





![Serraggio idraulicocilindro con rotazione e chiusur HDSZ · di serraggio la pressione idraulica va mantenuta costantemente ... forza di serraggio [kN] / con pressi-one d’esercizio](https://static.fdocumenti.com/doc/165x107/5c6a0a4709d3f27a7e8c07e0/serraggio-idraulicocilindro-con-rotazione-e-chiusur-di-serraggio-la-pressione.jpg)
Le lingue
Pagine
Legale


1
© Università di Pisa 2006
PRINCIPALI TIPI DI ELEMENTO E LORO IMPIEGO
© Università di Pisa 2006
PRINCIPALI TIPI DI ELEMENTO
2D2D 3D3D
x
y
x
zy
ASTA
Travature reticolari
TRAVE
Telai
SOLIDO
Pb. di Elasticità piana Pb. di Elasticità 3D
GUSCIO
Piastra/guscio assialsimmetrico
Piastra/guscio 3D
© Università di Pisa 2006
ALTRI TIPI COMUNI DI ELEMENTO
“GAP”
Pb. contatto
“PIPE”
Tubazioni
Massa
Masse concentrate
Molla
Elementi elastici
2
© Università di Pisa 2006
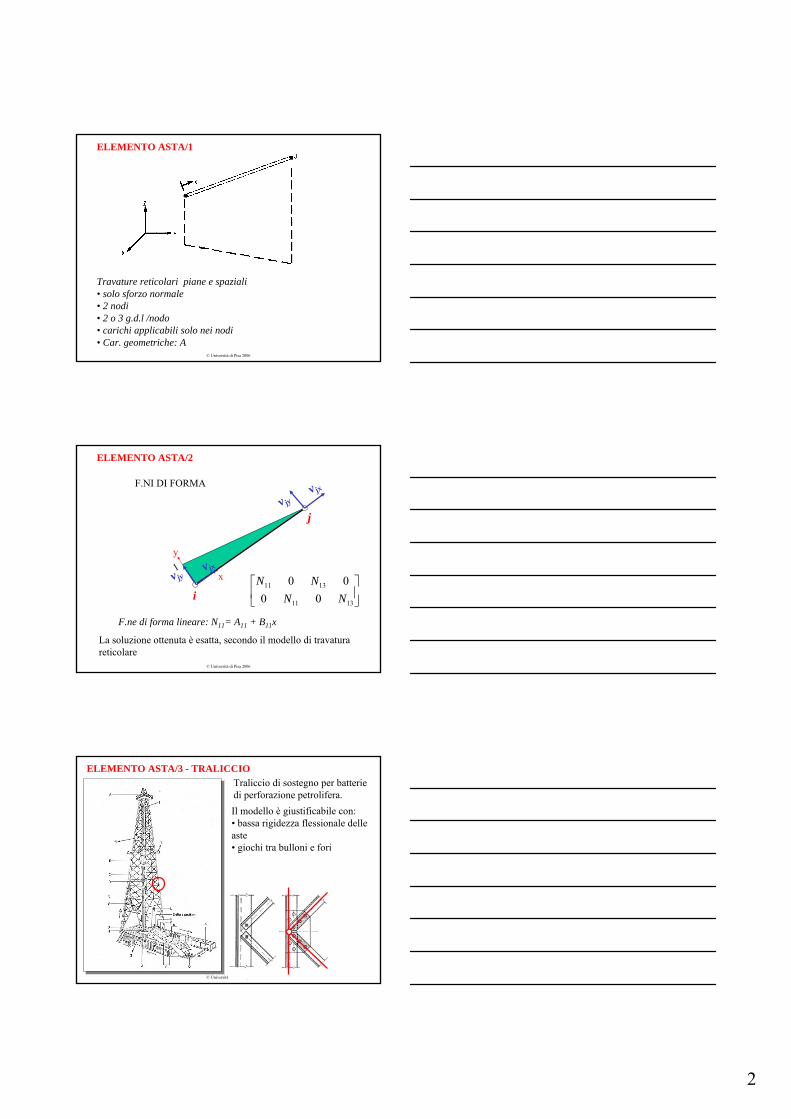
ELEMENTO ASTA/1
Travature reticolari piane e spaziali• solo sforzo normale• 2 nodi• 2 o 3 g.d.l /nodo• carichi applicabili solo nei nodi• Car. geometriche: A
© Università di Pisa 2006
ELEMENTO ASTA/2
F.NI DI FORMA
F.ne di forma lineare: N11= A11 + B11x
x
y1
i
j
v jx
v jy
v jxv jy
⎥⎦
⎤⎢⎣
⎡
1311
1311
0000
NNNN
La soluzione ottenuta è esatta, secondo il modello di travatura reticolare
© Università di Pisa 2006
ELEMENTO ASTA/3 - TRALICCIOTraliccio di sostegno per batterie di perforazione petrolifera. Questo tipo di strutture viene tradizionalmente trattato con modelli a travatura reticolare, assimilando i “nodi” a cerniere.
Il modello è giustificabile con:• bassa rigidezza flessionale delle aste• giochi tra bulloni e fori
3
© Università di Pisa 2006
ELEMENTO ASTA/4 - TRALICCIO
Nel fare il modello si escludono solitamente le aste che non hanno una funzione strutturale (rompitratta)
Modello di calcolo
© Università di Pisa 2006
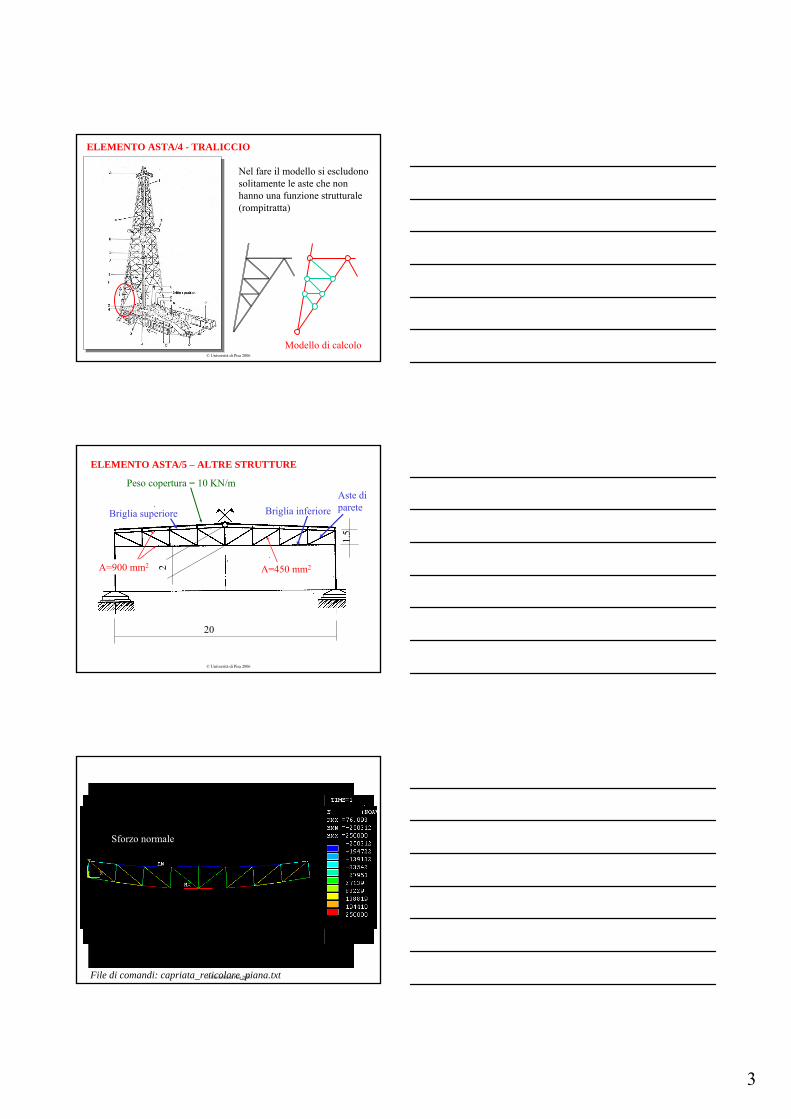
ELEMENTO ASTA/5 – ALTRE STRUTTURE
20
1.5
2A=900 mm2 A=450 mm2
Briglia superiore Briglia inferioreAste di parete
Peso copertura = 10 KN/m
© Università di Pisa 2006
Modello
Deformata
Sforzo normale
File di comandi: capriata_reticolare_piana.txt

4
© Università di Pisa 2006
ELEMENTO TRAVE/1
Telai piani• 2 nodi• 3 g.d.l /nodo• carichi concentrati e distribuiti• Car. geometriche: A, Jx, …
2D2D
Il piano x,y deve contenere:• nodi• carichi• uno degli assi principali di inerzia delle sezioni
© Università di Pisa 2006
ELEMENTO TRAVE/2
Telai spaziali• 2 (3) nodi• 6 g.d.l /nodo• carichi concentrati e distribuiti• Car. geometriche: A, Jzz, Jyy, Jxx, …
3D3D
© Università di Pisa 2006
Elementi piani: ogni nodo rappresenta un punto del continuo, tramite due g.d.l.
vix
θ
viy
yxv
yixx
y
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−=θ
x
y
i
( ) yxv
vyvyvixx
yixixx
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−=+= θ
Trave: con il nodo si vuole rappresentare lo stato di
spostamento dell’intera sezione
Trave: con il nodo si vuole rappresentare lo stato di
spostamento dell’intera sezione
Ipotesi sezioni pianeIpotesi sezioni piane
3 g.d.l. per nodo3 g.d.l. per nodo
ELEMENTO TRAVE/3
5
© Università di Pisa 2006
Stato di tensione/deformazione implicitamente conseguente alla scelta di elementi trave:• le deformazioni dovute al taglio sono trascurate
• le uniche componenti di tensione non nulle sono:
y
xσx
τxy
2D2D3D3D
τxyσx
τxz
• le σx hanno un andamento lineare nella sezione (formula di Navier)
y
xσx
ELEMENTO TRAVE/4
© Università di Pisa 2006
Oss.ne: la f.ne utilizzata per rappresentare la deformata della trave è una cubica.
( ) 32 DxCxBxAxvy +++=
Le f.ni di forma rappresentano correttamente punto per punto la deformata del tratto di trave solo nel caso di taglio costante. Negli altri casi la rappresentazione di spostamenti, deformazioni e tensioni nei punti interni è approssimata, con errore che decresce al diminuire delle dimensioni dell’elemento
T=costante
T non costante
( )costante3
3
==dx
xvdT y
y
ELEMENTO TRAVE/8
© Università di Pisa 2006
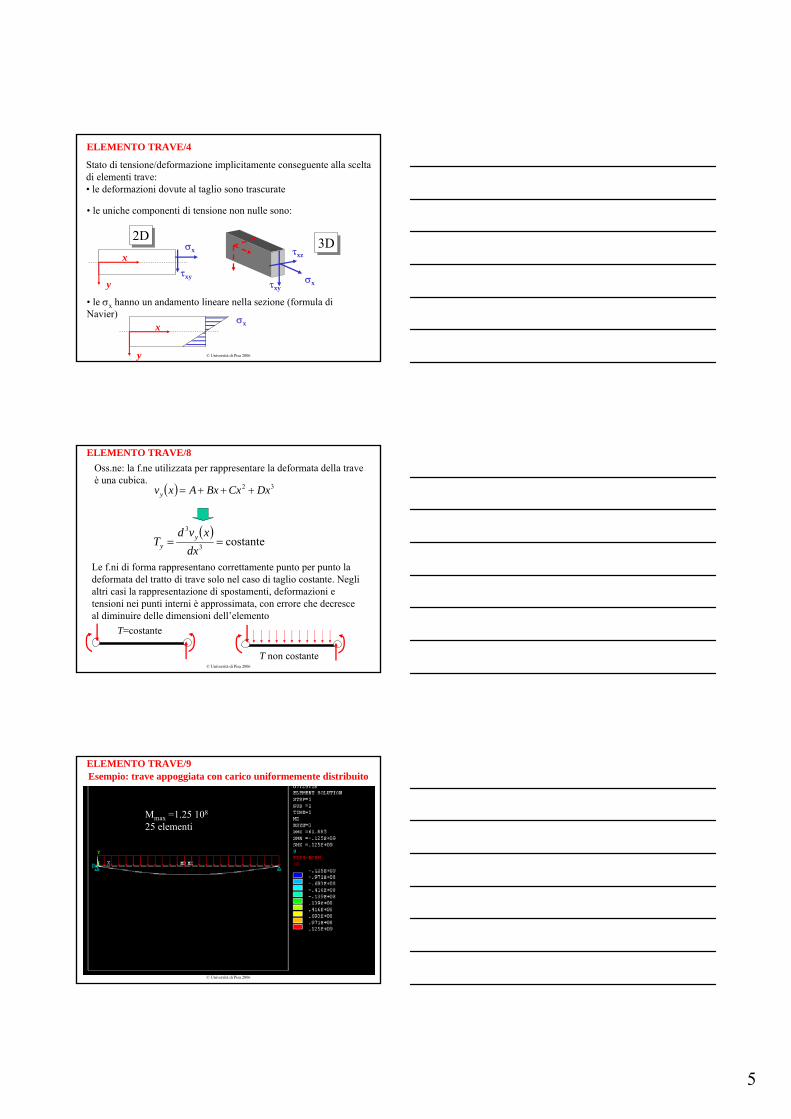
Esempio: trave appoggiata con carico uniformemente distribuito
10000
10
J=108
A=104
Mmax =1.25 108Mmax =1.25 108
3 elementiMmax =1.25 108
5 elementiMmax =1.25 108
7 elementiMmax =1.25 108
25 elementi
ELEMENTO TRAVE/9
6
© Università di Pisa 2006
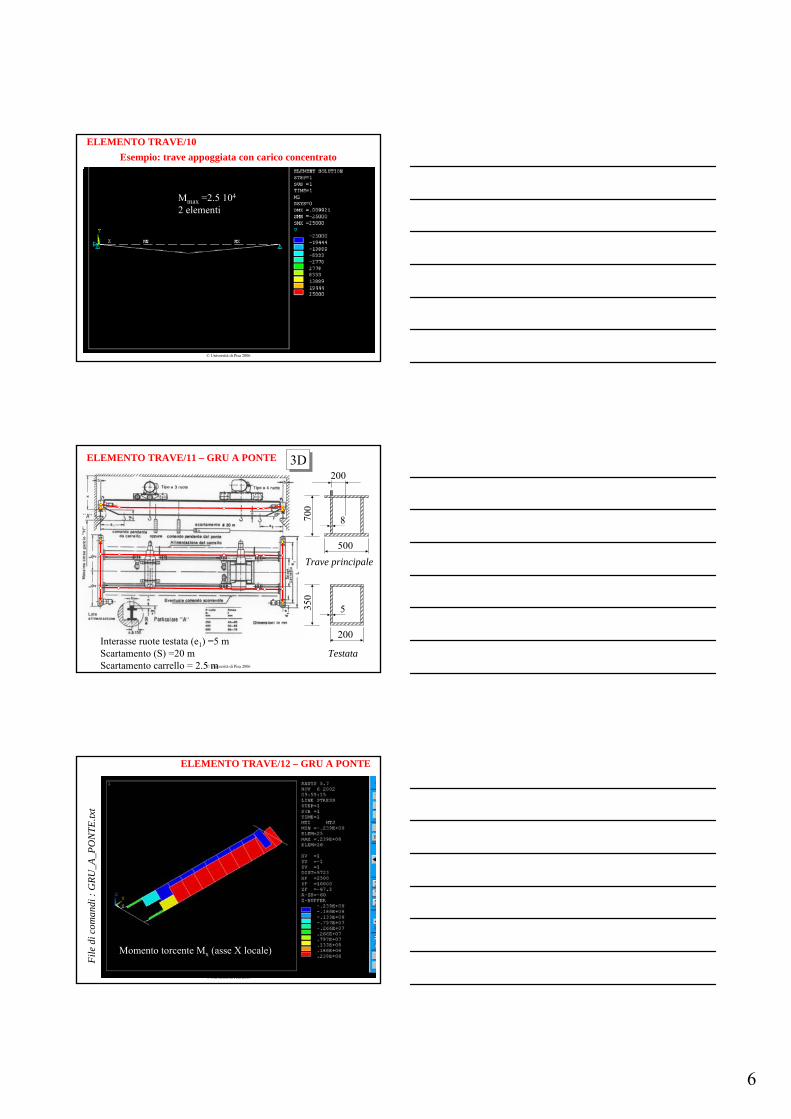
Esempio: trave appoggiata con carico concentrato
10000
10
J=108
A=104
Mmax =2.5 104Mmax =2.5 104
2 elementi
ELEMENTO TRAVE/10
© Università di Pisa 2006
ELEMENTO TRAVE/11 – GRU A PONTE 3D3D
Interasse ruote testata (e1) =5 m Scartamento (S) =20 mScartamento carrello = 2.5 m
500
700
200
8
Trave principale
200
350
5
Testata
© Università di Pisa 2006
ELEMENTO TRAVE/12 – GRU A PONTE
ModelloDeformataTaglio Z (asse Z locale)Momento flettente My (asse Y locale)Momento torcente Mx (asse X locale)
File
di c
oman
di :
GRU
_A_P
ON
TE.tx
t

7
© Università di Pisa 2006
5400
5000
4500
3500
500
Φ 500 sp. 5
2D2DELEMENTO TRAVE/13 – GRU A BANDIERA
CP400
400 5
Sez. braccio
© Università di Pisa 2006
ELEMENTO TRAVE/14 – GRU A BANDIERA
File
di c
oman
di: G
RU_A
_BAN
DIE
RA.tx
t
© Università di Pisa 2006
ELEMENTI “PIPE”/1Serie di elementi per lo studio di sistemi di tubazioni (“piping”) in 2 o 3 dimensioni• tubo rettilineo: elemento trave con un’apposita definizione dei parametri geometrici (diametri invece di A, J, etc.)

8
© Università di Pisa 2006
• tubo curvilineo: elemento con una speciale definizione della matrice di rigidezza, che tiene conto del basso rapporto tra raggio di curvatura e diametro• elementi speciali: finalizzati a rappresentare correttamente la rigidezza di molti componenti tipici (“T”, valvole, etc.)
© Università di Pisa 2006
Il modello rappresenta i tratti di tubazione di colore blu ed i 2 vessel
File comandi:“piping.txt”
Dimensioni espresse in metri
© Università di Pisa 2006
9
© Università di Pisa 2006
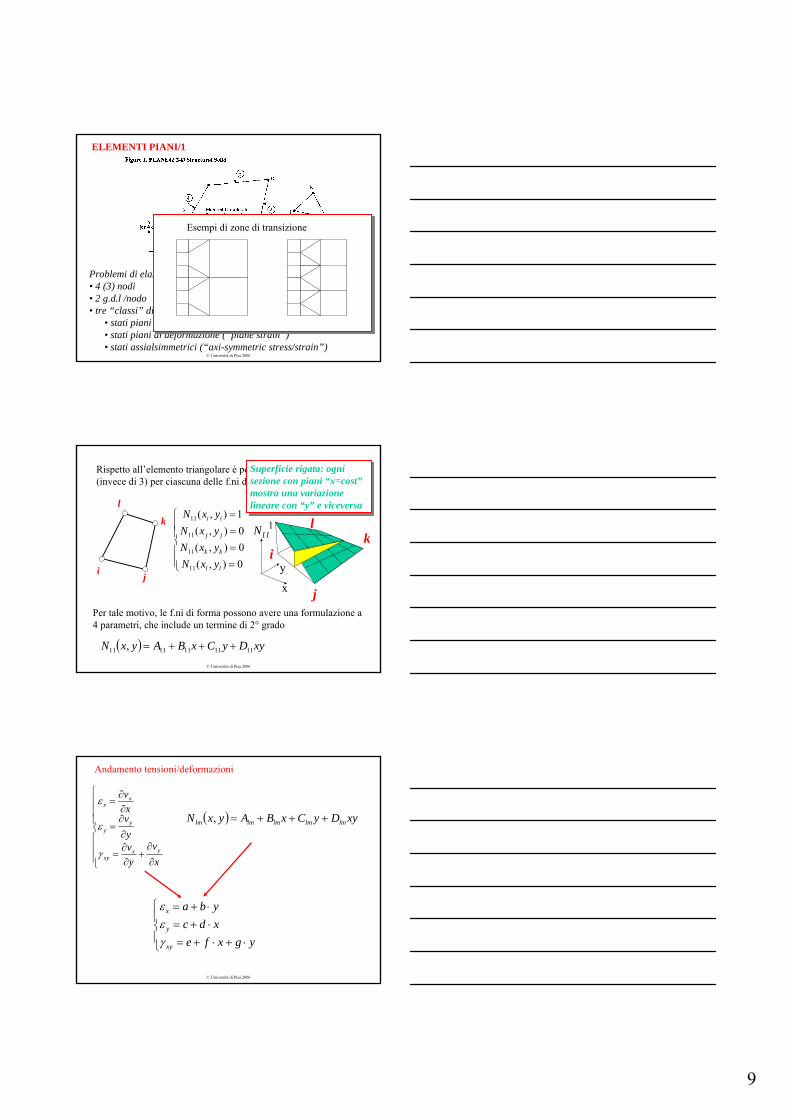
ELEMENTI PIANI/1
Problemi di elasticità piana• 4 (3) nodi• 2 g.d.l /nodo• tre “classi” di problemi:
• stati piani di tensione (“plane stress”)• stati piani di deformazione (“plane strain”)• stati assialsimmetrici (“axi-symmetric stress/strain”)
Esempi di zone di transizione
© Università di Pisa 2006
i
j
k
x
y
l
Rispetto all’elemento triangolare è possibile scrivere 4 condizioni (invece di 3) per ciascuna delle f.ni di forma
i
l
k
j⎪⎪⎩
⎪⎪⎨
⎧
====
0),(0),(0),(1),(
11
11
11
11
ll
kk
jj
ii
yxNyxNyxNyxN
N111
( ) xyDyCxBAyxN 1111111111 , +++=
Per tale motivo, le f.ni di forma possono avere una formulazione a 4 parametri, che include un termine di 2° grado
Superficie rigata: ogni sezione con piani “x=cost”mostra una variazione lineare con “y” e viceversa
Superficie rigata: ogni sezione con piani “x=cost”mostra una variazione lineare con “y” e viceversa
© Università di Pisa 2006
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂∂
+∂∂
=
∂∂
=
∂∂
=
xv
yvyvxv
yxxy
yy
xx
γ
ε
ε
Andamento tensioni/deformazioni
( ) xyDyCxBAyxN lmlmlmlmlm +++=,
⎪⎩
⎪⎨
⎧
⋅+⋅+=⋅+=⋅+=
ygxfexdcyba
xy
y
x
γεε

10
© Università di Pisa 2006
ELEMENTI PIANI/2Stati piani di tensione:• sono caratterizzati dall’avere una delle componenti principali di tensione identicamente nulla• si verificano tipicamente in corpi piani, di spessore piccolo rispetto alle altre dimensioni caratteristiche del problema, caricati nel loro piano medio.
x
y
z
y
0,,
0
≠
===
xyyx
yzxzz
τσσ
ττσ
© Università di Pisa 2006
180 R10
60
Il modello giace sul piano “x-y” e rappresenta il piano medio (a metà spessore) della struttura.I carichi possono essere sull’intero spessore o per unità di spessore.
© Università di Pisa 2006
x
y
z
ELEMENTI PIANI/3Stati piani di deformazione:• sono caratterizzati dall’avere una delle componenti principali di deformazione identicamente nulla• si verificano tipicamente in corpi di spessore grande rispetto alle altre dimensioni caratteristiche del problema.
0,,
0
≠
===
xyyx
yzxzz
γεε
γγε
εz=0
+-

11
© Università di Pisa 2006
x
y
z
Il modello giace sul piano “x-y” e rappresenta una sezione, eseguita con un piano ortogonale all’asse z, della struttura.I carichi sono per unità di spessore.
© Università di Pisa 2006
Stati assial-simmetrici
• si verificano in corpi di geometria assial-simmetrica (ottenibile per rotazione di una sezione attorno ad un asse fisso ζ) caricati con carichi che presentano lo stesso tipo di simmetria.
ζ
Provino cilindrico intagliato soggetto a trazione
ζ
ρθ
Recipiente cilindrico soggetto a pressione interna
ζ
• fissato un SR cilindrico “ρ, θ, ζ”, per simmetria lo stato di tensione/deformazione risulta indipendente da θ e le componenti di spostamento in direzione circonferenziale (θ) risultano nulle: il problema può di conseguenza essere studiato come piano.
© Università di Pisa 2006
Il modello deve rappresentare una sezione del corpo fatta con unpiano passante per l’asse di simmetria (in ANSYS, l’asse di simmetria e la direzione radiale devono coincidere rispettivamente con l’asse “Y” e l’asse “X” del SR cartesiano globale).

12
© Università di Pisa 2006
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
∂
∂+
∂∂
=
∂
∂=
∂∂
=
xv
xv
yvyvxv
x
yxxy
yy
xx
θε
γ
ε
εRispetto al caso “planestress” è necessario aggiungere una componente di deformazione/tensione
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
=
01
0
0
x
xy
y
x
L
Volume rappresentato dall’elemento
© Università di Pisa 2006
Esempio di applicazione
© Università di Pisa 2006
Modello geometricamente identico
File di comandi:ANALISI_PIANA_INTAGLIO.txt
13
© Università di Pisa 2006
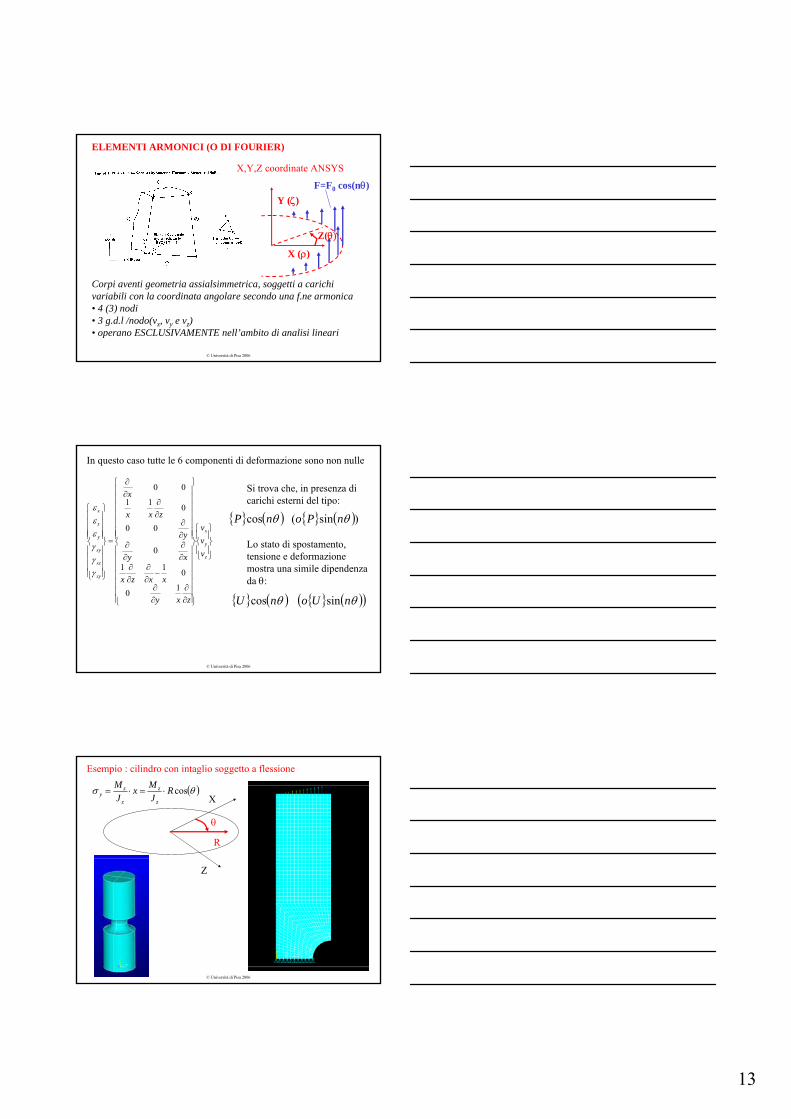
F=F0 cos(nθ)
ELEMENTI ARMONICI (O DI FOURIER)
Corpi aventi geometria assialsimmetrica, soggetti a carichi variabili con la coordinata angolare secondo una f.ne armonica• 4 (3) nodi• 3 g.d.l /nodo(vx, vy e vz)• operano ESCLUSIVAMENTE nell’ambito di analisi lineari
Y (ζ)
X (ρ)
Z(θ)
X,Y,Z coordinate ANSYS
© Università di Pisa 2006
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪⎪
⎨
⎧
∂∂
∂∂
−∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
z
y
x
zy
xz
xy
y
z
x
vvv
zxy
xxzx
xy
y
zxx
x
10
011
0
00
011
00
γγγεεε
In questo caso tutte le 6 componenti di deformazione sono non nulle
Si trova che, in presenza di carichi esterni del tipo:
{ } ( ) { } ( ))sin(cos θθ nPonP
Lo stato di spostamento, tensione e deformazione mostra una simile dipendenza da θ:
{ } ( ) { } ( )( )θθ nUonU sincos
© Università di Pisa 2006
Esempio : cilindro con intaglio soggetto a flessione
( )θσ cosRJMx
JM
z
z
z
zy ⋅=⋅=
X
Z
R
θ

14
© Università di Pisa 2006
File di comandi: CILINDRO_INTAGLIO_FLESSIONE.txt
© Università di Pisa 2006
ELEMENTI DI CONTATTO “GAP”
Contatto tra corpi• 2 nodi• 2 (3) g.d.l /nodo• consentono di rappresentare gioco ed interfernza
© Università di Pisa 2006
Esempio: giunti filettati conici per batterie di perforazione
DRILL COLLAR

15
© Università di Pisa 2006
Condizioni di carico:• forzamento dovuto al serraggio iniziale
• flessione rotante dovuta all’attraversamento di “dog-legs”, instabilità, vibrazioni etc.
© Università di Pisa 2006
SVILUPPO DI MODELLI FEM DELLE GIUNZIONI EFFICIENTI ED ACCURATI
Modello di base• Geometria assialsimmetrica• 30000 elementi circa
Aspetti principali• Fenomeni di contatto• Interferenza iniziale• Condizioni di carico assialsimmetriche e non assialsimmetriche
© Università di Pisa 2006

16
© Università di Pisa 2006
METODOLOGIA DI ANALISI
Flessione• Elementi armonici (Fourier)• Cond. carico non assialsimmetrica•Analisi elastica lineare
Coppia di serraggio• Elementi piani assialsimmetrici• Cond. carico assialsimmetrica•Analisi elasto-plastica non lineare
t
σσmax
Δσ
© Università di Pisa 2006
ELEMENTO GUSCIO ASSIALSIMMETRICO
Gusci aventi geometria assialsimmetrica, soggetti a carichi assialsimmetrici• 2 nodi• 3 g.d.l /nodo(vx, vy e θz)
© Università di Pisa 2006
17
© Università di Pisa 2006
vix
θ
viy
yxv
yixx
y
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−=θ
x
y
i
( ) yxv
vyvyvixx
yixixx
=⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂−=+= θ
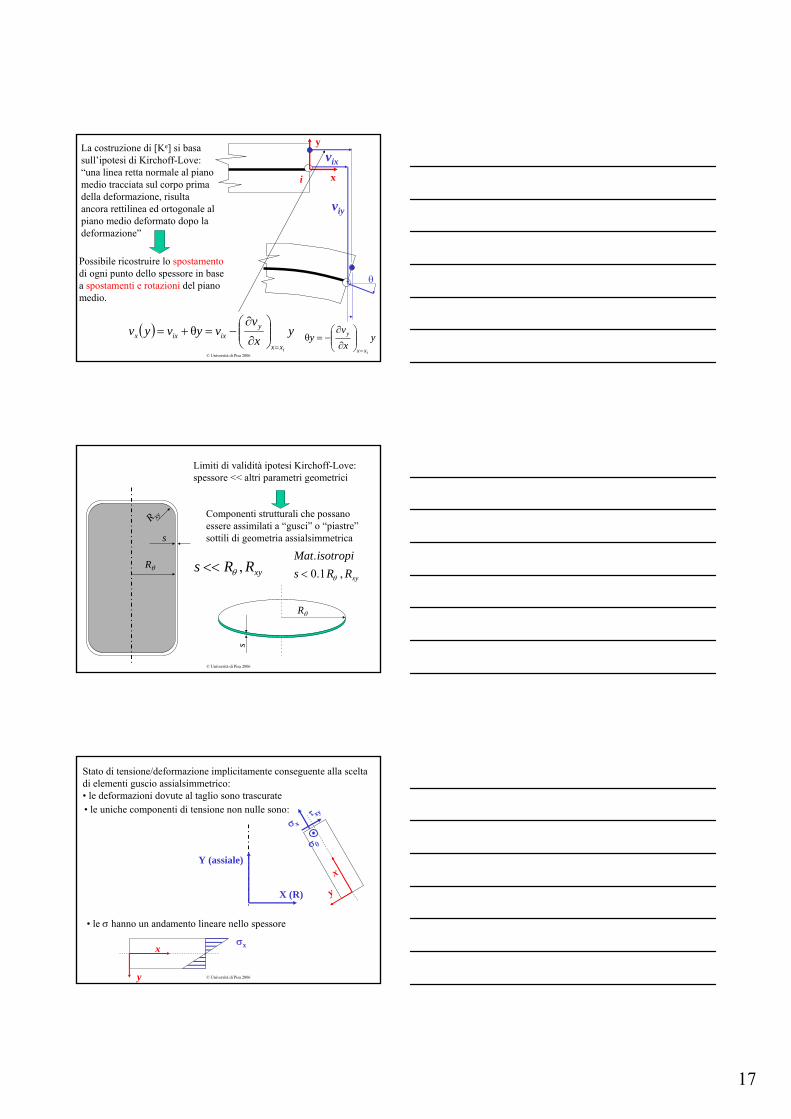
La costruzione di [Ke] si basa sull’ipotesi di Kirchoff-Love: “una linea retta normale al piano medio tracciata sul corpo prima della deformazione, risulta ancora rettilinea ed ortogonale al piano medio deformato dopo la deformazione”
Possibile ricostruire lo spostamentodi ogni punto dello spessore in base a spostamenti e rotazioni del piano medio.
© Università di Pisa 2006
Limiti di validità ipotesi Kirchoff-Love:spessore << altri parametri geometrici
R xy
Rθ
s
Rθ
s
xyRRs ,θ<<
Componenti strutturali che possano essere assimilati a “gusci” o “piastre”sottili di geometria assialsimmetrica
xyRRsisotropiMat
,1.0.
θ<
© Università di Pisa 2006
Stato di tensione/deformazione implicitamente conseguente alla scelta di elementi guscio assialsimmetrico:• le deformazioni dovute al taglio sono trascurate
• le σ hanno un andamento lineare nello spessore
y
xσx
• le uniche componenti di tensione non nulle sono:
y
x
σ xτ xy
X (R)
Y (assiale)σ θ
18
© Università di Pisa 2006
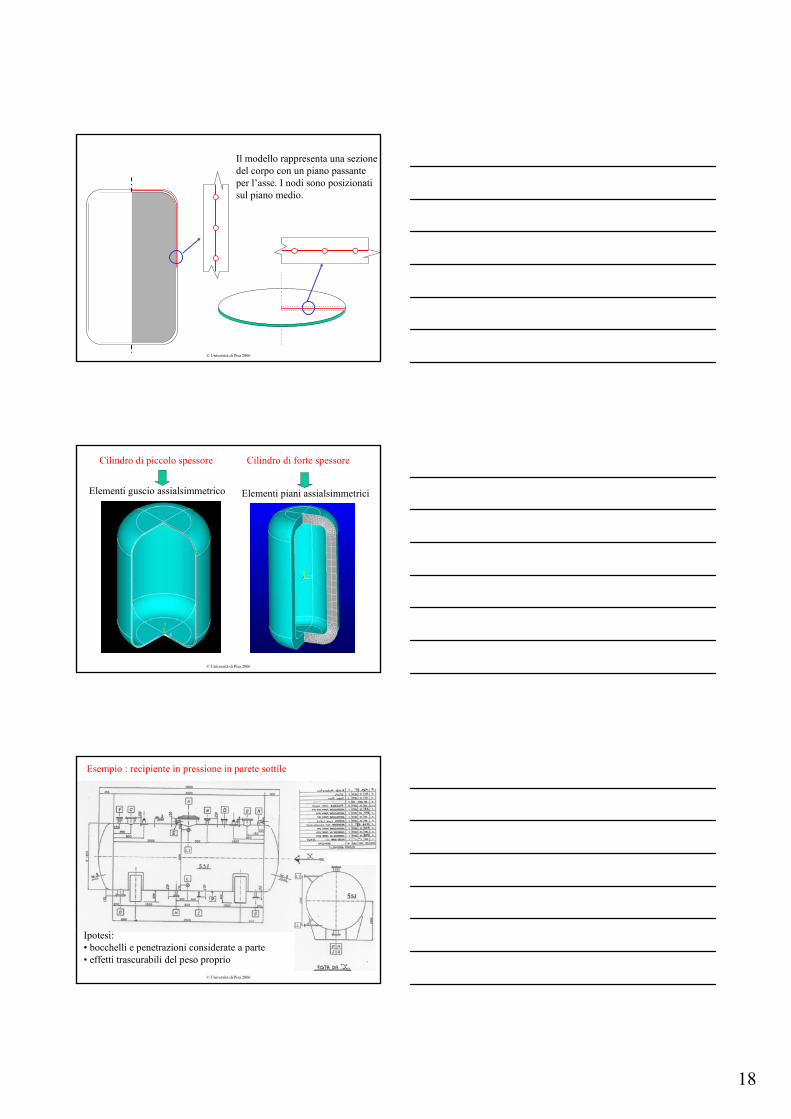
Il modello rappresenta una sezione del corpo con un piano passante per l’asse. I nodi sono posizionati sul piano medio.
© Università di Pisa 2006
Cilindro di piccolo spessore
Elementi guscio assialsimmetrico
Cilindro di forte spessore
Elementi piani assialsimmetrici
© Università di Pisa 2006
Esempio : recipiente in pressione in parete sottile
Ipotesi:• bocchelli e penetrazioni considerate a parte• effetti trascurabili del peso proprio

19
© Università di Pisa 2006File di comandi: REC_PRESS_SOTT.txt
© Università di Pisa 2006
Gusci e piastre aventi geometria qualsiasi.• 4 nodi• 6 g.d.l /nodo
ELEMENTO GUSCIO 3D
© Università di Pisa 2006
La costruzione di [Ke] si basa anche in questo caso sull’ipotesi di Kirchoff-Love.
Possibile ricostruire lo spostamentodi ogni punto dello spessore in base a spostamenti e rotazioni del piano medio.
Limiti di validità ipotesi Kirchoff-Love:
spessore << altri par. geometrici(dimensioni, raggi curvatura)
Componenti strutturali che possano essere assimilati a “gusci” o “piastre” sottili
20
© Università di Pisa 2006
x y
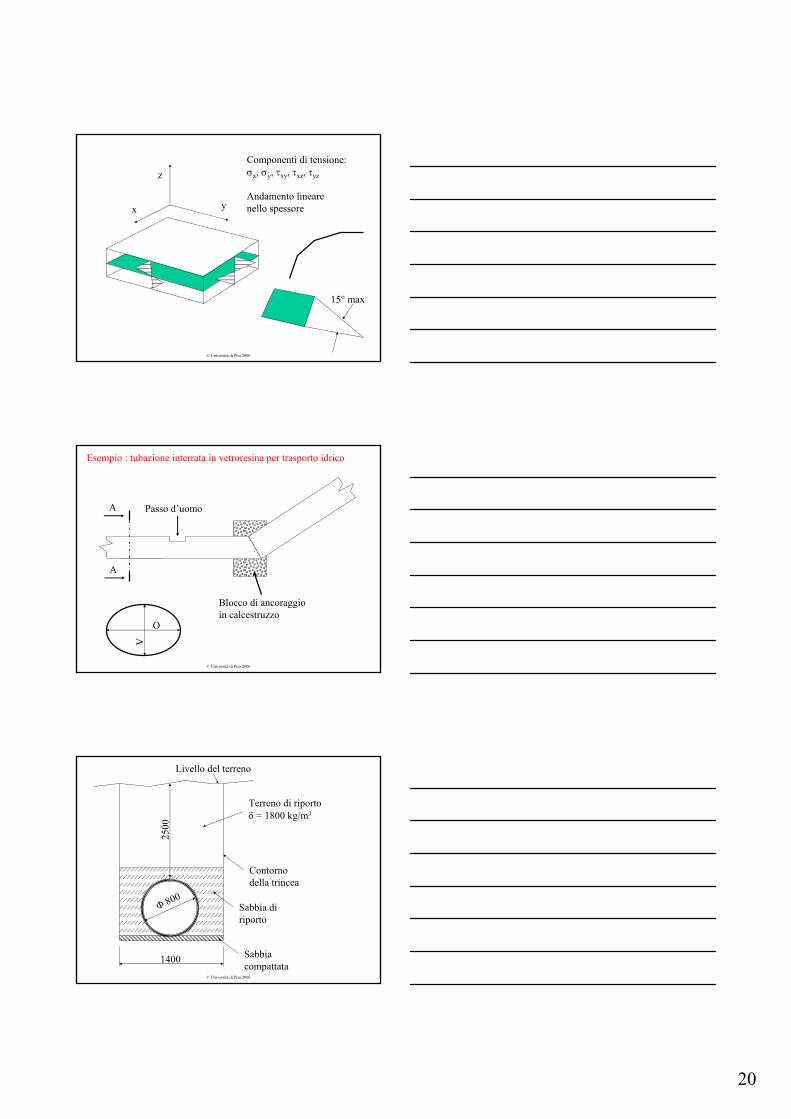
zComponenti di tensione:σx, σy, τxy, τxz, τyz
Andamento lineare nello spessore
15° max
© Università di Pisa 2006
Esempio : tubazione interrata in vetroresina per trasporto idrico
Blocco di ancoraggioin calcestruzzo
Passo d’uomoA
A
O
V
© Università di Pisa 2006
2500
1400
Φ 800
Livello del terreno
Terreno di riportoδ = 1800 kg/m3
Contorno della trincea
Sabbia di riporto
Sabbia compattata
21
© Università di Pisa 2006
© Università di Pisa 2006
© Università di Pisa 2006
22
© Università di Pisa 2006
© Università di Pisa 2006
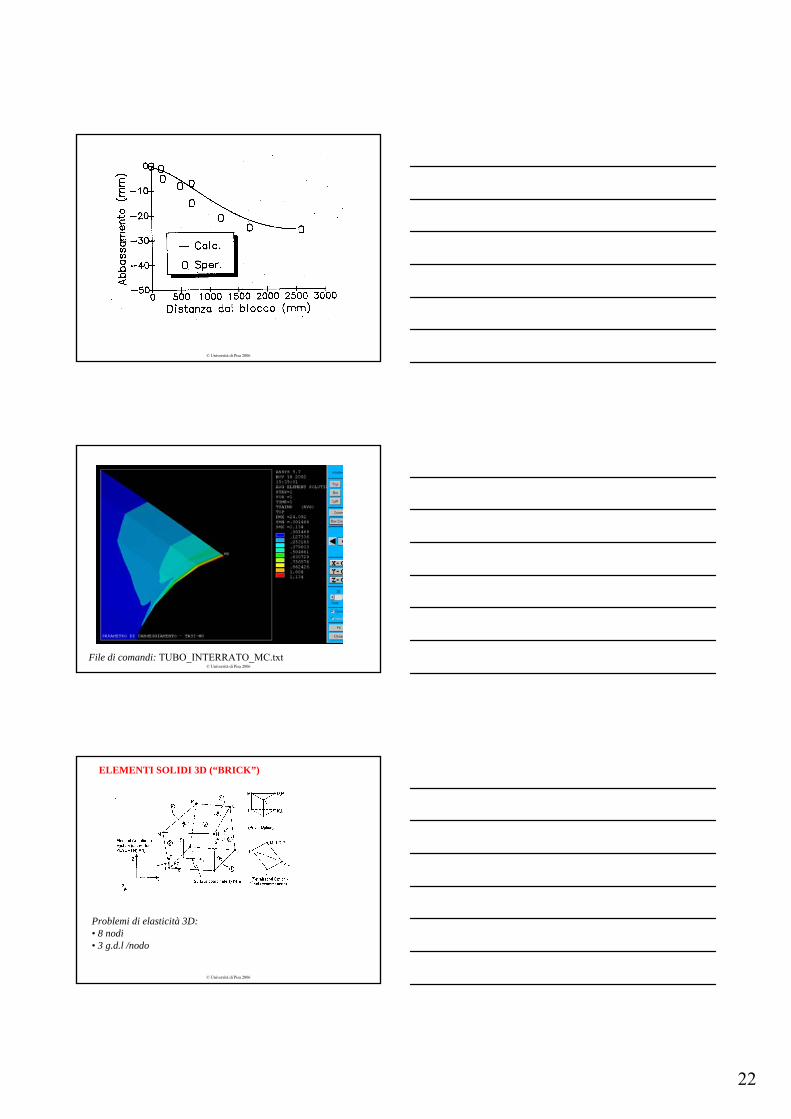
File di comandi: TUBO_INTERRATO_MC.txt
© Università di Pisa 2006
ELEMENTI SOLIDI 3D (“BRICK”)
Problemi di elasticità 3D:• 8 nodi• 3 g.d.l /nodo

23
© Università di Pisa 2006
Tetraedro: 4 nodi
F.ne di forma: A+Bx+Cy+Dz
Deformazioni/tensioni costanti
Esaedro: 8 nodi
F.ne di forma: A+Bx+Cy+Dz+Exy+Fyz+Gzx+Hxyz
Deformazioni/tensioni variabili linearmente
© Università di Pisa 2006
Approccio per sottostrutture (“submodelling”)
Stato di tensione spesso fortemente dipendente da parametri geometrici locali (es. raggi di raccordo).
Stato di tensione spesso fortemente dipendente da parametri geometrici locali (es. raggi di raccordo).
La sua analisi richiederebbe pertanto “mesh” localmente molto infittiti (elementi piccoli rispetto ai parametri geometrici locali). La sua analisi richiederebbe pertanto “mesh” localmente molto infittiti (elementi piccoli rispetto ai parametri geometrici locali).
Questo tende a rendere il modello complessivamente molto complesso da costruire (inclusione di tutti i dettagli geometrici) e pesante dal punto di vista computazionale (numero enorme di gdl)
Questo tende a rendere il modello complessivamente molto complesso da costruire (inclusione di tutti i dettagli geometrici) e pesante dal punto di vista computazionale (numero enorme di gdl)
Possibile alternativa: approccio per sottostrutture Possibile alternativa: approccio per sottostrutture
© Università di Pisa 2006
PREVISIONE DEL COMPORTAMENTO A FATICA DI ELEMENTI IN ALLUMINIO PRESSOFUSO
Esempio : staffa sospensione di scooter in lega di alluminio
24
© Università di Pisa 2006
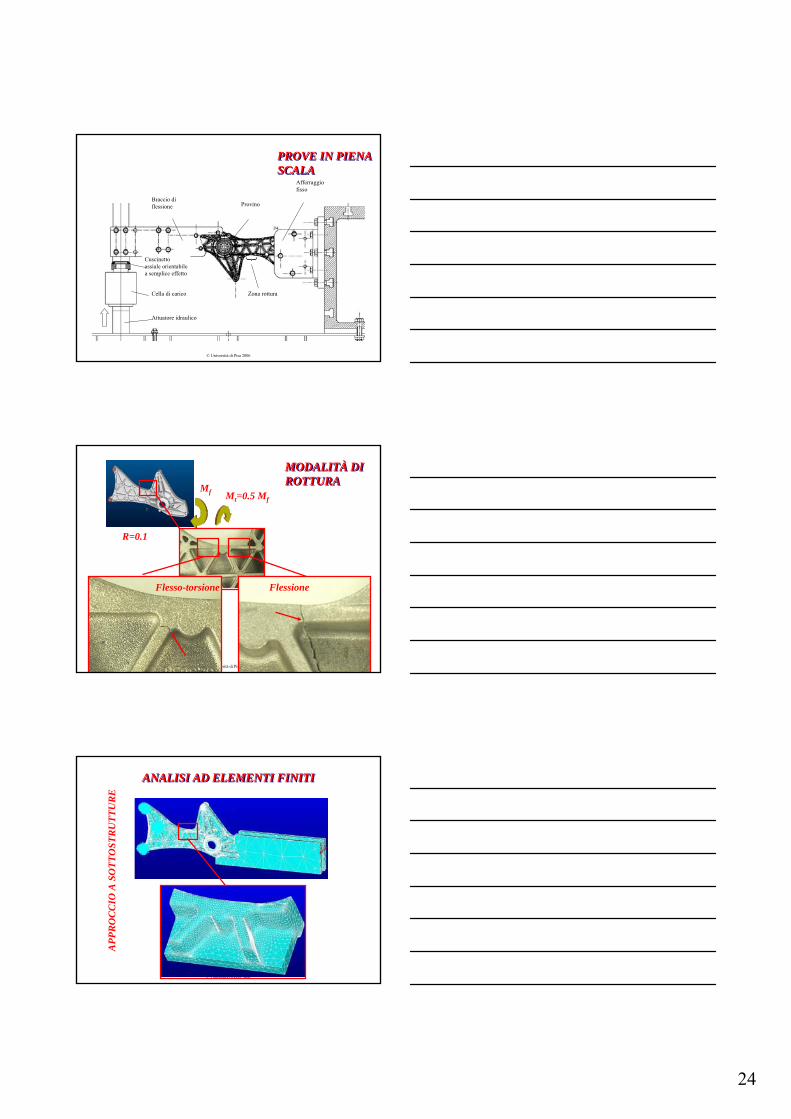
PROVE IN PIENA SCALAPROVE IN PIENA SCALA
Telaio di prova
Provino
Afferraggiofisso
Braccio diflessione
Cuscinettoassiale orientabilea semplice effetto
Attuatore idraulico
Cella di carico Zona rottura
© Università di Pisa 2006
Mf Mt=0.5 Mf
MODALITÀ DI ROTTURAMODALITÀ DI ROTTURA
R=0.1
FlessioneFlesso-torsione
© Università di Pisa 2006
ANALISI AD ELEMENTI FINITIANALISI AD ELEMENTI FINITI
APP
RO
CC
IO A
SO
TTO
STR
UTT
UR
E
25
© Università di Pisa 2006
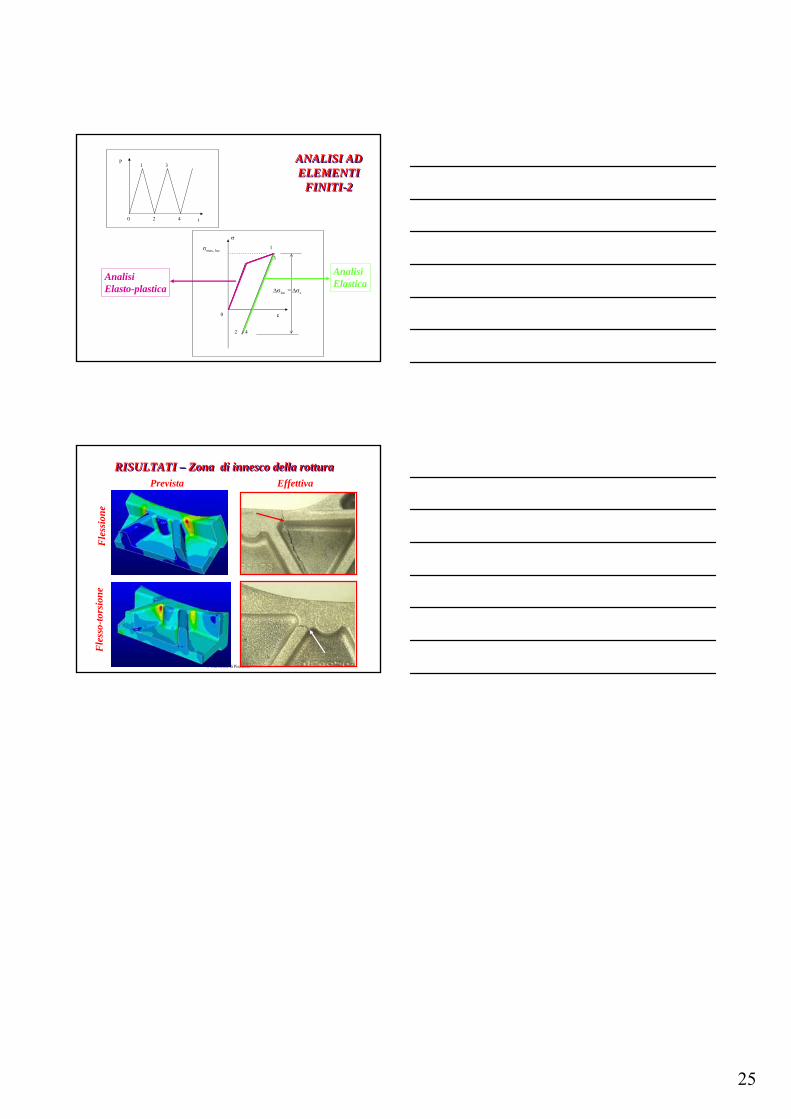
ANALISI AD ELEMENTI
FINITI-2
ANALISI AD ELEMENTI
FINITI-2
0
1
2
3
4
σ
ε
Δσloc = Δσe
σmax, loc
1
2
3
0 4 t
P
AnalisiElasto-plastica
AnalisiElastica
© Università di Pisa 2006
Fle
sso-
tors
ione
RISULTATI – Zona di innesco della rotturaRISULTATI – Zona di innesco della rottura
Fle
ssio
ne
Prevista Effettiva
Top Related