
11 MOTORE AD INDUZIONE - unife.it · visto per il motore Brushless, con l’unica differenza che,...
33
Motori Asincroni Università degli studi di Ferrara Azionamenti Elettrici 194 11 MOTORE AD INDUZIONE Il motore ad induzione è stato molto usato, perché è nato per essere alimentato direttamente dalla tensione di alimentazione trifase, e quindi per la totale mancanza di controllo, in applicazioni a basso livello. Il motore ad induzione è robusto e di costi contenuti, ma non è mai stato utilizzato per le applicazioni ad elevate prestazioni per la difficoltà di controllo. Ultimamente grazie ai progressi del controllo digitale e dell’elettronica di potenza comincia ad essere utilizzato anche in applicazioni che prima gli erano precluse. La tecnica del controllo è quella di elaborare un modello matematico, ricorrendo a trasformazioni vettoriali, che riconduca il funzionamento del motore ad induzione a quello di un motore in DC, e quindi alla sua semplicità di controllo. Il motore ad induzione viene usato in due tipi di azionamento: General Purpose (INVERTER) Controllo Vettoriale Il primo è usato per applicazioni nelle quali non sono richieste particolari prestazioni. Il controllo di coppia è ottenuto variando la tensione e la frequenza in modo coordinato, non ottenendo in questo modo delle prestazioni dinamiche di qualità; soprattutto a basse velocità, dove non riesce ad erogare coppie sufficientemente elevate. Il secondo tipo di controllo agisce sulla corrente e sul flusso, in modo del tutto analogo a quanto visto per il motore Brushless, con l’unica differenza che, mentre nel Brushless il flusso è generato dai magneti permanenti, nel motore ad induzione dipende dall’alimentazione. Questo tipo di controllo fornisce prestazioni dinamiche di elevata qualità anche a basse velocità. 11.1 Struttura del motore ad induzione STATORE Lo statore del motore ad induzione è lo stesso di un Brushless Sinusoidale e la distribuzione F(α) si considera sinusoidale, si trascurano le 3° armoniche, in modo da poter fare riferimento a vettori spaziali. Nei motori di uso corrente, ovvero motori di non elevate prestazioni dinamiche, l’avvolgimento è come quello del Brushless Trapezoidale, a passo-intero. Figura 1.
Transcript of 11 MOTORE AD INDUZIONE - unife.it · visto per il motore Brushless, con l’unica differenza che,...
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
194
11 MOTORE AD INDUZIONE Il motore ad induzione è stato molto usato, perché è nato per essere alimentato direttamente dalla tensione di alimentazione trifase, e quindi per la totale mancanza di controllo, in applicazioni a basso livello. Il motore ad induzione è robusto e di costi contenuti, ma non è mai stato utilizzato per le applicazioni ad elevate prestazioni per la difficoltà di controllo. Ultimamente grazie ai progressi del controllo digitale e dell’elettronica di potenza comincia ad essere utilizzato anche in applicazioni che prima gli erano precluse. La tecnica del controllo è quella di elaborare un modello matematico, ricorrendo a trasformazioni vettoriali, che riconduca il funzionamento del motore ad induzione a quello di un motore in DC, e quindi alla sua semplicità di controllo. Il motore ad induzione viene usato in due tipi di azionamento:
General Purpose (INVERTER) Controllo Vettoriale
Il primo è usato per applicazioni nelle quali non sono richieste particolari prestazioni. Il controllo di coppia è ottenuto variando la tensione e la frequenza in modo coordinato, non ottenendo in questo modo delle prestazioni dinamiche di qualità; soprattutto a basse velocità, dove non riesce ad erogare coppie sufficientemente elevate. Il secondo tipo di controllo agisce sulla corrente e sul flusso, in modo del tutto analogo a quanto visto per il motore Brushless, con l’unica differenza che, mentre nel Brushless il flusso è generato dai magneti permanenti, nel motore ad induzione dipende dall’alimentazione. Questo tipo di controllo fornisce prestazioni dinamiche di elevata qualità anche a basse velocità. 11.1 Struttura del motore ad induzione
STATORE
Lo statore del motore ad induzione è lo stesso di un Brushless Sinusoidale e la distribuzione F(α) si considera sinusoidale, si trascurano le 3° armoniche, in modo da poter fare riferimento a vettori spaziali. Nei motori di uso corrente, ovvero motori di non elevate prestazioni dinamiche, l’avvolgimento è come quello del Brushless Trapezoidale, a passo-intero.
Figura 1.
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
195
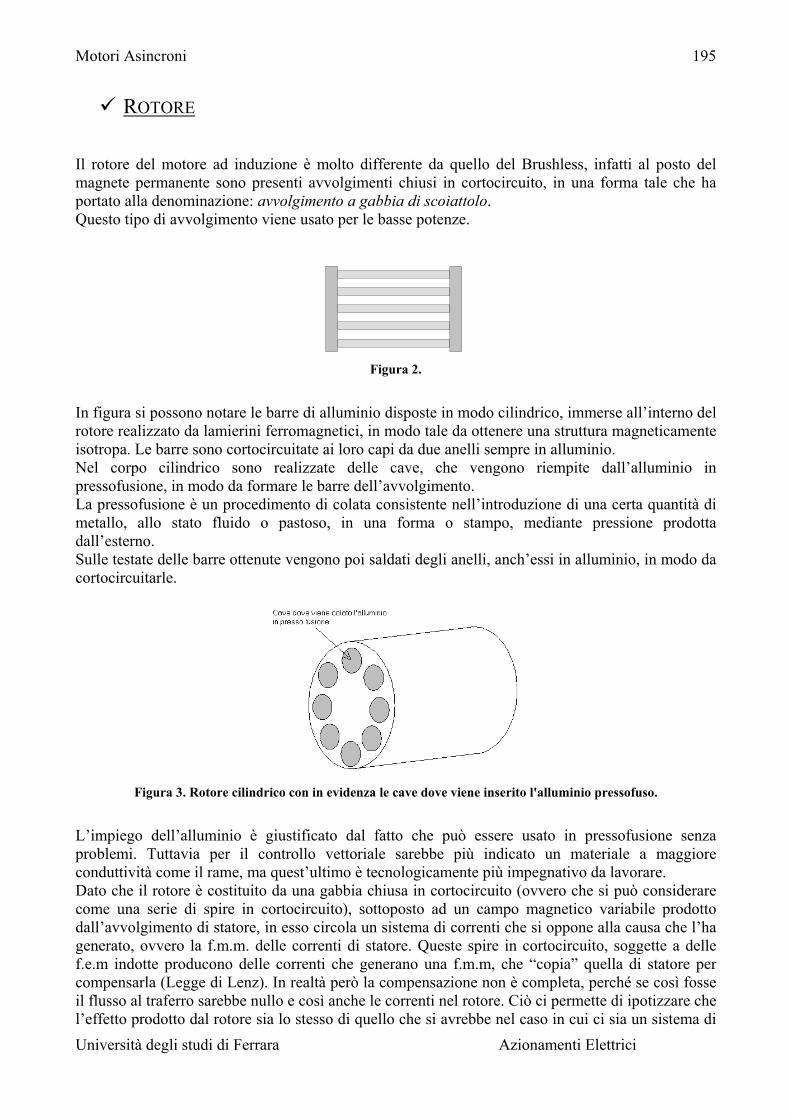
ROTORE Il rotore del motore ad induzione è molto differente da quello del Brushless, infatti al posto del magnete permanente sono presenti avvolgimenti chiusi in cortocircuito, in una forma tale che ha portato alla denominazione: avvolgimento a gabbia di scoiattolo. Questo tipo di avvolgimento viene usato per le basse potenze.
Figura 2.
In figura si possono notare le barre di alluminio disposte in modo cilindrico, immerse all’interno del rotore realizzato da lamierini ferromagnetici, in modo tale da ottenere una struttura magneticamente isotropa. Le barre sono cortocircuitate ai loro capi da due anelli sempre in alluminio. Nel corpo cilindrico sono realizzate delle cave, che vengono riempite dall’alluminio in pressofusione, in modo da formare le barre dell’avvolgimento. La pressofusione è un procedimento di colata consistente nell’introduzione di una certa quantità di metallo, allo stato fluido o pastoso, in una forma o stampo, mediante pressione prodotta dall’esterno. Sulle testate delle barre ottenute vengono poi saldati degli anelli, anch’essi in alluminio, in modo da cortocircuitarle.
Figura 3. Rotore cilindrico con in evidenza le cave dove viene inserito l'alluminio pressofuso.
L’impiego dell’alluminio è giustificato dal fatto che può essere usato in pressofusione senza problemi. Tuttavia per il controllo vettoriale sarebbe più indicato un materiale a maggiore conduttività come il rame, ma quest’ultimo è tecnologicamente più impegnativo da lavorare. Dato che il rotore è costituito da una gabbia chiusa in cortocircuito (ovvero che si può considerare come una serie di spire in cortocircuito), sottoposto ad un campo magnetico variabile prodotto dall’avvolgimento di statore, in esso circola un sistema di correnti che si oppone alla causa che l’ha generato, ovvero la f.m.m. delle correnti di statore. Queste spire in cortocircuito, soggette a delle f.e.m indotte producono delle correnti che generano una f.m.m, che “copia” quella di statore per compensarla (Legge di Lenz). In realtà però la compensazione non è completa, perché se così fosse il flusso al traferro sarebbe nullo e così anche le correnti nel rotore. Ciò ci permette di ipotizzare che l’effetto prodotto dal rotore sia lo stesso di quello che si avrebbe nel caso in cui ci sia un sistema di

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
196
avvolgimenti identico a quello di statore, invece della gabbia di scoiattolo, e che quindi anche la distribuzione di conduttori sia la stessa che si ha nello statore.
Figura 4. Distribuzione di un avvolgimento rotorico
A questo punto si suppone che nel rotore ci siano tre fasi come nello statore ma cortocircuitate, poiché non alimentate, e che la distribuzione dei conduttori di rotore sia la medesima di quelli di statore. Sia ξ la coordinata rotorica che fa riferimento al sistema di rotore e α la coordinata statorica che fa riferimento al sistema di statore si ha:
F(ξ) <=> F(α)
Consideriamo per tutti gli avvolgimenti lo stesso numero di spire N. Con queste premesse possiamo utilizzare, anche per descrivere le grandezze rotoriche, i vettori spaziali che avevamo definito per i motori Brushless. L’accoppiamento tra avvolgimento rotorico e statorico varia in funzione della posizione angolare del rotore in quanto quest’ultimo è libero di ruotare intorno al proprio asse. Scriviamo ora l’equazione di statore nel riferimento di statore:
dtdiRV s
sssλ
+= (Eq. 39)
Dove:
sV = vettore delle tensioni di alimentazione delle tre fasi le cui componenti sono le tre tensioni di alimentazione delle tre singole fasi.
iRs = caduta sulla resistenza statorica
sλ = flusso concatenato con gli avvolgimenti di statore Scriviamo l’equazione di rotore nel riferimento di rotore:
dtdiR r
rrλ
+=0 (Eq. 40)
L’unica differenza rispetto alle equazioni di statore è che la tensione di alimentazione è nulla, in quanto le spire sono chiuse in cortocircuito. Si può notare che le grandezze rotoriche non sono direttamente misurabili, sia perché la corrente ri fa riferimento ad un sistema equivalente non reale, sia perché il rotore non è accessibile dall’esterno.
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
197
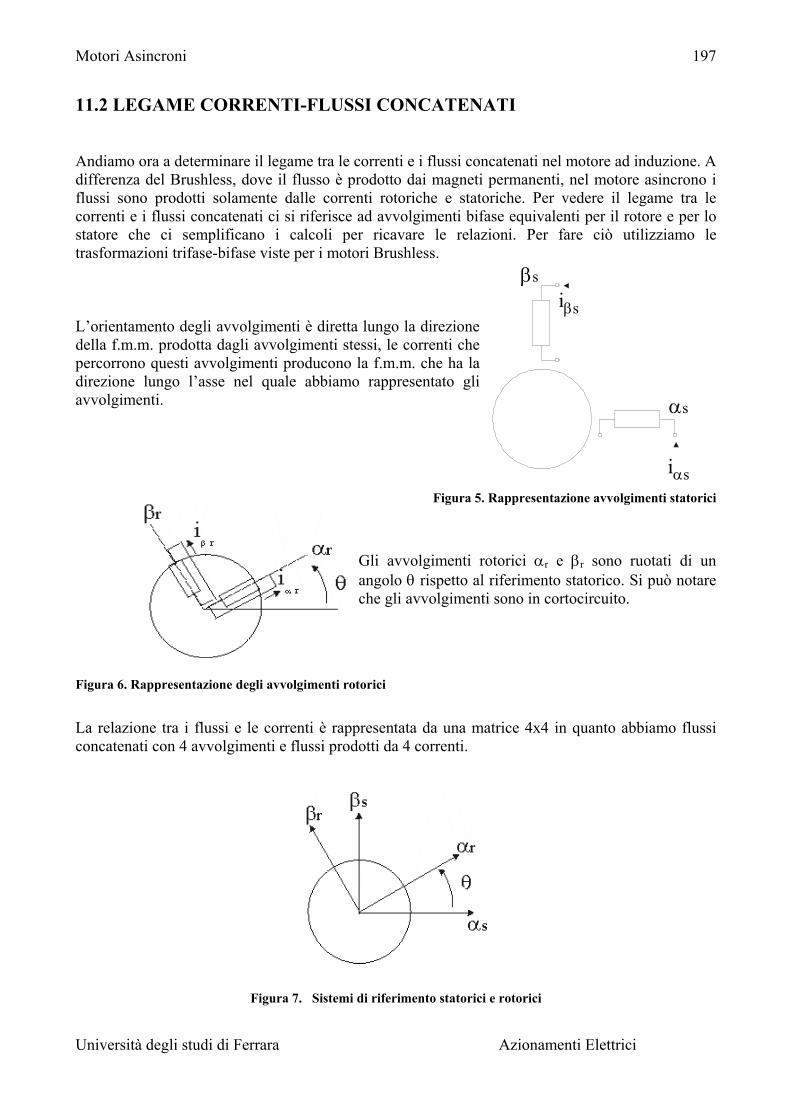
11.2 LEGAME CORRENTI-FLUSSI CONCATENATI Andiamo ora a determinare il legame tra le correnti e i flussi concatenati nel motore ad induzione. A differenza del Brushless, dove il flusso è prodotto dai magneti permanenti, nel motore asincrono i flussi sono prodotti solamente dalle correnti rotoriche e statoriche. Per vedere il legame tra le correnti e i flussi concatenati ci si riferisce ad avvolgimenti bifase equivalenti per il rotore e per lo statore che ci semplificano i calcoli per ricavare le relazioni. Per fare ciò utilizziamo le trasformazioni trifase-bifase viste per i motori Brushless. L’orientamento degli avvolgimenti è diretta lungo la direzione della f.m.m. prodotta dagli avvolgimenti stessi, le correnti che percorrono questi avvolgimenti producono la f.m.m. che ha la direzione lungo l’asse nel quale abbiamo rappresentato gli avvolgimenti.
Figura 5. Rappresentazione avvolgimenti statorici
Gli avvolgimenti rotorici αr e βr sono ruotati di un angolo θ rispetto al riferimento statorico. Si può notare che gli avvolgimenti sono in cortocircuito.
Figura 6. Rappresentazione degli avvolgimenti rotorici
La relazione tra i flussi e le correnti è rappresentata da una matrice 4x4 in quanto abbiamo flussi concatenati con 4 avvolgimenti e flussi prodotti da 4 correnti.
Figura 7. Sistemi di riferimento statorici e rotorici
αs
βs
iαs
iβs
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
198
La relazione è quindi la seguente:
[ ] [ ][ ]iL )(θλ = La matrice [L(θ)] è una matrice di autoinduttanze e mutue induttanze che dipende da θ in quanto al variare di θ variano gli accoppiamenti tra i vari avvolgimenti. La matrice [λ] è composta dai flussi concatenati con i quattro avvolgimenti ovvero:
[λ] = [λαs , λβs , λαr , λβr ]T
allo stesso modo la matrice [i] è composta dalle correnti dei quattro avvolgimenti ovvero:
[i] = [iαs , iβs , iαr , iβr ] T suddividiamo ora la matrice [L(θ)] in quattro sottomatrici 2x2 :
[L] =
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
r
r
s
s
LL
LL
00
00
La sottomatrice descrive la relazione tra i flussi prodotti dalle correnti di statore con gli avvolgimenti di statore e fa riferimento agli avvolgimenti sullo stesso riferimento. Ls (elemento 1-1 della sottomatrice) è il flusso prodotto da iαs che si concatena con l’avvolgimento αs: descrive quindi il flusso di autoinduzione. Ls è quindi il coefficiente di autoinduzione. Gli elementi fuori dalla diagonale principale della sottomatrice sono nulli in quanto il flusso concatenato con l’avvolgimento αs prodotto da iβs è ortogonale ad αs e il flusso concatenato con l’avvolgimento βs prodotto da iαs è ortogonale a βs. L’elemento 2-2 della sottomatrice (ancora una volta Ls) rappresenta il flusso prodotto da iβs che si concatena con l’avvolgimento βs; descrive quindi il flusso di autoinduzione. Ls è a sua volta un coefficiente di autoinduzione uguale a Ls (elemento 1-1 della sottomatrice) dato che abbiamo sempre fatto riferimento ad avvolgimenti simmetrici. Il medesimo discorso può essere fatto sulla sottomatrice . Questa sottomatrice fa riferimento alle relazioni tra i flussi prodotti dalle correnti di rotore con gli avvolgimenti di rotore e agli avvolgimenti sullo stesso sistema di riferimento. Avremmo però il coefficiente di auto induttanza Lr degli avvolgimenti di rotore. Allo stesso modo gli elementi fuori dalla diagonale principale saranno nulli perché sono relativi ad avvolgimenti tra di loro ortogonali.

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
199
Analizziamo ora la sottomatrice che descrive le relazioni tra i flussi prodotti dalle correnti di rotore concatenati con gli avvolgimenti di statore.
(iαr) (iβr) (λαs) M cos θ -M sinθ(λβs) M sin θ M cosθ
L’accoppiamento tra i flussi prodotti dalle correnti di rotore e gli avvolgimenti di statore, osservando la fig.4, varia al variare di θ. Il flusso prodotto dalla corrente iαr si accoppierà completamente, ovvero avrà il massimo accoppiamento con l’avvolgimento αs, quando θ = 0, ovvero quando gli avvolgimenti sono allineati. Con θ = π/2 l’accoppiamento sarà nullo, il flusso prodotto dalla corrente iαr non si accoppia con l’avvolgimento αs. Questo accoppiamento dipende da θ in funzione di cos θ in quanto è massimo quando θ = 0 e nullo quando θ = π/2. L’accoppiamento sarà quindi proporzionale a M cosθ dove M è una costante che corrisponde al coefficiente di mutua induttanza tra i due avvolgimenti. Abbiamo imposto che la distribuzione tra gli avvolgimenti sia di tipo sinusoidale; in realtà sarà pseudosinusoidale però, per il fatto che le terze armoniche non contano per il calcolo della coppia (le tre fasi sono collegate a stella con neutro isolato e sfasate di 120° elettrici), in pratica possiamo considerare che la distribuzione sia sinusoidale e che quindi l’accoppiamento tra gli avvolgimenti vari con Mcosθ. Vediamo ora il flusso prodotto dalla corrente iβr che si concatena con l’avvolgimento αs: è nullo per θ = 0, in quanto l’avvolgimento βr è ortogonale ad αs, è massimo quando θ = -π/2, perché βr è allineato con αs; quando θ = π/2, βr è allineato con αs ma di verso opposto, quindi ottengo il massimo valore ma con segno negativo. Il coefficiente di accoppiamento è proporzionale a - senθ. Nello stesso modo si possono verificare gli accoppiamenti tra il flusso prodotto dalle correnti rotoriche e l’avvolgimento βs. La sottomatrice , a meno del coefficiente M, è la trasposta della matrice di Park. Posso quindi andare a completare la matrice [L(θ)] e scriverla nella forma:
[λ] = [ ]iILMA
r
ts
⎥⎦
⎤⎢⎣
⎡
)()(
θθ
(Eq. 41)
Poiché deve valere la reciprocità della mutua induttanza, si ricava la matrice , dato che la matrice degli accoppiamenti deve essere simmetrica. Introduciamo ora i vettori rsrs ii ,,,λλ , dove λ s è il vettore le cui componenti sono i flussi concatenati con gli avvolgimenti di statore, rλ è il vettore le cui componenti sono i flussi concatenati con gli avvolgimenti di rotore e analogamente per le correnti. L’equazione matriciale (Eq. 41) può essere scritta come:
[ ] ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
r
s
r
s
ii
L )(θλλ

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
200
o nella forma estesa:
⎪⎩
⎪⎨⎧
+=
+=
rrsr
rt
sss
iLiMA
iMAiL
)(
)(
θλ
θλ (Eq.42)
λ s fa riferimento al sistema di riferimento statorico mentre la seconda equazione si riferisce ad un sistema di riferimento rotorico; è quindi conveniente trasformare le due equazioni e portarle entrambe in un sistema di riferimento unico che indichiamo con K. Consideriamo quindi il generico sistema di riferimento K ruotato di un angolo θk rispetto al riferimento di statore.
Figura 8. Rappresentazione sistema di riferimento K
Per fare questa trasformazione utilizziamo la matrice di Park A(.). Per effettuare le trasformazioni di grandezze dallo statore al sistema di riferimento K avremmo che:
sksk iAi )(θ= mentre l’inversa è:
skkt
s iAi )(θ= dove:
ski = correnti di statore nel riferimento K A(θk) = matrice di Park con argomento θk , in quanto il riferimento K ruota di θk rispetto al riferimento di statore. Per fare la trasformazione dal sistema di riferimento di rotore al sistema di riferimento K moltiplichiamo per la matrice di Park A(θk-θ) e otteniamo:
rkrk iAi )( θθ −= e la sua inversa:
rkkt
r iAi )( θθ −= Ora portiamo nel sistema di riferimento K il sistema di equazioni (Eq. 42):
-) Premoltiplichiamo l’equazione rt
sss iMAiL )(θλ += per la matrice di Park A(θk) e sostituendo a At(θ) il termine A(-θ) (la trasposta di A è uguale all’inversa) otteniamo:
A(θk) rksss iAMiL )()A( )A( k θθθλ −+=

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
201
Ricordando che: A(θk) sλ = skλ
si )A( kθ = ski )()A( θθ −Ak = )( θθ −kA ed inoltre rk iA )( θθ − = rki
si ottiene: skλ = Ls ski + M rki (a)
-) Premoltiplichiamo l’equazione rrsr iLiMA += )(θλ per la matrice di Park A(θk-θ) e sostituendo ad A(θk-θ) le matrici )()A( θθ −Ak , dato che effettuare una rotazione di (θk-θ) equivale ad effettuare una rotazione di (θk) e di (-θ), si ottiene:
A(θk-θ) rkrskr iALiAAMA )()()()( θθθθθλ −+−= Ricordando che: A(θk-θ) rλ = rkλ
sk iA )(θ = ski
rk iA )( θθ − = rki si ottiene:
rkλ = M ski + Lr rki (b)
Ora dalle equazioni (a) e (b) si ottiene il seguente sistema:
skλ = Ls ski + M rki (Eq. 43)
rkλ = M ski + Lr rki
Nel sistema di riferimento K non c’è dipendenza da θ. Allo stesso modo posso fare la trasformazione delle equazioni (Eq.39) ed (Eq.40) nel sistema di riferimento K. Facendo gli stessi passaggi fatti per il motore Brushless vediamo che le equazioni cambiano perché facciamo riferimento ad un sistema che ruota ad una certa velocità, rispetto al sistema di partenza, ed otteniamo delle forze motrici mozionali. In pratica le equazioni nel riferimento K rispetto al sistema statorico sono uguali a parte il termine: jωk skλ dove ωk è la velocità di rotazione del sistema di riferimento K rispetto al sistema di riferimento statorico.
skksk
skssk jdt
diRV λω
λ++= (Eq. 44)
La stessa cosa vale per il rotore, dove la forza motrice mozionale è data da: j(ωk-ω) rkλ , perché il rotore già ruota di una velocità ω e quindi la velocità relativa del sistema di riferimento K rispetto al sistema rotorico sarà data da ωk-ω.
rkkrk
rkr jdt
diR λωω
λ)(0 −++= (Eq. 45)

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
202
Normalmente il pedice k viene omesso perché l’indicazione del sistema di riferimento è dato dal termine aggiuntivo ωk. 11.3 Equazione della Coppia Premoltiplicando scalarmente le due equazioni di statore e di rotore per le rispettive correnti otteniamo l’equazione del bilancio energetico.
si x skss
sssss jidt
diiRiV λω
λ×+×+×=
kkrr
rrrr jidt
diiRi λωωλ )( 0 −×+×+×=
1 2 3 4
1 La somma di questi due termini mi dà la potenza elettrica entrante nel sistema. Poiché il rotore è in cortocircuito il vettore si x sV rappresenta la potenza elettrica entrante nel rotore. 2 La somma di questi due termini dà la potenza dissipata nell’avvolgimento di statore e di rotore per effetto Joule 3 La somma di questi due termini dà la variazione dell’energia magnetica del flusso concatenato con lo statore e con il rotore. 4 Trascurando le perdite nel ferro, la somma di questi due termini dà la potenza elettrica che viene trasformata in potenza meccanica. I termini che dipendono da ωk si devono annullare perché la potenza meccanica non può dipendere dal sistema di riferimento che stiamo considerando ma deve essere indipendente e quindi si deve cancellare. In alternativa posso considerare un riferimento con ωk = 0 cioè fisso. Come conseguenza la potenza elettrica che viene trasformata in meccanica è proporzionale a - ri x jωλ r.
Pm = 3/2 (- ri x jωλ r)
Abbiamo considerato le trasformazioni che mantengono le componenti e quindi per ottenere le potenze esatte dobbiamo, sempre, moltiplicare per il valore 3/2.
j rλ è in anticipo di 90° rispetto a rλ
Figura 9.

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
203
Posso scrivere il prodotto scalare come il modulo di un prodotto vettoriale ed invece di considerare il vettore j rλ considero il vettore λr e quindi scrivere:
Pm = 3/2ω ( rλ ∧ (- ri )) = 3/2 p ωm ( ri ∧ rλ ) Considerando che ω = pωm ,dove p è il numero di coppie polari e ωm è la velocità meccanica, allora la coppia può essere scritta nel seguente modo:
T = Pm / ωm = 3/2 p ri ∧ rλ Queste sono delle grandezze riferite al rotore, quindi questa forma non viene usata. Ricaviamo un’altra forma utilizzando i flussi concatenati di rotore.
srrr iMiL +=λ (c)
Sostituendo l’eq.(c) nell’equazione della coppia ed otteniamo:
T = 3/2 p ri ∧ ( srr iMiL + )
Ma ri ∧ rr iL = 0 T = 3/2 p ( ri ∧ siM ) Poiché le correnti di rotore non sono misurabili, ricaviamo ri dalla (c):
ri = )(1sr
r
iML
−λ
sostituendo abbiamo:
T = 3/2 p srr
sr
r iLMpiM
L∧=∧ λ
λ 2/3
Dove: rL
M = Kr coefficiente di accoppiamento rotorico.
Per calcolare la coppia abbiamo bisogno della corrente di statore, che siamo in grado di misurare, e del flusso concatenato con gli avvolgimenti di rotore. Quest’ultimo, però, non potendolo misurare, dobbiamo stimarlo . Il motore ad induzione viene controllato bene, ma dal punto di vista computazionale è un po’ più complesso rispetto al Brushless.

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
204
11.4 Circuito equivalente stazionario Le equazioni che abbiamo determinato (Eq. 43/44/45) sono equazioni dinamiche valide in generale in un riferimento generico. Le uniche ipotesi sono quelle di avere un motore isotropo senza problemi di saturazione magnetica e collegamento a stella con neutro isolato delle fasi disposte simmetricamente con distribuzione dei conduttori sinusoidale. Partendo da queste equazioni generali, ricaviamo il circuito equivalente stazionario. Poniamo ωk = ωe , dove ωe è la pulsazione delle tensioni di alimentazione delle tre fasi, otteniamo quindi:
ses
sss jdt
diRV λω
λ++= (Eq. 47)
rer
rr jdt
diR λωωλ )(0 −++= (Eq. 48)
Considerando il sistema stazionario possiamo fare delle semplificazioni nelle equazioni.
Nel caso in cui le tensioni di alimentazione sono di tipo sinusoidale, anche le correnti, a regime stazionario, sono di tipo sinusoidale.
)34cos(
)32cos(
cos
3
2
1
πω
πω
ω
−=
−=
=
tIi
tIi
tIi
em
em
em
Abbiamo tre correnti sinusoidali sfasate di 120° e 240° elettrici.
Il vettore corrente (3/2)I risultante dalla somma vettoriale delle tre correnti di fase, ruota di una velocità angolare ωe che è la pulsazione di alimentazione, questo vettore è la f.m.m. prodotta dalle correnti di statore. Non tutto il flusso presente nel traferro è però prodotto da questa corrente, bisogna infatti considerare anche la reazione rotorica. Dalle equazioni che definiscono i flussi di statore e di rotore :
rsss iMiL +=λ
srrr iMiL +=λ
Figura 10
i2
i1
i3
32I

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
205
Non tutto il flusso prodotto dal vettore di corrente statorica si si concatena con l’avvolgimento di rotore perché esiste un flusso di dispersione, generalmente piccolo, dato dal termine Lσs (induttanza di dispersione di statore). Si ha:
Ls = M + Lσs
Allo stesso modo si ragiona per l’induttanza di dispersione del rotore Lσr:
Lr = M + Lσr Andando a sostituire:
sssrs iLMii σλ ++= )( (d)
rrsrr iLMii σλ ++= )( (e) Dove Mii sr )( + rappresenta il flusso al traferro. Poiché le induttanze di dispersione sono piccole, le autoinduttanze L, di rotore e statore, sono circa uguali alla mutua-induttanza M ed il flusso di statore è abbastanza simile al flusso di rotore.
Il flusso è sfasato di un angolo α ma, considerando il fatto che siamo in regime stazionario, l’angolo è costante.
Nel considerare lo scorrimento, in condizioni stazionarie, posso fare riferimento a qualsiasi vettore, in quanto sono tutti vettori sincroni, e quindi posso riferirmi alle correnti statoriche e alle f.m.m. statoriche. Quando sono in condizioni dinamiche, invece, si deve definire lo scorrimento rispetto al vettore del flusso concatenato con il rotore. In condizioni stazionarie le velocità, e le grandezze sono costanti, quindi le derivate sono nulle. In questo sistema di riferimento si ha che:
sesss jIRV λω+= (f)
rerr jIR λωω )(0 −+= (g)
moltiplichiamo l’equazione (g) per il termine sce
e 1=
−ωωω
→ sc = e
e
ωωω −
dove sc è lo
scorrimento. Otteniamo:
rerr jI
scR
λω+=0 (h)
Figura 11
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
206
andiamo a sostituire ai flussi concatenati delle equazioni (f) e (h) le equazioni (d) ed (e). Otteniamo:
ssemesss ILjMIjIRV σωω ++=
rremerr ILjMIjI
scR
σωω ++=0
dove: srm III += Raccogliendo otteniamo:
messess IMjILjRV ωω σ ++= )( (i) )(0 rer LjR σω+= mer IMjI ω+ (l)
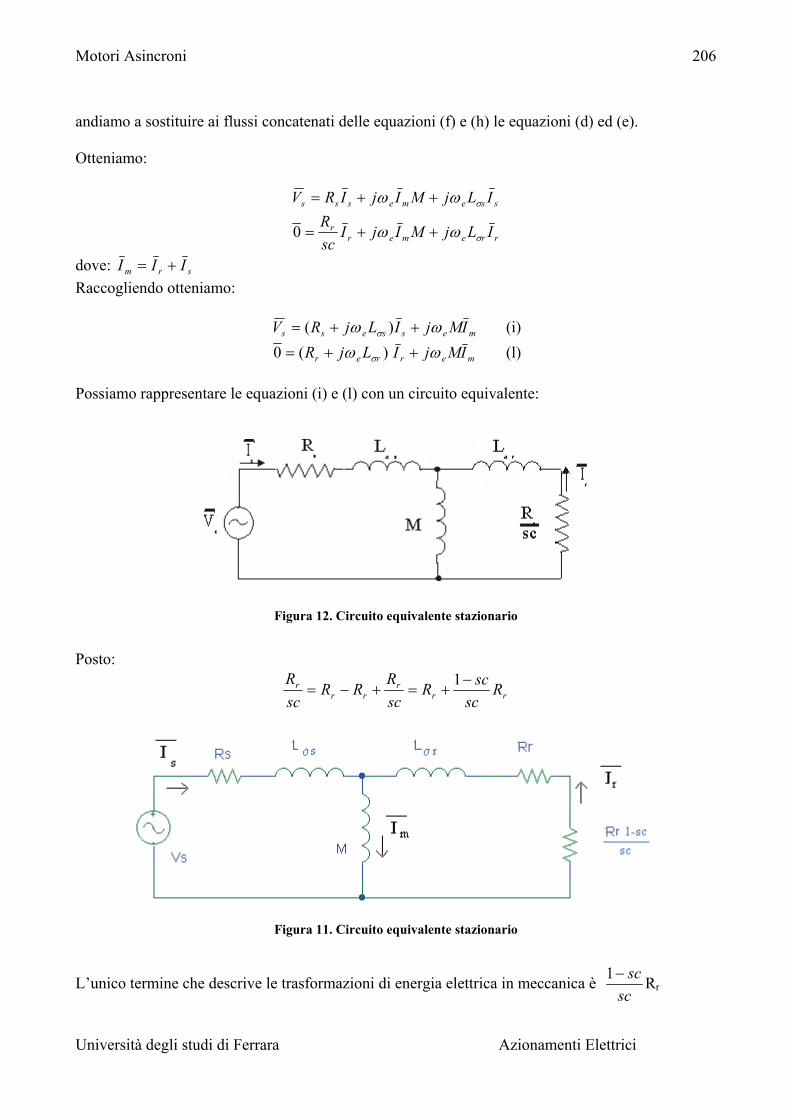
Possiamo rappresentare le equazioni (i) e (l) con un circuito equivalente:
Figura 12. Circuito equivalente stazionario
Posto:
rrr
rrr R
scscR
scR
RRscR −
+=+−=1
Figura 11. Circuito equivalente stazionario
L’unico termine che descrive le trasformazioni di energia elettrica in meccanica è sc
sc−1 Rr
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
207
PE = 3/2 sc
sc−1 Rr Ir eff2 2
Con PE si indica al potenza elettrica trasformata in meccanica Il raddoppio della corrente efficace è dovuto al fatto che abbiamo un sistema bifase. Ricordando che siamo in condizioni stazionarie e con correnti sinusoidali, si ha che:
Ir eff2 =
2
2rI
Da cui:
PE = 3/2 sc
sc−1 Rr 2rI
Considerando Vm la tensione ai capi della mutua induttanza possiamo scrivere :
PE = 3/2 sc
sc−1 Rr
22
2
)( rer
m
LscR
V
σω+⎟⎠⎞
⎜⎝⎛
= 3/2 sc
sc−1 Rr 222
22
)( scLRscV
rer
m
σω+= sostituendo (1-sc =
eωω )
= 23
re
Rωω
222
2
)( scLRscV
rer
m
σω+ =
23
re
m Rpωω
222
2
)( scLRscV
rer
m
σω+
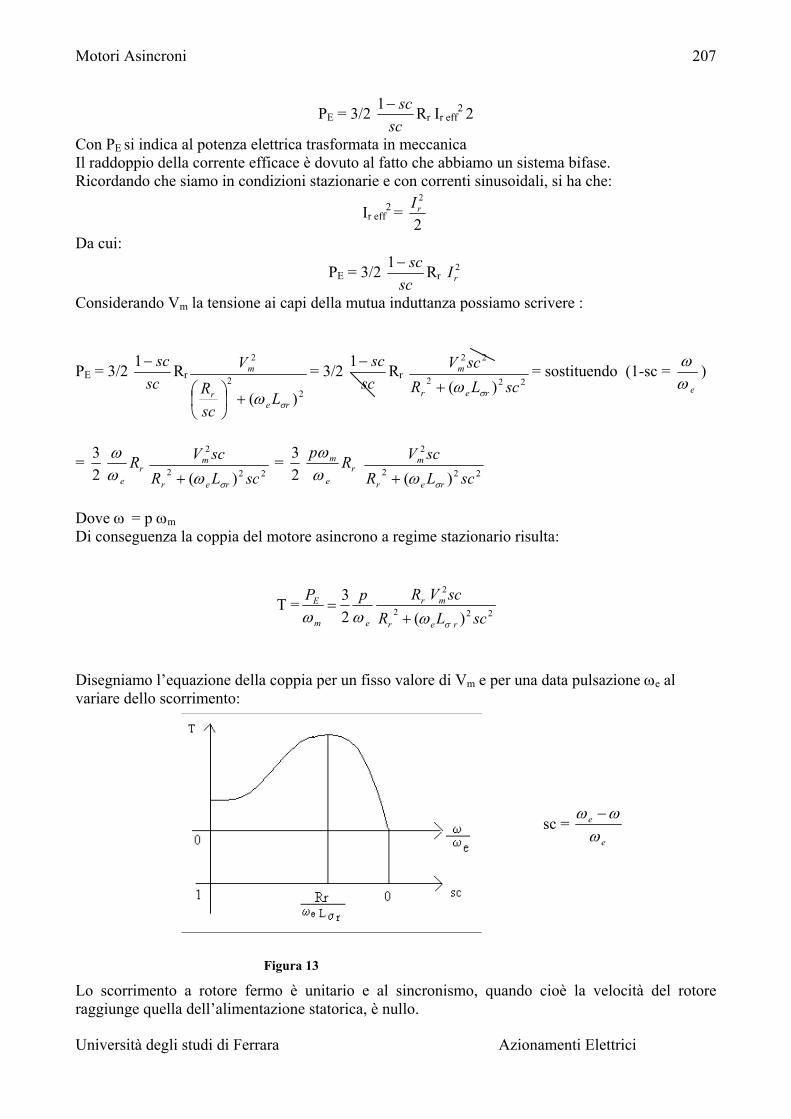
Dove ω = p ωm Di conseguenza la coppia del motore asincrono a regime stazionario risulta:
T =222
2
)(23
scLRscVRpP
rer
mr
em
E
σωωω +=
Disegniamo l’equazione della coppia per un fisso valore di Vm e per una data pulsazione ωe al variare dello scorrimento:
Figura 13
Lo scorrimento a rotore fermo è unitario e al sincronismo, quando cioè la velocità del rotore raggiunge quella dell’alimentazione statorica, è nullo.
sc = e
e
ωωω −

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
208
Diversamente il rapporto ω/ωe sarà unitario al sincronismo e nullo a rotore fermo. La curva di coppia raggiunge il massimo:
Tmax = ¾ p re
m
LV
σω 2
2
quando lo scorrimento è sc = re
r
LR
σω.
La coppia massima dipende dal rapporto Vm/ωe , più elevato è il rapporto e maggiore è la coppia massima. Si può vedere dalla Fig.13 che abbiamo due tipi di funzionamento: - Stabile - Instabile A destra del Tmax siamo nel funzionamento stabile dove lo scorrimento è basso. In questo tipo di funzionamento ωeLσr è trascurabile e quindi:
T =e
pω2
3
r
m
RscV 2
Per scorrimenti bassi la coppia è proporzionale allo scorrimento. Nel caso in cui viene aumentato il carico e quindi diminuisce la velocità, lo scorrimento aumenta e quindi anche la coppia. Il sistema riequilibra l’aumento di carico. A sinistra della Tmax ho un funzionamento instabile. Per scorrimenti elevati possiamo trascurare la resistenza rotorica e quindi l’equazione della coppia diventa:
T =e
pω2
3scL
VR
re
mr2
2
)( σω
Per scorrimenti alti, la coppia è inversamente proporzionale allo scorrimento. Di conseguenza l’aumento del carico provoca una diminuzione di coppia perché aumenta lo scorrimento.
Figura 44. Andamento della T al variare della Vs.
Collegando il motore ad induzione ad una tensione trifase, per un assegnato valore di Vs e per una data pulsazione di alimentazione , la curva di coppia che si ottiene è quella in figura 13.

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
209
Naturalmente si può notare che specificando un valore di Vs conseguentemente si fissa anche il valore di Vm; infatti normalmente le cadute statoriche su resistenza ed induttanza sono trascurabili e quindi Vs ≈Vm. Un problema della caratteristica di questo motore è quello di avere una coppia di spunto Ts troppo bassa: per ovviare a ciò esistono diverse tecniche. Una possibile soluzione consiste nell’aumentare la resistenza rotorica (Rr), tuttavia l’aumento di questo parametro va a scapito del controllo ad orientamento di campo. Infatti si viene ad avere una dissipazione per effetto Joule con relativa difficoltà nello smaltimento del calore. Inoltre avere grandi perdite equivale a dire che il motore non riesce ad erogare la stessa coppia che potrebbe invece fornire se avesse una resistenza rotorica inferiore. (Dobbiamo tener conto del fatto che il dimensionamento del motore è soprattutto termico) Come già visto in precedenza la caratteristica del motore ad induzione prevede due zone di funzionamento: una stabile e una instabile. Nella prima si è visto che, ad un aumento del carico, si ha una diminuzione della velocità, con conseguente aumento dello scorrimento. Osservando che in questa zona lo scorrimento è direttamente proporzionale alla coppia allora anche questa aumenta. Si può quindi affermare che la diminuzione della velocità è equilibrata dall’aumento della coppia erogata. Nella zona a funzionamento instabile ad un aumento della coppia resistente corrisponde invece una diminuzione di quella motrice. 11.5 Inverter Si può notare anche che la velocità nel motore ad induzione nella zona a funzionamento stabile è praticamente costante e varia soltanto di piccole percentuali al variare del carico. Allora se si vuole regolare la velocità di rotazione, si può variare la tensione di alimentazione, infatti se Vs cresce, aumenta l’ampiezza della caratteristica di coppia (si può notare che T ∝ Vs
2). Se si osserva la figura 14, si vede che a diminuzioni della Vs corrisponde un cambiamento del punto di lavoro, con conseguente variazioni della velocità angolare del motore. Questo tipo di controllo però ha un limite: è efficace solamente in un range limitato di velocità. Infatti si può vedere che ad una eccessiva diminuzione della Vs la retta di carico (in blu) non interseca più la caratteristica, con conseguente arresto del motore. Un'altra considerazione che si può fare è che se lo scorrimento è basso si ha:
11>>
−sc
sc rr RIsc
scRI 22 1>>
− Pm >> PDRr il rendimento η è molto alto
(Pm= potenza elettrica convertita in meccanica; PDRr = potenza dissipata su Rr ). Invece se lo scorrimento sc è alto, ovvero per velocità molto basse, si ha:
11<<
−sc
sc rr RIsc
scRI 22 1<<
− Pm << PDRr il rendimento η è molto basso,
infatti alla perdite sulla resistenza rotorica si aggiungono quelle nel ferro e sulla resistenza di statore.

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
210
Quindi per avere alti rendimenti devo lavorare vicino alla velocità di sincronismo, a questo proposito è desiderabile avere Vs più alta possibile per avere un’elevata coppia di picco. Tuttavia la Vs ha un limite superiore:
|Vs| < |Vsmax|
dove Vsmax è la tensione massima erogabile dal convertitore di potenza. Un altro vincolo su Vs si può ricavare dalla seguente espressione:
seSss jIRV λω+= Da cui si ricava che
e
ss
e
ss j
IRjV
ωωλ −=
dove a regime l’ultimo termine è trascurabile, quindi il flusso statorico in modulo si può approssimare nel seguente modo:
e
ss
Vω
λ |||| =
per evitare delle grandi perdite occorre lavorare con il flusso statorico massimo e costante ma che sia al di sotto della saturazione per il materiale ferromagnetico: in questo modo è come lavorare con coppia massima costante. Con questo accorgimento
max|| sesV λω= e, per mantenere il flusso costante, Vs deve variare con ωe. Variando Vs in modo proporzionale alla pulsazione della tensione di alimentazione si ottengono le seguenti curve:
Figura 14. Variazioni della curva di T in funzione della variazione di Vs proporzionale a ωe.
Con questo controllo non si hanno più i problemi alle basse velocità che si avevano con la regolazione precedente .
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
211
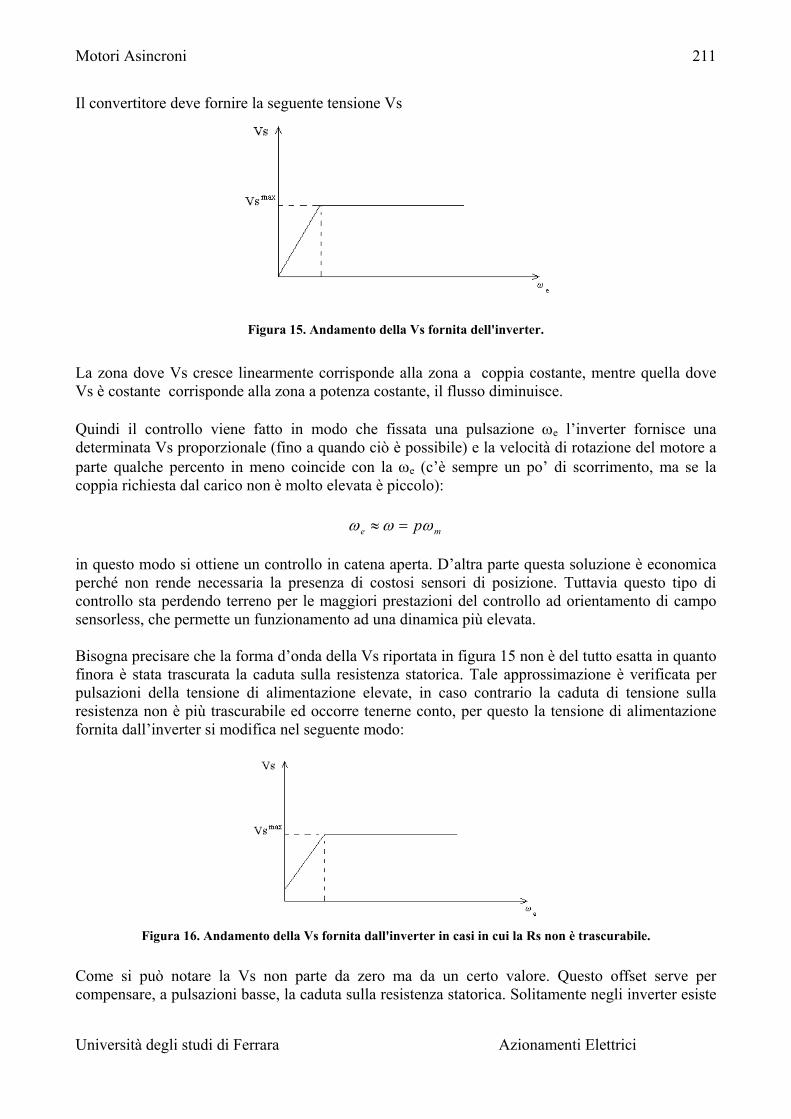
Il convertitore deve fornire la seguente tensione Vs
Figura 15. Andamento della Vs fornita dell'inverter.
La zona dove Vs cresce linearmente corrisponde alla zona a coppia costante, mentre quella dove Vs è costante corrisponde alla zona a potenza costante, il flusso diminuisce. Quindi il controllo viene fatto in modo che fissata una pulsazione ωe l’inverter fornisce una determinata Vs proporzionale (fino a quando ciò è possibile) e la velocità di rotazione del motore a parte qualche percento in meno coincide con la ωe (c’è sempre un po’ di scorrimento, ma se la coppia richiesta dal carico non è molto elevata è piccolo):
me pωωω =≈
in questo modo si ottiene un controllo in catena aperta. D’altra parte questa soluzione è economica perché non rende necessaria la presenza di costosi sensori di posizione. Tuttavia questo tipo di controllo sta perdendo terreno per le maggiori prestazioni del controllo ad orientamento di campo sensorless, che permette un funzionamento ad una dinamica più elevata. Bisogna precisare che la forma d’onda della Vs riportata in figura 15 non è del tutto esatta in quanto finora è stata trascurata la caduta sulla resistenza statorica. Tale approssimazione è verificata per pulsazioni della tensione di alimentazione elevate, in caso contrario la caduta di tensione sulla resistenza non è più trascurabile ed occorre tenerne conto, per questo la tensione di alimentazione fornita dall’inverter si modifica nel seguente modo:
Figura 16. Andamento della Vs fornita dall'inverter in casi in cui la Rs non è trascurabile.
Come si può notare la Vs non parte da zero ma da un certo valore. Questo offset serve per compensare, a pulsazioni basse, la caduta sulla resistenza statorica. Solitamente negli inverter esiste
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
212
la possibilità di settare il salto in base alla Rs del mio motore, infatti se controllassi il motore con la Vs in fig. 15 alle basse velocità il flusso sarebbe nullo e di conseguenza anche la coppia. 11.6 CONTROLLO AD ORIENTAMENTO DI CAMPO
Consideriamo l’ equazione rotorica riferita ad un sistema K che ruoti con velocità kω :
rkr
rr jdt
diR λωωλ )(0 −++=
dove ω è la velocità di rotazione elettrica del rotore. Si può notare che in questa espressione compare la corrente rotorica che non è misurabile in quanto è una grandezza fittizia. A questo proposito utilizzando l’espressione del flusso rotorico la si esprime in funzione di rλ e si :
rrsr iLiM +=λ r
srr L
iMi −=λ
ottenendo così la seguente espressione:
rkr
srr jdt
diM λωωλλτ )()(0 1 −++−= −
dove r
rr R
L=τ è la costante di tempo di rotore.
Ponendoci in un riferimento sincrono con rλ e che ruota ad una velocità 0ω si ottiene la nuova equazione rotorica:
rr
srr jdt
diM λωωλλτ )()(0 01 −++−= −
Moltiplicando per rτ e raccogliendo in modo opportuno si ottiene la seguente equazione vettoriale di rotore espressa nel riferimento sincrono con rλ :
srrr
r iMjdt
d=−++ λτωωλτ ])(1[ 0
Considerando ora gli assi (d,q), detti riferimento Field Oriented, sincroni con il vettore rλ in modo tale che l’asse d coincida con rλ e q coincidente con rjλ . rλ risulterà sfasato di un angolo 0θ rispetto al sistema di riferimento statorico. La situazione è simile a quella vista con il motore Brushless dove il sistema di riferimento (d,q) era stato preso coincidente con il flusso magnetico di rotore a sua volta coincidente con il sistema di riferimento rotorico. Nel motore ad induzione invece (d,q) viene preso sincrono con rλ , che non è più coincidente con il sistema di riferimento rotorico. Quindi uno dei maggiori problemi sarà andare a determinare proprio l’ angolo 0θ e quindi la posizione del flusso concatenato rotorico per determinare il sistema di riferimento (d,q).

Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
213
Figura 17.
Scrivendo la precedente equazione rotorica in forma scalare, sui due assi si ottiene:
Asse d: sdrr
r Midt
d=+ λλτ
Asse q: sqrr Mi=− λτωω )( 0
La velocità elettrica di scorrimento SCωωω =− )( 0 è riferita al vettore rλ (scorrimento dinamico). La coppia in questo riferimento si può esprimere nel seguente modo:
)(23
srr iKpT ∧= λ
per definizione di prodotto vettoriale sdrqsqrdsr iii λλλ −=∧ e considerando che rrd λλ = e 0=rqλ si ottiene:
sqrr ipKT λ23
=
Si può notare che la coppia è proporzionale ad un flusso ed a una corrente come nel caso del Brushless, con l’unica differenza che nel motore sincrono a magneti permanenti non si poteva modificare mλ , mentre nel motore ad induzione si può controllare rλ . Quindi la coppia può essere variata agendo sul prodotto sqriλ : - sqi può essere variato velocemente in quanto ha la stessa dinamica dell’anello di corrente - rλ invece è legato a sdi dalla funzione di trasferimento:
sdrr
r Midt
d=+ λλτ sd
rr i
sMτ
λ+
=1
Il ritardo rτ , che c’è tra la corrente statorica ed il flusso di rotore, aumenta al crescere della dimensione del motore e può essere compreso tra qualche centinaia di millisecondi e qualche secondo. Nel sistema di riferimento (d,q) così individuato, il controllo del motore ad induzione è equivalente a quello di un motore in D.C. con avvolgimenti di eccitazione: si ha una corrente (componente) sdi che controlla il flusso (come ecci per il motore D.C.) ed una sqi in quadratura che controlla la coppia (come ai nel caso in continua):
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
214
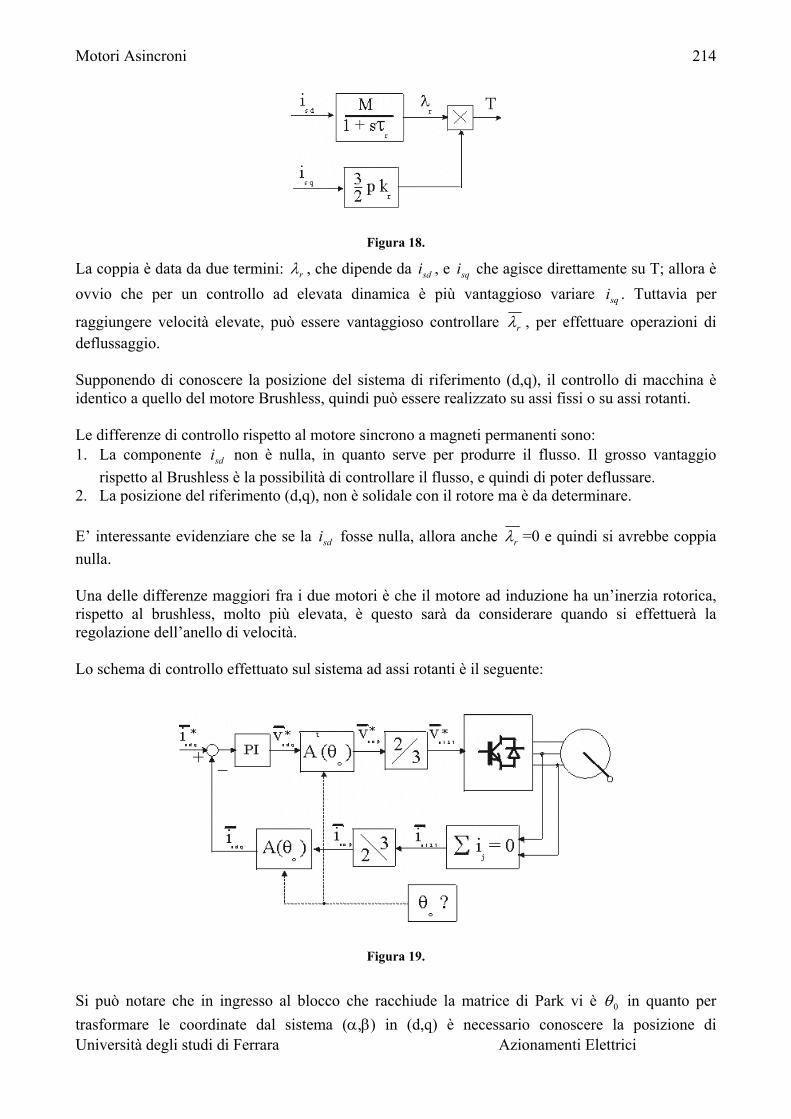
Figura 18.
La coppia è data da due termini: rλ , che dipende da sdi , e sqi che agisce direttamente su T; allora è ovvio che per un controllo ad elevata dinamica è più vantaggioso variare sqi . Tuttavia per
raggiungere velocità elevate, può essere vantaggioso controllare rλ , per effettuare operazioni di deflussaggio. Supponendo di conoscere la posizione del sistema di riferimento (d,q), il controllo di macchina è identico a quello del motore Brushless, quindi può essere realizzato su assi fissi o su assi rotanti. Le differenze di controllo rispetto al motore sincrono a magneti permanenti sono: 1. La componente sdi non è nulla, in quanto serve per produrre il flusso. Il grosso vantaggio
rispetto al Brushless è la possibilità di controllare il flusso, e quindi di poter deflussare. 2. La posizione del riferimento (d,q), non è solidale con il rotore ma è da determinare. E’ interessante evidenziare che se la sdi fosse nulla, allora anche rλ =0 e quindi si avrebbe coppia nulla. Una delle differenze maggiori fra i due motori è che il motore ad induzione ha un’inerzia rotorica, rispetto al brushless, molto più elevata, è questo sarà da considerare quando si effettuerà la regolazione dell’anello di velocità. Lo schema di controllo effettuato sul sistema ad assi rotanti è il seguente:
Figura 19.
Si può notare che in ingresso al blocco che racchiude la matrice di Park vi è 0θ in quanto per trasformare le coordinate dal sistema (α,β) in (d,q) è necessario conoscere la posizione di
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
215
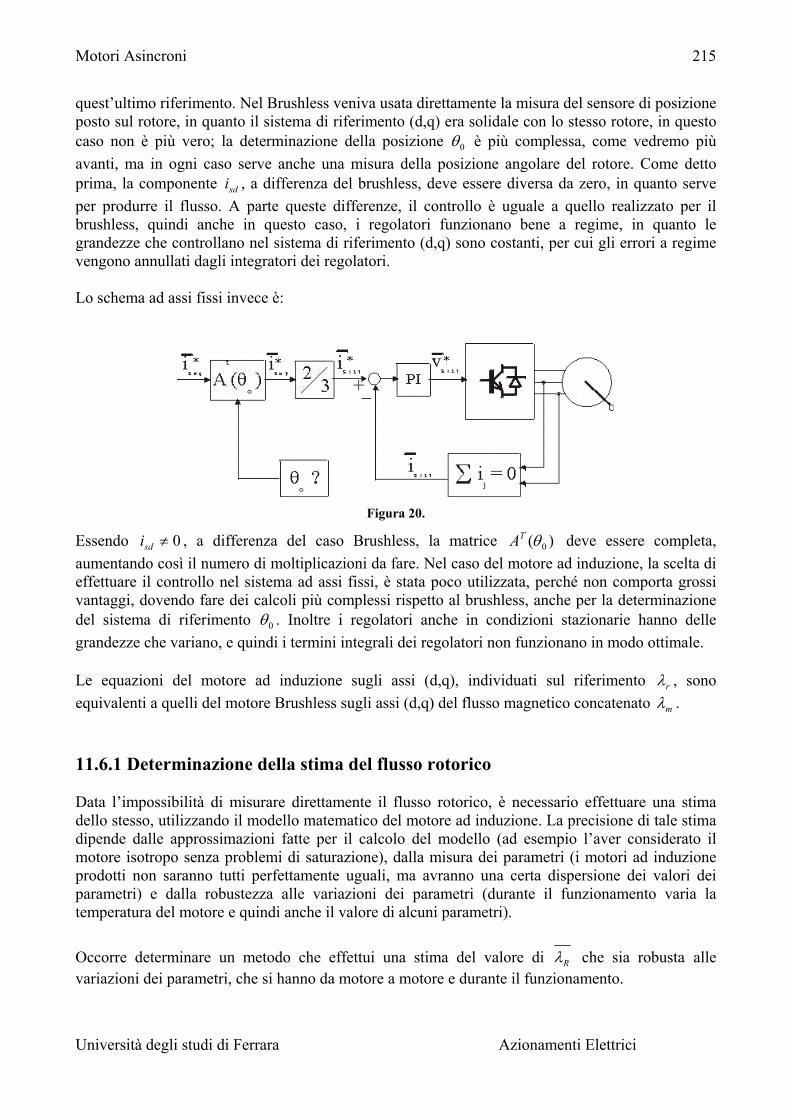
quest’ultimo riferimento. Nel Brushless veniva usata direttamente la misura del sensore di posizione posto sul rotore, in quanto il sistema di riferimento (d,q) era solidale con lo stesso rotore, in questo caso non è più vero; la determinazione della posizione 0θ è più complessa, come vedremo più avanti, ma in ogni caso serve anche una misura della posizione angolare del rotore. Come detto prima, la componente sdi , a differenza del brushless, deve essere diversa da zero, in quanto serve per produrre il flusso. A parte queste differenze, il controllo è uguale a quello realizzato per il brushless, quindi anche in questo caso, i regolatori funzionano bene a regime, in quanto le grandezze che controllano nel sistema di riferimento (d,q) sono costanti, per cui gli errori a regime vengono annullati dagli integratori dei regolatori. Lo schema ad assi fissi invece è:
Figura 20.
Essendo 0≠sdi , a differenza del caso Brushless, la matrice )( 0θTA deve essere completa,
aumentando così il numero di moltiplicazioni da fare. Nel caso del motore ad induzione, la scelta di effettuare il controllo nel sistema ad assi fissi, è stata poco utilizzata, perché non comporta grossi vantaggi, dovendo fare dei calcoli più complessi rispetto al brushless, anche per la determinazione del sistema di riferimento 0θ . Inoltre i regolatori anche in condizioni stazionarie hanno delle grandezze che variano, e quindi i termini integrali dei regolatori non funzionano in modo ottimale. Le equazioni del motore ad induzione sugli assi (d,q), individuati sul riferimento rλ , sono equivalenti a quelli del motore Brushless sugli assi (d,q) del flusso magnetico concatenato mλ . 11.6.1 Determinazione della stima del flusso rotorico Data l’impossibilità di misurare direttamente il flusso rotorico, è necessario effettuare una stima dello stesso, utilizzando il modello matematico del motore ad induzione. La precisione di tale stima dipende dalle approssimazioni fatte per il calcolo del modello (ad esempio l’aver considerato il motore isotropo senza problemi di saturazione), dalla misura dei parametri (i motori ad induzione prodotti non saranno tutti perfettamente uguali, ma avranno una certa dispersione dei valori dei parametri) e dalla robustezza alle variazioni dei parametri (durante il funzionamento varia la temperatura del motore e quindi anche il valore di alcuni parametri). Occorre determinare un metodo che effettui una stima del valore di Rλ che sia robusta alle variazioni dei parametri, che si hanno da motore a motore e durante il funzionamento.
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
216
Esistono molte tecniche per determinare una stima di rλ , una è quella di usare l’equazione di rotore riferita al rotore stesso. Scegliendo il sistema di riferimento solidale con il rotore, si ha ωω =0 e l’equazione rotorica diventa:
srr
r iMdt
d=+ λλτ
Si è annullato il termina corrispondente alla f.e.m. mozionale. Se si trasforma l’equazione con le trasformate di Laplace si ottiene:
sr
r is
Mτ
λ+
=1
Quindi rλ viene a dipendere da si attraverso una funzione di trasferimento ad un polo con costante di tempo rτ . Esprimendo l’equazione vettoriale del flusso rotorico in forma scalare si ha nel riferimento rα :
rsr
rr is
Mαα τ
λ+
=1
mentre nel riferimento rβ si ha:
rsr
rr is
Mββ τ
λ+
=1
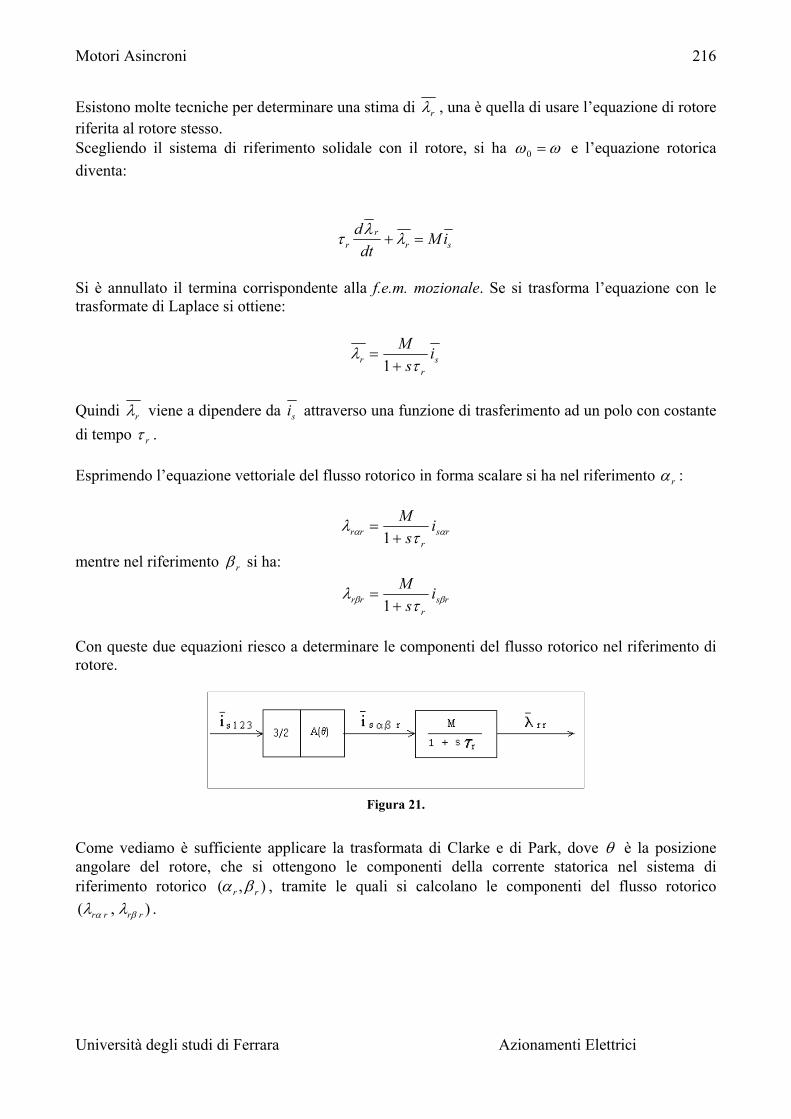
Con queste due equazioni riesco a determinare le componenti del flusso rotorico nel riferimento di rotore.
Figura 21.
Come vediamo è sufficiente applicare la trasformata di Clarke e di Park, dove θ è la posizione angolare del rotore, che si ottengono le componenti della corrente statorica nel sistema di riferimento rotorico ),( rr βα , tramite le quali si calcolano le componenti del flusso rotorico
),( rrrr βα λλ .
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
217
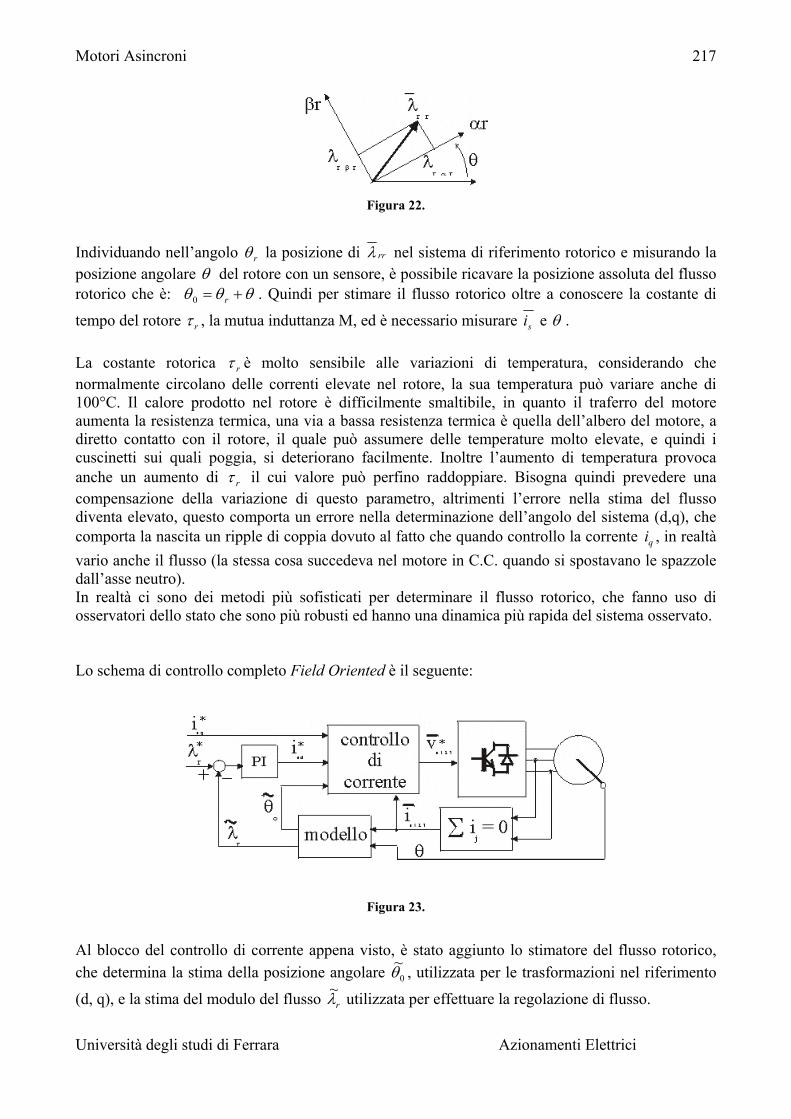
Figura 22.
Individuando nell’angolo rθ la posizione di rrλ nel sistema di riferimento rotorico e misurando la posizione angolare θ del rotore con un sensore, è possibile ricavare la posizione assoluta del flusso rotorico che è: θθθ += r0 . Quindi per stimare il flusso rotorico oltre a conoscere la costante di
tempo del rotore rτ , la mutua induttanza M, ed è necessario misurare si e θ . La costante rotorica rτ è molto sensibile alle variazioni di temperatura, considerando che normalmente circolano delle correnti elevate nel rotore, la sua temperatura può variare anche di 100°C. Il calore prodotto nel rotore è difficilmente smaltibile, in quanto il traferro del motore aumenta la resistenza termica, una via a bassa resistenza termica è quella dell’albero del motore, a diretto contatto con il rotore, il quale può assumere delle temperature molto elevate, e quindi i cuscinetti sui quali poggia, si deteriorano facilmente. Inoltre l’aumento di temperatura provoca anche un aumento di rτ il cui valore può perfino raddoppiare. Bisogna quindi prevedere una compensazione della variazione di questo parametro, altrimenti l’errore nella stima del flusso diventa elevato, questo comporta un errore nella determinazione dell’angolo del sistema (d,q), che comporta la nascita un ripple di coppia dovuto al fatto che quando controllo la corrente qi , in realtà vario anche il flusso (la stessa cosa succedeva nel motore in C.C. quando si spostavano le spazzole dall’asse neutro). In realtà ci sono dei metodi più sofisticati per determinare il flusso rotorico, che fanno uso di osservatori dello stato che sono più robusti ed hanno una dinamica più rapida del sistema osservato. Lo schema di controllo completo Field Oriented è il seguente:
Figura 23.
Al blocco del controllo di corrente appena visto, è stato aggiunto lo stimatore del flusso rotorico, che determina la stima della posizione angolare 0
~θ , utilizzata per le trasformazioni nel riferimento
(d, q), e la stima del modulo del flusso rλ~ utilizzata per effettuare la regolazione di flusso.
Motori Asincroni
Università degli studi di Ferrara Azionamenti Elettrici
218
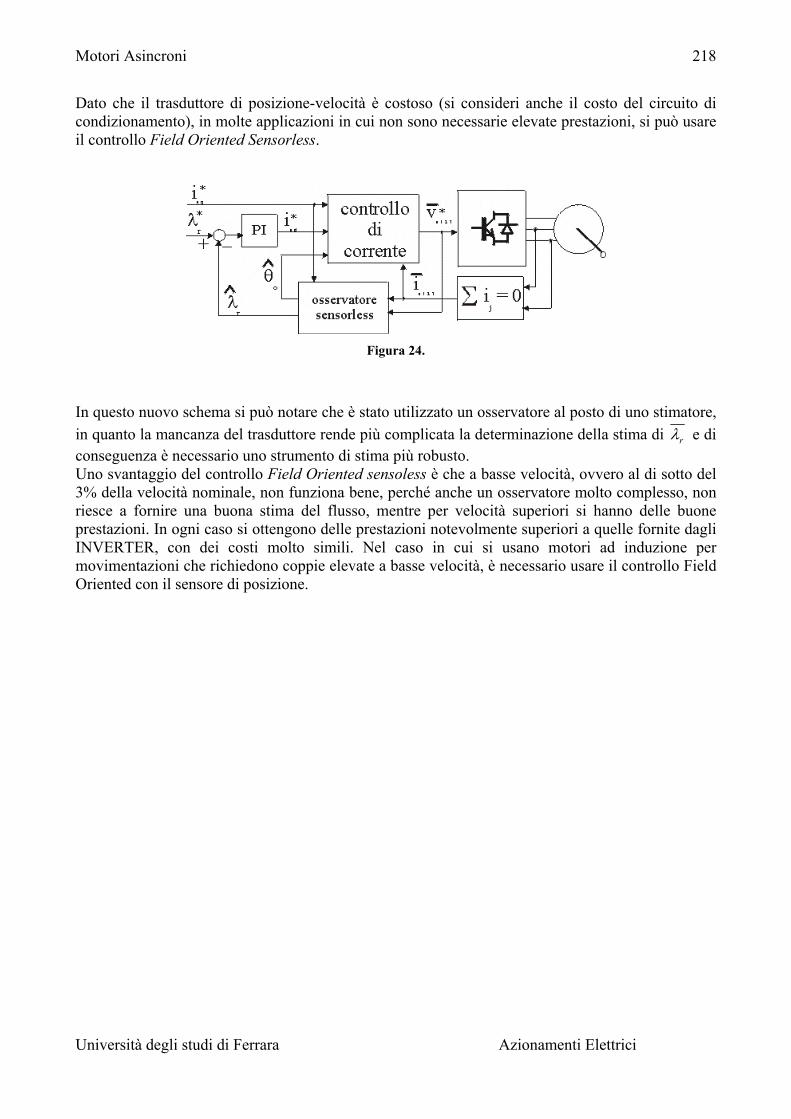
Dato che il trasduttore di posizione-velocità è costoso (si consideri anche il costo del circuito di condizionamento), in molte applicazioni in cui non sono necessarie elevate prestazioni, si può usare il controllo Field Oriented Sensorless.
Figura 24.
In questo nuovo schema si può notare che è stato utilizzato un osservatore al posto di uno stimatore, in quanto la mancanza del trasduttore rende più complicata la determinazione della stima di rλ e di conseguenza è necessario uno strumento di stima più robusto. Uno svantaggio del controllo Field Oriented sensoless è che a basse velocità, ovvero al di sotto del 3% della velocità nominale, non funziona bene, perché anche un osservatore molto complesso, non riesce a fornire una buona stima del flusso, mentre per velocità superiori si hanno delle buone prestazioni. In ogni caso si ottengono delle prestazioni notevolmente superiori a quelle fornite dagli INVERTER, con dei costi molto simili. Nel caso in cui si usano motori ad induzione per movimentazioni che richiedono coppie elevate a basse velocità, è necessario usare il controllo Field Oriented con il sensore di posizione.
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
219
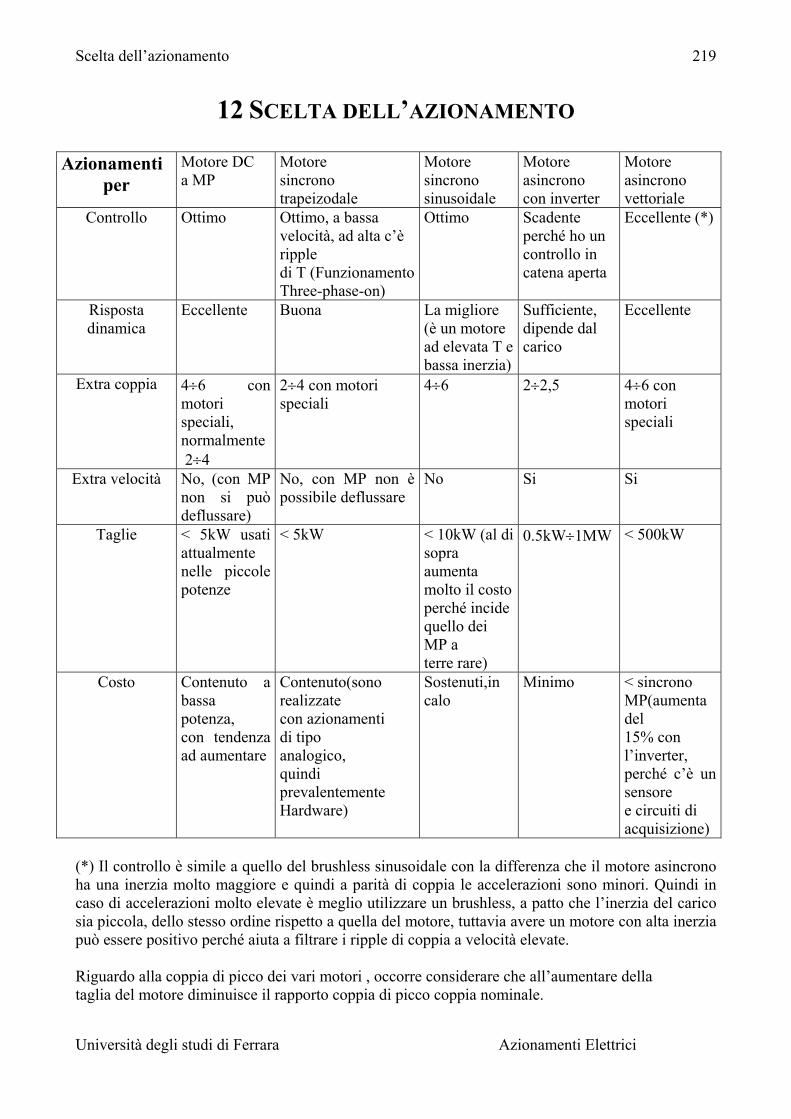
12 SCELTA DELL’AZIONAMENTO
Azionamenti per
Motore DC a MP
Motore sincrono trapeizodale
Motore sincrono sinusoidale
Motore asincrono con inverter
Motore asincrono vettoriale
Controllo Ottimo Ottimo, a bassa velocità, ad alta c’è ripple di T (FunzionamentoThree-phase-on)
Ottimo Scadente perché ho un controllo in catena aperta
Eccellente (*)
Risposta dinamica
Eccellente Buona La migliore (è un motore ad elevata T e bassa inerzia)
Sufficiente, dipende dal carico
Eccellente
Extra coppia 4÷6 con motori speciali, normalmente 2÷4
2÷4 con motori speciali
4÷6 2÷2,5 4÷6 con motori speciali
Extra velocità No, (con MP non si può deflussare)
No, con MP non è possibile deflussare
No Si Si
Taglie < 5kW usati attualmente nelle piccole potenze
< 5kW < 10kW (al di sopra aumenta molto il costoperché incide quello dei MP a terre rare)
0.5kW÷1MW < 500kW
Costo Contenuto a bassa potenza, con tendenza ad aumentare
Contenuto(sono realizzate con azionamenti di tipo analogico, quindi prevalentemente Hardware)
Sostenuti,in calo
Minimo < sincrono MP(aumenta del 15% con l’inverter, perché c’è un sensore e circuiti di acquisizione)
(*) Il controllo è simile a quello del brushless sinusoidale con la differenza che il motore asincrono ha una inerzia molto maggiore e quindi a parità di coppia le accelerazioni sono minori. Quindi in caso di accelerazioni molto elevate è meglio utilizzare un brushless, a patto che l’inerzia del carico sia piccola, dello stesso ordine rispetto a quella del motore, tuttavia avere un motore con alta inerzia può essere positivo perché aiuta a filtrare i ripple di coppia a velocità elevate. Riguardo alla coppia di picco dei vari motori , occorre considerare che all’aumentare della taglia del motore diminuisce il rapporto coppia di picco coppia nominale.
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
220
Per un corretto dimensionamento dell’azionamento occorre effettuare:
- Una analisi del tipo di carico: ovvero vedere se il carico è di tipo dissipativo oppure inerziale - Un dimensionamento del motore e quindi determinare la velocità massima, la coppia
nominale e di picco necessarie per il tipo di applicazione. - Un dimensionamento del convertitore: la tensione nominale di alimentazione, la corrente
nominale e la corrente di picco
12.1 ANALISI DEL TIPO DI CARICO MECCANICO
Nel caso si abbia un carico di tipo dissipativo, quasi tutta l’energia fornita dall’attuatore del drive è usata per la lavorazione (tornitura, fresatura), o dissipata per compensare l’effetto dell’attrito (mescolatura, trazione ferroviaria). Questo tipo di carico inoltre è caratterizzato dall’andamento della coppia.
Nel caso invece si abbia un carico di tipo inerziale, quasi tutta l’energia è utilizzata per accelerare e/o decelerare il carico (robot, macchine automatiche ad elevata dinamica). Questo carico è caratterizzato dall’andamento della velocità, e dall’inerzia, note le quali si può determinare la coppia necessaria.
La coppia di carico è data dalla somma della coppia inerziale (serve per accelerare e decelerare il carico) più la coppia dissipativa:
)()( ravdic TTTjTTT +++=+= ω&
Dove vT è la coppia di attrito viscoso, aT la coppia di attrito secco, rT la coppia resistente e J l’inerzia del carico più quella del motore.
Classificazione dei carichi
Dinamica molto lenta di TT <<Dinamica lenta di TT <
Dinamica rapida di TT > Dinamica molto rapida di TT >>
Infatti se si ha una coppia inerziale minore della coppia dissipativa, si hanno delle accelerazioni basse con conseguenti variazioni di velocità piccole e in definitiva si ottiene una dinamica lenta; chiaramente se vale il contrario abbiamo una dinamica più elevata. I primi casi sono caratterizzati da coppie elevate a basse velocità: riduttori ad elevato rapporto, o da velocità praticamente costanti (azionamenti mandrino: presa di carico). Nei carichi a dinamica molto rapida, essendo la coppia inerziale dominante, il profilo di velocità individua anche il profilo della coppia di carico, negli altri casi ciò non è vero. Nei carichi a dinamica molto lenta, viceversa, è la coppia dissipativa che è dominante e quindi rappresentativa della coppia di carico.
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
221
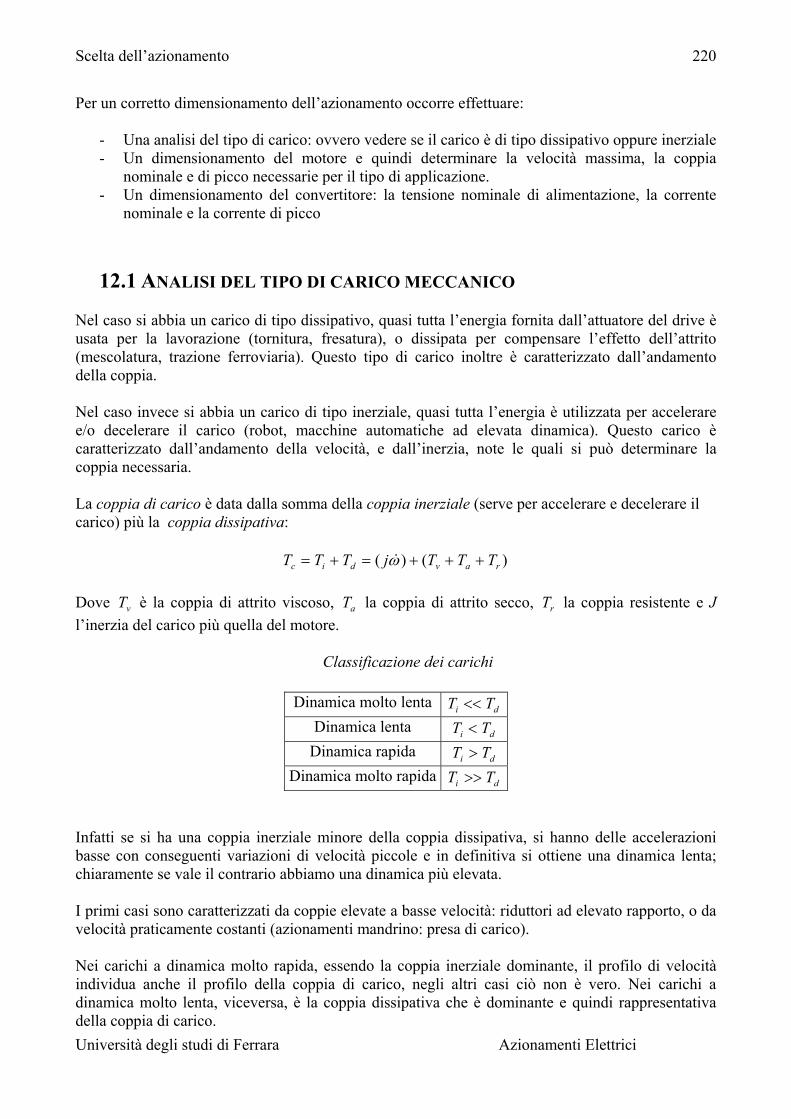
Prendiamo in esempio un carico a dinamica lenta (è il caso dell’azionamento di tipo mandrino): il suo moto è uniforme e quindi il dimensionamento del motore viene fatto facendo riferimento alla coppia nominale, che deve essere sufficientemente superiore a quella dissipativa., perché il motore funziona a regime termico, quindi non si può sfruttare la coppia di picco.
ω
Tt
tP
t
Pr
Td
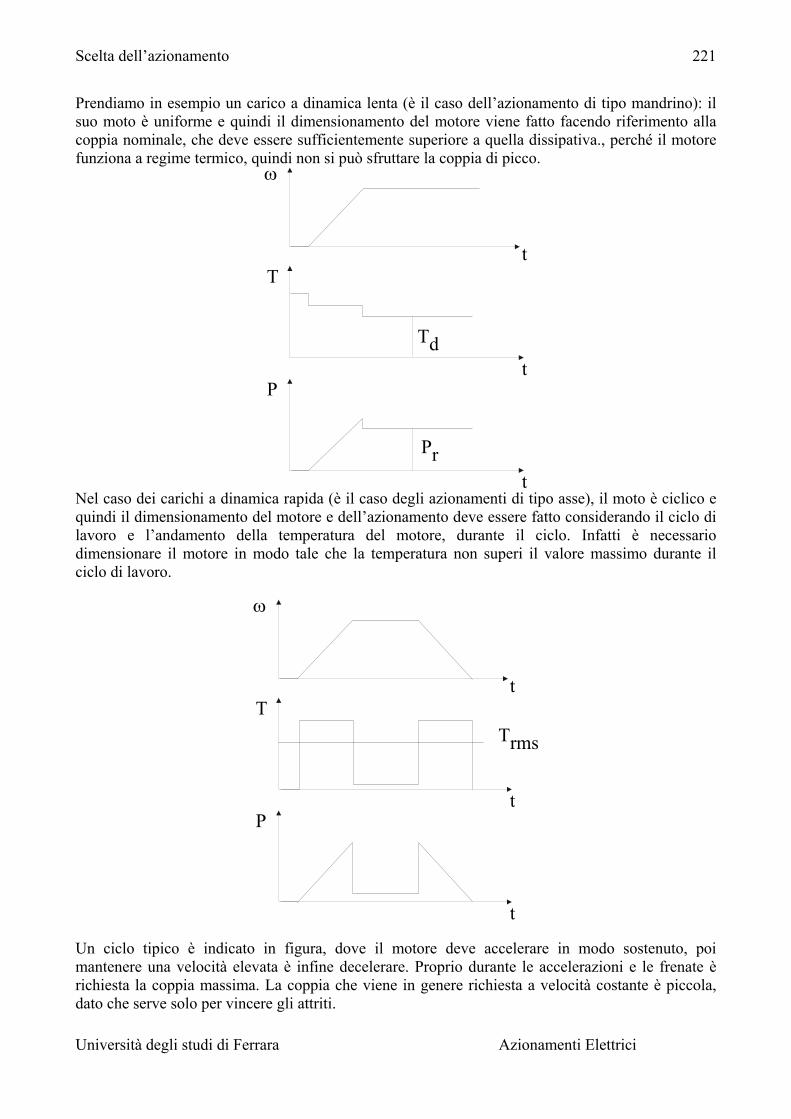
Nel caso dei carichi a dinamica rapida (è il caso degli azionamenti di tipo asse), il moto è ciclico e quindi il dimensionamento del motore e dell’azionamento deve essere fatto considerando il ciclo di lavoro e l’andamento della temperatura del motore, durante il ciclo. Infatti è necessario dimensionare il motore in modo tale che la temperatura non superi il valore massimo durante il ciclo di lavoro.
ω
Tt
tP
t
Trms
Un ciclo tipico è indicato in figura, dove il motore deve accelerare in modo sostenuto, poi mantenere una velocità elevata è infine decelerare. Proprio durante le accelerazioni e le frenate è richiesta la coppia massima. La coppia che viene in genere richiesta a velocità costante è piccola, dato che serve solo per vincere gli attriti.

Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
222
Spesso il motore viene utilizzato con calettato un riduttore sull’albero motore:
MOTORE
Jc
T ’c
ωm ωcriduttore
LOADTc
J ’c
posto il rapporto di riduzione pari a c
mnωω
= dove mω è la velocità sull’albero motore e cω la
velocità sul carico. Se ccdc jTT ω&+= è la coppia che occorre sul carico, allora si ha:
mcd
c nj
nTT ω&2+=′ sull’albero motore
Quindi la coppia si riduce di n , mentre l’inerzia di 2n . L’uso del riduttore oltre ad aumentare la coppia sul carico ha il grosso vantaggio di ridurre l’inerzia di 2n , anzi spesso si utilizza per questa seconda proprietà. Quando si usa il riduttore, occorre considerare il rendimento dello stesso, che normalmente varia tra 70% ÷ 90%. In ogni caso tutte le misurazioni fatte si riferiscono all’albero motore.
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
223
12.2 RAPPORTO INERZIA-CARICO E INERZIA-MOTORE Una delle prime cose da valutare nel dimensionamento del motore è il rapporto tra l’inerzia del carico e l’inerzia del motore. Questa scelta coinvolge la parte meccanica, il riduttore e il motore.
Accelerazioni elevate (cesoie, robotica)
1/1÷2/1
Accelerazioni medie (macchine utensili, imballaggio)
3/1÷5/1
Accelerazioni basse (automazione in generale)
6/1÷10/1
Nel caso di applicazioni con accelerazioni elevate occorre che il rapporto tra l’inerzia del carico, riferita all’albero motore, e l’inerzia del rotore, si mantenga a valori bassi (1/1÷ 2/1), perché all’aumentare di J diminuisce la MAXω& :
JTMAX
MAX =ω&
in questo modo si rischia, con estrema facilità, di saturare l’anello di corrente, creando problemi alla
stabilizzazione dell’anello di posizione. Inoltre per mantenere elevata la banda passante ⎟⎠⎞
⎜⎝⎛
JKP ,
occorre aumentare PK , con un aumento notevole del ripple di coppia, dovuto ai disturbi e alle imprecisioni nella misura della velocità, e possibili instabilità anche nel caso di piccole elasticità. Se il rapporto è < 1, la scelta non è ottimale, anche se può essere accettabile, in quanto vi è un sovradimensionamento del motore e quindi un maggior dispendio economico. Invece rapporti > 10/1 rendono difficile l’avere il sistema più stabile sulla retroazione di posizione, dovendo aumentare i guadagni che accentuano le imperfezioni e i disturbi sul motore (ripple di corrente elevato).
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
224
12.3 SCELTA DEL MOTORE La scelta del motore la si fa tenendo in considerazione tre fattori fondamentali:
- Velocità massima - Coppia nominale - Coppia di picco
1) Conoscendo la velocità massima di rotazione dell’albero motore, si può scegliere il motore
con la velocità massima adeguata, mantenendo certi margini. Normalmente la meccanica viene progettata considerando la taglia di velocità del motore (1500-2000-3000-4500-6000-…). Questo è uno dei pochi dati che viene fornito con una precisione accettabile.
2) Per il dimensionamento della coppia nominale, occorre, come visto in precedenza, fare
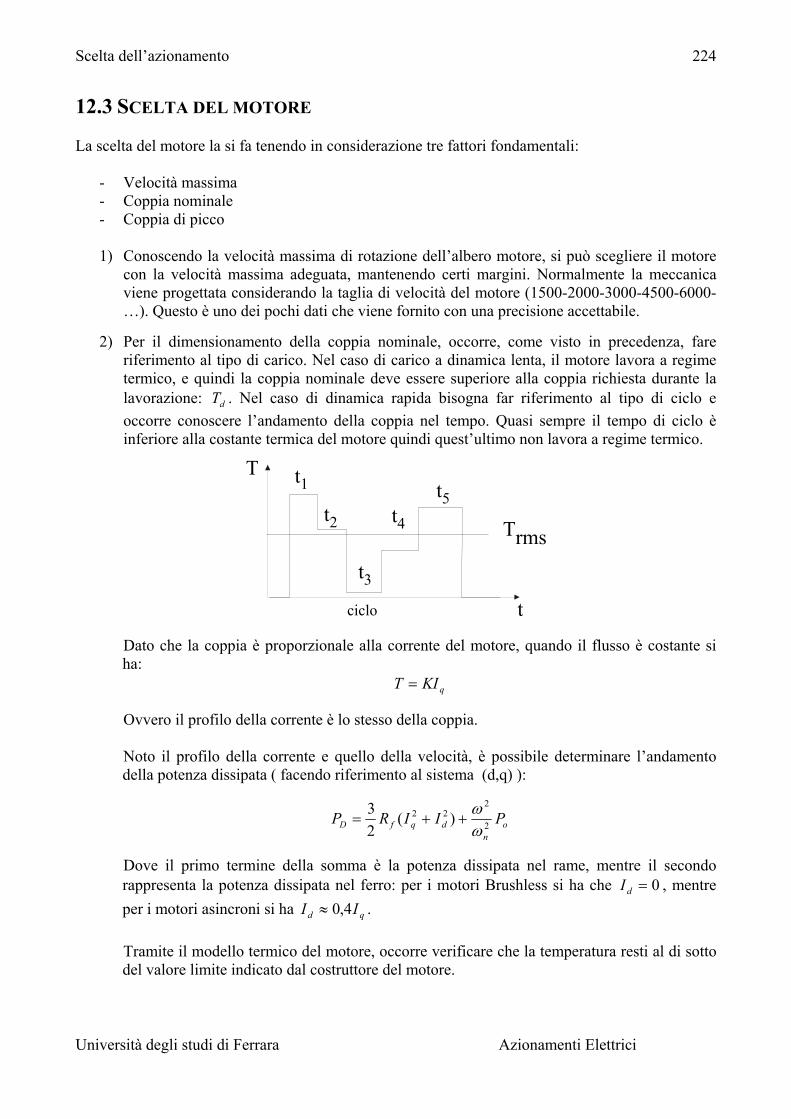
riferimento al tipo di carico. Nel caso di carico a dinamica lenta, il motore lavora a regime termico, e quindi la coppia nominale deve essere superiore alla coppia richiesta durante la lavorazione: dT . Nel caso di dinamica rapida bisogna far riferimento al tipo di ciclo e occorre conoscere l’andamento della coppia nel tempo. Quasi sempre il tempo di ciclo è inferiore alla costante termica del motore quindi quest’ultimo non lavora a regime termico.
T
t
Trms
t5t1
t2 t4
t3ciclo
Dato che la coppia è proporzionale alla corrente del motore, quando il flusso è costante si ha:
qKIT =
Ovvero il profilo della corrente è lo stesso della coppia. Noto il profilo della corrente e quello della velocità, è possibile determinare l’andamento della potenza dissipata ( facendo riferimento al sistema (d,q) ):
on
dqfD PIIRP 2
222 )(
23
ωω
++=
Dove il primo termine della somma è la potenza dissipata nel rame, mentre il secondo rappresenta la potenza dissipata nel ferro: per i motori Brushless si ha che 0=dI , mentre per i motori asincroni si ha qd II 4,0≈ . Tramite il modello termico del motore, occorre verificare che la temperatura resti al di sotto del valore limite indicato dal costruttore del motore.
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
225
Dato che la potenza dissipata sulla resistenza dell’avvolgimento è la parte più rilevante della potenza dissipata, che è proporzionale a 2
qI e quindi a 2T , normalmente si considera solo questa parte. Se il periodo di tempo di ciclo, che è dell’ordine di qualche minuto, è piccolo rispetto alla costante di tempo termica tht ( per un motore di medie dimensioni è di circa 20 minuti), allora la massima temperatura può essere calcolata basandosi sulla potenza media dissipata sulla resistenza dell’avvolgimento, che equivale alla potenza dissipata sulla resistenza dal valore efficace della corrente nello stesso periodo:
2
23
qrmsfD IRP =
Dato che la coppia è proporzionale alla corrente, normalmente si fa riferimento alla coppia efficace invece che alla corrente efficace:
ciclorms t
tTtTtTT .......32
322
212
1 ++=
Se la coppia efficace è minore della coppia nominale, allora si può dire che la temperatura dell’avvolgimento del motore si mantiene entro limiti ammissibili. Occorre tenere presente che è stata trascurata la potenza dissipata nel ferro. Nel caso di sistemi ad elevata dinamica, in cui la coppia del carico coincide con la coppia inerziale, situazione che si verifica spesso, per il calcolo della coppia efficace si può fare riferimento all’andamento della velocità. Quindi in base all’accelerazione ed all’inerzia totale (carico e motore sull’albero motore) si determina l’andamento della coppia durante il ciclo, e di conseguenza la coppia efficace. Nota la Trms devo verificare che questa sia minore di quella nominale, in questo caso la temperatura degli avvolgimenti del motore non supererà mai il valore massimo. Nel caso di temperatura dell’ambiente più elevata rispetto a quella per cui è stata fissata la coppia nominale, occorre declassare al coppia nominale del motore:
θθΔ
′Δ=′ 2
nn TT
In base all’esperienza comunque occorre scegliere un motore con una coppia nominale tale da soddisfare le condizioni indicate con un margine almeno del 30% (magari fino ad un massimo del 50%); infatti il tutto dipende da quanto sono precisi i dati ricevuti dal cliente e dalla conoscenza delle condizioni ambientali di funzionamento.
3) La coppia massima necessaria durante il ciclo macchina, o durante l’accelerazione nel moto
uniforme, deve essere minore della coppia massima erogabile dal motore (alla velocità richiesta), con l’azionamento associato. Occorre verificare che il periodo di utilizzo di tale coppia sia tale da mantenere la temperatura degli avvolgimenti entro limiti accettabili. Nel caso di carichi a dinamica lenta, tale coppia è leggermente superiore alla coppia nominale: (1,5 ÷ 2)Tnom.
Scelta dell’azionamento
Università degli studi di Ferrara Azionamenti Elettrici
226
12.4 SCELTA DEL DRIVE La scelta del drive è determinata dai seguenti parametri, che a loro volta sono legati alla scelta del tipo di motore utilizzato nell’azionamento:
a) Tensione b) Corrente nominale c) Corrente di picco
Per quanto concerne il primo parametro, questo dipende dal motore usato: 230Volt trifase/monofase o 400 ÷ 460Volt trifase, mentre la corrente nominale è legata alla costante di coppia del motore KT secondo la relazione:
T
rmsfrms K
TI =
Inoltre deve essere in grado di erogare la coppia di picco richiesta:
T
pkfrmspk K
TI =
Nel caso di carichi a dinamica lenta, tale valore è leggermente superiore alla corrente nominale.
Normalmente il Drive, che lavora sempre a regime termico, eroga la coppia nominale del motore e non necessariamente è in grado di erogare tutta la coppia di picco del motore, ma solo una parte, altrimenti dovrei sovradimensionare il Drive, con relativo aumento dei costi.










![MOTORE RINGED POLE, STRUTTURA E FUNZIONAMENTO - … · Figura 4 Schema a blocchi di un motore brushless SPM [9]. 9 Figura 5 Rappresentazione schematica di un motore IPM [2]. 10 ...](https://static.fdocumenti.com/doc/165x107/5c6a97c509d3f26b7d8d0755/motore-ringed-pole-struttura-e-funzionamento-figura-4-schema-a-blocchi-di.jpg)





