Presentazione di NovaVision: Trasduttore vibrazionale per non vedenti
Informatica 3
V anno

Sistemi e modelli
Teoria generale dei sistemi
Il concetto di sistema è alla base della teoria generale dei sistemi cioè
della disciplina il cui obiettivo è fornire un metodo rigoroso di analisi e
sintesi di una situazione reale allo scopo di studiarne il comportamento.
Cos’è un sistema?
Una semplice definizione di sistema po’ essere la seguente:
Un sistema è un insieme di elementi che interagiscono tra loro per
il funzionare come un unico elemento.
Seguendo la teoria generale dei sistemi, un sistema può essere
definito tale quando sono noti:
- gli obiettivi da raggiungere
- le parti (o elementi) che lo compongono
- le interazioni con il mondo esterno, espresse in termini di ingressi e
uscita
- le relazioni che descrivono i rapporti esistenti tra le varie componenti
I sottosistemi
Spesso le parti che costituiscono un sistema sono, a loro volta, sistemi.
Si parla, in questo caso, di sottosistemi:
Ogni sottosistema, pur essendo sempre un sistema e potendo
quindi essere considerato singolarmente, concorre al
raggiungimento dell’obiettivo del sistema principale di cui è parte.
Lo stato internoOltre a ingressi e uscite, un’altra importante grandezza che caratterizza
un sistema è lo stato interno.
Lo stato interno rappresenta le proprietà intrinseche, o
caratteristiche, di un sistema, ovvero l’insieme delle informazioni
necessarie e sufficienti per descrivere in modo esauriente le
condizioni in cui si trova il sistema in un qualsiasi istante.
Leggere i valori dello stato di un sistema in un certo istante equivale a
effettuare una fotografia del sistema in un dato istante.
I valori di ingresso, le uscite e i valori assunti dallo stato di un sistema
sono memorizzati in variabili che prendono il nome di:
- variabili d’ingresso
- variabili d’uscita
- varibili di stato
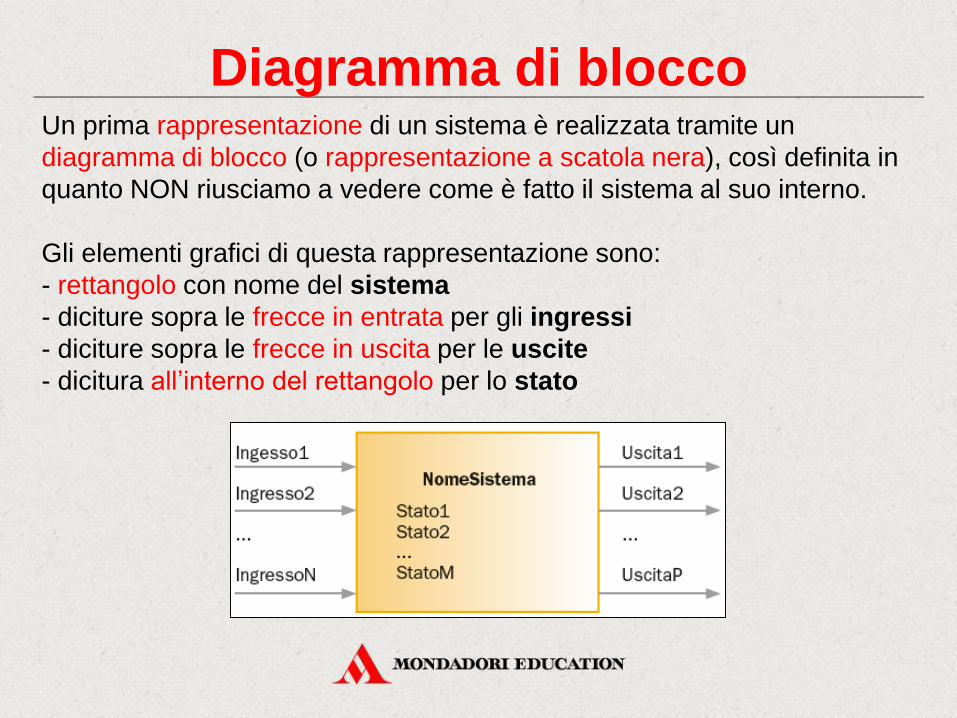
Diagramma di bloccoUn prima rappresentazione di un sistema è realizzata tramite un
diagramma di blocco (o rappresentazione a scatola nera), così definita in
quanto NON riusciamo a vedere come è fatto il sistema al suo interno.
Gli elementi grafici di questa rappresentazione sono:
- rettangolo con nome del sistema
- diciture sopra le frecce in entrata per gli ingressi
- diciture sopra le frecce in uscita per le uscite
- dicitura all’interno del rettangolo per lo stato
Comportamento di un sistema
Per descrivere il comportamento di un sistema occorre individuare le leggi
(o funzioni) che legano gli ingressi alle uscite e allo stato del sistema.
Tali leggi sono spesso complicate e vengono espresse mediante
complesse formule matematiche.
Le relazioni esistenti tra le variabili o tra le varie parti di un sistema NON
sono sempre immediatamente rilevabili ed esprimibili mediante funzioni
matematiche.
Esistono, infatti, relazioni che per loro natura possono essere espresse
SOLO tramite tabelle di corrispondenza esplicite, grafici o altre forme,
che, in alcuni casi, rendono difficile l’individuazione del tipo di relazione
matematica esistente.
Le funzioni
Le funzioni di un sistema sono:
- Funzione di transizione dello stato f() ci permette di calcolare quale
valore assumerà lo stato di un sistema s(t) a un generico istante t, in base
alla situazione iniziale del sistema s(t0) e a tutti gli ingressi applicati al
sistema dall’istante iniziale t0 fino all’istante t, cioè i(t):
s(t) = f(s(t0), i(t))
- Funzione di trasformazione delle uscite g() ci permette di calcolare quale
valore assumerà l’uscita u(t) a un generico istante (t), conoscendo il
valore dello stato e degli ingressi allo stesso istante:
u(t) = g(s(t), i(t))
Definizione di un sistema
Un sistema è completamente descritto quando si conoscono le sue
caratteristiche e il suo comportamento, cioè quando si sa che cosa
succede in uscita quando si applicano determinati ingressi.
Formalmente, occorre conosce i seguenti insiemi:
- Ingressi I = {I0, I1, I2, …, IN}
- Uscite U = {U0, U1, U2, …, UP}
- Stati S = {S0, S1, S2, …, SM}
- Funzione di transizione s(t) = f(s(t0), i(t))
- Funzione di trasformazione u(t) = g(s(t), i(t))
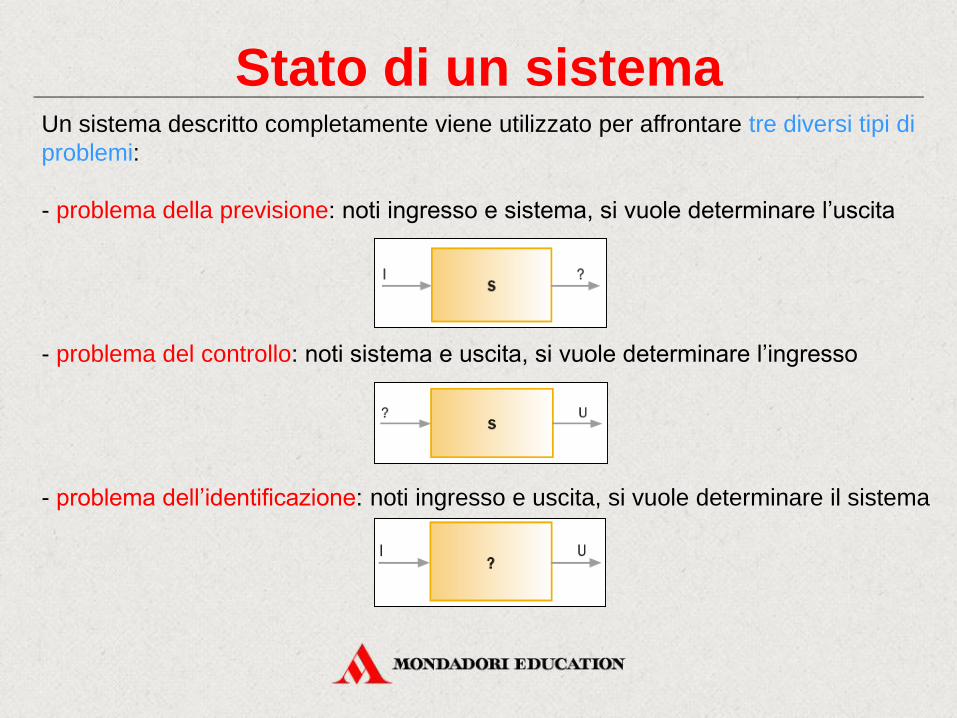
Stato di un sistemaUn sistema descritto completamente viene utilizzato per affrontare tre diversi tipi di
problemi:
- problema della previsione: noti ingresso e sistema, si vuole determinare l’uscita
- problema del controllo: noti sistema e uscita, si vuole determinare l’ingresso
- problema dell’identificazione: noti ingresso e uscita, si vuole determinare il sistema
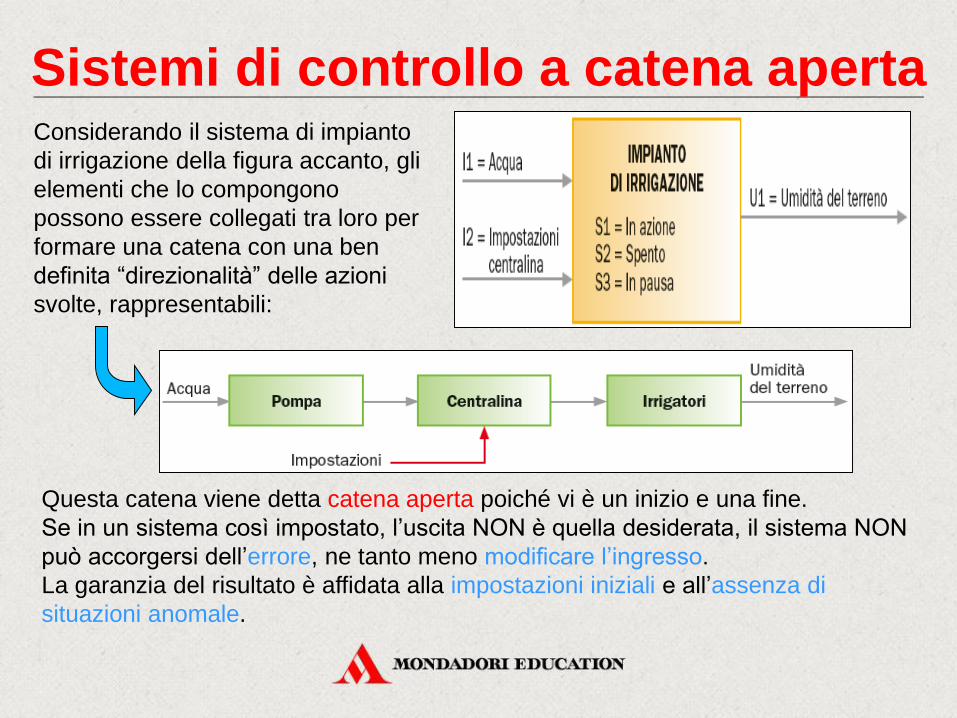
Sistemi di controllo a catena apertaConsiderando il sistema di impianto
di irrigazione della figura accanto, gli
elementi che lo compongono
possono essere collegati tra loro per
formare una catena con una ben
definita “direzionalità” delle azioni
svolte, rappresentabili:
Questa catena viene detta catena aperta poiché vi è un inizio e una fine.
Se in un sistema così impostato, l’uscita NON è quella desiderata, il sistema NON
può accorgersi dell’errore, ne tanto meno modificare l’ingresso.
La garanzia del risultato è affidata alla impostazioni iniziali e all’assenza di
situazioni anomale.
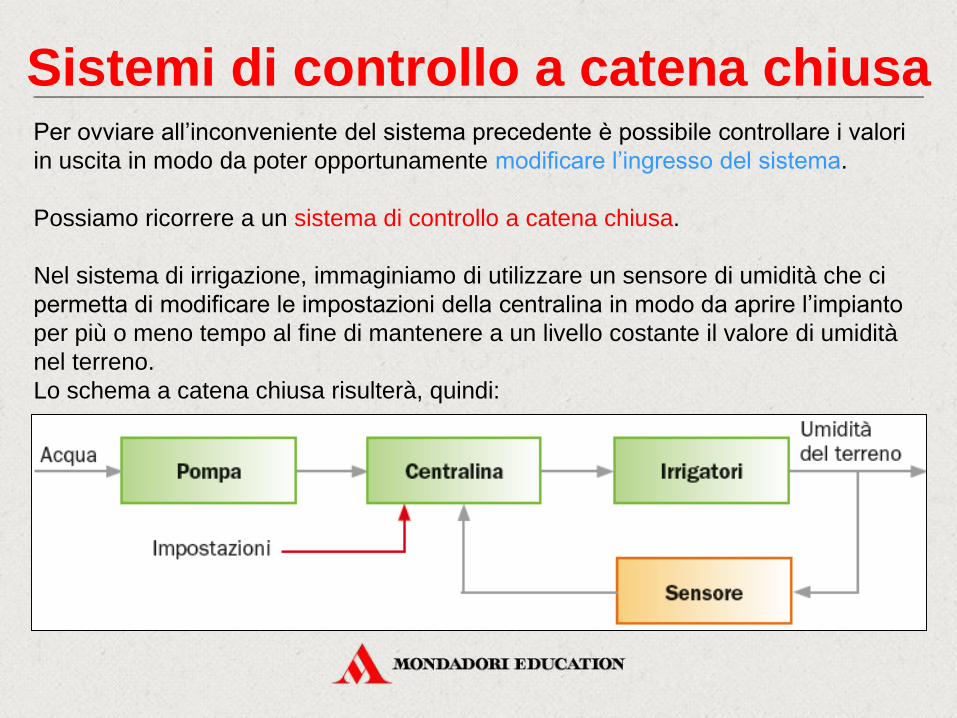
Sistemi di controllo a catena chiusaPer ovviare all’inconveniente del sistema precedente è possibile controllare i valori
in uscita in modo da poter opportunamente modificare l’ingresso del sistema.
Possiamo ricorrere a un sistema di controllo a catena chiusa.
Nel sistema di irrigazione, immaginiamo di utilizzare un sensore di umidità che ci
permetta di modificare le impostazioni della centralina in modo da aprire l’impianto
per più o meno tempo al fine di mantenere a un livello costante il valore di umidità
nel terreno.
Lo schema a catena chiusa risulterà, quindi:
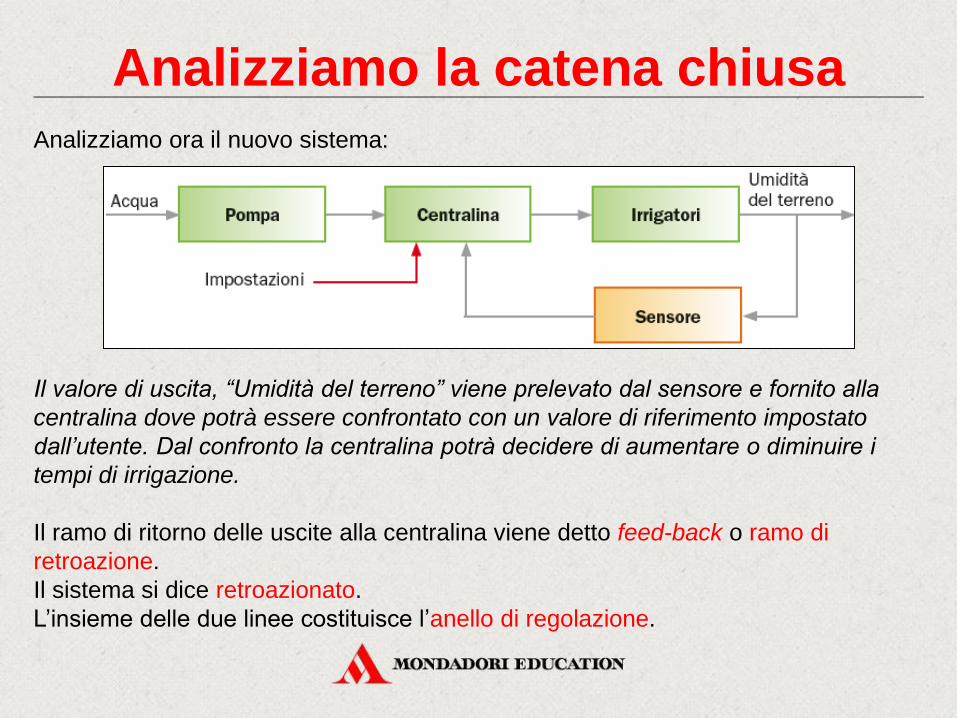
Analizziamo la catena chiusaAnalizziamo ora il nuovo sistema:
Il valore di uscita, “Umidità del terreno” viene prelevato dal sensore e fornito alla
centralina dove potrà essere confrontato con un valore di riferimento impostato
dall’utente. Dal confronto la centralina potrà decidere di aumentare o diminuire i
tempi di irrigazione.
Il ramo di ritorno delle uscite alla centralina viene detto feed-back o ramo di
retroazione.
Il sistema si dice retroazionato.
L’insieme delle due linee costituisce l’anello di regolazione.
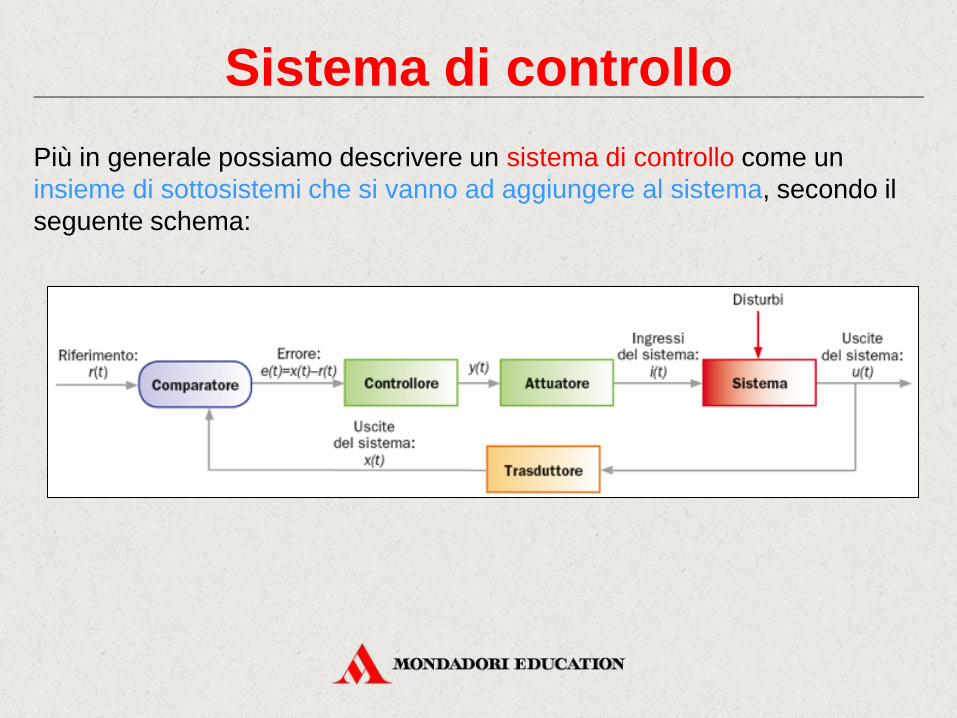
Sistema di controllo
Più in generale possiamo descrivere un sistema di controllo come un
insieme di sottosistemi che si vanno ad aggiungere al sistema, secondo il
seguente schema:

Sottosistemi del sistema di controllo
In particolare, nello schema abbiamo:
- Riferimento: r(t) è il segnale che corrisponde all’uscita che si desidera ottenere dal sistema
- Comparatore: confronta il segnale di riferimento con l’uscita del sistema valutando l’errore
e(t) che misura quanto l’uscita del sistema si discosta dal valore di riferimento
- Controlllore: in base all’errore e(t), elabora un valore y(t)
- Attuatore: trasforma e amplifica il segnale y(t) per generare una sollecitazione i(t) al sistema.
- Sistema: sistema che stiamo analizzando e vogliamo controllare. Il valore della grandezza
controllata u(t) deve essere misurato e controllato
- Trasduttore: trasforma l’uscita del sistema in un segnale x(t) compatibile con il comparatore,
che lo confronterà con il riferimento r(t) in modo da valutare gli opportuni interventi di
correzione sul sistema. Il termine sensore è equivalente a quello di trasduttore.
- Disturbi: fenomeni che alterano il corretto funzionamento del sistema.

Sistemi invarianti e varianti
Dato che i sistemi possono essere osservati sotto differenti punti di vista,
NON è possibile definire un unico tipo di classificazione estendibile a tutti i
contesti.
Una possibile classificazione, può essere distinguere tra sistemi invarianti
e sistemi varianti:
Un sistema si dice invariante, o stazionario, se risponde sempre allo
stesso modo quando lo sollecitano gli stessi ingressi, in istanti
diversi. Se, invece, le risposte sono diverse in istanti diversi, anche
con ingressi costanti, allora il sistema si dice variante, o
deteriorabile.
Variabili e funzioni continue e discrete
Tutte le variabili che descrivono il sistema e le funzioni di trasformazione e
transizione possono essere di natura discreta o continua:
Una variabile è continua quando, scelti due possibili valori diversi tra loro
del suo dominio di esistenza D, la variabile può assumere TUTTI gli infiniti
valori compresi tra questi due estremi, mentre diremo che è discreta
quando può assumere SOLO un numero finito di valori.
Un insieme di variabili è discreto quando ciascun elemento dell’insieme è
discreto, è continuo quando anche solo un elemento è continuo.
Una funzione è continua se lo è la legge che lega la variabile dipendente
(y) a quella indipendente (x) mentre si dice discreta quando il suo
codominio è discreto.

Sistemi discreti e continui
DISCRETI- Sistema discreto nell’avanzamento:
quando è discreto l’insieme dei tempi,
cioè il sistema può essere analizzato in
precisi istanti di tempo.
- Sistema discreto nelle sollecitazioni:
quando l’insieme dei possibili valori di
ingresso è discreto.
- Sistema discreto nelle interazioni:
quando la funzione di transizione e
quella di trasformazione sono discrete.
Sistemi discreti e continui si differenziano ulteriormente come segue:
CONTINUI- Sistema continuo nell’avanzamento:
quando le variabili si evolvono con
continuità e non ha senso analizzarle
solo a istanti prestabiliti.
- Sistema continuo nelle sollecitazioni:
quando l’insieme dei possibili valori di
ingresso è continuo, quindi infinito.
- Sistema continuo nelle interazioni:
quando la variazione nelle interazioni
registra solo valori continui.
Sistemi dinamici e statici
Un sistema si dice dinamico quando la configurazione (ossia l’insieme di
variabili che descrivono lo stato del sistema) varia nel tempo; si parla di
sistema statico quando si presenta il caso di variabili immutabili nel tempo.
Sistemi deterministici e stocastici
Un sistema si dice deterministico quando le funzioni di transizione e di
trasformazione sono definite in modo da permettere la determinazione del
valore dello stato e delle uscite in modo univoco. Si dice stocastico quando
una delle due funzioni è regolata da legami di natura probabilistica.

Sistemi combinatori e sequenziali
Un sistema si dice combinatorio se le uscite in un certo istante dipendono
SOLO dai valori presenti agli ingressi nel medesimo istante. Si dice
sequenziale quando le uscite dipendono NON solo dai valori degli ingressi
in un istante, ma anche dai valori assunti in precedenza dagli ingressi.
Si può anche dire che un sistema in cui NON è necessario introdurre la
variabile di stato è di tipo combinatorio.
I modelli
I sistemi, nella realtà sono molto più complessi di quelli visti finora. Anche
le relazioni tra le componenti interne spesso NON sono così intuitive.
Spesso, poi, sollecitare il sistema reale per valutarne i comportamenti, non
è possibile. Nella pratica si costruisce, perciò, una rappresentazione
integrale del sistema, detta modello.
Dato un sistema reale e un problema da risolvere su di esso, definiamo
modello, relativo al problema in esame, la rappresentazione semplificata
del sistema che evidenzi tutti gli elementi utili alla risoluzione del problema
e ci permetta di riprodurre e valutare le funzioni svolte dal sistema originale
senza intervenire direttamente su di esso.
Il processo di astrazione
Parlando di modelli siamo portati a parlare inevitabilmente di astrazione.
Il processo di astrazione consiste nell’estrapolare da tutte le informazioni
relative a una realtà solo quelle utili per risolvere il problema sostituendo,
successivamente, gli oggetti reali osservati con simboli. Inoltre, vengono
tralasciati i dettagli implementativi dei singoli oggetti e si analizza la realtà
nel suo insieme.
Dato un sistema, NON esiste, per come è stato definito, un modello che
risulti valido in qualsiasi contesto.
PER UN SISTEMA, quindi, POSSONO ESISTERE DIVERSI MODELLI.
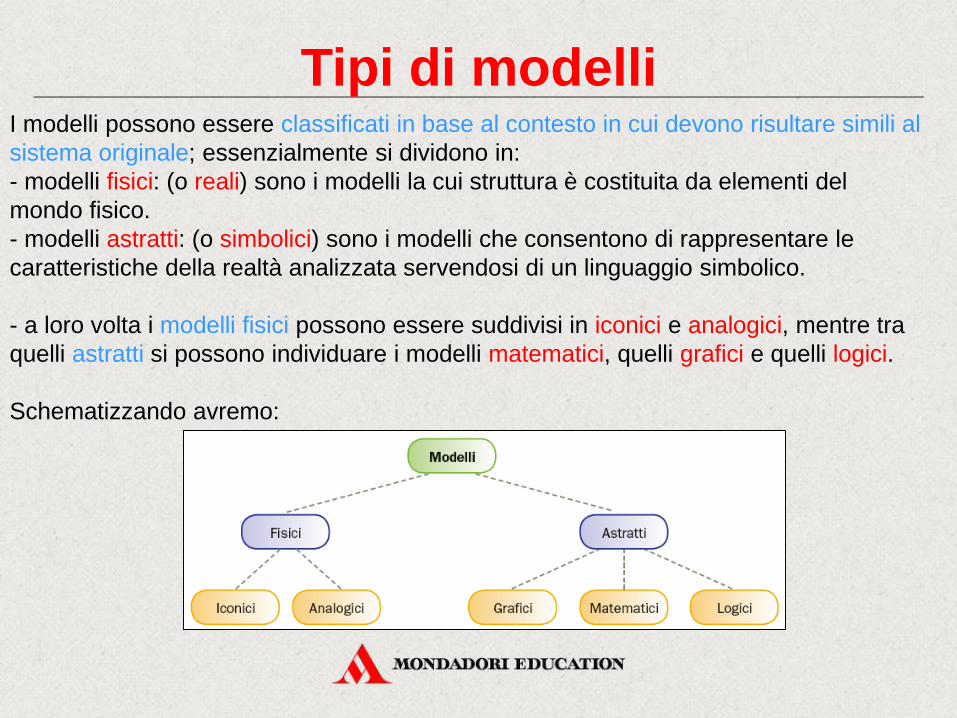
Tipi di modelliI modelli possono essere classificati in base al contesto in cui devono risultare simili al
sistema originale; essenzialmente si dividono in:
- modelli fisici: (o reali) sono i modelli la cui struttura è costituita da elementi del
mondo fisico.
- modelli astratti: (o simbolici) sono i modelli che consentono di rappresentare le
caratteristiche della realtà analizzata servendosi di un linguaggio simbolico.
- a loro volta i modelli fisici possono essere suddivisi in iconici e analogici, mentre tra
quelli astratti si possono individuare i modelli matematici, quelli grafici e quelli logici.
Schematizzando avremo:
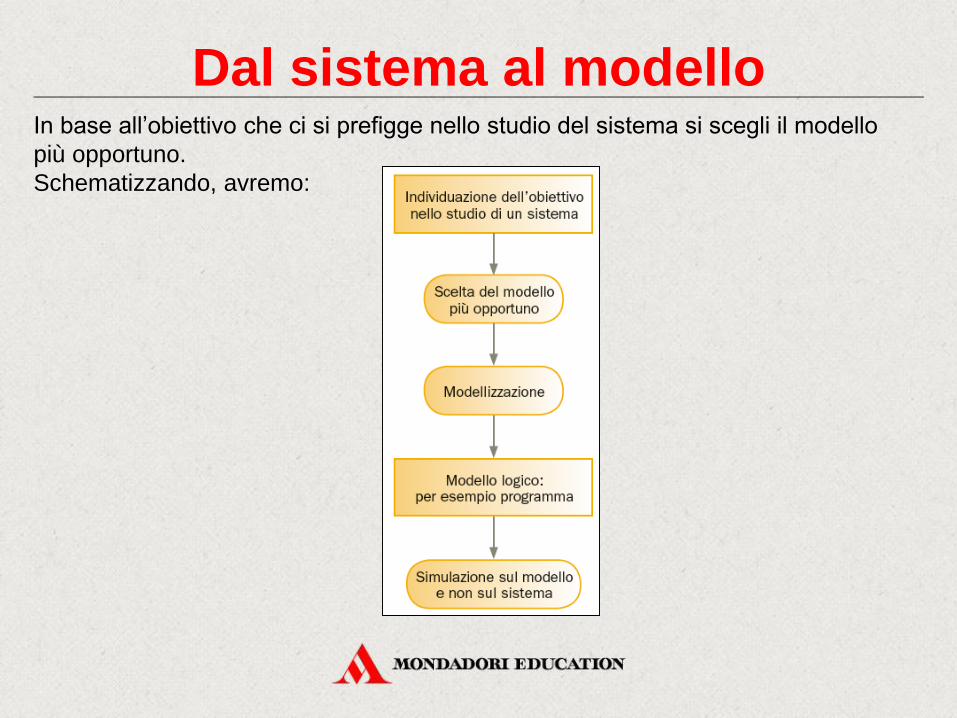
Dal sistema al modelloIn base all’obiettivo che ci si prefigge nello studio del sistema si scegli il modello
più opportuno.
Schematizzando, avremo:
Modelli iconici
Per spiegare i modelli iconici pensiamo a un plastico di un edificio.
Ovviamente, è una riproduzione del sistema in cui una o più grandezze
originali sono state modificate proporzionalmente, al fine di semplificarne lo
studio.
Nella rappresentazione in scala di un sistema non si effettua sempre e solo
una riduzione di scala ma spesso la scala viene lasciata naturale o
ingrandita, si parla, perciò, di modelli ridotti (scala < 1), naturali (scala 1:1)
o espansi (scala > 1).
Se il fattore di scala NON è lo stesso per tutte le grandezze si parla di
modello simile.
Modelli analogici
I modelli analogici sono le riproduzioni dei sistemi originali in cui vengono
mantenute le relazioni tra gli elementi del sistema, ma le grandezze fisiche
in gioco vengono sostituite (in parte o totalmente) con altre di
comportamento analogo.
Modelli matematici
I modelli matematici sono quei modelli in cui il sistema viene rappresentato
dalle leggi matematiche che lo regolano.
Tra i più utilizzati, ricordiamo:
- insiemistica
- algebra
- analisi funzionale
Modelli grafici
I modelli grafici rappresentano su carta, con particolari simbologie, il sistema
a cui si riferiscono, e si contraddistinguono per la loro capacità di
descrizione e per la potenza espressiva insita nella comunicazione visiva.
Tra essi ricordiamo:
- schemi a blocchi
- grafi di transizione
Queste due tipologie di modelli sono fondamentali per rappresentare
particolari sistemi dinamici, gli automi.

Modelli logiciI modelli logici sono insiemi di regole logico-funzionali che, se eseguite, permettono di
emulare integralmente il sistema originale.
Sono detti anche modelli algoritmici.
In questa classe di modelli rientrano le simulazioni di sistemi reali tramite linguaggi di
programmazione o altri strumenti informatici.
Lo schema che riassume il nostro percorso è il seguente: