Documentazione PixySFM v.1.2pixysfm.com/download/pixyworkflow.pdf · Il modello ricostruito è...
30
Transcript of Documentazione PixySFM v.1.2pixysfm.com/download/pixyworkflow.pdf · Il modello ricostruito è...
Documentazione PixySFM v.1.2.9
1
PIXYSFM Manuale d’uso
Sommario
1. Introduzione ...................................................................................................................................................... 2
1.1. Requisiti di sistema .................................................................................................................................... 2
1.2. Installazione ............................................................................................................................................... 2
1.3. Versione Dimostrativa ............................................................................................................................... 3
1.4. Acquisto ..................................................................................................................................................... 3
2. Per iniziare ......................................................................................................................................................... 3
2.1. Le fotografie .............................................................................................................................................. 3
2.2. La Finestra Principale ................................................................................................................................. 4
3. Processo di ricostruzione .................................................................................................................................. 5
3.1. Crea un progetto / Apri progetto .............................................................................................................. 5
3.2. Importa le fotografie ................................................................................................................................. 6
3.3. Target e punti di controllo ....................................................................................................................... 10
3.4. Riconoscimento dei target nelle fotografie ............................................................................................. 11
3.5. Associa i GCP alle fotografie .................................................................................................................... 13
3.6. Ricostruzione della nuvola di punti sparsa .............................................................................................. 14
3.7. Georeferenziazione con i punti di controllo (GCP) .................................................................................. 17
3.8. Ricostruzione della nuvola di punti densa ............................................................................................... 19
3.9. Editing della nuvola ................................................................................................................................. 20
3.10. Creazione Piani sul modello ................................................................................................................. 21
3.11. Ricostruzione delle superfici ................................................................................................................ 22
3.11.1. Superficie a mesh triangolare .......................................................................................................... 22
3.11.2. Ricostruzione dell’ortofoto .............................................................................................................. 24
3.11.3. Ricostruzione del DEM (Digital Elevation Model) ............................................................................ 26
4. Esportazione delle nuvole ............................................................................................................................... 27
4.1. Esportazione dei parametri di calibrazione ............................................................................................. 28
5. Comandi in breve ............................................................................................................................................ 29
Documentazione PixySFM v.1.2.9
2
1. Introduzione
Benvenuto in PIXYSFM.
PixySFM è un programma che ricostruisce un modello 3D partendo da una sequenza di fotografie. L’intento
del programma è di semplificare la ricostruzione di modelli mantenendo il rigore della fotogrammetria. Il
processo di costruzione è automatico e viene rappresentato con una sequenza di passi nell’interfaccia del
programma. Il modello ricostruito è composto da una nuvola di punti 3D e da superfici quali una mesh a
triangoli, un’ortofoto e un modello con le quote o Digital Elevation Model (DEM). Nella ricostruzione del
modello, PixySFM utilizza tecniche che rientrano nelle aree di studio denominate “Structure from Motion”
e “Multi-View Stereo” per estrarre informazioni dalle fotografie. Il sito del programma è
www.pixysfm.com.
Per informazioni sulle caratteristiche di PixySFM è possibile inviare una e-mail a: [email protected].
Per richiedere supporto è possibile inviare una e-mail a: [email protected]
1.1. Requisiti di sistema PIXYSFM è un programma che richiede risorse computazionali adeguate. Esso può utilizzare tutte le
unità computazionali (CPU cores) ed è consigliabile non eseguire altri processi durante la
computazione.
Requisiti minimi:
Sistemi operativi: Windows 10/8.1/8/7 (Win 7 SP1) 64 bit
Processore: Intel i5 2.60GHz o un processore equivalente
Memoria: 2GB di RAM
Hard Disk: 8GB di spazio libero
Scheda grafica: scheda video compatibile con OpenGL 4.5 e 256 MB di Ram dedicata
Requisiti di sistema raccomandati:
Sistemi operativi: Windows 10/8.1/8/7 (Win 7 SP1) 64 bit
Processore: Intel Quad-core o superiore o AMD CPU
Memoria: 16 GB o superiore di Ram
Hard Disk: 10 GB di spazio libero su SSD drive
Scheda grafica: scheda video compatibile con OpenGL 4.5 con almeno 1GB di Ram dedicata
1.2. Installazione L’esecuzione dell’installazione richiede che l’utente abbia i privilegi di Amministratore del sistema
Operativo. La sequenza di installazione è semplice ed è configurata con un percorso predefinito di passi
fino alla installazione del programma e dei componenti necessari alla sua esecuzione.
Documentazione PixySFM v.1.2.9
3
1.3. Versione Dimostrativa Al fine di consentire una valutazione del prodotto, il programma può essere scaricato dal sito
www.pixysfm.com ed utilizzato per il periodo di tempo indicato nel dialogo che compare all’avvio del
programma.
1.4. Acquisto L’acquisto può essere effettuato sul sito www.pixysfm.com dove esiste la possibilità di acquisto on line.
Dopo l’acquisto, tramite e-mail, verrà inviato un codice di attivazione del prodotto.
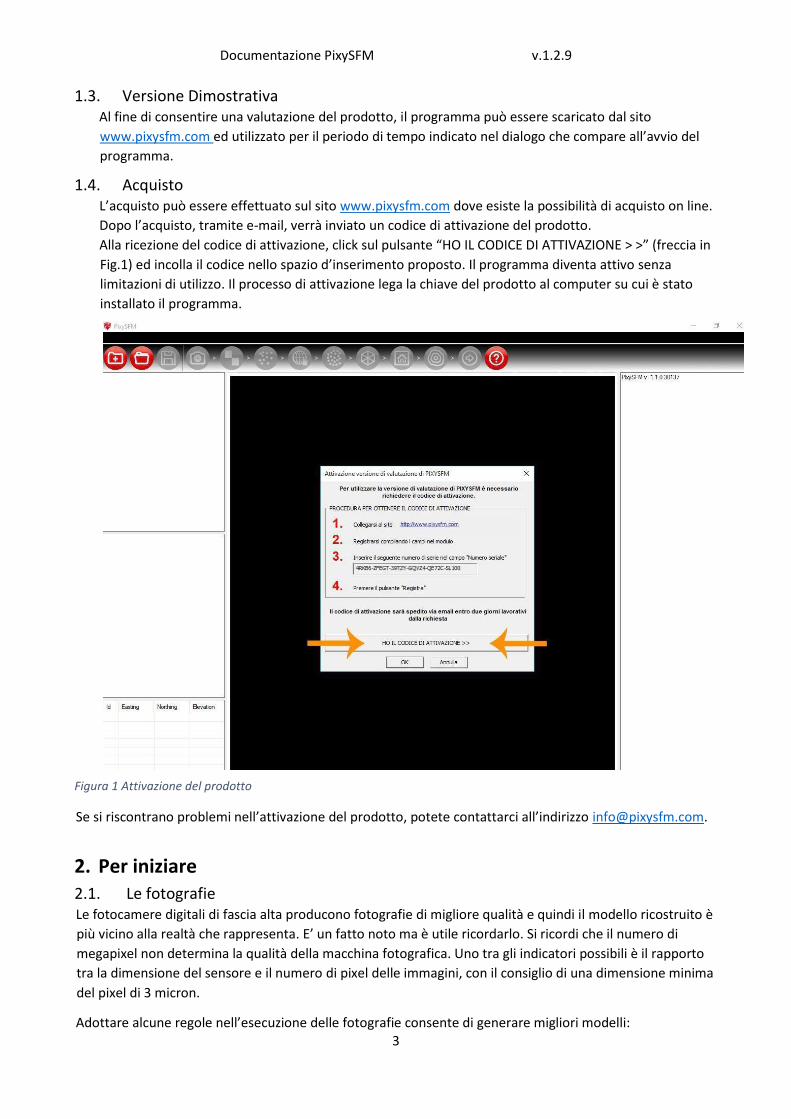
Alla ricezione del codice di attivazione, click sul pulsante “HO IL CODICE DI ATTIVAZIONE > >” (freccia in
Fig.1) ed incolla il codice nello spazio d’inserimento proposto. Il programma diventa attivo senza
limitazioni di utilizzo. Il processo di attivazione lega la chiave del prodotto al computer su cui è stato
installato il programma.
Figura 1 Attivazione del prodotto
Se si riscontrano problemi nell’attivazione del prodotto, potete contattarci all’indirizzo [email protected].
2. Per iniziare 2.1. Le fotografie Le fotocamere digitali di fascia alta producono fotografie di migliore qualità e quindi il modello ricostruito è
più vicino alla realtà che rappresenta. E’ un fatto noto ma è utile ricordarlo. Si ricordi che il numero di
megapixel non determina la qualità della macchina fotografica. Uno tra gli indicatori possibili è il rapporto
tra la dimensione del sensore e il numero di pixel delle immagini, con il consiglio di una dimensione minima
del pixel di 3 micron.
Adottare alcune regole nell’esecuzione delle fotografie consente di generare migliori modelli:
Documentazione PixySFM v.1.2.9
4
- evitare fotografie mosse o con effetti di trascinamento;
- l’illuminazione deve essere adeguata;
- sovrapposizione tra le fotografie: 80% lungo il percorso e 70% tra foto affiancate;
- mantenere la stessa distanza tra la fotocamera e l’oggetto;
- le fotografie dovrebbero contenere dettagli distinti e non essere omogenee;
- utilizzare la stessa fotocamera e lo stesso gruppo ottico per un dataset di immagini;
- Meglio eccedere nel numero di fotografie piuttosto che scarseggiare, in modo speciale sui dettagli
rilevanti.
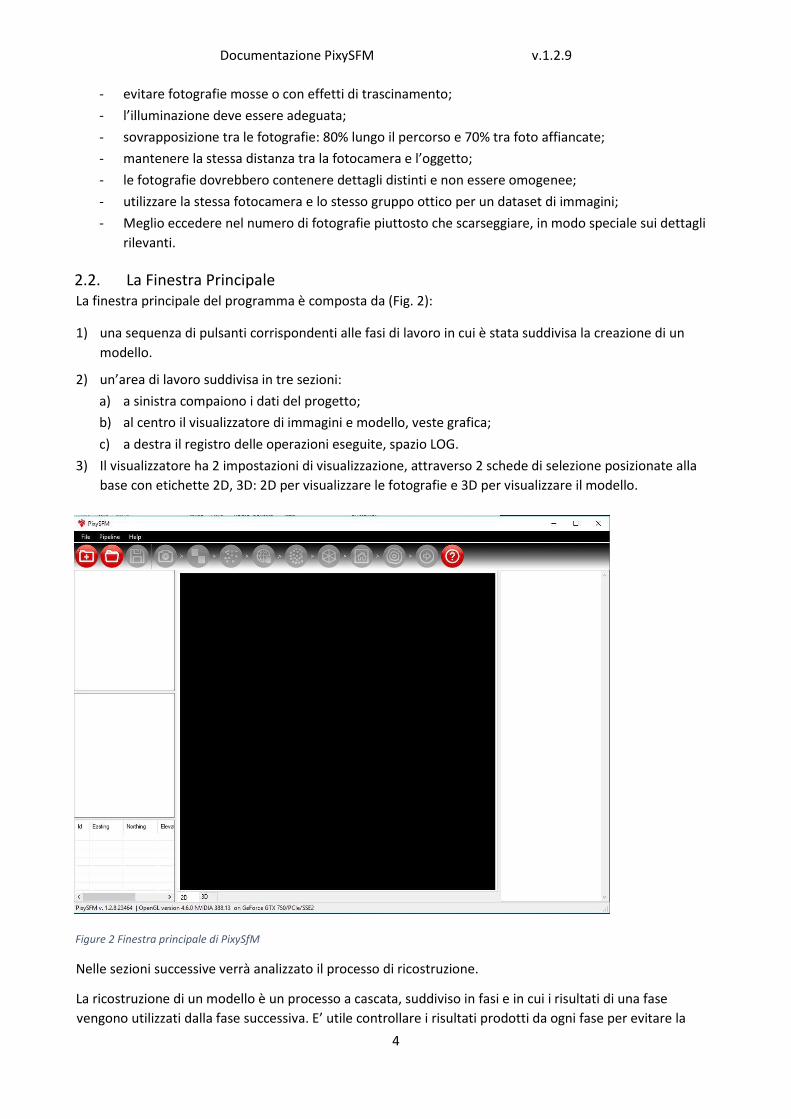
2.2. La Finestra Principale La finestra principale del programma è composta da (Fig. 2):
1) una sequenza di pulsanti corrispondenti alle fasi di lavoro in cui è stata suddivisa la creazione di un
modello.
2) un’area di lavoro suddivisa in tre sezioni:
a) a sinistra compaiono i dati del progetto;
b) al centro il visualizzatore di immagini e modello, veste grafica;
c) a destra il registro delle operazioni eseguite, spazio LOG.
3) Il visualizzatore ha 2 impostazioni di visualizzazione, attraverso 2 schede di selezione posizionate alla
base con etichette 2D, 3D: 2D per visualizzare le fotografie e 3D per visualizzare il modello.
Figure 2 Finestra principale di PixySfM
Nelle sezioni successive verrà analizzato il processo di ricostruzione.
La ricostruzione di un modello è un processo a cascata, suddiviso in fasi e in cui i risultati di una fase
vengono utilizzati dalla fase successiva. E’ utile controllare i risultati prodotti da ogni fase per evitare la
Documentazione PixySFM v.1.2.9
5
propagazione degli errori. Ad es. il controllo delle fotografie importate consente di eliminare l’utilizzo di
fotografie “mosse” o contenenti altri errori ed evitare la conseguente propagazione degli errori. In
generale, ogni fase può essere eseguita singolarmente, ma necessita del risultato della fase precedente per
un’esecuzione corretta.
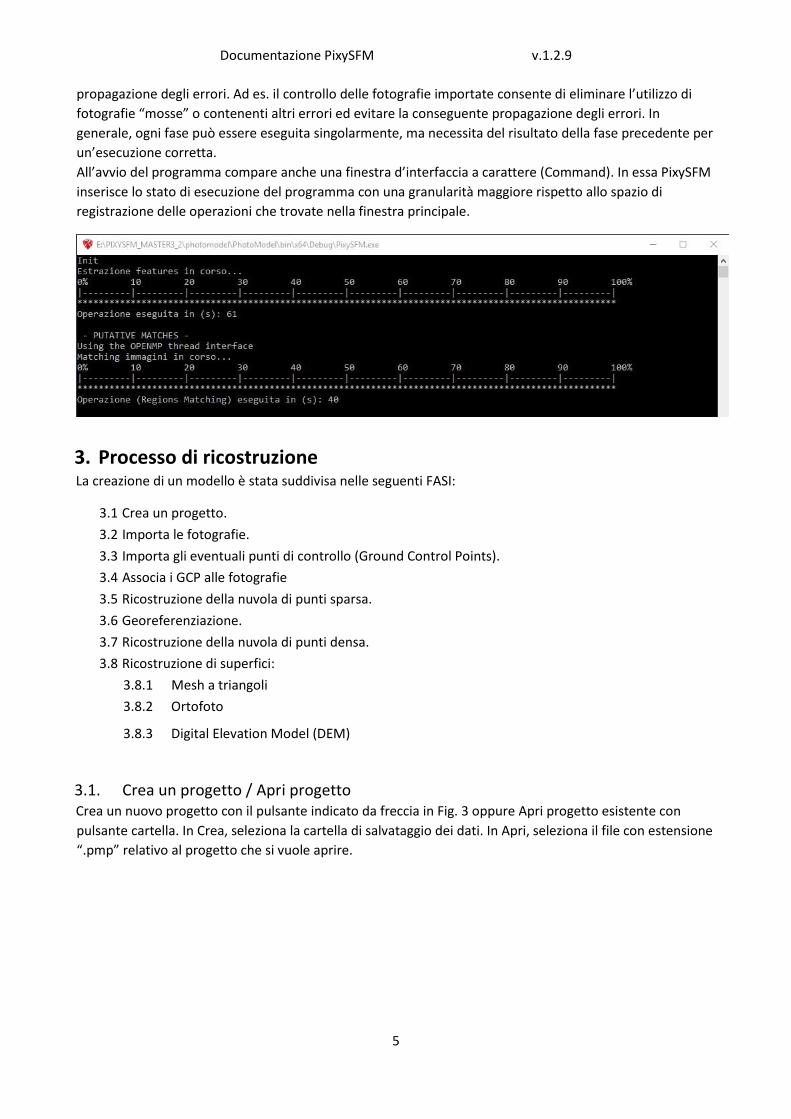
All’avvio del programma compare anche una finestra d’interfaccia a carattere (Command). In essa PixySFM
inserisce lo stato di esecuzione del programma con una granularità maggiore rispetto allo spazio di
registrazione delle operazioni che trovate nella finestra principale.
3. Processo di ricostruzione La creazione di un modello è stata suddivisa nelle seguenti FASI:
3.1 Crea un progetto.
3.2 Importa le fotografie.
3.3 Importa gli eventuali punti di controllo (Ground Control Points).
3.4 Associa i GCP alle fotografie
3.5 Ricostruzione della nuvola di punti sparsa.
3.6 Georeferenziazione.
3.7 Ricostruzione della nuvola di punti densa.
3.8 Ricostruzione di superfici:
3.8.1 Mesh a triangoli
3.8.2 Ortofoto
3.8.3 Digital Elevation Model (DEM)
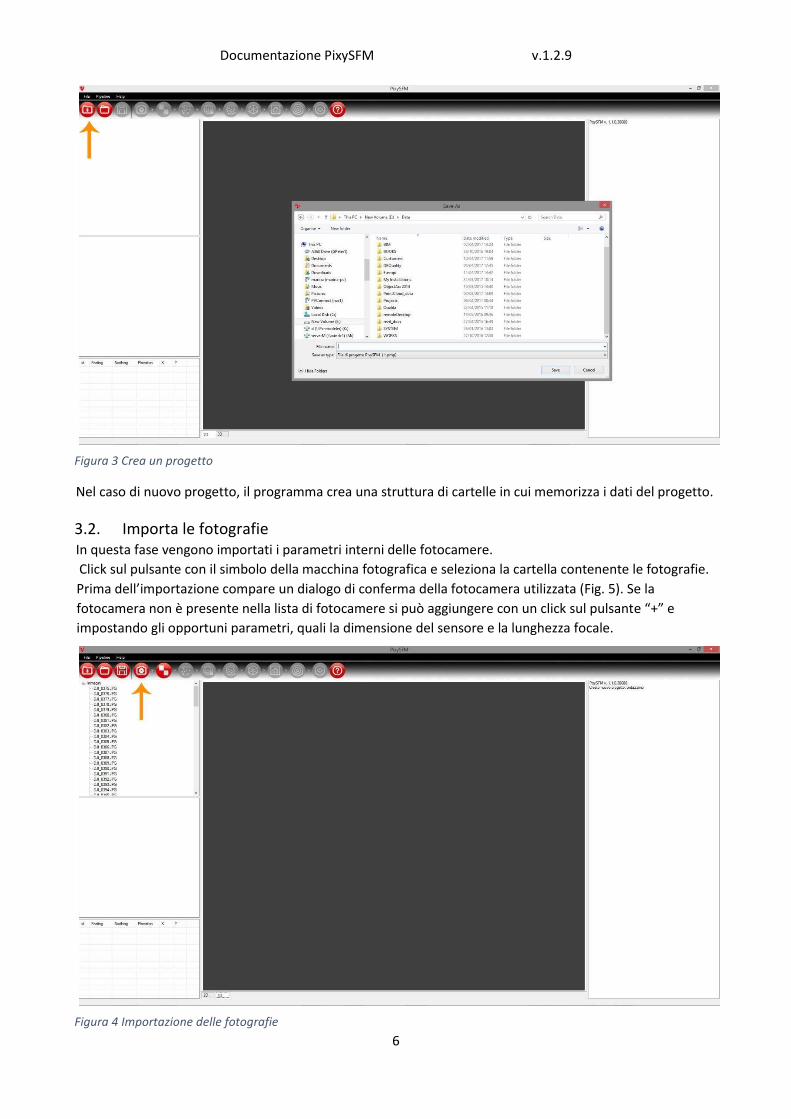
3.1. Crea un progetto / Apri progetto Crea un nuovo progetto con il pulsante indicato da freccia in Fig. 3 oppure Apri progetto esistente con
pulsante cartella. In Crea, seleziona la cartella di salvataggio dei dati. In Apri, seleziona il file con estensione
“.pmp” relativo al progetto che si vuole aprire.
Documentazione PixySFM v.1.2.9
6
Figura 3 Crea un progetto
Nel caso di nuovo progetto, il programma crea una struttura di cartelle in cui memorizza i dati del progetto.
3.2. Importa le fotografie In questa fase vengono importati i parametri interni delle fotocamere.
Click sul pulsante con il simbolo della macchina fotografica e seleziona la cartella contenente le fotografie.
Prima dell’importazione compare un dialogo di conferma della fotocamera utilizzata (Fig. 5). Se la
fotocamera non è presente nella lista di fotocamere si può aggiungere con un click sul pulsante “+” e
impostando gli opportuni parametri, quali la dimensione del sensore e la lunghezza focale.
Figura 4 Importazione delle fotografie

Documentazione PixySFM v.1.2.9
7
Figura 5 Conferma o imposta i parametri della fotocamera
Nel dialogo possono essere inseriti i parametri di calibrazione della fotocamera quali i fattori di distorsione
delle lenti suddivisi in tipo radiale (K1, …) e tangenziale (T1, T2). Per il rilievo fotografico è possibile
utilizzare diverse macchine fotografiche e in questo caso, l’insieme delle macchine fotografiche compare
nel dialogo di Fig. 5.
Se la macchina fotografica è presente ma ha i parametri di dimensioni sensore o lunghezza focale
incompleti, esegui il pulsante “Applica” in modo che il programma aggiorni i parametri con valori corretti.
Se la macchina fotografica usata per il rilievo fotografico non compare tra quelle già inserite, si può
aggiungere con click sul pulsante “+” della Fig. 5:
Documentazione PixySFM v.1.2.9
8
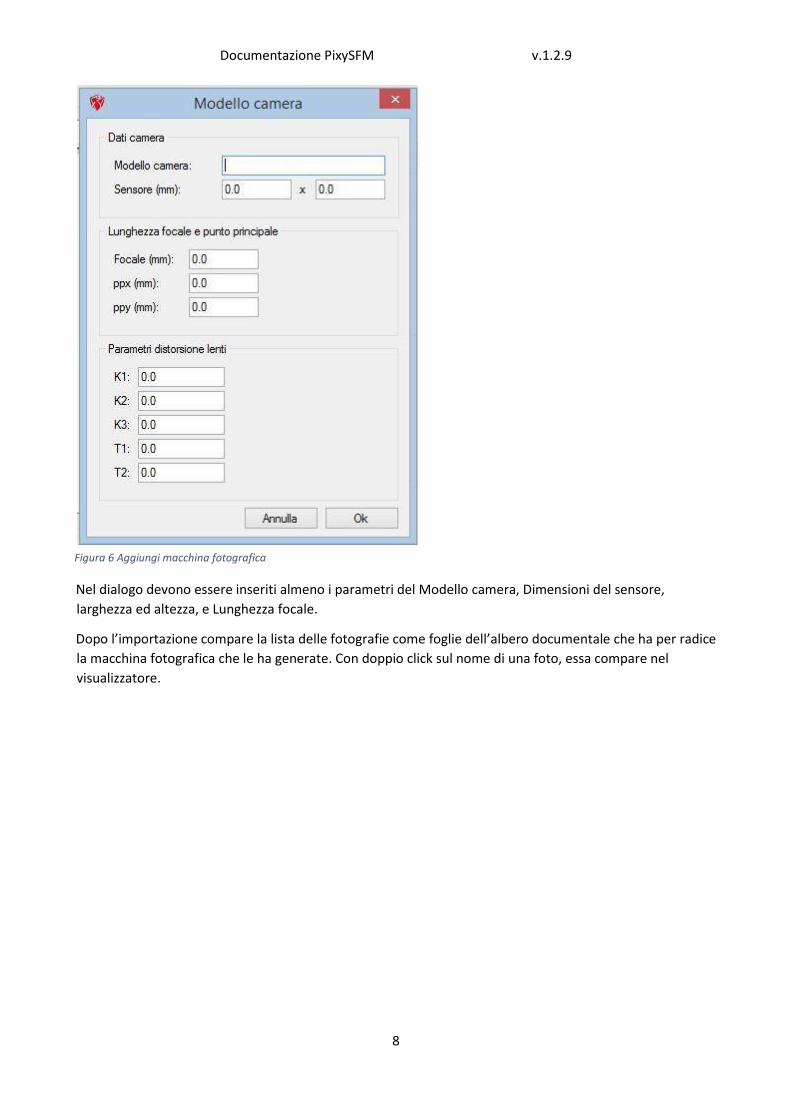
Figura 6 Aggiungi macchina fotografica
Nel dialogo devono essere inseriti almeno i parametri del Modello camera, Dimensioni del sensore,
larghezza ed altezza, e Lunghezza focale.
Dopo l’importazione compare la lista delle fotografie come foglie dell’albero documentale che ha per radice
la macchina fotografica che le ha generate. Con doppio click sul nome di una foto, essa compare nel
visualizzatore.
Documentazione PixySFM v.1.2.9
9
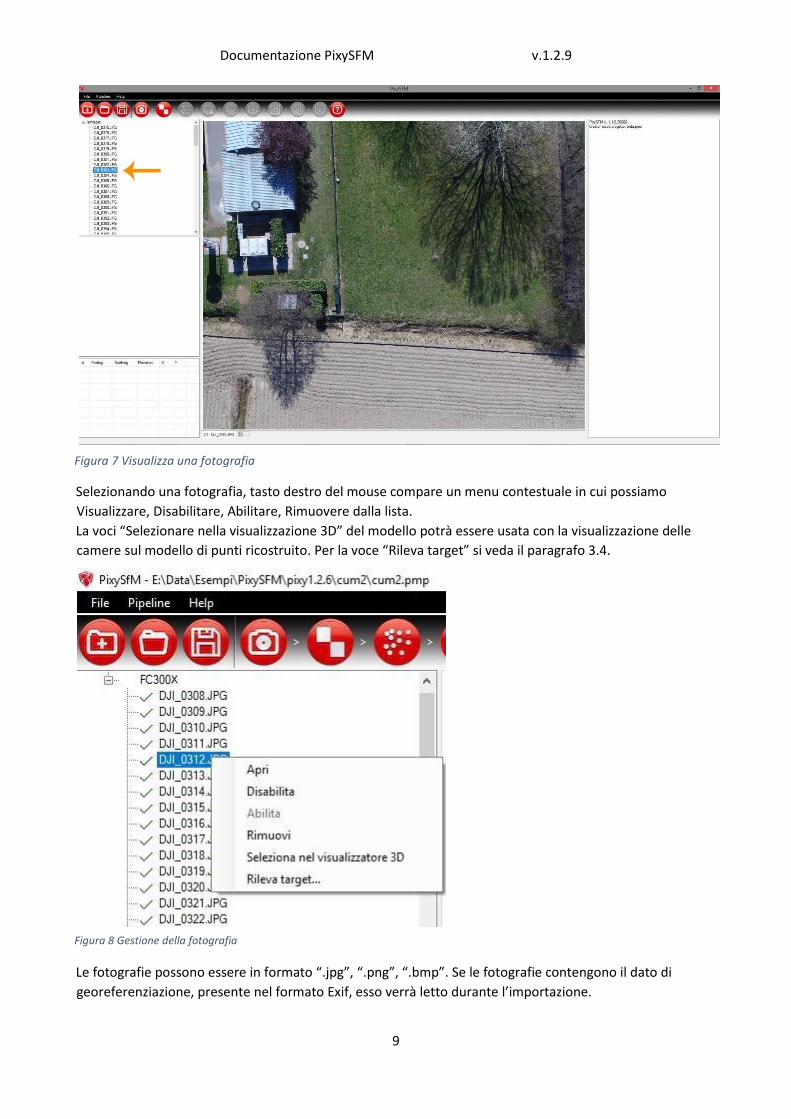
Figura 7 Visualizza una fotografia
Selezionando una fotografia, tasto destro del mouse compare un menu contestuale in cui possiamo
Visualizzare, Disabilitare, Abilitare, Rimuovere dalla lista.
La voci “Selezionare nella visualizzazione 3D” del modello potrà essere usata con la visualizzazione delle
camere sul modello di punti ricostruito. Per la voce “Rileva target” si veda il paragrafo 3.4.
Figura 8 Gestione della fotografia
Le fotografie possono essere in formato “.jpg”, “.png”, “.bmp”. Se le fotografie contengono il dato di
georeferenziazione, presente nel formato Exif, esso verrà letto durante l’importazione.
Documentazione PixySFM v.1.2.9
10
Flusso di lavoro. Si consiglia di verificare ora la correttezza delle fotografie, scartando le eventuali
inadeguate perchè “mosse” o con effetti da trascinamento. Si evita così di propagare errori nelle successive
fasi di ricostruzione del modello.
Il modello può essere ricostruito con l’utilizzo o meno di target e punti di controllo (GCP). Si noti che la
ricostruzione fotogrammetrica senza punti di controllo non consente l’applicazione di una misura
consistente sul modello ricostruito. Usando target e GCP aumenta la precisione del modello e la sua
accuratezza rispetto all’originale. Per la ricostruzione di un modello senza target e GCP si può proseguire
con il par. 3.5.
3.3. Target e punti di controllo Target
I target devono essere posizionati in modo da riprodurre il perimetro dell’oggetto/terreno da rilevare. Se
possibile inserire un target al centro dell’area d’interesse.
Nel caso del rilievo e ricostruzione di un oggetto di dimensioni limitate, es. statua, oggetto meccanico, è
necessario posizionare almeno 4 target alla base dell’oggetto come se fossimo nel piano X,Y di un sistema
locale (X, Y, Z), dove il primo punto ha coordinate (0, 0, 0) e misurare le distanze degli altri punti a contorno
dell’oggetto.
Il target corrispondente ad un punto di controllo deve comparire in almeno 2 foto.
Punti di controllo
I punti di controllo sono punti corrispondenti ai target sulle fotografie. Essi sono stati rilevati con uno
strumento di misura quale stazione totale, antenna GPS, metro, …. Il sistema di riferimento dei punti può
essere:
- Globale, proiezione cartografica UTMnnN/S con nn relativo al fuso in cui è stato eseguito il rilievo
(es. 32 o 33 o 34 per l’Italia).
- Locale, Coordinate locali, relative allo strumento di acquisizione.
Nel programma, click sul pulsante indicato nella freccia in Fig. 9, compare un dialogo per l’inserimento dei
punti di controllo. Nel dialogo selezionare il sistema di riferimento dei punti: Globale o Locale. I punti
possono essere inseriti:
1) a mano, inserendo le coordinate nei controlli Easting, Northing, Elevation e click sul pulsante
“Aggiungi”;
2) in automatico da un file .txt/.csv il cui formato indica:
campi previsti: ID numerico, Est (x), Nord (y), Elevazione (z)
separatori: spazio, carattere tab. ‘;’, ‘,’
separatore decimale: ‘.’ (si
veda dialogo di Fig. 9)

Documentazione PixySFM v.1.2.9
11
Figura 9 Importa i punti di controllo
Nel controllo in basso a sinistra sono visualizzati i punti di controllo importati (Fig. 10).
Figura 10 Lista i punti di controllo importati
3.4. Riconoscimento dei target nelle fotografie Dopo l’inserimento delle fotografie nel progetto è possibile eseguire l’algoritmo di rilevamento dei target
nelle fotografie. L’algoritmo è stato impostato per il riconoscimento dei seguenti target:

Documentazione PixySFM v.1.2.9
12
Figura 11Modello del target riconosciuto
Il programma di rilevamento target può essere eseguito su una singola fotografia o su tutte le fotografie del
progetto. Nel primo caso è sufficiente selezionare la fotografia, tasto destro del mouse e selezionare la
voce “Rilevamento target…”. Nel caso di elaborazione su tutte le fotografie abbiamo il menu a discesa,
associato alla voce Pipeline del menu principale, in cui compare la voce Rilevamento target…
Figura 12 Rilevamento target su tutte le fotografie
Selezionando la voce “Rilevamento target…” compare il seguente dialogo in cui è possibile impostare la
Tolleranza, cioè il limite inferiore al numero di riconoscimenti per essere considerato un target. Poiché
l’algoritmo itera la ricerca del target sull’immagine, questo limite inferiore limita il numero dei falsi positivi.
Figura 13Imposta la tolleranza
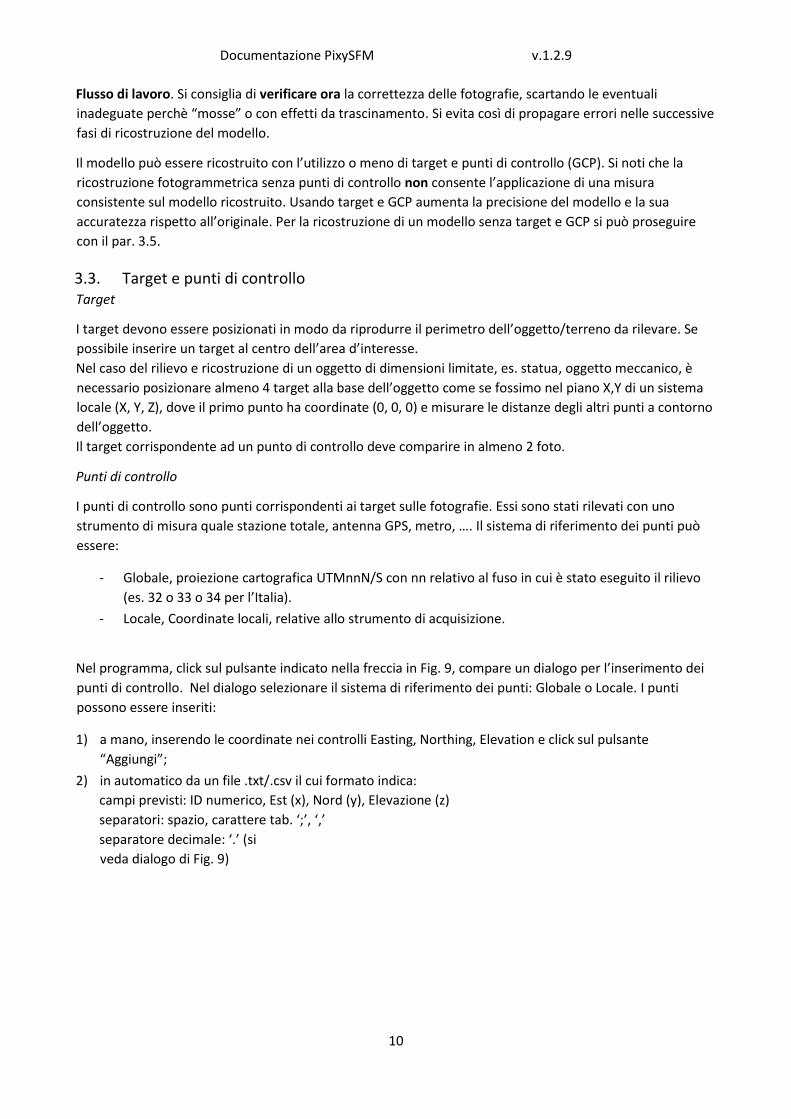
Per ogni target trovato in una fotografia, l’algoritmo assegna un identificatore specifico.
Documentazione PixySFM v.1.2.9
13
Figura 14 Identificatori di target
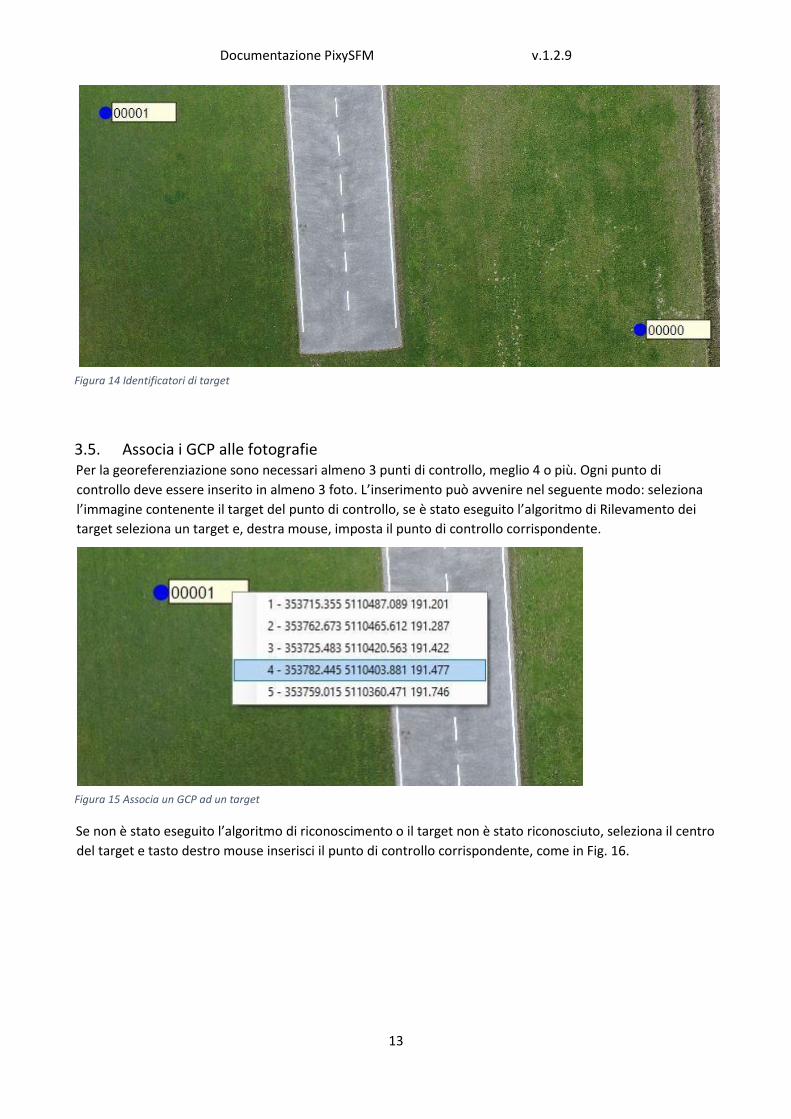
3.5. Associa i GCP alle fotografie Per la georeferenziazione sono necessari almeno 3 punti di controllo, meglio 4 o più. Ogni punto di
controllo deve essere inserito in almeno 3 foto. L’inserimento può avvenire nel seguente modo: seleziona
l’immagine contenente il target del punto di controllo, se è stato eseguito l’algoritmo di Rilevamento dei
target seleziona un target e, destra mouse, imposta il punto di controllo corrispondente.
Figura 15 Associa un GCP ad un target
Se non è stato eseguito l’algoritmo di riconoscimento o il target non è stato riconosciuto, seleziona il centro
del target e tasto destro mouse inserisci il punto di controllo corrispondente, come in Fig. 16.
Documentazione PixySFM v.1.2.9
14
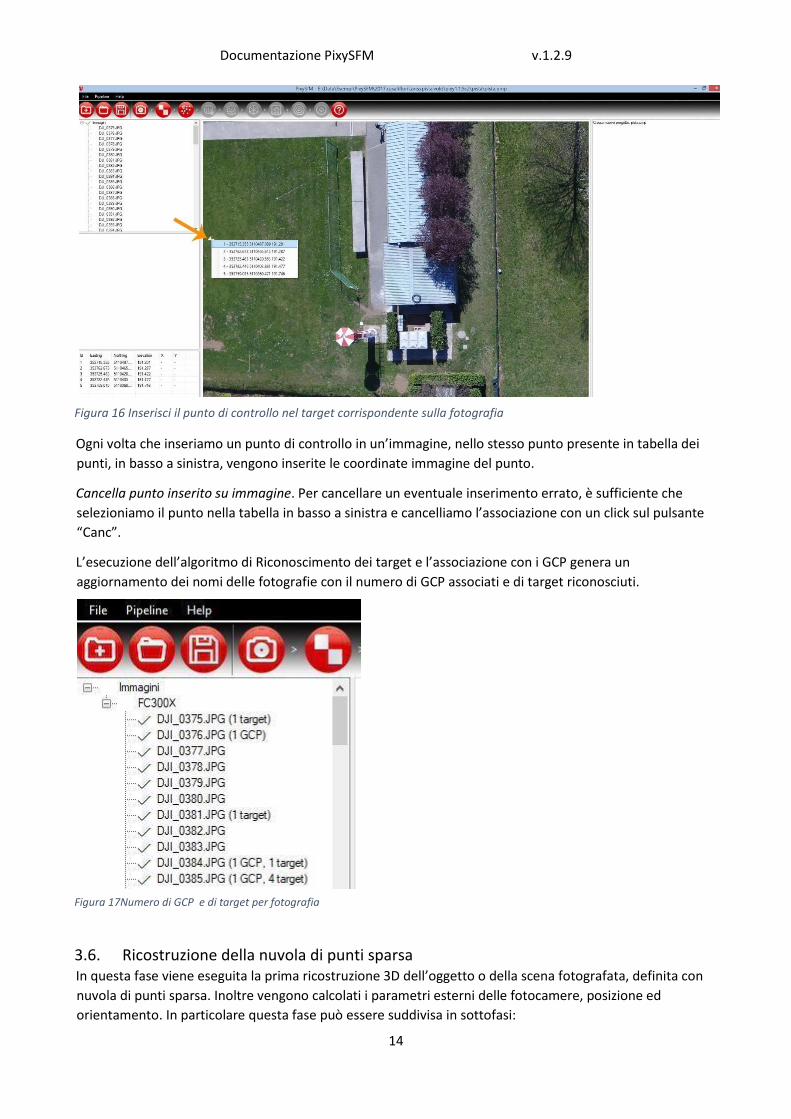
Figura 16 Inserisci il punto di controllo nel target corrispondente sulla fotografia
Ogni volta che inseriamo un punto di controllo in un’immagine, nello stesso punto presente in tabella dei
punti, in basso a sinistra, vengono inserite le coordinate immagine del punto.
Cancella punto inserito su immagine. Per cancellare un eventuale inserimento errato, è sufficiente che
selezioniamo il punto nella tabella in basso a sinistra e cancelliamo l’associazione con un click sul pulsante
“Canc”.
L’esecuzione dell’algoritmo di Riconoscimento dei target e l’associazione con i GCP genera un
aggiornamento dei nomi delle fotografie con il numero di GCP associati e di target riconosciuti.
Figura 17Numero di GCP e di target per fotografia
3.6. Ricostruzione della nuvola di punti sparsa In questa fase viene eseguita la prima ricostruzione 3D dell’oggetto o della scena fotografata, definita con
nuvola di punti sparsa. Inoltre vengono calcolati i parametri esterni delle fotocamere, posizione ed
orientamento. In particolare questa fase può essere suddivisa in sottofasi:
Documentazione PixySFM v.1.2.9
15
- calcola i punti caratteristici delle fotografie
- calcola gli accoppiamenti (matching) dei punti
- Bundle adjustment: calibrazione delle macchine fotografiche
- Calcolo delle posizioni relative
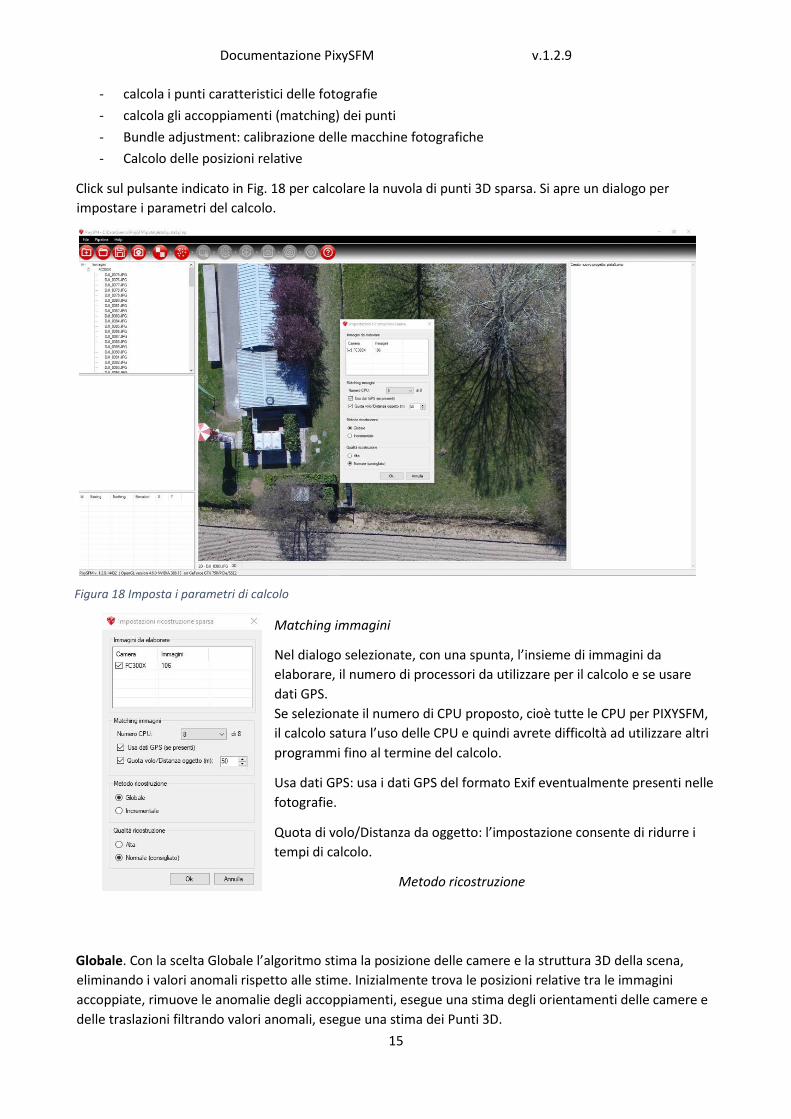
Click sul pulsante indicato in Fig. 18 per calcolare la nuvola di punti 3D sparsa. Si apre un dialogo per
impostare i parametri del calcolo.
Figura 18 Imposta i parametri di calcolo
Matching immagini
Nel dialogo selezionate, con una spunta, l’insieme di immagini da
elaborare, il numero di processori da utilizzare per il calcolo e se usare
dati GPS.
Se selezionate il numero di CPU proposto, cioè tutte le CPU per PIXYSFM,
il calcolo satura l’uso delle CPU e quindi avrete difficoltà ad utilizzare altri
programmi fino al termine del calcolo.
Usa dati GPS: usa i dati GPS del formato Exif eventualmente presenti nelle
fotografie.
Quota di volo/Distanza da oggetto: l’impostazione consente di ridurre i
tempi di calcolo.
Metodo ricostruzione
Globale. Con la scelta Globale l’algoritmo stima la posizione delle camere e la struttura 3D della scena,
eliminando i valori anomali rispetto alle stime. Inizialmente trova le posizioni relative tra le immagini
accoppiate, rimuove le anomalie degli accoppiamenti, esegue una stima degli orientamenti delle camere e
delle traslazioni filtrando valori anomali, esegue una stima dei Punti 3D.
Documentazione PixySFM v.1.2.9
16
Incrementale. L’algoritmo sceglie una coppia iniziale d’immagini sulla base delle loro posizioni reciproche,
esegue una stima della struttura 3D della scena ed un adattamento delle viste. Le camere addizionali sono
aggiunte sequenzialmente con una nuova stima della struttura 3D corrispondente all’osservazione di nuove
parti della scena.
In generale la Globale implica tempi inferiori di calcolo rispetto all’Incrementale. Inoltre può essere usato
sia per fotografie nadirali che ad angoli di ripresa diversi, es. 45°. Il metodo Incrementale genera un
risultato qualitativamente migliore, ma non sempre il metodo di ricostruzione termina con successo.
Qualità ricostruzione
Questa impostazione determina la risoluzione delle immagini utilizzata:
- Alta indica l’utilizzo di tutti i pixel dell’immagine,
- Normale indica l’utilizzo di metà dei pixel;
Da test eseguiti per la ricostruzione della sparsa un buon compromesso tra tempi di calcolo e nuvola
ricostruita è la scelta “Normale”.
Flusso di lavoro. Una strategia possibile per la creazione del modello è ricostruire, inizialmente, la nuvola
sparsa con metodo Globale e Qualità della ricostruzione Normale. Se la ricostruzione non ha esito positivo
ricostruire di nuovo la nuvola sparsa con metodo Incrementale e Qualità Normale.
In ogni caso, per aumentare l’accuratezza e la precisione del modello rispetto al reale, bisogna utilizzare i
punti di controllo o GCP ed applicare la relativa georeferenziazione con scala (vedi par. 3.7).
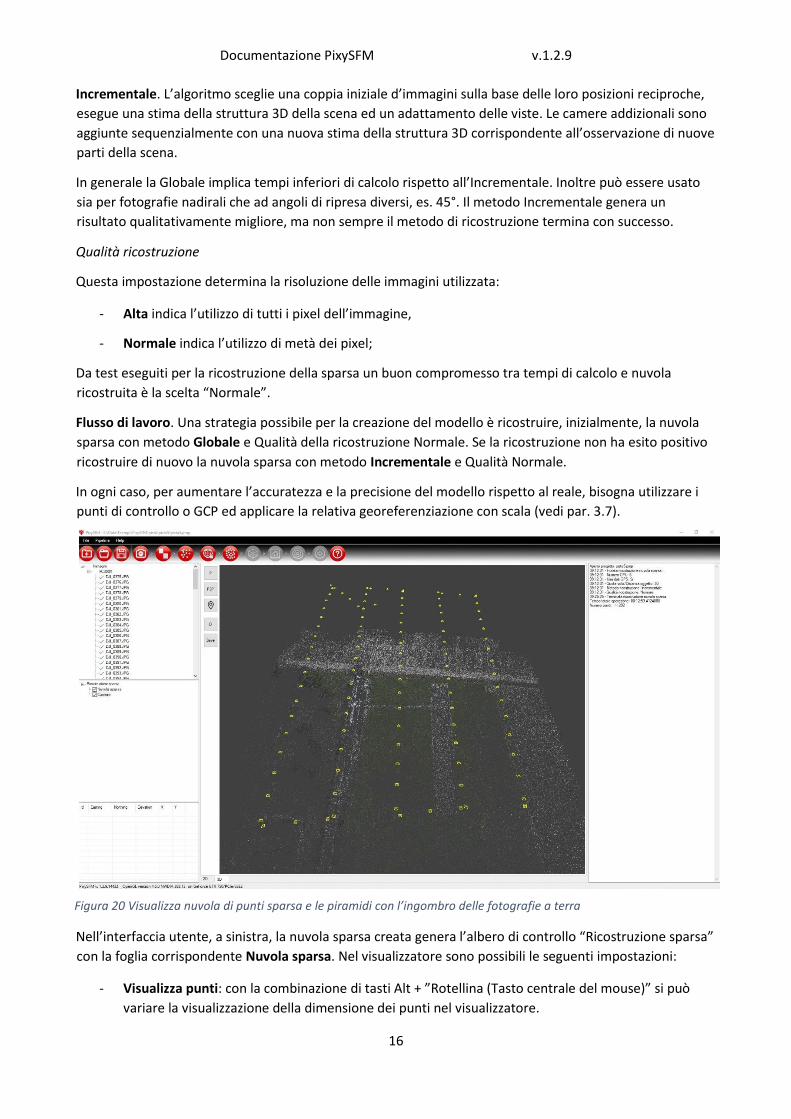
Figura 20 Visualizza nuvola di punti sparsa e le piramidi con l’ingombro delle fotografie a terra
Nell’interfaccia utente, a sinistra, la nuvola sparsa creata genera l’albero di controllo “Ricostruzione sparsa”
con la foglia corrispondente Nuvola sparsa. Nel visualizzatore sono possibili le seguenti impostazioni:
- Visualizza punti: con la combinazione di tasti Alt + ”Rotellina (Tasto centrale del mouse)” si può
variare la visualizzazione della dimensione dei punti nel visualizzatore.
Documentazione PixySFM v.1.2.9
17
- Centro di rotazione della nuvola: è possibile impostare il centro di rotazione della nuvola
attraverso la combinazione di tasti Ctrl + ”click del tasto sinistro del mouse” nel punto interno al
visualizzatore che si vuole diventi il centro di rotazione.
Nel visualizzatore vengono disegnati anche i punti di presa delle fotografie. Nella registrazione delle attività,
il controllo Log a destra, viene creata una voce con il numero dei punti ricostruiti nella nuvola sparsa.
Volendo visualizzare i punti di presa delle fotografie del rilievo, è sufficiente spuntare la voce Camere
nell’albero Ricostruzione sparsa.
Dopo la creazione della sparsa, nella lista delle fotografie compare un simbolo di spunta per ogni fotografia
allineata. Se compaiono delle fotografie senza spunta, quindi non allineate, e nel caso si sia utilizzato il
modo di calcolo “Incrementale”, si può provare ad usare il modo di calcolo “Globale”.
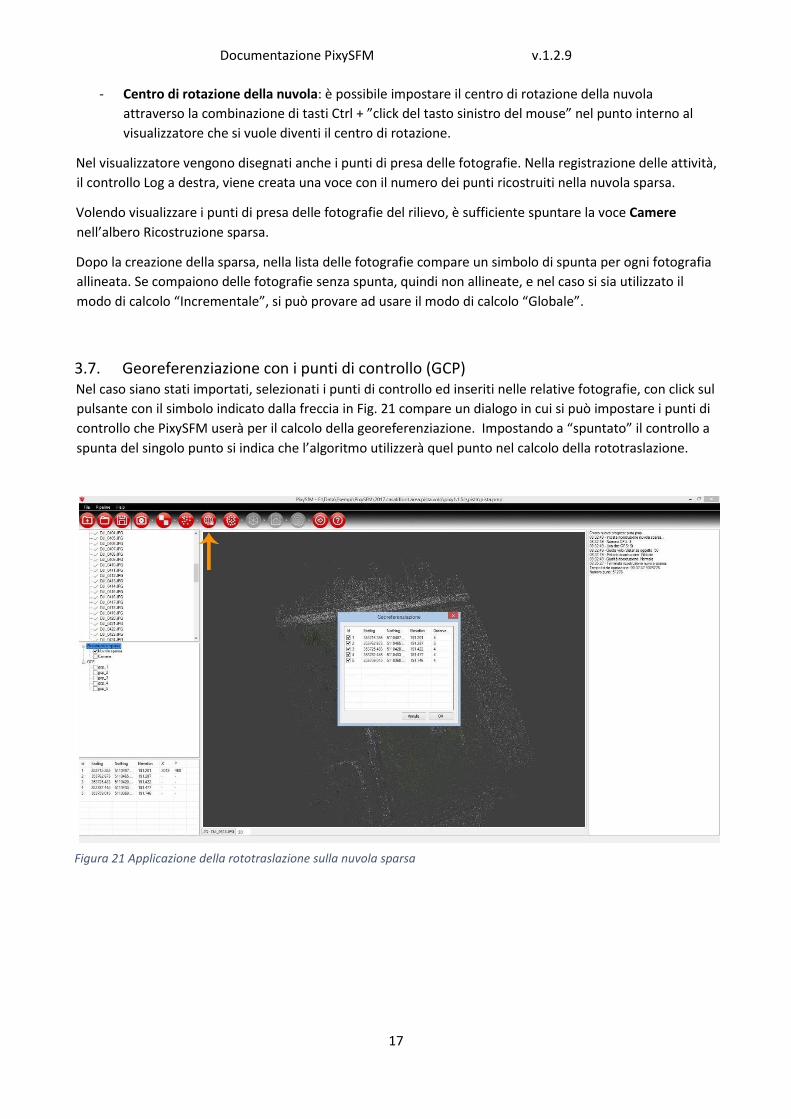
3.7. Georeferenziazione con i punti di controllo (GCP) Nel caso siano stati importati, selezionati i punti di controllo ed inseriti nelle relative fotografie, con click sul
pulsante con il simbolo indicato dalla freccia in Fig. 21 compare un dialogo in cui si può impostare i punti di
controllo che PixySFM userà per il calcolo della georeferenziazione. Impostando a “spuntato” il controllo a
spunta del singolo punto si indica che l’algoritmo utilizzerà quel punto nel calcolo della rototraslazione.
Figura 21 Applicazione della rototraslazione sulla nuvola sparsa
Documentazione PixySFM v.1.2.9
18
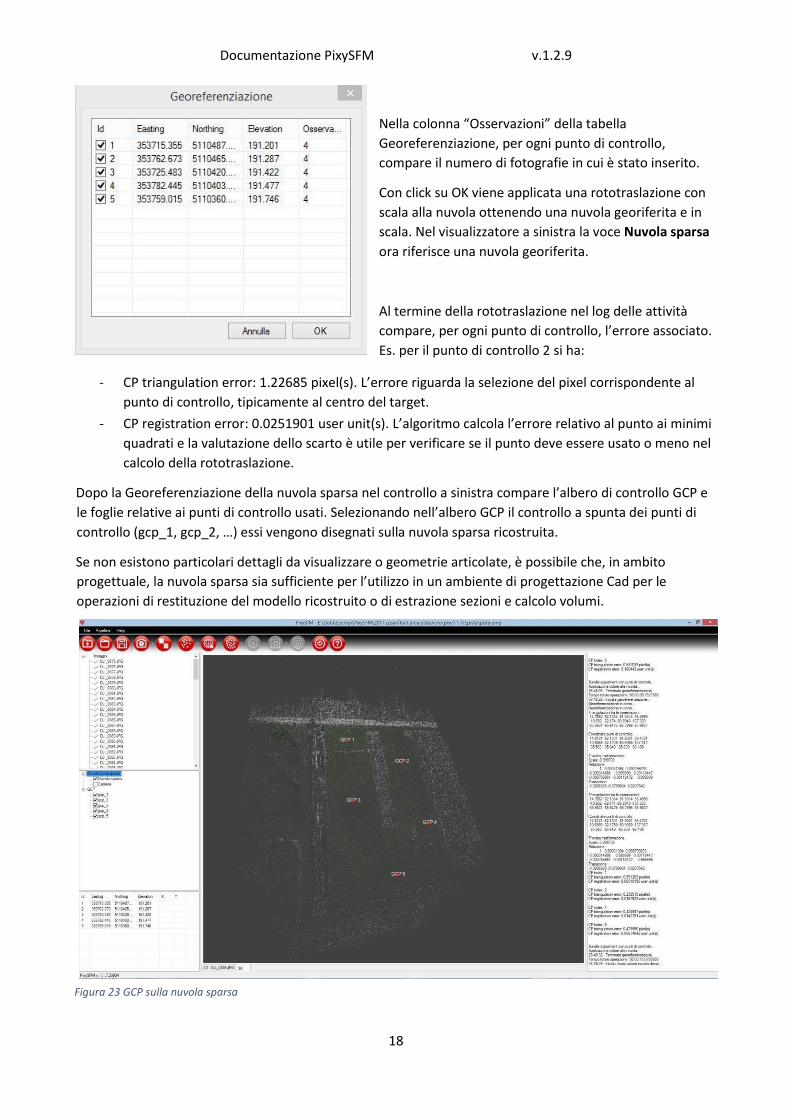
Nella colonna “Osservazioni” della tabella
Georeferenziazione, per ogni punto di controllo,
compare il numero di fotografie in cui è stato inserito.
Con click su OK viene applicata una rototraslazione con
scala alla nuvola ottenendo una nuvola georiferita e in
scala. Nel visualizzatore a sinistra la voce Nuvola sparsa
ora riferisce una nuvola georiferita.
Al termine della rototraslazione nel log delle attività
compare, per ogni punto di controllo, l’errore associato.
Es. per il punto di controllo 2 si ha:
- CP triangulation error: 1.22685 pixel(s). L’errore riguarda la selezione del pixel corrispondente al
punto di controllo, tipicamente al centro del target.
- CP registration error: 0.0251901 user unit(s). L’algoritmo calcola l’errore relativo al punto ai minimi
quadrati e la valutazione dello scarto è utile per verificare se il punto deve essere usato o meno nel
calcolo della rototraslazione.
Dopo la Georeferenziazione della nuvola sparsa nel controllo a sinistra compare l’albero di controllo GCP e
le foglie relative ai punti di controllo usati. Selezionando nell’albero GCP il controllo a spunta dei punti di
controllo (gcp_1, gcp_2, …) essi vengono disegnati sulla nuvola sparsa ricostruita.
Se non esistono particolari dettagli da visualizzare o geometrie articolate, è possibile che, in ambito
progettuale, la nuvola sparsa sia sufficiente per l’utilizzo in un ambiente di progettazione Cad per le
operazioni di restituzione del modello ricostruito o di estrazione sezioni e calcolo volumi.
Figura 23 GCP sulla nuvola sparsa
Documentazione PixySFM v.1.2.9
19
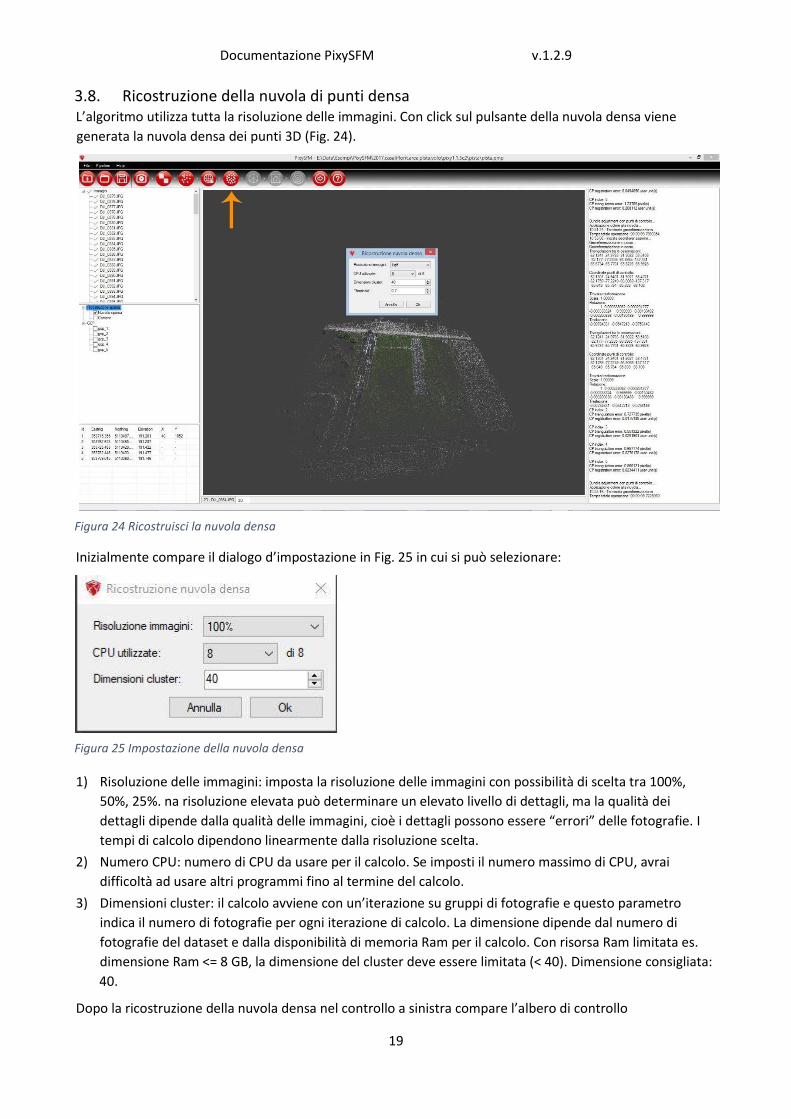
3.8. Ricostruzione della nuvola di punti densa L’algoritmo utilizza tutta la risoluzione delle immagini. Con click sul pulsante della nuvola densa viene
generata la nuvola densa dei punti 3D (Fig. 24).
Figura 24 Ricostruisci la nuvola densa
Inizialmente compare il dialogo d’impostazione in Fig. 25 in cui si può selezionare:
Figura 25 Impostazione della nuvola densa
1) Risoluzione delle immagini: imposta la risoluzione delle immagini con possibilità di scelta tra 100%,
50%, 25%. na risoluzione elevata può determinare un elevato livello di dettagli, ma la qualità dei
dettagli dipende dalla qualità delle immagini, cioè i dettagli possono essere “errori” delle fotografie. I
tempi di calcolo dipendono linearmente dalla risoluzione scelta.
2) Numero CPU: numero di CPU da usare per il calcolo. Se imposti il numero massimo di CPU, avrai
difficoltà ad usare altri programmi fino al termine del calcolo.
3) Dimensioni cluster: il calcolo avviene con un’iterazione su gruppi di fotografie e questo parametro
indica il numero di fotografie per ogni iterazione di calcolo. La dimensione dipende dal numero di
fotografie del dataset e dalla disponibilità di memoria Ram per il calcolo. Con risorsa Ram limitata es.
dimensione Ram <= 8 GB, la dimensione del cluster deve essere limitata (< 40). Dimensione consigliata:
40.
Dopo la ricostruzione della nuvola densa nel controllo a sinistra compare l’albero di controllo
Documentazione PixySFM v.1.2.9
20
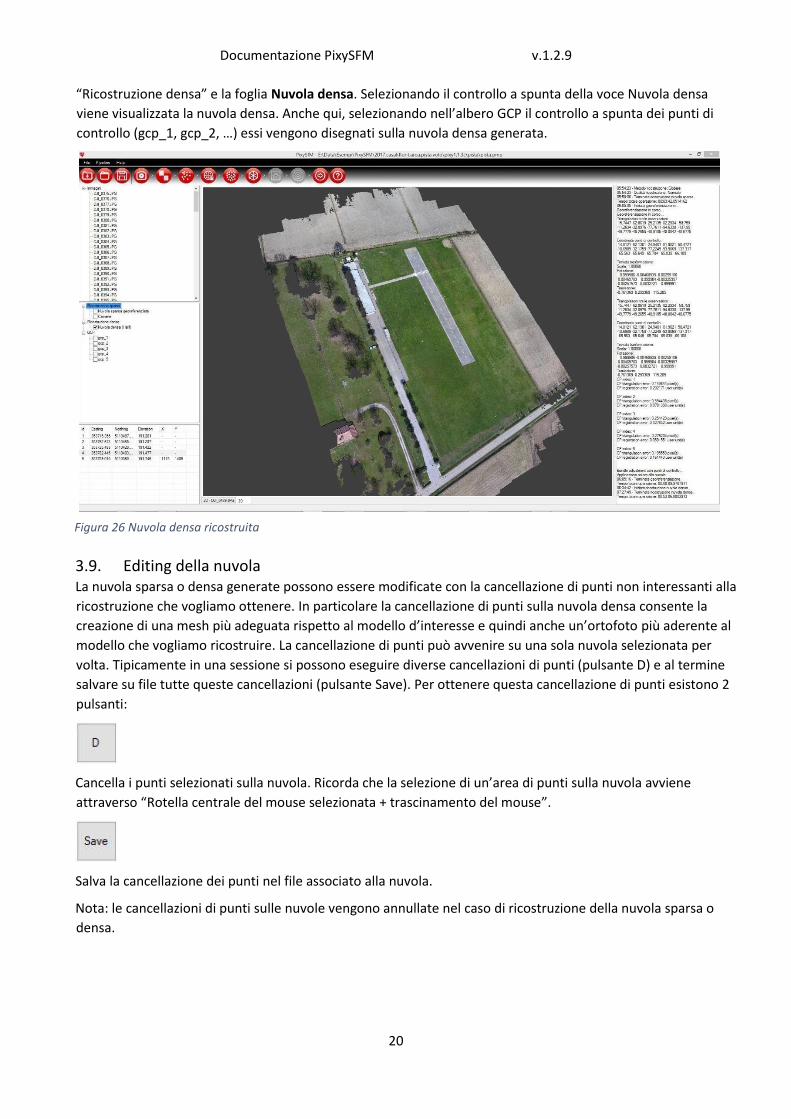
“Ricostruzione densa” e la foglia Nuvola densa. Selezionando il controllo a spunta della voce Nuvola densa
viene visualizzata la nuvola densa. Anche qui, selezionando nell’albero GCP il controllo a spunta dei punti di
controllo (gcp_1, gcp_2, …) essi vengono disegnati sulla nuvola densa generata.
Figura 26 Nuvola densa ricostruita
3.9. Editing della nuvola La nuvola sparsa o densa generate possono essere modificate con la cancellazione di punti non interessanti alla
ricostruzione che vogliamo ottenere. In particolare la cancellazione di punti sulla nuvola densa consente la
creazione di una mesh più adeguata rispetto al modello d’interesse e quindi anche un’ortofoto più aderente al
modello che vogliamo ricostruire. La cancellazione di punti può avvenire su una sola nuvola selezionata per
volta. Tipicamente in una sessione si possono eseguire diverse cancellazioni di punti (pulsante D) e al termine
salvare su file tutte queste cancellazioni (pulsante Save). Per ottenere questa cancellazione di punti esistono 2
pulsanti:
Cancella i punti selezionati sulla nuvola. Ricorda che la selezione di un’area di punti sulla nuvola avviene
attraverso “Rotella centrale del mouse selezionata + trascinamento del mouse”.
Salva la cancellazione dei punti nel file associato alla nuvola.
Nota: le cancellazioni di punti sulle nuvole vengono annullate nel caso di ricostruzione della nuvola sparsa o
densa.

Documentazione PixySFM v.1.2.9
21
3.10. Creazione Piani sul modello
In visualizzazione Modello 3D esistono 3 pulsanti con cui è possibile creare dei piani arbitrari sul
modello dei punti che potranno essere utilizzati come piani di proiezione per le ortofoto. I piani
possono essere basati sui punti GCP importati o su punti scelti e impostati come marker.
P Crea piano interpolato su punti selezionati (ALT + rotella centrale selezionata)
P3P Crea piano passante per 3 punti
Il “segnaposto” associa un marcatore (marker) ad un punto selezionato (SHIFT + sinistra mouse)
Marker
Un marker è un punto del modello a cui viene associato un identificatore.
Nuovo marker: click sul pulsante segnaposto che diventa attivo (verde) e scegli
il punto del marker sul modello: tenendo premuto il tasto SHIFT, click con tasto sinistro del
mouse. Così viene associato un marker al punto selezionato, inserito il suo identificatore sul
modello e aggiunto lo stesso nell’albero informativo, posto sul lato sinistro, contenente la lista
dei Marker. Nella barra laterale destra vengono riportate le coordinate del punto selezionato con una
scritta “Selected Point(x, y, z)” con x, y, z coordinate effettive.
Figura 27 Lista dei marker inseriti
Cancellazione dei marker: seleziona il marker da cancellare nell’albero
informativo a sinistra e tasto destro del mouse click su Elimina.
Piani sul modello
Per la generazione di piani sul modello PixySFM prevede 2 possibilità:
La creazione di un piano come interpolazione (fitting) di una serie di punti, impostando un’area
di selezione dei punti. In questo caso l’utente seleziona un’area del modello con la combinazione
di tasti ALT + rotella centrale selezionata e si sposta con il mouse identificando l’area di
selezione dei punti. Dopo la selezione click sul pulsante P e il programma genera il piano interpolato. Sul
visualizzatore vengono disegnati gli assi X, Y, Z del piano.
La creazione di un piano per 3 punti scelti tra gli eventuali GCP (Ground Control Point) già
importati oppure tra i marker inseriti. Con click sul pulsante P3P compare il seguente dialogo di
selezione dei 3 punti che identificano un piano. L’ordine d’inserimento deve essere:
- In P1 associa il punto Centro del piano;
Documentazione PixySFM v.1.2.9
22
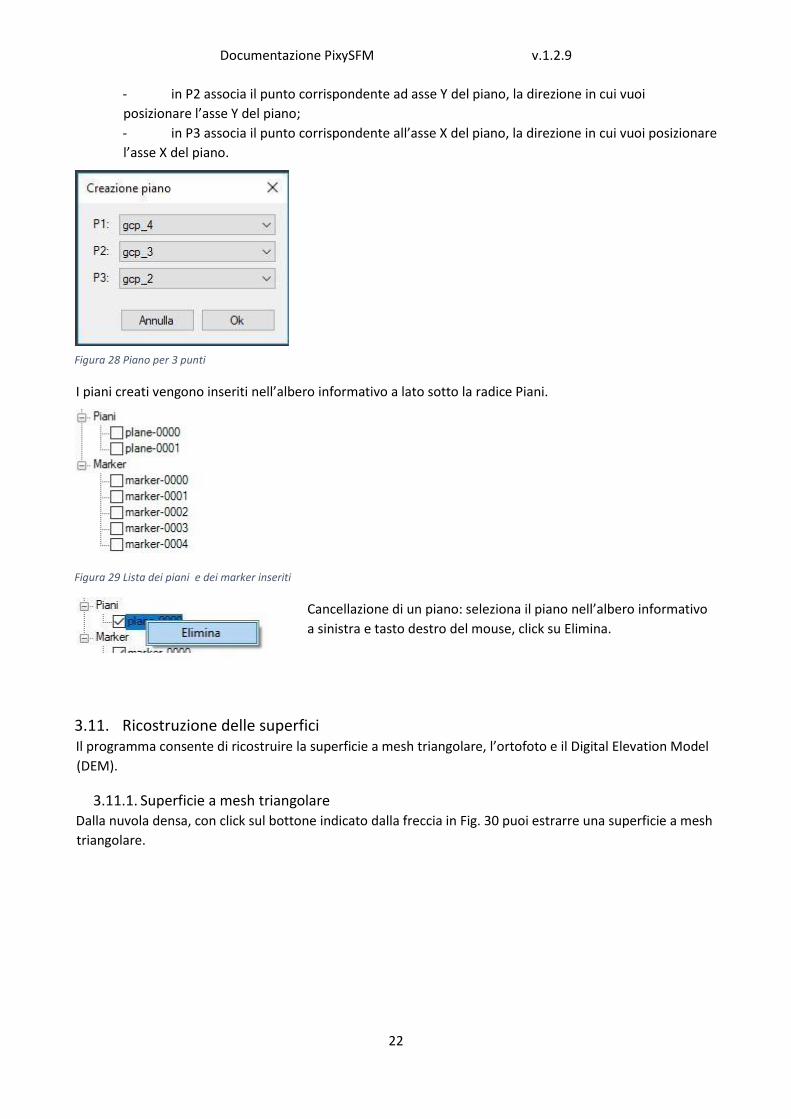
- in P2 associa il punto corrispondente ad asse Y del piano, la direzione in cui vuoi
posizionare l’asse Y del piano;
- in P3 associa il punto corrispondente all’asse X del piano, la direzione in cui vuoi posizionare
l’asse X del piano.
Figura 28 Piano per 3 punti
I piani creati vengono inseriti nell’albero informativo a lato sotto la radice Piani.
Figura 29 Lista dei piani e dei marker inseriti
Cancellazione di un piano: seleziona il piano nell’albero informativo
a sinistra e tasto destro del mouse, click su Elimina.
3.11. Ricostruzione delle superfici Il programma consente di ricostruire la superficie a mesh triangolare, l’ortofoto e il Digital Elevation Model
(DEM).
3.11.1. Superficie a mesh triangolare Dalla nuvola densa, con click sul bottone indicato dalla freccia in Fig. 30 puoi estrarre una superficie a mesh
triangolare.
Documentazione PixySFM v.1.2.9
23
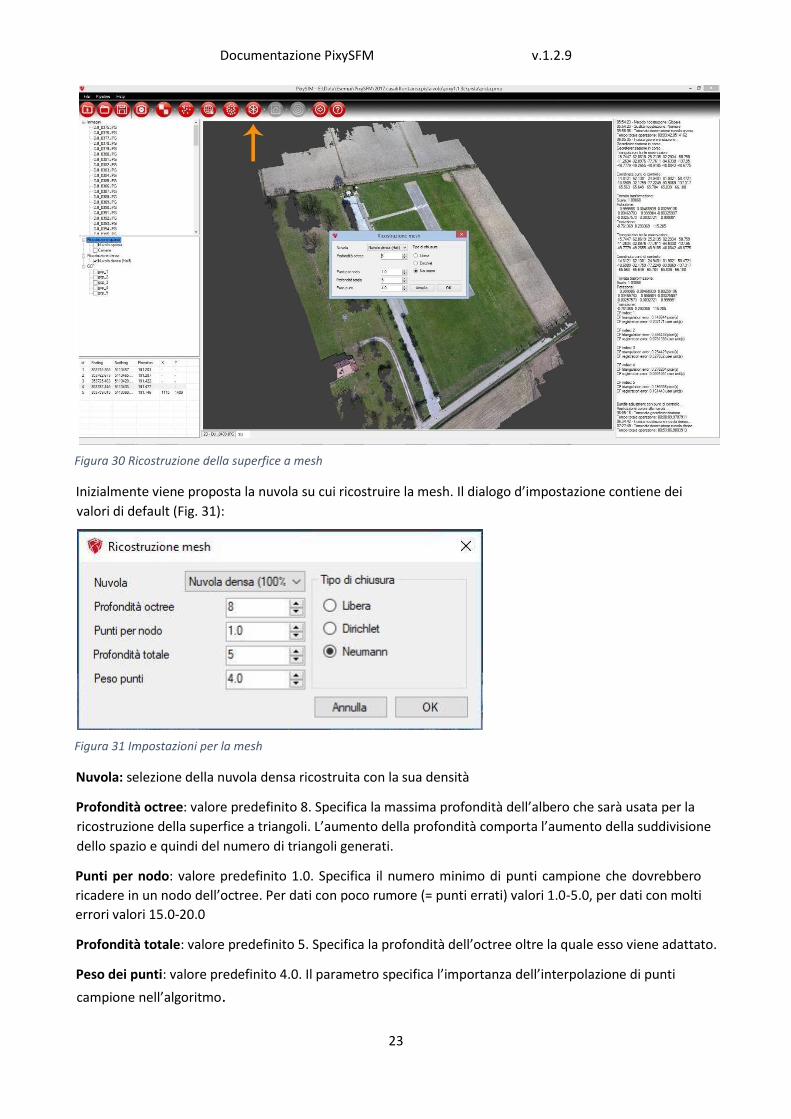
Figura 30 Ricostruzione della superfice a mesh
Inizialmente viene proposta la nuvola su cui ricostruire la mesh. Il dialogo d’impostazione contiene dei
valori di default (Fig. 31):
Figura 31 Impostazioni per la mesh
Nuvola: selezione della nuvola densa ricostruita con la sua densità
Profondità octree: valore predefinito 8. Specifica la massima profondità dell’albero che sarà usata per la
ricostruzione della superfice a triangoli. L’aumento della profondità comporta l’aumento della suddivisione
dello spazio e quindi del numero di triangoli generati.
Punti per nodo: valore predefinito 1.0. Specifica il numero minimo di punti campione che dovrebbero
ricadere in un nodo dell’octree. Per dati con poco rumore (= punti errati) valori 1.0-5.0, per dati con molti
errori valori 15.0-20.0
Profondità totale: valore predefinito 5. Specifica la profondità dell’octree oltre la quale esso viene adattato.
Peso dei punti: valore predefinito 4.0. Il parametro specifica l’importanza dell’interpolazione di punti
campione nell’algoritmo.
Documentazione PixySFM v.1.2.9
24
Per l’impostazione dei valori da assumere sul confine (chiusura) della mesh si hanno 3 possibilità.
Tipo di chiusura:
• Libera: nessun vincolo sui valori calcolati;
• Dirichlet: la superficie si richiude “arrotondando gli spigoli”.
• Neumann: il comportamento è analogo a quello della Libera.
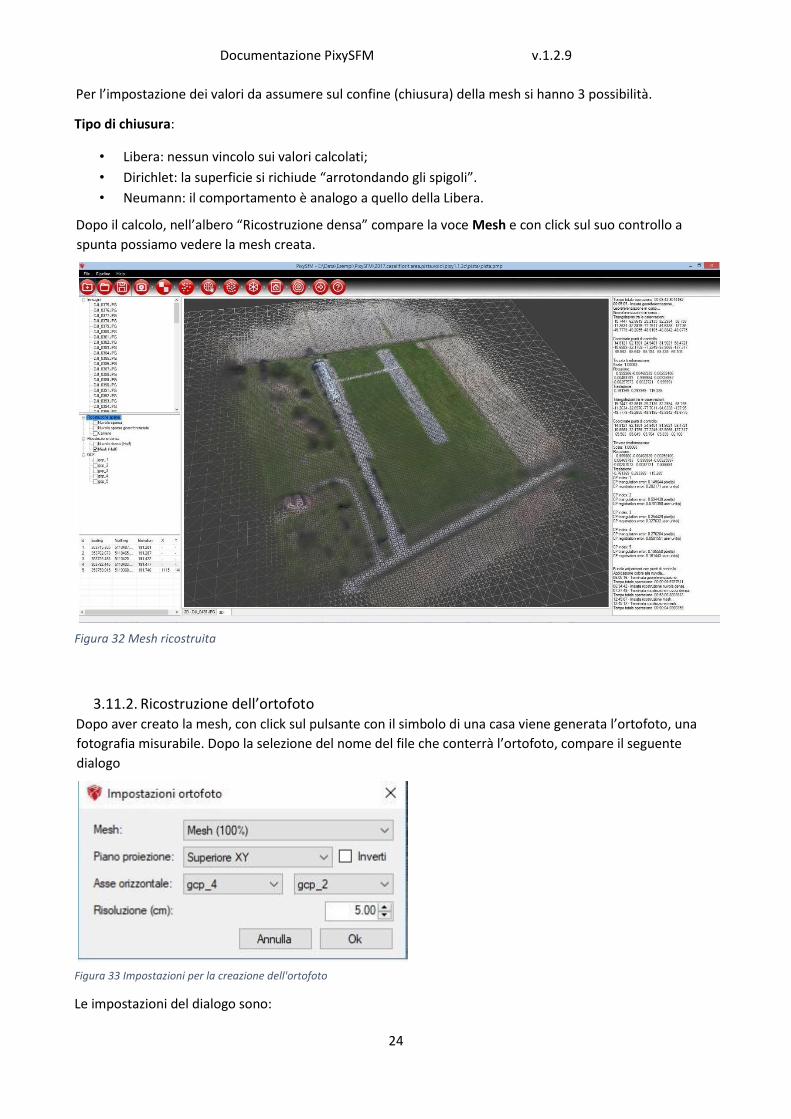
Dopo il calcolo, nell’albero “Ricostruzione densa” compare la voce Mesh e con click sul suo controllo a
spunta possiamo vedere la mesh creata.
Figura 32 Mesh ricostruita
3.11.2. Ricostruzione dell’ortofoto Dopo aver creato la mesh, con click sul pulsante con il simbolo di una casa viene generata l’ortofoto, una
fotografia misurabile. Dopo la selezione del nome del file che conterrà l’ortofoto, compare il seguente
dialogo
Figura 33 Impostazioni per la creazione dell'ortofoto
Le impostazioni del dialogo sono:
Documentazione PixySFM v.1.2.9
25
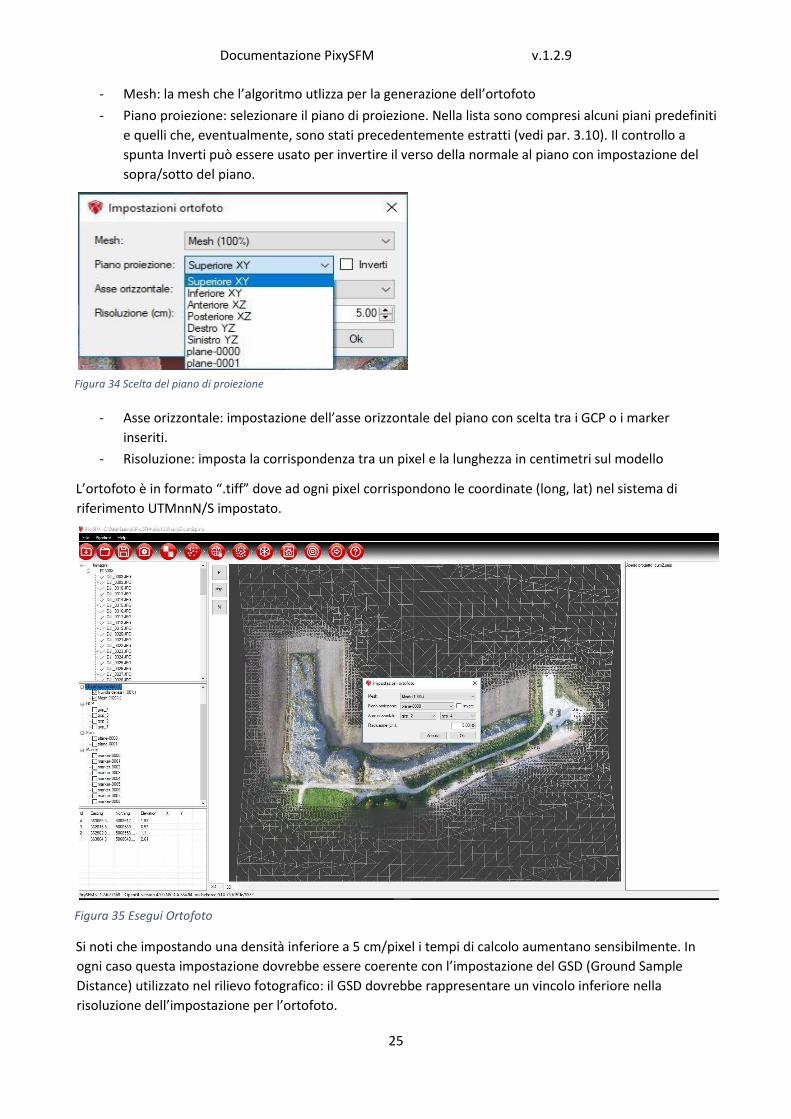
- Mesh: la mesh che l’algoritmo utlizza per la generazione dell’ortofoto
- Piano proiezione: selezionare il piano di proiezione. Nella lista sono compresi alcuni piani predefiniti
e quelli che, eventualmente, sono stati precedentemente estratti (vedi par. 3.10). Il controllo a
spunta Inverti può essere usato per invertire il verso della normale al piano con impostazione del
sopra/sotto del piano.
Figura 34 Scelta del piano di proiezione
- Asse orizzontale: impostazione dell’asse orizzontale del piano con scelta tra i GCP o i marker
inseriti.
- Risoluzione: imposta la corrispondenza tra un pixel e la lunghezza in centimetri sul modello
L’ortofoto è in formato “.tiff” dove ad ogni pixel corrispondono le coordinate (long, lat) nel sistema di
riferimento UTMnnN/S impostato.
Figura 35 Esegui Ortofoto
Si noti che impostando una densità inferiore a 5 cm/pixel i tempi di calcolo aumentano sensibilmente. In
ogni caso questa impostazione dovrebbe essere coerente con l’impostazione del GSD (Ground Sample
Distance) utilizzato nel rilievo fotografico: il GSD dovrebbe rappresentare un vincolo inferiore nella
risoluzione dell’impostazione per l’ortofoto.
Documentazione PixySFM v.1.2.9
26
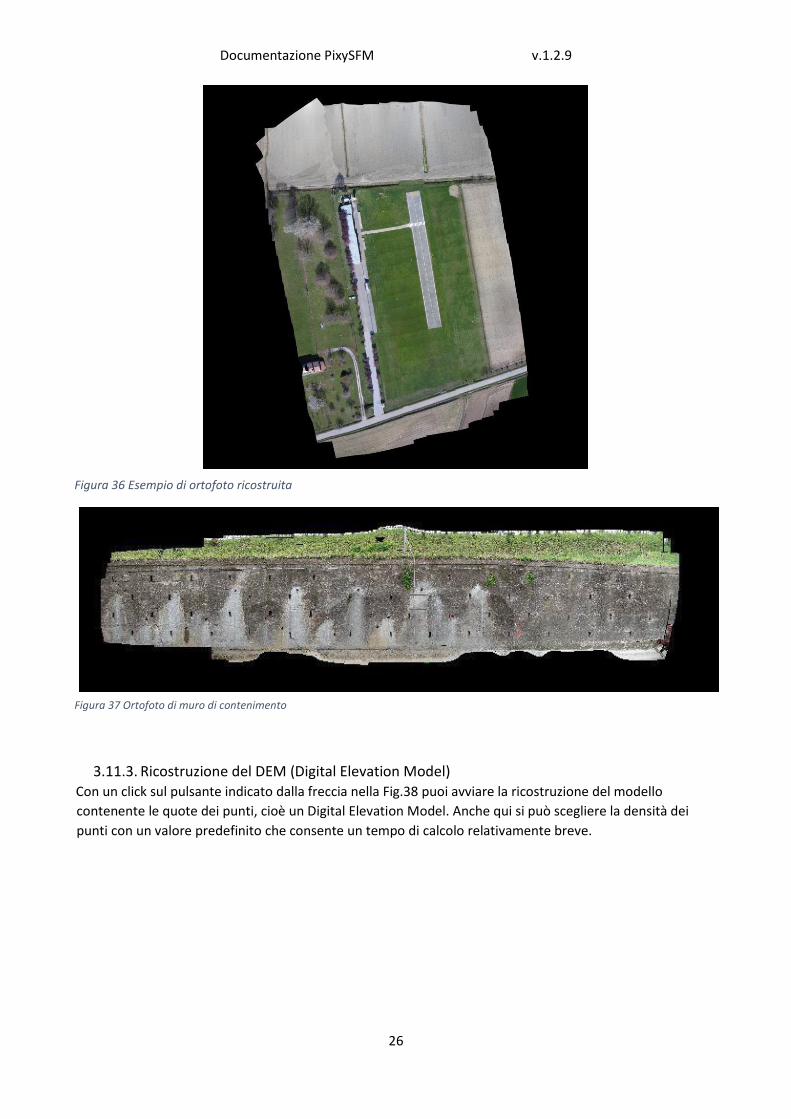
Figura 36 Esempio di ortofoto ricostruita
Figura 37 Ortofoto di muro di contenimento
3.11.3. Ricostruzione del DEM (Digital Elevation Model) Con un click sul pulsante indicato dalla freccia nella Fig.38 puoi avviare la ricostruzione del modello
contenente le quote dei punti, cioè un Digital Elevation Model. Anche qui si può scegliere la densità dei
punti con un valore predefinito che consente un tempo di calcolo relativamente breve.

Documentazione PixySFM v.1.2.9
27
Figura 38 Costruzione del DEM
4. Esportazione delle nuvole E’ possibile esportare le nuvole nel formato “.PLY”. Con il pulsante indicato in Fig.39, si apre un dialogo di
scelta della cartella destinazione.
Figura 39 Esportazione di nuvola
Se le nuvole sono georiferite, nella parte Header del file sono riportati i dati del sistema cartografico di
riferimento, del geoide e le coordinate di traslazione per ottenere la nuvola nel sistema di riferimento utilizzato.

Documentazione PixySFM v.1.2.9
28
4.1. Esportazione dei parametri di calibrazione Dopo la fase di ricostruzione della Nuvola Sparsa, si possono esportare i parametri di calibrazione delle
macchine fotografiche. PixySFM ha usato questi parametri per la correzione delle distorsioni introdotte
dalle lenti.
Passi dell’esportazione: dal menu File eseguite il comando “Esporta calibrazione camere…” (Fig. 40) che
apre il dialogo con la macchina fotografica utilizzata nel rilievo e i relativi parametri di calibrazione. Con Ok
nel dialogo di Fig. 41 il programma chiede la cartella e il nome del file, in formato xml, in cui esportare i
parametri visualizzati.
Figura 40 Esporta dati di calibrazione
Figura 41 Esportazione parametri di calibrazione della macchina fotografica
Documentazione PixySFM v.1.2.9
29
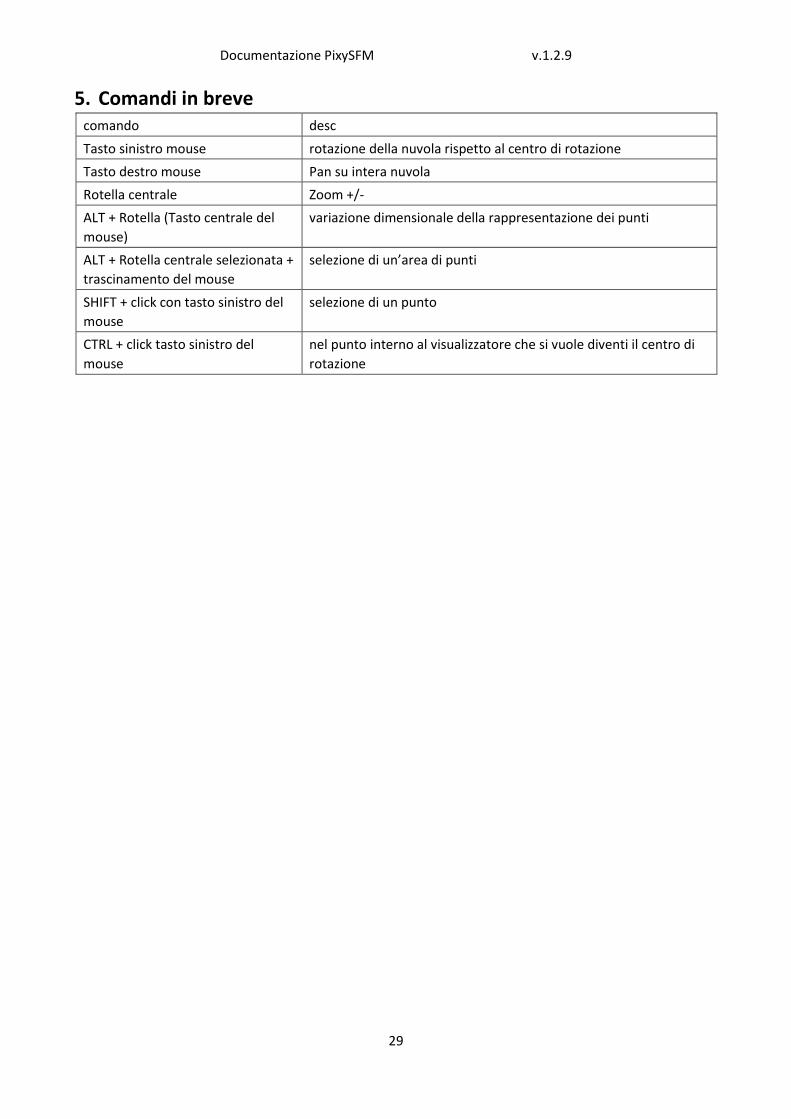
5. Comandi in breve comando desc
Tasto sinistro mouse rotazione della nuvola rispetto al centro di rotazione
Tasto destro mouse Pan su intera nuvola
Rotella centrale Zoom +/-
ALT + Rotella (Tasto centrale del
mouse)
variazione dimensionale della rappresentazione dei punti
ALT + Rotella centrale selezionata +
trascinamento del mouse
selezione di un’area di punti
SHIFT + click con tasto sinistro del
mouse
selezione di un punto
CTRL + click tasto sinistro del
mouse
nel punto interno al visualizzatore che si vuole diventi il centro di
rotazione