Corso TECNICO DI RETE - CESCOT · 25/03/2012 5 Memorie volatili • SRAM: Static Random Access...
18
25/03/2012 1 Corso TECNICO DI RETE MODULO 1 –dimensionamento architettura di rete Docente: ing.Andrea Sarneri [email protected] 1 ANDREA SARNERI - CORSO CESCOT 2010 ANDREA SARNERI - CORSO CESCOT 2010 2 Approfondimenti sull’hardware •Tecnologie di memorizzazione (memorie, dischi rigidi, dischi flash, architetture RAID,….) •Le tecnologie delle CPU (architetture RISC, single core, dual core, famiglie di microprocessori….) •Tecnologie di interconnessione ad alta velocità: fiber channel •Principi di funzionamento del Plug&Play e dei driver •Architetture server H24, affidabilità , ridondanza,architetture “blade”. •Sistemi di alimentazione e raffreddamento
Transcript of Corso TECNICO DI RETE - CESCOT · 25/03/2012 5 Memorie volatili • SRAM: Static Random Access...

25/03/2012
1
Corso TECNICO DI RETE
MODULO 1 –dimensionamento architettura di rete
Docente: ing.Andrea Sarneri [email protected]
1 ANDREA SARNERI - CORSO CESCOT 2010
ANDREA SARNERI - CORSO CESCOT 2010 2
Approfondimenti sull’hardware
•Tecnologie di memorizzazione (memorie, dischi rigidi, dischi flash,
architetture RAID,….)
•Le tecnologie delle CPU (architetture RISC, single core, dual core,
famiglie di microprocessori….)
•Tecnologie di interconnessione ad alta velocità: fiber channel
•Principi di funzionamento del Plug&Play e dei driver
•Architetture server H24, affidabilità , ridondanza,architetture
“blade”.
•Sistemi di alimentazione e raffreddamento

25/03/2012
2
Redundant Array of Inexpensive Disks (RAID)"
Quali sono i parametri fondamentali per un sistema di storage:
Realiability (affidabilità): è legata all’ MTBF (mean time between failure) che è un valore statistico che rappresenta il tempo medio tra due guasti consecutivi
Availability (disponibilità): la percentuale di tempo in cui posso recuperare o utilizzare il dato
Service ability (ritorno in servizio): è legato al tempo di ripristino in servizio a valle di un guasto
Le architetture RAID consentono di raggiungere obbiettivi RAS diversi, definendo strutture di dischi multipli e algoritmi di gestione e distribuzione dei dati opportune
ANDREA SARNERI - CORSO CESCOT 2010 3
ANDREA SARNERI - CORSO CESCOT 2010 4
Redundant Array of Inexpensive Disks (RAID)"
La tecnologia Raid prevede di mettere in parallelo fisicamente più dischi, e all’interno dei dischi, di creare dei segmenti logici (stripe) che vengono poi organizzati dagli algoritmi di gestione .
Aumentando il parallelismo si ottengono alcuni vantaggi: Ridondanza, fault tolerance peggioro la affidabilità ma aumento la disponibilità e il ritorno in servizio, replicando i dati su più dischi. Velocità di accesso partizionando i dati su più dischi posso aumentare il parallelismo e quindi la velocità di recupero dei dati
25/03/2012
3
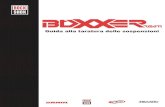
Tipologie / architetture RAID :
• RAID 1: disk mirroring. Due dischi vengono configurati uno come la copia dell'altro e quindi registrano entrambi gli stessi dati. La ridondanza è assicurata dal fatto che, in caso di guasto di uno, l'altro disco può continuare a funzionare garantendo l'accesso ai dati
• RAID 3. Due drive registrano i dati in mirroring e il terzo registra bit di parità. Se un disco si guasta gli stripe mancanti possono essere ripristinati calcolando lo XOR (informazioni di parità) di stripes posizionati in modo uguale sugli altri dischi, ripristinando il dato perduto.
ANDREA SARNERI - CORSO CESCOT 2010 5
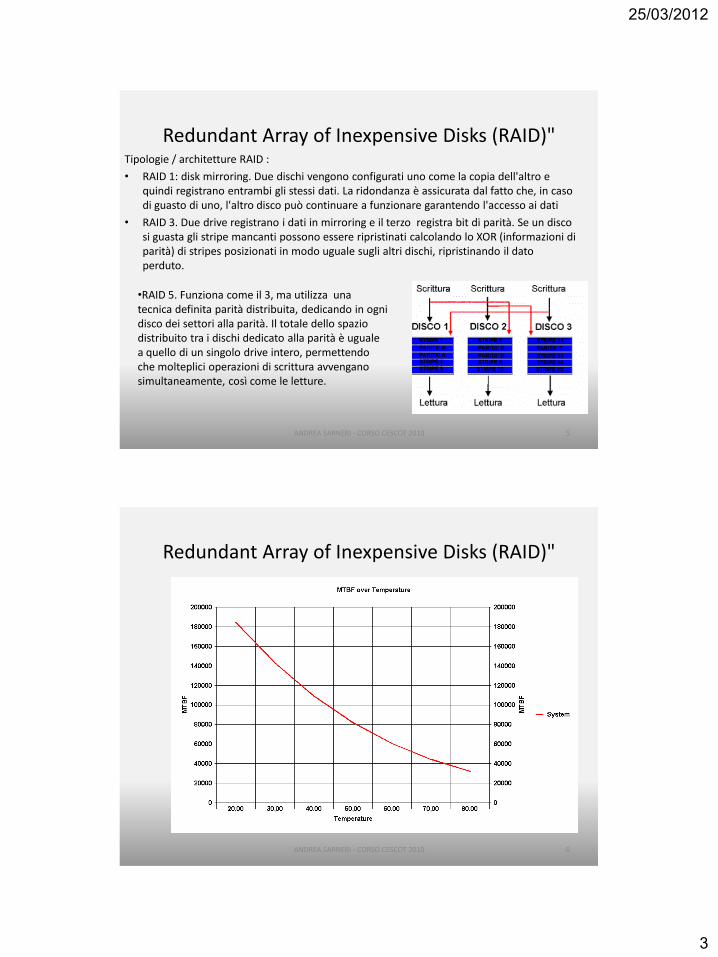
Redundant Array of Inexpensive Disks (RAID)"
•RAID 5. Funziona come il 3, ma utilizza una tecnica definita parità distribuita, dedicando in ogni disco dei settori alla parità. Il totale dello spazio distribuito tra i dischi dedicato alla parità è uguale a quello di un singolo drive intero, permettendo che molteplici operazioni di scrittura avvengano simultaneamente, così come le letture.
ANDREA SARNERI - CORSO CESCOT 2010 6
Redundant Array of Inexpensive Disks (RAID)"

25/03/2012
4
Dischi rigidi • Memoria su supporto magnetico rotativo 5000..12000 giri/m
• Testina di registrazione/rilevazione (tempo di accesso)
• Logica di controllo hardware
• Suddivisione logica in settori (fattore di blocco)
• Accesso random ai settori, accesso sequenziale al settore
ANDREA SARNERI - CORSO CESCOT 2010 7
Dischi Flash (SSD) • Memoria su array di chip di memorie flash
• Logica di gestione hardware e buffering
• Suddivisione logica in righe e colonne e blocchi
• Accesso random ai blocchi
• Velocità di accesso non limitata da parti meccaniche
ANDREA SARNERI - CORSO CESCOT 2010 8
Valori tipici hard disk ed SSD
Disco rigido SSD
Tempi di accesso 10 ms 10 us
Banda dati 100 MB/s 100 MB/S
Capacità tipica 1000 GB 100 GB
Interfaccia SATA, SATA 2 SATA, SATA 2
Rumorosità 20 dBA 0 dBA
Vita media 500.000 ore 1.000.000 ore
Consumi 0,1 - 10W 0,01 - 10W
Resistenza agli shock 100 G 1.000 G
Formati 1,8", 2,5", 3,5" 1,8", 2,5", 3,5"
25/03/2012
5
Memorie volatili • SRAM: Static Random Access Memory, ogni cella è costituita da un latch realizzato da due
porte logiche. Le celle sono disposte a matrice e l’accesso avviene specificando la riga e la colonna. Consentono di mantenere le informazioni per un tempo infinito, sono molto veloci, consumano poco e quindi dissipano poco calore. La necessità di usare molti componenti, però, le rende molto costose, difficili da impacchettare e con una scarsa capienza. Proprio per la loro bassa capienza, sono solitamente usate per le memorie cache, dove sono necessarie elevate velocità in abbinamento a ridotti consumi e capienze non troppo elevate (dell'ordine di pochi Mb).
• DRAM: Dynamic Random Access Memory, è costituita, a livello concettuale, da un transistor che separa un condensatore, il quale mantiene l'informazione, dai fili di dati. A livello pratico c’è la possibilità di aumentare notevolmente la densità di memoria. A causa del non perfetto isolamento il condensatore si scarica, quindi dopo un breve lasso di tempo il suo contenuto diventa inaffidabile. Si rende necessario perciò ricaricarlo ("refreshing”), operazione eseguita da un circuito interno alle memorie stesse.
• SDRAM:Synchronous Dynamic Random Access Memory, ovvero DRAM sincrone. Sono governate da un Clock che temporizza e sincronizza le operazioni di scambio di dati con il processore, raggiungendo una velocità almeno tre volte maggiore delle SIMM con EDO RAM
• DDR/DDR2/DDR3 SDRAM: Ha una larghezza di banda maggiore rispetto alla SDRAM poiché trasmette i dati sia sul fronte di salita che sul fronte di discesa del ciclo di clock. Questa tecnica consente di raddoppiare la velocità di trasferimento senza aumentare la frequenza del bus di memoria
ANDREA SARNERI - CORSO CESCOT 2010 9
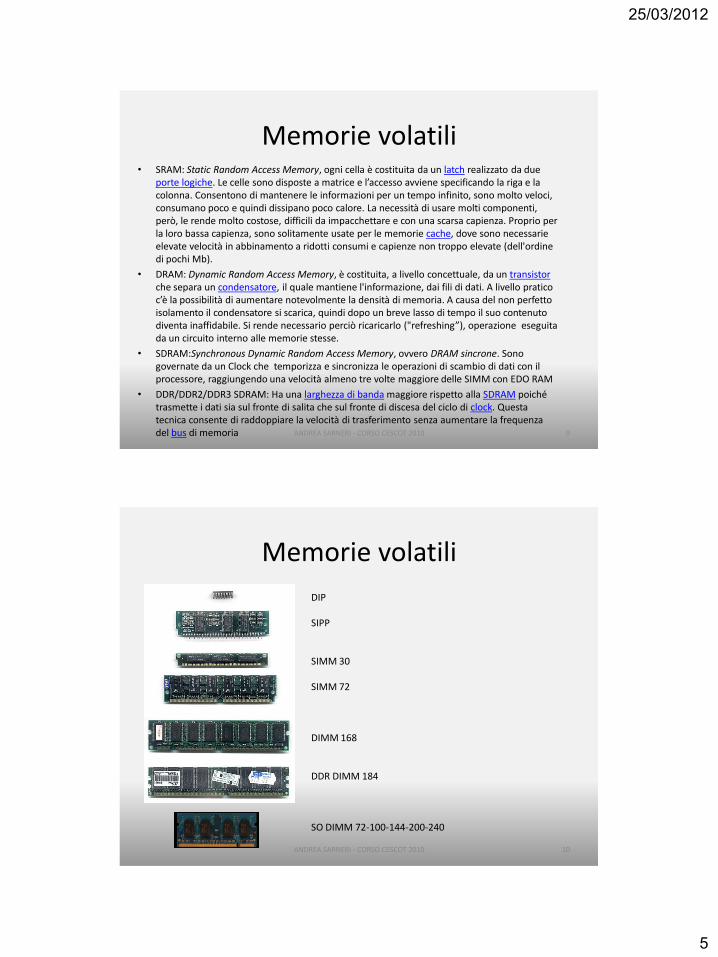
Memorie volatili
ANDREA SARNERI - CORSO CESCOT 2010 10
DIP SIPP SIMM 30 SIMM 72 DIMM 168 DDR DIMM 184 SO DIMM 72-100-144-200-240
25/03/2012
6
ANDREA SARNERI - CORSO CESCOT 2010 11
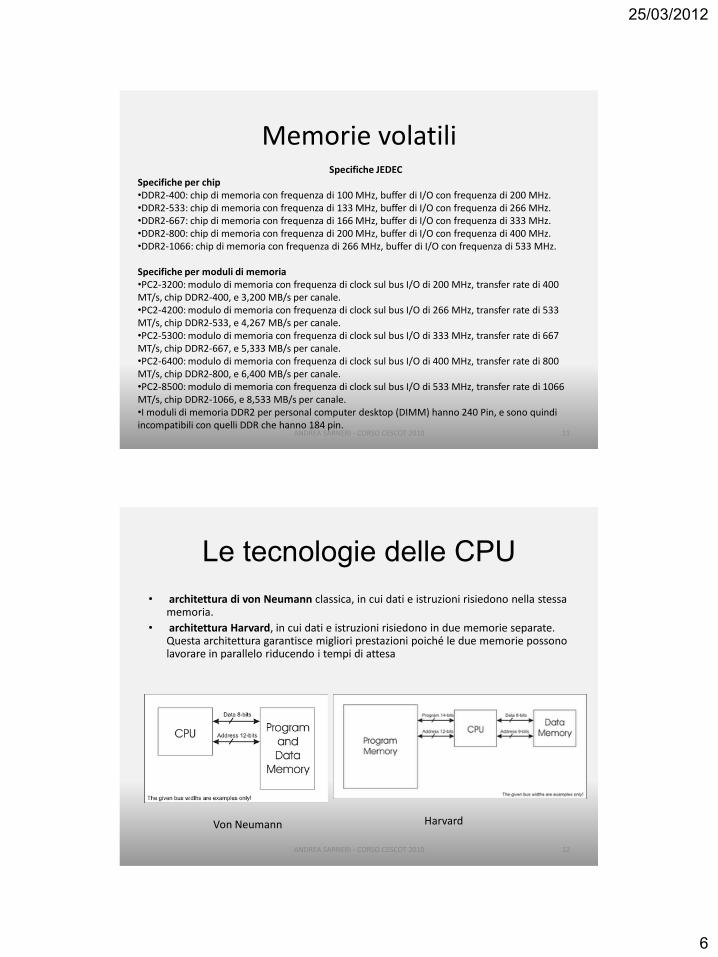
Specifiche JEDEC Specifiche per chip •DDR2-400: chip di memoria con frequenza di 100 MHz, buffer di I/O con frequenza di 200 MHz. •DDR2-533: chip di memoria con frequenza di 133 MHz, buffer di I/O con frequenza di 266 MHz. •DDR2-667: chip di memoria con frequenza di 166 MHz, buffer di I/O con frequenza di 333 MHz. •DDR2-800: chip di memoria con frequenza di 200 MHz, buffer di I/O con frequenza di 400 MHz. •DDR2-1066: chip di memoria con frequenza di 266 MHz, buffer di I/O con frequenza di 533 MHz. Specifiche per moduli di memoria •PC2-3200: modulo di memoria con frequenza di clock sul bus I/O di 200 MHz, transfer rate di 400 MT/s, chip DDR2-400, e 3,200 MB/s per canale. •PC2-4200: modulo di memoria con frequenza di clock sul bus I/O di 266 MHz, transfer rate di 533 MT/s, chip DDR2-533, e 4,267 MB/s per canale. •PC2-5300: modulo di memoria con frequenza di clock sul bus I/O di 333 MHz, transfer rate di 667 MT/s, chip DDR2-667, e 5,333 MB/s per canale. •PC2-6400: modulo di memoria con frequenza di clock sul bus I/O di 400 MHz, transfer rate di 800 MT/s, chip DDR2-800, e 6,400 MB/s per canale. •PC2-8500: modulo di memoria con frequenza di clock sul bus I/O di 533 MHz, transfer rate di 1066 MT/s, chip DDR2-1066, e 8,533 MB/s per canale. •I moduli di memoria DDR2 per personal computer desktop (DIMM) hanno 240 Pin, e sono quindi incompatibili con quelli DDR che hanno 184 pin.
Memorie volatili
Le tecnologie delle CPU
• architettura di von Neumann classica, in cui dati e istruzioni risiedono nella stessa memoria.
• architettura Harvard, in cui dati e istruzioni risiedono in due memorie separate. Questa architettura garantisce migliori prestazioni poiché le due memorie possono lavorare in parallelo riducendo i tempi di attesa
ANDREA SARNERI - CORSO CESCOT 2010 12
Von Neumann Harvard
25/03/2012
7
ANDREA SARNERI - CORSO CESCOT 2010 13
Le tecnologie delle CPU
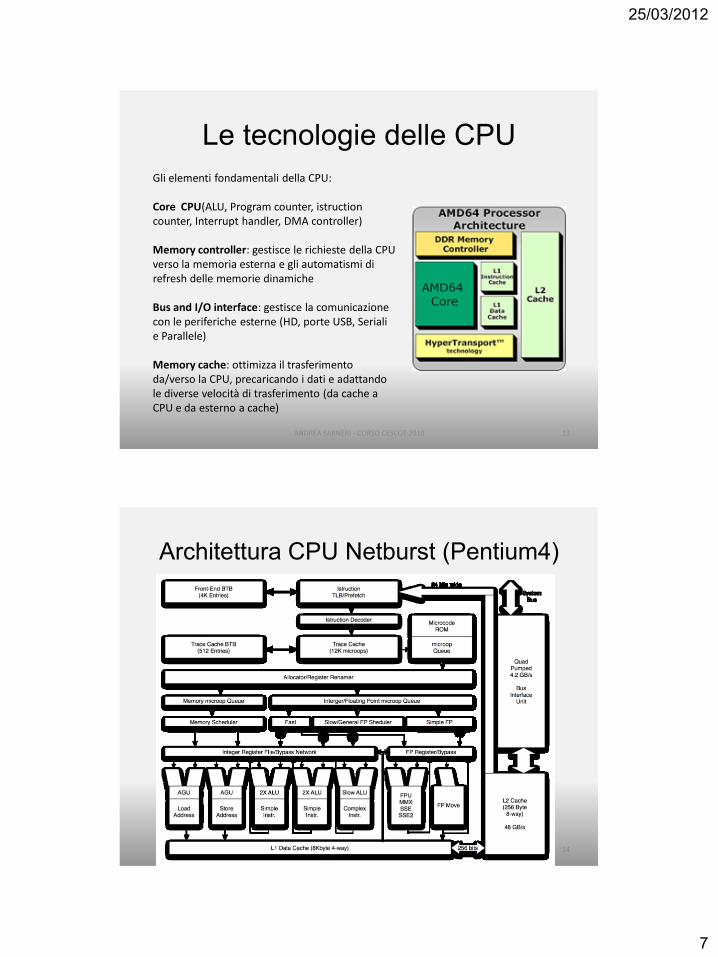
Gli elementi fondamentali della CPU: Core CPU(ALU, Program counter, istruction counter, Interrupt handler, DMA controller) Memory controller: gestisce le richieste della CPU verso la memoria esterna e gli automatismi di refresh delle memorie dinamiche Bus and I/O interface: gestisce la comunicazione con le periferiche esterne (HD, porte USB, Seriali e Parallele) Memory cache: ottimizza il trasferimento da/verso la CPU, precaricando i dati e adattando le diverse velocità di trasferimento (da cache a CPU e da esterno a cache)
ANDREA SARNERI - CORSO CESCOT 2010 14
Architettura CPU Netburst (Pentium4)
25/03/2012
8
ANDREA SARNERI - CORSO CESCOT 2010 15
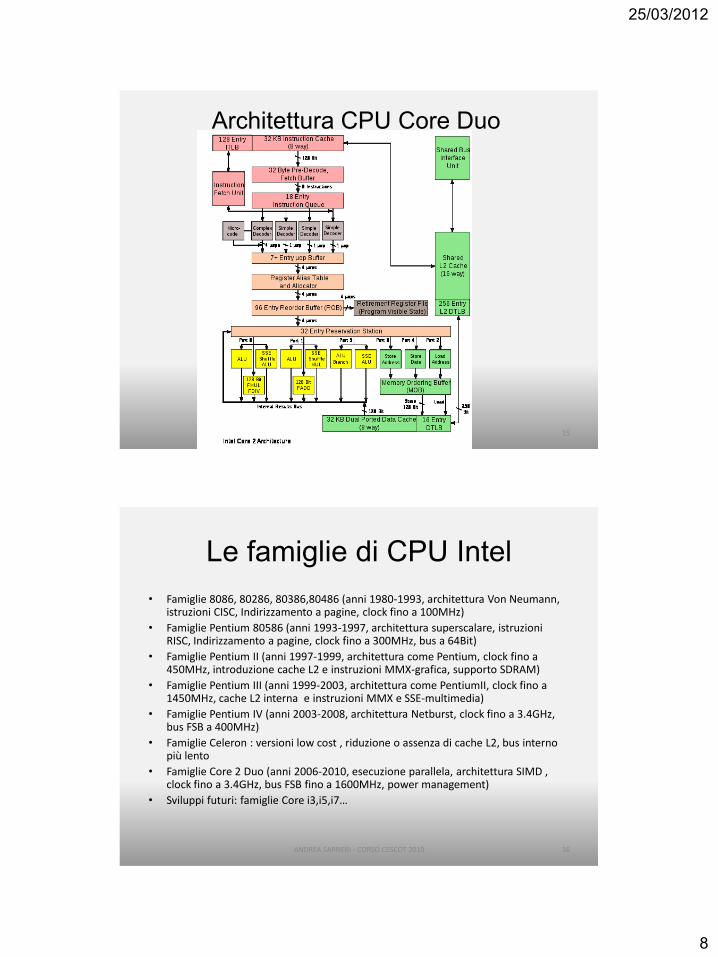
Architettura CPU Core Duo
• Famiglie 8086, 80286, 80386,80486 (anni 1980-1993, architettura Von Neumann, istruzioni CISC, Indirizzamento a pagine, clock fino a 100MHz)
• Famiglie Pentium 80586 (anni 1993-1997, architettura superscalare, istruzioni RISC, Indirizzamento a pagine, clock fino a 300MHz, bus a 64Bit)
• Famiglie Pentium II (anni 1997-1999, architettura come Pentium, clock fino a 450MHz, introduzione cache L2 e instruzioni MMX-grafica, supporto SDRAM)
• Famiglie Pentium III (anni 1999-2003, architettura come PentiumII, clock fino a 1450MHz, cache L2 interna e instruzioni MMX e SSE-multimedia)
• Famiglie Pentium IV (anni 2003-2008, architettura Netburst, clock fino a 3.4GHz, bus FSB a 400MHz)
• Famiglie Celeron : versioni low cost , riduzione o assenza di cache L2, bus interno più lento
• Famiglie Core 2 Duo (anni 2006-2010, esecuzione parallela, architettura SIMD , clock fino a 3.4GHz, bus FSB fino a 1600MHz, power management)
• Sviluppi futuri: famiglie Core i3,i5,i7…
ANDREA SARNERI - CORSO CESCOT 2010 16
Le famiglie di CPU Intel

25/03/2012
9
• Bus ISA/EISA: L'Industry Standard Architecture, è un bus parallelo per computer destinato al collegamento, attraverso appositi slot, di generiche schede d'espansione (schede video, schede audio, schede di rete, ecc.) di norma installate internamente al computer.
• Bus PCI: Peripheral Component Interconnect (PCI), Bus di sistema PC, (ma anche Apple, Sun). Sviluppato dalla Intel nel 1992 (in sostituzione del bus ISA). Diverse versioni: PCI, PCI 2.0, PCI 2.1, PCI 2.2, PCI-X, PCI-X DDR. 32 – 64, PCI-E linee dati-indirizzi (sovrapposte) (multiplexed) Clock a 33 – 66 – 133 – 266 MHz. Alimentazione 5 – 3,3 Volt. Il trasferimento che avviene attraverso un bus PCI è un "burst", composto da una fase di indirizzamento e da una o più fasi di dato. Bassa latenza ed elevato throughput.
• SCSI (Small Computer System Interface) :bus parallelo per dispositivi interni o esterni al computer: dischi rigidi (dischi SCSI), ma anche CD - DVD – unità nastro - stampanti - scanner. Versioni:SCSI-1, SCSI-2, Fast SCSI-2, Fast & wide SCSI-2, SCSI-3 Ultra. frequenze: 5 – 10 – 20 – 40 – 80 – 160 MHz linee di dati: 8 - 16 line banda passante 5 - 320 MB/sec Collega sino a 7- 15 controllori (unità) e massimo 2048 periferiche per controllore. Asincrono: con protocollo di hand-shake.
• Front Side Bus (FSB) : Il FSB collega la CPU al resto dell'hardware attraverso un chipset che, di solito, è diviso in northbridge e southbridge. A questo, poi, si collegano tutti gli altri bus della scheda madre, come il bus PCI e il bus AGP. Questi bus secondari, di solito, hanno una velocità che dipende dal FSB e non sono necessariamente sincroni ad esso.
ANDREA SARNERI - CORSO CESCOT 2010 17
Architetture Bus Motherboard
Architettura Motherboard e componenti:
•Cpu Socket: è uno zoccolo ZIF (Zero Insertion Force) che accoglie la CPU. Può essere di tipo PGA o LGA (Pin Grid Array o Land Grid Array) . La soluzione LGA è adottata da diverso tempo da Intel con molti dei suoi processori Pentium IV e ora con la serie Core, entrambi interfacciati con 775 pin.
•La ROM (può essere PROM, EEPROM, flash o altro) che contiene il BIOS della scheda madre
•Northbridge: un circuito integrato che connette il processore con la memoria RAM e con i bus di espansione principali
•Southbridge: è il secondo componente del chipset e il suo compito è quello di gestire tutte le interfacce a bassa velocità: gestisce le porte seriali e parallele, l'interfaccia per la tastiera e il mouse, l'interfaccia Ethernet, le porte USB e il bus SMB
•Una batteria al litio in grado di alimentare per anni l'orologio di sistema e la RAM CMOS del BIOS con le configurazioni.
•Gli slot d'alloggiamento della Memoria RAM (Random Access Memory) che possono essere di diversi tipi .Attualmente (2006) le schede madri in commercio adottano slot DDRAM, evoluzione delle precedenti SDRAM.
ANDREA SARNERI - CORSO CESCOT 2010 18
Architetture Motherboard

25/03/2012
10
ANDREA SARNERI - CORSO CESCOT 2010 19
Architetture PC: ATX La sigla ATX (dall'Inglese Advanced Technology Extended) è uno standard diffuso che riguarda il case, la scheda madre e l'alimentatore di un Personal Computer. Questo standard fu definito inizialmente da Intel nel 1995 e successivamente evoluto. Questo standard fornisce delle indicazioni per le dimensioni della scheda madre, la posizione degli slot, dei fori per il fissaggio della scheda madre al case, dell'alimentatore e del cabinato, le posizioni e il colore dei connettori e il collegamento dell'alimentazione. Questo standard è fondamentale per permettere l'assemblaggio di Personal computer a partire da componenti di vari costruttori che, sebbene diversi tra loro, risultano compatibili e interscambiabili. Lo standard prevede anche un posizionamento ottimale per lo smaltimento del calore.
ANDREA SARNERI - CORSO CESCOT 2010 20
Architetture PC: l’alimentatore
Calcolo del dimensionamento del consumo: Potenza [W]=V[volt]*I [Ampere] / Efficienza (75%) P (motherboard) + P (dischi) + P (altri dispositivi) nel caso peggiore. P(motherboard)= V*I su ciascun pin del connettore Esercizio: date le specifiche, calcolare la potenza necessaria per alimentare un sistema basato su MB ATX , due dischi rigidi a 7500rpm

25/03/2012
11
21 ANDREA SARNERI - CORSO CESCicazioneOT
2010
Fibre Channel è una tecnologia per reti dati, usata principalmente per implementazioni in Storage Area Network. Fibre Channel è standardizzata nel T11 del Comitato Internazionale per gli Standard dell'Information Technology (INCITS), un comitato degli standard accreditato dall'American National Standards Institute (ANSI). Iniziò per un utilizzo principalmente nel campo dei supercomputer, ma è diventato il tipo di connessione standard per le Storage Area Networks nell'enterprise storage. Nonostante la connotazione comune del suo nome, il segnale Fibre Channel può andare sia su cavi di rame UTP che su cavi a fibra ottica. Il Fibre Channel Protocol (FCP) è il protocollo di interfaccia dello SCSI sul Fibre Channel.
Bus ad alta velocità: Fiber channel
Tipologie di Fibre Channel
NOME Line-Rate (Gbps) Throughput ( MBps)
1GFC 1.0625 100
2GFC 2.125 200
4GFC 4.25 400
8GFC 8.5 800
10GFC Seriale 10.51875 1000
20GFC 10.52 2000
10GFC Parallelo 12.75
ANDREA SARNERI - CORSO CESCOT 2010 22
Fibre Channel è un protocollo a livelli o layer. Consiste di 5 livelli, ovvero: FC0 Livello fisico, che comprende cavi, fibre ottiche, connettori ecc. FC1 Livello data link, che implementa la codifica e decodifica del segnale. FC2 Livello network, definito dallo standard FC-PI-2, è il nocciolo del Fibre Channel, e definisce i principali protocolli. FC3 Livello "common services", un layer sottile che potrebbe eventualmente implementare funzioni come encryption o RAID. FC4 Livello Protocol Mapping, nel quale altri protocolli, come lo SCSI, vengono incapsulati in unità informative per essere consegnati a FC2.
Bus ad alta velocità: Fiber channel

25/03/2012
12
Driver e plug&play
• Driver è l'insieme di procedure, che permette ad un sistema operativo di pilotare un dispositivo hardware. Il driver permette al sistema operativo di utilizzare l'hardware senza sapere come esso funzioni, ma dialogandoci attraverso un'interfaccia standard, che astrae dall'implementazione dell'hardware e che ne considera solo il funzionamento logico. In questo modo hardware diverso costruito da produttori diversi può essere utilizzato in modo intercambiabile.
• Ne consegue che un driver è specifico sia dal punto di vista dell'hardware che pilota, sia dal punto di vista del sistema operativo per cui è scritto. Non è possibile utilizzare driver scritti per un sistema operativo su uno differente, perché l'interfaccia è generalmente diversa.
• Il driver è scritto solitamente dal produttore del dispositivo hardware, dato che è necessaria un'approfondita conoscenza dell'hardware per poter scrivere un driver funzionante
ANDREA SARNERI - CORSO CESCOT 2010 23
Driver e plug&play
• Nei sistemi operativi a kernel ibrido (come Windows), il driver è un file binario che viene caricato dinamicamente dal kernel. In questo caso è possibile aggiungere una nuova periferica e il kernel dovrà semplicemente caricare il file del driver opportuno. Il vantaggio di questo approccio solitamente è la "quasi sicurezza" di riuscire a utilizzare un certo hardware in quanto sono i produttori stessi a fornirlo.
• Ogni driver deve risolvere il problema della mutua esclusione garantendo ad un solo processo (specie se il sistema è multiprocessore) l'accesso esclusivo alla periferica in ogni istante
• Il driver deve tener conto delle operazioni “realtime” del dispositivo specifico e tipicamente utilizza la modalità ad interrupt per la gestione dell’hardware. Di conseguenza l’accesso all’hardware da parte delle applicazioni che utilizzano il driver deve prevedere l’utilizzo di meccanismi di sincronizzazione (semafori, flags, arbitri) per evitare conflitti.
ANDREA SARNERI - CORSO CESCOT 2010 24
25/03/2012
13
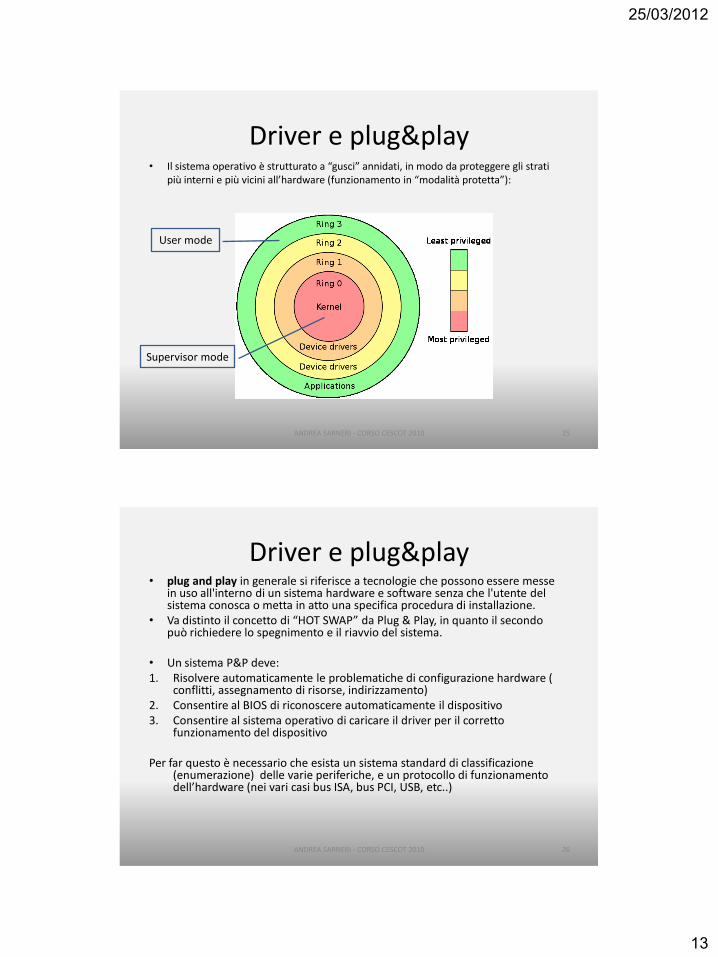
Driver e plug&play • Il sistema operativo è strutturato a “gusci” annidati, in modo da proteggere gli strati
più interni e più vicini all’hardware (funzionamento in “modalità protetta”):
ANDREA SARNERI - CORSO CESCOT 2010 25
User mode
Supervisor mode
Driver e plug&play • plug and play in generale si riferisce a tecnologie che possono essere messe
in uso all'interno di un sistema hardware e software senza che l'utente del sistema conosca o metta in atto una specifica procedura di installazione.
• Va distinto il concetto di “HOT SWAP” da Plug & Play, in quanto il secondo può richiedere lo spegnimento e il riavvio del sistema.
• Un sistema P&P deve: 1. Risolvere automaticamente le problematiche di configurazione hardware (
conflitti, assegnamento di risorse, indirizzamento) 2. Consentire al BIOS di riconoscere automaticamente il dispositivo 3. Consentire al sistema operativo di caricare il driver per il corretto
funzionamento del dispositivo
Per far questo è necessario che esista un sistema standard di classificazione (enumerazione) delle varie periferiche, e un protocollo di funzionamento dell’hardware (nei vari casi bus ISA, bus PCI, USB, etc..)
ANDREA SARNERI - CORSO CESCOT 2010 26

25/03/2012
14
Come avviene il boot del PC e come si inserisce il P&P.
Nel corso del processo di POST (Power on Self Test) i passi che vengono generalmente eseguiti dal BIOS sono i seguenti:
• verifica dell'integrità dello stesso codice del BIOS
• determinazione della causa che ha innescato il processo di POST (accensione, risveglio dallo standby, ecc.)
• individuazione, determinazione della dimensione e verifica della memoria primaria del sistema
• individuazione, inizializzazione e catalogazione di tutti i bus ed i device del sistema
• (se necessario) rilascio del controllo del processo a BIOS specializzati (ad esempio BIOS video)
• rendere disponibile un'interfaccia utente per la configurazione del sistema (alla pressione di un predeterminato tasto)
• identificare, organizzare e selezionare i device pronti per la continuazione della fase di bootstrap
• avvio del programma di boot e partenza del sistema operativo
• Richiesta al BIOS della tabella di device e relativi ID
• Allocazione delle risorse (memoria, interrupt, I/O) , configurazione e attivazione del device
• Scelta automatica dei driver da caricare
ANDREA SARNERI - CORSO CESCOT 2010 27
Driver e plug&play
Fault tolerance/High Availability
Fault tolerance= capacità di continuare a funzionare anche in presenza di guasto
High Availability= disponibilità del sistema >99%
Entrambe le definizioni considerano di non avere nel sistema un singolo punto di rottura in grado di bloccare tutto il sistema, ovvero se si verifica un guasto in un punto il sistema è in grado di continuare a operare.
Enhanced Availability Computers : Server con architetture PC “migliorate” • Doppio power supply. • Doppia scheda di rete. • Hard disks ridondati (RAID 1 or RAID 5). • ECC RAM to detect and correct transient RAM errors.
Nota: questo tipo di server ha ancora un “single point of failure”: la CPU, la memoria, per cui non
è completamente fault tolerant
ANDREA SARNERI - CORSO CESCOT 2010 28
25/03/2012
15
ANDREA SARNERI - CORSO CESCOT 2010 29
Fault tolerance/High Availability
Fault tolerance/High Availability
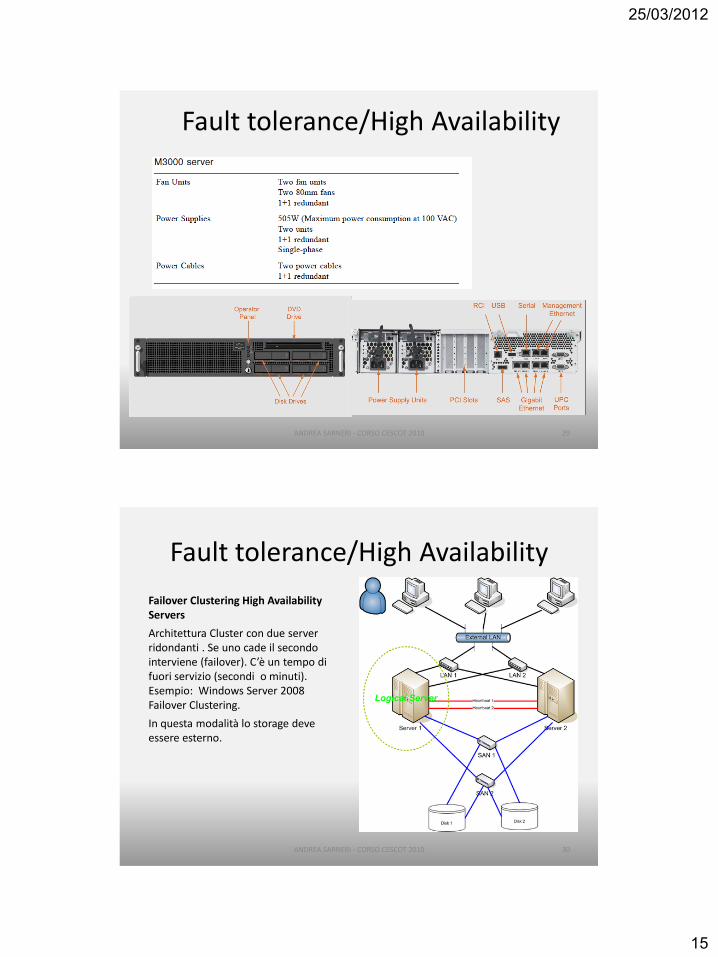
Failover Clustering High Availability Servers
Architettura Cluster con due server ridondanti . Se uno cade il secondo interviene (failover). C’è un tempo di fuori servizio (secondi o minuti). Esempio: Windows Server 2008 Failover Clustering.
In questa modalità lo storage deve essere esterno.
ANDREA SARNERI - CORSO CESCOT 2010 30
25/03/2012
16
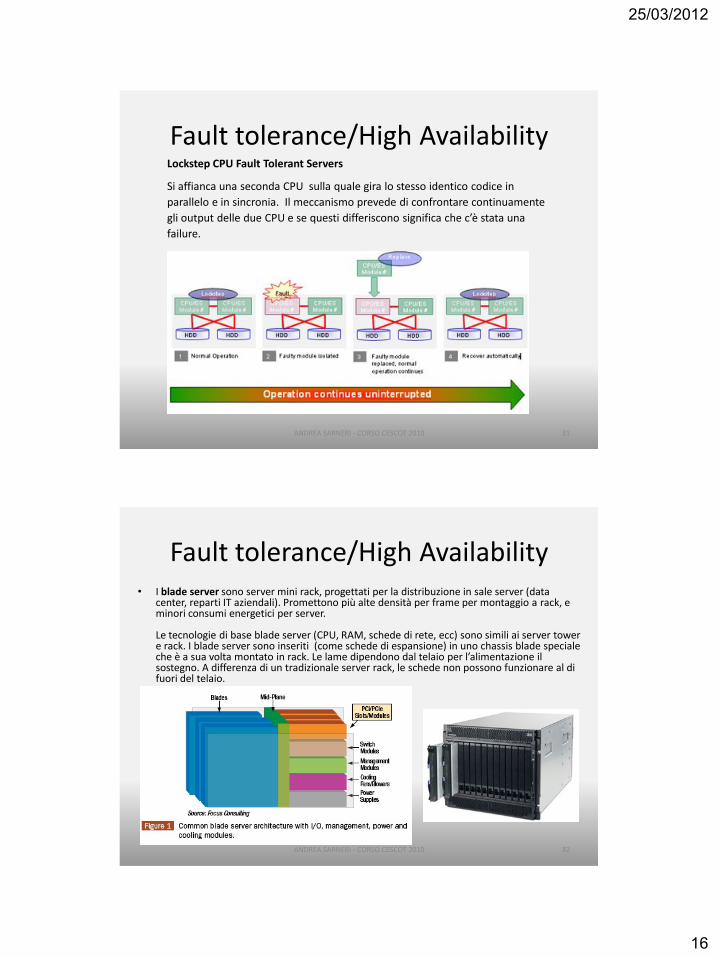
Fault tolerance/High Availability Lockstep CPU Fault Tolerant Servers
Si affianca una seconda CPU sulla quale gira lo stesso identico codice in
parallelo e in sincronia. Il meccanismo prevede di confrontare continuamente
gli output delle due CPU e se questi differiscono significa che c’è stata una
failure.
ANDREA SARNERI - CORSO CESCOT 2010 31
• I blade server sono server mini rack, progettati per la distribuzione in sale server (data center, reparti IT aziendali). Promettono più alte densità per frame per montaggio a rack, e minori consumi energetici per server. Le tecnologie di base blade server (CPU, RAM, schede di rete, ecc) sono simili ai server tower e rack. I blade server sono inseriti (come schede di espansione) in uno chassis blade speciale che è a sua volta montato in rack. Le lame dipendono dal telaio per l’alimentazione il sostegno. A differenza di un tradizionale server rack, le schede non possono funzionare al di fuori del telaio.
ANDREA SARNERI - CORSO CESCOT 2010 32
Fault tolerance/High Availability
25/03/2012
17
Generazione e dissipazione del calore
ANDREA SARNERI - CORSO CESCOT 2010 33
ANDREA SARNERI - CORSO CESCOT 2010 34
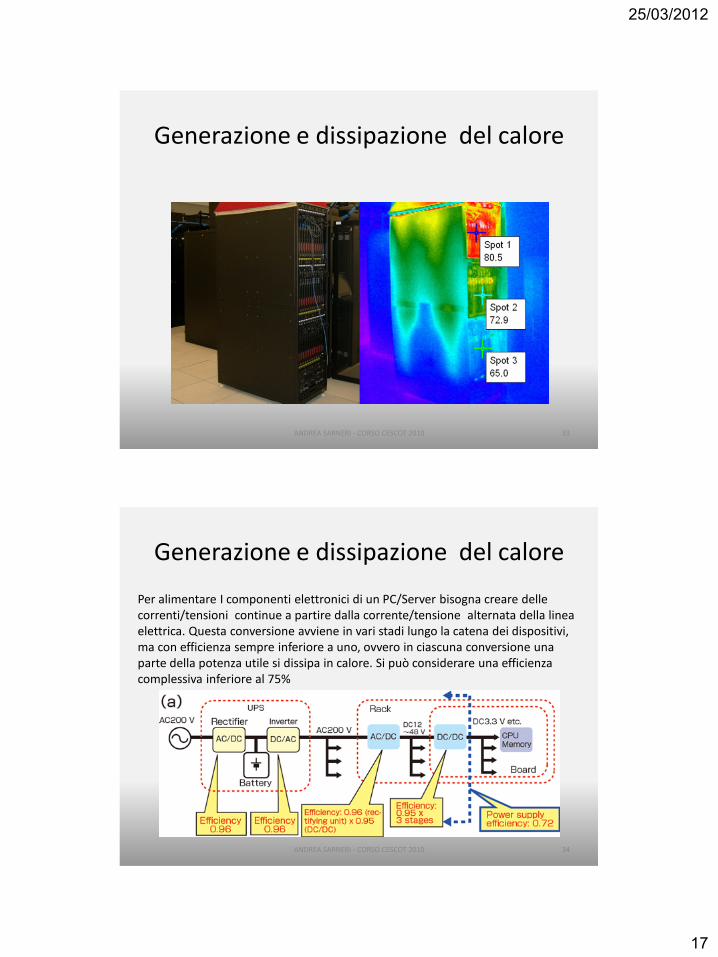
Per alimentare I componenti elettronici di un PC/Server bisogna creare delle correnti/tensioni continue a partire dalla corrente/tensione alternata della linea elettrica. Questa conversione avviene in vari stadi lungo la catena dei dispositivi, ma con efficienza sempre inferiore a uno, ovvero in ciascuna conversione una parte della potenza utile si dissipa in calore. Si può considerare una efficienza complessiva inferiore al 75%
Generazione e dissipazione del calore

25/03/2012
18
ANDREA SARNERI - CORSO CESCOT 2010 35
Generazione e dissipazione del calore Ventola CPU tradizionale
Raffreddamento a heatpipe Raffreddamento a heatpipe Per laptop
Flusso forzato in case ATX
Distribuzione calore su HD