C:/Users/maurilio/Documents/scuola/moduli/md21 sistemi 1 ......Esistono tre tipi di scale: scale...
75
COMPLEMENTI (INCOMPLETI) DI SISTEMI versione 0.9 30 settembre 2011
Transcript of C:/Users/maurilio/Documents/scuola/moduli/md21 sistemi 1 ......Esistono tre tipi di scale: scale...

COMPLEMENTI (INCOMPLETI) DI SISTEMI
versione 0.9
30 settembre 2011

2
(v. 0.9)

Indice
1 SISTEMI, MODELLI E PROCESSI 5
1.1 Sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.1 Definizione di sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Le variabili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.3 I parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.4 Le relazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.5 Classificazione dei sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.6 L’approccio sistemistico e l’approccio analitico . . . . . . . . . . . . . . . . 10
1.2 Modelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.1 La rappresentazione dei sistemi . . . . . . . . . . . . . . . . . . . . . . . . . 111.2.2 Definizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2.3 Funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2.4 Tipologie di modelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.2.5 Modelli statici e modelli dinamici . . . . . . . . . . . . . . . . . . . . . . . . 17
1.3 Processi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3.1 Definizioni generali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.3.2 Modelli di processi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4 Domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.5 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2 SEGNALI ELETTRICI 25
2.1 Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.1.1 Segnale continuo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.1.2 Segnale variabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.1.3 Segnale periodico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.1.4 Calcolo del valore medio di un segnale periodico . . . . . . . . . . . . . . . 262.1.5 Componente continua e componente alternata di un segnale periodico . . . 272.1.6 Calcolo del valore efficace di un segnale periodico . . . . . . . . . . . . . . . 28
2.2 Segnali sinusoidali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2.1 Segnali sinusoidali e moto circolare uniforme . . . . . . . . . . . . . . . . . 292.2.2 Parametri delle grandezze sinusoidali . . . . . . . . . . . . . . . . . . . . . . 322.2.3 Valore efficace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3 Il metodo simbolico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.3.1 Fasori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.3.2 Corrispondenza tra grandezze sinusoidali alternate e fasori . . . . . . . . . . 342.3.3 Corrispondenza tra grandezze sinusoidali alternate e numeri complessi . . . 34
2.4 Strumenti di laboratorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4.1 Oscilloscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4.2 Generatore di funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.5 Misure di fase con l’oscilloscopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.6 Domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.7 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3

4 INDICE
2.8 Esperienze di laboratorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.8.1 Analisi sperimentale della risposta temporale di una rete R-R ad un’onda
quadra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.8.2 Analisi sperimentale della risposta di una rete RC ad un’onda quadra. . . . 422.8.3 Misura dei parametri caratteristici dei segnali sinusoidali prodotti da un
generatore di funzioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 NOZIONI DI ANALISI MATEMATICA 45
3.1 Insiemi numerici. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.2 Funzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.3 Limite di una funzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.4 Funzioni continue e discontinue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.4.1 La funzione seno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.5 Derivata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.5.1 Derivazione di alcune funzioni fondamentali . . . . . . . . . . . . . . . . . . 523.5.2 Derivata seconda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.6 Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.7 Domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.8 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.8.1 Funzioni continue e discontinue . . . . . . . . . . . . . . . . . . . . . . . . . 593.8.2 Derivata prima e derivata seconda . . . . . . . . . . . . . . . . . . . . . . . 593.8.3 Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.8.4 Grafici di funzioni con i fogli di calcolo . . . . . . . . . . . . . . . . . . . . . 60
4 SISTEMI DINAMICI DETERMINISTICI 61
4.1 I sistemi deterministici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.1.1 Proprieta capacitiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.1.2 Proprieta resistiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.1.3 Proprieta inerziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.1.4 Le analogie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.2 Componenti meccanici elementari . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.2.1 Capacita meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.2.2 Resistenza meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.2.3 Inerzia meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3 Componenti elettrici elementari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.3.1 Capacita elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.3.2 Resistenza elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.3.3 Inerzia elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.4 Determinazione delle relazioni ingresso-uscita . . . . . . . . . . . . . . . . . . . . . 654.4.1 Sospensione meccanica - sistema meccanico . . . . . . . . . . . . . . . . . . 654.4.2 Circuito RCL - sistema elettrico . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5 Carica e scarica di un condensatore . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.6 Determinazione della risposta mediante metodi numerici . . . . . . . . . . . . . . . 684.7 Domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.8 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
(v. 0.9)

Capitolo 1
SISTEMI, MODELLI E
PROCESSI
Prerequisiti
• conoscere la legge di Ohm e la potenza elettrica.
Obiettivi specifici
• Saper descrivere le caratteristiche di sistemi di natura diversa.
1.1 Sistemi
1.1.1 Definizione di sistema
Il significato del termine sistema e conosciuto intuitivamente da tutti, ma per la sua genericitasiamo difficilmente in grado di formalizzarlo in una definizione che ci permetta di identificare senzaequivoci cosa e e cosa non e un sistema. Per formalizzare il concetto di sistema dobbiamo primarichiamare il ben noto concetto di insieme. Definizione
di insiemePer insieme si intende una collezione di elementi che rispettano tutti una legge di appartenenzadenominata proprieta caratteristica.
La legge di appartenenza deve essere univoca, ovvero non si deve prestare a diverse interpre-tazioni. Pero la definizione di insieme non specifica alcunche a proposito delle interazioni esistentitra i vari elementi. Quando si prende in considerazione l’esistenza di interazioni tra i vari elementidi un insieme si comprende che quella collezione di elementi e qualcosa di piu di un insieme. Definizione
di sistemaPer sistema si intende un insieme di elementi che interagiscono tra loro in modo tale daraggiungere una meta comune che non sarebbe stato possibile raggiungere da nessuno degli elementipresi singolarmente.
Nel linguaggio corrente la parola sistema e molto usata, spesso non consapevolmente, perdescrivere un insieme di parti tra di loro connesse per raggiungere uno scopo comune. Ad esempioe molto ricorrente il termine sistema scuola con il quale si indica l’insieme delle persone fisiche(personale docente, studenti, personale ausiliario), delle strutture, delle leggi, dei programmi, ecc.,che concorrono per ottenere l’educazione e la formazione degli alunni.
Altre espressioni molto usate sono il sistema sanita, il sistema economico, il sistema azienda,il sistema di gestione delle acque, ecc.
Questi ed altri numerosi esempi di tipo sociologico e antropologico confermano che il concetto disistema e comunque del tutto generale e dunque applicabile in qualsiasi campo: tecnico-scientifico,fisico, economico, politico, sociale,ecc.
La nostra attenzione sara rivolta quasi esclusivamente all’ambito tecnico-scientifico ma e co-munque importante, dato un sistema di qualsiasi tipo, saper individuare:
5

6 1.1. SISTEMI
• i componenti, ovvero le parti che compongono il sistema;
• le interazioni tra i componenti in termini di materia, energia ed informazione;
• la funzione, o scopo, per cui il sistema e realizzato.
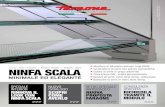
Esempio 1.1.1. Determinare i componenti, le interazioni e la funzione che caratterizzano ilsistema fresatrice a controllo numerico.
Figura 1.1: Fresa a controllo numerico
Soluzione.
Componenti. La fresatrice a controllo numerico e composta dagli organi meccanici di movi-mento, dall’unita di controllo, gli azionamenti elettrici, l’alimentazione elettrica e i dispositivi dimisura.
Interazioni. L’alimentazione elettrica riceve energia elettrica dalla rete elettrica e la trasferiscein parte all’unita di controllo e in parte agli azionamenti elettrici.
Gli azionamenti elettrici trasformano l’energia elettrica in energia meccanica che viene a suavolta trasferita agli organi meccanici di movimento.
L’unita di controllo per poter funzionare deve ricevere energia elettrica dall’alimentazione macontemporaneamente riceve informazione, direttamente dall’operatore o indirettamente mediantesegnali elettrici di comando da un computer supervisore, del tipo di lavorazioni che devono esseresvolte.
Gli organi meccanici di movimento ricevono l’energia meccanica dagli azionamenti elettrici emediante essa modificano i pezzi meccanici sottoposti a lavorazione.
I dispositivi di misura rilevano in tempo reale le posizioni e le velocita con cui stanno operandogli organi di movimento e trasmettono tali informazioni, normalmente sotto forma di segnaleelettrico all’unita di controllo.
Funzione. L’interazione tra i diversi componenti della fresatrice e finalizzata ad ottenere unadeterminata lavorazione di un pezzo meccanico, come ad esempio ottenere un certo profilo su unapiastra per mezzo del controllo della posizione dell’utensile sui tre assi x, y e z.
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 7
1.1.2 Le variabili
Un sistema e caratterizzato da un certo numero di attributi misurabili, denominati comunementevariabili, che descrivono l’andamento temporale del sistema stesso. Esse possono essere anche unindice del raggiungimento dell’obiettivo per il quale e costituito il sistema.
Piu precisamente si indicano con il termine variabili quegli attributi misurabili1, all’interno deisistemi, soggette a variazioni nel tempo.
Le funzioni che rappresentano l’andamento temporale di queste variabili si dicono segnali.Di regola l’andamento temporale di alcune variabili in un sistema e conseguenza di altre varia-
bili; si distinguono pertanto variabili di ingresso o variabili indipendenti e variabili di uscita (O) ovariabili dipendenti.
Inoltre nei sistemi soggetti a controllo le variabili di ingresso si suddividono a loro volta invariabili manipolabili (I) e variabili non manipolabili (N) o disturbi.
Vi sono inoltre le variabili interne o variabili di stato (X) che descrivono l’evoluzione internadel sistema. Esse sono un indice della quantita di energia e/o di materia accumulata dal sistemanel tempo. Nei sistemi digitali le variabili di stato si identificano anche con l’informazione presentein essi.
Il modo piu comune di rappresentare un sistema e quello di utilizzare un rettangolo e dellefrecce per ogni variabile. Il verso della freccia indica se la variabile e di ingresso oppure di uscita.
Figura 1.2: Le variabili di un sistema.
Questo modo di rappresentare un sistema e denominato schema a blocchi ed e fortementediffuso nella teoria dei sistemi come si avra modo di vedere.
1.1.3 I parametri
I parametri rappresentano le qualita specifiche di un sistema. Sono parametri la lunghezza del-l’asse x della fresatrice a controllo numerico, il diametro dell’utensile, il valore di resistenza di uncondensatore oppure il prezzo del caffe memorizzato nel distributore automatico. In questo sensoanche i parametri sono attributi misurabili del sistema, come le variabili, ma a differenza di essehanno la caratteristica di essere costanti nel tempo
Forse e piu corretto dire che sono costanti nell’intervallo di tempo incui il sistema e sottopostoad osservazione. Ad esempio non si puo escludere che il valore della resistenza si modifichi neltempo, ma sicuramente moloto piu lentamente del valore della tensione a cui e sottoposto ilresistore o dal valore di corrente da cui e attraversato.
In alcuni casi con il valore di parametri si intendono dei valori che sono memorizzati in modonon volatile nel sistema ma che possono essere modificati da un operatore dotato delgi appositistrumenti di programmazione. E’ questo il caso dei prezzi del distributore.
Non tutti i parametri hanno la stessa importanza per una eventuale analisi del comportamentodel sistema. Ad esempio, nella fresatrice a controllo numerico lo spessore della lamiera utilizzataper realizzare e un dato importante ma non tanto quanto la lunghezza dell’asse per analizzare ilsuo funzionamento.
1La misurabilita di un una variabile puo essere effettuata mediante la corrispondenza con un sistema numerico
opportuno denominato anche SCALA. Esistono tre tipi di scale: scale nominali, scale ordinali e scali proporzionali.
(v. 0.9)

8 1.1. SISTEMI
I parametri di importanza fondamentale sono quelli che entrano in gioco direttamente nellerelazioni che legano le variabili tra di esse. Poiche tali relazioni sono solitamente di tipo funzionalei parametri presenti in esse sono denominati parametri funzionali.
1.1.4 Le relazioni
Le variabili di uscita di un sistema dipendono dalle variabili di ingresso mediante delle relazioni.Di una relazione si puo dare una rappresentazione analitica o anche una rappresentazione
grafica.Le relazioni presenti nei sistemi sono generalmente relazioni di tipo funzionale.
1.1.5 Classificazione dei sistemi
La definizione di sistema vista nelle pagine precedenti e molto generale e comprende al suo internotipologie di sistemi anche molto differenti tra di essi, sistemi fisici, economici, sociali, ecc., anchese si sara notato che poniamo particolare attenzione a quelli di natura fisica.
Non tutti i sistemi, pero, hanno caratteristiche simili ed e per questo motivo che essi possonoessere classificati. Per effettuare una classificazione e necessario conoscerlo e poter disporre di uncriterio.
La classificazione dei sistemi e utile perche permette di unificare le metodologie di studio disistemi molto diversi tra di essi dal punto di vista fisico, ma che pero presentano caratteristichesimili in base ai criteri di classificazione adottati.
Classificazione in base all’origine.
I sistemi gia esistenti in natura e non modificati dall’uomo sono denominati sistemi naturali.Un esempio e il bacino idrografico di un torrente.
I sistemi costruiti dall’uomo sono denominati sistemi artificiali. Un esempio di sistemaartificiale e la centrale idroelettrica.
I sistemi naturali che vengono modificati dall’uomo sono denominati sistemi misti. Adesempio il bacino idrografico opportunamente modificato per poter accumulare una certa quantitad’acqua mediante la realizzazione di una diga e un esempio di sistema misto.
Classificazione in base alle qualita dei parametri.
Quando i parametri che caratterizzano un sistema non cambiano significativamente durante il tipodi osservazione del sistema si e allora in presenza di un sistema invariante.
Quando i parametri cambiano in modo significativo durante il tempo di osservazione delsistema, esso viene denominato sistema variante.
Prendiamo in considerazione il sistema moto e focalizziamo la nostra attenzione sul parametromassa M della moto. Nel caso del tragitto da casa a scuola si puo ritenere che la moto sia unsistema invariante, dal punto di vista della massa, perche il consumo di carburante non e tale dainfluire in modo significativo sulle prestazioni del mezzo. Se pero prendiamo in considerazioneuna gara di un motomondiale la variazione del parametro massa del mezzo dovuta al consumo dicarburante diventa significativo dal punto di vista delle prestazioni.
Classificazione in base alle qualita delle variabili
Presenza o meno di variabili di stato. Un sistema statico, o senza memoria, e un sistemain cui non sono presenti variabili di stato.
Un sistema dinamico, o con memoria, e un sistema incui sono presenti una o piu variabilidi stato.
Si e detto che una variabile di stato puo essere associata alla quantita di materia, energia oinformazione accumulata nel sistema. Vediamo per ognuno di questi casi alcuni esempi di sistemidinamici.
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 9
Materia. Un esempio di sistema dinamico con variabile di stato associata alla quantita dimateria e un serbatoio con rubinetto e sensore di troppo pieno con galleggiante e lampada,
Energia. La batteria di un auto. Quando la batteria si scarica cio che varia non e la suamassa ma la quantita di energia chimica accumulata.
Informazione. Il computer.Vediamo ora alcuni esempi di sistemi statici.Conduttore attraversato da una corrente elettrica.Porta NAND.Vediamo ora alcuni esempi di sistemi dinamici.Latch SR.
Presenza o meno di variabili di ingresso e di uscita In questo caso il sistema puo essereclassificato come chiuso se non sono presenti variabili di ingresso e di uscita, ovvero se il sistemanon scambia energia, materia ed informazioni con l’ambiente esterno.
Qualora invece siano presenti variabili di ingresso e/o di uscita ovvero il sistema scambia,energia, materia o informazioni con il mondo esterno, il sistema si dice aperto.
E’ evidente che nella realta i sistemi sono tutti di tipo aperto, pero in alcuni casi e focalizzan-do la nostra attenzione su alcuni tipi di interazioni alcuni sistemi si possono ritenere chiusi perapprossimazione. Ad esempio quando si prendono in considerazione le trasformazioni adiabaticheche avvengono in un gas.
Insieme dei valori assunti dalle variabili. Una variabile si dice continua quando puo esseremessa in corrispondenza con un sottoinsieme dei numeri reali. In termini piu semplici una variabilee continua quando puo assumere qualsiasi valore compreso all’interno di un intervallo.
Una variabile si dice discreta quando puo essere messa in corrispondenza con un sottoinsiemedei numeri interi relativi.
In base ai valori assunti dalle variabili il sistema puo essere classificato come:
• continuo, se e descritto da variabili continue;
• discreto, se e descritto da variabili discrete;
• misto, se e descritto da variabili di entrambi i tipi.
Esempio: impianto di riscaldamento di un edificio.
Insieme dei valori assunti dal tempo. I sistemi possono essere classificati anche in base aivalori del tempo in cui le variabili sono osservabili.
Un sistema e a tempo continuo se l’insieme dei valori del tempo in cui le variabili sonoosservabili e un intervallo continuo.
Un sistema e tempo discreto se l’insieme dei valori del tempo in cui le variabili sono osservabilie un insieme discreto.
Es.: stazione meteorologica.
Classificazione in base al tipo di relazioni.
Sistemi deterministici e probabilistici Esempio di sistema deterministico: trasmissionemorse tra due stanze.
Esempio di sistema stocastico: ponte radio disturbato.
Sistemi lineari e non lineari. La linearita di un sistema e una caratteristica strettamentelegata al soddisfacimento del principio di sovrapposizione degli effetti.
(v. 0.9)

10 1.1. SISTEMI
Principio di sovrapposizione degli effetti Si dice che un sistema soddisfa il principio disovrapposizione degli effetti quando la risposta dovuta alla somma di piu sollecitazioni e pari allasomma delle risposte che si otterebbero applicando le sollecitazioni una alla volta.
Un esempio chiarira meglio la definizione.
1.1.6 L’approccio sistemistico e l’approccio analitico
I problemi che la realta pone possono essere affrontati con diversi tipi di approccio. In questocontesto distinguiamo un approccio di tipo sistemistico ed uno di tipo analitico.
Nell’approccio sistemistico si tende ad affrontare il problema nel modo piu generale possibileconsiderando tutte le componenti che concorrono a formarlo o che ne influenzano il comportamento,cercando di sfruttare le analogie esistenti tra sistemi diversi ma con caratteristiche simili.
Uno dei punti di forza dell’approccio sistemico e che le stesse metodologie di studio possonoessere applicate a problemi di natura diversa ma con caratteristiche comuni, utilizzando strumentimatematici comuni.
Nell’approccio di tipo analitico il problema generale si scompone in sottoproblemi fino a rag-giungere un livello di semplificazione che permette di studiare il problema con leggi semplici rispettoal problema iniziale. Da un punto di vista storico l’approccio analitico trae origine dai secoli passa-ti mentre l’approccio sistemico si e imposto negli ultimi quaranta cinquant’anni quando tra l’altrosi e resa disponibile una sufficiente potenza di calcolo. L’approccio analitico a volte e denominatocon il termine riduzionistico, proprio per evidenziare il tentativo di ridurre un problema complessoa termini piu semplici.
Un tempo discipline quali la filosofia, la fisica e la matematica utilizzavano metodi di analisimolto simili tra loro. Ne e un esempio il problema cosmologico2, che, pur essendo un temaessenzialmente scientifico, nei secoli scorsi fu oggetto di accesi dibattiti filosofici e teologici.
L’evoluzione del pensiero scientifico ha portato nel corso dei secoli ad una differenziazionesempre piu accentuata tra i suoi vari ambiti. Questa evoluzione e alla base dell’approccio di tipoanalitico. Un ruolo di spicco in questo senso e stato svolto da Galileo Galilei.
Parallelamente a questa differenziazione e corrisposta, soprattutto negli ultimi decenni, unagrande volonta di unificazione delle leggi che regolano il mondo fisico. Tale volonta si palesa neltentativo di esprimere tali leggi attraverso teorie generali.
La teoria dei sistemi e figlia di questa esigenza di unificazione.
2Qui si fa riferimento alla disputa tra la concezione tolemaica e la concezione copernicana dell’universo
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 11
1.2 Modelli
1.2.1 La rappresentazione dei sistemi
Prendiamo in considerazione un motore elettrico in corrente continua ad eccitazione indipendente.Esso e costituito da diversi componenti meccanici ed elettrici il cui scopo e quello di trasformarel’energia elettrica in energia meccanica.
Il motore a corrente continua e costituito da una parte fissa, che costituisce l’induttore, e dauna parte mobile, che costituisce l’indotto. L’indotto ruota immerso nel flusso magnetico prodottodall’induttore.
Figura 1.3: Sezione schematica (modello iconico) di un motore elettrico a corrente continua.
Per comprendere il funzionamento del motore, oltre ad avere una discreta conoscenza di pro-blematiche di tipo elettrico, meccanico e termico, e molto utile dare una rappresentazione graficadi esso, come ad esempio una sezione schematica (figura 1.3).
Se pero si intende studiare il motore da un punto di vista elettrico conviene rappresentarlomediante il suo circuito equivalente. Nella figura 1.4 oltre alle variabili e ai parametri elettricisono state riportate per completezza le variabili ed i parametri meccanici.
Nel motore a c.c. la velocita angolare ω del rotore e direttamente proporzionale alla tensionevA applicata al circuito di armatura (figura 1.4) ma nel contempo dipende anche dalla coppiaresistente applicata al carico.
Pertanto possiamo considerare:
• vA tensione di armatura → variabile di ingresso manipolabile
• CR coppia resistente → variabile di ingresso non manipolabile
• ω velocita angolare → variabile di uscita
(v. 0.9)

12 1.2. MODELLI
Figura 1.4: Modello elettrico del motore a c.c. con eccitazione indipendente.
Invece le seguenti grandezze:
• Ra resistenza del circuito di armatura;
• La induttanza del circuito di armatura;
• Re resistenza del circuito di eccitazione;
• Le induttanza del circuito di eccitazione;
• Jmc momento di inerzia del motore e del carico;
sono i parametri, ovvero delle grandezze fisiche costanti che influenzano in qualche modo illegame esistente tra la tensione vA e la velocita angolare ω. Tale legame puo essere evidenziatomediante il seguente schema a blocchi.
Figura 1.5: Schema a blocchi del motore a c.c..
Si puo notare come dello stesso sistema si possano dare rappresentazioni diverse a secondadello scopo che ci si prefigge di ottenere attraverso di esse.
Queste rappresentazioni sono denominate modelli.
1.2.2 Definizione
Per risolvere un problema attinente ad un sistema presente nella realta, per prima cosa si rendenecessario descrivere il sistema, ovvero e necessario costruire un modello mentale della parte direalta che ha a che fare con il problema.
Il modello di un sistema altro non e che una rappresentazione del sistema stesso.Il modello che noi costruiamo e necessariamente una descrizione incompleta della realta perche
esso deve tenere conto solo degli aspetti significativi per la soluzione del problema per cui esso estato prodotto.
In sostanza un modello di un sistema e una rappresentazione semplificata del sistema stesso.Il carattere di incompletezza proprio dei modelli comporta, in positivo, la semplicita della
descrizione e , in negativo, un carattere di inesattezza ed approssimazione. Se per descrivere e
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 13
studiare un sistema si utilizza un modello troppo semplificato si rischia di ottenere delle conclusionierrate riguardo al sistema.
1.2.3 Funzioni
I modelli vengono prodotti per svolgere diverse funzioni. Le principali sono:
Studio. La costruzione del modello forza la comprensione da parte nostra del sistema stesso ela organizzazione e verifica della adeguatezza dei nostri concetti riguardo ad esso.
Comunicazione. Il modello permette di descrivere il sistema e di poter comunicare ad altri lanostra conoscenza di esso. Da questo punto di vista i modelli che si basano su rappresentazionigrafiche sono particolarmente efficaci. Come si suole dire, una buona figura vale piu di mille parole.
Istruzione ed addestramento. I simulatori di volo sono un esempio di modello realizzato persvolgere funzioni di istruzione ed addestramento.
Previsione e sperimentazione. Un modello puo servire a prevedere e/o riprodurre l’evoluzionetemporale del sistema. Un esempio di modelli di questo tipo sono le simulazioni al computer deicircuiti elettrici ed elettronici basate su modelli matematici dei circuiti stessi.
Analizzando le possibili funzioni che un modello puo svolgere appare evidente che un modellopuo essere realizzato per due scopi fondamentali: descrittivo e predittivo. In realta un modellopredittivo comporta quasi sempre una componente descrittiva.
L’aspetto predittivo e strettamente associato alla tecnica della simulazione. Simulare il com-portamento di un sistema significa costruire il suo modello, condurre esperimenti su di esso etrasferire al sistema reale le conoscenze acquisite su di esso. La simulazione e applicata sia aproblemi strettamente ingegneristici, quali il dimensionamento di una struttura portante o laprogettazione di una conduttura, sia a problemi biologici, gestionali, sociali.
1.2.4 Tipologie di modelli
Per i modelli dei sistemi possiamo applicare gli stessi criteri visti in precedenza per i sistemi.Ad esempio come esistono sistemi lineari e non lineari possiamo avere modelli lineari e non li-neari. Oppure i modelli utilizzati per le simulazioni al computer possono essere deterministici oprobabilistici.
I modelli possono pero essere classificati mediante un ulteriore criterio, il livello di astrazioneovvero la distanza dalla realta fisica che intendono rappresentare. Da qusto punto di vista sidistinguono tre tipologie di modelli: iconici, analogici e matematici.
Modelli iconici
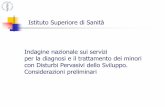
Nei modelli iconici viene mantenuta una forte somiglianza con il sistema originario. Ad esempioper studiare il comportamento della carena di una nave si realizza un modello in scala della navestessa. Esso viene poi sottoposto ad un flusso d’acqua costante all’interno di una vasca navale.O si pensi al modello in scala che fu effettuato della diga del Vajont. Tra il 1961 e il 1962 laSADE, ovvero la societa che stava costruendo la diga del Vajont, decise una serie di esperimentiper verificare gli effetti idraulici della caduta della frana del monte Toc nell’invaso del Vajont. Essifurono effettuati su un modello fisico-idraulico in scal 1:200, costruito a Nove, vicino a VittorioVeneto(Fig. 1.6).
In base ai risultati delle prove effettuate si ritenne che in caso di frana le ondate contro la spondadestra non sarebbero state piu elevate di 30 metri sulla quota del lago a 700 metri, ritenuto unvalore sicuro. Purtroppo nella realizzazione del modello e nella esecuzione delle prove furono fatte
(v. 0.9)

14 1.2. MODELLI
Figura 1.6: Modello fisico-idraulico della diga del Vajont.
delle ipotesi semplificative eccessive. In particolare la velocita effettiva della frana fu molto piucatastrofica di quella preventivata e ottenuta mediante un sistema di barre mosse da un trattore(Fig. 1.7).
Inoltre come materiale si utilizzo della ghiaia il cui effetto era molto diverso rispetto ad unamassa compatta argillosa come quella della frana (Fig. 1.8).
Questo e un esempio emblematico di come una eccessiva semplificazione e sottovalutazionenella realizzazione di un modello di un sistema puo portare a risultati pericolosamente errati.
Modelli analogici
Per analogia si intende una relazione di somiglianza e affinita tra due o piu entita, astratte oconcrete, che presentano alcune caratteristiche comuni.
Un classico esempio di analogia e quello esistente tra il circuito elettrico ed il circuito idraulico.
Due sistemi si definiscono analoghi quando, pur essendo di natura diversa (per esempio elet-trica ed idraulica) le loro variabili sono legate dalle medesime relazioni matematiche. Il compor-tamento del sistema idraulico rappresentato in figura 1.9 e analogo a quello del sistema elettricorappresentato a lato.
Tra sistemi di tipologia molto differente esistono spesso delle analogie molto potenti ed esse sipossono rivelare di grande utilita nello studio dei sistemi. Infatti si puo studiare il comportamentodi un sistema attraverso l’osservazione del comportamento di un altro sistema analogo ad esso.
Ad esempio il sistema meccanico massa-molla puo essere simulato con il circuito elettricooscillante induttore-condensatore.
Un altro esempio e un qualsiasi ambiente chiuso, dotato di una resistenza termica e di unacapacita termica. Esso puo essere modellizzato mediante una resistenza ed una capacita elettrica.
Tempo addietro spesso si effettuava lo studio della trasmissione del calore attraverso pareti ostrutture mediante dei modelli elettrici con reti di resistori e condensatori, che sfruttavano propriol’analogia esistente tra sistemi elettrici e sistemi termici. Attualmente tali tecniche di simulazionesono state soppiantate dall’uso di appositi programmi di simulazione, come ad esempio Simulink.
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 15
Figura 1.7: Schenma del dispositivo di trascinamento dei settori immersi nella massa di ghiaia.
Figura 1.8: Modello della diga prima di una prova in cui si vede la massa di ghiaia trattenutadalle reti di canapa e da corde.
(v. 0.9)

16 1.2. MODELLI
Figura 1.9: Analogia tra un sistema elettrico ed un sistema idraulico.
Modelli matematici
Analizzare un sistema significa determinare l’andamento temporale delle variabili di uscita quandoe noto l’andamento temporale degli stimoli in ingresso.
L’analisi di un sistema puo essere condotta mediante esperimenti o mediante simulazioni. Nelprimo caso si sottopone il sistema allo stimolo di ingresso e, mediante opportune misurazioni, sirilevano i valori delle grandezze di uscita. I dati ottenuti possono essere riportati su un grafico chepermette di mettere in relazione l’andamento delle uscite con l’andamento degli ingressi.
E’ evidente che non e sempre possibile procedere in questo modo. Nel caso in cui non sidisponga del sistema reale o si ritenga sconveniente approntare un modello analogico e necessarioricorrere alla tecnica della simulazione. La simulazione di un sistema puo essere condotta se sidispone di un modello matematico in grado di rappresentare correttamente il comportamento delsistema.
Un sistema puo essere rappresentato mediante un modello matematico in due modi diversi:
• mediante le variabili di stato;
• mediante la relazione ingresso-uscita.
La differenza fondamentale tra questi due metodi consiste nel fatto che, mentre il primo con-centra la sua attenzione sul comportamento interno del sistema tramite le variabili di stato, ilsecondo analizza il sistema dall’esterno evidenziando il legame esistente tra ingresso ed uscita.
Il primo metodo permette una analisi piu dettagliata del comportamento del sistema percheoltre a determinare l’andamento delle variabili di uscita determina anche l’andamento delle variabilidi stato. La conoscenza dell’andamento delle variabili di stato offre una maggiore conoscenza delfenomeno e permette di migliorare le procedure di controllo. Pero questo metodo presenta maggioridifficolta perche costringe ad analizzare il sistema nel suo complesso e non permette di suddividereil sistema in blocchi piu semplici.
In effetti i sistemi di controllo possono essere scomposti in blocchi piu elementari per i qualie abbastanza semplice determinare la relazione ingresso-uscita. Dalle singole relazioni ingresso-uscita e poi possibile determinare in modo abbastanza agevole la relazione complessiva medianteopportuni calcoli.
Per questo motivo utilizzeremo generalmente il metodo basato sulla relazione ingresso-uscita.Comunque in ogni caso i componenti fondamentali di un modello matematico sono:
• i parametri;
• le variabili;
• le relazioni funzionali.
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 17
Le variabili di uscita sono legate alle variabili di ingresso, manipolabili o non manipolabili,mediante delle relazioni funzionali che generalmente assumono la forma di espressioni matematichein cui sono presenti i parametri e le variabili di ingresso, direttamente o indirettamente attraversole variabili interne
Esempio del lunotto termico
1.2.5 Modelli statici e modelli dinamici
(v. 0.9)

18 1.3. PROCESSI
1.3 Processi
1.3.1 Definizioni generali
Il concetto di processo, in seguito agli sviluppi della teoria dei sistemi e della teoria delle comuni-cazioni elettriche, ha assunto nel tempo un importanza sempre maggiore.
Un processo e una sequenza temporale di azioni svolte o comportamenti tenuti da un sistemaper realizzare una certa funzione.
Le azioni svolte e i comportamenti tenuti dal sistema durante lo sviluppo del processo si iden-tificano con le variazioni temporali degli attributi che descrivono il sistema. Quando conosciamol’evoluzione temporale di questi attributi abbiamo in mano una descrizione del processo.
Ad esempio, nel processo di carica e scarica del condensatore noi abbiamo acquisito una co-noscenza di esso quando abbiamo rilevato l’evoluzione temporale delle grandezze fisiche elettrichead esso associate.
L’evoluzione temporale del processo puo essere naturale, come ad esempio nella sintesi cloro-filliana, o forzata da cause esterne, come nel caso dei processi industriali.
Da un punto di vista storico, alla base della disciplina dei controlli automatici e dell’automa-zione industriale sta lo studio e la progettazione dei processi produttivi industriali. Essi euna sequenza di trasformazioni che avvengono tramite apporto di energia, risorse ed informazioni,tendenti a dare un prodotto predefinito. Ne sono un esempio la laminazione dell’acciaio, la raffi-nazione del petrolio, la produzione dell’energia elettrica, ecc. Ogni processo industriale necessitadi un impianto di produzione, ovvero di un insieme di mezzi materiali in cui avviene il processo,mediante una opportuna alimentazione di risorse.
1.3.2 Modelli di processi
Per poter studiare un processo e necessario costruire un modello del processo stesso, il quale sibasa sul modello del sistema di cui si vuole conoscere l’evoluzione.
Analizzando la definizione di processo si nota la stretta relazione esistente tra tempo e proces-so.Conseguentemente la modellizzazione dei processi richiede un certo livello di astrazione che puoessere raggiunto solo utilizzando i modelli matematici del sistema coinvolto. D’altronde, i modelliiconici, come il modellino in scala di un auto o l’assonometria di una casa, sono fondamentalmentedei modelli statici e male si prestano a rappresentare l’evoluzione temporale di un sistema.
I modelli matematici utilizzati per la modellizzazione dei processi che verranno affrontati inquesta sede sono essenzialmente due:
• modelli ingresso-uscita;
• modelli nello spazio degli stati.
Il modello ingresso-uscita verra utilizzato per operare prevalentemente con sistemi continui ocon sistemi discreti dotati di un numero infinito di stati, mentre il modello nello spazio degli stativerra utilizzato con i sistemi discreti dotati di un numero finito di stati.
Il concetto di stato ha senso nel caso dei sistemi dinamici in cui lo stato coincide con la memoriainterna del sistema stesso. In questo caso la sequenza temporale di azioni porta il sistema acambiare il suo stato interno.
Si puo allora ridefinire il processo come la successione degli stati assunti dal sistema in seguitoall’azione di opportuni ingressi, al fine di raggiungere un determinato obiettivo.
Nello studio di un processo nello spazio degli stati si puo utilizzare una potente rappresentazionegrafica, il diagramma degli stati. Essa, pero, e applicabile solo nel caso di sistemi discreti conun numero finito di stati. I sistemi dinamici discreti ed invarianti che possono assumere solo unnumero finito di stati sono denominati automi a stati finiti.
Nel modello ingresso-uscita, molto utilizzato nel caso dei processi industriali, i sistemi vengonodescritti attraverso blocchi funzionali che forniscono il legame tra la sollecitazione in ingresso e larisposta in uscita. I sistemi possono essere a loro volta modellizzati con sottosistemi, ognuno dei
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 19
Figura 1.10: Esempio di diagramma degli stati.
quali rappresentati da un blocco funzionale, tra loro connessi. Ogni sistema o sottosistema vienerappresentato da un blocco rettangolare nel quale entrano le variabili di ingresso e dal quale esconoquelle di uscita. In questo modo si ottiene una particolare rappresentazione grafica denominatadiagramma ingresso-uscita.
Figura 1.11: Esempio di diagramma ingresso-uscita.
Nel modello ingresso-uscita cio che conta e la relazione tra ingresso ed uscita. Essa vienesolitamente indicata all’interno del blocco.
Essa viene denominata anche funzione di trasferimento e nel caso dei sistemi lineariinvarianti e definita proprio come rapporto tra uscita ed ingresso.
(v. 0.9)

20 1.4. DOMANDE
1.4 Domande
Conoscenze
1. Esprimi una definizione di sistema.
2. Le diverse parti che compongono un sistema sono denominate:
(a) parametri;
(b) variabili;
(c) componenti;
(d) modelli;
(e) controlli.
3. Che cosa sono le variabili ed i parametri di un sistema ?
4. Quali tipi di variabili si possono individuare in un sistema ?
5. In un sistema si possono individuare tre tipi di variabili: 1) di ingresso, 2) di uscita 3) distato. Associa a ciascun tipo di variabile una delle seguenti azioni.
(a) quantita di energia, materia o informazione accumulata dal sistema;
(b) quantita di energia, materia o informazione ceduta dal sistema;
(c) quantita di energia, materia o informazione fornita al sistema.
6. Le variabili discrete assumono dei valori appartenenti all’insieme dei numeri ..................
7. Le variabili continue assumono dei valori appartenenti all’insieme dei numeri ..................
8. Cos’e un segnale ?
9. Elencare e descrivere brevemente i problemi di cui si occupa la teoria dei sistemi.
10. Lo stato di un sistema e la misura in un determinato istante della quantita di energia, materiao informazione:
(a) ceduta al sistema;
(b) ceduta dal sistema;
(c) accumulata nel sistema;
(d) dissipata dal sistema;
(e) trasformata dal sistema.
11. Cosa si intende per sistemi varianti ed invarianti?
12. Cosa si intende per sistemi deterministici e stocastici ?
13. Esprimere la definizione di sistema dinamico.
14. Perche la presenza di elementi accumulatori di energia e discriminante per la dinamicita diun sistema ?
15. Un sistema dotato di elementi accumulatori di energia e un sistema dinamico ? Perche ?
16. Descrivere un esempio di sistema non lineare.
17. Il modello grafico che permette di evidenziare le relazioni presenti tra le varie parti di unsistema e tra esso ed il mondo esterno e rappresentato da:
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 21
(a) la caratteristica ingresso-uscita;
(b) lo schema a blocchi;
(c) il diagramma degli stati;
(d) lo schema equivalente.
18. Esprimere la definizione di modello.
19. Quali sono le funzioni svolte da un modello ?
20. Classificare i modelli di sistemi ed indicare chiaramente il criterio di classificazione utilizzato.
21. Elencare e descrivere brevemente gli aspetti fondamentali di cui e composto un modellomatematico.
22. Puo succedere che di uno stesso sistema si possa definire sia un modello statico che un modellodinamico. Quali condizioni devono essere soddisfatte per ottenere un modello statico e quali,invece, per ottenere un modello dinamico?
23. Perche nell’ambito dei controlli automatici i modelli matematici statici sono scarsamenteutilizzati ?
24. Disegnare lo schema elettrico-meccanico del motore a c.c., e classificare le grandezze fisichepresenti in esso.
25. Scrivere le equazioni alla base del modello dinamico di un motore a c.c..
26. Rappresentare il modello dinamico ingresso-uscita del motore a c.c. mediante uno schema ablocchi.
Abilita
1. Un semaforo, un serbatoio, una auto, un computer sono sistemi dinamici. Indica per ciascunodi essi la quantita immagazzinata (Materia, energia, informazione).
2. Disegna lo schema elettrico e lo schema a blocchi del sistema partitore di tensione, esprimianaliticamente la relazione ingresso-uscita e descrivi il modo con cui e stata ottenuta.
(v. 0.9)

22 1.5. ESERCIZI
1.5 Esercizi
1. Si prenda in considerazione il sistema impianto di riscaldamento di un edificio descritto daldiagramma sinottico riportato in figura.
(a) individuare i componenti, le interazioni, le variabili e la funzione che caratterizzano ilsistema;
(b) classificare il sistema applicando i diversi criteri visti in precedenza;
(c) rappresentare il sistema mediante uno schema a blocchi.
Figura 1.12: Impianto di riscaldamento di un edificio
2. Si prenda in considerazione il sistema di regolazione di portata con serbatoio descritto daldiagramma sinottico riportato in figura 1.13.
(a) individuare i componenti, le interazioni, le variabili e la funzione che caratterizzano ilsistema;
(b) classificare il sistema applicando i diversi criteri visti in precedenza;
(c) rappresentare il sistema mediante uno schema a blocchi.
Figura 1.13: Sistema di regolazione di portata con serbatoio.
3. Si prenda in considerazione il sistema cancello automatico descritto dal diagramma sinotticoriportato in figura 1.14.
(v. 0.9)

CAPITOLO 1. SISTEMI, MODELLI E PROCESSI 23
(a) descrivi verbalmente la funzione svolta dal sistema;
(b) elenca i componenti e descrivi verbalmente le interazioni tra di essi;
(c) elenca le variabili e per ciascuna indica se e di ingresso, ingresso non manipolabile,uscita o stato rispetto al sistema nel suo complesso, e se e continua, discreta-non binaria,discreta-binaria;
(d) classificare il sistema applicando i diversi criteri visti in precedenza;
(e) rappresentare il sistema mediante uno schema a blocchi.
Figura 1.14: Cancello automatico.
(v. 0.9)

24 1.5. ESERCIZI
(v. 0.9)

Capitolo 2
SEGNALI ELETTRICI
Nello specifico per segnale elettrico si intende l’evoluzione temporale di una tensione o di unacorrente a cui e associata una informazione. I segnali elettrici vengono utilizzati sostanzialmenteper due motivi fondamentali: per trasportare energia elettrica o per trasportare informazione. Nelprimo caso siamo nell’ambito di quella disciplina che prende il nome di elettrotecnica, nel secondocaso di quella disciplina denominata elettronica.
L’elettronica si occupa della generazione, della trasmissione e della elaborazione di segnalielettrici a cui e associata una informazione. Esempi di segnali elettrici che rispondono a questecaratteristiche sono i segnali audio e video.
Nell’ambito dei sistemi automatici la conoscenza dei segnali elettrici e di fondamentale impor-tanza. Praticamente tutti gli apparati di automazione fanno uso di segnali elettrici per trasferirele informazioni tra un componente e l’altro.
In particolare vengono utilizzati dei segnali elettrici di forma particolare, denominati segnalidi test, per la verifica della funzionalita delle apparecchiature elettriche ed elettroniche.
I segnali di test vengono prodotti con uno strumento denominato generatore di funzioni (Func-tion generator) e visualizzati con uno strumento denominato oscilloscopio (Oscilloscope).
Forme d’onda tipiche dei segnali di test sono:
• sinusoidale;
• quadra e rettangolare;
• triangolare;
• ad impulsi.
Un segnale elettrico puo essere rappresentato fondamentalmente mediante due modalita:
• rappresentazione grafica;
• espressione analitica o funzionale.
2.1 Definizioni
2.1.1 Segnale continuo
E’ un segnale elettrico che in ogni istante di tempo assume sempre lo stesso valore. Ne e unesempio la tensione ai capi di una batteria.
Rappresentazione graficaRappresentazione analitica
25

26 2.1. DEFINIZIONI
2.1.2 Segnale variabile
E’ un segnale elettrico che nel tempo assume con continuita valori diversi. Il valore assunto dalsegnale in un dato istante di tempo t e detto valore istantaneo e si indica con l’espressione v(t).
Si parla di segnale bidirezionale quando esso nel tempo assume valori sia positivi che negativi.Esempio di segnale bidirezionaleSi parla di segnale unidirezionale quando nel tempo esso assume solo valori o solo positivi o
solo negativi.Esempio di segnale unidirezionale
2.1.3 Segnale periodico
E’ un segnale che si ripete ciclicamente, ovvero esso riassume dopo un intervallo di tempo T,denominato periodo, gli stessi valori. In termini piu sintetici:
dove s(t) e il valore assunto dal segnale all’istante t ed s(t+T) e il valore assunto dal segnaleall’istante t+T. Esempio di segnale periodico Per un segnale periodico, come quello in figura, sipossono definire alcune grandezze tipiche. Faremo riferimento, per comodita, ad un segnale intensione.
s (t) = s (t+ T ) ∀t (2.1)
Parametri dei segnali periodici
f frequenza E’ il numero di cicli compiuti dal segnale in un secondo. Frequenza e periodo sonolegati dalla seguente relazione
f =1
T(2.2)
La frequenza indica quante volte in un secondo il segnale si ripete. L’unita di misura della frequenzae l’Hertz (simbolo Hz). 1Hz = 1s−1.
Vpp - valore picco-picco. E’ la differenza tra il valore massimo ed il valore minimo che ilsegnale assume nel periodo.
Vp - valore di picco. E’ il massimo valore in valore assoluto che il segnale puo assumererispetto allo zero di rfierimento.
Vm - valore medio. E’ il valore continuo dato dalla media aritmetica di tutti i valori assuntidal segnale in un periodo. Se il segnale e simmetrico rispetto all’asse dei tempi il valore mediorisulta nullo. In tal caso si parla di segnale alternato.
Vrms - valore efficace. E’ quel valore continuo che provoca in una resistenza la stessa dissi-pazione media di potenza provocata dal segnale periodico stesso (rms = root mean square, radicequadratica media).
2.1.4 Calcolo del valore medio di un segnale periodico
Una definizione alternativa alla definizione precedentemente data di valore medio e la seguente:Il valore medio di un segnale periodico e il segnale continuo che sottende in un periodo la stessa
area del segnale periodico.Il concetto pittoresco di ‘area sottesa’ fa riferimento all’area totale della figura formata dal
grafico del segnale periodico in un certo intervallo di tempo, avendo cura di considerare positivile parti dell’area corrispondenti ad ordinate positive e negative quelle corrispondenti ad ordinatenegative.
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 27
Figura 2.1: Rappresentazione grafica del valore medio.
Se indichiamo con A l’area sottesa, con T il periodo e con Vm il valore medio, si ha dalladefinizione precedente che:
A = Vm · T
da cui
Vm =A
T
2.1.5 Componente continua e componente alternata di un segnale pe-
riodico
Tutti i segnali periodici possono essere decomposti in una componente continua e in una compo-nente alternata.
Figura 2.2: Componente continua e componente alternata .
figura
(v. 0.9)

28 2.1. DEFINIZIONI
Dalla figura precedente si denota che la tensione periodica vA e data dalla somma dellacomponente continua VA e della componente alternata va.
vA = VA + va
Un modo per ottenere la tensione vA potrebbe essere quello suggerito dalla seguente figura.figuraDa quanto esposto precedentemente si puo notare che e stata utilizzata una specifica conven-
zione per rappresentare le grandezze elettriche continue, periodiche e alternate, che riassumiamoqui di seguito.
• Le tensioni e le correnti continue si rappresentano con una lettera maiuscola seguita da unpedice maiuscolo che indica il nodo (o il ramo) a cui si riferisce la tensione (o la corrente).
• I segnali variabili si rappresentano con una lettera minuscola seguita da un pedice minuscolo,se il segnale e a valore medio nullo, maiuscolo se il segnale e a valore medio non nullo.
2.1.6 Calcolo del valore efficace di un segnale periodico
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 29
2.2 Segnali sinusoidali
Le reti elettriche in cui tensioni e correnti rimangono costanti nel tempo sono solo un casoparticolare nell’ambito elettrico ed elettronico.
Ad esempio nelle reti elettriche utilizzate in ambito civile ed industriale per distribuire edutilizzare l’energia elettrica le tensioni e le correnti assumono tutte un andamento sinusoidalealternato come quello riportato in figura 2.3.
Figura 2.3: Tensione sinusoidale prodotta in laboratorio da un alternatore.
Limitandoci al solo ambito elettrico, i motivi che hanno determinato questo predominio dellegrandezze elettriche alternate nel settore elettrico sono la maggiore semplicita costruttiva dei gene-ratori di corrente alternata, la possibilita di effettuare la trasformazione mediante i trasformatorida bassa tensione ad alta tensione e viceversa , e inoltre la maggiore semplicita e robustezza deimotori a corrente alternata rispetto a i motori in corrente continua.
2.2.1 Segnali sinusoidali e moto circolare uniforme
Per comprendere piu in profondita l’origine dei segnali sinusoidali, vediamo come il segnale sinu-soidale e strettamente connesso al moto circolare uniforme.
Disegnamo una circonferenza goniometrica sul piano cartesiano, avente come centro O l’originedegli assi x ed y e consideriamo un punto P sulla circonferenza che si muove su di essa con motocircolare uniforme. Il raggio della circonferenza e pari alla lunghezza del segmento OP . All’istantet=0 il punto P si trova nella posizione indicata in figura 2.4. Inoltre il punto si muove con unavelocita angolare ω pari a:
ω =2π
T(2.3)
dove con T si intende il tempo impiegato a compiere un giro completo, corrispondente ad unangolo in radianti pari a 2π.
Consideriamo ora il punto Py, proiezione del punto P sull’asse delle y. Esso determina lacoordinata y del punto P. Noi siamo interessati a determinare l’andamento temporale y(t) del-la coordinata y generato dal moto circolare uniforme del punto P. Otteremmo tale andamentomediante la seguente costruzione grafica.
Consideriamo la posizione di P sul cerchio goniometrico in successivi istanti di tempo, scelti inmodo da dividere in almeno 8 parti un intervallo di tempo pari al periodo T, necessario perche Pcompia un giro completo. Riportiamo il corrispondente valore y in un diagramma cartesiano t-yposto a destra del cerchio (Fig. 2.5).
(v. 0.9)

30 2.2. SEGNALI SINUSOIDALI
Figura 2.4: Moto circolare uniforme.
Figura 2.5: Costruzione di un segnale sinusoidale.
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 31
Si puo notare che l’andamento temporale della proiezione y assume una forma sinusoida-le. Inoltre, si puo osservare che il valore massimo YM assunto da y e pari al raggio OP dellacirconferenza.
Esercizio proposto 2.2.1. Esercizio: si determini l’andamento temporale y(t) del segnale sinu-soidale generato dal moto circolare uniforme di un punto P che si muove in senso antiorario suuna circonferenza di diametro pari a 4, partendo con un angolo iniziale pari a 90 e compiendoun giro completo in 0.1s .
La grandezza sinusoidale altrnata y e univocamente determinata quando sono noti la pulsazioneω, l’ampiezza YM e la fase iniziale ϕ.
Una tensione sinusoidale alternata puo essere indotta ai capi di una spira in rotazione all’internodi un campo elettrico.
(v. 0.9)

32 2.2. SEGNALI SINUSOIDALI
2.2.2 Parametri delle grandezze sinusoidali
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 33
2.2.3 Valore efficace
(v. 0.9)

34 2.3. IL METODO SIMBOLICO
2.3 Il metodo simbolico
Quando si opera con tensioni e correnti sinusoidali alternate e di grande utilita applicare il me-todo simbolico. Esso consiste, sostanzialmente, nella rappresentazione delle tensioni e correntipresenti in una rete elettrica lineare in regime sinusoidale mediante numeri complessi, attraversol’introduzione di particolari vettori denominati fasori.
Per comprendere da dove nasce tale esigenza si propone un problema concreto.- schema elettrico V = V1 + V2- grafico- formulaTrovare un metodo relativamente semplice per risolvere il problema precedente e di fondamen-
tale importanza per poter risolvere le reti elettriche lineari.Infatti, quando si applica una eccitazione sinusoidale dotata di una frequenza f ad una rete
elettrica lineare dopo una fase transitoria piu o meno lunga, , tutte le differenze di tensione e lecorrenti assumono a regime un andamento sinusoidale alla stessa frequenza f.
Queste tensioni e correnti si differenziano tra loro solo per il loro valore efficace e per losfasamento reciproco.
Questa situazione prende il nome di regime sinusoidale.Un comune impianto elettrico alimentato dalla tensione di rete si trova normalmente in condi-
zioni di regime sinusoidale.
2.3.1 Fasori
Per fasore si intende un vettore, caratterizzato da un modulo e da una fase, rotante in sensoantiorario a velocita angolare costante.
2.3.2 Corrispondenza tra grandezze sinusoidali alternate e fasori
Ad ogni grandezza elettrica sinusoidale in un impianto elettrico puo essere associato un bendeterminato fasore utilizzando la seguente tabella di corrispondenza
riproposizione problema precedente con i fasori- soluzione grafica- soluzione matematica- necessita dei numeri complessi
2.3.3 Corrispondenza tra grandezze sinusoidali alternate e numeri com-
plessi
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 35
2.4 Strumenti di laboratorio
I segnali elettrici fanno parte a pieno titolo dell’insieme di oggetti con cui si opera in un laboratoriodi sistemi, siano essi segnali in ingresso o segnali in uscita da sistemi elettrici/elettronici di svariatacomplessita. Pertanto e inevitabile dover operare con gli strumenti tipici di un laboratorio dielettronica. Per questo motivo si ritiene opportuno in questa sede introdurre i piu importantistrumenti elettronici.
2.4.1 Oscilloscopio
Un oscilloscopio puo essere considerato essenzialmente come un voltmetro con immagini. Ma,mentre un normale voltmetro offre un dato numerico che rappresenta il valore medio assunto dallatensione in un certo punto di un sistema elettrico/elettronico, l’oscilloscopio mostra l’andamentostorico del segnale in forma grafica.
Un’ulteriore differenza risiede nel fatto che, mentre un voltmetro normalmente puo gestire unsolo segnale alla volta, un oscilloscopio permette di visualizzare l’andamento di due o piu segnalicontemporaneamente.
Esistono fondamentalmente due tipi di oscilloscopi:
• gli oscilloscopi analogici o tradizionali;
• gli oscilloscopi digitali o DSO1.
Quanto viene esposto qui di seguito si riferisce propriamente alla prima tipologia di oscilloscopi,anche se molti dei principi espressi possono essere applicati anche agli oscilloscopi digitali.
2.4.2 Generatore di funzioni
Il generatore di funzioni e in grado di fornire segnali periodici in una gamma di frequenze che vannodalla frazione di hertz a qualche megahertz. Le forme d’onda disponibili sono la sinusoidale, latriangolare e la quadra. Spesso si ha la possibilita di regolare il duty cicle e di aggiungere unacomponente continua (offset di tensione) al segnale con la possibilita, quindi, di ottenere segnalibidirezionali o unidirezionali. L’ampiezza in uscita e normalmente regolabile da pochi millivolt adalcune decine di volt.
E’ normalmente presente una uscita quadra TTL compatibile.Le entrate e le uscite del generatore di funzioni sono normalmente disponibili su connettori
BNC. Il connettore BNC viene utilizzato con i cavi schermati , o cavi coassiali. La calza del cavoschermato viene collegata alla massa del generatore di funzioni; in questo modo si impedisce adeventuali disturbi di natura elettromagnetica di essere captati dal conduttore centrale del cavo, edi essere quindi sovrapposti al segnale stesso.
Comandi
DC OFFSET Permette di sovrapporre al segnale in uscita una componente continua di ampiezzaregolabile. Permette quindi di ottenere segnali periodici non alternati.
DUTY CICLE Permette di regolare il ciclo utile del segnale e serve per ottenere un segnalerettangolare oppure ad impulsi.
2.5 Misure di fase con l’oscilloscopio
Vediamo come si puo misurare la differenza di fase tra due segnali sinusoidali.
1Digital Storage Oscilloscope
(v. 0.9)

36 2.6. DOMANDE
2.6 Domande
Conoscenze
1. Dare una definizione di segnale.
2. Dare una definizione di segnale alternato.
3. Come si definisce il tempo di salita, o rise time (tr), di un segnale ?
4. Disegnare lo schema a blocchi dell’oscilloscopio.
5. Qual’e la funzione svolta dal comando AC/DC/GD nell’oscilloscopio ?
6. Qual’e la funzione svolta dal circuito di trigger ?
7. Qual funzione svolge il comando amplitude ?
8. Disegnare lo schema elettrico del circuito di ingresso dell’oscilloscopio.
9. Disegnare lo schema a blocchi e l’andamento temporale delle varie tensioni presenti all’internodella base tempi di un oscilloscopio.
10. Qual’e la funzione svolta dal comando DC OFFSET nel generatore di funzioni ?
Abilita
1. In quale modo si puo valutare il valore medio di un segnale con l’ausilio dell’oscilloscopio ?
(a) Commutando il selettore di ingresso AC-DC-GD tra DC e GD.
(b) Commutando il selettore di ingresso AC-DC-GD tra AC e DC.
(c) Commutando il selettore di ingresso AC-DC-GD tra AC e GD.
(d) Commutando il selettore di ingresso AC-DC-GD tra AC, DC e GD.
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 37
2.7 Esercizi
1. In figura e rappresentato un segnale periodico rettangolare. Determinare:
(a) il periodo e la frequenza;
(b) il valore medio;
(c) il duty cicle.
Figura 2.6: Esercizio 1
2. Dato il segnale periodico di figura determinare:
(a) il periodo e la frequenza;
(b) il valore massimo, il valore minimo e il valore picco-picco;
(c) il valore medio.
Figura 2.7: Esercizio 3
3. Disegnare un segnale periodico rettangolare definito dai seguenti parametri: f = 2000Hz,Vpp = 10V , δ% = 25%, VMIN = 0V . Dopo averlo disegnato, calcolare il valore medio.
4. Disegnare la componente continua e la componente alternata del segnale periodico dell’eser-cizio precedente.
5. Determinare il periodo T, la frequenza f, il valore massimo VMAX , il valore minimo VMIN , ilvalore picco-picco Vpp e il valore medio Vm delle due forme d’onda visualizzate dallo schermodi oscilloscopio di figura 2.8.
6. Sullo schermo di un oscilloscopio compaiono le due forma d’onda v1 e v2 riportate in figura2.9. Determinare:
(a) il periodo, la frequenza ed il duty cicle delle due forme d’onda;
(b) il valore massimo, il valore minimo, il valore picco-picco e il valore medio di v1;
(v. 0.9)

38 2.7. ESERCIZI
Figura 2.8: Esercizio 5
Figura 2.9: Esercizio 6
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 39
(c) il valore massimo, il valore minimo, il valore picco-picco e il valore medio di v2;
(d) la relazione esistente tra v1 e v2.
(v. 0.9)

40 2.7. ESERCIZI
.
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 41
2.8 Esperienze di laboratorio
2.8.1 Analisi sperimentale della risposta temporale di una rete R-R ad
un’onda quadra
Obiettivi didattici
• Saper utilizzare l’oscilloscopio per effettuare misure di una onda quadra.
• Comprendere la relazione esistente tra ingresso ed uscita in un sistema statico lineare.
Schema elettrico
Procedimento.
1. Redarre l’elenco della strumentazione e la lista dei componenti messi a disposizione per laprova.
2. Predisporre la strumentazione ed i componenti secondo le indicazioni dello schema elettrico.
3. Accendere gli strumenti e regolare il generatore di funzioni, con l’ausilio dell’oscilloscopio,in modo da applicare in ingresso alla rete R-R un segnale alternato quadro di tensionepicco-picco pari a 5 V e frequenza pari ad 1 kHz.
4. Visualizzare sull’oscilloscopio le forme d’onda in ingresso ed in uscita dalla rete R-R e tra-scrivere fedelmente quanto presente sullo schermo dell’oscilloscopio su una griglia preceden-temente predisposta, avendo cura di indicare la posizione della massa di entrambi i cana-li, i settaggi della sensibilita orizzontale, della sensibilita verticale e dell’accoppiamento dientrambi i canali.
5. Determinare il periodo T, la frequenza f, il valore picco-picco Vpp e il valore medio Vm delledue forme d’onda visualizzate dall’oscilloscopio.
6. Applicare in ingresso alla rete R-R un segnale quadro di valore medio 5V di tensione picco-picco pari a 10 V, frequenza pari ad 1 kHz e ripetere i due punti precedenti.
Domande.
• Si intravede qualche relazione tra ingresso ed uscita ?
• Tale relazione e legata al valore di R1 ed R2 ?
(v. 0.9)

42 2.8. ESPERIENZE DI LABORATORIO
2.8.2 Analisi sperimentale della risposta di una rete RC ad un’onda
quadra.
Obiettivi didattici
• Saper misurare il tempo di salita di un segnale e la costante tempo di una rete RC.
• Conoscere e saper confrontare le risposte nel dominio del tempo di un sistema statico e diun sistema dinamico.
Schema elettrico
Procedimento.
1. Redarre l’elenco della strumentazione e la lista dei componenti messi a disposizione per laprova.
2. Predisporre la strumentazione ed i componenti secondo le indicazioni dello schema elettrico.
3. Calcolare la costante tempo nominale τn della rete RC in base ai valori nominali di R e C.
4. Calcolare le costanti tempo τmin e τmax in base alle tolleranze dei componenti utilizzati.
5. Disporre il deviatore nella posizione 1, accendere gli strumenti e regolare il generatore difunzioni, con l’ausilio dell’oscilloscopio, in modo da applicare in ingresso alla rete R-R unsegnale TTL compatibile di periodo T ∼= 10÷ 12 τn
6. Disporre il deviatore in posizione 2 e misurare il tempo di salita e la costante temposperimentale τsp.
7. Trascrivere fedelmente quanto presente sullo schermo dell’oscilloscopio su una griglia pre-cedentemente predisposta, avendo cura di indicare la posizione della massa di entrambi icanali, i settaggi della sensibilita orizzontale, della sensibilita verticale e dell’accoppiamentodi entrambi i canali.
8. Aumentare e diminuire di 10 volte la frequenza del segnale in ingresso e rilevare cosa accadeal segnae in uscita.
Domande.
• Cosa accade al segnale in uscita quando il deviatore passa dalla configurazione R-R allaconfigurazione RC ? Perche ?
• Che relazione c’e tra τn e le altre τ?
• Cosa accade se si aumenta o diminusice la frequenza ? Perche ?
(v. 0.9)

CAPITOLO 2. SEGNALI ELETTRICI 43
2.8.3 Misura dei parametri caratteristici dei segnali sinusoidali prodotti
da un generatore di funzioni.
Obiettivi didattici
• Saper misurare la differenza di fase tra due segnali sinusoidali.
• Sapere che la differenza di fase tra la tensione di ingresso e la tensione di uscita di una reteRC dipende dalla frequenza.
Schema elettrico
Procedimento.
1. Redarre l’elenco della strumentazione e la lista dei componenti messi a disposizione per laprova.
2. Predisporre la strumentazione ed i componenti secondo le indicazioni dello schema elettrico.
3. Rilevare i valori nominali di R e C e settare il generatore di funzioni in modo che forniscaun segnale sinusoidale alternato di frequenza fT
2 pari a:
fT =1
2πRC
4. Si visualizzi sull’oscilloscopio la tensione di ingresso v1 rilevata dal canale 1 e la tensione diuscita v2 rilevata dal canale 2, utilizzando riferimenti di massa coincidenti.
5. Misurare i parametri T, f, Vp, Vpp e Vm di entrambe le forme d’onda.
6. Trascrivere fedelmente quanto presente sullo schermo dell’oscilloscopio su una griglia pre-cedentemente predisposta, avendo cura di indicare la posizione della massa di entrambi icanali, i settaggi della sensibilita orizzontale, della sensibilita verticale e dell’accoppiamentodi entrambi i canali.
7. Determinare lo sfasamento φ della forma d’onda sul secondo canale rispetto a quella nelprimo canale, seguendo i seguenti passi:
(a) ricavare la distanza temporale ∆t tra i primi due picchi delle due forme d’onda
(b) convertire l’intervallo di tempo ∆t utilizzando la seguente formula di conversione doveT e il periodo delle due forme d’onda precedentemente misurato.
2fT rappresenta la frequenza di taglio del filtro passabasso RC
(v. 0.9)

44 2.8. ESPERIENZE DI LABORATORIO
ϕ = 360 ·∆t
T
8. Ripetere i punti precedenti per una frequenza 10 volte inferiore ed una frequenza 10 voltesuperiore a fT
Domande.
• Cosa succede allo sfasamento per le varie frequenze applicate ?
• Ci sono altre grandezze fisiche che variano con la frequenza ? Perche?
(v. 0.9)

Capitolo 3
NOZIONI DI ANALISI
MATEMATICA
Prerequisiti
• Conoscere gli insiemi numerici.
• Conoscenze di algebra.
Obiettivi specifici
• Conoscere i concetti intuitivi di funzione continua, derivata, integrale ed equazione differen-ziale.
3.1 Insiemi numerici.
In questa sede non si intende trattare estensivamente gli insiemi numerici ma si vuole richiamaremolto velocemente gli insiemi numerici tipicamente utilizzati in un corso di sistemi. Essi sono, inordine di complessita, i seguenti:
• Insieme N dei numeri naturali.
• Insieme Z dei numeri interi.
• Insieme Q dei numeri razionali.
• Insieme R dei numeri reali.
• Insieme C dei numeri complessi.
45

46 3.2. FUNZIONI
3.2 Funzioni
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 47
3.3 Limite di una funzione
(v. 0.9)

48 3.4. FUNZIONI CONTINUE E DISCONTINUE
3.4 Funzioni continue e discontinue
In termini intuitivi una funzione e continua se puo essere disegnata senza staccare la matita dalfoglio.
3.4.1 La funzione seno.
La funzione seno e un caso particolarmente importante di funzione continua. Appartengono allafamiglia delle funzioni sinusoidali le grandezze sinusoidali alternate che variano nel tempo secondola seguente legge:
y = YM · sen (ωt+ ϕ) (3.1)
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 49
3.5 Derivata
Intendiamo introdurre il concetto di derivata prima da punto di vista fisico e poi da un punto divista geometrico.
Significato fisico.
Prendiamo in considerazione una macchinetta che viene lanciata lungo un percorso rettilineopartendo da ferma. All’istante t0 = 0 s essa si trova nella posizione y (t0) = 0 m. Si supponga dirilevare la posizione y della persona negli istanti di tempo t1, t2, t3, ...,ti, ti+1, ... regolarmentedistanziati di un secondo uno dall’altro.
Dopo aver effettuato il rilevamento siamo in grado di tracciare l’andamento temporale y(t) suun grafico.
Figura 3.1: Legge oraria del moto
L’incremento del tempo ∆t = ti+1−ti e costante e pari a 1 s, per ogni valore di i scelto, mentrel’incremento della posizione ∆y = y (ti+1)− y (ti) non e altrettanto costante.
E’ altrettanto evidente che anche la velocita del corpo non e costante. Per ottenere una primavalutazione sommaria del suo andamento possiamo calcolare le velocita medie per ogni intervallodi tempo [ti, ti+1] utilizzando la seguente formula.
vi =y (ti+1)− y (ti)
ti+1 − ti(3.2)
Tenendo conto dei valori indicati in figura 3.1 si ottiene l’andamento riportato in figura 3.2.
Figura 3.2: Velocita medie.
(v. 0.9)

50 3.5. DERIVATA
Se si vuole ottenere una stima piu precisa della velocita posseduta dal corpo istante per istantee necessario ridurre il valore dell’incremento temporale ∆t.
Se poi ∆t viene fatto tendere a 0 allora la velocita media calcolata con la (3.2) tende allavelocita istantanea v (t). Infatti la velocita istantanea viene definita nel seguente modo:
v (t) = lim∆t→0
y (t+∆t)− y (t)
∆t(3.3)
In figura () e riportato l’andamento della velocita istantanea al variare del tempo.
Figura 3.3: Andamento della velocita istantanea.
Definizioni matematiche.
Ora diamo alcune definizioni matematiche. Il seguente rapporto tra l’incremento ∆y e l’incremento∆t
∆y
∆t=
y (t+∆t)− y (t)
∆t
prende il nome di rapporto incrementale della funzione y (t). Mentresi definisce derivata prima y’(t) della funzione y(t) nel punto ti, il limite del rapporto
incrementale ∆y∆t
per ∆t tendente a 0.
y′ (t) = lim∆t→0
∆y
∆t
Un altra notazione matematica molto diffusa per rappresentare la derivata prima di unafunzione e la seguente:
y′ (t) =dy
dt
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 51
Significato geometrico.
Riconsideriamo ora quello che accade tra i due generici istanti di tempo ti e ti+1. Dalla figura(3.4) si rileva che il rapporto incrementale e uguale al coefficente angolare della secante PiPi+1.
Figura 3.4: Significato geometrico della derivata.
Se ∆t tende a 0 allora P2 tende a P1 ed il rapporto incrementale tende ad essere pari alcoefficiente angolare della tengente alla curva nel punto P1.
Esempio 3.5.1. Un braccio meccanico si muove linearmente con la seguente legge oraria. Dise-gnare il corrispondente andamento della velocita.
Soluzione.
(v. 0.9)

52 3.5. DERIVATA
3.5.1 Derivazione di alcune funzioni fondamentali
Vediamo ora come si derivano alcune famiglie di funzioni fondamentali.
Funzioni lineari
Le funzioni lineari assumono la seguente forma:
y = m · t+ q (3.4)
I parametri m e q sono denominati rispettivamente coefficiente angolare e intercetta dellafunzione y.
Esempio 3.5.2. Intendiamo determinare la derivata della funzione lineare y = 2 · t− 3.
Soluzione. Per prima cosa determiniamo l’espressione dell’incremento ∆y.
∆y = y (t+∆t)− y (t) = 2 · (t+∆t)− 3− (2 · t− 3) = 2 ·∆t
A questo punto valutiamo il limite del rapporto incrementale ∆y/δt per ∆t tendente a 0.
y′ = lim∆t→0
∆y
∆t= lim
∆t→0
2 ·∆t
∆t= lim
∆t→02 = 2
Dall’esempio precedente si intuisce che la derivata prima di una funzione lineare coincide conil valore del suo coefficiente angolare m.
y′ = m
La derivata prima di una funzione lineare e una funzione costante.
Esercizio proposto 3.5.1. Disegnare l’andamento temporale della funzione lineare y = m · t+ qe della sua derivata y’ nel intervallo [-2,2] sapendo che m = 0,5 e q = -1.
Funzioni quadratiche
Le funzioni quadratiche assumono la seguente forma:
y = a · t2 + b · t+ c (3.5)
Esempio 3.5.3. Determiniamo la derivata della funzione quadratica y = 1
2· t2.
Soluzione. Per prima cosa determiniamo l’espressione dell’incremento ∆y.
∆y = y (t+∆t)− y (t) =1
2· (t+∆t)
2−
1
2· t2
Dopo aver sviluppato il quadrato del binomio (t+∆t) si ottiene:
∆y = t ·∆t+∆t2
A questo punto valutiamo il limite del rapporto incrementale ∆y/∆t per ∆t tendente a 0.
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 53
y′ = lim∆t→0
∆y
∆t= lim
∆t→0
t ·∆t+∆t2
∆t= lim
∆t→0(t+∆t) = t
Piu in generale si puo dimostrare che la derivata prima y’ della funzione quadratica (3.5) epari a
y′ = 2at+ b (3.6)
In pratica, la derivata prima di una funzione quadratica e una funzione lineare.
Esercizio proposto 3.5.2. Dimostrare la relazione (3.6).
Suggerimento.
Applicare la definizione di derivata come si e visto nell’esempio 3.5.2.
Esercizio proposto 3.5.3. Disegnare l’andamento temporale della funzione quadratica y e dellasua derivata y’ nell’intervallo [-2,2] sapendo che a=1, b=1 e c=0.
Suggerimento.
Disegnare la funzione quadratica per punti scegliendo per t i valori -2, -1, 0, 1, 2.
3.5.2 Derivata seconda
Si e visto che la derivata della legge oraria y(t) del moto di un corpo e pari alla sua velocitaistantanea. Cosa otteniamo se effettuiamo la derivata della velocita ?
Sappiamo che la rapidita con cui varia la velocita di un corpo e una grandezza fisica denomi-nata accelerazione. In particolare l’accelerazione media e il rapporto tra la variazione di velocitae l’intervallo di tempo in cui avviene tale variazione. Indicando con v (t1) e v (t2) le velocitarispettivamente negli istanti di tempo t1 e t2 e con am l’accelerazione media possiamo scrivere
am =v (t2)− v (t1)
t2 − t1=
∆v
∆t
In modo analogo a quanto visto quando si e definita la velocita istantanea come limite dellavelocita media, definiamo l’accelerazione istantanea a come limite dell’accelerazione media amper ∆t tendente a 0. In pratica l’accelerazione istantanea rappresenta la derivata della velocitaistantanea.
a = v′ = lim∆t→0
∆v
∆t
Esempio 3.5.4. Consideriamo un corpo che si muove su una traiettoria rettilinea con legge orariay (t) = t2. Determinare le espressioni analitiche della velocita istantanea v (t) e della accelerazioneistantanea a (t). Disegnare inoltre gli andamenti temporali di y (t), v (t) e a (t) nell’intervallo ditempo [0, 4s].
(v. 0.9)

54 3.5. DERIVATA
Soluzione.La y (t) e una funzione quadratica del tipo (3.5) in cui a = 1, b = 0 e c = 0. Pertanto, per
quanto riguarda la velocita, si ha che
v (t) = y′ (t) = 2at+ b = 2t
mentre per l’accelerazione si ha
a (t) = v′ (t) = 2a = 2
Si puo notare che l’accelerazione e costante. Dalla fisica sappiamo che i moti in cui l’accelera-zione e costante sono denominati moti uniformemente accelerati.
Poiche la velocita istantanea e a sua volta la derivata della legge oraria, l’accelerazione istanta-nea e la derivata della derivata della legge oraria del moto, o in altri termini, la derivata secondadella legge oraria.
a =dy′
dt= y′′
Un altro modo di indicare la derivata seconda della grandezza y e il seguente:
y′′ =d2y
dt2
Se applichiamo ad un corpo, non soggetto ad alcun attrito, una forza di intensita F, in base alsecondo principio della dinamica esso sara sottoposto ad una accelerazione costante pari a
a =F
m
Questo e il moto uniformemente accelerato.
Esercizio proposto 3.5.4. Un corpo si muove con una legge oraria di tipo quadratico pari a
y (t) =3
2· t2
Disegnare l’andamento temporale di y(t), v(t) e a(t) nell’intervallo di tempo [0,3s].
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 55
3.6 Integrale
Quando e stato introdotto il concetto di derivata si e ricavato l’andamento della velocita di uncorpo dalla sua legge oraria. Ora, per introdurre il concetto di integrale si seguira un percorsoinverso; dall’andamento temporale della velocita di un corpo si cerchera di determinare la leggeoraria del suo moto.
Si prenda in considerazione un oggetto fermo che si mette improvvisamente in moto con velocitacostante V = 2 m/s lungo un percorso rettilineo. Si vuole risalire alla legge oraria del corpo y(t).
E’ evidente che dopo 1 secondo sono stati percorsi 2 metri, dopo 2 secondi sono stati percorsi4 metri, e cosı via ... ; si intuisce che l’andamento di y(t) e una semiretta che parte da y(0), ilvalore della posizione iniziale che per semplicita questa volta ipotizzeremo pari a 0 metri.
Figura 3.5: Determinazione della legge oraria dalla velocita.
Poiche in questo caso la velocita e costante, si ha
V =∆y
∆t∀∆t
da cui si ottiene
∆y = V ·∆t
Tale espressione afferma che l’incremento ∆y e pari all’area sottesa dalla funzione v (t) = Vnell’intervallo di tempo ∆t.
y (t1) = y (t0) + V · (t1 − t0)
Se si considera t0 = 0 e t1 = t∗ l’espressione precedente diventa
y (t∗) = y (0) + V · t∗ = y (0) + S
dove con S si intende l’area sottesa dalla funzione v (t) = V tra 0 e t∗.
A ben vedere si puo notare che non vi e una sola legge oraria che ha una velocita con l’anda-mento riportato in figura 3.5, ma ve ne sono infinite, tanti quanti sono i valori che puo assumerey(0).
(v. 0.9)

56 3.6. INTEGRALE
Figura 3.6: Caso generale.
Quanto si e visto nell’esempio precedente puo essere generalizzato per qualsiasi andamento dellavelocita. In particolare, si afferma che
y (t∗) = y (0) + S (3.7)
Una giustificazione della validita della relazione (3.7) si ottiene suddividendo in n intervalliuguali l’intervallo di tempo [0, t∗] e considerando la velocita v′ ottenuta considerando i valoriassunti da v negli istanti di tempo t1, t2, . . . , tn.
Figura 3.7: La velocita v’.
Alla velocita v’ corrisponde una legge oraria y’(t). All’istante di tempo t1, in base a quantovisto nell’esempio precedente,
y′ (t1) = y′ (0) + v (t1) ·∆t
All’istante di tempo t2,
y′ (t2) = y′ (t1) + v (t2) ·∆t = y′ (0) + v (t1) ·∆t+ v (t2) ·∆t
e cosı via fino all’istante di tempo tn = t∗,
y′ (t∗) = y′ (0) +
n∑
i=1
v (ti) ·∆t
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 57
Il termine
n∑
i=1
v (ti) ·∆t
altro non e che l’area S’ sottesa da v’.Se aumentiamo il numero di intervalli, che equivale a ridurre il valore di ∆t, notiamo che v’
tende a confondersi con v ed S’ tende a diventare pari ad S. Questo fatto, utilizzando una notazionematematica ormai non del tutto sconosciuta, si esprime anche nel seguente modo
S = lim∆t→0
n∑
i=1
v (ti) ·∆t
I matematici amano esprimere l’espressione precedente nel seguente modo
S =
t∗∫
0
v (t)dt
Essa si legge integrale definito da 0 a t∗ della funzione v(t). Percio riassumendo la legge orariay(t) associata ad una velocita di andamento qualsiasi si ottiene nel seguente modo:
y (t) = y (0) +
t∗∫
0
v (t) dt
L’integrazione di una funzione e a tutti gli effetti una operazione inversa dell’operazione diderivazione. Dalla derivazione della legge oraria y(t) si ottiene la velocita v(t). Dall’integrazionedella velocita v(t) si ottiene la legge oraria y(t) a meno di una costante y(0).
Esempio 3.6.1. Si determini la legge oraria y(t) del moto di un corpo che si muove su unatraiettoria rettilinea con la seguente velocita
v =
0 per t < 0k · t per t ≥ 0
tenendo conto che y (0) = 1m e k = 0, 5m/s2.
Soluzione.Si tratta di calcolare l’area S di un triangolo di base pari a t∗ e altezza k · t∗.
y =
1 per t < 0
k · t2
2per t ≥ 0
(v. 0.9)

58 3.7. DOMANDE
Figura 3.8: Esempio 3.6.1
3.7 Domande
Conoscenze
1. Perche l’insieme ℜ dei numeri reali e denominato il continuo ?
2. Scrivere la definizione di funzione.
3. Scrivere la definizione di intervallo chiuso [a, b].
4. Scrivere la definizione di intervallo aperto (a, b).
5. Esporre la definizione di funzione limitata.
6. Scrivere la definizione di funzione continua.
7. Che legame c’e tra le due seguenti notazioni matematiche: ∆y∆t
, dydt
Abilita
1. Quanto vale il rapporto incrementale ∆y∆t
nel caso della funzione y (t) = 2 · t − 1 per t=2 e∆t = 2 e cosa esso rappresenta da un punto di vista fisico qualora y sia la legge oraria delmoto rettilineo di un corpo ?
2. Dimostrare che la derivata prima della funzione lineare y (t) = m · t+ q e pari a m.
(v. 0.9)

CAPITOLO 3. NOZIONI DI ANALISI MATEMATICA 59
3.8 Esercizi
3.8.1 Funzioni continue e discontinue
1. Determinare il dominio delle seguenti funzioni:
(a) y = t2−4
t+2
(b) y = 1
t2+1
2. Data la funzione discontinua riportata in figura 3.9, determinare:
(a) i limiti destro e sinistro della funzione per t = 1;
(b) i limiti destro e sinistro della funzione per t = 2;
Figura 3.9: Esercizio 2
3. Disegnare la seguente funzione, indicare se essa e continua o discontinua e giustificare larisposta.
y =
t per t < 2t+ 1 per t ≥ 2
4. Tracciare l’andamento temporale della seguente tensione periodica, sapendo che l’ampiezzavale 311 V, la pulsazione e pari a 314,2 rad/s e la fase e pari a 1,047 rad.
v (t) = VM · sen (ω · t+ ϕ)
3.8.2 Derivata prima e derivata seconda
5. Disegnare l’andamento temporale della funzione lineare y = m · t+ q e della sua derivata y’nel intervallo [-3,3] sapendo che m = -1 e q = 2.
6. Date le seguenti funzioni, calcola il loro valore e quello della derivata prima per i seguentivalori di t: -3, -2, -1, 0, 1, 2, 3. Aiutandoti con i valori calcolati, disegna l’andamento dellefunzioni e delle derivate prime nell’intervallo [-3,3].
(a) y (t) = 2 · t− 1
(b) y (t) = 2 · t2 − t
(c) y (t) = 3
(d)
(v. 0.9)

60 3.8. ESERCIZI
3.8.3 Integrale
7. Una moto effettua una partenza lanciata lungo un percorso rettilineo da una posizione inizialey (0) = 1, 5m e seguendo la seguente legge della velocita:
v (t) = 2 · t+ 1
Disegnare per punti l’andamento temporale nell’intervallo di tempo [0,4s] di y (t), y (t) edy (t). Determinare l’espressione analitica della legge oraria del moto y (t) e dell’accelerazioneistantanea a (t).
3.8.4 Grafici di funzioni con i fogli di calcolo
I fogli di calcolo si prestano bene a tracciare grafici di funzioni. Si propongono qui di seguitoalcuni spunti di lavoro come rinforzo a quanto appreso nelle pagine precedenti.
1. Tracciare il grafico della funzione seno, espressa nella seguente forma trigonometrica
y (t) = YM · sen (ωt+ ϕ)
Associare a YM , T e ϕ il contenuto di singole celle e calcolare gli altri valori da essi.
utilizzare un congruo numero di valori di t all’interno di un periodo.
2. Tracciare il grafico della funzione seno e della sua derivata stimata mediante il calcolo deirapporti incrementali associati a ciascun incremento temporale utilizzato per tracciare lafunzione.
(v. 0.9)

Capitolo 4
SISTEMI DINAMICI
DETERMINISTICI
4.1 I sistemi deterministici
La classe di sistemi che piu di ogni altre e oggetto del nostro studio sono i sistemi dinamicideterministici continui e lineari. Essi sono una classe molto importante nell’ambito dei sistemidi controllo perche essi rappresentano buona parte dei fenomeni fisici sottoposti ad attivita dicontrollo. Ad esempio il controllo della temperatura di un edificio, un acquedotto o un motoreelettrico sono esempi di sistemi di questo tipo.
I componenti presenti in un sistema di controllo sono molto spesso di diverso tipo. Infatti,e normale rilevare nello stesso sistema la presenza di componenti elettrici, meccanici, termici,idraulici e pneumatici.
Se intendiamo analizzare il sistema di controllo utilizzando il modello ingresso-uscita e neces-sario esaminare dapprima il comportamento di ciascuno dei componenti e poi ricavare il compor-tamento complessivo del sistema.
E’ gia stato sottolineato che questa procedura consente di semplificare la ricerca del modellomatematico, ovvero della relazione ingresso-uscita complessiva, qualora si conosca la relazioneingresso-uscita per ciascuno dei componenti.
Un ulteriore aiuto viene dal fatto che il comportamento di componenti di tipo diverso possaessere ricondotto alla presenza o meno di quattro proprieta fondamentali:
• la proprieta resistiva;
• la proprieta capacitiva;
• la proprieta inerziale;
Nel caso piu semplice un componente puo presentare un sola delle proprieta precedenti, adesempio quella resistiva, nel caso piu complesso il componente puo presentare contemporaneamentetutte e tre le proprieta.
La possibilita di individuare le stesse quattro proprieta elementari in sistemi di tipo anchecompletamente diverso apre la strada al metodo delle analogie ovvero alla possibilita di utilizzaremodelli dello stesso tipo per componenti di tipo diverso.
La formulazione delle quattro proprieta e indipendente dal tipo di sistema ma richiede unapprofondimento sulle proprieta delle variabili fisiche. Le variabili di un componente sono degliattributi misurabili, come ad esempio l’altezza del livello dell’acqua in un serbatoio o la temperatu-ra di un locale, che descrivono quantitativamente le trasformazioni che avvengono nel componentein termini di scambio e/o l’accumulo di energia, materia ed informazione.
61

62 4.1. I SISTEMI DETERMINISTICI
Pertanto le variabili sono degli indicatori dello scambio e dell’accumulo di energia, materia edinformazione.
Da questo punto di vista si possono distinguere due tipi di variabili: le variabili che sonoindicatori dei fenomeni che causano lo scambio e l’accumulo e le variabili che sono una misuradell’avvenuto scambio o accumulo. Per cui alcune variabili sono indicatori della causa di unfenomeno ed altre sono indicatori dell’effetto prodotto dal fenomeno.
Potenziale. Si indica con potenziale le variabili sono la causa dello scambio e/o accumulo dienergia, materia o informazione.
Quantita. Si indica con quantita le variabili che sono l’effetto dello scambio e/o accumulo dienergia, materia o informazione.
Vediamo alcuni esempi.
Sistema meccanico traslatorio La forza applicata ad un corpo provoca lo spostamento linearedel corpo. La forza rappresenta la causa o potenziale e lo spazio percorso e l’effetto o quantita.
Sistema meccanico rotatorio La coppia applicata ad un corpo provoca lo spostamento an-golare del corpo. La coppia rappresenta la causa o potenziale e l’angolo percorso e l’effetto oquantita.
Sistema termico La differenza di temperatura fra le due superfici di una parete determina unoscambio di energia termica. In questo caso la differenza di temperatura e la causa dello scambiodi energia termica. Pertanto la temperatura e il potenziale e il calore e la quantita.
Sistema idraulico Il volume d’acqua che attraversa un tubo dipende dalla differenza di pressio-ne presente ai capi del tubo. La variabile pressione e il potenziale ed e la causa dello spostamentodel volume d’acqua che e la quantita.
Sistema elettrico La tensione elettrica presente ai capi di una lampada determina il passaggiodi cariche elettriche. In questo caso la tensione elettrica e il potenziale mentre lo spostamento dicariche elettriche e la quantita.
4.1.1 Proprieta capacitiva
La capacita e la proprieta di un componente sottoposto ad una variazione del potenziale diaccumulare la quantita.
Un modo per verificare se un componente presenta effetto capacitivo e quello di fornirgli unavariazione del potenziale e verificare se si determina di conseguenza una variazione della quantitapresente in esso. Il valore della capacita, che viene indicato con il simbolo C, e pari al rapportotra la quantita ottenuta e il potenziale che la ha prodotta.
C =q
p
L’unita di misura della capacita dipende dalle variabili potenziale e quantita effettivamente ingioco, e quindi dal tipo di sistema, meccanico, elettrico, ecc.
(v. 0.9)

CAPITOLO 4. SISTEMI DINAMICI DETERMINISTICI 63
4.1.2 Proprieta resistiva
La resistenza e la proprieta di un componente di opporsi allo spostamento della quantita neltempo. Lo spostamento di una quantita nel tempo implica il moto della quantita stessa. Il motodella quantita si esprime in termini matematici come derivata della quantita. Pertanto possiamodefinire la resistenza nel seguente modo:
La resistenza e la proprieta di un componente di opporsi al moto della quantita.Un modo per verificare se un componente presenta una caratteristica resistiva e quello di
sottoporlo ad un moto della quantita e verificare la presenza ai capi del componente di un differenzadi potenziale, segno dell’opposizione presentata dal componente al moto. Il valore della resistenzasi indica solitamente con il simbolo R, e pari al rapporto tra il potenziale e la velocita di variazionedella quantita.
R =pdqdt
L’unita di misura della resistenza dipende dalle variabili potenziale e quantita effettivamentein gioco.
4.1.3 Proprieta inerziale
Ricordando la definizione di moto della quantita, possiamo dare la seguente definizione di inerzia.L’inerzia e la proprieta di un componente di opporsi alla variazione nel tempo del moto della
quantita. Un modo per verificare se un componente presenta inerzia e di fornirgli una variazionedel moto della quantita nel tempo e di verificare se cio determina la presenza di un potenziale nelcomponente. Il valore dell’inerzia si indica in vari modi a seconda del tipo di componente. Se ilcomponente e meccanico traslatorio si indica con m, se e meccanico rotatorio si indica con J, se eelettrico si indica con L. Noi per ora la indichiamo molto genericamente con I. L’inerzia e pari alrapporto tra il potenziale e la velocita di variazione del moto della quantita.
I =pd2qdt2
Anche in questo caso l’unita di misura dell’inerzia dipende dalle variabili potenziale e quantitaeffettivamente in gioco.
4.1.4 Le analogie
Nei paragrafi seguenti si prenderanno in considerazione i modelli matematici dei componenti fisicielementari ordinati per tipologia e per funzione. Sara cosı evidente l’esistenza di analogie tracomponenti di tipologia diversa ma che hanno comportamenti simili.
L’analogia si estendera anche agli aspetti strutturali dei sistemi compositi, come i concetti dinodo e maglia e alle leggi che regolano tali sistemi. Per esempio nelle reti elettriche e valido ilprimo principio di Khirchhoff che afferma che la somma algebrica delle correnti entranti in unnodo e nulla. Nei sistemi meccanici ad esso corrisponde il principio di D’Alambert che la sommadelle forze applicate ad un corpo in equilibrio dinamico e nulla.
L’utilita delle analogie e duplice: astratta e sperimentale. Astratta perche le analogie permet-tono di individuare una struttura matematica potente in grado di rappresentare sistemi concretiintrisecamente diversi venendo incontro in questo modo all’esigenza di unificazione sempre pre-sente sotto traccia nell’ambito della ricerca scientifica. Sperimentale perche puo essere possibilecostruire modelli fisici analogici, generalmente circuiti elettrici, di sistemi fisici diversi.
4.2 Componenti meccanici elementari
4.2.1 Capacita meccanica
(v. 0.9)

64 4.3. COMPONENTI ELETTRICI ELEMENTARI
Esercizio proposto 4.2.1. Una molla, sottoposta ad una forza di 95N, subisce una dilatazioneelastica pari a 25 cm. Determinare i valori della capacita meccanica e della costante della molla.
4.2.2 Resistenza meccanica
Esercizio proposto 4.2.2. Determinare il valore della resistenza meccanica introdotta in unsistema meccanico da uno smorzatore che, in base a rilevamenti sperimentali, presenta una coppiadi valori forza-velocita pari a 100N - 200m/s. Il regime del moto del fluido nello smorzatore elaminare.
4.2.3 Inerzia meccanica
Esercizio proposto 4.2.3. Un automobile ha una massa pari a 1600 kg. Determinare la forzanecessaria per portarla alla velocita di 100 km/ora in 5 s.
4.3 Componenti elettrici elementari
4.3.1 Capacita elettrica
Esercizio proposto 4.3.1. Determinare il valore della capacita di un componente elettrico chesottoposto ad una corrente costante I = 2 mA in un intervallo di tempo pari a 10 ms subisce unincremento di tensione pari a 30 V.
Esercizio proposto 4.3.2. Un condensatore da 1 mF e sottoposto ad una corrente costante paria 10 mA per un intervallo di tempo pari a 10s. Determinare l’andamento temporale della caricae della tensione ai capi del condensatore nell’ipotesi che il condensatore sia inizialmente scarico.
4.3.2 Resistenza elettrica
Esercizio proposto 4.3.3. determinare il valore della resistenza offerta al passaggio delle caricheelettriche in un componente il quale sottoposto ad una differenza di potenziale ∆V = 12V , eattraversato da 0,36 mC in 0,1 s.
(v. 0.9)

CAPITOLO 4. SISTEMI DINAMICI DETERMINISTICI 65
4.3.3 Inerzia elettrica
Esercizio proposto 4.3.4. Un impulso di tensione di ampiezza pari a ∆V = 3, 8V e durata∆t = 12ms, applicato ai capi di una bobina determina una una variazione della corrente che vicircola da 0 a 45 mA. Determinare il valore dell’induttanza del dispositivo.
4.4 Determinazione delle relazioni ingresso-uscita
4.4.1 Sospensione meccanica - sistema meccanico
4.4.2 Circuito RCL - sistema elettrico
Figura 4.1: Rete LRC.
(v. 0.9)

66 4.5. CARICA E SCARICA DI UN CONDENSATORE
4.5 Carica e scarica di un condensatore
Le relazioni ingresso-uscita rischiano di essere un puro esercizio matematico se non cerchiamodi addentrarci nell’aspetto fisico del problema. Per questo motivo cercheremo di comprenderel’andamento di un sistema leggermente piu semplice di quelli appena visti, ma fondamentale percomprendere anch’essi.
Prenderemo in considerazione un circuito elettrico formato da un generatore di tensione conti-nua E , da un resistore R e da un condensatore C (figura 4.2). Il generatore e collegato al resistoremediante un deviatore.
Figura 4.2: Circuito di carica e scarica di un condensatore.
Fase di carica.
Il deviatore si trova inizialmente nella posizione 2; in questo modo siamo sicuri che il conden-satore sia completamente scarico prima di iniziare il processo di carica. All’istante iniziale t0+,cioe appena dopo aver commutato il deviatore nella posizione 2, la tensione vC (t0+) ai capi delcondensatore e nulla, perche il condensatore e scarico.
vC (t0+) =1
C· q (t0+) =
1
C· 0 = 0 (4.1)
Se la tensione ai capi del condensatore e nulla allora il resistore R viene interessato da unacorrente i pari a
i(
0+)
=E
R(4.2)
Mediante la corrente i il generatore sottrae elettroni all’armatura connessa al morsetto positivoper poi spingerli verso l’armatura connessa al polo negativo. Questa fase transitoria terminaquando ai capi delle armature, grazie all’accumulo di cariche di segno opposto su entrambe learmature1, si viene a creare una differenza di potenziale man mano crescente tale da contrastarela f.e.m. E del generatore e quindi anche la corrente di carica che diventa sempre piu piccola.Siamo allora entrati nella fase a regime (t = ∞) e la tensione ai capi del condensatore e pari a E.
vC (∞) = E (4.3)
mentre la corrente i dovra necessariamente essere nulla.
i (∞) = 0 (4.4)
Durante la fase transitoria assistiamo contemporaneamente ad una tensione che cresce da unvalore nullo ad un valore di regime ed una corrente che da un valore massimo scende a 0. Siamoquindi in presenza di una corrente e di una tensione variabili: siamo allora usciti dal campodell’elettrostatica ed entrati nel campo dell’elettrodinamica.
1Nell’armatura collegata al morsetto positivo vi sara una carenza di elettroni quindi una presenza di ioni positivi,
mentre nell’armatura connessa al morsetto di negativo vi sara una prevalenza uguale ed opposta di elettroni.
(v. 0.9)

CAPITOLO 4. SISTEMI DINAMICI DETERMINISTICI 67
Se analizziamo il problema della carica del condensatore da un punto di vista sistemistico siamoin presenza di un circuito RC a cui viene applicata in ingresso una tensione variabile vI (t) conandamento a gradino e da cui si ottiene in uscita una tensione vO (t) che coincide con la tensionevC (t) ai capi del condensatore. Ci poniamo allora il problema di determinare l’espressione analiticadell’andamento della tensione vO (t) come funzione del tempo. Questo problema si suddivide indue fasi:
• determinazione della relazione ingresso-uscita;
• soluzione della relazione ingresso-uscita.
Cominciamo con il determinare la relazione ingresso-uscita che contraddistingue il nostrosistema. Applichiamo il secondo principio di Kirchhoff al nostro circuito durante la fase di carica.
Esempio 4.5.1. Si prenda in considerazione il circuito di figura 4.2, con E = 10 V, R = 100 kΩe C = 50 µF . All’istante t = 0 s il deviatore passa dalla posizione 1 alla posizione 2
1. Determinare la tensione vO ai capi del condensatore e la corrente i che lo attraversa nell’i-stante di tempo t = 0,5 τ .
2. Determinare dopo quanto tempo la tensione vO ha raggiunto il 10 % del valore finale.
3. Dopo 10 secondi il deviatore passa dalla posizione 2 alla posizione 1. Scrivere l’espressioneanalitica dell’andamento della tensione negli istanti di tempo successivi.
Soluzione.
Fase di scarica.
Fase di carica con condensatore inizialmente carico
Esempio 4.5.2. Il circuito della figura seguente presenta gli stessi valori di resistenza e capacitadel precedente. La fem E1 vale 2V mentre la fem E2 vale 10 V Prima dell’istante t = 0 il deviatoresi trova nella posizione 1 e poi per t = 0 si trova nella posizione 2. a.Determinare l’espressioneanalitica della tensione vO e della corrente i che lo attraversa nell’istante di tempo t = 0,5 t.b.Determinare la tensione vO ai capi del condensatore e la corrente i che lo attraversa negli istantidi tempo t = 0, t = 0,5·t e t = t.
Soluzione.
(v. 0.9)

68 4.6. DETERMINAZIONE DELLA RISPOSTA MEDIANTE METODI NUMERICI
4.6 Determinazione della risposta mediante metodi nume-
rici
Lo studio di un sistema dinamico conduce allo studio di una equazione differenziale. Esistono moltitipi di equazioni differenziali ed ogni tipo ha il suo metodo di soluzione. Abbiamo visto che leequazioni differenziali che descrivono i semplici sistemi con cui noi operiamo sono lineari, ovvero acoefficienti costanti, del primo e del secondo ordine. Esistono dei metodi analitici di soluzione chenon sono pero alla portata di chi non abbia una discreta conoscenza dei fondamenti dell’analisimatematica. Esistono pero dei metodi di numerici, facilmente implementabili con un foglio dicalcolo in un computer, che producono delle soluzioni approssimate ma comunque sufficenti a dareun’idea dell’andamento della risposta.
Il metodo numerico piu semplice per la soluzione delle equazioni differenziali del primo ordinee il metodo di Eulero. Introduciamo il metodo di Eulero applicandolo subito ad un caso pratico.
Prendiamo in considerazione la rete RC riportata in figura 4.2 a cui viene applicata in ingressola seguente tensione a gradino:
vi (t) =
0 per t < 0E per t ≥ 0
Sappiamo gia che il comportamento dinamico del sistema e descritto dall’andamento di vO,soluzione della seguente equazione differenziale:
τ ·dvOdt
+ vO = vI (4.5)
Per poter applicare il metodo di Eulero cominciamo con dividere l’intervallo temporale in cuiintendiamo calcolare vO (t) in n parti uguali di ampiezza pari a ∆t.
Gli istanti di tempo t0, t1, t2, . . ., ti, ti+1,. . ., tn−1, tn sono tra di essi tutti equidistanziati enoi andremo a stimare il valore assunto dalla tensione vO proprio in tali istanti.
Il metodo di Eulero si basa sul fatto che se ∆t e abbastanza piccolo la derivata prima di vO equasi uguale al rapporto incrementale,
d vO (ti)
dt∼=
vO (ti+1)− vO (ti)
ti+1 − ti(4.6)
ovvero la derivata prima di vO, calcolata nell’istante di tempo ti, e quasi uguale al rapportoincrementale calcolato tra ti e ti+1.
Se sostituiamo nell’equazione differenziale (4.5) la derivata prima con il corrispondente rapportoincrementale, trascurando l’errore commesso, otteniamo la seguente equazione alle differenze.
τ ·vO (ti+1)− vO (ti)
∆t+ vO (ti) = vI (ti)
Dalla precedente equazione si ottiene la seguente espressione di vO (ti+1)
vO (ti+1) = vO (ti) +∆t
τ· (vI (ti)− vO (ti)) (4.7)
(v. 0.9)

CAPITOLO 4. SISTEMI DINAMICI DETERMINISTICI 69
L’espressione precedente dimostra che la tensione vO aumenta nell’intervallo di tempo [ti, ti+1]della quantita
∆vO =∆t
τ· (vI (ti)− vO (ti))
Mediante l’applicazione iterata della (4.7), se si conoscono i valori della tensione di ingresso vInei vari istanti di tempo t0, t1, . . ., tn−1, tn, e le condizioni iniziali, ovvero il valore della tensionevO nell’istante di tempo iniziale t0, si puo calcolare la vO nei successivi istanti di tempo t1, t2, . . .,tn−1, tn.
La vO (t1) si ottiene da vO (t0) e vI (t0). vO (t2) a sua volta si ottiene da vO (t1) e da vI (t1), ecosı via.
(v. 0.9)

70 4.7. DOMANDE
4.7 Domande
Conoscenze
1. Quali sono le caratteristiche dei sistemi piu diffusamente sottoposti a controllo ?
2. In che cosa consiste l’analisi di un sistema e come essa puo essere effettuata ?
3. Esprimi la definizione di proprieta capacitiva.
4. Esprimi la definizione di proprieta resistiva.
5. Esprimi la definizione di proprieta inerziale.
6. Scrivi le relazioni funzionali alla base delle proprieta capacitiva, proprieta resistiva e proprietainerziale.
7. Cosa si intende per analogia ?
8. Scrivere la relazione tensione-corrente nel caso di un condensatore.
9. Scrivere la relazione forza-velocita nel caso di un elemento meccanico capacitivo.
10. Scrivere la relazione tensione-corrente nel caso di un resistore e la analoga relazione nel casodi uno smorzatore.
11. Se la corrente che attraversa un condensatore e costante come varia la tensione ai suoi capi?
12. Se la corrente che attraversa un induttore e costante quanto vale la tensione ai suoi capi?
13. Scrivere la relazione tensione-corrente nel caso di un induttore.
14. Che differenza passa tra l’incognita di una equazione algebrica e l’incognita di una equazionedifferenziale ?
15. Perche quando si tenta di aprire in modo brusco un circuito in cui sono presenti elementiinduttivi puo formarsi un arco elettrico tra i due contatti dell’interruttore ?
16. Perche la sospensione meccanica ed il circuito RCL sono classificati come sistemi del secondoordine ?
17. Per determinare la relazione ingresso-uscita del sistema sospensione meccanica da qualefamoso principio della fisica si e partiti ?
18. Per determinare la relazione ingresso-uscita del sistema circuito RCL da quale famoso prin-cipio della fisica si e partiti ?
19. Perche un sistema elettrico che contiene condensatori e induttori e di tipo dinamico, mentrese contiene solo resistori e di tipo statico ?
Abilita
1. Prova a determinare la relazione ingresso-uscita di un circuito RC partendo dalle relazionitensione-corrente di ciascun componente ed applicando le leggi fondamentali dei circuitielettrici.
2. Perche la tensione misurata ai capi di un condensatore durante la fase di carica mediante unresistore puo essere influenzata dal tipo di strumento utilizzato per effettuare la misura ?
3. Ai capi di una bobina di induttanza L = 100 mH si rileva una picco di tensione di 10V. Cosae successo alla bobina ?
(v. 0.9)

CAPITOLO 4. SISTEMI DINAMICI DETERMINISTICI 71
4.8 Esercizi
1. Un condensatore da 100µF , dotato di una carica iniziale di 100µC, e sottoposto ad unacorrente costante pari a 2 mA per un intervallo di tempo pari a 5s. Determinare l’andamentotemporale della carica e della tensione ai capi del condensatore.
2. La bobina riportata in figura 4.3, di induttanza L1 = 0, 25H, e sottoposta alla corrente i1 chepresenta l’andamento temporale riportato a lato. Determinare l’andamento della tensionee1 ai suoi capi.
Figura 4.3: Esercizio 4.3.
3. Dato il sistema LR riportato in figura 4.4 determinare la relazione ingresso-uscita nel dominiodel tempo.
Figura 4.4: Esercizio 3.
4. Determinare la relazione ingresso-uscita del sistema elettrico riportato in figura 4.5.
Figura 4.5: Esercizio 4
5. Determinare la relazione ingresso-uscita del sistema elettrico riportato in figura 4.6.
6. Sia dato un condensatore di capacita C = 1µF inizialmente carico alla tensione V0 = 4V .Esso viene collegato all’istante di tempo t0 = 0s ad un generatore reale di f.e.m. E = 12V eresistenza interna R = 1kΩ.
(a) Determinare la tensione vC ai suoi capi negli istanti di tempo t1 = 0, 5 · τ , t2 = τ ,t3 = 1, 5 · τ , t4 = 2 · τ e t5 = 2, 5 · τ .
(v. 0.9)

72 4.8. ESERCIZI
Figura 4.6: Domanda 5
(b) Tracciare su un diagrammma cartesiano l’andamento temporale della tensione interpo-lando i punti determinati al punto precedente.
7. Si prenda in considerazione il circuito di figura , con E = 10 V, R = 100 kΩ e C = 50 µF .All’istante t = 0 s il deviatore passa dalla posizione 2 alla posizione 1.
(a) Determinare la tensione vO ai capi del condensatore e la corrente i che lo attraversanegli istanti di tempo t = 0 s, t = 0, 5 · τ e t = τ .
(b) Tracciare l’andamento della tensione e della corrente.
(c) Determinare negli stessi istanti di tempo i valori della carica e dell’energia elettrostaticaaccumulata dal condensatore.
(d) Determinare dopo quanto tempo la tensione vO ha raggiunto il 10% del valore finale.
(e) Dopo 10 secondi dall’istante iniziale il deviatore ritorna alla posizione 2. Scriverel’espressione analitica dell’andamento della tensione negli istanti di tempo successivi.
Figura 4.7: Esercizio 7
8. Il circuito di figura 4.8 presenta i valori di resistenza e capacita R = 470 kΩ e C = 2200 µF .La f.e.m. E1 e pari a 2V mentre la f.e.m. E2 e pari a 10V. All’istante t = 0 il deviatorepassa dalla posizione 1 alla posizione 2. Determinare:
(a) l’espressione analitica della tensione vO e della corrente i del condensatore
(b) la tensione vO ai capi del condensatore e la corrente i che lo attraversa negli istanti ditempo t = 0, t = 0, 5 · τ e t = τ .
(c) il grafico della tensione e della corrente.
9. All’istante t = 0 s si chiude l’interruttore della rete elettrica riportata in figura. Determinare:
(a) la costante di tempo di carica τ di carica del condensatore;
(b)
(v. 0.9)

CAPITOLO 4. SISTEMI DINAMICI DETERMINISTICI 73
Figura 4.8: Esercizio 8.
(v. 0.9)

74 4.8. ESERCIZI
(v. 0.9)

Bibliografia
[1] A.De Santis, M.Cacciaglia, C.Saggese Sistemi 1, Fondamenti di informatica e di teoria deisistemi, Vol.1, Calderini Bologna (2005)
[2] G. Licata, SISTEMI 1, Paravia Bruno Mondadori Editori, Torino (2007)
75