11. Stabilit`a - unibo.it · 2015. 2. 4. · 11. Stabilit`a Un’orbita o un punto di equilibrio di...
19
11. Stabilit` a Un’orbita o un punto di equilibrio di un sistema dinamico sono stabili se a piccole variazioni delle condizioni iniziali corrispondono piccole variazioni dell’orbita. I sistemi lineari sono stabili nel futuro (t> 0), se tutti gli autovalori hanno parte reale negativa; in questo caso ogni orbita converge al punto equilibrio per t → +∞. La stabilit` a del punto di equilibrio si mantiene, a livello locale, in presenza di termini non lineari. Nei sistemi fisici questo tipo di stabilit` a si manifesta in presenza di forze dissipative. La stabilit` a perpetua (per t> 0e t< 0) si verifica invece nei sistemi conservativi; in quelli lineari ` e garantita quando tutti gli autovalori sono immaginari puri. Nei sistemi non lineari la stabilit` a dell’equilibrio viene analizzata mediante la funzione di Lyapounov, che per i sistemi fisici coincide con l’energia meccanica. 11.1. STABILIT ` A DELL’EQUILIBRIO I punti critici o di equilibrio x c un’equazione differenziale ˙ x = Φ(x,t) sono quelli in cui il campo vettoriale si annulla Φ(x c ,t) = 0 per ogni t. Ogni punto critico ` e un’orbita dell’equazione poich´ e x(0) = x c implica x(t)= x c per ogni t. Definizione. Un punto di equilibrio x c si dice stabile secondo Lyapounov se ad ogni suo intorno A ` e possibile associarne un altro A ′ ⊆A tale che per ogni condizione iniziale x(0) ∈A ′ l’orbita x(t) corrispondente sia contenuta in A per t ≥ 0. Se la condizione ` e soddisfatta anche per t< 0 si dice che l’equilibrio ` e perpetuamente stabile.
Transcript of 11. Stabilit`a - unibo.it · 2015. 2. 4. · 11. Stabilit`a Un’orbita o un punto di equilibrio di...

11. Stabilita
Un’orbita o un punto di equilibrio di un sistema dinamico sono stabili se a piccole variazionidelle condizioni iniziali corrispondono piccole variazioni dell’orbita. I sistemi lineari sonostabili nel futuro (t > 0), se tutti gli autovalori hanno parte reale negativa; in questo casoogni orbita converge al punto equilibrio per t → +∞. La stabilita del punto di equilibriosi mantiene, a livello locale, in presenza di termini non lineari. Nei sistemi fisici questotipo di stabilita si manifesta in presenza di forze dissipative. La stabilita perpetua (pert > 0 e t < 0) si verifica invece nei sistemi conservativi; in quelli lineari e garantita quandotutti gli autovalori sono immaginari puri. Nei sistemi non lineari la stabilita dell’equilibrioviene analizzata mediante la funzione di Lyapounov, che per i sistemi fisici coincide conl’energia meccanica.
11.1. STABILITA DELL’EQUILIBRIO
I punti critici o di equilibrio xc un’equazione differenziale x = Φ(x, t) sono quelli in cuiil campo vettoriale si annulla Φ(xc, t) = 0 per ogni t. Ogni punto critico e un’orbitadell’equazione poiche x(0) = xc implica x(t) = xc per ogni t.
Definizione. Un punto di equilibrio xc si dice stabile secondo Lyapounov se ad ognisuo intorno A e possibile associarne un altro A′ ⊆ A tale che per ogni condizione inizialex(0) ∈ A′ l’orbita x(t) corrispondente sia contenuta in A per t ≥ 0. Se la condizione esoddisfatta anche per t < 0 si dice che l’equilibrio e perpetuamente stabile.

c©88-08- 9820 11.1. Stabilita dell’equilibrio 255
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
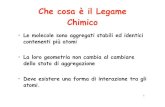
Figura 11.1.1. Punto critico perpetuamente stabile.
Il punto xc e stabile entro una sfera di raggio R (se R = ∞ la stabilita e globale) se adogni ǫ ≤ R e possibile associare un δǫ per cui si abbia
‖x(0) − xc‖ < δǫ −→ ‖x(t) − xc‖ < ǫ, ∀t ≥ 0 (11.1.1)
Un punto di equilibrio stabile si dice asintoticamente stabile se
limt→+∞
‖x(t) − x0‖ = 0 (11.1.2)
Le figure 11.1.1 e 11.1.2 illustrano il criterio di Lyapounov per un punto critico perpetua-mente stabile e per un punto asintoticamente stabile, quali sono i punti di equilibrio di unoscillatore armonico e di un oscillatore smorzato.
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
Figura 11.1.2. Punto critico asintoticamente stabile.
Se la condizione di stabilita si verifica soltanto per t>0 oppure per t<0 il punto critico si dice stabile
nel futuro oppure nel passato. Se la condizione di stabilita non e mai verificata il punto critico si dice
instabile. Se si ha stabilita nel passato il punto critico si dice instabile nel futuro e viceversa. Sovente si
parla di stabilita o instabilita riferendoci implicitamente al futuro.

256 11. Stabilita c©88-08- 9820
11.2. STABILITA LINEARE E NON LINEARE
Diamo qui i principali risultati sulla stabilita dell’equilibrio per i sistemi lineari e non lineari.La matrice A, che rappresenta l’applicazione lineare, si suppone che sia diagonalizzabile.Alcune propriea della norma di A sono richiamate nella appendice.
Proposizione. Il punto di equilibrio x = 0 della equazione differenziale lineare
dx
dt= Ax (11.2.1)
e asintoticamente stabile per t > 0 se gli autovalori hanno tutti parte reale negativa. Ilpunto x = 0 e perpetuamente stabile se gli autovalori hanno tutti parte reale nulla.
Se A e simmetrica e λd e il piu grande tra gli autovalori si ha
‖x(t)‖ = ‖eAtx(0)‖ ≤ ‖eAt‖ ‖x(0)‖ ≤ eλdt‖x(0)‖ (11.2.2)
Se λd < 0 da (11.2.2) segue che ‖x(t)‖ ≤ ‖x(0)‖; la condizione di stabilita alla Lyapounove soddisfatta su tutto lo spazio con δǫ = ǫ ed inoltre x(t) → 0 per t → ∞.Se A non e simmetrica ed ha autovalori λk + iωk con λ1 < λ2 < . . . λd
‖x(t)‖ ≤ ‖eAt‖ ‖x(0)‖ ≤ ce Re λdt‖x(0)‖, c = ‖U‖ ‖U−1‖ (11.2.3)
e la condizione di Lyapounov e soddisfatta per t > 0 se λd < 0 a patto di scegliere δǫ = ǫ/c.
Stabilita non lineare
Per un campo vettoriale non lineare Φ(x), localmente la stabilita di un punto critico ela stessa che per il sistema linearizzato, se gli autovalori hanno parte reale non nulla. Eessenziale sottolineare che le proprieta di stabilita di un sistema lineare hanno carattereglobale, quelle di un sistema non lineare hanno solo carattere locale. Se gli autovalori sonoimmaginari puri il problema della stabilita non lineare diventa assai complesso; alcunirisultati sono richiamati nel capitolo 20. Sia dunque xc = 0 un punto critico del campo esia
Φ(x) = Ax + b(x), ‖b(x)‖ ≤ c‖x‖2 (11.2.4)
dove la stima su b vale in una sfera di raggio R.
Proposizione. Se Φ(x) ha un punto critico xc = 0 asintoticamente stabile per il sistemalinearizzato x = Ax, localmente questo punto e asintoticamente stabile per il sistema nonlineare x = Φ(x).
Esiste inoltre un trasformazione di coordinate x → x′ tangente all’identita (la cui partelineare cioe e l’identita) che trasforma l’equazione x = Φ(x) nella sua parte lineare x′ =

c©88-08- 9820 11.2. Stabilita lineare e non lineare 257
Ax′; quindi in un intorno del punto le orbite del sistema non lineare e di quello linearizzatosono topologicamente equivalenti.
Diamo la dimostrazione soltanto della prima parte del teorema perche elementare. Sup-poniamo dapprima che A sia simmetrica per cui A = UΛU−1 con U ortogonale. Definitox′ = U−1x l’equazione
dx
dt= Ax + b(x), (11.2.5)
si trasforma indx′
dt= Λx′ + b′(x′), b′(x) = U−1b(Ux′) (11.2.6)
e ‖b′(x′)‖ ≤ ‖b(Ux′)‖ ≤ c‖Ux′‖2 = c‖x′‖2.Moltiplichiamo ambo i membri (11.2.6) scalarmente per x′
1
2
d‖x′‖2
dt= x′ · dx′
dt= x′ · Λx′ + x′ · b′ (11.2.7)
Usando la disuguaglianza di Schwartz abbiamo
|x′ · b′| ≤ ‖x′‖ ‖b′‖ ≤ c‖x′‖3 (11.2.8)
Facciamo ora una stima a priori, cioe assumiamo che per t > 0 la soluzione rimangaconfinata nella sfera di raggio R e verifichiamo successivamente che con condizioni iniziali‖x′(0)‖ = ‖x(0)‖ ≤ R tale condizione e soddisfatta. Se x = 0 e stabile per il sistemalineare, i suoi autovalori sono tutti negativi λ1 < . . . < λd ≡ −λ < 0. Possiamo quindiscrivere
d‖x′‖2
dt≤ −2λ‖x′‖2 + 2c‖x′‖3 ≤ −2(λ − cR)‖x′‖2 (11.2.9)
dove λ − cR > 0 purche R < λ/c. La disequazione differenziale cosı ottenuta ha soluzione
‖x′(t)‖ ≤ e−(λ−cR)t‖x′(0)‖ (11.2.10)
e pertanto se ‖x(0)‖ = ‖x′(0)‖ ≤ R e se R < λ/c si trova ‖x′(t)‖ ≤ ‖x′(0)‖ e la stimaa priori risulta soddisfatta. Nel disco aperto di raggio R = λ/c il punto di equilibrio easintoticamente stabile.
Se A non e simmetrica ma diagonalizzabile la dimostrazione e simile. Consideriamo persemplicita il caso d = 2 e sia
U−1x = z ≡(
zz∗
)
, U−1b(Uz) =
(
bb∗
)
(11.2.11)
dove z e complessa e siano −λ ∓ iω i due autovalori con λ > 0.

258 11. Stabilita c©88-08- 9820
Le due equazioni del moto nelle nuove coordinate complesse sono coniugate l’una dell’altra.
dz
dt= −(λ + iω)z + b(z, z∗)
dz∗
dt= −(λ − iω)z∗ + b∗(z, z∗)
(11.2.12)
Moltiplicando la prima equazione per z∗, la seconda per z e sommando si ottiene
d|z|2dt
= −2λ|z|2 + (zb∗ + z∗ b) ≤ −2λ|z|2 + 2c′|z|3 ≤ −2(λ − c′R)|z|2 (11.2.13)
avendo usato la disuguaglianza
zb∗ + z∗b ≤ 2|z| |b| =√
2 |z| ‖U−1b(Uz)‖ ≤ c√
2 |z| ‖U−1‖ ‖Uz‖2 ≤ 2c′|z|3 (11.2.14)
dove c′ =√
2 c ‖U−1‖ ‖U‖2. Da (11.2.14) segue che |z(t)| ≤ e−(λ−c′R)t|z(0)|. Tornandoalle coordinate iniziali si ha, come nel caso in cui A e simmetrica
‖x(t)‖ ≤ e−(λ−c′R)t‖U‖ ‖U−1‖ ‖x(0)‖ (11.2.15)
La condizione di stabilita e soddisfatta nel disco di raggio R < λ/c′ ove si puo scegliereδǫ = ǫ(‖U‖ ‖U−1‖)−1 per ogni ǫ < R.
BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB
tx
stabile instab
λ
λλ
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x
(x)Φ
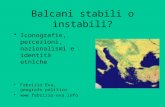
Figura 11.2.1. Grafico di Φ(x)=−λx+x2 (lato sinistro) e soluzione di x=Φ(x) (lato destro).

c©88-08- 9820 11.2. Stabilita lineare e non lineare 259
Un esempio
Si consideri l’equazione unidimensionale x = −λx + x2 sulla cui soluzione
x(t) =λx(0)
x(0) + eλt(λ − x(0))(11.2.16)
si verificano esplicitamente le condizioni del teorema. Infatti se x(0) < λ la soluzione(11.2.16), che e mostrata nella figura 11.2.1, resta limitata e converge a 0 per t → +∞. Sex(0) ≥ λ la soluzione presenta una singolarita e diverge per t = t∗ = −λ−1 log
(
1−λ/x(0))
.Il grafico di Φ(x) e una parabola che interseca l’asse x in x = 0, vedi figura 11.2.1. Rispettoall’origine il campo Φ(x) e attrattivo per x < λ, repulsivo per x > λ; il punto critico x = λe instabile nel futuro. L’insieme dei punti, da cui hanno origine orbite stabili convergentiad un un punto critico, si chiama bacino di stabilita del punto.
Per concludere mostriamo come si ottiene la soluzione della disequazione differenziale(11.2.9). Una funzione reale u(t) con valore iniziale assegnato e che soddisfi
du
dt≤ −σu (11.2.17)
e maggiorata dalla soluzione della corrispondente equazione differenziale u = −σu con lastessa condizione iniziale. Infatti portando i due membri di (11.2.15) dallo stesso lato emoltiplicando per eσt si ha
eσt
(
du
dt+ σu
)
=d
dt
(
eσtu)
≤ 0 (11.2.18)
Essendo la funzione eσtu(t) monotona non crescente, il suo valore per t > 0 sara nonsuperiore al suo valore iniziale per cui
eσtu(t) ≤ u(0), −→ u(t) ≤ e−σtu(0) (11.2.19)

260 11. Stabilita c©88-08- 9820
11.3. SISTEMI LINEARI PIANI
Consideriamo un sistema autonomo di equazioni differenziali lineari nel piano e classifichia-mo le orbite con diversa topologia, mettendole in relazione con gli autovalori della matriceA, da cui dipende la stabilita. Scriviamo esplicitamente l’equazione x = Ax nella forma
x = ax + byy = cx + dy
(11.3.1)
Gli autovalori della matrice sono dati da
λ± =a + d ±
√∆
2∆ = (a + d)2 − 4(ad − bc) (11.3.2)
y’y’
x’ x’
Figura 11.3.1. Fuoco: stabile nel futuro (lato sinistro), instabile nel futuro (lato destro).
I) Autovalori complessi: fuoco.Si presentano se ∆ < 0 e a + d 6= 0 e sono λ− = λ − iω, λ+ = λ + iω. Le traiettorie sonospirali e l’origine e asintoticamente stabile nel futuro se λ < 0, nel passato se λ > 0. Nellecoordinate normali x′ = V −1x, vedi da (10.5.14) a (10.5.19), l’equazione si scrive
x′ = λx′ + ωy′
y′ = λx′ − ωy′(11.3.3)
e la soluzione x′(t) = eλtR(ωt)x′(0) rappresenta una spirale, vedi figura 11.3.1, come sipuo verificare passando in coordinate polari.
II) Autovalori immaginari: centro
Si presentano se ∆ < 0 e a + d = 0 e sono λ− = −iω, λ+ = iω. Le traiettorie nellecoordinate normali sono cerchi, vedi figura 11.3.2, e l’origine e perpetuamente stabile;l’invariante del moto e x′2 + y′2.

c©88-08- 9820 11.3. Sistemi lineari piani 261
y’
x’
Figura 11.3.2. Centro: perpetuamente stabile.
III) Autovalori reali concordi: nodo
Gli autovalori λ± sono reali e dello stesso segno se ∆ > 0 e ad > bc. Il sistema nellecoordinate normali
x′ = λ−x′
y′ = λ+y′(11.3.4)
ha soluzione
x′ = x′(0)eλ−t y′ = y′(0)eλ+t (11.3.5)
e l’equazione dell’orbita si scrive
y′
y′(0)=
(
x′
x′(0)
)
λ+
λ−
(11.3.6)
Gli assi x′ e y′ sono sottospazi invarianti. Poiche y′ ha sempre lo stesso segno di y′(0), ex′ lo stesso segno di x′(0) si ha una curva per ogni quadrante, vedi figura 11.3.3, che siottiene per riflessione attorno agli assi da quella tracciata nel primo quadrante. Se λ± < 0l’origine e asintoticamente stabile nel futuro, se λ± > 0 lo e nel passato.
!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
λ λ<− + λ λ− +>
y’y’
x’ x’
Figura 11.3.3. Nodo: stabile nel futuro.

262 11. Stabilita c©88-08- 9820
IV) Autovalori reali discordi: sella
Gli autovalori λ± sono reali e di segno opposto se ∆ > 0 e ad < bc. L’equazione delle orbitein coordinate normali e ancora (11.3.6); se λ− = −λ+ le orbite sono rami di iperbole, vedifigura 11.3.4, e x′y′ e un invariante del moto. L’origine e sempre instabile, gli assi x′ e y′
sono la varieta stabile ed instabile rispettivamente se λ− < 0 e λ+ > 0.
!!!!!!!!!!!!
!!!!!!!!!
!!!!!!!!!
!!!!!!!!!!!!
!!!!!!!!!!!!!!!!
!!!!!!!!!!!!
y’
x’
Figura 11.3.4. Punto a sella: instabile.
V) Un autovalore nullo
Si ha λ− = 0, λ+ = (a + d)/2 ≡ λ se ad = bc. Dalle equazioni in coordinate normali
x′ = 0y′ = λy′
(11.3.7)
si vede che tutto l’asse x′ e formato da punti critici e le orbite sono rette parallele all’assey′, vedi figura 11.3.5.
!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!
x’
y’
Figura 11.3.5. Autovalore nullo: asse x stabile nel futuro.

c©88-08- 9820 11.3. Sistemi lineari piani 263
VI) Caso degenere
Si presenta se ∆ = 0 e l’autovalore ha molteplicita due λ− = λ+ = λ. Distinguiamo il casobanale in cui A = λI cioe a = d = λ, b = c = 0 e quindi le orbite x = x(0)eλt, y = y(0)eλt
sono rette uscenti dall’origine (stella) da quello in cui A non e multiplo dell’identita. Incoordinate normali la matrice prende la forma di Jordan B = λI + N l’equazione si scrive
x′ = λx′ + y′
y′ = λy′(11.3.8)
e la sua soluzione e data da
x′ = [x′(0) + t y′(0)]eλt y′ = y′(0)eλt (11.3.9)
y’ y’
x’ x’
Figura 11.3.6. Punto a stella (lato sinistro), forma di Jordan (lato destro).
L’equazione della traiettoria e
x′ =x′(0)
y′(0)y′ +
y′
λlog
y′
y′(0)(11.3.10)
e l’origine risulta asintoticamente stabile nel futuro se λ < 0, nel passato se λ > 0.L’andamento della traiettoria, vedi figura 11.3.6, si determina osservando che x′ = x′(y′)ha un punto di massimo o di minimo e che x′ → 0 per y′ → 0.

264 11. Sabilita c©88-08- 9820
11.4. FUNZIONE DI LYAPOUNOV
Un metodo efficace per determinare la stabilita di un punto critico xc, che assumiamo sial’origine, consiste nel passare dalla norma euclidea alla funzione di Lyapounov, che per unsistema meccanico e la somma della energia cinetica e potenziale.La funzione di Lyapounov H(x) e una variabile dinamica H(x) che gode delle proprietaseguenti:
i) H(x) ha un minimo in x = 0
ii) dHdt
= ∂H∂x
· Φ ≤ 0
Proposizione. Se l’equazione differenziale x = Φ(x) ha una funzione di Lyapounov Hche soddisfa le condizioni i) e ii), il punto critico x = 0 e asintoticamente stabile nel futuro.Se dH/dt = 0 il punto critico e perpetuamente stabile.
Non diamo la dimostrazione del teorema ma ci limitiamo ad illustrarne il significato geo-metrico nel caso d = 2. La funzione H ha un minimo ed il suo grafico ha la forma di uncatino. Le curve di livello H(x1, x2) = E di H sono le orbite del sistema se H e un integraleprimo cioe dH/dt = 0. Se dH/dt < 0, nel piano delle fasi (x1, x2) il campo Φ forma unangolo maggiore di π/2 con il gradiente di H ed e quindi diretto verso curve di livello convalori decrescenti di H. La traiettoria x(t) passa con continuita su curve di livello semprepiu interne, sino a raggiungere asintoticamente l’origine. Nella figura 11.4.1 si mostra lacurva (x1(t), x2(t), z(t)) tracciata sul grafico z = H(x1, x2) di H; la sua proiezione sulpiano delle fasi x1, x2 e l’orbita del sistema. Se dH/dt < 0 questa la curva spiraleggiaverso l’origine, se invece dH/dt = 0 la curva e l’intersezione del grafico di H con un pianoz = E.
x
z
2
x1
x1
x2
z
Figura 11.4.1. Funzione di Lyapounov H ed orbite con dH/dt<0 (a sinistra) e con dH/dt=0 (a destra).
Consideriamo il sistema dinamico costituito da una particella di massa unitaria in motolungo l’asse x sotto l’azione di un potenziale V (x) con derivata seconda continua avente

c©88-08- 9820 11.4. Funzione di Lyapounov 265
un minimo in x = 0, e di una forza dissipativa
x = v
v = −∂V
∂x− bv
=⇒ H =v2
2+ V (x) (11.4.1)
La funzione H e l’energia e varia secondo la legge dH/dt = −bv2; la stabilita perpetua siha se H si conserva cioe se b = 0. La funzione H(x, v), definita sul piano delle fasi, haun minimo assoluto nell’origine. Lo sviluppo di Taylor per V tenendo conto che V ′(0) =0, V ′′(0) > 0 si scrive
V (x) =1
2V ′′(ξ(x))
x2
2(11.4.2)
dove ξ(x) ∈ [0, x] e continua e tale risulta V ′′(ξ(x)) come funzione di x. Poiche V ′′(0) > 0esiste un intorno |x| ≤ R dell’origine, ove V ′′(ξ(x)) e positiva, ed e possibile delimitare ilgrafico di V (x) tra due parabole.
αx2
2≤ V ≤ β
x2
2, α > 0, |x| ≤ R (11.4.3)
Detto x = (x, v) vale la disuguaglianza seguente
1
2‖x(t)‖2 =
1
2[x(t)2 + v(t)2] ≤ 1
min(1, α)
(
v2
2+ α
x2
2
)
≤
≤ 1
min(1, α)H(x(t), v(t)) ≤ 1
min(1, α)H(x(0), v(0)) ≤
≤ 1
min(1, α)
(
v(0)2
2+ β
x(0)2
2
)
≤
≤ 1
2
max(1, β)
min(1, α)
(
v(0)2 + x(0)2)
≡ C2
2‖x(0)‖2
(11.4.4)
Se scegliamo δǫ = ǫ/C la condizione di stabilita alla Lyapounov e soddisfatta.
Nel caso di un oscillatore armonico il cui potenziale e V = ω2x2/2 si ha α = β = ω2. DaC = ω se ω > 1 e C = 1/ω se ω < 1 segue che C coincide con il rapporto tra il semiassemaggiore ed il semiasse minore della ellisse definita da H(v, x) = E.
Il significato geometrico e illustrato dalla figura 11.4.2. L’orbita piu esterna che ha almenoun punto nel cerchio di raggio δǫ e una ellisse di di semiasse minore δǫ, che e contenuta inun cerchio di raggio ǫ uguale al suo semiasse maggiore, poiche il rapporto δǫ/ǫ e uguale alrapporto tra i semiassi della ellisse.
In meccanica la funzione H e l’hamiltoniana del sistema. Se H ha un massimo nel puntocritico e dH/dt ≥ 0 si ha ugualmente stabilita. Il criterio non si applica invece se H hauna sella, come accade nel problema dei tre corpi ristretto, vedi paragrafo 23.5.

266 11. Stabilita c©88-08- 9820
ε
δε
v
x
Figura 11.4.2. Dischi di raggio ǫ e δǫ per l’oscillatore armonico.
11.5. STABILITA DEL MOTO
La definizione di stabilita per la soluzione x(t) di una equazione differenziale, e simile aquella data per un punto di equilibrio. La soluzione si dice stabile se, scelto x(0) in unintorno di x(0), per ogni t > 0 il punto x(t) e in un intorno di x(t). La soluzione e stabileentro un cilindro di raggio R se ad ∀ǫ < R si puo associare un δǫ tale che
‖x(0) − x(0)‖ ≤ δǫ −→ ‖x(t) − x(t)‖ ≤ ǫ, ∀t ≥ 0 (11.5.1)
Se la condizione vale anche per t < 0 si ha stabilita perpetua. Nel caso di un punto criticoil cilindro ha per asse una retta. Se risulta che
limt→+∞
‖x(t) − x(t)‖ = 0 (11.5.2)
si dice che la soluzione x(t) e asintoticamente stabile. Se la condizione(11.5.1) e soddisfattaanche per t < 0 l’orbita e perpetuamente stabile.
Da un punto di vista geometrico la definizione data significa che ogni traiettoria con puntoiniziale entro la sfera di raggio δǫ deve essere contenuta nel cilindro avente come asse latraiettoria x(t) e come base una sfera di raggio ǫ, nello spazio delle fasi esteso, vedi figura11.5.1. Nel caso di un punto critico, l’asse del cilindro x(t) = xc e una retta parallelaall’asse t, vedi figura 11.5.2.
Stabilita orbitale. E una definizione di stabilita riferita alla distanza tra le semiorbite(t ≥ 0) o le orbite del sistema. Nella precedente definizione a supt≥0 ‖x(t) − x(t)‖ ≤ ǫbasta sostituire la distanza di Hausdorff dH tra le due orbite. Se A e B sono due insiemicompatti si definisce dH(A, B) = maxmaxx∈A d(x, B), maxy∈B d(A,y) avendo indicatocon d(x, B) = miny∈B ‖x − y‖ la distanza del punto x dall’insieme B. La differenza trale due definizioni appare evidente se si considera un sistema nel piano le cui orbite sianocerchi, percorsi con una una velocita angolare che dipende dal raggio, vedi capitolo 18.

c©88-08- 9820 11.5. Stabilita del moto 267
x2
t
x 1
BBBBBBBBBBBBBBBBBB
x (t)(t)x
Figura 11.5.1. Stabilita di una traiettoria.
Ogni soluzione x(t) di un sistema lineare non omogeneo e stabile se risulta stabile l’origineper il sistema omogeneo associato. Se il sistema e autonomo si ha
x(t) = eAt(x(0) − x(0)) + x(t) (11.5.3)
ed applicando la definizione data sopra si vede che se A ha autovalori con parte realenegativa la soluzione x(t) e asintoticamente stabile.Se il sistema non e autonomo da (10.4.18) segue che
x(t) = X(t, 0)[x(0) − x(0)] + x(t) (11.5.4)
La stabilita della soluzione x(t) e dettata dal comportamento della matrice X(t, 0) ed equindi e uguale a quella del punto di equilibrio x = 0 per il sistema omogeneo.
Consideriamo come esempio il problema delle oscillazioni forzate affrontato nel paragrafo10.2 dove x e il vettore di componenti (x, x) e x∗(t) e definita da (10.2.11). La soluzionesi riscrive nella forma (11.5.3) dove
x(t) =
C cos(Ωt + γ)
−ΩC sin(Ωt + γ)
(11.5.5)
e eAt e data da (10.5.27), nel caso β < ω. La soluzione periodica x(t), cui corrisponde unaellisse nello spazio delle fasi, e asintoticamente stabile.
Altri esempi di traiettorie stabili sono i cicli limite nei sistemi non lineari piani, come quellodescritto dalla equazione equazione (2.9.1), per la quale il ciclo limite e il cerchio unitario.

268 11. Stabilita c©88-08- 9820
x 1
x2
t
BBBBBBBBBBBBBBBBBBBB
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x x= cx (t)
Figura 11.5.2. Stabilita di un punto di equilibrio.
11.6. RISONANZA PARAMETRICA
Ai sistemi non autonomi con dipendenza periodica dal tempo si applica la teoria di Floquet.Consideriamo la equazione di Mathieu (10.6.13) introdotta per il pendolo con punto disospensione oscillante
x + ω2(1 + ǫ cosΩt)x = 0, Ω =2π
T(11.6.1)
e determiniamo le curve che, nel piano ω/Ω, ǫ, separano le regioni in cui gli autovalori diX(T ) sono complessi, da quelle in cui sono reali. Queste curve separano quindi le regioni dimoto stabile da quelle di moto instabile: infatti data un’orbita x∗(t) la distanza da questadi un’orbita con punto iniziale x(0) e
‖x(t)−x∗(t)‖ ≤ ‖P (t)‖ ‖X(T )t/T ‖ ‖x(0)−x∗(0)‖ ≤ C‖X(T )t/T ‖ ‖x(0)−x∗(0)‖ (11.6.2)
La transizione si ha quando X(T ) = ±I e la matrice fondamentale X(t) = P (t) e periodicadi periodo T o 2T rispettivamente. Se ǫ = 0 e la matrice fondamentale diventa quelladell’oscillatore armonico (10.4.20)
X(T ) =
cos ωT ω−1 sinωT
−ω sinωT cosωT
(11.6.3)
e X(T ) = ±I quando ω/Ω e intero o semi-intero. Per ǫ vicino a zero i valori di ω/Ω peri quali X(T ) = ±I, si determinano cercando per via perturbativa soluzioni periodiche di

c©88-08- 9820 11.6. Risonanza parametrica 269
periodo T e 2T . La curva che parte da ω = Ω/2 per ǫ = 0 e data da
ω1(ǫ) =Ω
2
(
1 ± ǫ
4+ O(ǫ2)
)
(11.6.4)
Per ǫ qualsiasi e conveniente valutare X(T ) tramite un integratore, vedi capitolo 22, pertracciare nel piano (ω, ǫ) l’insieme dei punti instabili (|TrX(T)| > 2), la cui frontiera sono lecurve di transizione, corrispondenti a moti periodici. Un’equazione implicita D(ω, ǫ) = 0per le curve di transizione si ottiene sviluppando in serie di Fourier le corrispondentisoluzioni periodiche di periodo T ossia x(t) =
∑
k ckeikΩt, che sostituite in (11.6.1) danno
+∞∑
k=−∞
eikΩt[γkck + ck−1 + ck+1] = 0 γk = 2ω2 − k2Ω2
ǫω2(11.6.5)
un sistema lineare omogeneo nei coefficienti ck; la funzione D(ω, ǫ) e il determinante dellamatrice (infinita) di questo sistema. Le soluzioni di periodo 2T si ottengono in modoanalogo.
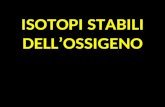
0 30
1
Figura 11.6.1. Regioni di instabilita (scure) per equazione di Mathieu con Ω=1 e approssimazione
perturbativa (linea continua) alla prima curva di transizione nello spazio dei parametri: il periodo e T=2π,
in ascissa si ha ω, in ordinata ǫ.
Nella figura 11.6.1 si mostrano le regioni di instabilita nello spazio dei parametri ǫ, ω/Ω,confrontandole con la soluzione perturbativa.
Pendolo variabile
Consideriamo ora l’equazione del pendolo variabile (10.6.15) linearizzata attorno a θ = 0.La matrice fondamentale e X(T ) = X+(T/2)X−(T/2) dove X±(T/2) sono dati da (11.6.3)

270 11. Stabilita c©88-08- 9820
con ω e sostituito da ω± e T da T/2. La sua traccia vale
Tr (X(T )) = 2 cos(ω−T/2) cos(ω+T/2) −(
ω+
ω−
+ω−
ω+
)
sin(ω−T/2) sin(ω+T/2) (11.6.6)
e le curve di transizione sono definite da Tr X(T ) = ±2. Nella figura 1.6.2 si mostranole regioni di instabilita e la soluzione perturbativa per ǫ piccolo delle curve di transizione.Riesprimendo il prodotto di coseni e seni come somma di coseni ed usando gli sviluppi(ω+/ω− + ω+/ω−) = 2 + ǫ2 + . . . con ω+ + ω− = 2ω(1− ǫ2/8) + . . . , ω+ − ω− = ωǫ + . . .si ottiene
Tr (X(T )) =
(
2 +ǫ2
2
)
cos
[
ωT
(
1 − ǫ2
8
)]
− ǫ2
2cos
(
ωTǫ
2
)
(11.6.7)
Le curve di transizione che corrispondono a moti periodici di periodo T sono date daTr X(T ) = 2 dove ωT = 2πk + α1ǫ + α2ǫ
2 + .., quelle che corrispondono a moti periodicidi periodo 2T sono date da Tr X(T ) = −2 dove ωT = 2π(k + 1
2 ) + α1ǫ + .... Sostituendonella (11.6.7) si trova che le curve di transizione ω(ǫ) sono paraboliche, poiche α1 = 0, nelprimo caso, lineari nel secondo caso
ω =2πk
T+
2πk
T
ǫ2
8
3
−1, ω =
2π
T
(
k +1
2
)
± ǫ
T(11.6.8)
0 30
1
0 10
0.005
Figura 11.6.2. Curve di transizione per il pendolo variabile, linearizzato attorno a θ=0 (lato sinistro) e
attorno a θ=π (lato destro). Il periodo e T=2π, in ascissa si ha ω, in ordinata ǫ.

c©88-08- 9820 11.A. Norme di matrici 271
La matrice fondamentale per l’equazione (10.6.16) del pendolo linearizzato attorno a θ = πe data da
X(T ) =
ch ω+T/2 ω−1+ shω+T/2
ω+sh ω+T/2 chω+T/2
cos ω−T/2 ω−1− sinω−T/2
−ω− sinω−T/2 cosω−T/2
(11.6.9)
e la sua traccia vale
Tr X(T ) = 2ch (ω+T/2) cos(ω−T/2) +
(
ω+
ω−
− ω−
ω+
)
sh (ω+T/2) sin(ω−T/2) (11.6.10)
Posto µ1/2 = ωT/(2ǫ1/2), supponendo ǫ < µ ≪ 1 e notando che (ω+/ω− − ω−/ω+) =2ǫ + O(ǫ2) sviluppando (11.6.10) in µ ed ǫ otteniamo
Tr X(T ) = 2(
1 +µ
2(1 + ǫ)
)(
1 − µ
2(1 − ǫ)
)
+ 2ǫµ + . . . = 2 + 4µǫ − µ2
2+ . . . (11.6.11)
dove i termini trascurati sono di ordine ǫ2µ e ǫµ2. La condizione di stabilita TrX(T ) < 2e soddisfatta se ǫ < µ/8 = ω2T 2/(32ǫ). Questa condizione insieme con µ < 1 si scrivono
ω2T 2
4< ǫ <
ωT
4√
2(11.6.12)
Nella figura 11.6.2 si mostra nel piano dei parametri ω, ǫ la regione di instabilita e la stimaperturbativa (1.6.12) della sua frontiera.
11.A. NORME DI MATRICI
La norma di una matrice A e definita da
‖A‖ = maxx
‖Ax‖‖x‖ (11.A.1)
E equivalente dire che ‖A‖ e il massimo di ‖Ax‖, dove x varia sulla sfera unitaria. Seuna matrice e simmetrica la sua norma e il massimo tra i moduli degli autovalori. DaA = RΛR e dalla invarianza della norma per trasformazioni ortogonali segue che
‖Ax‖‖x‖ =
‖ΛRx‖‖Rx‖ (11.A.2)
e quindi ‖A‖ = ‖Λ‖. Ordinando gli autovalori per modulo crescente |λ1| < |λ2| < . . . |λd|abbiamo che
‖Λx‖ = (λ21x
21 + . . . + λ2
dx2d)
1/2 ≤ |λd| (x21 + . . . + x2
d]1/2 = |λd| ‖x‖ (11.A.3)

272 11. Stabilita c©88-08- 9820
Poiche ‖Ax‖ ≤ |λd| ‖x‖ e l’uguaglianza e raggiunta se x e l’autovettore corrispondente aλd, si ha ‖A‖ = |λd|. Da un punto di vista geometrico la applicazione y = Ax trasformauna sfera in un elissoide. La norma di A che e il massimo modulo delle immagini dei vettoriappartenenti alla sfera unitaria, secondo la definizione (11.A.2), corrisponde al massimotra i semiassi dell’elissoide. Infatti consideriamo la sfera unitaria
‖x‖2 = x21 + x2
2 + . . . + x2d = 1 (11.A.4)
e l’applicazione lineare y = Ax. La norma della matrice ‖A‖ = max ‖y‖ e la mas-sima distanza dall’origine dei punti dell’elissoide; dopo la rotazione y′ = Ry l’equazionedell’elissoide diventa
1 = ‖x‖2 = ‖A−1y‖2 = ‖RΛ−1Ry‖2 = ‖Λ−1y′‖2 =y′12
λ21
+y′22
λ22
+ . . . +y′
d2
λ2d
(11.A.5)
e la massima distanza dall’origine e la lunghezza del semiasse maggiore cioe |λd|. Se lamatrice A non e simmetrica si introduce la matrice simmetrica definita positiva AA =RS2R dove S e una matrice diagonale positiva ed R una matrice ortogonale. La norma diA e uguale alla norma di S e quindi e la radice quadrata del massimo autovalore di AA.L’interpretazione geometrica e la stessa del caso simmetrico.
Alcune ovvie proprieta della norma sono:
‖Ax‖ ≤ ‖A‖ ‖x‖ (11.A.6)
che segue dalla definizione (11.A.1) e
‖AB‖ ≤ ‖A‖ ‖B‖, ‖An‖ ≤ ‖A‖n (11.A.7)
Se la matrice A e simmetrica ed i suoi autovalori sono λ1 < λ2 < . . . < λd, la normadi eAt per t > 0 e data da eλdt. Se A non e simmetrica la norma di eAt e quella di
eAt/2eAt/2. Se gli autovalori sono λk + iωk ordinati in una successione con parte realecrescente λ1 < . . . < λd e U e la matrice degli autovettori tale che eAt = UeΛtU−1 da‖eΛt‖ ≤ eλd t segue
‖eAt‖ =≤ ‖U‖ ‖U−1‖ eλd t (11.A.8)