2. 3. 4. 5. - scienze.uniroma2.it°-e-11°-ora... · 3. Prima legge di Newton: ... Abbiamo appreso...
23
Dinamica del punto materiale 1. La meccanica classica o Newtoniana. 2. Concetto di Forza 3. Prima legge di Newton: il principio di inerzia 4. Legge di inerzia e sistemi di riferimento inerziali 5. Concetto di Massa e definizione della quantità di moto 6. Seconda legge di Newton 7. Conservazione della quantità di moto 8. Terza legge di Newton: il principio di azione e reazione 9. Definizione operativa della forza ed unità di misura 10.Definizione operativa della massa 11.Esempi di forze: la forza peso 12. La forza elastica: Legge di Hooke
Transcript of 2. 3. 4. 5. - scienze.uniroma2.it°-e-11°-ora... · 3. Prima legge di Newton: ... Abbiamo appreso...

Dinamica del punto materiale
1. La meccanica classica o Newtoniana. 2. Concetto di Forza 3. Prima legge di Newton: il principio di inerzia 4. Legge di inerzia e sistemi di riferimento inerziali 5. Concetto di Massa e definizione della quantità di moto 6. Seconda legge di Newton 7. Conservazione della quantità di moto 8. Terza legge di Newton: il principio di azione e reazione 9. Definizione operativa della forza ed unità di misura 10. Definizione operativa della massa 11. Esempi di forze: la forza peso 12. La forza elastica: Legge di Hooke
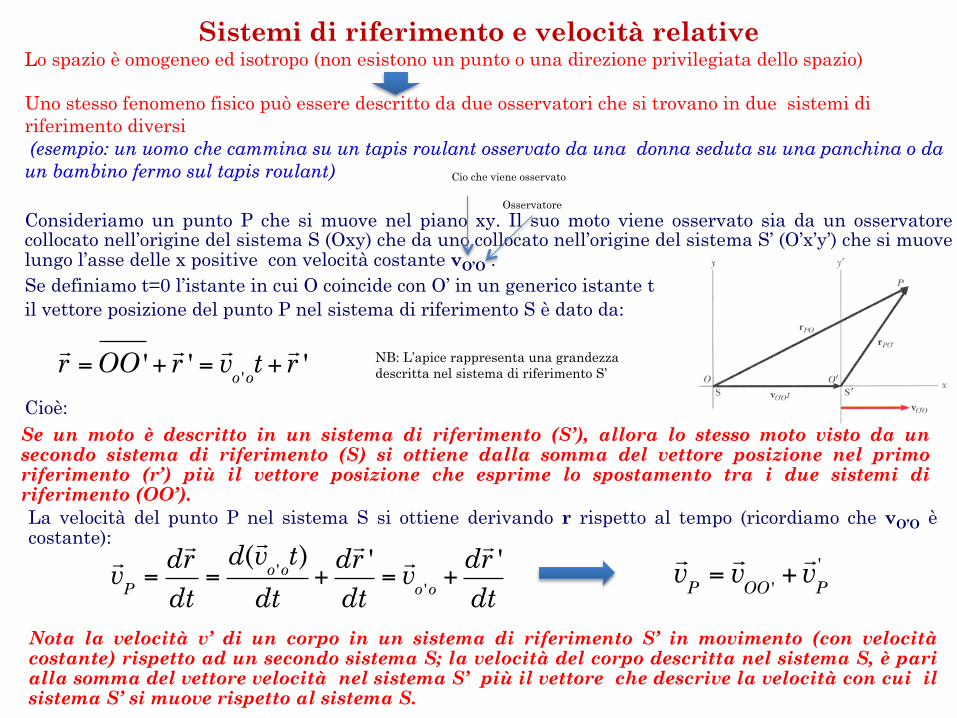
Sistemi di riferimento e velocità relative Lo spazio è omogeneo ed isotropo (non esistono un punto o una direzione privilegiata dello spazio) Uno stesso fenomeno fisico può essere descritto da due osservatori che si trovano in due sistemi di riferimento diversi (esempio: un uomo che cammina su un tapis roulant osservato da una donna seduta su una panchina o da un bambino fermo sul tapis roulant) Consideriamo un punto P che si muove nel piano xy. Il suo moto viene osservato sia da un osservatore collocato nell’origine del sistema S (Oxy) che da uno collocato nell’origine del sistema S’ (O’x’y’) che si muove lungo l’asse delle x positive con velocità costante vO’O . Se definiamo t=0 l’istante in cui O coincide con O’ in un generico istante t il vettore posizione del punto P nel sistema di riferimento S è dato da: Cioè:
!r =OO '+
!r ' =!vo 'ot +!r '
Cio che viene osservato
Osservatore
!vP=d!rdt
=d(!vo 'ot)
dt+d!r 'dt
=!vo 'o+d!r 'dt
NB: L’apice rappresenta una grandezza descritta nel sistema di riferimento S’
Se un moto è descritto in un sistema di riferimento (S’), allora lo stesso moto visto da un secondo sistema di riferimento (S) si ottiene dalla somma del vettore posizione nel primo riferimento (r’) più il vettore posizione che esprime lo spostamento tra i due sistemi di riferimento (OO’). La velocità del punto P nel sistema S si ottiene derivando r rispetto al tempo (ricordiamo che vO’O è costante):
!vP=!vOO '
+!vP'
Nota la velocità v’ di un corpo in un sistema di riferimento S’ in movimento (con velocità costante) rispetto ad un secondo sistema S; la velocità del corpo descritta nel sistema S, è pari alla somma del vettore velocità nel sistema S’ più il vettore che descrive la velocità con cui il sistema S’ si muove rispetto al sistema S.
Meccanica Newtoniana
Ø La dinamica di un punto materiale affronta lo studio delle cause del moto. L’accelerazione è causata da “qualcosa che spinge o tira”. Se tiriamo o spingiamo un corpo su di esso “applichiamo una forza”. Bisogna fare però attenzione che non sempre le forze causano un movimento.
Ø La teoria che lega le cause del moto alle variabili cinematiche che lo descrivono è detta Meccanica.
Ø Noi studiamo la meccanica classica, ovvero la teoria nella quale tutti i fenomeni di moto si possono descrivere usando soltanto tre leggi semplici dette leggi di Newton.
Ø Vengono introdotti i concetti di Forza e di Massa, tramite i quali è possibile collegare le cause del moto alle variabili cinematiche che lo descrivono.
Forza
Ø Il moto di un corpo è il risultato della sua interazione con i corpi circostanti.
Ø I fisici sono riusciti a ricondurre tutti i fenomeni al manifestarsi di quattro tipi di interazioni fondamentali:
Ø Gravitazionale(originata dalla presenza di materia)
Ø Elettromagnetica (originata dalla presenza di carica elettrica)
Ø Debole (responsabile di alcuni decadimenti radioattivi)
Ø Forte (operante tra le particelle fondamentali e genera il legame tra i nuclei)
Ø Ultimamente le interazioni elettromagnetica e debole sono state unificate in un’unica teoria “elettro-debole”.
Ø Le interazioni di un corpo con l’ ambiente esterno sono sintetizzate (in meccanica classica) dall’azione di una grandezza fisica vettoriale detta Forza. Ø L’azione simultanea di più forze su di un corpo si può sintetizzare tramite la loro somma vettoriale (detta RISULTANTE).

Prima legge di Newton
Questa legge in realtà risale ai tempi di Galileo ( alla prima metà del 17° secolo) , è conosciuta con il nome di PRINCIPIO D’ INERZIA e dice: “ Un corpo a riposo, rimane a riposo ed un corpo in movimento continua a muoversi con velocità costante se su di esso non agiscono forze esterne”
Ogni corpo permane nel suo stato iniziale di quiete o di moto rettilineo uniforme, fin quando non è costretto a cambiare il suo stato da una forza che viene applicata su di esso
Prima legge nella forma espressa da Newton:
Questo concetto ci è familiare ma va contro l’esperienza comune: se lanciamo un oggetto con una certa velocità iniziale esso non se ne andrà via lungo una traiettoria rettilinea, ma ad un certo punto si fermerà.. Questo perché c’è la forza gravitazionale Ma se pensiamo di fare la stessa cosa nello spazio? L’oggetto proseguirà indefinitamente il suo moto lungo la direzione della velocità iniziale.
Inerzia: Tendenza di un corpo ad opporsi ad una variazione del moto
Sistema di riferimento inerziale
Il principio di inerzia non è valido in tutti i sistemi di riferimento
Il principio di inerzia è valido nei sistemi di riferimento INERZIALI
Sistema di riferimento INERZIALE= Un qualsiasi Sistema di riferimento che si muove con velocità costante ( quindi con accelerazione nulla)
Se un sistema di riferimento è inerziale, ogni altro sistema che si muove a velocità costante rispetto ad esso è ancora un riferimento inerziale.
La prima legge di Newton si può sintetizzare dicendo che se , cioè quando su un corpo non agisce alcuna forza, la sua accelerazione è nulla Ciò implica che vi può essere movimento ( a velocità costante) senza che agiscano forze sul corpo e che tale legge non distingue tra corpo in quiete o a velocità costante. In effetti se un corpo si trova a v=0 oppure a v≠0 dipende dal sistema di riferimento dal quale lo si osserva. (Se osserviamo un passeggero seduto su un treno in movimento dal sedile di fronte esso è in quiete, se lo osserviamo dalla stazione esso è in movimento)
00 =⇒= aF !!
NB: possiamo provare la prima legge di newton? NO- perché non possiamo essere sicuri al 100% che il nostro sistema di riferimento sia un sistema inerziale Ma ci fidiamo??? SI- perché tale legge è consistente, all’interno dell’incertezza sperimentale, con tutti gli esperimenti che sono stati fatti finora ( metodo scientifico)
Sistemi inerziali
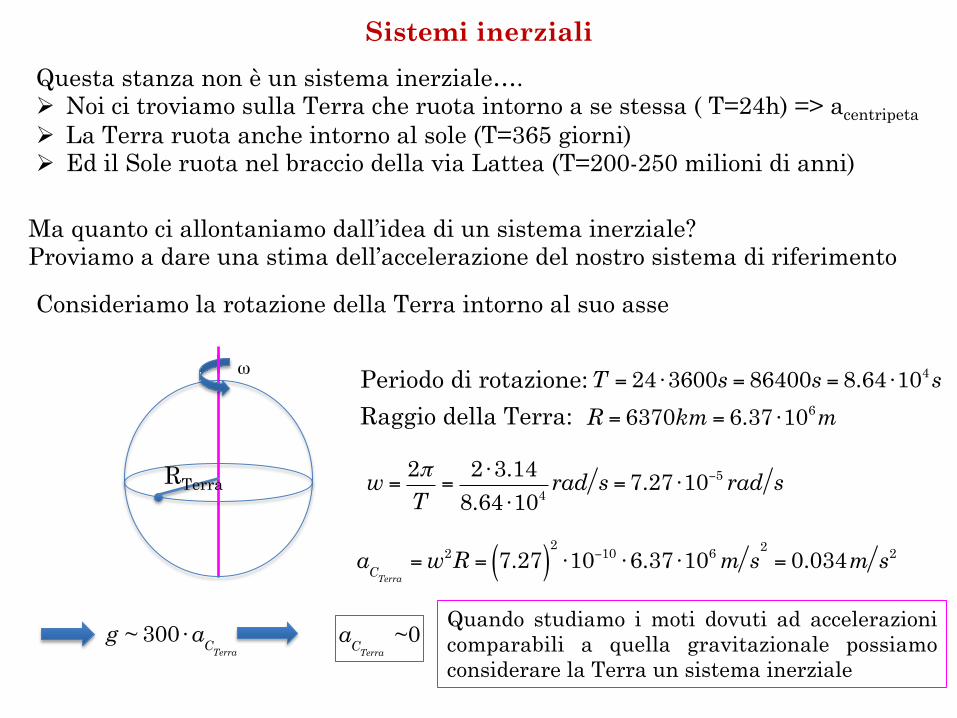
Questa stanza non è un sistema inerziale…. Ø Noi ci troviamo sulla Terra che ruota intorno a se stessa ( T=24h) => acentripeta Ø La Terra ruota anche intorno al sole (T=365 giorni) Ø Ed il Sole ruota nel braccio della via Lattea (T=200-250 milioni di anni)
Ma quanto ci allontaniamo dall’idea di un sistema inerziale? Proviamo a dare una stima dell’accelerazione del nostro sistema di riferimento
RTerra
ω
Consideriamo la rotazione della Terra intorno al suo asse
T = 24 ⋅3600s = 86400s = 8.64 ⋅104sPeriodo di rotazione:
Raggio della Terra: R = 6370km = 6.37 ⋅106m
w =2πT
=2 ⋅3.148.64 ⋅104
rad s = 7.27 ⋅10−5 rad s
aCTerra
=w2R = 7.27( )2⋅10−10 ⋅6.37 ⋅106m s
2= 0.034m s2
g ~ 300 ⋅aCTerra
Quando studiamo i moti dovuti ad accelerazioni comparabili a quella gravitazionale possiamo considerare la Terra un sistema inerziale
aCTerra
~0

Massa
Ø La massa è una proprietà intrinseca di un oggetto che misura la resistenza che esso oppone a variare la sua velocità (cioè l’inerzia del corpo). È una delle grandezze fondamentali. Maggiore è la massa di un oggetto minore è l’accelerazione dell’oggetto quando viene sottoposto ad una data forza Ø La massa è indipendente da ciò che lo circonda e dal metodo adoperato per misurarla.
Ø La massa è una quantità scalare (obbedisce alle regole dell’aritmetica ordinaria) Le masse si sommano e si sottraggono in modo numericamente semplice Es: posso mettere due masse insieme, una di 1Kg ed una di 3kg, a formare una massa totale di 4Kg
NB: Massa e Peso sono due grandezze differenti!!!!!!!!! La massa di un corpo rimane la stessa sia qui che sulla Luna, il peso del corpo cambierà ( il peso del corpo, misurato sulla Terra, sarà maggiore del peso misurato sulla Luna)

Seconda legge di Newton(1) Abbiamo appreso dalla prima legge della dinamica che una forza netta non nulla applicata
ad un corpo deve modificarne necessariamente la velocità, cioè provocare un cambiamento del modulo, della direzione o del verso del vettore velocità.
L’azione di una forza produce una accelerazione.
Ma qual’è la relazione esatta tra forza e accelerazione?
Consideriamo una molla a riposo con un estremo fissato al muro Estendiamola di una certa lunghezza (non è importante numericamente quanto, ma solo che durante la misura che si sta per fare questa lunghezza sia sempre riproducibile) Attacchiamo all’estremo libero una massa m1 e misuriamo l’accelerazione a1 subito dopo aver rilasciato la molla Facciamo la stessa cosa con diverse masse ( es m2> m1)
A riposo
m1 Spinta
a1
m2 a2
Misura
Risultato sperimentale: a parità di forza risultante applicata, più grande è la massa minore sarà ’accelerazione osservata Cioè se m1=1/10m2 allora a1 = 10a2
m1a1=m2a2
Spinta
1
2
2
1
aa
mm
=

1) A parità di forza applicata l’accelerazione di un corpo è inversamente proporzionale alla sua massa (più grande è la massa minore sarà l’accelerazione osservata)
Seconda legge di Newton(2)
Seconda legge di Newton: L’accelerazione di un oggetto è direttamente proporzionale alla forza risultante agente su di esso ed è inversamente proporzionale alla sua massa
mF
a ∑=!
!
NB: è la forza risultante data dalla somma vettoriale di tutte le forze agenti sull’oggetto di massa m
∑F!
Da semplici esperimenti è possibile verificare che applicando una forza doppia ad un certo oggetto, l’accelerazione prodotta sarà due volte più grande, applicando una forza tripla, l’accelerazione sarà tre volte più grande, e così via. Questo porta a dire che: 2)A parità di massa l’accelerazione di un corpo è proporzionale alla forza risultante ad esso applicata.
m1a1=m2a2
aF !!∝
Basandosi su queste evidenze sperimentali, Newton enunciò e formalizzò matematicamente la seconda legge della dinamica:
amF !!=∑

Forza
La forza è un vettore:
⎪⎪⎩
⎪⎪⎨
⎧
=
=
=
==∑ztot
ytot
xtot
tot
maF
maF
maF
amFF
z
y
x
!!!
NB: possiamo provare la seconda legge di Newton? NO- perché non possiamo essere sicuri al 100% che il nostro sistema di riferimento sia un sistema inerziale Ma ci fidiamo??? SI- perché tale legge è verificata, all’interno dell’incertezza sperimentale, da tutti gli esperimenti che sono stati fatti finora ( metodo scientifico)
Altro modo di definire la seconda legge di Newton: “Una forza che agisce su un corpo, produce su di esso un’accelerazione avente la stessa direzione della forza ed il modulo della forza è pari ad ma
Anche il secondo principio della dinamica è valido solo in sistemi di riferimento inerziali
Un corpo risulta in equilibrio se la somma di tutte le forze che agiscono su di esso è nulla:
⎪⎪⎩
⎪⎪⎨
⎧
=
=
=
==∑0
0
0
0
z
y
x
tot
tot
tot
tot
F
F
F
FF!!
0=a!
a!

Definizione operativa della forza
La seconda legge della dinamica permette di introdurre una definizione operativa di forza: Si consideri il chilogrammo campione, poggiato su un piano orizzontale privo di attrito ed agganciato ad una molla. Se la molla viene allungata essa esercita una forza sulla massa campione e quindi un’accelerazione. Definiamo unitaria la forza esercitata dalla molla quando questa imprime al kg campione una accelerazione di 1 m/s2
Tale forza unitaria equivale ad 1 N (Newton) ed è legato alle grandezze fondamentali dalla seguente espressione:
211smkgN ⋅
=
m=1kg
m=1kg

Definizione Operativa di massa
La seconda legge della dinamica permette di introdurre anche una definizione operativa di massa: Se applichiamo una stessa forza F a corpi diversi, abbiamo visto che: e quindi In particolare se confrontiamo l’accelerazione a di un corpo di massa incognita m con quella a0 del campione di massa m0 =1kg sottoposto alla stessa forza, otteniamo una misura della massa incognita m tramite la relazione :
1
2
2
1
aa
mm
=
aamm 0
0= kgaam 0=a
amm 0
0
=
2211 amamF ==
Misurata sperimentalmente
Misurata sperimentalmente
Esempio di Forza: Forza Gravitazionale Ø La forza gravitazionale è la forza esercitata dalla Terra su un corpo. Ø Tale forza è una grandezza vettoriale, la cui direzione è la direzione dell’accelerazione gravitazionale , cioè quella dal corpo al centro della terra. Ø Un corpo lasciato in caduta libera è sottoposto alla sola forza gravitazionale, cosicché la risultante delle forze è pari alla forza gravitazionale:
Ø L’accelerazione di un corpo in caduta libera è pari all’accelerazione gravitazionale, quindi: dove sia che sono diretti verso il centro della terra. Ø La relazione non richiede che il corpo sia in movimento.
Ø la forza di gravità è sempre presente, anche se un corpo non si muove perché poggiato su una superficie. Ø La massa mg ( massa gravitazionale) determina l’intensità dell’attrazione gravitazionale tra il corpo e la Terra ed in linea di principio essa è diversa dalla massa inerziale (cioè quella proprietà intrinseca dei corpi di opporsi ad una variazione della velocità dovuta all’applicazione di una forza), ma i risultati sperimentali nell’ambito della meccanica classica portano a dire che tali masse hanno stesso valore numerico
g!
!F =∑!Fg=m!a =m
g
!g
g!!Fg!Fg=m
g
!g
!F =∑!Fg
!Fg=m!g

Forza Gravitazonale ePeso(1)
gmP g=
Ø Il modulo della forza gravitazionale è detto Peso P:
Poiché il peso dipende da g, esso dipende dalla posizione geografica, i corpi pesano di meno su una montagna (quindi ad altitudini elevate) che non al mare poiché l’accelerazione g diminuisce allontanandosi dalla superficie terrestre ( o per meglio dire dal centro della Terra)
Il peso non è una proprietà intrinseca dei corpi ( a differenza della massa)
Esempio: l’accelerazione gravitazionale sulla luna è pari a gLuna= 1.6 m/s2
Il peso di un corpo di massa 10 kg sulla Terrà è Il suo peso sulla Luna è:
NmgmgP terraterra 98≈==
NmgP lunaluna 16≈=

Se teniamo sul palmo della mano una pallina da tennis, braccio teso, la pallina rimane ferma nel palmo della mano, non è soggetta ad accelerazione e quindi la forza risultante applicata alla pallina deve essere nulla. Sappiamo che la pallina ha una massa ( m= 58 g per la precisione) e quindi è sottoposta alla forza gravitazione mg Ma la forza totale deve essere nulla, quindi è chiaro che il palmo della mano deve “spingere verso l’alto” la pallina con un forza uguale e contraria a mg
Forza gravitazionale e Peso(2)
Nmg 5.0≅
g 58=m
NFpalmo 5.0≅
!Ftot=
!F =∑!Fpalmo
+!Fg= 0
!Fpalmo
= −!Fg
NB: non c’è alcun riferimento alla velocità nella seconda legge di Newton, quindi un corpo è soggetto alla stessa forza gravitazionale, indipendentemente dalla sua velocità ( a meno che tale velocità non sia prossima a quella della luce, in questo caso infatti la meccanica newtoniana non vale più e bisogna passare alla relatività ristretta di Einstein)
0=a! 0== amFtot!!
Fg=mg ⇒ F
palmo= −mg
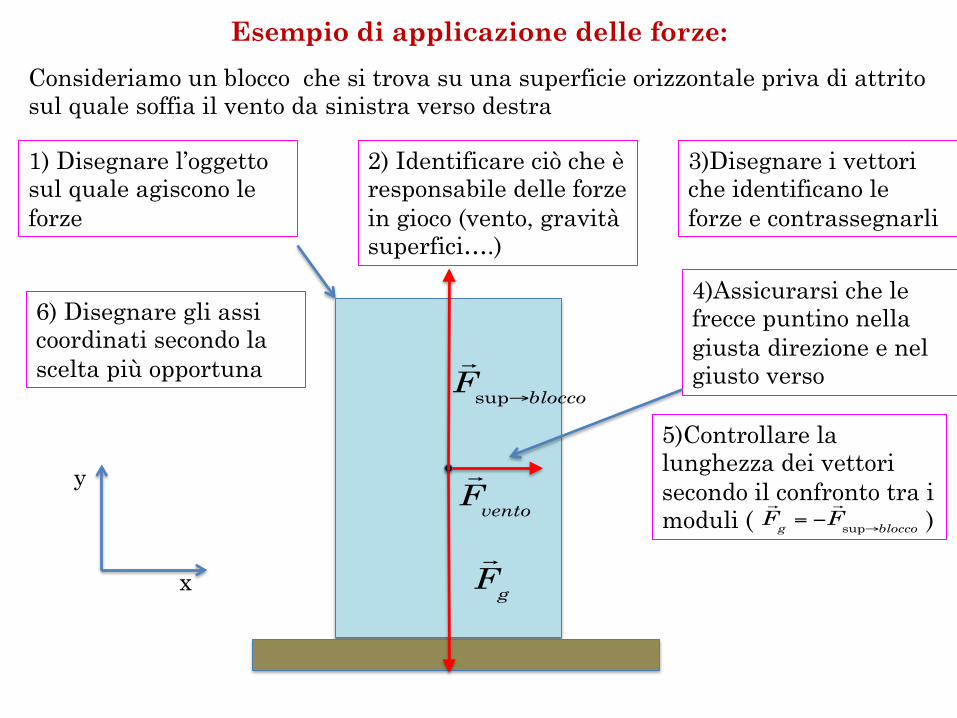
Esempio di applicazione delle forze:
Consideriamo un blocco che si trova su una superficie orizzontale priva di attrito sul quale soffia il vento da sinistra verso destra
1) Disegnare l’oggetto sul quale agiscono le forze
2) Identificare ciò che è responsabile delle forze in gioco (vento, gravità superfici….)
3)Disegnare i vettori che identificano le forze e contrassegnarli
!Fg
!Fsup→blocco
!Fvento
4)Assicurarsi che le frecce puntino nella giusta direzione e nel giusto verso
5)Controllare la lunghezza dei vettori secondo il confronto tra i moduli ( )
!Fg= −!Fsup→blocco
6) Disegnare gli assi coordinati secondo la scelta più opportuna
y
x

Terza legge di Newton
Se un corpo esercita una forza su un altro corpo, l’altro corpo eserciterà su di esso una forza uguale in modulo ma di verso opposto
3° legge di
Newton
12F!
21F!
Azione = -Reazione
!F12= −!F21
La legge di azione e reazione vale sempre, sia che gli oggetti stiano fermi sia che risultino accelerati
Non esiste una singola forza isolata, ma le forze si
presentano sempre a coppia
E la forza gravitazionale allora? Consideriamo una bambina che salta a corda Quando la bambina imprime al terreno una spinta per giocare a saltare con la corda è lei a spostarsi verso l’alto o non è invece la Terra a spostarsi verso il basso? La bambina preme il terreno con la stessa forza con cui il terreno spinge lei verso l’alto… ma…:
!FTB
!FBT
!FTB= −!FBT
mB<<M
T⇒!aT<<!aB
!FTB= −!FBT!
FTB=m
B
!aB!
FBT=M
T
!aT
"
#$$
%$$
mB|!aB|=M
T
!aT
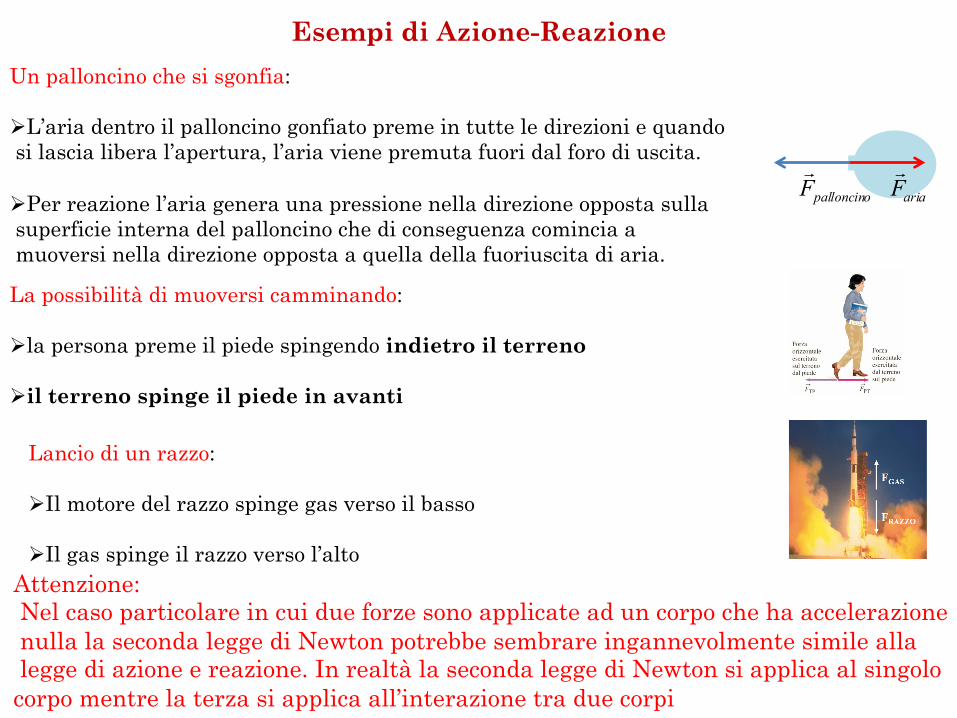
Esempi di Azione-Reazione
Un palloncino che si sgonfia: Ø L’aria dentro il palloncino gonfiato preme in tutte le direzioni e quando si lascia libera l’apertura, l’aria viene premuta fuori dal foro di uscita.
Ø Per reazione l’aria genera una pressione nella direzione opposta sulla superficie interna del palloncino che di conseguenza comincia a muoversi nella direzione opposta a quella della fuoriuscita di aria.
Lancio di un razzo: Ø Il motore del razzo spinge gas verso il basso
Ø Il gas spinge il razzo verso l’alto
La possibilità di muoversi camminando: Ø la persona preme il piede spingendo indietro il terreno
Ø il terreno spinge il piede in avanti
ariapalloncino FF!!
Attenzione: Nel caso particolare in cui due forze sono applicate ad un corpo che ha accelerazione nulla la seconda legge di Newton potrebbe sembrare ingannevolmente simile alla legge di azione e reazione. In realtà la seconda legge di Newton si applica al singolo corpo mentre la terza si applica all’interazione tra due corpi

Corpo di massa m
y
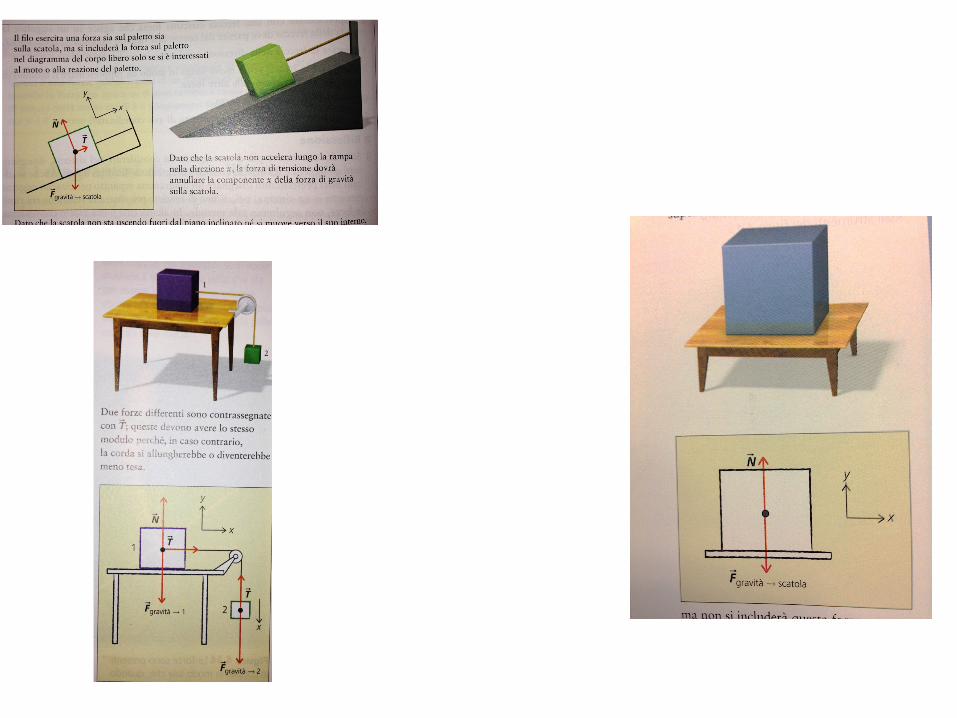
Forza Normale (o reazione Vincolare)(1)
Quando un corpo preme contro una superficie ( anche se apparentemente rigida) la superficie si “deforma” e spinge il corpo con una forza normale a tale superficie ( reazione vincolare)
NF!
Esempio: Un corpo di massa m giace sulla superficie orizzontale di un tavolino: Ø Il corpo preme sul tavolo a causa della forza gravitazionale Fg, deformandolo
Ø Il Tavolo preme il corpo verso l’alto con la forza normale FN (cioè perpendicolare alla superficie del tavolo)
Ø Sul corpo agiscono solo la forza peso e la forza normale ed entrambe sono dirette verticalmente ( prendiamo in considerazione solo le componenti lungo y).
Ø Dalla seconda legge della dinamica otteniamo il modulo della forza normale:
mgFmaFFFamF Nyygn −==⇒+== ∑∑ !!!!
gmFg!!
=
NF!
( )gamF yN +=
Nel caso in cui il corpo ha accelerazione nulla ( come nel nostro caso) si ha che: gmFa Ny 0 =⇒=
gmFg!!
=
Somma delle forze che agiscono sul corpo di massa m

y
y
Forza Normale (2)
Attenzione: la forza normale non è necessariamente uguale alla forza peso: Prendiamo di nuovo l’esempio di una scatola poggiata su un tavolo Caso (a) => identico al caso appena visto 0 =−=∑ mgFF Ny
mgFN =
Caso (b) => una mano preme sulla scatola con una forza di 40N (alla forza peso che preme sul tavolino si aggiunge la forza della mano)
040 =−−=∑ NmgFF Ny
NmgFN 40+=
Caso (c) => una mano tira la scatola verso l’alto con una forza di 40N (la forza peso e la forza della mano agiscono in versi opposti)
040 =+−=∑ NmgFF Ny
NmgFN 40−=
y

θ
Forza Normale (3)
Attenzione: la forza normale non è necessariamente Verticale
Corpo di massa
m
NF!
y
gF!
y
x
NF!
totF!
θ
Attenzione: la forza normale non sempre bilancia Fg
!⎪⎩
⎪⎨
⎧
=+=
≠==
+=
−
∑∑
∑ 0cos
0sin θ
θ
mg
gNy
xgx
gN FFF
maFFFFF"""
la forza normale FN bilancia solo la componente di Fg perpendicolare alla superficie vincolare
⎪⎩
⎪⎨⎧
==
=
θcos0
mgFF
FF
NN
xNN
y
!Componente lungo y di
gF!
NF!
È sempre perpendicolare alla superficie del vincolo
gF!
È sempre perpendicolare alla superficie della terra gF!
Corpo di massa
m
NF!
gF!