Corso di Elementi di Elettronica e Regolazione · – Che marcia mi conviene in salita? – Come...
29
Elementi di regolazione ROMA TRE Stefano Panzieri- 1 Corso di Corso di Elementi di Elettronica e Regolazione Elementi di Elettronica e Regolazione per l’Ingegneria Meccanica per l’Ingegneria Meccanica Prof. Stefano Panzieri Dipartimento di Informatica ed Automazione Via Vasca Navale 79, Roma e-mail: [email protected] WEB: WEB: www.dia.uniroma3.it/ www.dia.uniroma3.it/ autom autom /Regolazione /Regolazione regolazione.panzieri.it regolazione.panzieri.it
Transcript of Corso di Elementi di Elettronica e Regolazione · – Che marcia mi conviene in salita? – Come...

Elementi di regolazione ROMA TRE Stefano Panzieri- 1
Corso di Corso di
Elementi di Elettronica e RegolazioneElementi di Elettronica e Regolazioneper l’Ingegneria Meccanicaper l’Ingegneria Meccanica
Prof. Stefano Panzieri
Dipartimento di Informatica ed Automazione
Via Vasca Navale 79, Roma
e-mail: [email protected]
WEB: WEB: www.dia.uniroma3.it/www.dia.uniroma3.it/automautom/Regolazione/Regolazione
regolazione.panzieri.itregolazione.panzieri.it

Elementi di regolazione ROMA TRE Stefano Panzieri- 2
Cosa é l’Automatica
• Descrivere un “sistema” fisico– La mia moto è un “sistema”?
• Capire il suo comportamento– Quanti Km faccio con un litro?– In quanto spazio freno se vado a 60 Km/h?
• Esplorare la sua struttura – Che relazione c’è tra la potenza e la quantità
di miscela aria/benzina fornita dal carburatore?
• Modificare il suo funzionamento– Che marcia mi conviene in salita?– Come faccio a risparmiare la benzina?

Elementi di regolazione ROMA TRE Stefano Panzieri- 3
Decomposizione Gerarchica di un SistemaUtile per un autoricambi
Simile al modello di esplorazione del Web
Non mette in evidenza il “come” funziona !

Elementi di regolazione ROMA TRE Stefano Panzieri- 4
Decomposizione Funzionale di un Sistema
Posizioneangolare
Quantitàcombustibile
Coppia
Coppia x n
Forza
Velocità
Aperturavalvola
Esprime quelle relazioni di causa-effetto a noi necessarie per capire il funzionamento del sistema e per poter intervenire su di esso !
Posizione Angolare

Elementi di regolazione ROMA TRE Stefano Panzieri- 5
Approccio Sistemistico
Σingressi
disturbi
uscite
misure
Ingressi: li possiamo imporre (es.posizione acceleratore, tensione su un motore elettrico, angolo del timone)
Disturbi: agiscono indipendentemente (es. vento, coppia resistente, corrente in mare)
Uscite: ciò che ci interessa (es. velocità, angolo asse del motore, angolo di rotta)
Misure: ciò che possiamo misurare (es. posizione ago del tachimetro, lettura goniometro, lettura bussola)
Parametri: le "costanti" che appaiono nel modello del sistema (es. la massa, gli attriti, l’elasticità)
parametri
Blocchi strutturali: relazioni di causa - effetto

Elementi di regolazione ROMA TRE Stefano Panzieri- 6
Sistemi Statici e Dinamici
• Sistema Statico– Le uscite dipendono dagli ingressi attuali
• Sistema Dinamico– Le uscite dipendono dagli ingressi passati
u = ingresso y = uscita( )y f u=
u = ingresso y = uscita(1) ( ) (1) ( )( , ,..., , , ,..., ) 0n mg y y y u u u =

Elementi di regolazione ROMA TRE Stefano Panzieri- 7
Cosa é l’Automatica
• Modellazione– Ottenere una rappresentazione matematica basata
sulla fisica del sistema
• Studio delle soluzioni– Analitiche (in forma chiusa)– Computazionali (simulazioni)
• Esplorazione– Ricerca di relazioni tra struttura e comportamento– Approfondimento del comportamento del sistema
• Modifica, Controllo– Ricerca di metodi per cambiare il comportamento
del sistema
Analisi e Controllo dei Sistemi Dinamici

Elementi di regolazione ROMA TRE Stefano Panzieri- 8
Sistema di Controllo Automatico• Azione di Controllo (manuale o automatica)
– L’azione necessaria ad ottenere un comportamento predeterminato di un sistema
• Algoritmo di Controllo– La strategia necessarie ad assicurare la migliore
performance di un sistema nel rispetto dei suoi limiti operativi
• Sistema di Controllo Automatico– Strategia + Tecnologia necessarie affinché un
sistema svolga i suoi compiti con ridotto o nullo intervento umano
• Sistema intelligente– Sistema di controllo dotato di capacità decisionale
(ma intelligenza = adattabilità …)

Elementi di regolazione ROMA TRE Stefano Panzieri- 9
Controllo manuale della guida
Elaborazioneazione da intraprendere
AcquisizioneMisura
Attuazione delcomando
Posizioneangolare
Quantitàcombustibile Coppia
Coppia x nForza
VelocitàApertura

Elementi di regolazione ROMA TRE Stefano Panzieri- 10
Controllo manuale del livello
•Riempire un secchio di acqua è un’operazione che richiede l’intervento di:
•Un sistema di misura
•Un sistema di attuazione
•Un sistema di controllo
controllore
organo di misura
attuatore

Elementi di regolazione ROMA TRE Stefano Panzieri- 11
Cotrollo automatico del livello
galleggiantefulcro e levavalvola
Quando l’acqua raggiungeil livello desiderato,il galleggiante, tramite la leva,chiude la valvola
attuatore controllore organo di misura

Elementi di regolazione ROMA TRE Stefano Panzieri- 12
La controreazione (feedback)
elaborazioneazione
misura e acquisizione
Attuazione delcomando
confrontosistema da controllare
+
-
Velocità di riferimento
Velocità attualeErrore di
velocità
r e
u
y
Negli schemi di controllo visti sino ad ora si evidenzia la presenza di un LOOP

Elementi di regolazione ROMA TRE Stefano Panzieri- 13
Argomenti del corso di FdAPrimo Modulo
• Sistemi• Lineari costanti tempo
invarianti• Sviluppo di modelli
matematici appropriati• Funzione di
Trasferimento• Risposta Armonica
• Analisi delle proprietà dei Sistemi
• Stabilità• Comportamento a
Regime• Comportamento nei
transitori• Sintesi dei Controllori
• Specifiche nel tempo • Specifiche in frequenza
Secondo Modulo• Sistemi
• Lineari costanti tempo continuo e tempo discreto
• Sviluppo di modelli matematici appropriati
• Spazio di Stato• Funzione di trasferimento
discreta• Analisi delle proprietà dei
Sistemi• Proprietà strutturali dei
sistemi tempo continuo• Ruolo del tempo di
campionamento• Sintesi dei Controllori
• Assegnazione delle dinamiche
• Sistemi di controllo a segnali campionati

Elementi di regolazione ROMA TRE Stefano Panzieri- 14
Storia del controllo a Controreazione• Sviluppi fondamentali della storia umana che hanno
condizionato lo studio e lo sviluppo dei sistemi di controllo– Misura accurata del tempo (Greci e Arabi) 300AC!1258DC
(caduta di Bagdad in mano Mongola)• Orologi ad acqua• Regolatori del livello dell’olio nelle lampade
– La rivoluzione industriale (Inghilterra dal 1745 ma anche nel 1600)
• Mulini a vento e ad acqua• Temperatura delle fornaci• Motore a vapore
– Le comunicazioni di massa e le guerre mondiali (1910!1945)
• Telecomunicazioni (1920-30 Bell Telephone Laboratories)• Controllo delle navi (giroscopio 1910, PID 1922)• Sistemi di puntamento d’arma automatici (servomeccanismi e Radar)
– L’era del computer e dell’esplorazione spaziale• Sputnik 1957• Microprocessori

Elementi di regolazione ROMA TRE Stefano Panzieri- 15
Orologio ad Acqua di Ktesibios (270 AC) • Alessandria:terzo
secolo prima di Cristo (270 AC)
• La controreazione è usata per mantenere costante il livello dell’acqua, e quindi la pressione, nel primo serbatoio
• Klepsydra (ladra d’acqua)

Elementi di regolazione ROMA TRE Stefano Panzieri- 16
Orologio ad Acqua di Ktesibios (270 AC)

Elementi di regolazione ROMA TRE Stefano Panzieri- 17
Regolatore di Watt• Governor (1788)
• L'applicazione di questo congegno alla macchina a vaporeriveste una grande importanza nella storia della tecnica perchèesso fu il capostipite di una numerosissima famiglia di apparecchi automatici di controllo, tutti indispensabili per il corretto funzionamento degli impianti. Questo "governor" faceva accelerare la macchina se rallentava per il troppo carico o la faceva rallentare dopo una accelerazione dovuta a diminuzione di carico

Elementi di regolazione ROMA TRE Stefano Panzieri- 18
Regolatore di Watt
Valvola
Motoreorgani di trasmissione
asse
leveraggio
M M
ω
più veloce gira l'asse,
più le masse sono spinte dalla forza centrifuga,
più la valvola si chiuderà,
meno vapore alimenterà il motore,
meno velocemente girerà l’asse!
Come scegliere i parametri (M, rapp. di trasm.)?Occorre un modello dinamico matematico.

Elementi di regolazione ROMA TRE Stefano Panzieri- 19
Controllo di temperatura
alimentazione
Sensore ditemperatura(termostato)
Attuatore(relais)
Riscaldatore + acqua(processo)
T desiderata
Quando l’acqua si fredda,la barretta si accorcia echiude l’interruttore
Notare che la temperaturaoscilla intorno a Tdes

Elementi di regolazione ROMA TRE Stefano Panzieri- 20
Controllo di Posizione
• Finché i due angoli sono diversi, – l'amplificatore ha tensione di ingresso ≠ 0,– il motore ruota,– e la differenza tra gli angoli si riduce.
• Quando gli angoli sono uguali – L’errore è nullo– Il motore si ferma
motoreamplificatorepote
nzi
om
etro
ϑd
ϑcarico

Elementi di regolazione ROMA TRE Stefano Panzieri- 21
Rappresentazione con blocchi strutturaliControllo di posizione dell'asse di un motore
+E
-E +E
-E
V=costRid
ϕϕ iu
potenz. amplificatore motore +riduttore
potenziometro
+
-
ϕi ϕ
u
V alim.V eccit.Disturbi -->

Elementi di regolazione ROMA TRE Stefano Panzieri- 22
Piattaforma motorizzata
trasduttoredi posizione
amplificatoridi potenza
trasduttoredi velocità
i
ϕ
i
vel
Motori
Comando di sterzo
Comandodi velocità
Angolomisurato
Velocitàmisurata

Elementi di regolazione ROMA TRE Stefano Panzieri- 23
Controllo di Robot mobile
Xfin,Yfin
XoYo
Il task La traiettoriadesiderata
t
velocità
sterzo
Struttura cinematicadel veicolo
Controllore Controllore
v (t)d ϕ (t)d
Comando di sterzo
Angolomisurato
Comandodi velocità
Velocitàmisurata
pianificazione

Elementi di regolazione ROMA TRE Stefano Panzieri- 24
Fabbrica Automatica
Robot
MovimentazioneProcessocontinuo
Magazzini
Macchinea CN
1° LivelloComando delle singole macchine PLC)
2° LivelloCoordinamento delle
macchine
3° LivelloGestione della produzione(ottimizzazione)
4° LivelloPianif. globale
Rete di campo

Elementi di regolazione ROMA TRE Stefano Panzieri- 25
Sistemi ComplessiI sistemi a larga scala presentano spesso una struttura decomponibile in moduli (sottosistemi) interagenti fra loro
Organizzazione spesso di tipo gerarchico a livelli
coordinamento
un. locale
ctrl 1 ctrl N
subsyst 1 subsyst N
un. locale
Interazioni
comandi
+rapidità- intelligenza
+intelligenza- rapidità
informazionictrl 2
PLC

Elementi di regolazione ROMA TRE Stefano Panzieri- 26
Definizioni• Processo
• Insieme coordinato di trasformazioni e trasmissione di energia, materiali, informazioni, finalizzato ad un obiettivo
• Processo industriale• Continui (siderurgia, carta, vetro, petroliferi, chimici,
produzione e distribuzione dell’energia elettrica)• A lotti (stampaggio, ind. elettronica, mecanica,
tessile)
• Altri Processi• Biologici, medici, ecologici, organizzativi, gestionali,
economici
• Controllo di processo• l'uscita è una grandezza fisica, variabile con
continuità (temperatura pressione, pH).
• Servomeccanismo• l'uscita è una grandezza meccanica (posizione,
velocità)

Elementi di regolazione ROMA TRE Stefano Panzieri- 27
Definizioni
• Regolazione• l'uscita è mantenuta
costante intorno ad un valore predefinito
• Asservimento• l'uscita segue l'ingresso il
più possibile (inseguimento di traiettoria)
Nero: riferimentoRosso: uscita

Elementi di regolazione ROMA TRE Stefano Panzieri- 28
Obiettivi nella sintesi
• L'uscita segue gli andamenti desiderati, con date tolleranze in condizioni ideali.
• La risposta è veloce.• Rumori di diverse provenienze sono filtrati.• Incertezze sui parametri non influenzano l'uscita.• Disturbi esterni non influenzano l'uscita.
Ingressi e disturbi limitati producono effetti limitati
STABILITA'
Inoltre
Per ogni punto: Specifiche di Progetto1. Precisione a regime (caratt. statiche)2. Prontezza di risposta (Risposta armonica: banda passante,
risposta al gradino,tempo di salita)3. Precisione dinamica (Sovraelongazione della risposta al
gradino,costanza della risposta armonica )
Elementi di regolazione ROMA TRE Stefano Panzieri- 29
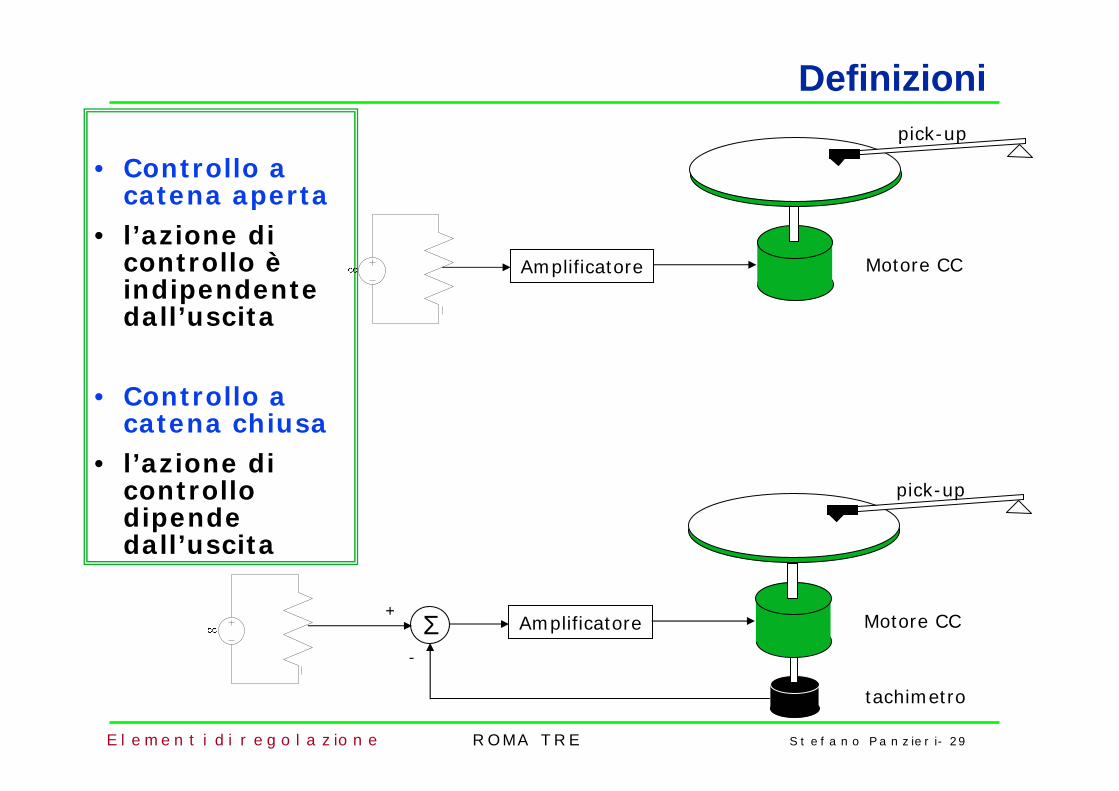
Definizioni
• Controllo a catena aperta
• l’azione di controllo è indipendente dall’uscita
• Controllo a catena chiusa
• l’azione di controllo dipende dall’uscita
Amplificatore
pick-up
Motore CC
tachimetro
Σ+
-
Amplificatore
pick-up
Motore CC