LABORATORIO DI FISICA I - UniPa...Parte II Come prima cosa, sono stati misurati i periodi...
18
UNIVERSITA’ DEGLI STUDI DI PALERMO CORSO DI LAUREA IN SCIENZE FISICHE A.A. 2018/2019 13 Dicembre 2018 LABORATORIO DI FISICA I RELAZIONE TERZA ESPERIENZA DI LABORATORIO GRUPPO 1 Nigrelli Giulia Valenti Giuseppe Amato Dario Maraventano Claudia
Transcript of LABORATORIO DI FISICA I - UniPa...Parte II Come prima cosa, sono stati misurati i periodi...

UNIVERSITA’ DEGLI STUDI DI PALERMO CORSO DI LAUREA IN SCIENZE FISICHE
A.A. 2018/2019
13 Dicembre 2018
LABORATORIO DI FISICA I
RELAZIONE TERZA ESPERIENZA DI LABORATORIO
GRUPPO 1 Nigrelli Giulia Valenti Giuseppe Amato Dario Maraventano Claudia
asus
Font monospazio
Valutazione prima parte: A Valutazione seconda parte: A

Misura del periodo di oscillazione e della costante elastica della molla di un
oscillatore armonico semplice
Obiettivo L’obiettivo della prima parte della terza esperienza di laboratorio, che si articola in due parti, è quello di determinare, graficamente e analiticamente, il periodo di oscillazione di un oscillatore armonico semplice a una data massa prefissata inizialmente. Lo scopo della seconda parte è invece quello di determinare la costante elastica della molla, avendo compiuto più misurazioni del periodo in laboratorio con masse diverse; i dati ottenuti vanno analizzati e confrontati graficamente e infine analiticamente, ricorrendo alle conoscenze teoriche sull’analisi e la rappresentazione grafica dei dati sperimentali acquisite durante le precedenti lezioni del corso di Laboratorio di Fisica I.
Strumenti e materiali utilizzati 1. Cronometro digitale centesimale al quale si può attribuire un errore di lettura
corrispondente a un’unità sul LSD pari a 0.01 s. 2. Masse campione in metallo da 20 g; 3. Software quali Excel, Word e Adobe Illustrator per l’analisi grafica dei dati e la
rappresentazione tabellare degli stessi; 4. Oscillatore armonico semplice, ossia una molla dotata di un gancio all’estremità, per
sostenere i pesi con il relativo supporto. La molla è a sua volta fissata ad un supporto in metallo che ne permette l’aggancio ad un’asta.
Requisiti teorici Per la corretta esecuzione di questa terza esperienza di laboratorio si è ricorso all’applicazione delle seguenti conoscenze, acquisite durante le lezioni precedenti:
1. Corretta rappresentazione delle misure ovvero, 𝑥 = (𝑥𝑏𝑒𝑠𝑡 𝑥); 2. Regole per l’approssimazione degli errori e delle misure;
3. Conoscenza di errore assoluto 𝑥 e di errore relativo 휀𝑥 =𝑥
|𝑥𝑏𝑒𝑠𝑡|;
4. Regole per la propagazione degli errori relativi ed assoluti in misure dipendenti e indipendenti;
5. Conoscenza del metodo delle rette di minima e massima pendenza e delle rette di massima e minima intercetta per la determinazione grafica di una misura;
6. Conoscenza delle nozioni di frequenza relativa ed assoluta, densità di frequenza, media, deviazione standard e deviazione standard della media;
7. Conoscenza dei principali metodi di rappresentazione grafica di dati sperimentali, quali istogrammi, grafici in scala lineare e in scala log-log;
8. Conoscenze teoriche sul funzionamento di un sistema massa-molla ideale.
asus
Nota
di quale frequenza si parla?

Parte I Il moto di un sistema massa-molla, considerando trascurabile il contributo delle forze di attrito, si può descrivere come un moto armonico semplice che segue l’equazione:
𝑑2𝑥
𝑑𝑡2+ 𝜔2𝑥 = 0
Tenendo conto che la pulsazione angolare 𝜔 può essere definita come:
𝜔 = √𝑘
𝑚 ovvero
2𝜋
𝑇
risulta che il periodo di oscillazione di un sistema massa-molla è
𝑇 = 2𝜋√𝑚
𝑘
Pertanto, per misurare il periodo del sistema oscillante, bisogna fissare una massa ben definita. Si è scelto come massa quella corrispondente a 40 g. Si è ritenuto ragionevole trascurare l’incertezza sulle masse dato che l’errore sul tempo è sicuramente maggiore di quest’ultima. Inoltre, dato che durante la misurazione del periodo gli errori casuali che entrano in gioco sono maggiori dell’errore strumentale, si è ritenuto opportuno prendere più misure del periodo in modo da considerare gli errori casuali introdotti dall’operatore. In particolare, ogni componente del gruppo ha preso 25 misure del tempo, ciascuna corrispondente a 10 oscillazioni. Si è deciso di misurare il tempo relativo a 10 oscillazioni, per poi ricavare il periodo di una singola oscillazione in modo da evitare degli errori dovuti al tempo di reazione dell’operatore. I set di dati così ottenuti sono stati raccolti nella tabella riportata nella pagina seguente, ordinati in ordine crescente per una visualizzazione più chiara. Successivamente sono stati costruiti i quattro istogrammi normalizzati relativi ai singoli set di dati, dopo aver realizzato le tabelle riportate in appendice, anch’essi riportati nelle pagine seguenti. Tutti e quattro gli istogrammi sono stati rappresentati con la stessa scala in modo da poter essere confrontati facilmente in modo opportuno. Successivamente tutti i dati sono stati raccolti e rappresentati in un unico istogramma normalizzato, dal quale è stato possibile ricavare il valore medio di dieci periodi e la deviazione standard.
asus
Barra
ridurre


asus
Nota
Gli istogrammi vanno costruiti utilizzando la scala delle ascisse. (p.e. vedi Taylor a pag. 129)

Analizzando i dati così riportati sono state calcolate, analiticamente e graficamente, media e deviazione standard di ciascun set di dati. Per la determinazione analitica sono state utilizzate le formule seguenti:
𝑇10 = 1
𝑁∑ 𝑇𝑖
𝑁
𝑖=0
𝜎𝑇10= √
1
𝑁 − 1∑(𝑇𝑖 − 𝑇10)2
𝑁
𝑖=1
Mentre per la determinazione grafica di media e deviazione standard si è proceduto come segue: il valor medio è stato rilevato come il valore centrale dell’istogramma ovvero, quello che lascia alla sua sinistra il 50% dei dati, mentre la deviazione standard è stata determinata come metà della
larghezza dell’istogramma a metà della sua altezza massima, ovvero Γ
2 .
I risultati sono stati riportati nella tabella che segue:
È significativo notare come la precisione delle misure non varia all’aumentare delle stesse; infatti la deviazione standard dell’intero set di dati è paragonabile a quella dei singoli set di dati. Al contrario la forma assunta dall’istogramma è influenzata dal numero di misure; infatti all’aumentare del numero di misure del set di dati, l’istogramma tende ad assumere la forma della distribuzione limite ovvero, di una funzione continua che in questo caso è la funzione normale o di Gauss. Successivamente per determinare la componente casuale dell’errore relativo a dieci periodi, si è calcolata la deviazione standard della media considerando come set di dati quello composto da tutte le misure.
𝜎𝑇10=
𝜎𝑇10
√𝑁

Per determinare l’errore totale bisogna sommare a quello casuale l’errore strumentale che si può considerare uguale a
𝛿𝑠𝑡𝑟𝑢𝑚𝑒𝑛𝑡𝑎𝑙𝑒 = 0.01 𝑠
Pertanto, la misura del tempo riferito a dieci oscillazioni è:
𝑇10 = (5.343 ± 0.018) 𝑠
Si è considerata una cifra significativa in più rispetto al valore riportato nella tabella precedente in relazione all’errore ottenuto. Pertanto, il periodo del sistema massa-molla si ottiene dividendo tale valore per dieci e considerando l’errore del periodo come un decimo di quello di 𝑇10:
𝑻 = (𝟎. 𝟓𝟑𝟒𝟑 ± 𝟎. 𝟎𝟎𝟏𝟖) 𝒔
Parte II
Come prima cosa, sono stati misurati i periodi corrispondenti a cinque masse differenti ovvero, 40 g, 60 g, 80 g, 100 g, 120 g. Dato che il periodo trovato nella prima parte dell’esperienza è quello corrispondente ad una massa di 40 g, si è utilizzata la misura già trovata in precedenza. Per tutte le altre masse sono stati misurati i tempi relativi a 10 oscillazioni per 25 volte raccogliendo così quattro nuovi set di dati. Successivamente, le varie misure dei periodi sono state calcolate utilizzando il metodo già descritto nella prima parte dell’esperienza. I dati sono stati riportati, in ordine crescente nella tabella della pagina seguente.
I periodi ottenuti sono stati invece riportati, insieme all’errore assoluto e alla loro deviazione standard, nella tabella che segue:

Per la massa di 40 g è stato utilizzato il set totale relativo alla prima parte dell’esperienza, del quale, per motivi grafici, sono state riportate solo le prime 23 misure delle 100 totali. Inoltre, a M1, M2, M3, M4 ed M5 corrispondono rispettivamente masse da 40 g, 60 g, 80 g, 100 g, e 120 g.
Per determinare il valore della costante elastica della molla si è sfruttata la seguente relazione, che
lega la frequenza angolare 𝜔 alla massa del corpo appeso e alla massa della molla stessa, ovvero:
𝜔 = √𝑘
𝑚 +𝑀3
Dove m è la massa del corpo appeso ed M è la massa della molla utilizzata. Tale massa M è stata successivamente misurata ottenendo un valore di circa 2 g. Per questo motivo si è ritenuto lecito trascurare la massa della molla poiché molto più piccola delle altre. La formula è stata semplificata come segue:

𝜔 = √𝑘
𝑚
Tale relazione può essere scritta anche come:
𝜔 = √𝑘 𝑚−12
Sapendo che la frequenza angolare dipende dall’inverso del periodo ovvero,
𝜔 =2𝜋
𝑇
È possibile calcolare l’errore sulle frequenze angolari propagando l’errore del periodo come segue:
𝛿𝜔 =2𝜋
𝑇2 𝛿𝑇
Sono state quindi raccolte in forma tabellare le frequenze angolari in funzione delle relative masse:
Così come fatto durante la prima parte dell’esperienza, gli errori sulle masse sono stati trascurati in quanto molto più piccoli degli altri errori introdotti nell’esperimento. Riportando tali dati in un grafico log-log ci si aspetta di ottenere una retta con pendenza -1/2 e con intercetta √k. Prima di calcolare √k con il metodo di massima e minima intercetta si è verificato con il metodo di massima e minima pendenza che il coefficiente angolare della retta fosse effettivamente -1/2. Per calcolare la massima e la minima pendenza sono stati considerati i punti agli estremi dell’intervallo di dispersione, ottenendo così i valori
𝑚𝑚𝑖𝑛 = − 0.509
𝑚𝑚𝑎𝑥 = − 0.519 Sono stati quindi calcolati il valore best e l’errore assoluto associato come la semisomma e la semidispersione:

𝑚𝑏𝑒𝑠𝑡 = 𝑚𝑚𝑖𝑛 + 𝑚𝑚𝑎𝑥
2= −0.513
𝛿𝑚 = 𝑚𝑚𝑎𝑥 − 𝑚𝑚𝑖𝑛
2= 0.005
Tenendo conto che il valore ottenuto è prossimo a -1/2 si è proceduto al calcolo di √k con il metodo di massima e minima intercetta. Per il calcolo delle intercette si è proceduto registrando il valore assunto dalla frequenza angolare in corrispondenza del valore 100 della massa e moltiplicando per 10 poiché non si è letta l’intercetta a 1 ma a 100. I valori così ottenuti sono stati riportati di seguito:
√𝑘𝑚𝑖𝑛 = 72.8 √𝑔/𝑠
√𝑘𝑚𝑎𝑥 = 77.5 √𝑔/𝑠
Il valore best e l’errore associato sono stati calcolati come:
√𝑘𝑏𝑒𝑠𝑡 =√𝑘𝑚𝑎𝑥 + √𝑘𝑚𝑖𝑛
2= 75 √𝑔/𝑠
𝛿√𝑘 =√𝑘𝑚𝑎𝑥 − √𝑘𝑚𝑖𝑛
2= 2 √𝑔/𝑠
Per il calcolo della costante elastica si è proceduto elevando al quadrato il valore best
√𝑘𝑏𝑒𝑠𝑡 e propagando l’errore come segue:
𝛿𝑘 = 2√𝑘𝑏𝑒𝑠𝑡𝛿√𝑘 = 300 𝑔/𝑠2
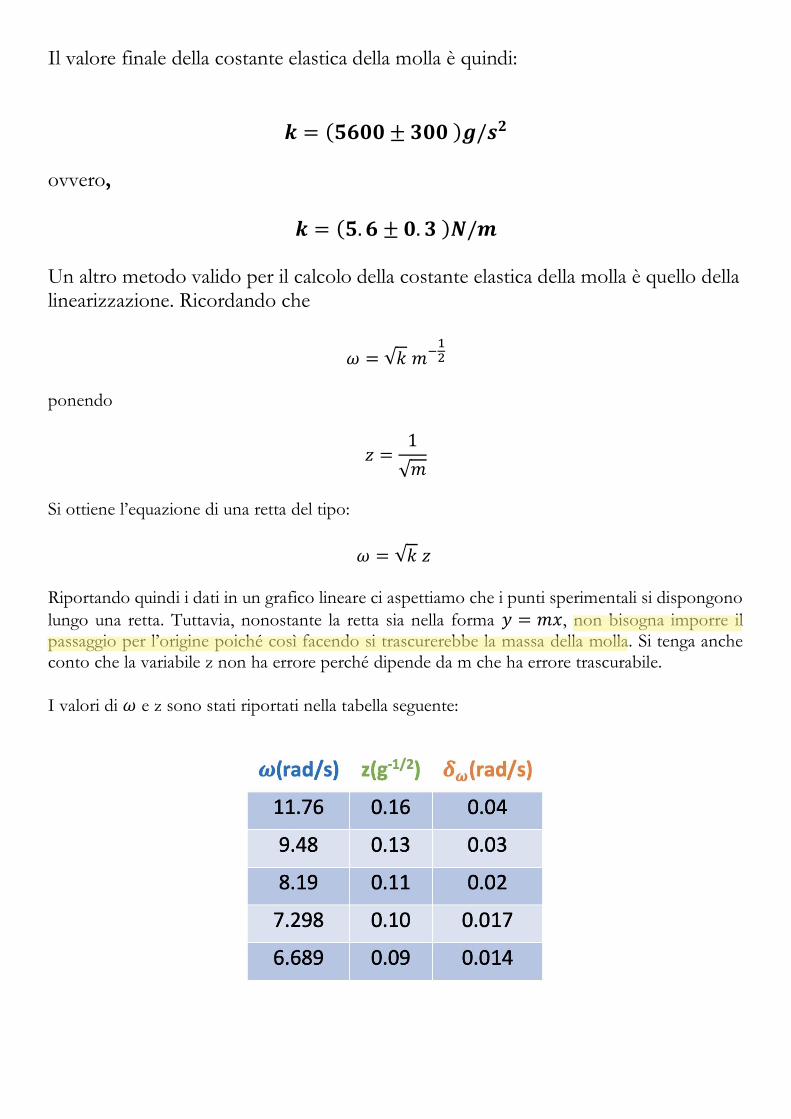
Il valore finale della costante elastica della molla è quindi:
𝒌 = (𝟓𝟔𝟎𝟎 ± 𝟑𝟎𝟎 )𝒈/𝒔𝟐 ovvero,
𝒌 = (𝟓. 𝟔 ± 𝟎. 𝟑 )𝑵/𝒎 Un altro metodo valido per il calcolo della costante elastica della molla è quello della linearizzazione. Ricordando che
𝜔 = √𝑘 𝑚−12
ponendo
𝑧 =1
√𝑚
Si ottiene l’equazione di una retta del tipo:
𝜔 = √𝑘 𝑧 Riportando quindi i dati in un grafico lineare ci aspettiamo che i punti sperimentali si dispongono
lungo una retta. Tuttavia, nonostante la retta sia nella forma 𝑦 = 𝑚𝑥, non bisogna imporre il passaggio per l’origine poiché così facendo si trascurerebbe la massa della molla. Si tenga anche conto che la variabile z non ha errore perché dipende da m che ha errore trascurabile.
I valori di 𝜔 e z sono stati riportati nella tabella seguente:
asus
Evidenziato
Con questa linearizzazione si può imporre il passaggio per l'origine, in quanto per z -> 0 quando m -> infinito e quindi la massa della molla non interviene!

Per determinare √kbest è stato utilizzato il metodo di massima e minima pendenza utilizzando i punti agli estremi dell’intervallo di dispersione. I valori così ottenuti sono:
√𝑘𝑚𝑖𝑛 = 75.1 √𝑔/𝑠
√𝑘𝑚𝑎𝑥 = 76.7 √𝑔/𝑠 Il valore best e l’errore assoluto associato sono stati calcolati come la semisomma e la semidispersione:
√𝑘𝑏𝑒𝑠𝑡 =√𝑘𝑚𝑎𝑥 + √𝑘𝑚𝑖𝑛
2= 75.9 √𝑔/𝑠
𝛿√𝑘 =√𝑘𝑚𝑎𝑥 − √𝑘𝑚𝑖𝑛
2= 0.8 √𝑔/𝑠
Analogamente a quanto fatto in precedenza è stato calcolato il valore best della
costante elastica della molla elevando al quadrato √𝑘𝑏𝑒𝑠𝑡 mentre per l’errore assoluto
si è propagato l’errore su √𝑘 come:
𝛿𝑘 = 2√𝑘𝑏𝑒𝑠𝑡𝛿√𝑘 = 120 𝑔/𝑠2
Il valore finale ottenuto è quindi
𝒌 = (𝟓𝟕𝟔𝟎 ± 𝟏𝟐𝟎 )𝒈/𝒔𝟐 ovvero,
𝒌 = (𝟓. 𝟕𝟔 ± 𝟎. 𝟏𝟐 )𝑵/𝒎

Grafici
Nel grafico sono state tracciate la retta di minima pendenza (in blu) la retta di massima pendenza (in rosso) per determinare il coefficiente angolare della retta.
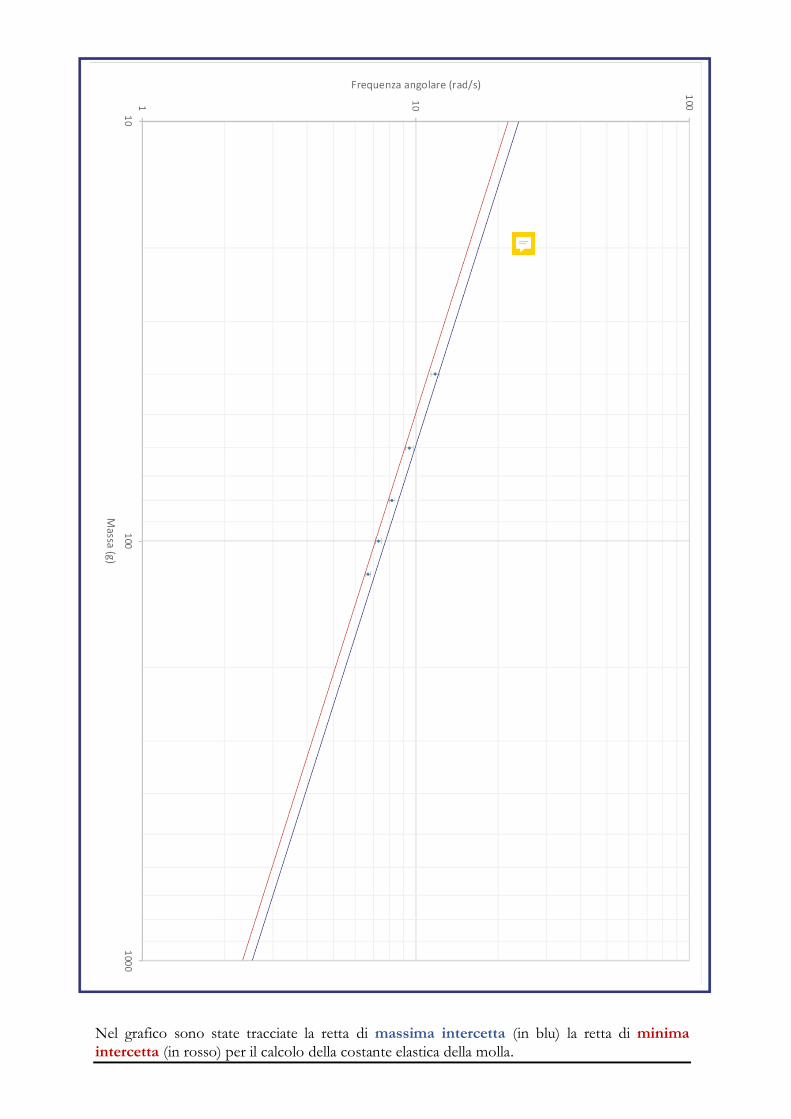
Nel grafico sono state tracciate la retta di massima intercetta (in blu) la retta di minima
intercetta (in rosso) per il calcolo della costante elastica della molla.
asus
Nota
Le rette devono passare per tutte le barre d'errore!

Nel grafico sono state tracciate la retta di massima pendenza (in blu) la retta di minima pendenza (in rosso) per il controllo del coefficiente angolare della retta, che rappresenta la radice quadrata della costante elastica della molla.
asus
Nota
Con questa linearizzazione si può imporre il passaggio per l'origine, in quanto per z -> 0 quando m -> infinito e quindi la massa della molla non interviene!
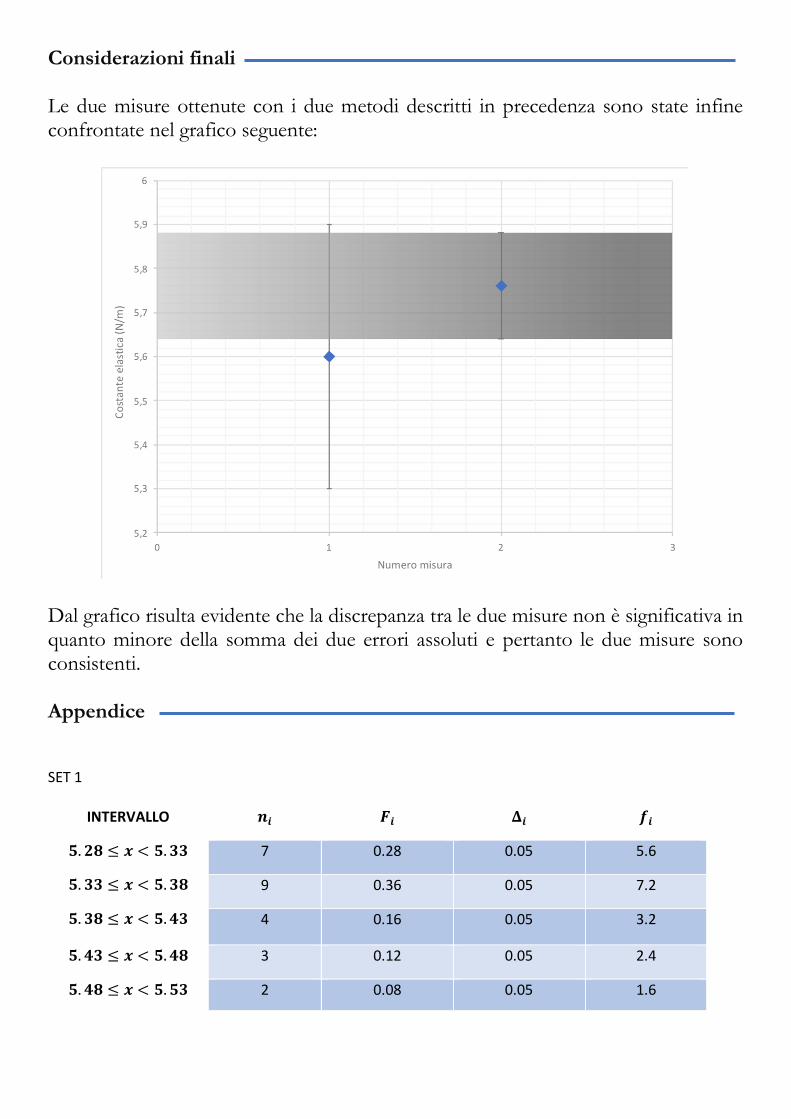
Considerazioni finali Le due misure ottenute con i due metodi descritti in precedenza sono state infine confrontate nel grafico seguente:
Dal grafico risulta evidente che la discrepanza tra le due misure non è significativa in quanto minore della somma dei due errori assoluti e pertanto le due misure sono consistenti. Appendice
SET 1
INTERVALLO 𝒏𝒊 𝑭𝒊 𝚫𝒊 𝒇𝒊
𝟓. 𝟐𝟖 ≤ 𝒙 < 𝟓. 𝟑𝟑 7 0.28 0.05 5.6
𝟓. 𝟑𝟑 ≤ 𝒙 < 𝟓. 𝟑𝟖 9 0.36 0.05 7.2
𝟓. 𝟑𝟖 ≤ 𝒙 < 𝟓. 𝟒𝟑 4 0.16 0.05 3.2
𝟓. 𝟒𝟑 ≤ 𝒙 < 𝟓. 𝟒𝟖 3 0.12 0.05 2.4
𝟓. 𝟒𝟖 ≤ 𝒙 < 𝟓. 𝟓𝟑 2 0.08 0.05 1.6
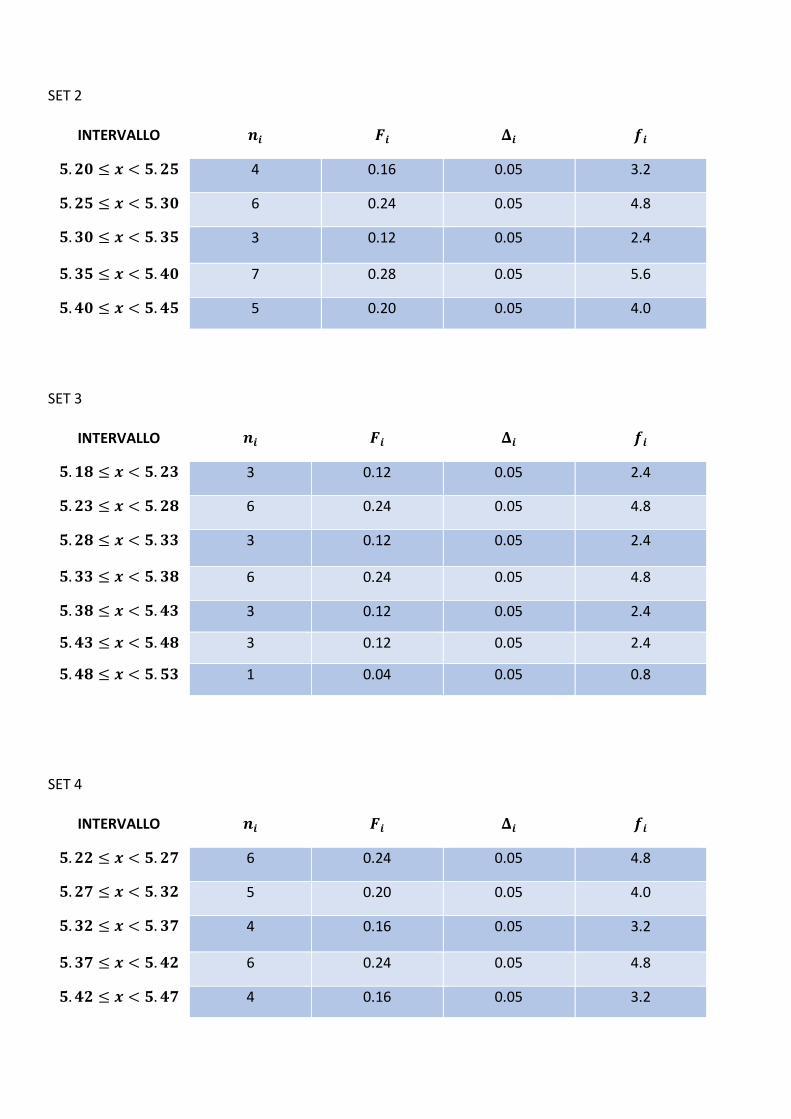
SET 2
INTERVALLO 𝒏𝒊 𝑭𝒊 𝚫𝒊 𝒇𝒊
𝟓. 𝟐𝟎 ≤ 𝒙 < 𝟓. 𝟐𝟓 4 0.16 0.05 3.2
𝟓. 𝟐𝟓 ≤ 𝒙 < 𝟓. 𝟑𝟎 6 0.24 0.05 4.8
𝟓. 𝟑𝟎 ≤ 𝒙 < 𝟓. 𝟑𝟓 3 0.12 0.05 2.4
𝟓. 𝟑𝟓 ≤ 𝒙 < 𝟓. 𝟒𝟎 7 0.28 0.05 5.6
𝟓. 𝟒𝟎 ≤ 𝒙 < 𝟓. 𝟒𝟓 5 0.20 0.05 4.0
SET 3
INTERVALLO 𝒏𝒊 𝑭𝒊 𝚫𝒊 𝒇𝒊
𝟓. 𝟏𝟖 ≤ 𝒙 < 𝟓. 𝟐𝟑 3 0.12 0.05 2.4
𝟓. 𝟐𝟑 ≤ 𝒙 < 𝟓. 𝟐𝟖 6 0.24 0.05 4.8
𝟓. 𝟐𝟖 ≤ 𝒙 < 𝟓. 𝟑𝟑 3 0.12 0.05 2.4
𝟓. 𝟑𝟑 ≤ 𝒙 < 𝟓. 𝟑𝟖 6 0.24 0.05 4.8
𝟓. 𝟑𝟖 ≤ 𝒙 < 𝟓. 𝟒𝟑 3 0.12 0.05 2.4
𝟓. 𝟒𝟑 ≤ 𝒙 < 𝟓. 𝟒𝟖 3 0.12 0.05 2.4
𝟓. 𝟒𝟖 ≤ 𝒙 < 𝟓. 𝟓𝟑 1 0.04 0.05 0.8
SET 4
INTERVALLO 𝒏𝒊 𝑭𝒊 𝚫𝒊 𝒇𝒊
𝟓. 𝟐𝟐 ≤ 𝒙 < 𝟓. 𝟐𝟕 6 0.24 0.05 4.8
𝟓. 𝟐𝟕 ≤ 𝒙 < 𝟓. 𝟑𝟐 5 0.20 0.05 4.0
𝟓. 𝟑𝟐 ≤ 𝒙 < 𝟓. 𝟑𝟕 4 0.16 0.05 3.2
𝟓. 𝟑𝟕 ≤ 𝒙 < 𝟓. 𝟒𝟐 6 0.24 0.05 4.8
𝟓. 𝟒𝟐 ≤ 𝒙 < 𝟓. 𝟒𝟕 4 0.16 0.05 3.2
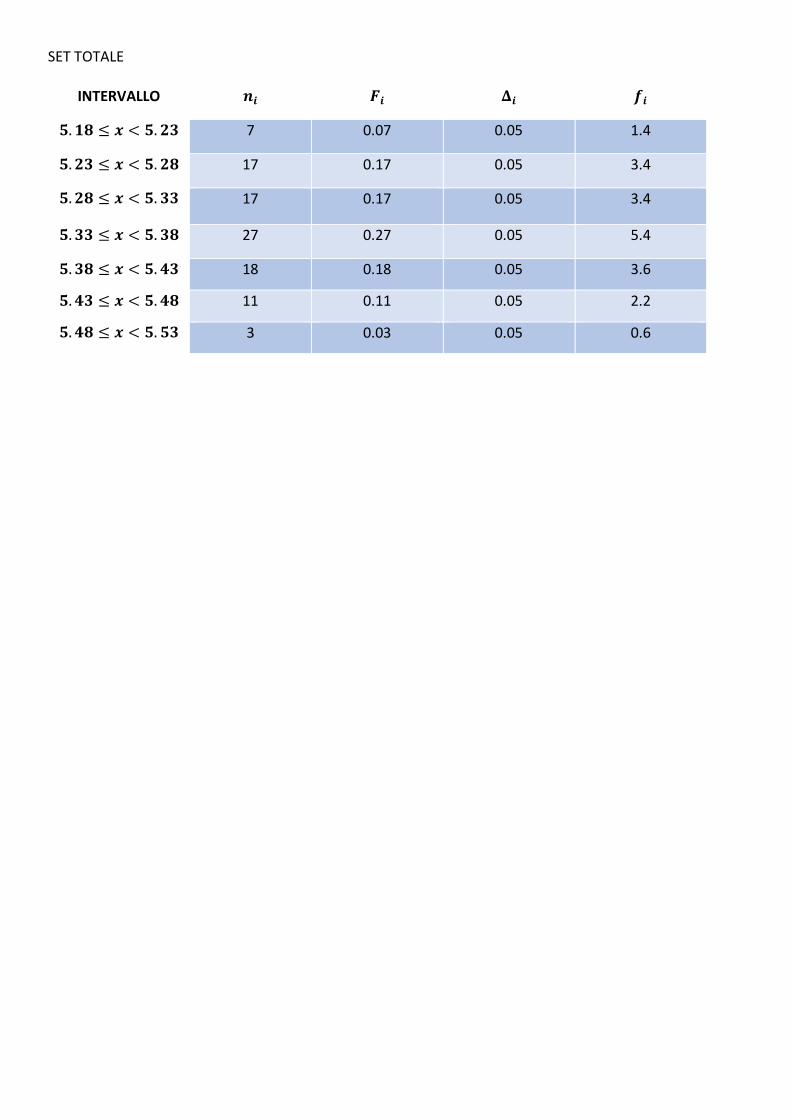
SET TOTALE
INTERVALLO 𝒏𝒊 𝑭𝒊 𝚫𝒊 𝒇𝒊
𝟓. 𝟏𝟖 ≤ 𝒙 < 𝟓. 𝟐𝟑 7 0.07 0.05 1.4
𝟓. 𝟐𝟑 ≤ 𝒙 < 𝟓. 𝟐𝟖 17 0.17 0.05 3.4
𝟓. 𝟐𝟖 ≤ 𝒙 < 𝟓. 𝟑𝟑 17 0.17 0.05 3.4
𝟓. 𝟑𝟑 ≤ 𝒙 < 𝟓. 𝟑𝟖 27 0.27 0.05 5.4
𝟓. 𝟑𝟖 ≤ 𝒙 < 𝟓. 𝟒𝟑 18 0.18 0.05 3.6
𝟓. 𝟒𝟑 ≤ 𝒙 < 𝟓. 𝟒𝟖 11 0.11 0.05 2.2
𝟓. 𝟒𝟖 ≤ 𝒙 < 𝟓. 𝟓𝟑 3 0.03 0.05 0.6