07 Calcolo Automatico Delle Strutture

of 20
Transcript of 07 Calcolo Automatico Delle Strutture
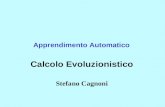
07 Calcolo Automatico delle Strutture.doc Pag. 1 di 20Corso di Teoria e Progetto di Strutture - 01GUYEM - 6 Crediti - II p.d. - A.A.2009/2010 - Napoli/SassoneCalcolo Automatico delle StruttureIntroduzioneInquestomodulovengonointrodottiiconcettielemetodologiedelcalcoloautomatico delle strutture basato sul Metodo degli Elementi Finiti (Finite ElementMethod).Questoprocedimentohaassuntounaimportanzaeccezionalenell'ingegneriaapartiredai primiannisettanta del novecento,quandol'evoluzionedelletecnologieinformaticheharesopossibileaffrontareiproblemidell'analisistrutturalepermezzodeicalcolatori.Ilmetododeglielementifiniti,nellaformulazionechevieneillustratainquestomodulo,trovalasuabaseteoricanelMetododegliSpostamenti,dicuisidannopernotiiconcettifondamentali.IlMetododegliSpostamenti(o dell'Equilibrio),dualedelMetododelleForze(odellaCongruenza),individuanelcampodispostamentil'incognitadelproblemastrutturale,dadeterminarsiattraversolasoluzionediunaopiequazioneiequilibrio.Nelcasogeneraleilcampodispostamentiunafunzionevettorialecontinuadellaposizionedeipuntidiuncorpo("ognipuntosispostadiunacertaquantitsecondounadatadirezione")percuileequazionidiequilibriosonoespresseinmododifferenziale.Perquantolaformadelleequazionisiarelativamentesemplice,quandolaformadelcorpodastudiarearbitrariageneralmenteimpossibiletrovareunasoluzioneanalitica(informachiusa)delproblema. Si verifica cos il paradosso per cui le leggi fondamentali che regolano ilcomportamento dei corpi elastici sono ormai note da due secoli, ma la soluzione dispecificiproblemi,riguardanticorpiestrutturediformaassegnataeconunadatacondizione di carico, non pu quasi mai essere trovata in forma analitica.Perovviareaquestoproblemasonostatemesseapuntodelletecnicheditiponumerico,ossiadeiprocedimentiperotteneresoluzioniapprossimateinformadidati numerici piuttosto che di funzioni analitiche: fra questi il Metodo degli ElementiFiniti senz'altro uno dei pi versatili e potenti. Il rapporto fra metodi numerici (cioalgoritmi di risoluzione approssimata dei problemi matematici) e calcolo automaticoeffettuatoattraversoilcomputer,moltostretto,dalmomentochelesoluzioniapprossimate richiedono in genere l'esecuzione di grandi quantit di calcoli. Si pugrossolanamente affermare che una procedura di calcolo automatico sostituisce adun problema semplice nella sua formulazione ma difficile o impossibile da risolvere,unproblemapisemplicedarisolveremacherichiedeunagrandequantitdioperazioni.E'perquestochelaformulazionedeimetodinumerici,comesivedrnelseguito,falargoimpiegodellascritturamatricialepergestireemanipolaregrandi quantit di operazioni.07 Calcolo Automatico delle Strutture.doc Pag. 2 di 201. La discretizzazione della struttura: Nodi, Elementi, MeshNellaprimapartedelcorsoabbiamoparlatodelcampodispostamentichesiproduceinuncorpoelasticoquandoessosoggettoadunsistemadiforzeereazioni vincolari equilibrate. Per determinare il campo di spostamenti a partire dalleforzeesterneedallecondizionidivincoloingeneralenecessariorisolvereunsistema di equazioni differenziali e algebriche che complessivamente costituisconoquellochesidefinisceilproblemaelastico.Larisoluzioneanaliticadelproblemaelasticopossibilesoloinunnumeromoltolimitatodicasi,quandolaformadelcorpoeladistribuzionedelleforzeesternesonosufficientementeregolari.Adesempio,nelcasodeisolididiDeSaintVenantcipossibile(entrocertelimitazioni), grazie al fatto che la loro geometria chiaramente definita (prismi retticon altezza molto maggiore delle dimensioni della base) e che le forze esterne sonoapplicate solo sulle basi.Nelcasoincuiilcorpochesivuolestudiareabbiaunaformaqualsiasi,nongeneralmentepossibilerisolvereilproblemainformachiusa,nottenereesplicitamentelafunzionechedescriveilcampodispostamenti.Divienepercinecessarioadottaremetodimatematicicheconsentanodiarrivarealmenoadunasoluzioneapprossimata,possibilmentecontrollandol'errorechesiintroduce.Lostudio di questi procedimenti costituisce una intero settore della matematica, e nonquestalasedeperunadisaminadettagliata.Cilimiteremoadescrivereilprocedimento che pi ha trovato impiego nell'analisi strutturale e che ha consentitodi automatizzare il calcolo attraverso l'uso del computer: ilMetodo degli ElementiFiniti.Ilconcettochesta allabasediquesto procedimentoquellodidiscretizzazione:dettoinparolesemplici,invecedicercareunafunzionecontinuacheesprimailcampodeglispostamentiintuttigliinfinitipuntidelcorpo,ciaccontentiamoditrovare la soluzione in un numero finito di punti, detti nodi, scelti arbitrariamente: alproblemacontinuovienepercisostituitounproblemadiscreto.Perfarecidobbiamosuddividereilcorpoinunnumerofinitodiporzionielementari,glielementifiniti,immaginandochequestepartisianofralorocollegatesoloincorrispondenza dei nodi. A partire dalla soluzione trovata in un numero finito di puntisipupoirisalirealledeformazioniall'internodeisingolielementiequindiaglispostamentiancheintuttiglialtripuntidellastruttura,attraversounprocessodiinterpolazione. Il risultato finale sar quindi un campo di spostamenti definito a tratti,cio definito separatamente su ogni elemento a partire dagli spostamenti dei nodi.Riferendoci persemplicitsoloaduedimensioni,questaoperazioneillustratainFigura 1.1; nel caso pi complesso di uncorpotridimensionale,le partielementarinon saranno figure piane (triangoli) ma figure solide (tetraedri).E' logico prevedere che la sostituzionedel problemarealeconquellodiscretizzatoporter delle approssimazioninelrisultato,percuilasoluzionenonpuquasimaidefinirsimatematicamenteesatta.Nellaschematizzazionediscreta,peresempio,isingolielementiincuiilcorpostatosuddivisosonocollegatifraloro07 Calcolo Automatico delle Strutture.doc Pag. 3 di 20esclusivamenteincorrispondenzadeinodi,manonincorrispondenzadeilatiadiacenti.Dacidiscendecheincorrispondenzadeilatideglielementinonsemprecertochelospostamentosiacontinuoeinlineadiprincipiopotrannoverificarsistrappiosovrapposizionidimateria,cosacheavevamoesplicitamenteescluso nella definizione del campo di spostamenti (vedi Dispensa 01).YXOFigura 1.1Una seconda fonte di errore sta nel fatto che la forma complessiva del corpo soloparzialmente approssimata dalla suddivisione in elementi: come si vedein figurailperimetrocurvilineo,adesempio,sitrasformainunaspezzata.Infineunaterzasorgentedierrorelegataalfattocheleforzeesterneelecondizionidivincolopossonoessereapplicatesolosuinodidellasuddivisione,percuicondizionidicaricoodivincoloditipodistribuito(adesempiotuttountrattodelperimetropotrebbe essere soggetto ad un carico distribuito, oppure potrebbe essere bloccatoda una condizione di vincolo), devono a loro volta essere discretizzate. Tutte questefontidierrorederivanodallasostituzionedelproblemadiscretoaquellocontinuo:adessesiaggiungeranno,macinonverrtrattatoinquestomodulo,glierroriderivanti dalla formulazioni interna degli elementi e quelli derivanti dal procedimentodicalcoloautomatico.Lasuddivisioneinnodiedelementisichiamacontermineanglosassonemesh.Daquantodettosoprachiaroche,nelcasogenerale,l'accuratezza della soluzione dipende dalla mesh che si adottata, in particolare dalnumero di nodi e di elementi e da quanto la mesh fitta o rada nelle varie parti dellastruttura.Per procedere nella ricerca della soluzione ora necessario introdurre due concetti: di ogni elemento finito, grazie allasua formasemplice, possibiledescrivereilcomportamento meccanicoattraversolerelazionifraglispostamentideinodiele forze applicate sui nodi stessi. A seconda del tipo di elemento queste relazionipotranno essere esatte oppure solamente approssimate. poichleincognitedelproblemasonoglispostamentideinodi,lasoluzionesitroverrisolvendounsistemadiequazionidiequilibrio,ognunadellequaliesprime l'equilibrio di un nodo secondo una particolare direzione.07 Calcolo Automatico delle Strutture.doc Pag. 4 di 20Lerelazionifraspostamentieforzenodalidiunsingoloelementodannoluogoaquella che si definisce la matrice di rigidezza locale dell'elemento. Nel caso che ilmetodo sia applicato a corpi costituiti da un mezzo elastico, le relazioni fra forze espostamenti sono di tipo lineare e la matrice di rigidezza altro non che la matricedei coefficienti di queste relazioni.InFigura1.2illustratounelementofinitopiano(bidimensionale)diformatriangolare con tre nodi, posizionati incorrispondenzadeivertici.Seilcorpodicuil'elementofinitopartesubisceunadeformazione,inodisispostanorispettoalleposizioni originarie: chiameremo e le componenti dello spostamento di ciascunnodo,rispettoadunsistemadiriferimentoassegnato.Analogamenteimmagineremo che alla deformazione si accompagni la presenza di forze applicateai nodi, di cui le H e le V sono le componenti, sempre secondo x e y.YXOV3 H3321V3H3H1V111212133 3Figura 1.2Ciascunadelleforzenodalisarinlineadiprincipiolegataatuttiglispostamentinodali,percuiilcomportamentomeccanicodell'elementopotrscriversicomeunsistemadi6equazionilineari,icuicoefficientikijcostituisconoglielementidiunamatrice quadrata:
+ + + + + =+ + + + + =+ + + + + =+ + + + + =+ + + + + =+ + + + + =3 66 3 65 2 64 2 63 1 62 1 61 33 56 3 55 2 54 2 53 1 52 1 51 33 46 3 45 2 44 2 43 1 42 1 41 23 36 3 35 2 34 2 33 1 32 1 31 23 26 3 25 2 24 2 23 1 22 1 21 13 16 3 15 2 14 2 13 1 12 1 11 1k k k k k k Vk k k k k k Hk k k k k k Vk k k k k k Hk k k k k k Vk k k k k k H(1.1)Scrivendo queste equazioni in forma compatta si ottiene: | 1 6 6 6 1 6 x x xu K Q = (1.2)07 Calcolo Automatico delle Strutture.doc Pag. 5 di 20La dimensione della matrice quadrata di rigidezza [K], cos come quella del vettoredegli spostamenti nodali {u} e del vettore delle forze nodali {Q} dipendono dal tipodielementofinitoadottatoediconseguenzadaltipodiproblemaconsiderato.Glielementinormalmenteimpiegatinell'analisistrutturalesonogrossolanamenteraggruppabili in tre categorie: elementi solidi (tridimensionali) [SOLID, BRICK, TETRA, ecc.]; elementi piani (bidimensionali) [SHELL, PLANE, ecc.] elementi monodimensionali [BEAM, TRUSS, ecc.]Glielementisolidivengonoadoperatiperiproblemidicaratteregenerale,incuiilcorpodaanalizzarenonpuesserericondottoaformesemplificate.Senzascendere ulteriormente in dettaglio essi possono essere a forma di parallelepipedooditetraedro.Nelprimocasosihanno8nodi,posizionatiaiverticidelparallelepipedo,ognunodeiquali hatregradidilibert(DOF);nelsecondocasoinodi sono solo 4 (esistono formulazioni pi complesse in cui il numero di nodi pielevato, ma non ci interessano in questa sede).ZXO1243Y12435 68712Elemento monodimensionalea 2 nodiElemento solidoa 4 nodiElemento solidoa 8 nodiFigura 1.3Glielementipianivengonoutilizzatipermodellarequeicorpiincuiunadelledimensionimoltopipiccoladellealtredue,ossialelastre,lepiastre,lemembrane ecc.InfineglielementifinitimonodimensionalivengonoimpiegatiperanalizzarelestrutturecompostedisolididiDeSaintVenant,comeletravicontinue,itelaieletravi reticolari.Nelseguitoverraffrontataindettagliolatrattazionerelativasolo aquest'ultimo tipo di elementi.07 Calcolo Automatico delle Strutture.doc Pag. 6 di 202. Strutture costituite da elementi monodimensionaliQuandoabbiamoachefareconuntelaiopiano,comequellorappresentatoinfigura,civieneormainaturaleconsiderarlocompostodipartipisemplici,ditipomonodimensionale (Solidi di DeSaintVenant), che rappresentano travi epilastriopi in generale aste. La struttura nel suo complesso risulter pertanto costituita da nelementimonodimensionali,collegatifraloroinmpunti.Ogniastadelloschemapuessereconsideratacomeunelementofinito,ditipotrave(beam)obiella(truss)percuilasuddivisioneinastediunoschemaintelaiatocostituiscegiunanaturalediscretizzazioneinelementi.Nelseguitosvilupperemoindettagliolatrattazione per questo tipo di strutture, sempre e solo ne caso piano, per semplicit.Laformulazionegeneraledelprocedimento,anchenelcasodielementipicomplessiediproblemitridimensionali,nondifferiscenellasostanzadaquellasvolta in questa sede.Nell'otticadicostruireunprocedimentochesiprestiadessereautomatizzatoeimplementatosuuncalcolatore,saropportunoscomporrelaprocedurainunasuccessione di sei fasi:1. calcolo delle matrici di rigidezza locali;2. rotazione dei sistemi di riferimento;3. assemblaggio della matrice di rigidezza globale;4. partizione della matrice di rigidezza globale;5. soluzione del sistema di equazioni;6. calcolo delle sollecitazioni all'interno degli elementi;Perarticolareilprocedimentosarutileragionaresuunsempliceesempio,lasemplice come la struttura rappresentata in Figura 1.4.1H2324123xyxyx45L LLYXFigura 2.1Comesivedesitrattadiunastrutturaditiporeticolare,costituitadatreastecollegatefraloroealsuolomediantecerniere.Ogniastapuquindiessereschematizzata come un elemento di tipo "biella", ottenendo un modello costituito da3 elementi e 4 nodi, di cui 3 vincolati.07 Calcolo Automatico delle Strutture.doc Pag. 7 di 202.1 Calcolo delle Matrici di Rigidezza LocaliLa matrice di rigidezza di un elemento finito dipende, dalla sua forma e dai gradi dilibert dei nodi e dalle propriet del materiale che lo compone. Per gli elementi finitimonodimensionaliessapuesseredeterminataapplicandolateoriadiDeSaintVenant.Consideriamo l'elemento finito pi semplice di tutti: l'elemento che rappresenta unabiella.Assumiamocheinodiiejdell'elemento,corrispondentiaisuoiestremipossano traslare di una quantit i e j parallelamente all'elemento stesso. Sui nodipotrannoinoltreessereapplicatedelleforzeFieFj,anch'esseparalleleall'elemento. La geometria e i gradi di libert sono descritti in Figura 2.1.1.ij xijijFiFjyFigura 2.1.1L'elemento ha due nodi e un solo grado di libert per nodo: la matrice di rigidezzaha quindi dimensione 2x2:
+ =+ =j i jj i ik k Fk k F22 2112 11(2.1.1) | 1 2 2 2 1 2 x x xu K Q = (2.1.2)Perdeterminareglielementidellamatriceconvieneragionarepercolonne:seadesempio imponiamo che lo spostamento nel nodo j sia nullo, la (2.1) diventa:i ji ik Fk F2111==(2.1.3)esipossonodeterminareicoefficientik11ek21.Risolviamoquindiilseguenteschema statico:07 Calcolo Automatico delle Strutture.doc Pag. 8 di 20Fi Fj=-Fi ii jFigura 2.1.2da cui si ottiene: EAF ;EAFEAFj j i i i i = = = (2.1.4)Se invece si considera il caso in cui sia nullo lo spostamento del nodo i, si ottiene:Fi = -Fj Fj i j jFigura 2.1.3 EAF ;EAFEAFj i j j j j = = = (2.1.5)La matrice di rigidezza dell'elemento biella dunque: |
=
+ = =EA EAEA EAKEA EAFEA EAFxj i jj i i2 2(2.1.6)Consideriamooraunasituazionediversa,incuiigradidilibertnonsianoletraslazionimalerotazionideinodi.L'elementochesiottienenondiparticolareutilit, dal momento che permette di descrivere solo travi inflesse in telai a nodi fissi,percuinonsitrovanellelibreriedeicodicidicalcolo;alsuopostositrovainvecel'elementotravepigenerale,dicuiparleremopiavanti.Dalpuntodivistadidatticotuttaviaquestocasoesempiopotraiutareachiarireilprocedimento.Lageometria e i gradi di libert sono descritti in Figura 2.1.4.07 Calcolo Automatico delle Strutture.doc Pag. 9 di 20i jxji jMiMjyiFigura 2.1.4Comenelcasoprecedentel'elementohaduenodieunsologradodilibertpernodo: la matrice di rigidezza avr quindi dimensione 2x2. Seguendo il ragionamentocondottoperl'elementobiella,imponiamoinizialmentechelarotazionenelnodojsia nulla:
+ =+ =j i jj i ik k Mk k M22 2112 11(2.1.7)
==i ji ik Mk M2111(2.1.8)ijMiMj =Mi/2iTi = (Mi+Mj)/L = 3/2 Mi/L Tj = -TiFigura 2.1.5da cui si ottiene:;EIT ;EITEIM ;EIMEIMi j i ii j i i i i2 26 62 44 = = = = =(2.1.9)Analogamente, ponendo uguale a zero la rotazione nel nodo i, si ottiene:07 Calcolo Automatico delle Strutture.doc Pag. 10 di 20ijMjMi =Mj/2jTi = -TjTj= -(Mi+Mj)/L= -3/2 Mi/LFigura 2.1.6da cui si ottiene:;EIT ;EITEIM ;EIMEIMj j j jj i j j j j2 26 62 44= = = = =(2.1.10)La matrice di rigidezza assume quindi la forma: |
=
+ =+ =EA EAEA EAKEI EIMEI EIMxj i jj i i4 22 44 22 42 2(2.1.11)Ilcasopigenerale,checomprendealsuointernoidueappenavisti,quellodell'elemento trave (nel piano), che ha 2 nodi e 3 gradi di libert per ogni nodo. Lageometria e i gradi di libert sono descritti in Figura 2.1.7.i jxi jMiMjyiiijjjTiTjNjNiFigura 2.1.7Alcuni coefficienti della matrice sono gi stati determinata nei due casi precedenti epossono essere inseriti nelle rispettive posizioni:07 Calcolo Automatico delle Strutture.doc Pag. 11 di 20
=
jjjiiijjjiiiEIkEIkEIkEIkEA EAEIkEIkEIkEIkEA EAMTNMTN402060600 0 0 0204060600 0 0 055 6224525235 32225222(2.1.12)Perdeterminaregliultimiquattrocoefficientipernecessariorisolvereunoschema ulteriore, ossia quello per cui fra tutti gli spostamenti possibili si consideradiversodazerosololacomponente nelnodo(eanalogamentenelnodoj).Loschema che si ottiene il seguente:ijMj = M1Mi = Ti/2LTi = 12EI/L3Tj= -TiiFigura 2.1.8;EIM ;EIMEIT ;EITEITi j i ii j i i i i2 23 336 612 1212= = = = =(2.1.13)Assumendo infine diversa da zero solo la componente nel nodo j si ottiene:ijMj = -2Tj/L Mi = MjTi = -TjTj = 12EI/L3jFigura 2.1907 Calcolo Automatico delle Strutture.doc Pag. 12 di 20;EIM ;EIMEIT ;EITEIT22 222 132 132 232 26 612 1212 = = = = =(2.1.14)e sostituendo nella matrice di rigidezza dell'elemento i valori trovati si ottiene infine:
=
jjjiiijjjiiiEI EI EI EIEI EI EI EIEA EAEI EI EI EIEI EI EI EIEA EAMTNMTN4 602 606 1206 1200 0 0 02 604 606 1206 1200 0 0 02 22 3 2 32 22 3 2 3(2.1.15)In modo analogo, anche se spesso pi complesso, si ottiene la matrice di rigidezzadi un elemento finito qualsiasi, a due o a tre dimensioni. Se vogliamo esprimere inmodo pi intuitivo il significato della matrice di rigidezza possiamo dire che: se i nodidi un elemento subiscono degli spostamenti, ad esempio perch l'elemento partediuncorposoggettoadeformazione,alloraneinodisigeneranodelleforze,chepossono,esserecalcolate,nelcasoelastico,premoltiplicandoilvettoredeglispostamenti per la matrice di rigidezza dell'elemento stesso. La matrice di rigidezzaesprimequindiilmodoincuiunelementorispondeall'imposizionedispostamentinodali, e in definitiva ne descrive il comportamento meccanico.2.2 Rotazione dei sistemi di riferimentoE'importantenotarecheglielementinonsonoparallelifraloro,masonoruotatiarbitrariamente. Per gestire questa situazione introdurremo il concetto di sistema diriferimento globale (X,Y) e di sistemi di riferimento locali (x,y). Ogni elemento ha unsuosistemadiriferimentolocale,incuil'assexvadalprimoalsecondonododell'elemento, e l'angolo di cui questo sistema ruotato rispetto a quello globale cidicecomel'elementoposizionatonelpiano.NellastrutturadiFigura2.1l'elemento 1 ruotato di 45, l'elemento 2 ruotato di 90mentre l'elemento 3 non07 Calcolo Automatico delle Strutture.doc Pag. 13 di 20ruotatorispettoalsistemadiriferimentoglobale1.Ognielementosarcaratterizzato dalla sua propria matrice di rigidezza locale: | | |
=
=
=LA ELA ELA ELA EK ;LA ELA ELA ELA EK ;LA ELA ELA ELA EKx x x3 3 3 33 3 3 32 2 12 2 2 22 2 2 22 2 21 1 1 11 1 1 12 2 12 22 2 (2.2.1)chestatadeterminatabasandosisulsistemadiriferimentolocaledell'elemento.Affinchquestematricisianofraloroconfrontabilibisognachesianoespresserispettoalsistemadiriferimentoglobale,cheunicopertuttiglielementi,attraverso una rotazione del sistema di riferimento.jxyFjFijiHjVji HiViYXFigura 2.2.1sen F Vcos F H;sen F Vcos F Hj jj ji ii i====(2.2.2) | | 1 2 2 4 4 10000x xTxjij j i i* Q N QFFsencossencosV H V H =
=(2.2.3)sen vcos u;sen vcos uj jj ji ii i====(2.2.4)1 Come sempre si considera positiva la rotazione cheportailsemiassepositivoxasovrapporsi sulsemiassepositivo y: di conseguenza positiva la rotazione antioraria07 Calcolo Automatico delle Strutture.doc Pag. 14 di 20 | | 1 2 2 4 4 10000x xTxjij j i i* u N usencossencosv u v u =
=(2.2.5)Le due espressioni ottenute possono essere invertite: | 1 4 4 2 1 2 xTx xQ N * Q = (2.2.6) | 1 4 4 2 1 2 xTx xu N * u = (2.2.7)e sostituite nella relazione iniziale: | | | 1 4 4 2 2 2 1 4 4 2 xTx x xTxu N * K Q N = (2.2.8) | | | , , 1 4 4 2 2 2 2 4 1 4 xTx x x xu N * K N Q = (2.2.9)da cui infine: | | | | | 1 4 4 4 1 4 4 2 2 2 2 4 4 4 x x xTx x x xu K Q N * K N K = = (2.2.10)Nelcasodell'elementobiella,comesipunotare,larotazionedelsistemadiriferimento porta ad una espansione della matrice di rigidezza dalla dimensione 2x2alladimensione4x4.Ingenerale,tuttavia,lamatricedirigidezzadiunelementoespressanelsistemadiriferimentolocaleequellaespressanelsistemadiriferimentoglobalehannolastessadimensione(ancheperl'elementobiellapossibile condurre il ragionamento in modo da evitare l'espansione).Nel caso dell'elemento trave l'operazione leggermente pi complessa:07 Calcolo Automatico delle Strutture.doc Pag. 15 di 20jxyVjHiiHjVijxyTjNiiNjTiFigura 2.2.2PertrovareVeHapartiredaTeNconvienescomporrequesteultimeseparatamente secondo le due direzioni globali X e Y, e successivamente sommarele due scomposizioni:xYH'V'XyNxYH''V''XyTFigura 2.2.3cos T sen N ' ' V ' V Vsen T cos N ' ' H ' H Hcos T ' ' Vsen T ' ' H; sen N ' V; cos N ' H+ = + = = + == ===(2.2.11)In forma compatta si ottiene:07 Calcolo Automatico delle Strutture.doc Pag. 16 di 20 | 1 6 6 6 6 11 0 0 0 0 00 0 0 00 0 0 00 0 0 1 0 00 0 0 00 0 0 0x x xjjjiiijjjiii* Q N QMTNMTNcos sensen coscos sensen cosMVHMVH=
=
(2.2.12) | 1 6 6 6 6 11 0 0 0 0 00 0 0 00 0 0 00 0 0 1 0 00 0 0 00 0 0 0x x xjjjiiijjjiii* u N ucos sensen coscos sensen cosvuvu=
=
(2.2.13)2.3 Assemblaggio della Matrice di Rigidezza GlobaleA partire dalle matrici di rigidezza locali, ruotate nel sistema di riferimento globale, orapossibilecostruireun'unicagrandematricequadratadicoefficienticherappresentaglobalmenteilcomportamentodell'interastruttura.Cisignificache,dato un vettore {F}nx1 di forze nodali, in cui n rappresenta il prodotto del numero dinodi perilnumerodigradidilibertdiogninodo,econsiderandoilvettore{U}nx1checontieneglinspostamentinodaliincogniti,ilproblemastrutturaleprendelaforma: | 1 1 nxnxnglob nxU K F = (2.3.1)La costruzione della matrice [Kglob] l'argomento di questo paragrafo.SeconsideriamolastrutturadescrittainFigura1.3,ladimensionedellamatriceglobalesar2(gradidilibertpernodo)x4(nodi)=8.Poichlastrutturacostituita da tre elementi a due nodi, avremo a disposizione tre matrici di rigidezzalocali[K1]4x4,[K2]4x4,[K3]4x4.L'assemblaggio,ciolacostruzione,dellamatriceglobale,consistenelcollocareicoefficientidellematricilocalinelleopportuneposizioni della matrice globale, seguendo la numerazione dei nodi. Come si vede inFigura2.3.1,lamatricelocale[K1]dell'elemento1checollegainodi1e2,siposizionanellamatriceglobaleincorrispondenzadeinodi1e2;lamatrice[K2]dell'elemento 2 si posiziona in corrispondenza dei nodi 2 e 3, mentre la matrice [K3]siseparaesiposizionaincorrispondenzadeinodi2e4.Dovelematricilocalisisovrappongono i coefficienti di rigidezza si sommano: questo perch in ogni nodo la07 Calcolo Automatico delle Strutture.doc Pag. 17 di 20forzanodaleesternaequilibratadallasommadellereazioniinternedituttiglielementicheconvergonoinquelnodo.Conl'assemblaggioquindisisommanoicontributi di rigidezza che offre ogni elemento convergente nel nodo.12 312412122 3232 424[Kglob] =[K2] =[K3] =[K1] =432 31241 43Figura 2.3.1Volendoformalizzarequestaoperazionedaunpuntodivistamatematicoopportuno suddividerla in due fasi distinte2: l'espansione delle matrici di rigidezza locali alla dimensione globale; la somma delle matrici locali espanse.Laprimaoperazione,schematizzatainFigura2.3.2,consistenelportareunaadunalematricilocalialladimensionediquellaglobale,collocandoitermininelleposizioni opportune.2 424[K3] =2 31241 43Figura 2.3.2Cisiottienemoltiplicandolematricilocaliperdellematricirettangolari,detteappunto matrici di assemblaggio, contenenti solo 1 e 0:2 E' importante notare che questo modo di formalizzare il problema non necessariamente coincide con il mododi operare che viene usato dal software, che spesso si basa su algoritmi pi efficienti.07 Calcolo Automatico delle Strutture.doc Pag. 18 di 20 | | | |xn xTnxnxn, globA K A K4 1 4 4 1 4 1 1= (2.3.2)
=
0 0 0 0 1 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 1 00 0 0 0 0 0 0 10 0 0 00 0 0 00 0 0 00 0 0 01 0 0 00 1 0 00 0 1 00 0 0 10 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 00 0 0 00 0 0 00 0 0 044 1 43 1 42 1 41 134 1 33 1 32 1 31 124 1 23 1 22 1 21 114 1 13 1 12 1 11 144 1 43 1 42 1 41 133 1 33 1 32 1 31 124 1 23 1 22 1 21 114 1 13 1 12 1 11 1, , , ,, , , ,, , , ,, , , ,, , , ,, , , ,, , , ,, , , ,K K K KK K K KK K K KK K K KK K K KK K K KK K K KK K K K(2.3.3)e cos via per tutte le matrici di rigidezza locali. Naturalmente il problema si spostasullacostruzionedellematricidiassemblaggio,malaposizionedegliunoedeglizeri facilmente determinabile a partire dal numero dell'elemento considerato e dainumeri dei nodi che esso collega.Il passo successivo solo pi una somma: | | | | | = == =mixn i x iTnx iminxni , globnxnglobA K A K K14 4 4 41(2.3.3)2.4 Partizione della Matrice di Rigidezza GlobaleNelragionamentocondottofinoaquestopuntononsonomaistatepreseinconsiderazione le condizioni di vincolo. In effetti nei nodi vincolati lo spostamento nullo, o al pi ha un valore noto, nel caso di un cedimento vincolare. Le equazioniche costituiscono il sistema di Eq. 2.3.1 sono quindi di due tipi distinti: quelle in cuila forza nodale nota e quelle in cui la forza nodale incognita. Come illustrato inFigura 2.3.3 Il vettore {U} degli spostamenti nodali pu essere quindi suddiviso nelvettore{UL}deglispostamentiliberi(rossi)enelvettore{UV}deglispostamentivincolati,nulliodivaloreassegnato(gialli).Ugualmenteilvettore{F}puesseresuddivisonelvettore{FL}delleforzelibere(verdi)enelvettore{FV}delleforzevincolate,ciodellereazionivincolari(fucsia).Ancheicoefficientidellamatricedirigidezzasipossonosuddividereinquattrosottomatrici,inbaseallerigheeallecolonne in cui si trovano: la sottomatrice [KLL], ottenuta incrociando le righe con glispostamentilibericonlecolonnecorrispondentialleforzelibere(rossa);lasottomatrice [KVV], ottenuta incrociando le righe con gli spostamenti vincolati con lecolonnecorrispondentialleforzevincolate(gialla)eleduesottomatrici[KLV]e[KVL],ottenuteincrociandospostamentilibericonforzevincolate(azzurra)eforzelibere con spostamenti vincolati (verdeacqua).07 Calcolo Automatico delle Strutture.doc Pag. 19 di 20={U} [K] {F}Figura 2.3.3Ilsistemadiequazionivienescompostoperrigheinduesistemidiequazioniseparati:==Figura 2.3.4e successivamente per colonne, separando i diversi contributi:==++Figura 2.3.5
=
VLVLVV VLLV LLFFUUK KK K | | VVLVV VLLVLLV LLFUUK KFUUK K=
=
| | | | V V VV L VLL V LV L LLF U K U KF U K U K= += +07 Calcolo Automatico delle Strutture.doc Pag. 20 di 20Dalprimodeiduesistemidiequazionisiricavanoglispostamentiliberi,checostituiscono la soluzione vera e propria del problema: | , , |1 =LL L V LV LK F U K U (2.3.3)E'importantenotarechelaparteonerosadalpuntodivistadelcalcolodatadall'inversione della matrice [KLL]. Una volta trovati gli spostamenti dei nodi liberi sufficientesostituirlinelsecondosistemadiequazionipertrovarelereazionivincolari.Aquesto puntolasoluzione del problemaottenuta,in terminidispostamentideinodiliberiedireazionivincolari.Daglispostamentinodalipossibilerisalirealleforzenodalisuisingolielementiapplicandolasecondadelle(2.2.10)esuccessivamente le (2.2.6).