FISICA MATEMATICAusers.dimi.uniud.it/~lorenzo.freddi/2009_fm.pdf · 6.2 Il metodo diretto del...
106
Universit` a degli Studi di Udine Dispense del corso di FISICA MATEMATICA tenuto presso la facolt` a di Scienze corso di Laurea in Matematica Lorenzo Freddi Anno Accademico 2008-2009
Transcript of FISICA MATEMATICAusers.dimi.uniud.it/~lorenzo.freddi/2009_fm.pdf · 6.2 Il metodo diretto del...

Universita degli Studi di Udine
Dispense del corso di
FISICA MATEMATICA
tenuto presso la facolta di Scienze
corso di Laurea in Matematica
Lorenzo Freddi
Anno Accademico 2008-2009

2
Indice
1 Vettori, tensori e applicazioni lineari 61.1 Definizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Vettori e covettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Forme bilineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Endomorfismi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Determinante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Coordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Coordinate rispetto ad una base . . . . . . . . . . . . . . . . . . . . . . . 8Cambiamento di base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Distribuzioni 102.1 Lo spazio delle funzioni test . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Non metrizzabilita di D(Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Lo spazio delle distribuzioni . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Funzioni localmente sommabili . . . . . . . . . . . . . . . . . . . . . . . . 132.5 Altri esempi di distribuzioni . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6 Caratterizzazione delle distribuzioni . . . . . . . . . . . . . . . . . . . . . 162.7 La topologia di D ′(Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.8 Derivata di una distribuzione . . . . . . . . . . . . . . . . . . . . . . . . . 182.9 Formula di Leibniz sulla derivazione del prodotto . . . . . . . . . . . . . . 192.10 Prodotto di una funzione con una distribuzione . . . . . . . . . . . . . . . 202.11 Distribuzioni con derivata nulla . . . . . . . . . . . . . . . . . . . . . . . . 212.12 Convoluzione e regolarizzazione . . . . . . . . . . . . . . . . . . . . . . . . 22
Supporto di una distribuzione . . . . . . . . . . . . . . . . . . . . . . . . . 23Convoluzione di una distribuzione con una funzione test . . . . . . . . . . 24
3 Cinematica dei continui 283.1 Riferimenti bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2 Notazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.3 Corpi e piazzamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.4 Deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.5 Configurazione di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . 293.6 Deformazioni rigide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.7 Teorema di decomposizione polare . . . . . . . . . . . . . . . . . . . . . . 333.8 Variazioni di volume, di area e di lunghezza . . . . . . . . . . . . . . . . . 34
Variazione di lunghezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Variazioni di area e di volume . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.9 I tensori di Cauchy-Green e di Green-Saint Venant . . . . . . . . . . . . . 36
3

4 INDICE
3.10 Deformazioni infinitesime . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.11 Spostamenti rigidi infinitesimi . . . . . . . . . . . . . . . . . . . . . . . . . 37
Calcolo di Pu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.12 Parti simmetrica ed emisimmetrica del gradiente . . . . . . . . . . . . . . 403.13 Moto di un corpo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 Dinamica dei continui 414.1 Riferimenti bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.2 Grandezze lagrangiane e euleriane . . . . . . . . . . . . . . . . . . . . . . 41
Velocita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Relazione tra le derivate . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42Accelerazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3 Derivazione di integrali dipendenti da un parametro . . . . . . . . . . . . 424.4 Distribuzione di massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.5 Sottocorpi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.6 Conservazione della massa . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.7 Quantita di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.8 Ipotesi sulle forze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.9 Il lemma fondamentale di Cauchy . . . . . . . . . . . . . . . . . . . . . . . 454.10 Azione e reazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.11 Prima equazione fondamentale del moto di un corpo continuo . . . . . . . 484.12 Seconda equazione fondamentale e simmetria del tensore degli sforzi . . . 494.13 Equazioni del moto ed equazioni di equilibrio . . . . . . . . . . . . . . . . 504.14 Il tensore di Piola-Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . . 514.15 Equazioni del moto nella configurazione di riferimento . . . . . . . . . . . 51
5 Materiali iperelastici 535.1 Riferimenti bibliografici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.2 Equazione costitutiva e potenziale elastico . . . . . . . . . . . . . . . . . . 535.3 Cambiamento della configurazione di riferimento . . . . . . . . . . . . . . 545.4 Simmetria materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.5 Obiettivita o indifferenza materiale . . . . . . . . . . . . . . . . . . . . . . 555.6 Equazioni di equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.7 Teoria infinitesima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Potenziale elastico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Equazioni costitutive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Proprieta di simmetria di C . . . . . . . . . . . . . . . . . . . . . . . . . . 62Densita di energia di Kirchhoff-De Saint Venant . . . . . . . . . . . . . . . 63
6 Teoria variazionale 646.1 Problemi di minimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646.2 Il metodo diretto del Calcolo delle Variazioni . . . . . . . . . . . . . . . . 656.3 Soluzioni deboli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666.4 Rilassamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 666.5 Convergenza debole in spazi di Hilbert . . . . . . . . . . . . . . . . . . . . 676.6 Spazi di Sobolev . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Funzioni di Sobolev nulle al bordo . . . . . . . . . . . . . . . . . . . . . . 72Approssimazione con funzioni regolari . . . . . . . . . . . . . . . . . . . . 72Teorema di Rellich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Traccia sul bordo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Derivazione per parti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75

INDICE 5
Disuguaglianze di Poincare . . . . . . . . . . . . . . . . . . . . . . . . . . 756.7 Esistenza di soluzioni deboli del Problema 1 . . . . . . . . . . . . . . . . . 776.8 Unicita della soluzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 786.9 Variazioni sul Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.10 Condizioni sufficienti di semicontinuita . . . . . . . . . . . . . . . . . . . . 806.11 Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 816.12 Non-esistenza e rilassamento . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7 Γ-convergenza negli spazi metrici 877.1 Calcolo dei Γ-limiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 917.2 Γ-convergenza di funzionali definiti su domini variabili . . . . . . . . . . . 927.3 Γ-convergenza di famiglie ad un parametro . . . . . . . . . . . . . . . . . 92
8 Energia di una piastra elastica lineare 948.1 Il problema 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 948.2 Passaggio ad un dominio fisso . . . . . . . . . . . . . . . . . . . . . . . . . 958.3 Studio della coercivita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 968.4 Energia limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 998.5 Convergenza dei problemi di minimo . . . . . . . . . . . . . . . . . . . . . 103

Capitolo 1
Vettori, tensori e applicazionilineari
La nozione di tensore generalizza tutte le strutture definite usualmente in algebra linearea partire da un singolo spazio vettoriale V. Sono particolari tensori i vettori, gli endo-morfismi, i funzionali lineari e i prodotti scalari. La genesi del termine tensore avvienenell’ambito della meccanica dei continui, per descrivere le sollecitazioni, le deformazionie, appunto, le tensioni, subite dai corpi elastici.
I tensori sono ampiamente utilizzati in relativita generale e in molti altri ambiti dellafisica, fra cui l’elettromagnetismo, la meccanica dei fluidi e la meccanica dei solidi. Inparticolare il tensore degli sforzi e il tensore di deformazione sono usati nella scienza dellecostruzioni per definire lo stato interno di tensione e deformazione in ogni punto di unadeterminata struttura.
I tensori sono altresı usati in geometria differenziale per definire su una varieta differen-ziabile le nozioni geometriche di distanza, angolo e volume. Questo viene fatto tramite lascelta di un tensore metrico, cioe di un prodotto scalare definito sullo spazio tangente diogni punto. Tramite questa nozione, vengono quindi definiti e studiati gli aspetti inerentila curvatura della varieta. Altri tensori, quali il tensore di Riemann ed il tensore di Ricci,sono strumenti importanti per questo studio.
Da un punto di vista fisico, un tensore e un oggetto molto generale, definito intrinse-camente a partire da uno spazio vettoriale V (che puo essere ad esempio lo spazio euclideo3-dimensionale, oppure lo spaziotempo 4-dimensionale), e quindi non dipendente da unparticolare sistema di riferimento.
Rispetto ad un fissato sistema di riferimento, un vettore e dato da una ennupla ordinatadi coordinate. Cambiando sistema di riferimento, lo stesso vettore e espresso con unaennupla diversa. Il concetto stesso di vettore quindi e piu generale della ennupla ordinatae indipendente dal sistema di riferimento. Al cambiare della base, infatti le coordinate diun vettore cambiano con una legge opportuna.
Al mutare del sistema di riferimento le componenti di un tensore, come quelle di unvettore, sono modificate da leggi precise.
La nozione matematica di tensore e realizzata in modo rigoroso tramite l’algebra lin-eare. Innanzitutto, nel linguaggio dell’algebra lineare un sistema di riferimento e una basee la legge di trasformazione e fornita dalla matrice di cambiamento di base. Inoltre, ladefinizione di tensore puo essere data senza fare nessun riferimento ai sistemi di riferi-mento (cioe alle basi), usando le nozioni di applicazione multilineare e di spazio vettorialeduale.
6

1.1. DEFINIZIONE 7
1.1 Definizione
La definizione di tensore che segue e quella piu intrinseca, perche non fa uso di basi.Una definizione alternativa, ampiamente usata in fisica, necessita di una base fissata, ede descritta successivamente, nella sezione dedicata alle coordinate di un tensore.
Sia V uno spazio vettoriale di dimensione n su un campo K. Lo spazio duale V ∗ e lospazio vettoriale formato da tutti i funzionali lineari da V in K.
Lo spazio V ∗ ha anch’esso dimensione n. Gli elementi di V e V ∗ sono chiamatirispettivamente vettori e covettori.
Un tensore e una applicazione multilineare
T : V ∗ × · · · × V ∗︸ ︷︷ ︸ × V × · · · × V︸ ︷︷ ︸ → K
h k
La coppia (h, k) e detta ordine o tipo del tensore. Per motivi che vedremo in seguito h edetto indice di controvarianza, k e detto indice di covarianza.
1.2 Esempi
Il tensore generalizza molte nozioni definite in algebra lineare a partire da uno spaziovettoriale V .
Vettori e covettori
Un covettore e un elemento dello spazio duale V ∗, ovvero un tensore di tipo (0, 1).D’altra parte, un vettore v definisce un tensore di tipo (1, 0) nel modo seguente
T (ϕ) = ϕ(v)
Forme bilineari
Una forma bilineare e un tensore di tipo (0, 2). Fra queste, troviamo ad esempio i prodottiscalari.
Endomorfismi
Un endomorfismo f su V definisce una tensore T di tipo (1, 1) nel modo seguente
T (ϕ, v) = ϕ(f(v))
E noto che, fissata una base, ogni endomorfismo si puo rappresentare con un matrice n×nche ha per colonne i vettori immagine degli elementi della base fissata. Al variare dellabase, cambiando questi vettori colonna, cambiera di conseguenza anche la matrice cherappresenta l’endomorfismo. In effetti, dal punto di vista formale, una matrice sarebbesemplicemente uno schema numerico bidimensionale, ma riguardandola come applicazionelineare diviene un ente tensoriale, cioe indipendente dal sistema di riferimento. Cio daorigine ad un abuso di linguaggio, che useremo anche noi, e, spesso, quando parleremo dimatrici intenderemo in realta riferirci all’applicazione lineare da lei rappresentata, cioe altensore, e non al semplice schema di numeri.
Determinante
Il determinante e un’applicazione multilineare sulle n colonne di una matrice: si trattaquindi di un tensore di tipo (0, n), definito su V = Kn.

8 CAPITOLO 1. VETTORI, TENSORI E APPLICAZIONI LINEARI
Coordinate
Fissata una base,un vettore (tensore (1, 0)) e descritto come una colonna di numeri detti coordinate,
cioe una matrice n× 1 (array 1-dimensionale);una trasformazione lineare (tensore (0, 2)) e descritta tramite una matrice n × n di
coordinate detta matrice associata (array 2-dimensionale);piu in generale, un tensore di tipo (h, k) e descritto da un array di coordinate di
dimensione h+ k.Per fare cio, e pero necessario fissare una base: scelte di basi differenti danno arraydifferenti.
Coordinate rispetto ad una base
Sia B = (a1, . . . , an) una base per V . Questa induce la base duale B∗ = (a∗1, . . . , a∗n) per
V ∗, definita da
a∗i (aj) =
1 se i = j
0 se i 6= j,
cioe a∗i (v) = vi = i−esima componente di v nella base B. Un tensore T di tipo (h, k) edeterminato dai valori
T j1,...,jhi1,...,ik= T (a∗j1 , . . . , a
∗jh, ai1 , . . . , aik)
che assume sugli elementi della base. Ciascuno degli h+k indici nell’espressione precedentepuo variare tra 1 e n. In totale sono quindi n(h+ k) valori. Questi formano le coordinatedel tensore rispetto alla base B.
Cambiamento di base
Rispetto ad un’altra base B = (a1, . . . , an) il tensore e descritto da coordinate differenti
T j1,...,jhi1,...,ik
Le due basi B e B sono collegate da una matrice di cambiamento di base M , definitadalle relazioni
aj = M ijai, j = 1, . . . , n
con la convenzione di Einstein che sottintende lan∑i=1
sull’indice ripetuto. L’indice i
descrive la riga e j la colonna della matrice.Le coordinate del tensore rispetto alle due basi sono quindi collegate tramite la re-
lazioneT j1,...,jhi1,...,ik
= M l1,...,lki1,...,ik
N j1,...,jhm1,...,mh
Tm1,...,mhl1,...,lk
dove N e la matrice inversa di M. La somma e effettuata da 1 a n su tutti gli indiciripetuti: e quindi una somma di n(h+ k) termini.
Esempio 1.1. Un vettore v e un tensore di tipo (1, 0), quindi le sue coordinate nelle duebasi saranno (vj) e (vj) e legate dalla relazione
vj = N ji vi.

1.2. ESEMPI 9
Esempio 1.2. Un covettore ϕ ∈ V ∗ e un tensore di tipo (0, 1), quindi le sue coordinatenelle due basi saranno (ϕi) e (ϕi) e legate dalla relazione
ϕi = M ji ϕj
Esercizio 1.3. Servendosi delle nozioni imparate nei corsi di geometria, riscrivere, usan-do il formalismo delle coordinate tensoriali, come cambiano le coordinate di una matriceassociata ad un’applicazione lineare al cambiare della base.
Dette L ed L le coordinate rispetto alle due basi si avra
Lji = Mri N
jsL
sr
cioeL = MLM−1
cioe al cambiare delle basi le coordinate degli endomorfismi si trasformano per similitudine.
Capitolo 2
Distribuzioni
In analisi matematica, le distribuzioni (note anche come funzioni generalizzate) sonooggetti che generalizzano i concetti di funzione e di misura.
Estendono il concetto di derivata a tutte le funzioni integrabili secondo Lebesgue (tracui ci sono tutte le funzioni continue) e oltre e vengono usate per formulare soluzionigeneralizzate delle equazioni differenziali alle derivate parziali.
Sono importanti in fisica e in ingegneria, in cui molti problemi non continui conducononaturalmente a equazioni differenziali le cui soluzioni sono distribuzioni.
Il fisico Paul Dirac le utilizzo alla fine degli anni 1920 per i suoi studi sulla meccanicaquantistica, pur non avendone una definizione rigorosa. La definizione matematica dellefunzioni generalizzate fu formulata da Sergei Sobolev nel 1935, ma lo sviluppo della teoriadelle distribuzioni e dovuto a Laurent Schwartz che per essa vinse nel 1950 la medagliaFields.
I principali riferimenti per questa lezione sono Schwartz [31], Vladimirov [34] e Barros-Neto [7].
2.1 Lo spazio delle funzioni test
Sia Ω un aperto di Rn. Consideriamo l’insieme C∞c (Ω). Se Ω = Rn, questo insieme e nonvuoto perche contiene la funzione
(2.1) ϕ(x) =
e−
11−|x|2 se |x| < 10 se |x| ≥ 1.
Modificando questa funzione in maniera opportuna si puo vedere che C∞c (Ω) e non vuotopurche l’aperto Ω sia non vuoto.
C∞c (Ω) e un sottospazio vettoriale dello spazio delle funzioni definite su Ω. Inoltre echiuso rispetto al prodotto con una funzione C∞(Ω).
Notazione: sia α = (α1, α2, . . . , αn) un multi indice. Allora, dato un insieme aperto Ωe una funzione ϕ in D(Ω), poniamo
Dαϕ := ∂αϕ :=∂|α|ϕ
∂xα11 ∂xα2
2 . . . ∂xαnn.
Indichiamo con D(Ω) lo spazio C∞c (Ω) con la struttura di convergenza introdotta dalladefinizione seguente.
10

2.2. NON METRIZZABILITA DI D(Ω) 11
Definizione 2.1. Una successione (ϕj), ϕj ∈ D(Ω) converge a zero in D(Ω) se sonosoddisfatte le due condizioni seguenti:
1. esiste un compatto K ⊂ Ω tale che suppϕj ⊆ K per ogni j ∈ N;
2. per ogni multiindice α la successione (Dαϕj) converge uniformemente a zero.
Data ϕ ∈ D(Ω) diremo poi che ϕj → ϕ in D(Ω) se ϕj − ϕ→ 0 in D(Ω).
Osserviamo che la richiesta 1 non e banale perche l’unione numerabile di chiusi puo nonessere chiusa.
In D(Ω) si puo definire una topologia (di limite induttivo degli spazi C∞K (Ω) = u ∈C∞(Ω) : suppu ⊆ K, con K compatto in Ω) le cui successioni convergenti sonoesattamente quelle della definizione precedente. Gli elementi di D(Ω) si dicono funzionitest.
Esempio 2.2. Sia ϕ come in (2.1) e sia ϕν(x) = 1νϕ(x). Allora ϕν(x)→ 0 in D(Ω).
Esempio 2.3. Sia ϕ come in (2.1) e sia ϕν = 1νϕ(xν ). Questa successione non converge
in D(Ω) perche non soddisfa la 1.
2.2 Non metrizzabilita di D(Ω)
La convergenza definita in D(Ω) non e descrivibile da una metrica. Lo proveremo mostran-do che in D(Ω) non funziona un procedimento diagonale tipico degli spazi metrici, de-scritto nel seguente lemma.
Lemma 2.4. (Procedimento diagonale standard) Sia (X, d) uno spazio metrico, esia
x11, . . . , x
1ν , . . . una successione convergente a x1
x21, . . . , x
2ν , . . . una successione convergente a x2
. . . . . . . . . . . . .xk1 , . . . , x
kν , . . . una successione convergente a xk
e supponiamo che (xk) converga ad x. Allora
1. esiste una successione strettamente crescente di interi (νk) tale che la successione(xkνk) converge a x;
2. esiste una successione non decrescente di interi kν → ∞ tale che la successione(xkνν ) converge a x.
Dimostrazione 1. Per definizione di limite
∀ k ∈ N ∃νk strettamente crescente : d(xkν , xk) <
12k∀ ν ≥ νk.
Allorad(xkνk , x) ≤ d(xkνk , x
k) + d(xk, x) <12k
+ d(xk, x)→ 0 per k →∞
cioe la tesi 1.Proviamo la 2. Passo 1. Per l’ipotesi limk x
k = x,
∃ k1 : d(xk1 , x) <121

12 CAPITOLO 2. DISTRIBUZIONI
e per l’ipotesi limν xk1ν = xk1 ,
∃ ν1 : d(xk1ν , x
k1) <121
∀ ν ≥ ν1.
Allora si had(xk1
ν , x) < 1 ∀ ν ≥ ν1.
Passo 2. Per l’ipotesi limk xk = x,
∃ k2 > k1 : d(xk2 , x) <122
e per l’ipotesi limν xk2ν = xk2 ,
∃ ν2 > ν1 : d(xk2ν , x
k2) <122
∀ ν ≥ ν2.
Allora si had(xk2
ν , x) <12
∀ ν ≥ ν2.
Per ν1 ≤ ν < ν2 si pone kν = k1, cosicche per tali ν si ha d(xkνν , x) < 1. Per i ν precedentisi puo scegliere ancora kν = k1 ma non c’e alcuna stima della distanza da x.
Passo 3. Per l’ipotesi limk xk = x,
∃ k3 > k2 : d(xk3 , x) <123
e per l’ipotesi limν xk3ν = xk3 ,
∃ ν3 > ν2 : d(xk3ν , x
k3) <123
∀ ν ≥ ν3.
Allora si had(xk3
ν , x) <122
∀ ν ≥ ν3.
Per ν2 ≤ ν < ν3 si pone kν = k2, cosicche per tali ν si ha d(xkνν , x) < 1/2.Passo n e n+ 1. Supponiamo di aver determinato k1 < k2 < k3 < · · · < kn e ν1 <
ν2 < ν3 < . . . < νn con le proprieta
d(xki , x) <12i, d(xkiν , x) <
12i−1
∀ ν ≥ νi.
e di aver posto kν = ki−1 per νi−1 ≤ ν < νi, cosicche per tali ν si ha d(xkνν , x) < 1/2i−1.Procedendo come sopra si costruiscono kn+1 e νn+1.
Induzione. Risultano in tal modo definite per induzione successioni (kn) e (νn) con cuisi costrisce una kν con la proprieta richiesta.
Esempio 2.5. La seguente successione mostra che nella 2 in generale non vale la crescenzastretta
xkν =
1 se ν > k0 altrimenti
Esercizio 2.6. Dimostrare la seguente proposizione.Sia (akν)k,ν∈N una successione di numeri reali. Se
limk
lim supν
akν = ` = limk
lim infν
akν ,
allora esistono due successioni di interi (νk) e (kν) con

2.3. LO SPAZIO DELLE DISTRIBUZIONI 13
• (νk) strettamente crescente
• (kν) non decrescente
tali chelimkak,νk = lim
νakν ,k = `.
Esempio 2.7. Sia ϕ come in (2.1). La famiglia di funzioni
ϕkν(x) =1νϕ(x
k)
non gode della proprieta descritta dal precedente lemma (nessuna diagonale ϕkνk puosoddisfare la proprieta 1. della convergenza in D(Rn)). Cio prova che D(Rn) non emetrizzabile.
2.3 Lo spazio delle distribuzioni
Definizione 2.8. Indichiamo con D ′(Ω) lo spazio duale di D(Ω), cioe lo spazio vettorialedelle applicazioni lineari e continue da D(Ω) in R. Gli elementi di D ′(Ω) sono dettidistribuzioni.
Esempio 2.9 (Distribuzione di Dirac). Sia Ω = Rn. Definiamo δ(ϕ) = ϕ(0) per ogniϕ ∈ D(Ω). δ e una distribuzione. Infatti:
• per ogni µ, λ ∈ R e per ogni ϕ1, ϕ2 ∈ D(Ω) si ha
δ(λϕ1 + µϕ2) = λϕ1(0) + µϕ2(0) = λδ(ϕ1) + µδ(ϕ2),
• se ϕj e una successione di funzioni in D(Ω) che tende alla funzione ϕ in D(Ω) allora
δ(ϕj) = ϕj(0)→ ϕ(0) = δ(ϕ)
per la definizione di convergenza in D(Ω).
Piu in generale, se x0 ∈ Ω, si pone δx0(ϕ) := ϕ(x0) per ogni ϕ ∈ D(Ω), e si ha cheδx0 ∈ D ′(Ω).
Esercizio 2.10. Sia n = 1 e Ω = R. T (ϕ) :=∞∑j=1
ϕ(j)(j) e una distribuzione.
2.4 Funzioni localmente sommabili
Sia Ω un sottoinsieme di Rn misurabile secondo Lebesgue. Si definisce
L1loc(Ω) := u : Ω→ R : ∀x0 ∈ Ω ∃Vx0 : u|Vx0
∈ L1(Vx0)
o, equivalentemente (esercizio),
L1loc(Ω) := u : Ω→ R : u|K ∈ L1(K) ∀K compatto, K ⊆ Ω.
Esercizio 2.11. Sia Ω un sottoinsieme di Rn misurabile secondo Lebesgue (non neces-sariamente di misura finita). Allora si ha1
Lp(Ω) ⊆ L1loc(Ω) ∀ p ∈ [1,+∞]
1Ricordiamo che se Ω ha misura finita allora 1 ≤ p < q ≤ ∞ ⇒ Lq(Ω) ⊆ Lp(Ω).

14 CAPITOLO 2. DISTRIBUZIONI
Esempio 2.12. Ogni funzione f ∈ L1loc(Ω) definisce una distribuzione
Tf (ϕ) =∫
Ω
f(x)ϕ(x)dx, ϕ ∈ D(Ω).
In questo senso le funzioni di L1loc sono distribuzioni. Mostriamo che Tf e una dis-
tribuzione. Infatti Tf e ben definita perche fϕ ∈ L1(Ω), Tf e lineare per linearitadell’integrale. Per vedere che e continua (in zero) supponiamo che ϕj → 0 in D(Ω).Allora esiste un insieme compatto K contenuto in Ω tale che suppϕj e contenuto in Kper n = 1, 2, 3, . . . . Allora
(2.2) |Tf (ϕj)| = |∫K
f(x)ϕj(x)dx| ≤ ‖ϕj‖∞,K∫K
|f(x)|
e l’ultimo membro della (2.2) tende a 0 perche ϕj → ϕ uniformemente su K.
Proposizione 2.13. L’immersione di L1loc(Ω) in D ′ definita dall’applicazione
T : L1loc(Ω) → D ′(Ω)
f 7→ Tf
ove Tf e definita come nell’esempio 2.12, e lineare e iniettiva.
Dimostrazione Diamo per semplicita la dimostrazione nel caso Ω = Rn. Il caso generalesi ottiene con semplici opportune modifiche. La linearita e conseguenza della linearitadell’integrale. Per dimostrare che e iniettiva basta, per la linearita, dimostrare che Tf = 0in D implica f = 0 in L1
loc cioe che∫f(x)ϕ(x)dx = 0 ∀ϕ ∈ D ⇒ f = 0 quasi ovunque.
Dimostriamo dapprima che ∫f(x)ϕ(x)dx = 0 ∀ϕ ∈ D
implica che∫f(x)χ(x)dx = 0 per ogni χ misurabile, limitata, a supporto compatto.
Sia j un mollificatore. Definiamo jh = hnj(xh). Poiche χ essendo misurabile, limitata enulla fuori da un compatto appartiene a L1, si ha
χh = χ ∗ jh ∈ C∞
e inoltresuppχh ⊆ suppχ+B(0, 1/h) ⊆ suppχ+B(0, 1) =: K
cioe i supporti delle χh sono tutti contenuti nel medesimo compatto K. In particolare,per l’ipotesi, si ha ∫
f(x)χh(x)dx = 0 ∀h ∈ N.
Inoltre, sempre per un noto teorema sulle convoluzioni con mollificatori si ha, per h→∞,
χh → χ in L1.

2.4. FUNZIONI LOCALMENTE SOMMABILI 15
Dalla (χh) si puo dunque estrarre una sottosuccessione convergente quasi ovunque, dici-amo χhk . Inoltre, poiche
∫jh = 1, si ha che
|χh(x)| = |∫χ(x− y)jh(y)dy| ≤ sup |χ| = M ∀h ∈ N
e per il teorema della convergenza dominata si ha allora
0 = limk→∞
∫f(x)χhk(x)dx = lim
k→∞
∫K
f(x)χhk(x)dx =∫f(x)χ(x)dx
come volevasi dimostrare. Rimane infine da provare che∫f(x)χ(x)dx = 0 per ogni χ misurabile, limitata, a supporto compatto
implica f = 0 quasi ovunque.A tal scopo osserviamo che, poiche f e misurabile, allora l’insieme Ω+ = supp f+, dove
f+ e la parte positiva di f , e misurabile. Quindi, fissato a > 0 e detta χa(x) la funzionecaratteristica di Ω+ ∩B(0, a) dove B(0, a) e la palla di centro 0 e raggio a, si ha
0 =∫f(x)χa(x)dx =
∫B(0,a)
f+(x)dx.
Questo implica che f+ = 0 quasi ovunque in B(0, a) e, per l’arbitrarieta di a, che f+ = 0quasi ovunque in Rn. Analogamente si prova che anche la parte negativa f−, e dunqueanche f , e nulla quasi ovunque.
La proposizione ora dimostrata consente di identificare L1loc con la sua immagine in D ′
mediante T e quindi di affermare che le funzioni localmente sommabili sono distribuzioni.
Osservazione 2.14. δx0 6∈ L1loc.
Si tratta di provare che non esiste f ∈ L1loc tale che
δx0(ϕ) =∫fϕ ∀ϕ ∈ D .
Supponiamo per assurdo che cio non sia vero, cioe che δx0 = Tf . Allora, presa ϕ comein (2.1) e ϕa = ϕ(x−x0
a ) si avrebbe
δx0(ϕa) =∫fϕa
cioe1e
=∫|x−x0|≤a
f(x)ϕa(x)dx
ma, per a→ 0
1e
=
∣∣∣∣∣∫|x−x0|≤a
f(x)ϕa(x)dx
∣∣∣∣∣ ≤∫|x−x0|≤a
|f(x)|dx→ 0
che e un’evidente contraddizione.

16 CAPITOLO 2. DISTRIBUZIONI
2.5 Altri esempi di distribuzioni
Esempio 2.15. Le misure su Ω finite sui compatti (dette misure di Radon) sono dis-tribuzioni, nel senso che l’applicazione
Tµ(ϕ) =∫
Ω
ϕdµ ∀ϕ ∈ D(Ω)
e una distribuzione. Infatti Tµ e lineare e, se ϕj → 0 in D(Ω) e K e un compatto che necontiene tutti i supporti allora
|Tµ(ϕj)| =∣∣∣∣∫K
ϕjdµ
∣∣∣∣ ≤ µ(K) sup |ϕj | → 0 per j →∞.
Esempio 2.16. La funzione
H(x) =
1 se x > 00 se x ≤ 0
appartiene a L1loc(R) e definisce pertanto una distribuzione
H(ϕ) =∫ +∞
0
ϕ(x) dx
detta distribuzione di Heaviside.
Esempio 2.17. Sia f ∈ L1loc e α ∈ Nm. L’applicazione
Tα(ϕ) =∫f(x)Dαϕ(x)dx
e una distribuzione.
2.6 Caratterizzazione delle distribuzioni
Teorema 2.18. Sia T : D(Ω) → R un’applicazione lineare. T ∈ D ′(Ω) se e solo se perogni compatto K ⊂ Ω esistono CK > 0 e mK ∈ N0 tali che
|T (ϕ)| ≤ CK∑|α|≤mK
sup |Dαϕ| ∀ϕ ∈ DK(Ω)
ove DK denota l’insieme delle funzioni test con supporto in K.
Dimostrazione (⇐) e facile. Proviamo (⇒). Per assurdo, supponiamo che esista K ⊂ Ωcompatto, tale che per ogni scelta di C > 0 ed m ∈ N0 esista una funzione ϕC,m ∈ DK(Ω)tale che
|T (ϕ)| > C∑|α|≤m
sup |Dαϕ|.
Prendendo in particolare C = m = j si ha che per ogni j ∈ N esiste ϕj ∈ DK(Ω) tale che
|T (ϕj)| > j∑|α|≤j
sup |Dαϕj |.

2.7. LA TOPOLOGIA DI D ′(Ω) 17
Osservato che il primo membro e strettamente positivo (anche il secondo per la verita)dividiamo ambo i membri per j|T (ϕj)| ottenendo
1j>∑|α|≤j
sup|Dαϕj ||T (ϕj)|
.
Posto ψj =ϕj
T (ϕj)si ha ψj ∈ DK(Ω) e
1j>∑|α|≤j
sup |Dαψj |.
Da quest’ultima, passando al limite per j → +∞, segue in particolare che ψj → 0 inD(Ω). Per la continuita di T allora T (ψj)→ 0 in R, contro il fatto che T (ψj) = 1.
Se l’m del teorema non dipende dal compatto K allora la distribuzione si dice diordine finito. In tal caso il piu piccolo m per cui vale la disuguaglianza si dice ordine delladistribuzione.
Esempio 2.19. Le funzioni di L1loc e le misure di Radon sono distribuzioni di ordine 0.
In effetti, per il teorema di rappresentazione di Riesz per le misure, la classe delle misuredi Radon puo essere identificata con il sottospazio (vettoriale) di D ′(Ω) costituito dalledistribuzioni di ordine 0.
La distribuzione dell’Esempio (2.17) e di ordine |α|.La distribuzione dell’Esercizio (2.10) non e di ordine finito.
2.7 La topologia di D ′(Ω)
Si e gia osservato che D ′(Ω) e uno spazio vettoriale. Come abbiamo fatto per lo spazio dellefunzioni test individuiamo in D ′(Ω) una topologia descrivendo le successioni convergenti.
Definizione 2.20. Sia (Tj) una successione di distribuzioni. Diremo che Tj → 0 inD ′(Ω) se Tj(ϕ)→ 0 in R per ogni ϕ ∈ D(Ω).
Si avra poi che Tj → T se e solo se Tj − T → 0. Si tratta dunque di convergenza pun-tuale. Essa caratterizza una topologia (non metrizzabile) usualmente chiamata topologiadebole per l’analogia con la topologia debole* dei duali degli spazi di Banach.
In D ′(Ω) vale un principio di limitatezza uniforme analogo al teorema di Banach-Steinhaus per gli spazi normati. Una conseguenza e che le successioni convergenti in ognipunto sono convergenti debolmente; vale cioe il seguente teorema.
Teorema 2.21. Sia (Tj) una successione di distribuzioni tale che per ogni ϕ ∈ D(Ω)esista finito il limite
limj→∞
Tj(ϕ).
Allora esiste T ∈ D ′(Ω) tale che Tj → T in D ′(Ω).
Dunque ogni successione puntualmente di Cauchy e debolmente convergente.
Esempio 2.22. La successione di funzioni
fj(x) =j se x ∈ (− 1
2j ,12j )
0 altrove in (−1, 1)

18 CAPITOLO 2. DISTRIBUZIONI
converge a δ0 in D ′(−1, 1). Essa costituisce quindi un esempio di successione limitatain L1 (‖fj‖1 = 1 per ogni j) da cui non e possibile estrarre una sottosuccessione debol-mente convergente in L1, infatti qualunque successione di questo tipo sarebbe costretta aconvergere alla δ0 che non appartiene a L1.
Esempio 2.23. Sia u ∈ D(Rn) tale che∫u = 1 e, per ogni h ∈ N
uh(x) = hnu(hx).
Si ha uh ∈ D(Rn), quindi in particolare uh ∈ D ′(Rn) e
uh → δ0 in D ′(Rn).
Esercizio 2.24. Sia (xj) ⊂ Rn. Mostrare che si ha
1. xj → x0 ⇒ δxj → δx0 .
2. |xj | → +∞ ⇒ δxj → 0.
2.8 Derivata di una distribuzione
Osservazione 2.25. Se f ∈ C1(Rn) allora la sua derivata parziale rispetto alla j-esimavariabile e continua e quindi L1
loc e pertanto definisce una distribuzione
TDjf (ϕ) =∫Djf(x)ϕ(x)dx.
Se indichiamo con x = (x′, xj) allora, eventualmente scambiando l’ordine di integrazione(usando i teoremi di Tonelli e di Fubini) e poi integrando per parti, si ha
TDjf (ϕ) =∫Rn−1
∫RDjf(x′, xj)ϕ(x′, xj) dxjdx′
= −∫Rn−1
∫Rf(x′, xj)Djϕ(x′, xj) dxjdx′ = −Tf (Djϕ).
Definiamo allora, in modo naturale, per f ∈ C1(Rn), la derivata della distribuzioneassociata ad f come la distribuzione associata alla derivata di f , cioe
DjTf (ϕ) := −Tf (Djϕ).
Abbiamo gia osservato che quella ora definita e una distribuzione (cfr. Esempio 2.17).Inoltre, non facendo uso della derivata di f , questa definizione si estende immediatamentea tutte le distribuzioni di L1
loc(Ω). Essa si estende a tutte le altre distribuzioni al modoseguente.
Definizione 2.26. Sia T ∈ D ′(Ω).
DjT (ϕ) := −T (Djϕ) .
Osservazione 2.27. Data una distribuzione T , trattandosi di una funzione lineare, datauna funzione test ϕ, si usa spesso scrivere 〈T vf〉 per indicare T (ϕ). Ne consegue che laprecedente definzione si trova spesso scritta nella forma
〈DjT, ϕ〉 = −〈T,Djϕ〉

2.9. FORMULA DI LEIBNIZ SULLA DERIVAZIONE DEL PRODOTTO 19
Poiche ora T non proviene necessariamente da una f ∈ L1loc(Ω), e necessario verificare
(esercizio) che la definizione e ben posta, cioe che DjT e effettivamente una distribuzione.Conseguenze della definizione ora data sono le seguenti
• ogni distribuzione e derivabile;
• si possono definire le derivate di ordine superiore e l’ordine di derivazione e semprecommutabile;
• se α ∈ Nn si haDαT (ϕ) = (−1)|α|T (Dαϕ)
e l’operatore di derivazione
Dα : D ′(Ω) → D ′(Ω)T 7→ DαT
e lineare e continuo;
• se f ∈ C |α|(Ω) allora la sue derivate classiche fino all’ordine |α|, che sono continuee quindi L1
loc(Ω), si identificano con quelle distribuzionali.
Esempio 2.28. Derivata della distribuzione di Heaviside: H ′ = δ0.
Esempio 2.29. Derivate della delta: Dαδ(ϕ) = (−1)|α|Dαϕ(0).
Esempio 2.30. Sia f ∈ Cm(R \ x0) tale che esistano finiti
f (h)(x+0 ) = lim
x→x+0
f (h)(x) e f (h)(x−0 ) = limx→x−0
f (h)(x)
per ogni h ∈ 0, ...,m, e indichiamo con
σh = f (h)(x+0 )− f (h)(x−0 )
i salti in x0 di f e delle sue derivate. Si ha f ∈ L1loc(R) e
T ′f = σ0δx0 + Tf ′ ,
e, in generale,T
(h)f = σ0δ
(h−1)x0
+ σ1δ(h−2)x0
+ · · ·+ σh−1δx0 + Tf(h) .
2.9 Formula di Leibniz sulla derivazione del prodotto
Lemma 2.31. Siano f, g funzioni di classe Cm e siano α, α1, α2 ∈ Nn con |α| ≤ m.Allora vale la formula
Dα(fg) =∑
α1+α2=α
α!α1!α2!
Dα1f ·Dα2g.
Dimostrazione Procediamo per induzione su |α|.Se |α| = 1 allora esiste j ∈ 1, 2, . . . , n tale che α = ej , pertanto la somma e composta
dai due soli addendi corrispondenti alle due sole possibili scelte α1 = ej , α2 = 0 e viceversa.Ne consegue che la formula in questo caso si riduce alla usuale formula di derivazione delprodotto.

20 CAPITOLO 2. DISTRIBUZIONI
Per procedere con l’induzione introduciamo il seguente ordinamento in Nn. Sianoα, α′ ∈ Nn; diremo che α′ < α se e solo se α′i ≤ αi per i = 1, . . . , n e esiste j ∈ 1, 2, . . . , ntale che α′j < αj .
Per ipotesi di induzione supponiamo la formula vera per ogni α′ < α, |α| > 1 e ladimostriamo per α = α′ + ej . Per ipotesi di induzione si ha
Dα(fg) = Dα′(Dj(fg)) = Dα′(Djf · g + f ·Djg)
=∑
α′1+α′2=α′
α′!α′1!α′2!
Dα′1Djf ·Dα′2g +∑
α′1+α′2=α′
α′!α′1!α′2!
Dα′1f ·Dα′2Djg.
Ponendo α′1 + ej = α1, α′2 = α2 nella prima somma e α′1 = α1, α′2 + ej = α2 nella secondae scrivendo tutto in termini di α1, α2 e α, si ottiene che
Dα(fg) =∑
α1+α2=α
(α− ej)!(α1 − ej)!α2!
Dα1f ·Dα2g +∑
α1+α2=α
(α− ej)!α1!(α2 − ej)!
Dα1f ·Dα2g
=∑
α1+α2=α
( (α− ej)!(α1 − ej)!α2!
+(α− ej)!
α1!(α2 − ej)!
)Dα1f ·Dα2g.
Osservato ora che
(α1 − ej)! =α1!α1j
, (α2 − ej)! =α1!α2j
si ha che
(α− ej)!(α1 − ej)!α2!
+(α− ej)!
α1!(α2 − ej)!=
(α− ej)!(α1j + α2j)α1!α2!
=(α− ej)!αjα1!α2!
=α!
α1!α2!
e quindi la tesi.
2.10 Prodotto di una funzione con una distribuzione
Vi sono diverse difficolta nel definire un prodotto tra distribuzioni che generalizzi quello trafunzioni, tra cui il fatto che L1
loc non e chiuso rispetto al prodotto (esempio: f(x) = 1/√x).
Risulta pero chiuso rispetto al prodotto con una funzione C∞.
Definizione 2.32. Siano T ∈ D ′(Ω) e a ∈ C∞(Ω). Definiamo prodotto della dis-tribuzione T con la funzione a la distribuzione
(aT )(ϕ) := T (aϕ).
La definizione ora data generalizza il prodotto di funzioni, cioe si ha
aTf = Taf .
E pero necessario provare che la definizione e ben posta, e cioe che aT e effettivamente unadistribuzione. Lo dimostriamo utilizzando il teorema di caratterizzazione. La linearita eimmediata. Poiche T e una distribuzione, per il teorema di caratterizzazione, per ognicompatto K ⊂ Ω esistono CK > 0 e mK ∈ N tali che
|(aT )(ϕ)| = |T (aϕ)| ≤ CK∑|α|≤mK
supK|∂α(aϕ)| ∀aϕ ∈ DK(Ω).

2.11. DISTRIBUZIONI CON DERIVATA NULLA 21
Per la formula di Liebnitz sulla derivazione del prodotto si ha
∂α(aϕ) =∑
α1+α2=α
α!α1!α2!
∂α1a ∂α2ϕ
e percio, posto C(K,α1) = maxx∈K|∂α1a(x)|,
|∂α(aϕ)| ≤∑
α1+α2=α
α!α1!α2!
C(K,α1)|∂α2ϕ| ≤ C(K,α)∑β≤α
|∂βϕ|
e infine
|(aT )(ϕ)| ≤ CK∑|α|≤mK
supK|∂α(aϕ)|
≤ CK∑|α|≤mK
C(K,α)∑β≤α
supK|∂βϕ| ≤ CK
∑|β|≤mK
supK|∂βϕ|
come volevasi dimostrare.
Osservazione 2.33. Se T e di ordine finito allora anche aT e di ordine finito.
Proposizione 2.34. Sia a ∈ C∞(Ω). L’applicazione
D ′(Ω) → D ′(Ω)T 7→ aT
e lineare e continua.
Dimostrazione Esercizio.
Esempio 2.35. (Prodotto di una funzione C∞ con una delta.) Si ha
aδx0 = a(x0)δx0 .
Esercizio 2.36. Siano a ∈ C∞(Ω) e T ∈ D ′(Ω). Provare che vale la formula di Leibniz
∂j(aT ) = ∂ja · T + a · ∂jT.
2.11 Distribuzioni con derivata nulla
Sia I = (a, b) un intervallo.
Lemma 2.37. Sia T ∈ D(I) tale che T ′ = 0 in D ′(I). Allora esiste una costante C taleche T = C.
Dimostrazione Poiche T ′ = 0 in D ′(I) allora
〈T, ϕ′〉 = 0 ∀ϕ ∈ D(I).
Basta provare che esiste C tale che
(2.3) 〈T − C,ψ〉 = 0 ∀ψ ∈ D(I).

22 CAPITOLO 2. DISTRIBUZIONI
2 Fissiamo una funzione w ∈ D(I) tale che∫Iw = 1. Per ogni ψ ∈ D(I) sia
h := ψ − 〈1, ψ〉w.
Chiaramente si ha h ∈ D(I) e∫Ih = 0. Consideriamo la funzione
ϕ(x) =∫ x
a
h(t) dt,
Chiaramente si ha ϕ ∈ C∞(I) e ϕ′ = h. Inoltre, poiche h ha supporto compatto contenutoin I che e un intervallo aperto allora ϕ ∈ D(I). Ne consegue che
0 = 〈T, ϕ′〉 = 〈T, h〉 = 〈T, ψ − 〈1, ψ〉w〉 = 〈T − 〈T,w〉, ψ〉.
Poiche quest’ultima vale per ogni ψ ∈ D(I) segue la tesi con C = 〈T,w〉.
Il lemma ora dimostrato si estende immediatamente al caso di piu variabili, ma ladimostrazione e molto meno semplice. In ogni caso vale il seguente risultato dove l’ipotesiche I sia un intervallo e sostituita da un ipotesi di connessione del dominio.
Lemma 2.38. Sia Ω un aperto connesso di Rn e sia T ∈ D ′(Ω) tale che DT = 0 inD ′(Ω). Allora T e costante su Ω.
2.12 Convoluzione e regolarizzazione
Nel seguito servira approssimare un’assegnata distribuzione, nel senso della convergenzadebole, con funzioni quanto piu regolari possibile. Cominciamo con un esempio in cui siapprossima una delta con funzioni C∞ a supporto compatto.
Indichiamo con B(0, 1) la palla unitaria di centro zero in Rn.
Definizione 2.39. Una funzione η ∈ C∞c (Rn) tale che suppϕ ⊆ B(0, 1), η ≥ 0,∫η = 1
si chiama mollificatore o nucleo regolarizzante.
Una funzione che soddisfa tutte le condizioni della definizione e, per esempio, laseguente
η(x) =
K e−
11−|x|2 se |x| < 10 se |x| ≥ 1
2Per capire l’idea della dimostrazione, osserviamo che la tesi e equivalente a
〈T,w〉 = C
∫Iw ∀w ∈ D(I)
e, in particolare, implica che
〈T,w〉 = C ∀w ∈ D(I) :
∫Iw = 1.
Quest’ultima puo dunque essere sostituita nella (2.3) che si trasforma nell’equivalente
〈T − 〈T,w〉, ψ〉 = 0 ∀ψ,w ∈ D(I) :
∫Iw = 1.
Ora, con qualche passaggio raccogliamo T a primo membro della precedente. Si ha
〈T − 〈T,w〉, ψ〉 = 〈T, ψ〉 − 〈〈T,w〉, ψ〉 = 〈T, ψ〉 − 〈1, ψ〉〈T,w〉 = 〈T, ψ − 〈1, ψ〉w〉.
La tesi risulta dunque equivalente a
〈T, ψ − 〈1, ψ〉w〉 = 0 ∀ψ,w ∈ D(I) :
∫Iw = 1.

2.12. CONVOLUZIONE E REGOLARIZZAZIONE 23
dove la costante di normalizzazione K e
K =
(∫|x|<1
e−1
1−|x|2 dx
)−1
Se η e un mollificatore, lo sono anche tutte le funzioni
(2.4) ηε(x) = ε−nη(x
ε), 0 < ε ≤ 1.
Si ha inoltre supp ηε ⊆ B(0, ε). I mollificatori sono utili per costruire approssimazioniregolari di distribuzioni.
Proposizione 2.40. Sia η un mollificatore ed ηε come nella (2.4). Si ha
ηε → δ0 in D ′(Rn)
Dimostrazione Eseguendo il cambiamento di variable y = x/ε si ha
〈ηε, ϕ〉 =∫|x|<ε
ε−nη(x/ε)ϕ(x) dx =∫|x|<1
η(y)ϕ(εy) dy
Passando al limite per ε → 0, per il teorema della convergenza dominata di Lebesgue(verificarne le ipotesi), si ha
〈ηε, ϕ〉 =∫|x|<1
η(y)ϕ(εy) dx→ ϕ(0)∫η dx = ϕ(0) = 〈δ0, ϕ〉.
dal momento che l’integrale di η e 1.
Supporto di una distribuzione
Data T ∈ D(Ω), si chiama supporto di T il complementare dell’insieme
x ∈ Ω : ∃Vx intorno di x : ϕ ∈ D(Ω), suppϕ ⊂ Vx ⇒ T (ϕ) = 0
Esercizio 2.41. Verificare che si ha
1. supp δx0 = x0;
2. se f ∈ L1loc(Ω) allora suppTf = supp f .
Proposizione 2.42. Siano T ∈ D ′(Ω) e ϕ ∈ D(Ω). Se suppϕ ∩ suppT = ∅ alloraT (ϕ) = 0.
Dimostrazione Dall’ipotesi segue subito che
suppϕ ⊆ (suppT )C = x ∈ Ω : ∃Vx intorno aperto di x : ϕ ∈ D(Vx) ⇒ T (ϕ) = 0
Per ogni x ∈ suppϕ possiamo dunque considerare un aperto Vx tale che suppψ ⊂ Vximplica T (ψ) = 0. La famiglia
Vxx∈suppϕ
costituisce un ricoprimento aperto di suppϕ da cui possiamo estrarre un sottoricoprimentofinito Vx1 , . . . , Vxh. Consideriamo una partizione dell’unita subordinata al ricoprimentofinito, cioe funzioni ϕi ∈ C∞c (Vxi) tali che
∑hi=1 ϕi(x) = 1 per ogni x ∈ suppϕ.
Ne consegue che
T (ϕ) = T (ϕh∑i=1
ϕi) =h∑i=1
T (ϕϕi) = 0
perche supp(ϕϕi) ⊂ Vxi .

24 CAPITOLO 2. DISTRIBUZIONI
Convoluzione di una distribuzione con una funzione test
Nel seguito, indicheremo spesso con D := D(Rn), D ′ := D ′(Rn), L1loc := L1
loc(Rn),Ck := Ck(Rn) e C∞ := C∞(Rn).
Date due funzioni ϕ ∈ D(Rn) e ψ ∈ L1loc(Rn) e ben definito il prodotto di convoluzione
ψ ∗ ϕ(x) :=∫Rn
ψ(y)ϕ(x− y)dy = Tψ(ϕ(x− ·)
).
Definizione 2.43. Siano T ∈ D ′ e ϕ ∈ D . Definiamo prodotto di convoluzione delladistribuzione T con la funzione ϕ la funzione
T ∗ ϕ(x) = T(ϕ(x− ·)
).
Dati A,B ⊆ R indicheremo con
A+B = x+ y : x ∈ A, y ∈ B, −A = −x : x ∈ A, A−B = A+ (−B).
Verificare per esercizio che se A e B sono compatti allora anche A+B, −A e A−B sonocompatti.
Le principali proprieta del prodotto di convoluzione sono riassunte nel seguente teore-ma.
Teorema 2.44. Siano T ∈ D ′ e ϕ ∈ D . Allora
1. T ∗ ϕ ∈ C∞;
2. suppT ∗ ϕ ⊂ suppT + suppϕ;
3. ∂α(T ∗ ϕ) = ∂αT ∗ ϕ = T ∗ ∂αϕ.
Dimostrazione Cominciamo col provare la 2. Supponiamo che x 6∈ suppT + suppϕ.Cio implica
(x− suppϕ) ∩ suppT = ∅;
infatti, se cio non fosse allora esisterebbe
∃ z ∈ suppT : z ∈ x− suppϕ
equivalente a∃ z ∈ suppT, y ∈ suppϕ : z = x− y
Allora x = z + y apparterrebbe a suppT + suppϕ, contro l’ipotesi.Proviamo la 1. Mostriamo anzitutto la continuita. Sia xh → x0 in Rn. Si ha
T ∗ ϕ(xh)− T ∗ ϕ(x0) = T (ψh)
doveψh(y) := ϕ(xh − y)− ϕ(x0 − y).
Si ha che ψh → 0 in D . Infatti,
suppψh ⊆ (xh − suppϕ) ∪ (x0 − suppϕ) ⊆ B(0, R)
prendendo R abbastanza grande. Inoltre, per la formula di Lagrange,
Dαψh(y) = (−1)|α|[Dαϕ(xh − y)−Dαϕ(x0 − y)
]= (−1)|α|(xh − x0) · ∇Dαϕ(ξh,y)

2.12. CONVOLUZIONE E REGOLARIZZAZIONE 25
dove ξh,y sta sul segmento congiungente xh − y e x0 − y. Si ha dunque
‖Dαψh‖∞ ≤ |xh − x0| · ‖∇Dαϕ‖∞ → 0
per h→∞. Ne consegue, per continuita di T , che
T ∗ ϕ(xh)− T ∗ ϕ(x0) = T (ψh)→ T (0) = 0
e quindi T ∗ ϕ ∈ C0.Una volta provata la seconda parte di 3, cioe che
(2.5) ∂α(T ∗ ϕ) = T ∗ ∂αϕ,
essendo T ∗ ∂αϕ ∈ C0 si ottiene automaticamente che T ∗ ϕ ∈ C∞. Proviamo quindila (2.5).
Per cio bastera dimostrare l’esistenza di una derivata prima e che
∂j(T ∗ ϕ) = T ∗ ∂jϕ
e poi iterare il procedimento.Preso x0 ∈ Rn vogliamo quindi provare che
limh→0
T ∗ ϕ(x0 + h ej)− T ∗ ϕ(x0)h
= T ∗ ∂jϕ(x0)
ovvero che
limh→0
T ∗ ϕ(x0 + h ej)− T ∗ ϕ(x0)h
− T ∗ ∂jϕ(x0) = 0.
Si haT ∗ ϕ(x0 + h ej)− T ∗ ϕ(x0)
h− T ∗ ∂jϕ(x0) = T (ψh)
dove
ψh(y) =ϕ(x0 + h ej −y)− ϕ(x0 − y)
h− ∂jϕ(x0 − y).
La tesi seguira dal fatto che ψh → 0 in D . Come prima si dimostra che i supporti sonotutti contenuti nel medesimo compatto. Dalla formula di Taylor di ordine 2 con restonella forma di Lagrange si ha
∂αϕ(x0 +h ej −y) = ∂αϕ(x0−y)+h∂j∂αϕ(x0−y)+h2
2∂2j ∂
αϕ(x0−y+τh ej), 0 ≤ τ ≤ 1
Si ha dunque‖∂αψh‖∞ ≤ |h|Cα
da cui la tesi segue passando al limite per h→ 0.Rimane da provare la prima parte della 3. Si ha
(DαT ) ∗ ϕ(x) = 〈DαT, ϕ(x− ·)〉 = (−1)|α|〈T,Dαyϕ(x− ·)〉
= (−1)|α|〈T, (−1)|α|Dαxϕ(x− ·)〉 = 〈T,Dα
xϕ(x− ·)〉 = T ∗Dαϕ(x)
Esempio 2.45. Indichiamo con 1 la funzione identicamente uguale a 1. Si ha 1 ∗ϕ(x) =∫ϕ per ogni x.

26 CAPITOLO 2. DISTRIBUZIONI
Esempio 2.46. Si ha δ0 ∗ϕ = ϕ, cioe δ0 e l’elemento neutro del prodotto di convoluzione.
Esempio 2.47. Si ha (H ∗ ϕ)′(x) = ϕ(x), sia con calcolo diretto che con le formule diderivazione.
Vale la seguente prorieta associativa.
Teorema 2.48. Sia T ∈ D ′ e siano ϕ,ψ ∈ D . Si ha
(T ∗ ϕ) ∗ ψ = T ∗ (ϕ ∗ ψ).
Dimostrazione La dimostrazione puo essere fatta scrivendosi l’integrale ϕ∗ψ come unasomma di Riemann per utilizzare poi la linearita di T . Vedi L. Hormander [18], Theorem4.1.2, per i dettagli.
Lemma 2.49. Sia (ηε) una famiglia di mollificatori come in (2.4). Data ψ ∈ D si ha
ηε ∗ ψ → ψ in D
Dimostrazione Anzitutto si ha
supp ηε ∗ ψ ⊂ supp ηε + suppψ ⊂ B(0, 1) + suppψ =: K.
e K e indipendente da ε.Sia ora ϕ ∈ D e dimostriamo che
ηε ∗ ϕ→ ϕ uniformemente.
Si ha infatti
‖ηε ∗ ϕ− ϕ‖∞ = supx
∣∣∣ ∫|y|<ε
ε−nη(y/ε)ϕ(x− y) dy − ϕ(x)∣∣∣
= supx
∣∣∣ ∫|z|<1
η(z)ϕ(x− εz) dz − ϕ(x)∣∣∣
= supx
∣∣∣ ∫|z|<1
η(z)[ϕ(x− εz)− ϕ(x)] dz∣∣∣
≤ supx
sup|z|<1
|ϕ(x− εz)− ϕ(x)| ≤ supx
sup|z|<1
Lε|z| ≤ Lε
dove nella penultima disuguaglianza abbiamo utilizzato il fatto che ϕ e lipschitziana concostante L.
Considerato cheDα(ηε ∗ ϕ) = ηε ∗Dαϕ,
la tesi segue prendendo ψ = Dαϕ e applicando il risultato precedente.
Osservazione 2.50. Date T ∈ D ′ e ϕ ∈ D e posto ϕ(x) := ϕ(−x) si ha
〈T, ϕ〉 = T ∗ ϕ(0)
Infatti,T ∗ ϕ(0) = 〈T, ϕ(0− ·)〉 = 〈T, ϕ〉.
Teorema 2.51. Sia (ηε) una successione di mollificatori come sopra. Allora si ha
T ∗ ηε → T in D ′

2.12. CONVOLUZIONE E REGOLARIZZAZIONE 27
Dimostrazione Sia ϕ ∈ D . Per l’Osservazione 2.50 e il Teorema 2.48 si ha
〈T ∗ ηε, ϕ〉 = (T ∗ ηε) ∗ ϕ(0) = T ∗ (ηε ∗ ϕ)(0) = 〈T,(ηε ∗ ϕ
)∨〉(0)
La tesi segue dunque dal fatto che, per quanto provato in precedenza, ηε∗ϕ→ ϕ in D .
Siamo ora in grado dimostrare il Lemma 2.38 di cui ricordiamo l’enunciato.
Lemma Sia Ω un aperto connesso di Rn e sia T ∈ D ′(Ω) tale che DT = 0 in D ′(Ω).Allora T e costante su Ω.
Dimostrazione Osserviamo dapprima che, identificando ogni funzione ϕ ∈ D(Ω) conil proprio prolungamento a zero su Rn, si ha che D(Ω) si identifica con un sottospaziovettoriale di D . Sia T ∈ D ′ tale che T|D(Ω) = T (l’esistenza di questa estensione egarantita ad esempio dal Teorema di Hahn-Banach).
Osserviamo che per ogni ϕ ∈ D(Ω) (identificata col proprio prolungamento a zero) siha
〈Dj T , ϕ〉 = −〈T , Djϕ〉 = −〈T,Djϕ〉 = 〈DjT, ϕ〉
cioe DT|D(Ω) = DT = 0.Sia (ηε) una successione di mollificatori come sopra. Per ogni x ∈ Ω e per ogni
j = 1, . . . , n si ha
Dj(T ∗ ηε)(x) = (Dj T ) ∗ ηε(x) = 〈Dj T , ηε(x− ·)〉 = 0
dove l’ultima uguaglianza segue dal fatto che, essendo Ω aperto, per ogni x e per ogni εsufficientemente piccolo si ha
supp ηε(x− ·) ⊆ x− supp ηε = x−B(0, ε) = B(x, ε) ⊂ Ω.
Dunque D(T ∗ ηε)(x) = 0 per ogni x ∈ Ω da cui, visto che T ∗ ηε ∈ C∞(Ω) ed Ω econnesso, segue che T ∗ ηε = Cε su Ω.
Utilizzando il fatto che Cε = T ∗ ηε → T in D ′ (Teorema 2.51) si ottiene che
Cε
∫Ω
ϕ→ 〈T , ϕ〉 = 〈T, ϕ〉 ∀ϕ ∈ D(Ω),
da cui, prendendo ϕ = w ∈ D(Ω) tale che∫
Ωw = 1 si ha Cε → 〈T,w〉 =: C e quindi
〈T, ϕ〉 = 〈C,ϕ〉
per ogni ϕ ∈ D(Ω), cioe T e costante.
Capitolo 3
Cinematica dei continui
3.1 Riferimenti bibliografici
I testi di carattere generale a cui ci si puo riferire per il presente capitolo sono [32, 25, 33,17].
3.2 Notazioni
Tutti i vettori di Rn sono considerati vettori colonna, cioe matrici n × 1. I vettori rigasono i loro trasposti. Il prodotto scalare verra indicato con il punto, i prodotti righe percolonne senza.
3.3 Corpi e piazzamenti
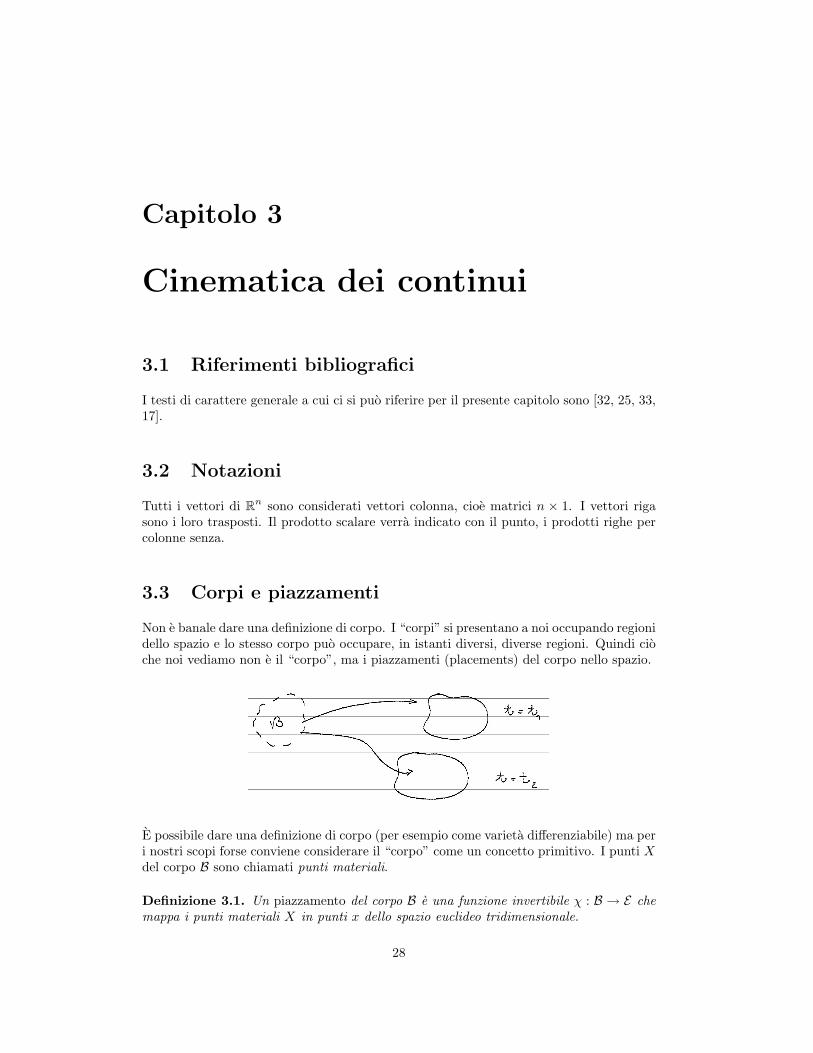
Non e banale dare una definizione di corpo. I “corpi” si presentano a noi occupando regionidello spazio e lo stesso corpo puo occupare, in istanti diversi, diverse regioni. Quindi cioche noi vediamo non e il “corpo”, ma i piazzamenti (placements) del corpo nello spazio.
E possibile dare una definizione di corpo (per esempio come varieta differenziabile) ma peri nostri scopi forse conviene considerare il “corpo” come un concetto primitivo. I punti Xdel corpo B sono chiamati punti materiali.
Definizione 3.1. Un piazzamento del corpo B e una funzione invertibile χ : B → E chemappa i punti materiali X in punti x dello spazio euclideo tridimensionale.
28

3.4. DEFORMAZIONI 29
D’ora in avanti assumeremo che le immagini dei piazzamenti, χ(B), siano dominiregolari; in particolare si trattera di insiemi limitati e aperti (o chiusura di aperti) confrontiera localmente grafico di funzioni lipschitziane (brevemente si dira che la frontierae lipschitziana). Sono ammessi quindi domini poligonali. Invece un semplice esempio diaperto di Rn+1 con frontiera non localmente lipschitziana e il seguente
D = (x, y) ∈ Rn × R :√|x| < y < 1.
3.4 Deformazioni
Dati due piazzamenti χ1 e χ2 assumeremo che la mappa
f = χ1 χ−12 ,
detta deformazione, sia un diffemorfismo di classe C1 (cioe f e biiettiva e di classe C1
insieme alla sua inversa) e conservi l’orientazione locale, cioe det∇f > 0.
Osserviamo che il fatto che f sia iniettiva evita che punti materiali diversi venganomandati nello stesso punto cioe proibisce la compenetrazione, il fatto che f sia continuaproibisce rotture mentre la continuita di f−1 proibisce saldature.
L’ipotesi di positivita del determinante del gradiente della deformazione impedisce adesempio che una terna destra possa essere deformata in una sinistra. In particolare leriflessioni non sono considerate “deformazioni”.
3.5 Configurazione di riferimento
Anziche lavorare con il corpo B, conviene scegliere, tra i vari piazzamenti, un piazzamentoprivilegiato che indicheremo con κ ed utilizzare come dominio per le deformazioni l’insiemeκ(B). Questo piazzamento κ viene detto configurazione di riferimento.

30 CAPITOLO 3. CINEMATICA DEI CONTINUI
La configurazione di riferimento κ potrebbe essere, ma non e necessario che lo sia, laposizione occupata dal corpo in un determinato istante.
La posizione di X in κ verra indicata con x, i.e. x = κ(X).Sia χ un piazzamento (che potrebbe rappresentare la posizione attuale del corpo).
Indicheremo con fκ la funzionefκ := χ κ−1
che, per quanto detto sopra, rappresenta la deformazione dalla configurazione di riferi-mento. Chiameremo gradiente di deformazione il suo gradiente
Fκ := ∇fκ.
Inoltre indicheremo con y l’immagine fκ(x).
Per semplicita di notazione, se non ci sono ambiguita, lasceremo cadere l’indice κ.
3.6 Deformazioni rigide
Definizione 3.2. Una deformazione f si dice rigida se lascia inalterata la distanza mutuatra i punti del corpo, vale a dire
|f(x)− f(y)| = |x− y| ∀x, y ∈ κ(B)
ovvero, se f e un’isometria.
SiaO(n) := Q ∈ Rn×n : QTQ = I, n ∈ N, n ≥ 2,
il cosiddetto gruppo ortogonale, un gruppo moltiplicativo i cui elementi sono le matriciortogonali di ordine n (Rn×n indica le matrici reali di ordine n e QT denota la traspostadi Q).
Teorema 3.3. Sia f : Rn → Rn. Le seguenti affermazioni sono equivalenti:

3.6. DEFORMAZIONI RIGIDE 31
1. f e un’isometria;
2. esiste Q ∈ O(n) tale chef(u) = f(v) +Q(u− v).
Dimostrazione 2⇒1 e un facile esercizio; infatti, se f(u) = f(v) +Q(u− v) allora
|f(u)− f(v)|2 = |Q(u− v)|2 = [Q(u− v)]T [Q(u− v)]
= (u− v)TQTQ(u− v) = (u− v)T (u− v) = |u− v|2.
La dimostrazione di 1⇒2 e invece decisamente piu complicata. Un modo di provarla equello di utilizzare un risultato piuttosto raffinato di teoria della misura noto come Teore-ma di Rademacher (cfr. ad esempio Evans e Gariepy [13] Capitolo 3, oppure Ziemer [35],che afferma che le funzioni Lipschitziane (e quindi le isometrie in particolare) di Rn in sesono funzioni differerenziabili quasi ovunque rispetto alla misura di Lebesgue in Rn. Parti-amo dunque dall’ipotesi che f sia un’isometria, quindi lipschitziana e percio differenziabilein Rn \N dove N e un insieme di misura nulla. Allora si ha
[f(u)− f(v)] · [f(u)− f(v)] = (u− v) · (u− v).
Differenziando rispetto ad u si ottiene
(3.1) ∇f(u)T [f(u)− f(v)] = u− v
per ogni v ∈ Rn e per ogni u in Rn \N . Differenziando quest’ultima rispetto a v si ottiene
(3.2) ∇f(u)T∇f(v) = I
per ogni u, v ∈ Rn \ N . Prendendo u = v si ha ∇f(u)T∇f(u) = I, cioe ∇f(u) ∈ O(n)per quasi ogni u ∈ Rn.
Dalla (3.2), moltiplicando a sinistra per ∇f(u), si ottiene allora che ∇f(u) = ∇f(v)per quasi ogni u e v, cioe esiste una matrice ortogonale Q tale che ∇f(u) = Q per quasiogni u. Infine, dalla (3.1) si ha f(u) − f(v) = Q(u − v) quasi ovunque, quindi su uninsieme denso. La tesi segue allora dalla continuita di f .
Indichiamo con
SO(n) := Q ∈ Rn×n : QTQ = I, detQ = 1, n ∈ N, n ≥ 2,
il cosiddetto gruppo speciale ortogonale, i cui elementi, detti rotazioni, sono le matriciortogonali di ordine n con determinante positivo.
Introducendo il vincolo della positivita del determinante il precedente teorema ha laseguente controparte meccanica.
Teorema 3.4. Sia f : Rn → Rn. Le seguenti affermazioni sono equivalenti:
1. f e una deformazione rigida;
2. esiste Q ∈ SO(n) tale che
f(u) = f(v) +Q(u− v);
3. f e differenziabile e si ha ∇f(u) ∈ SO(n) per ogni u ∈ Rn.

32 CAPITOLO 3. CINEMATICA DEI CONTINUI
L’equivalenza di 1 e 2 e un semplice corollario del teorema precedente.2 implica 3 e immediato (basta derivare).Dimostreremo che 3 implica 2, proponendo un’elegante dimostrazione di David Kinder-
lehrer [20].
Prima conviene ricordare la definizione di cofattore di una matrice (o di un’applicazionelineare).
Consideriamo una matrice A quadrata di ordine n e indichiamo conMij la sottomatricedi A di ordine n− 1 ottenuta da A cancellandone la riga i-esima e la colonna j-esima. Ildeterminante det(Mij) si chiama minore dell’elemento aij di A; si definisce cofattore diaij il minore con segno
(cofA)ij = (−1)i+j det(Mij)
Indicheremo con cofA la matrice dei cofattori degli elementi di A. E ben noto che il deter-minante della matrice A e uguale alla somma dei prodotti che si ottengono moltiplicandogli elementi di ogni riga (o colonna) per i rispettivi cofattori:
detA =n∑i=1
aij(cofA)ij =n∑j=1
aij(cofA)ij
Da questa definizione discende il seguente teorema.
Teorema 3.5. Per qualsiasi matrice quadrata A
(3.3) A(cofA)T = (cofA)TA = I detA
in cui I e la matrice identica. Cosı, se detA 6= 0,
A−1 =1
detA(cofA)T
Corollario 3.6. Per ogni A ∈ SO(n) si ha
cofA = A
Sia u ∈ C2(Rn; Rn) e F = ∇u. E facile verificare che allora, grazie alla possibiita diinvertire l’ordine di derivazione, si ha
div(cofF ) :=n∑j=1
(cofF )ij,j = 0.
Dimostrazione (del Teorema 3.4) Rimaneva da dimostrare che 3⇒2 . Cominciamofacendo l’ipotesi ulteriore che f ∈ C3. In seguito tale ipotesi verra rimossa. Indicato conF = ∇f , si ha
(3.4) div(cofF ) = 0.
Ora, siccome per ipotesi F ∈ SO(n) allora, per il corollario si ha cofF = F , cosicche laformula precedente diventa
div∇f = 0
cioe
(3.5) ∆f = 0.

3.7. TEOREMA DI DECOMPOSIZIONE POLARE 33
Si ha quindi che f e una funzione armonica. Si ha inoltre
|∇f |2 = |F |2 =∑ij
F 2ij = tr(FTF ) = tr(I) = n.
Riunendo il tutto si ha dunque
2|∇2f |2 = ∆|∇f |2 − 2∇f · ∇∆f = 0
da cui segue che ∇f e costante e quindi, integrando, si ottiene la (2).Rimuovendo l’ipotesi aggiuntiva f ∈ C2, si puo osservare che la (3.4) vale nel senso
delle distribuzioni. Allora vale nel senso delle distribuzioni anche la (3.5), da cui segueche f e armonica e quindi addirittura C∞. Siamo cosı ricondotti al caso precedente.
Corollario 3.7. Sia f : Rn → Rn. f e una deformazione rigida se e solo se esistonoQ ∈ SO(3) ed a ∈ Rn tali che
f(x) = Qx+ a ∀x ∈ Rn.
Osserviamo che se f(x) = Qx+a e una deformazione rigida si ha ovviamente F = ∇f = Q.
Esercizio 3.8. Dare degli esempi di deformazioni che non siano rigide.
3.7 Teorema di decomposizione polare
Teorema 3.9. Sia F una matrice invertibile di ordine n con detF > 0. Allora esistonouniche R ∈ SO(n) ed U ∈ Rn×n simmetrica e definita positiva tali che
F = RU.
Dimostrazione Sia C = FTF . Allora C e simmetrica (ovvio) e definita positiva. Infatti,per ogni v ∈ Rn si ha
Cv · v = FTFv · v = Fv · Fv = |Fv|2
quindi Cv · v ≥ 0 per ogni v e, siccome F e invertibile allora Cv · v = 0 ⇐⇒ Fv = 0⇐⇒ v = 0.
Per un corollario del teorema spettrale esiste una matrice ortogonale Q tale cheQTCQ = Λ := diag(λ1, . . . , λn) con λi > 0 per ogni i. Sia
√Λ := diag(
√λ1, . . . ,
√λn) e
definiamo U := Q√
ΛQT . Allora si ha che U e simmetrica e definita positiva e inoltre
U2 = QHQTQHQT = QH2QT = QΛQT = C.
Posto R := FU−1 si ha ovviamente F = RU e R ∈ SO(n), infatti
RTR = U−TFTFU−1 = U−TCU−1 = U−TU2U−1 = I.
Dimostriamo l’unicita. Supponiamo dunque che F = RU = SV . Da U = RTF eV = STF si ha che U2 = V 2 = FTF = C. Anzitutto osserviamo che, siccome C esimmetrica allora esistono n autovettori linearmente indipendenti che quindi costituisconouna base di Rn. Sia a uno degli autovettori di questa base. Siccome a e un autovettoredi C allora esiste un autovalore ω > 0 tale che Ca = ωa. Allora U2a = ωa e quindi
0 = (U2 − ωI)a = (U +√ωI)(U −
√ωI)a.
Posto v = (U −√ωI)a si ha Uv = −ωv da cui seguirebbe che U avrebbe un autovalore
negativo. Ne consegue che v = 0, per cui Ua =√ωa. Ragionando alla stessa maniera con
V si ottiene che V a =√ωa quindi U e V coincidono sugli autovettori di C cioe su una
base di Rn e quindi, per la linerita, coincidono su tutto lo spazio.

34 CAPITOLO 3. CINEMATICA DEI CONTINUI
3.8 Variazioni di volume, di area e di lunghezza
Variazione di lunghezza
Sia f : κ(B)→ R3 una deformazione.Consideriamo una curva γ di classe C1 in κ(B). Sia γ : [a, b] → κ(B) ⊂ R3 una sua
rappresentazione parametrica.Alla curva γ corrispondera una curva deformata f γ, di cui vogliamo calcolare la
lunghezza.
La lunghezza `0 della curva indeformata (nella configurazione κ) e data da (essendodi classe C1)
`0 =∫ b
a
∣∣dγdθ
∣∣dθ =∫ b
a
|γ(θ)|dθ
mentre a deformazione avvenuta si ha
` =∫ b
a
∣∣d(f γ)dθ
∣∣dθ.Poniamo
ds := |γ| dθ, dl :=∣∣d(f γ)
dθ
∣∣ dθ.Si tratta di due forme differenziali lineari utilizzate nella geometria differenziale localedelle curve; d` verra detta variazione di lunghezza (della curva γ sotto la deformazionef).
Per la formula di derivazione delle funzioni composte si ha
d` = |[(∇f) γ] γ|dθ = |F (γ)γ|dθ =([F (γ)γ]T [F (γ)γ]
)1/2dθ
=(γTF (γ)TF (γ)γ
)1/2dθ =
(F (γ)TF (γ)γ · γ
)1/2dθ =
(Cγ · γ
)1/2dθ
dove abbiamo posto
(3.6) C = F (γ)TF (γ) = U2
dove U e la matrice ortogonale della decomposizione polare di F .
Variazioni di area e di volume
Sia f : κ(B)→ R3 una deformazione.Consideriamo una superficie γ di classe C1 in κ. Sia γ : D → κ(B) ⊂ R3 una sua
rappresentazione parametrica, con D sottoinsieme di R2 diffeomorfo ad una palla aperta.Alla superficie γ corrispondera una superficie deformata f γ, di cui vogliamo calcolare
l’area.
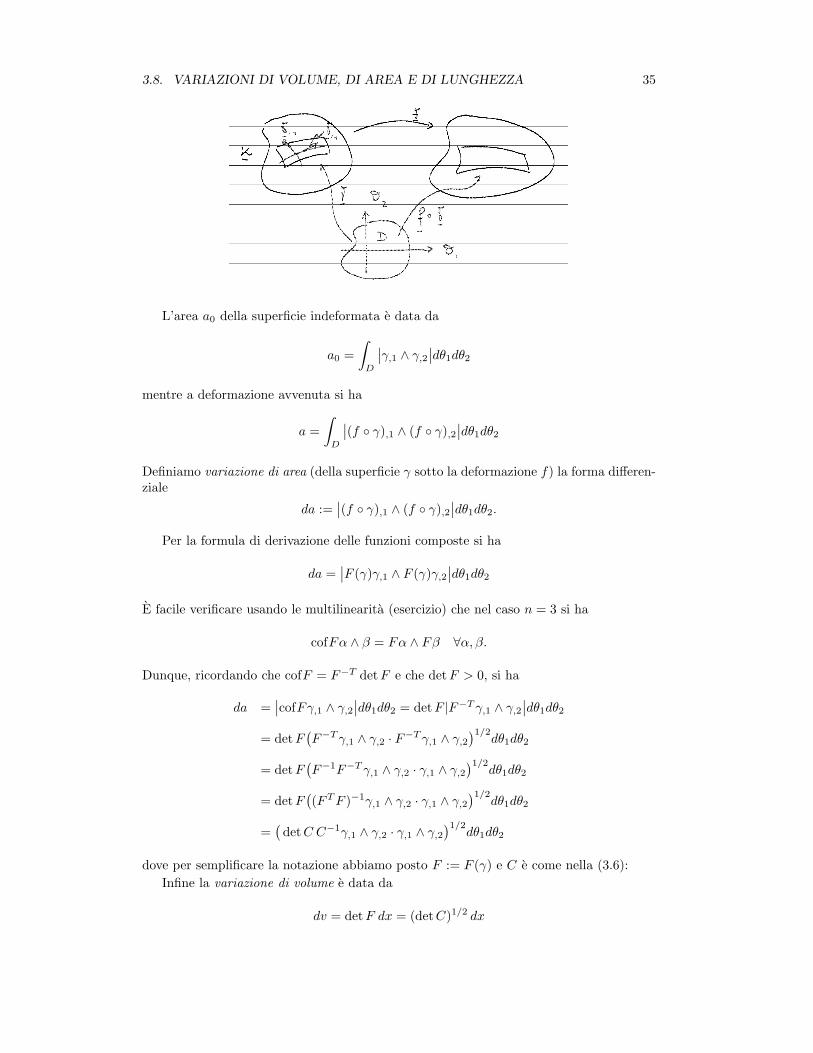
3.8. VARIAZIONI DI VOLUME, DI AREA E DI LUNGHEZZA 35
L’area a0 della superficie indeformata e data da
a0 =∫D
∣∣γ,1 ∧ γ,2∣∣dθ1dθ2
mentre a deformazione avvenuta si ha
a =∫D
∣∣(f γ),1 ∧ (f γ),2∣∣dθ1dθ2
Definiamo variazione di area (della superficie γ sotto la deformazione f) la forma differen-ziale
da :=∣∣(f γ),1 ∧ (f γ),2
∣∣dθ1dθ2.
Per la formula di derivazione delle funzioni composte si ha
da =∣∣F (γ)γ,1 ∧ F (γ)γ,2
∣∣dθ1dθ2
E facile verificare usando le multilinearita (esercizio) che nel caso n = 3 si ha
cofFα ∧ β = Fα ∧ Fβ ∀α, β.
Dunque, ricordando che cofF = F−T detF e che detF > 0, si ha
da =∣∣cofFγ,1 ∧ γ,2
∣∣dθ1dθ2 = detF |F−T γ,1 ∧ γ,2∣∣dθ1dθ2
= detF(F−T γ,1 ∧ γ,2 · F−T γ,1 ∧ γ,2
)1/2dθ1dθ2
= detF(F−1F−T γ,1 ∧ γ,2 · γ,1 ∧ γ,2
)1/2dθ1dθ2
= detF((FTF )−1γ,1 ∧ γ,2 · γ,1 ∧ γ,2
)1/2dθ1dθ2
=(
detC C−1γ,1 ∧ γ,2 · γ,1 ∧ γ,2)1/2
dθ1dθ2
dove per semplificare la notazione abbiamo posto F := F (γ) e C e come nella (3.6):Infine la variazione di volume e data da
dv = detF dx = (detC)1/2 dx

36 CAPITOLO 3. CINEMATICA DEI CONTINUI
3.9 I tensori di Cauchy-Green e di Green-Saint Venant
Si osserva quindi che le variazioni di lunghezza, d’area e di volume dipendono semplice-mente da C = U2 e non da F . In altre parole non dipendono dalla rotazione R nelladecomposizione polare F = RU .
L’applicazione lineare individuata dalla matrice
C = FTF
e detta tensore destro di Cauchy-Green.A deformazione nulla si ha F = I e C = I. La misura di deformazione
E =12
(C − I)
fa corrispondere ad una deformazione nulla il tensore nullo ed e chiamata tensore diGreen-Saint Venant o lagrangiano.
3.10 Deformazioni infinitesime
Sia κ la configurazione di riferimento in un dato corpo e χ un piazzamento.
Indichiamo, come al solito, con x = κ(X) e con y = χ(X) = f(x).Si definisce spostamento del punto X dalla posizione occupata nella configurazione κ
a quella occupata nel piazzamento χ la funzione
u(x) = f(x)− x
Il gradiente di spostamento si indica con
H(x) := ∇u(x) = F (x)− I
Una deformazione f e “piccola” se il gradiente di deformazione F differisce di poco da I.Indichiamo con
ε := |F − I| = |H|
il parametro di piccolezza della deformazione.Si ha
H = εH
|H|=: εH dove |H| = 1
che vale anche se H = 0 perche in tal caso ε = 0.Osserviamo che
(3.7) C = FTF = (I + εH)T (I + εH) = I + εHT + εH + ε2HT H

3.11. SPOSTAMENTI RIGIDI INFINITESIMI 37
Nella cosiddetta teoria infinitesima si suppone che ε << 1 e si trascurano, nell’espressionedi C, gli infinitesimi di ordine superiore al primo. Si assume cioe che
(3.8) C ' I + εHT + εH = I +HT +H.
In termini rigorosi:
Assioma 3.10. La teoria delle deformazioni infinitesime postula che le variazioni dilunghezza, area e volume siano espresse dalle relazioni precedenti sostituendo il tensore Cdi Cauchy-Green con I +HT +H.
3.11 Spostamenti rigidi infinitesimi
Se inoltre la deformazione e rigida, i.e. F = Q ∈ SO(3), siccome C = FTF = QTQ = Iallora la (3.8) diviene
I = I +HT +H
da cui segue che H = −HT , cioe il gradiente di spostamento H e un tensore emisimmetrico(skew symmetric), ovvero
H ∈ Skw := W ∈ R3×3 : W = −WT .
Dal fatto che u(x) = f(x)− x e che se f e rigida allora f(x) = Qx+ a (Corollario (3.7))e quindi u(x) = (Q− I)x+ a = Hx+ a, discende la definizione seguente.
Definizione 3.11. Uno spostamento u si dice rigido infinitesimo se esiste W ∈ Skw edun vettore a ∈ R3 per cui si ha
u(x) = a+Wx
Osservazione 3.12. Osserviamo che W ∈ Skw se e solo se W e della forma
W =
0 W12 W13
−W12 0 W23
−W13 −W23 0
=
0 W12 W13
0 W23
Skw 0
quindi W e completamente individuata da sole 3 componenti. Si verifica facilmente che,considerato il vettore ω di componenti
ω1 = −W23, ω2 = −W13, ω3 = −W12,
allora si haWx = ω ∧ x.
Sia Ω := κ(B). Indichiamo con
RΩ : = u(x) = a+Wx : W ∈ Skw, a ∈ R3= u(x) = a+ ω ∧ x : ω ∈ R3, a ∈ R3
l’insieme degli spostamenti rigidi infinitesimi su Ω.Si osservi che se |Ω| = L3(Ω) < +∞ allora
RΩ ⊂ L2(Ω; R3).
Esercizio 3.13. RΩ e un sottospazio di L2(Ω; R3) di dimensione finita.

38 CAPITOLO 3. CINEMATICA DEI CONTINUI
Dato che RΩ e un sottospazio di dimensione finita di uno spazio di Hilbert allora echiuso in L2(Ω; R3) quindi, per il Teorema delle Proiezioni (vedi Rudin [30], Teorema4.11), esiste una ed una sola coppia di applicazioni P e Q tali che P : L2(Ω; R3) → RΩ,Q : L2(Ω; R3)→ R⊥Ω e
u = Pu+Qu
per ogni u ∈ L2(Ω; R3). P e Q sono chiamate proiezioni ortogonali di L2(Ω; R3) su RΩ eR⊥Ω e godono delle seguenti proprieta:
1. se u ∈ RΩ allora Pu = u e Qu = 0;
2. se u ∈ R⊥Ω allora Pu = 0 e Qu = u;
3. ‖u− Pu‖ = inf‖u− q‖ : q ∈ RΩ per ogni u ∈ L2(Ω; R3);
4. ‖u‖22 = ‖Pu‖22 + ‖Qu‖22;
5. P e Q sono lineari.
Esercizio 3.14. Sia u ∈ L2(Ω; R3). Dimostrare che r = Pu se e solo se r ∈ RΩ e∫Ω
(u− r) · q dx = 0 ∀ q ∈ RΩ
Calcolo di Pu
Partiamo dal fatto che ∫Ω
(u− Pu) · q dx = 0 ∀ q ∈ RΩ.
Poiche q ∈ RΩ se e solo se esistono ω, a ∈ R3 tali che
q = a+ ω ∧ x
allora la condizione precedente diviene
(3.9)∫
Ω
(u− Pu) · (a+ ω ∧ x) dx = 0 ∀ a, ω ∈ R3.
Prendendo ω = 0 si ha ∫Ω
(u− Pu) · a dx = 0 ∀ a ∈ R3,
da cui segue che ∫Ω
(u− Pu) dx = 0.
Poiche Pu ∈ RΩ allora esistono ωu ∈ R3 e au ∈ R3 tali che
Pu = au + ωu ∧ x
che sostituito sopra da ∫Ω
(u(x)− au − ωu ∧ x) dx = 0
equivalente a
(3.10)∫
Ω
u(x) dx− |Ω|au − |Ω|ωu ∧ x(Ω) = 0

3.11. SPOSTAMENTI RIGIDI INFINITESIMI 39
dove x(Ω) := |Ω|−1∫
Ωx dx e il baricentro di Ω.
Prendendo a = 0 nella (3.9) e sostituendo anche Pu si ha invece∫Ω
(u− au − ωu ∧ x) · (ω ∧ x) dx = 0 ∀ω ∈ R3.
da cui (scambiando i prodotti)∫Ω
(u− au − ωu ∧ x) ∧ x dx = 0
e quindi
(3.11)∫
Ω
u ∧ x dx−∫
Ω
(ωu ∧ x) ∧ x dx− |Ω|au ∧ x(Ω) = 0.
Scegliendo un riferimento centrale cioe con origine in x(Ω) si ha x(Ω) = 0 e (3.10) e (3.11)si semplificano in
(3.12)∫
Ω
u(x) dx− |Ω|au = 0
(3.13) −∫
Ω
x ∧ u dx+∫
Ω
x ∧ (ωu ∧ x) dx = 0.
Dalla (3.12) segue che
au =1|Ω|
∫Ω
u(x) dx
Nella (3.13), ricordando che a ∧ (b ∧ c) = (a · c)b− (a · b)c si ha
x ∧ (ωu ∧ x) = |x|2ωu − (x · ωu)x = (|x|2I − x⊗ x)ωu
dove, dati due vettori a, b ∈ Rn, a⊗ b denota il tensore di tipo (1, 1) (matrice)
a⊗ b = (aibj)i,j=1,...,n
detto prodotto tensoriale di a e b o diade.Si ha dunque ∫
Ω
x ∧ (ωu ∧ x) dx =∫
Ω
(|x|2I − x⊗ x) dxωu = IOωu
doveIO =
∫Ω
(|x|2I − x⊗ x) dx
e il tensore d’inerzia di Ω (pensato come corpo omogeneo di densita unitaria). Ricordiamoche si tratta di un tensore simmetrico (ovvio) e definito positivo a meno di casi degeneri.
Dalla (3.13) si ottiene quindi
ωu = I−1O
∫Ω
x ∧ u dx
Ne consegue che
Pu = au + ωu ∧ x =1|Ω|
∫Ω
u dx+ I−1O
∫Ω
x ∧ u dx ∧ x

40 CAPITOLO 3. CINEMATICA DEI CONTINUI
3.12 Parti simmetrica ed emisimmetrica del gradiente
Osserviamo cheH(x) = ∇u(x) = E(x) +W (x)
dove E(x) = Eu(x) := 12
(∇u(x)+∇u(x)T
)e W (x) = Wu(x) := 1
2
(∇u(x)−∇u(x)T
)sono
rispettivamente la parte simmetrica e la parte emisimmetrica del gradiente di spostamento.Evidentemente Eu e un tensore simmetrico mentre Wu e emisimmetrico.
Osserviamo inoltre che se u ∈ L2(Ω; R3) (o anche semplicemente una distribuzione,cioe ui ∈ D ′(Ω), i = 1, 2, 3) allora il gradiente di spostamento H puo essere inteso nelsenso delle distribuzioni e si ha
Wij,k = Eik,j − Ejk,i;
infatti, grazie alla possibilita di scambiare l’ordine di integrazione
(3.14) 2Wij,k = (ui,j−uj,i),k = ui,jk−uj,ik = ui,kj+uk,ij−uk,ji−uj,ki = 2Eik,j−2Ejk,i
Teorema 3.15. Sia u ∈ D ′(Ω; R3) := D ′(Ω)3. Le seguenti proposizioni sono equivalenti
1. u e uno spostamento rigido infinitesimo;
2. Eu = 0.
Dimostrazione 1⇒2 e banale perche il gradiente di u e emisimmetrico e quindi ha partesimmetrica nulla.
Mostriamo che 2⇒1. Se Eu = 0 allora, per la relazione (3.14) si ha
Wij,k = 0,
da cuiHij,k = Eij,k +Wij,k = 0.
Le distribuzioni Hij , avendo gradiente nullo, sono dunque costanti. Dunque H(x) = C(matrice costante) per ogni x. Ne consegue che esiste a ∈ R3 tale che
u(x) = a+Hx
(infatti, ∇(u(x)−Hx) = H −H = 0, da cui segue che u(x)−Hx e costante). Dato cheEu(x) = 0 si ha H ∈ Skw e quindi u ∈ RΩ.
3.13 Moto di un corpo
Il moto di un corpo B in un intervallo di tempo I e definito da una famiglia di piazzamenti
χt : B → χt(B) := Ωt, t ∈ I
con Ωt aperti regolari di R3 (vedi capitolo precedente), e di deformazioni
f(·, t1, t0) : Ωt0 → Ωt1 , t0, t1 ∈ I
soddisfacenti le seguenti proprieta
1. f(·, t, t) = id per ogni t ∈ I;
2. f(·, t2, t1) f(·, t1, t0) = f(·, t2, t0) per ogni t0, t1, t2 ∈ I.
Fissato un t0 ∈ I come istante di riferimento indicheremo con Ω := Ωt0 e il moto si diraregolare (di classe C2) se le funzioni (x, t)→ f(x, t, t0) sono di classe C2(Ω× I).
Il moto si dice rigido se le deformazioni f(·, t1, t0) sono isometrie per ogni t0, t1 ∈ I.

Capitolo 4
Dinamica dei continui
4.1 Riferimenti bibliografici
I principali riferimenti bibliografici per questo capitolo sono [25, 32].
4.2 Grandezze lagrangiane e euleriane
In accordo con le notazioni del capitolo precedente, dato un corpo B in moto e X ∈ B,indicheremo con x la posizione nella configurazione di riferimento κ = χt0 e y la posizionenella configurazione attuale (deformata), ovvero
y = f(x, t) := f(x, t, t0)
Sia Ω = κ(B). Data una grandezza fisica definita sul corpo in moto, una sua rappresen-tazione lagrangiana e costituita da una funzione (scalare, vettoriale o tensoriale) g(x, t),(x, t) ∈ Ω× I, definita sulla configurazione di riferimento.
Si definisce rappresentazione euleriana della stessa grandezza fisica la sua immagine,mediante la deformazione f , nella configurazione attuale, cioe la funzione
h(y, t) := g(f−1(y, t), t), (y, t) ∈ Ωt × I,
dove f−1(y, t) denota l’inversa della funzione x→ f(x, t) ad istante t fissato.Nel seguito si dira che una funzione h(y, t) e di classe Ck in y ∈ Ωt e t ∈ I se la
funzione (x, t) 7→ h(f(x, t), t) e di classe Ck(Ω× I).
Velocita
Fissato x ∈ Ω, la curva di rappresentazione parametrica t 7→ f(x, t) e la traiettoriapercorsa durante il moto dalla particella X che nella configurazione di riferimento occupala posizione x.
Si definisce velocita lagrangiana il vettore derivato della traiettoria, cioe
V (x, t) =dy
dt:=
∂
∂tf(x, t)
la velocita nella configurazione di riferimento e velocita euleriana
U(y, t) = y := V (f−1(y, t), t)
la velocita nella configurazione attuale Ωt.
41

42 CAPITOLO 4. DINAMICA DEI CONTINUI
Relazione tra le derivate
Se g : Ω× I → R e derivabile, allora si ha che anche h(y, t) := g(f−1(y, t), t) e derivabilee sussiste la seguente relazione tra le derivate
dg
dt(x, t) =
d
dt[h(f(x, t), t)] =
[∂h∂t
(y, t) + (U · ∇)h(y, t)]y=f(x,t)
che si scrive anche, con abuso di notazione, semplicemente
dg
dt=∂h
∂t+ (U · ∇)h.
In tal caso, per evitare confusione, conviene tenere sempre distinte le differenti notazioniddt e ∂
∂t , per ricordare che il primo membro e espresso nelle variabili lagrangiane (x, t) eil secondo nelle variabili euleriane (y, t) e c’e di mezzo un cambiamento di variabile perpassare dalle une alle altre. Un ulteriore abuso di notazione consiste nell’identificare g eh e si usa quindi anche scrivere
d
dt=
∂
∂t+ U · ∇
e ddt e anche detta derivata totale (o sostanziale, o materiale, o convettiva). Quando
applicato ad una grandezza euleriana il simbolo ddt avra quindi da ora in poi sempre il
significato di derivata materiale.
Accelerazione
In variabili lagrangiane
a(x, t) =dV
dt=d2y
dt2:=
∂2
∂t2f(x, t)
L’accelerazione euleriana, denotata con γ o y, risulta allora
γ(y, t) := a(f−1(y, t), t) = [a(x, t)]x=f−1(y,t) = [dV
dt]x=f−1(y,t) =
∂U
∂t(y, t) + (U · ∇)U(y, t)
cioe
γ =dU
dt
4.3 Derivazione di integrali dipendenti da un parametro
Ricordiamo il risultato seguente.
Teorema 4.1 (del trasporto). Sia h = h(y, t) una funzione di classe C1 in y ∈ Ωt e t ∈ Ie supponiamo che il moto (e quindi la deformazione) sia di classe C2. Allora la funzione
t 7→∫
Ωt
h(y, t) dy
e derivabile in I e si ha
d
dt
∫Ωt
h(y, t) dy =∫
Ωt
(∂h∂t
(y, t) + div(hU)(y, t))dy.
Per il teorema della divergenza si ha inoltre la seguente conseguenza.

4.4. DISTRIBUZIONE DI MASSA 43
Corollario 4.2. Nelle ipotesi del teorema precedente, e se Ω ha frontiera sufficientementeregolare (ad esempio lipschitziana), allora si ha
d
dt
∫Ωt
h dy =∫
Ωt
∂h
∂tdy +
∫∂Ωt
hU · ndσ
dove n e il versore normale esterno a ∂Ωt (che deve esistere in ogni punto della frontiera,con l’eccezione al piu di un insieme di misura nulla).
4.4 Distribuzione di massa
Dato un corpo B in moto in un intervallo di tempo I e quindi assegnata una famigliaΩtt∈I di aperti regolari di R3 occupati da B durante il moto, supponiamo che per ognit ∈ I esista una misura mt di Borel su Ωt detta distribuzione di massa all’istante t.
Supponiamo inoltre che le misure mt siano assolutamente continue rispetto alle misuradi Lebesgue 3-dimensionale L3; in tal caso, per il Teorema di Radon-Nikodym, per ognit ∈ I esiste una funzione ρ(·, t) ∈ L1(Ωt) tale che
mt = ρ(·, t) · L3
detta densita di massa del corpo all’istante t.Converra spesso assumere che ρ(y, t) sia di classe C1 rispetto al complesso delle
variabili (y, t).
4.5 Sottocorpi
Scegliamo κ = χt0 come configurazione di riferimento e sia Ω = κ(B). Un sottoinsieme Pdel corpo B sara detto un sottocorpo se esiste A aperto in Ω tale che P = κ−1(A).
Il corpo B in moto e visto come famiglia di sistemi materiali cioe di spazi con misura
(Ωt,B(Ωt),mt)t∈I
dove B(Ωt) denota la σ-algebra di Borel di Ωt come sottospazio topologico di R3. Poichele deformazioni f(·, t, t0) sono diffeomorfismi per ogni t ∈ I, allora preso A aperto in Ωha che
At = f(A, t, t0) e aperto in Ωt.
Su ogni At si puo dunque definire una misura di Borel m|At definendo
m|At(B) := mt(B) ∀B ∈ B(At)
e, poiche χt(P) = At, la famiglia At,B(At),m|Att∈I definisce un sistema materialerelativo al moto del sottocorpo P = κ−1(A).
4.6 Conservazione della massa
Assioma 4.3. Assumiamo che durante il moto la massa di ogni sottocorpo si mantengacostante.
Poiche la massa di un sottocorpo At,B(At),m|Att∈I e data da∫At
dmt =∫At
ρ(y, t) dy,

44 CAPITOLO 4. DINAMICA DEI CONTINUI
l’assioma e tradotto dalla condizione
d
dt
∫At
dmt = 0
Teorema 4.4 (Equazione di continuita della massa). Nell’ipotesi ρ ∈ C1 e moto di classeC2 si ha
∂ρ
∂t+ div(ρU) = 0
per ogni t ∈ I e y ∈ Ωt.
Dimostrazione Basta applicare il Teorema 4.1 alla funzione∫At
dmt =∫At
ρ(y, t)dy
e sfruttare l’arbitrarieta di At e la continuita dell’integranda.
Una conseguenza della conservazione della massa e riassunta nella seguente propo-sizione, per dimostrare la quale basta appplicare il teorema di derivazione di un integraledipendente da un parametro e sfruttare l’equazione di continuita.
Proposizione 4.5. Sia h = h(y, t) una funzione di classe C1 in y ∈ Ωt e t ∈ I esupponiamo che il moto sia di classe C2 e la densita di massa di classe C1. Allora si ha
d
dt
∫Ωt
h(y, t)ρ(y, t) dy =∫
Ωt
dh
dt(y, t)ρ(y, t) dy
dove la ddt a secondo membro denota la derivata materiale.
Osservazione 4.6. La tesi della proposizione precedente si puo scrivere anche nellaseguente maniera molto suggestiva
d
dt
∫Ωt
h dmt(y) =∫
Ωt
dh
dtdmt(y)
4.7 Quantita di moto
Dato un sottocorpo P = κ−1(A) di B definiamo quantita di moto di P
Q(P, t) :=∫χt (P)
y(t) dmt(y) =∫At
U(y, t)ρ(y, t) dy
dove At = χt(P). Indichiamo con f(P, t) la risultante delle forze agenti su P all’istante
t. Nelle ipotesi di regolarita C2 del moto e C1 della densita di massa, per il Teorema 4.1si ha che Q(P, t) e derivabile rispetto a t.
Assumiamo che valga il seguente principio di conservazione della quantita di moto(prima equazione cardinale).
Assioma 4.7 (Principio di conservazione della quantita di moto). Per ogni sottocorpo Pdi B e in ogni istante t ∈ I
d
dtQ(P, t) = f(P, t).

4.8. IPOTESI SULLE FORZE 45
4.8 Ipotesi sulle forze
Sulla natura di f(P, t) assumiamo che valga il seguente assioma, nel quale evitiamo, persemplicita, di indicare esplicitamente la dipendenza da t.
Assumiamo che la risultante delle forze esercitate su P dall’esterno e dal resto delcorpo B sia somma di due termini
f(P) = fb(P) + fc(P)
in cui fb(P) rappresenta forze di volume, causate per esempio dalla gravita o da campielettromagnetici mentre fc(P) rappresenta le forze di contatto, dovute per esempio all’in-terazione tra i sottocorpi attraverso le parti comuni della frontiera.
Per quanto riguarda le forze di volume, e naturale assumere che si possano scriverenella forma
fb(P) =∫At
b dy, b ∈ L1(At; R3)
Quanto alle forze di contatto, faremo la seguente ipotesi nota come principio deglisforzi di Cauchy. Indichiamo con S2 := n ∈ R3 : |n| = 1 la sfera unitaria di R3.
Assioma 4.8 (principio degli sforzi). Supponiamo che per ogni t ∈ I esista una funzionedetta sforzo (in inglese stress)
T (·, ·, t) : Ωt × S2 → R3
(y, n) 7→ T (y, n, t)
tale che, ogniqualvolta la superficie ∂At e sufficientemente regolare, si abbia
fc(P) =∫∂At
T (y, n(y), t) da(y)
dove n(y) rappresenta il versore normale esterno a ∂At e da e una misura di superficie.
Il principio degli sforzi asserisce che in ogni punto y la densita delle forze di contatto(cioe lo sforzo T ) dipende dal sottocorpo P soltanto attraverso la normale ad At o, inaltre parole che, fissato y, lo sforzo T ha un valore comune per tutte le superfici che in yhanno lo stesso piano tangente.
4.9 Il lemma fondamentale di Cauchy
Omettiamo per comodita di indicare la variabile t, ovvero supponiamo di considerare ilcorpo in un istante t fissato.
Lemma 4.9 (lemma fondamentale di Cauchy). Assumiamo che le funzioni (y, n) 7→T (y, n) e y 7→ b(y) siano continue nei rispettivi domini. Allora esiste un campo tensorialedel second’ordine continuo (i.e. una funzione continua a valori tensoriali) σ(y), dettatensore degli sforzi, tale che
T (y, n) = σ(y)n per ogni y ∈ Ωt e ogni n ∈ S2.
Dimostrazione Fissata una base (e1, e2, e3) in R3 e supposto che 0 ∈ Ωt, si ha che
(4.1) T (0, ei) =: σji ej , i = 1, 2, 3.
In generaleT (y, ei) =: σji(y) ej , i = 1, 2, 3.

46 CAPITOLO 4. DINAMICA DEI CONTINUI
Sia n = (n1, n2, n3) ∈ S2 con ni > 0 per ogni i = 1, 2, 3. In tal caso la semiretta didirezione n uscente da 0 non e parallela ad alcun piano coordinato. Fissato h > 0, ilpiano ortogonale alla semiretta e distante h da 0 ha equazione
x · n = h.
Questo piano individua un tetraedro aperto Ah di vertici 0, V1, V2 e V3.
nh
V
V
V
1
3
2O
Ah
Utilizzando ad esempio il calcolo integrale in piu variabili, si dimostra facilmente che
(4.2)|Ah| =
h3
6n1n2n3, |V1V2V3| =
h2
2n1n2n3,
|0V2V3| = n1|V1V2V3|, |0V1V2| = n3|V1V2V3|, |0V1V3| = n2|V1V2V3|,
dove il modulo indica il volume nel caso di Ah e l’area negli altri casi. Siccome 0 e unpunto interno di Ωt, allora si ha Ah ⊂ Ωt per ogni h abbastanza piccolo. Consideriamo ilsottocorpo Ah = κ−1(Ah). Per il principio di conservazione della quantita di moto si ha
d
dtQ(Ah, t) = f(Ah, t).
che esplicitiamo usando le definizioni di Q ed f . A primo membro abbiamo
d
dtQ(Ah, t) =
d
dt
∫Ah
Uρdy =∫Ah
dU
dtρ dy =
∫Ah
γρ dy
e al secondof(Ah, t) =
∫Ah
b dy +∫∂Ah
T (y, n(y)) dσ(y).
Allora la prima equazione cardinale diviene
(4.3)∫Ah
(γρ− b) dy =∫∂Ah
T (y, n(y)) dσ(y)
Esplicitando ulteriormente il secondo membro si ha
(4.4)
∫∂Ah
T (y, n(y)) dσ(y) =∫
0V2V3
T (y,−e1) dy2dy3 +∫
0V1V2
T (y,−e3) dy1dy2+
+∫
0V1V3
T (y,−e2) dy1dy3 +∫V1V2V3
T (y, n) dσ(y)

4.9. IL LEMMA FONDAMENTALE DI CAUCHY 47
Consideriamo il primo termine a secondo membro. Poiche per ipotesi la mappa y 7→T (y,− e1) e continua allora
T (y,− e1) = T (0,− e1) + T (y,− e1)− T (0,− e1) = T (0,− e1) + g(y)
e g e una funzione continua e infinitesima per y → 0. Si ha dunque, usando il teoremadella media integrale, che∫
0V2V3
T (y,−e1) dy2dy3 = T (0,− e1)|0V2V3|+ |0V2V3|−∫
0V2V3
g(0, y2, y3)dy2dy3
= |0V2V3|(T (0,− e1) + o(1)
)per h→ 0.
Analogamente si ha∫0V1V2
T (y,−e3) dy1dy2 = |0V1V2|(T (0,− e3) + o(1)
),∫
0V1V3
T (y,−e2) dy1dy3 = |0V1V3|(T (0,− e2) + o(1)
),∫
V1V2V3
T (y, n) dσ(y) = |V1V2V3|(T (0, n) + o(1)
).
Utilizzando le (4.2) si ha allora∫∂Ah
T (y, n(y)) dσ(y) = |V1V2V3|(niT (0,− ei) + T (0, n) + o(1)
)= O(h2)
(niT (0,− ei) + T (0, n) + o(1)
)Considerando ora il primo membro della (4.3), si ha∫
Ah
(γρ− b) dy =(γ(0)ρ(0)− b(0) + o(1)
)O(h3).
Eguagliando primo e secondo membro e dividendo per O(h2) si ha
niT (0,− ei) + T (0, n) =(γ(0)ρ(0)− b(0) + o(1)
)O(h)
da cui, passando al limite per h→ 0 si ottiene
T (0, n) = −niT (0,− ei) (somma su i).
Questa relazione, che vale quando ni > 0, continua a valere, per la supposta continuitadi T rispetto ad n, anche se una o due componenti si annullano. Preso n = ei si ha
(4.5) T (0, ei) = −T (0,− ei), i = 1, 2, 3
che, riunita con la (4.1), fornisce
T (0,− ei) = −σji ej .
Infine allora
(4.6) T (0, n) = σjini ej = σn,
che vale quando ni ≥ 0. Se invece vi sono componenti negative allora le (4.2) continuano avalere sostituendo le ni con i rispettivi valori assoluti, mentre diventeranno positive alcunecomponenti dei versori normali alle facce del tetraedro cioe, se ad esempio se n1 < 0 allorail vettore − e1 che compare nella (4.4) cambiera in e1, e cosı via. Fatti quindi i dovutiadattamenti, il ragionamento conduce allo stesso risultato e quindi la (4.6) vale per ognin ∈ S2. In maniera ovvia essa si generalizza poi ad ogni y ∈ Ω e la continuita di σ(y)segue immediatamente da quella di T .

48 CAPITOLO 4. DINAMICA DEI CONTINUI
4.10 Azione e reazione
Osserviamo che la (4.5) stabilisce una proprieta di azione e reazione dello sforzo che valein generale. Dal lemma fondamentale si trae infatti la seguente conseguenza.
Corollario 4.10 (principio di azione e reazione degli sforzi). Per ogni y ∈ Ωt e per ognin ∈ S2 si ha
T (y, n) = −T (y,−n).
Dimostrazione Per la linearita si ha −T (y,−n) = −σ(y)(−n) = σ(y)n = T (y, n).
In pratica cio significa che all’azione esercitata sul sottocorpo P dal resto del corpo Bcorrisponde un’azione opposta (reazione) esercitata da P sul resto del corpo.
4.11 Prima equazione fondamentale del moto di uncorpo continuo
Reintroducendo la variabile t abbiamo che, in generale, σ = σ(x, t). In questa sezioneriscriviamo il principio di conservazione della quantita di moto, usando il tensore deglisforzi di Cauchy. In seguito ci occuperemo anche del principio di conservazione delmomento della quantita di moto, ovvero della seconda equazione cardinale.
Supponiamo in questa sezione, che σ sia di classe C1 in (y, t).
Teorema 4.11 (Prima equazione fondamentale). Dato un corpo continuo in moto regolarecon densita di massa ρ(y, t) di classe C1 e soggetto all’azione di forze esterne di volumecon densita b(y, t) continua in y, si ha, per ogni t ∈ I
ργi − σij,j = bi in Ωt, i = 1, 2, 3
ovvero, in forma vettoriale
(4.7) ργ − divσ = b in Ωt.
Dimostrazione Consideriamo un sottocorpo P di B che occupi all’istante t la regioneAt ⊂⊂ Ωt. Le forze esterne f(P, t) agenti su P sono forze di volume di densita b(y, t) e leforze di contatto esercitate dal resto del corpo su P e prescritte dal principio degli sforzi.Per il principio di conservazione della quantita di moto e il teorema della divergenza si hadunque ∫
At
γi(y, t)ρ(y, t) dy =∫At
bi(y, t) dy +∫∂At
T (y, n)i da(y)
=∫At
bi(y, t) dy +∫∂At
σij(y, t)nj da(y)
=∫At
bi(y, t) dy +∫At
σij,j (y, t) da(y)
dove da indica la misura di superficie. Poiche l’uguaglianza vale su ogni sottoinsiemeaperto At ⊂⊂ Ωt e la funzione integranda e continua, segue la tesi.
L’equazione (4.7) e anche detta prima equazione indefinita della dinamica dei continuiperche in essa non compare una condizione al contorno che deve essere necessariamentesoddisfatta quando il corpo e soggetto all’azione di forze esterne.
4.12. SECONDA EQUAZIONE FONDAMENTALE E SIMMETRIA DEL TENSORE DEGLI SFORZI49
Proposizione 4.12. Se sulla frontiera di Ωt, che supponiamo sufficientemente regolare,agisce una forza di contatto di densita superficiale g(y, t) continua in y, allora si ha
σ(y, t)n(y) = g(y, t)
per ogni t ∈ I e per ogni y ∈ ∂Ωt in cui esiste il versore normale n(y).
Dimostrazione Diamo qui solo uno sketch della dimostrazione, omettendo i dettagli.Sia y ∈ ∂Ωt in cui esiste il versore normale n(y).
Considerato un sistema di riferimento locale con e3 = n, si pone l’origine del riferimen-to in y. Nel piano y3 = −δ si considera una palla B2
δ di R2 con centro in (y1, y2) = (0, 0) eraggio δ. Per δ abbastanza piccolo e possibile considerare la superficie ∂Ωt in un intornodi 0 come grafico della funzione γδ : B2
δ → ∂Ωt, tale che γ(0) = y.Per δ abbastanza piccolo si avra che l’aperto
Ωδ = (y1, y2, y3) : (y1, y2) ∈ B2δ , δ < y3 < γ(y1, y2)
e contenuto in Ωt. A questo punto la tesi si ottiene esprimendo la conservazione dellaquantita di moto su Ωδ ∫
Ωδ
(ργ − f) dy =∫∂Ωδ
T (y, n) da(y),
ricordando che T (y, n) = g(y, t) su ∂Ωδ ∩ ∂Ωt, e facendo tendere δ a 0.
4.12 Seconda equazione fondamentale e simmetria deltensore degli sforzi
Dato un sottocorpo P = κ−1(A) di B definiamo momento della quantita di moto di Prispetto ad 0 (origine del riferimento)
K0(P, t) :=∫χt (P)
y ∧ y(t) dmt(y) =∫At
y ∧ U(y, t)ρ(y, t) dy
Nelle ipotesi di regolarita C2 del moto e C1 della densita di massa, per il Teorema 4.1 siha che K0(P, t) e derivabile rispetto a t.
Assumiamo che valga il seguente principio di conservazione del momento della quantitadi moto (seconda equazione cardinale).
Assioma 4.13 (principio di conservazione del momento della quantita di moto). Per ognisottocorpo P di B e in ogni istante t ∈ I
d
dtK0(P, t) = Ω0(P, t)
dove Ω0(P, t) denota il momento risultante delle forze agenti su P rispetto al polo Osupposto fisso o con veocita parallela a quella del centro di massa.
Usando il principio degli sforzi come abbiamo fatto in precedenza con la prima equazionecardinale, si perviene al seguente risultato.
Teorema 4.14 (seconda equazione fondamentale). Nelle ipotesi di regolarita C2 del motoe C1 della densita di massa e del tensore degli sforzi (rispetto ad y), nonche la continuitadi b rispetto ad y, si ha, in ogni istante t ∈ I
σT = σ in Ωt

50 CAPITOLO 4. DINAMICA DEI CONTINUI
Dimostrazione Consideriamo un sottocorpo P di B che occupi all’istante t la regioneAt ⊂⊂ Ωt. Le forze esterne f(P, t) agenti su P sono forze di volume di densita b(y, t) e leforze di contatto esercitate dal resto del corpo su P e prescritte dal principio degli sforzi.Rispetto ad un riferimento centrale, per il principio di conservazione del momento dellaquantita di moto si ha dunque
(4.8)∫At
y ∧ γ(y, t)ρ(y, t) dy =∫
Ωt
y ∧ b(y, t) dy +∫∂At
y ∧ T (y, n) da(y)
Si tratta di un’equazione vettoriale la cui prima componente e∫At
(y2γ3 − y3γ2)ρ(y, t) dy =∫At
(y2b3 − y3b2) dy +∫∂At
(y2σ3jnj − y3σ
2jnj) da(y)
=∫At
(y2b3 − y3b2) dy +∫At
[(y2σ3j),j − (y3σ
2j),j ] dy
=∫At
(y2b3 − y3b2) dy +∫At
[y2σ3j,j + σ32 − y3σ
2j,j σ
32] dy.
Raccogliendo y2 e y3 si ha∫At
[y2(γ3ρ− b3 − σ3j,j )− y3(γ2ρ− b2 − σ2j
,j ) + σ32 − σ23] dy = 0.
Per la prima equazione fondamentale si ha, d’altra parte, che i termini entro le parentesitonde nell’integrale sono nulli e di conseguenza si ha∫
At
[σ32 − σ23] dy = 0 per ogni At ⊂⊂ Ωt,
da cui segue che σ32 = σ23. Le uguaglianze σ13 = σ31 e σ12 = σ21 seguono analogamentedalla seconda e dalla terza componente dell’equazione (4.8).
4.13 Equazioni del moto ed equazioni di equilibrio
Il problema fonadamentale della dinamica dei corpi continui consiste nel determinarneil moto quando si suppongono assegnate le forze esterne di volume e di superficie e lecondizioni iniziali e al contorno.
A tale scopo abbiamo a disposizione le seguenti equazioni ρy − divσ = b in ΩtσT = σ in Ωtσn = g su ∂Ωt
a cui puo essere eventualmente aggiunta l’equazione di continuita della massa. Dalleequazioni del moto si traggono poi le seguenti equazioni di equilibrio −divσ = b in Ωt
σT = σ in Ωtσn = g su ∂Ωt
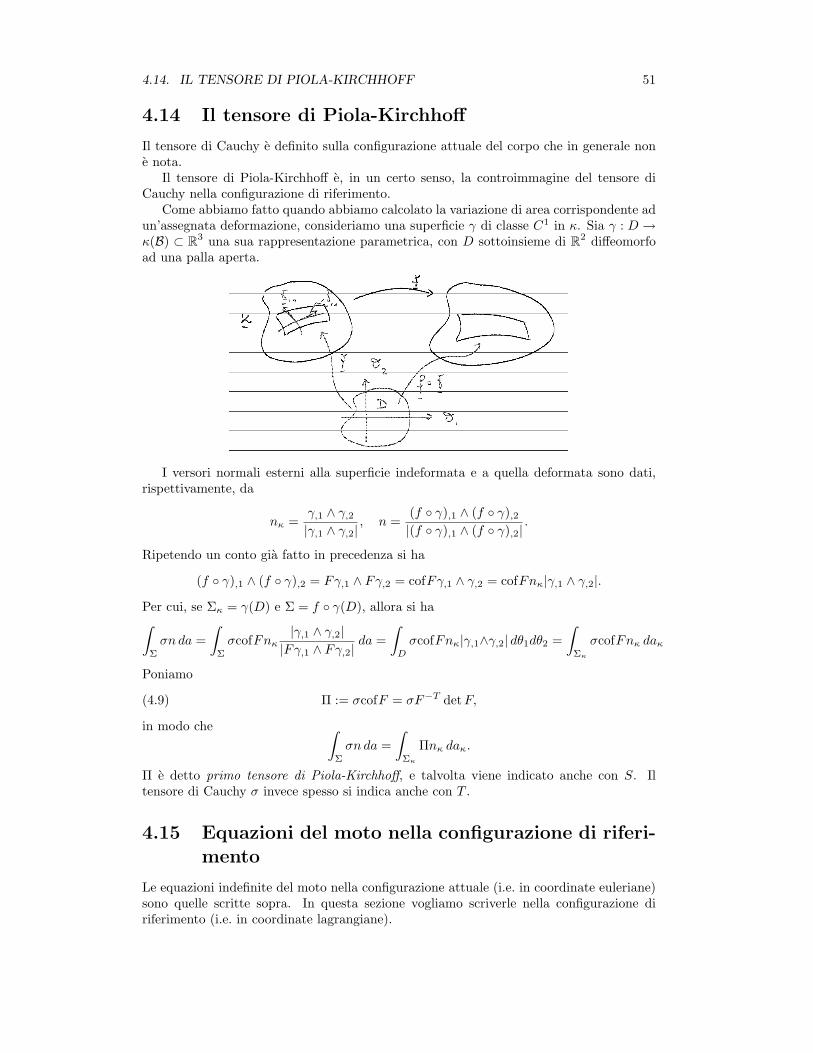
4.14. IL TENSORE DI PIOLA-KIRCHHOFF 51
4.14 Il tensore di Piola-Kirchhoff
Il tensore di Cauchy e definito sulla configurazione attuale del corpo che in generale none nota.
Il tensore di Piola-Kirchhoff e, in un certo senso, la controimmagine del tensore diCauchy nella configurazione di riferimento.
Come abbiamo fatto quando abbiamo calcolato la variazione di area corrispondente adun’assegnata deformazione, consideriamo una superficie γ di classe C1 in κ. Sia γ : D →κ(B) ⊂ R3 una sua rappresentazione parametrica, con D sottoinsieme di R2 diffeomorfoad una palla aperta.
I versori normali esterni alla superficie indeformata e a quella deformata sono dati,rispettivamente, da
nκ =γ,1 ∧ γ,2|γ,1 ∧ γ,2|
, n =(f γ),1 ∧ (f γ),2|(f γ),1 ∧ (f γ),2|
.
Ripetendo un conto gia fatto in precedenza si ha
(f γ),1 ∧ (f γ),2 = Fγ,1 ∧ Fγ,2 = cofFγ,1 ∧ γ,2 = cofFnκ|γ,1 ∧ γ,2|.
Per cui, se Σκ = γ(D) e Σ = f γ(D), allora si ha∫Σ
σn da =∫
Σ
σcofFnκ|γ,1 ∧ γ,2||Fγ,1 ∧ Fγ,2|
da =∫D
σcofFnκ|γ,1∧γ,2| dθ1dθ2 =∫
Σκ
σcofFnκ daκ
Poniamo
(4.9) Π := σcofF = σF−T detF,
in modo che ∫Σ
σn da =∫
Σκ
Πnκ daκ.
Π e detto primo tensore di Piola-Kirchhoff, e talvolta viene indicato anche con S. Iltensore di Cauchy σ invece spesso si indica anche con T .
4.15 Equazioni del moto nella configurazione di riferi-mento
Le equazioni indefinite del moto nella configurazione attuale (i.e. in coordinate euleriane)sono quelle scritte sopra. In questa sezione vogliamo scriverle nella configurazione diriferimento (i.e. in coordinate lagrangiane).

52 CAPITOLO 4. DINAMICA DEI CONTINUI
Osserviamo che dalla (4.9) si puo ricavare σ in termini di Π. Infatti
σ =1
detFΠFT .
Ne consegue immediatamente che
σT = σ ⇐⇒ ΠFT = FΠT ⇐⇒ ΠFT ∈ Sym
che traduce quindi la simmetria del tensore degli sforzi.La prima equazione fondamentale in forma integrale e∫
At
ρy dy =∫∂At
σn da(y) +∫At
b dy
che, col cambiamento di variabile y = f(x, t), cioe riportata sulla configurazione diriferimento, diviene ∫
A
ρy detF dx =∫∂A
Πnκ daκ(x) +∫A
bdetF dy
e, col teorema della divergenza∫A
ρy detF dx =∫A
divΠ dx+∫A
bdetF dx
da cui si ottiene, per l’arbitrarieta di A aperto in Ω,
(4.10) ρκy − divΠ = bκ in Ω
dove ρκ := ρdetF e bκ = bdetF . A questa va aggiunta la condizione al contorno
(4.11) Πnκ = gκ
dove gκ = g detF , la condizione di simmetria
(4.12) ΠFT ∈ Sym
e l’equazione di continuita della massa1
∂ρκ∂t
= 0
Nella impostazione del problema del moto, sia che la si faccia in variabili euleriane chelagrangiane, abbiamo dunque a disposizione 7 equazioni scalari in 13 incognite.
Il fatto che quindi il problema dinamico rimanga largamente indeterminato non devesorprendere. Infatti le equazioni sopra scritte, che sono state ottenute combinando op-portunamente gli assiomi fondamentali della meccanica dei continui (conservazione dellamassa, equazioni cardinali, principio degli sforzi) esprimono solamente quanto vi e dicomune a tutti i corpi continui.
In generale, corpi costituiti da materiali diversi si comportano in maniera diversa.Questa diversita e specificata attraverso le equazioni costitutive, ovvero specificando unlegame tra sforzo e deformazione. Materiali diversi saranno caratterizzati da equazionicostitutive diverse.
Sara questo l’oggetto del prossimo capitolo in cui introdurremo le equazioni costitutivedi alcuni particolari corpi solidi.
1che viene da ddt
∫Atρ(y, t) dy = 0 ⇐⇒ d
dt
∫A ρκ(x, t) dx = 0 ⇐⇒
∫A
∂∂tρκ(x, t) dx = 0 per ogni A
aperto in Ω.

Capitolo 5
Materiali iperelastici
5.1 Riferimenti bibliografici
I principali riferimenti per questo capitolo sono Paroni [29] e Ciarlet [10].
5.2 Equazione costitutiva e potenziale elastico
Sia come al solito Ω = κ(B).
Definizione 5.1. Il corpo B si dice costituito di materiale elastico se il tensore di Piola-Kirchhoff e determinato, in ogni punto, dal gradiente di deformazione, cioe se esiste unafunzione scalare
F : Ω× R3×3+ → R
(x, F ) 7→ F (x, F )
tale cheΠ(x) = F (x, F (x)).
Definizione 5.2. Un materiale elastico si dice iperelastico se il tensore di Piola-Kirchhoffammette un potenziale, cioe se esiste una funzione scalare
W : Ω× R3×3+ → R
(x, F ) 7→ W (x, F )
tale cheΠ(x) = DFW (x, F (x))
dove DF indica il gradiente rispetto ad F . La funzione W e detta potenziale elastico.
Se W = W (F ), cioe W e indipendente da x, il materiale si dice omogeneo. Il mo-tivo di questa denominazione deriva dal fatto che in tal caso anche lo stress Π dipendesolo dal gradiente di deformazione e non dal punto x, cioe risponde omogeneamente allesollecitazioni.
E il caso di osservare che, come succede per i campi vettoriali, non tutti i campitensoriali sono gradienti di un potenziale. Per i campi vettoriali una condizione necessariaaffinche cio avvenga e che il rotore sia nullo. Una condizione analoga puo essere stabilitaanche i campi tensoriali con un’opportuna nozione di rotore.
53

54 CAPITOLO 5. MATERIALI IPERELASTICI
Esempio 5.3. Nel caso di alcune gomme (materiali di Mooney-Rivlin) un potenzialeelastico appropriato e
W (F ) = a|F |2 + b|cofF |2 + Γ(detF )
con a > 0, b > 0 e Γ(δ) = cδ2− d log(δ) (c, d > 0) o piu in generale una funzione convessadi δ tale che limδ→0+ Γ(δ) = +∞.
Osserviamo che per ogni Q ∈ SO(3) si ha detQ = 1, |Q|2 = tr(QTQ) = tr I = 3 e|cofQ|2 = tr
((cofQ)T cofQ) = tr I = 3 e quindi
W (Q) = 3a+ 3b+ Γ(1) = costante
quindi il potenziale risulta lo stesso su tutte le rotazioni.
5.3 Cambiamento della configurazione di riferimento
La definizione di materiale iperelastico e stata data fissando una configurazione di rife-rimento. Dimostriamo ora che la definizione e indipendente da questa scelta cambiandoconfigurazione di riferimento e mostrando che il materiale rimane iperelastico anche conquesta nuova scelta.
Consideriamo quindi due configurazioni κ1 e κ2. Indichiamo con
p := κ2 κ−11
Consideriamo due deformazioni f1 e f2 legate dalla relazione f1 = f2p, che portano quindinella medesima configurazione. Indichiamo con P = ∇p e, come al solito, F1 = ∇f1 eF2 = ∇f2. Si ha
P = F−12 F1.
Relativamente ai tensori di Piola-Kirchhoff si ha
Π1 = σF−T1 detF1,
eΠ2 = σF−T2 detF2 ⇒ σ = Π2F
T2 detF−1
2 ,
per cui, sostituendo σ nell’espressione di Π1 si ottiene
Π1 = (detP )Π2P−T
Supponiamo che il materiale sia iperelastico rispetto a κ2 e sia W2 il potenziale elastico,cioe
Π2(x2) = DF2W2(x2, F2(x2))
e definiamo, per ogni F1 ∈ R3×3+ ,
(5.1) W1(x1, F1) := W2(p(x1), F1P−1) detP
Verificare che allora si ha
DF1W1(x1, F1(x1)) = Π1(x1).

5.4. SIMMETRIA MATERIALE 55
5.4 Simmetria materiale
Nella sezione precedente abbiamo visto che al variare della configurazione di riferimentoin generale il potenziale elastico non rimane costante, ma varia secondo la legge (5.1).
In particolare, se la mappa p ruota la configurazione di riferimento attorno ad unpunto fisso x0 cioe
p(x) = Q(x− x0) + x0
con Q ∈ SO(3), allora per la (5.1), si ha
Wκ(x0, F ) = WQκ(x0, FQT )
dove Qκ denota la configurazione p κ (cioe quella che prima chiamavamo κ2). Conside-riamo l’insieme
Gκ(x0) = Q ∈ SO(3) : Wκ(x0, F ) = WQκ(x0, F ) ∀F ∈ R3×3+ .
Proposizione 5.4. Gκ(x0) e un gruppo moltiplicativo detto gruppo di simmetria di x0
nella configurazione κ. Si ha inoltre
Gκ(x0) = Q ∈ SO(3) : Wκ(x0, FQ) = Wκ(x0, F ) ∀F ∈ R3×3+ .
Dimostrazione Dimostrare per esercizio che Gκ(x0) gode delle proprieta di gruppo
• I ∈ Gκ(x0);
• Q ∈ Gκ(x0) ⇒ Q−1 = QT ∈ Gκ(x0);
• Q,P ∈ Gκ(x0) ⇒ QP ∈ Gκ(x0).
Concludere la dimostrazione per esercizio.
Definizione 5.5. Un materiale iperelastico si dice isotropo in x0 se Gκ(x0) = SO(3).
Esempi di materiali isotropi: W (x, F ) = f(x,detF, |cofF |, FFT ) (tra cui vi sono anchele funzioni di |F | =
√tr(FFT )).
5.5 Obiettivita o indifferenza materiale
In inglese material frame indifference. Se anziche ruotare la configurazione di riferimento,ruotiamo la configurazione attuale, cio corrisponde solamente a cambiare il riferimento incui si pone l’osservatore. E quindi naturale assumere che il potenziale elastico in tal casonon cambi.
Data la deformazione f indichiamo con y0 = f(x0). La rotazione e effettuata tramite lamappa
r(y) = Q(y − y0) + y0, Q ∈ SO(3).
Indicato come al solito ∇f = F si ha
∇(r f) = QF

56 CAPITOLO 5. MATERIALI IPERELASTICI
Assioma 5.6 (principio di indifferenza materiale). Il potenziale elastico e invariante percomposizione con spostamenti rigidi , ovvero
Wκ(x0, F ) = Wκ(x0, QF ) ∀Q ∈ SO(3), F ∈ R3×3+ , x0 ∈ Ω.
Una ovvia conseguenza di questo fatto e che se F = RU e la decomposizione polaredi F allora si ha
W (x0, F ) = W (x0, U).
Se il materiale e anche isotropo si ha che
W (x0, U) = W (x0, QUQT )
e quindi si ha che il potenziale elastico non dipende dall’intero gradiente di deformazionema solo dagli autovalori di U , detti deformazioni (o stretches) principali.
Esempio 5.7. Soddisfano l’assioma di obiettivita i potenziali del tipo
W (x, F ) = W (x, detF, |cofF |, FTF ).
Tra questi ve ne possono di anisotropi (i.e. non isotropi), come ad esempio il potenzialeW (F ) = (FTF )12 (provare per esempio con F =
(0 0 11 0 01 1 0
)e Q =
(1 0 00 −1 00 0 −1
)).
Derivando la relazione che esprime l’obiettivita materiale si ottengono due identitadifferenziali che saranno utili nel seguito ed in particolare in teoria infinitesima.
Proposizione 5.8. Se la W e derivabile rispetto ad F un numero sufficiente di volte siha
1. DFW (·, F ) = QTDFW (·, QF ) per ogni Q ∈ SO(3);
2. D2FW (·, F ) · (ZF ) = ZDFW (·, F ) per ogni Z ∈ Skw.
Si osservi che nella 2 l’hessiano D2FW (·, F ) e un tensore di ordine 4 di componenti
Aijrs = ∂∂Fij
( ∂W∂Frs ) e A · (ZF ) indica il tensore di ordine 2 di componenti Aijrs(ZF )rs =AijrsZrhFhs detto prodotto contratto dei tensori A e ZF . Avvertiamo fin da subito chenel seguito un abuso di notazione fara cadere il punto e si scrivera AM per indicare A ·M(M tensore di ordine 2).
Dimostrazione Per dimostrare la 1 basta derivare rispetto ad F l’equazione
W (·, F ) = W (·, QF ).
Proviamo la 2. Dimostrare per esercizio che per ogni Z ∈ Skw e per ogni ω ∈ R si ha
Q := I + sinωZ + (1− cosω)Z2 ∈ SO(3)
(suggerimento: osservare che W 3 = −W ).Dalla 1 si ha
QDFW (·, F ) = DFW (·, QF ) per ogni Q ∈ SO(3).
Allora, denotato con
Qε := I + sin εZ + (1− cos ε)Z2, Z ∈ Skw

5.6. EQUAZIONI DI EQUILIBRIO 57
si ha Qε ∈ SO(3), quindi
QεDFW (·, F ) = DFW (·, QεF ) per ogni ε.
Indicato, per comodita con F (F ) := DFW (·, F ) e sostituito Qε, si ha
(5.2) F (F ) + sin εZF (F ) + (1− cos ε)Z2F (F ) = F (F + sin εZF + (1− cos ε)Z2F ).
A F fissato, indichiamo con g(ε) := F (F + sin εZF + (1− cos ε)Z2F ) il secondo membrodei quest’ultima identita. Per F fissato osserviamo che
gij(ε) = gij(0) + g′ij(0)ε+ o(ε2)
e che
g′ij(ε) = DFFij(F+sin εZF+(1−cos ε)Z2F )·(cos εZF+sin εZ2F )⇒ g′ij(0) = DFFij(F )·(ZF )
e quindigF (ε) = F (F ) + εDFF (F ) · (ZF ) + o(ε2).
Sostituendo nella (5.2) si ha dunque
εDFF (F )ZF = sin εZF (F ) + (1− cos ε)Z2F (F )
dall quale, dividendo per ε e passando al limite per ε→ 0 si ottiene
DFF (F ) · (ZF ) = ZF (F )
cioe la tesi.
5.6 Equazioni di equilibrio
Sia come al solito Ω = κ(B) un aperto di R3 con frontiera regolare. Consideriamo unapartizione di ∂Ω in due regioni Γd e Γt (i.e. Γd ∩ Γt = ∅, Γd ∪ Γt = ∂Ω).
Supponiamo che il corpo sia incastrato (clamped) in Γd cioe f(x) = x per ogni x ∈ Γd,mentre su Γt agiscano delle forze di superficie di densita tκ. Denotiamo con bκ la densitadelle forze di volume ed nκ il versore normale esterno a ∂Ω. Se i campi vettoriali etensoriali in gioco sono sufficientemente regolari, allora le equazioni di equilibrio sono(cfr. (4.10), (4.11), (4.12))
divΠ + bκ = 0 in ΩΠnκ = tκ su ΓtΠFT ∈ Sym in ΩΠ = DFW (·, F ) in ΩF = ∇f in Ωf(x) = x su Γd

58 CAPITOLO 5. MATERIALI IPERELASTICI
Osserviamo che si tratta di un sistema di 24 equazioni scalari nelle 24 incognite Πij ,Fij , Wi, fi (i, j = 1, 2, 3). L’introduzione dell’equazione costitutiva Π = DFW (·, F ) haquindi condotto al pareggiamento del numero di equazioni con quello delle incognite.
Generalmente, tuttavia, il potenziale elastico e noto essendo noto il materiale di cui ecostituito il corpo, mentre sono incognite le tre componenti della deformazione f .
Il sistema di equazioni di equilibrio, in termini della sola incognita f divienedivDFW (·,∇f) + bκ = 0 in ΩDFW (·,∇f)nκ = tκ su ΓtDFW (·,∇f)(∇f)T ∈ Sym in Ωf(x) = x su Γd
per un totale di 6 equazioni. Va detto, pero, come mostra l’esercizio seguente, che percerti materiali la condizione DFW (·, F )FT ∈ Sym e sempre soddisfatta, facendo quindiscomparire la corrispondente equazione di simmetria nel sistema che quindi si riduce a 3equazioni con 3 incognite.
Esercizio 5.9. Dimostrare per esercizio che la condizione DFW (x, F )FT ∈ Sym e sempresoddisfatta nei seguenti casi
1. W (F ) = |F |p, p > 0;
2. W (F ) = Γ(detF ) dove Γ e una funzione scalare derivabile.
1. Si ha |F |p = (|F |2)p2 . Dunque DF |F |p = p
2 (|F |2)p2−12F = p|F |p−2F e quindi
|F |pFT = p|F |p−2FFT ∈ Sym.
2. Supponiamo per cominciare che Γ(δ) = δ. Essendo detF =∑3j=1 Fij(cofF )ij dove
(cofF )ij = (−1)i+j det |Mij |, allora si ha
∂ detF∂Fij
=3∑j=1
Fij∂
∂Fij(cofF )ij + (cofF )ij = (cofF )ij
dal momento che ∂∂Fij
(cofF )ij = 0. Si ha dunque
DF detF = cofF
e quindi(DF detF )FT = (cofF )FT = (detF )F−TFT = I detF ∈ Sym.
La tesi per Γ qualunque si ottiene osservando che
DFΓ(detF ) = Γ′(detF )DF detF )
e applicando i risultati precedenti.
Teorema 5.10. Sia W ∈ C1(Ω × R3×3). Sono soluzioni del problema di equilibrio tuttie soli i punti stazionari del funzionale
I(g) =∫
Ω
W (x,∇g(x)) dx−∫
Ω
bκ · g dx−∫
Γt
tκ · g da,
sul dominioA = g : Ω→ R3 : g ∈ C1(Ω; R3) e g(x) = x su Γd,

5.6. EQUAZIONI DI EQUILIBRIO 59
detto insieme delle deformazioni cinematicamente ammissibili, che soddisfano la con-dizione
DFW (x,∇f)∇fT ∈ Sym.
Il funzionale I(g) e detto energia elastica totale ed e dato dalla somma dell’energia elas-tica immagazzinata (stored energy)
∫ΩW (x,∇g(x)) dx e del lavoro compiuto dalle forze
esterne agenti sul corpo. Il potenziale W e quindi anche detto densita di energia elastica.
Dimostrazione f ∈ A e un punto stazionario per I se e solo se
limε→0
I(f + εψ)− I(f)ε
= 0
per ogni ψ tale che f + εψ ∈ A, cioe per ogni ψ ∈ C1(Ω; R3) tale che ψ = 0 su Γd, vale adire
d
dεI(f + εψ)|ε=0 = 0.
Le funzioni f + εψ si chiamano variazioni di f e la derivata a primo membro e dettavariazione prima del funzionale I. Da questa terminologia prende il nome il Calcolo delleVariazioni.
Osserviamo che
d
dεI(f + εψ) =
=d
dε
(∫Ω
W (x,∇f(x) + ε∇ψ(x)) dx−∫
Ω
bκ · (f + εψ) dx−∫
Γt
tκ · (f + εψ) da)
=∫
Ω
d
dε
(W (x,∇f(x) + ε∇ψ(x))
)dx−
∫Ω
bκ · ψ dx−∫
Γt
tκ · ψ da
dove il passaggio sotto il segno di integrale e giustificato dall’usuale teorema di derivazionesotto il segno di integrale di Lebesgue (cfr. ad esempio Giusti [15], Capitolo sesto, Teorema9.1) che, oltre alla derivabilita con continuita della funzione integranda rispetto ad ε,garantita dal fatto che W ∈ C1, richiede l’esistenza di due funzioni sommabili ϕ0 e ϕ1
tali che
1. |W (x,∇f(x) + ε∇ψ(x))| ≤ ϕ0(x),
2. | ∂∂ε
(W (x,∇f(x) + ε∇ψ(x))
)| ≤ ϕ1(x)
per ogni ε in un intorno di 0. La prima condizione e soddisfatta perche la funzione(x, ε) 7→ ∇f(x) + ε∇ψ(x)) e limitata in Ω× [−δ, δ] (δ > 0 qualunque) grazie al fatto chef, ψ ∈ C1(Ω; R3), quindi ha valori in un compatto K di R3×3 e dunque
|W (x,∇f(x) + ε∇ψ(x))| ≤ supΩ×K
|W | =: ϕ0
dove il sup e massimo, e quindi finito, perche W e continua sul compatto Ω × K. Perquanto riguarda la seconda, usando il fatto che W ∈ C1(Ω× R3×3) si ha
| ∂∂ε
(W (x,∇f(x) + ε∇ψ(x))
)| = |DFW (x,∇f(x) + ε∇ψ(x))
)· ∇ψ(x)|
≤ ‖∇ψ‖∞ supΩ×K
|DFW | =: ϕ1.
60 CAPITOLO 5. MATERIALI IPERELASTICI
Si ha dunque
d
dεI(f + εψ)|ε=0 =
∫Ω
DFW (x,∇f(x)) · ∇ψ(x) dx−∫
Ω
bκ · ψ dx−∫
Γt
tκ · ψ da
e, dal momento che
DFW · ∇ψ = (DFW )ijψi,j = [(DFW )ijψi],j − (DFW )ij,jψi = div(ψDFW )−ψ · divDFW
per il teorema della divergenza, e usando il fatto che ψ = 0 su Γd, si ha
d
dεI(f + εψ)|ε=0 =
=∫
Ω
div[ψ(x)DFW (x,∇f(x))] dx−∫
Ω
ψ(x) · divDFW (x,∇f(x)) dx+
−∫
Ω
bκ · ψ dx−∫
Γt
tκ · ψ da
=∫∂Ω
ψ(x)DFW (x,∇f(x))nκ da−∫
Ω
ψ(x) · divDFW (x,∇f(x)) dx+
−∫
Ω
bκ · ψ dx−∫
Γt
tκ · ψ da
= −∫
Ω
(divDFW (x,∇f) + bκ
)· ψ dx+
∫Γt
(DFW (x,∇f)nκ − tκ) · ψ da
Abbiamo dunque ottenuto che f ∈ A e un punto stazionario per I se e solo se
(5.3)
−∫
Ω
(divDFW (x,∇f) + bκ
)· ψ dx+
∫Γt
(DFW (x,∇f)nκ − tκ) · ψ da = 0
per ogni ψ ∈ C1(Ω; R3) tale che ψ = 0 su Γd.
Questa equivalenza e nota come teorema dei lavori virtuali mentre la (5.3) e l’equazionedi Eulero-Lagrange in forma integrale.
E evidente che la (5.3) e soddisfatta se valgono le equazioni di equilibrio. Viceversa,dalla (5.3) prendendo ψ ∈ D(Ω), col che ψ = 0 su ∂Ω, si ha∫
Ω
(divDFW (x,∇f(x)) + bκ
)· ψ dx = 0 ∀ψ ∈ D(Ω)
da cui si ottienedivDFW (x,∇f(x)) + bκ = 0 ∀x ∈ Ω.
Prendendo Π(x) = DFW (x,∇f(x)) si ha dunque
divΠ + bκ = 0 in Ω.
Quindi la (5.3) si riduce a∫Γt
(DFW (x,∇f(x))nκ − tκ) · ψ da = 0
per ogni ψ ∈ C1(Ω; R3) tale che ψ = 0 su Γd, da cui segue che
DFW (x,∇f(x))nκ − tκ = 0 su Γt,
ovveroΠnκ = tκ su Γt.

5.7. TEORIA INFINITESIMA 61
5.7 Teoria infinitesima
Ricordando la relazione tra spostamento e deformazione
u(x) = f(x)− x,
indicato con F = ∇f e H = ∇u si ha
F = I +H = I]εH
dove ε := |H| e H = H/|H|.
Potenziale elastico
Se W e un potenziale elastico, che supponiamo almeno di classe C2 rispetto ad F , si hadunque
W (x, F ) = W (x, I + εH).
Per semplicita di notazione scriveremo W (F ) al posto di W (x, F ). Sviluppando intornoad ε = 0 la funzione di classe C2
ε 7→W (I + εH)
si ha
(5.4)W (I + εH) = W (I) + εDFW (I) · H +
12ε2D2
FW (I)H · H + o(ε2)
= W (I) +DFW (I) ·H +12D2FW (I)H ·H + o(|H|2)
PoniamoT := DFW (I)
T e lo sforzo a deformazione nulla, ovvero nella configurazione di riferimento. Esso e dettotensore degli sforzi iniziali o residui. Si osservi che, dalla relazione DFW (F )FT ∈ Symsegue, prendendo F = I che T e simmetrico.
Dalla 2 della Proposizione 5.8 si ha
(5.5) D2FW (I) · Z = ZDFW (I) = Z T ∀Z ∈ Skw
per cui, sostituendo nella (5.4) e scomponendo H nella somma della parte simmetrica Ee della parte emisimmetrica Z, si ha (attenzione agli abusi di notazione)
W (I +H) = W (I) + T ·H + 12D
2FW (I)(Z + E) ·H + o(|H|2)
= W (I) + T ·H + 12Z T ·H + 1
2D2FW (I)E ·H + o(|H|2)
= W (I) + T ·H + 12Z T ·H + 1
2D2FW (I)H · E + o(|H|2)
= W (I) + T ·H + 12Z T ·H + 1
2D2FW (I)(Z + E) · E + o(|H|2)
= W (I) + T ·H + 12Z T ·H + 1
2Z T ·E + 12D
2FW (I)E · E + o(|H|2)
= W (I) + T ·H + 12 (H − E) T ·H + 1
2E T ·(H − E) + 12D
2FW (I)E · E + o(|H|2)
= W (I) + T ·H + 12H T ·H − 1
2E T ·E + 12D
2FW (I)E · E + o(|H|2)
PostoC := D2W (I), L := D2W (I)− T = (C− T )

62 CAPITOLO 5. MATERIALI IPERELASTICI
dettoi, rispettivamente, tensore elastico e tensore di elasticita incrementale, si ha
W (F ) = W (I +H) = W (I) + T ·H +12H T ·H +
12
LE · E + o(|H|2)
Se W (I) = 0 (cosa che si puo sempre assumere in quanto il potenziale elastico e definitoa meno di una costante additiva) e in assenza di tensione residua, cioe T = DFW (I) = 0,allora si ha L = C e
W (F ) = W (I +H) =12
CE · E + o(|H|2)
doveLE · E := D2W (I)E · E =: CE · E.
Trascurando i termini di ordine superiore si ottiene che l’energia totale elastica lineare inquesto caso e dunque
F (u) =∫
Ω
12
CEu · Eudx−∫
Ω
bκ · g dx−∫
Γt
tκ · u da
dove u appartiene allo spazio degli spostamenti ammissibili
A = u ∈ C1(Ω; R3) e u(x) = 0 su Γd.
Equazioni costitutive
Per quanto riguarda il tensore di Piola-Kirchhoff, si ha
Π = DFW (F ) = DHW (I +H) = T +H T +LE + o(|H|)
In elasticita lineare con tensione residua si trascurano i termini di ordine superiore alprimo in |H| e quindi il tensore di Piola-Kirchhoff ha l’espressione
Π = T +H T +LE
Se la tensione residua e nulla, cioe T = 0, allora
Π = CE
Proprieta di simmetria di CPoiche C = D2W (I), allora, se W ∈ C2 oppure se le derivate sono intese nel senso delledistribuzioni si ha (simmetrie maggiori)
(5.6) Cijpq =∂2W
∂Fpq∂Fij=
∂2W
∂Fij∂Fpq= Cpqij .
Inoltre dalla (5.5) si ha, essendo T = 0,
CZ = 0 ∀Z ∈ Skw
da cui segue che (simmetrie minori)
(5.7) Cijpq = CijqpCombinando poi la (5.6) con la (5.7) si ha che anche
Cijpq = Cjipq.
In definitiva, basta ricordare che
Cijpq = Cpqij = Cjipq
5.7. TEORIA INFINITESIMA 63
Densita di energia di Kirchhoff-De Saint Venant
Se il materiale e omogeneo e isotropo e supponiamo anche che valga l’assioma di indif-ferenza materiale allora il tensore C = D2W (I) eredita da W certe proprieta di invarianzae simmetria. Si potrebbe dimostrare (cfr. ad esempio Gurtin [17] (Appendix) che in talcaso esistono due costanti λ e µ dette costanti di Lame tali che
Cijpq = λδijδpq + µ(δipδjq + δjpδiq)
dove δrs = 1 se r = s e 0 altrimenti.E facile verificare che allora si ha
CE = 2µE + λ tr(E)I
e di conseguenza
(5.8)12
CE · E = µ|E|2 +λ
2| tr(E)|2
Osserviamo che la (5.8) e la densita di energia elastica lineare di un materiale omogeneo,isotropo, ed e detta densita di energia di Kirchhoff-De Saint Venant.
Capitolo 6
Teoria variazionale
6.1 Problemi di minimo
Consideriamo qui l’approccio variazionale al problema di determinare le configurazionidi equilibrio stabile che consiste nel vedere il problema di equilibrio come problema diminimo, sia in elasticita lineare che non lineare.
Il primo problema e stabilire l’esistenza ed, eventualmente, l’unicita della soluzione.Decidiamo, per semplicita di restringere l’analisi al caso dei materiali omogenei e
isotropi, e in particolare consideriamo i due casi seguenti:
Problema 1 - elasticita nonlineare: consideriamo materiali di potenziale W (F ) =|F |2. L’energia elastica da minimizzare e quindi
I(y) =∫
Ω
|∇y|2 dx−∫
Ω
bκ · y dx−∫
Γt
tκ · y da
dove y appartiene allo spazio delle deformazioni ammissibili
A = y ∈ C1(Ω; R3) e y(x) = x su Γd.
Con poca fatica i risultati che otterremo si possono generalizzare a potenziali omogeneidi classe C2, convessi e soddisfacenti le condizioni di crescita p
c|F |p ≤W (F ) ≤ C(1 + |F |p), p > 1,
in cui rientra la precedente con p = 2.
Problema 2 - elasticita lineare: nel caso dei materiali elatici lineari, omogenei edisotropi la densita di energia da considerare e quella di Kirchhoff-De Saint Venant
f(E) = µ|E|2 +λ
2| tr(E)|2, λ ≥ 0, µ ≥ 0,
Quindi l’energia elastica da minimizzare e
F (u) =∫
Ω
f(Eu) dx−∫
Ω
bκ · g dx−∫
Γt
tκ · u da
dove u appartiene allo spazio degli spostamenti ammissibili
A = u ∈ C1(Ω; R3) e u(x) = 0 su Γd.
ed Eu denota la parte simmetrica del gradiente di spostamento e talvolta viene anchedenotato con e(u).
64

6.2. IL METODO DIRETTO DEL CALCOLO DELLE VARIAZIONI 65
6.2 Il metodo diretto del Calcolo delle Variazioni
L’esistenza di una soluzione puo essere dimostrata in vari modi. Quello che utilizzeremonoi e un esempio di applicazione del metodo diretto del Calcolo delle Variazioni il cuiingrediente principale e costituito dal seguente teorema di Tonelli.
Sia X uno spazio topologico.
Definizione 6.1. Una funzione f : X → R si dice (sequenzialmente) semicontinua infe-riormente in un punto x ∈ X se1
f(x) ≤ lim infn→∞
f(xn) per ogni xn → x.
Esercizio 6.2. Dimostrare che il sup di una famiglia di funzioni s.c.i. e una funziones.c.i.
Definizione 6.3. Una funzione F : X → R si dice (sequenzialmente) coerciva se perogni t ∈ R esiste un sottoinsieme sequenzialmente compatto2 Kt, di X tale che
x ∈ X : F (x) ≤ t ⊆ Kt.
Osservazione 6.4. Si verifica immediatamente che se F e coerciva e G ≥ F allora ancheG e coerciva.
Teorema 6.5. (Tonelli) Sia F : X → R una funzione
1. sequenzialmente semicontinua inferiormente;
2. sequenzialmente coerciva.
Allora esiste il minimo di F su X.
Dimostrazione Se F e identicamente +∞ non c’e nulla da provare. Altrimenti,
(6.1) infF (x) : x ∈ X < +∞.
Sia (xn) una successione minimizzante, cioe tale che
limn→∞
F (xn) = infF (x) : x ∈ X < +∞;
e un facile esercizio mostrare che una tale successione esiste sempre, ma a priori la (xn)potrebbe non essere convergente. La prima cosa da fare e allora cercare una successioneminimizzante convergente. La F (xn), invece, essendo convergente o, al piu, divergente a−∞, e limitata superiormente, cioe esiste L ∈ R tale che
F (xn) ≤ L ∀n ∈ N.
Poiche F e sequenzialmente coerciva allora la successione (xn) ammette una sottosuc-cessione (xnk) convergente ad un elemento x ∈ X (questa e appunto una successioneminimizzante convergente). A questo punto, x e candidato ad essere punto di minimo diF . Dobbiamo, cioe, provare che
(6.2) F (x) ≤ infF (x) : x ∈ X.1Ricordiamo che lim inf
n→∞f(xn) := sup
n∈Ninfk≥n
f(xk) = limn→∞
infk≥n
f(xk).
2K ⊂ X si dice (sequenzialmente) compatto, o compatto per successioni se da ogni successione in K epossibile estrarre una sottosuccessione convergente ad un elemento di K.

66 CAPITOLO 6. TEORIA VARIAZIONALE
Per ottenere la minorazione, dobbiamo mettere in relazione il valore in x con quelli nellexnk . Per la semicontinuita di F Si ha
F (x) ≤ lim infk→+∞
F (xnk) = infF (x) : x ∈ X
Segue la tesi.
Il teorema ora dimostrato costituisce il fondamento del cosiddetto “metodo diretto delCalcolo delle Variazioni”, che puo essere riassunto nello schema seguente
coercivita + semicontinuita inferiore ⇒ esistenza di punti di minimo
Osserviamo che le richieste 1. e 2. del Teorema di Tonelli sono tra loro contrastanti, inquanto la prima richiede che la topologia sia abbastanza forte (ipotesi di forza) mentre laseconda richiede che la topologia sia abbastanza debole (ipotesi di debolezza). Il metododiretto del Calcolo delle Variazioni, per la dimostrazione dell’esistenza del minimo di unfunzionale F su uno spazio topologico X, consiste nel determinare, quando cio e possibile,una topologia τ su X che soddisfi entrambe le ipotesi di semicontinuita e coercivita.
6.3 Soluzioni deboli
Consideriamo il Problema 1 e cominciamo con l’osservare che, supponendo bκ ∈ L2(Ω; R3)e trascurando per il momento l’integrale di superficie (prendendo ad esempio tκ = 0) e lacondizione al contorno, il dominio “naturale” del funzionale e l’insieme
W 1,2 = y ∈ L2(Ω; R3) : Dy ∈ L2(Ω; R3×3).
dove il gradiente e inteso in senso distribuzionale. Il vantaggio di considerare il funzionaledefinito su W 1,2 e che quest’ultimo risulta completo rispetto alla norma
‖y‖1,2 :=(∫
Ω
|y|2 dx+∫
Ω
|∇y|2 dx)1/2
(che, tra parentesi, e una norma anche in C1(Ω) che pero non e completo e di cui W 1,2
costituisce il completamento) e questo fatto, come vedremo, rende agevole l’applicazionedel metodo diretto. Le soluzioni del problema in W 1,2 saranno dette soluzioni deboli. Unavolta dimostrata l’esistenza di una soluzione debole, volendo risolvere il problema iniziale,occorrera dimostrarne la regolarita, cioe che appartiene ad A (altrimenti ci si accontentadella soluzione debole).
6.4 Rilassamento
Una maniera piu naturale, ma piu “tecnica” di procedere e quella di considerare l’esten-sione
I∞(y) =
I(y) se y ∈ A+∞ altrimenti in W 1,2
Per applicare il metodo diretto si vorrebbe che I∞ fosse corecivo e s.c.i. rispetto adun’opportuna convergenza. A proposito della coercivita consideriamo una successione(yh) tale che I∞(yh) ≤ C. Allora si ha yh ∈ A e
‖∇yh‖2 ≤ C

6.5. CONVERGENZA DEBOLE IN SPAZI DI HILBERT 67
e da questa successione se ne puo estrarre una convergente debolmente. Ci si chiede quindise I∞ sia s.c.i. rispetto a questa convergenza, cioe se sia vero che
∇yh → ∇y debolmente ⇒ lim infh
I∞(yh) ≥ I∞(y).
Per vedere che cio e falso basta considerare, ad esempio, la successione
yh(x) = |x|2h
2h−1 , x ∈ Ω = (−1, 1)
Si ha infatti yh ∈ C1(Ω) e yh → y(x) = |x| nella norma W 1,2, ma y 6∈ C1([−1, 1]) (che, tral’altro, mostra che C1 non e completo con la norma ‖·‖1,2. Inoltre ∇yh(x)→ x
|x| = ∇y(x)per ogni x 6= 0. D’altra parte, con calcolo diretto si vede che il liminf a primo membro efinito, mentre a secondo membro I∞(y) = +∞ perche y 6∈ A.
Dunque il funzionale esteso non e s.c.i. Cio conduce a considerare l’inviluppo semi-continuo inferiormente di I, cioe il piu grande funzionale s.c.i. (rispetto alla convergenzanella quale si ha coercivita) minore o uguale a I∞, detto funzionale rilassato (sequenziale)
I(y) = supG : G seq. s.c.i. e G ≤ I.
Si potrebbe dimostrare, e forse lo faremo in seguito, che nelle ipotesi considerate questofunzionale e definito da
I(y) =∫
Ω
|∇y|2 dx−∫
Ω
bκ · y dx, y ∈W 1,2
cioe e esattamente il funzionale che ci si ritroverebbe a studiare cercando soluzioni deboli.
6.5 Convergenza debole in spazi di Hilbert
Ricordiamo che uno spazio di Hilbert e uno spazio normato completo (Banach) in cui lanorma proviene da un prodotto scalare.
I piu importanti spazi di Hilbert che verranno utilizzati in seguito sono lo spazioL2(Ω; Rn) con il prodotto scalare
〈u, v〉 =∫
Ω
u(x) · v(x) dx.
e lo spazio di Sobolev W 1,2(Ω; Rn) con il prodotto scalare
〈u, v〉 =∫
Ω
u(x) · v(x) dx+∫
Ω
Du(x) ·Dv(x) dx,
e, piu in generale, per m ∈ N, m ≥ 1,
Wm,2(Ω; Rn) = y ∈ L2(Ω; R3) : Dαy ∈ L2 ∀ |α| ≤ 2
= y ∈ L2(Ω; R3) : Dy ∈ L2(Ω; Rn×n), D2y ∈ L2(Ω; Rn×n×n×n)
con il prodotto scalare
〈u, v〉 =∑|α|≤2
∫Ω
Dαu(x) ·Dαv(x) dx.
Diamo qui per nota la teoria elementare degli spazi di Hilbert. Per alcuni veloci richiamie anche come riferimento per questa sezione vedere [19], Capitolo 21.
Nel seguito H denotera sempre un generico spazio di Hilbert.

68 CAPITOLO 6. TEORIA VARIAZIONALE
Definizione 6.6. Siano u e (un) in H. Diremo che un converge debolmente a u in H,e scriveremo un u in H se
〈un, ϕ〉 → 〈u, ϕ〉 ∀ϕ ∈ H.
Riassumiamo nel seguente enunciato alcune importanti proprieta della convergenzadebole
Proposizione 6.7. Siano u e (un) in H. Si ha
1. un → u fortemente (cioe in norma) ⇒ un u debolmente;
2. se uu u allora (‖un‖)n e limitata e ‖u‖ ≤ lim infn→∞
‖un‖;
3. se un u e limn→∞
‖un‖ = ‖u‖ allora un → u fortemente;
4. se un → u e vn v in H allora 〈un, vn〉 → 〈u, v〉
5. un u ⇐⇒ un → u in D ′ e ‖un‖ ≤ C ∀n ∈ N.
Dimostrazione 1. Segue immediatamente dalla disuguglianza di Cauchy-Schwarz.
2. Supponiamo che un u e osserviamo che, per Cauchy-Schwarz
|〈un, u〉| ≤ ‖un‖‖u‖
e, passando al liminf per n→∞ ambo i membri si ha
‖u‖2 ≤ ‖u‖ lim infn→∞
‖un‖
da cui, dividendo per ‖u‖ 6= 0 si ottiene
‖u‖ ≤ lim infn→∞
‖un‖
che, d’altra parte, vale anche se u = 0. Ne consegue che la norma di H e un funzionalesequenzialmente semicontinuo inferiormente rispetto alla convergenza debole.
La limitatezza della successione (‖un‖) e la cosa meno banale da provare. Osservatoche
‖un‖ = 〈un,un‖un‖
〉,
basta dimostrare che i funzionali lineari
Lnv = 〈un, v〉
sono uniformemente limitati sulla palla unitaria B1 = v ∈ H : ‖v‖ ≤ 1, ovvero esisteC ≥ 0 tale che
(6.3) ‖Lnv‖ ≤ C ∀ v ∈ B1, ∀n ∈ N.
In effetti un u implica che Lnv → 〈u, v〉 ∀v ∈ L2. Ne consegue che per ogni v ∈ L2
la successione (Lnv)n e limitata, cioe esiste una costante Cv tale che
|Lnv| ≤ Cv ∀n ∈ N.
Se potessimo affermare che la costante Cv si puo scegliere indipendentemente da v, cioeesiste C tale che
|Lnv| ≤ C ∀n ∈ N, ∀v ∈ B1,
cioe che la limitatezza della successione e uniforme rispetto a v in B1, allora la tesi sarebbeprovata. La desiderata proprieta di limitatezza uniforme, non facile da dimostrare, estabilita da uno dei piu importanti teoremi dell’Analisi Lineare:

6.5. CONVERGENZA DEBOLE IN SPAZI DI HILBERT 69
Teorema 6.8. (Banach-Steinhaus o di limitatezza uniforme) Sia X uno spazio diBanach e sia Ljj∈J una famiglia (qualunque) di funzioni lineari e continue da X in R.
supj∈J|Ljx| < +∞ ∀x ∈ X ⇒ sup
j∈J‖Lj‖ < +∞
dove‖Lj‖ := sup|Ljx| : ‖x‖ ≤ 1.
Per una dimostrazione che non fa uso del teorema di Banach-Steinhaus (ma che pratica-mente lo ridimostra nel caso degli spazi di Hilbert) vedere [19], Lemma 21.11.
3. Si ha‖un − u‖2 = ‖un‖2 − 2〈un, u〉+ ‖u‖2
e basta quindi passare al limite per n→∞ per ottenere la tesi.
4. Basta osservare che si ha
|〈un, vn〉 − 〈u, v〉| ≤ |〈un, vn〉 − 〈u, vn〉|+ |〈u, vn〉 − 〈u, v〉|
≤ ‖un − u‖‖vn‖+ |〈u, vn〉 − 〈u, v〉|
e passare al limite per n→∞.
5. Esercizio.
Esempio 6.9. Mostriamo che il viceversa della 1 non vale. Un controesempio e dato inL2(0, 1) dalla successione un(x) = sen(2πnx), che converge debolmente a 0. Questo seguedalla 5; infatti la successione e limitata in L2 e per ogni ϕ ∈ D(0, 1) si ha
〈un, ϕ〉 =∫ 1
0
ϕ(x) sen(2πnx) dx =1
2πn
∫ 1
0
ϕ(x)d
dx[cos(2πnx)] dx
= −∫ 1
0
ϕ′(x)cos(2πnx)
2πndx→ 0,
ma non converge fortemente a 0 poiche
(6.4) ‖un‖2 =(∫ 1
0
|un|2dx)1/2
=(∫ 1
0
| sen(2πnx)|2dx)1/2
=1√2.
La stessa successione mostra anche che la 4 non vale se le convergenze sono entrambedeboli, considerando vn = un.
Utilissimo nel Calcolo delle Variazioni e il teorema seguente, per la cui dimostrazionesi rimanda a [19], Theorem 21.8.
Teorema 6.10. Ogni successione limitata (un) in uno spazio di Hilbert ammette unasottosuccessione convergente debolmente.
Segue immediatamente il seguente
Corollario 6.11 (Teorema di Alaoglu-Kakutani). Le palle chiuse di H sono debolmentecompatte per successioni.

70 CAPITOLO 6. TEORIA VARIAZIONALE
Noi abbiamo definito qui solamente la convergenza debole senza definire la topologiadebole e rimandiamo gli interessati per esempio al testo di Brezis [9]. In generale, a menoche lo spazio sia di dimensione finita, la topologia debole non e metrizzabile, cioe nonesiste una metrica in H tale che la topologia ad essa associata coincida con la topologiadebole. Si riesce pero a dimostrare che sugli insiemi limitati, ed in particolare sulle palle, latopologia debole e metrizzabile; si ha inoltre che tutto lo spazio e debolmente metrizzabilese e solo se ha dimensione finita.
Naturalmente cio che vale per la topologia debole vale anche per la convergenza de-bole, ma per quest’ultima, nel caso degli spazi di Hilbert separabili si riesce a dimostrarela metrizzabilita addirittura su tutto lo sapzio (cioe esiste una metrica che ha comesuccessioni convergenti esattamente le successioni debolmente convergenti).
Definizione 6.12. Si chiama base hilbertiana di H ogni successione (en) di elementi diH tale che
(i) ‖ en ‖ = 1 ∀n ∈ N, 〈em, en〉 = 0 ∀m,n, m 6= n;
(ii) lo spazio vettoriale generato da (en) (i.e. combinazioni lineari finite di elementi dellabase) e denso in H.
Definizione 6.13. H si dice separabile se possiede un sottoinsieme numerabile denso(per la topologia della norma).
Teorema 6.14. Se H e separabile allora H possiede una base hilbertiana.
Dimostrazione Sia (vn) un sottoinsieme numerabile denso in H e sia Fn = 〈v1, . . . , vn〉lo spazio vettoriale generato da v1, ..., vn. Gli Fn costituiscono una catena crescentedi sottospazi di dimensione finita tali che ∪∞n=1Fn e denso in H. Scegliamo una baseortonormale in F1 che completiamo in una base ortonormale di F2, ecc. Otteniamo cosıuna base hilbertiana di H.
Teorema 6.15. Se H e separabile allora la convergenza debole e metrizzabile.
Dimostrazione Dati u, v ∈ H definiamo
d(u, v) :=∞∑k=1
12k|〈u− v, ek〉|
Si verifica facilmente che d e una metrica in H.Sia un u. Allora ‖un‖ ≤ C e limn→∞〈un − u, ek〉 = 0 ∀ k ∈ N. Dunque
∀m ∈ N ∃nm ∈ N |〈un − u, ek〉| <1m∀n ≥ nm, ∀ k ≤ m.
Allora, ∀m ∈ N ∃nm ∈ N tale che
d(un, u) =m∑k=1
12k|〈un − u, ek〉|+
∞∑k=m+1
12k|〈un − u, ek〉|
≤m∑k=1
12k
1m
+∞∑
k=m+1
12k‖un − u‖‖ ek ‖
≤ 1m
+ ‖un − u‖∞∑
k=m+1
12k
≤ 1m
+ 2C∞∑
k=m+1
12k

6.6. SPAZI DI SOBOLEV 71
e, siccome
limm→∞
( 1m
+ 2C∞∑
k=m+1
12k)
= 0
allora∀ ε > 0 ∃mε ∈ N : d(un, u) < ε ∀n > nmε
quindi d(un, u)→ 0.Vicecersa, supponiamo che d(un, u)→ 0. Per definizione di d allora si ha
|〈un − u, ek〉| → 0 per n→∞ e per ogni k ∈ N
e cio implica un u.
6.6 Spazi di Sobolev
Per tutta la sezione, se non altrimenti specificato, tutte le derivate si intendono in sensodistribuzionale, e Ω indichera un sottoinsieme aperto, limitato e regolare di Rn (o un in-tervallo se n = 1), anche se molti degli enunciati valgono per classi di insiemi piu generali.Inoltre m ∈ N e 1 ≤ p ≤ +∞.
Lo spazio di Sobolev Wm,p(Ω) e definito da
Wm,p(Ω) = u ∈ Lp(Ω) : Dαu ∈ Lp(Ω) per ogni α ∈ Nn con |α| ≤ m.
Se m = 0 si ha Wm,p = Lp. Lo spazio vettoriale Wm,p(Ω) potra essere munito dellanorma
‖u‖m,p =( ∑|α|≤m
∫Ω
|Dαu|pdx) 1p
se p < +∞,
oppure‖u‖m,∞ = max
|α|≤m‖Dαu‖L∞(Ω) se p = +∞,
o altre norme equivalenti.
Teorema 6.16. (Wm,p(Ω), ‖ · ‖m,p) e uno spazio di Banach per 1 ≤ p ≤ +∞.
Dimostrazione Sia (uh) una successione di Cauchy in Wm,p; allora (Dαuh) e di Cauchyin Lp per |α| ≤ m. Di conseguenza, poiche Lp e completo, esistono delle funzioni u e uα,0 < |α| ≤ m, in Lp tali che uh → u e Dαuh → uα in Lp. Per ottenere la tesi basta provareche, per tali α, si ha uα = Dαu in Lp.
Poiche Lp ⊂ L1loc le (uh) individuano una distribuzione Tuh ∈ D ′ che d’ora in poi
continueremo ad indicare con uh. Nel senso delle distribuzioni si ha, per ogni ϕ ∈ D
(6.5) 〈Dαuh, ϕ〉 = (−1)|α|〈uh, Dαϕ〉.
Allora, passando al limite per h→∞ nella (6.5), si ha che
〈uα, ϕ〉 = (−1)|α|〈u,Dαϕ〉;
d’altra parte, per definizione di derivata distribuzionale il secondo membro e uguale a〈Dαu, ϕ〉 per cui si ha
〈uα, ϕ〉 = 〈Dαu, ϕ〉 ∀ϕ ∈ D
cioe uα = Dαu in D ′, e la tesi segue dall’iniettivita dell’immersione di L1loc in D ′.
In particolare si ha dunque che Wm,2(Ω), e quindi anche Wm,2(Ω; Rn), e uno spaziodi Hilbert.

72 CAPITOLO 6. TEORIA VARIAZIONALE
Funzioni di Sobolev nulle al bordo
Ricordiamo che, se 1 ≤ p < +∞, le funzioni di Lp si possono approssimare con funzioniC∞c . In Wm,p con m > 0 questa cosa risulta generalmente impossibile. Per renderseneconto basta cercare di approssimare una funzione costante diversa da zero nel caso n =m = p = 1, Ω = (0, 1).
Indichiamo con Wm,p0 (Ω) la chiusura di C∞c (Ω) in Wm,p(Ω) con la topologia della
norma. Scriveremo anche
Wm,p0 (Ω) = u ∈Wm,p(Ω) : u|∂Ω = 0.
Si ha che (Wm,p0 (Ω), ‖ · ‖m,p) e completo, e quindi di Banach, in quanto e un sottospazio
chiuso dello spazio completo Wm,p(Ω). I due spazi coincidono se p <∞ e Ω = Rn oppurem = 0.
Approssimazione con funzioni regolari
Vale il seguente teorema di approssimazione; per la dimostrazione si puo vedere Adams [3],Theorem 3.16.
Teorema 6.17 (di Meyers-Serrin (H = W )). Sia 1 ≤ p < +∞. Per ogni u ∈ Wm,p(Ω)esiste una successione di funzioni uh ∈ C∞(Ω) tale che ‖u− uh‖m,p → 0 per h→ +∞.
Dal teorema, e dal fatto che Ω e limitato, segue che la chiusura dell’insieme u ∈C∞(Ω) : ‖u‖m,p < ∞ in Wm,p(Ω) e tutto lo spazio Wm,p(Ω). In altri termini, lefunzioni C∞ sono dense in Wm,p. Il teorema di Meyers-Serrin e del 1964. Prima di alloraquesto risultato di chiusura non era noto e quindi si usava un altro simbolo, Hm,p(Ω), perindicare il completamento di u ∈ C∞(Ω) : ‖u‖m,p < ∞ rispetto alla norma ‖ · ‖m,p.Il teorema afferma quindi che H = W (questo e anche il titolo che gli autori hanno datoall’articolo in cui pubblicarono il risultato, [24]).
Osservazione 6.18. Notiamo che il teorema H = W non vale per p = ∞. Infattila funzione |x| appartiene a W 1,∞(−1, 1) ma non puo essere approssimata da funzioniregolari nella norma di W 1,∞(−1, 1) che implica la convergenza uniforme delle derivate.
Proposizione 6.19. Hm,p(Ω) = Hm,p(Ω).
Dimostrazione vedi Agmon [4], n.2.
Notazione: Hm = Hm,2.
Teorema di Rellich
Chiaramente l’applicazione di inclusione
Wm,p → Lp,u 7→ u
e continua, cioe e un’immersione, in quanto ‖u‖p ≤ ‖u‖m,p.Inoltre si ha
un → u in Wm,p ⇐⇒ Dαun → Dαu in Lp, |α| ≤ m.
La seguente proposizione mostra che una proprieta analoga vale anche per la convergenzadebole in W 1,2.

6.6. SPAZI DI SOBOLEV 73
Proposizione 6.20. Si ha
un u in Wm,2 ⇐⇒ un u in L2, Dun Du in L2.
Dimostrazione ⇐ segue immediatamente dalle definizioni. Rimane da dimostrare che
un u in Wm,2 ⇒ un u in L2, Dun Du in L2.
Per le proprieta della convergenza debole, dall’ipotesi segue che ‖un‖1,2 ≤ C. Perdefinizione della norma in W 1,2 segue che le successioni (un) e (Dun) sono limitate inL2 e quindi ammettono sottosuccessioni debolmente convergenti
unk v, Dunk z in L2.
Usando il fatto che la convergenza debole in L2 implica quella in D ′ si ha che z = Dv equindi unk v in W 1,2 da cui segue che v = u.
Ripetendo il ragionamento per ogni suttosuccessione si ha che da ogni sottosuccessione(unk) si puo estrarre una ulteriore sottosuccessione (unkp) tale che
unkp u in L2, Dunkp Du in L2.
Per la metrizzabilita della convergenza debole si ha allora che la convergenza sussiste perl’intera sottosuccessione, e il teorema e dimostrato.
Ma vale anche il seguente risultato piu forte per la cui dimostrazione rinviamo aBrezis [?], Theoreme IX.16.
Teorema 6.21 (Rellich). Si ha
un u in W 1,2 ⇐⇒ un → u in L2, Dun Du in L2.
Si usa dire che l’immersione e compatta.
Con il termine immersione si intende un’applicazione lineare, iniettiva, continua.Un’immersione si dice compatta se mappa insiemi limitati in relativamente compatti (intermini di successioni significa che da ogni successione limitata nel dominio e possibileestrarre una sottosuccessione convergente (fortemente) nel codominio).
Traccia sul bordo
Consideriamo il semispazio Ω = Rn+ = x = (x′, xn) ∈ Rn−1 × R : xn ≥ 0. La suafrontiera Γ = ∂Ω e l’iperpiano di Rn di equazione xn = 0, che nel seguito identificheremocon Rn−1.
Lemma 6.22. L’applicazione
γ : C1c (Rn) → Lp(Γ)u 7→ γ(u) = u|Γ(x′) = u(x′, 0)
e lineare e continua rispetto a ‖ · ‖1,p in C1c (Rn) e a ‖ · ‖p in Lp(Γ).
Dimostrazione La linearita e banale. Per provare la continuita dobbiamo mostrare cheesiste una costante C > 0 tale che ‖u|Γ‖p ≤ C‖u‖1,p per ogni u ∈ Lp(Γ). Osserviamo atal scopo che
‖u|Γ‖p =(∫
Γ
|u(x′, 0)|p dx′)1/p
.

74 CAPITOLO 6. TEORIA VARIAZIONALE
Osserviamo poi che, poiche la funzione G(t) := |t|p−1t e derivabile in ogni punto conderivata G′(t) = p|t|p−1 (a differenza di |t|p che puo non essere derivabile in 0) allora
|u(x′, 0)|p−1u(x′, 0) = −∫ ∞
0
∂
∂s
[|u(x′, s)|p−1u(x′, s)
]ds = −
∫ ∞0
∂
∂sG(u(x′, s)
)ds
= −∫ ∞
0
G′(u(x′, s)
)∂u∂s
(x′, s) ds = −∫ ∞
0
p∣∣u(x′, s)
∣∣p−1 ∂u
∂s(x′, s) ds.
Si ha dunque
|u(x′, 0)|p =∣∣|u(x′, 0)|p−1u(x′, 0)
∣∣ ≤ p ∫ ∞0
∣∣u(x′, s)∣∣p−1∣∣∂u
∂s(x′, s)
∣∣ ds ≤≤ C
[ ∫ ∞0
∣∣u(x′, s)∣∣p ds+
∫ ∞0
∣∣∂u∂s
(x′, s)∣∣p] ds.
Dove nell’ultimo passaggio e stata usata la disuguaglianza di Young
ab ≤ ap′
p′+bp
p
che vale per ogni a, b ≥ 0 e p, p′ ∈ (1,+∞) esponenti coniugati. La tesi segue integrandoambo i membri in x′ su Rn−1.
Per il lemma, il teorema di Hahn-Banach e la densita di C1c (Rn) in W 1,p(Rn), l’appli-
cazione γ si prolunga in modo unico ad un operatore lineare e continuo
γ : W 1,p(Rn)→ Lp(Γ)
detto traccia di u su Γ e denotato col simbolo u|Γ. Per la continuita esiste una costanteC > 0 tale che
‖u|Γ‖p ≤ C‖u‖1,p per ogni u ∈W 1,p(Rn)
detta disuguaglianza di traccia.
Osservazione 6.23. Osserviamo che lo stesso ragionamento non funziona sostituendo lanorma p a quella (1, p), perche non si riesce a controllare la norma della derivata di u conla norma p di u. Una differenza fondamentale tra Lp(Ω) e W 1,p(Ω) e che in Lp(Ω) nonha senso parlare di traccia su ∂Ω.
Possiamo immaginare ora come si potrebbe definire la traccia su Γ ⊆ ∂Ω di unafunzione u ∈ W 1,p(Ω) quando Ω e un aperto “abbastanza regolare” di Rn, ad esempiouna varieta di classe C1, servendosi di un’atlante di carte locali. In tal caso u|Γ ∈ Lp(Γ)dove la misura su Γ e quella indotta dalla struttura di varieta o elementarmente definita(misura superficiale dσ) su Γ, ovvero la misura di Hausdorff (n−1)-dimensionale (H n−1).Inoltre vale la disuguaglianza di traccia
‖u|Γ‖p ≤ C‖u‖1,p per ogni u ∈W 1,p(Ω) .
In effetti, come dice il seguente teorema, l’applicazione di traccia non e solo coninua main molti casi anche compatta. Cio accade ad esempio se p = 2 e n = 3 che e il caso checi interessera nelle applicazioni che vedremo in seguito, e piu in generale se l’indice disommabilita p e abbastanza grande rispetto ad n (vedere ad esempio [9] o [3]).

6.6. SPAZI DI SOBOLEV 75
Teorema 6.24. L’operatore di traccia
γ : W 1,2(Ω) → L2(Γ)u 7→ γ(u) = u|Γ
e compatto. In particolare
un u in W 1,2(Ω) ⇒ un → u in L2(Γ).
Nella dimostrazione di questa proprieta di compattezza gioca un ruolo essenzialel’osservazione che l’operatore di traccia γ non e suriettivo, cioe γ(W 1,p(Ω)) ⊂ Lp(Γ) el’inclusione e stretta. Per descriverne l’immagine occorre introdurre spazi di Sobolev conindice di derivazione frazionario, detti spazi di interpolazione. Tra i vari modi di farlo vie il seguente (cfr. Brezis [9], Commentaires sur le chapitre IX, 6). Per p ∈ [1,∞), m ∈ Ne σ ∈ (0, 1) si definisce
Wm+σ,p(Ω) = u ∈Wm,p(Ω) :|Dαu(x)−Dαu(y)||x− y|σ+n
p∈ Lp(Ω× Ω) ∀|α| = m
con la norma
‖u‖m+σ,p =(‖u‖pm,p +
∑|α|=m
∫Ω
∫Ω
|Dαu(x)−Dαu(y)||x− y|σ+n
pdxdy
)1/p
.
Se Ω e limitato e con frontiera localmente lipschitziana, allora l’operatore
γ : W 1,p(Ω) → W 1−1/p,p(Γ)u 7→ u|Γ
e lineare, continuo e suriettivo (cfr. Necas [26], Theoreme 5.7); il suo nucleo e W 1,p0 (Ω). Per
dimostrare il Teorema 6.24 occorre poi provare un teorema di tipo Rellich di compattezzadell’immersione di W
12 ,2(Γ) in L2(Γ).
Derivazione per parti
Valgono inoltre le formule di Green ([26], Theoreme 1.1)∫Ω
∂u
∂xiv dx =
∫Γ
u v ni dHn−1 −
∫Ω
u∂v
∂xidx ∀u, v ∈W 1,2(Ω), i = 1, . . . , n
dove n denota il versore normale esterno a Γ, che per Γ localmente lipschitziana esisteH n−1-quasi ovunque ([26], Lemme 4.2);
Per funzioni u, v ∈W 2,2(Ω) e Ω di classe C1 vale la formula di Green∫Ω
∆u v dx =∫
Γ
∂u
∂nv dH n−1 −
∫Ω
∇u∇v dx.
Quest’ultima formula ammette un’estensione agli aperti Ω poligonali (vedi Grisvard [16],1.5.3).
Disuguaglianze di Poincare
Trattiamo in questa sezione alcune disuguaglianze particolarmente utili nel Calcolo delleVariazioni.

76 CAPITOLO 6. TEORIA VARIAZIONALE
Teorema 6.25 (disuguaglianza di Poincare). Sia p > 1. Esiste una costante C > 0 taleche
‖u‖p ≤ C‖Du‖pdx
per ogni u ∈W 1,p0 (Ω).
Dimostrazione Caso n = 1. La dimostrazione e particolarmente semplice nel caso incui Ω = (a, b) e un intervallo limitato. In tal caso infatti, se u ∈ C1
c (Ω) vale la formulafondamentale del calcolo integrale e si ha quindi (poiche u(a) = 0)
|u(x)| = |u(x)− u(a)| =∣∣∣ ∫ x
a
u′(t) dt∣∣∣ ≤ ‖u′‖1,
cioe ‖u‖∞ ≤ ‖u′‖1 e la tesi segue dalla disuguaglianza di Holder (o di Jensen) e dalladensita di C1
c (Ω) in W 10 (Ω).
Caso generale. Diamo la dimostrazione nel caso p = 2 che e quello in cui il teorema verraapplicato. Nel caso di dimensione n qualunque si puo procedere per assurdo. Supponiamoche la disuguaglianza non valga. Allora in particolare per ogni C = j ∈ N esiste uj ∈W 1,2
0 (Ω; Rk) tale che
(6.6) ‖uj‖2 > j‖Duj‖2.
Non e restrittivo supporre che ‖uj‖2 = 1 per ogni j. Se infatti cosı non fosse basterebbeosservare che la (6.6) continua a valere per le funzioni vj = uj/‖u‖2.
Ne consegue che, per la (6.6), la successione (uj) e limitata in W 1,2 e quindi esiste unasottosuccessione, che continuiamo a denotare con (uj) tale che uj u in W 1,2, ovverouj → u in L2 e Duj Du in L2. Dalla (6.6), d’altra parte, si ottiene che
‖Duj‖2 <‖uj‖2j
=1j→ 0
e di qui e dal fatto che ‖Du‖2 ≤ lim infj→∞ ‖Duj‖2 = 0 segue che Du = 0. Per ilTeorema 2.38 si ha che u e costante su ogni componente connessa di Ω, ma poiche udeve tendere a zero sul bordo di ciascuna di esse ne consegue che u = 0, ma cio e incontraddizione col fatto che ‖u‖2 = limj→∞ ‖uj‖2 = 1.
Osservazione 6.26. Come conseguenza della disuguaglianza di Poincare, una normaequivalente in W 1,p
0 (Ω) e data da ‖Du‖p.
Analizzando la dimostrazione della disuguaglianza di Poincare si vede che l’ipotesiche u abbia traccia nulla sul bordo si puo indebolire richiedendo ad esempio che u abbiatraccia nulla solamente su una parte della frontiera, purche essa sia “non trascurabile” ecioe abbia misura di Hausdorff (n− 1)-dimensionale diversa da zero e Ω sia connesso. Ealtresı chiaro che se la si lascia cadere completamente il teorema non puo valere (bastaconsiderare il caso di una funzione costante non nulla). In tal caso vale pero la seguenteversione opportunamente modificata.
Teorema 6.27. Se Ω e connesso allora esiste una costante C > 0 tale che
‖u− uΩ‖p ≤ C‖Du‖p
per ogni u ∈W 1,p(Ω) dove uΩ = 1|Ω|∫
Ωu dx.
Un’altra utile generalizzazione e la seguente

6.7. ESISTENZA DI SOLUZIONI DEBOLI DEL PROBLEMA 1 77
Teorema 6.28. Supponiamo che Ω sia connesso e p > 1. Sia Γ una porzione di ∂Ω taleche H 2(Γ) > 0. Allora esiste C > 0 tale che
(6.7) ‖y‖p ≤ C(‖Dy‖p + ‖y|Γ‖p
)per ogni y ∈W 1,p(Ω; Rk).
Dimostrazione Esercizio (nel caso n = 2 procedere per assurdo come nella dimostrazioneprecedente).
6.7 Esistenza di soluzioni deboli del Problema 1
Sia Ω un aperto limitato regolare di R3 e consideriamo il problema di minimo (formu-lazione debole del Problema 1)
(6.8) minI(y) : y ∈ A
doveA = y(x) ∈W 1,2(Ω; R3), y(x) = x su Γd
eI(y) =
∫Ω
|∇y|2dx−∫
Ω
b(x) · y dx−∫
Γt
t(x) · y(x) dH 2(x).
Considerata la funzione indicatrice di A
χA(y) :=
0 se y ∈ A+∞ altrimenti in W 1,2(Ω; R3)
si ha che il problema di minimo e equivalente al seguente
minI∞(y) : y ∈W 1,2(Ω; R3)
dove I∞ := I + χA.Per provare l’esistenza del minimo con il metodo diretto cerchiamo una topologia su
W 1,2(Ω) tale che
1. I∞ sia sequenzialmente semicontinuo inferiormente,
2. I∞ sia sequenzialmente coercivo.
E facile vedere che se scegliamo la topologia della norma il funzionale e continuo ma none coercivo.
Affinche il funzionale sia coercivo occorre che gli insiemi di sottolivello
y ∈W 1,2(Ω; R3) : I∞(y) ≤ C
siano contenuti in un insieme sequenzialmente compatto. Consideriamo dunque unasuccessione (yn) in W 1,2(Ω; R3) tale che
I∞(yn) ≤ C.
Riusciamo a dire che da (yn) e possibile estrarre una sottosuccessione convergente inqualche senso? Osserviamo che yn ∈ A per ogni n ∈ N e
I∞(yn) = I(yn) ≥∫
Ω
|Dyn|2dx− ‖b‖2‖yn‖2 − ‖t‖2,Γ‖yn‖2,Γ.

78 CAPITOLO 6. TEORIA VARIAZIONALE
Utilizzando la disuguaglianza di Young
ab ≤ εa2
2+b2
2ε
che vale per ogni ε > 0 e si ottiene da quella solita sostituendo a con a√ε e b con b/
√ε,
si ha, per ogni ε > 0
I∞(yn) ≥ ‖Dyn‖22 −ε
2‖yn‖22 −
12ε‖b‖22 −
ε
2‖yn‖22,Γ −
12ε‖t‖22,Γ
e, usando la disuguaglianza di traccia
I∞(yn) ≥ ‖Dyn‖22 −ε
2‖yn‖22 −
12ε‖b‖22 −
ε
2Ct(‖yn‖22 + ‖Dyn‖2
)− 1
2ε‖t‖22,Γ
≥ (1− ε
2Ct)‖Dyn‖22 −
ε
2(Ct + 1)‖yn‖22 −
12ε‖b‖22 −
12ε‖t‖22,Γ.
Per la disuguaglianza di Poincare (6.7) e ricordando che yn(x) = x su Γd, si ha
‖yn‖22 ≤ Cp(‖Dyn‖22 + ‖yn|Γd‖
22
)= Cp
(‖Dyn‖22 + ‖x‖22
)= Cp
(‖Dyn‖22 +M
)e dunque
I∞(yh) ≥ (1− ε
2Ct)‖Dyh‖22 −
ε
2(Ct + 1)Cp
(‖Dy‖22 +M
)− 1
2ε‖b‖22 −
12ε‖t‖22,Γ
≥ (1− εC)‖Dyh‖22 −12ε‖b‖22 −
12ε‖t‖22,Γ − M.
Preso ε abbastanza piccolo (ε < 1/C), si ha che esistono due costanti positive A e B taliche
C ≥ I∞(yh) ≥ A‖Dyh‖22 −B.
Allora
‖Dyh‖2 ≤ K =
√B + C
A.
Sempre per la disuguaglianza di Poincare (6.7) si ha anche
‖yh‖2 ≤ Cp(‖Dyh‖2 + γ) ≤ K
quindi (yh) e limitata in W 1,2(Ω; R3) e pertanto ammette una sottosuccessione debolmenteconvergente. Quindi I∞ e coercivo rispetto alla convergenza debole.
Per la caratterizzazione della convergenza debole in W 1,2, I risulta sequenzialmentedebolmente s.c.i.. Infatti, presa una successione yn y in W 1,2 si ha che yn → y eDyn → Dy in L2 e yn|Γ → yΓ in L2(Γ), e da cio segue che (esercizio)
I∞(y) ≤ lim infn→∞
I∞(yn).
Il teorema di Tonelli garantisce allora l’esistenza di almeno una soluzione del proble-ma (6.8). La stretta convessita del funzionale ne garantisce infine l’unicita.
6.8 Unicita della soluzione
L’unicita del punto di minimo si puo dedurre invece dalla stretta convessita in y delfunzionale I∞, in accordo con quanto segue.

6.9. VARIAZIONI SUL PROBLEMA 1 79
Definizione 6.29. Sia X uno spazio vettoriale e f : X → R una funzione. f si diceconvessa se, per ogni t ∈]0, 1[ e per ogni x, y ∈ X tali che f(x) < +∞ e f(y) < +∞, siha
f(tx+ (1− t)y) ≤ tf(x) + (1− t)f(y).
f si dice strettamente convessa se f non e identicamente +∞ e per ogni t ∈]0, 1[ e perogni x, y ∈ X tali che x 6= y, f(x) < +∞ e f(y) < +∞ si ha
f(tx+ (1− t)y) < tf(x) + (1− t)f(y).
Proposizione 6.30. Sia f : X → R una funzione strettamente convessa. Allora f ha alpiu un punto di minimo in X.
Dimostrazione Supponiamo per assurdo che x e y siano due punti di minimo per f inX, allora
f(x) = f(y) = minz∈X
f(z) < +∞.
Se x 6= y, per la stretta convessita di f abbiamo che
f(x
2+y
2) <
12f(x) +
12f(y) = min
z∈Xf(z) < +∞,
in contraddizione col fatto che x e y siano punti di minimo. Allora x = y.
Proposizione 6.31. I∞ e strettamente convesso.
Segue dalla stretta convessita della funzione W (F ) = |F |2, F ∈ R3×e, che si dimostradirettamente ricorrendo alla disuguaglianza di Young
E 6= F ⇒ 2E · F < |E|2 + |F |2.
che si dimostra come in R partendo dalla disuguaglianza |E − F |2 ≥ 0 in cui vale 0 se esolo se E = f . Per ogni E 6= F si ha quindi
W(λE + (1− λ)F
)= |λE + (1− λ)F |2 = λ2|E|2 + (1− λ)|F |2 + 2λ(1− λ)E · F< λ2|E|2 + (1− λ)|F |2 + λ(1− λ)(|E|2 + |F |2)
= λ|E|2 + (1− λ)|F |2 = λW (E) + (1− λ)W (F ).
6.9 Variazioni sul Problema 1
Consideriamo il funzionale
F (y) =12
∫Ω
A(x)Dy ·Dy dx−∫
Ω
b(x)y dx
dove A(x) e una matrice a coefficienti misurabili e limitati, definita positiva. Osserviamoche se A(x) = I allora si ha A(x)Dy · Dy = |Dy|2, come nel caso precedente. Indicatocon λ(x) il minimo autovalore, in conseguenza delle ipotesi su A si ha λ(x) > 0 ed esisteuna costante Λ > 0 tale che per ogni
Λ|ξ|2 ≥ A(x)ξ · ξ ≥ λ(x)|ξ|2 ∀xi ∈ R3.
Per la seconda disuguaglianza si ha che
F (y) ≥∫
Ω
λ(x)|Dy|2dx−∫
Ω
b(x) · y dx.

80 CAPITOLO 6. TEORIA VARIAZIONALE
Se inoltre A(x) soddisfa la seguente condizione di ellitticita uniforme, cioe esiste unacostante c > 0 tale che
λ(x) ≥ c > 0 per quasi ogni x ∈ Ω
(equivalente a dire che 1/λ(x) ∈ L∞(Ω)) allora
F (u) ≥ c∫
Ω
|Dy|2dx−∫
Ω
b(x)y dx
e quindi F e sequenzialmente debolmente coercivo in W 1,20 (Ω) (perche maggiora un fun-
zionale coercivo). Inoltre, come prima, F e anche sequenzialmente debolmente semicon-tinuo inferiormente in W 1,2
0 (Ω) perche il pezzo di funzionale quadratico nel gradienterisulta essere una norma equivalente a quella finora considerata in W 1,2
0 (Ω) e pertantoil corrispondente problema di minimo ha soluzione in W 1,2
0 (Ω). Anche in questo casol’unicita della soluzione segue dalla stretta convessita di F che a sua volta deriva dallaipotesi di ellitticita (esercizio).
Verificare che l’equazione di Eulero-Lagrange di questo funzionale risulta−div(A(x)Dy) = b(x) in ΩA(x)Dy = 0 su ∂Ωy ∈W 1,2
0 (Ω; R3)
Si tratta di un sistema di equazioni differenziali ellittico in forma divergenza. L’esistenzadi un punto di minimo dell’energia implica che questo sistema di equazioni differenzialialle derivate parziali ammette almeno una soluzione.
E interessante notare che se si chiede solo che 1/λ(x) ∈ L1(Ω) allora il funzionalenon risulta debolmente coercivo in W 1,2
0 (Ω) (ad esempio λ(x) = xα con 0 < α < 1e Ω = (0, 1)). La coercivita puo essere in questo caso recuperata con un proceduracosiddetta di rilassamento che consiste in un’estensione a +∞ del funzionale su unospazio piu grande di W 1,2
0 (Ω) (ad esempio quello delle funzioni a variazione limitata)con un’opportuna topologia che garantisca la coercivita. In questo modo si puo peroperdere la semicontinuita. Per la coercivita, d’altra parte, le successioni minimizzantisono relativamente compatte e la caratterizzazione dei punti limite delle sottosuccessioniconvergenti puo essere fatta allora considerando il piu grande funzionale semicontinuoinferiormente minorante F , che risultera ancora coercivo e i cui punti di minimo sarannopunti di accumulazione delle successioni minimizzanti.
6.10 Condizioni sufficienti di semicontinuita
Nel caso precedente, per dimostrare la semicontinuita inferiore abbiamo utilizzato l’argo-mento che la parte principale del funzionale e una norma in uno spazio di Hilbert e cometale semicontinua inferiormente rispetto alla convergenza debole.
A voler essere precisi, pero, in realta noi abbiamo dimostrato solamente che: dato unprodotto scalare, la norma associata a quel determinato prodotto scalare e debolmentes.c.i.. E facile pero dimostrare che data una norma equivalente ‖ · ‖e, questa deriva dalprodotto scalare
〈u, v〉e :=14(‖x+ y‖2e − ‖x− y‖2e).
Si puo considerare dunque la convergenza debole definita da questo prodotto scalare,rispetto alla quale il funzionale rimane coercivo (per l’equivalenza delle norme) ed e anchesemicontinuo inferiormente.
Vale tuttavia il seguente teorema di semicontinuita piu generale.

6.11. PROBLEMA 2 81
Teorema 6.32. Sia W : Ω×Rn×n → R una funzione misurabile non negativa, e tale cheW (x, ·) e convessa per ogni x ∈ Ω. Sia
F (y) =∫
Ω
W (x,Dy) dy
Allora F : W 1,2(Ω; Rn) → [0,+∞] e debolmente semicontino inferiormente rispetto allaconvergenza debole in W 1,2(Ω; Rn.
Dimostrazione Vedere ad esempio Jost [19].
6.11 Problema 2
Consideriamo il problema di minimo per il funzionale
F (u) =∫
Ω
f(Eu) dx−∫
Ω
b · u dx−∫
Γt
t · u da
dove u appartiene allo spazio degli spostamenti ammissibili
A = u ∈W 1,2(Ω; R3) e u(x) = 0 su Γd.
e dove b ∈ L2(Ω; R2) e t ∈ L2(Γ; R3) sono funzioni assegnate. Ricordiamo che
f(E) = µ|E|2 +λ
2| tr(E)|2, λ ≥ 0, µ > 0,
ed E = E(u) denota la parte simmetrica del gradiente di spostamento.Anche in questo caso conviene scrivere il problema nella forma equivalente
minF∞(u) : u ∈W 1,2(Ω; R3)
dove F∞ = F + χA.Considerata una successione (un) in W 1,2(Ω; R3) tale che
F∞(un) ≤ C
osserviamo che un ∈ A e
F∞(un) ≥ ‖Eun‖22 − ‖b‖2‖un‖2 − ‖t‖2,Γ‖un‖2,Γ
Teorema 6.33. [Prima disuguaglianza di Korn] Sia Ω come nella sezione precedente. Siha
‖Du‖2 ≤√
2‖E(u)‖2per ogni u ∈W 1,2
0 (Ω,Rn).
Dimostrazione Poiche C∞c (Ω; Rn) e denso in H10 (Ω; Rn), basta dimostrare che la disu-
guaglianza vale per le funzioni u ∈ C∞c (Ω; Rn). Si ha
|E(u)|2 = EijEij =n∑
i,j=1
(ui,j + uj,i)2
4=
12
n∑i,j=1
(u2i,j + ui,juj,i)
e, integrando per parti e usando il fatto che u ha supporto compatto,∫Ω
|E(u)|2 dx =12
∫Ω
(|Du|2 − ui,jiuj
)dx =
12
∫Ω
(|Du|2 + ui,iuj,j
)dx
=12
∫Ω
(|Du|2 + |div(u)|2
)dx ≥ 1
2
∫Ω
|Du|2 dx

82 CAPITOLO 6. TEORIA VARIAZIONALE
da cui segue la tesi.
Notiamo che, a differenza della disuguaglianza di Poincare, la prima disuguaglianzadi Korn non e immediatamente generalizzabile a funzioni che si annullano solo su unaparte del bordo. Cio tuttavia puo essere fatto introducendo preliminarmente una secondadisuguaglianza di Korn che pero e molto piu difficile da dimostrare. Esistono varie di-mostrazioni; tra le piu semplici citiamo quelle di Nitsche [27] e di Kondratiev e Oleinik [28],Theorem 2.4.
Teorema 6.34. [Seconda disuguaglianza di Korn] Esiste una costante K > 0, tale che
‖u‖1,2 ≤ K(‖u‖2 + ‖E(u)‖2)
per ogni u ∈W 1,2(Ω; Rn).
Teorema 6.35. [Prima disuguaglianza di Korn] Supponiamo che Ω sia connesso. Sia Γuna porzione di ∂Ω tale che H 2(Γ) > 0. Allora esiste C > 0 tale che
‖u‖1,2 ≤ C‖E(u)‖2
per ogni u ∈W 1,2(Ω; R3) tale che u|Γ = 0.
Dimostrazione Supponiamo per assurdo che la tesi sia falsa. Allora per ogni j ∈ Nesiste uj ∈W 1,2(Ω; R3) tale che uj|Γ = 0 e
(6.9) ‖uj‖1,2 > j‖E(uj)‖2
e inoltre ‖uj‖1,2 = 1. Da quest’ultima si ha che esiste una sottosuccessione, che con-tinuiamo a chiamare (uj) tale che
(6.10) uj u in W 1,2.
Poiche ‖E(uj)‖2 < 1/j, si haE(uj)→ 0.
D’altra parte, la (6.10) implica E(uj) E(u) in L2 e quindi, per unicita del limite, si haE(u) = 0. Si ha allora u ∈ RΩ e quindi Pu = u. Per la continuita della traccia si ha poiu|Γ = 0 e, siccome u e uno spostamento rigido, questo implica u = 0.
Se dimostriamo che in effetti uj → 0 fortemente in W 1,2 allora otteniamo una con-traddizione col fatto che ‖uj | = 1. Per questo basta provare che (uj) e di Cauchy in W 1,2
usando la seconda disuguaglianza di Korn e la (6.9).
Sempre con la seconda disuguaglianza di Korn si dimostra la seguente ulteriore disug-uaglianza di Korn.
Teorema 6.36. [Disuguaglianza di Korn] Sia P la proiezione ortogonale di L2(Ω; Rn)sullo spazio RΩ degli spostamenti rigidi infinitesimi. Esiste una costante C > 0 tale che
‖u− Pu‖1,2 ≤ C‖E(u)‖2
per ogni u ∈W 1,2(Ω; Rn).
Dimostrazione Supponiamo per assurdo che la tesi sia falsa. Allora esiste una succes-sione vi ⊂W 1,2(Ω; Rn) tale che
‖vi − Pvi‖1,2 ≥ i‖E(vi)‖2.

6.12. NON-ESISTENZA E RILASSAMENTO 83
Rinormalizziamo definendoui =
vi − Pvi‖vi − Pvi‖1,2
.
Allora
(6.11) ‖ui‖1,2 = 1, ‖E(ui)‖2 ≤1i.
Notiamo che ui ∈ R⊥Ω , dove R⊥Ω e il complemento ortogonale hilbertiano di RΩ inL2(Ω; Rn). Per il teorema di Rellich esiste una sottosuccessione uij ⊂ ui ed unafunzione u ∈W 1,2(Ω; Rn) tali che
uij → u in L2(Ω; Rn).
Segue che u ∈ R⊥Ω . Per la seconda disuguaglianza di Korn e la (6.11) si ha che uij euna successione di Cauchy in W 1,2(Ω; Rn), sicche
uij → u in W 1,2(Ω; Rn).
Allora si ha ‖u‖1,2 = 1. Inoltre, per la (6.11)2, si ha E(u) = 0 e quindi u ∈ RΩ. Allorau ∈ RΩ ∩R⊥Ω e quindi u = 0, contro il fatto che ‖u‖1,2 = 1.
Torniamo al problema di minimo. La coercivita si dimostra usando quest’ultima dis-uguaglianza di Korn, la disuguaglianza di traccia e quella di Young come nel Problema 1.La semicontinuita inferiore segue ancora dal fatto che la parte principale del funzionale eequivalente alla norma di W 1,2. L’unicita segue dalla stretta convessita di F∞.
6.12 Non-esistenza e rilassamento
Mostriamo con un esempio che il minimo puo non esistere. Per semplicita consideriamoqui il caso di un funzionale scalare. Per un esempio piu rilevante fisicamente vedere LeDret [22].
Esempio 6.37. Sia Ω = (0, 1)×(0, 1), y : Ω → R, F = ∇y =(∂y∂x1
, ∂y∂x2
), W (F ) =
W (F1, F2) = (F 21 − 1)2 + F 4
2 .
miny|∂Ω=0
I(y) =∫
Ω
(( ∂y∂x1
)2 − 1)2
+( ∂y∂x2
)4dx
Il funzionale si annulla sulle funzioni con derivata nulla rispetto ad x2 e ±1 rispetto ad x1,ma e chiaro che funzioni di questo tipo non possono soddisfare le condizioni al contorno,per la quale si avrebbe y = 0 su tutto Ω (dal momento che D2y = 0 in Ω), ma su questafunzione il funzionale vale 1. Queste funzioni oscillanti si possono pero modificare inmodo da costruire delle successioni minimizzanti e provare quindi che l’estremo inferioredel funzionale e zero. Infatti, introdotta la funzione a dente di sega su [0, 1)
s(x) =
x se x ∈ [0, 1/4)1/2− x se x ∈ [1/4, 1/2)x− 1/2 se x ∈ [1/2, 3/4)x− 1 se x ∈ [3/4, 1)
e continuando ad indicare con s il suo prolungamento periodico su R, la successioneyn(x1, x2) := s(nx1)/n soddisfa I(yn)→ 0. La modifichiamo ponendo per ogni 1 > δ > 0
yδn(x1, x2) := s(nx1)/n, δ < x2 < 1− δ

84 CAPITOLO 6. TEORIA VARIAZIONALE
e interpolando linearmente per soddisfare la condizione al contorno. Si ha
limδ→0
limn→∞
I(yδn) = 0
e quindi esiste una successione (δn) tale che, posto yn := yδnn si ha
limn→∞
I(yn) = 0
Le successioni minimizzanti, che sono compatte in W 1,4, rappresentano matematicamentela microstruttura che si osserva sperimentalmente in certi materiali (Ball e James [6],1987).
In questo caso, come in tutti i problemi in cui il minimo non esiste, le successioniminimizzanti costituiscono vere e proprie soluzioni “deboli” o “generalizzate”, ed e quindidi fondamentale importanza caratterizzarne il comportamento. Cio viene fatto, appunto,tramite la formulazione, e successiva eventuale risoluzione, del problema rilassato.
E stato provato (vedi [10]) che l’ipotesi fisica limdetF→0W (F ) = +∞ non e compatibilecon indifferenza materiale + convessita. Quindi la mancanza di esitenza di soluzioni none affatto rara, ma piuttosto comune.
Sia F : X → R un funzionale coercivo, ma non semicontinuo inferiormente, su unospazio topologico (X, τ). Allora puo non esistere il minimo di F su X. Il problemadiventa, quindi, quello di caratterizzare i limiti di successioni minimizzanti per F , chesono compatte. A tale scopo associeremo ad F un funzionale F che ammetta minimo inX e che verifichi:
1. minx∈X
F (x) = infx∈X
F (x);
2. ogni punto x di minimo per F e il limite di una successione minimizzante per Fed ogni successione minimizzante di F ha una sottosuccessione convergente ad unpunto di minimo di F .
Definizione 6.38. Sia (X, τ) uno spazio topologico. Sia F : X → R un funzionale,si chiama inviluppo semicontinuo inferiormente o rilassato di F il massimo funzionalesemicontinuo inferiormente minore o uguale ad F e viene indicato con F .
Poiche l’estremo superiore di funzioni semicontinue inferiormente e semicontinuo inferi-ormente, segue che, se SF e l’insieme dei funzionali G : X → R semicontinui inferiormentee tali che G ≤ F ,
(6.12) F (x) = maxG∈SF
G(x)
per ogni x ∈ X.
Definizione 6.39. (Primo assioma di numerabilita (N1)) Si dice che X soddisfa alprimo assioma di numerabilita se ogni punto di x ammette un sistema fondamentale diintorni numerabile (cioe una famiglia numerabile di intorni di x tale che ogni intorno dix contiene un intorno della famiglia).
Definizione 6.40. (Secondo assioma di numerabilita (N2)) Si dice che X soddisfaal secondo assioma di numerabilita, o che e a base numerabile, se esiste una base di apertinumerabile per la topologia di X (cioe esiste una famiglia numerabile di aperti tale cheogni altro aperto e unione di aperti della famiglia).

6.12. NON-ESISTENZA E RILASSAMENTO 85
Si potrebbe dimostrare che N2⇒N1.
Osservazione 6.41. Gli spazi metrici soddisfano il primo assioma di numerabilita. Ingenere uno spazio metrico non soddisfa il secondo assioma di numerabilita (esempio Rcon la topologia discreta, indotta dalla metrica banale) a meno che non si supponga chesia separabile cioe che contenga un sottoinsieme numerabile denso. E questo il caso deglispazi metrici compatti. In ogni caso, gli spazi metrici separabili soddisfano entrambi gliassiomi di numerabilita.
Proposizione 6.42. Supponiamo che X soddisfi il primo assioma di numerabilita (adesempio che sia uno spazio metrico). Allora F e caratterizzato dalle due seguenti propri-eta:
1. per ogni successione (xk) convergente a x si ha
F (x) ≤ lim infk→+∞
F (xk);
2. per ogni x ∈ X esiste una successione (xk) convergente a x tale che
F (x) = limk→+∞
F (xk).
Dimostrazione Dimostriamo la prima proprieta. Se (xk) converge a x, allora, ricor-dando che F ≤ F e che F e semicontinuo inferiormente, si ha che
F (x) ≤ lim infk→+∞
F (xk) ≤ lim infk→+∞
F (xk).
Per dimostrare la seconda proprieta fissiamo una base numerabile (Uk) di intorni apertidi x tali che Uk+1 ⊆ Uk per ogni k ∈ N. Osserviamo che per ogni k ∈ N si ha
(6.13) infy∈Uk
F (y) ≤ F (x).
Infatti la funzione a primo membro e costante e quindi la sua estensione a −∞ fuori di Uke semicontinua inferiormente e ≤ F e quindi e minore o uguale a F (che e la piu grandefunzione semicontinua inferiormente e ≤ F ); restringendosi a x si ottiene la (6.13).
Quindi per ogni k esiste xk ∈ Uk tale che F (xk) ≤ F (x) +1k
. Allora la successione
(xk) cosı costruita converge a x e lim supk→∞
F (xk) ≤ F (x), e la tesi 2 segue da 1.
Viceversa, se F e una funzione che soddisfa le proprieta 1 e 2 allora F soddisfa
F (x) = minlim infn→∞
F (xn) : xn → x .
In altri termini, esiste un’unica funzione F che soddisfa la due proprieta; siccome, comeabbiamo appena dimostrato, il rilassato le soddisfa, allora deve coincidere con questafunzione.
Il seguente teorema riassume le proprieta variazionali del problema rilassato.
Teorema 6.43. Supponiamo che X soddisfi il primo assioma di numerabilita Sia F :X → R un funzionale coercivo. Allora si ha:
1. F e coercivo e quindi, essendo semicontinuo inferiormente, ammette minimo;

86 CAPITOLO 6. TEORIA VARIAZIONALE
2. infx∈X
F (x) = minx∈X
F (x);
3. se xn → x e una successione minimizzante per F , allora x e un punto di minimoper F ; viceversa, per ogni punto x di minimo per F esiste una successione xn → xminimizzante per F .
Dimostrazione 1. Dalla Proposizione 6.42 segue che per ogni C ∈ R
x ∈ X : F (x) ≤ C ⊆ x ∈ X : F (x) ≤ C + 1.
Se F e coercivo, l’insieme x ∈ X : F (x) ≤ C + 1 e contenuto in un compatto e quindiF e coercivo.2. Supponiamo che c = inf
x∈XF (x). Allora la funzione costante G(x) = c e semicontinua
inferiormente ed e minore o uguale ad F , quindi, per definizione di inviluppo semicontinuoinferiormente, si ha che c ≤ F (x) per ogni x ∈ X, cioe c ≤ min
x∈XF (x). La disuguaglianza
inversa segue invece dal fatto che F e, per definizione, minore o uguale a F .3. se xn → x e una successione minimizzante per F , poiche F e un funzionale semicontinuoinferiormente, segue che
F (x) ≤ lim infn→+∞
F (xn) ≤ lim supn→+∞
F (xn) = infy∈X
F (y).
Poiche infy∈X
F (y) = miny∈X
F (y), allora x e un punto di minimo per F . Se x e un punto di
minimo per F , dalla Proposizione 6.42 segue che esiste una successione (xn) convergentea x in X tale che
infy∈X
F (y) = F (x) = limn→+∞
F (xn).
Allora (xn) e una successione minimizzante per F .
Esercizio 6.44. Sia
I(y) =∫
Ω
|Dy|2 dx−∫
Ω
bκ · y dx−∫
Γt
tκ · y da
dove y appartiene allo spazio delle deformazioni ammissibili
A = y ∈ C1(Ω; R3) e y(x) = x su Γd.
e definiamo
I∞(y) =
I(y) se y ∈ A+∞ altimenti in L2(Ω; R3)
Dimostrare che si ha
I∞(y) = minlim infh→∞
I∞(yh) : yh ∈ L2, yh → y in L2
=
I(y) se y ∈W 1,2(Ω), y(x) = x su Γd+∞ altrimenti in L2(Ω; R3)
Capitolo 7
Γ-convergenza negli spazimetrici
Data una successione di funzionali Fn : X → R definita su uno spazio metrico (X, d) edun elemento x ∈ X, denotiamo con
(7.1)Γ lim inf
n→∞Fn(x) := inflim inf
n→∞Fn(xn) : xn
d→ x,
Γ lim supn→∞
Fn(x) := inflim supn→∞
Fn(xn) : xnd→ x,
che sono detti rispettivamente Γ-liminf e Γ-limsup Questi Γ-limiti sono anche detti sequen-ziali perche definiti usando le successioni e per distinguerli dalla piu generale definizionedi Γ-limite in uno spazio topologico (vedi ad esempio Dal Maso [11] o De Giorgi e Fran-zoni [12]). Come accade spesso in matematica, per denotare uno stesso oggetto si utiliz-zano svariate notazioni tra cui verra scelta la piu comoda a seconda del contesto (si pensiad esempio a quanti modi diversi esistono per indicare l’operatore di derivazione). Cosı ilΓliminf sopra definito si potra trovare indicato anche con i simboli
Γ−(Y ) lim inf, Γ−(Y, d) lim inf, Γ(d−) lim inf, Γ(Y −) lim inf .
Il segno meno viene utilizzato per distinguerli dai Γ+-limiti nei quali compare il sup alposto dell’inf nei secondi membri delle (7.1), e che sono lo strumento naturale per trattareproblemi di massimo. Poiche noi non li utilizzeremo, nel seguito ometteremo il segno menoper comodita di notazione.
Definizione 7.1. Siano F, Fn : X → R, n ∈ N, e sia x ∈ X. Diciamo che la successione(Fn) Γ-converge al Γ-limite F nel punto x, e scriviamo
Γ limn→∞
Fn(x) = F (x)
se
(7.2) Γ lim infn→∞
Fn(x) = Γ lim supn→∞
Fn(x) = F (x).
Diciamo che la successione Γ-converge in un insieme se Γ-converge in ogni punto dell’in-sieme.
Mentre Γ-liminf e Γ-limsup esistono sempre, e chiaro che il Γ-limite puo non esistere;esempio: X = R, Fn = (−1)n.
87

88 CAPITOLO 7. Γ-CONVERGENZA NEGLI SPAZI METRICI
Osservazione 7.2. Osserviamo (vedi l’esercizio seguente) che la (7.2) equivale al simul-taneo verificarsi delle seguenti due condizioni
1. (disuguaglianza del liminf) per ogni successione xn ∈ X tale che xnd→ x si ha
lim infn→∞
Fn(xn) ≥ F (x);
2. (disuguaglianza del limsup) esiste una successione xn ∈ X tale che xnd→ x e
lim supn→∞
Fn(xn) ≤ F (x).
Si osserva inoltre che, per la 1, il limsup che compare nella 2 e in effetti un limite e ladisuguaglianza e un’uguaglianza. Quindi la 2 puo essere sostituita dalla seguente
2′. (successione ottimale o recovery sequence) esiste una successione xn ∈ X tale chexn
d→ x elimn→∞
Fn(xn) = F (x).
Esercizio 7.3. Nell’osservazione precedente la disuguaglianza del liminf segue immedia-tamente dalla definizione di Γ− lim inf. Mostrare che quella del limsup si ottiene da
inflim supn→∞
Fn(xn) : xnd→ x = F (x).
Svolgimento. Infatti, per le proprieta dell’inf, per ogni k ∈ N esiste una successionexkn → x per n→∞ tale che
lim supn→∞
Fn(xkn) < F (x) +1k.
Ricordando che, per definizione di limite, si ha
limn→∞
xkn = x e lim supn→∞
Fn(xkn) = `k
se e solo se per ogni ε > 0 esiste nkε ∈ N tale che per ogni n ≥ nkε si ha
`k − ε < supj≥n
Fj(xkj ) < `k + ε e d(xkn, x) < ε.
Allora, preso ε = 1/k e poiche `k < F (y) + 1k , si ha che esiste una successione crescente
di interi nk → +∞ tale che
Fn(ykn) < F (y) +2k
e d(ykn, y) <1k
∀n ≥ nk.
Allora una successione con la proprieta richiesta e
yn =
y se n < n1
ykn se nk ≤ n < nk+1,
perche per ogni n ≥ nk si ha
d(yn, y) <1k
e Fn(yn) < F (y) +2k.
Riassumendo, vale la seguente

89
Proposizione 7.4. La successione (Fn) Γ-converge ad F in x ∈ X se e solo se
1. (disuguaglianza del liminf) xn → x ⇒ F (x) ≤ lim infn→∞
F (xn),
2. (recovery sequence) esiste xn → x tale che F (x) = limn→∞
F (xn).
Esempio 7.5. 1. Se Fn(x) = F1(nx), dove
F1(x) =
−1 se x = −1
0 altrimenti,
allora (Fn) Γ-converge in R alla funzione
F (x) =
0 se x 6= 0
−1 se x = 0,
mentre (Fn) converge puntualmente a 0. Infatti una recovery per x = 0 e xn =−1/n.
2. Se Fn(x) = nxe−2n2x2, allora (Fn) Γ-converge in R alla funzione
F (x) =
0 se x 6= 0
−12e−
12 se x = 0,
mentre (Fn) converge puntualmente a 0.
3. Se Fn(x) = nxenx, allora (Fn) Γ-converge in R alla funzione
F (x) =
0 se x < 0
−1/e se x = 0
+∞ se x > 0,
mentre (Fn) converge puntualmente a 0 in ]−∞, 0] ed a +∞ a in ]0,+∞[.
La Γ-convergenza gode della seguente proprieta che la rende interessante per il calcolodelle variazioni.
Definizione 7.6. Una successione di funzioni (Fn) si dice equi-coerciva sullo spaziometrico X se per ogni C ∈ R esiste un sottoinsieme compatto KC di X tale che
x ∈ X : Fn(x) ≤ C ⊆ KC per ogni n ∈ N.
Teorema 7.7 (proprieta variazionale). Se (Fn) e equi-coerciva e Γ-convergente a unafunzione F in X allora esiste
(7.3) minX
F = limn→+∞
infXFn.
Inoltre, se (xn) e una successione tale
(7.4) lim infn→∞
Fn(xn) = lim infn→∞
infXFn
(e.g. se xn e punto di minimo di Fn) allora

90 CAPITOLO 7. Γ-CONVERGENZA NEGLI SPAZI METRICI
1. se xn → x allora x e di minimo per F e lim infn→∞
Fn(xn) = F (x) (se xn e di minimo
per Fn allora il liminf e un limite);
2. se minX
F < +∞ allora esistono un punto di minimo x di F ed una sottosuccessione
(xnk) tali che xnk → x.
Dimostrazione Consideriamo una successione (xn) con la proprieta (7.4)
lim infn→∞
Fn(xn) = lim infn→∞
infXFn < +∞;
cioe una “successione minimizzante per la famiglia Fn” (provare, per esercizio, che unatale successione esiste sempre). Se il secondo membro fosse +∞, siccome per definizionedi Γ-liminf
Γ lim infn→+∞
Fn(x) ≥ lim infn→+∞
infXFn ∀x ∈ X,
si avrebbe allora subito che F ≡ +∞ e non vi sarebbe nulla da provare.Cerchiamo di trovare una sottosuccessione convergente. Poiche la successione (Fn(xn))
ammette una sottosuccessione tale che
limkFnk(xnk) = lim inf
n→∞infXFn < +∞
allora tale sottosuccessione e limitata superiormente e, per la equi-coercivita di Fn esisteuna sottosuccessione di (xnk), che possiamo continuare ad indicare con la stessa notazione,convergente ad un elemento x ∈ X. Per dimostrare l’esistenza del minimo bastera alloraprovare che x minimizza F .
La strategia che seguiremo consiste nel cercare di ottenere la seguenti stime (bound)per il comportamento asintotico della successione degli inf
XFn
(upper bound) lim supn→∞
infXFn ≤ inf
XF ≤ F (x)
(lower bound) F (x) ≤ lim infn→∞
infXFn
La tesi (7.3) e la 2 seguiranno quindi dal fatto che il primo termine della catena didisuguaglianze cosı ottenuta e uguale all’ultimo e si tratta quindi, in effetti, di uguaglianze.
Incidentalmente, resta provata anche la 1, infatti, se xn → x, siccome una sottosuc-cessione converge ad x, allora necessariamente sara x = x che sappiamo gia essere unminimizzante di F ; sempre per i bound e l’ipotesi, si ha poi
lim infn→∞
Fn(xn) = lim infn→∞
infXFn = F (x).
Cominciamo col provare la stima dall’alto (upper bound). La seconda disuguaglianza ebanalmente vera. La prima segue da
lim supn→∞
infXFn ≤ F (y) ∀ y ∈ Y
che e vero grazie alla disuguaglianza del limsup.La stima dal basso (lower bound) invece segue immediatamente dalla disuguaglianza
del liminf. Consideriamo a tal scopo la successione
xn =
xnk se ∃ k : n = nk
x se n 6= nk ∀ k.

7.1. CALCOLO DEI Γ-LIMITI 91
Poiche xn → x allora, per la disuguaglianza del liminf, si ha
F (x) ≤ lim infn→∞
Fn(xn) ≤ limk→+∞
Fnk(xnk) = lim infn→∞
infXFn,
e cio conclude la dimostrazione.
La definizione di Γ-limite e data ad hoc per garantire il funzionamento dello schemaseguente
equi-coercivita + Γ-convergenza ⇒ convergenza dei problemi di minimo
cioe la Γ-convergenza e sostanzialmente la piu debole convergenza di funzionali che garan-tisce la convergenza dei problemi di minimo.
Concludiamo questa sezione osservando che l’identificazione di un limite variazionalecomporta la scelta di un’opportuna topologia che deve essere sufficientemente debole dagarantire l’equi-coercivita ma il piu forte possibile perche piu forte e la topologia, piu fortesara la convergenza dei problemi di minimo. D’altra parte l’insieme delle topologie in com-petizione non e un insieme totalmente ordinato, cosicche non esiste, in genere, la piu fortetopologia che garantisce la coercivita, ma topologie diverse, tra loro non confrontabili,potranno dare descrizioni diverse del comportamento delle successioni minimizzanti, e lascelta della topologia migliore dipendera da quali proprieta delle successioni minimizzantisi vogliono mettere in evidenza.
7.1 Calcolo dei Γ-limiti
I Γ-limiti si comportano, in generale, in maniera piuttosto diversa dai limiti usuali. Adesempio, si osserva che il Γ-limite di una successione costante Fn = F e il funzionalerilassato di F , e quindi in generale non coincide con F . Siccome poi, in generale, il rilassatodi una somma non coincide con la somma dei rilassati (es. F = 1[0,+∞), G = 1(−∞,0]
su R), si ha immediatamente un esempio che mostra che, in generale, il Γ-limite di unasomma non coincide con la somma dei Γ-limiti. Questa proprieta si riesce, in certi casi, arecuperare rafforzando la covergenza di una delle due successioni, come mostra il seguenteteorema.
Definizione 7.8. Data una successione di funzioni a valori reali Gn : X → R, si diceche (Gn) converge con continuita a G : X → R in un punto x ∈ X se
xn → x ⇒ Gn(xn)→ G(x).
Teorema 7.9. Siano F, Fn : X → R e G, Gn : X → R. Se (Fn) Γ-converge a F e (Gn)converge con continuita a G allora
Γ limn→∞
(Fn +Gn) = F +G.
Dimostrazione Esercizio.
Discende immediatamente il seguente corollario.
Corollario 7.10. Siano F, Fn : X → R e G : X → R una funzione continua. Se (Fn)Γ-converge a F allora
Γ limn→∞
(Fn +G) = F +G.

92 CAPITOLO 7. Γ-CONVERGENZA NEGLI SPAZI METRICI
7.2 Γ-convergenza di funzionali definiti su domini vari-abili
In questa sezione generalizziamo la classica nozione di Γ-convergenza di De Giorgi al casodi famiglie di funzionali Fn : Yn → R definiti su spazi che possono essere differenti daquello del dominio del funzionale limite. Questa generalizzazione e particolarmente utilenel caso dei problemi di riduzione dimensionale ed e stata introdotta da Anzellotti, Baldoe Percivale in [5].
Sia Xn una successione di insiemi, (X, d) uno spazio metrico e qn : Yn → X unasuccessione di mappe. Data una successione di funzionali Fn : Yn → R e un punto x ∈ X,si definiscono
(7.5)Γ(qn, X) lim inf
n→∞Fn(x) := inflim inf
n→∞Fn(yn) : yn ∈ Yn, qn(yn) d→ x,
Γ(qn, Y ) lim supn→∞
Fn(x) := inflim supn→∞
Fn(yn) : yn ∈ Yn, qn(yn) d→ x,
che sono chiamati, rispettivamente, Γ-liminf e Γ-limsup nel punto x. Se questi coincidono,il loro valore comune sara detto Γ(qn, X)-limite della successione in x. Analogamente aprima si definisce la Γ(qn, X)-convergenza in un insieme.
Definizione 7.11. Sia Fαα∈I (I insieme di indici; ad esempio I = N) una famiglia difunzioni Fα : Yα → R e sia qα : Yα → X. La famiglia Fα e detta (qα, X)-equi-coercivase per ogni C ∈ R esiste un sottoinsieme compatto KC di X tale che
qα(y) : y ∈ Yα, Fα(y) ≤ C ⊆ KC
per ogni α ∈ I.
La definizione precedente si riduce a quella classica di equi-coercivita nel caso Yα = Xe qα = id per ogni α.
Dimostrare per esercizio che per questi nuovi Γ-limiti valgono tutte le proprieta enun-ciate nella due sezioni precedenti sostituendo a xn → x la convergenza qn(xn) → x, eanalogamente per le sottosuccessioni.
Osservazione 7.12. Posto
In(x) := infFn(y) : y ∈ Yn, qn(y) = x, n ∈ N
allora si ha
Γ(qn, X) limn→∞
Fn(x) = F (x) ⇐⇒ Γ(X) limn→∞
In(x) = F (x)
7.3 Γ-convergenza di famiglie ad un parametro
Data una famiglia di funzioni Fεε>0 diremo che
Γ limε→0
Fε(x) = F (x)
se e solo se per ogni successione εn 0 si ha
Γ limn→∞
Fεn(x) = F (x).
E immediato riconoscere che in questo contesto il Teorema 7.7 che esprime la proprietavariazionale si riscrive nella maniera seguente.

7.3. Γ-CONVERGENZA DI FAMIGLIE AD UN PARAMETRO 93
Proposizione 7.13. Sia (X, d) uno spazio metrico. Assumiamo che Γ(qε, X) limε→0
Fε = F
su X e che la famiglia Fε sia (qε, X)-equi-coerciva. Allora esiste
minX
F = limε→0
infXFε.
Inoltre, se xε ∈ X soddisfa a
lim infε→0
Fε(xε) = lim infε→0
inf Fε
(e.g. se xε e un punto di minimo per Fε) allora
1. se εn e una successione tale che εn 0 e se qεn(xεn) d→ x allora x e un minimizzantedi F su X e lim
n→∞Fεn(xεn) = F (x);
2. se minX F < +∞ allora esiste una successione εn 0 e un minimizzante x di Fsu X tale che qεn(xεn) d→ x.

Capitolo 8
Energia di una piastra elasticalineare
8.1 Il problema 3D
Sia ø ⊂ R2 aperto, limitato, connesso e con frontiera lipschitziana. Consideriamo ilsottoinsieme di R3
Ωε := ø× (−ε, ε), ε ∈ (0, 1]
che supponiamo essere la regione occupata da un corpo elastico lineare omogeneo edisotropo nella propria configurazione di riferimento. Supponiamo che sul corpo agiscanosolo forze di volume di densita bε.
Assumiamo µ > 0 e λ ≥ 0. Definiamo
A(Ωε) := H1d(Ωε; R3) := u ∈ H1(Ωε; R3) : u = 0 su Γεd := ∂ø× (−ε, ε).
Abbiamo gia dimostrato che, nelle ipotesi in cui siamo, il funzionale dell’energiaelastica totale
Fε(u) :=∫
Ωε
f(Eu) dx−∫
Ωε
bε · u dx
dove f(E) = µ|E|2 + (λ/2)| tr(E)|2, ammette, per ogni ε > 0, un unico punto di minimouε tra tutti gli spostamenti ammissibili u ∈ A(Ωε) = H1
d(Ωε; R3).Per ε piccolo i punti di minimo dell’energia Fε rappresentano le configurazioni di equi-
librio stabile di piastre di spessore sempre piu sottile. Il loro limite per ε→ 0 rappresen-terebbe la configurazione di equilibrio di una piastra di spessore nullo, pensata cioe comecorpo elastico bidimensionale. Possiamo dire qualcosa di piu su questa configurazione diequilibrio limite? Un calcolo diretto richiederebbe di conoscere uε, ma quest’ultimo, comesappiamo, e soluzione di un sistema di equazioni differenziali alle derivate parziali la cuirisoluzione esplicita e generalmente proibitiva. Occorre quindi procedere in maniera menodiretta. Ad esempio e ragionevole pensare che questa configurazione limite potrebbe es-sere, a sua volta, minimo di un funzionale in dimensione 2, che rappresenterebbe quindil’energia della piastra pensata come “struttura sottile”, cioe come oggetto 2D. Divienequindi naturale cercare questa energia 2D come Γ-limite della successione Fε per ε→ 0.
Questo problema e stato studiato nei primi anni ’90 dai francesi Bourquin, Ciarlet,Geymonat e Raoult [8] e dagli italiani Anzellotti, Baldo e Percivale [5]. Il primo lavoronel quale si considera un problema di riduzione dimensionale mediante Γ-convergenza einvece degli italiani Acerbi, Buttazzo e Percivale [1] (1991). L’idea della modellazione
94

8.2. PASSAGGIO AD UN DOMINIO FISSO 95
di strutture sottili mediante Γ-convergenza e pero gia presente in un lavoro del 1988 adopera degli stessi autori [2], che puo essere considerato il vero capostipite storico di questofilone di ricerca.
La scelta di trattare il caso della piastra deriva dal fatto che la relativa maggioresemplicita tecnica lo rende adatto ad una presentazione didattica. La tecnica su cuibasiamo le dimostrazioni e stata sviluppata in [14].
8.2 Passaggio ad un dominio fisso
Il primo problema che si presenta cercando di passare al limite per ε→ 0 e che le funzioniuε appartengono ai domini A(Ωε) cioe non stanno tutte allo stesso spazio. Si potrebbeovviare a questo fatto ricorrendo alla Γ-convergenza di funzionali definiti su domini vari-abili, ma e comunque tecnicamente piu semplice, quando possibile, lavorare con funzionidefinite tutte nello stesso spazio.
Percio conviene effettuare il semplice cambiamento di variabile
y1 = x1, y2 = x2, y3 = x3/ε
che trasforma il dominio Ωε in Ω := Ω1. Cioe, il cambiamento di variabile nell’integraledell’energia mediante il diffeomorfismo pε : Ω→ Ωε definito da
pε(y) = pε(y1, y2, y3) = (y1, y2, εy3),
consentira di lavorare con funzioni v = u pε che, al variare di ε in (0, 1], appartengonotutte quante a
A(Ω) = H1d(Ω; R3) := v ∈ H1(Ω; R3) : v = 0 on Γd = ∂ø× (−1, 1).
Sostituendo u = v p−1ε nell’espressione di Fε si ottiene l’energia associata al nuovo
spostamento v
A(Ω) 7→ R
v 7→ Fε(v p−1ε ) =
∫Ωε
f(E(v p−1ε (x))) dx−
∫Ωε
bε(x) · v p−1ε (x) dx.
Col cambiamento di variabile x = pε(y) si puo ora trasformare anche questo integrale suΩε in un integrale su Ω ottenendo
Fε(v p−1ε ) = ε
∫Ω
f(Eεv) dy − ε∫
Ω
bε pε · v dy
doveEεv := sym(Hεv), Hεv := (D1v,D2v,
D3v
ε),
e Div denota il vettore colonna delle derivate parziali di v rispetto ad yi.Il problema del calcolo del Γ-limite di Fε come funzione di u e cosı trasformato
nell’analogo problema per Fε(v p−1ε ) come funzione di v. E altresı evidente che, siccome
Fε(v p−1ε ) =
∫Ω
f(Eε(√εv)) dy −
∫Ω
√εbε pε · (
√εv) dy
allora si avra
inflim inf Fε(vε p−1ε ) : vε → v =
= inflim inf[ ∫
Ω
f(Eε(√εvε)) dy −
∫Ω
√εbε pε · (
√εv) dy
]: vε → v
= inflim inf[ ∫
Ω
f(Eεvε) dy −∫
Ω
√εbε pε · vε dy
]:vε√ε→ v

96 CAPITOLO 8. ENERGIA DI UNA PIASTRA ELASTICA LINEARE
e analogamente per il Γ-limsup, allora, siccome la convergenza delle vε non e ancorastata scelta, agli effetti dello studio della Γ-convergenza l’ε che moltiplica il funzionaledell’energia puo essere “semplificato. Osserviamo altresı che questa semplificazione epossibile per il fatto che la densita di energia elastica f e quadratica nello spostamento;non si puo quindi, in generale, operare questa semplificazione se il potenziale W non godedi questa proprieta, come accade usualmente in elasticita non lineare.
Dividiamo quindi tutto per ε e consideriamo il funzionale dell’energia “riscalato” Fε :H1d(Ω; R3)→ R definito da
Fε(v) :=1εFε(v p−1
ε ) =∫
Ω
f(Eεv) dy −∫
Ω
√εbε pε · v dy.
8.3 Studio della coercivita
Per determinare una convergenza rispetto alla quale la successione delle energie risultiequi-coerciva consideriamo una famiglia di spostamenti vε tali che
Fε(vε) ≤ C.
In assenza di forze esterne avremmo
µ
∫Ω
|Eεvε|2 dy ≤ C
Occorre un’opportuna disuguaglianza di Korn, che tenga conto che le derivate rispetto ady3 sono divise per ε. Possiamo procedere in due modi:
1. scrivere la disuguaglianza di Korn per Ωε e poi fare il cambiamento di variabile,
2. lavorare su Ω e ragionare sugli ε che compaiono in Eεv.
Cominciamo da 1. Per il Teorema 6.35 si ha
(8.1)∫
Ωε
(|u|2 + |Du|2
)≤ Cε
∫Ωε
|E(u)|2 dx ∀u ∈ A(Ωε)
e con il cambiamento di variabile si ottiene
(8.2)∫
Ω
(|v|2 + |Hεv|2
)≤ Cε
∫Ω
|Eεv|2 dx ∀ v ∈ A(Ω).
Il problema e che la costante Cε dipende da ε, ma non sappiamo in che modo, perche ilTeorema 6.35 e stato dimostrato per assurdo. Ci viene in aiuto in questo caso un teoremadi Kohn e Vogelius ( [21], Proposition 4.1; vedi anche [5], Appendix) che afferma chela (8.1) vale con Cε = C/ε2.
Passando a 2 e scrivendo esplicitamente Eεv si ha
(8.3)
Eεv =
v1,1
12 (v1,2 + v2,1) 1
2 (v1,3
ε+ v3,1)
v2,212 (v2,3
ε+ v3,2)
symv3,3
ε
=
εv1,1
εε 1
2 (v1,2
ε+v2,1
ε) 1
2 (v1,3
ε+ v3,1)
εv2,2
ε12 (v2,3
ε+ v3,2)
symv3,3
ε

8.3. STUDIO DELLA COERCIVITA 97
da cui segue che
(8.4) |Eεv|2 ≥ ε2|E(v1
ε,v2
ε, v3)|2.
Applicando al secondo membro la disuguaglianza di Korn usuale si ottiene allora
(8.5)∫
Ω
(|(v1
ε,v2
ε, v3)|2 + |D(
v1
ε,v2
ε, v3)|2
)≤ C
ε2
∫Ω
|Eεv|2 dx ∀ v ∈ A(Ω).
Mettendo insieme (8.2) e (8.5) si ottiene la seguente disuguaglianza di Korn riscalata.
Teorema 8.1. Esiste una costante positiva K tale che∫Ω
(∣∣(v1
ε,v2
ε, v3)
∣∣2 + |Hεv|2)dy ≤ K
ε2
∫Ω
|Eεv|2 dy,
per ogni v ∈ H1d(Ω; R3) e ogni ε ∈ (0, 1].
Questa disuguaglianza dice che affinche tutte le componenti di vε siano limitate in L2
assieme alle loro derivate e sufficiente che valga la condizione
(8.6)1ε2
∫Ω
|Eεvε|2 dy ≤ C ∀ ε ∈ (0, 1]
e questo suggerisce di riscalare ulteriormente il funzionale dell’energia dividendolo per ε2.Calcoleremo cioe il Γ-limite di
1ε2
Fε
Teorema 8.2 (di compattezza). Sia (vε) una famiglia di funzioni in H1d(Ω; R3) soddisfa-
cente (8.6). Allora, per ogni successione εn 0 esiste una sottosuccessione (εnk) ed unafunzione v ∈ H1
d(Ω; R3) tale che
(8.7) (vεnk1
εnk,vεnk2
εnk, vεnk3 ) v in H1(Ω; R3).
Inoltre si ha
v ∈ HKL(Ω; R3) := v ∈ H1d(Ω; R3) : (Ev)i3 = 0 per i = 1, 2, 3
cioe v e un cosiddetto spostamento di Kirchhoff-Love.
Dimostrazione. Per l’ipotesi (8.6), la relazione (8.4) e l’usuale disuguaglianza di Korn siha
C ≥ ‖Eεvε‖22ε2
≥ ‖E(v1
ε,v2
ε, v3)‖22 ≥ ‖(
v1
ε,v2
ε, v3)‖1,2
cioe ( v1ε ,
v2ε , v3) e limitata in H1(Ω; R3). Allora esiste v ∈ H1
d(Ω; R3) e una sottosucces-
sione εnk 0 tale che ( vεnk1εnk
,vεnk2εnk
, vεnk3 ) v in H1(Ω; R3).
Dalla (8.3) si vede poi facilmente che |(Eεvε)i3| ≥ |(E( v1ε ,
v2ε , v3))i3|, allora, usando
la (8.6) deduciamo che Cε ≥ ‖(E( v1ε ,
v2ε , v3))i3‖L2(Ω) e di conseguenza, per k →∞, si ha
(Ev)i3 = 0 per i = 1, 2, 3. Quindi v ∈ HKL(Ω; R3).

98 CAPITOLO 8. ENERGIA DI UNA PIASTRA ELASTICA LINEARE
La convergenza in cui si ha compattezza dei sottolivelli della parte di bulk dell’energiae quindi data dalla (8.7). Per stabilire la equi-coercivita dell’energia totale occorre oraprecisare la forma dei carichi bε. La piu semplice scelta non banale consiste nel supporreche le forze esterne abbiano la forma seguente
(8.8)bε1 pε(y) =
√εb1(y1, y2), bε2 pε(y) =
√εb2(y1, y2),
bε3 pε(y) = ε3/2b3(y1, y2),
con b = (b1, b2, b3) ∈ L2(ω; R3). In tal modo l’energia Fε(v) diviene
(8.9) Fε(v) =12
∫Ω
f(Eεv) dy − ε2
∫Ω
b ·(v1
ε,v2
ε, v3
)dy.
Lemma 8.3. Sia (vε) una famiglia di funzioni in H1d(Ω; R3). Se
supε
(Fε(vε)/ε2
)< +∞,
allora vale la (8.6) per un’opportuna costante C > 0.
Dimostrazione. Conviene porre wε := (vε1/ε, vε2/ε, v
ε3). Allora, grazie anche alla (8.9), si
ha
(8.10)
1ε2
Fε(uε) =1ε2
∫Ω
f(Eεuε) dy −∫
Ω
b · vε dy
≥ µ
ε2‖Eεuε‖2L2(Ω) − ‖b‖L2(Ω)‖vε‖L2(Ω)
≥ µ
ε2‖Eεuε‖2L2(Ω) −
12C1‖b‖2L2(Ω) −
C1
2‖vε‖2L2(Ω)
dove C1 e un arbitraria costante positiva. Per il Teorema 8.1 si ha
1ε2
Fε(uε) ≥µ
2K‖Hεuε‖2L2(Ω) +
( 1K− C1
2
)‖vε‖2L2(Ω) −
12C1‖b‖2L2(Ω),
dove K e la costante del Teorema 8.1. Scegliendo, ad esempio, C1 = 1/K e supponendoche supε
(Fε(uε)/ε2
)< +∞, otteniamo che esiste M > 0 tale hce
M ≥ µ
2K‖Hεuε‖2L2(Ω) +
12K‖vε‖2L2(Ω)
da cui segue che (vε) e limitata in L2(Ω; R3). Usando questo fatto in (8.10) si ottienela (8.6).
Corollario 8.4. La famiglia di funzionali (1/ε2)Fε e (qε, H1d(Ω; R3))-equi-coerciva con
qε(vε) :=(vε1/ε, v
ε2/ε, v
ε3
).
Dimostrazione I precedenti Lemma 8.3 e Lemma 8.2 implicano che per ogni successionevε tale che (1/ε2)Fε(vε) ≤ C con C > 0, e soddisfacente le condizioni al contorno, cioevε = 0 su Γd, la corrispondente successione qε(vε) e relativamente debolmente compattain H1(Ω; R3).

8.4. ENERGIA LIMITE 99
8.4 Energia limite
Per stabilire l’energia limite occorre identificare i limiti dello strain riscalato Eεvε
ε , cheesistono in L2 debole almeno per una sottosuccessione. Vale il seguente risultato.
Lemma 8.5. Sia (vε) una successione tale che qε(vε)→ v. Allora si ha
(Eεvε)11ε E11v = v1,1 in L2(Ω),
(Eεvε)22ε E22v = v2,2 in L2(Ω),
(Eεvε)12ε E12v = 1
2 (D1v2 +D2v1) in L2(Ω).
Dimostrazione. Basta osservare che (Eεvε)11/ε = D1(vε1/ε), (Eεvε)22/ε = D2(vε2/ε) e(Eεvε)12/ε = 1/2(D1(vε2/ε) +D2(vε1/ε)) e usare l’ipotesi.
Ricordando che f(A) = µ|A|2 + λ2 |trA|
2 definiamo
f0(α, β, γ) := minf(A) : A ∈ Sym, A12 = α, A11 = β,A22 = γ.
Risolvendo esplicitamente questo problema di minimo in piu variabili si ottiene
(8.11) f0(α, β, γ) := f(Λ(α, β, γ)
)= 2µα2 + µ(β2 + γ2) +
µλ
2µ+ λ(β + γ)2.
dove
Λ(α, β, γ) =
β α 0α γ 00 0 − λ
2µ+λ (β + γ)
.
Teorema 8.6 (di Γ-convergenza). Si ha
Γ(qε, H1d(Ω; R3)) lim
ε→0(1/ε2)Fε = F
dove F : H1d(Ω; R3)→ R ∪ +∞ e definito da
(8.12) F (v) :=∫
Ω
f0
((Ev)12, v1,1, v2,2
)dy −
∫Ω
b · v dy
se v ∈ HKL(Ω; R3) e +∞ altrimenti.
Dimostrazione. Indichiamo con
Lε(v) :=∫
Ω
b ·(v1
ε,v2
ε, v3
)dy
il lavoro delle forze esterne e osserviamo che, se qε(vε) = ( vε1ε ,
vε2ε , v
ε3
) v in H1(Ω; R3)
alloraLε(vε) =
∫Ω
b · (vε1
ε,vε2ε, vε3) dy →
∫Ω
b · v dy := L(v)
cioe Lε → L con continuita. Per il Teorema 7.9 occorre quindi solo provare la Γ-convergenza della parte di bulk
Iε(v) =1ε2
∫Ω
f(Eεv) dx

100 CAPITOLO 8. ENERGIA DI UNA PIASTRA ELASTICA LINEARE
al funzionale
I(v) :=
∫
Ω
f0
((Ev)12, v1,1, v2,2
)dy se v ∈ HKL(Ω; R3)
+∞ altrimenti
e cioe che
1. (disuguaglianza del liminf) per ogni successione εk 0 e ogni successione (vk) ⊂H1d(Ω; R3) tale che
(vk1εk,vk2εk, vk3 ) v in H1(Ω; R3),
si ha
lim infk→+∞
Iεk(vk)ε2k
≥ I(v);
2. (recovery sequence) per ogni successione εk 0 ed ogni v ∈ H1d(Ω; R3) esiste una
successione (vk) ⊂ H1d(Ω; R3) tale che
(vk1εk,vk2εk, vk3 ) v in H1(Ω; R3),
e
lim supk→+∞
Iεk(vk)ε2k
≤ I(v).
Dimostriamo la disuguaglianza del liminf. Dobbiamo dimostrare che
(8.13) lim infk→+∞
Iεk(uk)ε2k
≥∫
Ω
f0
(12
(D1v2 +D2v1), D1v1, D2v2
)dy.
Per definizione di f ed f0 si ha
f(A) ≥ f0(A12, A11, A22),
quindiIεk(vk)ε2k
≥∫
Ω
f0
( (Eεkvk)12
εk,
(Eεkvk)11
εk,
(Eεkvk)22
εk
)dy.
Usando l’espressione (8.11) di f0, la debole semicontinuita inferiore della norma di L2 eil Lemma 8.5 si ottiene che vale la disuguaglianza del liminf.Sia I(v) < +∞, altrimenti non c’e nulla da provare. Allora v ∈ HKL(Ω; R3). Costruiamouna recovery sequence (vε) tenendo presente che da essa vogliamo che
(vε1ε,vε2ε, vε3) v in H1(Ω; R3),
e che
Eεvε
ε Λ((Ev)12, v1,1, v2,2) =
v1,1 (Ev)12 0v2,2 0
sym − λ2µ+λ (v1,1 + v2,2)
.

8.4. ENERGIA LIMITE 101
In particolare si dovra avere chevε1,1ε ' v1,1,
vε2,2ε ' v2,2,
(Eεvε)12ε ' (Ev)12 = 1
2 (v2,1 + v1,2),
(Eεvε)33ε = vε3,3
ε2 ' −λ
2µ+λ (v1,1 + v2,2)
Procediamo formalmente, cioe senza giustificare i singoli passaggi, al solo scopo di indov-inare una recovery. Integrando la prima condizione rispetto ad y1 e la seconda rispettoad y2 si ottiene
vε1,1 ' εv1,1 ⇐⇒ vε1 ' εv1 + εϕε1(y2, y3)
vε2,2 ' εv2,2 ⇐⇒ vε2 ' εv2 + εϕε2(y1, y3)
Osserviamo poi che la terza condizione e soddisfatta se ϕε1,2 + ϕε2,1 0, quindi in parti-colare se ϕε1 = ϕε2 = 0. Integrando la quarta rispetto ad x3, per parti, si ottiene
vε3 ' −ε2 λ
2µ+ λ
∫(v1,1 + v2,2) dy3 = −ε2 λ
2µ+ λ
[y3(v1,1 + v2,2)−
∫y3(v1,13 + v2,23) dy3
]Osserviamo ora che, siccome v ∈ HKL, cioe (Ev)i3 = 0 allora v1,3 = −v3,1 e v2,3 = −v3,2,pertanto v1,13 = v1,31 = v3,11 e v2,23 = v2,32 = v3,22. Ne consegue che
−∫y3(v1,13 + v2,23) dy3 = +
∫y3(v3,11 + v3,22) dy3 =
y23
2(v3,11 + v3,22) + ϕε3(y1, y2)
in quanto l’integranda v3,11 + v3,22 non dipende dalla variabile di integrazione y3 (dalmomento che v3 non dipende da y3). Allora
vε3 ' −ε2 λ
2µ+ λ
[y3(v1,1 + v2,2) +
y23
2(v3,11 + v3,22)
]+ ϕε3(y1, y2)
e la condizione vε3 → v3 e soddisfatta prendendo ϕε3 = v3.Per la validita dei passaggi precedenti occorre poter fare la derivate seconde. Assum-
iamo dunque ora che v sia liscia e si annulli in un intorno di Γd. Sia v0,ε la successionedefinita da
v0,ε1 = εv1
v0,ε2 = εv2
v0,ε3 = v3 −
λ
2µ+ λε2[y3(v1,1 + v2,2) +
y23
2(v3,11 + v3,22)
].
Si ha che v0,ε si annulla su ∂ø e, usando anche il fatto che (Ev)i3 = 0 (e in particolareche quindi v3 non dipende da y3), si verifica facilmente che
(Eεv0,ε)11
ε= v1,1,
(Eεv0,ε)22
ε= v2,2,
(Eεv0,ε)12
ε= (Ev)12,
(Eεv0,ε)13
ε= − λ
2(2µ+ λ)ε[y3(v1,11 + v2,21) +
y23
2(v3,111 + v3,221)]→ 0 in L2(Ω),
(Eεv0,ε)23
ε= − λ
2(2µ+ λ)ε[y3(v1,12 + v2,22) +
y23
2(v3,112 + v3,222)
]→ 0 in L2(Ω),
(Eεv0,ε)33
ε= − λ
2µ+ λ(v1,1 + v2,2),

102 CAPITOLO 8. ENERGIA DI UNA PIASTRA ELASTICA LINEARE
in L2(Ω), ovvero(Eεv0,ε)
ε→ Λ(α, β, γ) in L2(Ω; R3×3)
con α = (Ev)12, β = v1,1, γ = v2,2. Si vede anche subito che(v0,ε1
ε,v0,ε
2
ε, v0,ε
3
)→ v in H1(Ω; R3).
Grazie alla convergenza forte in L2 di Eεv si ha che
limk
Iεk(vk)ε2k
=∫
Ω
f(Λ(α, β, γ)) dx = F (v),
Quindi (v0,εk) e una recovery sequence.Nel caso generale la tesi si ottiene con un opportuno procedimento diagonale. Sia
v ∈ H1d(Ω,R3). Per densita. per ogni δ > 0 esiste vδ ∈ C∞ e nulla in un intorno di Γd
tale che‖vδ − v‖
H1d(Ω,R3
)< δ.
Si definiscono poi la funzioni vδ,ε come prima si definiva la v0,ε ma con vδ in luogo di v.Si ha allora
limδ→0
limn→∞
qεn(vδ,εn) = v in H1
e
limδ→0
limn→∞
Fεn(vδ,εn)ε2n
= F (v)
e quindi, con un procedimento diagonale standard esiste una successione δn → 0 tale che
limn→∞
qεn(vδn,εn) = v in H1
e
limn→∞
Fεn(vδn,εn)ε2n
= F (v)
Allora la recovery sequence vale con vn := vδn,εn .
Lo spazio degli spostamenti di Kirchhoff-Love puo essere caratterizzato anche nel modoseguente (vedi Le Dret [23], Lemma 4.2)
(8.14)HKL(Ω; R3) = v ∈ H1
d(Ω; R3) : ∃ ξα ∈ H1d(ø),∃ ξ3 ∈ H2
d(ø) tali che
vα(y) = ξα(y1, y2)− y3ξ3,α(y1, y2), v3(y) = ξ3(y1, y2).
Ne consegue che, sostituendo e calcolando gli integrali rispetto ad y3, l’energia della piastradiviene
F (v) :=∫
Ω
(f0
((Ev)12, v1,1, v2,2
)dy − b · v
)dy
= 2µ∫ω
(|Eξ|2 + 1
3 |D2ξ3|2 + 2 µ+λ
2µ+λ
(| tr Dξ|2 + 1
3 | trD2ξ3|2
)− b · ξ
)dx1dx2 =: F (ξ)
dove b =(−∫ 1
−1
b1dx3,−∫ 1
−1
b2dx3,−∫ 1
−1
b3dx3
). Oserviamo che l’energia F (ξ) e realmente
bidimensionale perche gli spostamenti generalizzati ξi dipendono solo dalle variabili x1 ex2 e l’integrale e fatto sul dominio bidimensionale ω.

8.5. CONVERGENZA DEI PROBLEMI DI MINIMO 103
8.5 Convergenza dei problemi di minimo
Per ogni ε ∈ (0, 1] denotiamo con uε l’unica soluzione dei problemi di minimo
minFε(u) : u ∈ H1(Ωε; R3), u = 0 su ∂ø× (−ε, ε)
.
Corollario 8.7. Il problema di minimo per il funzionale Γ-limite F defined in (8.12)
minF (v) : v ∈ HKL(Ω; R3), v = 0 su ∂ø
ammette un’unica soluzione u. Inoltre, per ε→ 0, si ha
1. (uε1 pεε
,uε2 pεε
, uε3 pε)→ u in H1(Ω; R3);
2. (1/ε3)Fε(uε) converge a F (u).
Dimostrazione. La proprieta 1 e la convergenza debole in 1 seguono dal risultato di Γ-convergenza Teorema 8.6, dalla equi-coercivita della famiglia (1/ε2)Fε e dalla proprietavariazionale della Γ-convergenza. La convergenza forte in 1 si dimostra seguendo lo schemadella dimostrazione del Theorem 8.1 e Lemma 8.2 di Freddi, Morassi e Paroni [14].
Bibliografia
[1] E. Acerbi, G. Buttazzo, and D. Percivale. A variational definition of the strain energyfor an elastic string. Journal of Elasticity, 25:137–148, 1991.
[2] E. Acerbi, S. Buttazzo, and D. Percivale. Thin inclusions in linear elasticity: avariational approach. J. Reine Angew. Math., 386:99–115, 1988.
[3] R. Adams. Sobolev Spaces. Academic Press, New York, 1975.
[4] S. Agmon. Lectures on elliptic boundary value problems. Prepared for publicationby B. Frank Jones, Jr. with the assistance of George W. Batten, Jr. Van NostrandMathematical Studies, No. 2. D. Van Nostrand Co., Inc., Princeton, N.J.-Toronto-London, 1965.
[5] G. Anzellotti, S. Baldo, and D. Percivale. Dimension reduction in variational prob-lems, asymptotic development in γ-convergence and thin structures in elasticity.Asymptotic Analysis, 9(1):61–100, 1994.
[6] J. Ball and R. James. Fine phase mixtures as minimizers of energy. Arch. RationalMech. Anal., 100(1):13–52, 1987.
[7] J. Barros-Neto. An introduction to the theory of distributions. Dekker, New York,1973.
[8] F. Bourquin, P. Ciarlet, and G. Geymonat. Gamma-convergence et analyseasymptotique des plaques minces. C.R. Acad. Sci. Paris, t., 315.
[9] H. Brezis. Analyse Fonctionnelle. Theorie et Applications. Masson, Paris, 1983.
[10] P. G. Ciarlet. Mathematical elasticity. Vol. I, volume 20 of Studies in Mathe-matics and its Applications. North-Holland Publishing Co., Amsterdam, 1988.Three-dimensional elasticity.
[11] G. Dal Maso. An Introduction to Γ-convergence. Birkhauser, Boston, 1993.
[12] E. De Giorgi and T. Franzoni. On a type of variational convergence. In Proceedingsof the Brescia Mathematical Seminar, Vol. 3 (Italian), pages 63–101, Milan, 1979.Univ. Cattolica Sacro Cuore.
[13] L. C. Evans and R. F. Gariepy. Measure theory and fine properties of functions.Studies in Advanced Mathematics. CRC Press, Boca Raton, FL, 1992.
[14] L. Freddi, A. Morassi, and R. Paroni. Thin-walled beams: the case of the rectangularcross-section. J. Elasticity, 76(1):45–66, 2004.
[15] E. Giusti. Analisi Matematica 2. Boringhieri.
104

BIBLIOGRAFIA 105
[16] P. Grisvard. Singularities in boundary value problems. Springer, Berlin, 1992.
[17] M. E. Gurtin. An introduction to continuum mechanics, volume 158 of Mathemat-ics in Science and Engineering. Academic Press Inc. [Harcourt Brace JovanovichPublishers], New York, 1981.
[18] L. Hormander. The analysis of linear partial differential operators. I, volume 256 ofGrundlehren der Mathematischen Wissenschaften [Fundamental Principles of Math-ematical Sciences]. Springer-Verlag, Berlin, 1983. Distribution theory and Fourieranalysis.
[19] J. Jost. Postmodern analysis. Universitext. Springer-Verlag, Berlin, third edition,2005.
[20] D. Kinderlehrer. Remarks about equilibrium configurations of crystals. In Materi-al instabilities in continuum mechanics (Edinburgh, 1985–1986), Oxford Sci. Publ.,pages 217–241. Oxford Univ. Press, New York, 1988.
[21] R. V. Kohn and M. Vogelius. A new model for thin plates with rapidly varyingthickness. II. A convergence proof. Quart. Appl. Math., 43(1):1–22, 1985.
[22] H. Le Dret. An example of H1-unboundedness of solutions to strongly elliptic systemsof partial differential equations in a laminated geometry. Proc. Roy. Soc. EdinburghSect. A, 105:77–82, 1987.
[23] H. Le Dret. Problemes Variationnels dans les Multi-Domains. Masson, Paris, 1991.
[24] N. Meyers and J. Serrin. H=w. Proc. Nat. Acad. Sci. USA, 51, 1964.
[25] A. Morassi. Strain, stress and linearized elasticity. In Springer, editor, ClassicalAnd Advanced Theories Of Thin Structures: Mechanical And Mathematical Aspects,CISM Courses and Lectures Vol. 503, pages 1–34. 2008.
[26] J. Necas. Les Methodes Directes en Theorie des Equations Elliptiques. Academia,Prague, 1967.
[27] J. A. Nitsche. On Korn’s second inequality. RAIRO Anal. Numer., 15(3):237–248,1981.
[28] O. Oleinik, A. Shamaev, and G. Yosifian. Mathematical Problems in Elasticity andHomogenization. North-Holland, Amsterdam, 1992.
[29] R. Paroni. Constitutive equations and variational elasticity. In Springer, editor,Classical And Advanced Theories Of Thin Structures: Mechanical And MathematicalAspects, CISM Courses and Lectures Vol. 503, pages 35–60. 2008.
[30] W. Rudin. Analisi Reale e Complessa. Boringhieri.
[31] L. Schwartz. Theorie des distributions. Publications de l’Institut de Mathematique del’Universite de Strasbourg, No. IX-X. Nouvelle edition, entierement corrigee, refondueet augmentee. Hermann, Paris, 1966.
[32] R. Temam and A. Miranville. Mathematical modeling in continuum mechanics.Cambridge University Press, Cambridge, second edition, 2005.
[33] C. A. Truesdell, III. A first course in rational continuum mechanics. Vol. 1, volume 71of Pure and Applied Mathematics. Academic Press Inc., Boston, MA, second edition,1991. General concepts.

106 BIBLIOGRAFIA
[34] S. Vladimirov. Le distribuzioni nella fisica matematica. Edizioni Mir, Mosca, 1981.
[35] W. P. Ziemer. Weakly differentiable functions, volume 120 of Graduate Texts inMathematics. Springer-Verlag, New York, 1989. Sobolev spaces and functions ofbounded variation.







![Università degli studi di Salerno tensoriale: il calcolo delle forme di erenziali [indicato anche come alccolo di erenziale esterno , che abbrevieremo in alccolo esterno ]. Sviluppato](https://static.fdocumenti.com/doc/165x107/5c687b5a09d3f2d4158b6515/universita-degli-studi-di-tensoriale-il-calcolo-delle-forme-di-erenziali-indicato.jpg)









