Diffeomorfismi e Flussi
54
Cap.1 Diffeomorfismi e flussi §1.1 Sistemi dinamici Un sistema dinamico ` e un sistema (economico, fisico, biologico, etc.) che cambia, con certe regole, con il tempo. Tale sistema sar`a rappresentato matematicamente da un insieme e da una funzione dell’insieme in se, nel caso di tempo discreto; da un insieme ed un flusso , che definiremo successivamente , nel caso di tempo continuo. Supponiamo che lo stato del sistema possa essere rappresentato dai valori x ∈ M , chesichiamer`a spazio degli stati o spazio delle fasi. In generale lo spazio delle fasi sar`a uno spazio euclideo oppure una variet` a differenziabile. Nel caso di tempo discreto il sistema dinamico sar`a descritto dalle iterate di una funzione x t+1 = f (x t ),t ∈ Z. Supporremo nel seguito che f : M → M sia un diffeomorfismo, cio` e una applicazione differenziabile con inversa differenziabile (in certi casi un omeomorfismo, cio` e una applicazione continua con inversa continua) Definizione: Orbita Sia M una variet` a differenziabile e sia f : M → M un diffeomorfismo. Definiamo orbita (o traiettoria ) l’insieme {f m (x)} m∈Z cio` e l’insieme delle immagini di x rispetto alle iterate di f . Notiamo che, essendo f un diffeomorfismo, f −1 esiste e f −m =(f −1 ) m . Definiamo inoltre f 0 = I , la mappa identit` a. In genere la traiettoria di un punto ` e una sequenza infinita (nei due sensi) di punti distinti di M , con delle eccezioni: Definizione: Punto fisso Un punto x ∗ ∈ M ` e chiamato punto fisso di f se f m (x ∗ )= x ∗ ∀m ∈ Z Definizione: Punto periodico Un punto x ∗ ∈ M ` e chiamato punto periodico di f se ∃m ∈ Z,m =1 f m (x ∗ )= x ∗ Se indichiamo con q il pi` u piccolo valore degli m della definizione precedente, q ` e detto periodo del punto x ∗ ; l’orbita di x ∗ , cio` e {x ∗ , f (x ∗ ),..., f q−1 (x ∗ )} ` e detta orbita periodica di periodo q o q-ciclo di f . Chiaramente, se x ∗ ` e un punto di periodo q, tutti i punti della sua orbita sono periodici di periodo q e x ∗ ` e un punto fisso per la f q . I punti fissi possono essere classificati, secondo Lyapunov, in funzione del comportamento delle orbite di punti vicini. Definizione: Stabilit` a Un punto fisso, x ∗ ,` e detto punto stabile se ∀I x ∗ ⇒∃I ⊂ I x ∗ : f m (x) ∈ I x ∗ ∀x ∈ I ∀m> 0 Parlando in modo improprio possiamo dire che che un punto fisso x ∗ ` e stabile se le traiettorie di punti vicini a x ∗ rimangono vicini a x ∗ . Definizione: Stabilit` a asintotica Un punto fisso stabile, x ∗ ,` e detto asintoticamente stabile se ∃I x ∗ : lim m→∞ f m (x)= x ∗ ∀x ∈ I x ∗ 1
description
Diffeomorfismi e Flussi
Transcript of Diffeomorfismi e Flussi

Cap.1 Diffeomorfismi e flussi
§1.1 Sistemi dinamici
Un sistema dinamico e un sistema (economico, fisico, biologico, etc.) che cambia, con certe regole, conil tempo. Tale sistema sara rappresentato matematicamente da un insieme e da una funzione dell’insiemein se, nel caso di tempo discreto; da un insieme ed un flusso , che definiremo successivamente , nel caso ditempo continuo.
Supponiamo che lo stato del sistema possa essere rappresentato dai valori x ∈M , che si chiamera spaziodegli stati o spazio delle fasi. In generale lo spazio delle fasi sara uno spazio euclideo oppure una varietadifferenziabile.
Nel caso di tempo discreto il sistema dinamico sara descritto dalle iterate di una funzione
xt+1 = f(xt), t ∈ Z.
Supporremo nel seguito che f : M → M sia un diffeomorfismo, cioe una applicazione differenziabile coninversa differenziabile (in certi casi un omeomorfismo, cioe una applicazione continua con inversa continua)
Definizione: Orbita Sia M una varieta differenziabile e sia f : M →M un diffeomorfismo. Definiamoorbita (o traiettoria ) l’insieme
fm(x)m∈Z
cioe l’insieme delle immagini di x rispetto alle iterate di f .
Notiamo che, essendo f un diffeomorfismo, f−1 esiste e f−m = (f−1)m. Definiamo inoltre f0 = I, lamappa identita. In genere la traiettoria di un punto e una sequenza infinita (nei due sensi) di punti distintidi M , con delle eccezioni:
Definizione: Punto fisso Un punto x∗ ∈M e chiamato punto fisso di f se
fm(x∗) = x∗ ∀m ∈ Z
Definizione: Punto periodico Un punto x∗ ∈M e chiamato punto periodico di f se ∃m ∈ Z, m 6= 1
fm(x∗) = x∗
Se indichiamo con q il piu piccolo valore degli m della definizione precedente, q e detto periodo del puntox∗; l’orbita di x∗, cioe
x∗, f(x∗), . . . , fq−1(x∗)e detta orbita periodica di periodo q o q-ciclo di f . Chiaramente, se x∗ e un punto di periodo q, tutti i puntidella sua orbita sono periodici di periodo q e x∗ e un punto fisso per la fq.
I punti fissi possono essere classificati, secondo Lyapunov, in funzione del comportamento delle orbitedi punti vicini.
Definizione: Stabilita Un punto fisso, x∗, e detto punto stabile se
∀Ix∗ ⇒ ∃I ⊂ Ix∗ : fm(x) ∈ Ix∗ ∀x ∈ I ∀m > 0
Parlando in modo improprio possiamo dire che che un punto fisso x∗ e stabile se le traiettorie di puntivicini a x∗ rimangono vicini a x∗.
Definizione: Stabilita asintotica Un punto fisso stabile, x∗, e detto asintoticamente stabile se∃Ix∗ :
limm→∞
fm(x) = x∗ ∀x ∈ Ix∗
1

I punti stabili che non sono asintoticamente stabili si dicono marginalmente stabili. Punti fissi che nonsono stabili si chiamano instabili.
§1.2 Dinamica elementare di diffeomorfismi
Consideriamo la piu piccola varieta differenziabile non euclidea: il cerchio S1. Consideriamo sul cerchiol’esempio piu semplice di diffeomorfismi: le rotazioni. Consideriamo il cerchio con centro nell’origine di unriferimento cartesiano ed usiamo come coordinata locale la misura dell’angolo che il raggio rappresentativodel punto forma con la parte positiva dell’asse x; chiamiamolo θ e supponiamo che l’unita di misura sia2π radianti, quindi la misura dell’angolo giro e 1. La rotazione antioraria di angolo α puo quindi essererappresentata da
Rα(θ) = (θ + α) mod 1.
Supponiamo che α = p/q, con p, q ∈ Z, e p, q relativamente primi. Allora
Rqα(θ) = (θ + p) mod 1 = θ
pertanto ogni punto di S1 e periodico di periodo q, quindi l’orbita di ogni punto e un q-ciclo.
Se α e un irrazionale, allora, qualunque sia θ,
Rqα(θ) = (θ + qα) mod 1 6= θ
perche (θ + qα) mod 1 = θ implica che qα = p ∈ Z, contrariamente all’ipotesi di irrazionalita di α. Valeanzi il seguente:
Teorema: Jacobi Se α ∈ R\Q allora l’insieme A ≡ mα mod 1|m ∈ Z e denso in [0, 1].
Dim.
1) mα 6= m′α mod 1 sem 6= m′. Infatti dovrebbe esseremα = m′α+k con k ∈ Z, ma questo implicherebbeα = k/(m−m′) ∈ Z.
2) Considerato un qualsiasi intervallo di ampiezza 1/k esistono due punti mα e m′α che appartengono atale intervallo. Infatti, consideriamo il valore di l per il quale lα > 1/k. Gli angoli lα e 2lα differisconotra loro di un arco lα > 1/k, quidi i k + 1 ancgoli
lα, 2lα, . . . , , (k + 1)lα
non possono differire ognuno dagli altri tutti piu di 1/k poiche la lunghezza del cerchio e 1.
3) I punti della successione
(m−m′)α, 2(m−m′)α, 3(m−m′)α, . . .
distano meno di 1/k l’uno dall’altro.
4) Ogni ǫ-intorno contiene punti della successione del tipo precedente.
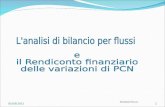
In generale possiamo considerare trasformazioni di S1 piu generali. In tali casi possiamo trovare i puntifissi considerando l’intersezione del grafico della trasformazione con la retta y = x. (ricordiamo che i puntiperiodici sono punti fissi per la adeguata iterata)
2

x* x*1 2 x
y
1
1
Fig.1 Punti fissi
Possiamo studiare il comportamento dei punti vicini a x∗ disegnando la traiettoria di un campione ditali punti, ma nel far questo usiamo la considerazione che, conosciuto x, si individua il punto (x, f(x)),che corrisponde al punto sulla curva, e quindi tracciando, da tale punto, la parallela all’asse x, si individual’intersezione con la retta y = x, quindi, si traccia la parallela all’asse y sino ad individuare l’intersezionecon la curva; l’ordinata di tale punto di intersezione corrisponde a f2(x). Si puo continuare in questo modosino ad ottenere un tragitto rappresentativo della traiettoria del punto.
x* x*1
x*32 x*4 x
y
1
1
Fig.2 Costruzione della traiettoria
3

Come ci suggerisce l’Analisi Numerica Il punto fisso x∗ e asintoticamente stabile se
∣
∣
∣
∣
(
df(x)
dx
)
x=x∗
∣
∣
∣
∣
< 1.
Infatti per x vicino a x∗
|f (n)(x) − x∗| ≍∣
∣
∣
∣
(
df (n)(x)
dx
)
x=x∗
∣
∣
∣
∣
|x− x∗|
Ma
df (n)(x)
dx
∣
∣
∣
∣
x=x∗
= f ′(
f (n−1)(x∗))
· f ′(
f (n−2)(x∗))
· · · f ′ (x∗)
= (f ′(x∗))n
Esercizio: Trovare i punti di periodo 2 del diffeomorfismo del cerchio f : S1 → S1
f(x) = x+ .5 + .1 sin(2πx)
Studiare la stabilita dell’orbita dei punti di periodo 2.Provare che non esistono, ne punti fissi ne orbite periodiche di periodo 3.
§1.3 Flussi ed equazioni differenziali
Lo studio di sistemi dinamici a tempo discreto definiti dal diffeomorfismo f : M → M , ci porta aconsiderare l’insieme di funzioni fn : n ∈ Z, cioe l’insieme delle iterate di f . Un tale insieme gode delleproprieta:
f0 = I (identita), f i f j = f i+j ∀i, j ∈ Z
cioe e una azione del gruppo Z su M generata da f .Consideriamo ora le azioni del gruppo R su M , cioe i flussi su M .
Definizione: Flusso Un flusso su M e una funzione differenziabile con continuita
ϕ : R ×M →M
tale che, la sua restrizione ϕ(t, ·) = ϕt(·) soddisfa
ϕ0 = I(1.3.1)
ϕt ϕs = ϕt+s, t, s ∈ R(1.3.2)
Dalla definizione precedente discende che (ϕt)−1 esiste ed e dato da ϕ−t. Infatti, per definizione di
inverso, deve essere (ϕt)−1 ϕt = I, ma, per la (1.3.2) e ϕ−t ϕt = ϕ0, quindi, per la (1.3.1), deve essere
(ϕt)−1 = ϕ−t. Pertanto, considerata la differenziabilita con continuita di ϕ, segue che, per ogni t ∈ R,
ϕt : M →M e un diffeomorfismo.
Definizione: Orbita Si chiamo orbita o traiettoria di ϕ passante per x, la curva di M definita daϕt(x) : t ∈ R orientata nel senso delle t crescenti
Per un punto x0 ∈ M passa una sola traiettoria. Infatti, supponiamo che x0 = ϕs(x) e x0 = ϕt(y),allora
y = ϕ−t(x0) = ϕ−(t−s)(ϕ−s(x0) = ϕ−(t−s)(x)
cioe y e x appartengono alla stessa traiettoria.
4

Definizione: Punto fisso Seϕt(x
∗) = x∗ ∀t ∈ R
il punto x∗ si dice punto fisso del flusso.
Ovviamente, anche al punto fisso per un flusso si associano le definizioni di stabilita che abbiamo datoper un punto fisso per un diffeomorfismo.
Definizione: Orbita chiusa Un’ orbita chiusa del flusso e una traiettoria, γ, che non e un punto fisso,ma e tale che ϕτ (x) = x per qualche x ∈ γ e τ 6= 0.
Il piu piccolo dei tempi di ritorno di x in se e detto periodo del punto x. Se γ e un’orbita chiusa ex ∈ γ ha periodo T , allora tutti i punti dell’orbita hanno lo stesso periodo T .
Infatti, se y = ϕt(x) allora
ϕT (y) = ϕT (ϕt(x)) = ϕT+t(x) = ϕt(ϕT (x)) = ϕt(x) = y
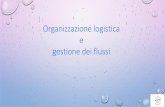
E’ quindi lecito parlare di periodo di γ.L’insieme delle traiettorie del flusso e chiamato ritratto di fase. Ogni traiettoria corrisponde ad una
curva orientata o ad un punto di M , pertanto e possibile rappresentare il sistema dinamico disegnando letraiettorie tipiche.
Fig. 3 Ritratto di fase di flusso sul Toro S2
Tale rappresentazione e ovviamente soltanto qualitativa; per una rappresentazione analitica del flusso sipuo associare allo stesso una equazione differenziale. Per far questo dobbiamo definire la velocita del flusso,e quindi necessario richiamare alcune nozioni di geometria differenziale.
Definizione: Sia M una varieta differenziabile, e sia x ∈ M , chiameremo curva liscia centrata in x
una qualsiasi mappa C1
c : J →M
con J = (a, b), tale che a < 0 < b e c(0) = x.
Supponiamo ora che M = Rn, diremo che due curve lisce c1 e c2 centrate in x ∈ Rn sono tangenti sehanno, in x, un contatto del primo ordine, cioe se
limt→0
c1(t) − c2(t)
t= 0
cioe anche, se hanno la stessa derivata in t = 0.Si dimostra facilmente che una tale relazione e di equivalenza, pertanto e definita la classe di equivalenza
delle curve tangenti in x. La relazione che associa ad ogni classe di curve tangenti in x il vettore di Rn
rappresentante la comune derivata alle curve in t = 0 e una bijezione tra lo spazio delle classi di equivalenza
5

delle curve tangenti in x, che denoteremo TxM e Rn. Pertanto TxM puo essere visto come uno spaziovettoriale e sara chiamato lo spazio tangente di M al punto x.
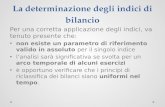
Se ritorniamo ora al caso generale di M varieta differenziale, possiamo definire anche in questo casoil concetto di curve tangenti nel punto x, appunto dicendo due curve lisce, basate in x, sono tangenti selo sono le rispettive rappresentanti locali rispetto alla stessa carta. Si dimostra che questa definizione nondipende dalla particolare scelta della carta, possiamo quindi definire il concetto di classe di equivalenza dellecurve tangenti al punto x. Possiamo pertanto anche in questo caso definire lo spazio tangente a M in x,TxM . Si dimostra che la struttura lineare di tale spazio, acquisita attraverso la bijezione con Rn, e la stessaqualunque sia la carta scelta per definirla.
x
a
b
b
d
ca
TM
M=S2
x
Fig. 4 Spazio tangente alla varieta S2.
Definizione: Campo vettoriale Si chiama velocita o campo vettoriale del flusso ϕ nel punto x ilvettore di TxM definito da:
X(x) ≡ dϕt
dt(x)|t=0 = lim
ǫ→0
ϕ(ǫ,x) − ϕ(0,x)
ǫ
Teorema: ϕt(x0) e la soluzione di x = X(x) che passa, al tempo t = 0 per il punto x0.
Dim
Poniamo ξ(t) = ϕt(x0). Allora
ξ(t) ≡ limǫ→0
ξ(t+ ǫ) − ξ(t)ǫ
= limǫ→0
ϕt+ǫ(x0) − ϕt(x0)
ǫ
= limǫ→0
ϕǫ ϕt(x0) − ϕt(x0)
ǫ= lim
ǫ→0
ϕ(ǫ, ξ(t)) − ϕ(0, ξ(t))
ǫ= X(ξ(t))
Pertanto ξ(t) e una soluzione dell’equazione differenziale x = X(x) e, essendo ξ(0) = ϕ0(x0) = x0 e anchequella che soddisfa le consizioni iniziali.
Notiamo che, se X(x∗) = 0, allora soluzione di x = X(x) che passa per x∗ a t = 0 e la soluzione costanteϕt(x
∗) ≡ x∗. D’altra parte, se il flusso in un punto e costante, cioe ϕt(x∗) = x∗, allora la relativa velocita e
6

nulla, cioe X(x∗) = 0. Possiamo pertanto affermare che condizione necessaria e sufficiente affinche il puntox∗ sia un punto fisso e che X(x∗) = 0. Tali punti si chiamano punti singolari del campo vettoriale X.
Il teorema precedente ci dice che ogni flusso su M e soluzione di una qualche equazione differenzialeautonoma (cioe per la quale la funzione X non dipende esplicitamente da t). In generale l’inverso non e vero.Infatti esistono equazioni differenziali autonome le cui soluzioni locali non possono essere estese per ogni t.
Esempio: Consideriamo l’equazione differenziale in R
x = x2
Ammette la soluzione banale x = 0 valida per ogni t ∈ R, ed ammette soluzioni di diverso tipo, escludendox = 0, infatti
∫
dx
x2=
∫
dt ⇒ − 1
x= t− C
quindi x = 1/(C − t) ma valida soltanto quando t 6= C. Quindi la soluzione di questo tipo non puo essereglobale, ma e valida soltanto o per t > C oppure per t < C. Osserviamo che la costante C rappresenta 1/x0
se x0 e il valore di x(t) per t = 0. Quindi se x0 > 0, allora dobbiamo scegliere la soluzione
x(t) =x0
1 − x0t
per t < 1/x0 (quella, delle due possibili, che comprende t = 0).La stessa soluzione la otteniamo se x0 < 0, ma questa volta la sua validita e estesa a t > 1/x0.Pertanto se consideriamo il flusso
ϕt(x0) =
0 x0 = 0x0
1−x0t x0 6= 0
questi ci garantisce, almeno localmente, un flusso soluzione dell’equazione differenziale. Infatti, se x0 6= 0,abbiamo la soluzione per
− 1
|x0|< t <
1
|x0|.
I sistemi dinamici potranno essere rappresentati o direttamente dal flusso, o dal campo vettoriale oppuredall’equazione differenziale autonoma. In questi ultimi casi la definizione del flusso potrebbe essere soltantolocale.
Esercizio: Verificare che
ϕ(t, x) =xet
xet − x+ 1
e un flusso in [0, 1] e trovare il campo vettoriale associato. Perche non e un flusso in R?
Ris.
ϕ(0, x) = x, inoltre
ϕt+s(x) =xet+s
xet+s − x+ 1ma
ϕt ϕs(x) =ϕs(x)e
t
ϕs(x)et − ϕs(x) + 1=
et xes
xes−x+1
et xes
xes−x+1 − xes
xes−x+1 + 1
=xet+s
xes − x+ 1
xes − x+ 1
xet+s − xes + xes − x+ 1
quindi le condizioni di flusso sono verificate. (Le condizioni di derivabilita continua si verificano immediata-mente)
7

dϕ
dt(x) = x
−x+ 1
(xet − x+ 1)2
quindi
X(x) =dϕ
dt(x)|t=0 = x− x2
La impossibilita di definire il flusso per x > 1 e dovuta alla necessita di garantire che il denominatoredella funzione che definisce il flusso sia diverso da 0.
Esercizio: Trovare le equazioni differenziali associate ai seguenti flussi (locali):a)
ϕt(x) =x√
1 − 2x2t, x ∈ R
b)
ϕt(x, y) =
(
xet,y
1 − yt
)
, (x, y) ∈ R2
Convicersi che, per ogni intervallo −a < t < a esiste un intorno dell’origine in cui i due flussi descrivonocorrettamente le soluzioni delle rispettive equazioni diffrenziali trovate.
Ris.
a)dϕ
dt(x) = x3(1 − 2x2t)−3/2
quindi
X(x) =dϕ
dt(x)|t=0 = x3
Il nostro flusso sara soluzione dell’equazione definita dal campo vettoriale trovato soltanto per |t| <1/(2x2
0).a)
dϕ
dt(x, y) =
(
xet,y2
(1 − yt)2
)
quindi
X(x) =dϕ
dt(x, y)|t=0 =
(
x, y2)
pertanto l’equazione differenziale associata e
x = x
y = y2
Il flusso sara soluzione soltanto per |t| < 1/y0.
§1.4 Insiemi invarianti
Alcune volte l’orbita di un punto sottoposto all’azione del diffeomorfismo f o del flusso ϕ rimane entrouna particolare regione dello spazio delle fasi per ogni tempo.
Definizione: Un insieme Λ ⊂M e detto invariante sotto il diffeomorfismo f (o il flusso ϕ) se fn(x) ∈ Λ(ϕt(x) ∈ Λ) per ogni x ∈ Λ ed ogni n ∈ Z (t ∈ R). Scriveremo anche
fn(Λ) ⊂ Λ, ∀n ∈ Z (ϕt(Λ) ⊂ Λ, ∀t ∈ R)
8

Delle volte considereremo insiemi positivamente o negativamente invarianti, ovviamente quando le in-clusioni precedenti si riferiscono a tempi positivi o negativi.
L’esempio piu ovvio di insieme invariante e l’orbita di ciascun punto. In particolare sono insiemi in-varianti i punti fissi, i cicli e le orbite chiuse. Comunque, questi sono insiemi invarianti speciali per duemotivi:a) Sono minimali nel senso che non hanno sottoinsiemi propri invariantib) Esibiscono periodicita.
Esercizio: Trovare gli insiemi invarianti chiusi e minimali pera) rotazioni irrazionali del cerchiob) rotazioni razionali del cerchio
Quale e, in entrambi i casi, l’insieme invariante chiuso piu generale.
Ris.
a) Poiche, quando l’angolo che definisce la rotazione e irrazionale, l’orbita di ogni punto e densa in S1,quindi l’orbita di ogni punto passa vicino quanto si vuole al punto stesso, allora l’insieme richiesto nonpuo che essere S1 stesso.
b) Se α = p/q allora ogni punto e periodico di periodo q, pertanto l’insieme richiesto e un qualsiasi insiemedel tipo
x ∪ Rp/q(x) ∪ · · · ∪ Rq−1p/q (x)
Per quanto riguarda la seconda domanda, ovviamente per il caso irrazionale la risposta e S1, mentreper il caso razionale e un qualsiasi insieme del tipo
U ∪Rp/q(U) ∪ · · · ∪Rq−1p/q (U)
se U ⊂ S1 e chiuso.
Una forma piu sottile di ricorrenza e descritta dalla seguente definizione
Definizione: Un punto x e detto non errante per il diffeomorfismo f (il flusso ϕ) se, dato un qualsiasiintorno W di x, ∃n > 0 (t > t0 > 0) per il quale
fn(W )∩W 6= ∅ (ϕt(W )∩W 6= ∅)
L’insieme dei punti non erranti per f (ϕ) e chiamato insieme non errante e denotato con Ω(f) (Ω(ϕ))
Esercizio: Provare che i punti fissi e periodici di un diffeomorfismo f su una varieta M appartengonoall’insieme non errante Ω. Mostrare che Ω e chiuso e invariante rispetto ad f .
Ris.
Per il punto fisso e ovvio perche allora la richiesta di ritorno all’intorno scelto, nella definizione di puntonon errante, e soddisfatta per ogni tempo, mentre per i punti periodici e soddisfatta, almeno, ogni periodo.
Per dimostrare che Ω e un chiuso basta dimostrare che Ωc e aperto, cioe che se x ∈ Ωc esiste un intornoW di x sottoinsieme di Ωc. Infatti, se x ∈ Ωc vuol dire che esiste un intorno W tale che fn(W )∩W = ∅ perogni n > 0. Ma un tale W e intorno anche di ogni punto y ∈W , pertanto tutti i punti di W sono erranti.
Consideriamo ora l’invarianza. Supponiamo, per assurdo che x ∈ Ω e che f(x) 6∈ Ω. Questo significache esiste un intorno W di f(x) tale che, per ogni m > 0, accade che
fm(W ) ∩W = ∅
Ma f−1(W ) e un intorno di x, quindi deve esistere m > 0 tale per cui
∅ 6= fm(f−1(W )) ∩ f−1(W ) = f−1 (fm(W ) ∩W )
ma non puo essere non vuoto f−1 di un insieme vuoto!
9

Definizione: Un punto y ∈ M e detto punto α-limite della traiettoria di f (ϕ) che passa per x, seesiste una successione mi (ti) che tende a −∞ e tale che
limi→∞
fmi(x) = y ( limi→∞
ϕti(x) = y)
Definizione: Un punto y ∈ M e detto punto ω-limite della traiettoria di f (ϕ) che passa per x, seesiste una successione mi (ti) che tende a +∞ e tale che
limi→∞
fmi(x) = y ( limi→∞
ϕti(x) = y)
L’insieme dei punti α-limite (ω-limite) di x e detto insieme α-limite (insieme ω-limite) di x e denotatocon Lα(x) (Lω(x)). Tali insiemi sono invarianti rispetto ad f . Infatti, supponiamo che y soddisfi una delledue definizioni precedenti, e consideriamo, per m ∈ Z, z = fm(y). Allora
limi→∞
fmi+m(x) = fm(
limi→∞
fmi(x))
= fm(y) = z
quindi y e z appartengono allo stesso insieme limite. (lo stesso ragionamento si ripete per il flusso ϕ)Notiamo che gli insiemi limiti sono sottoinsiemi di Ω. Infatti, supponiamo che y sia un punto limite di
x (non importa se α o ω) e supponiamo che y 6∈ Ω. Allora deve esistere un intorno W di y tale che, ∀m > 0deve essere
fm(W ) ∩W = ∅.Ma il fatto che y sia un punto limite implica che, deve esistere un intero N tale che, se i ≥ N allorafmi(x) ∈W . Pertanto, se z = fmN (x) ∈W , allora
fmi−mN (z) ∈W, ∀i > N
quindi, per m = mi −mN ,fm(W ) ∩W 6= ∅.
Esempio: Trovare Lα(x) ed Lω(x) per a) x = 0; b) x 6= 0, quando ϕ e il flusso su R2 indotto da
r = r(1 − r)
θ = 1
Ris.
Troviamo le soluzioni dell’equazione differenziale. Per la seconda la soluzione e θ = t+ θ0. Per la prima,la soluzione e
r(t) =
0 r0 = 0
1 − 11+Cet r0 < 1
1 r0 = 1
1 + 1Cet−1 r0 > 1
dove c = r0/|1 − r0|.Come si puo facilmente vedere, lo 0 rappresenta un punto fisso instabile, mentre l’orbita chiusa γ definita
da r(t) = 1, e l’unica orbita attrattiva ed il suo periodo e T = 2π.a) Poiche ϕ(0) = 0, allora Lα(0) = Lω(0) = 0.b) Fissato y ∈ γ, possiamo porre y = (cos θ, sin θ). Sia ti la successione dei tempi positivi nei quali l’orbita
di x attraversa la retta radiale che passa per y. Ovviamente
limi→∞
ϕti(x) = y
10

quindi y e un ω-limite di ogni x 6= 0.Un ragionamento analogo ci porta a dimostrare che Lα(x) = 0 se |x| < 1 e Lα(x) = γ se |x| = 1.Per |x| > 1 per ogni successione ti che tende a −∞ quando i tende a +∞, il
limi→∞
ϕti(x)
non esiste. Pertanto Lα(x) = ∅.
Esercizio: Descrivere il comportamento del diffeomorfismo di R f(x) = ax, a ∈ R, quando1) a < −12) a = −13) −1 < a < 04) 0 < a < 15) a = 16) 1 < a
Trovare Lα(x) e Lω(x) in ogni caso.
Dim.
1) f ′(x) = a < −1 quindi il modulo del punto tende ad aumentare ad ogni iterazione. Il punto x = 0 epunto fisso instabile. Lα(x) = 0 infatti
limn→−∞
fn(x) = 0.
Mentre Lω(x) = ∅ in quanto, considerata mi → ∞ per i→ ∞,
limi→∞
|fmi(x)| = ∞.
2) f2(x) = x quindi ogni punto e periodico di periodo 2, mentre x = 0 e un punto fisso marginalmentestabile. Pertanto Lα(x) = Lω(x) = x.
3) f ′(x) = a < 1 quindi ogni il modulo del punto tende a diminuire ad ogni iterazione. Il punto x = 0 epunto fisso asintoticamente stabile. Lω(x) = 0 infatti
limn→∞
fn(x) = 0.
Mentre Lα(x) = ∅ in quanto, considerata mi → −∞ per i→ ∞,
limi→∞
|fmi(x)| = ∞.
4) Le stesse considerazioni del caso precedente. La distinzione tra i due casi e l’oscillazione dei segni nelcaso precedente.
5) Abbiamo l’identita pertanto Lα(x) = Lω(x) = x.6) Le stesse considerazioni che nel primo caso eccentuate le oscillazioni di segno.
∂Α
Α
∂Β
ΒP
P
P
1
2
0
C
Fig.5
11

Esercizio: Sia ϕ il flusso che ha il ritratto di fase come in Fig. 5. Quali sono Lα(x) e Lω(x) perx ∈ A,B e C rispettivamente? Quale caratteristica hanno in comune i tre insiemi ω-limite?
Ris.
Se costruiamo una successione di tempi come nell’esercizio precedente si dimostra che
Lα(x) = P1; Lω(x) = ∂A x ∈ A
Lα(x) = P2; Lω(x) = ∂B x ∈ B
Lα(x) = ∅; Lω(x) = ∂A ∪ ∂B x ∈ C
Se chiamiamo con ΓA e ΓB le traiettorie che partono ed arrivano nel punto P0, si puo osservare che
∂A = ΓA ∪ P0, ∂B = ΓB ∪ P0.
Pertanto, possiamo affermare che i tre insiemi ω-limite sono unione di punti fissi e delle traiettorie che liuniscono.
Un teorema descrive, in generale, tale comportamento
Teorema: Poincare-Bendixson Un insieme limite compatto e non vuoto di un flusso del piano, se noncontiene punti fissi e un’orbita chiusa.
Definizione: Un ciclo limite e un’orbita chiusa γ che o γ ⊂ Lω(x) o γ ⊂ Lα(x) per qualche x 6∈ γ.
Definizione : Un insieme D ⊂ M e una regione intrappolante per il flusso ϕt definito su M , se De un insieme compatto, connesso e tale che ϕt(D) ⊂ D. (L’inclusione va intesa in senso stretto)
12

A
B
(a) (b)
(c) (d)
Fig.6 In (a) l’anello delimitato dal tratteggio e un esempio di regione intrap-polante con punti fissi. In (b) l’anello e una regione intrappolante con punti fissie separatrici (cioe curve chiuse costituite da piu traiettorie). In (c) l’anello e unaregione intrappolante costituita dai cili limite A e B e da un continuo di orbitechiuse. In (d) l’anello e un insieme invariante, ma non una regione intrappolante,perche le orbite non entrano nella regione. L’anello e privo di punti fissi ma non hacicli limite (soltanto orbite chiuse)
Osservazione: L’insieme Lω(x0) e un chiuso. Infatti se x 6∈ Lω(x0), esiste un intorno W di x chenon contiene nessun punto della traiettoria futura di x0. Ma, W e un intorno anche di ogni y ∈ W , quindiW ∩ Lω(x0) = ∅
Toerema: Se D e una regione intrappolante per il flusso del piano ϕt, che non contiene punti fissi,contiene cicli limite.
Dim.
Dalla definizione di insieme intrappolante esiste x0 ∈ D per il quale ϕt(x0) 6= x0 per ogni t > 0.Pertanto l’insieme Lω(x0), che e un compatto perche chiuso, contenuto nel compatto D. Per il teorema diPoincare-Bendixson, e un’orbita chiusa, quindi un ciclo limite, perche non contiene x0.
Esercizio: Mostrare che il ritratto di fase di
x− x(1 − 3x2 − 2x2) + x = 0
13

ha un ciclo limite.
Dim
L’equazione corrisponde al seguente sistema
x = y
y = −x+ y(1 − 3x2 − 2y2)
che, passando a coordinate polari, ricordando che
rr = xx+ yy, r2θ = yx− yx
diventa
r = r sin2 θ(1 − 3r2 cos2 θ − 2r2 sin2 θ) = r sin2 θ(1 − 2r2 − r2 cos2 θ)
θ = −1 + 12 (sin 2θ(1 − 3r2 cos2 θ − 2r2 sin2 θ)
L’equazione in r, per r = 12 diventa
r =1
2sin2 θ(1 − 2
1
4− 1
4cos2 θ) =
1
4sin2 θ(1 − 1
2cos2 θ)
quindi, r ≥ 0 con l’uguaglianza soltanto per θ = 0 e θ = π. Quindi l’insieme del piano corrispondente ar ≥ 1
2 e positivamente invariante.L’equazione in r, per r = 1√
2diventa
r =1√2
sin2 θ(1 − 21
2− 1
2cos2 θ) = − 1
2√
2sin2 θ cos2 θ
quindi, r ≤ 0 con l’uguaglianza soltanto per θ = k π2 con k intero. Pertanto l’insieme del piano corrispondente
a r ≤ 1√2
e positivamente invariante.
Pertanto l’insieme del piano corripsondente a 12 ≤ r ≤ 1√
2e positivamente invariante, e piu precisamente
e una regione intrappolante, in quanto le frontiere dell’insieme non rappresentano delle traiettorie (r non eidenticamente nullo in esse). Considerando che lunico punto fisso del sistema e l’origine, quindi non compresanella regione individuata, il teorema di Poincare-Bendixson, assicura l’eistenza di un ciclo limite.
Puntualizziamo il teorema di Poincare-Bendixson, che si permette di dimostrare l’esistenza di cicli limite,si riferisce a flussi del piano e non vale in dimensioni maggiori.
§1.5 Coniugazione
definizione: I due diffeomorfismi f ,g : M → M sono detti topologicamente (o C0) coniugati se esisteun omeomorfismo h : M →M tale che
(1.5.1) h f = g h
Ovviamente la coniugazione topologica di due flussi ϕt,ψt : M → M e definita in maniera analoga,dove, ovviamente, la (1.5.1) e sostituita da
h ϕt = ψt h, ∀t ∈ R.
La (1.5.1) significa che h porta ogni orbita della f (o ϕt) su un’orbita di g (ψt) conservando il parametrotempo m (t), cioe
fm(x)h
−−−−−→gm(h(x)), ∀m ∈ Z
14

o
ϕt(x)h
−−−−−→ψt(h(x)), ∀t ∈ R
ϕ (x)
ϕ t
h
h
M
M
h(ϕ t(x)) =ψt(h(x))
h(x)
ψt
Fig.7 Rappresentazione della relazione di coniugazione tra le traiettorie di dueflussi
Il significato delle uguaglianze precedenti e illustrato dalla Fig. 7. Si noti che per l’unicita dellatraiettoria di ogni flusso, una data traiettoria di ϕt e mandata in una ed una sola traiettoria di ψt eviceversa.
Esempio: Sia f : R → R un diffeomorfismo con Df(x) > 0 per qualche x ∈ R. Data l’equazionedifferenziale x = f(x) − x, sia ϕt : R → R il flusso da essa definito. Mostrare che f e topologicamenteconiugata a ϕ1.
Dim.
Poiche f e un diffeomorfismo, allora e continua ed invertibile quindi deve essere una funzione o crescenteo decrescente, inoltre la differenziabilita di f−1 implica che la Df non puo mai essere nulla. Questo implicache se, come in ipotesi, la Df > 0 per qualche x allora e sempre positiva. Quindi la f e una funzionecrescente. Cio implica che la funzione puo avere un qualunque numero di punti fissi: x∗i , i = 1, 2, . . . i qualisaranno punti singolari del campo vettoriale f(x) − x. Sia x0 un qualunque punto dell’intervallo (x∗i , x
∗i+1).
L’orbita di x0 rispetto alla f o alla ϕ1 e confinata a questo stesso intervallo ed hanno la stessa orientazione,infatti
sign(xn+1 − xn) = sign(f(xn) − xn) = sign(x), n ∈ Z.
Siano x0, y0 ∈ (x∗i , x∗i+1) e consideriamo l’orbita di x0 rispetto alla f e l’orbita di y0 rispetto alla ϕ1.
Sia Pn ≡ fn(x0) e Qn ≡ ϕn(y0), n ∈ Z. Osserviamo che
f : [Pn, Pn+1] → [Pn+1, Pn+2]
e
ϕ1 : [Qn, Qn+1] → [Qn+1, Qn+2]
con n ∈ Z sono diffeomorfismi che preservano l’ordine. Inoltre, se x ∈ [P0, P1] allora fn(x) ∈ [Pn, Pn+1] eche se y ∈ [Q0, Q1] allora ϕn
1 (y) = ϕn(y) ∈ [Qn, Qn+1].
15

Il nostro obbiettivo e costruire un omeomorfismo su [x∗i , x∗i+1] che manda l’orbita di ϕ1 sull’orbita di
f , in modo che venga preservato il parametro n ∈ Z. A questo scopo, sia h0 : [Q0, Q1] → [P0, P1] unomeomorfismo, per esempio potrebbe essere
h0(y0) ≡ x0 + (y − y0)f(x0) − x0
ϕ1(y0) − y0.
Per y ∈ [Qn, Qn+1], definiamohn(y) ≡ fn h0 ϕ−n(y).
Ovviamente, hn : [Qn, Qn+1] → [Pn, Pn+1] e, il che e piu importante,
hn(Qn+1) = hn+1(Qn+1) = Pn+1, n ∈ Z.
Da cio segue che h : [x∗i , x∗i+1] → [x∗i , x
∗i+1] definita da
h(y) ≡
x∗i y = x∗ihn(y) y ∈ [Qn, Qn+1], n ∈ Z
x∗i+1 y = x∗i+1
e un omeomorfismo.Infine, e facile verificare che h coniuga f con ϕ1. Infatti se x ∈ [x∗i , x
∗i+1] allora x ∈ [Qn, Qn+1] per
qualche n eh ϕ1(x) = hn+1 ϕ1(x) = fn+1 h0 ϕn+1 ϕ1(x) = f hn(x) = f h(x)
y
x
y=x
x x x x0 12
*
y=f(x)
Fig.8 Tipica orbita oscillante intorno al punto fisso di un diffeomorfismo f : R →R decrescente
16

Notiamo che l’esempio precedente mette in risalto una speciale proprieta di alcuni diffeomorfismi cres-centi della retta. Una tale proprieta non e prerogativa di un qualsiasi diffeormorfismo di R. Infatti, seconsideriamo un diffeomorfismo decrescente di R, l’orbita di un qualsiasi punto oscilla intorno all’unicopunto fisso Fig. 7. Cio rende incompatibile la coniugazione con un qualsiasi diffeomorfismo ricavato dalfissare il tempo di un qualsiasi flusso su R, perche cio implicherebbe traiettorie che attraversano il puntofisso.
Se nella definizione di coniugazione topologica assumiamo che la funzione h sia un Ck-diffeomorfismo,allora parleremo di diffeomorfismi (o flussi) Ck-coniugati.
Esercizio: Mostrare che:a) f(x) = 2x e g(x) = 8x sono topologicamente coniugate in R ma non differenzialmente coniugateab f(x) = 2x e g(x) = −2x non sono topologicamente coniugate mostrando che la coniugazione preserva
l’orientazionec) f(x) = 2x e g(x) = 1
2x non sono topologicamente coniugate considerando la natura del punto fisso neidue casi
Dim.
a) Consideriamo una costruzione per h simile a quella fatta per l’esempio precedente. Prendiamo x =y = 1 come punto iniziale per entrambe le mappe. Allora P0 = 1, P1 = f(1) = 2, mentre Q0 = 1 eQ1 = g(1) = 8. Basta ora scegliere h0 : [1, 8] → [1, 2]:
h0(y) = 1 + (y − 1)2 − 1
8 − 1=
6
7+
1
7y
e gli hn : [Qn, Qn+1] → [Pn, Pn+1] come nell’esempio precedente. E’ ovvio che possono essere ripetutetutte le considerazioni dell’esempio, pertanto i due diffeomorfismi sono topologicamente coniugati. Mala nostra scelta della h non garantisce la differenziabilita, come si puo vedere nei punti di raccordo degliintervalli [Qn, Qn+1]. Dobbiamo comunque dimostrare che e impossibile trovare una funzione h che siaun diffeomorfismo. Infatti, supponendo che h sia derivabile e
h(f(x)) = g(h(x))
allora dovrebbe essere: 2h′(2x) = 8h′(x), che implicherebbe h′(0) = 0, quindi la non differenziabilitadell’inversa h−1.
b) Supponiamo, come nel nostro caso che la f sia non decrescente e che la g sia non crescente. Supponi-amo di scegliere la h non decrescente (poiche e un omeomorfismo deve essere strettamente monotona).Scegliamo ora x1 < x2. Deve essere h(f(xi)) = g(h(xi)), i = 1, 2. Ma, applicando le monotonie deveanche essere
h(f(x1)) ≤ h(f(x2))
g(h(x1)) ≥ g(h(x2))
quindi h(f(x1)) = h(f(x2)) = g(h(x1)) = g(h(x2)). Questo risultato applicato ad ogni coppia dipunti porta alla costanza di ogni funzione. Lo stesso ragionamente si applica anche per gli altri tipi dimonotonia.
c) I due diffeomorfismi hanno ognuno un punto fisso, entrambi in 0, poiche i punti fissi di un diffeomorfismodevono corrispondere ai punti fissi del coniugato, h(0) = 0. Inoltre, per le considerazioni del puntoprecedente deve essere strettamente monotona. Ma per la g(x) lo 0 e punto fisso attrattivo, cioe ipunti tendono ad avvicinarsi allo 0, mentre, lo stesso 0, e repulsivo per la f(x), cioe i punti tendono adallontanarsi. Tutto cio e incompatibile con la monotonia di h.
Esercizio: Provare che ϕ : x → x2n+1, n ∈ N, e una coniugazione topologica dei diffeomorfismif(x) = 2x e g(y) = 22n+1y su R. Perche non esiste una coniugazione differenziabile per n > 0?
Dim.
17

La ϕ e, per ogni n ∈ N un omeomorfismo di R. Inoltre e ϕ(f(x)) = (2x)2n+1 e g(ϕ(x)) = 22n+1x2n+1
pertanto la condizione di coniugazione e soddisfatta. Per dimostrare che non esiste coniugazione differenzi-abile basta ripetere il ragionamento fatto per il primo punto dell’esercizio precedente.
Alcuni degli esercizi precedenti ci dimostrano che, non tutti i diffeomorfismi topologicamente coniugatisono anche Ck-coniugati per qualche valore di k > 0.
Vediamo ora cosa significa, nel caso di flussi la coniugazione differenziabile. Supponiamo che ϕt e ψt
siano due flussi su M . Sia h : M →M un Ck-diffeomorfismo (k > 0) tale che
(1.5.2) h(ϕt(x) = ψt(h(x))
cioe che i due flussi siano Ck-coniugati. Sia ora X(x) il campo vettoriale generato da ϕt e Y(y) quellogenerato da ψt.
Differenziando la (1.5.2), avremo
Dh(ϕt(x))dϕt
dt(x)
∣
∣
∣
∣
t=0
=dψt
dt(h(x))
∣
∣
∣
∣
t=0
cioe, considerato che ϕ0 = I,
(1.5.3) Dh(x)X(x) = Y(h(x)).
Applichiamo ora il cambio di variabili y = h(x) all’equazione differenziale x = X(x). Avremo
y = Dh(x)x = Dh(x)X(x) = Y(h(x)) = Y(y)
Abbiamo quindi dimostrato che la coniugazione differenziabile di due flussi corrisponde ad un cambio divariabili nelle equazioni differenziali che li rappresentano. Inoltre che la derivata di h, cioe la Dh(x),trasforma il campo vettoriale del primo flusso X(x) in quello del secondo Y(y), nel punto y = h(x).
Esercizio: Dimostrare che i due sistemi lineari x = Ax, y = By, x,y ∈ Rn, hanno flussi che sonolinearmente coniugati (h(x) lineare) se e solo se le matrici A e B sono simili.
Dim.
Supponiamo che i due flussi siano linearmente coniugati, allora h(x) = Tx, con T matrice regolare,quindi h′(x) = Tx, pertanto dalla (1.5.3) abbiamo
TAx = BTx
cioe la similitudine delle matrici.Supponiamo ora che la matrici siano simili, allora esiste una matrice regolare T tale che
TAx = BTx
allora, se consideriamo la funzione h(x) = Tx, e chiaro che questa rappresenta una coniugazione tra i flussi.
Esercizio: Siano ϕ, ψ flussi su Rn e supponiamo che ϕ abbia un punto fisso nell’origine. Supponiamoche ϕ e ψ siano Ck-coniugati, k > 0, da h : Rn → Rn. Dimostrare che i campi vettoriali X e Y di ϕ e ψsono tali che le matrici DX(0) e DY(h(0)) sono simili.
Dim.
Deriviamo la (1.5.3) rispetto ad x, otteniamo
D2h(x)X(x) +Dh(x)DX(x) = DY(h(x))Dh(x)
18

se calcoliamo entrambi i membri in x = 0, tenendo conto che il punto fisso di ϕ in 0 significa X(0) = 0,abbiamo:
Dh(0)DX(0) = DY(h(0))Dh(0).
Considerato che h e Ck implica che Dh(0) e regolare, abbiamo che le due matrici DX(0) e DY(h(0)),sono simili.
Vediamo ora un esempio di applicazione del concetto di C1-coniugazione.
Supponiamo che x0 sia un punto ordinario (non critico) del campo vettoriale X : Rn → Rn corrispon-dente al flusso ϕ : R × Rn → Rn. Notiamo che, essendo la funzione ϕ C1, ed essendo X la derivata pariale,rispetto al tempo,in 0, di ϕ, allora, X e una funzione continua.
Definizione: Chiameremo sezione locale di x0 un qualsiasi intorno di x0 appartenente ad un qualsiasiiperpiano H ⊂ Rn che non contenga il vettore X(x0)
Assumiamo, ma cio non e restrittivo, che H sia perpendicolare a X(x0). Per la continuita di X, esisteun intorno, V , di x0 di Rn tale che X(y) e non parallelo a H per ogni y ∈ V . Questo implica che, ognitraiettoria che passa per punti di V deve attraversare H . Quindi ogni punto x ∈ V e tale che x = ϕu(y) perqualche y ∈ S. Pertanto possiamo usare, localmente, le traiettorie del flusso per definire le nuove coordinate.
Queste nuove coordinate sono meglio collegate alle coordinate locali di x0. Facciamo una trasformazionedi coordinate in modo che x0 coincida con l’origine ed anche, che la prima direzione dei nuovi assi coordinaticoincida con la direzione di X(0). Rispetto a questo nuovo sistema di riferimento, l’insieme S, e un intornodi Rn−1 dell’origine, ed e caratterizzato, come sottoinsieme di Rn, dal fatto che tutti i suoi punti hanno laprima coordinata nulla. Quindi ogni punto di S e individuato da un vettore ξ ∈ Rn−1, mentre ogni puntox ∈ V puo essere scritto come
x = ϕu((0, ξ)) = h(u, ξ)
Consideriamo le caratteristiche della h. Poiche ϕ e una funzione C1 di R × Rn allora h e una funzioneC1 di Rn. Ora Duh(0) = X(0), quindi il primo elemento della matrice Jacobiana e diverso da 0. Ma h el’identita su S, pertanto tutti gli elementi, diversi dal primo, della diagonale della matrice Jacobiana sonouguali ad 1. Pertanto il determinante Jacobiano di h(0) e diverso da 0, quindi, per il teorema della funzioneinversa, h−1, localmente esiste , ed e C1.
Consideriamo ora, sempre localmente, il flusso che ha traiettorie rettilinee, cioe
ψt(u, ξ) ≡ (t+ u, ξ).
Dimostramo che h e la C1-coniugazione tra ϕt e ψt. Infatti
h(ψt(u, ξ)) = h(t+ u, ξ) = ϕt+u(0, ξ) = ϕt(ϕu(0, ξ)) = ϕt(h(u, ξ)
19

V
S
X(x )0
X(x )0
0
x=ϕ (0,y)u
x
0x
0
R
R
n
(a)
= 0
Sn-1⊇
R Sn-1⊇
0x = 0
~
~
(u,ξ)
(0,ξ)
u
(c)
(b)
Fig. 9 Differenti rappresentazioni della scatola di flusso contenente il punto x0:(a) nelle coordinate originali; (b) nelle coordinate locali in x0; (c) usando le coordi-nate locali definite dalle linee di flusso
20

Questa non e che la parte essenziale della dimostrazione del
Teorema: Scatola di flusso Sia x0 un punto ordinario del flusso ϕ. Allora, in ogni intorno di x0,sufficientemente piccolo, ϕ e C1-coniugato al flusso ψt(x) = x + te1, dove e1 e il versore dell’asse x1.
Abbiamo visto, dai precedenti esempi, che per provare la coniugazione di due diffeomorfismi o flussie necessario costruire l’appropriata funzione. E’ interessante anche trovare dei criteri che permettano diescludere la possibilita della coniugazione. Consideriamo due flussi ϕt e ψt, supponiamo che siano topologi-camente coniugati e che, per esempio il primo ha un punto fisso, mentre il secondo nessun punto fisso. Poichela coniugazione implica l’esistenza di un omeomorfismo che associa le traiettorie dei due flussi, deve esistereuna traiettoria di ψt associata alla traiettoria punto fisso di ϕt. Tale relazione deve essere biunivoca, cioedifferenti punti della prima traiettoria devono corrispondere a differenti punti della seconda, ma cio e chiara-mente impossibile. Questo risultato ha una ovvia estensione a piu punti fissi; possiamo, quindi, affermareche condizione necessaria affinche due flussi siano coniugati e che abbiano lo stesso numero di punti fissi.
Esercizio: Siano f , g diffeomorfismi di R dati da
f(x) = x+ sinx
g(x) = x+ hk(x)
dove
hk(x) = x− x3
3!+x5
5!+ · · · + (−1)k x2k+1
(2k + 1)!, k ∈ Z.
Dimostrare che f e g non sono topologicamente coniugati.
dim
Consideriamo i punti fissi dei rispettivi diffeomorfismi, cioe le intersezioni con l’asse y = x. Chiaramentef ha infinite intersezioni, esattamente quanti sono le radici di sinx = 0. Per quanto riguarda la g, invece,possiamo affermare che tali intersezioni sono finite, esattamente, al piu 2k + 1, cioe quante le radici delpolinomio hk. Pertanto i due diffeomorfismi non possono essere coniuigati.
Esercizio: Trovare i punti di periodo 2 dei diffeomorfismi del cerchio f e g i cui “lift” sono:
f(x) = x+ .5 + .1 sin 2πx mod 1
g(x) = x+ .3 + .1 sin 2πx mod 1
Mostrare che f e g non sono topologicamente coniugati.
dim
f2(x) = x+ .5 + .1 sin 2πx+ .5 + .1 sin 2π(x+ .5 + .1 sin 2πx) mod 1
= x+ .1(sin 2πx+ sin 2π(x+ .5 + .1 sin 2πx)) mod 1
e per x = 0 c’e intersezione con la retta y = x.Mentre
g2(x) = x+ .3 + .1 sin 2πx+ .3 + .1 sin 2π(x+ .3 + .1 sin 2πx) mod 1
= x+ .6 + .1(sin 2πx+ sin 2π(x+ .3 + .1 sin 2πx)) mod 1
quindi nessuna intersezione con la retta y = x.Pertanto i due diffeormorfismi, avendo differenti orbite periodiche non possono essere coniugati.
Consideriamo ora i diffeomorfismi del cerchio e cerchiamo un altro criterio sufficiente per la coniugazione.
Definizione: Lift Sia f : S1 → S1 un omeomorfismo, sia π : R → S1 definito da
π(x) = x mod 1.
21

Ogni funzione continua f : R → R tale che
π(f(x)) = f(π(x))
detta “lift” di f su R.
Rf
−−−−→ R
π ↓ ↓ π
S1 −−−−→f
S1
Definizione: Il numero di rotazione, ρ(f), di un omeomorfismo f : S1 → S1 e dato da:
ρ(f) ≡(
limn→∞
fn(x) − x
n
)
mod 1
se f e un “lift” di f .
Si dimostra, che ρ(f) e indipendente dal punto x.
Esercizio: Trovare il numero di rotazione dell’omeomorfismo f : S1 → S1 con “lift” f : R → R datoda:a) f(x) = x+ 2
3
b) f(x) = x+ 12 + 1
2π sin 2πx trovando punti fissi o periodici di f .
Dim.
Si parte dalla considerazione che se x∗ e un punto periodico di periodo q, allora
ρ(f) =
(
limn→∞
fnq
(x∗) − x∗
nq
)
mod 1.
a) Non ha punti fissi, ma tutti i punti sono periodici di periodo 3. Pertanto
limn→∞
fn3
(x) − x
n3=
2
3
b) Non ha punti fissi ma, se consideriamo
f2(x) = x+
1
2+
1
2πsin 2πx+
1
2+
1
2πsin 2π(x+
1
2+
1
2πsin 2πx)
= x+ 1 +1
2π
(
sin 2πx+ sin 2π(x+1
2+
1
2πsin 2πx)
)
che si annulla per x = 0, e come si vede facilmente e f2n
(0) = n, pertanto ρ(f) = 1/2.
Consideriamo ora la pura rotazione
Rγ(θ) = (θ + γ) mod 1
e il suo “lift”Rγ(x) = x+ γ
Ovviamente Rn
γ (x) = x+ nγ, pertanto ρ(Rγ) = γ, cioe il numero di rotazione di una rotazione pura Rγ e γstesso. Ovviamente una rotazione razionale, che ha soltanto orbite periodiche, non puo essere coniugata ad
22

una rotazione irrazionale le cui orbite sono sempre costituite da una quantita infinita di punti. Possiamo, inqualche modo, estendere tale risultato a diffeomorfismi generali del cerchio:
Teorema: Un diffeomorfismo f : S1 → S1 ha punti periodici se e soltanto se il suo numero di rotazioneρ(f) e razionale.
dim
Supponiamo che f abbia un punto periodico, e che f sia un “lift” di f . Allora esiste x∗ ∈ R tale che
fq(x∗) = x∗ + p
per qualche p, q ∈ Z. Pertanto fnq
(x∗) = x∗ + np, quindi
fnq
(x∗) − x∗
nq=np
nq=p
q.
quindi la razionalita di ρ(f).Supponiamo ora che, f non abbia nessun punto periodico. Allora, per ogni x ∈ R ed ogni p, q ∈ Z
fq(x) 6= x+ p.
Poniamo gq(x) = fq(x) − x. Ovviamente gq(x + 1) = gq(x) per ogni x ∈ R, quindi non ci puo essere una
tendenza all’infinito verso p, pertanto deve esistere un ǫ > 0 per il quale o
gq(x) < p− ǫ ∀x ∈ R
oppuregq(x) > p− ǫ ∀x ∈ R.
Supponiamo sia verificata la prima alternativa, allora fq(x) < x+ p− ǫ, per ogni x ∈ R, quindi
fnq
(x) = fq(f
(n−1)q(x)) < f
(n−1)q(x) + p− ǫ = f
q(f
(n−2)q(x)) + p− ǫ < · · · < x+ n(p− ǫ).
Nello stesso modo si dimostra che sarebbe
fnq
(x) > x+ n(p+ ǫ)
se valesse la seconda alternativa.In entrambi i casi il numero di rotazione sarebbe o maggiore di (p+ ǫ)/q o minore di (p− ǫ)/q, per ogni
p, q ∈ Z, pertanto
ρ(f) 6= p
qmod 1.
Teorema: Denjoy Sia f : S1 → S1 un diffeomorfismo che preserva l’orientazione e di classe C2.Supponiamo inboltre che ρ(f) = β ∈ R\Q. Allora f e topologicamente coniugato alla pura rotazione Rβ .
Quindi in particolare il teorema precedente afferma che, nelle ipotesi del teorema, ogni orbita di f edensa in S1. Se omettiamo l’ipotesi che f sia C2 questo non e piu necessariamente vero.
§1.6 Equivalenza di flussi
Per le mappe, la relatione di equivalenza naturale e la coniugazione topologica. Un omeomorfismo h eusato per far corrispondere punti successivi dell’orbita di una mappa f su quelli di un’altra mappa g. Poichequello che ci si prefigge e evidenziare il fatto che le orbite delle due mappe si comportano nello stesso modo,la continuita di h e della sua inversa e la minima richiesta di regolarita. D’altra parte, poiche le orbite di
23

mappe sono costituite da punti discreti e difficile immaginare un modo piu sensibile di associare orbite. Nelcaso dei flussi la situazione cambia.
La differenza, che ora ci interessa tra mappe e flussi, e costituita dal fatto che le orbite dei flussi sonoparametrizzate da un parametro continuo. Questo ci permette una maggiore liberta nell’associare orbite.
Definizione: Due flussi, ϕt, ψt, si dicono topologicamente (o C0) equivalenti se esiste un omeomorfismo,h, che associa orbite di ϕt su orbite di ψt, conservando l’orientazione.
Poiche l’unica richiesta e la conservazione dell’orientazione, e permesso
h(ϕt(x)) = ψτy(t)(y), y = h(x)
dove τy e una funzione crescente di t per ogni y. Il rilassamento della richiesta sulla conservazione delparametro t permette di considerare un maggior numero di classi di equivalenza tra flussi.
ϕ t1(x)
ϕ t2(x) h
h
hx y = h(x)
ψτy(t1)(h(x))
ψt1(h(x))
ψt2(h(x))
ψτy(t2)(h(x))
Fig.10 Traiettorie di due flussi equivalenti
Esempio: Consideriamo le equazioni differenziali di R2
24

r =1
2r(1 − r), θ = 1.
r = r(1 − r), θ = 2.
dove (r, θ) sono le coordinate polari. I flussi relativi hanno ritratti di fase simili. Infatti entrambi hanno unaorbita chiusa attrattiva γ per r(t) = 1 ed un punto fisso instabile nell’origine. Ma l’orbita chiusa nella primaequazione ha periodo 2π mentre nella seconda ha periodo π. Quindi una qualsiasi funzione che mandasseγ in γ non potrebbe essere iniettiva. Quindi i due flussi non possono essere topologicamente coniugati. Masono topologicamente equivalenti come si puo vedere considerando che la seconda coppia di equazioni si puoricavare dalla prima con i cambio di variabile t→ 2t.
Se nella definizione di equivalenza topologica la funzione h e anche Ck-differenziabile (k ≥ 1), alloraparleremo di flussi Ck-equivalenti. Se due flussi ϕ e ψ sonoCk-equivalenti (k ≥ 0) allora i loro campi vettorialiX(x) e Y(y) sono anche detti Ck-equivalenti; questo perche, molto spesso, i flussi sono implicitamente definitiattraverso i loro campi vettoriali. Nelle applicazioni si ha spesso a che fare con l’equazione differenzialeassociata al modello, senza l’esplicita soluzione.
Supponiamo k ≥ 1 e ricordiamo l’uguaglianza che ci ha portato alla (1.5.3), cioe
Dh(ϕt(x))dϕt
dt(x)
∣
∣
∣
∣
t=0
=dψτy(t)
dt(h(x))
∣
∣
∣
∣
t=0
e consideriamo chedψτy(t)
dt(y)
∣
∣
∣
∣
t=0
=
(
τy(t)dψτy
dτy(y)
)∣
∣
∣
∣
t=0
= σ(y)Y(y)
dove σ(y) = τy(0) rappresenta il fattore di scala che altera il modulo ma non la direzione di Y(y), otteniamol’analogo della (1.5.3)
Dh(x)X(x) = σ(h(x))Y(h(x)).
Esempio: Mostrare che i campi vettoriali Jx e J0x, con
J ≡(
α −ββ α
)
e J0 ≡(
1 −11 1
)
dove α, β > 0, sono topologicamente equivalenti.
Dim.
Consideriamo l’equazione differenziale vettoriale x = Jx, che puo essere scritta, se x = (x, y), in formaesplicita, come
x = αx − βy
y = βx + αy
oppure, ponendo z ≡ x+ iy e c ≡ α+ iβ, puo essere scritta come una equazione differenziale in C:
z = cz
che ha soluzione z(t) = bect, con b = b1 + ib2 ∈ C. Scrivendo la soluzione nelle coordinate polari, avremo
(1.6.1) ρ(t) = ρ0eαt, θ(t) = βt+ θ0, (ρ0 = eb1 ; θ0 = b2)
Se si ripete analogo ragionamento per l’equazione x = J0x, si ottiene l’equazione in C precedente conc = 1 + i, cioe
z = (1 + i)z
25

che corrispondente al sistema polarer = r, θ = 1
con soluzioni:
(1.6.2) r(t) = r0et, γ = t+ γ0.
Se poniamo τ = tβ in (1.6.1) otteniamo
(1.6.3.) ρ(τ) = ρ0eα τ
β ; θ = τ + θ0
I flussi definiti dalle (1.6.1) e (1.6.3) sono topologicamente equivalenti (basta prendere h = I e τy(t) = βt econsiderare che β > 0).
Eliminiamo ora il tempo tra le (1.6.2) e la (1.6.3) , otteniamo
(1.6.4.)ρ(t)
ρ0=
(
r(t)
r0
)α/β
, γ = (θ − θ0) + γ0.
L’equazione (1.6.4) definisce una mappa tra la traiettoria di (1.6.1) che passa per il punto (ρ0, θ0) e la traiet-toria di (1.6.2) passante per (r0, γ0). Per r, r0 > 0 tale mappa e biunivoca, continua e preserva l’orientazione(in effetti lascia invariato il tempo). In realta quella costruita e una famiglia di mappe dipendenti da quattroparametri. Scegliamo come rappresentante quella che si ottiene ponendo ρ0 = r0 = 1 e θ0 = γ0, in modo daottenere
(1.6.5) ρ(t) = (r(t))α/β , γ = θ,
con r > 0 e 0 ≤ θ < 2π. La (1.6.5) rappresenta la definizione della nostra h che completiamo definendoh(0) = 0. Allora quello ottenuto e un omeomorfismo che definisce l’equivalenza topologica tra le(1.6.2) ele (1.6.1). Poiche era gia stata stabilita l’equivalenza tra le (1.6.1) e le (1.6.3) abbiamo dimostrato quantovolevamo.
Esempio: Usare la mappa r′ = r e θ′ = θ − log r (r > 0) per dimostrare che il campo vettoriale J0x,con J0 definito nell’esempio percedente, ed il campo vettoriale x sono topologicamente equivalenti.
ris
Abbiamo gia ricavato la forma polare dell’equazione x = J0x, cioe
r = r, θ = 1.
Mentre e facile dimostrare che la forma polare dell’equazione x = x e
r′ = r′, θ′ = 0.
Consideriamo la mappa h del piano polare in se definita da
h(r, θ) =
(r, θ − log r), r > 0
(0, 0), r = 0.
Una tale funzione e continua ed ha inversa continua. Inoltre, essendo h(0) = 0, manda il punto fisso delflusso definito da J0x in quello definito da x. Per gli altri punti la funzione e differenziabile, quindi possiamovedere che rappresenta la trasformazione delle due equazioni differenziali in forma polare:
Dh =
(
1 0− 1
2 1
)
⇒(
1 0− 1
2 1
)(
r1
)
=
(
r0
)
26

Quindi J0x e x sono topologicamnte equivalenti. (la funzione trovata e soltanto un omeomorfismo,mancando la differenziabilita nell’origine)
Si poteva risolvere piu velocemente l’esercizio, considerando i due sistemi come equazioni in C:
z = (1 + i)z; x = x
La funzione h : C → C definita da h(x) ≡ x(1+i) rappresenta una coniugazione tra i due sistemi dinamici,infatti
Dh(x)x = (1 + i)x(1+i)−1x = (1 + i)x(1+i) = (1 + i)z
Quando due flussi sono topologicamente equivalenti diremo che sono dello stesso tipo topologico. I dueesempi precedenti hanno una grande importanza nella classificazione per tipi topologici dei flussi lineari. Lamatrice J e la forma reale di Jordan di una qualsiasi matrice 2 × 2 reale A, che abbia autovalori complessiα ± iβ, con α > 0. Questo significa che A e J sono matrici simili. Ma l’esercizio sui flussi lineari assicura,in questo caso, che i campi vettoriali Ax e Jx sono linearmente coniugati. Quindi possiamo affermare cheogni campo vettoriale Ax, quando A ha le caratteristiche dette, e dello stesso tipo topologico del campo x.
(a) (b)
(c) (d)
Fig.11
Spesso e facile riconoscere perche due flussi sono non topologicamente equivalenti osservando le carat-teristiche chiave dei loro ritratti di fase.
Esercizio: Descrivere, per ogni diagramma in Fig.11 le differenti caratteristiche che devono essereconservate dall’equivalenza topologica e che non e condivisa dagli altri. Perche il cerchio invariante in b) none un ciclo limite?
Dim.
La figura (a) ha un punto fisso repulsivo ed un’orbita periodica attrattiva. La figura (b) ha due puntifissi, uno repulsivo e l’altro attrattivo. Il cerchio non e un ciclo limite perche non e un’orbita periodica,
27

contenendo un punto fisso. La figura (c) ha un punto fisso attrattivo ed un’orbita periodica repulsiva. Lafigura (d) ha un punto fisso repulsivo un’orbita periodica attrattiva ed una repulsiva.
Esercizio: Consideriamo il sistema x = Xα(x), α ∈ R,
x = 1, y = α
su R2 e il flusso su T 2 indotto dalla mappa π : R2 → T 2 dove π(x, y) = (x mod 1, y mod 1). Mostrare,attraverso il ritratto di fase, che i flussi che si ottengono per α razionale ed α irrazionale non sono topologi-camente equivalenti.
Dim.
Le soluzioni del sistema ex(t) = t+ x0, y(t) = αt+ y0.
Tenendo conto di π x∗ = (x∗, y∗) sara un punto periodico se, esiste τ , tale che
x(τ) = x∗ + k, y(τ) = y∗ + h, h, k ∈ Z
cioe deve essere τ = k e ατ = h, e questo e possibile se e soltanto se α e razionale.
Esercizio: Siano ϕ e ϕ′ flussi topologicamente coniugati sulla varieta M e ψ e ψ′ flussi topologicamenteconiugati sulla varieta N . Dimostrare che il flusso prodotto ϕ × ψ e topologicamente coniugato a ϕ′ × ψ′
sulla varieta M × N . Mostrare che lo stesso risultato non si estende alla equivalenza topologica di flussiconsiderando flussi su M = N = S1.
Dim.
Occorre considerare che(ϕ×ψ)t(x,y) = ϕt ×ψt(x,y).
Dalle coniugazioni, abbiamo che
h(ϕt(x) = ϕ′t(h(x)), k(ψt(y) = ψ′
t(k(y))
dove h e un omeomorfismo di M , mentre k e un omeomorfismo di N . Ovviamente h×k e un omeomorfismodi M ×N e
(h × k)(ϕ ×ψ)t(x,y) = (h× k)(ϕt ×ψt)(x,y) = (h(ϕt(x)),k(ψt(y)))
= (ϕ′t(h(x)),ψ′
t(k(y))) = (ϕ′ ×ψ′)t(h× k)(x,y).
Per l’estensione all’equivalenza basta tener conto che le due trasformazioni del tempo possono non esserecompatibili , quindi basta considerare i flussi relativi ai “lift”
ϕt(x) = x+ t, ϕ′t(x) = x+
√2t, ψt(x) = ψ
′t(x) = ϕt(x)
§1.7 Classificazione di sistemi lineari in R2
Proposizione: Forma di Jordan Sia A una matrice reale 2 × 2. Esiste una matrice non singolare M
tale che la matriceJ ≡ M−1AM
28

abbia la forma:a)
(
λ1 00 λ2
)
quando λ1, λ2 sono gli autovalori reali di A.b)
(
λ0 00 λ0
)
quando λ0 e l’autovalore reale doppio di A ed A e diagonale.c)
(
λ0 10 λ0
)
quando λ0 e l’autovalore reale doppio di A ed A e non diagonale.d)
(
α −ββ α
)
quando A ha autovalori complessi coniugati. α e la parte reale e β quella complessa di tali autovalori
La matrice J si chiama forma di Jordan della matrice A.
Esercizio: Trovare la forma di Jordan delle seguenti matrici:
(a)
(
1 21 1
)
; (b)
(
2 1−2 4
)
; (c)
(
3 −11 1
)
Dim
Gli autovalori della generica matrice A sono le soluzioni dell’equazione caratteristica
λ2 − tr(A)λ+ det(A) = 0
quindi:a) l’equazione caratteristica e
λ2 − 2λ− 1 = 0
le soluzioni sono reali e distinte: λ1 = 1 +√
2 e λ2 = 1 −√
2. Quindi la forma di Jordan associata e
J =
(
1 +√
2 00 1 −
√2
)
b) l’equazione caratteristica e
λ2 − 6λ− 10 = 0
le soluzioni complesse coniugate: λ1 = 3 + i e λ2 = 3 − i. Quindi la forma di Jordan associata e
J =
(
3 −11 3
)
c) l’equazione caratteristica e
λ2 − 4λ− 4 = 0
le soluzioni sono reali e coincidenti, λ = 2, inoltre la matrice e non diagonale. Quindi la forma di Jordanassociata e
29

J =
(
2 10 2
)
Ricordando l’esercizio sui flussi lineari, possiamo affermare che un qualsiasi sistema lineare del pianoe coniugato al sistema che si ottiene sostituendo la matrice con la propria forma di Jordan. Consideriamodapprima i sistemi semplici, cioe il sistema lineare
x = Ax
dove A e non singolare, cioe tale che det(A) 6= 0 e quindi con autovalori diversi da 0. (Poiche, sia ildeterminante che il polinomio caratteristico sono invarianti per similitudine, anche la relativa forma diJordan ha le stesse caratteristiche). In tali ipotesi l’unica soluzione di
Ax = 0
e x = 0 che rappresenta l’unico punto fisso. Lo stesso e vero per il sistema lineare ottenuto con la relativaforma di Jordan che chiameremo sistema canonico.
Possiamo pertanto, per caratterizzare i differenti tipi di sistemi lineari semplici nel piano, studiare idiffferenti tipi di sistemi canonici.Autovalori reali distinti
(1.7.1) x =
(
λ1 00 λ2
)
x
cioe, nelle coordinate
x1 = λ1x1
x2 = λ2x2
Le soluzioni sono
x1(t) = C1eλ1t
x2(t) = C2eλ2t
Se gli autovalori hanno lo stesso segno l’origine si dice un nodo. Se gli autovalori sono positivi sichiamera instabile, mentre si dira stabile nel caso siano negativi.
(a) (b)Fig.12 Ritratti di fase di punti fissi tipo nodo: (a) instabile (0 < λ1 < λ2); (b)stabile (λ2 < λ1 < 0)
Se gli autovalori hanno segno opposto il punto fisso si dira punto sella
30

Fig.13 Ritratti di fase di punti fissi tiposella: (λ2 < 0 < λ1)
Autovalori coincidenti
Se gli autovalori sono coincedenti e la matrice e diagonale, siamo in un caso particolare di (1.7.1), conλ1 = λ2 = λ0 6= 0. In questo caso l’origine e un particolare nodo chiamato stella (stabile se λ0 < 0;instabile se λ0 > 0)
(a) (b)
Fig.14 Ritratti di fase di punti fissi tipo stella: (a) instabile λ0 > 0; (b) stabile
λ0 < 0
Se gli autovalori sono coincidenti ma la matrice e non diagonale, cioe
x =
(
λ0 10 λ0
)
x
quindi
x1 = λ0x1 + x2
x2 = λ0x2
Le soluzioni sono
x1(t) = (C1 + tC2)eλ0t
x2(t) = C2eλ0t
L’origine, in questo caso si dira nodo improprio (stabile se λ0 < 0, instabile se λ0 > 0)
31

(a) (b)Fig.15 Ritratti di fase di punti fissi tipo nodo improprio: (a) instabile λ0 > 0;(b) stabile λ0 < 0
Autovalori complessi
x =
(
α −ββ α
)
x
cioe, nelle coordinate
x1 = αx1 − βx2
x2 = βx1 + αx2
che, in coordinate polari, diventa
ρ = αρ
θ = β
con soluzioni:
ρ(t) = ρ0eαt
θ(t) = βt+ θ0
Se α 6= 0 l’origine e detta fuoco (stabile se α < 0 ed instabile se α < 0).
Se α = 0 l’origine e detta centro.(Questo e il solo caso di comportamento periodico in un sistema linearepiano)
(a) (b) (c)
Fig.16 Ritratti di fase di punti fissi nel caso di autovalori complessi: (a) fuoco
instabile λ0 > 0; (b) centro α = 0; (c) fuoco stabile λ0 < 0
32

tr(A)
det(A)
Fig.17 Come il ritratto di fase del sistema x = Ax dipende dalla traccia e daldeterminante di A
Se il sistema lineare x = Ax e non semplice (det(A)=0, almeno uno degli autovettori e nullo) il sistema
Ax = 0
ammette altre soluzioni oltre quella banale x = 0. Ci sono due possibilita in dipendenza dal rango dellamatrice A. Se il rango di A e 0, allora tutti i punti del piano sono punti fissi. Se il rango e 1 c’e una lineadi punti fissi passanti per l’origine.
(a) (b)
Fig.18 (a) A =
(
0 10 0
)
; (b) A =
(
1 00 0
)
§1.8 Linearizzazione di sistemi dinamici in R2
33

Sia
A ≡(
a bc d
)
Se l’equazione differenziale del piano puo essere scritta sotto la forma
(1.8.1) x = Ax + f(x)
cioe, in forma estesa
x1 =ax1 + bx2 + f1(x1, x2)
x2 =cx1 + dx2 + f2(x1, x2)
con
limx,y→0
f1(x1, x2)√
x21 + x2
2
= limx,y→0
f2(x1, x2)√
x21 + x2
2
= 0
chiameremo linearizzazione il sistema di equazioni differenziali lineari:
x =ax+ by
y =cx+ dy
cioe, in forma compattax = Ax
Naturalmente se il sistema di equazioni ha un punto fisso diverso dall’origine possiamo sempre ricondurcial caso considerato con un opportuno cambio di variabili.
In generale l’equazione differenziale si presenta nella forma
x = X(x),
se supponiamo che X(0) = 0 e X sia C2 possiamo ricondurla nella forma (1.8.1) con uno sviluppo diMacLaurin al secondo ordine. In questo caso la matrice A coincide con la matrice Jacobiana nello 0:
A ≡(
∂f1(x)∂x1
∂f1(x)∂x2
∂f2(x)∂x1
∂f2(x)∂x2
)∣
∣
∣
∣
∣
(x=0)
Esercizi: Mostrare che il sistema
x1 =ex1+x2 − x2
x2 = − x1 + x1x2
ha un solo punto fisso e travare la linearizzazione in tale punto.
Dim
Il punto fisso e soluzione del sistema
ex1+x2 − x2 = 0
−x1 + x1x2 = 0
quindi il solo punto (−1, 1). Con il cambio di variabile y1 = x1 + 1 e y2 = x2 − 1 il sistema diventa
y1 =ey1+y2 − y2 − 1
y2 = − y2 + y1y2.
34

Lo Jacobiano e
A =
(
ey1+y2 ey1+y2 − 1y2 −1 + y1
)∣
∣
∣
∣
(y1,y2)=(0,0)
=
(
1 00 −1
)
quindi la linearizzazione e il sistema
y1 =y1
y2 = − y2
Definizione: Il punto fisso all’origini del sistema non lineare
x = X(x) x ∈ R2
e detto semplice se la sua linearizzazione e semplice.
Teorema: Linearizzazione Supponiamo che il sistema non lineare
x = X(x) x ∈ R2
sia semplice. Supponiamo che la sua linearizzazione non sia un centro. Allora esiste un intorno dell’originenel quale il sistema non lineare e la sua linearizzazione sono topologicamente equivalenti.
Non dimostriamo il teorema ma mostriamo che l’ipotesi che la linearizzazione non sia un centro eessenziale
Esercizio: Mostrare che i sistemi
x1 = − x2 + x1(x21 + x2
2)
x2 =x1 + x2(x21 + x2
2)(1.8.2)
e
x1 = − x2 − x1(x21 + x2
2)
x2 =x1 − x2(x21 + x2
2)(1.8.3)
hanno la stessa linearizzazione nell’origine ma hanno ritratti di fase qualitativamente differenti in ogni intornodell’origine.
Dim.
Poiche
lim(x1,x2)→(0,0)
x1(x21 + x2
2)√
x21 + x2
2
= lim(x1,x2)→(0,0)
x1(x21 + x2
2)√
x21 + x2
2
= 0
la linearizzazione e
x1 = − x2
x2 =x1.
La matrice del sistema lineare e
A =
(
0 −11 0
)
gli autovalori sono λ1 = i e λ2 = −i pertanto il sistema e un centro (autovalori con parte reale nulla).
35

Se passiamo in coordinate polari nel (1.8.2) otteniamo
ρ cos θ − ρθ sin θ = − ρ sin θ + ρ3 cos θ
ρ sin θ + ρθ cos θ =ρ cos θ + ρ3 sin θ
quindi
ρ =ρ3
θ =1.(1.8.4)
Lo stesso ragionamento applicato alla (1.8.3)conduce alla
ρ = − ρ3
θ =1.(1.8.5)
E’ chiaro che le soluzioni di (1.8.4) sono delle spirali che si allontanano dall’origine, al contrario di quellerelative a (1.8.5) che sono spirali che si avvicinano all’origine.
(a) (b) (c)Fig. 19 Ritratto di fase dei sistemi: (a) (1.8.4) (b)(1.8.5); (c) della linearizzazione
Definizione: Punti iperbolici Se il punto fisso del sistema non lineare e semplice e se la linearizzazionenon e un centro, il punto fisso si dice iperbolico
Pertanto potremo catalogare i punti iperbolici secondo la classificazione trovata per le rispettive lin-earizzazioni, quindi parleremo di nodi, punti sella, etc. anche per punti fissi di sistemi non lineari.
Esercizio: Usare il teorema di linearizzazione per determinare il ritratto di fase locale del sistema
x1 =x1 + 4x2 + ex1 − 1
x2 = − x2 − x2ex1(1.8.6)
nell’origine.
Dim
Le componenti del campo vettoriale in (1.8.6) sono differenziabili due volte quindi, possiamo considerarelo sviluppo di MacLaurin e quindi lo Jacobiano
A =
( ∂∂x1
(x1 + 4x2 + ex1 − 1) ∂∂x2
(x1 + 4x2 + ex1 − 1)∂
∂x1(−x2 − x2e
x1) ∂∂x2
(−x2 − x2ex1)
)∣
∣
∣
∣
(x1,x2)=(0,0)
=
(
2 40 −2
)
.
Quindi la linearizzazione e
x1 =2x1 + 4x2
x2 = − 2x2
36

e l’origine presenta un punto sella, infatti gli autovalori sono 2 e -2.
Esercizio: Studiare il sistema
x = sinx
y = − sin y
e la sua linearizzazione in (0, 0)
Ris.
∫
1
sinxdx = − log
(
cos(x
2
))
+ log(
sin(x
2
))
+ c = log(
tan(x
2
))
+ c
La linearizzazione e
x = x
y = −yquindi
A =
(
1 00 −1
)
eλ2 − 0λ− 1 = 0
pertanto autovalori λ1 = 1 e λ2 = −1, cioe un punto sella.
Fig. 19 Rtratto di fase del sis-tema non lineare
Fig. 20 Ritratto di fase del sis-tema lineare
Esercizio: Studiare il sistema
x = x− y3
y = y + x3
e la sua linearizzazione in (0, 0)
Ris.
Considerato che
lim(x,y)→(0,0)
y3
√
x2 + y2= lim
(x,y)→(0,0)
x3
√
x2 + y2= 0
La linearizzazione e
x = x
y = y
37

quindi
A =
(
1 00 1
)
e
λ2 − 2λ+ 1 = 0
pertanto autovalori λ1 = λ2 = 1, cioe un punto stella instabile.
Fig. 21 Rtratto di fase del sistemanon lineare
Fig. 22 Ritratto di fase del sistemalineare
Esercizio: Studiare il sistema
x = 12 (x+ y) + x2
y = 12 (3y − x)
e la sua linearizzazione in (0, 0)
Ris.
Considerato che
lim(x,y)→(0,0)
x2
√
x2 + y2= 0
La linearizzazione e
x = 12 (x+ y)
y = 12 (3y − x)
quindi
A =
(
12
12
− 12
32
)
e
λ2 − 2λ+ 1 = 0
pertanto autovalori λ1 = λ2 = 1, (matrice non diagonale), cioe un nodo improprio instabile.
38

Fig. 23 Rtratto di fase del sistemanon lineare
Fig. 24 Ritratto di fase del sistemalineare
Definizione: Se il punto fisso del sistema non lineare e semplice e se la linearizzazione non e un
centro, il punto fisso si dice iperbolico
Potremo pertanto catalogare i punti iperbilici secondo la classificazione trovata per le rispettive lineariz-zazioni, quindi parleremo di nodi, pinti sella, etc. anche per i punti fissi di sistemi non lineari.
Definizione: Il pinto fisso di un sistema si dira non semplice se il corrispondente sistema lineare enon semplice (Determinante della matrice nullo!)
Nel caso di sistemi non semplici non possiamo, in nessun caso, aapplicare il ragionamento fatto con isistemi semplici, perche in questo caso, il comportamento e determinato dalla natura del termine non lineare.
Consideriamo il sistema
x = x(x + 2y)
y = y(2x+ y)
Lo Jacopiano nell’origine e
A =
( ∂∂xx(x+ 2y) ∂
∂yx(x + 2y)∂∂xy(2x+ y) ∂
∂yy(2x+ y)
)∣
∣
∣
∣
(0,0)
=
(
0 00 0
)
Quindi il sistema lineare e non semplice con tutti i punti del piano fissi, mentre il ristratto di fase delsistema e
39

Fig. 25 Rtratto di fase del sistema non lineare non semplice
Consideriamo il sistema
x = x(x− 2y)
y = −y(2x− y)
Lo Jacopiano nell’origine e
A =
( ∂∂xx(x− 2y) ∂
∂yx(x − 2y)∂∂x − y(2x− y) ∂
∂y − y(2x− y)
)∣
∣
∣
∣
(0,0)
=
(
0 00 0
)
Quindi il sistema lineare e non semplice con tutti i punti del piano fissi, mentre il ristratto di fase delsistema e
40

Fig. 26 Rtratto di fase del sistema non lineare non semplice
Consideriamo il sistema
x = −y5
y = x+ y2
Lo Jacopiano nell’origine e
A =
( ∂∂x − y5 ∂
∂y − y5
∂∂xx+ y2 ∂
∂yx+ y2
)∣
∣
∣
∣
(0,0)
=
(
0 01 0
)
Quindi il sistema lineare e non semplice con tutti i punti dell’asse y fissi, mentre il ristratto di fase delsistema e
41

Fig. 27 Rtratto di fase del sistema non lineare non semplice
§1.9 Mappe di Poincare e sospensioni
Dalla definizione di flusso sappiamo che, per ogni fissato t ∈ R , ϕt : M → M e un diffeomorfismo.Quindi un modo di ottenere diffeomorfismi da un flusso e quello di fissare il tempo e considerare la relativatrasformazione. Per esempio, fissiamo τ > 0, e consideriamo la trasformazione ϕτ : M →M . Ovviamente leorbite del diffeomorfismo sono costrette dalle traiettorie del flusso
ϕmτ (x)|mZ = ϕmτ (x)|mZ ⊂ ϕt(x)|tR.
Questo significa che le dinamiche di ϕτ sono fortemente influenzate da quella del flusso ϕ e non sono quelletipiche dei diffeomorfismi. E’ da notare che, sebbene le orbite di x, rispetto a ϕτ1
e rispetto a ϕτ2, con
τ1 6= τ2, si comportano allo stesso modo, essendo sottoinsieme della stessa traiettoria di ϕ, le due mappe nonnecessariamente sono dello stesso tipo topologico. Supponiamo, per esempio che ϕt abbia un’orbita periodicaγ di periodo T , consideriamo τ1 = αT, α ∈ Q e τ2 = βT, β ∈ R\Q. Ovviamente il diffeomorfismo ϕτ1
ha γcome insieme invariante tutto costituito di punti periodici di periodo q, se α = p/q. Per il diffeormorfismoϕτ2
γ e sempre un insieme invariante, ma ogni punto di γ ha orbita non periodica, anzi densa in γ. Pertantoi due diffeomorfismi non possono essere dello steso tipo topologico.
Esercizio: Mostrare che una mappa f : R → R della forma f(x) = αx, α ∈ R, ha un punto fissoin x = 0 e che tale puno e stabile o instabile a seconda che sia |α| < 1 o |α| > 1 rispettivamente. Siconsideri la mappa ad un tempo ϕ1 del flusso x = x − x2. Dedurre che ϕ1 ha punti fissi in x = 0 e x = 1.Ottenere l’approssimazione lineare di ϕ1 in questi punti in modo da dedurre la loro stabilita. Dare un’ideadel comportamento di ϕ1. Comparare i risultati ottenuti con il ritratto di fase del flusso.
.
42

Che il punto x = 0 e un punto fisso e ovvio. Ed anche la stabilita una volta osservato che
| limn→∞
fn(x)| = limn→∞
|α|n|x| =
0 |α| < 1
∞ |α| > 1.
La soluzione dell’equazione e, posto c = x0/|1 − x0|,
x(t) =
cc−e−t x > 1
cc+e−t 0 < x < 1
quindi sostituendo il valore di c, otteniamo
x(t) =x0
x0 + (1 − x0)e−t
valida per t in un intorno dello zero, che puo comunque essere estesa ad un qualsiasi tempo positivo. Pertanto,possiamo considerare il valore del flusso per t = 1 ed otteniamo
ϕ1(x) =xe
xe+ (1 − x)
che ha punti fissi in x = 0 e x = 1 con x = 0 instabile e x = 1 stabile, infatti la derivata nel primo punto e−e2 mentre nel secondo e nulla.
Il rispettivo flusso, come si puo facilmente vedere, ha lo stesso tipo di punti fissi. Infatti le orbite chepassano per x 6= 0 tendono verso 1.
Un modo piu interessante di ottenere un diffeomorfismo da un flusso e quello di costruire la corrispon-dente mappa di Poincare. Sia ϕ un flusso su M , e sia X il relativo campo vettoriale. Sia Σ una sottovarietadi M di codimensione 1. Diremo che Σ e una sezione globale del flusso ϕ se:1) comunque fissato T > 0, ogni orbita di ϕ interseca Σ sia per tempi maggiori di T che per tempi minori
di −T2) se x ∈ Σ, X(x) e non tangente rispetto a Σ, cioe deve essere diversa da zero la componente di X(x)
ortogonale a Σ.Se y ∈ Σ, indichiamo con τ(y), il primo tempo positivo per il quale ϕτ(y)(x) ∈ Σ, cioe per il quale il
punto y torna in Σ.
Definizione: ChiameremoP(y) ≡ ϕτ(y)(y), y ∈ Σ
mappa di Poincare (o anche mappa del primo ritorno) per Σ.
Esempio: Calcolare la mappa di Poincare, P , per il flusso del piano definito dalle seguenti equazioniin coordinate polari
r = r(1 − r), θ = 1
rispetto alla semiretta Σ definita dalla parte positiva dell’asse x, cioe da θ = 0. Come cambia P se scegliamoΣ definito da θ = θ0?
Dim.
Abbiamo gia visto il ritratto di fase del flusso, cioe un’orbita periodica attrattiva, di periodo 2π, data dar = 1. Se indichiamo con ϕt(r, θ) il punto di R2 che rappresenta il flusso, possiamo indicare con (ϕt(r, θ))x
la sua prima coordinata cartesiana. Pertanto, se x > 0, allora
P (x) ≡ (ϕτ(x)(r, θ))x
dove indichiamo con τ(x) il tempo di rivoluzione intorno all’origine del punto (0, x). Poiche θ = 1, risultaτ(x) = 2π.
43

L’equazione radiale, r = r(1 − r), con condizione iniziale r(0) = r0 ha soluzione
r(t) =r0
r0 + (1 − r0)e−t
pertanto
P (x) =x
x+ (1 − x)e−2π.
Se Σ e definito da θ = θ0, allora, se indichiamo con (·)r la componente radiale di un punto di R2,
P (r) ≡ (ϕτ(r)(r, θ0))r
Ma τ(r) = 2π, quindi P ha la stessa forma del caso precedente, basta sostituire ad x la r.
In generale ci si aspetta che il diffeomorfismo mappa di Poincare rifletta le proprieta del rispettivoflusso. In effetti nell’esempio precedente, possiamo notare che il punto x = 1 e un punto fisso, ed anche chetale punto e attrattivo, in effetti P (x) < 1 se x > 1 e P (x) > 1 se x < 1. Tale punto fisso attrattivo deldiffeomorfismo, corrisponde ad un ciclo limite stabile del flusso.
Esempio: Consideriamo il flusso ϕ : T 2 → T 2 definito da
θ = α, γ = β, α, β > 0.
Il flusso ha quindi la forma
θ(t) = (αt+ θ0) mod 2π, γ(t) = (βt+ γ0) mod 2π
Consideriamo le condizioni che garantiscono il ritorno al punto iniziale θ0, γ0 e calcoliamo il tempo di primoritorno. Dovra essere
2kπ = θ(tθ) − θ0 = αtθ, 2kπ = γ(tγ) − γ0 = βtγ
quindi αtθ = 2kπ e βtγ = 2hπ. Ovviamente si avra un ritorno se tθ = tγ e questo e possibile soltanto seβ/α = h/k, Quindi se e soltanto se, α e β sono razionalmente correlati ogni punto e periodico. Se i duesono razionalmente scorrelati l’orbita passante per il punto θ0, γ0 e non periodica e non ritorna mai in θ0, γ0,anche se vi si avvicina in modo arbitrario.
Una scelta possibile di sezione globale e quella di γ = γ0, allora Σ e un cerchio, S1, la cui cooordinata eθ. Poiche l’orbita del flusso ritorna per la prima volta in γ = γ0 al tempo tgamma = 2π/β, allora possiamodire che P : S1 → S1 e definita da
P (θ) = (θ0 +2πα
β) mod 2π
cioe e una rotazione di angolo 2πα/β. Anche in questo caso le proprieta delle rotazioni del cerchio riflettonoqiuelle del flusso descritte sopra.
ϕ
€θ
Fig.20 Sezione di Poincare e tipica traiettoria di flusso sul toro
44

Si puo facilmente provare che non tutti i flussi ammettono una sezione globale. Basta considerare ilflusso che ha un punto fisso in x∗. Poiche l’orbita coincide con x∗, la eventuale sezione globale deve contenereil punto fisso, ma allora il campo vettoriale, in x∗ sarebbe tangente, in quanto nullo, alla sezione globale,quindi cadrebbe la seconda condizione che definisce la stessa. L’affermazione contraria, invece e vera. Cioe,un diffeomorfismo e sempre la mappa di Poincare di un qualche flusso, che chiameremo sospensione deldiffeomorfismo. Questo implica che ogni risultato ricavato per diffeomorfismi ha un corrispettivo risultatoper flussi di dimensione maggiorata di 1.
Definizione: Indichiamo con [·] la parte intera di ·, sia x ∈M , θ ∈ [0, 1]. Il flusso su M
ψt(x, θ) ≡ (f [t+θ](x), t + θ − [t+ θ])
e una sospensione del diffeomorfismo f : M → M se M e la varieta compatta ottenuta con il prodottoM × [0, 1] quando si identifica (x, 1) con (f(x), 0)
Possiamo pensare geometricamente ad M come un cilindro di base M deformato in modo che vengasoddisfatta la condizione della definizione. Si puo ottenere allora un M = m × S1 (quando f e deformabilecon continuita nell’identita), ma si possono anche avere costruzioni piu complicate. Consideriamo il casoM = S1 e f sia una rotazione. Allora M = S1 × S1. Se invece f e la riflessione rispetto ad un diametro diS1, bisogna identificare la faccia superiore di (S1, 1) con quella inferiore di (S1, 0), cioe bisogna considerarela bottiglia di Klein.
Consideriamo un esempio a dimensione 1 per meglio intuire il problema geometrico. Sia M = (0, 1),sia f la riflessione rispetto al punto x = x/2. Quindi, in particolare, il punto (0, 1) deve essere identificatocon il punto (1, 0), e questo si ottiene “girando” la striscia prima di “incollare”, cioe si ottiene la striscia diMobius.
Esercizio: Sospendere il diffeomorfismo su [0, 1] definito da
f(x) =1
2(x+ x2).
Su quale superficie e definito il flusso? Descrivere Il comportamento del flusso.
Dim.
Il diffeomorfismo ha due punti fissi, x = 0 e x = 1. La superficie su cui e definita la sospensione e ilcilindro. Il flusso ha due orbite periodiche che passano per i punti (0, 0) e (1, 0). Le altre orbite sono dellespirali.
Esercizio: Illustrare i flussi sospensioni dei diffeomorfismi:1) f : [−1, 1] → [−1, 1], f(x) = − 3
2x+ 12x
3
2) f : S1 → S1, f(e2πix) = e−2πix
Dim.
1) Il diffeomorfismo ha un solo punto fisso x = 0, inoltre fa corrispondere a x = −1 il punto x = 1 eviceversa quindi M sara un nastro di Mobius. Il flusso avra un’orbita periodica di periodo 1 che passaper (0, 0) ed un’orbita periodica di periodo 2 che passa sul bordo del nastro.
2) Il diffeomorfismo e una riflessione rispetto al diametro orizzontale. Quindi la superficie e la bottigliadi Klein, tutte le orbite che passano per tale diametro, saranno cicli periodici di periodo 1, gli altri diperiodo 2.
§1.10 Sistemi non autonomi periodici
Consideriamo il sistema non autonomo
x = X(x, t) x ∈M
45

con il campo vettoriale periodico di periodo T :
X(x, t+ T ) = X(x, t) ∀t ∈ R
Consideriamo la seguente trasformazione del tempo: s = 2πT t, quindi t(s) = T
2π s allora dtds = T
2π , pertanto, seconsideriamo x(t) = x(t(s)):
dx(t(s))
ds=
x(t)
dt
dt
ds= X (x(t(s)), t(s))
T
2π
quindi, ponendo X′(x, θ) ≡ T2πX(x, T
2π θ) e θ ≡ 2πT t il sistema originale puo essere visto come il sistema
autonomo
x = X′(x, θ)
θ = 1
definito sulla varieta differenziabile M × R.
periodo
periodo
aperiodiche
Ovviamente
X′(x, θ + 2π) =T
2πX
(
x,T
2π(θ + 2π)
)
=T
2πX(x, t+ T ) =
=T
2πX(x, t) =
T
2πX(x,
T
2πθ) = X′(x, θ)
cioe la periodicita del nuovo campo vettoriale rispetto alla variabile θ.
E’ quindi utile considerare θ = θ + 2kπ, k ∈ Z, quindi con θ ∈ S1 ed ottenere un flusso sulla varietaM × S1
46

periodo
periodo
Esercizio: Dimostrare che, se x = ξ(t) e una soluzione dell’equazione X(x, t) con X(x, t+T ) = X(x, t),allora anche x = ξ(t+ T ) e soluzione dello stesso sistema.
Considerare il sistema con X(x, t) = (1 + sin t)x, per l’esistenza di soluzioni non periodiche
Dim
Sappiamo ched
dtx =
d
dtξ(t) = X(ξ(t), t)
quindi, prendendo x = ξ(t+ T ),
d
dtx =
d
dtξ(t+ T ) = X(ξ(t+ T ), t+ T ) = X(ξ(t+ T ), t) = X(x, t)
Il campo vettoriale dell’esercizio e, in t, periodico di periodo eπ, e l’equazione si risolve per separazionidelle variabili:
∫
1
xdx =
∫
(1 + sin t)dt
quindilog |x| = t− sin t+ c =⇒ x = Cet−sin t
MaCet+2π−sin(t+2π) = Cet+2π−sin t 6= Cet−sin t
Rispetto al flusso su M ×S1, ovviamente ogni sottovarieta del tipo Σθ ≡M ×θ e una sezione globale.Possiamo, pertanto, defininire, per ogni θ ∈ S1 la relativa mappa di Poincare
Pθ : Σθ → Σθ
47

Esercizio: Considerare il caso lineare:
x = A(t)x (x, t) ∈ Rn × R X(x, t+ T ) = X(x, t)
e dimostare che l’insieme delle soluzioni e uno spazio vettoriale n-dimensionale.
Dim
1) Dimostriamo che l’insieme delle soluzioni sono uno spazio vettoriale. Supponiamo che ξ(t) e η(t), sianosoluzioni. Anche αξ(t) e ξ(t) + η(t) lo sono:
d
dtαξ(t) = α
d
dtξ(t) = αA(t)ξ(t) = A(t)αξ(t)
d
dt(ξ(t) + η(t)) =
d
dtξ(t) +
d
dtη(t) = A(t)ξ(t) + A(t)η(t) = A(t) (ξ(t) + η(t))
2) Dimostriamo che non possono esistere n + 1 soluzioni linearmente indipendenti. Supponiamo cheξ1, . . . , ξn+1 siano tutte soluzioni del sistema. Ovviamente, devono esistere α1, . . . ,αn+1 vettori, nontutti nulli, tali che
n+1∑
k=1
αkξk(0) = 0
Ma la funzione∑n+1
k=1 αkξk(t) per il punto 1) e soluzione del sistema, con punto iniziale 0, (punto fisso),
quindi, per l’unicita della soluzione, anche∑n+1
k=1 αkξk(t) = 0 per ogni t ∈ R
3) Dimostriamo che devono esistere n soluzioni linearmente indipendenti. Esistono n vettori di Rn linear-mente indipendenti: x0
1, · · · ,x0n tali che comunque scelgo α1, . . . ,αn, non tutti nulli, allora
n∑
k=1
αkx0k 6= 0
Siano, per k = 1, . . . n, ξk(t) le soluzioni del sistema tali che ξk(0) = x0k. Per la 1) anche
∑nk=1αkξk(t)
e soluzione del sistema, che, per l’unicita della soluzione non puo mai essere 0
In relazione al caso lineare, chiameremo matrice di transizione di stato, la matrice ϕ(t, t0) tale che
ξ(t) = ϕ(t, t0)ξ(0)
Esercizio: Sia ϕ(t, t0) la matrice di transizione di stato del sistema lineare dell’esercizio precedente.Provare che
ϕ(t+ T, t) = ϕ(0, t)−1ϕ(T, 0)ϕ(0, t)
Dim
1) Dimostriamo che ϕ(t + T, t0 + T ) = ϕ(t, t0). Infatti, se chiamiamo ψs(x0, θ0) il flusso su M × S1
relativo al sistema autonomo associato, allora, se ξ(t) e la soluzione del sistema non autonomo, tale cheξ(t0) = x0. Ricordiamo che s = 2π
T t e θ(s) = s, allora
(ξ(t(s)), θ(s)) = ϕs−s0(x0, s0) = (ϕ(t, t0)x0, s)
(ξ(t(s)), θ(s)) = ϕs+2π−(s0+2π)(x0, s0 + 2π) = (ϕ(t+ T, t0 + T )x0, s+ 2π) = (ϕ(t+ T, t0 + T )x0, s)
(si sfrutta due volte il fatto che θ + 2π = θ e che s+ 2π = 2πT t+ 2π = 2π
T (t+ T ))2) Dimostriamo che ϕ(t, 0)−1 = ϕ(0, t). Infatti, se ξ(t) e la soluzioine del sistema non autonomo, tale cheξ(0) = x0, allora
(ξ(t(s)), θ(s)) = ψs (ψ−s(ξ(t(s)), s) = ψs (ϕ(0, t)ξ(t(s)), 0) = (ϕ(t, 0)ϕ(0, t)ξ(t(s)), s)
48

3) Dimostriamo cheϕ(t+ T, t) = ϕ(0, t)−1ϕ(T, 0)ϕ(0, t)
La tesi equivale aϕ(0, t)ϕ(t+ T, t) = ϕ(T, 0)ϕ(0, t)
che deriva da(ϕ(t+ T, t)ξ(t(s)), s+ 2π) = (ψ2π(ξ(t(s)), s))
(ϕ(0, t)ϕ(t+ T, t)ξ(t(s)), 0) = ψ−s (ψ2π(ξ(t(s)), s))
e(ϕ(0, t)ξ(t(s)), 0) = (ψ−s(ξ(t(s)), s))
(ϕ(T, 0)ϕ(0, t)ξ(t(s)), 0) = ψ2π (ψ−s(ξ(t(s)), s))
L’ultima tesi dell’esercizio implica che le matrici ϕ(t+ T, t) e ϕ(T, 0) sono simili. Se si considera che laprima matrice di transizione di stato altro non e che la mappa di Poincare del flusso autonomo, relativo allasezione Σt e la seconda matrice di transizione di atto quella relativa all sezione Σ0, l’esercizio assicura che,nel caso di flusso non autonomo lineare e “periodico”, le mappe di Poincare dell’autonomo associato sonotutte topologicamente (linearmente) coniugate, indipendentemente dalla sezione globale scelta.
Si puo dimostare che lo stesso risultato e vero anche nel caso non lineare. Cioe, per le proprietatopologiche si puo considerare la mappa di Poincare P = P0 del sistema autonomo “periodico”. D’altra parte,ricordando la definizione di sospensione di un diffeomorfismo, in questo caso, partendo dal diffeomorfismo P
su M , la sospensione agisce esattamente su M = M × S1 e coincide con il sistema autonomo associato alnon autonomo.
Esercizio: Sia ϕ(t, t0) la matrice di transizione di stato del precedente sistema lineare non autonomo.Sia W (t) ≡ det(ϕ(t, 0)).
Dimostrare chei) ϕ(t+ h, 0) = ϕ(t, 0) + hA(t)ϕ(t, 0) + o(h)ii) W (t+ h) = det(I + hA(t) + o(h))W (t) =
∏ni=1(1 + hλi + o(h))W (t) dove λi sono gli autovalori di A(t)
iii) W (t) = Tr(A(t))W (t)
Dim
i) Se ξ(t) e una soluzione del sistema tale che ξ(0) = x0, allora ξ(t+ h) = ϕ(t+ h, 0)x0 e ξ(t) = ϕ(t, 0)x0.Sappiamo che
limh→0
ξ(t+ h) − ξ(t)h
= A(t)ξ(t)
quindi
ξ(t+ h) − ξ(t) = hA(t)ξ(t) + o(h)
ii) Evidente, se si considera che il determinante del prodotto e uguale al prodotto dei determinanti e sepensiamo di mettere le matrici in forma diagonale.
iii) Nello sviluppo della produttoria, possiamo isolare il termine di ordine 0, che e 1, ed il termine di ordineh che e
∑ni=1 λi = TrA(t) dai termini restanti che sono comunque di ordine h2. Quindi
W (t+ h) = W (t) + hTrA(t)W (t) +O(h2)
cioeW (t+ h) −W (t)
h= TrA(t)W (t) +O(h)
49

Esempio:
x+ [ω(t)]2x = 0 x ∈ R ω(t) = ω(t+ T ), ∀ t ∈ R
Considerare la stabilita del punto fisso 0.
Dim
L’equazione del secondo ordine puo essere vista come un sistema di equazioni del primo ordine:
x = A(t)x
dove x =
(
xy
)
=
(
xx
)
∈ R2 e
A(t) ≡(
0 1−[ω(t)]2 0
)
Al solito, considerando la matrice di transizione di spazio, abbiamo che, se ξ(t) ∈ R2 e la soluzione delsistema, tale che ξ(t0) = x0, allora
ξ(t) = ϕ(t, t0)x0
La mappa di Poincare P = P0 = ϕ(T, 0) relativa alla sezione globale θ = 0 e, come dimostratonell’esercizio, rappresentativa di ogni mappa di Poincare.
Consideriamo ora il det(P), cioe il det(ϕ(T, 0). Ma dall’esercizio precedente, poiche Tr(A(t)) = 0,abbiamo che
W (t) = 0
quindi chedetP = detϕ(T, 0) = W (T ) = W (0) = detϕ(0, 0) = 1
L’equazione caratteristica di P eλ2 − λTr(P) + 1 = 0
per la quale il ∆ = Tr(P)2 − 4.Se |Tr(P)| < 2), abbiamo ∆ < 0, quindi due radici complesse coniugate dell’equazione caratteristica,
che in piu dovranno avere modulo 1, in quanto λ1λ1 = |λ1|2 = 1, termine noto dell’equazione caratteristica.Quindi possiamo scrivere λ1 = cosβ + i sinβ. Indichiamo con z = u + iv, u,v ∈ R2 l’autovettore di λ1,quindi
Pu + iPv = Pz = λ1z = (cosβ + i sinβ)(u + iv) = cosβu− sinβv + i(sinβu + cosβv)
Esplicitamente
P
(
ux
uy
)
=
(
ux cosβ − vx sinβuy cosβ − vy sinβ
)
P
(
vx
vy
)
=
(
ux sinβ + vx cosβuy sinβ + vy cosβ
)
cioe
P
(
vx ux
vy uy
)
=
(
ux sinβ + vx cosβ ux cosβ − vx sinβuy sinβ + vy cosβ uy cosβ − vy sinβ
)
=
(
vx ux
vy uy
)(
cosβ − sinβsinβ cosβ
)
=
(
vx ux
vy uy
)
R
Abbiamo dimostrato che la matrice P e simile alla matrice R, quindi che la mappa di Poicare e linear-mente coniugata con il diffeomorfismo definito da x′ = Rx.
Ma come sono le traiettorie di un tale diffeomorfismo? Possiamo vederlo passando in coordinate polari:
ρ′ cos θ′ = cosβρ cos θ − sinβρ sin θ = ρ cos(β + θ)
ρ′ sin θ′ = sinβρ cos θ − sinβρ cos θ = ρ sin(β + θ)
quindi ρ′ = ρ e θ′ = θ + β, cioe la rotazione di angolo β.
50

Pertanto, se le traiettorie di R sono dei cerchi, le coniugate di P saranno delle ellissi. Questo implicache il punto 0 e un punto fisso stabile (marginalmente) per P e quindi anche per il flusso originario.
Se |Tr(P)| > 2), abbiamo ∆ > 0, quindi due radici reali e distinte che devono soddisfare la relazioneλ1λ2 = 1, quindi λ2 = λ−1
1 . Se u e un autovettore di λ1 e v e un autovettore di 1λ1
, allora
P
(
ux
uy
)
= λ1
(
ux
uy
)
=
(
λ1ux
λ1uy
)
P
(
vx
vy
)
=1
λ1
(
vx
vy
)
=
( vx
λ1vy
λ1
)
quindi
P
(
ux vx
uy vy
)
=
(
λ1uxvx
λ1
λ1vxvy
λ1
)
=
(
ux vx
uy vy
)(
λ1 00 1
λ1
)
Il diffeomorfismo P e quindi linearmente coniugato con D definito dalla matrice
(
λ1 00 1
λ1
)
. Come sono
le traiettorie di D? I punti immagine di D sono in questa relazione con i punti iniziali:
x′ = λ1x
y′ = yλ1
quindi x′y′ = xy, cioe tutti i punti di una traiettoria appartengono ad una iperbole, che implica che lo 0 siaun punto instabile.
Quindi abbiamo visto che perturbazioni periodiche della frequenza ω di un oscillatore armonico possonorendere instabile il punto fisso . E’ quello che accade nel’altalena con il movimento appropriato del corpoper aumentare sempre piu l’ampiezza delle oscillazioni.
§1.11 Flussi Hamiltoniani
Definizione: Sia U ⊂ R2n aperto e H : U → R una funzione C2. Il sistema di equazioni differenziali
x = XH(x)
con
(XH)i =
∂H∂xi+n
1 ≤ i ≤ n
− ∂H∂xi−n
n+ 1 ≤ i ≤ 2n
e detto sistema Hamiltoniano conservativo con n-gradi di liberta.Il punto x e usualmente denotato con
x = (q1, . . . , qn, p1, . . . , pn)T
od anche con
x(t) =
(
q(t)
p(t)
)
dove q(t) e la configurazione del sistema nelle n coordinate generalizzate qi(t), mentre p(t) rappresenta ilvettore dei momenti generalizzati coniugati pi(t). Il sistema Hamiltoniano si puo anche scrivere, in formaestesa
(1.11.1) qi =∂H
∂pi, pi = −∂H
∂qi, i = 1, . . . , n.
H = H(q,p) e detta l’Hamiltoniana del sistema e le equazioni sono dette Hamiltoniane.
Notiamo che, nella definizione data, mentre le qi e le pi cambiano con il tempo t, H non cambia lungoil moto. Infatti, per ogni t
H =
n∑
i=1
(
∂H
∂qiqi +
∂H
∂pipi
)
= 0.
51

Si dice in questo caso che l’Hamiltoniana e una quantita conservata o anche che e una costante del moto.Oppure, se indichiamo con
ϕHt : U → R2n
il flusso Hamiltoniano, cio il flusso derivato dalle equazioni Hamiltoniane, allora H e un integrale primo delflusso, cioe e costante lungo le traiettorie di ϕH
t .
Teorema: Liouville Sia ϕt un flusso indotto da
x = X(x)
e
Ω(t) = m(ϕt(D)) m e la misura di lebesgue
con D una regione limitata dello spazio delle fasi. Se divX ≡ 0, allora ϕt preseva il volume, cioe Ω(t) = Ω(0)per ogni t.
dim
La regione ϕt(D) puo essere vista come la regione nelle coordinate
xT = (q′i, . . . , q′n, p
′1, . . . , p
′n),
quando D e la regione nelle coordinate
xT = (q1, . . . , qn, p1, . . . , pn)
e la funzione ϕt e vista come il cambio di coordinate x′ = ϕt(x). Pertanto
Ω(t) =
∫
ϕt(D)
dq′1, . . . , p′n =
∫
D
det(Dϕt(x))dqi, . . . , pn.
Possiamo sviluppare ϕt(x) in t nel punto t = 0,
ϕt(x) = ϕ0(x) + td
dtϕt(x)|t=0 + o(t) = x + tX(x) + o(t)
quindi
Dϕt(x) = I + tDX(x) + o(t)
Possiamo pensare di trasformare, per similitudine, tutte le matrici in questione in matrici triangolari,con gli autovalori nella diagonale principale. Il determinante allora sara uguale al prodotto degli elementidella diagonale principale, cioe degli autovalori. Pertanto, se indichiamo con ηi(x) gli autovalori della matriceDX(x),
det(Dϕt(x)) = det(I + tDX(x) + o(t)) =2n∏
i=1
(1 + tηi(x) + o(t))
= 1 + t2n∑
i=1
ηi(x) +O(t2) = 1 + tTrDX(x) +O(t2).
(L’ultima uguaglianza e giustificata dal fatto che la traccia e un invariante per similitudine). Ma
TrDX(x) =
2n∑
i=1
∂Xi(x)
∂xi= divX(x)
52

Ora, considerando che
dΩ
dt|t=0 = Ω(0) = lim
h→0
∫
D
(
det(Dϕt(x)) − 1
t
)
dx =
∫
D
divX(x)dx
Considerando che la dimostrazione precedente non dipende dal fatto di aver scelto come punto inizialelo 0, possiamo scrivere
Ω(t) =
∫
ϕt(D)
divX(x)dx.
E’ ovvio, ora che se divX(x) ≡ 0, allora Ω(t) = Ω(0) per ogni t.
Consideriamo ora un sistema Hamiltoniano, allora
divX(x) =
n∑
i=1
(
∂
∂qi
(
∂H
∂pi
)
+∂
∂pi
(
−∂H∂qi
))
≡ 0
pertanto, possiamo affermare che il flusso ϕHt preseva i volumi nello spazio delle fasi.
Introduciamo
S ≡(
0 −I
I 0
)
dove I e la matrice unita n× n. Allora
(1.11.2) SXH(x) = [DxH(x)]T .
Definizione: Un diffeomorfismo h : U → R2n con U ⊂ R2n e detto simplettico se
[Dh(x)]T SDh(x) = S
per ogni x ∈ U .
Sia ora y = h(x) doveyT = (Q1, . . . , Qn, P1, . . . , Pn).
Indichiamo con H ′ il trasformato di H , cioe
H ′(y) = H ′(h(x)) = H(x)
quindi consideriamo le nuove equazioni
((1.11.3)) y = XH′ (y)
e, analogamente alla (1.11.2)
((1.11.4)) SXH′ (y) = [DyH′(y)]T .
Teorema: Condizione necessaria e sufficiente affinche la (1.11.1) e la (1.11.3) siano C1-coniugati e cheh sia simplettico.
Dim.
Ricordiamo la condizione, sui campi vettoriali, della C1-coniugazione
((1.11.5)) Dxh(x)XH(x) = XH′(h(x))
53

Derivando l’uguaglianza H(x) = H ′(h(x)) otteniamo
((1.11.6)) ∇xH(x) = ∇yH′(h(x))Dxh(x)
cioe in forma esplicita
(
∂H
∂q1, . . . ,
∂H
∂qn,∂H
∂p1, . . . ,
∂H
∂pn
)
=
(
∂H ′
∂Q1, . . . ,
∂H ′
∂Qn,∂H ′
∂P1, . . . ,
∂H ′
∂Pn
)
∂Q1
∂q1. . . ∂Q1
∂qn
∂Q1
∂p1. . . ∂Q1
∂pn
......
∂Pn
∂q1. . . . . . . . . . . . . . . . . . . . . . ∂Pn
∂pn
.
Moltiplichiamo ora a sinistra per [Dxh(x)]T S la (1.11.5)
[Dxh(x)]T SDxh(x)XH(x) = [Dxh(x)]T SXH′ (h(x)).
Per la (1.11.4), abbiamo che
[Dxh(x)]T SXH′ (h(x)) = [Dxh(x)]T [∇yH′((y))]T = [∇yH
′(y)Dxh(x)]T
quindi, per la (1.11.6) uguale a DyXH(x). Considerando la (1.11.2) possiamo pertanto scrivere
[Dxh(x)]T SDxh(x)XH(x) = SXH(x).
Da questa ultima uguaglianza, ricaviamo che condizione necessaria e sufficiente affinche l’uguaglianza da cuisiamo partiti, cioe la (1.11.5), sia verificata e che, h(x) sia tale che
[Dxh(x)]T SDxh(x) = S
per ogni x ∈ U .
Osserviamo che la condizione di essere un simplesso rende una trasformazione di coordinate canonica.
54