Cinematica – Soluzioni - Dipartimento di Energetica · e del camion ad un determinato istante t,...
50
Cinematica – Soluzioni 1) Scegliamo un asse coordinato avente la direzione del viale, l’origine O coincidente con la posizione del semaforo e un verso concorde con quello della velocità del camion; indichiamo con x A e x C le distanze rispettivamente dell’auto e del camion ad un determinato istante t, supponendo di misurare il tempo a partire dall’istante in cui il semaforo diventa verde. Le corrispondenti equazioni di moto sono: x A = at 2 /2 (1) x C = v C t (2) I corrispondenti grafici orari sono riportati in figura. 0 50 100 150 200 0 2 4 6 8 10 12 14 x A , x C ( m) t ( s ) A C t* a) Come si vede l’auto raggiungerà il camion quando le due coordinate assumeranno lo stesso valore (x A = x C ) ossia in corrispondenza dell’intersezione delle due curve a t ≠ 0 . Imponendo la condizione sopra detta si ottiene: x A = at 2 /2 = v C t = x C (3) da cui il tempo t* t* = 2v C /a e la distanza d dal semaforo per cui si ha un nuovo affiancamento dei due veicoli dopo quello iniziale (corrispondente alla soluzione t = 0 dell’Eq. (3) ) d = x C (t*) = v C t* = 2v C 2 /a Numericamente risulta t* = 5 s e d = 100 m.
Transcript of Cinematica – Soluzioni - Dipartimento di Energetica · e del camion ad un determinato istante t,...

Cinematica – Soluzioni
1) Scegliamo un asse coordinato avente la direzione del viale, l’origine Ocoincidente con la posizione del semaforo e un verso concorde con quello dellavelocità del camion; indichiamo con xA e xC le distanze rispettivamente dell’autoe del camion ad un determinato istante t, supponendo di misurare il tempo apartire dall’istante in cui il semaforo diventa verde. Le corrispondenti equazioni dimoto sono:
xA = at2/2 (1) xC = vCt (2)
I corrispondenti grafici orari sono riportati in figura.
0
50
100
150
200
0 2 4 6 8 10 12 14
x A , x C (
m)
t ( s )
A
C
t*
a) Come si vede l’auto raggiungerà il camion quando le due coordinate assumeranno lostesso valore (xA = xC) ossia in corrispondenza dell’intersezione delle due curve a t ≠ 0 .Imponendo la condizione sopra detta si ottiene:
xA = at2/2 = vCt = xC (3)
da cui il tempo t* t* = 2vC/a
e la distanza d dal semaforo per cui si ha un nuovo affiancamento dei due veicolidopo quello iniziale (corrispondente alla soluzione t = 0 dell’Eq. (3) )
d = xC (t*) = vCt* = 2vC2/a
Numericamente risulta t* = 5 s e d = 100 m.

b) L’equazione oraria della velocità dell’auto è data da vA = at , quindi la sua velocitànell’istante del sorpasso è data da
vA* = at* = 2vC
numericamente quindi si ha vA*= 20 m/s (72 Km/h).
[Osservazione: essendo all’istante t* nuovamente affiancati, i due veicoli devonoavere durante questo intervallo di tempo la stessa velocità media, pari a vc. Dato chein un moto uniformemente accelerato la velocità media fra due istanti qualsiasi è lamedia aritmetica delle velocità nei due istanti, si poteva anche scrivere la relazione:
vAM = vC = [vA (t = 0) + vA*]/2 = vA*/2
da cui il risultato trovato.]
2) Scegliamo un asse coordinato diretto lungo la verticale, orientato positivamenteverso l’alto e con l’origine O coincidente con il punto da cui viene lanciata lapalla, e misuriamo il tempo a partire dall’istante di lancio. La palla si muove dimoto uniformemente accelerato e le equazioni orarie per la velocità e lacoordinata della palla sono:
v = v0 – gt (1)
x = v0t – gt2/2 (2)
-10
-5
0
5
10
0 0.5 1 1.5 2 2.5-10
-5
0
5
10
x (
m )
t ( s )
abs(
v )
( m
/s )
v (
m/s
)

In figura sono riportati il grafico orario per x , v (linea tratteggiata) e per il suo valoreassoluto (linea continua).
a) La palla raggiunge la massima quota quando si annulla la sua velocità, pertantodalla Eq. (1) si ottiene il tempo impiegato t* ponendo v = 0 :
t* = v0/g t* = 1.02 s
b) La massima quota raggiunta corrisponde al valore della coordinata x per t = t*,quindi da (2) si ha:
H = x(t*) = v02/2g H = 5.09 m
c) Il tempo t’ che impiega la palla per tornare al punto di partenza lo si ottiene dallaEq. (2) ponendo x = 0 ; la soluzione t = 0 corrisponde all’istante di partenza,mentre per t’ si ha.
t’ = 2v0/g = 2t* t’ = 2.04 s
d) La velocità quando la palla torna al punto di partenza è ottenuta immediatamenteponendo nell’Eq. (1) t = t’ e si ottiene:
v = v0 - gt’ = - v0
e) Eliminando il tempo fre le Eq. (1) e (2) si può esprimere la velocità della palla infunzione della sua coordinata e si ottiene:
v2 = 2gx - v02 v = ± (2gx - v0
2)0.5
Come risulta dalla precedente espressione ( si veda anche il grafico ) la velocità dellapalla può assumere per una stessa quota due valori uguali in modulo ed opposti inverso in corrispondenza della fase ascendente e discendente del moto. Ponendo x =H/2 (rappresentato in figura dalla retta orizzontale tratteggiata) si ottiene v = ± 9.38m/s.f) Consideriamo i due istanti t e t+Dt e le corrispondenti coordinate della palla x(t) e
x(t+Dt); la differenza fra le due posizioni è data, in modulo e segno, da Dx =x(t+Dt) - x(t) e risulta esplicitamente:
Dx= (v0 - gt)Dt – g(Dt)2/2 = v(t)Dt – g(Dt)2/2
quindi per due istantanee successive al tempo nDt e (n + 1)Dt si ha:
Dx= v0Dt – g(2n+1)(Dt)2/2
la distanza fra due posizioni successive della palla è quindi data da Dd = abs(Dx) ;come risulta da questa espressione Dd decresce gradualmente all’avvicinarsi dellapalla alla sommità della traiettoria per poi tornare ad aumentare nuovamente una voltache inizia a muoversi verso il basso ( nella figura l’ordinate dei pallini corrispondono

alle posizioni della palla a intervalli di 0.1 s). Nella figura successiva sono riportati ivalori di Dx(n) in funzione del numero d’ordine n dell’istantanea.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 5 10 15 20 25
Dx
(
m )
n
3) Scelto l’asse coordinato coincidente con il binario, con l’origine O nel punto incui si trova il treno A quando il macchinista inizia a frenare, ed orientato nel versodi marcia dei treni, le loro equazioni orarie risultano:
xA = v0At – at2/2 xB = d – vBt
dove con -a si è indicato la decelerazione del treno A. I corrispondenti grafici sonoriportati in figura per due diversi valori di a.
-100
0
100
200
300
400
500
600
700
-100
0
100
200
300
400
500
600
700
0 5 10 15 20 25
x A ( m
)
t ( s )
x B ( m
)
A
AB

Come si vede a seconda della grandezza della decelerazione si ha o meno un’intersezionefra i due grafici orari ed essa corrisponde all’eventuale collisione. Imponendo quindi lacondizione xA = xB dalle due precedenti equazioni si ricava:
xA = v0At – at2/2 = d – vBt = xB
da cui per l’istante di collisione t* (si scarta ovviamente la radice di valore maggiore):
t* = {(v0A – vB) - [(v0A – vB)2 –2ad]0.5}/2
Perché vi sia effettivamente un impatto t* deve risultare reale, quindi se il terminesotto radice quadrata è minore di zero la collisione non avviene. Imponendo questacondizione si ottiene il minimo valore di a necessario ad evitare lo scontro:
a > a* = (v0A – vB)2/2d
ovvero numericamente a* = 0.906 m/s2.
4) Scegliamo un asse coordinato verticale, orientato positivamente verso l’alto e conl’origine sul fondo del pozzo; misurando i tempi a partire dall’istante in cui siabbandona il sasso dalla sommità del pozzo, detta h la quota corrispondente, siper l’equazione oraria del sasso:
y = h - gt2/2
a) Dalla precedente equazione si ricava immediatamente la profonditàimponendo che per t = t* il sasso abbia raggiunto il fondo del pozzo,corrispondente a y = 0. Si ha:
h = gt*2/2 h = 122 m (1)
b) Il valore ora trovato non è corretto se teniamo conto che il suono sipropaga con una velocità finita e quindi che il tempo misurato t* è inrealtà la somma del tempo tc che il sasso impiega effettivamente araggiungere il fondo e del tempo ts che il suono (prodotto dall’urto delsasso ) impiega per giungere dal fondo alla cima del pozzo. Scriveremopertanto le seguenti relazioni che legano fra loro h ed i tempi considerati:
h = g tc2/2 h = vs ts
tc + ts = t*
Eliminando nelle precedenti equazioni tc e ts si ottiene l’equazione:

h2 – 2h(vst* + vs2/g) + (vst*)2 = 0
da cui h = (vst* + vs
2/g) – [(vst* + vs2/g)2 - (vst*)2]0.5
che fornisce il valore numerico h = 107 m.
c) Se l’operatore arresta il cronometro con un ritardo t , il tempoeffettivamente impiegato dal sasso a cadere (trascurando la velocità delsuono) sarà t’ = t*- t. La relazione corretta risulta quindi data da:
h = gt’2/2
da cui l’errore che si commette assumendo t* come tempo effettivo di caduta
Dh = gt*2/2 – gt’2/2 = gt*t - gt2/2
Numericamente risulta Dh = 4.85 m , e come si vede un piccolo ritardo nell’arrestodel cronometro comporta un errore (per eccesso) non trascurabile nelladeterminazione di h.
5) Scegliamo un asse coordinato diretto lungo la verticale ascendente con l’origine 0in corrispondenza del davanzale della finestra da cui si osserva. Indichiamo con hla quota, incognita, del punto da cui cade l’oggetto e scegliamo come istanteiniziale quello di inizio della caduta. Il corpo si muove di moto uniformementeaccelerato sotto l’azione della gravità; la sua equazione di moto è pertanto:
y = h - gt2/2 y
Se indichiamo con t’ il tempo che l’oggetto impiegaper arrivare al limite superiore della finestra ( y = l)e di conseguenza con ( t’ + t ) il tempo impiegatoper arrivare al davanzale (y = 0 ), avremo dall’equa-zione di moto le due relazioni:
l = h – gt’2/2 h
0 = h - g(t’ + t)2/2
Queste due equazioni consento di determinare i lvalori incogniti di t’ ed h ; risolvendo per quest’ulti-mo si ottiene: O
h = [ 1 + l/gt2 + gt2/4l ]l/2

e numericamente h = 8.78 m.
6) Le accelerazioni medie dei due veicoli sono determinate immediatamenteapplicando la definizione, e si ottiene:
a1 = V/T1 a1 = 1.91 m/s2
a2 = V/T2 a2 = 6.17 m/s2
I corrispondenti spazi percorsi nella fase di accelerazione sono dati da:
s1 = a1T12/2 = VT1/2 s1 = 62.5 m
s2 = a2T22/2 = VT2/2 s2 = 201.4 m
(Osservazione: nelle due precedenti relazioni lo spazio percorso è espresso come ilprodotto della velocità media per il tempo. In un moto uniformemente accelerato lavelocità media vm in un intervallo di tempo in cui la velocità passa dal valore v1 alvalore v2 è facilmente calcolabile essendo data dalla media aritmetica dei due valori,ossia da: vm = (v1 + v2)/2
Ovviamente quest’ultimo risultato vale soltanto per un moto uniformementeaccelerato. )
7) Consideriamo un asse coordinato nella direzione di marcia del veicolo e con lostesso verso; poniamo l’origine nel punto in cui si trova il veicolo all’inizio dellafrenata e corrispondentemente fissiamo l’istante iniziale. Le equazioni orariecorrispondenti a questo moto uniformemente accelerato sono:
x = v0t - at2/2 v = v0 – at
dove v0 è la velocità del veicolo all’inizio della frenata. Da queste, eliminando fra ledue il tempo, si ottiene una relazione diretta fra la posizione, l’accelerazione e levelocità: a = (v0
2 – v2 )/2x
a) Ponendo in questa relazione v = 0 ed x = s si ricava immediatamentel’accelerazione media:
a= v02/2s a = 4.96 m/s2
b) La precedente espressione mostra come, a parità di accelerazione, lo spazio difrenata cresca quadraticamente con la velocità iniziale del veicolo, quindi per unavelocità v’0 = 27.78 m/s ( 100 Km/h) si ha:

s’ = v02/2a s’ = 77.78 m
c) Se teniamo conto del tempo di reazione complessivo vi è una prima fase del moto, di durata t , in cui il veicolo si muove di moto rettilineo uniforme con velocitàpari a v0, seguito dalla fase di frenata. Quindi lo spazio totale di arresto diviene:
s* = v0t + s s* = 44.7 m
Nel caso in cui la velocità sia v’0 lo spazio di frenata divene:
s’* = v’0t + s’ s’* = 105.5 m
8) Indichiamo con t la durata dell’urto, misurata a partire dal contatto dellamacchina col muro, e con a l’accelerazione media; dalle equazioni orarie per lavelocità e lo spazio si ottiene al termine dell’urto ( ossia per t = t ):
v(t = t ) = 0 = v0 – at d = v0t - at2/2
dove v0 è la velocità iniziale del veicolo. Risolvendo per a e t si ottiene:
a= v02/2d a = 321.5 m/s2 ª 33 g
t = v0/a t = 43 ms
9) Si scelga un asse di riferimento verticale, orientato positivamente verso l’alto econ l’origine al livello del suolo, e si misuri il tempo a partire dall’istante didistacco della goccia. Le equazioni orarie per una goccia, soggetta soloall’accelerazione di gravità, sono:
v = -gt y = h - gt2/2
Da queste si può ricavare immediatamente la velocità della goccia, quando essaraggiunge il suolo, vs = v(y = 0):
vs = (2gh)0.5 v = 140 m/s = 504 km/h
Il tempo impiegato ad arrivare a terra è in questo caso pari a:
ts = (2h/g)0.5 = 2h/vs ts = 14.3 s
Da confrontare con il tempo che impiega muovendosi con velocità costante:

t0 = h/v0 t0 = 153.8 s
[ Osservazione - La velocità così calcolata è ovviamente irrealistica, ladeterminazione corretta del moto della goccia deve tener conto della resistenzadell’aria comme illustrato nel successivo esercizio 10). ]
10) Si scelga un asse di riferimento verticale, orientato positivamente verso l’alto econ l’origine al livello del suolo, e si misuri il tempo a partire dall’istante didistacco della goccia.
a) La goccia è soggetta ad una accelerazione diretta verso il basso data da:
a = - g - Kv
La velocità limite, costante, viene raggiunta quando si annulla l’accelerazione ossiaquando g + Kv = 0
da cui posto v = -v0 si ha K = g/v0 ossia K = 1.51 s-1.b) In modo analogo al precedente caso si ha quando la goccia ha raggiunto la velocitàlimite v = - v0:
a* = - g + Kv02 = 0
da cui K = g/v02 ossia K = 2.32 m-1.
c) L’equazione di moto della goccia nel caso a) è data da:
a = dv/dt = - (g + Kv) (1)
La derivazione delle equazioni orarie per la velocità e la posizione della goccia deveessere fatta integrando l’Eq. (1); separando le variabili si ottiene:
Kdv/( g + Kv ) = - Kdt
Integrando direttamente questa equazione, membro a membro, fra l’istante iniziale (t= 0 ) e l’istante generico t in cui la velocità vale rispettivamente v = 0 e v(t) siottiene:
†
Kdv 'g + Kv '0
v( t )Ú = -K dt'
0
tÚ
da cui
ln( 1 + Kv(t)/g) = -Kt

e infine invertendo il logaritmo:
v = v(t) = - (g/K)[1 – exp(-Kt)] = - v0[1 – exp(-Kt)] (2)
Si vede quindi che la velocità si avvicina esponenzialmente al valore limite v0 conuna costante di tempo pari ad (1/K).[NOTA: dicesi “costante di tempo”, relativa ad un andamento esponenziale di unagrandezza fisica, il tempo in cui l’esponenziale passa dal valore iniziale ( = 1 ) alvalore 1/e ].L’equazione oraria può essere ottenuta per integrazione diretta dell’Eq. (2), infatti siha: v = dy/dt = - v0[1 – exp(-Kt)]
e, separando le variabili: dy = - v0[1 – exp(-Kt)]dt
integrando direttamente fra l’stante iniziale ( t = 0 , h = 0 ) e l’istante generico t ( y =y(t) ) si ottiene:
†
dy = -v0 [1- exp(-Kt')]dt'0
tÚh
y( t )Ú
da cui y – h = - v0t + (v0/K)[1 – exp(-Kt)] (3)
I corrispondenti andamenti per il modulo della velocità e per la coordinata sonoriportati nelle figure in fondo all’esercizio ed indicati con la lettera c . Nel graficodella velocità è riportata anche la retta v = 0.9v0 la cui intersezione con la funzione v= v(t) fornisce il valore di t = t’ per cui si raggiunge il 90% della velocità limite. Nelgrafico della coordinata è riportata la retta t = t’ la cui intersezione con la funzione y= y(t) fornisce la distanza percorsa dalla goccia all’istante considerato; si noti chedopo tale istante il moto può essere considerato con buona approssimazione rettileouniforme.
La goccia quindi raggiungerà una velocità v = - 0.9v0 dopo un tempo t’ il cui valore siottiene immediatamente dall’Eq. (2):
v = - 0.9v0 = - v0[1 – exp(-Kt’)]da cui: t’ = - (1/K)ln(1 – v/v0) = ln(10)/K t’ = 1.52 s
La distanza Dy percorsa dalla goccia nel tempo t’ è calcolata immediatamente dall’Eq. (3)ponendo t = t’ e si ha:
Dy = h – y(t’) = v0t’ - (v0/K)[1 – exp(-Kt’)] = v0t’ - 0.9v0/K = v0t’ - 0.9v02/g
da cui Dy = 6 m.

d) In questo caso l’equazione di moto è data da:
dv/dt = a* = - g + Kv2 = - g[1 – (v/v0)2]
dove si è tenuto conto dell’espressione di K = g/v02.
Anche in questo caso separando le variabili e riordinando i termini si ottiene:
dv/v0[1 – (v/v0)2] = -(g/v0)dt
Questa equazione può essere integrata direttamente fra l’istante iniziale ( t = 0, v = 0) el’stante generico t ( v = v(t)):
†
11- (v '
v0)2
dv'v0
= -( gv0
) dt '0
tÚ0
v( t )Ú
da cui ln[(1 + v/v0)/( 1 – v/v0)] = -2(g/v0)t (4)
ossia invertendo il logaritmo:
v = v(t) = - v0tgh(gt/v0) (5)
Anche in questo caso la velocità limite viene raggiunta asintoticamente con una costantedi tempo dell’ordine di v0/g = 1/(Kg)0.5.Dall’Eq. (5) si puo infine ottenere l’equazione oraria, infatti risulta:
v = dy/dt = - v0tgh(gt/v0)
Da questa separando le variabili si ottiene:
dy = - v0tgh(gt/v0)dt
che integrata fra l’stante iniziale t = 0 ( y = h ) e l’stante generico t ( y = y(t) ) fornisce:
†
dy '= -v0 tgh(gt'v0
)dt '0
tÚ0
y( t )Ú
da cui y – h = - (v0
2/g)ln[cosh(gt/v0)] (6)
I corrispondenti andamenti per il modulo della velocità e per la coordinata sono riportatinelle figure in fondo all’esercizio ed indicati con la lettera d . Nel grafico della velocità èriportata anche la retta v = 0.9v0 la cui intersezione con la funzione v = v(t) fornisce ilvalore di t = t* per cui si raggiunge il 90% della velocità limite. Nel grafico dellacoordinata è riportata la retta t = t* la cui intersezione con la funzione y = y(t) fornisce ladistanza percorsa dalla goccia all’istante considerato; si noti che dopo tale istante il motopuò essere considerato con buona approssimazione rettileo uniforme.
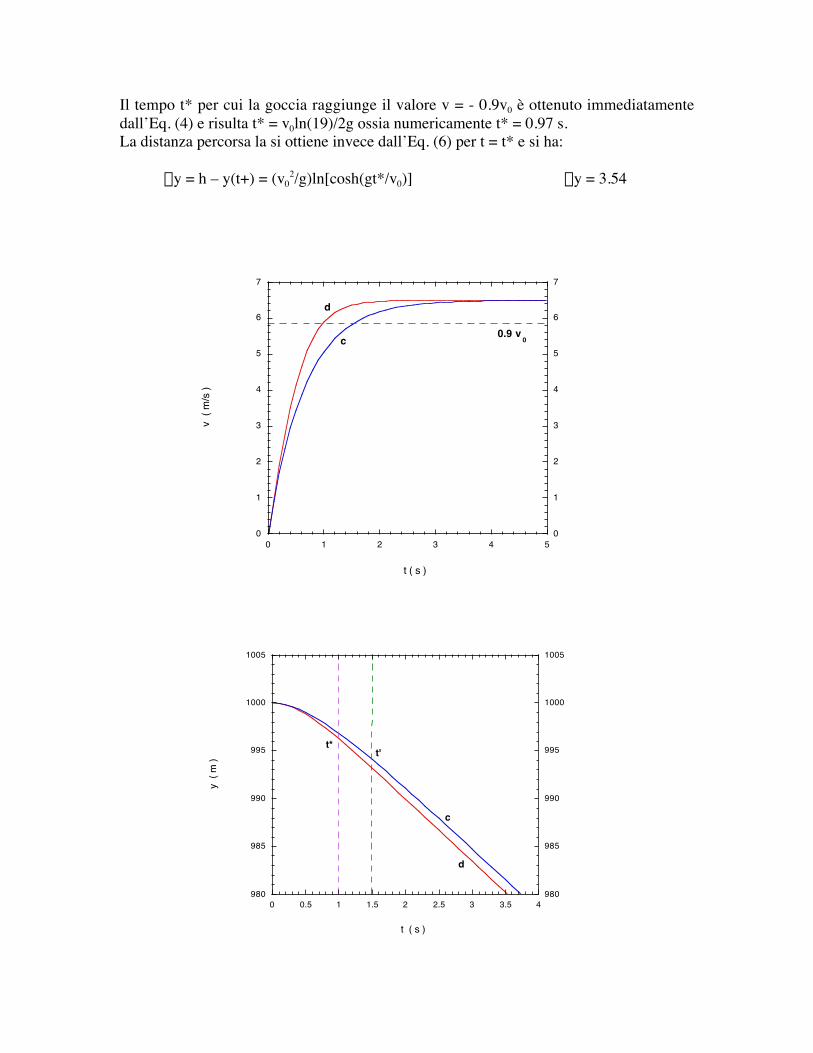
Il tempo t* per cui la goccia raggiunge il valore v = - 0.9v0 è ottenuto immediatamentedall’Eq. (4) e risulta t* = v0ln(19)/2g ossia numericamente t* = 0.97 s.La distanza percorsa la si ottiene invece dall’Eq. (6) per t = t* e si ha:
Dy = h – y(t+) = (v02/g)ln[cosh(gt*/v0)] Dy = 3.54
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0 1 2 3 4 5
v (
m/s
)
t ( s )
d
c 0.9 v0
980
985
990
995
1000
1005
980
985
990
995
1000
1005
0 0.5 1 1.5 2 2.5 3 3.5 4
y (
m )
t ( s )
d
c
t*t'

[ N.B. Il procedimento adottato per la soluzione dei punti c) e d) è esemplificativo delmetodo di soluzione che deve essere utilizzato nel caso generale: come si vede si procedeper integrazioni successive delle equazioni differenziali per la velocità e per la posizione.La determinazione completa dell’equazione oraria implica la conoscenza della velocità edella posizione (oppure di due posizioni) dell’oggetto a due istanti determinati.Osservazione. Le due espressioni adottate per la resistenza viscosa del mezzocorrispondono alle sue due schematizzazioni classiche la cui aderenza alla realtà dipendeda molteplici fattori. Senza entrare in dettagli si può dire che, in linea generale, laschematizzazione utilizzata al punto d) meglio si adatta al caso di una goccia, o di unaltro corpo (naturalmente varierà K ), che cade in aria. Sempre a grandi linee laschematizzazione del caso c) è invece più aderente al caso di una goccia di olio ( o di unaltro corpo ) che si muove in un acqua.]
11) Nel piano del moto del corpo scegliamo un sistema di riferimento con l’origine Onel punto da cui esso viene lanciato, l’asse x diretto lungo l’orizzontale nel versodella componente orizzontale della velocità e con l’asse y verticale e diretto versol’alto; si sceglie come istante iniziale quello del lancio del corpo. Dette v0x =v0cosq e v0y = v0sinq le componenti della velocità di lancio, le equazioni orarie,lungo i due assi, per la velocità sono:
vx = v0x = v0cosq (1) vy = v0y – gt = v0sinq - gt (2)
Per le coordinate del corpo si hanno le equazioni orarie:
x = v0xt = (v0cosq)t (3) y = v0yt - gt2/2 = (v0sinq)t - gt2/2 (4)
0
10
20
30
40
50
60
70
0 1 2 3 4 5
x ,
y
( m)
t ( s )

Nella figura precedente sono riportate i diagrammi orari per le coordinate x ed ycorrispondenti agli angoli di lancio q = p/6 (linea continua), q = p/4 (linea tratteggiata) eq = p/3 (linea con pallini). Le gittate raggiunte per i diversi angoli sono indicate dallefrecce.Le Eq. (3-4) forniscono la traiettoria del corpo in forma parametrica, in cui il parametro èil tempo, ed eliminado t fra di esse si ottiene l’equazione della traiettoria che come è notoè una parabola passante per O:
y = xtgq - gx2/2(v0cosq)2 = xtgq - g(1 + tgq2)x2/2v02 (5)
Nella figura seguente sono riportate le tre traiettorie corrispondenti agli angoli di lancio q= p/6 (linea continua), q = p/4 (linea tratteggiata) e q = p/3 (linea con pallini).
0
5
10
15
20
25
30
0 10 20 30 40 50 60 70
y (
m )
x ( m )
Le Eq. (1-5) consentono di rispondere a tutte le domande formulate nel testo.a) La gittata, ossia la distanza da O del punto in cui cade il corpo, la si ottiene
immediatamente dall’Eq. (5) ponendo in essa y = 0 : l’equazione così ottenuta
x[tgq - gx/2(v0cosq)2] = 0
ammette due radici che corrispondono all’intersezione della traiettoria con l’asse delleascisse, corrispondente al suolo. La prima radice, x = 0 , corrisponde ad O ossia alpunto di lancio del corpo, l’altra è quella che ci dà la gittata e risulta:
x = 2v02sinqcosq/g = v0
2sin2q/g
Da questa relazione si ottiene immediatamente che la gittata massima x* vieneraggiunta con un angolo q = b = p/4 e risulta x* = v0
2/g ; numericamente si ha x* =63.7 m.b) Il tempo t* che il corpo impiega per toccare terra nel punto x = x* lo si ottiene
dall’Eq. (3) per x = x* e si ha:

t* = x*/(v0cosb) = v0/(gcosb) t* = 3.6 s
c) Le componenti della velocità nell’istante dell’impatto t = t* sono forniteimmediatamente dalle Eq. (1-2) e risulta:
vx = v0x vy = - v0y
Pertanto il modulo della velocità è esattamente uguale a v0 , cioè quello che ha ilcorpo al momento del lancio, e l’unica differenza sta nel cambiamento di segno dellacomponente verticale della velocità.d) Il punto più alto della traiettoria viene raggiunto quando la componente verticaledella velocità si annulla, ossia all’istante t’ dato dall’equazione:
vy = v0y – gt = v0sinb - gt = 0
ossia per t’ = v0sinb/g = v0/2gcosb = t*/2 . Il risultato poteva anche essere scrittoimmediatamente tenendo conto che il vertice della parabola si trova esattamente nelpunto intermedio fra l’origine O ed il punto di impatto.Per quanto riguarda la velocità risulta immediatamente che, essendo nel vertice vy = 0, essa è orizzontale ed essendo questa componente costante nel tempo essa è pari av0cosb.La quota massima raggiunta dal corpo corrisponde giusto all’ordinata y’ del verticedella parabola e si ottiene immediatamente dall’Eq. (4) per t = t’ ( oppure dall’Eq. (5)per x = x*/2 ): y’ = (v0sinb)2/2g y’ = 15.93 m
12) L’equazione della traiettoria di un proiettile sparato con un alzo q e velocità v0 èdata dell’Eq. (11-5):
y = xtgq - gx2/2(v0cosq)2 = xtgq - g(1 + tgq2)x2/2v02 (1)
Se vogliamo che il proiettile colpisca un bersaglio posto in un punto P , di coordinatex = a ed y = b, dovremo imporre che la traiettoria passi per il punto P determinandodi conseguenza i valori di q per cui questa condizione è soddisfatta. Dalla Eq. (1) siottiene quindi l’equazione di II grado in tgq:
(b + ga2/2v02) – a tgq + (ga2/2v0
2) tgq2 = 0
le cui soluzioni sono:
tgq = (v02/ga) ± [(v0
2/ga)2 – ( 1 + 2bv02/ga2)]0.5 (2)

affinchè le soluzioni siano reali, e quindi esista una traiettoria che passa per P, deveessere:
(v02/ga)2 – ( 1 + 2bv0
2/ga2) ≥ 0ovvero: b £ v0
2/2g – (g/2v02) a2 (3)
Pertanto il bersaglio posto in P sarà colpito solo se le sue coordinate (a, b) soddisfanoquesta disequazione, ovvero se P si trova nella regione di spazio delimitata dagli assix ed y e dalla parabola definita dall’Eq. (3) con il segno di uguale ( detta “parabola disicurezza”):
y £ v02/2g – (g/2v0
2) x2
Si noti che in queste condizioni è sempre possible colpire un bersaglio impostandodue diversi alzi: l’angolo più piccolo corrisponde ad una traiettoria più tesa, quellomaggiore corrisponde ad una traiettoria a “colombella” o da mortaio.b) Fissate le coordinate del punto a = d e b = h , l’Eq. (3) fornisce immediatamente i
valori dei due angoli e risulta:
q+ = 1.22 rad = 69.93° q- = 0.426 rad = 24.40°
0
500
1000
1500
2000
2500
3000
3500
0
500
1000
1500
2000
2500
3000
3500
0 1000 2000 3000 4000 5000 6000 7000
y (
m )
x ( m )
ps
P
Nella figura è riportata la parabola di sicurezza, indicata con ps, e le due possibilitraiettorie con cui è possible colpire un bersaglio posto in P ( intersezione delle dueparabole).

13) Nel piano del moto del corpo scegliamo un sistema di riferimento con l’asse x ,posto a livello del terreno, diretto lungo l’orizzontale nel verso della componenteorizzontale della velocità dell’aereo, e con l’asse y verticale, diretto verso l’alto epassante per il punto in cui avviene il distacco del bullone; si sceglie come istanteiniziale quello del suo distacco dall’aereo. Le componenti della velocità delbullone all’istante iniziale, uguali a quelle della velocità dell’aereo, risultano v0x =v0cosq e v0y = v0sinq ; le equazioni orarie per le componenti della velocità sonoquindi:
vx = v0x = v0cosq (1) vy = v0y – gt = v0sinq - gt (2)
Per le coordinate del bullone al tempo t si ha:
x = v0xt = (v0cosq)t (3) y = h + v0yt - gt2/2 = h + (v0sinq)t - gt2/2 (4)
Eliminado t fra le Eq. (3-4) si ottiene l’equazione della traiettoria :
y = h + xtgq - gx2/2(v0cosq)2 (5)
a) La coordinata x* del punto di atterraggio la si ottiene immediatamente andando adeterminare in quale punto la traiettoria del bullone interseca il suolo ossiaponendo nell’Eq. (5) y = 0 ; si ottiene così:
x* = (v02sinqcosq/g) + [(v0
2sinqcosq/g)2 – 2h(v0cosq)2/g ]0.5
e numericamente risulta x* = 2916.52 mb) Il tempo di volo t* lo si ottiene dall’ Eq. (3) per x = x* e risulta:
t* = x*/(v0cosq) t* = 24.2 s
c) La velocità del bullone al momento dell’impatto si ricava dalle Eq. (1-2) per t =t*:
v*x = v0x = v0cosq v*x = 120.28 m/s v*y = v0y – gt* = v0sinq - gt* v*y = -167.95 m/s
Il modulo della velocità risulta quindi dato da v* =( v*x2 + v*y
2)0.5 = 206.6 m/s (653.7Km/h).
d) Il bullone raggiungerà la massima quota all’istante t’ in cui la componenteverticale della sua velocità si annulla; ponendo quindi vy = 0 nell’Eq. (2) si ricava:
t’ = v0sinq/g
da cui, sostituendo nell’Eq. (4):

y’ = y(t’) = h + (v0sinq)2/2g y’ = 1445.8 m
e) Poichè la componente orizzontale della velocità rimane costante durante il moto,il minimo valore di v lo si ottiene quando si annulla la componente verticale dellavelocità, ossia al vertice della traiettoria, e risulta uguale a v0x = v0cosq ;ugualmente la velocità è massima quando è massima la sua componente verticale,ossia al momento dell’impatto col terreno, e risulta quindi uguale a v*.
Nel grafico di figura è riportata la traiettoria parabolica del bullone e la treiettoriadell’aereo da cui si sgancia (linea tratteggiata )
0
400
800
1200
1600
0
400
800
1200
1600
0 500 1000 1500 2000 2500 3000
y ( m
)
x ( m )
14) Scegliamo un sistema di riferimento con l’origine O nel punto in cui si trova lastazione radar, l’asse x orizzontale ed orientato nel verso di V e l’asse y verticaleorientato positivamente verso l’alto; scegliamo come istante iniziale quello in cuiil proiettile ha raggiunto l’apice della traiettoria. Le coordinate e le componentidella velocità del proiettile all’istante iniziale sono quindi:
x0 = -Lcosq v0x = V y0 = Lsinq v0y = 0
Le equazioni orarie per le coordinate del proiettile e per le componenti della velocitàsono quindi: v0x = V v0y = -gt (1)
x = -Lcosq + Vt y = Lsinq - gt2/2 (2)
a) Il priettile toccherà terra all’istante t = t* dato dall’equazione y = y(t*) = 0 ; dallaEq. (2) si ricava:

t* = (2Lsinq/g)0.5 t* = 16.6 s
per cui la coordinata del punto d’impatto risulta data da :
x* = -Lcosq + Vt* x* = 2641 m
Il proiettile atterra quindi alla destra della stazione radar.b) La traiettoria del proiettile è simmetrica rispetto alla linea verticale passante per il
vertice della parabola ( quindi esso impiega un tempo uguale a t* per arrivare dalpunto di sparo all’apice della traiettoria ) e la distanza lungo l’orizzontale delvertice dal punto di sparo è uguale a Vt* (uguale alla distanza in orizzontale fra ilvertice ed il punto di atterraggio). La coordinata del cannone X risulta quindi:
X = -Lcosq - Vt* X = -7318 m
c) La componente orizzontale della velocità del proiettile è costante; la componenteverticale, sempre per la simmetria della traiettoria, ha invece all’istante iniziale unvalore uguale ed opposto a quello che ha al momento dell’atterraggio. Pertanto siha:
v0x = V v0y = gt* = (2Lgsinq)0.5 v0 = (V2 + 2Lgsinq)0.5
e quindi numericamente v = 341 m/s.L’alzo b è dato immediatamente dalla relazione:
tgb = v0y/v0x = (2Lgsinq)0.5/V b = 0.497 rad = 28.5°
0
500
1000
1500
2000
0
500
1000
1500
2000
-1 104 -8000 -6000 -4000 -2000 0 2000 4000
y ( m
)
x ( m )
L
O
V
y
q

15) Scegliamo un sistema di riferimento con l’asse x orizzontale, a livello del suolo, el’asse y verticale, ascendente, e passante per il punto di lancio della freccetta;scegliamo come istante iniziale quello di distacco della mela dal ramo.
a) Le equazioni orarie della mela sono:
xM = d yM = h - gt2/2 (1)
mentre quelle della freccetta, scagliata al momento del distacco della mela, sono:
x = (v0cosq)t (2) y = l + (v0sinq)t - gt2/2 (3)
dove v0 è la velocità di lancio e q è l’angolo che essa forma con l’orizzontale.La freccetta colpirà la mela se ad un determinato istante t* esse hanno le stessecoordinate, quindi dovrà risultare:
xM = x Æ d = (v0cosq)t* (4) yM = y Æ h – gt*2/2 = l + (v0sinq)t* - gt*2/2
eliminando fra queste due equazioni il tempo t* si ottiene l’angolo q di lancio:
tgq = ( h – l )/d q = 0.38 rad = 21.78°
Per colpire la mela si dovrà quindi mirare esattamente verso il punto di distacco dalramo.
b) Le precedenti equazioni determinano la quota a cui si colpisce la mela infunzione della velocità v0 ; esiste quindi un valore minimo della velocitàper cui è possibile colpire il bersaglio prima che tocchi terra ed è fornitodalla condizione:
yM = h – gt*2/2 > 0
per cui ricavando dall’Eq. (4) il valore di t* = d/(v0cosq) e sostituendo nelladisuguaglianza si ottiene:
v0 > (d/cosq)(g/2h)0.5 v0 > 6.88 m/s
In figura è riportata la traiettoria della freccetta per una velocità v0 = 10 m/s.

0
0.5
1
1.5
2
2.5
3
3.5
0
0.5
1
1.5
2
2.5
3
3.5
0 1 2 3 4 5 6 7
y (
m )
t ( s )
h
l
v0
q
c) Una volta che la velocità v0 sia stata fissata ad un determinato valore sipotrà colpire la mela ad una quota prefissata scegliendo opportunamentel’istante di lancio t’ e la direzione di lancio b della freccetta.
Le equazioni orarie della mela rimangono inalterate, rispetto al caso a), mentre quelledella freccetta, tenendo conto del ritardo t’ nel suo lancio, divengono:
x = (v0cosb)(t – t’) (4) y = l + (v0sinb)(t – t’) – g(t – t’)2/2 (5)
Dovendo la freccetta colpire la mela quando essa passa per il punto a quota l dovràrisultare:
d = (v0cosb)(t – t’) l = l + (v0sinb)(t – t’) – g(t – t’)2/2
con t dato dall’equazione: yM = l = h – gt2/2
Risolvedo queste tre equazioni si ottiene:
sin2b = gd/v02 b = 0.325 rad =18.64°
t = [2(h – l)/g]0.5 t = 0.638 s
t’ = t – d/(v0cosb) t’ = 52 ms
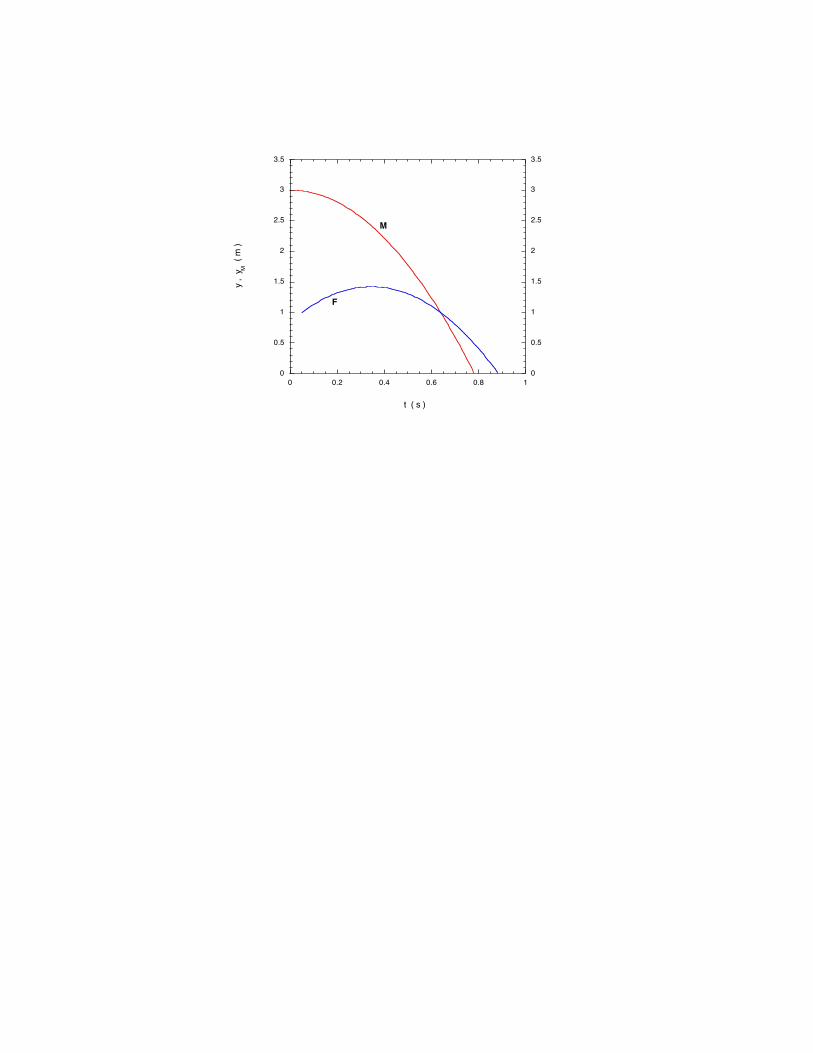
Nella figura seguente sono riportate le equazioni orarie per le quote della freccetta ( F) e della mela ( M ).
0
0.5
1
1.5
2
2.5
3
3.5
0
0.5
1
1.5
2
2.5
3
3.5
0 0.2 0.4 0.6 0.8 1
y ,
y M (
m )
t ( s )
M
F

16) In tutti i casi presi in considerazione nelle varie domande si ha a che fare conmoti circolari uniformi; quindi la velocità v e l’accelerazione centripeta a sonodati, in modulo, dalle seguenti espressioni:
w = 2pn = 2p/T v = wR a = w2R = vw = v2/R
dove R è il raggio della circonferenza, T è il periodo associato col moto in esame e wla frequenza angolare. Utilizzando i dati forniti per i vari casi si ha quindi:
a) n = 10 Hz T= 0.1 s w = 62.8 rad/s v = 31.4 m/s a = 1972 m/s2 = 201 g
b) T = 24 h = 86400 s w = 7.27 10-5 rad/s v = 463 m/s a = 3.36 10-2 m/s2 = 3.43 10-3 g
c) T = 365 gg = 3.134 107 s w = 1.99 10-7 rad/s v = 2.98 104 m/s a = 5.93 10-3 m/s2 = 6.04 10-4 g
d) T = 2 1011 a.a. = 6.27 1018 s w = 1.00 10-18 rad/s v = 3.096 10-7 m/s a = 3.10 10-25 m/s2
17) Consideriamo un pianeta che si muove su un’orbita circolare di raggio R con unavelocità angolare w = 2p /T , dove T è il periodo di rivoluzione attorno al Sole;l’accelerazione centripeta a cui è soggetto vale:
a = w2R = (2p/T)2R = (2p/R)2K = 4.23 1019/R2
dove si è sfruttata, nelle ultime espressioni la III Legge di Keplero.Dato che questa relazione, che esprime l’accelerazione come il prodotto di una costanteper l’inverso del quadrato della distanza del pianeta dal Sole, vale identica qualunque siail pianeta considerato ne segue che essa è l’espressione di una stessa legge fisica. Questarelazione sta alla base delle considerazioni che portarono Newton a formulare la Legge diGravitazione universale secondo cui due corpi puntiformi dotati di “massa” interagisconocon una “forza” attrattiva inversamente proporzionale al quadrato della loro distanza ediretta lungo la congiungente i due corpi. L’accelerazione con cui i pianeti ed i satelliti simuovono sulle loro orbite e l’accelerazione di gravità sono il risultato di questainterazione detta “gravitazionale”
18) a) In prossimità della superficie terrestre ogni corpo è soggetto all’accelerazionedi gravità g ( = 9.81 m/s2) diretta perpendicolarmente al suolo e quindi verso ilcentro della terra. Questa accelerazione è il risultato dell’interazione

gravitazionale fra la Terra ed il corpo ed in base alla Legge di Gravitazioneuniversale essa è inversamente proporzionale al quadrato della distanza del corpodal centro della Terra, pari al raggio terrestre RT. Si ha quindi la relazione chefissa il valore della costante di proporzionalità:
g = C/RT 2 C = 3.98 1014 m3/s2
b) In base alla Legge di Gravitazione universale l’accelerazione centripeta acui è soggetta la Luna nel suo moto attorno alla terra è data dallarelazione:
a = w2RTL = (2p/T)2RTL = C/RTL2 = gRT
2/RTL2
Dove T è il periodo di rivoluzione della Luna attorno alla Terra. Si ottiene allora daquesta relazione:
T = 2p(RTL3/C)0.5 T = 2.37 106 s = 27.43 gg
valore che, nei limiti delle approssimazioni fatte circa l’orbita della Luna, è in ottimoaccordo con il valore effettivo.Queste valutazioni, effettuate in modo più raffinato e preciso, furono fatte dallo stessoNewton per verificare la validità della Legge di Gravitazione universale.c) Per un satellite artificiale che orbita attorno alla Terra periodo di rivoluzione T ( ovelocità angolare w) e raggio dell’orbita R , supposta circolare, sono strettamentecorrelate dalla stessa relazione che abbiamo visto valere per la Luna ed abbiamo:
a = w2R = (2p/T)2R = C/R2 = gRT 2/R2
Nel caso di un satellite geostazionario la sua velocità angolare dovrà essere esattamenteuguale a quella della Terra di modo che la sua posizione rimanga fissa sopra la verticale,o raggio, passante per un punto della superficie terrestre. Quindi risulta T = 24 h = 86400s ed w = 7.27 10-5 rad/s da cui:
R = (C/w2)1/3 R = 4.22 107 m = 6.63 RT
19) a) Nell’ipotesi che il razzo si muova con velocità radiale costante v il tempo t*impiegato a coprire la distanza Terra-Luna è dato dalla relazione:
t* = (RTL - RT)/v t* = 6.85 gg = 5.9184 105s
b) Indichiamo con r e RL i raggi che uniscono in centro della Terra al razzoed alla Luna rispettivamente e con q e qL gli angoli che essi fanno rispettoad uno stesso asse polare di riferimento, che scegliamo coincidente con la

v
RL r q qL
congiungente Terra-Luna all’istante di lancio del razzo che scegliamo comeistante iniziale t = 0. Perchè il razzo colpisca la Luna, di cui si trascurano ledimensioni, all’istante t* questi due raggi dovranno essere sovrapposti equindi q e qL dovranno essere uguali a meno di un multiplo intero di 2p.Essendo all’istante t = 0 qL = 0 e q = q0 , le equazioni orarie per lecoordinate angolari del razzo e della Luna sono:
q = q0 + wTt qL = wLt
dove wT è la velocità angolare del razzo , uguale a quella della Terra da cui vienelanciato, e wL ( = wT/28 ) la velocità angolare della Luna. Per quanto detto al tempo t*deve risultare
q = qL Æ q0 + wTt* = wLt* + 2pnda cui: q0 = ( wL - wT )t* + 2pn = - (27/28)wTt* + 2pn
numericamente risulta q0 = -0.60 2p = - 3.79 rad = - 217.3°. Per la coordinata angolaredella Luna al momento dell’impatto si ha invece: qL = wLt* ossia qL = 1.537 rad = 88.1°.Le traiettorie della Luna (traccia circolare blu) e del razzo (spirale tratteggiata rossa )sono riportate nel diagramma polare A della figura (v anche domanda e). Come si vede inquesto caso il razzo compirebbe, durante il suo avvicinamento alla Luna, circa 7 giriattorno al’asse di rotazione terrestre. Nel diagramma polare B è riportato uningrandimento della parte iniziale del moto del razzo (traccia rossa)
c) La velocità vR del razzo quando raggiunge la Luna è la risultante dellacomponente radiale, pari a v, e della componente angolare pari a wTRTL ,quindi si ha:

vR = [v2+ (wTRTL)2]0.5 vR = 28 Km/s
d) In un punto qualsiasi della traiettoria a distanza r dal centro della Terra lavelocità vR del razzo è data da:
vR = [v2+ (wTr)2]0.5
Per l’accelerazione tangenziale risulta quindi dalla sua definizione, tenendo conto chedr/dt = v :
at = dvR/dt = (dvR/dr)dr/dt = wT2vr/[v2+ (wTr)2]0.5
La massima accelerazione tangenziale la si ha per r = RTL per cui risulta numericamenteat = 4.64 10-2 m/s2 .
e) La traiettoria del razzo può essere calcolata immediatamente a partiredalle equazioni orarie per le sue coordinate radiali ed angolari; si hainfatti:
r = RT + vt q = q0 + wTt (1)
Eliminando il tempo fra queste due equazioni si ottiene:
r - RT = v(q - q0 )/wT
equazione che corrisponde ad un ramo di spirale di Archimede come mostrato neidiagrammi polari delle figure.f) In questo caso la velocità angolare w del razzo diminuisce con la distanza dal centrodella Terra, ossia del tempo, e precisamente risulta:
w = dq/dt = RT2wT/r2 = RT
2wT/(RT + vt)2 (2)
dove nell’ultima espressione si è usata l’Eq. (1) per esprimere la distanza r in funzionedel tempo. L’Eq. (2) può essere integrata separando le variabili e si ottiene:
†
dq'=q 0
q
Ú dt 'RT2wT RT + vt'( )2
0
tÚ
da cui: q - q0 = wTt/(1 + vt/RT) (3)
Imponendo come prima che per t = t* la Luna e il razzo abbiano la stessa coordinataangolare, a meno di multipli di 2p , si trova per l’angolo di lancio
q0 = wLt* - wTt*(RT/RTL)

e numericamente q0 = 0.823 rad = 47.1°. Anche in questo caso si ottiene l’equazione dellatraiettoria eliminando il tempo fra l’Eq. (3) e la prima delle Eq. (1) e si ha:
RT(1 - RT/r ) = v(q - q0 )/wT
Nei grafici polari della figura la traiettoria del razzo è in questo caso rappresentata daltratto di spirale di colore verde; il raggio disegnato individual la direzione di lancio delrazzo, corrispondente a q0 = 47.1°.
A B
05 104
1 105
1.5 105
2 105
2.5 105
3 105
3.5 105
4 105
0
30
60
90
120
210
240
270
300
330
r ( K
m )
5000
1 104
1.5 104
2 104
2.5 104
3 104
3.5 104
4 104
0
30
60
90
120
210
240
270
300
330
r ( K
m )
20) Il primo ciclista si muove di moto uniforme lungo l’anello del velodromo, quindi convelocità angolare costante w1; velocità lineare v1 ed equazione oraria per la coordinataangolare q1 sono dati da:
v1 = w1R q1 = q10 + w1t = p/2 + w1t (1)
Nello scrivere le Eq. (1) si è supposto di misurare l’angolo q a partire della linea dipartenza (e di arrivo) dei corridori e si è scelto come istante iniziale quello in cui parteil secondo corridore , per cui q1(t = 0)= q10 = p/2. Durante il suo moto il ciclista 1sarà soggetto unicamente all’ accelerazione centripeta ar1 = w1
2R.Il secondo ciclista si muove con accelerazione angolare a costante ossia di motouniformemente accelerato. Con le scelte fatte per il riferimento angolare e l’istanteiniziale abbiamo le seguenti relazioni per l’equazioni orarie, la velocità lineare v2,l’accelerazione tangenziale at2 e l’accelerazione centripeta ar2:
q2 = at2/2 w2 = at

1 2
q1 q2
O
v2 = w2R at2 = aR ar2 = w22R
a) Tenuto conto dell’angolo descritto dal raggio che individua la posizione del primociclista nel tempo t* si ha:
w1 = [q1(t*) - q10]/t* = 19p/2t* w1= 0.166 rad/s v1 = 10.8 m/s = 38.8 Km/h
b) Dall’equazione oraria del secondo ciclista si ha per l’accelerazione angolare etangenziale:
a = 2q2(t*)/t*2 = 20p/t*2 a = 1.94 mrad/s2 at2= 0.126 m/s2
c) Dall’equazione oraria per la velocità del secondo ciclista si ha quando arriva altraguardo:
w*2 = w2(t*) = at* = 20p/t* w*2 = 0.349 rad/s v*2 = 22.7 m/s = 81.7 km/h
d) Per il modulo delle accelerazioni dei due ciclisti sul traguardo si ha infine :
a*1 = ar1 = w12R a*1 = 1.79 m/s2
a*2 = [at22+ ar2
2]0.5 = [(aR)2+ (w*22R)2]0.5 a*2 = 2.81 m/s2
21) In ogni punto della traiettoria è nota l’accelerazione totale agente sul proiettile cherisulta pari all’accelerazione di gravità g. Inoltre con i dati forniti è possibilecalcolare la traiettoria. che risulta essere una parabola data dell’Eq. (11-5), equindi in ogni punto è possibile calcolare la tangente alla traiettoria e la velocità.Le componenti tangenziale at e normale an dell’accelerazione possono quindiessere calcolate proiettando g lungo la direzione tangente e normale alla taiettoria;

infine il raggio di curvatura r = v2/an può essere calcolato utilizzandol’espressione generale dell’accelerazione normale.
a) La tangente alla traiettoria è individuata dalla direzione della velocità quindiforma con l’orizzontale un angolo q . Le componenti dell’accelerazione e il raggiodi curvatura sono pertanto dati da:
an = gcosq an = 8.49 m/s2
at = -gsinq at = - 4.9 m/s2
r = v02/gcosq r = 7357 m
La componente tangenziale dell’accelerazione può ovviamente essere calcolataricorrendo alla sua definizione at = dv/dt ottenendo identico risultato; si noti il segno– nell’espressione di at che indica un decremento del modulo della velocità in questaparte della traiettoria, ovvero un verso di at opposto a quello di v.b) Nel punto più alto della traiettoria la tangente e quindi la velocità v’ sonoorizzontali e v’= v0cosq, ne segue pertanto immediatamente:
at = 0 an = g an = 9.81 m/s2
r = (v0cosq)2/g r = 4778 m
All’apice della traiettoria risulta at = 0 in conseguenza del fatto che il modulo dellavelocità risulta minimo in questo punto.c) Essendo la traiettoria simmetrica rispetto alla retta passante per il vertice della
parabola risulta immediatamente che le componenti dell’accelerazione ed ilraggio di curvatura sono uguali in modulo a quelle che si hanno nel punto dilancio, calcolate in a). L’unica differenza riguarda il segno dell’accelerazionetangenziale che in questo caso risulta positiva dato che il modulo della velocità, inquesta parte della traiettoria, aumenta (verso di at concorde con quello di v).
y
v’ v0 q x at q v’’ an an g
g at g

22) La velocità della barca, rispetto alla riva, è la somma vettoriale della velocità concui essa si muove rispetto all’acqua e della velocità di quest’ultima checorrisponde alla velocità di trascinamento. In questo caso la denominazione di“velocità di trascinamento” ha un significato immediato ed intuitivo in quanto labarca immessa nell’acqua, senza velocità alcuna rispetto ad essa, viene trascinatadalla corrente con velocità V. Volendo formalizzare il problema possiamo direche si ha un sistema di riferimento S solidale con la riva del fiume, un sistema diriferimento mobile S’ , solidale con l’acqua del fiume, che trasla rispetto ad S convelocità V, ed infine la barca che si muove relativamente ad S’ con velocità vB. Lavelocità v della barca rispetto alla riva ( ossia nel sistema S ) è quindi data da:
v = V + vB (1)
Questa relazione consente di rispondere a tutte le varie domande.a) La velocità della barca v , data dalla Eq. (1) con vB = v0 , è costante quindi la
barca si muove lungo la retta individuata dalla direzione di v a partire dallaposizione iniziale A sulla riva; l’intersezione B di questa retta con la riva oppostaindividua il punto di arrivo. Si ha pertanto per l’angolo q che v forma con le rive:
tgq = v0/V q = 0.38 rad = 21.8°
Quindi indicando con H il punto opposto ad A sull’altra riva del fiume , la distanza D= BH risulta data da:
D = L/tgq = LV/v0 D = 150 m
H B
v0 v L q V
A
b) Il tragitto spazialmente più breve è quello che va dal punto di partenza A al puntoH opposto ad esso sull’altra riva. Perchè la barca segua questo tragitto la velocitàv dovrà essere diretta lungo la retta passante per A ed H, quindi la suacomponente in direzione parallela alla riva dovrà essere nulla, ossia, in baseall’Eq. (1), la componente di vB parallela alla riva dovrà essere uguale ed oppostaa V :
V + vBcosq = 0 Æ vB = - V/cosq (2)
Il valore minimo di vB lo si ha in corrispondenza di un angolo che differisca da p diuna quantità infinitesima , quindi per vB = v* = V. E’ evidente che se non si è in grado
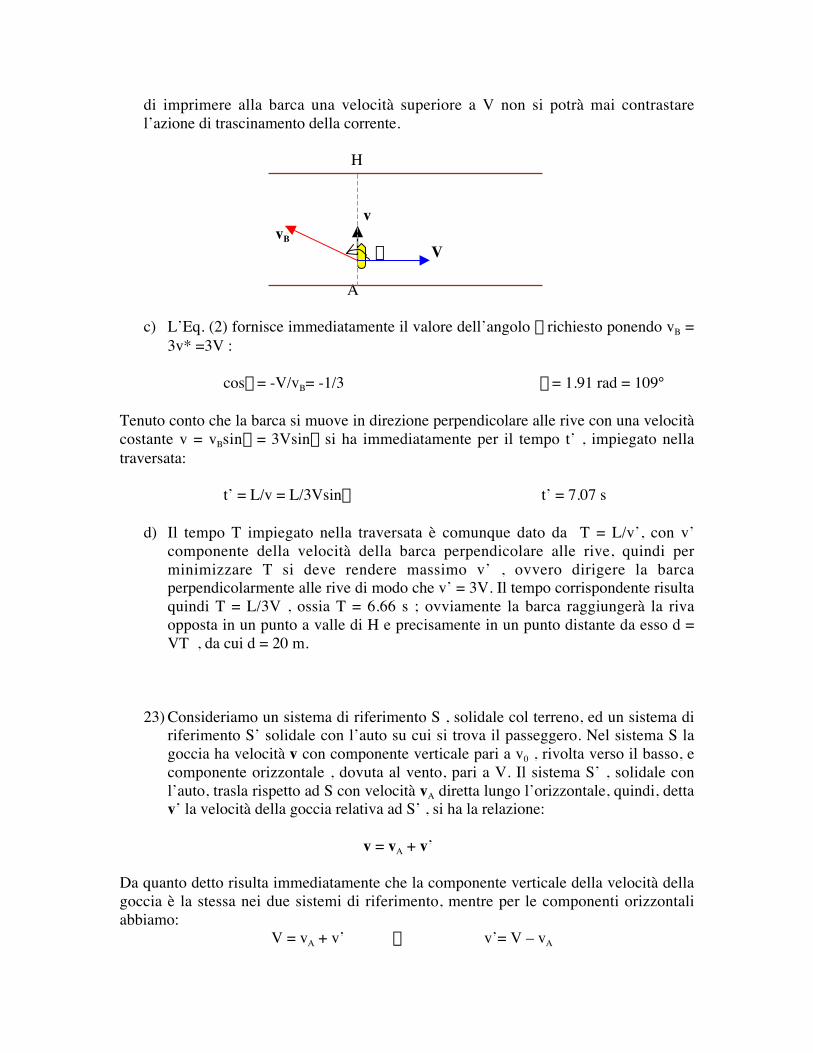
di imprimere alla barca una velocità superiore a V non si potrà mai contrastarel’azione di trascinamento della corrente.
H
v vB q V
A
c) L’Eq. (2) fornisce immediatamente il valore dell’angolo q richiesto ponendo vB =3v* =3V :
cosq = -V/vB= -1/3 q = 1.91 rad = 109°
Tenuto conto che la barca si muove in direzione perpendicolare alle rive con una velocitàcostante v = vBsinq = 3Vsinq si ha immediatamente per il tempo t’ , impiegato nellatraversata:
t’ = L/v = L/3Vsinq t’ = 7.07 s
d) Il tempo T impiegato nella traversata è comunque dato da T = L/v’, con v’componente della velocità della barca perpendicolare alle rive, quindi perminimizzare T si deve rendere massimo v’ , ovvero dirigere la barcaperpendicolarmente alle rive di modo che v’ = 3V. Il tempo corrispondente risultaquindi T = L/3V , ossia T = 6.66 s ; ovviamente la barca raggiungerà la rivaopposta in un punto a valle di H e precisamente in un punto distante da esso d =VT , da cui d = 20 m.
23) Consideriamo un sistema di riferimento S , solidale col terreno, ed un sistema diriferimento S’ solidale con l’auto su cui si trova il passeggero. Nel sistema S lagoccia ha velocità v con componente verticale pari a v0 , rivolta verso il basso, ecomponente orizzontale , dovuta al vento, pari a V. Il sistema S’ , solidale conl’auto, trasla rispetto ad S con velocità vA diretta lungo l’orizzontale, quindi, dettav’ la velocità della goccia relativa ad S’ , si ha la relazione:
v = vA + v’
Da quanto detto risulta immediatamente che la componente verticale della velocità dellagoccia è la stessa nei due sistemi di riferimento, mentre per le componenti orizzontaliabbiamo: V = vA + v’ Æ v’= V – vA

Avendo scelto un sistema di riferimento con l’asse orizzontale orientato positivamentenel verso in cui spira il vento; l’equazione mostra che la velocità relativa v’ risulteràcomunque positiva se la macchina si muove nel verso opposto a quello in cui spira ilvento, mentre se si muove nello stesso verso sarà v’ > 0 ( < 0 ) se vA < V ( > V).Nel caso in cui la macchina è ferma (vA = 0 ) v’ = V , l’angolo q0 che la traccia dellagoccia forma con la verticale discendente è dato dalla relazione:
tgq0 = v’/v0 = V/v0 (1)
Invece nel caso in cui la macchina sia in movimento l’angolo q è dato dalla relazione:
tgq = v’/v0 = (V – vA)/v0 (2)
Dalle equazioni (1-2) si ottiene per V e v0:
v0 = vA/( tgq0 - tgq) v0= 7.7 m/s V = v0tgq0 V = 4.44 m/s
24) Il problema può essere risolto nel modo più semplice considerando un sistema diriferimento S’ solidale con la nave B, quindi che trasla con velocità costante vBrispetto al sistema di riferimento S solidale con la banchina del porto. La velocitàdell’imbarcazione A rispetto ad S’ , v’A ,è data da:
vA = vB + v’A Æ v’A = vA – vB
Tenendo conto che le velocità delle navi sono uguali in modulo, un passeggero dellanave B vedrà avvicinarsi la nave A , lungo una retta corrispondente alla bisettricedell’angolo formato dalle rotte delle due navi, con una velocità di modulo v’A =2vAcosf = 2vcosf con f = (p – b)/2 ( naturalmente lo stesso passeggero vede ancheavvicinarsi le banchine del porto con velocità vA ). Nel disegno la linea continua blu (individuata dalla velocità relativa v’A) rappresenta la traiettoria della nave A come èvista da un passeggero della nave B.a) Tenuto conto che le rotte delle navi si intersecano in corrispondenza
dell’inboccatura del porto P (corrispondente anche alla posizionedell’imboccatura del porto in S’ all’istante iniziale ) e che la minima distanza dfra le due navi corrisponde alla distanza BH della nave B dalla rota seguita da Anel sistema di riferimento S’ si ha immediatamente dal triangolo PBH:
d = Dsinf d = 259 m
b) Quando la nave A raggiunge , al tempo t*, la minima distanza da B si trova, inS’, ad una distanza dalla sua posizione iniziale pari alla lunghezza l d e l

segmento PH e risulta l = Dcosf. Muovendosi con velocità costante v’A lungo lasua rotta, il tempo t* risulta dato da:
t* = l/v’A = D/2v t* = 50 s
A P
f f D vA P’
v’A
vB B d H
c) Le distanze delle due navi dall’imboccatura del porto P al tempo t* risultanodate immediatamente dalle relazioni:
dA = vt* = D/2 dA = 500 m dB = D - vt* = D/2 dB = 500 m
25) a) Scelto il sistema S solidale con la tromba dell’ascensore, possiamo risolvere ilproblema scrivendo le equazioni di moto per il bullone ed il pavimentodell’ascensore. Il bullone cade, partendo da fermo dato che la velocitàdell’ascensore nell’ istante di distacco è nulla, sotto l’azione della accelerazione digravità. Pertanto scelto un asse y verticale, orientato positivamente verso l’alto, el’origine O in corrispondenza della quota del pavimento dell’ascensore all’istanteiniziale, le equazioni orarie per la coordinata e la velocità del bullone sono dateda:
yB = h – gt2/2 vB = -gt (1)

Il pavimento dell’ascensore nell’istante in cui il bullone si stacca inizia a muoversiverso l’alto, partendo da fermo, con accelerazione costante A. Le sue equazioni orariesono pertanto:
yP = At2/2 vP = At (2)
Nell’istante t = t* in cui il bullone urta il pavimento dell’ascensore le loro coordinatesaranno uguali, pertanto si ha l’equazione:
yB = yP Æ h – gt*2/2 = At*2/2
che fornisce per l’istante cercato:
t* = [2h/(g + A)]0.5 t* = 0.61 s
Per le velocità del bullone e del pavimento all’istante dell’urto si ha invece:
v*B = -gt* vB = -5.98 m/s v*P = At* vP = 1.22 m/s
La velocità del bullone rispetto al pavimento v’* è quindi , nell’istante considerato:
v’* = v*B – v*P = - (g + A)t* = - [2h(g + A)]0.5 v’ = -7.2 m/s
y y’ S S’ A
g g a’
-A
b) Il sistema S’ solidale con la gabina dell’ascensore è quello di un passeggero delmedesimo che vede staccarsi, con velocità nulla, il bullone dal soffitto. Il sistemaS’, che scegliamo con un asse verticale y’, orientato verso l’alto, e con l’origineO’ sul pavimento dell’ascensore , trasla rispetto ad S con accelerazione A evelocità istantanea vP , rivolte verso l’alto. Indicate con a’ e con v’ l’accelerazionee la velocità relativa del bullone in S’ , si hanno le relazioni fra le accelerazioni ele velocità in S ed S’ :
vB = vP + v’ - g = A + a’

Quindi il bullone si muove in S’ di moto rettilineo uniformemente accelerato sottol’azione di una accelerazione a’ = - (g + A). Di conseguenza le sue equazioni orariesaranno in S’:
y’B = h + at2/2 = h – (g + A)t2/2 v’ = a’t = -(g + A)t
Imponendo la condizione y’B = 0 nella prima equazione si determina l’istante t* diimpatto col pavimento e conseguentemente la velocità, con risultati ovviamenteuguali a quelli trovati al punto a).
y y’ S S’
-A*
g a’
A* g
c) Nel caso che l’ascensore si muova verso il basso con accelerazione A*= -A leequazioni scritte risultano uguali con l’eccezione del segno dell’accelerazione.Cambiando nelle precedenti equazioni A con – A si ottiene per il tempo di impatto
t’ = [2h/(g - A)]0.5 t’ = 0.75 s
e per la velocità
v” = - (g - A)t* = - [2h(g - A)]0.5 v” = - 5.86 m/s
Come si vede il tempo di caduta risulta più lungo e la velocità di impatto più piccolarispetto ai valori determinati per il caso precedente.
26) Nel sistema di riferimento S solidale con il terreno il corpo si muove sottol’azione dell’accelerazione di gravità g e, essendo la sua velocità iniziale nulla, simuove lungo la verticale. Il sistema di riferimento S’ trasla lungo l’orizzontale,rispetto ad S. Indichiamo con v’ e a’ la velocità e l’accelerazione del corpo nelsistema S’ (velocità ed accelerazione relative) e con V e A la velocità istantaneadi traslazione e l’accelerazione di S’ rispetto ad S (velocità ed accelerazione di

trascinamento). Le accelerazioni a cui è soggetto il corpo e le velocità nei duesistemi di riferimento sono legate fra loro dalle relazioni:
g = a’ + A v = v’ + V (1)
y S h
g v0 A x
y’ S’
- v0 -A
x’
g a’
Per i due sistemi di riferimento si scelgono: gli assi y ed y’ diretti lungo la verticale,orientati positivamente verso l’alto e coincidenti all’istante iniziale con la verticalepassante per il corpo; gli assi x e x’ orizzontali e a livello del suolo. (N.B. Nelle figuregli assi risultano traslati per necessità di chiarezza grafica). L’istante iniziale t = 0viene fissato al momento del distacco del corpo e si suppone l’accelerazione A e lavelocità V ( orizzontali) dirette nel verso opposto a quello di orientazione degli assi xe x’.L’equazioni (1) , proiettate lungo gli assi coordinati forniscono per le componentidell’accelerazione a’ e della velocità iniziale v0’ = v’(t = 0):
a’x = A a’y = -g v’0x = v0 v’0y = 0
Il moto del corpo (se A ≠ 0) sarà pertanto un moto uniformemente accelerato lungoentrambi gli assi x’ e y’. Essendo x’( t = 0) = 0 e y’( t = 0) = h l’equazioni di motoassumono la forma generale:
x’ = v0t + At2/2 y’ = h - gt2/2
Queste equazioni esprimono la traiettoria del corpo in forma parametrica; eliminandofra di esse il tempo si ottiene l’equazione della traiettoria:

[x’ + (A/g)(y’- h)]2 = 2v02(h - y’)/g (2)
che corrisponde in generale ad un arco di parabola.a) Nel caso in cui A = 0 l’Eq. (2) diviene:
y’ = h – gx’2/2v02
che corrisponde esattamente ad una parabola con il vertice nel punto di distacco delcorpo.b) Nel caso in cui v0= 0 l’Eq. (2) degenera nell’equazione della retta:
y’ = h – (g/A)x’
c) Come già detto in precedenza la traiettoria è in questo caso un arco di parabola.Le traiettorie per i vari casi considerati sono riportate in figura: (v0 = 0, A = 2 m/s2)linea tratteggiata verde, (v0 = 15 m/s, A = 0 m/s2) traccia rossa, (v0 = 15 m/s, A = 5m/s2) traccia tratteggiata nera; inoltre è riportato anche il caso (v0 = 15 m/s, A = 2m/s2) traccia blu.A conclusione dell’esercizio è utile ribadire che nel sistema S’ , se A≠ 0, il corpo èsoggetto ad un’ accelerazione a’ = ( g – A ) ossia ad una accelerazione costante dimodulo a’ = (g2 + A2)0.5 diretta lungo la direzione della risultante di (g – A) ossialungo una retta di coefficiente angolare –(g/A). Sono quindi facilmente prevedibili edinterpretabili i risultati trovati, in particolare quello del punto b), dato che il moto delcorpo è quello conseguente all’azione di un’accelerazione costante a’ che agiscelungo una direzione obliqua rispetto alla verticale.
-3
-2.5
-2
-1.5
-1
-0.5
0
0 0.5 1 1.5 2 2.5 3 3.5 4
y ' (
m )
x' ( m )
a = 0
v0
= 0a = 2
a = 5

27) Nel sistema di riferimento S, solidale con il terreno, la traiettoria del corpo P ènota; scelto l’asse x orizzontale e coincidente con la traiettoria del corpo, l’asse zverticale e coincidente con l’asse di rotazione della giostra e scegliendo comeistante iniziale quello di passaggio del corpo per l’origine O ( posta sull’asse dirotazione) si ha:
x = vt y = 0 z = 0
y S’ x’ y’
S q v x O P
Il sistema S’, solidale con la giostra, ruota rispetto ad S con velocità angolare costantew ( con i dati del problema w = 0.105 rad/s ); in questo caso la determinazione dellatraiettoria del corpo nel sistema S’ è ottenuta applicando semplicemente la relazionedi trasformazione delle coordinate fra sistemi ruotanti. Per il sistema S’ si scegliel’asse z’ verticale e coincidente con l’asse di rotazione della giostra e l’asse x’orizzontale e coincidente con l’ asse x all’istante iniziale. All’istante t , quando l’assex’ è ruotato di un’angolo q = wt rispetto alla posizione iniziale ( coincidente conl’asse x ) , un punto P , di coordinate in S ( x, y = 0, z = 0) (rappresentativo dellaposizione del corpo) , ha in S’ coordinate:
x’ = xcosq = xcoswt y’ = - xsinq = - xsinwt z’ = 0
tenuto conto che x = vt l’equazioni orarie che descrivono il moto del corpo nelsistema della giostra sono:
x’ = vtcoswt y’ = - vtsinwt
L’equazione della traiettoria può anche essere riscritta in forma più compatta intermini della distanza del corpo da O’≡ O , data da r’ = vt , e dell’angolo polare, q’ =-wt , che il segmento O’P ≡ r’ forma rispetto all’asse x’; eliminando fra le espressionidi r’ e q’ il tempo si ottiene:
r’ = - (v/w)q

Questa equazione rappresenta una spirale di Archimede, e pertanto l’osservatore sullagiostra vedrà il corpo muoversi lungo una curva di questo tipo il cui andamento èriportato nel diagramma polare di figura.
0
2
4
6
8
10
0
30
60
90
120
210
240
270
300
330
r' (
m )
(N.B. - L’osservatore in S , solidale col terreno, vede un corpo che si muove convelocità costante e quindi non soggetto ad accelerazione; l’osservatore sulla giostravede invece un corpo che si muove lungo una spirale e quindi necessariamentesoggetto ad una accelerazione non nulla. Come sarà detto a suo tempo, considerandola dinamica dei corpi, questa diversità implica una sostanziale differenza fra i duesistemi di riferimento. )
28) La velocità di un qualsiasi punto P del disco può essere espressa a partire dallavelocità angolare w e dalla velocità di traslazione di un punto di riferimentoqualsiasi del disco per mezzo della relazione fondamentale della cinematica deicorpi rigidi. Scegliendo in essa come punto di riferimento, con cui caratterizzare ilmoto di traslazione del corpo, il centro O si ha:
vP = v0 + w Ÿ (P – O) = v0 + w Ÿ r (1)
Scelto un sistema di riferimento con l’asse x orizzontale, orientato nel verso di v0,l’asse y verticale ascendente, e l’asse z fissato di conseguenza si ha:
v0 = iv0 w = wk r = r[isinq + jcosq]
dove i , j , k sono i versori lungo i tre assi x,y,z e q è l’angolo che il raggio r = OPforma ad un certo istante con l’asse y. Le componenti della velocità di P sono quindi:
vPx = v0 - wrcosq vPy= wrsinq (2)

y
q P
O r vP
d
x C
(N.B.- Nello scrivere l’espressioni (2) si è fatto riferimento ad una terna “destrorsa”nella quale il verso positivo di rotazione, e di misurazione degli angoli, è quelloantiorario).a) Supponendo che il disco ruoti con velocità angolare costante, in modulo pari ad W
, in verso orario , per cui w = -W , si ha per i vari punti del bordo del disco ( r =R):
(A ; q = 0 ) vAx = v0 + WR vAy= 0
(B ; q = p/2 ) vBx = v0 vBy= -WR
(C ; q = p ) vCx = v0 - WR vCy= 0
(D ; q = 3p/2 ) vDx = v0 vDy= WR
A vA
vR vD B D v0
C vB
vC
Come si vede dall’espressione (1) la velocità in ogni punto è la somma vettorialedella velocità di traslazione e della velocità di rotazione attorno ad O.

( N.B. - Particolare importanza ha la velocità del punto C di contatto fra la ruota edil terreno. Come si vede dalla sua espressione vC > 0 se v0 > WR , ossia se lacomponente traslazionale della velocità è maggiore di quella rotazionale; peresempio al limite W = 0 (rotazione bloccata) il disco “struscia” sul piano comeaccade quando si bloccano le ruote di una macchina a causa di una frenata troppobrusca. Si ha invece vC < 0 se v0 < WR , ossia se la componente rotazionale dellavelocità di C prevale su quella traslazionale; al limite v0 = 0 (traslazione del mozzodella ruota bloccata) la ruota “slitta” sul terreno come accade quando la ruota diuna macchina rimane insabbiata.)b) Il particolare moto che si realizza quando la ruota trasla con velocità v0 del centroO e contemporaneamente ruota in verso orario con velocità W = v0/R rivestenotevole importanza e viene detto “moto di puro rotolamento” ( si dice anche che ildisco “rotola senza strisciare” ); in queste condizioni si vede subito che per quantoriguarda il punto di contatto col terreno si ha:
(C ; q = p ) vC = v0 - WR = 0 (3)
Quindi nel moto di puro rotolamento la velocità del punto C del disco che ad undeterminato istante si trova a contatto col terreno deve essere nulla. Questacondizione, espressa dall’equazione (3), costituisce la “condizione di purorotolamento” e determina un preciso legame fra la velocità del centro del disco e lasua velocità angolare. Per questo tipo di moto la relazione (3) ( indipendentemente dacome è stata ricavata) vale in qualsiasi istante facendo ovviamente riferimento allevelocità istantanee, quindi non solo se le velocità sono costanti. Questa relazionecostituisce una condizione necessaria e sufficiente per la sussistenza di un moto dipuro rotolamento: la condizione vC = 0 vale necessariamente se il moto è di questotipo e viceversa è sufficiente verificare che vC = 0 per asserire che il moto è di purorotolamento.In queste condizioni per il punto A , diametralmente opposto a C, si ha:
(A ; q = 0 ) vA = v0 + WR = 2WR = 2v0
A vA
vD B D
C vB vC = 0

c) Per il modulo di un generico punto P si ha immediatamente dalle Eq. (2), tenutoconto della condizione di puro rotolamento v0 = WR:
vP = [vPx2 + vPy
2]0.5 = [v0 2 + (Wr)2 + 2v0Wrcosq] 0.5 = W[R 2 + r2 + 2Rrcosq] 0.5 = Wd
dove d = PC rappresenta la distanza del punto P dal punto C di contatto col terreno.Il vettore (P – C) = d risulta dato da:
d = irsinq + j(R + rcosq)
Tenuto conto delle Eq. (2) si verifica subito che il prodotto scalare d•vP = 0 per cui idue vettori risultano perpendicolari.In conclusione quindi, essendo I) la velocità di C nulla , II) la velocità di un puntoqualsiasi P del disco diretta perpendicolarmente alla congiungente P con C e III) dimodulo Wd , pari al prodotto della velocità angolare per la distanza di P da C , si puòaffermare che il moto di puro rotolamento corrisponde, istante per istante, ad un motodi pura rotazione attorno a C , che per qusto viene detto “centro di istantanearotazione”.A questa conclusione si poteva anche arrivare immediatamente dalla relazionefondamentale della cinematica dei corpi rigidi scegliendo come punto di riferimentodel corpo rigido C, infatti si ha:
vP = vC + w Ÿ (P – C) = w Ÿ d w = -Wk (4)
Riassumendo un moto di puro rotolamento può essere descritto in modo convenientee del tutto equivalente o come il risultato di un moto di traslazione del suo centro Ocon velocità v0 più una rotazione attorno ad esso con velocità angolare W = v0/R (moto roto-traslatorio) oppure come una semplice rotazione attorno a C con la stessavelocità angolare W.
29) Consideriamo il moto del punto P del bordo del disco che all’istante iniziale sitrova nel punto più alto della circonferenza. Scegliamo un sistema di riferimento conl’asse y verticale ascendente e passante per la posizione iniziale di P e l’asse xorizzontale, giacente nel piano su cui rotola il disco, e orientato nel verso dellavelocità del centro O; di conseguenza P all’istante t = 0 ha coordinate ( x = 0 , y = 2R). La velocità del punto P ad un qualsiasi istante è data dalla relazione fondamentaledella cinematica dei corpi rigidi
vP = v0 + w Ÿ (P – O) = v0 + w Ÿ r (1)
che fornisce per le componenti della velocità:
vPx = v0 + WRcosq = WR(1 + cosWt) vPy= - WRsinq = -WRsinWt (2)

dove q = Wt è l’angolo che il raggio r forma con l’asse y all’istante t e si è tenutoconto della condizione di puro rotolamento v0 = Wt W = |w|.
y
P P’ q
O xO O’
x
a) La traiettoria di P può essere determinata integrando direttamente le Eq. (2)rispetto al tempo, oppure , in modo del tutto equivalente e senza eseguire gliintegrali, tenendo conto che il moto di puro rotolamento è il risultato dellacomposizione di un moto di traslazione lungo l’orizzontale con velocità costantev0 e di un moto di rotazione attorno ad O con velocità angolare costante W. Diconseguenza all’istante t il centro O del disco è traslato di una quantità xO = v0t =W Rt , mentre il raggio r è ruotato di un angolo q = W t. Con sempliciconsiderazioni geometriche si ha allora per le coordinate del punto P.
x = RWt + Rsin Wt y = R + RcosWt
Queste relazioni esprimono in forma parametrica l’equazione di una “cicloide” che èappunto la traiettoria di un punto del bordo di un disco che rotola senza strisciare.b) In un sistema di riferimento S’, solidale col centro del disco, che trasla con
velocità costante v0 il punto P descrive un moto circolare uniforme con velocitàangolare W. L’accelerazione a cui è soggetto P in S’ è quindi l’accelerazionecentripeta ar = W 2R diretta da P verso O ; dato che l’accelerazione ditrascinamento di S’ rispetto ad un sistema S, solidale col terreno, è nulla (v0 = costfi aT= 0) ne risulta che in S l’accelerazione di P è ancora ugualeall’accelerazione centripeta.
c) Per individuare le componenti tangenziale e normale della traiettoria èinnanzitutto necessario determinare la direzione della velocità in un puntoqualsiasi. Questo può essere fatto nel modo più semplice ricordando che il motodi puro rotolamento può essere interpretato come una pura rotazione, con velocitàangolare W, attorno al punto di contatto col terreno C; di conseguenza la velocitàè perpendicolare al segmento CP e l’angolo OPC risulta uguale a q/2 dove q èsempre l’angolo che il raggio r forma con l’asse y.

y (m
)
x ( m )
0
0.5
1
1.5
2
2.5
0 0.5 1 1.5 2 2.5
P
0
1
2
3
Le componenti tangenziale e normale dell’accelerazione sono quindi:
an = arcos(q/2) = W2Rcos(Wt/2) (3) at = Sarsin(q/2) = SW2Rsin(Wt/2)( S = – 1 0 < (q –2np) < p fase discendente, + 1 p < (q –2np) < 2p fase ascendente )
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
y ( m
)
x ( m )
O
P
v
C
aq
an
at
Nel punto più alto della traiettoria (q = 2np) l’accelerazione tangenziale è nulla, inaccordo col fatto che il modulo della velocità è massimo, mentre l’accelerazione normalevale in modulo W2R ed è diretta lungo la verticale verso il basso. Nel punto più basso

della traiettoria (q = (2n + 1)p) la componente normale è nulla mentre l’accelerazionetangenziale vale in modulo W2R ed è diretta lungo la verticale verso l’alto.( Nota - Per calcolare la componente tangenziale dell’accelerazione si poteva anchericorrere alla sua definizione. Tenuto conto che il modulo della velocità è v = WR(PC) =2WR|cos(Wt/2)| si ha at = dv/dt = 2WRd|cos(Wt/2)|/dt ).d) Il raggio di curvatura in un punto qualsiasi della traiettoria può essere ottenutodall’espressione dell’accelerazione normale e risulta r = v2/an. Tenuto conto dell’Eq. (3)si ha: r = 4R|cos(Wt/2)| = 2(PC) = 2PC
( N.B. – Come si vede r risulta doppio della distanza del punto P dal centro di istantanearotazione C; in generale quindi per un punto qualsiasi il raggio di curvatura dellatraiettoria sarà diverso dal raggio della circonferenza su cui esso si muove addeterminato istante.)
30) a) Nel caso in cui l’estremo B sia incernierato al manicotto M il sistemaha un solo grado di libertà; per individuare la configurazione del sistema si puòscegliere, in modo conveniente, l’angolo f , misurato positivamente in versoantiorario, che il raggio OP forma con la guida in cui scorre il manicotto.
y
P
f x O B≡M
La velocità e l’accelerazione di un qualsiasi punto del sistema potranno quindi essereespresse in termini della velocità angolare w e dell’accelerazione angolare a deldisco, che costituiscono le uniche variabili cinematiche essenziali. Le relazioni fra levarie grandezze cinematiche e a ed w possono essere ottenute a partire dalle relazionigeometriche che tengano ovviamente conto dei vincoli; scelto un sistema diriferimento con l’origine nel centro O del disco e l’asse x coincidente con la guidaper i punti P e B ≡ M si ha:
xP = Rcosf yP = Rsinf (1) xB = 2Rcosf yB = 0 (2)

Le rispettive componenti della velocità possono essere ottenute immediatamente dalleprecedenti relazioni geometriche per derivazione:
vPx = - wRsinf vPy = wRcosf (3) vBx = - 2wRsinf vBy = 0 (4)
Analogamente per l’accelerazione derivando le Eq. (3-4) si ottiene:
aPx = - aRsinf - w2Rcosf aPy = aRcosf - w2Rsinf aBx = - 2aRsinf - 2w2Rcosf aBy = 0
Per quanto riguarda il punto P quelle adesso calcolate sono le componenti lungo gli assi xed y dell’accelerazione: se , come accade in molti casi , si vogliono le componenti radialee tangenziale, tenendo conto che P si muove su una circonferenza di raggio R convelocità v = wR , dalle definizioni risulta:
aPt = aR aPr = - w2R
b)Nel caso particolare in cui il disco ruota con velocità angolare costante w , lavelocità ed l’accelerazione sono immediatamente ricavate dalle precedenti espressionidel punto a) ponendo a = 0 e f = wt. Le espressioni della velocità sono identiche aquelle delle Eq. (3) e (4) e si ha quindi:
vBx = - 2wRsinwt vBy = 0
Per l’accelerazione si ottiene invece:
aBx = - 2w2Rcoswt = - w2xB aBy = 0
Come si vede da queste espressioni il punto B descrive lungo la guida un moto armonicodi ampiezza 2R.
d) Nel caso in cui l’estremo B dell’asta non sia più vincolato a scorrere lungo l’astail sistema ha due gradi di libertà: per individuare completamente la configurazione delsistema è necessaria oltre all’angolo f un’altra coordinata , che può per esempioessere l’angolo q che la sbarra PB forma con l’asse x , misurato positivamente insenso antiorario.
y
P B q f O x

Per il punto P non cambiano rispetto al caso precedente le relazioni geometriche e diconseguenza la sua velocità e la sua accelerazione sono identiche a quelleprecedentemente calcolate. Per il punto B si ha invece:
xB = Rcosf - Rcosq yB = Rsinf - Rsinq
Derivando rispetto al tempo queste espressioni si ricava per le componenti della velocità:
vBx = - wRsinf + w*Rsinq vBy = wRcosf - w*Rcosq
dove w* = dq/dt. Analogamente per l’accelerazione, posto a* = dw*/dt, si ha:
aPx = - aRsinf - w2Rcosf + a*Rsinq - w*2Rcosq aPy = aRcosf - w2Rsinf - a*Rcosq + w*2Rsinq
31) Il sistema in oggetto ha un solo grado di libertà, infatti una volta fissata la posizionedel punto B risulta automaticamente fissata la posizione di P essendo fissata la lunghezzaL della funicella PAB. La configurazione del sistema può convenientemente essereindividuata tramite l’angolo f , misurato positivamente in verso orario, che la funicellaOB forma rispetto ad una retta orizzontale. Scegliamo un sistema di riferimento conl’origine in O, l’asse x coincidente con la direzione ed il verso da O ad A e l’asse yverticale ascendente.
y
O A x f
B
P

Le coordinate dei punti B e P sono quindi:
xP = l yP = -[L - 2lsin(f/2)] (1) xB = lcosf yB = - lsinf (2)
Posto w = df/dt e a = dw/dt si ha per derivazioni successive dell’Eq. (1-2):
vPx = 0 vPy = wlcos(f/2) vBx = - wlsinf vBy = - wlcosf
aPx = 0 aPy = aRcos(f/2) - (w2R/2)sin(f/2) aBx = - alsinf - w2lcosf aBy = - alcosf + w2lsinf
Come si vede è quindi possible esprimere velocità ed accelerazione di P e B unicamentein termini della velocità angolare w e dell’accelerazione angolare a.
32) a) Nel caso in cui la rotazione del cilindro sia bloccata il sistemacostituisce un’unico corpo rigido ed esso ha un solo grado di libertàmuovendosi l’estremo A a contatto con la parete verticale e il cilindro sulpiano orizzontale. La configurazione del sistema può essere individuataconvenientemente per esempio mediante l’angolo f , misurato positivamentein verso antiorario, che la sbarra OA forma con la verticale discendente.
y
A
f
O
x
Il sistema , come ogni corpo rigido, compirà un moto roto-traslatorio, maavendo un solo grado di libertà una soltanto sarà la varibile cinematicaindipendente e quindi velocità di traslazione e velocità angolare risulterannolegate fra di loro. Il legame fra la velocità angolare w = df/dt , l’accelerazioneangolare a = dw/dt , la velocità e l’accelerazione dei vari punti e ricavato apartire dalle relazioni geometriche. Scelto un sistema di riferimento con l’assex orizzontale, orientato positivamente nel verso del moto di O, e l’asse y ,orientato positivamente verso l’alto, nel piano verticale su cui si muove A ,per i punti A ed O in questo caso si ha:

xA = 0 yA = R + 4Rcosf (1) xO = 4Rsinf yO = R (2)
Velocità ed accelerazioni di A ed O sono ottenute per derivazione successive,rispetto al tempo, delle relazioni (1-2).
vAx = 0 vAy = - 4Rwsinf vOx = 4Rwcosf vOy = 0
aAx = 0 aAy = - 4Rasinf - 4Rw2cosf aOx = 4Racosf - 4Rw2sinf aOy = 0
b) In questo caso il sistema, rispetto al caso precedente, ha un grado di libertàaddizionale dato dalla rotazione del cilindro attorno al proprio asse e di conseguenzadovremo considerare anche la relativa velocità angolare W. Per quanto riguarda ipunti A ed O le relazioni geometriche (1-2) non cambiano , quindi saranno identichele espressioni della velocità e dell’accelerazione. Per quanto riguarda W la condizionedi puro rotolamento comporta un legame fra essa e la velocita del centro O eprecisamente risulta:
W = vOx/R = 4wcosf
e per l’accelerazione angolare A = dW /dt :
A = aOx/R = 4acosf - 4w2sinf
Nel caso di puro rotolamento quindi anche la velocità angolare W del disco èesprimibile in termini di w e analogamente per l’accelerazione A.c) Nel caso in cui il cilindro rotoli e strisci non esiste più alcun legame fra la suavelocità angolare W e le altre variabili cinematiche (in particolare con la velocità delcentro O ) per cui essa è del tutto indipendente. Le relazioni (1-2) rimangono inveceinalterate.d) Nel caso in cui l’estremo A della sbarra non sia più appoggiato alla parete
verticale per individuare completamente la posizione e la configurazione delsistema, avendo bloccato la rotazione del cilindro ( caso a)), non è più sufficientel’angolo f .
Oltre a questo si dovrà per esempio assegnare anche una coordinata di un punto delsistema, per esempio l’ascissa di O: quindi il sistema ha due gradi di libertà, lecoordinate indipendenti sono adesso f e xO e di conseguenza risultano variabilicinematiche indipendenti w e vOx. Per quanto riguarda il punto A si ha adesso
xA = xO – 4Rsinf yA = R + 4Rcosf

y
A
f
O
x
Da cui per velocità ed accelerazione si ottiene
vAx = vOx - 4Rwcosf vAy = - 4Rwsinf
aAx = aOx - 4Racosf - 4Rw2sinf aAy = - 4Rasinf - 4Rw2cosf
Nel caso di puro rotolamento del cilindro ( caso b)) la sua velocità angolare W èlegata alla velocità di traslazione del centro O dalla relazione W = vOx/R e leespressioni della velocità ed accelerazione di A rimangono inalterate. Nel caso che ilcilindro rotoli e strisci invece la relazione ora scritta non è più valida e W risultaessere una variabile cinematica indipendente.