Leonardo Colzani IL MODELLO DI POINCARÉ DELLA GEOMETRIA...
11
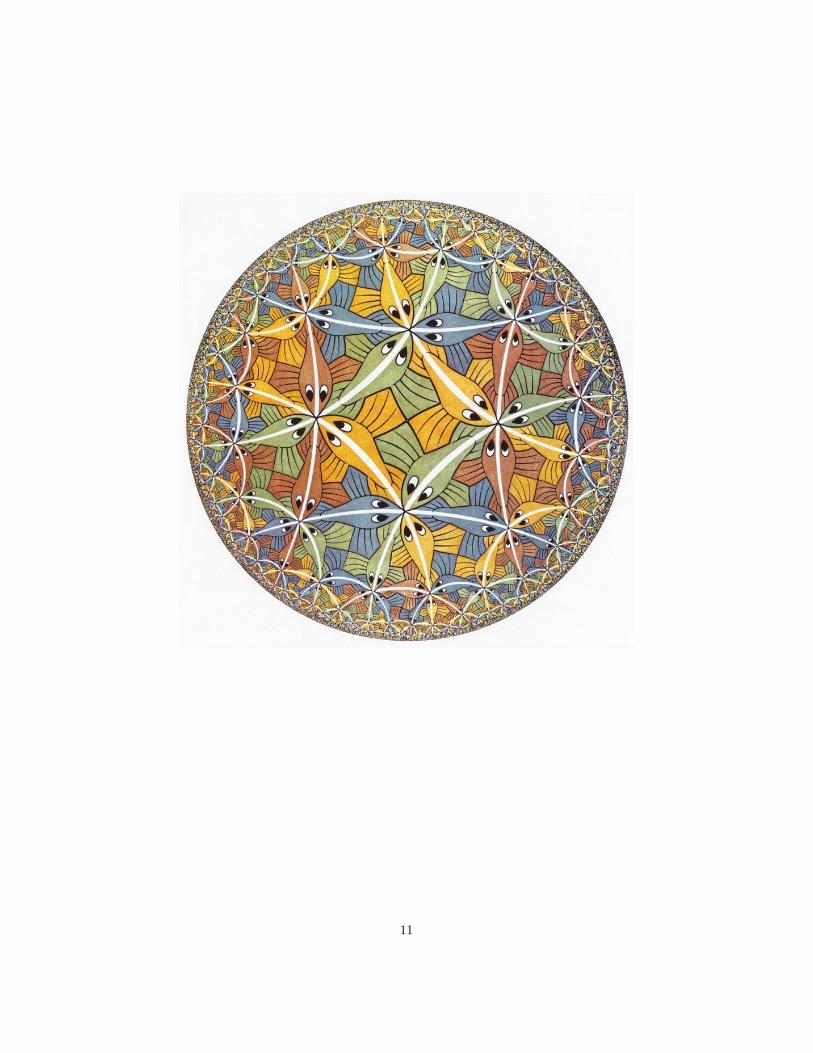
Leonardo Colzani IL MODELLO DI POINCAR DELLA GEOMETRIA NON EUCLIDEA Maurits Cornelis Escher Limite del Cerchio 1960 1
Transcript of Leonardo Colzani IL MODELLO DI POINCARÉ DELLA GEOMETRIA...

Leonardo Colzani
IL MODELLO DI POINCARÉDELLA GEOMETRIA NON EUCLIDEA
Maurits Cornelis Escher � Limite del Cerchio 1960
1

I POSTULATI DI EUCLIDE:(1) Tra due punti qualsiasi è possibile tracciare una ed una sola retta.(2) Una linea retta si può prolungare inde�nitamente.(3) Dato un punto e una lunghezza, è possibile descrivere un cerchio.(4) Tutti gli angoli retti sono uguali.(5) Se una retta taglia altre due rette, prolungando le due rette, esse si
incontrano dalla parte dove la somma dei due angoli è minore di due retti.
Un postulato di Proclo, equivalente al quinto, è che per un punto è possi-bile tracciare una ed una sola parallela ad una retta data. Negando il quintopostulato, si ottiene una geometria non euclidea. La geometria euclidea è lageometria su una super�cie con curvatura nulla. La geometria non euclidea el-littica è la geometria su una super�cie con curvatura positiva, la sfera, non cisono parallele e la somma degli angoli interni di un triangolo è maggiore di dueangoli retti. La geometria non euclidea iperbolica è la geometria su una super-�cie con curvatura negativa, la pseudosfera, per un punto fuori da una retta èpossibile tracciare in�nite parallele alla retta, la somma degli angoli interni diun triangolo è minore di due angoli retti, più un triangolo è grande minore è lasomma degli angoli, e non esistono triangoli con area arbitrariamente grande,....
La geometria non euclidea iperbolica è stata scoperta indipendentementeda Carl Friedrich Gauss (1777-1855), Nikolai Ivanovic Lobacevsky (1792-1856),János Bolyai (1802-1860), e modelli di questa geometria sono stati costruitida Eugenio Beltrami (1835-1900), Felix Christian Klein (1849-1925), e JulesHenri Poincaré (1854-1912). Questi modelli mostrano che il quinto postulato diEuclide non è conseguenza dei primi quattro, e che la geometria non euclidea èconsistente tanto quanto quella euclidea.
TRASFORMAZIONI LINEARI FRATTE
Una equazione di¤erenziale lineare omogenea del second�ordine con coe¢ ci-enti analitici ha soluzioni analitiche,
A (x)d2y
dx2+B (x)
dy
dx+ C (x) y = 0:
2

Queste soluzioni sono ben de�nite in ogni aperto semplicemente connesso chenon contiene zeri del coe¢ ciente A (x) o poli di B (x) e C (x). Se la variabilex gira intorno ad uno zero di A (x) o un polo di B (x) o C (x), una variabile sitrasforma in un�altra. In particolare, una base per le soluzioni fy1 (x) ; y2 (x)gsi trasforma in un�altra base fY1 (x) ; Y2 (x)g,�
Y1 (x) = �y1 (x) + �y2 (x) ;Y2 (x) = y1 (x) + �y2 (x) ;
Y1 (x) =Y2 (x) =�y1 (x) =y2 (x) + �
y1 (x) =y2 (x) + �:
La funzione z (x) = y1 (x) =y2 (x) prende quindi più valori, e la funzioneinversa x (z) è automorfa,
x (z) = x
��z + �
z + �
�:
De�nizione: Una trasformazione lineare fratta è una trasformazione dellasfera S = C [ f1g del tipo
w =�z + �
z + �:
In coordinate omogenee z = z1=z2 e w = w1=w2,�w1w2
�=
�� � �
� �z1z2
�:
Teorema:(1) Due matrici multiple una dell�altra danno la stessa trasformazione e la
trasformazione è invertibile se e solo se ha determinante non nullo. Le trasfor-mazioni w = (�z + �) = ( z + �) e z = (�w � �) = (� w + �) sono l�una inversadell�altra. In particolare, l�insieme delle trasformazioni invertibili è un gruppo, ilgruppo lineare proiettivo PGL (2;C). Questo gruppo è generato dalle traslazioniw = z + � , dilatazioni e rotazioni w = �z, e dall�inversione w = 1=z.(2) Dati tre punti distinti fa; b; cg e tre punti distinti fA;B;Cg nella sfera
S, esiste una ed una sola trasformazione lineare w = T (z) con T (a) = A,T (b) = B, T (c) = C.(3) Le trasformazioni lineari fratte trasformano rette e cerchi in rette e cer-
chi, e conservano il birapporto
(a; b; c; d) =a� ca� d :
b� cb� d :
(4) Le trasformazioni lineari fratte sono conformi, cioè conservano gli angolitra le curve.
Dimostrazione: (1) La dimostrazione che le trasformazioni lineari sono ungruppo è immediata. Per dimostrare questo gruppo è generato dalle traslazioni,
3

dilatazioni, rotazioni, e dall�inversione, basta osservare che
�z + �
z + �=(�= ) ( z + �) + (� � ��= )
z + �=� (�� � � ) = 2
z + �= + �= :
(2) Nella trasformazione w = (�z + �) = ( z + �) i parametri f�; �; ; �g sonode�niti a meno di una costante, ci sono tre gradi di libertà e si possono imporretre condizioni. Più esplicitamente, la trasformazione
P (z) =z � az � b :
c� ac� b
manda fa; b; cg in f0;1; 1g e la trasformazione
Q (z) =z �Az �B :
C �AC �B ;
manda fA;B;Cg in f0;1; 1g. Quindi Q�1T (z) manda fa; b; cg in fA;B;Cg.(3) Nel campo complesso le rette ed i cerchi hanno equazioni azz+ bz+ cz+
d = 0, se a = 0 è una retta e se a 6= 0 è un cerchio. Le traslazioni, dilatazioni,rotazioni, e l�inversione, conservano la famiglia di queste equazioni. Per esempio,l�inversione w = 1=z trasforma azz+bz+cz+d = 0 in dww+cw+dw+a = 0. Ladimostrazione che le traslazioni, dilatazioni, rotazioni, e l�inversione, conservanoil birapporto è simile. Per esempio, nel caso dell�inversione basta veri�care che
1=a� 1=c1=a� 1=d :
1=b� 1=c1=b� 1=d =
a� ca� d :
b� cb� d :
(4) Tutte le trasformazioni olomorfe invertibili sono conformi. �
Teorema:(1) Il gruppo degli automor�smi del disco fjzj < 1g sono le trasformazioni
lineari fratte
w = ei#�� z1� �z ;
con 0 � # < 2� e j�j < 1.(2) Ogni automor�smo del disco si fattorizza in R T�R', con R' = ei'z
e T� (z) = (� � z) = (1� �z), 0 � ' < 2� e 0 � � < 1. In particolare, gliautomor�smi del disco agiscono in modo doppiamente transitivo sul disco, sipuò mandare un punto del disco in un qualunque altro punto del disco e poi sipuò girare intorno a questo punto.
Dimostrazione: (1) La trasformazione w = (�� z) = (1� �z) è l�inversa dise stessa, scambia 0 con �, e manda il cerchio fjzj = 1g in se. Infatti, se z = ei#,
�� ei#1� �ei# = �e
i# 1� �e�i#1� �ei# :
E jw=wj = 1. In�ne, se S(z) è un automor�smo del disco con S(0) = � ese T (z) = (�� z) = (1� �z), allora TS(z) trasforma il disco nel disco e �ssa
4

l�origine, TS(0) = 0 e, per il Lemma di Schwarz, jd=dz TS(0)j � 1. Similmente,per il lemma di Schwarz applicato all�automor�smo inverso,
��d=dz S�1T�1(0)�� �1. Quindi jd=dz TS(0)j = 1, e dal lemma di Schwarz si ricava che TS(z) = ei#zè una rotazione. Quindi, S(z) = T
�ei#z
�.
(2) Se � = �e�i', allora
ei#�� z1� �z = e
i(#��) � � ei'z1� �ei'z : �
Teorema:La trasformazione lineare fratta w = i (1� z) = (1 + z) è una mappa con-
forme del disco fjzj < 1g nel semipiano fIm(w) > 0g, e la trasformazione in-versa z = (i� w) = (i+ w) è una mappa conforme del semipiano nel disco.Se S(w) = (i� w) = (i+ w) e se F (z) è un automor�smo del disco, alloraS�1FS(w) è un automor�smo del semipiano. Viceversa, se G(w) è un au-tomor�smo del semipiano, allora SGS�1(z) è un automor�smo del disco. Inparticolare, i gruppi di automor�smi del disco e del semipiano sono isomor�.
Dimostrazione: La mappa conforme z = (i� w) = (i+ w) trasforma laterna f0; 1;1g nella terna f1; i;�1g, e trasforma i in 0. Quindi trasforma ilsemipiano fIm(w) > 0g nel disco fjzj < 1g. �
LA METRICA DEL DISCO IPERBOLICO
In un mondo anisotropo con dei limiti di velocità v(z) che variano da puntoa punto, la via più rapida tra due punti è la curva � che minimizza l�integraleZ
�
dt =
Z�
jdzjjdzj =dt =
Z�
jdzjv(z)
:
De�nizione: La lunghezza di una curva regolare a tratti � = fz(t); a � t � bgrispetto ad una metrica conforme �(z) jdzj, con �(z) > 0, è
L (�) =
Z�
�(z) jdzj =Z b
a
�(z) jd=dt z(t)j dt:
L�area di una regione rispetto ad una metrica conforme �(z) jdzj è
A () =
Z Z
�2(x+ iy)dxdy:
Si può introdurre nel disco fjzj < 1g una metrica riemanniana conforme conla proprietà che gli automor�smi sono isometrie.
Teorema:(1) Gli automor�smo del disco fjzj < 1g sono isometrie della metrica �(z) jdzj
se e solo se �(z) = �(0)�1� jzj2
��1.
5

(2) Le geodetiche nella metrica�1� jzj2
��1jdzj sono i diametri del disco e
gli archi di cerchio perpendicolari al bordo del cerchio. Per ogni coppia di puntipassa una ed una sola geodetica.
(3) La distanza tra due punti z e w nel disco con la metrica�1� jzj2
��1jdzj
è
d (z; w) =1
2log
�j1� zwj+ jz � wjj1� zwj � jz � wj
�:
Equivalentemente, se fz; w; p; qg sono quattro punti su un cerchio ortogonaleal bordo del disco fjzj < 1g, con z e w interni al disco e p e q sul bordo, ladistanza tra z e w è il logaritmo del birapporto tra i punti fz; w; p; qg,
d (z; w) =1
2log (z; w; p; q) =
1
2log
�z � pz � q :
w � pw � q
�:
(4) Se z = x + iy, la misura�1� x2 � y2
��2dxdy è invariante per gli au-
tomor�smi del disco. L�area di un triangolo geodetico con angoli f�; �; g è� � � � � � . Più in generale, l�area di un poligono geodetico semplicementeconnesso con n lati ed angoli f�; �; ; :::; �g è (n� 2)� � (�+ � + + :::+ �).
Dimostrazione: (1) La trasformazione w = S(z) è una isometria se e solose il vettore tangente alla curva S (�) nel punto S (z (t)) ha lunghezza uguale alvettore tangente alla curva � nel punto z (t). Per una metrica conforme �(z) jdzj,
� (S (z (t))) jd=dt S (z (t))j = � (S (z (t))) jd=dz S (z (t))j jd=dt z (t)j
=
�� (S (z (t)))
� (z (t))jd=dz S (z (t))j
�� (z (t)) jd=dt z (t)j :
Quindi, la trasformazione è una isometria se e solo se
� (S (z))
� (z)jd=dz S (z)j = 1:
In particolare, con z = 0,
� (S (0)) =� (0)
jd=dz S (0)j :
Se S(z) = ei# (�� z) = (1� �z), allora���� ddzS(z)���� =
�����ei# ��� 1(1� �z)2
����� = 1� j�j2
j1� �zj2:
In particolare, S (0) = ei#� e jd=dz S (0)j = 1 � j�j2. Quindi, se la met-rica �(z) jdzj è una isometria, allora �(z) = �(0)
�1� jzj2
��1. È ora semplice
6

veri�care che questa metrica è e¤ettivamente una isometria.
� (S (z)) =�(0)
1� jS (z)j2=
�(0)
1� j�� zj2
j1� �zj2
=�(0) j1� �zj2�
1� j�j2��1� jzj2
� :Quindi,
jd=dt S (z (t))j1� jS (z (t))j2
=jd=dt z (t)j1� jzj2
:
(2) Si può confrontare la lunghezza di una curva � = fz (t) = x (t) + iy (t)gche connette l�origine 0 ad un punto 0 < p < 1 con la lunghezza del segmento� = fz (t) = x (t)g,
jd=dt x (t)j1� jx (t)j2
�
q(d=dt x (t))
2+ (d=dt y (t))
2
1� x (t)2 � y (t)2:
Questo segue dal fatto che aumentando il numeratore e diminuendo il denom-inatore la frazione cresce. Quindi la lunghezza di � è minore della lunghezzadi � e le geodetiche per l�origine sono i diametri. Una qualunque coppia dipunti a e b nel disco è l�immagine attraverso una trasformazione lineare frattaw = S(z) dell�origine 0 e di un punto 0 < p < 1. Siccome gli automor�smidel disco sono isometrie, l�immagine del segmento f0 � t � pg è la geodeticache congiunge a a b. In�ne, un diametro è perpendicolare al bordo del discofjzj < 1g, e l�immagine di un diametro attraverso un automor�smo del disco èun altro diametro, o un cerchio perpendicolare al bordo del disco. La geodeticaper questi punti a e b è il cerchio che passa per a, b, e per 1=b.(3) La geodetica che congiunge l�origine 0 ad un punto z è il segmento
ftz; 0 � t � 1g, ed ha lunghezza
d (0; z) =
Z 1
0
jzj dt1� jtzj2
=1
2log
�1 + jzj1� jzj
�:
Se � e � sono punti nel disco, con l�automor�smo S(z) = (�� z) = (1� �z)si può trasportare � in 0 e � nel punto (�� �) = (1� ��) e, siccome S(z) è unaisometria,
d (�; �) = d (0; (�� �) = (1� ��)) = 1
2log
�j1� ��j+ j�� �jj1� ��j � j�� �j
�:
Una de�nizione equivalente di distanza è la seguente. Dati i quattro puntif0; � ; 1;�1g, con 0 < � < 1, la distanza tra 0 e 1 è la metà del logaritmo delbirapporto di f0; � ; 1;�1g, 1=2 log (0; � ; 1;�1) = 1=2 log ((1 + �) = (1� �)). Sic-come sia la distanza che il birapporto sono invarianti per trasformazioni linearifratte, se fz; w; p; qg sono quattro punti su un cerchio ortogonale al bordo deldisco fjzj < 1g, con z e w interni al disco e p e q sul bordo, la distanza tra z ew è la metà del logaritmo del birapporto dei punti fz; w; p; qg.
7

(4) Sia l�area A () che il difetto angolare (n� 2)� � (�+ � + + :::+ �)sono invarianti per gli automor�smi del disco e sono funzioni additive sull�insiemedei poligoni geodetici semplicemente connessi. Quindi, queste quantità sonoproporzionali tra loro, A () = c ((n� 2)� � (�+ � + + :::+ �)). Basta poicalcolare la costante di proporzionalità su un particolare triangolo. Una di-mostrazione alternativa segue dal corrispondente risultato nel semipiano. Conla notazione z = x + iy e w = u + iv e con il cambio di variabili w =i (1� z) = (1 + z) e z = (i� w) = (i+ w) tra il disco fjzj < 1g e il semipianofIm(w) > 0g, ad un quadratino con area
�1� x2 � y2
��2dxdy nel disco è asso-
ciato un quadratino con area v�2dudv nel semipiano. Infatti, la trasformazionez = (i� w) = (i+ w) è conforme ed ha derivata dz=dw = �2i= (i+ w)2, e
dxdy
(1� x2 � y2)2=
����2i= (i+ (u+ iv))2���2�1� j(i� (u+ iv)) = (i+ (u+ iv))j2
�2 dudv = dudv
v2:
Si può ora calcolare l�area di un triangolo nel semipiano con vertici neipunti
�Rei(���); Rei� ;1
ed angoli interni f�; �; 0g,
A () =
Z Z
dudv
v2=
Z@
du
v=
Z �
���
d=d# R cos (#)
R sin (#)d# = � � �� �: �
Nel disco fjzj < 1g con limitedi velocità
�1� jzj2
�il bordo
è in�nitamente lontano. Ladistanza tra due punti A e Bè la metà del logaritmo delbirapporto fA;B; P;Qg . Lasomma degli angoli internial triangolo è minore di � el�area è uguale al difettoangolare � � �� � � .
In un triangolo con lati fa; b; cg ed angoli f�; �; g ,cosh (a) = cosh (b) cosh (c)� sinh (b) sinh (c) cos (�) ;
sinh (a)
sin (�)=sinh (b)
sin (�)=sinh (c)
sin ( ):
Per esempio, in un triangolo rettangolo con vertici O = (0; 0), A = (a; 0),
8

B = (0; b), i cateti misurano
OA =1
2log
�1 + a
1� a
�;
OB =1
2log
�1 + b
1� b
�;
AB =1
2log
p1 + a2b2 +
pa2 + b2p
1 + a2b2 �pa2 + b2
!:
Si ha poi
cosh (2OA) =1 + a2
1� a2 ;
cosh (2OB) =1 + b2
1� b2 ;
cosh (2AB) =1 + a2 + b2 + a2b2
1� a2 � b2 + a2b2 :
Quindi il teorema di Pitagora non euclideo è
cosh (2AB) = cosh (2OA) � cosh (2OB) :
Se il triangolo è piccolo, per a; b ! 0+ si ritrova il teorema di Pitagoraeuclideo,
cosh (2OA) � cosh (2OB) � cosh (2a) � cosh (2b) � 1 + 2�a2 + b2
�;
cosh (2AB) � 1 + 2AB2:
In geometria non euclidea il raggio del cerchio e la lunghezza della circon-ferenza con centro (0; 0) passante per z sono
r = d (0; z) =1
2log
�1 + jzj1� jzj
�;
2� jzj1� jzj2
=�
2(exp (2r)� exp (�2r)) :
E ancora, al limite per r ! 0+ si ottiene la circonferenza euclidea 2�r.Quanto visto nel disco si può estendere immediatamente ad un semipiano.
Teorema:(1) Gli automor�smo del semipiano fjIm (z)j > 0g sono isometrie della met-
rica �(z) jdzj se e solo se �(z) = � (i) (Im (z))�1.(2) Le geodetiche nella metrica (Im (z))�1 jdzj sono semirette verticali e archi
di cerchio perpendicolari all�asse reale. Per ogni coppia di punti passa una eduna sola geodetica.
9

(3) Se fz; w; p; qg sono quattro punti su un cerchio ortogonale al bordo delsemipiano, con z e w interni al semipiano e p e q sul bordo, la distanza tra ze w è la metà del logaritmo del birapporto tra i punti fz; w; p; qg,
d (z; w) =1
2log (z; w; p; q) =
1
2log
�z � pz � q :
w � pw � q
�:
(4) Nel semipiano con la metrica jIm (z)j�1 jdzj l�area di un poligono geo-detico semplicemente connesso con n lati ed angoli f�; �; ; :::; �g è (n� 2)��(�+ � + + :::+ �).
Dimostrazione: La dimostrazione è analoga a quella del teorema prece-dente. �
Più in generale, si può introdurre una metrica iperbolica in ogni dominiosemplicemente connesso distinto dall�intero piano. Se w = w (z) è una trasfor-mazione conforme di un dominio nel disco fjwj < 1g, in si può de�nire lametrica
jdw=dzj1� jwj2
dz:
Per visualizzare i piani delle geometrie euclidee e non euclidee, si possonoritagliare e poi incollare assieme lungo i lati un certo numero di triangoli equila-teri. Se in ogni vertice si incollano 3, o 4, o 5 triangoli, si ottengono un tetraedro,un ottaedro, un icosaedro, poliedri che approssimano una sfera, una super�ciecon curvatura positiva. Se in ogni vertice concorrono 6 triangoli, si ottiene ilpiano euclideo, che ha curvatura zero. Se in ogni vertice si incollano 7, 8, o piùtriangoli, la super�cie si increspa e tende ad avere una curvatura negativa. Lageometria non euclidea ellittica è la geometria su una super�cie con curvaturapositiva, la geometria euclidea è la geometria su una super�cie con curvaturanulla, e la geometria non euclidea iperbolica è la geometria su una super�cie concurvatura negativa. In�ne, quanto visto in due dimensioni si può estendere a tredimensioni. Lo spazio è un semispazio. I piani sono piani o semisfere perpendi-colari al bordo del semispazio. Le rette sono rette o semicerchi perpendicolarial bordo del semispazio. La distanza è la metà del logaritmo del birapportotra i due punti nel semispazio ed i due punti sul bordo. Una interpretazione�sica della geometria di Poincaré è un mondo caldo al centro ed in�nitamentefreddo al bordo. Spostandosi dal centro verso il bordo, un corpo si ra¤redda esi contrae. Ma questi mutamenti di distanze e dimensioni si possono percepiresolo dall�esterno. Per chi vive all�interno di questo mondo e muovendosi si es-pande e si contrae insieme al corpo, uno stesso corpo appare uguale a se stessoindipendentemente dalla sua posizione.
10
11



![LL l barrata [ ł Ł ]. Lettera dell’alfabeto chipewyan, navajo, polacco e di molte altre lingue. labbro [dal lat. labrum]. Taglio dell’asse* della legatura*, cioè la stretta](https://static.fdocumenti.com/doc/165x107/5e349a6c4c6f1f26e453b3df/l-l-l-barrata-lettera-dellaalfabeto-chipewyan-navajo-polacco-e-di.jpg)