
Corso di Topografia Esercizi di statistica e...
192
Corso di Topografia Esercizi di statistica e topografia Paolo ZATELLI
Transcript of Corso di Topografia Esercizi di statistica e...
Corso di Topografia
Esercizi di statistica e topografia
Paolo ZATELLI

Indice
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VII
I Richiami di teoria e schemi operativi 1
1 La compensazione a minimi quadrati delle reti 21.1 Prerequisiti e notazioni . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Il principio di stima ai minimi quadrati . . . . . . . . . . . . . . . . . 31.3 Primi esempi elementari . . . . . . . . . . . . . . . . . . . . . . . . 61.4 La stima di σ2
0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.5 Generalizzazione del principio di stima ai minimi quadrati . . . . . . 91.6 Le equazioni di osservazione delle reti topografiche planimetriche . . 101.7 Esempi numerici . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.7.1 Determinazione delle coordinate di un punto da tre misure didistanza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.7.2 Livellazione con quattro punti e cinque misure . . . . . . . . 12
2 Rototraslazione e variazione di scala 14
II Esercizi 20
3 Propagazione della varianza 213.1 Schemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2 Esercizi risolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.1 Volume e superficie di un cilindro . . . . . . . . . . . . . . . 233.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.1 Trasformazione di coordinate cartesiane in polari . . . . . . . 243.3.2 Perimetro e area di un triangolo . . . . . . . . . . . . . . . . 243.3.3 Volume e superficie di un cilindro . . . . . . . . . . . . . . . 253.3.4 Superficie e volume di un parallelepipedo . . . . . . . . . . . 253.3.5 Area e perimetro di un rettangolo . . . . . . . . . . . . . . . 253.3.6 Distanza fra due punti . . . . . . . . . . . . . . . . . . . . . 263.3.7 Trasformazione di coordinate polari in cartesiane . . . . . . . 263.3.8 Volume e superficie di un cilindro . . . . . . . . . . . . . . . 263.3.9 Volume e superficie di un parallelepipedo . . . . . . . . . . . 273.3.10 Area e perimetro di un rombo . . . . . . . . . . . . . . . . . 273.3.11 Massa di una sfera . . . . . . . . . . . . . . . . . . . . . . . 273.3.12 Trasformazione di coordinate polari in cartesiane . . . . . . . 28
I
II INDICE
3.3.13 Perimetro e area di un triangolo . . . . . . . . . . . . . . . . 283.3.14 Trasformazione di coordinate polari in cartesiane . . . . . . . 293.3.15 Volume e superficie di un cilindro . . . . . . . . . . . . . . . 293.3.16 Massa di una sfera . . . . . . . . . . . . . . . . . . . . . . . 303.3.17 Trasformazione di coordinate polari in cartesiane . . . . . . . 303.3.18 Area e perimetro di una corona circolare . . . . . . . . . . . . 303.3.19 Trasformazione di coordinate polari in cartesiane e distanza . 313.3.20 Angoli come differenze di direzioni . . . . . . . . . . . . . . 323.3.21 Area e perimetro di un rombo . . . . . . . . . . . . . . . . . 323.3.22 Trasformazione di coordinate polari in cartesiane e distanza . 333.3.23 Angoli come differenze di direzioni . . . . . . . . . . . . . . 333.3.24 Volume e superficie di un parallelepipedo . . . . . . . . . . . 343.3.25 Quote da battute concatenate . . . . . . . . . . . . . . . . . . 343.3.26 Area e perimetro di un rombo . . . . . . . . . . . . . . . . . 353.3.27 Angoli come differenze di direzioni . . . . . . . . . . . . . . 353.3.28 Area e perimetro di una corona circolare . . . . . . . . . . . . 363.3.29 Area e perimetro di un rombo . . . . . . . . . . . . . . . . . 373.3.30 Area e perimetro di un rombo . . . . . . . . . . . . . . . . . 373.3.31 Area e perimetro di un rombo . . . . . . . . . . . . . . . . . 373.3.32 Area e perimetro di un triangolo . . . . . . . . . . . . . . . . 373.3.33 Area e perimetro di un triangolo . . . . . . . . . . . . . . . . 383.3.34 Area e perimetro di un triangolo . . . . . . . . . . . . . . . . 383.3.35 Quote da battute concatenate . . . . . . . . . . . . . . . . . . 383.3.36 Angoli come differenze di direzioni . . . . . . . . . . . . . . 393.3.37 Trasformazione di coordinate polari in cartesiane . . . . . . . 403.3.38 Due quote da un punto . . . . . . . . . . . . . . . . . . . . . 403.3.39 Volume di un solido . . . . . . . . . . . . . . . . . . . . . . 413.3.40 Trasformazione di coordinate polari in cartesiane e distanza . 413.3.41 Trasformazione di coordinate polari in cartesiane e distanza . 423.3.42 Due quote da un punto . . . . . . . . . . . . . . . . . . . . . 433.3.43 Angoli come differenze di direzioni . . . . . . . . . . . . . . 443.3.44 Trasformazione di coordinate polari in cartesiane . . . . . . . 443.3.45 Perimetro e area di un rettangolo . . . . . . . . . . . . . . . . 453.3.46 Volume di un solido . . . . . . . . . . . . . . . . . . . . . . 453.3.47 Aree di rettangoli . . . . . . . . . . . . . . . . . . . . . . . . 463.3.48 Aree di rettangoli . . . . . . . . . . . . . . . . . . . . . . . . 463.3.49 Aree di rettangoli . . . . . . . . . . . . . . . . . . . . . . . . 473.3.50 Aree di rettangoli . . . . . . . . . . . . . . . . . . . . . . . . 473.3.51 Distanze tra tre punti . . . . . . . . . . . . . . . . . . . . . . 473.3.52 Distanze tra tre punti . . . . . . . . . . . . . . . . . . . . . . 483.3.53 Distanze tra tre punti . . . . . . . . . . . . . . . . . . . . . . 483.3.54 Distanze tra tre punti . . . . . . . . . . . . . . . . . . . . . . 483.3.55 Perimetri di rettangoli . . . . . . . . . . . . . . . . . . . . . 493.3.56 Perimetri di rettangoli . . . . . . . . . . . . . . . . . . . . . 493.3.57 Perimetri di rettangoli . . . . . . . . . . . . . . . . . . . . . 503.3.58 Perimetri di rettangoli . . . . . . . . . . . . . . . . . . . . . 503.3.59 Volumi di parallelopipedi . . . . . . . . . . . . . . . . . . . . 503.3.60 Distanze tra tre punti . . . . . . . . . . . . . . . . . . . . . . 513.3.61 Volume di un solido . . . . . . . . . . . . . . . . . . . . . . 513.3.62 Due quote da un punto . . . . . . . . . . . . . . . . . . . . . 52

INDICE III
3.3.63 Volumi di cilindri . . . . . . . . . . . . . . . . . . . . . . . . 523.3.64 Superficie di una figura . . . . . . . . . . . . . . . . . . . . . 533.3.65 Perimetro e area di un rettangolo . . . . . . . . . . . . . . . . 533.3.66 Perimetro e area di un rettangolo . . . . . . . . . . . . . . . . 533.3.67 Perimetro e area di un triangolo . . . . . . . . . . . . . . . . 533.3.68 Volumi di cilindri . . . . . . . . . . . . . . . . . . . . . . . . 543.3.69 Trasformazione di coordinate polari in cartesiane . . . . . . . 543.3.70 Due quote da un punto . . . . . . . . . . . . . . . . . . . . . 553.3.71 Angoli come differenze di direzioni . . . . . . . . . . . . . . 553.3.72 Distanze tra tre punti . . . . . . . . . . . . . . . . . . . . . . 563.3.73 Perimetro e area di un rettangolo . . . . . . . . . . . . . . . . 56
4 Test statistici 584.1 Schemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.1.1 Test sulla media di campioni numerosi . . . . . . . . . . . . . 584.1.2 Test di buon adattamento . . . . . . . . . . . . . . . . . . . . 594.1.3 Test per campioni normali . . . . . . . . . . . . . . . . . . . 60
4.2 Esercizi risolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.2.1 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 614.2.2 Test sulla media di un campione normale . . . . . . . . . . . 624.2.3 Test sulla uguaglianza di medie di campioni normali . . . . . 634.2.4 Test sulla uguaglianza di medie di campioni normali . . . . . 64
4.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.3.1 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 654.3.2 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 654.3.3 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 664.3.4 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 664.3.5 Test sulla media di un campione normale . . . . . . . . . . . 674.3.6 Test sulla uguaglianza di medie di campioni normali . . . . . 674.3.7 Test sulla uguaglianza di medie di campioni normali . . . . . 684.3.8 Test sulla uguaglianza di medie di campioni normali . . . . . 684.3.9 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 684.3.10 Test sulla uguaglianza di medie di campioni normali . . . . . 694.3.11 Test sulla uguaglianza di medie di campioni normali . . . . . 694.3.12 Test sulla media di un campione normale . . . . . . . . . . . 704.3.13 Test sulla uguaglianza di medie di campioni normali . . . . . 704.3.14 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 704.3.15 Test sulla uguaglianza di medie di campioni normali . . . . . 714.3.16 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 714.3.17 Test sulla uguaglianza di medie di campioni normali . . . . . 724.3.18 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 724.3.19 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 734.3.20 Test sulla uguaglianza di medie di campioni normali . . . . . 734.3.21 Test di buon adattamento (χ2) . . . . . . . . . . . . . . . . . 744.3.22 Test sulla uguaglianza di medie di campioni normali . . . . . 74

IV INDICE
5 Compensazione di reti di livellazione 765.1 Schemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.2 Esercizi risolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.2.1 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 785.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3.1 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 815.3.2 Rete di livellazione (con propagazione) . . . . . . . . . . . . 825.3.3 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 825.3.4 Rete di livellazione (con propagazione) . . . . . . . . . . . . 835.3.5 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 845.3.6 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 845.3.7 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 865.3.8 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 865.3.9 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 875.3.10 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 885.3.11 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 895.3.12 Rete di livellazione (con propagazione) . . . . . . . . . . . . 895.3.13 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 915.3.14 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 925.3.15 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 935.3.16 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 935.3.17 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 945.3.18 Rete di livellazione . . . . . . . . . . . . . . . . . . . . . . . 95
6 Compensazione di reti planimetriche 976.1 Schemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 976.2 Esercizi risolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.2.1 Rete con misure di angoli e distanze . . . . . . . . . . . . . . 996.2.2 Rete con sole misure di distanze . . . . . . . . . . . . . . . . 104
6.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1086.3.1 Rete con misure di angoli e distanze . . . . . . . . . . . . . . 1086.3.2 Rete con sole misure di distanze . . . . . . . . . . . . . . . . 1096.3.3 Rete con misure di angoli e distanze . . . . . . . . . . . . . . 1106.3.4 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1116.3.5 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1126.3.6 Rete con sole misure di angoli . . . . . . . . . . . . . . . . . 1136.3.7 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1146.3.8 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1156.3.9 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1156.3.10 Rete con misure di angoli e distanze . . . . . . . . . . . . . . 1166.3.11 Rete con misure di angoli e distanze . . . . . . . . . . . . . . 1186.3.12 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1196.3.13 Rete con misure di distanza e costante addittiva . . . . . . . . 1196.3.14 Rete con misure di angoli e distanze . . . . . . . . . . . . . . 1216.3.15 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1226.3.16 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1236.3.17 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1246.3.18 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 1246.3.19 Rete con sole misure di distanza . . . . . . . . . . . . . . . . 125
INDICE V
7 Simulazioni e confronti di reti 1277.1 Schemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277.2 Esercizi risolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
7.2.1 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1297.2.2 Confronto di reti con misure di distanza . . . . . . . . . . . . 130
7.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1347.3.1 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1347.3.2 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1347.3.3 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1357.3.4 Confronto di reti con misure di distanza . . . . . . . . . . . . 1367.3.5 Confronto di reti con misure di distanza . . . . . . . . . . . . 1377.3.6 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1387.3.7 Confronto di reti con misure di distanza . . . . . . . . . . . . 1397.3.8 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1407.3.9 Confronto di reti con misure di distanza . . . . . . . . . . . . 1417.3.10 Confronto di reti con misure di distanza . . . . . . . . . . . . 1427.3.11 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1437.3.12 Confronto di reti con misure di distanza . . . . . . . . . . . . 1447.3.13 Confronto di reti con misure di distanza . . . . . . . . . . . . 1457.3.14 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1477.3.15 Confronto di reti con misure di distanza . . . . . . . . . . . . 1487.3.16 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 1497.3.17 Confronto di reti con misure di distanza . . . . . . . . . . . . 1507.3.18 Confronto di reti con misure di distanza . . . . . . . . . . . . 1517.3.19 Confronto di reti con misure di distanza . . . . . . . . . . . . 1527.3.20 Confronto di reti con misure di distanza . . . . . . . . . . . . 1537.3.21 Confronto di reti di livellazione . . . . . . . . . . . . . . . . 155
8 Rototraslazione e variazione di scala 1568.1 Schemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1568.2 Esercizi risolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
8.2.1 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1598.3 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
8.3.1 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1628.3.2 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1628.3.3 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1638.3.4 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1648.3.5 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1658.3.6 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1668.3.7 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1678.3.8 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1688.3.9 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1698.3.10 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1708.3.11 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1718.3.12 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1728.3.13 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1738.3.14 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1748.3.15 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1758.3.16 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1768.3.17 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 177
VI INDICE
8.3.18 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1788.3.19 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1788.3.20 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1798.3.21 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 1808.3.22 Rototraslazione e variazione di scala . . . . . . . . . . . . . . 181
Bibliografia 183

Elenco delle figure
1.1 rete di livellazione con tre misure . . . . . . . . . . . . . . . . . . . . 61.2 rete di livellazione con due sole misure . . . . . . . . . . . . . . . . . 71.3 spazio delle misure . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
VII

IntroduzioneQuesto volume raccoglie alcuni degli esercizi proposti per i corsi di Topografia, Topo-grafia 1 e Topografia 2 per i Corsi di Laurea in Ingegneria per l’Ambiente e il Territorio,Ingegneria del Controllo Ambientale e in Ingegneria Civile tenuti presso la Facoltà diIngegneria dell’Università degli Studi di Trento.
Gli esercizi riguardano la compensazione ai minimi quadrati di reti di interesse to-pografico, in particolare reti di livellazione e reti planimetriche, oltre a esercizi sullapropagazione della varianza e sui test statistici. Gli esercizi sono proposti per argo-mento per evidenziare meglio tutti gli aspetti del problema per ogni tipo di esercizio,guidando il lettore alla soluzione dapprima del problema di base per arricchirlo suc-cessivamente delle possibili varianti legate alle diverse configurazioni delle reti e dellemisure.
Il volume è organizzato in due parti: la prima parte è dedicata alla teoria della stimaai minimi quadrati e al calcolo dei parametri di una trasformazione di rototraslazione evariazione di scala, la seconda parte riguarda gli esercizi.
Questa seconda parte è composta di sei capitoli, dal terzo all’ottavo, che raggrup-pano ciascuno una tipologia di esercizio con le sue possibili varianti. Il terzo capitoloè dedicato alla propagazione della varianza; il quarto affronta i test statistici. Il quintocapitolo riguarda gli esercizi sulle reti di livellazione geometrica, sia con misure ripe-tute sulle diverse battute sia con tratti composti da più battute. Il sesto capitolo trattala compensazione di reti planimetriche con la misura di angoli e distanze, con misuresingole e ripetute sia di angoli che distanze. Il settimo capitolo affronta gli eserci-zi di simulazione e confronto di reti. L’ottavo capitolo riguarda la rototraslazione evariazione di scala nel piano.
Ogni capitolo inizia con alcuni schemi operativi per la soluzione della classe diesercizi del capitolo in questione. Gli esercizi che hanno costituito prova d’esameriportano in nota il corso e la data.
Le soluzioni numeriche sono state ampiamente testate ma è comunque possibile lapresenza di errori, anche dovuti alla fase di trascrizione. Si prega di segnalare eventualicorrezioni, che verranno inserite nelle prossime stesure.
Si ringraziano Camilla Archetti, Dino Buffoni, Giorgia Carolli, Pavlinka Damjanova eFabiano Lorenzi per la segnalazione di errori presenti nelle precedenti versioni.
Versione del 15 febbraio 2017, 186 esercizi© 2001 - 2017 Paolo [email protected] di Ingegneria Civile, Ambientale e MeccanicaUniversità degli Studi di Trentovia Mesiano, 7738123 TRENTO
Questo documento è disponibile con licenza:cc⃝ Creative Commons Attribuzione-Non commerciale-Condividi allo stesso modo 2.5 ItaliaSome Rights Reserved
VIII

Parte I
Richiami di teoria e schemioperativi
1

Capitolo 1
La compensazione a minimiquadrati delle reti
Il presente capitolo è adattato, con il consenso dell’autore, da: Battista Benciolini Mo-delli di Compensazione, progettazione e ottimizzazione del rilievo topografico e foto-grammetrico di controllo, L. Mussio e F. Crosilla - Eds. – CISM - Udine p. 9-27 –1989.
1.1 Prerequisiti e notazioni
Nel seguito si considerano noti i concetti fondamentali della statistica, dell’algebralineare e dell’analisi.
Si definisce qui il significato di alcuni simboli, mentre altri saranno defini nel testo:
y è una variabile casuale (v.c.) a m dimensioni, che rappresenta di solito un insiemedi misure;
y è la media di y;
x è un vettore di parametri a n dimensioni;
M [·] è l’operatore di media;
y è una stima di y;
x e x sono stime di x;
I è la matrice identità generica;
In è la matrice identità n×n;
y0 è una estrazione della v.c. y.
Il carattere grassetto indica grandezze vettoriali o matriciali.
2

1.2. IL PRINCIPIO DI STIMA AI MINIMI QUADRATI 3
1.2 Il principio di stima ai minimi quadratiÉ data l’estrazione y0 della v.c. y, si sa inoltre che la media y di y appartiene ad unavariabilità lineare di dimensioni n (con n < m). Si vuole ottenere una stima di y, basatasu queste due informazioni, e si vuole che tale stima abbia, sotto opportune condizioni,delle buone proprietà statistiche, che si lasciano per ora indeterminate.
Si deve notare che la appartenenza di y ad una variabilità lineare in Rm si puòscrivere:
By = l (1.1)
oppurey = Ax+ l (1.2)
dove B è una matrice di dimensioni (m− n)×m, A è una matrice di dimensionim×n e l è un vettore di dimensioni opportune (diverse nei due casi); si suppone che Ae B siano di rango pieno.
Si trascurano qui altri casi piú complessi e si trattano, separatamente, solo questidue che sono talvolta chiamati "problema della stima per osservazioni condizionate"e "problema della stima per osservazioni indirette". Il principio dei minimi quadratidefinisce la stima y di y nel seguente modo:
By = l (1.3)v = y−y0 (1.4)vv = min. (1.5)
Le espressioni 1.3-1.5 sono la traduzione analitica di un concetto geometrico: lastima y rappresenta un punto in Rm che è il più vicino a y0 tra tutti i punti che appar-tengono alla stessa varietà della media.
Si può utilizzare la 1.2 al posto della 1.1 e si ottiene:
y = Ax+ l (1.6)v = y−y0 (1.7)vv = min. (1.8)
con identico significato geometrico. È ora necessario ricavare, a partire dalle 1.3-1.5 e dalle 1.6-1.8, le espressioni esplicite delle stime cercate e successivamente le pro-prietà di tali stime. In molti casi uno stesso problema può essere risolto sia scrivendoun’equazione nella forma 1.1 sia nella forma 1.2 e le due soluzioni che si ottengo-no sono equivalenti. La espressione 1.2, e di conseguenza le 1.6-1.8, sono di solitopreferibili per due motivi:
1. i parametri contenuti nel vettore x hanno un preciso significato geometrico ofisico e la loro stima x è in realtá più utile della stima y di y;
2. é piú facile esprimere il vincolo su y con un’equazione del tipo 1.2 piuttosto chedel tipo 1.1 e, soprattutto, é piú facile automatizzare il procedimento che costrui-sce tale equazione a partire dalle misure e dai dati ausiliari raccolti assieme allemisure stesse.
Le 1.3-1.5 esprimono un principio di minimo vincolato, che si trasforma in un prin-cipio di minimo libero con il metodo dei moltiplicatori di Langrange tramite i seguentipassaggi elementari:
Bv = By−By0 = l−By0 (1.9)

4 CAPITOLO 1. LA COMPENSAZIONE A MINIMI QUADRATI DELLE RETI
e quindi {vv = minBv = l−By0
(1.10)
da cui
v′v+2λ ′ (Bv− (l−By0)) (1.11)
dove λ é il vettore dei moltiplicatori di Lagrange. Eguagliando a zero il differen-ziale del primo membro della 1.11 si ottiene:
dv′v+v′dv+2λ ′Bdv+2dλ ′ (Bv− (l−By0)) (1.12)
da cui: {Bv = l−By0v′ = λ ′B (1.13)
e quindi {Bv = l−By0v = B′λ (1.14)
BB′λ = l−By0 (1.15)
ed infine:v = B′ (BB′)−1
(l−By0) (1.16)
che definisce v e di conseguenza y :
y = y0 +v = B′ (BB′)−1 l+(
I−B′ (BB′)−1 B)
y0 (1.17)
L’espressione 1.17 fornisce in modo esplicito la stima richiesta y, inoltre la stessaespressione si può utilizzare per calcolare la matrice di varianza e covarianza di y 1,data la matrice di varianza e covarianza di y, che si suppone della forma:
Cyy = σ20 I (1.18)
si ottiene:Cyy = σ2
0
(I−B′ (BB′)−1 B
)(1.19)
É ora necessario studiare alcune proprietá della stima y. La stima y é corretta, cioérisulta:
M [y] = y (1.20)
La stima y é la stima lineare corretta di minima varianza di y se é valida l’ipotesi1.18.
Queste proprietá non vengono dimostrate; si dimostreranno, invece, piú agevol-mente, le proprietá analoghe di x stima di x nel modello basato sulla espressione 1.2del vincolo.
1 il vettore y indica, con abuso di notazione, sia il vettore numerico funzione di y0 sia il vettore di v.c.funzione di y.

1.2. IL PRINCIPIO DI STIMA AI MINIMI QUADRATI 5
Riprendendo dunque le 1.6-1.8, in cui si può porre senza perdita di generalità l = 0,si ottiene: {
v′v = minv = Ax−y0
(1.21)
e infine:x =
(A′A
)−1 A′y0 (1.22)
y = A(A′A
)−1 A′y0 (1.23)
Le espressioni trovate forniscono x e y , in funzione dei dati, cioé di y0. In generale,come già detto, l’attenzione si concentra su x e non su y. Dalla 1.22 si ottiene, sempreipotizzando la 1.18:
Cxx = σ20(A′A
)−1 (1.24)
Si deve notare che sia l’espressione 1.17 sia le espressioni 1.22 e 1.23 rappresentanoanaliticamente l’operazione geometrica di proiezione ortogonale sulla varietà lineare acui appartiene la media; ciò sarà illustrato anche graficamente nel prossimo paragrafo.La matrice che rappresenta analiticamente una proiezione si chiama "proiettore" ed hala caratteristica di essere idempotente, cioè di rimanere uguale a se stessa quando la simoltiplica per se stessa. Le matrici:
B′ (BB′)−1 B ; I−B′ (BB′)−1 B e A(A′A
)−1 A′
sono proiettori.La correttezza di x 2 è facilmente provata:
M [x] = M[(
A′A)−1 A′y0
]=(A′A
)−1 A′M [y] =(A′A
)−1 A′Ax = x (1.25)
La stima x è la stima lineare corretta di minima varianza di x sempre sotto l’ipotesi1.18. Ciò si può dimostrare considerando una stima lineare generica x=Dy imponendola correttezza e confrontando infine la varianza di x e di x 3 Imponendo la correttezzasi ottiene:
M [x] = x → M [Dy] = x → DM [y] = x → DAx = x → DA = In (1.26)
Se si pone:D =
((A′A
)−1 A′+K)
(1.27)
la condizione di correttezza è soddisfatta solo se KA = 0; perciò la matrice divarianza e covarianza di x risulta:
Cxx = σ20
((A′A
)−1+K′K
)(1.28)
e le varianze delle componenti di x sono maggiori delle varianze delle componentidi x per qualsiasi scelta diversa da K = 0; tale scelta riconduce alla stima x. Si devenotare che questo risultato è indipendente dal valore di σ2
0 , che infatti agisce comepuro fattore di proporzionalità sulla matrice Cxx, ma non è indipendente, in generale,dalla forma di Cyy; è valido solo se Cyy è proporzionale all’identità. Ciò lascia apertoil problema di come si debba modificare il principio di stima a minimi quadrati perottenere stime ottimali sotto condizioni più generali.
2vale anche per x ciò che è stato osservato in nota 1 su y.3ci si limiterà, in realtà, a confrontare le varianze delle componenti dei vettori x e x.

6 CAPITOLO 1. LA COMPENSAZIONE A MINIMI QUADRATI DELLE RETI
1.3 Primi esempi elementariGli esempi di questo paragrafo sono esclusivamente simbolici e servono ad illustrarealcuni concetti esposti nel paragrafo 1.2 e per confrontare tra di loro i metodi di stimabasati sulle espressione 1.1 e sulla 1.2.
Si consideri una livellazione geometrica costituita da tre lati che congiungono trepunti, il primo dei quali ha quota nota e nulla (si può pensare, per dare senso fisico allacosa, che sia collegato ad un mareografo), lo schema della rete è dunque il seguente:
\\
\\
\\
\\\�
��
��
��
�� 2
3
1
Figura 1.1: rete di livellazione con tre misure
Il vettore delle misure è
y0 =
q12q23q31
(1.29)
Avendo indicato con qi j la differenza di quota misurata tra i due punti i e j. Larelazione di chiusura dell’unico ciclo della rete si può scrivere:
By = 0 (1.30)
dove
B = [1,1,1] (1.31)
ed applicando le formule ricavate nel paragrafo 1.2 si ottiene:
y =(
I−B′ (BB′)−1 B)
y0 = y0 −
111
· 13 ∑
iy0i (1.32)
Da questa epressione si vede che in pratica si passa dalle misure y0 alle stime ydistribuendo in modo uniforme il residuo di chiusura.
I dislivelli compensati y soddisfano, ovviamente, le relazione di chiusura By = 0,che non è soddisfatta, in generale, dalle misure y0 (cioè By0 = 0). Ciò significa ancheche le quantità y determinano le quote dei punti 2 e 3 in modo univoco, a differenzadelle misure y0. Volendo utilizzare l’espressione 1.2 si può porre:
x =
[Q2Q3
](1.33)
dove Q2 e Q3 sono le quote dei punti 2 e 3. Risulta dunque:
Ax = y (1.34)

1.3. PRIMI ESEMPI ELEMENTARI 7
dove
A =
1 0−1 1
0 −1
(1.35)
e poi,
x =(A′A
)−1 A′y0 =
[2 −1
−1 2
]−1 1 0
−1 10 −1
q12q23q31
= (1.36)
=
[ 23
13
13
23
][q12 −q23q23 −q31
]=
13
[2q12 −q23 −q312q23 −q12 −q31
]Risulta evidente che questa stima delle quote è identica a quella ottenibile a partire
dalla stima y espressa dalla 1.32. È possibile mettere in evidenza anche graficamente illegame tra le due forme della stima a minimi quadrati se si esamina il caso, ancora piùsemplice, della rete qui schematizzata:
�����������PPPPPPPPPPP�����������PPPPPPPPPPP1 2
q12
q21
Figura 1.2: rete di livellazione con due sole misure
che contiene due soli punti (il primo di quota nota e nulla) collegati da due misuredi dislivello. Lo spazio della y è lo spazio R2; la varietà a cui appartiene la media è labisettrice del IIo e IV o quadrante.
Su tale retta si definisce una ascissa x = Q2. La appartenenza del punto y dicoordinate [y1, y2] alla retta si può esprimere con la equazione di vincolo:
y1 + y2 = 0 (1.37)
oppure in funzione del parametro x:{y1 = xy2 =−x (1.38)
Ovviamente la 1.37 è una equazione della stessa forma delle 1.1 ed il sistema 1.38ha la stessa forma della 1.2; la loro equivalenza è evidente. Si deve infine notare che nelcaso di una rete complessa, con molti lati e molti punti, la scrittura corretta e completadei vincoli nella forma di equazioni di condizione pure (cioè tipo 1.1) può essere moltolaboriosa ed in ogni caso è una operazione difficile da automatizzare.
Al contrario la scrittura delle equazioni di vincolo con parametri (cioè tipo 1.2) puòessere svolta in modo semplice ed univoco con una procedura che può essere facilmentecodificata in un programma automatico.

8 CAPITOLO 1. LA COMPENSAZIONE A MINIMI QUADRATI DELLE RETI
-
6
AAAAAAU
AAAA
AAAA
��
��
��
q21
y0
q12
Q2
y
Figura 1.3: spazio delle misure
1.4 La stima di σ20
Si è sempre supposto, fino a questo punto, che la matrice Cyy sia proporzionale all’i-dentità tramite un fattore σ2
0 . È utile ricavare una stima di σ20 a partire dai dati y0;
tale stima serve sempre come fattore di proporzionalità per le matrici Cxx e Cyy; inoltreil confronto tra la stima σ2
0 ed il valore eventualmente noto a priori σ20 permette di
formulare un giudizio sulla qualità dei dati e sulla correttezza del modello adottato.Le espressioni di σ2
0 che si usano nei due casi di equazioni di condizione pure econ parametri aggiuntivi sono (ponendo r = m−n):
σ20 =
v′vr
(1.39)
σ20 =
v′vm−n
(1.40)
Qui di seguito si ricava solo la prima delle due espressioni. Partendo dall’espres-sione di v in funzione di y0:
v =(
B′ (BB′)−1 B)
y0 (1.41)
si ottiene:
M[v′v
]= M
[tr(v′v
)]= M
[tr(vv′
)]= tr M
[(vv′
)]= (1.42)
= σ20 tr
[(BB′)−1 ·BB′
]= σ2
0 trIr = r σ20
ne segue che l’espressione 1.39 è una stima corretta di σ20 .

1.5. GENERALIZZAZIONE DEL PRINCIPIO DI STIMA AI MINIMI QUADRATI9
1.5 Generalizzazione del principio di stima ai minimiquadrati
Il principio di stima ai minimi quadrati che è stato definito nel paragrafo 1.2 perde lesue caratteristiche di ottimalità se la matrice Cyy non è proporzionale all’identità. Se sisuppone che sia:
Cyy = σ20 Q (1.43)
dove Q è una qualsiasi matrice simmetrica e definita positiva. Conviene scrivere ilprincipio dei minimi quadrati nel modo seguente:
v′Q−1v = min (1.44)
Seguendo gli stessi procedimenti del paragrafo 1.2 si ottengono allora le espressio-ni: {
y = y0 −QB′ (BQB′)−1 (l−By0)
Cyy = σ20
(Q−QB′ (BQB′)−1 BQ
) (1.45)
per il modello con equazioni di condizione pure, e{x =
(A′Q−1A
)−1 AQ−1y0
Cxx = σ20(A′Q−1A
)−1 (1.46)
per il modello con equazioni di condizione con parametri, mentre le espressioni diσ2
0 si ottengono sostituendo v′Q−1v al posto di v′v nelle 1.39 e 1.40.La scelta 1.44 si può giustificare dimostrando che le stime che si ottengono in
questo modo sono le stime lineari corrette di minima varianza hanno cioè la stessaproprietà delle stime ai minimi quadrati semplici nel caso Cyy = σ2
0 I.Si può però seguire una via diversa. Si definisca una matrice W tale che:
W′W = Q−1 (1.47)
e si considera il vettore di v. c. β definito da:
β = Wy (1.48)
Si ottiene poi facilmente la matrice di varianza e covarianza di β , che risulta:
Cββ = σ20 I (1.49)
Le espressioni 1.45 e 1.46 si possono ora ottenere con la seguente sequenza dioperazioni:
1. si trasforma lo spazio delle misure con la trasformazione 1.48;
2. si applica il principio dei minimi quadrati semplice, cosa che è giustificata dalla1.49;
3. si ritorna, se necessario, alla rappresentazione originale delle misure invertendola 1.48.

10 CAPITOLO 1. LA COMPENSAZIONE A MINIMI QUADRATI DELLE RETI
Qui di seguito si applica tale procedimento al solo caso delle equazioni con para-metri.
La trasformazione di variabili 1.48 fornisce i dati:
β0 = Wy0 (1.50)
da trattare con il modello: {Ax = βCββ = σ2
0 I (1.51)
dove A = WA. Applicando il principio dei minimi quadrati come nel paragrafo 1.2si ottiene:
x =(A′A
)−1 A′β0 =(A′W′WA
)−1 A′W′Wy0 =(A′Q−1A
)−1 AQ−1y0 (1.52)
cioè proprio la 1.46.
1.6 Le equazioni di osservazione delle reti topograficheplanimetriche
Nel paragrafo 1.3 si sono discusse, sia pure solo tramite esempi, le equazioni del-le reti di livellazione. In questo paragrafo si devono trattare le equazioni delle retiplanimetriche.
Le misure che si considerano sono direzioni azimutali e distanze orizzontali; i pa-rametri sono le coordinate planimetriche dei punti. Si considerano, per semplicità,coordinate cartesiane ortogonali.
Le equazioni che legano angoli e direzioni con i parametri di punto sono in ognicaso non lineari, ma possono essere scritte isolando il termine che rappresenta la mi-sura. È necessario disporre di valori approssimati dei parametri x per linearizzare leequazioni prima di applicare il metodo di stima a minimi quadrati; si passa così dalsistema:
f1 (x) = l1f2 (x) = l2···fm (x) = lm
(1.53)
al sistema matriciale:Aξ = l− f(x) (1.54)
dove:
Ai j =∂ fi
∂x j
∣∣∣∣x=x
(1.55)
ξ = x− x (1.56)
L’equazione della distanza è:
di j =
√(xi − x j)
2 +(yi − y j)2 (1.57)

1.7. ESEMPI NUMERICI 11
dove d è la distanza orizzontale, x e y sono le coordinate cartesiane e i e j indicanodue punti della rete.
L’equazione della direzione è:
θi j = arctanx j − xi
y j − yi−δ j (1.58)
dove θ è la direzione e δ è l’origine delle direzioni misurata rispetto alla direzionedell’asse y. Le equazioni 1.57 e 1.58 si linearizzano ponendo:
x = x+ξ (1.59)y = y+η (1.60)
di j =
√(xi − x j)
2 +(yi − y j)2 (1.61)
θi j = arctanx j − xi
y j − yi− δ j (1.62)
(1.63)
e diventano:
di j − di j =x j − xi
di j(ξi −ξ j)+
y j − yi
di j(ηi −η j) (1.64)
θi j − θi j =y j − yi
di j2(ξi −ξ j)+
x j − xi
di j2(ηi −η j) (1.65)
Il principio di stima a minimi quadrati si applica in modo elementare solo se lamatrice A che lega i parametri (coordinate) con le misure è di rango pieno: ciò non av-viene in una rete topografica in cui si misurano solo angoli oppure angoli e distanze. Inentrambi i casi si può sopperire alla deficienza di rango di A in vari modi: il modo piùsemplice, anche se non esente da critiche, è di fissare a priori il valore di 3 o 4 coordi-nate di punti nella rete. Il problema è in realtà sia concettualmente sia numericamentedelicato e non sarà trattato in dettaglio.
Negli esempi sviluppati in seguito si supporrà sempre che le coordinate di un cer-to numero di punti, anche sovrabbondanti, siano esattamente note a priori, e ciò ècomunque sufficiente perchè i problemi siano risolvibili.
1.7 Esempi numerici
1.7.1 Determinazione delle coordinate di un punto da tre misure didistanza
Dal punto P (vicino all’origine del sistema di riferimento) si sono misurate le distanzedi tre punti di coordinate note. Le coordinate dei punti e le distanze sono riportate (inmetri) in tabella 1.1.
Si devono stimare le coordinate di P e la loro matrice di varianza e covarianza. Leequazioni di osservazione linearizzata assumono la forma:
Aξ = y (1.66)
dove:

12 CAPITOLO 1. LA COMPENSAZIONE A MINIMI QUADRATI DELLE RETI
n. x y dist.1 400 300 499.8592 400 -300 500.1953 -200 0 199.958
Tabella 1.1: coordinate dei punti e distanze
A =
− 45 − 3
5− 4
535
1 0
(1.67)
ξ =
[xPyP
](1.68)
e si dispone della estrazione di y
y0 =
−0.1410.195
−0.042
(1.69)
Applicando le espression ricavate al paragrafo 1.2 si ottiene facilmente:
ξ =
[0.250
−0.050
](1.70)
Cξ ξ = 114 ·10−6 ·[ 25
18 00 25
57
](1.71)
1.7.2 Livellazione con quattro punti e cinque misure
Si consideri una rete di livellazione con quattro punti (denominati 1, 2, 3 e 4) di cui ilprimo di quota nota e nulla. Il risultato delle operazioni di misura è il seguente:
y0 =
q14 = 1.01 mmq12 = 0.99 mmq23 = 1.05 mmq13 = 2.04 mmq34 = −1.05 mm
(1.72)
qi j = Q j −Qi (1.73)
Si devono stimare le quote dei punti 2, 3 e 4 supponendo che le misure siano incor-relate e di uguale precisione. Si deve anche stimare la matrice di varianza e covarianzadel risultato:
x =
Q2Q3Q4
(1.74)

1.7. ESEMPI NUMERICI 13
A =
0 0 +1
+1 0 0−1 +1 0
0 +1 00 −1 +1
(1.75)
y0 =
q14q12q23q13q34
(1.76)
e si ottiene alla fine:
x =
0.99252.04501.0025
(1.77)
Cxx =18·
5 2 12 4 21 2 5
(1.78)

Capitolo 2
Rototraslazione e variazione discala
Gli esercizi di calcolo dei parametri di rototraslazione e variazione di scala possono es-sere svolti, avendo scritto le opportune equazioni di osservazione, come gli altri esercizidi stima ai minimi quadrati.
E’ tuttavia utile introdurre una trattazione apposita per questa categoria di problemiin quanto essa porta a notevoli vantaggi computazionali. Si tratta di una specializzazio-ne del metodo di stima ai minimi quadrati per questo tipo di problemi che trae beneficiodalla particolare struttura delle matrici e vettori coinvolti.
Una trasformazione di rototraslazione e variazione di scala si può in generale espri-mere come
xi = λRx′i +x0 (2.1)
che porta dalle coordinate x′i alle coordinate x per ogni punto i. Nel piano la matricedi rotazione R è funzione di un solo angolo R = R(α):
R =
[cos(α) sin(α)
−sin(α) cos(α)
](2.2)
Utilizzare questa forma per la matrice R nella 2.1 porta alla scrittura di un sistemanon lineare; si preferisce perciò riscrivere la matrice R nella forma
λR =
[a b
−b a
](2.3)
avendo posto a = λ cos(α) e b = λ sin(α). E‘ ovviamente possibile calcolare λ eα a partire da a e b con le
λ =√
a2 +b2 (2.4)
α = arctanba
(2.5)
Queste equazioni possono essere utilizzate in due diversi modi:
1. noti i parametri α , λ e x0 si trasformano le coordinate x′i in xi;
14

15
2. note le coordinate di alcuni punti in entrambi i sistemi x′i e xi si calcolano i valoridei parametriα , λ e x0.
Mentre il primo tipo di utilizzo è banale e richiede l’applicazione di semplici pas-saggi algebrici e non sarà approfondito nel seguito, il secondo tipo di problemi richiedeulteriori considerazioni.
Innanzitutto per il calcolo dei quattro parametri è necessario scrivere almeno quat-tro equazioni (due nella forma vettoriale 2.1): si devono conoscere le coordinate dialmeno due punti in entrambi i sistemi 1. E’ opportuno però avere un controllo sullasignificatività dei parametri calcolati; per questo motivo si utilizzano sempre più di duepunti di coordinate note, stimando i parametri con il criterio dei minimi quadrati.
Si utilizza quindi il metodo di stima ai minimi quadrati con parametri aggiuntiviper stimare i parametri a, b e x0, da cui è possibile ricavare α , λ e x0. Il metodopermette inoltre il calcolo della matrice di varianza e covarianza di questi parametri.L’equazione 2.1 si scrive in forma scalare
xi = ax′i +by′i + x0yi =−bx′i +ay′i + y0
(2.6)
per ogni punto i si scrive una coppia di equazioni di questa forma. La matricedisegno A della compensazione ha quattro colonne (per a, b, x0 e y0) e 2×N righe, conN numero di punti con coordinate note nei due sistemi. Tale matrice si scrive:
A =
x′1 y′1 1 0y′1 −x′1 0 1x′2 y′2 1 0y′2 −x′2 0 1
...
...x′N y′N 1 0y′N −x′N 0 1
(2.7)
Ipotizzando le coordinate x indipendenti e determinate con la stessa precisione, lamatrice dei pesi Q−1 è uguale all’identità. La matrice normale N risulta quindi
N = A′A =
∑N
i=1 x′i2 + y′i
2 ∑Ni=1 x′iy
′i − y′ix
′i ∑N
i=1 x′i ∑Ni=1 y′i
∑Ni=1 x′iy
′i − y′ix
′i ∑N
i=1 x′i2 + y′i
2 ∑Ni=1 y′i −∑N
i=1 x′i∑N
i=1 x′i ∑Ni=1 y′i N 0
∑Ni=1 y′i −∑N
i=1 x′i 0 N
(2.8)
Dove ovviamente x′iy′i = y′ix
′i ∀i e quindi
N =
∑N
i=1 x′i2 + y′i
2 0 ∑Ni=1 x′i ∑N
i=1 y′i0 ∑N
i=1 x′i2 + y′i
2 ∑Ni=1 y′i −∑N
i=1 x′i∑N
i=1 x′i ∑Ni=1 y′i N 0
∑Ni=1 y′i −∑N
i=1 x′i 0 N
(2.9)
E’ possibile semplificare significativamente questa matrice fino a renderla diagona-le sostituendo alle coordinate x′i le coordinate baricentriche x′i, determinate sottraendoalle coordinate le coordinate del loro baricentro (cioè le medie delle coordinate). Posto
x′B =1N
N
∑i=1
x′i (2.10)
1si scrivono infatti due equazioni per ogni punto

16 CAPITOLO 2. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
y′B =1N
N
∑i=1
y′i (2.11)
e quindi le coordinate baricentriche
x′i = x′i − x′B (2.12)
y′i = y′i − y′B (2.13)
l’equazione 2.1 si scrive quindi
xi = λRx′i +x0 (2.14)
Per le coordinate baricentriche, per come sono state costruite, si ha
N
∑i=1
x′i = 0 (2.15)
N
∑i=1
y′i = 0 (2.16)
e quindi la matrice normale N si scrive
N =
∑N
i=1 x′i2 + y′i
2 0 0 00 ∑N
i=1 x′i2 + y′i
2 0 00 0 N 00 0 0 N
(2.17)
Il termine noto normale risulta
TN = A′y0 =
∑N
i=1 x′ixi + y′iyi
∑Ni=1 y′ixi − x′iyi
∑Ni=1 xi
∑Ni=1 yi
(2.18)
Passando alle coordinate baricentriche anche per il sistema x, con
xB =1N
N
∑i=1
xi (2.19)
yB =1N
N
∑i=1
yi (2.20)
e quindi le coordinate baricentriche
xi = xi − xB (2.21)
yi = yi − yB (2.22)
poiché
N
∑i=1
xi = 0 (2.23)

17
N
∑i=1
yi = 0 (2.24)
il termine noto normale si scrive
TN = A′y0 =
∑N
i=1 x′ixi + y′iyi∑N
i=1 y′ixi − x′iyi∑N
i=1 xi
∑Ni=1 yi
=
∑N
i=1 x′ixi + y′iyi∑N
i=1 y′ixi − x′iyi00
(2.25)
La stima di x risulta quindi
x = N−1TN =
∑N
i=1 x′ixi+y′iyi
∑Ni=1 x′i
2+y′i2
∑Ni=1 y′ixi−x′iyi
∑Ni=1 x′i
2+y′i2
00
(2.26)
cioè
a =∑N
i=1 x′ixi + y′iyi
∑Ni=1 x′i
2 + y′i2 (2.27)
b =∑N
i=1 y′ixi − x′iyi
∑Ni=1 x′i
2 + y′i2 (2.28)
x0 = 0 (2.29)y0 = 0 (2.30)
I valori di α e λ si ricavano dalle 2.27-2.28 con le 2.4-2.5. La traslazione x0 tra idue sistemi si determina applicando la 2.1 ai baricentri, con i parametri a e b appenacalcolati
xB = λRx′B +x0 (2.31)
da cui
x0 = xB −λRx′B (2.32)
cioè {x0 = xB −ax′B −by′By0 = yB +bx′B −ay′B
(2.33)
La stima della varianza si calcola con la 2
σ20 =
v′vm−n
(2.34)
dove m è il numero di equazioni e n il numero di parametri stimati. In questo caso,con N punti di coordinate note in entrambi i sistemi, m= 2N e n= 4, i parametri stimatisono infatti a, b, x0 e y0. Si ha quindi
2si ricordi che Q−1 = I

18 CAPITOLO 2. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
σ20 =
v′v2N −4
(2.35)
La stima degli scarti v si ricava ancora una volta dalla 2.1, usando i parametri a, b,x0 e y0 stimati. Per ogni punto i si scrive una equazione vettoriale:
v = xi −(λRx′i +x0
)(2.36)
ed in forma scalare: {vxi = xi − (ax′i +by′i + x0)vyi = yi − (−bx′i +ay′i + y0)
(2.37)
e quindi
σ20 =
v′v2N −4
=∑N
i=1
(v2
xi + v2yi
)2N −4
(2.38)
con i = 1 . . .N.A partire dalla sima di σ2
0 e dalla 2.17 è possibile stimare la matrice di varianzae covarianza di a, b, x0 e y0: gli ultimi due termini non rappresentano le traslazionifra i due sistemi. Se si richiede il calcolo della varianza e covarianza delle traslazioniè necessario procedere al calcolo della matrice normale inversa N−1 completa. Lamatrice calcolata di seguito è quindi utile per il solo calcolo delle varianze di a e b.
Cabx0y0 = σ20 N−1 = σ2
0
1
∑Ni=1 x′i
2+y′i2 0 0 0
0 1∑N
i=1 x′i2+y′i
2 0 0
0 0 1N 0
0 0 0 1N
(2.39)
e quindi
σ2a = σ2
b =σ2
0
∑Ni=1 x′i
2+y′i2
σab = 0(2.40)
Tenendo presente il legame rappresentato dalle 2.4-2.5 si può determinare la matri-ce Cλα a partire dalla 2.39 propagando opportunamente la varianza. Poiché λ e α nondipendono da x0 e y0 conviene estrarre dalla matrice Cabx0y0 la sottomatrice Cab, 2×2,relativa ad a e b
Cab =
[σ2
a 00 σ2
b
]= σ2
0
1∑N
i=1 x′i2+y′i
2 0
0 1∑N
i=1 x′i2+y′i
2
(2.41)
da cui Cλα
Cλα = JCabJ′ (2.42)
Lo Jacobiano J si scrive
J =
[ ∂λ∂a
∂λ∂b
∂α∂a
∂α∂b
](2.43)

19
dove
∂λ∂a
=12
2a√a2 +b2
=aλ
(2.44)
∂λ∂b
=12
2b√a2 +b2
=bλ
(2.45)
∂α∂a
=1
1+( b
a
)2 b−1a2 =
a2ba2 +b2
−1a2 =− b
λ 2 (2.46)
∂α∂b
=1
1+( b
a
)21a=
a2
a2 +b21a=
aλ 2 (2.47)
e quindi
J =
[ aλ
bλ
− bλ 2
aλ 2
](2.48)
e infine
Cλα = JCabJ′ =[ a
λbλ
− bλ 2
aλ 2
][σ2
a 00 σ2
b
][ aλ
−bλ 2
bλ
aλ 2
]=
=
(a2
λ 2 +b2
λ 2
)σ2
a 0
0(
a2
λ 4 +b2
λ 4
)σ2
b
=
[σ2
a 0
0 σ2b
λ 2
](2.49)
Si ricava quindi, tenendo conto che σ2a = σ2
b ,
σ2λ = σ2
a = σ2b (2.50)
σ2α =
σ2a
λ 2 =σ2
bλ 2 (2.51)
σλα = 0 (2.52)

Parte II
Esercizi
20

Capitolo 3
Propagazione della varianza
3.1 Schemi
La propagazione della varianza permette il calcolo della matrice di varianza e covarian-za di una variabile vettoriale a partire dalla matrice di varianza e covarianza di un’altravariabile vettoriale una volta noto il loro legame y = f (x).
Nel caso in cui la funzione f (x) sia una lineare, il legame si può esprimere con
y = Ax+b (3.1)
e la matrice di varianza e covarianza di y si scrive
Cyy = ACxxA′ (3.2)
dove A è la matrice dei coefficienti di x nella 3.1 e Cxx la matrice di varianza ecovarianza di x, come nella 3.4.
Nel caso in cui la funzione f (x) non sia lineare, l’espressione generale per la pro-pagazione della varianza dalla variabile vettoriale x, di dimensione n, alla variabilevettoriale y, di dimensione m, è
Cyy = JCxxJ′ (3.3)
dove Cxx è la matrice di varianza e covarianza di x, J è lo Jacobiano della funzioneche lega y a x e Cyy è la matrice di varianza e covarianza di y.
Cxx =
σ2
x1x1σx1x2 . . . σx1xn
σx2x1 σ2x2x2
. . . σx2xn
. . .σxnx1 σxnx2 . . . σ2
xnxn
(3.4)
J =
∂y1∂x1
∂y1∂x2
. . . ∂y1∂xn
∂y2∂x1
∂y2∂x2
. . . ∂y2∂xn
. . .∂ym∂x1
∂ym∂x2
. . . ∂ym∂xn
(3.5)
21

22 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
Cyy =
σ2
y1y1σy1y2 . . . σy1yn
σy2y1 σ2y2y2
. . . σy2yn
. . .σyny1 σyny2 . . . σ2
ynyn
(3.6)

3.2. ESERCIZI RISOLTI 23
3.2 Esercizi risolti
3.2.1 Volume e superficie di un cilindro1
Si determimino il volume V e la superficie S di un cilindro e la loro matrice di varianzae covarianza avendo misurato il raggio r della base e la altezza h.
r = 1m con σ2r = 1mm2 h = 2m con σ2
h = 2mm2
dove
S = 2πr2 +2πrh = 2πr (r+h) V = πr2h
SvolgimentoLa superficie ed il volume risultano rispettivamenteS = 2π1(1+2) = 6π = 18.849555 m2 V = π122 = π2 = 6.283185 m4
CSV = JCrhJ′
dove lo Jacobiano J risulta
J =
[ ∂S∂ r
∂S∂h
∂V∂ r
∂V∂h
]=
[2π (2r+h) 2πr
2πrh πr2
]=
[8π 2π4π π
]= π
[8 24 1
]e la matrice di varianza e covarianza di r e h, supposte le misure indipendenti e avendoespresso le varianza in metri al quadrato
Crh =
[σ2
r 00 σ2
h
]=
[10−6 0
0 2 10−6
]da cui
CSV = JCrhJ′ = π[
8 24 1
]·[
10−6 00 2 10−6
]·π
[8 42 1
]=
=
[72 3636 18
]10−6 π2 =
[7.106115 10−4 3.553058 10−4
3.553058 10−4 1.776529 10−4
]
1Diploma Universitario, 5 marzo 1999

24 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3 Esercizi
3.3.1 Trasformazione di coordinate cartesiane in polari2
Sono note le coordinate di un punto P(xP,yP) in un sistema di coordinate cartesiane(x,y) e la loro varianza. Si vogliono esprimere le coordinate del punto P e la loroprecisione in un sistema di coordinate polari (α,ρ) con origine coincidente con quellodel sistema cartesiano e origine della coordinata angolare sull’asse x (vedi figura).
-�������
��
6P(x,y)
α
ρ
x
y
Le coordinate del punto P e la loro matrice di varianza e covarianza risultano dauna precedente compensazione:
(xP,yP) = (100,100) m
CxP,yP =
(σ2
xPσxP,yP
σxP,yP σ2yP
)=
(10 ·10−6 2 ·10−6
2 ·10−6 10 ·10−6
)m2
Si determinino le coordinate (αP,ρP) e la loro matrice di varianza e covarianza.
Soluzione
L’angolo αP ed il raggio ρP risultano rispettivamente αP = π4 ρP = 100
√2 e la loro
matrice di varianza e covarianza
Cαρ =
[4 10−10 0
0 1.2 10−5
]
3.3.2 Perimetro e area di un triangolo3
Si misurano i cateti l1 e l2 di un triangolo rettangolo. Le misure sono incorrelate e diuguale precisione.
l1 = 300 ml2 = 400 m
σl = 1 cm
Si determini la matrice di varianza e covarianza di perimetro ed area del triangolo.2Diploma Universitario, 10 novembre 19983Diploma Universitario, 26 ottobre 1999

3.3. ESERCIZI 25
Soluzione
Il perimetro P e l’area A risultano rispettivamente P = 1200 m A = 60000 m2 e la loromatrice di varianza e covarianza
CAP =
[6.25 5.9 10−2
5.9 10−2 5.8 10−4
]
3.3.3 Volume e superficie di un cilindro4
Si vogliono determinare volume e superficie di un cilindro e la loro matrice di varianzae covarianza. A questo scopo sono stati misurati il raggio r della base con r = 100me la altezza h = 0.5m. Le misure sono indipendenti e di uguale precisione, con σr =σh = 1mm.
(Si lasci indicato π senza sostituire il suo valore)
Soluzione
La superficie ed il volume risultano rispettivamente S = 20100π m2 e V = 5 103π m3.La matrice di varianza e covarianza di S e V risulta
CSV = JCrhJ′ =[
2.00801 10−1 2.0402.040 1.0001 102
]π2
3.3.4 Superficie e volume di un parallelepipedo5
E’ stata asfaltata una strada rettilinea, di cui sono state misurate la lunghezza Lu paria 10km con σLu = 3m e la larghezza La di 10m con σLa = 3cm. Sapendo che lo spes-sore s pari a 10 cm è stato misurato con σs = 3mm, determinare il volume di asfaltonecessario, la sua superficie (superiore) e la loro matrice di varianza e covarianza.
Nota: i dati potrebbero non essere realistici perchè sono stati scelti per semplificare i calcolinecessari alla risoluzione del problema.
Soluzione
Il volume e la superficie risultano rispettivamente: V = 104 m3 S = 105 m2 e la loromatrice di varianza e covarianza
CV S =
[90909 90909090 90900
]
3.3.5 Area e perimetro di un rettangolo6
Sono stati misurati un lato e la diagonale di un appezzamento di terreno rettangolare,ottenendo 40.0 m per il lato e 50.0 m per la diagonale. Le misure sono indipendentied entrambe con sqm pari a 1 mm. Si determinino area, perimetro e loro matrice divarianza e covarianza.
4Diploma Universitario, recupero 1999-20005Diploma Universitario, 7 novembre 20006Topografia e Trattamento delle osservazioni, 24 giugno 2002

26 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
Soluzione
L’area ed il perimetro risultano rispettivamente A = 1200 m2 P = 140 m e la loromatrice di varianza e covarianza
CAP =
[4.98 10−3 2.37 10−4
2.37 10−4 1.15 10−5
]
3.3.6 Distanza fra due punti7
Dati due punti 1 e 2 del piano, con (x,y)1 = (6,8)m e (x,y)2 = (2,5)m, le cui coordinatesono incorrelate e di uguale precisione σc = 1mm, determinare la distanza d e la suavarianza.
Soluzione
d12 = 5 m
σ2d12
= 2 10−6 m2
3.3.7 Trasformazione di coordinate polari in cartesiane8
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P e la loro precisione in un sistema di coordinate cartesiane conasse delle ascisse x coincidente con l’asse rispetto a cui è stato misurato l’angolo α .
DatiαP =−50g con σα = 10cc
ρP = 100m con σρ = 1mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza.
Soluzione
(xP,yP) = (100
√2
2,−100
√2
2) m
CxP,yP =
[σ2
xPσxP,yP
σxP,yP σ2yP
]=
[1.733700 ·10−6 7.337005 ·10−7
7.337005 ·10−7 1.733700 ·10−6
]m2
3.3.8 Volume e superficie di un cilindro9
Si vogliono determinare volume e superficie di un cilindro e la loro matrice di varianzae covarianza. A questo scopo sono stati misurati il raggio r della base con r = 10m ela altezza h = 1m. Le misure sono indipendenti e di uguale precisione, con σr = σh =1mm.
(Si lasci indicato π senza sostituire il suo valore)
7Topografia e Trattamento delle osservazioni, 14 aprile 20038Topografia 1, 6 febbraio 20029Topografia 1, 25 febbraio 2002

3.3. ESERCIZI 27
Soluzione
Il volume e la superficie risultano rispettivamente V = 100π m3 e S = 220π m2. Lamatrice di varianza e covarianza di V e S risulta
CV S = JCrhJ′ =[
1.040 10−2 2.840 10−3
2.840 10−3 2.164 10−3
]π2
3.3.9 Volume e superficie di un parallelepipedo10
Si vogliono determinare volume e superficie di un parallelepipedo e la loro matrice divarianza e covarianza. A questo scopo sono stati misurati i tre spigoli l1 = 100m, l2 =200m e l3 = 300m. Le misure sono indipendenti e di uguale precisione con σl = 1mm.
Soluzione
Il volume e la superficie risultano rispettivamente: V = 6 106 m3 S = 2.2 105 m2 e laloro matrice di varianza e covarianza
CV S =
[4900 96
96 2
]
3.3.10 Area e perimetro di un rombo11
Si vogliono determinare area e perimetro di un rombo e la loro matrice di varianza ecovarianza. A questo scopo sono stati misurate le diagonali d1 = 60m, d2 = 80m. Lemisure sono indipendenti e di uguale precisione con σl = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A= 2400m2 P= 200m e la loro matricedi varianza e covarianza
CAP =
[2500 9696 4
]10−6
3.3.11 Massa di una sfera12
Si determinino la massa e la sua varianza di una sfera di legno di abete avendonemisurati il raggio, con R = 1m e σR = 1mm, e la densità, con ρ = 600 kg/m3 e σρ =3 kg/m3.
Soluzione
La massa risulta: M = π800kg e la sua varianza σ2M = π2 21.76kg2.
10Topografia 1, 8 gennaio 200311Topografia 1, 21 gennaio 200312Topografia 1, 14 aprile 2003

28 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3.12 Trasformazione di coordinate polari in cartesiane13
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P e la loro precisione in un sistema di coordinate cartesiane conasse delle ascisse x coincidente con l’asse rispetto a cui è stato misurato l’angolo α .
-�������
��
6P(x,y)
α
ρ
x
y
DatiαP = 50g con σα = 20cc
ρP = 200m con σρ = 2mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza.
Soluzione
(xP,yP) = (100√
2,100√
2) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
=
[2.173921 ·10−5 −1.773921 ·10−5
−1.773921 ·10−5 2.173921 ·10−5
]m2
3.3.13 Perimetro e area di un triangolo14
Si vogliono determinare area e perimetro di un triangolo rettangolo e la loro matrice divarianza e covarianza. A questo scopo sono stati misurati i due cateti con l1 e l2. Lemisure sono incorrelate e di uguale precisione.
l1 = 5 ml2 = 12 m
σl = 2 mm
13Topografia 1, 2 luglio 200314Topografia 1, 10 settembre 2003

3.3. ESERCIZI 29
Soluzione
Il perimetro P e l’area A risultano rispettivamente P= 30 m A= 30 m2 e la loro matricedi varianza e covarianza
CAP =
[1.69 10−4 5.246154 10−5
5.246154 10−5 2.246153 10−5
]
3.3.14 Trasformazione di coordinate polari in cartesiane15
Sono note le coordinate di un punto P in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ dall’origine. Si vuoleesprimere le coordinate del punto P e la loro precisione in un sistema cartesiano conasse delle ascisse x coincidente con la direzione origine di α . Sono date le misure del-l’angolo α , con α = 50g e σα = 20cc, e della distanza dall’origine ρ , con ρ = 1000 me σρ = 1 mm +1 ppm.Si determinino le coordinate cartesiane (xP,yP) del punto P e la loro matrice di varianzae covarianza.
Soluzione
(xP,yP) = (1000
√2
2,1000
√2
2) m
CxP,yP =
[σ2
xPσxP,yP
σxP,yP σ2yP
]=
=
[4.954802 ·10−4 −4.914802 ·10−4
−4.914802 ·10−4 4.954802 ·10−4
]m2
3.3.15 Volume e superficie di un cilindro16
Si vogliono determinare volume e superficie di un cilindro e la loro matrice di varianzae covarianza. A questo scopo sono stati misurati il raggio r della base con r = 10m ela altezza h = 2m. Le misure sono indipendenti e di uguale precisione, con σr = σh =0.5mm.
(Si lasci indicato π senza sostituire il suo valore)
Soluzione
La superficie ed il volume risultano rispettivamente S = 440π m2 e V = 200π m3. Lamatrice di varianza e covarianza di S e V risulta
CSV = JCrhJ′ =[
5.84 10−4 9.40 10−4
9.40 10−4 2.90 10−3
]π2
15Topografia e Trattamento delle osservazioni, 11 settembre 200316Topografia e Trattamento delle osservazioni, 18 dicembre 2003

30 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3.16 Massa di una sfera17
Si determinino la massa e la sua varianza di una sfera di acciaio avendone misuratiil raggio, con R = 3mm e σR = 0.1mm, e la densità, con ρ = 8000 kg/m3 e σρ =100 kg/m3.
Soluzione
La massa risulta M = π3.24 10−4kg e la sua varianza σ2M = π2 8.4240 10−10kg2.
3.3.17 Trasformazione di coordinate polari in cartesiane18
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P e la loro precisione in un sistema di coordinate cartesiane conasse delle ascisse x coincidente con l’asse rispetto a cui è stato misurato l’angolo α .
-�������
��
6
P(x,y)
α
ρ
x
y
DatiαP = 30◦ con σα = 1◦.8 10−3
ρP = 200m con σρ = 1mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza.
Soluzione
(xP,yP) = (100√
3,100) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
[1.062 10−5 −1.6 10−5
−1.6 10−5 2.985881 10−5
]m2
3.3.18 Area e perimetro di una corona circolare19
Si determinino superficie, perimetro e loro matrice di varianza e covarianza di unacorona circolare avendone misurati raggio interno r1 = 10 m ed esterno r2 = 20 m, conσr1 = σr2 = 1 mm.
17Topografia 1, 16 gennaio 200418Topografia 1, 9 febbraio 200419Topografia 1, 15 aprile 2004

3.3. ESERCIZI 31
����&%'$
-6r1r2
Soluzione
A = 300π m2 P = 60π m
CAP =
[2000 40
40 8
]π2 10−6 =
[1.973921 10−2 3.947842 10−4
3.947842 10−4 7.895684 10−5
]
3.3.19 Trasformazione di coordinate polari in cartesiane e distan-za20
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P, la sua distanza dal punto A di coordinate note, e la loro pre-cisione in un sistema di coordinate cartesiane con asse delle ascisse x coincidente conl’asse rispetto a cui è stato misurato l’angolo α .
-���������
6
P(x,y)
α
ρ
x
y
AAAAAAAAAA
DatiαP = 50g con σα = 20cc
ρP = 20m con σρ = 1mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza. Si
determini inoltre la distanza dPA del punto P dal punto A di coordinate note (20,0) e lasua varianza.
Soluzione
(xP,yP) = (10√
2,10√
2) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
20Topografia 1, 21 giugno 2004

32 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
=
[6.974 10−7 3.026 10−7
3.026 10−7 6.974 10−7
]m2
dAP = 15.307 m σ2dAP
= 4.834160 10−7 m2
3.3.20 Angoli come differenze di direzioni21
A partire dalla direzione y di un sistema di riferimento cartesiano sono state misuratein modo indipendente tre direzioni θ1 = 10g, θ2 = 50g, θ3 = 80g, con σθ1 = σθ2 =σθ3 = 20cc, da cui sono stati ricavati gli angoli α e β come in figura. Si determininogli angoli α e β e la loro matrice di varianza e covarianza.
y
x
θ1
θ2
θ3β
α
Soluzione
α = 40g β = 30g
Cα,β =
[σ2
α σαβσβα σ2
β
]=
[2 −1
−1 2
]π2 10−10 rad2 ≃
≃[
1.973921 10−9 9.869604 10−10
9.869604 10−10 1.973921 10−9
]rad2
3.3.21 Area e perimetro di un rombo22
Si vogliono determinare area e perimetro di un rombo e la loro matrice di varianza ecovarianza. A questo scopo sono state misurate le diagonali d1 = 8m, d2 = 15m. Lemisure sono indipendenti e di uguale precisione con σl = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 60m2 P = 34m e la loro matrice divarianza e covarianza
CAP = 10−6[ 289
424017
24017 4
]=
[7.225 10−5 1.411765 10−5
1.411765 10−5 4 10−6
]21Topografia 1, 5 luglio 200422Topografia 1, 7 settembre 2004

3.3. ESERCIZI 33
3.3.22 Trasformazione di coordinate polari in cartesiane e distan-za23
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P, la sua distanza dal punto A di coordinate note, e la loro pre-cisione in un sistema di coordinate cartesiane con asse delle ascisse x coincidente conl’asse rispetto a cui è stato misurato l’angolo α .
-���������
6P(x,y)
α
ρ
x
y
A
DatiαP = π/6 rad con σα = 10−5 radρP = 200m con σρ = 2mm
si determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza. Sidetermini inoltre la distanza dPA del punto P dal punto A di coordinate (100
√3,0) e la
sua varianza.
Soluzione
(xP,yP) = (100√
3,100) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
[4 10−6 0
0 4 10−6
]m2
dOP = 100 m σ2dAP
= 4 10−6 m2
3.3.23 Angoli come differenze di direzioni24
A partire dalla direzione y di un sistema di riferimento cartesiano sono state misuratein modo indipendente tre direzioni θ1 = 20g, θ2 = 60g, θ3 = 80g, con σθ1 = σθ2 =σθ3 = 10cc, da cui sono stati ricavati gli angoli α e β come in figura. Si determininogli angoli α e β e la loro matrice di varianza e covarianza.
23Topografia 1, 11 gennaio 2005 e Topografia e Trattamento delle osservazioni, 12 gennaio 200524Topografia 1, 1 febbraio 2005 e Topografia e Trattamento delle osservazioni, 2 febbraio 2005

34 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
y
x
θ1
θ2
θ3β
α
Soluzione
α = 40g β = 20g
Cα,β =
[σ2
α σαβσβα σ2
β
]=
[2 −1
−1 2
]2.5 π2 10−11 rad2 ≃
≃[
4.934480 10−10 −2.467401 10−10
−2.467401 10−10 4.934480 10−10
]rad2
3.3.24 Volume e superficie di un parallelepipedo25
Si vogliono determinare volume e superficie di un parallelepipedo e la loro matrice divarianza e covarianza. A questo scopo sono stati misurati i tre spigoli l1 = 100m, l2 =100m e l3 = 200m. Le misure sono indipendenti e di uguale precisione con σl = 2mm.
Soluzione
Il volume e la superficie risultano rispettivamente: V = 2 106 m3 S = 105 m2 e la loromatrice di varianza e covarianza
CV S =
[3.6 103 1.12 102
1.12 102 3.52
]
3.3.25 Quote da battute concatenate26
È stato misurato il dislivello tra i punti 1 e 2 e 2 e 3 in due battute concatenate, comenello schema sotto. Il punto 1 ha quota nota e nulla Q1 = 0. I dislivelli, misurati inmodo indipendente, sono q21 =−1 m tra il punto 1 e 2, e q32 =−1.5 m tra il punto 2e 3, con sqm pari a 1 mm.
25Topografia 1, 9 febbraio 200526Topografia 1, 23 giugno 2005

3.3. ESERCIZI 35
Si determinino le quote Q2 e Q3 dei punti 2 e 3 e la loro matrice di varianza ecovarianza.
NB la convenzione sui segni dei dislivelli è qi j = Q j −Qi.
j j j1 2 3
Soluzione
Q2 = 1 m Q3 = 2.5 m
CQ2Q3 =
[σ2
Q2σQ2Q3
σQ2Q3 σ2Q3
]=
[1 11 2
]10−6 m2
3.3.26 Area e perimetro di un rombo27
Si vogliono determinare area e perimetro di un rombo e la loro matrice di varianza ecovarianza. A questo scopo sono stati misurate le diagonali d1 = 3m, d2 = 4m. Lemisure sono indipendenti e di uguale precisione con σd = 2mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 6m2 P = 10m e la loro matrice divarianza e covarianza
CAP =
[25 96
5965 16
]10−6 =
[25 19.2
19.2 16
]10−6
3.3.27 Angoli come differenze di direzioni28
A partire dalla direzione y di un sistema di riferimento cartesiano sono state misuratein modo indipendente tre direzioni θ1 = 15g, θ2 = 65g, θ3 = 85g, con σθ1 = σθ2 =σθ3 = 20cc, da cui sono stati ricavati gli angoli α e β come in figura. Si determininogli angoli α e β e la loro matrice di varianza e covarianza.
27Topografia 1, 12 luglio 200528Topografia e Trattamento delle osservazioni, 20 giugno 2005

36 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
y
x
θ1
θ2
θ3β
α
Soluzione
α = 50g β = 20g
Cαβ =
[σ2
α σαβσβα σ2
β
]=
[2 −1
−1 2
]4 10−6 gon2 =
[2 −1
−1 2
]π2 10−10 rad2 ≃
≃[
1.973921 10−9 −9.869604 10−10
−9.869604 10−10 1.973921 10−9
]rad2
3.3.28 Area e perimetro di una corona circolare29
Si determinino superficie, perimetro e loro matrice di varianza e covarianza di unacorona circolare avendone misurati in modo indipendente raggio interno r1 = 1 m edesterno r2 = 3 m, con σr1 = σr2 = 2 mm.
����&%'$
-6r1r2
Si lasci indicato π nello svolgere i calcoli.
Soluzione
A = 8π m2 P = 8π m
CAP =
[160 3232 32
]π2 10−6 =
[1.579137 10−3 3.158273 10−4
3.158273 10−4 3.158273 10−4
]29Topografia 1, 6 settembre 2005

3.3. ESERCIZI 37
3.3.29 Area e perimetro di un rombo30
Si vogliono determinare area e perimetro di un rombo e la loro matrice di varianza ecovarianza. A questo scopo sono state misurate le diagonali d1 = 6m, d2 = 8m. Lemisure sono indipendenti e di uguale precisione con σd = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 24m2 P = 20m e la loro matrice divarianza e covarianza
CAP =
[25 9.69.6 4
]10−6
3.3.30 Area e perimetro di un rombo31
Si vogliono determinare area e perimetro di un rombo e la loro matrice di varianza ecovarianza. A questo scopo sono state misurate le diagonali d1 = 10m, d2 = 24m. Lemisure sono indipendenti e di uguale precisione con σd = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 120m2 P = 52m e la loro matricedi varianza e covarianza
CAP =
[169 480
1348013 16
]10−6 =
[169 36.923076
36.923076 16
]10−6
3.3.31 Area e perimetro di un rombo32
Si vogliono determinare area e perimetro di un rombo e la loro matrice di varianza ecovarianza. A questo scopo sono state misurate le diagonali d1 = 18m, d2 = 24m. Lemisure sono indipendenti e di uguale precisione con σd = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 216m2 P = 60m e la loro matricedi varianza e covarianza
CAP =
[225 144
5144
5 4
]10−6 =
[225 28.828.8 4
]10−6
3.3.32 Area e perimetro di un triangolo33
Si vogliono determinare area e perimetro di un triangolo rettangolo e la loro matricedi varianza e covarianza. A questo scopo sono stati misurati i due cateti con l1 = 6m el2 = 8m. Le misure sono incorrelate e di uguale precisione, con σl = 1mm.
30Topografia 1, 7 novembre 200531Topografia 1, 7 novembre 200532Topografia 1, 7 novembre 200533Topografia 1, 7 novembre 2005

38 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
Soluzione
L’area e il perimetro risultano rispettivamente: A = 24m2 P = 24m e la loro matrice divarianza e covarianza
CAP =
[25 59
5595
295
]10−6 =
[25 11.8
11.8 5.8
]10−6
3.3.33 Area e perimetro di un triangolo34
Si vogliono determinare area e perimetro di un triangolo rettangolo e la loro matricedi varianza e covarianza. A questo scopo sono stati misurati i due cateti con l1 = 5m el2 = 12m. Le misure sono incorrelate e di uguale precisione, con σl = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 30m2 P = 30m e la loro matrice divarianza e covarianza
CAP =
[ 1694
34126
34126
7313
]10−6 =
[42.25 13.115385
13.115385 5.615385
]10−6
3.3.34 Area e perimetro di un triangolo35
Si vogliono determinare area e perimetro di un triangolo rettangolo e la loro matricedi varianza e covarianza. A questo scopo sono stati misurati i due cateti con l1 = 9m el2 = 12m. Le misure sono incorrelate e di uguale precisione, con σl = 1mm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 54m2 P = 36m e la loro matrice divarianza e covarianza
CAP =
[ 2254
17710
17710
295
]10−6 =
[56.25 17.717.7 5.8
]10−6
3.3.35 Quote da battute concatenate36
È stato misurato il dislivello tra i punti 1 e 2 e 2 e 3 in due battute concatenate, comenello schema sotto. Il punto 1 ha quota nota Q1 = 10. I dislivelli, misurati in modoindipendente, sono q21 = 1.2 m tra il punto 1 e 2, e q32 = 1.3 m tra il punto 2 e 3, consqm pari a 2 mm.
Si determinino le quote Q2 e Q3 dei punti 2 e 3 e la loro matrice di varianza ecovarianza.
NB la convenzione sui segni dei dislivelli è qi j = Q j −Qi.
34Topografia 1, 7 novembre 200535Topografia 1, 7 novembre 200536Topografia 1, 12 gennaio 2006

3.3. ESERCIZI 39
j j j1 2 3
Soluzione
Q2 = 8.8 m Q3 = 7.5 m
CQ2Q3 =
[σ2
Q2σQ2Q3
σQ2Q3 σ2Q3
]=
[1 11 2
]4 10−6 m2
3.3.36 Angoli come differenze di direzioni37
A partire da una direzione generica sono state misurate in modo indipendente tre di-rezioni θ1 = 25g, θ2 = 60g, θ3 = 75g, con σθ1 = σθ2 = σθ3 = 20cc, da cui sono statiricavati gli angoli α e β come in figura. Si determinino gli angoli α e β e la loromatrice di varianza e covarianza.
θ1
θ2
θ3β
α
Nota bene:()g indica angoli in gon (angolo retto = 100 gon);()cc indica angoli in secondi centesimali (un secondo centesimale = 10−4 gon).
Soluzione
α = 35g β = 15g
Cαβ =
[σ2
α σαβσβα σ2
β
]=
[2 −1
−1 2
]4 10−6 gon2 =
[2 −1
−1 2
]π2 10−10 rad2 ≃
≃[
1.973921 10−9 −9.869604 10−10
−9.869604 10−10 1.973921 10−9
]rad2
37Topografia 1, 14 febbraio 2006

40 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3.37 Trasformazione di coordinate polari in cartesiane38
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P e la loro precisione in un sistema di coordinate cartesiane conasse delle ascisse x coincidente con l’asse rispetto a cui è stato misurato l’angolo α .
-���������
6P(x,y)
α
ρ
x
y
A
DatiαP = 60◦ con σα = 3.6◦ 10−3
ρP = 400 m con σρ = 2 mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza.
Soluzione
(xP,yP) = (200,200√
3) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
[4.747410 10−4 −2.717824 10−4
−2.717824 10−4 1.609137 10−4
]m2
3.3.38 Due quote da un punto39
È stato misurato il dislivello tra i punti 1 e 2 e 1 e 3, come nello schema sotto. Ilpunto 1 ha quota nota Q1 = 10 mm con σQ1 = 1 mm. I dislivelli, misurati in modoindipendente, sono q12 = 5 mm tra il punto 1 e 2, e q13 = 6 mm tra il punto 1 e 3,entrambi con sqm pari a 2 mm.
Si determinino le quote Q2 e Q3 dei punti 2 e 3 e la loro matrice di varianza ecovarianza.
NB la convenzione sui segni dei dislivelli è qi j = Q j −Qi.
j je j2 1 3
38Topografia 1, 12 giugno 200639Topografia 1, 4 luglio 2006

3.3. ESERCIZI 41
Soluzione
Q2 = 15 mm Q3 = 16 mm
CQ2Q3 =
[σ2
Q2σQ2Q3
σQ2Q3 σ2Q3
]=
[5 11 5
]mm2
3.3.39 Volume di un solido40
Per determinare il volume di un corpo solido irregolare lo si immerge in un liquidocontenuto in un recipiente cilindrico trasparente e si osserva l’innalzamento del livello.
Si misura con un calibro il diametro interno del recipiente che risulta 22.0 mm; los.q.m. di questa misura è di 0.1 mm. L’innalzamento del fluido si misura accostandoun righello al recipiente e fissandolo rigidamente al recipiente stesso per tutta la du-rata dell’operazione (si ritiene che la scala graduata del righello sia parallela all’assedel cilindro). Le due letture, effettuate osservando il livello del liquido prima e dopol’immersione del corpo, sono 123 mm e 137 mm; ciascuna lettura ha uno s.q.m. di 1mm.
Determinare il volume del solido e il suo s.q.m.Si può lasciare indicato π nelle espressioni dei risultati.
Soluzione
V = 1694π mm3 σ2V = 29519.16π2 mm6 = 291342.43 mm6
3.3.40 Trasformazione di coordinate polari in cartesiane e distan-za41
Sono ottenute dalla misura dell’angolo α e della distanza ρ le coordinate del punto Pin un sistema di coordinate polari (α,ρ). Si vuole esprimere le coordinate del puntoP e la loro precisione in un sistema di coordinate cartesiane con asse delle ascisse xcoincidente con l’asse rispetto al quale è stato misurato l’angolo α .
-�������
��
6
P(x,y)
α
ρ
x
y
ZZZ
ZZZ
ZZZ
A
DatiαP = 30◦ con σα = 1◦.8 10−3
ρP = 100m con σρ = 1mm
40Topografia 1, 22 agosto 200641Topografia 1, 4 novembre 2006 (Prima prova di accertamento AA 2006-2007, tipo 1)

42 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
si determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza. Sidetermini inoltre la distanza dPA del punto P dal punto A di coordinate note (100,0) ela sua varianza.
Soluzione
(xP,yP) = (50√
3,50) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
=106
4
[3π2 +1
√3(−π2 +1
)√
3(−π2 +1
)π2 +3
]m2 ≃
≃[
7.652203 10−6 −3.840651 10−6
−3.840651 10−6 3.217401 10−6
]m2
dAP = 51.763809 m σ2dAP
= 9.275454 10−6 m2 σdAP = 3.045563 10−3 m
3.3.41 Trasformazione di coordinate polari in cartesiane e distan-za42
Sono ottenute dalla misura dell’angolo α e della distanza ρ le coordinate del punto Pin un sistema di coordinate polari (α,ρ). Si vuole esprimere le coordinate del puntoP e la loro precisione in un sistema di coordinate cartesiane con asse delle ascisse xcoincidente con l’asse rispetto al quale è stato misurato l’angolo α .
-������
6
P(x,y)
αρ
x
y
SS
SS
SSA
DatiαP = 60◦ con σα = 1◦.8 10−3
ρP = 100m con σρ = 1mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza. Si
determini inoltre la distanza dPA del punto P dal punto A di coordinate note (0,100) ela sua varianza.
42Topografia 1, 4 novembre 2006 (Prima prova di accertamento AA 2006-2007, tipo 2)

3.3. ESERCIZI 43
Soluzione
(xP,yP) = (50√
3,50) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
=106
4
[π2 +3
√3(−π2 +1
)√
3(−π2 +1
)3π2 +1
]m2 ≃
≃[
3.217401 10−6 −3.840651 10−6
−3.840651 10−6 7.652203 10−6
]m2
dAP = 51.763809 m σ2dAP
= 9.275454 10−6 m2 σdAP = 3.045563 10−3 m
3.3.42 Due quote da un punto43
È stato misurato il dislivello tra i punti 1 e 2 e 1 e 3, come nello schema sotto. Il punto 1ha quota nota Q1 = 20 m con σQ1 = 2 mm. I dislivelli, misurati in modo indipendente,sono q12 = 1 m tra il punto 1 e 2, e q13 = 2 m tra il punto 1 e 3, entrambi con sqm paria 1 mm.
Si determinino le quote Q2 e Q3 dei punti 2 e 3 e la loro matrice di varianza ecovarianza.
NB la convenzione sui segni dei dislivelli è qi j = Q j −Qi.
j je j2 1 3
Consigli:
1. equazioni lineari non hanno bisogno di essere linearizzate;
2. somme e prodotti di numeri interi di una cifra si eseguono a mano meglio che construmenti elettronici.
Soluzione
Q2 = 21 m Q3 = 22 m
CQ2Q3 =
[σ2
Q2σQ2Q3
σQ2Q3 σ2Q3
]=
[5 44 5
]mm2
43Topografia 1, 8 gennaio 2007

44 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3.43 Angoli come differenze di direzioni44
A partire da una direzione generica sono state misurate in modo indipendente tre dire-zioni θ1 = 10g, θ2 = 40g, θ3 = 70g, con σθ1 =σθ2 =σθ3 = 5cc, da cui sono stati ricavatigli angoli α e β come in figura. Si determinino gli angoli α e β e la loro matrice divarianza e covarianza.
θ1
θ2
θ3β
α
Nota bene:()g indica angoli in gon (angolo retto = 100 gon);()cc indica angoli in secondi centesimali (un secondo centesimale = 10−4 gon).
Soluzione
α = 30g β = 30g
Cαβ =
[σ2
α σαβσβα σ2
β
]=
[2 −1
−1 2
]2.5 10−7 gon2 =
[2 −1
−1 2
]254
π2 10−12 rad2 ≃
≃[
1.233701 10−10 −6.168503 10−11
−6.168503 10−11 1.233701 10−10
]rad2
3.3.44 Trasformazione di coordinate polari in cartesiane45
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coor-dinate ottenute dalla misura dell’angolo α e della distanza ρ . Si vuole esprimere lecoordinate del punto P e la loro precisione in un sistema di coordinate cartesiane conasse delle ascisse x coincidente con l’asse rispetto a cui è stato misurato l’angolo α .
DatiαP = 30◦ con σα = 5.4◦ 10−3
ρP = 600 m con σρ = 3 mmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza.
44Topografia 1, 2 febbraio 200745Topografia 1, 22 giugno 2007

3.3. ESERCIZI 45
-���������
6P(x,y)
α
ρ
x
y
A
Soluzione
(xP,yP) = (300√
3,300) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
= 9 10−6[
9π2 +3/4 −9√
3π2 +√
3/4−9
√3π2 +
√3/4 27π2 +1/4
]m2 ≃
≃[
8.061879 10−4 −1.380770 10−3
−1.380770 10−3 2.400563 10−3
]m2
3.3.45 Perimetro e area di un rettangolo46
Si vogliono determinare area e perimetro di un rettangolo e la loro matrice di varianzae covarianza. A questo scopo sono state misurati i lati l1 = 100 m, l2 = 200 m. Lemisure sono indipendenti con σl = 1 mm+1 ppm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 2 104 m2 P = 6 102 m e la loromatrice di varianza e covarianza
CAP =
[6.28 10−2 7.72 10−4
7.72 10−4 1.06 10−5
]
3.3.46 Volume di un solido47
Per determinare il volume di un corpo solido irregolare lo si immerge in un liquidocontenuto in un recipiente cilindrico trasparente e si osserva l’innalzamento del livello.
Si misura con un calibro il diametro interno del recipiente che risulta 10.0 mm; los.q.m. di questa misura è di 0.1 mm.
L’innalzamento del fluido si misura accostando un righello al recipiente e fissandolorigidamente al recipiente stesso per tutta la durata dell’operazione (si ritiene che la scalagraduata del righello sia parallela all’asse del cilindro).
46Topografia 1, 9 luglio 200747Topografia 1, 27 agosto 2007

46 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
Le due letture, effettuate osservando il livello del liquido prima e dopo l’immersio-ne del corpo, sono 37 mm e 53 mm; ciascuna lettura ha uno s.q.m. di 2 mm.
Determinare il volume del solido e il suo s.q.m.Si può lasciare indicato π nelle espressioni dei risultati.
Soluzione
V = 4 102π mm3 σ2V = 5064π2 mm6 = 49979.677 mm6
3.3.47 Aree di rettangoli48
Si determinino le aree dei due rettangoli A1 e A2, che hanno un lato in comune e sonorappresentati in figura, e la loro matrice di varianza e covarianza, avendo misurato i trelati a, b e c, con a = 10 m, b = 20 m e c = 10 m in modo indipendente con σ = 2 mm.
b c
aA1 A2
Soluzione
A1 = 200 m2 A2 = 100 m2 CA1A2 =
[σ2
A1σA1A2
σA1A2 σ2A2
]= 4 10−4
[5 22 2
]m4
3.3.48 Aree di rettangoli49
Si determinino le aree dei due rettangoli A1 e A2, che hanno un lato in comune e sonorappresentati in figura, e la loro matrice di varianza e covarianza, avendo misurato i trelati a, b e c, con a = 10 m, b = 30 m e c = 10 m in modo indipendente con σ = 2 mm.
a
b
c
A1
A2
48Topografia 1, 27 ottobre 2007 (Prima prova di accertamento AA 2007-2008, tipo 1)49Topografia 1, 27 ottobre 2007 (Prima prova di accertamento AA 2007-2008, tipo 2)

3.3. ESERCIZI 47
Soluzione
A1 = 300 m2 A2 = 100 m2 CA1A2 =
[σ2
A1σA1A2
σA1A2 σ2A2
]= 4 10−4
[10 33 2
]m4
3.3.49 Aree di rettangoli50
Si determinino le aree dei due rettangoli A1 e A2, che hanno un lato in comune e sonorappresentati in figura, e la loro matrice di varianza e covarianza, avendo misurato i trelati a, b e c, con a = 20 m, b = 10 m e c = 10 m in modo indipendente con σ = 2 mm.
a
b c
A1 A2
Soluzione
A1 = 200 m2 A2 = 200 m2 CA1A2 =
[σ2
A1σA1A2
σA1A2 σ2A2
]= 4 10−4
[5 11 5
]m4
3.3.50 Aree di rettangoli51
Si determinino le aree dei due rettangoli A1 e A2, che hanno un lato in comune e sonorappresentati in figura, e la loro matrice di varianza e covarianza, avendo misurato i trelati a, b e c, con a = 10 m, b = 10 m e c = 20 m in modo indipendente con σ = 2 mm.
a
b c
A1 A2
Soluzione
A1 = 100 m2 A2 = 200 m2 CA1A2 =
[σ2
A1σA1A2
σA1A2 σ2A2
]= 4 10−4
[2 22 5
]m4
3.3.51 Distanze tra tre punti52
Dati i tre punti 1, 2 e 3, con (x,y)1 = (2,2), (x,y)2 = (6,5) e (x,y)3 = (9,1), le cuicoordinate sono incorrelate e di uguale precisione σc = 1 mm, determinare le distanzetra i punti 1 e 2 e tra i punti 2 e 3, e la loro matrice di varianza e covarianza.
50Topografia 1, 27 ottobre 2007 (Prima prova di accertamento AA 2007-2008, tipo 3)51Topografia 1, 27 ottobre 2007 (Prima prova di accertamento AA 2007-2008, tipo 4)52Topografia 1, 10 gennaio 2008 (tipo 1)

48 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
Soluzione
d12 = d23 = 5 m
Cd12d23 =
[σ2
d12σd12d23
σd12d23 σ2d23
]=
[2 00 2
]10−6 m2 = 2 10−6I2 m2
3.3.52 Distanze tra tre punti53
Dati i tre punti 1, 2 e 3, con (x,y)1 = (2,8), (x,y)2 = (6,5) e (x,y)3 = (9,8), le cuicoordinate sono incorrelate e di uguale precisione σc = 1 mm, determinare le distanzetra i punti 1 e 2 e tra i punti 2 e 3, e la loro matrice di varianza e covarianza.
Soluzione
d12 = d23 = 5 m
Cd12d23 =
[σ2
d12σd12d23
σd12d23 σ2d23
]=
[2 00 2
]10−6 m2 = 2 10−6I2 m2
3.3.53 Distanze tra tre punti54
Dati i tre punti 1, 2 e 3, con (x,y)1 = (4,10), (x,y)2 = (8,7) e (x,y)3 = (5,3), le cuicoordinate sono incorrelate e di uguale precisione σc = 1 mm, determinare le distanzetra i punti 1 e 2 e tra i punti 2 e 3, e la loro matrice di varianza e covarianza.
Soluzione
d12 = d23 = 5 m
Cd12d23 =
[σ2
d12σd12d23
σd12d23 σ2d23
]=
[2 00 2
]10−6 m2 = 2 10−6I2 m2
3.3.54 Distanze tra tre punti55
Dati i tre punti 1, 2 e 3, con (x,y)1 = (8,8), (x,y)2 = (4,5) e (x,y)3 = (7,9), le cuicoordinate sono incorrelate e di uguale precisione σc = 1 mm, determinare le distanzetra i punti 1 e 2 e tra i punti 2 e 3, e la loro matrice di varianza e covarianza.
Soluzione
d12 = d23 = 5 m
Cd12d23 =
[σ2
d12σd12d23
σd12d23 σ2d23
]=
[2 00 2
]10−6 m2 = 2 10−6I2 m2
53Topografia 1, 10 gennaio 2008 (tipo 2)54Topografia 1, 10 gennaio 2008 (tipo 3)55Topografia 1, 10 gennaio 2008 (tipo 4)

3.3. ESERCIZI 49
3.3.55 Perimetri di rettangoli56
Si determinino i perimetri dei due rettangoli A1 e A2, che hanno un lato in comune esono rappresentati in figura, e la loro matrice di varianza e covarianza, avendo misuratoi tre lati a, b e c, con a = 10 m, b = 20 m e c = 10 m in modo indipendente conσ = 2 mm.
b c
aA1 A2
Soluzione
P1 = 60 m P2 = 60 m CP1P2 =
[σ2
P1σP1P2
σP1P2 σ2P2
]= 16 10−6
[2 11 2
]m2
3.3.56 Perimetri di rettangoli57
Si determinino i perimetri dei due rettangoli A1 e A2, che hanno un lato in comune esono rappresentati in figura, e la loro matrice di varianza e covarianza, avendo misuratoi tre lati a, b e c, con a = 10 m, b = 30 m e c = 10 m in modo indipendente conσ = 2 mm.
a
b
c
A1
A2
Soluzione
P1 = 80 m P2 = 80 m CP1P2 =
[σ2
P1σP1P2
σP1P2 σ2P2
]= 16 10−6
[2 11 2
]m2
56Topografia 1, 4 febbraio 2008 (tipo 1)57Topografia 1, 4 febbraio 2008 (tipo 2)

50 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3.57 Perimetri di rettangoli58
Si determinino i perimetri dei due rettangoli A1 e A2, che hanno un lato in comune esono rappresentati in figura, e la loro matrice di varianza e covarianza, avendo misuratoi tre lati a, b e c, con a = 20 m, b = 10 m e c = 10 m in modo indipendente conσ = 2 mm.
a
b c
A1 A2
Soluzione
P1 = 60 m P2 = 40 m CP1P2 =
[σ2
P1σP1P2
σP1P2 σ2P2
]= 16 10−6
[2 11 2
]m2
3.3.58 Perimetri di rettangoli59
Si determinino i perimetri dei due rettangoli A1 e A2, che hanno un lato in comune esono rappresentati in figura, e la loro matrice di varianza e covarianza, avendo misuratoi tre lati a, b e c, con a = 10 m, b = 10 m e c = 20 m in modo indipendente conσ = 2 mm.
a
b c
A1 A2
Soluzione
P1 = 40 m P2 = 60 m CP1P2 =
[σ2
P1σP1P2
σP1P2 σ2P2
]= 16 10−6
[2 11 2
]m2
3.3.59 Volumi di parallelopipedi60
Si determinino i volumi dei due parallelepipedi A1 e A2, che hanno una faccia in co-mune e sono rappresentati in figura, e la loro matrice di varianza e covarianza, avendomisurato i quattro spigoli a, b, c e d, con a = 10 m, b = 10 m, c = 20 m e d = 10 m inmodo indipendente con σ = 1 mm.
58Topografia 1, 4 febbraio 2008 (tipo 3)59Topografia 1, 4 febbraio 2008 (tipo 4)60Topografia 1, 23 giugno 2008

3.3. ESERCIZI 51
��� �
��
��
�
���
����
a
b c
d
A1 A2
Soluzione
V1 = 103 m3 V2 = 2 103 m3 CA1A2 =
[σ2
V1σV1V2
σV1V2 σ2V2
]= 10
[3 44 9
]m6
3.3.60 Distanze tra tre punti61
Dati i tre punti 1, 2 e 3, con (x,y)1 = (1,5), (x,y)2 = (4,1) e (x,y)3 = (8,4), le cuicoordinate sono incorrelate e di uguale precisione σc = 2 mm, determinare le distanzetra i punti 1 e 2 e tra i punti 2 e 3, e la loro matrice di varianza e covarianza.
Soluzione
d12 = d23 = 5 m
Cd12d23 =
[σ2
d12σd12d23
σd12d23 σ2d23
]= 8 10−6 I2 m2
3.3.61 Volume di un solido62
Per determinare il volume di un corpo solido irregolare lo si immerge in un liquidocontenuto in un recipiente cilindrico trasparente e si osserva l’innalzamento del livello.
Si misura con un calibro il diametro interno del recipiente che risulta 20.0 mm; los.q.m. di questa misura è di 0.1 mm.
L’innalzamento del fluido si misura accostando un righello al recipiente e fissandolorigidamente al recipiente stesso per tutta la durata dell’operazione (si ritiene che lascala graduata del righello sia parallela all’asse del cilindro). Le due letture, effettuateosservando il livello del liquido prima e dopo l’immersione del corpo, sono 13 mm e33 mm; ciascuna lettura ha uno s.q.m. di 1 mm.
Determinare il volume del solido e il suo s.q.m.Si può lasciare indicato π nelle espressioni dei risultati.
Soluzione
V = 2 103π mm3 σ2V = 20400π2 mm6 ≃ 201339.929782 mm6
61Topografia 1, 7 luglio 200862Topografia 1, 25 agosto 2008

52 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
3.3.62 Due quote da un punto63
È stato misurato il dislivello tra i punti 1 e 2 e 1 e 3, come nello schema sotto. Il punto 1ha quota nota Q1 = 10 m con σQ1 = 1 mm. I dislivelli, misurati in modo indipendente,sono q12 = 2 m tra il punto 1 e 2, e q13 = 3 m tra il punto 1 e 3, entrambi con sqm paria 2 mm.
Si determinino le quote Q2 e Q3 dei punti 2 e 3 e la loro matrice di varianza ecovarianza.
NB la convenzione sui segni dei dislivelli è qi j = Q j −Qi.
j je j2 1 3
Consigli:
1. equazioni lineari non hanno bisogno di essere linearizzate;
2. somme e prodotti di numeri interi di una cifra si eseguono a mano meglio che construmenti elettronici.
Soluzione
Q2 = 12 m Q3 = 13 m
CQ2Q3 =
[σ2
Q2σQ2Q3
σQ2Q3 σ2Q3
]=
[5 11 5
]mm2
3.3.63 Volumi di cilindri64
Si determinino i volumi dei due cilindri A1 e A2, che hanno la base in comune e sonorappresentati in figura, e la loro matrice di varianza e covarianza. Sono stati misuratiil raggio della base r e le due altezze a e b, con r = 1 m, a = 2 m e b = 4 m in modoindipendente con σr = 1 mm e σa = σb = 2 mm.
a b
r
Si lasci indicato π senza sostituire il suo valore.
Soluzione
V1 = 2π m3 V2 = 4π m3 CA1A2 =
[σ2
V1σV1V2
σV1V2 σ2V2
]= 4π210−6
[5 88 17
]m6
63Topografia 1, 8 gennaio 200964Topografia 1, 30 gennaio 2009

3.3. ESERCIZI 53
3.3.64 Superficie di una figura65
Si deve determinare l’area di una figura molto irregolare; per fare questo si disegna la figura sudi un foglio di cartoncino e la si ritaglia. Si disegna a parte (sullo stesso tipo di cartoncino) unquadrato di un decimetro di lato e lo si ritaglia.Si suppone che il cartoncino abbia spessore e peso specifico costanti e si pesano separatamentele due figure ritagliate ottenendo i valori (le misure si considerano indipendenti):
peso della figura irregolare = 2.7 10−3 kgpeso del quadrato = 3.0 10−3 kg
Si sa che lo scarto quadratico medio delle pesate è 9 10−6 kg.Determinare l’area della figura irregolare ed il suo sqm.
Soluzione
A = 9 10−3 m2 σ2A = 1.629 10−9 m4 σA = 4.036 10−5 m2
3.3.65 Perimetro e area di un rettangolo66
Si vogliono determinare area e perimetro di un rettangolo e la loro matrice di varianza e covarian-za. A questo scopo sono state misurati i lati l1 = 50 m, l2 = 120 m. Le misure sono indipendenticon σl = 2 mm+1 ppm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 6 103 m2 P = 340 m e la loro matrice divarianza e covarianza
CAP =
[71752 1458.04
1458.04 34.79
]10−6
3.3.66 Perimetro e area di un rettangolo67
Si vogliono determinare area e perimetro di un rettangolo e la loro matrice di varianza e cova-rianza. A questo scopo sono state misurati i cateti l1 = 80 m e l2 = 150 m. Le misure sonoindipendenti con σl = 2 mm+2 ppm.
Soluzione
L’area e il perimetro risultano rispettivamente: A = 12 103 m2 P = 460 m e la loro matrice divarianza e covarianza
CAP =
[1.388320 10−1 2.246080 10−3
2.246080 10−3 3.982240 10−5
]
3.3.67 Perimetro e area di un triangolo rettangolo68
Si vogliono determinare area e perimetro di un triangolo e la loro matrice di varianza e cova-rianza. A questo scopo sono state misurati i cateti l1 = 80 m e l2 = 150 m. Le misure sonoindipendenti con σl = 2 mm+2 ppm.
65Topografia 1, 23 giugno 200966Topografia 1, 13 luglio 200967Topografia 1, 26 agosto 200968Topografia 1, 12 gennaio 2010

54 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
Soluzione
L’area e il perimetro risultano rispettivamente: A = 6 103 m2 P = 400 m e la loro matrice divarianza e covarianza
CAP =
[3.470800 10−2 9.128941 10−4
9.128941 10−4 2.883377 10−5
]
3.3.68 Volumi di cilindri69
Si determinino i volumi dei due cilindri V1 e V2, che hanno la base in comune e sono rappresentatiin figura, e la loro matrice di varianza e covarianza. Sono stati misurati il raggio della base r ele due altezze a e b, con r = 2 m, a = 1 m e b = 3 m in modo indipendente con σr = 1 mm eσa = σb = 2 mm.
a b
r
Si lasci indicato π senza sostituire il suo valore.
Soluzione
V1 = 4π m3 V2 = 12π m3 CA1A2 =
[σ2
V1σV1V2
σV1V2 σ2V2
]= 16π210−6
[5 33 13
]m6
3.3.69 Trasformazione di coordinate polari in cartesiane70
Sono note le coordinate di un punto in un sistema di coordinate polari (α,ρ), coordinate ottenutedalla misura dell’angolo α e della distanza ρ . Si vuole esprimere le coordinate del punto P e laloro precisione in un sistema di coordinate cartesiane con asse delle ascisse x coincidente conl’asse rispetto a cui è stato misurato l’angolo α .
-���������
6
P(x,y)
α
ρ
x
y
A
DatiαP = 50g con σα = 20cc
ρP = 300 m con σρ = 1 mm +2 ppmsi determinino le coordinate (xP,yP) e la loro matrice di varianza e covarianza.
69Topografia 1, 26 gennaio 201070Topografia 1, 16 giugno 2010

3.3. ESERCIZI 55
Soluzione
(xP,yP) = (150√
2,150√
2) m
CxP,yP =
[σ2
xPσxP,yP
σyP,xP σ2yP
]=
= 5 10−5[
9π2 +2.56 −9π2 +2.56−9π2 +2.56 9π2 +2.56
]m2 ≃
≃ 10−5[
4.569322 −4.313322−4.313322 4.569322
]m2
3.3.70 Due quote da un punto71
È stato misurato il dislivello tra i punti 1 e 2 e 1 e 3, come nello schema sotto. Il punto 1 ha quotanota Q1 = 20 m con σQ1 = 2 mm. I dislivelli, misurati in modo indipendente, sono q12 = 4 mtra il punto 1 e 2, e q13 = 5 m tra il punto 1 e 3, entrambi con sqm pari a 3 mm.
Si determinino le quote Q2 e Q3 dei punti 2 e 3 e la loro matrice di varianza e covarianza.NB la convenzione sui segni dei dislivelli è qi j = Q j −Qi.
j je j2 1 3
Consigli:
1. equazioni lineari non hanno bisogno di essere linearizzate;
2. somme e prodotti di numeri interi di una cifra si eseguono a mano meglio che construmenti elettronici.
Soluzione
Q2 = 24 m Q3 = 25 m
CQ2Q3 =
[σ2
Q2σQ2Q3
σQ2Q3 σ2Q3
]=
[13 1
1 13
]mm2
3.3.71 Angoli come differenze di direzioni72
A partire da una direzione generica sono state misurate in modo indipendente tre direzioni θ1 =20g, θ2 = 40g, θ3 = 70g, con σθ1 = σθ2 = σθ3 = 20cc, da cui sono stati ricavati gli angoli α e βcome in figura. Si determinino gli angoli α e β e la loro matrice di varianza e covarianza.
71Topografia 1, 22 luglio 201072Topografia 1, 30 agosto 2010

56 CAPITOLO 3. PROPAGAZIONE DELLA VARIANZA
θ1
θ2
θ3β
α
Nota bene:()g indica angoli in gon (angolo retto = 100 gon);()cc indica angoli in secondi centesimali (un secondo centesimale = 10−4 gon).
Soluzione
α = 20g β = 30g
Cαβ =
[σ2
α σαβσβα σ2
β
]=
[2 −1
−1 2
]4 10−6 gon2 =
[2 −1
−1 2
]4π2 10−10 rad2 ≃
≃[
1.973921 10−9 −9.869604 10−10
−9.869604 10−10 1.973921 10−9
]rad2
3.3.72 Distanze tra tre punti73
Dati i tre punti 1, 2 e 3, con (x,y)1 = (0,4), (x,y)2 = (3,0) e (x,y)3 = (7,3), le cui coordinatesono incorrelate e di uguale precisione σc = 2 mm, determinare le distanze tra i punti 1 e 2 e trai punti 2 e 3, e la loro matrice di varianza e covarianza.
Soluzione
d12 = d23 = 5 m
Cd12d23 =
[σ2
d12σd12d23
σd12d23 σ2d23
]= 8 10−6 I2 m2
3.3.73 Perimetro e area di un rettangolo74
Si vogliono determinare area e perimetro di un rettangolo e la loro matrice di varianza e cova-rianza. A questo scopo sono state misurati i lati l1 = 1000 m, l2 = 2000 m. Le misure sonoindipendenti con σl = 1 mm+1 ppm.
Nota: ppm significa “parti per milione” ed indica una componente di σ che è in proporzionealla grandezza misurata.
73Topografia 1, 10 gennaio 201174Topografia 1, 14 febbraio 2011

3.3. ESERCIZI 57
Soluzione
L’area e il perimetro risultano rispettivamente: A = 2 106 m2 P = 6 103 m e la loro matrice divarianza e covarianza
CAP =
[25 34 10−3
34 10−3 52 10−6
]

Capitolo 4
Test statistici
4.1 Schemi4.1.1 Test sulla media di campioni numerosiIpotesi semplice H0 : µ = µ0 (con σ2 nota)
M −µ0σ√N
≤ Z α2
(4.1)
dove è N il numero di elementi del campione,
M =1N ∑
iXi (4.2)
la media campionaria, e α2 = P(Z ≥ Z α
2).
Differenza di medie, ipotesi semplice H0 : µX = µY (con σ2X , σ2
Y note, X e Y indipendenti)
|MX −MY |√σ 2
XNX
+σ 2
YNY
≤ Z α2
(4.3)
dove è NX il numero di elementi del campione X , NY il numero di elementi del campioneY ,
MX =1
NX∑
iXi (4.4)
MY =1
NY∑
iYi (4.5)
le medie campionarie di X eY , e α2 = P(Z ≥ Z α
2).
Ipotesi composta H0 : µ = µ0 (con σ2 incognita)
M −µ0S√
N
≤ Z α2
(4.6)
dove è N il numero di elementi del campione,
M =1N ∑
iXi (4.7)
58

4.1. SCHEMI 59
S =1
N −1 ∑i(Xi −M )2 (4.8)
rispettivamente la media campionaria e la varianza corretta, e α2 = P(Z ≥ Z α
2).
Differenza di medie, ipotesi composta H0 : µX = µY (con σ2X , σ2
Y incognite)
|MX −MY |√S XNX
+ S YNY
≤ Z α2
(4.9)
dove è NX il numero di elementi del campione X , NY il numero di elementi del campioneY ,
MX =1
NX∑
iXi (4.10)
MY =1
NY∑
iYi (4.11)
SX =1
NX −1 ∑i(Xi −MX )2 (4.12)
SY =1
NY −1 ∑i(Yi −YX )2 (4.13)
rispettivamente le medie campionarie di X eY e le loro varianze corrette, e α2 = P(Z ≥
Z α2).
Nel caso in cui σ2X = σ2
Y = σ2 si può stimare σ2 con
S2=
NX −1NX +NY −2
S2X +
NY −1NX +NY −2
S2Y (4.14)
da cui
|MX −MY |
S√
1NX
+ 1NY
≤ Z α2
(4.15)
4.1.2 Test di buon adattamentoTest del χ2 Ipotesi semplice, non si stimano parametri della distribuzione teorica
m
∑i=1
(Ni −νi)2
νi≤ χ2
α,m−1 (4.16)
dove m è il numero di intervalli in cui si è suddiviso il dominio di definizione, Ni lefrequenze empiriche assolute per l’intervallo i-esimo e νi le frequenze teoriche assoluteper lo stesso intervallo.
Ipotesi composta, si stimano h parametri della distribuzione teorica; i gradi di libertà sonoora m−1−h e quindi
m
∑i=1
(Ni −νi)2
νi≤ χ2
α,m−1−h (4.17)

60 CAPITOLO 4. TEST STATISTICI
4.1.3 Test per campioni normaliMedie di campioni normali H0 : µ = µ0. La variabile casuale X è normale con media µ e
varianza σ2 X ∼ N [µ,σ2], σ2 è incognita, l’ipotesi è quindi composta.
|M −µ0|S√
N
≤ tN−1, α2
(4.18)
dove N è il numero di elementi del campione e
M =1N ∑
iXi (4.19)
S =1
N −1 ∑i(Xi −M )2 (4.20)
rappresentano rispettivamente la media campionaria e la varianza corretta.Uguaglianza di medie di campioni normali H0 : µX = µY .
|MX −MY |
S√
1NX
+ 1NY
≤ tNX+NY−2, α2
(4.21)
dove
S2=
NX −1NX +NY −2
S2X +
NY −1NX +NY −2
S2Y (4.22)
dove è NX il numero di elementi del campione X , NY il numero di elementi del campioneY ,
MX =1
NX∑
iXi (4.23)
MY =1
NY∑
iYi (4.24)
SX =1
NX −1 ∑i(Xi −MX )2 (4.25)
SY =1
NY −1 ∑i(Yi −YX )2 (4.26)
rispettivamente le medie campionarie di X eY e le loro varianze corrette.Varianza di campioni normali H0 : σ2 = σ2
0 .
S2
σ2 (N −1)≤ χ2N−1 (4.27)
dove N è il numero di elementi del campione e
M =1N ∑
iXi (4.28)
S =1
N −1 ∑i(Xi −M )2 (4.29)
rappresentano rispettivamente la media campionaria e la varianza corretta.
NotaI test di verifica della presenza di errori grossolani nei dati utilizzati per una stima ai minimi qua-drati si trovano come domanda aggiuntiva degli esercizi di compensazione in quanto utilizzanocome dato in ingresso il risultato della compensazione stessa.

4.2. ESERCIZI RISOLTI 61
4.2 Esercizi risolti4.2.1 Test di buon adattamento (χ2) 1
Si sottoponga al test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoalla variabile casuale con densità di probabilità:
• simmetrica rispetto all’origine;
• lineare tra -1 e 0 e tra 0 e +1;
• continua;
• nulla al di fuori dell’intervallo [-1, +1].
(vedi grafico)
-
6
������Z
ZZZ
ZZ-1 +1
Si esegua due volte il test, con α = 10% e con α = 1%.Si suddivida l’intervallo [-1, +1] in tre classi: [-1, -0.2), [-0.2, +0.2), [+0.2, +1].
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da ren-dere rapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numerosoe l’uso di classi diverse.
campione0.10 0.08 -0.10 0.18 0.80 0.01 -0.15
-0.70 0.80 -0.61 -0.01 -0.19 -0.17 -0.52
Svolgimento
Intervallo estremi Ni Pi ·N = νi1 -1, -0.2 3 0.32 ·14 4.482 -0.2, +0.2 9 0.36 ·14 5.043 +0.2, +1 2 0.32 ·14 4.48
dove Ni = frequenze assolute empiricheνi = frequenze assolute teoricheN = numerosita’ del campionepi = probabilita’ teorica di appartenenza all’ i-esimo intervallo.
L’altezza nell’origine della funzione densità di probabilità risulta pari a 1 imponendo l’areasottesa unitaria. A = 0.8·h
2 dove h = 0.8 per similitudine.
A =0.8 ·0.8
2= 0.32
1Topografia e Trattamento delle osservazioni, 1 giugno 1999

62 CAPITOLO 4. TEST STATISTICI
-������Z
ZZ
ZZZ
-1 +1-0.2 +0.2
AA B
B = 1− (0.32 ·2) = 0.36
m
∑i=1
(Ni −νi)2
νi= χ2
m−1
m
∑i=1
(Ni −νi)2
νi=
(3−4.48)2
4.48+
(9−5.04)2
5.04+
(2−4.48)2
4.48= 4.973
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(3−1) = 4.61 ipotesi H0 NON accettata perchè 4.9 > 4.6
α = 1% χ2(3−1) = 9.21 ipotesi H0 accettata perchè 4.9 < 9.21
4.2.2 Test sulla media di un campione normale 2
Si sottoponga a test l’ipotesi H0 : µ = 0.00 del campione normale N[µ,σ2] di elementi:
2 4 -4 2 1 4 -2
con livello di significatività α = 5% e si dica quali sono gli estremi dell’intervallo fiduciario.
SvolgimentoLa variabile statistica da sottoporre a test è
m−µS√N
= t(N−1)
La media empirica del campione risulta
m =77= 1
La stima corretta della varianza campionaria:
S2=
17−1
(12 +32 +52 +12 +02 +32 +32) =546
= 9
e quindi
2Topografia e Trattamento delle osservazioni, 1 giugno 1999

4.2. ESERCIZI RISOLTI 63
1−03√7
=
√7
3≃ 0.8819
Il test da effettuare è a due code, con i valori teorici per α = 5% pari a:
t(7−1) 5%2=±2.447
da cui l’ipotesi H0 è accettata.
L’intervallo fiduciario risulta da
|m−µ| ≤ t(7−1) 5%2
S√N
|m−µ| ≤ 2.447 · 3√7= 2.7746
m−2.77 < µ < m+2.77
−1.77 < µ < 3.77
Questa diseguaglianza determina i valori di µ compatibili con il risultato empirico dato dalcampione.
4.2.3 Test sulla uguaglianza di medie di campioni normali3
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 0 -2 2 4 1 -1 0 -1Campione y: 4 2 0 6 2 3 5 2
SvolgimentoEssendo i due campioni estratti da variabili casuali normali con pari varianza, perchè H0 siaaccettata deve risultare: ∣∣mx −my
∣∣S√
1Nx
+ 1Ny
≤ t(Nx+Ny−2),α/2
dove medie e varianze campionarie dei due campioni x e y valgono:
mx = 0.375 my = 3S2
x = 3.70 S2y = 3.72
La varianza campionaria congiunta risulta
S2=
Nx −1Nx +Ny −2
S2x +
Ny −1Nx +Ny −2
S2y =
714
3.70+714
3.72 = 3.71
da cui3Topografia e Trattamento delle osservazioni, 31 maggio 2002

64 CAPITOLO 4. TEST STATISTICI
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.72
Per i due diversi livelli di significatività risulta
t(Nx+Ny−2),α/2 = t14,α/2 =
{t14,0.005 = 2.98t14,0.025 = 2.14
Per il livello di significatività α1 = 1% |toss|< tα1/2 l’ipotesi H0 è accettata;per il livello di significatività α1 = 5% |toss|> tα2/2 l’ipotesi H0 è rifiutata.
4.2.4 Test sulla uguaglianza di medie di campioni normali4
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 5 3 7 9 6 4 5 4Campione y: 9 7 5 11 7 8 10 7
SvolgimentoEssendo i due campioni estratti da variabili casuali normali con pari varianza, perchè H0 siaaccettata deve risultare: ∣∣mx −my
∣∣S√
1Nx
+ 1Ny
≤ t(Nx+Ny−2),α/2
dove medie e varianze campionarie dei due campioni x e y valgono:
mx = 5.38 my = 8.00S2
x = 3.70 S2y = 3.72
La varianza campionaria congiunta risulta
S2=
Nx −1Nx +Ny −2
S2x +
Ny −1Nx +Ny −2
S2y =
714
3.70+7
143.72 = 3.71
da cui
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.72
Per i due diversi livelli di significatività risulta
t(Nx+Ny−2),α/2 = t14,α/2 =
{t14,0.005 = 2.98t14,0.025 = 2.14
Per il livello di significatività α1 = 1% |toss|< tα1/2 l’ipotesi H0 è accettata;per il livello di significatività α1 = 5% |toss|> tα2/2 l’ipotesi H0 è rifiutata.
4Topografia e Trattamento delle osservazioni, 19 maggio 2000

4.3. ESERCIZI 65
4.3 Esercizi
4.3.1 Test di buon adattamento (χ2)5
Si sottoponga al test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoalla variabile casuale con densità di probabilità uniforme sull’intervallo [0,10]. Si esegua duevolte il test, con α = 10% e con α = 1%.
3.9 2.2 9.3 2.1 4.4 1.1 5.9 8.1 3.9 2.43.1 7.4 0.7 3.3 5.5 2.6 4.1 4.8 9.9 5.2
Si suddivida l’intervallo [0, 10] in cinque classi.
Soluzione
5
∑i=1
(Ni −νi)2
νi= 8.5
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 8.5 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 8.5 < 13.28
4.3.2 Test di buon adattamento (χ2)6
Si sottoponga a test del χ2 (su una sola coda) il buon adattamento del campione sotto riportato aduna distribuzione normale standardizzata. Si esegua due volte il test con livello di significativitàα = 10% e 1%.
Si utilizzino 5 classi di estremi:[−∞,−1.7], [−1.7,−0.4], [−0.4,+0.4], [+0.4,+1.7], [+1.7,+∞].
Il campione (già ordinato per valori argomentali crescenti) è il seguente:
-3.5 -2.2 -2.1 -1.8 -1.6 -1.2 -0.8 -0.6 -0.3 -0.2-0.2 -0.1 +0.1 +0.2 +0.3 +0.3 +0.7 +0.7 +1.0 +1.1+1.2 +1.5 +2.5 +2.8 +4.5
Soluzione
Risulta
χ2empirico = 12.59
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 12.59 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 12.59 < 13.28
5Topografia e Trattamento delle osservazioni, 19 giugno 20016Topografia e Trattamento delle osservazioni, 2 luglio 2001

66 CAPITOLO 4. TEST STATISTICI
4.3.3 Test di buon adattamento (χ2)7
Si sottoponga al test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoalla variabile casuale con densità di probabilità:
• simmetrica rispetto all’origine;
• lineare tra -2 e 0 e tra 0 e +2;
• continua;
• nulla al di fuori dell’intervallo [-2, +2].
(vedi grafico)
-
6
������Z
ZZ
ZZZ
-2 +2
Si esegua due volte il test, con α = 10% e con α = 1%.Si suddivida l’intervallo [-2, +2] in tre classi: [-2, -0.5), [-0.5, +0.5), [+0.5, +2].
campione-1.1 -0.3 1.3 -0.9 -0.6 0.0 0.1 -1.9 -1.3 -0.10.4 0.2 -1.4 -0.7 0.3 0.2 -0.1 -0.8 -0.4 -0.1
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da ren-dere rapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numerosoe l’uso di classi diverse.
Soluzione
Risultaχ2
empirico = 5.38
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(3−1) = 4.61 ipotesi H0 NON accettata perchè 4.61 < 5.38
α = 1% χ2(3−1) = 9.21 ipotesi H0 accettata perchè 9.21 > 5.38
4.3.4 Test di buon adattamento (χ2)8
Si sottoponga al test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoalla variabile casuale con densità di probabilità uniforme sull’intervallo [0,100]. Si esegua duevolte il test, con α = 10% e con α = 1%.
24.9 49.0 14.3 81.4 58.9 35.6 27.0 65.1 50.5 7.273.3 38.4 21.5 97.3 30.1 24.8 57.8 56.7 32.6 41.2
Si suddivida l’intervallo [0, 100] in cinque classi.
7Topografia e Trattamento delle osservazioni, 28 gennaio 20028Topografia e Trattamento delle osservazioni, 17 giugno 2003

4.3. ESERCIZI 67
Soluzione
5
∑i=1
(Ni −νi)2
νi= 8
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 8 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 8 < 13.28
4.3.5 Test sulla media di un campione normale9
Il campione dato di seguito è tratto da una variabile gaussiana. Si sottoponga a test l’ipotesi chela variabile sia a media nulla con livello di significatività del 5 per cento.
CAMPIONE: 0.2 , -0.3 , 0.6 , 0.6 , -0.2 , 0.5 , 0.0
Soluzione
m = 0.2 S2= 0.1433 S = 0.3786
m−µS/
√N
= 1.3976 < t6,0.975 = 2.45
l’ipotesi è quindi accetata.
4.3.6 Test sulla uguaglianza di medie di campioni normali10
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 7 5 9 11 8 6 7 6Campione y: 11 9 7 13 9 10 12 9
Soluzione
m1 = 7.375 m2 = 10 S12= 3.70 S2
2= 3.71 S2
= 3.705
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.727
toss = 2.727 < t14,0.995 = 2.977
toss = 2.727 > t14,0.975 = 2.145
l’ipotesi è quindi accetata con livello di significatività all’1% e rifiutata con livello di significati-vità al 5% .
9Topografia e Trattamento delle osservazioni, 23 giugno 200010Topografia e Trattamento delle osservazioni, 25 maggio 2001 - tipo 1

68 CAPITOLO 4. TEST STATISTICI
4.3.7 Test sulla uguaglianza di medie di campioni normali11
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 3 1 5 7 4 2 3 2Campione y: 9 7 5 11 7 8 10 7
Soluzione
m1 = 7.375 m2 = 8 S12= 3.70 S2
2= 3.71 S2
= 3.705
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 4.805
toss = 4.805 > t14,0.995 = 2.977
toss = 4.805 > t14,0.975 = 2.145l’ipotesi è quindi rifiutata per entrambi i livelli di significatività.
4.3.8 Test sulla uguaglianza di medie di campioni normali12
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 8 6 10 12 9 7 8 8Campione y: 12 10 8 14 10 11 13 10
Soluzione
m1 = 8.5 m2 = 11 S12= 3.43 S2
2= 3.71 S2
= 3.57
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.65
toss = 2.65 < t14,0.005 = 2.98
toss = 2.65 > t14,0.025 = 2.14l’ipotesi è quindi accetata con livello di significatività all’1% e rifiutata con livello di significati-vità al 5% .
4.3.9 Test di buon adattamento (χ2)13
Si sottoponga al test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoalla variabile casuale con densità di probabilità uniforme sull’intervallo [0,10]. Si esegua duevolte il test, con α = 10% e con α = 1%.
2.5 7.1 5.6 0.1 2.2 3.9 9.5 4.1 2.6 6.35.9 3.7 1.9 5.0 5.4 3.0 1.3 4.4 2.7 3.8
Si suddivida l’intervallo [0, 10] in cinque classi.
11Topografia e Trattamento delle osservazioni, 25 maggio 2001 - tipo 212Topografia e Trattamento delle osservazioni, 30 maggio 200313Topografia e Trattamento delle osservazioni, 21 giugno 2004

4.3. ESERCIZI 69
Soluzione
5
∑i=1
(Ni −νi)2
νi= 8.5
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 8.5 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 8.5 < 13.28
4.3.10 Test sulla uguaglianza di medie di campioni normali14
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 1 -1 3 5 2 0 1 0Campione y: 5 3 1 7 3 4 6 4
Soluzione
m1 = 1.375 m2 = 4.125 S12= 3.696 S2
2= 3.554 S2
= 3.63
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.89
toss = 2.89 < t14,0.005 = 2.98
toss = 2.89 > t14,0.025 = 2.14l’ipotesi è quindi accettata con livello di significatività all’1% e rifiutata con livello di significa-tività al 5% .
4.3.11 Test sulla uguaglianza di medie di campioni normali15
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 2 -1 4 3 1 0 -1 0Campione y: 3 2 -1 7 2 4 4 3
Soluzione
m1 = 1 m2 = 3 S12= 3.429 S2
2= 5.143 S2
= 4.29
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 1.93
toss = 1.93 < t14,0.005 = 2.98
toss = 1.93 < t14,0.025 = 2.14l’ipotesi è quindi accettata con entrambi i livelli di significatività.
14Topografia e Trattamento delle osservazioni, 7 settembre 200415Topografia e Trattamento delle osservazioni, 27 aprile 2005

70 CAPITOLO 4. TEST STATISTICI
4.3.12 Test sulla media di un campione normale16
Si sottoponga a test l’ipotesi H0 : µ = 1.00 del campione normale N[µ,σ2] di elementi:
3 5 -3 3 2 5 -1
con livello di significatività α = 5%.
Soluzione
m = 2 S2= 9 S = 3
m−µS/
√N
=
√7
3≃ 0.8819 < t6,0.975 = 2.45
l’ipotesi è quindi accettata.
4.3.13 Test sulla uguaglianza di medie di campioni normali17
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 3 0 5 4 2 1 0 1Campione y: 5 4 1 9 4 6 6 5
Soluzione
m1 = 2 m2 = 5 S12= 3.429 S2
2= 5.143 S2
= 4.29
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.9
toss = 2.9 < t14,0.005 = 2.98
toss = 2.9 > t14,0.025 = 2.14
l’ipotesi è quindi accettata con livello di significatività all’1% e rifiutata con livello di significa-tività al’5%.
4.3.14 Test di buon adattamento (χ2)18
Si sottoponga a test del χ2 (su una sola coda) il buon adattamento del campione sotto riportato aduna distribuzione normale standardizzata. Si esegua due volte il test con livello di significativitàα = 10% e 1%.
Si utilizzino 5 classi di estremi:(−∞,−1.5],(−1.5,−0.5],(−0.5,+0.5],(+0.5,+1.5],(+1.5,+∞).
Il campione (già ordinato per valori argomentali crescenti) è il seguente:
16Topografia e Trattamento delle osservazioni, 12 luglio 200517Topografia e Trattamento delle osservazioni, 15 febbraio 200618Topografia e Trattamento delle osservazioni, 19 aprile 2006

4.3. ESERCIZI 71
-1.3 -1.1 -1.1 -0.8 -0.7 -0.6 -0.4 -0.4 -0.2 -0.10.0 0.2 +0.3 +0.4 +0.9 +1.0 +1.3 +1.7 +2.4 +3.0
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da ren-dere rapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numerosoe l’uso di classi diverse.
Soluzione
Risulta
χ2empirico = 9.39
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 9.39 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 9.39 < 13.28
4.3.15 Test sulla uguaglianza di medie di campioni normali19
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 1 -2 3 2 0 -1 -2 -1Campione y: 3 2 -1 7 2 4 4 3
Soluzione
m1 = 0 m2 = 3 S12= 3.429 S2
2= 5.143 S2
= 4.29
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.9
toss = 2.9 < t14,0.005 = 2.98
toss = 2.9 > t14,0.025 = 2.14
l’ipotesi è quindi accettata con livello di significatività all’1% e rifiutata con livello di significa-tività al’5%.
4.3.16 Test di buon adattamento (χ2)20
Si sottoponga a test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoad una distribuzione uniforme. Si esegua due volte il test con livello di significatività α = 10%e 1%.
Si utilizzino 5 classi di estremi:
[0.0,0.2],(0.2,0.4],(0.4,0.6],(0.6,0.8],(0.8,1.0).
Il campione (già ordinato per valori argomentali crescenti) è il seguente:
19Topografia e Trattamento delle osservazioni, 10 gennaio 200720Topografia e Trattamento delle osservazioni, 6 febbraio 2007

72 CAPITOLO 4. TEST STATISTICI
0.10 0.25 0.27 0.30 0.41 0.45 0.50 0.52 0.55 0.560.56 0.59 0.63 0.69 0.81 0.88 0.91 0.95 0.97 0.99
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da rendererapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numeroso el’uso di classi diverse.
Soluzione
Risulta
χ2empirico = 8.5
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 8.5 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 8.5 < 13.28
4.3.17 Test sulla uguaglianza di medie di campioni normali21
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e si suppone chequesto, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono misurate le distanze, a meno di errori grossolani, è data da σ =
2mm.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani, con
livello di significatività del 5%.
Soluzione
m1 = 10 m2 = 40 S12= 342.9 S2
2= 514.3 S2
= 428.57
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.9
toss = 2.9 < t14,0.005 = 2.98
toss = 2.9 > t14,0.025 = 2.14
l’ipotesi è quindi accettata con livello di significatività all’1% e rifiutata con livello di significa-tività al’5%.
4.3.18 Test di buon adattamento (χ2)22
Si sottoponga a test del χ2 (su una sola coda) il buon adattamento del campione sotto riportato aduna distribuzione normale standardizzata. Si esegua due volte il test con livello di significativitàα = 10% e 1%.
Si utilizzino 5 classi di estremi:(−∞,−1.5],(−1.5,−0.5],(−0.5,+0.5],(+0.5,+1.5],(+1.5,+∞).
Il campione (già ordinato per valori argomentali crescenti) è il seguente:
21Topografia e Trattamento delle osservazioni, 23 giugno 200722Topografia e Trattamento delle osservazioni, 27 agosto 2007

4.3. ESERCIZI 73
-2.0 -1.4 -1.0 -0.9 -0.7 -0.6 -0.3 -0.2 -0.2 0.00.0 +0.1 +0.2 +0.4 +0.7 +1.1 +1.4 +1.6 +2.2 +3.1
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da rendererapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numeroso el’uso di classi diverse.
Soluzione
Risulta
χ2empirico = 6.39
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 accettata perchè 6.39 < 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 6.39 < 13.28
4.3.19 Test di buon adattamento (χ2)23
Si sottoponga a test del χ2 (su una sola coda) il buon adattamento del campione sotto riportatoad una distribuzione uniforme. Si esegua due volte il test con livello di significatività α = 10%e 1%. Si utilizzino 5 classi di estremi:
(1,3],(3,5],(5,7],(7,9],(9,11).Il campione (già ordinato per valori argomentali crescenti) è il seguente:
2.0 3.5 3.7 4.0 5.1 5.5 6.0 6.2 6.5 6.66.8 6.9 7.3 7.9 9.1 9.8 10.1 10.5 10.7 10.9
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da rendererapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numeroso el’uso di classi diverse.
Soluzione
Risulta
χ2empirico = 8.5
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 8.5 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 8.5 < 13.28
4.3.20 Test sulla uguaglianza di medie di campioni normali24
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 10 -20 30 20 0 -10 -20 -10Campione y: 30 20 -10 70 20 40 40 30
23Topografia e Trattamento delle osservazioni, 10 gennaio 200824Topografia e Trattamento delle osservazioni, 4 febbraio 2008

74 CAPITOLO 4. TEST STATISTICI
Soluzione
m1 = 0 m2 = 30 S12= 342.9 S2
2= 514.3 S2
= 428.57
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.9
toss = 2.9 < t14,0.005 = 2.98
toss = 2.9 > t14,0.025 = 2.14
l’ipotesi è quindi accettata con livello di significatività all’1% e rifiutata con livello di significa-tività al 5%.
4.3.21 Test di buon adattamento (χ2)25
Si sottoponga a test del χ2 (su una sola coda) il buon adattamento del campione sotto riportato aduna distribuzione normale standardizzata. Si esegua due volte il test con livello di significativitàα = 10% e 1%.
Si utilizzino 5 classi di estremi:(−∞,−1.5],(−1.5,−0.5],(−0.5,+0.5],(+0.5,+1.5],(+1.5,+∞).
Il campione (già ordinato per valori argomentali crescenti) è il seguente:
-3.0 -2.1 -1.7 -0.8 -0.7 -0.6 -0.4 -0.4 -0.2 -0.10.0 0.2 0.3 0.6 0.9 1.0 1.3 1.7 2.4 3.0
Nota: il piccolo numero dei dati e la particolare scelta suggerita per le classi sono tali da rendererapidi i calcoli; la esecuzione appropriata del test richiederebbe un campione più numeroso el’uso di classi diverse.
Soluzione
Risulta
χ2empirico = 10.03
Il test viene effettuato ad una coda ed i valori teorici di confronto nei due casi di significativitàsono:
α = 10% χ2(5−1) = 7.78 ipotesi H0 NON accettata perchè 10.03 > 7.78
α = 1% χ2(5−1) = 13.28 ipotesi H0 accettata perchè 10.03 < 13.28
4.3.22 Test sulla uguaglianza di medie di campioni normali26
Si sottoponga a test l’ipotesi H0 : µx = µy di uguaglianza delle medie µx e µy dei due campioninormali sotto riportati di pari varianza σ2
x = σ2y a livello di significatività α1 = 1% e α2 = 5%.
Campione x: 5 -1 9 7 3 1 -1 1Campione y: 8 6 0 16 6 10 10 8
25Topografia e Trattamento delle osservazioni, 23 giugno 200826Topografia e Trattamento delle osservazioni, 7 luglio 2008

4.3. ESERCIZI 75
Soluzione
m1 = 3 m2 = 8 S12= 13.714 S2
2= 20.571 S2
= 17.140
toss =
∣∣mx −my∣∣
S√
1Nx
+ 1Ny
= 2.42
toss = 2.42 < t14,0.005 = 2.98
toss = 2.42 > t14,0.025 = 2.14
l’ipotesi è quindi accettata con livello di significatività all’1% e rifiutata con livello di significa-tività al 5%.

Capitolo 5
Compensazione di reti dilivellazione
5.1 SchemiGli esercizi vengono risolti usando la stima a minimi quadrati con parametri aggiuntivi (si vedail capitolo 1). Le equazioni di osservazione si scrivono
qi j = Q j −Qi (5.1)
La matrice disegno A è la matrice dei coefficienti delle Q, dalla 5.1 si ricava che ogni rigadella matrice A ha al più due soli coefficienti diversi da 0 che valgono -1 e +1. La matricenormale N risulta da
N = A′Q−1A (5.2)
Nel caso Q−1 = I la matrice N ha sulla diagonale il numero di misure che coinvolgono ilvertice corrispondente, mentre all’incrocio di ogni riga e colonna l’elemento della matrice vale-1 se i due vertici che corrispondono a riga e colonna sono collegati da una misura, 0 altrimenti.Se due vertici della rete sono collegati tra loro da piú di una misura il coefficiente all’incrocio trarighe e colonne corrispondenti è pari −N, dove N è il numero di misure tra i due vertici.
Il termine noto normale si scrive
T.N.= A′Q−1y0 (5.3)
e la stima dei parametri
x =
Q1Q2. . .
Qn
=(
A′Q−1A)−1
A′Q−1y0 (5.4)
Il vettore degli scarti si puó determinare con
v = y−y0 = Ax−y0 (5.5)
e quindi la stima della varianza
σ20 =
v′Q−1vm−n
(5.6)
con m numero di osservazioni (misure) e n numero di parametri (quote) incogniti. La stimadella matrice di varianza e covarianza dei parametri (quote) si scrive
76

5.1. SCHEMI 77
Cxx = CQQ = σ20 N−1 = σ2
0
(A′Q−1A
)−1(5.7)
Sulla diagonale di questa matrice si leggono le stime delle varianze dei parametri (quote) eal di fuori della diagonale le stime delle covarianze. La verifica dell’ortogonalità degli scarti siscrive
A′Q−1v = 0 (5.8)

78 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
5.2 Esercizi risolti
5.2.1 Rete di livellazione1
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 3, si determinino le quote dei punti 2 e 4 ed il loro scarto quadratico medio. Lemisure sono incorrelate e con uguale precisione, il dislivello q23 è misurato due volte.
����
���
����
���A
AAA
AAA
.......................... ..........................
.......................... ..........................
1
2 3
4
DatiQ1 = 0mmQ3 = 10mm
Misureq12 4.7mmq23 4.6mm 5.0mmq24 10.1mmq34 4.9mm
SvolgimentoLe equazioni di osservazione si scrivono:
q12 = Q2 −Q1q23 = Q3 −Q2q23 = Q3 −Q2q24 = Q4 −Q2q34 = Q4 −Q3
Le quote Q1 e Q3 sono note, le equazioni di osservazione si riscrivono come
q12 +Q1 = Q2q23 −Q3 = −Q2q23 −Q3 = −Q2q24 = −Q2 +Q4q34 +Q3 = Q4
Scrivendo il sistema come y = Ax la matrice disegno A risulta
1Topografia e Trattamento delle osservazioni, 7 maggio 1999

5.2. ESERCIZI RISOLTI 79
A =
1 0
−1 0−1 0−1 1
0 1
ed il termine noto
y =
4.7 +04.6 −105.0 −10
10.14.9 +10
=
4.7
−5.4−5.010.114.9
Dalla incorrelazione delle misure, la matrice Cyy di varianza e covarianza risulta diagonale,
dalla loro uguale precisione segue che la matrice Cyy è proporzionale, per un fattore incognitoche non influenza la soluzione, alla matrice identità 5× 5. Ne consegue che la matrice Q puóessere scelta uguale alla matrice identità e quindi anche la matrice dei pesi Q−1, sua inversa,risulta tale. La matrice normale N = A′Q−1A con Q−1 = I si scrive
N =
[4 −1
−1 2
]Il determinante risulta det (N) = 7 e quindi l’inversa
N−1 =
[ 27
17
17
47
]Il termine noto normale A′Q−1y è
A′Q−1y = A′y =[
4.7+5.4+5.0−10.110.1+14.9
]=
[525
]La stima delle incognite Q2 e Q4 risulta
x = N−1A′Q−1y = N−1A′y =[
Q2Q4
]=
=
[ 17 (5 ·2+25)17 (5+4 ·25)
]=
[ 357
1057
]=
[5
15
]mmmm
Gli scarti sono
v = y−Ax =
4.7
−5.4−5.010.114.9
−
5−5−5
−5+1515
=
−0.3−0.4
00.1
−0.1
e quindi la stima della varianza della compensazione risulta
σ20 =
v′Q−1vm−n
=v′v
5−2=
0.09+0.16+0+0.01+0.013
=0.27
3= 0.09 mm2
La matrice di varianza e covarianza delle incognite viene stimata con
Cxx = σ20 N−1 = 0.09
[ 27
17
17
47
]=
[2.571429 10−2 1.285714 10−2
1.285714 10−2 5.142857 10−2
]

80 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
Gli scarti quadratici medi dei parametri risultano quindi
σQ2 =√
2.571429 10−2 = 1.603567 10−1 mmσQ4 =
√5.142857 10−2 = 2.2677868 10−1 mm
La verifica dell’ortogonalità degli scarti si scrive
A′Q−1v = A′v =[
−0.3+0.4−0.1+00.1−0.1
]=
[00
]

5.3. ESERCIZI 81
5.3 Esercizi5.3.1 Rete di livellazione2
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Nota la quotadel punto 2, nulla, si determinino le quote dei punti 1, 3 e 4 ed il loro scarto quadratico medio.Le misure sono incorrelate e con uguale varianza.
bbbbbbbbbbbbbbbbbbb1
2 3
4
DatiQ2 = 0.0mm
Misureq12 = 21.4mmq14 = 21.6mmq43 = −24.8mmq23 = −22.2mmq24 = 0.8mm
Domanda aggiuntiva
Come risulterebbe la matrice dei pesi se la misura q24 avesse varianza doppia rispetto alle altre?
Soluzione
x =
Q1Q3Q4
=
−20.95−22.95
1.1
σ20 = 8.1 10−1 mm2
Cxx =
5.0625 10−1 1.0125 10−1 2.0250 10−1
1.0125 10−1 5.0625 10−1 2.0250 10−1
2.0250 10−1 2.0250 10−1 4.0500 10−1
Domanda aggiuntiva
La matrice dei pesi Q−1 risulterebbe
Q−1 =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 1
2
2Diploma Universitario, 19 gennaio 1999

82 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
5.3.2 Rete di livellazione (con propagazione)3
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Nota la quotadel punto 1, nulla, si determinino le quote dei punti 2 e 3 e la loro matrice di varianza e cova-rianza. Le misure sono incorrelate e con uguale varianza, tranne la q12 che ha varianza doppia.
\\
\\
\\
\\\�
��
��
��
�� 2
3
1
4
DatiQ1 = 0.0m
Misureq12 = 3.10mq23 = 4.05mq31 = −7.05m
Dopo aver eseguito la compensazione si determini la quota del punto Q4 e la relativa varian-za, avendo misurato il dislivello q34 = 5m con σq34 = 1cm.
Soluzione
x =[
Q2Q3
]=
[3.0507.075
]σ2
0 = 2.5 10−3 m2
Cxx =
[2.500 10−3 1.250 10−3
1.250 10−3 1.875 10−3
]q34 = Q4 −Q3 = 5 m Q4 = q34 +Q3 = 12.075 mσ2
Q4= σ2
q34+σ2
Q3= 10−4 +1.875 10−3 = 1.975 10−3 m2
5.3.3 Rete di livellazione4
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 3 e 4, si determinino le quote dei punti 1 e 2 ed il loro scarto quadratico medio. Lemisure sono incorrelate e di uguale precisione.
Dati MisureQ3 = 3 m q12 = 1.1 mQ4 = 0 m q13 = 2 m
q14 = −1.1 mq23 = 1 mq24 = −1.9 m
Soluzione
x =[
Q1Q2
]=
[12
]σ2
0 = 10−2 m2 Cxx =
[3.75 10−3 1.25 10−3
1.25 10−3 3.75 10−3
]3Diploma Universitario, recupero 1999-20004Topografia e Trattamento delle osservazioni, 14 settembre 2000

5.3. ESERCIZI 83
��
��
��
��
���
3 1
42
5.3.4 Rete di livellazione (con propagazione)5
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 3 e 4, si determinino le quote dei punti 1 e 2 ed il loro scarto quadratico medio. Lemisure sono incorrelate e di uguale precisione.
��
��
��
��
��
���
3 1
42
@@@@
5
DatiQ3 = 10 mQ4 = 0 m
Misureq12 = −1.8 mq13 = 4 mq14 = −6.2 mq23 = 6 mq24 = −3.8 m
Si calcoli la quota del punto 5 e la sua varianza, avendo misurato il dislivello q51 =−4m cons.q.m. pari a 1 cm.
Soluzione
x =[
Q1Q2
]=
[64
]σ2
0 = 4 10−2 m2 Cxx =
[1.5 10−2 0.5 10−2
0.5 10−2 1.5 10−2
]
q51 = Q1 −Q5 Q5 =−q51 +Q1 = 10mσ2
Q5= σ2
q51+σ2
Q1= 10−4 +1.5 10−2 = 1.5110−2 m2
5Diploma Universitario, 5 febbraio 2001

84 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
5.3.5 Rete di livellazione6
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Nota la quotadel punto 1, si determinino le quote dei punti 2, 3 e 4 ed il loro scarto quadratico medio. Lemisure sono incorrelate e di uguale precisione.
��
��
��
��
���
@@@@@
@@@
@@@
1 2
34
Dati MisureQ1 = 0 m q12 = 3 m
q13 = 9.8 mq14 = 7.2 mq23 = 7.4 mq24 = 3.6 mq34 = −2.8 m
Si facciano osservazioni sul rapporto fra lo schema della rete dell’esercizio precedente e larelativa matrice normale.
Soluzione
x =
Q2Q3Q4
=
3107
σ20 = 1.46 10−1 m2
Cxx =
7.3 10−2 3.6 10−2 3.6 10−2
3.6 10−2 7.3 10−2 3.6 10−2
3.6 10−2 3.6 10−2 7.3 10−2
5.3.6 Rete di livellazione7
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 3, 4 e 5, si determinino le quote dei punti 1 e 2 ed il loro scarto quadratico medio. Lemisure sono incorrelate e con uguale precisione, il dislivello q12 è misurato due volte.
Dati Q3 = 10.0m Q4 = 12.0m Q5 = 15.0m
Misure
q13 −2.8m q24 −2.3mq14 −1.0m q23 −4.5mq12 0.6m 0.8m q25 1.2mq15 2.4m
6Topografia e Trattamento delle osservazioni, 19 febbraio 20017Topografia e Trattamento delle osservazioni, 19 giugno 2001
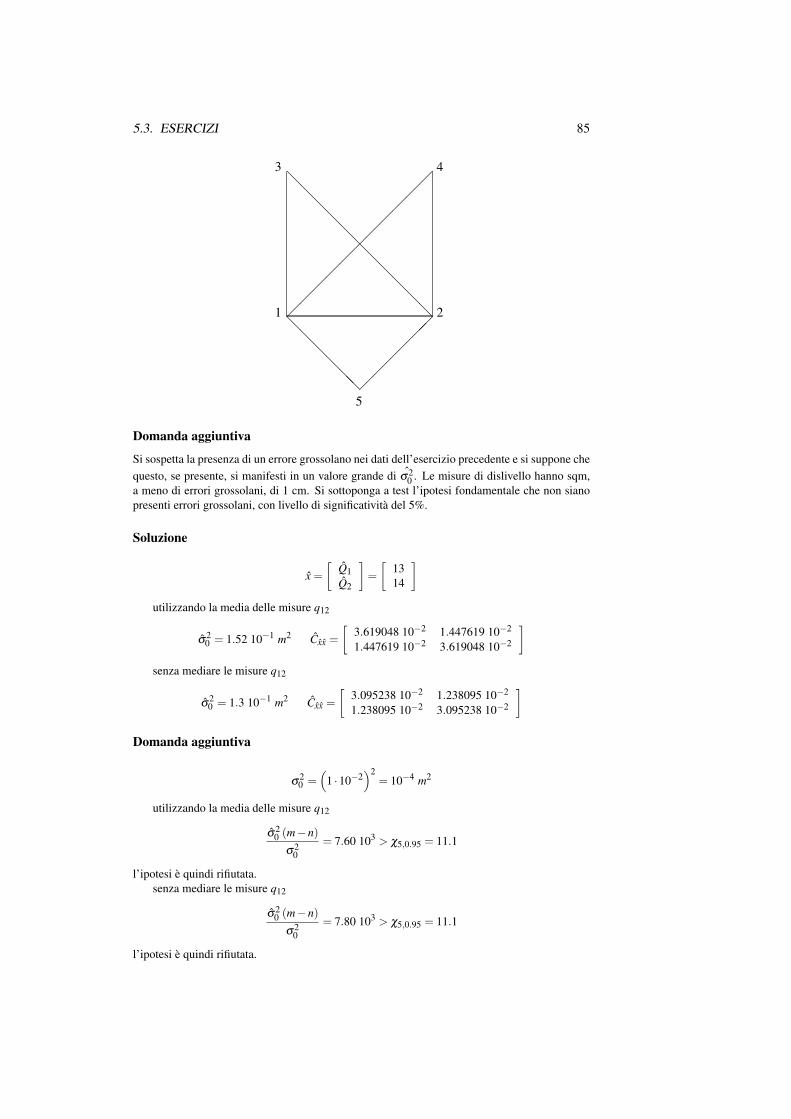
5.3. ESERCIZI 85
@@@@@@@
@@@@
��
��
��
��
��
�@@@@@@�
���
��
3 4
1 2
5
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e si suppone chequesto, se presente, si manifesti in un valore grande di σ2
0 . Le misure di dislivello hanno sqm,a meno di errori grossolani, di 1 cm. Si sottoponga a test l’ipotesi fondamentale che non sianopresenti errori grossolani, con livello di significatività del 5%.
Soluzione
x =[
Q1Q2
]=
[1314
]utilizzando la media delle misure q12
σ20 = 1.52 10−1 m2 Cxx =
[3.619048 10−2 1.447619 10−2
1.447619 10−2 3.619048 10−2
]senza mediare le misure q12
σ20 = 1.3 10−1 m2 Cxx =
[3.095238 10−2 1.238095 10−2
1.238095 10−2 3.095238 10−2
]
Domanda aggiuntiva
σ20 =
(1 ·10−2
)2= 10−4 m2
utilizzando la media delle misure q12
σ20 (m−n)
σ20
= 7.60 103 > χ5,0.95 = 11.1
l’ipotesi è quindi rifiutata.senza mediare le misure q12
σ20 (m−n)
σ20
= 7.80 103 > χ5,0.95 = 11.1
l’ipotesi è quindi rifiutata.

86 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
5.3.7 Rete di livellazione8
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 2 e 3 rappresentauna misura ripetuta due volte.
��
��
��
��
��
��
��
��
��
��
��
��
1 2
43
Misure Datiq12 = 0.8 m Q1 = 1 mq13 = 1.9 m Q4 = 4 mq23 = 0.4 mq23 = 1.2 mq24 = 2.2 mq34 = 0.5 m
Soluzione
x =[
Q2Q3
]=
[23
]
senza mediare le misure di q23:
σ20 = 1.85 10−1 m2 Cxx =
[6.16 10−2 3.083 10−2
3.083 10−2 6.16 10−2
]
utilizzando la media delle misure di q23:
σ20 = 1.4 10−1 m2 Cxx =
[4.6 10−2 2.3 10−2
2.3 10−2 4.6 10−2
]
5.3.8 Rete di livellazione9
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 2 e 3 rappresentauna misura ripetuta due volte.
8Topografia e Trattamento delle osservazioni, 25 marzo 20029Topografia e Trattamento delle osservazioni, 16 settembre 2002

5.3. ESERCIZI 87
1 2
43
Misure Datiq12 = 2.1 m Q1 = 2 mq13 = 4.3 m Q4 = 8 mq13 = 3.8 mq24 = 4.3 mq24 = 3.8 mq34 = 2.1 m
Soluzione
x =[
Q2Q3
]=
[46
]
senza mediare le misure di q13 e q24:
σ20 = 7 10−2 m2 Cxx =
[2.3 10−2 0
0 2.3 10−2
]
utilizzando le medie delle misure di q13 e q24:
σ20 = 1.25 10−2 m2 Cxx =
[4.16 10−3 0
0 4.16 10−3
]
5.3.9 Rete di livellazione10
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 2 e 3, si determinino le quote dei punti 1 e 4 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 1 e 4 rappresentauna misura ripetuta due volte.
Misure Datiq12 = 0.7 m Q2 = 2 mq13 = 2.2 m Q3 = 3 mq14 = 2.7 mq14 = 3.4 mq43 = −1.2 mq42 = −1.7 m
10Topografia 2, 15 gennaio 2004

88 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
@@@@@@@@
@@@@
@@
@@@
@@
@@
@@@
1 2
43
Soluzione
x =[
Q1Q4
]=
[14
]senza mediare le misure di q14:
σ20 = 1.275 10−1 m2 Cxx =
[4.25 10−2 2.125 10−2
2.125 10−2 4.25 10−2
]utilizzando la media delle misure di q14:
σ20 = 8.83 10−2 m2 Cxx =
[2.94 10−2 1.472 10−2
1.472 10−2 2.94 10−2
]
5.3.10 Rete di livellazione11
Si esegua la compensazione a minimi quadrati della rete di livellazione schematizzata in figura.Note le quote dei punti 1, 2 e 4, si determinino le quote dei punti 3 e 5 e la loro matrice divarianza e covarianza. Le misure sono incorrelate e con uguale precisione.
@@
@@@�
��
��@
@@@
@@
@@@
��
��
��
���1 2
35
4
Dati Q1 = 20.0m Q2 = 10.0m Q4 = 50.0m
Misureq13 = 10.1m q15 = 20.3m q23 = 19.9m q25 = 29.7mq34 = 20.1m q35 = 9.9m q45 =−9.9m
11Topografia 2, 15 aprile 2004

5.3. ESERCIZI 89
Soluzione
x =[
Q3Q5
]=
[3040
]σ2
0 = 4.6 10−2 m2
Cxx =
[1.226 10−2 3.06 10−3
3.06 10−3 1.226 10−2
]
5.3.11 Rete di livellazione12
Si esegua la compensazione a minimi quadrati della rete di livellazione schematizzata in figura.Note le quote dei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianzae covarianza. Le misure sono indipendenti e di uguale precisione. Le linee doppie tra i punti 1 e2 e 3 e 4 rappresentano misure ripetute due volte.
��
��
��
��
��
���
1 2
43Misure Dati
q12 = 3.0 m Q1 = 1 mq12 = 3.1 m Q4 = 10 mq13 = 5.2 mq23 = 1.9 mq24 = 6.2 mq34 = 4.0 mq34 = 4.1 m
Soluzione
x =[
Q2Q3
]=
[46
]σ2
0 = 2.2 10−2 m2
Cxx =
[5.86 10−3 1.46 10−3
1.46 10−3 5.86 10−3
]
5.3.12 Rete di livellazione (con propagazione)13
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. Le linee doppie tra i punti 2 e 3 e tra i punti 2e 4 rappresentano misure ripetute due volte.
12Topografia 2 e Topografia e Trattamento delle osservazioni, 12 luglio 200513Topografia 2 e Topografia e Trattamento delle osservazioni, 13 giugno 2006, la domanda aggiuntiva solo
per Topografia e Trattamento delle osservazioni

90 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
��
��
��
��
��
��
��
��
��
��
��
��
1 2
43
Misure Datiq12 = 1.998 m Q1 = 0 mq13 = 4.004 m Q4 = 6 mq23 = 1.996 mq23 = 2.004 mq24 = 3.996 mq24 = 4.002 mq34 = 2.004 m
Domanda aggiuntiva
Si calcoli il dislivello tre i punti 2 e 3 a partire dalle quote stimate nell’esercizio precedente.Quale è la varianza di tale livello?
Soluzione
x =[
Q2Q3
]=
[24
]senza mediare le misure q23 e q24
σ20 = 1.760 10−5 m2
Cxx =
[4.4 10−6 2,2 10−6
2.2 10−6 5.5 10−6
]utilizzando la media delle misure q23 e q24
σ20 = 1.26 10−5 m2
Cxx =
[3.16 10−6 1.583 10−6
1.583 10−6 3.39583 10−6
]
Domanda aggiuntiva
q23 = Q3 − Q2 = 2 m
Senza mediare le misure q23 e q24
σ2q23
= 5.5 10−6 m2
utilizzando la media delle misure q23 e q24
σ2q23
= 3.39583 10−6 m2

5.3. ESERCIZI 91
5.3.13 Rete di livellazione14
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 2 e 3 rappresentauna misura ripetuta due volte.
��
��
��
��
��
��
��
��
��
��
��
��
1 2
43Misure Dati
q12 = −1.8 cm Q1 = 10 cmq13 = −0.9 cm Q4 = 10 cmq23 = 1.0 cmq23 = 0.9 cmq24 = 2.3 cm
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e si suppone chequesto, se presente, si manifesti in un valore grande di σ2
0 . L’incertezza con cui sono misuratidislivelli, a meno di errori grossolani, è data da σ = 2mm.
Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani, conlivello di significatività del 5%.
Soluzione
x =[
Q2Q3
]=
[89
]senza mediare le misure q23
σ20 = 5 10−6 m2
Cxx =
[1.875 1.2501.250 2.500
]10−6
utilizzando la media delle misure q23
σ20 = 7.25 10−6 m2
Cxx =
[2.7187 1.81251.8125 3.625
]10−6 m2
14Topografia 2 e Topografia e Trattamento delle osservazioni, 26 aprile 2007, la domanda aggiuntiva soloper Topografia e Trattamento delle osservazioni

92 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
Domanda aggiuntiva
σ20 =
(2 10−2
)2= 4 10−6 m2
Senza mediare le misure q23
σ20 (m−n)
σ20
= 3.75 < χ3,0.95 = 7.81
l’ipotesi è quindi accettata.Utilizzando la media delle misure q23
σ20 (m−n)
σ20
= 5.4375 < χ3,0.95 = 7.81
l’ipotesi è quindi accettata.
5.3.14 Rete di livellazione15
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 2 e 3 rappresentauna misura ripetuta due volte.
��
��
��
��
��
��
��
��
��
��
��
��
1 2
43Misure Dati
q12 = 3.6 mm Q1 = 0 mmq13 = 0.8 mm Q4 = 2 mmq23 = −1.2 mmq23 = −2.6 mmq24 = −0.6 mmq34 = 1.0 mm
Soluzione
x =[
Q2Q3
]=
[31
]senza mediare le misure q23
σ20 = 3.9 10−1 mm2
Cxx =
[1.3 6.5 10−1
6.5 10−1 1.3
]10−1 mm2
15Topografia 2 e Topografia e Trattamento delle osservazioni, 23 giugno 2008

5.3. ESERCIZI 93
5.3.15 Rete di livellazione16
Si esegua la compensazione a minimi quadrati della rete schematizzata in figura. Note le quotedei punti 1 e 2, si determinino le quote dei punti 3 e 4 e la loro matrice di varianza e covarianza.Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 3 e 4 rappresentauna misura ripetuta due volte.
@@@@@@
@@
@@@
@@
��
��
��
��
��
���
1 2
3 4
Misure Datiq13 = 3.001 m Q1 = 5 mq14 = 7.002 m Q2 = 10 mq23 = −2.003 mq24 = 2.000 mq34 = 4.003 mq34 = 3.995 m
Soluzione
x =[
Q3Q4
]=
[8
12
]m
senza mediare le misure q34
σ20 = 1.2 10−5 m2
Cxx =
[4 22 4
]10−6 m2
mediando le misure q34
σ20 = 5.3 10−6 m2
Cxx =
[1.7 0.08
0.08 1.7
]10−6 m2
5.3.16 Rete di livellazione17
Si esegua la compensazione a minimi quadrati della rete di livellazione schematizzata in figura.Note le quote dei punti 2 e 3, si determinino le quote dei punti 1 e 4 e la loro matrice di varianza

94 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
3 1
24
e covarianza. Le misure sono indipendenti e di uguale precisione. Le linee doppie tra i punti 1 e3 e 2 e 4 rappresentano misure ripetute due volte.
Misure Datiq12 = 0.993 m Q2 = 2 mq13 = 2.004 m Q3 = 3 mq13 = 2.003 mq24 = 1.999 mq24 = 1.998 mq34 = 1.003 m
Soluzione
x =[
Q1Q4
]=
[14
]m
senza mediare le misure q13 e q24
σ20 = 2.2 10−5 m2
Cxx =
[1 00 1
]7.3 10−6 m2
mediando le misure q13 e q24
σ20 = 4.35 10−5 m2
Cxx =
[1 00 1
]1.45 10−5 m2
5.3.17 Rete di livellazione18
Si esegua la compensazione a minimi quadrati della rete di livellazione schematizzata in figura.Note le quote dei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianzae covarianza. Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 2 e 3rappresenta una misura ripetuta due volte.
16Topografia 2, 8 aprile 200917Topografia 2, 12 gennaio 201018Topografia 2, 22 luglio 2010

5.3. ESERCIZI 95
@@@@@@
@@
@@@
@@
��
��
��
��
��
���
1 4
2 3
Misure Datiq21 = −2.000 m Q1 = 1 mq23 = −0.995 m Q4 = 4 mq23 = −1.003 mq24 = 0.998 mq31 = −1.001 mq34 = 2.003 m
Soluzione
x =[
Q2Q3
]=
[32
]m
senza mediare le misure q23
σ20 = 1.2 10−5 m2
Cxx =
[4 22 4
]10−6 m2
mediando le misure q34
σ20 = 7.6 10−6 m2
Cxx =
[2.5 1.27
1.27 2.5
]10−6 m2
5.3.18 Rete di livellazione19
Si esegua la compensazione a minimi quadrati della rete di livellazione schematizzata in figura.Note le quote dei punti 1 e 4, si determinino le quote dei punti 2 e 3 e la loro matrice di varianzae covarianza. Le misure sono incorrelate e di uguale precisione. La linea doppia tra i punti 2 e 3rappresenta una misura ripetuta due volte.
Misure Datiq12 = 3.004 m Q1 = 1 mq13 = 0.996 m Q4 = 3 mq23 = −1.996 mq23 = −1.995 mq24 = −1.005 mq34 = 1.005 m
19Topografia 2, 10 gennaio 2011

96 CAPITOLO 5. COMPENSAZIONE DI RETI DI LIVELLAZIONE
��
��
��
��
��
��
��
��
��
��
��
��
1 2
43
Soluzione
x =[
Q2Q3
]=
[42
]m
senza mediare le misure q23
σ20 = 3.075 10−5 m2
Cxx =
[1.025 5.125 10−1
5.125 10−1 1.025
]10−5 m2
mediando le misure q34
σ20 = 3.403 10−5 m2
Cxx =
[1.1361 5.680556 10−1
5.680556 10−1 1.1361
]10−5 m2
Capitolo 6
Compensazione di retiplanimetriche
6.1 SchemiGli esercizi vengono risolti usando la stima a minimi quadrati con parametri aggiuntivi (si vedail capitolo 1). Per la scrittura e la linearizzazione delle equazioni di osservazione di distanze eangoli si veda il paragrafo 1.6.
La matrice disegno A è la matrice dei coefficienti delle "correzioni" rispetto ai valori ap-prossimati dei parametri, cioè le derivate nelle 1.64 e 1.65 valutate nei valori approssimati deiparametri. Nel caso in cui le misure di distanza siano affette da un fattore di scala incognito leequazioni di osservazione per la distanza diventano:
di j = λ√(
xi − x j)2
+(yi − y j
)2 (6.1)
e quindi la loro linearizzazione
di j − di j = λx j − xi
di j
(ξi −ξ j
)+ λ
y j − yi
di j
(ηi −η j
)+ di jδλ (6.2)
La matrice normale N risulta da
N = A′Q−1A (6.3)
e il termine noto normale si scrive
T.N.= A′Q−1y0 (6.4)
La stima della variazione dei parametri rispetto ai valori approssimati si stima con
ξ =
ξ1ξ2. . .
ξn
=(
A′Q−1A)−1
A′Q−1y0 (6.5)
e quindi la stima dei parametri
x =
x1x2. . .xn
=
ξ1ξ2. . .
ξn
+
x1x2. . .xn
(6.6)
97

98 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
Per la stima degli scarti nel caso non lineare è necessario ristimare le osservazioni a partiredai parametri stimati:
di j =
√(xi − x j
)2+(yi − y j
)2 (6.7)
dove d è la distanza orizzontale, x e y sono le stime delle coordinate cartesiane (oppure ivalori dati delle coordinate se queste sono considerate note) e i e j indicano due punti della rete.
L’equazione della direzione è:
θi j = arctanx j − xi
y j − yi− δ j (6.8)
dove θ è la stima della direzione e δ è la stima dell’origine delle direzioni misurata rispettoalla direzione dell’asse y. Queste espressioni consentono la stima y di y e quindi del vettore degliscarti v:
v = y−y0 (6.9)
e quindi la stima della varianza
σ20 =
v′Q−1vm−n
(6.10)
con m numero di osservazioni (misure) e n numero di parametri incogniti. La stima dellamatrice di varianza e covarianza dei parametri si scrive
Cxx = σ20 N−1 = σ2
0
(A′Q−1A
)−1(6.11)
Sulla diagonale di questa matrice si leggono le varianze dei parametri e al di fuori delladiagonale le covarianze, gli scarti quadratici medi dei parametri si ricavano quindi estraendo laradice degli elementi sulla diagonale. La verifica dell’ortogonalità degli scarti si scrive
A′Q−1v = 0 (6.12)
Si tenga presente che nel caso di equazioni di osservazione non lineari tale verifica puòessere influenzata in modo significativo dalle approssimazioni introdotte dalla linearizzazionedelle equazioni.

6.2. ESERCIZI RISOLTI 99
6.2 Esercizi risolti
6.2.1 Rete con misure di angoli e distanze1
Nella rete riportata in figura si sono effettuate le seguenti osservazioni:
α = 50g.0020 d1 = 212.130 mangoli β = 49g.9980 distanze d2 = 212.140 m
γ = 99g.9990
con vertici A e B di coordinate note.
Si determini la stima ai minimi quadrati delle coordinate del punto P e la stima della matricedi varianza e covarianza, supposte le osservazioni tra loro indipendenti e con σα = 15cc per gliangoli e σd = 2mm+ 2ppm per le distanze (le espressioni definitive di σ2
α e σ2d devono essere
espresse con una sola cifra significativa. Esempio: 0.95 ∼= 1 , 99 ·10−5 ∼= 10−3).
-����
������@
@@
@@@
@@@@
6
A B x
y
P
α β
γ
Valori approssimati (x, y)P = (150.0,150.0)mPunti noti (x,y)A = (0.0,0.0)m
(x,y)B = (300.0,0.0)m
Svolgimento
Le equazioni di osservazione si scrivono:
α = arctan(
yP−yAxP−xA
)β = arctan
(yP−yBxB−xP
)γ = arctan
(xA−xPyA−yP
)− arctan
(xB−xPyB−yP
)d1 =
√(xP − xA)
2 +(yP − yA)2
d2 =
√(xP − xB)
2 +(yP − yB)2
1Topografia e Trattamento delle osservazioni, 4 marzo 1996

100 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
Tali equazioni, valutate nei valori approssimati (xP, yP), portano a:
α = arctan(
150.0−0.0150.0−0.0
)= arctan(1) = π
4 rad
β = arctan(
150.0−0.0300.0−150.0
)= arctan(1) = π
4 rad
γ = arctan(
0.0−150.00.0−150.0
)− arctan
(300.0−150.00.0−150.0
)=
= arctan(1)− arctan(−1) = π2 rad
d1 =
√(150.0−0.0)2 +(150.0−0.0)2 = 150.0
√2 m
d2 =
√(150.0−300.0)2 +(150.0−0.0)2 = 150.0
√2 m
La scrittura della matrice disegno A risulta dalle derivate delle equazioni di osservazionerispetto ai parametri (xP,yP) incogniti, valutate nei valori approssimati (xP, yP):
∂α∂xP
= 1
1+(
yP−yAxP−xA
)2yP−yA
(xP−xA)2 (−1) =− yP−yA
d21
∂α∂xP
|xP,yP =− 150−0(150
√2)
2 =− 1300
∂α∂yP
= 1
1+(
yP−yAxP−xA
)21
xP−xA= xP−xA
d21
∂α∂yP
|xP,yP = 150−0(150
√2)
2 = 1300
∂β∂xP
= 1
1+(
yP−yBxB−xP
)2yP−yB
(xB−xP)2 (−1)(−1) = yP−yB
d22
∂β∂xP
|xP,yP = 150−0(150
√2)
2 = 1300
∂β∂yP
= 1
1+(
yP−yBxB−xP
)21
xB−xP= xB−xP
d22
∂β∂yP
|xP,yP = 300−150(150
√2)
2 = 1300
∂γ∂xP
= 1
1+(
xA−xPyA−yP
)2−1
(yA−yP)− 1
1+(
xB−xPyB−yP
)2−1
(yB−yP)
=− yA−yPd2
1+ yB−yP
d22
∂γ∂xP
|xP,yP =− 0−150(150
√2)
2 +0−150
(150√
2)2 = 0
∂γ∂yP
= 1
1+(
xA−xpyA−yP
)2xA−xP
(yA−yP)2 (−1)(−1)−
+ 1
1+(
xB−xpyB−yP
)2xB−xP
(yB−yP)2 (−1)(−1) = xA−xP
d21
− xB−xPd2
2
∂γ∂yP
|xP,yP = 0−150(150
√2)
2 +300−150(150
√2)
2 =− 1150
∂d1∂xP
=2(xP−xA)
2√
(xP−xA)2+(yP−yA)
2= xP−xA
d1
∂d1∂xP
|xP,yP = 150−0150
√2= 1√
2
∂d1∂yP
=2(yP−yA)
2√
(xP−xA)2+(yP−yA)
2= yP−yA
d1
∂d1∂yP
|xP,yP = 150−0150
√2= 1√
2
∂d2∂xP
=1(xP−xB)
1√
(xP−xB)1+(yP−yB)
1= xP−xB
d1
∂d2∂xP
|xP,yP = 150−300150
√2
=− 1√2
∂d2∂yP
=1(yP−yB)
1√
(xP−xB)1+(yP−yB)
1= yP−yB
d1
∂d2∂yP
|xP,yP = 150−0150
√2= 1√
2
La matrice disegno A si scrive quindi
A =
∂α∂xP
|xP,yP∂α∂yP
|xP,yP
∂β∂xP
|xP,yP∂β∂yP
|xP,yP
∂γ∂xP
|xP,yP∂γ∂yP
|xP,yP
∂d1∂xP
|xP,yP∂d1∂yP
|xP,yP
∂d2∂xP
|xP,yP∂d2∂yP
|xP,yP
=
− 1
3001
3001
3001
3000 − 1
1501√2
1√2
− 1√2
1√2

6.2. ESERCIZI RISOLTI 101
Dalla incorrelazione delle misure, la matrice Cyy di varianza e covarianza delle misure risultadiagonale, con numero di righe uguale al numero di colonne pari a 5. Le varianze delle misurerisultano per gli angoli σα = σβ = σγ = 15cc e quindi
σ2α = σ2
β = σ2γ =
(15 ·10−4 · π
200)2
=(
152 ·10−6π
)2=
=(2.35610−5)2
= 5.5510−10 ∼= 6 10−10rad2
in radianti al quadrato, avendo utilizzato una sola cifra significativa come indicato dal testo. Perle distanze le varianze si scrivono
σ2d1=(
2 10−3 +2 10−6 212.130)2
= 5.877 10−6 ∼= 6 10−6m2
e
σ2d2=(
2 10−3 +2 10−6 212.140)2
= 5.877 10−6 ∼= 6 10−6m2
avendo espresso le varianze in metri al quadrato e utilizzando una sola cifra significativa. Lamatrice di varianza e covarianza delle misure si scrive quindi
Cyy =
σ2
α 0 0 0 00 σ2
β 0 0 00 0 σ2
γ 0 00 0 0 σ2
d10
0 0 0 0 σ2d2
=
=
6 10−10 0 0 0 0
0 6 10−10 0 0 00 0 6 10−10 0 00 0 0 6 10−6 00 0 0 0 6 10−6
Ponendo σ2
0 = 6 10−10 si ricava
Cyy = 6 10−10
1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 104 00 0 0 0 104
= σ20
1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 104 00 0 0 0 104
e quindi
Q =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 104 00 0 0 0 104
ed infine la matrice dei pesi Q−1
Q−1 =
1 0 0 0 00 1 0 0 00 0 1 0 00 0 0 10−4 00 0 0 0 10−4
La matrice normale N = A′Q−1A si scrive quindi

102 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
N =
[1.2 10−4 0
0 1.6 10−4
]e quindi l’inversa
N−1 =
[8.18 103 0
0 6 103
]Il termine noto del sistema linearizzato y = y0 − y risulta
y =
α − αβ − βγ − γ
d1 − d1d2 − d2
=
50.0020 π
200 −π4
49.9980 π200 −
π4
99.9990 π200 −
π2
212.130−150√
2212.140−150
√2
=
3.141593 10−5
−3.141593 10−5
−1.570796 10−5
−2.034300 10−3
7.965700 10−3
Il termine noto normale A′Q−1y è
A′Q−1y =[
−9.165463 10−7
5.241331 10−7
]La stima delle incognite ξP e ηP risulta
ξ = N−1A′Q−1y =[
ξPηP
]=
[−7.499015 10−3
3.144798 10−3
]E quindi la stima delle coordinate di P[
xPyP
]=
[ξPηP
]+
[xPyP
]=
[149.992501 m150.003145 m
]La stima delle osservazioni, ricavata dalle equazioni di osservazione con i valori stimati delle
coordinate di P, risulta:
α = arctan(
150.003145−0.0149.992501−0.0
)= 0.785424 rad
β = arctan(
150.003145−0.0300.0−149.992501
)= 0.785384 rad
γ = arctan(
0.0−149.9925010.0−150.003145
)− arctan
(300.0−149.9925010.0−150.003145
)= 1.570775 rad
d1 =
√(149.992501−0.0)2 +(150.003145−0.0)2 = 212.129 m
d2 =
√(149.992501−300.0)2 +(150.003145−0.0)2 = 212.1396 m
e quindi
y =
0.7854240.7853841.570775212.129212.1396
e quindi gli scarti
v = y− y0
−4.063448 10−6
−1.690187 10−5
5.257362 10−6
1.044596 10−3
4.393872 10−4

6.2. ESERCIZI RISOLTI 103
La stima della varianza della compensazione si scrive:
σ20 =
v′Q−1vm−n
=v′Q−1v5−2
= 1.527497 10−10 m2
mentre lo scarto quadratico medio risulta
σ0 =√
σ20 = 1.235119 10−5 m
e quindi
σ20
σ20= 0.254583
La matrice di varianza e covarianza delle incognite viene stimata con
Cxx = σ20 N−1 =
[1.249770 10−6 0
0 9.164981 10−7
]=
Gli scarti quadratici medi dei parametri risultano quindi
σxP =√
1.249770 10−6 = 1.117931 10−3 mσyP =
√9.164981 10−7 = 9.573391 10−4 m
La verifica dell’ortogonalità degli scarti si scrive
A′Q−1v = A′v =[
4.279047 10−4
1.049230 10−3
]Se σ2
α e σ2d non sono espresse con una sola cifra significativa la matrice Cyy risulta:
Cyy =
1.1103 10−9 0 0 0 0
0 1.1103 10−9 0 0 00 0 1.1103 10−9 0 00 0 0 5.8770 10−6 00 0 0 0 5.8771 10−6
La soluzione cambia e la stima delle incognite ξP e ηP risulta
ξ = N−1A′Q−1y =[
ξPηP
]=
[−7.3188 10−3
3.5098 10−3
]E quindi la stima delle coordinate di P[
xPyP
]=
[ξPηP
]+
[xPyP
]=
[149.992681 m150.003510 m
]Le ristime delle osservazioni risultano
y =
0.785430.785391.57077
212.12934212.13969
e quindi gli scarti

104 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
v = y− y0
4.06799 10−6
1.8720 10−5
−7.6918 10−5
−6.5884 10−4
−3.0865 10−4
La stima della varianza della compensazione si scrive:
σ20 =
v′Q−1vm−n
=v′Q−1v5−2
= 1.5956 10−1 m2
mentre lo scarto quadratico medio risulta
σ0 =√
σ20 = 3.994496 10−1 m
Gli scarti quadratici medi dei parametri risultano quindi
σxP = 9.1601 10−4 mσyP = 8.3257 10−4 m
6.2.2 Rete con sole misure di distanze 2
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti O, A, B, C e D, si determinino le coordinate del punto P e la loromatrice di varianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
ZZ
ZZ
ZZ
ZZZ
���������
6
-�
��
��
��
��
C
y
OA x
B
D
P
Noti(x,y)O = (0,0)m (x,y)A = (700,0)m(x,y)B = (700,400)m (x,y)C = (0,300)m(x,y)D = (0,−400)m
con (x, y)P = (400,0)m coordinate approssimate del punto P.
2Topografia e Trattamento delle osservazioni, 19 maggio 2000

6.2. ESERCIZI RISOLTI 105
Osservazioni:dOP = 400.005 m dAP = 299.995 m
distanze dBP = 499.986 m dCP = 500.002 mdDP = 565.721 m
SvolgimentoLe equazioni di osservazione si scrivono:
dOP =
√(xP − xO)
2 +(yP − yO)2
dAP =
√(xP − xA)
2 +(yP − yA)2
dBP =
√(xP − xB)
2 +(yP − yB)2
dCP =
√(xP − xC)
2 +(yP − yC)2
dDP =
√(xP − xD)
2 +(yP − yD)2
Tali equazioni, valutate nei valori approssimati (xP, yP), portano a:
dOP = xP = 400 mdAP =
√3002 = 300 m
dBP =√
3002 +4002 = 500 mdCP =
√4002 +3002 = 500 m
dDP =√
4002 +4002 = 400√
2 m
La scrittura della matrice disegno A risulta dalle derivate delle equazioni di osservazionerispetto ai parametri (xP,yP) incogniti, valutate nei valori approssimati (xP, yP):
∂dOP∂xP
= 1 ∂dOP∂yP
= 0∂dAP∂xP
= xP−xAdAP
=−1 ∂dAP∂yP
= yPdAP
= 0∂dBP∂xP
= xP−xBdBP
=− 35
∂dBP∂yP
= yP−yBdBP
=− 45
∂dCP∂xP
= xP−xCdCP
= 45
∂dCP∂yP
= yP−yCdCP
=− 35
∂dDP∂xP
= xP−xDdDP
= 1√2
∂dDP∂yP
= yP−yDdDP
= 1√2
La matrice disegno A si scrive quindi
A =
1 0
−1 0− 3
5 − 45
45 − 3
51√2
1√2
Dalla incorrelazione delle misure, la matrice Cyy di varianza e covarianza delle misure risulta
diagonale, dalla loro uguale precisione segue che la matrice Cyy è proporzionale, per un fattoreincognito che non influenza la soluzione, alla matrice identità 5× 5, essendo 5 il numero dimisure. Ne consegue che la matrice Q puó essere scelta uguale alla matrice identità e quindianche la matrice dei pesi Q−1, sua inversa, risulta tale. La matrice normale N = A′Q−1A conQ−1 = I si scrive
N =
[1+1+ 9
25 +1625 +
12
12
12
1625 +
925 +
12
]=
[ 72
12
12
32
]Il determinante risulta det (N) = 21
4 − 14 = 20
4 = 5 e quindi l’inversa
N−1 =15
[ 32 − 1
2− 1
272
]=
[ 310 − 1
10− 1
107
10
]

106 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
Il termine noto risulta
y0 =
400.005299.995499.986500.002565.721
mentre il termine noto del sistema linearizzato y = y0 − y è
y =
400.005299.995499.986500.002565.721
−
400300500500
400√
2
=
5 10−3
−5 10−3
−1.4 10−2
2 10−3
3.555300 10−2
Il termine noto normale A′Q−1y è
A′Q−1y = A′y =
=
[5 10−3 +5 10−3 − 3
5 · (−1.4 10−2)+ 45 ·2 10−3 + 1√
2·3.555300 10−3
0+0− 45 · (−1.4 10−2)− 3
5 ·2 10−3 + 1√2·3.555300 10−3
]=
=
[0.0450.035
]La stima delle incognite ξP e ηP risulta
ξ = N−1A′Q−1y = N−1A′y =[
ξPηP
]=
[0.01 m0.02 m
]E quindi la stima delle coordinate di P[
xPyP
]=
[ξPηP
]+
[xPyP
]=
[400.010 m
0.020 m
]La stima delle osservazioni, ricavata dalle equazioni di osservazione con i valori stimati delle
coordinate di P, risulta:
y =
400.010000299.990001499.978000499.996000565.706638
e quindi gli scarti
v = y− y0
5 10−3
−4.999333 10−3
−7.999984 10−3
−5.999516 10−3
−1.436180 10−2
La stima della varianza della compensazione si scrive:
σ20 =
v′Q−1vm−n
=v′v
5−2= 1.187496 10−4 m2
La matrice di varianza e covarianza delle incognite viene stimata con

6.2. ESERCIZI RISOLTI 107
Cxx = σ20 N−1 = 1.187496 10−4
[ 310 − 1
10− 1
10710
]=
=
[3.562487 10−5 −1.187496 10−5
−1.187496 10−5 8.312469 10−5
]Gli scarti quadratici medi dei parametri risultano quindi
σxp =√
3.562487 10−5 = 5.968657 10−3 mσyp =
√8.312469 10−5 = 9.117274 10−3 m
La verifica dell’ortogonalità degli scarti si scrive
A′Q−1v = A′v =[
−1.556175 10−4
−1.556316 10−4
]

108 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
6.3 Esercizi
6.3.1 Rete con misure di angoli e distanze3
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti A, B e C, si determinino le coordinate del punto P e la loro matrice divarianza e covarianza, avendo misurato direzioni e distanze rispetto ai punti di coordinate note.Tutte le misure sono incorrelate e con s.q.m. pari a σd = 1 mm per le distanze e σθ = 20cc per ledirezioni.
-
6
�������
SS
SS
SS
SA B
C
y
xP
θPBδ
θPCθPA
Noti(x,y)A = (−30.00,40.00)m (x,y)B = (30.00,40.00)m(x,y)C = (0.00,−31.25)m
con (x, y)P = (0,0)m coordinate approssimate del punto P.
Osservazioni:dPA = 49.002 m θPA = 355g.488
distanze dPB = 47.800 m direzioni θPB = 40g.477dPC = 33.252 m θPC = 201g.035
Nota: porre π2 ≃ 10 nella determinazione dei pesi.
Soluzione
ξ =
ξx
ξy
ξδ
=
9.998022 10−1
2.0001651.570796 10−2
x =
xpyp
δ
=
9.998022 10−1
2.0001651.570796 10−2
σ20 = 2.024931 10−3 m2 Cxx =
1.419665 10−6 0 00 1.25 10−6 00 0 1.07 10−9
3Topografia e Trattamento delle osservazioni, 23 giugno 2000

6.3. ESERCIZI 109
6.3.2 Rete con sole misure di distanze4
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti O, A, B, C e D, si determinino le coordinate del punto P e la loromatrice di varianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
6
-�����S
SS
SSS
������
C
BD
O
P
A
y
x
Noti(x,y)O = (0,0)m (x,y)A = (0,700)m(x,y)B = (−300,700)m (x,y)C = (−300,0)m(x,y)D = (400,600)m
con (x, y)P = (0,300)m coordinate approssimate del punto P.
Osservazioni:dOP = 300.025 mdAP = 399.975 m
distanze dBP = 499.981 mdCP = 424.306 mdDP = 499.967 m
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e si suppone chequesto, se presente, si manifesti in un valore grande di σ2
0 . Le misure di distanza hanno sqm, ameno di errori grossolani, di 1 cm.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani, con livellodi significatività del 5%.
Soluzione
ξ =
[ξx
ξy
]=
[0.020.03
]x =
[xpyp
]=
[0.02
300.03
]σ2
0 = 5.000556 10−5 m2
Cxx =
[3.500390 10−5 −5.000558 10−6
−5.000558 10−6 1.500167 10−5
]4Topografia e Trattamento delle osservazioni, 29 gennaio 2001

110 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
Domanda aggiuntiva
σ20 =
(1 ·10−2
)2= 10−4 m2
σ20 (m−n)
σ20
= 1.500167 < χ3,0.95 = 7.81
l’ipotesi è quindi accetata.
6.3.3 Rete con misure di angoli e distanze5
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti A, B e C, si determinino le coordinate del punto P e la loro matrice divarianza e covarianza, avendo misurato direzioni e distanze rispetto ai punti di coordinate note.Tutte le misure sono incorrelate e con s.q.m. pari a σd = 1 mm per le distanze e σθ = 20cc per ledirezioni.
-
6
���
���
ZZZ
ZZZ
A
B
C
y
xP
θPAδ
θPC
θPB
Noti(x,y)A = (40.00,30.00)m (x,y)B = (40.00,−30.00)m(x,y)C = (−31.25,0.00)m
con (x, y)P = (0,0)m coordinate approssimate di P e δ = 0 valore approssimato dell’an-golo δ .
Osservazioni:dPA = 50.059 m θPA = 57g.882
distanze dPB = 49.991 m direzioni θPB = 139g.655dPC = 31.371 m θPC = 298g.643
Nota: porre π2 ≃ 10 nella determinazione dei pesi.
Domanda aggiuntiva
Si determini la distanza di P dall’origine dOP e la sua varianza σ2dOP
.
5Topografia e Trattamento delle osservazioni, 9 aprile 2001

6.3. ESERCIZI 111
Soluzione
ξ =
ξx
ξy
δ
=
2 10−2
1 10−2
2 10−2
x =
xpyp
δ
=
2 10−2
1 10−2
2 10−2
σ20 = 7.628304 10−3
Cxx =
2.970478 10−3 0 00 3.381000 10−3 00 0 2.540000 10−6
Domanda aggiuntiva
dOP = 2.236068 10−2 m
σ2dOP
= 3.052581 10−3
6.3.4 Rete con sole misure di distanza6
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D usando unostrumento con fattore di scala incognito. Note le coordinate dei punti A, B, C e D, si determi-nino le coordinate del punto P e il fattore di scala incognito, con la loro matrice di varianza ecovarianza. Tutte le misure sono incorrelate e con pari precisione.
6
-����
��
SS
SS
SS
��
��
��
SSSSSS
AB
CD
Px
y
Noti(x,y)A = (40,30)m (x,y)B = (−30,40)m(x,y)C = (−40,−30)m (x,y)D = (30,−40)m
con (x, y)P = (0,0)m coordinate approssimate del punto Pe λ = 1 valore approssimato del fattore di scala del distanzionmetro.
Osservazioni:distanze dAP = 50.015 m dCP = 50.087 m
dBP = 50.051 m dDP = 50.047 m
6Topografia e Trattamento delle osservazioni, 25 maggio 2001 - tipo 1

112 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
Soluzione
ξ =
ξx
ξyˆδλ
=
3 10−2
2 10−2
10−3
x =
xpyp
λ
=
3 10−2
2 10−2
1.001
σ2
0 = 4.054668 10−6 m2
Cxx =
2.027334 10−6 0 00 2.027334 10−6 00 0 4.054668 10−10
6.3.5 Rete con sole misure di distanza7
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D usando unostrumento con fattore di scala incognito. Note le coordinate dei punti A, B, C e D, si determi-nino le coordinate del punto P e il fattore di scala incognito, con la loro matrice di varianza ecovarianza. Tutte le misure sono incorrelate e con pari precisione.
6
-������
ZZ
ZZ
ZZ
��
��
��
ZZ
ZZZZ
AB
CD
Px
y
Noti(x,y)A = (30,40)m (x,y)B = (−40,30)m(x,y)C = (−30,−40)m (x,y)D = (40,−30)m
con (x, y)P = (0,0)m coordinate approssimate del punto Pe λ = 1 valore approssimato del fattore di scala del distanzionmetro.
Osservazioni:distanze dAP = 50.089 m dCP = 50.113 m
dBP = 50.065 m dDP = 50.133 m
Soluzione
ξ =
ξx
ξyˆδλ
=
−2 10−2
3 10−2
2 10−3
x =
xpyp
λ
=
−2 10−2
3 10−2
1.002
σ2
0 = 3.970111 10−6 m2
7Topografia e Trattamento delle osservazioni, 25 maggio 2001 - tipo 2

6.3. ESERCIZI 113
Cxx =
1.985056 10−6 0 00 1.985056 10−6 00 0 3.970111 10−10
6.3.6 Rete con sole misure di angoli8
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti A, B, C e D, si determinino le coordinate del punto P e la loromatrice di varianza e covarianza. Le misure sono le direzioni da P ai punti di coordinate note,con direzione del cerchio incognita. Tutte le misure sono incorrelate e di uguale precisione.
-
6
������
�������
ZZZZZZ
��
��
��
ZZ
ZZ
ZZA
BC
D
y
x
P
θPAδ
θPC
θPB
θPD
Noti(x,y)A = (50.00,30.00)m (x,y)B = (90.00,−30.00)m(x,y)C = (−30.00,−10.00)m (x,y)D = (−70.00,50.00)m
con (x, y)P = (10,10)m coordinate approssimate di P e δ = 0 valore approssimato del-l’angolo δ .
Osservazioni:θPA = 67g.338 θPB = 126g.270 θPC = 267g.389 θPD = 326g.270
Domanda aggiuntiva
Si determini la distanza di P dall’origine dOP e la sua varianza σ2dOP
.
Soluzione
ξ =
ξx
ξy
ξδ
=
2 10−2
−1 10−2
5 10−2
x =
xpyp
δ
=
1.002000 10+1
9.9900005 10−2
σ2
0 = 4.000480 10−6 m2
Cxx =
2.500300 10−2 7.500900 10−3 07.500900 10−3 6.250750 10−3 0
0 0 1.0000120 10−6
8Topografia e Trattamento delle osservazioni, 12 settembre 2001

114 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
Domanda aggiuntiva
dOP = 14.149223 σ2dOP
= 2.315586 10−2 m2
6.3.7 Rete con sole misure di distanza9
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti O, A, B, C e D, si determinino le coordinate del punto P e la loromatrice di varianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
6
-
��
��
��
��ZZ
ZZ
ZZZZ
��
��
��
��B
C
OP
D
A
Noti(x,y)O = (0,0)m (x,y)A = (−700,0)m(x,y)B = (−700,−400)m (x,y)C = (0,−300)m(x,y)D = (0,400)m
con (x, y)P = (−400,0)m coordinate approssimate del punto P.
Osservazioni:dOP = 399.975 mdAP = 300.025 m
distanze dBP = 500.028 mdCP = 499.996 mdDP = 565.678 m
Soluzione
ξ =
[ξx
ξy
]=
[2.005005 10−2
1.015014 10−2
]x =
[xpyp
]=
[−3.999799 102
1.015014 10−2
]
σ20 = 1.133526 10−4 m2
Cxx =
[3.400578E 10−5 −1.133526 10−5
−1.133526 10−5 7.934683 10−5
]9Topografia e Trattamento delle osservazioni, 30 maggio 2003 - la misura di dCP è diversa

6.3. ESERCIZI 115
6.3.8 Rete con sole misure di distanza10
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti O, A, B, C e D, si determinino le coordinate del punto P e la loromatrice di varianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
��������S
SSSSSSS
6
-
A
P
BCO
D
y
x
Noti(x,y)O = (0,0)m (x,y)A = (80,130)m (x,y)B = (140,0)m(x,y)C = (80,0)m (x,y)D = (0,80)m
con (x, y)P = (80,80)m coordinate approssimate del punto P.
Osservazioni:dOP = 113.492 mdAP = 49.701 m
distanze dBP = 100.165 mdCP = 80.296 mdDP = 80.202 m
Soluzione
ξ =
[ξx
ξy
]=
[1.869863 10−1
3.102740 10−1
]x =
[xpyp
]=
[8.018699 101
8.031027 101
]σ2
0 = 4.517231 10−4 m2
Cxx =
[2.428785 10−4 −1.546997 10−6
−1.546997 10−6 1.438707 10−4
]
6.3.9 Rete con sole misure di distanza11
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D usando unostrumento con fattore di scala incognito. Note le coordinate dei punti A, B, C e D, si determininole coordinate del punto P, il fattore di scala incognito e la loro matrice di varianza e covarianza.Tutte le misure sono incorrelate e con pari precisione.
10Topografia 2, 10 febbraio 200411Topografia e Trattamento delle osservazioni, 16 aprile 2004

116 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
-
6
���
��
@@@
@@
@@
@@
@
��
��
�
A
BC
D
POx
y
Noti(x,y)A = (110,110)m (x,y)B = (110,−90)m(x,y)C = (−90,−90)m (x,y)D = (−90,110)m
con (x, y)P = (10,10)m coordinate approssimate del punto Pe λ = 1 valore approssimato del fattore di scala del distanzionmetro.
Osservazioni:dAP = 141.691 m
distanze dBP = 141.703 mdCP = 141.719 mdDP = 141.703 m
Domanda aggiuntiva
Si determini la distanza dOP del punto P dall’origine (0,0) e la sua varianza.
Soluzione
ξ =
ξx
ξy
ξλ
=
1.000000 10−2
1.000000 10−2
2.000000 10−3
x =
xpyp
λ
=
10.01010.0101.002
σ2
0 = 4.004435 10−6 m2
Cxx =
2.002218 10−6 0 00 2.002218 10−6 00 0 5.005544 10−11
Domanda aggiuntiva
dOP = 1.418459 101 m σ2dOP
= 2.002218 10−6 m2 (= σ2xP
= σ2yP)
6.3.10 Rete con misure di angoli e distanze12
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti A, B e C, si determinino le coordinate del punto P e la loro matrice di
12Topografia 2 e Topografia e Trattamento delle osservazioni, 5 luglio 2004, la domanda aggiuntiva soloper Topografia e Trattamento delle osservazioni

6.3. ESERCIZI 117
varianza e covarianza, avendo misurato direzioni e distanze rispetto ai punti di coordinate note.Tutte le misure sono incorrelate e con s.q.m. pari a σd = 1 mm per le distanze e σθ = 20cc per ledirezioni.
-
6
�������
������
ZZ
ZZ
ZZA
B
C
y
x
P
θPAδ
θPC θPB
Noti(x,y)A = (30.00,40.00)m (x,y)B = (0.00,−31.25)m(x,y)C = (−30.00,40.00)m
con (x, y)P = (0,0)m coordinate approssimate di Pe δ = 0 valore approssimato dell’angolo δ .
Osservazioni:dPA = 50.012. m θPA = 39g.579
distanze dPB = 31.319 m direzioni θPB = 198g.811dPC = 49.944 m θPC = 357g.791
Nota: porre π2 ≃ 10 nella determinazione dei pesi.
Domanda aggiuntiva
Si determini la distanza di P dall’origine dOP e la sua varianza σ2dOP
.
Soluzione
x =
xpyp
δ
= ξ =
ξx
ξy
ξδ
=
1 10−2
3 10−2
2 10−2
σ20 = 4.144798 10−3 m2
Cxx =
1.837233 10−3 0 00 1.614018 10−3 00 0 1.381599 10−6
Domanda aggiuntiva
dOP = 3.162278 10−2 m σ2dOP
= 1.636339 10−3 m2

118 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
6.3.11 Rete con misure di angoli e distanze13
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti A, B, C e D, si determinino le coordinate del punto P e la loro matricedi varianza e covarianza, avendo misurato direzioni e distanze rispetto ai punti di coordinate note.Tutte le misure sono incorrelate e con s.q.m. pari a σd = 1 mm per le distanze e σθ = 20cc per ledirezioni.
A
B C
D
P
PB
δ
θPD
θ
θ
θPC
PA
y
x
Noti(x,y)A = (0.00,200.00)m (x,y)B = (0.00,0.00)m(x,y)C = (200.00,0.00)m (x,y)D = (200.00,200.00)m
con (x, y)P = (100,100)m coordinate approssimate di P e δ = 0 valore approssimatodell’angolo δ .
Osservazioni:dPA = 141.455. m θPA = 348g.700
distanze dPB = 141.483 m direzioni θPB = 250g.010dPC = 141.412 m θPC = 148g.750dPD = 141.384 m θPD = 49g.990
Nota: porre π2 ≃ 10 nella determinazione dei pesi.
Soluzione
x =
xpyp
δ
= ξ + x =
ξx
ξy
ξδ
+
xpypδ
=
5 ·10−2
2 ·10−2
1 ·10−2
+
100100
0
=
100.05100.021 ·10−2
σ20 = 9.962774 10−2 m2
Cxx =
4.744178 10−2 0 00 4.744178 10−2 00 0 2.490693 10−5
13Topografia 2 e Topografia e Trattamento delle osservazioni, 27 aprile 2005

6.3. ESERCIZI 119
6.3.12 Rete con sole misure di distanza14
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D. Note lecoordinate dei punti A, B, C e D, si determinino le coordinate del punto P e la loro matrice divarianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
6
-
@@@@@@@@@@@@@
y
x
A
B
C
D
P
Noti(x,y)A = ( 0,100)m (x,y)B = ( 0,200)m(x,y)C = (200,100)m (x,y)D = (200, 0)m
con (x, y)P = (100,100)m coordinate approssimate del punto P.
Osservazioni:dAP = 100.013 m
distanze dBP = 141.415 mdCP = 99.993 mdDP = 141.249 m
Soluzione
ξ =
[ξx
ξy
]=
[1.000000 10−2
2.000000 10−2
]x =
[xpyp
]=
[100.010100.020
]
σ20 = 9.996821 10−6 m2
Cxx =
[4.998410 10−6 4.998410 10−6
4.998410 10−6 1.499523 10−5
]
6.3.13 Rete con misure di distanza e costante addittiva15
Sono state misurate quattro distanze dal punto P ai punti 1, 2, 3 e 4, in modo indipendente econ uguale precisione. A causa della mancata taratura dell’insieme distanziometro+prisma ledistanze sono affette da una costante addittiva incognita.
Si chiede di eseguire la stima ai minimi quadrati delle coordiante di P e della costanteaddittiva. Si deve produrre anche la matrice di varianza e covarianza dei risultati.
14Topografia 2 e Topografia e Trattamento delle osservazioni, 15 febbraio 200615Topografia 2 e Topografia e Trattamento delle osservazioni, 22 agosto 2006, la domanda aggiuntiva solo
per Topografia e Trattamento delle osservazioni

120 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
-
6
12
3
4
y
x
P
Le coordinate approssimate del punto P sono (x, y)P = (0,0)m.Le coordinate dei punti noti e le misure di distanza sono:
1 ( 100.000, 0.000) 99.8512 (−100.000, 0.000) 100.2513 ( 0.000, 100.000) 99.7494 ( 0.000, −100.000) 100.349
(coordinate e misure in metri).
Domanda aggiuntiva
Le misure dell’esercizio precedente hanno un s.q.m. noto a priori pari a 1.5 mm. Si deve sospet-tare la presenza di un errore grossolano? Si risponda due volte eseguendo un test statistico conlivello di significatività pari a 0.01 e pari a 0.05.
Soluzione
ξ =
ξx
ξy
δc
= x =
xpypc
=
2 10−1
3 10−1
5 10−2
m
σ20 = 4 10−6 m2 Cxx =
2 0 00 2 00 0 4
10−6
Domanda aggiuntiva
σ20 =
(1.5 10−3
)2= 2.25 10−6 m2
σ20 (m−n)
σ20
= 1.7 < χ1,0.99 = 3.84
σ20 (m−n)
σ20
= 1.7 < χ1,0.95 = 6.63
l’ipotesi è quindi accettata per entrambi i livelli di significatività.

6.3. ESERCIZI 121
6.3.14 Rete con misure di angoli e distanze16
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Note le coordinate dei punti A, B, C e D, si determinino le coordinate del punto P e la loro matricedi varianza e covarianza, avendo misurato direzioni e distanze rispetto ai punti di coordinate note.Tutte le misure sono incorrelate e con s.q.m. pari a σd = 1 mm per le distanze e σθ = 20cc per ledirezioni.
y
x
ϑPB
ϑ
ϑ
ϑ
PC
PD
PA
δ
B
A
C
D
P
Noti(x,y)A = (0.00,100.00)m (x,y)B = (100.00,0.00)m(x,y)C = (0.00,−100.00)m (x,y)D = (−100.00,0.00)m
con(x, y)P = (0.00,0.00)m coordinate approssimate di Pδ = 0 valore approssimato dell’angolo δ
Osservazioni:dPA = 99.980 m θPA = 399g.344
distanze dPB = 99.970 m direzioni θPB = 99g.377dPC = 100.020 m θPC = 199g.382dPD = 100.030 m θPD = 299g.351
Nota: porre π2 ≃ 10 nella determinazione dei pesi.
Soluzione
ξ =
ξx
ξy
ξδ
=
2.998592 10−2
2.003821 10−2
9.998119 10−3
=
xpyp
δ
= x σ20 = 9.337934 10−5 m2
Cxx =
4.244516 10−5 0 00 4.244516 10−5 00 0 2.334484 10−8
16Topografia 2 e Topografia e Trattamento delle osservazioni, 23 giugno 2007, la domanda aggiuntiva solo
per Topografia e Trattamento delle osservazioni

122 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
6.3.15 Rete con sole misure di distanza17
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C, D ed E. Note lecoordinate dei punti A, B, C, D ed E, si determinino le coordinate del punto P e la loro matricedi varianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
-�������������
@@@
@@@@
6y
xA B C
DE
P
Noti(x,y)A = ( 0, 0)m (x,y)B = (100, 0)m(x,y)C = (200, 0)m (x,y)D = (200,200)m(x,y)E = (100,200)m
con (x, y)P = (100,100)m coordinate approssimate del punto P.
Osservazioni:dAP = 141.458 mdBP = 100.023 m
distanze dCP = 141.414 mdDP = 141.387 mdEP = 99.983 m
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e si suppone chequesto, se presente, si manifesti in un valore grande di σ2
0 . L’incertezza con cui sono misurate ledistanze, a meno di errori grossolani, è data da σ = 2mm.
Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani, conlivello di significatività del 5%.
Soluzione
ξ =
[ξx
ξy
]=
[3.028407 10−2
1.996026 10−2
]x =
[xpyp
]=
[100.030284100.019960
]σ2
0 = 6.685838 10−6 m2
Cxx =
[4.680087 10−6 −6.685838 10−7
−6.685838 10−7 2.005752 10−6
]17Topografia 2 e Topografia e Trattamento delle osservazioni, 9 luglio 2007, la domanda aggiuntiva solo
per Topografia e Trattamento delle osservazioni

6.3. ESERCIZI 123
Domanda aggiuntiva
σ20 =
(2 10−3
)2= 4 10−6 m2
σ20 (m−n)
σ20
= 5.014379 < χ3,0.95 = 7.81
l’ipotesi è quindi accettata.
6.3.16 Rete con sole misure di distanza18
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D. Note lecoordinate dei punti A, B, C e D, si determinino le coordinate del punto P e la loro matrice divarianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
-
6
ZZZZZZZZ
��
��
��
��
x
y
AB
C
D
P
Noti(x,y)A = ( 40,−30)m (x,y)B = (−30,−40)m(x,y)C = (−30, 0)m (x,y)D = ( 0, 40)m
con (x, y)P = (0,0)m coordinate approssimate del punto P.
Osservazioni:dAP = 49.996 m
distanze dBP = 50.033 mdCP = 30.017 mdDP = 40.004 m
Soluzione
ξ =
[ξx
ξy
]=
[2 10−2
1 10−2
]= x =
[xpyp
]
σ20 = 2.048980 10−4 m2
Cxx =
[1.0244490 10−4 0
0 1.0244490 10−4
]18Topografia 2 e Topografia e Trattamento delle osservazioni, 10 gennaio 2008

124 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
6.3.17 Rete con sole misure di distanza19
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D. Note lecoordinate dei punti A, B, C e D, si determinino le coordinate del punto P e la loro matrice divarianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
-
6
ZZ
ZZ
ZZ
ZZ
��
��
��
��
P
A
B
C
D
y
x
Noti(x,y)A = ( 0,−400)m (x,y)B = ( 300, 0)m(x,y)C = (−400, 300)m (x,y)D = (−300,−400)m
con (x, y)P = (0,0)m coordinate approssimate del punto P.
Osservazioni:dAP = 400.031 m
distanze dBP = 299.993 mdCP = 499.993 mdDP = 500.031 m
Soluzione
ξ =
[ξx
ξy
]=
[1 10−2
3 10−2
]= x =
[xpyp
]
σ20 = 9.992576 10−6 m2
Cxx =
[4.996288 10−6 0
0 4.996288 10−6
]
6.3.18 Rete con sole misure di distanza20
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C, D ed E. Note lecoordinate dei punti A, B, C, D ed E, si determinino le coordinate del punto P e la loro matricedi varianza e covarianza. Tutte le misure sono incorrelate e con pari precisione.
Noti(x,y)A = (−300, 0)m (x,y)B = (−300,400)m(x,y)C = ( 400, 300)m (x,y)D = ( 400, 0)m(x,y)E = ( 400,−400)m
19Topografia 2, 13 luglio 200920Topografia 2, 19 aprile 2010

6.3. ESERCIZI 125
-
6
SS
SS
SS
SS
��������
@@
@@
@@
@@A
B
C
D
E
P x
y
con (x, y)P = (0,0)m coordinate approssimate del punto P.
Osservazioni:dAP = 300.022 mdBP = 500.001 m
distanze dCP = 499.982 mdDP = 399.977 mdEP = 565.678 m
Soluzione
ξ =
[ξx
ξy
]=
[21
]10−2 = x =
[xpyp
]
σ20 = 1.266762 10−5 m2
Cxx =
[3.800286 1.2667621.266762 8.867334
]10−6
6.3.19 Rete con sole misure di distanza21
Si esegua la compensazione a minimi quadrati della rete planimetrica schematizzata in figura.Dal punto P di coordinate incognite si misurano le distanze dai punti A, B, C e D usando unostrumento con fattore di scala incognito. Note le coordinate dei punti A, B, C e D, si determi-nino le coordinate del punto P e il fattore di scala incognito, con la loro matrice di varianza ecovarianza. Tutte le misure sono incorrelate e con pari precisione.
Noti(x,y)A = (50,40)m (x,y)B = (−20,50)m(x,y)C = (−30,−20)m (x,y)D = (40,−30)m
con (x, y)P = (10,10)m coordinate approssimate del punto Pe λ = 1 valore approssimato del fattore di scala del distanzionmetro.
Osservazioni:distanze dAP = 50.015 m dCP = 50.087 m
dBP = 50.051 m dDP = 50.047 m
21Topografia 2, 4 luglio 2011

126 CAPITOLO 6. COMPENSAZIONE DI RETI PLANIMETRICHE
6
-�
��
���
SS
SS
SS
��
��
��
SSSSSS
AB
CD
P
x
y
Soluzione
ξ =
ξx
ξyˆδλ
=
3 10−2
2 10−2
10−3
x =
xpyp
λ
=
1.003 101
1.002 101
1.001
σ2
0 = 4.054668 10−6 m2
Cxx =
2.027334 10−6 0 00 2.027334 10−6 00 0 4.054668 10−10

Capitolo 7
Simulazioni e confronti di reti
7.1 SchemiIl confronto di reti ha lo scopo di determinare la migliore configurazione tra quelle proposterispetto alle precisioni ottenibili per le coordinate dei punti coinvolti.
La scelta della precisione da massimizzare, ad esempio le coordinate di un determinato puntopiuttosto che una sola coordinata di tutti i punti, dipende ovviamente dallo scopo per cui la rete èistituita. In questo ambito tutti punti e le coordinate saranno trattate come ugualmente importanti,i criteri di confronto illustrati hanno valore generale.
Le precisioni delle misure si suppongono note e quindi si suppone nota la loro varianza apriori σ2
0 ; negli esercizi di questo capitolo i valori della varianza a priori σ20 sono uguali per tutte
le reti da confrontare.Il confronto fra le reti viene fatto in base alle varianze e covarianze delle coordinate ricavate
dalla compensazione, e quindi in base alla matrice di varianza e covarianza dei parametri Cxx.Nella procedura di stima ai minimi quadrati con parametri aggiuntivi la stima della matrice divarianza e covarianza dei parametri Cxx si ricava dalla
Cxx = σ20
(A′Q−1A
)−1= σ2
0 N−1 (7.1)
Il fattore di proporzionalità σ20 (varianza a posteriori) è calcolabile a partire dagli scarti
(par.1.4), sarebbe quindi necessario conoscere le misure. Si può tuttavia supporre il valore dellavarianza a posteriori uguale per tutte le reti, assumendo le medesime condizioni (strumenti, ope-ratori, ecc.) per le operazioni di misura. Il confronto può essere quindi fatto direttamente sullematrici normali inverse N−1. Fatti salvi i casi di confronto di reti per scopi specifici di cui si èparlato sopra, i confronti che vengono effettuati sono:
differenza di normali inverse definita positiva : se la matrice differenza delle due normali in-verse è definita positiva significa che la prima matrice della differenza è “maggiore” dellaseconda, non esiste cioè nessun cambiamento di coordinate per cui l’iperellissoide rela-tivo alla seconda matrice è al di fuori dall’iperellissoide associato alla prima matrice. Inquesto casi si preferisce quindi la seconda rete.
determinante della matrice N−1 : il determinante della matrice di varianza e covarianza deiparametri Cxx è proporzionale all’ipervolume dell’iperellissoide d’errore. Il determinan-te della Cxx è proporzionale per il fattore
(σ2
0)2 al determinante della matrice normale
inversa. Si sceglie quindi la configurazione a cui corrisponde la matrice normale inversacon determinante minore.
MIN-MAX sulla diagonale della N−1 : si ritiene migliore la rete che ha valore massimo del-le varianze dei parametri (coordinate) minore. Tali varianze sono proporzionali per il
127

128 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
fattore σ20 agli elementi sulla diagonale della matrice normale inversa: si sceglie quindi
la configurazione (rete) che ha elemento massimo sulla diagonale della normale inversaminore.
MIN-MAX sugli autovalori : si applica il criterio MIN-MAX a quantità invarianti rispetto alsistema di riferimento, in questo modo si ha un confronto indipendente dal particolaresistema di riferimento in uso. Rispetto al criterio precedente questo confronto è più signi-ficativo perchè si confrontano i valori massimi per qualunque cambiamento di sistemi diriferimento. Si sceglie quindi la rete che ha matrice normale inversa con massimo degliautovalori minore.
rapporto degli autovalori più prossimo a 1 : si controlla in questo modo, indipendentementedal sistema di riferimento, l’omogeneità delle precisioni delle coordinate e non la preci-sione come per i criteri precedenti: lo scopo di questo criterio è quindi differente da quellodei precenti. Si preferisce la configurazione che ha precisioni più omogenee, cioè la reteper cui i rapporti fra autovalori sono più prossimi all’unità.
I criteri appena esposti possono essere applicati ai soli parametri significativi della rete (adesempio alcune coordinate), escludendo dal confronto parametri meno importanti (come adesempio l’angolo che individua la direzione rispetto a cui sono misurati gli angoli in una reteplanimetrica). Questo può essere fatto estraendo dalla matrice normale inversa la sottomatricerelativa ai parametri significativi e applicando i criteri descritti.

7.2. ESERCIZI RISOLTI 129
7.2 Esercizi risolti7.2.1 Confronto di reti di livellazione1
Si individui la migliore configurazione fra le reti di livellazione 1 (compensata nell’esercizio5.2.1 a pagina 78) e 2, riportate in figura, giustificando analiticamente la scelta. Il dislivello tra ipunti 2 e 3 è misurato due volte per la rete 1 ed una sola volta per la rete 2; i punti Q1 e Q3 hannoquota nota per entrambe le reti.
����
����
����A
AAA
AA
��
����
��
����A
AAAAA
.......................... ........................
..
.......................... ........................
.. .......................... ..........................
.......................... ........................
..1
2 3
4
Rete 2
1
2 3
4
Rete 1
SvolgimentoLe matrici normali N per le due reti risultano
Rete1 Rete2[4 −1
−1 2
] [3 −1
−1 3
]det (N) = 7 det (N) = 8
e le loro inverse N−1
Rete1 Rete2[ 27
17
17
47
] [ 38
18
18
38
]det
(N−1)= 1
7 det(N−1)= 1
8
Non è possibile scrivere una diseguaglianza tra le matrici N−1 delle due reti, perchè la lo-ro differenza non nè definita positiva ne’ definita negativa. Allora conviene usare il criterio"min max": si preferisce la seconda rete, che ha la minima varianza massima ( 3
8 contro 47 ). Si
preferisce la seconda rete anche considerando che ha il minore determinante di N−1 ( 18 contro
17 ). Cerchiamo gli autovalori di N−1 . Per semplicità cerchiamo prima gli autovalori di N, e liinvertiamo
Polinomio caratteristico di N1Topografia e Trattamento delle osservazioni, 7 maggio 1999

130 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
Rete1 Rete2
det (N −λ I) = det (N −λ I) =
(2−λ )(4−λ )−1 = (3−λ )(3−λ )−1 =
λ 2 −6λ +7 λ 2 −6λ +8
da cui
autovalori di N
Rete1 Rete2
λ = 3±√
2 λ = 3±1
λ1 = 3−√
2 ≃ 1.585786 λ1 = 2
λ2 = 3+√
2 ≃ 4.414214 λ1 = 4
λ1λ2
= 0.359245 λ1λ2
= 0.5
Per N−1 gli autovalori sono quindi
autovalori di N−1
Rete1 Rete2
λ1 =1
3+√
2≃ 0.23 λ1 =
14 = 0.25
λ2 =1
3−√
2≃ 0.63 λ2 =
12 = 0.5
λ1λ2
≃ 0.36 λ1λ2
= 0.5
Anche il criterio "min max" applicato agli autovalori fa preferire la rete 2 (0.5 < 0.63). Laseconda rete ha inoltre precisioni più omogenee perchè presenta il rapporto λ1
λ2più prossimo a 1.
7.2.2 Simulazione di rete con misure di distanza2
Si individui la migliore configurazione fra le due reti planimetriche schematizzate in figura, dovesono state misurate le distanze AP, BP, CP e DP, giustificando analiticamente la scelta. Tutte lemisure sono incorrelate e con pari precisione; le coordinate del punto P sono incognite, mentrequelle dei punti A, B, C e D sono note.
Valori approssimati: Valori approssimati:(x, y)P = (100,100)m (x, y)P = (100,100)mPunti noti: Punti noti:(x,y)A = (0,0)m (x,y)A = (0,0)m(x,y)B = (100,0)m (x,y)B = (200,0)m(x,y)C = (200,200)m (x,y)C = (200,200)m(x,y)D = (0,100)m (x,y)D = (0,200)m
2Topografia e Trattamento delle osservazioni, 31 maggio 2002

7.2. ESERCIZI RISOLTI 131
6
��
����
������
-A B
D P
C6
-���
���
���
���@
@@
@@
@@
@@@@
A
C
P
B
D
SvolgimentoPrima reteLe equazioni di osservazione si scrivono:
dAP =
√(xP − xA)
2 +(yP − yA)2
dBP =
√(xP − xB)
2 +(yP − yB)2
dCP =
√(xP − xC)
2 +(yP − yC)2
dDP =
√(xP − xD)
2 +(yP − yD)2
Tali equazioni, valutate nei valori approssimati (xP, yP), portano a:
dAP =√
1002 +1002 = 100√
2 mdBP =
√1002 = 100 m
dCP =√
1002 +1002 = 100√
2 mdDP =
√1002 = 100 m
La scrittura della matrice disegno A risulta dalle derivate delle equazioni di osservazionerispetto ai parametri (xP,yP) incogniti, valutate nei valori approssimati (xP, yP):
∂dAP∂xP
= xP−xAdAP
= 1√2
∂dAP∂yP
= yPdAP
= 1√2
∂dBP∂xP
= xP−xBdBP
= 0 ∂dBP∂yP
= yP−yBdBP
= 1∂dCP∂xP
= xP−xCdCP
=− 1√2
∂dCP∂yP
= yP−yCdCP
=− 1√2
∂dDP∂xP
= xP−xDdDP
= 1 ∂dDP∂yP
= yP−yDdDP
= 0
La matrice disegno A si scrive quindi
A =
1√2
1√2
0 1− 1√
2− 1√
21 0
Dalla incorrelazione delle misure, la matrice Cyy di varianza e covarianza delle misure risulta
diagonale, dalla loro uguale precisione segue che la matrice Cyy è proporzionale, per un fattoreincognito che non influenza la soluzione, alla matrice identità 4× 4, essendo 4 il numero dimisure. Ne consegue che la matrice Q puó essere scelta uguale alla matrice identità e quindianche la matrice dei pesi Q−1, sua inversa, risulta tale. La matrice normale N = A′Q−1A conQ−1 = I si scrive

132 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
N =
(
1√2
)2+(−1√
2
)2+12
(1√2
)2+(−1√
2
)2(1√2
)2+(−1√
2
)2 (1√2
)2+(−1√
2
)2+12
=
[2 11 2
]
Il determinante risulta det (N) = 4−1 = 3 e quindi l’inversa
N−1 =13
[2 −1
−1 2
]=
[ 23 − 1
3− 1
323
]Seconda rete
Le equazioni di osservazione si scrivono:
dAP =
√(xP − xA)
2 +(yP − yA)2
dBP =
√(xP − xB)
2 +(yP − yB)2
dCP =
√(xP − xC)
2 +(yP − yC)2
dDP =
√(xP − xD)
2 +(yP − yD)2
Tali equazioni, valutate nei valori approssimati (xP, yP), portano a:
dAP =√
1002 +1002 = 100√
2 mdBP =
√1002 +1002 = 100
√2 m
dCP =√
1002 +1002 = 100√
2 mdDP =
√1002 +1002 = 100
√2 m
La scrittura della matrice disegno A risulta dalle derivate delle equazioni di osservazionerispetto ai parametri (xP,yP) incogniti, valutate nei valori approssimati (xP, yP):
∂dAP∂xP
= xP−xAdAP
= 1√2
∂dAP∂yP
= yPdAP
= 1√2
∂dBP∂xP
= xP−xBdBP
=− 1√2
∂dBP∂yP
= yP−yBdBP
= 1√2
∂dCP∂xP
= xP−xCdCP
=− 1√2
∂dCP∂yP
= yP−yCdCP
=− 1√2
∂dDP∂xP
= xP−xDdDP
= 1√2
∂dDP∂yP
= yP−yDdDP
=− 1√2
La matrice disegno A si scrive quindi
A =
1√2
1√2
− 1√2
1√2
− 1√2
− 1√2
1√2
− 1√2
Dalla incorrelazione delle misure, la matrice Cyy di varianza e covarianza delle misure risulta
diagonale, dalla loro uguale precisione segue che la matrice Cyy è proporzionale, per un fattoreincognito che non influenza la soluzione, alla matrice identità 4× 4, essendo 4 il numero dimisure. Ne consegue che la matrice Q puó essere scelta uguale alla matrice identità e quindianche la matrice dei pesi Q−1, sua inversa, risulta tale. La matrice normale N = A′Q−1A conQ−1 = I si scrive
N =(
1√2
)2+(
1√2
)2+(
1√2
)2+(
1√2
)2 (1√2
)2−(−1√
2
)2+(
1√2
)2−(−1√
2
)2(1√2
)2−(−1√
2
)2+(
1√2
)2−(−1√
2
)2 (1√2
)2+(−1√
2
)2+(
1√2
)2+(−1√
2
)2

7.2. ESERCIZI RISOLTI 133
=
[2 00 2
]Il determinante risulta det (N) = 4 e quindi l’inversa
N−1 =14
[2 00 2
]=
[ 12 00 1
2
]Confrontando le due reti quindi, le matrici normali N risultano
Rete1 Rete2[2 11 2
] [2 00 2
]det (N) = 3 det (N) = 4
e le loro inverse N−1
Rete1 Rete2[ 23 − 1
3− 1
323
] [ 12 00 1
2
]det
(N−1)= 1
3 det(N−1)= 1
4
Non è possibile scrivere una diseguaglianza tra le matrici N−1 delle due reti, perchè la lo-ro differenza non nè definita positiva ne’ definita negativa (gli autovalori − 1
6 e 12 hanno segni
diversi). Allora conviene usare il criterio "min max": si preferisce la seconda rete, che ha laminima varianza massima ( 1
2 contro 23 ). Si preferisce la seconda rete anche considerando che ha
il minore determinante di N−1 ( 14 contro 1
3 ). Cerchiamo gli autovalori di N−1 . Per semplicitàcerchiamo prima gli autovalori di N, e li invertiamo
Polinomio caratteristico di N−1
Rete1 Rete2
det (N −λ I) = det (N −λ I) =( 23 −λ
)( 23 −λ
)− 1
9 =( 1
2 −λ)( 1
2 −λ)=
λ 2 − 43 λ + 1
3( 1
2 −λ)2
da cui
autovalori di N−1
Rete1 Rete2
λ = 23 ±
13 λ = 1
2
λ1 =13 λ1 =
12
λ2 = 1 λ2 =12
λ1λ2
= 13
λ1λ2
= 1
Anche il criterio "min max" applicato agli autovalori fa preferire la rete 2 ( 12 < 1). La
seconda rete ha inoltre precisioni più omogenee perchè presenta il rapporto λ1λ2
pari a 1 rispetto
al valore 13 della prima rete.

134 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
7.3 Esercizi
7.3.1 Confronto di reti di livellazione3
Si individui la migliore configurazione fra le reti di livellazione 1 (compensata nell’esercizio5.3.3 a pagina 82) e 2, riportate in figura, giustificando analiticamente la scelta. Le linee semplicidei due grafici indicano misure tutte della stessa precisione. La linea doppia tra i punti 1 e 4 dellaseconda rete rappresenta una misura ripetuta due volte. Tutte le misure sono incorrelate. I punti3 e 4 hanno quota nota per entrambe le reti.
��
��
��
��
���
3 1
42 2
3 1
4
Rete 1 Rete 2
Soluzione
N1 =
[3 −1
−1 3
]N2 =
[3 00 2
]N−1
1 =
[ 38
18
18
38
]N−1
2 =
[ 13 00 1
2
]detN−1
1 = 18 detN−1
2 = 16
autovalori di N−11 autovalori di N−1
2λ1 =
12 λ2 =
14 λ1 =
12 λ2 =
13
N−11 −N−1
2 =
[ 124
18
18 − 1
8
]autovalori λ1 =− 17
12 λ2 =1912
Quindi:
1. Non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. Max di N−12 = 1
2 > max di N−11 = 3
8 , si preferisce la prima;
4. Max autovalore di N−12 = 1
2 = max autovalore di N−11 = 1
2 ;
5. λ1λ2
= 2 per la prima rete e λ1λ2
= 32 per la seconda rete, si preferisce la seconda.
7.3.2 Confronto di reti di livellazione4
Si individui la migliore configurazione fra le reti di livellazione 1 (compensata nell’esercizio5.3.5 a pagina 84) e 2, riportate in figura, giustificando analiticamente la scelta. Le linee semplicidei due grafici indicano misure tutte della stessa precisione. La linea doppia tra i punti 1 e 3 dellaseconda rete rappresenta una misura ripetuta due volte. Tutte le misure sono incorrelate. Il punto1 ha quota nota per entrambe le reti.
Nota: l’uso di criteri che richiedono il calcolo di autovalori è facoltativo.3Topografia e Trattamento delle osservazioni, 14 settembre 20004Topografia e Trattamento delle osservazioni, 19 febbraio 2001

7.3. ESERCIZI 135
��
��
��
��
���
@@@
@@@@@@@@ @
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@@
1 2
34 4
1 2
3
Rete 1 Rete 2
Soluzione
N1 =
3 −1 −1−1 3 −1−1 −1 3
N2 =
2 −1 0−1 4 −1
0 −1 2
N−1
1 =
12
14
14
14
12
14
14
14
12
N−12 =
712
16
112
16
13
16
112
16
712
detN−1
1 = 116 detN−1
2 = 112
autovalori di N−11 autovalori di N−1
2λ1 = 1 λ2 =
14 λ3 =
14 λ1 =
12 λ2 =
13−
√3
λ3 =1
3+√
3
N−11 −N−1
2 =
1 0 −10 −1 0
−1 0 1
autovalori λ1 =−1 λ2 = 2 λ3 = 0
Quindi:
1. Non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. Sulla diagonale max di N−12 = 7
12 > max di N−11 = 1
2 , si preferisce la prima;
4. Max autovalore di N−11 = 1
3−√
3< max autovalore di N−1
2 = 1;
5. i massimi rapporti fra autovalori: λ1λ2
= 14 = 0.25 per la prima rete e λ2
λ3= 3−
√3
3+√
3≃ 0.27
per la seconda rete, si preferisce la seconda.
7.3.3 Confronto di reti di livellazione5
Si individui la migliore configurazione fra le reti di livellazione 1 (compensata nell’esercizio5.3.7 di pagina 86) e 2, riportate in figura, giustificando analiticamente la scelta. Le linee semplicidei due grafici indicano misure tutte della stessa precisione. Le linee doppie tra i punti 2 e 3 dellaprima rete e i punti 1 e 3 e 2 e 4 della seconda rete rappresentano misure ripetute due volte. Tuttele misure sono incorrelate. I punti 1 e 4 hanno quota nota per entrambe le reti.
5Topografia e Trattamento delle osservazioni, 25 marzo 2002

136 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
��
��
��
��
��
���
��
��
��
��
��
��
1 2
43 3
1 2
4
Rete 2
Soluzione
N1 =
[4 −2
−2 4
]N2 =
[3 00 3
]N−1
1 =
[ 13
16
16
13
]N−1
2 =
[ 13 00 1
3
]detN−1
1 = 112 detN−1
2 = 19
autovalori di N−11 autovalori di N−1
2λ1 =
12 λ2 =
16 λ1 =
13 λ2 =
13
N−11 −N−1
2 =
[0 1
616 0
]ha determinante negativo (− 1
36 )
e autovalori λ1 =− 16 λ2 =
16
Quindi:
1. Non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. Sulla diagonale max di N−12 = 1
3 = max di N−11 = 1
3 , non si può dire nulla;
4. Max autovalore di N−11 = 1
2 > max autovalore di N−12 = 1
3 , si preferisce la seconda;
5. i massimi rapporti fra autovalori: λ1λ2
= 13 per la prima rete e λ2
λ3= 1 per la seconda rete, si
preferisce la seconda.
7.3.4 Confronto di reti con misure di distanza6
Si individui la migliore configurazione fra le due reti planimetriche schematizzate in figura, dovesono state misurate le distanze AP, BP, CP e DP, giustificando analiticamente la scelta. Tutte lemisure sono incorrelate e con pari precisione; le coordinate del punto P sono incognite, mentrequelle dei punti A, B, C e D sono note.
Valori approssimati: Valori approssimati:(x, y)P = (50,50)m (x, y)P = (50,50)mPunti noti: Punti noti:(x,y)A = (0,−100)m (x,y)A = (0,0)m(x,y)B = (0,−50)m (x,y)B = (100,0)m(x,y)C = (50,0)m (x,y)C = (0,100)m(x,y)D = (100,0)m (x,y)D = (100,100)m
6Topografia e Trattamento delle osservazioni, 14 aprile 2003

7.3. ESERCIZI 137
6 -
���
�����
���
C
PB
A
D 6
-����
���
���
��@@@@@
@@@
@@@
A
C
P
B
D
Soluzione
N1 =
[2 11 2
]N2 =
[2 00 2
]N−1
1 =
[ 23 − 1
3− 1
323
]N−1
2 =
[ 12 00 1
2
]detN−1
1 = 13 detN−1
2 = 14
autovalori di N−11 autovalori di N−1
2λ1 =
13 λ2 = 1 λ1 =
12 λ2 =
12
N−11 −N−1
2 =
[ 16 − 1
3− 1
316
]ha determinante negativo (− 1
12 )
e autovalori λ1 =− 16 λ2 =
12
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 2
3 > max di N−12 = 1
2 , si preferisce la seconda;
4. max autovalore di N−11 = 1 > max autovalore di N−1
2 = 12 , si preferisce la seconda;
5. i rapporti fra autovalori sono λ1λ2
= 3 per la prima rete e λ2λ3
= 1 per la seconda rete, sipreferisce la seconda.
7.3.5 Confronto di reti con misure di distanza7
Si individui la migliore configurazione fra le due reti planimetriche schematizzate in figura, dovesono state misurate le distanze AP, BP, CP e DP, giustificando analiticamente la scelta. Tutte lemisure sono incorrelate e con pari precisione; le coordinate del punto P sono incognite, mentrequelle dei punti A, B, C e D sono note.
Valori approssimati: Valori approssimati:(x, y)P = (40,30)m (x, y)P = (40,30)mPunti noti: Punti noti:(x,y)A = (0,0)m (x,y)A = (0,30)m(x,y)B = (40,0)m (x,y)B = (40,0)m(x,y)C = (70,0)m (x,y)C = (70,0)m(x,y)D = (10,60)m (x,y)D = (10,60)m
7Topografia e Trattamento delle osservazioni, 17 giugno 2003

138 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
6
-�������@
@@
@@
@@
@@
@
A B C
P
D6
-
@@@
@@
@@
@@
@
B C
P
D
A
Soluzione
N1 =
[ 4125 − 13
25− 13
255925
]N2 =
[2 −1
−1 2
]N−1
1 =
[ 5990
1390
1390
4190
]N−1
2 =
[ 23
13
13
23
]detN−1
1 = 518 detN−1
2 = 13
autovalori di N−11 autovalori di N−1
2λ1 ≃ 0.731 λ2 ≃ 0.380 λ1 = 1 λ2 =
13
N−11 −N−1
2 =
[− 1
90 − 1790
− 1790 − 19
90
]autovalori λ1 ≃ 0.103 λ2 ≃−0.325
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. sulla diagonale max di N−11 = 59
90 < max di N−12 = 2
3 , si preferisce la prima;
4. max autovalore di N−11 ≃ 0.731 < max autovalore di N−1
2 = 1, si preferisce la prima;
5. i rapporti fra autovalori sono λ1λ2
≃ 0.532 ≃ 12 per la prima rete e λ1
λ2= 1
3 per la secondarete, si preferisce la prima.
7.3.6 Confronto di reti di livellazione8
Si individui la migliore configurazione fra le reti di livellazione 1 e 2, riportate in figura, giu-stificando analiticamente la scelta. Le linee semplici dei due grafici indicano misure tutte dellastessa precisione. Le linee doppie tra i punti 2 e 3 della prima rete rappresentano misure ripetutedue volte. Tutte le misure sono incorrelate. I punti 1 e 4 hanno quota nota per entrambe le reti,nella seconda rete anche il punto 5 ha quota nota.
8Topografia e Trattamento delle osservazioni, 11 settembre 2003

7.3. ESERCIZI 139
��
��
��
��
��
�
��
��
��
��
��
�
1 2
43
��
��
��
��
��
�
1 2
43
5Rete 1 Rete 2
Soluzione
N1 =
[4 −2
−2 4
]N2 =
[4 −1
−1 3
]N−1
1 =
[ 13
16
16
13
]N−1
2 =
[ 311
111
111
411
]detN−1
1 = 112 detN−1
2 = 111
autovalori di N−11 autovalori di N−1
2λ1 =
16 ≃ 1.6 10−1 λ2 =
12 = 5 10−1 λ1 ≃ 2.165 10−1 λ2 ≃ 4.198 10−1
N−11 −N−1
2 =
[ 233
566
566 − 1
33
]autovalori λ1 ≃−7.319 10−2
λ2 ≃ 1.035 10−1
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. sulla diagonale max di N−11 = 1
3 ≃ 0.3 < max di N−12 = 4
11 ≃ 0.36, si preferisce la prima;
4. max autovalore di N−11 = 5 10−1 > max autovalore di N−1
2 ≃ 4.198 10−1, si preferisce laseconda;
5. i rapporti fra autovalori sono λ1λ2
= 13 ≃ 0.3 per la prima rete e λ1
λ2≃ 0.516 per la seconda
rete, si preferisce la seconda.
7.3.7 Confronto di reti con misure di distanza9
Si individui la migliore configurazione fra le due reti planimetriche schematizzate in figura, dovesono state misurate le distanze AP, BP, CP e DP, giustificando analiticamente la scelta. Tutte lemisure sono incorrelate e con pari precisione; le coordinate del punto P sono incognite, mentrequelle dei punti A, B, C e D sono note.
Valori approssimati: Valori approssimati:(x, y)P = (120,−50)m (x, y)P = (120,−50)mPunti noti: Punti noti:(x,y)A = (0,0)m (x,y)A = (0,−50)m(x,y)B = (0,−50)m (x,y)B = (120,0)m(x,y)C = (170,0)m (x,y)C = (170,0)m(x,y)D = (70,−100)m (x,y)D = (70,−100)m
9Topografia e Trattamento delle osservazioni, 18 dicembre 2003

140 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
6 -HHHHHHHH
��
��
��
��
A
B
D
P
C6 -
��
��
��
��
D
P
CB
A
Soluzione
N1 =
[ 482169
109169
109169
194169
]N2 =
[2 11 2
]N−1
1 =
[ 194483 − 109
483− 109
483482483
]N−1
2 =
[ 23 − 1
3− 1
323
]detN−1
1 = 169483 detN−1
2 = 13
autovalori di N−11 autovalori di N−1
2λ1 ≃ 0.33 λ2 ≃ 1.07 λ1 = 1 λ2 =
13
N−11 −N−1
2 =
[− 128
48352
48352483
160483
]autovalori λ1 ≃ 0.35 λ2 ≃−0.28
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 482
483 ≃ 1 > max di N−12 = 2
3 , si preferisce la seconda;
4. max autovalore di N−11 ≃ 1.07 > max autovalore di N−1
2 = 1, si preferisce la seconda;
5. i rapporti fra autovalori sono λ1λ2
≃ 3.2 ≃ 12 per la prima rete e λ1
λ2= 3 per la seconda rete,
si preferisce la seconda.
7.3.8 Confronto di reti di livellazione10
Si individui la migliore configurazione fra le reti di livellazione 1 e 2, riportate in figura, giu-stificando analiticamente la scelta. Le linee semplici dei due grafici indicano misure tutte dellastessa precisione. Le linee doppie tra i punti 1 e 3 e 2 e 4 della prima rete e i punti 1 e 3 dellaseconda rete rappresentano misure ripetute due volte. Tutte le misure sono incorrelate. I punti 1e 4 hanno quota nota per entrambe le reti.
10Topografia 2 e Topografia e Trattamento delle osservazioni, 21 giugno 2004

7.3. ESERCIZI 141
��
��
��
��
��
���
1 2
43 3
1 2
4
Rete 1 Rete 2
Soluzione
N1 =
[3 00 3
]N2 =
[3 −1
−1 4
]N−1
1 =
[ 13 00 1
3
]N−1
2 =
[ 411
111
111
311
]detN−1
1 = 19 detN−1
2 = 111
autovalori di N−11 autovalori di N−1
2λ1 = λ2 =
13 λ1 ≃ 2.16 10−1 λ2 ≃ 4.20 10−1
N−11 −N−1
2 =
[− 21
33 − 111
− 111
3533
]autovalori λ1 ≃ 1.02 λ2 ≃−9.90 10−1
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 1
3 ≃ 0.33 < max di N−12 = 4
11 ≃ 0.36, si preferisce la prima;
4. max autovalore di N−11 = 1
3 ≃ 0.33 < max autovalore di N−12 ≃ 0.4, si preferisce la prima;
5. i rapporti fra autovalori sono λ1λ2
= 1 per la prima rete e λ1λ2
≃ 0.5 per la seconda rete, sipreferisce la prima.
7.3.9 Confronto di reti con misure di distanza11
Si individui la migliore configurazione fra le due reti planimetriche schematizzate in figura, dovesono state misurate le distanze AP, BP, CP e DP, giustificando analiticamente la scelta. Tutte lemisure sono incorrelate e con pari precisione; le coordinate del punto P sono incognite, mentrequelle dei punti A, B, C e D sono note.
Valori approssimati: Valori approssimati:(x, y)P = (−100,100)m (x, y)P = (−100,100)mPunti noti: Punti noti:(x,y)A = (−200, 0)m (x,y)A = (−200,100)m(x,y)B = ( 0,200)m (x,y)B = (−100,200)m(x,y)C = ( 0,100)m (x,y)C = ( 0,100)m(x,y)D = ( 0, 0)m (x,y)D = (−100, 0)m
11Topografia 2 e Topografia e Trattamento delle osservazioni, 2 febbraio 2005
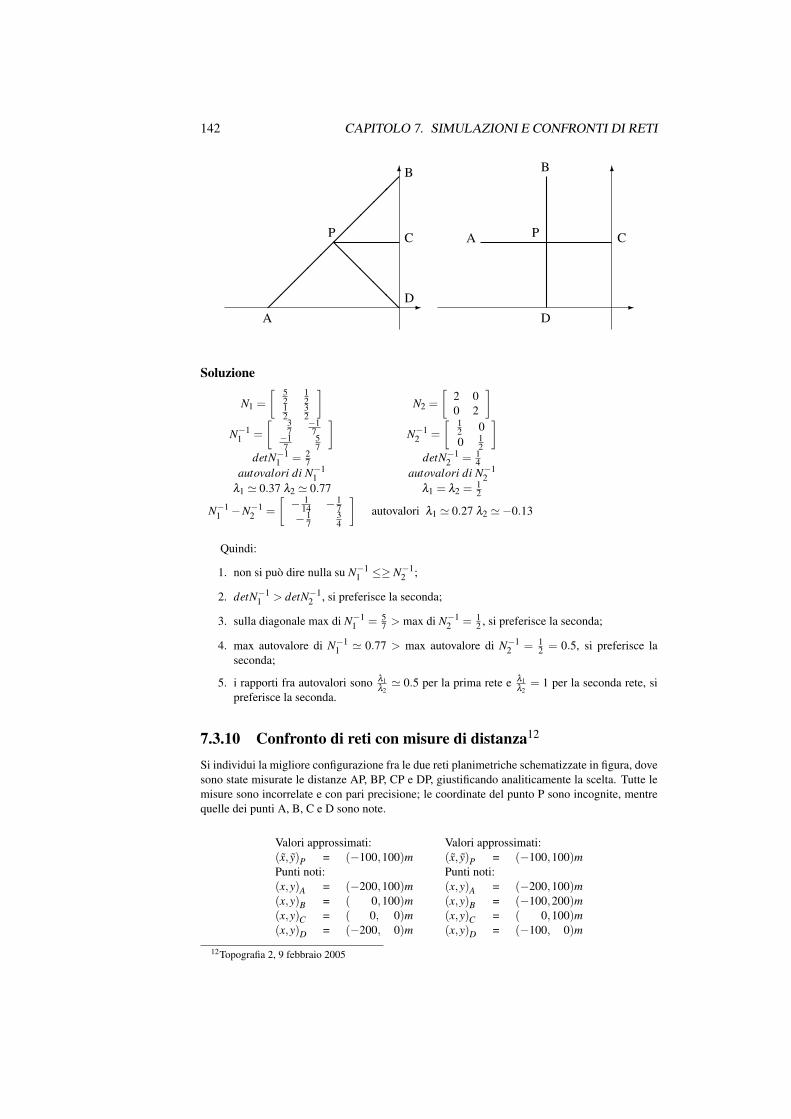
142 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
����������
@@@
@@ -
6
A
P
B
C
D -
6
P CA
B
D
Soluzione
N1 =
[ 52
12
12
32
]N2 =
[2 00 2
]N−1
1 =
[ 37
−17
−17
57
]N−1
2 =
[ 12 00 1
2
]detN−1
1 = 27 detN−1
2 = 14
autovalori di N−11 autovalori di N−1
2λ1 ≃ 0.37 λ2 ≃ 0.77 λ1 = λ2 =
12
N−11 −N−1
2 =
[− 1
14 − 17
− 17
34
]autovalori λ1 ≃ 0.27 λ2 ≃−0.13
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 5
7 > max di N−12 = 1
2 , si preferisce la seconda;
4. max autovalore di N−11 ≃ 0.77 > max autovalore di N−1
2 = 12 = 0.5, si preferisce la
seconda;
5. i rapporti fra autovalori sono λ1λ2
≃ 0.5 per la prima rete e λ1λ2
= 1 per la seconda rete, sipreferisce la seconda.
7.3.10 Confronto di reti con misure di distanza12
Si individui la migliore configurazione fra le due reti planimetriche schematizzate in figura, dovesono state misurate le distanze AP, BP, CP e DP, giustificando analiticamente la scelta. Tutte lemisure sono incorrelate e con pari precisione; le coordinate del punto P sono incognite, mentrequelle dei punti A, B, C e D sono note.
Valori approssimati: Valori approssimati:(x, y)P = (−100,100)m (x, y)P = (−100,100)mPunti noti: Punti noti:(x,y)A = (−200,100)m (x,y)A = (−200,100)m(x,y)B = ( 0,100)m (x,y)B = (−100,200)m(x,y)C = ( 0, 0)m (x,y)C = ( 0,100)m(x,y)D = (−200, 0)m (x,y)D = (−100, 0)m
12Topografia 2, 9 febbraio 2005

7.3. ESERCIZI 143
�����@
@@@@ -
6
A
D
P B
C -
6
P CA
B
D
Soluzione
N1 =
[3 00 1
]N2 =
[2 00 2
]N−1
1 =
[ 13 00 1
]N−1
2 =
[ 12 00 1
2
]detN−1
1 = 13 detN−1
2 = 14
autovalori di N−11 autovalori di N−1
2λ1 =
13 λ2 = 1 λ1 = λ2 =
12
N−11 −N−1
2 =
[− 1
6 00 1
2
]autovalori λ1 =− 1
6 λ2 =12
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 1 > max di N−1
2 = 12 , si preferisce la seconda;
4. max autovalore di N−11 = 1 > max autovalore di N−1
2 = 12 , si preferisce la seconda;
5. i rapporti fra autovalori sono λ1λ2
= 13 per la prima rete e λ1
λ2= 1 per la seconda rete, si
preferisce la seconda.
7.3.11 Confronto di reti di livellazione13
Si individui la migliore configurazione fra le reti di livellazione 1 e 2, riportate in figura, giu-stificando analiticamente la scelta. Le linee semplici dei due grafici indicano misure tutte dellastessa precisione. Le linee doppie tra i punti 1 e 2 e 3 e 4 della prima rete rappresentano misureripetute due volte. Tutte le misure sono incorrelate. I punti 2 e 3 hanno quota nota per entrambele reti.
13Topografia 2 e Topografia e Trattamento delle osservazioni, 20 giugno 2005

144 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
@@@
@@@
@@@
@@@@
1 2
43 3
1 2
4
Rete 1 Rete 2
Soluzione
N1 =
[3 00 3
]N2 =
[3 −1
−1 3
]N−1
1 =
[ 13 00 1
3
]N−1
2 =
[ 38
18
18
38
]detN−1
1 = 19 detN−1
2 = 18
autovalori di N−11 autovalori di N−1
2λ1 = λ2 =
13 λ1 =
14 λ2 =
12
N−11 −N−1
2 =
[− 1
24 − 18
− 18 − 1
24
]determinante = − 1
72
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 , essendo il determinante negativo gli autovalorihanno segno discorde;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. sulla diagonale max di N−11 = 1
3 ≃ 0.33 < max di N−12 = 3
8 = 0.375, si preferisce laprima;
4. max autovalore di N−11 = 1
3 ≃ 0.33 < max autovalore di N−12 = 1
2 = 0.5, si preferisce laprima;
5. i rapporti fra autovalori sono λ1λ2
= 1 per la prima rete e λ1λ2
= 12 per la seconda rete, si
preferisce la prima.
7.3.12 Confronto di reti con misure di distanza14
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP e CP, giustificando analiticamentela scelta. Tutte le misure sono incorrelate e con pari precisione; le coordinate del puntoP sono incognite, mentre quelle dei punti A, B e C sono note.
Valori approssimati: Valori approssimati:(x, y)P = (0,0)m (x, y)P = (0,0)mPunti noti: Punti noti:(x,y)A = ( 0,−50)m (x,y)A = ( 0,−50)m(x,y)B = (−30,40)m (x,y)B = (−40,30)m(x,y)C = ( 30,40)m (x,y)C = ( 40,30)m
14Topografia 2 e Topografia e Trattamento delle osservazioni, 19 aprile 2006

7.3. ESERCIZI 145
-
SSSSS�
����
6
A
B C
P-Z
ZZZ
��
��
6
A
B C
P
Soluzione
N1 =
[ 1825 00 57
25
]N2 =
[ 3225 00 43
25
]
N−11 =
[ 2518 00 25
57
]N−1
2 =
[ 2532 00 25
43
]detN−1
1 = 6251026 ≃ 0.61 detN−1
2 = 6251376 ≃ 0.45
autovalori di N−11 autovalori di N−1
2λ1 =
2518 λ2 =
2557 λ1 =
2532 λ2 =
2543
N−11 −N−1
2 =
[ 350576 0
0 − 3502451
]λ1 =
350576 λ2 =− 350
2451
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 , essendo gli autovalori di segno discorde;
2. detN−11 ≃ 0.61 > detN−1
2 ≃ 0.45, si preferisce la seconda;
3. sulla diagonale max di N−11 = 25
18 > max di N−12 = 25
32 , si preferisce la seconda;
4. gli autovalori coincidono con gli elementi in diagonale: max autovalore di N−11 =
2518 > max autovalore di N−1
2 = 2532 , si preferisce la seconda;
5. i rapporti fra autovalori sono λ1λ2
= 5718 ≃ 3.18 per la prima rete e λ1
λ2= 43
32 ≃ 1.34per la seconda rete, si preferisce la seconda.
7.3.13 Confronto di reti con misure di distanza15
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP, CP e DP, giustificando analitica-mente la scelta. Tutte le misure sono incorrelate e con pari precisione; le coordinatedel punto P sono incognite, mentre quelle dei punti A, B, C e D sono note.
15Topografia 2 e Topografia e Trattamento delle osservazioni, 10 gennaio 2007

146 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
-
6
�����@
@@@@
A B C
P
D
-
6
���
��@@
@@@
A B C
PD
Valori approssimati: Valori approssimati:(x, y)P = (100,100)m (x, y)P = (100,100)mPunti noti: Punti noti:(x,y)A = ( 0, 0)m (x,y)A = ( 0, 0)m(x,y)B = (100, 0)m (x,y)B = (100, 0)m(x,y)C = (200, 0)m (x,y)C = (200, 0)m(x,y)D = (100,200)m (x,y)D = ( 0,100)m
Soluzione
N1 =
[1 00 3
]N2 =
[2 00 2
]
N−11 =
[1 00 1
3
]N−1
2 =
[ 12 00 1
2
]detN−1
1 = 13 detN−1
2 = 14
autovalori di N−11 autovalori di N−1
2λ1 = 1 λ2 =
13 λ1 =
12 = λ2 =
12
N−11 −N−1
2 =
[ 12 00 − 1
6
]λ1 =
12 λ2 =− 1
6
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 , essendo gli autovalori di segno discorde;
2. detN−11 = 1
3 > 14 = detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 1 > max di N−1
2 = 12 , si preferisce la seconda;
4. gli autovalori coincidono con gli elementi in diagonale: max autovalore di N−11 =
1 > max autovalore di N−12 = 1
2 , si preferisce la seconda;
5. i rapporti fra autovalori sono λ1λ2
= 3 per la prima rete e λ1λ2
= 1 per la secondarete, si preferisce la seconda.

7.3. ESERCIZI 147
7.3.14 Confronto di reti di livellazione16
Si individui la migliore configurazione fra le reti di livellazione 1 e 2, riportate in figura,giustificando analiticamente la scelta. Le linee semplici dei due grafici indicano misuretutte della stessa precisione. Le linee doppie tra i punti 1 e 2 e 2 e 4 della prima rete, 1e 2 e 3 e 4 della seconda rete, rappresentano misure ripetute due volte. Tutte le misuresono incorrelate. I punti 1 e 4 hanno quota nota per entrambe le reti.
��
��
��
��
��
���
��
��
��
��
��
���
1 2
43 3
1 2
4
Rete 1 Rete 2
Soluzione
N1 =
[5 −1
−1 3
]N2 =
[4 −1
−1 4
]N−1
1 =
[ 314
114
114
514
]N−1
2 =
[ 415
115
115
415
]detN−1
1 = 114 detN−1
2 = 115
autovalori di N−11 autovalori di N−1
2
λ1 =4−
√2
14 λ2 =4+
√2
14 λ1 =15 λ2 =
13
N−11 −N−1
2 = 1210
[−11 1
1 19
]determinante = − 1
210
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 , essendo il determinante negativo gliautovalori hanno segno discorde;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 5
14 > max di N−12 = 4
15 , si preferisce la seconda;
4. max autovalore di N−11 = 4+
√2
14 ≃ 0.387 > max autovalore di N−12 = 1
3 = 0.3, sipreferisce la seconda;
5. i rapporti fra autovalori sono λ1λ2
≃ 2.17 per la prima rete e λ1λ2
= 35 ≃ 1.65 per la
seconda rete, si preferisce la seconda.
16Topografia 2 e Topografia e Trattamento delle osservazioni, 27 agosto 2007

148 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
7.3.15 Confronto di reti con misure di distanza17
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP, CP e DP, giustificando analitica-mente la scelta. Tutte le misure sono incorrelate e con pari precisione; le coordinatedel punto P sono incognite, mentre quelle dei punti A, B, C e D sono note.
-
6
��
��
��
SSSSSS
��
��
��
SS
SS
SS
BC
DA
-
6
������
��
��
��
A
B
C
D
Valori approssimati: Valori approssimati:(x, y)P = (0,0)m (x, y)P = (0,0)mPunti noti: Punti noti:(x,y)A = ( 40, 30)m (x,y)A = ( 30, 40)m(x,y)B = ( 30,−40)m (x,y)B = ( 40, 0)m(x,y)C = (−40,−30)m (x,y)C = (−40,−30)m(x,y)D = (−30, 40)m (x,y)D = (−30, 0)m
Soluzione
N2 =
[2 00 2
]N1 =
[3 24
252425 1
]
N−12 =
[ 12 00 1
2
]N−1
1 =
[ 6251299 − 200
433− 200
433625433
]detN−1
1 = 14 ≃ 0.25 detN−1
2 = 6251299 ≃ 0.48
autovalori di N−11 autovalori di N−1
2λ1 = λ2 =
12 = 0.25 λ1 ≃ 0.3 λ2 ≃ 1.6
N−11 −N−1
2 =
[ 492598
200433
200433 − 817
866
]λ1 ≃−1.1 λ2 =≃ 0.2
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 , essendo gli autovalori di segno discorde;
17Topografia 2 e Topografia e Trattamento delle osservazioni, 4 febbraio 2008

7.3. ESERCIZI 149
2. detN−11 = 1
4 = 0.25 < 6251299 ≃ 0.48 = detN−1
2 , si preferisce la prima;
3. sulla diagonale max di N−11 = 1
2 < max di N−12 = 625
433 ≃ 1.44, si preferisce laprima;
4. max autovalore di N−11 = 1
2 < max autovalore di N−12 ≃ 1.6, si preferisce la
prima;
5. i rapporti fra autovalori sono λ1λ2
= 1 per la prima rete e λ1λ2
≃ 0.18 per la secondarete, si preferisce la prima.
7.3.16 Confronto di reti di livellazione18
Si individui la migliore configurazione fra le reti di livellazione 1 e 2, riportate in figura,giustificando analiticamente la scelta.
Le linee semplici dei due grafici indicano misure tutte della stessa precisione. Lelinee doppie tra i punti 2 e 3 della prima rete rappresentano misure ripetute due volte;le linee triple tra i punti 1 e 3 e 2 e 4 della seconda rete indicano misure ripetute trevolte.
Tutte le misure sono incorrelate. I punti 1 e 4 hanno quota nota per entrambe lereti.
��
��
��
��
��
���
��
��
��
��
��
��
1 2
43 3
1 2
4
Rete 2
Soluzione
N1 =
[4 −2
−2 4
]N2 =
[4 00 4
]
N−11 =
[ 13
16
16
13
]N−1
2 =
[ 14 00 1
4
]detN−1
1 = 112 detN−1
2 = 116
autovalori di N−11 autovalori di N−1
2λ1 =
12 λ2 =
16 λ1 = λ2 =
14
N−11 −N−1
2 = 16
[ 12 11 1
2
]detN−1
1 −N−12 =− 1
48
18Topografia 2 e Topografia e Trattamento delle osservazioni, 7 luglio 2008
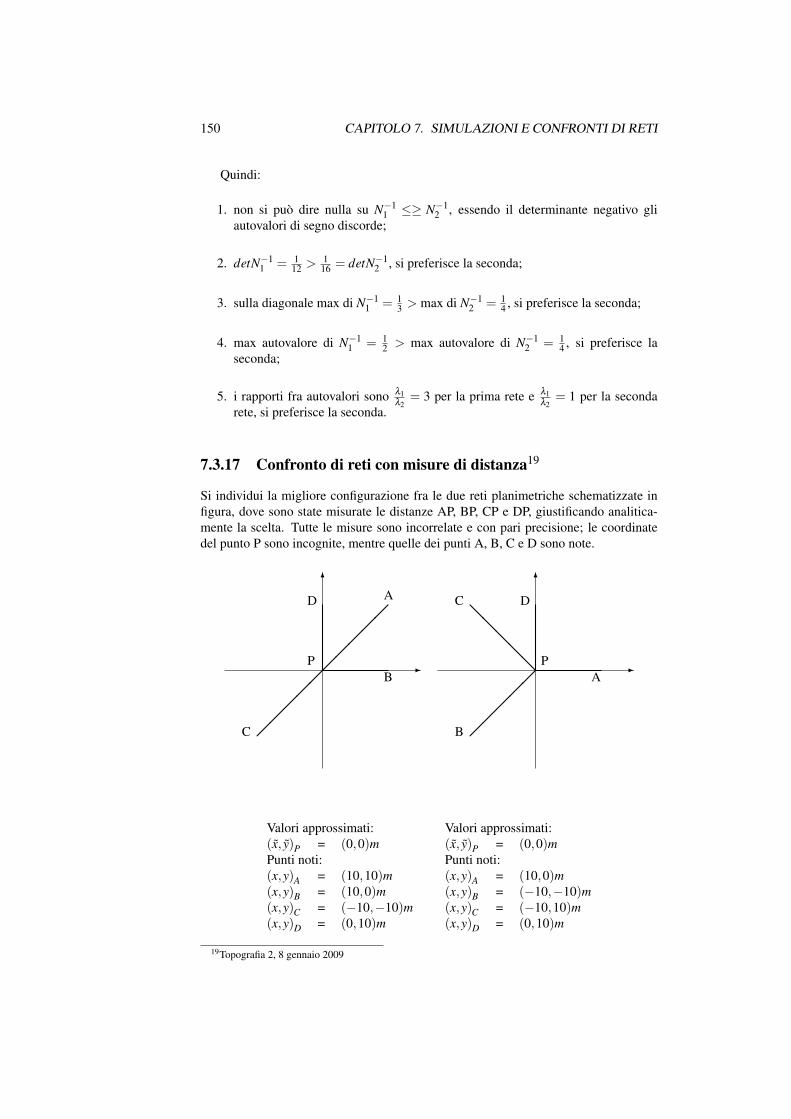
150 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 , essendo il determinante negativo gliautovalori di segno discorde;
2. detN−11 = 1
12 > 116 = detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 1
3 > max di N−12 = 1
4 , si preferisce la seconda;
4. max autovalore di N−11 = 1
2 > max autovalore di N−12 = 1
4 , si preferisce laseconda;
5. i rapporti fra autovalori sono λ1λ2
= 3 per la prima rete e λ1λ2
= 1 per la secondarete, si preferisce la seconda.
7.3.17 Confronto di reti con misure di distanza19
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP, CP e DP, giustificando analitica-mente la scelta. Tutte le misure sono incorrelate e con pari precisione; le coordinatedel punto P sono incognite, mentre quelle dei punti A, B, C e D sono note.
6
-
����������
A
B
C
D
P
6
-
��
���@
@@
@@
D
B
AP
C
Valori approssimati: Valori approssimati:(x, y)P = (0,0)m (x, y)P = (0,0)mPunti noti: Punti noti:(x,y)A = (10,10)m (x,y)A = (10,0)m(x,y)B = (10,0)m (x,y)B = (−10,−10)m(x,y)C = (−10,−10)m (x,y)C = (−10,10)m(x,y)D = (0,10)m (x,y)D = (0,10)m
19Topografia 2, 8 gennaio 2009

7.3. ESERCIZI 151
Soluzione
N1 =
[2 11 2
]N2 =
[2 00 2
]N−1
1 =
[ 23 − 1
3− 1
323
]N−1
2 =
[ 12 00 1
2
]detN−1
1 = 13 detN−1
2 = 14
autovalori di N−11 autovalori di N−1
2λ1 =
13 λ2 = 1 λ1 =
12 λ2 =
12
N−11 −N−1
2 =
[ 16 − 1
3− 1
316
]ha determinante negativo (− 1
12 )
e autovalori λ1 =− 16 λ2 =
12
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 2
3 > max di N−12 = 1
2 , si preferisce la seconda;
4. max autovalore di N−11 = 1 > max autovalore di N−1
2 = 12 , si preferisce la
seconda;
5. i rapporti fra autovalori sono λ1λ2
= 3 per la prima rete e λ1λ2
= 1 per la secondarete, si preferisce la seconda.
7.3.18 Confronto di reti con misure di distanza20
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP, CP e DP, giustificando analitica-mente la scelta. Tutte le misure sono incorrelate e con pari precisione; le coordinatedel punto P sono incognite, mentre quelle dei punti A, B, C e D sono note.
6
-@@@@@
@@
@@
@C
BD
A
P
6
-
��
���
���
��
C
B
D A
P
20Topografia 2, 23 giugno 2009

152 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
Valori approssimati: Valori approssimati:(x, y)P = (0,0)m (x, y)P = (0,0)mPunti noti: Punti noti:(x,y)A = (100,−100)m (x,y)A = (0,−100)m(x,y)B = (100,0)m (x,y)B = (100,0)m(x,y)C = (−100,100)m (x,y)C = (100,100)m(x,y)D = (−100,0)m (x,y)D = (−100,−100)m
Soluzione
N1 =
[3 −1
−1 1
]N2 =
[2 11 2
]N−1
1 =
[ 12
12
12
32
]N−1
2 =
[ 23 − 1
3− 1
323
]detN−1
1 = 12 detN−1
2 = 13
autovalori di N−11 autovalori di N−1
2λ1 = 1−
√2 λ2 = 1+
√2 λ1 =
13 λ2 = 1
N−11 −N−1
2 = 16
[−1 5
5 5
]ha determinante negativo (− 5
6 )
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 3
2 > max di N−12 = 2
3 , si preferisce la seconda;
4. max autovalore di N−11 = 1+
√2 ≃ 2.4 > max autovalore di N−1
2 = 1, si prefe-risce la seconda;
5. i rapporti fra autovalori sono λ1λ2
= 0.16 per la prima rete e λ1λ2
= 0.3 per la secondarete, si preferisce la seconda.
7.3.19 Confronto di reti con misure di distanza21
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP e OP per la prima rete, AP e BPper la seconda, giustificando analiticamente la scelta. Tutte le misure sono incorrelatee con pari precisione; i tratti singoli indicano una misura, quelli doppi due misure equelli tripli tre misure. Le coordinate del punto P sono incognite, mentre quelle deipunti A, B e O sono note.
Valori approssimati: (x, y)P=(100,100)mPunti noti: (x,y)A=(0,100)m (x,y)B=(100,0)m (x,y)O=(0,0)m
21Topografia 2, 26 gennaio 2010

7.3. ESERCIZI 153
6
-���
������
�����
����
A
BO
P
6
-
A
BO
P
Soluzione
N1 =
[3 11 2
]N2 =
[3 00 2
]N−1
1 =
[ 25 − 1
5− 1
535
]N−1
2 =
[ 13 00 1
2
]detN−1
1 = 15 detN−1
2 = 16
autovalori di N−11 autovalori di N−1
2λ1 =
25−
√5
λ2 =2
5+√
5λ1 =
12 λ2 =
13
N−11 −N−1
2 =
[ 115 − 1
5− 1
5110
]ha determinante negativo (− 1
30 )
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 > detN−1
2 , si preferisce la seconda;
3. sulla diagonale max di N−11 = 3
5 > max di N−12 = 1
2 , si preferisce la seconda;
4. max autovalore di N−11 = 2
5−√
5≃ 0.723 > max autovalore di N−1
2 = 12 , si prefe-
risce la seconda;
5. i rapporti fra autovalori sono λ1λ2
≃ 2.6 per la prima rete e λ1λ2
= 23 = 1.5 per la
seconda rete, si preferisce la seconda.
7.3.20 Confronto di reti con misure di distanza22
Si individui la migliore configurazione fra le due reti planimetriche schematizzate infigura, dove sono state misurate le distanze AP, BP, CP e DP, giustificando analitica-mente la scelta. Tutte le misure sono incorrelate e con pari precisione. Le coordinatedel punto P sono incognite, mentre quelle dei punti A, B, D e D sono note.
22Topografia 2, 30 agosto 2010

154 CAPITOLO 7. SIMULAZIONI E CONFRONTI DI RETI
6
-���������
��@
@@@@@@@
@@@
A B
CD
P
6
-���
���
���
��
A
P
B
C
D
Valori approssimati: Valori approssimati:(x, y)P = (10,10)m (x, y)P = (10,10)mPunti noti: Punti noti:(x,y)A = (0,0)m (x,y)A = (0,0)m(x,y)B = (20,0)m (x,y)B = (10,0)m(x,y)C = (20,20)m (x,y)C = (20,10)m(x,y)D = (0,20)m (x,y)D = (20,20)m
Soluzione
N1 =
[2 00 2
]N2 =
[2 11 2
]N−1
1 =
[ 12 00 1
2
]N−1
2 =
[ 23 − 1
3− 1
323
]detN−1
1 = 14 detN−1
2 = 13
autovalori di N−11 autovalori di N−1
2λ1 =
12 λ2 =
12 λ1 =
13 λ2 = 1
N−11 −N−1
2 =
[− 1
613
13 − 1
6
]ha determinante negativo (− 1
12 )
e autovalori λ1 =− 12 λ2 =
16
Quindi:
1. non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. sulla diagonale max di N−11 = 1
2 < max di N−12 = 2
3 , si preferisce la prima;
4. max autovalore di N−11 = 1
2 = 0.5 < max autovalore di N−12 = 1, si preferisce la
prima;
5. i rapporti fra autovalori sono λ1λ2
= 1 per la prima rete e λ1λ2
= 3 per la secondarete, si preferisce la prima.

7.3. ESERCIZI 155
7.3.21 Confronto di reti di livellazione23
Si individui la migliore configurazione fra le reti di livellazione 1 e 2, riportate in figura,giustificando analiticamente la scelta.
Le linee semplici dei due grafici indicano misure tutte della stessa precisione. Lelinee doppie tra i punti 1 e 3 della prima rete e tra i punti 1 e 2 e 3 e 4 della secondarete rappresentano misure ripetute due volte.
Tutte le misure sono incorrelate. I punti 2 e 4 hanno quota nota per entrambe lereti.
@@@
@@@@@
@@@@
@@
@@
@@
@@
@@
1 2
4
1
4
2
33
Soluzione
N1 =
[4 −2
−2 4
]N2 =
[3 00 3
]N−1
1 =
[ 13
16
16
13
]N−1
2 =
[ 13 00 1
3
]detN−1
1 = 112 detN−1
2 = 19
autovalori di N−11 autovalori di N−1
2λ1 =
12 λ2 =
16 λ1 =
13 λ2 =
13
N−11 −N−1
2 =
[0 1
616 0
]ha determinante negativo (− 1
36 )
e autovalori λ1 =− 16 λ2 =
16
Quindi:
1. Non si può dire nulla su N−11 ≤≥ N−1
2 ;
2. detN−11 < detN−1
2 , si preferisce la prima;
3. Sulla diagonale max di N−12 = 1
3 = max di N−11 = 1
3 , non si può dire nulla;
4. Max autovalore di N−11 = 1
2 > max autovalore di N−12 = 1
3 , si preferisce laseconda;
5. i massimi rapporti fra autovalori: λ1λ2
= 13 per la prima rete e λ2
λ3= 1 per la seconda
rete, si preferisce la seconda.
23Topografia 2, 5 settembre 2011

Capitolo 8
Rototraslazione e variazione discala
8.1 SchemiPer una trattazione completa della procedura utilizzata per la stima dei parametri di unatrasformazione si veda il capitolo 2, in questo ambito si riportano le formule utilizzateper la risoluzione degli esercizi di questo capitolo.
Una trasformazione di rototraslazione e variazione di scala si può scrivere
xi = λRx′i +x0 (8.1)
che porta dalle coordinate x′i alle coordinate x per ogni punto i. La matrice dirotazione R si esprime come
λR =
[a b
−b a
](8.2)
avendo posto a = λ cos(α) e b = λ sin(α). E‘ ovviamente possibile calcolare λ eα a partire da a e b con le
λ =√
a2 +b2 (8.3)
α = arctanba
(8.4)
Si calcolano le coordinate x′B, y′B, xB e yB dei baricentri per i due sistemi con le
x′B =1N
N
∑i=1
x′i (8.5)
y′B =1N
N
∑i=1
y′i (8.6)
xB =1N
N
∑i=1
xi (8.7)
yB =1N
N
∑i=1
yi (8.8)
156

8.1. SCHEMI 157
e quindi le coordinate baricentriche per i = 1, . . . ,N, con N numero di punti
x′i = x′i − x′B (8.9)
y′i = y′i − y′B (8.10)
xi = xi − xB (8.11)
yi = yi − yB (8.12)
La stima dei parametri a e b risulta:
a =∑N
i=1 x′ixi + y′iyi
∑Ni=1 x′i
2 + y′i2 (8.13)
b =∑N
i=1 y′ixi − x′iyi
∑Ni=1 x′i
2 + y′i2 (8.14)
I valori di α e λ si ricavano dalle 8.13-8.14 con le 8.3-8.4.I parametri di traslazione si stimano dalle{
x0 = xB −ax′B −by′By0 = yB +bx′B −ay′B
(8.15)
La stima della varianza si calcola con la 1
σ20 =
v′v2N −4
=∑N
i=1
(v2
xi + v2yi
)2N −4
(8.16)
La stima degli scarti v si ricava dalle{vxi = xi − (ax′i +by′i + x0)vyi = yi − (−bx′i +ay′i + y0)
(8.17)
con i = 1 . . .N. È possibile ora stimare la matrice di varianza e covarianza di a, b,x0 e y0: gli ultimi due termini non rappresentano le traslazioni fra i due sistemi. Se sirichiede il calcolo della varianza e covarianza delle traslazioni è necessario procedereal calcolo della matrice normale inversa N−1 completa.
Cabx0y0 = σ20 N−1 = σ2
0
1
∑Ni=1 x′i
2+y′i2 0 0 0
0 1∑N
i=1 x′i2+y′i
2 0 0
0 0 1N 0
0 0 0 1N
(8.18)
e quindi
σ2a = σ2
b =σ2
0
∑Ni=1 x′i
2+y′i2
σab = 0(8.19)
1si ricordi che Q−1 = I

158 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
La matrice di varianza di λ e α , Cλα si ricava a partire dalla Cabx0y0 propagandoopportunamente la varianza, ottenendo:
=
(a2
λ 2 +b2
λ 2
)σ2
a 0
0(
a2
λ 4 +b2
λ 4
)σ2
b
=
[σ2
a 0
0 σ2b
λ 2
](8.20)
Dato che σ2a = σ2
b , si ha
σ2λ = σ2
a = σ2b (8.21)
σ2α =
σ2a
λ 2 =σ2
bλ 2 (8.22)
σλα = 0 (8.23)

8.2. ESERCIZI RISOLTI 159
8.2 Esercizi risolti
8.2.1 Rototraslazione e variazione di scala2
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x′,y′)1 = (5.00,0.00) ↔ (x,y)1 = (199.96,300.00)(x′,y′)2 = (5.00,5.00) ↔ (x,y)2 = (100.00,400.04)(x′,y′)3 = (0.00,5.00) ↔ (x,y)3 = ( 0.04,300.00)(x′,y′)4 = (0.00,0.00) ↔ (x,y)4 = (100.00,199.96)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
xy
]= λR(α)
[x′
y′
]+
[x0y0
]Si stimino:
1. angolo di rotazione, scala e traslazione che portano dal sistema (x′,y′) a quello(x,y);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
SvolgimentoLe coordinate dei baricentri dei punti nei due sistemi sono:
x′B = 2.5 y′B = 2.5 xB = 100 yB = 300
e quindi le coordinate baricentriche
Punto x′ y′ x y1 2.5 -2.5 99.960 02 2.5 2.5 0 100.0403 -2.5 2.5 -99.960 04 -2.5 -2.5 0 -100.040
A partire da questi valori si valutano le espressioni
4
∑i=1
x′ixi + y′iyi = 2.5(99.960+100.040+99.960+100.040) = 2.5 ·400 = 1000
4
∑i=1
y′ixi − x′iyi =−25(99.960+100.040+99.960+100.040) =−2.5 ·400 =−1000
2Diploma Universitario, 9 gennaio 1996

160 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
4
∑i=1
x′i2+ y′i
2= 8(2.5)2 = 8
(52
)2
= 8254
= 50
da cui
a =∑4
i=1 x′ixi+y′iyi
∑4i=1 x′i
2+y′i2 = 1000
50 = 20
b =∑4
i=1 y′ixi−x′iyi
∑4i=1 x′i
2+y′i2 = −1000
50 =−20
e quindi
λ =√
a2 +b2 =√
202 +(−20)2 = 20√
2 ≃ 28.284271α = arctan b
a = arctan(− 20
20
)= arctan(−1) =−π
4
Il calcolo delle componenti della traslazione si effettua con le
x0 = xB −ax′B −by′B = 100−20 ·2.5+20 ·2.5 = 100 my0 = yB +bx′B −ay′B = 300−20 ·2.5−20 ·2.5 = 200 m
Gli scarti di ogni equazione si ricavano da
vx1 = x1 − (ax′1 +by′1 + x0) = 199.960− (20 ·5−20 ·0+100) =−0.040vy1 = y1 − (−bx′1 +ay′1 + y0) = 300− (20 ·5+20 ·0+200) = 0vx2 = x2 − (ax′2 +by′2 + x0) = 100− (20 ·5−20 ·5+100) = 0vy2 = y2 − (−bx′2 +ay′2 + y0) = 400.040− (20 ·5+20 ·5+200) = 0.040vx3 = x3 − (ax′3 +by′3 + x0) = 0.040− (20 ·0−20 ·5+100) = 0.040vy3 = y3 − (−bx′3 +ay′3 + y0) = 300− (20 ·0+20 ·5+200) = 0vx4 = x4 − (ax′4 +by′4 + x0) = 100− (20 ·0−20 ·0+100) = 0vy4 = y4 − (−bx′4 +ay′4 + y0) = 199.960− (20 ·0+20 ·0+200) =−0.040
e quindi la stima della varianza
σ20 =
v′v2N −4
=∑N
i=1
(v2
xi + v2yi
)2N −4
=(0.040)2 ·4
8−4=
1.6 10−3 ·44
= 1.6 10−3
La matrice di varianza e covarianza di a, b, x0 e y0 risulta
Cabx0y0 = σ20 N−1 = σ2
0
1
∑Ni=1 x′i
2+y′i2 0 0 0
0 1∑N
i=1 x′i2+y′i
2 0 0
0 0 1N 0
0 0 0 1N
=
= 1.6 10−3 ·
1
50 0 0 00 1
50 0 00 0 1
4 00 0 0 1
4
=
3.2 10−5 0 0 0
0 3.2 10−5 0 00 0 4 10−4 00 0 0 4 10−4
Dalla Cabx0y0 si estrae la sottomatrice Cab
Cab =
[3.2 10−5 0
0 3.2 10−5
]

8.2. ESERCIZI RISOLTI 161
da cui
σ2a = σ2
b = 3.2 10−5
σab = 0
la matrice Cλα di varianza e covarianza di λ e α è quindi
Cλα =
[σ2
a 0
0 σ2b
λ 2
]=
[3.2 10−5 0
0 3.2 10−5
800
]=
[3.2 10−5 0
0 4 10−8
]Gli scarti quadratici medi di λ e α risultano
σλ =√
3.2 10−5 = 5.65685 10−3
σα =√
4 10−8 = 2 10−4 rad

162 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
8.3 Esercizi
8.3.1 Rototraslazione e variazione di scala3
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (10,0) ↔ (x′,y′)1 = (199.96,300.00)(x,y)2 = (10,10) ↔ (x′,y′)2 = (100.00,400.04)(x,y)3 = (0,10) ↔ (x′,y′)3 = (0.04,300.00)(x,y)4 = (0,0) ↔ (x′,y′)4 = (100.00,199.96)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
1. angolo di rotazione, scala e traslazione che portano dal sistema (x,y) a quello(x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 10, b = −10 e quindi λ = 10√
2, α =−π
4 rad, x0 = 100 m e y0 = 200 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 1.6 10−3
Cab =
[8 10−6 0
0 8 10−6
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[8 10−6 0
0 4 10−8
]
8.3.2 Rototraslazione e variazione di scala4
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
3Diploma Universitario, 29 novembre 19994Topografia e Trattamento delle osservazioni, 19 dicembre 2000

8.3. ESERCIZI 163
(x,y)1 = (500,900) ↔ (x′,y′)1 = (582,380)(x,y)2 = (700,−500) ↔ (x′,y′)2 = (19,−378)(x,y)3 = (−700,−700) ↔ (x′,y′)3 = (−821,179)(x,y)4 = (−900,700) ↔ (x′,y′)4 = (−180,1019)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
1. angolo di rotazione, scala e traslazione che portano dal sistema (x,y) a quello(x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 0.5, b = 0.5 e quindi λ =√
2, α = π4 rad,
x0 =−100 m e y0 = 200 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 803
Cab =
[2.0075 10−4 0
0 2.0075 10−4
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[2.0075 10−4 0
0 4.0150 10−4
]
8.3.3 Rototraslazione e variazione di scala5
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (3.00,3.00) ↔ (x′,y′)1 = (14.00,25.00)(x,y)2 = (5.00,4.00) ↔ (x′,y′)2 = (14.00,28.00)(x,y)3 = (4.00,2.00) ↔ (x′,y′)3 = (15.00,25.00)(x,y)4 = (4.00,3.00) ↔ (x′,y′)4 = (14.00,26.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
5Topografia e Trattamento delle osservazioni, 2 luglio 2001

164 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
1. angolo di rotazione, fattore di scala e traslazione che portano dal sistema (x,y) aquello (x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 0.75, b = −1 e quindi λ = 1.250000,α =−0.927295 rad, x0 = 14.25 m e y0 = 19.75 m. La matrice di varianza e covarianzadi a e b risulta
σ20 = 1.25 10−1
Cab =
[3.125000 10−2 0
0 3.125000 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3.125000 10−2 0
0 2.000000 10−2
]
8.3.4 Rototraslazione e variazione di scala6
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (3.00,3.00) ↔ (x′,y′)1 = (12.50,24.00)(x,y)2 = (5.00,4.00) ↔ (x′,y′)2 = (12.50,26.50)(x,y)3 = (4.00,2.00) ↔ (x′,y′)3 = (14.00,25.50)(x,y)4 = (4.00,3.00) ↔ (x′,y′)4 = (13.00,25.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
1. angolo di rotazione, fattore di scala e traslazione che portano dal sistema (x,y) aquello (x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.6Topografia e Trattamento delle osservazioni, 28 gennaio 2002

8.3. ESERCIZI 165
Soluzione
I parametri della rototralazione risultano a = 0.25, b = −1 e quindi λ = 1.030776,α =−1.325818 rad, x0 = 15.000000 m e y0 = 20.500000 m. La matrice di varianza ecovarianza di a e b risulta
σ20 = 1.25 10−1
Cab =
[3.125000 10−2 0
0 3.125000 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3.125000 10−2 0
0 2.941200 10−2
]
8.3.5 Rototraslazione e variazione di scala7
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (3.00,3.00) ↔ (x′,y′)1 = (10.50,22.50)(x,y)2 = (5.00,4.00) ↔ (x′,y′)2 = (11.00,24.00)(x,y)3 = (4.00,2.00) ↔ (x′,y′)3 = (11.50,22.50)(x,y)4 = (4.00,3.00) ↔ (x′,y′)4 = (11.00,24.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
1. angolo di rotazione, fattore di scala e traslazione che portano dal sistema (x,y) aquello (x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 0.5, b = −0.5 e quindi λ =√
2, α =−π
4 rad, x0 = 10.5 m e y0 = 19.75 m. La matrice di varianza e covarianza di a e brisulta
σ20 = 1.875000 10−1
7Topografia e Trattamento delle osservazioni, 24 giugno 2002

166 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
Cab =
[4.6875 10−2 0
0 4.6875 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[4.6875 10−2 0
0 9.3750 10−2
]
8.3.6 Rototraslazione e variazione di scala8
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (3.00,3.00) ↔ (x′,y′)1 = (10.00,26.00)(x,y)2 = (5.00,4.00) ↔ (x′,y′)2 = (12.00,30.00)(x,y)3 = (4.00,2.00) ↔ (x′,y′)3 = (12.00,28.00)(x,y)4 = (4.00,3.00) ↔ (x′,y′)4 = (10.00,28.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
1. angolo di rotazione, fattore di scala e traslazione che portano dal sistema (x,y) aquello (x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e sisuppone che questo, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono note le coordinate (x′,y′), a meno di errori grossolani, è
data da σ = 0.7m.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani,
con livello di significatività del 5%.
Soluzione
I parametri della rototralazione risultano a = 1, b =−1 e quindi λ =√
2, α =−π4 rad,
x0 = 10 m e y0 = 21 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 1
8Topografia e Trattamento delle osservazioni, 30 gennaio 2003

8.3. ESERCIZI 167
Cab =
[2.5 10−1 0
0 2.5 10−1
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[2.5 10−1 0
0 1.25 10−1
]Domanda aggiuntiva
σ20 =
(7 10−1)2
= 4.9 10−1 m2
σ20 (m−n)
σ20
= 8.16 < χ4,0.95 = 9.49
l’ipotesi è quindi accettata.
8.3.7 Rototraslazione e variazione di scala9
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (28,28) ↔ (x′,y′)1 = (24.1,62.0)(x,y)2 = (30,29) ↔ (x′,y′)2 = (25.6,64.0)(x,y)3 = (29,27) ↔ (x′,y′)3 = (25.6,61.5)(x,y)4 = (29,28) ↔ (x′,y′)4 = (24.7,62.5)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si stimino:
1. angolo di rotazione, fattore di scala e traslazione che portano dal sistema (x,y) aquello (x′,y′);
2. la varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e sisuppone che questo, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono note le coordinate (x′,y′), a meno di errori grossolani, è
data da σ = 1m.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani,
con livello di significatività del 5%.9Topografia e Trattamento delle osservazioni, 1 luglio 2003

168 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
Soluzione
I parametri della rototralazione risultano a = 1, b =−0.5 e quindi λ = 1.118034, α =−4 .636476 10−1rad, x0 = 10 m e y0 = 20 m. La matrice di varianza e covarianza di ae b risulta
σ20 = 3 10−2
Cab =
[7.5 10−3 0
0 7.5 10−3
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[7.5 10−3 0
0 6 10−3
]Domanda aggiuntiva
σ20 = 12 = 1 m2
σ20 (m−n)
σ20
= 1.2 10−1 < χ4,0.95 = 9.49
l’ipotesi è quindi accettata.
8.3.8 Rototraslazione e variazione di scala10
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (13.00,5.00) ↔ (x′,y′)1 = (35.60,8.50)(x,y)2 = (15.00,6.00) ↔ (x′,y′)2 = (38.10,8.50)(x,y)3 = (14.00,4.00) ↔ (x′,y′)3 = (36.10,7.00)(x,y)4 = (14.00,5.00) ↔ (x′,y′)4 = (36.20,8.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.10Topografia 2, 4 febbraio 2004

8.3. ESERCIZI 169
Soluzione
I parametri della rototralazione risultano a = 1, b = 0.5 e quindi λ = 1.118034, α =4.636476 10−1 rad, x0 = 20 m e y0 = 10 m. La matrice di varianza e covarianza di a eb risulta
σ20 = 3 10−2
Cab =
[7.5 10−3 0
0 7.5 10−3
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[7.5 10−3 0
0 6 10−3
]
8.3.9 Rototraslazione e variazione di scala11
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (23.00,5.00) ↔ (x′,y′)1 = (38.20,43.00)(x,y)2 = (25.00,6.00) ↔ (x′,y′)2 = (39.20,46.00)(x,y)3 = (24.00,4.00) ↔ (x′,y′)3 = (40.20,43.00)(x,y)4 = (24.00,5.00) ↔ (x′,y′)4 = (38.40,44.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e sisuppone che questo, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono note le coordinate (x′,y′), a meno di errori grossolani, è
data da σ = 0.3m.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani,
con livello di significatività del 5%.
11Topografia e Trattamento delle osservazioni, 20 febbraio 2004

170 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
Soluzione
I parametri della rototralazione risultano a = 1, b =−1 e quindi λ =√
2, α =−π4 rad,
x0 = 20 m e y0 = 15 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 1.2 10−1
Cab =
[3 10−2 0
0 3 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3 10−2 0
0 1.5 10−2
]Domanda aggiuntiva
σ20 =
(3 10−1)2
= 9 10−2 m2
σ20 (m−n)
σ20
= 5.3 < χ4,0.95 = 9.49
l’ipotesi è quindi accettata.
8.3.10 Rototraslazione e variazione di scala12
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (23.00,5.00) ↔ (x′,y′)1 = (43.10,−8.00)(x,y)2 = (25.00,6.00) ↔ (x′,y′)2 = (46.10,−9.00)(x,y)3 = (24.00,4.00) ↔ (x′,y′)3 = (43.10,−10.00)(x,y)4 = (24.00,5.00) ↔ (x′,y′)4 = (43.70,−9.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.12Topografia 2 e Topografia e Trattamento delle osservazioni, 7 settembre 2004

8.3. ESERCIZI 171
Soluzione
I parametri della rototralazione risultano a = 1, b = 1 e quindi λ =√
2 ≃ 1.414213,α = 7.853982 10−1 rad = 50g = 45◦, x0 = 15 m e y0 = 10 m. La matrice di varianzae covarianza di a e b risulta
σ20 = 3 10−1
Cab =
[7.5 10−3 0
0 7.5 10−3
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[7.5 10−3 0
0 3.75 10−3
]
8.3.11 Rototraslazione e variazione di scala13
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (11.00,26.00) ↔ (x′,y′)1 = (41.70,2.00)(x,y)2 = (13.00,27.00) ↔ (x′,y′)2 = (43.70,0.50)(x,y)3 = (12.00,25.00) ↔ (x′,y′)3 = (41.20,0.50)(x,y)4 = (12.00,26.00) ↔ (x′,y′)4 = (41.40,1.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a= 0.5, b= 1 e quindi λ =√
5/2≃ 1.118034,α = 1.107149, x0 = 10 m e y0 = 0 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 1.2 10−1
Cab =
[3 10−2 0
0 3 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3 10−2 0
0 2.4 10−2
]13Topografia 2 e Topografia e Trattamento delle osservazioni, 12 gennaio 2005

172 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
8.3.12 Rototraslazione e variazione di scala14
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (103.00,55.00) ↔ (x′,y′)1 = (148.20,158.00)(x,y)2 = (105.00,56.00) ↔ (x′,y′)2 = (149.20,161.00)(x,y)3 = (104.00,54.00) ↔ (x′,y′)3 = (150.20,158.00)(x,y)4 = (104.00,55.00) ↔ (x′,y′)4 = (148.40,159.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e sisuppone che questo, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono note le coordinate (x′,y′), a meno di errori grossolani, è
data da σ = 0.3m.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani,
con livello di significatività del 5%.
Soluzione
I parametri della rototralazione risultano a = 1, b =−1 e quindi λ =√
2, α =−π4 rad,
x0 = 100 m e y0 = 0 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 1.2 10−1
Cab =
[3 10−2 0
0 3 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3 10−2 0
0 1.5 10−2
]14Topografia 2 e Topografia e Trattamento delle osservazioni, 6 settembre 2005, la domanda aggiuntiva
solo per Topografia e Trattamento delle osservazioni

8.3. ESERCIZI 173
Domanda aggiuntiva
σ20 =
(3 10−1)2
= 9 10−2 m2
σ20 (m−n)
σ20
= 5.3 < χ4,0.95 = 9.49
l’ipotesi è quindi accettata.
8.3.13 Rototraslazione e variazione di scala15
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (33.00,4.00) ↔ (x′,y′)1 = (62.30,51.00)(x,y)2 = (35.00,5.00) ↔ (x′,y′)2 = (65.30,55.00)(x,y)3 = (34.00,3.00) ↔ (x′,y′)3 = (65.30,50.00)(x,y)4 = (34.00,4.00) ↔ (x′,y′)4 = (63.10,52.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e sisuppone che questo, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono note le coordinate (x′,y′), a meno di errori grossolani, è
data da σ = 0.4m.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani,
con livello di significatività del 5%.
15Topografia 2 e Topografia e Trattamento delle osservazioni, 13 gennaio 2006, la domanda aggiuntivasolo per Topografia e Trattamento delle osservazioni

174 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
Soluzione
I parametri della rototralazione risultano a = 2, b = −1 e quindi λ = 2.236068, α =−4.636476 10−1 rad, x0 = 0 m e y0 = 10 m. La matrice di varianza e covarianza di ae b risulta
σ20 = 2.7 10−1
Cab =
[6.75 10−2 0
0 6.75 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[6.75 10−2 0
0 1.35 10−2
]Domanda aggiuntiva
σ20 =
(4 10−1)2
= 1.6 10−1 m2
σ20 (m−n)
σ20
= 6.75 < χ4,0.95 = 9.49
l’ipotesi è quindi accettata.
8.3.14 Rototraslazione e variazione di scala16
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (−33.00,−4.00) ↔ (x′,y′)1 = (−18.80,−17.00)(x,y)2 = (−35.00,−5.00) ↔ (x′,y′)2 = (−19.80,−20.00)(x,y)3 = (−34.00,−3.00) ↔ (x′,y′)3 = (−20.80,−17.00)(x,y)4 = (−34.00,−4.00) ↔ (x′,y′)4 = (−20.60,−18.00)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.16Topografia 2 e Topografia e Trattamento delle osservazioni, 5 luglio 2006, la domanda aggiuntiva solo
per Topografia e Trattamento delle osservazioni

8.3. ESERCIZI 175
Domanda aggiuntiva
Si sospetta la presenza di un errore grossolano nei dati dell’esercizio precedente e sisuppone che questo, se presente, si manifesti in un valore grande di σ2
0 .L’incertezza con cui sono note le coordinate (x′,y′), a meno di errori grossolani, è
data da σ = 0.3m.Si sottoponga a test l’ipotesi fondamentale che non siano presenti errori grossolani,
con livello di significatività del 5%.
Soluzione
I parametri della rototralazione risultano a = 1, b =−1 e quindi λ =√
2, α =−π4 rad,
x0 = 10 m e y0 = 20 m. La matrice di varianza e covarianza di a e b risulta
σ20 = 1.2 10−1
Cab =
[3 10−2 0
0 3 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3 10−2 0
0 1.5 10−2
]Domanda aggiuntiva
σ20 =
(3 10−1)2
= 9 10−2 m2
σ20 (m−n)
σ20
= 5.3 < χ4,0.95 = 9.49
l’ipotesi è quindi accettata.
8.3.15 Rototraslazione e variazione di scala17
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (9.00,4.00) ↔ (x′,y′)1 = (12.20,9.20)(x,y)2 = (11.00,5.00) ↔ (x′,y′)2 = (17.20,9.20)(x,y)3 = (10.00,3.00) ↔ (x′,y′)3 = (13.20,6.20)(x,y)4 = (10.00,4.00) ↔ (x′,y′)4 = (13.40,7.40)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
17Topografia 2 e Topografia e Trattamento delle osservazioni, 6 febbraio 2007

176 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 2, b = 1 e quindi λ =√
5 ≃ 2.236068,α = 0.463648 rad, x0 =−10 m e y0 = 10 m. La matrice di varianza e covarianza di ae b risulta
σ20 = 2.4 10−1
Cab =
[6 10−2 0
0 6 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[6 10−2 0
0 1.2 10−2
]
8.3.16 Rototraslazione e variazione di scala18
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (−1.00,−1.00) ↔ (x′,y′)1 = (26.10, −7.90)(x,y)2 = ( 1.00, 0.00) ↔ (x′,y′)2 = (31.10,−12.90)(x,y)3 = ( 0.00,−2.00) ↔ (x′,y′)3 = (24.10,−11.90)(x,y)4 = ( 0.00,−1.00) ↔ (x′,y′)4 = (26.70,−11.30)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
18Topografia 2 e Topografia e Trattamento delle osservazioni, 21 aprile 2008

8.3. ESERCIZI 177
Soluzione
I parametri della rototralazione risultano a = 1, b = 3 e quindi λ =√
10 ≃ 3.162278,α = 1.249046 rad, x0 = 30 m e y0 =−10 m. La matrice di varianza e covarianza di ae b risulta
σ20 = 6 10−2
Cab =
[1.5 10−2 0
0 1.5 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[1.5 10−2 0
0 1.5 10−3
]
8.3.17 Rototraslazione e variazione di scala19
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (12.00,6.00) ↔ (x′,y′)1 = (130.20,90.20)(x,y)2 = (14.00,7.00) ↔ (x′,y′)2 = (135.20,90.20)(x,y)3 = (13.00,5.00) ↔ (x′,y′)3 = (131.20,87.20)(x,y)4 = (13.00,6.00) ↔ (x′,y′)4 = (131.40,88.40)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 2, b = 1 e quindi λ =√
5 ≃ 2.23606798,α = 0.46364761 rad, x0 = 100 m e y0 = 90 m. La matrice di varianza e covarianza dia e b risulta
σ20 = 2.4 10−1
Cab =
[6 10−2 0
0 6 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[6 00 1.2
]10−2
19Topografia 2 e Topografia e Trattamento delle osservazioni, 25 agosto 2008

178 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
8.3.18 Rototraslazione e variazione di scala20
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (−41.00,−36.00) ↔ (x′,y′)1 = (95.30,13.30)(x,y)2 = (−39.00,−35.00) ↔ (x′,y′)2 = (96.30,16.30)(x,y)3 = (−40.00,−37.00) ↔ (x′,y′)3 = (97.30,13.30)(x,y)4 = (−40.00,−36.00) ↔ (x′,y′)4 = (95.10,13.10)
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a= 1, b=−1 e quindi λ =√
2≃ 1.41421356,α = −π
4 ≃ −0.78539816 rad, x0 = 100 m e y0 = 90 m. La matrice di varianza ecovarianza di a e b risulta
σ20 = 5.4 10−1
Cab =
[1.35 10−1 0
0 1.35 10−1
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[1.35 10−1 0
0 6.75 10−2
]
8.3.19 Rototraslazione e variazione di scala21
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (19.00,9.00) ↔ (x′,y′)1 = (18.10,0.20)(x,y)2 = (21.00,10.00) ↔ (x′,y′)2 = (21.20,−0.90)(x,y)3 = (20.00,8.00) ↔ (x′,y′)3 = (18.30,−1.80)(x,y)4 = (20.00,9.00) ↔ (x′,y′)4 = (18.40,−1.50)
20Topografia 2, 30 gennaio 200921Topografia 2, 26 agosto 2009

8.3. ESERCIZI 179
La trasformazione tra i due sistemi di riferimento è rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]dove λ é lo scalare che rappresenta il fattore di scala e R(α) é la matrice di rotazione
(2x2) funzione di un angolo.Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 1, b = 1 e quindi λ =√
2 ≃ 1.41421356,α = π
4 ≃ 0.78539816 rad, x0 =−10 m e y0 = 10 m. La matrice di varianza e covarianzadi a e b risulta
σ20 = 2.1 10−1
Cab =
[5.25 10−2 0
0 5.25 10−2
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[5.25 10−2 0
0 2.6250 10−2
]
8.3.20 Rototraslazione e variazione di scala22
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (8.00,1.00) ↔ (x′,y′)1 = (8.10,6.30)(x,y)2 = (10.00,2.00) ↔ (x′,y′)2 = (14.30,4.10)(x,y)3 = (9.00,0.00) ↔ (x′,y′)3 = (8.50,2.30)(x,y)4 = (9.00,1.00) ↔ (x′,y′)4 = (9.10,3.30)
La trasformazione tra i due sistemi di riferimento é rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]dove λ é lo scalare che rappresenta il fattore di scala e R(α) é la matrice di rotazione
(2x2) funzione di un angolo.Si determinino:
22Topografia 2, 16 giugno 2010

180 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a = 2, b = 2 e quindi λ = 2√
2 ≃ 2.828427,α = π
4 ≃ 0.78539816 rad, x0 =−10 m e y0 = 20 m. La matrice di varianza e covarianzadi a e b risulta
σ20 = 4.6 10−1
Cab =
[1.15 10−1 0
0 1.15 10−1
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[1.15 10−1 0
0 1.4375 10−2
]
8.3.21 Rototraslazione e variazione di scala23
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (14.00,14.00) ↔ (x′,y′)1 = (−9.70,−17.50)(x,y)2 = (16.00,15.00) ↔ (x′,y′)2 = (−10.50,−20.70)(x,y)3 = (15.00,13.00) ↔ (x′,y′)3 = (−11.30,−17.50)(x,y)4 = (15.00,14.00) ↔ (x′,y′)4 = (−12.50,−20.30)
La trasformazione tra i due sistemi di riferimento é rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]dove λ è lo scalare che rappresenta il fattore di scala e R(α) é la matrice di rotazione
(2x2) funzione di un angolo.Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.23Topografia 2, 14 febbraio 2011

8.3. ESERCIZI 181
Soluzione
I parametri della rototralazione risultano a = 2, b = 2 e quindi λ = 2√
2 ≃ 2.828427,α = π
4 ≃ 0.78539816 rad, x0 = 0 m e y0 = 20 m. La matrice di varianza e covarianzadi a e b risulta
σ20 = 1.34
Cab =
[3.35 10−1 0
0 3.35 10−1
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3.35 10−1 0
0 4.187500 10−2
]
8.3.22 Rototraslazione e variazione di scala24
Sono note senza errore le coordinate (x,y) di alcuni punti; sono state determinate lecoordinate (x′,y′) degli stessi punti in un altro riferimento.
Le coordinate (x′,y′) hanno tutte la stessa varianza e sono incorrelate.
(x,y)1 = (9.00,5.00) ↔ (x′,y′)1 = (28.30,12.50)(x,y)2 = (11.00,6.00) ↔ (x′,y′)2 = (34.50,10.30)(x,y)3 = (10.00,4.00) ↔ (x′,y′)3 = (28.70,8.50)(x,y)4 = (10.00,5.00) ↔ (x′,y′)4 = (28.50,8.70)
La trasformazione tra i due sistemi di riferimento é rappresentata da una trasforma-zione lineare conforme (rotrotraslazione e variazione di scala) nella forma:[
x′
y′
]= λR(α)
[xy
]+
[x0y0
]dove λ è lo scalare che rappresenta il fattore di scala e R(α) é la matrice di rotazione
(2x2) funzione di un angolo.Si determinino:
1. la stima di angolo di rotazione, fattore di scala e vettore traslazione che portanodal sistema (x,y) a quello (x′,y′);
2. la stima della varianza σ20 della compensazione;
3. la matrice di varianza e covarianza di angolo e fattore di scala.
Soluzione
I parametri della rototralazione risultano a =−1, b = 1 e quindi λ =√
2 ≃ 1.414214,α = −π
4 ≃ −0.78539816 rad, x0 = −10 m e y0 = 10 m. La matrice di varianza ecovarianza di a e b risulta
σ20 = 1.34
24Topografia 2, 20 giugno 2011

182 CAPITOLO 8. ROTOTRASLAZIONE E VARIAZIONE DI SCALA
Cab =
[3.35 10−1 0
0 3.35 10−1
]e quindi la matrice di varianza e covarianza di λ e α
Cλ α =
[3.35 10−1 0
0 1.6750 10−1
]

Bibliografia
[1] Migliaccio F. Albertella A., Brovelli M.A. and Sona G. Probabilità, variabili ca-suali ad una dimensione, variabilie casuali bi-dimensionali, covarianza, volume 1of Esercizi di trattamento statistico dei dati. Città Studi Edizioni/UTET Libreriasrl, Milano, 1998.
[2] Migliaccio F. Albertella A., Brovelli M.A. and Sona G. Teoria della stima, in-ferenza statistica, catene di Markov, processi stocastici, volume 2 of Esercizi ditrattamento statistico dei dati. Città Studi Edizioni/UTET Libreria srl, Milano,1998.
[3] Benciolini B. Modelli di Compensazione, progettazione e ottimizzazione del rilievotopografico e fotogrammetrico di controllo, pages 9–27. CSM, Udine, 1989.
[4] Sansò F. Quaderni di trattamento statistico dei dati. Città Studi Edizioni/UTETLibreria srl, Milano, 1998. Quaderni 1, 2 e 3.
183


















