Relazione Caratterizzazione dinamica di un trasduttore di pressione
17
1 Università degli studi di Càgliàri Dipàrtimento di Meccànicà, Chimicà e Màteriàli Corso di: Sperimentazione sulle macchine Docente prof. Mandas Natalino & Ing. Cambuli ESERCITAZIONE 2 CARATTERIZZAZIONE DINAMICA DI UN TRASDUTTORE DI PRESSIONE Anno accademico 2014/2015 Studente: Stefano Manca, Matr.: 47131
-
Upload
stefano-manca -
Category
Documents
-
view
223 -
download
2
Transcript of Relazione Caratterizzazione dinamica di un trasduttore di pressione

1
Università degli studi di Càgliàri
Dipàrtimento di Meccànicà, Chimicà e Màteriàli
Corso di: Sperimentazione sulle macchine Docente prof. Mandas Natalino & Ing. Cambuli
ESERCITAZIONE 2
CARATTERIZZAZIONE DINAMICA DI UN
TRASDUTTORE DI PRESSIONE
Anno accademico 2014/2015
Studente:
Stefano Manca, Matr.: 47131

2
Indice CARATTERIZZAZIONE DINAMICA DI UN TRASDUTTORE DI PRESSIONE...................................... 1
Abstract .................................................................................................................................... 3
Simbologia ................................................................................................................................ 3
1. INTRODUZIONE ........................................................................................................... 4
2. PARTE TEORICA .......................................................................................................... 4
2.1 Dinamica degli strumenti di misura .......................................................................... 4
2.2 Modello linea-cavità .................................................................................................. 6
3. DESCRIZIONE DELLE PROVE REALIZZATE IN LABORATORIO ................. 8
3.1 Descrizione generale della catena di misura ............................................................. 8
3.2 Descrizione del tipo di trasduttore e dello strumento primario adottato per la
generazione delle pressioni................................................................................................... 9
3.3 Caratteristiche degli altri strumenti utilizzati .......................................................... 10
3.4 Procedura sperimentale .......................................................................................... 11
4. RISULTATI DELLE PROVE SPERIMENTALI E ANALISI DEI RISULTATI . 11
4.1 Risultati nel dominio del tempo .............................................................................. 11
4.2 Risultati nel dominio della frequenza ..................................................................... 14
5. CONCLUSIONI ............................................................................................................ 17
Bibliografia .............................................................................Errore. Il segnalibro non è definito.

3
Abstract In questa relazione si effettua la caratterizzazione dinamica di uno strumento di
misura per le pressioni dinamiche. In particolare il trasduttore in esame viene
sottoposto a un segnale in ingresso di pressione e ne viene studiato il segnale di
uscita ai fini della determinazione dei parametri dinamici del sistema di misura. La
sperimentazione è stata svolta per cinque volte in cui è stata variata una lunghezza
appartenente alla catena di misura: i risultati ottenuti vengono poi posti a confronto e
studiati per la determinazione dell’ordine dello strumento.
Simbologia D diametro [mm]
l lunghezza [mm]
V tensione [V]
p pressione [mBar]
f frequenza [Hz]
t tempo [s]
M modulo [dB]
4
1. INTRODUZIONE
Uno strumento di misura sottoposto a condizioni di misura costanti, ma diverse da
quelle iniziali, non raggiunge istantaneamente le condizioni di equilibrio. Esso presenta
un ritardo nella risposta dovuto ai tempi caratteristici di propagazione delle differenti
forme di energia scambiate tra sensore e misurando (ambiente di misura).
Il solo tempo di risposta[1]
di uno strumento non è sufficiente a caratterizzare il
comportamento dinamico perché è caratteristico solo della variazione a gradino del
misurando. Per poter caratterizzare completamente il comportamento dinamico di uno
strumento è necessario in primo luogo sapere di che tipo sia, e in base a questo si
determinano i parametri dinamici che ne descrivono il comportamento[2]
.
Nella seguente relazione viene esposto il problema sperimentale della caratterizzazione
dinamica di un sistema di misura di pressione, in cui si acquisiscono, per ogni prova, i
valori del segnale di uscita nel dominio del tempo. Questi in un secondo momento sono
stati elaborati mediante il software Matlab nel calcolatore. Dopo l’analisi nel tempo, i
dati sono stati elaborati nel dominio delle frequenze ai fini di determinare la funzione di
trasferimento del trasduttore. In questo ultimo dominio sono maggiormente rilevabili i
fenomeni di disturbo che entrano in gioco nel sistema di misura.
2. PARTE TEORICA
2.1 Dinamica degli strumenti di misura
Tutti gli strumenti di misura sono caratterizzati da un modello matematico, una
relazione ricavata con ipotesi semplificative che rendono il modello semplice, ma
affidabile e accurato. Questo permette di comprendere come lo strumento si comporta
quando riceve un segnale in ingresso di tipo tempo-variante.
Le funzioni ingresso x(t) ed uscita y(t) di uno strumento sono entrambe legate alla
variabile tempo, tramite equazioni differenziali di ordine n con coefficienti costanti, che
rappresentano il modello matematico che ne descrive la caratteristica dello strumento in
esame (2.1):
( )
( )
( )
( )
( )
( )
(2.1)
Questo modello è valido sotto le seguenti ipotesi:
Sistema dinamico;
Continuo;
Con linearità;
A parametri concentrati;
Stazionario (in riferimento ai coefficienti an, bn)
Causalità.
1 Si definisce prontezza o tempo di risposta (“response time”) di uno strumento il tempo impiegato a raggiungere le
condizioni di equilibrio. 2 Esempio: per uno strumento del primo ordine i parametri necessari e soddisfacenti ai fini della caratterizzazione
dinamica sono la costante di tempo (τ) e la sensibilità statica (k).

5
Nella maggior parte dei casi gli strumenti sono ben rappresentabili da equazioni
differenziali di I o II ordine. In particolare, le equazioni del II ordine hanno una forma
del tipo (2.2):
(2.2)
Dividendo entrambi i membri per a0, si ottiene (2.3):
(2.3)
Dove si evidenziano i parametri caratteristici del sistema:
, sensibilità statica;
√
, pulsazione naturale [rad/s];
√ , smorzamento.
Sostituendo detti parametri nell’equazione, e considerando l’operatore formale D=d/dt,
si ottiene la (2.4):
(
) ( ) ( )
(2.4)
La funzione del segnale di uscita y(t) è possibile determinarla, nel dominio del tempo,
mediante la convoluzione[3]
tra la funzione di trasferimento del sensore e la funzione del
segnale d’ingresso, come nella (2.5):
( ) ( ) ( ) ∫ ( ) ( )
(2.5)
Nel caso di segnali sinusoidali a frequenza costante, si passa dal dominio del tempo al
dominio di Laplace, dove tra l’altro di usano operazioni matematiche più semplici.
Inoltre, se si ipotizza il termine d’ingresso a ampiezza costante, è possibile passare
direttamente al dominio di Fourier, in cui l’ingresso viene espresso come X(jω), l’uscita
come Y(jω) e la funzione di trasferimento come W(jω). Queste tre grandezze sono
legate dalla relazione (2.6):
( ) ( )
( ) (2.6)
In particolare, per un sistema del II ordine, la funzione di trasferimento nel dominio di
Laplace è espressa come (2.7):
( )
(
)
(2.7)
3 In matematica la convoluzione è un'operazione tra due funzioni che genera una terza funzione che viene vista come
la versione modificata di una delle due funzioni iniziali.

6
2.2 Modello linea-cavità
Il sistema di misura di pressione può essere semplificato con soli due componenti: una
linea e una cavità. Questo modello denominato “linea-cavità” (Figura 2.1) è composto
da tre sezioni principali che delimitano due tratti:
Tratto 1-2: estremi della linea (rappresenta il tubo di connessione);
Tratto 2-3: estremi della cavità (rappresenta il volume interno del sensore).
Figura 2.1: Schema del modello linea-cavità.
La linea ha il compito di trasferire l’informazione sotto forma di pressione fornita in
ingresso nella sezione 1: il moto del fluido si considera come fosse un blocco unico in
movimento con pressione costante tra le due sezioni e con flusso incomprimibile.
L’unico termine variabile è la velocità del fluido. Per cui si ha:
Mentre la cavità possiede un certo volume che permette il movimento della membrana e
un aumento della pressione: si considera il flusso comprimibile, con velocità nulla
(statico), con unica variabile la pressione. Allora si ha:
Affinché si possa caratterizzare un sistema di questo tipo, è utile sottoporlo a un
ingresso canonico, nel caso specifico a un gradino di pressione. L’ideale sarebbe l’invio
di un impulso di pressione, ma risulterebbe complicato da realizzarsi in fase
sperimentale. Il sistema lo si considera a parametri concentrati, per cui l’unica variabile
indipendente risulta essere il tempo t. Lo scopo è quello di trovare un parametro
costante nello spazio e variabile solo nel tempo, sia nella linea sia nella cavità:
v(t) = la velocità delle particelle lungo la linea sarà funzione solo del tempo;
p(t) = la pressione nella cavità sarà funzione solo del tempo.
Partendo dall’equazione di conservazione della quantità di moto (2.8), con il bilancio a
regime non stazionario, nella linea si determina un modello matematico distinto per il
flusso laminare e per quello turbolento.
( ) ( )
( ) (2.8)
Dove:
p1, p2 = pressioni nelle sezioni 1 e 2 [Pa];
A = sezione della linea (
) [mm
2];
ρ = densità della linea [kg/m3];
( )
( )

7
Ω = volume della linea (Ω =A l) [mm3];
( ( )) = forze di attrito presenti nel tubo [N];
D = diametro tubo [mm];
l = lunghezza tubo [mm].
Una volta applicate le seguenti semplificazioni:
- costante nel tempo;
- regime stazionario;
sono state determinate le equazioni per il flusso laminare (2.9), con coefficiente di
attrito
, e per il flusso turbolento (2.10), con :
( )
(2.9)
( )
( )
(2.10)
Le due equazioni differenziali del I ordine, appena illustrate, si differenziano per la
presenza di un termine lineare della velocità, presente solo per il flusso laminare.
Entrambe possiedono due incognite: la velocità v e la pressione p2, per cui non sono
risolvibili. Perciò si vuole determinare un’equazione differenziale anche per la cavità,
con lo scopo di individuare una delle due incognite della linea, la pressione p2=p(t).
Allora, per quanto riguarda la cavità, si parte con l’applicazione dell’equazione di
conservazione della massa (2.11):
( ) (2.11)
Dove ( ) rappresenta la portata massica uscente dalla linea ed entrante nella cavità.
Facendo le seguenti ipotesi:
- membrana cedevole: si hanno i termini e in funzione del tempo,
- sistema adiabatico: considerando che si hanno rapide compressioni;
- termini costanti nel tempo: la sezione A e (
);
si arriva a determinare l’equazione integro differenziale (2.12):
( )
(
) ∫
(2.12)
Dove:
v = velocità del fluido [m/s];
n = esponente della adiabatica (=1,4);
p0 = pressione ambiente [Pa].
Questa equazione ottenuta insieme a una delle eq. della linea, ponendole a sistema,
permettono di determinare la velocità e pressione del fluido lungo tutto il modello.
Ma lo scopo è quello di determinare un'unica equazione che rappresenti il completo
sistema di misura. Per cui, ponendo in relazione le due equazioni ottenute per la linea e
cavità, considerando il caso di flusso laminare, si ottiene un’equazione differenziale del
II ordine (2.13):
( )
( ( )
) (2.13)

8
Essendo, al tempo t=0, la pressione costante, il termine differenziale dp si annulla e si
ottiene così un’equazione omogenea (2.14):
( )
(2.14)
Con condizioni al contorno:
(
) (
)
Dove p1, espresso in termini relativi, è la pressione in ingresso nella linea.
La forma ottenuta risulta essere perciò quella classica di un sistema del II ordine, del
tipo (2.15):
(
) ( ) (2.15)
3. DESCRIZIONE DELLE PROVE REALIZZATE IN
LABORATORIO
3.1 Descrizione generale della catena di misura
La catena di misura messa in atto (Figura 3.1) è adattata per realizzare un gradino di
pressione da inviare come segnale d’ingresso al trasduttore. Questa pressione viene
creata per mezzo di un serbatoio contenente aria compressa (serbatoio di pressione),
inviata poi al sensore che a sua volta è connesso a un condizionatore del segnale (C.S.).
Questo invia l’informazione elettrica al sistema di acquisizione dati (D.A.Q. = “Data
Acquisition” system), rappresentato da una scheda PCI integrata al personal computer,
in cui viene digitalizzato il segnale e poi visualizzato sul software di calcolo.
Figura 3.1: Schema a blocchi della catena di misura utilizzata in laboratorio nelle prime 3 prove.
Nella seconda fase di acquisizione, nella catena è stato aggiunto un ulteriore
componente interposto fra l’uscita del serbatoio di pressione e il sensore: una sonda
aerodinamica (Figura 3.2). Con questa modalità sono state svolte le ultime due prove.

9
Figura 3.2: Sonda aggiunta nella catena di misura per le ultime 2 prove.
3.2 Descrizione del tipo di trasduttore e dello strumento primario adottato per la
generazione delle pressioni
Trasduttore di pressione
Il trasduttore utilizzato è uno STATHAM (SCANIVALVE – PDCR 23/D), di tipo
resistivo, costituito da una lamina e una resistenza. La lamina rappresenta fisicamente
una membrana in monocristallo di silicio, resistenza sulla quale è fotoinciso un
elemento resistivo: la lamina, e quindi la resistenza, sono deformati dalla differenza di
pressione vigente all’interno del sensore, e viene inviato un segnale elettrico in uscita al
C.S.
In riferimento al modello linea-cavità, la linea rappresenta un tubo in vipla nella quale
viene introdotta aria in pressione in ingresso al sensore, mentre la cavità rappresenta il
corpo cilindrico del trasduttore, in cui al suo interno è presente la membrana.
All’interno del trasduttore si ha un sistema comparabile a un ponte di Wheatstone, in cui
la resistenza installata nel monocristallo risulta essere l’elemento sensibile che
determina la variazione di tensione in uscita dal ponte (dell’ordine dei mV), misurata ai
morsetti. Il ponte viene alimentato dal condizionatore del segnale a 12V (Vcc = + 12V).
Possiede inoltre 2 ingressi di pressione, in cui uno legge pressioni positive (con ingresso
posto nella parete frontale) e l’altro pressioni negative, posto sul retro del sensore
(Figura 3.3). La denominazione D = “differential” deriva dal fatto che legge pressioni
differenziali, per cui fornisce in uscita dei Δp in termini di tensioni.
Figura 3.3: Immagine del trasduttore utilizzato, evidenziando gli ingressi di pressione.
L’incertezza fornita dal costruttore è pari a ±0,1% del f.s, mentre la risposta in
frequenza, con il minimo disturbo nella linea-cavità, è pari a 10kHz (per cui si hanno
10000 eventi ogni secondo).

10
Generatore di pressione
Come generatore di pressione si ha un piccolo serbatoio di 1,5 l, in acciaio Inox, con
ingresso collegato in attacco rapido alla rete di aria compressa del laboratorio. Si hanno
due sistemi di riduzione della pressione mediante delle valvole; questa pressione viene
letta grazie a due manometri con differente accuratezza: il primo possiede un fondo
scala di 6 Bar, con accuratezza di 1/10 di Bar; mentre il secondo possiede un fondo
scala di 1 grammes/cm2
(1 kg/cm2 = 0,98 Bar), con accuratezza pari a 1/100 di Bar
(quindi 10 volte più accurato rispetto al primo ma limitato a letture di pressioni 1Bar).
Il serbatoio viene riempito d’aria fino alla pressione desiderata, regolata mediante il
riduttore/regolatore di pressione. L’uscita del serbatoio viene connessa con un tubo in
vipla di 2 mm di diametro (che rappresenta la linea del modello) all’ingresso del
trasduttore (p +). La lunghezza di questo tubo viene fatta variare nelle diverse prove per
poter analizzare i differenti segnali di uscita.
Il serbatoio è costituito al suo interno da una valvola, comandata da una bobina elettrica,
che a sua volta è connessa a una centralina di controllo, la quale permette il passaggio
dell’aria dal serbatoio al tubo fino al sensore[4]
. Il tempo di apertura di questa valvola è
di circa 1 ms. Si comprende come il gradino di pressione generato potrà contenere
frequenze fino a 1000 Hz.
3.3 Caratteristiche degli altri strumenti utilizzati
Sonda aerodinamica
La sonda aerodinamica aggiunta nelle ultime due prove è la VKI 2D, costituita da
doppio sensore, uno che valuta la direzione del flusso rispetto alla sonda e la pressione
totale, e l’altro serve per valutare la pressione statica del flusso. Questa risulta essere
adatta per flussi bidimensionali, avendo i sensori sfalsati. Il collegamento è stato fatto
fra l’uscita del serbatoio e il beccuccio inferiore, ingresso che permette le letture di
pressioni statiche; mentre l’uscita della sonda è stata connessa al tubo in vipla, fino al
sensore di pressione.
Condizionatore del segnale
Il condizionatore del segnale è un SCANIVALVE, modello SCSG2. Questo fornisce
l’alimentazione di 12 V al trasduttore e riceve il segnale elettrico di uscita dallo stesso,
il tutto grazie ad un connettore a 5 pin (GND, 2 uscite di alimentazione e 2 ingressi del
segnale). È costituito da un filtro interno, che permette l’elaborazione del segnale di
ingresso, e un amplificatore che fornisce in uscita un segnale a ±5V, collegato alla
scheda di acquisizione PCI. Nel pannello frontale è presente uno switch del range di
pressione che permette di regolare il guadagno (va da 1 a 15psi).
Possiede un errore di linearità pari a ±0,001% del f.s.
Scheda di acquisizione e software
La scheda di acquisizione utilizzata è della National Instrument PCI (E Series
Multifunction DAQ) integrata al pc nell’unità di sistema. Essa comprende una
morsettiera con 16 canali d’ingresso analogici (8 in differenziale) e 12 bit di risoluzione.
Il canale utilizzato è quello “0”, ricevendo in ingresso il segnale inviato dal
condizionatore del segnale (C.S), mentre in uscita invia il segnale digitalizzato al pc,
4 In uscita del serbatoio è presenta una valvola “vent” che permette di eliminare gli errori di misura causati dai
trafilamenti presenti nella valvola interna, portando a pressione atmosferica (patm) la linea e il sensore.

11
che permette l’acquisizione e l’elaborazione dei dati ottenuti per mezzo del software
Maltab.
3.4 Procedura sperimentale
Acquisizione dati
Il sensore invia il segnale di pressione sotto forma di tensione alla scheda di
acquisizione (al canale 0), trasformando poi il segnale analogico in digitale. I valori
sono acquisiti dalla scheda con frequenza di 10000 Hz e con campo di tensione 0 1 V
leggendo il segnale di uscita y(t), compreso di fase transitoria e valore a regime. Sono
state eseguite in tutto 5 prove, riportate in Tabella 4.1, in cui:
1) Nella prova 1, 2 e 3 viene fatto variare la lunghezza della linea, senza la sonda,
partendo da 20 mm fino a raggiungere i 1200 mm;
2) nelle ultime 2 prove è stata aggiunta la sonda aerodinamica incrementando perciò la
lunghezza sommata alla linea.
Si suppone, nelle ultime 2 prove, che sia la sonda a subire il gradino di pressione (come
nella realtà), valore poi trasferito al trasduttore.
Il tempo di acquisizione risulta essere di 0,2 s per le prime 4 prove, e di 0,8 s per
l’ultima (avendo un transitorio più lungo). La modalità utilizzata viene chiamata “buffer
circolare”: questo metodo permette la registrazione in memoria delle tensioni vigenti
nella linea-cavità prima che venga inviato il gradino di pressione; una volta colmata la
totale memoria, la registrazione riprende da capo sovrascrivendo i dati precedenti,
determinando così un andamento “circolare” di memorizzazione. Quando viene fatto
partire il gradino grazie all’apertura della valvola, inizia la memorizzazione una volta
superato il valore del trigger di tensione preimpostato: da qui inizia lo zero di
acquisizione e si riesce ad ottenere perciò una memorizzazione completa del segnale,
con la completa fase di salita a regime e stabilizzazione del segnale (grazie alla scelta
del numero di campioni del post trigger).
Nel programma utilizzato su Matlab sono stati scelti valori di default della frequenza di
acquisizione, del trigger (in termini di tensione), del pre trigger e post trigger (in termini
di numero di campioni da acquisire), che permettono di visualizzare graficamente, una
volta conclusa l’acquisizione, l’intero andamento del segnale. Il valore del pre trigger
consente di rappresentare i valori registrati nel buffer prima del raggiungimento del
trigger.
La frequenza di acquisizione è stata scelta in modo tale da non superare la frequenza
associata al tempo di apertura della valvola interna del serbatoio, dell’ordine del
millesimo di secondo, per evitare di visualizzare una rampa di pressione in ingresso,
non più un gradino.
4. RISULTATI DELLE PROVE SPERIMENTALI E ANALISI DEI
RISULTATI
4.1 Risultati nel dominio del tempo
I valori numerici ottenuti sono stati riportati in un foglio Excel per permettere una
visualizzazione grafica dei risultati. Le prive 3 prove senza la sonda sono state inserite

12
nello stesso grafico (Figura 4.1), mentre le prove 4 e 5 con la sonda, vengono
visualizzate in un grafico a parte (Figura 4.2).
Figura 4.1: Segnale di uscita delle prime 3 prove nel dominio del tempo, senza sonda.
Figura 4.2: Segnale di uscita delle ultime 2 prove nel dominio del tempo, con sonda.
Una volta fatto questo, si è voluto effettuare un’adimensionalizzazione della tensione
dei 5 segnali di uscita, affinché si abbia una corretta comparabilità dei grafici. Sono
state eseguite principalmente due operazioni:
1) Correzione dello zero di tensione:
Inizialmente non si ha un valore di tensione nullo, per cui si riporta a zero la tensione
iniziale, sottraendo la media dei valori iniziali di tensione su tutta la curva. Inoltre è
stato traslato l’asse dei tempi, facendo coincidere a t=0 l’inizio della curva del segnale
(non appena è stato avvistato un aumento di tensione).
2) Correzione al valore finale:
Il valore a regime di tutte le curve è stato riportato al valore unitario: per fare questo è
stato preso il valore a regime del segnale (yreg), calcolato come media dei valori ottenuti
in un certo Δt finale, e si è fatto il rapporto con i singoli valori di y variabili nel tempo
(ovvero ( )
).
Sono stati ottenuti in questo modo i seguenti grafici (Figure 4.3, 4.4, 4.5), riducendo il
valore massimo dell’asse dei tempi per permettere una buona visualizzazione della fase
transitoria di ogni risposta:
0
0,2
0,4
0,6
0,8
1
-0,05 -0,025 0 0,025 0,05 0,075 0,1 0,125 0,15 0,175 0,2
Ten
sio
ne
[V
]
Tempo t [s]
Prova 1
Prova 2
Prova 3
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
-0,1 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
Ten
sio
ne
[V
]
Tempo [s]
Prova 5
Prova 4
13
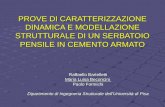
Figura 4.3: Segnale di ingresso a gradino adimensionalizzato.
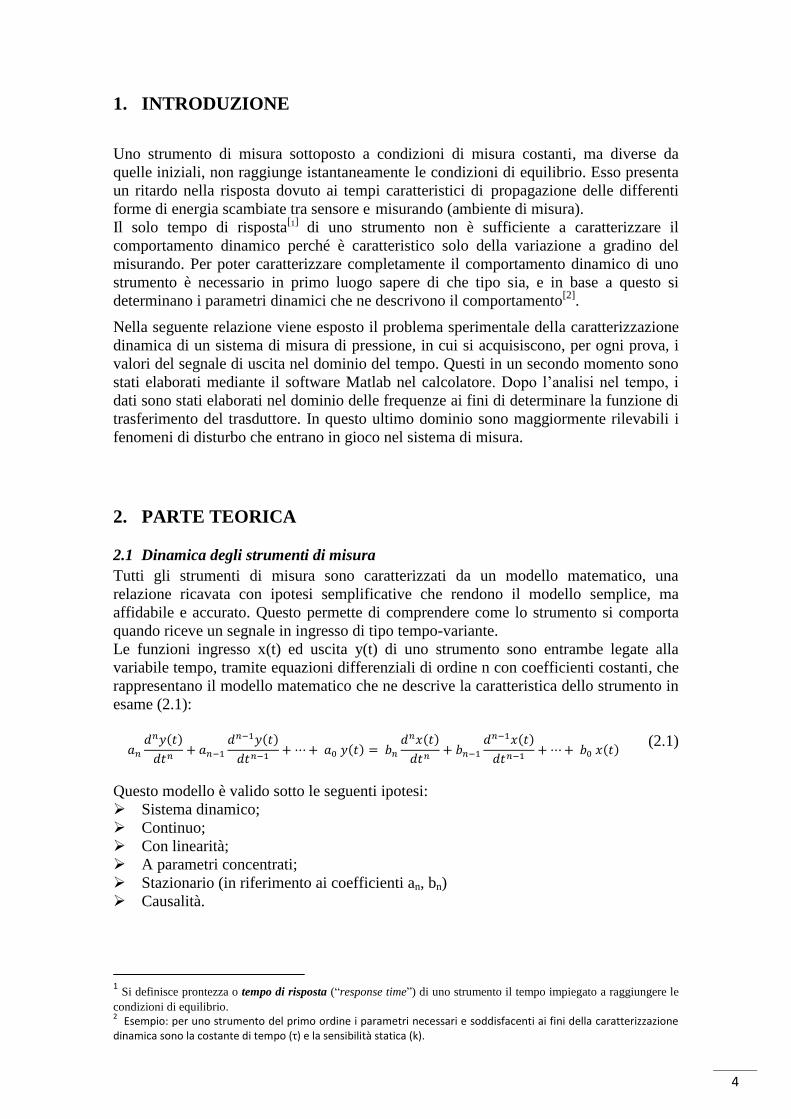
Figura 4.4: Segnale di uscita delle prime 3 prove adimensionalizzate, senza sonda.
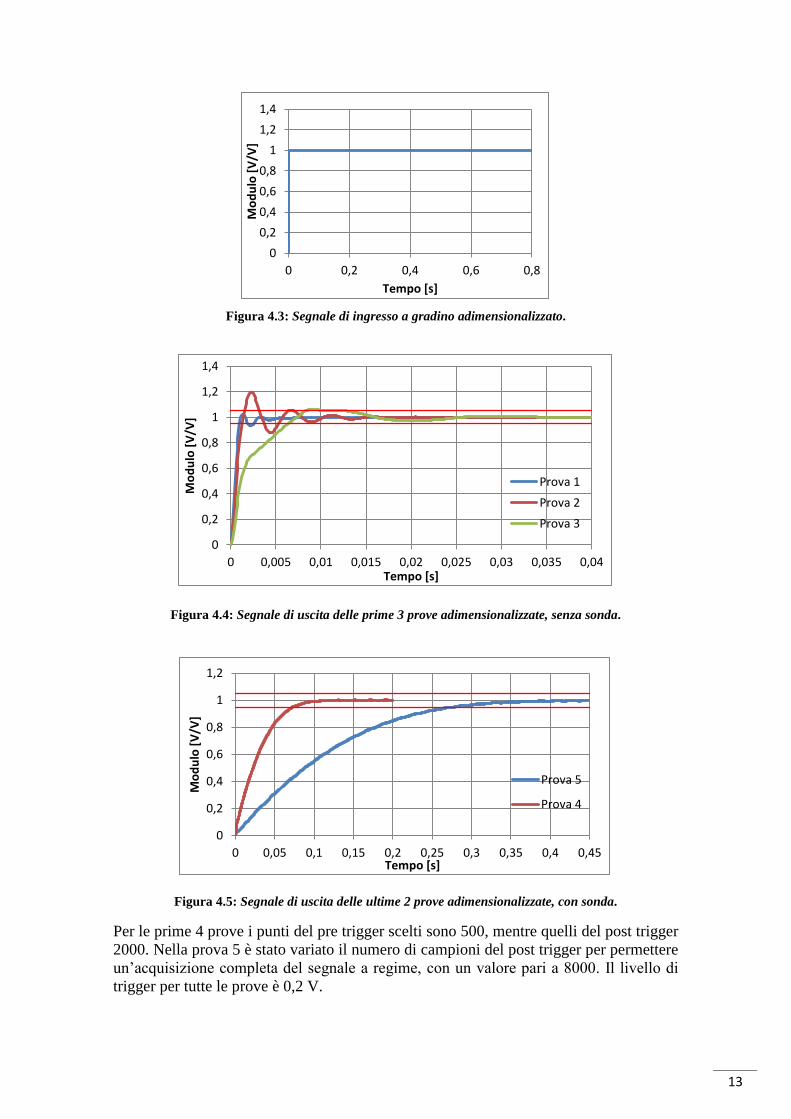
Figura 4.5: Segnale di uscita delle ultime 2 prove adimensionalizzate, con sonda.
Per le prime 4 prove i punti del pre trigger scelti sono 500, mentre quelli del post trigger
2000. Nella prova 5 è stato variato il numero di campioni del post trigger per permettere
un’acquisizione completa del segnale a regime, con un valore pari a 8000. Il livello di
trigger per tutte le prove è 0,2 V.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 0,2 0,4 0,6 0,8
Mo
du
lo [
V/V
]
Tempo [s]
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04
Mo
du
lo [
V/V
]
Tempo [s]
Prova 1
Prova 2
Prova 3
0
0,2
0,4
0,6
0,8
1
1,2
0 0,05 0,1 0,15 0,2 0,25 0,3 0,35 0,4 0,45
Mo
du
lo [
V/V
]
Tempo [s]
Prova 5
Prova 4

14
Per ogni prova eseguita, al variare della lunghezza l, si esegue un’analisi del segnale nel
dominio del tempo, in cui vengono determinati per via numerica i seguenti parametri
(Tabella 4.1):
Δp = gradino di pressione in termini relativi;
f = frequenza di acquisizione;
tm = “tempo morto”, ovvero tempo misurato al 5% del valore a regime del segnale
(yreg);
t95% = tempo misurato al 95% del valore a regime;
ts = “tempo di salita”, calcolato come differenza tra il t95% e il tm;
ta = “tempo di assestamento”, calcolato al 105% del valore massimo a regime.
I tempi tm, t95% e ta sono stati ricavati interpolando linearmente nell’intorno del valore
richiesto.
Tabella 4.1: Valori impostati e rilevati per le singole prove, nel dominio del tempo.
l
[mm]
Δp
[mBar]
f
[Hz]
tm
[s]
t95%
[s]
ts
[s]
ta
[s]
Prova 1 20 300 10000 0,8·10-4
9,8·10-4
9·10-4
2,54·10-3
Prova 2 200 300 10000 1,4·10-4
1,27·10-3
1,13·10-3
6,92·10-3
Prova 3 1200 300 10000 2,2·10-4
6,36·10-3
6,14·10-3
1,28·10-2
Prova 4 200 + lsonda 300 10000 9,8·10-4
7,31·10-2
7,21·10-2
7,31·10-2
Prova 5 1200 + lsonda 300 10000 7,35·10-3
2,78·10-1
2,71·10-1
2,79·10-1
È possibile notare come il segnale ottenuto nella prova 2 sia quello con andamento più
correlabile a un sistema del II ordine, presentandosi una sovraelongazione piuttosto
pronunciata, con successivo smorzamento delle oscillazioni a regime. Mentre il segnale
1 possiede un breve tempo di salita e raggiunge il regime piuttosto velocemente, ma
presenta una lieve sovraelongazione non simmetrica: si ha una curva di risposta distorta,
con andamento simile, in prima approssimazione, a una rampa. Ciò è dovuto a un
problema fisico, dato che il sistema con linea di 20 mm riesce a percepire la non
istantanea apertura della valvola, grazie alla sua rapidità di risposta.
Il segnale 3, invece, ha uno strano andamento transitorio, essendo caratterizzato quasi
da una spezzata, e la sovraelongazione è meno evidente rispetto alla prova 2. Anche
l’andamento dei segnali 4 e 5 è particolare, ma ciò può essere spiegato come tipico dei
sistemi del secondo ordine fortemente smorzati.
Non riuscendo a trovare una spiegazione nel dominio del tempo, soprattutto nella prova
3, per capire al meglio il motivo di questi andamenti è utile effettuare un’analisi nel
dominio delle frequenze, studiandone l’andamento del modulo della funzione di
trasferimento del trasduttore in funzione della frequenza.
4.2 Risultati nel dominio della frequenza
Una volta determinate le trasformate di Fourier dei singoli segnali di ingresso ( ( )) e
di uscita ( ( )), è stata determinata la funzione di trasferimento H per la singola prova
(nel campo complesso) come (4.1):
( ) ( )
( ) (4.1)
L’andamento del modulo di H (MH in decibel) in funzione della frequenza f, o meglio il
diagramma di Bode, è riportato in Figura 4.6 per le diverse prove.

15
Figura 4.6: Andamento del modulo della FdT della prova 1 (a), prova 2 (b), prova 3 (c), prova 4 (d) e
prova 5 (e).
a)
b)
c)
d)
e)

16
Per il singolo grafico è stata determinata la banda passante[5]
(BP), intercettando il
valore del modulo che si scosta di ±3dB dal valore “centrale” (zero), evidenziato con le
linee blu nella Figura 4.6, e determinando la frequenza corrispondente, che rappresenta
la frequenza di taglio (fc). I valori sono riportati nella Tabella 4.2.
Tabella 4.2: Valori determinati delle frequenze di taglio per le singole prove.
Prova 1 Prova 2 Prova 3 Prova 4 Prova 5
f di taglio [Hz] 533 192,5 58,8 5,8 1,7
Si noti come la frequenza di taglio si riduca sensibilmente nelle prime 3 prove, al
diminuire della lunghezza della linea. Lo stesso avviene nelle prove 4 e 5 (comprese di
sonda), ma con valori decisamente inferiori di frequenza.
La riduzione molto marcata del modulo nelle ultime 2 prove è dovuta presumibilmente
da perdite di carico e dall’aumento dei volumi, introdotte dall’aggiunta della sonda
aerodinamica. Inoltre si notano dei picchi del modulo alla frequenza di 50 Hz,
probabilmente per disturbi dovuti alla rete elettrica del laboratorio. Altro fenomeno
visualizzabile, soprattutto nella prova 3, è il fenomeno d’onda generato dalle onde di
pressione che si formano nel condotto indirizzato al trasduttore, andandosi a sommare ai
fenomeni inerziali della linea. Esso è rappresentato nel diagramma di Bode dal secondo
picco a frequenza di circa 150 Hz, con un valore di circa -4 dB e quindi ancora elevato.
Questo viene visualizzato graficamente dagli andamenti ondulatori del modulo a
frequenza maggiore di quella di taglio. È possibile determinare la frequenza d’onda
osservando che le onde ripetono il loro percorso due volte nella linea prima di colpire il
trasduttore, muovendosi alla velocità del suono, come in (4.2):
√
(4.2)
Una volta misurata la temperatura vigente in laboratorio (T=20°C), e considerando i
valori standard della costante dei gas R e del coefficiente k (riferiti all’aria considerato
come gas biatomico), per la prova 3 è stato ottenuta la (4.3):
√
√ ( )
(4.3)
Con la lunghezza della linea nella prova 3.
Il valore, a meno di inevitabili differenze dovute al non perfetto calcolo della lunghezza
della linea e alla semplificazione della 4.2, presenta un corretto accordo col valore di
150 Hz evidenziato dal secondo picco della prova 3.
5 Intervallo di frequenze che un dato segnale contiene, o che un dato apparecchio è in grado di trattare.

17
5. CONCLUSIONI
Si è notato come la lunghezza della linea abbia inciso notevolmente sul segnale di uscita
del trasduttore. Nel caso in cui la lunghezza del tubo era massima (1200 mm) senza la
sonda, è entrato in gioco il fenomeno d’onda, oltre quello inerziale, peggiorando
ulteriormente la risposta del sistema creando delle ondulazioni anomale alle alte
frequenze. Lo stesso fenomeno viene riscontrato anche nelle due prove con sonda, ma
risulta di entità inferiore dovuto al fatto che l’effetto inerziale, ma soprattutto lo
smorzamento, è preponderante, creando una risposta simile a quella di un sistema del
primo ordine.
La prova che maggiormente soddisfa un andamento tipico del sistema del II ordine è
sicuramente la seconda, mostrando una risposta al gradino nel dominio del tempo con la
tipica sovraelongazione e successivo andamento periodico del segnale, che via via si
smorza andando a regime (Figura 4.4); mentre nel dominio delle frequenze (Figura 4.6
b) si ha un picco del modulo che poi man mano decresce fino a valori molto bassi (<0)
alle alte frequenze.
Riassumendo:
per sistemi con linea ridotta il sistema di generazione del gradino è insufficiente;
l’incremento della lunghezza della linea provoca un aumento di importanza dei
fenomeni d’onda;
l’inserimento della sonda ha causato un forte smorzamento che, unito all’incremento
dei volumi della linea, determina un andamento fortemente smorzato, con aumento
del tempo di assestamento a circa .
Si può affermare l’utilità dello studio della funzione di trasferimento nel dominio della
frequenza: ciò ha permesso di porre in evidenza fenomeni che nel dominio del tempo
non erano ben chiari o facili da interpretare. Un esempio concreto è l’andamento a
spezzata che si è riscontrato nella fase transitoria del segnale di uscita della prova 3 nel
dominio del tempo, evento dovuto alla presenza dei fenomeni d’onda notati nel dominio
delle frequenze (con frequenza di circa 144 Hz).