4/2008:AIPND 3/2005 rivista - ndt.net - Il georadar.pdf · Il georadar è un metodo di indagine...
9
38 Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008 1. Riepilogo Da oltre un decennio, il georadar è impiegato in misura crescente per la valutazione non distruttiva di infra- strutture di trasporto. Per numerosi scopi di prova di ambito ingegneristi- co è stato possibile dimostrare che le informazioni fornite dal georadar hanno un’esattezza ed affidabilità suf- ficiente per la pratica. In questo con- tributo saranno presentate applicazio- ni tipiche d’impiego del georadar per verifiche/indagini non distruttive d’infrastrutture di trasporto e saranno discusse sulla base di esempi. Si porrà in particolare risalto la qualità dei ri- sultati ottenibile in condizioni reali- stiche. 2. Introduzione Infrastrutture come strade, ponti, tunnel e tratti ferroviari sono opere di grande valore. La loro manutenzione assorbe non solo enormi somme di denaro, ma è percepita spesso con disappunto a causa degli ostacoli al traffico che spesso l’accompagnano. A ciò si aggiunge che numerose costru- zioni presentano notevoli variazioni rispetto al progetto di costruzione. Procedimenti non distruttivi, che for- niscano informazioni con elevata effi- cienza ed esattezza sulla costruzione e sullo stato delle infrastrutture sono perciò di grande interesse e sono im- piegati sempre di più. 3. Materiali e quesiti di prova Le infrastrutture di trasporto consi- stono per la maggior parte di mate- riali quali il cemento armato (aggre- gati minerali, cemento, additivi), ac- ciaio, asfalto (componenti minerali, bitume, additivi) e componenti mi- nerali non coesi (per esempio tratti ferroviari e sottofondi stradali). Ec- cetto l’acciaio, questi materiali si prestano bene alla verifica con geo- radar, perché presentano una con- duttività elettrica minima. Lo spessore degli strati componenti la struttura è oggetto frequentemente di interrogativi d’indagine, come per esempio lo spessore del manto strada- le o di singoli strati di copertura, lo spessore del calcestruzzo nelle pareti di tunnel oppure la consistenza del pietrisco o ballast nei tratti ferroviari. Inoltre, a volte è necessario determi- nare la profondità e la posizione di materiali inglobati, ad esempio delle armature nel calcestruzzo, dei cavi di precompressione oppure degli anco- raggi negli elementi portanti. Nei ca- si più semplici è sufficiente la prova che un elemento incorporato previsto sia effettivamente presente. Oltre a questi quesiti di prova concer- nenti la struttura delle costruzioni, aumenta d’importanza anche la verifi- ca delle proprietà dei materiali, alme- no per la ricerca e lo sviluppo. Esem- pi in tal senso sono l’umidità dei ma- teriali, il contenuto di cloruro nel cal- cestruzzo o lo stato del manto in asfalto. 4. Principi del georadar Il georadar è un metodo di indagine elettromagnetico, denominato anche Ground Penetrating Radar (GPR), Surface Penetrating Radar oppure Electromagnetic Reflection Method. Prevalentemente è impiegato come procedimento in riflessione del se- gnale: un segnale radar è emesso me- diante un’antenna, penetra nei mate- Speciale RADAR Il Georadar per la valutazione non distruttiva di infrastrutture di trasporto Johannes Hugenschmidt EMPA, Swiss Federal Laboratories for Material Testing and Research Dübendorf/Svizzera [email protected] Key words: Ground penetrating radar (GPR), Transportation Fig. 1 - Principio radar Fig. 2 – Segnale emesso e ricevuto
Transcript of 4/2008:AIPND 3/2005 rivista - ndt.net - Il georadar.pdf · Il georadar è un metodo di indagine...

38 Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008
1. RiepilogoDa oltre un decennio, il georadar èimpiegato in misura crescente per lavalutazione non distruttiva di infra-strutture di trasporto. Per numerosiscopi di prova di ambito ingegneristi-co è stato possibile dimostrare che leinformazioni fornite dal georadarhanno un’esattezza ed affidabilità suf-ficiente per la pratica. In questo con-tributo saranno presentate applicazio-ni tipiche d’impiego del georadar perverifiche/indagini non distruttived’infrastrutture di trasporto e sarannodiscusse sulla base di esempi. Si porràin particolare risalto la qualità dei ri-sultati ottenibile in condizioni reali-stiche.
2. Introduzione Infrastrutture come strade, ponti,tunnel e tratti ferroviari sono opere digrande valore. La loro manutenzioneassorbe non solo enormi somme didenaro, ma è percepita spesso condisappunto a causa degli ostacoli altraffico che spesso l’accompagnano. Aciò si aggiunge che numerose costru-zioni presentano notevoli variazioni
rispetto al progetto di costruzione.Procedimenti non distruttivi, che for-niscano informazioni con elevata effi-cienza ed esattezza sulla costruzione esullo stato delle infrastrutture sonoperciò di grande interesse e sono im-piegati sempre di più.
3. Materiali e quesiti di provaLe infrastrutture di trasporto consi-stono per la maggior parte di mate-riali quali il cemento armato (aggre-gati minerali, cemento, additivi), ac-ciaio, asfalto (componenti minerali,bitume, additivi) e componenti mi-nerali non coesi (per esempio trattiferroviari e sottofondi stradali). Ec-cetto l’acciaio, questi materiali siprestano bene alla verifica con geo-radar, perché presentano una con-duttività elettrica minima.Lo spessore degli strati componenti lastruttura è oggetto frequentemente diinterrogativi d’indagine, come peresempio lo spessore del manto strada-le o di singoli strati di copertura, lospessore del calcestruzzo nelle paretidi tunnel oppure la consistenza delpietrisco o ballast nei tratti ferroviari.
Inoltre, a volte è necessario determi-nare la profondità e la posizione dimateriali inglobati, ad esempio dellearmature nel calcestruzzo, dei cavi diprecompressione oppure degli anco-raggi negli elementi portanti. Nei ca-si più semplici è sufficiente la provache un elemento incorporato previstosia effettivamente presente. Oltre a questi quesiti di prova concer-nenti la struttura delle costruzioni,aumenta d’importanza anche la verifi-ca delle proprietà dei materiali, alme-no per la ricerca e lo sviluppo. Esem-pi in tal senso sono l’umidità dei ma-teriali, il contenuto di cloruro nel cal-cestruzzo o lo stato del manto inasfalto.
4. Principi del georadarIl georadar è un metodo di indagineelettromagnetico, denominato ancheGround Penetrating Radar (GPR),Surface Penetrating Radar oppureElectromagnetic Reflection Method.Prevalentemente è impiegato comeprocedimento in riflessione del se-gnale: un segnale radar è emesso me-diante un’antenna, penetra nei mate-
Speciale RADAR
Il Georadar per la valutazione non distruttivadi infrastrutture di trasporto
Johannes HugenschmidtEMPA, Swiss Federal Laboratories for Material Testing and Research
Dübendorf/[email protected]
Key wor ds: Gr ound penetrating radar (GPR), Transpor tation
Fig. 1 - Principio radar Fig. 2 – Segnale emesso e ricevuto
Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008 39
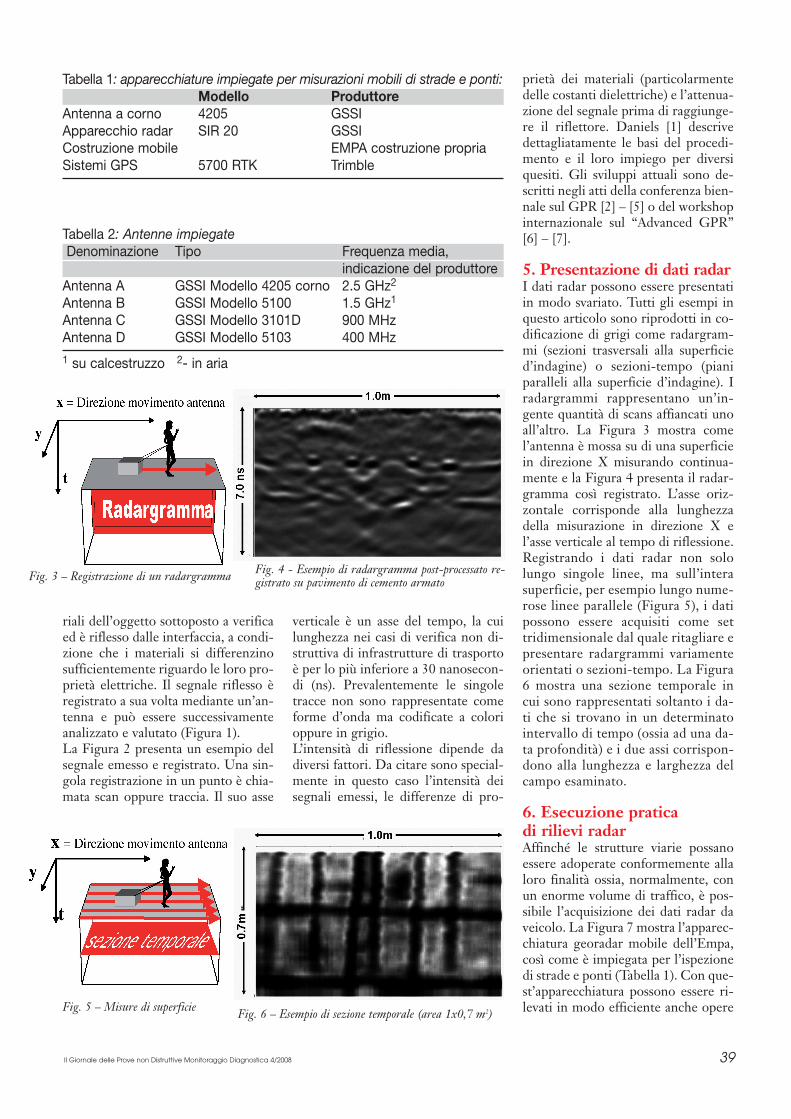
riali dell’oggetto sottoposto a verificaed è riflesso dalle interfaccia, a condi-zione che i materiali si differenzinosufficientemente riguardo le loro pro-prietà elettriche. Il segnale riflesso èregistrato a sua volta mediante un’an-tenna e può essere successivamenteanalizzato e valutato (Figura 1).La Figura 2 presenta un esempio delsegnale emesso e registrato. Una sin-gola registrazione in un punto è chia-mata scan oppure traccia. Il suo asse
verticale è un asse del tempo, la cuilunghezza nei casi di verifica non di-struttiva di infrastrutture di trasportoè per lo più inferiore a 30 nanosecon-di (ns). Prevalentemente le singoletracce non sono rappresentate comeforme d’onda ma codificate a colorioppure in grigio.L’intensità di riflessione dipende dadiversi fattori. Da citare sono special-mente in questo caso l’intensità deisegnali emessi, le differenze di pro-
prietà dei materiali (particolarmentedelle costanti dielettriche) e l’attenua-zione del segnale prima di raggiunge-re il riflettore. Daniels [1] descrivedettagliatamente le basi del procedi-mento e il loro impiego per diversiquesiti. Gli sviluppi attuali sono de-scritti negli atti della conferenza bien-nale sul GPR [2] – [5] o del workshopinternazionale sul “Advanced GPR”[6] – [7].
5. Presentazione di dati radarI dati radar possono essere presentatiin modo svariato. Tutti gli esempi inquesto articolo sono riprodotti in co-dificazione di grigi come radargram-mi (sezioni trasversali alla superficied’indagine) o sezioni-tempo (pianiparalleli alla superficie d’indagine). Iradargrammi rappresentano un’in-gente quantità di scans affiancati unoall’altro. La Figura 3 mostra comel’antenna è mossa su di una superficiein direzione X misurando continua-mente e la Figura 4 presenta il radar-gramma così registrato. L’asse oriz-zontale corrisponde alla lunghezzadella misurazione in direzione X el’asse verticale al tempo di riflessione. Registrando i dati radar non sololungo singole linee, ma sull’interasuperficie, per esempio lungo nume-rose linee parallele (Figura 5), i datipossono essere acquisiti come settridimensionale dal quale ritagliare epresentare radargrammi variamenteorientati o sezioni-tempo. La Figura6 mostra una sezione temporale incui sono rappresentati soltanto i da-ti che si trovano in un determinatointervallo di tempo (ossia ad una da-ta profondità) e i due assi corrispon-dono alla lunghezza e larghezza delcampo esaminato.
6. Esecuzione pratica di rilievi radarAffinché le strutture viarie possanoessere adoperate conformemente allaloro finalità ossia, normalmente, conun enorme volume di traffico, è pos-sibile l’acquisizione dei dati radar daveicolo. La Figura 7 mostra l’apparec-chiatura georadar mobile dell’Empa,così come è impiegata per l’ispezionedi strade e ponti (Tabella 1). Con que-st’apparecchiatura possono essere ri-levati in modo efficiente anche opere
Fig. 3 – Registrazione di un radargramma
Fig. 5 – Misure di superficie Fig. 6 – Esempio di sezione temporale (area 1x0,7 m2)
Fig. 4 - Esempio di radargramma post-processato re-gistrato su pavimento di cemento armato
Tabella 1: apparecchiature impiegate per misurazioni mobili di strade e ponti:Modello Produttore
Antenna a corno 4205 GSSIApparecchio radar SIR 20 GSSICostruzione mobile EMPA costruzione propriaSistemi GPS 5700 RTK Trimble
Tabella 2: Antenne impiegateDenominazione Tipo Frequenza media,
indicazione del produttoreAntenna A GSSI Modello 4205 corno 2.5 GHz2
Antenna B GSSI Modello 5100 1.5 GHz1
Antenna C GSSI Modello 3101D 900 MHzAntenna D GSSI Modello 5103 400 MHz
1 su calcestruzzo 2- in aria

40 Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008
di grande dimensione, infatti l’appa-recchiatura è predisposta per una ve-locità massima di 80 Km/h; nellaprassi la velocità durante le indagini èper lo più notevolmente più bassa. Suiponti per esempio si viaggia prevalen-temente a 10 Km/h, perché si devemisurare con precisione lungo lineedefinite in precedenza. Nel caso in cui non sia possibile l’im-piego di un’apparecchiatura mobile,si misura manualmente (Figura 8, Fi-gura 9) o si realizzano soluzioni parti-colari, come per esempio nelle inda-gini di tratti di linee ferroviarie (Figu-ra 10). La Tabella 2 presenta le antenne ado-perate per le configurazioni di appa-recchiature ed esempi di dati riporta-ti in questa relazione. Sono adoperatele denominazioni di “AntennaA/B/C“, per evitare l’uso permanente
di nomi di prodotti e ditte e per elu-dere le prevalenti, numerose indica-zioni per le frequenze medie da partedel produttore.Quando non è necessaria un’inter-pretazione dei dati radar direttamen-te sul luogo di rilievo, si rinuncia al-l’elaborazione in tempo reale durantele acquisizioni. L’elaborazione dei da-ti, prevalentemente monocanale, ese-guita immediatamente dopo le misu-re, consiste di singole sequenze d’ela-borazione come ad esempio filtraggipassabanda, correzione del punto ze-ro o “background removal”, e perse-gue diversi obiettivi come per esem-pio il miglioramento di rapporto trasegnale e rumore. La Figura 11 mo-stra un radargramma, registrato conun’attrezzatura mobile su di un pon-te della lunghezza di 25 m; in Figura12 è rappresentato l’analogo radar-
Fig. 7 - Apparecchiatura georadar mobile,antenna A
Fig. 8 – Misurazione manuale, antenna B Fig. 9 – Misurazione georadar alla parte sot-tostante di un ponte, antenna B
Fig. 10 - Dispositivo per la misurazione su bi-nari, antenna C
Fig. 11 – Radargramma del viadotto Wyssenried, antenna A Fig. 12 – Radargramma elaborato del viadotto Wyssenried, antenna A

Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008 41
gramma dopo l’elaborazione. Ovvia-mente l’elaborazione dei dati deve es-sere adattata sia al catalogo dei quesi-ti di prova sia alla qualità dei dati.
7. Esempi d’applicazione
Tratti ferroviariNelle indagini di tratti ferroviari,hanno priorità la consistenza di spes-sore del pietrisco (ballast) ed il rilievodi zone con materiale fine (sporco)penetrato sotto il pietrisco. A causadella lunghezza da esaminare, preva-
lentemente di diversi chilometri,s’impone l’impiego di un veicolo diprova (Figura 10). Il tempo disponibi-le per le misure è limitato alle pauseche intercorrono tra due treni, moti-vo per il quale in linea di massima simisura di notte. Infine binari, traver-sine e apparati addizionali posti lungoi binari, come scambi, conduzioni osistemi di sicurezza, costituiscono unproblema,La Figura 13 presenta il radargrammadi un tratto di tracciato ferroviariodella lunghezza di 40 m prima e dopo
l’elaborazione dati. Le sequenze d’e-laborazione impiegate sono descrittepiù dettagliatamente in [8]. Nell’e-sempio, le sopra riportate sfavorevolicondizioni possono essere superatemediante acquisizione ed elaborazio-ne dati adeguate che consentano d’a-vere a disposizione dati valutabili. In un progetto pilota su incarico delleFerrovie Federali Svizzere FFS, sonostati esaminati tre tratti di ferrovia peruna lunghezza complessiva di 15.1 km.Come supporto per l’elaborazione e lacalibrazione della velocità di propaga-
Fig. 13 - Tratto di ra-dargramma grezzo,20 ns (sopra) e datielaborati (sotto), an-tenna C
Fig. 17 – Viadotto Wyssenried
Fig. 14 – Tratto di ra-dargramma per deter-minare lo spessore delballast, 20 ns (sopra), einterpretazione, pro-fondità 1m (sotto); i fo-ri di sondaggio sonocontrassegnati con lineeverticali, antenna C
Fig. 15 – Radargram-ma di un tratto ferro-viario con zone argillo-se (sporco) su fondo delpietrisco, antenna C
Fig. 16 - Costruzione schematica di un impalcato per ponte

42 Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008
zione del segnale radar nel pietriscoerano a disposizione 41 fori di sondag-gio. In aggiunta a ciò sono stati scavatiin seguito, dalla FFS, 77 fori che nonerano disponibili durante la valutazio-ne dei dati radar e sono stati utilizzatiper controllare i risultati. Con l’ausilio dei fori di sondaggio, èstata individuata una velocità di pro-pagazione del segnale di 1.4* 108
m/s e mantenuta per tutta la lun-ghezza del tratto. La Figura 14 pre-senta un radargramma di 750 m dilunghezza unitamente all’elabora-zione per lo spessore del pietrisco.Quattro punti di sondaggio presentiin questo tratto sono marcati da li-nee nere verticali. Il numero a sini-stra accanto alla linea rappresenta lospessore del pietrisco ottenuto colradar, quello di destra rappresentalo spessore rilevato ai sondaggi di ri-ferimento. Il sondaggio a 66200 m
era a disposizione durante la valuta-zione dei dati radar, altrimenti lafalsa riflessione sarebbe stata inter-pretata probabilmente come limiteinferiore del pietrisco. La deviazio-ne media tra i risultati del radar equelli delle fessure di sondaggio am-monta a 4 cm. Con ciò i risultati ra-dar presentano una esattezza suffi-ciente per tutte le esigenze. Tra le 19 posizioni con materialesporco, riscontrate tramite sondaggi,ne sono stati localizzate 12 tramiteverifica radar; altre due sono stateidentificate come ipotetici punti consporco. Cinque zone non sono staterilevate per i seguenti motivi:• in 2 zone il materiale fine era pene-
trato solo 2 cm e 4 cm rispettiva-mente.
• Tre zone si trovavano nell’ambito diuna stazione, dove la qualità dei da-ti era pessima a causa di condutture
posate sul suolo e dei rifiuti sul pie-trisco.
La Figura 15 presenta un tratto di li-nea ferroviaria di 200 m di lunghezza,in cui è facilmente riconoscibile la ri-flessione al limite superiore di unaposizione con sporco come anche al-l’interno e nella parte inferiore delpietrisco.
PontiLa Figura 16 mostra schematicamen-te la costruzione di una soletta perponte con impermeabilizzante e co-pertura. Osservando l’impalcato insenso verticale dall’alto, è presenteper lo più una copertura d’asfaltomultistrato, il cui spessore può varia-re enormemente a seconda del pontee del tipo di copertura. Al di sotto sitrova un sigillante, prevalentementedi strati coibenti, bituminosi, saldati,dello spessore di 5 mm. Direttamente
Fig. 18 - Saggio di ispezione sulla soletta in cemento armato
Fig. 20 – Confronto tra risultati radar (X – linea tratteggiata),realtà (+ linea continua) e differenze assolute (punti) lungo tutto losviluppo del ponte
Fig. 21 – Radargramma con localizzazione di cavi di precompressione, 8 ns,lunghezza 4 m, antenna B
Fig. 19 – Soletta segata del ponte Wyssenried

Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008 43
sul calcestruzzo della soletta vengonoposti, a seconda della situazione, di-versi strati di fondo ed impermeabi-lizzanti. Nella soletta del ponte si tro-vano spesso diversi strati d’armatura ecavi di precompressione. La costru-zione qui descritta rappresenta un ca-so tipico, in pratica esistono peròmolti casi particolari.
I ponti presentano molti quesiti d’inda-gine che possono essere chiariti con ilgeoradar. Lo spessore del manto è dinotevole importanza, se l’asfalto doves-se essere fresato senza danneggiare ilmanto di impermeabilizzazione. Laprofondità dell’armatura nel calce-struzzo è rilevante per la protezionecontro la corrosione e per la statica; laposizione dei cavi di precompressionedeve essere nota, quando per esempio
dovessero essere eseguite delle perfora-zioni, perché il danneggiamento di untale cavo metterebbe in pericolo la sta-bilità del ponte. In un progetto di ricerca [9] conclu-sosi nell’anno 2005 sono state esami-nate l’esattezza e l’affidabilità dei ri-sultati radar sui ponti. Cinque pontidiversi, per i quali era prevista la de-molizione, sono stati esaminati amezzo georadar ed i risultati delle in-dagini sono stati resi pubblici. Duran-te e dopo la demolizione dei ponti,sono stati controllati i risultati radarrilevati lungo aree fresate e parti diponti segate e messe da parte. Il viadotto Wyssenried (Figura 17)era divenuto superfluo a causa dellacostruzione di un tratto ferroviario equindi necessitava demolizione. Il ra-dargramma ottenuto da un veicolo
mobile (Figure 11 e 12) presenta, os-servando dall’alto al basso, le seguen-ti riflessioni: 1 Transizione asfalto-cemento armato2 Posizione dell’armatura superiore3 Cavo di precompressione 4 Superficie inferiore della soletta del
ponte oppure posizione dell’arma-tura inferiore.
A sostegno delle interpretazioni radare per la calibrazione delle velocità dipropagazione del segnale radar nelmateriale era a disposizione un saggio(Figura 18). Nella demolizione è statamisurata la copertura superiore delferro (profondità della posizione del-l’armatura superiore nel calcestruzzo)lungo le parti segate del ponte (Figu-ra 19) usando un metro. Lo spessoredell’asfalto non poteva essere misura-to perché rimosso prima della demo-lizione della soletta. La Figura 21presenta il confronto tra risultati ra-dar e dati reali unitamente alle diffe-renze assolute. Il risultato radar ripro-duce fedelmente il decorso generalelungo il ponte. La differenza massimatra il risultato radar e la realtà am-monta a 41 mm. La deviazione media tra valori radar ereali è stata per tutti i cinque ponti di9 mm per lo spessore dell’asfalto e di10 mm per la copertura del ferro del-la maglia superiore d’armatura. Sul 95% e rispettivamente sul 77 % dellalunghezza esaminata, è stato possibileottenere un risultato per lo spessoredell’asfalto e la copertura del ferro.La localizzazione di cavi di precom-pressione si esegue per lo più con mi-surazioni manuali come per esempioin Figura 9. L’interpretazione dei dati
Fig. 22 – Parte superiore dell’apparecchiatu-ra per rilievi radar di pareti di sostegno
Fig. 24 - Sezione temporale di parete di sostegno, profondità ca. 4 cm,antenna B
Fig. 25 – Sezione temporale di parete di sostegno, profondità ca. 8 cm,antenna B
Fig. 23 – Parte inferiore dell’apparecchiaturaper rilievi di pareti di sostegno
44 Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008
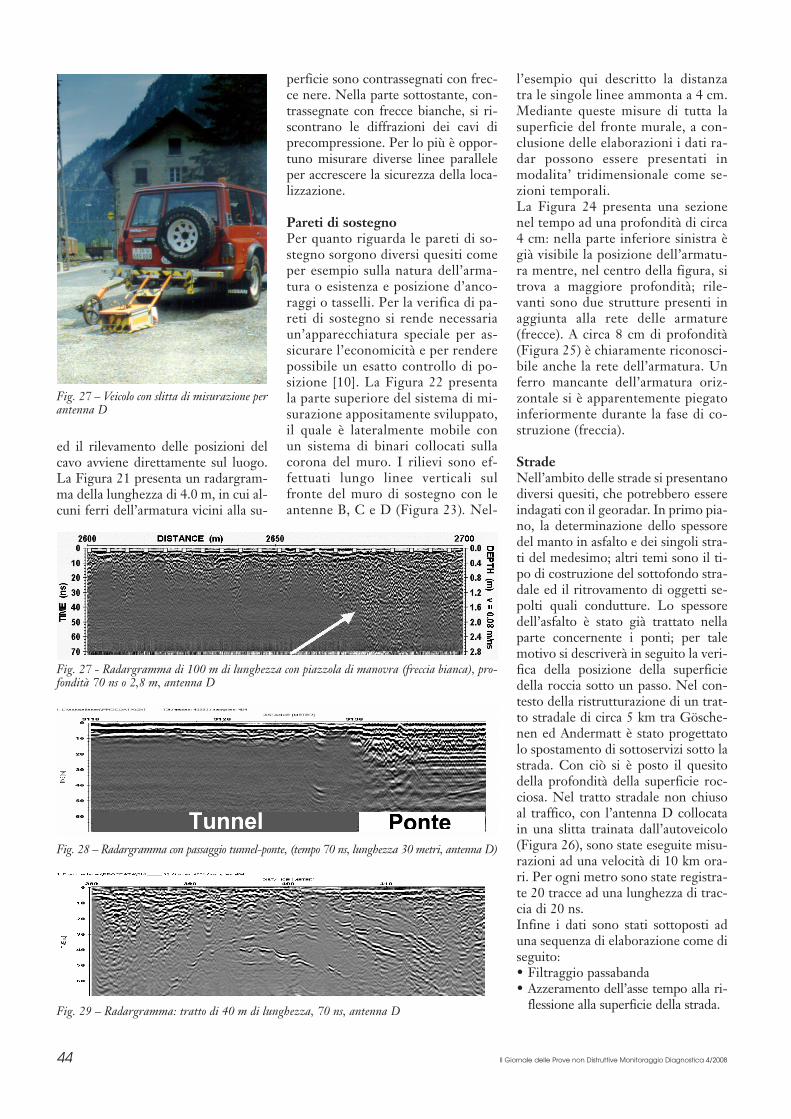
ed il rilevamento delle posizioni delcavo avviene direttamente sul luogo.La Figura 21 presenta un radargram-ma della lunghezza di 4.0 m, in cui al-cuni ferri dell’armatura vicini alla su-
perficie sono contrassegnati con frec-ce nere. Nella parte sottostante, con-trassegnate con frecce bianche, si ri-scontrano le diffrazioni dei cavi diprecompressione. Per lo più è oppor-tuno misurare diverse linee paralleleper accrescere la sicurezza della loca-lizzazione.
Pareti di sostegnoPer quanto riguarda le pareti di so-stegno sorgono diversi quesiti comeper esempio sulla natura dell’arma-tura o esistenza e posizione d’anco-raggi o tasselli. Per la verifica di pa-reti di sostegno si rende necessariaun’apparecchiatura speciale per as-sicurare l’economicità e per renderepossibile un esatto controllo di po-sizione [10]. La Figura 22 presentala parte superiore del sistema di mi-surazione appositamente sviluppato,il quale è lateralmente mobile conun sistema di binari collocati sullacorona del muro. I rilievi sono ef-fettuati lungo linee verticali sulfronte del muro di sostegno con leantenne B, C e D (Figura 23). Nel-
l’esempio qui descritto la distanzatra le singole linee ammonta a 4 cm.Mediante queste misure di tutta lasuperficie del fronte murale, a con-clusione delle elaborazioni i dati ra-dar possono essere presentati inmodalita’ tridimensionale come se-zioni temporali. La Figura 24 presenta una sezionenel tempo ad una profondità di circa4 cm: nella parte inferiore sinistra ègià visibile la posizione dell’armatu-ra mentre, nel centro della figura, sitrova a maggiore profondità; rile-vanti sono due strutture presenti inaggiunta alla rete delle armature(frecce). A circa 8 cm di profondità(Figura 25) è chiaramente riconosci-bile anche la rete dell’armatura. Unferro mancante dell’armatura oriz-zontale si è apparentemente piegatoinferiormente durante la fase di co-struzione (freccia).
StradeNell’ambito delle strade si presentanodiversi quesiti, che potrebbero essereindagati con il georadar. In primo pia-no, la determinazione dello spessoredel manto in asfalto e dei singoli stra-ti del medesimo; altri temi sono il ti-po di costruzione del sottofondo stra-dale ed il ritrovamento di oggetti se-polti quali condutture. Lo spessoredell’asfalto è stato già trattato nellaparte concernente i ponti; per talemotivo si descriverà in seguito la veri-fica della posizione della superficiedella roccia sotto un passo. Nel con-testo della ristrutturazione di un trat-to stradale di circa 5 km tra Gösche-nen ed Andermatt è stato progettatolo spostamento di sottoservizi sotto lastrada. Con ciò si è posto il quesitodella profondità della superficie roc-ciosa. Nel tratto stradale non chiusoal traffico, con l’antenna D collocatain una slitta trainata dall’autoveicolo(Figura 26), sono state eseguite misu-razioni ad una velocità di 10 km ora-ri. Per ogni metro sono state registra-te 20 tracce ad una lunghezza di trac-cia di 20 ns. Infine i dati sono stati sottoposti aduna sequenza di elaborazione come diseguito:• Filtraggio passabanda• Azzeramento dell’asse tempo alla ri-
flessione alla superficie della strada.
Fig. 27 – Veicolo con slitta di misurazione perantenna D
Fig. 27 - Radargramma di 100 m di lunghezza con piazzola di manovra (freccia bianca), pro-fondità 70 ns o 2,8 m, antenna D
Fig. 28 – Radargramma con passaggio tunnel-ponte, (tempo 70 ns, lunghezza 30 metri, antenna D)
Fig. 29 – Radargramma: tratto di 40 m di lunghezza, 70 ns, antenna D

Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008
45
• Conversione dei metri di lunghezzaradar nel sistema di lunghezza ado-perato dall’ente della strada
• Migrazione• Background RemovalLa valutazione dei dati si è rivelatadifficile, soprattutto perché erano adisposizione solo poche perforazio-ni, eseguite prima dell’indagine ra-dar. Ulteriori informazioni sulla sot-tostruttura della strada non erano
disponibili, conseguentemente la ve-locità di propagazione del segnaleradar è stata stimata di 0.8 m/ns. Intali condizioni i risultati non poteva-no essere esatti al centimetro, ma siè tentato di realizzare in prevalenzauna valutazione qualificata della si-tuazione della superficie rocciosa.Ciò appare il migliore dei possibilimezzi di verifica a disposizione perottenere informazioni ed, in aggiun-
ta, le superfici di roccia non sono piùrilevanti per il collocamento di con-duzioni a partire da una certa pro-fondità. Gli esempi di riflessione trovati neiradargrammi sono stati suddivisi in 4categorie:1.caotico e non strutturato,2.nessuna riflessione,3.strutturato,4.altri.Esempi di riflessione caotici si posso-no verificare per esempio su pietriscogrosso oppure su pezzi di roccia. Il ra-dargramma rappresentato nella Figu-ra 27 copre anche l’area di una piaz-zola di manovra (Figura 30, frecciabianca) dove la zona entro il muro disostegno è stata riempita con breccia-me ed altro. Nessuna riflessione è da aspettarsi inrocce massicce, intatte. La sezionemostrata in Fig. 28 proviene da unazona di passaggio da un breve tunnela un ponte (Fig. 31). Nella zona deltunnel, oltre i 15 ns, non si riscontra-no riflessioni alcune. Si possono registrare esempi di rifles-sione strutturati per esempio nelle zo-ne di roccia non intatta. La sezionemostrata nella Figura 29 presenta unesempio di riflessione che ricorda idisturbi sul gneis presente principal-mente in questa zona (Figura 32). Altri tipi di riflessione sono da aspet-tarsi su ponti (Figura 31) ma, poichésono irrilevanti per l’investigazione
Fig. 30 – Piazzola di manovra (freccia bianca)
Fig. 33 – Confronto tra risultato radar (linea sottile) e la superficie di roccia visibile (linea spessa);scala delle profondità fino a 2,4 m
Fig. 34 – Costruzione di una parete di tunnel e radargramma, 12 ns, 12.0m, antenna B
Fig. 31 – Passaggio tunnel-ponte Fig. 32 – Gneis esposto alle intemperie al latodella strada

46 Il Giornale delle Prove non Distruttive Monitoraggio Diagnostica 4/2008
della superficie di rocce, qui non sa-ranno trattati. La determinazione della profonditàdella superficie rocciosa (e della suaqualità) è stata eseguita basandosi so-prattutto su un procedimento diesclusione, nel quale le zone con cam-pioni di riflessione caotici sono stateritenute come giacenti sopra la super-ficie della roccia. In aggiunta le rifles-sioni strutturate sono state tenute inconsiderazione dove erano presenti.In questo modo si è potuto ottenereun risultato sulla maggior parte deltratto esaminato. Per verificare i ri-sultati, in alcuni posti dove la rocciasporgeva lateralmente dai muri di so-stegno si è confrontata la superficievisibile della roccia con il risultato delradar. Qui si trattava prevalentementedi un test di affidabilità, particolar-mente perché il muro di sostegno eralontano circa una mezza larghezza ditraccia dal profilo radar. Un simileconfronto, per una lunghezza di 140m, è rappresentato nella Figura 33.Per lo meno qualitativamente si ri-scontra una discreta coincidenza deidue risultati.
Pareti di tunnelIn una galleria sperimentale, sonostati registrati dati GPR in direzionedella lunghezza del tunnel, su unaparete lunga 12 m. La parete presen-tava cinque diverse costruzioni (Fig.34 sopra). Per mezzo di una misura-zione eseguita prima dell’ingresso ingalleria, è noto che la parete presen-ta solo minime variazioni di spessoreper tutta la lunghezza. Il radargram-ma corrispondente è presentato in fi-gura 34 sotto. Evidentemente la parete posteriorecausa una riflessione valutabile solo
dove è presente un distacco tra calce-struzzo e roccia. Il motivo di ciò pro-babilmente è dovuto al fatto che leproprietà del calcestruzzo e quelledella roccia (silico-calcarea) sono si-mili. In aggiunta a ciò si può costata-re che l’armatura può essere visualiz-zata dettagliatamente. Sul calcestruz-zo non armato, e senza distacchi, nonsi riscontrano riflessioni valutabili.
8. ConclusioniIl procedimento georadar è uno stru-mento molto efficace per la verificanon distruttiva quasi continua ed eco-nomica d’infrastrutture di trasporto. Per la valutazione quantitativa di datiradar sono necessarie altre informa-zioni come per esempio prelievi di ca-rote, saggi d’ispezione; questi sonoutili in ogni caso ed in molti casi ne-cessari. L’affidabilità e l’esattezza dei risultatiradar dipendono da tutto quanto siimpiega di volta in volta nella verifica,dalle informazioni complementariche sono a disposizione, dalla idonei-tà del procedimento per ogni doman-da posta e dalla complessità dell’og-getto esaminato. Si è potuto dimostrare che i risultatiottenuti per mezzo del georadar han-no per diversi quesiti un’esattezza edun’affidabilità sufficienti nella pratica.
9. RingraziamentiGli esempi mostrati provengono daprogetti di ricerca e servizi, eseguitiper incarico dell’Ufficio Federale perle Strade, della Ferrovia FederaleSvizzera FFS e dagli Uffici del GenioCivile dei Cantoni Uri e Zurigo. Aicommittenti è dovuto il ringrazia-mento per aver permesso la pubblica-zione.
10. Letteratura1. Daniels D. J.: Ground Penetrating
Radar, The Institution of Electri-cal Engineers, London, UnitedKingdom, second edition, 2004
2. Proc. 11th Int. Conf. Ground Pen-etrating Radar, GPR 2006, June19-22 2006, Columbus, Ohio,USA
3. Proc. 10th Int. Conf. Ground Pen-etrating Radar, GPR 2004, June21-24, Delft, The Netherlands
4. Proc. 9th Int. Conf. Ground Pen-etrating Radar, GPR 2002, April29-May 2, Santa Barbara, Califor-nia, USA
5. Proc. 8th Int. Conf. Ground Pen-etrating Radar, GPR 2000, May23-26, Gold Coast, Queensland,Australia
6. Proc. of the 2007 4th Int. Work-shop on Advanced Ground Pene-trating Radar, IWAGPR 2007,June 27-29 2007, Naples, Italy
7. Proc. of the 2005 3rd Int. Work-shop on Advanced Ground Pene-trating Radar, IWAGPR 2005,May 2-3 2005, Delft, TheNetherlands
8. Hugenschmidt J.: Railway trackinspection using GPR, Journal ofApplied Geophysics, 43, 2000, pp.147-155
9. Hugenschmidt J. and MastrangeloR.: GPR inspection of concretebridges, Cement & ConcreteComposites, 28 (2006), pp. 384-392
10.Hugenschmidt J. and MastrangeloR.: The inspection of large retain-ing walls using GPR, Proc. of the2007 4th Int. Workshop on Ad-vanced Ground PenetratingRadar, June ’07 27-29, Naples,Italy, pp 267-271