può essere tollerata una riduzione tem-poranea della frequenza degli impulsi a favore di una conservazione del pro-cesso.Svantaggio:la riduzione della frequenza degli impulsi favorisce una maggiore ondulazione dicorrente, che può avere come conseguenze l’incremento dell’ondulazione dellacoppia sull’albero motore (con basso momento di inerzia) e l’aumento del livellodi rumorosità. La riduzione della frequenza degli impulsi non ha effetti sulla di-namica del circuito di regolazione della corrente poiché il tempo di campiona-mento della regolazione di corrente rimane costante.
S Riduzione della frequenza di uscita (p0290 = 0, 2)Questa variante è utile se non si desidera una riduzione della frequenza degliimpulsi o se la frequenza impulsi è già impostata al livello minimo. Il carico deveinoltre avere caratteristiche di ventilazione, ossia una curva caratteristica dicoppia quadratica con riduzione della velocità. La diminuzione della frequenzadi uscita provoca una sensibile riduzione della corrente di uscita del convertitoree minori perdite nella parte di potenza.
S Nessuna riduzione (p0290 = 1)Questa opzione deve essere selezionata se non si verificano una riduzionedella frequenza degli impulsi o della corrente di uscita. Il convertitore non cam-bia punto di lavoro dopo il superamento della soglia di avviso affinché l’utentepossa continuare a utilizzare l’azionamento fino al raggiungimento dei valori didisinserzione. Dopo il raggiungimento di tale soglia, il convertitore si disinseri-sce segnalando l’anomalia “Sovratemperatura, sovraccarico”. Il tempo di disin-serzione non è tuttavia definito e dipende dall’entità del sovraccarico. Si puòmodificare solo la soglia di avviso e mantenere quindi un avviso preventivo,eventualmente intervenendo dall’esterno nel processo di azionamento (ad es.riduzione del carico, diminuzione della temperatura ambiente).
Schema logico per sorveglianze termiche e reazioni ai sovraccarichi
S 8014 Sorveglianza termica parte di potenza
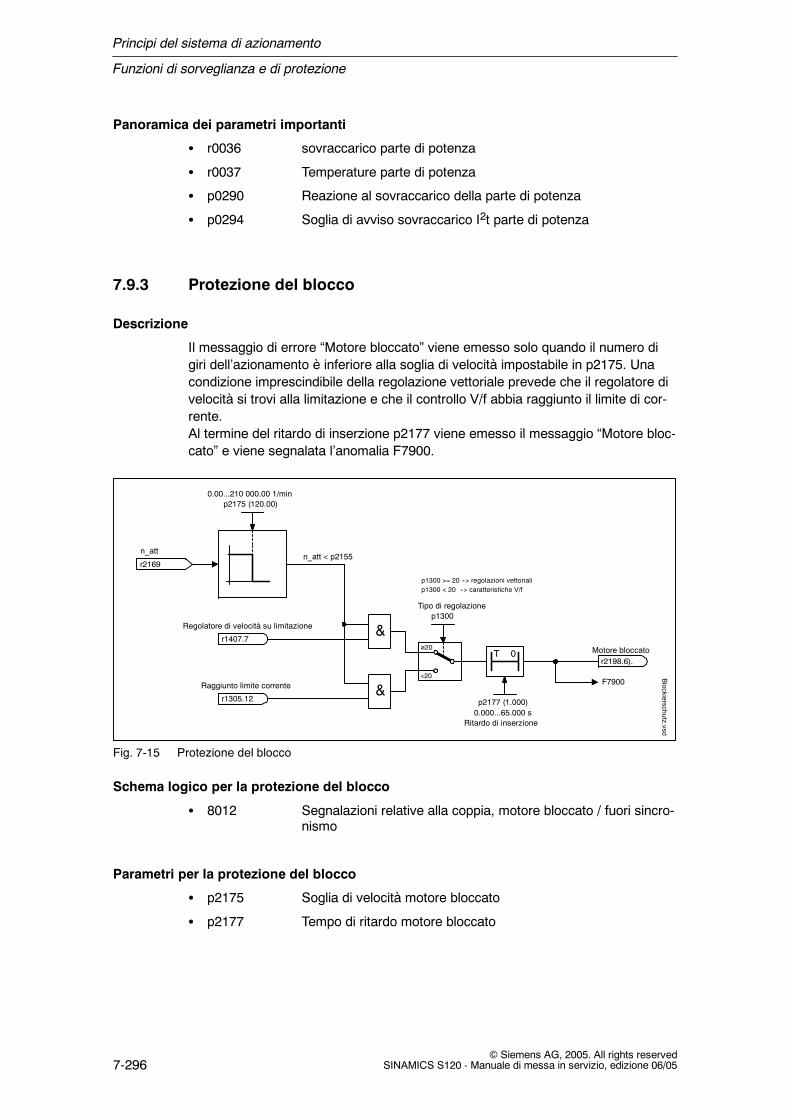
Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-296© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica dei parametri importanti
S r0036 sovraccarico parte di potenza
S r0037 Temperature parte di potenza
S p0290 Reazione al sovraccarico della parte di potenza
S p0294 Soglia di avviso sovraccarico I2t parte di potenza
7.9.3 Protezione del blocco
Descrizione
Il messaggio di errore “Motore bloccato” viene emesso solo quando il numero digiri dell’azionamento è inferiore alla soglia di velocità impostabile in p2175. Unacondizione imprescindibile della regolazione vettoriale prevede che il regolatore divelocità si trovi alla limitazione e che il controllo V/f abbia raggiunto il limite di cor-rente.Al termine del ritardo di inserzione p2177 viene emesso il messaggio “Motore bloc-cato” e viene segnalata l’anomalia F7900.
r2169
n_att
0.00...210 000.00 1/minp2175 (120.00)
n_att < p2155
T 0
p2177 (1.000)0.000...65.000 s
Ritardo di inserzione
F7900
Motore bloccator2198.6).
Regolatore di velocità su limitazione
r1407.7&
<20
≥20
&Raggiunto limite corrente
r1305.12
Tipo di regolazionep1300
p1300 >= 20 --> regolazioni vettorialip1300 < 20 --> caratteristiche V/f
Blockierschutz.vsd
Fig. 7-15 Protezione del blocco
Schema logico per la protezione del blocco
S 8012 Segnalazioni relative alla coppia, motore bloccato / fuori sincro-nismo
Parametri per la protezione del blocco
S p2175 Soglia di velocità motore bloccato
S p2177 Tempo di ritardo motore bloccato
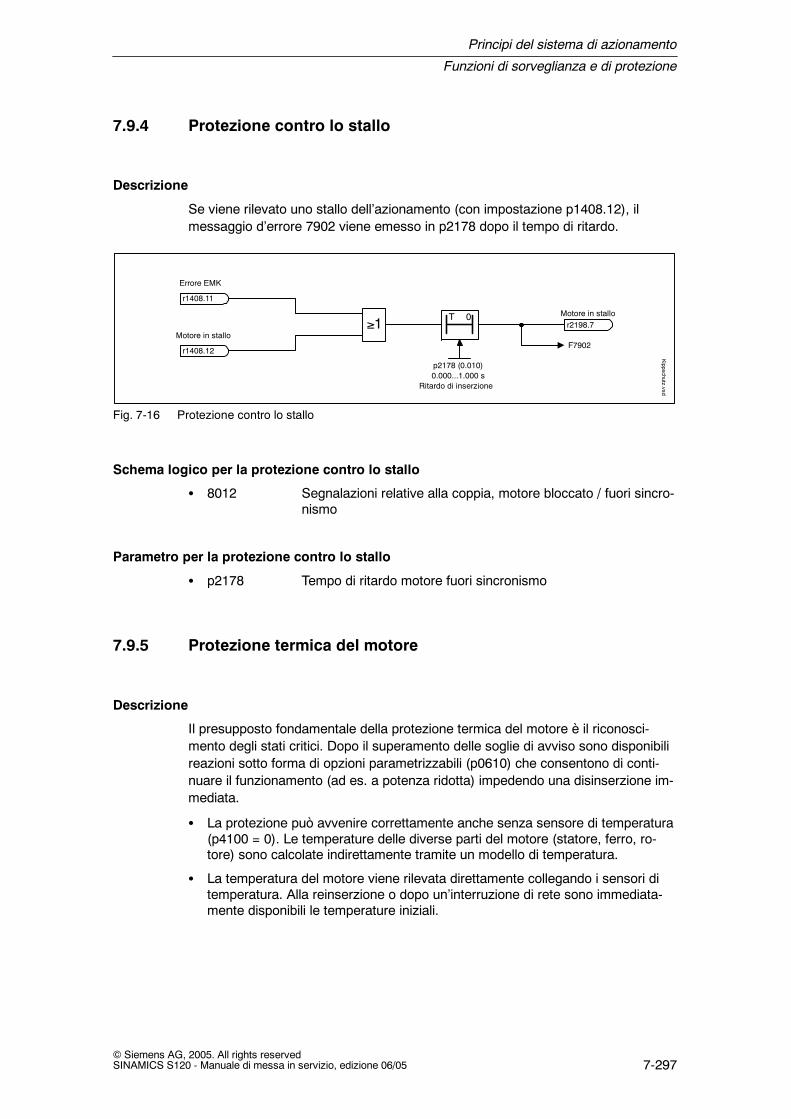
Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-297© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.9.4 Protezione contro lo stallo
Descrizione
Se viene rilevato uno stallo dell’azionamento (con impostazione p1408.12), ilmessaggio d’errore 7902 viene emesso in p2178 dopo il tempo di ritardo.
T 0
F7902
Motore in stallor2198.7
p2178 (0.010)0.000...1.000 s
Ritardo di inserzione
≥1Motore in stallo
r1408.12
Errore EMK
r1408.11
Kippschutz.vsd
Fig. 7-16 Protezione contro lo stallo
Schema logico per la protezione contro lo stallo
S 8012 Segnalazioni relative alla coppia, motore bloccato / fuori sincro-nismo
Parametro per la protezione contro lo stallo
S p2178 Tempo di ritardo motore fuori sincronismo
7.9.5 Protezione termica del motore
Descrizione
Il presupposto fondamentale della protezione termica del motore è il riconosci-mento degli stati critici. Dopo il superamento delle soglie di avviso sono disponibilireazioni sotto forma di opzioni parametrizzabili (p0610) che consentono di conti-nuare il funzionamento (ad es. a potenza ridotta) impedendo una disinserzione im-mediata.
S La protezione può avvenire correttamente anche senza sensore di temperatura(p4100 = 0). Le temperature delle diverse parti del motore (statore, ferro, ro-tore) sono calcolate indirettamente tramite un modello di temperatura.
S La temperatura del motore viene rilevata direttamente collegando i sensori ditemperatura. Alla reinserzione o dopo un’interruzione di rete sono immediata-mente disponibili le temperature iniziali.

Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-298© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Rilevamento della temperatura tramite KTY
Il collegamento avviene nel senso di passaggio del diodo, ad es. sulla morsettiera(TM31) in corrispondenza dei morsetti X522:7 (anodo) e X522:8 (catodo). Il valoredi temperatura misurato viene limitato a un intervallo --48 _C ... +248 _C e messo adisposizione per l’ulteriore valutazione.
S Impostazione del tipo di sensore di temperatura KTY: p0601 = 2
S Attivazione del rilevamento della temperatura del motore tramite un sensoreesterno: p0600 = 10
S Al raggiungimento della soglia di avviso (impostabile tramite p0604, imposta-zione di fabbrica 120_ C) viene emesso l’avviso A7910.
Tramite il parametro p0610 si può impostare la reazione dell’azionamentoall’avviso emesso:
-- 0: Nessuna reazione, solo avviso, nessuna riduzione di I_max
-- 1: Avviso con riduzione di I_max e anomalia (F7011)
-- 2: Avviso e anomalia (F7011), nessuna riduzione di I_max
S Al raggiungimento della soglia di anomalia (impostabile tramite p0605) vienesegnalata l’anomalia F7011 in abbinamento a p0610.
Rilevamento della temperatura tramite PTC
Il collegamento avviene, ad esempio, sulla morsettiera (TM31) morsetto X522:7/8.Il valore di soglia per la commutazione in caso di avviso o anomalia è impostato a1650 Ω. Al superamento della soglia, il valore di temperatura di --50 _C viene con-vertito internamente a +250 _C, quindi messo a disposizione per l’ulteriore valuta-zione.
S Impostazione del tipo di sensore di temperatura KTY: p0601 = 1
S Attivazione del rilevamento della temperatura del motore tramite un sensoreesterno: p0600 = 10
S Dopo la risposta del PTC viene emesso l’avviso A7910.
S Trascorso l’intervallo di attesa in p0606 viene segnalata l’anomalia F7011.
Sorveglianza dei sensori per rottura conduttore o cortocircuito
Se il valore della sorveglianza della temperatura del motore non è compresonell’intervallo previsto di --50 _C ... +250 _C, questo significa che si sono verificatiuna rottura conduttore e/o un cortocircuito del cavo del sensore; viene quindiemesso l’avviso A07915 “Errore sensore di temperatura”. Trascorso l’intervallo diattesa in p0607 viene segnalata l’anomalia F07016 “Anomalia ed errore del sen-sore di temperatura”.
L’anomalia F07016 può essere esclusa tramite il parametro p0607 = 0. Se è colle-gato un motore asincrono, l’azionamento continua a funzionare con i dati calcolatidel modello di motore termico.
Se si riscontra che il sensore di temperatura del motore impostato in p0600 non ècollegato, viene emesso l’avviso A07820 “Sensore di temperatura non collegato”.
Principi del sistema di azionamento
Funzioni di sorveglianza e di protezione
7-299© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Schemi logici per la protezione termica del motore
S 8016 Sorveglianza termica motore
S 9576 Analisi di temperatura KTY/PTC
S 9577 Sorveglianza dei sensori KTY/PTC
Parametri per la protezione termica del motore
S p0600 Sensore della temperatura motore per sorveglianza
S p0601 Sensore della temperatura motore, tipo di sensore
S p0604 Sovratemperatura motore, soglia di anomalia
S p0605 Sovratemperatura motore, soglia di avviso
S p0606 Sovratemperatura motore, temporizzatore
S p0607 Errore del sensore di temperatura, temporizzatore
S p0610 Sovratemperatura motore, reazione in caso di superamento

Principi del sistema di azionamento
Aggiornamento del firmware
7-300© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.10 Aggiornamento del firmware
L’aggiornamento del firmware è necessario quando una nuova versione del fir-mware offre una gamma di funzioni più ampia di quelle normalmente disponibili.
Le versioni del firmware di tutti i componenti DRIVE-CLiQ sono memorizzate nellascheda CompactFlash. La Control Unit carica il firmware durante l’avvio dellascheda CompactFlash. Occorre avviare un aggiornamento dei componentiDRIVE-CLiQ collegati.
7.10.1 Aggiornamento del firmware e del progetto in STARTER
Ciò presuppone un progetto pronto per il funzionamento, una scheda Compact-Flash con il nuovo firmware e una versione aggironata di STARTER.
Aggiornare il progetto
1. Il progetto è presente in STARTER? Sì, proseguire al punto 3.
2. Caricare il progetto con STARTERCollega al sistema di destinazione --> Sistema di destinazione --> Carica -->Progetto in PG
3. Aggiornare il progetto alla versione corrente del firmwareFare clic con il pulsante destro del mouse sull’apparecchio di azionamento -->Apparecchio di destinazione --> Versione apparecchio --> ad es. selezionare laversione “SINAMICS S120 V2.2x” --> Modifica versione.
Aggiornare il firmware e caricare il progetto aggiornato nell’apparecchio di destinazione
1. Inserire la scheda CompactFlash con la nuova versione del firmwareDisinserire la tensione della Control Unit --> Inserire la scheda CompactFlashcon la nuova versione del firmware --> Reinserire l’alimentazione della ControlUnit.
2. Passare online e caricare il progetto nel sistema di destinazione --> Copia daRAM a ROM
3. Aggiornamento del firmware dei componenti DRIVE-CLiQSotto l’apparecchio di azionamento --> Configurazione --> Panoramica delle ver-sioni --> Seleziona tutto --> Avvia update firmware --> Copia da RAM a ROM
Attenzione
Le versioni del firmware sui componenti DRIVE-CLiQ possono essere diverse traloro.
4. Eseguire un POWER ON di tutti i componenti DRIVE-CLiQ
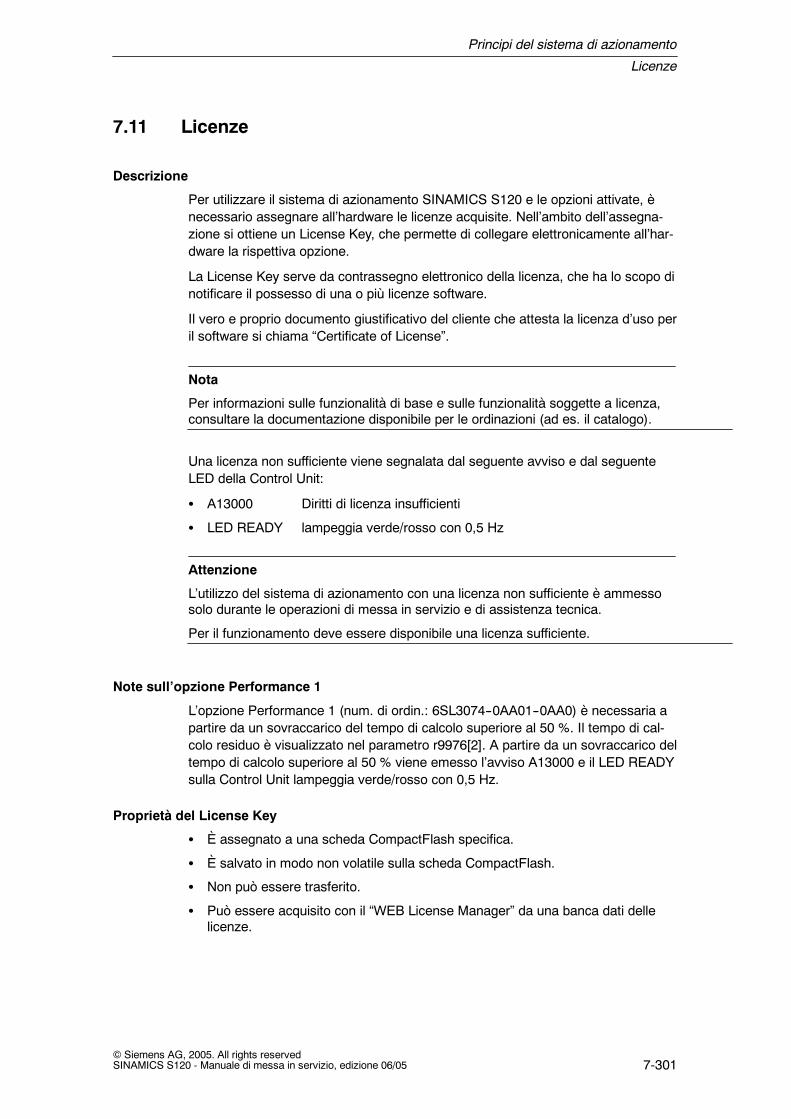
Principi del sistema di azionamento
Licenze
7-301© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
7.11 Licenze
Descrizione
Per utilizzare il sistema di azionamento SINAMICS S120 e le opzioni attivate, ènecessario assegnare all’hardware le licenze acquisite. Nell’ambito dell’assegna-zione si ottiene un License Key, che permette di collegare elettronicamente all’har-dware la rispettiva opzione.
La License Key serve da contrassegno elettronico della licenza, che ha lo scopo dinotificare il possesso di una o più licenze software.
Il vero e proprio documento giustificativo del cliente che attesta la licenza d’uso peril software si chiama “Certificate of License”.
Nota
Per informazioni sulle funzionalità di base e sulle funzionalità soggette a licenza,consultare la documentazione disponibile per le ordinazioni (ad es. il catalogo).
Una licenza non sufficiente viene segnalata dal seguente avviso e dal seguenteLED della Control Unit:
S A13000 Diritti di licenza insufficienti
S LED READY lampeggia verde/rosso con 0,5 Hz
Attenzione
L’utilizzo del sistema di azionamento con una licenza non sufficiente è ammessosolo durante le operazioni di messa in servizio e di assistenza tecnica.
Per il funzionamento deve essere disponibile una licenza sufficiente.
Note sull’opzione Performance 1
L’opzione Performance 1 (num. di ordin.: 6SL3074--0AA01--0AA0) è necessaria apartire da un sovraccarico del tempo di calcolo superiore al 50 %. Il tempo di cal-colo residuo è visualizzato nel parametro r9976[2]. A partire da un sovraccarico deltempo di calcolo superiore al 50 % viene emesso l’avviso A13000 e il LED READYsulla Control Unit lampeggia verde/rosso con 0,5 Hz.
Proprietà del License Key
S È assegnato a una scheda CompactFlash specifica.
S È salvato in modo non volatile sulla scheda CompactFlash.
S Non può essere trasferito.
S Può essere acquisito con il “WEB License Manager” da una banca dati dellelicenze.

Principi del sistema di azionamento
Licenze
7-302© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Creazione di una License Key tramite “WEB License Manager”
A questo scopo sono necessarie le seguenti informazioni:
-- Numero di serie della scheda CompactFlash (indicato sulla scheda CF)
-- Numero di licenza e numero della bolla di consegna della licenza (indicatosul Certificate of License)
1. Richiamare “WEB License Manager”
http://www.siemens.com/automation/license
2. Selezionare “Accesso diretto”
3. Specificare il numero di licenza e il numero della bolla di consegna della licenza
----> Fare clic su “Avanti”
4. Immettere il numero di serie della scheda CompactFlash
5. Selezionare il prodotto “SINAMICS S CU320”
----> Fare clic su “Avanti”
6. Selezionare “Numeri di licenza disponibili”
----> Fare clic su “Avanti”
7. Verificare l’assegnazione
----> Fare clic su “Assegna”
8. Quando si è certi di aver assegnato la licenza corretta, fare clic su “OK”
9. La License Key viene visualizzata e può essere immessa.
Immettere la License Key
Esempio di License Key:
E1MQ--4BEA = 69 49 77 81 45 52 66 69 65 dec (caratteri ASCII)
Procedura di immissione di una License Key (vedere l’esempio):
1. p9920[0] = 69 1. carattere
...
2. p9920[8] = 65 9. carattere
3. p9920[9] = 0 nessun carattere
...
4. p9920[19] = 0 nessun carattere
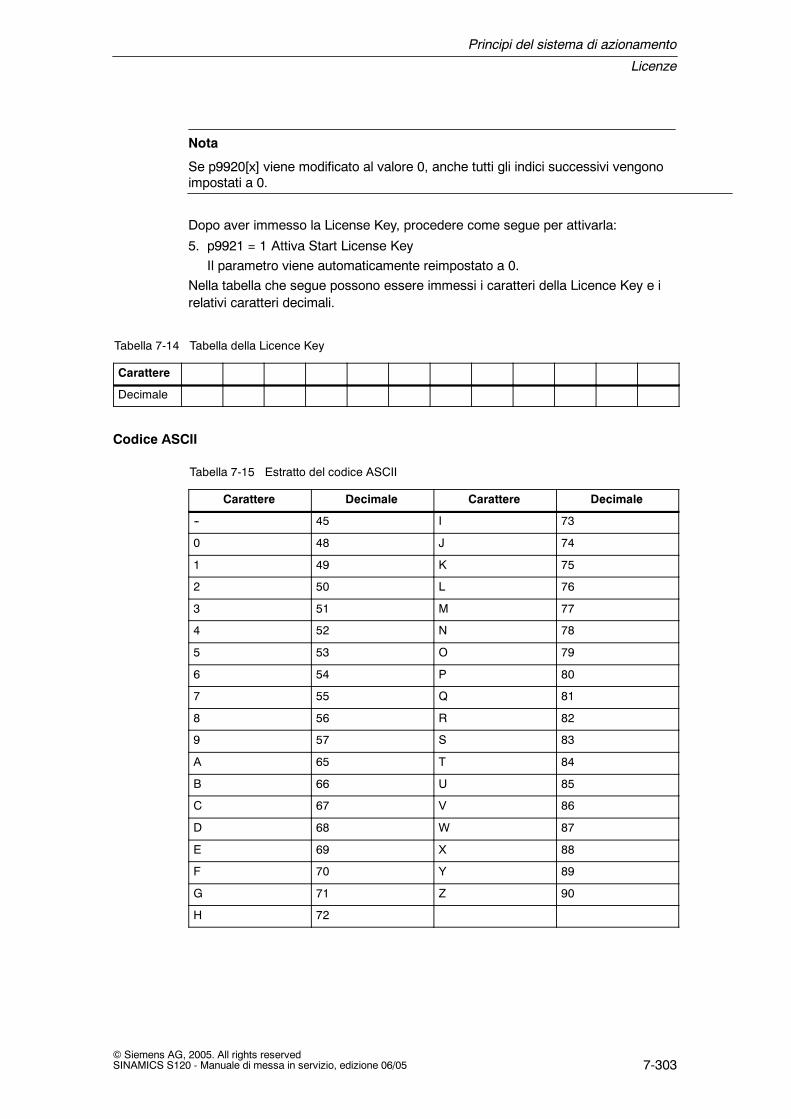
Principi del sistema di azionamento
Licenze
7-303© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Nota
Se p9920[x] viene modificato al valore 0, anche tutti gli indici successivi vengonoimpostati a 0.
Dopo aver immesso la License Key, procedere come segue per attivarla:
5. p9921 = 1 Attiva Start License KeyIl parametro viene automaticamente reimpostato a 0.
Nella tabella che segue possono essere immessi i caratteri della Licence Key e irelativi caratteri decimali.
Tabella 7-14 Tabella della Licence Key
Carattere
Decimale
Codice ASCII
Tabella 7-15 Estratto del codice ASCII
Carattere Decimale Carattere Decimale
-- 45 I 73
0 48 J 74
1 49 K 75
2 50 L 76
3 51 M 77
4 52 N 78
5 53 O 79
6 54 P 80
7 55 Q 81
8 56 R 82
9 57 S 83
A 65 T 84
B 66 U 85
C 67 V 86
D 68 W 87
E 69 X 88
F 70 Y 89
G 71 Z 90
H 72
Principi del sistema di azionamento
Licenze
7-304© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Panoramica dei parametri (vedere il manuale delle liste)
S p9920 immette la License Key della licenza
S p9921 attiva la License Key della licenza
S p9950
S p9976[0...2] tempo di calcolo residuo
J
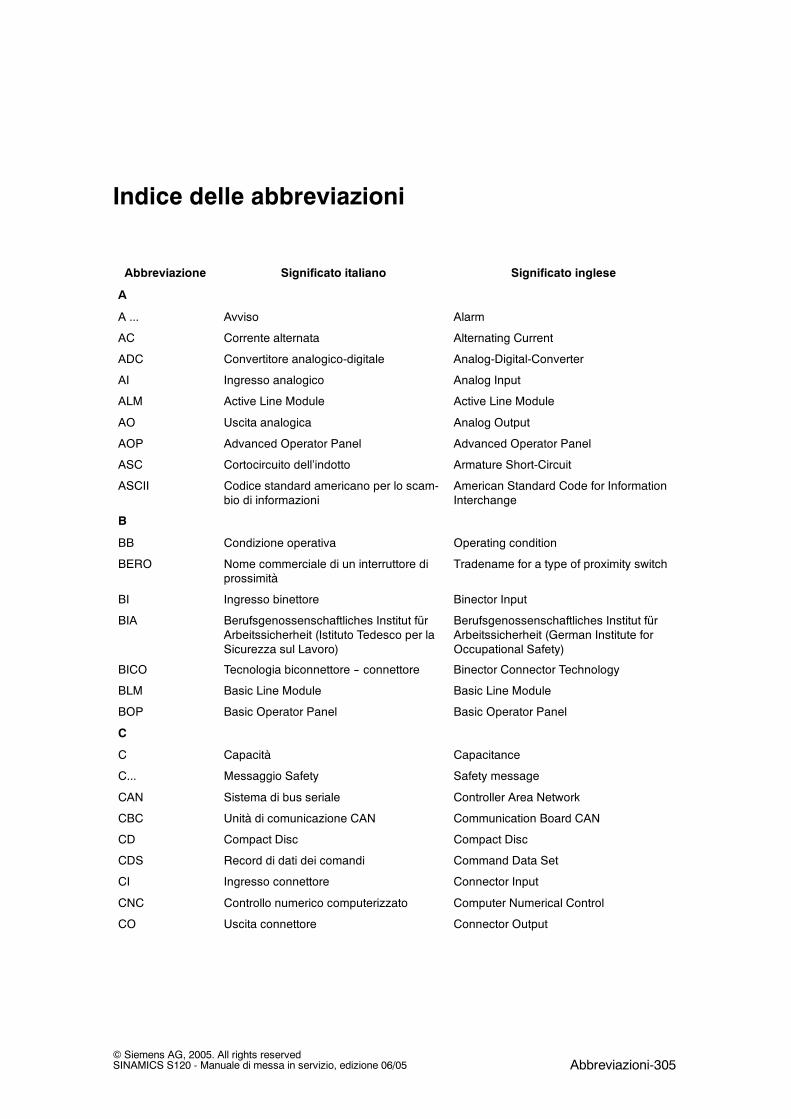
Abbreviazioni-305© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Indice delle abbreviazioni
Abbreviazione Significato italiano Significato inglese
A
A ... Avviso Alarm
AC Corrente alternata Alternating Current
ADC Convertitore analogico-digitale Analog-Digital-Converter
AI Ingresso analogico Analog Input
ALM Active Line Module Active Line Module
AO Uscita analogica Analog Output
AOP Advanced Operator Panel Advanced Operator Panel
ASC Cortocircuito dell’indotto Armature Short-Circuit
ASCII Codice standard americano per lo scam-bio di informazioni
American Standard Code for InformationInterchange
B
BB Condizione operativa Operating condition
BERO Nome commerciale di un interruttore diprossimità
Tradename for a type of proximity switch
BI Ingresso binettore Binector Input
BIA Berufsgenossenschaftliches Institut fürArbeitssicherheit (Istituto Tedesco per laSicurezza sul Lavoro)
Berufsgenossenschaftliches Institut fürArbeitssicherheit (German Institute forOccupational Safety)
BICO Tecnologia biconnettore -- connettore Binector Connector Technology
BLM Basic Line Module Basic Line Module
BOP Basic Operator Panel Basic Operator Panel
C
C Capacità Capacitance
C... Messaggio Safety Safety message
CAN Sistema di bus seriale Controller Area Network
CBC Unità di comunicazione CAN Communication Board CAN
CD Compact Disc Compact Disc
CDS Record di dati dei comandi Command Data Set
CI Ingresso connettore Connector Input
CNC Controllo numerico computerizzato Computer Numerical Control
CO Uscita connettore Connector Output
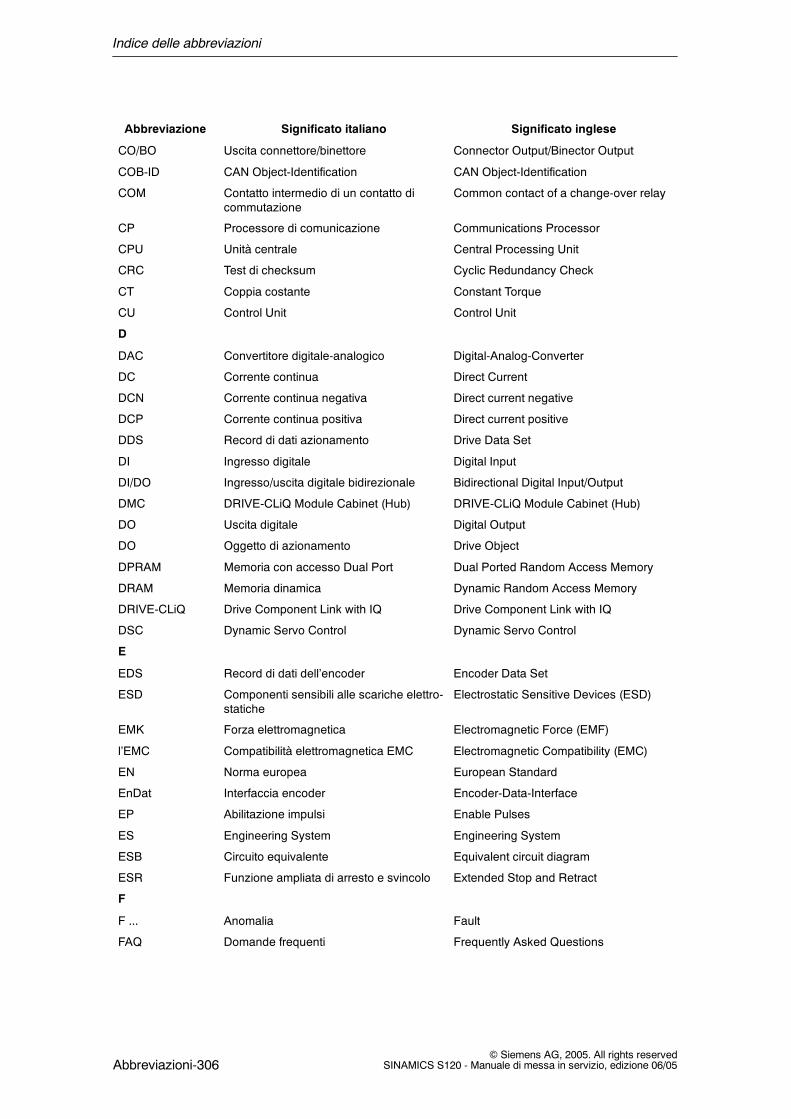
Indice delle abbreviazioni
Abbreviazioni-306© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abbreviazione Significato ingleseSignificato italiano
CO/BO Uscita connettore/binettore Connector Output/Binector Output
COB-ID CAN Object-Identification CAN Object-Identification
COM Contatto intermedio di un contatto dicommutazione
Common contact of a change-over relay
CP Processore di comunicazione Communications Processor
CPU Unità centrale Central Processing Unit
CRC Test di checksum Cyclic Redundancy Check
CT Coppia costante Constant Torque
CU Control Unit Control Unit
D
DAC Convertitore digitale-analogico Digital-Analog-Converter
DC Corrente continua Direct Current
DCN Corrente continua negativa Direct current negative
DCP Corrente continua positiva Direct current positive
DDS Record di dati azionamento Drive Data Set
DI Ingresso digitale Digital Input
DI/DO Ingresso/uscita digitale bidirezionale Bidirectional Digital Input/Output
DMC DRIVE-CLiQ Module Cabinet (Hub) DRIVE-CLiQ Module Cabinet (Hub)
DO Uscita digitale Digital Output
DO Oggetto di azionamento Drive Object
DPRAM Memoria con accesso Dual Port Dual Ported Random Access Memory
DRAM Memoria dinamica Dynamic Random Access Memory
DRIVE-CLiQ Drive Component Link with IQ Drive Component Link with IQ
DSC Dynamic Servo Control Dynamic Servo Control
E
EDS Record di dati dell’encoder Encoder Data Set
ESD Componenti sensibili alle scariche elettro-statiche
Electrostatic Sensitive Devices (ESD)
EMK Forza elettromagnetica Electromagnetic Force (EMF)
l’EMC Compatibilità elettromagnetica EMC Electromagnetic Compatibility (EMC)
EN Norma europea European Standard
EnDat Interfaccia encoder Encoder-Data-Interface
EP Abilitazione impulsi Enable Pulses
ES Engineering System Engineering System
ESB Circuito equivalente Equivalent circuit diagram
ESR Funzione ampliata di arresto e svincolo Extended Stop and Retract
F
F ... Anomalia Fault
FAQ Domande frequenti Frequently Asked Questions
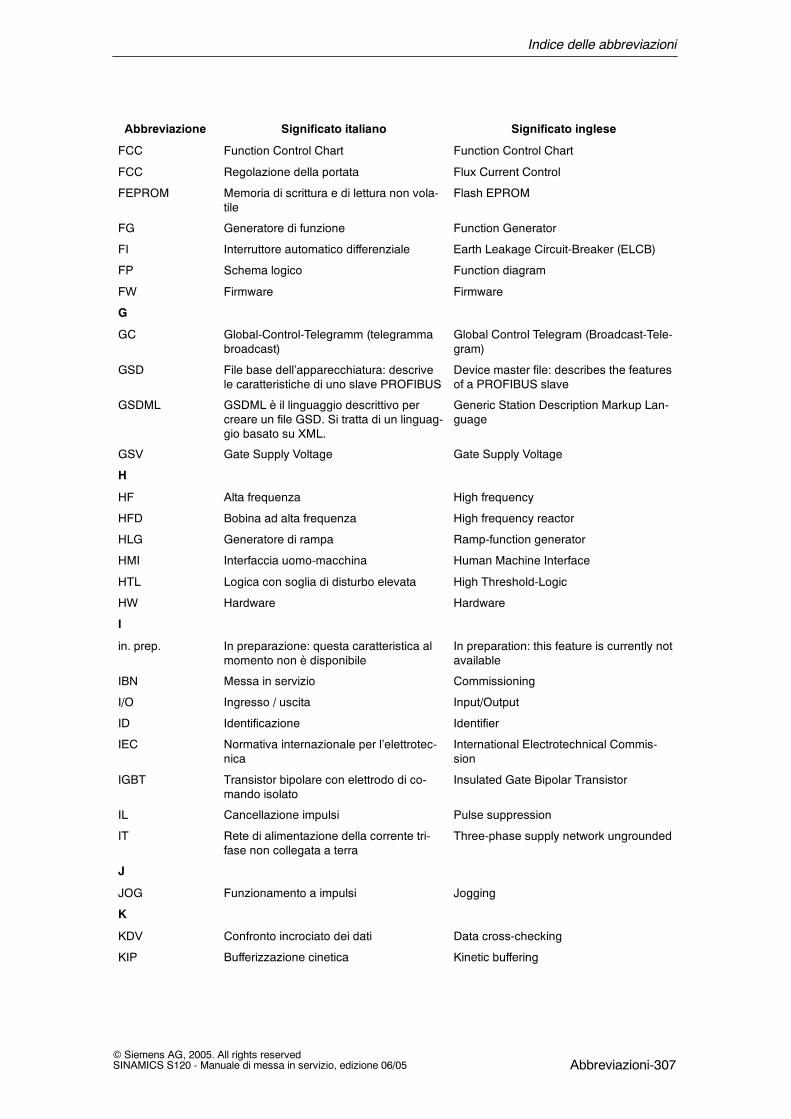
Indice delle abbreviazioni
Abbreviazioni-307© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abbreviazione Significato ingleseSignificato italiano
FCC Function Control Chart Function Control Chart
FCC Regolazione della portata Flux Current Control
FEPROM Memoria di scrittura e di lettura non vola-tile
Flash EPROM
FG Generatore di funzione Function Generator
FI Interruttore automatico differenziale Earth Leakage Circuit-Breaker (ELCB)
FP Schema logico Function diagram
FW Firmware Firmware
G
GC Global-Control-Telegramm (telegrammabroadcast)
Global Control Telegram (Broadcast-Tele-gram)
GSD File base dell’apparecchiatura: descrivele caratteristiche di uno slave PROFIBUS
Device master file: describes the featuresof a PROFIBUS slave
GSDML GSDML è il linguaggio descrittivo percreare un file GSD. Si tratta di un linguag-gio basato su XML.
Generic Station Description Markup Lan-guage
GSV Gate Supply Voltage Gate Supply Voltage
H
HF Alta frequenza High frequency
HFD Bobina ad alta frequenza High frequency reactor
HLG Generatore di rampa Ramp-function generator
HMI Interfaccia uomo-macchina Human Machine Interface
HTL Logica con soglia di disturbo elevata High Threshold-Logic
HW Hardware Hardware
I
in. prep. In preparazione: questa caratteristica almomento non è disponibile
In preparation: this feature is currently notavailable
IBN Messa in servizio Commissioning
I/O Ingresso / uscita Input/Output
ID Identificazione Identifier
IEC Normativa internazionale per l’elettrotec-nica
International Electrotechnical Commis-sion
IGBT Transistor bipolare con elettrodo di co-mando isolato
Insulated Gate Bipolar Transistor
IL Cancellazione impulsi Pulse suppression
IT Rete di alimentazione della corrente tri-fase non collegata a terra
Three-phase supply network ungrounded
J
JOG Funzionamento a impulsi Jogging
K
KDV Confronto incrociato dei dati Data cross-checking
KIP Bufferizzazione cinetica Kinetic buffering

Indice delle abbreviazioni
Abbreviazioni-308© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abbreviazione Significato ingleseSignificato italiano
Kp Guadagno proporzionale Proportional gain
KTY Sensore di temperatura speciale Special temperature sensor
L
L Induttanza Inductance
LED Diodo luminoso Light Emitting Diode
LSB Bit di valore minimo Least Significant Bit
LSS Interruttore di rete Line Side Switch
M
M Massa Reference potential, zero potential
MB Megabyte Megabyte
MCC Motion Control Chart Motion Control Chart
MDS Record di dati motore Motor Data Set
MLFB Denominazione del prodotto leggibilesulla macchina
Machine-readable product designation
MMC Comunicazione uomo -- macchina Man Machine Communication
MSB Bit con valore massimo Most Significant Bit
MSCY_C1 Comunicazione ciclica tra master(classe 1) e slave
Master Slave Cycle Class 1
MT Tastatore di misura Measuring probe
N
n. c. Non collegato Not connected
N... Nessun messaggio o messaggio interno No Report
NAMUR Normativa per tecniche di misurazione eregolazione nell’industria chimica
Standardization association formeasurement and control in chemicalindustries
NC Contatto NC (normalmente chiuso) Normally Closed (contact)
NC Controllo numerico Numerical Control
NEMA Commissione normativa USA (UnitedStates of America)
National Electrical Manufacturers Asso-ciation
NM Tacca di zero Zero Mark
NO Contatto normalmente aperto Normally Open (contact)
O
OEM Original Equipment Manufacturer Original Equipment Manufacturer
OLP Connettore di bus per cavo in fibra ottica Optical Link Plug
OMI Option Module Interface Option Module Interface
P
p ... Parametro di impostazione Adjustable parameter
PcCtrl Priorità di comando Master Control
PDS Record di dati parte di potenza Power Module Data Set
PE Terra di protezione Protective Earth

Indice delle abbreviazioni
Abbreviazioni-309© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abbreviazione Significato ingleseSignificato italiano
PELV Bassissima tensione di protezione Protective Extra Low Voltage
PG Dispositivo di programmazione Programming terminal
PI Proportional Integral Proportional Integral
PID Proportional Integral Differential Proportional Integral Differential
PLC Controllore programmabile (PLC) Programmable Logical Controller
PLL Modulo per la sincronizzazione Phase Locked Loop
PNO Consorzio PROFIBUS PROFIBUS user organisation
PRBS Rumore bianco Pseudo Random Binary Signal
PROFIBUS Bus dati seriale Process Field Bus
PS Alimentatore Power Supply
PSA Power Stack Adapter Power Stack Adapter
PTC Coefficiente di temperatura positivo Positive Temperature Coefficient
PTP Punto a punto Point To Point
PWM Modulazione in ampiezza Pulse Width Modulation
PZD Dati di processo PROFIBUS PROFIBUS Process data
Q
R
r ... Parametri di supervisione (solo lettura) Display parameter (read only)
RAM Memoria di lettura e scrittura Random Access Memory
RCCB Interruttore automatico differenziale Residual Current Circuit Breaker
RCD Interruttore automatico differenziale Residual Current Device
RJ45 Norma. Descrive un connettore a 8 policon Twisted-Pair Ethernet.
Standard. Describes an 8-pole plug con-nector with twisted pair Ethernet.
RKA Impianto di raffreddamento Recooling system
RO Sola lettura Read Only
RPDO Receive Process Data Object Receive Process Data Object
RS232 Interfaccia seriale Serial Interface
RS485 Norma. Descrive le caratteristiche fisichedi un’interfaccia seriale digitale.
Standard. Describes the physical charac-teristics of a digital serial interface.
S
S1 Servizio continuo Continuous operation
S3 Servizio intermittente Periodic duty
SBC Comando sicuro dei freni Safe Brake Control
SBH Arresto sicuro Safe operating stop
SBR Rampa di frenatura sicura Safe braking ramp
SGE Segnale di ingresso orientato alla sicu-rezza
Safe input signal
SH Arresto sicuro Safe Standstill
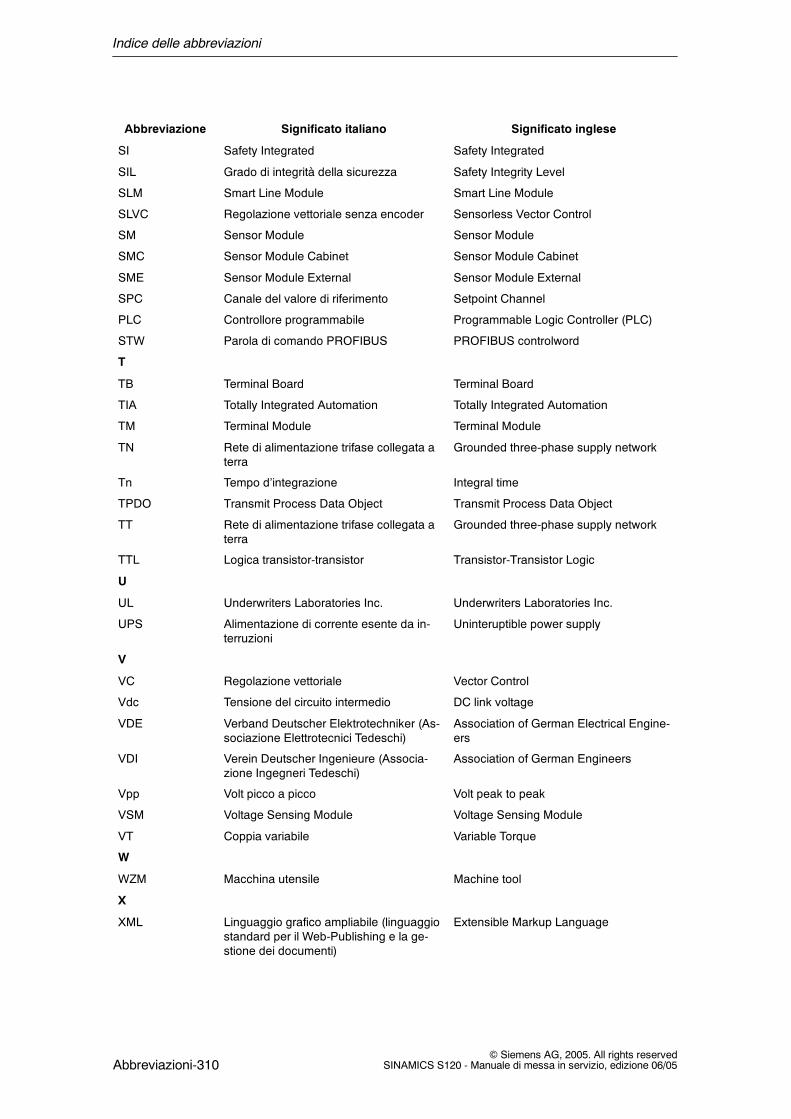
Indice delle abbreviazioni
Abbreviazioni-310© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abbreviazione Significato ingleseSignificato italiano
SI Safety Integrated Safety Integrated
SIL Grado di integrità della sicurezza Safety Integrity Level
SLM Smart Line Module Smart Line Module
SLVC Regolazione vettoriale senza encoder Sensorless Vector Control
SM Sensor Module Sensor Module
SMC Sensor Module Cabinet Sensor Module Cabinet
SME Sensor Module External Sensor Module External
SPC Canale del valore di riferimento Setpoint Channel
PLC Controllore programmabile Programmable Logic Controller (PLC)
STW Parola di comando PROFIBUS PROFIBUS controlword
T
TB Terminal Board Terminal Board
TIA Totally Integrated Automation Totally Integrated Automation
TM Terminal Module Terminal Module
TN Rete di alimentazione trifase collegata aterra
Grounded three-phase supply network
Tn Tempo d’integrazione Integral time
TPDO Transmit Process Data Object Transmit Process Data Object
TT Rete di alimentazione trifase collegata aterra
Grounded three-phase supply network
TTL Logica transistor-transistor Transistor-Transistor Logic
U
UL Underwriters Laboratories Inc. Underwriters Laboratories Inc.
UPS Alimentazione di corrente esente da in-terruzioni
Uninteruptible power supply
V
VC Regolazione vettoriale Vector Control
Vdc Tensione del circuito intermedio DC link voltage
VDE Verband Deutscher Elektrotechniker (As-sociazione Elettrotecnici Tedeschi)
Association of German Electrical Engine-ers
VDI Verein Deutscher Ingenieure (Associa-zione Ingegneri Tedeschi)
Association of German Engineers
Vpp Volt picco a picco Volt peak to peak
VSM Voltage Sensing Module Voltage Sensing Module
VT Coppia variabile Variable Torque
W
WZM Macchina utensile Machine tool
X
XML Linguaggio grafico ampliabile (linguaggiostandard per il Web-Publishing e la ge-stione dei documenti)
Extensible Markup Language

Indice delle abbreviazioni
Abbreviazioni-311© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Abbreviazione Significato ingleseSignificato italiano
Y
Z
CI Circuito intermedio DC link
ZSW Parola di stato PROFIBUS PROFIBUS statusword
J
Indice delle abbreviazioni
Abbreviazioni-312© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Spazio per appunti
Bibliografia-313© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Bibliografia
Documentazione per SINAMICS
Cataloghi
/D11.1/ SINAMICS G110 Convertitori da incasso da 0,12 kW a 3 kWN. di ordinazione: E86060--K5511--A111--A2 Edizione: 10.2005
/D11/ SINAMICS G130 Convertitori da incasso,SINAMICS G150 Convertitori in armadioN. di ordinazione: E86060--K5511--A101--A2 Edizione: 07.2004
/D21.1/ SINAMICS S120 Sistema di azionamento Vector ControlN. di ordinazione: E86060--K5521--A111--A1 Edizione: 04.2005
/D21.1/ SINAMICS S120 Sistema di azionamento Servo ControlN. di ordinazione: E86060--K5521--A121--A1 Edizione: 04.2004
/D21.3/ SINAMICS S150 Convertitori in armadio75 kW ... 1200 kWN. di ordinazione: E86060--K5521--A131--A1 Edizione: 05.2004
Altri cataloghi
/ST70/ SIMATIC Componenti per la Totally Integrated Automation, catalogo ST70Catalogo per le ordinazioniN. di ordinazione: E86060--K4670--A111--A9 Edizione: 10.2004
/PM10/ SIMOTION Motion Control System, Catalogo PM10Catalogo per le ordinazioniN. di ordinazione: E86060--K4910--A101--A5 Edizione: 07.2005

Bibliografia
Bibliografia-314© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Cataloghi interattivi
/CA01/ La mall offline di Automation and DrivesCD-ROMN. di ordinazione: E86060--D4001--A100--C3 Edizione: 10.2004
/Mall/ A&D Mall, Catalogo e sistema di ordinazione onlinehttp://www.siemens.com/automation/mall
Documentazione elettronica
/CD2/ SINAMICSIl sistema SINAMICSN. di ordinazione: 6SL3097--2CA00--0YG2 Edizione: 07.2005
Documentazione per l’utente
/BA1/ SINAMICS G150Istruzioni per l’usoN. di ordinazione: su richiesta Edizione: 06.2005
/BA2/ SINAMICS G130Istruzioni per l’usoN. di ordinazione: su richiesta Edizione: 06.2005
/BA3/ SINAMICS S150Istruzioni per l’usoN. di ordinazione: su richiesta Edizione: 06.2005
/GH1/ SINAMICS S120Manuale ControlUnits e componenti di sistema supplementariN. di ordinazione: 6SL3097--2AH00--0AP2 Edizione: 06.2005
/GH2/ SINAMICS S120Manuale, parti di potenza booksizeN. di ordinazione: 6SL3097--2AC00--0AP2 Edizione: 06.2005
Bibliografia
Bibliografia-315© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
/GH3/ SINAMICS S120Manuale parti di potenza chassisN. di ordinazione: 6SL3097--2AE00--0AP0 Edizione: 12.2004
/GH4/ SINAMICS S120Manuale Cold-Plate booksizeN. di ordinazione: 6SL3097--2AJ00--0AP2 Edizione: 06.2005
/GS1/ SINAMICS S120Getting StartedN. di ordinazione: 6SL3097--2AG00--0AP2 Edizione: 06.2005
/IH1/ SINAMICS S120Manuale per la messa in servizioN. di ordinazione: 6SL3097--2AF00--0AP3 Edizione: 06.2005
/FH1/ SINAMICS S120Manuale delle funzioniN. di ordinazione: 6SL3097--2AB00--0AP1 Edizione: 06.2005
/IH2/ SINAMICS S120Manuale di messa in servizio CANopenN. di ordinazione: 6SL3097--2AA00--0AP1 Edizione: 12.2004
/LH1/ SINAMICS SManuale delle listeN. di ordinazione: 6SL3097--2APF00--0AP3 Edizione: 06.2005
Altra documentazione integrativa
1 Drive ES Basic V5.1Descrizione della funzioneEngineering System per azionamenti della famiglia di prodottidi SIEMENS A&DN. di ordinazione: 6SW1700--0JA00--0AA0 Edizione: 08.2001
2 SIMOTION Engineering SystemGestioneN. di ordinazione: 6AU1900--1AB32--0AA0 Edizione: 12.2004

Bibliografia
Bibliografia-316© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
/PJAL/ SIMODRIVE, SIMOVERT MASTERDRIVES, SINAMICSParte generale per i motori sincroniManuale di progettazioneN. di ordinazione: 6SN1197--0AD07--0AP2 Edizione: 12.2004
/PFK7S/ SIMODRIVE Motori sincroni 1FK7Manuale di progettazioneN. di ordinazione: 6SN1197--0AD16--0AP0 Edizione: 12.2004
/PFT6S/ SIMODRIVE Motori sincroni 1FT6Manuale di progettazioneN. di ordinazione: 6SN1197--0AD12--0AP0 Edizione: 12.2004
/PFK7/ SIMODRIVE e SIMOVERT MASTERDRIVES Motori sincroni 1FK7Manuale di progettazioneN. di ordinazione: 6SN1197--0AD06--0AP2 Edizione: 07.2005
/PFT6/ SIMODRIVE e SIMOVERT MASTERDRIVES Motori sincroni 1FT6Manuale di progettazioneN. di ordinazione: 6SN1197--0AD02--0AP1 Edizione: 07.2005
Documentazione per PROFIBUS
/P1/ PROFIBUS-DP/DPV1 IEC 61158Grundlagen, Tipps und Tricks für AnwenderHüthig; Manfred Popp, 2a edizioneISBN 3--7785--2781--9
/P2/ PROFIBUS-DP, Nozioni per un rapido apprendimentoPROFIBUS Nutzerorganisation e. V.; Manfred PoppN. di ordinazione 4.071
/P3/ Decentralizzare con PROFIBUS DPStruttura, progettazione e impiego di PROFIBUS DP con SIMATIC S7SIEMENS; Publics MCD Verlag; Josef Weigmann, Gerhard KilianN. di ordinazione: A19100--L531--B714ISBN 3--89578--074--X
/P4/ Manuale per reti PROFIBUS, SIEMENSN. di ordinazione: 6GK1970--5CA20--0AA0

Bibliografia
Bibliografia-317© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
/P5/ PROFIBUS Profile PROFIdrive Profile Drive TechnologyPROFIBUS Nutzerorganisation e. V.Haid-und-Neu-Straße 7, 76131 KarlsruheN. di ordinazione: 3.172 Versione 3.1, novembre 2002
/IKPI/ SIMATIC NET, Comunicazione industriale e apparecchi di campoCatalogoN. di ordinazione: E86060--K6710--A101--B4 Edizione: 2005
/PDP/ Direttiva di installazione PROFIBUSInstallation Guideline for PROFIBUS-FMS/DPInstallation and wiring recommendation for RS 485 TransmisionN. di ordinazione: 2.111 (tedesco)
2.112 (inglese) Versione 1.0
Bibliografia
Bibliografia-318© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Documentazione per la tecnica di sicurezza
Nota
Informazioni sulla documentazione tecnica per l’argomento “Safety Integrated”sono presenti in internet al seguente indirizzo:
http://www.siemens.de/safety
Di seguito sono riportati alcuni esempi di documentazione relativa alla tecnica disicurezza.
/LVP/ Tecnica di manovra a bassa tensioneCatalogoN. di ordinazione: E86060--K1002--P101--A5 Edizione: 2005
/LV10/ Apparecchi di manovra per l’industriaCatalogoN. di ordinazione: E86060--K1002--A101--A4 Edizione: 2004
/LV20/ BERO -- Sensori per l’automazioneCatalogoN. di ordinazione: E86060--K1803--A101--A3 Edizione: 2004
/LV30/ Prodotti e sistemi per la distribuzione dell’energiaCatalogoN. di ordinazione: E86060--K1801--A101--A4 Edizione: 2004
/MRL/ Direttiva 98/37/CE del Parlamento Europeo e del ConsiglioDirettiva sulle macchineBundesanzeiger-Verlags GmbH Edizione: 22.06.1998
/SIAH/ Safety IntegratedManuale di applicazioneN. di ordinazione: 6ZB5000--0AA01--0BA1 5a edizione
/SICD/ Safety IntegratedCD-ROMN. di ordinazione: E20001--D10--M103--X--7400 Edizione: 09.2004
J
Indice-319© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
IndiceA
Abbreviazioni, Abbreviazioni-305
Anomalie, 6-245Buffer anomalie, 6-248Configurazione, 6-250Tacitazione, 6-246
Avvertenze, viiHotline, ixPer utenti poco esperti, viPericolo di cariche elettrostatiche, xPericolo e avvertenza, viiSimboli, viiSupporto tecnico, ixtecniche, ixtecniche di sicurezza, xi
Avvertenze ESD, x
Avvisi, 6-245Buffer avvisi, 6-249Configurazione, 6-250
B
Barre degli strumenti di STARTER,visualizzazione, 3-47
Bibliografia, Bibliografia-313
Binettore, 7-267
Blocco inserzione, 4-125
Buffer anomalie, 6-248
Buffer avvisi, 6-249
C
Cataloghi, Bibliografia-313
Certificate of Licence, 7-301
Clock di sorveglianza, 5-179
Codice ASCII, Licenze, 7-303
Comando di frenatura sicuro adue canali, 5-188
Comunicazione, Tramite PROFIBUS, 4-94
Confronto incrociato dei dati, 5-179
Connessione tramite tecnica BICO, 7-268
Connettore, 7-267
Control UnitLED dopo l’avviamento, 6-220LED durante l’avviamento, 6-219
Customer Support, ix
D
Dati di processo, 4-111Parole di comando
A_DIGITAL, 4-115, 4-147CU_STW, 4-115, 4-147E_STW1, 4-115, 4-119G1_STW, 4-115, 4-135G2_STW, 4-115, 4-139G3_STW, 4-115, 4-139MT_STW, 4-115Par. comando 2, 4-115, 4-118Par.comando 1, 4-115Par.comando1, 4-116
Parole di statoA_ZSW1, 4-124AIST_GLATT, 4-123CU_ZSW, 4-124, 4-148E_DIGITAL, 4-149E_ZSW1, 4-132FAULT_CODE, 4-124G1_ZSW, 4-123G2_ZSW, 4-123, 4-145G3_ZSW, 4-123, 4-145Gn_ZSW, 4-139MELDW, 4-123, 4-128MSOLL_GLATT, 4-123MT_ZSW, 4-123MT1_ZS_F, 4-124MT1_ZS_S, 4-124MT2_ZS_F, 4-124MT2_ZS_S, 4-124Par. stato 2, 4-123, 4-127Parola di stato 1, 4-123, 4-124WARN_CODE, 4-124
Valori attualiE_DIGITAL, 4-123G1_XIST1, 4-123, 4-141G1_XIST2, 4-123, 4-142G2_XIST1, 4-123, 4-145G2_XIST2, 4-123, 4-145G3_XIST1, 4-123, 4-145G3_XIST2, 4-123, 4-145
Indice
Indice-320© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
IAIST_GLATT, 4-124ITIST_GLATT, 4-123MIST_GLATT, 4-124NIST_A, 4-123, 4-127NIST_A_GLATT, 4-124NIST_B, 4-123, 4-127PIST_GLATT, 4-124
Valori di riferimentoKPC, 4-115, 4-121MOMRED, 4-115, 4-122NRIF_A, 4-115, 4-120NRIF_B, 4-115, 4-121XERR, 4-115, 4-121
Destinatari, vi
Determinazione del numero di asse, 4-159
Determinazione del numero di oggetto, 4-159
Diagnosticatramite LED del Basic Line Module, 6-223tramite LED del Braking
Module Booksize, 6-227tramite LED del Control
Supply Module, 6-227tramite LED del Double
Motor Module, 6-226tramite LED del Sensor
Module Cabinet 10, 6-228tramite LED del Sensor
Module Cabinet 20, 6-228tramite LED del Sensor
Module Cabinet 30, 6-229tramite LED del Single Motor Module, 6-226tramite LED del Terminal Module 31, 6-230tramite LED dell’Active Line Module, 6-222tramite LED dello Smart Line Module
16 kW e 36 kW, 6-2255 kW e 10 kW, 6-224
tramite LED su Control Unit 320, 6-219
Dinamizzazione forzata, 5-178
Drive Object, 7-265
DRIVE--CLiQ, 7-276Regole per il cablaggio, 2-33
E
EsempioImpostazione dell’indirizzo
PROFIBUS, 4-102Lettura di parametri con PROFIBUS, 4-160
Scrittura dei parametri conPROFIBUS, 4-163
Struttura dei telegrammi PROFIBUS, 4-98
F
Funzionamento online con STARTER, 3-48
Funzione di diagnostica, 6-231Generatore di funzioni, 6-232Prese di misura, 6-240Trace, 6-236
Funzione di misura, 6-237
Funzione Trace, Registrazionedi segnali, 6-231
FunzioniArresto sicuro (SH), 5-182Comando di frenatura sicuro (SBC), 5-187Safety Integrated, 5-176
G
Generatore di funzioni, Caratteristiche, 6-233
Generatore per segnali, 6-232
Gestore delle licenze, 7-301
H
Hotline, ix
I
Identificazione dell’apparecchio, 4-103
IndiceAbbreviazioni, Abbreviazioni-305Bibliografia, Bibliografia-313
IndirizzoImpostazione dell’indirizzo
PROFIBUS, 4-102Informazioni sui prodotti in Internet, ixLicense Manager in Internet, 7-301
Ingressi analogici, 7-286Caratteristiche, 7-290Elaborazione dei segnali, 7-290
Ingressi digitali, 7-286Bidirezionali, 7-289
Indice
Indice-321© Siemens AG, 2005. All rights reservedSINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Caratteristiche, 7-287Elaborazione dei segnali, 7-287Se non funzionano, 7-287
Ingressi rapidi, 7-286
Ingressi/uscite, Panoramica, 7-286
Ingressi/uscite bidirezionali, 7-286
Interconnessione di segnali tramitetecnica BICO, 7-268
Interfaccia dell’encoder, 4-134Misura al volo, 4-138Ricerca della tacca di riferimento, 4-137
Internet, ix
Interruttore per indirizzo PROFIBUS, 4-102
L
LEDdel Basic Line Module, 6-223del Braking Module Booksize, 6-227del Control Supply Module, 6-227del Double Motor Module, 6-226del Motor Module, 6-226del Sensor Module Cabinet 10, 6-228del Sensor Module Cabinet 20, 6-228del Sensor Module Cabinet 30, 6-229del Terminal Module 31, 6-230dell’Active Line Module, 6-222dello Smart Line Module
16 kW e 36 kW, 6-2255 kW e 10 kW, 6-224
per Control Unit 320, 6-219
License Key, 7-301
Licenze, 7-301Codice ASCII, 7-303
ListaAbbreviazioni, Abbreviazioni-305Bibliografia, Bibliografia-313
M
Messa in serviziocon STARTER, 3-46Lista di controllo, 2-29, 2-30Safety Integrated, 5-190
Messaggi, 6-245Attivazione dall’esterno, 6-252Configurazione, 6-250
Trigger, 6-251
Misura al volo, 4-138
Moduli funzionali, 7-275
Motion Control con PROFIBUS, 4-167
O
Oggetto di azionamento, 7-265
P
Panoramica dei LED, 6-218
Panoramica dei LED dei moduli, 6-218
Parametri, 7-254Suddivisione, 7-254Tipi, 7-254
Parametrizzazione, con STARTER, 3-46
Password per Safety Integrated, 5-181
Personale qualificato, viii
Personale qualificato?, viii
Prese di misura, 6-240
PROFIBUS, 4-94Componenti, 2-32File base dell’apparecchiatura, 4-103Identificazione dell’apparecchio, 4-103Impostare gli indirizzi, 4-102Interface Mode, 4-113Master classe 1 e 2, 4-95Motion Control con PROFIBUS, 4-167Resistenza terminale, 4-104Segn.funz.vit., 4-173Telegrammi, 4-108
Protocollo di collaudo, 5-205
R
Reazione di stopSTOP A, 5-196STOP F, 5-196
Record di datiCDS: Command Data Set, 7-257DDS: Drive Data Set, 7-258EDS: Encoder Data Set, 7-259MDS: Motor Data Set, 7-260
Recorder, 6-236

Indice
Indice-322© Siemens AG, 2005. All rights reserved
SINAMICS S120 - Manuale di messa in servizio, edizione 06/05
Registrazione di segnali con lafunzione Trace, 6-231
Regole per il cablaggio, DRIVE--CLiQ, 2-33
Ricerca della tacca di riferimento, 4-137
S
Safety IntegratedArresto sicuro (SH), 5-182Comando di frenatura sicuro (SBC), 5-187Informazioni generali, 5-176Messa in servizio, 5-190Messa in servizio di serie, 5-191Norme e direttive, 5-177Panoramica degli schemi logici, 5-199Panoramica dei parametri, 5-198Password, 5-181Protocollo di collaudo, 5-205Reazioni di stop, 5-196Tacitazione anomalie, 5-197Test di collaudo, 5-205
Segnali di ingresso sicuri, 5-179
Segnali di pericolo, vii
Sequenza degli oggetti nel telegramma, 4-96
Sostituzione dei componenti, 7-280
Sottolicenza, 7-301
Spiegazione dei simboli utilizzati, vii
STARTER, 3-46Funzionamento online tramite
PROFIBUS, 3-48
Stile, ix
Struttura dei telegramma PROFIBUS, 4-98
Support, ix
Supporti per la ricerca, vi
Supporto tecnico, ix
T
T0, T1, T2, 6-240
Tacitazione, 6-246
Targhetta elettronica, 7-276
Targhetta elettronica dei dati, 7-276
Tastatore di misura, centrale, 4-151
Tastatori di misura centrali, Esempio, 4-151
Tecnica BICOChe cos’è?, 7-267Interconnessione di segnali, 7-268Riduttori di corrente, 7-271Valori fissi, 7-271
TelegrammiLiberi, 4-109Sequenza degli oggetti, 4-96Specifici del costruttore, 4-109Standard, 4-108Struttura, 4-111
Telegrammi liberi, 4-109
Telegrammi specifici del costruttore, 4-109
Telegrammi standard, 4-108
Tempi di campionamento, 7-283
Tempi di campionamento di sistema, 7-283
Test dei tracciati di arresto, 5-178
Test di collaudo, 5-205
Tools, STARTER, 3-46
Trace, 6-236
U
Uscite analogiche, 7-286Caratteristiche, 7-291Elaborazione dei segnali, 7-291
Uscite digitali, 7-286Bidirezionali, 7-289Caratteristiche, 7-288Elaborazione dei segnali, 7-288Se non funzionano, 7-288
Utenti poco esperti (avviso per la lettura), vi
V
Valore anomalia, 6-248
Valore avviso, 6-249
J
Mittente
Nome
Indirizzo della Ditta/dell’ufficio
Via
CAP: Località:
Telefono: /
Proposte
Correzioni
per il manuale:
SINAMICS S120
Documentazione per il costruttore /per il service
Manuale di messa in servizio
N. di ordinazione: 6SL3 097--2AF00--0CP3Edizione: 06/05
Se consultando il presente manuale siriscontrassero errori di stampa, Vipreghiamo di segnalarceli utilizzano ilpresente foglio.Vi saremo altresì grati per eventualisuggerimenti o proposte migliorative.
ASIEMENS AGA&D MC BMSPostfach 3180
D--91050 ErlangenTel.: +49 (0) 180 / 5050 -- 222 (Hotline)Fax: +49 (0) 9131 / 98 -- 2176 (Documentazione)E--mail: [email protected]
Telefax: /
Proposte e/o correzioni

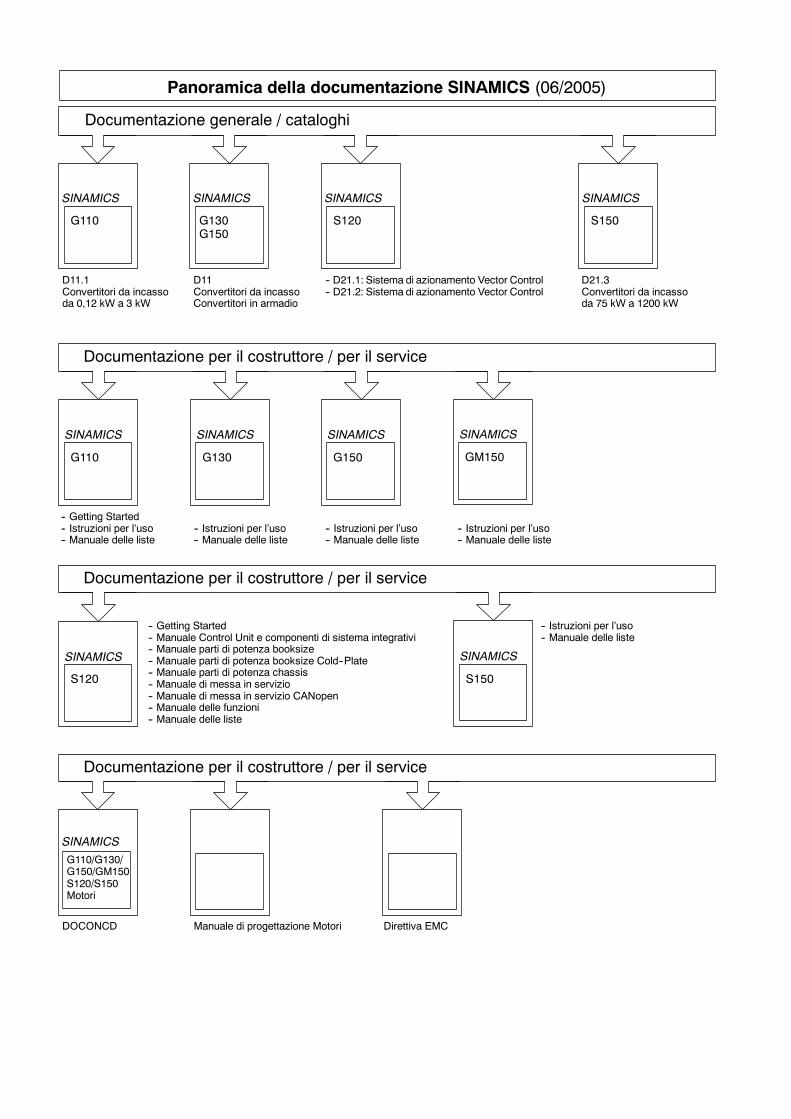
Documentazione generale / cataloghi
Documentazione per il costruttore / per il service
Panoramica della documentazione SINAMICS (06/2005)
D11.1Convertitori da incassoda 0,12 kW a 3 kW
SINAMICS
G110
SINAMICS
G130G150
D11Convertitori da incassoConvertitori in armadio
SINAMICS
S120
D21.3Convertitori da incassoda 75 kW a 1200 kW
-- D21.1: Sistema di azionamento Vector Control-- D21.2: Sistema di azionamento Vector Control
Documentazione per il costruttore / per il service
-- Getting Started-- Manuale Control Unit e componenti di sistema integrativi-- Manuale parti di potenza booksize-- Manuale parti di potenza booksize Cold--Plate-- Manuale parti di potenza chassis-- Manuale di messa in servizio-- Manuale di messa in servizio CANopen-- Manuale delle funzioni-- Manuale delle liste
SINAMICS
S150
DOCONCD
-- Istruzioni per l’uso-- Manuale delle liste
SINAMICS
G130
-- Istruzioni per l’uso-- Manuale delle liste
SINAMICS
G150
-- Getting Started-- Istruzioni per l’uso-- Manuale delle liste
SINAMICS
G110
Manuale di progettazione Motori Direttiva EMC
SINAMICS
S120
Documentazione per il costruttore / per il service
G110/G130/G150/GM150S120/S150Motori
SINAMICS
-- Istruzioni per l’uso-- Manuale delle liste
SINAMICS
S150
-- Istruzioni per l’uso-- Manuale delle liste
SINAMICS
GM150

Siemens AG Automation and Drives Motion Control Systems Postfach 3180, D - 91050 Erlangen Repubblica Federale Tedesca www.siemens.com/motioncontrol
© Siemens AG 2005 Ci riserviamo eventuali modifiche
N. di ord.: 6SL3 097-2AF00-0CP3
Gedru Stampato nella Repubblica Federale Tedesca