Vettori Applicati

of 5
description
Vettori Applicati
Transcript of Vettori Applicati
-
POLITECNICO DI MILANO DIPARTIMENTO DI FISICA
Anno Accademico 2002-2003
CORSO DI FISICA SPERIMENTALE
A+B ESERCITAZIONI
Prof. Marco Finazzi Dott. Ing. Antonio Montano
Znon! Cruel Znon! Znon D'le! M'as-tu perc de cette flche aile Qui vibre, vole, et qui ne vole pas!
Le son m'enfante et la flche me tue! Ah! le soleil... quelle ombre de tortue
Pour l'me, Achille immobile grands pas!
Paul Valery, Le cimetire Marin, XXII
-
1PARTE 3: VETTORI APPLICATI
3.1 Introduzione
Nello studio della meccanica vengono introdotte grandezze fisiche vettoriali (forze, velocit,
etc.), le quali si riferiscono in generale a ben definiti elementi materiali. quindi naturale
rappresentare tali grandezze mediante vettori applicati, cio vettori aventi l'origine nelle
posizioni istantaneamente occupate dagli elementi materiali. La maggior parte delle
operazioni introdotte nella prima parte di questo capitolo hanno significato soltanto per vettori
liberi. Ci particolarmente evidente per l'operazione di somma geometrica, la quale, una
volta scelto in maniera arbitraria un punto di partenza P1, per essere effettuata, richiede l'uso
di ben determinati rappresentanti dei vettori addendi. Ci possibile soltanto quando si abbia
a che fare con vettori liberi.
Nella descrizione dei fenomeni meccanici risulta utile considerare i vettori liberi individuati
dai vettori applicati di cui trattasi ed applicare a questi le operazioni introdotte nei precedenti
paragrafi. Sono definibili, tuttavia, operazioni che hanno senso soltanto per vettori applicati;
di queste vengono di seguito forniti alcuni brevi cenni.
3.2 Momento polare di un vettore applicato
Il momento polare &
MO del vettore applicato (P, &
V ) rispetto al polo O il vettore libero
definito dal prodotto vettore fra i vettori liberi che hanno come rappresentanti i vettori
applicati (P, &
V ) ed OP
& &M OP VO = (3.1)
&MO si annulla quando OP sia parallelo a
&V oppure quando PO. Sia r la retta sovrapposta a
(P,&
V ), P' un punto di r distinto da P ed inoltre il punto O non appartenga ad r; risulta&
MO (P,&
V )=&
MO (P', &
V ). Si ha infatti
( )OP V OP P P V OP V P P V OP V = + = + = & & & & &' ' ' ' ' (3.2)ove si tenuto conto che P'P parallelo a
&V e quindi che P P V' =
&0. Si pu quindi
concludere che il momento polare non muta ove si sposti un vettore lungo la sua retta di
applicazione.
-
23.3 Momento assiale di un vettore
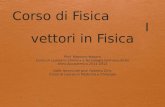
Il MOMENTO ASSIALE del vettore applicato PQ rispetto alla retta orientata r di versore r la quantit scalare definita dalla relazione
( )&M d P QO r = ' ' (3.3)dove P' e Q' sono le proiezioni di P e Q su
un piano ortogonale ad r (Fig. 3.1), d la
distanza da r della retta r' sovrapposta ad
B'. Si conviene di prendere il segno + se la
retta personificata vede il vettore PQ avvolgersi in senso antiorario attorno ad r ed il segno - in
caso contrario. Il momento assiale si annulla quando le rette r ed r' siano fra loro incidenti
(d=0) o parallele ( )P Q' ' = 0 , in definitiva, quando r ed r' siano COMPLANARI.Si pu quindi vericare che la componente del momento polare di un vettore applicato,
calcolato rispetto ad un punto O di una retta r, coincide con il momento assiale del vettore
rispetto ad r.
3.4 Momento polare ed assiale di un sistema di vettori
Il momento risultante di un sistema di vettori applicati ( )P Vl l, & rispetto al polo O il vettorelibero somma geometrica dei momenti polari dei singoli vettori
& &M OP VO l l
l
N
= =
1
(3.4)
Nel caso particolare in cui tutti i vettori siano applicati in un medesimo punto T la (3.6)
diviene
& & &M OP V OP RO l l
l
N
l=
=
=
1
(3.5)
nella quale R il rappresentante applicato in T della somma geometrica dei vettori. Il
momento assiale rispetto ad una retta r del sistema di vettori definito come la somma
Q
Q
P
Fig. 3.1
r
Prd
-
3algebrica dei momenti assiali dei singoli vettori
M d P Qr l l ll
N
= =
1
(3.6)
La componente secondo r del momento polare risultante calcolata rispetto ad un polo r
uguale alla somma delle componenti dei singoli momenti polari, pertanto dalla (3.6) segue che
essa uguale al momento assiale complessivo.
3.5 Legge di variazione del momento polare al variare del polo
Siano O e O due punti generici dello spazio e ( )P Vl l, & (l=1,2...N) un sistema di vettoriapplicati; risulta
( )& & & & &M OP V OO O P V OO V O P VO l ll
N
l ll
N
l l ll
N
l
N
= = + = + = = ==
1 1 11
' ' ' ' (3.7)
ossia
& & &M M OO RO O= + ' ' (3.8)
ESEMPIO 4. Con riferimento ad una terna cartesiana Oxyz siano dati i vettori: &
V i k1 3= + ;&
V j2 2= ; &
V i j k3 3= + + rispettivamente applicati nei punti: ( )P1 0 1 2 , , ; ( )P2 0 0 , , 1 ;( )P3 0 1 , , 0 . Si calcoli:
a) il momento polare del sistema di vettori rispetto all'origine;
b) il momento assiale rispetto all'asse x;
c) il momento rispetto al punto ( )O' , , 1 1 1d) l'asse centrale.
Soluzione:
a)& & & &
M OP V OP V OP VO = + + =1 1 2 2 3 3
k4j2i2113010kji
020100kji
301210kji
+=++=
b) ( )M M i i j k ix O= = + =& 2 2 4 2
-
4c) ( ) ( ) ( )&R i j k i j k= + + + + + + + + = + +1 0 3 0 2 1 3 0 1 4 3 4
( )&M i j ki j k
O'
= + + =2 2 4 1 1 1
4 3 4
( ) ( ) ( )= + + + + = + 2 2 4 4 3 4 4 3 4 3 2 5 i j k i j k i j k
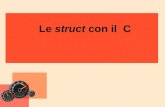
3.6 Sistema semplice di due vettori: coppia
La coppia l'insieme di due vettori ( P1 , &
V1 ) e ( P2 , &
V2 ) opposti (&
V1 =&
V2 ) (Fig.3.2). Il
risultante del sistema nullo, pertanto il
momento della coppia &
M in base alla (3.8)
indipendente dal polo. Esso pu essere
calcolato scegliendo un polo qualsiasi, per
esempio il punto P1 ;si ottiene allora
& &M P P V= 1 2 2 (3.9)
&M ortogonale sia a P P1 2 sia a
&V2 e quindi al piano dei vettori
&V1 e
&V2 , il suo verso tale da
vedere il vettore P P1 2 ruotare in senso antiorario per sovrapporsi a &
V2 . Il suo modulo pari
all'area del parallelogramma costruito sui vettori P P1 2 e &
V2 , ossia al prodotto di &
V2 per la
distanza d (braccio) fra le rette di applicazione di &
V1 e &
V2 . Il momento &
M si annulla quando
P P1 2 parallelo a &
V2 , ossia quando i due vettori sono sovrapposti alla medesima retta (coppia
di braccio nullo).
Fig. 3.2
P1
d
P2
&V1
&V1
&M