
Laboratorio Progettazione del telaio - Sito operativo …. Verificato l’RBE2 reimpostiamo il...
14
Laboratorio Progettazione del telaio Lezione: 01/06/17 (Continuazione della lezione precedente di laboratorio) Scopo lezione: analisi statica e dinamica di una monoscocca semplificata tipo formula SAE. Scarico da wiki, nella sezione “FEM: telaio tipo formula SAE semplificato”, i seguenti file: • https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2017/telaio_monocoque_2017_v009b.mud • https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2016/inerzia_parallelepipedo_equivalente_m otore.ods • https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2016/inerzia_parallelepipedo_equivalente_gr uppi_mozzo.ods • https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2016/telaio_monocoque_solomasse.mfd 1. Apro con Marc_Mentat il file telaio_monocoque_2017_v009b 2. Aggiungiamo i gradi mancanti all’ RBE2 del portamozzo • LINKS à RBE2 à EDIT à (aggiungiamo gradi di libertà 4, 5, 6) 3. Controlliamo condizioni al bordo à ok, sono corrette. Una volta controllato che il modello sia completo e giusto, passiamo ad analizzare la struttura: 4. Impostiamo il JOBS: • JOBS à NEW à STRUCTURAL à name: calcolo_kt o PROPERTIES à INITIAL LOAD à selezionare tutti i carichi iniziali
Transcript of Laboratorio Progettazione del telaio - Sito operativo …. Verificato l’RBE2 reimpostiamo il...

LaboratorioProgettazionedeltelaio
Lezione:01/06/17
(Continuazionedellalezioneprecedentedilaboratorio)
Scopolezione:analisistaticaedinamicadiunamonoscoccasemplificatatipoformulaSAE.
Scaricodawiki,nellasezione“FEM:telaiotipoformulaSAEsemplificato”,iseguentifile:
• https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2017/telaio_monocoque_2017_v009b.mud• https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2016/inerzia_parallelepipedo_equivalente_m
otore.ods• https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2016/inerzia_parallelepipedo_equivalente_gr
uppi_mozzo.ods• https://cdm.ing.unimo.it/dokuwiki/_media/wikitelaio2016/telaio_monocoque_solomasse.mfd
1. AproconMarc_Mentatilfiletelaio_monocoque_2017_v009b
2. Aggiungiamoigradimancantiall’RBE2delportamozzo
• LINKSàRBE2
àEDITà(aggiungiamogradidilibertà4,5,6)
3. Controlliamocondizionialbordoàok,sonocorrette.
Unavoltacontrollatocheilmodellosiacompletoegiusto,passiamoadanalizzarelastruttura:
4. ImpostiamoilJOBS:
• JOBSàNEW
àSTRUCTURALàname:calcolo_kt
o PROPERTIESàINITIALLOAD
àselezionaretuttiicarichiiniziali

o JOBRESULTSàselezioniamo:
§ STRESS(MAX&MIN)§ EQUIVALENTVONMISSES(MAX&MIN)
5. Lanciolasimulazione:
• premocomandiCHECK,RENUMBERALL(solitopassaggioprimadelSUBMIT)• premoRUN
àSUBMIT
6. Apriamoladeformatapervederesehannosensoirisultati:“direidisì”(cit.professore)
7. Effettuiamocalcolodellarigidezzatorsionaleattraversolaformula:
𝑀 = 𝐾! ∙ 𝜃PoichéMarcciforniscesolamenteglispostamenti(displacement),calcoliamolarotazioneattraversolalunghezzadellacareggiata(c)elospostamentosull’assez(dz).Poichésiamoinpresenzadiangolipiccolipossiamoapprossimarelatangenteall’angoloinradianti:
tan 𝜃 ≈ 𝜃[rad]quindi
𝜃 = !"![rad]=!"
!∙ !"#![deg]=0,00104643
dove:
• dz=0,0253191mm• c=1387,02mm
dzèstatoricavatoattraverso:
• selezionareNUMERICSdalmenùeleggereilnumerorelativoallospostamento(displacementZ)delportamozzoanterioredestro(vedifrecciaverdeimmagine)
cèstatoricavatoattraverso:
• UTILS(menùinbasso)àDISTANCE
àselezionareipuntiaterradxesx(vedifrecciarossaimmagine)

Quindilarigidezzatorsionalerisulta:
𝐾! =𝑀𝜃=𝑐 ∙ 𝐹𝜃
=1,38702 𝑚 ∙ 1𝑁0,00104589
= 1326,15 𝑁𝑚°
8. DalmenùRESULTS,selezioniamoilsottomenùSCALARPLOT:
• SCALAR
àMaxEquivalentVonMisesStressAcrossLayers.
ilqualecidaun’ideadelladistribuzionedelletensioni:inquestomodopossiamocapiredovesarebbemeglioutilizzaredeirinforziperlastruttura
NOTA:èsbagliatoutilizzareRBE3traattacchisospensioniecentro-ruotanelcalcolodiKtperchéinquestomodolasospensionerisulterebbescarica,equindinontrasmetterebbelereazionialtelaio.
9. FacciamounaprovacambiandomodulodiYoungalmaterialedellamollaeverifichiamocheRBE2funzionacorrettamente:
• MATERIALPROPERTIESàNEW
àSTANDARDàname:molle

o STRUCTURAL§ YOUNG’SMODULSàporre1(moltiordinedigrandezzainferioreaquello
dell’acciaio);§ POISSON’SRATIOà0
o ADDàselezionarecomeelementiiduepuntoni(vediinfigura);
10. RilancioilJOBS:
§ pervisualizzaremeglioladeformatacambioscalaàmanual:100;§ dall’immagine(vedifigura)sinota:
o tuttalarotazioneèconcentratasullemolle:unasicomprimeel’altrasiespande;o ladistribuzionedelletensionièidenticaaprima,ciòvuoldirecheilsistemadi
sospensionifunzionacorrettamenteetrasmettebeneleforzealtelaio(verificadell’RBE2eseguita)


11. Verificatol’RBE2reimpostiamoilmaterialedellemollecomeinprecedenza(alluminio);
12. Mentreèfacilevalutareilcomportamentostaticodelveicolo,poichénelcalcolodellarigidezzatorsionaledobbiamoconsiderareelementidelveicolochehannorigidezzaparagonabileaquelladeltelaio(esempiomotore),ilcomportamentodinamicoèpiùdifficiledavalutareinquantoentranoingiocomasseeinerzierilevanti(ilveicoloinfettièsoggettoadaccelerazioni).Lemasserilevantipossonoessere:
§ gruppiruota;§ motore(inFormulaSAEcostituisce¼dellamassatotale);§ serbatoio;§ pilota;§ pacchettoaerodinamico.
13. Nelcasotrattatoinquestalezionesiesegueunanalisisemplificatainserendosologrupporuotae
motore:
§ Apriamofilescaricatoadiniziolezione:telaio_monocoque_solomasse;
Comesipuòvedereilfileègiàcompostodi:
§ 4nodichecorrispondonoaicentridelle4ruotedicuiunoècopertodaunelementocubicorappresentativodellaruota(rappresentazionestilizzata);
§ unaltrocuborappresentativoilmotore.
14. ImpostiamoRBE2perilgrupporuotaeperilmotore:
• LINKSàRBE2
àNEWàNODEREFERENCEàselezionarecentrodelcubodellaruotaàNODESADDàselezionareiverticidelcubodellaruota(NOilcentro!!)àattivaretuttiiGDL(DOF)
àNEWàNODEREFERENCEàcentrodelmotoreàNODEADDàselezionareiverticidelcubodelmotore(NOilcentro!!)àattivaretuttiiGDL(DOF)
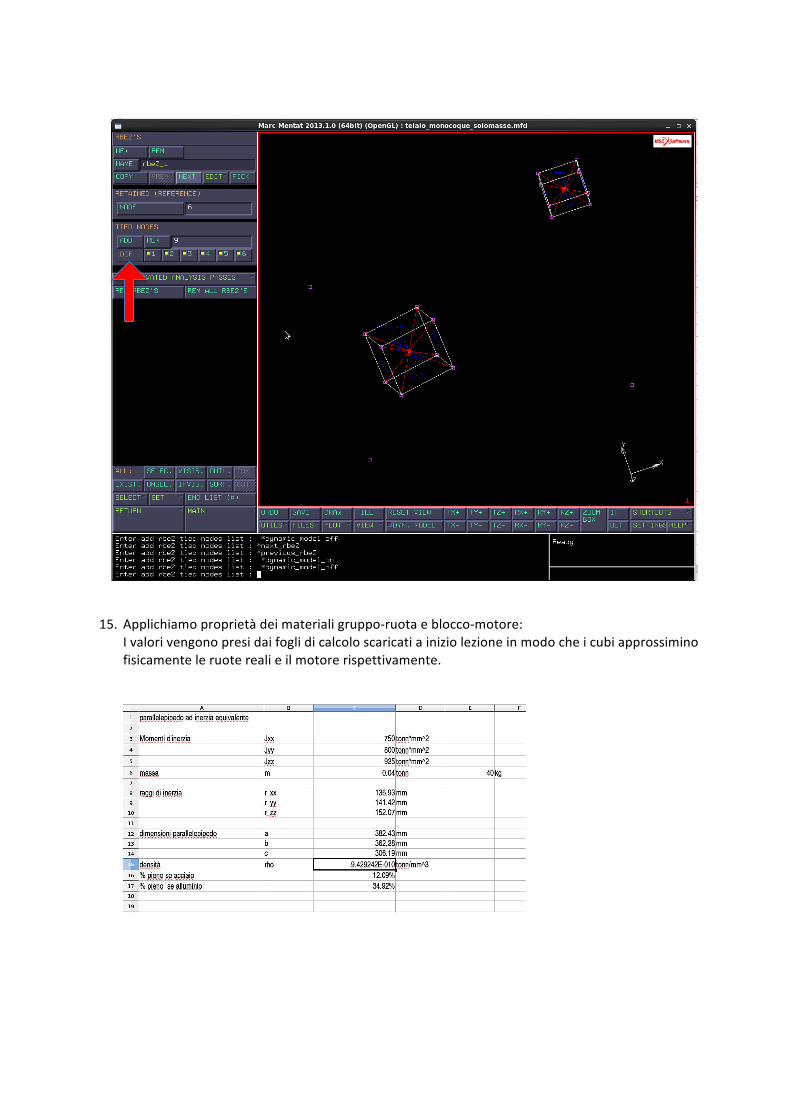
15. Applichiamoproprietàdeimaterialigruppo-ruotaeblocco-motore:Ivalorivengonopresidaifoglidicalcoloscaricatiainiziolezioneinmodocheicubiapprossiminofisicamenteleruoterealieilmotorerispettivamente.

Ruota:
• MATERIALPROPERTIESàNEW
àSTANDARDàname:ruota
o GENERALàMASSDENSITY:porrevalorefogliocalcolo:4.907133e-10
o STRUCTURALàYOUNG’SMODULUS:porrevalore:1
(perilmodulodiYoungbastaporrequalsiasivalorediversodazero,inquantol’RBE2,essendoinfinitamenterigido,nonrisentedelmodulodiYoung). àELEMENTS
àADDàselezioniarel’elementoruota
Motore:
• MATERIALPROPERTIESàNEW
àSTANDARDàname:motore
o GENERAL
àMASSDENSITY:porrevalore:9.429242-10
o STRUCTURALàYOUNG’SMODULUS:porrevalore:1
(stesseconsiderazionidelModulodiYoungvisteperilgruppo-ruota) àELEMENTS
àADDàselezionarel’elementomotore

16. Duplichiamoilgrupporuotasuglialtricentro-ruota:
• MESHGENERATIONàDUPLICATE
àFROM/TO:selezionareilcentrocubo-ruotaeilnuovocentroruotaàDUPLICATEàselezionareilcubo-ruotaàENDLIST
Stessoprocedimentoperglialtri2centri-ruota.
17. EseguireunoSWEEPALLesalvare.
18. Torniamoalmodellomonoscoccaeinseriamoilgrupporuoteemotore:
• FILESàOPEN
àaprireTelaio_monocoque_2017_v009b àMERGE
àapriretelaio_monocoque_solomasse
19. ColleghiamoilmotorealtelaioattraversoRBE3inmododafarpassaresololeforzeinerziali,senzaandareairrigidireiltelaio:
• LINKSàRBE3
àNEWàREFERENCENODE
ànodocentraledelmotoreà(attivaretuttie6ig.d.l.)
àNODESàADD

àSETàselezionarepunti_attacco_motopropulsore
-->(attivaresoloiprimi3g.d.l.deinodiappenaaggiunti)
AnalisiCinematica:
§ indaghiamosuimodipropridellastruttura,inmododavalutarelefrequenzepropriedel
sistema,dipendentida:o rigidezza;o masseeinerzie.
E’importanteconoscereimodipropridelsistemaperilfenomenodellarisonanza.Perl’analisicinematicaperòtogliamoivincolidellaprovastaticapoichéaltrimentiavremomodipropriodellastrutturadiversidallarealtà.Esempi:
§ Considerandounavetturachepassasuundosso,ilsistemanonèpiùvincolatoaterracomeinunaprovastaticapoichélavetturapotrebbesollevarsi,quindinonpotremostudiareimodipropridelsistemavincolandoloaterra;
§ Unelicotteroessendoconcepitopernonaverevincoli,sidistruggesevienevincolatoaterra(vedivideo:https://www.youtube.com/watch?v=-LFLV47VAbI),questoperchéhamodipropridiversisevincolatoono.
20. Impostiamol’analisicinematica:
• LOADCASESàNEW àDYNAMICMODEL àname:lcase_modal
o PROPERTIES:à(impostarecomeinfigura)

• JOBS
àNEW àSTRUCTURAL àname:modi_propri
o PROPERTIESàattivarelcase_modal(LOADCASEappenacreato)àINITIALLOADS àdisattivareiltutto
àJOBRESULTS
àattivare:
§ EquivalentVonMisesStress§ Stress
21. Lanciolasimulazione:
• premocomandiCHECK,RENUMBERALL• premoRUN
àSUBMIT
Conirisultatiottenutipossiamovisualizzareimodipropridellastrutturaattraverso:
• JOBRESULTSàcliccandoiltastoNEXTsipossonoscorreretuttii10modipropridelsistema,anchesequelliimportantisonoiprimi5,dicuiiprimitresono:
• IMODO:TORSIONALE;• IIMODO:STERZO;• IIIMODO:FLESSIONALE
Considerazionieosservazioni:
a. peralzarelafrequenzadelprimomodo(cioèquellotorsionale)sipuòalleggerireoilgruppo-ruotaoiltelaio;
b. perquantoriguardailsecondomodo(cioèquellodisterzo)sifannosentireleinerziedelleruoteesipuòosservaredairisultatilasovrasollecitazionesulfondovettura(vedifigura)

c. perquantoriguardailterzomodo(cioèquelloflessionale)sinotalasovrasollecitazioneneipuntidiattaccodellamonoscocca.
Percontinuarel’Analisicalcoliamol’inertanza,laqualeèunaquantitàscalareeserveavalutarel’attitudinediunastrutturaaseguitodiun’applicazionediunaforza.
𝐼 =𝑎𝐹
22. Perapplicareunaforzadinamica:
• BOUNDARYCONDITIONSàNEW àSTRUCTURAL àHARMONICPOINTLOAD àname:harmonic_load
o PROPERTIES:àFORCEZ àMAGNITUDE:porrevalore1; àPHASE:porrevalore0.
àADD:
àpuntoaterraruotaanterioredx
23. Nuovaanalisi:
• LOADCASEàNEW àTYPE àDYNAMICHARMONIC àname:lcase2
o PROPERTIESàimpostarecometabellasottostante
àSOLUTIONCONTROL àattivareNON-POSITIVEDEFINITE
Inquestomodoabbiamoapplicatounaforzaalpuntoaterradellaruotaanterioredxmodulataperuncos𝜔𝑡,facendovariare𝜔infrequenzada1Hza150Hzconunpassodi0,25Hz.Cosìfacendoabbiamoapplicatoalsistemaunaforzaafrequenzeviaviapiùalteevediamolarispostadellastruttura.

24. AndiamoaimpostareilJOBS
• JOBSàNEW àSTRUCTURAL àname:harmonic;
o PROPERTIESàattivarelcase2;àINITIALLOADS
àeliminiamotuttoeccettoarmonic_load(boundarycondition)
àJOBRESULTS
àattivare:
§ EquivalentVonMisesStress§ Stress
Perilcalcolodell’Inertanzaabbiamobisognodell’accelerazione(vediformulasopra),masiccomeMarcciforniscesologlispostamentialloracicalcoliamoleaccelerazioniattraversoladerivatasecondadeglispostamenti:
𝑤 = 𝑤 ∙ cos𝜔𝑡
𝑤 = − 𝜔!𝑤 ∙ cos𝜔𝑡
OSS.:quindiperpassaredaglispostamentialleaccelerazionibastamoltiplicareper− 𝜔!.
25. Andiamoaplottareglispostamentiinfunzionedellafrequenza:
• HISTORYPLOTàSETLOCATION àselezionareilpuntoaterraanterioredxàINCRANGE ànelterminalscrivo:0:1(premoinvio),0:150(premoinvio)àADDCURVE àALLLOCATION:
• GLOBALVARIABLES:frequency;• VARIABLESATLOCATION:displacementZ.

Ilqualegraficoè:


















