Appunti di Matematica Discreta - Algebra lineare · Appunti di Matematica Discreta - Algebra...
209
Appunti di Matematica Discreta - Algebra lineare 7 ottobre 2011 AVVISO: I presenti appunti possono contenere (anzi sicuramente conterranno) errori e/o ripetizioni. Essi sono infatti opera di vari collage e, per ovvie questioni di tempo, non sono stati rivisti. Pertanto non intendono sostituire alcun libro di teoria e/o esercizi ma vogliono sopratutto essere un dettagliato programma del corso. Prego gli studenti di prestare particolare attenzione nella loro lettura e di informarmi sia direttamente che per e-mail ([email protected]) su qualunque errore (certo o sospetto) notato. Cercher` o di correggere nel pi` u breve tempo possibile qualunque errore trovato. Pertanto questi appunti saranno continuamente aggiornati: la data dell’ultimo aggiornamento appare in prima pagina. Consiglio infine agli studenti di non stamparli immediatamente ma farlo il pi` u tardi possibile (per lo meno alcuni giorni dopo che l’argomento sia stato trattato a lezione). 1
Transcript of Appunti di Matematica Discreta - Algebra lineare · Appunti di Matematica Discreta - Algebra...

Appunti di Matematica Discreta - Algebralineare
7 ottobre 2011
AVVISO: I presenti appunti possono contenere (anzi sicuramente conterranno) errori e/oripetizioni. Essi sono infatti opera di vari collage e, per ovvie questioni di tempo, non sonostati rivisti. Pertanto non intendono sostituire alcun libro di teoria e/o esercizima vogliono sopratutto essere un dettagliato programma del corso. Prego gli studenti diprestare particolare attenzione nella loro lettura e di informarmi sia direttamente che pere-mail ([email protected]) su qualunque errore (certo o sospetto) notato.
Cerchero di correggere nel piu breve tempo possibile qualunque errore trovato. Pertantoquesti appunti saranno continuamente aggiornati: la data dell’ultimo aggiornamento apparein prima pagina. Consiglio infine agli studenti di non stamparli immediatamente mafarlo il piu tardi possibile (per lo meno alcuni giorni dopo che l’argomento sia stato trattatoa lezione).
1
Indice
1 Insiemi e operazioni su di essi 4
2 Applicazioni 5
3 Relazioni di equivalenza 8
4 Relazioni di ordinamento parziale 9
5 Cardinalita di un insieme 11
6 Operazioni algebriche binarie 13
7 Gruppi 16
8 Campi 20
9 Omomorfismi fra strutture 21
10 Matrici: prodotto righe per colonne 23
11 Sistemi lineari e matrici ridotte per righe 30
12 Ancora sui sistemi lineari. 50
13 Sistemi lineari dipendenti da un parametro 54
14 Come ricavare la matrice inversa attraverso il metodo di riduzione. 59
15 Determinanti. Teorema di Cramer. Teorema di Rouche-Capelli 65
16 Vettori applicati del piano 79
17 Vettori applicati dello spazio 87
18 Vettori liberi 90
19 Rette del piano e loro equazioni 92
20 Coordinate omogenee nel piano 97
21 Isometrie e similitudini nel piano 100
22 Piani e rette dello spazio e loro equazioni 115
23 Punti e rette improprie nello spazio 121
2
24 Spazi vettoriali 128
25 Sottospazi Vettoriali 131
26 Base e dimensione di uno spazio vettoriale 141
27 Applicazioni lineari 162
28 Matrici e Applicazioni Lineari. 167
29 Autovalori ed autovettori 180
30 Ricerca degli autovalori e degli autospazi ad essi associati 183
31 Un’applicazione degli autovettori: il motore di ricerca Google 186
32 Endomorfismi semplici 189
33 Matrici diagonalizzabili 195
34 Similitudine fra matrici 200
3

1 Insiemi e operazioni su di essi
Per comodita dello studente richiamiamo alcuni concetti elementari di teoria degli insiemi.Il concetto di insieme e primitivo ed e sinonimo di classe, totalita. Sia A un insieme di
elementi qualunque. Per indicare che a e un elemento di A scriveremo a ∈ A. Se A e B sonoinsiemi, diremo che A e un sottoinsieme di B e scriveremo A ⊆ B se ogni elemento di A eun elemento di B. Fra i sottoinsiemi di B ci sono in particolare B stesso e l’insieme vuotoche viene denotato con ∅. Due insiemi A e B si dicono uguali, A = B, se hanno gli stessielementi. Cioe:
A = B ⇐⇒ A ⊆ B e B ⊆ A.
Diremo che un sottoinsieme A di B e proprio, se A 6= B e scriveremo A ⊂ B.Se A e un insieme, denoteremo con P (A) l’ insieme i cui elementi sono tutti i sottoinsiemi
di A; P (A) si dice l’insieme delle parti di A.
Esempio 1.1 Sia A = {1, 2, 3}. Allora P (A) = {b1, b2, . . . , b8} essendo b1 = ∅, b2 = {1},b3 = {2}, b4 = {3}, b5 = {1, 2}, b6 = {1, 3}, b7 = {2, 3}, b8 = {1, 2, 3}.
Se A e B sono insiemi, diremo unione di A e B l’insieme A∪B costituito dagli elementiche stanno in A oppure in B, A ∪ B = {x | x ∈ A o x ∈ B}, diremo intersezione di A e Bl’insieme A ∩ B costituito dagli elementi comuni ad A e B, A ∩ B = {x | x ∈ A e x ∈ B},mentre diremo differenza di A e B l’insieme A−B degli elementi di A che non sono elementidi B, A − B = A \ B = {x | x ∈ A e x 6∈ B}. Due insiemi si dicono disgiunti se la lorointersezione e l’insieme vuoto.
Se A e sottoinsieme di B diremo complementare (o complemento) di A in B l’insiemeB − A e lo denoteremo con CBA. Se B e l’insieme ambiente il complementare di A in Bverra semplicemente denotato con CA.
Se A e B sono insiemi, definiamo prodotto cartesiano di A e B e lo denoteremo con A×B,l’insieme i cui elementi sono le coppie ordinate (a, b) con a ∈ A e b ∈ B.
Proprieta
1. A ∪ A = A, A ∩ A = A;
2. A ∪B = B ∪ A, A ∩B = B ∩ A (proprieta commutativa);
3. A ∪ ∅ = A, A ∩ ∅ = ∅;4. A ∪ (B ∪ C) = (A ∪B) ∪ C, A ∩ (B ∩ C) = (A ∩B) ∩ C (proprieta associativa);
5. A ∪ (B ∩C) = (A ∪B) ∩ (A ∪C) (proprieta distributiva dell’unione rispetto all’inter-sezione);
6. A ∩ (B ∪ C) = (A ∩ B) ∪ (A ∩ C) (proprieta distributiva dell’intersezione rispettoall’unione);
4

7. C (A ∩B) = CA ∪ CB, C (A ∪B) = CA ∩ CB (formule di De Morgan).
Nel seguito denoteremo con N, Z, Q, R e C rispettivamente gli insiemi dei numeri naturali(N = {0, 1, 2, . . . , n, . . .}), degli interi relativi (Z = {. . . ,−3,−2,−1, 0,+1,+2,+3, . . .}), deinumeri razionali (Q =
{nm
| n,m ∈ Z,m 6= 0}), dei numeri reali e dei numeri complessi.
2 Applicazioni
Siano A e B insiemi non vuoti.
Definizione 2.1 Si dice applicazione (o funzione) di A in B, e si denota con f : A → B,una corrispondenza che associa ad ogni elemento x ∈ A uno ed un solo elemento f(x) ∈B.
Un’applicazione si dice:
• iniettiva se ad elementi distinti di A corrispondono elementi distinti di B, cioe se∀x1, x2 ∈ A, x1 6= x2 ⇒ f(x1) 6= f(x2) o anche da f(x1) = f(x2) ⇒ x1 = x2;
• suriettiva (od anche: su tutto) se ogni elemento di B e il corrispondente di qualcheelemento di A, cioe se ∀y ∈ B, ∃x ∈ A tale che y = f(x);
• biiettiva se e iniettiva e suriettiva; una applicazione biiettiva di A in B e detta pureuna corrispondenza biunivoca fra A e B.
Esempio 2.1 Siano N l’insieme dei numeri naturali e R quello dei numeri reali. La leggef(n) = 1
n−1, non definisce un’applicazione f : N→ R, perche non esiste f(1). Essa puo pero
essere vista come un’applicazione f : N \ {1} → R.
Esempio 2.2 Sia R+ l’insieme dei numeri reali non negativi. La legge f che ad ogni a ∈ R+
associa quel numero o quei numeri b ∈ R tali che b2 = a non e un’applicazione. Infatti, peresempio, al numero 4 ∈ R+, la f associa sia 2 che −2. Invece la legge g che ad ogni a ∈ R+
associa quel numero o quei numeri b ∈ R+ tali che b2 = a e un’applicazione g : R+ → R+
definita da g(x) =√x per ogni x ∈ R+.
Esempio 2.3 Sia Z l’insieme dei numeri interi relativi e sia Q l’insieme delle frazioni, ridotteai minimi termini, m
ncon m,n ∈ Z e n 6= 0. La legge f : Q → Z tale che f(m
n) = m + n, e
un’applicazione. Si osservi che f non e iniettiva. Infatti si ha 236= 3
2ma f(2
3) = f(3
2).
Esempio 2.4 L’applicazione iA : A → A, definita dalla legge i(x) = x ∀x ∈ A, dicesiapplicazione identica o unita, essa e iniettiva e suriettiva pertanto e biiettiva.
Esempio 2.5 L’applicazione f : N→ N, definita dalla legge f(n) = n+1 e un’ applicazioneiniettiva ma non suriettiva perche lo 0 non proviene da nessun elemento.
5

Definizione 2.2 Sia f : A → B un’applicazione; dicesi immagine di f e si indica con Imf ,il sottoinsieme di B costituito dagli elementi che sono corrispondenti di qualche elemento diA. Cioe:
Imf = {y ∈ B | ∃x ∈ A tale che y = f(x)}.
Chiaramente f e suriettiva se e solo se Imf = B.Sia f : A → B un’applicazione. Se b ∈ B indicheremo con f−1(b) l’insieme degli elementi
a ∈ A tali che f(a) = b. Poniamo cioe
f−1(b) = {a | a ∈ A e f(a) = b}.
Ovviamente se b 6∈ Imf si ha f−1(b) = ∅.
Definizione 2.3 Prodotto di applicazioni. Siano f : A → B, g : B → C applicazioni.Si definisce prodotto o composizione di f e g, l’applicazione di A in C ottenuta applicandosuccessivamente prima f e poi g; essa viene denotata con g ◦ f ed e definita da
(g ◦ f)(x) = g(f(x)) ∀x ∈ A.
Il prodotto di applicazioni gode della proprieta associativa cioe per f : A → B, g : B → C,h : C → D si ha h ◦ (g ◦ f) = (h ◦ g) ◦ f .
Definizione 2.4 Applicazione inversa. Se l’ applicazione f : A → B e biiettiva allorasi puo definire l’applicazione inversa f−1 : B → A come segue: ∀y ∈ B, f−1(y) e l’ unicoelemento x ∈ A tale che f(x) = y.
Chiaramente e:
• f ◦ f−1 = iB,
• f−1 ◦ f = iA,
• (f−1)−1 = f .
Sulla composizione di due applicazioni si hanno vari risultati, alcuni dei quali sono ri-chiamati nelle due seguenti proposizioni. La dimostrazione della Proposizione 2.1 e lasciataallo studente come esercizio.
Proposizione 2.1 Siano f : A → B, g : B → C applicazioni.
1. Se f e g sono iniettive allora g ◦ f e iniettiva.
2. Se f e g sono suriettive allora g ◦ f e suriettiva.
3. Se f e g sono biettive allora g ◦ f e biiettiva.
4. Se g ◦ f e suriettiva allora g e suriettiva.
6

5. Se g ◦ f e iniettiva allora f e iniettiva.
6. Se g ◦ f e biettiva allora f e iniettiva e g e suriettiva.
Proposizione 2.2 Siano f : A → B, g : B → A applicazioni, e inoltre f ◦ g = iB eg ◦ f = iA, allora f e g sono entrambe biiettive e g = f−1.
Dimostrazione. Proviamo che f e biettiva, in modo analogo si prova la biettivita di g.
• f e suriettiva: Sia y ∈ B; si ha g(y) = x ∈ A, da cui f(x) = f(g(y)) = f ◦ g(y) =iB(y) = y.
• f e iniettiva: Siano x1, x2 ∈ A tali che f(x1) = f(x2). Allora g(f(x1)) = g(f(x2)),g ◦ f(x1) = g ◦ f(x2), ia(x1) = iA(x2), x1 = x2.
Proviamo che g = f−1. Cioe che per ogni y ∈ B, g(y) = f−1(y). Sia x l’unica soluzione(nella variabile x) dell’equazione f(x) = y. Cioe y = f(x). Allora f−1(y) = x. Quindig(y) = g(f(x)) = g ◦ f(x) = ia(x) = x.
Esercizio. Sia f : N→ Z l’applicazione cosı definita
f(n) =
{+n
2se n e′ pari
−n+12
se n e′ dispari.
Dire se f e biunivoca oppure no.
Dati due insiemi non vuoti A e B possiamo considerare un nuovo insieme, denotato conBA, costituito da tutte le applicazioni di A in B. Un caso particolarmente importante e ilcaso in cui B = {0, 1} e l’insieme costituito da due elementi 0, 1; denoteremo tale insiemecon il simbolo 2. Se f ∈ 2A, cioe se f : A → {0, 1}, allora ∀x ∈ A si ha f(x) = 0 oppuref(x) = 1.
Se A e un insieme, per ogni suo sottoinsieme I, I ⊆ A, possiamo definire un’applicazionefI : A → {0, 1} che caratterizza gli elementi di I, detta funzione caratteristica di I, nelseguente modo:
fI(x) =
{0 se x 6∈ I1 se x ∈ I
.
Chiaramente fA : A → {0, 1} e definita da fA(x) = 1 ∀x ∈ A, mentre f∅ : A → {0, 1} edefinita da f∅(x) = 0 ∀x ∈ A.
Teorema 2.1 Sia A un insieme. Esiste un’applicazione biunivoca fra gli insiemi 2A e P (A).
Dimostrazione. Definiamo due applicazioni ϕ, ψ come segue: ϕ : 2A → P (A) associaad ogni applicazione f : A → 2 il sottoinsieme di A costituito dagli elementi x ∈ A tali che
7

f(x) = 1; ψ : P (A) → 2A associa ad ogni sottoinsieme B ⊆ A l’applicazione f : A → 2definita da
f(x) =
{0 se x 6∈ B1 se x ∈ B
.
E facile verificare le seguenti uguaglianze: ϕ ◦ ψ = iP (A) e ψ ◦ ϕ = i2A . La Proposizione 2.2completa la dimostrazione.
Faremo uso del seguente assioma della teoria degli insiemi:
Assioma della scelta o di Zermelo. Sia A un insieme non vuoto. Esiste allora unaapplicazione che ad ogni sottoinsieme non vuoto B ⊆ A associa un elemento appartenente aB.
3 Relazioni di equivalenza
Definizione 3.1 Dicesi relazione binaria definita su un insieme non vuoto A, un sottoin-sieme R ⊆ A× A.
Se (a, b) ∈ R scriviamo anche aRb e diciamo che a sta nella relazione R con b. Esempi direlazioni binarie definite su A sono A× A stesso e la relazione identica I definita da aIb see solo se a = b.
Si dice che una relazione binaria gode della proprieta:
• riflessiva se aRa per ogni a ∈ A,
• transitiva se da aRb e bRc segue aRc per a, b, c ∈ A,
• antisimmetrica se da aRb e bRa segue a = b per a, b ∈ A,
• simmetrica se da aRb segue bRa per a, b ∈ A.
Definizione 3.2 Equivalenza. Una relazione binaria definita sull’insieme non vuoto Asi chiama relazione di equivalenza su A se gode delle proprieta riflessiva, simmetrica etransitiva.
Se E e una relazione di equivalenza, invece di aEb scriveremo a ≡ b (E) e leggeremo “aequivalente a b in E” o, quando non c’e possibilita di equivoco, scriveremo semplicementea ≡ b e leggeremo “a equivalente a b”.
Definizione 3.3 Sia A un insieme non vuoto. Dicesi partizione di A una famiglia di sot-toinsiemi non vuoti di A tale che ogni elemento di A sta in uno ed uno solo dei sottoinsiemidella famiglia. I sottoinsiemi della famiglia si dicono le classi della partizione.
Teorema 3.1 Una partizione di A definisce una relazione di equivalenza su A e viceversa.
8

Dimostrazione. (Dimostrazione obbligatoria) Per dimostrare che una partizione di Adefinisce una relazione di equivalenza su A, basta porre a ≡ b (E) quando a e b stanno nellastessa classe della partizione: infatti si vede subito che gode delle tre proprieta: riflessiva,transitiva, simmetrica.
Viceversa, una relazione di equivalenza su A definisce una partizione di A. Infatti perogni a ∈ A, consideriamo il sottoinsieme C(a) ⊆ A costituito dagli elementi equivalenti ada, cioe C(a) = {x ∈ A | x ≡ a}; si vede subito che la famiglia {C(a) | a ∈ A} costituisceuna partizione di A: infatti a ∈ C(a) perche a ≡ a; inoltre se e pure a ∈ C(b) si ha a ≡ b; seallora x e un elemento qualunque di C(b) e x ≡ b e per le proprieta simmetrica e transitivax ≡ a cioe x ∈ C(a) da cui C(b) ⊆ C(a); analogamente C(a) ⊆ C(b). Ne segue che ognielemento di A sta in una e una sola classe della famiglia {C(a) | a ∈ A}.
Definizione 3.4 (Insieme quoziente). Sia E una relazione di equivalenza definita suA. Dicesi insieme quoziente di A rispetto ad E l’insieme, denotato con A/E, che ha comeelementi le classi della partizione di A associata ad E. Cioe A/E = {C(a) | a ∈ A}.
Se ad ogni a ∈ A associamo la classe C(a) cui esso appartiene, otteniamo una applicazioneϕE : A → A/E detta applicazione canonica associata ad E; si vede subito che ϕE e suriettivaed e iniettiva se e solo se E = I.
Siano dati ora due insiemi A, B ed una applicazione f : A → B tra essi, allora si puodefinire su A una relazione di equivalenza Ef ponendo a ≡ b (Ef ) se f(a) = f(b); talerelazione si dice relazione di equivalenza associata ad f .
4 Relazioni di ordinamento parziale
Definizione 4.1 (Ordinamento parziale). Una relazione binaria definita su un insiemeA si chiama relazione di ordinamento parziale se gode delle proprieta riflessiva, transitiva,antisimmetrica.
Un insieme A con una relazione R di ordinamento parziale definita su di esso, si diceparzialmente ordinato, brevemente p.o..
Se R e una relazione di ordinamento parziale definita su A, per a, b ∈ A scriveremo a ≤ binvece che aRb e leggeremo “a e minore od uguale a b”. Se e a ≤ b ed a 6= b allora scriveremoa < b e leggeremo “a e strettamente minore di b”.
Sia A un insieme p.o. e a, b ∈ A. Se a ≤ b oppure b ≤ a allora i due elementi a e b sidicono confrontabili . Un insieme p.o. in cui due qualunque elementi sono confrontabili, sidice un insieme ordinato o linearmente ordinato o catena.
Un elemento a ∈ A si dice minimo (assoluto) di A se a ≤ x per ogni x ∈ A. Il minimo,quando esiste, e unico.
Un elemento a ∈ A si dice minimale o minimo relativo di A se non c’e nessun elementominore o uguale ad a distinto da a stesso, cioe se da x ≤ a segue x = a.
9

Definizione 4.2 (Insieme ben ordinato). Un insieme p.o. si dice ben ordinato quandoogni suo sottoinsieme ha il minimo. Un insieme ben ordinato e anche ordinato.
In modo del tutto analogo si danno le nozioni di massimo e di massimo relativo.
Minoranti e maggioranti. Estremo inferiore ed estremo superiore. Sia A uninsieme p.o. e B un suo sottoinsieme. Si chiama minorante di B in A un elemento a ∈ Atale che a ≤ x per ogni x ∈ B.
Si chiama estremo inferiore di B in A il massimo dei minoranti. Notiamo che non e dettoche esistano minoranti di B in A e se ne esistono puo darsi che il loro insieme non abbiamassimo; pertanto l’estremo inferiore non sempre esiste.
L’estremo inferiore a di B in A e caratterizzato dalle seguenti due proprieta:
(i) a ∈ A e a ≤ x per ogni x ∈ B;
(ii) se b ∈ A e tale che b ≤ x per ogni x ∈ B allora b ≤ a.
Osserviamo che se l’ estremo inferiore di B in A esiste ed e un elemento di B allora esso e ilminimo di B; viceversa il minimo di B, se esiste, e anche l’ estremo inferiore di B in A. Inmodo analogo si danno le definizioni di maggioranti e di estremo superiore di B in A.
Un insieme p.o. si dice completo quando ogni suo sottoinsieme ha estremo superiore eestremo inferiore. In particolare un insieme p.o. completo ha minimo e massimo.
Diagrammi di insiemi p.o. finiti. Assegnato un insieme p.o. finito (A;≤) e utileconsiderare il diagramma di A, ottenuto nel seguente modo. Si disegnano tanti punti quantisono gli elementi dell’insieme, avendo l’accortezza di disegnare a piu in basso di b se a ≤ b; sicongiungono poi due elementi a, b con un segmento se a < b e non ci sono elementi maggioridi a e minori di b. Dal grafico che si ottiene si possono leggere con facilita tutte le proprietadell’insieme p.o. A.
Condizioni equivalenti all’ assioma di Zermelo. Le seguenti condizioni sono equi-valenti all’assioma di Zermelo:
(i) (Teorema di Zermelo). Ogni insieme puo essere ben ordinato.
(ii) (Lemma di Zorn). Se un insieme p.o. A gode della proprieta che ogni catena in essocontenuta ha un maggiorante allora A ha almeno un massimo relativo.
10

5 Cardinalita di un insieme
Definizione 5.1 Si dice che due insiemi A e B hanno la stessa cardinalita o sono equipo-tenti, e si scrive |A| = |B|, se esiste un’applicazione biunivoca fra A e B.
Esercizi.
1. Provare che N ha la stessa cardinalita dell’insieme dei numeri interi pari.
2. Provare che N ha la stessa cardinalita di N \ {0}.3. Provare che N ha la stessa cardinalita di N \ {1, 3}.
Definizione 5.2 Si dice che A ha cardinalita maggiore di B, e si scrive |A| > |B|, se B eequipotente ad un sottoinsieme di A ed A e B non sono equipotenti.
Proposizione 5.1 Sia X non vuoto. L’equipotenza induce una relazione di equivalenza suP (X).
Definizione 5.3 Un insieme si dice numerabile se ha la stessa cardinalita dell’insieme deinumeri naturali N = {0, 1, 2, 3, . . .}.
Proposizione 5.2 Sia A un insieme numerabile. Allora A× A e pure numerabile.
Dimostrazione. Poiche A e numerabile possiamo numerare i suoi elementi. Quindipossiamo scrivere
A = {a1, a2, a3, . . .}.Disponiamo gli elementi di A× A nel quadro:(a1, a1), (a1, a2), (a1, a3), . . .(a2, a1), (a2, a2), (a2, a3), . . .(a3, a1), (a3, a2), (a3, a3), . . .........................................e stabiliamo la corrispondenza f : N→ A× A come segue:f(1) = (a1, a1), f(2) = (a1, a2), f(3) = (a2, a1), f(4) = (a1, a3), f(5) = (a2, a2), f(6) =(a3, a1), . . . e cosı via secondo il cosiddetto metodo diagonale di Cantor.
Proposizione 5.3 L’insieme N dei numeri naturali, l’insieme Z dei numeri interi relativie l’insieme Q dei numeri razionali hanno la stessa cardinalita.
Proposizione 5.4 La cardinalita di N e minore di quella di R, cioe |R| > |N|.
11

Dimostrazione. Osservato che N ⊆ R basta provare che N ed R non sono equipotenti.Supponiamo per assurdo che esista la biiezione f : N→ R cosı definita (i numeri reali sonoscritti in forma di numeri decimali illimitati non periodici di periodo 9):f(0) = ±a0, c01c02c03 . . . c0n . . .f(1) = ±a1, c11c12c13 . . . c1n . . .................................................f(n) = ±an, cn1cn2cn3 . . . cnn . . .................................................
Considerato il numero α = 0, c0c1 . . . cn . . . con c0 6= 9, c01, c1 6= 9, c12, c2 6= 9, c23, . . .,cn 6= cn,n+1,9 . . . si ha che ∀n ∈ N f(n) 6= α. Ma questo e un assurdo perche avevamosupposto |N| = |R|.
Definizione 5.4 Un insieme si dice avere la cardinalita o potenza del continuo se ha lastessa cardinalita dell’insieme R dei numeri reali.
Proposizione 5.5 Per ogni insieme A e |A| < |P (A)| = |2A|.
Dimostrazione. Anzitutto P (A) contiene il sottoinsieme costituito dalle parti di A chepossiedono un solo elemento e quindi otteniamo una applicazione iniettiva di A in questosottoinsieme di P (A). Proviamo adesso che non puo esistere un’applicazione suriettiva di Ain P (A), e quindi A e P (A) non sono equipotenti. Supponiamo per assurdo che esista unaapplicazione suriettiva f : A → P (A); sia B = {a ∈ A | a 6∈ f(a)}. B e un sottoinsieme diA e quindi, per la suriettivita di f esiste b ∈ A tale che f(b) = B. Due casi sono possibili:b ∈ f(b) = B allora per definizione deve essere b 6∈ B oppure b 6∈ f(b) = B allora perdefinizione b ∈ B; in entrambi i casi si ha l’assurdo.
Definizione 5.5 Un insieme si dice finito se e vuoto oppure se, per qualche n ∈ N, eequipotente all’insieme {0, 1, 2, 3, . . . , n− 1} formato dai primi n numeri naturali.
Definizione 5.6 Un insieme si dice infinito se non e finito.
Proposizione 5.6 Sia A un insieme. Le seguenti condizioni sono equivalenti:
(i) A e infinito.
(ii) A possiede un sottoinsieme numerabile.
(iii) A e equipotente ad un suo sottoinsieme proprio.
Dimostrazione. (i) ⇒ (ii). A non e vuoto. Sia a1 ∈ A; e {a1} 6= A perche A e infinito.Sia a2 ∈ A con a2 6= a1; e {a1, a2} 6= A. Sia a3 ∈ A con a3 6= a1, a2, e cosı via costruiamo unsottoinsieme numerabile {a1, a2, a3, . . .} ⊆ A. Osserviamo che in questa prova si e fatto uso
12
dell’assioma di Zermelo.(ii) ⇒ (iii). Sia N ⊆ A un sottoinsieme numerabile; indichiamo con a1, a2, . . . gli elementidi N ; consideriamo il seguente sottoinsieme A′ di A, A′ = (A − N) ∪ {a2, a4, a6 . . .}. Siha A′ 6= A perche a1 6∈ A′ ed inoltre A′ e equipotente ad A: basta infatti considerarel’applicazione f : A′ → A definita da f(x) = x se x ∈ A−N ed f(a2n) = an per n = 1, 2, . . .(iii) ⇒ (i). Un insieme finito non e equipotente ad un suo sottoinsieme proprio. Tale fatto,che sembra piuttosto evidente, puo essere facilmente dimostrato mediante induzione.
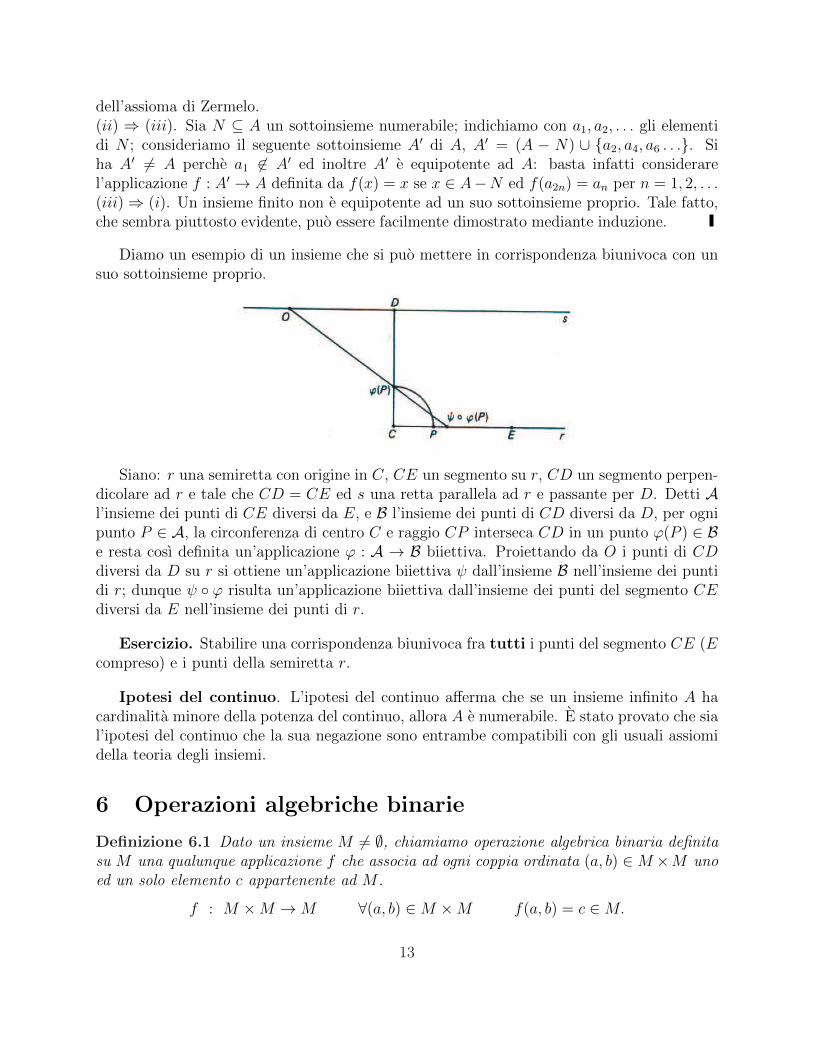
Diamo un esempio di un insieme che si puo mettere in corrispondenza biunivoca con unsuo sottoinsieme proprio.
Siano: r una semiretta con origine in C, CE un segmento su r, CD un segmento perpen-dicolare ad r e tale che CD = CE ed s una retta parallela ad r e passante per D. Detti Al’insieme dei punti di CE diversi da E, e B l’insieme dei punti di CD diversi da D, per ognipunto P ∈ A, la circonferenza di centro C e raggio CP interseca CD in un punto ϕ(P ) ∈ Be resta cosı definita un’applicazione ϕ : A → B biiettiva. Proiettando da O i punti di CDdiversi da D su r si ottiene un’applicazione biiettiva ψ dall’insieme B nell’insieme dei puntidi r; dunque ψ ◦ ϕ risulta un’applicazione biiettiva dall’insieme dei punti del segmento CEdiversi da E nell’insieme dei punti di r.
Esercizio. Stabilire una corrispondenza biunivoca fra tutti i punti del segmento CE (Ecompreso) e i punti della semiretta r.
Ipotesi del continuo. L’ipotesi del continuo afferma che se un insieme infinito A hacardinalita minore della potenza del continuo, allora A e numerabile. E stato provato che sial’ipotesi del continuo che la sua negazione sono entrambe compatibili con gli usuali assiomidella teoria degli insiemi.
6 Operazioni algebriche binarie
Definizione 6.1 Dato un insieme M 6= ∅, chiamiamo operazione algebrica binaria definitasu M una qualunque applicazione f che associa ad ogni coppia ordinata (a, b) ∈ M ×M unoed un solo elemento c appartenente ad M .
f : M ×M → M ∀(a, b) ∈ M ×M f(a, b) = c ∈ M.
13

L’operazione f viene indicata, a seconda del caso particolare che si sta studiando, con isimboli: ∗, ◦, ⊕, ⊗, . . .. Per esempio si scrive a ∗ b = c invece di f(a, b) = c, ecc.
Esempi.
1. La somma e il prodotto introdotte in N sono operazioni algebriche binarie, mentre lasottrazione e la divisione non lo sono.
2. Sia P = 2Z l’insieme dei numeri pari e D quello dei numeri dispari, la somma eun’operazione algebrica binaria definita su P , mentre non lo e su D.
3. Sono esempi di operazioni algebriche binarie definite su N∗ 1
• l’applicazione f che associa alla coppia (a, b), di elementi distinti o no, la potenzache ha per base il primo elemento e per esponente il secondo elemento: f(a, b) = ab
cioe a ∗ b = ab;
• l’applicazione f che associa alla coppia (a, b) ∈ Z × Z il loro MCD: a ◦ b =M.C.D.(a, b).
Si dice che l’operazione ∗ definita su M gode della proprieta commutativa se:
∀a, b ∈ M si verifica che a ∗ b = b ∗ a.
Le operazioni + e · sugli insiemi Z e Q sono commutative; le operazioni − in Z e / in Q∗,come pure l’elevamento a potenza in N∗ non sono commutative.
L’operazione ∗ definita su M gode della proprieta associativa se:
∀a, b, c ∈ M si verifica che (a ∗ b) ∗ c = a ∗ (b ∗ c).
Le operazioni + e · su N, Q e Z sono associative.Le seguenti operazioni non sono associative:
• l’elevamento a potenza in N∗; infatti ad esempio e (2 ∗ 3) ∗ 4 6= 2 ∗ (3 ∗ 4), avendosi(2 ∗ 3) ∗ 4 = 23 ∗ 4 = (23)4 = 212 e 2 ∗ (3 ∗ 4) = 2 ∗ 34 = 2(34) = 281.
• la sottrazione in Z, infatti ad esempio e 8− (5−2) 6= (8−5)−2, avendosi 8− (5−2) =8− 3 = 5 e (8− 5)− 2 = 3− 2 = 1.
Esempi.
1. Sia M un insieme non vuoto e ∗ l’operazione su di esso definita in modo tale che:∀a, b ∈ M , a ∗ b = b. Tale operazione e associativa, infatti e (a ∗ b) ∗ c = a ∗ (b ∗ c),avendosi (a ∗ b) ∗ c = b ∗ c = c e a ∗ (b ∗ c) = a ∗ c = c; ma non e commutativa, a menoche l’insieme sia costituito da un unico elemento, cioe |M | = 1.
1I simboli N∗, Z∗, Q∗ , R∗ indicano gli insiemi dei numeri naturali, interi, razionali e reali privati dello 0.
14

2. Sia E un insieme e P (E) l’insieme delle sue parti, le operazioni di ∩ e ∪ su P (E) sonocommutative e associative.
Definizione 6.2 Dicesi struttura algebrica un insieme non vuoto M su cui sono definiteuna o piu operazioni algebriche binarie ∗, +, ⊕, . . ..
Indichiamo con (M, ∗) una struttura algebrica dove e definita l’operazione ∗, con (M, ∗,+)una struttura algebrica dove sono definite le operazioni ∗ e +, (M, ∗,+,⊕, . . .) una strutturaalgebrica dove sono definite le operazioni ∗, +, ⊕, . . ..N, Z, Q e R con le operazioni + e/0 · sono strutture algebriche.
Definizione 6.3 Dicesi semigruppo una struttura algebrica (M, ∗), ove ∗ e operazione as-sociativa su M .
Definizione 6.4 Dicesi elemento neutro di (M, ∗) un elemento e ∈ M tale che ∀a ∈ M siha: a ∗ e = e ∗ a = a.
Si osservi che
• N, Z, Q, con l’operazione di addizione + hanno lo 0 elemento neutro.
• N, Z, Q, con l’operazione di moltiplicazione · hanno 1 come elemento neutro ed echiamato elemento unita.
• Q∗ con l’operazione di divisione / non ha elemento neutro, infatti a/1 = a mentre1/a 6= a.
Definizione 6.5 Sia (M, ∗) una struttura algebrica avente elemento neutro e. Dicesi ele-mento simmetrico di a ∈ M un elemento a′ ∈ M tale che a ∗ a′ = a′ ∗ a = e.
Diremo che a e simmetrizzabile se esiste l’elemento a′ simmetrico di a.
Si ha
• In N nessun elemento tranne lo 0 e simmetrizzabile rispetto a +.
• In (Z,+) qualsiasi elemento e simmetrizzabile (il simmetrico di a e −a) cosı anche in(Q∗, ·) (il simmetrico di a e 1
a).
Definizione 6.6 Dicesi monoide un semigruppo (M, ∗) dotato di elemento neutro. In altreparole un monoide e un insieme M dotato di un’operazione ∗ associativa in cui esiste unelemento e tale che a ∗ e = e ∗ a = a per ogni a ∈ M .
(N,+) e un monoide ove il numero zero e l’elemento neutro. (Z, ·) e un monoide ove ilnumero 1 e l’elemento neutro. Sia X un insieme non vuoto. allora (XX , ◦) e un monoideove l’applicazione identica iX e l’elemento neutro.
15

7 Gruppi
Definizione 7.1 Dicesi gruppo un insieme non vuoto M con una operazione algebrica bi-naria f : M × M → M (f(a, b) = a ∗ b) definita su di esso che gode delle seguenti treproprieta:
1. ∀a, b, c ∈ M (a ∗ b) ∗ c = a ∗ (b ∗ c) (l’operazione ∗ e associativa);
2. ∃e ∈ M tale che a ∗ e = e ∗ a = a ∀a ∈ M (esistenza dell’elemento neutro).
3. ∀a ∈ M ∃a′ ∈ M tale che a ∗ a′ = a′ ∗ a = e (ogni elemento a ∈ M e simmetrizzabile).
Teorema 7.1 In un gruppo l’elemento neutro e unico.
Dimostrazione. Supponiamo per assurdo che esistano due elementi neutri e ed e′. Per laproprieta dell’elemento neutro si ha: ∀a ∈ M a ∗ e = e ∗ a = a. Dunque:
e ∗ e′ = e′ ∗ e = e
e anchee′ ∗ e = e ∗ e′ = e′
da cui e = e′.
Teorema 7.2 In un gruppo ogni elemento a ammette un solo simmetrico a′.
Dimostrazione. Sia (M, ∗) un gruppo. Supponiamo per assurdo che esista un a ∈ Mavente due elementi simmetrici a′′ ed a′. Si ha:
a′ = e ∗ a′ = (a′′ ∗ a) ∗ a′ = a′′ ∗ (a ∗ a′) = a′′ ∗ e = a′′.
da cui a′ = a′′.
Definizione 7.2 Un gruppo (M, ∗) si dice abeliano o commutativo se l’operazione gode dellaproprieta commutativa: a ∗ b = b ∗ a per ogni a, b ∈ M .
Teorema 7.3 Sia (M, ∗) un gruppo. Per ogni coppia fissata a, b ∈ M esiste uno e un solox ∈ M tale che a ∗ x = b, oppure esiste uno e un solo y ∈ M tale che y ∗ a = b.
In altre parole in un gruppo le equazioni a ∗ x = b e y ∗ a = b hanno una e una solosoluzione. Si noti che in generale non e detto che queste soluzioni siano uguali. Se invece ilgruppo e commutativo le due soluzioni coincidono.
16

Dimostrazione. Sia a ∗ x = b, moltiplicando a destra entrambi i membri per a′ (ilsimmetrico di a) si ha a′ ∗ (a ∗ x) = a′ ∗ b. Per la proprieta associativa, (a′ ∗ a) ∗ x = a′ ∗ b,e ∗ x = a′ ∗ b e quindi x = a′b e l’unica soluzione della equazione a ∗ x = b.
Analogamente (moltiplicando a sinistra per a′) si prova che l’unica soluzione di y ∗ a = be y = b ∗ a′.
Se il gruppo e abeliano abbiamo x = a′ ∗ b = b ∗ a′ = y.
Spesso l’operazione algebrica binaria del gruppo e indicata con · (chiamata moltiplica-zione) oppure con + (chiamata addizione). Nel primo caso il gruppo si dice moltiplicativo,nel secondo additivo. Si usa la seguente terminologia:
• In un gruppo moltiplicativo l’elemento neutro verra indicato con 1 ed e detto unita,mentre il simmetrico di a verra indicato con a−1, ed e detto il reciproco.
E immediato verificare che: (a−1)−1 = a e (a · b)−1 = b−1 · a−1.
• In un gruppo additivo l’elemento neutro verra indicato con 0 ed e detto elemento nullo,mentre il simmetrico di a verra indicato con −a, ed e detto l’opposto.
E immediato verificare che: −(−a) = a e −(a+ b) = (−b) + (−a).
Il Teorema 7.3 puo essere riformulato nelle due seguenti forme:
Teorema 7.4 Se (G, ·) e un gruppo moltiplicativo, ∀a, b ∈ G le due equazioni a · x = b ey · a = b ammettono una sola soluzione (date da x = a−1 · b e y = b · a−1, rispettivamente).Se (G,+) e un gruppo additivo, ∀a, b ∈ G le due equazioni a+ x = b e y+ a = b ammettonouna sola soluzione (date da x = −a+ b e y = b− a, rispettivamente).
Teorema 7.5 In un gruppo moltiplicativo (G, ·) valgono le leggi di cancellazione a sinistrae a destra, cioe:
∀a, b, c ∈ G, da a · b = a · c segue che b = c;
∀a, b, c ∈ G, da b · a = c · a segue che b = c.
In un gruppo additivo (G,+) valgono le leggi di cancellazione a sinistra e a destra, cioe:
∀a, b, c ∈ G, da a+ b = a+ c segue che b = c;
∀a, b, c ∈ G, da b+ a = c+ a segue che b = c.
Sono esempi di gruppi additivi abeliani (con le usuali operazioni di addizione +): (Z,+),gruppo additivo degli interi relativi, (Q,+), gruppo additivo dei razionali, (R,+), gruppoadditivo dei reali. Si osservi che, se si considera l’usuale operazione di prodotto ·, (Z\{0}, ·)non e un gruppo moltiplicativo (non esiste l’inverso di un elemento), mentre (Q \ {0}, ·) e(R \ {0}, ·) sono gruppi moltiplicativi abeliani. Per dare qualche altro esempio di gruppointroduciamo la nozione di matrice.
17

Definizione 7.3 Siano m e n due numeri naturali. Una matrice A di tipo m × n su R euna tabella di numeri reali
A =
a11 a12 · · · a1na21 a22 · · · a2n· · · · · ·
am1 am2 · · · amn
dove aij ∈ R per i = 1, 2, . . . ,m e j = 1, 2, . . . , n. Scriveremo anche
A = (aij) , i = 1, 2, . . . ,m, j = 1, 2, . . . , n.
Indicheremo con il simbolo M(m,n;R) l’insieme delle matrici di tipo m× n su R. Ognielemento aij della matrice e contrassegnato da due indici: il primo i denota la riga mentre ilsecondo j la colonna alla quale l’elemento appartiene. Si dice anche che aij e l’elemento diposto (i, j) nella matrice A.
Se m = n, allora la matrice A si dice quadrata di ordine n; in tal caso scriveremo M(n;R)invece di M(m,n;R). Le matrici di tipo 1× n si diranno matrici riga e quelle di tipo m× 1matrici colonna. L’i-esima riga della matrice A = (aij) e la matrice di tipo 1× n
Ri = (ai1, ai2, . . . , ain),
mentre la j-esima colonna di A e data dalla matrice di tipo m× 1
Cj =
a1ja2j·
amj
.
Dicesi matrice nulla di M(m,n;R) la matrice Θ di tipo m×n i cui elementi sono tutti ugualia 0. Cioe
Θ =
0 0 · · · 00 0 · · · 0· · · · · ·0 0 · · · 0
.
In M(m,n;R) definiamo l’operazione di addizione ⊕ nel seguente modo: per ogni A,B ∈M(m,n;R), A = (aij) e B = (bij), poniamo
(aij)⊕ (bij) = (aij + bij) .
E facile verificare che ((M(m,n;R),⊕) e un gruppo abeliano.
Definizione 7.4 Un gruppo si dice finito se ha un numero finito di elementi. Il numero deisuoi elementi si dice ordine del gruppo.
18

Talvolta, specialmente quando si tratta di gruppi abeliani, si usa la notazione additivainvece di quella moltiplicativa. Cioe: l’operazione del gruppo si chiama addizione (invece dimoltiplicazione) e si scrive a+ b (invece di a · b), l’elemento unita del gruppo si chiama zeroe si indica con 0 (invece di 1); l’inverso di un elemento a si chiama opposto e si indica con−a (invece di a−1). Si pone inoltre a+ (−b) = a− b.
Gruppo simmetrico. Sia M un insieme non vuoto. L’insieme delle applicazioni biiettivedi M in M e un gruppo e si chiama il gruppo simmetrico su M . Se M e finito e ha nelementi, il gruppo simmetrico su M e finito ed ha n! = 1 · 2 · · ·n elementi. In quest’ultimocaso il gruppo simmetrico si suole chiamare gruppo delle sostituzioni su n elementi. SeM = {1, 2, . . . , n} allora la sostituzione f : M → M tale che f(i) = ai e f(ai) 6= f(aj) perogni i, j ∈ M con i 6= j, viene spesso indicata con
(1 2 . . . n
a1 a2 . . . an
)
o, piu semplicemente, con a1, a2, . . . , an e viene chiamata permutazione di 1, 2, . . . , n.
Definizione 7.5 Dicesi sottogruppo di un gruppo (G, ·) un sottoinsieme A non vuoto di Gche risulta essere un gruppo rispetto alla stessa operazione definita in G.
In ogni gruppo (G, ·) esistono almeno due sottogruppi, i cosiddetti sottogruppi banali oimpropri. Essi sono il gruppo stesso e il sottogruppo che ha come unico elemento l’elementoneutro di G; ogni altro sottogruppo e detto proprio.
Teorema 7.6 Condizione necessaria e sufficiente affinche A (sottoinsieme non vuoto delgruppo (G, ·)) sia un sottogruppo di G e che siano verificate le seguenti due condizioni:
1. ∀a, b ∈ A =⇒ a · b ∈ A;
2. ∀a ∈ A =⇒ a−1 ∈ A.
Dimostrazione. Necessita. Supponiamo che A sia un sottogruppo di G. Allora A stessoe un gruppo e quindi le condizioni 1 e 2 sono verificate.Sufficienza. Supponiamo che le condizioni 1 e 2 siano verificate. Per la 1, a, b ∈ A =⇒ a·b ∈ Ae quindi · e anche un’operazione definita in A che verifica la proprieta associativa in A(∀a, b, c ∈ A si ha a · (b · c) = (a · b) · c) valendo essa in G. Poiche le condizioni 1 e 2valgono per ogni coppia di elementi di A, varranno in particolare per a e a−1 ∀a ∈ A. Alloraa · a−1 = e ∈ A, cioe l’elemento neutro di G appartiene pure ad A. Ed essendo anche cheper ogni a ∈ A anche a−1 ∈ A, segue che (A, ·) e un gruppo, cioe un sottogruppo di (G, ·).
Le condizioni 1 e 2 sono equivalenti all’unica condizione ∀a, b ∈ A ⇒ ab−1 ∈ A.
Teorema 7.7 Intersezione di sottogruppi. Se S e H sono due sottogruppi di G, alloraS ∩H e un sottogruppo di G.
19

Dimostrazione. Si ha:
1. Se a ∈ S ∩ H, essendo S e H sottogruppi, abbiamo a−1 ∈ S e a−1 ∈ H quindia−1 ∈ S ∩H.
2. Se a, b ∈ S ∩ H, essendo S e H sottogruppi, abbiamo ab ∈ S e ab ∈ H. Quindiab ∈ S ∩H.
1 e 2 provano la tesi.
Piu in generale, se Gi, i ∈ I e un insieme di sottogruppi di G, allora G′ = ∩i∈IGi (formatodagli elementi comuni a tutti i sottogruppi Gi) e un sottogruppo di G.
Teorema 7.8 Unione di sottogruppi. Se S e H sono due sottogruppi di G, allora S ∪Hnon e sottogruppo di G, tranne nel caso in cui H ⊆ S oppure S ⊆ H.
Dimostrazione. Sia a ∈ S−H e b ∈ H−S, facciamo vedere che ab 6∈ S∪H. Supponiamoper assurdo che ab ∈ S ∪ H, ad esempio sia ab ∈ S. Avremo ab = s per qualche s ∈ S.Moltiplicando ambo i membri a sinistra per a−1 (si ricordi che a−1 ∈ S), si avrebbe a−1ab =a−1s ∈ S, da cui b = a−1s ∈ S. Cio e assurdo perche b 6∈ S; analogamente se ab ∈ H siperviene ad un assurdo.
8 Campi
Definizione 8.1 Dicesi campo K una terna (K,+,×) dove K e insieme non vuoto mentre+ e × sono due operazioni binarie su K tali che:
K1) (Chiusura). Per ogni coppia a, b ∈ K, a+ b ∈ K e a× b ∈ K.K2) (Associativita). Comunque presi a, b, c ∈ K, a + (b + c) = (a + b) + c e a × (b × c) =
(a× b)× c.
K3) (Commutativita). Per ogni coppia a, b ∈ K, a+ b = b+ a e a× b = b× a.
K4) (Identita). Esistono due elementi in K, denotati con 0 e 1 e detti rispettivamente lozero e l’unita del campo, tali che 0 6= 1 e, per ogni a ∈ K, a+ 0 = a e a× 1 = a.
K5) (Opposto). Per ogni a ∈ K, esiste un elemento b ∈ K (detto l’opposto di a), tale chea+ b = 0.(Inverso). Per ogni a ∈ K∗ = K \ {0} esiste un elemento c ∈ K (detto l’inverso di a)tale che a× c = 1.
K6) (Distributivita). Comunque presi a, b, c ∈ K, a× (b+ c) = a× b+ a× c.
Ricordiamo che le condizioniK1),K2),K4) eK5) dicono che (K,+) e un gruppo additivoe (K∗,×) un gruppo moltiplicativo. Si puo provare che:
20

• a× b non e mai uguale a 0 se a 6= 0 e b 6= 0;
• l’inverso di a ∈ K∗ e sempre diverso da 0;
• sia l’inverso che l’opposto di a sono unici e si indicano, rispettivamente, con a−1 e −a.
Sono esempi di campi: (Q,+, ·), (R,+, ·), (C,+, ·). Come e ben noto, (Z,+, ·) non e uncampo.
Se (K,+,×) e un campo e K e un insieme finito, diremo che il campo e finito. Si puodimostrare il seguente teorema.
Teorema 8.1 Se (K,+,×) e un campo finito, esistono un numero primo p e un interopositivo k tali che |K| = pk. Viceversa, per ogni primo p e intero positivo k, esiste un campofinito avente pk elementi.
E anche noto che, a meno di isomorfismi, un campo finito e unico. Esso e denotato conGF (pk).
Un interessante esempio di campo finito e dato da (K,+, ·) in cui K = {0, 1} e leoperazioni + e · sono cosı definite:
0 + 0 = 0, 0 + 1 = 1, 1 + 0 = 1, 1 + 1 = 0;
0 · 0 = 0, 0 · 1 = 0, 1 · 0 = 0, 1 · 1 = 1.
9 Omomorfismi fra strutture
Definizione 9.1 Siano (G, ∗) e (G′, ◦) due gruppi. Un’applicazione f : G → G′ si dice unomomorfismo di G in G′ quando, per ogni a, b ∈ G, e f(a ∗ b) = f(a) ◦ f(b).
Un omomorfismo biiettivo fra G e G′ si dice un isomorfismo. Se G′ = G l’isomorfismo sidice automorfismo.
Teorema 9.1 Sia f : G → G′ un omomorfismo fra gruppi. Allora
1. f(e) = e′, essendo e ed e′ gli elementi unita rispettivamente di G e G′;
2. f(a−1) = (f(a))−1;
3. se H e un sottogruppo di G allora f(H) = {a′ ∈ G′ | ∃a ∈ H tale che f(a) = a′} eun sottogruppo di G.
4. se H ′ e un sottogruppo di G′ allora f−1(H ′) = {a ∈ G | f(a) ∈ H ′} e un sottogruppodi G.
21

Dimostrazione. (1) Si ha f(a) ◦ f(e) = f(a ∗ e) = f(a) e f(e) ◦ f(a) = f(e ∗ a) = f(a).Dunque f(e) e l’elemento neutro di G′.(2) Da e′ = f(e) = f(a ∗ a−1) = f(a) ◦ f(a−1) e e′ = f(e) = f(a−1 ∗ a) = f(a−1) ◦ f(a), segueche f(a−1) e l’inverso di f(a), cioe f(a−1) = (f(a))−1.(3) Innanzitutto si osservi che f(H) non e vuoto perche e′ = f(e) ∈ f(H). Inoltre sea′, b′ ∈ f(H) significa che a′ = f(a) e b′ = f(b) con a, b ∈ H; allora a′◦b′−1 = f(a)◦(f(b))−1 =f(a) ◦ f(b−1) = f(a ∗ b−1) ∈ f(H) perche a ∗ b−1 ∈ H essendo H un sottogruppo di G.(4)Intanto f−1(H ′) non e vuoto perche e ∈ f−1(H ′) in quanto f(e) = e′ ∈ H ′. Inoltrese a, b ∈ f−1(H ′) significa f(a), f(b) ∈ H ′; allora a ∗ b−1 ∈ f−1(H ′) perche f(a ∗ b−1) =f(a) ◦ f(b−1) = f(a) ◦ (f(b))−1 ∈ H ′ essendo H ′ un sottogruppo di G′.
Nucleo ed immagine di un omomorfismo. Sia f : G → G′ un omomorfismo di gruppi.Definiamo nucleo di f e lo denotiamo con Ker f il sottoinsieme di G cosı definito
Ker f = {a ∈ G | f(a) = e′}.
Definiamo immagine di f e la denotiamo con Imf , il sottoinsieme di G′ cosı definito
Imf = {a′ ∈ G′ | esiste a ∈ G tale che f(a) = a′}.
Teorema 9.2 Sia f : G → G′ un omomorfismo di gruppi. Si ha
1. Ker f e un sottogruppo di G.
2. Imf e un sottogruppo di G′.
3. f e iniettiva se e solo se Ker f = {e}.4. f e suriettiva se e solo se Imf = G′.
Definizione 9.2 Siano (K,+, ·) e (K′,⊕, ◦) due campi. Un’applicazione f : K → K′ e unomomorfismo di K in K′ se ∀a, b ∈ K risulta:
1. f(a+ b) = f(a)⊕ f(b),
2. f(a · b) = f(a) ◦ f(b).
Un omomorfismo biiettivo si dice un isomorfismo fra K e K′. Se K′ = K l’isomorfismo sidice automorfismo. Per gli omomorfismi tra campi valgono teoremi analoghi a quelli per gliomomorfismi fra gruppi.
22

10 Matrici: prodotto righe per colonne
Nella Definizione 7.3 del paragrafo 7 abbiamo introdotto il concetto di matrice di tipo m×nad elementi in R. Sempre nello stesso paragrafo abbiamo definito cosa si intende per somma⊕ fra matrici e per matrice nulla e abbiamo lasciato al lettore il compito di verificare chel’insieme delle matrici m×n con l’operazione di somma forma un gruppo additivo abeliano.In questo paragrafo vogliamo richiamare alcune definizioni e operazioni sulle matrici che cisaranno utili in seguito. E facile verificare che tutto quanto detto precedentemente per lematrici ad elementi in R puo ripetersi per le matrici ad elementi in un generico campo K.
Sia M(m,n;K) l’insieme delle matrici di tipo m × n ad elementi in un campo K, i cuielementi chiameremo scalari (qualora m = n porremo M(n, n;K) = M(n;K)).
Definizione 10.1 Dicesi prodotto di uno scalare λ ∈ K per una matrice A = (aij) ∈M(m,n;K) la matrice
λA = (λaij)
ottenuta moltiplicando per λ tutti gli elementi di A.
Definizione 10.2 Siano date le matrici A = (aij) ∈ M(m,n;K) e B = (bij) ∈ M(n, p;K)(si noti che A e di tipo m× n e B di tipo n× p). Dicesi prodotto righe per colonne di A perB la matrice
A ·B = (cij) ∈ M(m, p;K)
definita, per ogni i = 1, 2, . . . ,m e j = 1, 2, . . . , p, nel seguente modo:
cij =n∑
s=1
aisbsj = ai1b1j + ai2b2j + . . .+ aisbsj + . . . ainbnj.
Esempio 10.1 Siano
A =
(3 2 3 4−4 2 5 7
)∈ M(2, 4;R) e B =
2 −3 13 2 24 5 15 7 3
∈ M(4, 3;R).
Allora A ·B e la matrice di tipo 2× 3 data da
(3 · 2 + 2 · 3 + 3 · 4 + 4 · 5 3(−3) + 2 · 2 + 3 · 3 + 4 · 7 3 · 1 + 2 · 2 + 3 · 1 + 4 · 3−4 · 2 + 2 · 3 + 5 · 4 + 7 · 5 −4(−3) + 2 · 2 + 5 · 5 + 7 · 7 −4 · 1 + 2 · 2 + 5 · 1 + 7 · 3
)=
=
(44 38 2253 90 26
).
23

Esempio 10.2 Siano
A =
3 2 4 15 2 7 32 3 4 6
∈ M(3, 4;R) e B =
2345
∈ M(4, 1;R).
Allora
A ·B =
3 · 2 + 2 · 3 + 4 · 4 + 1 · 55 · 2 + 2 · 3 + 4 · 7 + 3 · 52 · 2 + 3 · 3 + 4 · 4 + 6 · 5
=
335659
.
Esempio 10.3 Siano
A =
(2 34 5
)∈ M(2, 2;R) e B =
(1 72 9
)∈ M(2, 2;R).
Allora
A ·B =
(2 · 1 + 3 · 2 2 · 7 + 3 · 94 · 1 + 5 · 2 4 · 7 + 5 · 9
)=
(8 4114 73
).
Si osservi che sia A che B sono quadrate di ordine n allora si possono fare entrambi iprodotti A ·B e B · A. In generale si ha
A ·B 6= B · A.
Infatti siano A e B le matrici di ordine 2 definite nell’Esempio 10.3. Si ha
B · A =
(1 72 9
)·(
2 34 5
)=
(30 3838 51
)6= A ·B.
Definizione 10.3 Dicesi matrice identica di ordine n la seguente matrice quadrata di ordinen:
In =
1 0 0 · · · 00 1 0 · · · 00 0 1 · · · 0· · · · · · ·0 0 0 · · · 1
.
Per l’operazione di moltiplicazione fra matrici valgono le proprieta elencate nel seguenteteorema di cui lasciamo al lettore la facile verifica. D’ora in poi la somma fra le matrici A eB saraa indicata con A+B invece di A⊕B.
Teorema 10.1 Siano A,B ∈ M(m,n;K), C,D ∈ M(n, p;K), E ∈ M(p, q;K) e λ ∈ K.Allora:
24

1. (A+B) · C = A · C +B · C;
2. A · (C +D) = A · C + A ·D;
3. λ(A · C) = (λA) · C = A · (λC);
4. (A · C) · E = A · (C · E);
5. A · In = Im · A = A;
6. se C = D allora A · C = A ·D;
7. se A = B allora A · C = B · C.
Si osservi che, in generale, la (6) e la (7) del Teorema 10.1 non possono essere invertite.Infatti, posto nel primo caso
A =
0 2 1 −10 2 1 10 3 −1 2
, C =
−1 22 73 15 8
, e D =
7 82 73 15 8
,
abbiamo C 6= D e
A · C = A ·D =
2 712 2313 36
.
Analogamente, posto
A =
(2 3−1 4
), B =
(4 39 4
), e C =
(0 07 2
),
abbiamo A 6= B e
A · C = B · C =
(21 628 8
).
Definizione 10.4 Dicesi matrice diagonale una matrice quadrata A = (aij) di ordine n taleche aij = 0 ∀i 6= j, ovvero se
A =
a11 0 0 · · · 00 a22 0 · · · 00 0 a33 · · · 0· · · · · · ·0 0 0 · · · ann
. (1)
Conseguenza immediata del prodotto riga per colonna fra matrici e il seguente teorema.
25

Teorema 10.2 Sia A la matrice diagonale (1). Allora
Ak =
ak11 0 0 · · · 00 ak22 0 · · · 00 0 ak33 · · · 0· · · · · · ·0 0 0 · · · aknn
.
Esempio 10.4 Sia A =
2 0 00 −3 00 0 −1
. Allora
A2 = A · A =
22 0 00 (−3)2 00 0 (−1)2
=
4 0 00 9 00 0 1
,
A3 = A · A · A =
23 0 00 (−3)3 00 0 (−1)3
=
8 0 00 −27 00 0 −1
.
Definizione 10.5 Sia A = (aij) ∈ M(m,n;K). Dicesi trasposta di A la matrice AT =(bji) ∈ M(n,m;K) tale che bji = aij per ogni i = 1, 2, . . . ,m e j = 1, 2, . . . , n.
Esempio 10.5 Sia
A =
1 2 3 45 6 7 89 10 11 12
.
Allora
AT =
1 5 92 6 103 7 114 8 12
.
Per le matrici trasposte valgono le proprieta elencate nel seguente teorema di cui lasciamoal lettore la facile verifica.
Teorema 10.3 Siano A,B ∈ M(m,n;K), C ∈ M(n, p;K) e λ ∈ K. Allora:1. (A+B)T = AT +BT ;
2. (λA)T = λ(AT );
3. (A · C)T = CT · AT ;
4. (AT )T = A;
26

5. ITn = In.
Definizione 10.6 Una matrice quadrata A di ordine n, cioe A ∈ M(n;K) si dice simme-trica se AT = A, cioe se aij = aji per ogni i, j = 1, 2, . . . , n.
Esempio 10.6 La seguente matrice e simmetrica
1 2 3 42 5 6 73 6 8 94 7 9 10
.
Se A = (aij) ∈ M(n;K) allora gli elementi a11, a22, . . . , ann formano la diagonale princi-pale di A.
Definizione 10.7 Una matrice quadrata A ∈ M(n;K) si dice invertibile se esiste unamatrice B ∈ M(n;K) tale che
A ·B = B · A = In.
Esempio 10.7 Verificare se la matrice
A =
(1 23 6
)
e invertibile.
SVOLGIMENTO. Essendo A ∈ M(2, ;R) bisogna verificare se esiste una matrice B ∈M(2;R) tale che A ·B = B · A = I2. Poniamo
B =
(x yz t
)
e cerchiamo di determinare x, y, z, t ∈ R in modo che(
1 23 6
)·(
x yz t
)=
(1 00 1
).
La precedente uguaglianza equivale a(
x+ 2z y + 2t3x+ 6z 3y + 6t
)=
(1 00 1
)
la quale e vera se e solo se il seguente sistema ammette soluzioni
x+ 2z = 1y + 2t = 03x+ 6z = 03y + 6t = 1
. (2)
Poiche (2) non ha soluzioni, la matrice data A non e invertibile.
27

Esempio 10.8 Verificare se la matrice
A =
(1 23 7
)
e invertibile.
SVOLGIMENTO. Essendo A ∈ M(2, ;R) bisogna verificare se esiste una matrice B ∈M(2;R) tale che AB = BA = I2. Poniamo
B =
(x yz t
)
e cerchiamo di determinare x, y, z, t ∈ R in modo che(
1 23 7
)·(
x yz t
)=
(1 00 1
).
La precedente uguaglianza equivale a(
x+ 2z y + 2t3x+ 7z 3y + 7t
)=
(1 00 1
)
la quale e vera se e solo se il seguente sistema ammette soluzioni
x+ 2z = 1y + 2t = 03x+ 7z = 03y + 7t = 1
. (3)
Poiche (2) ha l’unica soluzione (x, y, z, t) = (7,−2,−3, 1), l’inversa di A e
B =
(7 −2−3 1
).
Infine non e difficile verificare che
B · A =
(7 −2−3 1
)·(
1 23 7
)=
(1 00 1
)= I2.
Teorema 10.4 Sia A ∈ M(n;K) invertibile. Allora esiste una ed una sola matrice B ∈M(n;K) tale che
A ·B = B · A = In.
Dimostrazione. Per definizione di matrice invertibile, esiste almeno una B ∈ M(n;K)tale che A · B = B · A = In. Sia adesso C ∈ M(n;K) tale che A · C = C · A = In. AlloraC = C · In = C · (A ·B) = (C · A) ·B = In ·B = B.
Per il precedente teorema la matrice B verra indicata con A−1 e sara detta la matriceinversa di A. Come proveremo nel Teorema 15.8, se esiste una matrice B tale che A ·B = Inallora esiste una matrice C ∈ M(n;K) tale che C · A = In. Vale il seguente teorema.
28

Teorema 10.5 Sia A ∈ M(n;K). Se esistono B,C ∈ M(N ;K) tali che
A ·B = In e C · A = In,
allora C = B.
Dimostrazione. Si ha C = C · In = C · (A ·B) = (C · A) ·B = In ·B = B.
Il seguente risultato e immediata conseguenza dei Teoremi 10.4, 10.5 e 15.8.
Teorema 10.6 Una matrice A ∈ M(n;K) e invertibile se e solo se esiste B ∈ M(n;K)tale che A ·B = In.
L’insieme delle matrici invertibili A ∈ M(n;K) si indica con GL(n;K). In GL(n;K)valgono le seguenti proprieta.
Teorema 10.7 Siano A,B ∈ GL(n;K), allora si ha:
1. A ·B ∈ GL(n;K) e (A ·B)−1 ∈ GL(n;K).
2. A−1 ∈ GL(n;K) e (A−1)−1
= A.
3. AT ∈ GL(n;K) e(AT
)−1= (A−1)
T.
4. In ∈ GL(n;K) e (In)−1 = In.
L’insieme GL(n;K) con il prodotto righe per colonne costituisce un gruppo non commu-tativo, detto il gruppo lineare generale. Si osservi quindi che in GL(n;K) valgono le leggi dicancellazione a sinistra ed a destra:
1. se C · A = C ·B e A,B,C ∈ GL(n;K), allora A = B;
2. se A · C = B · C e A,B,C ∈ GL(n;K), allora A = B.
Si confronti la precedente affermazione con la (6) e la (7) del Teorema 10.1.
Teorema 10.8 Siano A,B ∈ M(m,n;K).
• Sia C ∈ GL(m;K). Allora A = B se e solo se C · A = C ·B.
• Sia C ∈ GL(n;K). Allora A = B se e solo se A · C = B · C.
Dimostrazione. Sia C ∈ GL(m;K). Se A = B allora, per la (6) del Teorema 10.1, si haC ·A = C ·B. Sia, ora, C ·A = C ·B. Essendo C ∈ GL(m;K), esiste la matrice inversa C−1
di C. Allora, per il Teorema 10.1,
C−1 · (C · A) = C−1 · (C ·B),
(C−1 · C) · A = (C−1 · C) ·B,
A = B.
Se C ∈ GL(n;K), la dimostrazione e analoga.
29

11 Sistemi lineari e matrici ridotte per righe
Sia K un campo e siano aij ∈ K, i = 1, 2, . . . ,m e j = 1, 2, . . . , n, tali che: 1) per ognii = 1, 2, . . . ,m, se bi = 0 allora esiste almeno un ji ∈ {1, 2, . . . , n} per cui aiji 6= 0; 2) perogni j = 1, 2, . . . , n esiste almeno un ij ∈ {1, 2, . . . ,m} per cui aijj 6= 0. Allora, posto bi ∈ K,diremo che la scrittura
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2..........................................am1x1 + am2x2 + . . .+ amnxn = bm
. (4)
rappresenta un sistema lineare di m equazioni nelle n variabili x1, x2, . . . , xn. Gli elementiaij e bi si dicono rispettivamente i coefficienti e i termini noti di (4).
Definizione 11.1 Dicesi soluzione del sistema (4) una qualsiasi n-upla ordinata (η1, η2, . . . , ηn)di elementi di K tale che
a11η1 + a12η2 + . . .+ a1nηn = b1a21η1 + a22η2 + . . .+ a2nηn = b2..........................................am1η1 + am2η2 + . . .+ amnηn = bm
.
Dato un sistema lineare, ad esso e associato il problema di determinare l’insieme di tuttele sue soluzioni. Ovviamente un sistema lineare potrebbe essere impossibile (cioe non averealcuna soluzione). In tal caso l’insieme delle sue soluzioni coincide con l’insieme vuoto.
Definizione 11.2 Due sistemi lineari si dicono equivalenti se i loro insiemi di soluzionicoincidono.
Definizione 11.3 Un sistema lineare si dice omogeneo se i suoi termini noti sono tuttinulli.
Un sistema lineare omogeneo di m equazioni nelle n variabili x1, x2, . . . , xn si scrive quindinel seguente modo:
a11x1 + a12x2 + . . .+ a1nxn = 0a21x1 + a22x2 + . . .+ a2nxn = 0..........................................am1x1 + am2x2 + . . .+ amnxn = 0
. (5)
Si ricordi che i coefficienti di (5) godono delle seguenti proprieta: 1) per ogni i = 1, 2, . . . ,mesiste almeno un ji ∈ {1, 2, . . . , n} per cui aiji 6= 0; 2) per ogni j = 1, 2, . . . , n esiste almenoun ij ∈ {1, 2, . . . ,m} per cui aijj 6= 0.
Per determinare l’insieme delle soluzioni di un sistema lineare (e in particolare di unsistema lineare omogeneo) e ben noto il metodo di Gauss di eliminazione delle variabili.
Consideriamo dapprima i sistemi lineari omogenei. In tal caso il metodo di Gauss si basasul seguente teorema.
30

Teorema 11.1 Comunque fissati λ, µ ∈ K con λ 6= 0, e comunque presi i, j ∈ {1, 2, . . . ,m}con i 6= j, (5) e equivalente al sistema che si ottiene sostituendo l’equazione i-esima con laseguente:
λ(ai1x1 + ai2x2 + . . .+ ainxn) + µ(aj1x1 + aj2x2 + . . .+ ajnxn) = 0. (6)
Dimostrazione. (Dimostrazione obbligatoria) Senza ledere la generalita, possiamosupporre i = 1 e j = 2. Dobbiamo cosı dimostrare che (5) e equivalente al sistema
λ(a11x1 + a12x2 + . . .+ a1nxn) + µ(a21x1 + a22x2 + . . .+ a2nxn) = 0a21x1 + a22x2 + . . .+ a2nxn = 0..........................................am1x1 + am2x2 + . . .+ amnxn = 0
. (7)
E immediato verificare che una soluzione di (5) e anche soluzione di (7). Viceversa, suppo-niamo che (α1, α2, . . . , αn) e soluzione di (7). Si ha
λ(a11α1 + a12α2 + . . .+ a1nαn) + µ(a21α1 + a22α2 + . . .+ a2nαn) = 0a21α1 + a22α2 + . . .+ a2nαn = 0..........................................am1α1 + am2α2 + . . .+ amnαn = 0
e quindi, essendo a21α1 + a22α2 + . . .+ a2nαn = 0,
λ(a11α1 + a12α2 + . . .+ a1nαn) = 0a21α1 + a22α2 + . . .+ a2nαn = 0..........................................am1α1 + am2α2 + . . .+ amnαn = 0
.
Avendo supposto λ 6= 0, possiamo moltiplicare entrambi i membri della prima equazione per1λottenendo
a11α1 + a12α2 + . . .+ a1nαn = 0a21α1 + a22α2 + . . .+ a2nαn = 0..........................................am1α1 + am2α2 + . . .+ amnαn = 0
,
cioe (α1, α2, . . . , αn) e soluzione di (5).
Esempio 11.1 Risolvere il sistema
2x1 − 3x2 + 4x3 − 5x4 = 0x1 − 2x2 + x3 − x4 = 02x1 − x2 + x3 − 2x4 = 0x1 + x2 + x3 − x4 = 0x1 − x2 + 2x3 + 4x4 = 0
,
31

a coefficienti in R, facendo uso del Teorema 11.1.
SVOLGIMENTO. Nel seguito scriveremo Ei → λEi + µEj per indicare che, nel sistemain considerazione, sostituisco l’equazione i-esima con l’equazione avente il primo membroformato dalla somma del primo membro della i-esima con il primo membro della j-esimarispettivamente moltiplicati per λ e µ.
2x1 − 3x2 + 4x3 − 5x4 = 0x1 − 2x2 + x3 − x4 = 02x1 − x2 + x3 − 2x4 = 0x1 + x2 + x3 − x4 = 0x1 − x2 + 2x3 + 4x4 = 0
E2 → 2E2 − E1
E3 → E3 − E1
E4 → 2E4 − E1
E5 → 2E5 − E1
−→
2x1 − 3x2 + 4x3 − 5x4 = 0−x2 − 2x3 + 3x4 = 02x2 − 3x3 + 3x4 = 05x2 − 2x3 + 3x4 = 0x2 + 13x4 = 0
E3 → E3 + 2E2
E4 → E4 + 5E2
E5 → E5 + E2
−→
2x1 − 3x2 + 4x3 − 5x4 = 0−x2 − 2x3 + 3x4 = 0−7x3 + 9x4 = 0−12x3 + 18x4 = 0−2x3 + 16x4 = 0
E4 → 7E4 − 12E3
E5 → 7E5 − 2E3
−→
2x1 − 3x2 + 4x3 − 5x4 = 0−x2 − 2x3 + 3x4 = 0−7x3 + 9x4 = 018x4 = 094x4 = 0
E5 → 47E5 − 4E4 −→
2x1 − 3x2 + 4x3 − 5x4 = 0−x2 − 2x3 + 3x4 = 0−7x3 + 9x4 = 018x4 = 00 = 0
.
Che ha, come unica soluzione, (0, 0, 0, 0). Quindi il sistema assegnato ha una ed una solasoluzione data da (0, 0, 0, 0).
Esempio 11.2 Risolvere il sistema
2x1 − 3x2 + 4x3 − 5x4 = 0x1 − 2x2 + x3 − x4 = 02x1 − x2 + x3 − 2x4 = 0
,
a coefficienti in R, facendo uso del Teorema 11.1.
SVOLGIMENTO.
2x1 − 3x2 + 4x3 − 5x4 = 0x1 − 2x2 + x3 − x4 = 02x1 − x2 + x3 − 2x4 = 0
E2 → 2E2 − E1
E3 → E3 − E1
−→
2x1 − 3x2 + 4x3 − 5x4 = 0−x2 − 2x3 + 3x4 = 02x2 − 3x3 + 3x4 = 0
E3 → E3 + 2E2 −→
2x1 − 3x2 + 4x3 − 5x4 = 0−x2 − 2x3 + 3x4 = 0−7x3 + 9x4 = 0
. (8)
32

Posto x4 = η, (8) equivale a
2x1 − 3x2 + 4x3 = 5η−x2 − 2x3 = −3η−7x3 = −9η
.
Risolvendo per sostituzione, esso ammette infinite soluzioni date da(47η, 3
7η, 9
7η, η
)per ogni
η ∈ R.Si noti che in (8) si puo prendere come parametro x3 invece di x4. In tal caso, posto
x4 = ρ, avremo
2x1 − 3x2 − 5x4 = −4ρ−x2 + 3x4 = 2ρ9x4 = 7ρ
,
che ha le soluzioni(49ρ, 1
3ρ, ρ, 7
9ρ)per ogni ρ ∈ R. Si noti che
{(4
7η,
3
7η,
9
7η, η
)| η ∈ R
}=
{(4
9ρ,
1
3ρ, ρ,
7
9ρ
)| ρ ∈ R
}.
Per il Teorema 11.1, esse sono anche le soluzioni del sistema assegnato.
Osservazione 11.1 Sia
b11x1 + b12x2 + . . .+ b1nxn = 0b21x1 + b22x2 + . . .+ b2nxn = 0..........................................bm1x1 + bm2x2 + . . .+ bmnxn = 0
. (9)
il sistema ottenuto da (5) mediante la trasformazione (6) per opportuni i, j, λ e µ con i 6= je λ 6= 0. Allora
1. In (9) l’equazione i-esima potrebbe essere trasformata in una identita del tipo 0 = 0.
2. In (9) il numero delle variabili continua ad essere uguale ad n.
La prima osservazione e provata dall’Esempio 11.1. Proviamo la seconda. Cioe che,comunque presa una variabile xj, j = 1, 2, . . . , n, esiste almeno una equazione di (9) in cui ilcoefficiente di xj e diverso dallo zero. Per esempio consideriamo la variabile x1 e supponiamoa11 6= 0. Se nella (6) e i 6= 1, avremo b11 = a11 6= 0 ed il risultato rimane provato. Per i = 1,avremo b11 = λa11 + µaj1 con λ 6= 0 e j 6= 1. Se b11 6= 0 segue il risultato, invece se b11 = 0,avremo λa11+µaj1 = 0, µaj1 = −λa11 6= 0, bj1 = aj1 6= 0 e il risultato rimane completamenteprovato.
Nel definire il sistema (4) abbiamo supposto che esso non contenga variabili i cui coef-ficienti siano tutti nulli e nemmeno equazioni del tipo 0 = 0. Si noti che il metodo dirisoluzione del Teorema 11.1 continua a valere anche senza queste restrizioni sul sistema.
33

Definizione 11.4 Matrice ridotta per righe. Una matrice A = (aij), i = 1, 2, . . . ,mj = 1, 2, . . . , n, si dice ridotta per righe se, per ogni i, e verificata una delle due seguenticondizioni:
• aij = 0 per ogni j = 1, 2, . . . , n, oppure
• esiste almeno un t ∈ {1, 2, . . . , n} tale che ait 6= 0 e, se i < m, aρt = 0 per ognii+ 1 ≤ ρ ≤ m.
Esempio 11.3 La matrice
A =
1 −1 2 0 2 07 0 3 1 1 00 0 0 0 0 00 0 1 0 0 10 0 0 2 0 4
.
e ridotta per righe.
Definizione 11.5 Elemento speciale. Sia A = (aij), i = 1, 2, . . . ,m j = 1, 2, . . . , n,una matrice ridotta per righe. Per la Definizione 11.4, ogni riga Ri = (ai1, ai2, . . . , ain) 6=(0, 0, . . . , 0) contiene almeno un elemento ait 6= 0 tale che, se i < m, aρt = 0 per ognii + 1 ≤ ρ ≤ m. Per ogni riga non nulla Ri si fissi, a piacere, uno solo di questi elementi.Esso si chiama l’elemento speciale relativo ad Ri.
Sia A la matrice ridotta dell’Esempio 15.4. Gli elementi candidati ad essere di tipospeciale sono quelli di posto (1, 2), (2, 1), (2, 5), (4, 3), (5, 4) e (5, 6) (si noti che la terza riganon puo contenere alcun elemento speciale). Possiamo quindi scegliere come speciali quellidi posto (1, 2), (2, 5), (4, 3) e (5, 4).
Teorema 11.2 Il numero di elementi speciali di una matrice ridotta m × n e minore oduguale al min{m,n}.Dimostrazione. Sia r il numero degli elementi speciali in una matrice ridotta m× n. Perdefinizione, in ogni riga si puo fissare al piu un elemento speciale, allora r ≤ m. Inoltre, comesi vede facilmente, due elementi speciali non possono mai trovarsi in una stessa colonna. Nesegue r ≤ n.
Una qualsiasi matrice m× n, A = (aij), puo essere sempre vista come la matrice incom-pleta associata ad un sistema lineare omogeneo di m ≤ m equazioni (A potrebbe avere unao piu righe nulle, in tal caso conviene eliminare le identita 0 = 0) in n ≤ n incognite (Apotrebbe avere una o piu colonne formate tutte da zeri). Ridurre per righe A equivale adapplicare ripetutamente il Teorema 11.1 al sistema ad essa associato e a quelli equivalenti chevia via si ottengono e/o scambiare due equazioni fra loro. Il risultato e una matrice ridottail cui sistema omogeneo associato e equivalente al sistema associato alla matrice iniziale.Mostriamo questo fatto nel seguente esempio.
34

Esempio 11.4 Vogliamo ridurre per righe la matrice
−1 1 2 0 1 21 2 −1 0 2 10 0 0 0 0 0−1 1 1 0 2 11 −1 2 0 1 1
. (10)
Il sistema formalmente associato alla (10) e
−x1 + x2 + 2x3 + x5 + 2x6 = 0x1 + 2x2 − x3 + 2x5 + x6 = 00 = 0−x1 + x2 + x3 + 2x5 + x6 = 0x1 − x2 + x3 + x5 + x6 = 0
. (11)
Si noti che l’identita 0 = 0 sta ad indicare che la matrice associata ha una riga tutta formatada zeri. Analogamente l’assenza della variabile x4 in (11) indica che la quarta colonna dellamatrice associata e tutta nulla. Applicando a (11) le riduzioni
E2 → E2 + E1 E4 → E4 − E1 E5 → E5 + E1 ,
otteniamo
−x1 + x2 + 2x3 + x5 + 2x6 = 03x2 + x3 + 3x5 + 3x6 = 00 = 0x3 − x5 + x6 = 04x3 + 2x5 + 3x6 = 0
. (12)
Ridurre il sistema (11) equivale a ridurre la matrice (10) nel modo seguente
R2 → R2 +R1 R4 → R4 −R1 R5 → R5 +R1 .
Come risultato si ottiene la matrice
−1 1 2 0 1 20 3 1 0 3 30 0 0 0 0 00 0 1 0 −1 10 0 4 0 2 3
(13)
il cui sistema omogeneo associato e (12). Adesso applichiamo le riduzioni
E5 → E5 − 4E4 e R5 → R5 − 4R4
35

rispettivamente al sistema (12) ed alla matrice (13). Abbiamo
−x1 + x2 + 2x3 + x5 + 2x6 = 03x2 + x3 + 3x5 + 3x6 = 00 = 0x3 − x5 + x6 = 06x5 − x6 = 0
e
−1 1 2 0 1 20 3 1 0 3 30 0 0 0 0 00 0 1 0 −1 10 0 0 0 6 −1
. (14)
Quest’ultima matrice e ridotta. Gli elementi speciali sono quelli di posto (1, 1), (2, 2), (4, 3)e, a scelta, o quello di posto (5, 5) oppure quello di posto (5, 6). Tanto per fissare le ideesupponiamo che l’elemento speciale nella quinta riga sia quello di posto (5, 5). Cio equivalea considerare la variabile x6 come parametro arbitrario e le variabili x1, x2, x3 ed x5 comeincognite. Otteniamo cosı il sistema (non omogeneo)
−x1 + x2 + 2x3 + x5 = −2x6
3x2 + x3 + 3x5 = −3x6
x3 − x5 = −x6
6x5 = x6
le cui soluzioni sono(− 7
18x6,−8
9x6,−5
6x6,
1
6x6, x6
)per ogni x6 ∈ R.
Se nella quinta riga della matrice (14) prendiamo come elemento speciale quello di posto(5, 6), otteniamo il sistema non omogeneo
−x1 + x2 + 2x3 + 2x6 = −x5
3x2 + x3 + 3x6 = −3x5
x3 + x6 = x5
x6 = 6x5
(15)
in cui x5 e assunto come parametro libero e x1, x2, x3, x6 come incognite. Esso ha le ∞1
soluzioni (−7
3x5,−16
3x5,−5x5, x5, 6x5
)per ogni x5 ∈ R.
Se nella quinta riga della matrice in (14) prendiamo come elemento speciale quello di posto(5, 5), otteniamo il sistema non omogeneo
−x1 + x2 + 2x3 + x5 = −2x6
3x2 + x3 + 3x5 = −3x6
x3 − x5 = −x6
6x5 = x6
(16)
in cui x6 e assunto come parametro libero e x1, x2, x3, x5 come incognite. Esso ha le ∞1
soluzioni{(− 7
18x6,−8
9x6,−5
6x6,
1
6x6, x6
)| x6 ∈ R
}=
{(−7
3x5,−16
3x5,−5x5, x5, 6x5
)| x5 ∈ R
}.
36

Si osservi che il numero di elementi speciali di una matrice ridotta coincide col numero dellevariabili assunte come incognite nel sistema ridotto ad essa associato.
Riassumendo, per ridurre una matrice, basta applicare opportunamente ad essa ed allematrici cia via ottenute, le seguenti
Regole di riduzione per righe:
1. Sostituire a tutti gli elementi della riga Ri i corrispondenti elementi di Ri moltiplicatiper λ 6= 0 e sommare ad essi i corrispondenti elementi della riga Rj, con j 6= i,moltiplicati per µ. Possiamo riassumere questa regola come segue
Ri → λRi + µRj, essendo λ 6= 0 e i 6= j. (17)
2. Scambiare due righe fra loro. Cioe
Ri ←→ Rj. (18)
Questa regola e lecita in quanto equivale a scambiare, nel sistema associato, dueequazioni fra loro.
Esempio 11.5 Si consideri la matrice associata al sistema dell’Esempio 11.2:
A =
2 −3 4 −51 −2 1 −12 −1 1 −21 1 1 −11 −1 2 4
.
Ridurre per righe A equivale ad usare le stesse regole adoperate per trasformare il sistemadato nell’Esempio 11.2.
2 −3 4 −51 −2 1 −12 −1 1 −2
R2 → 2R2 −R1
R3 → R3 −R1
−→
2 −3 4 −50 −1 −2 30 2 −3 3
R3 → R3 + 2R2 −→
2 −3 4 −50 −1 −2 30 0 −7 9
, la quale risulta ridotta (gli elementi sottolineati corrispondono agli
elementi speciali scelti).
Si osservi che la (17) puo essere usata scegliendo arbitrariamente coppie di valori λ eµ (purche sia λ 6= 0) e coppie di righe i e j (purche sia i 6= j). Si capisce quindi cheriducendo una stessa matrice A si puo pervenire a matrici ridotte distinte. Tuttavia esse,pur essendo distinte, conservano la stessa informazione: i sistemi lineari omogenei associati
37

sono equivalenti, cioe hanno insiemi di soluzioni coincidenti. Il motivo segue immediatamentedal Teorema 11.1 in quanto ogni sistema lineare omogeneo associato ad una matrice ridottadalla matrice A e equivalente al sistema lineare omogeneo associato alla matrice A stessa.Illustriamo questo fatto con il seguente esempio.
Esempio 11.6 Sia
A =
1 −1 21 4 23 −1 12 −1 11 1 4
.
Riduciamo A per righe in due modi diversi.
Riduzione numero 1.
A =
1 −1 21 4 23 −1 12 −1 11 1 4
R2 → R2 −R1
R3 → R3 − 3R1
R4 → R4 − 2R1
R5 → R5 −R1
−→
1 −1 20 5 00 2 −50 1 −30 2 2
R3 → 5R3 − 2R2
R4 → 5R4 −R2
R5 → 5R5 − 2R2
−→
1 −1 20 5 00 0 −250 0 −150 0 10
R4 → 5R4 − 3R3
R5 → 5R5 + 2R3
−→
1 −1 20 5 00 0 −250 0 00 0 0
= B.
Riduzione numero 2.
A =
1 −1 21 4 23 −1 12 −1 11 1 4
R2 → R2 + 4R1
R3 → R3 −R1
R4 → R4 −R1
R5 → R5 +R1
−→
1 −1 25 0 102 0 −11 0 −12 0 6
R3 → 10R3 +R2
R4 → 10R4 +R2
R5 → 5R5 − 3R2
−→
1 −1 25 0 1025 0 015 0 0−5 0 0
R4 → 5R4 − 3R3
R5 → 5R5 +R3
−→
1 −1 25 0 1025 0 00 0 00 0 0
= C.
Sia B che C sono matrici ridotte dalla A. Ma, come si vede facilmente, i sistemi a loroassociati sono equivalenti. Infatti si ha:
38

sistema associato a B:
x− y + 2z = 05y = 0−25z = 0
;
sistema associato a C:
x− y + 2z = 05x+ 10z = 025x = 0
.
Entrambi questi sistemi hanno una e una sola soluzione, la banale, cioe (x, y, z) =(0, 0, 0).
Si noti che nell’Esempio 11.6 sia B che C hanno lo stesso numero di elementi speciali.Questo non e un caso ma in tutte le matrici ridotte da una stessa matrice fissata, il numerodegli elementi speciali e costante. Esso infatti coincide col numero delle incognite del sistemaad essa associato (si noti che questo sistema potrebbe essere non omogeneo).
Si osservi ancora che, nell’Esempio 11.6, il numero degli elementi speciali delle matriciridotte dalla A coincide col numero delle incognite del sistema lineare omogeneo associatoad A e, questo sistema ammette solo la soluzione banale (0, 0, 0). Anche questo non e uncaso ma, come si verifica facilmente, un sistema lineare omogeneo ha come unica soluzionequella banale se e solo se il numero degli elementi speciali della matrice ridotta associata allamatrice incompleta coincide col numero delle incognite.
Vediamo ora, in alcuni esempi, cosa accade quando in un sistema lineare omogeneo il nu-mero degli elementi speciali della matrice ridotta associata alla matrice incompleta e minoredel numero delle incognite.
Esempio 11.7 Studiare in R il sistema lineare omogeneo:
x+ y + 2z + 3t = 0−x+ y + z + t = 02x+ 2y + 2z + 2t = 0x+ y − z − t = 16x+ 12y + 15z + 18t = 0
SVOLGIMENTO. Riduciamo la matrice incompleta del sistema assegnato.
1 1 2 3−1 1 1 12 2 2 26 12 15 18
R2 → R2 +R1
R3 → R3 − 2R1
R4 → R4 − 6R1
−→
1 1 2 30 2 3 40 0 −2 −40 6 3 0
R4 → R4 − 3R2 −→
1 1 2 30 2 3 40 0 −2 −40 0 −6 −12
R4 → R4 − 3R3 −→
1 1 2 30 2 3 40 0 −2 −40 0 0 0
39

Quest’ultima matrice risulta ridotta (possiamo prendere per elementi speciali quelli diposto (1, 1), (2, 2) e (3, 3)). Assumendo come incognite le variabili i cui coefficienti concorronoa formare le colonne contenenti gli elementi speciali (nel nostro esempio x, y, z) e le rimanenti(nel nostro esempio solo la t) come parametri liberi, il sistema assegnato risulta equivalenteal seguente:
x+ y + 2z = −3t2y + 3z = −4t−2z = 4t
Si vede facilmente che questo sistema ha le ∞1 soluzioni
(x, y, z, t) = (0, t,−2t, t)
per ogni t ∈ R.
Esempio 11.8 Studiare in R il sistema lineare omogeneo:
x1 − x2 + 2x3 + 3x4 + 4x5 + x6 = 02x1 − x2 + x3 + x4 + 3x5 + x6 = 02x1 + x2 − x3 + x4 + x5 + x5 = 02x1 + x3 − x4 + 3x5 = 0
SVOLGIMENTO. Riduciamo la matrice incompleta del sistema assegnato.
1 −1 2 3 4 12 −1 1 1 3 12 1 −1 1 1 12 0 1 −1 3 0
R2 → R2 − 2R1
R3 → R3 − 2R1
R4 → R4 − 2R1
−→
1 −1 2 3 4 10 1 −3 −5 −5 −10 3 −5 −5 −7 −10 2 −3 −7 −5 −2
R3 → R3 − 3R2
R4 → 3R4 − 2R2
−→
1 −1 2 3 4 10 1 −3 −5 −5 −10 0 4 10 8 20 0 1 −11 −1 −4
R4 → 4R4 −R3 −→
1 −1 2 3 4 10 1 −3 −5 −5 −10 0 4 10 8 20 0 0 −54 −12 −18
.
Quest’ultima matrice risulta ridotta (possiamo prendere per elementi speciali quelli diposto (1, 1), (2, 2), (3, 3) e (4, 4)). Prendendo come incognite le variabili i cui coefficienticoncorrono a formare le colonne contenenti gli elementi speciali, il sistema assegnato risultaequivalente al seguente:
40

x1 − x2 + 2x3 + 3x4 = −4x5 − x6
x2 − 3x3 − 5x4 = 5x5 + x6
4x3 + 10x4 = −8x5 − 2x6
−54x4 = 12x5 + 18x6
Si vede facilmente che questo sistema ha le ∞2 soluzioni
(x1, x2, x3, x4, x5, x6) =
(21x5
−9,43x5 − 12x6
−9,26x5 − 6x6
−9,2x5 + 3x6
−9, x5, x6
)
per ogni x5, x6 ∈ R.
In conclusione un sistema lineare omogeneo ammette sempre almeno una soluzione (quellabanale). Se il numero degli elementi speciali della matrice ridotta associata alla matriceincompleta del sistema coincide col numero delle variabili, la banale e l’unica soluzione delsistema. Se il numero degli elementi speciali della matrice ridotta associata alla matriceincompleta e minore del numero delle colonne, si hanno ∞α soluzioni, essendo α uguale alnumero delle variabili meno il numero degli elementi speciali.
Consideriamo adesso il caso generale di un sistema lineare i cui termini noti non e dettosiano tutti nulli. Si noti che quanto diremo per determinare le soluzioni di questi sistemi sipuo applicare al caso dei sistemi omogenei. Non e comunque difficile rendersi conto che lostudio sopra esposto dei sistemi lineari omogenei e una versione semplificata della seguente.Sia dato il sistema lineare
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2..........................................am1x1 + am2x2 + . . .+ amnxn = bm
(19)
con aij, bi ∈ K, i = 1, 2, . . . ,m e j = 1, 2, . . . , n, tali che: 1) per ogni i = 1, 2, . . . ,m, se b1 = 0allora esiste almeno un ji ∈ {1, 2, . . . , n} per cui aiji 6= 0; 2) per ogni j = 1, 2, . . . , n esistealmeno un ij ∈ {1, 2, . . . ,m} per cui aijj 6= 0 (come osservato per i sistemi omogenei, quelloche diremo in seguito vale anche se il sistema non soddisfi queste condizioni, cioe anche nelcaso (19) contenga identita del tipo 0 = 0 oppure in cui una o piu variabili di (19) abbiacoefficienti tutti nulli).
In modo del tutto analogo al Teorema 11.1 si prova il seguente risultato.
Teorema 11.3 Comunque fissati λ, µ ∈ K con λ 6= 0, e comunque presi i, j ∈ {1, 2, . . . ,m}con i 6= j, (19) e equivalente al sistema che si ottiene sostituendo l’equazione i-esima con laseguente:
λ(ai1x1 + ai2x2 + . . .+ ainxn) + µ(aj1x1 + aj2x2 + . . .+ ajnxn) = λbi + µbj. (20)
41

Si ricordi che
a11 a22 · · · a1na21 a22 · · · a2n· · · · · ·
am1 am2 · · · amn
e detta la matrice incompleta del sistema (19), mentre
a11 a22 · · · a1n b1a21 a22 · · · a2n b2· · · · · · ·
am1 am2 · · · amn bm
e detta la matrice completa di (19).
Per risolvere il sistema (19) conviene trasformarlo (usando ripetutamente il Teorema11.3) in uno equivalente le cui matrici completa ed incompleta risultino ridotte per righe.Per comodita conveniamo di separare nella matrice completa la colonna dei termini notidalle colonne dei coefficienti delle incognite. Scriveremo cioe
a11 a22 · · · a1n b1a21 a22 · · · a2n b2· · · · · · ·
am1 am2 · · · amn bm
e applicheremo ripetutamente ad essa le regole di riduzione per righe in modo che, alla fine,sia la matrice completa che quella incompleta risultino ridotte.
Esempio 11.9 Studiare in R il sistema lineare:
x+ y + 3t = 1x− y + 2t = 2x+ y + 4t = −1
.
SVOLGIMENTO. Nella notazione seguita viene scritta la matrice completa, separandocon una linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta.
1 1 3 11 −1 2 21 1 4 −1
R2 → R2 −R1
R3 → R3 −R1
−→
1 1 3 10 −2 −1 10 0 1 −2
.
Si osservi che sia la matrice incompleta che quella completa sono ridotte (gli elementi spe-ciali sono quelli di posto (1, 1), (2, 2) e (3, 3)). Si ottiene cosı il seguente sistema, equivalentea quello assegnato,
42

x+ y + 3t = 1−2y − 2t = 1t = −2
.
In tal caso i coefficienti di tutte le variabili concorrono a formare le colonne contenenti glielementi speciali quindi tutte le variabili devono essere prese come incognite. E immediatoverificare che il sistema precedente ha una sola soluzione data da (11
2, 32,−2).
Esempio 11.10 Studiare in R il sistema lineare:
x− 2y + 3z + t = 17x− 2y + 7z + 2t = 52x− y + z + 3t = 2
.
SVOLGIMENTO. Nella notazione seguita viene scritta la matrice completa, separandocon una linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta.
1 −2 3 1 17 −2 7 2 52 −1 1 3 2
R2 → −R2 + 7R1
R3 → R3 − 2R1
−→
1 −2 3 1 10 −12 14 5 20 3 −5 1 0
R3 → 4R3 +R1 −→
1 −2 3 1 10 −12 14 5 10 0 −6 9 2
.
Si ottiene cosı il seguente sistema, equivalente a quello assegnato,
x− 2y + 3z + t = 1−12y + 14z + 5t = 2−6z + 9t = 2
Prendendo come incognite le variabili i cui coefficienti concorrono a formare le colonnecontenenti gli elementi speciali possiamo scrivere
x− 2y + 3z = 1− t−12y + 14z = 2− 5t−6z = 2− 9t
Il sistema precedente ha le ∞1 soluzioni
(x, y, z, t) =
(−21t+ 16
18,39t− 10
18,9t− 2
6, t
)
per ogni t ∈ R.
43

Esempio 11.11 Studiare in R il sistema lineare:
x− 2y + 3z + t = 4x− y + z − t = 2x+ 2y − z + 3t = 0x+ y − z − t = 12x+ 3y − z − 3t = 5
.
SVOLGIMENTO. Nella notazione seguita viene scritta la matrice completa, separandocon una linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta.
1 −2 3 1 41 −1 1 −1 21 2 −1 3 01 1 −1 −1 12 3 −1 −3 5
R2 → R2 −R1
R3 → R3 −R1
R4 → R4 −R1
R5 → R5 − 2R1
−→
1 −2 3 1 40 1 −2 −2 −20 4 −4 2 −40 3 −4 −2 −30 7 −7 −5 −3
R3 → 3R3 − 4R2
R4 → R4 − 3R2
R5 → R5 − 7R2
−→
1 −2 3 1 40 1 −2 −2 −20 0 4 10 40 0 2 4 30 0 7 9 11
R4 → −2R4 +R3
R5 → 4R5 − 7R3
−→
1 −2 3 1 40 1 −2 −2 −20 0 4 10 40 0 0 2 −20 0 0 −34 16
R5 → R5 + 17R4 −→
1 −2 3 1 40 1 −2 −2 −20 0 4 10 40 0 0 2 −20 0 0 0 −18
= B.
Si ottiene cosı il seguente sistema, equivalente a quello assegnato,
x− 2y + 3z + t = 4y − 2z − 2t = −24z + 10t = 42t = −20 = −51
44

Il precedente sistema e impossibile (cioe non ha soluzioni) in quanto l’ultima delle sueequazioni
0x+ 0y + 0z + 0t = −51
non ha soluzioni. Quindi anche il sistema assegnato e impossibile.
Nell’Esempio 11.11 sia la matrice B che quella incompleta (cioe la matrice ottenutaeliminando l’ultima colonna della B) risultano ridotte ma il numero degli elementi specialidella incompleta e minore del numero degli elementi speciali della completa B. Quandoaccade questo fatto il sistema non ha mai soluzioni (e impossibile). Se invece il numerodegli elementi speciali della matrice incompleta e uguale al numero degli elementi specialidella completa B, il sistema ammette soluzioni (vedasi Esempi 11.9 e 11.10). In tal casose il numero degli elementi speciali e uguale al numero delle variabili (Esempio 11.9), lasoluzione e unica, mentre se il numero degli elementi speciali e minore del numero dellevariabili (Esempio 11.10) avremo ∞α soluzioni, con α dato dalla differenza fra il numerodelle variabili e quello degli elementi speciali.
Per risolvere il sistema lineare (19) possiamo procedere nel seguente modo:
1. Si riduca la matrice completa
B =
a11 a22 · · · a1n b1a21 a22 · · · a2n b2· · · · · · ·
am1 am2 · · · amn bm
in modo che anche quella incompleta
A =
a11 a22 · · · a1na21 a22 · · · a2n· · · · · ·
am1 am2 · · · amn
risulti ridotta. Siano rispettivamente A′ e B′ le matrici ridotte della A e della B.
2. Se il numero degli elementi speciali di A′ e minore di quello di B′, il sistema eimpossibile.
3. Se il numero degli elementi speciali di A′ coincide con quello di B′ il sistema ammettesoluzioni (si noti che in questo caso gli elementi speciali possono essere scelti in modoche siano tutti contenuti in colonne di A′). Piu precisamente, posto uguale ad r ilnumero degli elementi speciali, si proceda nel seguente modo:
(a) Se r = n, cioe il numero degli elementi speciali coincide con quello delle variabilidi (19), il sistema ha una ed una sola soluzione che si puo trovare risolvendo persostituzione il sistema ridotto avente B′ come matrice completa.
45

(b) Se r < n, il sistema ammette ∞n−r soluzioni che possono trovarsi procedendocome segue (si vedano gli Esempi 11.10 e 11.12). Si scriva il sistema avente B′
come matrice completa e si scartino le eventuali identita del tipo 0 = 0. Il risultatoe un sistema di r equazioni. In esso si mettano a termine noto tutti i monomicontenenti le variabili i cui coefficienti non concorrono a formare le colonne di A′
dove si trovano gli elementi speciali (queste variabili saranno considerate comeparametri arbitrari di K). Si ottiene cosı un nuovo sistema di r equazioni in rincognite che puo essere risolto per sostituzione.
Esempio 11.12 Studiare in R il sistema lineare:
x1 + 2x2 − x3 + 3x4 + 4x5 + 5x6 = 13x1 + x2 + 2x3 + 3x4 + 4x5 + x6 = 32x1 − x2 + 3x3 + x6 = 25x1 + 3x2 + 5x3 + 6x4 + 8x5 + 11x6 = 4
.
SVOLGIMENTO. Nella notazione seguita viene scritta la matrice completa B, separandocon una linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta A.
1 2 −1 3 4 5 13 1 2 3 4 6 32 −1 3 0 0 1 25 3 5 6 8 11 4
R2 → R2 −R1
R4 → R4 − 2R1
−→
1 2 −1 3 4 5 12 −1 3 0 0 1 22 −1 3 0 0 1 23 −1 7 0 0 1 2
R3 → R3 −R2
R4 → R4 −R2
−→
1 2 −1 3 4 5 12 −1 3 0 0 1 20 0 0 0 0 0 01 0 4 0 0 0 0
= B′.
In B′ gli elementi speciali sono sottolineati. Si ottiene cosı il seguente sistema, equivalentea quello assegnato,
x1 + 2x2 − x3 + 3x4 + 4x5 + 5x6 = 12x1 − x2 + 3x3 + x6 = 20 = 0x1 + 4x3 = 0
ovvero
x1 + 2x2 − x3 + 3x4 + 4x5 + 5x6 = 12x1 − x2 + 3x3 + x6 = 2x1 + 4x3 = 0
.
Prendendo come incognite le variabili i cui coefficienti concorrono a formare le colonnecontenenti gli elementi speciali (cioe le colonne 3, 4 e 6) otteniamo il seguente sistema di treequazioni nelle tre incognite x3, x4 e x6:
−x3 + 3x4 + 5x6 = 1− x1 − 2x2 − 4x5
3x3 + x6 = 2− 2x1 + x2
4x3 = −x1
46

al variare dei parametri reali x1, x2 e x5. Esso ha le ∞1 soluzioni(x1, x2,−1
4x1, 2− 5
4x1 + x2,−3 +
5
3x1 − 7
3x2 − 4
3x5
)
comunque presi x1, x2, x5 ∈ R.
PostoA = (aij) , i = 1, 2, . . . ,m, j = 1, 2, . . . , n,
X =
x1
x2
···xm
e B =
b1b22···bm
,
il sistema (4) puo scriversi nella seguente forma vettoriale
A ·X = B. (21)
Se C e una matrice quadrata di ordine m invertibile, per il Teorema 10.8, il sistema (21) eequivalente al seguente
(C · A) ·X = C ·B. (22)
Di fatto, il metodo di riduzione di Gauss precedentemente esposto consiste nel determinare(attraverso le successive riduzioni) una matrice invertibile C di ordine m per cui il sistema(22) si risolva piu facilmente di (21). Illustriamo adesso con alcuni esempi come si costruisceC. Innanzitutto si ricordi che il metodo di riduzione per righe si basa sulla successivaapplicazione di una delle due regole (17) o (18). Se poniamo D = (drs) ove, per r =1, 2, . . . ,m e s = 1, 2, . . . ,m, si ha
drs =
1 se r = s 6= iλ 6= 0 se r = s = i0 se r 6= s e (r, s) 6= (i, j)µ se (r, s) = (i, j)
,
allora applicare a (21) la regola (17) equivale a moltiplicare entrambi i membri di (21) perD (si noti che, avendo supposto λ 6= 0, D e invertibile). Analogamente la regola (18)equivale a moltiplicare entrambi i membri di (21) per F , essendo F la matrice che si ottienescambiando la riga i con la riga j nella matrice identica Im (si osservi che F−1 = F ). Ilsistema dell’Esempio 11.10, in forma vettoriale, e
1 −2 3 17 −2 7 22 −1 1 3
·
xyzt
=
152
. (23)
47

Applicare ad esso la regola R2 → −R2 + 7R1 equivale a moltiplicare entrambi i membri di(23) per la matrice
G1 =
1 0 07 −1 00 0 1
.
Infatti
1 0 07 −1 00 0 1
·
1 −2 3 17 −2 7 22 −1 1 3
·
xyzt
=
1 0 07 −1 00 0 1
·
152
,
1 −2 3 10 −12 14 52 −1 1 3
·
xyzt
=
122
.
Ora applichiamo la riduzione R3 → R3 − 2R1, cioe moltiplichiamo entrambi i membri diquest’ultimo sistema per
G2 =
1 0 00 1 0−2 0 1
,
1 0 00 1 0−2 0 1
·
1 −2 3 10 −12 14 52 −1 1 3
·
xyzt
=
1 0 00 1 0−2 0 1
·
120
,
1 −2 3 10 −12 14 50 3 −5 1
·
xyzt
=
120
.
Si perviene al sistema ridotto applicando la regola R3 → 4R3 + R1, cioe moltiplicandoentrambi i membri per
G3 =
1 0 00 1 01 0 4
,
1 0 00 1 01 0 4
·
1 −2 3 10 −12 14 50 3 −5 1
·
xyzt
=
1 0 00 1 01 0 4
·
120
,
1 −2 3 10 −12 14 50 0 −6 9
·
xyzt
=
112
.
48

Si osservi che questo sistema si ottiene moltiplicando entrambi i membri di (23) per la matriceC = G3 ·G2 ·G1.
Si osservi che nell’esempio precedente abbiamo moltiplicato entrambi i membri di (23) perG1. Avremmo potuto, piu semplicemente, scrivere (23) in forma matriciale e poi moltiplicareper G1, cioe
1 0 07 −1 00 0 1
·
1 −2 3 1 17 −2 7 2 52 −1 1 3 2
=
1 −2 3 1 10 −12 14 5 22 −1 1 3 2
e procedere analogamente con le matrici G2 e G3.Come secondo esempio risolviamo il sistema
x1 − x2 + 3x3 = 2−x1 + 2x2 + x3 + 2x4 = 13x1 − x2 + x3 = 1−x1 + x2 + 2x3 + x4 = 1
. (24)
Come ormai dovrebbe essere chiaro, (24) puo scriversi
2 −1 3 0 2−1 2 1 2 13 −1 1 0 1−1 1 2 1 1
.
Riduciamo la precedente matrice mediante le seguenti regole:
1. R1 ↔ R4 cui corrisponde la matrice
G1 =
0 0 0 10 1 0 00 0 1 01 0 0 0
;
2. R2 → R2 −R1 cui corrisponde la matrice
G2 =
1 0 0 0−2 1 0 00 0 1 00 0 0 1
;
3. R2 ↔ R3 cui corrisponde la matrice
G3 =
1 0 0 00 0 1 00 1 0 00 0 0 1
;
49

4. R4 → R4 −R2 cui corrisponde la matrice
G4 =
1 0 0 00 1 0 00 0 1 00 −1 0 1
;
5. R4 → R4 +R3 cui corrisponde la matrice
G5 =
1 0 0 00 1 0 00 0 1 00 0 1 1
.
Essendo
G5 ·G4 ·G3 ·G2 ·G1 =
0 0 0 10 0 1 00 1 0 −21 1 −1 −2
,
il sistema (24) si riduce al seguente
0 0 0 10 0 1 00 1 0 −21 1 −1 −2
·
2 −1 3 0 2−1 2 1 2 13 −1 1 0 1−1 1 2 1 1
,
cioe
−1 1 2 1 13 −1 1 0 11 0 −3 0 −10 0 −1 0 0
.
12 Ancora sui sistemi lineari.
Il metodo di risoluzione di un sistema lineare illustrato alla fine del Paragrafo 11, trasformail sistema assegnato, quando ha soluzioni, in uno ridotto formato da una equazione aventeesattamente una incognita, una equazione avente al piu due incognite, una equazione aventeal piu tre incognite ... e cosı via fino ad esaurire tutte le incognite del sistema ridotto.Ovviamente un tale sistema si risolve facilmente. Nell’ Esempio 11.10, il sistema
x− 2y + 3z + t = 17x− 2y + 7z + 2t = 52x− y + z + 3t = 2
50

e stato ridotto nel seguente
x− 2y + 3z = 1− t−12y + 14z = 2− 5t−6z = 2− 9t
. (25)
Sebbene esso si risolva facilmente, ci poniamo la seguente domanda: E possibile usare ancorail metodo di riduzione in modo da ottenere direttamente le soluzioni? Per esempio il sistema(25) ha come matrice
1 −2 3 1− t0 −12 14 2− 5t0 0 −6 2− 9t
. (26)
Applicando il metodo di riduzione
Ri → λRi + µRj, λ 6= 0, i 6= j,
dal basso verso l’alto trasformiamo la (26) nella matrice identica:
1 −2 3 1− t0 −12 14 2− 5t0 0 −6 2− 9t
R1 → 2R1 +R3
R2 → 3R2 + 7R3
−→
2 −4 0 4− 11t0 −36 0 20− 78t0 0 −6 2− 9t
R1 → −9R1 +R2 −→
−18 0 0 −16 + 21t0 −36 0 20− 78t0 0 −6 2− 9t
R1 → − 118R1
R2 → − 136R2
R3 → −16R3
−→
1 0 0 16−21t18
0 1 0 39t−1018
0 0 1 9t−26
da cui otteniamo le soluzioni
(x, y, z, t) =
(−21t+ 16
18,39t− 10
18,9t− 2
6, t
)
per ogni t ∈ R.
In generale, per risolvere completamente un sistema lineare si puo procedere riducendola matrice ad esso associata procedendo dall’alto verso il basso in modo da ottenere glielementi speciali e cosı verificare se il sistema e possibile o impossibile. Nel primo caso si puoproseguire col metodo di riduzione procedendo dal basso verso l’alto in modo da trasformarela matrice ridotta in una verificante le seguenti condizioni: 1) tutti gli elementi speciali sonouguali ad 1; 2) gli elementi delle colonne contenenti un elemento speciale sono tutti nulli,facendo ovviamente eccezione per l’elemento speciale stesso. Da una tale matrice si ricavanoimmediatamente le soluzioni del sistema. Illustriamo questo procedimento con alcuni esempi.
51

Esempio 12.1 Studiare in R il sistema lineare:
3x− 2y + 4z = 3x− y + z = 12x+ 4y + 2z = 1
.
SVOLGIMENTO. Scriviamo le matrici completa e incompleta del sistema come fatto prece-dentemente e applichiamo il metodo di riduzione dall’alto verso il basso in modo da otteneregli elementi speciali e vedere quindi se il sistema e possibile o no.
3 −2 4 31 −1 1 12 4 2 1
R2 → −3R2 +R1
R3 → 3R3 − 2R1
−→
3 −2 4 30 1 1 00 16 −2 −3
R3 → R3 − 16R2 −→
3 −2 4 30 1 1 00 0 −18 −3
Abbiamo cosı ridotto la matrice. Gli elementi speciali sono quelli di posto (1, 1), (2, 2) e(3, 3). Essi appaiono tutti nella matrice incompleta (quella che ha come colonne i coefficientidelle incognite) pertanto il sistema e possibile. Infine, essendo il numero degli elementispeciali uguale al numero delle incognite, la soluzione e unica. Per determinarla procediamocol metodo di riduzione dal basso verso l’alto:
3 −2 4 30 1 1 00 0 −18 −3
R1 → 9R1 + 2R3
R2 → 18R2 +R3
−→
27 −18 0 210 18 0 −30 0 −18 −3
R1 → R1 +R2 −→
27 0 0 180 18 0 −30 0 −18 −3
R1 → 127R1
R2 → 118R2
R3 → 1−18
R3
−→
1 0 0 23
0 1 0 −16
0 0 1 16
.
Quindi la soluzione del sistema assegnato e
(x, y, z) =
(2
3,−1
6,1
6
).
Esempio 12.2 Studiare in R il sistema lineare:
2x− 3y + 4z + 3t = 12x+ 6z + 4t = 3x+ y − z − t = 2−x+ 2y + 3z + 2t = 0
.
SVOLGIMENTO. Scriviamo le matrici completa e incompleta del sistema e applichiamo ilmetodo di riduzione dall’alto verso il basso in modo da ottenere gli elementi speciali e vederequindi se il sistema e possibile o no.
52

2 −3 4 3 12 0 6 4 31 1 −1 −1 2−1 2 3 2 0
R3 → 3R3 +R1
R4 → 3R4 + 2R1
−→
2 −3 4 3 12 0 6 4 35 0 1 0 71 0 17 12 2
R3 → 2R3 − 5R2
R4 → −2R4 +R2
−→
2 −3 4 3 12 0 6 4 30 0 −28 −20 −10 0 −28 −20 −1
R4 → R4 −R3 −→
2 −3 4 3 12 0 6 4 30 0 −28 −20 −10 0 0 0 0
.
Abbiamo cosı ridotto la matrice. Gli elementi speciali fissati sono quelli di posto (1, 2),(2, 1) e (3, 3) (invece di quest’ultimo si potrebbe scegliere quello di posto (3, 4) e procedere diconseguenza). Gli elementi speciali sono tutti appartenenti alla matrice incompleta pertantoil sistema e possibile. Infine, essendo il numero degli elementi speciali (=3) minore delnumero delle variabili (=4), abbiamo ∞1 soluzioni al variare del parametro libero t. Perdeterminarle procediamo col metodo di riduzione dal basso verso l’alto:
2 −3 4 3 12 0 6 4 30 0 −28 −20 −10 0 0 0 0
R1 → R1 − 2R2 −→
0 −3 −2 −1 −22 0 6 4 30 0 −28 −20 −10 0 0 0 0
R1 → −14R1 +R3
R2 → 14R2 + 3R3
−→
0 42 0 −6 2728 0 0 −4 390 0 −28 −20 −10 0 0 0 0
R1 → 142R1
R2 → 128R2
R3 → 1−28
R3
−→
0 1 0 −17
914
1 0 0 −17
3928
0 0 1 57
128
0 0 0 0 0
.
Quindi le soluzioni del sistema assegnato sono
(x, y, z, t) =
(39
28+
1
7t,
9
14+
1
7t,
1
28− 5
7t, t
)∀t ∈ R.
Si osservi che, similmente a quanto visto alla fine del Paragrafo 11, applicare ad unamatrice le regole di riduzione dal basso verso l’alto equivale a moltiplicarla per una opportunamatrice invertibile.
53

13 Sistemi lineari dipendenti da un parametro
Dedichiamo questo paragrafo ad alcuni esempi di risoluzione di sistemi lineari dipendenti daun parametro reale. Risolveremo tali sistemi usando sempre il metodo di riduzione illustratonei paragrafi precedenti. L’unica differenza e la presenza del parametro che per certi valoripotrebbe annullare elementi della matrice candidati ad essere speciali.
Esempio 13.1 Studiare, al variare del parametro reale k, il sistema lineare:
kx+ y + z = 1x+ ky + z = kx+ y + kz = k2
kx+ (2− k)y + kz = k2 − k + 1
.
SVOLGIMENTO. Scriviamo le matrici completa e incompleta del sistema e applichiamo ilmetodo di riduzione dall’alto verso il basso in modo da ottenere gli elementi speciali e vederequindi, al variare di k ∈ R, se il sistema e possibile o no.
k 1 1 11 k 1 k1 1 k k2
k 2− k k k2 − k + 1
R2 → R2 −R1
R3 → R3 − kR1
R4 → R4 − kR1
−→
k 1 1 11− k k − 1 0 k − 11− k2 1− k 0 k2 − kk − k2 2− 2k 0 k2 − 2k + 1
= B
Se k = 1, B diventa
1 1 1 10 0 0 00 0 0 00 0 0 0
,
quindi, per k = 1, il sistema ha le ∞2 soluzioni (−y − z + 1, y, z) per ogni y, z ∈ R.
Consideriamo ora k 6= 1. In tal caso la matrice B non e ancora ridotta.
k 1 1 11− k k − 1 0 k − 11− k2 1− k 0 k2 − kk − k2 2− 2k 0 k2 − 2k + 1
R3 → R3 +R2
R4 → R4 + 2R2
−→
k 1 1 11− k k − 1 0 k − 1
2− k − k2 0 0 k2 − 12− k − k2 0 0 k2 − 1
R4 → R4 −R3 −→
54

k 1 1 11− k k − 1 0 k − 1
2− k − k2 0 0 k2 − 10 0 0 0
= C.
Se 2− k− k2 = 0, cioe se k = 1 oppure se k = −2, la terza riga della matrice incompletae formata da elementi nulli. Poiche stiamo studiando il sistema per k 6= 1, l’unica soluzioneaccettabile dell’equazione 2−k−k2 = 0 e k = −2. Per tale valore di k, essendo k2−1 = 3 6= 0,il sistema e impossibile.
Sia ora k 6= −2, 1. Per questi valori di k, essendo 2 − k − k2 6= 0, la matrice ha treelementi speciali tutti appartenenti alla matrice incompleta. Poiche le incognite sono tre ilsistema ha una ed una sola soluzione. Gli elementi speciali sono quelli di posto (1, 3), (2, 2)e (3, 1) (si ricordi che k 6= −2, 1). Per determinarla procediamo col metodo di riduzione dalbasso verso l’alto (si osservi che nella matrice C possiamo eliminare l’ultima riga):
k 1 1 11− k k − 1 0 k − 1
(1− k)(k + 2) 0 0 k2 − 1
R1 → (1− k)(k + 2)R1 − kR3
R2 → (k + 2)R2 −R3
−→
0 (1− k)(k + 2) (1− k)(k + 2) (1− k)(k + 2)− k(k2 − 1)0 (k − 1)(k + 2) 0 (k − 1)(k + 2)− k2 + 1
(1− k)(k + 2) 0 0 k2 − 1
R1 → R1 +R2 −→
0 0 (1− k)(k + 2) (k − 1)(k + 1)2
0 (k − 1)(k + 2) 0 k − 1(1− k)(k + 2) 0 0 k2 − 1
R1 → 1(1−k)(k+2)
R1
R2 → 1(k−1)(k+2)
R2
R3 → 1(1−k)(k+2)
R3
−→
0 0 1 − (k+1)2
k+2
0 1 0 1k+2
1 0 0 −k+1k+2
.
Quindi le soluzioni del sistema assegnato sono
(x, y, z) =
(−(k + 1)2
k + 2,
1
k + 2,−k + 1
k + 2
).
Esempio 13.2 Studiare, al variare del parametro reale k, il sistema lineare omogeneo:
(1− k)x+ y + z = 02x+ (2− k)y + 2z = 0x+ y + (1− k)z = 0
.
SVOLGIMENTO. Essendo il sistema omogeneo scriviamo solo la matrice incompleta eapplichiamo ad essa il metodo di riduzione dall’alto verso il basso.
55

1− k 1 12 2− k 21 1 1− k
R2 → R2 − 2R1
R3 → R3 + (k − 1)R1
−→
1− k 1 12k −k 0
−k2 + 2k k 0
R3 → R3 +R2 −→
1− k 1 12k −k 0
−k2 + 4k 0 0
= B.
Se −k2+4k = 0, cioe k = 0, 4, la terza riga di B ha tutti gli elementi nulli. Inoltre si ha:
Se k = 0 allora
B =
1 1 10 0 00 0 0
e quindi, per k = 0, si hanno le ∞2 soluzioni (−y − z, y, z) per ogni y, z ∈ R.
Se k = 4 allora
B =
−3 1 18 −4 00 0 0
.
Questa matrice risulta ridotta con elementi speciali quello di posto (1, 3) e quello di posto(2, 2). Riduciamo B verso l’alto (si osservi che possiamo eliminare la terza riga di B)
( −3 1 18 −4 0
)R1 → 4R1 +R2 −→
( −4 0 48 −4 0
)
R1 → 14R1
R2 → −14R2
−→( −1 0 1
−2 1 0
)e quindi, per k = 4, si hanno le ∞1 soluzioni (x, 2x, x)
per ogni x ∈ R.
Sia ora k 6= 0, 4. Allora −k2 +4k 6= 0 e B ha tre elementi speciali. In tal caso il sistema,avendo tre incognite ed essendo omogeneo, ha l’unica soluzione banale (0, 0, 0).
Esempio 13.3 Studiare, al variare del parametro reale k, il sistema lineare:
x+ y + z = 1kx+ y + z = kx− y + kz = 22x+ 3y + z = k − 1
.
SVOLGIMENTO. Scriviamo le matrici completa e incompleta del sistema e applichiamo ilmetodo di riduzione dall’alto verso il basso in modo da ottenere gli elementi speciali e vederequindi, al variare di k ∈ R, se esso e possibile o no.
56
1 1 1 1k 1 1 k1 −1 k 22 3 1 k − 1
R2 → R2 −R1
R3 → R3 +R1
R4 → R4 − 3R1
−→
1 1 1 1k − 1 0 0 k − 12 0 k + 1 3−1 0 −2 k − 5
= B
Se k = 1, B diventa
1 1 1 10 0 0 02 0 2 3−1 0 −2 −4
R4 → 2R4 +R3 −→
1 1 1 10 0 0 02 0 2 30 0 −2 −5
.
Quindi, per k = 1, il numero degli elementi speciali coincide con quello delle incognite.Inoltre gli elementi speciali sono nella matrice incompleta. Pertanto il sistema ha una solasoluzione. Determiniamola procedendo col metodo di riduzione dal basso verso l’alto appli-cato alla matrice ridotta in cui abbiamo eliminato la seconda riga perche formata tutta dazeri.
1 1 1 12 0 2 30 0 −2 −5
R2 → R2 +R3
R1 → 2R1 +R3
−→
2 2 0 −32 0 0 −20 0 −2 −5
R1 → R1 −R2 −→
0 2 0 −42 0 0 −20 0 −2 −5
R1 → 12R1
R2 → 12R2
R3 → −12R3
−→
0 1 0 −21 0 0 −10 0 1 5
2
.
Quindi per k = 1 abbiamo l’unica soluzione (−1,−2, 52).
Sia ora k 6= 1. Allora
B =
1 1 1 1k − 1 0 0 k − 12 0 k + 1 3−1 0 −2 k − 5
R2 → 1
k−1R2 −→
1 1 1 11 0 0 12 0 0 k2 − 1
2− k − k2 0 k + 1 3−1 0 −2 k − 5
R3 → R3 − 2R2
R4 → R4 +R2
−→
57

1 1 1 11 0 0 10 0 k + 1 10 0 −2 k − 4
.
Se k = −1, il sistema e impossibile. Sia k 6= −1,+1. Allora
1 1 1 11 0 0 10 0 k + 1 10 0 −2 k − 4
R4 → (k + 1)R4 + 2R3 −→
1 1 1 11 0 0 10 0 k + 1 10 0 0 k2 − 3k − 2
.
Se k2 − 3k− 2 6= 0 il sistema e impossibile. Supponiamo k2 − 3k− 2 = 0, cioe k = 3±√17
2,
allora l’ultima riga della matrice precedente e formata tutta da elementi nulli. Eliminandoques’ultima riga e ricordando che k = 3±√
172
, la matrice diventa
1 1 1 11 0 0 10 0 k + 1 10 0 0 k2 − 3k − 2
R1 → (k + 1)R1 −R3 −→
k + 1 k + 1 0 k1 0 0 10 0 k + 1 1
R1 → R1 − (k + 1)R2 −→
0 k + 1 0 −11 0 0 10 0 k + 1 1
R1 → R11
k+1R1
R3 → R31
k+1R3
−→
0 1 0 − 1k+1
1 0 0 10 0 1 1
k+1
dalla quale, ricordando che k = 3±√17
2, otteniamo le soluzioni
(1,− 2
5 +√17
,2
5 +√17
)e
(1,− 2
5−√17
,2
5−√17
).
Esempio 13.4 Studiare, al variare del parametro reale k, il sistema lineare:
x+ ky − t = k(k + 1)x+ y + t = 12x+ y + kt = 2
.
SVOLGIMENTO. Scriviamo le matrici completa e incompleta del sistema e applichiamo ilmetodo di riduzione dall’alto verso il basso in modo da ottenere gli elementi speciali e vederequindi, al variare di k ∈ R, se esso e possibile o no.
1 k −1 kk + 1 1 1 12 1 k 2
R2 → R2 − (k + 1)R1
R3 → R3 − 2R1
−→
58

1 k −1 k0 −k2 − k + 1 k + 2 −k2 − k + 10 1− 2k k + 2 2− 2k
= B
Se k = −2, B diventa
1 −2 −1 −20 −1 0 −10 5 0 6
R3 → R3 + 5R2 −→
1 −2 −1 −20 −1 0 10 0 0 1
.
Quindi per k = −2 il sistema e impossibile.
Sia adesso k 6= −2. Abbiamo
1 k −1 k0 −k2 − k + 1 k + 2 −k2 − k + 10 1− 2k k + 2 2− 2k
R3 → R3 −R2 −→
1 k −1 k0 −k2 − k + 1 k + 2 −k2 − k + 10 k2 − k 0 k2 − k + 1
.
Se k = 0, 1 sia la matrice incompleta che la completa sono ridotte ma la matrice incom-pleta ha due elementi speciali (per esempio, quelli di posto (1, 1) e (2, 3)) mentre la completaha tre elementi speciali (per esempio, quelli di posto (1, 1), (2, 3) e (3, 4)). Quindi per k = 0, 1il sistema e impossibile.
Se k 6= 0, 1 la matrice incompleta e la completa hanno tre elementi speciali (nei posti(1, 1), (2, 3) e (3, 2)). Poiche il sistema ha tre incognite si ha una sola soluzione. Lasciamoal lettore la determinazione di questa soluzione.
14 Come ricavare la matrice inversa attraverso il me-
todo di riduzione.
Ricordiamo che per il Teorema 10.6, una matrice A di ordine n e invertibile se e solo se esisteuna matrice B di ordine n tale che A ·B = In, essendo In la matrice identica di ordine n. Inquesto paragrafo mostreremo come sia possibile, mediante il metodo di riduzione, verificarese una matrice A e invertibile e, in tal caso, determinarne l’inversa.
Esempio 14.1 Determinare l’eventuale inversa della matrice:
A =
1 2 −11 1 12 1 3
.
59

SVOLGIMENTO. A e invertibile se esiste una matrice
B =
x1 x2 x3
y1 y2 y3z1 z2 z3
tale che A ·B = I3, cioe
1 2 −11 1 12 1 3
·
x1 x2 x3
y1 y2 y3z1 z2 z3
=
1 0 00 1 00 0 1
la quale equivale a
x1 + 2y1 − z1 x2 + 2y2 − z2 x3 + 2y3 − z3x1 + y1 + z1 x2 + y2 + z2 x3 + y3 + z32x1 + y1 + 3z1 2x2 + y2 + 3z2 2x3 + y3 + 3z3
=
1 0 00 1 00 0 1
. (27)
Uguagliando nella (27) la prima, seconda e terza colonna della matrice a primo membrorispettivamente con la prima, seconda e terza colonna di quella a secondo membro, deduciamoche A ha inversa se i seguenti tre sistemi lineari
x+ 2y − z = 1x+ y + z = 02x+ y + 3z = 0
,
x+ 2y − z = 0x+ y + z = 12x+ y + 3z = 0
,
x+ 2y − z = 0x+ y + z = 02x+ y + 3z = 1
hanno soluzione. Tali soluzioni, se esistono, costituiscono le tre colonne dell’inversa B.Poiche i precedenti sistemi differiscono solamente nelle colonne dei termini noti possiamorisolverli, in modo piu compatto, nel seguente modo. Si riduca per righe la seguente matriceformata nella prima parte dai coefficienti delle incognite (uguali per tutti e tre i sistemi) e,nella seconda parte, dalle tre colonne dei termini noti:
1 2 −1 1 0 01 1 1 0 1 02 1 3 0 0 1
R2 → −R2 +R1
R3 → R3 − 2R1
−→
1 2 −1 1 0 00 1 −2 1 −1 00 −3 5 −2 0 1
R3 → R3 + 3R2 −→
1 2 −1 1 0 00 1 −2 1 −1 00 0 −1 1 −3 1
R1 → R1 −R3
R2 → R2 − 2R3
−→
1 2 0 0 3 −10 1 0 −1 5 −20 0 −1 1 −3 1
R1 → R1 − 2R2 −→
60

1 0 0 2 −7 30 1 0 −1 5 −20 0 −1 1 −3 1
R3 → −R3 −→
1 0 0 2 −7 30 1 0 −1 5 −20 0 1 −1 3 −1
.
Le soluzioni dei tre sistemi sono quindi
(x1, y1, z1) = (2,−1,−1), (x2, y2, z2) = (−7, 5, 3), (x3, y3, z3) = (3,−2,−1)
e la matrice inversa della A e
B =
2 −7 3−1 5 −2−1 3 −1
.
Dall’esempio precedente se ne deduce che la matrice
A =
1 2 −11 1 12 1 3
e invertibile se, mediante il metodo di riduzione, e possibile trasformare la matrice
1 2 −1 1 0 01 1 1 0 1 02 1 3 0 0 1
(28)
in modo che la sottomatrice che nella (28) e a sinistra della | (quella coincidente con A)coincida con la matrice identica. In tal caso, la sottomatrice che otterremo a destra della |fornisce l’inversa di A. Nel nostro esempio abbiamo trasformato la (28) nella
1 0 0 2 −7 30 1 0 −1 5 −20 0 1 −1 3 −1
,
pertanto
2 −7 3−1 5 −2−1 3 −1
e l’inversa di A.
61

Possiamo schematizzare quanto detto nel seguente modo. Sia data la matrice A di ordinen. Si vuole sapere se essa e invertibile e, al tempo stesso, determinarne l’inversa (se esiste).Si puo procedere nel seguente modo.
Metodo per determinare l’eventuale inversa di una matrice A:
1. Si formi la matrice (A | In), in cui In denota la matrice identica di ordine n.
2. Si applichi il metodo di riduzione a (A | In) sia dall’alto verso il basso che, eventual-mente, dal basso verso l’alto:
(a) se, mediante il metodo di riduzione, non e possibile trasformare A nella matriceIn allora A non e invertibile;
(b) se, mediante il metodo di riduzione, A viene trasformata in In avremo trasformato(A | In) in (In | B). In tal caso A e invertibile e B e la sua inversa.
Esempio 14.2 Determinare l’inversa della matrice:
A =
1 2 1 0 4−1 1 3 2 01 5 0 1 04 −1 0 0 00 3 0 0 0
.
SVOLGIMENTO. La matrice assegnata e ridotta. Applichiamo il metodo di riduzione dalbasso verso l’alto alla matrice (A | I5) in modo da trasformarla nella (I5 | A−1):
(A | I5) =
1 2 1 0 4 1 0 0 0 0−1 1 3 2 0 1 0 0 0 01 5 0 1 0 0 0 1 0 04 −1 0 0 0 0 0 0 1 00 3 0 0 0 0 0 0 0 1
R4 → 3R4 +R5
R3 → 3R3 − 5R5
R2 → 3R2 −R5
R1 → 3R1 − 2R5
−→
3 0 3 0 12 3 0 0 0 −2−3 0 9 6 0 0 3 0 0 −13 0 0 3 0 0 0 3 0 −512 0 0 0 0 0 0 0 3 10 3 0 0 0 0 0 0 0 1
R3 → 4R3 −R4
R2 → 4R2 +R4
R1 → 4R1 −R4
−→
0 0 12 0 48 12 0 0 −3 −90 0 36 24 0 0 12 0 3 −30 0 0 12 0 0 0 12 −3 −2112 0 0 0 0 0 0 0 3 10 3 0 0 0 0 0 0 0 1
R2 → R2 − 2R3 −→
62
0 0 12 0 48 12 0 0 −3 −90 0 36 0 0 0 12 −24 9 390 0 0 12 0 0 0 12 −3 −2112 0 0 0 0 0 0 0 3 10 3 0 0 0 0 0 0 0 1
R1 → 3R1 −R2 −→
0 0 0 0 144 36 −12 24 −18 −660 0 36 0 0 0 12 −24 9 390 0 0 12 0 0 0 12 −3 −2112 0 0 0 0 0 0 0 3 10 3 0 0 0 0 0 0 0 1
R1 → 1144
R1
R2 → 136R2
R3 → 112R3
R4 → 112R4
R5 → 13R1
−→
0 0 0 0 1 14
−12
16
−18
−1124
0 0 1 0 0 0 13
−23
14
1312
0 0 0 1 0 0 0 1 −14
−74
1 0 0 0 0 0 0 0 14
112
0 1 0 0 0 0 0 0 0 13
da cui, scambiando opportunamente le righe fra loro, otteniamo
1 0 0 0 0 0 0 0 14
112
0 1 0 0 0 0 0 0 0 13
0 0 1 0 0 0 13
−23
14
1312
0 0 0 1 0 0 0 1 −14
−74
0 0 0 0 1 14
−12
16
−18
−1124
. Pertanto A−1 =
0 0 0 14
112
0 0 0 0 13
0 13
−23
14
1312
0 0 1 −14
−74
14
−12
16
−18
−1124
.
Esempio 14.3 Determinare l’eventuale inversa della matrice:
A =
1 2 1−1 1 31 5 5
.
SVOLGIMENTO. Applichiamo il precedente metodo.
(A | I3) =
1 2 1 1 0 0−1 1 3 0 1 01 5 5 0 0 1
R2 → R2 +R1
R3 → R3 −R1
−→
1 2 1 1 0 00 3 4 1 1 00 3 4 −1 0 1
R3 → R3 −R2 −→
1 2 1 1 0 00 3 4 1 1 00 0 0 −2 −1 1
.
E evidente che A non puo mai essere trasformata nella I3, pertanto non e invertibile.
63

Esempio 14.4 Dire per quali valori del parametro reale k la seguente matrice e invertibilee, per questi, determinarne l’inversa:
A =
1 k −11 2 1−1 −4 k
.
SVOLGIMENTO. Applichiamo il precedente metodo.
(A | I3) =
1 k −1 1 0 01 2 1 0 1 0−1 −4 k 0 0 1
R2 → R2 −R1
R3 → R3 +R1
−→
1 k −1 1 0 00 2− k 2 −1 1 00 k − 4 k − 1 1 0 1
R3 → 2R3 − (k − 1)R2 −→
1 k −1 1 0 00 2− k 2 −1 1 00 k2 − k − 6 0 k + 1 1− k 2
.
Se k2 − k − 6 = 0, cioe k = −2, 3, la matrice non e invertibile.
Sia, per il momento, k = 2. Allora
1 k −1 1 0 00 2− k 2 −1 1 00 k2 − k − 6 0 k + 1 1− k 2
=
1 2 −1 1 0 00 0 2 −1 1 00 −4 0 3 −1 2
R1 → 2R1 +R3
R2 → R2 +R3
−→
2 0 −2 5 −1 20 −4 2 2 0 20 −4 0 3 −1 2
R3 → R3 −R2 −→
2 0 −2 5 −1 20 −4 2 2 0 20 0 −2 1 −1 0
R1 → R1 −R3
R2 → R2 +R3
−→
2 0 0 4 0 20 −4 0 3 −1 20 0 −2 1 −1 0
R1 → 12R1
R2 → −14R2
R3 → −12R1
−→
1 0 0 2 0 10 1 0 −3
414
−12
0 0 1 −12
12
0
.
Allora, per k = 2, la matrice A e invertibile e la sua inversa e
2 0 1−3
414
−12
−12
12
0
.
64

Consideriamo adesso k 6= −2, 2, 3.
1 k −1 1 0 00 2− k 2 −1 1 00 k2 − k − 6 0 k + 1 1− k 2
R3 → (k − 2)R3 + (k2 − k − 6)R2 −→
1 k −1 1 0 00 2− k 2 −1 1 00 0 2(k2 − k − 6) 4 2(k − 4) 2(k − 2)
R1 → (k − 2)R1 + kR2 −→
k − 2 0 k + 2 −2 k 00 2− k 2 −1 1 00 0 2(k2 − k − 6) 4 2(k − 4) 2(k − 2)
R1 → 2(k2 − k − 6)R1 − (k + 2)R3
R2 → (−k2 + k + 6)R2 +R3
−→
α 0 0 −4k2 + 16 2k3 − 4k2 − 8k + 16 −2k2 + 80 β 0 k2 − k − 2 −k2 + 3k − 2 2k − 40 0 γ 4 2k − 8 2k − 4
(essendo α = 2k3 − 6k2 − 8k + 24, β = k3 − 3k2 − 4k + 12 e γ = 2k2 − 2k − 12)
R1 → 12(k−2)(k2−k−6)
R1
R2 → 1(k−2)(k2−k−6)
R2
R3 → 12(k2−k−6)
R3
−→
1 0 0 −2(k+2)k2−k−6
k2−4k2−k−6
− k+2k2−k−6
0 1 0 k+1k2−k−6
1−kk2−k−6
2k2−k−6
0 0 1 2k2−k−6
k−4k2−k−6
k−2k2−k−6
.
Allora, per k 6= −2, 2, 3, la matrice A e invertibile e la sua inversa e
−2(k+2)k2−k−6
k2−4k2−k−6
− k+2k2−k−6
k+1k2−k−6
1−kk2−k−6
2k2−k−6
2k2−k−6
k−4k2−k−6
k−2k2−k−6
.
15 Determinanti. Teorema di Cramer. Teorema di
Rouche-Capelli
Definizione 15.1 Sia A = (aij) una matrice n × m. Per ogni i ∈ {1, 2, . . . , n} e j ∈{1, 2, . . . ,m} dicesi minore complementare dell’elemento aij la matrice (n−1)× (m−1) chesi ottiene dalla A sopprimendo in essa la riga i-esima e la colonna j-esima.
65

Esempio 15.1 Sia
A =
1 10 20 −4 3 80 5 9 −11 2 48 −7 12 4 8 25 9 19 21 −3 556 −1 45 34 0 −7
.
Il minore complementare di a34 e
1 10 20 3 80 5 9 2 45 9 19 −3 556 −1 45 0 −7
.
Vogliamo ora definire per ricorrenza una funzione di M(n;K) in K che ad ogni matricequadrata A di ordine n associa un elemento det A ∈ K, detto il determinante di A.
Passo 1. Sia A = (a11) una matrice quadrata di ordine n = 1. In tal caso poniamo
det A = det (a11) = a11.
Passo 2. Sia
A =
(a11 a12a21 a22
).
In tal caso poniamo
det A = det
(a11 a12a21 a22
)= a11a12 − a12a21.
Passo 3. Sia
A =
a11 a12 a13a21 a22 a23a31 a32 a33
.
In tal caso poniamo
det A = det
a11 a12 a13a21 a22 a23a31 a32 a33
= a11a22a33+a12a23a31+a13a21a32−a13a22a31−a12a21a33−
a11a23a32.
Passo 4. Supponiamo che sia stato definito det A per una matrice quadrata A di ordinen − 1. Definiamo det A per una matrice quadrata A di ordine n. Innanzitutto diamo laseguente definizione.
66

Definizione 15.2 Sia A = (aij) una matrice quadrata di ordine n. Per ogni i ∈ {1, 2, . . . , n}e j ∈ {1, 2, . . . ,m} dicesi complemento algebrico dell’elemento aij, e si indica con Aij, ilnumero (−1)i+j moltiplicato per il determinante del minore complementare dell’elemento aij(si noti che questo minore e una matrice quadrata di ordine n − 1 di cui si suppone ne siastato definito il determinante).
Per esempio, posto
A =
2 3 1−1 4 01 3 5
,
il complemento algebrico dell’elemento a23 e
(−1)2+3 det
(2 31 3
)= −(6− 3) = −3.
Vale, in generale, il seguente teorema di cui omettiamo la dimostrazione.
Teorema 15.1 (Teorema di Laplace) Fissata una linea qualsiasi (riga o colonna) di unamatrice quadrata A di ordine n ≥ 2, la somma dei prodotti degli elementi della linea per irispettivi complementi algebrici e un valore che e indipendente dalla linea scelta.
In altre parole il teorema precedente afferma che comunque si scelgano due linee differenti(non necessariamente parallele), la somma dei prodotti degli elementi di una linea per irispettivi complementi algebrici e uguale per entrambe le lineee scelte.
Definizione 15.3 (Definizione ricorsiva di determinante) Data una matrice quadrataA di ordine n ≥ 2, si dice determinante di A (e si scrive det A oppure |A|) la somma deiprodotti di una linea qualsiasi di A per i rispettivi complementi algebrici.
Come esempio facciamo vedere che, quando A ha ordine 2 oppure 3, le definizioni didet A date ai Pass1 2 e 3 coincidono con quella ricorsiva del Passo 4.
Sia n = 2 e sia
A =
(a11 a12a21 a22
).
Fissata come linea la prima riga abbiamo
det A = det
(a11 a12a21 a22
)= a11A11+a12A12 = a11(−1)1+1 det (a22)+a12(−1)1+2 det (a21) =
a11a12 − a12a21.
Sia n = 3 e sia
A =
a11 a12 a13a21 a22 a23a31 a32 a33
.
67

Fissata come linea la prima riga abbiamo
det A = det
a11 a12 a13a21 a22 a23a31 a32 a33
= a11A11+a12A12+a13A13 = a11(−1)1+1 det
(a22 a23a32 a33
)+
a12(−1)1+2 det
(a21 a23a31 a33
)+ a13(−1)1+3 det
(a21 a22a31 a32
)= a11(a22a33 − a32a23)−
a12(a21a33−a23a31)+a13(a21a32−a31a22) = a11a22a33+a12a23a31+a13a21a32−a13a22a31−
a12a21a33 − a11a23a32.
Esempio 15.2 Calcolare il det A, essendo
A =
1 2 −1 10 0 2 1−3 1 1 01 1 0 0
.
SVOLGIMENTO. Fissando la terza riga abbiamo
det A = −3(−1)3+1 det
2 −1 10 2 11 0 0
+ 1(−1)3+2 det
1 −1 10 2 11 0 0
+
1(−1)3+3 det
1 2 10 0 11 1 0
+ 0(−1)3+4 det
1 2 −10 0 21 1 0
= −3(−3)− (−3) + 1 = 13.
Proprieta dei determinanti. Sia A una matrice quadrata di ordine n ≥ 2. Allora
1. Se in A esiste una linea con gli elementi tutti nulli, det A = 0.
2. Se si scambiano fra loro di posto due lineee parallele si ottiene una nuova matrice A′
per la quale si ha det A′ = − det A.
3. Se in A vi sono due lineee parallele uguali, allora det A = 0.
4. Se si moltiplicano tutti gli elementi di una linea di A per α ∈ K, si ottiene una nuovamatrice A′ per la quale si ha det A′ = α det A.
5. Se in A vi sono due linee parallele proporzionali, allora det A = 0.
68

6. Se gli elementi di una linea di A sono binomi, allora det A = det B+det C, essendo Be C rispettivamente le matrici ottenute da A sostituendo ad ogni binomio il suo primoaddendo ed il suo secondo addendo.
Per esempio se
A =
b11 + c11 b12 + c12 b13 + c13a21 a22 a23a31 a32 a33
si ha
det A = det
b11 b12 b13a21 a22 a23a31 a32 a33
+ det
c11 c12 c13a21 a22 a23a31 a32 a33
.
7. Se agli elementi di una linea di A si aggiungono gli elementi corrispondenti di altrelinee parallele, moltiplicate per costanti qualsiasi, il valore del det A non cambia.
8. Se in A tutti gli elementi al di sopra (o al di sotto) della diagonale principale sono tuttinulli, allora il det A e uguale al prodotto degli elementi della diagonale principale.
Per esempio se
A =
a11 0 0a21 a22 0a31 a32 a33
oppure A =
a11 a12 a130 a22 a230 0 a33
si ha det A = a11a22a33.
9. La somma dei prodotti degli elementi di una linea di A per i complementi algebricidegli elementi corrispondenti di un’altra linea ad essa parallela, e 0.
10. Il determinante di A coincide col determinante della sua trasposta, cioe det A =det AT .
Le precedenti proprieta (in particolare la 7) si rivelano utili quando si debba effettuare ilcalcolo del determinante di una matrice quadrata A di ordine n ≥ 4. Data la matrice A, perla definizione ricorsiva di determinante, bisogna prima scegliere una linea e moltiplicare poi isuoi elementi per i rispettivi complementi algebrici. E allora evidente che conviene scegliereuna linea nella quale figuri il maggior numero possibile di zeri. Se in nessuna linea c’e unsufficiente numero di zeri, mediante la proprieta 7, e possibile costruire una nuova matriceA′, avente il determinante uguale a quello di A, la quale possieda in una sua linea il massimonumero possibile di zeri. Illustriamo quanto detto con un esempio. Sia
A =
1 2 −1 34 1 2 −13 −1 2 −11 −1 0 3
.
69

Applichiamo la proprieta 7 (ovviamente Ci denota la colonna i-esima):
1 2 −1 34 1 2 −13 −1 2 −11 −1 0 3
R2 → R2 −R3 −→
1 2 −1 31 2 0 03 −1 2 −11 −1 0 3
C2 → C2 − 2C1 −→
1 0 −1 31 0 0 03 −7 2 −11 −3 0 3
.
Le matrici ottenute hanno tutte lo stesso determinante. Pertanto
det A = det
1 0 −1 31 0 0 03 −7 2 −11 −3 0 3
= 1(−1)2+1 det
0 −1 3−7 2 −1−3 0 3
= 6.
Del seguente teorema omettiamo la dimostrazione.
Teorema 15.2 Teorema di Binet. Siano A e B due matrici quadrate di ordine n. Ildeterminante della matrice prodotto A ·B e uguale al prodotto dei determinanti di A e di B.Cioe
det A ·B = det A · det B.
Teorema 15.3 Sia A una matrice quadrata di ordine n e sia A′ una matrice ridotta perrighe della A mediante le regole di riduzione (17) e (18). Allora det A 6= 0 se e solo sedet A′ 6= 0. In generale pero non e detto che A ed A′ hanno gli stessi determinanti.
Dimostrazione. Per le proprieta dei determinanti abbiamo che se ad A si applica laregola di riduzione Ri → λRi + µRj (con λ 6= 0 e i 6= j) si ottiene una matrice B tale chedet B = λ det A. Analogamente, se ad A si applica la regola Ri ↔ Rj si ottiene una matriceB tale che det B = − det A.
Adesso ci poniamo la seguente domanda: Sia A una matrice quadrata di ordine n. Esi-stono matrici A′ ridotte per righe della A tali che det A′ = det A? La risposta a questoquesito e positiva e segue dalla proprieta 7 dei determinanti che possiamo enunciare come
Regola di riduzione in senso stretto:
Ri → Ri + µRj, ∀µ ∈ K, i 6= j. (29)
Diremo che la matrice A′ e la matrice ridotta in senso stretto della A se A′ puo essereottenuta dalla A mediante la regola (29).
70

Teorema 15.4 Sia A una matrice quadrata di ordine n e sia A la matrice ridotta in sensostretto della A. Allora det A = det A.
Dimostrazione. Si veda la proprieta 7 dei determinanti.
Definizione 15.4 Sia A una matrice m× n e sia h ≤ min{m,n}. Scelte in A h righe e hcolonne qualsiasi, gli h2 elementi in cui esse si intersecano formano una matrice quadratache prende il nome di minore di ordine h della matrice A.
Definizione 15.5 Si dice rango o caratteristica di una matrice A di tipo m × n, l’ordinemassimo dei minori di A aventi determinante diverso da zero. Il rango di A si indica conr(A).
Dalla proprieta 10 dei determinanti si ottiene facilmente il seguente risultato.
Teorema 15.5 Il rango di una matrice A coincide con quello della sua trasposta AT .
Sia A una matrice ridotta. Fissati in A gli elementi speciali, sia M il minore ottenutoprendendo in A gli elementi in cui si intersecano le righe e le colonne passanti per gli elementispeciali. Allora, per le proprieta 2 e 8 dei determinanti, det M 6= 0. Per esempio si considerila matrice ridotta
A =
−1 2 3 1 1 20 0 0 0 0 00 5 14 5 5 70 −8 −14 6 −1 00 0 0 0 0 0
.
Si ha
M =
−1 3 20 14 70 −14 0
.
Scambiando fra loro in M le colonna 2 e 3, abbiamo
M ′ =
−1 2 30 7 140 0 −14
che e una matrice triangolare. Pertanto det M = − det M ′ = (−1) · 7 · (−4) 6= 0.
Teorema 15.6 Il rango di una matrice A coincide col numero degli elementi speciali di unaqualsiasi matrice ridotta dalla A mediante il metodo di riduzione per righe.
71

Dimostrazione. Sia M un minore di ordine h, h ≤ min{m,n}, della matrice A di tipom × n. Il metodo di riduzione per righe trasforma A in una matrice A′. Sia M ′ il minoreottenuto scegliendo nella A′ le righe e le colonne corrispondenti (nella A) a quelle di M . Perle proprieta 2, 4, 6 e 7 dei determinanti si ottiene che det M ′ = 0 se e solo se det M = 0.
Sia ora B la matrice ridotta dalla A mediante il metodo di riduzione per righe e suppo-niamo che B ha h elementi speciali. Indichiamo infine con C il minore ottenuto scegliendo inB le h righe e le h colonne occupate dagli elementi speciali. Allora C e un minore di ordinemassimo, infatti B ha esattamente h righe non tutte nulle. Inoltre, come osservato prima,per le proprieta 2 e 8 dei determinanti, si ha det C 6= 0.
Esempio 15.3 Determinare il rango della matrice
A =
−1 2 3 1 1 2−2 4 6 2 2 43 −1 5 2 2 11 −1 1 2 1 14 −2 6 4 3 2
.
SVOLGIMENTO. Per il Teorema 15.6, il rango di A coincide col numero degli elementispeciali di una sua matrice ridotta per righe.
−1 2 3 1 1 2−2 4 6 2 2 43 −1 5 2 2 11 −1 1 2 1 14 −2 6 4 3 2
R2 → R2 − 2R1
R3 → R3 + 3R1
R4 → R4 +R1
R5 → R5 + 4R1
−→
−1 2 3 1 1 20 0 0 0 0 00 5 14 5 5 70 1 4 3 2 30 6 18 8 7 10
R4 → 7R4 − 3R3
R5 → 7R5 − 10R3
−→
−1 2 3 1 1 20 0 0 0 0 00 5 14 5 5 70 −8 −14 6 −1 00 −8 −14 6 −1 0
R6 → R6 −R3 −→
−1 2 3 1 1 20 0 0 0 0 00 5 14 5 5 70 −8 −14 6 −1 00 0 0 0 0 0
. Pertanto il rango di A e 3.
Si osservi il numero degli elementi speciali di una matrice ridotta A′ coincide col numerodelle sue righe non nulle. Pertanto abbiamo il seguente
Metodo per determinare il rango di una matrice: Il rango di una matrice A e datodal numero di righe non nulle di una sua qualsiasi matrice ridotta per righe.
72

Definizione 15.6 Matrice ridotta per colonne. Una matrice A = (aij), i = 1, 2, . . . ,mj = 1, 2, . . . , n, si dice ridotta per colonne se, per ogni j, e verificata una delle due seguenticondizioni:
• aij = 0 per ogni i = 1, 2, . . . , n, oppure
• esiste almeno un t ∈ {1, 2, . . . ,m} tale che atj 6= 0 e, se j < n, atρ = 0 per ognij + 1 ≤ ρ ≤ n.
Esempio 15.4 La matrice
A =
1 7 0 0 0−1 0 0 0 02 3 0 1 00 1 0 0 22 1 0 0 00 0 0 1 4
.
e ridotta per colonne.
Definizione 15.7 Elemento speciale di una matrice ridotta per colonne. Sia A =(aij), i = 1, 2, . . . ,m j = 1, 2, . . . , n, una matrice ridotta per colonne. Per la Definizione 11.4,ogni colonna Cj = (a1j, a2j, . . . , amj) 6= (0, 0, . . . , 0) contiene almeno un elemento atj 6= 0 taleche, se j < n, atρ = 0 per ogni j + 1 ≤ ρ ≤ n. Per ogni colonna non nulla Cj si fissi, apiacere, uno solo di questi elementi. Esso si chiama l’elemento speciale relativo a Cj.
La dimostrazione del seguente teorema e immediata.
Teorema 15.7 Ridurre per colonne la matrice A equivale a ridurre per righe la sua traspostaAT . Inoltre, se A′ e una matrice ridotta per colonne di A, esiste una matrice ridotta perrighe di AT che coincide con (A′)T .
Esempio 15.5 Sia
A =
−1 1 −12 2 13 1 24 1 1
.
Determinare una matrice A′ ridotta per colonne della A. Cercare una matrice ridotta perrighe della AT che coincida con (A′)T .
A =
−1 1 −12 2 13 1 24 1 1
C2 → C2 + C1
C3 → −C3 + C1
−→
−1 0 02 4 13 4 14 5 3
C3 → −4C3 + C2 −→
73

A′ =
−1 0 02 4 03 4 04 5 −7
dove gli elementi sottolineati sono stati scelti come speciali. Adesso
riduciamo per righe la trasposta di A:
AT =
−1 2 3 41 2 1 1−1 1 2 1
R2 → R2 +R1
R3 → −R3 +R1
−→
−1 2 3 40 4 4 50 1 1 3
R3 → −4R3 +R2
−→
−1 2 3 40 4 4 50 0 0 −7
.
Sia dato il sistema
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2..........................................am1x1 + am2x2 + . . .+ amnxn = bm
.
Diremo che l’equazioneaj1x1 + aj2x2 + . . .+ ajnxn = bj
e combinazione lineare delle rimanenti se esistono m− 1 scalari λi ∈ K, i = 1, . . . ,m, i 6= j,per cui le due seguenti uguaglianze siano verificate per ogni (x1, x2, . . . , xn) ∈ Kn:
aj1x1 + aj2x2 + . . .+ ajnxn =m∑i=1i 6=j
λi (ai1x1 + ai2x2 + . . .+ ainxn) , (30)
e
bj =m∑i=1i6=j
λibi. (31)
Consideriamo adesso il sistema lineare di n equazioni in n variabili
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2..........................................an1x1 + an2x2 + . . .+ annxn = bn
. (32)
Supponiamo che (32) abbia infinite soluzioni. Come visto nel Paragrafo 11, applicandoripetutamente il Teorema 11.3 e possibile ridurre (32) ad un sistema in cui almeno una frale sue equazioni (supponiamo la j-esima) coincida con l’identita 0 = 0. Questo equivale adire che l’equazione j-esima di (32) e combinazione lineare delle rimanenti.
74

Teorema 15.8 Sia A ∈ M(n;K). Supponiamo che esista una matrice B ∈ M(n;K) taleche A ·B = In. Allora esiste una matrice C ∈ M(n;K) tale che C · A = In.
Dimostrazione. Siano
A =
a11 a12 · · · a1na21 a22 · · · a2n· · · · · ·
an1 an2 · · · ann
, e B =
b11 ab2 · · · b1nb21 b22 · · · b2n· · · · · ·bn1 bn2 · · · bnn
.
Consideriamo gli n sistemi
(1)
a11x1 + a12x2 + . . .+ a1nxn = 1a21x1 + a22x2 + . . .+ a2nxn = 0..........................................an1x1 + an2x2 + . . .+ annxn = 0
,
(2)
a11x1 + a12x2 + . . .+ a1nxn = 0a21x1 + a22x2 + . . .+ a2nxn = 1..........................................an1x1 + an2x2 + . . .+ annxn = 0
,
...............................................................
(n)
a11x1 + a12x2 + . . .+ a1nxn = 0a21x1 + a22x2 + . . .+ a2nxn = 0..........................................an1x1 + an2x2 + . . .+ annxn = 1
Essendo A · B = In, per j = 1, . . . , n, (b1j, b2j . . . , bnj) e una soluzione del sistema (j).Proviamo adesso che, per ogni j, questa soluzione e unica. Supponiamo per esempio che(1) abbia piu di una soluzione, quindi infinite. Come osservato precedentemente, almenouna delle sue equazioni e combinazione lineare delle rimanenti. Per la (31), essa non puocoincidere con la prima. Supponiamo sia la j-esima per qualche 2 ≤ j ≤ n. Allora, per le(30) e (31),
aj1x1 + aj2x2 + . . .+ ajnxn =n∑
i=2i6=j
λi (ai1x1 + ai2x2 + . . .+ ainxn)
per ogni (x1, x2, . . . , xn) ∈ Kn. Ricordando che (b1j, b2j, . . . , bnj) e una soluzione del sistema(j), abbiamo
1 = a1jb1j+a2jb2j+. . .+anjbnj =∑n
i=2i6=j
λi (ai1b1j + ai2b2j + . . .+ ainbnj) =∑n
i=2i 6=j
λi·0 = 0. Im-
possibile, quindi per j = 1, 2, . . . , n il sistem (j) ammette l’unica soluzione (b1j, b2j, . . . , bnj).Allora, come esplicitamente osservato nel Paragrafo 11, il numero degli elementi speciali della
75

matrice ridotta della A e uguale ad n (in altre parole il rango di A e n). Per i Teoremi 15.5e 15.6, anche AT ha rango n. Ne segue che esiste una ed una sola matrice Y ∈ M(n;K)tale che AT · Y = In (si osservi che l’i-esima colonna di Y e l’unica soluzione del sistema
ATXi = Fi). Quindi(AT · Y )T
= ITn = In, da cui Y T · A = In. Pertanto la matrice cercatae C = Y T .
Il seguente risultato fornisce una formula per calcolare la matrice inversa quando essaesiste.
Teorema 15.9 Una matrice A di ordine n e invertibile se e solo se det A 6= 0. Posto inoltreA = (aij) e A−1 = (bij), si ha
bij =Aji
det A
essendo Aji il complemento algebrico dell’elemento aji di A (si veda la Definizione 15.2).
Esempio 15.6 Sia data la matrice
A =
1 2 43 −1 21 1 1
.
Dire se A e invertibile e, in caso affermativo, determinare l’inversa A−1.
SVOLGIMENTO. Si ha det A = 11 6= 0. Pertanto A e invertibile. Abbiamo quindi A−1 =(Bij) essendo:
b11 =
(−1)1+1 det
( −1 21 1
)
11= − 3
11, b12 =
(−1)2+1 det
(2 41 1
)
11=
2
11,
b13 =
(−1)3+1 det
(2 4−1 2
)
11=
8
11, b21 =
(−1)1+2 det
(3 21 1
)
11= − 1
11,
b22 =
(−1)2+2 det
(1 41 1
)
11= − 3
11, b23 =
(−1)3+2 det
(1 43 2
)
11=
10
11,
b31 =
(−1)1+3 det
(3 −11 1
)
11=
4
11, b32 =
(−1)2+3 det
(1 21 1
)
11=
1
11,
b33 =
(−1)3+3 det
(1 23 −1
)
11= − 7
11.
76

Pertanto
A−1 =
− 311
211
811
− 111
− 311
1011
411
111
− 711
.
Si consideri il seguente sistema lineare di n equazioni in n incognite (un sistema lineareil cui numero di equazioni coincide col numero delle incognite si dice quadrato):
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2..........................................an1x1 + an2x2 + . . .+ annxn = bn
. (33)
Si ricordi che
A =
a11 a22 · · · a1na21 a22 · · · a2n· · · · · ·
an1 an2 · · · ann
e detta la matrice incompleta del sistema (33). Per la risoluzione dei sistemi lineari, oltre almetodo di riduzione illustrato nei paragrafi precedenti, si possono applicare i seguenti dueimportanti teoremi di cui omettiamo la dimostrazione.
Teorema 15.10 (Teorema di Cramer). Se det A 6= 0, allora il sistema (33) ha un’unicasoluzione data da (
det A1
det A,det A2
det A, . . . ,
det An
det A
)
essendo Ai, i = 1, 2, . . . , n, la matrice che si ottiene sostituendo nella matrice incompleta Adel sistema la colonna i-esima con la colonna
b1b2···bn
dei coefficienti. Per esempio
A1 =
b1 a22 · · · a1nb2 a22 · · · a2n· · · · · ·bn an2 · · · ann
.
77

Teorema 15.11 (Teorema di Rouche-Capelli). Il sistema lineare completo di m equa-zioni in n incognite
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2..........................................am1x1 + am2x2 + . . .+ amnxn = bm
(34)
ammette soluzioni se e solo se la sua matrice incompleta
A =
a11 a22 · · · a1na21 a22 · · · a2n· · · · · ·
am1 am2 · · · amn
e la sua matrice completa
B =
a11 a22 · · · a1n b1a21 a22 · · · a2n b2· · · · · · ·
am1 am2 · · · amn bm
hanno lo stesso rango. In tal caso, posto r(A) = r(B) = h ≤ min{n,m} e indicato conH un minore di A di ordine h avente determinante diverso da zero, (34) e equivalentead un sistema di h equazioni in h incognite avente come equazioni quelle i cui coefficienticoncorrono a formare le righe di H (le altre equazioni si scartano) e come incognite quelle icui coefficienti concorrono a formare le colonne di H (le altre incognite si portano a terminenoto). Il sistema cosı ottenuto si puo risolvere mediante il Teorema di Cramer.
Esempio 15.7 Studiare, applicando il Teorema di Rouche-Capelli, il sistema lineare:
x− 2y + 3z + t = 17x− 2y + 7z + 2t = 52x− y + z + 3t = 2
.
SVOLGIMENTO. Come visto nell’Esempio 11.10 la matrice incompleta e la matrice comple-ta hanno lo stesso numero di elementi speciali, cioe hanno lo stesso rango pertanto il sistemaammette soluzioni. Il massimo ordine di un minore della matrice incompleta A del sistemaassegnato e 3. Infatti il minore formato dalle prime tre colonne di A ha determinante −18.Quindi, per il Teorema di Rouche-Capelli, il sistema assegnato equivale al seguente
x− 2y + 3z = 1− t7x− 2y + 7z = 5− 2t2x− y + z = 2− 3t
78
che, per il Teorema di Cramer, ha soluzione
det
1− t −2 35− 2t −2 72− 3t −1 1
−18,
det
1 1− t 35 5− 2t 72 2− 3t 1
−18,
det
1 −2 1− t7 −2 5− 2t2 −1 2− 3t
−18
.
16 Vettori applicati del piano
Definizione 16.1 Sia O un punto fissato del piano. Si chiama vettore applicato in O unsegmento orientato OP , dove P e un punto del piano diverso da O.
Un vettore applicato e individuato da tre elementi:
• la direzione, cioe la retta passante per i punti O e P ;
• il verso, che e quello che va da O a P (indicato dalla freccia);
• il modulo, cioe il numero reale non negativo che misura la lunghezza del segmento (nonorientato) OP .
Il vettore che ha modulo uguale a zero e direzione e verso indeterminati dicesi vettorenullo e si indica con ~O.
Definizione 16.2 Due vettori applicati in O sono uguali se e solo se o entrambi hannomodulo zero, oppure hanno la stessa direzione, lo stesso verso e lo stesso modulo.
Un vettore si indica con−→OP oppure, piu semplicemente, con ~v. Il modulo di un vettore
si indica con | −→OP |, oppure |~v |.
Definizione 16.3 Somma di vettori. Siano−→OP e
−→OQ due vettori applicati in O. Voglia-
mo definire il vettore −→OR =
−→OP +
−→OQ
detto somma di−→OP e
−→OQ. Procediamo nel seguente modo:
• Se−→OP = ~O, porremo
−→OR = ~O +
−→OQ =
−→OQ+ ~O =
−→OQ.
Analogamente, se−→OQ = ~O, porremo
−→OR = ~O +
−→OP =
−→OP + ~O =
−→OP .
79

• Se−→OP e
−→OQ sono entrambi diversi dal vettore nullo ed hanno direzioni pure diverse,
costruiamo il seguente parallelogramma OPRQ
Il vettore−→OR definisce la somma
−→OP +
−→OQ.
• Siano ora−→OP e
−→OQ due vettori entrambi diversi dal vettore nullo ed aventi la stessa
direzione (cioe giacenti sulla stessa retta).
1. Se−→OP e
−→OQ hanno lo stesso verso, si definisce
−→OP +
−→OQ il vettore
−→OR che ha
la stessa direzione e verso dei due vettori dati e modulo uguale a | −→OP |+ | −→OQ |.2. Se
−→OP e
−→OQ hanno verso opposto e moduli diversi, si definisce
−→OP +
−→OQ come
quel vettore−→OR che ha la stessa direzione dei vettori dati, lo stesso verso del
vettore che ha modulo maggiore, e modulo uguale alla differenza dei moduli (ilmaggiore meno il minore).
3. Se−→OP e
−→OQ hanno verso opposto e lo stesso modulo, si definisce
−→OP +
−→OQ il
vettore nullo ~O.
Definizione 16.4 Dicesi opposto del vettore ~v 6= ~O il vettore avente la stessa direzione e lostesso modulo di ~v, ma verso opposto. L’opposto di ~v si indica con −~v. Porremo − ~O = ~O.
Definizione 16.5 Dati due vettori ~v e ~w si chiama differenza di ~v e ~w (e si indica con~v − ~w) il vettore ~v + (−~w)
Si puo verificare che l’insieme dei vettori applicati in un punto, con l’operazione di somma,risulta essere un gruppo abeliano.
Definizione 16.6 Prodotto di un numero per un vettore.
• Siano ~v un vettore non nullo e a ∈ R, a 6= 0. Dicesi prodotto di a per ~v il vettore (chesi indica con a~v) cosı definito:
1. il modulo di a~v e uguale a |a||~v|;2. la direzione di a~v e quella di ~v;
80

3. il verso di a~v e quello di ~v se a > 0, oppure e il verso opposto a quello di ~v sea < 0.
• Per convenzione si pone 0~v = a ~O = ~O.
Proposizione 16.1 Il prodotto di un numero, detto scalare, per un vettore gode delle se-guenti proprieta:
• Distributiva rispetto agli scalari: (λ+ µ)~v = λ~v + µ~v.
• Distributiva rispetto ai vettori: λ(~v + ~w) = λ~v + λ~w.
• Associativa: λ(µ~v) = (λµ)~v.
• Esistenza dell’elemento neutro: 1~v = ~v.
Si puo provare che−~v = (−1)~v.
Nel piano α fissiamo un sistema di coordinate cartesiane O~x~y e consideriamo i vettori diα applicati in O.
Definizione 16.7 Componenti di un vettore applicato. Sia ~v =−→OP . Le coordinate
(a, b) del punto P si chiamano le componenti di ~v (rispetto al sistema di coordinate fissatoO~x~y).
Valgono le seguenti proprieta:
1. Due vettori sono uguali se hanno le componenti ordinatamente uguali.
2. Le componenti di ~v si indicano con vx e vy e scriveremo ~v =
(vxvy
).
3. Se ~v =
(vxvy
)allora si ha |~v | = √
v2x + v2y.
Definizione 16.8 Versore. Dicesi versore un vettore di modulo 1.
Quindi ~v e un versore se e solo se v2x + v2y. Si ha inoltre che per ogni vettore non nullo ~vesiste uno ed un solo versore avente la stessa direzione e lostesso verso di ~v, esso e dato da1|~v |~v, si chiama versore associato a ~v e si indica con vers~v.
I vettori~i =
(10
)e ~j =
(01
)sono due versori, detti i versori fondamentali del sistema
di coordinate O~x~y.
81

Teorema 16.1 Scomposizione. Per ogni vettore ~v si ha
~v = vx~i+ vy~j.
Cioe ogni vettore si puo scomporre in modo unico nella somma di un vettore avente ladirezione dell’asse ~x e di un vettore avente la direzione dell’asse ~y; e questi due vettori siottengono moltiplicando i versori fondamentali per le componenti di ~v.
Proposizione 16.2 Siano ~v = vx~i+ vy~j e ~w = wx~i+ wy
~j e sia a ∈ R. Allora:
1. a~v = (avx)~i+ (avy)~j;
2. ~v + ~w = (vx + wx)~i+ (vy + wy)~j.
Definizione 16.9 Vettori paralleli. Siano ~v =−→OP e ~w =
−→OQ due vettori non nulli. Essi
si dicono paralleli (e si scrive ~v//~w) se hanno la stessa direzione (cioe se i punti O, P e Qgiacciono sulla stessa retta).
Per convenzione ~O e parallelo ad ogni vettore ~v.
Proposizione 16.3 Siano ~v e ~w due vettori non nulli. Allora:
1. ~v//~w se e solo se esiste t ∈ R, t 6= 0, tale che ~w = t~v. Si ha inoltre che t = | ~w ||~v | se ~v e
~w hanno lo stesso verso, oppure t = − | ~w ||~v | se ~v e ~w hanno verso opposto.
2. ~v//~w se e solo se vxwy − vywx = 0.
Esempio 16.1 Siano ~v = 3~i+4~j e ~w = 6~i+ h~j. Trovare, se esistono, i valori di h ∈ R percui ~v//~w.
SVOLGIMENTO. Per la (2) della Proposizione 16.3 deve essere vxwy − vywx = 3h− 24 = 0.Quindi h = 8.
Piu in generale e possibile provare il seguente risultato.
Teorema 16.2 Siano ~u e ~v due vettori non nulli e non paralleli del piano. Allora, comunquesi fissi un vettore ~w nel piano esiste una ed una sola coppia ordinata (a, b) ∈ R2 tale che~w = a~u+ b~v.
Vogliamo ora stabilire una condizione necessaria e sufficiente affinche due vettori nonnulli del piano siano ortogonali. A tale scopo richiamiamo alcuni importanti risultati dellageometria euclidea.
Teorema 16.3 Teorema di Pitagora. In un triangolo rettangolo, il quadrato costruitosull’ipotenusa e equivalente alla somma dei quadrati costruiti sui cateti.
82

Dimostrazione. (Dimostrazione obbligatoria) Si consideri il triangolo rettangoloLGH in figura.
Vogliamo provare che LG2= LH
2+HG
2. Costruiamo due quadrati ACFH e LPRT come
nella figura seguente.
Entrambi questi quadrati hanno lato uguale a LH + HG. Si osservi inoltre che i triangoliLHG, GEF , BCE, ABL (contenuti nel primo quadrato) sono equivalenti fra loro, e itriangoli LHG, LNG, GQR, GRS (contenuti nel secondo quadrato) sono pure equivalenti
fra loro. Pertanto LG2= As(LBEG) = As(ACFH)−As(LHG)−As(GEF )−As(BCE)−
As(ABL) = As(LPRT )−As(LHG)−As(LNG)−As(GQR)−As(GRS) = As(NPQG)+
As(HGST ) = LH2+HG
2.
Teorema 16.4 Sia POQ un triangolo qualsiasi. Posto α = POQ si ha che
1. PO2+QO
2> PQ
2se e solo se 0 < α < π
2;
2. PO2+QO
2= PQ
2se e solo se α = π
2;
3. PO2+QO
2< PQ
2se e solo se π
2< α < π.
Dimostrazione. (Dimostrazione obbligatoria) Se α = π2, allora per il teorema di
Pitagora, PO2+ QO
2= PQ
2. Sia 0 < α < π
2. Se l’angolo PQO e retto, per il teorema di
Pitagora abbiamo PQ2= OP
2 − OQ2< OP
2+ OQ
2. Supponiamo ora che PQO non sia
retto. Allora si ha uno dei due casi mostrati nella figura seguente
83

In ogni caso il piede H della perpendicolare condotta da P al lato OQ appartiene alla
semiretta avente origine in O e contenente il punto Q. Quindi QH2= (OQ−OH)2. Da cui
PQ2= QH
2+HP
2= OQ
2+OH
2−2OH ·OQ+HP2= OQ
2+OP
2−2OH ·OQ < OQ2+OP
2.
Sia ora π2< α < π. Allora abbiamo
e quindi PQ2= QH
2+HP
2= (OH + OQ)2 +HP
2= HP
2+ OH
2+ OQ
2+ 2OH · OQ =
OP2+OQ
2+ 2OH ·OQ > OP
2+OQ
2.
Viceversa, supponiamo che vale l’equazione OP2+OQ
2= PQ
2, allora α = π
2. Infatti se
0 < α < π2si ha, come abbiamo provato sopra, OP
2+ OQ
2> PQ
2. Mentre se π
2< α < π,
abbiamo OP2+ OQ
2< PQ
2. Analogamente si prova che se OP
2+ OQ
2> PQ
2, allora
0 < α < π2mentre se OP
2+OQ
2< PQ
2, allora π
2< α < π.
Siano ~v =−→OP e ~w =
−→OQ due vettori non nulli e non paralleli. L’angolo in O del triangolo
OPQ (non orientato e di misura in radianti compreso fra 0 e π) si chiama l’angolo formato
dai due vettori non nulli ~v e ~w e si denota col simbolo ~v ~w.
Nel seguito confonderemo ~v ~w con la sua misura in radianti.
Se ~v e ~w sono non nulli e paralleli poniamo ~v ~w = 0 se ~v e ~w hanno lo stesso verso, ~v ~w = πse ~v e ~w hanno verso opposto.
Si osservi che ~v ~w = π2se e solo se ~v⊥ ~w (~v e ~w sono ortogonali).
Teorema 16.5 Siano ~v e ~w due vettori. Allora
84

1. |~v|2 + |~w|2 > |~v − ~w|2 se e solo se 0 ≤ ~v ~w < π2;
2. |~v|2 + |~w|2 = |~v − ~w|2 se e solo se ~v ~w = π2;
3. |~v|2 + |~w|2 < |~v − ~w|2 se e solo se π2≤ ~v ~w ≤ π.
Dimostrazione. (Dimostrazione obbligatoria) Se ~v ~w = 0 o ~v ~w = π, la tesi segue
facilmente. Sia ora ~v 6= ~O e ~w 6= ~O. Posto ~v =−→OP e ~w =
−→OQ si ha |~v − ~w| = PQ e il
risultato segue dal Teorema 16.4.
Convenendo che il vettore nullo ~O =
(00
)puo essere considerato sia parallelo che
ortogonale ad un qualsiasi altro vettore ~w, il seguente corollario e conseguenza immediatadel Teorema 16.5 e della definizione di modulo di un vettore.
Corollario 16.1 Siano ~v =
(vxvy
)e ~w =
(wx
wy
). Allora
1. 0 ≤ ~v ~w < π2se e solo se vxwx + vywy > 0;
2. ~v ~w = π2se e solo se vxwx + vywy = 0;
3. π2≤ ~v ~w ≤ π se e solo se vxwx + vywy < 0.
Definizione 16.10 Prodotto scalare. Siano ~v =
(vxvy
)e ~w =
(wx
wy
)due vettori del
piano. Dicesi prodotto scalare o prodotto interno di ~v e ~w il numero reale ~v · ~w cosı definito:
~v · ~w =(vx vy
) ·(
wx
wy
)= vxwx + vywy.
Teorema 16.6 Si ha~v · ~w = |~v||~w| cos ~v ~w.
Dimostrazione. Poniamo ~v =−→OP =
(vxvy
)e ~w =
−→OQ =
(wx
wy
). Nel caso in cui
uno dei due vettori e nullo il teorema segue facilmente. Supponiamo ~v 6= ~O e ~w 6= ~O.
Dimostriamo il teorema solo nel caso in cui ~v =−→OP e ~w =
−→OQ siano come nella figura
seguente lasciando al lettore gli altri casi.
85

Si ha vx = |~v| cos ~v~i, vy = |~v| sin ~v~i, wx = |~w| cos ~w~i, wy = |~w| sin ~w~i e ~v ~w = ~v~i− ~w~i. Quindi
cos ~v ~w = cos(~v~i− ~w~i) = cos ~v~i cos ~w~i+ sin ~v~i sin ~w~i = vxwx+vywy
|~v||~w| , da cui la tesi.Si osservi che questo risultato si puo ottenere come conseguenza del teorema di Carnot.
Infatti, considerando il triangolo OPQ, si ha PQ = |~v − ~w| e, per il teorema di Carnot,
|~v − ~w|2 = |~v|2 + |~w|2 − 2|~v||~w| cos ~v ~w,cioe
(vx − wx)2 + (vy − wy)
2 = v2x + v2y + w2x + w2
y − 2|~v||~w| cos ~v ~w,da cui la tesi.
Si osservi che, nel corso della dimostrazione del precedente teorema, e stata ottenuta laseguente rilevante uguaglianza per due vettori non nulli ~v e ~w:
cos ~v ~w =~v · ~w
|~v||~w| =vxwx + vywy√
v2x + v2y√
w2x + w2
y
. (35)
Si osservi che ~v · ~v = |~v |2, ~i · ~i = ~j · ~j = 1 e ~i · ~j = ~j · ~i = 0. Dal Corollario 16.1segue infine che:
1. ~v · ~w > 0 se e solo se 0 ≤ ~v ~w < π2;
2. ~v · ~w = 0 se e solo se ~v ~w = π2;
3. ~v · ~w < 0 se e solo se π2< ~v ~w ≤ π.
Proposizione 16.4 Il prodotto scalare gode delle seguenti proprieta:
1. Associativa: (a~v) · ~w = a(~v · ~w).
2. Commutativa: ~v · ~w = ~w · ~v.3. Distributiva: ~v · (~u+ ~w) = ~v · ~u+ ~v · ~w.
86

17 Vettori applicati dello spazio
Analogamente ai vettori applicati del piano possiamo definire i vettori applicati dello spa-zio. Omettiamo di ripetere (perche del tutto equivalenti) le definizioni di vettore applicato,vettore nullo, uguaglianza fra vettori, somma di vettori, vettore opposto, prodotto di unoscalare per un vettore.
Ovviamente se ~v =−→OP e un vettore e nello spazio fissiamo un sistema di coordinate
cartesiane O~x~y~z, le coordinate (a, b, c) di P si chiamano le componenti di ~v e si indicano convx, vy e vz. Il modulo di ~v e quindi
|~v | =√
v2x + v2y + v2z .
I versori fondamentali sono
~i =
100
, ~j =
010
, ~k =
001
.
Teorema 17.1 Scomposizione. Per ogni vettore ~v si ha
~v = vx~i+ vy~j + vz~k.
Cioe ogni vettore si puo scomporre in modo unico nella somma di un vettore avente ladirezione dell’asse ~x, di un vettore avente la direzione dell’asse ~y e di un vettore avente ladirezione dell’asse ~z; e questi tre vettori si ottengono moltiplicando i versori fondamentaliper le componenti di ~v.
87

Se ~v = vx~i+ vy~j + vz~k, ~w = wx~i+ wy
~j + wz~k e a ∈ R, si ha
~v + ~w = (vx + wx)~i+ (vy + wy)~i+ (vz + wz)~k,
a~v = (avx)~i+ (avy)~j + (avz)~k.
Due vettori non nulli ~v e ~w sono paralleli se e solo se esiste t ∈ R, t 6= 0, tale che ~w = t~v(cioe wx = tvx, wy = tvy e wz = tvz). Si vede facilmente che
~v//~w ⇐⇒ vxwy − vywx = vywz − vzwy = vxwz − vzwx = 0.
Le definizione di angolo e di prodotto scalare fra due vettori applicati coincidono conquelle date nel piano. Ovviamente si ha
~v · ~w = vxwx + vywy + vzwz,
cos ~v ~w =~v · ~w
|~v || ~w | =vxwx + vywy + vzwz√
v2x + v2y + v2z√
w2x + w2
y + w2z
.
In particolare ~v e ~w sono ortogonali se e solo se vxwx + vywy + vzwz = 0.
Definizione 17.1 Coseni direttori. Sia ~v un vettore non nullo. Si dicono coseni direttoridi ~v i coseni che ~v forma con gli assi coordinati. Abbiamo quindi
cos ~v~i =vx√
v2x + v2y + v2z,
cos ~v~j =vy√
v2x + v2y + v2z,
cos ~v~k =vz√
v2x + v2y + v2z.
Corollario 17.1 La somma dei quadrati dei coseni direttori di un vettore non nullo e ugualead 1.
Definizione 17.2 Prodotto vettoriale. Siano ~v e ~w due vettori. Dicesi prodotto vetto-riale di ~v e ~w il vettore ~v ∧ ~w coincidente col vettore nullo se ~v e ~w sono paralleli oppure, se
non sono paralleli, con il vettore avente modulo uguale a |~v || ~w | sin ~v ~w, direzione ortogonaleal piano individuato da ~v e ~w e verso come indicato nella seguente figura
88

Si osservi che, se ~v e ~w sono non nulli, il verso di ~v ∧ ~w e determinato dalla Regola dellamano sinistra: si dispongano le tre dita della mano sinistra pollice, indice e medio in modoche l’indice sia ortogonale al piano formato dal pollice e dal medio. Se il pollice indica ilverso di ~v e il medio quello di ~w, allora l’indice indichera il verso di ~v ∧ ~w.
Si ha
∧ ~i ~j ~k
~i ~O ~k −~j
~j −~k ~O ~i
~k ~j −~i ~O
Proposizione 17.1 Il prodotto vettoriale gode delle seguenti proprieta:
1. Se ~v e ~w sono non nulli, allora ~v ∧ ~w = ~O se e solo se ~v//~w. Abbiamo quindi che ~v e~w sono paralleli se e solo se vxwy − vywx = vywz − vzwy = vxwz − vzwx = 0.
89

2. (a~v) ∧ ~w = a(~v ∧ ~w) e ~v ∧ (a~w) = a(~v ∧ ~w).
3. ~v ∧ (~w + ~u) = ~v ∧ ~w + ~v ∧ ~u e (~v + ~w) ∧ ~u = ~v ∧ ~u+ ~w ∧ ~u.
4. ~v ∧ ~w = −(~w ∧ ~v).
Si noti che, in generale, il prodotto vettoriale non gode della proprieta associativa.
Teorema 17.2 Siano ~v = vx~i+ vy~j + vz~k e ~w = wx~i+ wy
~j + wz~k, allora
~v ∧ ~w =
∣∣∣∣∣∣
~i ~j ~kvx vy vzwx wy wz
∣∣∣∣∣∣.
Dimostrazione. Ricordando la Proposizione 17.1, abbiamo
~v ∧ ~w = (vx~i+ vy~j + vz~k) ∧ (wx~i+wy
~j +wz~k) =
∣∣∣∣vy vzwy wz
∣∣∣∣~i−∣∣∣∣vx vzwx wz
∣∣∣∣~j +∣∣∣∣vx vywx wy
∣∣∣∣ =
=
∣∣∣∣∣∣
~i ~j ~kvx vy vzwx wy wz
∣∣∣∣∣∣.
Definizione 17.3 Prodotto misto. Dicesi prodotto misto dei tre vettori ~u, ~v e ~w (e sidenota con ~u · ~v∧ ~w), il numero reale che si ottiene facendo il prodotto scalare fra ~u e ~v∧ ~w.
Se almeno uno dei tre vettori e nullo oppure se ~v//~w allora ~u · ~v ∧ ~w = 0. Si ha inoltre
Teorema 17.3 Il prodotto misto ~u · ~v ∧ ~w e uguale a zero se e solo se i tre vettori sonocomplanari.
Teorema 17.4 Se ~u = ux~i+ uy
~j + uz~k, ~v = vx~i+ vy~j + vz~k e ~w = wx
~i+ wy~j + wz
~k, allora
~u · ~v ∧ ~w =
∣∣∣∣∣∣
ux uy uz
vx vy vzwx wy wz
∣∣∣∣∣∣.
18 Vettori liberi
Un vettore libero e un segmento orientato libero di muoversi nello spazio senza cambiarelunghezza, direzione e verso. Se AB e un segmento orientato da A a B, esso rappresentaun vettore libero. Un altro segmento CD orientato da C a D rappresenta lo stesso vettorelibero se e solo se i due segmenti giacciono su rette parallele (o sulla stessa retta), hanno lastessa lunghezza e sono orientati concordemente.
90
Il vettore libero ~v rappresentato dal segmento AB si denota col simbolo B − A o anchecon le stesse notazioni dei vettori applicati.
Indicato con V l’insieme di tutti i vettori applicati dello spazio, definiamo su di esso la
seguente relazione L: il vettore applicato−→AB e in relazione L col vettore applicato
−−→CD se e
solo se essi giacciono su rete parallele (o sulla stessa retta), hanno lo stesso modulo e sonoorientati concordemente.
Si vede facilmente che L e una relazione di equivalenza su V e ogni classe di equivalenzapuo essere identificata con un vettore libero.
Se ~v = B − A e un vettore libero e R e un punto qualsiasi dello spazio, esiste un unicopunto S tale che ~v = S−R. In particolare, se O e un punto fissato dello spazio, ogni vettorelibero ~v si puo scrivere come P − O (per un opportuno punto P ). Cioe a ~v corrisponde il
vettore−→OP applicato in O.
Il modulo di un vettore libero e la lunghezza di uno qualunque dei segmenti che lorappresentano.
Si faccia attenzione a non confondere il vettore libero P − O col vettore applicato in O,−→OP , che lo rappresenta.
Per effettuare una qualunque operazione con i vettori liberi basta applicarli in uno stessopunto, effettuare la corrispondente operazione fra i vettori applicati, e prendere il risultatoottenuto convenendo che, se il risultato e un vettore, bisogna considerarlo come libero. Valeinoltre la seguente proposizione.
Proposizione 18.1 Regola della poligonale. Per sommare due o piu vettori liberi,~v1, ~v2, . . . , ~vn (n ≥ 2, si scrive ~v1 = P1 − P0, ~v2 = P2 − P1, . . ., ~vn = Pn − Pn−1, e si
91

somma formalmente
~v1 + ~v2 + . . .+ ~vn = (P1 − P0) + (P2 − P1) + . . .+ Pn − Pn−1 = Pn − P0.
Se ~v = B − A e un vettore libero con A ≡ (x1, y1, z1) e B ≡ (x2, y2, z2), le componentidel vettore libero ~v sono
vx = x2 − x1, vy = y2 − y1, vz = z2 − z1.
Risulta|~v | = |AB| =
√(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2.
19 Rette del piano e loro equazioni
Una retta r del piano si puo individuare assegnando per esempio:
1. un punto P0 di r e un vettore ~v non nullo ortogonale ad r; oppure
2. un punto P0 di r e un vettore ~w non nullo parallelo ad r; oppure
3. due punti distinti P1 e P2 di r.
Caso 1: Equazione cartesiana della retta. Siano P0 ≡ (x0, y0) un punto di r e ~v =(ab
)un vettore ortogonale ad r. Un punto P ≡ (x, y) del piano appartiene ad r se
e solo se il vettore P − P0 e ortogonale a ~v. Cioe se e solo se
~v · (P − P0) = 0. (36)
La (36) si chiama equazione vettoriale della retta. Da essa segue
(a b
) ·(
x− x0
y − y0
)= 0,
a(x− x0) + b(y − y0) = 0,
ax+ by − ax0 − by0 = 0.
ove, posto c = −ax0 − by0, si ha
ax+ by + c = 0 con (a, b) 6= (0, 0), (37)
detta equazione cartesiana della retta.
Si osservi che per ogni k ∈ R, k 6= 0, l’equazione kax+kby+kc = 0 (con (a, b) 6= (0, 0))e la (37) rappresentano la stessa retta. Viceversa, se ax+by+cz = 0 e a′x+a′y+b′z = 0
92

rappresentano una stessa retta, allora esiste un numero reale k 6= 0 tale che a′ = ka,b′ = kb e c′ = kc.
Se b 6= 0, la (37) puo scriversi
y = −a
bx− c
b,
la quale, posto m = −abe n = − c
b, diventa
y = mx+ n
e viene detta l’equazione esplicita della retta.
Caso 2: Equazioni parametriche della retta. Sia r la retta passante per il punto P0 ≡(x0, y0) e parallela al vettore non nullo ~w =
(lm
)= l~i + m~j. Il punto P ≡ (x, y)
appartiene ad r se e solo se P − P0//~w, cioe P − P0 = t~w (vedasi Proposizione 16.3).
Quindi si ha
(x− x0
y − y0
)= P − P0 = t~w =
(tltm
), da cui
{x = x0 + lty = y0 +mt
, (38)
dette le equazioni parametriche di r. Si osservi che, per t = 0, il punto P coincide conP0.
Per passare dalla rappresentazione parametrica a quella cartesiana di r basta eliminareil parametro t tra le (38). Cioe:(1) Se l 6= 0 e m 6= 0 si ha t = x−x0
le t = y−y0
me quindi l’equazione cartesiana di r e
x− x0
l=
y − y0m
.
(2) Se l = 0 e quindi, essendo ~w 6= 0, m 6= 0 le (38) diventano
{x = x0
y = y0 +mt,
da cui l’equazione cartesiana di r e x = x0.(3) Se m = 0 e quindi l 6= 0 si ha, analogamente al caso precedente, la seguenteequazione cartesiana
y = y0.
Viceversa il passaggio dalla rappresentazione cartesiana alla parametrica si puo farenel seguente modo. Essendo ~v = a~i+ b~j ortogonale ad r, ~w = b~i+ (−a)~j e ortogonalea ~v (vedasi (35)). Quindi ~w e parallelo ad r. Inoltre:
93

(1) Se b 6= 0 si ha che P0 ≡ (0,− cb) e un punto della retta r di rappresentazione
cartesiana ax+ by + c = 0 e, in tal caso, le equazioni parametriche di r sono
{x = bty = − c
b− at
.
(2) Se a 6= 0, allora P0 ≡ (− ca, 0) e un punto della retta r di rappresentazione cartesiana
ax+ by + c = 0 e, in tal caso, le equazioni parametriche di r sono
{x = − c
a+ bt
y = −at.
Caso 3: Retta r per i due punti distinti A ≡ (x1, y1) e B ≡ (x2, y2). Un vetto-
re parallelo ad r e ~w = B − A =
(x2 − x1
y2 − y1
). Quindi r ha le seguenti equazioni
paramentriche {x = x1 + t(x2 − x1)y = y1 + t(y2 − y1)
,
dalle quali si puo ricavare, col procedimento descritto sopra, l’equazione cartesiana.Quindi l’equazione della retta r passante per i due punti distinti A ≡ (x1, y1) e B ≡(x2, y2) e:
• x−x1
x2−x1= y−y1
y2−y1se x2 − x1 6= 0 e y2 − y1 6= 0;
• x = x1 se x2 − x1 = 0 (quindi y2 − y1 6= 0);
• y = y1 se y2 − y1 = 0 (quindi x2 − x1 6= 0).
Riassumendo l’equazione della retta del piano passante per i due punti distinti A ≡(x1, y1) e B ≡ (x2, y2) e ∣∣∣∣∣∣
x y 1x1 y1 1x2 y2 1
∣∣∣∣∣∣= 0.
La seguente tabella riassume le condizioni di parallelismo e perpendicolarita fra due retter e r′.
94

RETTE PARALLELISMO ORTOGONALITA
r) ax+ by + c = 0
(ab
)//
(a′
b′
)cioe
(ab
)⊥
(a′
b′
)cioe
r′) a′x+ b′y + c′ = 0 ab′ − a′b = 0 aa′ + bb′ = 0
r) ax+ by + c = 0
(ab
)⊥
(lm
)cioe
(ab
)//
(lm
)cioe
r′){
x = x0 + lty = y0 +mt
al + bm = 0 am− bl = 0
r)
{x = x0 + lty = y0 +mt
(lm
)//
(l′
m′
)cioe
(lm
)⊥
(l′
m′
)cioe
r′){
x = x′0 + l′ρ
y = y′0 +m′ρlm′ −ml′ = 0 ll′ +mm′ = 0
Esempio 19.1 Scrivere l’equazione della retta r passante per P0 ≡ (1,−3) e parallela a
~w =
(21
).
SVOLGIMENTO. Si ha {x = 1 + 2ty = −3 + t
,
da cui (eliminando t) x−12
= y + 3.
Esempio 19.2 Scrivere l’equazione della retta s passante per P0 ≡ (1,−3) ed ortogonale a~v = (2, 1). Scrivere le equazioni parametriche di s.
SVOLGIMENTO. Si ha ~v · (P −P0) = 0,(2 1
) ·(
x− 1y + 3
)= 0. Quindi l’equazione di s
e 2(x−1)+y+3 = 0. Per trovare le sue equazioni parametriche basta scrivere la precedente
95

equazione come x− 1 = −y+32
e porre
{x− 1 = t−y+3
2= t
, da cui
{x = 1 + ty = −3− 2t
Esempio 19.3 Scrivere l’equazione della retta r passante per i punti A ≡ (1,−3) e B ≡(1, 4).
SVOLGIMENTO. I due punti hanno la stessa ascissa. Quindi r ha equazione x = 1.
Esempio 19.4 Determinare l’intersezione fra le due rette distinte r) ax + by + c = 0 es) a′x+ b′y + c′ = 0.
SVOLGIMENTO. L’intersezione fra r ed r′ e data dall’insieme dei punti P le cui coordinatesono soluzioni del sistema lineare
{ax+ by + c = 0a′x+ b′y + c′ = 0
. (39)
Supponiamo dapprima che ab′ − a′b = 0, cioe che il vettore ~v =
(ab
)(ortogonale ad r) e
parallelo al vettore ~w =
(a′
b′
)(ortogonale ad r′). In tal caso il sistema (39) o ha infinite
soluzioni oppure e impossibile (si veda il Teorema 15.11). Piu precisamente, posto
A =
(a ba′ b′
)e B =
(a b ca′ b′ c′
),
si ha, nella nostra ipotesi, r(A) = 1 (vedasi Definizione 15.5). Se anche r(B) = 1 il sistema(39) ha infinite soluzioni e quindi r coincide con r′. Se r(B) = 2, (39) e impossibile, quindir ∩ r′ = ∅. In entrambi i casi diremo che r e r′ sono parallele.
Sia ora ab′ − a′b 6= 0. Per il teorema di Cramer 15.10, (39) ha una ed una sola soluzione.Essa fornisce le coordinate dell’unico punto intersezione fra le rette r ed r′.
Teorema 19.1 La distanza fra il punto P0 ≡ (x0, y0) dalla retta r di equazione ax + by +cz + d = 0 e data da
d(P0, r) =|ax0 + by0 + c|√
a2 + b2.
Se b 6= 0 l’equazione della retta r)ax+ by + c = 0 puo essere scritta nella forma esplicita
y = −a
bx− c
b.
Il numero m = −abdicesi coefficiente angolare di r. Se b = 0 r non ha coefficiente angolare.
Si puo dimostrare che m = tanα essendo α l’angolo fra il semiasse positivo delle ascissee la retta r rappresentato in figura:
96

Se A ≡ (x1, y1) e B ≡ (x2, y2) con x1 6= x2 allora la retta r passante per A e B hacoefficiente angolare dato da
m =y2 − y1x2 − x1
.
Teorema 19.2 Le due rette r) y = mx + n e r′) y = m′x + n′ sono ortogonali se e solo semm′ = −1.
20 Coordinate omogenee nel piano
Si definisca su R3 \ {(0, 0, 0)} la seguente relazione R:
(α, β, γ)R (α′, β′, γ′) ⇐⇒ esiste k ∈ R, k 6= 0 tale che α′ = kα, β′ = kβ, γ′ = kγ.
Si verifica facilmente che la relazione R sopra definita e di equivalenza. Ad ogni (α, β, γ) ∈R3 \ {(0, 0, 0)} resta cosı associata la classe di equivalenza
[(α, β, γ)] ={(α′, β′, γ′) ∈ R3 \ {(0, 0, 0)} | (α′, β′, γ′)R(α, β, γ)
}.
Ogni punto P del piano, rispetto al sistema O~x~y, viene identificato tramite le sue coor-dinate (x, y); esse verranno dette le coordinate non omogenee del punto P e P viene dettopunto proprio. Ad ogni punto P ≡ (x, y) possiamo associare [(x, y, 1)] = {(t′x, t′y, t′) | t′ ∈R, t′ 6= 0}. Ognuna delle terne (x′, y′, t′) ∈ [(x, y, 1)] viene detta coordinate omogenee di P .
Si osservi che se (x′, y′, t′) sono le coordinate omogenee del punto P ≡ (x, y), allorax′ = t′x e y′ = t′y. Possiamo quindi dire che ad ogni terna (x′, y′, t′) con t′ 6= 0 corrispondeil punto P ≡ (x
′t′ ,
y′t′ ). Ovviamente questa corrispondenza e suriettiva ma non iniettiva.
Se consideriamo una terna (x′, y′, 0), ad essa non corrisponde alcun punto proprio P delpiano. Diremo per definizione che alla terna (x′, y′, 0) ∈ R3 \{(0, 0, 0)} corrisponde un nuovopunto P del piano, detto punto improprio.
Ovviamente nella rappresentazione cartesiana i punti impropri non possono essere rap-presentati. Per esempio ogni terna di [(1, 2, 0)] rappresenta un punto improprio del piano.
97

Si consideri la retta r di equazione ax+by+c = 0. Sia P ≡ (x, y) ∈ r. Rappresentando Pin coordinate omogenee abbiamo P ≡ (t′x, t′y, t′) qualunque sia t′ ∈ R \ {0}. Posto x′ = t′xe y′ = t′y, l’equazione di r diventa ax′
t′ + by′t′ + c = 0, da cui
ax′ + by′ + ct′ = 0, (40)
che e detta l’equazione omogenea della retta r.Si osservi che il punto improprio (b,−a, 0) verifica la (40) (sostituendo ovviamente b al
posto di x′, −a al posto di y′ e 0 al posto di t′). Si vede facilmente che tutte le soluzionidiverse da (0, 0, 0) del sistema
{t′ = 0ax′ + by′ + ct′ = 0
sono date da k(b,−a, 0) per ogni k ∈ R \ {0}.L’insieme di tutti i punti impropri del piano viene chiamato retta impropria e, ovviamente,
la sua equazione e data da t′ = 0. Si ricordi che non tutte le soluzioni (α, β, γ) dell’equazionet′ = 0 sono le coordinate di un punto improprio.
Siano date le due rette distinte r ed r′, di equazioni omogenee rispettivamente ax′+ by′+ct′ = 0 e a′x′ + b′y′ + c′t′ = 0. Allora (bc′ − b′c, ca′ − ac′, ab′ − a′b) 6= (0, 0, 0), altrimenti lerette sarebbero coincidenti. Per trovare i punti comuni si deve risolvere il sistema formatodalle loro equazioni {
ax′ + by′ + ct′ = 0a′x′ + b′y′ + c′t′ = 0
. (41)
Ricordando la teoria riguardante i sistemi lineari, si vede che (41) oltre alla soluzione banaleha le seguenti soluzioni
(ρ(bc′ − b′c), ρ(ca′ − ac′), ρ(ab′ − a′b)) (42)
con ρ parametro arbitrario non nullo. Le (42) sono le coordinate omogenee di uno stessopunto (proprio o improprio) del piano. Quindi due rette distinte hanno sempre un solo puntoa comune di cui le (42) sono le coordinate omogenee.
Se ab′ − a′b 6= 0 le due rette si incontrano nel punto proprio di coordinate non omogenee(bc′−b′cab′−a′b ,
a′c−ac′ab′−a′b
), e le due rette si dicono incidenti.
Se invece ab′−a′b = 0 il punto comune alle due rette e improprio. Ed allora, se una dellerette, per esempio r′, e la retta impropria, esse si incontrano, come abbiamo visto, nel puntoimproprio (b,−a, 0) della retta r.Se entrambe le rette sono proprie, la condizione ab′ − a′b = 0 e la condizione di parallelismoed in tal caso, ponendo a′ = µa e b′ = µb, il sistema (41) ammette la soluzione (b,−a, 0).
In conclusione due rette distinte e proprie si incontrano in uno e un sol punto, che eimproprio se e solo se le rette sono parallele.
Siano date le due rette distinte r ed r′, di equazioni omogenee rispettivamente ax′+ by′+ct′ = 0 e a′x′ + b′y′ + c′t′ = 0. Definiamo fascio di rette individuato da r e r′ la totalita delle
98

rette la cui equazione si ottiene facendo una combinazione lineare delle equazioni delle duerette con λ e µ parametri non entrambi nulli:
λ(ax′ + by′ + ct′) + µ(a′x′ + b′y′ + c′t′) = 0. (43)
Per individuare una retta del fascio bisogna fissare λ e µ a meno di un fattore di poporzio-nalita (cioe bisogna fissare o λ
µoppure µ
λ).
Talvolta e utile scrivere l’equazione del fascio usando un solo parametro. Per esempio seλ 6= 0 (43) puo scriversi, posto µ
λ= h,
(ax′ + by′ + ct′) + h(a′x′ + b′y′ + c′t′) = 0.
Questa equazione contiene tutte le rette del fascio ad eccezione della retta
a′x′ + b′y′ + c′t′ = 0.
Si puo dimostrare che le rette del fascio individuato dalle rette (distinte) r ed r′ sonotutte e sole le rette passanti per il punto P = r ∩ r′. In particolare se P e un punto proprioallora le rette del fascio sono tutte e sole le rette passanti per esso, detto centro del fascio;se P e improprio allora r ed r′ sono parallele e le rette del fascio sono tutte le rette parallelealle rette date.
In coordinate non omogenee possiamo scrivere che l’equazione del fascio di rette passantiper P0 ≡ (x0, y0) e λ(x − x0) + µ(y − y0) = 0 per ogni λ, µ ∈ R con λ2 + µ2 6= 0. Mentrel’equazione del fascio di rette parallele alla retta ax+ by + c = 0 e ax+ by + λ = 0 per ogniλ ∈ R.
Esempio 20.1 Trovare, se esistono, le equazioni delle rette s passanti per P0 ≡ (−1, 1) eche formano con gli assi un triangolo di area assegnata uguale a 1
2.
SVOLGIMENTO. La retta s, qualora esista, appartiene al fascio
λ(x+ 1) + µ(y − 1) = 0.
Poiche s interseca entrambi gli assi cartesiani possiamo scrivere la precedente equazione nelseguente modo
k(x+ 1) + y − 1 = 0
ove si e posto k = λµ6= 0. Le intersezioni di s con gli assi cartesiani sono pertanto
A ≡ (0, 1− k), B ≡ (1− k
k, 0).
Posto O ≡ (0, 0) si ottiene il triangolo rettangolo OAB la cui area e data da
|OA||OB|2
=1
2|1− k|
∣∣∣∣1− k
k
∣∣∣∣ .
99

Abbiamo quindi1
2|1− k|
∣∣∣∣1− k
k
∣∣∣∣ =1
2,
∣∣∣∣(1− k)2
k
∣∣∣∣ = 1,
(1− k)2
|k| = 1,
k2 − 2k + 1 = |k|e, ricordando che k 6= 0, abbiamo due casi:
Caso k > 0. Si ha k2 − 3k + 1 = 0 da cui
k =3±√
5
2.
Per k = 3+√5
2otteniamo i punti
A ≡(0,−1 +
√5
2
), B ≡
(1−√
5
3 +√5, 0
).
Per k = 3−√5
2otteniamo i punti
A ≡(0,
−1 +√5
2
), B ≡
(−1 +
√5
3−√5, 0
).
Caso k < 0. Si ha k2 − k + 1 = 0 che non ha alcuna soluzione reale.
21 Isometrie e similitudini nel piano
(Tutte le dimostrazioni presentate in questo paragrafo sono obbligatorie anchese non appaiono sotto forma di teorema)
Un’isometria piana e un’applicazione del piano in se che conserva la distanza. Se deno-tiamo il piano con R2, un’applicazione f : R2 → R2 e un’isometria se e solo se comunquepresi due punti P e Q in R2, si ha d(f(P ), f(Q) = |f(P )f(Q)| = |PQ| = d(P,Q).
Proposizione 21.1 Sia f un’isometria piana. Allora:
• f e biunivoca e continua;
• se i punti P , Q ed R giacciono su una stessa retta, allora anche i punti corrispondentif(P ), F (Q), F (R) giacciono su una stessa retta;
100

• due segmenti corrispondenti sono uguali;
• due triangoli corrispondenti sono uguali;
• due angoli corrispondenti sono uguali.
L’insieme delle isometrie del piano, con l’operazione di composizione (prodotto di dueapplicazioni) e un gruppo, giacche:
- la composizione di due isometrie e un isometria;
- la composizione di due isometrie e associativa;
- l’identita e un’isometria;
- per ogni isometria esiste la sua inversa.
Sono esempi di isometrie piane: la traslazione di un vettore ~v; la rotazione di centro unpunto P0 e angolo α; la riflessione rispetto a una retta r; la glissoriflessione di asse r e vettore~v.
Sia f : R2 → R2 un’applicazione del piano in se. Un punto P ∈ R2 si dice fisso sottol’azione della f se f(P ) = P (il punto P viene mandato in se stesso).
Una retta r ⊂ R2 si dice fissa sotto l’azione della f se f(P ) ∈ r se e solo se P ∈ r; intal caso scriveremo f(r) = r.
Traslazione di un vettore ~v. La traslazione di un vettore ~v e quell’applicazione, tv, che
ad ogni punto P del piano associa il punto P1 = tv(P ) tale che−−→PP1 = ~v.
Due segmenti corrispondenti sotto l’azione di una traslazione oltre ad essere uguali sonopure paralleli (sono equipollenti).
Se ~v 6= 0, tv non ha punti fissi, mentre ogni retta parallela a ~v e fissa.Fissato nel piano il sistema di riferimento cartesiano ortogonale O~x~y e posto ~v = (a, b),
la traslazione piana tv : R2 → R2 fa corrispondere al punto P ≡ (x, y) il punto P1 ≡ (x1, y1)tale che x1 = x+ a e y1 = y+ b. Convenendo di rappresentare sia i vettori che le coordinatedi un punto come vettori colonna, possiamo scrivere
(x1
y1
)= tv
(xy
), ovvero
(x1
y1
)=
(x+ ay + b
), essendo ~v =
(ab
).
101

Riassumendo la traslazione tv puo essere rappresentata nel seguente modo(
x1
y1
)=
(xy
)+
(ab
). (44)
Esempio 21.1 Sia ~v =
(20
)e sia r la retta di equazione 3x + 2y = 12. Determinare
l’equazione della retta traslata di r sotto l’azione di tv o, in altre parole, l’equazione di tv(r).
SVOLGIMENTO. Si ha
tv
(xy
)=
(x1
y1
)=
(x+ 2y
),
da cui {x1 = x+ 2y1 = y
,
{x = x1 − 2y = y1
,
e, sostituendo nell’equazione di r i valori trovati, otteniamo
tv(r)) 3(x1 − 2) + 2y1 = 12.
Da cui, cambiando nome alle variabili, si ha che l’equazione richiesta e
3x+ 2y = 18.
Un altro modo per risolvere il precedente problema consiste nel determinare due puntiA,B ∈ r, calcolare A1 = tv(A) e B1 = tv(B) e quindi scrivere l’equazione della retta
passante per i punti A1 e B1. Per esempio si ha A ≡(
40
), B ≡
(06
), A1 ≡
(4 + 20 + 0
)
e B1 ≡(
0 + 26 + 0
). L’equazione della retta passante per A1 e B1 e
x− 6
−4=
y
6, ovvero 3x+ 2y = 18.
Esempio 21.2 Sia ~v =
(13
)e sia r la retta di equazione 2x + 3y = 6. Determinare
l’equazione della retta traslata di r sotto l’azione di tv o, in altre parole, l’equazione di tv(r).
SVOLGIMENTO. Procediamo come nell’Esempio 21.1. Si ha(
x1
y1
)=
(x+ 1y + 3
)=⇒
(xy
)=
(x1 − 1y1 − 3
).
Quindi l’equazione di tv(r) e
2(x1 − 1) + 3(y1 − 3) = 6,
102

2x+ 3y = 17.
Risolviamo lo stesso esercizio usando il secondo metodo. Due punti distinti di r sono:
A ≡(
30
), B ≡
(02
).
I traslati di A e B sono
A ≡(
3 + 10 + 3
), B ≡
(0 + 12 + 3
).
L’equazione della retta passante per A1 e B1 e
x− 4
1− 4=
y − 3
5− 3, ovvero 2x+ 3y = 17.
Come visto negli esercizi precedenti, vale la seguente proposizione.
Proposizione 21.2 Siano ~v =
(ab
)e P1 = tv(P ). Posto P ≡
(xy
)e P1 ≡
(x1
y1
), si
ha (xy
)=
(x1 − ay1 − b
). (45)
Come usualmente considerato in trigonometria, un angolo orientato e l’angolo generatodalla rotazione di una semiretta intorno alla propria origine; viene convenzionalmente con-siderato positivo se la rotazione avviene in verso antiorario, negativo in caso contrario. Lasemiretta di partenza e quella di arrivo si chiamano primo e secondo lato dell’angolo.
Rotazione di centro un punto P0 ed angolo α. La rotazione di centro P0 ed angolo α equell’applicazione ϕP0,α : R2 → R2 che ad ogni punto P ∈ R2 associa il punto P1 = ϕP0,α(P )
tale che |P0P | = |P0P1| e PP0P1 = α.
Si osservi che, sotto l’azione di ϕP0,α, l’unico punto fisso e P0 mentre si hanno rette fissese e solo se α e un multiplo di π, in tal caso esse sono tutte le rette per P0.
Cominciamo col considerare il caso in cui P0 ≡ O ≡(
00
)(rotazione attorno all’origine).
Sia P ≡(
xy
)e supponiamo che la retta OP formi un angolo γ con l’asse delle ~x. Vogliamo
determinare le coordinate del punto P1 = ϕO,α(P0). Per semplicita supponiamo α > 0 e che ipunti P e P1 si trovino nel primo quadrante (si veda la figura seguente). Allo stesso risultatosi perviene anche negli altri casi.
103

Ricordando che |OP | = |OP1|, si ha{
x = |OK| = |OP | cos γy = |KP | = |OP | sin γ ,
{x1 = |OH| = |OP | cos(α+ γ) = |OP | cosα cos γ − |OP | sinα sin γ = x cosα− y sinαy1 = |HP1| = |OP | sin(α+ γ) = |OP | sinα cos γ + |OP | cosα sin γ = x sinα+ y cosα
e quindi (x1
y1
)=
(cosα − sinαsinα cosα
)(xy
). (46)
In generale possiamo dire che, fissato un angolo α e supposte note le coordinate
(xy
)
di un punto P del piano, le coordinate
(x1
y1
)del punto P1 ottenuto ruotando attorno
all’origine P di un angolo α (si ricordi che il verso positivo delle rotazioni e quello antiorario)sono date dalla (46).
Consideriamo adesso il problema inverso: siano noti l’angolo α e le coordinate
(x1
y1
)
del punto P1 = ϕO,α(P ). Quali sono le coordinate di P?
Proposizione 21.3 Sia P1 = ϕO,α(P ). Posto P ≡(
xy
)e P1 ≡
(x1
y1
), si ha
(xy
)=
(cosα sinα− sinα cosα
)(x1
y1
). (47)
Dimostrazione. Dalla (46), ricavando
(xy
)in funzione di
(x1
y1
), abbiamo
(xy
)=
(cosα − sinαsinα cosα
)−1(x1
y1
).
104

Per completare la dimostrazione e sufficiente osservare che
(cosα − sinαsinα cosα
)−1
=
(cosα sinα− sinα cosα
).
Infatti si ha (cosα sinα− sinα cosα
)(cosα − sinαsinα cosα
)=
(1 00 1
).
Si osservi che l’applicazione rappresentata dalla (47) si ottiene applicando una rotazionedi −α alla (46) e cambiando il nome alle variabili. Quindi la (47) e l’applicazione inversadella (46).
Esempio 21.3 Sia r la retta di equazione x + y = 1. Scrivere l’equazione della retta sottenuta applicando a r una rotazione di centro l’origine e angolo α = π
4.
Ricordando la (47), abbiamo
(xy
)=
(cos π
4sin π
4
− sin π4
cos π4
)(x1
y1
)=
( √22
√22
−√22
√22
)(x1
y1
),
da cui
x =√22x1 +
√22y1
y = −√22x1 +
√22y1
.
Sostituendo nell’equazione di r otteniamo√2y1 = 1. Quindi, cambiando nome alle variabili,
l’equazione di s e y =√22.
Un altro procedimento per risolvere l’esercizio consiste nel fissare due punti distinti A,B ∈r, calcolare le coordinate dei punti A′ = ϕO,π
4(A) e B′ = ϕO,π
4(B) e, infine, scrivere
l’equazione della retta passante per A′ e B′. Essa coincide con l’equazione della retta s
cercata. Siano per esempio A ≡(
10
)e B ≡
(01
). Per la (46), si ha
A′ ≡(
cos π4
− sin π4
sin π4
cos π4
)(10
)=
( √22
−√22√
22
√22
)(10
)=
( √22√22
),
B′ ≡(
cos π4
− sin π4
sin π4
cos π4
)(01
)=
( √22
−√22√
22
√22
)(01
)=
(−
√22√22
).
Pertanto l’equazione della retta A′B′ e y1 =√22.
105

Esempio 21.4 Sia r la retta di equazione 2x − 3y = 1. Scrivere l’equazione della retta sottenuta applicando a r una rotazione di centro l’origine e angolo α = π
6.
Ricordando la (47), abbiamo
(xy
)=
(cos π
6sin π
6
− sin π6
cos π6
)(x1
y1
)=
( √32
12
−12
√32
)(x1
y1
),
da cui
x =√32x1 +
12y1
y = −12x1 +
√32y1
.
Sostituendo nell’equazione di r otteniamo (2√3+3)x1+(2−3
√3)y1 = 2. Quindi, cambiando
nome alle variabili, l’equazione di s e (2√3 + 3)x+ (2− 3
√3)y = 2.
Consideriamo adesso il caso generale di una rotazione di centro P0 ≡(
x0
y0
). Sia
P ≡(
xy
)un punto generico del piano. Vogliamo ricavare le coordinate
(x1
y1
)del punto
P1 = ϕP0,α(P ). Procediamo nel seguente modo:
1. Applichiamo una traslazione di ~v =
( −x0
−y0
), in tal modo i punti P0 e P vengono
traslati rispettivamente nell’origine e nel punto Q ≡(
x− x0
y − y0
).
2. Applichiamo una rotazione di centro O ≡ P0 ed angolo α (si veda la (46)). Allora Qviene ruotato nel punto
R ≡(
cosα − sinαsinα cosα
)(x− x0
y − y0
).
3. Il punto cercato P1 ≡(
x1
y1
)si ottiene traslando R di un vettore −~v =
(x0
y0
),
(x1
y1
)=
(cosα − sinαsinα cosα
)(x− x0
y − y0
)+
(x0
y0
). (48)
Procedendo in modo analogo alla Proposizione 21.3, si dimostra il seguente risultato.
Proposizione 21.4 Siano dati il punto P0 ≡(
x0
y0
)e l’angolo α. Se P1 = ϕP0,α(P ), con
P ≡(
xy
)e P1 ≡
(x1
y1
), allora
(xy
)=
(cosα sinα− sinα cosα
)(x1 − x0
y1 − y0
)+
(x0
y0
). (49)
106

Esempio 21.5 Sia r la retta di equazione x + y = 1. Scrivere l’equazione della retta sottenuta applicando a r una rotazione di centro P0 ≡ (3, 4) e angolo α = π
4.
Ricordando la (49), abbiamo
(xy
)=
(cos π
4sin π
4
− sin π4
cos π4
)(x1 − 3y1 − 4
)+
(34
)=
( √22
√22
−√22
√22
)(x1 − 3y1 − 4
)+
(34
),
da cui
x =√22x1 +
√22y1 +
6−7√2
2
y = −√22x1 +
√22y1 +
8−√2
2
.
Sostituendo nell’equazione di r otteniamo√2y1 + 7 − 4
√2 = 0. Quindi, cambiando nome
alle variabili, l’equazione di s e√2y + 7− 4
√2 = 0.
Esempio 21.6 Sia r la retta di equazione 2x − 3y = 1. Scrivere l’equazione della retta sottenuta applicando a r una rotazione di centro P0 ≡ (1, 2) e angolo α = π
6.
Ricordando la (49), abbiamo
(xy
)=
(cos π
6sin π
6
− sin π6
cos π6
)(x1 − 1y1 − 2
)+
(12
)=
( √32
12
−12
√32
)(x1 − 1y1 − 2
)+
(12
),
da cui
x =√32x1 +
12y1 −
√32
y = −12x1 +
√32y1 +
5−2√3
2
.
Sostituendo nell’equazione di r otteniamo (2√3+3)x1+(2−3
√3)y1+4
√3−17 = 0. Quindi,
cambiando nome alle variabili, l’equazione di s e (2√3 + 3)x+ (2− 3
√3)y + 4
√3− 17 = 0.
Un’applicazione f : R2 → R2 si dice lineare se per ogni
(xy
),
(xy
)∈ R2 e per ogni
λ, µ ∈ R si ha
f
(λ
(xy
)+ µ
(xy
))= λf
(xy
)+ µf
(xy
).
Si osservi che ϕO,α e un’applicazione lineare. Ricordando la (46), si ha infatti
ϕO,α
(λ
(xy
)+ µ
(xy
))=
(cosα − sinαsinα cosα
)(λx+ µxλy + µy
)=
= λ
(cosα − sinαsinα cosα
)(xy
)+µ
(cosα − sinαsinα cosα
)(xy
)= λϕO,α
(xy
)+µϕO,α
(xy
).
107

Si verifichi che, se P0 6=(
00
), allora ϕP0,α non e un’applicazione lineare.
Riflessione rispetto ad una retta. La riflessione rispetto alla retta r e quell’applicazioneδr(P ) che ad ogni punto P del piano associa il punto P1 = δr(P ) che sta sulla perpendicolaread r per P e tale che il punto medio di PP1 stia su r.
E chiaro che se P ∈ r allora P1 = δr(P ) = P , cioe ogni punto di r ha come corrispondentese stesso. Sotto l’azione di δr i punti fissi sono tutti e soli quelli di r. L’unica retta fissa e rstessa.
Cominciamo col considerare il caso in cui la retta r coincide con l’asse delle ascisse. Posto
P ≡(
xy
)e P1 = δr(P ) =
(x1
y1
), si ha
(x1
y1
)=
(x−y
). Quindi la riflessione nell’asse
delle ascisse si puo rappresentare nel seguente modo(
x1
y1
)=
(1 00 −1
)(xy
)(50)
Consideriamo ora il caso generale di una retta r passante per il punto P0 ≡ (x0, y0) eformante un angolo α col semiasse positivo delle ~x. Per ottenere le coordinate di P1 = δr(P )applichiamo, nell’ordine, le seguenti isometrie:
1. La traslazione del vettore ~v =
( −x0
−y0
)si ha
P ≡(
xy
)−→ Q1 ≡
(x− x0
y − y0
).
Si osservi che con la precedente applicazione P0 viene traslato nell’origine e la retta rnella retta r′ parallela ad r e passante per l’origine.
2. La rotazione di centro l’origine ed angolo −α. Per la (46), essendo cos(−α) = cosα esin(−α) = − sinα, abbiamo
Q1 −→ Q2 ≡(
cosα sinα− sinα cosα
)(x− x0
y − y0
).
Si osservi che, come risultato della precedente rotazione, r′ e coincide con l’asse delle~x.
3. La riflessione nell’asse ~x (si veda (50)
Q2 −→ Q3 ≡(
1 00 −1
)(cosα sinα− sinα cosα
)(x− x0
y − y0
).
4. La rotazione di centro l’origine ed angolo α
Q3 −→ Q4 ≡(
cosα − sinαsinα cosα
)(1 00 −1
)(cosα sinα− sinα cosα
)(x− x0
y − y0
),
108

Q4 ≡(
cos2 α− sin2 α 2 sinα cosα2 sinα cosα sin2 α− cos2 α
)(x− x0
y − y0
),
Q4 ≡(
cos 2α sin 2αsin 2α − cos 2α
)(x− x0
y − y0
).
5. La traslazione di −~v =
(x0
y0
)
Q4 −→ Q5 ≡(
cos 2α sin 2αsin 2α − cos 2α
)(x− x0
y − y0
)+
(x0
y0
).
Si osservi che Q5 coincide col punto P1 cercato.
In conclusione la riflessione nella retta r passante per P0 ≡(
x0
y0
)e formante un angolo α
col semiasse positivo delle ascisse si puo rappresentare nel seguente modo
(x1
y1
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x− x0
y − y0
)+
(x0
y0
). (51)
Dalla (51), procedendo in modo analogo alla Proposizione 21.3, segue il seguente risultato.
Proposizione 21.5 Sia r la retta passante per il punto P0 ≡ (x0, y0) e formante un angoloα col semiasse positivo delle ~x. Siano (x1, y1) le coordinate del punto P1 = δr(P ). Allora lecoordinate (x, y) di P sono date da
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − x0
y1 − y0
)+
(x0
y0
). (52)
Si osservi che, cambiando nome alle variabili, la (51) e la (52) coincidono. Questo risultatoera facilmente prevedibile in quanto la composizione di due riflessioni (ovviamente entrambenella stessa retta r) e l’identita. Si puo provare che δr e lineare se e solo se r passa perl’origine.
Esempio 21.7 Sia s la retta di equazione 2x − 3y = 1. Scrivere l’equazione della retta s′
ottenuta applicando ad s una riflessione nella retta r di equazione x+ y = 1.
Sia α l’angolo che r forma col semiasse positivo delle ascisse. Posto P0 ≡(
10
), per la (52),
abbiamo
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − 1y1 − 0
)+
(10
).
109

La retta r ha coefficiente angolare m = −1. Pertanto tanα = −1 e
cos 2α =1− tan2 α
1 + tan2 α= 0,
sin 2α =2 tanα
1 + tan2 α= −1.
Quindi (xy
)=
( −y1 + 1−x1 + 1
),
Sostituendo nell’equazione di s otteniamo
s′) 2(−y1 + 1)− 3(−x1 + 1) = 1.
Esempio 21.8 Sia s la retta di equazione x − 2y = 1. Scrivere l’equazione della retta s′
ottenuta applicando ad s una riflessione nella retta r di equazione 2x+ 3y = 1.
Sia α l’angolo che la retta r forma col semiasse positivo delle ascisse. Posto P0 ≡(
2−1
)∈ r,
per la (52), abbiamo
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − 2y1 + 1
)+
(2−1
).
La retta r ha coefficiente angolare m = −23. Pertanto tanα = −2
3e
cos 2α =1− tan2 α
1 + tan2 α=
5
13,
sin 2α =2 tanα
1 + tan2 α= −12
13.
Quindi (xy
)=
(513(x1 − 2)− 12
13(y1 + 1) + 2
−1213(x1 − 2)− 5
13(y1 + 1)− 1
),
s′)5
13(x1 − 2)− 12
13(y1 + 1)− 2
(−12
13(x1 − 2)− 5
13(y1 + 1)− 1
)= 1.
Glissoriflessione. Per glissoriflessione (o antitraslazione) di asse r e vettore di traslazioneil vettore ~v (parallelo a r) si intende la composizione δr,v = δr ◦ tv = tv ◦ δr della riflessionerispetto alla retta r con la traslazione del vettore ~v. Il fatto che il vettore ~v sia parallelo a rgarantisce che tale composizione gode della proprieta commutativa.
Sotto l’azione di δr,v (con ~v 6= ~O) non si hanno punti fissi, mentre l’unica retta fissa e rstessa.
110

Sia r la retta passante per il punto P0 ≡(
x0
y0
)e formante un angolo α col semiasse
positivo delle ascisse. Sia ~v =
(x− x0
y − y0
)il vettore della glissoriflessione. Allora, dovendo
essere ~v parallelo ad r, deve accadere che o x = x0 se r e parallela all’asse ~y, oppurey−y0x−x0
= tanα se r non e parallela all’asse ~y.Applicando opportunamente la (51) e la (45) si determinano le due rappresentazioni
della glissoriflessione a seconda che supponiamo δr,v = tv ◦ δr oppure δr,v = δr ◦ tv. Abbiamorispettivamente
P1 ≡(
x1
y1
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x− x0
y − y0
)+
(xy
), (53)
P1 ≡(
x1
y1
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x+ x− 2x0
y + y − 2y0
)+
(x0
y0
). (54)
Si osservi che la (53) e la (54), avendo i primi membri uguali, devono avere pure i secondimembri uguali. Vale infatti la seguente proposizione.
Proposizione 21.6 Il secondo membro della (53) e uguale al secondo membro della (54).
Dimostrazione. Possiamo supporrre che α e
(xy
)verifichino le seguenti condizioni:
1. 0 ≤ α < π (si ricordi che α e l’angolo che la retta r forma con il semiasse positivo delleascisse);
2. ~v 6= ~O, cioe
(xy
)6=
(x0
y0
)(se ~v = ~O la glissoriflessione coinciderebbe con la
riflessione nella retta r);
3. x = x0 se α = π2(caso in cui r e parallela all’asse ~y) oppure y−y0
x−x0= tanα se α 6= π
2
(caso in cui r non e parallela all’asse ~y).
Provare che(
cos 2α sin 2αsin 2α − cos 2α
)(x− x0
y − y0
)+
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x+ x− 2x0
y + y − 2y0
)+
(x0
y0
)
equivale a provare la seguente uguaglianza
(cos 2α sin 2αsin 2α − cos 2α
)(x− x0
y − y0
)=
(x− x0
y − y0
). (55)
Abbiamo i seguenti casi
111

Caso 1: α = π2. Allora x− x0 = 0 e la (55) equivale a
( −1 00 1
)(0
y − y0
)=
(0
y − y0
),
che e banalmente verificata.
Caso 2: α = 0. Allora y − y0 = 0 e la (55) equivale a(
1 00 −1
)(x− x0
0
)=
(x− x0
0
),
che e banalmente verificata.
Caso 3: α 6= 0, π2. Allora la (55) equivale a
(x− x0) cos 2α+ (y − y0) sin 2α = x− x0
(x− x0) sin 2α− (y − y0) cos 2α = y − y0
,
(x− x0)(cos2 α− sin2 α) + (y − y0)2 sinα cosα = x− x0
(x− x0)2 sinα cosα− (cos2 α− sin2 α)(y − y0) = y − y0
.
Essendo α 6= 0, π2abbiamo x − x0 6= 0, y − y0 6= 0. Quindi il sistema precedente e
equivalente a
cos2 α− sin2 α + 2 y−y0x−x0
sinα cosα = 1
2x−x0
y−y0sinα cosα− cos2 α + sin2 α = 1
.
Ricordando infine che y−y0x−x0
= tanα, abbiamo
cos2 α− sin2 α + 2 sinαcosα
sinα cosα = 1
2 cosαsinα
sinα cosα− cos2 α + sin2 α = 1
che sono banalmente verificate.
Dalle (53) e (54), procedendo in modo analogo alla Proposizione 21.3, segue il seguenterisultato.
Proposizione 21.7 Sia r la retta passante per il punto P0 ≡ (x0, y0) e formante un angoloα col semiasse positivo delle ~x. Siano (x1, y1) le coordinate del punto P1 = δr,v(P ). Allorale coordinate (x, y) di P sono date da
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − xy1 − y
)+
(x0
y0
), (56)
112

o, equivalentemente,
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − x0
y1 − y0
)+
(2x0 − x2y0 − y
). (57)
Esempio 21.9 Sia s la retta di equazione 2x − 3y = 1. Scrivere l’equazione della retta s′
ottenuta applicando ad s una glissoriflessione nella retta r di equazione x+ y = 1 di vettore
~v =
( −33
).
La retta r ha coefficiente angolare m = −1. Pertanto tanα = −1, cos 2α = 0 e sin 2α = −1.
Posto P0 ≡(
x0
y0
)=
(10
)∈ r e ~v =
(x− x0
y − y0
), abbiamo
(x− 1y
)=
( −33
),
da cui x = −2 e y = 3. Per la (56),
(xy
)=
(0 −1−1 0
)(x1 + 2y1 − 3
)+
(10
),
da cui {x = −y1 + 4y = −x1 − 2
.
Sostituendo nell’equazione di s otteniamo 2(−y1 + 4)− 3(−x1 − 2) = 1. Quindi, cambiandonome alle variabili, l’equazione di s′ e 3x− 2y + 13 = 0.
Se invece della (56) si applica la (57), abbiamo
(xy
)=
(0 −1−1 0
)(x1 − 1y1
)+
(4−3
),
pervenendo allo stesso risultato.
Una similitudine e un’applicazione f del piano in se che conserva i rapporti fra le distan-ze: esiste cioe una costante k > 0 tale che per ogni coppia di punti P e Q del piano siha d(f(P ), f(Q)) = |f(P )f(Q)| = k|PQ| = kd(P,Q). La costante k si dice rapporto disimilitudine. Ovviamente ogni isometria e una similitudine ma non viceversa.
Proposizione 21.8 Sia f una similitudine nel piano con rapporto k. Allora:
• f e un’applicazione biunivoca e continua;
• f manda rette in rette;
113

• f trasforma una circonferenza di centro P0 e raggio ρ in una circonferenza di centrof(P0) e raggio kρ;
• angoli corrispondenti mediante la f sono uguali;
• triangoli corrispondenti mediante f sono simili.
L’insieme delle similitudini del piano con la legge di composizione naturale (composizionedi applicazioni) e un gruppo. E da osservare pero che nella composizione di due similitudini, ilrapporto di similitudine e uguale al prodotto dei due rapporti di similitudine. Un interessanteesempio di similitudine e l’omotetia.
Un’omotetia di centro C e rapporto λ (λ ∈ R, λ 6= 0) e l’applicazione f = fC,λ del piano inse che fissa C e ad ogni punto P 6= C fa corrispondere il punto P1 = fC,λ(P ) che sta sullaretta CP , dalla stessa parte di P se λ > 0, dalla parte opposta di P se λ < 0 e tale ched(C,P1) = |λ|d(C,P ).
Proposizione 21.9 Valgono le seguenti proprieta:
- Un’omotetia di centro C e rapporto λ e una similitudine con rapporto di similitudine|λ|.
- Per λ = 1, si ottiene l’identita; per λ = −1, si ottiene il mezzogiro intorno al punto C.
- Ogni omotetia e un’applicazione biunivoca e quindi invertibile: l’inversa della omotetiafC,λ e l’omotetia di centro C e rapporto 1
λ.
- L’omotetia fC,λ fissa ogni retta passante per C.
- Le omotetie conservano la direzione: se r e una retta allora fC,λ(r) e una retta parallelaad r (vviamente se r passa per C allora fC,λ(r) = r).
Proposizione 21.10 L’omotetia di centro C ≡(
x0
y0
)e rapporto λ fa corrispondere al
punto P ≡(
xy
)il punto P1 ≡
(x1
y1
)definito dalla seguente legge
(x1
y1
)=
(λ 00 λ
)(x− x0
y − y0
)+
(x0
y0
). (58)
Dalla (58) segue subito che un’omotetia di centro O ≡(
00
)e un’applicazione lineare.
Proposizione 21.11 Sia f : R2 → R2 una generica similitudine. Allora l’espressioneanalitica di f e (
x1
y1
)=
(λ cosα −λ sinαλ sinα λ cosα
)(xy
)+
(xy
)(59)
114

oppure (x1
y1
)=
(λ cosα λ sinαλ sinα −λ cosα
)(xy
)+
(xy
)(60)
per un opportuno angolo α e un opportuno vettore
(xy
).
22 Piani e rette dello spazio e loro equazioni
(Tutte le dimostrazioni contenute in questo paragrafo sono obbligatorie anche senon appaiono sotto forma di teorema)
Fissato nello spazio un sistema di coordinate cartesiane O~x~y~z ad ogni punto P vengonoassegnate le coordinate reali non omogenee P ≡ (x, y, z).
Un piano reale π dello spazio si puo individuare assegnando:
1. un punto P0 di π e un vettore ~v non nullo ortogonale a π;
2. tre punti non allineati P0, P1 e P2 di π.
Caso 1: Equazione cartesiana del piano. Sia P0 ≡ (x0, y0.z0) un punto di π e sia
~v =
abc
6=
000
un vettore ad esso ortogonale. Un punto P ≡ (x, y, z) appartiene
a π se e solo se~v · (P − P0) = 0,
cioea(x− x0) + b(y − y0) + c(z − z0) = 0.
Quest’ultima equazione e detta l’equazione cartesiana del piano ed e equivalente allaseguente
ax+ by + cz + d = 0, a2 + b2 + c2 > 0.
Caso 2: Equazione vettoriale del piano. Siano P0 ≡ (x0, y0, z0), P1 ≡ (x1, y1, z1),P2 ≡ (x2, y2, z2), tre punti non allineati dello spazio. Allora esiste un unico pianoπ passante per essi. Esso puo vedersi come il piano per P0 ortogonale al vettore~v = (P1 −P0)∧ (P2 −P0) (che non e nullo, essendo i tre punti non allineati). Pertantosi ha
(P − P0) · (P1 − P0) ∧ (P2 − P0) = 0
che e l’equazione vettoriale di π. Essa puo scriversi
∣∣∣∣∣∣
x− x0 y − y0 z − z0x1 − x0 y1 − y0 z1 − z0x2 − x0 y2 − y0 z2 − z0
∣∣∣∣∣∣= 0.
115

Esempio 22.1 Siano ~v =
12−1
e P0 ≡ (2, 0, 3). L’equazione del piano π passante per
P0 e ortogonale a ~v e(1 2 −1
) ·
x− 2y
z − 3
= 0, ovvero x− 2 + 2y − (z − 3) = 0.
Esempio 22.2 Siano P0 ≡ (2, 0, 3), P1 ≡ (1,−1, 0) e P2 ≡ (0, 1, 0). Il piano passante perquesti tre punti ha equazione
∣∣∣∣∣∣
x− 2 y z − 31− 2 −1− 0 0− 30− 2 1− 0 0− 3
∣∣∣∣∣∣= 0.
Parallelismo ed ortogonalita fra piani. I due piani distinti π) ax + by + cz + d = 0 e
π′) a′x + b′y + c′z + d′ = 0 sono paralleli se e solo se i due vettori associati ~v =
abc
e
~w =
a′
b′
c′
(ortogonali rispettivamente a π e π′) sono paralleli. Cioe
π // π′ ⇐⇒ ~v = λ~w ⇐⇒ ~v ∧ ~w = ~O.
I piani π e π′ sono ortogonali se e solo se
~v ⊥ ~w ⇐⇒ aa′ + bb′ + cc′ = 0.
Equazioni parametriche di una retta. La retta r dello spazio passante per il punto
P0 ≡ (x0, y0, z0) e parallela a ~v =
lmn
e il luogo dei punti P ≡ (x, y, z) dello spazio tali
che P − P0 e parallelo a ~v. CioeP − P0 = t~v,
x− x0
y − y0z − z0
=
ltmtnt
,
x = x0 + lty = y0 +mtz = z0 + nt
che sono dette le equazioni parametriche di r. Le componenti (l,m, n) si chiamano i parametridirettori.
116

Equazioni della retta passante per due punti. Siano A ≡ (x1, y1, z1) e B ≡ (x2, y2, z2)due punti distinti dello spazio e sia r la retta passante per essi. Un vettore parallelo ad r e
~v = B − A =
x2 − x1
y2 − y1z2 − z1
. Le equazioni parametriche di r sono pertanto
x = x1 + t(x2 − x1)y = y1 + t(y2 − y1)z = z1 + t(z2 − z1)
. (61)
Se x1 6= x2, y1 6= y2 e z1 6= z2 dalle (61) si ricavano le seguenti equazioni di r
x− x1
x2 − x1
=y − y1y2 − y1
=z − z1z2 − z1
.
Se x1 = x2, y1 6= y2 e z1 6= z2 si ha
r)
{x = x1y−y1y2−y1
= z−z1z2−z1
.
Se x1 = x2, y1 = y2 e z1 6= z2 si ha
r)
{x = x1
y = y1,
e similmente si procede negli altri casi.
Intersezione fra piani dello spazio. Siano α e β due piani dello spazio e consideriamoα ∩ β. Si possono avere tre casi:
1. α ∩ β e una retta r; in tal caso i due piani si dicono incidenti;
2. α∩β contiene tutti i punti di α (e quindi di β); in tal caso i due piani si dicono parallelie coincidenti o, piu semplicemente, coincidenti;
3. α ∩ β non contiene alcun punto; in tal caso si dicono paralleli e distinti.
Per trovare α ∩ β si considera il sistema formato dalle due equazioni. esso risulta ri-spettivamente: risolubile con una incognita libera, risolubile con due incognite libere, nonrisolubile. Nel primo caso il sistema fornisce di per se una rappresentazione cartesiana di r.Per esempio siano α) ax + by + cz + d = 0 e β) a′x + b′y + c′z + d′ = 0 due piani nonparalleli (cioe (a, b, c) non e proporzionale ad (a′, b′, c′) o, equivalentemente, il sistema delleequazioni di α e β e risolubile con una incognita libera). Allora α e β si intersecano in unaretta r la cui rappresentazione cartesiana e
r)
{ax+ by + cz + d = 0a′x+ b′y + c′z + d′ = 0
.
117

Esempio 22.3 Siano π) 2x− y+ z − 1 = 0 e π′) x− z = 0. Poiche i due vettori
2−11
e
10−1
non sono proporzionali, i due piani dati individuano la retta
r)
{2x− y + z − 1 = 0x− z = 0
.
Per determinare un vettore ~v parallelo ad r basta scrivere le sue equazioni parametriche. Nelnostro esempio, posto z = t abbiamo
r)
y = 3t− 1x = tz = t
Quindi ~v =
131
.
Proposizione 22.1 Siano dati i piani α e β e le rette r ed s. Inoltre sia
• ~v un vettore ortogonale ad α,
• ~w un vettore ortogonale a β,
• ~u un vettore parallelo ad r,
• ~q un vettore parallelo ad s.
Allora
1. α//β se e solo se ~v//~w, cioe ~v ∧ ~w = ~O oppure esiste k 6= 0 tale che ~v = k ~w;
2. α ⊥ β se e solo se ~v ⊥ ~w, cioe se e solo se ~v · ~w = 0;
3. r//s se e solo se ~u//~q, cioe se e solo se ~u∧ ~q = ~O oppure esiste k 6= 0 tale che ~v = k~q;
4. r ⊥ s se e solo se ~u ⊥ ~q, cioe se e solo se ~u · ~q = 0;
5. α//r se e solo se ~v ⊥ ~u, cioe se e solo se ~v · ~u = 0;
6. α ⊥ r se e solo se ~v//~u, cioe se e solo se ~v ∧ ~u = ~O oppure esiste k 6= 0 tale che~v = k~u.
Intersezione di una retta e un piano. Siano α un piano e r una retta. Consideriamoα ∩ r. Si hanno tre casi:
118

• α ∩ r e un solo punto, allora diremo che α e r sono incidenti;
• α ∩ r coincide con r, allora diremo che r e parallela e giacente su α;
• α ∩ r non contiene nessun punto, allora diremo che r e parallela con α senza esservicontenuta.
Per trovare α ∩ r si puo procedere nel seguente modo:
1. Si trova un rappresentazione parametrica di r:
x = x0 + lty = y0 +mtz = z0 + nt
. (62)
2. Si sostituiscono i valori di (62) al posto delle variabili x, y e z nell’equazione ax+ by+cz + d = 0 del piano α.
3. Si risolve l’equazione di primo grado in t cosı ottenuta. Se α∩ r e un solo punto questaequazione ammette una ed una solo soluzione t0 la quale, sostituita al posto di t nelle(62), da le coordinate del punto intersezione. Se α∩ r = r l’equazione sara un’identita,mentre se α ∩ r = ∅ non sara risolubile.
Intersezione fra due rette. Siano r ed s due rette nello spazio. Consideriamo r ∩ s. Sihanno quattro casi:
1. r ∩ s e un solo punto; allora le rette si dicono incidenti;
2. r ∩ s non contiene alcun punto e le rette non giacciono su uno stesso piano; allora r es si dicono sghembe;
3. r ∩ s non contiene nessun punto e r ed s giacciono su uno stesso piano; allora esse sidicono parallele e distinte;
4. r ∩ s contiene infiniti punti; allora r ∩ s = r = s e le rette si dicono coincidenti.
Per trovare r ∩ s si puo procedere nel seguente modo:
a) Si trovano le equazioni parametriche delle rette
r)
x = x0 + lty = y0 +mtz = z0 + nt
s)
x = x′0 + l′t′
y = y′0 +m′t′
z = z′0 + n′t′
(con l’avvertenza di chiamare in modo diverso i paramentri nelle due rappresentazioni).
119

b) Si risolve il sistema lineare (nelle due incognite t e t′
x0 + lt = x′0 + l′t′
y0 +mt = y′0 +m′t′
z0 + nt = z′0 + n′t′.
Se r ∩ s e come nel caso 1, il sistema precedente e risolubile con una sola soluzione(t0, t
′0). I valori di t0 e t′0, sostituiti rispettivamente al posto di t e di t′ nelle equazioni
di r ed s, forniscono le coordinate del punto intersezione fra le due rette. Nei casi 2e 3 il sistema non ha soluzioni. Nel caso 4 il sistema ha infinite soluzioni (con unaincognita libera).
Angolo fra due rette. L’angolo fra due rette dello spazio e l’angolo formato da due vettorinon nulli paralleli rispettivamente alle due rette (si noti che si definisce l’angolo fra due retteanche se queste non sono incidenti).
Ovviamente, se due rette formano un angolo ϕ, esse formano anche l’angolo π − ϕ.
Sia ~v =
lmn
parallelo alla retta r e sia ~w =
l′
m′
n′
parallelo alla retta s. Allora
cos rs = ± cos ~v ~w e quindi
cos rs = ± ll′ +mm′ + nn′√l2 +m2 + n2
√l′2 +m′2 + n′2
.
Angolo fra due piani. L’angolo fra due piani e l’angolo formato da due vettori non nulliortogonali ai due piani. Se i due piani formano l’angolo ϕ allora essi formano pure l’angolo
π−ϕ. Pertanto, indicato con ~v =
abc
il vettore ortogonale al piano α e con ~w =
a′
b′
c′
il vettore ortogonale al piano β, si ha
cos αβ = ± aa′ + bb′ + cc′√a2 + b2 + c2
√a′2 + b′2 + c′2
.
Angolo fra una retta ed un piano non ortogonali. L’angolo fra una retta r ed unpiano α non ortogonali e dato dall’angolo acuto che r forma con la sua proiezione ortogonalesu α, e quindi e il complementare dell’angolo che un vettore non nullo parallelo ad r forma
con un vettore ortogonale ad α. Pertanto se ~v =
lmn
//r e ~w =
abc
⊥ α, si ha
sin rα = |cos~v ~w|, da cui
sin rα =|al + bm+ cn|√
a2 + b2 + c2√l2 +m2 + n2
.
120

23 Punti e rette improprie nello spazio
Analogamente alle coordinate omogenee nel piano introdotte nel paragrafo 20, si possonointrodurre le coordinate omogenee di un punto P nello spazio. Se P ≡ (x, y, z), allora lecoordinate omogenee di P sono date da una qualsiasi quaterna (x′, y′, z′, t′) tale che t′ 6= 0 ex = x′
t′ , y = y′t′ e z = z′
t′ .
Il punto P ≡ (x′, y′, z′, 0), con x′2 + y′2 + z′2 > 0, e detto punto improprio dello spazio.Se ax+ by + cz + d = 0 e l’equazione del piano α, allora
ax′ + by′ + cz′ + dt′ = 0 (63)
rappresenta l’equazione di α in forma omogenea.I punti impropri dello spazio sono caratterizzati dall’equazione t′ = 0 (si ricordi che
(0, 0, 0, 0) non e un punto improprio). Quindi la (63) rappresenta l’equazione di un pianoproprio se a2 + b2 + c2 > 0 oppure del piano improprio se a2 + b2 + c2 = 0.
Sia ax′+ by′+ cz′+dt′ = 0 l’equazione del piano proprio α (quindi si ha a2+ b2+ c2 > 0).I punti impropri di α si ottengono dal sistema
{t′ = 0ax′ + by′ + cz′ + dt′ = 0
,
{t′ = 0ax′ + by′ + cz′ = 0
.
Tale luogo di punti e detto la retta impropria del piano α.
Sia data la retta r di equazioni{
ax′ + by′ + cz′ + dt′ = 0a′x′ + b′y′ + c′z′ + d′t′ = 0
.
Il punto improprio di r si ottiene intersecando r col piano improprio; cioe risolvendo il sistema
t′ = 0ax′ + by′ + cz′ + dt′ = 0a′x′ + b′y′ + c′z′ + d′t′ = 0
. (64)
Se ~v =
lmn
e parallelo ad r, le sue componenti sono le prime tre coordinate del punto
improprio di r. Infatti i vettori ~w =
abc
e ~w′ =
a′
b′
c′
sono ortogonali rispettivamente
ai piani ax′ + by′ + cz′ + dt′ = 0 e a′x′ + b′y′ + c′z′ + d′t′ = 0, quindi sono ortogonali a r e alvettore ~v. Pertanto
~w ⊥ ~v =⇒ al + bm+ cn = 0,
~w′ ⊥ ~v =⇒ a′l + b′m+ c′n = 0.
Cio vuol dire che l, m e n soddisfano la seconda e terza equazione del sistema (64) e quindisono le prime tre coordinate del punto improprio di r.
121

Esempio 23.1 Determinare il punto improprio della retta r passante per i due punti P1 ≡(1, 0, 2) e P2 = (0, 2,−1).
SVOLGIMENTO. La retta r ha equazioni
x− 1
0− 1=
y − 0
2− 0=
z − 2
−1− 2,
da cui si ottengono le equazioni parametriche
x = 1− ty = 2tz = 2− 3t
.
Il vettore ~v =
−123
e parallelo a r. Quindi il suo punto improprio e (−1, 2,−3, 0).
Esempio 23.2 Scrivere l’equazione del piano passante per il punto P0 ≡ (2, 0,−1) ed orto-
gonale alla retta r)
{x− y = 02x+ z + 1 = 0
.
SVOLGIMENTO. Per determinare le componenti del vettore ~v parallelo ad r e sufficientescrivere le sue equazioni parametriche:
r)
{y = xz = −2x− 1
, r)
x = ty = tz = −2t− 1
.
Quindi ~v =
11−2
. L’equazione del piano cercato si ottiene scrivendo l’equazione del
piano passante per P0 ed ortogonale al vettore ~v:
(1 1 −2
) ·
x− 2y − 0
z − (−1)
= 0,
1(x− 2) + 1(y − 0)− 2(z + 1) = 0,
x+ y − 2z − 4 = 0.
Proposizione 23.1 La retta r e parallela alla retta r′ se e solo se hanno lo stesso puntoimproprio (si ricordi che in effetti un punto improprio (a, b, c, 0), a2 + b2 + c2 > 0, individuale infinite quaterne (ka, kb, kc, 0) al variare di k ∈ R).
Il piano α e parallelo al piano β se e solo se le loro rette improprie coincidono.
122

Fasci di piani. Dati due piani distinti α) ax+ by+ cz + d = 0 e β) a′x+ b′y+ c′z + d′ = 0,si definisce fascio Φ(α, β) di piani la totalita dei piani descritti dall’equazione
λ(ax+ by + cz + d) + µ(a′x+ b′y + c′z + d′) = 0
al variare di λ, µ ∈ R con λ2 + µ2 > 0.
Proposizione 23.2 Valgono le seguenti proprieta:
1. Per un punto dello spazio o passa un solo piano del fascio o passano tutti i piani delfascio.
2. Siano π e π′ due piani distinti del fascio Φ(α, β). Allora Φ(π, π′) = Φ(α, β).
3. Siano α e β due piani distinti. Detta r la retta intersezione di α con β, il fascio Φ(α, β)e formato da tutti e soli i piani contenenti r.
Distanza fra due punti dello spazio. La distanza fra i punti P1 ≡ (x1, y1, z1) e P2 ≡(x2, y2, z2) e
P1P2 = |P1P2| =√
(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2.
Distanza fra un punto ed un piano. La distanza fra il punto P0 ≡ (x0, y0, z0) e il pianoα) ax+ by + cz + d = 0 e data da
d(P0, α) =|ax0 + by0 + cz0 + d|√
a2 + b2 + c2.
Proiezione ortogonale di un punto su una retta. La proiezione ortogonale del puntoP0 sulla retta r e il punto intersezione fra r e il piano passante per P0 ed ortogonale ad r.
Distanza fra un punto ed una retta. La distanza fra il punto P0 e la retta r e data dallalunghezza del segmento avente per estremi P0 e la proiezione ortogonale di P0 su r.
Esempio 23.3 Calcolare la distanza fra il punto P0 ≡ (6, 0, 0) e la retta r)
x = ty = tz = 2t
.
SVOLGIMENTO. Il piano α passante per P0 ed ortogonale ad r e dato da
(1 1 2
) ·
x− 6y − 0z − 0
= 0.
Quindiα) x+ y + 2z − 6 = 0.
Per trovare il punto P1 = α ∩ r sostituiamo nell’equazione di α i valori di x, y e z dati nelleequazioni di r: t + t + 2(2t) − 6 = 0, da cui t = 1, quindi P1 ≡ (1, 1, 2) e la proiezioneortogonale di P0 su r. Si ha d(P0, r) = |P0P1| =
√25 + 1 + 4 =
√30.
123

Esempio 23.4 Trovare l’equazione della retta r passante per P0 ≡ (2, 0,−1) ed ortogonaleal piano α) 2x+ y − 3z + 2 = 0.
SVOLGIMENTO. Il vettore ~v =
21−3
e ortogonale ad α, quindi ~v//r. Allora l’equazione
di r coincide con quella della retta passante per P0 e parallela a ~v. Cioe
r)
x = 2 + 2ty = 0 + 1tz = (−1) + (−3)t
.
Esempio 23.5 Siano dati la retta r)
{x− y = 02x+ z + 1 = 0
e il piano α) x + y − 2z − 1 = 0.
Provare che r e α si intersecano in un punto P0. Determinare inoltre le equazioni della rettas passante per P0 e il punto Q ≡ (2, 0,−1).
SVOLGIMENTO. Le coordinate di P0 sono individuate dalla soluzione del sistema
x− y = 02x+ z + 1 = 0x+ y − 2z − 1 = 0
.
Quindi P0 ≡(−1
6,−1
6,−2
3
). Le equazioni di s sono
x− 2
−16− 2
=y − 0
−16− 0
=z + 1
−23+ 1
.
Esempio 23.6 Nello spazio siano assegnati il punto P0 ≡ (1,−1, 0), la retta r)
x = 1 + ty = −tz = 3 + 2t
e il piano α) x− y + 4 = 0. Trovare, se esistono, la o le equazioni delle rette parallele ad α,passanti per P0 ed incidenti r.
SVOLGIMENTO. Nel nostro esempio si vede subito che P0 6∈ α, P0 6∈ r e r non e parallela adα. Pertanto esiste una sola retta s parallela ad α ed incidente r. Essa si ottiene intersecandoil piano β passante per P0 e contenente la retta r con il piano γ passante per P0 e paralleload α.
Piano β. Si scrive l’equazione del fascio di piani per r)
{x+ y − 1 = 02y + z − 3 = 0
λ(x+ y − 1) + µ(2y + z − 3) = 0.
124

Si impone il passaggio per P0: −λ + µ(−2 − 3) = 0, λ + 5µ = 0. Possiamo quindi porreλ = 5 e µ = −1 ottenendo β) 5(x+ y − 1) + (−1)(2y + z − 3) = 0.
Piano γ. Essendo
1−10
ortogonale ad α, otteniamo che l’equazione di γ e
(1 −1 0
) ·
x− 1y − (−1)z − 0
= 0,
da cui x− y − 2 = 0.L’equazione della retta s e cosı
{x− y − 2 = 05x+ 3y − z − 2 = 0
.
Esempio 23.7 Nello spazio siano assegnati il punto P0 ≡ (2,−1, 5), la retta r)
x = 1 + ty = −tz = 3 + 2t
e il piano α) x− y + 4 = 0. Trovare, se esistono, la o le equazioni delle rette parallele ad α,passanti per P0 ed incidenti r.
SVOLGIMENTO. Nel nostro esempio si vede subito che P0 6∈ α, P0 ∈ r (infatti se nelleequazioni parametriche di r si pone t = 1 si ottengono le coordinate di P0) e r non eparallela ad α. Pertanto ogni retta s parallela ad α e passante per P0 (quindi incidente rin P0) e una soluzione del nostro problema. Essa si ottiene intersecando il piano γ passanteper P0 e parallelo ad α con un qualunque piano β del fascio di piani contenente r.
Piano γ. Essendo
1−10
ortogonale ad α, otteniamo che l’equazione di γ e
(1 −1 0
) ·
x− 2y + 1z − 5
= 0,
da cui x− y − 3 = 0.Fascio di piani contenenti r: λ(x+ y − 1) + µ(2y + z − 3) = 0.Al variare di λ, µ ∈ R, con λ2 + µ2 > 0, otteniamo una retta s soluzione del nostro
problema {x− y − 3 = 0λ(x+ y − 1) + µ(2y + z − 3) = 0
.
125

Esempio 23.8 Nello spazio siano assegnati il punto P0 ≡ (1,−1, 0), la retta r)
x = 1 + ty = −tz = 3 + 2t
e il piano α) 3x+ 5y+ z + 7 = 0. Trovare, se esistono, la o le equazioni delle rette parallelead α, passanti per P0 ed incidenti r.
SVOLGIMENTO. Nel nostro esempio si vede subito che P0 6∈ α, P0 6∈ r e r e parallela ad α
(infatti il vettore
1−12
parallelo ad r e ortogonale al vettore
351
che e ortogonale ad
α).L’eventuale soluzione s del nostro problema, dovendo essere parallela ad α, deve giacere
sul piano γ passante per P0 e parallelo ad α. Inoltre s deve essere incidente r, quindiγ ∩ r 6= ∅. Questo contraddice il fatto che γ ed r sono paralleli. Quindi il nostro problemanon ha soluzioni.
Proposizione 23.3 Condizione di complanarita fra due rette nello spazio. Rettesghembe. Nello spazio siano assegnate le due rette distinte
r)
{ax′ + by′ + cz′ + dt′ = 0a′x′ + b′y′ + c′z′ + d′t′ = 0
, s)
{ax′ + by′ + cz′ + dt′ = 0
a′x′ + b′y′ + c′z′ + d′t′ = 0.
Poniamo
A =
a b c da′ b′ c′ d′
a b c d
a′ b′ c′ d′
.
Allora
1. r ed s sono complanari se e solo se detA = 0;
2. r ed s sono sghembe se e solo se detA 6= 0.
Dimostrazione. Le equazioni omogenee delle rette date sono
r)
{ax′ + by′ + cz′ + dt′ = 0a′x′ + b′y′ + c′z′ + d′t′ = 0
, s)
{ax′ + by′ + cz′ + dt′ = 0
a′x′ + b′y′ + c′z′ + d′t′ = 0.
L’intersezione r ∩ s si ricava dallo studio del seguente sistema lineare omogeneo (nelleincognite x′, y′, z′, e t′)
ax′ + by′ + cz′ + dt′ = 0a′x′ + b′y′ + c′z′ + d′t′ = 0
ax′ + by′ + cz′ + dt′ = 0
a′x′ + b′y′ + c′z′ + d′′= 0
. (65)
126

Ovviamente (65) ha la soluzione banale (0, 0, 0, 0) ma questa quaterna non rappresenta lecoordinate omogenee di un punto nello spazio. Com’e noto dalla teoria, (65) ha soluzionidiverse dalla banale se e solo si annulla il determinante della matrice incompleta A. Quindi,se det A = 0 le rette r ed s, essendo distinte, si intersecano in un punto proprio od improprio(in questo secondo caso r ed s sono parallele). Se det A 6= 0 le rette sono sghembe.
Distanza fra due rette sghembe. Siano
r)
x = x0 + lty = y0 +mtz = z0 + nt
ed s)
x = x′0 + l′t
y = y′0 +m′tz = z′0 + n′t
due rette sghembe. Allora esiste una ed una sola retta p, ortogonale sia ad r che ad s, che leinterseca entrambe. Se P0 e Q0 sono i punti intersezione di p con r e con s rispettivamente,la distanza |P0Q0| si chiama distanza fra r ed s.
La retta p si trova nel seguente modo: si considerano il punto generico P ≡ (x0 + lt, y0 +mt, z0 + nt) di r e il punto generico Q ≡ (x′
0 + l′t′, y′0 +m′t′, z′0 + n′t′) di s (nota che nellecoordinate di Q abbiamo cambiato nome alla variabile t) e si impone al vettore P − Q di
essere ortogonale sia ad r che a s, cioe ai due vettori ~v =
lmn
e ~w =
l′
m′
n′
. Quindi
abbiamo il sistema (nelle variabili t e t′){
(P −Q) · ~v = 0(P −Q) · ~w = 0
.
Esso ammette un’unica soluzione (t0, t′0). Quindi P0 ≡ (x0 + lt0, y0 +mt0, z0 + nt0) e Q0 ≡
(x′0 + l′t′0, y
′0 +m′t′0, z
′0 + n′t′0).
Esempio 23.9 Siano date le rette
r)
x = ty = tz = −1 + 2t
ed s)
x = ty = −2tz = −t
.
Verificare che r ed s sono sghembe e determinarne la distanza.
SVOLGIMENTO. Le equazioni omogenee delle rette sono
r)
{x′ − y′ = 02x′ − z′ − t′ = 0
ed s)
{2x′ + y′ = 0x′ + z′ = 0
.
Poiche ∣∣∣∣∣∣∣∣
1 −1 0 02 0 −1 12 1 0 01 0 1 0
∣∣∣∣∣∣∣∣= 3 6= 0,
127

r ed s sono sghembe. Supposti P ∈ r e Q ∈ s, abbiamo P −Q =
t− t′
t+ 2t′
2t− 1 + t′
. I vettori
paralleli ad r ed s sono rispettivamente ~v =
112
e (~w =
1−2−1
. Quindi
{(P −Q · ~v = 0(P −Q) · ~w = 0
diventa {1(t− t′) + 1(t+ 2t′) + 2(2t+ t′ − 1) = 01(t− t′) + (−2)(t+ 2t′) + (−1)(2t+ t′ − 1) = 0
,
che ha l’unica soluzione(13, o). Quindi P0 ≡
(13, 13,−1
3
)e Q0 ≡ (0, 0, 0). Da cui
d(r, s) = |P0Q0| =√3
3.
La retta p che incontra ortogonalmente r ed s e la retta passante per P0 e Q0. Cioe
p)
x = 13t
y = x = 13t
z = −x = 13t
.
Condizione di allineamento fra tre punti. I tre punti (in coordinate omogenee) P ≡(x′, y′, z′, t′), P1 ≡ (x′
1, y′1, z
′1, t
′1) e P2 ≡ (x′
2, y′2, z
′2, t
′2) sono allineati se e solo se la matrice
x′ y′ z′ tx′1 y′1 z′1 t′1
x′2 y′2 z′2 t′2
ha rango minore od uguale a 2.
24 Spazi vettoriali
Siano dati un insieme non vuoto V e un campo K.
Definizione 24.1 Diremo che V e uno spazio vettoriale (o lineare) sul campo K se sonodefinite due operazioni
+ : V × V → V e · : K× V → V,
tali che(u,v) +
−→ u+ v e (λ,u) ·−→ λ · u = λu
che verificano le seguenti proprieta
128

1. Associativa: per ogni u,v,w ∈ V , si ha u+ (v +w) = (u+ v) +w.
2. Commutativa: per ogni u,v ∈ V , si ha u+ v = v + u.
3. Esistenza dell’elemento neutro: esiste in V un elemento o ∈ V , detto vettore nullo,tale che o+ u = u+ o = u per ogni u ∈ V .
4. Esistenza dell’opposto: per ogni u ∈ V esiste un vettore u′ ∈ V , detto l’opposto di u,tale che u+ u′ = u′ + u = o. In seguito indicheremo u′ con −u.
5. Se 1 e l’unita del campo ∈ K, allora 1u = u per ogni u ∈ V . L’elemento 1 e dettol’unita nella moltiplicazione per scalari.
6. Per ogni λ, µ ∈ K e per ogni u ∈ V si ha λ(µu) = (λµ)u.
7. Per ogni λ, µ ∈ K e per ogni u ∈ V si ha (λ+ µ)u = λu+ µu.
8. Per ogni λ ∈ K e per ogni u,v ∈ V si ha λ(u+ v) = λu+ λv.
Si osservi che (V,+) e un gruppo additivo commutativo con elemento neutro o. Pertantoin uno spazio vettoriale V , l’elemento neutro o e l’opposto di un elemento sono unici.
Esempio 24.1 L’insieme dei vettori applicati in uno stesso punto forma uno spazio vetto-riale sul campo R (si veda la Proposizione 16.1).
Esempio 24.2 Si verifica facilmente che V = M(m,n;K), l’insieme delle matrici m× n adelementi in K, con le usuali operazioni di somma fra matrici e prodotto di una matrice peruno scalare e uno spazio vettoriale su K.
Nel caso in cui V = M(1, n;K) (V = M(m, 1;K)) gli elementi di V saranno chiamatimatrici riga (matrici colonna).
Teorema 24.1 Valgono le seguenti proprieta:
1. Esiste un solo vettore nullo in V .
2. Ogni vettore in V ha un solo opposto.
3. Per ogni u,v ∈ V , l’equazione x+ u = v ammette l’unica soluzione x = v − u.
4. Per ogni scalare λ ∈ K, si ha λ0 = 0.
5. Per ogni vettore u ∈ V si ha 0u = 0.
6. Per ogni u ∈ V , si ha (−1)u = −u.
7. Per ogni λ ∈ K e per ogni u ∈ V , si ha (−λ)u = −(λu) = λ(−u).
129
8. Legge di annullamento della moltiplicazione per scalari
λu = 0 ⇔ λ = 0 oppure u = 0.
9. Leggi di cancellazione della moltiplicazione per scalari. Per ogni λ, µ ∈ K e per ogniu,v ∈ V , si ha
λu = µu, u 6= 0 ⇒ λ = µ,
λu = λv, λ 6= 0 ⇒ u = v.
10. Se V ha almeno un vettore non nullo e K e un insieme infinito, allora anche V einfinito.
Dimostrazione. (Dimostrazione obbligatoria) Le (1), (2) e (3) sono diretta conse-guenza del fatto che (V,+) e un gruppo additivo abeliano.
(4): Per ogni scalare λ ∈ K, si ha λ0 = 0. Infatti λ0 = λ(0 + 0) = λ0 + λ0. Da cuiλ0 = 0.
(5): Per ogni vettore u ∈ V si ha 0u = 0. Infatti 0u = (0 + 0)u = 0u + 0u. Da cui0u = 0.
(6): Per ogni u ∈ V , si ha (−1)u = −u. Infatti (−1)u+u = (−1)u+1u = (−1+ 1)u =0u = 0. Da cui la tesi.
(7): Per ogni λ ∈ K e per ogni u ∈ V , si ha (−λ)u = −(λu) = λ(−u). Infatti0 = [λ+(−λ)]u = λu+(−λ)u da cui (−λ)u = −λu. Inoltre 0 = λ[u+(−u)] = λu+λ(−u).Da cui λ(−u) = −λu.
(8): Legge di annullamento della moltiplicazione per scalari
λu = 0 ⇔ λ = 0 oppure u = 0.
Infatti se λ = 0 la legge e provata. Se λ 6= 0 si ha u = (λ−1λ)u = λ−1(λu) = λ−10 = 0.
(9): Leggi di cancellazione della moltiplicazione per scalari. Per ogni λ, µ ∈ K e per ogniu,v ∈ V , si ha
λu = µu, u 6= 0 ⇒ λ = µ,
λu = λv, λ 6= 0 ⇒ u = v.
Infattiλu = µu, u 6= 0 ⇒ λu− µu = 0 ⇒ (λ− µ)u = 0 ⇒ λ− µ = 0;λu = λv, λ 6= 0 ⇒ λu− λv = 0 ⇒ λ(u− v) = 0 ⇒ u− v = 0.
(10): Se V ha almeno un vettore non nullo e K e un insieme infinito, allora anche V einfinito. Infatti sia u ∈ V , u 6= 0. Se V e finito anche{λu | λ ∈ K} ⊆ V e finito. Quindiesisteranno λ1, λ2 ∈ K con λ1 6= λ2, tali che λ1u = λ2u. Questo contraddice la primaimplicazione in (9).
130

25 Sottospazi Vettoriali
Sia V uno spazio vettoriale su un campo K e sia W un sottoinsieme non vuoto di V .
Definizione 25.1 Diremo che W e un sottospazio vettoriale di V se sono soddisfatte leseguenti condizioni:
1. Per ogni u,v ∈ W si ha u+ v ∈ W .
2. Per ogni u ∈ W e per ogni λ ∈ K si ha λu ∈ W .
Dalla precedente definizione segue immediatamente che W e un sottospazio vettoriale diV se e solo se W e un sottoinsieme non vuoto di V che risulta essere uno spazio vettoriale suK con la stessa somma fra vettori e lo stesso prodotto di un vettore per uno scalare definitiper V .
Esempio 25.1 Siano V = R3 e K = R. Sia W = {(x, y, z) | (x, y, z) ∈ R3 e x+3y−4z =0}. Provare che W e un sottospazio vettoriale di R3.
SVOLGIMENTO. Siano u = (x1, y1, z1) ∈ W e v = (x2, y2, z2) ∈ W . Allora
{x1 + 3y1 − 4z1 = 0x2 + 3y2 − 4z2 = 0
.
Sommando membro a membro abbiamo
(x1 + 3y1 − 4z1) + (x2 + 3y2 − 4z2) = 0,
x1 + x2 + 3(y1 + y2)− 4(z1 + z2) = 0.
Da cui u+ v = (x1 + x2, y1 + y2, z1 + z2) ∈ W e la 1 della Definizione 25.1 risulta provata.Sia u ∈ W . Allora x1 + 3y1 − 4z1 = 0. Moltiplicando quest’ultima equazione per λ ∈ R,abbiamo λx1 + 3λy1 − 4λz1 = 0. Essendo λu = λ(x1, y1, z1) = (λx1, λy1, λz1) ∈ W e la 2della Definizione 25.1 risulta provata.
Esempio 25.2 Siano V = R3 e K = R. Sia W = {(x, y, z) | (x, y, z) ∈ R3 e x+3y−4z =2}. Verificare se W e un sottospazio vettoriale di R3.
SVOLGIMENTO. Siano u = (3, 1, 1) e v = (6, 0, 1). Si verifica immediatamente che u,v ∈W . Poiche u+v = (9, 1, 2) e 9+ 3 · 1− 4 · 2 = 4 6= 2, la 1 della Definizione 25.1 risulta falsa.Pertanto W non e un sottospazio vettoriale di W .
Si osservi che l’insieme W descritto nell’Esempio 25.2 non puo essere un sottospaziovettoriale di V perche o 6∈ W . Come mostra il seguente esempio, o ∈ W ⊆ V non implicanecessariamente che W sia un sottospazio vettoriale di V .
131

Esempio 25.3 Siano V = R3 e K = R. Sia W = {(x, y, z) | (x, y, z) ∈ R3 e x2+3y−4z =0}. Verificare se W e un sottospazio vettoriale di R3.
SVOLGIMENTO. Siano u = (1, 1, 1) e v = (2, 0, 1). Si verifica immediatamente che u,v ∈W . Poiche u + v = (3, 1, 2) e 32 + 3 · 1 − 4 · 2 = 4 6= 0, la 1 della Definizione 25.1 risultafalsa. Pertanto W non e un sottospazio vettoriale di W .
Teorema 25.1 W e sottospazio vettoriale di V se e solo se per ogni u,v ∈ W e per ogniλ, µ ∈ K si ha λu+ µv ∈ W .
Dimostrazione. (Dimostrazione obbligatoria) Sia W un sottospazio vettoriale di V esiano u,v ∈ W e λ, µ ∈ K. Per la 2 della Definizione 25.1 si ha λu ∈ W e µv ∈ W . Per la1 della Definizione 25.1 si ha λu+ µv ∈ W , cioe la tesi.
Viceversa, supponiamo cheW ⊆ V verifichi la condizione λu+µv ∈ W per ogni u,v ∈ We per ogni λ, µ ∈ K. Posto λ = µ = 1 si ha u + v ∈ W , cioe la 1 della Definizione 25.1.Posto µ = 0 si ha λu ∈ W , cioe la 2 della Definizione 25.1.
Esempio 25.4 Siano V = R3 e K = R. Sia W = {(x, y, z) | (x, y, z) ∈ R3, 2x − y + z =0 e x+ 3y − 4z = 0}. Provare che W e un sottospazio vettoriale di R3.
SVOLGIMENTO. Siano u = (x1, y1, z1) ∈ W e v = (x2, y2, z2) ∈ W . Allora
2x1 − y1 + z1 = 0x1 + 3y1 − 4z1 = 02x2 − y2 + z2 = 0x2 + 3y2 − 4z2 = 0
.
Siano λ, µ ∈ R3. Dal sistema precedente segue
2λx1 − λy1 + λz1 = 0λx1 + 3λy1 − 4λz1 = 02µx2 − µy2 + µz2 = 0µx2 + 3µy2 − 4µz2 = 0
,
e quindi {2(λx1 + µx2)− (λy1 + µy2) + λz1 + µz2 = 0λx1 + µx2 + 3(λy1 + µy2)− 4(λz1 + µz2) = 0
.
Da cui λu+ µv = λ(x1, y1, z1) + µ(x2, y2, z2) = (λx1 + µx2, λy1 + µy2, λz1 + µz2) ∈ W e, peril Teorema 25.1, W e un sottospazio vettoriale di R3.
Corollario 25.1 Sia W un sottospazio vettoriale dello spazio vettoriale V su K. Seu1,u2, . . . ,un ∈ W allora λ1u1 + λ2u2 + . . .+ λnun ∈ W per ogni n-upla λ1, λ2, . . . , λn ∈ K.
132

Dimostrazione. (Dimostrazione facoltativa) Per n = 1 l’asserto segue dalla 2 dellaDefinizione 25.1. Per n = 2 l’asserto segue dal Teorema 25.1. Sia n = 3. Allora λ1u1+λ2u2 ∈W (perche il caso n = 2 e stato provato), quindi per il Teorema 25.1 si ha (λ1u1 + λ2u2) +λ3u3 ∈ W , da cui l’asserto per n = 3. Cosı procedendo si prova il corollario per ogni n ∈ N,n ≥ 4.
Teorema 25.2 Siano V uno spazio vettoriale su K e siano W1 e W2 due suoi sottospazivettoriali. Allora W1 ∩W2 e un sottospazio vettoriale di V .
Dimostrazione. (Dimostrazione obbligatoria) Si osservi innanzitutto che, essendoo ∈ W1 ∩ W2, si ha W1 ∩ W2 6= ∅. Siano u,v ∈ W1 ∩ W2 e λ, µ ∈ K. Allora u,v ∈ W1 eu,v ∈ W2 e quindi, essendo W1 e W2 sottospazi vettoriali, λu + µv ∈ W1 e λu + µv ∈ W2.Cioe λu+ µv ∈ W1 ∩W2. Per il Teorema 25.1, si ha la tesi.
Nel seguente teorema mostriamo che, in generale, non vale per l’unione di due sottospaziun teorema analogo al Teorema 25.2.
Teorema 25.3 Sia V uno spazio vettoriale sul campo K. Siano W1 e W2 due sottospazivettoriali di V . Condizione necessaria e sufficiente affinche W1 ∪ W2 sia un sottospaziovettoriale di V e che W1 ⊆ W2 oppure W2 ⊆ W1.
Dimostrazione. (Dimostrazione obbligatoria) Necessita. Supponiamo che W1 ∪ W2
sia un sottospazio vettoriale di V , W1 6⊆ W2 e W2 6⊆ W1. Allora esistono u,v ∈ V tali cheu ∈ W1, u 6∈ W2, v ∈ W2, v 6∈ W1. Essendo u,v ∈ W1 ∪W2 e avendo supposto che W1 ∪W2
sia un sottospazio vettoriale, si ha u+v ∈ W1∪W2. Quindi u+v ∈ W1 oppure u+v ∈ W2.Se u+ v ∈ W1, per ogni λ, µ ∈ K si ha λ(u+ v) + µu ∈ W1. Da cui, posto λ = 1 e µ = −1,u+ v− u ∈ W1. E cio contraddice il supposto v 6∈ W1. Se u+ v ∈ W2, per ogni λ, µ ∈ K siha λ(u+ v) + µv ∈ W2. Da cui, posto λ = 1 e µ = −1, u+ v − v ∈ W2. E cio contraddiceil supposto u 6∈ W2.
Sufficienza. Supponiamo W1 ⊆ W2 (oppure W2 ⊆ W1) allora W1 ∪ W2 = W2 (oppureW1 ∪W2 = W1). Quindi W1 ∪W2 e sottospazio di V .
Definizione 25.2 Sia V uno spazio vettoriale sul campo K. Dicesi combinazione linearedei vettori u1,u2, . . . ,un ∈ V a coefficienti nel campo K ogni vettore del tipo λ1u1 + λ2u2 +. . .+ λnun con λ1, λ2, . . . , λn ∈ K.
Definizione 25.3 Sia V uno spazio vettoriale sul campo K e sia A = {u1,u2, . . . ,un} ⊆V . Dicesi Span(A) (spanning dell’insieme A) l’insieme di tutte le combinazioni lineari deivettori u1,u2, . . . ,un a coefficienti nel campo K. Cioe
Span(A) = {λ1u1 + λ2u2 + . . .+ λnun | λ1, λ2, . . . , λn ∈ K}.
133

Si osservi che, se A = {u1,u2, . . . ,un}, allora u1,u2, . . . ,un ∈ Span(A). Infatti
ui = 0u1 + 0u2 + . . .+ 0ui−1 + 1ui + 0ui+1 + . . .+ un
per ogni i = 1, 2, . . . , n.
Teorema 25.4 Sia V uno spazio vettoriale sul campo K e sia A = {u1,u2, . . . ,un} ⊆ V .Span(A) e un sottospazio vettoriale di V che risulta minimo, rispetto all’inclusione, fra tuttii sottospazi di V che contengono A.
Dimostrazione. (Dimostrazione obbligatoria) Siano w,v ∈ Span(A). Allora esistonoλi, µi ∈ K, i = 1, 2, . . . , n tali che
w = λ1u1 + λ2u2 + . . .+ λnun,
v = µ1u1 + µ2u2 + . . .+ µnun.
Per ogni α, β ∈ K, si ha αw+βv = α(λ1u1+λ2u2+. . .+λnun)+β(µ1u1+µ2u2+. . .+µnun) =(αλ1 + βµ1)u1 + (αλ2 + βµ2)u2 + . . . + (αλn + βµn)un ∈ Span(A). Dunque Span(A) e unsottospazio vettoriale di V . Si osservi infine che se W e un sottospazio di V e A ⊆ W si ha,per il Corollario 25.1, che ogni combinazione lineare dei vettori u1,u2, . . . ,un appartiene aW . Quindi Span(A) ⊆ W .
Definizione 25.4 Il sottospazio vettoriale Span(A) si dice il sottospazio vettoriale generatoda A. Nel caso in cui Span(A) = V , diremo che V e finitamente generato e che A e un suoinsieme di generatori.
Si noti che V potrebbe avere altri insiemi di generatori diversi da A, per questa ragioneabbiamo detto che A e un insieme di generatori per V .
Esempio 25.5 Si consideri il sottospazio W di R3 definito nell’Esempio 25.1. Abbiamo che(x, y, z) ∈ W se e solo se x + 3y − 4z = 0. Ricavando x in funzione di y e z possiamoaffermare che W = {(−3y + 4z, y, z) | y, z ∈ R}. Quindi gli elementi di W sono tutti e solii vettori u = (−3y + 4z, y, z) per ogni y, z ∈ R. Possiamo scrivere u = (−3y + 4z, y, z) =(−3y, y, 0)+(4z, 0, z) = y(−3, 1, 0)+z(4, 0, 1). Quindi, posto u1 = (−3, 1, 0) e u2 = (4, 0, 1),si ha W = Span({u1,u2}).
Teorema 25.5 Sia V uno spazio vettoriale sul campo K e siano u1,u2, . . . ,un ∈ V .Se Span({u1,u2, . . . ,un−1,un}) = Span({u1,u2, . . . ,un−1}) allora esistono
α1, α2, . . . , αn−1 ∈ K tali che un = α1u1 + α2u2 + . . .+ αn−1un−1.Viceversa, se esistono α1, α2, . . . , αn−1 ∈ K tali che un = α1u1 + α2u2 + . . .+ αn−1un−1,
allora Span({u1,u2, . . . ,un−1,un}) = Span({u1,u2, . . . ,un−1}).
134

Dimostrazione. (Dimostrazione facoltativa) La prima parte del teorema e immediata con-seguenza della Definizione 25.3. Proviamo la seconda parte. Si ha Span({u1,u2, . . . ,un−1}) ⊆Span({u1,u2, . . . ,un−1,un}). Infatti per ogni (n−1)-upla λ1, λ2, . . . , λn−1 di elementi di K siha λ1u1+λ2u2+. . .+λn−1un−1 = λ1u1+λ2u2+. . .+λn−1un−1+0un ∈ Span({u1,u2, . . . ,un−1,un}).
Proviamo ora che Span({u1,u2, . . . ,un−1,un}) ⊆ Span({u1,u2, . . . ,un−1}). Per ogni n-upla λ1, λ2, . . . , λn di elementi di K si ha λ1u1 + λ2u2 + . . . + λn−1un−1 + λnun = λ1u1 +λ2u2+ . . .+λn−1un−1+λn(α1u1+α2u2+ . . .+αn−1un−1) = (λ1+λnα1)u1+(λ2+λnα2)u2+. . .+ (λn−1 + λnαn−1)un−1+ ∈ Span({u1,u2, . . . ,un−1}).Caratterizzazioni di un sottospazio vettoriale finitamente generato. Alla luce degliEsempi 25.1, 25.4 e 25.5 possiamo concludere che un sottospazio lineare finitamente generatoW dello spazio vettorale V sul campo K puo essere caratterizzato nei tre modi seguenti:
1. Mediante la, o le, sue equazioni (si vedano gli Esempi 25.1 e 25.4). Se W coincidecon tutto lo spazio V oppure con {o} (il sottospazio contenente il solo vettore nullo)
le equazioni diventano, rispettivamente, 0x+ 0y + 0z = 0 e
x = 0y = 0z = 0
.
2. Mediante la descrizione dei suoi punti.
Come abbiamo visto nell’Esempio 25.5 il vettore u = (−3y + 4z, y, z) descrive ilsottospazio W di R3 la cui equazione e x+ 3y − 4z = 0.
Il sottospazio W dell’Esempio 25.4 coincide con l’insieme dei vettori u = (x, 2x, 74x) al
variare di x ∈ R.3. Mediante un insieme A di suoi generatori. Cioe producendo un sottoinsieme A
di vettori di V tali che Span(A) = W (si veda l’Esempio 25.5).
Determiniamo un insieme di generatori per il sottospazio W dell’ Esempio 25.4. Poicheu = (x, 2x, 7
4x), per ogni x ∈ R, descrive i vettori di W abbiamo u = (x, 2x, 7
4x) =
x(1, 2, 74). Pertanto W = Span({(1, 2, 7
4)}).
Esempio 25.6 Siano V = R3 e K = R. Siano u1 = (1, 2,−5), u2 = (2, 4, 0), u3 = (1, 0, 1)e u4 = (4, 8,−10). Determinare le equazioni di W1 = Span({u1}), W2 = Span({u1,u2}),W3 = Span({u1,u2,u3}) e W4 = Span({u1,u2,u4}).
SVOLGIMENTO. Determiniamo W1 = Span({u1}). Il vettore u = (x, y, z) ∈ W1 se esolo se esiste λ ∈ R tale che λu1 = u o, equivalentemente, λ(1, 2,−5) = (x, y, z). Cioeu = (x, y, z) ∈ W1 se e solo se il seguente sistema (nella incognita λ e avente x, y e z cometermini noti) ammette soluzioni
λ = x2λ = y−5λ = z
.
Pertanto
135

1 x2 y−5 z
R2 → R2 − 2R1
R3 → R3 + 5R1
−→
1 x0 y − 2x0 z + 5x
.
Il sistema associato a quest’ultima matrice ha soluzioni se e solo se
{y − 2x = 0z + 5x = 0
. (66)
Il sistema (66) rappresenta le equazioni del sottospazio W1.Si osservi che alle (66) si poteva pervenire osservando che per ogni u ∈ W1 esiste un
λ ∈ R tale che u = λ(1, 2,−5) = (λ, 2λ,−5λ). Se poniamo u = (x, y, z) otteniamo x = λ,y = 2λ e z = −5λ. Da cui, eliminando il λ, otteniamo (66).
Determiniamo W2 = Span({u1,u2}). Il vettore u = (x, y, z) ∈ W2 se e solo se esistonoλ1, λ2 ∈ R tali che λ1u1 + λ2u2 = u oppure, equivalentemente, λ1(1, 2,−5) + λ2(2, 4, 0) =(x, y, z). Cioe u = (x, y, z) ∈ W2 se e solo se il seguente sistema (nelle variabili λ1, λ2 eavente x, y e z come termini noti) ammette soluzioni
λ1 + 2λ2 = x2λ1 + 4λ2 = y−5λ1 + 0λ2 = z
.
Pertanto
1 2 x2 4 y−5 0 z
R2 → R2 − 2R1 −→
1 2 x0 0 y − 2x−5 0 z
.
Il sistema associato a quest’ultima matrice ha soluzioni se e solo se
y − 2x = 0. (67)
La (67) rappresenta l’equazione del sottospazio W2.
DeterminiamoW3 = Span({u1,u2,u3}). Il vettore u = (x, y, z) ∈ W3 se e solo se esistonoλ1, λ2, λ3 ∈ R tali che λ1u1 + λ2u2 + λ3u3 = u oppure, equivalentemente, λ1(1, 2,−5) +λ2(2, 4, 10) + λ(1, 0, 1) = (x, y, z). Cioe u = (x, y, z) ∈ W3 se e solo se il seguente sistema(nelle variabili λ1, λ2, λ3 e avente x, y e z come termini noti) ammette soluzioni
λ1 + 2λ2 + λ3 = x2λ1 + 4λ2 + 0λ3 = y−5λ1 + 0λ2 + λ3 = z
.
Pertanto
136

1 2 1 x2 4 0 y−5 0 1 z
R2 → R2 − 2R1
R3 → R3 + 5R1
−→
1 2 1 x0 0 −2 y − 2x0 10 6 z + 5x
R3 → R3 + 3R2 −→
1 2 1 x0 0 −2 y − 2x0 10 0 z + 3y − x
.
Il sistema associato a quest’ultima matrice ha per ogni terna (x, y, z), fissata arbitraria-mente in R3, una ed una sola soluzione. Pertanto W = R3. In tal caso, non essendoci alcunlegame fra x, y e z, non si puo’ parlare di equazioni fra questi parametri, o, se proprio sivuole, si ha 0x+ 0y + 0z = 0.
DeterminiamoW4 = Span({u1,u2,u4}). Il vettore u = (x, y, z) ∈ W4 se e solo se esistonoλ1, λ2, λ3 ∈ R tali che λ1u1 + λ2u2 + λ3u4 = u oppure, equivalentemente, λ1(1, 2,−5) +λ2(2, 4, 10)+λ3(4, 8,−10) = (x, y, z). Cioe u = (x, y, z) ∈ W4 se e solo se il seguente sistema(nelle variabili λ1, λ2, λ4 e avente x, y e z come termini noti) ammette soluzioni
λ1 + 2λ2 + 4λ3 = x2λ1 + 4λ2 + 8λ3 = y−5λ1 + 0λ2 − 10λ3 = z
.
Pertanto
1 2 4 x2 4 8 y−5 0 −10 z
R2 → R2 − 2R1 −→
1 2 4 x0 0 0 y − 2x−5 0 −10 z
.
Il sistema associato a quest’ultima matrice ha soluzioni se e solo se
y − 2x = 0. (68)
La (68) rappresenta l’equazione del sottospazio W2. Si osservi che W4 = W2. Pertanto, invirtu del Teorema 25.5, u4 e combinazione lineare di u1 e u2.
Un metodo per ottenere le equazioni di un sottospazio vettoriale di Rn qualorasia noto un suo insieme di generatori. Se si osservano i vari casi dell’Esempio 25.6, sivede che per ottenere l’equazione (o le equazioni) del sottospazio Span(A) di Rn (o piu ingenerale Kn) e sufficiente procedere nel seguente modo:
1. Sia A = {u1,u2, . . . ,um} con ui = (ui1, ui2, . . . , uin), i = 1, 2, . . . ,m. Il sistema lineare(nelle variabili λ1, . . . , λm)
λ1u11 + λ2u21 + . . .+ λmum1 = x1
λ1u12 + λ2u22 + . . .+ λmum2 = x2
...............................................λ1u1n + λ2u2n + . . .+ λmumn = xm
137

ha la matrice completa
u11 u21 · · · um1 x1
u12 u22 · · · um2 x2
· · · · · · ·u1n u2n · · · umn xn
. (69)
Si noti che (69) ha come ultima colonna (quella corrisondente ai termini noti) il vet-tore generico (x1, x2, . . . , xn) di Rn e come matrice incompleta la matrice avente comecolonne, nell’ordine, uT
1 ,uT2 , . . . ,u
Tm.
2. Si applichi ripetutamente il metodo di riduzione per righe in modo da ottenere, allafine, una matrice B la cui sottomatrice formata dalle prime m colonne risulti ridotta.
3. Si eguaglino a zero gli ultimi elementi (quelli corrispondenti alla colonna dei termininoti) delle eventuali righe di B che hanno 0 nei primi m posti. Ovviamente, se lasottomatrice di B formata dalle prime m colonne non ha righe nulle, si ha Span(A) =Rm.
Esempio 25.7 Siano V = R3 e K = R. Siano u1 = (2, k, 1), u2 = (k, 1, 1) e u3 = (1, 1, k).Determinare, al variare di k ∈ R, le equazioni di W = Span({u1,u2,u3}).
SVOLGIMENTO. Consideriamo la matrice
2 k 1 xk 1 1 y1 1 k z
R2 → R2 −R1
R3 → R3 − kR1
−→
2 k 1 xk − 2 1− k 0 y − x1− 2k 1− k2 0 z − kx
= B.
Se k = 1 abbiamo
B =
2 1 1 x−1 0 0 y − x−1 0 0 z − x
R3 → R3 −R2 −→
2 1 1 x−1 0 0 y − x0 0 0 y − z
.
Quindi per k = 1 l’equazione di W e y − z = 0 e si ha W = {(x, y, y) | x, y ∈ R}.
Sia adesso k 6= 1. Abbiamo
B R3 → R3 − (1 + k)R2 −→
2 k 1 xk − 2 1− k 0 y − x
−k2 − k + 1 0 0 x− (1 + k)y + z
.
Quindi:
• Se −k2 − k + 1 6= 0 e k 6= 1, il sottospazio W coincide con R3, cioe W = {(x, y, z) |x, y, z ∈ R}.
138

• Se −k2 − k + 1 = 0, cioe k = −1±√5
2, l’equazione di W e
x− 1±√5
2y + z = 0
e si ha W ={(
1±√5
2y − z, y, z
)| y, z ∈ R
}.
Definizione 25.5 Sia V uno spazio vettoriale su K e siano W1 e W2 due suoi sottospazi.Si dice somma di W1 con W2 il sottoinsieme W1 +W2 di V cosı definito
W1 +W2 = {u+ v | u ∈ W1,v ∈ W2}.
Teorema 25.6 La somma W1+W2 di due sottospazi vettoriali di V e ancora un sottospaziodi V . Inoltre, W1 + W2 e il minimo (rispetto all’inclusione) tra tutti i sottospazi di V checontengono W1 ∪W2.
Dimostrazione. (Dimostrazione facoltativa) Siano u,v ∈ W1 + W2. Allora esistonou1,v1 ∈ W1 e u2,v2 ∈ W2 tali che u = u1 + u2 e v = v1 + v2. Se λ, µ ∈ K, si haλu+ µv = λ(u1 + u2) + µ(v1 + v2) = (λu1 + µv1) + (λu2 + µv2) che appartiene a W1 +W2
in quanto λu1 + µv1 ∈ W1 e λu2 + µv2 ∈ W2.Sia W un sottospazio di V contenente W1 ∪W2. Proviamo che W1 +W2 ⊆ W . Infatti,
se u ∈ W1 +W2, esistono u1 ∈ W1 e u2 ∈ W2 per cui u = u1 + u2. Allora u1,u2 ∈ W1 ∪W2
ed, essendo W un sottospazio di V contenente W1 ∪W2, si ha u1 + u2 ∈ W .
Si osservi che ogni vettore u1 ∈ W1 (u2 ∈ W2) appartiene alla somma W1 +W2. Infattiu1 = u1 + o con u1 ∈ W1 e o ∈ W2 (u2 = o+ u1 con o ∈ W1 e u2 ∈ W2).
Definizione 25.6 La somma fra due sottospazi W1 e W2 di V si dice diretta, e si scriveW1 ⊕W2 (invece di W1 +W2) se W1 ∩W2 = {o}. In tal caso i sottospazi W1 e W2 si diconocomplementari.
Teorema 25.7 Ogni vettore v ∈ W1 ⊕W2 si esprime in uno e un sol modo come somma diun vettore di W1 piu un vettore di W2. Cioe esiste una e una sola coppia di vettori w1 ∈ W1
e w2 ∈ W2 tali che v = w1 +w2.
Dimostrazione. (Dimostrazione facoltativa) Per definizione di somma diretta esiste sicu-ramente almeno una coppia (w1,w2) ∈ W1 ×W2 tale che v = w1 +w2. Supponiamo esistaun’altra coppia (u1,u2) ∈ W1 ×W2 tale che v = u1 + u2. Allora w1 +w2 = u1 + u2, da cuiw1−u1 = u2−w2 ∈ W1∩W2, essendo w1−u1 ∈ W1 e u2−w2 ∈ W2. Poiche W1∩W2 = {o},segue w1 = u1 e w2 = u2, cioe (u1,u2) = (w1,w2).
Esempio 25.8 Siano V = R4 e K = R. Siano W1 = {(x, y, z, t) ∈ R4 | x + y − z + t =2x + 3y + z + 3t = 0} e W2 = {(x, y, z, t) ∈ R4 | 2x − y + z − t = x + y + 3z + t = 0}.
139

Determinare W1+W2 e W1∩W2 mediante la descrizione dei punti, le equazioni ed un insiemedei generatori. Dire inoltre se la somma W1 +W2 e diretta.
SVOLGIMENTO. Determiniamo i punti di W1. Risolvendo il sistema
{x+ y − z + t = 02x+ 3y + z + 3t = 0
,
otteniamo W1 ={(−4
3y − 4
3t, y,−1
3y − 1
3t, t
) | y, t ∈ R}. Analogamente, risolvendo il siste-ma {
2x− y + z − t = 0x+ y + 3z + t = 0
,
otteniamo W2 ={(−4
3z,−5
3z − t, z, t
) | z, t ∈ R}. Determiniamo i punti di W1 + W2 me-diante la Definizione 25.5:W1 +W2 =
{(−43y − 4
3t, y,−1
3y − 1
3t, t
)+(−4
3z,−5
3z − t, z, t
) | y, t, z, t ∈ R} ==
{(−43y − 4
3t− 4
3z, y − 5
3z − t,−1
3y − 1
3t+ z, t+ t
) | y, t, z, t ∈ R}.Si osservi che abbiamo cambiato nome alle variabili del punto generico di W2 (perche?).
Essendo(−4
3y − 4
3t− 4
3z, y − 5
3z − t,−1
3y − 1
3t+ z, t+ t
)=
=(−4
3, 1,−1
3, 0)y +
(−43, 0,−1
3, 1)t+
(−43,−5
3, 1, 0
)z + (0,−1, 0, 1) t,
i vettori u1 =(−4
3, 1,−1
3, 0), u2 =
(−43, 0,−1
3, 1), u3 =
(−43,−5
3, 1, 0
)e u4 = (0,−1, 0, 1)
formano un insieme di generatori di W1 +W2.
Determiniamo le equazioni di W1 +W2:
−43
−43
−43
0 x1 0 −5
3−1 y
−13
−13
1 0 z0 1 0 1 t
R2 → 43R2 +R1
R3 → −4R3 +R1
−→
−43
−43
−43
0 x0 −4
3−32
9−4
3x+ 4
3y
0 0 −163
0 x− 4z0 1 0 1 t
R4 → 43R4 +R1 +
43R2 −→
−43
−43
−43
0 x0 −4
3−32
9−4
3x+ 4
3y
0 0 −163
0 x− 4z0 0 −32
90 4
3t+ x+ 4
3y
R4 → 163R4 − 32
9R3 −→
−43
−43
−43
0 x0 −4
3−32
9−4
3x+ 4
3y
0 0 −163
0 x− 4z0 0 0 0 −2048
27
(y3+ z + t
3
)
.
Quindi l’equazione di W1 +W2 e y3+ z + t
3= 0.
140

Le equazioni di W1 ∩W2 sono
x+ y − z + t = 02x+ 3y + z + 3t = 02x− y + z − t = 0x+ y + 3z + t = 0
. (70)
Per determinare i punti di W1 ∩W2 risolviamo il sistema omogeneo (70):
1 1 −1 12 3 1 32 −1 1 11 1 3 1
R2 → R2 − 2R1
R3 → R3 − 2R1
R4 → −R4 +R1
−→
1 1 −1 10 1 3 10 −3 3 −30 0 −4 0
R3 → R3 + 3R2 −→
1 1 −1 10 1 3 10 0 12 00 0 −4 0
R4 → 3R4 +R3 −→
1 1 −1 10 1 3 10 0 12 00 0 0 0
.
Quindi W1 ∩W2 = {(0,−t, 0, t) | t ∈ R} e (0,−1, 0, 1) e l’unico generatore di W1 ∩W2.Essendo W1 ∩W2 6= {o}, la somma W1 +W2 non e diretta. Si osservi infine che le equazioni(70) di W1 ∩W2 possono scriversi, piu semplicemente,
x = 0z = 0y + t = 0
.
26 Base e dimensione di uno spazio vettoriale
Definizione 26.1 Sia V uno spazio vettoriale su un campo K. Gli n ≥ 1 vettori u1,u2, . . . ,un
di V si dicono linearmente dipendenti se esistono n scalari λ1, λ2, . . . , λn ∈ K non tutti nullitali che
λ1u1 + λ2u2 + . . .+ λnun = o.
Definizione 26.2 Sia V uno spazio vettoriale su un campo K. Gli n ≥ 1 vettori u1,u2, . . . ,un
di V si dicono linearmente indipendenti se
λ1u1 + λ2u2 + . . .+ λnun = o,
con λ1, λ2, . . . , λn ∈ K, implica
λ1 = λ2 = . . . = λn = 0.
141

Esempio 26.1 Nello spazio vettoriale R4 sul campo R, determinare la lineare dipendenza oindipendenza dei vettori u = (1, 2,−3, 4), u2 = (3,−1, 3, 3) e u3 = (2, 0, 0, 1).
SVOLGIMENTO. In base alle Definizioni 26.1 e 26.2 bisogna verificare se l’equazione vetto-riale
λ1u1 + λ2u2 + λ3u3 = o
nelle variabili reali λ1, λ2 e λ3 ammette solamente la soluzione banale (λ1, λ2, λ3) = (0, 0, 0)(in questo caso u1, u2 e u3 risultano linearmente indipendenti) oppure altre soluzioni oltre labanale (in tal caso u1, u2 e u3 risultano linearmente dipendenti). La precedente equazioneequivale al seguente sistema omogeneo:
λ1 + 3λ2 + 2λ3 = 02λ1 − λ2 = 0−3λ1 + 3λ2 = 04λ1 + 3λ2 + λ3 = 0
.
Pertanto
1 3 22 −1 0−3 3 04 3 1
R4 → −2R4 +R1 −→
1 3 22 −1 0−3 3 0−7 −3 0
R3 → 2R3 + 3R2
R4 → 2R4 + 7R2
−→
1 3 22 −1 00 3 00 −13 0
R4 → 3R4 + 13R3 −→
1 3 22 −1 00 3 00 0 0
.
Poiche il numero delle incognite coincide col numero degli elementi speciali, il sistemaomogeneo ha la sola soluzione banale. Quindi i tre vettori dati sono linearmente indipendenti.
Esempio 26.2 Nello spazio vettoriale R4 sul campo R, determinare se i vettori u1 = (1, 2,−3, 4),u2 = (3,−1, 3, 3) e u3 = (12, 3, 0, 21) sono linearmente dipendenti o indipendenti.
SVOLGIMENTO. In base alle Definizioni 26.1 e 26.2 bisogna verificare se l’equazione vetto-riale
λ1u1 + λ2u2 + λ3u3 = o
nelle variabili reali λ1, λ2 e λ3 ammette solamente la soluzione banale (λ1, λ2, λ3) = (0, 0, 0)(in questo caso u1, u2 e u3 risultano linearmente indipendenti) oppure altre soluzioni oltre labanale (in tal caso u1, u2 e u3 risultano linearmente dipendenti). La precedente equazioneequivale al seguente sistema omogeneo:
λ1 + 3λ2 + 12λ3 = 02λ1 − λ2 + 3λ3 = 0−3λ1 + 3λ2 = 04λ1 + 3λ2 + 21λ3 = 0
.
142

Pertanto
1 3 122 −1 3−3 3 04 3 21
R2 → 3R2 +R1
R3 → R3 −R1
R4 → R4 −R1
−→
1 3 127 0 21−4 0 −123 0 9
R3 → 7R3 + 4R2
R4 → 7R4 − 3R2
−→
1 3 127 0 210 0 00 0 0
.
Poiche il numero delle incognite e maggiore del numero degli elementi speciali, il sistemaomogeneo ha infinite soluzioni. Quindi i tre vettori dati sono linearmente dipendenti.
Teorema 26.1 Un vettore u ∈ V e linearmente dipendente se e soltanto se u = o.
Dimostrazione. (Dimostrazione obbligatoria) Se u = o allora 1u = 1o = o, essendo1 l’elemento unita del campo K. Quindi u = o e linearmente dipendente. Viceversa sia ulinearmente dipendente. Esiste allora λ ∈ K, λ 6= 0, tale che λu = o. Ne segue u = o per lalegge di annullamento della moltiplicazione per scalari.
Teorema 26.2 Sia V uno spazio vettoriale su K e siano u1,u2, . . . ,un ∈ V . Se m vettori fradi essi (con 1 ≤ m < n) sono linearmente dipendenti, allora tutti i vettori sono linearmentedipendenti.
Dimostrazione. Supponiamo, senza perdere la generalita che u1,u2, . . . ,um siano linear-mente dipendenti. Allora esistono λ1, λ2, . . . , λm ∈ K non tutti nulli (cioe (λ1, λ2, . . . , λm) 6=(0, 0, . . . , 0)) tali che λ1u1 + λ2u2 + . . .+ λmum = o. Ne segue
λ1u1 + λ2u2 + . . .+ λmum + 0um+1 + . . .+ 0un = o
con (λ1, λ2, . . . , λm, 0, . . . , 0) 6= (0, 0, . . . , 0). Pertanto u1,u2, . . . ,un sono linearmente dipen-denti.
Dal teorema precedente segue facilmente il seguente corollario.
Corollario 26.1 Se n vettori sono linearmente indipendenti allora m vettori qualunque fraessi (con 1 ≤ m ≤ n) sono linearmente indipendenti.
Teorema 26.3 Condizione necessaria e sufficiente affinche n ≥ 2 vettori u1,u2, . . . ,un ∈V siano linearmente dipendenti e che almeno uno fra essi sia combinazione lineare deirimanenti.
143

Dimostrazione. (Dimostrazione facoltativa) Condizione necessaria. Se u1,u2, . . . ,un
sono linearmente dipendenti, allora esistono λ1, λ2, . . . , λn ∈ K non tutti nulli tali cheλ1u1 + λ2u2 + . . .+ λnun = o. Senza ledere la generalita, possiamo supporre che sia λ1 6= 0.Allora, risolvendo rispetto ad u1, si ha u1 = − (λ1)
−1 λ2u2− (λ1)−1 λ3u3− . . .− (λ1)
−1 λnun,cioe u1 e combinazione lineare dei vettori u2,u3, . . . ,un.
Condizione sufficiente. Supponiamo che uno degli n vettori, ad esempio u1, sia combina-zione lineare dei rimanenti, cioe u1 = µ2u2+µ3u3+. . .+µnun. Allora (−1)u1+µ2u2+µ3u3+. . . + µnun = o con (−1, µ2, . . . , µn) 6= (0, 0, . . . , 0). Quindi u1,u2, . . . ,un sono linearmentedipendenti.
Presentiamo adesso un metodo pratico che permetta di individuare in un insieme Γ divettori di Kn un sottoinsieme linearmente indipendente di cardinalita massima. Questometodo si basa sui due seguenti teoremi.
Teorema 26.4 Sia Γ = {v1,v2, . . . ,vm} un insieme di vettori di Kn tali che la matriceA =
(vT1 | vT
2 | . . . | vTm
)risulti ridotta per righe. Allora i vettori corrispondenti alle colonne
contenenti gli elementi speciali sono linearmente indipendenti e, supposto che il loro numerosia ρ, Γ contiene al massimo ρ vettori linearmente indipendenti.
Dimostrazione. (Dimostrazione facoltativa) Senza ledere la generalita, possiamo pensareche vT
1 ,vT2 , . . . ,v
Tρ siano le colonne di A contenenti gli elementi speciali (si noti che ogni
colonna di A contiene al piu un elemento speciale, quindi ρ ≤ m).La matrice B =
(vT1 | vT
2 | . . . | vTρ
), anch’essa ridotta per righe, puo essere vista come la
matrice incompleta di un sistema lineare omogeneo avente n equazioni e ρ incognite. Poicheil numero di incognite coincide con quello degli elementi speciali il sistema ha la sola soluzionebanale. In altre parole l’equazione vettoriale λ1v1 + λ2v2 + . . . + λρvρ = o, nelle variabiliλ1, . . . , λρ, ha la sola soluzione banale λ1 = λ2 = . . . = λρ = 0. Pertanto v1,v2, . . . ,vρ sonolinearmente indipendenti.
Se ρ < m, A contiene (oltre alle colonne vT1 , v
T2 , . . ., v
Tρ ) m− ρ colonne nelle quali non
appaiono elementi speciali. Sia vT una di esse. Allora B =(vT1 | vT
2 | . . . | vTρ | vT
)puo
essere vista come la matrice completa di un sistema lineare di n equazioni in ρ incogniteavente vT come colonna dei termini noti e
(vT1 | vT
2 | . . . | vTρ
)come matrice incompleta.
Pertanto il sistema non omogeneo associato a B ha una ed una sola soluzione. Suppostoche essa sia (λ1, λ2, . . . , λρ), abbiamo λ1v1 + λ2v2 + . . .+ λρvρ = v), cioe v e combinazionelineare dei vettori v1,v2, . . . ,vρ. Ripetendo il ragionamento per ognuna delle m− ρ colonnedi A non contenenti elemento speciale si ha la tesi.
Esempio 26.3 Siano assegnati i vettori di R5 v1 = (1, 0, 0, 0, 0), v2 = (2, 0, 3, 0, 0), v3 =(3, 0, 4, 0, 0), v4 = (4, 0, 4, 0, 0), v5 = (5, 0, 4, 1, 0) e v6 = (6, 0, 4, 1, 0). Abbiamo
144

A =(vT1 | vT
2 | vT3 | vT
4 | vT5 | vT
6
)=
1 2 3 4 5 60 0 0 0 0 00 3 4 4 4 40 0 0 0 1 10 0 0 0 0 0
.
Nella matrice precedente abbiamo sottolineato gli elementi speciali (si noti che nellaprima riga si ha una sola possibilita di scelta per l’elemento speciale, mentre nella terza rigasi hanno tre possibilita e, nella quarta, due). La matrice B =
(vT1 | vT
2 | vT5
), formata dalle
colonne di A contenenti gli elementi speciali, equivale al seguente sistema lineare omogeneo(si osservi che la seconda e quarta equazione potrebbero essere omesse)
x1 + 2x2 + 5x3 = 00x1 + 0x2 + 0x3 = 03x2 + 4x3 = 0x3 = 00x1 + 0x2 + 0x3 = 0
(71)
la cui unica soluzione e (x1, x2, x3) = (0, 0, 0). Cioe
x1v1 + x2v2 + x3v5 = o se e solo se x1 = x2 = x3 = 0.
Quindi v1, v2 e v5 sono linearmente indipendenti.Si consideri ora una colonna di A che non contiene elementi speciali, per esempio vT
4 .Formiamo la matrice
C =(vT1 | vT
2 | vT5 | vT
4
)=
1 2 5 40 0 0 00 3 4 40 0 1 00 0 0 0
.
Essa equivale al seguente sistema lineare non omogeneo
x1 + 2x2 + 5x3 = 40x1 + 0x2 + 0x3 = 00x1 + 3x2 + 4x3 = 40x1 + 0x2 + x3 = 00x1 + 0x2 + 0x3 = 0
che ha come unica soluzione (x1, x2, x3) = (43, 43, 0) 6= (0, 0, 0), quindi
v4 = (4, 0, 4, 0, 0) =4
3(1, 0, 0, 0, 0) +
4
3(2, 0, 3, 0, 0) + 0(5, 0, 4, 1, 0) =
4
3v1 +
4
3v2 + 0v5
e combinazione lineare di v1, v2 e v5.Analogamente si puo dimostrare che v3 e v6 sono combinazioni lineare di v1, v2 e v5.
145

Il Teorema 26.4 permette di individuare in Γ ⊆ Kn un sottoinsieme linearmente indipen-dente di cardinalita massima solo nell’ipotesi che la matrice A avente come colonne i vettoridi Γ sia ridotta per righe. Come procedere quando A non e ridotta? La risposta a questadomanda si ottiene facilmente dal seguente teorema.
Teorema 26.5 I vettoriu1 = (a11, a21, . . . , an1),
u2 = (a12, a22, . . . , an2),
..............................
um = (a1m, a2m, . . . , anm)
sono linearmente indipendenti se e solo se, comunque fissati λ, µ ∈ K, con λ 6= 0, e comunquescelti i, j ∈ {1, 2, . . . , n} con i 6= j,
v1 = (a11, . . . , a(i−1)1, λai1 + µaj1, a(i+1)1, . . . , an1),
v2 = (a12, . . . , a(i−1)2, λai2 + µaj2, a(i+1)2, . . . , an2),
.............................................................................
vm = (a1m, . . . , a(i−1)m, λaim + µajm, a(i+1)m, . . . , anm)
sono linearmente indipendenti.
Dimostrazione. (Dimostrazione facoltativa) Ovviamente u1,u2, . . . ,um sono linearmenteindipendenti se e solo se il sistema lineare omogeneo
a11x1 + a12x2 + . . .+ a1mxm = 0a21x1 + a22x2 + . . .+ a2mxm = 0...........................an1x1 + an2x2 + . . .+ anmxm = 0
(72)
ammette la sola soluzione banale.Per il Teorema 11.1, (72) equivale al seguente
a11x1 + a12x2 + . . .+ a1mxm = 0...........................a(i−1)1x1 + a(i−1)2x2 + . . .+ a(i−1)mxm = 0(λai1 + µaj1)x1 + (λai2 + µaj2)x2 + . . .+ (λaim + µajm)xm = 0a(i+1)1x1 + a(i+1)2x2 + . . .+ a(i+1)mxm = 0...........................an1x1 + an2x2 + . . .+ anmxm = 0
(73)
il quale ha solamente la soluzione banale se e solo se v1,v2, . . . ,vm sono linearmente indi-pendenti.
Riassumiamo quanto detto sopra nel seguente metodo per individuare il massimonumero di vettori linearmente indipendenti in un sottoinsieme A di Kn.
146

Dato l’insieme di vettori Γ = {v1,v2, . . . ,vm} ⊆ Kn si puo determinare un sottoinsiemedi massima cardinalita di Γ di vettori linearmente indipendenti nel seguente modo:
1. si formi la matrice A =(vT1 | vT
2 | . . . | vTm
);
2. si riduca per righe A e si fissino gli elementi speciali nella matrice ridotta B;
3. si considerino le colonne di A che corrispondono, nella matrice ridotta B, allecolonne contenenti gli elementi speciali. Ovviamente esse individuano un sottoinsiemedi Γ. Esso costituisce un sottoinsieme di cardinalita massima di vettori linearmenteindipendenti di Γ.
Esempio 26.4 Sia Γ = {v1,v2,v3,v4,v5} ⊆ R5, essendo v1 = (1, 2,−1, 3, 1),v2 = (−1,−1,−1, 0, 0), v3 = (1, 1, 0, 1, 1), v4 = (1, 2,−2, 4, 2) e v5 = (0, 0,−1, 1, 1).Determinare un sottoinsieme linearmente indipendente di Γ avente massima cardinalita.
SVOLGIMENTO. Consideriamo la matrice
A =(vT1 | vT
2 | vT3 | vT
4 | vT5
)=
1 −1 1 1 02 −1 −1 2 0−1 −1 0 −2 −13 0 1 4 11 0 1 2 1
R2 → R2 −R1
R3 → R3 −R1
−→
A1 =
1 −1 1 1 01 0 0 1 0−2 0 −1 −3 −13 0 1 2 11 0 1 2 1
R3 → R3 + 2R2
R4 → R4 − 3R2
R5 → R5 −R2
−→
A2 =
1 −1 1 1 01 0 0 1 00 0 −1 −1 −10 0 1 1 10 0 1 1 1
R4 → R4 +R3
R5 → R5 +R3
−→ A3 =
1 −1 1 1 01 0 0 1 00 0 −1 −1 −10 0 0 0 00 0 0 0 0
.
Sia Ψ l’insieme dei vettori corrispondenti alle colonne di A3. Per il Teorema 26.4, ivettori corrispondenti alle prime tre colonne di A3 formano un sottoinsieme linearmenteindipendente di Ψ avente cardinalita massima. Per il Teorema 26.5, i vettori corrispondentialle prime tre colonne di A2 sono linearmente indipendenti mentre quelli rimanenti sono unaloro combinazione lineare. Applicando di nuovo il Teorema 26.5 alle matrici A2 e A1 e poiA1 ed A, otteniamo che i vettori corrispondenti alle prime tre colonne di A formano unsottoinsieme linearmente indipendente di Γ avente cardinalita massima.
Corollario 26.2 Il massimo numero di vettori linearmente indipendenti nello spazio vetto-riale Kn e n.
147

Dimostrazione. (Dimostrazione facoltativa) Cominciamo col provare che in Kn si hannoal piu n vettori linearmente indipendenti. Infatti siano u1,u2, . . .um ∈ Kn con m ≥ n.La matrice A =
(uT1 | . . . | uT
m
)ha n righe. Pertanto la matrice ridotta da essa ottenuta
contiene al piu n elementi speciali (si ricordi che ogni riga puo avere al massimo un soloelemento speciale). Come abbiamo visto il numero degli elementi speciali della matriceridotta di A coincide con la cardinalita massima di un sottoinsieme linearmente indipendentedi {u1 . . . ,um}.
Proviamo ora che Kn contiene n vettori linearmente indipendenti. Poniamo (si ricordiche 1 indica l’elemento unita del campo K):
e1 = (1, 0, 0, . . . , 0, 0) ∈ Kn,
e2 = (0, 1, 0, . . . , 0, 0) ∈ Kn,
e3 = (0, 0, 1, . . . , 0, 0) ∈ Kn,
..............................
en−1 = (0, 0, 0, . . . , 1, 0) ∈ Kn,
en = (0, 0, 0, . . . , 0, 1) ∈ Kn.
Ovviamente la matrice A =(eT1 | . . . | eTn
)risulta ridotta e contiene n elementi speciali
(gli unici che in essa sono diversi dallo 0). Quindi l’insieme {e1, . . . , en} e linearmenteindipendente.
Definizione 26.3 Definizione di base. Sia V uno spazio vettoriale finitamente generatosu un campo K. Un sottoinsieme finito B di V e detto base di V se soddisfa le seguentiproprieta:
1. B e un insieme di generatori di V , cioe Span(B) = V ;
2. B e linearmente indipendente.
Nello spazio Kn i vettori e1 . . . , en definiti nella dimostrazione del Corollario 26.2 formanouna base di Kn.
Enunciamo i seguenti importanti teoremi di cui omettiamo, in questo contesto, la dimo-strazione.
Teorema 26.6 Sia A un insieme finito di generatori di uno spazio vettoriale V 6= {o} e siaH un sottoinsieme di A linearmente indipendente. Allora esiste almeno una base B di Vtale che H ⊆ B ⊆ A.
Il seguente teorema permette di estendere un qualsiasi sottoinsieme linearmente indipen-dente H di uno spazio vettoriale finitamente generato V ad una base di V .
148

Teorema 26.7 Sia V uno spazio vettoriale su un campo K avente una base B = {u1,u2, . . . ,un}.Se v1,v2, . . . ,vh, h ≤ n, sono h vettori linearmente indipendenti, allora si puo costruire unanuova base di V aggiungendo a v1,v2, . . . ,vh n− h vettori opportunamente scelti in B.
Dal Teorema 26.7 segue in particolare, per h = n, il seguente corollario
Corollario 26.3 Se uno spazio vettoriale V ammette una base formata da n vettori, alloraogni sottoinsieme di n vettori linarmente indipendenti di V e una base di V .
Teorema 26.8 Sia V uno spazio vettoriale su un campo K avente una base formata da nvettori. Allora valgono le seguenti proprieta:
1. Ogni sottoinsieme di V linearmente indipendente ha cardinalita minore od uguale adn.
2. Qualsiasi base di V possiede n vettori.
3. Ogni insieme di generatori di V , formato da n vettori, e linearmente indipendente.
La proprieta 2 del Teorema 26.8 giustifica la seguente importante definizione.
Definizione 26.4 Sia V 6= {o} uno spazio vettoriale finitamente generato su un campo K.Si dice dimensione di V , e si indica con dimV , la cardinalita di una qualsiasi base di V . SeV = {o}, si pone dim {o} = 0.
Esempio 26.5 Siano assegnati i vettori di R4 v1 = (2, 3, 1,−4), v2 = (0, 1, 1, 2), v3 =(2, 9, 4, 2), v4 = (1, 1, 2, 2), v5 = (5, 14, 8, 2) e v6 = (1, 0, 1, 0). Determinare un suo sot-toinsieme linearmente indipendente di cardinalita massima e verificare se esso e una base diR4.
SVOLGIMENTO. Applichiamo il metodo illustrato precedentemente. Sia
A =(vT1 | vT
2 | vT3 | vT
4 | vT5 | vT
6
)=
2 0 2 1 5 13 1 9 1 14 01 1 4 2 8 1−4 2 2 2 2 0
R3 → R3 −R1 −→
2 0 2 1 5 13 1 9 1 14 0−1 1 2 1 3 0−1 2 2 2 2 0
R3 → R3 −R2
R4 → R4 − 2R2
−→
2 0 2 1 5 13 1 9 1 14 0−4 0 −7 0 −11 0−10 0 −16 0 −26 0
R4 → 5R3 − 2R4 −→
2 0 2 1 5 13 1 9 1 14 0−4 0 −7 0 −11 00 0 −3 0 −3 0
.
149

Nella matrice precedente abbiamo sottolineato gli elementi speciali. Pertanto un sottoin-sieme linearmente indipendente di {v1, . . . ,v6} di cardinalita massima e Γ = {v1,v3,v4,v6}.Per i Corollari 26.2 e 26.3, Γ e una base di R4. Ovviamente si ha Span(Γ) = R4.
Esempio 26.6 Siano assegnati i vettori di R4 v1 = (2, 3, 1,−4), v2 = (0, 1, 1, 2), v3 =(2, 6, 4, 2), v4 = (4, 10, 6, 0), v5 = (4, 9, 5,−2) e v6 = (4, 11, 7, 2). Determinare un suosottoinsieme linearmente indipendente di cardinalita massima e verificare se esso e una basedi R4.
SVOLGIMENTO. Applichiamo il metodo illustrato precedentemente. Sia
A =(vT1 | vT
2 | vT3 | vT
4 | vT5 | vT
6
)=
2 0 2 4 4 43 1 6 10 9 11−1 1 4 6 5 74 2 2 0 −2 2
R2 → R2 − 3R1
R3 → R3 − 2R1
R4 → R4 −R1
−→
2 0 2 4 4 4−3 1 0 −2 −3 −1−5 1 0 −2 −3 −12 2 0 −4 −6 −2
R3 → R3 −R2
R4 → R4 − 2R2
−→
2 0 2 4 4 4−3 1 0 −2 −3 −1−2 0 0 0 0 08 0 0 0 0 0
R4 → R4 + 4R3 −→
2 0 2 4 4 4−3 1 0 −2 −3 −1−2 0 0 0 0 00 0 0 0 0 0
.
Nella matrice precedente abbiamo sottolineato gli elementi speciali. Pertanto un sottoin-sieme linearmente indipendente di {v1, . . . ,v6} di cardinalita massima e Γ = {v1,v2,v3}.Per i Corollari 26.2 e 26.3, Γ non e una base di R4.
Cerchiamo Span(Γ). Usando le precedenti riduzioni, il sistema associato alla matrice
2 0 2 x3 1 6 y−1 1 4 z4 2 2 t
si riduce a
2 0 2 x−3 1 0 y − 3x−2 0 0 z − y + x0 0 0 9x− 6y + 4z + t
.
Pertanto l’equazione di Span(Γ) e 9x− 6y + 4z + t = 0 (cioe (x, y, z, t) ∈ Span(Γ) se e solose 9x− 6y+4z+ t = 0). Si osservi inoltre che i vettori v1, v2 e v3 non generano R4. Infatti,per esempio, (0, 0, 0, 1) ∈ R4 ma (0, 0, 0, 1) 6∈ Span(Γ).
150

Il seguente teorema, di cui omettiamo la dimostrazione, permette di determinare ledimensioni dei sottospazi somma e somma diretta.
Teorema 26.9 (Formula di Grassmann) Sia V uno spazio vettoriale finitamente generatosu un campo K. Se W1 e W2 sono due sottospazi vettoriali di V , allora
dim (W1 +W2) + dim (W1 ∩W2) = dimW1 + dimW2.
Corollario 26.4 Sia V uno spazio vettoriale finitamente generato su un campo K. Se W1
e W2 sono due sottospazi vettoriali di V tali che W1 ∩W2 = {o}, alloradim (W1 ⊕W2) = dimW1 + dimW2.
Esempio 26.7 Siano V = R4, W1 = {(x, y, z, t) | (x, y, z, t) ∈ R4, x+y+z = 0, y+2z+ t =0} e W2 = Span({u1 = (4, 1, 0, 4),u2 = (3, 0, 2, 1),u3 = (9, 3,−2, 11)}). Determinare basi edimensioni di W1, W2, W1 +W2 e W1 ∩W2.
SVOLGIMENTO. Cerchiamo dimW1. Si haW1 = {(−y−z, y, z,−y−2z) | y, z ∈ R}. Essen-do (−y−z, y, z,−y−2z) = (−y, y, 0,−y)+(−z, 0, z,−2z) = y(−1, 1, 0,−1)+z(−1, 0, 1,−2),abbiamo W1 = Span({v1 = (−1, 1, 0,−1),v2 = (−1, 0, 1,−2)}). Poiche
−1 −11 00 1−1 −2
R2 → R2 +R1
R4 → R4 −R1
−→
−1 −10 −10 10 −1
R3 → R3 +R2
R4 → R4 −R2
−→
−1 −10 −10 00 0
,
{v1,v2} e linearmente indipendente e quindi, generando W1, ne costituisce una base. Ab-biamo cosı dimW1 = 2.
Consideriamo W2. Poiche
4 3 91 0 30 2 −24 1 11
R2 → 4R2 −R1
R4 → R4 −R1
−→
4 3 90 −3 30 2 −20 −2 2
R3 → 3R3 + 2R2
R4 → 3R4 − 2R2
−→
4 3 90 3 30 0 00 0 0
,
i vettori u1 e u2 sono linearmente indipendenti mentre u3 e combinazione lineare di u1 e u2.Quindi {u1,u2} e una base di W2 e dimW2 = 2.
Consideriamo oraW1+W2. Abbiamo chew ∈ W1+W2 se e solo se esistono λ1, λ2, µ1, µ2 ∈R tali che w = λ1v1+µ1v2+λ2u1+µ2u2. Infatti w ∈ W1+W2 se e solo se esistono x ∈ W1
151

e y ∈ W2 tali che w = x + y. Essendo {v1,v2} una base di W1 e {u1,u2} una base di W2,abbiamo l’asserto.
QuindiW1+W2 = Span({v1,v2,u1,u2}). Una base diW1+W2 sara data dal sottoinsiemelinearmente indipendente di {v1,v2,u1,u2} avente cardinalita massima. Per determinarlobasta ridurre la matrice
−1 −1 4 31 0 1 00 1 0 2−1 −2 4 1
R2 → R2 +R1
R4 → R4 −R1
−→
−1 1 4 30 −1 5 30 1 0 20 −1 0 −2
R4 → R4 +R3 −→
−1 1 4 30 −1 5 30 1 0 20 0 0 0
.
Allora W1+W2 = Span({v1,v2,u1,u2}) = Span({v1,v2,u1}). Quindi {v1,v2,u1} e unabase di W1 +W2 e dim (W1 +W2) = 3.
Consideriamo infine W1 ∩W2. Per la formula di Grassmann,
dim (W1 +W2) + dim (W1 ∩W2) = dimW1 + dimW2,
3 + dim (W1 ∩W2) = 2 + 2,
dim (W1 ∩W2) = 1.
Le equazioni di W1 ∩ W2 si ottengono mettendo a sistema quelle di W1 con quelle di W2.Determiniamo quindi le equazioni di W2, essendo gia date quelle di W1. Poiche W2 =Span({u1,u2}),
4 3 x1 0 y0 2 z4 1 t
R2 → 4R2 −R1
R4 → R4 −R1
−→
4 3 x0 −3 4y − x0 0 3z + 8y − 2x0 0 3t− x− 8y
.
Le equazioni di W2 sono quindi
{3z + 8y − 2x = 03t− x− 8y = 0
.
Mettendo a sistema la equazioni di W1 con quelle di W2 abbiamo
x+ y + z = 0y + 2z + t = 03z + 8y − 2x = 03t− x− 8y = 0
.
152

Essendo dim (W1 ∩W2) = 1, il precedente sistema puo essere ridotto ad uno formato da treequazioni.
1 1 1 00 1 2 1−2 8 3 0−1 −8 0 3
R3 → R3 + 2R1
R4 → R4 +R1
−→
1 1 1 00 1 2 10 10 5 00 −7 1 3
R4 → R4 − 3R2 −→
1 1 1 00 1 2 10 10 5 00 −10 −5 0
R4 → R4 +R3 −→
1 1 1 00 1 2 10 10 5 00 0 0 0
.
Le equazioni di W1 ∩W2 sono pertanto
x+ y + z = 0y + 2z + t = 010y + 5z = 0
,
e W1 ∩W2 = {(y, y,−2y, 3y) | y ∈ R}. Quindi {(1, 1,−2, 3)} e una base di W1 ∩W2.
Definizione 26.5 Definizione di base ordinata. Sia V uno spazio vettoriale su K didimensione finita n. Si dice base ordinata di V ogni n-upla ordinata B = (u1,u2, . . . ,un) divettori linearmente indipendenti di V .
Il concetto di base ordinata e di fondamentale importanza nella teoria degli spazi vet-toriali; esso riveste un ruolo analogo a quello del riferimento di coordinate cartesiane nellageometria euclidea. Infatti, possiamo rappresentare univocamente ogni vettore rispetto unabase ordinata mediante una n-upla di scalari, detti le componenti del vettore. Le opera-zioni di addizione vettoriale e di moltiplicazione per scalari si traducono poi nelle analogheoperazioni sulle componenti.
Teorema 26.10 Sia V uno spazio vettoriale sul campo K di dimensione finita n e sia B =(u1,u2, . . . ,un) una sua base ordinata. Per ogni vettore v ∈ V esiste una ed una sola n-uplaordinata di scalari (λ1, λ2, . . . , λn) ∈ Kn, detta la n-upla delle componenti di v rispetto labase ordinata B, tale che
v = λ1u1 + λ2u2 + . . .+ λnun.
Dimostrazione. (Dimostrazione facoltativa) Essendo B una base di V , v e combinazionelineare dei vettori di B. Pertanto v = λ1u1 + λ2u2 + . . . + λnun. Se esiste un’altra n-uplaordinata (µ1, µ2, . . . , µn) ∈ Kn tale che v = µ1u1 + µ2u2 + . . .+ µnun, abbiamo
λ1u1 + λ2u2 + . . .+ λnun = µ1u1 + µ2u2 + . . .+ µnun
da cui(λ1 − µ1)u1 + (λ2 − µ2)u2 + . . .+ (λn − µn)un = o.
153

Pertanto λ1 = µ1, λ2 = µ2, . . . , λn = µn.
Siano A = (u1,u2, . . . ,un) e B = (v1,v2, . . . ,vn) due basi ordinate dello spazio vetto-riale V . Se w ∈ V allora esistono due n-uple (λ1, λ2, . . . , λn) e (µ1, µ2, . . . , µn) che sonorispettivamente le componenti di w rispetto le basi ordinate A e B. Per evitare confusionele indicheremo da ora in poi con (λ1, λ2, . . . , λn)A e (µ1, µ2, . . . , µn)B per indicare la baserispetto la quale la n-upla data rappresenta le componenti.
Sia B = (u1,u2, . . . ,un) una base ordinata dello spazio vettoriale V sul campo K. Lan-upla delle componenti del vettore nullo o di V e il vettore nullo (0, 0, . . . , 0)B ∈ Kn,infatti o = 0u1 + 0u2 + . . . + 0un. La n-upla delle componenti del vettore u1 di B e(1, 0, . . . , 0)B ∈ Kn, infatti u1 = 1u1+0u2+ . . .+0un; la n-upla delle componenti del vettoreu2 di B e (0, 1, . . . , 0)B ∈ Kn, infatti u2 = 0u1+1u2+. . .+0un; . . .; la n-upla delle componentidel vettore un della base ordinata B e (0, 0, . . . , 1)B ∈ Kn, infatti un = 0u1+0u2+ . . .+1un.
Definizione 26.6 Base canonica. Nello spazio vettoriale Kn dicesi base canonica la baseordinata En = (e1, e2, . . . , en) con e1 = (1, 0, . . . , 0), e2 = (0, 1, . . . , 0), . . ., en = (0, 0, . . . , 1).
Teorema 26.11 Sia En la base canonica di Kn. Se u = (u1, u2, . . . , un) ∈ Kn allora lecomponenti di u rispetto En coincidono con la n-upla (u1, u2, . . . , un). Cioe
(u1, u2, . . . , un)En = (u1, u2, . . . , un).
Teorema 26.12 Sia V uno spazio vettoriale di dimensione finita sul campo K e sia B =(u1,u2, . . . ,un) una sua base ordinata. L’applicazione (detta l’isomorfismo delle componentirispetto la base ordinata B)
fB : V → Kn
che ad ogni vettore v = v1u1 + v2u2 + . . . + vnun = (v1, v2, . . . , vn)B ∈ V associa la n-uplaordinata (v1, v2, . . . , vn) ∈ Kn delle componenti di v rispetto la base ordinata B soddisfa leseguenti proprieta:
1. fB e biunivoca.
2. Per ogni v,w ∈ V , si ha fB(v +w) = fB(v) + fB(w).
3. Per ogni v ∈ V e per ogni λ ∈ K, si ha fB(λv) = λfB(v).
Dimostrazione. (Dimostrazione facoltativa) 1) L’applicazione fB e sia suriettiva che iniet-tiva. La suriettivita si ha perche, essendo B una base ordinata di V , per ogni (v1, v2, . . . , vn) ∈Kn abbiamo v = v1u1 + v2u2 + . . .+ vnun ∈ V e fB(v) = (v1, v2, . . . , vn). L’inettivita di fBsegue immediatamente dal Teorema 26.10.
2) Siano
v = v1u1 + v2u2 + . . .+ vnun, e w = w1u1 + w2u2 + . . .+ wnun.
154

Allorav +w = (v1 + w1)u1 + (v2 + w2)u2 + . . .+ (vn + wn)un,
e quindifB(v) = (v1, v2, . . . , vn) ∈ Kn, fB(w) = (w1, w2, . . . , wn) ∈ Kn,
fB(v+w) = (v1+w1, v2+w2, . . . , vn+wn) = (v1, v2, . . . , vn)+(w1, w2, . . . , wn) = fB(v)+fB(w).
3) Se v = v1u1 + v2u2 + . . .+ vnvn ∈ V e λ ∈ K, allora si ha
λv = (λv1)u1 + (λv2)u2 + . . .+ (λvn)un
e quindifB(v) = (v1, v2, . . . , vn) ∈ Kn,
fB(λv) = (λv1, λv2, . . . , λvn) = λ(v1, v2, . . . , vn) = λfB(v).
Teorema 26.13 Sia V uno spazio vettoriale sul campo K avente la base ordinata B =(u1,u2, . . . ,un). Allora l’applicazione
f−1B : Kn → V
che ad ogni (λ1, λ2, . . . , λn) ∈ Kn associa il vettore v = λ1u1+λ2u2, . . . , λnun = (λ1, λ2, . . . , λn)Bdi V e biunivoca e si ha
f−1B (α(λ1, λ2, . . . , λn)+β(µ1, µ2, . . . , µn)) = αf−1
B (λ1, λ2, . . . , λn)+βf−1B (µ1, µ2, . . . , µn) (74)
per ogni α, β ∈ K e (λ1, λ2, . . . , λn), (µ1, µ2, . . . , µn) ∈ Kn.
Dimostrazione. (Dimostrazione facoltativa) L’applicazione f−1B e l’inversa della fB de-
finita nel Teorema 26.12. Pertanto f−1B e biunivoca. Proviamo che vale la (74). Siano
v1 = f−1B (λ1, λ2, . . . , λn) e v2 = f−1
B (µ1, µ2, . . . , µn). Allora fB(v1) = (λ1, λ2, . . . , λn)B efB(v2) = (µ1, µ2, . . . , µn)B. Ne segue, per il Teorema 26.12, fB(αv1 + βv2) = αfB(v1) +βfB(v2) = α(λ1, λ2, . . . , λn)++β(µ1, µ2, . . . , µn) = (αλ1 + βµ1, αλ2 + βµ2, . . . , αλn + βµn), e quindi
f−1B (αλ1 + βµ1, αλ2 + βµ2, . . . , αλn + βµn) = αv1 + βv2. (75)
Dalla (75) otteniamof−1B (α(λ1, λ2, . . . , λn) + β(µ1, µ2, . . . , µn)) = f−1
B (αλ1 + βµ1, αλ2 + βµ2, . . . , αλn + βµn) == αv1 + βv2 = αf−1
B (λ1, λ2, . . . , λn) + βf−1B (µ1, µ2, . . . , µn).
155

Esempio 26.8 Siano dati in R4 i vettori u1 = (1, 1,−1, 2), u2 = (1, 2,−1, 3), u3 =(2, 2, 0, 0) e u4 = (2, 0, 0, 1). Provare che essi formano una base di R4. Determinare lecomponenti (α, β, γ, δ) di v = (7, 8, 5, 3) rispetto le basi ordinate B = (u1,u2,u3,u4) eC = (u2,u4,u1,u3).
SVOLGIMENTO. I vettori u1, u2, u3 e u4 formano una base di R4 se sono linearmenteindipendenti.
1 1 2 21 2 2 0−1 −1 0 02 3 0 1
R2 → R2 −R1 −→
1 1 2 20 1 0 −2−1 −1 0 02 3 0 1
R4 → 2R4 +R2 −→
1 1 2 20 1 0 −2−1 −1 0 04 7 0 0
R4 → R4 + 4R3 −→
1 1 2 20 1 0 −2−1 −1 0 02 3 0 1
.
Quindi u1, u2, u3 e u4 sono linearmente indipendenti.Cerchiamo le componenti di v rispetto la base ordinata B. Si ha
v = αu1 + βu2 + γu3 + δu4, (76)
ovvero (7, 8, 5, 3) = α(1, 1,−1, 2) + β(1, 2,−1, 3) + γ(2, 2, 0, 0) + δ(2, 0, 0, 1) = (α+ β + 2γ +2δ, α+2β+2γ,−α− β, 2α+3β+ δ). Le componenti α, β, γ e δ sono quindi le soluzioni delsistema
α+ β + 2γ + 2δ = 7α+ 2β + 2γ = 8−α− β = 52α+ 3β + δ = 3
(77)
la cui matrice associata e
1 1 2 2 71 2 2 0 8−1 −1 0 0 52 3 0 1 3
.
Applicando a questa matrice le precedenti riduzioni otteniamo
1 1 2 2 70 1 0 −2 1−1 −1 0 0 50 3 0 0 27
R1 → −3R1 +R4
R2 → −3R2 +R4
R3 → 3R3 +R4
−→
−3 0 −6 −6 60 0 0 6 24−3 0 0 0 420 3 0 0 27
156

R1 → R1 −R3 −→
0 0 −6 −6 −360 0 0 6 24−3 0 0 0 420 3 0 0 27
R1 → R1 +R2 −→
0 0 −6 0 −120 0 0 6 24−3 0 0 0 420 3 0 0 27
R1 → −16R1
R2 → 16R2
R3 → −13R3
R4 → 13R4
−→
0 0 1 0 20 0 0 1 41 0 0 0 −140 1 0 0 9
e quindi α = −14, β = 9, γ = 2, δ = 4 sono le componenti di v = (7, 8, 5, 3) rispetto la baseordinata B, cioe v = (−14, 9, 2, 4)B.
Cerchiamo ora le componenti di v rispetto la base ordinata C = (u2,u4,u1,u3). Si ha
v = αu2 + βu4 + γu1 + δu3, (78)
ovvero (7, 8, 5, 3) = α(1, 2,−1, 3) + β(2, 0, 0, 1) + γ(1, 1,−1, 2) + δ(2, 2, 0, 0) = (α+ 2β + γ +2δ, 2α+ γ +2δ,−α− γ, 3α+ β +2γ). Quindi le componenti α, β, γ e δ sono le soluzioni delsistema
α+ 2β + γ + 2δ = 72α+ γ + 2δ = 8−α− γ = 53α+ β + 2γ = 3
(79)
il quale ha soluzione (α, β, γ, δ) = (9, 4,−14, 2), quindi v = (9, 4,−14, 2)C .Si osservi che non e il caso di risolvere di nuovo il sistema (79). Infatti basta porre in
esso β al posto di α, δ al posto di β, α al posto di γ e, infine, γ al posto di δ per ottenereil sistema (77). Ovviamente questa sostituzione si ricava osservando le uguaglianze (76) e(78).
Esempio 26.9 Si considerino in R3 la basi ordinate A = (u1,u2,u3) e B = (v1,v2,v3)essendo u1 = (2, 1, 3), u2 = (−1, 1, 1), u3 = (0, 2, 1), v1 = (0, 1, 1), v2 = (2, 3,−1) ev3 = (2, 2, 2). Siano note, nella base A, le componenti dei due vettori w1 = (5,−2, 7)A ew2 = (−3, 14, 2)A. Determinare le componenti di w1 e w2 nella base B.
SVOLGIMENTO. Di questo esercizio daremo due metodi di risoluzione. Il primo si basa sulmetodo visto nell’Esempio 26.8. Il secondo mostrera una tecnica di risoluzione molto piugenerale ed interessante e introduce al problema della ricerca della matrice di cambiamentodi base.
I metodo. Come abbiamo detto vogliamo riutilizzare le tecniche viste nell’Esempio 26.8.Pertanto come primo passo dobbiamo determinare le coordinate dei vettori w1 e w2: w1 =(5,−2, 7)A = 5u1 − 2u2 + 7u3 = 5(2, 1, 3) − 2(−1, 1, 1) + 7(0, 2, 1) = (12, 17, 20), w2 =(−3, 14, 2)A = −3u1 + 14u2 + 2u3 = −3(2, 1, 3) + 14(−1, 1, 1) + 2(0, 2, 1) = (−20, 15, 7).
157

Procedendo come nell’Esempio 26.8, bisogna determinare i valori degli aij, i = 1, 2 e j =1, 2, 3, tali che
w1 = (12, 17, 20) = a11v1+a12v2+a13v3 = (2a12+2a13, a11+3a12+2a13, a11−a12+2a13) e
w2 = (−20, 15, 7) = a21v1 + a22v2 + a23v3 = (2a22 +2a23, a21 +3a22 +2a23, a21 − a22 +2a23).
In altre parole bisogna risolvere i due sistemi seguenti nelle incognite aij:
2a12 + 2a13 = 12a11 + 3a12 + 2a13 = 17a11 − a12 + 2a13 = 20
2a22 + 2a23 = −20a21 + 3a22 + 2a23 = 15a21 − a22 + 2a23 = 7
. (80)
Si vede subito che (a parte il nome delle variabili) i sistemi precedenti differiscono so-lamente per i termini noti. Poiche li vogliamo risolvere col metodo di riduzione, possiamocompattare entrambi i sistemi in un’unica matrice le cui due colonne finali coincidono conle due colonne dei termini noti.
0 2 2 12 −201 3 2 17 151 −1 2 20 7
R2 → R2 −R1
R3 → R3 −R1
−→
0 2 2 12 −201 1 0 5 351 −3 0 8 27
R3 → R3 −R2 −→
0 2 2 12 −201 1 0 5 350 −4 0 3 −8
R2 → 4R2 +R3
R1 → 2R1 +R3
−→
0 0 4 27 −484 0 0 23 1320 −4 0 3 −8
R1 ↔ R2 −→
4 0 0 23 1320 0 4 27 −480 −4 0 3 −8
R2 ↔ R3
−→
4 0 0 23 1320 −4 0 3 −80 0 4 27 −48
R1 → 14R1
R2 → −14R2
R3 → 14R3
−→
1 0 0 234
330 1 0 −3
42
0 0 1 274
−12
.
Pertanto w1 = (a11, a12, a13)B = (234,−3
4, 27
4)B e w2 = (a21, a22, a23)B = (33, 2,−12)B.
II metodo. Abbiamo w1 = (5,−2, 7)A = 5u1 − 2u2 + 7u3. Supponiamo che ui =(ai1, ai2, ai3)B = ai1v1 + ai2v2 + ai3v3. Allora w1 = (5,−2, 7)A = 5u1 − 2u2 + 7u3 =5(a11v1 + a12v2 + a13v3) − 2(a21v1 + a22v2 + a23v3) + 7(a31v1 + a32v2 + a33v3) = (5a11 −2a21 + 7a31)v1 + (5a12 − 2a22 + 7a3)v2 + (5a13 − 2a23 + 7a33)v3 = (5a11 − 2a21 + 7a31, 5a12 −2a22 + 7a3, 5a13 − 2a23 + 7a33)B. Quindi, posto
PA,B =
a11 a21 a31a12 a22 a32a13 a23 a33
,
158

le componenti di w1 nella base B sono date dal prodotto riga per colonna di PA,B con lamatrice 3× 1 i cui elementi sono le componenti di w1 in base A
PA,B(wT1 ) =
a11 a21 a31a12 a22 a32a13 a23 a33
5−27
A
.
Allo stesso modo si ricavano le componenti nella base B di w2 = (−3, 14, 2)A
PA,B(wT2 ) =
a11 a21 a31a12 a22 a32a13 a23 a33
−3142
A
.
Occorre quindi determinare le componenti nella base B dei vettori u1, u2 e u3. Abbiamoquindi
u1 = (2, 1, 3) = a11v1 + a12v2 + a13v3 = a11(0, 1, 1) + a12(2, 3,−1) + a13(2, 2, 2) =(2a12 + 2a13, a11 + 3a12 + 2a13, a11 − a12 + 2a13),
u2 = (−1, 1, 1) = a21v1 + a22v2 + a23v3 = a21(0, 1, 1) + a22(2, 3,−1) + a23(2, 2, 2) =(2a22 + 2a23, a21 + 3a22 + 2a23, a21 − a22 + 2a23),
u3 = (0, 2, 1) = a31v1 + a32v2 + a33v3 = a31(0, 1, 1) + a32(2, 3,−1) + a33(2, 2, 2) =(2a32 + 2a33, a31 + 3a32 + 2a33, a31 − a32 + 2a33).
Bisogna quindi risolvere i tre sistemi:
2a12 + 2a13 = 2a11 + 3a12 + 2a13 = 1a11 − a12 + 2a13 = 3
2a22 + 2a23 = −1a21 + 3a22 + 2a23 = 1a21 − a22 + 2a23 = 1
2a32 + 2a33 = 0a31 + 3a32 + 2a33 = 2a31 − a32 + 2a33 = 1
(81)
Si vede subito che (a parte il nome delle variabili) i sistemi precedenti differiscono so-lamente per i termini noti. Poiche li vogliamo risolvere col metodo di riduzione, possiamocompattarli in un’unica matrice le cui tre colonne finali coincidono con le tre colonne deitermini noti.
0 2 2 2 −1 01 3 2 1 1 21 −1 2 3 1 1
R2 → R2 −R1
R3 → R3 −R1
−→
0 2 2 2 −1 01 1 0 −1 2 21 −3 0 1 2 1
R3 → R3 −R2 −→
0 2 2 2 −1 01 1 0 −1 2 20 −4 0 2 0 −1
R2 → 4R2 +R3
R1 → 2R1 +R3
−→
0 0 4 6 −2 −14 0 0 −2 8 70 −4 0 2 0 −1
R1 ↔ R2 −→
4 0 0 −2 8 70 0 4 6 −2 −10 −4 0 2 0 1
R2 ↔ R3
159

−→
4 0 0 −2 8 70 −4 0 2 0 −10 0 4 6 −2 −1
R1 → 14R1
R2 → −14R2
R3 → 14R3
−→
1 0 0 −12
2 74
0 1 0 −12
0 14
0 0 1 32
−12
−14
.
Pertanto
PA,B =
−12
2 74
−12
0 14
32
−12
−14
.
Le componenti di wT1 nella base B saranno quindi
−12
2 74
−12
0 14
32
−12
−14
5−27
A
=
234
−34
274
B
.
Analogamente le componenti di wT2 in base B sono
−12
2 74
−12
0 14
32
−12
−14
−3142
A
=
332
−12
B
.
Il metodo dell’Esempio 26.9 fornisce il seguente
Metodo per determinare la matrice PA,B di cambiamento di base dalla base Aalla base B.
Siano A = (u1,u2, . . . ,un) e B = (v1,v2, . . . ,vn) due basi ordinate dello spazio vettorialeKn. Per ogni i = 1, 2, . . . , n siano ui = (ui1, ui2, . . . , uin) e vi = (vi1, vi2, . . . , vin) le coordinatedei vettori ui e vi. Poniamo
A =
u11 u21 · · · un1
u12 u22 · · · un2
· · · · · ·u1n u2n · · · unn
e B =
v11 v21 · · · vn1v12 v22 · · · vn2· · · · · ·
v1n v2n · · · vnn
.
Per determinare PA,B si proceda nel seguente modo:
1. Si scriva la matrice
(B|A) =
v11 v21 · · · vn1 u11 u21 · · · un1
v12 v22 · · · vn2 u12 u22 · · · un2
· · · · · · · · · · · ·v1n v2n · · · vnn u1n u2n · · · unn
. (82)
2. Con il metodo di riduzione per righe si trasformi la matrice (82) in modo che la sotto-matrice B venga trasformata nella matrice identica In. Allora la sottomatrice A verratrasformata nella PA,B. Schematizzando abbiamo
160

(B|A) riduzione per righe −→ (In|PA,B
). (83)
Possiamo usare lo stesso metodo, e la stessa matrice (B|A) definita in (82), per determi-nare la matrice PB,A di cambiamento di base dalla base B alla base A. Infatti e immediatoverificare che se, mediante il metodo di riduzione per righe, si trasforma la (82) in modoche la sottomatrice A venga trasformata nella matrice identica In allora B verra trasformatanella PB,A. Schematizzando abbiamo
(B|A) riduzione per righe −→ (PB,A|In
). (84)
Teorema 26.14 Valgono le seguenti uguaglianze: PA,B = B−1 · A e PB,A = A−1 · B.
Dimostrazione. (Dimostrazione facoltativa) Come visto alla fine del Paragrafo 11, lariduzione (83) equivale alla costruzione di una matrice invertibile H tale che
H · (B|A) = (H · B|H · A) =(In|PA,B
).
Essendo detB 6= 0 (le colonne di B sono i trasposti dei vettori della base B), si ha H = B−1.Pertanto PA,B = B−1 · A. Analogamente, dalla (84) segue PB,A = A−1 · B.
E importante ricordare che le colonne della matrice PA,B rappresentano(nell’ordine) le componenti in base B dei trasposti dei vettori della base ordinataA. Analogamente, le colonne della matrice PB,A rappresentano (nell’ordine) lecomponenti in base A dei trasposti dei vettori della base ordinata B.
Esempio 26.10 Si considerino in R3 la basi ordinate A = (u1,u2,u3) e B = (v1,v2,v3)essendo u1 = (2, 1, 3), u2 = (−1, 1, 1), u3 = (0, 2, 1), v1 = (0, 1, 1), v2 = (2, 3,−1) ev3 = (2, 2, 2). Si determinino le matrici di cambiamento di base PA,B e PB,A.
SVOLGIMENTO. PA,B e stata determinata nell’ Esempio 26.9. Cerchiamo PB,A. Si ha
A =
2 −1 01 1 23 1 1
, B =
0 2 21 3 21 −1 2
.
Pertanto
(B|A) =
0 2 2 2 −1 01 3 2 1 1 21 −1 2 3 1 1
R2 → R2 +R1
R3 → R3 +R1
−→
0 2 2 2 −1 01 5 4 3 0 21 1 4 5 0 1
R3 → 2R3 −R2 −→
0 2 2 2 −1 01 5 4 3 0 21 −3 4 7 0 0
R2 → −7R2 + 3R3
R1 → −7R1 + 2R3
−→
161

2 −20 −6 0 7 0−4 −44 −16 0 0 −141 −3 4 7 0 0
R1 ↔ R3 −→
1 −3 4 7 0 0−4 −44 −16 0 0 −142 −20 −6 0 7 0
R2 ↔ R3 −→
1 −3 4 7 0 02 −20 −6 0 7 0−4 −44 −16 0 0 −14
R1 → 17R1
R2 → 17R2
R3 → − 114R3
−→
17
−37
47
1 0 027
−207
−67
0 1 0−2
7−22
787
0 0 1
. Pertanto PB,A =
17
−37
47
27
−207
−67
27
227
87
.
27 Applicazioni lineari
Definizione 27.1 Siano V e W due spazi vettoriali su un campo K. Un’applicazione
f : V → W
si dice lineare se soddisfa le due seguenti condizioni:
1. f(u+ v) = f(u) + f(v) per ogni u,v ∈ V ;
2. f(λu) = λf(u) per ogni u ∈ V e λ ∈ K.E immediato verificare il seguente risultato:
Teorema 27.1 L’applicazionef : V → W
e lineare se e solo se f(λu+ µv) = λf(u) + µf(v) per ogni u,v ∈ V e λ, µ ∈ K.Esempio 27.1 Sia f : R4 → R3 l’applicazione definita dalla seguente legge:
f(x, y, z, t) = (2x− 3y + 4z − t, x+ 2y + t, 3x− y + z + 4t).
Provare che f e lineare.
SVOLGIMENTO. Per il Teorema 27.1 bisogna verificare che f(λu + µv) = λf(u) + µf(v)per ogni u,v ∈ R4 e λ, µ ∈ R. Posto u = (x1, y1, z1, t1) e v = (x2, y2, z2, t2), abbiamof(λu+µv) = f(λx1 +µx2, λy1 +µy2, λz1 +µz2, λt1 +µt2) = (2(λx1 +µx2)− 3(λy1 +µy2)+4(λz1+µz2)− (λt1+µt2), λx1+µx2+2(λ11+µy2)+(λt1+µt2), 3(λx1+µx2)− (λy1+µy2)+(λz1+µz2)+4(λt1+µt2)) = ((2λx1−3λy1+4λz1−λt1)+(2µx2−3µy2+4µz2−µt2), (λx1+2λy1 + λt1) + (µx2 + 2µy2 + µt2), (3λx1 − λy1 + λz1 + 4λt1) + (3µx2 − µy2 + µz2 + 4µt2)) =(2λx1 − 3λy1 + 4λz1 − λt1, λx1 + 2λy1 + λt1, 3λx1 − λy1 + λz1 + 4λt1) + (2µx2 − 3µy2 +4µz2 − µt2, µx2 + 2µy2 + µt2, 3µx2 − µy2 + µz2 + 4µt2) = λ(2x1 − 3y1 + 4z1 − t1, x1 +2y1 + t1, 3x1 − y1 + z1 + 4t1) + µ(2x2 − 3y2 + 4z2 − t2, x2 + 2y2 + t2, 3x2 − y2 + z2 + 4t2) =λf(x1, y1, z1, t1) + µf(x2, y2, z2, t2) = λf(u) + µf(v).
162

Definizione 27.2 Un’applicazione lineare f : V → W e detta
• isomorfismo se e biunivoca;
• endomorfismo se V = W ;
• automorfismo se e biunivoca e V = W .
Il Teorema 26.12 puo essere riformulato nella seguente maniera:
Teorema 27.2 Sia V uno spazio vettoriale su un campo K finitamente generato e sia B =(u1, . . . ,un) Per una base ordinata di V . Si definisca l’applicazione
fB : V → Kn
nel seguente modo: per ogni v ∈ V si ha fB(v) = (v1, v2, . . . , vn) se e solo se v = v1u1 +v2u2 + . . .+ vnun (cioe fB associa ad ogni vettore v ∈ V l’n-upla delle sue componenti nellabase ordinata B). Allora fB e un isomorfismo.
Teorema 27.3 Siano V , W e U tre spazi vettoriali finitamente generati sul campo K. Sianodati i due isomorfismi
f : V → W e g : W → U.
Allorag ◦ f : V → U
e un isomorfismo.
Dimostrazione. (Dimostrazione facoltativa) L’applicazione g◦f e suriettiva. Infatti per lasuriettivita di g, comunque preso u ∈ U esiste w ∈ W tale che g(w) = u. Per la suriettivitadi f , esiste v ∈ V tale che f(v) = w. Quindi u = g(w) = g[f(v)] = g ◦ f(v).
L’applicazione g ◦ f e iniettiva. Infatti siano v1,v2 ∈ V con v1 6= v2. Per l’iniettivita dif si ha f(v1) 6= f(v2) e, per l’iniettivita di g, g[f(v1)] 6= g[f(v2)] cioe g ◦ f(v1) 6= g ◦ f(v2).
L’applicazione g ◦ f e lineare. Infatti g ◦ f(λv1 + µv2) = g[f(λv1 + µv2)] = g[λf(v1) +µf(v2)] = g[λf(v1)] + g[µf(v2)] = λg[f(v1)] + µg[f(v2)] = λg ◦ f(v1) + µg ◦ f(v2).
Teorema 27.4 Sia f : V → W un’applicazione lineare. Valgono le seguenti proprieta:
1. Se oV e il vettore nullo di V , allora f(oV ) = oW ove oW denota il vettore nullo di W .
2. Se u1,u2, . . . ,un ∈ V e λ1, λ2, . . . , λn ∈ K allora f(λ1u1 + λ2u2 + . . . + λnun) =λ1f(u1) + λ2f(u2) + . . .+ λnf(un).
3. Se V ′ e un sottospazio vettoriale di V , allora f(V ′) e un sottospazio vettoriale di W .
4. Se W ′ e un sottospazio vettoriale di W , allora f−1(W ′) e un sottospazio vettoriale diV .
163

Dimostrazione. (Dimostrazione obbligatoria) Le proprieta 1 e 2 seguono direttamentedalla definizione di applicazione lineare. Infatti si ha f(oV ) = f(0u) = 0f(u) = oW ef(λ1u1 + λ2u2 + . . . + λnun) = f(λ1u1) + f(λ2u2) + . . . + f(λnun) = λ1f(u1) + λ2f(u2) +. . .+ λnf(un).
Proviamo la proprieta 3. Per ogni λ, µ ∈ K e per ogni u′,v′ ∈ f(V ′) proviamo cheλu′ + µv′ ∈ f(V ′). Se u′,v′ ∈ f(V ′), allora esistono u,v ∈ V ′ tali che f(u) = u′ ef(v) = v′. Poiche V ′ e un sottospazio vettoriale di V , si ha λu + µv ∈ V ′ e quindiλu′ + µv′ = λf(u) + µf(v) = f(λu+ µv) ∈ f(V ′).
Proprieta 4. Basta provare che per ogni u,v ∈ f−1(W ′) e per ogni λ, µ ∈ K si haλu+ µv ∈ f−1(W ′).
Poiche f(u), f(v) ∈ W ′ e W ′ e un sottospazio vettoriale di W , si ha f(λu + µv) =λf(u) + µf(v) ∈ W ′. Dunque λu+ µv ∈ f−1(W ′) come richiesto.
Definizione 27.3 Sia f : V → W un’applicazione lineare. Dicesi immagine di f l’insiemeImf = f(V ) = {f(v) | ∀ v ∈ V }.
Definizione 27.4 Sia f : V → W un’applicazione lineare. Dicesi nucleo di f l’insiemeKer f = f−1(oW ) = {v | v ∈ V e f(v) = oW}.
Dalle proprieta 3 e 4 del Teorema 27.4 si ottiene il seguente corollario.
Corollario 27.1 Sia f : V → W un’applicazione lineare. Allora:
1. Imf e un sottospazio vettoriale di W ;
2. Ker f e un sottospazio vettoriale di V ;
3. se A = {v1,v2, . . . ,vn} e un insieme di generatori di V , allora
f(A) = {f(v1), f(v2), . . . , f(vn)}
e un insieme di generatori di Imf .
Teorema 27.5 Siano f : V → W e g : V → W due applicazioni lineari fra i duesottospazi V e W entrambi di dimensione finita. Sia B = (u1,u2, . . . ,un) una base ordinatadi V , Se f(ui) = g(ui) per ogni i = 1, 2, . . . , n allora le due applicazioni coincidono, cioef(v) = g(v) per ogni v ∈ V .
Dimostrazione. (Dimostrazione facoltativa) Per ogni v ∈ V , posto v = λ1u1 + λ2u2 +. . .+λnun, si ha f(v) = f(λ1u1+λ2u2+ . . .+λnun) = λ1f(u1)+λ2f(u2)+ . . .+λnf(un) =λ1g(u1) + λ2g(u2) + . . .+ λng(un) = g(λ1u1 + λ2u2 + . . .+ λnun) = g(v).
Teorema 27.6 L’applicazione lineare f : V → W e iniettiva se e solo se Ker f = {oV }.
164

Dimostrazione. (Dimostrazione facoltativa) Necessita. Sia f iniettiva e sia v ∈ Ker fcon v 6= 0. Si ha f(v) = oW e, per la linearita di f , f(oV ) = oW . Quindi f(v) = f(oV ) checontraddice l’potesi che f e iniettiva.
Sufficienza. Sia Ker f = {oV } e siano v1,v2 ∈ V tali che f(v1) = f(v2). Alloraf(v1 − v2) = oW e, per l’ipotesi Ker f = {oV }, v1 − v2 = oV .
Teorema 27.7 Sia f : V → W un’applicazione lineare fra i due spazi vettoriali sul campoK, V e W . Siano v1,v2, . . . ,vn ∈ V . Valgono le seguenti proprieta:
1. Se f e iniettiva allora v1,v2, . . . ,vn sono linearmente indipendenti se e solo sef(v1), f(v2) . . . , f(vn) sono linearmente indipendenti.
2. Se f(v1), f(v2) . . . , f(vn) sono linearmente indipendenti, allora v1,v2, . . . ,vn sonolinearmente indipendenti.
Dimostrazione. (Dimostrazione facoltativa) Proviamo la 1). Supponiamo che
λ1f(v1) + λ2f(v2) + . . .+ λnf(vn) = oW .
Per la linearita di f ,f(λ1v1 + λ2v2 + . . .+ λnvn) = oW
cioe λ1v1 + λ2v2 + . . . + λnvn ∈ Ker f . Essendo, per ipotesi, f iniettiva si ha, in virtudel Teorema 27.6, λ1v1 + λ2v2 + . . . + λnvn = oV . Da cui segue, avendo supposto chev1,v2, . . . ,vn sono indipendenti, che λ1 = λ2 = . . . = λn = 0.
Proviamo la 2). Dall’uguaglianza λ1v1+λ2v2+. . .+λnvn = oV , applicando la f otteniamoλ1f(v1) + λ2f(v2) + . . . + λnf(vn) = oW dalla quale si deduce che λ1 = λ2 = . . . = λn = 0,perche f(v1), f(v2), . . . , f(vn) sono linearmente indipendenti per ipotesi.
Corollario 27.2 Se f : V → W e un’applicazione lineare iniettiva e B e una base di V ,allora f(B) e una base di Imf .
Esempio 27.2 Si consideri l’applicazione lineare f : R4 → R3 definita da f(x, y, z, t) =(2x− y + z, x+ 2z, 4x− 3y − z). Determinare base e dimensione di Ker f e Imf .
SVOLGIMENTO. Per definizione Ker f coincide con le soluzioni (x, y, z, t) del sistemaomogeneo
2x− y + z + 0t = 0x+ 0y + 2z + 0t = 04x− 3y − z + 0t = 0
.
2 −1 1 01 0 2 04 −3 −1 0
R3 → R3 − 3R1 −→
2 −1 1 01 0 2 0−2 0 −4 0
165

R3 → R3 + 2R2 −→
2 −1 1 01 0 2 00 0 0 0
.
Pertanto Ker f e dato dalle soluzioni (x, y, z, t) del sistema
{2x− y = −zx = −2z
,
cioe Ker f = {(−2z,−3z, z, t) | z, t ∈ R}. Abbiamo (−2z,−3z, z, t) = (−2z,−3z, z, 0) +(0, 0, 0, t) = z(−2,−3, 1, 0) + t(0, 0, 0, 1). Quindi Ker f = Span({(−2,−3, 1, 0), (0, 0, 0, 1)}).Poiche
−2 0−3 01 00 1
R2 → −2R2 − 3R1
R3 → 2R3 +R1
−→
−2 00 00 00 1
,
una base di Ker f e data da {(−2,−3, 1, 0), (0, 0, 0, 1)} e dimKer f = 2.Essendo Imf = {(2x − y + z, x + 2z, 4x − 3y − z) | x, y, z ∈ R}, possiamo scrivere
(2x − y + z, x + 2z, 4x − 3y − z) = (2x, x, 4x) + (−y, 0,−3y) + (z, 2z,−z) = x(2, 1, 4) +y(−1, 0,−3) + z(1, 2,−1). Quindi Imf = Span({(2, 1, 4), (−1, 0,−3), (1, 2,−1)}). Poiche
2 −1 11 0 24 −3 −1
R3 → R3 − 3R1 −→
2 −1 11 0 2−2 0 −4
R3 → R3 + 2R2 −→
2 −1 11 0 20 0 0
,
una base di Imf e data da {(2, 1, 4), (−1, 0, 3)} e dim Imf = 2.
Teorema 27.8 Siano V e W due spazi vettoriali di dimensione finita definiti su un campoK. Sia f : V → W un’applicazione lineare. Allora
dimV = dimKer f + dim Imf.
Dimostrazione. (Dimostrazione facoltativa) Supponiamo innanzitutto che dimKer f = 0,cioe Ker f = {oV }. In tal caso, per il Teorema 27.6, f e iniettiva e per il Corollario 27.2,l’immagine mediante la f di una base di V e una base di Imf . Quindi dim Imf = dimVe si ha la tesi.
Sia dimKer f = dim V . Allora Ker f = V e quindi Imf = {oW} e il teorema e provato.Sia infine dimKer f = r, 1 ≤ r < dimV = n. Siano B = {u1,u2, . . .ur} una ba-
se di Ker f e B′ = {u1,u2, . . . ,ur,ur+1, . . . ,un} una base di V che estende B (questa
166

base esiste per il Teorema 26.7). Proviamo che f(B′ \ B) = {ur+1, . . . ,un} e una ba-se di Imf . Per ogni v ∈ Imf esiste un vettore w ∈ V tale che f(w) = v e quindiv = f(w) = f(λ1u1 + . . . + λrur + λr+1ur+1 + . . . + λnun) = f(λ1u1 + . . . + λrur) +f(λr+1ur+1+ . . .+λnun) = oW +λr+1f(ur+1)+ . . .+λnf(un) = λr+1f(ur+1)+ . . .+λnf(un).Cioe Span({f(ur+1, . . . , f(un)}) = Imf .
Proviamo adesso che {f(ur+1), . . . , f(un)} e linearmente indipendente. Sia
µr+1f(ur+1) + µr+2f(ur+2) + . . .+ µnf(un) = ow,
alloraf(µr+1ur+1 + µr+2ur+2 + . . .+ µnun) = ow,
µr+1ur+1 + µr+2ur+2 + . . .+ µnun ∈ Ker f = Span(B),
µr+1ur+1 + µr+2ur+2 + . . .+ µnun = ν1u1 + ν2u2 + . . .+ νrur,
µr+1ur+1 + µr+2ur+2 + . . .+ µnun − ν1u1 − ν2u2 − . . .− νrur = oV
e quindi, essendo B′ una base di V ,
−ν1 = −ν2 = . . . = −νr = µr+1 = µr+2 = . . . = µn = 0,
e, in particolare, µr+1 = µr+2 = . . . = µn = 0.
28 Matrici e Applicazioni Lineari.
Siano V e W due spazi lineari sullo stesso campo K aventi rispettivamente dimensione n em e basi A = (v1,v2, . . . ,vn) e B = (w1,w2, . . . ,wm). Vale il seguente teorema.
Teorema 28.1 Un’applicazione lineare f : V → W si puo assegnare, rispetto le basi A e B,nei seguenti tre modi equivalenti:
(1) mediante la leggef(v) = f ((x1, x2, . . . , xn)A) = (a11x1 + a21x2 + . . .+ an1xn, a12x1 + a22x2 + . . .+ an2xn, . . .
. . . , a1mx1 + a2mx2 + . . .+ anmxn)B;
(2) mediante la matrice
MA,Bf =
a11 a21 . . . an1a12 a22 . . . an2· · . . . ·· · . . . ·· · . . . ·
a1m a2m . . . anm
(detta la matrice associata all’applicazione lineare f rispetto le basi A e B) ponendo
167
(f(v))T = (f ((x1, x2, . . . , xn)A))T =
MA,B
f
x1
x2
···xn
A
B
;
(3) mediante le immagini dei vettori della base A espresse in base B:
f(v1) = f ((1, 0, 0, . . . , 0, 0)A) = (a11, a12, . . . , a1m)B,f(v2) = f ((0, 1, 0, . . . , 0, 0)A) = (a21, a22, . . . , a2m)B,.................................................................................f(vn) = f ((0, 0, 0, . . . , 0, 1)A) = (an1, an2, . . . , anm)B,
ponendo f(v) = f ((x1, x2, . . . , xn)A) = x1f(v1) + x2f(v2) + . . .+ xnf(vn).
Dimostrazione. (Dimostrazione obbligatoria) L’equivalenza fra (1) e (2) segueimmediatamente dal prodotto fra matrici.
Se la legge di f e quella in (1), allora i valori di f(v1), f(v2), ..., f(vn) coincidono conquelli dati in (3). Proviamo ora il viceversa: sia f assegnata mediante le (3), allora la sualegge e quella espressa dalla (1). Infatti si haf(v) = f ((x1, x2, . . . , xn)A) = f(x1v1 + x2v2 + . . . + xnvn) = x1f(v1) + x2f(v2) + . . . +xnf(vn) = x1f ((1, 0, 0, . . . , 0, 0)A)+x2f ((0, 1, 0, . . . , 0, 0)A)+ . . .+xnf ((0, 0, 0, . . . , 0, 1)A) =x1 (a11, a12, . . . , a1m)B + x2 (a21, a22, . . . , a2m)B + . . .+ xn (an1, an2, . . . , anm)B == (a11x1 + a21x2 + . . .+ an1xn, a12x1 + a22x2 + . . .+ an2xn, . . . , a1mx1 + a2mx2 + . . .+ anmxn)B.
Le precedenti uguaglianze provano anche che se f e assegnata mediante le (3), allora lasua matrice associata coincide con quella data in (2).
Sia infine f assegnata mediante la sua matrice associata MA,Bf data in (2). Allora
(f(v1))T = (f ((1, 0, . . . , 0)A))
T =
MA,B
f
10···0
A
B
=
a11a12···
a1m
B
,
(f(v2))T = (f ((0, 1, . . . , 0)A))
T =
MA,B
f
01···0
A
B
=
a21a22···
a2m
B
,
168

...................................................
(f(vn))T = (f ((0, 0, . . . , 1)A))
T =
MA,B
f
00···1
A
B
=
an1an2···
anm
B
.
Ricordando quanto detto alle pagine 137 e 146 e negli Esempi 26.5 e 26.6, si ha
Corollario 28.1 Imf = Span{(f(v1))
T , f(v2))T , . . . , f(vn))
T}, pertanto
dim Imf = rangoMA,Bf .
Esempio 28.1 Si consideri l’applicazione lineare f : R3 → R4 definita dalla legge
f(v) = f ((x, y, z)A) = (x− y, x− z, y − z, x+ y + z)B
essendo A = (v1,v2,v3) e B = (w1,w2,w3,w4) rispettivamente le basi di R3 e R4. Si ha
(x, y, z)A = xv1 + yv2 + zv3, e
(x−y, x−z, y−z, x+y+z)B = (x−y)w1+(x−z)w2+(y−z)w3+(x+y+z)w4 = x(w1+w2+w4)+y(−w1+w3+w4)+z(−w2−w3+w4) = x(1, 1, 0, 1)B+y(−1, 0, 1, 1)B+z(0,−1,−1, 1)B.
Per la linearita di f , f ((x, y, z)A) = f(xv1+yv2+zv3) = xf(v1)+yf(v2)+zf(v3). Pertantof(v1) = (1, 1, 0, 1)B, f(v2) = (−1, 0, 1, 1)B e f(v3) = (0,−1,−1, 1)B.
Viceversa, posto f(v1) = (1, 1, 0, 1)B, f(v2) = (−1, 0, 1, 1)B e f(v3) = (0,−1,−1, 1)B,abbiamo f ((x, y, z)A) = f(xv1 + yv2 + zv3) = xf(v1) + yf(v2) + zf(v3) = x(1, 1, 0, 1)B +y(−1, 0, 1, 1)B + z(0,−1,−1, 1)B = (x− y, x− z, y − z, x+ y + z)B.
Si osservi infine che
MA,Bf =
((f(v1))
T | (f(v2))T | (f(v3))
T)=
1 −1 01 0 −10 1 −11 1 1
.
La dimostrazione della seguente proposizione viene lasciata al lettore come facile esercizio.
Proposizione 28.1 Siano V , W e U tre spazi vettoriali sullo stesso campo K aventi rispet-tivamente dimensioni n, m e p e basi A, B e C.
169

• Se f e ϕ sono due applicazioni lineari da V in W , con matrici associate MA,Bf e MA,B
ϕ ,
allora all’applicazione lineare f + ϕ resta associata la matrice MA,Bf +MA,B
ϕ .
• Sia λ ∈ K. Se f e un’applicazione lineare da V in W , con matrice associata MA,Bf ,
allora all’applicazione lineare λf resta associata la matrice λMA,Bf .
• Se f e un isomorfismo fra V e W (quindi m = n), con matrice associata MA,Bf , allora
all’applicazione lineare λf−1 resta associata la matrice λ(MA,B
f
)−1
.
• Se f : V → W e ϕ : W → U sono due applicazioni lineari, aventi rispettivamentematrici associate MA,B
f e MB,Cϕ , allora all’applicazione lineare ϕ ◦ f resta associata la
matrice MB,Cϕ MA,B
f .
Esempio 28.2 Si considerino le basi A = (v1 = (1, 2, 2),v2 = (1, 1, 0),v3 = (1, 0, 1)) eB = (w1 = (1, 1),w2 = (1, 0)) di R3 e di R2, rispettivamente. Assegnamo, in tutti e tre imodi, un’applicazione lineare f : R3 → R2:
1. Come equazione f ((x, y, z)A) = (x− y, z − x)B.
2. Come matrice
MA,Bf =
(1 −1 0−1 0 1
).
3. Assegnando i valori, nella base B, assunti dalla f nei vettori della base A:
f(1, 2, 2) = f ((1, 0, 0)A) = (1,−1)B,
f(1, 1, 0) = f ((0, 1, 0)A) = (−1, 0)B,
f(1, 0, 1) = f ((0, 0, 1)A) = (0, 1)B.
Esempio 28.3 Siano f : R3 → R2, A e B definite come nell’Esempio 28.2. DeterminareME3,E2
f e l’equazione di f rispetto le basi canoniche.
SVOLGIMENTO. Occorre determinare, nella base E2, i valori di f(e1), f(e2), f(e3) e porreME3,E2
f = ((f(e1))T | (f(e2))T | (f(e1))T ).
Passo primo. Si determinano i vettori e1 = (1, 0, 0), e2 = (0, 1, 0) e e3 = (0, 0, 1) nella baseA. Procedendo come nel paragrafo 26,
1 1 1 1 0 02 1 0 0 1 02 0 1 0 0 1
R3 → R3 −R1 −→
1 1 1 1 0 02 1 0 0 1 01 −1 0 −1 0 1
R3 → R3 +R2 −→
1 1 1 1 0 02 1 0 0 1 03 0 0 −1 1 1
R2 → −3R2 + 2R3
R1 → −3R1 +R3
−→
170

0 −3 −3 −4 1 10 −3 0 −2 −1 23 0 0 −1 1 1
R1 → R1 −R2 −→
0 0 −3 −2 2 −10 −3 0 −2 −1 23 0 0 −1 1 1
R1 ↔ R3 −→
3 0 0 −1 1 10 −3 0 −2 −1 20 0 −3 −2 2 −1
R1 → 13R1
R2 −→ −13R2
R3 −→ −13R3
−→
1 0 0 −13
13
13
0 1 0 23
13
−23
0 0 1 23
−23
13
.
Quindi
e1 =
(−1
3,2
3,2
3
)
A
= −1
3v1 +
2
3v2 +
2
3v3,
e2 =
(1
3,1
3, −2
3
)
A
=1
3v1 +
1
3v2 − 2
3v3,
e3 =
(1
3, −2
3,1
3
)
A
=1
3v1 − 2
3v2 +
1
3v3.
Passo secondo. Essendo f ((x, y, z)A) = (x− y, z − x)B, si ha
f(e1) = f((−1
3, 2
3, 2
3
)A
)= MA,B
f
−13
2323
A
= (−1, 1)B,
f(e2) = f((
13, 1
3, −2
3
)A
)= MA,B
f
1313
−23
A
= (0,−1)B,
f(e3) = f((
13, −2
3, 1
3
)A
)= MA,B
f
13
−23
13
A
= (1, 0)B.
Passo terzo. Si determinano (−1, 1)B, (0,−1)B e (1, 0)B nella base E2. Bisogna quindicercare la matrice di cambiamento di base PB,E2 . Per quanto detto nel paragrafo 26, si deveridurre la matrice (
1 0 1 10 1 1 0
)(85)
in modo che la matrice di ordine 2 prima della | coincida con I2. In tal caso la (85) soddisfaquesto requisito. Quindi
PB,E2 =
(1 11 0
)
171

ed essendo
PB,E2
( −11
)
B
=
(0−1
)
E2
, PB,E2
(0−1
)
B
=
( −10
)
E2
, PB,E2
(10
)
B
=
(11
)
E2
,
abbiamo (−1, 1)B = (0,−1)E2 , (0,−1)B = (−1, 0)E2 , (1, 0)B = (1, 1)E2 .Si osservi che avremmo potuto determinare (−1, 1)B, (0,−1)B e (1, 0)B nella base E2 piu
semplicemente procedendo nel seguente modo:
(−1, 1)B = −w1 +w2 = −(1, 1) + (1, 0) = (0,−1) = (0,−1)E2 ,
(0,−1)B = 0w1 −w2 = 0(1, 1)− (1, 0) = (−1, 0) = (−1, 0)E2 ,
(1, 0)B = w1 + 0w2 = (1, 1) + 0(1, 0) = (1, 1) = (1, 1)E2 .
Abbiamo quindi
ME3,E2
f =
(0 −1 1−1 0 1
)
e l’equazione della f e
f ((x, y, z)E3) = ME3,E4
f
xyz
E3
= (−y + z,−x+ z)E2 .
Nel caso specifico (stiamo cercando la matrice di f relativa alle basi canoniche), proponiamoun altro modo per determinare ME3,E2
f che ci consente di evitare l’esplicita determinazionedei vettori e1, e2, e3 nella base A. Infatti possiamo scrivere
f ((1, 2, 2)E3) = f ((1, 0, 0)A) = (1,−1)B = (1, 1)E2 − (1, 0)E2 = (0, 1)E2 ;
f ((1, 1, 0)E3) = f ((0, 1, 0)A) = (−1, 0)B = −(1, 1)E2 = (−1,−1)E2 ;
f ((1, 0, 1)E3) = f ((0, 0, 1)A) = (0, 1)B = (1, 0)E2 .
Ed essendof ((1, 2, 2)E3) = f(e1 + 2e2 + 2e3), f ((1, 1, 0)E3) = f(e1 + e2), f ((1, 0, 1)E3) = f(e1 + e3),
f(e1 + 2e2 + 2e3) = (0, 1)E2
f(e1 + e2) = (−1,−1)E2
f(e1 + e3) = (1, 0)E2
,
f(e1) + 2f(e2 + 2f(e3) = (0, 1)E2
f(e1) + f(e2) = (−1,−1)E2
f(e1) + f(e3) = (1, 0)E2
.
Risolviamo il sistema precedente (nelle incognite f(e1), f(e2) e f(e3)):
172

1 2 2 (0, 1)1 1 0 (−1,−1)1 0 1 (1, 0)
−→
1 2 2 (0, 1)1 1 0 (−1,−1)−1 2 0 (−2, 1)
−→
1 2 2 (0, 1)1 1 0 (−1,−1)0 3 0 (−3, 0)
−→
3 0 6 (6, 3)−3 0 0 (0, 3)0 3 0 (−3, 0)
−→
0 0 6 (6, 6)−3 0 0 (0, 3)0 3 0 (−3, 0)
−→
−3 0 0 (0, 3)0 3 0 (3, 0)0 0 6 (6, 6)
−→
1 0 0 (0,−1)0 1 0 (−1, 0)0 0 1 (1, 1)
.
Quindi f(e1) = (0,−1), f(e2) = (−1, 0), f(e3) = (1, 1) e
ME3,E2
f =
(0 −1 1−1 0 1
).
Esempio 28.4 Sia f : R3 → R4 l’applicazione lineare definita, rispetto le basi canoniche,dalla matrice
ME3,E4
f =
1 1 21 −1 −11 1 0−1 0 1
.
1. Studiare f .
2. Verificare che
A = ((1, 2, 1), (1, 2, 0), (0, 1, 1)) e B = ((1, 1, 2, 2), (3, 1, 3, 1), (1, 1, 0, 0), (2, 0, 1, 1))
sono due basi rispettivamente in R3 e in R4.
3. Determinare MA,Bf .
4. Determinare la legge di f rispetto le basi A e B.
SVOLGIMENTO. Punto 1. Per determinare le dimensioni di Ker f e di Imf occorretrovare il rango di ME3,E4
f :
1 1 21 −1 −11 1 0−1 0 1
−→
1 1 22 0 10 0 −2−1 0 1
−→
1 1 22 0 10 0 −20 0 0
,
173

ME3,E4
f ha rango 3, quindi dim Imf = 3 e dimKer f = 3 − 3 = 0. Ne segue Ker f ={(0, 0, 0)E3} e C = ((1, 1, 1,−1)E4 , (1,−1, 1, 0)E4 , (2,−1, 0, 1)E4) e una base di Imf . Pertrovare l’equazione di Imf , consideriamo il generico vettore (x, y, z, t)E4 ∈ Imf . Esso deveessere combinazione lineare dei vettori della base C. Pertanto la seguente matrice deve avererango 3:
1 1 2 x1 −1 −1 y1 1 0 z−1 0 1 t
. (86)
Per il metodo di riduzione
1 1 2 x1 −1 −1 y1 1 0 z−1 0 1 t
−→
1 1 2 x2 0 1 x+ y0 0 −2 z − x−1 0 1 t
−→
1 1 2 x2 0 1 x+ y0 0 −2 z − x0 0 3 2t+ 2y + 2x
−→
1 1 2 x2 0 1 x+ y0 0 −2 z − x0 0 0 4t+ x+ 4y + 3z
,
Dovendo essere 3 il rango della (86), dobbiamo porre
4t+ x+ 4y + 3z = 0
che e l’equazione di Imf .
Punto 2. Si verifica facilmente che le seguenti matrici hanno rango 3 e 4, rispettivamente:
1 1 02 2 11 0 1
1 3 1 21 1 1 02 3 0 12 1 0 1
.
Pertanto A e B sono due basi.
Punto 3. Calcoliamo ora MA,Bf . Si ha:
f ((1, 0, 0)A) = f ((1, 2, 1)E3) = (5,−2, 3, 0)E4 ,
f ((0, 1, 0)A) = f ((1, 2, 0)E3) = (3,−1, 3,−1)E4 ,
f ((0, 0, 1)A) = f ((0, 1, 1)E3) = (3,−2, 1, 1)E4 .
Adesso bisogna esprimere in base B i vettori (5,−2, 3, 0)E4 , (3,−1, 3,−1)E4 e (3,−2, 1, 1)E4 .Cerchiamo la matrice di cambiamento di base PE4,B:
174
1 3 1 2 1 0 0 01 1 1 0 0 1 0 02 3 0 1 0 0 1 02 1 0 1 0 0 0 1
−→
1 3 1 2 1 0 0 00 −2 0 −2 −1 1 0 02 3 0 1 0 0 1 02 1 0 1 0 0 0 1
−→
1 3 1 2 1 0 0 00 −2 0 −2 −1 1 0 04 4 0 0 −1 1 2 04 0 0 0 −1 1 0 2
−→
0 −12 −4 −8 −5 1 0 20 −2 0 −2 −1 1 0 00 4 0 0 0 0 2 −24 0 0 0 −1 1 0 2
−→
0 0 −4 −8 −5 1 6 −40 0 0 −4 −2 2 2 −20 4 0 0 0 0 2 −24 0 0 0 −1 1 0 2
−→
0 0 −4 0 −1 −3 2 00 0 0 −4 −2 2 2 −20 4 0 0 0 0 2 −24 0 0 0 −1 1 0 2
−→
4 0 0 0 −1 1 0 20 4 0 0 0 0 2 −20 0 −4 0 −1 −3 2 00 0 0 −4 −2 2 2 −2
−→
1 0 0 0 −14
14
0 12
0 1 0 0 0 0 12
−12
0 0 1 0 14
34
−12
00 0 0 1 1
2−1
2−1
212
.
Pertanto
PE4,B =
−14
14
0 12
0 0 12
−12
14
34
−12
012
−12
−12
12
.
Essendo
PE4,B
5−230
E4
=
−74
−32
−74
2
B
, PE4,B
3−13−1
E4
=
−32
2−3
2
0
B
e
PE4,B
3−211
E4
=
−34
0−5
452
B
,
abbiamo
f ((1, 0, 0)A) = (5,−2, 3, 0)E4 =
(−7
4,−3
2,−7
4, 2
)
B
,
f ((0, 1, 0)A) = (3,−1, 3,−1)E4 =
(−3
2, 2,−3
2, 0
)
B
,
f ((0, 0, 1)A) = (3,−2, 1, 1)E4 =
(−3
4, 0,−5
4,5
2
)
B
e quindi
175

MA,Bf =
−74
−32
−34
32
2 0−7
4−3
254
2 0 52
.
Punto 4. L’equazione di f rispetto le basi A e B e
f ((x, y, z)A) = MA,Bf
xyz
A
=
(−7
4x− 3
2y − 3
4z,
3
2x+ 2y,−7
4x− 3
2y − 5
4z, 2x+
5
2z
)
B
.
Esempio 28.5 Siano A = (v1 = (1, 2),v2 = (2, 2)), C = (u1 = (3, 3),u2 = (1, 0)),B = (w1 = (1, 2, 3, 3),w2 = (2, 2, 0, 0),w3 = (1, 0, 1, 0),w4 = (1, 1, 1, 1)),D = (z1 = (−1,−1, 1, 1), z2 = (0, 1, 1, 1), z3 = (0, 0, 1, 1), z4 = (0, 0, 0, 1)).
1. Verificare che A e C sono due basi in R2 e che B e D sono due basi in R3.
2. Assegnata l’applicazione f avente matrice associata
MA,Bf =
−1 11 32 −11 2
,
determinare MC,Df .
SVOLGIMENTO. Il quesito 1 si verifica facilmente. Risolviamo il quesito 2. Determiniamou1 e u2 nella base A (in altre parole determineremo la matrice PC,A):
(1 2 3 12 2 3 0
)−→
(1 2 3 10 −2 −3 −2
)−→
(1 0 0 −10 −2 −3 −2
)−→
(1 0 0 −10 1 3
21
).
Abbiamo quindi PC,A =
(0 −132
1
), cioe
u1 =
(0,
3
2
)
A
, u2 = (−1, 1)A.
Poiche f ((x, y)A) = MA,Bf
(xy
)
A
= (−x+ y, x+ 3y, 2x− y, x+ 2y)B, si ha
176

f(u1) = f((0, 3
2)A)=
(32, 92,−3
2, 3)B,
f(u2) = f ((−1, 1)A) = (2, 2,−3, 1)B.
Ora, determiniamo(32, 92,−3
2, 3)Be (2, 2,−3, 1)B in base D. A tale scopo cerchiamo la
matrice di cambiamento di base PB,D.
−1 0 0 0 1 2 1 1−1 1 0 0 2 2 0 11 1 1 0 3 0 1 11 1 1 1 3 0 0 1
−→
−1 0 0 0 1 2 1 10 1 0 0 1 0 −1 00 1 1 0 4 2 2 20 1 1 1 4 2 1 2
−→
−1 0 0 0 1 2 1 10 1 0 0 1 0 −1 00 0 1 0 3 2 3 20 0 1 1 3 2 2 2
−→
−1 0 0 0 1 2 1 10 1 0 0 1 0 −1 00 0 1 0 3 2 3 20 0 0 1 0 0 −1 0
−→
1 0 0 0 −1 −2 −1 −10 1 0 0 1 0 −1 00 0 1 0 3 2 3 20 0 1 1 0 0 −1 0
.
Pertanto
PB,D =
−1 −2 −1 −11 0 −1 03 2 3 20 0 −1 0
,
e quindi
(3
2,9
2,−3
2, 3
)
B
=
(−12, 3, 15,
3
2
)
D
, (2, 2,−3, 1)B = (−2, 7,−1, 3)D
e
MC,Df =
−12 −23 715 −132
3
.
Nell’Esempio 28.5 abbiamo determinatoMC,Df , supposta nota laMA,B
f . Il metodo mostra-to in questo esempio e, ovviamente, del tutto generale. Possiamo formulare meglio il metodousato in modo da mettere in evidenza il legame intercorrente fra le matrici di cambiamentodi base e le matrici associate all’applicazione lineare f .
Teorema 28.2 (Metodo per determinare la matrice associata MC,Df qualora si
supponga nota la MA,Bf .)
177

Siano V e W due spazi vettoriali su K di dimensione finita n ed m, rispettivamente. Siaf : V → W un’applicazione lineare. Se A e C sono due basi di V e B e D sono due basidi W , si ha
MC,Df = PB,DMA,B
f PC,A. (87)
eMA,B
f = PD,BMC,Df PA,C . (88)
Dimostrazione. Si vuole determinare la matrice associata MC,Df qualora si supponga nota
la MA,Bf e viceversa. Siano u ∈ V e v ∈ W tali che
f(u) = v. (89)
Postou = (u1, u2, . . . , un)A = (u′
1, u′2, . . . , u
′n)C e
v = (v1, v2, . . . , vm)B = (v′1, v′2, . . . , v
′m)D,
possiamo scrivere la (89) nei due seguenti modi (a seconda che si consideri la matrice associataalla f espressa rispetto le basi A,B oppure C,D):
v1v2···vn
B
= MA,Bf
u1
u2
···um
A
e
v′1v′2···v′n
D
= MC,Df
u′1
u′2
···u′m
C
. (90)
Ricordando che PC,A e la matrice di cambiamento dalla base C alla base A in V e PB,D e lamatrice di cambiamento da B a D in W , si ha
PC,A
u′1
u′2
···u′m
C
=
u1
u2
···um
A
e PB,D
v1v2···vn
B
=
v′1v′2···v′n
D
.
Quindi
v′1v′2···v′n
D
= PB,D
v1v2···vn
B
= PB,DMA,Bf
u1
u2
···um
A
= PB,DMA,Bf PC,A
u′1
u′2
···u′m
C
178

da cui
v′1v′2···v′n
D
= PB,DMA,Bf PC,A
u′1
u′2
···u′m
C
(91)
Confrontando la (91) con la seconda delle (90) si ottiene la (87). Dalla (87) si ricava,
MA,Bf =
(PB,D
)−1MC,D
f
(PC,A
)−1= PD,BMC,D
f PA,C
e quindi 88 resta provata.
Nell’Esempio 28.5 abbiamo gia determinato le seguenti matrici
MA,Bf =
−1 11 32 −11 2
, PC,A =
(0 −132
1
)e PB,D =
−1 −2 −1 −11 0 −1 03 2 3 20 0 −1 0
.
Per la (87) si ha
MC,Df =
−1 −2 −1 −11 0 −1 03 2 3 20 0 −1 0
−1 11 32 −11 2
(0 −132
1
)=
−12 −23 715 −132
3
.
Si consideri adesso l’endomorfismof : V → V.
Per quanto detto sopra (ove si suppone W = V , B = A e D = C) si hanno le uguaglianze
MC,Cf = PA,CMA,A
f PC,A e MA,Af = PC,AMC,C
f PA,C
che possiamo scrivere
MC,Cf = (PC,A)−1MA,A
f PC,A e MA,Af = (PA,C)−1MC,C
f PA,C . (92)
Pertanto MA,Af si ottiene dalla MC,C
f attraverso il prodotto H−1MC,Cf H essendo, nel no-
stro caso, H = PA,C . Analogamente MC,Cf si ottiene dalla MA,A
f attraverso il prodotto
H−1MC,Cf H ove si ponga H = PC,A =
(PA,C
)−1. Possiamo generalizzare quanto detto nel
seguente modo.
Definizione 28.1 Due matrici A,B ∈ M(n;K) si dicono simili se esiste una matriceinvertibile H ∈ M(n;K) di ordine n tale che B = H−1AH.
179

Proposizione 28.2 Per ogni A,B ∈ M(n;K) si consideri la seguente relazione S: AS Bse e solo se A e B sono simili. S e una relazione di equivalenza.
Dimostrazione. (Dimostrazione facoltativa) Proprieta riflessiva: per ogni A ∈ M(n;K) eAS A. Infatti A = I−1
n AIn.Proprieta simmetrica: se AS B allora B S A. Infatti se AS B esiste H ∈ M(n;K) tale
che A = H−1BH da cui HA = BH, HAH−1 = B, (H−1)−1
AH−1 = B cioe B S A.Proprieta transitiva: se AS B e B S C allora AS C. Poiche AS B esiste una matrice
invertibile H1 tale che A = H−11 BH1; poiche B S C esiste una matrice invertibile H2 tale
che B = H−12 CH2. Sostituendo nell’uguaglianza precedente avremo A = H−1
1 H−12 CH2H1.
Ponendo H = H2H1 e ricordando che H−1 = H−11 H−1
2 si ottiene AS C.
Vale il seguente teorema.
Teorema 28.3 Due matrici quadrate A,B ∈ M(n;K) sono simili se e solo se sono associatead uno stesso endomorfismo f di uno spazio vettoriale V di dimensione n sul campo Krispetto a basi opportune.
Date due matrici A,B ∈ M(n;K) nasce quindi il problema di decidere se esse sono similioppure no. In generale questo e un problema difficile.
29 Autovalori ed autovettori
Sia V uno spazio vettoriale sul campo K e sia f : V → V un endomorfismo. OvviamenteKer f e Imf sono entrambi sottospazi dello stesso spazio V e, piu in generale, ogni vettore osottospazio del dominio V di f si trova anche nel suo codominio (che e ancora V ). Pertantopossono esistere sottospazi W di V tali che f(W ) = W oppure f(W ) ⊆ W . Possono ancheesistere vettori v ∈ V tali che f(v) = v o, piu in generale, f(v) ∈ Span({v}).
Definizione 29.1 Sia f : V → V un endomorfismo. Un elemento λ ∈ K si dice autovaloreper f se esiste un vettore v ∈ V , v 6= o, tale che f(v) = λv.
Definizione 29.2 Sia f : V → V un endomorfismo. Un vettore v ∈ V , v 6= o, si diceautovettore per f se esiste un elemento λ ∈ K tale che f(v) = λv. In tal caso diremo che ve un autovettore associato all’autovalore λ.
Si noti che il vettore nullo o pur soddisfacendo l’equazione f(o) = λo qualunque siaλ ∈ K non e un autovettore.
Esempio 29.1 Sia A = (u1 = (1, 0),u2 = (1, 1)) una base di R2 e sia f : R2 → R2
l’endomorfismo assegnato mediante f(u1) = (1, 1), f(u2) = (2, 2). Cercare gli autovalori egli autovettori per f .
180

SVOLGIMENTO. In base alla definizione di autovalore bisogna cercare i λ ∈ R per cuiesiste un v = (a, b) ∈ R2, v 6= (0, 0), tale che f(v) = λv. Essendo f assegnato mediante leimmagini della base A cominciamo con esprimere v in base A: v = (a, b) = αu1 + βu2 =α(1, 0) + β(1, 1) = (α + β, β), da cui α = a − b e β = b. Quindi v = (a − b)u1 + bu2 ef(v) = f((a− b)u1 + bu2) = (a− b)f(u1) + bf(u2) = (a− b)(1, 1) + b(2, 2) = (a+ b, a+ b).Pertanto l’equazione f(v) = λv diventa (a+ b, a+ b) = λ(a, b), da cui
{a+ b = λaa+ b = λb
,
{(1− λ)a+ b = 0a+ (1− λ)b = 0
.
Per essere λ un autovalore, il precedente sistema deve avere soluzioni (a, b) diverse dallabanale. Quindi deve essere ∣∣∣∣
1− λ 11 1− λ
∣∣∣∣ = 0,
le cui soluzioni λ = 0 e λ = 2 danno gli autovalori cercati.All’autovalore λ = 0 corrispondono gli autovettori (a,−a) per ogni a ∈ R, a 6= 0. Infatti
essi sono le soluzioni diverse dalla banale del sistema{
(1− λ)a+ b = 0a+ (1− λ)b = 0
per λ = 0. Analogamente gli autovettori corrispondenti a λ = 2 sono dati da (a, a) per ognia ∈ R, a 6= 0.
Esempio 29.2 Sia f : R2 → R2 l’endomorfismo definito, rispetto la base canonica di R2,dalla legge f(x, y) = (x+ 2y,−x− y). Verificare che f non ammette autovettori.
SVOLGIMENTO. Se (α, β) ∈ R2 fosse un autovettore per f , allora (α, β) 6= (0, 0) ed esi-sterebbe un λ ∈ R tale che f(α, β) = λ(α, β) ovvero (α + 2β,−α − β) = λ(α, β). Quindi ilsistema {
(1− λ)α + 2β = 0−α− (1 + λ)β = 0
(93)
dovrebbe ammettere soluzioni diverse dalla banale. Il che implica
∣∣∣∣1− λ 2−11 −1− λ
∣∣∣∣ = 0,
e quindi λ2 + 1 = 0 per qualche λ 6= 0. Impossibile.
Osservazione. La stessa legge f , applicata allo spazio vettoriale C2 sul campo C, risulta unendomorfismo su C2 che ha autovalori.
Teorema 29.1 Sia f : V → V un isomorfismo. Allora λ ∈ K e un autovalore per f se esolo se λ−1 e un autovalore per f−1.
181

Teorema 29.2 Sia f : V → V un endomorfismo e sia λ ∈ K. Allora l’applicazione
fλ = f − λiV : V → V
definita da f(v) = f(v)− λv e un endomorfismo.
Teorema 29.3 Sia f : V → V un endomorfismo. Allora λ ∈ K e un autovalore per f see solo se l’endomorfismo fλ non e iniettivo.
Dimostrazione. (Dimostrazione facoltativa) Necessita. Supponiamo che λ sia un autova-lore per f . Allora esiste v 6= o tale che f(v) = λv; ovvero f(v)−λv = o. Quindi v ∈ Ker fλe v 6= o. Per il Teorema 27.6, fλ non e iniettivo.
Sufficienza. Supponiamo che fλ non sia iniettivo. Allora Ker fλ 6= {o}. Quindi esistealmeno un v 6= o, v ∈ Ker fλ. Ovvero fλ(v) = o, f(v) − λv = o, f(v) = λv il che provache λ e un autovalore per f .
Definizione 29.3 Sia f : V → V un endomorfismo e λ ∈ K un autovalore per f . Dicesiautospazio associato all’autovalore λ, e si denota con Vλ, l’insieme dei vettori v ∈ V tali chef(v) = λv. Cioe
Vλ = {v ∈ V | f(v) = λv}.
Notiamo che Vλ e costituito dal vettore nullo o e da tutti gli autovettori associati a λ.Inoltre Vλ e un sottospazio di V poiche Vλ = Ker fλ. Osserviamo infine che se λ = 0 e unautovalore per f si ha V0 = Ker f in quanto f0 = f .
Teorema 29.4 Sia f : V → V un endomorfismo e λ1, λ2, . . . , λr ∈ K r suoi autovaloridistinti. Per i = 1, 2, . . . , r sia vi ∈ Vλi
. Allora gli autovettori v1,v2, . . . ,vr sono linearmenteindipendenti.
Teorema 29.5 Siano Vλ1 , Vλ2 , . . . , Vλr autospazi distinti di un endomorfismo f : V → V .Allora Vλ1 + Vλ2 + . . .+ Vλr e diretta.
Teorema 29.6 Sia V uno spazio vettoriale di dimensione n. Allora ogni endomorfismo diV ammette al piu n autovalori.
Definizione 29.4 Sia f : V → V un endomorfismo di uno spazio vettoriale di dimensionefinita n e λ ∈ K un autovalore per f . Dicesi molteplicita geometrica di λ, e si denota congλ, la dimensione dell’autospazio Vλ associato a λ; cioe gλ = dimVλ.
Teorema 29.7 Sia V uno spazio vettoriale di dimensione n e sia f : V → V un en-domorfismo i cui autovalori distinti sono λ1, λ2, . . . , λr. Allora la somma delle molteplicitageometriche degli autovalori distinti e al piu n. Cioe gλ1 + gλ2 + . . .+ gλr ≤ n.
182

30 Ricerca degli autovalori e degli autospazi ad essi
associati
Sia V uno spazio vettoriale su K di dimensione n e sia f : V → V un endomorfismo. Fissatauna base A per V restera associata la matrice MA,A
f . Consideriamo l’endomorfismo fλ =f − λiV , con λ ∈ K. Ricordando la Proposizione 28.1, la matrice ad esso associata rispettoalla stessa base A sara MA,A
fλ= MA,A
f−λiV= MA,A
f +MA,A−λiV
= MA,Af − λMA,A
iV= MA,A
f − λIn.Abbiamo quindi il seguente teorema.
Teorema 30.1 Sia f : V → V un endomorfismo di uno spazio vettoriale su K di dimen-sione finita n e sia A una base di V . Un elemento λ ∈ K e un autovalore per f se e solose
|MA,Af − λIn| = 0.
Definizione 30.1 Sia M una matrice quadrata di ordine n su K. Si chiama polinomiocaratteristico di M , e si denota con ΨM(x), il determinante della matrice M − xIn, cioe
ΨM(x) = |M − xIn|.
Nel caso in cui M = MA,Af (cioe M e la matrice associata ad un endomorfismo f rispetto
ad una stessa base A) ΨMA,Af
(x) si chiama il polinomio caratteristico di f e si indica con
Ψf (x).
La definizione di Ψf (x) sembra essere mal posta, in quanto sembra che Ψf (x) dipendanon solo dall’endomorfismo f ma anche dalla base A fissata. Vale pero il seguente teorema.
Teorema 30.2 Sia f : V → V un endomorfismo di uno spazio vettoriale su K di dimen-sione finita n e siano A e B due basi di V . Posto D = MA,A
f e C = MB,Bf si ha che D e C
hanno lo stesso polinomio caratteristico, cioe ΨD(x) = ΨC(x).
Esempio 30.1 Si consideri lo spazio vettoriale V = R3 sul campo R. Sia f : R3 → R3
l’endomorfismo individuato dalle assegnazioni
f(v1) = (2, 3, 3), f(v2) = (2,−1, 0), f(v3) = (0, 2, 1)
dove v1 = (1, 1, 1), v2 = (1, 0,−1) e v3 = (0, 1, 1) formano una base A di R3. Verificare cheΨ
ME3,E3f
(x) = ΨMA,Af
(x) = Ψf (x) e determinare inoltre gli autovalori per f .
SVOLGIMENTO. Per le assegnazioni date si ha
MA,E3
f =
2 2 03 −1 23 0 1
.
183
Per determinare ΨM
E3,E3f
(x) e necessario calcolare la matrice ME3,E3
f . Per la (87) (vedasi
Teorema 28.2) abbiamoME3,E3
f = PE3,E3MA,E3
f PE3,A. (94)
Essendo PE3,E3 = I3, e sufficiente calcolare PE3,A.
1 1 0 1 0 01 0 1 0 1 01 −1 1 0 0 1
−→
1 1 0 1 0 00 1 −1 1 −1 00 2 −1 1 0 −1
−→
1 1 0 1 0 00 1 −1 1 −1 00 0 1 −1 2 −1
−→
1 1 0 1 0 00 1 0 0 1 −10 0 1 −1 2 −1
−→
1 0 0 1 −1 10 1 0 0 1 −10 0 1 −1 2 −1
.
Quindi
PE3,A =
1 −1 10 1 −1−1 2 −1
e, per la (94),
ME3,E3
f = I3
2 2 03 −1 23 0 1
1 −1 10 1 −1−1 2 −1
=
2 0 01 0 22 −1 2
.
Pertanto
ΨM
E3,E3f
(x) =
∣∣∣∣∣∣
2− x 0 01 −x 22 −1 2− x
∣∣∣∣∣∣= (2− x)(x2 − 2x+ 2).
Determiniamo ora ΨMA,Af
(x). In tal caso dobbiamo calcolare MA,Af . Per la (87) (vedasi
Teorema 28.2) abbiamoMA,A
f = PE3,AMA,E3
f PA,A
e quindi
MA,Af =
1 −1 10 1 −1−1 2 −1
2 2 03 −1 23 0 1
I3 =
2 3 −10 −1 11 −4 3
.
Pertanto
ΨMA,Af
(x) =
∣∣∣∣∣∣
2− x 3 −10 −1− x 11 −4 3− x
∣∣∣∣∣∣= (2− x)(x2 − 2x+ 2)
184

e, secondo le previsioni del Teorema 30.2,
ΨM
E3,E3f
(x) = ΨMA,Af
(x) = Ψf (x) = (2− x)(x2 − 2x+ 2)
e il polinomio caratteristico cercato.Ricordando il Teorema 30.1, gli autovalori per f sono le soluzioni in R dell’equazione
Ψf (x) = (2− x)(x2 − 2x+ 2) = 0 la cui unica soluzione e x = 2.
La ricerca degli autospazi associati agli autovalori per l’endomorfismo f : V → V (siricordi che V e uno spazio vettoriale di dimensione n sul campo K) si fa tenendo presenteche, se λ ∈ K e un autovalore, allora e Vλ = Ker(fλ). Per cui Vλ va calcolato con gli usualimetodi per la ricerca del nucleo di una applicazione lineare, applicati all’endomorfismo fλ.Quindi le componenti rispetto alla base A di V dei vettori x = (x1, x2, . . . , xn)A ∈ Vλ sonodate dalle soluzioni del sistema lineare omogeneo
(MA,Af − λIn)
x1
x2
···xn
=
00···0
, (95)
per cui, in particolare,dimVλ = n− r(MA,A
f − λIn),
ove r(MA,Af − λIn) denota il rango della matrice MA,A
f − λIn (vedasi Definizione 15.5).
Esempio 30.2 Sia f l’endomorfismo definito nell’Esempio 30.1. Determinare, nella baseA, i vettori dell’autospazio V2 associato all’unico autovalore per f .
SVOLGIMENTO. In virtu della (95), e sufficiente risolvere il sistema
(MA,Af − 2I3)
x1
x2
x3
=
000
,
2 3 −10 −1 11 −4 3
− 2
1 0 00 1 00 0 1
x1
x2
x3
=
000
,
0 3 −10 −3 11 −4 1
x1
x2
x3
=
000
,
{3x2 − x3 = 0x1 − x2 = 0
.
185

QuindiV2 = {(x2, x2, 3x2)A | ∀x2 ∈ R} .
Essendo r(MA,Af − 2I3) = 2,
dimV2 = 3− r(MA,Af − 2I3) = 1.
Una base di V2 e data dal vettore (1, 1, 3)A.
31 Un’applicazione degli autovettori: il motore di ri-
cerca Google
Il presente paragrafo e la (libera) traduzione italiana dell’articolo Searching the web witheigenvectors di Herbert S. Wilf, University of Pennsylvania, Philadelphia, PA 19104-6395(April 13, 2001).
Come potremmo misurare l’importanza di un sito web? Un sito e importante se altri im-portanti siti web si connettono ad esso (questa definizione potrebbe apparire un circolo vizio-so ma, per il momento, non preoccupiamocene). Supponiamo che x1, x2, . . . , xn esprimano,rispettivamente, la misura dell’importanza dei siti 1, 2, . . . , n. Cioe
xi = importanza del sito i.
Vogliamo che l’importanza di ogni sito web sia proporzionale alla somma delle importanzedi tutti gli altri siti che si connettono ad esso. Si ottiene un sistema di n equazioni in nincognite che potrebbe assomigliare, per esempio, al seguente:
x1 = k(x14 + x97 + x541)x2 = k(x14 + x1003 + x3224 + x10029). . . = . . .xn = k(x1 + x23 + x10098 + x10099)
. (96)
Il significato del precedente sistema e immediato: la prima equazione ci dice che i siti 14,97 e 541 si connettono al sito 1 e la sua importanza x1 e data dal prodotto di una costantepositiva di proporzionalita k per la somma delle importanze dei siti che si connettono ad 1.La seconda equazione esprime il fatto che solamente 14, 1003, 3224 e 10029 si connettono alsito 2 e la sua importanza x2 e uguale al prodotto della costante di proporzionalita k per lasomma delle importanze dei siti che si connettono ad 1. E cosı via.
Riassumendo, se per ogni coppia i, j ∈ {1, 2, . . . , n}, poniamo
aij =
{1 se il sito j si connette col sito i0 se il sito j non si connette col sito i
,
186

il sistema (96) puo essere scritto nel seguente modo
x1 = k(a11x1 + a12x2 + . . .+ a1nxn)x2 = k(a21x1 + a22x2 + . . .+ a2nxn). . . = . . .xn = k(an1x1 + an2x2 + . . .+ annxn)
(97)
ove si ponga aij = 1 per ogni coppia (i, j) ∈ {(1, 14), (1, 97), (1, 541), (2, 14), (2, 1003), (2, 3224),(2, 10029), . . . , (n, 1), (n, 23), (n, 10098), (n, 10099)} e aij = 0 per ogni coppia (i, j) tale chexij non appare al secondo membro di (96).
Ovviamente, attribuendo valori diversi (ma sempre 0 o 1) ai coefficienti aij, (97) esprime,in generale, l’importanza che ogni sito ha in funzione dei rimanenti. Si noti che in (97)valgono sempre le uguaglianze aii = 0 per ogni i ∈ {1, 2, . . . , n}.
Posto
x =
x1
x2
x3
·xn
e A =
0 a12 a13 · · · a1na21 0 a23 · · · a2na31 a32 0 · · · a3n· · · · · · ·
an1 an2 an3 · · · 0
,
il sistema (97) puo essere formulato nel seguente modo
x = kAx,
o, equivalentemente,
Ax =1
kx. (98)
Ricordando che A puo essere vista come la matrice associata, rispetto alla base canonica,ad una applicazione lineare f : Rn → Rn (tale che MEn,En
f = A) la (98) diventa
f(x) =1
kx. (99)
Il vettore delle importanze e quindi una soluzione x della (99). Dunque il vettore delleimportanze e un particolare autovettore corrispondente ad un opportuno autovalore positivo1k. Possiamo allora procedere, per esempio, trovando tutti gli autovettori di f e poi sceglierne
uno avente tutte le componenti positive.Il motore di ricerca Google usa una variante di questa idea (descritta dettagliatamente
dagli inventori di Google, Sergey Brin e Lawrence Page, The anatomy of a large-scale hy-pertextual web search engine, Computer Networks and ISDN Systems, 30 (1998), 107-117).L’utente invia una richiesta al motore Google ed ottiene in risposta una lista di siti in ordinedecrescente di importanza. Questo, in genere, fa risparmiare tempo prezioso nella ricerca.L’idea di usare gli autovettori per determinare il vettore delle importanze e dovuta a Kendalle Wei intorno al 1950. Sebbene si possa usare in molti altri campi questo metodo e diventatofamoso grazie alle applicazioni web. Il lettore interessato puo studiare i lavori originali:
187

• M.G. Kendall, Further contributions to the theory of paired comparisons, Biometrics11 (1955), p. 43.
• T.H. Wei, The algebraic foundations of ranking theory, Cambridge University Press,London 1952.
Per finire illustriamo questa idea nel caso in cui si vuole trovare il vettore delle squadre dicalcio dopo che esse hanno finito il torneo. Precisiamo che non stiamo cercando la classificafinale in base ai risultati delle partite ma una diversa classifica della bravura delle squadreritenendo che una squadra e brava non solo se ha vinto ma anche se ha vinto squadre anch’essebrave (ecco il circolo vizioso che ritorna!).
Consideriamo un torneo fra sei squadre ad un solo turno in cui ogni partita non puo finirepari (quindi una delle due squadre deve vincere e l’altra perdere). Per ogni i, j ∈ {1, . . . , 6},i 6= j, poniamo aij = 1 se la squadra i vince con la squadra j e aij = 0 se la squadra i perdecon la squadra j. Ovviamente aii = 0 per ogni i = 1, . . . , 6. A torneo finito riassumiamo irisultati nella seguente tabella
A = (aij) =
0 1 0 0 1 00 0 1 0 1 01 0 0 0 0 01 1 1 0 0 10 0 1 1 0 01 1 1 0 1 0
. (100)
Se poniamo xi = bravura della squadra i, abbiamo il sistema:
x1 = k(a12x2 + a15x5)x2 = k(a23x3 + a25x5)x3 = ka31x1
x4 = k(a41x1 + a42x2 + a43x3 + a46x6)x5 = k(a53x3 + a54x4)x6 = k(a61x1 + a62x2 + a63x3 + a65x5)
che, espresso in forma matriciale, diventa
x = kAx,
ovvero
Ax =1
kx
e quindi, anche questo problema, diventa quello della ricerca di un’opportuno autovalorecon un opportuno autovettore ad esso associato. Questo problema oggi e risolto in tempibrevissimi dai programmi di calcolo a disposizione. Nel nostro caso, la matrice A definita in
188

(100) ha un solo autovalore reale positivo 1k= 2.0427 cui possiamo associare l’autovettore
x =
x1
x2
x3
x4
x5
x6
=
0.31130.25910.15240.61730.37680.5383
.
Quindi, concordemente al vettore delle bravure, la classifica finale in base alla bravura e,nell’ordine,
4, 6, 5, 1, 2, 3.
Si noti che, in base al punteggio, avremmo avuto al primo posto con punti 4 le squadre 4 e6, al secondo posto con punti 2 le squadre 1, 2, e 3.
32 Endomorfismi semplici
Alla fine del Paragrafo 29 abbiamo visto che se f : V → V e un endomorfismo i cuiautovalori distinti sono λ1, λ2, . . . , λr, allora
Vλ1 ⊕ Vλ2 ⊕ . . .⊕ Vλr ⊆ V.
E naturale chiedersi quando vale l’uguaglianza nella precedente inclusione. In tal caso,essendo
Vλ1 ⊕ Vλ2 ⊕ . . .⊕ Vλr = V
sara possibile costruire in V una base formata da autovettori: bastera prendere l’unione dibasi prese da ciascun sottospazio Vλi
, i = 1, 2, . . . , r.
Definizione 32.1 Sia V uno spazio vettoriale sul campo K. Un endomorfismo f : V → Vsi dice semplice se esiste una base di V formata da autovettori.
Teorema 32.1 Un endomorfismo f : V → V e semplice se e solo se esiste una base A diV tale che la matrice MA,A
f risulti una matrice diagonale (si veda la Definizione 10.4).
Dimostrazione. (Dimostrazione facoltativa) Sia f : V → V un endomorfismo semplice.Allora esiste una base A = (v1,v2, . . . ,vn) per V con v1,v2, . . . ,vn autovettori per f . Perdefinizione di autovettore, esistono n scalari λ1, λ2, . . . , λn ∈ K (non necessariamente distinti)tali che
f(vi) = λivi, i = 1, 2, . . . , n.
Segue subito
MA,Af =
λ1 0 0 · · · 00 λ2 0 · · · 00 0 λ3 · · · 0· · · · · · ·0 0 0 · · · λn
.
189

Viceversa, sia f : V → V un endomorfismo per cui esiste una base di V A = (v1,v2, . . . ,vn)tale che
MA,Af =
α1 0 0 · · · 00 α2 0 · · · 00 0 α3 · · · 0· · · · · · ·0 0 0 · · · αn
.
Ne seguef(vi) = αivi, i = 1, 2, . . . , n
e quindi i vettori vi della base A sono autovettori ed f risulta semplice.
Teorema 32.2 Sia V uno spazio vettoriale su K di dimensione finita n e sia f : V → Vun endomorfismo avente n autovalori distinti. Allora f e semplice.
Definizione 32.2 Sia λ un autovalore per l’endomorfismo f : V → V . Dicesi molteplicitaalgebrica di λ, e si denota con mλ, la molteplicita di λ come radice del polinomio caratteristicodi f .
Teorema 32.3 Sia V uno spazio vettoriale su K e sia f : V → V un endomorfismo aventeun autovalore λ ∈ K di molteplicita algebrica mλ. Allora
1 ≤ gλ = dimVλ ≤ mλ.
In altre parole la molteplicia geometrica e minore od uguale a quella algebrica.
Teorema 32.4 Sia V uno spazio vettoriale su K e sia f : V → V un endomorfismo i cuiautovalori distinti sono λ1, λ2, . . . , λr. Allora i seguenti fatti sono equivalenti:
1. f e semplice;
2. V = Vλ1 ⊕ Vλ2 ⊕ . . .⊕ Vλr ;
3. dimV = dimVλ1 + dimVλ2 + . . .+ dimVλr ;
4. ogni radice λ del polinomio caratteristico Ψf (x) sta in K e gλ = dimVλ = mλ.
Esempio 32.1 Sia f : R3 → R3 l’endomorfismo definito da f(v1) = hv1, f(v2) = (h −2)v1+2v2 e f(v3) = (2h+4)v1+4v2−2v3, dove v1 = (1, 0,−1), v2 = (0, 1, 1) e v3 = (1, 2, 0).Determinare i valori del parametro reale h per cui f e semplice ed in tali casi trovare unabase di autovettori.
SVOLGIMENTO. Innanzitutto si osservi che∣∣∣∣∣∣
1 0 10 1 2−1 1 0
∣∣∣∣∣∣6= 0,
190

quindi A = (v1,v2,v3) e una base per R3 e f(v1) = (h, 0, 0)A, f(v2) = (h − 2, 2, 0)A,f(v3) = (2h+ 4, 4,−2)A. Quindi
MA,Af =
h h− 2 2h+ 40 2 40 0 −2
,
Ψf (x) =
∣∣∣∣∣∣
h h− 2 2h+ 40 2 40 0 −2
− x
1 0 00 1 00 0 1
∣∣∣∣∣∣=
=
∣∣∣∣∣∣
h− x h− 2 2h+ 40 2− x 40 0 −2− x
∣∣∣∣∣∣= (h− x)(2− x)(−2− x).
Le radici del polinomio caratteristico sono −2, 2, h che possono essere semplici o doppiea seconda che h 6= ±2 oppure h = ±2.
Caso h = −2. Gli autovalori sono −2, 2 e si ha m−2 = 2 e m2 = 1. Bisogna quindi
controllare se g−2 = m−2, essendo g−2 = dimV−2 = 3− r(MA,A
f − (−2)I3
).
MA,Af − (−2)I3 =
−2 −4 00 2 40 0 −2
+ 2
1 0 00 1 00 0 1
=
0 −4 00 4 40 0 0
il cui rango e 2.
Quindi g−2 = 3 − 2 = 1 < 2 = m−2 e l’endomorfismo non e semplice. Pertanto non esisteuna base di autovettori.
Caso h = 2. Gli autovalori sono −2, 2 con molteplicita algebrica m−2 = 1 e m2 = 2. Bisogna
quindi controllare se g2 = m2, essendo g2 = dimV2 = 3− r(MA,A
f − 2I3
).
MA,Af − 2I3 =
2 0 80 2 40 0 −2
− 2
1 0 00 1 00 0 1
=
0 0 80 0 40 0 −4
il cui rango e 1. Quindi g2 = 3− 1 = 2 = m2 e l’endomorfismo e semplice ed esiste una basedi autovettori. Essa e data dall’unione di una base di V2 con una di V−2.
Ricerca di una base per V2. Si ha che (x1, x2, x3)A ∈ V2 se e solo se
(MA,A
f − 2I3
)
x1
x2
x3
=
000
,
∣∣∣∣∣∣
0 0 80 0 40 0 −4
∣∣∣∣∣∣
x1
x2
x3
=
000
,
191

x3 = 0.
QuindiV2 = {(x1, x2, 0)A | ∀x1, x2 ∈ R} .
Pertanto ((1, 0, 0)A, (0, 1, 0)A) e una base per V2.Ricerca di una base per V−2. Si ha che (x1, x2, x3)A ∈ V2 se e solo se
(MA,A
f − (−2)I3
)
x1
x2
x3
=
000
,
∣∣∣∣∣∣
4 0 80 4 40 0 0
∣∣∣∣∣∣
x1
x2
x3
=
000
,
{x2 = −x3
x1 = −2x3.
QuindiV−2 = {(−2x3,−x3, x3)A | ∀x3 ∈ R} .
Pertanto una sua base e ((−2,−1, 1)A).In conclusione una base di autovettori e data da
D = ((1, 0, 0)A, (0, 1, 0)A, (−2,−1, 1)A) .
Si noti che, per il Teorema 32.1, si ha
MD,Df =
2 0 00 2 00 0 −2
.
Proviamo quest’ultimo risultato cercando la matrice MD,Df mediante il Teorema 28.2. Si
haMD,D
f = PA,DMA,Af PD,A.
Cerchiamo le matrici di cambiamento di base PA,D e PD,A mediante il metodo di pagina160. Si osservi che A = ((1, 0, 0)A, (0, 1, 0)A, (0, 0, 1)A). Pertanto
PD,Af =
1 0 −20 1 −10 0 1
.
Determiniamo PA,D.
1 0 −2 1 0 00 1 −1 0 1 00 0 1 0 0 1
−→
1 0 0 1 0 20 1 0 0 1 10 0 1 0 0 1
,
192

quindi
PA,Df =
1 0 20 1 10 0 1
,
MD,Df = PA,DMA,A
f PD,A =
1 0 20 1 10 0 1
·
2 0 80 2 40 0 −2
·
1 0 −20 1 −10 0 1
=
2 0 00 2 00 0 −2
.
Caso h 6= ±2. In tal caso si hanno tre autovalori distinti −2, 2, h e quindi l’endomorfismo esemplice (cfr. Teorema 32.2). Cerchiamo le basi dei tre autospazi V2, V−2 e Vh.
Ricerca di una base per V2. Si ha che (x1, x2, x3)A ∈ V2 se e solo se
(MA,A
f − 2I3
)
x1
x2
x3
=
000
,
∣∣∣∣∣∣
h− 2 h− 2 2h+ 40 0 40 0 −4
∣∣∣∣∣∣
x1
x2
x3
=
000
,
{x2 = −x1
x3 = 0.
QuindiV2 = {(x1,−x1, 0)A | ∀x1 ∈ R} .
Una sua base e quindi (1,−1, 0)A.Ricerca di una base per V−2. Si ha che (x1, x2, x3)A ∈ V−2 se e solo se
(MA,A
f − (−2)I3
)
x1
x2
x3
=
000
,
∣∣∣∣∣∣
h+ 2 h− 2 2h+ 40 4 40 0 0
∣∣∣∣∣∣
x1
x2
x3
=
000
,
{x1 =
h+6h+2
x2
x3 = −x2.
Quindi
V−2 =
{(h+ 6
h+ 2x2, x2,−x2
)
A
| ∀x2 ∈ R}.
193

Una sua base e quindi(h+6h+2
, 1,−1)A.
Ricerca di una base per Vh. Si ha che (x1, x2, x3)A ∈ Vh se e solo se
(MA,A
f − hI3
)
x1
x2
x3
=
000
,
∣∣∣∣∣∣
0 h− 2 2h+ 40 2− h 40 0 −2− h
∣∣∣∣∣∣
x1
x2
x3
=
000
,
{x2 = 0x3 = 0
.
QuindiVh = {(x1, 0, 0)A | ∀x1 ∈ R} .
Una sua base e quindi (1, 0, 0)A.In conclusione una base di autovettori e data da
D =
((1,−1, 0)A,
(h+ 6
h+ 2, 1,−1
)
A
, (1, 0, 0)A
).
Si noti che, per il Teorema 32.1, si ha
MD,Df =
2 0 00 −2 00 0 h
.
Proviamo quest’ultimo risultato cercando la matrice MD,Df mediante il Teorema 28.2. Si
haMD,D
f = PA,DMA,Af PD,A.
Cerchiamo le matrici di cambiamento di base PA,D e PD,A mediante il metodo di pagina160. Si osservi che A = ((1, 0, 0)A, (0, 1, 0)A, (0, 0, 1)A). Pertanto
PD,Af =
1 h+6h+2
1
−1 1 00 −1 0
.
Determiniamo PA,D.
1 h+6h+2
1 1 0 0
−1 1 0 0 1 00 −1 0 0 0 1
−→
1 h+6h+2
1 1 0 0
0 2h+8h+2
1 1 1 0
0 −1 0 0 0 1
−→
194

1 0 1 1 0 h+6h+2
0 0 1 1 1 2h+8h+2
0 −1 0 0 0 1
−→
1 0 0 0 −1 −10 0 1 1 1 2h+8
h+2
0 −1 0 0 0 1
, quindi
PA,Df =
0 −1 −10 0 11 1 2h+8
h+2
,
MD,Df =
0 −1 −10 0 −11 1 2h+8
h+2
·
h h− 2 2h+ 40 2 40 0 −2
·
1 h+6h+2
1
−1 1 00 −1 0
=
2 0 00 −2 00 0 h
.
33 Matrici diagonalizzabili
In questo paragrafo risponderemo alle due seguenti domande:
1. Data una matrice quadrata di ordine n ad elementi in un campo K, e essa simile aduna matrice diagonale? (cfr Definizione 10.4).
2. Se M e simile (cfr. Definizione 28.1) ad una matrice diagonale D, qual’e una matriceinvertibile H che ne permette la diagonalizzazione, cioe tale che D = H−1MH?
Definizione 33.1 Una matrice quadrata M di ordine n e ad elementi nel campo K si dicediagonalizzabile se e simile ad una matrice diagonale, cioe se esiste una matrice invertibileH per cui H−1MH e diagonale.
Com’e noto ad ogni matrice M di ordine n e ad elementi nel campo K si puo associarel’endomorfismo
f : Kn → Kn,
tale che, fissata una base A in Kn,MA,A
f = M.
Quindi f e cosı definita
f(x1, x2, . . . , xn)A =
M ·
x1
x2
··xn
T
A
.
Vale il seguente teorema.
195

Teorema 33.1 Sia A una base di di Kn. La matrice M ∈ M(n;K) e diagonalizzabile see solo se l’endomorfismo associato f : Kn → Kn tale che MA,A
f = M e semplice. Inquesto caso, detta D una base di Kn formata da autovettori di f , la matrice cambiamento dibase PD,A permette la diagonalizzazione. Cioe PA,DMPD,A e una matrice diagonale che hacome elementi sulla diagonale principale gli autovalori di f (si ricordi che PA,D e l’inversadi PD,A).
Esempio 33.1 Data la matrice
M =
(1 α1 2
)
dire per quali valori di α ∈ R e diagonalizzabile in M(2;R).
SVOLGIMENTO. Si tratta di studiare la semplicita di M . Per fare cio calcoliamo ilpolinomio caratteristico
ΨM(x) =
∣∣∣∣1− x α1 2− x
∣∣∣∣ = x2 − 3x+ 2− α.
Essendo ∆ = 1 + 4α, abbiamo i seguenti casi:
1. Se α < −14allora ∆ < 0 e il polinomio caratteristico non ha radici reali. Quindi M
non e diagonalizzabile.
2. Se α > −14allora ∆ > 0 e il polinomio caratteristico ha due radici reali e distinte.
Quindi M e diagonalizzabile.
3. Se α = −14allora ∆ = 0 e il polinomio caratteristico ha la radice 3
2con molteplicita 2.
D’altra parte
r
(1− 3
2α
1 2− 32
)= 1
per cuig 3
2= dimV 3
2= 2− 1 = 1 < 2 = m 3
2,
cioe ϕA non e semplice. Pertanto M non e diagonalizzabile.
Esempio 33.2 Dire se la matrice
M =
( −1 13 1
)
e diagonalizzabile e, in caso affermativo, determinare la matrice H che permette la diagona-lizzazione.
SVOLGIMENTO. M e diagonalizzabile se e solo se e semplice l’endomorfismo f : R2 → R2
tale che ME,Ef = M . Il polinomio caratteristico e
ΨM(x) =
∣∣∣∣−1− x 1
3 1− x
∣∣∣∣ = x2 − 4.
196

Quindi si hanno i due autovalori distinti 2 e −2 e f e semplice. La matrice che permette ladiagonalizzazione e data dalla matrice di cambiamento di base PD,E, essendo D una base diautovettori. D si ottiene dall’unione di una base di V2 con una di V−2.
Base per V2: ( −1− 2 13 1− 2
)·(
x1
x2
)=
(00
),
quindi V2 = {(x1, 3x1)E | x1 ∈ R} e una sua base e (1, 3)E.Base per V−2: ( −1 + 2 1
3 1 + 2
)·(
x1
x2
)=
(00
),
quindi V−2 = {(x1,−x1)E | x1 ∈ R} e una sua base e (1,−1)E.Quindi D = ((1, 3)E, (1,−1)E) e una base di autovettori. Ricordando il metodo di pagina
160, la matrice che permette la diagonalizzazione e
PD,E =
(1 13 −1
).
Si noti che, per il Teorema 32.1, si ha
MD,Df =
(2 00 −2
).
Proviamo quest’ultimo risultato cercando MD,Df mediante il Teorema 28.2. Si ha
MD,Df = PE,DME,E
f PD,E.
Calcoliamo PE,D col metodo di pagina 160.
(1 1 1 03 −1 0 1
)−→
(1 1 1 00 −4 −3 1
)−→
(4 0 1 10 −4 −3 1
)−→
(1 0 1
414
0 1 34
−14
), quindi
PE,Df =
(14
14
34
−14
),
MD,Df = PE,DME,E
f PD,E =
(14
14
34
−14
)·( −1 1
3 1
)·(
1 13 −1
)=
(2 00 −2
).
Metodo per calcolare la potenza di una matrice diagonalizzabile. SiaM ∈ M(n;K)una matrice diagonalizzabile. In questo caso per calcolare la potenza Mk invece di fare ilprodotto M · M · · ·M k volte, possiamo usare il seguente metodo molto piu rapido del
197

precedente. Per la Definizione 33.1, esiste una matrice invertibile H tale che H−1MH = D,ove D e una matrice diagonale. Ne segue M = HDH−1. Pertanto
Mk = (HDH−1) · (HDH−1) · · · (HDH−1)︸ ︷︷ ︸k volte
= HD(H−1H)D(H−1H)D · · · (H−1H)DH,
quindiMk = HDkH−1.
Si osservi che l’utilita della precedente formula dipende dal fatto che, per il Teorema 10.2, ilcalcolo della potenza di una matrice diagonale e immediato.
Esempio 33.3 Sia
M =
( −1 13 1
).
Calcolare M79.
Come visto nell’Esempio 33.2, M e diagonalizzabile e la matrice H che permette la diago-nalizzazione e
H =
(1 13 −1
).
Sempre nello stesso esempio abbiamo determinato
H−1 =
(14
14
34
−14
)
ed abbiamo verificato l’uguaglianza
(14
14
34
−14
)·( −1 1
3 1
)·(
1 13 −1
)=
(2 00 −2
).
Ne segue ( −1 13 1
)=
(1 13 −1
)·(
2 00 −2
)·(
14
14
34
−14
),
( −1 13 1
)79
=
(1 13 −1
)·(
2 00 −2
)79
·(
14
14
34
−14
)=
(1 13 −1
)·(
279 00 (−2)79
)·(
14
14
34
−14
).
Esempio 33.4 Sia
M =
6 −7 −35 −6 −3−1 1 2
.
198

Calcolare M5.
SVOLGIMENTO. Vediamo se M e diagonalizzabile. Cioe se l’endomorfismo f : R3 → R3
tale che ME,Ef = M e semplice. Il polinomio caratteristico e
ΨM(x) =
∣∣∣∣∣∣
6− x −7 −35 −6− x −3−1 1 2− x
∣∣∣∣∣∣= (x2 − 1)(2− x).
Quindi, avendosi i tre autovalori distinti −1, 2 e −1, f e semplice. La matriceH che permettela diagonalizzazione e data dalla matrice di cambiamento di base PD,E, essendo D una basedi autovettori. D si ottiene dall’unione delle basi di V−1, V2 e V1.
Base per V−1:
7 −7 −35 −5 −3−1 1 3
·
x1
x2
x3
=
000
,
quindi V−1 = {(x1, x1, 0)E | x1 ∈ R} e una sua base e (1, 1, 0)E.Base per V2:
4 −7 −35 −8 −3−1 1 0
·
x1
x2
x3
=
000
,
quindi V2 = {(−x3,−x3, x3)E | x3 ∈ R} e una sua base e (−1,−1, 1)E.Base per V1:
5 −7 −35 −7 −3−1 1 1
·
x1
x2
x3
=
000
,
quindi V1 = {(2x2, x2, x2)E | x2 ∈ R} e una sua base e (2, 1, 1)E.Quindi D = ((1, 1, 0)E, (−1,−1, 1)E, (2, 1, 1)) e una base di autovettori. Ricordando il
metodo di pagina 160, la matrice che permette la diagonalizzazione e
H = PD,E =
1 −1 21 −1 10 1 1
.
Cerchiamo H−1:
1 −1 2 1 0 01 −1 1 0 1 00 1 1 0 0 1
−→
1 −1 2 1 0 00 0 1 1 −1 00 1 1 0 0 1
−→
199

1 −1 2 1 0 00 1 1 0 0 10 0 1 1 −1 0
−→
1 −1 0 −1 2 00 1 0 −1 1 10 0 1 1 −1 0
, quindi
H−1 =
−2 3 1−1 1 11 −1 0
,
M =
6 −7 −35 −6 −3−1 1 2
=
1 −1 21 −1 10 1 1
·
−1 0 00 2 00 0 1
·
−2 3 1−1 1 11 −1 0
.
Ne segue
M5 =
1 −1 21 −1 10 1 1
·
−1 0 00 2 00 0 1
5
·
−2 3 1−1 1 11 −1 0
=
=
1 −1 21 −1 10 1 1
·
−1 0 00 32 00 0 1
·
−2 3 1−1 1 11 −1 0
.
34 Similitudine fra matrici
Come osservato alla fine del paragrafo 28, il problema di determinare se due matrici di ordinen sono simili (cfr. Definizione 28.1) oppure no e difficile. In questo paragrafo daremo unaparziale risposta a questo problema.
In virtu dei Teoremi 28.3 e 30.2, due matrici simili A e B hanno lo stesso polinomiocaratteristico (non e detto pero che vale il viceversa!). Quindi un primo metodo di controlloconsiste nel calcolare i due polinomi caratteristici ΨA(x) e ΨB(x):
• Se ΨA(x) 6= ΨB(x) allora A e B non sono simili.
• Se ΨA(x) = ΨB(x) allora A e B possono essere simili.
Esempio 34.1 Provare che le matrici
A =
(2 00 4
), B =
(0 −24 6
), C =
(2 10 4
)
sono a due a due simili.
SVOLGIMENTO. Si verifica immediatamente che A, B e C hanno lo stesso polinomio carat-teristico x2 − 6x+ 8. Gli autovalori sono 2 e 4. Si noti anche che A e una matrice diagonale
200

avente gli autovalori nella diagonale principale. Per provare che A e B (risp. A e C) sonosimili e sufficiente provare che B (risp. C) e diagonalizzabile. Infatti, per il Teorema 33.1,se B (risp. C) e diagonalizzabile allora e possibile determinare una matrice invertibile H1
(risp. H2) tale che A = H11BH1 (risp. A = H1
2CH2). In particolare se F (risp. G) e unabase di R2 formata da autovettori di ϕB (risp. ϕC , H1 (risp. H2) coincide con la matrice dicambiamento di base P F,E2 (risp. PG,E2).
Ricordiamo cheME2,E2
ϕB= B
e che 2 e 4 sono i due autovalori di ϕB.I vettori di V2 si ottengono risolvendo il sistema
(0− 2 −24 6− 2
)(x1
x2
)=
(00
).
Quindi V2 = {(−x2, x2)E2 | x2 ∈ R} e una sua base e data dal vettore (−1, 1).I vettori di V4 si ottengono risolvendo il sistema
(0− 4 −24 6− 4
)(x1
x2
)=
(00
).
Quindi V4 = {(x1,−2x1)E2 | x1 ∈ R} e una sua base e data dal vettore (1,−2).
Pertanto F = ((−1, 1), (1,−2)). E immediato verificare che H1 = P F,E2 =
( −1 11 −2
).
Cerchiamo PE2,F .( −1 1 1 0
1 −2 0 1
)−→
( −1 1 1 00 −1 1 1
)−→
( −1 0 2 10 −1 1 1
)−→
−→(
1 0 −2 −10 1 −1 −1
). Quindi H−1
1 = PE2,F =
( −2 −1−1 −1
).
E immediato verificare che PE2,FBP F,E2 = A. Infatti( −2 −1
−1 −1
)(0 −24 6
)( −1 11 −2
)=
( −4 −2−4 −4
)( −1 11 −2
)=
(2 00 4
).
Abbiamo cosı provato che A e B sono simili. Proviamo ora la similitudine fra A e C.Ricordiamo che
ME2,E2ϕC
= C
e che 2 e 4 sono i due autovalori di ϕC .I vettori di V2 si ottengono risolvendo il sistema
(2− 2 10 4− 2
)(x1
x2
)=
(00
).
201

Quindi V2 = {(x1, 0)E2 | x1 ∈ R} e una sua base e data dal vettore (1, 0).I vettori di V4 si ottengono risolvendo il sistema
(2− 4 10 4− 4
)(x1
x2
)=
(00
).
Quindi V4 = {(x1, 2x1)E2 | x1 ∈ R} e una sua base e data dal vettore (1, 2).
Pertanto G = ((1, 0), (1, 2)). E immediato verificare che H2 = PG,E2 =
(1 10 2
).
Cerchiamo PE2,G.(
1 1 1 00 2 0 1
)−→
(1 0 1 −1
2
0 1 0 12
). Quindi H−1
2 = PE2,G =
( −12
0 12
).
E immediato verificare che PE2,GCPG,E2 = A. Infatti(
1 −12
0 12
)(2 10 4
)(1 10 2
)=
(2 −10 2
)(1 10 2
)=
(2 00 4
).
La similitudine fra B e C segue immediatamente dalla Proposizione 28.2.
Come conseguenza del Teorema 33.1, se una matrice A e diagonalizzabile sara simile amatrici diagonali in cui gli elementi della diagonale sono gli autovalori di ϕA (con la dovutamolteplicita). D’altra parte, se A e diagonalizzabile, cioe simile ad una matrice diagonale D,ogni matrice simile ad A e diagonalizzabile alla stessa matrice D: infatti, se H−1AH = D(con D diagonale) e B e simile ad A, sara A = Q−1BQ da cui avremo
D = H−1AH = H−1Q−1BQH = (QH)−1BQH
cioe B e diagonalizzabile a D.Cosı, date due matrici A,B ∈ M(n;K), per verificare se sono simili si puo procedere nel
seguente modo:
1. Se A e B sono diagonalizzabili basta controllare se sono simili ad una stessa matricediagonale, in altri termini se i loro polinomi caratteristici ΨA(x) e ΨB(x) hanno lestesse radici con la stessa molteplicita; in caso affermativo A e B sono simili e possiamodeterminare la matrice che individua la similitudine; infatti da
H−1AH = D e Q−1BQ = D
segueH−1AH = Q−1BQ
da cuiA = HQ−1BQH−1 =
(QH−1
)−1B(QH−1
).
Ovviamente, in caso contrario, cioe se A e B sono diagonalizzabili a matrici differenti,per l’osservazione precedente, A e B non saranno simili.
202

2. Se A e diagonalizzabile e B non lo e (o viceversa), allora A e B non sono simili.
3. Se A e B sono entrambe non diagonalizzabili con questi strumenti non siamo in grado didecidere in maniera semplici se esse sono simili o no. Un calcolo diretto sara necessarioper dare la dovuta risposta (si veda l’Esempio 34.3).
Esempio 34.2 Si considerino le matrici
A =
3 1 01 3 0−1 −1 2
, B =
5 3 0−3 1 23 3 2
,
F =
3 0 −11 4 1−1 0 3
, G =
2 0 04 6 4−2 −2 0
.
Dire se A e simile a B o F o G ed in caso affermativo trovare una matrice invertibile Hche produce tale similitudine.
SVOLGIMENTO. Vediamo dapprima se A e diagonalizzabile. Per quanto visto precedente-mente bastera controllare la semplicita di ϕA. Si ha ΨA(x) = (2 − x)[(3 − x)2 − 1] per cuiϕA ammette gli autovalori 2 e 4 con m2 = 2 e m4 = 1. Poiche il rango della matrice
A− 2I3 =
1 1 01 1 0−1 −1 0
e 1, si ha m2 = g2 = dimV2 = 3 − r(A − 2I3) = 2 cioe ϕA e semplice, quindi A ediagonalizzabile, ad esempio alla matrice
D =
2 0 00 2 00 0 4
.
Per cui adesso bastera controllare se le matrici B, F e G sono diagonalizzabili (alla stessamatrice D).
Per quanto riguarda B abbiamo ΨB(x) = −x3 + 8x2 − 20x+ 16 per cui gli autovalori diϕB sono 2 e 4 con m2 = 2 e m4 = 1 ma il rango di
B − 2I3 =
3 3 0−3 −1 23 3 0
e 2 per cui g2 = 1 < m2 = 2 cosı B non e diagonalizzabile, e quindi non e simile ad A.Per quanto riguarda F abbiamo ΨF (x) = (4 − x)[(3 − x)2 − 1] per cui gli autovalori
di ϕF sono 2 e 4 con m2 = 1 e m4 = 2 e quindi, indipendentemente dal fatto che ϕF sia
203

semplice o meno, F non puo essere simile ad A (si noti che gli autovalori sono gli stessi mala molteplicita e diversa).
Per quanto riguarda G abbiamo ΨG(x) = (2 − x)(x2 − 6x + 8) per cui gli autovalori diϕG sono 2 e 4 con m2 = 2 e m4 = 1 inoltre il rango di
G− 2I3 =
0 0 04 4 4−2 −2 −2
e 1 per cui g2 = m2 = 2; in definitiva, G e diagonalizzabile alla stessa matrice
D =
2 0 00 2 00 0 4
e quindi G e simile ad A.Per trovare in questo caso una matrice invertibile H tale che G = H−1AH bastera
trovare matrici diagonalizzanti T e Q per A e G, per cui T−1AT = D e Q−1GQ = D da cuiG = QT−1ATQ−1 = H−1AH dove H = TQ−1.
Per avere T bisogna trovare una base di autovettori per ϕA:
V2 = {(x1, x2, x3)E3 | x1 + x2 = 0} ,
V4 = {(x1, x2, x3)E3 | x1 = x2 = x3}per cui una base di autovettori sara
((1,−1, 0), (0, 0, 1), (1, 1,−1))
quindi
T =
1 0 1−1 0 10 1 −1
.
Per avere Q troviamo una base di autovettori per ϕG:
V2 = {(x1, x2, x3)E3 | x1 + x2 + x3 = 0} ,
V4 = {(x1, x2, x3)E3 | x1 = x2 + x3 = 0}per cui una base di autovettori sara
((1, 0,−1), (0, 1,−1), (0,−2, 1))
quindi
Q =
1 0 00 1 −2−1 −1 1
.
204

Cosı una matrice H che fornisce la similitudine fra A e G sara
H =
1 0 1−1 0 10 1 −1
1 0 00 1 −2−1 −1 1
−1
=
0 −1 −1−2 −1 −1−1 0 −1
.
Esempio 34.3 Dire quali fra le seguenti matrici di M(2;R)
A =
(4 −11 2
), B =
(4 31 2
), C =
(3 01 3
)
sono simili e, quando lo sono, trovare le matrici invertibili che realizzano questa similitudine.
SVOLGIMENTO. Calcoliamo i polinomi caratteristici delle tre matrici: ΨA(x) = (x − 3)2,ΨB(x) = x2 − 6x + 5, ΨC(x) = (x− 3)2. La matrice B, avendo un polinomio caratteristicodiverso da quello di A e di C, non e simile a nessuna delle altre due matrici. Per quantoriguarda A e C, poiche r(A − 3I2) = r(C − 3I2) = 1, tali matrici sono entrambe nondiagonalizzabili. Cerchiamo tuttavia una matrice invertibile
H =
(a bc d
)
tale che A = H−1CH, ovvero HA = CH. Avremo
(a bc d
)(4 −11 2
)=
(3 01 3
)(a bc d
)
che conduce al sistema lineare
4a+ b = 3a−a+ 2b = 3b4c+ d = a+ 3c−c+ 2d = b+ 3d
,
{b = −ad = a− c
e poiche H deve essere invertibile, occorre che ad− bc = a2 6= 0. In definitiva, ponendo peresempio a = 1 e c = 0 (da cui b = −1 e d = 1), A e C sono simili e
H =
(1 −10 1
).
205
Indice analitico
2A, 7En, 154GF (pk), 21GL(n;K), 29Ker f , 22, 164MA,B
f , 167
PA,B, 160PB,A, 161Span(A), 133N, Z, Q, R, C, 5M(m,n;K), 23M(m,n;R), 18M(n;K), 23M(n;R), 18f−1(b), 6Imf , 6, 22, 164
addizione fra matrici, 18angolo fra due piani, 120angolo fra due rette dello spazio, 120angolo fra due vettori, 84, 88angolo fra una retta ed un piano, 120angolo orientato, 103applicazione, 5applicazione biiettiva, 5applicazione canonica, 9applicazione composta, 6applicazione identica, 5applicazione iniettiva, 5applicazione inversa, 6applicazione lineare, 107, 162, 167applicazione suriettiva, 5assioma della scelta o di Zermelo, 8automorfismo, 21, 22, 163autospazio, 182autovalore, 180autovettore, 180
base, 148base canonica, 154
base ordinata, 153
calcolo matrice inversa, 59campo, 20campo finito, 21caratteristica di una matrice, 71caratterizzazioni di un sottospazio vettoriale
finitamente generato, 135cardinalita del continuo, 12cardinalita del numerabile, 11cardinalita di un insieme, 11combinazione lineare, 133combinazione lineare di equazioni, 74complemento algebrico, 67componenti di un vettore, 81, 87, 92condizione di allineamento fra tre punti, 128condizione di complanarita fra due rette nello
spazio, 126condizione di parallelismo fra rette del piano,
98coordinate non omogenee, 97coordinate omogenee, 97, 121corrispondenza biunivoca, 5coseni direttori, 88
determinante, 66, 67diagramma di un insieme p.o. completo, 10differenza fra due insiemi, 4differenza fra due vettori, 80dimensione, 149direzione di un vettore, 79distanza fra due punti dello spazio, 123distanza fra due rette sghembe, 127distanza fra un punto e un piano, 123distanza fra un punto e una retta, 123
elementi confrontabili, 9elemento neutro, 15elemento nullo, 17elemento opposto, 19elemento simmetrico, 15
206
elemento speciale di una matrice ridotta percolonne, 73
elemento speciale di una matrice ridotta perrighe, 34
elemento unita, 15, 17endomorfismo, 163endomorfismo semplice, 189equazioni di un sottospazio di Rn, 137estremo inferiore, estremo superiore, 10
fasci di piani, 123fascio di rette del piano, 98formula di Grassmann, 151funzione, 5funzione caratteristica, 7
glissoriflessione, 110gruppo, 16gruppo abeliano o commutativo, 16gruppo additivo, 17gruppo delle sostituzioni, 19gruppo finito, 18gruppo lineare generale, 29gruppo moltiplicativo, 17gruppo simmetrico, 19
immagine di f , 6, 22immagine di un’applicazione lineare, 164insieme, 4insieme BA, 7insieme ben ordinato, 10insieme complementare, 4insieme delle parti, 4insieme di generatori, 134insieme finito, 12insieme infinito, 12insieme numerabile, 11insieme ordinato, 9insieme p.o. completo, 10insieme quoziente, 9insiemi equipotenti, 11intersezione di sottogruppi, 19intersezione fra sottospazi, 133ipotesi del continuo, 13
isometria piana, 100isomorfismo, 21, 22, 163
lemma di Zorn, 10
massimo, massimo relativo di A, 10matrice associata ad una applicazione lineare,
167, 177matrice colonna, 18matrice completa del sistema, 42matrice di cambiamento di base, 160matrice di tipo m× n, 18matrice diagonale, 25matrice diagonalizzabile, 195matrice identica, 24matrice incompleta del sistema, 42matrice inversa, 28matrice invertibile, 27matrice nulla, 18matrice quadrata di ordine n, 18matrice ridotta per colonne, 73matrice ridotta per righe, 34matrice riga, 18matrice simmetrica, 27matrice trasposta, 26matrici simili, 179, 200metodo di riduzione per la risoluzione di un
sistema lineare, 45metodo per determinare il rango di una ma-
trice, 72minimo di A, 9minimo relativo di A, 9minorante, maggiorante, 10minore complementare, 65minore di ordine h, 71modulo di un vettore, 79, 91molteplicita algebrica di un autovalore, 190molteplicita geometrica di un autovalore, 182monoide, 15
nucleo di un omomorfismo, 22nucleo di un’applicazione lineare, 164
omomorfismo fra campi, 22
207
omomorfismo fra gruppi, 21omotetia, 114operazione algebrica binaria, 13opposto, 17opposto di un vettore, 80ortogonalita fra due piani, 116ortogonalita fra due rette del piano, 94ortogonalita fra due vettori, 88
parallelismo fra due piani, 116parallelismo fra due rette del piano, 94partizione di un insieme, 8permutazione, 19piani incidenti, 117piani paralleli, 117piano dello spazio, equazione cartesiana, 115piano dello spazio, equazione omogenea, 121piano dello spazio, equazione vettoriale, 115piano improprio, 121polinomio caratteristico, 183potenza di una matrice diagonalizzabile, 197prodotto cartesiano, 4prodotto di un numero per un vettore, 80prodotto di uno scalare per una matrice, 23prodotto interno, 85prodotto misto, 90prodotto o composizione di applicazioni, 6prodotto righe per colonne fra matrici, 23prodotto scalare, 85, 88prodotto vettoriale, 88proiezione ortogonale di un punto su una ret-
ta, 123proprieta associativa, 14proprieta commutativa, 14proprieta distributiva, 20proprieta riflessiva, simmetrica, transitiva, an-
tisimmetrica, 8punto improprio, 97, 121punto improprio di una retta, 121punto proprio, 97
rango di una matrice, 71reciproco, 17
regola della poligonale, 91regola di riduzione in senso stretto, 70regole di riduzione per righe, 37relazione, 8relazione di equivalenza, 8relazione di ordinamento parziale, 9retta del piano passante per due punti, 94retta del piano, equazione cartesiana, 92retta del piano, equazione omogenea, 98retta del piano, equazioni parametriche, 93retta dello spazio passante per due punti, 117retta dello spazio, equazioni parametriche, 116retta impropria, 98retta impropria del piano, 121retta incidente un piano, 119retta parallela con un piano, 119rette incidenti, 98, 119rette parallele, 119rette sghembe, 119riflessione rispetto ad una retta, 108rotazione nel piano, 103
scomposizione di un vettore, 82, 87semigruppo, 15similitudine nel piano, 113sistema omogeneo, 30sistema impossibile, 30sistema lineare, 30sistema quadrato, 77sistemi equivalenti, 30soluzione di un sistema lineare, 30somma di due sottospazi, 139somma di vettori, 79somma diretta, 139sostituzione, 19sottogruppi banali o impropri, 19sottogruppo, 19sottoinsieme, 4sottospazio vettoriale, 131sottospazio vettoriale finitamente generato, 134spanning di A, 133spazio generato, 134spazio lineare, 128
208
spazio vettoriale, 128struttura algebrica, 15
teorema di Binet, 70teorema di Cramer, 77teorema di Laplace, 67teorema di Pitagora, 82teorema di Rouche-Capelli, 78teorema di Zermelo, 10traslazione piana, 101trasposta, 26
unione di sottogruppi, 20unione di sottospazi, 133unione e intersezione di due insiemi, 4unita del campo, 20
verso di un vettore, 79versore, 81versori fondamentali, 87vettore applicato, 79vettore libero, 90vettore nullo, 79vettori applicati uguali, 79vettori linearmente dipendenti, 141vettori linearmente indipendenti, 141, 146vettori paralleli, 82
zero del campo, 20zero del gruppo, 19
209