CINEMATICA DEL PUNTO MATERIALE MOTI RETTILINEI E...
12
“CINEMATICA DEL PUNTO MATERIALE: MOTI RETTILINEI E INTRODUZIONE AL MOTO IN PIÙ DIMENSIONI” PROF. FRANCESCO DE PALMA
Transcript of CINEMATICA DEL PUNTO MATERIALE MOTI RETTILINEI E...

“CINEMATICA DEL PUNTO
MATERIALE: MOTI RETTILINEI
E INTRODUZIONE AL MOTO IN
PIÙ DIMENSIONI”
PROF. FRANCESCO DE PALMA

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
2 di 12
Sommario
INTRODUZIONE ALLA CINEMATICA ..................................................................................................................... 3
MOTO RETTILINEO UNIFORMEMENTE ACCELERATO ................................................................................... 4
CADUTA LIBERA ........................................................................................................................................................... 6
ESEMPIO 1 DI PROBLEMA SU UN CORPO IN CADUTA LIBERA ............................................................................................ 7 ESEMPIO 2 DI PROBLEMA SU UN CORPO IN CADUTA LIBERA ............................................................................................ 7
MOTO IN PIÙ DIMENSIONI ........................................................................................................................................ 9
MOTO IN UN PIANO ....................................................................................................................................................... 10
BIBLIOGRAFIA ............................................................................................................................................................ 12

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
3 di 12
Introduzione alla cinematica
In questa lezione descriveremo ed analizzeremo le equazioni orarie della posizione x(t),
della velocità v(t) e dell’accelerazione a(t) per alcuni tipi di moti rettilinei peculiari. I moti rettilinei
possono essere classificati in base al parametro che resta costante durante il moto:
Moto uniforme: velocità costante,
Moto uniformemente accelerato: accelerazione costante,
Moto vario: accelerazione variabile,
Moto uniforme
Nel moto uniforme l’accelerazione istantanea è pari a quella media ed è sempre nulla; in tal
modo si ha che in un intervallo di tempo qualunque, , la velocità resta costante, ovvero:
Poiché la velocità è costante possiamo, applicando la definizione della velocità media per un
intervallo di tempo qualunque, , ottenere:
Se chiamiamo , ed assumiamo , possiamo riscrivere le leggi orarie
che abbiamo ottenuto nella forma seguente:
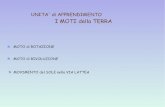
Graficamente avremo i risultati mostrati in Figura 1, dove si vede che lo spostamento risulta
una retta con intercetta con l’asse x nel punto e coefficiente angolare pari alla velocità costante
del moto. La velocità, a destra in Figura 1, risulta una retta parallela all’asse del tempo, poiché è
costante.

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
4 di 12
Figura 1: Leggi orarie per il moto rettilineo uniforme.
Moto rettilineo uniformemente accelerato
Per studiare il moto rettilineo uniformemente accelerato, poniamo nuovamente il tempo
iniziale pari a zero e ed otterremo dalla semplice definizione di accelerazione
media:
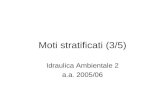
pertanto la velocità varia linearmente con il tempo. Come si vede anche in Figura 2, nel
riquadro più a destra, l’accelerazione resta costante durante il moto, la velocità, nell’immagine al
centro, è descritta da una retta con intercetta pari alla velocità a t=0 e coefficiente angolare pari
all’accelerazione costante del corpo.
Poiché la velocità varia linearmente nel tempo, quando l’accelerazione è costante, possiamo
esprimere nel modo seguente la velocità media nell’intervallo di tempo tra 0 e t:
Uguagliando tale valore della velocità media con la sua definizione tra t e 0
,
otterremo il valore di x(t):

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
5 di 12
Dove è stato sostituito il valore di trovato in precedenza. Sostituendo avremo
le equazioni orarie per il moto uniformemente accelerato:
In Figura 2 sono rappresentate le 3 leggi orarie. La funzione x(t) è l’equazione di una
parabola che intercetta l’asse x in .
Figura 2: Leggi orarie per il moto rettilineo uniformemente accelerato.
Una relazione utile nell’analisi di sistemi in moto uniformemente accelerato è quella che
lega velocità, accelerazione e spostamento, senza utilizzare direttamente il tempo.
Valutiamo il valore di t nota la variazione di velocità e l’accelerazione:
Se sostituiamo il valore appena trovato nell’equazione di secondo grado che esprime lo
spostamento, avremo:
In tal modo, noti i punti, le velocità iniziale e finale, è possibile determinare direttamente
l’accelerazione. Tale equazione per implica, ovviamente,
Abbiamo visto, nella lezione “introduzione alla cinematica del punto materiale”, che
possiamo anche usare una rappresentazione differenziale per la velocità (come derivata prima di

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
6 di 12
x(t)) e l’accelerazione (come derivata seconda di x(t)). Possiamo ricavare le leggi orarie tramite una
notazione integrale, in tal caso, considerando sempre un accelerazione a costante.
L’equazione che descrive la velocità può essere ottenuta quindi:
L’equazione che descrive la posizione, invece, risulta da:
Caduta libera
Un corpo in caduta libera (a prescindere dal suo stato di moto iniziale) in prossimità della
superfice terrestre sente un’accelerazione costante g (trascurando l’attrito dell’aria), detta
accelerazione terrestre, diretta secondo la verticale e verso la superficie terrestre con g =9,8 m/s2.
Come mostrato in Figura 3.
Figura 3: Rappresentazione grafica della caduta libera di un corpo da altezza h, rispetto alla superfice terrestre.
Pertanto un corpo in caduta libera avrà un moto uniformemente accelerato, potremo quindi
utilizzare le formule che abbiamo mostrato nel paragrafo precedente.
Se consideriamo un asse y positivo verso l’alto ed un corpo che cade da un’altezza
con velocità iniziale avremo:

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
7 di 12
Se per , con un asse positivo verso l’alto, la velocità del corpo risulterà
negativa e quindi puntata verso il basso, infatti il corpo è in caduta e la sua altezza sta diminuendo.
Possiamo ora fare degli esempi di configurazioni peculiari, dove studiare la caduta libera di
un corpo.
Esempio 1 di problema su un corpo in caduta libera
Un corpo cade da una altezza h dal suolo con velocità nulla al tempo t=0, dobbiamo
calcolare il tempo impiegato th per raggiungere il suolo (ovvero il punto dove risulta y(th)=0) e la
velocità al suolo v(th).
Poiché siamo in caduta libera il moto sarà uniformemente accelerato con accelerazione
lungo l’asse orizzontale y pari a . Le equazioni al tempo quando il corpo tocca terra,
risultano:
Dalla prima equazione si ottiene il valore di , che inserita nella seconda ci consente di
valutare la velocità del corpo quando raggiunge il suolo.
Esempio 2 di problema su un corpo in caduta libera
Consideriamo un corpo lanciato verso l’alto con una velocità da una altezza h, come
mostrato in Figura 4, vogliamo calcolare il tempo impiegato per raggiungere la massima altezza (tm)
e la sua posizione lungo l’asse y (ym), il tempo e la velocità con cui ripassa da h (th,vh) e tocca il
suolo (ts,vs).
Valutiamo la prima parte del problema. Il corpo raggiunge la massima altezza possibile
quando la sua velocità di salita diviene nulla:

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
8 di 12
Dalla seconda equazione possiamo ottenere il valore di ed è possibile sostituirlo nella
prima per ottenere l’altezza massima raggiunta dal corpo.
Come mostrato in Figura 4, il corpo dopo aver raggiungo inizia la sua discesa e ripassa
dalla quota da dove era stato lanciato. Possiamo valutare il tempo quando ciò avviene imponendo
. Le equazioni risulteranno:
Nel risolvere la prima equazione ovviamente si è esclusa la soluzione per t=0, la quale
coincideva con lo stato iniziale del sistema. Sostituendo il valore di nella seconda equazione si
ottiene la velocità del corpo quando ripassa da una altezza h. Si noti che è pari a quella di partenza
con il segno opposto.
Possiamo al termine, valutare quando il corpo tocchi terra. Ciò avviene per , in tal
caso le equazioni risultano:
La soluzione dell’equazione scelta è quella con poiché stiamo studiando un sistema
fisico che evolve verso t positive. Sostituendo il valore di è possibile ottenere la velocità finale
con cui il corpo tocca terra.
Figura 4: Rappresentazione del copro in caduta libera, lanciato verso l'alto.

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
9 di 12
Moto in più dimensioni
Negli studi precedenti abbiamo analizzato moti in una singola dimensione, ovviamente per
descrivere fenomeni fisici più complessi abbiamo bisogno di ridefinire le quantità per moti in più
dimensioni. Definiamo il vettore spostamento la differenza tra i raggi vettori al tempo finale ( ) ed
iniziale ( ), indicato in rosso nella Figura 5, ovvero:
Possiamo definire in tal modo la velocità media nel caso multidimensionale, come il
rapporto tra il vettore spostamento ed il tempo impiegato a percorrerlo, ovvero:
Figura 5: Rappresentazione di un moto di un corpo in un piano, in azzurro è indicata la traiettoria del corpo.
Possiamo definire la velocità istantanea, per :
La direzione della velocità istantanea in un punto è quella della tangente in quel punto alla
traiettoria, come si può intuire dalla Figura 6. Per intervalli di tempo sempre più ridotti si può
intuire come la direzione della velocità media tenda ad essere quella della tangente alla curva, se
l’intervallo temporale è infinitesimo la direzione della velocità è tangenziale alla curva.

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
10 di 12
Figura 6: Esempio grafico utile per valutare la direzione della velocità istantanea. Si noti che per intervalli sempre più brevi di
tempo il vettore velocità tende ad avere la direzione tangente alla traiettoria.
Dopo aver ridefinito la velocità media ed istantanea nel caso multidimensionale possiamo,
ridefinire l’accelerazione media, pari alla variazione della velocità istantanea (mostrata in Figura 7)
diviso l’intervallo di tempo, ovvero:
Figura 7: Rappresentazione grafica della variazione della velocità.
L’accelerazione istantanea risulta:
Moto in un piano
Il moto in un piano, ovvero in 2 dimensioni, può essere descritto come due moti indipendenti
lungo due assi ortogonali (ad esempio gli assi x e y del piano cartesiano). Ogni cambiamento lungo
l’asse x non modifica il moto lungo l’asse y e viceversa. Come mostrato in Figura 8, il moto di P
può essere scomposto in un moto di e di .
Il vettore posizione può essere espresso in una componente lungo l’asse x ed una lungo
l’asse y, utilizzando i versori paralleli all’asse x e y, rispettivamente (si veda la Figura 8):

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
11 di 12
Possiamo valutare la velocità istantanea del corpo rispetto alle velocità delle due componenti
lungo x e y (ovviamente i versori non dipendono dal tempo):
In modo analogo possiamo esprimere l’accelerazione istantanea:
Come si può vedere le componenti lungo x e y evolvono indipendentemente e la loro
composizione vettoriale individua la velocità e l’accelerazione vettoriale del corpo nel piano.
Una simile analisi può essere fatta per un corpo in moto nello spazio, con le componenti
nelle tre direzioni x, y e z che evolvono indipendentemente.
Figura 8: Moto di un punto P nel piano.

Università Telematica Pegaso Cinematica del punto materiale:
moti rettilinei e introduzione al moto in più dimensioni
Attenzione! Questo materiale didattico è per uso personale dello studente ed è coperto da copyright. Ne è severamente
vietata la riproduzione o il riutilizzo anche parziale, ai sensi e per gli effetti della legge sul diritto d’autore
(L. 22.04.1941/n. 633)
12 di 12
Bibliografia
P. Mazzoldi, M. Nigro, C. Voci, Fisica Vol I, Edises
D. Halliday, R. Resnick, J. Walker, Fondamenti di fisica. Meccanica, termologia, CEA