Approssimazione di dati e funzioni -...
38
Generalit` a Interpolazione polinomiale Convergenza Interpolazione polinomiale a tratti Metodo dei minimi quadrati Approssimazione di dati e funzioni Stefano Berrone Dipartimento di Matematica tel. 011 0907503 [email protected] http://calvino.polito.it/~sberrone Laboratorio di modellazione e progettazione materiali Stefano Berrone Approssimazione di dati e funzioni
Transcript of Approssimazione di dati e funzioni -...

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Approssimazione di dati e funzioni
Stefano Berrone
Dipartimento di Matematicatel. 011 0907503
http://calvino.polito.it/~sberrone
Laboratorio di modellazione e progettazione materiali
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Generalita
Problema 1 Dati (xi , yi ) i = 0, ..., n (es. misurazioni) voglioapprossimarli con una funzione g in modo da poter stimarel’andamento dei dati anche in punti x 6= xi .Problema 2 Data f voglio approssimarla con una g piu facile dausare (ad esempio un polinomio). Es:∫ b
aexp(−x2)dx =?
Se exp(−x2) ' g e g so integrarla facilmente,∫ b
aexp(−x2)dx '
∫ b
ag(x)dx
NB Problema 2 si tratta come il Problema 1 con dati (xi , f (xi )),i = 0, ..., n
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Step: data f ∈ F = C k [a, b]1 Individuare un sottospazio Fm di funzioni di dimensione finita
in cui scegliere la funzione fm che approssima f1 Pm, polinomi algebrici di grado m:
fm(x) = pm(x) =∑m
k=0 akxk
2 PTm,funzioni polinomiali a tratti di grado r (tipicamente basso):
fm|[xi ,xi+1] = pr (x)(i)
3 Sr , funzioni spline di ordine r (vedi dopo, caso particolare di 2)4 Πm, polinomi trigonometrici:πm(x) = a0 +
∑mk=1 (akcos(kωx) + bksin(kωx))
5 . . .
2 Individuare un criterio per determinare fm ∈ Fm
1 interpolazione: fm(xi ) = yi , i = 0, ..., n2 minimi quadrati: min
∑ni=0(fm(xi )− yi )
2 (ideale perapprossimazione di dati sperimentali)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Dimensioni...
1 dim(Pm) = m + 1
2 dim(PTm) = (r + 1)×(numero di intervalli)
3 dim(Sm) = ...
4 dim(Πm) = 2m + 1
5 . . .
NB Remind: Dimensione = # elementi della base di Fm = #parametri che individua fm ∈ Fm = # di condizioni da imporre(interpolazione: #nodi = n + 1 = m + 1 = grado polinomio + 1)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Misura dell’errore
Norma di funzione:
‖f ‖∞ = supx∈[a,b]
|f (x)| = maxx∈[a,b]
|f (x)|
Facendo crescere m mi aspetto che l’approssimazione migliori.
Definizione (convergenza)
Dati {Fm}m≥0, e fm ∈ Fm, se
limm→∞
‖f − fm‖∞ = 0
si dice che si ha convergenza (uniforme) di fm a f (i.e.convergenza dell’approssimazione)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Dati: (xi , yi ), i = 0, . . . , n (xi : nodi)Target: pn(x) =
∑nk=0 akφk(x)
Pn = span{φ0(x), ...φn(x)}Esempio: Pn = span{1, x , x2, ..., xn}Criterio di interpolazione:pn(xi ) = yi i = 0, ..., n ⇒
∑nk=0 akφk(xi ) = yi
Posto:
G =
φ0(x0) φ1(x0) . . . φn(x0)φ0(x1) φ1(x1) . . . φn(x1)
...φ0(xn) φ1(xn) . . . φn(xn)
∈ R(n+1)×(n+1)
a = (a0, ..., an)T ∈ Rn+1, y = (y0, ..., yn)T ∈ Rn+1
=⇒ Ga = y G matrice di Grahm
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Esistenza e unicita polinomio interpolante ⇔ invertibilita di G
Proposizione
Se φk(x), k = 0, ..., n linearmente indipendenti e xi 6= xj per i 6= j(nodi distinti) una matrice della forma di G e invertibile.
Poiche φk(x) formano una base, nodi distinti garantisconoesistenza e unicita di pn(x).
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Base di Lagrange
Come trovo ak? NON risolvo il sistema lineare:1 non conviene computazionalmente2 puo essere molto mal condizionato (es. G = matrice di
Vandermonde con base monomiale)
Basi diverse =⇒ metodi diversi per determinare coefficienti dellacombinazione lineare Base di Lagrange: φk(x) = `k(x) t.c.:
`k(xi ) = δik =
{1 i = k
0 i 6= k
yi = pn(xi ) =n∑
k=0
ak`k(xi ) = ai`i (xi ) = ai
⇓ai = yi !!!
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Come e fatto `k(x)?
`k(x) =
∏i 6=k(x − xi )∏i 6=k(xk − xi )
Esempio
(x0, y0) = (−2, 3), (x1, y1) = (1,−7), (x2, y2) = (3,−5):
`0(x) =(x − 1)(x − 3)
(−2− 1)(−2− 3), `1(x) =
(x + 2)(x − 3)
(1 + 2)(1− 3)
`2(x) =(x + 2)(x − 1)
(3 + 2)(3− 1)
p2(x) = 3`0(x)− 7`1(x)− 5`2(x)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Sia pn(x) interpolante (xi , yi ), i = 0, ..., nAggiungo (xn+1, yn+1) e cerco di scrivere pn+1(x) sfruttando illavoro gia fatto
pn+1(x) = pn(x) + qn(x), q(x) =???
Che sappiamo di qn(x)?
1 e un polinomio di grado n + 1
2 pn+1(xi ) = pn(xi ) + qn+1(xi ), i = 0, ..., n ⇓yi = yi + qn+1(xi ) =⇒ qn+1(xi ) = 0 ⇓qn+1(x) ha come radici xi , i = 0, ..., n
qn+1(x) = an+1(x − x0)(x − x1) . . . (x − xn) = an+1ωn+1(x)
an+1 =yi+1 − pn(xi+1)
ωn+1(xi+1)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
pn+1(x) = pn(x) + an+1ωn+1(x)
pn+1(x) = pn−1(x)+anωn(x) + an+1ωn+1(x)
pn+1(x) =n+1∑k=0
akωk(x)
Base di Newton:
ω0(x) ≡ 1
ω1(x) = x − x0
ω2(x) = (x − x0)(x − x1)...
ωn+1(x) = Πnk=0(x − xk)
Calcolo dei coefficienti ak in modo semplificato?Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Differenze divise
Siano xi , i = 0, ..., n nodi distinti
Definizione
Differenza divisa di ordine 0 relativa al nodo xk
f [xk ] := f (xk)
Definizione
Differenza divisa di ordine k relativa ai nodi xi0 , xi1 , ..., xik
f [xi0 , xi1 , ..., xik ] :=f [xi1 , ..., xik ]− f [xi0 , xi1 , ..., xik−1
]
xik − xi0
Proprieta
ak = f [x0, x1, ..., xk ]
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Tavola delle differenze divise
Esempio
Siano (x0, y0) = (−2, 2), (x1, y1) = (1,−7), (x2, y2) = (3,−5),(x3, y3) = (4,−7)
xk f [xk ] f [xk , xk+1] f [xk , xk+1, xk+2] f [xk , xk+1, xk+2, xk+3]−2 21 −7 −7−2
1+2 = −3
3 −5 −5+73−1 = 1 1+3
3+2 = 45
4 −7 −7+54−3 = −2 −2−1
4−1 = −1−1− 4
54+2 = − 3
10
p3(x) = 2− 3(x + 2) +4
5(x + 2)(x − 1)− 3
10(x + 2)(x − 1)(x − 3)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Proprieta delle differenze divise
Le differenze divise non dipendono dall’ordine dei nodi
f [xi0 , ..., xik ] = f [P(xi0 , ..., xik )]
dove P(xi0 , ..., xik ) e una qualunque permutazione dei nodi.
Osservazione
Se i nodi sono distinti, i denominatori delle differenze divise sonosempre diversi da zero tavola ben definita
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Base di LagrangeBase di Newton
Interpolazione di Hermite
Dati: (xi , f (xi )), i = 0, ..., n e (xi , f′(xi )), i = 0, ..., n La forma di
Newton e particolarmente efficiente
xk f [xk ] f [xk , xk+1] f [xk , xk+1, xk+2]x0 f (x0)x0 f (x0) f ′(x0)
x1 f (x1) f [x0, x1] f [x0,x1]−f ′(x0)x1−x0
x1 f (x1) f ′(x1)...
...
Generalizzabile a piu derivate e non su tutti i nodi le stesse derivate
Esercizio proposto
Esempi 5.1 e 5.2 libro di testo (Monegato)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Convergenza dell’interpolazione polinomiale
Errore di interpolazione:
En(x) = f (x)− pn(x)
Sicuramente:1 En(xi ) = 02 En(x) ≡ 0 se f e un polinomio di grado ≤ n
Teorema
Sia f ∈ Cn+1([a, b]), En(x) = f n+1(ξ)(n+1)! ωn+1(x), con ξ ∈ [a, b].
Ma in generale che accade a
limn→∞
‖En(x)‖∞?
Dipende dalla scelta nodi e dalle caratteristiche di f !Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Creiamo una successione di nodi:
x(1)0
x(2)0 x
(2)1
...
x(n+1)0 x
(n+1)1 . . . x
(n+1)n
...Teorema
Sia f ∈ C 0([a, b]),||En||∞ ≤ (1 + Λn) min
q∈Pn
||f − q||∞, Λn costante di Lebesgue.
1 nodi equidistanti: Λn ≥ en2
2 nodi di Chebichev xi = cos( 2i+12(n+1)π) ∈ (−1, 1), i = 0, ..., n
Λn ∼ π2 log n
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
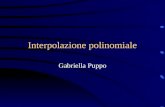
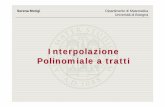
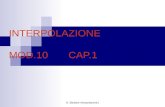
Esempio (Fenomeno di Runge)
f (x) = 11+x2 , x ∈ [a, b]
x ∈ [1, 2], nodi equidistantiStefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
x ∈ [−5, 5], nodi equidistanti
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
x ∈ [−5, 5], nodi Chebichev
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Teorema ( ¨ )
Se f ∈ C 0[a, b] esiste una successione di nodi di interpolazione in[a, b] tale che la successione di polinomi interpolanti costruita suessi converge uniformemente a f
Teorema (Faber, _)
Data una qualunque successione di nodi di interpolazione distinti in[a, b] esiste sempre f ∈ C 0[a, b] per cui la successione di polinomiinterpolanti costruita su essi non converge uniformemente a f
Teorema (Bernstein, ¨ )
Se f ∈ C 1[a, b] la successione di polinomi interpolanti costruiti sunodi di Chebycev converge uniformemente a f in [a, b].Se f ∈ C 2[a, b], si ha inoltre ‖En‖∞ = O( 1√
n)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Teorema ( ¨ )
Se f (z) e analitica in un dominio del piano complesso che contiene[a, b] e le singolarita di f (z) distano da [a, b] piu di b − a, alloralimn→∞ ‖En‖∞ = 0.
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Interpolazione polinomiale a tratti (non raccordata)
Interpolazione polinomiale: infittire nodi non garantisce migliorcomportamento di pn(x)Interpolazione polinomiale a tratti:
1 fissiamo a priori il grado r (piccolo) del polinomio2 partizioniamo [a, b] in tanti intervallini tramite n + 1 nodi xi :
a = x0 ≤ x1 ≤ . . . ≤ xn = b
3 ogni r + 1 nodi, costruiamo unpolinomio diverso
4 infittire i nodi non significaaumentare r ma il numero di trattidi polinomio
5 se f e regolare convergeuniformemente
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Interpolazione tramite spline
Definizione (spline)
Siano xi nodi che formano una partizione di [a, b]. Fissato d ≥ 1,sd(x) e una funzione spline relativa alla partizione di [a, b] se:
1 sd(x) e un polinomio di grado (al piu) d su ogni [xi , xi+1]
2 s(k)d (x) e una funzione continua in [a, b] per ogni
k = 0, ..., d − 1
Definizione (spline interpolante)
Dati (xi , yi ), i = 0, ..., n, sd(x) e una spline interpolante i dati se:
1 sd(x) e una funzione spline relativa alla partizione {xi}2 sd(xi ) = yi , i = 0, .., n
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Gradi di liberta
# parametri: (d + 1)× n = dn + n# condizioni: n + 1 + d × (n − 1) = dn + d + n − 1n + 1:interpolazione + (n − 1) ∗ d :raccordo nei nodi interniDifferenza: d − 1 Nel caso piu utilizzato (d = 3, spline cubiche)mancano 2 condizioni Le spline cubiche vengono dette...
1 naturali: s ′′3 (x0) = 0, s ′′3 (xn) = 0
2 periodiche: s ′3(x0) = s ′3(xn), s ′′3 (x0) = s ′′3 (xn)
3 vincolate: s ′3(x0) = y ′0, s ′3(xn) = y ′n, con y ′0, y ′n dati
4 not–a–knot: s ′′′3 (x) continua anche in x1 e xn−1
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Convergenza delle spline cubiche
Teorema
Sia s3(x) la spline cubica interpolante i dati (xi , yi ) per i = 0, ..., ncon condizioni di tipo 1,2,3. Sia h = maxi hi , hi = xi − xi−1. Sef ∈ C 2[a, b] per h→ 0 si ha
‖s(p)3 − f (p)‖∞ = o(h2−p), p = 0, 1, 2
Se f ∈ C k [a, b], k = 3, 4 e hhi≤ cost. per h→ 0 si ha
‖s(p)3 − f (p)‖∞ =
{o(h3−p) k = 3
O(h4−p) k = 4p = 0, 1, 2, 3
Per regolarita di f maggiori la velocita di convergenza non migliora.
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Proprieta delle spline cubiche
Teorema
Tra tutte le funzioni f ∈ C 2[a, b] che assumono valori yi nei nodixi e soddisfacenti condizioni di tipo 1,2,3, le spline cubiche sono lesole funzioni che minimizzano l’integrale
E (f ) =
∫ xn
x0
[f ′′(x)]2dx
Le spline naturali godono di una proprieta di minimo assoluto.
f ′′(x)
(1 + f ′(x)2)3/2= curvatura di f nel punto x
⇒ se |f ′(x)| e sufficientemente piccolo E (f ) e unaapprossimazione della curvatura globale di f in [a, b].
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Comandi MATLAB
1 a = polyfit(x,y,n)
2 yy = polyval(a,xx)
3 yy = spline(x,y,yy)
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Limiti dell’interpolazione:
interpolazione polinomiale globale non adatta per n grandi
interpolazione in generale non adatta per dati sperimentali(molti dati + affetti da errore)
Fissiamo a priori un modello per i nostri dati in uno spazio didimensione m + 1 (tipicamente m� n): se φi (x), i = 0, ...,msono m funzioni linearmente indipendenti cerchiamo
fm(x) = c0φ0(x) + c1φ1(x) + . . .+ cmφm(x)
Esempi:
f1(x) = c0 + c1x
f2(x) = c0 + c1x + c2x2
f3(x) = c0 + c1x + c2 cos(x) + c3 sin(x)
f1(x) = c0 + c1exp(x)
. . .Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Come si determinano i coefficienti ck?
fm(xi ) = yi NO
minc∈Rm+1
n∑i=0
(fm(xi )− yi )2
minc∈Rm+1
n∑i=0
(m∑
k=0
ckφk(xi )− yi
)2
Definizione
fm(x) e la migliore approssimazione nel senso dei minimiquadrati
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Notazione matriciale: posto
A =
φ0(x0) φ1(x0) . . . φm(x0)φ0(x1) φ1(x1) . . . φm(x1)
...φ0(xn) φ1(xn) . . . φm(xn)
∈ Rn+1×m+1
y = (y0, . . . , yn)T ∈ Rn+1, c = (c1, . . . , cm)T ∈ Rm+1
minc∈Rm+1
n∑i=0
m∑
k=0
ckφk(xi )︸ ︷︷ ︸Ac
−yi
2
= minc∈Rm+1
‖Ac − y‖22
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
‖Ac − y‖22 funzionale quadratico convesso: minimo assunto in
corrispondenza degli zeri del gradiente, quindi per c che soddisa
∇‖Ac − y‖22 = AT Ac − AT y = 0
AT Ac = AT y e detto sistema delle equazioni normali
Proprieta
AT A simmetrica semidefinita positiva. Se colonne di A linearmenteindipendenti, AT A simmetrica definita positiva. Se φk(x)linearmente indipendenti e nodi distinti, sicuramente colonne di Alinearmente indipendenti.
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Esempio
(−1, 2), (1, 3), (3,−5), (2, 7), f2(x) = c0 + c1x + c2x2
A =
1 −1 11 1 11 3 91 2 4
, y =
23−57
AT A =
4 5 155 15 35
15 35 99
, AT y =
70−12
Soluzione sistema lineare AT Ac = AT y: c = ( 11
2 ,94 ,−
74 )T .
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Approssimazione polinomiale:
AT A =
∑
i 1∑
i xi . . .∑
i xmi∑
i xi∑
i x2i . . .
∑i xm+1
i...∑
i xmi
∑i xm+1
i . . .∑
i x2mi
∈ Rm+1×m+1
AT y =
∑
i yi∑i yixi...∑
i yixmi
∈ Rm+1
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Svantaggi dell’approccio precedente:
costoso costruire AT A
tipicamente mal condizionata
Alternativa computazionale: uso della fattorizzazione QR
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Proprieta
Matrici ortogonali (QT Q = QQT = I ) non cambiano normaeuclidea di vettore:
‖Qx‖22 = (Qx)T Qx = xT QT Qx = xT x = ‖x‖2
2
Sia A = QR ∈ Rn+1×m+ R = QT A ∈ Rn+1×m+1,Q ∈ Rn+1×n+1
R =
(R1
0
)Rm+1×m+1
R(n−m)×m+1 QT y =
(z1
z2
)Rm+1
Rn−m
‖Ac − y‖22 = ‖QT (Ac − y)‖2
2 = ‖QT Ac − QT y‖22 =
= ‖Rc − QT y‖22 = ‖Rc − z1‖2
2 + ‖z2‖22
min ‖Ac−y‖22 ⇔ min ‖Rc−z1‖2
2+‖z2‖22 ⇔ min ‖Rc−z1‖2
2 ⇔ Rc = z1
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Comandi MATLAB
polyfit se φk(x) polinomiali
Stefano Berrone Approssimazione di dati e funzioni

GeneralitaInterpolazione polinomiale
ConvergenzaInterpolazione polinomiale a tratti
Metodo dei minimi quadrati
Un esempio nonlineare
Modello: a1ea2x
NON e nella forma∑
ckφk(x)! Ma con una trasformazione divariabili...
y = a1ea2x
log(y)︸ ︷︷ ︸z
= log(a1ea2x) = log(a1)︸ ︷︷ ︸c1
+ a2︸︷︷︸c2
x
z = c1 + c2x
Quindi con i dati (xi , log(yi )) posso ricostruire c1 e c2 e quindirisalire a a1 = ec1 e a2 = c2
Stefano Berrone Approssimazione di dati e funzioni