Analisi Statistica di Serie Temporali · In questa tesi si è affrontato il tema dell'analisi delle...
49
Scuola Politecnica e delle Scienze di Base Corso di Laurea in Ingegneria Informatica Elaborato finale in Teoria dei Segnali Analisi Statistica di Serie Temporali Anno Accademico 2015/2016 Candidato: Maurizio Nappi Quintiliano matr. N46/000894
-
Upload
duongkhanh -
Category
Documents
-
view
216 -
download
0
Transcript of Analisi Statistica di Serie Temporali · In questa tesi si è affrontato il tema dell'analisi delle...

Scuola Politecnica e delle Scienze di BaseCorso di Laurea in Ingegneria Informatica
Elaborato finale in Teoria dei Segnali
Analisi Statistica di Serie Temporali
Anno Accademico 2015/2016
Candidato:
Maurizio Nappi Quintiliano
matr. N46/000894

Alla mia famiglia, colonna portante di questo percorso.
Indice
Indice..................................................................................................................................................III
Introduzione..........................................................................................................................................4
Capitolo 1: Concetti fondamentali.......................................................................................................6
1.1 Parametri di caratterizzazione di un processo aleatorio.............................................................6
1.2 Stima delle medie, autocovarianze e autocorrelazioni...............................................................9
1.3 Rappresentazione a media mobile e autoregressiva per le sere temporali...............................14
Capitolo 2: Modelli di serie temporali...............................................................................................18
2.1 Modelli di serie temporali stazionari .......................................................................................18
2.1.1 Modello autoregressivo.....................................................................................................18
2.1.2 Modello a media mobile....................................................................................................23
2.1.3 Modello di processo autoregressivo a media mobile........................................................26
2.2 Modelli di serie temporali non stazionarie ..............................................................................28
2.2.1 Non stazionarietà della media...........................................................................................28
2.2.2 Modello autoregressivo integrato a media mobile(ARIMA)............................................30
2.2.3 Non stazionarietà della varianza e autocovarianza............................................................32
Capitolo 3: Analisi delle serie temporali con R.................................................................................36
3.1 Identificazione del modello di una serie temporale..................................................................36
3.2 Il software R.............................................................................................................................38
3.3 Esempio di analisi di una serie temporale con R......................................................................39
Conclusioni.........................................................................................................................................46
Bibliografia.........................................................................................................................................48
Ringraziamenti...................................................................................................................................49
III
Introduzione
“The list of areas in wich time series is observed and studied is endless.” (William Wu-
Shyong Wei, Professore di Statistica alla Temple University in Philadelphia,
Pennsylvania)
In questa tesi si è affrontato il tema dell'analisi delle serie temporali, da cui ne deriva il
titolo. L'analisi delle serie temporali, o serie storiche, è un insieme di strumenti statistici e
matematici che ci permettono di studiare fenomeni che si evolvono nel tempo in maniera
stocastica, essa viene utilizzata principalmente in economia e finanza per studiare quali
sono, ad esempio, gli andamenti degli utili di un azienda, e poterne prevedere gli
andamenti futuri, ma viene impiagata anche in molti altri campi, come la medicina,
l'ingegneria, l'agricoltura, ecc.. L'analisi delle serie temporali si basa principalmente sul
concetto di processo aleatorio e di stabilità in termini statistici, che ne derivano varie
proprietà delle caratteristiche di un processo aleatorio, quali media, varianza,
autocovarianza, autocorrelazione ed autocorrelazione parziale. Dunque l'obbiettivo di
questa tesi è di descrivere quali sono le basi matematiche e statistiche su cui si fonda
l'analisi delle serie temporali ed applicarle ad un esempio pratico con l'ausilio, anche, di un
software specifico. In particolare nel primo capitolo si affronteranno i concetti basilari di
statistica su cui si fonda l'analisi delle serie temporali, ovvero i processi aleatori,
soffermandosi particolarmente su quali sono i parametri che caratterizzano un processo
aleatorio, il concetto di stabilità, i processi Gaussiani, i processi rumore bianco, la stima
dei parametri di caratterizzazione di una serie temporale e le varie rappresentazioni con
qui può essere descritta. Nel secondo capitolo si occuperà principalmente di descrivere
quali sono i modelli più comuni di serie temporali che vengono utilizzati, facendo
particolare attenzione su quali sono le caratteristiche e le proprietà principali che li
distinguono l'uno con l'altro e facendo una netta distinzione tra serie stazionarie e non
stazionarie, concentrandosi, per le prime, su quali sono i vari modelli che si possono
adottare e le loro caratteristiche, e successivamente, per le seconde, sui vari casi di non
4
stabilità, quali media e varianza, e le soluzioni da adottare quando si presentano, facendo
particolare attenzione sui modelli più comuni. Infine il terzo capitolo è concentrato sulla
metodologia tradizionale di analisi delle serie temporali, descritta tramite una serie di passi
fondamentali che ci portano a una caratterizzazione completa di tutte le proprietà del caso
in analisi. Segue un breve focus sul software utilizzato, ovvero R, ed infine il caso di
studio, ovvero una serie temporale che descrive il traffico di un server in Internet, su cui si
proverà a determinare quale sia il modello più adatto che la descrive secondo i parametri
che la caratterizzano.
5
Capitolo 1: Concetti Fondamentali
In questo capitolo introdurremo i concetti fondamentali che servono per modellare una
serie temporale.
Innanzitutto definiamo una serie temporale (o serie storica) come un insieme di variabili
aleatorie ordinate temporalmente che esprime la dinamica di un fenomeno nel tempo. In
particolare in statistica definiamo una serie temporale come una realizzazione, o funzione
campione, di un processo aleatorio.
Un processo aleatorio (o processo stocastico) Z ( t ,ω) è definito come un insieme di
variabili aleatorie dipendenti dal tempo, con t variabile temporale e ω proviene da uno
spazio campione. Se fissiamo t il nostro processo aleatorio è una variabile aleatoria,
fissando ω, Z (t ,ω) è una funzione della sola t e viene chiamata realizzazione o funzione
campione. L'insieme di tutte le possibili realizzazioni viene chiamato insieme dell'analisi
dei processi stocastici e delle serie temporali.
1. 1 Parametri di caratterizzazione di un processo aleatorio
Consideriamo un set di variabili aleatorie {Z t1, Z t2
,... , Z tn} da un processo aleatorio
{Z (ω , t): t=0,±1,±2,...} , la sua funzione di distribuzione n-dimensionale risulta essere:
F Z t1, Z t2
, ... ,Z t n
= P {ω :Z t1<x1 , Z t2
<x 2 , ... , Z t n<xn} dove x i : i=1,... , n sono numeri
reali.
Un processo è detto stazionario del primo ordine nel senso delle distribuzioni se la sua
funzione di distribuzione di primo ordine è tempo invariante, ovvero se per ogni
t 1 , k e t 1+k risulta F Z t1
(x1)=F Z t1+k( x1) ; stazionario del secondo ordine se per ogni
t 1 , t2 , k , t 1+k e t 2+k risulta:
F Z t1,Z t
2
(x1 , x2)=F Z t1+k , Z t
2+k(x1 , x2) (1.1.1)
n-esimo ordine se
F Z t1,Z t
2,... , Z t
n
( x1 , x2 , ... , xn)=F Z t1+k , Z t
2+k ,... ,Z t
n+k(x1 , x2 ,... , xn) (1.1.2)
6

per ogni n-upla (t 1 , ... , t n) e k di interi. Un segnale è definito stazionario in senso stretto se
la (1.1.2) è verificata per ogni valore di n.
Per quanto detto, per semplicità, denoteremo un processo stocastico Z (ω , t) con le
notazioni Z (t ) o Z t sopprimendo la variabile ω, e denoteremo una variabile aleatoria X
invece di X (ω) . Un processo aleatorio è detto a valori reali se assume solo valori reali.
Per un dato processo aleatorio a valori reali definiamo i seguenti parametri:
• Funzione media: μt=E (Z t) ;
• Funzione varianza: σt2=E (Z t−μt)
2 ;
• Funzione di covarianza tra Z t 1e Z t 2
: γ(t1 , t 2)=E (Z t 1−μt 1
)(Z t2−μ t2
) ;
• Coefficiente di correlazione tra Z t 1e Z t 2
: ρ(t1 , t2)=γ(t 1 , t 2)
√σt1
2 √σt 1
2.
Per un processo stazionario in senso stretto, se la funzione di distribuzione è la stessa per
ogni valore di t, abbiamo che i parametri sopra definiti saranno:
• μt=μ purché E (∣Z t∣)<∞ con μ costante;
• σt2=σ
2 purché E (Z t2)<∞ con σ costante per ogni t;
• γ(t1 , t 2)=γ(t−k , t )=γ(t , t+k )=γk e ρ(t1 , t2)=ρ(t−k ,t )=ρ( t , t+k )=ρk
considerando la (1.1.1) per ogni t 1 , t2 , k interi e ponendo t 1=t+k e t2=t , ovvero
la covarianza e la correlazione tra Z t1e Z t2
dipende solo dalla differenza
temporale k.
Un esempio banale di processo aleatorio stazionario in senso stretto è una sequenza di
variabili aleatorie identicamente distribuite, ma, essendo che una sequenza del genere non
esiste o non interessa nello studio delle serie temporali, attualmente risulta molto difficile o
addirittura impossibile definire una funzione di distribuzione specialmente se data una
serie temporale osservata ci sono momenti congiunti. Nello studio delle serie storiche
generalmente utilizziamo una definizione di stazionarietà più debole in termini di momenti
riguardanti il processo.
Un processo è detto stazionario debolmente di ordine n se tutti i suoi momenti congiunti
fino all'ordine n esistono e sono tempo-invarianti. Ciò è seguito dal fatto che un processo
7
stazionario debolmente del secondo ordine avrà media e varianza entrambe costanti e le
funzioni di covarianza e correlazione dipendenti solo dalla differenza temporale, quindi le
definizioni stazionario in senso lato o stazionarietà della covarianza possono essere
utilizzate per definire un processo di questo tipo. É importante precisare che dalle
definizioni di stretta stazionarietà del secondo ordine di un processo che può avere primi
due momenti finiti si possa dedurre che può essere anche stazionario in senso lato, ciò è
messo in dubbio dal fatto che un processo stazionario in senso stretto può non avere
momenti finiti e quindi non può essere un processo stazionario in senso lato.
In seguito utilizzeremo solo il termine stazionario per indicare i processi stazionari in
senso lato per due motivi. Innanzitutto la definizione di stazionarietà della covarianza ha
un significato molto più debole rispetto alla stretta stazionarietà, inoltre nell'analisi delle
serie temporali il lavoro sarà incentrato sui processi stazionari debolmente del secondo
ordine poiché è relativamente più semplice da controllare i primi due momenti.
Un processo è detto normale o Gaussiano se la sua funzione di distribuzione congiunta è
normale. Dato che un processo normale è caratterizzato solo dai suoi primi due momenti,
un processo stazionario è anche Gaussiano e quindi i processi di cui discuteremo saranno
tutti Gaussiani.
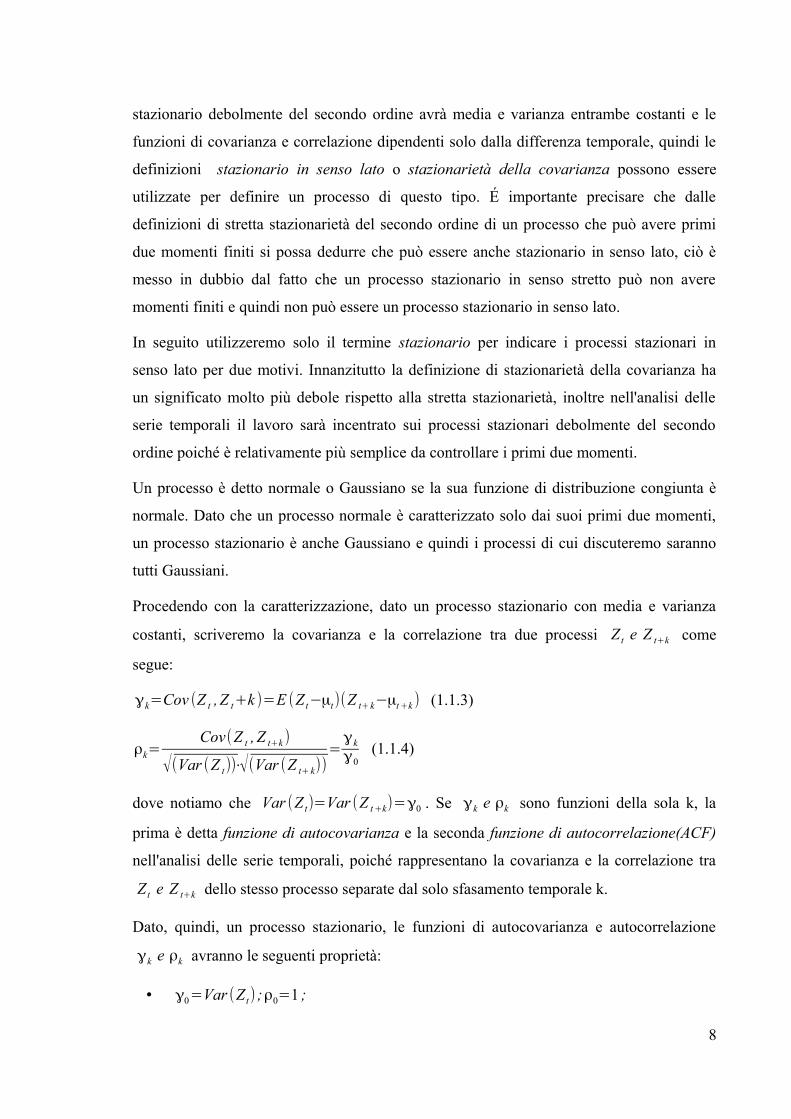
Procedendo con la caratterizzazione, dato un processo stazionario con media e varianza
costanti, scriveremo la covarianza e la correlazione tra due processi Z t e Z t+k come
segue:
γk=Cov (Z t , Z t+k )=E (Z t−μt)(Z t+ k−μt +k ) (1.1.3)
ρk=Cov(Z t , Z t+k )
√(Var (Z t))⋅√(Var (Z t+ k))=
γk
γ0(1.1.4)
dove notiamo che Var (Z t)=Var (Z t +k)=γ0 . Se γk e ρk sono funzioni della sola k, la
prima è detta funzione di autocovarianza e la seconda funzione di autocorrelazione(ACF)
nell'analisi delle serie temporali, poiché rappresentano la covarianza e la correlazione tra
Z t e Z t+k dello stesso processo separate dal solo sfasamento temporale k.
Dato, quindi, un processo stazionario, le funzioni di autocovarianza e autocorrelazione
γk e ρk avranno le seguenti proprietà:
• γ0=Var (Z t) ;ρ0=1 ;
8

• ∣γk∣⩽γ0 ; ∣ρk∣⩽1 ;
• γk=γ−k e ρk =ρ−k per ogni k, ovvero le due funzioni risultano simmetriche rispetto
al ritardo k=0 . Questa proprietà proviene dal fatto che se consideriamo due
processi Z t e Z t+k oppure Z t e Z t−k abbiamo la stessa differenza temporale;
• Le funzioni di autocovarianza e autocorrelazione sono semidefinite positive,
ovvero ∑i=1
n
∑j =1
n
αi α j γ∣ti−t j∣⩾0 e ∑
i=1
n
∑j =1
n
αi α j ρ∣t i−t j∣⩾0 per ogni insieme di valori nel
tempo t 1 , t2 ,... , t n e ogni α1 ,α2 ,... ,αn numeri reali.
Infine definiamo la funzione di autocorrelazione parziale (PACF) come l' autocorrelazione
di un processo stocastico in due istanti di tempo separati da un ritardo k senza considerare
tutti gli istanti intermedi, ovvero consideriamo la correlazione tra Z t e Z t+k e la loro
mutua dipendenza lineare, rimuovendo tutti gli istanti intermedi Z t +1 , Z t +2 , ... , Z t +k−1
risulta:
P k =Corr (Z t , Z t +k ∣Z t +1 , ... , Z t +k )
Si può dimostrare1 che la funzione di autocorrelazione parziale si può scrivere nel seguente
modo:
P k =ϕkk=
∣1 ρ1 ρ2 ⋯ ρk−2 ρ1
ρ1 1 ρ1 ⋯ ρ k−3 ρ2
⋮ ⋮ ⋮ ⋱ ⋮ ⋮ρk−1 ρk−2 ρk−3 ⋯ ρ1 ρk
∣∣
1 ρ1 ρ2 ⋯ ρk−2 ρk−1
ρ1 1 ρ1 ⋯ ρk−3 ρk−2
⋮ ⋮ ⋮ ⋱ ⋮ ⋮ρk−1 ρk−2 ρk−3 ⋯ ρ1 1 ∣
(1.1.5)
1.2 Stima delle medie, autocovarianze e autocorrelazioni
Prima di procedere con la stima della media, dell'autocovarianza e dell'autocorrelazione è
importante definire cos'è un processo rumore bianco (o white noise).
Un processo {a t} è definito rumore bianco se la sua sequenza di variabili aleatorie
incorrelate data una distribuzione a media costante E (a t)=μa che generalmente viene
assunta nulla, varianza costante Var (a t)=σa2 e covarianza γk=Cov (a t , a t+k )=0 per ogni
1 Dimostrazione rif. William Wuu-Shyong Wei “Time Series Analsys – Univariate and Multivariate Methods” Pearson ed. cap. 2 par. 2.3 pp. 12-15
9

k. Per definizione segue che il processo {a t} è stazionario, in particolare avremo che la
sua funzione di autocovarianza sarà:
γk={σ t2 k=0
0 k≠0
la funzione di autocorrelazione invece:
ρk={1 k=00 k≠0
e la funzione di autocorrelazione parziale:
ϕkk={1 k=00 k≠0
per definizione, quindi, un processo rumore bianco sarà Gaussiano se le sue funzioni di
distribuzione congiunte sono normali. Di seguito, quindi, {a t} sarà sempre riferito a un
processo rumore bianco Gaussiano.
Una serie temporale è caratterizzata dalle funzioni di media, varianza, autocorrelazione e
autocorrelazione parziale. Questi valori possono essere calcolati solo se si conosce
l'insieme di tutte le realizzazioni, ma spesso non è possibile poterli calcolare. Quindi si
procede a una stima di tali valori per poter procedere alla caratterizzazione sotto alcune
condizioni che ci permettono di stimare in maniera corretta questi parametri.
Consideriamo un processo stazionario, uno stimatore non polarizzato2 della media
μ=E (Z t) può essere :
Z=1n∑t=1
n
Z t
ovvero la media temporale di n osservazioni. Ciò può essere dimostrato considerando la
varianza di tale stimatore:
Var ( Z )=1n2 ∑
t=1
n
∑s=1
n
Cov (Z t ,Z s)=γ0
n2 ∑t=1
n
∑s=1
n
ρ∣t−s∣=γ0
n2 ∑k =−(n−1)
n−1
(n−∣k∣)ρk
=γ0
n∑
k=−(n−1 )
n−1
(1−∣k∣
n)ρk
(1.2.1)
ponendo k=t−s . Se il limite della serie
2 Uno stimatore si dice non polarizzato (o consistente) se il suo valore stimato coincide con il valore atteso, viceversa si dice polarizzato se il suo valore stimato non coincide con il valore atteso.
10

limn→∞ [ ∑
k=−(n−1)
n−1
(1−∣k∣
n)ρk]
risulta finito, e Var ( Z )→0 per n →∞ , Z è uno stimatore consistente per la media μ e
risulterà
limn →∞
1n ∑
t=1
nZ t=μ (1.2.2)
Il processo è definito ergodico per la media se è verificata la (1.2.2).
Ricordiamo che un processo stocastico è definito ergodico se la sua media statistica
coincide quasi ovunque alla sua media temporale, ovvero, presa X una variabile aleatoria,
avremo che:
Xn
→q.o.
X P( limn→∞
Xn= X )=1
In particolare un processo è definito ergodico per la media se la media temporale e la
media statistica coincidono.
Si può dimostrare che una condizione sufficiente per contenere tale risultato è che
l'autocorrelazione ρk →0 se k →∞ , ovvero:
limn →∞
1n ∑
k =−(n−1)
n−1
ρk =0
che implica nella (1.2.1) che:
limn →∞
Var ( Z )=0 (1.2.3)
Similmente impieghiamo la seguente stima usando la media temporale per stimare la
funzione di autocovarianza:
γk=1n∑t=1
n−k
(Z t−Z )(Z t +k−Z ) oppure γk=1
n−k∑t=1
n−k
(Z t−Z )(Z t+k−Z )
in particolare la sommatoria può essere approssimata come segue:
∑t =1
n−k
(Z t−Z )(Z t+k−Z )=∑t=1
n−k
[(Z t−μ)−( Z −μ)] [(Z t+ k−μ)( Z−μ)]=...
...≈∑t=1
n−k
(Z t−μ)(Z t +k−μ)−(n−k )( Z−μ)2
11

ovvero moltiplicando membro a membro e approssimando i termini
∑t =1
n−k
(Z t−μ) e ∑t =1
n−k
(Z t+k−μ) con (n−k )( Z−μ) .
Avremo che:
E ( γk)≃γk−kn
γk−(n−k
n)Var ( Z )
E ( γk)≃γk−Var ( Z )
Chiaramente possiamo notare che entrambi gli stimatori sono polarizzati. Se ignoriamo il
termine Var ( Z ) che rappresenta l'effettiva stima di μ, γk risulta non polarizzato, mentre
γk è ancora polarizzato poiché quest'ultimo ha un errore di polarizzazione maggiore,
specialmente per k grande quanto n. Se ρk →0 per k →∞ e il processo risulta ergodico
per la media, ovvero è verificata la (1.2.3) abbiamo che entrambi gli stimatori γk e γk
risultano asintoticamente non polarizzati.
Bartlett(1946) ha dimostrato le seguenti approssimazioni per un processo Gaussiano:
Cov( γk , γk+ j)≃1n ∑
i=−∞
∞
(γi γi+ j+γi+k+ j γi−k) e
Var ( γk)≃1n ∑
i=−∞
∞
(γ i2+γi+k γi−k)
Similmente
Cov( γk , γk+ j)≃1
n−k ∑i=−∞
∞
(γi γi+ j+γi+k + j γi−k) e
Var ( γk)≃1
n−k ∑i=−∞
∞
(γ i2+γi+k γ i−k ) (1.2.4)
Come possiamo notare nella (1.2.4) la varianza di γk è più grande di quella di γk e
sostanzialmente per valori di k grandi può essere conseguente una stima instabile ed
irregolare. Ciò che ci serve è capire quando un processo è ergodico per l'autocovarianza,
ovvero:
12

limn→∞
γk= limn→∞
1n∑t=1
n−k
(Z t− Z )(Zt+k− Z )=γk (1.2.5)
dimostrare la (1.2.5) in maniera rigorosa, ai fini della nostra analisi, risulta complicato e
non necessaria, quindi è sufficiente notare che l'autocovarianza campionaria è uno
stimatore non polarizzato se risulta che:
∑−∞
∞
∣γi∣<∞ e limn→∞
Var ( γk )=0
Un ulteriore parametro da stimare è l'autocorrelazione. Consideriamo una serie temporale
del tipo Z1 , Z 2, ... , Zn , la ACF campionaria risulterà
ρk=γk
γo=
∑t=1
n−k
(Z t−Z )(Z t +k−Z )
∑t =1
n−k
(Z t−Z )2
per k=0,1,2 , ...
con Z=∑t =1
nZn
media campionaria della serie. Bartlett(1946) ha dimostrato che per un
processo Gaussiano con k>0 e k+ j>0 avremo che:
Cov (ρk ,ρk+ j)≃
1n
∑i=−∞
∞
(ρiρ j+ρi+k++ j ρi−k−2ρk ρiρi−k− j−2ρk + jρi ρi−k− j+2ρk ρk+k ρi2)
(1.2.6)
per valori di n grandi, ρk è approssimativamente normalmente distribuita con media ρk e
varianza:
Var (ρk)≃1n ∑
i=−∞
∞
(ρi2+ρi+k ρi−k−4ρk ρi ρi−k+2ρk
2ρi2) (1.2.7)
per processi dove ρk=0 e k>m l'approssimazione di (1.2.7) diventa
Var (ρk )≃1n
(1+2ρ12+2ρ2
2+...+2ρm2 )
in pratica tutti i valori di ρi con i=1,2 , ... ,m non sono conosciuti e vengono sostituiti con
le loro stime campionarie ρi e avremo il seguente errore standard per grandi ritardi:
S ρk=√ 1
n(1+2ρ1
2+2ρ22+...+2ρm
2 )
per un processo rumore bianco avremo
13

S ρk=√ 1
n
Per calcolare la funzione di autocorrelazione parziale campionaria ϕkk basta sostituire
nella (1.2.6) ρi al posto di ρi . I calcoli sono molto complicati da effettuare; adottando un
metodo ricorsivo dato da Durbin(1960) ponendo ϕii=ρi avremo che:
ϕk +1, k+1=
ρk+1−∑j=1
k
ϕkj ρk+1− j
1−∑j=1
k
ϕkj ρ j
e ϕk+1, j=ϕkj−ϕk+1, k+1 ϕk , k+1− j .
il metodo è valido anche per calcolare ϕkk . Quenouille (1949) ha dimostrato che per una
sequenza di rumori bianchi la varianza di ϕkk può essere approssimata da:
Var(ϕkk)≃1n
quindi utilizzeremo come limite critico su ϕkk il valore ±2
√nper testare l'ipotesi di un
processo bianco.
1.3 Rappresentazione a media mobile e autoregressiva per le serie temporali
Nell'analisi delle serie temporali abbiamo due utili rappresentazioni per descrivere una
serie storica. Una è data dallo scrivere un processo Z t come una combinazione lineare di
una sequenza di variabili aleatorie incorrelate:
Z t=μ+at+ψ1 at−1+ψ2 at−2+...=μ+∑j=0
∞
ψ j a t− j (1.3.1)
dove ψ0=1 , {a t} è un processo white noise a media nulla e ∑j=0
∞
ψ j2<∞ .
Una sommatoria infinita di variabili aleatorie è definita, quindi, come il limite della media
quadratica delle somme parziali finite, ovvero:
E [( Z t−∑j =0
n
ψ j at − j)2]→0 per n→∞
con Z t=Z t−μ . Introducendo l'operatore “backshift” B j=xt j possiamo scrivere la (1.3.1)
nella forma compatta:
Z t=ψ(B)at (1.3.2)
14

con ψ( B)=∑j =0
∞
ψ j B j
da ciò è facile verificare dal processo descritto nella (1.3.1):
E (Z t)=μ (1.3.3)
Var (Z t)=σa2 ∑
j=0
∞
ψ j2 (1.3.4)
E (a t Z t− j)={σa2 per j=0
0 per j>0(1.3.5)
γk=E ( Z t Z t+k )=σa2 ∑
i =0
∞
ψi ψi+k (1.3.6)
ρk=
∑i=0
∞
ψi ψi+k
∑i=0
∞
ψi2
(1.3.7)
dove l'autocovarianza e l'autocorrelazione nelle (1.3.6) e (1.3.7) sono dipendenti soltanto
dal ritardo k. Per far si che il processo sia stazionario dobbiamo dimostrare che
l'autocovarianza sia finita per ogni valore di k, ovvero dalla (1.3.6):
∣γk∣=∣E ( Z t Z t+k)∣⩽[Var (Z t)Var (Z t+k)]1 /2=σa2 ∑
j=0
∞
ψ j2
da ciò si evince che la sommatoria ∑j =0
∞
ψ j2<∞ deve essere sommabile per far si che la
(1.3.1) sia stazionaria. La forma descritta nella (1.3.1) viene detta rappresentazione a
media mobile (MA) di un processo. Wold(1938) ha dimostrato che un processo stazionario
che è puramente non deterministico può essere scritto nella sua rappresentazione a media
mobile. Per una data sequenza di autocovarianze, definiamo la funzione generatrice delle
autocovarianze la funzione seguente:
γ(B)= ∑k =−∞
∞
γk Bk
dove la varianza del processo γ0 è il coefficiente di B0 e quello della covarianza γk è il
coefficiente sia di Bk che di B−k .
Utilizzando la (1.3.6) e la definizione di stazionarietà avremo che:
15

γ(B)=σa2 ∑
k=0
∞
∑i=0
∞
ψi ψi+k Bk=σa2 ∑
i=0
∞
∑k =0
∞
ψi ψ j B j−i
=σa2 ∑
j=0
∞
ψ j B j ∑i=0
∞
ψi B−i=σa2ψ(B)ψ( B−1
)
(1.3.8)
con j=i+k e ψ j=0 per j<0 . Analogamente per la funzione generatrice
dell'autocorrelazione dalla (1.3.7) avremo che:
ρ(B)= ∑k=−∞
∞
ρk Bk=γ(B)γo
(1.3.9)
Un'altra forma utile per descrivere un processo è quello di scriverla nella sua
rappresentazione autoregressiva (AR) dove noi regrediamo il valore di Z all'istante t con il
suo valore precedente più un disturbo aleatorio (random shock), come segue:
Z t=π1 Z t −1+π2 Z t−2+...+a t (1.3.10)
o in maniera equivalente
π( B) Z t=a t (1.3.11)
con π( B)=1−∑j=1
∞
π j B j e 1+∑j=1
∞
∣π j∣<∞ .
Box e Jenkins (1976) definiscono un processo invertibile se può essere scritto in questa
forma. E' facile dimostrare che non tutti i processi stazionari sono invertibili, in particolare
se un processo lineare della forma Z t=ψ(B) at è invertibile se le radici di ψ( B)=0
funzione della sola B giacciono al di fuori della circonferenza di raggio unitario, ovvero,
preso β come radice del polinomio, ∣β∣>1 . È importante precisare che un processo
invertibile non è necessariamente stazionario. Per il risultato di Wold, la (1.3.11) può
essere scritta, secondo la rappresentazione MA in:
Z t=1
π(B)at=ψ(B)a t se ∑
j=0
∞
ψ j2<∞
ciò è vero se tutte le radici di π( B)=0 giacciono al di fuori della circonferenza di raggio
unitario, ovvero ∣δ∣>1 se δ è una radice di π( B) .
Un processo viene detto autoregressivo di ordine p se nella sua rappresentazione
autoregressiva abbiamo un numero di pesi π finiti non nulli, ovvero risulta
π1=ϕ1, π2=ϕ2,... ,π p=ϕp e πk =0∀k> p e viene descritto come segue:
Z t−ϕ1˙Z t−1−...−ϕp
˙Z t− p=a t (1.3.12)
16

analogamente per un processo a media mobile di ordine q se nella sua rappresentazione a
media mobile abbiamo un numero di pesi ψ finiti non nulli, ovvero risulta
ψ1=θ
1,ψ
2=θ
2,..., ψ
p=θ
pe ψ
k=0∀k>q e viene descritto:
Z t=a t−θ1at−1−...−θq at−q
alternativamente possiamo descrivere il nostro processo con la rappresentazione mista
autoregressiva a media mobile:
Z t−ϕ1˙Z t−1−...−ϕp Z t− p=a t−θ1 a t−1−...−θq a t−q .
17
Capitolo 2 : Modelli di serie temporali
In questo capitolo analizzeremo i principali modelli per poter caratterizzare una serie
temporale. Seguendo la definizione di stazionarietà descritta nel capitolo precedente
faremo una distinzione tra i modelli stazionari e quelli non stazionari, descrivendo tutte le
loro caratteristiche, che poi utilizzeremo nel capitolo successivo per effettuare un' analisi
corretta.
2.1 Modelli di serie temporali stazionari
In questo paragrafo introduciamo un modello parametrico di ordine finito di serie
temporale, dato un numero finito di osservazioni, denominato modello autoregressivo a
media mobile che è la combinazione di due modelli: il modello autoregressivo e quello a
media mobile.
2.1.1 Modello autoregressivo
Come menzionato precedentemente nel paragrafo 1.3 nella rappresentazione
autoregressiva di una serie temporale abbiamo un numero finito di pesi π non nulli, ovvero
π1=ϕ1 ,π2=ϕ2 , ... ,π p=ϕp e πk =0∀ k> p risulta che il processo è definito come processo
autoregressivo e viene indicato con AR(p), dato da:
Z t=ϕ1 Z t−1+...+ϕ p Z t− p+at
oppure
ϕp( B) Z t=at
con ϕp( B)=(1−ϕ1 B−...−ϕp Bp) e Z t=Z t−μ .
Poiché ∑j=1
∞
∣π j∣=∑h=1
p
∣ϕ j∣<∞ il processo è sempre invertibile; per essere stazionario le
radici del polinomio ϕp( B) devono giacere al di fuori della circonferenza di raggio
18

unitario. Da ciò si evince che un processo autoregressivo dipende dai valori precedenti più
un disturbo aleatorio. Di seguito analizzeremo vari casi di un processo autoregressivo.
Un processo autoregressivo del primo ordine AR(1) è descritto da:
(1−ϕ1 B) Z t=at (2.1.1a)
oppure
Z t=ϕ1 Z t−1+a t
il processo è chiaramente invertibile; per risultare stazionario le radici di (1−ϕ1 B)=0
devono giacere al di fuori della circonferenza di raggio unitario,ovvero ∣ϕ1∣<1 , se questa
condizione non fosse verificata decadrebbe la proprietà di stazionarietà poiché abbiamo
assunto implicitamente che il processo sia espresso come combinazione lineare di variabili
rumore bianco presenti e passati. Un processo AR(1) è anche detto processo Markov
poiché la distribuzione di Z t data da Z t −1 , Z t −2 , Z t−3 , ... è la stessa distribuzione di Z t
data da ˙Z t −1 . Quindi la ACF di un processo AR(1) è ottenuta da:
E ( Z t −k Z t)=E (ϕ1 Z t−1 Z t)+E ( Z t−k a t) γk=ϕ1 γk−1 , k⩾1 (2.1.2)
analogamente la funzione di autocorrelazione diventa:
ρk=ϕ1 ρk−1=ϕ1k dove assumiamo che ρ0=1 . Quindi, quando ∣ϕ1∣<1 e il processo è
stazionario, la ACF decresce esponenzialmente in due forme distinte dipendenti dal segno
di ϕ1 . Se 0<ϕ1<1 tutte le autocorrelazioni sono positive, invece se −1<ϕ1<0 il segno
delle autocorrelazioni mostrano un pattern alternato che inizia con segno negativo. Per un
processo AR(1), dalla (1.1.5) si ricava la seguente PACF:
ϕkk={ρ1=ϕ1 k=10 k⩾2
(2.1.3)
dove ha un unico valore, positivo o negativo a seconda del segno ϕ1 , al valore di k=1,
mentre gli altri valori di k maggiori vengono tagliati. Quando abbiamo una finzione di
autocorrelazione della forma ϕ∣k∣ con ∣ϕ∣<1 il modello AR(1) può essere scritto anche
nella forma:
Z t−ϕ Z t−1=at (2.1.4)
oppure
Z t−ϕ−1 Z t−1=bt (2.1.5)
19

dove sia a t che bt sono rumori bianchi a media nulla dove la varianza del secondo è più
grande del primo di un fattore ϕ−2 . Per scopi pratici utilizzeremo sempre la
rappresentazione della (2.1.4).
In maniera del tutto analoga definiamo un processo autoregressivo del secondo ordine, o
AR(2), un processo della forma:
(1−ϕ1 B−ϕ2 B2) Z t=at (2.1.6a)
oppure
Z t=ϕ1 Z t−1+ϕ2 Z t−2+at (2.1.6b)
Il processo AR(2) è un modello autoregressivo finito ed è sempre invertibile. Per essere
stazionario le radici di ϕ(B)=(1−ϕ1 B−ϕ2 B2)=0 devono giacere al di fuori della
circonferenza di raggio unitario. La proprietà di stazionarietà di un processo AR(2) può
essere anche espressa anche in termini dei valori dei parametri. In particolare presi
B1 e B2 come radici di (1−ϕ1 B−ϕ2 B2)=0 avremo che:
B1=−ϕ1+√ϕ1
2+4 ϕ1
2ϕ2
e B2=−ϕ1−√ϕ1
2+4ϕ1
2ϕ2
in particolare
1B1
=ϕ1+√ϕ1
2+4ϕ1
2e 1
B2
=ϕ1−√ϕ1
2+4ϕ1
2
La condizione necessaria ∣Bi∣<1 implica che ∣ 1Bi∣<1 con i=1,2; quindi avremo che
∣ 1B1
⋅1B2∣=∣ϕ2∣<1 e ∣ 1
B1
+1
B2∣=∣ϕ1∣<2
per avere radici sia reali che complesse, la condizione necessaria è:
{−1<ϕ2<1−2<ϕ1<2
in particolare per radici reali:
{ϕ2+ϕ1<1ϕ2−ϕ1<1
e per radici complesse:20

{ϕ2+ϕ1<1ϕ2−ϕ1<1
−1<ϕ2<1
La funzione di autocorrelazione del processo AR(2) possiamo ottenerla moltiplicando
ambo i membri della (2.1.6b) con Z t −k ed avremo che:
E ( Z t −k Z t)=ϕ1 E (Z t−k Z t −1)+ϕ2 E ( Z t −k Z t−2)+ E( Z t−k a t)
γk=ϕ1 γk−1+ϕ2 γk−2 k⩾1
quindi la funzione di autocorrelazione diventa:
ρk=ϕ1 ρk−1+ϕ2ρk−2 k⩾1 (2.1.7)
in particolare per k= 1 e 2:
ρ1=ϕ1+ϕ2 ρ1=ϕ1
1−ϕ2
ρ2=ϕ1ρ1+ϕ2 =ϕ1
2+ϕ2−ϕ2
2
1−ϕ2
(2.1.8)
per k=3 e valori successivi ρk è calcolata ricorsivamente dalla (2.1.7).
L'andamento della ACF è data dall'equazione alle differenze ricavata dalla (2.1.7), ovvero
(1−ϕ1 B−ϕ2 B2)ρk=0 , risolvendola3 avremo:
ρk={ b1[ϕ1+√ϕ12+4ϕ1
2 ]+b2[ ϕ1−√ϕ12+4 ϕ1
2 ] se ϕ12+4 ϕ2≠0
(b1+b2 k )[ϕ1
2 ]k
se ϕ12+4 ϕ2=0
(2.1.9)
dove b1 e b2 sono risolte utilizzando le condizioni iniziali della (2.1.8). Se le radici di
(1−ϕ1 B−ϕ2 B2)ρk=0 sono reali la ACF decresce esponenzialmente, se, invece, sono
complesse allora avrà un andamento sinusoidale. Considerando la (2.1.7) abbiamo che la
PACF risulta:
ϕ11=ρ1=ϕ1
1−ϕ2
(2.1.10a)
3 Utilizzando il teorema 2.7.1 dimostrato in: William Wuu-Shyong Wei “Time Series Analsys – Univariate and Multivariate Methods” Pearson ed. cap. 2 par. 2.7 p. 28
21

ϕ22=∣1 ρ1ρ1 ρ2∣
∣1 ρ1
ρ1 1 ∣=
ρ2−ρ12
1−ρ12 =…=ϕ2 (2.1.10b)
ϕ33=∣
1 ρ1 ρ1
ρ1 1 ρ2ρ2 ρ1 ρ3
∣∣
1 ρ1 ρ2
ρ1 1 ρ1
ρ2 ρ1 1 ∣=…=0 (2.1.10c)
poiché l'ultima colonna del numeratore è combinazione lineare delle prime due colonne.
Da ciò si evince che per k⩾3 abbiamo che ϕkk=0 . Quindi la funzione di
autocorrelazione parziale del modello AR(2) taglia tutti i valori successivi all'istante 2.
Un processo autoregressivo di ordine p, o AR(p), è della forma:
(1−ϕ1 B−ϕ2 B2−…−ϕp b p
) Z t=a t (2.1.11a)
oppure
Z t=ϕ1 Z t−1+ϕ2 Z t−2+…+ϕp Z t− p+a t (2.1.11b)
Per calcolare la funzione di autocorrelazione moltiplichiamo ambo i membri della (2.11.b)
per Z t−k e avremo:
Z t −k Z t=ϕ1 Z t −1+ϕ2 Z t −k Z t−2+…+ϕp Z t−k Z t − p+Z t −k a t
ovvero:
γk=ϕ1 γk−1+…+ϕp γk− p k>0 (2.1.12)
dove ricordiamo che E (a t Z t−k)=0 ∀k>0 . La nostra ACF sarà quindi:
ρk=ϕ1 ρk−1+⋯+ϕ2ρ k−2 k>0 .
Utilizzando gli stessi passaggi per il modello AR(2) esteso, però, a p>2, avremo che:
ρk=∑i=1
m
∑k=0
di−1
bij k j Gik (2.1.13)
se d i=1 per ogni i e Gi−1 sono tutti distinti, l'espressione precedente diventa:
22

ρk=∑i =1
p
bij G ik (2.1.14)
Per un processo stazionario risulta che ∣G−1i∣>1 e ∣Gi∣<1 . L'andamento della funzione di
autocorrelazione decresce come un misto tra decadimento esponenziale e smorzamento
sinusoidale dipendente dalle radici di ϕ(B)=0 se sono reali o complesse. Lo
smorzamento sinusoidale è dato dalle radici complesse.
Essendo ρk=ϕ1 ρk−1+ϕ2ρk−2+… per k>0 possiamo notare che per k>p l'ultima colonna a
numeratore della (1.1.5) può essere scritta come combinazione lineare delle colonne
precedenti della stessa matrice, quindi la PACF ϕkk sarà nulla per valori di k>p.
2.1.2 Modello a media mobile
Come menzionato nel paragrafo 1.3 nella rappresentazione a media mobile di una serie
temporale abbiamo un numero finito di pesi ψ non nulli tale che
ψ1=−θ1, ψ2=−θ2,... ,ψq=−θq e ψk=0∀k>q risulta che il processo viene definito come
processo a media mobile e viene denotato con MA(q). Esso è dato da:
Z t=a t−θ1 a t−1−…−θq at −q (2.1.15a)
oppure
Z t=θ( B)a t (2.1.15b)
con
θ(B)=(1−θ1 B−…−θ1 Bq)
se (1−θ1 B−…−θ1 Bq)<∞ il processo risulta sempre stazionario. Risulta invertibile se
θ(B)=0 ha radici che risiedono all'esterno della circonferenza di raggio unitario. I
processi a media mobile sono utili per descrivere i fenomeni i quali eventi producono
effetti che terminano nel breve periodo. Prima di effettuare la caratterizzazione di un
processo MA(q) analizzeremo prima dei casi semplici.
Un processo è detto a media mobile del primo ordine o MA(1) se può essere descritto nella
forma:
Z t=a t−θ1 a t−1=(1−θ1 B)at (2.1.16)
dove a t è un processo rumore bianco a media nulla e varianza costante σ a2 . La media di
{Z t } è E ( Z t)=0 mentre E (Z t)=μ costante. Per procedere con il calcolo della funzione
23

di autocorrelazione, consideriamo la funzione generatrice dell'autocovarianza del processo
MA(1) utilizzando la (1.3.8) come segue:
γ(B)=σa2 (1−θ1 B)(1−θ1 B−1)=σa
2 {−θ1 B−1+(1−θ1 B2)−θ1b }
quindi l'autocovarianza del processo risulta:
γk{(1+θ1
2)σa
2 k=0
−θ1 σa2 k=1
0 k>1
(2.1.17)
e l'autocorrelazione invece sarà:
ρk{−θ1
1+θ12 k=0
0 k>1
(2.1.18)
siccome che 1+θ12 è sempre limitato, il processo MA(1) è sempre stazionario, invece per
essere invertibile le radici di (1−θ1 B)=0 devono sempre giacere all'esterno della
circonferenza di raggio unitario, ovvero B=1θ1
con ∣θ1∣<1 . La funzione di
autocorrelazione parziale, invece, sarà in generale:
ϕkk=−θ1
k(1−θ1
2)
1−θ12(k +1 )
per k⩾1 (2.1.19)
Contrariamente alla ACF, che taglia i valori successivi all'istante k⩾1 , la PACF decade
esponenzialmente in una o due forme dipendenti dal segno di θ1 , in particolare, per segni
positivi decade per valori negativi, viceversa per segni negativi decade per valori positivi.
Quando θ(B)=(1−θ1 B−θ2 B2) abbiamo un processo a media mobile del secondo ordine
MA(2), ovvero:
Z t=(1−θ1 B−θ2 B2)at (2.1.20)
con {a t} processo rumore bianco a media nulla. Essendo un modello di ordine finto, esso
risulta sempre stazionario, per l'invertibilità abbiamo che le radici di (1−θ1 B−θ2 B2)=0
devono giacere al di fuori della circonferenza di raggio unitario, ovvero devono essere
soddisfatte le seguenti condizioni:
24

{θ2+θ1<1θ2−θ1<1
−1<θ2<1
(2.1.21)
quindi le autocovarianze del modello MA(2) saranno:
γ0=(1+θ12+θ2
2)σa
2
γ1=−θ1(1−θ2)σa2
γ2=−θ2 σa2
γk=0 k>2
la funzione di autocorrelazione sarà:
ρk={−θ1(1−θ2)
1+θ12+θ2
2 k=1
−θ2
1+θ12+θ2
2 k=2
0 k>2
(2.1.22)
per ottenere la funzione di autocorrelazione parziale, dalla 1.1.5 otteniamo che:
ϕ11=ρ1
ϕ22=ρ2−ρ1
2
1−ρ12
ϕ33=ρ1
3−ρ1ρ2(2−ρ2)
1−ρ22−2ρ1
2(1−ρ2)
⋮
quindi possiamo notare che se le radici di (1−θ1 B−θ2 B2)=0 sono complesse la PACF ha
un andamento di tipo sinusoidale, viceversa se sono reali ha un decadimento di tipo
esponenziale. Per un processo generico a media mobile di ordine q o MA(q) avremo la
seguente espressione:
Z t=(1−θ1 B−θ2 B2−…−θq Bq
)at (2.1.23)
per questo modello la varianza risulta:
γo=σa2∑
j =0
q
θ j2 (2.1.24)
con θ0=1 e le covarianze risultano:
25

γk={σa2(−θk+θ1θk+1+…+θq−k θq) k=1,2…q
0 k>q(2.1.25)
quindi la funzione di autocorrelazione diventa:
ρk={−θk+θ1θk+1+…+θq−k θq
1+θ12+…+θq
2 k=1,2…q
0 k>q
(2.1.26)
notiamo che la ACF ha valori nulli per valori maggiori di q.
Come discusso per i modelli MA(1) e MA(2) anche per il modello generico la PACF
decresce esponenzialmente o ha un andamento sinusoidale a seconda delle radici del
polinomio (1−θ1 B−…−θ1 Bq)=0 se sono corrispettivamente reali o complesse.
Prima di procedere con la caratterizzazione di un modello di processo autoregressivo a
media mobile, è importante precisare, e si può dimostrare4 che un modello stazionario di
ordine finito autoregressivo AR(p) corrisponde a un modello invertibile di ordine non
finito di un processo a media mobile, viceversa un modello invertibile di ordine finito a
media mobile MA(q) corrisponde a un modello stazionario di ordine non finito di un
processo autoregressivo.
2.1.3 Modello di processo autoregressivo a media mobile
Un'estensione di un processo puramente autoregressivo e puramente a media mobile è un
modello di processo misto autoregressivo a media mobile o anche detto ARMA.
Generalmente risulta molto difficile caratterizzare un processo stazionario e invertibile con
un modello che abbia le caratteristiche sia del modello autoregressivo che quello a media
mobile poiché ci sarebbero troppe variabili da tener conto, infatti un modello di ordine
molto grande necessita di una buona approssimazione.
Quindi risulta necessario definire una rappresentazione mista per creare un modello per i
processi che hanno entrambe le caratteristiche, come segue:
ϕp( B) Z t=θ1( B)a t (2.1.27)
con
ϕp( B)=1−ϕ1 B−…−ϕp B p e θ p(B)=1−θ1 B−…−θq Bq .
4 Dimostrazione rif. William Wuu-Shyong Wei “Time Series Analsys – Univariate and Multivariate Methods”Pearson ed. cap.3 par. 3.3 pag. 54
26

Il processo per essere stazionario le radici di ϕp( B)=0 devono giacere al di fuori della
circonferenza di raggio unitario, invece per essere stazionario le radici di θq( B)=0
devono giacere al di fuori della circonferenza di raggio unitario; condizione necessaria che
entrambi i polinomi non abbiano radici in comuni. Un processo ARMA può essere scritto
nella rappresentazione autoregressiva pura:
π( B) Z t=a t (2.1.28)
con:
π( B)=ϕp(B)
θq(B)=(1−π1 B−π2 B2
−…) (2.1.29)
o, analogamente, nella rappresentazione a media mobile pura:
Z t=ψ(B)at (2.1.30)
con
ψ( B)=θq(B)
ϕp(B)=(1+ψ1 B+ψ2 B2
+…) (2.1.31)
Per calcolare la funzione di autocorrelazione, riscriviamo la (2.1.27) come segue:
Z t=ϕ1 Z t−1+…ϕp Z t− p+a t−θ1 a t−1−…θq a t−q
moltiplicando ambo i membri per ˙Z t−k avremo che:
Z t Z t−k=ϕ1 Z t −k Z t−1+…+ϕp Z t−k Z t− p+a t−θ1 Z t−k a t−1−…θq Z t−k a t−q
prendiamo il valore atteso per ottenere:
γk=ϕ1 γk−1+…+ϕp γk− p+E ( ˙Z t −k a t)−θ1 E ( ˙Z t−k at −1)−…−θq E ( ˙Z t−k a t−q)
essendo
E ( Z t −k at −i)=0 ∀k>i
avremo che:
γk=ϕ1 γk−1+…+ϕp γk− p k⩾(q+1) (2.1.32)
analogamente :
ρk=ϕ1 ρk−1+…+ϕp ρk− p k⩾(q+1) (2.1.33)
Come possiamo notare la ACF decresce gradualmente dopo l'istante q così come abbiamo
visto per un processo AR(p), quindi dipende solo dai parametri autoregressivi del modello.
27
Invece per prime q autocorrelazioni dipendono sia dai parametri autoregressivi che quelli a
media mobile e servono come parametri iniziali per il modello. Dato che il processo
ARMA contiene il processo MA come caso particolare, la sua funzione di autocorrelazione
parziale decresce esponenzialmente o ha un andamento sinusoidale che dipendono dalle
radici di θq( B)=0 e ϕp( B)=0 .
2.2 Modelli di serie temporali non stazionari
Nella nostra analisi delle serie temporali abbiamo discusso fin'ora dei modelli stazionari,
ma in molte applicazioni possiamo incorrere a casi dove le condizioni di stazionarietà
vanno decadere, in particolare si possono avere medie non costanti e/o varianze non
costanti e ciò rende più complessa la nostra analisi. Prima di procedere con la
caratterizzazione dei processi non stazionari è necessario introdurre i concetti di non
stazionarietà della media e della varianza .
2.2.1 Non stazionarietà della media
Un processo non stazionario nella media rappresenta un problema molto grande per la
stima della media senza avere più realizzazioni. Fortunatamente vi sono due modelli che a
partire da una singola realizzazione ci permettono di descrivere il fenomeno.
La funzione media di un processo non stazionario può essere rappresentata da un modello
di trend deterministico nel tempo. In questo caso la regressione standard del modello può
essere utilizzata per descrivere il fenomeno. Se la funzione media μt assume un trend
lineare del tipo μ t=α0+α1t , possiamo anche utilizzare il modello di trend deterministico
lineare seguente:
Z t=α0+α1t+a t
con a t serie di rumore bianco a media nulla. Per un modello di trend deterministico
quadratico possiamo utilizzare:
Z t=α0+α1t+α2t 2+a t
più in generale per un polinomio di ordine k , possiamo utilizzare il seguente modello:
Z t=α0+α1t+…+αk t k+a t
28

Se il trend deterministico può essere rappresentato da una curva seno-coseno, possiamo
avere:
Z t=vo+v cos (ω t+θ)+a t=vo+αcos (ω t)+β cos(ω t )+a t
con:
α=v cosθ β=−v sin θ
v=√α2+β2 θ=tan−1 (−β/α)
con v chiamata ampiezza, ω la frequenza e θ la fase della curva. Più in generale avremo:
Z t=vo+∑j=1
m
(α j cos (ω j t)+β j sin(ω j t))+a t
chiamato anche modello delle periodicità nascoste.
Anche se molte serie sono non stazionarie, esse hanno molte parti che assumono lo stesso
comportamento tranne che per la loro differenza nei livelli di media locale; Box e Jenkins
definiscono le serie che assumono questo comportamento come serie omogenee non
stazionarie. In termini del modello ARMA, esso risulta non stazionario se alcune radici del
polinomio della componente autoregressiva non giacciono al di fuori della circonferenza di
raggio unitario. Quindi, detto Ψ(B) l'operatore autoregressivo che descrive questo
comportamento, il nostro modello ARMA può essere descritto come:
Ψ(B)(Z t+C )=Ψ (B)Z t (2.2.1)
con C costante. Quindi la forma di Ψ(B) sarà:
Ψ(B)=ϕ( B)(1−B)d (2.2.2)
per ogni d positivo con ϕ(B) operatore autoregressivo stazionario. Così, un serie
omogenea non stazionaria può essere ridotta a una serie stazionaria considerando un'adatta
differenziazione delle serie. In altre parole la serie Z t è non stazionaria, ma la sua d-esima
serie differenziata {(1−B)d Z t} per qualche intero d⩾1 , risulta stazionaria. Ad esempio
per la d-esima serie differenziata avremo che:
(1−B)d Z t=at (2.2.3)
per d=1 avremo:
(1−B) Z t=a t oppure Z t=Z t−1 a t
29
Prendendo le informazioni precedenti, il livello della serie all'istante t risulta
μ t=Z t−1 (2.2.4)
il quale è soggetto alla dispersione aleatoria all'istante (t-1). In altre parole il livello di
media del processo aleatorio Z t in {(1−B)d Z t} per d⩾1 cambia nel tempo casualmente
e noi caratterizziamo il processo come se avesse un trend aleatorio.
2.2.2 Modello autoregressivo integrato a media mobile (ARIMA)
Dalla serie differenziata (1−B)d Z t , possiamo caratterizzare un processo ARMA(p,q)
come segue:
ϕp( B)(1−B)d Z t=θ0+θq(B)a t (2.2.5)
dove l'operatore AR stazionario ϕp( B)=(1−ϕ1 B−…−ϕp B p) e l'operatore MA invertibile
θq( B)=(1−θ1 B−…−θq Bq) non hanno fattori comuni. Il parametro θ0 gioca dei ruoli
differenti per valori diversi di d. In particolare per d=0 il processo originario risulta
stazionario poiché θ0=μ(1−ϕ1−…ϕp) e θ0 è collegato alla media del processo. Per
d⩾1 , θ0 è chiamato termine di trend deterministico e può essere omesso dal modello
tranne se risulta realmente necessario. Il modello omogeneo non stazionario descritto nella
(2.2.5) è definito modello autoregressivo integrato a media mobile di ordine p d q e viene
denotato con ARIMA(p,d,q). In seguito analizzeremo dei casi particolari.
Per p=0,d=1 e q=0, ovvero per un processo ARIMA(0,1,0) abbiamo il processo random
walk descritto da:
(1−B) Z t=a t (2.2.6a)
oppure:
Z t=Z t −1+a t (2.2.6b)
In questo modello il valore di Z all'istante t è equivalente al suo valore all'istante (t-1) più
un disturbo aleatorio. Notiamo che il modello random walk limita il processo AR(1)
(1−ϕ B)Z t=a t con ϕ →1 e, poiché la sua funzione di autocorrelazione risulta ρk=ϕk
con ϕ →1 , può essere caratterizzato da grandi picchi non nulli nella funzione di
autocorrelazione campionaria della serie originale {Z t} e una funzione di autocorrelazione
nulla per la serie differenziata {(1−ϕ B)Z t} . Il modello ARIMA(0,1,0) è denominato
30

“random walk” poiché segue l'andamento che ha un uomo ubriaco la cui posizione
all'istante t è uguale alla sua posizione all'istante (t-1) più un disturbo aleatorio.
Consideriamo la (2.2.6a) aggiungendo un termine non nullo:
(1−B) Z t=θ0a t (2.2.7)
oppure
Z t=Z t −1+θ0+at (2.2.8)
considerando l'origine dei tempi all'istante k, per sostituzioni successive avremo che:
Z t=Z t −1+θo+at=…=Z k +(t−k )θ0+ ∑j=k+1
t
a j per t >k.
Risulta chiaro che Z t contiene un trend deterministico con pendenza o sfasamento θ0 . In
generale assumeremo che θ0=0 per d >0 a meno che non risulti chiaro la necessità di un
componente deterministico.
Generalmente la (2.2.7) per θ0≠0 viene chiamata modello random walk con sfasamento,
la sua media sarà pari a:
μ=Z t −1+θ0 (2.2.9)
la quale è influenzata dal disturbo aleatorio all'istante (t -1) attraverso il termine Z t −1 così
come dal componente deterministico dato da θ0 . Per θ0=0 abbiamo un modello solo con
un trend aleatorio.
Un altro caso particolare da analizzare è quando abbiamo p=0, d=1, q=1. Questo modello
è detto ARIMA(0,1,1) o IMA(1,1) ed è caratterizzato da:
(1−B) Z t=(1−θ B)a t (2.2.10a)
oppure:
Z t=Z t −1+a t+θ at −1 (2.2.10b) con -1< θ<1.
Questo modello per Z t è ridotto al modello stazionario MA(1) per la prima serie
differenziata (1−B) Z t , in particolare possiamo notare che il modello random walk
illustrato precedente mente è un caso particolare dell'IMA(1,1) per θ =0. Quindi possiamo
dire che il modello IMA(1,1) è caratterizzato sia dalla ACF della serie originaria che
31
decade molto lentamente che dalla ACF della sua prima serie differenziata che assume il
pattern di un processo a media mobile del primo ordine.
Per -1< θ<1 abbiamo la seguente relazione:
(1−B)
(1−θ B)=(1−B)(1+θ B+θ
2 B2+…)
=1+θ B+θ2 B2
+…−B−θ B2−…
=1−(1−θ) B−(1−θ)θ B2−…
=1−α B−α(1−α) B2−α(1−α)
2 B3−…
(2.2.11)
con α=(1−θ)
Da ciò si ha che
Z t=α ∑j=1
∞
(1−α) j−1 Z t− j+at (2.2.12)
Possiamo notare che questa equazione è la rappresentazione AR del modello, quindi il
risultato dell'analisi regressiva, la previsione ottimale Z t del processo Z t è data da:
Z t=α ∑j=1
∞
(1−α) j−1 Z t− j (2.2.13)
In altre parole la previsione ottimale di Z t all'istante t risulta un decremento esponenziale
pesato a media mobile dei suoi valori precedenti, in particolare all'istante t+1 la (2.2.13)
diventa:
Z t +1=α Z t+(1−α) Z t (2.2.14)
ovvero la previsione all'istante successivo risulta uguale alla media pesata della nuova
osservazione disponibile e dall'ultima previsione. Il coefficiente è anche detto costante di
livellamento del metodo di smussamento esponenziale. Perciò il modello generale
ARIMA(p,d,q) ha alcuni di questi metodi come casi particolari.
2.2.3 Non stazionarietà della varianza e autocovarianza
Fin'ora abbiamo parlato delle serie storiche non stazionarie omogenee, ovvero quando la
media risulta non stazionaria. Molte serie, però, presentano, invece della dipendenza
temporale della media, dipendenza temporale nella varianza, ovvero risultano non
stazionarie e non omogenee, quindi abbiamo bisogno, oltre che a una corretta
differenziazione, anche di una trasformazione.
32

In particolare nelle serie temporali la stazionarietà della media non implica la stazionarietà
della varianza, viceversa se la media è non stazionaria anche la varianza è non stazionaria.
Dunque nel modello ARIMA, come visto in precedenza,oltre la dipendenza temporale
della media, abbiamo che anche la varianza e l'autocovarianza dipendono dal tempo.
Per prima cosa notiamo che, anche se il modello risulta non stazionario, la caratteristica
completa del processo è determinata per ogni istante da un numero finito di parametri,
ovvero ϕi θ j σa2 . Quindi l'evoluzione completa del processo può essere modellata da un
modello ARIMA adattato su un dato set {Z 1, Z 2,… , Z n} . Per esempio, consideriamo il
modello IMA(1,1):
(1−B) Z t=(1−θ B)a t (2.2.15a)
oppure:
Z t=Z t −1+at+θa t−1 (2.2.15b)
e lo adattiamo a una serie di n0 osservazioni. Riferendoci all'origine dei tempi n0 , per
t>n0 possiamo scrivere per sostituzioni successive:
Z t=Z t−1+at+θa t−1
=Z t−2+a t+(1−θ)at−1+θ a t−2
⋮=Z n0
+at+(1−θ)a t−1+…+(1−θ)an0+1+θan0
(2.2.16)
similmente per t>k abbiamo:
Z t −k =Z n0+a t−k +(1−θ)at −k−1+…+(1−θ)an0 +1+θan0
(2.2.17)
Quindi rispettando l'origine dei tempi n0 avremo che:
Var (Z t)=[1+(t−n0−1)(1−θ)2]σa
2
Var (Z t−k)=[1+(t−k−n0−1)(1−θ)2]σa
2
Cov(Z t−k , Z t)=[(1−θ)+(t−n0−1)(1−θ)2]σa
2
Corr (Z t−k , Z t)=Cov(Z t−k , Z t)
√Var (Z t−k )Var (Z t)
=(1−θ)+( t−n0−1)(1−θ)
2
√[1+(t−k−n0−1)(1−θ)2] [1+(t−n0−1)(1−θ)
2]
(2.2.18)
dove Zn0e an0
sono conosciuti rispetto all'origine dei tempi n0 .
Da tali relazioni, è importante fare le seguenti osservazioni:
33

1. La varianza dei processi ARIMA dipende dal tempo e Var (Z t)≠Var (Z t −k) per
k≠0 ;
2. La varianza è non limitata per t →∞ ;
3. L'autocovarianza e l'autocorrelazione sono dipendenti dal tempo quindi sono non
invarianti rispetto alla traslazione temporale. In altre parole queste funzioni sono
dipendenti dalla traslazione temporale k e dal tempo t rispetto alla base dei tempi
n0 ;
4. Se t è abbastanza grande rispetto a n0 abbiamo che dall'ultima relazione della
(2.2.18) Cov(Z t−k , Z t)≃1 poiché essendo, dunque, ∣Cov (Z t−k , Z t)∣⩽1 implica
che l'autocorrelazione decresce lentamente per ogni aumento di k.
Quindi operando la differenziazione, il processo ARIMA può essere studiato come un
processo ARMA. Questo non è sempre vero, poiché possono essere stazionarie nella media
ma non nella varianza. Per ovviare a questo problema necessitiamo di una trasformazione
stabilizzante per la varianza.
Ciò che dobbiamo trovare è una funzione di trasformazione T (Z t) tale che il nostro
processo Z t abbia che la varianza scritta nella forma:
Var (Z t)=cf (μt)
stabile. Per illustrare questo metodo, per prima cosa approssimiamo la nostra funzione con
la propria serie di Taylor limitandoci al primo ordine:
T (Z t)≃T (μt)+T ' (μt)(Z t−μt) (2.2.19)
Calcoliamo la varianza di T (Z t) :
Var [T (Z t)]≃[T ' (μ t)]2 Var (Z t)=c [T ' (μt)]
2 f (μt) (2.2.20)
da questa relazione notiamo che per stabilizzare la varianza, deve risultare che:
T ' (μt)=1
√ f (μt)(2.2.21)
ciò implica che l'equazione (2.2.21) diventa:
T (μt)=∫1
√ f (μ t)(2.2.22)
Seguono, quindi, le seguenti osservazioni:
34
1. La trasformazione stabilizzante della varianza è definita solo per le serie
positive;questa definizione non è così restrittiva come sembra poiché basta
sommare una costante alla serie senza che ne modifichi la struttura della
correlazione;
2. Se necessitiamo di una trasformazione stabilizzante della varianza essa va fatta
prima di qualsiasi analisi e della differenziazione;
3. Frequentemente la trasformazione non implica solo la stabilizzazione della
varianza, ma migliora anche l'approssimazione della distribuzione a una
distribuzione normale.
35
Capitolo 3: Analisi delle serie temporale con R
In questo capitolo ci occuperemo di analizzare una serie temporale utilizzando i modelli
teorici affrontati nei capitoli precedenti mediante un software. In primo luogo illustreremo
una serie di passi per poter modellare in maniera efficace e quanto più possibile precisa
una serie temporale . Segue una breve introduzione al software che verrà utilizzato, infine
ci sarà un esempio pratico di analisi di una serie temporale.
3.1 Identificazione del modello di una serie temporale.
L'analisi statistica delle serie temporali oggi si realizza mediante software specifici,
soprattutto in campo dell'economia e della finanza. Tale analisi, seppur ampiamente
automatizzata, è basata sui concetti teorici illustrati finora. Un obbiettivo molto importante
di ciò è quello di identificare quale tipologia circa la nostra serie da analizzare per poi
poterne fare delle previsioni secondo strumenti appositi. Noi ci limiteremo ad analizzare
quali sono le caratteristiche di una serie temporale e, successivamente, identificarne qual è
il modello che più si adatta al fenomeno preso in analisi. Tale obbiettivo è composto da
una serie di passi ben definiti che ci portano a poter identificare il modello più adatto tra
quelli visti nel capitolo 2 cercando di capire quali sono le caratteristiche della funzione di
autocorrelazione e della funzione di autocorrelazione parziale.
Passo1: Eseguire il grafico che descrive la serie temporale ed effettuare eventuali
trasformazioni. Generalmente della nostra serie disponiamo soltanto di una serie di dati in
forma testuale o tabellare che ci il fenomeno che dà luogo alla nostra serie in analisi.
Questo insieme di dati, detto data set , vanno riportati su un diagramma cartesiano (in
gergo si dice plottare il data set) e sono rappresentati da una curva, generalmente una
linea spezzata. Dall'andamento della curva così ottenuta possiamo vedere graficamente se
essa presenta dei trend specifici, stagionalità, varianze non costanti e altre caratteristiche
che possono descrivere fenomeni non stazionari e/o non normali. Nel caso in cui sia
evidente una non stazionarietà della media e/o della varianza, è opportuno effettuare prima
delle trasformazioni, come visto nel paragrafo 2.2.3, e successivamente delle
36
differenziazioni per stabilizzare i parametri non stazionari. Dopo di che si passa allo step
successivo.
Passo2:Analisi delle funzioni di autocorrelazione ed autocorrelazione parziale della serie
originale. Da quanto visto precedentemente nel secondo capitolo ogni modello ha una
propria caratteristica delle funzioni di autocorrelazione e autocorrelazione parziale.
Dall'andamento di tali funzioni della serie originale possiamo vedere se necessita di
ulteriori differenziazioni seguendo queste regole:
• Se la ACF decade molto lentamente e la PACF smorza dopo il ritardo 1 allora
necessitiamo di ulteriori differenziazioni.
• In generale per avere un buon livello di non stazionarietà necessitiamo di un livello
molto alto di differenziazione.
Passo3: Analisi della ACF e della PACF della serie trasformata e differenziata
propriamente. Lo scopo dell'analisi delle serie temporali è quello di identificare l'ordine più
appropriato della parte autoregressiva e a media mobile che le compongono. Ciò possiamo
farlo analizzando i grafici della ACF e della PACF della serie trasformata e differenziata
precedentemente e vedendo qual è il loro andamento secondo i principi illustrati nel
capitolo precedente, riassunti nello schema seguente:
Processo ACF PACF
AR(p) Decresce esponenzialmente oha un andamento sinusoidale
Taglia via i valori dopo ilritardo p
MA(q) Taglia via i valori dopo ilritardo q
Decresce esponenzialmente oha un andamento sinusoidale
ARMA(p,q) Decresce dopo il ritardo (p-q) Decresce dopo il ritardo (p-q)
Passo4: Identificare il valore del trend θ0 . Come abbiamo discusso nel capitolo
precedente, il modello ARIMA(p,d,q) è descritto dalla relazione
ϕ(B)(1−B)d Z t=θ0+θ( B)a t . Il termine di trend deterministico θ0 generalmente viene
omesso, in modo da essere in grado di capire quali sono i cambiamenti aleatori, il trend e le
pendenze della serie presa in considerazione. Nel caso in cui abbiamo un motivo per
credere che questo termine sia incluso nella serie, possiamo comparare la media
campionaria della serie differenziata con il suo errore standard approssimato.
37
3.2 Il software R
I software che andremo ad utilizzare per effettuare l'analisi del paragrafo successivo è R.
Esso è un software libero specifico per l'analisi statistica dei dati e per la realizzazione di
grafici, distribuito con la licenza GNU GPL ed è disponibile per numerosi sistemi operativi
quali Unix, GNU/Linux, Mac OS X e Windows. Il suo linguaggio è orientato agli oggetti
che deriva dal linguaggio S distribuito con una licenza non open source sviluppato presso i
Bell Laboratories.
Questo software è caratterizzato da un'ampia gamma di moduli distribuiti con licenza GPL
e organizzati su un apposito sito chiamato CRAN5 (Comprehensive R Archieve Network).
Tramite tali moduli è possibile estendere le funzionalità di questo software come, ad
esempio, oltre alle numerose funzioni statistiche, è possibile effettuare collegamenti a
database o con sistemi GIS (Global Information Systems).
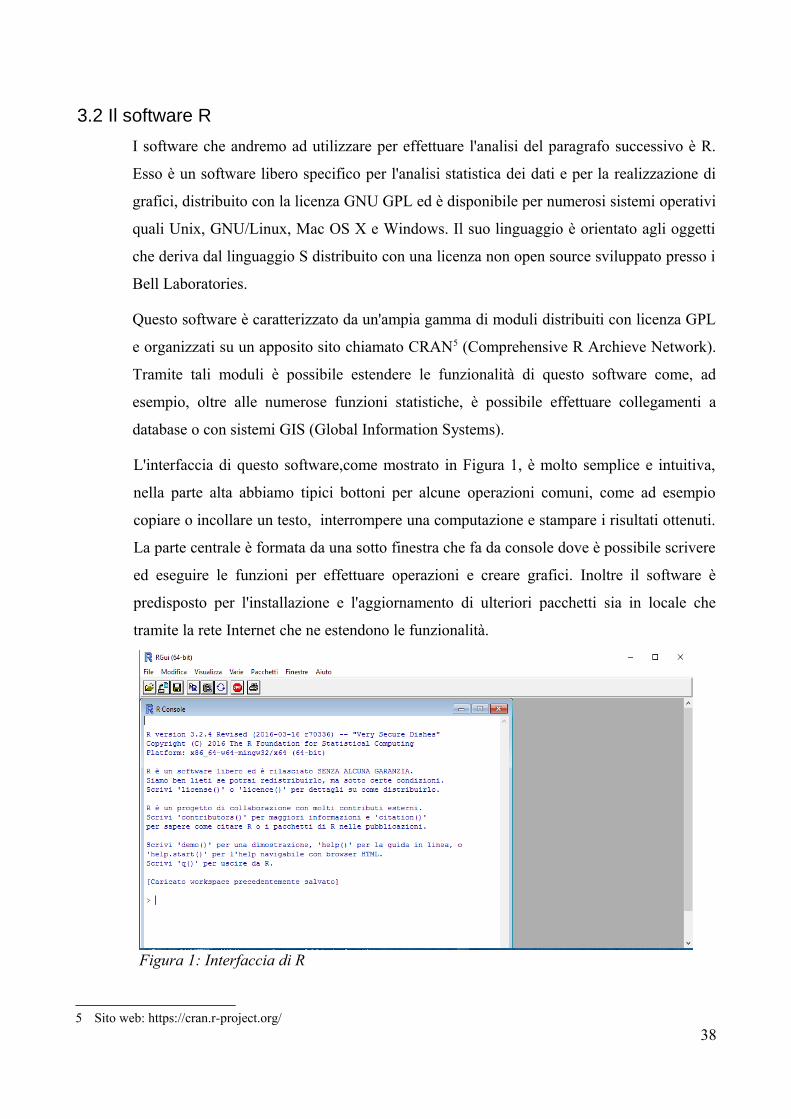
L'interfaccia di questo software,come mostrato in Figura 1, è molto semplice e intuitiva,
nella parte alta abbiamo tipici bottoni per alcune operazioni comuni, come ad esempio
copiare o incollare un testo, interrompere una computazione e stampare i risultati ottenuti.
La parte centrale è formata da una sotto finestra che fa da console dove è possibile scrivere
ed eseguire le funzioni per effettuare operazioni e creare grafici. Inoltre il software è
predisposto per l'installazione e l'aggiornamento di ulteriori pacchetti sia in locale che
tramite la rete Internet che ne estendono le funzionalità.
5 Sito web: https://cran.r-project.org/38
Figura 1: Interfaccia di R
Una delle prerogative di R è quello di poter scrivere dei script che possono essere eseguiti
tramite console che possono essere creati dall'utente o possono essere scaricati tramite il
web sul sito di CRAN. Inoltre R permette,oltre a un'ampia gamma di data set che già
dispone, di importare da altri file di estensione diversa i data set da analizzare secondo
appositi comandi.
La versione che è stata utilizzata per l'analisi del capitolo successivo è la 3.2.4 del 3 marzo
2016 per Windows scaricata dal sito ufficiale di CRAN.
3.3 Esempio di analisi di una serie temporale con R
Il data set che andremo ad analizzare di seguito è già disponibile all'interno di R. Esso
descrive il numero di utenti che sono connessi in un server in un intervallo di 100 minuti
con una frequenza di una campione ogni minuto. L'origine di questo data set è data dalla
seguente pubblicazione “Durbin, J. and Koopman, S. J. (2001) Time Series Analysis by
State Space Methods. Oxford University Press “ con riferimenti anche in “Makridakis, S.,
Wheelwright, S. C. and Hyndman, R. J. (1998) Forecasting: Methods and Applications.
Wiley.”6 .
Per procedere all'analisi della serie presa in considerazione bisogna importare il data set nel
workspace di R eseguendo il comando:
data(WWWusage)
Questo comando ci permette di importare nel workspace il data set che vogliamo
analizzare, quello preso in considerazione è disponibile sotto il nome di “WWWusage”.
Ora necessitiamo di visualizzare l'entità del data set per farci un'idea di cosa andremo ad
analizzare. Scrivendo sulla console il seguente comando specifico:
WWWusage7
Come possiamo vedere in console vi sono presenti tutte le informazioni del nostro data set.
In particolare possiamo notare che la nostra serie temporale parte dall'istante 1 fino
all'istante 100 con una frequenza di 1 campione a istante. La serie temporale presa in
analisi, quindi, è composta da un vettore di 100 elementi come mostrato nella Tabella 1.
6 Tutte le informazioni sul data set sono disponibili all'indirizzo https://stat.ethz.ch/R-manual/R-devel/library/datasets/html/WWWusage.html
7 Il comando “WWWusage” è specifico per il data set che stimo analizzando, per poter visualizzare un data set diverso basta importarlo e successivamente scrivere il nome in console.
39
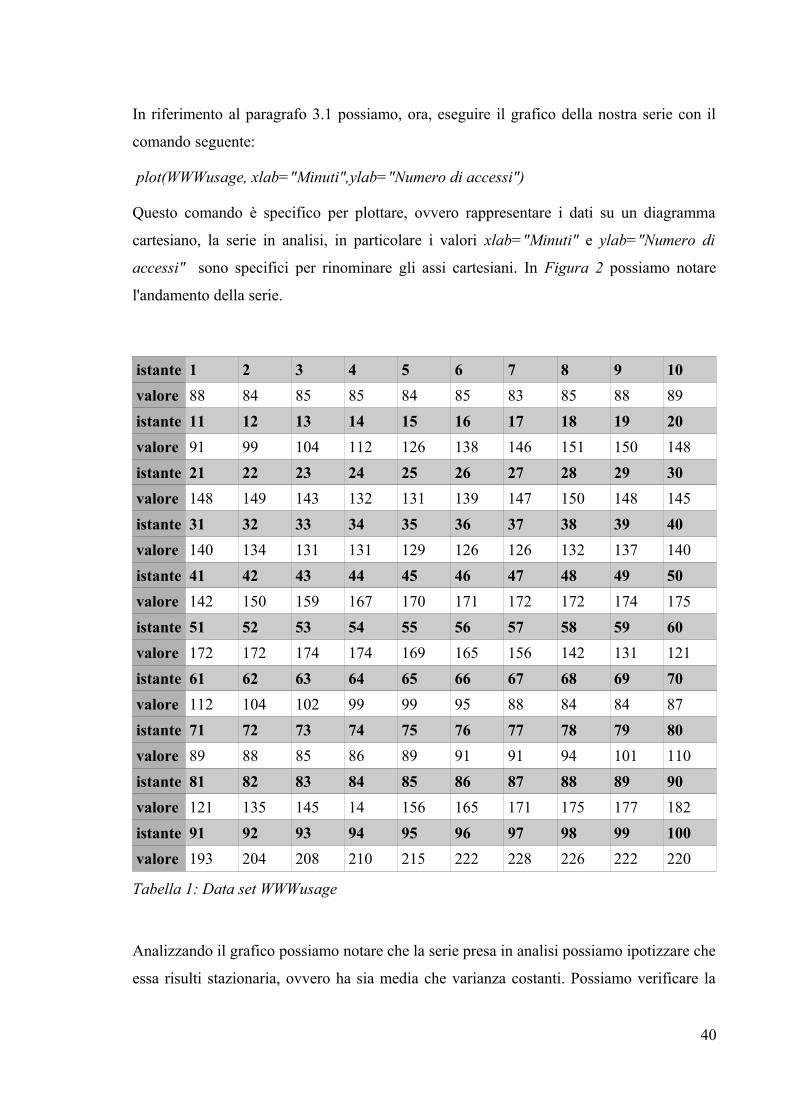
In riferimento al paragrafo 3.1 possiamo, ora, eseguire il grafico della nostra serie con il
comando seguente:
plot(WWWusage, xlab="Minuti",ylab="Numero di accessi")
Questo comando è specifico per plottare, ovvero rappresentare i dati su un diagramma
cartesiano, la serie in analisi, in particolare i valori xlab="Minuti" e ylab="Numero di
accessi" sono specifici per rinominare gli assi cartesiani. In Figura 2 possiamo notare
l'andamento della serie.
istante 1 2 3 4 5 6 7 8 9 10
valore 88 84 85 85 84 85 83 85 88 89
istante 11 12 13 14 15 16 17 18 19 20
valore 91 99 104 112 126 138 146 151 150 148
istante 21 22 23 24 25 26 27 28 29 30
valore 148 149 143 132 131 139 147 150 148 145
istante 31 32 33 34 35 36 37 38 39 40
valore 140 134 131 131 129 126 126 132 137 140
istante 41 42 43 44 45 46 47 48 49 50
valore 142 150 159 167 170 171 172 172 174 175
istante 51 52 53 54 55 56 57 58 59 60
valore 172 172 174 174 169 165 156 142 131 121
istante 61 62 63 64 65 66 67 68 69 70
valore 112 104 102 99 99 95 88 84 84 87
istante 71 72 73 74 75 76 77 78 79 80
valore 89 88 85 86 89 91 91 94 101 110
istante 81 82 83 84 85 86 87 88 89 90
valore 121 135 145 14 156 165 171 175 177 182
istante 91 92 93 94 95 96 97 98 99 100
valore 193 204 208 210 215 222 228 226 222 220
Tabella 1: Data set WWWusage
Analizzando il grafico possiamo notare che la serie presa in analisi possiamo ipotizzare che
essa risulti stazionaria, ovvero ha sia media che varianza costanti. Possiamo verificare la
40

nostra ipotesi calcolando media e varianza. Con il comando mean(WWWusage) possiamo
calcolare la media produciamo il seguente risultato:
[1] 137.08
Analogamente con il comando sum((WWWusage - mean(WWWusage))^2)/100 possiamo
calcolare la varianza producendo il seguente risultato:
[1] 1583.954
Come possiamo notare dai risultati ottenuti la serie risulta stazionaria poiché sia la media
che la varianza hanno un unico valore, quindi sono costanti. Per poter confermare che la
serie risulti stabile come definito, possiamo verificare delle proprietà, in particolare il
valore della funzione di autocorrelazione di una serie temporale all'istante zero risulta
unitario, e il valore della funzione di autocovarianza all'istante zero è uguale alla varianza,
ovvero γ0=Var (Z t) e ρ0=1 .
41Figura 2: Grafico della serie WWWusage
Possiamo verificare queste proprietà calcolando i valori della funzione di autocorrelazione
tramite la funzione acf(WWWusage,plot='FALSE'). La funzione acf() calcola i valori della
funzione di autocorrelazione e li riporta su un diagramma cartesiano Notiamo che tra i
valori passati nella funzione abbiamo in particolare plot='FALSE', ciò è necessario poiché
ora necessitiamo soltanto dei valori di tale funzione come riportato nella Tabella 2.
istante 0 1 2 3 4 5 6 7 8 9
valore 1,000 0,960 0,901 0,829 0,746 0,57 0,565 0,469 0,371 0,274
istante 10 11 12 13 14 15 16 17 18 19
valore 0,181 0,091 0,002 -0,085 -0167 -0,239 -0,299 -0,350 -0393 -0,425
istante 20
valore -0,443
Tabella 2: valori della ACF della serie temporale
Analogamente con il comando acf(WWWusage,type="covariance",plot="FALSE")8
possiamo calcolare i valori della funzione di autocovarianza. I risultati sono illustrati nella
Tabella 3.
istante 0 1 2 3 4 5 6 7 8 9
valore 1583,95 1520,88 1427,36 1312,70 1181,61 1041,04 894,49 742,18 857,45 434,29
istante 10 11 12 13 14 15 16 17 18 19
valore 286,46 143,39 3,38 -134,91 -264,61 -378,39 -473,66 -554,03 -622,05 -672,81
istante 20
valore -701,46
Tabella 3: Valori della funzione di autocovarianza
Come possiamo notare dalle tabelle abbiamo che γ0=Var (Z t) e ρ0=1 , inoltre notiamo
dalle tabelle che ∣γk∣⩽γ0 e ∣ρk∣⩽1 ; . Le altre proprietà mostrate nel paragrafo 1.1 possono
essere dimostrate analiticamente. Da tali risultati possiamo confermare che la serie risulta
sicuramente stazionaria. Per completezza calcoliamo i valori della PACF con il comando
pacf(WWWusage,plot='FALSE'). Il risultato è illustrato nella Tabella 4.
8 Il valore passato nella funzione type=”covariance” ci permette di dire al programma che ciò che vogliamo calcolare sono i valori della funzione di autocovarianza
42
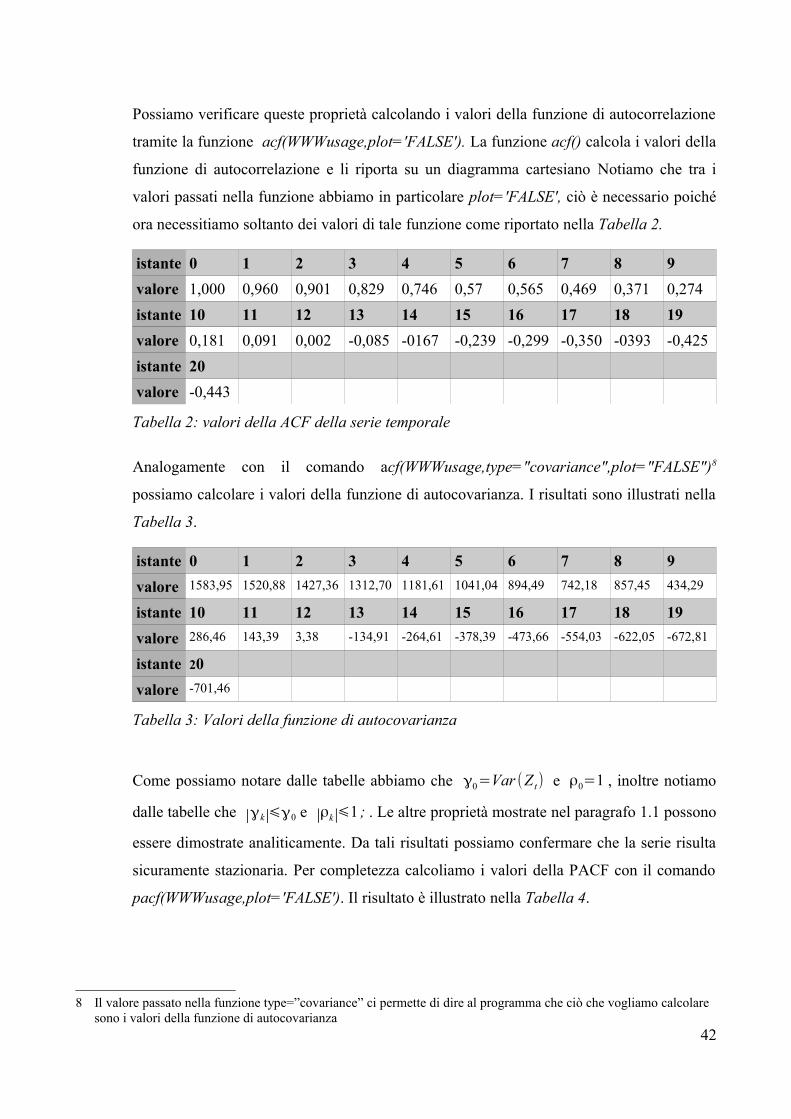
istante 1 2 3 4 5 6 7 8 9 10
valore 0,960 -0,267 -0,154 -0,120 -0,072 -0,065 -0,084 -0,065 -0,046 -0,030
istante 11 12 13 14 15 16 17 18 19 20
valore -0,055 -0,080 -0,094 -0,030 0,019 0,017 -0,032 -0,050 0,011 0,053
Tabella 4: Valori della PACF della serie temporale
Dato che la serie è stazionaria, non è necessario effettuare eventuali trasformazioni e
differenziazioni, quindi passiamo al passo successivo, ovvero studiare l'andamento della
funzione di autocorrelazione e della funzione di autocorrelazione parziale. Con il comando
acf(WWWusage) possiamo vedere il grafico della ACF mostrato in Figura 3.
Come possiamo notare la ACF ha un decadimento di tipo esponenziale, quindi possiamo
ipotizzare che la serie può essere modellata come un processo autoregressivo, in
particolare non abbiamo andamenti sinusoidali quindi probabilmente sarà del primo ordine.
43
Figura 3: ACF della serie temporale

Per confermare questa ipotesi vediamo il grafico della PACF con i comando
pacf(WWWusage). Il risultato è mostrato nella Figura 4.
Notiamo che la PACF ha un unico picco all'istante 1, mentre agli istanti successivi i valori
sono tutti smorzati. Dall'analisi condotta fin'ora quindi possiamo essere certi che la serie
analizzata si tratta di un processo autoregressivo del primo ordine AR(1) poiché ha media e
varianza costanti, la funzione di autocorrelazione decade in maniera esponenziale e la
funzione di autocorrelazione parziale ha un unico picco all'istante 1. Quindi la relazione
che lo descrive è:
(1−ϕ B)(Z t−μ)=at
I passi 3 e 4 illustrati nel paragrafo 3.1 sono superflui poiché non abbiamo effettuato
alcuna trasformazione o differenziazione. Quindi l'unica cosa che ci rimane da fare è
44
Figura 4: PACF della serie temporale
calcolare il valore della componente autoregressiva φ. In questa operazione il software R ci
fornisce di un'importante funzionalità che ci permette di calcolare i valori delle varie
componenti che compongono la serie temporale che stiamo analizzando utilizzando la
funzione arima(WWWusage,order=c(1,0,0)). Il parametro order=c(1,0,0) indica che
vogliamo che calcoli le componenti di un processo AR(1) utilizzando il data set indicato
(in questo caso WWWusage). Il risultato è che il valore di φ ϕ=0,9953 con un errore
standard di circa il 6%.
Il risultato finale è che la nostra serie temporale è descritta dalla relazione:
(1−0,9953 ⋅B)(Z t−137,08)=at .
45
Conclusioni
In questo lavoro sono stati descritti i concetti basilari per poter poter analizzare una serie
temporale tramite strumenti statistici e matematici.
Nel primo capitolo sono introdotti i processi aleatori, definendo una serie temporale come
una realizzazione di un processo aleatorio, ovvero un insieme di variabile aleatorie che
dipendono dal tempo. Successivamente si è introdotto quali sono i parametri che
caratterizzano un processo aleatorio, e quindi una serie temporale, soffermandosi
particolarmente sulle funzioni di media, varianza, covarianza e correlazione, la loro forma
e le loro proprietà. Segue un excursus sul concetto di stabilità, sulle varie tipologie e
relativi ordini, attraverso la descrizione della forma delle funzioni sopracitate, e cosa
intenderemo quando parleremo di stabilità nei capitoli successivi. È riportato inoltre un
breve inciso sui processi Gaussiani e rumore bianco, descrivendone le proprietà e
successivamente vengono definite le funzioni di autocovarianza, autocorrelazione e
autocorrelazione parziale. Dopo di che si parla delle stime delle medie, autocovarianze e
autocorrelazioni, poiché non è sempre disponibile l'insieme di tutte le realizzazioni che può
avere una serie temporale. Infine si è affrontato il discorso delle rappresentazioni che può
avere una serie temporale, ovvero quella a media mobile e autoregressiva, soffermandoci
sul significato di invertibilità e stabilità.
Nel secondo capitolo si è affrontato il discorso sui modelli delle serie temporali facendo
una distinzione tra i modelli stazionari e non stazionari. Come si è visto il modello
stazionario principale è l' ARMA(p,q), ovvero modello auto regressivo di ordine p e a
media mobile di ordine q, qual è l'equazione che la descrive e la forma che assumono i
parametri di caratterizzazione, soffermandosi nei casi specifici se si ha un processo che ha
solo la componente autoregressiva di ordine 1, 2 o p , quindi ha media e varianza costante,
funzione di autocorrelazione che decade esponenzialmente o ha un andamento sinusoidale,
a seconda del grado e del valore delle soluzioni del polinomio che la descrive,e la funzione
di autocorrelazione parziale che taglia i valori dopo un certo istante p che corrisponde
all'ordine del modello autoregressivo; analogamente ci si è soffermati sul modello a media
mobile di ordine 1, 2 e q, che ha sempre media e varianza costanti e,contrariamente al
modello autoregressivo, si è visto che ha la funzione di autocorrelazione che taglia via i
valori dopo l'istante q, che coincide all'ordine del modello, e la funzione di
46
autocorrelazione parziale che ha un decadimento esponenziale o un andamento sinusoidale,
a seconda del numero e dal valore delle radici del polinomio che lo rappresenta. Dopo di
che si sono viste varie tipologie di non stazionarietà, ovvero quando la media non risulta
costante, quindi se la media ha un trend lineare, ovvero può essere descritta da un
polinomio, basta utilizzare il modello delle periodicità nascoste, se invece assume un trend
aleatorio, ovvero il polinomio che descrive la serie temporale presa in analisi ha radici che
giacciono all'interno della circonferenza di raggio unitario, bisogna incorrere alla
differenziazione. Successivamente si è descritto il modello autoregressivo integrato a
media mobile di ordine p d e q, definendo il termine di trend deterministico che può essere
omesso se risulta necessario, focalizzandoci sui casi particolari del modello random walk,
ovvero ARIMA (0,1,0) ,e IMA(1,1). Infine si è descritto la non stazionarietà della varianza
e dell'autocovarianza, e della soluzione della funzione di trasformazione quando si
presentano.
Nel terzo capitolo si è affrontato un esempio pratico che utilizza i principi illustrati nei
capitoli precedenti, in particolare nella prima parte si è descritto una sequenza di passi che
ci permette di identificare in maniera precisa qual è il modello più adatto che descrive il
fenomeno che stiamo analizzando, nella seconda parte, invece, vi è un'introduzione al
software che viene utilizzato nell'analisi della serie temporale, ovvero R, un programma
open source che utilizza un linguaggio orientato ad oggetti, derivato dal linguaggio S con
licenza non open source. Infine si è analizzato una serie temporale che descrive il numero
di accessi di un server su Internet nell'intervallo temporale di 100 minuti con frequenza di
misurazione di un campione ogni minuto, quindi abbiamo che la nostra serie temporale è
un vettore di 100 elementi. Studiando quindi l'andamento della serie si è ipotizzato che
essa risulta stazionaria. Utilizzando le funzionalità di R siamo riusciti a confermare la
nostra ipotesi, calcolandoci media, varianza, autocovarianza, autocorrelazione e
autocorrelazione parziale verificando che la funzione di autocorrelazione ha un
decadimento esponenziale e la funzione di autocorrelazione parziale taglia via i valori dopo
l'istante 1, quindi da tali risultati abbiamo stabilito che il processo può essere rappresentato
con un modello AR(1) e quindi siamo riusciti a calcolare, sempre tramite il software, quali
sono i valori delle componenti che lo descrivono.
47
Bibliografia
[1] William Wu-Shyong Wei, Time Series Analsys: an univariate and multivariate
methods,Pearson, 2006.
[2] Jonathan D. Cryer- Kung-Sik Chan, Time Series Analsys: With application in R,
Springer, 2008,
[3] The Comprehensive R Archive Network, https://cran.r-project.org,16/04/2016 alle
09:31.
[4] R: Internet Usage per minute, https://stat.ethz.ch/R-manual/R-
devel/library/datasets/html/WWWusage.html ,18/04/2016 alle 10:42.
48
Ringraziamenti
Innanzitutto vorrei ringraziare il prof. Francesco Verde, che mi ha fornito tutto il materiale
necessario per poter stilare questo elaborato.
Ringrazio anche i professori che hanno fatto parte della mia carriera universitaria che,
oltre ai corsi e agli esami, mi hanno dato molti insegnamenti riguardo il mondo
dell'ingegneria,dell'informatica e del lavoro che mi prospetterà.
Vorrei ringraziare la mia famiglia, a cui questo lavoro è dedicato, che mi ha permesso di
poter conseguire questo percorso, di far si che la passione per l'informatica possa diventare
il mio domani, insegnandomi a sempre perseverare e impegnarsi al massimo,anche se le
situazioni sono avverse, per raggiungere i propri obbiettivi.
Ringrazio i miei amici di sempre, Fabio e Melania, ormai sono come dei fratelli acquisiti
per me, che mi hanno dato sempre tutto il sostegno necessario per affrontare a testa alta
ogni avversità.
Ringrazio tutta la “combriccola”, abbiamo condiviso per tanti anni molte tappe dei nostri
percorsi, affrontando alti e bassi, nonostante tutto siamo sempre più uniti,come una
seconda famiglia.
Ringrazio tutti i miei colleghi universitari, in particolare Fabiana, dove abbiamo condiviso
i corsi più impegnativi, gli esami più difficili, gli appunti più disparati e gli orari più strani
che uno studente universitario può affrontare sostenendoci l'uno con l'altro.
Ringrazio in oltre tutti i ragazzi del “Centro Polifunzionale Pier Paolo Pasolini” di
Casalnuovo di Napoli e i dipendenti comunali che la gestiscono, dove in questi anni, tra
una pausa caffè e un altro, confronti universitari, discussioni tra le più disparate, uscite e
cene mi hanno sempre sostenuto.
Infine ringrazio tutte le persone che non ci sono più e tutte le altre persone che non ho
citato che in un modo o nell'altro hanno fatto parte della mia vita in questi anni e che
hanno dato anche un piccolo contributo a quello che sono diventato.
49