7. Utilizzazione della potenza a bordo - Antonino Di...
14
100 7. Utilizzazione della potenza a bordo 7.1 Motori termici diesel - otto I motori alternativi per la trazione si dividono in due grandi categorie in funzione del ciclo termico seguito: motori a ciclo otto (scoppio) e motori a ciclo diesel (iniezione), la principale differenziazione è dovuta al fatto che nei primi la fase di co-mbustione della miscela aria-benzina avviene a volume costante, mentre negli altri la fase di combustione del gasolio avviene a pressione costante. Nei motori a scoppio il combustibile è miscelato all’aria in un apparato esterno al cilindro (carburatore), oppure in una fase precedente alla combustione (iniezione in aspirazione), successivamente l’accensione della miscela avviene per mezzo di una scintilla fatta scoccare da un apposito apparato elettrico (candela). Nei motori diesel il combustibile è iniettato nella camera di combustione immediatamente prima della combustione stessa e l’accensione avviene per l’elevata temperatura dell’aria comburente per effetto della precedente compressione, oppure per la presenza di un punto di ignizione permanente nella camera stessa (candeletta incandescente). I motori alternativi si differenziano, inoltre, per il tipo di regolazione effettuata. Nei motori a scoppio la regolazione avviene per variazione della quantità di miscela aria – benzina che viene introdotta all’interno della camera di combustione, definita regolazione per quantità; maggiore è la quantità di miscela benzina-aria che si utilizza, maggiore è la potenza che si riesce ad ottenere dal motore. Nei motori diesel la regolazione avviene per variazione della quantità di gasolio iniettato all’interno della camera di combustione, definita regolazione per qualità; al variare della quantità di gasolio che si inietta, a parità di aria presente all’interno della camera di combustione, varia la composizione percentuale della miscela gasolio – aria (miscela più ricca, miscela meno ricca). Di seguito (Figura 68) è rappresentato il ciclo teorico Otto nel diagramma pressione – volume del fluido all’interno della camera di combustione: - Il fluido operante inizia il ciclo dal punto 1, a pressione e temperatura atmosferica; - da 1 a 2 si ha la fase di compressione adiabatica; - da 2 a 3 si ha la fase di combustione a volume costante; - da 3 a 4 si ha l’espansione adiabatica, ossia senza scambio di calore con l’esterno (sola fase attiva del ciclo che produce lavoro utile); - nel punto 4 terminano le trasformazioni con lo scarico nell’atmosfera. Il ciclo Otto è di tipo aperto, infatti da 4 a 1 si ha la sostituzione dei prodotti della combustione con un nuovo fluido, che inizia il ciclo successivo. Il volume del fluido che ha già operato, punto 4, ed il volume del fluido nuovo, punto 1, sono uguali (essi hanno però temperatura e pressione diversa), quindi la linea da 4 a 1 può assimilarsi ad una trasformazione a volume costante, che chiude il ciclo. Di seguito (Figura 69) è rappresentato, in modo analogo, il ciclo teorico Diesel, che differisce sostanzialmente dal ciclo Otto per il fatto che la trasformazione da 2 a 3
-
Upload
nguyenxuyen -
Category
Documents
-
view
222 -
download
1
Transcript of 7. Utilizzazione della potenza a bordo - Antonino Di...
100
7. Utilizzazione della potenza a bordo
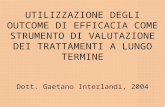
7.1 Motori termici diesel - otto I motori alternativi per la trazione si dividono in due grandi categorie in funzione del ciclo termico seguito: motori a ciclo otto (scoppio) e motori a ciclo diesel (iniezione), la principale differenziazione è dovuta al fatto che nei primi la fase di co-mbustione della miscela aria-benzina avviene a volume costante, mentre negli altri la fase di combustione del gasolio avviene a pressione costante. Nei motori a scoppio il combustibile è miscelato all’aria in un apparato esterno al cilindro (carburatore), oppure in una fase precedente alla combustione (iniezione in aspirazione), successivamente l’accensione della miscela avviene per mezzo di una scintilla fatta scoccare da un apposito apparato elettrico (candela). Nei motori diesel il combustibile è iniettato nella camera di combustione immediatamente prima della combustione stessa e l’accensione avviene per l’elevata temperatura dell’aria comburente per effetto della precedente compressione, oppure per la presenza di un punto di ignizione permanente nella camera stessa (candeletta incandescente). I motori alternativi si differenziano, inoltre, per il tipo di regolazione effettuata. Nei motori a scoppio la regolazione avviene per variazione della quantità di miscela aria – benzina che viene introdotta all’interno della camera di combustione, definita regolazione per quantità; maggiore è la quantità di miscela benzina-aria che si utilizza, maggiore è la potenza che si riesce ad ottenere dal motore. Nei motori diesel la regolazione avviene per variazione della quantità di gasolio iniettato all’interno della camera di combustione, definita regolazione per qualità; al variare della quantità di gasolio che si inietta, a parità di aria presente all’interno della camera di combustione, varia la composizione percentuale della miscela gasolio – aria (miscela più ricca, miscela meno ricca). Di seguito (Figura 68) è rappresentato il ciclo teorico Otto nel diagramma pressione – volume del fluido all’interno della camera di combustione:
- Il fluido operante inizia il ciclo dal punto 1, a pressione e temperatura atmosferica;
- da 1 a 2 si ha la fase di compressione adiabatica; - da 2 a 3 si ha la fase di combustione a volume costante; - da 3 a 4 si ha l’espansione adiabatica, ossia senza scambio di calore con
l’esterno (sola fase attiva del ciclo che produce lavoro utile); - nel punto 4 terminano le trasformazioni con lo scarico nell’atmosfera.
Il ciclo Otto è di tipo aperto, infatti da 4 a 1 si ha la sostituzione dei prodotti della combustione con un nuovo fluido, che inizia il ciclo successivo. Il volume del fluido che ha già operato, punto 4, ed il volume del fluido nuovo, punto 1, sono uguali (essi hanno però temperatura e pressione diversa), quindi la linea da 4 a 1 può assimilarsi ad una trasformazione a volume costante, che chiude il ciclo. Di seguito (Figura 69) è rappresentato, in modo analogo, il ciclo teorico Diesel, che differisce sostanzialmente dal ciclo Otto per il fatto che la trasformazione da 2 a 3
101
avviene a pressione costante; per il resto valgono le medesime considerazioni effettuate per il ciclo Otto.
Figura 68 – Diagramma ciclo otto Figura 69 – Diagramma ciclo diesel
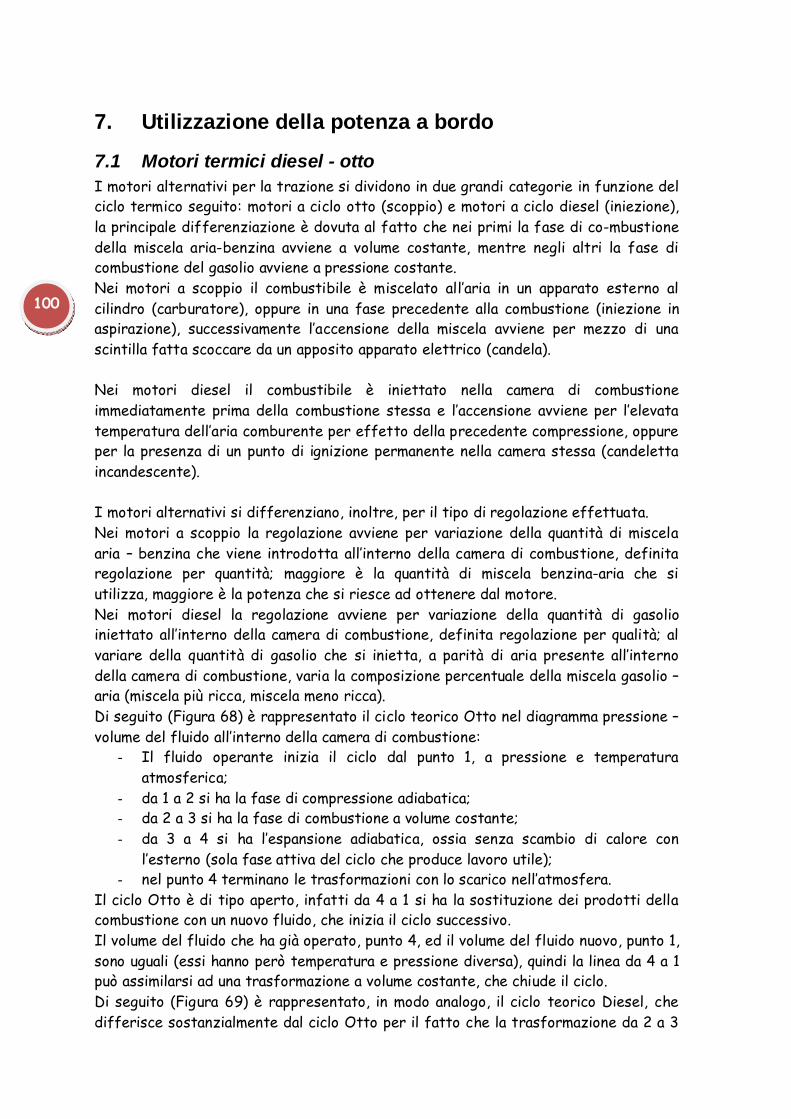
7.2 Motore ideale Si definisce apparato motore ideale quello che eroga sempre la medesima potenza (potenza massima) al variare del numero di giri. La caratteristica di potenza di un motore ideale è costituita da un segmento di retta limitato dai regimi minimo e massimo di funzionamento del motore (Figura 70).
Figura 70 – curve caratteristiche di un motore ideale
La potenza di una macchina è data, a meno di costanti numeriche, dal prodotto tra la coppia motrice e la velocità di rotazione dell’albero motore
[ ]. CV 75
mCN ⋅=ω C [ ]mkg ⋅ (1)
Poiché la curva di potenza di un motore ideale è una retta orizzontale, la curva

102
caratteristica della coppia, in base alle considerazioni precedentemente esposte, sarà data da un’iperbole equilatera, che ha come asintoti l’asse delle ascisse e l’asse delle ordinate, di equazione
[ ]Kgm 2.716nNCm ⋅= , (2)
con:
, 30
n⋅=πω
dove n ed ω rappresentano il regime di rotazione del motore, il primo espresso in giri/1' ed il secondo in rad/sec. Si ricorderà che se Nm è la potenza erogata dal motore, la potenza necessaria alle ruote è:
, tmr NN η⋅= essendo ηt il rendimento della trasmissione. Alla periferia delle ruote motrici perviene uno sforzo di trazione T per effetto della trasmissione della coppia Cm del motore alle ruote. L’andamento della funzione ( )vTT = è analogo a quello della curva caratteristica di coppia, infatti la velocità del veicolo è funzione del numero di giri dell’albero motore. Indicando con r il raggio delle ruote (in metri) e con m il rapporto di riduzione tra albero motore ed asse delle ruote motrici, si ha:
[ ]
[ ]. Kg r
C=T
; Km/h 6.360
2
.m
trasmm
mnrV
η
π
⋅⋅
⋅⋅⋅⋅⋅
=
Ricavando n dalla prima e Cm dalla seconda si ha:
.
; 65.26.32
60
mrTC
Vrm
rvmn
tm ⋅
⋅=
⋅⋅=⋅⋅⋅⋅⋅
=
η
π
Sostituendo nella Cm=716.2⋅N/n, ad n il valore trovato ed uguagliando i due valori di Cm , si ha:
. 65.2
2.716mVrN
mrT
t ⋅⋅⋅⋅
=⋅⋅
η
Risolvendo rispetto a T si ha:
. 270V
NT t⋅
⋅=η
Nel caso di motore ideale (cioè N=cost.) la curva T(v), che prende il nome di caratteristica meccanica di trazione è rappresentata da un'iperbole equilatera (Figura 71). Il tratto della curva che interessa è ABC in quanto lo sforzo di trazione massimo è limitato dalla aderenza (Tmax=f1⋅Pa) e il punto C rappresenta la velocità massima

103
ammissibile, per data livelletta e per dato peso. Note la curva di trazione e le parabole delle resistenze al moto, è possibile ricavare tutte le curve caratteristiche del moto del veicolo. Nella Figura 71 è riportato l'andamento della curva (T-R) che rappresenta, in funzione della velocità, la differenza positiva tra sforzo di trazione e resistenza ordinaria al moto, disponibile per la accelerazione, o meglio, naturalmente utilizzata per raggiungere il punto di equilibrio Vmax .
Figura 71 - Caratteristica meccanica di trazione
E' da notare ancora che nel tratto AB, fino a quando non è stata raggiunta la velocità V1 , non è possibile utilizzare tutta la potenza disponibile del motore. A seconda del tipo di motore verranno quindi adottati metodi di parzializzazione della potenza che solo a partire dal punto B sarà uguale alla potenza massima disponibile. Le caratteristiche del moto del veicolo durante la fase di avviamento (da V=V0 a V=Vmax), vengono studiate attraverso la determinazione della accelerazione, velocità e spazio in funzione del tempo durante tutta la fase di spunto. Note, infatti, la T e la Rtot , funzioni di V, riferendosi allo sforzo acceleratore
specifico [ ]Kg/tonn. .
PRTf tot
a−
= , potrà scriversi:
, 1000dtdv
gkf a
a ⋅⋅
=
con ka coefficiente d’inerzia, da cui:
, 1000
a
a
fdv
gkdt ⋅⋅
=
e quindi:
; 1000
0∫⋅
⋅=
v
a
a
fdv
gkt
è possibile, quindi, per ogni velocità intermedia tra 0 e Vmax ,(punto in cui fa=0), determinare il tempo necessario a raggiungere la velocità V intermedia in corrispondenza della quale resta determinato anche il valore della accelerazione, pari a:
. 1000 a
a
kgf
dtdv
⋅⋅
=
104
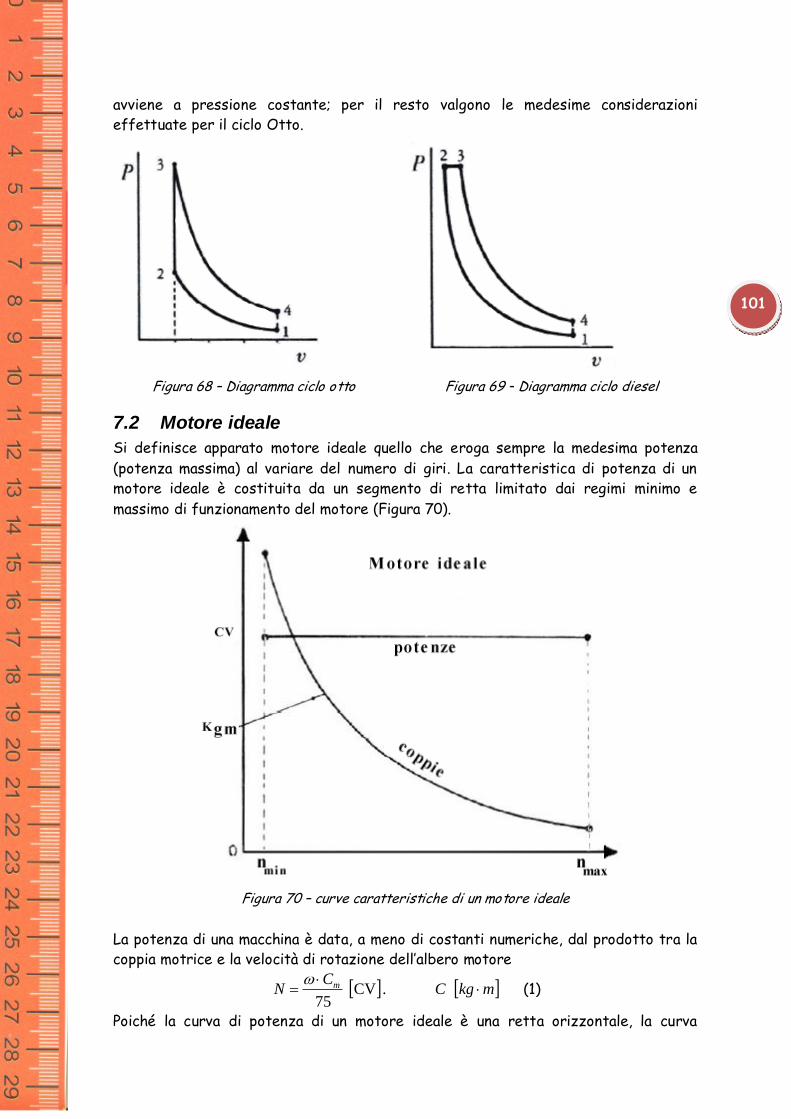
Per pervenire alle curve caratteristiche a(t), v(t) ed s(t) (curve di spunto) si procede graficamente come in Figura 72; riportato infatti su un diagramma a(v), l'inverso di fa(v), ovvero dello sforzo acceleratore specifico, l'area racchiusa dalla curva 1/fa(v) e
dagli assi, per una certa velocità V intermedia, rappresenta, a scala g
ka⋅1000 il tempo
necessario a conseguire l'accelerazione a(v) alla velocità V considerata.
Figura 72
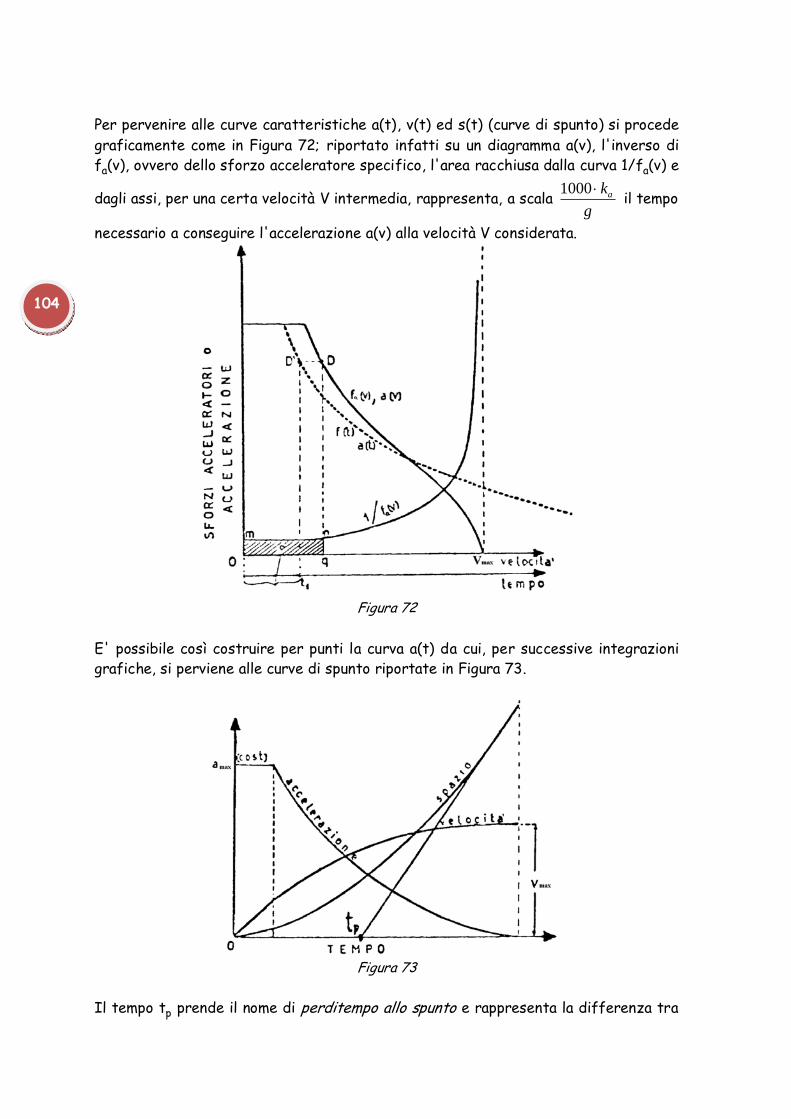
E' possibile così costruire per punti la curva a(t) da cui, per successive integrazioni grafiche, si perviene alle curve di spunto riportate in Figura 73.
Figura 73
Il tempo tp prende il nome di perditempo allo spunto e rappresenta la differenza tra
105
il tempo reale necessario al conseguimento della velocità Vmax ed il tempo che si impiegherebbe se lo spazio necessario all'avviamento venisse percorso integralmente alla velocità costante Vmax.
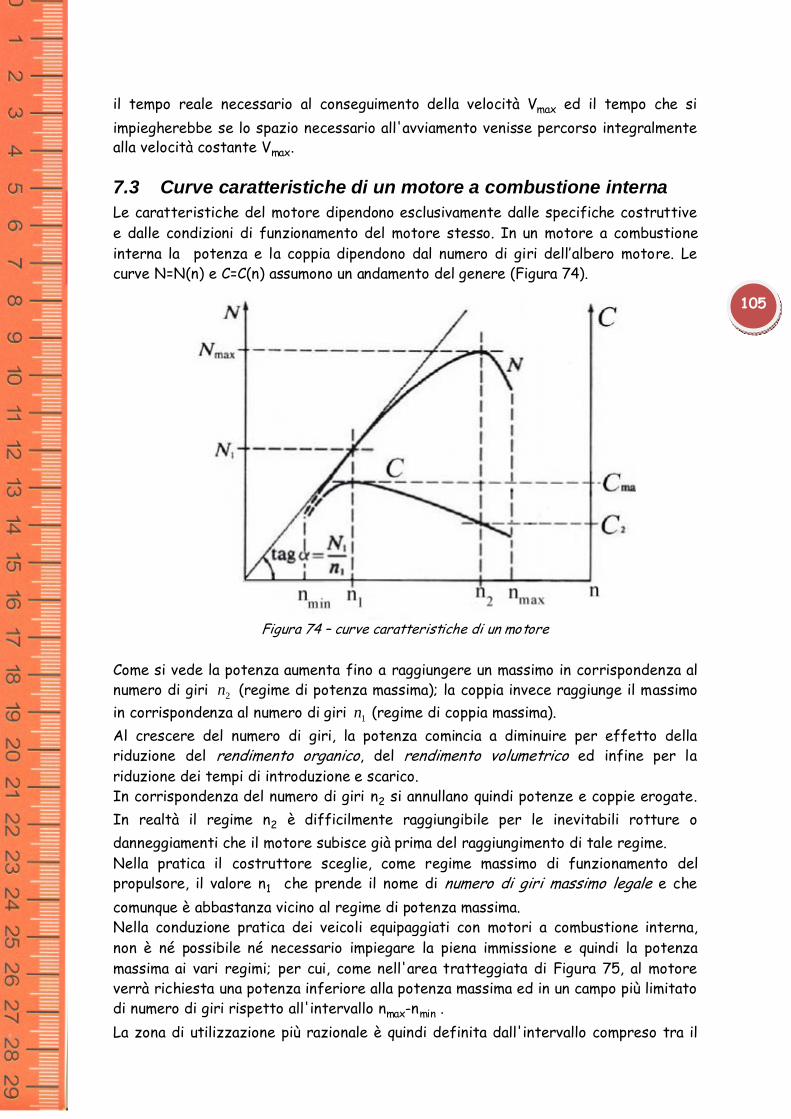
7.3 Curve caratteristiche di un motore a combustione interna Le caratteristiche del motore dipendono esclusivamente dalle specifiche costruttive e dalle condizioni di funzionamento del motore stesso. In un motore a combustione interna la potenza e la coppia dipendono dal numero di giri dell’albero motore. Le curve N=N(n) e C=C(n) assumono un andamento del genere (Figura 74).
Figura 74 – curve caratteristiche di un motore
Come si vede la potenza aumenta fino a raggiungere un massimo in corrispondenza al numero di giri 2n (regime di potenza massima); la coppia invece raggiunge il massimo in corrispondenza al numero di giri 1n (regime di coppia massima). Al crescere del numero di giri, la potenza comincia a diminuire per effetto della riduzione del rendimento organico, del rendimento volumetrico ed infine per la riduzione dei tempi di introduzione e scarico. In corrispondenza del numero di giri n2 si annullano quindi potenze e coppie erogate. In realtà il regime n2 è difficilmente raggiungibile per le inevitabili rotture o danneggiamenti che il motore subisce già prima del raggiungimento di tale regime. Nella pratica il costruttore sceglie, come regime massimo di funzionamento del propulsore, il valore n1 che prende il nome di numero di giri massimo legale e che comunque è abbastanza vicino al regime di potenza massima. Nella conduzione pratica dei veicoli equipaggiati con motori a combustione interna, non è né possibile né necessario impiegare la piena immissione e quindi la potenza massima ai vari regimi; per cui, come nell'area tratteggiata di Figura 75, al motore verrà richiesta una potenza inferiore alla potenza massima ed in un campo più limitato di numero di giri rispetto all'intervallo nmax-nmin . La zona di utilizzazione più razionale è quindi definita dall'intervallo compreso tra il
106
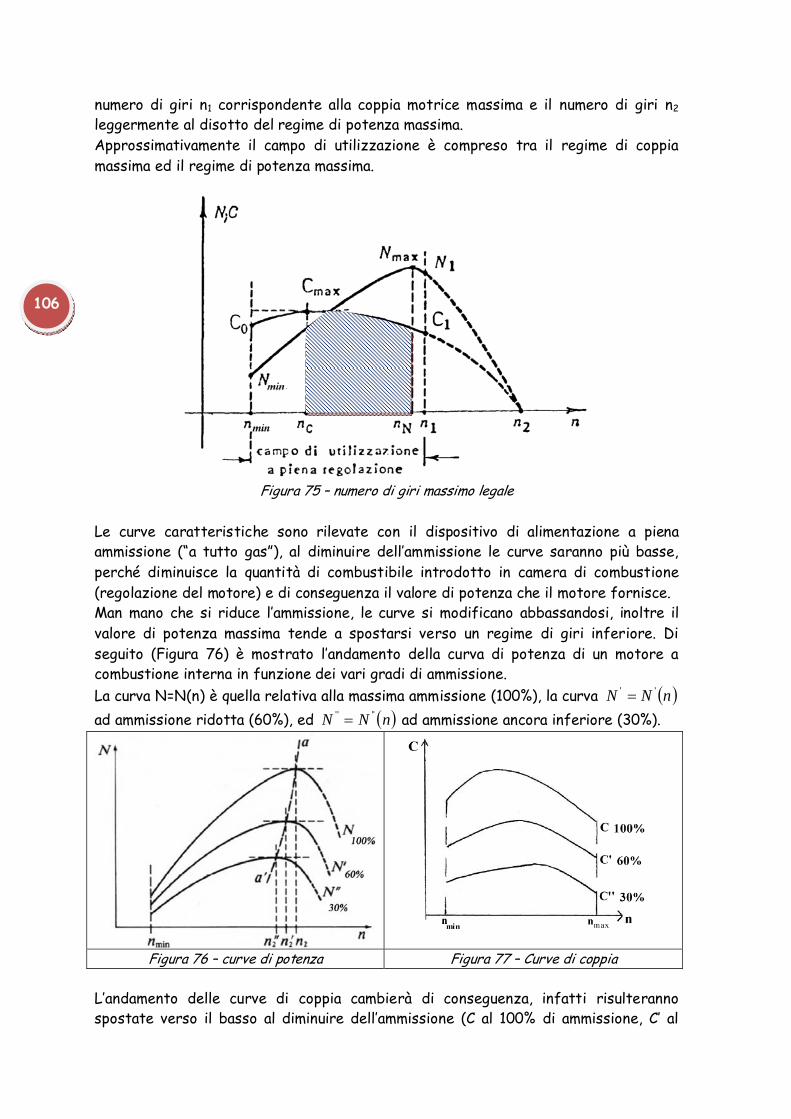
numero di giri n1 corrispondente alla coppia motrice massima e il numero di giri n2 leggermente al disotto del regime di potenza massima. Approssimativamente il campo di utilizzazione è compreso tra il regime di coppia massima ed il regime di potenza massima.
Figura 75 – numero di giri massimo legale
Le curve caratteristiche sono rilevate con il dispositivo di alimentazione a piena ammissione (“a tutto gas”), al diminuire dell’ammissione le curve saranno più basse, perché diminuisce la quantità di combustibile introdotto in camera di combustione (regolazione del motore) e di conseguenza il valore di potenza che il motore fornisce. Man mano che si riduce l’ammissione, le curve si modificano abbassandosi, inoltre il valore di potenza massima tende a spostarsi verso un regime di giri inferiore. Di seguito (Figura 76) è mostrato l’andamento della curva di potenza di un motore a combustione interna in funzione dei vari gradi di ammissione. La curva N=N(n) è quella relativa alla massima ammissione (100%), la curva ( )nNN '' = ad ammissione ridotta (60%), ed ( )nNN '''' = ad ammissione ancora inferiore (30%).
Figura 76 – curve di potenza Figura 77 – Curve di coppia
L’andamento delle curve di coppia cambierà di conseguenza, infatti risulteranno spostate verso il basso al diminuire dell’ammissione (C al 100% di ammissione, C’ al
107
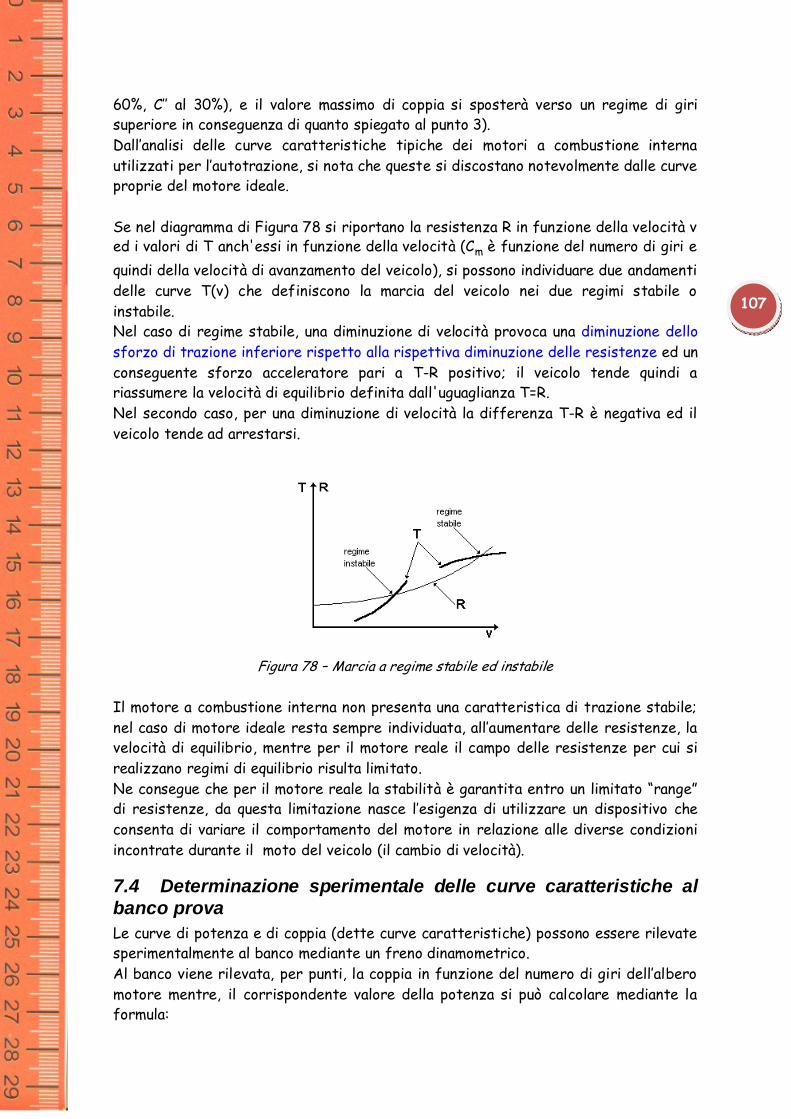
60%, C’’ al 30%), e il valore massimo di coppia si sposterà verso un regime di giri superiore in conseguenza di quanto spiegato al punto 3). Dall’analisi delle curve caratteristiche tipiche dei motori a combustione interna utilizzati per l’autotrazione, si nota che queste si discostano notevolmente dalle curve proprie del motore ideale. Se nel diagramma di Figura 78 si riportano la resistenza R in funzione della velocità v ed i valori di T anch'essi in funzione della velocità (Cm è funzione del numero di giri e quindi della velocità di avanzamento del veicolo), si possono individuare due andamenti delle curve T(v) che definiscono la marcia del veicolo nei due regimi stabile o instabile. Nel caso di regime stabile, una diminuzione di velocità provoca una diminuzione dello sforzo di trazione inferiore rispetto alla rispettiva diminuzione delle resistenze ed un conseguente sforzo acceleratore pari a T-R positivo; il veicolo tende quindi a riassumere la velocità di equilibrio definita dall'uguaglianza T=R. Nel secondo caso, per una diminuzione di velocità la differenza T-R è negativa ed il veicolo tende ad arrestarsi.
Figura 78 - Marcia a regime stabile ed instabile
Il motore a combustione interna non presenta una caratteristica di trazione stabile; nel caso di motore ideale resta sempre individuata, all’aumentare delle resistenze, la velocità di equilibrio, mentre per il motore reale il campo delle resistenze per cui si realizzano regimi di equilibrio risulta limitato. Ne consegue che per il motore reale la stabilità è garantita entro un limitato “range” di resistenze, da questa limitazione nasce l’esigenza di utilizzare un dispositivo che consenta di variare il comportamento del motore in relazione alle diverse condizioni incontrate durante il moto del veicolo (il cambio di velocità).
7.4 Determinazione sperimentale delle curve caratteristiche al banco prova Le curve di potenza e di coppia (dette curve caratteristiche) possono essere rilevate sperimentalmente al banco mediante un freno dinamometrico. Al banco viene rilevata, per punti, la coppia in funzione del numero di giri dell’albero motore mentre, il corrispondente valore della potenza si può calcolare mediante la formula:
108
716,2nCN ⋅
= [ ]CV con C [ ]mkg ⋅ , e n ⎥⎦⎤
⎢⎣⎡
mingiri
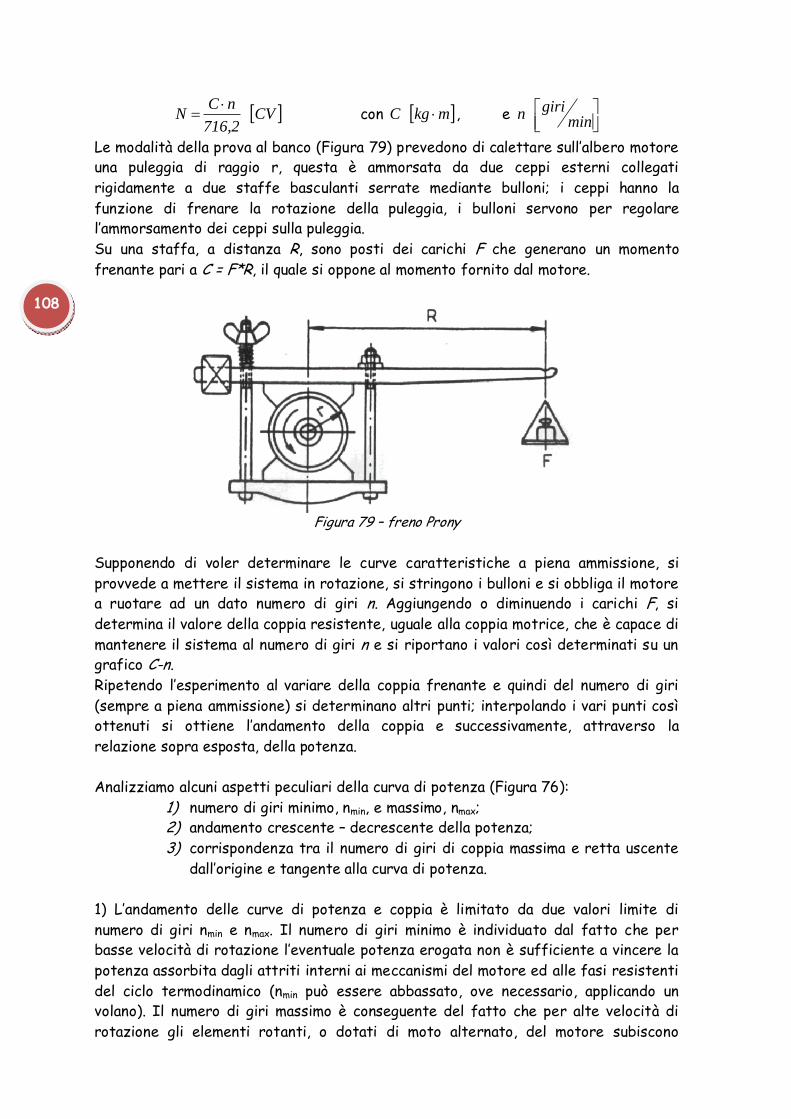
Le modalità della prova al banco (Figura 79) prevedono di calettare sull’albero motore una puleggia di raggio r, questa è ammorsata da due ceppi esterni collegati rigidamente a due staffe basculanti serrate mediante bulloni; i ceppi hanno la funzione di frenare la rotazione della puleggia, i bulloni servono per regolare l’ammorsamento dei ceppi sulla puleggia. Su una staffa, a distanza R, sono posti dei carichi F che generano un momento frenante pari a C = F*R, il quale si oppone al momento fornito dal motore.
Figura 79 – freno Prony
Supponendo di voler determinare le curve caratteristiche a piena ammissione, si provvede a mettere il sistema in rotazione, si stringono i bulloni e si obbliga il motore a ruotare ad un dato numero di giri n. Aggiungendo o diminuendo i carichi F, si determina il valore della coppia resistente, uguale alla coppia motrice, che è capace di mantenere il sistema al numero di giri n e si riportano i valori così determinati su un grafico C-n. Ripetendo l’esperimento al variare della coppia frenante e quindi del numero di giri (sempre a piena ammissione) si determinano altri punti; interpolando i vari punti così ottenuti si ottiene l’andamento della coppia e successivamente, attraverso la relazione sopra esposta, della potenza. Analizziamo alcuni aspetti peculiari della curva di potenza (Figura 76):
1) numero di giri minimo, nmin, e massimo, nmax; 2) andamento crescente – decrescente della potenza; 3) corrispondenza tra il numero di giri di coppia massima e retta uscente
dall’origine e tangente alla curva di potenza. 1) L’andamento delle curve di potenza e coppia è limitato da due valori limite di numero di giri nmin e nmax. Il numero di giri minimo è individuato dal fatto che per basse velocità di rotazione l’eventuale potenza erogata non è sufficiente a vincere la potenza assorbita dagli attriti interni ai meccanismi del motore ed alle fasi resistenti del ciclo termodinamico (nmin può essere abbassato, ove necessario, applicando un volano). Il numero di giri massimo è conseguente del fatto che per alte velocità di rotazione gli elementi rotanti, o dotati di moto alternato, del motore subiscono
109
sollecitazioni così elevate che porterebbero a danneggiamenti o rotture (motore in fuori giri). 2) L’andamento della curva di potenza inizialmente crescente, diventa decrescente raggiunto un massimo; questo avviene a causa della comprimibilità dell’aria ed alle resistenze che questa incontra nel condotto di aspirazione. Infatti, ad alte velocità, l’aria presente nel condotto non riesce ad entrare completamente all’interno del cilindro, determinando una caduta nella potenza erogata dal motore. 3) La retta uscente dall’origine è tangente alla curva di potenza in corrispondenza di un determinato numero di giri ove si realizzano le condizioni di coppia massima, infatti
essendo per tutti i punti della curva nN716,2C ⋅= , il massimo di C si ha per il massimo
del rapporto nN (coefficiente angolare delle rette uscenti dall’origine), che è anche la
tangente alla curva delle potenze.
7.5 Elasticità dei motori La caratteristica meccanica dei motori utilizzati nella trazione e le relative caratteristiche di trazione si discostano da quelle relative al motore ideale, talché è necessario definire il comportamento del motore rispetto a quello del motore ideale. Si introduce a tal fine la definizione di elasticità di un motore da trazione, considerando infinita l'elasticità del motore ideale. Date come in Figura 74 le curve della coppia e della potenza di un motore reale si definisce elasticità in un punto della curva N(n) il rapporto:
, 1
dndNE =
cui corrisponde il valore infinito dell'elasticità per N=costante (motore ideale). L'elasticità è quindi variabile nel caso reale per ogni regime di funzionamento del motore. E' opportuno in taluni casi passare dalla elasticità puntuale alla elasticità di un arco che può esprimersi secondo la:
. N n
1122
12
12
122
1nCnC
nnNNnnn
n ⋅−⋅−
=−−
≅⎥⎦⎤
⎢⎣⎡ΔΔ
Con riferimento alla Figura 74, è possibile dimostrare che il valore di coppia massima si realizza al regime nB
relativo al punto B di tangenza della curva N(n) con la retta uscente dall'origine degli assi. Quando si vogliono confrontare le elasticità di due motori diversi è necessario utilizzare formule semi-empiriche, come ad esempio la:
, B
A
A
B
nn
CCE ⋅=
per il confronto dei motori endotermici, ove CB è la coppia massima, CA è la coppia fornita al regime di potenza massima, nA ed nB sono i numeri di giri ai quali viene
110
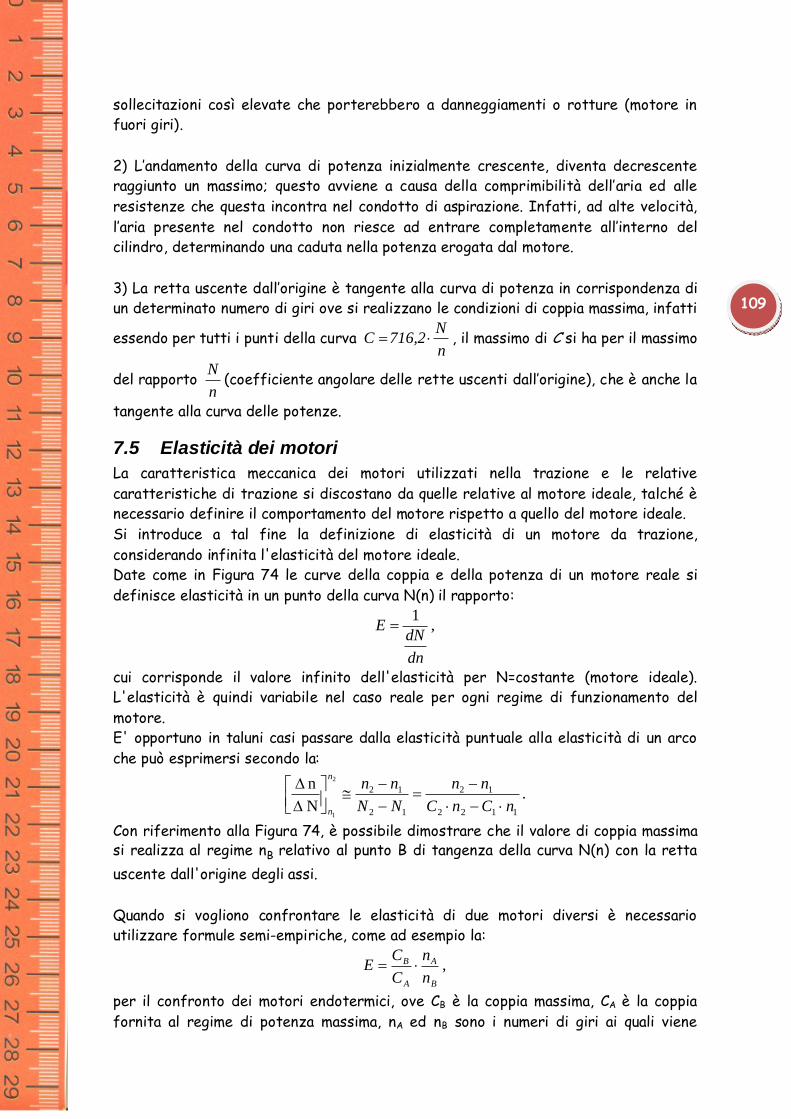
erogata rispettivamente la potenza massima e la coppia massima. Convenzionalmente si definisce motore rigido un motore che fornisce una coppia costante e quindi una potenza che varia con legge lineare al variare del numero di giri (Figura 80), la potenza erogata dal motore varierà linearmente, di conseguenza l’indice di elasticità di tale motore sarà piuttosto basso.
Figura 80 – motore rigido
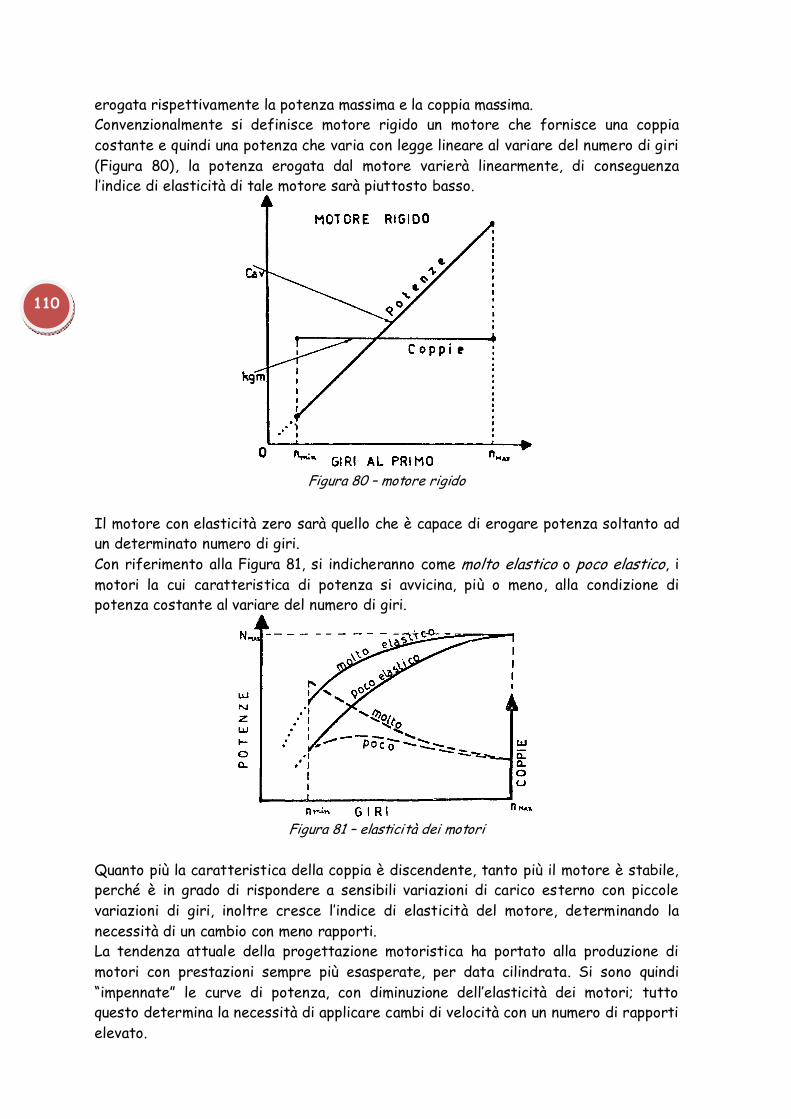
Il motore con elasticità zero sarà quello che è capace di erogare potenza soltanto ad un determinato numero di giri. Con riferimento alla Figura 81, si indicheranno come molto elastico o poco elastico, i motori la cui caratteristica di potenza si avvicina, più o meno, alla condizione di potenza costante al variare del numero di giri.
Figura 81 – elasticità dei motori
Quanto più la caratteristica della coppia è discendente, tanto più il motore è stabile, perché è in grado di rispondere a sensibili variazioni di carico esterno con piccole variazioni di giri, inoltre cresce l’indice di elasticità del motore, determinando la necessità di un cambio con meno rapporti. La tendenza attuale della progettazione motoristica ha portato alla produzione di motori con prestazioni sempre più esasperate, per data cilindrata. Si sono quindi “impennate” le curve di potenza, con diminuzione dell’elasticità dei motori; tutto questo determina la necessità di applicare cambi di velocità con un numero di rapporti elevato.
111
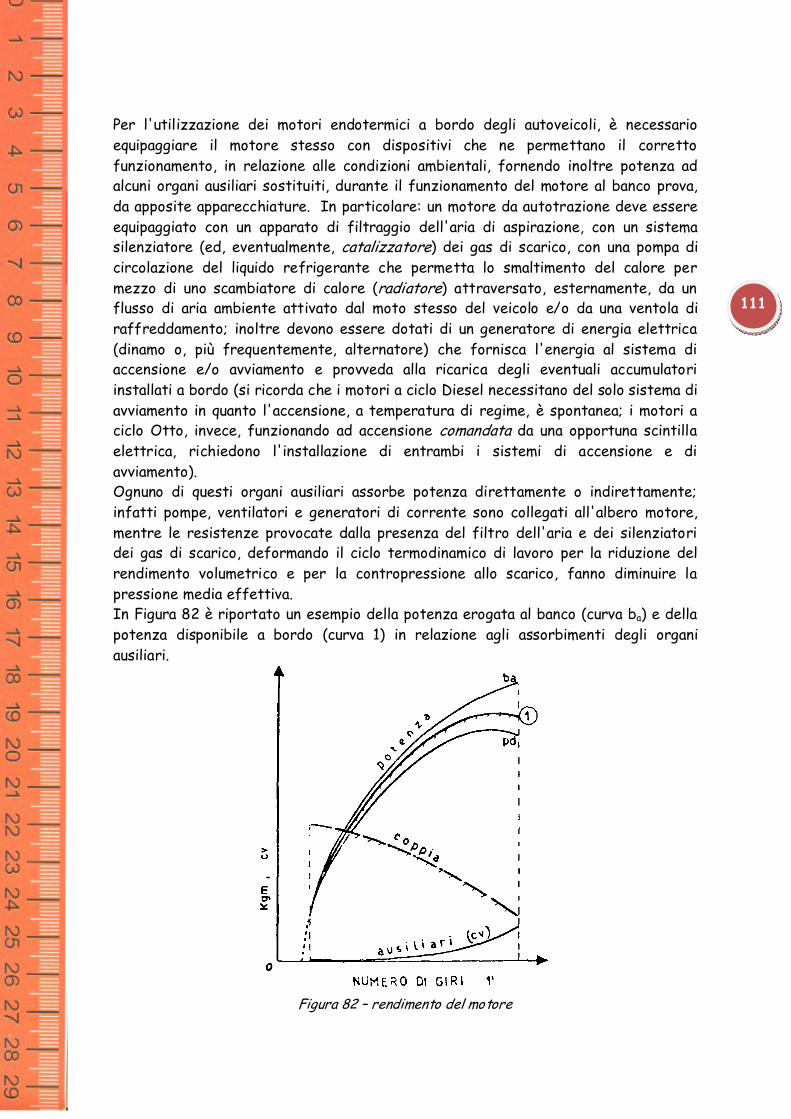
Per l'utilizzazione dei motori endotermici a bordo degli autoveicoli, è necessario equipaggiare il motore stesso con dispositivi che ne permettano il corretto funzionamento, in relazione alle condizioni ambientali, fornendo inoltre potenza ad alcuni organi ausiliari sostituiti, durante il funzionamento del motore al banco prova, da apposite apparecchiature. In particolare: un motore da autotrazione deve essere equipaggiato con un apparato di filtraggio dell'aria di aspirazione, con un sistema silenziatore (ed, eventualmente, catalizzatore) dei gas di scarico, con una pompa di circolazione del liquido refrigerante che permetta lo smaltimento del calore per mezzo di uno scambiatore di calore (radiatore) attraversato, esternamente, da un flusso di aria ambiente attivato dal moto stesso del veicolo e/o da una ventola di raffreddamento; inoltre devono essere dotati di un generatore di energia elettrica (dinamo o, più frequentemente, alternatore) che fornisca l'energia al sistema di accensione e/o avviamento e provveda alla ricarica degli eventuali accumulatori installati a bordo (si ricorda che i motori a ciclo Diesel necessitano del solo sistema di avviamento in quanto l'accensione, a temperatura di regime, è spontanea; i motori a ciclo Otto, invece, funzionando ad accensione comandata da una opportuna scintilla elettrica, richiedono l'installazione di entrambi i sistemi di accensione e di avviamento). Ognuno di questi organi ausiliari assorbe potenza direttamente o indirettamente; infatti pompe, ventilatori e generatori di corrente sono collegati all'albero motore, mentre le resistenze provocate dalla presenza del filtro dell'aria e dei silenziatori dei gas di scarico, deformando il ciclo termodinamico di lavoro per la riduzione del rendimento volumetrico e per la contropressione allo scarico, fanno diminuire la pressione media effettiva. In Figura 82 è riportato un esempio della potenza erogata al banco (curva ba) e della potenza disponibile a bordo (curva 1) in relazione agli assorbimenti degli organi ausiliari.
Figura 82 – rendimento del motore
112
Si nota, ancora, che occorre, per la misura della potenza disponibile alle ruote, valutare il rendimento della trasmissione motore-ruote che riduce ulteriormente la potenza utilizzabile per la trazione [come valore indicativo del rendimento di trasmissione si può assumere quello del 93%. In tale ipotesi si è segnata in Figura 82 anche la curva pd della potenza ottenibile alle ruote, in presa diretta(*)]. Poiché la potenza erogata da un motore a combustione interna dipende dalla pressione e dalla temperatura dell'aria in cui opera che in condizioni standard sono pari a 760 mmHg e 15 C°, sia nei riguardi delle condizioni di prova al banco che nelle condizioni di esercizio, dovrà operarsi una correzione della potenza misurata o disponibile, utilizzando delle formule proposte dai vari Enti di unificazione e che sono le seguenti: - metodo SAE
(a) ( ) ; 5.302
2734.736 0
2
trOH
trcorretta Ntpp
NNN −+
⋅−
⋅+=
- metodo CUNA
(b) ; 544
529760 0tp
NNcorretta+
⋅⋅=
- metodo DIN
(c) ; 293
273760 0tp
NNcorretta+
⋅⋅=
- metodo IGM
(d) . 544
529760 0tp
NNcorretta+
⋅⋅=
7.6 Consumi chilometrici e consumi orari I motori a combustione interna, nel trasformare l'energia termica in energia meccanica, consumano, per ogni CV erogato e per ogni h di funzionamento, una certa quantità di combustibile che prende il nome di consumo specifico. Il consumo specifico è funzione, oltre che delle caratteristiche costruttive del motore e quindi del suo rendimento totale, anche del numero di giri e del carico del motore (percentuale della potenza massima che viene utilizzata). Per ogni motore, le curve di potenza e di coppia e la curva del consumo specifico, che si esprime generalmente in gr/CV⋅h, al variare del numero di giri, vengono ricavate sperimentalmente al banco prova motori. Il motore viene fatto funzionare a pieno regime di ammissione e direttamente o indirettamente, al variare del numero di giri, si misurano i tre parametri suddetti. Nel diagramma di fig.107, sono riportate le curve di potenza, coppia e consumo specifico a piena ammissione in funzione del numero di giri. Per il calcolo del consumo orario valgono le seguenti formule:
(*) La presa diretta è una particolare condizione di trasmissione del moto rotatorio, per la quale il numero di giri compiuto nell'unità di tempo dall'albero primario del cambio di velocità, eguaglia quello compiuto dall'albero secondario. (l'albero primario è calettato sul volano del motore, il secondario sull'albero di trasmissione del moto alle ruote).
113
[ ]
[ ]. l/h q
; Kg/h
1
2
1
h γγNqq
Nqq
h
h
⋅==
⋅=
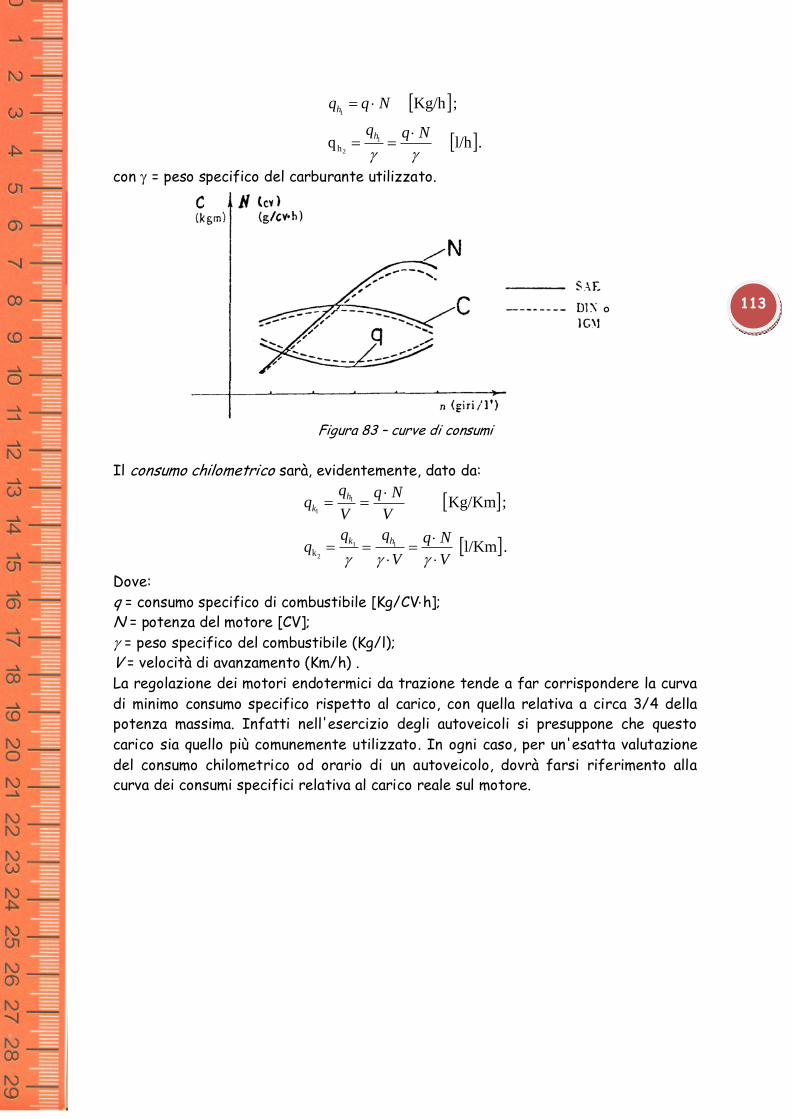
con γ = peso specifico del carburante utilizzato.
Figura 83 – curve di consumi
Il consumo chilometrico sarà, evidentemente, dato da:
[ ]
[ ]. l/Km
; Kg/Km
11
2
1
1
k VNq
Vqq
q
VNq
Vq
q
hk
hk
⋅⋅=
⋅==
⋅==
γγγ
Dove: q = consumo specifico di combustibile [Kg/CV⋅h]; N = potenza del motore [CV]; γ = peso specifico del combustibile (Kg/l); V = velocità di avanzamento (Km/h) . La regolazione dei motori endotermici da trazione tende a far corrispondere la curva di minimo consumo specifico rispetto al carico, con quella relativa a circa 3/4 della potenza massima. Infatti nell'esercizio degli autoveicoli si presuppone che questo carico sia quello più comunemente utilizzato. In ogni caso, per un'esatta valutazione del consumo chilometrico od orario di un autoveicolo, dovrà farsi riferimento alla curva dei consumi specifici relativa al carico reale sul motore.