
Dragaggi
6
APRILE 2009 quarry & construction 37 * LEICA GEOSYSTEMS - SALES MANAGER HMC PROGETTI SPECIALI Sistema di guida GPS per il controllo grafico delle operazioni di dragaggio su DRAGLINE La ditta Tomasin di Romans d’Isonzo Go- rizia, una delle società di riferiemento più importanti del Friuli per l’estrazione di ma- teriale inerte, ha dotato la sua Liebherr HS985 del sistema di controllo di esca- vazione LEICA EASYDRAG. Il sistema di guida Leica Easydrag consente di visua- lizzare graficamente sullo schermo dell’operatore la posizione della benna ri- spetto alle quote progettuali, nonché di controllare il movimento della benna ri- spetto al piano inclinato del piede di scar- pata. L eica Geosystems in particolare la sua divisione interna HMC “Hexa- gon Machine Controll” dedita alla realizzazione di soluzioni di controllo per i progetti speciali, ha realizzato in questi ultimi anni sistemi di controllo ad alta pre- cisione per i lavori di dragaggio marino e fluviale. Queste soluzioni di guida con l’aiuto della tecnologia satellitare GPS permettono l’esecuzione di scavi esatta- mente in quota progettuale, anche di falde inclinate memorizando all’interno di un file di registro l’esatta quota di scavo rag- giunta dalla macchina. MACCHINE & MATERIALI Il mondo delle draghe in evoluzione Accendiamo i riflettori su alcune interessanti soluzioni di dragaggio proposte dalla società Leica Geosystems: il futuro degli scavi sottomarini passa da qui Tecnologie di dragaggio EMILIO PALCHETTI*
-
Upload
emilio-palchetti -
Category
Documents
-
view
217 -
download
1
description
macchine & materiali Accendiamo i riflettori su alcune interessanti soluzioni di dragaggio proposte dalla società Leica Geosystems: il futuro degli scavi sottomarini passa da qui Sistema di guida GPS per il controllo grafico delle operazioni di dragaggio su DRAGLINE Il mondo delle draghe in evoluzione quarry & construction 37 * Leica Geosystems - saLes manaGer Hmc ProGetti sPeciaLi Aprile 2009
Transcript of Dragaggi

Aprile 2009quarry & construction 37
macchine & materiali
* Leica Geosystems - saLes manaGer
Hmc ProGetti sPeciaLi
Sistema di guida GPS per il controllo grafico delle operazioni di dragaggio su DRAGLINE
La ditta Tomasin di Romans d’Isonzo Go-rizia, una delle società di riferiemento più importanti del Friuli per l’estrazione di ma-teriale inerte, ha dotato la sua Liebherr HS985 del sistema di controllo di esca-vazione LEICA EASYDRAG. Il sistema di guida Leica Easydrag consente di visua-lizzare graficamente sullo schermo dell’operatore la posizione della benna ri-spetto alle quote progettuali, nonché di controllare il movimento della benna ri-spetto al piano inclinato del piede di scar-pata.
Leica Geosystems in particolare la sua divisione interna HMC “Hexa-gon Machine Controll” dedita alla
realizzazione di soluzioni di controllo per i progetti speciali, ha realizzato in questi ultimi anni sistemi di controllo ad alta pre-cisione per i lavori di dragaggio marino e fluviale. Queste soluzioni di guida con l’aiuto della tecnologia satellitare GPS permettono l’esecuzione di scavi esatta-mente in quota progettuale, anche di falde inclinate memorizando all’interno di un file di registro l’esatta quota di scavo rag-giunta dalla macchina.
macchine & materiali
Il mondo delle draghe in evoluzione
Accendiamo i riflettori su alcune interessanti soluzioni di dragaggio proposte dalla società Leica Geosystems:
il futuro degli scavi sottomarini passa da qui
Tecnologie di dragaggio Emilio PalchEtti*

Aprile 2009quarry & construction38
Il sistema di controllo è composto da un ricevitore Leica GPS a 20 HZ di precisione centimetrica ope-rante con correzione differenziale, una base in GPS a 20 HZ a terra, un computer rugherizzato, un radio modem. L’operatore della macchina, ha come riferi-mento di controllo un monitor, sul quale viene visua-lizzata in modo semplice e veloce, la posizione pla-nimetrica della benna della macchina rispetto alla po-sizione ideale di progetto.Il software guida l’operatore, con una grafica sem-plice ed immediata attraverso una quota numerica ed il colore verde (quando si è in quota) oppure rosso (quando si è fuori quota).
DragaggioNella fase di dragaggio, l’operatore, una volta inse-rita la quota di riferimento batimetria progettuale di dragaggio, può osservare graficamente le aree in cui
deve ancora intervenire (aree gialle) e quelle già completate alla quota di pro-getto (aree verdi). Contemporaneamente, è possibile visualizzare la posizione della benna in relazione alla sezione di pro-getto. È possibile quindi effettuare una verifica video in tempo reale dello stato del fondale dopo la fase di dragaggio cam-biando la schermata del display. Il caso dell’Impresa Pietro Cidonio Spa Vediamo ora il sistema di guida GPS che Leica Geosystems ha fornito per una draga della società Romana Impresa Pietro Cidonio Spa. Il sistema di controllo è composto da due ricevitori GPS a 20 HZ di precisione cen-timetrica operanti con correzione diffe-

Aprile 2009quarry & construction 39
macchine & materiali
renziale, una base GPS a 20 HZ a terra, un computer rugherizzato, un radio mo-dem e l’ecoscandaglio di bordo. Gli incli-nometri a bordo della macchina vengono utilizzati per la gestione del sistema.Le informazioni delle coordinate utili al posizionamento della piattaforma nell’area di progetto, provengono da due ricevitori GPS installati sopra la draga, rispettiva-mente in coda e sopra la cabina. Il sistema di guida Leica Geosystems, permette al pilota di poter controllare la navigazione della draga sulla posizione ideale di dragaggio in tempo reale. Questa operazione di posizionamento è impor-tante per collocare la piat-taforma in una posizione tale da poter interessare la
maggior area di scavo o dragaggio dispo-nibile e quindi ridurre al minimo i tempi morti di movimentazione della piatta-forma.L’operatore della macchina, ha come ri-ferimento di controllo un monitor, sul quale viene visualizzato in modo semplice e ve-loce, la posizione planimetrica della mac-china rispetto alla posizione ideale di pro-getto.
Guida della draga I due GPS Rover, posizionati sopra la macchina operatrice ricevono via radio dalla base le informazioni della correzione differenziale, indispensabile per poter uti-lizzare il sistema GPS in tempo reale ad un precisione centimetrica. L’operatore osservasul display in cabina, le informa-zioni utili per eseguire il controllo della draga rispetto alla posizione ideale di la-voro.
DragaggioIl software di guida della draga è stato strutturato in modo da prevedere l’utilizzo dei sensori GPS per due tipi di applica-zioni contemporanee. Nella fase di dra-gaggio, l’operatore, una volta inserita la quota di riferimento batimetria proget-tuale di dragaggio, può osservare grafi-camente le aree in cui deve ancora inter-venire (aree bianche), quelle già comple-tate alla quota di progetto (aree verdi), quelle sotto quota di progetto (aree rosse)
e quelle sopra quota di progetto (aree gialle).Contemporanemente, grazie all’eco-scandaglio posto in coda, il sistema aggiorna in planimetria lo stato del fondale in tempo reale ed è quindi possibile avere sempre sotto con-trollo l’avanzamento delle operazioni. È possibile quindi effettuare una veri-fica video in tempo reale dello stato del fondale dopo la fase di dragaggio cambiando la schermata del display.
Sistema di guida economico DGPS per draga e lavorazioni di dragaggio
Un’altra possibilità per le operazioni di dragaggio di tipo economico e di preci-sione submetrica è servirsi di un sistema di controllo composto da un ricevitore DGPS a 1HZ di precisione submetrica, operante con correzione differenziale ac-quisita da rete internet dalla rete ItalPoS o da altre reti di stazioni permanenti, una bussola digitale, un dispositivo radio mo-dem, il tutto ruggherizzato in contenitore IP65.

Aprile 2009quarry & construction40
Il software del sistema può essere imple-mentato e personalizzato in funzione delle applicazioni richieste di volta in volta, per-mettendo non solo il controllo visivo di posizionamento della draga, ma anche la progettazione delle rotte ottimali per le lavorazioni. Vengono utilizzati i dati di pro-fondità derivanti dal sistema a bordo della macchina per la gestione del sistema. Le informazioni delle coordinate utili al posi-zionamento della piattaforma nell’area di progetto provengono dal sistema instal-lato sopra la draga, rispettivamente all’in-terno e sopra la cabina.Il sistema di guida Leica Geosystems per-mette al pilota di poter controllare la na-vigazione della draga sulla posizione ide-ale di dragaggio e lungo una linea di rotta, il tutto in tempo reale. Questa operazione di posizionamento è importante per col-locare la piattaforma in una posizione tale da poter coprire tutta l’area di scavo o dragaggio disponibile e quindi ridurre al minimo i tempi morti di movimentazione della piattaforma.
Smart Design e Smart Lay - Sistema di guida e memorizzazione della posizione dei frangiflutti Vediamo da vicino la solu-zione proposta da Leica Geosystems alla Società C.E.M. di Napoli per il con-trollo e la memorizzazione
della posa dei tetrapodi in base ad un pro-getto vettoriale.La soluzione è quella di far visualizzare all’operatore tramite un display grafico, la posizione spaziale in tempo reale del tetrapodo rispetto alla sezione proget-tuale di posa. In questo modo grazie ad una guida controllata, diventa possibile poter individuare l’esatta collocazione dei Frangiflutti in base alle coordinate proget-tuali di posa.L’operatività è garantita da un nuovo si-stema di guida denominato “Smart Lay”, un dispositivo pratico e veloce per la ge-stione dei progetti e l’esecuzione dei la-vori marittimi tramite la tecnologia GPS.Smart Lay consente all’operatore il mo-nitoraggio in tempo reale direttamente dalla propria cabina, con estrema sempli-cità, di tutte le operazioni di posa e me-morizzazione delle coordinate nel sistema di riferimento locale del tetrapodo.Il sistema di guida si basa sull’uso di ri-cevitori GPS Leica della serie MNS1200 a 20 Hz: una tecnologia ad alta velocità di flusso, (20 impulsi al secondo) che con-sente di eseguire applicazioni di controllo di guida in tempo reale e ad alta preci-

Aprile 2009quarry & construction 41
macchine & materiali
sione (errore planimetrico del posiziona-mento satellitare circa 1,5 cm in planime-tria).Il sistema si compone di due parti:1) Fase di rilievo e gestione della proget-tazione “Smart Design”2) Fase di guida “Smart Lay”La prima fase prevede una procedura di preparazione dei dati di guida da inserire all’interno del computer installato sulla macchina operatrice. Il topografo prepara il progetto nel formato di guida da inse-rire all’interno del computer della mac-china operatrice, importando semplice-mente le coordinate dei punti nodali della posizione progettuale di ogni tetrapodo.Nel programma di progettazione è pos-sibile creare un piano Layer in relazione alla caratteristica di ogni tipo di tetrapodo, in modo da distinguere le maglie di posa assecondando le specifiche di pro-getto.Da evidenziare che il Programma Smart Design è predisposto anche per la crea-zione di report grafici o numerici che per-mettono di analizzare dopo la posa l’esatto stato dell’avanzamento dei lavori.
Base di riferimento GPSL’intera elettronica del sistema, proget-tata con concetti di ultima generazione, consente di:- migliorare le prestazioni e le precisione in tutte le fasi operative;- aumentare notevolmente la velocità di
Hardware sulla macchina operatriceLa soluzione Smart Lay utilizza una base di riferimento GPS Leica GX 1200.Il range operativo della base di riferimento Leica Geosystems è di 5 km, ma a richiesta è possibile poter co-prire distanze maggiori con l’ausilio di tecno-logia GPRS.La macchina operatrice viene allestita con un quadro IP64 al cui interno sono installate le seguenti componenti: GPS
calcolo di elaborazione dei segnali rice-vuti, riducendo i tempi di inizializzazione, soprattutto quando si lavora in Real Time (RTK);- garantire, mediante l’implementazione di nuove tecnologie “Smart Track” e “Smart Check”, l’acquisizione dei segnali in tempi rapidissimi, il loro mantenimento anche a piccoli angoli di elevazione dei satelliti e soprattutto il miglioramento delle prestazioni in termini di rapporto segnale/rumore, resistenza ai disturbi ed attenua-zione del multipath. Il tempo di acquisi-zione dei satelliti all’accensione del rice-vitore è stimato in circa 30 secondi. Il tempo di riacquisizione dopo un’even-tuale perdita del segnale dei satelliti è en-tro 1 secondo ed assicura un ottimo rap-porto segnale/rumore; - incrementare la robustezza dell’intero apparato, per con-sentire l’operatività in qua-lunque condizione atmosfe-rica/ambientale: la proget-tazione e la realizzazione sono state infatti eseguite secondo le specifiche MIL-STD-810F.
Aprile 2009quarry & construction42
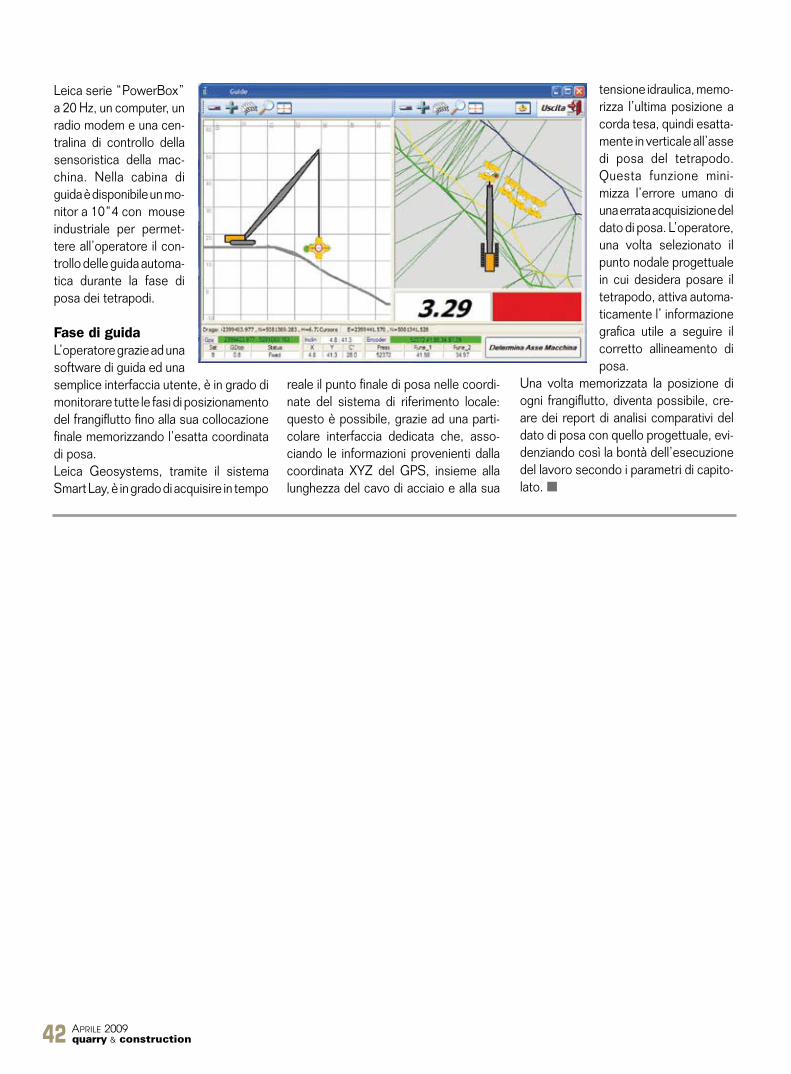
Leica serie “PowerBox” a 20 Hz, un computer, un radio modem e una cen-tralina di controllo della sensoristica della mac-china. Nella cabina di guida è disponibile un mo-nitor a 10“4 con mouse industriale per permet-tere all’operatore il con-trollo delle guida automa-tica durante la fase di posa dei tetrapodi.
Fase di guidaL’operatore grazie ad una software di guida ed una semplice interfaccia utente, è in grado di monitorare tutte le fasi di posizionamento del frangiflutto fino alla sua collocazione finale memorizzando l’esatta coordinata di posa.Leica Geosystems, tramite il sistema Smart Lay, è in grado di acquisire in tempo
reale il punto finale di posa nelle coordi-nate del sistema di riferimento locale: questo è possibile, grazie ad una parti-colare interfaccia dedicata che, asso-ciando le informazioni provenienti dalla coordinata XYZ del GPS, insieme alla lunghezza del cavo di acciaio e alla sua
tensione idraulica, memo-rizza l’ultima posizione a corda tesa, quindi esatta-mente in verticale all’asse di posa del tetrapodo. Questa funzione mini-mizza l’errore umano di una errata acquisizione del dato di posa. L’operatore, una volta selezionato il punto nodale progettuale in cui desidera posare il tetrapodo, attiva automa-ticamente l’ informazione grafica utile a seguire il corretto allineamento di posa.
Una volta memorizzata la posizione di ogni frangiflutto, diventa possibile, cre-are dei report di analisi comparativi del dato di posa con quello progettuale, evi-denziando così la bontà dell’esecuzione del lavoro secondo i parametri di capito-lato. n




