La Bussola Solare ENEA: l’invenzione e i risultati … di RT...La bussola, insieme all’algoritmo...
14
1 La Bussola Solare ENEA: l’invenzione e i risultati ottenuti 1. Introduzione In numerose applicazioni è indispensabile conoscere con elevata accuratezza la direzione del Nord geografico, ovvero la direzione parallela all’asse terrestre, che, come noto, non coincide con quella del Nord magnetico. Tra le applicazioni più importanti si possono citare quelle tipiche in cui vengono usati i teodoliti come le rilevazioni cartografiche, le misure per i rilievi geologici, i monitoraggi ambientali, i rilievi d’ingegneria civile, i rilevamenti di siti urbani o di siti industriali, l’installazione d’impianti solari a concentrazione (termici e/o fotovoltaici), l’installazione d’impianti radar, la guida di robot per rilievi in zone contaminate etc. Il dispositivo più comunemente usato per rilevare la direzione Nord è rappresentato dalla bussola magnetica, la quale, però, soffre di un errore sistematico dovuto in primis alla non coincidenza del Nord magnetico con quello geografico, e, in seconda battuta, al fatto che il campo magnetico terrestre non è uniforme né spazialmente né temporalmente, il che può portare ad errori nella misura della direzione nord anche superiori ad 1 grado [ref a1]. Anche il sistema basato sulla posizione del sole o delle stelle, usato in particolare per la navigazione marittima, fino a poco tempo fa non poteva essere molto preciso, poiché era fondamentale conoscere molto accuratamente l’ora in cui veniva fatto il rilevamento per poter ricavare, grazie all’osservazione del sole, le coordinate del luogo di osservazione o la direzione da tenere. Con l’avvento degli orologi elettronici, l’uso delle leggi che regolano il moto della Terra intorno al Sole è divenuto il sistema più accurato per fare misure di direzione e orientamento. Conoscendo le coordinate del luogo e l’ora esatta (corretta della longitudine e delle variazioni dovute al movimento non uniforme della Terra) e misurando la direzione di osservazione del Sole, è possibile conoscere l’asse Nord-Sud con un’accuratezza di circa 1/60 di grado, ovvero di un primo di arco. Al giorno d’oggi l’ora è nota con accuratezza inferiore al secondo e la propria posizione con un’accuratezza inferiore al metro, grazie alla costellazione dei satelliti artificiali in orbita attorno alla Terra ed usati per il cosiddetto Global Positioning System, o GPS. Grazie a queste precisioni, esistono oggi diversi strumenti che sfruttano la posizione del sole per fornire la direzione Nord-Sud molto meglio rispetto ad una bussola magnetica. A nostra conoscenza, però, non esistono bussole solari che arrivino ad accuratezze migliori di 1/10 di grado e la limitazione è data essenzialmente dal sistema che misura la direzione di osservazione del sole. Inoltre, molte bussole fanno uso di tabelle per derivare le misure, o di software per il calcolo della posizione del sole che hanno limitazioni di validità nel tempo (cioè vanno adeguatamente aggiornati). La bussola oggetto del presente lavoro, al contrario, sfrutta un software molto semplice che si basa sulla soluzione delle equazioni di Keplero e non presenta né problemi di complessità (può essere contenuto in un economico microprocessore) né di durata o affidabilità limitata. Questo software, unito ad un sistema elettro-ottico innovativo, adottato per la misura della posizione del sole, consente di misurare la direzione Nord-Sud con un’accuratezza teorica di 1’. La bussola, insieme all’algoritmo per il calcolo della posizione del sole, è stata oggetto della richiesta di brevetto presso l’ufficio italiano brevetti e marchi e presso l’European Patent Office [ref. a]. 2. Calcolo della posizione del sole ed equazioni analitiche Le equazioni che regolano il moto della Terra (e quindi il moto apparente del Sole) sono le leggi di Keplero, dalle quali è stato derivato il software inserito nella bussola solare. La principale
Transcript of La Bussola Solare ENEA: l’invenzione e i risultati … di RT...La bussola, insieme all’algoritmo...

1
La Bussola Solare ENEA: l’invenzione e i risultati ottenuti
1. Introduzione
In numerose applicazioni è indispensabile conoscere con elevata accuratezza la direzione del
Nord geografico, ovvero la direzione parallela all’asse terrestre, che, come noto, non coincide con quella del Nord magnetico. Tra le applicazioni più importanti si possono citare quelle tipiche in cui vengono usati i teodoliti come le rilevazioni cartografiche, le misure per i rilievi geologici, i monitoraggi ambientali, i rilievi d’ingegneria civile, i rilevamenti di siti urbani o di siti industriali, l’installazione d’impianti solari a concentrazione (termici e/o fotovoltaici), l’installazione d’impianti radar, la guida di robot per rilievi in zone contaminate etc.
Il dispositivo più comunemente usato per rilevare la direzione Nord è rappresentato dalla bussola magnetica, la quale, però, soffre di un errore sistematico dovuto in primis alla non coincidenza del Nord magnetico con quello geografico, e, in seconda battuta, al fatto che il campo magnetico terrestre non è uniforme né spazialmente né temporalmente, il che può portare ad errori nella misura della direzione nord anche superiori ad 1 grado [ref a1].
Anche il sistema basato sulla posizione del sole o delle stelle, usato in particolare per la navigazione marittima, fino a poco tempo fa non poteva essere molto preciso, poiché era fondamentale conoscere molto accuratamente l’ora in cui veniva fatto il rilevamento per poter ricavare, grazie all’osservazione del sole, le coordinate del luogo di osservazione o la direzione da tenere.
Con l’avvento degli orologi elettronici, l’uso delle leggi che regolano il moto della Terra intorno al Sole è divenuto il sistema più accurato per fare misure di direzione e orientamento. Conoscendo le coordinate del luogo e l’ora esatta (corretta della longitudine e delle variazioni dovute al movimento non uniforme della Terra) e misurando la direzione di osservazione del Sole, è possibile conoscere l’asse Nord-Sud con un’accuratezza di circa 1/60 di grado, ovvero di un primo di arco.
Al giorno d’oggi l’ora è nota con accuratezza inferiore al secondo e la propria posizione con un’accuratezza inferiore al metro, grazie alla costellazione dei satelliti artificiali in orbita attorno alla Terra ed usati per il cosiddetto Global Positioning System, o GPS. Grazie a queste precisioni, esistono oggi diversi strumenti che sfruttano la posizione del sole per fornire la direzione Nord-Sud molto meglio rispetto ad una bussola magnetica.
A nostra conoscenza, però, non esistono bussole solari che arrivino ad accuratezze migliori di 1/10 di grado e la limitazione è data essenzialmente dal sistema che misura la direzione di osservazione del sole. Inoltre, molte bussole fanno uso di tabelle per derivare le misure, o di software per il calcolo della posizione del sole che hanno limitazioni di validità nel tempo (cioè vanno adeguatamente aggiornati).
La bussola oggetto del presente lavoro, al contrario, sfrutta un software molto semplice che si basa sulla soluzione delle equazioni di Keplero e non presenta né problemi di complessità (può essere contenuto in un economico microprocessore) né di durata o affidabilità limitata. Questo software, unito ad un sistema elettro-ottico innovativo, adottato per la misura della posizione del sole, consente di misurare la direzione Nord-Sud con un’accuratezza teorica di 1’.
La bussola, insieme all’algoritmo per il calcolo della posizione del sole, è stata oggetto della richiesta di brevetto presso l’ufficio italiano brevetti e marchi e presso l’European Patent Office [ref. a].
2. Calcolo della posizione del sole ed equazioni analitiche
Le equazioni che regolano il moto della Terra (e quindi il moto apparente del Sole) sono le
leggi di Keplero, dalle quali è stato derivato il software inserito nella bussola solare. La principale

2
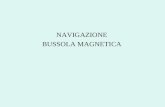
novità di questo software consiste nell’aver invertito le equazioni ottenendo, a partire dagli angoli con cui viene osservato il Sole da un punto particolare della Terra, la declinazione e l’angolo di rotazione oraria del Sole, ovvero l’angolo che la direzione del Sole fa con il piano dell’equatore celeste e quello che esprime il movimento del Sole durante il giorno, nel suo moto apparente da Est verso Ovest, come illustrato in figura 1 [ref. e].
Mentre la declinazione varia molto poco da giorno a giorno (la sua variazione dipende
dall’inclinazione dell’asse terrestre, perciò passa da -23.5° a +23.5° in 6 mesi) l’angolo di rotazione oraria varia di circa 15° all’ora (corrispondenti a 360° al giorno, cioè una rotazione completa). E’ chiaro che, per avere un’adeguata precisione nel calcolo della posizione del sole, è fondamentale conoscere l’ora esatta del luogo in cui si esegue la misura. L’ora esatta, meglio nota come Tempo Vero del Luogo, differisce da quella fornita dagli orologi per 3 motivi: la longitudine del luogo (cioè la posizione del luogo all’interno del fuso orario di riferimento), il movimento non uniforme della Terra durante il corso dell’anno (dovuto alla distanza non costante dal Sole) e l’inclinazione dell’asse terrestre.
A parte la correzione dovuta alla longitudine (indipendente dal giorno dell’anno) gli effetti dovuti alle altre due ragioni incidono sulla determinazione dell’ora esatta per una quantità che varia di +/- 15 minuti circa rispetto al valor medio. E’ da notare che un errore di 1 minuto nella conoscenza dell’ora porterebbe ad una errata valutazione della posizione del sole di circa ¼ di grado ovvero di 15’ di arco, errore che si rifletterebbe automaticamente sulla determinazione della direzione Nord.
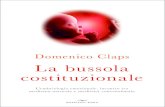
La variazione nel corso dell’anno del Tempo Vero del Luogo rispetto all’ora media è riportata nella figura 2, dove la curva ottenuta dalla formula teorica è confrontata con i valori riscontrabili nella tavola delle effemeridi.
Figura 1: rappresentazione degli angoli di osservazione del sole nel suo moto apparente intorno
alla Terra che sono utilizzati per la determinazione della direzione del sole rispetto al Nord
geografico
Equatore celeste
EST
NORD
declinazione
angolo di rotazione oraria
Terra Sole
Piano del Mezzogiorno

3
Figura 2: variazione nel corso dell’anno del Tempo Vero del Luogo rispetto all’ora media. La curva è stata
ottenuta tramite la formula teorica mentre i cerchi sono i valori dati dalle effemeridi.
Date le coordinate di un dato luogo e l’ora esatta, dunque, il software messo a punto dall’ENEA
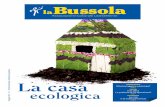
è in grado di fornire le coordinate astronomiche del Sole con un’accuratezza paragonabile a quella dei migliori software di calcoli astronomiciIn figura 3 sono riportati gli scostamenti nel calcolo della declinazione e dell’azimut del sole tra il nostro software e i valori ottenuti con il Solar Positioning Algorithm [ref. e2] su 100 date ed orari casuali.
Il notevole vantaggio del software sviluppato consiste nella sua semplicità matematica, per cui non è necessario un computer né un’elettronica di prestazioni particolarmente elevate ed inoltre non necessita di tabelle o di database in quanto esprime una soluzione semianalitica delle equazioni di Keplero semplicemente imponendo un valore noto ad una determinata data.
Figura 3: scostamenti, in primi d’arco, dei valori di azimut e di declinazione del sole tra il risultato
dell’algoritmo ENEA e i valori forniti dal software SPA su 100 date ed orari casuali

4
Sfruttando questo software, dunque, e conoscendo sia la posizione del luogo da cui si osserva il Sole sia gli angoli sotto cui lo si sta osservando è possibile determinare la direzione in cui si trova la posizione apparente del Sole rispetto all’asse terrestre e, di conseguenza, la direzione del vero Nord geografico.
Avendo risolto il problema delle equazioni, resta quello di determinare con un’adeguata accuratezza la direzione sotto la quale si sta osservando il Sole. In commercio esistono altre bussole elettroniche che funzionano sfruttando la posizione del Sole, la quale viene misurata con differenti sistemi ottico-elettronici. In particolare, la bussola descritta nel brevetto US 2012/0227273 [ref b] sfrutta un sistema a gnomone, ovvero misura la posizione del Sole grazie all’ombra che fa un’asta verticale (esattamente come avviene per le meridiane, in cui l’ombra serve per determinare l’ora del luogo). Questo sistema implica una forte imprecisione dovuta alla dimensione apparente del sole la quale crea una zona di penombra che influisce sul calcolo del baricentro in maniera tanto più forte quanto più è piccolo lo gnomone e quanto più è alto il Sole.
La bussola relativa al brevetto US 2007/0117078 [ref c], al contrario, utilizza una lente sferica, ad elevato f-number (numero che esprime il rapporto tra la lunghezza focale di una lente ed il suo diametro) ed una CCD in cui viene rilevata l’immagine di corpi celesti focalizzati dalla lente. In questo caso l’accuratezza è compromessa dalla presenza delle aberrazioni ottiche della lente che sono particolarmente forti per una lente molto convessa (necessaria per limitare le dimensioni della bussola) e variano a seconda della direzione con cui arrivano i raggi provenienti dal sole, dalla luna o dalle stelle. Il sensore solare relativo descritto nel brevetto US 6,490,801 [ref d] sfrutta un sistema di micro-fori, in pratica una multi-camera oscura ed un sensore elettronico. La posizione angolare del Sole viene ottenuta misurando il baricentro delle piccole macchie luminose formate dai raggi solari che attraversano i fori. Anche in questo caso la dimensione apparente del Sole fa sì che i piccoli dischi luminosi siano allargati e deformati, portando ad errori nel calcolo del baricentro.
Le bussole descritte, sfruttando le equazioni del Sole ed utilizzando sistemi elettro-ottici tecnologicamente molto evoluti, consentono di migliorare notevolmente la determinazione del Nord geografico rispetto alle bussole magnetiche, arrivando ad accuratezze dichiarate di circa 1/10 di grado.
La bussola presentata in questo lavoro, si basa su un sistema analogo a quello delle bussole concorrenti, ma con un accorgimento che consente di migliorarne ancora la precisione, sistema descritto nel paragrafo seguente.
3. Descrizione della bussola solare ENEA
Il cuore della bussola solare elettronica ENEA è il meccanismo attraverso il quale viene
misurata la posizione angolare del Sole rispetto ad un piano verticale. Questo meccanismo si basa su una fenditura ed un sensore elettronico. La fenditura lascia passare una sottile lama di luce solare che illumina una striscia verticale del sensore. A causa del fatto che il Sole non è una sorgente puntiforme, la riga di luce sul sensore ha una dimensione traversa un po’ più grande della fenditura, ma il fatto di non usare un’ottica (che comporta aberrazioni) e il fatto di usare una sola dimensione per il calcolo del baricentro (integrando su quella ortogonale) comporta un abbattimento degli errori di calcolo che consentono di pervenire ad un’accuratezza inferiore a 1/30 di grado.
Nello stabilire le dimensioni della fenditura e la sua distanza dal sensore elettro-ottico è necessario trovare un compromesso tra la richiesta di precisione (che imporrebbe una larghezza minima della fenditura che fosse la più piccola possibile) e l’allargamento della riga di luce dovuta agli effetti di diffrazione (che risulta minore quanto più è grande la fenditura).
Questo allargamento dovrebbe essere mantenuto nei limiti dell’allargamento dovuto alla dimensione apparente del Sole (che è pari a circa 0.5°).
La diffrazione fa sì che dei raggi paralleli incidenti sulla fenditura ne escano dispersi su un angolo pari a circa 2λ/d dove λ è la lunghezza d’onda della luce e d la larghezza della fenditura. Per

5
la luce del Sole si considera λ=530 nm, perciò, per avere un angolo di 0.5° (pari a 9 mrad) la fenditura dovrebbe essere non più piccola di 2*0.53*10-3/0.009 = 0.12 mm ovvero 120 µm.
La distanza fenditura-sensore va stabilita in funzione della dimensione del sensore e della dimensione del singolo pixel. Per avere un’alta precisione la distanza dovrebbe essere la più elevata possibile (cosicché una piccola variazione angolare del Sole corrisponderebbe ad un elevato spostamento della riga di luce sul sensore) ma questo comporterebbe sia un aumento nell’ingombro della bussola, sia un maggior allergamento della linea di luce sul sensore. La migliore situazione si ha con un sensore di grande area e con pixel di piccole dimensioni, ma in questo caso il problema risiede nel costo di tale sensore e nel tempo di calcolo, che dipende dal numero di pixel.
Il primo prototipo di bussola realizzato ha una fenditura di circa 45 µm ottenuta avvicinando due lame metalliche (una dimensione piuttosto piccola rispetto ai requisiti dovuti alla diffrazione, ma a posteriori si è visto che ciò non ha comportato problemi), una distanza dal sensore di circa 20 mm ed un sensore di 2.8 x 2.3 mm dotato di 352x288 pixel da 8 µm di larghezza. Alla distanza di 20 mm, 1 pixel di 8 µm corrisponde ad un angolo di 0.4 mrad cioè circa 1.4’, paragonabile all’errore che ci si aspetta dal software del calcolo della posizione del Sole. E’ possibile adottare un opportuno algoritmo matematico, comunque, in modo da calcolare il centro della riga di luce sul sensore con una precisione di circa 1/10 di pixel.
La fenditura è posta su un piano che si trova a 45° rispetto alla base della scatola contenente l’elettronica. In questo modo, oltre a minimizzare l’errore sulla misura angolare del Sole [ref. a] la bussola può essere utilizzata sia quando il Sole è all’orizzonte (altezza = 0°) sia quando è allo zenit (altezza = 90°), disponendo di una fenditura lunga almeno il doppio della distanza dal sensore quindi almeno pari a 40 mm nel caso del prototipo ENEA.
Il sensore utilizzato è un rivelatore a CMOS di una semplice webcam, che è stato interfacciato tramite USB ad un pc su cui è stato installato il software per il calcolo dell’azimut.
Le dimensioni della scatola contenente l’elettronica e la fenditura sono di di circa 6cm x 6cm x 6cm. Questa scatola è stata posizionata su un teodolite della tedesca Tecnik (modello FET-420K) dotato di goniometro ad altissima precisione (sensibilità di 1”), di una livella a bolla torica con un errore di lettura di circa 0.5’ e di un puntatore a cannocchiale. Il teodolite è stato interfacciato al pc tramite porta seriale per la lettura automatizzata del valore segnato dal goniometro.
Il pc è stato anche connesso ad un sensore GPS che fornisce sia le coordinate del luogo (secondo il database WGS84) sia l’ora di Greenwich.
Il software è stato realizzato in C++ utilizzando MS Visual Studio e le librerie grafiche della National Instruments. Questo software è stato progettato per avere un controllo accurato di tutti i passaggi del calcolo in modo da verificare in ogni momento il corretto funzionamento della bussola, ed è ovviamente molto più complesso di quello che dovrebbe essere inserito nel microprocessore dedicato alla bussola commerciale, oltre al fatto di avere un’interfaccia grafica piuttosto elaborata.
La meccanica della bussola è stata interamente realizzata dai tecnici di ENEA-UTAPRAD. Essa consiste in un contenitore di alluminio in cui è alloggiato il circuito con il fotosensore, sulla parete a 45° è fissata la fenditura, costituita, come detto, da due lamette avvicinate ed incollate su un supporto, e un portafiltro. Sulle pareti del contenitore sono state predisposte delle viti per consentire l’allineamento del sensore ottico rispetto alla fenditura.
In figura 4 è riportato il disegno usato in fase di progettazione e la foto della bussola realizzata. L’uso della bussola è semplice e veloce. Una volta posizionato il teodolite in modo che il suo
asse di rotazione sia perfettamente verticale, si ruota la parte sensibile della bussola fino a che la fenditura non sia approssimativamente di fronte al sole. A questo punto sul fotosensore si forma una riga di luce molto netta su cui il software fa delle elaborazioni per verificare che il segnale luminoso sia accettabile.
Quando il software fornisce un responso positivo (il che avviene in circa 1 secondo se c’è sole pieno e la riga di luce è posizionata ben dentro il rettangolo del fotosensore) il computer calcola la declinazione e l’azimut del sole in quel momento (grazie alle coordinate e all’ora di Greenwich forniti dal modulo GPS) e, in base alla posizione della riga di luce sul fotosensore, fornisce il valore

6
dell’azimut del piano verticale su cui giace la fenditura. In quella posizione si acquisisce il valore del goniometro del teodolite (o, ancora meglio, lo si azzera) e poi si ruota il teodolite fino a traguardare con il cannocchiale l’oggetto del quale si deve misurare l’azimut rispetto al punto di osservazione. Il valore del goniometro del teodolite, sommato all’azimut della fenditura della bussola, fornisce la direzione di osservazione dell’oggetto stesso rispetto al Nord o al Sud geografico.
Nella figura 5 è mostrata la schermata della riga di luce vista dalla webcam ed elaborata dal
computer, in cui si nota il profilo di intensità lungo la riga centrale. La riga verde rappresenta il baricentro della linea di luce, mentre la riga gialla indica la colonna che corrisponde all’intersezione del piano verticale passante per la fenditura con il piano del fotosensore; il valore della distanza tra queste due colonne (in pixel, ovvero in separazione angolare rispetto al piano in cui giace la fenditura) viene usato per la determinazione dell’azimut della bussola.
4. Calibrazione e test
Affinché la bussola dia un risultato entro l’accuratezza stimata (si parla di 1/30 di grado, quindi
della massima precisione attualmente possibile per una bussola elettronica non basata su misurazioni con GPS) è indispensabile conoscere perfettamente tutti i parametri di costruzione. In particolare, i numeri da conoscere e da inserire nell’algoritmo sono i seguenti:
- rapporto tra distanza fenditura e sensore - posizione della colonna di pixel corrispondenti alla proiezione geometrica della fenditura - posizione della colonna di pixel giacenti nel piano verticale passante per la fenditura - separazione angolare tra la direzione puntata dal cannocchiale del teodolite e il piano passante
per la fenditura - angolo di inclinazione del sensore rispetto al piano su cui giace la fenditura
Figura 5: schermata del sensore di luce su cui è
stata rilevata la luce del sole passata attraverso
la fenditura. La curva arancione rappresenta il
profilo d’intensità lungo la riga centrale, la
linea verde verticale è il baricentro della linea
di luce mentre la linea gialla verticale indica
l’intersezione tra il piano verticale passante per
la fenditura e il piano del sensore.
Figura 4: disegno tridimensionale del progetto della bussola e primo prototipo realizzato

7
- angolo di rotazione delle colonne di pixel del sensore rispetto alla direzione della fenditura. In laboratorio alcuni di tali parametri sono stati stimati utilizzando sistemi di allineamento
laser, ma gli altri, in particolare quelli relativi all’inclinazione e alla rotazione del sensore, sono stati impostati come variabili e dedotti in fase di taratura.
La taratura della bussola si è articolata in tre fasi. La prima, come già accennato, è stata realizzata in laboratorio, la seconda è stata eseguita utilizzando la tecnica del passaggio del sole a mezzogiorno e la terza è stata fatta confrontando i dati di azimut misurati dalla bussola con quelli ricavabili dai dati delle mappe geografiche.
4.1 Calibrazione in laboratorio
La fase iniziale di taratura si è svolta in laboratorio, cercando di posizionare al meglio il
sensore parallelamente al piano su cui giace la fenditura ed allineando le colonne alla direzione della fenditura stessa. Queste operazioni sono state eseguite inviando la luce emessa da una serie di led, posti su una colonna perfettamente verticale, attraverso la fenditura fino ad illuminare il sensore. Sempre utilizzando dei led, è stata anche misurata la colonna corrispondente alla proiezione geometrica della fenditura sul piano del sensore e quella giacente nel piano verticale passante per la fenditura. Un laser è stato usato, invece, per misurare l’angolo di cui sono separate due colonne di pixel viste dalla fenditura e per determinare lo scostamento della direzione puntata dal cannocchiale rispetto al piano verticale passante per la fenditura. Tramite il lavoro in laboratorio sono stati dunque determinati in prima approssimazione i 6 parametri individuati come i fattori determinanti per la corretta taratura della bussola.
4.2 Calibrazione con il sole
Per raffinare la taratura della bussola sono state eseguite due tipologie di misure: la prima è
stata svolta traguardando la direzione Nord-Sud, mentre la seconda si è basata sulle misure di azimut di una direzione facilmente rintracciabile su una carta geografica.
La prima di queste operazioni è stata preceduta dalla determinazione della direzione Nord-Sud tramite il transito del sole a mezzogiorno. Conoscendo le coordinate del luogo è possibile sapere con estrema accuratezza il momento in cui il sole si troverà perfettamente a Sud, ovvero il mezzogiorno reale del luogo stesso. Per definire correttamente la direzione Nord-Sud è stato disposto un filo a piombo in un locale chiuso ma esposto a Sud tramite delle finestre, la cui ombra era proiettata su un muro ad una distanza di circa 3 metri. Al momento del mezzogiorno, è stata segnata la posizione dell’ombra su una carta millimetrata così da avere una direzione ben definita passante per il filo e per il segno della sua ombra. La bussola è stata quindi collocata ad una distanza di circa 80 metri dal luogo in cui si trovava il filo a piombo ed è stata traguardata la direzione congiungente il filo e il segno della sua ombra a mezzogiorno.
Completata questa operazione, sono state eseguite delle vere e proprie misure di azimut di obiettivi traguardati da un determinato punto di osservazione. In particolare, la bussola è stata collocata sul tetto dell’edificio 2 dell’ENEA di Frascati ed è stato misurato l’azimut sotto il quale veniva ossservato il traliccio di un’antenna posta su Monte Mario a Roma. Per determinare il valore teorico di questa direzione sono state usate le coordinate geografiche reperibili su alcuni siti internet (Google Maps, Faureragani) ed è stato utilizzato un calcolo basato sul modello ellissoidico della Terra (ref. f). Secondo questo calcolo, la direzione tra la bussola e l’antenna è risultato pari a 120° 24,15’ +/- 0,15’ a partire da Sud, in direzione positiva verso Ovest. Le misure eseguite con la bussola hanno fornito valori variabili tra 120° 26’ e 120° 30’, mostrando una forte dipendenza dalla posizione della riga di luce sul sensore rispetto al bordo e dall’altezza del sole sull’orizzonte. Utilizzando i dati raccolti è stato possibile rideterminare il valore dei 6 parametri di taratura, i cui valori sono stati inseriti nel software ed è stata avviata un’altra giornata di misure per verificare la

8
corretta taratura della bussola. In questa occasione, sempre dalla terrazza dell’edificio 2, questa volta è stata puntata la cupola della basilica di San Pietro, ben visibile da Frascati. Purtroppo, le misure hanno evidenziato ancora uno scarto di 5’ rispetto all’incertezza teorica della bussola, insieme ad una elevata imprecisione. A seguito di tali misure sono state effettuate accurate analisi sia della qualità dei filtri usati per attenuare la luce del sole, sia della risposta del fotosensore in funzione di quali colonne erano investite dalla luce del sole.
Tali analisi hanno portato a concludere che l’uso di filtri a riflessione comporta la comparsa di immagini multiple del sole sul sensore, aumentando l’inaccuratezza della misura e che le impurezze presenti sul sensore ottico influiscono sul calcolo del centro riga diminuendo la precisione. E’ stato pertanto sostituito un filtro a riflessione con un filtro di tipo cut-off, ad assorbimento, in grado di selezionare lunghezze d’onda nell’intervallo dell’infrarosso ed il software è stato modificato in modo da acquisire una serie di misure a bussola ferma così da mediare gli errori dovuti al calcolo del baricentro. Con queste modifiche, e conseguente variazione dei parametri di calibrazione, è stata fatta un’altra serie di misure, posizionando il treppiede del teodolite sul terreno (e non più sul tetto di un edificio) in prossimità del confine del centro ENEA, da dove era possibile traguardare diversi punti notevoli, in particolare un’antenna per telecomunicazioni posta su Monte Mario, la cupola di San Pietro e la cima di un monte dei pressi del lago di Bracciano.
Nella tabella seguente sono riportati i sperimentali ottenuti con la bussola nelle condizioni appena descritte, in confronto con quelli teorici ottenuti calcolando la direzione di osservazione tramite le coordinate geografiche.
Oggetto puntato distanza Azimut
misurato con la bussola
Azimut teorico
Differenza in primi d’arco
Antenna su Monte Mario 21.9 Km +120° 52.3' +120° 51.92' + 0.38'
Cupola della Basilica di S. Pietro 20.2 Km +117° 8.8' +117° 9.45' – 0.65'
Cima di Monte Rocca Romana (Trevignano) 54 Km +137° 58.6' +137° 58.73' – 0.13'
L’errore della stima dell’azimut è risultato inferiore ad 1’ in tutti e tre i casi, mostrando
l’elevatissima accuratezza e precisione della bussola una volta eliminate le fonti degli errori sistematici. L’accuratezza della bussola è stata confermata poi in tutti i successivi casi in cui è stata utilizzata come vero strumento di misura, come descritto nel prossimo paragrafo.
5. Sviluppi
L’invenzione della bussola solare, basata sul semplice principio di utilizzare una fenditura di
larghezza opportuna e un fotosensore ad un’opportuna distanza da essa, nonché l’uso di un innovativo algoritmo per il calcolo della posizione del sole, ha suscitato un vasto interesse da parte di alcune aziende operanti in settori molto diversi. Grazie all’interazione con tali aziende, il panorama delle applicazioni in cui poter utilizzare la bussola ENEA si è allargato fino a comprendere i seguenti usi:
- orientamento di mezzi mobili adatti a misure di monitoraggio ambientale - controllo della staticità di edifici e di territori a rischio geologico - tarature di bussole magnetiche e giroscopiche - guida per la costruzione di tunnel stradali
In seguito ai confortanti risultati ottenuti durante i test, la bussola è stata utilizzata per eseguire
diverse misure, su richiesta di ditte potenzialmente interessate allo sfruttamento dell’invenzione e per la dimostrazione delle sue caratteristiche di accuratezza e semplicità d’uso.

9
5.1 Misure per ACEA
Nell’ambito di un accordo con l’azienda ACEA LaboratoRI SpA di Roma, sono state eseguite
delle misure volte a determinare con precisione le mutue direzioni di vista di alcuni pozzi presenti nella zona delle sorgenti della Doganella, nel comune di Rocca Priora. Le misure sono state eseguite in due giornate, la prima utile per conoscere il luogo e per realizzare una prima misura al fine di constatare la corrispondenza tra la cartografia e i dati ottenuti con la bussola. Nella seconda giornata sono stati traguardati 6 pozzi da due punti di osservazione ed è stata misurata la loro altitudine relativa (grazie al puntatore ottico del teodolite, dotato di un goniometro ad asse di rotazione orizzontale di altissima precisione) per verificare se le mappe in possesso di ACEA fossero sufficientemente precise. Anche in questo caso, i dati ottenuti con la bussola sono stati confrontati con le mappe geografiche presenti su web, dimostrando un’eccezionale rispondenza ai dati teorici. Queste misure, tra l’altro, hanno consentito di verificare che l’uso dei puri calcoli trigonometrici fatti usando un reticolato chilometrico porta a risultati erronei se non si tiene conto dell’angolo di convergenza del meridiano di tale reticolato. Tale angolo, nel caso delle sorgenti della Doganella, è piuttosto elevato, pari ad 1.8°, valore pari esattamente all’angolo con cui le direzioni traguardate dalla bussola sono ruotate rispetto al Nord se il confronto lo si fa con una carta UTM, basata sul reticolato chilometrico.
Successivamente a queste misure, sempre l’ACEA ha chiesto di poter verificare tramite la nostra bussola, di quanto si scostava dalla direzione prevista, l’orientamento di un loro mezzo mobile parcheggiato usando una bussola magnetica. Dopo aver parcheggiato il furgone (in direzione Est-Ovest, secondo le intenzioni degli addetti ACEA), è stato posizionato uno specchio di dimensioni 1 m x 30 cm sulla fiancata del furgone. Il treppiede con la bussola è stato posizionato a circa 4 metri dalla fiancata e, dopo la consueta messa in bolla, il cannocchiale è stato puntato in direzione dello specchio in modo che si riflettesse in modo perfettamente perpendicolare ad esso. A questo punto la bussola ha fornito il valore corretto dell’allineamento del mezzo (chiaramente la bussola era ruotata di 90° rispetto all’asse del furgone, ed avrebbe dovuto puntare perfettamente il Sud) risultato pari a 106° in direzione antioraria a partire da Nord, quindi con circa 16° di errore rispetto alla direzione Est-Ovest (quella inizialmente desiderata). Una seconda prova di parcheggio, eseguita con maggiore scrupolo, ha comunque dimostrato la difficoltà nel posizionare il mezzo secondo una direzione prestabilita semplicemente usando una bussola magnetica.
Le foto riportate in figura 6 sono state scattate durante la misura fatta alle sorgenti della Doganella e durante le misure di posizionamento del mezzo mobile dell’ACEA.
Ù Figura 6: foto scattate durante i rilievi eseguiti per conto di ACEA. A sinistra: misure fatte alle sorgenti
della Doganella, vicino ad uno dei pozzi. A destra: misure fatte presso il centro ACEA LaboratoRI, dove è
visibile il mezzo mobile su cui è stato posizionato uno specchio rettangolare, di fronte alla bussola ENEA.

10
5.2 Misure per il sistema a concentrazione solare di ENEA Casaccia Una della applicazioni in cui la bussola ENEA può risultare molto vantaggiosa è quella relativa
agli impianti fotovoltaici e solari termodinamici, in cui la radiazione solare, concentrata grazie a lenti o specchi, viene usata per la conversione fotovoltaica o per riscaldare un liquido utilizzato per la successiva generazione di energia elettrica tramite turbina.
Dal momento che in questi impianti la luce solare viene concentrata, è necessario un opportuno sistema di inseguimento del sole, a uno o due assi a seconda della tipologia dell’ottica. Inoltre, al momento dell’installazione è indispensabile conoscere perfettamente come sia orientato il sistema di concentrazione, in particolare per gli impianti costituiti da specchi parabolici molto lunghi come quello che si trova in ENEA Casaccia e che replica, in piccolo, l’impianto del progetto Archimede in funzione a Priolo, in provincia di Siracusa.
Un errore sulla conoscenza dell’allineamento degli specchi parabolici (formati da 2 bracci lunghi 50 metri l’uno), può comportare un mancato sfruttamento dell’energia solare dell’ordine di alcuni punti percenutali, in quanto, se lo specchio non è perfettamente allineato sulla direzione del sole, la linea della focalizzazione non si sovrappone perfettamente al tubo collettore in cui passa il liquido che si deve scaldare.
La ditta DD di Udine, responsabile della parte relativa alla movimentazione degli specchi di ENEA Casaccia, la quale ha tra i propri obiettivi quello della fabbricazione e realizzazione di impianti per la produzione di energia da solare termodinamico, ha mostrato un forte interesse per la bussola ENEA e, insieme ai responsabili di ENEA Casaccia che curano l’impianto termodinamico, ha chiesto di poter eseguire una misura dell’allineamento degli specchi. Gli specchi, secondo il progetto iniziale dovevano essere disposti lungo la direzione Est-Ovest, disposizione che presenta il vantaggio di minimizzare la movimentazione degli stessi per seguire il moto apparente del sole durante il giorno.
La misura è stata effettuata ad Ottobre 2013, in una giornata in cui il sole si è presentato solamente per pochi minuti, affacciandosi tra nubi piuttosto minacciose. Tanto è bastato, comunque, per fare la misura che è consistita nel traguardare dei fili a piombo predisposti sull’impianto stesso dai tecnici della Casaccia, come mostrato in figura 7 (accanto alla quale c’è una foto del momento in cui si è posizionato il teodolite) ed il risultato è riportato nella successiva tabella.
Figura 7: a sinistra, schema della disposizione dei fili a piombo lungo l’impianto di ENEA Casaccia e della
bussola solare ENEA. A destra, una foto scattata alla fine del primo troncone da 50 metri e che inquadra la
bussola montata sul treppiede. In primo piano, sfocato, si vede il supporto su cui era legato il filo a piombo.

11
Ora rilievo Azimut iniziale bussola
Azimut tratto 0-50 m
Deviazione da Est
Azimut tratto 0-100 m
Deviazione da Est
11.43 -7° 25.704’ -89° 59.52’ 0.48’ sud -89° 59.87’ 0.13’ sud
12.41 11° 2.4’ -90° 0.16’ 0.16’ nord -90° 0.42’ 0.42’ nord
media -89° 59.84’ 0.16 sud -90° 0.15 0.15 nord
Valori ottenuti tramite le misure con la bussola. I dati di azimut sono riferiti alla direzione
Sud, con i valori crescenti in direzione Ovest (n.e. = non eseguito)
Come si vede dalla Tabella, l’allineamento del primo troncone da 50 metri del CSP è accurato
entro 0.5’ rispetto alla direzione Est-Ovest. Si nota inoltre che il tratto 0-100m (quindi quello comprendente entrambi i tronconi del CSP) ha un azimut mediamente più negativo di una quantità 0.31’ rispetto al tratto 0-50 cioè rispetto al tratto che corrisponde al 1° troncone del CSP (quello più a Ovest); tramite semplici considerazioni geometriche, se ne deduce che il 2° troncone (quello più a Est) è ruotato di 0.47’ verso nord come mostrato in figura 8 (in cui si è volutamente amplificato il disallineamento rispetto alla direzione Est-Ovest).
In sostanza, la bussola ENEA ha confermato che gli specchi sono stati installati sul terreno con un errore sulla direzione Est-Ovest inferiore ad 1’, cosa che consente di evitare perdite di energia solare dovute al disallineamento.
Figura 8: angolo di disallineamento degli assi degli specchi parabolici rispetto alla direzione Est-Ovest.
Tramite gli angoli α e β, misurati con la bussola posta ad ovest degli specchi, si ricava l’angolo δ.
5.3 Misura eseguita all’Istituto Geografico Militare
Tra i possibili utilizzi della bussola ENEA vi è quello di campione per la taratura delle bussole
magnetiche e delle girobussole (bussole basate sul principio della conservazione del momento angolare di un giroscopio). Perché uno strumento di misura possa fungere da sistema di taratura per altri strumenti è necessario che esso sia preventivamente approvato dall’istituzione che rappresenta l’ente di riferimento per quel tipo di misura, in questo caso l’Istituto Geografico Militare Italiano (IGMI), che ha sede a Firenze.
Una volta contattato, l’IGMI si è mostrato subito interessato all’invenzione dell’ENEA e ha chiesto un incontro per discutere delle caratteristiche e delle potenzialità della bussola solare. In quell’occasione, si è anche trovato il tempo per eseguire una misura di direzione utilizzando dei
direzione tronco 0-50
direzione tronco 0-100
β=0.16' α=0.15'
OVEST EST
δ=α+2β=0.47'
direzione tronco 50-100
NORD

12
pilastri di riferimento che si trovano nel perimetro dell’istituto. Le coordinate della posizione di tali pilastri sono note al millimetro, dal momento che essi sono usati proprio per controllare i sistemi di navigazione ed orientamento (bussole e GPS).
Per realizzare la misura, la bussola è stata posizionata sulla testa del teodolite (senza treppiede) e questa è stata collocata sopra un pilastro investito dalla luce del sole. Su un secondo pilastro, posto a circa 50 metri di distanza dal primo, è stata sistemata un’asta centrata sul punto di riferimento, traguardabile dal cannocchiale del teodolite.
Poiché la distanza tra i due pilastri era molto limitata, anche un errore di pochi centimetri avrebbe avuto un forte effetto sulla misura, visto che a 50 metri 1/60 di grado corrisponde a circa 14 mm, per cui il posizionamento del teodolite e dell’asta è stato fatto con la massima accuratezza.
Pochi secondi di sole sono stati sufficienti per ottenere il valore dell’azimut della bussola, dopodiché il cannocchiale è stato puntato verso il secondo pilastro ed il goniometro del teodolite ha fornito il valore da aggiungere all’azimut della bussola in modo da ottenere la direzione che intercorreva tra i due pilastri.
In questa occasione non è stato necessario ricorrere al calcolo dell’azimut teorico mediante mappe geografiche, dal momento che le coordinate dei due pilastri sono perfettamente note, e quindi il confronto del dato sperimentale con quello teorico è sicuramente più affidabile che non nei precedenti test. Nella tabella seguente è mostrato l’eccezionale risultato ottenuto, mentre nella figura 9 si vede la zona in cui sono presenti altri due pilastri dell’IGMI, indicati da due cerchi, allineati quasi esattamente come i due riferimenti oggetto della misura (i pilastri in foto erano in ombra al momento della misura, quindi non era possibile utilizzarli).
Oggetto puntato distanza Azimut misurato
con la bussola Azimut teorico
Differenza in primi d’arco
Pilastro di riferimento IGM
< 0.1 Km -57° 02’ 36” -57° 02’ 48” + 0.2'
Figura 9: foto aerea della zona in cui sono posizionati due pilastri di riferimento nell’area dell’Istituto
Geografico Militare di Firenze, evidenziati dai cerchi gialli. La direzione tratteggiata è quasi parallela a
quella, mostrata in verde, che congiunge i due pilastri (non visibili) utilizzati per la misura di azimut
5.4 Preparazione e realizzazione di una nuova bussola
Dopo i convincenti risultati ottenuti durante i test e in occasione delle misure eseguite sul
campo, sono stati avviati i lavori per la realizzazione del secondo prototipo della bussola solare. In questo prototipo la parte meccanica è rimasta sostanzialmente inalterata, a parte la fenditura che è stata realizzata tramite tecniche litografiche dal laboratorio di fotonica del CNR di Roma. La nuova fenditura è stata ricavata depositando del materiale che assorbe la radiazione solare su un vetrino da

13
microscopio e lasciando una sottile striscia trasparente. Il vantaggio di questa fenditura è duplice: da un lato le sue dimensioni sono molto più precise e vicine al valore ottimale, oltre al fatto che i bordi sono molto più regolari rispetto ad una lama da bisturi. In secondo luogo, il vetro sigilla la parte superiore della bussola, impedendo l’ingresso della polvere che potrebbe andare a coprire il fotosensore, come è avvenuto per il primo prototipo, causando problermi nel calcolo del centro riga.
La modifica più consistente, comunque, è legata alla parte elettronica, in quanto la CMOS della webcam è stata sostituita da un fotosensore da 640x480 pixel, un numero decisamente maggiore rispetto al primo prototipo, mentre il software è stato implementato su un microprocessore il quale è interfacciato sia al fotosensore, sia, tramite porta seriale, al goniometro del teodolite. Il modulo GPS è poi integrato nel sistema e connesso al microprocessore. In questo modo la bussola diventa un oggetto realmente autonomo, in quanto non c’è necessità di connetterla ad elementi esterni. E’ stato infine progettato e realizzato un pannello di controllo, dotato di pulsanti e di un display per visualizzare i dati. La nuova bussola sarà anche dotata di un’interfaccia seriale per essere collegata con un computer in modo da scaricare i dati elaborati e per eventuali operazioni di debug o di taratura.
La figura 10 mostra una fotografia in cui si vede il secondo prototipo della bussola accanto al contenitore con il pannello di controllo in cui è contenuta l’elettronica di comando ed una in cui la bussola e il pannello di controllo montati sul teodolite.
Figura 10: a sinistra, foto del secondo prototipo di bussola solare ENEA, collegata al pannello di controllo
in cui è contenuta l’elettronica di comando e, a destra, la bussola ed il pannello installati sul teodolite
6. Conclusioni
La bussola solare ENEA è un semplice strumento che, grazie ad un algoritmo basato sulle
equazioni di Keplero e ad un sistema optoelettronico, è in grado di fornire la direzione del Nord geografico e/o l’azimut di una qualsiasi direzione semplicemente acquisendo l’immagine del sole.
La semplicità dell’algoritmo, prevalentemente analitico e solo in minima parte numerico, e l’idea di utilizzare una fenditura come ottica per creare l’immagine del sole su un fotosensore, hanno consentito di realizzare un dispositivo che ha la migliore accuratezza al momento nota tra le bussole elettroniche, se si escludono i costosissimi sistemi di misura di orientamento basati su GPS differenziali o giroscopi di precisione.
La bussola è stata progettata, realizzata, tarata e testata sul campo, dimostrando la sua semplicità di utilizzo e la sua elevatissima accuratezza, testimoniata dall’interesse suscitato non solo da ditte che fabbricano strumenti per topografi e ingegneri civili, ma anche dell’istituto italiano di

14
riferimento per ciò che concerne la misura del nord geografico, ovvero l’Istituto Geografico Militare.
Per quanto riguarda le applicazioni in cui è possibile utilizzare la bussola, dall’iniziale scopo di un sistema di tracking per pannelli solari a concentrazione gli obiettivi si sono allargati a comprendere l’installazione d’impianti radar, la guida di robot per rilievi in zone contaminate o per missioni extraterrestri, l’orientamento di mezzi mobili adatti a misure di monitoraggio ambientale, il controllo della staticità di edifici e di territori a rischio geologico, la taratura di bussole magnetiche e giroscopiche, un sistema di guida per la costruzione di tunnel stradali….
La bussola è stata realizzata in un due prototipi, il primo dotato di un sensore a scarsa risoluzione e con una fenditura non ottimale, già testato e funzionante, mentre il secondo, con un hardware migliorato e con un’elettronica integrata, è ancora in fase di test. Nonostante i limiti di costruzione, comunque, i test fatti sul primo prototipo hanno dimostrato che l’accuratezza delle misure può arrivare sotto il primo di grado, un valore ancora più ottimistico di quello previsto dai calcoli iniziali.
Il semplice algoritmo usato, inoltre, è già di per sé un forte competitore nei confronti di software molto più pesanti ed ingombranti che richiedono processori ad elevate prestazioni ed ingenti costi, mentre quello usato nella bussola può comodamente essere salvato su un economico microprocessore programmabile.
In conclusione, la bussola solare ENEA si è dimostrata un’invenzione che ha mantenuto le aspettative di un sistema semplice, economico, veloce, robusto ed accurato per la misura dell’azimut di una direzione o per la semplice determinazione del nord geografico. L’unico svantaggio appare quello della necessità che vi sia sole pieno per poter funzionare, ma è da rilevare che la presenza del sole è richiesta per pochi secondi, come è avvenuto durante alcuni test eseguiti in giornate particolarmente nuovolose. [a1] vedi, ad es, “Elementi di orientamento” Michele T. Mazzucato, ed. Maggioli (Santarcangelo di
Romagna, Rimini, 2008) pagg. 3-5. [a] “Bussola solare elettronica ad alta precisione”, F. Flora, S. Bollanti, D. De Meis, P. Di Lazzaro,
A. Fastelli, G:P. Gallerano, L. Mezi, D. Murra, A. Torre, D. Vicca, n° domanda brevetto RM2012A000664 (27 Dicembre 2012). Estensione internazionale: “High Precision Electronic Solar Compass”n. PCT 29379 (23 Dicembre 2013)
[b] “Digital solar compass”, Christopher John Morcom, US patent application n. US 2012/0227273 (13 Settembre 2012)
[c] “Celestial compass”, Donald Bruns, David Sandler, Mikhail Belenkii, US patent application n. US 2007/0117078 (24 Maggio 2007)
[d] “Sun sensors using multi-pinhole overlays”, Charles H. Hersom, Philip Duggan, William A. Gault, brevetto n. US 6,490,801, pubblicato in data 10 Dicembre 2002
[e] “Calcolo analitico della posizione del sole per l’allineamento di impianti solari ed altre applicazioni”, S. Bollanti, D. De Meis, P. Di Lazzaro, A. Fastelli, F. Flora, G.P. Gallerano, L. Mezi, D. Murra, A. Torre, D. Vicca ENEA RT/2012/24 (2012)
[e2] “Solar position algorithm for solar radiation applications”, Ibrahim Reda and Afshin Andreas, Solar Energy, 76 (2004) pagg. 577–589. Questo codice è stato sviluppato dal National Renewable Energy Laboratory del U.S. Depratment of Energy nel 1993 ed è scaricabile dal sito https://www.nrel.gov/midc/spa/
[f] vedi, ad es., “Lezioni di topografia“, A. Spalla R. Galetto, ed. CUSL (Pavia, 1998), cap. III (scaricabile dal sito geomatica.unipv.it/spalla/materiale/capitolo III.pdf - ultimo accesso Aprile 2014)