Vibrazioni Sistemi Ad Un GdL

If you can't read please download the document
-
Upload
federico-pinto -
Category
Documents
-
view
162 -
download
1
Transcript of Vibrazioni Sistemi Ad Un GdL
1. MODELLO DINAMICO AD UN GRADO DI LIBERT1 Alcune definizioni preliminari Isistemivibrantipossonoesserelineariononlineari:nelprimocasovaleilprincipiodisovrapposi-zionedeglieffetti1nelsecondono.Ingeneraletuttiisistemirealinon non non nonsonolineari,mapossonoes-sere considerati tali finch la sollecitazione in ingresso piccola o essa confinata entro certicampi ben definiti (campi a comportamento lineare); in generale si ricorre all approssimazione diconsiderareilsistemalineare.Un sistema (non necessariamente vibrante) detto a parametri costanti se tutte le sue principaliproprietnondipendonodaltempo2.Sidefiniscemodellofisico,larappresentazioneschematicadelsistemareale;ilmodellomatemati-co,invece,larappresentazioneanalitica(valeadireinterminidiequazioni)delprecedentemo-dello fisico. evidente che uno stesso modello matematico pu rappresentare pi modelli fisici epiancorasistemireali3.Ilmodellofisicopuessereaparametriconcentratiodistribuiti4.Riferen-docioraaisolisistemivibranti,sipuaffermarecheunmodellofisicoaparametriconcentratica-ratterizzatodallacombinazioneditresolielementidibase:masse,molleesmorzatori(Figura1-1).
Figura Figura Figura Figura1 11 1- -- -1 11 1.Elementi .Elementi .Elementi .Elementidibasediunsistemavibrante. dibasediunsistemavibrante. dibasediunsistemavibrante. dibasediunsistemavibrante.Nella schematizzazione di un sistema reale mediante un modello fisico a parametri concentrati, icorpisonoconsideratidotatidimassa,manondielasticit,valeadirechesonorigidi;lecaratteri-sticheelastichedelsistemasonoconcentratenellemolle(chesonoprivedimassa),mentreladis-
1 Il principio di sovrapposizione degli effetti (PSE) stabilisce che se y1 ed y2 sono le risposte di uno stesso sistema agli input x1 ed x2, allora la risposta del sistema allinput ax1+bx2 sar sicuramente: ay1+by2. Un sistema per il quale il legame tra la sollecitazione (o ingresso) e la risposta (o uscita) del tipo y = f(x) = ax2 non rispetta il PSE. In generale, nei modelli non lineari le variabili indipen-denti (ad esempio, lo spostamento) non compaiono alla prima potenza ed, inoltre, non sono presenti prodotti tra le diverse variabili indipendenti. 2 Un sistema elettrico a parametri costanti se i valori delle sue resistenze, capacit ed induttanze sono costanti nel tempo. 3 Si noti che il modello matematico di uno stesso modello fisico pu essere lineare o non lineare. Quindi uno stesso modello fisico pu essere descritto anche con pi modelli matematici (esempio del pendolo matematico, dove la forza di richiamo pu essere lega-ta al seno dellangolo o allangolo). 4 In generale, un modello fisico a parametri distribuiti caratterizzato da un modello matematico ove compaiono equazioni differen-ziali alle derivate parziali, mentre un modello concentrato caratterizzato da equazioni differenziali ordinarie. massa mollasmorzatoreModelloDinamicoadunGradodiLibert_____________________________________________2/28sipazionedienergiaavvieneadoperadeglismorzatori(sipensiadunosmorzatoreadattritooconfluido viscoso). In altri termini le propriet inerziali dei corpi sono concentrate nelle masse, quelleelastiche nelle rigidezze, mentre quelle dissipative negli smorzatori. Nella realt, invece, tali pro-prietcoesistononellostessoelemento:questoilcasodeimodellifisiciaparametridistribuiti5.Una molla (o anche molla lineare, per sottolineare il fatto che la sua risposta lineare) un ele-mento che reagisce con una forza ( )0k l l allorch viene allungato di0l l , dove0l la lun-ghezzaariposodellamollae k lacostanteelasticaorigidezzadellamolla.Ingeneralesiponelalunghezzaariposodellamollapariazero.Uno smorzatore viscoso un elemento che introduce nel sistema una forza proporzionale, permezzo del coefficiente di smorzamento c, alla velocit relativa l& dei suoi estremi; il verso di taleforzaoppostoaquellodellavelocitrelativadegliestremi6.Losmorzatoreviscoso,adifferenzadellamollalineare,nonrestituiscelenergiacheimmagazzina.Levibrazionidiunsistemasonodettelibereoforzate7.Unsistemavibraliberamentesepertur-bato dalla sua condizione di quiete e poi lasciato libero di vibrare; la perturbazione pu avveniremedianteunospostamentoomedianteunurto8.Nelcasodivibrazioniforzateilsistemasollecita-todaunaforzaesternaevibraacausadellazionepersistentediquestultima.2 Richiami sui numeri complessi Unnumerocomplesso s puessereespressosianellasuaformacartesianachepolare:
js j e = + = ;dove2 2 = + e arctan | |= |\ ,dovejlunitimmaginaria(j2=-1).Nellaformacartesiana,inumericomplessisonopuntinelpianodiGauss(odiNyquistoanchediArgand)icuiassicoordinatisonodettiasserealeedasseimmaginario,mentrenellaformapolaresono punti del piano polare e la loro rappresentazione coincide con quella cartesiana a patto diconsiderareloriginedelpianopolarecoincidenteconquelladelpianodiGausselasserealecoin-cidenteconivalorinullidellafase.Sottoquesteipotesti,ilnumerocomplessoinvarianterispettoallasuarappresentazione,valeadirecheilpuntochelorappresentailmedesimosianellarap-presentazionecartesianacheinquellapolare.
5 Nelle tipiche applicazioni ingegneristiche si adottano sia modelli fisici a parametri concentrati che distribuiti. 6 Vale a dire che se gli estremi si allontanano, la forza viscosa tende a riavvicinarli e viceversa. 7 In generale, interessano le seconde, ma molto spesso per determinarle necessario conoscere anche le prime. 8 Sar pi chiaro in seguito che nel primo caso le condizioni iniziali (necessarie ad integrare le equazioni differenziali) sono rappre-sentatedaunaposizionenonnullaedaunavelocitnulla,mentrenelsecondocaso(sollecitazionepermezzodiunimpulso)da una velocit non nulla e da una posizione nulla. ColleferroCostruzionediMacchineeCalcoloAutomatico_____________________A.A.2008/093/28Nellambito delle vibrazioni si fa spesso riferimento ai numeri complessi pensandoli come vettorirotantiofasori;atalescopoinFigura1-2nedataunasemplicerappresentazioneedriportatalarelazioneallabasedellecosiddetteformulediEulero.9
Figura Figura Figura Figura1 11 1- -- -2 22 2.Rappresentazionediunfas .Rappresentazionediunfas .Rappresentazionediunfas .Rappresentazionediunfasore. ore. ore. ore.3 Oscillazioni libere senza smorzamento Il pi semplice modello fisico vibrante costituito da una massa mcollegata per mezzo di unamolladicostanteelastica k alterrenoechepuoscillareinunasoladirezione(adesempio,x).
Figura Figura Figura Figura1 11 1- -- -3 33 3.Sistemamassa .Sistemamassa .Sistemamassa .Sistemamassa- -- -molla. molla. molla. molla.Lequazionechegovernatalemodello(nonsonopresentiforzeesterne:ilsistemaunavoltaper-turbatosiponeinvibrazione):
22d xF m kxdt= = ,valeadire:
9 Risulta:cos sinje j = + ;cos2j je e += ;sin2j je ej = . m1k1x1F1t ( ) ( ) cos sinjte t j t = + ReImModelloDinamicoadunGradodiLibert_____________________________________________4/28 0 mx kx + = &&(1.1)QuestaequazionedifferenzialerappresentailmodelloanaliticoassociatoalmodellofisicodifiguraFigura1-3econsente,unavoltorisolto,dideterminarelandamentotemporale ( ) x t .Isistemirealiche si possono studiare, evidentemente in maniera approssimata, con tale modello fisico sonorappresentatiinfiguraFigura1-4.
Figura Figura Figura Figura1 11 1- -- -4 44 4.Sistemi .Sistemi .Sistemi .Sistemianalizzabiliconilmodelloadungradodilibertsenzasmorzamento. analizzabiliconilmodelloadungradodilibertsenzasmorzamento. analizzabiliconilmodelloadungradodilibertsenzasmorzamento. analizzabiliconilmodelloadungradodilibertsenzasmorzamento.Definendolaquantit:
2nkm =(1.2)lequazionedelmoto(1.1)diventa:20nx x + = && ,chehacomesoluzione10: ( ) sin cosn nx t A t B t = +(1.3)doveAeBsonocostantidadeterminaremediantelecondizioniiniziali,valeadirelostatodelsi-stema(in termini di posizione e velocit) allistante iniziale dellanalisi vibratoria11. La quantitn prendeilnomedipulsazionepropriaonaturaledelsistemainquantodipendedallecaratteristicheintrinseche del sistema (massa e costante elastica) e rappresenta la pulsazione delloscillazione
10 Si ricordi che vale il teorema di esistenza ed unicit della soluzione per cui una soluzione che soddisfa lequazione differenziale (1.1) la soluzione dellequazione differenziale.11 Unaltra soluzione del tutto equivalente alla (1.3) data dalla seguente:( ) ( ) sinnx t X t = + , dove si usata la funzione armonicasin(t),masisarebbepotutousareanchelacos(t),determinandosemplicementeuncambiamentodellafaseiniziale . Espandendo( ) sinnX t +appare chiaro che: 2 2tanX A BB A = +=. Utilizzando i fasori la soluzione si pu anche scrivere: ( )1 1n nj t j tx t Ae B e = + ,dovelecostantisonograndezzecomplesseconiugateerisulta,applicandoleformulediEulero: 1 1;2 2B jA B jAA B += = . Si vuole far notare esplicitamente che le soluzioni riportate sono a meno di una differente espres-sione matematica del tutto identiche, essendo la soluzione di un stessa equazione differenziale. F , I l ,pJ l ColleferroCostruzionediMacchineeCalcoloAutomatico_____________________A.A.2008/095/28liberadelsistema.Ilperiododelleoscillazioniliberevalechiaramente:2nnT= ,mentrelalorofre-quenzavale:1 12nnkfT m = = .Si utilizza il modello del sistema senza smorzamento qualora questo fisicamente molto piccoloe/ononsiinteressaanalizzarelarispostaperunampiointervalloditempo.Sinoticheconoscendola deflessione statica della molla soggetta al solo peso della massa, si pu facilmente ricavare lafrequenzapropriadelsistema.4 Oscillazioni libere con smorzamento Considerando uno smorzatore viscoso12 come quello discusso in precedenza, in questo casolequazionedelmotosiscrive: 0 mx cx kx + + = && &(1.4)dividendo tutto per la massa m e ponendo il fattore di smorzamento (o smorzamento relativo)2 2nc cm km= =13,lequazionedelmotodiventa:
22 0n nx x x + + = && &(1.5)Lasoluzionedellaprecedenteequazionedifferenzialepuesserescrittanellaforma(anchesenonsempre:sivedaintalproposito4.2): ( )1 2t tx t Ae Be = +(1.6)doveAeBsonoduecostantichesideterminanoconlecondizioniiniziali,mentre1e2sonoleradicidellequazionecaratteristica:
( )( )212 22212 01nn nn = + + = = + (1.7)Asecondadelsegnodeldiscriminante21 ,sipossonoaveresituazionicompletamentedifferen-ti:
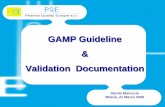
12 Si intende ribadire chiaramente che il modello viscoso solo uno dei modelli di smorzamento esistenti (smorzamento isteretico, ad attrito, ). Il vantaggio del modello di smorzamento viscoso che molto facile da trattare matematicamente. Si noti, inoltre, che molte volte i fenomeni dissipativi sono dovuti al trasferimento di energia da un tipo ad un altro: si pensi alla vibrazione indotta da un colpo su un tavolo ed al fatto che si persa energia a causa del fatto che udiamo un rumore. 13 Il fattore di smorzamento una grandezza adimensionale. ModelloDinamicoadunGradodiLibert_____________________________________________6/284.11 >( )24 c km >Accadeallorchilsistemafortementesmorzato;intalcasolarispostaadunaperturbazionedallostatodiquietedatadaunmotoaperiodico.Analiticamentelasoluzione: ( )1 2t tx t Ae Be = + ,con1e2realienegative (1.8)InFigura1-5sonorappresentatevariesoluzionialmutaredellecondizioniiniziali(C.I.).0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.0500.050.10.15Tempo [s]Posizione [m]Fattore di smorzamento 3 x0 = 0.1v0 = 1.0x0 = 0.1v0 = 0.0x0 = 0.1v0 = -1.0x0 = 0.0v0 = -1.0x0 = 0.1v0 = -2.5x0 = 0.0v0 = 2.0
Figura Figura Figura Figura1 11 1- -- -5 55 5.AndamentodellarispostapersistemiipercriticialvariaredelleC.I. .AndamentodellarispostapersistemiipercriticialvariaredelleC.I. .AndamentodellarispostapersistemiipercriticialvariaredelleC.I. .AndamentodellarispostapersistemiipercriticialvariaredelleC.I.4.21 =( )24 c km =Leradicidellequazionecaratteristicasonoreali,coincidentienegativeevalgono:
1 2 n = = Lasoluzioneanalitica: ( )n nt tx t Ae Bte = +(1.9)laqualerappresentaunmotoaperiodicocritico;ilvaloredellosmorzamentodettosmorzamentocritico e vale: 2crc c km = = . Si noti che la soluzione dellequazione differenziale (1.5) allorchcrc c = nonpuessererappresentatadalla(1.6)giacchintalcasononsarebberosoddisfabilige-nerichecondizioniiniziali.LaFigura1-6riportaalcuniesempidirispostapersistemiconsmorzamentocriticoperdiverseC.I.ColleferroCostruzionediMacchineeCalcoloAutomatico_____________________A.A.2008/097/280 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.25-0.2-0.15-0.1-0.0500.050.10.150.20.25Tempo [s]Posizione [m]Smorzamento critico x0 = 0.1v0 = 1.0x0 = 0.1v0 = 0.0x0 = 0.1v0 = -1.0x0 = 0.0v0 = -1.0x0 = 0.1v0 = -2.5x0 = 0.0v0 = 2.0
Figura Figura Figura Figura1 11 1- -- -6 66 6.EsempidirisposteperunsistemaconsmorzamentocriticoalvariaredelleC.I. .EsempidirisposteperunsistemaconsmorzamentocriticoalvariaredelleC.I. .EsempidirisposteperunsistemaconsmorzamentocriticoalvariaredelleC.I. .EsempidirisposteperunsistemaconsmorzamentocriticoalvariaredelleC.I.4.31