2573 interno - Aracne editrice · 7.5.1 Stabilità dinamica longitudinale 7.5.1.1 Equazioni del...
26
A09 129
Transcript of 2573 interno - Aracne editrice · 7.5.1 Stabilità dinamica longitudinale 7.5.1.1 Equazioni del...
A09129

Teoria del volodell’elicottero
Aerodinamica – Meccanica del volo
Dott. Ing. Giovanni Di Giorgio
Seconda edizione

Copyright © MMIXARACNE editrice S.r.l.
via Raffaele Garofalo, 133 A/B00173 Roma
(06) 93781065
ISBN 978–88–548–2573–4
I diritti di traduzione, di memorizzazione elettronica,di riproduzione e di adattamento anche parziale,
con qualsiasi mezzo, sono riservati per tutti i Paesi.
Non sono assolutamente consentite le fotocopiesenza il permesso scritto dell’Editore.
I edizione: novembre 2007II edizione: giugno 2009
7
Indice
Prefazione alla seconda edizione 13
Prefazione alla prima edizione 15
Unità di misura 17
Elenco dei simboli 19
Sigle ed abbreviazioni 25
Capitolo 1 Configurazioni degli elicotteri 1.1 L’elicottero ed il volo verticale 27 1.2 Le configurazioni degli elicotteri
1.2.1 Sistemi non convenzionali di generazione della spinta anticoppia
28 32
1.3 Il rotore ed i comandi di volo 1.3.1 Le tipologie costruttive fondamentali del rotore principale e del rotore di coda anticoppia 1.3.2 I comandi ed il meccanismo del piatto oscillante
33 33
37
Capitolo 2 Aerodinamica del rotore nel volo in traslazione assiale ed a punto fisso (hover)
2.1 Introduzione 43 2.2 Teoria impulsiva 43
2.2.1 Volo verticale in salita 44 2.2.2 Volo a punto fisso (hover) 48 2.2.3 Volo verticale in discesa 49 2.2.3 Curve della velocità indotta in volo verticale 51
2.3 Teoria dell’elemento di pala 52 2.3.1 La trazione generata dal rotore, la coppia e la
potenza richieste 55
2.3.2 Svergolamento lineare della pala rotore 59 2.3.3 Velocità indotta non uniforme 61 2.3.4 Perdite di radice e perdite all’estremità di pala 63 2.3.5 Figura di Merito 64
8
2.3.6 Procedura di calcolo dei parametri aerodinamici, dei carichi sulla pala e della potenza richiesta
66
2.4 L’effetto suolo 71 2.5 Introduzione alla Teoria vorticosa 72
2.5.1 Richiami di dinamica dei fluidi ideali 2.5.2 Relazioni fondamentali applicate al rotore 2.5.2.1 Applicazione del Teorema di Kutta-Joukowsky 2.5.2.2 Velocità indotte dai vortici, la Legge di Biot-Savart 2.5.3 Modellazione del rotore in hover e problematiche di calcolo 2.5.4 Fenomeni di interazione dovuti ai vortici d’estremità 2.5.5 Scia fissata a priori, il modello di Landgrebe in hover
74 78 79 80
82
84
85
Capitolo 3 Dinamica del rotore
3.1 Introduzione 89 3.2 Assi e piani fondamentali 89 3.3 Il moto di flappeggio della pala 92 3.4 Eccentricità della cerniera di flappeggio e momenti di
controllo 95
3.5 Il rotore in volo avanzato: il moto di flappeggio delle pale ed il principio della precessione giroscopica
100
3.6 Moto di brandeggio della pala 102 3.7 Variazione ciclica del passo 103 3.8 Accoppiamenti tra i moti fondamentali della pala 105
Capitolo 4 Aerodinamica del rotore in volo avanzato 4.1 Introduzione 109 4.2 Teoria impulsiva 110 4.3 Teoria dell’elemento di pala 113
4.3.1 Calcolo delle componenti della velocità del flusso sulla pala rotore 4.3.1.1 Regione di flusso inverso 4.3.2 Angolo di incidenza locale 4.3.3 Le sollecitazioni aerodinamiche sul rotore, equazioni in forma chiusa 4.3.3.1 Calcolo della trazione 4.3.3.2 Calcolo della resistenza H4.3.3.3 Calcolo della coppia
113
118 119 121
124 128 132
4.4 Coefficienti di flappeggio 134 4.5 Piano di non flappeggio e piano del mozzo 137
9
4.5.1 Grandezze aerodinamiche riferite al piano di non flappeggio 4.5.2 Grandezze aerodinamiche riferite al piano del mozzo
137
139
4.6 Equilibrio dell’elicottero ed aerodinamica del rotore 141 4.7 Correzione dei risultati della Teoria dell’elemento di pala 145 4.8 Limiti della Teoria dell’elemento di pala 147 4.9 Fenomeni di stallo e compressibilità 147
4.9.1 Terminale di pala a freccia e numero di Mach locale
152
4.10 Cenni sui modelli di scia del rotore in volo avanzato 153 4.11 Aerodinamica computazionale e metodologie avanzate
ad approccio multidisciplinare 156
Capitolo 5 L’equilibrio dell’elicottero5.1 Introduzione 159 5.2 Sistemi di riferimento 160 5.3 Equazioni generali del moto dell’elicottero 162 5.4 Condizioni di equilibrio (‘trim’) dell’elicottero 167
5.4.1 Trattazione generale dell’equilibrio (‘trim’) 167 5.5 Momento di reazione del sistema rotore-fusoliera 169 5.6 Trattazione semplificata dell’equilibrio (trim) 171
5.6.1 Equazioni di equilibrio in volo avanzato 171 5.6.2 Espressione della Potenza in volo avanzato orizzontale
177
5.7 Stima rapida delle condizioni di equilibrio longitudinale 179 5.8 Soluzione generale dell’equilibrio (‘trim’) 183 5.9 L’autorotazione 193
5.9.1 Autorotazione del rotore e manovra di autorotazione dell’elicottero
193
5.9.1.1 Condizione aerodinamica in autorotazione 194 5.9.1.2 Fase finale della manovra di autorotazione ed
atterraggio 195
5.9.2 Limitazioni all’autorotazione e Diagramma Quota-Velocità
197
5.9.3 Osservazioni conclusive 198
Capitolo 6 Prestazioni dell’elicottero
6.1 Introduzione 199 6.2 La potenza richiesta totale 199 6.3 Atmosfera standard 200 6.4 Il motore e la potenza disponibile 203
10
6.4.1 Il regime operativo del rotore principale 204 6.4.2 Configurazione costruttiva del motore turbo- albero a turbina libera (free shaft turbine engine)
205
6.4.3 Il sistema rotore/trasmissione/motore 207 6.4.4 Prestazioni del motore installato: le potenze disponibili
209
6.5 Prestazioni in hover 211 6.5.1 Le potenze richieste RPP e rcP nel volo a punto fisso (hover)
211
6.5.2 Resistenza verticale dell’elicottero 6.5.3 Quota massima di hovering
212 214
6.6 Prestazioni in salita verticale 215 6.7 Prestazioni in volo traslato orizzontale
6.7.1 Le potenze richieste RPP e rcP6.7.1.1 La resistenza parassita fD in volo orizzontale
216 216
218
6.7.2 La potenza necessaria totale in volo orizzontale 6.7.2.1 Velocità massima in volo livellato 6.7.2.2 Autonomie di volo 6.7.2.3 Correzioni della potenza richiesta per stallo e compressibilità
221 225 226 228
6.8 Prestazioni in volo traslato in salita ed in discesa 229 6.8.1 La potenza necessaria RPP nel volo traslato in salita
229
6.8.2 Ratei ed angoli di salita, quote di tangenza 230 6.8.3 La potenza necessaria RPP nel volo traslato in discesa
234
6.9 Prestazioni in autorotazione 234 6.10 Analisi di missione 236
6.10.1 Peso al decollo ed in atterraggio 236 6.10.2 Impostazione dello studio di missione 238
Capitolo 7 Stabilità e controllo; introduzione alla Dinamica del
volo dell’elicottero7.1 Introduzione 241 7.2 Stabilità statica e stabilità dinamica 242 7.3 Stabilità statica 242
7.3.1 Stabilità al disturbo di velocità 243 7.3.2 Stabilità al disturbo di ‘incidenza’ 243 7.3.3 Stabilità direzionale (disturbo d’imbardata) 244
7.4 Stabilità dinamica 244 7.4.1 Teoria delle piccole perturbazioni 247 7.4.2 Introduzione delle derivate di stabilità 249
11
7.4.3 Osservazioni sul metodo di studio delle piccole perturbazioni
251
7.5 Stabilità dinamica longitudinale e latero-direzionale in hover
252
7.5.1 Stabilità dinamica longitudinale 7.5.1.1 Equazioni del moto, rappresentazione agli stati
252 253
7.5.2 Stabilità dinamica latero-direzionale 258 7.6 Stabilità dinamica longitudinale e latero-direzionale in
volo avanzato 261
7.6.1 Stabilità dinamica longitudinale 261 7.6.2 Stabilità dinamica latero-direzionale 264
7.7 Controllo dell’elicottero 265 7.7.1 Stabilità, Controllo e Qualità di volo 265 7.7.2 Controllo longitudinale in hover; approccio ad un grado di libertà
266
7.7.3 Controllo latero-direzionale in hover; approccio ad un grado di libertà
268
Capitolo 8 Manovre a traiettoria curva in un piano orizzontale e in un piano verticale
8.1 Introduzione 269 8.2 Virata corretta stabilizzata 269
8.2.1 Cenni sulle virate 272 8.2.2 Momenti precessionali d’inerzia nella manovra di virata
272
8.2.3 Potenza richiesta in virata corretta 272 8.3 Richiamata stabilizzata 273
Capitolo 9 Elicotteri con due rotori controrotanti coassiali o in tandem
9.1 Introduzione 275 9.2 Elicotteri con due rotori controrotanti coassiali 275
9.2.1 Applicazione della Teoria impulsiva al volo a punto fisso
275
9.2.2 Caratteristiche generali dell’elicottero 278 9.2.3 Equilibrio dell’elicottero intorno all’asse velivolo Z
281
9.3 Elicotteri con due rotori controrotanti in tandem 282 9.3.1 Descrizione generale e definizioni 282 9.3.2 Applicazione della Teoria impulsiva e della Teoria dell’elemento di pala al volo a punto fisso
284
9.3.3 Applicazione della Teoria impulsiva al volo in avanzamento livellato
287
12
9.3.4 Dati sperimentali 289 9.3.5 Condizione di equilibrio longitudinale dell’elicottero
289
9.3.6 Osservazioni sulla Stabilità 292 9.3.6.1 Stabilità al disturbo di velocità 292 9.3.6.2 Stabilità dinamica a comandi bloccati in hover 293
Appendice A Definizioni dei coefficienti adimensionali del rotore 295 Appendice B Atmosfera ISA 296
Appendice C Richiami sulla trasformata di Laplace 297
Indice delle figure 299 Indice delle tabelle 304 Bibliografia 305 Indice analitico 309
Capitolo 1
Configurazioni degli elicotteri 1.1 L’elicottero ed il volo verticale Differentemente dagli aeromobili ad ala fissa, per l’elicottero (aeromobile ad ala rotante) le forze di sostentamento, di propulsione e di controllo sono generate dal rotore, costituito dalle pale collegate ad un mozzo centrale e mantenuto in rotazione da uno o più motori mediante uno specifico sistema di trasmissione. Il moto relativo tra l’aria e le pale (di opportuna forma in pianta, svergolamento e profilo aerodinamico) necessario per generare portanza è dovuto alla rotazione di queste ultime; in virtù di tale proprietà l’elicottero può sostenere condizioni di volo traslato con velocità molto basse, fino alla condizione di volo a punto fisso rispetto al suolo (definita con il termine ‘hover’, ed eseguibile per intervalli di tempo significativi), con la possibilità di effettuare il volo in salita ed in discesa verticale, inclusi il decollo e l’atterraggio verticale. Il moto di avanzamento dell’elicottero si ottiene mediante l’inclinazione dell’asse di applicazione della trazione prodotta dal rotore in conseguenza dell’inclinazione del disco rotore (disco descritto dalle estremità delle pale in rotazione, con la trazione perpendicolare al disco), imposta tramite sistemi e meccanismi di comando intrinsecamente complessi e vitali per la sicurezza del volo. In tal modo si ottiene una componente della trazione nella direzione di traslazione, la forza propulsiva, che equilibra la resistenza aerodinamica all’avanzamento e consente la traslazione dell’elicottero.
28 Capitolo 1
Essendo possibile inclinare il disco rotore in ogni direzione, può essere effettuato il volo traslato in avanti, laterale ed all’indietro. Nell’ambito dei velivoli a decollo ed atterraggio verticale (VTOL), per gli elicotteri il carico sul disco rotore assume valori tipicamente compresi tra 100 e 600 N/m2. Le caratteristiche descritte conferiscono all’elicottero la capacità di eseguire particolari e specifiche missioni.
Si ritiene opportuno, pertanto, dedicare il primo capitolo del testo alla descrizione schematica delle configurazioni costruttive tipiche degli elicotteri, dei rotori che essi impiegano e dei relativi comandi di volo; le proprietà e le caratteristiche presentate saranno poi tradotte in termini analitici.
1.2 Le configurazioni degli elicotteri
La rotazione imposta all’assieme rotore tramite un albero collegato (mediante un sistema di trasmissione) al motore installato in fusoliera comporta la presenza di una coppia di reazione che pone fusoliera e rotore in moto di reciproca ed opposta rotazione (allo sviluppo della coppia di reazione ed allo studio analitico dell’equilibrio dell’elicottero è dedicato il Capitolo 5). Il disegno della configurazione costruttiva di un elicottero è ovviamente condizionato dall’azione di contrasto nei confronti di tale fenomeno; adottando una classificazione degli elicotteri secondo il tipo, il numero e la disposizione dei rotori, le configurazioni fondamentali risultano essere le seguenti:
· con singolo rotore principale e con rotore di coda anticoppia; · con due rotori controrotanti in tandem; · con due rotori controrotanti coassiali; · con due rotori controrotanti ‘side by side’.
Nel primo caso, la coppia di reazione rotore/fusoliera è contrastata dal rotore anticoppia di coda, mentre nei rimanenti casi è cancellata dalla mutua azione dei due rotori controrotanti.
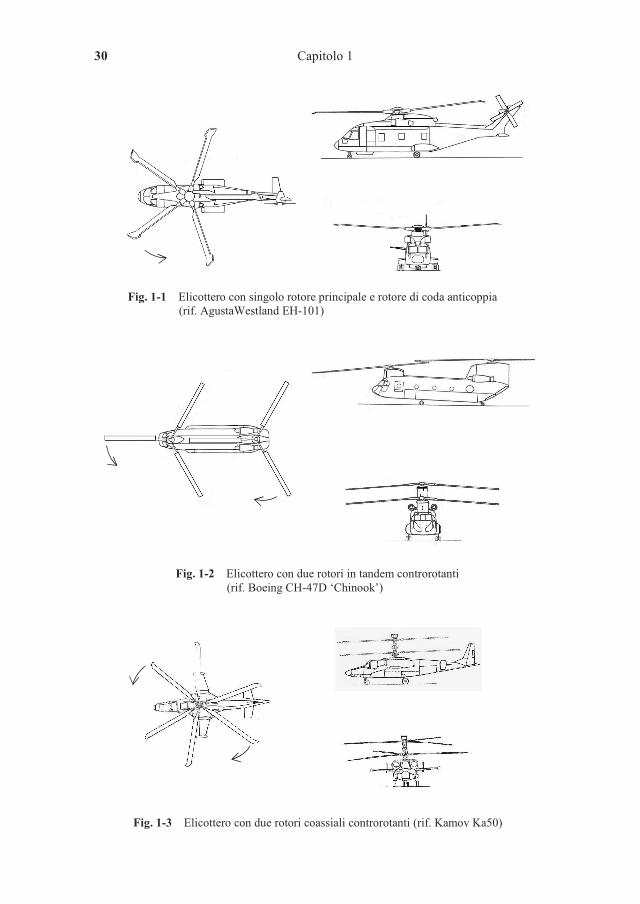
Elicottero con singolo rotore principale e con rotore di coda anticoppia E’ questa la configurazione di maggiore applicazione (fig. 1-1), detta anche configurazione convenzionale; si caratterizza per il singolo rotore principale
Configurazioni degli elicotteri 29
posto sulla parte superiore della fusoliera, al quale è demandato il sostentamento, la spinta (che consente il moto traslato), il controllo longitudinale, laterale e verticale dell’elicottero; in particolare il controllo longitudinale e laterale si ottengono, rispettivamente, facendo inclinare il disco rotore in avanti (o indietro) e lateralmente, in entrambi i casi azionando il comando ciclico (rif. par. 1.3.2). Il controllo verticale si ottiene, invece, facendo variare la trazione prodotta (mediante variazione del passo collettivo, rif. par. 1.3.2). Sulla parte di coda dell’aeromobile è installato un rotore anticoppia di diametro minore, con moto collegato a quello del rotore principale, il quale garantisce una spinta in direzione laterale; quest’ultima, mediante un braccio opportuno, consente di equilibrare la coppia di reazione del rotore principale/fusoliera ed, inoltre, consente il controllo direzionale dell’elicottero.
Elicottero con due rotori controrotanti in tandemDi particolare interesse è certamente la scelta di impiegare due rotori uguali in tandem controrotanti (fig. 1-2), risultata negli ultimi decenni adeguata per il trasporto di carichi elevati e di diversa tipologia, sia nel campo strettamente militare che nelle missioni di protezione civile: la fusoliera può contenere un’ampia area cargo per il trasporto di truppe, di mezzi militari, attrezzature ed equipaggiamenti, oltre a consentire operazioni di trasporto di elevati carichi esterni al gancio. La soluzione tipicamente applicata prevede due rotori in tandem tripala completamente articolati. Il controllo longitudinale dell’elicottero viene effettuato facendo variare in modo differente la trazione prodotta dai due rotori (mediante variazioni differenti del passo collettivo dei due rotori, rif. par. 1.3.2); il controllo laterale si ottiene facendo inclinare lateralmente e nello stesso verso entrambi i rotori (mediante variazione uniforme del passo ciclico laterale, rif. par. 1.3.2). Il controllo direzionale si effettua facendo inclinare i due rotori lateralmente ed in verso opposto; infine, il controllo verticale si ottiene mediante variazione uniforme della trazione prodotta da entrambi i rotori (variazione uniforme del passo collettivo dei due rotori).
Elicottero con due rotori controrotanti coassialiIn fig. 1-3 sono rappresentate le tre viste di un elicottero a due rotori uguali coassiali controrotanti. Tale scelta costruttiva ha trovato applicazione nei paesi dell’Europa orientale, ed anche se non ha avuto ampia diffusione, resta sicuramente originale.
30 Capitolo 1
Fig. 1-1 Elicottero con singolo rotore principale e rotore di coda anticoppia (rif. AgustaWestland EH-101)
Fig. 1-2 Elicottero con due rotori in tandem controrotanti (rif. Boeing CH-47D ‘Chinook’)
Fig. 1-3 Elicottero con due rotori coassiali controrotanti (rif. Kamov Ka50)
Configurazioni degli elicotteri 31
Si caratterizza per i rotori di raggio contenuto, con favorevole impiego nei casi di operazioni da unità navali (per le quali le dimensioni geometriche costituiscono un requisito di vincolo importante). Anche in questo caso, i modelli reali che impiegano tale configurazione sono dotati di due rotori tripala completamente articolati e coassiali. Il controllo longitudinale dell’elicottero viene effettuato facendo inclinare in avanti (oppure indietro) entrambi i rotori; il controllo laterale si ottiene facendo inclinare lateralmente e nello stesso verso entrambi i rotori (mediante variazione uniforme del passo ciclico laterale). Il controllo direzionale si ottiene facendo variare la coppia dei rotori in maniera differente ed il controllo verticale si effettua mediante variazione della trazione prodotta da entrambi i rotori.
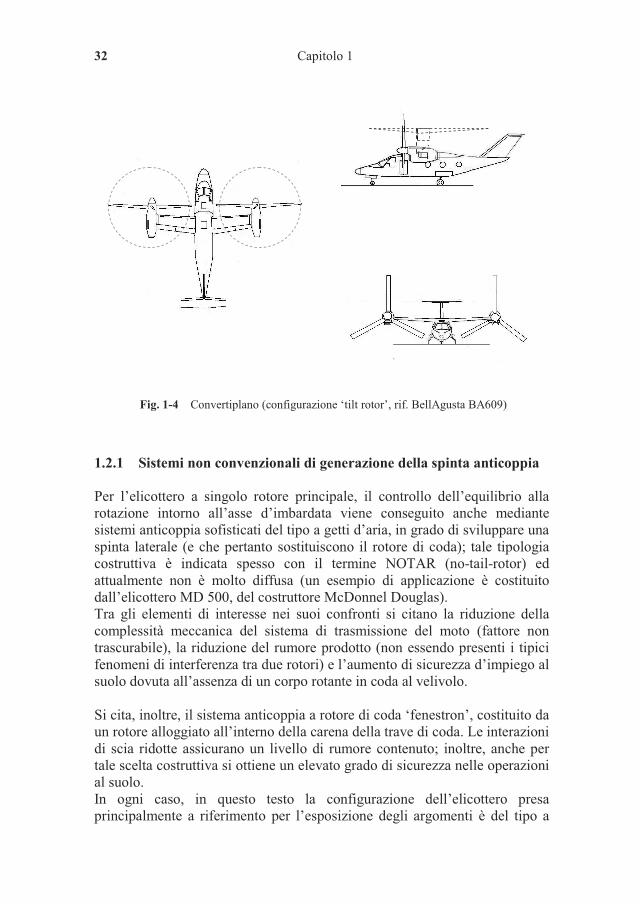
Elicottero con due rotori controrotanti affiancati (‘side by side’)Quest’ultima configurazione ha trovato pochissime applicazioni pratiche (alcuni elicotteri pesanti di progettazione russa) e si caratterizza per la disposizione dei due rotori lungo la direzione trasversale rispetto alla fusoliera, installati alle estremità di due semiali o strutture reticolari, al di sopra dei relativi motori. Il controllo dell’elicottero si ottiene in modalità simili al caso della configurazione a due rotori contro-rotanti in tandem, con le differenze introdotte dalla nuova disposizione dei rotori. Si precisa che in configurazione ‘side by side’ non sono state previste zone di intersezione per i due dischi rotorici. Se tale configurazione non si è imposta per gli elicotteri, è comunque stata scelta quale soluzione costruttiva di posizionamento dei rotori del convertiplano, aeromobile in grado di volare sia in modalità elicottero sia in modalità aeroplano, mediante opportuna rotazione dell’asse dei rotori (configurazione ‘tilt rotor’, fig. 1-4) o mediante rotazione dell’ala, alla cui estremità sono solidalmente installati i due rotori (configurazione ‘tilt wing’). Negli ultimi decenni il convertiplano ha destato elevato interesse per il particolare profilo di volo proposto, delineato dalle caratteristiche di forza dell’elicottero (possibilità di eseguire il volo verticale ed il volo a punto fisso) e dell’aeroplano (possibilità di volare a velocità dell’ordine dei 500 km/h, superando, pertanto, le limitazioni di velocità di avanzamento dell’elicottero, rif. Cap. 4). Si registrano numerosi modelli sperimentali e da alcuni anni è in produzione una versione militare statunitense (Bell Boeing V22 ‘Osprey’); prossimamente è prevista l’entrata in servizio di una versione per impieghi governativi e commerciali, il convertiplano (tilt rotor) Bell Agusta BA609, che comporterà senza dubbio nuove modalità di impiego operativo, con l’abbattimento di importanti limiti di offerta dell’attuale trasporto aereo.
32 Capitolo 1
1.2.1 Sistemi non convenzionali di generazione della spinta anticoppia Per l’elicottero a singolo rotore principale, il controllo dell’equilibrio alla rotazione intorno all’asse d’imbardata viene conseguito anche mediante sistemi anticoppia sofisticati del tipo a getti d’aria, in grado di sviluppare una spinta laterale (e che pertanto sostituiscono il rotore di coda); tale tipologia costruttiva è indicata spesso con il termine NOTAR (no-tail-rotor) ed attualmente non è molto diffusa (un esempio di applicazione è costituito dall’elicottero MD 500, del costruttore McDonnel Douglas). Tra gli elementi di interesse nei suoi confronti si citano la riduzione della complessità meccanica del sistema di trasmissione del moto (fattore non trascurabile), la riduzione del rumore prodotto (non essendo presenti i tipici fenomeni di interferenza tra due rotori) e l’aumento di sicurezza d’impiego al suolo dovuta all’assenza di un corpo rotante in coda al velivolo.
Si cita, inoltre, il sistema anticoppia a rotore di coda ‘fenestron’, costituito da un rotore alloggiato all’interno della carena della trave di coda. Le interazioni di scia ridotte assicurano un livello di rumore contenuto; inoltre, anche per tale scelta costruttiva si ottiene un elevato grado di sicurezza nelle operazioni al suolo. In ogni caso, in questo testo la configurazione dell’elicottero presa principalmente a riferimento per l’esposizione degli argomenti è del tipo a
Fig. 1-4 Convertiplano (configurazione ‘tilt rotor’, rif. BellAgusta BA609)
Configurazioni degli elicotteri 33
singolo rotore principale con rotore anticoppia di coda (fig. 1-1), in quanto di maggiore applicazione.
1.3 Il rotore ed i comandi di volo
1.3.1 Le tipologie costruttive fondamentali del rotore principale e del rotore di coda anticoppia
L’assieme rotore principale è costituito da due o più pale uguali collegate ad un mozzo centrale; quest’ultimo, mediante un innesto dentato, è calettato sulla brocciatura superiore dell’albero rotore (mast), il quale è mantenuto in rotazione dal motore tramite un apposito sistema di trasmissione. I rotori sono fondamentalmente classificati in funzione della tipologia di collegamento tra le pale ed il mozzo; il tipo di cerniera influisce in modo determinante sulle qualità di volo (come sarà evidenziato nel prosieguo), sugli aspetti aeroelastici e di vibrazione, ed ogni soluzione costruttiva si caratterizza per proprietà favorevoli e per altre meno favorevoli. Le scelte del progettista, in generale, sono dettate dall’impiego dell’elicottero e dagli aspetti legati ai costi. Si premette che la pala rotore è dotata di tre movimenti fondamentali, i quali, con riferimento alla configurazione del mozzo completamente articolato a cerniere meccaniche (riportata in fig. 1-6), sono così definiti:
a) un movimento di rotazione intorno ad un proprio e particolare asse longitudinale (asse di variazione passo), definito moto di variazione del passo, che consente di controllare l’angolo d’attacco della pala;
b) un movimento intorno ad un asse giacente nel piano del mozzo e perpendicolare alla direzione radiale della pala stessa, definito di moto di flappeggio;
c) un movimento nel piano di rotazione, definito moto di anticipo/ritardo o di brandeggio.
Per gli aspetti di base, si premette che il moto di variazione (aumento/diminuzione) del passo della pala consente di controllare le forze aerodinamiche sul rotore e pertanto di aumentare/diminuire la trazione prodotta (perpendicolare al piano del disco). Il moto di flappeggio consente di contrastare l’asimmetria di portanza che si avrebbe nel volo in
34 Capitolo 1
avanzamento, in virtù della diversa velocità relativa del flusso che interessa la pala avanzante e la pala retrocedente. Il terzo moto (brandeggio), è dovuto principalmente all’insorgere delle forze di Coriolis in conseguenza del moto di flappeggio delle pale in rotazione. Tali argomenti saranno ripresi e trattati nel Capitolo 3, dedicato alla dinamica del rotore; per quanto di interesse del presente paragrafo, di seguito sono descritte le tipologie fondamentali di rotore (nelle figure 1-5, 1-6 ed 1-7 sono rappresentati i relativi schemi).
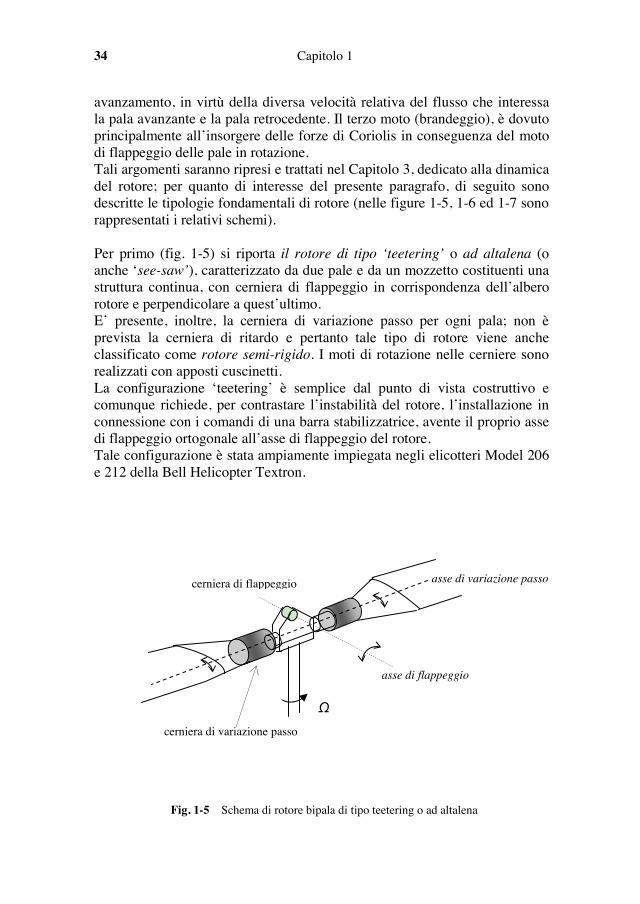
Per primo (fig. 1-5) si riporta il rotore di tipo ‘teetering’ o ad altalena (o anche ‘see-saw’), caratterizzato da due pale e da un mozzetto costituenti una struttura continua, con cerniera di flappeggio in corrispondenza dell’albero rotore e perpendicolare a quest’ultimo. E’ presente, inoltre, la cerniera di variazione passo per ogni pala; non è prevista la cerniera di ritardo e pertanto tale tipo di rotore viene anche classificato come rotore semi-rigido. I moti di rotazione nelle cerniere sono realizzati con apposti cuscinetti. La configurazione ‘teetering’ è semplice dal punto di vista costruttivo e comunque richiede, per contrastare l’instabilità del rotore, l’installazione in connessione con i comandi di una barra stabilizzatrice, avente il proprio asse di flappeggio ortogonale all’asse di flappeggio del rotore. Tale configurazione è stata ampiamente impiegata negli elicotteri Model 206 e 212 della Bell Helicopter Textron.
Fig. 1-5 Schema di rotore bipala di tipo teetering o ad altalena
cerniera di flappeggio
asse di flappeggio
cerniera di variazione passo
asse di variazione passo
Configurazioni degli elicotteri 35
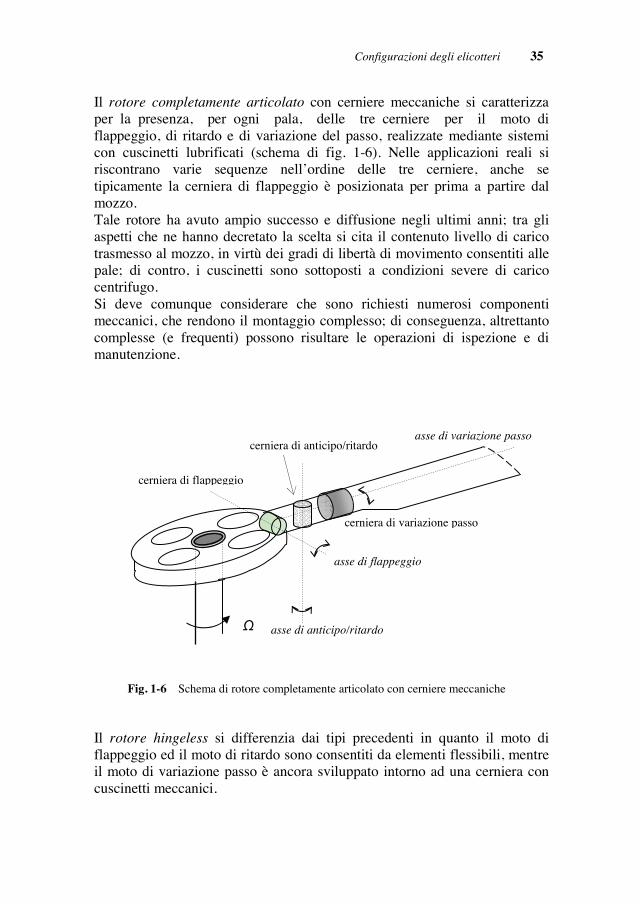
Il rotore completamente articolato con cerniere meccaniche si caratterizza per la presenza, per ogni pala, delle tre cerniere per il moto di flappeggio, di ritardo e di variazione del passo, realizzate mediante sistemi con cuscinetti lubrificati (schema di fig. 1-6). Nelle applicazioni reali si riscontrano varie sequenze nell’ordine delle tre cerniere, anche se tipicamente la cerniera di flappeggio è posizionata per prima a partire dal mozzo. Tale rotore ha avuto ampio successo e diffusione negli ultimi anni; tra gli aspetti che ne hanno decretato la scelta si cita il contenuto livello di carico trasmesso al mozzo, in virtù dei gradi di libertà di movimento consentiti alle pale; di contro, i cuscinetti sono sottoposti a condizioni severe di carico centrifugo. Si deve comunque considerare che sono richiesti numerosi componenti meccanici, che rendono il montaggio complesso; di conseguenza, altrettanto complesse (e frequenti) possono risultare le operazioni di ispezione e di manutenzione.
Il rotore hingeless si differenzia dai tipi precedenti in quanto il moto di flappeggio ed il moto di ritardo sono consentiti da elementi flessibili, mentre il moto di variazione passo è ancora sviluppato intorno ad una cerniera con cuscinetti meccanici.
asse di flappeggio
cerniera di flappeggio
asse di anticipo/ritardo
cerniera di variazione passo
cerniera di anticipo/ritardo
Fig. 1-6 Schema di rotore completamente articolato con cerniere meccaniche
asse di variazione passo
36 Capitolo 1
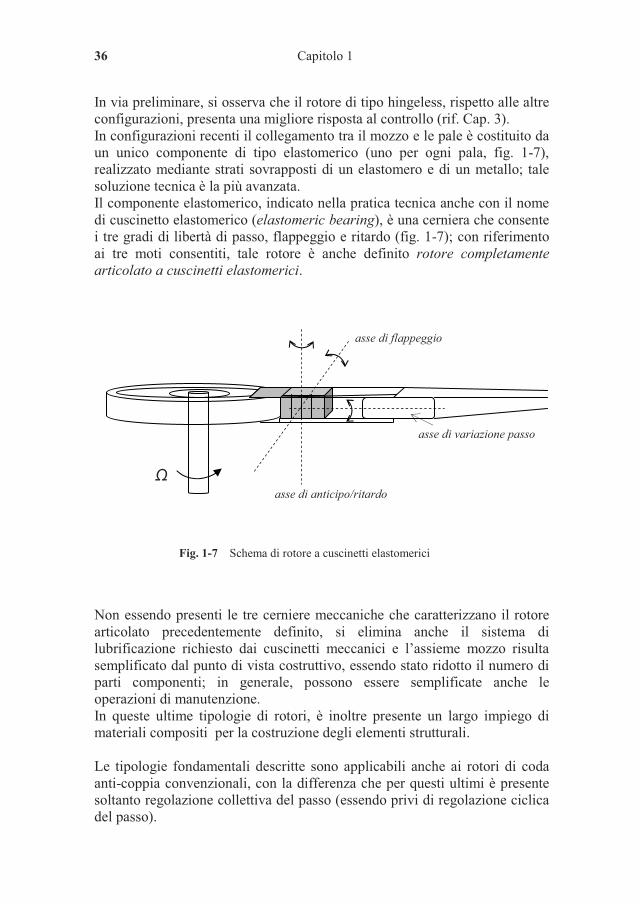
In via preliminare, si osserva che il rotore di tipo hingeless, rispetto alle altre configurazioni, presenta una migliore risposta al controllo (rif. Cap. 3). In configurazioni recenti il collegamento tra il mozzo e le pale è costituito da un unico componente di tipo elastomerico (uno per ogni pala, fig. 1-7), realizzato mediante strati sovrapposti di un elastomero e di un metallo; tale soluzione tecnica è la più avanzata. Il componente elastomerico, indicato nella pratica tecnica anche con il nome di cuscinetto elastomerico (elastomeric bearing), è una cerniera che consente i tre gradi di libertà di passo, flappeggio e ritardo (fig. 1-7); con riferimento ai tre moti consentiti, tale rotore è anche definito rotore completamente articolato a cuscinetti elastomerici.
Non essendo presenti le tre cerniere meccaniche che caratterizzano il rotore articolato precedentemente definito, si elimina anche il sistema di lubrificazione richiesto dai cuscinetti meccanici e l’assieme mozzo risulta semplificato dal punto di vista costruttivo, essendo stato ridotto il numero di parti componenti; in generale, possono essere semplificate anche le operazioni di manutenzione. In queste ultime tipologie di rotori, è inoltre presente un largo impiego di materiali compositi per la costruzione degli elementi strutturali.
Le tipologie fondamentali descritte sono applicabili anche ai rotori di coda anti-coppia convenzionali, con la differenza che per questi ultimi è presente soltanto regolazione collettiva del passo (essendo privi di regolazione ciclica del passo).
�asse di anticipo/ritardo
Fig. 1-7 Schema di rotore a cuscinetti elastomerici
asse di variazione passo
asse di flappeggio
Configurazioni degli elicotteri 37
1.3.2 I comandi ed il meccanismo del piatto oscillante
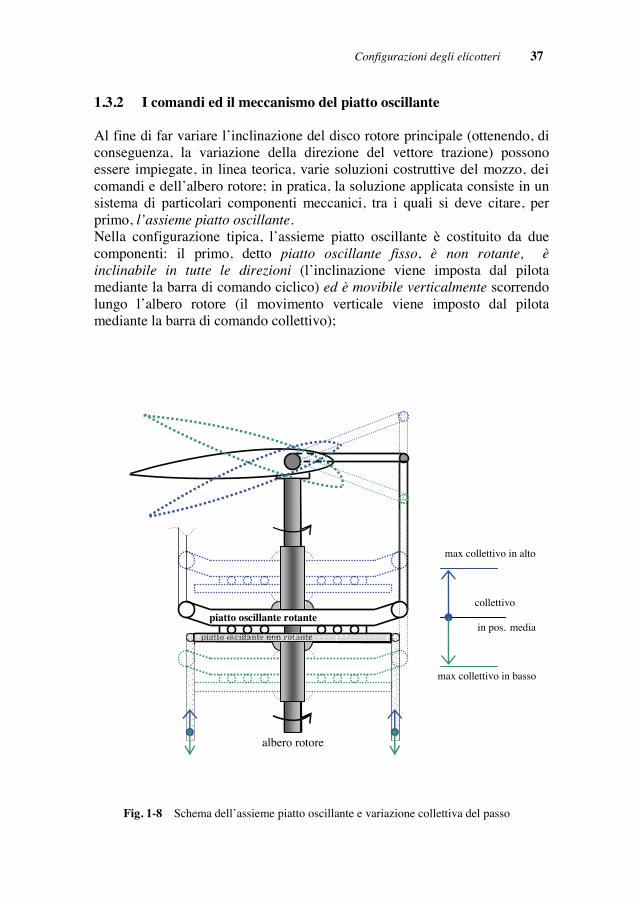
Al fine di far variare l’inclinazione del disco rotore principale (ottenendo, di conseguenza, la variazione della direzione del vettore trazione) possono essere impiegate, in linea teorica, varie soluzioni costruttive del mozzo, dei comandi e dell’albero rotore; in pratica, la soluzione applicata consiste in un sistema di particolari componenti meccanici, tra i quali si deve citare, per primo, l’assieme piatto oscillante. Nella configurazione tipica, l’assieme piatto oscillante è costituito da due componenti: il primo, detto piatto oscillante fisso, è non rotante, è inclinabile in tutte le direzioni (l’inclinazione viene imposta dal pilota mediante la barra di comando ciclico) ed è movibile verticalmente scorrendo lungo l’albero rotore (il movimento verticale viene imposto dal pilota mediante la barra di comando collettivo);
Fig. 1-8 Schema dell’assieme piatto oscillante e variazione collettiva del passo
piatto oscillante rotante
piatto oscillante non rotante
albero rotore
collettivo
in pos. media
max collettivo in alto
max collettivo in basso
38 Capitolo 1
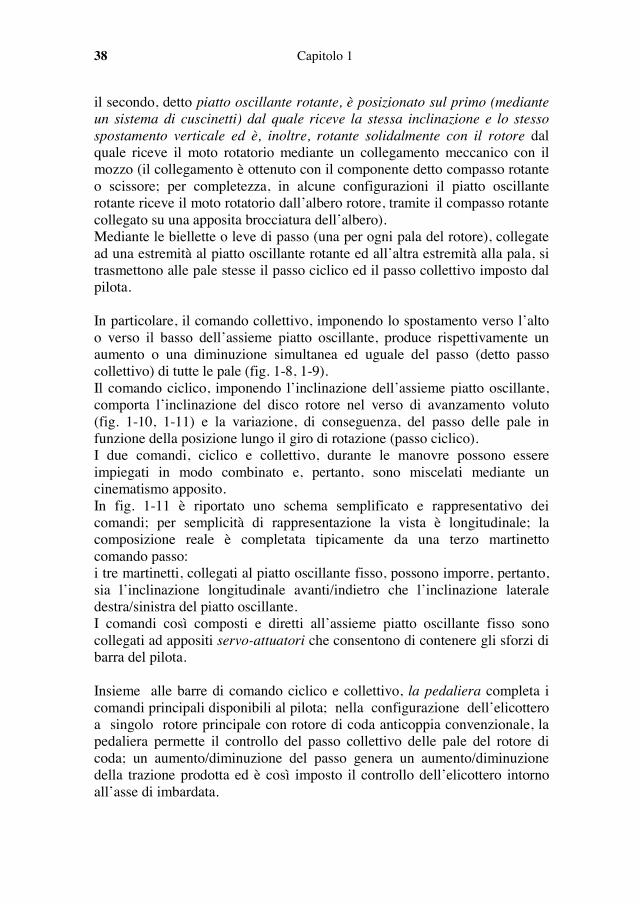
il secondo, detto piatto oscillante rotante, è posizionato sul primo (mediante un sistema di cuscinetti) dal quale riceve la stessa inclinazione e lo stesso spostamento verticale ed è, inoltre, rotante solidalmente con il rotore dal quale riceve il moto rotatorio mediante un collegamento meccanico con il mozzo (il collegamento è ottenuto con il componente detto compasso rotante o scissore; per completezza, in alcune configurazioni il piatto oscillante rotante riceve il moto rotatorio dall’albero rotore, tramite il compasso rotante collegato su una apposita brocciatura dell’albero). Mediante le biellette o leve di passo (una per ogni pala del rotore), collegate ad una estremità al piatto oscillante rotante ed all’altra estremità alla pala, si trasmettono alle pale stesse il passo ciclico ed il passo collettivo imposto dal pilota.
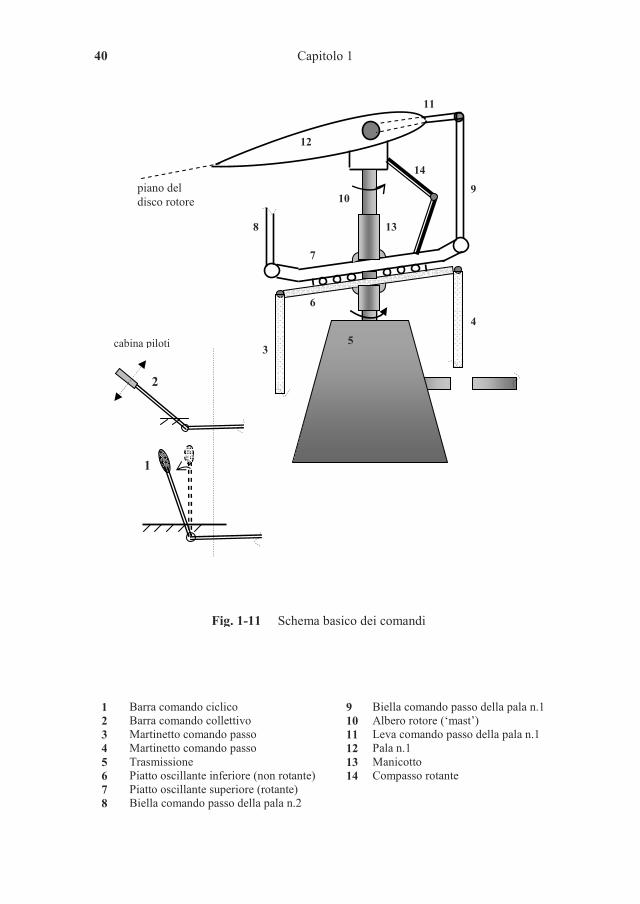
In particolare, il comando collettivo, imponendo lo spostamento verso l’alto o verso il basso dell’assieme piatto oscillante, produce rispettivamente un aumento o una diminuzione simultanea ed uguale del passo (detto passo collettivo) di tutte le pale (fig. 1-8, 1-9). Il comando ciclico, imponendo l’inclinazione dell’assieme piatto oscillante, comporta l’inclinazione del disco rotore nel verso di avanzamento voluto (fig. 1-10, 1-11) e la variazione, di conseguenza, del passo delle pale in funzione della posizione lungo il giro di rotazione (passo ciclico). I due comandi, ciclico e collettivo, durante le manovre possono essere impiegati in modo combinato e, pertanto, sono miscelati mediante un cinematismo apposito. In fig. 1-11 è riportato uno schema semplificato e rappresentativo dei comandi; per semplicità di rappresentazione la vista è longitudinale; la composizione reale è completata tipicamente da una terzo martinetto comando passo: i tre martinetti, collegati al piatto oscillante fisso, possono imporre, pertanto, sia l’inclinazione longitudinale avanti/indietro che l’inclinazione laterale destra/sinistra del piatto oscillante. I comandi così composti e diretti all’assieme piatto oscillante fisso sono collegati ad appositi servo-attuatori che consentono di contenere gli sforzi di barra del pilota.
Insieme alle barre di comando ciclico e collettivo, la pedaliera completa i comandi principali disponibili al pilota; nella configurazione dell’elicottero a singolo rotore principale con rotore di coda anticoppia convenzionale, la pedaliera permette il controllo del passo collettivo delle pale del rotore di coda; un aumento/diminuzione del passo genera un aumento/diminuzione della trazione prodotta ed è così imposto il controllo dell’elicottero intorno all’asse di imbardata.
Configurazioni degli elicotteri 39
Fig. 1-10 Inclinazione del disco rotore e comando ciclico
trazione T
spinta di traslazione
ciclico in pos. neutraciclico in basso
pala 1
pala 2
piatto oscillante rotante
cerniera di variazione passo
albero rotore
leva comando passo della pala 1
mozzo
Fig. 1-9 Schema del piatto oscillante, vista dall’alto
40 Capitolo 1
1 Barra comando ciclico 9 Biella comando passo della pala n.1 2 Barra comando collettivo 10 Albero rotore (‘mast’) 3 Martinetto comando passo 11 Leva comando passo della pala n.1 4 Martinetto comando passo 12 Pala n.1 5 Trasmissione 13 Manicotto 6 Piatto oscillante inferiore (non rotante) 14 Compasso rotante 7 Piatto oscillante superiore (rotante) 8 Biella comando passo della pala n.2
3
4
5
6
7
8
910
11
12
13
15
cabina piloti
2
5
14piano del disco rotore
Fig. 1-11 Schema basico dei comandi
1
2

Configurazioni degli elicotteri 41
In ultimo, i meccanismi di comando posizionati al di sopra del piatto oscillante sono classificati come ‘comandi rotanti’, mentre i meccanismi di comando diretti dalla cabina piloti fino al piatto oscillante non rotante sono classificati come ‘comandi fissi’.