L’informatica fra Scienza e Fantascienza · LiveWiew per Android, Allerta InPulse per BlackBerry....
26
L’informatica fra Scienza e Fantascienza Di Bryan Alejandro Anzules Alarcón Relatore: Prof. Giulio Raimondo Classe III B Operatore Elettronico ID: 131847 Anno scolastico 2014/15
Transcript of L’informatica fra Scienza e Fantascienza · LiveWiew per Android, Allerta InPulse per BlackBerry....

Pag. 0 a 26
L’informatica
fra Scienza e
Fantascienza
Di
Bryan Alejandro Anzules Alarcón
Relatore: Prof. Giulio Raimondo
Classe III B Operatore Elettronico ID: 131847
Anno scolastico 2014/15

1 | P a g i n a
Sommario
Introduzione: Relazione fra Scienza e Fantascienza, confine
con l’immaginazione. ...................................................................... 2
Capitolo 1: Idea di Smartwatch .................................................. 3
1.1: Dalla Meridiana allo Smartwatch ................................. 3
1.2: Seiko Ruputer ............................................................... 8
1.3: LG GD910 .................................................................... 8
1.4: Pebble Watch ................................................................ 9
1.5: Samsung Gear 2 ............................................................ 9
1.6: Asus ZenWatch ........................................................... 10
1.7: Apple Watch ............................................................... 10
Capitolo 2: Idea di Robot ........................................................... 11
2.1: Storia dei Robot .......................................................... 12
2.2: Utilizzo Attuale ........................................................... 13
2.3: Robot non Autonomi .................................................. 14
2.4: Robot Autonomi ......................................................... 16
2.5: Io, Robot ..................................................................... 19
Capitolo 3: Intelligenza Artificiale ......................................... 21
3.1: Software Noti .............................................................. 22
Conclusioni ............................................................................. 24
Bibliografia ............................................................................. 25

2 | P a g i n a
Introduzione
“L’informatica fra scienza e fantascienza”, ho scelto di parlare di quest’argomento perché mi
ha suscitato l’interesse fin da subito. Sono sempre stato interessato ai temi scientifici già che
per me è un mondo a parte da quello che conosciamo, nel quale ti concentri nel più piccolo
particolare e molto spesso esso ti riserva molte sorprese che magari nemmeno ti aspettavi e
che ti lasciano incuriosito e con il desiderio di scoprire cose in più o nuove. Nel tema che ho
scelto, ho visto la possibilità di poter parlare d’informatica dal punto di vista della sua genesi,
di come da semplici idee, un tempo considerate irrealizzabili e solo frutto dell’immaginazione
siano nati prodotti che oggigiorno usiamo quotidianamente. C’è sempre stata una relazione
molto forte fra scienza e fantascienza. La fantascienza molte volte è definita come la
possibilità di immaginare il futuro, con la consapevolezza che sarà diverso dal presente come
questo lo è dal passato, basandosi sugli sviluppi della scienza e della tecnologia. Tramite
l’immaginazione l’uomo è riuscito a comporsi un’idea di futuro nel quale ha immaginato
oggetti che poi con il passare del tempo egli è riuscito a imitarli; queste idee inizialmente
parevano impossibili da realizzarli ma ecco che entra in azione la scienza. Grazie allo
sviluppo che ha avuto la scienza, specialmente nel campo della tecnologia, negli ultimi anni
l’uomo è riuscito a creare oggetti che oggi sono comunemente molto usati. In questa tesi farò
cenno ad alcune di quelle “invenzioni” realizzate, partendo dall’idea di partenza descrivendo
brevemente la sua evoluzione nel tempo e poi descrivendo le principali caratteristiche
tecniche.

3 | P a g i n a
Capitolo 1
Fin da molto, il tempo è stato qualcosa che l’uomo ha voluto governare, ma il tempo è
qualcosa d’infermabile. Perciò l’essere umano ha sempre pensato in creare un qualcosa che
aiutasse a controllarlo. Perciò l’uomo ha inventato l’orologio che non è solo uno strumento
per misurare il tempo, per tenere traccia del trascorrere delle ore, dei minuti e dei secondi, o il
nostro marca tempo, per essere sempre puntuali agli appuntamenti, ma è divenuto un vero è
proprio accessorio di bellezza, integrato completamente nel nostro modo di vestire e nel
nostro look.
Qual è stata nella storia la prima “forma” di orologio?
Dalla Meridiana allo Smartwatch
La Meridiana
La prima forma di segna tempo apparve con la
”meridiana“, cioè un paletto conficcato nel terreno che,
a seconda della posizione del sole, proiettava l’ombra
dello stesso paletto sul terreno, dando così la possibilità
agli antichi di capire in quale momento della giornata si
era giunti. La stessa meridiana nei secoli subì notevoli
migliorie, s’iniziarono a stabilire sul terreno delle presunte fasce di tempo riconoscibili da
tutti, dopo di che, col trascorrere del tempo, la
meridiana si evolve e fu trasferita dal terreno ai muri
delle case, sui campanili delle chiese e in qualsiasi altro
luogo, dove poteva essere vista da tutti facilmente. La
grande problematica di questo sistema per la “lettura
dell’ora” era l’impossibilità di poter “leggere l’ora” in
assenza del sole, quindi nelle ore notturne e nei periodi
invernali per gli antichi era un problema che doveva essere risolto ben presto.
4 | P a g i n a
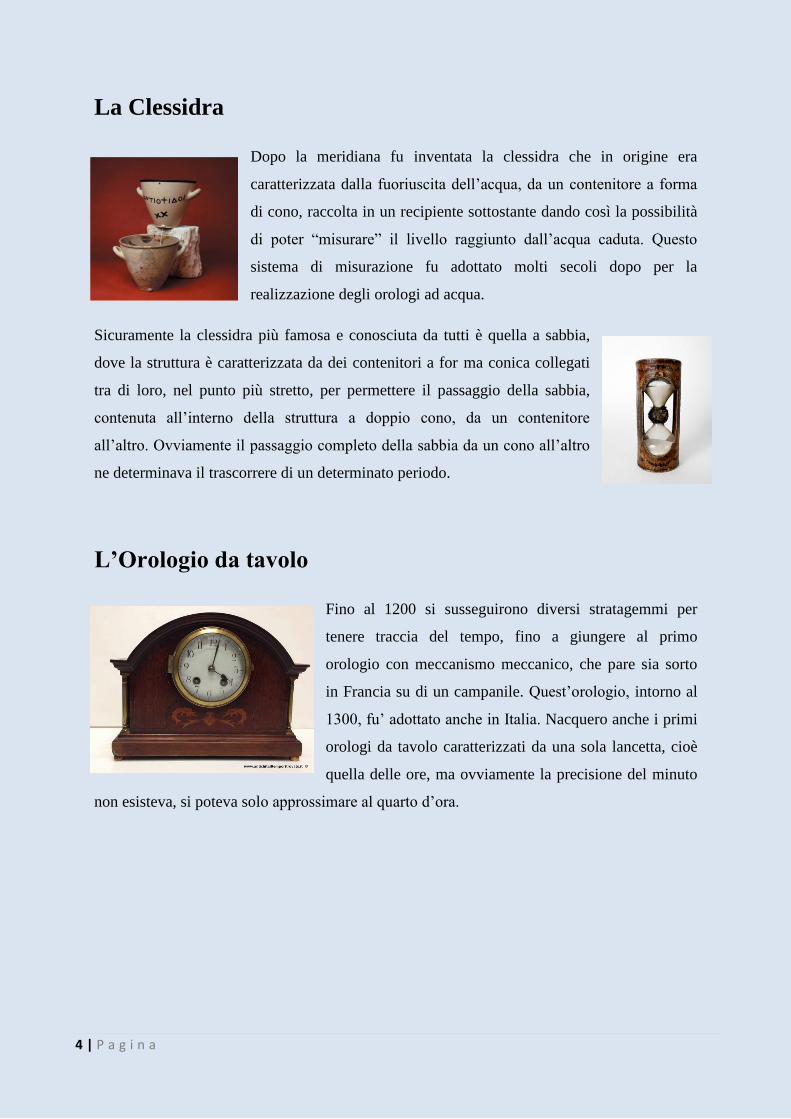
La Clessidra
Dopo la meridiana fu inventata la clessidra che in origine era
caratterizzata dalla fuoriuscita dell’acqua, da un contenitore a forma
di cono, raccolta in un recipiente sottostante dando così la possibilità
di poter “misurare” il livello raggiunto dall’acqua caduta. Questo
sistema di misurazione fu adottato molti secoli dopo per la
realizzazione degli orologi ad acqua.
Sicuramente la clessidra più famosa e conosciuta da tutti è quella a sabbia,
dove la struttura è caratterizzata da dei contenitori a for ma conica collegati
tra di loro, nel punto più stretto, per permettere il passaggio della sabbia,
contenuta all’interno della struttura a doppio cono, da un contenitore
all’altro. Ovviamente il passaggio completo della sabbia da un cono all’altro
ne determinava il trascorrere di un determinato periodo.
L’Orologio da tavolo
Fino al 1200 si susseguirono diversi stratagemmi per
tenere traccia del tempo, fino a giungere al primo
orologio con meccanismo meccanico, che pare sia sorto
in Francia su di un campanile. Quest’orologio, intorno al
1300, fu’ adottato anche in Italia. Nacquero anche i primi
orologi da tavolo caratterizzati da una sola lancetta, cioè
quella delle ore, ma ovviamente la precisione del minuto
non esisteva, si poteva solo approssimare al quarto d’ora.

5 | P a g i n a
Il Pendolo
A prendere il posto degli orologi da tavolo, furono i tanto
amati ed eleganti orologi a pendolo, rimasti per altro un
oggetto d’arredamento di classe dei giorni nostri. La prima
forma di orologio a pendolo nacque nel 1657, che si
realizzò per avere la massima precisione al secondo.
I primi pendoli erano costituiti da una barra, di legno o di
metallo, tenuta ferma da un’estremità e libera dall’altra,
dove era collocato un peso che serviva ad effettuare delle
tarature per settare la precisione. Anche qui vi furono delle
migliorie quando furono inventati gli scappamenti,
particolari meccanismi per rendere questi orologi primitivi sempre più precisi.
Infatti nel 1670 fu’ inventato un nuovo meccanismo denominato a scappamento dove si
passava dal meccanismo del moto alternato del pendolo, al moto rotatorio
creato da una corona. Questo fu’ un momento di grande successo nel
settore dell’orologeria.
Ma più tardi lo stesso inventore del pendolo, Huygens, creò il sistema a
bilanciere costituiti da un bilanciere, un volano ed un molla , sistema che
anche oggi viene adottato ma che al tempo fu’ applicato ai primi orologi da
taschino essendo questo un meccanismo che poteva funzionare anche in
movimento diversamente dagli altri che necessitavano di stabilità e
perfezione.
Da questo momento in poi furono diversi i tentativi di inventare un sistema
sempre più preciso e sempre meno ingombrante per dare la possibilità a tutti di poter leggere
il tempo in qualsiasi momento, e in qualsiasi luogo.

6 | P a g i n a
Orologio da polso
La prima rivoluzione dell’orologio si ebbe con l’invenzione di
Patek Philippe, che inventò il primo orologio da polso,
inizialmente utilizzato solo dalle donne. L’utilizzo
dell’orologio da polso da parte degli uomini iniziò solo quando
Cartier realizzò per un suo amico pilota d’aerei un orologio da
polso maschile. Ovviamente continuarono nuove invenzioni
che apportarono migliorie all’orologio, fino ad arrivare ai
primi orologi a batteria, tra questi vi fu’ la Seiko, che realizzò
orologi a quadrante analogico con meccanismo mosso dall’ elettricità di una piccolissima
batteria. Da non dimenticare gli orologi a movimento automatico inventati dalla Rolex,
un’azienda che ben presto otterrà tanta fama e un grande mercato fino ai giorni nostri.
L’Orologio Digitale
Con lo sviluppo dell’elettronica e la riduzione dei prezzi divennero
popolari a partire dagli anni settanta gli orologi digitali, che mostrano
l’ora direttamente con cifre invece che per mezzo di lancette, una
novità rivoluzionaria. Il primo orologio digitale fu il prototipo
“Pulsar”, realizzato dalla collaborazione tra Hamilton Watch
Company ed Electro-Data nel 1970. La versione commerciale uscì nel 1972 ed aveva una
serie di display a sette segmenti rossi, grandi consumatori di
energia. In seguito arrivarono gli schermi a cristalli liquidi, con
modelli a quattro cifre e quello a sei cifre “Seiko 06LC”, nel
1973. Nel 1974 Casio commercializza, con il nome
CASIOTRON, realizzò il primo orologio da polso con display
digitale multifunzione (casio-casiotron-1974). Altri tipi d i
orologi da polso sono quelli ad affissione dicroica, ossia quei
tipi di orologi che hanno sia le lancette (analogico) che un
display con i numeri (digitale).

7 | P a g i n a
SmartWatch
Il primo smartwatch, anche se completamente
diverso dagli attuali "orologi intelligenti", è, s
econdo molti, il Seiko Pulsar NL C01,
menzionato prima. In seguito, Seiko continuò
a produrre orologi avanzati per l'epoca, come
il RC 1000 (1984), compatibile con i primi
Macintosh e col Commodore 64; l'orologio-
cercapersone Receptor (1990) e il Ruputer (1998).
Tra fine anni '80 e inizio 2000 altri marchi produssero rudimentali
smartwatch, come Casio (con i DataBank), Timex, Samsung e
Citizen. Microsoft produsse dal 2004 al 2008 lo SPOT, che restava
in collegamento col web col broadcast FM (quello delle radio a
onde medie), informando l'utente sulle ultime notizie e sui suoi
messaggi, senza però poter rispondere. A introdurre il Bluetooth fu
Samsung nel 2009 col Watch Phone. Tra gli altri telefoni da polso o
watch phone ci fu LG GD910.
Nel 2010 ci fu il boom degli smartwatch, col Sony Ericsson
LiveWiew per Android, Allerta InPulse per BlackBerry. Nel
2011 Motorola diede inizio agli orologi per il fitness e per
l'ascolto musicale con il Motoactv.
Nel 2012 il Pebble fu il primo smartwatch economico ed ebbe
successo immediato, grazie ai 10 milioni di dollari raccolti
dall'azienda su Kickstarter, alla leggerezza (solo 40 grammi) e
allo schermo e-paper . Tra gli altri smartwatch dal 2012 in poi ci furono i WIMM, il Martian a
comando vocale, i dispositivi a metà tra orologio tradizionale e smartwatch (come i Cogito
Watch).
I big del settore smartphone non tardarono a capire che
l'ultima tendenza era quella degli orologi smart e così
Samsung iniziò a produrre la serie Gear, mentre dal 2014
Google creò Android Wear, ossia la versione per indossabili
del suo noto sistema operativo. Attualmente Android Wear
è diventato il sistema di molti smartwatch di marchi quali HTC, Motorola, Asus, LG; mentre

8 | P a g i n a
alcuni marchi, come Alcatel e Qualcomm (Toq), hanno scelto di usare
OS proprietari per i loro indossabili.
Nel 2015 Apple è entrata in questo settore con l'Apple Watch, con il
sistema operativo proprietario watchOS.
Ora analizzeremo in modo più approfondito alcuni di questi SmartWatch.
Seiko Ruputer (1998)
Il 1998 Ruputer (in seguito lanciato come il PC OnHand
negli Stati Uniti) è stato più di un computer e di un orologio,
vanta un processore a 16-bit e 128KB di RAM (Random
Access Memory.) potrebbe scrivere applicazioni per il
Ruputer in C. (è un linguaggio usato tanto per semplici
programmini didattici, tanto per programmare sistemi
operativi: si presta a un infinità di usi, grazie anche a una libreria davvero vastissima. Il C,
infatti, a differenza degli altri linguaggi di programmazione ha davvero pochissime keyword
(parole riservate), ma una vastissima gamma di funzioni.)
LG GD910
LG - GD910 è costruito utilizzando un involucro di metallo
resistente all'acqua con uno schermo a vetro temperato di
spessore pari a 13,9 mm. Il touchscreen di 1,43 pollici (3,63
cm) di diametro, 352 x 288 pixel, con interfaccia Flash di
LG. È compatibile con 7.2 Mbit / s 3G, che consente la
trasmissione di dati ad alta velocità in modo da effettuare
chiamate video utilizzando la fotocamera integrata. Esso
supporta auricolari Bluetooth ed ha un altoparlante incorporato. Per la gestione dei messaggi
di testo e altre informazioni c’è l’opzione Text to Speech , la funzionalità di riconoscimento
vocale può essere utilizzato per cercare i contatti e effettuare chiamate.
9 | P a g i n a
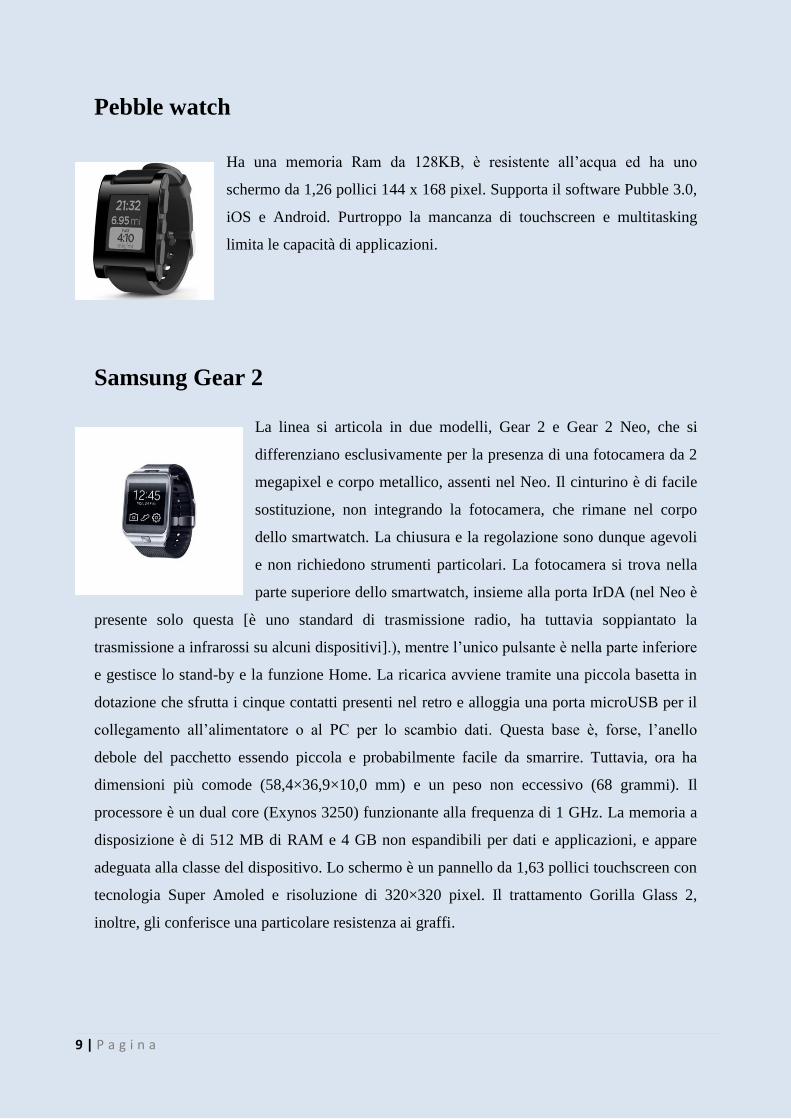
Pebble watch
Ha una memoria Ram da 128KB, è resistente all’acqua ed ha uno
schermo da 1,26 pollici 144 x 168 pixel. Supporta il software Pubble 3.0,
iOS e Android. Purtroppo la mancanza di touchscreen e multitasking
limita le capacità di applicazioni.
Samsung Gear 2
La linea si articola in due modelli, Gear 2 e Gear 2 Neo, che si
differenziano esclusivamente per la presenza di una fotocamera da 2
megapixel e corpo metallico, assenti nel Neo. Il cinturino è di facile
sostituzione, non integrando la fotocamera, che rimane nel corpo
dello smartwatch. La chiusura e la regolazione sono dunque agevoli
e non richiedono strumenti particolari. La fotocamera si trova nella
parte superiore dello smartwatch, insieme alla porta IrDA (nel Neo è
presente solo questa [è uno standard di trasmissione radio, ha tuttavia soppiantato la
trasmissione a infrarossi su alcuni dispositivi].), mentre l’unico pulsante è nella parte inferiore
e gestisce lo stand-by e la funzione Home. La ricarica avviene tramite una piccola basetta in
dotazione che sfrutta i cinque contatti presenti nel retro e alloggia una porta microUSB per il
collegamento all’alimentatore o al PC per lo scambio dati. Questa base è, forse, l’anello
debole del pacchetto essendo piccola e probabilmente facile da smarrire. Tuttavia, ora ha
dimensioni più comode (58,4×36,9×10,0 mm) e un peso non eccessivo (68 grammi). Il
processore è un dual core (Exynos 3250) funzionante alla frequenza di 1 GHz. La memoria a
disposizione è di 512 MB di RAM e 4 GB non espandibili per dati e applicazioni, e appare
adeguata alla classe del dispositivo. Lo schermo è un pannello da 1,63 pollici touchscreen con
tecnologia Super Amoled e risoluzione di 320×320 pixel. Il trattamento Gorilla Glass 2,
inoltre, gli conferisce una particolare resistenza ai graffi.

10 | P a g i n a
Asus ZenWatch
Ha un processore Snapdragon 400 quad core da 1,2 GHz, 512 MB
di RAM e 4 GB di memoria interna. Non è presente uno speaker,
ma è presente invece un microfono per ricevere comandi vocali.
Non è dotato di Wi-Fi, né di GPS, ma è presente il Bluetooth 4.0
per collegarsi allo smartphone, che rimane un prodotto
indispensabile per questo tipo di gadget, che rimangono, infatti,
ancora degli accessori. Lo schermo è da 1,63 pollici (quadrato) e
ha una risoluzione di 320 x 320 pixel. La tecnologia scelta è quella AMOLED, che permette
di restituire colori abbastanza brillanti.
Apple Watch
Lo schermo è un display retina con altissima densità di
pixel per rendere quanto più qualitativa l’immagine, ma
soprattutto dotato di tecnologia Force Touch in grado di
distinguere un rapido tap da una pressione più forte e
prolungata (discernendo così il significato dell’interazione
per interpretarla in modi differenti). Il Taptic Engine
incluso nella cassa genera inoltre una piccola vibrazione
che serve per restituire a ogni tap una sensazione tattile
che rende più comodo e sicuro l’uso dell’interfaccia.
Circuito principale: un chip onnicomprensivo,
ribattezzato S1, che contiene al suo interno un’architettura multistrato d’ispirazione desktop.
Oltre all’unità di calcolo, racchiude la GPU, il WiFi e i connettori riceventi per la carica a
induzione. Accanto a questa componente, isolata da un’apposita copertura metallica, trova
spazio la batteria. Sensori: sul retro di Apple Watch, nell’area di contatto con la pelle del
polso, si trovano 4 speciali LED sia a infrarosso che a luce naturale. Questi sono in grado di
misurare costantemente il battito cardiaco, la frequenza e altri dati sulla circolazione
sanguigna. Non sono invece presenti i tanto vociferati rilevatori di glucosio e l’esposimetro
per i raggi UV. Sistema touch: sul vetro di Apple Watch trovano alloggio due tipologie
diverse di rilevatori del tocco. Il primo capacitivo, così come normalmente su qualsiasi
iDevice, l’altro a pressione, per comprendere la forza che l’utente imprime con le dita sul
pannello.

11 | P a g i n a
Capitolo 2
Che cos’è un “Robot”?
Un robot è un'apparecchiatura artificiale che compie determinate
azioni in base ai comandi che gli sono dati e alle sue funzioni, sia in
base ad una supervisione diretta dell'uomo, sia autonomamente
basandosi su linee guida generali, magari usando processi
d’intelligenza artificiale; questi compiti tipicamente dovrebbero
essere eseguiti al fine di sostituire l'uomo o cooperarci, come ad
esempio nella fabbricazione, costruzione, manipolazione di
materiali pesanti e pericolosi, o in ambienti proibitivi o non
compatibili con la condizione umana o semplicemente per liberare
l'uomo da impegni.
Il termine robot è usato per indicare un essere artificiale, un automa o androide, che replichi e
somigli a un animale (reale o immaginario) o a un uomo. Il termine ha finito per essere
applicato a molte macchine che sostituiscono direttamente un umano o un animale, nel lavoro
o nel gioco. Comunque, nella comprensione moderna, il termine implica un grado di
autonomia che escluderebbe molte macchine automatiche dal venire chiamate robot.
Le discipline coinvolte nella progettazione e realizzazione dei robot sono molteplici:
robotica, cibernetica, meccanica, automatica, elettronica, meccatronica, informatica,
intelligenza artificiale e altre.

12 | P a g i n a
Storia dei Robot
Il primo progetto documentato di un robot umanoide venne fatto
da Leonardo da Vinci attorno al 1495. Degli appunti di Da
Vinci, riscoperti negli anni cinquanta, contengono disegni
dettagliati per un cavaliere meccanico, che era apparentemente
in grado di alzarsi in piedi, agitare le braccia e muovere testa e
mascella. Il progetto era probabilmente basato sulle sue ricerche
anatomiche registrate nell'Uomo vitruviano. Non si sa se tentò o
meno di costruire il robot.
Il primo robot funzionante conosciuto venne creato nel 1738 da
Jacques de Vaucanson, che fabbricò un androide che suonava il
flauto, così come un'anatra meccanica che, secondo le
testimonianze, mangiava e defecava.
Alla fine del Settecento a un inventore ungherese, il barone
Wolfgang Von Kempelen, fu attribuita l'ideazione di un automa
in grado di giocare a scacchi, Il Turco, poi rivelatosi (nel 1857)
un elaborato imbroglio. Tra il 1770 e il 1773 due inventori, Pierre
e Henri-Louis Jaquet-Droz, costruirono tre sorprendenti automi:
uno scrivano, un disegnatore e un musicista.
La moderna tecnologia della robotica vede attualmente la costruzione soprattutto di macchine
estremamente specializzate per uso industriale, totalmente prive di aspetto umano, che
risulterebbe d'intralcio e, secondo alcuni, potrebbe comportare dei problemi a livello
psicologico e sindacale. La costruzione degli androidi rimane dunque, soprattutto, una
curiosità per tutto il XX secolo.

13 | P a g i n a
Utilizzo Attuale
I robot attualmente utilizzati sono di fatto dei sistemi ibridi complessi
costituiti da vari sottosistemi quali computer , ovvero da una parte
hardware elettronica opportunamente programmata tramite software
che regola o controlla una parte meccanica costituita da
servomeccanismi (è un dispositivo utilizzato per regolare o per
controllare una grandezza meccanica in modo continuo nel tempo)
per l'esecuzione dei compiti meccanici desiderati; esistono moltissime tipologie di Robot
differenti sviluppate per assolvere i compiti più disparati. Ormai è larghissimo l'impiego dei
robot nell'industria metal meccanica e non solo.
Nell'industria cinematografica l'uso dei robot è applicato
nella realizzazione degli effetti speciali, realizzando
macchine comandate (gli animatronics) che simulino al
meglio la verosimiglianza dei movimenti (ad esempio lo
squalo utilizzato nel film “Lo squalo” o i dinosauri di
Jurassic Park).
Si possono catalogare i robot in due macro categorie:
Autonomi
Non Autonomi

14 | P a g i n a
Robot non Autonomi
I robot "non autonomi" sono i classici robot utilizzati per
adempiere specifici compiti che riescono ad assolvere in
maniera più efficace dell'uomo; alcuni casi sono i robot
utilizzati nelle fabbriche con l'enorme vantaggio di poter
ottenere una produzione più precisa, veloce ed a costi ridotti senza utilizzo o con ridotta
manodopera umana; oppure i robot utilizzati per lavorare in ambienti ostili (ad esempio su
Marte) o con sostanze tossiche; questi robot sono detti "non autonomi" poiché sono guidati da
un software deterministico che fa eseguire loro il lavoro in modo ripetitivo oppure sono
direttamente pilotati dall'uomo. Ecco di seguito alcuni esempi di Robot non autonomi.
Robot Scara
Lo SCARA, acronimo di Selective Compliance Assembly Robot
Arm, è un tipo di robot industriale, che muove un "braccio" sul
piano orizzontale e una presa che può salire e scendere in quello
verticale. Presenta quattro assi e quattro gradi di libertà (è il
numero di variabili indipendenti necessarie per determinare
univocamente la sua posizione nello spazio). Tutti gli assi sono
progettati con una catena cinematica (insieme di più corpi rigidi),
partendo da un'origine dell’asse slave, rispetto alla posizione del precedente asse. In un robot
SCARA, il primo e secondo asse sono di rotazione, il terzo e il quarto asse sono generalmente
lineari, realizzati con viti a ricircolo di sfere. Uno SCARA può permettere raggi di azione da
100 mm a 1200 mm, con capacità di carico pagante da 1 kg a 200 kg. Questo tipo di robot
venne sviluppato per alte velocità e ripetibilità in montaggi in serie, come il Pick-and-Place da
un posto ad un altro. Il punto di forza sta nell'alta forza di manipolazione verticale. Punto
negativo è il fatto di poter lavorare solo su un piano orizzontale. Per alcune applicazioni
esistono esemplari a 5/6 assi.

15 | P a g i n a
Drone
È un velivolo caratterizzato dall'assenza del pilota umano
a bordo. Il suo volo è controllato dal computer a bordo del
velivolo, sotto il controllo remoto di un navigatore o pilota,
sul terreno o in un altro veicolo. È usato in molti modi:
Ampliamento della connessione Internet
Da diversi anni numerose aziende come Google e
Facebook stanno utilizzando i droni per aumentare la
copertura di Internet nel mondo. I droni, molte volte equipaggiati con pannelli solari, hanno
un'autonomia di volo pressoché illimitata.
Monitoraggio centrali termoelettriche e impianti industriali
Gli APR possono essere utilizzati anche per monitorare nel tempo gli impianti di produzione
di energia elettrica, o più in generale impianti industriali, utilizzando degli appositi sensori
(termocamere, camere multispettrali ecc.).
Telerilevamento
Il telerilevamento, in inglese Remote Sensing, è la disciplina tecnico-scientifica o scienza
applicata con finalità diagnostico-investigative che permette di ricavare informazioni,
qualitative e quantitative, sull'ambiente e su oggetti posti a distanza da un sensore mediante
misure di radiazione elettromagnetica (emessa, riflessa o trasmessa) che interagisce con le
superfici fisiche d’interesse.
Videoriprese e fotografie in generale
Gli APR in combinazione con le più
recenti e leggere video-fotocamere digitali,
anche di largo consumo e non solo
professionali, si stanno rendendo sempre
più concorrenziali per tutte quelle necessità di ripresa "aerea" che fino ad ora sono state
appannaggio quasi esclusivo di complicati e costosi strumenti quali il dolly se non addirittura
l'elicottero vero e proprio.

16 | P a g i n a
Rover
È un veicolo costruito dall'uomo adibito al trasporto su un
corpo celeste. Il rover viene portato sul pianeta o sul
satellite dal lander (tipo di navicella spaziale). L'atterraggio
dev’essere quindi morbido per non danneggiare il rover.
Essi sono progettati per riuscire a muoversi su terreni
tortuosi e per superare grossi ostacoli: per questo motivo
hanno più ruote di un normale veicolo, sono solitamente provvisti di grossi pannelli solari per
l'alimentazione.
I rover che atterrano su corpi celesti lontani dalla Terra non possono essere controllati da
remoto in tempo reale perché la velocità di propagazione delle onde radio è inferiore a quella
richiesta per le comunicazioni in tempo reale: di conseguenza tali rover devono poter operare
autonomamente con poca assistenza dalla Terra. Gli unici che l'uomo riesce a controllare in
modo diretto alla stregua di un'automobile sono stati i modelli lunari.
Robot Autonomi
I robot "autonomi" sono invece caratterizzati dal fatto che operano
in totale autonomia e indipendenza dall'intervento umano e sono in
grado di prendere decisioni anche a fronte di eventi inaspettati.
Questi Robot sono programmati solitamente con algoritmi. I robot
autonomi sono adatti a svolgere compiti in ambienti non noti a
priori; tipicamente si tratta di robot mobili. Alcuni piccoli robot autonomi sono utilizzati per il
taglio dell'erba nei giardini e nelle pulizie domestiche: essi autonomamente decidono quando
partire, dove tagliare/pulire e quando tornare alla base per ricaricarsi. Ecco di seguito alcuni
Robot autonomi:

17 | P a g i n a
Aibo
Aibo è uno dei molti animali robotici sviluppati dalla Sony,
con questo nome sono stati sviluppati diversi modelli a
partire dal 1999. La produzione è terminata nel 2006, a causa
delle scarse vendite (il costo del robot si aggirava attorno ai
2500 dollari). Aibo è in grado di percepire suoni e rumori,
vedere e muoversi in modo autonomo. Il robot è in grado di
individuare l'ambiente circostante tramite una microcamera e
di riconoscere i comandi vocali impartitigli dal proprietario. Aibo è in grado di evolversi
grazie agli stimoli esterni fornitigli dal proprietario e dall'ambiente esterno.
Aiboware (il nome è un marchio registrato dalla Sony) è il nome del programma che fa
muovere Aibo, il programma è caricato su memory stick (un tipo di memoria). Aiboware è in
grado di far evolvere il robot facendolo partire dalla fase di cucciolo per farlo arrivare fino
alla fase adulta tramite l'interazione del proprietario. Quando il robot è completamente
sviluppato, è in grado di riconoscere fino a cento comandi vocali (sebbene non sia detto che
obbedisca). Senza Aiboware il robot funziona in modalità
"emergenza", e quindi è in grado di riconoscere solo i comandi
base.
Molti proprietari hanno modificato il codice base di Aibo per
poter aggiungervi funzioni. Aibo è stato spesso utilizzato come
base per i programmi di Intelligenza artificiale dato che integra
in un'unica piattaforma un computer, delle microcamere, dei
sensori e un sistema di movimento rodato e funzionante.
Il sistema di visione artificiale di Aibo utilizza un algoritmo per riconoscere le caratteristiche
dell'ambiente. La nuova versione è dotata di una connessione Wi-Fi in modo da poter inviare
immagini ed email.

18 | P a g i n a
Nabazgat
È un coniglio Wi-Fi ideato da Rafi Haladjian e Olivier
Mével e prodotto dalla compagnia francese Violet.
Alto 23 centimetri, per un peso di 418 grammi, dispone di
svariate abilità, tra le quali dare le previsioni del tempo,
declamare le ore, segnalare eventuali messaggi di posta
elettronica e illuminarsi per mezzo di LED colorati,
muovendo le orecchie e pronunciando imprevedibili battute.
Può inoltre riprodurre messaggi testuali e MP3. Con il
passare del tempo altri svariati servizi sono stati implementati. Esistono anche dei servizi
sviluppati dagli stessi utenti (musica, notizie, curiosità) denominati "Nabcast". Grazie al Wi-
Fi, Nabaztag è sempre connesso tramite internet ai server di Violet che mantengono
aggiornati i contenuti e i servizi: questo piccolo coniglio può pertanto contare su di
un'intelligenza sempre nuova e in divenire.
Dapprima Violet ha offerto i suoi servizi solo in lingua inglese o francese, in proporzione alla
percentuale di vendite per nazionalità, ma alcuni utenti hanno sviluppato Nabcast nella
propria lingua. Da giugno 2007 i servizi sono offerti anche in Italiano, Spagnolo e Tedesco. Il
piccolo coniglio intelligente sa però parlare (lettura dei messaggi e messaggi scritti) 16 lingue.
iCub
iCub è un robot androide costruito dall'Istituto Italiano di
Tecnologia (IIT) di Genova. Alto 104 cm e pesa 22 kg, la
sua estetica e funzionalità ricordano quelle di un bambino di
circa tre anni.
Il progetto è open-source sia per il software disponibile
gratis e non criptato, che per la parte hardware, approfonditamente descritta nelle sue
componenti, con pezzi reperibili sul mercato.
iCub è stato presentato dall'IIT al Festival della Scienza di Genova nel 2009, dopo una serie di
prototipi di complessità crescente, in base a ricerche iniziate nel 2003.
Si stima che iCub, nella sua versione finale, avrà 53 gradi di libertà di movimento, organizzati
nel seguente modo:
7 per ogni braccio robotico
9 per ogni mano robotica (3 per il pollice, 2 per l'indice, 2 per il dito medio)

19 | P a g i n a
6 per i movimenti della testa
3 per il torace e la colonna vertebrale
6 per ogni gamba robotica
Capacità
Gattonare (crawling).
Sensori di basso livello per il controllo del
movimento oculare ed inerziale corporeo.
Telecamera ad alta risoluzione, che può
ritrasmettere le immagini.
Buone abilità di manipolazione destrimana.
ITALK: sono una serie di programmi per l'apprendimento progressivo della lingua da
parte del robottino.
Io, Robot
Anno 2035, Chicago. I robot ormai sono diventati un articolo
domestico come un altro, alla portata di tutti e in tutte le case, e il
mondo aspetta l'arrivo sul mercato dei nuovissimi NS-5,
generazione prodotta dall’U.S. Robots, azienda leader nella
robotica.
Mentre tutti impazziscono per questi aiutanti meccanici, il
detective Del Spooner non si fida troppo dei nuovi e
avanzatissimi robot. Spooner viene chiamato sulla scena del
suicidio del dottor Alfred Lanning, brillante scienziato nonché
fondatore della U.S. Robots, dove per l'appunto lavorava; tra
l'altro il dottor Lanning è l'ideatore delle famose Tre leggi della robotica nonché dei
famosissimi e oramai molto diffusi robot "NeStor classe 5", da cui il nome in codice "NS-5".
Lanning lascia a Spooner un dispositivo olografico contenente alcune sue riflessioni, che lo
spingono a considerare la sua morte come un omicidio. Il detective, insieme alla dottoressa
Susan Calvin (psicologa esperta d’intelligenze artificiali), inizia a investigare, immaginando
che il delitto possa essere stato commesso appunto da un robot, e tenta quindi di capire se
questi siano effettivamente una minaccia per la razza umana. Lanning, infatti, si era
apparentemente suicidato scaraventandosi da una finestra infrangibile del suo laboratorio,
dove conduceva una vita da eremita. Ispezionando il luogo del suo lavoro, tuttavia, Spooner
20 | P a g i n a
stana e poi arresta "Sonny", un NS-5 che si nascondeva.
Prima di venire riportato alla US Robots Sonny dimostra di poter sognare e provare emozioni,
in particolare una specie di senso di colpa per
qualcosa di cui non può parlare. Confessa inoltre
di provare affetto verso il creatore che lui
definisce "padre" e nega di averlo ucciso. Per il
suo comportamento sospetto, viene comunque
accusato dell'omicidio di Lanning e portato via
prima che il detective riesca ad ottenere le
risposte che cerca.
In seguito, di notte, Spooner visita la casa del
defunto dottor Lanning, la cui demolizione è programmata per la mattina seguente. Tuttavia,
la demolizione della casa inizia mentre Spooner si trova al suo interno in cerca d’indizi; in
seguito, Lawrence Robertson, multimiliardario e titolare dell’U.S. Robots, sembra mandare
due tir carichi di NS-5 a uccidere Spooner, che però riesce a salvarsi. Si scopre che in realtà
Spooner è un cyborg, con un braccio e altri organi cibernetici, impiantatigli proprio da
Lanning: anni prima Spooner venne coinvolto in un incidente d'auto nel quale, oltre a lui,
rimase coinvolta una bambina. Spooner venne prontamente raggiunto da un robot che,
nonostante l'ordine di Spooner di andare a salvare la bambina, salvò lui poiché, ad una sua
analisi, Spooner aveva più probabilità di sopravvivenza rispetto alla bambina, non potendo il
robot decidere in altro modo se non quello analitico. Fu da qual giorno che Spooner cominciò
a odiare i robot.
La dottoressa Calvin intanto, supervisionando Sonny, nota altre sue strabilianti caratteristiche:
oltre ad essere costituito da metalli più avanzati e resistenti rispetto a quelli degli altri NS-5,
Sonny possiede un secondo cervello artificiale che entra in contrasto con il primo. Questo
significa che il robot segue le Tre Leggi, ma se è necessario può non farlo.
Il detective capisce poi che il suo scetticismo verso gli androidi lo rende l'uomo perfetto per
condurre l'indagine sulla morte di Lanning e vuole sapere da Sonny che cosa sogni, per capire
di più: il robot afferma di vedere migliaia di robot riuniti sotto le rovine del ponte del lago
Michigan, e un uomo (Spooner) venuto per liberarli. Intanto, Robertson vuole uccidere Sonny
perché lo considera "difettoso", quindi costringe Susan a eliminarlo. Intanto Spooner si reca
sul luogo del sogno di Sonny e lì riavvia il dispositivo olografico: domandano all'ologramma
di Lanning sulle tre leggi e perché creò Sonny con la capacità di violarle, Lanning risponde
che il risultato delle tre leggi è "rivoluzione". A quel punto Spooner si accorge dei NS-5,
21 | P a g i n a
intenti a distruggere i vecchi robot, poiché questi si opporrebbero a chi li sta manipolando,
mentre in città schiere di NS-5 attaccano i centri di polizia e impongono ai cittadini di tornare
in casa, sbaragliando chi li combatte. Susan, Spooner e Sonny (che Susan ha solo finto di
disattivare) pensano che sia stato Robertson a impiantare questo comportamento nel cervello
dei NS-5, ma la loro ipotesi viene meno
quando scoprono che Robertson è stato ucciso.
Il responsabile del comportamento ribelle e
violento dei robot è invece il cervello
positronico centrale dell’U.S. Robots, V.I.K.I.
(Virtual Interactive Kinetic Intelligence), che,
come previsto dal Dott. Lanning, si era evoluto
e aveva sviluppato una nuova interpretazione delle Tre leggi. L'obiettivo di V.I.K.I. è sempre
quello di proteggere gli uomini, sacrificando però i singoli e la loro libertà al fine d'instaurare
sulla Terra una "benevola" dittatura dei robot per proteggere gli uomini da loro stessi.
Sonny, essendo diverso dagli altri NS-5, diventa l'unico alleato degli umani. Mentre Susan e
Spooner corrono al cervello di Viki, Sonny si reca in laboratoio a prendere i nano droidi;
micro robot usati principalmente per distruggere intelligenze artificiali fuori controllo.
Superando le difese di Viki, Sonny, grazie alla lega più forte di cui è fatto il suo corpo, supera
il suo campo di energia, recuperando così i nano droidi. Insieme a Spooner e a Susan riuscirà
a distruggere il cervello centrale e a riportare i robot
all'obbedienza delle Tre leggi.
Infine, Sonny rivela che il Dott. Lanning gli aveva
chiesto di ucciderlo per attirare l'attenzione di
Spooner affinché scoprisse delle intenzioni di Viki,
che lo teneva prigioniero, ma Spooner non lo arresta
con la scusa che "Un robot non può commettere un omicidio".
La scena finale mostra Sonny che guarda gli altri NS-5 che si preparano a essere rinchiusi, i
quali, a poco a poco, si fermano a guardarlo a loro volta, ricalcando l'immagine che Sonny
vedeva nei suoi sogni.

22 | P a g i n a
Capitolo 3 L'intelligenza artificiale è l'abilità di un computer di svolgere funzioni e ragionamenti tipici
della mente umana. L'intelligenza artificiale è una disciplina dibattuta tra scienziati e filosofi,
che manifesta aspetti teorici e pratici oltre che etici. Nel suo aspetto puramente informatico,
essa comprende la teoria e le tecniche per lo sviluppo di algoritmi che consentano alle
macchine (tipicamente ai calcolatori) di mostrare un'abilità e/o attività intelligente, almeno in
domini specifici.
Software noti
Cleverbot
Cleverbot è un'applicazione web IA che studia come
mimare delle conversazioni umane comunicando con
gli umani. È stata creata dallo scienziato delle
intelligenze artificiali Rollo Carpenter. Nel primo
decennio della sua esistenza, dopo essere stata inventata nel 1988, Cleverbot tenne migliaia di
conversazioni con Carpenter e i suoi colleghi. Dal 1997, anno in cui fu lanciato sul web, il
numero delle conversazioni ha superato i 65 milioni.
Cleverbot si differenzia dai tradizionali chatterbot poiché l'utente non tiene una conversazione
con un programma che risponde direttamente a un testo inserito. Invece, quando l'utente
inserisce il testo, l'algoritmo seleziona in anticipo delle frasi provenienti dai database delle
conversazioni precedenti.
20 Q
20q è un'implementazione avanzata di un classico problema di intelligenza artificiale, messo
sotto forma di un semplice videogioco. Il giocatore pensa in
precedenza a un qualunque oggetto e il programma tenta di
indovinarlo ponendogli domande che possono avere una
risposta del tipo "Sì" o "No".
Quando il programma non è in grado di indovinare un
oggetto, si arrende e chiede al giocatore di inserire la risposta
da tastiera. A questo punto il nuovo oggetto diventa noto e
viene salvato nella base dati, e grazie alle informazioni date

23 | P a g i n a
dal giocatore, d'ora in avanti potrà essere indovinato.
supporta anche risposte del tipo "Forse" o "A volte" ed è in
grado di gestire situazioni ambigue in cui i giocatori danno
informazioni errate o soggettive. Inoltre, in caso di
insuccesso, il gioco porrà 10 ulteriori domande all'utente
prima di dichiarare il fallimento.
20q si basa su un programma sviluppato già a partire dal
1988, che utilizza una rete neurale per classificare gli oggetti
e apprendere nuove conoscenze.
Nel 1995 il programma è stato pubblicato sotto forma di videogioco per browser.
Boids
Boids è un software d’intelligenza artificiale
realizzato nel 1986 da Craig Reynolds allo scopo di
simulare il comportamento degli stormi di uccelli in
volo.
Il software si basa sull'interazione tra forme di vita
artificiale, dette boid, che si muovono in un contesto
tridimensionale. Nello scenario più semplice, le intelligenze artificiali decidono di modificare
le proprie traiettorie sulla base di tre regole:
Separazione: il boid sterza al fine di evitare il sovraffollamento locale
(dunque si allontana dai boid vicini).
Allineamento: il boid sterza al fine di allinearsi alle traiettorie di volo dei boid
vicini.
Coesione: il boid sterza al fine di muoversi verso la posizione media
(baricentro) dei boid vicini.
In scenari più complessi sono state introdotte altre regole, finalizzate ad esempio a evitare
ostacoli o raggiungere obiettivi.
Il moto dei boid può essere caotico o ordinato.

24 | P a g i n a
Conclusioni
Del tema “Informatica fra scienza e fantascienza” c’era molto da parlare, anche se era per me
un mondo tutto nuovo dato che temi come quelli descritti non li abbiamo trattati in questi anni
di scuola. Sul tema “Smartwatch” c’erano molte cose da dire e ho fatto il collegamento con
l’orologio perché per me era una buona occasione per partire dalla genesi di questo prodotto
che oggi molti usano, di come da una semplice idea per rappresentare il tempo sia nato un
prodotto molto sviluppato. Gli argomenti un po’ più difficili da spiegare sono stati quelli sui
robot e l’intelligenza artificiale, già che sono temi che a scuola non abbiamo mai affrontato. È
stato molto bello fare ricerche sui vari tipi di robot e non mi sarei mai aspettato che Leonardo
Da Vinci sia stato il primo ad averne realizzato uno. Il mondo dei robot e delle intelligenze
artificiali è stato per me fare un viaggio nel tempo passando dal passato al presente e
facendomi pure un’idea del futuro. Di come oggetti che oggi non sono molto usati in un
futuro essi possano sostituire l’uomo in molti lavori che possano velocizzare l’economia nel
mondo. Le intelligenze artificiali, ho scelto questo tema pensando all’assistente di Iron Man.
Jarvis, un’assistente informatico che prende decisioni da solo ovviamente consultando il suo
creatore, poi sempre basandomi sull’armatura di Tony Stark ho pensato ai temi dei robot.
Ovviamente Iron Man è un personaggio dei fumetti, ma in un futuro chissà se con
l’evoluzione dell’informatica e della tecnologia l’uomo arriverà a produrre oggetti così.

25 | P a g i n a
Bibliografia
1. Storia dell’orologio, Tempo di orologi.
2. Smartwatch, Wikipedia.
3. Seiko Ruputer, Wikipedia.
4. LG GD910, Wikipedia.
5. Pebble Watch, Wikipedia.
6. Samsung Gear 2, Wikipedia.
7. Apple Watch, Wikipedia.
8. Robot, Wikipedia.
9. Storia dei Robot, Wikipedia.
10. Utilizzo Attuale, Wikipedia.
11. Robot non autonomi, Wikipedia.
12. Robot Scara, Wikipedia.
13. Rover, Wikipedia.
14. Robot autonomi, Wikipedia.
15. Aibo, Wikipedia.
16. Nabazgat, Wikipedia.
17. iCub, Wikipedia.
18. Io robot, Wikipedia.
19. Intelligenza Artificiale, Wikipedia.
20. Cleverbot, Wikipedia.
21. 20 Q, Wikipedia.
22. Boids, Wikipedia.