Capitolo 1: Elementi di algebra vettoriale e...
105
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri 1 Capitolo 1: Elementi di algebra vettoriale e tensoriale TENSORE : ente matematico (astratto) che rappresenta quantità fisiche indipendenti dal particolare sistema di riferimento in cui sono espresse. COMPONENTI DEL TENSORE : quantità necessarie alla scrittura del tensore in un sistema di riferimento. TRASFORMAZIONE : la legge di trasformazione delle componenti di un tensore viene utilizzata come definizione del tensore stesso. Una volte note le componenti in un sistema di riferimento esse sono note in tutti gli altri. TENSORI GENERALI TENSORI CARTESIANI sist. coordinate curvilinee arbitrario sist. coordinate cartesiane trasformazioni generali
Transcript of Capitolo 1: Elementi di algebra vettoriale e...
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
1
Capitolo 1:Elementi di algebra vettoriale e tensoriale
TENSORE: ente matematico (astratto) che rappresenta quantità fisiche indipendenti dal particolare sistema di riferimento in cui sono espresse.
COMPONENTI DEL TENSORE: quantità necessarie alla scrittura del tensore in un sistema di riferimento.
TRASFORMAZIONE: la legge di trasformazione delle componenti di un tensore viene utilizzata come definizione del tensore stesso. Una volte note le componenti in un sistema di riferimento esse sono note in tutti gli altri.
TENSORI GENERALI TENSORI CARTESIANI
sist. coordinate curvilinee arbitrario
sist. coordinate cartesiane
trasformazioni generali

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
2
Capitolo 1:Elementi di algebra vettoriale e tensoriale
ORDINE DEI TENSORI: SPAZIO EUCLIDEO A 3D
ORDINE ZERO 30=1
1° ORDINE (vettori) 31=3
2° ORDINE (σij, εij) 32=9
3° ORDINE (Eijk) 33=27
4° ORDINE (Cijhk) 34=81
Numero di componenti nello spazio Euclideo
RICHIAMI DI ALGEBRA VETTORIALE
cabba =+=+Somma di vettori
da)b(ba =+−=−Sottrazione di vettori
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
3
Capitolo 1:Elementi di algebra vettoriale e tensoriale
Proprietà commutativa (di somma e sottrazione):
fc)ba(c)ba(d)cb(ac)ba(
=−+=−+=++=++
Moltiplicazione per uno scalare:
bmam)ab(m)ba(mbmbnb)mn(b)nm(
)bm(n)b(mn)bn(m
+=+=++=+=+
==
(proprietà associativa e distributiva)
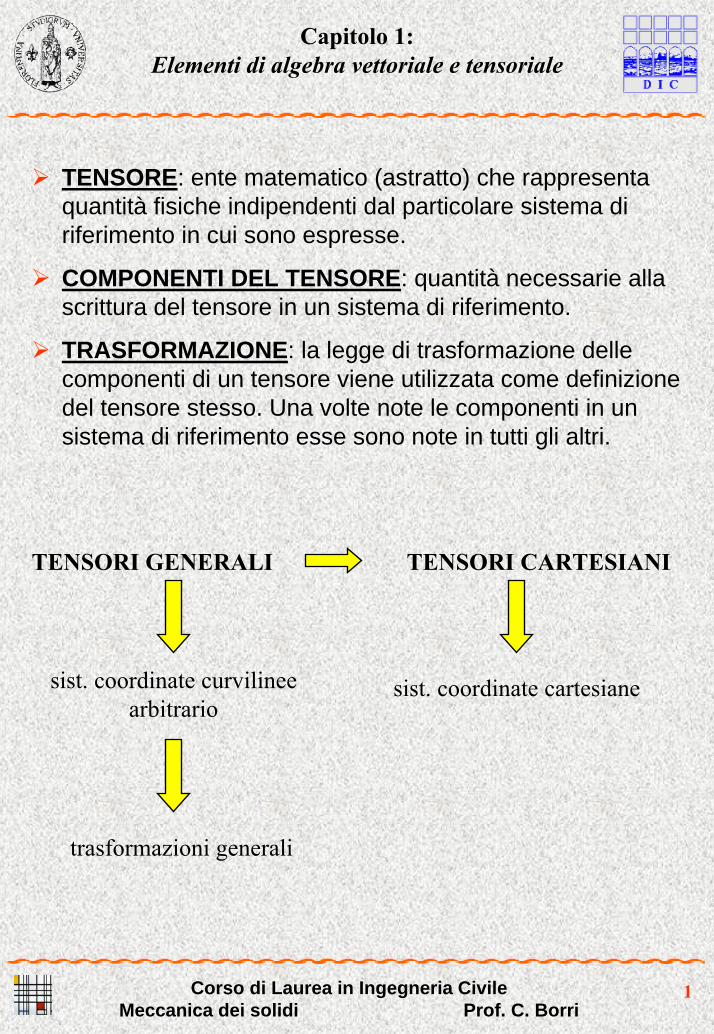
Prodotto scalare (o interno):
θ=⋅=⋅=λ cosab)ab()ba(
se a (o b) = 1, si ottiene la proiezione nella direzione dell'altro
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
4
Capitolo 1:Elementi di algebra vettoriale e tensoriale
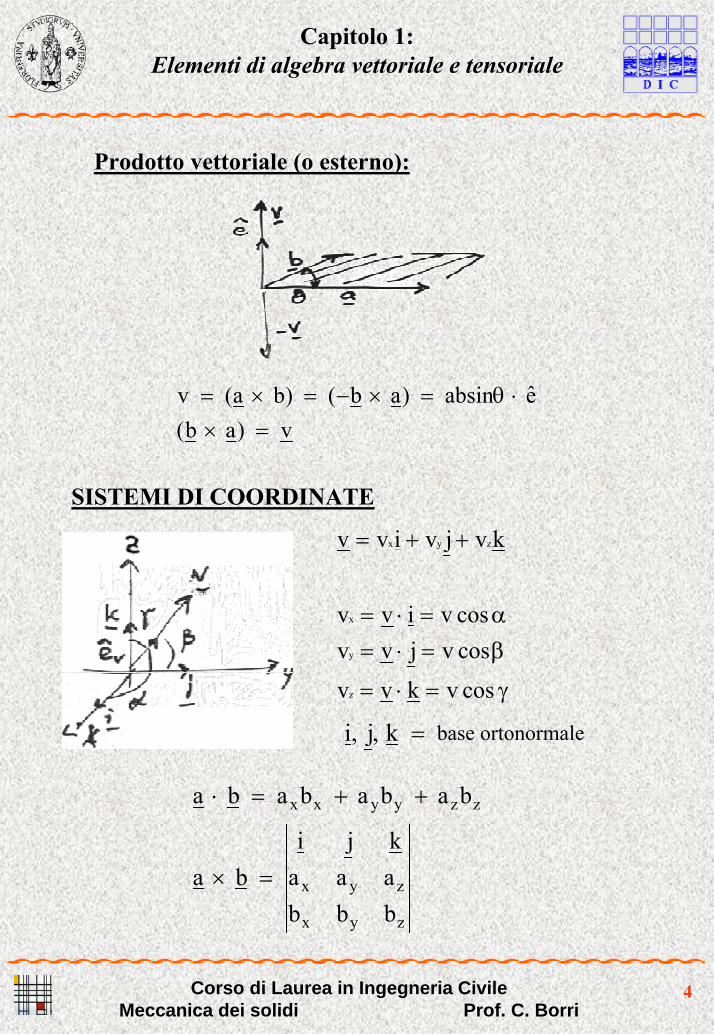
Prodotto vettoriale (o esterno):
v)ab(eabsin)ab()ba(v
=×⋅θ=×−=×=
SISTEMI DI COORDINATE
γ=⋅=
β=⋅=α=⋅=
++=
cosvkvv
cosvjvvcosvivv
kvjvivv
z
y
x
zyx
base ortonormale=k,j,i
zyx
zyx
zzyyxx
bbbaaakji
ba
babababa
=×
++=⋅
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
5
Capitolo 1:Elementi di algebra vettoriale e tensoriale
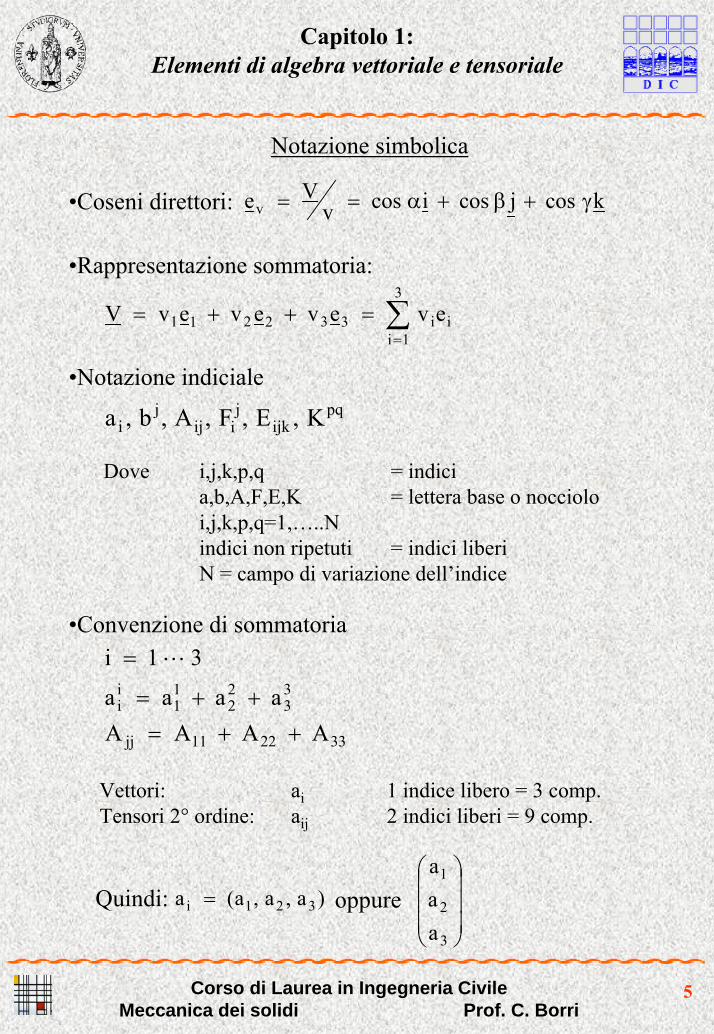
Notazione simbolica
•Coseni direttori: kcosjcosicosvVev γ+β+α==
•Rappresentazione sommatoria:
∑=
=++=3
1iii332211 evevevevV
•Notazione indicialepq
ijkj
iijj
i K,E,F,A,b,a
Dove i,j,k,p,q = indicia,b,A,F,E,K = lettera base o nocciolo i,j,k,p,q=1,…..N indici non ripetuti = indici liberiN = campo di variazione dell’indice
•Convenzione di sommatoria
332211jj
33
22
11
ii
AAAAaaaa
31i
++=++=
= L
Vettori: ai 1 indice libero = 3 comp.Tensori 2° ordine: aij 2 indici liberi = 9 comp.
)a,a,a(a 321i =Quindi: oppure⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
3
2
1
aaa

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
6
Capitolo 1:Elementi di algebra vettoriale e tensoriale
•Scrittura di sistemi lineari:
3332321313
3232221212
3132121111
jiji
yayayaxyayayax
yayayax
3,1j,i yax
++=++=++=
== K
22222221212211212111111122
22122221112212122111112121
22221221211212221111211112
12121212111212121111111111
pqiqipij
DCBDCBDCBDCBADCBDCBDCBDCBADCBDCBDCBDCBA
DCBDCBDCBDCBA
2,1q,p,j,i DCBA
+++=+++=+++=+++=
== K
•Notazione simbolica + sommatoria:
iiijji
jijijjii
ii
bababababa
eebaebeabaevevevevv
=++=
==⋅=⋅=++=
332211
332211
)()(
δ
⎩⎨⎧
≠=
=jiperjiper
cker)Kronedideltadove ij 01
(δ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
7
Capitolo 1:Elementi di algebra vettoriale e tensoriale
TENSORI: trasformazioni di coordinate (caso generale)
j
i
321ii
xjakobiano.detj
)x,x,x(
∂θ∂
==
θ=θ
allora esiste la trasformazione inversa:
Se 0j 1 ≠−
),,(x)(xx 321iiij θθθ=θ=
Vettore differenziale: equazione prototipo del tensore jj
ii dx
xd
∂θ∂
=θ
Tensore del I ordine contro-variante (b: generica quantità fisica)
jj
ii b
xb ⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
=θ*Le componenti bi sono componenti di un tensore se:
dove:
bj: componenti del tensore del vecchio sistema di coordinate (xi) b*i: componenti del tensore del nuovo sistema di coordinate (θi)
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
8
Capitolo 1:Elementi di algebra vettoriale e tensoriale
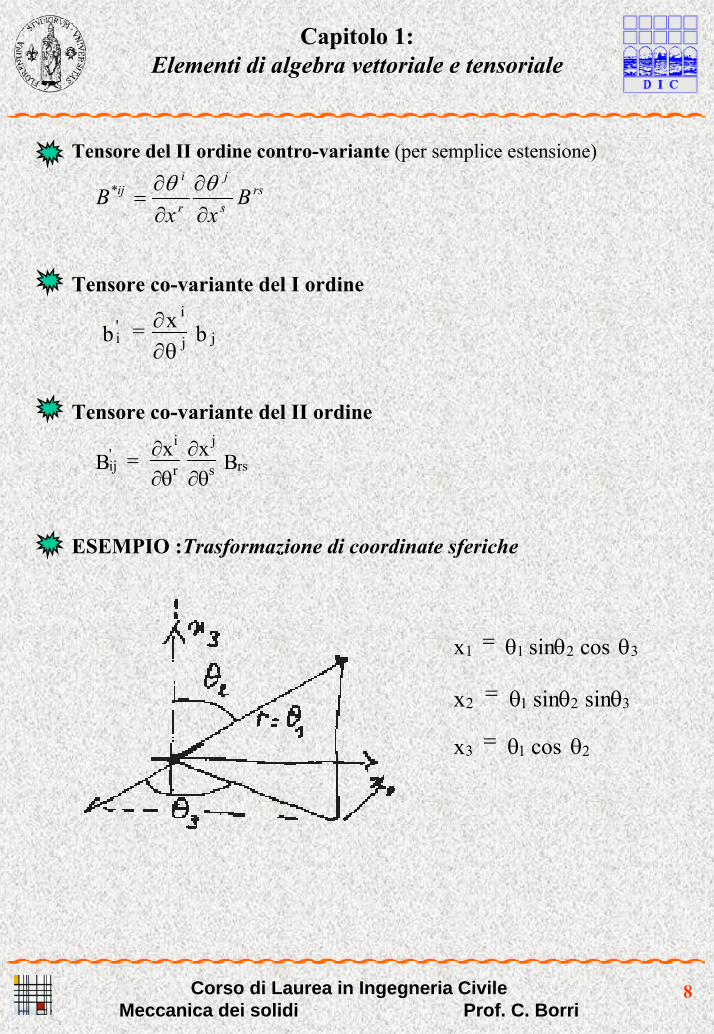
Tensore del II ordine contro-variante (per semplice estensione)
rss
j
r
iij B
xxB
∂∂
∂∂
=θθ*
Tensore co-variante del I ordine
bx = b jj
i'i
θ∂∂
BxxB rss
j
r
i'ij
θ∂∂
θ∂∂=
Tensore co-variante del II ordine
ESEMPIO :Trasformazione di coordinate sferiche
θθθ= cossinx 3211
θθθ= sinsinx 3212
θθ= cosx 213

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
9
Capitolo 1:Elementi di algebra vettoriale e tensoriale
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=∂
∂−=∂
∂=∂
∂
=∂
∂=∂
∂=∂
∂
−=∂
∂=∂=∂
∂
0cos
coscos
coscoscos
3
321
2
32
1
1
3213
3321
2
232
1
2
3213
1321
2
132
1
1
θθθ
θθ
θ
θθθθ
θθθθ
θθϑ
θθθθ
θθθδθθθ
ϑ
xsin
xx
sinx
sinx
sinsinx
sinsinxx
sinx
ESEMPIO :Tensore metrico (tensore fondamentale dello spazio)
( ) ii dxdxds =2
( )321 ,, ϑϑϑii xx =
( ) 3,,1,,2K=
∂∂
∂∂
= ljiddxxds jll
i
j
i
ϑϑϑϑ
,jj
ii dxdx ϑ
ϑ∂∂
=
l
i
j
i
jlxxgϑϑ ∂
∂∂∂
= gjl tensore metrico o fondamentale dello spazio
δ jljlg =Per i tensori cartesiani inoltre: (delta di Kronecker)
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
10
Capitolo 1:Elementi di algebra vettoriale e tensoriale
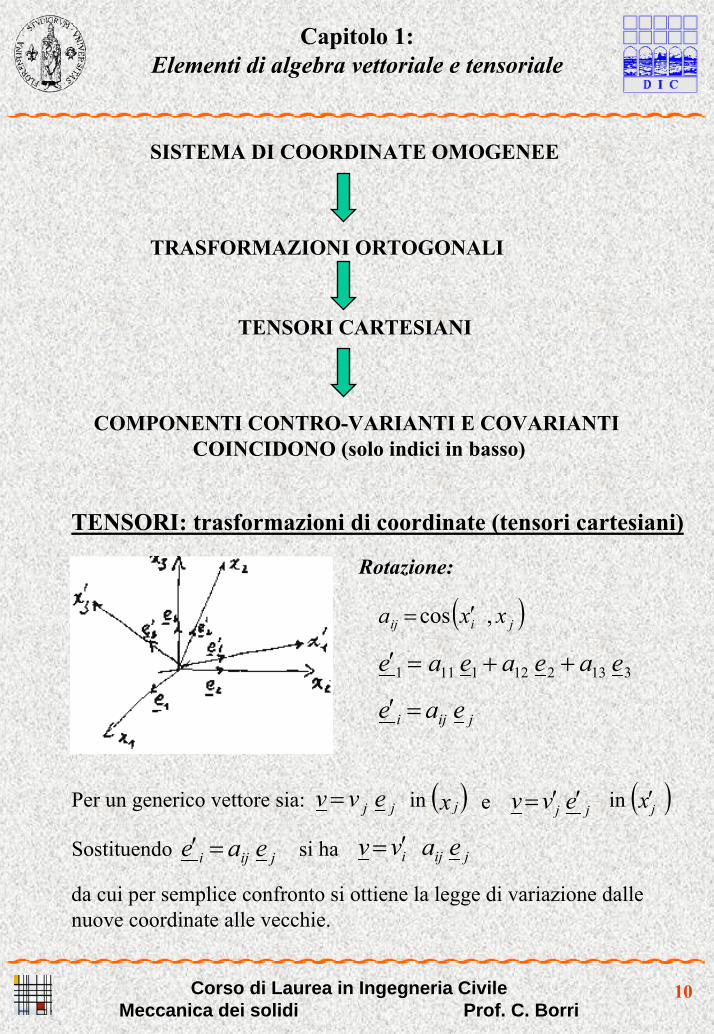
SISTEMA DI COORDINATE OMOGENEE
TRASFORMAZIONI ORTOGONALI
TENSORI CARTESIANI
COMPONENTI CONTRO-VARIANTI E COVARIANTICOINCIDONO (solo indici in basso)
TENSORI: trasformazioni di coordinate (tensori cartesiani)
Rotazione:
( )jiij xxa ,cos ′=
3132121111 eaeaeae ++=′
jiji eae =′
Per un generico vettore sia: ( )x jin in
Sostituendo si ha
jj evv = jj evv ′′= ( )jx′
jiji eae =′ jiji eavv ′=
e
da cui per semplice confronto si ottiene la legge di variazione dalle nuove coordinate alle vecchie.
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
11
Capitolo 1:Elementi di algebra vettoriale e tensoriale
Tensore cartesiano del I ordine:
a) Trasformazione inversa:
Trasformazione delle componenti di un vettoreiijj vav ′=
Trasformazione dei versori della basejiji eae =′
b) trasformazione inversa :
jiji vav =′
Combinando a) e b) con opportuna scelta degli indici:
jjkikijj vvvaav =⇒=
Per l’arbitrarietà di vj, ne segue:
9 condizioni dette di ortogonalitào ortonormalità
jkikij aa δ= Trasformazioneortogonale
Nota: δij come operatore “sostituzione”
bbbbb iiiijij =++= 332211 δδδδ
FFFFF jkkjkjkjikij =i, j = 1, 2, 3
++= 332211 δδδδ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
12
Capitolo 1:Elementi di algebra vettoriale e tensoriale
Tensore cartesiano del II ordine:
Se si considera il prodotto scalare (diade):( )( ) qpiqipqiqpipii uuaauauavuvu ==′′⇒′⋅′
Risulta immediata la generalizzazione al secondo ordine:
pqjqipij TaaT =′
OPERAZIONI TRA TENSORI
ijkijkijk TBA =+Somma di tensori cartesiani:
ijijjj ABeb λλα ==Moltiplicazione per uno scalare:
Prodotto vettoriale:
Introducendo lo pseudo-tensore (tensore di Ricci) come:ijk∈
cba =×
⎪⎩
⎪⎨
⎧
→→−
→=∈
1,2,3 di nepermutazio una sononon k j,i, se01,2,3 di dispari nepermutazio una sonok j,i, se1
1,2,3 di pari nepermutazio una sonok j,i, se1
ijk
ikjijk cba =∈Allora:
Pseudo-tensore simbolo di permutazione
ijk⇒∈ si trasforma come un tensore cartesiano
Se det aij = -1 , trasformazione propria ijk⇒∈
ijk∈
Se det aij = 1 , trasformazione propria
si trasforma a meno del segno

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
13
Capitolo 1:Elementi di algebra vettoriale e tensoriale
• RAPPRESENTAZIONE MATRICIALE
• MATRICI RIGA, COLONNA E MATRICI QUADRATE • MATRICE IDENTICA • MATRICE TRASPOSTA • MATRICE SINGOLARE • MATRICE ORTOGONALE IAAAAAA
TTT ==⇒= −1
• PRODOTTO FRA MATRICI (NON COMMUTATIVO)
Prodotto interno:
CBA ikjkij = (riga x colonna)
Scomposizione di un tensore del II ordine
jiij DD =⇒Dij : simmetrico
jiij DD −=⇒Dij : antisimmetrico
( )( ) ( )
( )[ ] [ ]
4342143421ijijjiij DD
ijij
DD
jiijij DDDDD−==
−++= 21
21
tale scomposizione è unica
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
14
Capitolo 1:Elementi di algebra vettoriale e tensoriale
VALORI PRINCIPALI (AUTOVALORI) E DIREZIONI PRINCIPALI (AUTOVETTORI) DI TENSORI SIMMETRICI DEL II ORDINE
Definito Tij in un punto, per ogni direzione n viene definito un vettore
jiji nTv =
T opera come “operatore lineare vettoriale”v è il vettore coniugato da T alla direzione n
nnT ijij λ=Se n è tale che:
ossia il coniugato o trasformato di n è parallelo a n stesso allora n è una direzione principale del tensore T
Si può trasformare la precedente come:
0)( =−⇒== jijijjijijij nTnnnT λδλδλ
⎪⎭
⎪⎬
⎫
=−++=+−+=++−
0)(0)(0)(
333232131
323222121
313212111
nTnTnTnTnTnTnTnTnT
λλ
λ 3 equazioni
4 incognite
1=iinnInoltre:
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
15
Capitolo 1:Elementi di algebra vettoriale e tensoriale
•Il sistema è omogeneo negli nj
•Soluzione banale: nj = 0
•Soluzioni non banali:
00)det( 23 =−+−→=− TTTijij IIIIIIT λλλλδ
equazione caratteristica del tensore
⎪⎪
⎭
⎪⎪
⎬
⎫
=
−
=
)det(:
)(21:
)(:
ijijT
ijijjjiiT
ijriiT
TTIII
TTTTII
TtTI
1°, 2° e 3° invariante di Tij
valori principali:,, )3()2()1( λλλ
Teorema spettrale:
Ogni tensore simmetrico ammette una terna ortogonale di autovettori con autovalori reali
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
16
Capitolo 1:Elementi di algebra vettoriale e tensoriale
Campi vettoriali e tensoriali
),( txiΦ=Φ(a) campo scalare:
),( txvv jii =(b) campo vettoriale:
(c) campo tensoriale: ),( txTT kijij =
Campo tensoriale continuo: le componenti sono continue e derivabili di x e t
Campo tensoriale stazionario: )(xTT ijij =
Operatori simbolici:
(nabla) : iii
i ex
e ∂=∂∂
=∇ ixi
i ,=∂∂
=∂
kijk
iji
i
TxT
x ,, ; =∂
∂Φ=
∂Φ∂
ad esempio:
Operatori differenziali:
ii
ex
grad∂Φ∂
=Φ∇=Φ ii ,Φ=Φ∂o anche
3
3
2
2
1
1, x
vxv
xvvvvvdiv jiii ∂
∂+
∂∂
+∂∂
==∂=⋅∇=
jkijkkjijk vvvvrot ,=∈∂=∈×∇=
iiii ,2 Φ=Φ∂=Φ∇⋅∇=Φ∇
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
17
Capitolo 1:Elementi di algebra vettoriale e tensoriale
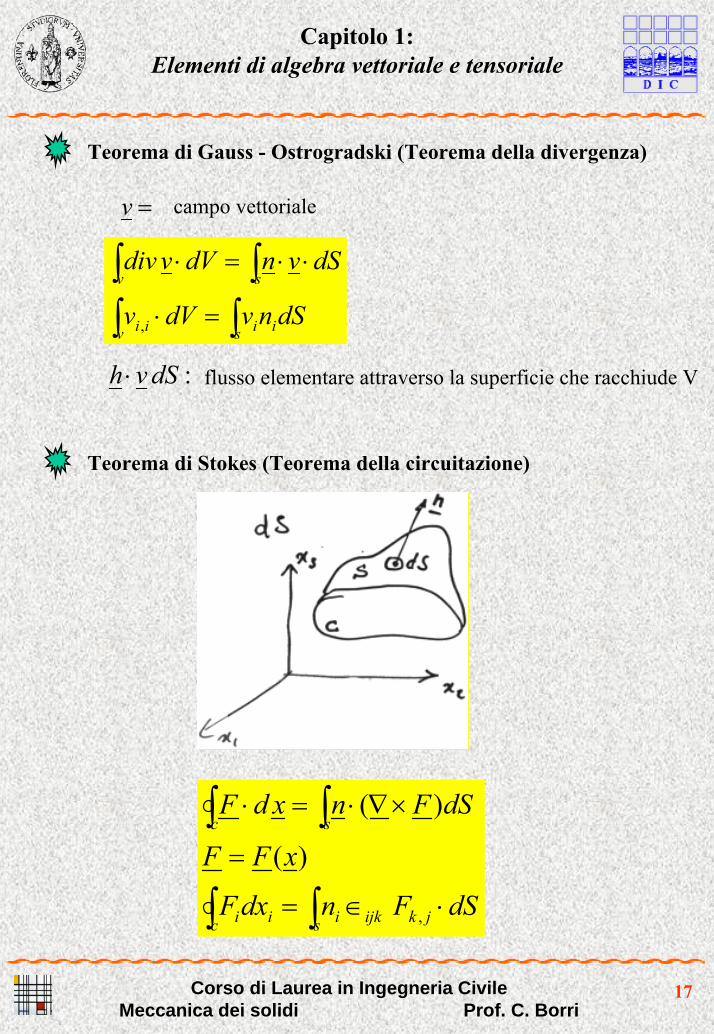
Teorema di Gauss - Ostrogradski (Teorema della divergenza)
=v campo vettoriale
∫∫∫∫
=⋅
⋅⋅=⋅
s iiv ii
sv
dSnvdVv
dSvndVvdiv
,
:dSvh ⋅ flusso elementare attraverso la superficie che racchiude V
Teorema di Stokes (Teorema della circuitazione)
∫∫
∫∫
⋅∈=
=
×∇⋅=⋅
s jkijkic ii
sc
dSFndxF
xFF
dSFnxdF
,
)(
)(
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
18
Capitolo 2:Stato di tensione
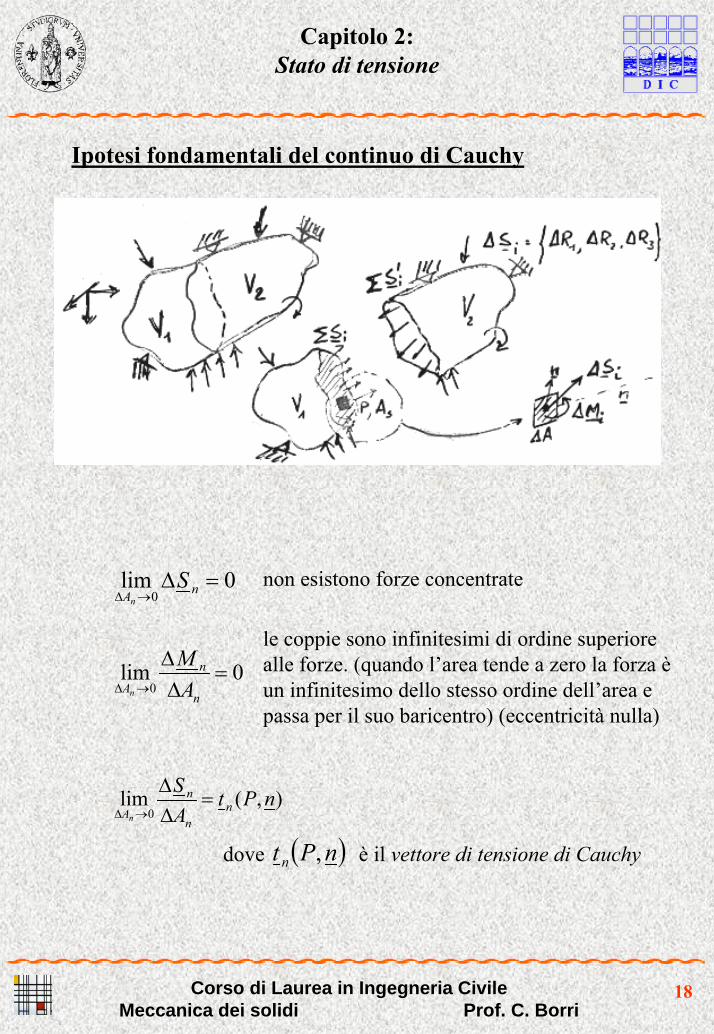
Ipotesi fondamentali del continuo di Cauchy
non esistono forze concentrate0lim0
=∆→∆ nA
Sn
le coppie sono infinitesimi di ordine superiore alle forze. (quando l’area tende a zero la forza è un infinitesimo dello stesso ordine dell’area e passa per il suo baricentro) (eccentricità nulla)
0lim0
=∆
∆→∆
n
n
A AM
n
),(lim0
nPtAS
nn
n
An
=∆∆
→∆
( )nPt n ,dove è il vettore di tensione di Cauchy

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
19
Capitolo 2:Stato di tensione
Caratterizzazione delle componenti dello stato di tensione
Chiamando , e i versori relativi ai tre assi coordinati x, y e z del sistema di riferimento assunto, ciascun vettore tensione è rappresentato dalle sue componenti:
i j k
kjit xzxyxxx σσσ ++=
kjit yzyyyxy σσσ ++=
kjit zzzyzxz σσσ ++=
componente del vettore tensione (relativo all’elemento piano di normale ) secondo la direzione
ijσ iti j
Chiamando la matrice delle componenti così definita:Σ
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==Σ
zzzyzx
yzyyyx
xzxyxx
ij
σσσσσσσσσ
σ
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
20
Capitolo 2:Stato di tensione
( ) nnPt n ⋅Σ=,Risulta:
Si possono scrivere le componenti del vettore tensione rispetto al sistema di riferimento O(x, y, z) come segue:
nt
( ) ( ) ( ) ++++++=++= yyzyyyxxxzxyxxzzyyxxn nkjinkjintntntnPt σσσσσσ,
( ) ( ) ( ) ++++++=+++ jnnninnnnkji zzyyyyxxyzzxyyxxxxyzzzyzx σσσσσσσσσ
( ) ktjtitknnnzyx nnnzzzyyzxxz ++=+++ σσσ
Le componenti del vettore tensione per esteso risultano:
⎪⎩
⎪⎨
⎧
++=++=++=
zzzyyzxxzn
zzyyyyxxyn
zzxyyxxxxn
nnntnnntnnnt
z
y
x
σσσσσσσσσ
Adottando la convenzione di Einstein infine:
iijnj nt σ=
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
21
Capitolo 2:Stato di tensione
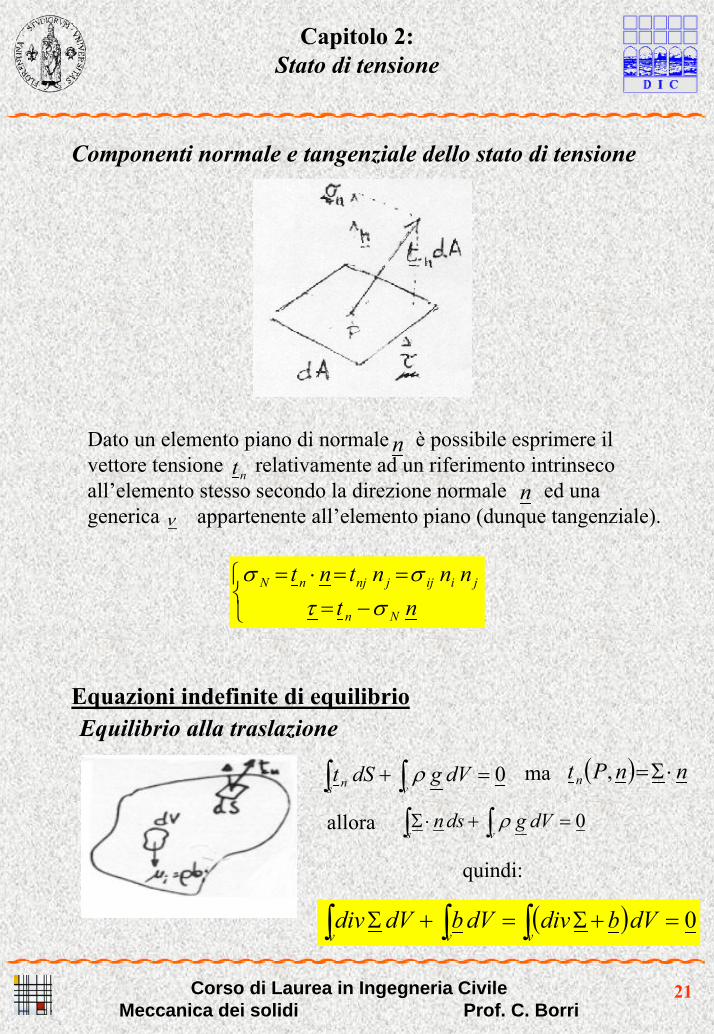
Componenti normale e tangenziale dello stato di tensione
Dato un elemento piano di normale è possibile esprimere il vettore tensione relativamente ad un riferimento intrinsecoall’elemento stesso secondo la direzione normale ed una generica appartenente all’elemento piano (dunque tangenziale).
n
nnt
ν
⎩⎨⎧
−===⋅=nt
nnntnt
Nn
jiijjnjnN
στσσ
Equazioni indefinite di equilibrioEquilibrio alla traslazione
0=+ ∫∫ vs n dVgdSt ρ ( ) nnPt n ⋅Σ=,ma
0=+⋅Σ ∫∫ dVgdsnvs
ρallora
quindi:
( ) 0=+Σ=+Σ ∫∫∫ dVbdivdVbdVdivvvv

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
22
Capitolo 2:Stato di tensione
Data l’arbitrarietà del volume V in partenza considerato:
0=+Σ bdiv
Questa scritta in componenti rispetto al solito sistema di riferimento cartesiano ortonormale O(x, y, z) risulta:
0, =+ jiij bσ (equazioni di Cauchy)
Equilibrio alla rotazione (sul piano y-z)
Imponendo l’equilibrio dei momenti si ottiene:
( ) ( )
zyyz
zyyz dzdydxdydzdx
σσ
σσ
=⇓
=
Analogamente imponendo l’equilibrio alla rotazione per le altre giaciture è facile dimostrare la reciprocità delle tensioni, pertanto:
σσ jiij = (simmetria del tensore di Cauchy)
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
23
Capitolo 2:Stato di tensione
Condizioni di equilibrio al contorno
Preso un elemento infinitesimo di superficie dA l’equilibrio richiede che la componente vettoriale di tensione su questa giacitura coincida con la corrispondente forza superficiale applicata
dAfdAt n =
In componenti:
jiij fn =σ
Considerazioni conclusive
•Equazioni di equilibrio del continuo (tre equazioni differenziali)
⎪⎩
⎪⎨⎧
∂=
=+
Vsu
Vsub
jiij
jiij
σσ
σ 0,
•Incognite: sei componenti di ijσ
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==Σ
zzzyzx
yzyyyx
xzxyxx
ij
σσσσσσσσσ
σ
• il problema dell'equilibrio punto-punto in un continuo diCauchy è sempre staticamente indeterminato (iperstaticitàdell'equilibrio interno)
• la simmetria dello stato interno di tensione è un fatto intrinseco, dovuto al solo equilibrio e non al tipo di materiale od altro (Cauchy);
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
24
Capitolo 2:Stato di tensione
Sforzi principali - Direzioni principali
nnt Lnσ=⋅Σ=
Una direzione si dice principale per lo stato di tensione se n Σ
cioè se è parallelo alla direzione tn n
Per il teorema spettrale, per lo stato di tensione alla Cauchy(essendo un tensore del II° ordine simmetrico reale) esiste almeno una base ortonormale reale di direzioni principali ed una terna di tensioni principali reali ad essa associata
Determinazione delle direzioni e degli sforzi principali
Per la determinazione delle direzioni principali si ricorre direttamente alla definizione scrivendo in componenti:
jLiij nn σσ =
( ) ( ) 0=−=− iijLijijiLiij nnn δσσδσσ
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
000
z
y
x
Lzzzyzx
yzLyyyx
xzxyLxx
nnn
σσσσσσσσσσσσ
L’individuazione di tali direzioni principali è stata ricondottaalla soluzione di un sistema lineare omogeneo.
0det =− ijLij δσσ
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
25
Capitolo 2:Stato di tensione
sviluppando il determinante, si ottiene
0322
13 =−+− III LLL σσσ (equazione caratteristica del tensore)
I coefficienti Ii sono detti invarianti del tensore (non dipendono dal sistema di riferimento in cui è scritto σ) e sono:
( ) 3322111 σσσσ ++=Σ== trI iiInvariante lineare:
Invariante quadratico:
Invariante cubico:
( )ijijjjiiI σσσσ −=21
2
( )Σ== det3 ijI σ
Gli invarianti hanno un significato fisico molto importante; ad essi possono essere associati stati di tensione particolarmente importanti ed immediatamente riconoscibili.
ΣComponente sferica e deviatorica del tensoreRisulta conveniente esprimere lo stato di tensione come somma delle seguenti due componenti:
ijijMij s+= δσσ
Componente sferica
Componente deviatorica3
iiMijM dove σσδσ =
ijMijijs δσσ −=
Le direzioni principali del tensore deviatore coincidono con quelle del tensore iniziale, mentre gli sforzi principali deviatorici sono dati da:
MLiLis σσ −=
L'equazione caratteristica del tensore deviatorico è 0323 =−+
DDIsIs
01 =D
Iessendo

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
26
Capitolo 2:Stato di tensione
Stato tensionale monoassiale
Uno stato tensionale si dice monoassiale, per definizione, quando una sola delle tre tensioni principali è diversa da zero e le altre due tensioni principali sono nulle:
0== ζη σσe quindi:
ξξσξ
ntn =
tale caso è facilmente riconoscibile dallo studio degli invarianti del tensore degli sforzi. Esso si verificherà quanto:
00 123 ≠== IeII
ξ⊥nNel caso in cui:
Esempio di stato monoassiale

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
27
Capitolo 2:Stato di tensione
Stato tensionale biassiale
Condizione sufficiente e necessaria perché lo stato di tensione possa dirsi biassiale è che si verifichi: I3 = 0. In questo caso l’equazione secolare diviene semplicemente:
( ) 0212 =+−⋅ II LLL σσσ
Da cui le soluzioni:
⎪⎩
⎪⎨
⎧
==
=
ηη
ξξ
ξ
σσ
σ
η
ξ
ntnt
n
n
0
Comunque si faccia variare o ruotare le giacitura la tensione non avrà componente lungo ξ, bensì solo lungo η e ξ; cioè la tensione sta sempre tutta nello stesso piano.
Esempio di stato piano:
Anche se in tutti i punti il piano di tensione non è lo stesso si tratta di stato piano (i piani di tensione sono infiniti e tutti paralleli)

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
28
Capitolo 2:Stato di tensione
Quadrica degli sforzi di Cauchy
Nel sistema ξi , il tensore delle tensioni in P ha componenti σij . L’equazione (k = cost.) rappresenta una famiglia di quadratiche simili aventi centro in P.
2kjiij ±=ζξσ
Per un punto sulla quadrica di vettore posizione le componenti saranno dove è il versore di
rrii nr=ξ in
In P la componente normale σN è data (per la direzione ni) da:
jiijn
in
iN nnntnt σσ =⋅== )()(
Assumendo k2 = σNr2 allora la quadratica risultante, detta quadrica di Cauchy è:
2rNjiij σξξσ ±=

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
29
Capitolo 2:Stato di tensione
Proprietà:
2
2
rk
N ±=σ (σN è inversamente proporzionale a r)
)(nt agente in P su dA (perpendicolare al vettore posizione ) è parallelo alla normale al piano tangente alla quadrica nel punto identificato da r
Massimi e minimi degli sforzi tangenziali
Il vettore tensione sulla faccia normale può essere decomposto nella somma delle sue componenti vettoriali normale alla faccia ( orientato come ) e tangenziale ( ):
nt n
Nσ n τ
⎩⎨⎧
−===⋅=nt
nnntnt
Nn
jiijjnjnN
στσσ
Sviluppando l’espressione di σN e del modulo di supponendo di ordinare le componenti principali del tensore delle tensioni in modo che
τ
IIIIII σσσ >>
222IIIIIIIIIIIIjiijjnjnN nnnnnntnt σσσσσ ++===⋅=
( ) ( ) =−⋅=−⋅−=⋅= 22Nn
tnNnNn
t ttntnt σσστττ
( )2222222222IIIIIIIIIIIIIIIIIIIIIIII nnnnnn σσσσσσ ++−++=
In sostanza:
( )22222222222IIIIIIIIIIIIIIIIIIIIIIII nnnnnn σσσσσστ ++−++=

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
30
Capitolo 2:Stato di tensione
Massimi e minimi col metodo dei moltiplicatori di Lagrange:
ii nnF λτ −= 2
Dove ni è la variabile indipendente e F è il funzionale da minimizzare o massimizzare e λ è detto moltiplicatore di Lagrange.
Occorre porre la stazionarietà di questo funzionale F rispetto alle ni, così facendo si ottiene (ricordiamo che le ni sono tali da dare nini = 1):
( )( )( )⎪
⎩
⎪⎨
⎧
=−−=−−=−−
⇒=∂∂
022022022
022
22
22
λσσλσσλσσ
AnAnAn
nF
IIIIIIIII
IIIIII
III
i
dove con A si indica: 222IIIIIIIIIIII nnnA σσσ ++=
Il sistema è risolvibile; un gruppo di soluzioni è
000
100010001
321
321
321
===
⇒⎪⎭
⎪⎬
⎫
±====±====±=
τττ
nnnnnnnnn
Un secondo gruppo di soluzioni è dato da:
⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
==±=
±==±=
±=±==
022
22
220
22
22
220
IIIIII
IIIIII
IIIIII
nnn
nnn
nnn( )
( )
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−=
−=
−=
2
2
2
III
IIII
IIIII
σστ
σστ
σστ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
31
Capitolo 2:Stato di tensione
Le direzioni individuate dalle ni sono ortogonali ad un asse principale e ruotate di π/4 rispetto agli altri due. La τ risulterà massima su una di tali giaciture, ed in particolare possiamo ottenere:
{ }IIIIIIIIIIII σσσσσστ −−−= ,,max21
max
La componente massima di τ agisce nel piano che biseca l'angolo retto formato dalle direzioni degli sforzi max e min. principali.
Localizzazione degli sforzi: Cerchi di Mohr
Si può scrivere: 23
222
221
222 nnn IIIIIIN σσστσ ++=+
(dove nini = 1)
Risolvendo rispetto ai coseni direttori:
( )( )( )( )IIIIIII
IIINIINIn
σσσστσσσσ
−−+−−
=2
2
Ordinando le tensioni principali in modo tale da avere IIIIII σσσ >>
si ha
( )( ) 02 ≥+−− τσσσσ IIINIIN
cioè è esterno al cerchio (o sulla sua circonferenza):( )τσ ,NP ≡
( ) ( ) 22
2
22 ⎥⎦⎤
⎢⎣⎡ −
=+⎥⎦⎤
⎢⎣⎡ +
− IIIIIIIIIIN
σστσσσ (C1)
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
32
Capitolo 2:Stato di tensione
( )( )( )( )IIIIIIII
INIIINIIn
σσσστσσσσ
−−+−−
=2
2
( )( ) 02 ≤+−− τσσσσ INIIIN
( ) ( ) 22
2
22 ⎥⎦⎤
⎢⎣⎡ −
=+⎥⎦⎤
⎢⎣⎡ +
− IIIIIIIIN
σστσσσ (C2)
( )( )( )( )IIIIIIIII
INIINIIIn
σσσστσσσσ
−−+−−
=2
2
( )( ) 02 ≥+−− τσσσσ INIIN
( ) ( ) 22
2
22 ⎥⎦⎤
⎢⎣⎡ −
=+⎥⎦⎤
⎢⎣⎡ +
− IIIIIIN
σστσσσ (C3)
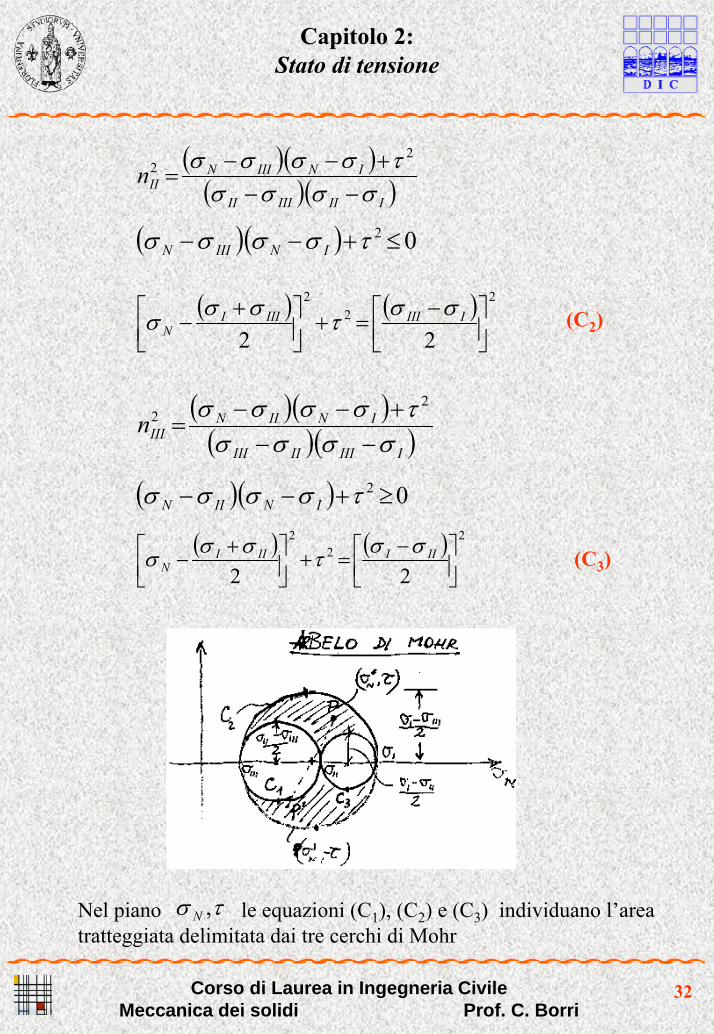
Nel piano le equazioni (C1), (C2) e (C3) individuano l’area tratteggiata delimitata dai tre cerchi di Mohr
τσ ,N
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
33
Capitolo 3:Stato di deformazione
Cinematica dei continui deformabili (congruenza o compatibilità)
Congruenza dei continui - Deformazione
iii uXxxxxPXXXP
+=≡′≡
321
321
,,,,
ui = vettore spostamento
In generale: dove χ = trasformazione( )Xx χ=
•χ permanentemente biunivoca (suriettiva + iniettiva)
•χ continua con χ-1 continua
•χ e χ-1 differenziabili quanto occorre
χ espressione lagrangiana (o referenziale)
χ-1 espressione euleriana (o spaziale)
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
34
Capitolo 3:Stato di deformazione
Determinante Jacobiano
1
det
det
,,
,,
=⋅
=∂∂
==
=∂∂
==
EL
E
j
ijiji
L
j
ijiji
JJ
JxXXX
JXxxx
Ipotesi di lavoro su )( EL JoJPer lavorare con i continui è necessario:
0>J (strettamente)
∞<⇒>> EE
L JJ
J 01;0
J = 0 implosione , J = ∞ esplosione
Gradiente dello spostamento
0,,,,,, >+==⇒−=
−=
jijijiL
jijiji uxJxu
Xxu
δδ
la condizione sul determinante dello jacobiano della trasformazionesi trasforma in una condizione sul gradiente dello spostamento

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
35
Capitolo 3:Stato di deformazione
Tensori della variazione di posizione
33
12
2
11
1
11 dX
XxdX
XxdX
Xxdx
∂∂
+∂∂
+∂∂
=Posto che:
jjkiik dXxdXxdxxdxdld ,,22 ⋅==⋅=′si può scrivere:
jiijii dXdXdXdXXdXddXdl δ=⋅=⋅== 22ma:
( ) jiijjkik dXdXxxdXdx δ−=− ,,22quindi
Si definisce:
Gxx ijjkik =,,Tensore di Green (o di variazione della posizione)
CXXxX
xX
ijjkik
j
k
i
k =←∂
∂
∂
∂,,
Tensore di Cauchy (variazione della posizione)

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
36
Capitolo 3:Stato di deformazione
In dettaglio:
Coord Spost. Coord. immagine
P0 X j uj uXx jjj +=
Q0 XdXX Qjj j=+ dXuu iijj + uXx QQQ jjj
+=
Sviluppando in serie e troncando al I° ordine:}dl
XdnuudXuuu iijjiijjQ j+=+=
Le coordinate dei punti immagine saranno:
uXx jjj +=
{
}
( ) ( ) dlnuxdlnunuX
u
dlXdnuu
X
dln
dXXuXx
iijijjiijjjj
Q
iijj
Q
j
jjQQQ
j
j
jjj
++=+++=
=+++=+=
δ
44 844 76
48476
( ) dlnuxxdx jjikikQk k ,+=−= δAllora:
Calcolando il nuovo modulo 'dldx =
( ) ( ) dlnudlnudxdxxddl jjkkjiikkikk ,,22' +⋅+=== δδ
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
37
Capitolo 3:Stato di deformazione
Sviluppando:
( ) 2,,,,
2
2,,
,,
2
dlnnuuuuld
dlnnuu
u
u
u
uld
jijkikijjiij
jijkik
ij
kikj
ji
kjki
ij
kjki
+++=′
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅+⋅+⋅+⋅=′
δ
δδ
δ
δδ321321321
Poiché: 1=jiij nnδ
( )[ ][ ] 22
2,,,,
2
21
1
dlnnLld
dlnnuuuuld
jiij
jijkikijji
+=′
+++=′Si ottiene:
ijL2 = tensore delle deformazioni finite (6 componenti)
Moto rigido: 0222 =⇒=′ ijLdlld
Ricordando che era stato definito:
jiij
jkikij
dXdXGdx
xxG
=
=2
,,
È possibile provare che:
ijijjkik Lxx 2,, =−δ
Tensore della deformazione finita o di Green-Lagrange

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
38
Capitolo 3:Stato di deformazione
Sostituendo:
( )jkikijjiij
ijjiji
uuuuL
ux
,,,,
,,
21
++=
+= δ
In termini Euleriani
( )ijijijij CeE −== δ21
Tensore della deformazione finita di Eulero-Almansi
Deformazioni infinitesime
a) “piccoli” spostamenti
b) “piccolo” il gradiente ijijji ELu ≅⇒<< 1,
( )⇒+= ijjiij uu ,,21
l tensore lagrangiano di deformazione infinitesima
( )⇒+= ijjiij uu ,,21ε tensore euleriano di deformazione infinitesima
1. Rapporto di stiramento (deformazione) nella direzione "m"
jiijjiij
mm
mmGdX
dXdXGdXdx
===⎟⎠⎞
⎜⎝⎛ Λ 2
22

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
39
Capitolo 3:Stato di deformazione
Si ha:
( ) jiijijjiijmm
mmLmmGdXdx
⋅+==Λ=⎟⎠⎞
⎜⎝⎛ δ2
Allungamento percentuale lungo una direzione m:
11 −=−=−
= ΛΛ∗
mm dXdx
dXdXdx
Nella direzione degli assi coordinati:
( )
( ) 121
11212
+=+
−+=−Λ=
ΛΛ
∗
∗
iii
iiii
L
L
In deformazioni infinitesime:
iii
i
iiii L
ε=
→≅
+=++
ΛΛ
ΛΛ
∗
∗
∗∗
0
12122
2

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
40
Capitolo 3:Stato di deformazione
2. Dilatazione angolare (deformazioni infinitesime)
121/22,112
2,12
1/21
1221
2εγββ
γββ
=+=
≅≅
=+
uuuu
3. Dilatazione superficiale (deformazioni infinitesime)
( )( )
( )( )
021cos
1121cos11cos
11
2211
12
2211221112221112
1212
21
2112212211
21
212112
≅≅
−+++=−++=∆=
−++=
−=
−′=∆
εεγ
εεεεγεεγϕ
ϕεε
sindXdX
dXdXsindXdXdXdX
dXdXdxdxdA
dAAd
4. Dilatazione di volume (deformazioni infinitesime)
Con analoghi sviluppi:
332211321
321321 εεε ++=−
=∆dXdXdX
dXdXdXdxdxdxv
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
41
Capitolo 3:Stato di deformazione
Scomposizione in componenti simmetrica ed assimetrica
dXuuu iijpQ jj,+=
dlnuuu iijPQ jj ,+=
( ) ( )ijjiijjiji uuuuu ,,,,, 21
21
−++=
Quindi:
( ) ( ) dXuuuuuu ijiijjiijpQjj ⎥⎦
⎤⎢⎣⎡ −+++= ,,,, 2
121
traslazione Deformazione pura
(parte simm.)
Rotazione rigida
(parte asimm.)
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
42
Capitolo 3:Stato di deformazione
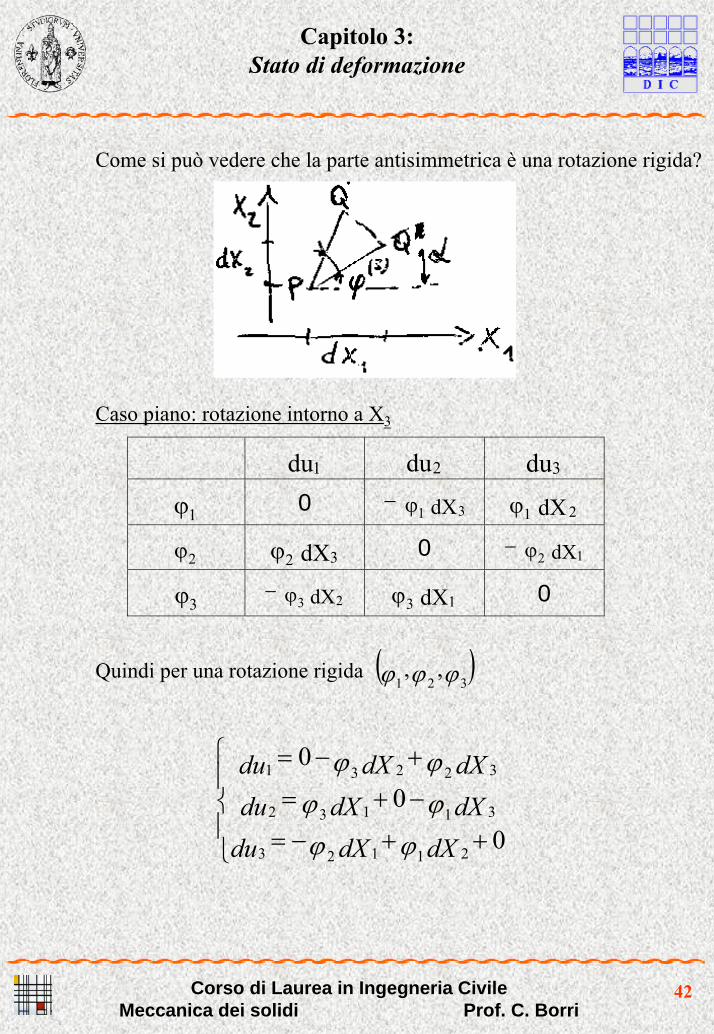
Come si può vedere che la parte antisimmetrica è una rotazione rigida?
Caso piano: rotazione intorno a X3
du1 du2 du3
ϕ1 0 dX31ϕ− dX 21ϕ
ϕ2 dX32ϕ 0 dX12ϕ−
ϕ3 dX23ϕ− dX13ϕ 0
( )ϕϕϕ 321,,Quindi per una rotazione rigida
⎪⎩
⎪⎨
⎧
++−=
−+=
+−=
00
0
21123
31132
32231
dXdXdudXdXdudXdXdu
ϕϕϕϕϕϕ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
43
Capitolo 4:Lavori Virtuali per i continui deformabili
Lavori virtuali per i continui deformabili
p dS: forze di superficie (distribuite o concentrate)µ dV: forze di volume
In ogni punto P siano definiti:
come campo tensionale in equilibrio con le forze esterne applicate (l'equilibrio è soddisfatto in termini globali e locali);
( )Pijij σσ =
( )Puu = come campo di spostamenti congruenti, piccoli a piacere che rispettino la compatibilità cinematica interna ed esterna. Sia inoltre il campo di spostamenti u tale che ui,j << 1
Allora è definita:
( )Pijij εε = come campo di deformazioni puntuali congruenti
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
44
Capitolo 4:Lavori Virtuali per i continui deformabili
Lavoro virtuale esterno
Si definisce il lavoro virtuale esterno, Le*, come prodotto dal campo
di forze esterne di superficie p e di massa µ per il campo di spostamenti infinitesimi (del tutto indipendente dal campo di forze) congruenti e compatibili con i vincoli (spostamenti u* virtuali):
( ) ( )∫∫ ⋅+⋅=VS
e dVudSupL *** µ
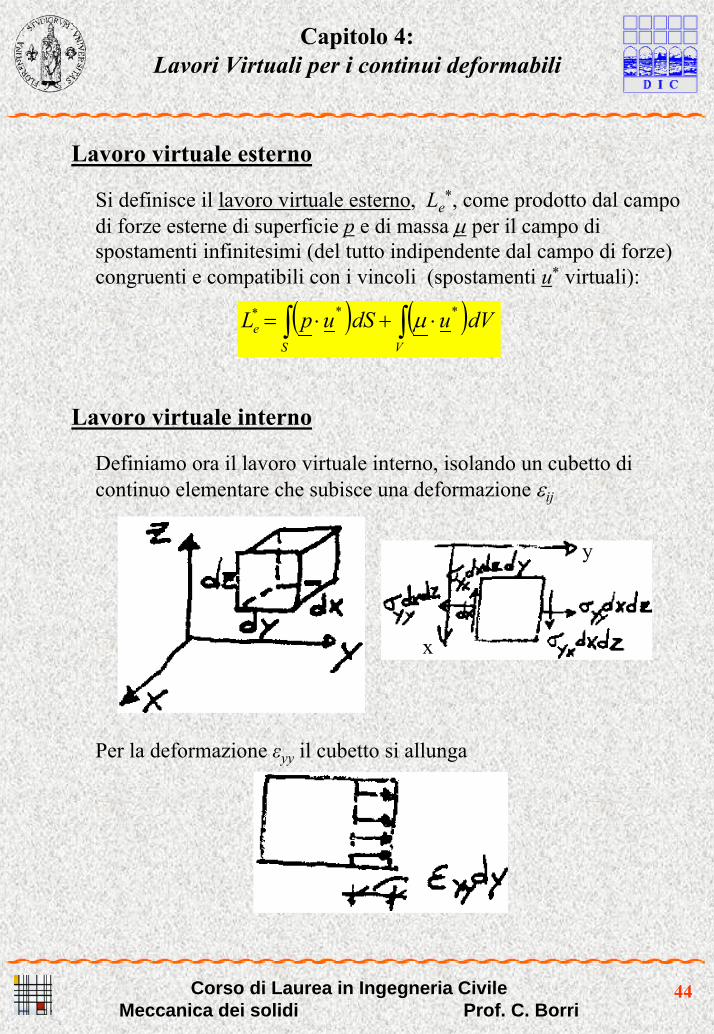
Lavoro virtuale interno
Definiamo ora il lavoro virtuale interno, isolando un cubetto dicontinuo elementare che subisce una deformazione εij
x
y
Per la deformazione εyy il cubetto si allunga

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
45
Capitolo 4:Lavori Virtuali per i continui deformabili
La forza σyydxdz compie un lavoro pari a:
dVdydzdx yyyyyyyy εσεσ =⋅
Analogamente:dVx xxxx εσ→
dVz zzzz εσ→
Oltre alle componenti considerate, se non è stato fissato un sistema principale, devono essere considerate le componenti di lavoro dovuto alle distorsioni:
Il lavoro è prodotto solo dalla σyx:
dVdzdxdy yxyxyxyx γσσγ =⋅
Analogamente:
dVxz xzxz γσ→
dVyz yzyz γσ→
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
46
Capitolo 4:Lavori Virtuali per i continui deformabili
Per un campo di deformazioni virtuali (cioè infinitesime e compatibili con i vincoli interni ed esterni) εij assolutamente indipendenti dal sistema di forze:
( ) dVdL yzyzxzxzxyxyzzzzyyyyxxxx∗∗∗∗∗∗∗ +++++= γσγσγσεσεσεσint
dove∗∗∗∗ +== ijijijij εεεγ 2
Quindi per ogni termine misto si ottiene:
∗∗ + jijiijij εσεσ
Allora, in notazione tensoriale:
dVdL ijij∗∗ = εσint
Sostituendo in termini integrali si ottiene:
∫=V
ijiji dVL ** εσ
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
47
Capitolo 4:Lavori Virtuali per i continui deformabili
Teorema dei lavori virtualiSupponiamo di avere, in un certo riferimento, un solido che occupi in condizioni di equilibrio un certo volume V sul quale siano applicate forze di superficie e di volume note. Essendo il solido in equilibrio valgono le equazioni di equilibrio, punto per punto, di Cauchy:
⎪⎩
⎪⎨
⎧
=∂=
=+
jiij
jiij
jiij
VinfnVinb
σσσσ 0,
Ad equilibrio raggiunto supponiamo di applicare un campo di spostamenti u* qualunque purché congruente. Partendo dalle equazioni di equilibrio moltiplichiamo queste per il campo di spostamenti in modo da saturare l’indice libero:
0**, =+ jjjiij ubuσ 0**
, =+ ∫∫V
jjV
jiij dVubdVuσ
∫∫∫∫ ⋅=⇒⋅=s jjv ijs jjv j dSnAdVAdSnAdVdivA ,
Ricorrendo al teorema della divergenza (Gauss - Ostrogradski):
si ha:
( ) ∫∫ =S
ijijV
ijij dAnudVu *,
* σσ( ) ∫∫∫ +=V
ijijV
jiijV
ijij dVudVudVu *,
*,,
* σσσ
∫∫∫ =+S
ijijV
ijijV
jiij dAnudVudVu **,
*, σσσ
∫∫∫ −=V
ijijS
ijijV
jiij dVudAnudVu *,
**, σσσ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
48
Capitolo 4:Lavori Virtuali per i continui deformabili
0**,
* =+− ∫∫∫V
jjV
ijijS
ijij dVubdVudAnu σσDunque:
jiijj fnt ==∗ σSfruttando le equazioni di equilibrio al contorno
∫∫∫ =+V
ijijV
jjS
jj dVudVubdAuf *,
** σ
Il termine del gradiente dello spostamento ui,j* può essere decomposto
nella sua parte simmetrica εi,j* (tensore delle deformazioni ) e
antisimmetrica ωi,j* (tensore delle rotazioni).
In virtù di questa decomposizione e del fatto che il tensore degli sforzi σi,j
* è un tensore simmetrico, come si ricava dall’equilibrio alla rotazione del continuo di Cauchy, ed essendo il prodotto di un tensore simmetrico per uno antisimmetrico nullo si ha:
( ) *,
*,
*,
*, ijijijijijijij u εσωεσσ =+=
Si ottiene infine:
∫∫∫ =+V
ijijV
jjS
jj dVdVubdAuf *** εσ
Quindi è stato dimostrato il teorema di lavoro virtuale per continui deformabili partendo dalle ipotesi di:
0, =+ jiij bσStato tensionale di equilibrio
( )ijjiij uu ,,21
+=εStato deformativo congruente

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
49
Capitolo 4:Lavori Virtuali per i continui deformabili
EQUILIBRIO
LAVORO VIRTUALE NULLOCONGRUENZA
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
50
Capitolo 4:Il continuo elastico lineare
Il continuo elastico lineare
Dati: Incognite:( )
( )( )⎪⎩
⎪⎨
⎧
→=→=→=
funzioniPfunzioniPuufunzioniP
ijij
ii
ijij
636
εε
σσ( )bp,Forze applicate:
Reazioni vincolari
3 equazioni di equilibrio + 6equazioni di congruenza
Equazioni a disposizione:
Il problema del continuo non è determinabile se non ricorrendo a delle condizioni aggiuntive. Queste condizioni aggiuntive sono le equazioni costitutive (o di legame). Tramite queste equazioni che mettono in relazione il campo di tensioni con il campo di deformazioni il problema del continuo diventa isodeterminato. Quindi il problema del continuo è risolvibile soltanto considerando l'aspetto statico (equilibrio) e cinematico (congruenza) congiuntamente.
εσ ijij ↔ equazioni costitutive (o di legame)

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
51
Capitolo 4:Il continuo elastico lineare
Il legame costitutivo elastico-lineare
Il solido elastico lineare è caratterizzato da una proporzionalità tra il tensore di deformazione e delle tensioni.
klijklij C εσ =
La legge costitutiva elastica lineare è:
biunivoca
lineare (proporzionalità)
invertibile 1−=⇒= CBB ijklijkl σε
In generale il tensore Cijkl ha 34 = 81 componenti.Per la simmetria dei tensori σij e εij tali componenti si riducono a 36
Biunivocità del legame Sistema conservativo
Esistenza del POTENZIALE DI DEFORMAZIONE
Lavoro interno (LI): lavoro compiuto da un campo σ per un campo ε (valori finali) anche completamente indipendenti.
Lavoro di deformazione (Ld): lavoro compiuto dal variare (proporzionale) di σ per il corrispondente stato di deformazione ε(pure variabile).
dVdL ijijI εσ=dVL ijV ijI εσ∫=

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
52
Capitolo 4:Il continuo elastico lineare
Se σij ed εij variano:
( )ijklijklijijI C
dVdL δεεδεσδφδ ==⎟
⎠⎞
⎜⎝⎛=
klijklij C εσ =
avendo introdotto con φ il lavoro di deformazione per unità di volume:
( ) ∫=⇒=V
dij dVL φεφφ
Se φ è una funzione potenziale, allora δφ è un differenziale esatto. Allora, per il teorema di Schwartz:
klijijklij
kl
kl
ij
ijklklij
CC =⇒∂∂
=∂
∂⇒
∂∂∂
=∂∂
∂εσ
εσ
εεφ
εεφ 22
Si ottiene un'ulteriore simmetria, rispetto ai gruppi ij e kl: scambiando i due gruppi fra loro, la matrice non cambia. Quindi le componenti si riducono da 36 a 21
Da quanto scritto si ha:
σε
φij
ij
=∂
∂
e per il legame costitutivo si ha:
Cijklkl
ij =∂
∂
ε
σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
53
Capitolo 4:Il continuo elastico lineare
Quindi:
φεε
φ⇒=
∂∂∂
Cijklklij
2
è al più quadratica
costante→Cijkl
L'espressione più generale di φ è dunque:
klijijklijij CA εεεφφ *0 ++=
Per convenzione:
( ) 000 0 =⇒== φεφ
Quindi resta:
klijklijij
klijijklijij CACA εεφεεεφ ** +=
∂∂
⇒+=
però
σε
φij
ij
=∂
∂
Quindi risulterebbe che per 0=klε 0≠= ijij Aσ
ciò contrasta con l'ipotesi di lavoro iniziale di biunivocità, invertibilità, etc. della legge di legame, allora:
klijijklC εεφ *=

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
54
Capitolo 4:Il continuo elastico lineare
Vediamo la relazione che intercorre fra e Cijkl Cijkl
*
εεσε
φklklijklijklij
ijCC
** +==∂
∂
Per la simmetria rispetto all'ordine dei due gruppi ij e kl:
εσ klijklij C2*=
E confrontando con:
Cijklkl
ij =∂
∂
ε
σ
Si ha:
CC ijklijkl 21* =
Infine:
klijklijijklC εσεεφ21
21
==
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
55
Capitolo 4:Il continuo elastico lineare
Principio dell’unicità della soluzione
iijiji uP →→→ εσ
ijiP σ→ è lineare se si possono scrivere le equazioni di equilibrio nella configurazione indeformata(ipotesi di piccoli spostamenti)
ijij εσ → è lineare per l’ipotesi fatta sulla legge costitutiva
ijij εσ → è lineare se 1, <<jiu
Se il sistema è elastico: ( )∫==V
ijdf dVLL εφ
(cioè il lavoro fatto dalle forze è uguale a quello necessario adeformare il corpo) la soluzione del problema esiste ed è unica (lo si intuisce per la linearità).
Se la soluzione non fosse unica:
iii
iii
up
up′′′′→
′′→
,
,'
'
σ
σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
56
Capitolo 4:Il continuo elastico lineare
Sovrapponendo gli effetti ''''' ,0 iiiiii uupp −′′−′→−= σσ
dove
0
0''' ≠−
≠′′−′
ii
ii
uu
σσ
Quindi un sistema di forze nullo provocherebbe tensioni e spostamenti.
Teorema di reciprocità (Betti)
Il lavoro mutuo fatto dal sistema di forze (a) per gli spostamenti dei loro punti di applicazione indotti dal sistema (b) è uguale al lavoro fatto dalle forze del sistema (b) per gli spostamenti dei loro punti di applicazione indotti dal sistema (a).
•Per la dimostrazione del teorema di reciprocità si procede come segue:
Se si applica prima il sistema (a) e poi il sistema (b):
LLLL abba ++=1
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
57
Capitolo 4:Il continuo elastico lineare
Se si applica prima il sistema (b):
LLLL baab ++=2
Ovviamente:
LLLL baab =⇒= 21
•Sistemi energicamente ortogonali:
0== LL baab
Energia potenziale totale di un corpo elastico
Energia di posizione (potenziale delle forze): ∑−=Π ii uFEnergia di deformazione (potenziale elastico):
∫∫ ⎟⎠⎞
⎜⎝⎛==
Vklijijkl
Vd dVCdVL εεφ
21
Π+= ∫V
dVφξEnergia potenziale totale:
Si può dimostrare che: “Per campi (u, ε) congruenti e campitensionali equilibrati la energia potenziale totale è stazionaria”
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
58
Capitolo 4:Il continuo elastico lineare
Ipotesi di omogeneità
I Cijkl sono uguali in tutti i punti del continuo
Ipotesi di isotropia
Al variare della terna di riferimento non varia neppure l'espressione di Φ ⇒ Cijkl è costante rispetto alla direzione.
L'ipotesi di ISOTROPIA implica che, nella espressione di Φ, devono comparire soltanto i TRE INVARIANTI della deformazione:
33222
11
2EAEAEA
++=φ
dove
εεεε 3322111 ++== iiE( )εεεεεεεεεεεε 1331322321123322331122112 ++−++=E
ε ijE det3 =
ed inoltre:03 =A
poiché Φ può essere AL PIU' quadratica in ε. Allora le costanti si riducono a 2: A1 e A2 .

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
59
Capitolo 4:Il continuo elastico lineare
Attribuiamo alle due costanti un significato fisico ⇒ legame fra ε e σ.
εεεσ
∂
∂+∂
∂=∂
Φ∂=
ijijijij
EA
EE
A 22
11
122
Esplicitando:
γγετσ GAA ijijijijij =−=−==
22
2ji ≠a)
quindi le componenti tangenziali della tensione, nel caso isotropo, dipendono soltanto dalle dilatazioni angolari corrispondenti.
=⎟⎟⎠
⎞⎜⎜⎝
⎛=− GA
22 modulo di elasticità tangenziale (o
trasversale [F/S]).
Poiché Φ deve essere positivo
( )
0
21
21 2
1222121212122
>⇓
−=−−==Φ
G
AAAijij εεεεεεσ
b) i = j, per esempio = 1
( ) ( )33222332211111 εεεεεσ +++++= AA
Sommando e sottraendo A2ε11 si ha:
( )( ) { 1123322112111
2εεεεσ
GAAA −++++=
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
60
Capitolo 4:Il continuo elastico lineare
Quindi, posto λ = A1 + A2
( )( )332211
3322111111
22
εεελεσεεελεσ
+++=+++=
iiii GG
Le componenti normali di σ dipendono da tutte e tre le deformazioni lineari, ma non dalle componenti tangenziali.Riunendo le due formule si ha:
iiijijij G εδλεσ =∆∆+= ;2
Legge di Hooke generalizzataOsservazioni
•Per materali isotropi, se una terna di riferimento è principale per εè principale anche per σ
•λ non ha significato fisico immediato; per riconoscerlo, si possono rovesciare le espressioni:
( ) ijkkijij GGGσσδ
λλε
21
232+
+−
=
•Introducendo le costanti “ingegneristiche” E e ν, tramite le relazioni:
11
33
11
22
33
33
22
22
11
11
εε
εε
εσ
εσ
εσ
−=−=
===
v
E

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
61
Capitolo 4:Il problema elastostatico
Si ottiene:
kkijijij
kkijijii
Ev
Ev
vv
vE
σδσε
εδεσ
−+
=
⎟⎠⎞
⎜⎝⎛
−+
+=
1211
E = 2G(1+ν) (modulo di Young)
( )λλ+
=G
v2
(coefficiente di Poisson)
Il problema elastostatico
Abbiamo un solido nella configurazione Co soggetto a forze di superficie assegnate su una porzione di superficie del solido e forze di volume . Inoltre se il solido è elastico si introduce il tensore del legame costitutivo elastico. Questo tensore ha 36 componenti distinte se il solido è elastico senza simmetrie. Queste si riducono a 21 se è iperelastico, e a 2 sole se il solido è isotropo. Per conoscenza della soluzione si intende la conoscenza in tutti i punti del solido di:
fb
ijklC
( )Puu ii = le componenti di spostamento in tutti i punti del continuo Co
( )Pijij εε = le componenti di deformazione in tutti i punti del continuo
( )Pijij σσ = le componenti di tensione in tutti i punti del continuo

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
62
Capitolo 4:Il problema elastostatico
Si dispone delle seguenti equazioni:
0, =+ jiij bσEquazioni di equilibrio in V (di Co)
jiij fn ˆ=σe equazioni ai limiti
ijijkkij G εδελσ 2+=Equazioni di legame
Equazioni di compatibilità - congruenza in V( )ijjiij uu ,,21
+=ε
Condizioni di contorno espressi in uno dei seguenti modi:I. sono assegnati gli spostamenti lungo tutto il contorno
II. sono assegnati gli sforzi lungo tutto il contornof
III. su una parte del contorno sono assegnati gli spostamenti e sull’altra parte gli sforzi
Alla fine si hanno:• 6 equazioni di congruenza;• 3 equazioni di equilibrio;• 6 equazioni costitutive;per un totale di 15 equazioni.
Per contro abbiamo:•3 incognite di spostamento;•6 incognite di deformazione;•6 incognite di tensione;per un totale di 15 incognite
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
63
Capitolo 4:Il problema elastostatico
Nel caso I si ottengono le seguenti equazioni di Navier-Cauchy (1827)
02 ,, =++ jiijijikk bG εδελ
( ) 0212
,,,. =+++ jiijjiijkik buuGu δλ
0,,. =+++ jiijjiikjk buGuGuλ
( ) 0,2 =+++∇ jijij buGuG λ
Nel caso II si ottengono le seguenti equazioni di Beltrami-Michell (1900)
⎟⎠⎞
⎜⎝⎛
−++−=+
+ ijkkijjikkijijkk bbb δν
νσσν ,,,,. 11
1
Nel caso III si risolve il problema di equazioni e si impongono condizioni al contorno parziali
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
64
Capitolo 5:Il problema di De Saint Venant
Postulato di De Saint Venant
Si consideri un generico continuo e sia questo in equilibrio per effetto di un sistema di forze S applicato su una porzione del solido.
Il postulato di De St. Venant afferma che: "gli effetti, in termini di σed ε, di questo sistema di forze S si risentono solo in una porzione del solido di dimensioni paragonabili alla massima distanza tra i punti di applicazione delle forze".
Sovrapponendo gli effetti:
⇒ rispetto ad (a), in (c) lo stato tensionale cambia solo in B".
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
65
Capitolo 5:Il problema di De Saint Venant
"Se si sostituisce un sistema di forze con la sua risultante, gli effetti in termini di tensioni e deformazioni si risentono solo nella porzione di dimensioni paragonabili alla massima distanza fra i
punti di applicazioni delle forze"
⇓
Il corollario di De St. Venant ci permette di dire che per le travi il campo tensionale in una sezione dipende solo dalle caratteristiche di sollecitazione, con la sola esclusione delle zone, molto ristrette,
dove sono applicate forze e coppie concentrate.
Problema di De St. Venant
Il problema di De St. Venant consiste nella soluzione del problema elastico per un solido cilindrico allungato. Vediamo nel particolare le ipotesi di base al problema di De St. Venant.
•Geometria del solidoSolido prismatico a sezione costante con lunghezza “L” molto maggiore delle dimensioni trasversali (le quali si suppongono dello stesso ordine di grandezza tra loro): L>>D.
x, y, z si fissano sugli assi principali d’inerzia
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
66
Capitolo 5:Il problema di De Saint Venant
•Natura del solidoCorpo elastico omogeneo e isotropo: le caratteristiche meccaniche del corpo sono le stesse in tutti i punti del corpo così come le costanti di Lamé.
•VincoliPer impedire il moto rigido del sistema possiamo fissare, ad esempio, il baricentro G0 del sistema di riferimento assunto, pertanto:
( ) ( ) ( ) 0,,,,,, 000000000 === zyxwzyxvzyxu
ϕϕϕ zyx
xw
zu
zv
↓↓↓∂∂
=∂∂
=∂∂
•ForzeTutte le forze esterne sono applicate solo sulle basi estreme del solido. Sono nulle le forze superficiali sulla superficie laterale ed anche le forze di massa.
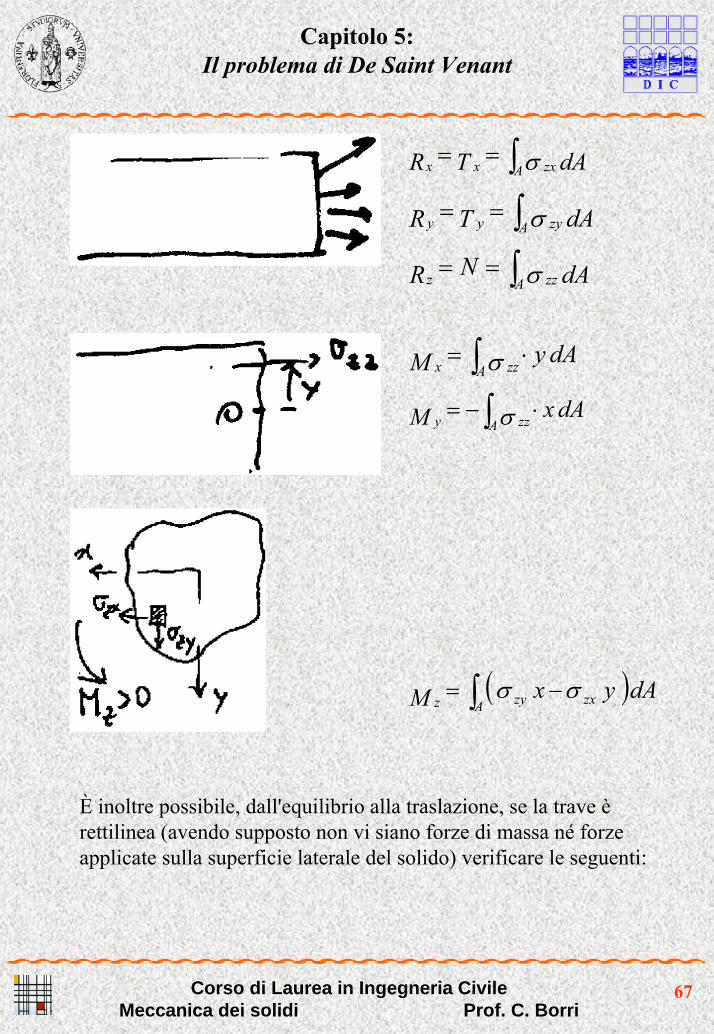
Caratteristiche di sollecitazioneOgni sezione del prisma ha uno stato di sollecitazione caratterizzato da una forza F e un momento M ottenuti come forza e momento risultante, rispetto al baricentro della sezione, del sistema di forze superficiali applicate (ad esempio) sulla base sinistra del prisma. Le loro componenti rispetto al sistema di riferimento assunto vengono dette caratteristiche di sollecitazione. È immediato verificare, da semplici considerazioni di equilibrio, la validità delle seguenti relazioni:
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
67
Capitolo 5:Il problema di De Saint Venant
dATR A zxxx ∫== σ
dATR A zyyy ∫== σ
dANR A zzz ∫== σ
dAyM A zzx ⋅= ∫ σ
dAxM A zzy ⋅−= ∫ σ
( )dAyxM A zxzyz ∫ −= σσ
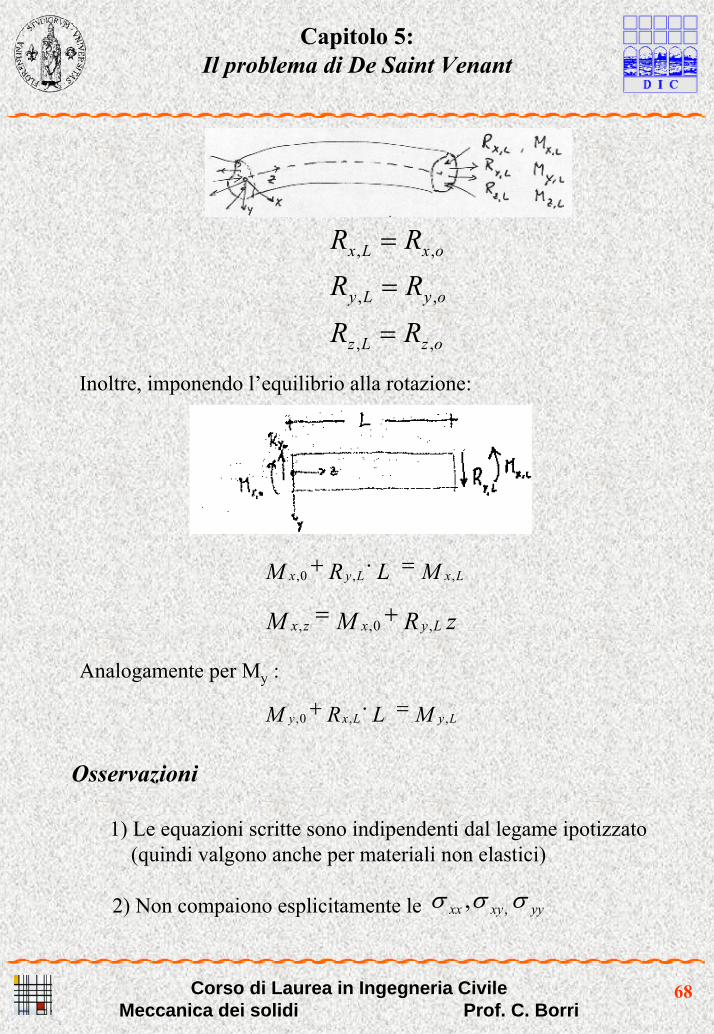
È inoltre possibile, dall'equilibrio alla traslazione, se la trave è rettilinea (avendo supposto non vi siano forze di massa né forzeapplicate sulla superficie laterale del solido) verificare le seguenti:
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
68
Capitolo 5:Il problema di De Saint Venant
ozLz
oyLy
oxLx
RR
RRRR
,,
,,
,,
=
=
=
Inoltre, imponendo l’equilibrio alla rotazione:
MLRM LxLyx ,,0, =⋅+
zRMM Lyxzx ,0,, +=
Analogamente per My :
MLRM LyLxy ,,0, =⋅+
Osservazioni
1) Le equazioni scritte sono indipendenti dal legame ipotizzato (quindi valgono anche per materiali non elastici)
2) Non compaiono esplicitamente le yyxyxx σσσ ,,
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
69
Capitolo 5:Il problema di De Saint Venant
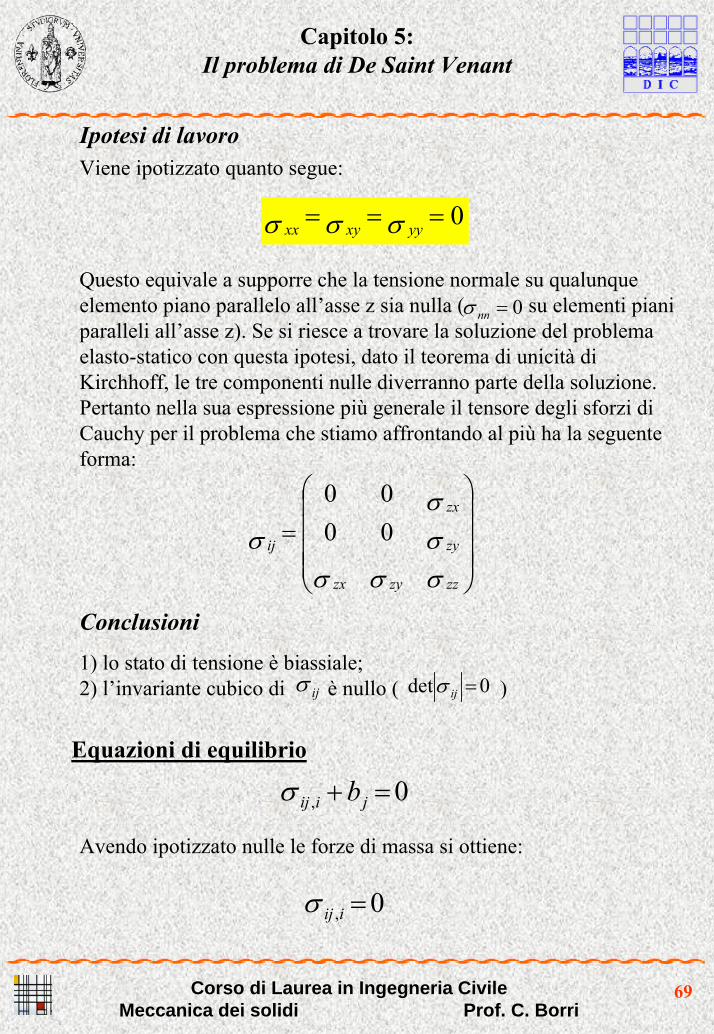
Ipotesi di lavoroViene ipotizzato quanto segue:
0=== σσσ yyxyxx
Questo equivale a supporre che la tensione normale su qualunque elemento piano parallelo all’asse z sia nulla ( su elementi piani paralleli all’asse z). Se si riesce a trovare la soluzione del problemaelasto-statico con questa ipotesi, dato il teorema di unicità diKirchhoff, le tre componenti nulle diverranno parte della soluzione. Pertanto nella sua espressione più generale il tensore degli sforzi diCauchy per il problema che stiamo affrontando al più ha la seguente forma:
0=nnσ
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
=
σσσσσ
σzzzyzx
zy
zx
ij 0000
Conclusioni
1) lo stato di tensione è biassiale;2) l’invariante cubico di è nullo ( )ijσ 0det =ijσ
Equazioni di equilibrio
0, =+ jiij bσ
Avendo ipotizzato nulle le forze di massa si ottiene:
0, =iijσ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
70
Capitolo 5:Il problema di De Saint Venant
Allora:
⎪⎩
⎪⎨
⎧
=++==
000
,,,
,
,
zzzyyzxxz
zzy
zzx
σσσσσ
Dalle prime due equazioni segue che le componenti di tensione tangenziale, avendo la derivata nulla rispetto a z, sono funzioni al più di solo x e y. In altri termini la distribuzione delle tensioni tangenziali è la stessa in tutte le sezioni : ( )yx,ττ =
Derivando invece la terza equazione rispetto a z i primi due termini spariscono per quanto appena detto e rimane: . Ossia è al più una funzione lineare in z.
0, =zzzzσ zzσ
Introducendo le equazioni costitutive del problema elastico:
( )[ ]ijijij IE
δνσνε σ−+= 11
dove , e particolarizzandole allo stato di tensione di De St.Venant:
zzI σσ =
( )[ ] zzzzyyxxxxxx EEu σνσσνσε −=+−==
1,
( )[ ] zzzzxxyyyyyy EEu σνσσνσε −=+−==
1,
( )[ ] zzyyxxzzzzzz EEu σσσνσε 11
, =+−==
02,, ===+=G
uu xyxyxyyxxy
σεγ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
71
Capitolo 5:Il problema di De Saint Venant
Guu yz
yzyzzyyz
σεγ ==+= 2,,
Guu xz
xzxzzxxzσεγ ==+= 2,,
Pertanto nella sua espressione più generale il tensore della deformazione per il problema che stiamo affrontando al più ha laseguente forma:
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
=
εεεεεεε
εzzxzyzx
yzyy
xzxx
ij 00
Dalla equazione di Beltrami si dimostra:
0, =xxzzσ 0, =yyzzσ 0. =xyzzσ
La funzione ha dunque le derivate seconde nulle rispetto a x, y e z, e nulle anche quelle rispetto alle derivate miste in x e y. Allora al più la sua forma più generale, sintesi di equilibrio congruenza e legame, è la seguente:
zzσ
( )ycxbazycxbazz ⋅+⋅+±++= 111σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
72
Capitolo 5:Il problema di De Saint Venant
Equazioni di equilibrio al contorno
a) superficie laterale (scarica)
I coseni direttori sono caratterizzati dalla forma ossia:
( )0,, yx nnn ≡0=zn
Le equazioni al contorno diventano:jiij fn =σ
00 ==+=⋅++= jyyzxxzzzyyzxxziij fnnnnn σσσσσσ
Prendendo un qualunque elemento piano di normale , e indicando con il vettore la condizione precedente può essere, per ogni punto del contorno, riscritta:
( )yx nnn ≡τ ji zyzx σστ +=
0=⋅nτ
( )00 =zSb) Base
I coseni direttori sono caratterizzati dalla forma . Le equazioni al contorno diventano:
( )1,0,0 −≡n
jiij fn =σ
⎪⎩
⎪⎨
⎧
−=−=−=
3
2
1
fff
zz
zy
zx
σσσ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
73
Capitolo 5:Il problema di De Saint Venant
c) Base ( )LzSL =
I coseni direttori sono caratterizzati dalla forma Le equazioni al contorno diventano:
( )1,0,0≡njiij fn =σ
⎪⎩
⎪⎨
⎧
===
3
2
1
fff
zz
zy
zx
σσσ
DSV: Caso 1 (flessione composta)
0=== zyx MTT
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=⇒==≠
σσσσσ
zz
ijzyzz zx00
000000
0,0
dall’equilibrio infinitesimo:
0, =zzzσ
quindi:( )0zcybxazz +++=σ
Coefficienti delle equazioni di equilibrio globale:
( )ANaAaydAcxdAbaAdAcybxadAN
AAAA
zzz =⇒⋅=++=++== ∫∫∫∫σ
JMcJcdAycxydAbydAadAyM
xx
xxxAAA
Azzx =⇒=++=⋅= ∫∫∫∫
2σ
J
MbJbdAxycdAxbxdAadAxMyy
yyyAAA
Azzy −=⇒−=−−−=⋅−= ∫∫∫∫
2σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
74
Capitolo 5:Il problema di De Saint Venant
Si ottiene la cosiddetta formula di Navier per la flessione composta:
xJ
MyJM
AN
yy
y
xx
xzz ⋅−⋅+=σ
1° sottocaso: forza normale semplice ( e )0≠zN 0== yx MM
Stato tensionale:
AN
z =σ
Stato deformativo:
EAN
yyxx ⋅−= νεε( )EAN
zzz == λε 0=== zxyzxy γγγ
Stato di spostamento:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
==
⋅−==
⋅−==
EANw
EANvEANu
zzz
yyy
xxx
,
,
,
ε
νε
νε
( )
( )
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+=
+−=
+−=
⇒
yxfzEANw
zxfyAN
Ev
zyfxAN
Eu
,
,
,
3
2
1
ν
ν
⎪⎪⎩
⎪⎪⎨
⎧
+==
+==
+==
yzyz
xzxz
xyxy
wvwu
vu
,,
,,
,,
00
0
γγ
γ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
75
Capitolo 5:Il problema di De Saint Venant
dalle condizioni sugli scorrimenti si ricava essere nulle le fi e dunque la soluzione in termini di spostamenti è:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⋅=
⋅−=
⋅−=
zEANw
yEANv
xEANu
ν
ν
Il solido si deforma in seguito all’applicazione di una sollecitazione di forza normale semplice:
⎪⎩
⎪⎨
⎧
+=+=+=
wzzvyyuxx
'
'
'
zEANz ⋅⎟
⎠⎞
⎜⎝⎛ += 1'
xAN
Ex ⋅⎟
⎠⎞
⎜⎝⎛ −=
ν1'
yAN
Ey ⋅⎟
⎠⎞
⎜⎝⎛ −=
ν1'
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
76
Capitolo 5:Il problema di De Saint Venant
In conclusione:
"ogni sezione retta nella deformazione rimane piana e si mantiene parallela a se stessa; l'asse geometrico si allunga ma non si sposta; inoltre ogni punto della sezione si sposta in direzione del baricentro di una quantità proporzionale alla distanza dal baricentro".
Lavoro di deformazione
∫∫ =Φ=V
zzzzVD dVdVL εσ21
Essendo la sezione costante, si ha:
lEANAl
EANdV
EAN
AN
LD
2
2
2
21
21
21
==⋅= ∫
2° sottocaso: flessione retta ( e )0≠xM 0=yM 0=zN
Stato tensionale
yJM
xx
xzz ⋅=σ
Stato deformativo
yEJM
Exx
xzzxxyy ⋅−=−== νσνεε
yEJM
xx
xzz =ε
0=== γγγ yzxzxx

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
77
Capitolo 5:Il problema di De Saint Venant
Stato di spostamento
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⋅==
⋅−==
⋅−==
yEJMw
yJM
Ev
yJM
Eu
xx
xzzz
xx
xyyy
xx
xxxx
,
,
,
ε
νε
νε
⎪⎪⎩
⎪⎪⎨
⎧
+==
+==
+==
yzyz
xzxz
xyxy
wvwu
vu
,,
,,
,,
00
0
γγ
γ
Integrando le prime tre e sostituendo nelle seconde si ha:
( ) ( ) ( ) ( ) ( ) ( )( )0000;0000 ====== ϕϕϕ zyxwvu
( ) yxJM
Euzyfyx
JM
Eu
xx
x
xx
x νν−=⇒+−= ,
1
( ) ( )( )xyzEJMvzxfy
JM
Ev
xx
x
xx
x 222
2
2
2, −+−=⇒+−= νν
( ) yzEJMwyxfyz
EJMw
xx
x
xx
x =⇒+= ,3
Da queste si deduce quanto segue:
l'asse geometrico non esce dal piano ;( )0== yx zy −
la trave assume la forma di una curva, con raggio di curvatura nella sezione:
xx
x
EJM
dzyd
Rvyy −==⇒+= 2
'2' 1
(se Mx è costante la deformata è un arco di cerchio);

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
78
Capitolo 5:Il problema di De Saint Venant
l'asse geometrico non si allunga né si accorcia: ;( )0== yx 0=w
le sezioni rette rimangono piane, ma ruotano:
cEJMcy
EJMcwzzcostantecz
xx
x
xx
x ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛+=⋅+=+=⇒== 1'
per fibre parallele all'asse y:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⋅=+= y
EJMxuxx
xx
xν1'
il piano di flessione è perpendicolare all'asse neutro:
n -n asse neutro: luogo geometrico in cui si annulla ;zzσ
f -f asse di flessione: intersezione del piano di flessione (dove è contenuta la deformata) col piano della sezione;
s -s asse di sollecitazione: intersezione del piano di sollecitazione (dove è contenuta la coppia Mx ) col piano della sezione.
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
79
Capitolo 5:Il problema di De Saint Venant
Lavoro di deformazione
EJ
MdAydzdVE
yJMdVL
xx
xlv
xx
xzzv zzD 2
22
2
211
21
21
∫ ∫∫∫ =⎟⎟⎠
⎞⎜⎜⎝
⎛== εσ
ma
JdAy xx=∫2
e
EJ
lMxL
xxD
2
21
=
3° sottocaso: flessione deviata ( e )0≠xM 0≠yM 0=zN
Stato tensionale
xJ
MyJM
yy
y
xx
xzz ⋅−⋅=σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
80
Capitolo 5:Il problema di De Saint Venant
Asse neutro
Si deduce:
xM
M
JJy
x
y
yy
xxzz =⇒= 0σ
M
Mmxtgx
y=∧
M
M
JJxntg
x
y
yy
xx=∧ ∧∧
= mxtgJJxntg
yy
xx
In flessione deviata, n è perpendicolare ad s soltanto quando si ha che Jxx = Jyy , ossia l'ellisse centrale d’inerzia è un cerchio
Come avviene la deformazione ?
dzEJ
MdzEJMddd
yy
y
xx
xyx
+=+= ϕϕϕ
⎟⎠⎞
⎜⎝⎛=⇒==
^xntgtg
MJ
J
Md
dtg
x
xx
yy
y
x
yβ
ϕ
ϕβ
La rotazione avviene dunque intorno all'asse neutro ed è contenuta nel piano di flessione
la "deviazione" è data dall'angolo formato dall'asse f e l'asse s
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
81
Capitolo 5:Il problema di De Saint Venant
4°sottocaso: flessione composta o pressoflessione ( e )0≠xM 0=yM 0≠zN
Stato tensionale
xJ
MyJM
AN
yy
y
xx
xzz ⋅−⋅+=σ
Centro di sollecitazione
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−≡≡
NM
NMyxP xy
PP ,,
Giratori di inerzia
AJ
AJ yy
yxx
x== ρρ
22,
xA
NxyA
NyANx
AMy
AM
AN
y
P
x
P
y
y
x
xzz
ρρρρσ 2222 −+=−+=
Asse neutro
L’asse neutro è il luogo geometrico dei punti non sollecitati nella flessione. Pertanto lo si trova imponendo l’annullarsi della :zzσ
010 22 =⋅+⋅+⇒= xxyy
y
P
x
Pzz ρρ
σ
Nella polarità d’inerzia i punti uniti, ossia quelli appartenenti alla propria polare, sono punti immaginari, pertanto è conveniente sostituire la polarità di inerzia con una antipolarità definita a partire dalla polarità di inerzia con l’aggiunta di una simmetria rispetto al baricentro G della sezione. In questo modo si ha: e .'' PP xx −= '' PP
yy −=

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
82
Capitolo 5:Il problema di De Saint Venant
PUNTI UNITI = APPARTENENTI ALLA PROPRIA POLARE
POLARITA’ D’INERZIA ⇒ PUNTI UNITI IMMAGINARI
LUOGO GEOMETRICO INDIPENDENTE DAL VALORE DI N
POLARITA’ : ELISSE IMMAGINARIO01 2
2
2
2
=++yx
xyρρ
ANTIPOLARITA’ = POLARITA’ + SIMMETRIA RISPETTO A G:
'' PP xx −= '' PPyy −=
ANTIPOLARITA’ : ELISSE REALE01 2
2
2
2
=−−yx
xyρρ
“Nocciolo centrale d'inerzia”: luogo degli antipoli rispetto all'ellisse centrale reale (o dei poli rispetto a quello immaginario) delle rette tangenti, e non secanti, al contorno".
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
83
Capitolo 5:Il problema di De Saint Venant
Equazione della retta r:
121
12
232 Bρ BH
HBy
=⋅=12
112
232 H
BHBH
x=⋅=ρ
ρ2
2012022
x
PyHH
yHyHy =−⇒=+−
⇒=+−⇒=
00 2 =⇒= Py
P xxρ
Si ottiene:
62
12
2 HH
HyP−=−=
0=PxPer la retta r’:
6'
HyP
+=
DSV: Caso 2
0≠zxσ
0≠zyσ0≠zzσ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
84
Capitolo 5:Il problema di De Saint Venant
0≠zzσ;0≠zxσ ;0≠zyσDSV: Caso 2
1° sottocaso: torsione: ( e )0≠zxσ 0≠zyσ 0=zzσ
Stato tensionale
Detto n il versore normale alla frontiera, diretto verso l’esterno, si può esprimere le condizioni al contorno come segue:
0=⋅ nzτdove
σστ zyzxz+=
Dall’analisi delle prime due equazioni di equilibrio si ricava che è indipendente da z. Dalla terza equazione invece:
zτ
0,, =+ yzyxzx σσ 0=zdivτ
⇓Teor. di Gauss: il flusso di attraverso qualunque curva chiusa è nullozτ
⇒
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
85
Capitolo 5:Il problema di De Saint Venant
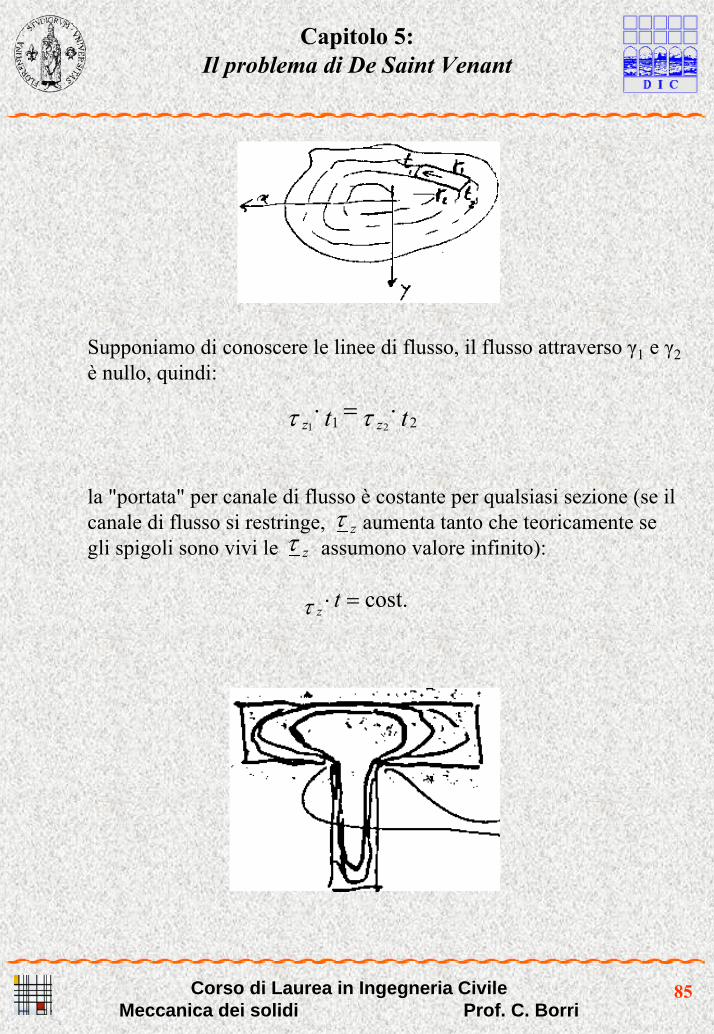
Supponiamo di conoscere le linee di flusso, il flusso attraverso γ1 e γ2è nullo, quindi:
tt zz 21 21⋅=⋅ ττ
la "portata" per canale di flusso è costante per qualsiasi sezione (se il canale di flusso si restringe, aumenta tanto che teoricamente se gli spigoli sono vivi le assumono valore infinito):
zτzτ
cost.=⋅ tzτ
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
86
Capitolo 5:Il problema di De Saint Venant
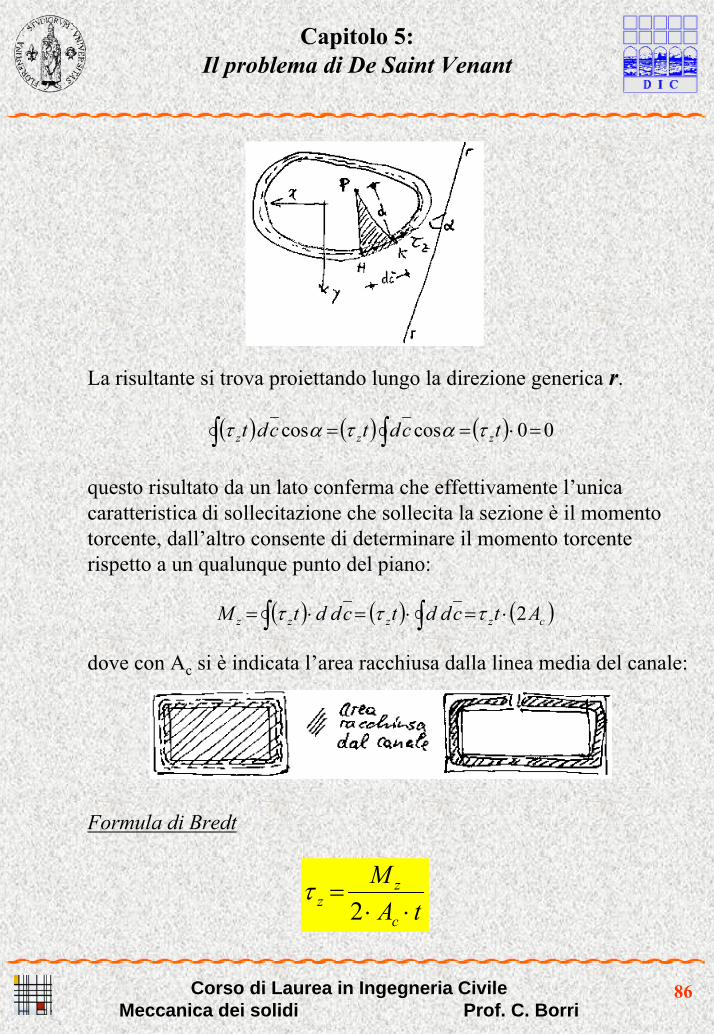
La risultante si trova proiettando lungo la direzione generica r.
( ) ( ) ( ) 00coscos =⋅== ∫∫ tcdtcdt zzz τατατ
questo risultato da un lato conferma che effettivamente l’unica caratteristica di sollecitazione che sollecita la sezione è il momento torcente, dall’altro consente di determinare il momento torcenterispetto a un qualunque punto del piano:
( ) ( ) ( )czzzz AtcddtcddtM 2⋅=⋅=⋅= ∫∫ τττ
dove con Ac si è indicata l’area racchiusa dalla linea media del canale:
Formula di Bredt
tAM
c
zz ⋅⋅=
2τ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
87
Capitolo 5:Il problema di De Saint Venant
Stato deformativo
Definita kzdz (kz è la cosiddetta caratteristica di deformazione) come la rotazione relativa intorno a z di due sezioni consecutive poste a distanza infinitesima dz, si può esprimere il lavoro elementare tra le due sezioni come:
dzkMdMdL zzzzD 21
21
== ϕ
∫∫ ===A ijijv ijijzzD dAdzdVdzkMdL εσεσ
221
21
ma
( )22
21
41
21
00000
zyzxijijijij
yzxz
zy
zx
ij GGσσσσεσ
σσσσ
σ +==⇒=
dove222zzyzx τσσ =+
Quindi sostituendo sopra:
∫=A zzz dA
GkM 21 τ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
88
Capitolo 5:Il problema di De Saint Venant
Per ogni canale elementare, dalla formula di Bredt, si può esprimere la τz :
( )
∫∫
∫∫∫∫
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
=====
canalec
z
cc
z
cz
cz
czA zzz
tcd
GAM
tcd
AM
G
tcdt
Gcd
tt
Gcdt
GdA
GkM
2
2
2
2
222
222
441
1111 ττττ
∫=⇒canale
c
zz t
cdAG
Mk 241
Definendo Jt (momento d’inerzia ridotto) come segue:
[ ] [ ]4
2411
LJ
tcd
AJ
t
canalect
=
= ∫
Si può scrivere:
t
zz GJ
Mk =
Si può anche esprimere:
)1( ≥= qconqJJ G
t
dove q è il fattore di torsione

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
89
Capitolo 5:Il problema di De Saint Venant
Esempio: Sezione circolare piena
.cos).cos(.cos ttttt zz =⇒=⇒=⋅ ττ
Momento torcente esterno applicato in funzione della tensione:
( ) 22 rtrM zz πτ=
Per un canale di spessore dr si ha:
( ) drrrdM zz22 πτ=
E quindi su tutta la sezione:
( )∫=R
zz drrrM0
22 τπ
Scrivendo le equazioni fondamentali si ottiene:
( )
( ) zxzzyxzyyzx
zyzzxxzyyzy u
,,,
,,,
1,
1,
σννσσ
σνσσ
++
=−
+−
=−

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
90
Capitolo 5:Il problema di De Saint Venant
Ma poiché: 0=zzσ
( )( ) 0,
0,
,,
,,
=−
=−
yxzyyzx
xxzyyzy
σσ
σσ
Inoltre:( )
0
,,
zyzx
yyxz
yzxxzyz
kji
rot
verszrot
σ
τ
σστ
∇∂∂
∂∂
∂∂
=
−=
Pertanto per le due equazioni precedenti si ha:
costanterot yzxxzyz =−= ,, σστ (congruenza elastica)ANALOGIA IDRODINAMICA
Inoltre:
→=⋅ 0nzτ equilibrio di contorno
equilibrio locale
equilibrio globale
→= 0zdivτ
( )∫ →⋅−⋅=A zxzyz dAyxM σσ
Le quattro equazioni di cui sopra rendono determinato il problema
( )yxzz ,ττ =

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
91
Capitolo 5:Il problema di De Saint Venant
Tornando alla sezione circolare anulare (se R1=0 la sezione è piena):
( )cr
drrrM
z
R
R zz
=
= ∫τ
τπ 2
1
22
Questo comporta:
cycr
cx
zzx
zzy
−=−=−=
==
αατσ
ατσ
sensen
cos
Quindi:
crotrot zz 2cost =⇒= ττ
Tutte le condizioni delle equazioni di cui sopra sono soddisfatte dunque l’ipotesi inizialmente sulla circolarità delle linee di flusso viene confermata.
( )
rJMJcM
drrcdrrM
G
zzGz
R
R
R
R zz
=⇒⋅=
== ∫∫τ
πττπ 2
1
2
1
32 22
dove
G
R
RJdrr =∫
2
1
32π
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
92
Capitolo 5:Il problema di De Saint Venant
Infine si determina l’espressione della tensione τz per la sezione circolare:
rJM
G
zz =τ
Determinazione della deformazione globale:
( )
t
z
G
z
z
Gz
AA zyzxzz
zz
GJMq
GJM
GMJck
dArcG
dzdAG
dzdzkM
dzkd
===
=+=
=
∫∫2
2222
4421 σσ
ϕ
GAJdAr =∫ 2Dove:
Le uniche componenti di spostamento sono:
xv z ⋅+= ϕyu z ⋅−= ϕ
↓ ↓zyk z− zxk z
0=w

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
93
Capitolo 5:Il problema di De Saint Venant
Esempio: Sezione rettangolare allungata (a>>b)
IpotesiLe linee tangenziali del campo vettoriale delle tensioni tangenziali sono parallele all’asse delle x per quasi tutta la sezione (ad esclusione delle zone terminali). Si possono allora applicare a questa sezione la teoria di Bredt al canale di spessore dy e procedere al calcolo dell’aliquota di momento torcente assorbita da questo.
zτ
cyrot zxy
zxzzy −=⇒=−=⇒= σστσ cost.0
dyaycaydyaydyAdydM zxzczz2422222 ==−=−= σττ
62344
332
0
22
0
acbbacdyyacdMMbb
zz =⎟⎠⎞
⎜⎝⎛=== ∫∫ 3
6abMc z=⇒
Particolarizzata la costante di proporzionalità si può esprimere la tensione σzx :

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
94
Capitolo 5:Il problema di De Saint Venant
yJMy
abMy
abM
t
zzzzx
2
3
2633 −=−=−=σ
Ponendo si può infine scrivere anche :12
3abJ x = y
JM
x
zzzx 2
1−== τσ
Spesso si è interessati al valore massimo delle tensioni tangenziali, questo lo si può valutare ponendo nella espressione precedente y=b/2
( ) bJ
Mbab
MbabM
t
zzzz ⋅=⋅=⋅=
33max
312
6τ
Si determina la caratteristica di deformazione kz anche per il caso in esame:
( )
=⎟⎠⎞
⎜⎝⎛=
+==
∫
∫∫
Azx
zx
A xzxzzxzxA ijijzz
dAG
dz
dAdzdAdzdzkM
22
2
2221
σσ
εσεσεσ
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
=⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛=
∫∫
∫∫
At
zA zx
Azx
zxAzx
zx
dAJM
GdzdA
Gdz
dAG
dzdAG
dz
22 2
22
22
222
2
σ
σσσσ
t
zz
J
At
z
JM
Gdzab
ab
MG
dzdAyJM
Gdz
x
23
23
22
2
2
212
3
42
42
⋅=⋅
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=⋅= ∫ 321

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
95
Capitolo 5:Il problema di De Saint Venant
Ricapitolando:
t
zz
t
zzz GJ
MkJ
MG
dzdzkM =⇒⋅=2
221
Per il fattore di torsione:
( )2233
121212baabbaabJG +⋅=+=
411 2
2
⎟⎟⎠
⎞⎜⎜⎝
⎛+==
ba
JJq
t
G
Per si vede che JG>Jt , come atteso, mentre per , la sezione non può essere considerata come allungata.
ba 3> ba 3<
2° sottocaso: taglio ( e )0≠zxσ 0≠zyσ 0≠zzσ
Stato tensionale
L’azione tagliante non è disgiunta da un’azione flettente: si haautomaticamente anche un momento (flettente). Si accetta come ipotesi che la tensione normale, che diviene una parte della soluzione, sia:
( )y
zLy
JT
JM
x
y
x
xzz
−−==σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
96
Capitolo 5:Il problema di De Saint Venant
Occorre determinare σzx e σzy:
Definito il “Centro di taglio” come quel punto di applicazione della forza di taglio che realizza: kz=0 e Mz=0
( ) yGCX t ⇔≡= 0 asse di simmetria
Valgono le seguenti:• Il centro di taglio è unico;• Se il taglio non passa per il centro posso ridurre il sistema ad una
forza di taglio centrata + un momento torcente;
Considerazioni sull’equilibrio:
0
00
,,,
,
,
=++
=
=
zzzyzyxzx
zyz
zxz
σσσ
σσ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
97
Capitolo 5:Il problema di De Saint Venant
ma( )
yJT
yJ
zLT yzzz
x
yzz =⇒
−⋅−= ,σσ
e quindi:
0,, =++ yJT
x
yyzyxzx σσ
Sulla superficie laterale: 0=⋅ nzτ
Introduciamo il flusso attraverso una corda B1B2 , questo è positivo se uscente da A1
( )τφ zBB 21
Lungo il contorno esterno B1 B2 , allora tutto il flusso da A1 ad A2 è lungo la curva di separazione.Applicando il teorema di Gauss il flusso entrante in A1 è:
021
=φ BB
( ) ( ) ∫∫ ⋅=+−=11
21 ,,A x
y
AyzyxzxzBB dAy
JT
dAσστφ
( ) ∫=A
ydAJ
T
x
yzBB
121
τφ
Con Ty e Jx costanti nella sezione, dunque:

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
98
Capitolo 5:Il problema di De Saint Venant
Ma è il momento statico di A1 rispetto all’asse x pertanto:∫A ydA1
( ) SJ
TBB x
x
yz 121
=τφ
Poiché il flusso entrante in A2 sarà021 =+xx
SS ( ) SJ
Tx
x
yzBB 121
−=τφ
Se, come viene assunto generalmente nelle applicazioni, B1 B2rettilinea allora e dunque il flusso può essere riscritto:dld
pzτφ =
( ) ∫= BB
dlpzzBB
2
121
ττφ
Dal teorema della media:
bBB pz ⋅= τφ21
quindi:
bS
J
TzbzS
J
T x
x
yx
x
y
pp
11 =⇒⋅= ττ
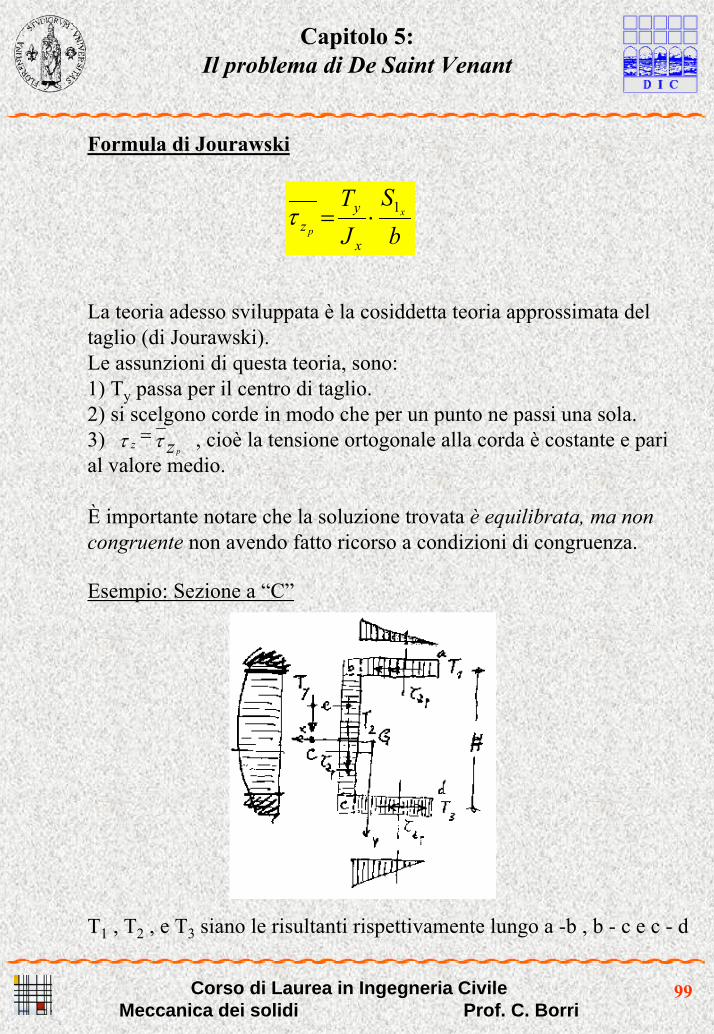
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
99
Capitolo 5:Il problema di De Saint Venant
Formula di Jourawski
bS
JT
x
px
yz
1⋅=τ
La teoria adesso sviluppata è la cosiddetta teoria approssimata del taglio (di Jourawski).Le assunzioni di questa teoria, sono: 1) Ty passa per il centro di taglio.2) si scelgono corde in modo che per un punto ne passi una sola.3) , cioè la tensione ortogonale alla corda è costante e pari al valore medio.
È importante notare che la soluzione trovata è equilibrata, ma non congruente non avendo fatto ricorso a condizioni di congruenza.
ττ zpz =
Esempio: Sezione a “C”
T1 , T2 , e T3 siano le risultanti rispettivamente lungo a -b , b - c e c - d

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
100
Capitolo 5:Il problema di De Saint Venant
Per l’equilibrio:
HTeTY ⋅=⋅ 1 31 TT = yTT =2
Il centro di taglio è definito da:
T
HTey
⋅= 1
Esempio: Sezione con un asse di simmetria (Trattazione generale)
Corde parallele all'asse x; applicando la formula di Jourawski si ha:
cost. 1 ===bJ
Szz
x
xy
yp
τστ
( )y
J
zlT
x
yzz
−−=σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
101
Capitolo 5:Il problema di De Saint Venant
Dalla III) equazione di equilibrio si ha:
0,,, =++ σσσ zzzyzyxzx
Derivando rispetto a x:
0,,, =++ σσσ zxzzyxzyxxzx
0, =σ yxzy 0, =σ zxzz
Per cui:
21 axazx +=σ
⎪⎪⎩
⎪⎪⎨
⎧
−==
+=−=
2b x,
2b x,
2
1
Bintg
Bintg
zy
zx
zy
zx
βσσ
βσσ
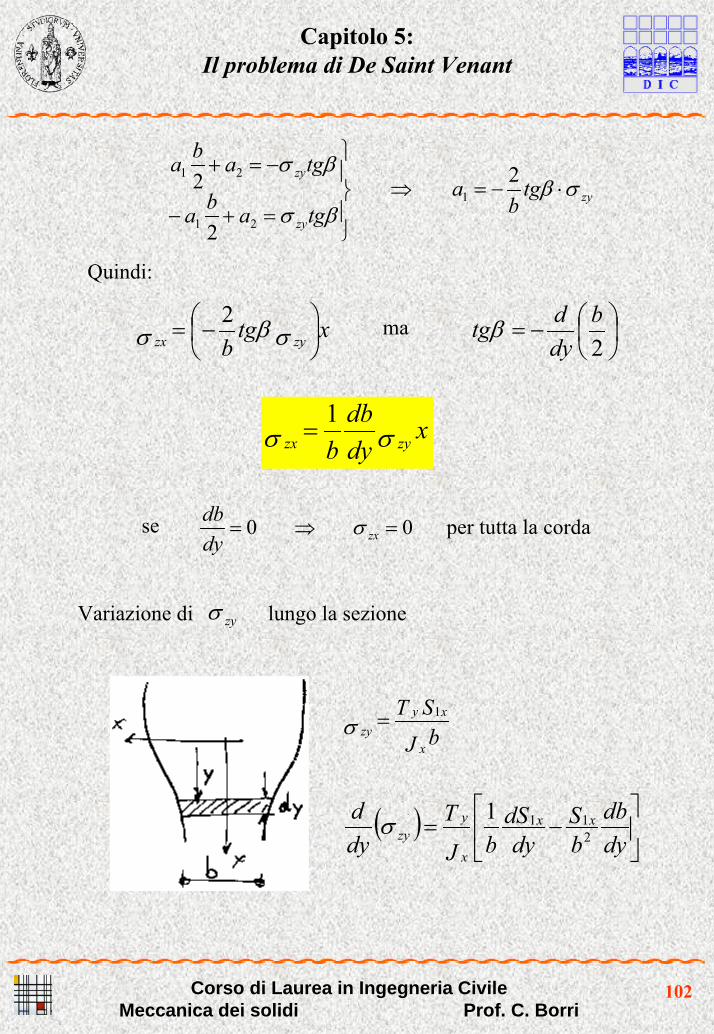
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
102
Capitolo 5:Il problema di De Saint Venant
zy
zy
zytg
ba
tgaba
tgabaσβ
βσ
βσ⋅−=⇒
⎪⎭
⎪⎬
⎫
=+−
−=+ 2
2
21
21
21
Quindi:
xtgb zyzx ⎟
⎠⎞
⎜⎝⎛−= σβσ
2⎟⎠⎞
⎜⎝⎛−=
2b
dydtgβma
xdydb
b zyzx σσ1
=
00 =⇒= zxdydb σse per tutta la corda
Variazione di lungo la sezionezyσ
bJ
ST
x
xyzy
1=σ
( ) ⎥⎦
⎤⎢⎣
⎡−=
dydb
bS
dydS
bJ
Tdyd xx
x
yzy 2
111σ

Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
103
Capitolo 5:Il problema di De Saint Venant
Se si incrementa la corda di dy: ydy 11 bdy
dydS
dSx
x −== allora
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡−−=
dydb
b
SyJ
Tdyd x
x
yzy 2
1σ
dydb
b
Sydy
d xzy21
max0 −=⇒=σ
Quindi se 0=dydb
σ zymaxè baricentrica
Stato di deformazione a taglio
La teoria approssimata del taglio non può fornire una soluzione per la deformazione punto-punto poiché la soluzione non è una soluzione congruente. Si deve perciò limitare lo studio alla deformazione globale. Prendendo due sezioni distanti dz, la deformazione riferibile al solo taglio è ridotta ad uno scorrimento relativo di una sezione rispetto all’altra nella direzione dell’asse di flessione. Per analogia con quanto fatto in precedenza si definisce come caratteristica di deformazione tagliante lo scorrimento relativo di una sezione rispetto all’altra quando queste sezioni sono poste a distanza dz.
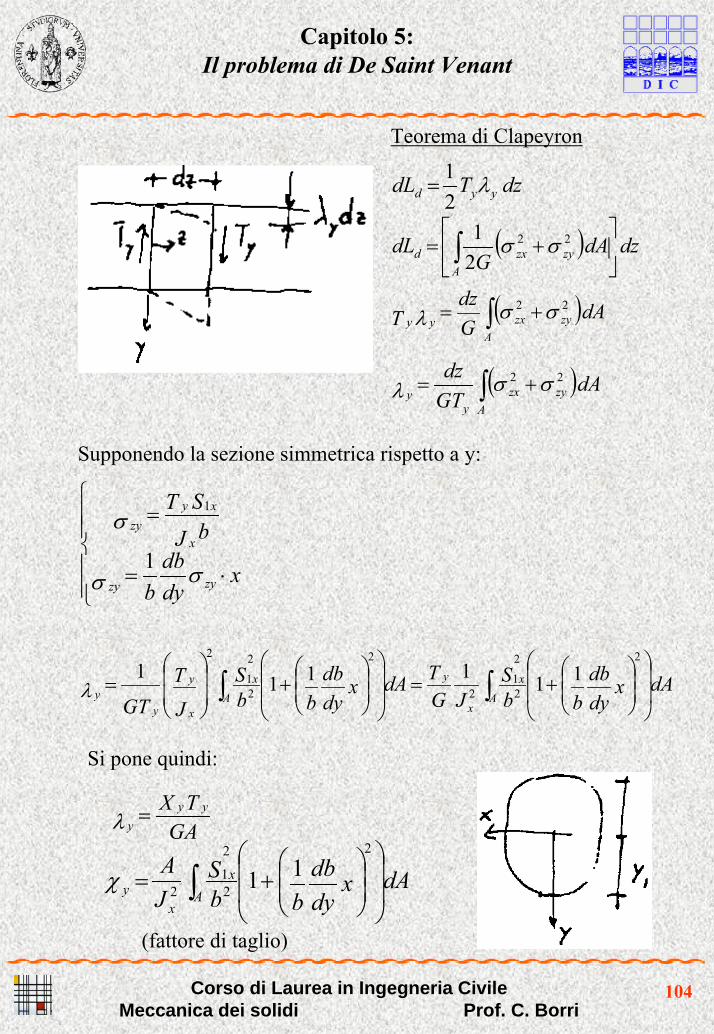
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
104
Capitolo 5:Il problema di De Saint Venant
Teorema di Clapeyron
dzTdL yyd λ21
=
( ) dzdAG
dLA
zyzxd ⎥⎦
⎤⎢⎣
⎡+= ∫ 22
21 σσ
( )∫ +=A
zyzxyy dAGdz
T22 σσλ
( )∫ +=A
zyzxy
y dAGTdz 22 σσλ
Supponendo la sezione simmetrica rispetto a y:
⎪⎪⎩
⎪⎪⎨
⎧
⋅=
=
xdydb
b
bJ
ST
zyzy
x
xyzy
σσ
σ
1
1
dAxdydb
bbS
JGTdAx
dydb
bbS
J
TGT A
x
x
y
Ax
x
y
yy ⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛= ∫∫ 111111
2
2
2
12
2
2
2
1
2
λ
Si pone quindi:
GATX yy
y =λ
dAxdydb
bbS
JA
Ax
xy ⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛+= ∫ 11
2
2
2
12χ
(fattore di taglio)
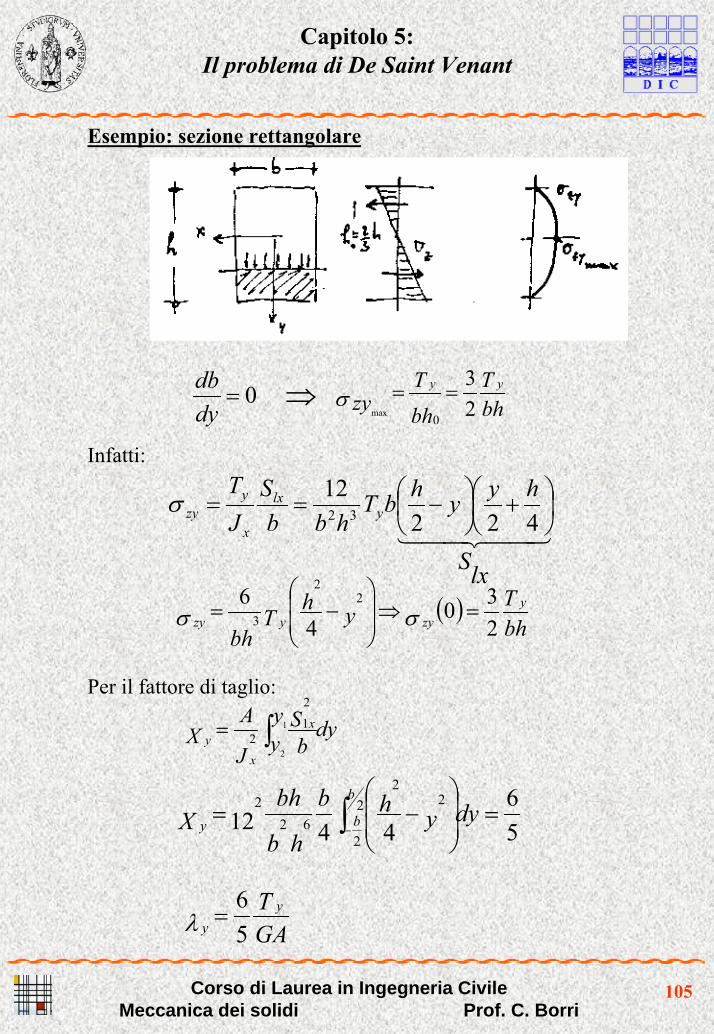
Corso di Laurea in Ingegneria Civile Meccanica dei solidi Prof. C. Borri
105
Capitolo 5:Il problema di De Saint Venant
Esempio: sezione rettangolare
0=dydb ⇒ bh
T
bh
Tzy
yy
23
0max
==σ
Infatti:
44 344 21
lxS
hyyhbThbb
SJT
ylx
x
yzy ⎟
⎠⎞
⎜⎝⎛ +⎟
⎠⎞
⎜⎝⎛ −==
42212
32σ
( )bhT
yhT
bh
yzyyzy 2
304
6 22
3 =⇒⎟⎟⎠
⎞⎜⎜⎝
⎛−= σσ
dyyy b
S
J
AX
x
xy ∫= 1
2
2
12
Per il fattore di taglio:
56
44122
2
22
622 =⎟
⎟⎠
⎞⎜⎜⎝
⎛−= ∫−
dyyhb
hb
bhX
b
by
GAT y
y 56
=λ