VALUTAZIONE DEGLI ALLAGAMENTI IN AREE …...I Ringraziamenti Vorrei ringraziare in primo luogo il...
101
POLITECNICO DI MILANO Dipartimento di Ingegneria Idraulica, Ambientale, Infrastrutture viarie e Rilevamento Ingegneria per l’Ambiente e il Territorio, laurea specialistica in Difesa del Suolo e Prevenzione dai Rischi Naturali VALUTAZIONE DEGLI ALLAGAMENTI IN AREE URBANE CON UN MODELLO BIDIMENSIONALE Relatore: Prof. Giovanni Ravazzani Tesi di laurea di: Riccardo Beretta Matr. 805612 Anno accademico 2014/2015
Transcript of VALUTAZIONE DEGLI ALLAGAMENTI IN AREE …...I Ringraziamenti Vorrei ringraziare in primo luogo il...
POLITECNICO DI MILANO
Dipartimento di Ingegneria Idraulica, Ambientale,
Infrastrutture viarie e Rilevamento
Ingegneria per l’Ambiente e il Territorio, laurea specialistica in Difesa del Suolo e Prevenzione
dai Rischi Naturali
VALUTAZIONE DEGLI ALLAGAMENTI IN AREE URBANE CON UN MODELLO
BIDIMENSIONALE
Relatore: Prof. Giovanni Ravazzani
Tesi di laurea di:
Riccardo Beretta Matr. 805612
Anno accademico 2014/2015


I
Ringraziamenti
Vorrei ringraziare in primo luogo il prof. Giovanni Ravazzani, per la cortesia e l’infinita
disponibilità con la quale mi ha seguito durante tutto questo lavoro di tesi.
Rivolgo un sincero ringraziamento anche all’ing. Carlo Maiorano di MMI srl, per avermi fornito i
dati relativi all’evento alluvionale avvenuto a Olbia nel novembre 2013, oltre a preziosi consigli a
proposito della modellazione idraulica bidimensionale.
Il grazie più sentito lo dedico infine alla mia famiglia, per avermi supportato nel raggiungimento
di un traguardo così importante.

II

III
Indice dei contenuti
INTRODUZIONE .............................................................................................................................. 1
CAPITOLO 1 ANALISI DEL RISCHIO IDRAULICO IN AREE URBANE........................... 3
1.1 METODI PER LA DELIMITAZIONE DELLE AREE INONDABILI ................................................................. 3
1.1.1 Determinazione dell’idrogramma di progetto ...................................................................... 4
1.1.2 Metodi speditivi .......................................................................................................................... 5
1.1.3 Metodi di dettaglio..................................................................................................................... 7
1.2 ANALISI BIDIMENSIONALE DEL FLUSSO IDRICO .................................................................................. 8
1.2.1 Aree urbane in modelli bidimensionali ................................................................................ 10
CAPITOLO 2 IL SOFTWARE HEC RAS 5.0 ............................................................................. 11
2.1 CARATTERISTICHE E CAPACITÀ DEL SOFTWARE ................................................................................ 11
2.1.1 Il modulo RAS Mapper e la creazione delle aree a moto bidimensionale ....................... 11
2.1.2 Mesh computazionale ............................................................................................................. 13
2.1.3 Condizioni al contorno e schemi numerici di soluzione .................................................... 15
2.1.4 Modellazione delle aree urbane ............................................................................................ 17
2.1.5 Vantaggi e svantaggi della modellazione 2D ..................................................................... 17
2.2 VALIDAZIONE DEI RISULTATI DEL SOFTWARE ................................................................................... 19
2.2.1 Dati in ingresso per la validazione ....................................................................................... 20
2.2.2 Risultati .................................................................................................................................... 23
2.2.3 Considerazioni finali .............................................................................................................. 25
CAPITOLO 3 MODELLO FISICO DI LABORATORIO .......................................................... 27
3.1 MODELLO FISICO DELLE OPERE DI SCARICO E REGOLAZIONE: DIGA DI LAMINAZIONE DI
PRATOLUNGO .......................................................................................................................................... 27
3.1.1 Rilievo sezioni fluviali e quote del terreno della piana alluvionale ................................. 30
3.1.2 Definizione del modello digitale del terreno ....................................................................... 34
3.2 CALIBRAZIONE DEI PARAMETRI CARATTERISTICI DEL MODELLO FISICO .......................................... 35
3.2.1 Definizione della portata transitante ................................................................................... 35

IV
3.2.2 Definizione della scabrezza ................................................................................................... 40
CAPITOLO 4 PROVE DI LABORATORIO ................................................................................ 44
4.1 INTRODUZIONE DI UN’AREA URBANA NEL MODELLO FISICO ............................................................. 44
4.1.1 Esperimento 1 ........................................................................................................................... 45
4.1.2 Esperimento 2 .......................................................................................................................... 47
4.1.3 Esperimento 3 .......................................................................................................................... 48
4.2 RISULTATI E CONFRONTI SPERIMENTALI .......................................................................................... 49
4.2.1 Esperimento 1 .......................................................................................................................... 49
4.2.2 Esperimento 2 ......................................................................................................................... 56
4.2.3 Esperimento 3 ......................................................................................................................... 61
4.2.4 Considerazioni finali .............................................................................................................. 63
CAPITOLO 5 CASO REALE: ALLUVIONE DEL 18-19/11/2013 A OLBIA ........................ 67
5.1 I BACINI IDROGRAFICI ........................................................................................................................ 67
5.2 MODELLAZIONE DEL DOMINIO URBANO ........................................................................................... 68
5.2.1 Geometria del modello e condizioni al contorno ................................................................ 68
5.2.2 Caratterizzazione delle scabrezze ........................................................................................ 70
5.3 RISULTATI DELLA RICOSTRUZIONE DELL’EVENTO ............................................................................ 72
5.4 DEFINIZIONE DELLE FASCE DI PERICOLOSITÀ IDRAULICA ................................................................ 80
5.4.1 La normativa della regione Liguria ..................................................................................... 80
5.4.2 Fasce di inondabilità: il Riu San Nicola .............................................................................. 81
5.4.3 Risultati e considerazioni finali ............................................................................................ 83
CONCLUSIONI ................................................................................................................................ 86
BIBLIOGRAFIA ............................................................................................................................... 88

V
Indice delle figure
Figura 1.1: procedura di ricerca degli idrogrammi di progetto. .........................................................4
Figura 1.2: casi analizzati con il metodo topografico. ......................................................................... 5
Figura 1.3: metodo volumetrico. ..........................................................................................................6
Figura 2.1: interfaccia RAS Mapper. .................................................................................................. 12
Figura 2.2: terminologia della mesh computazionale. ..................................................................... 13
Figura 2.3: esempio di diagramma Delaunay (colore nero) Voronoi (rosso).................................. 14
Figura 2.4: esempio creazione di un ponte. ...................................................................................... 18
Figura 2.5: esempio file HDF. ............................................................................................................ 19
Figura 2.6: modello fisico della valle del fiume Toce. ...................................................................... 20
Figura 2.7: DEM modello valle del Toce............................................................................................ 21
Figura 2.8: punti di misura. ............................................................................................................... 21
Figura 2.9: bridge 1: ponte vero e ponte modellato. ........................................................................ 22
Figura 2.10: bridge 2: ponte vero e ponte modellato. ...................................................................... 22
Figura 2.11: barrage vero e modellato. .............................................................................................. 22
Figura 3.1: stramazzi triangolari Thompson in funzione. ............................................................... 28
Figura 3.2: geometria luci a battente. ............................................................................................... 28
Figura 3.3: modello in scala diga di laminazione di Pratolungo. .................................................... 29
Figura 3.4: schema del rilievo e coordinate di ogni punto. ............................................................. 30
Figura 3.5: asta idrometrica e trave porta-asta. ................................................................................ 31
Figura 3.6: DEM e legenda (valori espressi in metri). ...................................................................... 35
Figura 3.7: micro-mulinello. .............................................................................................................. 37
Figura 4.1: ponte in legno, sezione 500. ............................................................................................45
Figura 4.2: mattone per la riproduzione degli edifici. ......................................................................45
Figura 4.3: posizionamento punti di misura (esperimento 1). ........................................................ 46
Figura 4.4: modello ponte in legno. .................................................................................................. 46
Figura 4.5: disposizione mattoni e punti di misura (esperimento 2). ............................................. 47
Figura 4.6: disposizione mattoni e punti di misura (esperimento 3). ............................................ 49
Figura 4.7: sistema di riferimento per la misura delle velocità. .......................................................52
Figura 4.8: tiranti idrici calcolati per le tre portate. ......................................................................... 55
Figura 4.9: velocità idriche calcolate per le tre portate. ................................................................... 55

VI
Figura 4.10: tiranti idrici calcolati per i tre diversi metodi. ............................................................ 58
Figura 4.11: velocità idriche calcolate per i tre diversi metodi. ....................................................... 60
Figura 4.12: tiranti idrici esperimento 3........................................................................................... 62
Figura 4.13: velocità idriche esperimento 3. .................................................................................... 63
Figura 5.1:reticolo idrografico dell’area urbana di Olbia. ................................................................ 68
Figura 5.2: dominio di calcolo 2D e posizione degli idrogrammi in ingresso. ............................... 69
Figura 5.3: scabrezze idrauliche. ........................................................................................................ 71
Figura 5.4: confronto aree allagate censite e simulate. .................................................................... 72
Figura 5.5: confronto tiranti idrici HEC-RAS/InfoWorks................................................................ 73
Figura 5.6: confronto velocità idriche HEC-RAS/InfoWorks. ......................................................... 73
Figura 5.7: punti per confronto HEC-RAS/InfoWorks. ................................................................... 76
Figura 5.8: confronto fasce pericolosità in vigore (a sinistra) e aggiornate (a destra). ................. 84
Figura 5.9: confronto fasce pericolosità moto permanente e moto vario. ...................................... 85

VII
Indice dei grafici
Grafico 2.1: esempio di curva elevazione-volume per una cella. ...................................................... 15
Grafico 2.2: idrogramma in ingresso. ............................................................................................... 20
Grafico 3.1: sezione 600. .................................................................................................................... 31
Grafico 3.2: sezione 500. ................................................................................................................... 32
Grafico 3.3: sezione 400. ................................................................................................................... 32
Grafico 3.4: sezione 300. ................................................................................................................... 33
Grafico 3.5: sezione 200. ................................................................................................................... 33
Grafico 3.6: sezione 100. ................................................................................................................... 34
Grafico 3.7: idrogrammi in ingresso al modello. ............................................................................. 40
Grafico 4.1: idrogramma in ingresso al modello. ............................................................................. 48
Grafici 4.2: idrogramma corto e idrogramma lungo. ...................................................................... 64
Grafico 5.1: idrogrammi in immissione nei differenti punti. .......................................................... 70
Grafico 5.2: idrogramma in immissione al nodo 6 (Riu Seligheddu). ............................................ 70
Grafico 5.1: istogramma differenze tiranti idrici. .............................................................................. 74
Grafico 5.2: istogramma differenze velocità idriche. ........................................................................ 75
Grafico 5.3: confronto tiranti e velocità idriche, punto 1. ................................................................. 76
Grafico 5.4: confronto tiranti e velocità idriche, punto 2. ................................................................ 77
Grafico 5.5: confronto tiranti e velocità idriche, punto 3. ................................................................ 77
Grafico 5.6: confronto tiranti e velocità idriche, punto 4. ............................................................... 78
Grafico 5.7: confronto tiranti e velocità idriche, punto 5. ............................................................... 78
Grafico 5.8: confronto tiranti e velocità idriche, punto 6. ................................................................ 79
Grafico 5.9: confronto tiranti e velocità idriche, punto 7. ................................................................ 79
Grafico 5.10: idrogrammi in ingresso nel punto 1, al variare di T. ................................................. 82
Grafico 5.11: idrogrammi di moto vario in ingresso al punto 1, al variare di T. ............................. 83

VIII
Indice delle tabelle
Tabella 2.1: metodi numerici HEC-RAS 5.0. ..................................................................................... 16
Tabella 2.2: classificazione uso del suolo. ......................................................................................... 17
Tabella 2.3: osservazioni sperimentali. ............................................................................................ 23
Tabella 2.4: risultati modello diffusivo. ............................................................................................ 24
Tabella 2.5a: risultati modello completo DSV.................................................................................. 24
Tabella 2.5b: risultati modello completo DSV. .................................................................................25
Tabella 2.6: NRMSE medio. ...............................................................................................................25
Tabella 2.7: nuovo NRMSE medio. ................................................................................................... 26
Tabelle 3.1: apertura ottimale luci a battente, con a altezza della luce e b larghezza. .................... 37
Tabelle 3.2: apertura ottimale luci a battente. ................................................................................. 38
Tabelle 3.3: altezze e velocità misurate per le tre portate. .............................................................. 39
Tabelle 3.4: portate calcolate. ........................................................................................................... 39
Tabella 3.5: altezze osservate e calcolate, caso 1. .............................................................................. 41
Tabella 3.6: altezze osservate e calcolate, caso 2. ............................................................................. 41
Tabella 3.7: altezze osservate e calcolate, caso 3. ............................................................................. 42
Tabella 3.8: NRMSE per ogni valore di scabrezza. .......................................................................... 43
Tabella 4.1: altezze misurate e calcolate, con Q = 14.17 L/s. ........................................................... 50
Tabella 4.2: : altezze misurate e calcolate, con Q = 16.59 L/s. ........................................................ 50
Tabella 4.3: altezze misurate e calcolate, con Q = 18.78 L/s. ........................................................... 51
Tabella 4.4: NRMSE altezze idriche. ................................................................................................. 51
Tabelle 4.5: velocità misurate e calcolate, con Q = 14.17 L/s. ..........................................................52
Tabelle 4.6: velocità misurate e calcolate, con Q = 16.59 L/s. ......................................................... 53
Tabella 4.7a: velocità misurate e calcolate, con Q = 18.78 L/s. ........................................................ 53
Tabella 4.7b: velocità misurate e calcolate, con Q = 18.78 L/s. .......................................................54
Tabelle 4.8: NRMSE velocità. ............................................................................................................54
Tabella 4.9: NRMSE medio. ...............................................................................................................54
Tabella 4.10: altezze misurate e calcolate, casette-DEM, Q = 22.57 L/s. ........................................56
Tabella 4.11: altezze misurate e calcolate, casette-n Manning, Q = 22.57 L/s. ............................... 57
Tabella 4.12: altezze misurate e calcolate, area urbana-n Manning, Q = 22.57 L/s. ...................... 57
Tabella 4.13: NRMSE medio tiranti idrici. ....................................................................................... 58

IX
Tabella 4.14: velocità misurate e calcolate, casette-DEM, Q = 22.57 L/s. .......................................59
Tabella 4.15: velocità misurate e calcolate, casette-n Manning, Q = 22.57 L/s. .............................59
Tabella 4.16: velocità misurate e calcolate, area urbana-n Manning, Q = 22.57 L/s. .................... 60
Tabelle 4.17: NRMSE medio, componenti di velocità x e y. ............................................................. 61
Tabella 4.18: altezze misurate e calcolate, con Q = 22.81 L/s. ......................................................... 61
Tabella 4.19: velocità misurate e calcolate, con Q = 22.81 L/s. ....................................................... 62
Tabella 4.20: NRMSE medio. ........................................................................................................... 63
Tabella 4.21: risultati simulazione con idrogramma corto. ............................................................. 64
Tabella 4.22: risultati simulazione con idrogramma lungo. ............................................................65
Tabella 4.23: confronto simulazione con idrogramma corto. ..........................................................65
Tabella 4.24: confronto simulazione con idrogramma lungo. ........................................................ 66
Tabella 5.1: estensione aree allagate. ................................................................................................. 74
Tabella 5.2: ambiti normativi relativi alle fasce di inondabilità (Regione Liguria). ....................... 81
Tabella 5.3: portate in ingresso per il Riu San Nicola. .................................................................... 82
Tabella 5.4: caratteristiche allagamenti ai vari T, moto permanente. ............................................ 83
Tabella 5.5: estensione aree a differente pericolosità, normativa Liguria, moto permanente. ..... 83
Tabella 5.6: caratteristiche allagamenti ai vari T, moto vario. ........................................................ 84
Tabella 5.7: estensione aree a differente pericolosità, normativa Liguria, moto vario. ................. 84

X

1
INTRODUZIONE
L’esondazione di un corso d’acqua rappresenta uno dei maggiori rischi ambientali
connessi alle attività umane, con possibili conseguenze sull'incolumità della popolazione e
perdite economiche in seguito all’interruzione dei servizi erogati su un dato territorio.
Ovviamente, i rischi maggiori sono presenti nelle aree urbane densamente abitate, dove gli
allagamenti sono sempre più frequenti. I motivi principali sono da attribuirsi
all’intensificarsi negli ultimi anni di eventi meteorici estremi, ma soprattutto a un errato
sviluppo urbanistico delle città, che ha portato all’impermeabilizzazione di molte aree rurali e
al restringimento delle sezioni fluviali.
Da queste osservazioni risulta evidente la necessità di analisi sempre più dettagliate di questi
fenomeni, in modo da prevedere e definire le aree maggiormente esposte e progettare opere
di difesa, valutando caso per caso la soluzione migliore fra interventi di tipo strutturale e non
strutturale.
La stima dell’estensione delle aree inondabili può essere effettuata in maniera speditiva
utilizzando un modello di moto permanente monodimensionale; soprattutto in aree urbane,
questo metodo risulta di scarsa efficacia, in quanto l’ipotesi è difficilmente applicabile in
zone caratterizzate da topografie complesse.
Per l’analisi di queste aree si preferisce quindi l’utilizzo di modelli bidimensionali, descritti
matematicamente dalle equazioni di De Saint Venant (DSV). Queste equazioni permettono di
analizzare più fedelmente il flusso idrico all’interno di una città, spesso caratterizzato da
direzioni preferenziali di moto a causa della presenza degli edifici. Il rischio viene quindi
valutato considerando sia l’altezza idrica, sia la velocità raggiunta dalla corrente.
La corretta rappresentazione dell’area urbana all’interno del modello è un fattore
fondamentale per la definizione delle zone più esposte al rischio. Attualmente sono
disponibili tecniche di rilevamento ad alta definizione che permettono di rappresentare le
città con griglie con un grado di precisione elevatissimo (risoluzione circa di 2 m); ne sono un
esempio le tecniche fotogrammetriche e il metodo di indagine LiDAR.

2
La precisione dei dati topografici non è però supportata da un’altrettanto dettagliata
conoscenza della dinamica del moto idrico; spesso è quindi conveniente introdurre delle
semplificazioni alle equazioni DSV. D’altro canto, per diminuire l’onere computazionale del
modello, si considerano generalmente topografie con risoluzione non inferiore ai 5 m.
Nel caso in cui non siano disponibili dati precisi riguardo alla topografia urbana, si
introducono modelli semplificati che descrivono il comportamento degli edifici inserendo dei
parametri di scabrezza o porosità.
Per esaminare la validità di queste semplificazioni è sempre necessaria una verifica
sperimentale dei risultati del modello.
In questo contesto, il presente lavoro di tesi si propone di confrontare, per un’area urbana, i
risultati ottenuti utilizzando il software HEC-RAS 5.0 e quelli ricavati da una serie di
osservazioni sperimentali in laboratorio. L’obiettivo finale è quello di individuare una
metodologia generale per l’analisi dei flussi idrici nelle aree urbane, da applicarsi poi a casi
reali di allagamenti.

3
CAPITOLO 1
ANALISI DEL RISCHIO IDRAULICO IN
AREE URBANE
L’analisi delle esondazioni dei corsi d’acqua in aree urbane riveste un ruolo chiave nella
definizione delle zone allagabili e dei possibili rischi per la popolazione. I modelli matematici
utilizzati a questo scopo introducono delle semplificazioni che vanno verificate confrontando
i risultati con quelli ottenuti empiricamente.
Nel presente capitolo si descriveranno quindi i metodi per la definizione delle aree
inondabili, oltre ad alcuni modelli matematici per la descrizione del flusso idrico in città.
1.1 Metodi per la delimitazione delle aree inondabili
Per la definizione delle aree a rischio inondazione la legge italiana prevede la redazione
di mappe di pericolosità idraulica, in cui sono evidenziate le zone maggiormente esposte al
rischio.
Gli indicatori che vengono utilizzati nella composizione della mappa sono l’altezza idrica e, in
alcuni casi, la velocità della corrente, di particolare importanza soprattutto se l’analisi
riguarda un ambiente urbano.
Un problema da non sottovalutare è quello della definizione dell’idrogramma di progetto,
che varia in funzione delle caratteristiche morfologiche del bacino e dell’intensità delle
precipitazioni.
Comunque, per la definizione di un’area allagabile, non esiste una procedura standard da
seguire ma, a seconda del caso, si può propendere per l’utilizzo di un modello piuttosto che
un altro; si ricordano in particolare due metodi, quelli speditivi e quelli di dettaglio.

4
1.1.1 Determinazione dell’idrogramma di progetto
Considerato un generico bacino idrografico, per la determinazione dell’estensione delle
aree inondabili è necessaria l’individuazione dell’idrogramma che massimizza il volume di
piena, per il tempo di ritorno considerato. In aree urbane, dove la componente della velocità
del flusso idrico assume una notevole importanza, è consigliabile tenere in considerazione
anche l’idrogramma caratterizzato dal picco di portata massimo. Generalmente, nella
redazione delle mappe di pericolosità, si valutano i tempi di ritorno di 50 e 200 anni.
Per determinare questi idrogrammi di progetto, si ritiene valida l’ipotesi di isofrequenza fra
eventi meteorici e portate, servendosi di un modello afflusso-deflusso.
A partire dalle linee segnalatrici di possibilità pluviometrica (LSPP), curve che associano la
durata e l’altezza della precipitazione, è possibile ottenere una serie di idrogrammi per ogni
durata di pioggia, relativi al tempo di ritorno considerato. Fra questi, si individuano quelli
corrispondenti alle durate che massimizzano il picco e il volume dell’idrogramma.
Figura 1.1: procedura di ricerca degli idrogrammi di progetto.
Matematicamente, i due idrogrammi possono essere descritti dalle seguenti formulazioni:
𝑃𝑀𝑃𝐷𝐹: 𝑀𝑎𝑥 {𝑄(𝑑, 𝑡)} [ 1 ]
con PMPDF ‘probable maximum peak design flood’ e Q portata che varia con la durata di
pioggia d e il tempo t.

5
𝑃𝑀𝑉𝐷𝐹: 𝑀𝑎𝑥 {∫(𝑄(𝑑, 𝑡) − 𝑀𝐴𝐹)𝑑𝑡} [ 2 ]
con PMPDF ‘probable maximum volume design flood’ e MAF valore massimo di portata che
può essere trasportata dal tratto fluviale in analisi.
1.1.2 Metodi speditivi
Utilizzando dei metodi speditivi è possibile avere una prima approssimazione delle zone
a rischio inondazione. Si ricordano in particolare tre metodi:
Metodo topografico:
Figura 1.2: casi analizzati con il metodo topografico.
procedura che si basa sul confronto tra le quote idriche nel corso d’acqua in condizioni di
moto permanente e le quote topografiche delle aree circostanti. Il principio alla base del
metodo ipotizza che nel corso della piena si realizza un livello del pelo libero orizzontale in
tutto il transetto. Si considerano in particolare tre ipotesi, evidenziate in Figura 1.2. Nel caso
A si calcolano le quote idriche immaginando argini infinitamente alti; nel caso B si ipotizza
che il tirante idrico sia coincidente con la quota della sommità degli argini stessi; infine, nel

6
caso C, per tenere conto del flusso fuori dall’alveo in caso di esondazione, il profilo di moto
permanente viene calcolato estendendo la sezione di flusso all’area circostante,
immaginando l’assenza di argini. È evidente come i tre metodi introducano notevoli
semplificazioni al problema: il caso A tende a sovrastimare l’estensione delle aree inondabili,
quello B non è applicabile per argini con quote molto differenti, il caso C non considera il
moto bidimensionale nelle aree golenali o urbane e individua zone allagate anche dove il
livello idrico è inferiore a quello degli argini.
Metodo topologico:
introducendo un modello di moto permanente e ipotizzando argini infinitamente alti, si
ricava la quota del profilo idrico in corrispondenza della sezione iniziale i; se il tirante
sovrasta l’altezza reale dell’argine, nella sezione immediatamente più a valle la portata
considerata sarà quella precedente diminuita di una quantità pari a quella fuoriuscita nella
sezione iniziale. Il processo viene così iterato fino a che l’acqua esondata non ritorni in alveo
in sezioni di valle.
Le aree inondabili vengono definite individuando la zona più vicina del piano campagna che
ha quota minore rispetto a quella della sezione in cui il fluido stramazza.
Il problema di questo metodo è la sua insensibilità al tempo di ritorno.
Metodo volumetrico:
Figura 1.3: metodo volumetrico.
Questo metodo richiede la conoscenza dell’idrogramma di piena. Il volume esondato viene
valutato dopo l’imposizione di una portata massima di deflusso e sarà pari all’area compresa
tra il segmento intercettato e l’idrogramma. Il procedimento va reiterato, per ogni sezione,
fino a conoscere per tutta la zona di interesse il volume fuoriuscito dall’alveo che trova
recapito nelle depressioni topografiche delle zone in prossimità del fiume. L’estensione
dell’area inondabile viene valutata raccordando l’inviluppo dei punti allagati più lontani dal

7
corso d’acqua. Il metodo non è però attendibile; al variare del tempo di ritorno cambia anche
il volume esondabile.
1.1.3 Metodi di dettaglio
Per avere una stima più precisa delle grandezze tipiche dei fenomeni di inondazione
(altezze idriche e velocità della corrente), si fa ricorso a modelli idraulici che riproducono il
comportamento distribuito dell’alveo. In particolare, riferendosi agli idrogrammi di progetto
prima definiti, i modelli simulano la propagazione dell’onda a partire dalla determinazione di
opportune condizioni iniziali e al contorno.
A seconda degli obiettivi della simulazione, si può scegliere fra due tipi di modelli idraulici:
Modelli monodimensionali (1-D):
la formulazione monodimensionale è la più adatta per l’analisi di percorsi fluviali con
andamento regolare, che presentano sezioni di ampiezza pressoché costante e aree golenali
di limitata estensione.
Le equazioni più adatte alla descrizione matematica del fenomeno sono quelle riportate di
seguito, che fanno riferimento ad un moto di tipo permanente:
𝜕𝑄
𝜕𝑡= 0 [3]
𝜕𝐻
𝜕𝑥= −𝐽 [4]
𝐻 = 𝑧𝑓 + 𝑦 +
𝑉2
2𝑔 [5]
Come indicato dall’equazione [3], la portata non varia nel tempo; come valore critico si
assume quello ricavato in precedenza dall’idrogramma di progetto con picco massimo.
L’equazione [4], considerando l’ascissa curvilinea x, descrive le perdite di energia per unità di
lunghezza dell’alveo ricavate dalla formulazione di Chezy (cadente 𝐽 = 𝑉2 (𝜒2 ∙ 𝑅⁄ )), mentre
la [5] esprime la conservazione dell’energia totale H della corrente, con zf quota del fondo e y
tirante idrico.
Il tracciamento dei profili avviene mediante l’integrazione di questo sistema di equazioni;
introducendo, in particolare, il concetto di energia specifica E, ovvero l’energia totale della
corrente espressa rispetto ad un riferimento coincidente con il fondo della sezione, si ricava
che:

8
𝐸 = 𝑦 +𝑉2
2𝑔 [6]
𝜕𝐸
𝜕𝑥= 𝑖 − 𝐽 [7]
con i pendenza del fondo dell’alveo. Integrando numericamente l’equazione [7] si ricava il
profilo di pelo libero e quindi le grandezze idrauliche ricercate per la stima delle zone
inondabili.
Modelli bidimensionali (2-D):
questo tipo di modelli viene utilizzato nel caso di aree inondabili ampie e in zone in cui è
evidente la presenza di componenti di velocità in direzione ortogonale a quella dell'alveo.
L’utilizzo di questa formulazione è necessario per una corretta interpretazione delle
esondazioni in aree urbane, dove la presenza degli edifici genera direzioni preferenziali di
flusso.
Le equazioni utilizzate per l’analisi bidimensionale sono quelle del moto vario di De Saint
Venant (DSV), generalmente risolte utilizzando metodi numerici alle differenze finite. Il
dominio di integrazione è definito schematizzando la planimetria urbana come una griglia;
ogni cella viene determinata a partire da rilevazioni topografiche ad alta definizione,
utilizzando tecniche fotogrammetriche o il metodo di indagine LiDAR. Il grado di risoluzione
ottenibile con queste tecniche è elevatissimo (circa 2 m). In molti casi, però, la precisione dei
dati topografici non è supportata da un’altrettanto minuziosa conoscenza dei fenomeni
idraulici; questa osservazione spinge all’introduzione di una serie di semplificazioni alle
equazioni DSV, eliminando ad esempio i termini inerziali e all’introduzione di topografie con
risoluzione non inferiore ai 5 metri.
Una trattazione più dettagliata di questo tipo di modelli è riportata nel paragrafo successivo.
1.2 Analisi bidimensionale del flusso idrico
In aree urbane, la presenza di una molteplicità di ostacoli impedisce l’utilizzo di modelli
semplificati monodimensionali per la definizione delle aree allagabili; risulta necessaria
quindi l’introduzione di modelli bidimensionali, per la corretta rappresentazione del flusso
idrico in direzione ortogonale rispetto a quella dell’alveo.
In particolare, il moto 2D è descritto dalle equazioni di De Saint Venant (DSV), dette anche
shallow water equations (SWE), derivate a partire dalla formulazione completa di Navier
Stokes.

9
Queste equazioni si ottengono imponendo la conservazione della massa (equazione di
continuità) e della quantità di moto nelle due direzioni principali x e y all’interno di un
generico volume di controllo.
Si otterrà quindi il seguente sistema di equazioni:
𝜕𝐻
𝜕𝑡+
𝜕(ℎ𝑢)
𝜕𝑥+
𝜕(ℎ𝑣)
𝜕𝑦= 𝑠𝑜𝑢𝑟𝑐𝑒𝑠 − 𝑠𝑖𝑛𝑘𝑠
[ 8a ]
𝜕𝑢
𝜕𝑡+ (𝑢
𝜕𝑢
𝜕𝑥+ 𝑣
𝜕𝑢
𝜕𝑦) = −𝑔
𝜕𝐻
𝜕𝑥+ 𝑣𝑡 (
𝜕2𝑢
𝜕𝑥2+
𝜕2𝑢
𝜕𝑦2) − 𝑐𝑓𝑢 + 𝑓𝑣
𝜕𝑣
𝜕𝑡+ (𝑢
𝜕𝑣
𝜕𝑥+ 𝑣
𝜕𝑣
𝜕𝑦) = −𝑔
𝜕𝐻
𝜕𝑦+ 𝑣𝑡 (
𝜕2𝑣
𝜕𝑥2+
𝜕2𝑣
𝜕𝑦2) − 𝑐𝑓𝑣 − 𝑓𝑢
[ 9a ]
L’equazione [8a] esprime la conservazione della massa, ovvero un aumento o diminuzione di
un volume che deve essere bilanciato da una portata in entrata o in uscita. Il termine H
indica il livello idrico fissata una quota z di riferimento e i singoli termini indicano
rispettivamente:
𝜕𝐻
𝜕𝑡 variazione del livello idrico nel volume di controllo considerato;
𝜕(ℎ𝑢)
𝜕𝑥+
𝜕(ℎ𝑣)
𝜕𝑦 variazione spaziale della portata in entrata o in uscita, con u e v velocità
media della corrente in direzione x e y;
i termini sources e sinks determinano infine le portate localizzate in ingresso o in
uscita.
Le equazioni [9a] esprimono invece la conservazione della quantità di moto, con i singoli
termini che indicano per le direzioni principali x e y:
𝜕𝑢
𝜕𝑡+ (𝑢
𝜕𝑢
𝜕𝑥+ 𝑣
𝜕𝑢
𝜕𝑦) accelerazione locale e convettiva (termini fra parentesi);
𝑔𝜕𝐻
𝜕𝑥 gradiente della pressione idrostatica;
𝑣𝑡 (𝜕2𝑢
𝜕𝑥2 +𝜕2𝑢
𝜕𝑦2) termini legati alla viscosità;
𝑐𝑓𝑢 resistenza dell’alveo; 𝑓𝑣 parametro di Coriolis.
La risoluzione prevede l’applicazione delle equazioni [8a] e [9a] per ogni cella in cui si è
suddiviso il dominio urbano, utilizzando generalmente metodi numerici alle differenze finite
o a volume finito. Al termine della procedura di calcolo, va verificata la convergenza e la
stabilità della soluzione, riferendosi ad esempio al criterio di Courant.
La complessità della trattazione porta all’introduzione di alcune semplificazioni alle
equazioni DSV, che riconducono all’analisi del modello diffusivo, tralasciando i termini

10
inerziali relativi alle accelerazioni locali e convettive. Da precedenti esperimenti, si è notato
infatti come in molti casi i modelli a complessità ridotta conducano a risultati del tutto
confrontabili con quelli più complessi, con il vantaggio di un minore onere computazionale e
una maggiore stabilità della soluzione.
I termini dell’equazione DSV si modificano quindi nel modo seguente:
𝜕𝐻
𝜕𝑡+
𝜕(ℎ𝑢)
𝜕𝑥+
𝜕(ℎ𝑣)
𝜕𝑦= 𝑠𝑜𝑢𝑟𝑐𝑒𝑠 − 𝑠𝑖𝑛𝑘𝑠
[ 8b ]
𝑐𝑓𝑢 = 𝑔
𝜕𝐻
𝜕𝑥
𝑐𝑓𝑣 = 𝑔𝜕𝐻
𝜕𝑦
[ 9b ]
La nuova formulazione dell’equazione [9b] esprime la variazione del pelo libero bilanciata
unicamente dalla resistenza dell’alveo.
L’utilizzo del modello diffusivo è quindi consigliabile soprattutto in analisi che presentano
variazioni di portata graduali e piccole pendenze del terreno, in cui i termini legati alle
accelerazioni locali e convettive sono meno influenti sul risultato finale.
1.2.1 Aree urbane in modelli bidimensionali
Nel caso in cui non fosse disponibile una topografia dettagliata dell’area urbana, questa
può essere riprodotta introducendo un parametro di porosità φ all’interno delle equazioni
DSV; il valore assunto da questo sarà diverso per ogni cella, a seconda se l’obiettivo è la
rappresentazione di una zona rurale o urbana. In particolare, φ indica la frazione di cella
disponibile per il flusso idrico. Si noti come la stessa procedura può essere eseguita
analogamente considerando, invece della porosità, un parametro di scabrezza, che assumerà
valori elevati in corrispondenza dell’area urbana per descrivere la maggiore resistenza al
flusso idrico. In entrambi i casi, sarà comunque necessaria una calibrazione dei parametri,
confrontando i risultati del modello con osservazioni reali.
11
CAPITOLO 2
IL SOFTWARE HEC RAS 5.0
Tutte le sperimentazioni presenti in questo elaborato sono state eseguite utilizzando il
software HEC-RAS 5.0, sviluppato dal Hydrologic Engineering Center (HEC). La versione
5.0 è la prima che permette una modellazione bidimensionale del moto idrico.
Nel presente capitolo verranno quindi descritte le principali funzionalità del software e sarà
eseguita una validazione dei risultati, riferendosi alle osservazioni sperimentali derivanti da
una prova presente in letteratura.
2.1 Caratteristiche e capacità del software
Il software HEC-RAS 5.0 permette la modellazione bidimensionale del flusso idrico sia
utilizzando le equazioni DSV sia il modello diffusivo, con l’ulteriore possibilità di associare
all’interno dello stesso progetto un’analisi 1D (ad esempio per l’alveo di magra) e 2D (per le
aree golenali).
La versione 5.0 presenta un’interfaccia grafica del tutto paragonabile a quella dei precedenti
software sviluppati da HEC; le differenze principali si riscontrano nell’editor Geometric
Data, dove sono state aggiunte opzioni per la creazione delle aree 2D e nel potenziamento
degli strumenti GIS attraverso il modulo RAS Mapper.
2.1.1 Il modulo RAS Mapper e la creazione delle aree a moto
bidimensionale
RAS Mapper è uno strumento che permette la visualizzazione dei dati cartografici
associati alla modellazione 2D, oltre che l’osservazione dei risultati delle simulazioni.

12
La sua funzionalità principale, comunque, riguarda la possibilità di importare nel software i
modelli digitali del terreno, necessari per la processazione dei risultati in 2D; si noti anche
l’opportunità di creare un DEM relativo al solo alveo partendo dalle sezioni fluviali inserite
nell’editor della geometria.
Figura 2.1: interfaccia RAS Mapper.
La Figura 2.1 mostra l’interfaccia grafica di RAS Mapper; sulla sinistra, nella directory
principale, sono presenti i layer che identificano l’elemento che si desidera visualizzare.
Si noti come, oltre al DEM già citato, si possano inserire anche altri Map Layers per meglio
descrivere l’area che si sta analizzando; in generale è possibile importare dei file GIS di tipo
shape, oppure scaricare direttamente da internet un’immagine aerea della superficie in
analisi.
Un’altra importante funzionalità di RAS Mapper riguarda la possibilità di creare delle
dettagliate mappe di inondazione, ricercando ad esempio il massimo valore di tirante idrico
in tutto il dominio 2D.
Una volta importato il DEM, si può procedere con la creazione dell’area 2D, ritornando ad
operare all’interno dell’editor Geometric Data; cliccando sullo strumento 2D Flow Area si
abilita la funzione che permette di disegnare l’area a moto bidimensionale. Si noti come, se si

13
desidera inserire una superficie di dimensioni specifiche, attraverso il GIS Tools sia possibile
assegnare all’area appena disegnata delle coordinate precise.
A questo punto restano due operazioni da svolgere: la creazione della mesh computazionale e
l’assegnazione delle condizioni al contorno, sempre sfruttando opportune opzioni all’interno
del Geometric Data.
2.1.2 Mesh computazionale
Cliccando sull’editor 2D Flow Area è possibile creare la mesh relativa al dominio
realizzato in precedenza; dopo aver inserito il valore di scabrezza di Manning e definito la
spaziatura delle celle in direzione x e y, il software crea in automatico il reticolo
computazionale.
Le celle possono avere sia elementi rettangolari o quadrati (celle strutturate) sia elementi
triangolari o quadrilateri con dimensioni diverse (celle non strutturate); in generale, HEC-
RAS non permette la creazione di una cella con più di otto lati.
All’interno della mesh, ogni cella presenta le seguenti caratteristiche:
Figura 2.2: terminologia della mesh computazionale.
Si noti come ogni cell center, cell face e cell face point sia identificato da un numero, in modo
da facilitare l’operazione di analisi e visualizzazione dei risultati.

14
Generalmente, come si nota in Figura 2.2, il software crea delle celle di forma quadrata nella
zona centrale, mentre in prossimità del contorno esterno la mesh si adatta al profilo
dell’area.
In alcuni casi, come in presenza di ostacoli o di elevate pendenze del terreno, conviene
infittire manualmente la mesh iniziale, in modo da giungere a soluzioni numeriche più
precise. Se ad esempio si decide di aggiungere un cell center, HEC-RAS ridisegna la cella
facendo riferimento alla Delaunay Triangulation, massimizzando il minimo angolo interno
dei triangoli; successivamente andrà a creare il diagramma di Voronoi, il quale costituisce la
mesh finale in modo del tutto analogo al metodo dei poligoni di Thiessen.
Figura 2.3: esempio di diagramma Delaunay (colore nero) Voronoi (rosso)
In altri casi, come in presenza di argini, è inoltre utile non solo infittire la mesh, ma anche
orientare il posizionamento delle celle, per descrivere in modo più fedele l’andamento del
terreno. Questa operazione è possibile disegnando una Break Line in corrispondenza
dell’argine considerato.
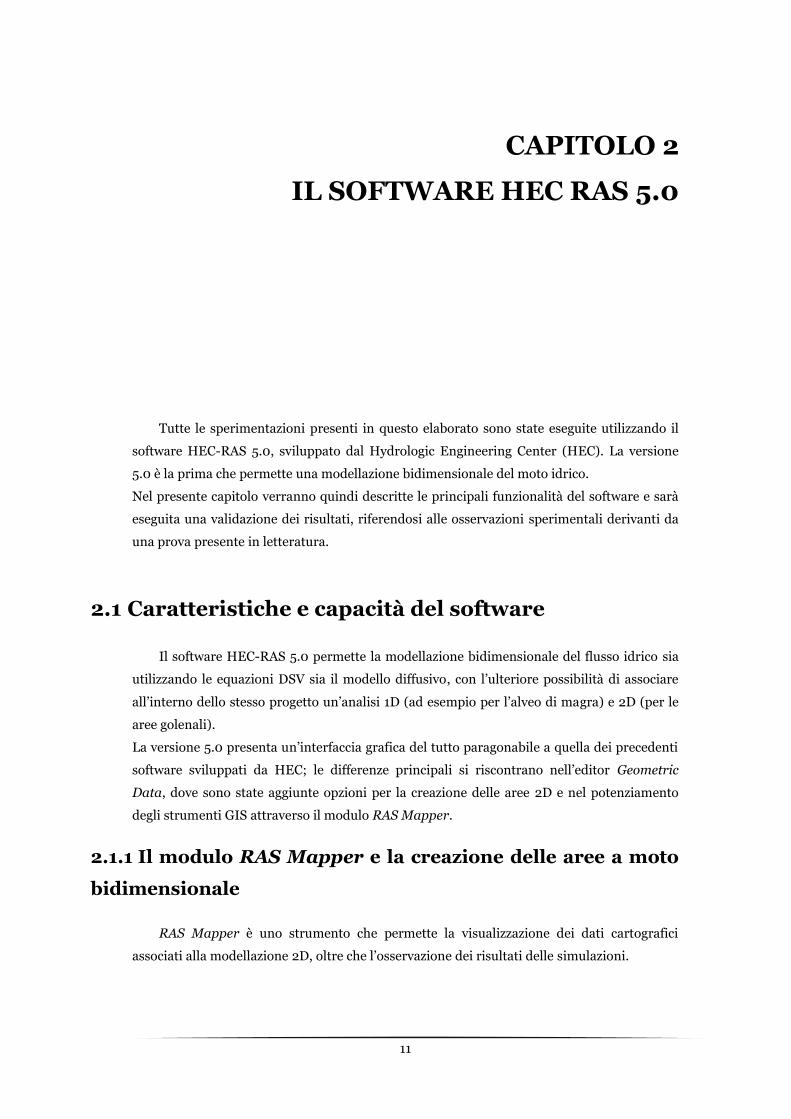
Il più grande vantaggio della modellazione bidimensionale in HEC-RAS riguarda comunque
la dimensione della mesh computazionale. Ogni cella viene infatti pre-processata in modo da
creare una serie di tabelle idrauliche, che mettono in relazione l’elevazione e il volume e, su
ogni lato della cella, l’elevazione con il perimetro bagnato, l’area e la scabrezza.
Queste curve permettono di utilizzare celle di dimensioni più grandi rispetto ad altri
programmi 2D, con evidente diminuzione dei tempi computazionali.
15
Grafico 2.1: esempio di curva elevazione-volume per una cella.
2.1.3 Condizioni al contorno e schemi numerici di soluzione
Una importante funzionalità di HEC-RAS 5.0 riguarda la possibilità di creare all’interno
dello stesso progetto aree a modellazione monodimensionale associandole a zone a
modellazione bidimensionale.
L’associazione avviene introducendo un’opportuna condizione al contorno: una struttura
laterale (lateral weir) se l’area 2D si trova in una zona esterna all’alveo di magra, che invece
viene modellato con un moto 1D; un collegamento in linea (inline structure) se l’obiettivo è
quello di collegare direttamente un reach 1D con un’area 2D o viceversa.
Per le aree 2D possono inoltre essere aggiunte le seguenti condizioni al contorno, sfruttando
lo strumento SA/2D Area BC Lines all’interno dell’editor Geometric Data:
Variazione portata in funzione del tempo (Flow Hydrograph);
Variazione livello idrico in funzione del tempo (Stage Hydrograph);
Altezza di moto uniforme (Normal Depth);
Scala di deflusso (Rating Curve).
L’ultima procedura da eseguire prima del lancio della simulazione riguarda l’introduzione
delle condizioni iniziali.
Per le aree 2D è possibile inserire il valore dell’altezza idrica iniziale cliccando sul comando
Unsteady Flow Editor. In molti casi, questo valore non è costante per l’intero dominio,

16
quindi è necessario impostare un tempo di ramp-up che permetta al programma, prima
dell’inizio della simulazione, di costruire le corrette condizioni iniziali di moto.
Questa opzione è ovviamente fondamentale nei casi in cui si decida di modellare l’intero
dominio con un moto bidimensionale, meno nelle analisi miste 1D/2D, in quanto l’area 2D
potrebbe essere inizialmente asciutta.
A questo punto è possibile lanciare la simulazione di moto vario. I metodi di risoluzione
variano in base ad alcuni fattori e possono essere riassunti nella seguente tabella:
modello mesh risoluzione
diffusivo strutturata differenze finite
diffusivo non strutturata volume finito
DSV completo qualsiasi volume finito
Tabella 2.1: metodi numerici HEC-RAS 5.0.
Si noti come sia il metodo alle differenze finite sia quello a volume finito utilizzino lo schema
risolutivo semi-implicito generalizzato di Crank-Nicholson; il vantaggio di questo tipo di
formulazione riguarda l’ottima flessibilità del modello alle differenze finite, garantita dalla
possibilità di variare a piacimento il fattore Theta fra i valori 0.6 e 1.
In una simulazione di moto vario, comunque, il parametro più significativo da considerare è
l’intervallo computazionale ΔT, che deve essere scelto con accuratezza in modo da non
influenzare negativamente l’esito delle analisi.
Generalmente questo valore viene valutato basandosi sul criterio di Courant, esprimibile
nella maniera seguente:
Equazioni DSV:
𝐶 =
𝑉∆𝑇
∆𝑋≤ 1 [10a]
Modello diffusivo:
𝐶 =
𝑉∆𝑇
∆𝑋≤ 2 [10b]
Tenendo presente che V e ΔX sono rispettivamente la velocità massima dell’acqua e la
dimensione media delle celle.
Molto importante è anche sottolineare che il software computa la velocità della corrente nei
nodi della griglia, mentre il livello idrico è calcolato nel cell center della griglia stessa.

17
2.1.4 Modellazione delle aree urbane
Considerato un generico dominio 2D, le aree urbane possono essere modellate seguendo
due differenti procedimenti:
Topografia di dettaglio degli edifici: metodo che prevede l’inserimento nel modello
digitale del terreno di ogni singolo edificio. E’ possibile utilizzare questa procedura
solamente se si è in possesso di rilevamenti ad alta definizione dell’area.
Introduzione di un parametro di scabrezza: metodo che prevede l’introduzione nel
dominio in analisi di sottosezioni, caratterizzate da diversi parametri di scabrezza.
L’idea di base è quella di suddividere l’area 2D a seconda delle destinazioni d’uso del
terreno. La definizione di queste zone è possibile importando nei Map Layers un file
(shapefile o formato grid) contenente le informazioni necessarie, sfruttando il
comando Add New Land Cover Layer.
A seconda della tipologia di terreno, il manuale di HEC-RAS consiglia i seguenti valori di
scabrezza:
Destinazione d'uso Manning n
singolo edificio 10
zona residenziale 0.12
spazio aperto 0.045
parco 0.04
alberi 0.08
area urbana 0.15
Tabella 2.2: classificazione uso del suolo.
Osservando la Tabella 2.2, si nota come anche i singoli edifici possono essere modellati
introducendo un diverso valore di scabrezza, ad esempio nel caso in cui si ha a disposizione
uno shapefile contenente l’esatto posizionamento degli stessi.
2.1.5 Vantaggi e svantaggi della modellazione 2D
L’utilizzo di un modello bidimensionale è necessario per valutare le altezze e le velocità
idriche in aree golenali o comunque in quegli alvei in cui è complicato definire a priori il
percorso dell’acqua. L’analisi 2D è quindi necessaria per valutare il flusso idrico in un’area
urbana, data la grandissima quantità di ostacoli che indebolisce l’ipotesi di moto
monodimensionale.
Gli svantaggi principali rispetto ai modelli 1D riguardano il tempo di calcolo e la maggiore
quantità di dati geometrici da inserire in input.

18
Un altro fattore da considerare in un’analisi 2D riguarda il set di equazioni da utilizzare per
la risoluzione; il modello diffusivo in molti casi garantisce risultati confrontabili con quelli
ottenibili dalle equazioni DSV complete, con l’ulteriore vantaggio di un tempo
computazionale molto inferiore.
Nel caso in cui si decidesse di analizzare il flusso idrico con un modello misto 1D/2D,
potrebbero sorgere problemi di convergenza della soluzione nelle zone di collegamento,
spesso risolvibili aumentando il numero di iterazioni fra elementi 1D e 2D.
Un problema presente nell’attuale versione del software riguarda la modellazione dei ponti
nelle aree 2D. Al momento, nell’editor Geometric Data non è infatti presente un comando
per la creazione di un ponte; se si desidera introdurre questo tipo di strutture bisogna
utilizzare lo strumento e l’editor SA/2D Area Connection in corrispondenza di una Break
Line, e creare un collegamento all’interno della stessa area 2D di tipo Weir and Culvert.
Figura 2.4: esempio creazione di un ponte.
Terminate le simulazioni, all’interno del modulo Ras Mapper si possono visualizzare una
grande quantità di soluzioni, che riguardano non solo le altezze e le velocità idriche, ma
anche ad esempio i tempi di arrivo dell’acqua a partire dall’istante iniziale considerato.
I risultati completi per ogni cella e istante temporale vengono comunque salvati dal software
in forma binaria all’interno di un file HDF, leggibile utilizzando il programma HDFView 2.11
scaricabile gratuitamente dal web.

19
Figura 2.5: esempio file HDF.
2.2 Validazione dei risultati del software
Ogni programma informatico, prima di essere utilizzato, necessita di una fase di verifica
dei risultati prodotti. In questo caso, si è valutata l’efficacia del software basandosi sulle
osservazioni derivanti da un esperimento presente in letteratura condotto al Centro
Elettrotecnico Sperimentale Italiano (CESI); nella struttura è infatti presente un modello
fisico della valle del fiume Toce (scala 1:100), impiegato per esperimenti di propagazione
delle onde di piena.
Nel processo di validazione descritto in seguito si sono inoltre confrontati i risultati ottenuti
utilizzando il set di equazioni completo DSV e quello semplificato relativo al modello
diffusivo.
20
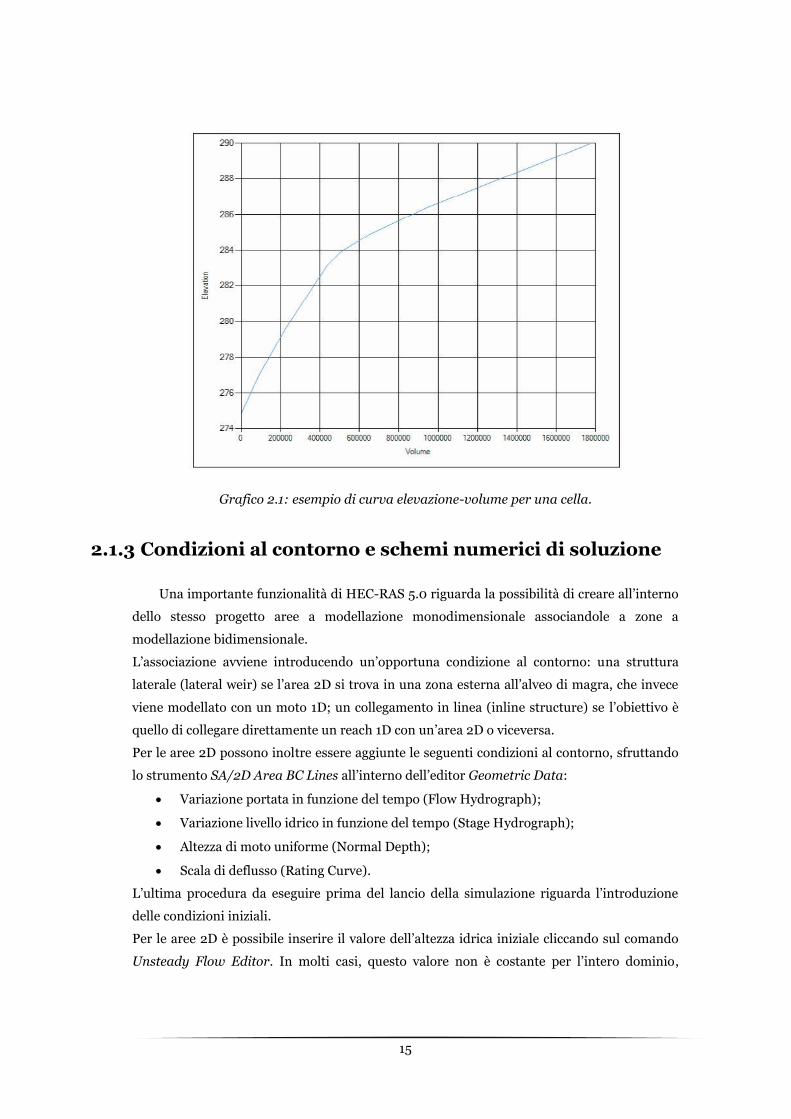
Figura 2.6: modello fisico della valle del fiume Toce.
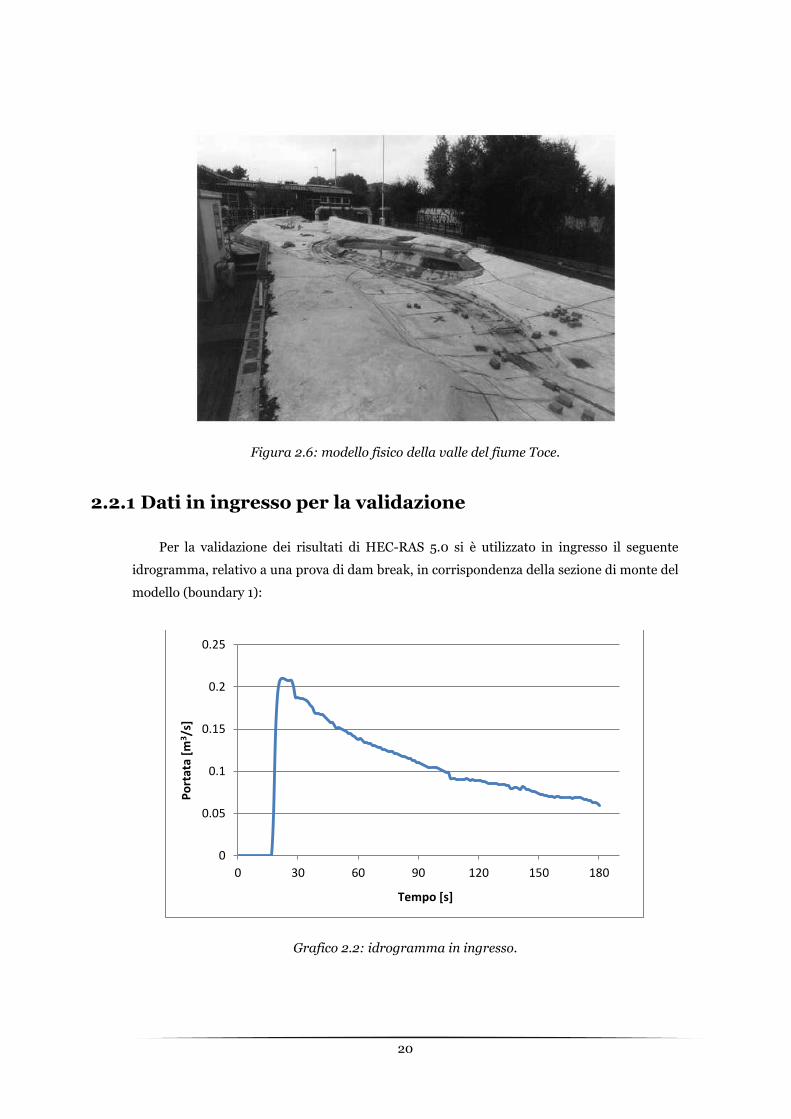
2.2.1 Dati in ingresso per la validazione
Per la validazione dei risultati di HEC-RAS 5.0 si è utilizzato in ingresso il seguente
idrogramma, relativo a una prova di dam break, in corrispondenza della sezione di monte del
modello (boundary 1):
Grafico 2.2: idrogramma in ingresso.
0
0.05
0.1
0.15
0.2
0.25
0 30 60 90 120 150 180
Po
rtat
a [m
3 /s]
Tempo [s]
21
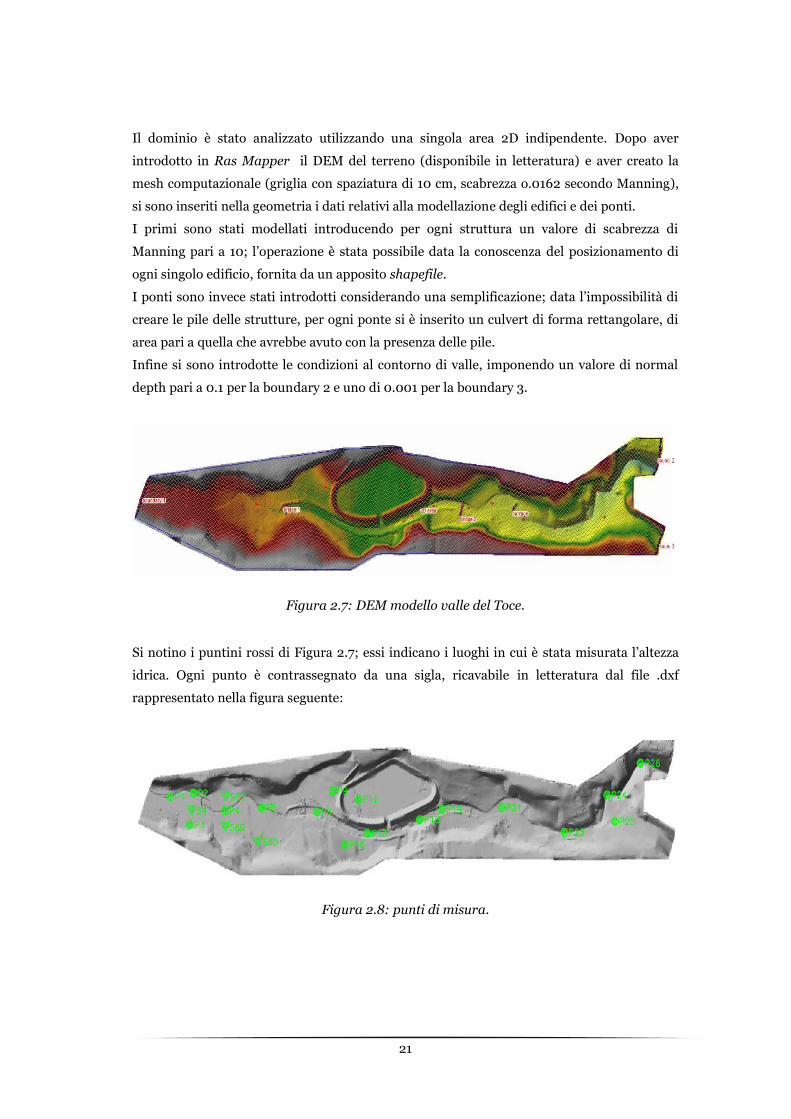
Il dominio è stato analizzato utilizzando una singola area 2D indipendente. Dopo aver
introdotto in Ras Mapper il DEM del terreno (disponibile in letteratura) e aver creato la
mesh computazionale (griglia con spaziatura di 10 cm, scabrezza o.0162 secondo Manning),
si sono inseriti nella geometria i dati relativi alla modellazione degli edifici e dei ponti.
I primi sono stati modellati introducendo per ogni struttura un valore di scabrezza di
Manning pari a 10; l’operazione è stata possibile data la conoscenza del posizionamento di
ogni singolo edificio, fornita da un apposito shapefile.
I ponti sono invece stati introdotti considerando una semplificazione; data l’impossibilità di
creare le pile delle strutture, per ogni ponte si è inserito un culvert di forma rettangolare, di
area pari a quella che avrebbe avuto con la presenza delle pile.
Infine si sono introdotte le condizioni al contorno di valle, imponendo un valore di normal
depth pari a 0.1 per la boundary 2 e uno di 0.001 per la boundary 3.
Figura 2.7: DEM modello valle del Toce.
Si notino i puntini rossi di Figura 2.7; essi indicano i luoghi in cui è stata misurata l’altezza
idrica. Ogni punto è contrassegnato da una sigla, ricavabile in letteratura dal file .dxf
rappresentato nella figura seguente:
Figura 2.8: punti di misura.

22
Figura 2.9: bridge 1: ponte vero e ponte modellato.
Figura 2.10: bridge 2: ponte vero e ponte modellato.
Figura 2.11: barrage vero e modellato.

23
2.2.2 Risultati
A questo punto si possono lanciare le due simulazioni (equazioni DSV e modello
diffusivo). Nella Tabella 2.3 sono riportate le osservazioni nei punti di misura del modello
fisico:
esperim. altezze idriche nei punti di misura [m]
Tempo [s] P1 P2 P3 P4 P5 P6
60 0.085 0.099 0.047 0.074 0.108 nd
120 0.066 0.073 0.033 0.056 0.068 nd
180 0.057 0.061 0.022 0.047 0.06 nd
Tempo [s] P7 P8 P9 P10 P12 P13
60 nd 0.126 0.1 0.022 0 0.098
120 nd 0.121 0.085 0.035 0 0.131
180 nd 0.094 0.062 0.007 0 0.102
Tempo [s] P18 P19 P21 P23 P24 P25
60 0.124 0.101 0.035 0.083 0.106 0
120 0.139 0.107 0.122 0.122 0.272 0.082
180 0.109 0.086 0.108 0.156 0.281 0.106
Tempo [s] P26 S2 S4 S6S S6D S8D
60 0 0.114 0.042 0.017 0.058 0.069
120 0.12 0.097 0.026 0.018 0.047 0.045
180 0.132 0.085 0.03 0.011 0.04 0.028
Tabella 2.3: osservazioni sperimentali.
Nella Tabella 2.4 e in quella 2.5 sono invece riportati i valori delle altezze idriche calcolati da
HEC-RAS. L’errore tra livello osservato e computato è stato valutato introducendo il
parametro NRMSE (Normalized Root Mean Square Error), che si basa sulla seguente
formulazione:
𝑁𝑅𝑀𝑆𝐸 =
𝑅𝑀𝑆𝐸
𝑋𝑜𝑠𝑠
[11]
Con 𝑅𝑀𝑆𝐸 = √[∑ (𝑋𝑜𝑠𝑠,𝑖 − 𝑋𝑚𝑜𝑑𝑒𝑙,𝑖)2𝑛
𝑖=1 ]/𝑛.

24
diffusivo altezze idriche nei punti di misura [m]
Tempo [s] P1 P2 P3 P4 P5 P6
60 0.084 0.07 0.046 0.099 0.125 0.072
120 0.069 0.056 0.032 0.067 0.07 0.014
180 0.06 0.05 0.024 0.061 0.059 0.005
NRMSE 0.04 0.26 0.04 0.30 0.13 nd
Tempo [s] P7 P8 P9 P10 P12 P13
60 0.155 0.193 0.127 0.107 0.062 0
120 0.068 0.102 0.035 0 0.033 0.101
180 0.055 0.09 0.022 0 0.005 0.082
NRMSE nd 0.35 0.49 2.49 nd 0.55
Tempo [s] P18 P19 P21 P23 P24 P25
60 0 0 0 0 0 0
120 0.128 0.102 0.162 0.246 0.33 0.144
180 0.108 0.077 0.07 0.12 0.119 0
NRMSE 0.58 0.60 0.43 0.74 0.53 1.13
Tempo [s] P26 S2 S4 S6S S6D S8D
60 0 0.08 0.052 0.066 0.058 0.08
120 0.3 0.065 0.039 0.033 0.026 0.021
180 0.1 0.055 0.031 0.026 0.019 0.012
NRMSE 1.26 0.32 0.29 2.01 0.35 0.38
Tabella 2.4: risultati modello diffusivo.
DSV altezze idriche nei punti di misura [m]
Tempo [s] P1 P2 P3 P4 P5 P6
60 0.105 0.091 0.058 0.066 0.097 0.046
120 0.082 0.071 0.039 0.056 0.079 0.03
180 0.068 0.06 0.03 0.051 0.07 0.017
NRMSE 0.23 0.06 0.25 0.09 0.14 nd
Tempo [s] P7 P8 P9 P10 P12 P13
60 0.108 0.154 0.099 0.033 0 0.121
120 0.092 0.141 0.08 0.02 0.029 0.127
180 0.075 0.119 0.06 0.003 0.045 0.107
NRMSE nd 0.22 0.04 0.51 nd 0.12
Tempo [s] P18 P19 P21 P23 P24 P25
60 0.173 0.097 0.057 0 0 0
120 0.169 0.096 0.132 0.16 0.267 0.083
180 0.152 0.084 0.113 0.151 0.258 0.074
NRMSE 0.33 0.07 0.16 0.44 0.29 0.29
Tabella 2.5a: risultati modello completo DSV.

25
DSV altezze idriche nei punti di misura [m]
Tempo [s] P26 S2 S4 S6S S6D S8D
60 0 0.144 0.056 0.025 0.048 0.054
120 0.171 0.114 0.037 0.022 0.035 0.038
180 0.173 0.095 0.029 0.017 0.027 0.025
NRMSE 0.45 0.21 0.32 0.41 0.24 0.21
Tabella 2.5b: risultati modello completo DSV.
2.2.3 Considerazioni finali
Calcolando il valore medio di NRMSE per le due simulazioni, si ottiene un buon
indicatore sulla validità del modello.
Di seguito sono riportati i risultati ottenuti:
modello NRMSE durata simul.
diffusivo 0.63 7 min
DSV completo 0.24 22 min
Tabella 2.6: NRMSE medio.
In generale, per l’analisi di un esperimento di dam break è sicuramente consigliabile
utilizzare un modello DSV completo, in quanto questo tipo di prove produce condizioni
estreme di allagamento difficilmente riproducibili con modelli semplificati.
Comunque, analizzando la Tabella 2.4 riferita al modello diffusivo, si è notata la presenza di
quattro punti (P10, P25, P26 e S6S) in cui l’errore è notevolmente superiore a quello medio.
Questa imprecisione è causata probabilmente dal particolare posizionamento dei punti nel
modello fisico, che potrebbe determinare le seguenti problematiche:
Punti P10 e S6S: si trovano in prossimità di ostacoli o rilievi del terreno che
producono una deviazione del flusso idrico verso aree limitrofe, causando a seconda
del caso sovrastima o sottostima dell’altezza dell’acqua.
Punto P25: è posizionato in un’area esterna all’alveo principale a forte
contropendenza, condizione che rende difficile la simulazione con un modello
diffusivo.
Punto P26: si trova immediatamente a valle di un restringimento di sezione fluviale,
che potrebbe causare fenomeni dissipativi oltre al passaggio della corrente per lo
stato critico. E’ evidente che un modello semplificato privo di termini inerziali non
sia in grado di simulare correttamente il flusso idrico in questo tipo di aree.

26
Si è quindi deciso di ricalcolare il valore medio di NRMSE eliminando queste quattro
osservazioni, confrontando i risultati per gli altri punti che si trovano in zone a moto
pressoché uniforme.
Si sono pertanto ottenuti i seguenti risultati:
modello NRMSE
diffusivo 0.37
DSV completo 0.20
Tabella 2.7: nuovo NRMSE medio.
In questo caso, l’errore finale del modello diffusivo è molto inferiore rispetto alla situazione
precedente e anche il valore relativo al modello completo decresce.
Per le due simulazioni, i valori medi di NRMSE non sono così differenti; questa osservazione
conferma come il modello diffusivo, per condizioni di moto pseudo-uniforme, conduca a
risultati del tutto confrontabili a quelli ottenibili applicando le equazioni DSV complete.
In conclusione, per l’analisi di un fenomeno di inondazione, l’utilizzo di un modello diffusivo
può essere vantaggioso, essenzialmente per due motivi:
Tempo computazionale limitato (vedi Tabella 2.6).
Errori contenuti in assenza di condizioni di moto critiche (risalti idraulici, condizioni
estreme di inondazione).

27
CAPITOLO 3
MODELLO FISICO DI LABORATORIO
Dopo aver accertato l’efficienza del software, il lavoro è proseguito eseguendo una serie
di esperimenti in laboratorio, con l’obiettivo iniziale di verificare l’efficienza del modello
fisico.
Nel presente capitolo verrà pertanto descritto il prototipo di laboratorio utilizzato per il
confronto sperimentale, con le annesse problematiche relative alla portata transitante e alla
scabrezza.
3.1 Modello fisico delle opere di scarico e regolazione:
diga di laminazione di Pratolungo
Per il confronto e la validazione di tutti i risultati ottenuti mediante l’impiego del
software HEC-RAS 5.0, si è utilizzato il modello fisico della diga di laminazione di
Pratolungo.
Questo prototipo è stato realizzato dal Politecnico di Milano a supporto di un progetto per la
riduzione del rischio di esondazione del Fosso di Pratolungo, corso d’acqua affluente del
fiume Aniene, nel Lazio.
In particolare, il modello fisico rappresenta le opere di regolazione e sfioro del corpo diga e
circa 20 m di ciascun lato del rilevato arginale per una larghezza complessiva di 4.6 m, che in
scala corrispondono a 115 m. Lungo la sezione longitudinale, sono invece rappresentati in
scala 20 m a monte degli sfioratori e 70 m a valle del bacino di dissipazione.
Il modello è alimentato da una portata proveniente da due stramazzi triangolari di tipo
Thompson, molto usati in laboratorio per la loro elevata sensibilità alle basse portate
garantita proprio dalla particolare conformazione triangolare. Tramite l’impiego di

28
un’apposita strumentazione e della definizione della curva livelli - portate è possibile sapere
esattamente la portata in uscita dagli stramazzi che fluisce all’interno del modello. La
massima portata ottenibile, in questo caso, è di circa 110 L/s.
Figura 3.1: stramazzi triangolari Thompson in funzione.
Il livello idrico all’interno dell’invaso di laminazione è regolato da due luci a battente di
forma rettangolare, di altezza 3 m e larghezza 2 m; considerando la scala geometrica, nel
modello fisico queste dimensioni sono rispettivamente di 12 cm e 8 cm. Si noti come
l’apertura delle bocche di regolazione possa essere ridotta tramite l’abbassamento di
un’apposita paratoia. Una portata di piena elevata comporta inoltre l’attivazione degli
sfioratori di superficie, sagomati con profilo Creager-Scimemi.
Figura 3.2: geometria luci a battente.

29
L’obiettivo del lavoro è quello di valutare i livelli e le velocità idriche, in corrispondenza del
passaggio di una certa portata di piena, nella piana alluvionale a valle della diga di
laminazione.
Figura 3.3: modello in scala diga di laminazione di Pratolungo.
Il rapporto λ tra le lunghezze nel modello fisico e quelle reali è di 1:25, mentre quello delle
portate è pari a 1:3125; questi valori sono stati definiti in base ad una serie di considerazioni
riguardanti le seguenti caratteristiche:
rappresentatività delle grandezze idrauliche (tiranti, pressioni, sforzi e velocità),
gestione delle portate circolanti e capacità di realizzazione in scala degli elementi più
piccoli;
ingombri del modello all’interno del laboratorio.
Il modello fisico prevede la possibilità di introdurre diverse condizioni al contorno,
attraverso l’inserimento o la rimozione di due sfioratori laterali e uno frontale (Figura 3.3).
Questa soluzione è stata adottata a causa della limitata lunghezza longitudinale del prototipo
(circa 2 m per la piana alluvionale), che non permette di rappresentare correttamente il
rigurgito causato dalla presenza del Grande Raccordo Anulare (GRA), posto a circa 650 m a
valle delle opere di sbarramento.
Nel nostro caso, la condizione al contorno di valle è stata ottenuta ostruendo solamente la
sezione del canale inciso, eliminando lo sfioratore frontale; questa decisione è stata presa in
modo da favorire un allagamento della piana alluvionale anche per portate non elevatissime
e per facilitare le misurazioni nelle zone potenzialmente allagabili all’esterno dell’alveo
inciso.

30
3.1.1 Rilievo sezioni fluviali e quote del terreno della piana
alluvionale
Una corretta modellazione 2D del flusso idrico è possibile solamente se si è in possesso
di un modello digitale del terreno dell’area in analisi. Nel nostro caso, il DEM della piana
alluvionale è stato creato all’interno di Ras Mapper, a partire dai rilevamenti delle sezioni
fluviali.
In particolare, per l’alveo inciso, si sono considerate sei sezioni principali, con misurazioni
ogni 10 cm estese anche all’area della piana alluvionale e 4 sezioni secondarie, con rilievi
ripetuti ogni 20 cm.
Figura 3.4: schema del rilievo e coordinate di ogni punto.
Le misure sono state effettuate servendosi di un’asta idrometrica dotata di nonio, in grado di
misurare lunghezze con approssimazioni inferiori al millimetro. Tali aste sono posizionate su
travi porta-asta a loro volta poggiate su una struttura di travi in acciaio che definisce un
piano orizzontale al di sopra del modello fisico. Questo permette di disporre di un piano di
riferimento per la misura delle quote del terreno nei punti di interesse.

31
Figura 3.5: asta idrometrica e trave porta-asta.
In seguito sono esposti i dati relativi alle sei sezioni principali, ordinate da monte verso valle,
una volta inserite le quote misurate in HEC-RAS:
Grafico 3.1: sezione 600.
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
0 0.5 1 1.5 2 2.5 3 3.5 4
Ele
vati
on
[m
]
Station [m]

32
Grafico 3.2: sezione 500.
Grafico 3.3: sezione 400.
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
0.23
0 0.5 1 1.5 2 2.5 3 3.5 4
Ele
vati
on
[m
]
Station [m]
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
0.23
0 0.5 1 1.5 2 2.5 3 3.5 4
Ele
vati
on
[m
]
Station [m]

33
Grafico 3.4: sezione 300.
Grafico 3.5: sezione 200.
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
0.23
0 0.5 1 1.5 2 2.5 3 3.5 4
Ele
vati
on
[m
]
Station [m]
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
0.23
0 0.5 1 1.5 2 2.5 3 3.5 4
Ele
vati
on
[m
]
Station [m]

34
Grafico 3.6: sezione 100.
Si noti come la distanza lungo la direzione dell’alveo fra una sezione e l’altra sia di 40 cm,
tranne fra le sezioni più a monte 600 e 500, dove l’intervallo è di 38 cm.
Le sezioni secondarie (Figura 3.4) si trovano invece a metà del tratto fra la sezione principale
considerata e quella immediatamente a valle.
Nei grafici precedenti, oltre alle quote del terreno, sono inoltre evidenziati per ogni sezione i
due punti che definiscono l’alveo di magra, indicati in rosso.
Immediatamente a valle della sezione 100, a una distanza di 5 cm, è stata infine aggiunta
un’ultima sezione (95) in corrispondenza dell’ostruzione del canale inciso.
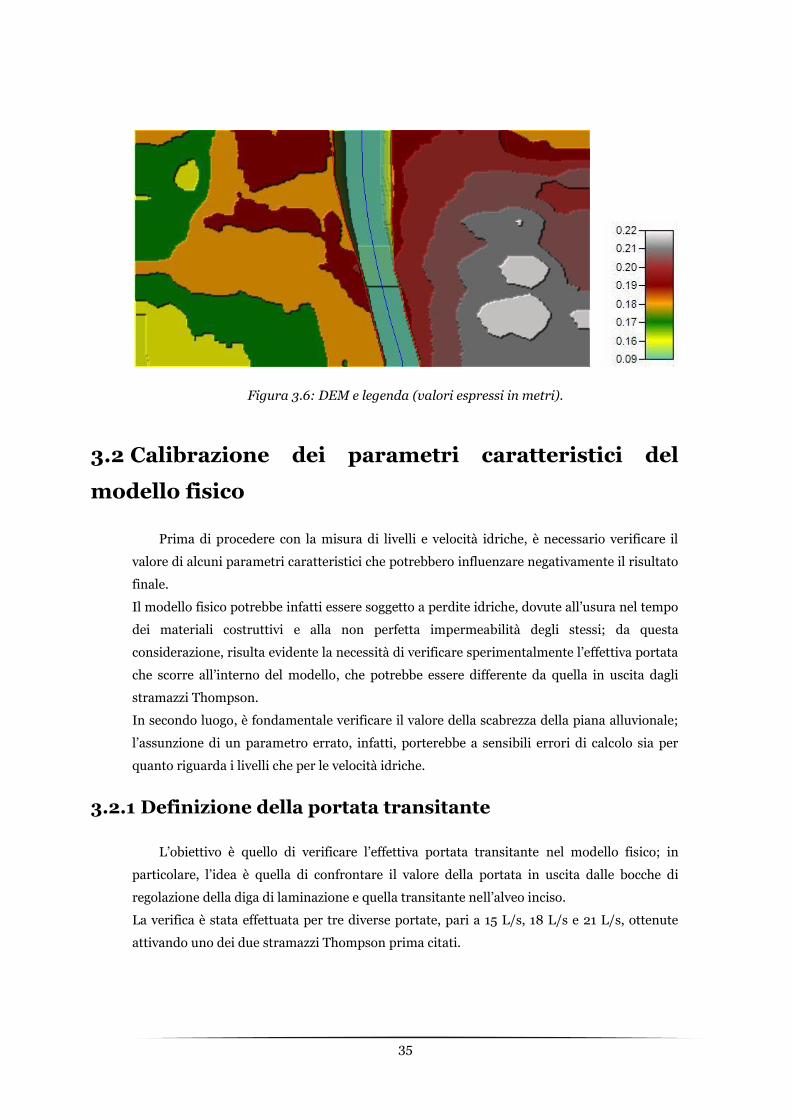
3.1.2 Definizione del modello digitale del terreno
A partire dai dati delle sezioni principali e secondarie, Ras Mapper è in grado di creare
un DEM a griglia di tipo raster, in cui ogni cella contiene l’informazione relativa alla quota
del terreno.
Nel caso in analisi, si è scelta una dimensione della griglia di 1 cm, valore sufficientemente
piccolo per le modellizzazioni idriche richieste.
Si noti come RAS Mapper utilizzi il formato GeoTIFF per la creazione del DEM; questo per la
maggiore facilità di impiego di questo tipo di formato, dovuta anche alla minore dimensione
del file rispetto ai tradizionali formati FLT o ESRI grid.
Di seguito si riporta quindi il modello digitale del terreno così ottenuto:
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
0.23
0 0.5 1 1.5 2 2.5 3 3.5 4
Ele
vati
on
[m
]
Station [m]
35
Figura 3.6: DEM e legenda (valori espressi in metri).
3.2 Calibrazione dei parametri caratteristici del
modello fisico
Prima di procedere con la misura di livelli e velocità idriche, è necessario verificare il
valore di alcuni parametri caratteristici che potrebbero influenzare negativamente il risultato
finale.
Il modello fisico potrebbe infatti essere soggetto a perdite idriche, dovute all’usura nel tempo
dei materiali costruttivi e alla non perfetta impermeabilità degli stessi; da questa
considerazione, risulta evidente la necessità di verificare sperimentalmente l’effettiva portata
che scorre all’interno del modello, che potrebbe essere differente da quella in uscita dagli
stramazzi Thompson.
In secondo luogo, è fondamentale verificare il valore della scabrezza della piana alluvionale;
l’assunzione di un parametro errato, infatti, porterebbe a sensibili errori di calcolo sia per
quanto riguarda i livelli che per le velocità idriche.
3.2.1 Definizione della portata transitante
L’obiettivo è quello di verificare l’effettiva portata transitante nel modello fisico; in
particolare, l’idea è quella di confrontare il valore della portata in uscita dalle bocche di
regolazione della diga di laminazione e quella transitante nell’alveo inciso.
La verifica è stata effettuata per tre diverse portate, pari a 15 L/s, 18 L/s e 21 L/s, ottenute
attivando uno dei due stramazzi Thompson prima citati.

36
Si sono considerati tre valori di portata molto bassi; questo per semplificare i calcoli,
evitando l’attivazione degli sfioratori di superficie della diga e l’allagamento della piana
alluvionale. A questo scopo, lo sbarramento di valle dell’alveo inciso è stato
momentaneamente rimosso.
Si noti che nel modello fisico il massimo livello dell’invaso che non comporta l’attivazione
degli sfioratori è pari a 30 cm, 7.5 m nella realtà.
Il valore della portata in uscita dall’efflusso è stato calcolato utilizzando l’equazione
caratteristica delle luci a battente:
𝑄𝑒𝑓𝑓 = 𝜇 ∙ 𝐴 ∙ √2𝑔ℎ [12]
Con μ = 0.75 coefficiente di efflusso, A area delle luci e h altezza idrica dell’invaso rispetto al
baricentro delle luci a battente, ipotizzando acqua ferma all’interno del bacino.
Per livelli di portata così bassi l’efflusso a battente non entra però in funzione, in quanto il
flusso idrico presenta un livello inferiore ai 12 cm dell’altezza della luce.
In seguito si è quindi ricercato, per i tre valori di portata considerati, l’abbassamento
ottimale della paratoia.
Il valore transitante all’interno dell’alveo inciso, invece, è stato calcolato sfruttando la nota
relazione:
𝑄 = 𝑉 ∙ 𝐴 [13]
Con V velocità idrica per la sezione considerata, in questo caso le sezioni rettangolari 300 e
200 e A area della sezione bagnata.
La velocità V è stata calcolata utilizzando un micro-mulinello; il valore ricercato viene
visualizzato sullo schermo dell’apparecchio e indica la frequenza di rotazione in Hertz dello
strumento immerso in acqua.
Per ricavare la velocità idrica in m/s si fa riferimento alla seguente formulazione:
{𝑉 = 0.0046𝑓 + 0.1984 𝑠𝑒 𝑓 < 110 𝐻𝑧𝑉 = 0.0080𝑓 − 0.1747 𝑠𝑒 𝑓 > 110 𝐻𝑧
[14]
Con f frequenza di rotazione del mulinello (Hz).

37
Figura 3.7: micro-mulinello.
Di seguito si riportano quindi i risultati ottenuti:
a [m] 0.12
a [m] 0.1
a [m] 0.09
b [m] 0.08
b [m] 0.08
b [m] 0.08
0.75
0.75
0.75
Q [L/s] h [cm]
Q [L/s] h [cm]
Q [L/s] h [cm]
30 22.14
30 31.89
30 39.37
29 20.69
29 29.80
29 36.79
28 19.29
28 27.78
28 34.29
27 17.94
27 25.83
27 31.89
26 16.63
26 23.95
26 29.57
25 15.38
25 22.14
25 27.34
24 14.17
24 20.41
24 25.20
23 13.02
23 18.74
23 23.14
22 11.91
22 17.15
22 21.17
21 10.85
21 15.63
21 19.29
20 9.84
20 14.17
20 17.50
19 8.88
19 12.79
19 15.79
18 7.97
18 11.48
18 14.17
17 7.11
17 10.24
17 12.64
16 6.30
16 9.07
16 11.20
15 5.54
15 7.97
15 9.84
Tabelle 3.1: apertura ottimale luci a battente, con a altezza della luce e b larghezza.

38
Come si nota dalle Tabelle 3.1, per un’altezza della luce pari a 12 cm, l’efflusso a battente non
si attiva per nessuna delle tre portate in analisi, quindi è necessario ridurre l’area delle
bocche di regolazione abbassando una paratoia.
Osservando anche i risultati delle Tabelle 3.2, si è deciso di considerare come valore ottimale
quello corrispondente ad un’altezza della luce di 8.5 cm; si nota infatti come già per
un’apertura di 7 cm, per la portata massima di 21 L/s, si avrebbe un’altezza idrica dell’invaso
superiore ai 30 cm, che comporterebbe l’attivazione degli sfioratori frontali.
a [m] 0.085
a [m] 0.08
a [m] 0.07
b [m] 0.08
b [m] 0.08
b [m] 0.08
0.75
0.75
0.75
Q [L/s] h [cm]
Q [L/s] h [cm]
Q [L/s] h [cm]
30 44.14
30 49.82
30 65.08
29 41.24
29 46.56
29 60.81
28 38.45
28 43.40
28 56.69
27 35.75
27 40.36
27 52.71
26 33.15
26 37.42
26 48.88
25 30.65
25 34.60
25 45.19
24 28.25
24 31.89
24 41.65
23 25.94
23 29.29
23 38.25
22 23.73
22 26.79
22 35.00
21 21.63
21 24.41
21 31.89
20 19.62
20 22.14
20 28.92
19 17.70
19 19.99
19 26.10
18 15.89
18 17.94
18 23.43
17 14.17
17 16.00
17 20.90
16 12.55
16 14.17
16 18.51
15 11.03
15 12.46
15 16.27
Tabelle 3.2: apertura ottimale luci a battente.
Dopo aver definito la dimensione dell’apertura delle bocche di regolazione, si sono misurate
per le sezioni fluviali l’altezza idrica tramite asta idrometrica, a cui è stata aggiunta per le
sezioni rettangolari 300 e 200 la misura della velocità tramite micro-mulinello.
È stato infine misurato il tirante idrico all’interno della diga di laminazione, utilizzando una
seconda asta idrometrica.
Si sono ottenuti i seguenti risultati:

39
Q = 15 L/s
Q = 18 L/s
sezione h [m] v [m/s]
sezione h [m] v [m/s]
invaso 0.431 /
invaso 0.4675 /
600 0.1404 /
600 0.1412 /
500 0.1502 /
500 0.1485 /
400 0.1499 /
400 0.151 /
300 0.1484 0.865
300 0.1532 0.945
200 0.1246 1.185
200 0.1375 1.065
Q = 21 L/s
sezione h [m] v [m/s]
invaso 0.5055 /
600 0.1334 /
500 0.1188 /
400 0.1575 /
300 0.158 0.985
200 0.1452 1.025
Tabelle 3.3: altezze e velocità misurate per le tre portate.
Sapendo che la quota del fondo dell’invaso è pari a 0.29 m, si è confrontato il valore di
portata ottenuto utilizzando le formule [12] e [13], ottenendo i seguenti risultati:
Q = 15 L/s
Q = 18 L/s
Q = 21 L/s
sezione Q [L/s]
sezione Q [L/s]
sezione Q [L/s]
300 14.02
300 16.63
300 18.71
200 13.71
200 16.31
200 17.98
efflusso 14.17
efflusso 16.59
efflusso 18.78
Tabelle 3.4: portate calcolate.
Analizzando i risultati si nota come le portate, per ognuno dei tre casi, assumano valori molto
simili, osservazione che porta ad affermare l’assenza di perdite idriche fra la diga di
laminazione e le sezioni di valle 300 e 200 dell’alveo inciso.
Le portate calcolate risultano comunque inferiori rispetto a quelle in uscita dallo stramazzo
Thompson, considerazione che conferma l’esistenza di perdite idriche nel modello.
Per la valutazione esatta della portata transitante nella piana alluvionale, è quindi opportuno
misurare l’altezza idrica all’interno dell’invaso, ricavando poi la portata dalla formula [12]
dell’efflusso.

40
3.2.2 Definizione della scabrezza
Un parametro che influenza sensibilmente i risultati delle simulazioni idriche è quello
relativo alla scabrezza. Il modello fisico in analisi è stato realizzato utilizzando il calcestruzzo
come materiale di costruzione, dato che spinge ad ipotizzare un valore di scabrezza secondo
Strickler compreso fra i 50 e 60 m1/3/s.
La calibrazione del parametro è stata eseguita in HEC-RAS, utilizzando un moto
bidimensionale, ripetendo le simulazioni per diversi valori di scabrezza; si è considerato
valido il valore che meglio ha approssimato sia le altezze idriche rilevate in alveo sia quelle
misurate in una serie di punti della piana alluvionale.
Per quanto riguarda le condizioni al contorno imposte al moto, per prima cosa si sono
realizzati tre idrogrammi tali da ricreare il moto permanente relativo alle portate considerate
(15, 18 e 21 L/s), imponendoli come condizione di monte in corrispondenza della sezione 600
dell’alveo inciso.
A valle, invece, si sono imposte due condizioni di normal depth (friction slope pari a 0.01) ai
lati del canale, ostruito all’altezza della sezione 95.
Grafico 3.7: idrogrammi in ingresso al modello.
Si noti come il valore di portata inserito nella simulazione, per ciascuno dei tre casi, sia pari
al valore effettivo di portata transitante nel modello determinato nel paragrafo 3.2.1.
I calcoli sono stati ripetuti per quattro differenti valori di scabrezza di Strickler (50, 53, 57,
60 m1/3/s) ottenendo i seguenti risultati:
0
0.005
0.01
0.015
0.02
0.025
0 30 60 90 120 150 180
Po
rtat
a [m
3/s
]
Tempo [s]
Q = 14.2 L/s
Q = 16.6 L/s
Q = 18.8 L/s

41
Caso 1: Qeff = 14.17 L/s
h calcolata [m]
punto h osservata [m] ks=50 ks=53 ks=57 ks=60
600 0.106 0.117 0.116 0.116 0.115
500 0.112 0.117 0.116 0.116 0.115
400 0.107 0.117 0.116 0.115 0.115
300 0.110 0.109 0.108 0.107 0.107
200 0.119 0.116 0.116 0.115 0.115
100 0.124 0.116 0.116 0.115 0.115
500,16 0.007 0.019 0.016 0.016 0.016
200,16 0.013 0.016 0.016 0.015 0.014
100,16 0.017 0.02 0.02 0.019 0.018
250,9 0.010 0.015 0.014 0.014 0.013
450,3 0.017 0.022 0.021 0.021 0.02
450,1 0.018 0.03 0.029 0.028 0.028
250,1 0.006 0.016 0.015 0.014 0.013
250,B 0.014 0.007 0.006 0.006 0.005
Tabella 3.5: altezze osservate e calcolate, caso 1.
Caso 2: Qeff = 16.59 L/s
h calcolata [m]
punto h osservata [m] ks=50 ks=53 ks=57 ks=60
600 0.106 0.119 0.118 0.117 0.117
500 0.111 0.119 0.118 0.117 0.117
400 0.109 0.118 0.118 0.117 0.116
300 0.113 0.11 0.11 0.109 0.108
200 0.125 0.118 0.117 0.117 0.116
100 0.127 0.118 0.117 0.117 0.116
500,16 0.009 0.021 0.018 0.016 0.016
200,16 0.022 0.018 0.018 0.017 0.015
100,16 0.022 0.022 0.021 0.021 0.019
250,9 0.014 0.017 0.016 0.015 0.015
450,3 0.015 0.024 0.023 0.022 0.022
450,1 0.018 0.031 0.031 0.03 0.03
250,1 0.006 0.018 0.017 0.016 0.015
250,B 0.018 0.009 0.008 0.007 0.007
Tabella 3.6: altezze osservate e calcolate, caso 2.

42
Caso 3: Qeff = 18.78 L/s
h calcolata [m]
punto h osservata [m] ks=50 ks=53 ks=57 ks=60
600 0.107 0.121 0.12 0.119 0.118
500 0.111 0.12 0.119 0.119 0.118
400 0.110 0.12 0.119 0.118 0.118
300 0.113 0.112 0.111 0.11 0.11
200 0.127 0.119 0.119 0.118 0.117
100 0.131 0.119 0.119 0.118 0.117
500,16 0.011 0.022 0.02 0.02 0.018
200,16 0.014 0.019 0.019 0.018 0.018
100,16 0.024 0.023 0.023 0.022 0.021
250,9 0.015 0.018 0.017 0.017 0.016
450,3 0.019 0.025 0.025 0.024 0.023
450,1 0.020 0.033 0.032 0.031 0.031
250,1 0.010 0.02 0.018 0.017 0.017
250,B 0.018 0.01 0.009 0.009 0.008
Tabella 3.7: altezze osservate e calcolate, caso 3.
Si osservi che i punti identificati da un solo numero si riferiscono alla sezione dell’alveo
inciso in cui è stata effettuata la misura di altezza, mentre le restanti osservazioni fanno
riferimento a punti della piana alluvionale basati sullo schema introdotto in Figura 3.4.
In Tabella 3.8 (vedi pagina seguente) sono infine riportati per ogni punto gli errori fra altezze
osservate e calcolate, utilizzando sempre il NRMSE come indicatore.
Per quanto riguarda le misurazioni in alveo, l’errore minore si riscontra in corrispondenza
dei valori di scabrezza pari a 53 e 57, dato che porterebbe a pensare a un valore ottimale
intorno ai 55 m1/3/s.
Considerando però i punti sulla piana alluvionale, si nota come l’errore medio minore si trovi
in corrispondenza del valore di scabrezza pari a 60, a fronte di un piccolo incremento
dell’errore sulle misurazioni nel canale.
Si è quindi deciso, per tutte le modellazioni effettuate, di utilizzare un ks = 60 m1/3/s, in
modo da ottenere risultati più precisi nelle aree allagabili della piana alluvionale.

43
NRMSE
punto ks=50 ks=53 ks=57 ks=60
600 0.12 0.11 0.11 0.10
500 0.07 0.06 0.06 0.05
400 0.09 0.08 0.07 0.07
300 0.02 0.02 0.03 0.03
200 0.05 0.05 0.06 0.06
100 0.08 0.08 0.08 0.09
500,16 1.23 0.94 0.88 0.80
200,16 0.26 0.26 0.24 0.29
100,16 0.09 0.10 0.09 0.12
250,9 0.32 0.25 0.23 0.18
450,3 0.40 0.37 0.32 0.29
450,1 0.69 0.65 0.60 0.60
250,1 1.56 1.38 1.24 1.14
250,B 0.48 0.54 0.56 0.60
media 0.39 0.35 0.33 0.32
media alv. 0.0710 0.0684 0.0684 0.0686
Tabella 3.8: NRMSE per ogni valore di scabrezza.

44
CAPITOLO 4
PROVE DI LABORATORIO
Dopo aver calibrato i parametri caratteristici del modello fisico, si è proseguito il lavoro
eseguendo un’ulteriore serie di esperimenti, con l’obiettivo finale di identificare una corretta
metodologia per la modellazione in HEC-RAS 5.0 del flusso idrico nelle aree urbane.
Nel presente capitolo verranno pertanto descritte le prove eseguite, presentando infine le
conclusioni a cui si è giunti.
4.1 Introduzione di un’area urbana nel modello fisico
Come detto, l’obiettivo di questi esperimenti è la definizione di una metodologia per la
modellazione del flusso idrico nelle aree urbane. Il confronto sperimentale è infatti
fondamentale per la validazione dei risultati di qualsiasi programma informatico.
Per giungere a questo obiettivo, si sono introdotte delle modifiche al modello fisico, anche
alla luce delle osservazioni relative alle prove eseguite in precedenza.
In particolare, sono stati rimossi i due sfioratori laterali e, in corrispondenza della sezione
500 dell’alveo inciso, è stato introdotto un piccolo ponte in legno; l’idea di base è quella di
facilitare l’allagamento della piana alluvionale, favorendo anche la formazione di un tirante
idrico maggiore.
Per quanto riguarda l’area urbana, è stata riprodotta posizionando una serie di mattoni
(dimensioni 11 × 24 𝑐𝑚) oltre la sponda destra dell’alveo, maggiormente interessata dal
fenomeno di inondazione.
Si noti come alla base di ogni mattone sia stato incollato uno strato di moltoprene, in modo
da favorire una migliore aderenza al terreno dello stesso.

45
Figura 4.1: ponte in legno, sezione 500.
Figura 4.2: mattone per la riproduzione degli edifici.
4.1.1 Esperimento 1
L’obiettivo principale del primo esperimento è quello di verificare l’efficacia delle misure
di velocità all’interno del modello, considerando per ogni punto di rilevamento sia la
componente x sia quella y del moto.
In secondo luogo, si vuole analizzare l’influenza del ponte in legno sulle altezze idriche; a
questo scopo, la prova è stata eseguita senza introdurre un’area urbana.
Di seguito è quindi riportato il posizionamento dei punti di misura all’interno della piana
alluvionale:

46
Figura 4.3: posizionamento punti di misura (esperimento 1).
La prova è stata ripetuta per le tre portate utilizzate in precedenza nella calibrazione del
parametro di scabrezza; le condizioni al contorno introdotte in HEC-RAS sono pertanto le
stesse descritte nel paragrafo 3.2.2, con l’aggiunta di due condizioni di normal depth in
corrispondenza degli sfioratori laterali rimossi, con friction slope pari a 0.001.
L’ultima operazione da effettuare riguarda la modellazione del ponte; seguendo il
procedimento descritto nel paragrafo 2.1.5 si è giunti al seguente risultato:
Figura 4.4: modello ponte in legno.

47
A questo punto si è lanciata la simulazione in HEC-RAS, utilizzando il set di equazioni
relative al modello diffusivo.
4.1.2 Esperimento 2
Per il secondo esperimento si è introdotta un’area urbana semplificata, in modo da
individuare più facilmente il metodo migliore di modellazione del flusso idrico all’interno e
in prossimità della stessa.
In particolare, il posizionamento dei mattoni e dei punti in cui sono state effettuate le
misure, è riassunto nella figura seguente:
Figura 4.5: disposizione mattoni e punti di misura (esperimento 2).
La prova è stata eseguita considerando una portata in ingresso pari a 22.57 L/s, riferita alla
sezione 600 dell’alveo inciso; questo valore è stato ricavato applicando la formula
dell’efflusso per le luci a battente, dopo aver misurato la quota idrica all’interno dell’invaso,
in questo caso uguale a 0.5822 m.
Le condizioni al contorno imposte in HEC-RAS sono quindi identiche al caso precedente, con
l’eccezione dell’idrogramma in ingresso, ricreato nella maniera seguente:
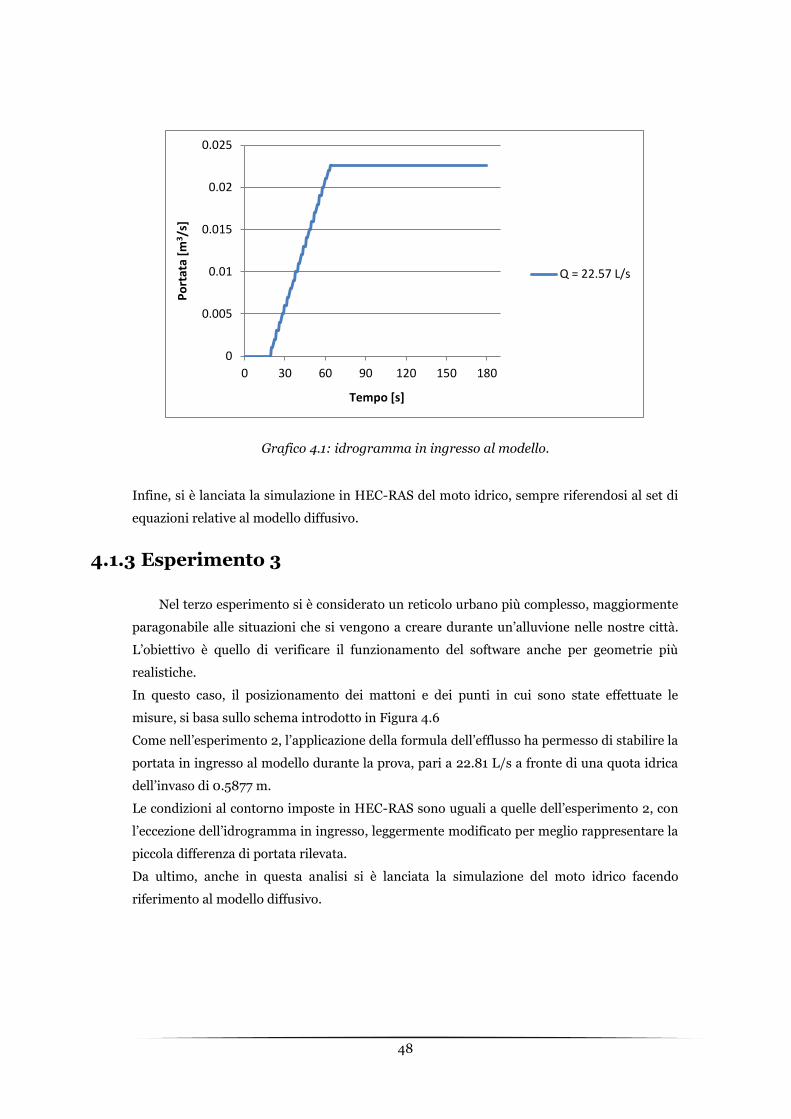
48
Grafico 4.1: idrogramma in ingresso al modello.
Infine, si è lanciata la simulazione in HEC-RAS del moto idrico, sempre riferendosi al set di
equazioni relative al modello diffusivo.
4.1.3 Esperimento 3
Nel terzo esperimento si è considerato un reticolo urbano più complesso, maggiormente
paragonabile alle situazioni che si vengono a creare durante un’alluvione nelle nostre città.
L’obiettivo è quello di verificare il funzionamento del software anche per geometrie più
realistiche.
In questo caso, il posizionamento dei mattoni e dei punti in cui sono state effettuate le
misure, si basa sullo schema introdotto in Figura 4.6
Come nell’esperimento 2, l’applicazione della formula dell’efflusso ha permesso di stabilire la
portata in ingresso al modello durante la prova, pari a 22.81 L/s a fronte di una quota idrica
dell’invaso di 0.5877 m.
Le condizioni al contorno imposte in HEC-RAS sono uguali a quelle dell’esperimento 2, con
l’eccezione dell’idrogramma in ingresso, leggermente modificato per meglio rappresentare la
piccola differenza di portata rilevata.
Da ultimo, anche in questa analisi si è lanciata la simulazione del moto idrico facendo
riferimento al modello diffusivo.
0
0.005
0.01
0.015
0.02
0.025
0 30 60 90 120 150 180
Po
rtat
a [m
3/s
]
Tempo [s]
Q = 22.57 L/s
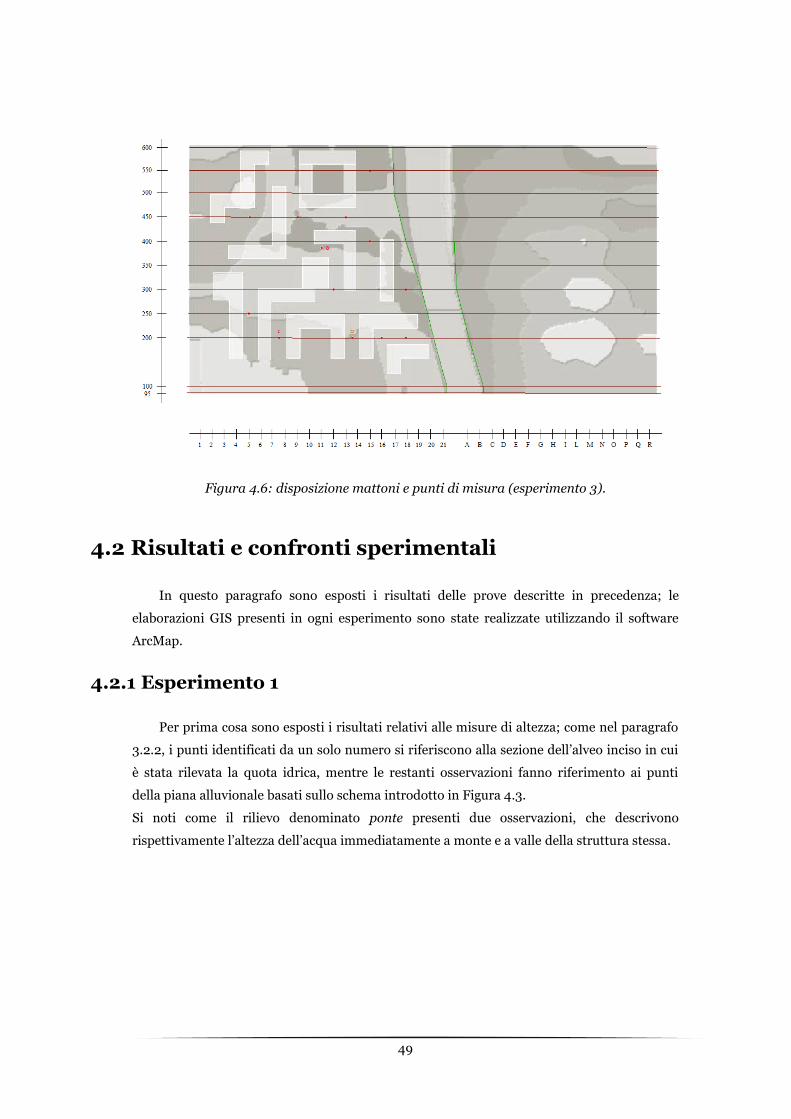
49
Figura 4.6: disposizione mattoni e punti di misura (esperimento 3).
4.2 Risultati e confronti sperimentali
In questo paragrafo sono esposti i risultati delle prove descritte in precedenza; le
elaborazioni GIS presenti in ogni esperimento sono state realizzate utilizzando il software
ArcMap.
4.2.1 Esperimento 1
Per prima cosa sono esposti i risultati relativi alle misure di altezza; come nel paragrafo
3.2.2, i punti identificati da un solo numero si riferiscono alla sezione dell’alveo inciso in cui
è stata rilevata la quota idrica, mentre le restanti osservazioni fanno riferimento ai punti
della piana alluvionale basati sullo schema introdotto in Figura 4.3.
Si noti come il rilievo denominato ponte presenti due osservazioni, che descrivono
rispettivamente l’altezza dell’acqua immediatamente a monte e a valle della struttura stessa.

50
Q = 14.17 L/s
punto quota terr. quota H2O h osservata h calcolata differenza
500,16 0.1834 0.1968 0.013 0.016 0.003
200,16 0.1781 0.1956 0.018 0.014 -0.003
100,16 0.1744 0.191 0.017 0.018 0.001
250,9 0.1759 0.1918 0.016 0.012 -0.004
450,3 0.1695 0.189 0.020 0.017 -0.002
450,1 0.1675 0.1894 0.022 0.024 0.002
250,1 0.1733 0.1842 0.011 0.008 -0.003
250,B 0.1954 0.2097 0.014 0.005 -0.009
600 0.0864 0.2024 0.116 0.117 0.001
ponte 0.0825 0.21 0.128 0.117 -0.011
0.0825 0.2025 0.120 0.115 -0.005
400 0.0875 0.2074 0.120 0.114 -0.006
300 0.0925 0.2073 0.115 0.107 -0.008
200 0.0847 0.2084 0.124 0.114 -0.010
100 0.0846 0.2094 0.125 0.114 -0.011
Tabella 4.1: altezze misurate e calcolate, con Q = 14.17 L/s.
Q = 16.59 L/s
punto quota terr. quota H2O h osservata h calcolata differenza
500,16 0.1834 0.1959 0.013 0.017 0.005
200,16 0.1781 0.1964 0.018 0.015 -0.003
100,16 0.1744 0.1931 0.019 0.019 0.000
250,9 0.1759 0.1955 0.020 0.013 -0.007
450,3 0.1695 0.188 0.019 0.018 0.000
450,1 0.1675 0.1884 0.021 0.025 0.004
250,1 0.1733 0.1871 0.014 0.009 -0.005
250,B 0.1954 0.2133 0.018 0.006 -0.012
600 0.0864 0.2012 0.115 0.118 0.003
ponte 0.0825 0.2149 0.132 0.118 -0.014
0.0825 0.2041 0.122 0.116 -0.006
400 0.0875 0.2103 0.123 0.116 -0.007
300 0.0925 0.211 0.119 0.108 -0.011
200 0.0847 0.2125 0.128 0.116 -0.012
100 0.0846 0.2132 0.129 0.116 -0.013
Tabella 4.2: : altezze misurate e calcolate, con Q = 16.59 L/s.

51
Q = 18.78 L/s
punto quota terr. quota H2O h osservata h calcolata differenza
500,16 0.1834 0.1954 0.012 0.019 0.007
200,16 0.1781 0.2029 0.025 0.017 -0.008
100,16 0.1744 0.1975 0.023 0.020 -0.003
250,9 0.1759 0.1945 0.019 0.015 -0.004
450,3 0.1695 0.1871 0.018 0.019 0.001
450,1 0.1675 0.1874 0.020 0.026 0.006
250,1 0.1733 0.1878 0.015 0.010 -0.004
250,B 0.1954 0.2179 0.023 0.007 -0.016
600 0.0864 0.1934 0.107 0.120 0.013
ponte 0.0825 0.218 0.136 0.119 -0.017
0.0825 0.208 0.126 0.117 -0.008
400 0.0875 0.2148 0.127 0.117 -0.010
300 0.0925 0.217 0.125 0.109 -0.016
200 0.0847 0.2177 0.133 0.117 -0.016
100 0.0846 0.2198 0.135 0.117 -0.018
Tabella 4.3: altezze misurate e calcolate, con Q = 18.78 L/s.
In seguito sono quindi esposti gli errori rilevati in ogni punto, sempre riferendosi al NRMSE
come indicatore:
altezze idriche
punto NRMSE
500,16 0.40
200,16 0.26
100,16 0.10
250,9 0.27
450,3 0.09
450,1 0.21
250,1 0.32
250,B 0.69
600 0.07
ponte 0.11
0.05
400 0.06
300 0.10
200 0.10
100 0.11
Tabella 4.4: NRMSE altezze idriche.

52
Si noti come l’errore relativo ai punti della piana alluvionale sia in generale maggiore rispetto
a quello delle misure in corrispondenza dell’alveo inciso; questa osservazione è giustificabile
considerando il piccolo tirante idrico della prima situazione, che, a parità di errore, produce
valori di NRMSE più alti.
Vengono ora mostrati i risultati relativi alle misure di velocità, sempre effettuate utilizzando
il micro-mulinello presentato nel paragrafo 3.2.1.
Nei punti all’interno del canale la misura è stata realizzata allineando lo strumento alla
direzione principale del moto, in quelli esterni considerando sia la componente di velocità x
sia quella y, basandosi sul seguente sistema di riferimento:
Figura 4.7: sistema di riferimento per la misura delle velocità.
Q = 14.17 L/s
griglia velocità osservate velocità calcolate
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s]
500,16 0.43 0.22 0.33 0.18
200,16 0.29 0.22 0.49 0.22
100,16 nd nd 0.32 0.36
250,9 0.27 0.22 0.21 0.3
450,3 0.24 0 0.17 0.12
450,1 0.24 0 0.13 0.11
250,1 nd nd 0.08 0.29
250,B 0 0 0 0.02
Q = 14.17 L/s
punto vel o [m/s] vel c [m/s]
600 0.29 0.15
ponte 0.31 0.38
0.27 0.3
400 0.24 0.23
300 0.24 0.25
200 0.22 0.16
100 0 0.01
Tabelle 4.5: velocità misurate e calcolate, con Q = 14.17 L/s.

53
Q = 16.59 L/s
griglia velocità osservate velocità calcolate
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s]
500,16 0.43 0.24 0.35 0.21
200,16 0.31 0.24 0.51 0.24
100,16 nd nd 0.34 0.37
250,9 0.29 0.24 0.24 0.32
450,3 0.27 0 0.19 0.14
450,1 0.27 0 0.15 0.14
250,1 nd nd 0.09 0.33
250,B 0 0 0 0.03
Q = 16.59 L/s
punto vel o [m/s] vel c [m/s]
600 0.31 0.17
ponte 0.34 0.42
0.29 0.35
400 0.22 0.28
300 0.24 0.3
200 0.22 0.19
100 0 0.04
Tabelle 4.6: velocità misurate e calcolate, con Q = 16.59 L/s.
Q = 18.78 L/s
griglia velocità osservate velocità calcolate
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s]
500,16 0.38 0.50 0.38 0.23
200,16 0.29 0.24 0.53 0.25
100,16 nd nd 0.36 0.39
250,9 0.47 0.34 0.27 0.34
450,3 0.27 0 0.2 0.15
450,1 0.24 0 0.15 0.15
250,1 nd nd 0.1 0.36
250,B 0 0 0 0.03
Tabella 4.7a: velocità misurate e calcolate, con Q = 18.78 L/s.

54
Q = 18.78 L/s
punto vel o [m/s] vel c [m/s]
600 0.38 0.19
ponte 0.43 0.48
0.34 0.4
400 0.29 0.31
300 0.31 0.32
200 0.27 0.2
100 0.22 0.01
Tabella 4.7b: velocità misurate e calcolate, con Q = 18.78 L/s.
Nelle tabelle seguenti sono indicati i valori di NRMSE relativi ad ogni stazione di misura.
In alcuni punti (indicati con la sigla nd) non è stato possibile ricavare questo indicatore,
principalmente per due motivi:
Presenza di un basso livello idrico che ha impedito i rilevamenti di velocità.
Velocità rilevate nulle.
velocità x
velocità y
velocità alveo
punto NRMSE
punto NRMSE
punto NRMSE
500,16 0.18
500,16 0.49
600 0.49
200,16 0.71
200,16 0.02
ponte 0.19
100,16 nd
100,16 nd
0.18
250,9 0.37
250,9 0.24
400 0.15
450,3 0.28
450,3 nd
300 0.12
450,1 0.43
450,1 nd
200 0.24
250,1 nd
250,1 nd
100 1.68
250,B nd
250,B nd
Tabelle 4.8: NRMSE velocità.
Di seguito sono infine esposti i valori medi di NRMSE, per tutti i rilievi effettuati, oltre ad
alcune elaborazioni GIS dei risultati ottenuti in HEC-RAS.
NRMSE medio
altezza 0.20
vel x 0.39
vel y 0.25
vel alveo 0.44
Tabella 4.9: NRMSE medio.

55
Figura 4.8: tiranti idrici calcolati per le tre portate.
Figura 4.9: velocità idriche calcolate per le tre portate.

56
Osservando la Tabella 4.9, si nota come l’errore relativo alle altezze idriche sia inferiore
rispetto a quello delle velocità; questo dato è giustificabile pensando alla elevata aleatorietà
delle misure effettuate con il mulinello. Si consideri infine la Figura 4.9; è evidente
l’influenza del ponte in legno sulle velocità idriche, molto elevate in corrispondenza dello
stesso.
4.2.2 Esperimento 2
I risultati dell’esperimento 1 hanno mostrato una buona fedeltà del modello nella
riproduzione del moto idrico bidimensionale; in questa seconda prova, l’obiettivo è quello di
verificare l’efficacia della simulazione anche in corrispondenza di un’area urbana.
Per introdurre gli edifici nella modellazione, sono stati testati tre metodi:
Casette-DEM: in questo primo caso, si è modificato il DEM del terreno introducendo
al suo interno gli edifici. Questa situazione rispecchia fedelmente il modello fisico di
laboratorio.
Casette-n Manning: i singoli edifici sono stati introdotti nel modello modificando il
parametro di scabrezza in corrispondenza degli stessi, posto a n = 10.
Area urbana-n Manning: per la modellazione si sono considerati gli effetti dell’area
urbana nel suo complesso, ovvero imponendo n = 0.15 all’interno del perimetro in
cui sono posizionati gli edifici.
Di seguito, sono analizzati i risultati ottenuti, riferendosi inizialmente ai soli tiranti idrici:
Q = 22.57 L/s
punto quota terr. quota H2O h osservata h calcolata differenza NRMSE
400,8 0.184 0.1978 0.014 0.009 -0.005 0.35
400,11 0.1862 0.2085 0.022 0.014 -0.008 0.37
400,14 0.1859 0.2077 0.022 0.016 -0.006 0.27
375,14 0.189 0.233 0.044 0.024 -0.020 0.45
250,7 0.1771 0.1885 0.011 0.008 -0.003 0.30
250,15 0.178 0.2179 0.040 0.023 -0.017 0.42
200,11 0.1736 0.193 0.019 0.019 0.000 0.02
200,15 0.1731 0.2168 0.044 0.027 -0.017 0.38
a 0.1893 0.2134 0.024 0.022 -0.002 0.09
b 0.1893 0.2105 0.021 0.021 0.000 0.01
c 0.1896 0.2055 0.016 0.018 0.002 0.13
d 0.1856 0.2024 0.017 0.018 0.001 0.07
e 0.1905 0.2055 0.015 0.019 0.004 0.27
f 0.1848 0.195 0.010 0.014 0.004 0.37
Tabella 4.10: altezze misurate e calcolate, casette-DEM, Q = 22.57 L/s.

57
Q = 22.57 L/s
punto quota terr. quota H2O h osservata h calcolata differenza NRMSE
400,8 0.184 0.1978 0.014 0.009 -0.005 0.35
400,11 0.1862 0.2085 0.022 0.013 -0.009 0.42
400,14 0.1859 0.2077 0.022 0.016 -0.006 0.27
375,14 0.189 0.233 0.044 0.023 -0.021 0.48
250,7 0.1771 0.1885 0.011 0.009 -0.002 0.21
250,15 0.178 0.2179 0.040 0.022 -0.018 0.45
200,11 0.1736 0.193 0.019 0.019 0.000 0.02
200,15 0.1731 0.2168 0.044 0.026 -0.018 0.41
a 0.1893 0.2134 0.024 0.021 -0.003 0.13
b 0.1893 0.2105 0.021 0.021 0.000 0.01
c 0.1896 0.2055 0.016 0.019 0.003 0.19
d 0.1856 0.2024 0.017 0.018 0.001 0.07
e 0.1905 0.2055 0.015 0.019 0.004 0.27
f 0.1848 0.195 0.010 0.014 0.004 0.37
Tabella 4.11: altezze misurate e calcolate, casette-n Manning, Q = 22.57 L/s.
Q = 22.57 L/s
punto quota terr. quota H2O h osservata h calcolata differenza NRMSE
400,8 0.184 0.1978 0.014 0.009 -0.005 0.35
400,11 0.1862 0.2085 0.022 0.014 -0.008 0.37
400,14 0.1859 0.2077 0.022 0.016 -0.006 0.27
375,14 0.189 0.233 0.044 0.024 -0.020 0.45
250,7 0.1771 0.1885 0.011 0.009 -0.002 0.21
250,15 0.178 0.2179 0.040 0.022 -0.018 0.45
200,11 0.1736 0.193 0.019 0.019 0.000 0.02
200,15 0.1731 0.2168 0.044 0.026 -0.018 0.41
a 0.1893 0.2134 0.024 0.022 -0.002 0.09
b 0.1893 0.2105 0.021 0.022 0.001 0.04
c 0.1896 0.2055 0.016 0.019 0.003 0.19
d 0.1856 0.2024 0.017 0.018 0.001 0.07
e 0.1905 0.2055 0.015 0.019 0.004 0.27
f 0.1848 0.195 0.010 0.014 0.004 0.37
Tabella 4.12: altezze misurate e calcolate, area urbana-n Manning, Q = 22.57 L/s.

58
Figura 4.10: tiranti idrici calcolati per i tre diversi metodi.
NRMSE medio
casette-DEM 0.25
casette-n Mann. 0.26
area urb.-n Mann. 0.25
Tabella 4.13: NRMSE medio tiranti idrici.
Come si osserva in Tabella 4.13, gli errori medi relativi alle altezze idriche sono praticamente
identici per tutti e tre i metodi in analisi.
Da questa considerazione si può concludere che, anche in assenza di un DEM dettagliato, la
modellazione degli edifici può essere effettuata, giungendo a buoni risultati, anche attraverso
l’introduzione di aree a differente scabrezza.
A questo punto si sono esaminati i valori relativi alle velocità idriche, sempre riferendosi alle
componenti x e y del moto.
I risultati sono esposti in seguito:

59
Q = 22.57 L/s
griglia velocità osservate velocità calcolate NRMSE
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s] vel x vel y
400,8 0.43 -0.27 0.33 0.1 0.23 1.37
400,11 0.34 -0.24 0.37 0.13 0.10 1.53
400,14 0.50 0.70 0.31 0.14 0.38 0.80
375,14 0.41 0.43 0.37 0.05 0.09 0.88
250,7 nd nd 0.1 0.4 nd nd
250,15 0.22 0.64 0.19 0.49 0.14 0.23
200,11 0.00 0.24 0.48 0.1 nd 0.59
200,15 0.34 0.57 0.42 0.56 0.25 0.01
a 0.27 0.00 0.11 0.04 0.59 nd
b 0.00 0.50 0 0.4 nd 0.20
c 0.27 0.00 0.09 0.05 0.66 nd
d 0.00 0.57 0 0.55 nd 0.03
e 0.00 0.36 0 0.4 nd 0.11
f 0.00 0.38 0 0.49 nd 0.28
Tabella 4.14: velocità misurate e calcolate, casette-DEM, Q = 22.57 L/s.
Q = 22.57 L/s
griglia velocità osservate velocità calcolate NRMSE
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s] vel x vel y
400,8 0.43 -0.27 0.33 0.03 0.23 1.11
400,11 0.34 -0.24 0.35 0.12 0.04 1.49
400,14 0.50 0.70 0.3 0.19 0.40 0.73
375,14 0.41 0.43 0.34 0.14 0.16 0.67
250,7 nd nd 0.13 0.44 nd nd
250,15 0.22 0.64 0.25 0.45 0.13 0.29
200,11 0.00 0.24 0.49 0.14 nd 0.43
200,15 0.34 0.57 0.45 0.51 0.34 0.10
a 0.27 0.00 0.45 0.02 0.68 nd
b 0.00 0.50 0 0.33 nd 0.34
c 0.27 0.00 0.44 0.04 0.65 nd
d 0.00 0.57 0 0.55 nd 0.03
e 0.00 0.36 0 0.35 nd 0.03
f 0.00 0.38 0 0.53 nd 0.39
Tabella 4.15: velocità misurate e calcolate, casette-n Manning, Q = 22.57 L/s.

60
Q = 22.57 L/s
griglia velocità osservate velocità calcolate NRMSE
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s] vel x vel y
400,8 0.43 -0.27 0.35 0.03 0.18 1.11
400,11 0.34 -0.24 0.36 0.08 0.07 1.33
400,14 0.50 0.70 0.29 0.18 0.42 0.74
375,14 0.41 0.43 0.32 0.14 0.21 0.67
250,7 nd nd 0.13 0.42 nd nd
250,15 0.22 0.64 0.24 0.49 0.08 0.23
200,11 0.00 0.24 0.52 0.11 nd 0.55
200,15 0.34 0.57 0.46 0.51 0.37 0.10
a 0.27 0.00 0.06 0.04 0.78 nd
b 0.00 0.50 0.05 0.03 nd 0.94
c 0.27 0.00 0.06 0.05 0.78 nd
d 0.00 0.57 0.06 0.07 nd 0.88
e 0.00 0.36 0.06 0.04 nd 0.89
f 0.00 0.38 0.05 0.07 nd 0.82
Tabella 4.16: velocità misurate e calcolate, area urbana-n Manning, Q = 22.57 L/s.
Figura 4.11: velocità idriche calcolate per i tre diversi metodi.

61
NRMSE medio vel x
NRMSE medio vel y
casette-DEM 0.30
casette-DEM 0.55
casette-n Mann. 0.33
casette-n Mann. 0.51
area urb.-n Mann. 0.36
area urb.-n Mann. 0.75
Tabelle 4.17: NRMSE medio, componenti di velocità x e y.
Anche in queste prove, i valori di NRMSE medio relativi alle velocità del moto idrico
risultano maggiori rispetto a quelli dei tiranti. In particolare, gli errori più elevati si sono
riscontrati nella modellazione complessiva degli edifici come area urbana; in questo caso,
come si nota anche in Figura 4.11, il modello non è in grado di simulare correttamente il
flusso idrico in prossimità delle case, con valori prossimi allo zero calcolati per ogni punto
dell’area.
In conclusione, si può affermare che i tre metodi in analisi sono ugualmente efficaci nella
simulazione dei tiranti idrici, mentre se si vuole valutare in maniera idonea le velocità è
consigliabile utilizzare una modellazione che consideri gli effetti dei singoli edifici.
4.2.3 Esperimento 3
Sulla base dei risultati osservati per l’esperimento 2, in questa ultima prova gli edifici
sono stati modellati introducendo solamente il parametro n di Manning pari a 10.
Di seguito sono quindi riportati i risultati e le elaborazioni grafiche ottenute:
Q = 22.81 L/s
punto quota terr. quota H2O h osservata h calcolata differenza NRMSE
550,15 0.1856 0.2082 0.023 0.027 0.004 0.19
450,5 0.1695 0.1789 0.009 0.021 0.012 1.23
450,9 0.1836 0.209 0.025 0.02 -0.005 0.21
450,13 0.1813 0.21 0.029 0.032 0.003 0.11
400,15 0.187 0.21 0.023 0.024 0.001 0.04
300,12 0.1772 0.2036 0.026 0.025 -0.001 0.05
300,18 0.1875 0.2201 0.033 0.025 -0.008 0.23
250,5 0.1762 0.1825 0.006 0.008 0.002 0.27
200,16 0.1781 0.2105 0.032 0.024 -0.008 0.26
200,18 0.1789 0.212 0.033 0.03 -0.003 0.09
a 0.18 0.2041 0.024 0.017 -0.007 0.29
b 0.1743 0.1932 0.019 0.027 0.008 0.43
c 0.1748 0.1959 0.021 0.017 -0.004 0.19
Tabella 4.18: altezze misurate e calcolate, con Q = 22.81 L/s.

62
Figura 4.12: tiranti idrici esperimento 3.
Q = 22.81 L/s
griglia velocità osservate velocità calcolate NRMSE
punto vel x [m/s] vel y [m/s] vel x [m/s] vel y [m/s] vel x vel y
550,15 0.34 0.29 0.12 0.23 0.64 0.21
450,5 0.00 0.00 0.28 0.19 nd nd
450,9 0.31 0.00 0.35 0.05 0.12 nd
450,13 0.41 0.00 0.59 0 0.46 nd
400,15 0.34 0.29 0.26 0.5 0.23 0.72
300,12 0.22 0.22 0.28 0 0.26 1.00
300,18 0.22 0.31 0.18 0.23 0.19 0.27
250,5 nd nd 0 0.53 nd nd
200,16 0.38 0.22 0.7 0.45 0.83 1.03
200,18 0.47 0.00 0.6 0 0.26 nd
a -0.22 0.00 0.2 0.02 1.90 nd
b 0.00 0.50 0.03 0.69 nd 0.39
c 0.00 0.45 0 0.56 nd 0.24
Tabella 4.19: velocità misurate e calcolate, con Q = 22.81 L/s.

63
Figura 4.13: velocità idriche esperimento 3.
Valutando infine il NRMSE medio (Tabella 4.20), anche in quest’ultimo esperimento si
notano errori paragonabili a quelli delle prove precedenti, con i valori delle altezze idriche
generalmente più precisi rispetto a quelli delle velocità.
Si conferma quindi, anche in presenza di geometrie urbane complesse, la buona riproduzione
del flusso idrico da parte del modello diffusivo, così come l’efficacia della riproduzione degli
edifici attraverso l’introduzione di un parametro di scabrezza.
NRMSE medio
altezza 0.28
vel x 0.54
vel y 0.55
Tabella 4.20: NRMSE medio.
4.2.4 Considerazioni finali
Analizzando i risultati dei precedenti esperimenti si è dunque appurata l’efficacia della
modellazione delle aree urbane attraverso l’introduzione di un diverso valore di scabrezza.
Tuttavia, l’assenza degli edifici nel DEM del terreno comporta che le aree occupate dagli
stessi siano interessate dal flusso idrico, seppur con velocità prossime allo zero, fatto che
potrebbe causare errori nel calcolo dei volumi idrici effettivamente transitanti all’interno del
dominio.
Il problema è evidentemente meno rilevante in casi di moto permanente, dove la portata in
ingresso è costante, ma potrebbe influenzare negativamente i risultati in situazioni di moto
vario più vicine alla realtà.

64
Per chiarire la questione si è deciso di ripetere le simulazioni dell’esperimento 2,
introducendo come condizione di monte i due idrogrammi di uguale picco e diversa durata
esposti in seguito:
Grafici 4.2: idrogramma corto e idrogramma lungo.
L’obiettivo è quello di confrontare, a vari istanti temporali e a parità di idrogramma in
ingresso, i valori di altezza e velocità idrica calcolati introducendo gli edifici nel DEM o
modellando le singole case con il metodo della scabrezza.
La comparazione è stata effettuata utilizzando per la simulazione del flusso idrico sia le
equazioni DSV complete sia il modello diffusivo, ottenendo i seguenti risultati:
Casette-DEM Casette-n Manning
DSV completo mod. diffusivo DSV completo mod. diffusivo
punto t. st [s] alt [m] vel [m/s] alt [m] vel [m/s] alt[m] vel [m/s] alt [m] vel [m/s]
b
20 0.02 0.11 0.017 0.346 0.019 0.06 0.016 0.324
40 0.023 0.09 0.018 0.325 0.025 0.025 0.018 0.295
60 0.01 0.05 0.006 0.032 0.013 0.01 0.006 0.026
c
20 0.016 0.094 0.014 0.066 0.013 0.109 0.014 0.29
40 0.019 0.115 0.016 0.07 0.02 0.104 0.016 0.365
60 0.009 0.033 0.005 0.005 0.01 0.033 0.005 0.055
f
20 0.009 0.206 0.01 0.432 0.001 0.08 0.01 0.423
40 0.012 0.212 0.012 0.468 0.012 0.09 0.012 0.484
60 0.003 0.145 0.001 0.171 0.004 0.07 0.001 0.177
Tabella 4.21: risultati simulazione con idrogramma corto.
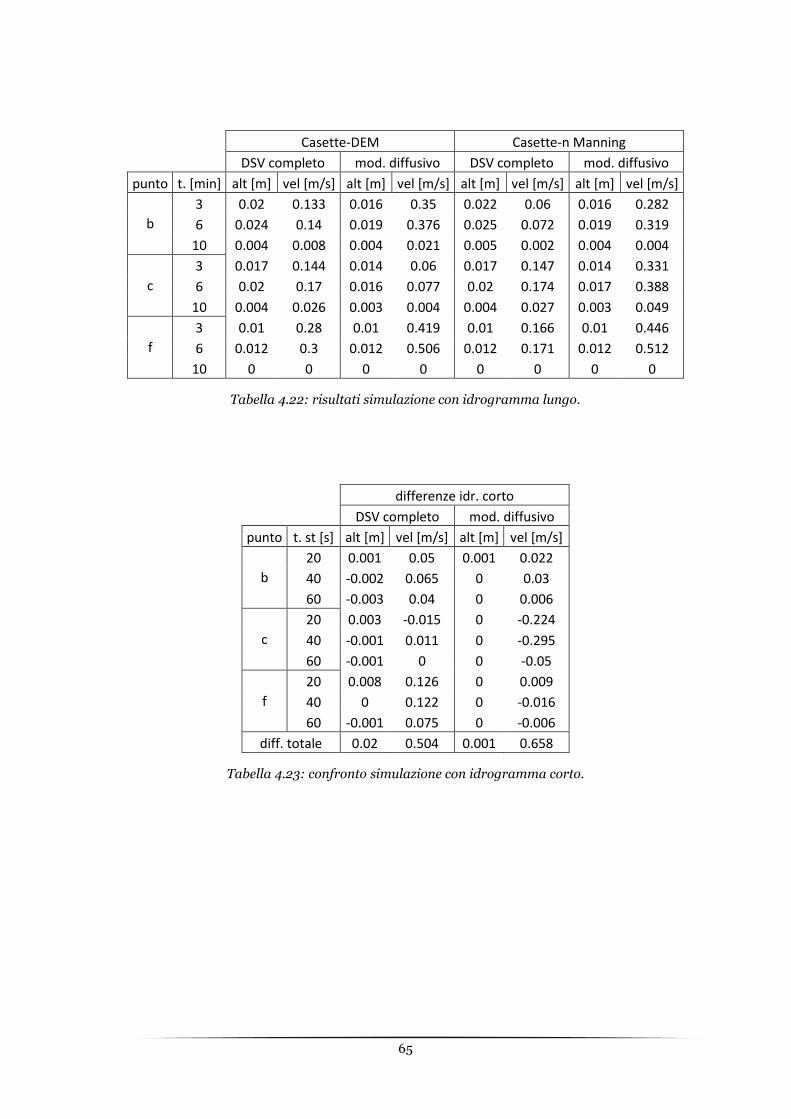
65
Casette-DEM Casette-n Manning
DSV completo mod. diffusivo DSV completo mod. diffusivo
punto t. [min] alt [m] vel [m/s] alt [m] vel [m/s] alt [m] vel [m/s] alt [m] vel [m/s]
b
3 0.02 0.133 0.016 0.35 0.022 0.06 0.016 0.282
6 0.024 0.14 0.019 0.376 0.025 0.072 0.019 0.319
10 0.004 0.008 0.004 0.021 0.005 0.002 0.004 0.004
c
3 0.017 0.144 0.014 0.06 0.017 0.147 0.014 0.331
6 0.02 0.17 0.016 0.077 0.02 0.174 0.017 0.388
10 0.004 0.026 0.003 0.004 0.004 0.027 0.003 0.049
f
3 0.01 0.28 0.01 0.419 0.01 0.166 0.01 0.446
6 0.012 0.3 0.012 0.506 0.012 0.171 0.012 0.512
10 0 0 0 0 0 0 0 0
Tabella 4.22: risultati simulazione con idrogramma lungo.
differenze idr. corto
DSV completo mod. diffusivo
punto t. st [s] alt [m] vel [m/s] alt [m] vel [m/s]
b
20 0.001 0.05 0.001 0.022
40 -0.002 0.065 0 0.03
60 -0.003 0.04 0 0.006
c
20 0.003 -0.015 0 -0.224
40 -0.001 0.011 0 -0.295
60 -0.001 0 0 -0.05
f
20 0.008 0.126 0 0.009
40 0 0.122 0 -0.016
60 -0.001 0.075 0 -0.006
diff. totale 0.02 0.504 0.001 0.658
Tabella 4.23: confronto simulazione con idrogramma corto.

66
differenze idr. lungo
DSV completo mod. diffusivo
punto t.[min] alt [m] vel [m/s] alt [m] vel [m/s]
b
3 -0.002 0.073 0 0.068
6 -0.001 0.068 0 0.057
10 -0.001 0.006 0 0.017
c
3 0 -0.003 0 -0.271
6 0 -0.004 -0.001 -0.311
10 0 -0.001 0 -0.045
f
3 0 0.114 0 -0.027
6 0 0.129 0 -0.006
10 0 0 0 0
diff. totale 0.004 0.398 0.001 0.802
Tabella 4.24: confronto simulazione con idrogramma lungo.
Per quanto riguarda i tiranti idrici, le differenze maggiori fra i due metodi si riscontrano
quando viene eseguito il set completo di equazioni DSV. In particolare, nel caso in cui la
condizione di monte è rappresentata dall’idrogramma lungo, le discordanze sono minori
rispetto a quando è riprodotta da quello corto; questa osservazione è giustificabile pensando
al fatto che nella prima situazione si è più vicini a una condizione di moto permanente, con
differenze contenute fra volume entrante e uscente dal dominio 2D.
Nell’esecuzione del modello diffusivo, invece, qualsiasi sia l’idrogramma in ingresso, i tiranti
idrici presentano praticamente gli stessi valori sia introducendo gli edifici nel DEM, sia
modellando le case con il parametro di scabrezza, in accordo con i risultati ottenuti negli
esperimenti prima descritti.
Considerando infine le velocità di scorrimento, si riscontrano differenze più marcate per tutti
i confronti effettuati; questo dato conferma le maggiori problematiche nella corretta
modellazione delle velocità idriche, testimoniate dai più alti valori di NRMSE calcolati nelle
prove precedenti.

67
CAPITOLO 5
CASO REALE: ALLUVIONE DEL 18-
19/11/2013 A OLBIA
Nel presente capitolo il software HEC-RAS 5.0 verrà utilizzato per simulare un evento
alluvionale realmente accaduto ad Olbia nel novembre 2013.
I risultati ottenuti verranno confrontati con quelli acquisiti tramite il programma InfoWorks,
impiegato da MMI srl per la ricostruzione dell’evento alluvionale e per lo studio di variante al
piano stralcio per l’assetto idrogeologico (PAI).
5.1 I bacini idrografici
Il territorio del comune di Olbia presenta un reticolo idrografico particolarmente
articolato che, a partire dal secondo dopoguerra, ha subito un intenso fenomeno di
urbanizzazione.
In particolare, procedendo da sud verso nord, si individuano le seguenti aste fluviali e i
rispettivi rii minori (Figura 5.1):
Riu Paule Longa (nero);
Riu Seligheddu (arancio);
Riu Gadduresu (giallo);
Canale Zozò (verde);
Riu San Nicola (magenta);
Riu Tilibas (rosso).
Per modellare correttamente l’evento alluvionale sarà necessario considerare il contributo di
ogni singolo corso d’acqua, in modo da non tralasciare le eventuali interazioni fra essi.
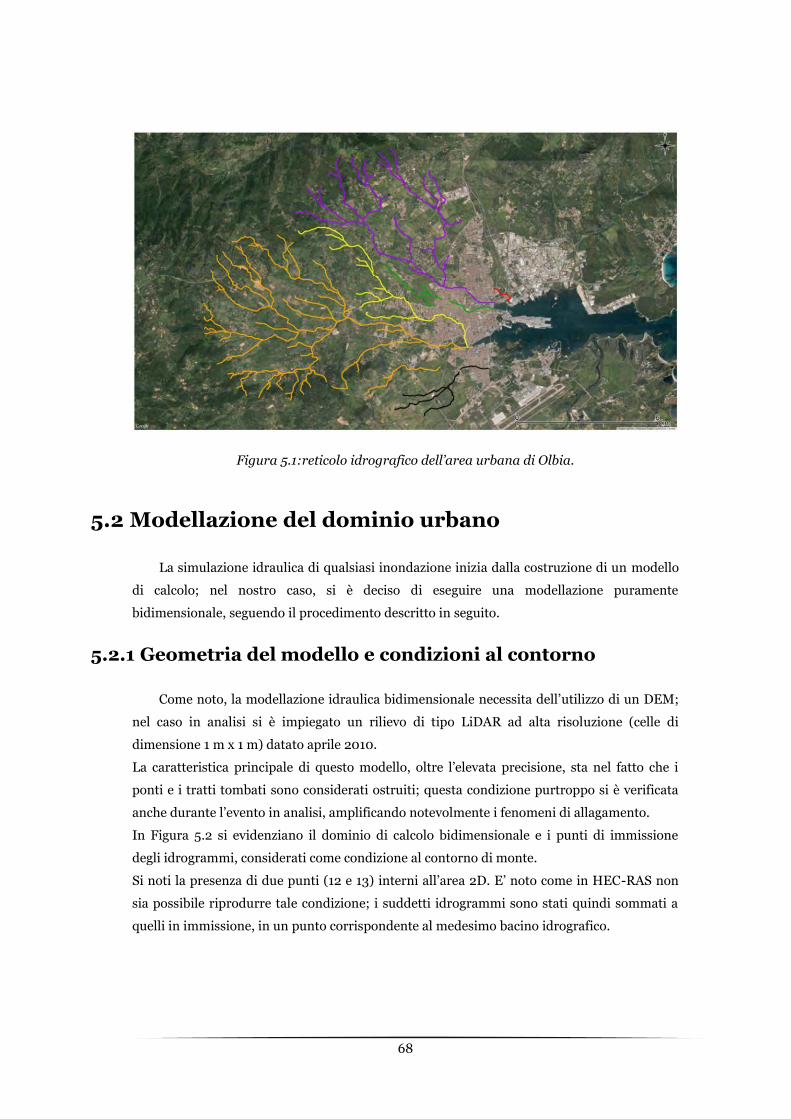
68
Figura 5.1:reticolo idrografico dell’area urbana di Olbia.
5.2 Modellazione del dominio urbano
La simulazione idraulica di qualsiasi inondazione inizia dalla costruzione di un modello
di calcolo; nel nostro caso, si è deciso di eseguire una modellazione puramente
bidimensionale, seguendo il procedimento descritto in seguito.
5.2.1 Geometria del modello e condizioni al contorno
Come noto, la modellazione idraulica bidimensionale necessita dell’utilizzo di un DEM;
nel caso in analisi si è impiegato un rilievo di tipo LiDAR ad alta risoluzione (celle di
dimensione 1 m x 1 m) datato aprile 2010.
La caratteristica principale di questo modello, oltre l’elevata precisione, sta nel fatto che i
ponti e i tratti tombati sono considerati ostruiti; questa condizione purtroppo si è verificata
anche durante l’evento in analisi, amplificando notevolmente i fenomeni di allagamento.
In Figura 5.2 si evidenziano il dominio di calcolo bidimensionale e i punti di immissione
degli idrogrammi, considerati come condizione al contorno di monte.
Si noti la presenza di due punti (12 e 13) interni all’area 2D. E’ noto come in HEC-RAS non
sia possibile riprodurre tale condizione; i suddetti idrogrammi sono stati quindi sommati a
quelli in immissione, in un punto corrispondente al medesimo bacino idrografico.

69
Figura 5.2: dominio di calcolo 2D e posizione degli idrogrammi in ingresso.
In particolare, ogni idrogramma è stato ricostruito utilizzando il modello idrologico
distribuito FEST-RS, che permette di valutare la trasformazione afflussi-deflussi e di
quantificare le portate per ciascuna sezione del reticolo idrografico.
Nello specifico, l’idrogramma di piena viene calcolato localmente a partire dalle informazioni
pluviometriche e dalle caratteristiche morfologiche e di assorbimento del bacino in analisi.
La propagazione del deflusso viene infine determinata basandosi sul metodo di propagazione
idrologica di Muskingum-Cunge, nella sua forma non lineare.
I risultati relativi a questa procedura sono riportati di seguito (Grafico 5.1 e Grafico 5.2),
considerando come t = 0 le ore 9:55 del giorno 18 novembre 2013.
Per quanto riguarda la condizione al contorno di valle, è stata posizionata lungo la linea di
costa, imponendo un valore costante pari a 1 mslm.
Si osservi infine come il dominio bidimensionale sia caratterizzato da mesh quadrate con lato
pari a 15 m, eccetto in corrispondenza dei confini, dove il software genera automaticamente
delle celle compatibili con la forma degli stessi.

70
Grafico 5.1: idrogrammi in immissione nei differenti punti.
Grafico 5.2: idrogramma in immissione al nodo 6 (Riu Seligheddu).
5.2.2 Caratterizzazione delle scabrezze
Il dominio di calcolo è caratterizzato da zone a differente scabrezza, immesse in HEC-
RAS sfruttando il comando Land Cover. In particolare si evidenziano le seguenti aree
omogenee:
n = 0.022 canali rivestiti;
0
5
10
15
20
25
30
0 5 10 15 20
Q [
m3/s
]
t [ore]
5
14
7
8
3
4
10+12
11
9
1+13
0
20
40
60
80
100
120
140
160
180
200
0 5 10 15 20
Q [
m3 /
s]
t [ore]
6
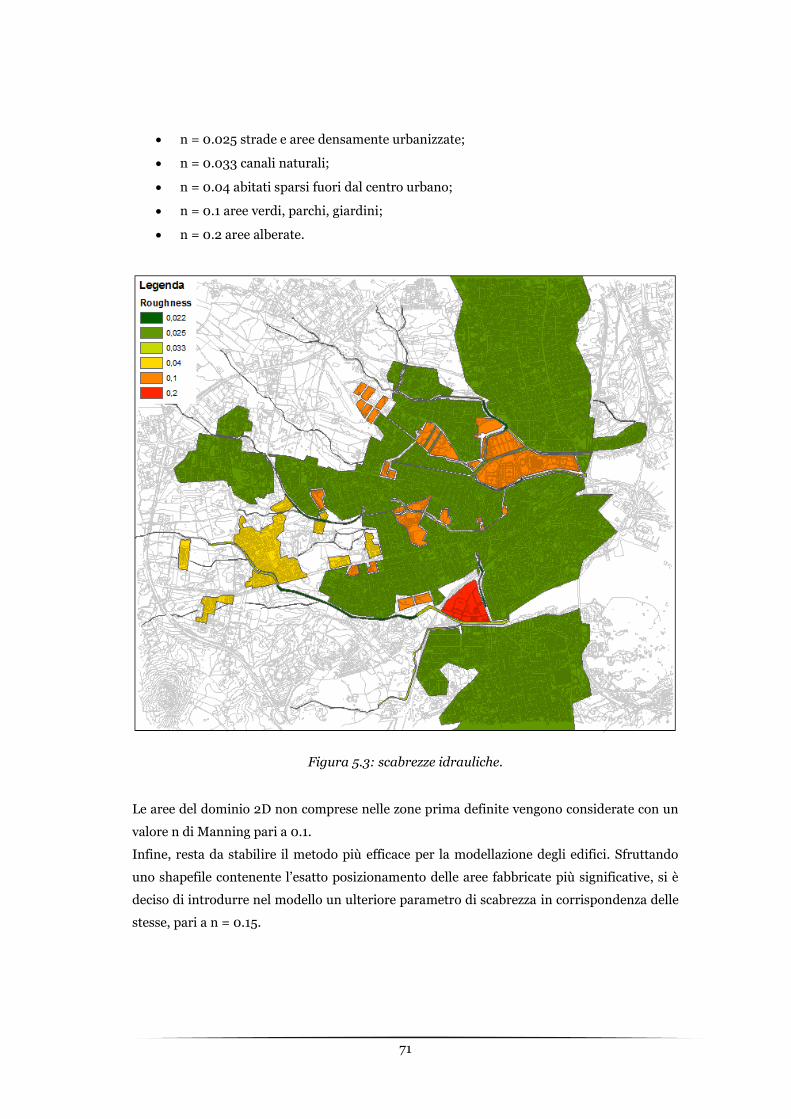
71
n = 0.025 strade e aree densamente urbanizzate;
n = 0.033 canali naturali;
n = 0.04 abitati sparsi fuori dal centro urbano;
n = 0.1 aree verdi, parchi, giardini;
n = 0.2 aree alberate.
Figura 5.3: scabrezze idrauliche.
Le aree del dominio 2D non comprese nelle zone prima definite vengono considerate con un
valore n di Manning pari a 0.1.
Infine, resta da stabilire il metodo più efficace per la modellazione degli edifici. Sfruttando
uno shapefile contenente l’esatto posizionamento delle aree fabbricate più significative, si è
deciso di introdurre nel modello un ulteriore parametro di scabrezza in corrispondenza delle
stesse, pari a n = 0.15.

72
5.3 Risultati della ricostruzione dell’evento
Per prima cosa, si è eseguito un confronto tra le aree allagate ricostruite da HEC-RAS e
quelle effettivamente rilevate dal comune di Olbia. Il risultato è esposto in seguito:
Figura 5.4: confronto aree allagate censite e simulate.
In generale si osserva una buona ricostruzione dell’evento alluvionale, considerando anche il
fatto che il modello idraulico non considera gli effetti del rigurgito della rete di drenaggio
urbana.
La stessa ricostruzione dell’evento è stata eseguita da MMI srl nell’ambito di uno studio di
variante al piano stralcio per l’assetto idrogeologico (PAI), utilizzando il software InfoWorks
ICM; si sono quindi confrontate le aree allagate, ottenendo i risultati esposti in seguito.

73
Figura 5.5: confronto tiranti idrici HEC-RAS/InfoWorks.
Figura 5.6: confronto velocità idriche HEC-RAS/InfoWorks.

74
Come si evince dalle figure 5.5 e 5.6, le due simulazioni conducono a risultati del tutto
confrontabili, sia per le altezze sia per le velocità idriche.
In particolare, le differenze più consistenti si riscontrano in alcune aree limitrofe al Riu
Gadduresu, dove HEC-RAS sottostima leggermente l’estensione delle aree inondate.
Questa osservazione è confermata dai dati riassunti in Tabella 5.1 dove, in base alla
dimensione dei pixel, si è ricavata la superficie totale allagata.
celle HEC celle Info
numero 3541948 4009803
area [m2] 2935924 3323730
area [ha] 293.5924 332.373
Tabella 5.1: estensione aree allagate.
Successivamente si è eseguito un confronto puntuale fra le altezze e le velocità idriche
simulate dai due software, determinando per ogni cella la differenza fra il valore calcolato da
HEC-RAS e quello definito da InfoWorks. I risultati ottenuti confermano le considerazioni
esposte in precedenza e sono riassunti dai seguenti istogrammi:
Grafico 5.1: istogramma differenze tiranti idrici.
0
1
1
2
2
3
(-3
.81
3; -
3.3
14
)
(-3
.31
4; -
2.8
14
)
(-2
.81
4; -
2.3
15
)
(-2
.31
5; -
1.8
16
)
(-1
.81
6; -
1.3
16
)
(-1
.31
6; -
0.8
17
)
(-0
.81
7; -
0.3
17
)
(-0
.31
7; 0
.18
2)
(0.1
82
; 0.6
81
)
(0.6
81
; 1.1
81
)
(1.1
81
; 1.6
80
)
(1.6
80
; 2.1
80
)
(2.1
80
; 2.6
79
)
(2.6
79
; 3.1
78
)
(3.1
78
; 3.6
78
)
(3.6
78
; 4.1
77
)
(4.1
77
; 4.6
76
)
(4.6
76
; 5.1
76
)
(5.1
76
; 5.6
75
)
(5.6
75
; 6.1
75
)
con
tegg
io c
elle
[m
ilio
ni]
differenza [m]

75
Grafico 5.2: istogramma differenze velocità idriche.
Infine è stato effettuato un confronto fra l’andamento delle altezze e delle velocità idriche
durante l’evento alluvionale; in particolare, la comparazione è stata eseguita per una serie di
punti significativi, descritti in seguito ed esposti in Figura 5.7:
Punto 1: posizionato nella zona di valle fra il Canale Zozò e il Riu San Nicola, una
delle aree maggiormente interessate dagli allagamenti.
Punto 2: si trova in prossimità del Riu Gadduresu, area dove si riscontrano le più
grandi differenze fra i risultati dei due software.
Punto 3: posizionato all’interno dell’alveo del Riu Gadduresu, a monte di un tratto
tombato.
Punto 4 e Punto 6: collocati all’interno di due aree densamente urbanizzate, in modo
da valutare le differenze di modellazione idraulica in prossimità degli edifici.
Punto 5: si trova immediatamente a monte del ponte della ferrovia, sull’alveo del Riu
Gadduresu. Si noti come questa struttura sia l’unica all’interno del dominio non
considerata ostruita, modellata in HEC-RAS con il metodo descritto nel paragrafo
2.1.5.
Punto 7: posizionato all’interno del corso d’acqua del Riu Seligheddu, in un’area
fortemente interessata dal fenomeno alluvionale.
0
1
1
2
2
3
(-6
.63
4; -
6.0
25
)
(-6
.02
5; -
5.4
16
)
(-5
.41
6; -
4.8
08
)
(-4
.80
8; -
4.1
99
)
(-4
.19
9; -
3.5
90
)
(-3
.59
0; -
2.9
81
)
(-2
.98
1; -
2.3
72
)
(-2
.37
2; -
1.7
64
)
(-1
.76
4; -
1.1
55
)
(-1
.15
5; -
0.5
46
)
(-0
.54
6; 0
.06
3)
(0.0
63
; 0.6
71
)
(0.6
71
; 1.2
80
)
(1.2
80
; 1.8
89
)
(1.8
89
; 2.4
98
)
(2.4
98
; 3.1
07
)
(3.1
07
; 3.7
15
)
(3.7
15
; 4.3
24
)
(4.3
24
; 4.9
33
)
(4.9
33
; 5.5
42
)
con
tegg
io c
elle
[m
ilio
ni]
differenza [m/s]

76
Figura 5.7: punti per confronto HEC-RAS/InfoWorks.
I risultati ottenuti sono quindi esposti nei seguenti grafici:
Grafico 5.3: confronto tiranti e velocità idriche, punto 1.

77
Per il punto 1 l’andamento temporale di altezze e velocità è paragonabile per entrambe le
simulazioni; è inoltre confermata la tendenza di HEC-RAS a sottostimare leggermente i
picchi rispetto a InfoWorks.
Grafico 5.4: confronto tiranti e velocità idriche, punto 2.
La variazione dei tiranti del punto 2 conferma le osservazioni fatte in precedenza riguardo
alla sottostima di HEC-RAS in prossimità del Riu Gadduresu. Le velocità, invece, presentano
un andamento maggiormente confrontabile.
Grafico 5.5: confronto tiranti e velocità idriche, punto 3.
Il punto 3 presenta delle altezze idriche praticamente identiche al variare del tempo, mentre
le velocità, a partire dal raggiungimento del picco, in HEC-RAS presentano valori
costantemente inferiori di circa 0.15 m/s.

78
Grafico 5.6: confronto tiranti e velocità idriche, punto 4.
L’andamento temporale delle altezze nel punto 4 è molto simile in entrambi i casi, fatto che
conferma la bontà della modellazione degli edifici attraverso il parametro di scabrezza n =
0.15. Le velocità sono praticamente identiche per le prime 8 ore di evento, poi si osserva una
sottostima dei valori calcolati da HEC-RAS.
Grafico 5.7: confronto tiranti e velocità idriche, punto 5.
Il punto 5 è l’unico in cui si osservano dei tiranti idrici superiori in HEC-RAS rispetto a
InfoWorks, probabilmente a causa dei diversi metodi di modellazione del ponte sulla
ferrovia. Questa considerazione è verosimilmente alla base delle ampie differenze che si
riscontrano anche nell’andamento temporale delle velocità.
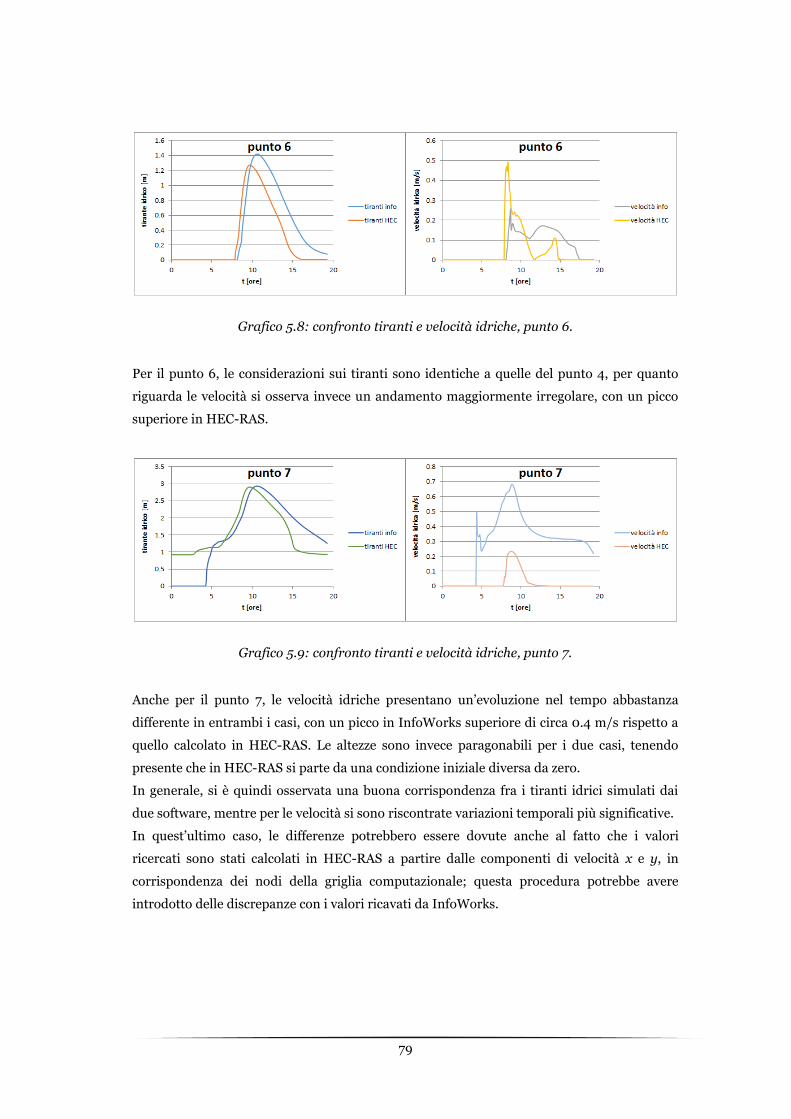
79
Grafico 5.8: confronto tiranti e velocità idriche, punto 6.
Per il punto 6, le considerazioni sui tiranti sono identiche a quelle del punto 4, per quanto
riguarda le velocità si osserva invece un andamento maggiormente irregolare, con un picco
superiore in HEC-RAS.
Grafico 5.9: confronto tiranti e velocità idriche, punto 7.
Anche per il punto 7, le velocità idriche presentano un’evoluzione nel tempo abbastanza
differente in entrambi i casi, con un picco in InfoWorks superiore di circa 0.4 m/s rispetto a
quello calcolato in HEC-RAS. Le altezze sono invece paragonabili per i due casi, tenendo
presente che in HEC-RAS si parte da una condizione iniziale diversa da zero.
In generale, si è quindi osservata una buona corrispondenza fra i tiranti idrici simulati dai
due software, mentre per le velocità si sono riscontrate variazioni temporali più significative.
In quest’ultimo caso, le differenze potrebbero essere dovute anche al fatto che i valori
ricercati sono stati calcolati in HEC-RAS a partire dalle componenti di velocità x e y, in
corrispondenza dei nodi della griglia computazionale; questa procedura potrebbe avere
introdotto delle discrepanze con i valori ricavati da InfoWorks.

80
5.4 Definizione delle fasce di pericolosità idraulica
Prima delle modifiche apportate in seguito ai recenti eventi alluvionali, in tutta la
regione Sardegna le aree a differente pericolosità idraulica erano definite in base al Piano
Stralcio per le Fasce Fluviali (P.S.F.F.), in vigore dal 2008.
Questo studio, realizzato utilizzando un software che opera in campo monodimensionale,
delimita le zone allagabili definendo le porzioni di territorio caratterizzate da uguale
probabilità di inondazione.
In particolare, il modello 1D è stato eseguito considerando una simulazione di moto
permanente, in base alle portate definite a vari tempi di ritorno (50, 100, 200 e 500 anni).
L’obiettivo finale è quello di confrontare le fasce di pericolosità definite con questo metodo
con quelle che si otterrebbero applicando un modello bidimensionale, abbinato alla
normativa in vigore in Liguria che tiene conto dei massimi tiranti idrici e delle velocità di
scorrimento.
5.4.1 La normativa della regione Liguria
Il documento approvato con DGR 250 del 15/2/2005 introduce nuovi criteri che si
affiancano al metodo standard descritto in precedenza, basati sulla valutazione congiunta in
ogni punto delle massime altezze idriche e delle velocità.
L’obiettivo di questo aggiornamento è la definizione, all’interno delle fasce A (aree inondabili
in eventi con T=50) e B (allagamenti con T=200), di zone a minore pericolosità relativa dove
i vincoli all’edificazione diventano meno stringenti. Queste aree sono determinate in base a
soglie idrodinamiche fondate sul concetto di spinta tollerabile condizionata all’energia
specifica, considerando l’azione meccanica di una corrente in termini di spinta e di energia.
In particolare, da risultati sperimentali, è stato assunto un valore pari a 2500 N/m come
soglia tra bassa e alta pericolosità.
La nuova normativa prevede quindi le seguenti modifiche nella definizione delle fasce di
inondabilità:
Fascia AA: vige la normativa prevista per la fascia A, con l’esclusione delle aree A0 a
minore pericolosità relativa che sono considerate assimilabili a una fascia B.
Fascia BB: corrisponde alla fascia B, zona in cui non sono possibili nuove edificazioni
né ristrutturazioni urbanistiche.
Fascia B0: aree della fascia B a minore pericolosità relativa, dove sono possibili
nuove costruzioni connesse a misure di protezione civile.
Nella seguente tabella sono infine riassunti tutti gli aggiornamenti previsti dalla nuova
regolamentazione:

81
Tabella 5.2: ambiti normativi relativi alle fasce di inondabilità (Regione Liguria).
5.4.2 Fasce di inondabilità: il Riu San Nicola
Il confronto è stato effettuato per il Riu San Nicola, comparando le fasce previste dal
P.S.F.F. del 2008 con quelle ottenute applicando i metodi prima esposti.
Le simulazioni 2D sono state ripetute per i diversi tempi di ritorno, apportando delle piccole
modifiche al modello bidimensionale utilizzato in precedenza per lo studio dell’evento
alluvionale.
In particolare, si è adattato il dominio 2D all’area interessata dal bacino in analisi,
aggiungendo in corrispondenza del punto 1 (vedi Figura 5.2) degli idrogrammi tali da
ricreare le condizioni di moto permanente. In secondo luogo, si è modificato il DEM in base
alle sezioni rilevate lungo il corso d’acqua, in modo da eliminare i tratti ostruiti considerati in
precedenza. Da ultimo, si sono modellati i ponti sfruttando anche in questo caso il metodo
descritto nel paragrafo 2.1.5.
Le portate e gli idrogrammi utilizzati sono presentati in seguito:

82
T=50 T=200 T=500
Q [m3/s] 107 155 189
Tabella 5.3: portate in ingresso per il Riu San Nicola.
Grafico 5.10: idrogrammi in ingresso nel punto 1, al variare di T.
A conferma dei risultati ottenuti, si è infine aggiunta un’ulteriore comparazione fra le fasce di
inondabilità ricavate con il metodo sopra descritto e quelle che si otterrebbero introducendo
una condizione di monte di moto vario. Questo procedimento permetterà di analizzare
l’estensione delle aree allagabili in eventi alluvionali paragonabili a quelli reali e di verificare
l’attendibilità delle simulazioni di moto permanente. In alcuni casi, infatti, potrebbe accadere
che le zone a differente pericolosità si differenzino in funzione di alcuni parametri, esposti in
seguito:
Particolari morfologie del terreno.
Volumi di piena caratteristici dell’evento alluvionale.
Portata smaltibile del bacino.
Nello specifico, si sono utilizzati i seguenti idrogrammi triangolari; i picchi, corrispondenti
alle portate di moto permanente riportate in Tabella 5.3, si raggiungono dopo 3.85 ore di
simulazione, valore relativo al tempo di corrivazione del bacino in esame.
0
20
40
60
80
100
120
140
160
180
200
0 2 4 6 8 10
Po
rtat
a [m
3 /s]
t [ore]
T = 50
T = 200
T = 500

83
Grafico 5.11: idrogrammi di moto vario in ingresso al punto 1, al variare di T.
5.4.3 Risultati e considerazioni finali
In primo luogo, si riportano i risultati relativi alle simulazioni di moto permanente che,
abbinati alla normativa in vigore in Liguria, permettono di definire le mappe di pericolosità
per le aree in prossimità del Riu San Nicola.
I valori ottenuti e il confronto fra le metodologie presentate è esposto in seguito:
T=50 T=200 T=500
volume esondato [m3] 545305.5 691694.7 782761.6
estensione allagamenti [km2] 0.803 0.923 0.991
Tabella 5.4: caratteristiche allagamenti ai vari T, moto permanente.
area AA area A0 area BB area B0
estensione area [km2] 0.530 0.272 2.49E-02 0.367
Tabella 5.5: estensione aree a differente pericolosità, normativa Liguria, moto permanente.
0
20
40
60
80
100
120
140
160
180
200
0 2 4 6 8
Po
rtat
a [m
3 /s]
t [ore]
T=50
T=200
T=500

84
Figura 5.8: confronto fasce pericolosità in vigore (a sinistra) e aggiornate (a destra).
Osservando le tabelle precedenti e la Figura 5.8 si nota in generale una buona
corrispondenza fra le due metodologie, soprattutto fra le aree a maggior pericolosità (fascia A
e fascia AA). Si nota inoltre come, applicando la normativa della regione Liguria, le zone
allagabili a T=200 ricadano quasi interamente all’interno della fascia B0 a minore
pericolosità relativa; in queste zone sarebbe quindi possibile la costruzione di nuovi edifici,
abbinati a corrette misure di protezione civile.
Viene ora presentato il confronto fra la simulazione in regime di moto permanente e quella di
moto vario, basandosi sulle seguenti tabelle e sulla Figura 5.9:
T=50 T=200 T=500
volume esondato [m3] 487721 638517.8 698702.9
estensione allagamenti [km2] 0.741 0.883 0.909
Tabella 5.6: caratteristiche allagamenti ai vari T, moto vario.
area AA area A0 area BB area B0
estensione area [km2] 0.489 0.252 3.52E-02 0.359
Tabella 5.7: estensione aree a differente pericolosità, normativa Liguria, moto vario.

85
Figura 5.9: confronto fasce pericolosità moto permanente e moto vario.
E’ evidente come l’estensione delle aree allagabili sia praticamente identica in entrambi i
casi, a conferma dell’efficacia delle analisi in moto permanente per il bacino in esame.
In conclusione, si sottolinea il fatto che in tutte le simulazioni idrauliche effettuate si è
modellato solamente il bacino del Riu San Nicola, trascurando l’interazione fra i vari corsi
d’acqua appartenenti all’intero reticolo fluviale di Olbia; questa semplificazione potrebbe
portare a notevoli errori nella definizione delle aree inondabili, in particolare a una
sottostima delle zone potenzialmente interessate da eventi alluvionali.
86
CONCLUSIONI
Una stima efficace dell’estensione delle aree inondabili è fondamentale nella corretta
definizione delle zone maggiormente esposte al rischio alluvionale.
Specialmente in aree urbane, i modelli idraulici bidimensionali permettono una maggiore
precisione nella simulazione del flusso idrico, caratterizzato da direzioni preferenziali di
moto a causa della presenza degli edifici.
In questo studio, si è analizzata l’efficienza del software HEC-RAS 5.0, il primo sviluppato
dal Hydrologic Engineering Center (HEC) che permette una modellazione 2D del flusso
idrico.
In particolare, la procedura di validazione dei risultati è cominciata da un confronto con le
osservazioni ricavate da un esperimento presente in letteratura, condotto al Centro
Elettrotecnico Sperimentale Italiano (CESI). In questa prova, si è effettuata una
comparazione fra la simulazione idrica basata sul set di equazioni DSV completo e quella
relativa al modello diffusivo; i risultati ottenuti hanno confermato, in entrambi i casi,
l’affidabilità del software, oltre alla bontà del modello diffusivo nella simulazione di eventi
caratterizzati da condizioni di moto pseudo-uniforme.
A questo punto, l’obiettivo principale era l’individuazione di una corretta metodologia per la
modellazione del flusso idrico nelle aree urbane. A questo scopo, si sono effettuati una serie
di confronti sperimentali, utilizzando come base il modello fisico della diga di laminazione di
Pratolungo, realizzato dal Politecnico di Milano.
Si è quindi appurata l’efficacia della simulazione degli edifici attraverso l’introduzione di
zone a differente scabrezza, con buoni risultati ottenuti soprattutto nelle analisi dei tiranti
idrici; per quanto riguarda le velocità di scorrimento, invece, si sono riscontrate differenze
più marcate fra valori osservati e calcolati, in parte imputabili all’elevata aleatorietà delle
misure effettuate con il micro-mulinello.
Sulla base di queste considerazioni, si è infine studiato un caso reale di allagamento, relativo
all’evento alluvionale accaduto ad Olbia tra il 18 e 19 novembre 2013.
87
I risultati delle simulazioni ottenute in HEC-RAS sono stati comparati con quelli modellati
dal software InfoWorks, utilizzato da MMI srl per uno studio di variante relativo al Piano
Stralcio per l’Assetto Idrogeologico (PAI).
Questo confronto ha portato alla definizione di aree allagate del tutto confrontabili in
entrambi i casi, confermando la bontà delle simulazioni eseguite in HEC-RAS.
Da ultimo, si sono studiate, per portate in ingresso relative a vari tempi di ritorno, le zone
inondate in corrispondenza del Riu San Nicola; l’obiettivo finale era quello di definire fasce
di pericolosità che tenessero conto dei tiranti e delle velocità idriche.
La normativa attualmente in vigore in Sardegna non prevede questo tipo di analisi, per cui
nello studio si è fatto riferimento a quella approvata per la regione Liguria.
I risultati delle simulazioni effettuate con questo metodo hanno portato alla definizione di
fasce a rischio generalmente paragonabili con quelle ad oggi disponibili.
In ogni caso, per una corretta definizione delle zone maggiormente esposte, sarebbe
opportuno svolgere una modellazione idraulica sull’intero reticolo fluviale di Olbia; in
corrispondenza di eventi meteorici estremi, infatti, l’interazione fra i vari corsi d’acqua
potrebbe portare ad allagamenti più estesi rispetto a quelli previsti, con evidenti rischi per la
popolazione e le attività economiche connesse.

88
BIBLIOGRAFIA
Alcrudo F. 2004. “Mathematical Modelling Techniques for Flood Propagation in Urban
Areas”. IMPACT Project technical report (www.impact-project.net).
Aricò C, Sinagra M, Begnudelli L, Tucciarelli T. 2011. MAST-2D diffusive model for flood
prediction on domains with triangular Delaunay unstructured meshes. Advances in Water
Resources, 34:1427-1449.
Dottori F. and Todini E. 2012. “Testing a simple 2D hydraulic model in an urban flood
experiment’’. Hydrological processes, 27, 1301-1320, Università di Bologna, Dipartimento di
Scienze Della Terra e Geologico-Ambientali.
Hunter NM., Bates PD., Horritt MS., Wilson MD. 2007. “Simple spatially distributed
models for predicting flood inundation: a review’’. Geomorphology, 90: 208–225.
Mc Millan HK., Brasington J. 2007. “Reduced complexity strategies for modelling urban
floodplain inundation’’. Geomorphology, 90: 226–243.
Prestininzi P. 2008. “Suitability of the diffusive model for dam break simulation:
Application to a CADAM experiment. Journal of Hydrology, 361: 172-185.
Ravazzani G., Mancini M., Meroni C. 2009. “Design hydrograph and routing scheme for
flood mapping in a dense urban area’’. Urban Water Journal, 6:3, 221-231.
Soares-Frazão S., Lhomme J., Guinot V., Zech Y. 2008. “Two-dimensional shallow-
water model with porosity for urban flood modeling’’. Journal of Hydraulic Research 46(1):
45–64.
Szydlowski M. 2005. “Numerical Simulation of Extreme Flooding in a Built-up Area’’.
Archives of Hydro-Engineering and Environmental Mechanics Vol. 52 No. 4, pp. 321–333.
Testa G., Zuccala D., Alcrudo F., Mulet J., Soares-Frazao S. 2007. “Flash flood flow
experiment in a simplified urban district’’. Journal of Hydraulic Research, 45: 37–44.

89
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa
“Introduzione alla modellazione in 2D con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa
“Panoramica del moto vario con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa “Teoria per
analisi in 2D con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa “RAS
Mapper per la modellazione in 2D con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa “Creazione
delle aree 2D con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa
“Visualizzazione dei risultati con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa “Confronto
tra modellazione in 1D e 2D con HEC-RAS’’.
WEST Consultants, Inc. Milano Novembre 2015, corso HEC-RAS. Dispensa
“Risoluzione dei problemi, Revisione e Calibrazione con HEC-RAS 2D’’.