1/38 Università degli Studi di Napoli Federico II Facoltà di Ingegneria Tesi di Laurea in...
36
1/38 Università degli Studi di Napoli Università degli Studi di Napoli Federico II Federico II Facoltà di Ingegneria Facoltà di Ingegneria Tesi di Laurea in Meccanica delle Vibrazioni Tesi di Laurea in Meccanica delle Vibrazioni INFLUENZA DELLA FLESSIBILITA’ INFLUENZA DELLA FLESSIBILITA’ STRUTTURALE DELL’AVANTRENO SULLA STRUTTURALE DELL’AVANTRENO SULLA DINAMICA DEL MOTOCICLO DINAMICA DEL MOTOCICLO Relatore: Relatore: Ch.mo Prof. Sergio della Ch.mo Prof. Sergio della Valle Valle Correlatore : Correlatore : Dott. Ing. Giandomenico Di Dott. Ing. Giandomenico Di Massa Massa Candidati: Candidati: Veronica Veronica D’Onofrio D’Onofrio Matr. 343/101 Matr. 343/101 Claudio Iaselli Claudio Iaselli Matr. 343/224 Matr. 343/224
-
Upload
bonfilia-masi -
Category
Documents
-
view
216 -
download
0
Transcript of 1/38 Università degli Studi di Napoli Federico II Facoltà di Ingegneria Tesi di Laurea in...

1/38
Università degli Studi di Napoli Università degli Studi di Napoli Federico IIFederico II
Facoltà di IngegneriaFacoltà di Ingegneria
Tesi di Laurea in Meccanica delle VibrazioniTesi di Laurea in Meccanica delle Vibrazioni
INFLUENZA DELLA FLESSIBILITA’ INFLUENZA DELLA FLESSIBILITA’ STRUTTURALE DELL’AVANTRENO SULLA STRUTTURALE DELL’AVANTRENO SULLA
DINAMICA DEL MOTOCICLODINAMICA DEL MOTOCICLO
Relatore:Relatore:Ch.mo Prof. Sergio della ValleCh.mo Prof. Sergio della Valle
Correlatore : Correlatore : Dott. Ing. Giandomenico Di Dott. Ing. Giandomenico Di MassaMassa
Candidati:Candidati:Veronica Veronica D’OnofrioD’OnofrioMatr. 343/101Matr. 343/101Claudio Iaselli Claudio Iaselli Matr. 343/224Matr. 343/224

2/38
Obiettivi del lavoro di tesiObiettivi del lavoro di tesi
Analisi dell’influenza della flessibilità strutturale Analisi dell’influenza della flessibilità strutturale sul fenomeno dinamico denominato “shimmy” e sul fenomeno dinamico denominato “shimmy” e la sua stabilità nei sistemi costituiti da ruote la sua stabilità nei sistemi costituiti da ruote sterzanti, con particolare riferimento sterzanti, con particolare riferimento all’avantreno del motociclo.all’avantreno del motociclo.
Il problema è stato trattato secondo due diversi Il problema è stato trattato secondo due diversi approcci:approcci:
- - Integrazione numerica delle equazioni del motoIntegrazione numerica delle equazioni del moto
- - Modellazione di tipo multibodyModellazione di tipo multibody

3/38
Il fenomeno dinamico detto “shimmy”Il fenomeno dinamico detto “shimmy”
Vibrazione che Vibrazione che interessa le ruote interessa le ruote sterzanti dei veicolisterzanti dei veicoli
Ambiti in cui si Ambiti in cui si manifesta il manifesta il fenomeno: automobili, fenomeno: automobili, carrelli di atterraggio, carrelli di atterraggio, motociclimotocicli
Il fenomeno riguarda Il fenomeno riguarda sia ruote disposte su sia ruote disposte su un asse comune sia un asse comune sia ruote singole (caster)ruote singole (caster)

4/38
Il casterIl caster
Ruota sterzante il cui Ruota sterzante il cui punto di contatto con il punto di contatto con il piano stradale giace piano stradale giace posteriormente posteriormente rispetto all’intersezione rispetto all’intersezione dell’asse di sterzo con dell’asse di sterzo con il piano stesso.il piano stesso.
Il motociclo secondo Il motociclo secondo Roe: coppia di caster Roe: coppia di caster vincolati mediante vincolati mediante cerniera di sterzo con cerniera di sterzo con asse inclinato.asse inclinato.

5/38
Modi di vibrare “out of plane” del Modi di vibrare “out of plane” del motociclomotociclo
Modo Modo capsizecapsize : modo : modo non oscillatorio, di non oscillatorio, di caduta laterale del caduta laterale del motoveicolo.motoveicolo.
Modo Modo weaveweave : modo : modo oscillatorio, di oscillatorio, di ondeggiamento e ondeggiamento e serpeggiamento che serpeggiamento che coinvolge tutto il veicolo coinvolge tutto il veicolo ma in particolare il ma in particolare il retrotreno.retrotreno.

6/38
Modi di vibrare “out of plane” del Modi di vibrare “out of plane” del motociclomotociclo
Modo Modo wobblewobble : modo : modo oscillatorio, che si oscillatorio, che si manifesta con manifesta con l’oscillazione l’oscillazione dell’avantreno intorno dell’avantreno intorno all’asse di sterzo.all’asse di sterzo.
Caratteristiche :Caratteristiche :
- Velocità di avanzamento - Velocità di avanzamento moderatemoderate
- Frequenze da 4 a 9 Hz- Frequenze da 4 a 9 Hz

7/38

8/38
Cause della instabilità delle oscillazioni Cause della instabilità delle oscillazioni del casterdel caster
Primi studiPrimi studi : :
- Influenza della deformabilità dei pneumatici sulla instabilità - Influenza della deformabilità dei pneumatici sulla instabilità delle oscillazionidelle oscillazioni
Teoria di RoeTeoria di Roe (1970)(1970) : :
- La flessibilità strutturale come causa prima della - La flessibilità strutturale come causa prima della instabilità del sistemainstabilità del sistema
- Origine del fenomeno : possibilità di deviazione laterale della - Origine del fenomeno : possibilità di deviazione laterale della superficie di contatto ruota-strada rispetto al piano individuato superficie di contatto ruota-strada rispetto al piano individuato dall’asse di sterzo del motociclodall’asse di sterzo del motociclo

9/38
Il modello di RoeIl modello di Roe
Ipotesi:Ipotesi: - veicolo che avanza - veicolo che avanza
con velocità costante con velocità costante vv
- ruota rigida- ruota rigida - attrito coulombiano - attrito coulombiano
(F=(F=μμR)R)
Ruota libera di Ruota libera di spostarsi lateralmentespostarsi lateralmente
Flessibilità laterale Flessibilità laterale strutturale modellata strutturale modellata mediante due molle di mediante due molle di rigidità krigidità k
'2 RttktMtM ww '2 RttktMtM ww '2 RttktMtM ww

10/38
Il modello di RoeIl modello di Roe
Le equazioni del moto :Le equazioni del moto :
- Asse di sterzo verticale :- Asse di sterzo verticale :
- Asse di sterzo obliquo :- Asse di sterzo obliquo :
2
-
- - '
s wo
W W
I I tk
M t M t tk Rt
( ) ' sin ' sin sinS WO SI I sk R t s M gh R
2 ' sin sinW W WM s M s sk sR M gs

11/38
Il modello di Roe : risultatiIl modello di Roe : risultati
k k è il parametro è il parametro che ha la che ha la maggiore maggiore influenza sulla influenza sulla stabilitàstabilità
All’aumentare di All’aumentare di kk si osserva un si osserva un incremento dello incremento dello smorzamento e smorzamento e un decremento un decremento della ampiezza della ampiezza delle oscillazionidelle oscillazioni
K = 10K = 104 4 N/mN/m
K = 10K = 105 5 N/mN/m
K = 10K = 106 6 N/mN/m

12/38
Modello analitico dell’avantreno del Modello analitico dell’avantreno del motociclomotociclo
Integrazione numerica delle equazioni differenziali del motoIntegrazione numerica delle equazioni differenziali del moto
(Simulink)(Simulink)
Modelli di riferimento:Modelli di riferimento: Modello analitico di Roe :Modello analitico di Roe :
equazioni differenziali di difficile integrazione numericaequazioni differenziali di difficile integrazione numerica
Modello “Modello “classical shimmying wheel classical shimmying wheel ” di St” di Stééppáán e n e Goodwine:Goodwine:
modello più semplice, con un numero ridotto di gradi di modello più semplice, con un numero ridotto di gradi di libertàlibertà

13/38
Modello “Modello “classical shimmying wheelclassical shimmying wheel””
Ipotesi :Ipotesi : - Ruota rigidaRuota rigida- Veicolo modellato come un corpo rigido che avanza in Veicolo modellato come un corpo rigido che avanza in
rettilineo a velocità costanterettilineo a velocità costante- Cerniera di sterzo ad asse verticaleCerniera di sterzo ad asse verticale- Moto trasversale della cerniera di sterzo vincolata al veicolo Moto trasversale della cerniera di sterzo vincolata al veicolo
attraverso elementi elastici di rigidità k/2attraverso elementi elastici di rigidità k/2
Il sistema ha tre gradi di libertà : Il sistema ha tre gradi di libertà : θθ, y, , y, φφ
Parametri geometrici-inerziali :Parametri geometrici-inerziali :
mmww massa ruota massa ruota
mmcc massa braccio di massa braccio di sospensione sospensione
ruota ruota
l l lunghezza caster lunghezza caster
r r raggio ruota raggio ruota

14/38
Reazione del vincolo (suolo) Reazione del vincolo (suolo) < F attrito statico< F attrito statico
2 2 1
2s x y s z s c wF F F F m m
2 22
22 2
2
3 31 11
cos 2 2 2 cos
1cos cos 6 cos
3 4
w w
c c c
w
c
m mv k tgtg y
l m lm m
m rtg tg
m l
cos
ly vtg
Moto di puro rotolamento :Moto di puro rotolamento :
Vincolo cinematico: vVincolo cinematico: vrr = 0= 0
Equazioni Equazioni
di Appell-di Appell-GibbsGibbs
(Due equazioni differenziali scalari (Due equazioni differenziali scalari del primo ordine)del primo ordine)
++Equazioni differenziali del Equazioni differenziali del moto : moto :
cos
v lsen
R
Il sistema evolve nello spazio delle fasi a tre Il sistema evolve nello spazio delle fasi a tre dimensionidimensioni
Condizione di Condizione di stabilità lineare stabilità lineare della soluzione della soluzione
nulla (nulla (θθ=0, y=0) :=0, y=0) :3m3mwwrr2 2 < < 2m2mccll22
Funzione dei parametri geometrici ed inerzialiFunzione dei parametri geometrici ed inerziali Indipendente dalla velocitàIndipendente dalla velocità
, , y

15/38
Reazione del vincolo (suolo) Reazione del vincolo (suolo) > F attrito > F attrito staticostatico
Equazioni di Equazioni di LagrangeLagrange
ry ry2 rxc w2 2 2 2 2 2
rx ry rx ry rx ry
2c w
c w2
v vg vm m - Ml sen - ky - sen M - cos M
cosv v v v v v
m m1 r lm 1 m - Mlcos
3 4l M cos
dd dg g
Equazioni differenziali del moto:Equazioni differenziali del moto:
2ry
c w2 2 2rx ry
v g1 r ly m 1 m -
3 4l Mcos cosv vd
rx
2 2rx ry
2M gv
m rv vd
w
Moto di slittamento:Moto di slittamento:
Il sistema evolve nello spazio delle Il sistema evolve nello spazio delle
fasi a 6 dimensioni fasi a 6 dimensioni , , y, y, ,

16/38
RotolamentoRotolamento SlittamentoSlittamento
SlittamentoSlittamento RotolamentoRotolamento
FFss > > μμssMg Mg
vvr r = 0= 0
FFss ≤ ≤ μμssMg Mg
Quando è consentito il Quando è consentito il passaggio tra le due passaggio tra le due condizionicondizioni
Moto Moto caoticocaotico
mc=1.5 kg mw=3.75 kg l=0.2 r=0.1 mc=1.5 kg mw=3.75 kg l=0.2 r=0.1 m, m,
k=75 N/m v=1m/s k=75 N/m v=1m/s μμs=0.18 s=0.18 μμd=0.18d=0.18

17/38
mw massa di ruota + pneumatico 9 Kg
mc
massa avantreno (ruota esclusa) =massa di steli + piastra di supporto + perno del cannotto di sterzo + perno
della ruota + distanziale
9.8 Kg
l avancorsa normale 0.084 m
r raggio della ruota 0.3 m
Parametri geometrici ed inerziali scooter Scarabeo 150
La SimulazioneLa Simulazionefd coefficiente di attrito dinamico 0.5
fs coefficiente di attrito statico 1• La simulazione viene condotta La simulazione viene condotta
valutando l’influenza di tre valori di valutando l’influenza di tre valori di rigidezza :rigidezza :
1. k=105 N/m
2. k=104 N/m
3. k=106 N/m
• Sono effettuate più prove per valori crescenti di velocità tra 5 e 50 m/s

18/38
La simulazione : moto di La simulazione : moto di rotolamentorotolamento
La condizione di stabilità : 3mLa condizione di stabilità : 3mwwrr2 2
<2m<2mccll22
non è soddisfattanon è soddisfatta
Modello Simulink del sistema in condizione di puro Modello Simulink del sistema in condizione di puro rotolamento :rotolamento :

19/38
k = 10k = 1055 N/m N/m
k = 10k = 1066 N/m N/m
k = 10k = 1044 N/m N/m
Dalle simulazioni risulta che le oscillazioni intorno Dalle simulazioni risulta che le oscillazioni intorno all’asse di sterzo sono instabili per ciascun valore di k all’asse di sterzo sono instabili per ciascun valore di k
consideratoconsiderato

20/38
La simulazione : moto di La simulazione : moto di slittamentoslittamento
Condizioni iniziali assegnate in modo da assicurare la Condizioni iniziali assegnate in modo da assicurare la continuità nel passaggio tra le due condizioni:continuità nel passaggio tra le due condizioni:
2 22 22 2 4 2 2 2 2
2 2
31 10
4 3 4 2w c
w w s w cw c
m r m lm l v m m m g
m r m l
per ogni vper ogni v
Dai risultati delle Dai risultati delle simulazioni relative al simulazioni relative al moto di rotolamentomoto di rotolamento
Condizioni iniziali del sistema di Condizioni iniziali del sistema di equazioni differenziali del moto equazioni differenziali del moto di slittamentodi slittamento
per ogni k e per ogni k e vv
s sF Mg *
, , , , y y
, t (s)

21/38
Modello Simulink del sistema in condizione di slittamentoModello Simulink del sistema in condizione di slittamento

22/38
v = 5 v = 5 m/sm/s v = 10 v = 10 m/sm/s
v = 20 v = 20 m/sm/s v = 50 v = 50 m/sm/s
1) k = 101) k = 1055 N/m N/m

23/38
1) k = 101) k = 1066 N/m N/m v = 5 v = 5 m/sm/s v = 20 v = 20 m/sm/s
v = 50 v = 50 m/sm/s Rispetto al caso precedente:Rispetto al caso precedente:
• Aumento dello smorzamento delle Aumento dello smorzamento delle oscillazionioscillazioni
• Ampiezze di oscillazione molto più Ampiezze di oscillazione molto più basse (0.002 rad circa)basse (0.002 rad circa)

24/38
3) k = 103) k = 1044 N/m N/m
v = 5 m/sv = 5 m/s
• Ampiezze di Ampiezze di oscillazione maggiori oscillazione maggiori rispetto ai casi rispetto ai casi precedenti: 0.25 rad precedenti: 0.25 rad (14° circa)(14° circa)
v = 50 m/sv = 50 m/s
• Leggero aumento della Leggero aumento della ampiezza della oscillazione ampiezza della oscillazione rispetto a v=5 m/s: 0.3 rad rispetto a v=5 m/s: 0.3 rad (17° circa) (17° circa)

25/38
ConclusioniConclusioni La rigidezza strutturale ha una importante influenza sulla stabilità La rigidezza strutturale ha una importante influenza sulla stabilità
del sistema:del sistema:
Bassi valori di kBassi valori di k Grandi Grandi ampiezze di ampiezze di oscillazioneoscillazione
Valori di k Valori di k elevatielevati
•Aumento dello Aumento dello smorzamento delle smorzamento delle oscillazionioscillazioni
•Riduzione delle Riduzione delle ampiezze della ampiezze della oscillazione stazionariaoscillazione stazionaria Modelli successivi che considereranno l’inclinazione dell’asse di sterzo e l’evoluzione Modelli successivi che considereranno l’inclinazione dell’asse di sterzo e l’evoluzione
continua del sistema tra le condizioni di puro rotolamento e di slittamento potrebbero continua del sistema tra le condizioni di puro rotolamento e di slittamento potrebbero rappresentare meglio la dinamica reale del fenomeno consideratorappresentare meglio la dinamica reale del fenomeno considerato

26/38
Modellazione al CAD dell’avantreno del Modellazione al CAD dell’avantreno del motociclomotociclo (Scarabeo Aprilia 150)(Scarabeo Aprilia 150)
Rilevazione Rilevazione delle quote delle quote caratteristichcaratteristiche dei e dei componenticomponenti
Modellazione Modellazione dei dei componenti componenti con l’ausilio con l’ausilio del software del software SolidworksSolidworks
MODELLAZIONE MULTIBODYMODELLAZIONE MULTIBODY
RUOTARUOTA
PIASTRPIASTRAA
FODERFODEROO
STELOSTELO

27/38
Assegnazione delle condizioni di vincolo tra Assegnazione delle condizioni di vincolo tra le partile parti

28/38
Schematizzazione del sistema di Schematizzazione del sistema di sospensionesospensione
Il vincolo utilizzato Il vincolo utilizzato rappresenta una rappresenta una combinazione di un combinazione di un elemento elastico e di elemento elastico e di uno smorzatore nella uno smorzatore nella direzione di scorrimentodirezione di scorrimento
CorsaCorsa 110 mm110 mm
PrecaricoPrecarico 176.4 N176.4 N
RigidezzaRigidezza 17652 N/m17652 N/m
SmorzamentSmorzamentoo
425 Ns/m425 Ns/m

29/38
Forze agenti sul sistemaForze agenti sul sistema Derivanti dal contatto pneumatico-strada :Derivanti dal contatto pneumatico-strada :
Forza lateraleForza lateraleForza Forza longitudinalelongitudinale
Coppia di Coppia di resistenza al resistenza al rotolamentorotolamento
Forza di Forza di attritoattrito

30/38
Forze agenti sul sistemaForze agenti sul sistema
Derivanti Derivanti dall’interazione con dall’interazione con la parte di motociclo la parte di motociclo non modellata:non modellata:
Carico verticale pari Carico verticale pari a 1000 N sulla a 1000 N sulla sommità del perno sommità del perno del cannotto di del cannotto di sterzosterzo

31/38
Simulazioni di prova su strada e al Simulazioni di prova su strada e al bancobanco
Stessi risultati a parità di velocità di avanzamento, Stessi risultati a parità di velocità di avanzamento, impulso di coppia e di rigidezza trasversale impulso di coppia e di rigidezza trasversale

32/38
Simulazione con il sistema montato al Simulazione con il sistema montato al bancobanco
Velocità Velocità del del
nastronastro
SpostameSpostamento nto
lateralelaterale
Forza Forza elastica di elastica di richiamo richiamo regolata regolata
da kda k
Rotazione Rotazione dello sterzodello sterzo

33/38
Simulazione (velocità 20m/s, k=250 Simulazione (velocità 20m/s, k=250 N/mm)N/mm)
Impulso Impulso di di
coppia coppia allo allo
sterzosterzo

34/38
Simulazione (velocità 20m/s, k=1000 Simulazione (velocità 20m/s, k=1000 N/mm)N/mm)
Impulso Impulso di di
coppia coppia allo allo
sterzosterzo

35/38
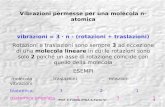
Analisi dei risultatiAnalisi dei risultati
-0.2
-0.1
0.0
0.1
0.2
0 1 2 3 4 5
Ango
lo d
i Ste
rzo
[gra
di]
[s]
-20
-10
0
10
20
0 1 2 3 4 5 6 7 8 9 10 11
Ango
lo d
i Ste
rzo
[gra
di]
[s]
K=250 K=250 N/mmN/mm
K=1000 K=1000 N/mmN/mm
Oscillazione Oscillazione instabileinstabile
Oscillazione stabileOscillazione stabile
Accordo con i risultati del modello di RoeAccordo con i risultati del modello di Roe

36/38
ConclusioniConclusioni
Sviluppo di un modello multibody a partire dal Sviluppo di un modello multibody a partire dal modello CAD dell’avantreno dello scooter modello CAD dell’avantreno dello scooter ScarabeoScarabeo
Effettuando simulazioni di prova al banco e su Effettuando simulazioni di prova al banco e su strada si ottengono i medesimi risultatistrada si ottengono i medesimi risultati
E’ stata valutata l’influenza della rigidezza E’ stata valutata l’influenza della rigidezza strutturale dell’avantreno sulla stabilità del strutturale dell’avantreno sulla stabilità del modo wobblemodo wobble