Applicazione della Proper Orthogonal Decomposition (POD...
21
Applicazione della Proper Orthogonal Decomposition (POD) al Problema di Minima Compliance Pierluigi Colombo
Transcript of Applicazione della Proper Orthogonal Decomposition (POD...
Applicazione della Proper Orthogonal Decomposition (POD) al Problema di Minima
Compliance
Pierluigi Colombo
Abstract In molte applicazioni, le classiche procedure di discretizzazione possono portare ad alti
costi computazionali, a causa del grande numero di gradi di libertà che la
discretizzazione comporta. Un modo efficiente di ridurre la complessità del problema
discretizzato è la Proper Orthogonal Decomposition (POD). Questo metodo consiste
nel catturare la dinamica dominante del fenomeno fisico attraverso delle soluzioni già
calcolate, e la costruzione a partire da queste di un sottospazio di dimensione ridotta
con una base ortonormale. Come vedremo questa tecnica è in grado di ridurre in
maniera considerevole i costi computazionali del calcolo di una nuova soluzione. In
questo lavoro si tratterà della POD, del problema di ottimizzazione topologica di
minima compliance e di come la POD vi è stata implementata. L’algoritmo di
ottimizzazione topologica unito alla POD è stato poi applicato ad un problema concreto
ed i risultati sono stai poi comparati con quelli dell’algoritmo di ottimizzazione
topologica classico.
1 POD e relazione con SVD In questo capitolo si presenta l’obiettivo della POD e la sua relazione con la Singular
Value Decomposition (SVD). L’obiettivo è di trovare una base ortonormale dello
spazio generato da 𝑛 vettori 𝑦1, 𝑦2, …, 𝑦𝑛 con 𝑦𝑧 ∈ ℝ𝑚 con 𝑧 = 1, … , 𝑛.
Sia 𝑌 ∈ ℝ𝑚×𝑛 la matrice le cui colonne sono i vettori 𝑦1, 𝑦2,…, 𝑦𝑛. La SVD ci
garantisce che esistono due matrici ortogonali 𝑈 ∈ ℝ𝑚×𝑚 e 𝑉 ∈ ℝ𝑛×𝑛 ed una
matrice diagonale Σ ∈ ℝ𝑚×𝑛 tale che:
𝑌 = 𝑈Σ𝑉𝑇 (1)
In particolare esistono 𝑟 valori positivi 𝜎1 ≥ 𝜎2 ≥ ⋯ ≥ 𝜎𝑟 tale che:
Σ = (𝐷 00𝑇 𝑂
) (2)
Con 𝐷 = 𝑑𝑖𝑎𝑔(𝜎1, 𝜎2, … , 𝜎𝑟). Le colonne {ϕ𝑗}𝑗=1
𝑚 di 𝑈 e {ψ𝑖}𝑖=1
𝑛 di 𝑉 sono dette
rispettivamente vettori singolari sinistri e vettori singolari destri di 𝑌, ed i valori
{𝜎𝑘}𝑗=1𝑟 sono detti valori singolari di 𝑌
Per le matrici 𝑌𝑌𝑇 e 𝑌𝑇𝑌, simmetriche e definite positive, valgono le seguenti
relazioni:
𝑌𝑌𝑇 = (𝑈Σ𝑉𝑇)(𝑈Σ𝑉𝑇)𝑇 = 𝑈ΣΣT𝑈𝑇 (3)
𝑌𝑇𝑌 = (𝑈Σ𝑉𝑇)𝑇(𝑈Σ𝑉𝑇) = 𝑉ΣTΣ𝑉𝑇 (4)
quindi {(ϕ𝑗 , 𝜎𝑗2)}
𝑗=1
𝑟 e {(ψ𝑖 , 𝜎𝑖
2)}𝑖=1𝑟 sono coppie autovalore-autovettori per le matrici
𝑌𝑌𝑇 E 𝑌𝑇𝑌 rispettivamente. Le rimanti coppie {(ϕ𝑗 , 0)}𝑗=𝑟+1
𝑚(se 𝑚 > 𝑛) o
{(ψ𝑖 , 0)}𝑖=𝑟+1𝑛 (se 𝑛 > 𝑚) identificano una base per 𝐾𝑒𝑟(𝑌𝑌𝑇), 𝐾𝑒𝑟(𝑌𝑇𝑌).
Essendo in generale 𝑟 < min (𝑚, 𝑛), la SVD di 𝑌 può essere scritta in termini di matrici
ridotte:
𝑌 = 𝑈𝑟D𝑉𝑟𝑇 (5)
Con
𝑈𝑟 = [(ϕ1, ϕ2, … , 𝜙𝑟] ∈ ℝ𝑚×𝑟 (6)
𝑉𝑟 = [(ψ1, ψ2, … , ψ𝑟] ∈ ℝ𝑛×𝑟
(7)
Data una matrice 𝐴 ∈ ℝ𝑛×𝑛 simmetrica e positiva (𝐴 = 𝐴𝑇), e sia (𝜆, 𝑣𝜆) una coppia
autovalore-autovettore, Allora 𝐴𝑣𝜆 = 𝜆𝑣𝜆. Quindi moltiplicando per 𝐴𝑇 si ottiene
𝐴𝑇𝐴𝑣𝜆 = 𝜆𝐴𝑇𝑣𝜆 = 𝜆2𝑣𝜆. Quindi 𝜆2 è un autovalore della matrice 𝐴𝑇𝐴, che è a sua
volta il quadrato del valore singolare 𝜎𝜆 = 𝜆. Essendo per ipotesi la matrice singolare
𝐴 positiva si ottiene che gli autovalori di 𝐴 coincidono con suoi valori singolari.
Un’altra proprietà fondamentale della SVD è che le prime 𝑟 colonne della matrice
ortogonale 𝑈 sono una base per lo spazio delle colonne di 𝑌. Quindi le colonne
𝑦1, 𝑦2, … 𝑦𝑛 ammettono una espansione di Fourier (finita) rispetto agli autovalori
singolari {𝜙𝑗}𝑗=1
𝑟. Infatti sapendo che (𝑈𝑟)𝑇𝑈𝑟 = 𝐼𝑟 (𝑈𝑟 è ortogonale), si ha che:
𝑦𝑗 = ∑ (𝐷(𝑉𝑟)𝑇)𝑘𝑗𝑈∙,𝑘 =𝑟𝑘=1
∑ ((𝑈𝑟)𝑇𝑈𝑟𝐷(𝑉𝑟)𝑇)𝑘𝑗𝑈∙,𝑘 =𝑟𝑘=1 ∑ ((𝑈𝑟)𝑇𝑈𝑟𝐷(𝑉𝑟)𝑇)𝑘𝑗𝑈∙,𝑘 =𝑟
𝑘=1
∑ ((𝑈𝑟)𝑇𝑌)𝑘𝑗𝑈∙,𝑘 =𝑟𝑘=1 ∑ (𝑦𝑗 , 𝜙𝑘)
ℝ𝑚𝜙𝑘𝑟𝑘=1
Quindi
𝑦𝑗 = ∑(𝑦𝑗 , 𝜙𝑘)ℝ𝑚𝜙𝑘
𝑟
𝑘=1
(7)
Formuliamo ora il problema della POD. Si vuol trovare la base {𝜙𝑗}𝑗=1
𝑟 tale che l’errore
di approssimazione di ogni vettore 𝑦𝑖 ∈ ℝ𝑚 con la sua proiezione sui vettori

{𝜙𝑗}𝑗=1
𝑟sia minimizzato. Se consideriamo il caso di 𝑟 = 1 il problema è formulato nel
seguente modo:
𝑚𝑎𝑥 {∑|(𝑦𝑖 , �̃�)|2
, ϕ̃ ∈ ℝ𝑚: ‖�̃�‖ℝ𝑚
2𝑛
𝑖=1
= 1}
(P1)
𝑃1 è un problema di ottimizzazione vincolato che può essere risolto con il metodo dei
moltiplicatori di Lagrange. Qui (∙,∙) identifica il prodotto scalare in ℝ𝑚 e ‖∙‖ℝ𝑚 indica
la norma euclidea in ℝ𝑚. Introducendo la funzione 𝑒: ℝ𝑚 → ℝ definita
𝑒(𝜙) = 1 − ‖𝜙‖2, 𝜙 ∈ ℝ𝑚 (8)
il vincolo del problema 𝑃1 può essere espresso come 𝑒(𝜙) = 0. Da notare come
∇𝑒(𝜙) = −2𝜙, che è diverso da zero per ogni 𝜙 tale che 𝑒(𝜙) = 0, quindi la nostra
soluzione ottima è un punto regolare per il vincolo del problema 𝑃1. Sia ora
𝐿: ℝ𝑚 × ℝ → ℝ la lagrangiana associata al problema 𝑃1:
𝐿(𝜙, 𝜈) = ∑|(𝑦𝑖 , 𝜙)|2 +
𝑛
𝑖=1
𝜈(1 − ‖𝜙‖2)
(9)
Sia 𝜙 un ottimo locale del problema 𝑃1. Essendo 𝜙 un punto regolare per il vincolo
𝑒(𝜙) = 0 allora esiste un unico moltiplicare di Lagrange 𝜈 tale che ∇𝐿(𝜙, 𝜈) = 0.
Calcolando il gradiente di 𝐿 rispetto a 𝜙 si ottiene:
𝜕𝐿
𝜕𝜙𝑖
(𝜙, 𝜈) =𝜕
𝜕𝜙𝑖(∑ |∑ 𝑌𝑘𝑖𝜙𝑘
𝑚
𝑘=1
|
2
+ 𝜈(1 − ∑ 𝜙𝑘2)
𝑚
𝑘=1
𝑛
𝑗=1
) =
= 2 ∑ (∑ 𝑌𝑘𝑗𝜙𝑘𝑌𝑖𝑗
𝑚
𝑘=1
)
𝑛
𝑗=1
− 2𝜈𝜙𝑖 = 2(𝑌𝑌𝑇𝜙)𝑖 − 2𝜈𝜙𝑖
Quindi la soluzione 𝜙 del problema 𝑃1 risolve il problema agli autovalori
𝑌𝑌𝑇𝜙 = 𝜈𝜙
(10)
In più il valore della funzione obiettivo valutata in 𝜙 è uguale all’autovalore associato
in equazione 10. Prendendo il massimo degli autovalori della matrice 𝑌𝑌𝑇(che è
semidefinita positiva) si può dimostrare che questo è anche il massimo assunto dalla

funzione obiettivo del problema 𝑃1 e tale autovalore coincide con il valore singolare
più alto della matrice 𝑌. La soluzione quindi del problema 𝑃1 è il vettore singolare
sinistro associato al valore singolare più grande.
Questi ragionamenti possono essere estesi nel caso in cui non si cerchi un solo vettore
�̃� che massimizzi il problema 𝑃1 ma 𝑙 vettori 𝜙1, 𝜙2, … , 𝜙𝑙 tale che massimizzino il
problema 𝑃2 qui esposto:
𝑚𝑎𝑥 {∑ ∑|(𝑦𝑖 , 𝜙𝑘)|2
𝑛
𝑖=1
𝑙
𝑘=1
, (𝜙𝑝, 𝜙𝑞) = 𝛿𝑝𝑞 ∀𝑝, 𝑞: 1 ≤ 𝑝, 𝑞 ≤ 𝑙}
(P2)
La soluzione in questo caso è composta dai vettori che costituiscono le prime 𝑙 colonne
della matrice dei vettori singolari sinistri. In tale soluzione il valore del funzionale è
∑ 𝜎𝑖𝑙𝑖=1 . Un valore estremamente importante è la somma dei valori associati ai vettori
singolari sinistri che non sono usati nella creazione del sottospazio. Infatti tale valori
equivale all’errore commesso proiettando i vettori {𝑦𝑖}𝑖=1𝑛 nel sottospazio generato dai
vettori {𝜙𝑘}𝑘=1𝑙 . Quindi la POD consiste nel risolvere il problema agli autovalori della
matrice 𝑌𝑌𝑇 e troncare da un certo punto in poi i valori singolari della matrice 𝑌.
In genere però in molte applicazioni può succedere che il numero di gradi di liberta 𝑚
dei vettori 𝑦𝑖 sia di molto inferiore (diversi ordini di grandezza) del numero 𝑛 di vettori
𝑦𝑖 disponibili. In tal caso la matrice 𝑌𝑌𝑇 ∈ ℝ𝑚×𝑚 può essere estremamente grande.
Per poter risolvere il problema della POD però può essere sfruttata la matrice
𝑌𝑇𝑌 ∈ ℝ𝑛×𝑛, molto più piccola della precedente. L’idea è calcolare gli autovettori e
gli autovalori della matrice 𝑌𝑇𝑌. Infatti se 𝜓𝑖 è l’autovettore associato all’autovalore
𝜆𝑖, quindi
𝑌𝑇𝑌𝜓𝑖 = 𝜆𝑖𝜓𝑖
Allora
𝜙𝑖 =1
√𝜆𝑖
𝑌𝜓𝑖 , ∀ 𝑖: 1 ≤ 𝑖 ≤ 𝑙
Infatti se 𝜓𝑖 è un autovettore della matrice 𝑌𝑇𝑌 allora:
𝑌𝑇𝑌𝜓𝑖 = 𝜆𝑖𝜓𝑖 → (𝑌𝑌𝑇)𝑌𝜓𝑖 = 𝜆𝑖𝑌𝜓𝑖
Quindi 𝑌𝜓𝑖è autovettore della matrice 𝑌𝑌𝑇. Il fattore 1
√𝜆𝑖 è una normalizzazione.
2 Applicazione
La POD è stata sfruttata per risolvere un problema minima compliance, un problema
di ottimizzazione topologica, che ha l’obiettivo di costruire la più rigida struttura
utilizzando una quantità limitata di materiale. Per risolvere il problema di
ottimizzazione è stato utilizzato il S.I.M.P (Solid Isotropic Material with Penalization),
un metodo che introduce una appropriata funzione di densità per descrivere la
soluzione ottima.
In particolare, dato un corpo Ω ⊂ ℝdim (𝑑𝑖𝑚 = 2,3) con una forza 𝑓 applicata su Γ𝑁 ⊂
𝜕Ω, l’obiettivo è calcolare il sottoinsieme Ω𝑚𝑎𝑡 ⊂ Ω che minimizza il lavoro delle
forze esterne ∫ 𝑓 ∙ �⃗⃗�ΓN
𝑑𝛾 con �⃗⃗� il campo di spostamento.
2.1 Problema elastico
Qui è presentato il problema elastico per un materiale con coefficiente di Poisson 𝜇 e
modulo di Young 𝐸. Sia Ω un dominio, Γ𝐷 ⊂ 𝜕Ω la porzione del bordo in cui è fissato
uno spostamento, Γ𝑁 ⊂ 𝜕Ω la porzione del bordo in cui è imposto il carico 𝑓 e Γ𝐹 =
𝜕Ω\(Γ𝐷 ∪ Γ𝑁). Il problema dell’equilibrio elasto-statico consiste nel trovare il campo
di spostamento �⃗⃗� tale che:
{
−∇∙σ(�⃗⃗⃗�)=0 𝑖𝑛 Ω𝑢=0 𝑖𝑛 Γ𝐷
σ(�⃗⃗⃗�)�⃗⃗�=𝑓 𝑖𝑛 Γ𝑁
σ(�⃗⃗⃗�)�⃗⃗�=0 𝑖𝑛 Γ𝐹
(11)
Con �⃗⃗� il vettore unitario uscente ortogonale a 𝜕Ω e 𝜎 il tensore di stress. Con l’ipotesi
di piccoli spostamenti il tensore 𝜎 nella teoria elastica è:
𝜎(�⃗⃗�) = 2𝜇𝜖(�⃗⃗�) + 𝜆 𝑡𝑟(𝜖(�⃗⃗�))𝐼 (12)
con i coefficienti di Lamè definiti come:
𝜆 =𝐸𝜈
(1+𝜈)(1−𝜈) e 𝜇 =
𝐸
2(1+𝜈)
𝜖(�⃗⃗�) definito come:
𝜖(�⃗⃗�) =∇�⃗⃗� + ∇�⃗⃗�𝑇
2
ed 𝐼 il tensore identità. In accordo con la legge di Hook lo stress il tensore di stress può
essere scritto come
𝜎(�⃗⃗�) = 𝐸0𝜖(�⃗⃗�) (13)
𝐸0 è detto tensore di elasticità e dipende dalle proprietà del materiale 𝜆 e 𝜇.
2.2 Ottimizzazione topologica
Per inserire nel problema 11 le informazioni della struttura del dominio, oltre a quelle
del materiale, si definisce il tensore
𝐸𝑚𝑎𝑡 = 𝜒𝑚𝑎𝑡(𝑥)𝐸0 (14)
con 𝜒𝑚𝑎𝑡(𝑥) la funzione caratteristica del sottoinsieme Ω𝑚𝑎𝑡 ⊂ Ω definita:
𝜒𝑚𝑎𝑡(𝑥) = {1 𝑥 ∈ Ω𝑚𝑎𝑡
0 𝑥 ∉ Ω𝑚𝑎𝑡 (15)
in questo caso ogni dominio ottimo Ω𝑚𝑎𝑡sarà identificato univocamente dalla sua
funzione caratteristica 𝜒𝑚𝑎𝑡. Con l’introduzione del tensore 𝐸𝑚𝑎𝑡 è possibile ridefinire
il tensore 𝜎 come:
𝜎𝑚𝑎𝑡(�⃗⃗�) = 𝐸𝑚𝑎𝑡𝜖(�⃗⃗�) (16)
La formulazione debole quindi del problema (11), con all’interno anche la struttura del
dominio definita da (15) è: trovare �⃗⃗� ∈ 𝑈 tale che
𝑎(�⃗⃗�, �⃗�) = 𝑙(�⃗�) ∀�⃗� ∈ 𝑈 (17)
con
𝑎(�⃗⃗�, �⃗�) = ∫ 𝜎𝑚𝑎𝑡(�⃗⃗�): 𝜖(�⃗�)𝑑ΩΩ
(18)
𝑙(�⃗⃗�) = ∫ 𝑓 ∙ �⃗⃗�Γ𝑁
𝑑𝛾 (19)
con 𝑓definita come in (11), �⃗� funzione test e
𝑈 = {�⃗⃗� ∈ [𝐻1(Ω)]𝑑𝑖𝑚, 𝑑 = 2,3 ∶ �⃗⃗� = 0 𝑠𝑢 Γ𝐷} (20)
Il problema di minima compliance è quindi definito: trovare Ω𝑚𝑎𝑡 ⊂ Ω tale che
{
min(𝑙(�⃗⃗�)) 𝑐𝑜𝑛 �⃗⃗�(𝐸𝑚𝑎𝑡) ∈ 𝑈
𝑎(�⃗⃗�, �⃗�) = 𝑙(�⃗�) ∀�⃗� ∈ 𝑈
∫ 𝜒𝑚𝑎𝑡𝑑Ω = 𝑉𝑜𝑙(Ω𝑚𝑎𝑡) ≤ 𝛼𝑉0Ω
(21)
𝛼 è detto volume fraction ed è compreso nell’intervallo (0,1), 𝑉0 è il volume della
struttura iniziale. In genere la funzione binaria 𝜒𝑚𝑎𝑡 viene sostituita da una funzione
𝜌: Ω → [0,1]. Il tensore elastico quindi diventa
𝐸(𝑥) = ℎ(𝜌(𝑥))𝐸0 (22)
𝜌 è considerata una densità, nel senso che ∫ 𝜌𝑑ΩΩ
è uguale al volume della struttura.
Nel modello S.I.M.P si ha
ℎ(𝜌(𝑥)) = 𝜌𝑝 (23)
con 𝑝 > {2
1−𝜈,
4
1+𝜈}. In questo modo valori di 𝑝 ≠ {0,1} vengono penalizzati dal
modello poiché contribuiscono all’integrale ∫ 𝜌𝑑ΩΩ
non fornendo però rigidezza alla
struttura. Il problema (21) quindi diventa: trova 𝜌: Ω → [0,1] ∈ 𝐿∞ tale che
{
min(𝑙(�⃗⃗�)) 𝑐𝑜𝑛 �⃗⃗�(𝜌) ∈ 𝑈
𝑎𝜌(�⃗⃗�, �⃗�) = 𝑙(�⃗�) ∀�⃗� ∈ 𝑈
∫ 𝜌𝑑Ω = 𝑉𝑜𝑙(Ω𝑚𝑎𝑡) ≤ 𝛼𝑉0Ω 𝑐𝑜𝑛 𝜌min ≤ 𝜌 ≤ 𝜌
(24)
2.3 Algoritmo di ottimizzazione
Un approccio per risolvere il problema di ottimizzazione è:
Imposta una funzione di densità iniziale
While (criterio di converegenza non verificato)
Calcola lo spostamento con la densità in memoria;
Aggiorna la densità con un algoritmo di ottimizzazione;
end
L’ottimizzazione è stata svolta con la libreria NLopt (Versione 2.4.2). La proiezione
nel sottospazio costruito dalla POD viene utilizzata nel calcolo dello spostamento con
l’attuale funzione di densità. Definendo Ωℎ = {𝐾𝑗} una partizione del dominio Ω, si
definisce lo spazio 𝑋ℎ1 come:
𝑋ℎ1 = {𝑣ℎ ∈ 𝐶0(Ω̅): 𝑣ℎ|𝐾𝑗
∈ 𝑃1(𝐾𝑗) ∀ 𝐾𝑗 ∈ Ωℎ} (25)
e lo spazio 𝑉ℎ ⊂ 𝑉 lo spazio finito dimensionale degli spostamenti ammissibili come:
𝑉ℎ = {𝑣ℎ ∈ [𝑋ℎ1]𝑑𝑖𝑚: 𝑣ℎ = 0 𝑠𝑢 Γ𝐷} (26)
lo spostamento numerico all’iterazione 𝑖 del ciclo �⃗⃗�𝑛𝑢𝑚,𝑖 è soluzione del problema

𝐴�⃗⃗�𝑛𝑢𝑚,𝑖 = �⃗� (27)
con 𝐴 matrice il cui generico elemento (𝑖, 𝑗)è definito come
𝐴𝑖𝑗 = 𝑎(𝜙𝑖⃗⃗ ⃗⃗ , �⃗⃗�𝑗) (28)
e �⃗� vettore il cui generico elemento 𝑖 è definito
�⃗�𝑖 = 𝑙(�⃗⃗�𝑗) (29)
con �⃗⃗�𝑗 elemento della base 𝑉ℎ. Se la dimensione di 𝑋ℎ1 è 𝑁𝑒, la matrice
𝐴 ∈ ℝ𝑑𝑖𝑚∙𝑁𝑒×𝑑𝑖𝑚∙𝑁𝑒 ed �⃗� ∈ ℝ𝑑𝑖𝑚∙𝑁𝑒. Nella iterazione dell’algoritmo di ottimizzazione
non viene risolto il sistema (27), ma viene risolto una opportuna proiezione del sistema
(27) attraverso una matrice 𝑃 ∈ ℝ(𝑑𝑖𝑚∙𝑁𝑒)×𝑟, con 𝑟 ≪ 𝑑𝑖𝑚 ∙ 𝑁𝑒 ricavata dalla
decomposizione di Tucker in equazione (17). In questo caso viene risolto il sistema
𝑃𝑇𝐴𝑃�⃗⃗�𝑟𝑖𝑑,𝑖 = 𝑃𝑇�⃗� (30)
La matrice di cui viene svolta la SVD è la matrice 𝑼 i cui vettori sono gli spostamenti
ottimi 𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
della configurazione con volume fraction 𝛼𝑖. 𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
è il
campo di spostamento ottenuto con la densità ottima.
3 Implementazione
3.1 Librerie utilizzate e classe ElasticProblemSolver
Le librerie utilizzate sono 3:
• fenics/2016.1.0 per la discretizzazione del problema 17
• Eigen/3.2.8 per il calcolo dello spostamento 𝑢𝑛𝑢𝑚,𝑖 ad ogni iterazione di
ottimizzazione e per il calcolo della SVD (necessaria per la POD).
• NLopt/2.4.2 per l’ottimizzazione.
• Paraview versione 5.4.1 per la visualizzazione dei risultati.
A queste librerie si aggiunge una classe ElasticProblemSolver, creata da Leonardo
Locatelli e Francesco Clerici, e da me modificata per utilizzare le matrici sparse ed il
solver di Eigen e la POD. La classe contiene gli attributi necessari per la
discretizzazione del problema 28:
• Costanti fisiche: 𝜇 e 𝜆
• Vincoli: condizioni al bordo di Dirichlet e volume fraction imposta
• Discretizzazioni: spazi funzionali e mesh e vettori singolari sinistri per la POD
• Soluzioni: �⃗⃗�𝑛𝑢𝑚 e 𝜌𝑛𝑢𝑚
I principali metodi della classe sono:
• Un solver ElasticProblemSolver::Solve(). Il solver calcola lo spostamento �⃗⃗�𝑛𝑢𝑚
senza la POD usando:
1. Costanti fisiche: 𝜇 e 𝜆
2. Condizione al bordo di Dirichlet
3. Gli spazi funzionali
4. La densità 𝜌𝑛𝑢𝑚
Per il calcolo della soluzione �⃗⃗�𝑛𝑢𝑚 viene usato il solver di Fenics.
• Un metodo ElasticProblemSolver::get_compl() per il calcolo della compliance
usando:
1. Costanti fisiche: 𝜇 e 𝜆
2. Le soluzioni numeriche del problema 28 𝜌𝑛𝑢𝑚 e �⃗⃗�𝑛𝑢𝑚
• Un solver ElasticProblemSolver::Solve_eigen(). Il solver calcola lo spostamento
�⃗⃗�𝑛𝑢𝑚 senza la POD usando:
5. Costanti fisiche: 𝜇 e 𝜆
6. Condizione al bordo di Dirichlet
7. Gli spazi funzionali
8. La densità 𝜌𝑛𝑢𝑚
Per il calcolo della soluzione �⃗⃗�𝑛𝑢𝑚 viene usato il solver di Eigen. Il metodo
utilizza la funzione solver_eigen_sparso del file funzioni.cpp
• ElasticProblemSolver::Solve_proiettato(). Il solver calcola lo spostamento
�⃗⃗�𝑛𝑢𝑚 con la POD usando:
1. Costanti fisiche: 𝜇 e 𝜆
2. Condizione al bordo di Dirichlet
3. Gli spazi funzionali
4. La densità 𝜌𝑛𝑢𝑚
5. I vettori singolari sinistri.
Per il calcolo della soluzione �⃗⃗�𝑛𝑢𝑚 viene usato il solver di Eigen. Il metodo utilizza la
funzione solver_eigen_proiettato del file funzioni.cpp. Nel file funzioni.cpp vengono
definite altre funzioni utili al progetto quali
• void lettura(int (&dimensioni)[2],Eigen::Matrix<double, Eigen::Dynamic,
Eigen::Dynamic> &matrice_spostamenti_online). La funzione legge da file i
dati necessari per la POD
• void stampa_dati(const Eigen::Matrix<double, Eigen::Dynamic,
Eigen::Dynamic> &matrice). La funzione stampa su file i dati necessari per la
POD
• void dolfin2eigen(const dolfin::Vector &vector_dolfin, Eigen::Matrix<double,
Eigen::Dynamic, 1> &vettore_eigen,const dolfin::Matrix
&matrice_dolfin,Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic>
&matrice_eigen). La funzione è utilizzata per trasferire i dati da una matrice di
Dolfin ad una matrice di Eigen
• void dolfin2eigen_sparsa(const dolfin::Vector &vector_dolfin,
Eigen::Matrix<double, Eigen::Dynamic, 1> &vettore_eigen,const
dolfin::Matrix &matrice_dolfin,Eigen::SparseMatrix<double>
&matrice_eigen). La funzione fa la stessa cosa della funzione precedente ma la
funzione eigen che riceve i dati è una matrice sparsa. È stata utilizzata questa
funzione per sfruttare la struttura sparsa delle matrice di Dolfin generate.
• 3 funzioni, utilizzate per i metodi solver della classe ElasticProblemSolver
precedentemente citata:
a) void solver_eigen(dolfin::Function &u, const Eigen::Matrix<double,
Eigen::Dynamic, Eigen::Dynamic> &matrice, const
Eigen::Matrix<double, Eigen::Dynamic, 1> &vettore_destro). Solver
che usa le matrici dense di Eigen
b) void solver_eigen_sparso(dolfin::Function &u, const
Eigen::SparseMatrix<double> &matrice, const Eigen::Matrix<double,
Eigen::Dynamic, 1> &vettore_destro, const Eigen::MatrixXd
&vettori_singolari_sinistri). Solver che usa le matrici sparse di Eigen
c) void solver_eigen_proiettato(dolfin::Function &u, const
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic> &matrice,
const Eigen::Matrix<double, Eigen::Dynamic, 1> &vettore_destro,
const Eigen::MatrixXd &vettori_singolari_sinistri). Solver che usa la
POD
A questo file si aggiunge un file myfun.hh con le funzioni obiettivo utilizzate
nell’ottimizzazione.
3.2 Fase Offline e Fase Online
Il Progetto comprende una fase Offline ed una fase Online separate. La fase Offline è
stata utilizzata per generare le 𝑆 soluzioni ottime {𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑒(𝑖)
}𝑖=1𝑆 associate al
problema 24 con la volume fraction{𝛼𝑖}𝑖=1𝑆 . Le soluzioni ottime sono state calcolate
senza l’utilizzo della POD. Le {𝑢𝑛𝑢𝑚(𝑖)
}𝑖=1𝑆 calcolate vengono quindi stampate su un file
txt di nome “soluzione_spostamento.txt”. La fase Online invece prevede la lettura del
file “soluzione_spostamento.txt” e il calcolo di una nuova soluzione 𝑢𝑛𝑢𝑚𝑃𝑂𝐷 e 𝜌𝑃𝑂𝐷 per
un valore di valume fraction 𝛼𝑃𝑂𝐷 diverso dagli 𝑆 valori di volume fraction {𝛼𝑖}𝑖=1𝑆
utilizzati per risolvere il problema della fase Offline. 𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜𝑃𝑂𝐷 e 𝜌𝑜𝑡𝑡𝑖𝑚𝑜
𝑃𝑂𝐷 sono
calcolati sfruttando la proiezione nel sottospazio generato dalla SVD della matrice le
cui colonne sono le soluzioni {𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
}𝑖=1𝑆 ad ogni iterazione del ciclo di
iterazione.
3.2.1 Fase Offline
Avviata l’esecuzione del codice verrà chiesto se si vuole procedere con la fase Offline
(premendo 0) o con la fase Online (premendo un qualsiasi altro numero). Avviata la
fase Offline verrà chiesto di inserire la volume fraction 𝛼𝑚𝑖𝑛𝑖𝑚𝑎, la volume fraction
𝛼𝑚𝑎𝑠𝑠𝑖𝑚𝑎 e per quante volume fraction si vuole avere la soluzione (il programma
quindi calcolerà la soluzione per quel numero di volume fraction uniformemente
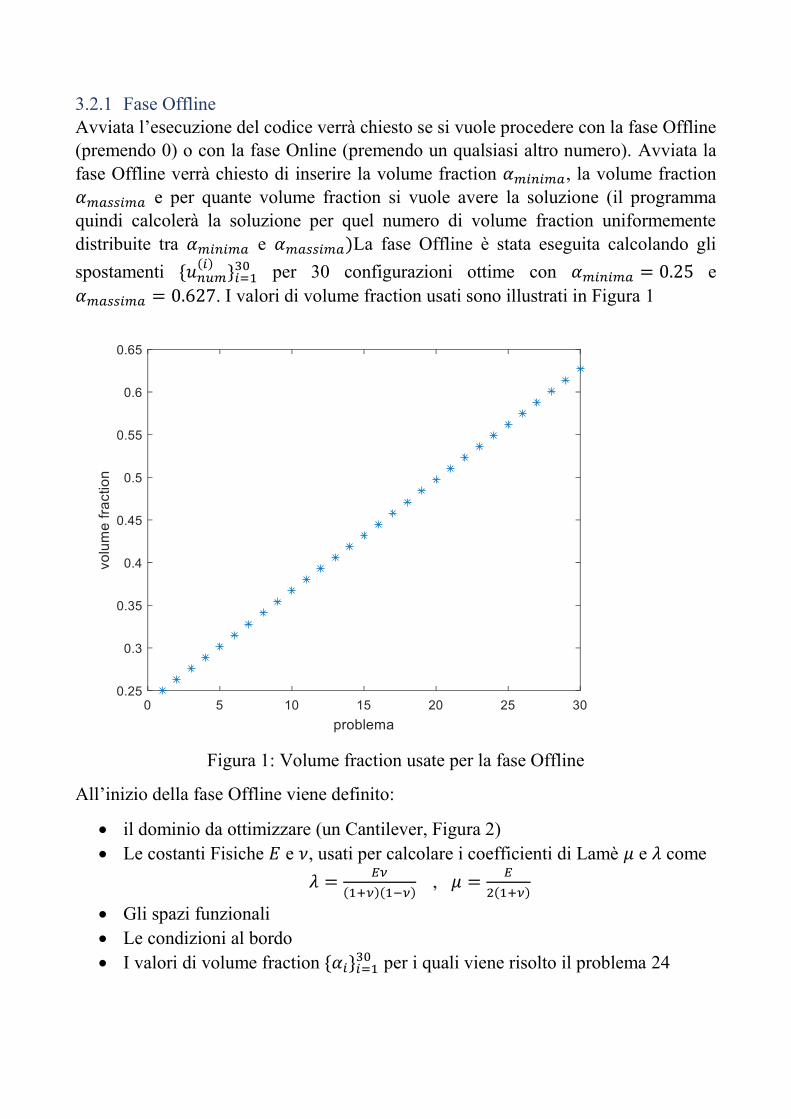
distribuite tra 𝛼𝑚𝑖𝑛𝑖𝑚𝑎 e 𝛼𝑚𝑎𝑠𝑠𝑖𝑚𝑎)La fase Offline è stata eseguita calcolando gli
spostamenti {𝑢𝑛𝑢𝑚(𝑖)
}𝑖=130 per 30 configurazioni ottime con 𝛼𝑚𝑖𝑛𝑖𝑚𝑎 = 0.25 e
𝛼𝑚𝑎𝑠𝑠𝑖𝑚𝑎 = 0.627. I valori di volume fraction usati sono illustrati in Figura 1
Figura 1: Volume fraction usate per la fase Offline
All’inizio della fase Offline viene definito:
• il dominio da ottimizzare (un Cantilever, Figura 2)
• Le costanti Fisiche 𝐸 e 𝜈, usati per calcolare i coefficienti di Lamè 𝜇 e 𝜆 come
𝜆 =𝐸𝜈
(1+𝜈)(1−𝜈) , 𝜇 =
𝐸
2(1+𝜈)
• Gli spazi funzionali
• Le condizioni al bordo
• I valori di volume fraction {𝛼𝑖}𝑖=130 per i quali viene risolto il problema 24
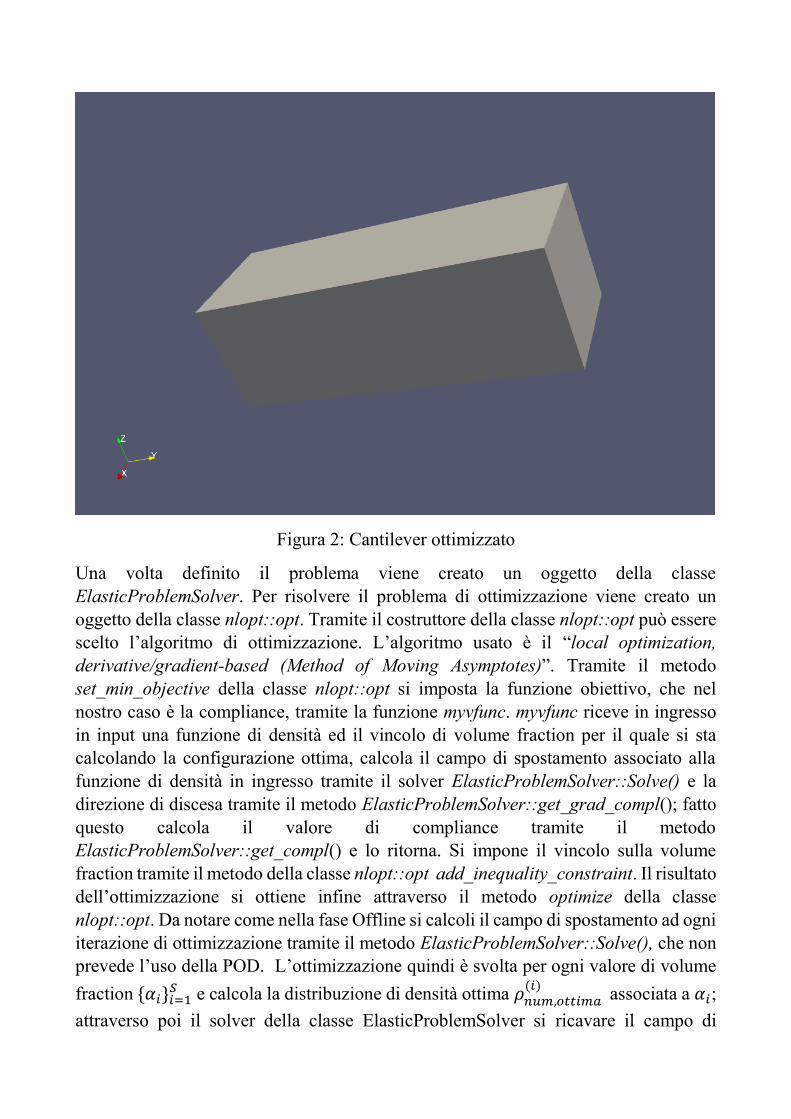
Figura 2: Cantilever ottimizzato
Una volta definito il problema viene creato un oggetto della classe
ElasticProblemSolver. Per risolvere il problema di ottimizzazione viene creato un
oggetto della classe nlopt::opt. Tramite il costruttore della classe nlopt::opt può essere
scelto l’algoritmo di ottimizzazione. L’algoritmo usato è il “local optimization,
derivative/gradient-based (Method of Moving Asymptotes)”. Tramite il metodo
set_min_objective della classe nlopt::opt si imposta la funzione obiettivo, che nel
nostro caso è la compliance, tramite la funzione myvfunc. myvfunc riceve in ingresso
in input una funzione di densità ed il vincolo di volume fraction per il quale si sta
calcolando la configurazione ottima, calcola il campo di spostamento associato alla
funzione di densità in ingresso tramite il solver ElasticProblemSolver::Solve() e la
direzione di discesa tramite il metodo ElasticProblemSolver::get_grad_compl(); fatto
questo calcola il valore di compliance tramite il metodo
ElasticProblemSolver::get_compl() e lo ritorna. Si impone il vincolo sulla volume
fraction tramite il metodo della classe nlopt::opt add_inequality_constraint. Il risultato
dell’ottimizzazione si ottiene infine attraverso il metodo optimize della classe
nlopt::opt. Da notare come nella fase Offline si calcoli il campo di spostamento ad ogni
iterazione di ottimizzazione tramite il metodo ElasticProblemSolver::Solve(), che non
prevede l’uso della POD. L’ottimizzazione quindi è svolta per ogni valore di volume
fraction {𝛼𝑖}𝑖=1𝑆 e calcola la distribuzione di densità ottima 𝜌𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑎
(𝑖) associata a 𝛼𝑖;
attraverso poi il solver della classe ElasticProblemSolver si ricavare il campo di
spostamento 𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
associato a 𝜌𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
. Il campo di spostamento 𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
viene quindi stampato sul file “soluzione_spostamento.txt”
3.2.2 Fase Online
Nella fase Online vengono usate le informazioni raccolte nel file
“soluzione_spostamento.txt” dalla fase Offline. Nella fase Online verrà chiesto il
valore di Volume fraction 𝛼 per il quale voler fare l’ottimizzazione, e poi si passerà
alla lettura della file “soluzione_spostamento.txt”, i cui dati verranno salvati nella
matrice matrice_spostamenti_online, un oggetto della classe:
Eigen::Matrix<double, Eigen::Dynamic, Eigen::Dynamic>
La matrice matrice_spostamenti_online avrà nella colonna 𝑖 il campo di spostamento
𝑢𝑛𝑢𝑚,𝑜𝑡𝑡𝑖𝑚𝑜(𝑖)
associato alla densità ottima 𝜌𝑖 calcolato con il valore di volume fraction
𝛼𝑖.
Per fare la SVD viene creato un oggetto 𝑠𝑣𝑑 della classe:
Eigen::JacobiSVD<Eigen::MatrixXd>
nel cui costruttore viene passato la matrice matrice_spostamenti_online. Per estrarre
poi la matrice dei vettori singolari sinistri si usa il metodo matrixU() della classe
Eigen::JacobiSVD<Eigen::MatrixXd>. I vettori singolari sinistri sono salvati
nell’oggetto vettori_singolari_sinistri della classe Eigen::MatrixXd. Il prossimo
passaggio è scegliere la dimensione del sottospazio nel quale si proietterà il sistema in
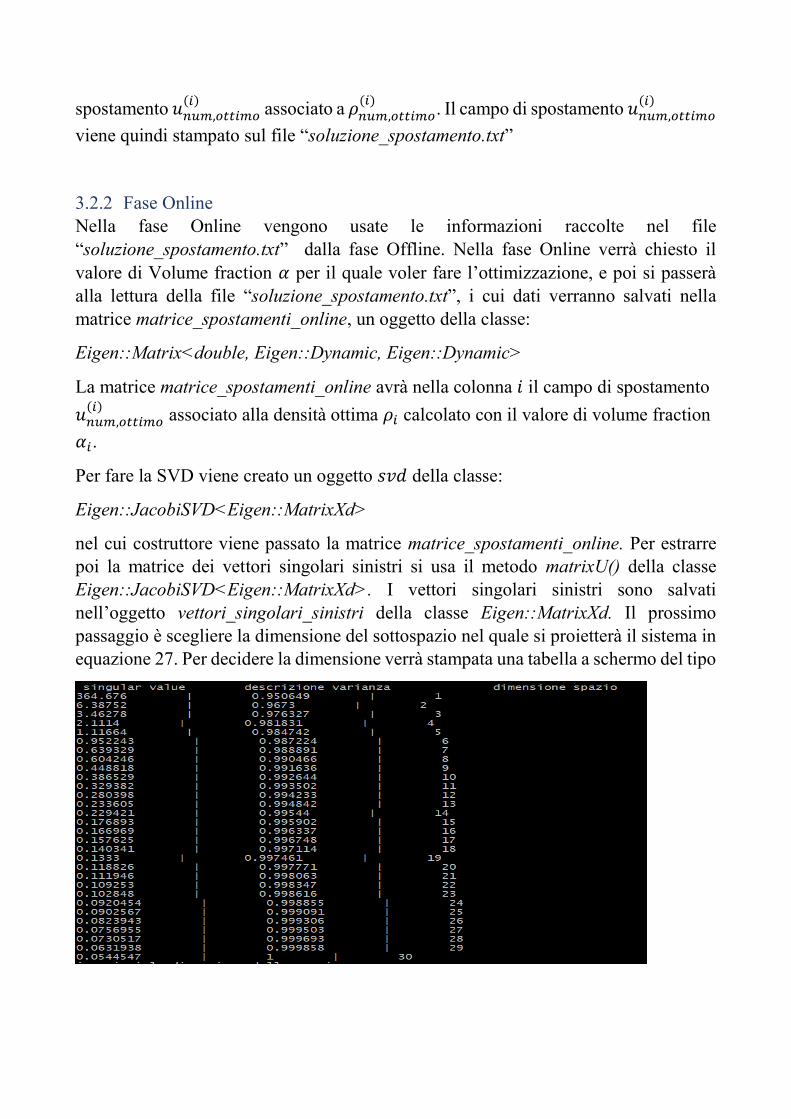
equazione 27. Per decidere la dimensione verrà stampata una tabella a schermo del tipo

Nella prima colonna della tabella vengono mostrati i valori singolari in ordine
decrescente. Nella seconda colonna viene mostrata la 𝑑𝑒𝑠𝑐𝑟𝑖𝑧𝑖𝑜𝑛𝑒 𝑑𝑖 𝑣𝑎𝑟𝑖𝑎𝑛𝑧𝑎. La
descrizione di varianza in riga 𝑗 è uguale alla somma dei primi 𝑗 valori singolari fratto
la somma totale. 1 − 𝑑𝑒𝑠𝑐𝑟𝑖𝑧𝑖𝑜𝑛𝑒 𝑑𝑖 𝑣𝑎𝑟𝑖𝑎𝑛𝑧𝑎 è uguale all’errore di proiezione delle
soluzione storiche nel sottospazio di dimensione 𝑗. Il valore in riga 𝑗 della terza colonna
indica la grandezza della dimensione dello spazio di proiezione per avere la
𝑑𝑒𝑠𝑐𝑟𝑖𝑧𝑖𝑜𝑛𝑒 𝑑𝑖 𝑣𝑎𝑟𝑖𝑎𝑛𝑧𝑎 nela riga 𝑗. Grazie alla tabella si può scegliere la dimensione
più appropriata per lo spazio di proiezione.
I passaggi successivi definiscono il problema da risolvere, come nel caso Offline:
• il dominio da ottimizzare (un Cantilever, Figura x1)
• Le costanti Fisiche 𝐸 e 𝜈, usati per calcolare i coefficienti di Lamè 𝜇 e 𝜆 come
𝜆 =𝐸𝜈
(1+𝜈)(1−𝜈) , 𝜇 =
𝐸
2(1+𝜈)
• Gli spazi funzionali
• Le condizioni al bordo
• Il valore di volume fraction 𝛼𝑖 per il quale si vuole risolvere il problema 24.
E si passa quindi a definire il problema di ottimizzazione tramite la classe nlopt::opt.
La funzione obiettivo in questo caso però non è descritta dalla funzione myvfunc
utilizzata nella fase Offline, ma dalla funzione myvfunc_proiettata. myvfunc_proiettata
è analoga a myvfunc ma calcola il campo di spostamento associato ad una funzione di
densità (ad ogni iterazione del ciclo di ottimizzazione) tramite il solver
ElasticProblemSolver::Solve_proiettato(). La soluzione di densità calcolata dopo il
ciclo di ottimizzazione è salvata nel file 3DOpt_online.pvd
4 Risultati In questa sezione verranno mostrati i risultati dell’ottimizzazione topologica con la
POD e paragonati, in termini di tempo e soluzione, con l’algoritmo di ottimizzazione
classico. Nell’algoritmo classico ad ogni iterazione 𝑖 di ottimizzazione viene
calcolato il campo di spostamento 𝑢𝑛𝑢𝑚,𝑖 tramite la risoluzione di un sistema lineare
con una matrice con 126630009 valori, 11253 righe e 11253 colonne, con 450459
elementi non nulli. In Figura 3 è mostrato il risultato con l’algoritmo di
ottimizzazione classico con un valore di volume fraction pari a 0.57. Il tempo di
calcolo è 4 minuti e 38 secondi, la risoluzione del sistema lineare ad ogni ciclo è di
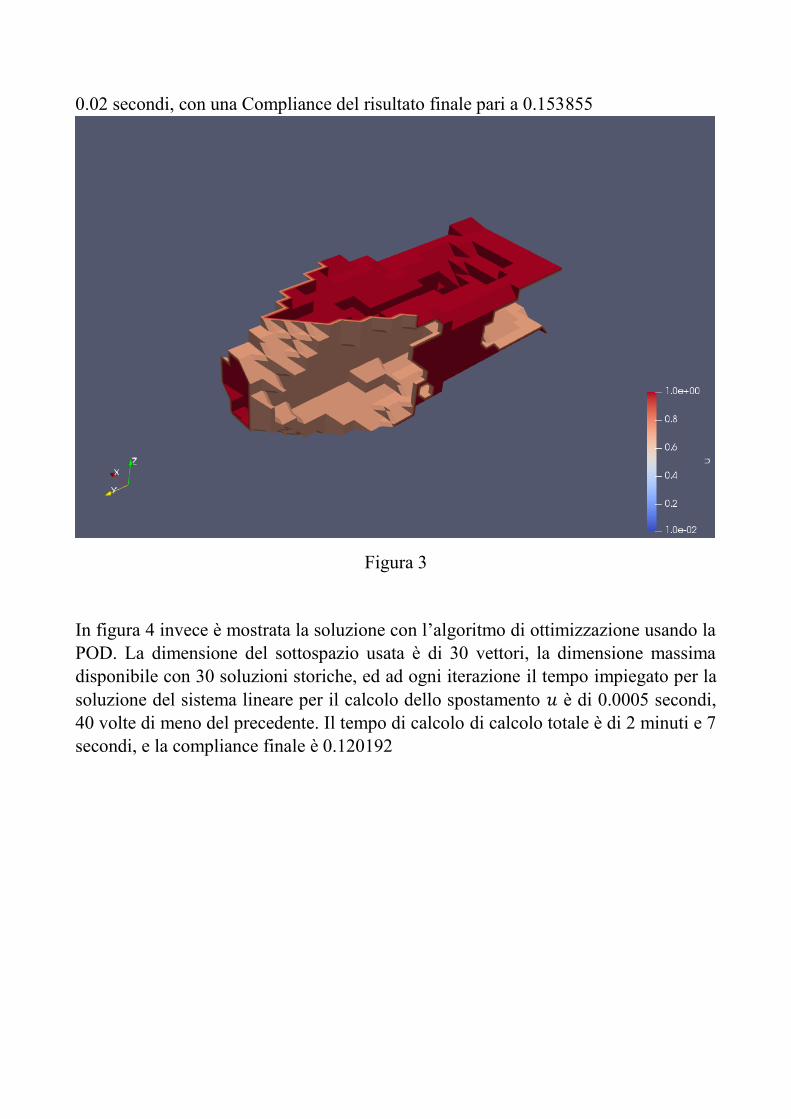
0.02 secondi, con una Compliance del risultato finale pari a 0.153855
Figura 3
In figura 4 invece è mostrata la soluzione con l’algoritmo di ottimizzazione usando la
POD. La dimensione del sottospazio usata è di 30 vettori, la dimensione massima
disponibile con 30 soluzioni storiche, ed ad ogni iterazione il tempo impiegato per la
soluzione del sistema lineare per il calcolo dello spostamento 𝑢 è di 0.0005 secondi,
40 volte di meno del precedente. Il tempo di calcolo di calcolo totale è di 2 minuti e 7
secondi, e la compliance finale è 0.120192

Figura 4
In Figura 5 viene mostrato invece il caso di una ottimizzazione topologica con POD
usando però con una base di dimensione 15. Con una base di questa dimensione
l’errore, riferito alla proiezione delle soluzioni storiche in questo sottospazio, è meno
dello 0.5%. Il tempo di calcolo dello spostamento 𝑢 ad ogni iterazione è di 0.0002
secondi, circa la metà del caso con una dimensione dello spazio di proiezione di 30. Il

tempo di calcolo totale è di 1 minuto e 39 secondi, meno del precedente.
Figura 5
Pur avendo scelto una dimensione dello spazio di proiezione metà del primo caso i
risultati sono molto simili. Questo è dovuto al fatto da una dimensione pari a 15 ad una
pari a 30 si passa da un errore dello 0.5% ad uno dello 0%.
Con una dimensione del sottospazio pari a 5 l’errore di proiezione delle soluzioni
storiche in tale sottospazio è del 2%. Il tempo per risolvere il sistema lineare è un terzo
del caso in cui il sottospazio abbia dimensione 15 e il tempo di calcolo globale è di 1
minuto e 35 secondi. Il risultato è mostrato in Figura 6.
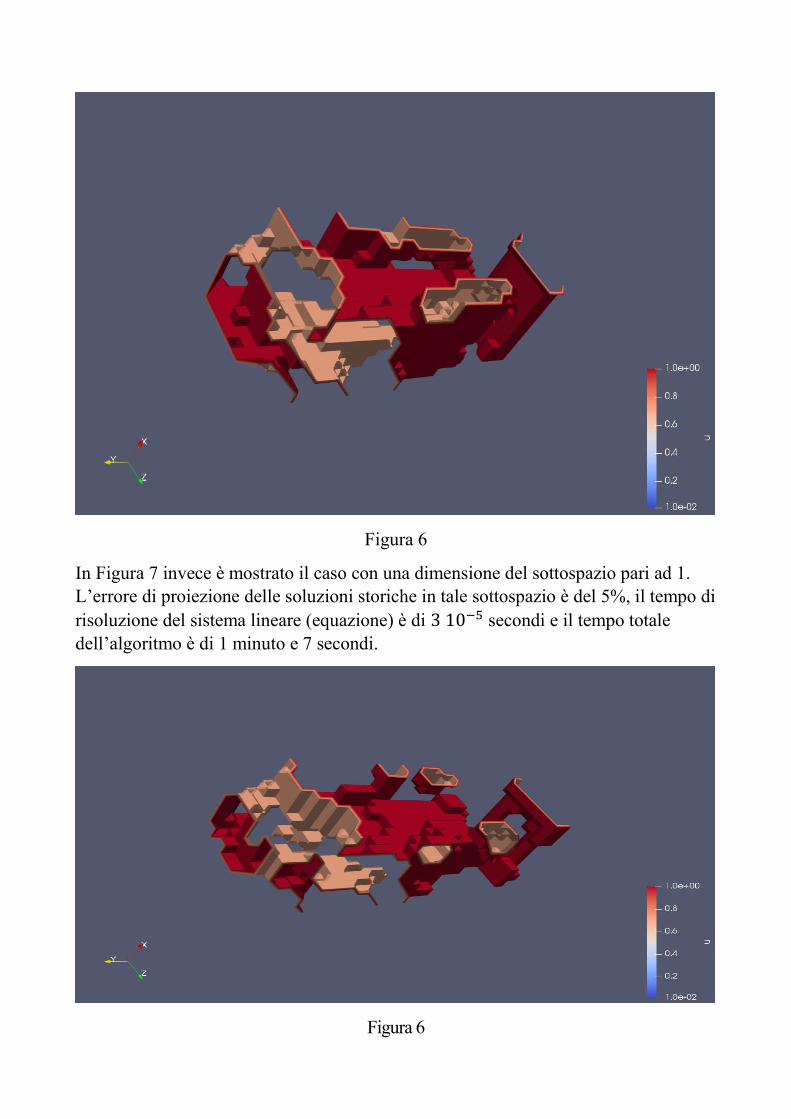
Figura 6
In Figura 7 invece è mostrato il caso con una dimensione del sottospazio pari ad 1.
L’errore di proiezione delle soluzioni storiche in tale sottospazio è del 5%, il tempo di
risoluzione del sistema lineare (equazione) è di 3 10−5 secondi e il tempo totale
dell’algoritmo è di 1 minuto e 7 secondi.
Figura 6

5 Conclusioni Nel progetto è stata introdotto la POD e il problema di ottimizzazione topologica a minima
compliance, è stato introdotto l’algoritmo implementato per poter usare la POD nel ciclo di
ottimizzazione per il calcolo dello spostamento 𝑢 e sono stati presentati i risultati. I risultati
hanno mostrato un calo del tempo di calcolo dell’ottimizzazione con POD rispetto a quello
classico, è una buona scalabilità al variare della dimensione del sottospazio. In particolare al
diminuire della dimensione si aveva un guadagno in tempo con una soluzione praticamente
identica al caso di dimensioni del sottospazio più alte. Questo è dovuto alla distribuzione del
valori dei valori singolari sinistri.
6 Creazione ambiente, Compilazione ed avvio Il progetto è stato testato ed i risultati sono stati prodotti su una macchina virtuale
VirtualBox. L’installazione del sistema operativo è:
• Installazione di vagrant e git
• Con git nella cartella lanciare “vagrant init centos/7”
• Lanciare “vagrant up”
• Apri il file C:\Users\{username}\.vagrant.d\boxes\centos-VAGRANTSLASH-
7\1611.01\virtualbox\Vagrantfile e lo modifichi in modo che compaia
config.vm.synced_folder ".", "/vagrant", type: "virtualbox"
• Lanciare “vagrant plugin install vagrant-vbguest” nella cartella del punto 2
• Lanciare “vagrant up”
• Lanciare “vagrant ssh”
• Installazione dei moduli con “curl -O "http://www1.mate.polimi.it/PACS/gcc5-
glibc.tgz" ”
• sudo tar xvzf gcc5-glibc.tgz -C /
cat - >> ~/.bashrc <<EOF
export mkPrefix=/u/sw
source \$mkPrefix/etc/profile
module load gcc-glibc/5 octave
EOF
La macchina virtuale è pronta. Per avviarla bisogna lanciare:
• vagrant up
• vagrant ssh
• source /u/sw/etc/profile
• module load gcc-glibc/5 octave
• module load fenics
Al primo avvio bisogna scaricare ed installare NLopt-2.4.2.tar.gz dal sito:
http://nlopt.readthedocs.io/en/latest/
Di default, libnlopt.so sarà installato in usr/local/lib e nlopt.h in /usr/local/include. Se
le cartelle sono diverse bisogna correggere il cmake inserito del progetto, nelle righe
• set(NLOPTINC /usr/local/include)
• set(NLOPTLIB /usr/local/lib)
Per la compilazione ed esecuzione lanciare
• cmake .
• make
• ./3Delasticty
L’output del programma è 3DOpt_online.pvd, da aprire con paraview.
IMPORTANTE: Nella cartella ci sono due file: soluzioni_spostamento.txt
e dimensioni.txt . Questi file contengono le informazioni delle 30 simulazioni offline.
Se si lancia una nuova fase offline vengono sovrascritti. Per evitare che succeda basta
rinominarli prima che si lanci una nuova fase offline, in questo modo nel caso si voglia
lanciare una fase online con le stesse soluzioni storiche di questo paper è sufficiente
rinominarli con il nome giusto.
7 References S. Volkwein: Proper Orthogonal Decomposition: Theory and Reduced-Order
Modelling
M.P. Bendsoe, O. Sigmund: Topology optimization Theory, Methods and
Applications